
Statistics on the Manifold of Multivariate Normal Distributions: Theory and Application to Diffusion...
42
Statistics on the Manifold of Multivariate Normal Distributions: Theory and Application to Diffusion Tensor MRI Processing † Christophe Lenglet ([email protected]) I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE Mika¨ el Rousson ([email protected]) Siemens Corporate Research, 755 College Road East, Princeton, NJ 08540, USA Rachid Deriche ([email protected]) I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE Olivier Faugeras ([email protected]) I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE October 10, 2005 Abstract. This paper is dedicated to the statistical analysis of the space of multivariate normal distributions with an application to the processing of Diffusion Tensor Images (DTI). It relies on the differential geometrical properties of the underlying parameters space, en- dowed with a Riemannian metric, as well as on recent works that led to the generalization of the normal law on Riemannian manifolds. We review the geometrical properties of the space of multivariate normal distributions with zero mean vector and focus on an original characterization of the mean, covariance matrix and generalized normal law on that manifold. We extensively address the derivation of accurate and efficient numerical schemes to estimate these statistical parameters. A major application of the present work is related to the analysis and processing of DTI datasets and we show promising results on synthetic and real examples. Keywords: multivariate normal distribution, symmetric positive-definite matrix, information geometry, Riemannian geometry, Fisher information matrix, geodesics, geodesic distance, Ricci tensor, curvature, statistics, mean, covariance matrix, diffusion tensor magnetic resonance imaging † Paper to appear in the Journal of Mathematical Imaging and Vision (Springer), in 2005 at: www.springeronline.com/sgw/cda/frontpage/0,0,5-0-70-35618158-0,0.html
Transcript of Statistics on the Manifold of Multivariate Normal Distributions: Theory and Application to Diffusion...

Statistics on the Manifold of Multivariate Normal Distributions:
Theory and Application to Diffusion Tensor MRI Processing†
Christophe Lenglet ([email protected])
I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE
Mikael Rousson ([email protected])
Siemens Corporate Research, 755 College Road East, Princeton, NJ 08540, USA
Rachid Deriche ([email protected])
I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE
Olivier Faugeras ([email protected])
I.N.R.I.A Sophia-Antipolis, 2004 Route des lucioles, Sophia-Antipolis, FRANCE
October 10, 2005
Abstract. This paper is dedicated to the statistical analysis of the space of multivariate
normal distributions with an application to the processing of Diffusion Tensor Images (DTI).
It relies on the differential geometrical properties of the underlying parameters space, en-
dowed with a Riemannian metric, as well as on recent works that led to the generalization
of the normal law on Riemannian manifolds. We review the geometrical properties of the
space of multivariate normal distributions with zero mean vector and focus on an original
characterization of the mean, covariance matrix and generalized normal law on that manifold.
We extensively address the derivation of accurate and efficient numerical schemes to estimate
these statistical parameters. A major application of the present work is related to the analysis
and processing of DTI datasets and we show promising results on synthetic and real examples.
Keywords: multivariate normal distribution, symmetric positive-definite matrix, information
geometry, Riemannian geometry, Fisher information matrix, geodesics, geodesic distance, Ricci
tensor, curvature, statistics, mean, covariance matrix, diffusion tensor magnetic resonance
imaging
† Paper to appear in the Journal of Mathematical Imaging and Vision (Springer), in
2005 at: www.springeronline.com/sgw/cda/frontpage/0,0,5-0-70-35618158-0,0.html
2
1. Introduction
The definition of differential geometrical structures for statistical models started
in 1936 with the work of Mahalanobis (Mahalanobis, 1936) on multivariate
normal distributions of fixed covariance matrix. Since then, several authors in
information geometry (Madsen, 1978), (Amari, 1990) and references therein, and
physics (Caticha, 2000) have contributed to the description of those geometries.
Rao (Rao, 1945) expressed one of the fundamental results in 1945 by showing
that it was possible to use the Fisher information matrix as a Riemannian metric
between parameterized probability density functions (pdf). In 1982, Burbea and
Rao (Burbea and Rao, 1982) proposed a unified approach to the derivation of
metrics in pdfs spaces. They introduced the notion of φ-functional whose Hessian
in a direction of the tangent space of the parameters space is taken as the metric.
Following the pioneering work of Rao (Rao, 1945), and a theorem by Jensen
(1976, private communication in (Atkinson and Mitchell, 1981)), Atkinson and
Mitchell obtained closed-form expressions for the geodesic distances between
elements of well-known families of distributions such as multivariate normal pdfs
of fixed mean. We focus, in this paper, on the geometrical properties of those
particular distributions and make use of results stated in (Skovgaard, 1984),
(Burbea, 1986), (Calvo and Oller, 1991) and (Forstner and Moonen, 1999) to
propose a novel framework for the statistical analysis of a set of multivariate
normal pdfs.
In (Pennec, 2004), the author generalized the notion of normal law to random
samples of primitives belonging to an n-dimensional Riemannian manifold M.
In that framework, and under certain technical hypothesis, it is possible to define
the mean, as proposed by Karcher (Karcher, 1977) and Kendall (Kendall, 1990),
as well as the covariance matrix of a subset ofM. Using an information minimiza-
tion approach, Pennec approximated the normal model by the usual Gaussian

3
in the tangent space TθM at the mean value θ ∈M.
We propose to combine the Riemannian characterization of the multivariate
normal model, based on the Fisher information matrix, with this notion of gen-
eralized normal law on manifolds to study the statistical properties of a special
type of dataset obtained from a recent magnetic resonance imaging technique
known as Diffusion Tensor Imaging (DTI). We also derive original, accurate and
efficient computational tools to process these images.
Diffusion magnetic resonance imaging was introduced in the middle of the 1980s
(Le Bihan et al., 1986) and acquires, at each voxel, data allowing the recon-
struction of a probability density function characterizing the average motion of
water molecules. As of today, it is the only non-invasive method that allows to
distinguish the anatomical structures of the cerebral white matter. Well-known
examples are the corpus callosum, the arcuate fasciculus or the corona radiata.
These are commissural, associative and projective neural pathways, the three
main types of fiber bundles, respectively connecting the two hemispheres, regions
of a given hemisphere or the cerebral cortex with subcortical areas. Diffusion MRI
is particularly relevant to a wide range of clinical applications related to patholo-
gies such as acute brain ischemia, stroke, Alzheimer’s disease or schizophrenia.
It is also extremely useful in order to identify the neural connectivity patterns
of the human brain (Lenglet et al., 2004a) and references therein.
In 1994, Basser et al. (Basser et al., 1994) proposed to model the probability
density function of the water molecules motion x ∈ R3, at each voxel of a
diffusion MR image, by a normal distribution of mean x = 0µm/ms and whose
covariance matrix is given by the diffusion tensor. Diffusion Tensor Imaging
thus produces a three-dimensional image containing, at each voxel, a 3 × 3
symmetric positive-definite matrix corresponding to the covariance matrix of the
underlying Brownian motion of water molecules. Although this model becomes
insufficient at voxels where many neuronal fibers exist (Tuch et al., 2003), it

4
has proven to be very useful to characterize the diffusion properties of struc-
tured biological tissues. The estimation of these tensors requires the acquisition
of diffusion weighted images (DWI) in several non-collinear sampling direc-
tions as well as a T2-weighted image and numerous algorithms have already
been proposed to tackle this task (Mangin et al., 2002), (Wang et al., 2004),
(Tschumperle and Deriche, 2003) and references therein. Diffusion tensors must
be understood as parameters of normal distributions and, as such, perfectly fit
the model we are about to develop.
Contributions:
Preliminary results were presented by the authors in (Lenglet et al., 2004b),
(Lenglet et al., 2005) and (Lenglet et al., 2004c). Other works related to the
statistical analysis or filtering of DTI datasets have been carried out by Basser et
al. (Basser and Pajevic, 2003), Pennec et al. (Pennec et al., 2004) and Fletcher
and Joshi (Fletcher and Joshi, 2004). In (Basser and Pajevic, 2003), a symmet-
ric positive-definite fourth-order tensor is used to encode the variability of a
set of diffusion tensors but the geometry of the parameters space is not taken
into account as in the other works. Barbaresco et al. used similar ideas in
(Barbaresco et al., 2004) for purposes related to the anisotropic regularization
of normal or Gamma law parameters and of radar or Doppler data. In this
paper, we derive and experiment with original methods to compute the mean
and covariance matrix of a set of multivariate normal distributions. We also show
how to compute and use the Ricci curvature tensor in order to accurately ap-
proximate a normal law on the manifoldM of multivariate normal distributions.
We successfully apply these numerical schemes to tackle, in an original manner,
important processing tasks for diffusion tensor datasets.
Paper organization:
Section 2 reviews necessary material related to the Riemannian geometry of the

5
multivariate normal model. Section 3 introduces the theoretical basis and the
numerical schemes that lead to an approximated normal law on the manifold
described in section 2. In section 4, we first provide a simple algorithm to
generate random normal distributions following a given normal law. We also
demonstrate that the correct estimation of diffusion tensors can be easily solved
by a gradient descent algorithm similar to the one used to compute the mean. We
finally present a novel approach embedding our statistical model into a level-set
framework to perform the segmentation of DTI datasets. For each of these three
applications, numerical experiments are conducted on synthetic or real data to
illustrate their respective performance.
2. The Riemannian Geometry of the Multivariate Normal Model
We hereafter review important notions that led to the metrization of probability
density functions spaces and apply them to the multivariate normal model with
fixed zero mean. This yields a characterization of the connection and curvature
of that space as well as the definition of a distance between normal distributions
under certain regularity conditions.
2.1. Metrization of the Space of Probability Density Functions
We start by a general characterization of the space of probability density func-
tions, together with the characterization of its possible metrics. Let L1(X , µ)
denote the space of integrable µ-measurable real functions defined over the space
X ⊂ Rm, e.g.:
L1(X , µ) = p : ‖p‖µ =
∫
X|p(x)|dµ(x) <∞
We are interested in the subset P of L1+ such that:
P = p ∈ L1+ : ‖p‖µ = 1

6
with L1+ = p ∈ L1(X , µ) : p(x) ≥ 0 for µ-almost all x ∈ X
Let φ be a continuous real function on Iφ ⊂ R+ and Fφ(X , µ) the set of µ-
measurable functions p defined over X and taking values in Iφ. The φ-entropy
functional introduced in (Burbea and Rao, 1982) is defined as:
Hφ(p) = −∫
Xφ(p(x))dµ(x) ∀p ∈ L1
φ = L1+ ∩ Fφ
The second order differential of the entropy functional Hφ at p in the direction
of f ∈ L1φ is given by:
d2Hφ(p; f) = −∫
Xφ′′(p(x))(f(x))2dµ(x)
We now introduce the set of parameters θ : θ = (θ1, ..., θn) ∈ O ⊂ Rn. This
set defines a manifoldM in Rn and we consider the subset FM of Pφ = P ∩Fφ:
FM = p(x|θ) ∈ Pφ : x ∈ X , θ ∈M
FM is the family of probability density functions of the random variable x ∈ Xparameterized by the n-dimensional vector θ. We wish to quantify the second
variation of the entropy functional Hφ in the direction dp(.|θ) of the tangent
space TM, with:
dp(.|θ) =n∑
i=1
∂p(.|θ)∂θi
dθi
denoting the first order approximation of the difference between the densities
associated with the parameters θ and θ + dθ. Hence the second variation of Hφ
at θ writes:
d2Hφ(p(.|θ); dp(.|θ)) = −∫
Xφ′′(p(x|θ))(dp(x|θ))2dµ(x)
Under the assumption that φ is convex in Iφ, we set:
ds2φ(θ) = −d2Hφ(p(.|θ); dp(.|θ)) =
n∑
i,j=1
g(φ)ij (θ)dθidθj
with
g(φ)ij (θ) =
∫
Xφ′′(p(x|θ))∂p(x|θ)
∂θi
∂p(x|θ)∂θj
dµ(x)

7
g(φ)ij defines a positive-definite form on the tangent space TM and thus gives a
Riemannian metric on M, an n× n matrix known as the φ-entropy metric.
The line element ds = (ds2φ(θ))1/2 is easily seen to be invariant under transfor-
mation of θ. Consequently, g(φ)ij (θ) is a second order covariant symmetric tensor.
Various possible choices for the entropy function φ have been proposed. We
concentrate, in this paper, on the Shannon entropy associated with φ(p) =
p log p, ∀p ∈ FM. Then,
H(p) = −∫
Xp(x|θ) log p(x|θ)dµ(x)
and the components of the metric tensor gij, known as the Fisher information
matrix, become:
gij(θ) =
∫
X
∂ log p(x|θ)∂θi
∂ log p(x|θ)∂θj
p(x|θ)dµ(x) = E[∂ log p(x|θ)
∂θi
∂ log p(x|θ)∂θj
]
It is interesting to note that, in this case, the squared line element ds2φ(θ) coin-
cides with the variance of the relative difference between p(.|θ) and p(.|θ + dθ).
Indeed, we have:
dp(.|θ)p(.|θ) =
p(.|θ + dθ)− p(.|θ)p(.|θ) =
n∑
i=1
∂ log p(.|θ)∂θi
dθi
It follows that the expected value of the relative difference is zero since
∫
X
(∂ log p(x|θ)
∂θidθi
)p(x|θ)dµ(x) =
∂
∂θi
(∫
Xp(x|θ)dµ(x)
)dθi = 0
but that its variance does not vanish and defines a positive-definite quadratic
form ds2(θ) =∑n
i,j=1 gijdθidθj, based on the Fisher information matrix, that can
be used as a metric. We exploit that result in the next section to describe the dif-
ferential geometrical properties of the space of multivariate normal distributions
with fixed zero mean.

8
2.2. Geometrical Properties of the Multivariate Normal Model
Our ultimate goal being to define statistics between multivariate normal distri-
butions and to apply it to diffusion tensor data, in other words 3-variate normal
distributions with zero mean, we identify the space of parameters M = θ :
θ = (θ1, ..., θn) ∈ O ⊂ Rn with the manifold S+(m,R) and endow it with the
information metric gij, i, j = 1, ..., n previously introduced.
S+(m,R) denotes the set of m×m (m = 3 in our case) real symmetric positive-
definite matrices. Its elements are used to describe the covariance matrices of the
zero mean normal distributions. Through the mapping that associates to each
Σ ∈ S+(m,R) its components σrs, r ≤ s, r, s = 1, ...,m, we see that S+(m,R)
is isomorphic to Rn with n = 12m(m + 1). Hence, from now on, the elements of
parameter space M will simply be the components of the covariance matrices
Σ and linearly accessed through the mapping θi = σi = σrs with i = 1, ..., n,
r ≤ s = 1, ...,m and θ1 = σ11, θ2 = σ12, ..., θ6 = σ33.
We denote by Ei, i = 1, ..., n the canonical basis of the tangent space TS+(m,R) =
S(m,R) (e.g. the space of vector fields). We equally denote by E∗i , i = 1, ..., n
the dual basis of the cotangent space T ∗S+(m,R) = S∗(m,R) (e.g. the space of
differential forms). The tangent space S(m,R) coincides with the space of m×msymmetric matrices and the basis is given by:
Ei = Ers
1rr , r = s
(1rs + 1sr) , r 6= sE∗i = E∗rs
1rr , r = s
12(1rs + 1sr) , r 6= s
where 1rs stands for the m ×m matrix with 1 at row r and column s and 0
everywhere else. For the clarity of expressions, we will drop the references to m
and R in S+(m,R) when no ambiguity is possible.

9
As detailed by the authors of (Skovgaard, 1984), (Burbea, 1986), (Eriksen, 1986),
(Calvo and Oller, 1991) and (Forstner and Moonen, 1999), we can characterize
S+ as a Riemannian manifold for which closed form expressions are available for
the metric g, the Christoffel symbols and the associated affine connection, the
Riemann curvature tensor, the solution of the geodesic equations as well as for
the geodesic distance (also known as Rao’s distance). Those constitute all the
fundamental mathematical tools that we need to derive algorithms for the mean
and covariance matrix of elements of S+ and express a generalized normal law
on this manifold.
2.2.1. Metric Tensor, Affine Connection and Curvature Tensors
The proofs of the theorems stated in this section are available in (Skovgaard, 1981).
2.2.1.1. The metric tensor
The metric tensor for S+, derived from the Fisher information matrix presented
in section 2.1, is given by the following theorem:
THEOREM 2.2.1. The Riemannian metric for the space S+(m,R) of multivari-
ate normal distributions with zero mean is given, ∀Σ ∈ S+(m,R) by the twice
covariant tensor:
gij = g(Ei, Ej) = 〈Ei, Ej〉Σ =1
2tr(Σ−1EiΣ
−1Ej) i, j = 1, ..., n (1)
In practice, this means that for any vectors A,B ∈ S, their inner product relative
to Σ is 〈A,B〉Σ = 12tr(Σ−1AΣ−1B). In particular, the distance between two
infinitesimally close elements Σ and Σ + dΣ of S+, with respect to Σ, is:
‖dΣ‖Σ =
√1
2tr((Σ−1dΣ)2)
It is very informative, at this stage, to look at the well-known Kullback-Leibler
divergence Dkl, or relative entropy, that the authors already used for the seg-
mentation task that will be addressed in the last section of this paper. In
10
(Lenglet et al., 2004b), they used it as a measure of dissimilarity between prob-
ability density functions, as often done in the information theory community.
However, it can be shown by a second order Taylor expansion of the relative
entropy between two infinitesimally close pdfs parameterized by Σ and Σ + dΣ
(assuming that Dkl is twice differentiable around p(x|Σ)) that:
Dkl(p(x|Σ), p(x|Σ + dΣ)) =
∫
Xp(x|Σ) log
p(x|Σ)
p(x|Σ + dΣ)dµ(x)
=1
2
∫
X
(1
p2(x|Σ)
∂p(x|Σ)
∂σi
∂p(x|Σ)
∂σj− 1
p(x|Σ)
∂2p(x|Σ)
∂σi∂σj
)p(x|Σ)dσidσjdµ(x)
which can be shown to reduce to:
Dkl(p(x|Σ), p(x|Σ + dΣ)) =1
2E[∂ log p(x|Σ)
∂σi
∂ log p(x|Σ)
∂σj
]dσidσj
if the partial derivatives with respect to σi and σj commute with the integral.
As a consequence, the relative entropy simply equals half of the squared line
element ds2 and it coincides with the geodesic distance for infinitesimal distances.
Computing it between distant pdfs would yield a result very different from the
geodesic distance.
2.2.1.2. The choice of the affine connection
We now would like to define two fundamental tensors in Riemannian geometry
for the manifold S+. They are respectively known as the Riemann and Ricci
curvature tensor and will be denoted by R and R. The latter will play an
important role in the expression of the generalized normal law on S+.
But before being able to define these elements, we have to choose a Riemannian
connection ∇ which allows us to map any tangent space TΣ1S+ at Σ1 to the
tangent space TΣ2S+ at Σ2. This mapping depends on the curve Σ(t) connecting
Σ1 and Σ2. This way, even if Σ(t) is a loop, the tangent space TΣ1S+ is mapped
onto itself along this curve but, the origin of TΣ1S+ might be mapped onto
another point (e.g. not itself). The change in the direction of a vector under this
mapping characterizes the curvature of the manifold.

11
The canonical affine connection on a Riemannian manifold is known as the
Levi-Civita connection (or covariant derivative). An important property of this
connection is that it is compatible with the metric. In other words, the covariant
derivative of the metric is zero. The Levi-Civita connection coefficients are given
by the n3 functions called the Christoffel symbols of the second kind Γkij defined
as (using Einstein’s summation convention):
Γkij = gklΓijl =1
2gkl(∂gjl∂σi
+∂gil∂σj− ∂gij∂σk
)i, j, k, l = 1, ..., n (2)
Using the local coordinates, the Christoffel symbols can also be expressed in
terms of the elements of the canonical and dual basis Eii=1,...,n and E∗i i=1,...,n.
Γ(Ei, Ej;E∗k) = E∗k .(∇F
EiEj) (3)
By the fact that (see lemma 2.3 in (Skovgaard, 1981)):
∂g(Ei, Ej)
∂σk= −1
2tr(Σ−1EkΣ
−1EiΣ−1Ej)−
1
2tr(Σ−1EiΣ
−1EkΣ−1Ej)
the following result can be proved from equation 2:
Γ(Ei, Ej;E∗k) = −1
2tr(EiΣ
−1EjE∗k)− 1
2tr(EjΣ
−1EiE∗k) (4)
It is then possible to use this result in order to derive the expression of the unique
affine connection (Levi-Civita)∇F associated with the Fisher information metric
from equation 3. However, other connections have been proposed and we still
need to make a choice since this will greatly influence the curvature properties
of the manifold. Amari (Amari, 1990) has indeed introduced a one-parameter
family of affine connections, known as the α-connections, in order to better
represent the intrinsic properties of the family of probability distributions. The
α-connections are defined in the following manner:
〈∇αEiEj, Ek〉Σ = 〈∇F
EiEj, Ek〉Σ + αT (Ei, Ej, Ek)
where we remind that 〈., .〉Σ denotes the inner product and the third-order
symmetric tensor Tijk is defined as
Tijk = E[∂ log p(x|θ)
∂σi
∂ log p(x|θ)∂σj
∂ log p(x|θ)∂σk
]

12
Obviously, we see that the 0-connection boils down to the Levi-Civita connection.
We recall that it is the only one to be compatible with the metric, in other words,
the only one by which the parallel transport of a vector does not affect its length.
The α-connections are not compatible with the metric for α 6= 0.
Moreover, it was stated in (Burbea, 1986) that, for any exponential family (a
special type of distributions in which the multivariate normal model can be
recast), the α-Riemann curvature tensor writes:
Rαijkl = (1− α2)RF
ijkl
thus giving an α-curvature to the multivariate normal model distinct from the
curvature induced by the Levi-Civita connection for all α 6= 0. Because of
their non-compatibility with the metric and their induced 0-curvature, the ±1-
connections (respectively known as Efron and David connections) do not seem
to be good candidates for the following derivations of statistics on the mani-
fold of multivariate normal distributions. We will indeed require our space to
exhibit a non-positive sectional curvature in order to ensure the existence and
uniqueness of the Riemannian barycenter. For this reason, we will work with
the classical Levi-Civita connection in the remaining developments. We have to
notice, however, that α-connections with α 6= ±1 will have to be investigated.
2.2.1.3. The curvature tensors
The Riemann curvature tensor for S+, derived from the Fisher information met-
ric presented in section 2.1, is given by the following theorem (see (Skovgaard, 1981)):
THEOREM 2.2.2. The Riemann curvature tensor derived from the Fisher in-
formation metric and the classical Levi-Civita affine connection in S+(m,R) is
given by:
RFijkl = RF (Ei, Ej, Ek, El) =
1
4tr(EjΣ
−1EiΣ−1EkΣ
−1ElΣ−1)
− 1
4tr(EiΣ
−1EjΣ−1EkΣ
−1ElΣ−1)

13
where Ei, Ej, Ek and El denote the elements of the canonical basis of vector
fields and Σ ∈ S+(m,R)
The important point is that we can now compute the sectional curvature κ of the
manifold S+ and verify that it is actually non-constant and, more importantly,
non-positive. A sectional curvature is associated to any two-dimensional subset of
vectors E in the tangent space at Σ, TΣS+. It is defined as the Gaussian curvature
of that hypersurface made of the set of points reached by the geodesics starting
at Σ in all the directions described by the plane E .
It can be shown that, if we denote by ρ2rs = σ2
rs
σrrσssthe correlation coefficient
between the components σrs, r ≤ s, r, s = 1, ...,m of the covariance matrices Σ,
the sectional curvature at Σ is given, for r 6= s, by
1. κ(E ,Σ) = − ρ2rs
1+ρ2rs
if E = span(Err, Ess)
2. κ(E ,Σ) = − 12
if E = span(Err, Ers)
which indeed depends on Σ and is non-positive.
Finally, we can derive the Ricci curvature tensor R, which is defined as the
contraction of the Riemann curvature tensor, and which can be thought of as
the Laplacian of the Riemannian metric. It is a symmetric, n × n covariant
tensor. We recall that the Riemann tensor can be expressed in terms of the
partial derivatives of the metric:
Rlijk =
∂Γlik∂σj− ∂Γlij∂σk
+ ΓmikΓlmj − ΓmijΓ
lmk
and the expression of the Ricci tensor follows:
Rij = Rkijk = Rijklg
kl (5)
where gkl denotes the inverse of the metric. Summarizing everything, we have the
expression for Rijkl and gij. Symbolic calculations easily lead to the components

14
of the Ricci tensor in terms of the components of Σ. A quite interesting point is
that, by comparison of the Ricci tensor with the metric tensor, we can also deduce
that the space of zero mean multivariate normal distributions is, in general, not
an Einstein manifold. It is indeed a space of non-constant non-positive sectional
curvature for which the following equality does not hold:
Rij = Lgij
where L is some universal constant.
Now that we have defined the metric, connection and curvature in S+, we can
characterize the geodesics of that manifold.
2.2.2. Geodesics and Geodesic Distance between Normal Distributions
The geodesic distance D induced by the Riemannian metric g, derived from the
Fisher information matrix, was investigated for some parametric distributions in
(Atkinson and Mitchell, 1981), (Burbea and Rao, 1982), (Oller and Cuadras, 1985),
(Burbea, 1986), (Eriksen, 1986) and references therein. More recently, Calvo
and Oller derived an explicit solution of the geodesic equations for the general
multivariate normal model in (Calvo and Oller, 1991).
We recall that, if Σ : t 7→ Σ(t) ∈ M, ∀t ∈ [t1, t2] ⊂ R denotes a curve segment
in M between two parameterized distributions p(.|Σ1) and p(.|Σ2), its length is
expressed as:
LΣ(p(.|Σ1), p(.|Σ2)) =
∫ t2
t1
(〈Σ(t), Σ(t)〉Σ(t)
)1/2
dt
=
∫ t2
t1
(n∑
i,j=1
gij(Σ(t))dσi(t)
dt
dσj(t)
dt
)1/2
dt
A geodesic Σ(t) is a piecewise smooth curve characterized by the fact that it
is autoparallel, or in other words, that the field of tangent vectors Σ(t) stays
parallel along Σ(t). It is equivalent to say that, in coordinates notations, a curve

15
is a geodesic if and only if it is the solution of the n second order Euler-Lagrange
equations:
d2σk(t)
dt2+
n∑
i,j=1
Γkijdσi(t)
dt
dσj(t)
dt= 0 ∀k = 1, ..., n (6)
where we recall that the Γkij are the Christoffel symbols of the second kind.
Solving the Euler-Lagrange equations and evaluating the geodesic distance Dconstitute, in general, a difficult task. However, for the multivariate normal
model with zero mean, it can be proved that those equations reduce to:
d2Σ(t)
dt2− dΣ(t)
dtΣ(t)−1dΣ(t)
dt= 0 (7)
Proof. This is straightforward from the use of equation 4 in the general
geodesic equation 6.
It is interesting to note that the closed-form expression for the geodesic curves
Σ(t), t ∈ [t1, t2] ⊂ R and the geodesic distance have been independently derived
by several authors:
In (Skovgaard, 1981) and (Moakher, 2005), the geodesics equation were obtained
respectively by solving equation 7 and by identifying S+(m,R) with the quotient
space GL+(m,R)/SO(m,R). In this last case, it is easy to recast the expression
of the geodesics from any point Σ(0) of the space into the simpler configuration
Σ(0) = I, because of the invariance by congruence transformation of GL+(m,R).
Burbea (Burbea, 1986) addressed this problem by using the properties of the
group of automorphisms of S+ onto itself. Calvo and Oller, in (Calvo and Oller, 1991),
proposed a more general solution on the basis of the information geometry de-
scribed in (Skovgaard, 1984), (Burbea, 1986) and (Eriksen, 1986). They derived
an explicit expression of the geodesics for the multivariate normal model with
non-constant mean vector.
Regarding the geodesic distance, it seems to have been derived for the first time
in 1976 by Jensen (private communication in (Atkinson and Mitchell, 1981))
for multivariate distributions of fixed mean, and then again in the indepen-
16
dent work (Skovgaard, 1981). Another distinct work by Forstner and Moonen
(Forstner and Moonen, 1999) proposed the same distance measure with a sim-
ilar point of view as the one used in (Moakher, 2005). However, the geodesic
equations were not solved in (Forstner and Moonen, 1999). Other references re-
lated to the information geometry approach can be found in (Burbea, 1986) and
(Calvo and Oller, 1990). Motivated by medical image processing tasks, Fletcher
and Joshi (Fletcher and Joshi, 2004), Lenglet et al. (Lenglet et al., 2004c) and
Pennec et al. (Pennec et al., 2004) have recently used these results to derive
statistical and filtering tools on tensor fields.
As stated for example in (Moakher, 2005), the geodesic starting from Σ(t1) ∈ S+
in the direction Σ(t1) = Σ(t1)1/2XΣ(t1)1/2 with Σ(t1), X ∈ S = TS+ is given
by:
Σ(t) = Σ(t1)1/2 exp ((t− t1)X)Σ(t1)1/2 ∈ S+, ∀t ∈ [t1, t2] (8)
where the matrix square root is well-defined since it always applies to symmetric
positive-definite matrices. We recall that the geodesic distance D between any
two elements Σ1 and Σ2 of S+ is the length of the minimizing geodesic between
Σ1 and Σ2:
D(Σ1,Σ2) = infΣLΣ(Σ1,Σ2) : Σ1 = Σ(t1),Σ2 = Σ(t2)
It is given by the following theorem, whose original proof is available in an
appendix of (Atkinson and Mitchell, 1981) but different versions can also be
found in (Skovgaard, 1981) and (Forstner and Moonen, 1999).
THEOREM 2.2.3. (S.T. Jensen, 1976)
Consider the family of multivariate normal distributions with common mean vec-
tor but different covariance matrices. The geodesic distance between two members
of the family with covariance matrices Σ1 and Σ2 is given by
D(Σ1,Σ2) =
√1
2tr(log2(Σ
−1/21 Σ2Σ
−1/21 )) =
√√√√1
2
m∑
i=1
log2(ηi)
17
where ηi denote the m eigenvalues of the matrix Σ−1/21 Σ2Σ
−1/21 ∈ S+.
Properties of D:
D is indeed a distance on S+ and exhibits nice properties that we hereafter
summarize (see (Forstner and Moonen, 1999) for details and proofs):
[P1] Positivity: D(Σ1,Σ2) ≥ 0, D(Σ1,Σ2) = 0⇔ Σ1 = Σ2
[P2] Symmetry: D(Σ1,Σ2) = D(Σ2,Σ1)
[P3] Triangle inequality: D(Σ1,Σ3) ≤ D(Σ1,Σ2) +D(Σ2,Σ3)
[P4] Invariance under congruence transformations:
D(Σ1,Σ2) = D(PΣ1PT , PΣ2P
T )∀P ∈ GL+(m,R)
[P5] Invariance under inversion: D(Σ1,Σ2) = D(Σ−11 ,Σ−1
2 )
We must note however that no complete proof of [P3] was given in the work
by Forstner and Moonen. Now that we have setup all the mathematical tools
that we need, we define important statistical parameters on the manifold S+
and provide efficient numerical schemes to compute them. This will lead to the
definition of the generalized normal law on S+.
3. Statistics on Multivariate Normal Distributions
3.1. Intrinsic Mean
3.1.1. Definition
We propose a new gradient descent algorithm for the computation of the intrinsic
mean distribution of a set of multivariate normal distributions with zero mean
vector. It relies on the classical definition of the Riemannian center of mass and
uses the geodesics equation to derive a manifold-constrained numerical integrator

18
and thus ensures that each step forward of the gradient descent stays within the
space S+. As we will show in the numerical experiments, this method is very
efficient and usually converges in just a few iterations.
We seek to estimate the empirical mean as proposed by Frechet (Frechet, 1948),
Karcher (Karcher, 1977), Pennec (Pennec, 2004) or Moakher (Moakher, 2002).
DEFINITION 3.1.1. (Empirical Riemannian mean)
The normal distribution p(.|Σ) with zero mean vector, parameterized by Σ ∈S+(m,R), and defined as the empirical mean of N distributions p(.|Σk), k =
1, ..., N , achieves a local minimum of the objective function λ2 : S+(m,R)→ R+
known as the empirical variance and defined as:
λ2(Σ1, ...,ΣN ) =1
N
N∑
k=1
D2(Σk,Σ) = E[D2(Σk,Σ)] (9)
Karcher proved in (Karcher, 1977) that such a mean, also known as the Rie-
mannian barycenter, exists and is unique for manifolds of non-positive sectional
curvature. This was shown to be the case for S+ in the previous section so that
we can be assured to always find a solution, given that the numerical gradient
descent is carefully designed and does not get stuck in some local minimum.
In order to derive this gradient descent algorithm, we rely on the following
remarks (see (Chefd’hotel et al., 2004) and references therein for more details):
We want to derive a flow evolving an initial guess Σ(0) toward the mean of a
set of N elements of S+. If we denote by Σ(s), s ∈ [0,∞) the family of solutions
for:∂Σ(s)
∂s= V(Σ(s))
where V denotes the velocity (e.g. the tangent vector) driving the evolution, we
have the equivalence:
Σ(s) ∈ S+(m,R), ∀s > 0
⇔ Σ(0) ∈ S+(m,R) and V(Σ(s)) ∈ TΣ(s)S+(m,R) = S(m,R), ∀s > 0
19
In other words, we are guaranteed to stay in S+ as long as Σ(0) does and that
the velocity belongs to the space of real symmetric matrices. We shall see that
the artificial time-step ds will be directly related to the geodesic parameter t
through the definition of the exponential map.
We identify the velocity V with the opposite of the gradient of the objective
function λ2(Σ1, ...,ΣN ). This was shown to be (see (Moakher, 2005)):
∇λ2(Σ1, ...,ΣN ) =Σ(s)
N
N∑
k=1
log(Σ−1k Σ(s)) (10)
Hence the evolution:
∂Σ(s)
∂s= −Σ(s)
N
N∑
k=1
log(Σ−1k Σ(s)) (11)
3.1.2. Numerical Implementation
As mentioned in (Chefd’hotel et al., 2004), the corresponding numerical imple-
mentation has to be dealt with carefully and we have to build a step-forward
operator Kds such that the discrete flow:
Σl+1 = Kds(Σl), Σ(0) ∈ S+
provides an intrinsic, or ”consistent”, approximation of the evolution equation 11
(l denotes the discrete version of the continuous family parameter s and we have
dropped the overline for the clarity of the expressions). As we have previously
pointed out, a closed-form expression for the geodesics of S+ does exist. Hence,
all we need to do is to make sure that we perform our gradient descent along the
geodesics of the manifold. If we were to simply move in the direction given by
−ds∇λ2, we would have to check, at every single step, that the current estimate
of the mean lies within S+ and reproject it if needed. Instead, we have the
following proposition:

20
PROPOSITION 3.1.1. For any Σ(s) ∈ S+(m,R), s ∈ [0,∞) and any tangent
vector V = −∇λ2 ∈ S(m,R), an intrinsic (or consistent) approximation of the
flow 11 can be obtained by using the step-forward operator:
Kds(Σl) = Σ1/2l exp (−dsΣ−1/2
l ∇λ2Σ−1/2l )Σ
1/2l (12)
Proof. The geodesic starting from Σ(s) and pointing in the direction of interest
V = Σ(s)1/2XΣ(s)1/2, X ∈ S(m,R) is given by:
Σ(s+ ds) = Σ(s)1/2 exp (dsX)Σ(s)1/2 ∀ds ∈ [0, 1]
If V is now identified with the opposite of the gradient of any objective functional
λ2 (which is in S(m,R)), we obtain:
X = −Σ(s)−1/2∇λ2Σ(s)−1/2 and
Σ(s+ ds) = Σ(s)1/2 exp (−dsΣ(s)−1/2∇λ2Σ(s)−1/2)Σ(s)1/2
Identifying Σ(s) with the current estimate of the solution of the gradient descent
Σl yields the result.
It is natural to ask how this numerical scheme compares to the gradient descent
associated with the following step-forward operator:
Kds(Σl) = Σl − ds∇λ2 (13)
We have the following proposition:
PROPOSITION 3.1.2. The extrinsic step-forward operator 13 is a first order
approximation of the operator of Proposition 3.1.1.
Proof. Recalling that the matrix exponential is defined by the following power
series:
exp (A) =∞∑
n=0
An
n!= I + A+
AA
2+AAA
6+ ... ∀A ∈ S(m,R)

21
A first order expansion of 12 yields:
Kds(Σl) = Σ1/2l (I− dsΣ−1/2
l ∇λ2Σ−1/2l )Σ
1/2l
= Σl − ds∇λ2
The exponential map is defined from [0, 1] onto S+. The optimal time step ds is
then equal to 1 and we have checked that the gradient descent is indeed stable
for any value of ds between 0 and 1. The optimal step-forward operator is then
expressed as follows:
K(Σl) = Σ1/2l exp (−Σ
−1/2l ∇λ2Σ
−1/2l )Σ
1/2l
This will be illustrated in the section dedicated to the numerical experiments.
3.1.3. Conclusion
We now come back to the derivation of a numerical algorithm to estimate the
Riemannian barycenter Σ of a set of parameterized multivariate normal distri-
butions with zero mean vector. We make use of the explicit expression of the
gradient ∇λ2 given in 10. This yields the simple step-forward operator:
Kds(Σl) = Σ1/2
l exp
(−ds 1
NΣ
1/2
l
(N∑
k=1
log(Σ−1k Σl)
)Σ−1/2
l
)Σ
1/2
l (14)
whose associated flow converges toward the barycenter for any initial guess Σ0.
At this stage, we can verify that our result is consistent with the gradient descent
proposed in (Pennec et al., 2004). Indeed, using the fact that ∀A,B ∈ GL(m,R),
log (A−1BA) = A−1 log (B)A and log (A−1) = − log (A), we have:
Σ1/2
l exp(−ds 1
NΣ
1/2
l
(∑Nk=1 log(Σ−1
k Σl))
Σ−1/2
l
)Σ
1/2
l
= Σ1/2
l exp(−ds 1
N
(∑Nk=1 log
(Σ
1/2
l Σ−1k ΣlΣ
−1/2
l
)))Σ
1/2
l
= Σ1/2
l exp(ds 1
N
(∑Nk=1 log
(Σ−1/2
l ΣkΣ−1/2
l
)))Σ
1/2
l
which coincides with the result in the above mentioned work.

22
3.2. Intrinsic Covariance Matrix and Principal Modes
We propose a new algorithm for the computation of the intrinsic empirical
covariance matrix of a set of N multivariate normal distributions with zero
mean vector. We follow (Charpiat et al., 2003), and references therein, where
this problem was addressed in the infinite dimensional case of a set of planar
closed curves.
The works of (Fletcher and Joshi, 2004) and (Pennec et al., 2004) are closely
related. They derived the expression of the Riemannian logarithmic map by
considering S+ as a homogeneous space and using the invariance property of the
metric under congruence transformation. In (Lenglet et al., 2004c), we address
this problem with an information geometric approach. As it will become clear in
the following, we use the gradient of the squared geodesic distance as the initial
velocity of the unique geodesic connecting two elements of S+. The estimation
of the covariance matrix becomes then computationally easier.
Our objective is to derive an intrinsic numerical scheme for the estimation of the
covariance matrix Λ relative to the empirical mean Σ of N normal distributions
and using the explicit solution of the geodesic distance. As we consider the
6-dimensional manifold of parameterized normal distributions with zero mean
vector, we will naturally end up with Λ ∈ S+(6,R) acting on the space S(6,R).
We associate to each of the N normal distributions p(.|Σk) the unique tangent
vector βk ∈ S(m,R) (seen as an element of Rn) such that the empirical mean Σ is
mapped onto Σk by the exponential map expΣ (βk) = Σ1/2
exp(
Σ−1/2
βkΣ−1/2
)Σ
1/2
(see Figure 1). We then have the following definition:
DEFINITION 3.2.1. Given N elements of S+(m,R) and a mean value Σ, the
empirical covariance matrix relative to Σ is defined as:
ΛΣ =1
N − 1
N∑
k=1
βkβTk

23
Figure 1. Depiction of the velocity field βk at the empirical mean Σ (The black lines represent
the geodesics between each pair (Σk,Σ) and the green arrows are the associated initial tangent
vectors βk)
We identify the βk with the opposite of the gradient of the squared geodesic
distance function ∇D2(Σk,Σ). As detailed in (Moakher, 2005), we have:
∇D2(Σk,Σ) = Σ log(Σ−1k Σ)
Once we have computed Λ, it is fairly easy and instructive, in order to further
understand the structure of our subset of normal distributions, to compute
the eigenvalues and eigenvectors of the covariance matrix. Fletcher and Joshi
(Fletcher et al., 2003) generalized the notion of Principal Component Analysis
to Lie groups by seeking geodesic submanifolds, by analogy with the lower-
dimensional linear subspaces of PCA, that maximize the projected variance of
the data. They successfully applied this method to diffusion tensor datasets in
(Fletcher and Joshi, 2004). This actually amounts to characterizing the tangent
space at the mean element Σ through classical PCA in order to construct an
orthogonal basis of tangent vectors vk, k = 1, ..., d ≤ n that can be used to
generate l-dimensional subspaces Vl = span(v1, ..., vl), l ≤ n that maximize the
projected variance. The vk are defined as the set of eigenvectors of the covariance
matrix Λ. However, since we have the geodesics equation in S+, we have a closed-
form expression to generate elements of any geodesic submanifold Hk defined as
the exponential mapping of the Vk.

24
Indeed, we can define any linear combination of the vk, v =∑d
k=1 αkvk ∈ S(m,R)
and then compute the unique element C of S+(m,R) reached by following the
geodesic emanating from Σ in the direction v and computed as:
C = Σ1/2
exp
(Σ−1/2
(d∑
k=1
αkvk
)Σ−1/2
)Σ
1/2(15)
It is straightforward to apply our definition of the covariance matrix Λ to com-
pute those principal modes. In the next section, we will see how the covari-
ance matrix must be modified, because of the manifold curvature, to yield the
concentration matrix and an approximated continuous Gaussian pdf on S+.
3.3. A Generalized Normal Law between Multivariate Normal
Distributions of Zero Mean Vector
Our last contribution uses the various quantities derived up to that point and
fully exploits the information they provide in order to derive the expression of
a normal law on S+. We proceed by using the appropriate quantities in the
generalization of the normal distribution to Riemannian manifolds proposed in
(Pennec, 2004) for sufficiently concentrated probability density functions, e.g. for
small covariance matrices. The main idea of this work was to correctly deal with
the curvature of the manifold since it modifies the definition of the concentration
matrix γ. In Euclidean space, this matrix is simply the inverse of the covariance
matrix Λ. On a Riemannian manifold, we must incorporate the contribution of
the Ricci curvature tensor R. We have the following theorem :
THEOREM 3.3.1. The generalized normal distribution in S+(m,R) for a co-
variance matrix Λ of small variance σ2 = tr(Λ) is of the form:
q(Σ|Σ,Λ) =1 +O(σ3) + ε(σ
ξ)
√(2π)m(m+1)/2|Λ|
exp−βTγβ
2∀Σ ∈ S+(m,R)
25
Σ is computed as in section 3.1.
β is defined as −∇D2(Σ,Σ) = −Σ log(Σ−1Σ) and expressed in vector form.
The concentration matrix is γ = Λ−1−R/3 +O(σ) + ε(σξ), with Λ defined as in
section 3.2 and R as in section 2.2.1 (both are computed at location Σ).
ξ is the injectivity radius at Σ and ε is such that lim0+ x−ωε(x) = 0 ∀ω ∈ R+.
It should be clear now that, in section 3.2, the contribution of the Ricci curvature
tensor was not taken into account and the concentration matrix was identified
with the inverse of the empirical covariance matrix Λ. When approximating
a continuous probability density function such as q(Σ|Σ,Λ) in the theorem
above, equation 5 can be used to compute the tensor R and, hence, to modify
the covariance matrix in order to reflect the local curvature properties of the
manifold.
4. Applications, Diffusion Tensor Images Processing
We now would like to propose three interesting applications of the theory we
just developed, our major purpose being diffusion tensor images processing. The
first application is very simple and shows how to consistently generate a set of
random covariance matrices so that they follow our generalized normal law. The
second application deals with the issue of the estimation of diffusion tensors.
We will show how to derive robust gradient descent algorithms that naturally
ensure the symmetry and positiveness of the estimated tensors by evolving in S+.
Finally, we will embed our statistical framework into a level-set based algorithm
to segment anatomical structures of interest in the brain white matter from
diffusion tensor images.

26
4.1. Generation of Random, Normally Distributed Tensors
4.1.1. Background
Figure 1 is useful to understand the situation and the problem we have to solve.
It is basically the opposite of the covariance matrix estimation problem. Let
us consider that we lie in S+(m,R) at Σ and that we want to shoot along the
geodesics of the space to reach the random, normally distributed, symmetric
positive-definite matrices Σk, k = 1, ..., N . Knowing the 6× 6 covariance matrix
Λ that we want to impose, all we need to do is to randomly choose the shooting
directions, e.g. the tangent vectors βk ∈ S(m,R). In other words, we must be
able to draw random samples of the βk, seen as elements of Rm(m+1)/2 with zero
mean and covariance matrix Λ. Any random element Σk ∈ S+ is then obtained by
applying the exponential map at Σ in a given direction βk. In practice however,
there is no need to do so since we have the following relation between βk and Σk:
βk = −Σ log(Σ−1k Σ). Hence, the random covariance matrix is readily obtained
as:
Σk =(
exp(−Σ−1βk)Σ
−1)−1
(16)
We now discuss how to compute the random vector βk. As described for example
in (Devroye, 1986), it is always possible to produce a random vector according to
an imposed covariance matrix Λ and a zero mean value. Indeed, if Z is a random
vector of Rn, n = m(m + 1)/2 with independent and identically distributed
components Z1, ..., Zn of zero mean and unit variance, the vector that we seek
is βk = HZ, such that:
E[βk] = HE[Z] = 0
E[βkβTk ] = E[HZZTHT ] = HE[ZZT ]HT = HHT = Λ
Putting everything together, the four steps to generate a random element of S+
with imposed mean and covariance matrix are:
1. Choose the mean Σ and covariance matrix Λ.
2. Perform the Cholesky decomposition Λ = HHT

27
3. Generate a random vector Z ∈ Rn as described above and form βk = HZ
4. Compute Σk =(
exp(−Σ−1βk)Σ
−1)−1
with βk reshaped as an element of S(m,R).
We illustrate this method with the following example and use it to demonstrate the
performance of the numerical schemes described in section 3.
4.1.2. Numerical Experiments
We have generated a set S of up to 100000 covariance matrices parameterizing 3-variate
normal distributions and following the statistical distribution q(Σ|Σ,Λ) as defined in
theorem 3.3.1. To that end, we have randomly chosen the mean tensor Σ and the
covariance matrix Λ while ensuring to verify the main hypothesis of theorem 3.3.1,
namely a moderate variance tr(Λ) = 1.0. Those two quantities are given below. It is
then straightforward to use them in the above algorithm to generate our set S. Once
this synthetic dataset was created, we applied the numerical schemes presented in the
previous section to estimate the mean and covariance matrix. The results of these
computations with 100000 elements are denoted by Σ and Λ. As we can notice, they
are very close to the expected values.
Σ =
0.90324 0.12560 −0.3106
0.12560 0.74092 0.20922
−0.3106 0.20922 1.25043
Σ =
0.9040 0.1254 −0.3111
0.1254 0.7401 0.2107
−0.3111 0.2107 1.2495
Λ =
0.3956 −0.0538 −0.0204 0.1725 −0.1387 −0.0698
−0.0538 0.0551 −0.0140 −0.0013 −0.0041 0.0455
−0.0204 −0.0140 0.1236 −0.0256 −0.0550 0.0330
0.1725 −0.0013 −0.0256 0.1436 −0.1035 0.0220
−0.1387 −0.0041 −0.0550 −0.1035 0.1430 −0.0526
−0.0698 0.0455 0.0330 0.0220 −0.0526 0.1391
Λ =
0.3954 −0.0541 −0.0209 0.1714 −0.1375 −0.0712
−0.0541 0.0549 −0.0143 −0.0013 −0.0036 0.0452
−0.0209 −0.0143 0.1253 −0.0258 −0.0555 0.0330
0.1714 −0.0013 −0.0258 0.1425 −0.1021 0.0213
−0.1375 −0.0036 −0.0555 −0.1021 0.1415 −0.0514
−0.0712 0.0452 0.0330 0.0213 −0.0514 0.1383

28
Table I. Geodesic distances D(
Σ, Σ)
and D(
Λ, Λ)
in
terms of the number of elements
Elements 10 100 1000 10000 100000
D(
Σ, Σ)
0.5787 0.1110 0.0267 0.0114 0.0028
D(
Λ, Λ)
2.1959 0.5518 0.1484 0.0490 0.0208
Table II. Mean estimation convergence time in terms of the number of elements
Elements 10 100 500 1000 5000 10000 50000
Time (in s) 0.0665 0.4143 1.9685 3.8459 19.5005 39.4221 193.7162
Table I shows how well the set S fits the imposed Gaussian distribution as the
number of elements increases. As expected, the error greatly decreases with the size
of the random set. One last point of interest before moving to the next applica-
tion is the performance of the gradient descent algorithm, as already pointed out
in (Lenglet et al., 2004c). By running it repeatedly with different initial guesses, we
have ensured that it was not affected by that parameter since it converged every time
in no more than 5 iterations. This was highly reproducible and tested on the synthetic
dataset S. In practice, we thus always start from the identity. We also present, in table
II, the evolution of the time of convergence (on a Pentium IV at 2.4GHz) in terms of
the number of elements in S. This is, of course, O(N).
4.2. Robust Gradient Descents for Diffusion Tensors Estimation
4.2.1. Background
As already quickly described in the introduction, Diffusion Tensor MRI evaluates, from
a set of diffusion weighted images, the covariance matrix Σ of the water molecules
Brownian motion at each voxel of the acquisition volume Ω ⊂ R3. In other words, it

29
approximates the probability density function modeling the motion of water molecules
by a 3-variate normal distribution of zero mean vector x ∈ R3.
The estimation of the field of 3×3 symmetric positive-definite matrices Σ is performed
by using the Stejskal-Tanner equation (Stejskal and Tanner, 1965) for anisotropic dif-
fusion. This equation relates the magnetic resonance signal attenuation to the diffusion
tensor and the sequence parameters:
Sk(w) = S0(w) exp (−bgTk Σ(w)gk) ∀w ∈ Ω, k = 1, ...,M (17)
gk are the M normalized non-collinear gradient directions corresponding to each dif-
fusion weighted image (DWI) Sk and b is the diffusion weighting factor. Moreover
a regular T2-weighted image S0 must be acquired. Many approaches have already
been derived to estimate the diffusion tensors Σ from a set of DWI (at least 6) and
references can be found for example in (Westin et al., 2002), (Mangin et al., 2002),
(Wang et al., 2004), (Tschumperle and Deriche, 2003).
Following (Tschumperle and Deriche, 2003), we will show how intrinsic numerical schemes
in S+, similar to the gradient descent proposed to estimate the empirical mean, can be
derived. We will not incorporate any smoothness constraint on the tensor field but the
major advantage of this approach is to naturally evolve in S+. Compared to simple
least squares, where the tensor components are obtained by solving a linear system
derived from the M Stejskal-Tanner equations, this ensures the symmetry and positive
definiteness of each diffusion tensor. Moreover, the combination of robust regression
methods with this intrinsic gradient descent enables us to propose a more reliable and
efficient estimation method.
We seek to minimize the following objective function at each w ∈ Ω by searching for
the optimal Σ ∈ S+:
E(S0, ..., SM ) =M∑
k=1
ψ
(1
blnSkS0
+ gTk Σgk
)
where ψ : R→ R is a real-valued functional that, in the M-estimators framework, tries
to reduce the effect of outliers by replacing the classical squared residual ψ(rk) = r2k/2
by another function with a unique minimum at zero and chosen to be less increasing
than the square function (see for example (Zhang, 1997)). In order to minimize this
energy through a gradient descent, we follow exactly the same idea as for the mean

30
and thus need to compute the gradient of E. We recall that, given a smooth function
f : Σ ∈ S+ 7→ f(Σ) ∈ R, its derivative in the direction v at Σ:
Df(Σ)v = lims→0
f(Σ + sv)− f(Σ)
s
and the inner product 〈., .〉Σ, the gradient ∇f exists and is unique by the Riesz-Frechet
theorem. It is defined by the relationship:
Df(Σ)v =df(Σ(t))
dt
∣∣∣∣t=0
= 〈∇f(Σ(t)), v〉Σ(t)
∣∣t=0
where Σ(t) is the unique geodesic starting from Σ(0) = Σ in the direction v = Σ(0).
With the residual rk(Σ(t)) = 1b ln Sk
S0+ gTk Σ(t)gk we have by the chain rule:
dψ(rk(Σ(t)))
dt
∣∣∣∣t=0
=dψ(rk)
drk
∣∣∣∣t=0
m∑
i,j=1
∂rk(Σ(t))
∂Σij(t)
dΣij(t)
dt
∣∣∣∣∣∣t=0
=dψ(rk)
drktr
(drk(Σ(t))
dΣ(t)
(dΣ(t)
dt
)T)∣∣∣∣∣t=0
= ψ′(rk)tr(gkg
Tk Σ(0)
)
= ψ′(rk)tr(
Σ−1ΣgkgTk ΣTΣ−T Σ(0)
)
= ψ′(rk)tr(
Σ−1Σgk (Σgk)T Σ−1Σ(0)
)
Hence, ∇ψ(rk(Σ)) = ψ′(rk(Σ))Σgk (Σgk)T ∈ S(m,R) and finally:
∇E =M∑
k=1
ψ′(rk(Σ))Σgk (Σgk)T
We can use the intrinsic step-forward integrator of proposition 3.1.1 to obtain the
gradient descent (which depends on the function ψ) to be carried out at each voxel w
of the volume Ω:
Σl+1 = Σ1/2l exp (−dsΣ−1/2
l ∇EΣ−1/2l )Σ
1/2l
= Σ1/2l exp
(−dsΣ−1/2
l
(M∑
k=1
ψ′(rk(Σl))Σlgk (Σlgk)T
)Σ−1/2l
)Σ
1/2l
4.2.2. Numerical Experiments
The numerical scheme given above has been implemented for various well-known
functions ψ, namely the Cauchy, Fair, Huber and Tukey M-estimators, and their
31
associated influence function ψ′(rk). In practice however, we use Huber’s function since
this estimator is very satisfactory with the classical tuning constant c = 1.2107 which
allows to achieve an asymptotic efficiency of 95% on the standard normal distribution.
The combination of the M-estimators with our intrinsic gradient descent has shown
to be far less sensitive to noise than the classical least squares and to naturally avoid
the estimation of non-positive definite tensors. By applying a least squares estimation
procedure on various DTI datasets, we usually obtained a few thousands non-positive
definite tensors. This is obviously always corrected by our method. We however need
to point out the higher computational overhead of the gradient descent, by comparison
to least squares which are almost instantaneous.
To prove the robustness of our method, we have generated a synthetic dataset con-
sisting of a 50 × 50 tensor field divided in 2 regions: the background and a 20 × 20
square area centered at pixel (25, 25). Each region was assigned with a distinct mean
tensor and covariance matrix. We used the method proposed in the previous section to
randomly choose the tensors belonging to each region. They follow 2 different normal
distributions and thus span a wide range of tensor configurations, which is desirable to
consistently evaluate the performance of our estimator. The tensor field is presented
on figure 2 left where each of the 3 × 3 matrix is depicted as a 3D ellipsoid. We
created an artificial set of diffusion weighted images from this tensor field by using the
Stejskal-Tanner equation 17. S0 was taken to be constant and equal to 10 everywhere
while the b-factor was set to 1s.mm−2. Finally, 12 gradient directions gk were used and
given by the vertices of the icosahedron. The images were corrupted by a Gaussian
noise with variance 0.52 (images intensity amplitude was approximately [2, 10]).
We performed the estimation of the diffusion tensors by least squares and by gradient
descent with 600 iterations and a time step ds = 0.2. It was then possible to compare
the accuracy of the reconstructed tensor fields by computing the geodesic distance
between the tensor estimates and the ground-truth data at each voxel. Table III sum-
marizes the results and is a striking proof of the gradient descent approach superiority.
We also applied our approach to a real set of diffusion weighted images. They were
32
Table III. Comparison of the performance of least squares and gradient descent tensors
estimation: [Col. 1] Number of non-positive definite tensors, [Col. 2-5] Statistics of
the geodesic distance between estimated and ground-truth tensor fields
NPD tensors Mean Variance Minimum Maximum
Least Squares 225 12.8906 40.4182 0.00198837 227.899
Gradient Descent 0 0.587561 5.78362 0.00409459 143.845
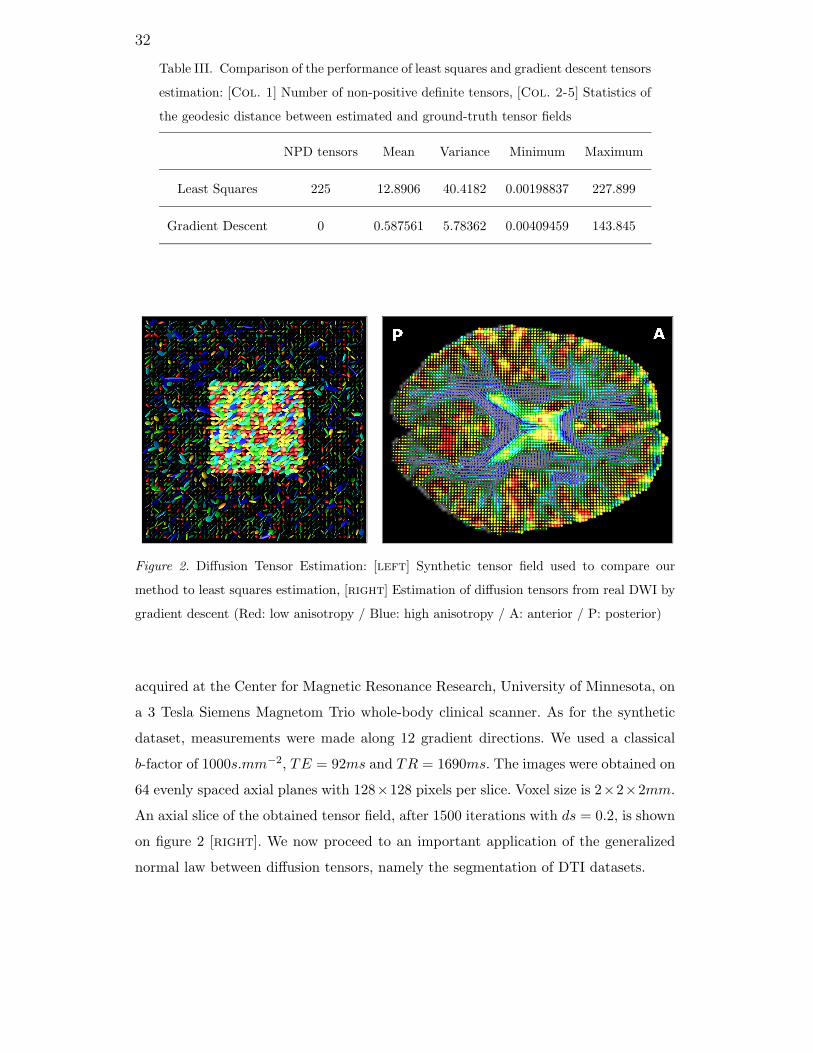
Figure 2. Diffusion Tensor Estimation: [left] Synthetic tensor field used to compare our
method to least squares estimation, [right] Estimation of diffusion tensors from real DWI by
gradient descent (Red: low anisotropy / Blue: high anisotropy / A: anterior / P: posterior)
acquired at the Center for Magnetic Resonance Research, University of Minnesota, on
a 3 Tesla Siemens Magnetom Trio whole-body clinical scanner. As for the synthetic
dataset, measurements were made along 12 gradient directions. We used a classical
b-factor of 1000s.mm−2, TE = 92ms and TR = 1690ms. The images were obtained on
64 evenly spaced axial planes with 128×128 pixels per slice. Voxel size is 2×2×2mm.
An axial slice of the obtained tensor field, after 1500 iterations with ds = 0.2, is shown
on figure 2 [right]. We now proceed to an important application of the generalized
normal law between diffusion tensors, namely the segmentation of DTI datasets.

33
4.3. Statistical and Level-Set based DTI Segmentation
4.3.1. Background
It is well-known that normal brain functions require specific cortical regions to commu-
nicate through fiber pathways. Most of the existing techniques addressing the issue of
the anatomical connectivity mapping work on a fiber-wise basis. However, it should be
pointed out that all those relying on DTI, and not on HARDI (high angular resolution
diffusion imaging (Tuch et al., 2003)), cannot overcome the fiber crossing problem.
Adding to that, very few techniques take into account the global coherence existing
among fibers of a given tract. For example, Corouge et al. (Corouge et al., 2004)
have proposed to cluster and align fibers but their method relies on the classical
streamline approach to fiber tracking (Mori et al., 1999) which is known to be very
sensible to noise and unreliable in areas of fiber crossings. In this section, we do not
address the fiber crossing problem but rather propose a statistical and level-set based
DTI segmentation algorithm to extract fiber bundles. Contrary to the methods in
(Zhukov et al., 2003), (Wiegell et al., 2003), (Feddern et al., 2004),
(Wang and Vemuri, 2004b), (Wang and Vemuri, 2004a), and (Jonasson et al., 2004),
our approach is grounded on the statistical characterization of the regions to be
extracted. A level-set framework is setup to evolve a surface while maximizing the
likelihood of the region of interest.
Let B be the optimal boundary between the object to extract Ω1 and the background
Ω2 so that Ω = Ω1∪Ω2. We introduce the level-set function (Dervieux and Thomasset, 1979),
(Dervieux and Thomasset, 1980) and (Osher and Sethian, 1988) φ : Ω → R, defined
as follows:
φ(w) = 0, if w ∈ Bφ(w) = DEucl(w,B), if w ∈ Ω1
φ(w) = −DEucl(w,B), if w ∈ Ω2.
where DEucl(w,B) stands for the Euclidean distance between w and B. Furthermore,
let Hε(.) and δε(.) be regularized versions of the Heaviside and Dirac functions as
defined in (Chan and Vese, 1999). If we denote by q1 and q2 the normal probability
density functions modeling the distributions of the diffusion tensors respectively in Ω1
34
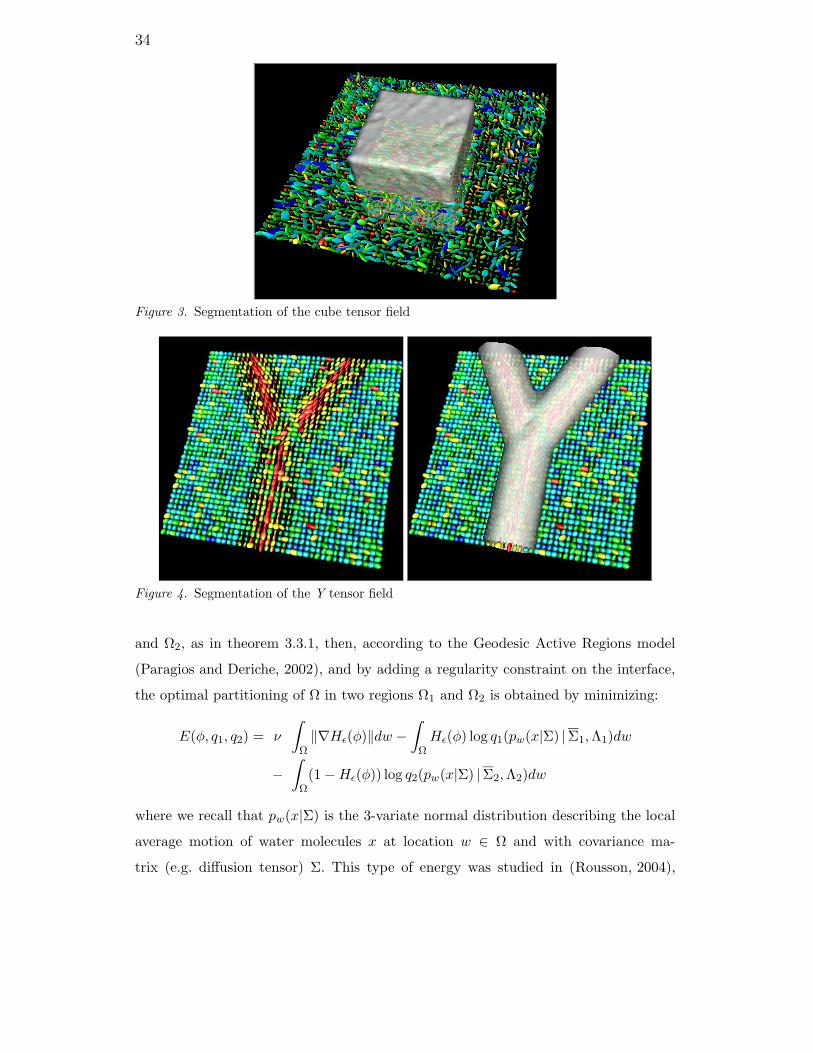
Figure 3. Segmentation of the cube tensor field
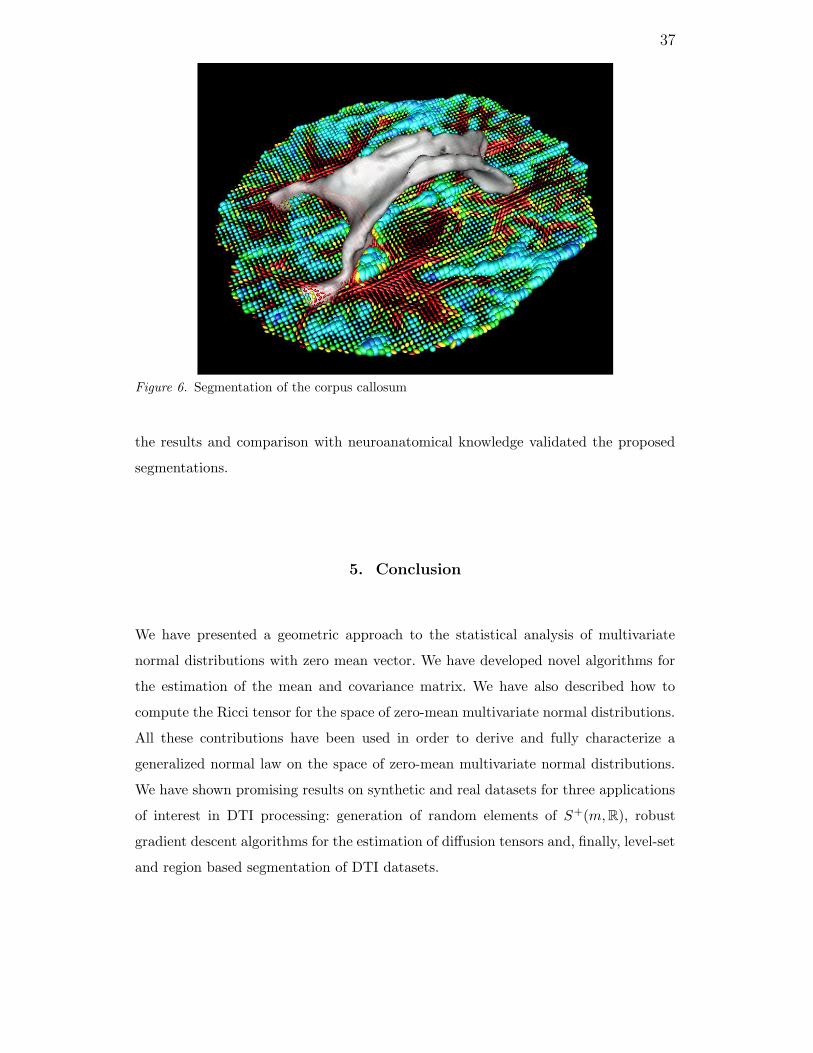
Figure 4. Segmentation of the Y tensor field
and Ω2, as in theorem 3.3.1, then, according to the Geodesic Active Regions model
(Paragios and Deriche, 2002), and by adding a regularity constraint on the interface,
the optimal partitioning of Ω in two regions Ω1 and Ω2 is obtained by minimizing:
E(φ, q1, q2) = ν
∫
Ω‖∇Hε(φ)‖dw −
∫
ΩHε(φ) log q1(pw(x|Σ) |Σ1,Λ1)dw
−∫
Ω(1−Hε(φ)) log q2(pw(x|Σ) |Σ2,Λ2)dw
where we recall that pw(x|Σ) is the 3-variate normal distribution describing the local
average motion of water molecules x at location w ∈ Ω and with covariance ma-
trix (e.g. diffusion tensor) Σ. This type of energy was studied in (Rousson, 2004),

35
Figure 5. 3D views of the corpus callosum segmentation (A: anterior, P: posterior)
(Rousson and Deriche, 2002) and the Euler-Lagrange equations for φ yield the follow-
ing evolution equation for the level-set function φ(w) ∀w ∈ Ω:
φt(w) = δε(φ)
(ν div
∇φ‖∇φ‖ +
1
2log|Λ2||Λ1|
− 1
2βT1 Λ−1
1 β1 +1
2βT2 Λ−1
2 β2
)
where βs=1,2 = −Σs log(Σ−1Σs) as usual and the statistical parameters are esti-
mated with the methods proposed in section 3. We now present results of this surface
evolution algorithm on synthetic and real DTI dataset.
4.3.2. Numerical Experiments
Two important parameters have to be carefully chosen when implementing the pro-
posed surface evolution: The first one is the value of ν, which constrains the smoothness
of the surface and is usually set in the range 5 to 10. The second parameter arises from
the hypothesis of theorem 3.3.1 regarding the trace of the covariance matrix Λ. This
quantity must be small for the generalized Gaussian law to hold. This means that
we restrict ourselves to concentrated distributions. Hence, we set a threshold for the
variance which, whenever reached during the surface evolution, induces the end of the
update for the statistical parameters. We let the surface evolve while using a fixed

36
mean and covariance matrix to model the distribution of the tensors in Ω1 and Ω2.
Finally, it turns out that, within the limits of theorem 3.3.1, the term involving the
Ricci tensor R/3 can be neglected since we found a difference of at least 2 orders of
magnitude between Λ−1 and R/3.
In order to validate the algorithm on ground-truth data, we have extended the syn-
thetic tensor field of the previous section to a 50 × 50 × 50 3D volume composed of
a background and a 20 × 20 × 20 cube centered at location (25, 25, 25). The tensors
in these two regions follow distinct normal distributions with different means and
covariance matrices. We initialized the segmentation process with a small sphere inside
the 20× 20× 20 cube and were able to extract the whole object as shown on figure 3.
We have also generated a more complex synthetic 40× 40× 40 dataset composed by a
diverging tensor field and a background of isotropic tensors (see figure 4). Within the
Y shape, tensors fractional anisotropy decreases as we get away from the center-line.
Noise was added to the original dataset by using the method presented in section 4.1.
Our method was able to extract the Y shape after about 30 iterations.
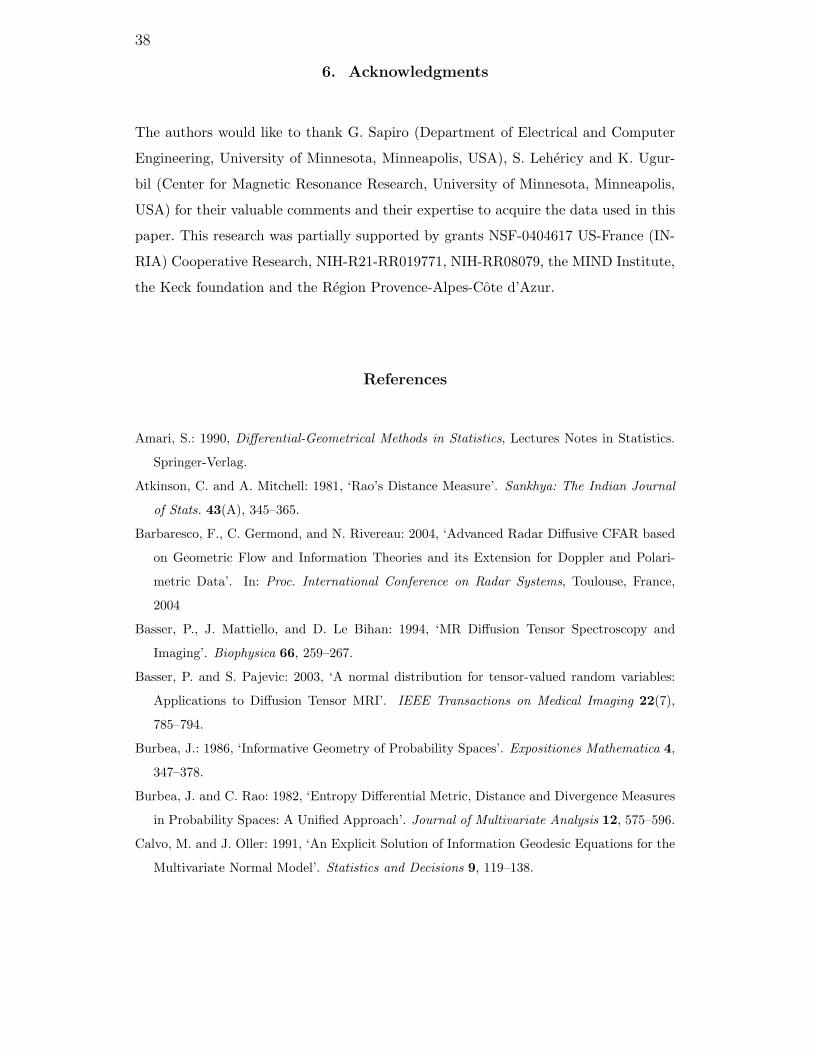
We also applied the algorithm to extract the corpus callosum from various real diffusion
tensors datasets estimated by our gradient descent method. The corpus callosum is
a very important part of the brain white matter that connects areas of each hemi-
spheres together. Diffusion weighted images were acquired at the Center for Magnetic
Resonance Research, University of Minnesota. We used 81 gradient directions so that
the resulting tensors were accurately estimated. With a b-factor of 1000s.mm−2,
TE = 109ms and TR = 5100ms, the images were obtained on 24 evenly spaced
axial planes with 64 × 64 pixels per slice. Voxel size is 3 × 3 × 3mm. By initializ-
ing our segmentation algorithm with a small sphere within the corpus callosum and
evolving it as described above, we managed to extract the volume presented on figure
5. Despite the relatively low resolution of the dataset, the algorithm performs quite
well thanks to the good classification power of the generalized normal law and to the
level-set implementation. We also applied our segmentation scheme to a dataset used
in the previous section. The final surface is presented on figure 6. Visual inspection of
37
Figure 6. Segmentation of the corpus callosum
the results and comparison with neuroanatomical knowledge validated the proposed
segmentations.
5. Conclusion
We have presented a geometric approach to the statistical analysis of multivariate
normal distributions with zero mean vector. We have developed novel algorithms for
the estimation of the mean and covariance matrix. We have also described how to
compute the Ricci tensor for the space of zero-mean multivariate normal distributions.
All these contributions have been used in order to derive and fully characterize a
generalized normal law on the space of zero-mean multivariate normal distributions.
We have shown promising results on synthetic and real datasets for three applications
of interest in DTI processing: generation of random elements of S+(m,R), robust
gradient descent algorithms for the estimation of diffusion tensors and, finally, level-set
and region based segmentation of DTI datasets.
38
6. Acknowledgments
The authors would like to thank G. Sapiro (Department of Electrical and Computer
Engineering, University of Minnesota, Minneapolis, USA), S. Lehericy and K. Ugur-
bil (Center for Magnetic Resonance Research, University of Minnesota, Minneapolis,
USA) for their valuable comments and their expertise to acquire the data used in this
paper. This research was partially supported by grants NSF-0404617 US-France (IN-
RIA) Cooperative Research, NIH-R21-RR019771, NIH-RR08079, the MIND Institute,
the Keck foundation and the Region Provence-Alpes-Cote d’Azur.
References
Amari, S.: 1990, Differential-Geometrical Methods in Statistics, Lectures Notes in Statistics.
Springer-Verlag.
Atkinson, C. and A. Mitchell: 1981, ‘Rao’s Distance Measure’. Sankhya: The Indian Journal
of Stats. 43(A), 345–365.
Barbaresco, F., C. Germond, and N. Rivereau: 2004, ‘Advanced Radar Diffusive CFAR based
on Geometric Flow and Information Theories and its Extension for Doppler and Polari-
metric Data’. In: Proc. International Conference on Radar Systems, Toulouse, France,
2004
Basser, P., J. Mattiello, and D. Le Bihan: 1994, ‘MR Diffusion Tensor Spectroscopy and
Imaging’. Biophysica 66, 259–267.
Basser, P. and S. Pajevic: 2003, ‘A normal distribution for tensor-valued random variables:
Applications to Diffusion Tensor MRI’. IEEE Transactions on Medical Imaging 22(7),
785–794.
Burbea, J.: 1986, ‘Informative Geometry of Probability Spaces’. Expositiones Mathematica 4,
347–378.
Burbea, J. and C. Rao: 1982, ‘Entropy Differential Metric, Distance and Divergence Measures
in Probability Spaces: A Unified Approach’. Journal of Multivariate Analysis 12, 575–596.
Calvo, M. and J. Oller: 1991, ‘An Explicit Solution of Information Geodesic Equations for the
Multivariate Normal Model’. Statistics and Decisions 9, 119–138.
39
Calvo, M. and J. Oller: 1990, ‘A Distance between Multivariate Normal Distributions Based
in an Embedding into a Siegel Group’. Journal of Multivariate Analysis 35, 223–242
Caticha, A.: 2000, ‘Change, Time and Information Geometry’. In: Proc. Bayesian Inference
and Maximum Entropy Methods in Science and Engineering, Vol. 568. pp. 72–82.
Chan, T. and L. Vese: 1999, ‘An active contour model without edges’. In: Scale-Space Theories
in Computer Vision, Vol. 1682 of Lecture Notes in Computer Science. Springer–Verlag, pp.
141–151.
Charpiat, G., O. Faugeras, and R. Keriven: 2003, ‘Approximations of shape metrics and
application to shape warping and shape statistics’. Research Report 4820, INRIA, Sophia
Antipolis.
Chefd’hotel, C., D. Tschumperle, R. Deriche, and O. Faugeras: 2004, ‘Regularizing Flows for
Constrained Matrix-Valued Images’. Journal of Mathematical Imaging and Vision 20(1-2),
147–162.
Corouge, I., S. Gouttard, and G. Gerig: 2004, ‘A Statistical Shape Model of Individual Fiber
Tracts Extracted from Diffusion Tensor MRI’. In: Proc. Seventh Intl. Conf. on Medi-
cal Image Computing and Computer Assisted Intervention, Vol. 3217 of Lecture Notes in
Computer Science, pp. 671–679.
Dervieux, A. and F. Thomasset: 1979, ‘A finite element method for the simulation of Rayleigh-
Taylor instability’. Lecture Notes in Mathematics 771, 145–159.
Dervieux, A. and F. Thomasset: 1980, ‘Multifluid incompressible flows by a finite element
method’. In: Proc. Seventh Intl. Conf. on Numerical Methods in Fluid Dynamics, Vol. 141
of Lecture Notes in Physics, pp. 158–163.
Devroye, L.: 1986, Non-Uniform Random Variate Generation. Springer–Verlag.
Eriksen, P.: 1986, ‘Geodesics Connected with the Fisher Metric on the Multivariate Manifold’.
Preprint 86-13, Institute of Electronic Systems, Aalborg University, Denmark.
Feddern, C., J. Weickert, B. Burgeth, and M. Welk: 2004, ‘Curvature-driven PDE methods
for matrix-valued images’. Technical Report 104, Department of Mathematics, Saarland
University, Saarbrucken, Germany.
Fletcher, P. and S. Joshi: 2004, ‘Principal Geodesic Analysis on Symmetric Spaces: Statistics of
Diffusion Tensors’. In: Proc. ECCV’04 Workshop Computer Vision Approaches to Medical
Image Analysis, Vol. 3117 of Lecture Note in Computer Science, pp. 87–98.
Fletcher, P. T., C. Lu, and S. Joshi: 2003, ‘Statistics of shape via principal geodesic analysis
on Lie groups’. In: Proc. IEEE Conf. on Computer Vision and Pattern Recognition, pp.
95–101.
40
Forstner, W. and B. Moonen: 1999, ‘A metric for covariance matrices’. Technical report,
Stuttgart University, Dept. of Geodesy and Geoinformatics.
Frechet, M.: 1948, ‘Les elements aleatoires de nature quelconque dans un espace distancie.
Annales de l’Institut Henri Poincare X(IV), 215–310.
Jonasson, L., X. Bresson, P. Hagmann, O. Cuisenaire, R. Meuli, and J. Thiran:2004, ‘White
matter fiber tract segmentation in DT-MRI using geometric flows’. Medical Image Analysis,
9(3):223–236, June 2005.
Karcher, H.: 1977, ‘Riemannian centre of mass and mollifier smoothing’. Comm. Pure Appl.
Math 30, 509–541.
Kendall, W.: 1990, ‘Probability, convexity, and harmonic maps with small image i: uniqueness
and fine existence’. Proc. London Math. Soc. 61(2), 371–406.
Le Bihan, D., E. Breton, D. Lallemand, P. Grenier, E. Cabanis, and M. Laval-Jeantet: 1986,
‘MR Imaging of Intravoxel Incoherent Motions: Application to Diffusion and Perfusion in
Neurologic Disorders’. Radiology pp. 401–407.
Lenglet, C., R. Deriche, and O. Faugeras: 2004a, ‘Inferring White Matter Geometry from
Diffusion Tensor MRI: Application to Connectivity Mapping’. In: Proc. Eighth European
Conference on Computer Vision, Vol. 3024 of Lecture Notes in Computer Science, pp.
127–140.
Lenglet, C., M. Rousson, and R. Deriche: 2004b, ‘Segmentation of 3D Probability Density
Fields by Surface Evolution: Application to diffusion MRI’. In: Proc. Seventh Intl. Conf.
on Medical Image Computing and Computer Assisted Intervention, Vol. 3216 of Lecture
Notes in Computer Science, pp.18–25.
Lenglet, C., M. Rousson, R. Deriche, O. Faugeras, S. Lehericy and K. Ugurbil: 2005, ‘A
Riemannian Approach to Diffusion Tensor Images Segmentation’. In: Proc. Information
Processing in Medical Imaging, Glenwood Springs, CO, USA, July 2005.
Lenglet, C., M. Rousson, R. Deriche, and O. Faugeras: 2004c, ‘Statistics on Multivariate
Normal Distributions: A Geometric Approach and its Application to Diffusion Tensor MRI’.
Research Report 5242, INRIA, Sophia Antipolis.
Madsen, L.: 1978, ‘The geometry of statistical models’. Ph.D. thesis, University of Copenhagen.
Mahalanobis, P.: 1936, ‘On the generalized distance in statistics’. Proceedings of the Indian
National Institute Science 2, 49–55.
Mangin, J., C. Poupon, C. Clark, and I. Le Bihan, D.and Bloch: 2002, ‘Distortion correction
and robust tensor estimation for MR diffusion imaging’. Medical Image Analysis 6(3),
191–198.
41
Moakher, M.: 2002, ‘Means and Averaging in the Group of Rotations’. SIAM J. Matrix Anal.
Appl. 24(1), 1–16.
Moakher, M.: 2005, ‘A differential geometric approach to the geometric mean of symmetric
positive-definite matrices’. SIAM J. Matrix Anal. Appl. 26(3), 735–747
Mori, S., B. Crain, V. Chacko, and P. V. Zijl: 1999, ‘Three-DImensional Tracking of Axonal
Projections in the Brain by Magnetic Resonance Imaging’. Annals of Neurology 45(2),
265–269.
Oller, J. and C. Cuadras: 1985, ‘Rao’s Distance for Negative Multinomial Distributions’.
Sankhya: The Indian Journal of Stats. 47, 75–83.
Osher, S. and J. Sethian: 1988, ‘Fronts propagating with curvature dependent speed: algorithms
based on the Hamilton–Jacobi formulation’. Journal of Computational Physics 79, 12–49.
Paragios, N. and R. Deriche: 2002, ‘Geodesic active regions: a new paradigm to deal with
frame partition problems in computer vision’. Journal of Visual Communication and Image
Representation 13(1/2), 249–268.
Pennec, X.: 2004, ‘Probabilities and Statistics on Riemannian Manifolds: A Geometric
Approach’. Research Report 5093, INRIA, Sophia Antipolis.
Pennec, X., P. Fillard, and N. Ayache: 2004, ‘A Riemannian Framework for Tensor Computing’.
Research Report 5255, INRIA, Sophia Antipolis.
Rao, C.: 1945, ‘Information and Accuracy Attainable in the Estimation of Statistical
Parameters’. Bull. Calcutta Math. Soc. 37, 81–91.
Rousson, M.: 2004, ‘Cues Integrations and Front Evolutions in Image Segmentation’. Ph.D.
thesis, Universite de Nice-Sophia Antipolis.
Rousson, M. and R. Deriche: 2002, ‘A Variational Framework for Active and Adaptative
Segmentation of Vector Valued Images’. In: Proc. IEEE Workshop on Motion and Video
Computing, pp. 56–62.
Skovgaard, L.: 1981, ‘A Riemannian Geometry of the Multivariate Normal Model’. Technical
Report 81/3, Statistical Research Unit, Danish Medical Research Council, Danish Social
Science Research Council.
Skovgaard, L.: 1984, ‘A Riemannian Geometry of the Multivariate Normal Model’. Scandina-
vian Journal of Statistics 11, 211–233.
Stejskal, E. and J. Tanner: 1965, ‘Spin diffusion measurements: spin echoes in the presence of
a time-dependent field gradient’. Journal of Chemical Physics 42,

42
Tschumperle D. and R. Deriche: 2003, ‘Variational Frameworks for DT-MRI Estimation,
Regularization and Visualization’. In: Proc. Ninth International Conference on Computer
Vision, pp. 116–122.
Tuch, D.S., T.G. Reese, M.R. Wiegell, and V.J. Wedeen: 2003, ‘Diffusion MRI of complex
neural architecture’. Neuron, 40, 885–895.
Wang, Z. and B. Vemuri: 2004a, ‘An Affine Invariant Tensor Dissimilarity Measure and its
Application to Tensor-valued Image Segmentation’. In: Proc. IEEE Conf. on Computer
Vision and Pattern Recognition, pp.228–233.
Wang, Z. and B. Vemuri: 2004b, ‘Tensor Field Segmentation Using Region Based Active
Contour Model’. In: Eighth European Conference on Computer Vision, Vol. 3024 of Lecture
Notes in Computer Science, pp. 304–315.
Wang, Z., B. Vemuri, Y. Chen, and T. Mareci: 2004, ‘A constrained variational principle for
direct estimation and smoothing of the diffusion tensor field from complex DWI’. IEEE
Transactions on Medical Imaging 23(8), 930–939.
Westin, C., S. Maier, H. Mamata, A. Nabavi, F. Jolesz, and R. Kikinis: 2002, ‘Processing
and Visualization for Diffusion Tensor MRI’. In: In Medical Image Analysis, Vol. 6(2). pp.
93–108.
Wiegell, M., D. Tuch, H. Larson, and V. Wedeen: 2003, ‘Automatic Segmentation of Thalamic
Nuclei from Diffusion Tensor Magnetic Resonance Imaging’. NeuroImage 19, 391–402.
Zhang, Z: 1997, ‘Parameter Estimation Techniques: A Tutorial with Application to Conic
Fitting’. International Journal of Image and Vision Computing 15(1), 59–76.
Zhukov, L., K. Museth, D. Breen, R. Whitaker, and A. Barr: 2003, ‘Level Set Segmentation and
Modeling of DT-MRI Human Brain Data’. Journal of Electronic Imaging 12(1), 125–133.




















