Hydrodynamics of electromagnetically controlled jet oscillations

SPH modeling of dissipation mechanisms in gravity waves
Andrea Colagrossi∗
CNR-INSEAN, The Italian Ship Model Basin
Via di Vallerano 139, 00128 ROMA, Italy
CESOS/CAMOS: Centre for Excellence for Ship and Ocean Structures,
NTNU, Trondheim, Norway
Antonio Souto-Iglesias†
Naval Architecture Department (ETSIN),
Technical University of Madrid (UPM), 28040 Madrid, Spain
Matteo Antuono‡ and Salvatore Marrone§
CNR-INSEAN, The Italian Ship Model Basin
Via di Vallerano 139, 00128 ROMA, Italy
(Dated: June 11, 2015)
Abstract
The Smoothed Particle Hydrodynamics (SPH) method has been used to study the evolution of free-
surface Newtonian viscous flows specifically focusing on dissipation mechanisms in gravity waves. The
numerical results have been compared with an analytical solution of the linearized Navier-Stokes equations
for Reynolds numbers in the range 50− 5000. We found that a correct choice of the number of neighboring
particles is of fundamental importance in order to obtain convergence towards the analytical solution. This
number has to increase with higher Reynolds numbers in order to prevent the onset of spurious vorticity
inside the bulk of the fluid, leading to an unphysical over-damping of the wave amplitude. This generation
of spurious vorticity strongly depends on the specific kernel function used in the SPH model.
PACS numbers: 47.11.-j, 47.15.-x, 47.10.ad
Keywords: Smoothed Particle Hydrodynamics, numerical stability, gravity waves, viscous dissipation, spurious
vorticity
∗Electronic address: [email protected]†Electronic address: [email protected]
1

I. MOTIVATION
The modeling of dissipation mechanisms in gravity waves is a challenging problem in
computational fluid mechanics. This phenomenon is made more complex by the simultaneous
action of nonlinearities, free-surface deformation and evolution and, eventually, by wave breaking.
In the latter case, only semi-empirical approaches, like that proposed by Sun & Fujino [1], can be
found in the literature.
Smoothed Particle Hydrodynamics (SPH) is a promising technique in modeling free-surface
flows since no boundary conditions have to be explicitly enforced at the free surface [2].
Consequently, it is not necessary to detect and define the fluid particles belonging to the free
surface. This is a major benefit when dealing with highly distorted free-surface flows because no
numerical diffusion is introduced through the interface tracking. Despite this, a careful approach
to dissipation mechanisms in gravity waves is still needed since a number of numerical issues arise
when simulating viscous flows characterized by large Reynolds numbers. Since the main topic of
the present work is about dissipation, we will only consider non-breaking waves and postpone the
analysis of wave breaking to future works.
In the scientific literature, many numerical works have dealt with gravity wave dissipation (e.g.
Harlow & Welch, [3]; Haddon & Riley, [4]; Liu & Orfila, [5]; Raval et al., [6]; just to cite a few).
Concerning SPH models, several contributions on confined viscous flows have been proposed over
the years (see e.g. Basa et al. [7], Macià et al. [8] and Valizadeh and Monaghan [9]). Despite this
and to our knowledge, no analysis on the dissipation mechanisms of free-surface viscous flows has
been proposed until now.
The aim of the present work is therefore to fill this void and prove that the SPH scheme can
correctly account for dissipation phenomena in gravity waves even for moderately large Reynolds
numbers. As shown in the following sections, this last topic implies a number of numerical issues
concerning spatial resolution and the number of neighboring particles to be used. Incidentally,
we underline that in all numerical simulations, the Reynolds number has been chosen low enough
such as to exclude the generation of turbulence.
For numerical reasons, the following analysis deals with the evolution of standing waves. This
choice does not limit the validity of our results and is motivated by the fact that a standing
wave does not propagate and, consequently, the computational domain is much reduced when
compared to progressive wave problems (see for example [10]). Furthermore, due to the huge
3

computational effort required, a smaller domain is paramount when tackling the convergence
analysis of discretized formulations.
The numerical outputs of the SPH scheme have been validated against an analytical solution
obtained from the linearized Navier-Stokes equations [11]. This solution extends on some previous
works about dissipation mechanisms in gravity waves (see, for example, Lighthill[12]) and
provides a useful formula for the estimation of the damping rate.
This paper is organized as follows: Section §II introduces the governing equations while
Section §III briefly recalls the dissipation mechanisms in gravity waves. Then, the remaining
sections are devoted to the description of the analytical solution and of the SPH scheme and,
finally, to the analysis of dissipative effects through the SPH method.
II. GOVERNING EQUATIONS
Let us consider a two-dimensional fluid domain Ω whose boundary, ∂Ω, consists of a free
surface, ∂ΩF , a solid boundary at the bottom, ∂ΩB, and lateral boundaries, ∂ΩP, where periodic
boundary conditions are enforced (figure 1). Hereinafter, H denotes the still water depth, L the
horizontal length of the domain and the couple (x, y) represents a Cartesian frame of reference
whose origin is at the still water level.
Similarly to Colagrossi et al. [13], the fluid is assumed to be barotropic and weakly-
Perio
dic
y
x
Perio
dic
FIG. 1: Layout of the physical domain.
4

compressible. Under these hypotheses, the Navier-Stokes equations read:
DρDt
+ ρ∇ · u = 0 ,
DuDt
= g +∇ ·
ρ,
p = c20 (ρ − ρ0) ,
(II.1)
where D/Dt represents the Lagrangian derivative. Here, p is the pressure, c0 is the sound velocity
(assumed constant) ρ is the fluid density, ρ0 is the density along the free surface for a fluid at rest
and g is a generic body force. The flow velocity, u, is defined as the material derivative of a fluid
material point at the position r:
DrDt
= u . (II.2)
Symbol indicates the stress tensor of a Newtonian fluid:
= (−p + λ tr ) 1 + 2 µ , (II.3)
where is the rate of strain tensor, i.e. = (∇u + ∇uT )/2. Finally, µ and λ are the viscosity
coefficients. In the analysis that follows, it is useful to consider the viscous part of the stress tensor,
that is:
= λ tr1 + 2 µ , (II.4)
and write:
∇ · = −∇p + ∇ · = −∇p + (λ + µ)∇(∇ · u) + µ∇2u . (II.5)
A. Boundary conditions (BCs)
A no-slip BC is imposed along the bottom, ∂ΩB. Such a condition is expressed as:
u = V∂ΩB ∀x ∈ ∂ΩB (II.6)
where V∂ΩB is the solid boundary velocity.
Along the free surface, both kinematic and dynamic BCs should be fulfilled. The kinematic
free-surface BC implies that while evolving with the fluid flow, the material points initially on
5

∂ΩF remain on ∂ΩF . Denoting by n the unit vector normal to the free surface and pointing out of
the fluid, the kinematic free-surface condition is formalized by projecting the particle speed u and
the boundary speed V∂ΩF in the direction of n:
u · n = V∂ΩF · n ∀x ∈ ∂ΩF (II.7)
The dynamic free-surface BC is a consequence of the continuity of the stresses across the free
surface. Assuming that the surface tension is negligible, a free surface does not withstand neither
perpendicular normal stresses nor parallel/tangential shear stresses. For a Newtonian fluid, by
denoting this stress field as t, the dynamic free-surface BC can be expressed as:
t = · n = (−p + λ tr ) n + 2 µ · n = 0 . (II.8)
This condition can be projected both in the normal direction and on the free-surface tangent plane
(τ being a unitary vector lying on such tangent plane). In this case, since tr = ∇ · u and
n · · n = n · ∂u/∂n, two relationships arise from equation (II.8):
p = λ∇ · u + 2 µ n · ∂u/∂n (II.9)
τ · · n = 0 (II.10)
An important consequence of equation (II.9) is that the pressure field is generally discontinuous
across the free surface.
In two dimensions, equation (II.10) can be rewritten as follows (see, for example, [14]):
ω = −2∂u∂τ· n (II.11)
resulting in an expression for the vorticity generated at the free-surface. This vorticity diffuses
inside the fluid domain generating a boundary layer whose thickness depends on the Reynolds
number. This is discussed in detail in the following sections.
III. MECHANICAL ENERGY AND ENSTROPHY
The mechanical energy of a fluid (EM) is given by the sum of the kinetic (EK) and potential
energy (EP). Its evolution in time is described by the following law:
dEM
dt=
∫Ω
div () · u dV (III.12)
6

Using the divergence theorem, the mechanical power on the boundary ∂Ω can be expressed as:∫∂Ω
(n · ) · u dS =
∫Ω
div( · u) dV =
∫Ω
div() · u dV +
∫Ω
: ∇u dV (III.13)
This power is zero on the free surface ∂ΩF since, by definition, an interface is said to be a free
surface when the tension τ = n · is null. Similarly, it is zero on the bottom ∂ΩB (which is
assumed here fixed) since the no-slip condition along solid bodies implies that u = 0. Using the
above considerations, equation (III.12) becomes:
dEM
dt= −
∫Ω
: dV (III.14)
where the velocity gradient has been replaced by its symmetric component since the tensor is
symmetric. For a Newtonian viscous fluid (see section II), equation (III.14) can be re-written as:
dEM
dt=
∫Ω
p div(u) dV − λ
∫Ω
[div(u)]2 dV − 2 µ∫
Ω
D : D dV (III.15)
In the analysis that follows, we define the different contributions as:
dEC
dt=
∫Ω
p div(u) dV ,dEB
dt= − λ
∫Ω
[div(u)]2 dV ,dED
dt= − 2 µ
∫Ω
D : D dV .
(III.16)
The energy EC represents the work associated with the fluid compressibility and is a pure reversible
energy. Using the equation of state and the continuity equation, EC can be reshaped as a potential
energy. The term EB represents the dissipation due to the fluid compressibility while ED is the
classical viscous term for a Newtonian fluid. If the fluid is weakly-compressible, EB can be
neglected. In fact, in all the numerical simulations that follow, it remains smaller than 0.1% of
the initial mechanical energy.
For an incompressible fluid, equation (III.15) reduces to:
dEM
dt=
dED
dt= − 2 µ
∫Ω
D : D dV (III.17)
Under the same hypothesis, substituting equation (II.3) in (III.12) the time variation of the
mechanical energy can be rewritten as:
dEM
dt=
∫Ω
−∇p · u dV + µ
∫Ω
∇2u · u dV , (III.18)
and, using the following identity (see, for example, [15]),
∇2u · u = div(u × ω) − |ω2| , (III.19)
7

it becomes:
dEM
dt=
∫Ω
−∇p · u dV − µ
∫∂Ω
(ω × u) · ndS − µ
∫Ω
|ω2| dV . (III.20)
Note that, because of the incompressibility of the fluid, it follows∫∂Ω
p u · ndS =
∫Ω
div(p u) dV =
∫Ω
∇p · u dV , (III.21)
and equation (III.20) can finally be rewritten as:
dEM
dt= −
∫∂Ω
p u · ndS − µ
∫∂Ω
(ω × u) · ndS − µ
∫Ω
|ω2| dV . (III.22)
Similarly to equation (III.15), we define the following contributions:
dE f p
dt= −
∫∂Ω
p u · ndS ,dE fω
dt= − µ
∫∂Ω
(ω × u) · ndS ,dEE
dt= − µ
∫Ω
|ω2| dV .
(III.23)
All these surface integrals are null at the bottom because of the no-slip condition whilst they
generally differ from zero along the free surface. The term EE is proportional to the enstrophy
(that is, to the rotational energy) and is always negative.
Equations (III.15) and (III.22) are used in the analysis of the numerical simulations, taking into
account the different energy contributions described above. Indeed, under certain conditions, we
show that the SPH model fails to converge to the expected solution and some of the contributions
defined in this section increase, inducing a non-physical attenuation of the wave amplitude.
Using the free-surface boundary conditions (II.9) and (II.11), equation (III.22) can be rewritten
as follows:dEM
dt= −2µ
∫∂ΩF
(∇u u) · ndS − µ
∫Ω
|ω2| dV . (III.24)
The above expression highlights the contribution on the rate of change of the mechanical energy
due to the flux of the convective acceleration (∇u u) on the free surface. The first term of (III.24)
may be extended to ∂Ω, since u is zero at the bottom. Note that, using the divergence theorem, we
can write:
∇ · (∇u u) = ∇(∇ · u) · u + ∇T u : ∇u = ∇(∇ · u) · u + D : D − |ω2|/2 (III.25)
For an incompressible fluid, the first term is zero and, consequently, it is possible to recover
equation (III.17).
8

IV. THE SPH MODEL
A. The SPH Regularized Navier-Stokes equations
The SPH model is based on the filtering (smoothing) of a generic flow field f through a
convolution integral with a kernel function W over the fluid domain Ω:
〈 f 〉(r) =
∫Ω
f (r′) W(r′ − r; h) dV ′ (IV.26)
where h is a measure of the kernel support and is generally called smoothing length. When h tends
to zero the kernel function W becomes a delta Dirac function. When this smoothing procedure is
applied to the differential operators of the governing equation (II.1), a regularized version of the
Navier-Stokes equations is obtained (see [16] for more details):
DρDt
= −ρ 〈∇ · u〉 ,
DuDt
= g −〈∇p〉ρ
+〈∇ ·〉
ρ,
DrDt
= u, p = c20 (ρ − ρ0)
(IV.27)
Following [2], the smoothed operators for the velocity and the pressure are:
〈∇ · u〉(r) =
∫Ω
[u(r′) − u(r)
]· ∇W(r′ − r) dV ′
〈∇p〉(r) =
∫Ω
[p(r′) + p(r)
]∇W(r′ − r) dV ′
(IV.28)
Assuming that the viscosity coefficients are constant across the fluid domain, the smoothed
operator for the viscous term is (see [13]):
〈∇ ·〉(r) = µK∫
Ω
[u(r′) − u(r)
]· (r′ − r)
|r′ − r|2∇W(r′ − r) dV ′ , (IV.29)
where the coefficient K is a parameter that depends on the spatial dimension (K = 6, 8, 10, in 1D,
2D and 3D respectively). A general discussion on the SPH viscous term can be found in [17].
The consistency of the system (IV.27) when h tends to zero has been deeply investigated in
[13] for viscous free-surface flows and in Macià et al.[18] for unidirectional flows with no-slip
boundary conditions along the solid boundaries. We underline that, the regularized equations
(IV.27) along with the differential operators in (IV.28) (IV.29) satisfy the free-surface boundary
conditions (II.9)-(II.10) in a weak sense (see, for example, [13]). Consequently, the free-surface
boundary conditions are not explicitly enforced in the SPH scheme.
9

B. Discretization of the governing equation
The SPH equations are obtained by discretizing the convolution integral inside equations
(IV.27):
Dρi
Dt= − ρi
∑j
(uj − uj
)· ∇Wi j ∆V j ,
Dui
Dt= g −
1ρi
∑j
(p j + pi)∇Wi j ∆V j + νK
∑j
[u j − ui
]· (r j − ri)
|r j − ri|2 ∇Wi j ∆V j ,
Dri
Dt= ui , pi = c2
0 (ρi − ρ0)
(IV.30)
Initially, particles are positioned on a Cartesian lattice with spacing ∆x and, consequently, their
volumes are ∆Vi = ∆x2. The velocity and pressure fields given as initial conditions come from
the analytical solution; the initial density field is deduced by using the equation of state. Thus, the
particle masses are mi = ρi ∆Vi. During the time evolution, mi does not change whilst the particle
volumes are updated through the density field, that is, ∆Vi(t) = mi/ρi(t). Finally, the ghost particles
method (see e.g. [19]) is used to enforce the boundary condition on the bottom.
Regarding the kernel function, we use the Wendland kernel ψ31 (see [20] for more details).
Such a kernel is positive defined and has continuous second derivatives. Hereinafter, we denote it
through WC2 and, following [21, 22], we renormalized it to obtain a compact support of radius
2h:
W(q) = β
(2 − q)4(1 + 2q) for 0 ≤ q ≤ 2
0 for q > 2. (IV.31)
Here, q = |r|/h while β is a normalization constant equal to 7/(64π) in 2D.
It is well documented in the SPH literature that the choice of the kernel function largely affects
the properties of the numerical scheme (see e.g [23–25]). The influence of this choice on the topic
addressed in this paper ( gravity waves attenuation SPH modeling ) is discussed in section VII C.
The convergence analysis for the SPH scheme has to be done by decreasing both the smoothing
length h and the spatial resolution ∆x. Specifically, the ratio h/∆x is proportional to the number
of neighbors interacting with a given particle (that is, to the number of particles in the kernel
domain). This ratio influences the accuracy of the discrete differential operators (see e.g. [26, 27])
and, consequently, the global properties of the scheme. Despite this, in the SPH literature, few
works focus on this topic which in turn mainly deal with inviscid flows (see e.g. [28], [29]) .
10

Error bounds of the interpolation procedure have been highlighted by Quinlan et al. [27] and
confirmed by Ellero et al. [30]. Specifically, Ellero et al. simulated the flow past a circular cylinder
with periodic boundary conditions at low Reynolds numbers. They investigated the convergence
rate of the drag coefficient and found, heuristically, that an increase of the spatial resolution does
not guarantee convergence unless the number of neighbors is above a certain limit.
Regarding this topic, it is important to underline that, in some practical applications, the
variability range of the parameter h/∆x can be very restricted, since numerical instabilities may
occur (for more details, see [31] and [32]).
The equations of system (IV.30) are marched in time using an explicit fourth-order Runge-Kutta
scheme. The global CFL of the integration scheme has to account for viscous diffusion, particle
acceleration ai, sound speed and particle velocity. The time-step bounds deriving from the first
two components have been modeled following Morris et al. [33]:
∆t1 ≤ 0.125h2
ν(IV.32)
∆t2 ≤ 0.25 mini
√h‖ai‖
(IV.33)
Usually, they depend very weakly on the specific integration scheme. The advective/acoustic
component is:
∆t ≤ CFL3 mini
(h
c0 + ‖ui‖
)(IV.34)
For a fourth-order Runge-Kutta scheme and for a Wendland kernel, we heuristically found
CFL3 = 2.2. The global CFL is given by the minimum of all the above bounds.
Since a fluid is generally characterized by a high sound speed, it is common practice in SPH
to use a numerical sound speed several orders of magnitude smaller than the physical one. In any
case, this numerical velocity has to be large enough to avoid compressibility effects. To make
them negligible, we set c0 = 10√
gH, as suggested in Madsen & Schäffer [34]. The validity of this
assumption is further verified in section VI.
Note that the numerical sound velocity is generally quite large and, if Re 1, the constrain
(IV.34) usually dominates over those in (IV.32) and (IV.33). Despite that, there always exists
a critical value of the smoothing length, say h∗, under which the constrain (IV.32) becomes
predominant. Below this value, the computational costs largely increase due to the quadratic
dependence of (IV.32) on the smoothing length.
11

V. ATTENUATION OF A STANDING WAVE
In the present section, we analyze in detail the phenomenon of viscous damping for gravity
waves. As explained in the introduction, we consider the evolution of a standing wave in order to
reduce the computational effort. An analytical solution of the linearized Navier-Stokes equation
(see formula (V.38) of the next section) has been used to evaluate the damping rate of the kinetic
energy and to check whether the SPH model is able to correctly predict the mechanical energy
decay. A further advantage of the standing wave is that the maximum wave steepness before
breaking is kA = 0.68 (here, A is the wave amplitude) while for propagative waves it is closer
to 0.45 (see [35]). This means that it is possible to inspect a wider range of wave steepnesses.
Remarkably, the analytical solution described in Section V A proved to be a reliable approximation
even for moderately high wave steepnesses (see section VII).
Figure 2 describes the initial configuration of the problem. Here, L is the wave length and
H = L/2 is the still water depth, the dimensionless wave number kH is therefore equal to π. Note
that the latter value means that the studied regime lies between deep (kH ≥ π) and intermediate
water conditions (π/10 ≤ kH < π). The free surface is initially flat in order to simplify particle
positioning. The initial value of the kinetic energy is computed and denoted as EK0. The initial
FIG. 2: Initial particle configuration, pressure and velocity fields for the standing wave problem.
12

pressure and velocity fields were evaluated using the analytical solution of Antuono & Colagrossi
[11].
As a first test case, we choose the nonlinearity parameter ε = 2A/H equal to 0.1 corresponding
to the steepness kA equal to π/20. The period of oscillation, T , is obtained through equation V.37
and depends on the Reynolds number chosen for the simulation (we recall that Re = H√
gH/ν).
Specifically, we chose five test cases with Re = 50, 250, 500, 2500, 5000. All simulations were
done assuming the fluid regime remains laminar. This is consistent with the analysis of Babanin
[36] which predicts that in similar conditions to the ones presented here, the critical Reynolds
number is close to 650, 000.
A. Approximate analytical solution for viscous gravity waves
To check the accuracy of the SPH scheme, we use an analytical solution of the linearized
Navier-Stokes equations for traveling waves.
The fluid variables are expressed through the following formulas:
u = U(y) eı θ + c.c. v = V(y) eı θ + c.c. (V.35)
p = P(y) eı θ + c.c. η = E eı θ + c.c. (V.36)
where u, v are the horizontal and vertical components of the velocity field, η is the free-surface
elevation, θ = k x − σ t and k is the wave number (i.e. k = 2π/L where L is the wave length).
Unlike the solution predicted by the inviscid theory, σ is a complex number: its real part represents
the circular frequency while the imaginary part gives the damping rate of the viscous gravity wave.
Substituting the expressions in (V.35) and (V.36) inside the linearized Navier-Stokes equations
and imposing the correct boundary conditions along the bottom and the free surface, it is possible
to obtain an implicit linear dispersion relation. Such a relation has been properly expanded in
13

series for ν 1 (where ν is the kinematic viscosity of the fluid):
<(σ) =√
g k tanh(kH) +
√2 (g ν2 k5)1/4
(tanh(kH)2 − 1
)4 tanh(kH)3/4 +
−
√2 (ν6 k11/g)1/4
(7 tanh(kH)6 + 147 tanh(kH)4 − 11 tanh(kH)2 − 15
)128 tanh(kH)13/4 + . . . (V.37)
=(σ) =
√2 (g ν2 k5)1/4
(tanh(kH)2 − 1
)4 tanh(kH)3/4 +
ν k2(tanh(kH)4 − 8 tanh(kH)2 − 1
)4 tanh(kH)2 +
+
√2 (ν6 k11/g)1/4
(7 tanh(kH)6 + 147 tanh(kH)4 − 11 tanh(kH)2 − 15
)128 tanh(kH)13/4 + . . . (V.38)
These expansions are well-posed for Re 1 and for Re−1 k Re2/3, where Re = H√
gH/ν is
the Reynolds number. The above bounds ensure that each term inside the perturbation expansion
is smaller than the preceding and larger than the subsequent for every value of k. The complex part
=(σ) is strictly negative and gives the dissipation rate of a viscous gravity wave propagating with
velocity<(σ)/k. As expected, the leading order of<(σ) coincides with the dispersion relation of
the potential theory while for the higher-orders, strictly negative terms appear. This means that the
viscosity tends to reduce the circular frequency and, consequently, the phase velocity of the wave.
Details of this analytical solution are reported in Antuono & Colagrossi [11].
Despite the linearized solution neglecting the advective terms inside the Navier-Stokes
equations, it adequately represents the global flow evolution as long as the nonlinearity parameter
ε stays small and the flow remains laminar. In fact, such hypotheses guarantee that the advective
terms are of order O(ε2).
B. Test matrix
To check the convergence of the SPH scheme, a matrix of 100 test cases has been considered.
The matrix has been organized as follows:
1. The range of Reynolds numbers (Re = 50, 250, 500, 2500, 5000) has been chosen broad
enough to describe different dissipation regimes.
2. For Re = 50, 250 and 500 the final time of the simulations (hereinafter t f ) has been chosen
large enough to reduce the kinetic energy to about 1% of its initial value. For Re = 2500 and
14

Re NT t f EK(t f )/EK0
50 4 14.2 0.0002
250 9 32.0 0.0103
500 16 56.8 0.0147
2500 25 88.8 0.2472
5000 28 99.4 0.4495
HHHH
HHHHH
h/∆xH/∆x 50 100 200 400 800
1 50 100 200 400 800
2 25 50 100 200 400
4 12.5 25 50 100 200
8 6.25 12.5 25 50 100
TABLE I: (Left) parameters of the simulations for the chosen Re. (Right) H/h values.
5000, this final time would imply too large computational costs due to the lower damping
rate. Therefore, in these cases the simulation time has been chosen long enough to allow for
a reasonable number of periods, NT , to take place.
3. For each Reynolds number, different spatial resolutions have been chosen. Specifically,
H/∆x = 50, 100, 200, 400, 800 with the corresponding number of particles being
5000, 20000, 80000, 320000 and 1280000 respectively.
4. h/∆x = 1, 2, 4, 8 in order to cover a realistic range of neighboring particles (respectively
8, 44, 200 and 800).
All these details are summarized in table I. Specifically, the right one contains the values of H/h
(representative of the smoothing level of the SPH modeling) as a function of H/∆x and h/∆x.
It is worth mentioning that a substantial computational effort was needed to run all these
simulations. A parallelized version of the code was used on a 30-CPU cluster, each CPU having 8
Xeon 2.33 GHz cores, running continuously for 30 days.
VI. VALIDATION OF THE SPH METHOD
A. Kinetic energy attenuation
In this section, the SPH scheme described in section IV is validated by studying the kinetic
energy decay for a viscous standing wave. The parameters of the problem, as well as those of the
SPH scheme, have been described in the previous sections.
The SPH kinetic energy is evaluated by a direct summation over the particles and its evolution
in time is compared with the analytical exponential decay of the kinetic energy described in section
15

V A. In agreement with the theoretical analysis of Colagrossi et al. [13] and for the highest values
of H/∆x and h/∆x, the SPH solution perfectly coincides with the analytical solution. These results
are reported in figures 3 to 5 for each Reynolds number along with the analytical damping rate.
Whilst for the lowest Reynolds number (Re = 50, left plot of figure 3) almost 98% of the energy
is attenuated after 2 periods, for the largest Reynolds number (Re = 5000, figure 5) and due to
the smaller viscosity, about 50% of the energy remains after 28 periods. This gives an idea of the
broad range of dissipation regimes considered in the present analysis.
B. Convergence of the SPH scheme
For the five Reynolds numbers considered, the convergence to the exact dissipation rate has
been investigated by inspecting the influence of the number of neighboring particles (h/∆x) and
the spatial resolution H/h. For each test case, an effective attenuation rate of the kinetic energy
has been obtained using a least square exponential fitting. Hereinafter, we will denote through
µ0 = 2=(σ) the analytical damping rate and by µ the damping rate predicted by the SPH scheme.
The SPH convergence to the analytical solution is achieved as both h/H and ∆x/h simultaneously
tend to zero. This is the case for all Reynolds numbers, as shown in figures 6 to 8.
For Re = 50, 250, 500 and for all h/∆x ratios (figure 6 and the left panel of figure 7), there is a
monotonic convergence to 1 of the µ/µ0 ratio when h goes to zero. Remarkably, the convergence
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
SPH
Analytical decay
0 1 2 3 4 5 6 7 8 9
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
SPH
Analytical decay
FIG. 3: Kinetic energy decay. Left: Re = 50, h/∆x = 4, H/∆x = 800. Right: Re = 250, h/∆x = 4,
H/∆x = 800.
16

0 2 4 6 8 10 12 14 16
t/T
0.0
0.2
0.4
0.6
0.8
1.0E K
(t)/E K
0SPH
Analytical decay
0 5 10 15 20 25
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
SPH
Analytical decay
FIG. 4: Kinetic energy decay. Left: Re = 500, h/∆x = 2, H/∆x = 800. Right: Re = 2500, h/∆x = 4,
H/∆x = 800.
0 5 10 15 20 25
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
SPH
Analytical decay
FIG. 5: Kinetic energy decay: Re = 5000, h/∆x = 4, H/∆x = 800.
is attained even when using only 8 neighboring particles (that is, for h/∆x = 1). As expected, the
convergence rate increases as h/∆x becomes larger and larger.
For Re = 2500 (right plot of figure 7), the convergence is lost for h/∆x = 1 while for h/∆x = 2
the SPH method seems to converge to a value that is slightly different from the analytical one.
Similarly, for Re = 5000 (figure 8), the case with h/∆x = 1 provides inaccurate results while for
h/∆x = 2 the damping rate is largely overestimated.
For small values of h/∆x and high Reynolds numbers, the failure to converge may be hastily
17

attributed to the lack of a fine enough spatial resolution to model the boundary layers. Indeed,
for high Reynolds numbers, the vorticity is mainly concentrated in these thin layers of fluid
whose thickness, δBL, is inversely proportional to the square root of Re [37] (see table II). Then,
if the spatial resolution of the SPH scheme is too coarse, the dissipation rate may be wrongly
estimated. Unfortunately, the dissipative phenomenon is also badly represented in those test cases
characterized by a very fine discretization. This is briefly described in figure 9 where the test cases
100
101
102
103
0.95
1
1.05
1.1
1.15
H/h
/ 0
h/x=1h/x=2h/x=4h/x=8
100
101
102
103
1
1.1
1.2
1.3
1.4
H/h
/ 0
h/x=1h/x=2h/x=4h/x=8
FIG. 6: Convergence analysis of the µ/µ0 ratio; left: Re = 50, right: Re = 250.
100
101
102
103
1
1.2
1.4
1.6
H/h
/ 0
h/x=1h/x=2h/x=4h/x=8
100
101
102
103
1
1.5
2
H/h
/ 0
h/x=1h/x=2h/x=4h/x=8
FIG. 7: Convergence analysis of the µ/µ0 ratio; left: Re = 500, right: Re = 2500.
100
101
102
103
1
1.5
2
2.5
3
3.5
H/h
/ 0
h/x=1h/x=2h/x=4h/x=8
FIG. 8: Convergence analysis of the µ/µ0 ratio, Re = 5000.
18

Re 50 250 500 2500 5000
δBL/H 0.14 0.06 0.04 0.02 0.01
TABLE II: Thickness of the free-surface boundary layer as a function of Re (see [37]).
characterized by δBL/h between 3 and 5 have been selected. Although the boundary layers are
well discretized, the ratio µ/µ0 for h/∆x = 2 diverges as Re increases. This means that, even if the
free surface boundary layer is properly resolved, an increase of h/∆x is still necessary in order to
maintain an equivalent accuracy as Re increases. In the next sections we try to better address this
issue.
101
102
103
104
1
1.5
2
2.5
3
Re
/ 0
h/x=1h/x=2h/x=4h/x=8
FIG. 9: Attenuation ratio as a function of Re and h/∆x (3 ≤ δBL/h ≤ 5).
C. Analysis of the dissipation components
Figure 10 displays the evolution of the kinetic energy for Re = 5000 and h/∆x = 2, 4.
Specifically, for h/∆x = 2 the SPH model predicts an over damping of the wave energy when
compared to the theoretical decay. For the present analysis, it is of fundamental importance to
understand the cause of such an extra dissipation.
In section III, the mechanical energy variation has been divided into three contributions,
EB,EC,ED [see equation (III.15)]. Specifically, EB is negligible since it remains smaller than
0.1% of the initial kinetic energy, EK0, while EC is sensibly different from zero and is related to
the fluid compressibility. The last contribution, that is ED, represents the classical dissipative term
19

0 5 10 15 20 25
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
h/∆x = 2
h/∆x = 4
Analytical decay
0 5 10 15 20 25
t/T
−0.05
0.00
0.05
0.10
0.15
E C(t
)/E K
0
h/∆x = 2
h/∆x = 4
FIG. 10: Evolution in time of the kinetic energy (top panel) and of the pressure term EC (bottom panel) for
Re = 5000, H/∆x = 800 and h/∆x = 2, 4.
for incompressible Newtonian flows.
First, we focus on EC and check whether it may be the cause of the reduced accuracy of the
SPH scheme. In the bottom plot of figure 10, the evolution time of EC is shown for h/∆x = 2, 4
and Re = 5000. Both time series consist of high frequency (namely, ' c0/2/L) components that
oscillate around a constant mean value (EC being a pure reversible energy). Since the mean value
does not exceed 5% of the initial kinetic energy, we conclude that the weakly compressibility
nature of the numerical scheme does not justify the large differences observed in the top plot of
figure 10. We therefore deduce that the cause of the unphysical over-damping is due to the term
ED.
Using equations (III.17) and (III.24), it is possible to express ED as a sum of three contributions:
a free-surface pressure term, E f p, a free-surface vorticity term, E fω and an enstrophy volume
integral, EE.
Figure 11 displays the vorticity field for h/∆x = 4, H/∆x = 800 and Re = 5000 at two
20

representative instants of the simulation. As shown in figure 10, this case accurately predicts the
attenuation rate. The vorticity field is smooth and characterized by high gradients close to the
free-surface boundary layer while being practically zero inside the bulk of the fluid.
FIG. 11: Vorticity field for h/∆x = 4, H/∆x = 800 and Re = 5000 at t/T = 4.5 (left panel) and t/T = 16.5
(right panel).
In figure 12, the vorticity field is drawn at the same time instants for h/∆x = 2, H/∆x = 800
and Re = 5000. In this case and after a few periods, spurious vorticity appears in the bulk of the
fluid with an intensity comparable to the vorticity enclosed in the free-surface boundary layer. As
the simulation goes on (right plot of figure 12), these spurious vortical structures occupy an ever
growing part of the fluid domain.
The areas where the vorticity instabilities first occur are characterized by the largest velocities
and particle displacements. In these regions the initial Cartesian lattice is greatly deformed
and numerical errors induce a rearrangement of the particle positions which causes the spurious
vorticity spots. Instabilities in the vorticity field also appear close to the free surface, possibly
caused by the interpolation errors related to the kernel truncation (see e.g. [2]).
Figure 13 shows some details of these vorticity spots. Remarkably, no particle disorder is
associated with these structures. This phenomenon is closely related to the development of
spurious vorticity discussed in Ellero et al.[38], where a similar study was performed on a steady
shear flow. Due to the unsteadiness nature of the viscous standing wave and to the presence of
21

FIG. 12: Vorticity field for h/∆x = 2, H/∆x = 800 and Re = 5000 at t/T = 4.5 (left panel) and t/T = 16.5
(right panel).
FIG. 13: Details of the vorticity field for h/∆x = 2, H/∆x = 800 and Re = 5000 at t/T = 4.5 (left panel)
and t/T = 16.5 (right panel).
free-surface dynamics, it has not been possible to follow the analysis of that work.
The spurious vorticity generated when h/∆x = 2 mainly affects the enstrophy integral, EE. The
contributions E f p,E fω and EE defined in equation III.24 are displayed in figure 14. The surface
integral terms, namely(E f p + E fω
), are displayed in the left plot of figure 14. The agreement with
the analytical solution is good for h/∆x = 4 while some discrepancies arise for a smaller number
22

0 5 10 15 20 25
t/T
0.4
0.5
0.6
0.7
0.8
0.9
1.0(Efp(t
)+E f
ω(t
))/E
K0
+1 h/∆x = 2
h/∆x = 4
Analytical solution
0 5 10 15 20 25
t/T
0.84
0.86
0.88
0.90
0.92
0.94
0.96
0.98
1.00
E E(t
)/E K
0+
1
h/∆x = 2
h/∆x = 4
Analytical solution
FIG. 14: Standing wave with Re = 5000, H/∆x = 800 and h/∆x = 2, 4. Left: surface integral terms,(E f p + E fω
). Right: enstrophy contribution, EE .
FIG. 15: Dynamic pressure field (Re = 5000) at t/T = 4.5 (H/∆x = 800). Left panel: h/∆x = 2. Right
panel: h/∆x = 4.
of neighboring particles (h/∆x = 2). The evolution of EE, that is, the volume integral of the
enstrophy, is shown in the right plot of figure 14. When the spurious generation of vorticity occurs
(as is the case for h/∆x = 2), EE largely deviates from the analytical solution and is responsible
for the largest part of the extra dissipation.
The analytical solution plotted in figure 14 highlights the fact that the main dissipation
mechanism is mainly due to the surface term of equation (III.24) rather than the enstrophy term.
This is a peculiarity of gravity waves in deep water condition, since in intermediate and shallow
water conditions the enstrophy becomes increasingly relevant due to the dynamics of the bottom
boundary layer. This is briefly shown in section VII A.
23

When the instabilities on the vorticity field occur, spurious pressure forces develop inducing
spurious particle motions (see figure 15). In all the cases described in the present work, the
pressure term F pi = (∇p/ρ)i dominates the viscous one, namely Fv
i = µ(∇2u/ρ)i. In any case, the
action in time of the viscous term is non-negligible since it causes the mechanical energy decay.
Conversely, as shown in this section, the energy components due to the weakly-compressible
assumption, namely EB and EC, remain negligible even when the scheme becomes unstable.
This means that this kind of numerical instabilities is likely due to the particulate nature of
the method rather than the use of a specific equation of state. This statement is coherent with
the Moving Particle Semi-Implicit (MPS) method simulations of the attenuation of a standing
wave documented in [39], where over-damping is also present. The MPS method is a meshless
numerical technique [40, 41] used to solve incompressible Navier-Stokes equations. In order for
the obtained flow field to exhibit the properties of an incompressible flow, a fractional time step
approach is used. As discussed in [39], the MPS method is closely related to SPH in general and
to incompressible SPH in particular, due to the technique used to impose incompressibility.
VII. ADDITIONAL REMARKS
A. Influence of the wave number
In the present section we show that the results described until now are still valid when different
wave numbers are considered. Specifically, we chose kH = 2π (deep water) and kH = π/2
(intermediate water) and limited the analysis to the most challenging case, that is, Re = 5000.
The nonlinearity parameter ε = 2A/H is maintained equal to 0.1 as in the previous test cases.
For kH = 2π the standing wave dynamics intensify and after 30 periods about 80% of the kinetic
energy is dissipated. Conversely, for kH = π/2 the same result would be obtained after 320 periods
of evolution. The spatial resolution is the same for both cases, that is, H/∆x = 800, meaning that
the test case where kH = π/2 requires about 2.5 million particles. Because of this huge number
of particles and of the slower dynamics, it was only possible to simulate 7 periods of oscillation
for kH = π/2. In any case, this interval is long enough for the proposed analysis. Similarly
to the results described in the previous section, in both cases, spurious vorticity is generated for
h/∆x = 2 (left panels of figot me ures 16 and 17) leading to an over-damping of the kinetic energy
(see figure 18). For kH = 2π, the over-damping is limited to a few percent and is visible after
24

FIG. 16: Vorticity field for kH = 2π, Re = 5000, H/∆x = 800. Left: h/∆x = 2. Right: h/∆x = 4.
FIG. 17: Vorticity field for kH = π/2, Re = 5000, H/∆x = 800. Top: h/∆x = 2. Bottom: h/∆x = 4.
only 20 periods whilst for kH = π/2 a larger energy decay appears after just a few periods of
the evolution. Again, when using h/∆x = 4 the spurious vorticity field disappears and the SPH
solution regains a good agreement with the analytical one. Note that for kH = π/2 the dynamics
of the bottom boundary layer are quite strong (see bottom panel of figure 17) and play a relevant
25

0 5 10 15 20 25 30
t/T
0.0
0.2
0.4
0.6
0.8
1.0E K
(t)/E K
0h/∆x = 2
h/∆x = 4
Analytical decay
0 1 2 3 4 5 6
t/T
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
E K(t
)/E K
0
h/∆x = 2
h/∆x = 4
Analytical decay
FIG. 18: Kinetic energy for Re = 5000, H/∆x = 800. Left: kH = 2π. Right: kH = π/2.
role in the dissipation mechanisms.
B. Influence of the wave amplitude
Here, we inspect the influence of the variation of the wave amplitude on the dissipation
mechanisms. The dimensionless wave amplitude, ε = 2A/H, is reduced to 0.002 (note that in
all previous tests cases ε = 0.1). Figure 19 displays the kinetic energy evolution for Re = 500,
h/∆x = 2 and H/∆x = 400. Similarly to the case where ε = 0.1, no over-damping is detected even
if the SPH signal is disturbed by high-frequency oscillations caused by the fluid compressibility.
As a second example, we choose a large amplitude wave characterized by ε = 0.4, In this case,
the wave steepness is kA = 0.628 and therefore very close to the breaking limit 0.68 (see [35]).
Hence, this case is characterized by high non-linearities, especially close to the free surface (see
left plot of figure 20). Nonetheless, the agreement with the linear solution (section V A) is still
good (see the right plot of figure 20). This is a clear indication that the linearized Navier-Stokes
solution provides a good estimation of the energy attenuation even for high wave steepnesses.
0 2 4 6 8 10 12 14 16
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
ε = 0.1
ε = 0.002
Analytical decay
FIG. 19: Kinetic energy for different wave amplitudes (Re = 500, h/∆x = 2, H/∆x = 400).
26

0 2 4 6 8 10 12 14 16
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
SPH
Analytical decay
FIG. 20: Large amplitude case: ε = 0.4, Re = 500, h/∆x = 2, H/∆x = 400. Left: vorticity field. Right:
kinetic energy decay.
C. Effects of the kernel choice for Re = 5000
As a final part of the analysis, we inspect the influence of the kernel choice on the gravity wave
simulations. Specifically, we focus on the test cases where Re = 5000.
As shown in section VI B, the damping rate computed using the Wendland kernel does not
converge for H/∆x = 800 and h/∆x = 2 (figures 10 and 12). This simulation has been repeated
using a Renormalized Gaussian Kernel (hereinafter RGK). In the SPH literature[23], the radius of
the RGK is set equal to 3h. However, to allow a comparison with the Wendland kernel, its radius
has been rescaled to 2h:
WRGK(q) = Mα
exp(−α2 q2) − mα for 0 ≤ q ≤ 2
0 for q > 2(VII.39)
where α = 3/2, M3/2 = 0.717082 and m3/2 = exp(−9).
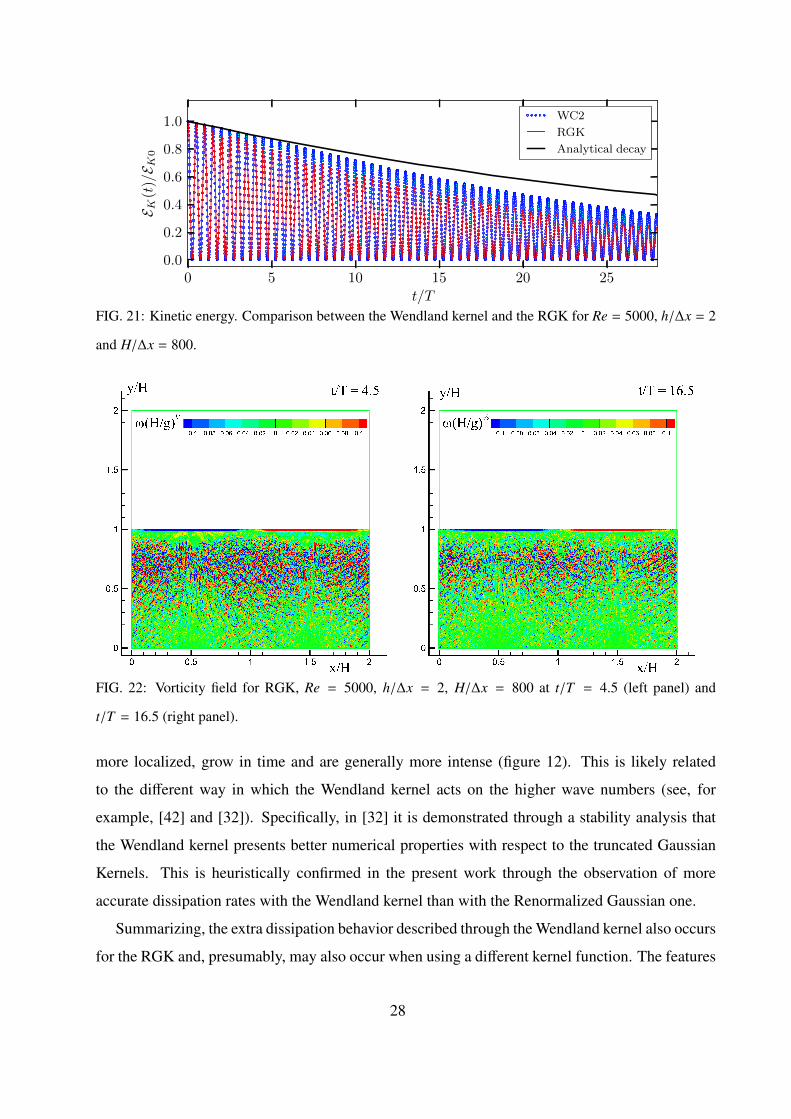
Figure 21 clearly shows that, in comparison to the Wendland kernel, the use of the RGK leads
to a larger over-damping process. Similarly to what was done for the Wendland kernel, we focus
on the evolution of the vorticity field. Figure 22 displays the vorticity field predicted by SPH
with the RGK at t = 4.5T and t = 16.5T . In the early phase of the simulation, a significant
amount of spurious vorticity is generated across the fluid domain and remains almost unchanged
throughout the process. On the contrary, the vorticity structures displayed using the WC2 are
27
0 5 10 15 20 25
t/T
0.0
0.2
0.4
0.6
0.8
1.0
E K(t
)/E K
0
WC2
RGK
Analytical decay
FIG. 21: Kinetic energy. Comparison between the Wendland kernel and the RGK for Re = 5000, h/∆x = 2
and H/∆x = 800.
FIG. 22: Vorticity field for RGK, Re = 5000, h/∆x = 2, H/∆x = 800 at t/T = 4.5 (left panel) and
t/T = 16.5 (right panel).
more localized, grow in time and are generally more intense (figure 12). This is likely related
to the different way in which the Wendland kernel acts on the higher wave numbers (see, for
example, [42] and [32]). Specifically, in [32] it is demonstrated through a stability analysis that
the Wendland kernel presents better numerical properties with respect to the truncated Gaussian
Kernels. This is heuristically confirmed in the present work through the observation of more
accurate dissipation rates with the Wendland kernel than with the Renormalized Gaussian one.
Summarizing, the extra dissipation behavior described through the Wendland kernel also occurs
for the RGK and, presumably, may also occur when using a different kernel function. The features
28

of the over-damping process are obviously related to the specific kernel adopted but are likely
influenced by the ratio h/∆x.
VIII. CONCLUSIONS
The attenuation of a viscous standing wave has been studied using the Smoothed Particle
Hydrodynamics model in its original weakly compressible version. A broad range of Reynolds
numbers has been considered and the convergence of the numerical scheme has been checked
by varying the spatial resolution as well as the number of neighboring particles. A solution of
the linearized Navier-Stokes equation over finite depths has been used as benchmark for the SPH
results.
It has been shown that the kinetic energy attenuation predicted by the SPH scheme generally
shows a good agreement with the analytical solution as the spatial resolution and number of
neighbors increase. Specifically, it has been shown that for higher Reynolds numbers more
neighboring particles are needed in order to correctly model the dissipation.
Over-attenuation of the wave has been observed in some cases; it has been shown that such
an extra dissipation does not come from the weak compressibility of the numerical model but
is strictly related to a spurious growth of the enstrophy. In these cases, large spurious vorticity
develops inside the bulk of fluid.
Three additional topics have been considered, namely, the influence of the wave amplitude,
wave number and kernel choice in the attenuation rate. The former two do not affect the results
while the kernel choice has a significant influence on the evolution of the dissipation contributions.
Future works will be addressed to clarify the main mechanism which leads to the generation of
spurious vorticity for high Reynolds numbers. The influence of the kernel choice also remains an
open problem.
Acknowledgments
The research leading to these results has received funding by the Flagship Project RITMARE
- The Italian Research for the Sea - coordinated by the Italian National Research Council and
funded by the Italian Ministry of Education, University and Research within the National Research
Program 2011-2013 and by the Spanish Ministry for Science and Innovation under the grant
29

TRA2010-16988 “Caracterización Numérica y Experimental de las Cargas Fluido-Dinámicas en
el transporte de Gas Licuado”. This work was also partially supported by the Centre of Excellence
CeSOS/CAMOS, NTNU, Norway.
The authors thank Marco Ellero from TUM and Andrea di Mascio from IAC in Rome for their
inspiration during the initial part of the research presented in this paper. Finally, the authors are
grateful to Hugo Gee for the correction and improvement of the English text.
[1] L. M. Sun and Y. Fujino, Journal of Fluids and Structures 8, 471 (1994).
[2] A. Colagrossi, M. Antuono, and D. L. Touzé, Physical Review E (Statistical, Nonlinear, and Soft
Matter Physics) 79, 056701 (pages 13) (2009).
[3] F. H. Harlow and J. E. Welch, Physics of Fluids 8, 2182 (1965).
[4] E. Haddon and N. Riley, Wave Motion 5, 43 (1983), ISSN 0165-2125, URL http://www.
sciencedirect.com/science/article/pii/0165212583900057.
[5] P. L.-F. Liu and A. Orfila, Journal of Fluid Mechanics 520, 83 (2004), URL http://dx.doi.org/
10.1017/S0022112004001806.
[6] A. Raval, X. Wen, and M. H. Smith, Journal of Fluid Mechanics 637, 443 (2009), URL http:
//dx.doi.org/10.1017/S002211200999070X.
[7] M. Basa, N. J. Quinlan, and M. Lastiwka, International Journal for Numerical Methods in Fluids 60,
1127 (2009).
[8] F. Macià, J. M. Sánchez, A. Souto-Iglesias, and L. M. González, International Journal for Numerical
Methods in Fluids 69, 509 (2012), ISSN 1097-0363.
[9] A. Valizadeh and J. J. Monaghan, Physics of Fluids 24, 035107 (pages 18) (2012), URL http:
//link.aip.org/link/?PHF/24/035107/1.
[10] M. Antuono, A. Colagrossi, S. Marrone, and C. Lugni, Computer Physics Communications
182, 866 (2011), ISSN 0010-4655, URL http://www.sciencedirect.com/science/article/
B6TJ5-51PRYCS-1/2/b69f4a14370f08b80c197c90035b226a.
[11] M. Antuono and A. Colagrossi, Wave Motion pp. – (2012), ISSN 0165-2125, URL http://www.
sciencedirect.com/science/article/pii/S0165212512001060.
[12] J. Lighthill, Waves in fluids (Cambridge University Press, 2001).
[13] A. Colagrossi, M. Antuono, A. Souto-Iglesias, and D. Le Touzé, Physical Review E 84, 26705+
30

(2011).
[14] T. Lundgren and P. Koumoutsakos, Journal of Fluid Mechanics 382, 351 (1999), URL http:
//dx.doi.org/10.1017/S0022112098003978.
[15] A. Iafrati, Journal of Fluid Mechanics 622, 371 (2009), URL http://dx.doi.org/10.1017/
S0022112008005302.
[16] J. J. Monaghan, Reports on Progress in Physics 68, 1703 (2005).
[17] D. Violeau, Phys. Rev. E 80, 036705 (2009), URL http://link.aps.org/doi/10.1103/
PhysRevE.80.036705.
[18] F. Maciá, M. Antuono, L. M. González, and A. Colagrossi, Progress of Theoretical Physics 125, 1091
(2011), URL http://ptp.ipap.jp/link?PTP/125/1091/.
[19] A. Colagrossi and M. Landrini, J. Comp. Phys. 191, 448 (2003).
[20] H. Wendland, Adv. Comput. Math. 4, 389 (1995), ISSN 1019-7168, URL http://dx.doi.org/10.
1007/BF02123482.
[21] M. Robinson and J. Monaghan, in 3rd ERCOFTAC SPHERIC workshop on SPH applications (2008),
pp. 78–84.
[22] M. Robinson, Ph.D. thesis, Department of Mathematical Science, Monash University (2009).
[23] D. Molteni and A. Colagrossi, Computer Physics Communications 180, 861 (2009).
[24] J. Hongbin and D. Xin, Journal of Computational Physics 202, 699 (2005), ISSN
0021-9991, URL http://www.sciencedirect.com/science/article/B6WHY-4D98HF9-2/2/
d14f8e7073f8e75148d766a8623e9af3.
[25] J. Morris, Ph.D. thesis, Mathematics Department, Monash University, Melbourne, Australia (1996).
[26] S. Mas-Gallic and P. A. Raviart, Numerische Mathematik 51, 323 (1987), ISSN 0029-599X,
10.1007/BF01400118, URL http://dx.doi.org/10.1007/BF01400118.
[27] N. J. Quinlan, M. Lastiwka, and M. Basa, International Journal for Numerical Methods in Engineering
66, 2064 (2006), URL http://dx.doi.org/10.1002/nme.1617.
[28] R. Di Lisio, E. Grenier, and M. Pulvirenti, Computers and Mathematics with Applications 35, 95
(1998).
[29] B. M. B and J. Vila, SIAM Journal on Numerical Analysis 37 (3), 863 (2000).
[30] M. Ellero and N. A. Adams, International Journal for Numerical Methods in Engineering 86, 1027
(2011), ISSN 1097-0207, URL http://dx.doi.org/10.1002/nme.3088.
[31] J. W. Swegle, D. L. Hicks, and S. W. Attaway, Journal of Computational Physics 116, 123 (1995).
31

[32] W. Dehnen and H. Aly, Monthly Notices of the Royal Astronomical Society 425, 1068 (2012), ISSN
1365-2966, URL http://dx.doi.org/10.1111/j.1365-2966.2012.21439.x.
[33] J. P. Morris, P. J. Fox, and Y. Zhu, Journal of Computational Physics 136, 214 (1997).
[34] P. Madsen and H. Schäffer, Coastal Engineering 53, 93 (2006), ISSN 0378-3839, URL http:
//www.sciencedirect.com/science/article/pii/S0378383905001250.
[35] R. Dean and R. Dalrymple, Water wave mechanics for engineers and scientists, Advanced series on
ocean engineering (World Scientific, 1991), ISBN 9789810204211, URL http://books.google.
es/books?id=9-M4U\_sfin8C.
[36] A. V. Babanin, Geophysical Research Letters 33, L20605+ (2006), ISSN 0094-8276, URL http:
//dx.doi.org/10.1029/2006GL027308.
[37] A.-K. Liu and S. H. Davis, Journal of Fluid Mechanics 81, 63 (1977), URL http://dx.doi.org/
10.1017/S0022112077001918.
[38] M. Ellero, P. Español, and N. A. Adams, Phys. Rev. E 82, 046702 (2010).
[39] A. Souto-Iglesias, F. Macià, L. M. González, and J. L. Cercos-Pita, Computer Physics
Communications pp. – (2012), ISSN 0010-4655, URL http://www.sciencedirect.com/
science/article/pii/S0010465512003852?v=s5.
[40] A. Khayyer and H. Gotoh, Applied Ocean Research 37, 120 (2012), ISSN 0141-1187, URL
http://www.sciencedirect.com/science/article/pii/S0141118712000399.
[41] M. M. Tsukamoto, L.-Y. Cheng, and K. Nishimoto, Computers & Fluids 49, 1 (2011), ISSN 0045-
7930, URL http://www.sciencedirect.com/science/article/pii/S0045793011001423.
[42] F. Macià, A. Colagrossi, M. Antuono, and A. Souto-Iglesias, in 6th ERCOFTAC SPHERIC workshop
on SPH applications (2011).
32
Copyright © 2022 FDOKUMEN