SMART CAR SYSTEM USING SENSOR, GPS AND GSM
6
29 SMART CAR SYSTEM USING SENSOR, GPS AND GSM Sangita N Gujar 1 * and Jagruti R Panchal 1 *Corresponding Author: Sangita N Gujar, [email protected] Through this our expectation is that the car should break automatics if any obstacle detection as per sensor input.It should also break if the car does not follow driving track and re-track car. If the above said condition it should generate alert message for immediate help and send that message to a predefined mobile number.In that SMS it is should send current place latitude and longitude obtained from GPS so using that latitude and longitude,we can find its location on earth and we can provide fast help in case of emergency. The Microcontroller PIC18F26K22 is interfaced with a track sensor that continuously detect, track, vehicle is in motion if track sensor output detect off road path,then microcontroller immediately slow down vehicle speed and try to move the vehicle back on path depending on track sensor output. Also microcontroller interfaced with IR sensors to detect any obstacle is present in vehicle path, is in movement. Keywords: Track sensing, Detecting obstacle, PIC microcontroller, Global Service for Mobile Application (GSM), Global Positioning System (GPS) INTRODUCTION In addition to more security if the driver applies harsh break in emergency, this condition detects as accident porn situation in this case immediate SMS will send to owner via GSM along with GPS location of vehicle informing about accident porn situation alert in time. So it will help people in the car to get immediate help if needed (Syedul Amin Jalil et al., 2012). SMS along with GPS location is also sent to the owner in ISSN 2319 – 2518 www.ijeetc.com Vol. 3, No. 3, July 2014 © 2014 IJEETC. All Rights Reserved Int. J. Elec&Electr.Eng&Telecoms. 2014 1 Siddhant College of Engineering, Pune, India. case of Dynamic Stability and track detection control occurs. To improve overall system, Microcontroller featured with GSM and GPS interface. GPS device received valid GPS signals from satellite and send calculated longitude and latitude and speed of the vehicle to microcontroller at every one second. Microcontroller continuously monitor the speed received from GPS if there is a huge predefined difference between two consecutive readings of speed from the GPS Research Paper
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of SMART CAR SYSTEM USING SENSOR, GPS AND GSM

29
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
SMART CAR SYSTEM USING SENSOR, GPS ANDGSM
Sangita N Gujar1* and Jagruti R Panchal1
*Corresponding Author: Sangita N Gujar, [email protected]
Through this our expectation is that the car should break automatics if any obstacle detection asper sensor input.It should also break if the car does not follow driving track and re-track car. If theabove said condition it should generate alert message for immediate help and send that messageto a predefined mobile number.In that SMS it is should send current place latitude and longitudeobtained from GPS so using that latitude and longitude,we can find its location on earth and wecan provide fast help in case of emergency. The Microcontroller PIC18F26K22 is interfaced witha track sensor that continuously detect, track, vehicle is in motion if track sensor output detectoff road path,then microcontroller immediately slow down vehicle speed and try to move thevehicle back on path depending on track sensor output. Also microcontroller interfaced with IRsensors to detect any obstacle is present in vehicle path, is in movement.
Keywords: Track sensing, Detecting obstacle, PIC microcontroller, Global Service for MobileApplication (GSM), Global Positioning System (GPS)
INTRODUCTIONIn addition to more security if the driverapplies harsh break in emergency, thiscondition detects as accident porn situationin this case immediate SMS will send toowner via GSM along with GPS location ofvehicle informing about accident pornsituation alert in time. So it will help people inthe car to get immediate help if needed(Syedul Amin Jalil et al., 2012). SMS alongwith GPS location is also sent to the owner in
ISSN 2319 – 2518 www.ijeetc.comVol. 3, No. 3, July 2014
© 2014 IJEETC. All Rights Reserved
Int. J. Elec&Electr.Eng&Telecoms. 2014
1 Siddhant College of Engineering, Pune, India.
case of Dynamic Stability and track detectioncontrol occurs.
To improve overall system, Microcontrollerfeatured with GSM and GPS interface. GPSdevice received valid GPS signals from satelliteand send calculated longitude and latitude andspeed of the vehicle to microcontroller at everyone second. Microcontroller continuouslymonitor the speed received from GPS if thereis a huge predefined difference between twoconsecutive readings of speed from the GPS
Research Paper

30
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
is treated as accident condition. In such eventmicrocontroller will send respective ATcommands to GSM modem interfaced to takeaction for sending text SMS to predefinedmobile number. This text message includescurrent latitude and longitude received from theGPS receiver (Sri Krishna Chaitanya Varmaet al., 2013).
On Dynamic Stability and track detectioncontrol makes driving on twisty and slippery roadconditions safer, by using sensors to detect anyof the wheels is losing path. It has the ability toslow down car speed, helping the car to regainits grip on the path. If in any case the car shows atendency to skid the system Automatically slowsdown the wheel speed to help maintain control.In obstacle detection car will detect any object orother car in its driving path, as any obstacledetects in path it shall automatically reduce thecar speed by applying smooth break.
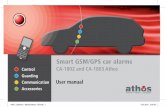
PROPOSED BLOCK DIAGRAMAs soon as any obstacle detected through thissensor microcontroller shall immediately slowdown vehicle speed and come to rest tillobstacle is in the path. Once the sensor detectsnothing is in path controller shall bypass controlon breaks.
To detect obstacle in vehicle path the sensoris placed in such a way that each cover themaximum area in front of the vehicle chassisand to detect an obstacle either obstacle issmall or big.
EQUIPMENT AND PROPOSEDMETHODOLOGYMicrocontroller UnitThe Microcontroller PIC18F26K22 isinterfaced with a track sensor that continuously
detect, track, the vehicle is in motion if tracksensor output detects off road path, then themicrocontroller immediately slow down vehiclespeed and try to move the vehicle back on pathdepending on track sensor output.
Also microcontroller interfaced with IRsensors to detect any obstacle is present invehicle path, is in movement. In addition, toimprove overall system, Microcontrollerfeatured with GSM and GPS interface.
The Track SensingThe demonstration vehicle chassis uses IRsensors to sense the line, an array of 8 IR LEDs(TX) and sensors (Rx), facing the ground hasbeen used in this setup. The output of thesensors is an analog signal that depends onthe amount of light reflected back, this analogsignal is given to the comparator to produce0s and 1s that are then fed to themicrocontroller.
The Motor Driver has four inputs to controlthe motion of the motors and to enable theinputs Which are used for switching the motorson and off.
Figure 1: Block Diagramof Interconnected Module

31
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
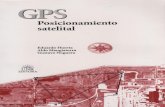
Detecting ObstaclePIC generating Signal of 38 KHz frequency forbetter determination of the object. DetectorTSOP1738, gives a high output signal IRdetector circuit is a circuit which gives a lowoutput in the absence of IR signal When someobstacle come in path IR signal reflected backand fall onto the IR detector. In such a way thatobstacle is detected.
and acquisition features. The output of GPSL50 has Recommended MinimumSpecification, Global positioning system,GNSS DOP and Active satellite and GNSSSatellite in view Messages body format.
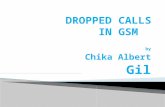
Emergency AlertIn case harsh braking (Narendar Singh et al.,2013) is detected microcontroller runs set ofAT commands to send GPS location overSMS to predefined numbers. Microcontrollercontinuously receiving current valid location,i.e., latitude and longitude from GPS andmonitor variation in speed in case of suddenvariation it will announce as accident pornsituation and text message sent to end user.
Figure 2: Detecting Obstacle ActualSetup
GSM/GPS ModemThe modem can be controlled by amicrocontroller through AT command set. TheM12/M95 Quectel GSM Modem used in thissystem with Quad band 850/900/1800/1900MHz. Compact “Plug And Play” Quad bandGSM modems can be directly connected tothe serial port of a desktop or notebookcomputer through the RS232 interface. Astandard SIM card can be inserted in theintegral card-holder within the metal enclosure.
GPS ModuleThe GPS module can receive the data byconnecting to PIC Microcontroller UART1through RS232. Quectel L50 ROM basedGPS used in this system.L50 has fast tracked
Figure 3: Emergency Alert System
SoftwareAll components are built in Microchip MPLAB.In this code firmware. c. We have writtenembedded C codes for accident detection andavoidance. For that we have usedmicrocontroller GPIO port, Uart1, Uart2, timer0,etc. Code uses the Peripheral support libraryavailable with MCC18 Compiler. Somecommands are as follows:
voidcall_uart1_receive_data_funcation(void):This function is will receive GPRMC latitude,longitude location string from GPS via Uart1port of PIC18.
voidSendGPS_GPRM_Setting_to_GPS(void):This function will send GPRMC setting stringto GPS for disable other responses.

32
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
void send_gps_loaction_sms(void): Thisfunction will send location message to GSMvia uart2 port of PIC18.
InterruptVectorHigh(void): This function isinterrupt area for timer0,uart1,uart2, etc.
void Inittialize_System(void): This functionis used for initializing sensor uart1,uart2,timer0peripheral, etc.
void delay_function(void): This function isused for generating delay.
Initialize all input and output ports of theMicrocontroller and power is supplied to GPS,GSM and sensor modules. IR Sensors areplaced at the bottom of the car and are usedto detect the road track. Due to someunexpected situation, if the car left the track,then system shall automatically break the carand retract the car on proper location. An alertSMS shall be sent to the predefined mobilenumber. If the car is on track, then systemalways monitors the road.
Figure 4: Flow Chart of Obstacle Detection and Alert System

33
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
An Ultrasonic sensor of five meter range isused to detect an obstacle in the front side. Ifan obstacle is detected then, system shallautomatically break and reduce the car speedat the same time an alert SMS with longitudeand latitude shall be sent to a predefinedMobile number. This operation is controlledand monitored by using the PICMicrocontroller.
LITERATURE SURVEYSyedul Amin Jalil et al. (2012) in this paperauthor built components using PIC 18F4550Microcontroller. We have referred this paperin our project. GPS Play an important role inthe vehicle system. GPS always monitors thespeed of the vehicle. If accidental porn isoccurring then, GPS sends the location of theaccident with some predefined message bodyof the alert system or to the concern person.Microcontroller receives data from the GPSand encode that data. That meansmicrocontroller compare the previous andcurrent value. Some threshold values aredefined as concerns with speed. If the vehiclespeed is below the threshold value the weconsidered as something is happening to thevehicle. The location details sent via GSMmodule to concern authority on his/her mobilenumber.
Sri Krishna Catania Varma et al. (2013)authors demonstrates the accident detectionand alert system using GPS and GSM system.In this project authors uses microcontrollerAT89C52 as a core. He prepares a surveyreport that shows an porn occur because ofthe various things. Authors decides to nullifythe accidental situation because it is difficultto track the accidental situation in the rural area.
The whole project assembly is placed insidethe vehicle. GPS find the location of the vehicle.Data shall be sent to MAX232 via RS232Cable. Different sensors are used to sendintimation from GSM modem. Vibration andsound sensors are used efficient and thecorrect way of accident identification.
ADVANTAGES• Security and remote monitoring of vehicles,
especially during military operations.
• Used in automotive and transport vehiclesfrom lighter vehicles like cars, to heavierautomotive like ships and airplanes.
• To monitor the road track detection.
LIMITATIONSOne of the major disadvantage is that, thissystem is used only for front collision, thesystem needs GSM networking for SMSservice, systems need GPS Signal foracquiring location from the satellite.
APPLICATIONSA growing world population and a rise ininternational prosperity have brought about aserious increased the accident on roadmaximum accident is done because ofcarelessness of drivers sometimes due to theroad condition or harsh braking. Thistechnology can help us in reducing suchcalamities using a sensor, GSM and GPStechnology. This project also provides SMSalert in case of any emergency, so it can helpin proving fast basic aids.
CONCLUSIONIf any obstacle detects the sensor sense thesituation and car should break slowly and stop

34
Int. J. Elec&Electr.Eng&Telecoms. 2014 Sangita N Gujar and Jagruti R Panchal, 2014
automatically. If the car is on the wrong trackthen breaking car slowly and follows the righttrack automatically. In both the situation an alertSMS with predefined message body sent tothe concert person. So that he/she can reachthat place to save the human life.
ACKNOWLEDGMENTThe authors wish to thank Dr S Khot Principal,for providing necessary facilities towardscarrying out the work. With deep sense ofgratitude we express sincere thanks to theHead of the Department Prof M S Biradar, whohad a faith in this project, believed in ourtechnical work, whispered the words ofencouragement and made helpful suggestionsfrom time to time. Our thanks to staff memberof the Department for their full cooperation andhelp.
REFERENCES1. Bhumkar S P et al. (2012), “Intelligent Car
System for Accident Prevention UsingARM-7”, IJETAE, Vol. 2, No. 4, ISSN:2250-2459.
2. Md. Syedul Amin Jalil et al. (2012),“Accident Detection and ReportingSystem Using GPS, GPRS and GSM
Technology”, IEEE/OSA/IAPR InternationalConference on Informatics, Electronics &Vision.
3. Narendar Singh D et al. (2013), “VehicleSpeed Limit Alerting and Crash DetectionSystem at Various Zones”, InternationalJournal of Latest Trends in Engineeringand Technology (IJLTET).
4. Naresh Kumar Reddy B et al. (2012),“Designing of a Smart Car Using Arm7”,IJAET, Vol. 3, No. 2, pp. 185-191, ISSN:2231-1963.
5. Shaikh J R et al. (2012), “Arm7 BasedSmart Car Security System”, IJETT,Vol. 3, No. 2.
6. Sri Krishna Chaitanya Varma et al.(2013), “Automatic Vehicle AccidentDetection and Messaging System UsingGPS and GSM Modems”, InternationalJournal of Scientific & EngineeringResearch, Vol. 4, No. 8.
7. Vikram Kulkarni et al. (2012), “A Low CostExtendable Embedded Smart Car SecuritySystem on Face Detection and ContinuousVideo Monitoring System”, IJCCT &IJESAT, Vol. 2, No. 3, pp. 416-421.