Shaking table presentation 31-10-2014 - lecture.pdf
21
REALIZATION OF A PROTOTYPE REALIZATION OF A PROTOTYPE OF MONODIMENSIONAL SHAKING TABLE Politecnico di Torino – Sede di Alessandria Student: Testa Claudio
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Shaking table presentation 31-10-2014 - lecture.pdf

REALIZATION OF A PROTOTYPEREALIZATION OF A PROTOTYPE OF MONODIMENSIONAL
SHAKING TABLE
Politecnico di Torino – Sede di Alessandria
Student:Testa Claudio

Acknowledgments
• Eng Franchini Fausto• Eng. Franchini Fausto• Eng. Pallavicini Enrico

Project goals:
• Create a monodimensional prototype that• Create a monodimensional prototype that can replicate an earthquake
• Create a prototype that can multi task
• Create a prototype that can be further developed in the futuredeveloped in the future

Multi task of the shaking table
• Simulate an earthquake on a structure, or a b ildinga building
• Simulate an earthquake on a bridge
• Execute “hybrid” test

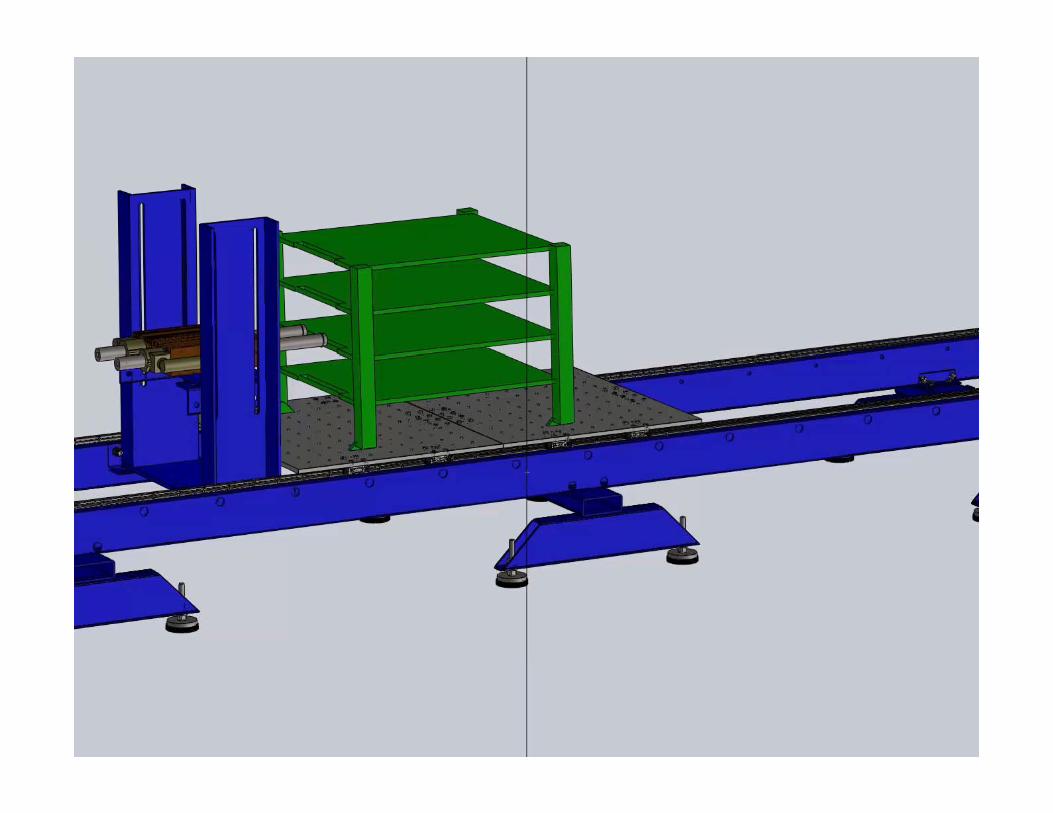
Test on a structured lModel
Linear guideModel table
Electrical engines
FrameFrame


Test on a bridge
Model
Electrical motor
Model table 1
Model table 2
Electrical motor
Mounting holes allow for mounitng different model sizes


“Hybrid” testVertical position of engine can be adjusted
Model
Model table is locked in place

Phases of realization• 3D Mechanical design
External sensors
Frame standard sizes
welded reinforcing rib
• Optimization of the project wherever possible, standard components already present on the market and are cheaper.

Phases of production of the machine

Painting and assembling

Electrical drive2 linear electrical engines PS 01 48x240‐C of LinMOT.g
Max force: 585 NMax force: 585 NMax stroke: 330 mmMax speed: 1,7 m/s
Stator Motor axle
Motor support

Control panel Emergency button
Start button

Control panel Power supply Engine controlsPower supply
Power supply for engine
t l
Engine controls
control
National Accelerometer InstrumentsConverters
data acquisition
Electrical devices protection

Position sensorM d l blM ti d i Model tableMagnetic drive
Position sensor
Sensor support

Different methods for testing
Parallel electrical drive
Single electrical drive

Structure of the control
1. The accelerograms inputes the values of acceleration as a function of time with a random signal frequency (coresponding to an earthquake).
2 T i th l ti f th i ’ ti i d th2. To improve the resulotion of the engine’s motion, we increased the resulotion of the acceleration signal to 200 units per second.
3. The electrical engines are controlled by signals of position. For this reason we need to integrate the values of acceleration to obtain the equivalent values of position.
4. This value is passed to a National Instruments analogic/digital converter.4. This value is passed to a National Instruments analogic/digital converter.
5. The converter outputs a voltage value that it is proportional to the value of displacement.
6. The electrical engines read this value of voltage and moves to a coresponding displacement.
It is possible to check the real value of acceleration using accelerometers

Future developmentD l th t t ith th l f i l ti lDevelop the prototype with the goal of simulating a real earthquake in all directions (multi‐axel set up)
In the future if we use more motors we can simulate a real earthquakeearthquake
Thank youy