
Robot Pengikut Cahaya Menggunakan ATMEGA16
18
Robot Pengikut Cahaya Menggunakan ATMEGA16 OLEH:
Transcript of Robot Pengikut Cahaya Menggunakan ATMEGA16
Robot Pengikut Cahaya MenggunakanATMEGA16
OLEH:

BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi sudah semakin maju,
keperluan robot di zaman ini sudah mulai diperlukan
untuk membantu memudahkan suatu pekerjaan. Apalagi
perkembangan teknologi yang berbasis mikrokontroller
dan mikroprosessor dalam pembuatan robot sudah mulai
menjamur seperti halnya yang terdapat pada alat-alat
industri. Banyaknya robot-robot yang menggunakan
remote control dengan pengaplikasian mikrokontroller
dapat meminimalisir waktu kerja dengan hasil yang
maksimal. Robot Pengikut Cahaya Menggunakan ATMega16
salah satunya, adalah sebuah robot yang cukup
sederhana karena dapat bergerak hanya dengan
menggunakan cahaya. Komponen yang digunakan pada
Robot Pengikut Cahaya ini adalah 2 sensor LDR (Light
Dependent Resistor) yangmana jika salah satu sensor
saja yang diterangi cahaya maka robot akan belok,
namun jika keduanya diberikan cahaya/lampu maka
robot tersebut akan berjalan maju. Program tersebut
tertanam dalam IC mikrokontroller yang berisi

program sebagaimana robot dapat bergerak dengan
sempurna.
Pada saat ini kebutuhan akan Robot Pengikut Cahaya
memang belum terlalu diperlukan karena fungsinya
yang belum terlalu spesifik.
1.2 Tujuan
Adapun tujuan di buatnya robot ini adalah:
1. Membuat sebuah robot light follower yang mampu
mengikuti cahaya.
1.3 Manfaat
Manfaat di buatnya robot ini adalah:
1. Menambah pengetahuan tentang bagaimana cara atau
bagaimana membuat suatu Robot Pengikut Cahaya yang
mampu mengikuti cahaya.
1.4 Batasan Masalah
Agar masalah yang dihadapi robot ini tidak meluas,
maka adanya pembatasan masalah sebagai berikut:
1. Mikrokontroller yang digunakan adalah
mikrokontroller ATMega16.
2. Sensor yang digunakan adalah sensor LDR (Light
Dependent Resistor) sebanyak 2 buah terletak di
kiri dan kanan bagian depan robot. Jika sensor LDR
sebelah kiri diberi senter maka ia akan belok ke
kiri, jika kedua sensor tersebut diberi cahaya
senter maka robot tersebut akan maju.
1.5 Metodelogi Penelitian
Dalam merancang dan membuat ROBOT PENGIKUT CAHAYA
MENGGUNAKAN ATMega16 ini, pengumpulan data yang penulis
lakukan pada penyusunan proposal ini menggunakan
beberapa teknik yaitu:
1.Mengadakan Studi Literatur (Kepustakaan), yang
meliputi:
a. Pencarian data-data yang dapat dijadikan
sebagai refrensi penulisan proposal ini.
b. Mempelajari berbagai jenis buku yang
menyangkut teori-teori tentang
rangkaian dan sistem mekanik yang digunakan dan
perumusan ide
pokok serta gagasan pokok lalu meyimpulkannya
hingga dapat sebuah judul yang sesuai dengan
pokok permasalahan yang akan dicari
solusinya.
2.Mengadakan Studi Lapangan, yang meliputi:
a. Perolehan alat dan bahan untuk perancangan
robot yang akan di buat.
3. Perancangan dan Pengembangan Sistem, yang
meliputi:
a. Perancangan dan pengembangan hardware dan
software.
b. Pembuatan program pengendalian robot
pendeteksi kebocoran gas dengan menggunakan
software code vision AVR dengan bahasa C.
4. Pengujian sistem, yang meliputi:
a. Pengujian robot untuk dapat hasil optimum pada
robot.
b. Pengambilan data dilakukan dengan cara
mengirimkan data hasil pengujian dari
mikrokontroler ke komputer melalui serial port.
1.6 Rincian Biaya
Rincian perkiraan biaya yang digunakan untuk membuat
robot ini adalah:
2 Sensor LDR : Rp. 6.000
1 Mikrokontroler ATMEGA 16 : Rp. 145.000,-
1 Gear Box : Rp. 180.000,-
Castor : Rp. 7.000,-
Baterai : Rp. 120.000,-
Switching Baterai : Rp. 20.000,-
Akrilik : Rp. 25.000,-
Kaki Pcb : Rp. 30.000,-
Jumper,Resistor,Kapasitor,Transistor : Rp.
50.000,- +
Total : Rp.,-
BAB II
TEORI DASAR
2.1 Logika Yang Digunakan
Dalam membuat robot pendeteksi cahaya ini mempunyai
dua perangkat yaitu: perangkat keras (Hadware) dan
perangkat lunak (Software). Perangkat keras Hadware
terdiri dari mikrokontroler, catu daya, serta rangkaian

sensor. Perangkat lunak software terdiri dari
serangkaian program.
Dirancang sebuah robot pendeteksi cahaya dengan
sensor yang digunakan adalah sensor LCR (Light
Dependent Resistor), sementara yang menjadi pusat
pengendalian dari seluruh alat yang dirancang digunakan
mikrokontroller ATMega16. Secara garis besar, alat yang
dirancang ini terdiri dari 3 buah blok dasarm yaitu:
mikrokontroller, sensor, dan catu daya. Dimana prinsip
kerja dari sensor LDR adalah akan berubah seiring
dengan perubahan intensitas cahaya yang mengenainya
atau yang ada disekitarnya. Dalam keadaan gelap
resistansi LDR seki-tar 10MΩ dan dalam keadaan terang
sebesar 1KΩ atau kurang. LDR terbuat dari bahan
semikonduktor seperti kadmium sulfida. Dengan bahan ini
energi dari cahaya yang jatuh menyebabkan lebih banyak
muatan yang dilepas atau arus listrik meningkat.
Artinya resistansi bahan telah mengalami penurunan.
2.1 Sensor
Sensor yang digunakan terdiri dari 2 buah jenis
sensor yaitu:
2.2.1 Sensor LDR (Light Dependent Resistor)
Sensor Cahaya LDR (Light Dependent Resistor)
adalah salah satu jenis resistor yang dapat
mengalami perubahan resistansinya apabila mengalami
perubahan penerimaan cahaya. Besarnya nilai hambatan
pada Sensor Cahaya LDR (Light Dependent Resistor)
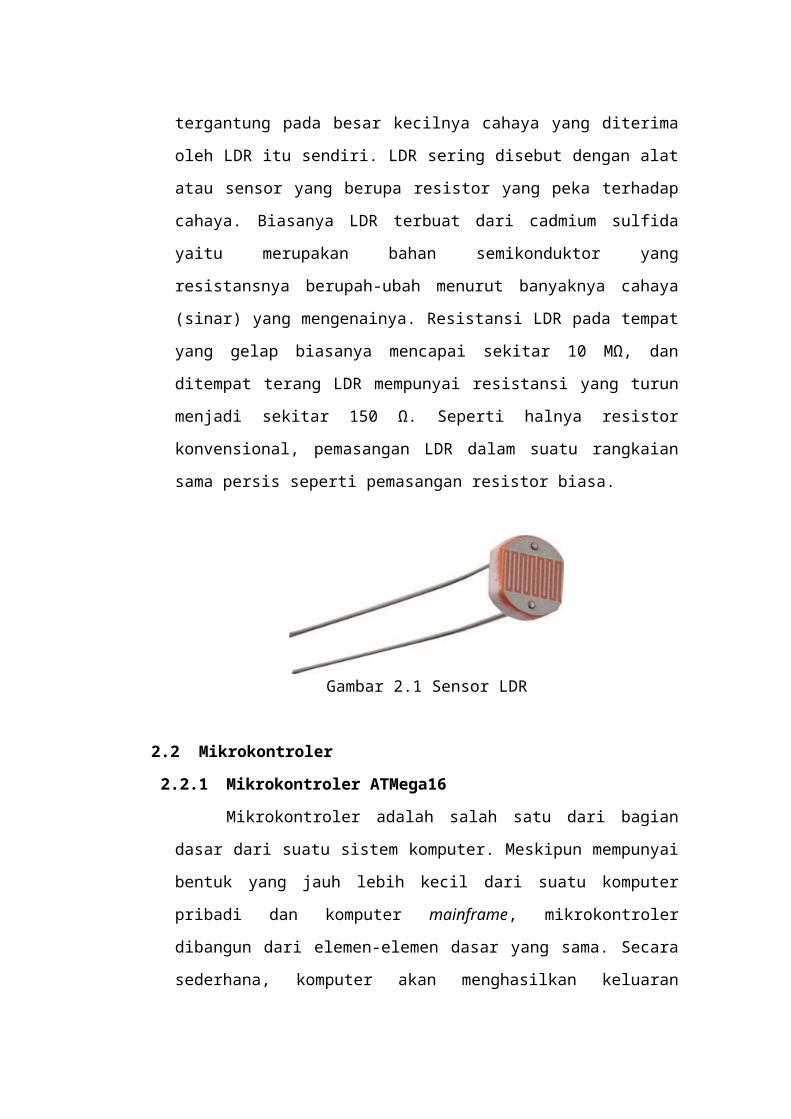
tergantung pada besar kecilnya cahaya yang diterima
oleh LDR itu sendiri. LDR sering disebut dengan alat
atau sensor yang berupa resistor yang peka terhadap
cahaya. Biasanya LDR terbuat dari cadmium sulfida
yaitu merupakan bahan semikonduktor yang
resistansnya berupah-ubah menurut banyaknya cahaya
(sinar) yang mengenainya. Resistansi LDR pada tempat
yang gelap biasanya mencapai sekitar 10 MΩ, dan
ditempat terang LDR mempunyai resistansi yang turun
menjadi sekitar 150 Ω. Seperti halnya resistor
konvensional, pemasangan LDR dalam suatu rangkaian
sama persis seperti pemasangan resistor biasa.
Gambar 2.1 Sensor LDR
2.2 Mikrokontroler
2.2.1 Mikrokontroler ATMega16
Mikrokontroler adalah salah satu dari bagian
dasar dari suatu sistem komputer. Meskipun mempunyai
bentuk yang jauh lebih kecil dari suatu komputer
pribadi dan komputer mainframe, mikrokontroler
dibangun dari elemen-elemen dasar yang sama. Secara
sederhana, komputer akan menghasilkan keluaran
spesifik berdasarkan masukan yang diterima dan
program yang dikerjakan. Seperti umumnya komputer,
mikrokontroler adalah alat yang mengerjakan
instruksi-instruksi yang diberikan kepadanya.
Artinya, bagian terpenting dan utama dari suatu
sistem terkomputerisasi adalah program itu sendiri.
Program ini menginstruksikan komputer untuk
melakukan jalinan yang panjang dari aksi-aksi
sederhana untuk melakukan tugas yang lebih kompleks.
2.2.2 Fitur ATMega16
Pembuatan robot ini menggunakan mikrokontroler
ATmega16. ATMega16
merupakan mikrokontroler CMOS 8-bit buatan Atmel
keluarga AVR. AVR mempunyai 32 register general-
purpose, timer/counter dengan metode compare, interrupt
eksternal dan internal, serial UART, progammable
Watchdog Timer, ADC dan PWM internal.
Gambar 2.2 ATmega16
Mikrokontroler ini menggunakan arsitektur Harvard yang
memisahkan memori program dari memori data, baik bus
alamat maupun bus data, sehingga pengaksesan program
dan data dapat dilakukan secara bersamaan (concurrent).
Mikrokontroler ATmega16 memiliki beberapa fitur atau
spesifikasi yang menjadikannya sebuah solusi pengendali
yang efektif untuk berbagai keperluan. Fitur-fitur
tersebut antara lain:
1. Arsitektur RISC dengan throughput mencapai 16 MIPS
pada frekuensi 16Mhz.
2. Saluran I/O 32 buah, yaitu Bandar A, Bandar B,
Bandar C, dan Bandar D.
3. CPU yang terdiri dari 32 buah register.
2. User interupsi internal dan eksternal
3. Bandar antarmuka SPI dan Bandar USART sebagai
komunikasi serial
4. Fitur Peripheral
• Dua buah 8-bit timer/counter dengan prescaler
terpisah dan mode compare
• Satu buah 16-bit timer/counter dengan prescaler
terpisah, mode compare, dan
mode capture
• Real time counter dengan osilator tersendiri
• Empat kanal PWM dan Antarmuka komparator analog
• 8 kanal, 10 bit ADC
• Byte-oriented Two-wire Serial Interface
• Watchdog timer dengan osilator internal
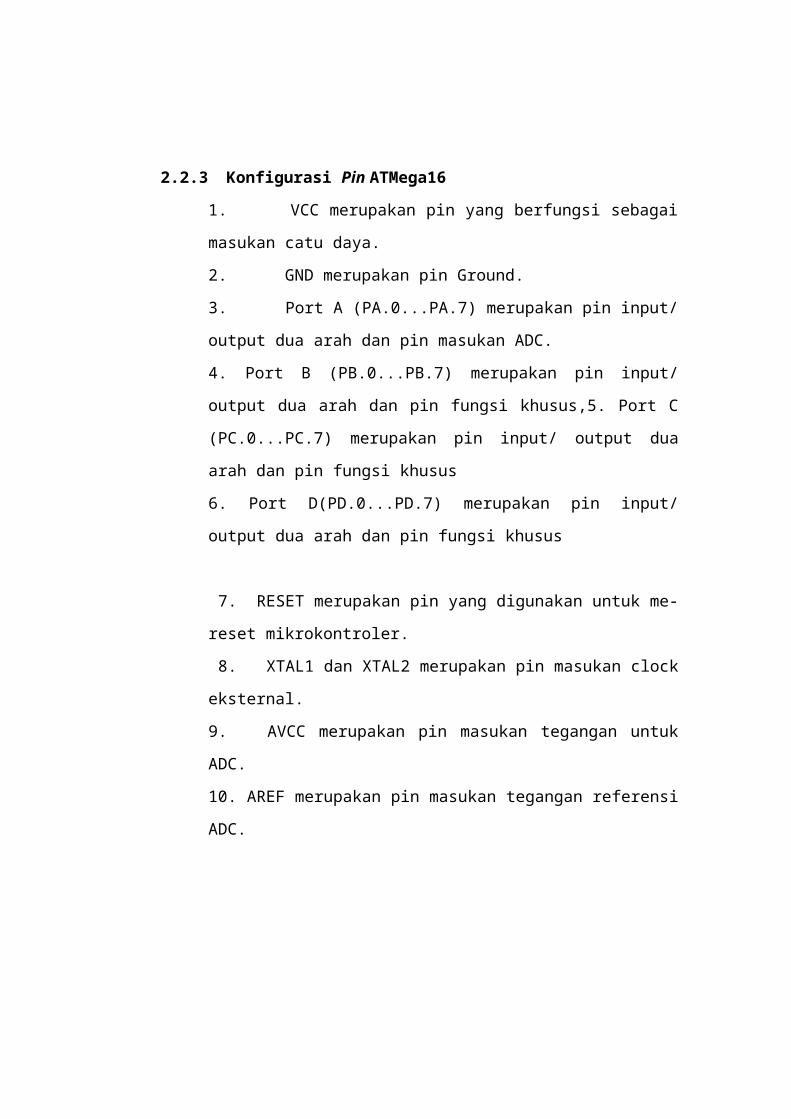
2.2.3 Konfigurasi Pin ATMega16
1. VCC merupakan pin yang berfungsi sebagai
masukan catu daya.
2. GND merupakan pin Ground.
3. Port A (PA.0...PA.7) merupakan pin input/
output dua arah dan pin masukan ADC.
4. Port B (PB.0...PB.7) merupakan pin input/
output dua arah dan pin fungsi khusus,5. Port C
(PC.0...PC.7) merupakan pin input/ output dua
arah dan pin fungsi khusus
6. Port D(PD.0...PD.7) merupakan pin input/
output dua arah dan pin fungsi khusus
7. RESET merupakan pin yang digunakan untuk me-
reset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock
eksternal.
9. AVCC merupakan pin masukan tegangan untuk
ADC.
10. AREF merupakan pin masukan tegangan referensi
ADC.
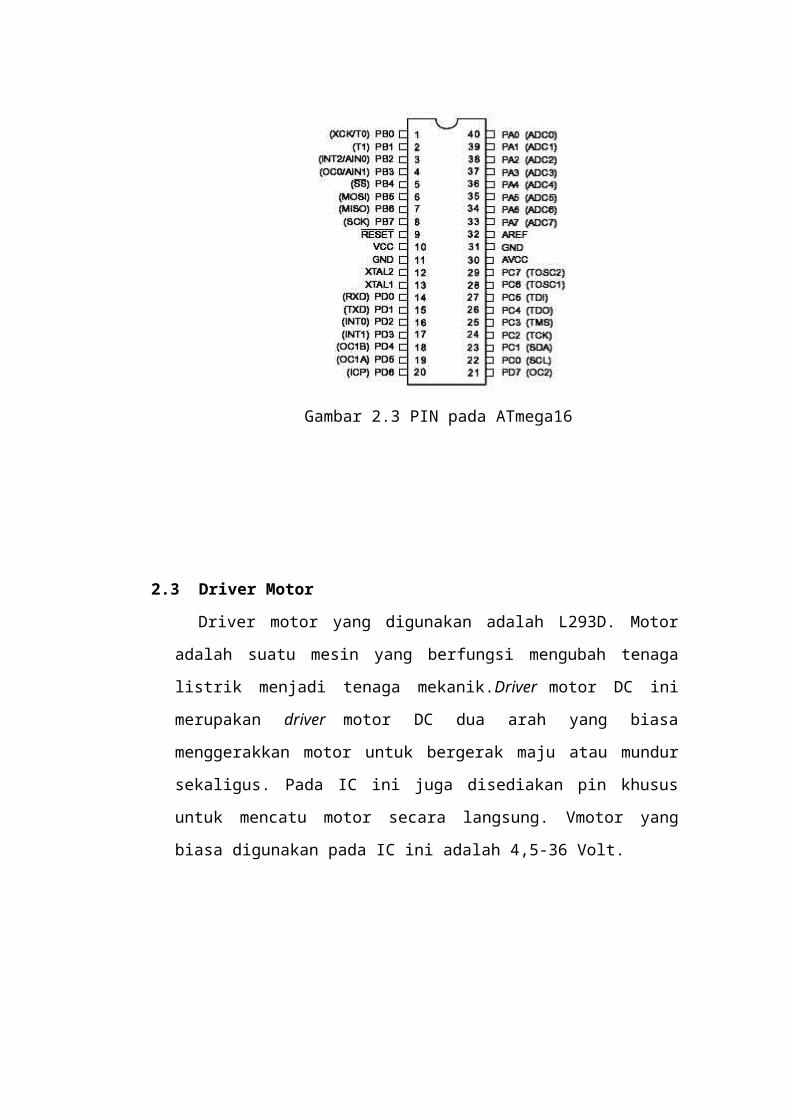
Gambar 2.3 PIN pada ATmega16
2.3 Driver Motor
Driver motor yang digunakan adalah L293D. Motor
adalah suatu mesin yang berfungsi mengubah tenaga
listrik menjadi tenaga mekanik.Driver motor DC ini
merupakan driver motor DC dua arah yang biasa
menggerakkan motor untuk bergerak maju atau mundur
sekaligus. Pada IC ini juga disediakan pin khusus
untuk mencatu motor secara langsung. Vmotor yang
biasa digunakan pada IC ini adalah 4,5-36 Volt.

Gambar 2.4 PIN Driver Motor L293D
Dalam Penggerakan motor DC satu arah putar, IC
L293D dapat menggerakkan empat buah motor.Namun,
dalam penggerakan motor DC dua arah putar IC L293D
hanya dapat menggerakkan dua buah motor DC.
Gambar 2.5 Penggerak motor DC dua arah dengan IC
L293D
Prinsip kerja IC L293 dalam menggerakkan motor DC
sama dengan prinsip kerja penggerak motor
konfigurasi transistor H-Bridge. Untuk memutar motor
DC searah jarum jam cukup berikan tegangan masukan
rendah pada pin input-1 dan berikan tegangan masukan
rendah pada pin input-2 dan sebaliknya. Hindari
pemberian tegangan masukan tinggi secara bersamaan
pada pin input-1 dan input-2.
2.4 Motor DC
Pada motor DC tenaga mekanik tersebut berupa
putaran rotor secara kontinu. Prinsip kerja dari
motor DC berdasarkan pada penghantar yang membawa
arus kedalam kumparan sehingga kumparan akan
menimbulkan medan magnet. Medan magnet ini dibuat
sedemikian rupa sehingga keadaannya selalu tolak
menolak antara medan magnet yang ditimbulkan stator
dan medan magnet yang ditimbulkan rotor sehingga
didapat gaya dorong diantara keduanya maka timbulah
putaran.
Pada motor DC magnet permanen tegangan armaturnya
dapat diatur dengan cara mengatur besar arus yang
lewat pada armatur, karena besar arus sebanding
dengan kecepatan motor. Sedangkan untuk mengubah
arah putaran motor DC dengan cara membalikkan
polaritas sumber tegangannya.

Gambar 2.6 Cara Kerja Motor DC
2.5 Catu Daya
Dalam pembuatan robot patrol pendeteksi kebocoran
gas ini catu daya yang kami gunakan adalah baterai.
Baterai yang kami gunakan adalah Baterai Power Bank.
Untuk menstabilkan teganggan kami menggunakan
Regulator LM7805. Regulator ini menghasilkan
tegangan output stabil 5 Volt dengan syarat tegangan
input yang diberikan minimal 7-8 Volt (lebih besar
dari tegangan output) sedangkan batas maksimal
tegangan input yang diperbolehkan dapat dilihat pada
datasheet IC 78XX karena jika tidak maka tegangan
output yang dihasilkan tidak akan stabil atau kurang
dari 5 Volt.
Keunggulan
1. Jika dibandingkan dengan regulator tegangan lain,
seri 78XX ini mempunyai keunggulan di antaranya.
2. Untuk regulasi tegangan DC, tidak memerlukan
komponen elektronik tambahan.
3. Aplikasi mudah dan hemat ruang
4. Memiliki proteksi terhadap overload (beban
lebih), overheat (panas lebih), dan hubung
singkat
5. Dalam keadaan tertentu, kemampuan pembatasan arus
peranti 78XX tidak hanya melindunginya sendiri,
tetapi juga melindungi rangkaian yang
ditopangnya. (Wikipedia)
Kekurangan
1. Tegangan input harus lebih tinggi 2-3 Volt dari
tegangan output sehingga IC 7805 kurang tepat jika
digunakan untuk menstabilkan tegangan battery 6
Volt menjadi 5 Volt.
2. Seperti halnya regulator linier lain, arus input
sama dengan arus output. Karena tegangan input
harus lebih tinggi dari tegangan output maka akan
terjadi terjadi panas pada IC regulator 7805
sehingga diperlukan heatsink (pendingin) yang
cukup.

Cara kerja rangkaian
1. Ketika switch (S1) ditutup (On), arus dari sumber
DC 12 Volt akan mengalir menuju fuse (F1) yang
berfungsi sebagai pengaman hubungsingkat, kemudian
akan mengalir melalui dioda (D1) yang berfungsi
sebagai pengaman polaritas. Condensator C1 yang
berfungsi sebagai filter dapat dihilangkan jika
tegangan input merupakan tegangan DC stabil
misalnya dari sumber battery (accu/aki).
2. Setelah melalui IC 7805, tegangan akan diturunkan
menjadi 5 Volt stabil. Fungsi C2 adalah sebagai
filter terakhir yang berfungsi mengurangi noice
(ripple tegangan) sedangkan LED1 yang dipasang
seri dengan resistor (R1) berfungsi sebagai
indikator.
Fungsi
Rangkaian regulator ini dapat dipakai untuk
menurunkan tegangan 12 Volt aki (accu) pada sebuah
perangkat elektronika atau pada sebuah kendaran
menjadi 5 Volt stabil.
Gambar 2.7 Karakteristik Regulator 7805

Gambar 2.8 Rangkaian Regulator 7805
BAB III
PERANCANGAN
3.1 Rancangan Badan Robot
3.1.1 Rancangan Robot Tampak Atas




















