
Reconstruction of time-dependent coefficients: A check of approximation schemes for non-Markovian...
11
Reconstruction of time-dependent coefficients: a check of approximation schemes for non-Markovian convolutionless dissipative generators Bruno Bellomo, 1, 2 Antonella De Pasquale, 1, 3 Giulia Gualdi, 1, 4 and Ugo Marzolino 1, 5 1 MECENAS, Universit` a Federico II di Napoli, Via Mezzocannone 8, I-80134 Napoli, Italy 2 CNISM and Dipartimento di Scienze Fisiche ed Astronomiche, Universit` a di Palermo, via Archirafi 36, 90123 Palermo, Italy 3 Dipartimento di Fisica, Universit` a di Bari, via Amendola 173, I-70126 Bari, Italy; INFN, Sezione di Bari, I-70126 Bari, Italy 4 Dipartimento di Matematica e Informatica, Universit` a degli Studi di Salerno, Via Ponte don Melillo, I-84084 Fisciano (SA), Italy; CNR-INFM Coherentia, Napoli, Italy; CNISM Unit´ a di Salerno; INFN Sezione di Napoli gruppo collegato di Salerno, Italy 5 Dipartimento di Fisica, Universit` a di Trieste, Strada Costiera 11, 34151, Trieste, Italy; INFN, Sezione di Trieste, 34151, Trieste, Italy We propose a procedure to fully reconstruct the time-dependent coefficients of convolutionless non- Markovian dissipative generators via a finite number of experimental measurements. By combining a tomography based approach with a proper data sampling, our proposal allows to relate the time- dependent coefficients governing the dissipative evolution of a quantum system to experimentally accessible quantities. The proposed scheme not only provides a way to retrieve full information about potentially unknown dissipative coefficients but also, most valuably, can be employed as a reliable consistency test for the approximations involved in the theoretical derivation of a given non-Markovian convolutionless master equation. PACS numbers: 03.65.Wj, 03.65.Yz I. INTRODUCTION The dissipative evolution of a quantum system inter- acting with an environment represents a phenomenon of paramount importance in quantum information science and beyond, as it addresses a fundamental issue in quan- tum theory. In general a complete microscopic descrip- tion of the dynamical evolution of a system coupled to the environment (or bath) is a complex many-body prob- lem which requires the solution of a potentially infinite number of coupled dynamical equations. According to an open system approach, this issue is tackled by retaining only basic information about the environment and de- scribing the system dynamics in terms of a master equa- tion [1, 2]. The lack of a complete knowledge about the bath leads to master equations coefficients (MECs) which may be either unknown, or obtained from a microscop- ical derivation carried out within some approximation scheme. As a matter of fact it would then be highly appealing to devise a procedure allowing to retrieve the MECs starting from experimentally accessible quantities. This would in fact both give access to otherwise unknown quantities and provide a strong indication about the va- lidity of the adopted theoretical framework. So far two main dynamical regimes, Markovian and non-Markovian, can usually be distinguished according to the timescale of environment dynamics (respectively shorter or longer than that of the system). In [3] it has been shown that, in case of Markovian Gaussian noise, the MECs can be retrieved by means of a finite number of tomographic measurements by using Gaussian states as a probe. Here we want to address the more involved non- Markovian case. In facts, even though Markovian evolutions have been extensively investigated (see e.g. [1, 2, 4, 5]), in general real noisy dynamics are far from being Markovian. Despite a growing interest in both theory and experiment [6, 7] a comprehensive theory of non-Markovian dynamics is yet to come. Exact non- Markovian master equations have been derived for a Brownian particle linearly coupled to a harmonic oscilla- tor bath via e.g. path integral methods [8, 9] or phase- space and Wigner function computations [10, 11]. Analo- gous results have been obtained employing quantum tra- jectories, either exactly or in weak coupling approxima- tion [12–15]. In the framework of path integral methods, master equations have been derived both for initially cor- related states [16, 17], and for factorized initial states in the case of weak non linear interactions [18]. Neverthe- less, all these master equations cover only few cases and are not simple to solve. Indeed, it would be highly de- sirable to find an approximation scheme fully capturing non-Markovian features, as in general different approxi- mations may lead to irreconcilable dynamics [1]. A first generalization of the tomography-based ap- proach proposed in [3] to time-dependent dissipative gen- erators has been presented in [19]. Under the assump- tion of Gaussian noise, the time-independent parameters (TIPs) characterizing the time-dependent MECs (whose functional form is previously known) as for example the system-bath coupling, temperature and bath frequency cut-off, can in fact be obtained with a finite set of mea- surements. In this paper we propose an experimentally feasible pro- cedure which allows the full reconstruction of the MECs of convolutionless non-Markovian generators. Indeed, arXiv:1007.4537v1 [quant-ph] 26 Jul 2010
Transcript of Reconstruction of time-dependent coefficients: A check of approximation schemes for non-Markovian...

Reconstruction of time-dependent coefficients: a check of approximation schemes fornon-Markovian convolutionless dissipative generators
Bruno Bellomo,1, 2 Antonella De Pasquale,1, 3 Giulia Gualdi,1, 4 and Ugo Marzolino1, 5
1MECENAS, Universita Federico II di Napoli, Via Mezzocannone 8, I-80134 Napoli, Italy2CNISM and Dipartimento di Scienze Fisiche ed Astronomiche,Universita di Palermo, via Archirafi 36, 90123 Palermo, Italy
3Dipartimento di Fisica, Universita di Bari, via Amendola 173, I-70126 Bari, Italy;INFN, Sezione di Bari, I-70126 Bari, Italy
4Dipartimento di Matematica e Informatica, Universita degli Studi di Salerno,Via Ponte don Melillo, I-84084 Fisciano (SA), Italy; CNR-INFM Coherentia, Napoli,
Italy; CNISM Unita di Salerno; INFN Sezione di Napoli gruppo collegato di Salerno, Italy5Dipartimento di Fisica, Universita di Trieste, Strada Costiera 11, 34151, Trieste, Italy;
INFN, Sezione di Trieste, 34151, Trieste, Italy
We propose a procedure to fully reconstruct the time-dependent coefficients of convolutionless non-Markovian dissipative generators via a finite number of experimental measurements. By combininga tomography based approach with a proper data sampling, our proposal allows to relate the time-dependent coefficients governing the dissipative evolution of a quantum system to experimentallyaccessible quantities. The proposed scheme not only provides a way to retrieve full informationabout potentially unknown dissipative coefficients but also, most valuably, can be employed as areliable consistency test for the approximations involved in the theoretical derivation of a givennon-Markovian convolutionless master equation.
PACS numbers: 03.65.Wj, 03.65.Yz
I. INTRODUCTION
The dissipative evolution of a quantum system inter-acting with an environment represents a phenomenon ofparamount importance in quantum information scienceand beyond, as it addresses a fundamental issue in quan-tum theory. In general a complete microscopic descrip-tion of the dynamical evolution of a system coupled tothe environment (or bath) is a complex many-body prob-lem which requires the solution of a potentially infinitenumber of coupled dynamical equations. According to anopen system approach, this issue is tackled by retainingonly basic information about the environment and de-scribing the system dynamics in terms of a master equa-tion [1, 2]. The lack of a complete knowledge about thebath leads to master equations coefficients (MECs) whichmay be either unknown, or obtained from a microscop-ical derivation carried out within some approximationscheme. As a matter of fact it would then be highlyappealing to devise a procedure allowing to retrieve theMECs starting from experimentally accessible quantities.This would in fact both give access to otherwise unknownquantities and provide a strong indication about the va-lidity of the adopted theoretical framework.
So far two main dynamical regimes, Markovian andnon-Markovian, can usually be distinguished accordingto the timescale of environment dynamics (respectivelyshorter or longer than that of the system). In [3] it hasbeen shown that, in case of Markovian Gaussian noise,the MECs can be retrieved by means of a finite numberof tomographic measurements by using Gaussian statesas a probe.Here we want to address the more involved non-
Markovian case. In facts, even though Markovianevolutions have been extensively investigated (see e.g.[1, 2, 4, 5]), in general real noisy dynamics are far frombeing Markovian. Despite a growing interest in boththeory and experiment [6, 7] a comprehensive theory ofnon-Markovian dynamics is yet to come. Exact non-Markovian master equations have been derived for aBrownian particle linearly coupled to a harmonic oscilla-tor bath via e.g. path integral methods [8, 9] or phase-space and Wigner function computations [10, 11]. Analo-gous results have been obtained employing quantum tra-jectories, either exactly or in weak coupling approxima-tion [12–15]. In the framework of path integral methods,master equations have been derived both for initially cor-related states [16, 17], and for factorized initial states inthe case of weak non linear interactions [18]. Neverthe-less, all these master equations cover only few cases andare not simple to solve. Indeed, it would be highly de-sirable to find an approximation scheme fully capturingnon-Markovian features, as in general different approxi-mations may lead to irreconcilable dynamics [1].
A first generalization of the tomography-based ap-proach proposed in [3] to time-dependent dissipative gen-erators has been presented in [19]. Under the assump-tion of Gaussian noise, the time-independent parameters(TIPs) characterizing the time-dependent MECs (whosefunctional form is previously known) as for example thesystem-bath coupling, temperature and bath frequencycut-off, can in fact be obtained with a finite set of mea-surements.In this paper we propose an experimentally feasible pro-cedure which allows the full reconstruction of the MECsof convolutionless non-Markovian generators. Indeed,
arX
iv:1
007.
4537
v1 [
quan
t-ph
] 2
6 Ju
l 201
0

2
whenever the assumption of Gaussian noise is satisfied,by combining a tomography based approach and a properchoice of data sampling, starting from a finite and dis-crete set of measurements it is possible to obtain globalinformation about the time-dependent MECs. We envis-age two main applications of the proposed scheme: botha full reconstruction starting from previously unknownMECs, and a sound, reliable and complete consistencytest of the theoretical assumptions made in deriving thedissipative generator.
The paper is organized as follows. In section II we re-view the tomography based approach introduced in [3]allowing to reconstruct the MECs at any fixed time witha finite amount of measurements. In section III we in-troduce the main lines of our reconstruction scheme dis-tinguishing two in principle distinct cases based on thepurpose of the reconstruction and on the available priorknowledge of the MECs. In section IV two differentimplementations, integral and differential, of the recon-struction procedure are presented and their applicationis discussed. To provide an explicit example of both ap-proaches, in section V they are applied to the specificmodel of a brownian particle interacting with an Ohmicbath of harmonic oscillators. In section VI we summa-rize and discuss our results, and finally in Appendix A weprovide some more details about the sampling theoremsinvolved in our reconstruction scheme.
II. THE T-C PROCEDURE
Consider a master equation with unknown coefficientswhich generates a Gaussian Shape Preserving (hereafterGSP) dissipative evolution or, in other words, a Gaus-sian map. Then for any fixed time t this property can beexploited to reconstruct the value of the master equationcoefficients at that time by using a Gaussian state as aprobe. In facts, if gaussianity is preserved, the value attime t of the evolved cumulants can be retrieved by per-forming a limited number of tomographic measurements.The value of the unknown MECs is then obtained by in-verting the dynamical equations of the system. In thissection we briefly review the main steps of the procedureintroduced in [3] which allows to relate the evolved cumu-lants of a Gaussian state to tomographic measurements.As a starting point we exploit the fact that once the timeevolution of its first and second cumulants is known, thenthe dynamics of a Gaussian state is completely deter-mined. In general, given a master equation governingthe evolution of the density matrix of the system ρ(t),
the dynamical equations for the cumulants formally read
〈q〉t = Tr(ρ(t)q),
〈p〉t = Tr(ρ(t)p),
∆q2t = Tr(ρ(t)q2)− 〈q〉2t ,
∆p2t = Tr(ρ(t)p2)− 〈p〉2t ,
σ(q, p)t = Tr
(ρ(t)
qp+ pq
2
)− 〈q〉t〈p〉t. (1)
The explicit form of these equations depends on theadopted master equation whose coefficients, in general,are either unknown or derived by means of phenomeno-logical assumptions. Once measured the cumulants, oneobtains information about the either unknown or as-sumed MECs using Eqs. (1) (or the differential equa-tions they satisfy). The idea is to seek for a procedurethat, at each instant of time, allows to establish a linkbetween system dynamics and measurable quantities. Inour strategy, these quantities are related to the phase-space description. We begin by switching from the spaceof quantum states, i.e. the Hilbert space, to phase-space,which can be done by means of the Wigner map. In facts,a quantum state ρ(t) can be represented on phase-spacein terms of its Wigner function W defined as
W (q, p, t) =1
π
∫ +∞
−∞dy exp
(i2py
)ρ(q − y, q + y, t).
(2)The Wigner function of a Gaussian state is itself a Gaus-sian function on phase space. Hence, if the dissipativeevolution is GSP, at any time the Wigner function of theevolved Gaussian state can be written as
W (q, p, t) =1
2π√
∆q2t∆p2
t − σ(q, p)2t
· exp
[− ∆q2
t (p− 〈p〉t)2 + ∆p2t (q − 〈q〉t)2
2[∆q2t∆p2
t − σ(q, p)2t ]
−2σ(q, p)t(q − 〈q〉t)(p− 〈p〉t)2[∆q2
t∆p2t − σ(q, p)2
t ]
].(3)
Performing a tomographic map then amounts to projectthe above Wigner function along a line in phase-space
X − µq − νp = 0, (4)
or, in other words, to compute its Radon transform [20],which again is a Gaussian function:
$(X,µ, ν) =1
√2π√
∆q2t µ
2 + ∆p2tν
2 + 2σ(q, p)tµν
· exp
[− (X − µ〈q〉t − ν〈p〉t)2
2[∆q2t µ
2 + ∆p2tν
2 + 2σ(q, p)tµν]
],
(5)
where the second cumulants always obey the constrain∆q2
t µ2 +∆p2
tν2 +2σ(q, p)tµν > 0 as a consequence of the

3
Schrodinger-Robertson relation [21], which represents ageneralization of the Heisenberg principle. At this pointone could wonder whether, due to experimental errors,a violation of the uncertainty principle might be ob-served. This may happen if measurements are performedon states almost saturating the inequality, i.e. on purestates. In our case measurements are performed on statesundergoing a dissipative evolution which typically are farfrom being pure hence from saturating the uncertaintyrelation. Furthermore any additional noise of statisticalorigin will have the effect of moving the reconstructedstate further away from the boundary, as noted in [22].
The Radon transform (5) provides a relation betweenthe cumulants and the tomogram values along each line.In facts, performing a tomographic measurement consistsin choosing a pair (µ, ν), i.e. a line in phase space, andin computing $(X,µ, ν) for a given value of X. In [3] ithas been shown that by choosing the lines correspondingto position and momentum probability distributions (i.e.(µ, ν) = (1, 0) and (0, 1)) then, for any fixed t, at mostfour points along each line (i.e. tomogram) are needed toretrieve the first and second cumulant of the associatedvariable. Analogously, the covariance of the two variablesis obtained by measuring at most two points along theline (µ, ν) = (1/
√2, 1/√
2). In overall, starting from aGSP master equation, the first and second order evolvedmomenta at time t can be obtained via a total amount ofeight or at most ten points measured in three different di-rections. In the following, we will refer to this procedureas the tomograms-cumulants (T-C) procedure.
To summarize, at each time t, the T-C procedure com-bined with Eqs. (1) provides the sought-for bridge be-tween dynamical parameters and measurable quantities.We note that, in the Markovian case, this combinationis straightforwardly performed by inverting Eqs. (1) [3].Finally, we emphasize that even though the assumptionof Gaussian noise might be seen as an idealization, it isactually well fitted for a significant number of models[1, 2] and small deviations from Gaussianity would onlyintroduce small and controllable errors. Also, Gaussianprobes are quite straightforward to produce either with alaser or an ordinary light source (obtaining, respectively,a poissonian or a thermal distribution) [23].
III. SKETCH OF THE RECONSTRUCTION
The T-C procedure allows to gain information aboutthe unknown MECs -via experimentally accessiblequantities- locally in time. This is enough if the GSPdissipative generator is time-independent, as the infor-mation needed to fully reconstruct the unknown MECsis obtainable by performing tomographic measurementsat one arbitrary instant of time, as shown in [3]. This isno longer true when facing a time-dependent generator.In this case to fully reconstruct the unknown MECs wein principle need to gather information globally in time.Now, taking the T-C procedure as a starting point, the
problem we tackle is how to retrieve the full informationwe need by combining measurements performed on a fi-nite and discrete set of times, i.e. starting from partialinformation.
A. the dissipative generator
We focus on the reconstruction of the time-dependentMECs of the following class of master equations
dρ(t)
dt= − i
[H0, ρ(t)
]− i(λ(t) + δ)
2[q, ρ(t)p+ pρ(t)]
+i(λ(t)− δ)
2[p, ρ(t)q + qρ(t)]
−Dpp(t)
2[q, [q, ρ]]− Dqq(t)
2[p, [p, ρ(t)]]
+Dqp(t)
2([q, [p, ρ(t)]] + [p, [q, ρ(t)]]) , (6)
where the unknown MECs are λ(t), Dqq(t), Dpp(t),Dqp(t). The system Hamiltonian H is chosen to be atmost a second-order polynomial in the position and mo-mentum operators p, q [24]
H = H0 +δ
2(qp+ pq) , H0 =
1
2mp2 +
mω2
2q2, (7)
where the time dependence which may be introduced bythe Lamb shift term has been neglected. This is typi-cally justified as most of the times either the Lamb shiftis negligible or the Hamiltonian part of the dissipativegenerator reaches its asymptotic value on a much shortertimescale compared to the non unitary part [1]. In over-all, the choice of operators in Eq. (6) represents a naturalgeneralization of the GSP time-independent master equa-tion introduced in [24]. The investigation of this time-dependent class of master equations is further motivatedby the existence of a wide range of models obeying a GSPdissipative dynamics of this form [9–11, 13–17].
As a side remark we note that there may be some am-biguity in literature about the relation between time-dependent dissipative generators and Markovian/non-Markovian dynamics. In facts, some authors classify asnon-Markovian only generators containing a convolutionintegral. It has recently been proved in [25] that thesegenerators can be mapped into convolutionless ones. Thedistinctive feature of non-Markovianity becomes then thedependence of the convolutionless generator on t − t0where t0 is the initial time. Exploiting the same kindof technique, a time-dependent convolutionless genera-tor of the kind (6) can be mapped in Markovian time-independent generators. However, following a consistentpart of literature, e.g. [8, 10, 11, 13, 14, 18, 26], we willterm non-Markovian also convolutionless time-dependentgenerators as the one in Eq. (6).

4
B. the reconstruction scheme
Our strategy towards the reconstruction of the MECsin Eq. (6) is made up of three main steps:
1. use the T-C procedure to get indirect measure-ments of the evolved cumulants at different times;
2. employ the dynamical equations (1) to retrieve thevalues of the MECs (or functions of them) at thosetimes;
3. starting from the obtained discrete and finite set ofvalues, reconstruct the full expression for the MECsby applying proper sampling theorems.
In particular, useful for our purposes will be the Nyquist-Shannon theorem [27, 28] and one of its more sophisti-cated generalizations involving an additive random sam-pling [27, 29, 30]. In principle we can distinguish twodifferent applications of the reconstruction procedure:check of the a priori assumed time-dependence of MECs(Case I) or complete reconstruction of MECs with no apriori assumptions (Case II).
Case I: we assume a priori a certain time dependenceof the MECs as a consequence, for example, of a mi-croscopical derivation of the master equation. In thisperspective, we are interested in experimentally recon-structing the MECs to check the validity of the approx-imations made. A mismatch between the assumed andthe measured MECs would in fact provide a strong ev-idence of the breakdown of the adopted approximationscheme. In this case a full knowledge of the MECs is as-sumed, including that of the TIPs involved, such as thebath frequency cut-off, system-bath coupling, etc. TheTIPs can be either assumed or previously reconstructed[19]. In this case, given the prior knowledge of the band-width associated to the function to be reconstructed (i.e.the width of its Fourier transform), the suitable samplingtheorem can be chosen accordingly. If the function isband-limited then to obtain an exact reconstruction it isenough to apply the simplest sampling theorem, i.e. theNyquist-Shannon theorem (see Appendix A). The func-tion can hence be reconstructed starting from a discreteset of values spaced according to the width of its Fouriertransform. If the bandwidth is not limited one couldtruncate it and still apply the same procedure, whichwould then be affected by the so-called aliasing error. Tominimize it one can perform a proper truncation, whereasto completely avoid it one should resort to the more re-fined sampling theorem illustrated in the following.
Case II: here we want to fully reconstruct the MECs,or derived functions, with no previous assumption on thedynamics, i.e. the MECs are fully unknown. In general,this implies no prior knowledge of the bandwidth asso-ciated to the function to be reconstructed. In this casewe must resort to an additive random sampling (see Ap-pendix A). If on one hand this procedure involves func-tion averages with respect to the probability of draw-ing n sampling times (i.e. more involved measurements),
on the other it does not require prior knowledge of thebandwidth. To obtain the averages of the function weshould in principle perform measurements over a contin-uous interval of time, as the reconstruction is proposedwith continuous random processes. In practice, every ex-perimental apparatus employed to record and process thedata has a dead working time, such that the random pro-cess will be discrete in time, no matter how dense, thusintroducing an intrinsic source of error in the procedure.
As a conclusive remark, we note that in both cases theset of measurements required turns out to be discretebut in principle infinite, as the reconstruction should beperformed over the whole real axis. This number can bemade finite by invoking the largely reasonable physicalcondition of a finite observation time.
IV. DIFFERENT PROCEDURES
In this section we illustrate in more detail how to im-plement the above sketched reconstruction scheme. Thestarting point are the general equations (1) and (6) whichcan be expressed in compact matrix form as
d
dtS(t) = (M − λ(t)I2)S(t), (8)
d
dtX(t) = (R− 2λ(t)I3)X(t) +D(t), (9)
where I2(3) is the 2(3)-dimensional identity matrix. Thevectors S(t) and X(t) correspond, respectively, to thefirst and second order cumulants
S(t) =1√
√mω〈q〉t〈p〉t√mω
, X(t) =1
mω(∆q)2t
(∆p)2t
mω(σq,p)t
,(10)
and the matrices M and R contain the Hamiltonian pa-rameters
M =
(δ ω−ω −δ
), R =
2δ 0 2ω0 −2δ −2ω−ω ω 0
. (11)
Finally, D(t) is the diffusion vector
D(t) =2
mωDqq(t)Dpp(t)
mωDqp(t)
, (12)
such that the MECs to be reconstructed are λ(t) andD(t). The dynamical evolution of the first cumulants,Eq. (8), only depends on the friction coefficient λ(t)whereas that of the second cumulants, Eq. (9), dependson the whole set of MECs. At this point we can distin-guish two different approaches towards the reconstruc-tion, i.e. integral and differential.

5
A. Integral approach
The formal solution of Eq. (8) can be written as
Λ(t) ≡∫ t
0
dt′λ(t′) = ln
(Sj(0)
Sj(t)
), (13)
where the suffix j = 1, 2 labels the two components ofthe vector
S(t) = e−tMS(t). (14)
We note that in Eq. (13) the measurable quantities andthe unknown MEC appear on different sides. Analo-gously, we rewrite Eq. (9) as
d
dtX(t) = D(t), (15)
where
X(t) = e2Λ(t)I3e−tRX(t),
D(t) = e2Λ(t)I3e−tRD(t). (16)
Eqs. (14) and (16) are always invertible, provided one
sets the quantity√δ2 − ω2 ≡ η to the value iΩ whenever
η2 < 0 [24]. The formal solution of Eq. (15) is given by
X(t) = X(0) +∫ t
0dt′D(t′), which, using Eq. (16), can be
recast in terms of X(t) as∫ t
0
dt′e−2Λ(t,t′)I3e(t−t′)RD(t′)
= X(t)− etRe−2Λ(t)X(0); (17)
where Λ(t, t′) =∫ tt′dt′′λ(t′′). Again, considering Λ(t)
as a known quantity from Eq. (13), in Eq. (17) exper-imentally accessible quantities and MECs are groupedon different sides, respectively right and left-hand. Theright-hand sides of both equations can thus be regardedas experimental measurements of the corresponding left-hand sides. The first step is then to compute the lefthand side of Eq. (13) using the friction coefficient λ(t)provided by the assumed model. A theoretical value forΛ(t), say Λth(t), is obtained and its Fourier transformis performed. Once obtained the bandwidth associatedto Λth(t) and consequently the amount of points in timerequired for the full reconstruction (according to the cho-sen sampling theorem) the following step is to evaluate
S(t) (Eq. (14)) on these points by successive applicationsof the T-C procedure. Finally, the last step is to applythe sampling theorem to the experimental data and toreconstruct the left-hand side of Eq. (13), let us denoteit by Λex(t). If the match between Λth(t) and Λex(t) ispositive within the desired accuracy, one can then pro-ceed further to the reconstruction of the left-hand sideof Eq. (17) according to the same procedure. We notethat the integral approach is also feasible in case of time-dependent Hamiltonian parameters (i.e. m(t), ω(t), δ(t))as long as the generator remains GSP. In general this kindof generators requires a numerical evaluation of the inte-grals in Eqs. (8) and (9), according to which the suitablesampling theorem must be chosen.
B. Differential approach
The T-C procedure allows to measure not only thecumulants of a given Gaussian state but also their firsttime derivatives. Indeed, by measuring each cumulantat two different times t and t + δt, its derivative can beestimated via its finite incremental ratio. For instance
d
dt∆q2
t ∼∆q2
t+δt −∆q2t
δt, (18)
where the amount of time δt is taken as the smallest timeinterval which can elapse between two different measure-ments. Once the cumulants and their derivatives at fixedtimes are given as experimental inputs, Eqs.(8) and (9)become linear algebraic equations whose unknown are theMECs. Hence from Eqs. (8) and (9) we obtain the desiredexperimentally accessible estimations for the MECs
λex(t) ' δ +1
〈q〉t
(1
m〈p〉t −
〈q〉2t+δt − 〈q〉2tδt
)' −δ − 1
〈p〉t
(mω2〈q〉t +
〈p〉2t+δt − 〈p〉2tδt
), (19)
Dexqq (t) ' (λ(t)− δ)∆q2
t −1
mσ(q, p)t
+∆q2
t+δt −∆q2t
2δt, (20)
Dexpp(t) ' (λ(t) + δ)∆p2
t +mω2σ(q, p)t
+∆p2
t+δt −∆p2t
2δt, (21)
Dexqp(t) ' m
2ω2∆q2
t −1
2m∆p2
t + λ(t)σ(q, p)t
+σ(q, p)2
t+δt − σ(q, p)2t
2δt. (22)
The number of points required to fully reconstruct theMECs depends on the sampling theorem employed. InCase I, given the prior knowledge of the bandwidth, ifthe function is band limited or it can be truncated on aneffective compact support outside of which the contribu-tions are negligible, the Nyquist-Shannon theorem canbe applied. Otherwise one must resort to the additiverandom sampling theorem, which must be in generalemployed in Case II.As the integral approach, the differential approach isalso suitable in case of time-dependent Hamiltonianparameters as long as the generator remains GSP.The Hamiltonian parameters would then be includedamong the MEPs to be reconstructed, thus raisingtheir number to seven. Since Eqs.(8) and (9) are five,two more equations would be required as for examplethose for two higher order cumulants, e.g. Tr(ρ(t)q3)and Tr(ρ(t)p3). This would not increase the numberof experimental measurements, since the higher ordermoments and cumulants of Gaussian states are com-pletely determined by the first and the second cumulants.

6
C. Comparison between the two approaches
Let us now briefly compare the two procedures de-scribed in this section. The differential approach requiresmore experimental measurements compared to the inte-gral approach, whereas the latter might result more in-volved from a computational point of view. For example,within the frame of Case I, the computation of the firstmember of Eq. (17) might require some numerical or an-alytical approximations. As any kind of approximation inprinciple reduces the accuracy of the reconstruction, thedifferential approach would be a better choice. On theother hand, if the computation of the integral functionsin Eqs. (13)-(17) does not exhibit remarkable difficul-ties, the integral procedure should be preferred, since itrequires a lower number of interactions with the physicalsystem.
In Case II, the integral approach could be employed toreconstruct the left hand sides of Eqs. (13)-(17), whichare functionals of the unknown MECs. By means of timederivatives and linear operations on the reconstructedfunctions, the MECs can finally be retrieved. However,the time derivatives may amplify the error of the recon-struction. For instance, the Nyquist-Shannon theorem(see Appendix A) requires a truncation of the Fourier’sfrequencies, thus inducing an oscillating behaviour of thereconstructed functions (aliasing error). Even if the oscil-lations around the mean (true) functions are small, thetime derivative may increase them. Hence, either oneperforms a better reconstruction (e.g. a larger truncationor a random additive sampling requiring a larger numberof measurements, Eq. (A8)) or one adopts the differen-tial approach, thus directly reconstructing the MECs.In general, one could say that the integral procedure ismore advantageous in terms of number of measurements,but requires the ability of solving potentially involved an-alytical expressions. The differential approach, instead,is more advantageous from the point of view of versatility,as it allows to deal in a straightforward way with com-plex generators (i.e. exhibiting time-dependent Hamil-tonian parameters), at the expenses of a higher numberof measurements. Therefore, which of the two proposedapproaches proves better, strictly depends on the specificcase under investigation.
V. AN EXAMPLE
To provide an example of how to implement the pro-posed integral and differential procedures, in this sec-tion we apply both to a specific model i.e. within theperspective of Case I. As a model to be tested we con-sider a harmonic oscillator of frequency ω (our system-particle) linearly coupled to an Ohmic bath of harmonicoscillators. The TIPs of this model are the system-bathcoupling constant α, the Lorentz-Drude cut-off ωc andthe temperature T [1]. Starting from a superoperatorialversion of the Hu-Paz-Zhang master equation [8], in the
weak-coupling limit (i.e. up to α2) for this model a gen-erator of the form of Eq. (6) can be obtained [26]. Morespecifically, the Hamiltonian parameter δ is set to 0 andthe MECs provided by the model are
λth(t) =α2ω2
cω
ω2c + ω2
1− e−ωct
[cos(ωt) +
ωcω
sin(ωt)]
,
Dthqp = 0, mωDth
qq/ = Dthpp/(mω) = ∆th(t)/2, (23)
where at high temperature T
∆th(t) =2α2ω2
c
ω2c + ω2
kT
1− e−ωct
[cos(ωt)− ω
ωcsin(ωt)
].
(24)With this choice of MECs the dissipative generator isGSP [26]. The Markovian limit is recovered when thetime dependent parameters λth(t) and ∆th(t) reach theirstationary values, i.e. at times larger than 1/ωc
λth(t)→ α2ω2cω
ω2c + ω2
, ∆th(t)→ 2α2ω2c
ω2c + ω2
kT
. (25)
Usually, when studying quantum Brownian motion, oneassumes ωc/ω 1 with ωc → ∞, corresponding to anatural Markovian reservoir. In this limit, the thermal-ization time [26] is inversely proportional to the couplingstrength, while for an out-of-resonance engineered reser-voir with ωc/ω 1 (i.e. highly non Markovian), thethermalization process is slowed down.
Microscopic derivations of Master Equations usuallygive a time dependent renormalization of Hamiltonianparameters (m, ω, δ). However, they are negligible forthis benchmark model in the considered limits.
A. Integral approach
Following the steps of the integral approach we solveEq. (13) using λth(t) (Eq. (23)) and we get
Λth(t) =α2ω2
cω2
(ω2c + ω2)2
ωtω2c + ω2
ω2− 2
ωcω
+e−ωct
[2ωcω
cos(ωt) +ω2c − ω2
ω2sin(ωt)
].
(26)
The obtained function does not belong to the functionalspace L2((R)) thus not matching the condition for theapplicability of the Nyquist-Shannon theorem (see Ap-pendix A). However, as we are interested in a finite timeinterval, we can restrict the support of Λth(t) to [0, t] anddefine:
Λth(t) ≡
Λth(t) t ∈ [0, t]
0 else. (27)
The function Λth(t) is in L2(R) thus can be reconstructedby the Nyquist-Shannon theorem. The discontinuity at
7
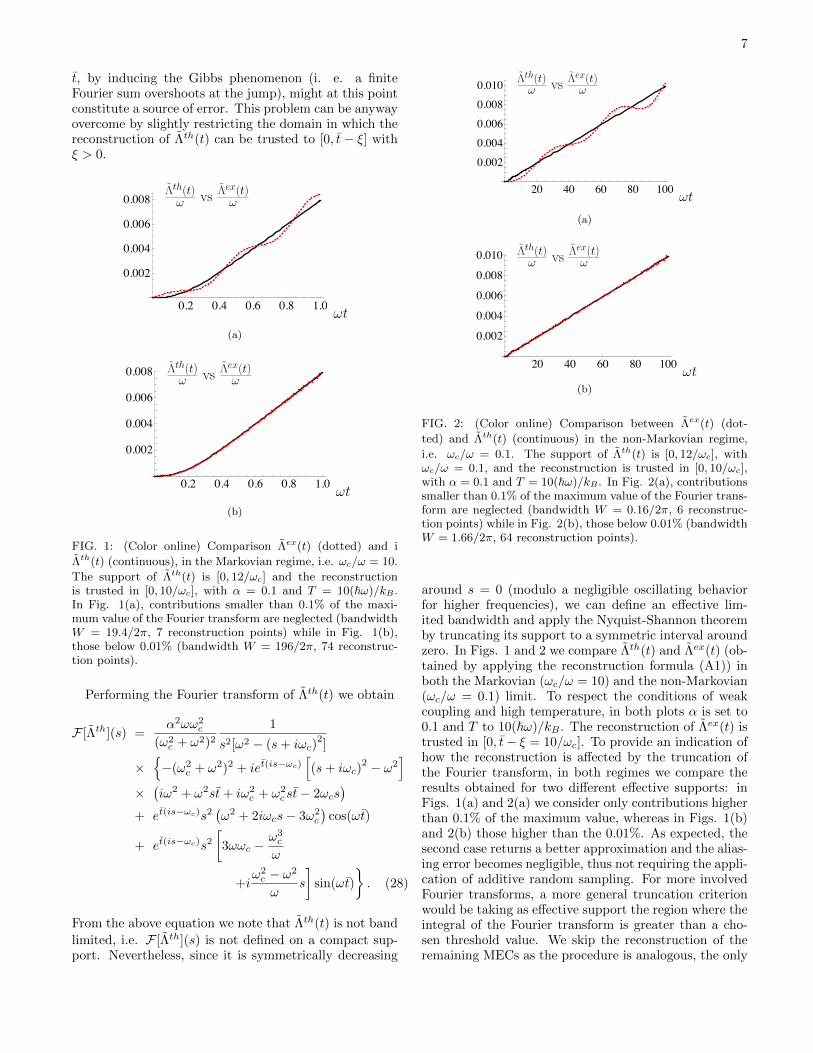
t, by inducing the Gibbs phenomenon (i. e. a finiteFourier sum overshoots at the jump), might at this pointconstitute a source of error. This problem can be anywayovercome by slightly restricting the domain in which thereconstruction of Λth(t) can be trusted to [0, t − ξ] withξ > 0.
Λth(t)ω vs Λex(t)
ω
ωt0.2 0.4 0.6 0.8 1.0
0.002
0.004
0.006
0.008
(a)
Λth(t)ω vs Λex(t)
ω
ωt0.2 0.4 0.6 0.8 1.0
0.002
0.004
0.006
0.008
(b)
FIG. 1: (Color online) Comparison Λex(t) (dotted) and i
Λth(t) (continuous), in the Markovian regime, i.e. ωc/ω = 10.
The support of Λth(t) is [0, 12/ωc] and the reconstructionis trusted in [0, 10/ωc], with α = 0.1 and T = 10(ω)/kB .In Fig. 1(a), contributions smaller than 0.1% of the maxi-mum value of the Fourier transform are neglected (bandwidthW = 19.4/2π, 7 reconstruction points) while in Fig. 1(b),those below 0.01% (bandwidth W = 196/2π, 74 reconstruc-tion points).
Performing the Fourier transform of Λth(t) we obtain
F [Λth](s) =α2ωω2
c
(ω2c + ω2)2
1
s2[ω2 − (s+ iωc)2]
×−(ω2
c + ω2)2 + iet(is−ωc)[(s+ iωc)
2 − ω2]
×(iω2 + ω2st+ iω2
c + ω2cst− 2ωcs
)+ et(is−ωc)s2
(ω2 + 2iωcs− 3ω2
c
)cos(ωt)
+ et(is−ωc)s2
[3ωωc −
ω3c
ω
+iω2c − ω2
ωs
]sin(ωt)
. (28)
From the above equation we note that Λth(t) is not band
limited, i.e. F [Λth](s) is not defined on a compact sup-port. Nevertheless, since it is symmetrically decreasing
Λth(t)ω vs Λex(t)
ω
ωt20 40 60 80 100
0.002
0.004
0.006
0.008
0.010
(a)
Λth(t)ω vs Λex(t)
ω
ωt20 40 60 80 100
0.002
0.004
0.006
0.008
0.010
(b)
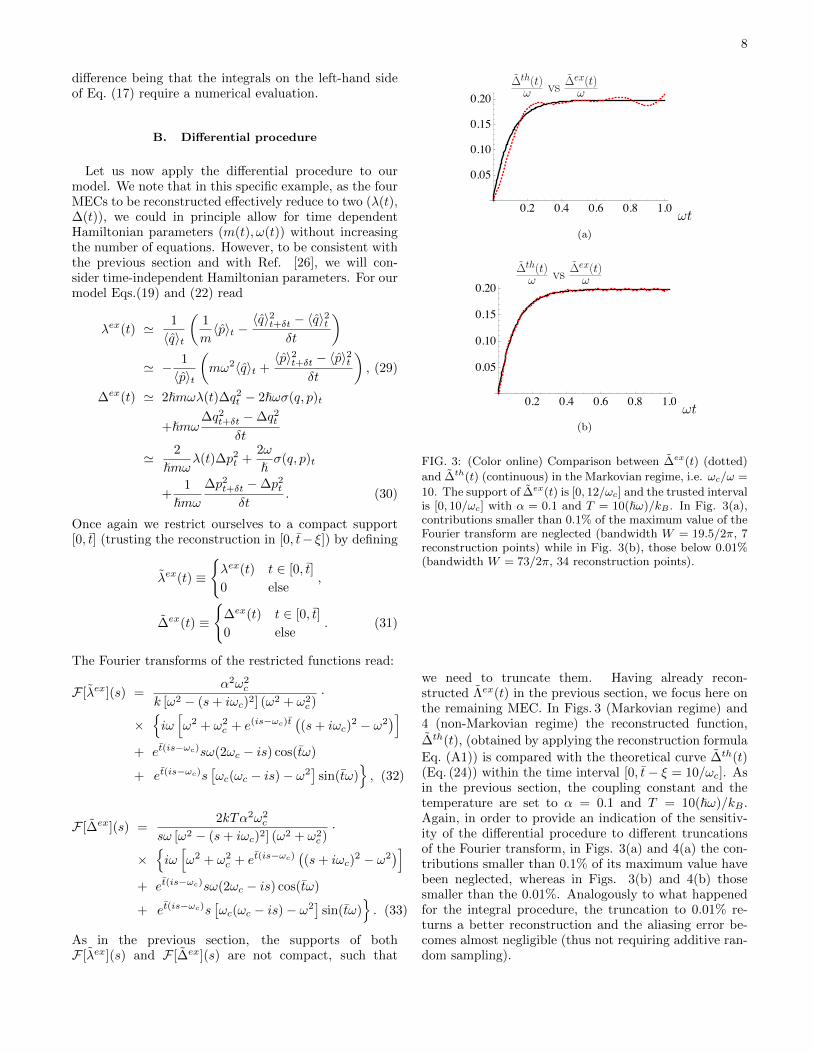
FIG. 2: (Color online) Comparison between Λex(t) (dot-
ted) and Λth(t) (continuous) in the non-Markovian regime,
i.e. ωc/ω = 0.1. The support of Λth(t) is [0, 12/ωc], withωc/ω = 0.1, and the reconstruction is trusted in [0, 10/ωc],with α = 0.1 and T = 10(ω)/kB . In Fig. 2(a), contributionssmaller than 0.1% of the maximum value of the Fourier trans-form are neglected (bandwidth W = 0.16/2π, 6 reconstruc-tion points) while in Fig. 2(b), those below 0.01% (bandwidthW = 1.66/2π, 64 reconstruction points).
around s = 0 (modulo a negligible oscillating behaviorfor higher frequencies), we can define an effective lim-ited bandwidth and apply the Nyquist-Shannon theoremby truncating its support to a symmetric interval aroundzero. In Figs. 1 and 2 we compare Λth(t) and Λex(t) (ob-tained by applying the reconstruction formula (A1)) inboth the Markovian (ωc/ω = 10) and the non-Markovian(ωc/ω = 0.1) limit. To respect the conditions of weakcoupling and high temperature, in both plots α is set to0.1 and T to 10(ω)/kB . The reconstruction of Λex(t) istrusted in [0, t− ξ = 10/ωc]. To provide an indication ofhow the reconstruction is affected by the truncation ofthe Fourier transform, in both regimes we compare theresults obtained for two different effective supports: inFigs. 1(a) and 2(a) we consider only contributions higherthan 0.1% of the maximum value, whereas in Figs. 1(b)and 2(b) those higher than the 0.01%. As expected, thesecond case returns a better approximation and the alias-ing error becomes negligible, thus not requiring the appli-cation of additive random sampling. For more involvedFourier transforms, a more general truncation criterionwould be taking as effective support the region where theintegral of the Fourier transform is greater than a cho-sen threshold value. We skip the reconstruction of theremaining MECs as the procedure is analogous, the only
8
difference being that the integrals on the left-hand sideof Eq. (17) require a numerical evaluation.
B. Differential procedure
Let us now apply the differential procedure to ourmodel. We note that in this specific example, as the fourMECs to be reconstructed effectively reduce to two (λ(t),∆(t)), we could in principle allow for time dependentHamiltonian parameters (m(t), ω(t)) without increasingthe number of equations. However, to be consistent withthe previous section and with Ref. [26], we will con-sider time-independent Hamiltonian parameters. For ourmodel Eqs.(19) and (22) read
λex(t) ' 1
〈q〉t
(1
m〈p〉t −
〈q〉2t+δt − 〈q〉2tδt
)' − 1
〈p〉t
(mω2〈q〉t +
〈p〉2t+δt − 〈p〉2tδt
), (29)
∆ex(t) ' 2mωλ(t)∆q2t − 2ωσ(q, p)t
+mω∆q2
t+δt −∆q2t
δt
' 2
mωλ(t)∆p2
t +2ω
σ(q, p)t
+1
mω∆p2
t+δt −∆p2t
δt. (30)
Once again we restrict ourselves to a compact support[0, t] (trusting the reconstruction in [0, t− ξ]) by defining
λex(t) ≡
λex(t) t ∈ [0, t]
0 else,
∆ex(t) ≡
∆ex(t) t ∈ [0, t]
0 else. (31)
The Fourier transforms of the restricted functions read:
F [λex](s) =α2ω2
c
k [ω2 − (s+ iωc)2] (ω2 + ω2c )·
×iω[ω2 + ω2
c + e(is−ωc)t((s+ iωc)
2 − ω2)]
+ et(is−ωc)sω(2ωc − is) cos(tω)
+ et(is−ωc)s[ωc(ωc − is)− ω2
]sin(tω)
, (32)
F [∆ex](s) =2kTα2ω2
c
sω [ω2 − (s+ iωc)2] (ω2 + ω2c )·
×iω[ω2 + ω2
c + et(is−ωc)((s+ iωc)
2 − ω2)]
+ et(is−ωc)sω(2ωc − is) cos(tω)
+ et(is−ωc)s[ωc(ωc − is)− ω2
]sin(tω)
. (33)
As in the previous section, the supports of bothF [λex](s) and F [∆ex](s) are not compact, such that
∆th(t)ω vs ∆ex(t)
ω
ωt0.2 0.4 0.6 0.8 1.0
0.05
0.10
0.15
0.20
(a)
∆th(t)ω vs ∆ex(t)
ω
ωt0.2 0.4 0.6 0.8 1.0
0.05
0.10
0.15
0.20
(b)
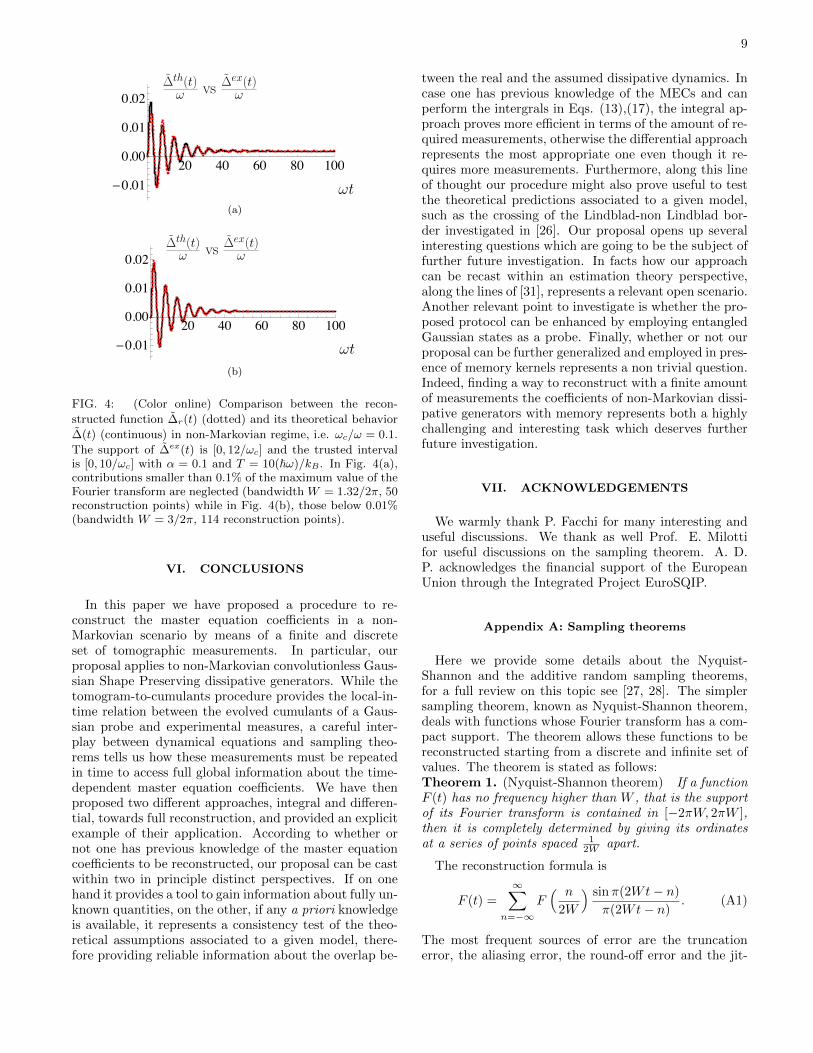
FIG. 3: (Color online) Comparison between ∆ex(t) (dotted)
and ∆th(t) (continuous) in the Markovian regime, i.e. ωc/ω =
10. The support of ∆ex(t) is [0, 12/ωc] and the trusted intervalis [0, 10/ωc] with α = 0.1 and T = 10(ω)/kB . In Fig. 3(a),contributions smaller than 0.1% of the maximum value of theFourier transform are neglected (bandwidth W = 19.5/2π, 7reconstruction points) while in Fig. 3(b), those below 0.01%(bandwidth W = 73/2π, 34 reconstruction points).
we need to truncate them. Having already recon-structed Λex(t) in the previous section, we focus here onthe remaining MEC. In Figs. 3 (Markovian regime) and4 (non-Markovian regime) the reconstructed function,
∆th(t), (obtained by applying the reconstruction formula
Eq. (A1)) is compared with the theoretical curve ∆th(t)(Eq. (24)) within the time interval [0, t− ξ = 10/ωc]. Asin the previous section, the coupling constant and thetemperature are set to α = 0.1 and T = 10(ω)/kB .Again, in order to provide an indication of the sensitiv-ity of the differential procedure to different truncationsof the Fourier transform, in Figs. 3(a) and 4(a) the con-tributions smaller than 0.1% of its maximum value havebeen neglected, whereas in Figs. 3(b) and 4(b) thosesmaller than the 0.01%. Analogously to what happenedfor the integral procedure, the truncation to 0.01% re-turns a better reconstruction and the aliasing error be-comes almost negligible (thus not requiring additive ran-dom sampling).
9
∆th(t)ω vs ∆ex(t)
ω
ωt
20 40 60 80 1000.01
0.00
0.01
0.02
(a)
∆th(t)ω vs ∆ex(t)
ω
ωt
20 40 60 80 1000.01
0.00
0.01
0.02
(b)
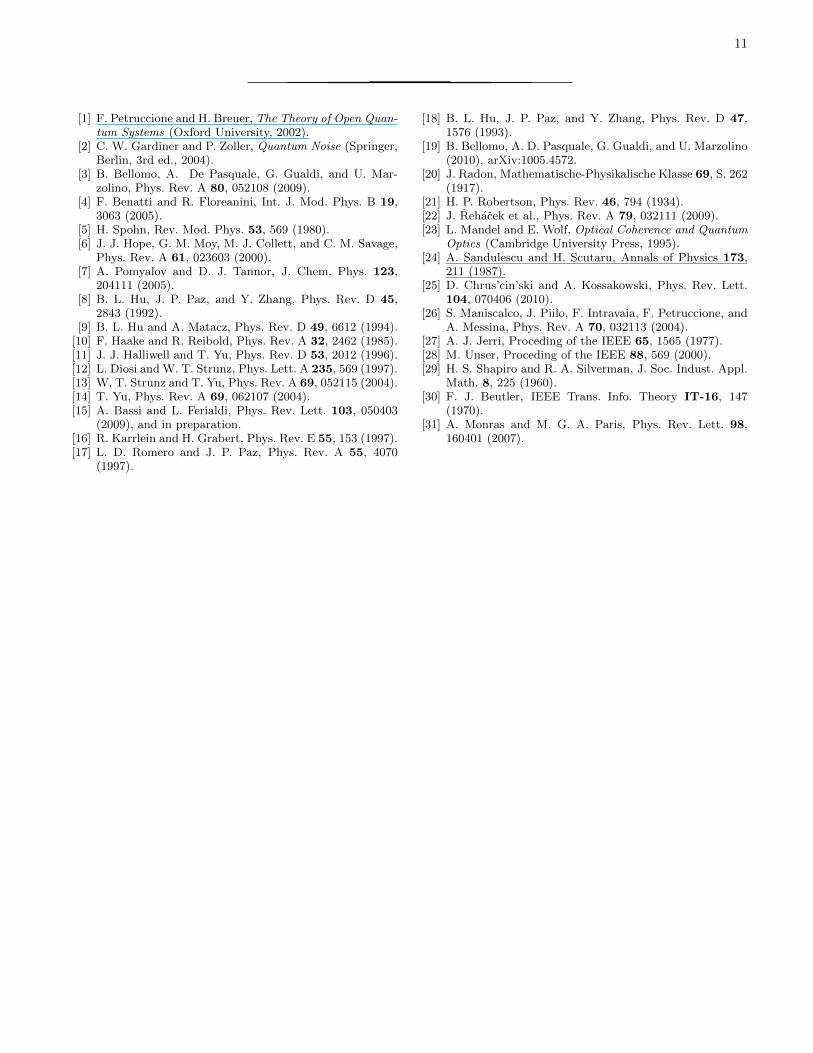
FIG. 4: (Color online) Comparison between the recon-
structed function ∆r(t) (dotted) and its theoretical behavior
∆(t) (continuous) in non-Markovian regime, i.e. ωc/ω = 0.1.
The support of ∆ex(t) is [0, 12/ωc] and the trusted intervalis [0, 10/ωc] with α = 0.1 and T = 10(ω)/kB . In Fig. 4(a),contributions smaller than 0.1% of the maximum value of theFourier transform are neglected (bandwidth W = 1.32/2π, 50reconstruction points) while in Fig. 4(b), those below 0.01%(bandwidth W = 3/2π, 114 reconstruction points).
VI. CONCLUSIONS
In this paper we have proposed a procedure to re-construct the master equation coefficients in a non-Markovian scenario by means of a finite and discreteset of tomographic measurements. In particular, ourproposal applies to non-Markovian convolutionless Gaus-sian Shape Preserving dissipative generators. While thetomogram-to-cumulants procedure provides the local-in-time relation between the evolved cumulants of a Gaus-sian probe and experimental measures, a careful inter-play between dynamical equations and sampling theo-rems tells us how these measurements must be repeatedin time to access full global information about the time-dependent master equation coefficients. We have thenproposed two different approaches, integral and differen-tial, towards full reconstruction, and provided an explicitexample of their application. According to whether ornot one has previous knowledge of the master equationcoefficients to be reconstructed, our proposal can be castwithin two in principle distinct perspectives. If on onehand it provides a tool to gain information about fully un-known quantities, on the other, if any a priori knowledgeis available, it represents a consistency test of the theo-retical assumptions associated to a given model, there-fore providing reliable information about the overlap be-
tween the real and the assumed dissipative dynamics. Incase one has previous knowledge of the MECs and canperform the intergrals in Eqs. (13),(17), the integral ap-proach proves more efficient in terms of the amount of re-quired measurements, otherwise the differential approachrepresents the most appropriate one even though it re-quires more measurements. Furthermore, along this lineof thought our procedure might also prove useful to testthe theoretical predictions associated to a given model,such as the crossing of the Lindblad-non Lindblad bor-der investigated in [26]. Our proposal opens up severalinteresting questions which are going to be the subject offurther future investigation. In facts how our approachcan be recast within an estimation theory perspective,along the lines of [31], represents a relevant open scenario.Another relevant point to investigate is whether the pro-posed protocol can be enhanced by employing entangledGaussian states as a probe. Finally, whether or not ourproposal can be further generalized and employed in pres-ence of memory kernels represents a non trivial question.Indeed, finding a way to reconstruct with a finite amountof measurements the coefficients of non-Markovian dissi-pative generators with memory represents both a highlychallenging and interesting task which deserves furtherfuture investigation.
VII. ACKNOWLEDGEMENTS
We warmly thank P. Facchi for many interesting anduseful discussions. We thank as well Prof. E. Milottifor useful discussions on the sampling theorem. A. D.P. acknowledges the financial support of the EuropeanUnion through the Integrated Project EuroSQIP.
Appendix A: Sampling theorems
Here we provide some details about the Nyquist-Shannon and the additive random sampling theorems,for a full review on this topic see [27, 28]. The simplersampling theorem, known as Nyquist-Shannon theorem,deals with functions whose Fourier transform has a com-pact support. The theorem allows these functions to bereconstructed starting from a discrete and infinite set ofvalues. The theorem is stated as follows:Theorem 1. (Nyquist-Shannon theorem) If a functionF (t) has no frequency higher than W , that is the supportof its Fourier transform is contained in [−2πW, 2πW ],then it is completely determined by giving its ordinatesat a series of points spaced 1
2W apart.
The reconstruction formula is
F (t) =
∞∑n=−∞
F( n
2W
) sinπ(2Wt− n)
π(2Wt− n). (A1)
The most frequent sources of error are the truncationerror, the aliasing error, the round-off error and the jit-

10
tering error. The truncation error arises from consid-ering a finite sampling instead of an infinite one, as inpractice it is unfeasible to sample and store an infinitenumber of values (unless some regular behavior of thefunction to reconstruct can be postulated). The alias-ing error occurs whenever a function which is not band-limited is reconstructed by means of procedures suitablefor band-limited functions which is often the case sinceband-limited functions are very peculiar. Whenever atruncation or an aliasing error occurs, it means that thereare different functions matching the exploited sampling,anyway there exist conditions to bind this kind of errors[27, 28]. Whereas the two previous errors are sampling-related, whereas the round-off and the jittering error arelinked to the precision of the experimental apparatus. Inparticular, the round-off error is caused by errors affect-ing the sampling values and, finally, the jittering error isdue to errors affecting the sampling times.A remarkable generalization of the sampling theorem isdeveloped in [29, 30] and requires an additive randomsampling. The function is sampled at additively ran-domly chosen points tn = tn−1 + γn, where γn isa family of independent identically distributed randomvariables, whose probability distribution p(t) obeys thefollowing constraints
p(t) ∈ L2(R), p(t) = 0 for t < 0, E[γn] = h <∞,(A2)
where E[·] is the expected value and h is the average spac-ing of the sampling. Additive random samplings maybe alias-free, namely they may provide reconstructionswithout any aliasing error. As a consequence, non band-limited functions may as well be reconstructed. Exam-ples of alias-free samplings are discussed in [29, 30]. Thefollowing theorem provides the condition for an additivesampling to be alias-free:Theorem 2. An additive random sampling is alias-freeif the characteristic function φ(ω) = E[eiωt] takes no val-ues more than once on the real axis.Conversely, if the characteristic function φ(ω) takes thesame value at two different points of the open upper half-plane, then aliasing occurs with an additive random sam-pling.
The probability distribution pn(t) of tn is defined bythe relations:
pn(t) =
∫ ∞−∞
dupn−1(t− u)p(u)
=
∫ ∞0
dupn−1(t− u)p(u),
p1(t) = p(t). (A3)
Since the functions pn(t) are linearly independent [29],we can apply the orthogonalization procedure to themthus obtaining the orthonormal set qn(t)n:
∫ ∞0
dτqn(t)qm(t) = δn,m. (A4)
The function qn(t) can be expressed as a linear combina-tion of pn(t):
qn(t) =
n∑m=1
bn,mpn(t). (A5)
To reconstruct the function F (t), we define the averages
fn =
∫ ∞−∞
dτpn(t)F (t) =
∫ ∞0
dτpn(t)F (t), (A6)
where we have used pn(t) = 0 (Eq. (A2)). From Eq.(A5),we get
βn =
∫ ∞0
dτqn(t)F (t) =
n∑m=1
bn,mfn. (A7)
The reconstruction formula can then be written as
F (t) =
∞∑n=1
βnqn(t), (A8)
where the sum converges in the L2-norm. We emphasizethat in this case the input sampling is not a countableset of values but rather a countable set of averages (A6)as the sample spacing is a random variable itself and wemake an average over all possible spacings. If the spacingdistribution is highly picked on h, i.e. p(t) = δ(τ−h), thespacing variance vanishes E[γ2
n] = E2[γn], and the recon-struction procedure recovers the usual one with equallyspaced samplings. If the spacing variance is compara-ble with its mean value E[γ2
n] − E2[γn] ∼ h2, then allspacings are highly probable and we get an effectivecontinuous sampling. An unavoidable source of errorin the implementation of this sampling theorem is thatit involves functions defined on arbitrarily small times[29, 30] whereas any experimental apparatus exhibits adead working time interval to record and process data.Finally we note that we want to reconstruct functionsdefined only for t > 0 hence we do not encounter anylower truncation error. The upper truncation error canbe also avoided by reconstructing slightly different func-tions: F (t)(1 − θ(t − t)) instead of F (t). The differ-ences arise from the integral transforms involved in thereconstruction formula, but if we are interested in re-constructing functions in the experimentally accessibletimescales, values greater than the threshold t of exper-imentally reachable times can be neglected. The sametrick can be exploited to avoid errors due to a finite in-put size for an additive random sampling. Indeed if thesampling probability is well localized, each pn(t) is local-ized as well. The probabilities pn(t) localized at timeslarger than the threshold t do not contribute and thecorresponding fn vanish. .
11
[1] F. Petruccione and H. Breuer, The Theory of Open Quan-tum Systems (Oxford University, 2002).
[2] C. W. Gardiner and P. Zoller, Quantum Noise (Springer,Berlin, 3rd ed., 2004).
[3] B. Bellomo, A. De Pasquale, G. Gualdi, and U. Mar-zolino, Phys. Rev. A 80, 052108 (2009).
[4] F. Benatti and R. Floreanini, Int. J. Mod. Phys. B 19,3063 (2005).
[5] H. Spohn, Rev. Mod. Phys. 53, 569 (1980).[6] J. J. Hope, G. M. Moy, M. J. Collett, and C. M. Savage,
Phys. Rev. A 61, 023603 (2000).[7] A. Pomyalov and D. J. Tannor, J. Chem. Phys. 123,
204111 (2005).[8] B. L. Hu, J. P. Paz, and Y. Zhang, Phys. Rev. D 45,
2843 (1992).[9] B. L. Hu and A. Matacz, Phys. Rev. D 49, 6612 (1994).
[10] F. Haake and R. Reibold, Phys. Rev. A 32, 2462 (1985).[11] J. J. Halliwell and T. Yu, Phys. Rev. D 53, 2012 (1996).[12] L. Diosi and W. T. Strunz, Phys. Lett. A 235, 569 (1997).[13] W. T. Strunz and T. Yu, Phys. Rev. A 69, 052115 (2004).[14] T. Yu, Phys. Rev. A 69, 062107 (2004).[15] A. Bassi and L. Ferialdi, Phys. Rev. Lett. 103, 050403
(2009), and in preparation.[16] R. Karrlein and H. Grabert, Phys. Rev. E 55, 153 (1997).[17] L. D. Romero and J. P. Paz, Phys. Rev. A 55, 4070
(1997).
[18] B. L. Hu, J. P. Paz, and Y. Zhang, Phys. Rev. D 47,1576 (1993).
[19] B. Bellomo, A. D. Pasquale, G. Gualdi, and U. Marzolino(2010), arXiv:1005.4572.
[20] J. Radon, Mathematische-Physikalische Klasse 69, S. 262(1917).
[21] H. P. Robertson, Phys. Rev. 46, 794 (1934).[22] J. Rehacek et al., Phys. Rev. A 79, 032111 (2009).[23] L. Mandel and E. Wolf, Optical Coherence and Quantum
Optics (Cambridge University Press, 1995).[24] A. Sandulescu and H. Scutaru, Annals of Physics 173,
211 (1987).[25] D. Chrus’cin’ski and A. Kossakowski, Phys. Rev. Lett.
104, 070406 (2010).[26] S. Maniscalco, J. Piilo, F. Intravaia, F. Petruccione, and
A. Messina, Phys. Rev. A 70, 032113 (2004).[27] A. J. Jerri, Proceding of the IEEE 65, 1565 (1977).[28] M. Unser, Proceding of the IEEE 88, 569 (2000).[29] H. S. Shapiro and R. A. Silverman, J. Soc. Indust. Appl.
Math. 8, 225 (1960).[30] F. J. Beutler, IEEE Trans. Info. Theory IT-16, 147
(1970).[31] A. Monras and M. G. A. Paris, Phys. Rev. Lett. 98,
160401 (2007).




















