Real-time hardware simulation of a small-scale helicopter dynamics
12
Real-time hardware simulation of a small-scale helicopter dynamics Agus Budiyono, Idris E. Putro, K. Yoon, Gilar B. Raharja and G.B. Kim Department of Aerospace Information Engineering, Konkuk University, Seoul, South Korea Abstract Purpose – The purpose of this paper is to develop a real-time simulation environment for the validation of controller for an autonomous small-scale helicopter. Design/methodology/approach – The real-time simulation platform is developed based on the nonlinear model of a series of small-scale helicopters. Dynamics of small-scale helicopter is analyzed through simulation. The controller is designed based on the extracted linear model. Findings – The model-based linear controller can be effectively designed and tested using real-time simulation platform. The hover controller is demonstrated to be robust against wind disturbance. Research limitations/implications – To use the real-time simulation environment to test and validate controllers for small-scale helicopters, basic helicopter parameters need to be measured, calculated or estimated. Practical implications – The real-time simulation environment can be used generically to test and validate controllers for small-scale helicopters. Originality/value – The paper presents the design and development of a low-cost hardware in the loop simulation environment using xPC target critical for validating controllers for small-scale helicopters. Keywords Simulation, Helicopters, Controllers, Design and development Paper type Research paper I. Introduction The design and testing of autonomous control system for rotorcraft-based unmanned aerial vehicle (RUAV) is challenging due to the complexity of the vehicle dynamics, flight testing risk associated with expensive onboard system and uncertainty in the overall flight environment. Rigorous simulations are, therefore, necessary prior to implementing autonomous control in the actual flight. In addition, RUAV is inherently unstable, thus its dynamics must be understood and sufficiently modeled to continuously control the vehicle throughout the flight envelope. The simulation phase of UAV flight control design and development is generally aimed at identifying potential problems that might arise during the flight test. Simulation facility provides ways to emulate realistic environment to access unmeasurable flight variables and to conduct sensitivity analysis of UAV control performance with respect to flight parameters. Despite its indispensable role of simulation, there exist classical gaps between theoretical control synthesis and the actual implementation. In the last several decades, hardware in the loop simulation (HILS) has been proposed to bridge the gaps by incorporating physical hardware into simulated system. HILS, therefore, allows for the detection and prevention of unexpected hardware malfunctions as well as errors in the real-time simulation codes prior to the flight test. HILS basically simulates realistically time-dependent signals in the UAV system; the practical problems such as sensor noise and actuator lag are, therefore, naturally covered. As such, one can hope that the UAV behavior in this real frame work closely mimic that of the real experiment. The real-time simulation framework has been used extensively in both the industry and the academia for various applications including robotics, automation, aerospace, power systems and manufacturing. The use of the HILS in the development of autonomous control for RUAV has been demonstrated by various research group worldwide, including Massachusetts Institute of Technology (Gavrilets et al., 2000), Georgia Tech (Johnson and Fontaine, 2001), Institut Teknologi Bandung (Budiyono, 2005), Korea Aerospace Research Institute (Kim et al., 2009) and more recently National University of Singapore (Cai et al., 2009). This paper was focused on the development of a real-time hardware simulation of RUAVs model for an autonomous control design. This is a part of HILS setup based on real-time environment. A developed flight dynamics small-scale helicopter model is given in Simulink under Matlab environment, and real-time implementation was carried out by using real-time workshop (RTW). II. Real-time hardware simulation platform The real-time hardware simulation includes one host personal computer (PC) and two target PC based on Matlab/xPC target environment (Mosterman et al., 2005). Host PC is connected to each target PC to handle the simulation. First, a nonlinear small-scale helicopter dynamic model is developed and implemented as plant platform target PC. Second, the control model is implemented as controller platform target PC. The current issue and full text archive of this journal is available at www.emeraldinsight.com/1748-8842.htm Aircraft Engineering and Aerospace Technology: An International Journal 82/6 (2010) 360–371 q Emerald Group Publishing Limited [ISSN 1748-8842] [DOI 10.1108/00022661011104510] This research was supported by the faculty research fund of Konkuk University in 2010 and by the MKE (The Ministry of Knowledge Economy), Korea, under the ITRC (Information Technology Research Center) support program supervised by the NIPA (National IT Industry Promotion Agency) (NIPA-2010-C1090-1031-0003). 360
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Real-time hardware simulation of a small-scale helicopter dynamics
Real-time hardware simulationof a small-scale helicopter dynamics
Agus Budiyono, Idris E. Putro, K. Yoon, Gilar B. Raharja and G.B. Kim
Department of Aerospace Information Engineering, Konkuk University, Seoul, South Korea
AbstractPurpose – The purpose of this paper is to develop a real-time simulation environment for the validation of controller for an autonomous small-scalehelicopter.Design/methodology/approach – The real-time simulation platform is developed based on the nonlinear model of a series of small-scale helicopters.Dynamics of small-scale helicopter is analyzed through simulation. The controller is designed based on the extracted linear model.Findings – The model-based linear controller can be effectively designed and tested using real-time simulation platform. The hover controller isdemonstrated to be robust against wind disturbance.Research limitations/implications – To use the real-time simulation environment to test and validate controllers for small-scale helicopters, basichelicopter parameters need to be measured, calculated or estimated.Practical implications – The real-time simulation environment can be used generically to test and validate controllers for small-scale helicopters.Originality/value – The paper presents the design and development of a low-cost hardware in the loop simulation environment using xPC targetcritical for validating controllers for small-scale helicopters.
Keywords Simulation, Helicopters, Controllers, Design and development
Paper type Research paper
I. Introduction
The design and testing of autonomous control system for
rotorcraft-based unmanned aerial vehicle (RUAV) is challenging
due to the complexity of the vehicle dynamics, flight testing risk
associated with expensive onboard system and uncertainty in the
overall flight environment. Rigorous simulations are, therefore,
necessary prior to implementing autonomous control in the
actual flight. In addition, RUAV is inherently unstable, thus its
dynamics must be understood and sufficiently modeled to
continuously control the vehicle throughout the flight envelope.The simulation phase of UAV flight control design and
development is generally aimed at identifying potential
problems that might arise during the flight test. Simulation
facility provides ways to emulate realistic environment to access
unmeasurable flight variables and to conduct sensitivity analysis
of UAV control performance with respect to flight parameters.
Despite its indispensable role of simulation, there exist classical
gaps between theoretical control synthesis and the actual
implementation. In the last several decades, hardware in the
loop simulation (HILS) has been proposed to bridge the gaps by
incorporating physical hardware into simulated system. HILS,
therefore, allows for the detection and prevention of unexpected
hardware malfunctions as well as errors in the real-time
simulation codes prior to the flight test. HILS basically
simulates realistically time-dependent signals in the UAV
system; the practical problems such as sensor noise and actuator
lag are, therefore, naturally covered. As such, one can hope thatthe UAV behavior in this real frame work closely mimic that of
the real experiment. The real-time simulation framework hasbeen used extensively in both the industry and the academia for
various applications including robotics, automation, aerospace,power systems and manufacturing. The use of the HILS in the
development of autonomous control for RUAV has been
demonstrated by various research group worldwide, includingMassachusetts Institute of Technology (Gavrilets et al., 2000),
Georgia Tech (Johnson and Fontaine, 2001), Institut TeknologiBandung (Budiyono, 2005), Korea Aerospace Research
Institute (Kim et al., 2009) and more recently NationalUniversity of Singapore (Cai et al., 2009).
This paper was focused on the development of a real-time
hardware simulation of RUAVs model for an autonomouscontrol design. This is a part of HILS setup based on real-time
environment. A developed flight dynamics small-scalehelicopter model is given in Simulink under Matlab
environment, and real-time implementation was carried outby using real-time workshop (RTW).
II. Real-time hardware simulation platform
The real-time hardware simulation includes one host personal
computer (PC) and two target PC based on Matlab/xPC targetenvironment (Mosterman et al., 2005). Host PC is connected to
each target PC to handle the simulation. First, a nonlinearsmall-scale helicopter dynamic model is developed and
implemented as plant platform target PC. Second, the control
model is implemented as controller platform target PC.The current issue and full text archive of this journal is available at
www.emeraldinsight.com/1748-8842.htm
Aircraft Engineering and Aerospace Technology: An International Journal
82/6 (2010) 360–371
q Emerald Group Publishing Limited [ISSN 1748-8842]
[DOI 10.1108/00022661011104510]
This research was supported by the faculty research fund of KonkukUniversity in 2010 and by the MKE (The Ministry of KnowledgeEconomy), Korea, under the ITRC (Information Technology ResearchCenter) support program supervised by the NIPA (National IT IndustryPromotion Agency) (NIPA-2010-C1090-1031-0003).
360

The plant platform runs the RUAV’s model in real-time
environment under DOS, while the controller platform whichuses single-board PC WAFER-8522 supports the controlimplementation of RUAVs model in real-time environment aswell. Utilizing this framework, plant platform and controllerplatform are handled by using Matlab/Simulink programmable.
The xPC target host-target arrangement is shown in Figure 1and schematically can be seen as a diagram in Figure 2. The hostPC runs Matlab, Simulink, RTW and xPC Target. The xPCtarget works with the code generated from the Simulink
application and a Cþþ compiler to build the real-time targetapplication.
The target application can run in real-time on a target PC onceit is downloaded from the host PC. The target PC can be set up
either in dosloader or stand alone mode. This real-time hardwaresimulation implemented the plant model as a dosloader targetPC while the controller model was configured as stand-alonetarget PC. In dosloader target PC, the target application, whichhas been downloaded to target PC, can be controlled and
modified from the host PC. In the stand-alone target PC, thetarget PC runs completely autonomously. The controller modelis no longer controlled from the host, but it is stored on the CFboot disk. When the controller platform starts, the model startsrunning automatically, with a certain stop time.
A. Host computer
Basically, the plant model and controller model in the hostcomputer runs in Matlab under Windows operating system.
Therefore, the model does not run in real-time environment.In this stage, Matlab is used as a software platform to workwith Simulink. The host computer functions as a modelbuilder. Eventually, the host computer manages the targetcomputer to run in real-time environment in dosloader mode.
Host computer generates executable files through Simulinkthat can run in real-time using RTW and Cþþ compilerwhich need to be installed to extend Matlab functionality.The host computer is connected to the target computers
through 100 Mbps TCP/internet protocol (IP) connection fordownloading executable files into target computer using xPCtarget in Matlab. This high-speed connection allows usingxPC target explorer in the host computer as a console formonitoring and controlling the target computer during the
process of the real-time hardware simulation. The host
computer is also used to display and analyze all of the flight
simulation data of the small-scale helicopter model.Acer 4935 laptop is used as a host computer to run the
plant model of nonlinear small-scale helicopter. The hostcomputer manages the target PC for real-time simulation ofplant model using dosloader mode. The specification of this
host PC is given in Table I.The communication between the host PC and the target
PC is executed using user datagram protocol (UDP) port.
This high-speed connection will establish xPC target display(or spy) in the host PC while the simulation is running. xPCtarget spy is target screen display in the host PC while the
target PC is running. This functionality is commonly used todisplay the target PC simulation on the host PC. As a result,the simulation of target PC can be monitored on the host PC
and directly controlled from plant model.
B. Target computer
The plant model and controller model run in the target PCand target single-board computer (SBC) were built from thehost PC. The models are represented by executable files that
have been configured to run as a real-time kernel applicationon free-DOS operating system. The plant model which is anonlinear small-scale helicopter dynamic model run in a
standard desktop PC powered by Intel Pentium 2.4 GHz and1 GB double data rate (DDR) memory. The plant target PC isshown in Figure 2 as part of real-time hardware simulation.
Additionally, a 3.500 SBC powered by Intel Celeron600 MHz and 512 MB 400 MHz DDR memory (SBC:
WAFER-8522) is used to run a controller model in real-time under xPC target environment. The SBC is shown inFigure 3.
The SBC’s performance allows the process to run in highfrequency as in a PC all done within a small compact packagethat makes it readily viable for an onboard flight control
computer. The integrated video graphics accelerator on theSBC is used to display the real-time response of the model ina liquid crystal display monitor. The setup allows the
observation and analysis of the simulation process in thestandalone mode. Therefore, after all control configurationshave been fixed, the host computer can be eliminated to
simplify the system.The plant target PC is connected to the SBC controller
model by two channels of RS-232 at 115,200 bps, eight data
bits and one stop bits. Output data from the plant target PCare sent through RS-232 com-3 port and are received as inputdata at com-4 port of the SBC controller model. Meanwhile,
the command data from SBC controller model are sentthrough RS-232 com-3 port and are received as input data atcom-4 port by the plant target PC. The command data are
also sent to the servo motors of the helicopter which allowsthe testing of command inputs against actual physicalconstraints. Since the SBC has six RS-232 ports, two
separate channels separately are used to avoid serialcommunication problem such as central processing unitoverload that typically occurs when only one serial port is
used to alternately send and receive data.
III. Nonlinear small-scale helicopter dynamicmodel
The HILS experiment uses the small-scale Voyager GR-260PUH and Xcell-60 SE helicopters as the research test-beds.
Figure 1 Hardware setup of real-time hardware simulation
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
361
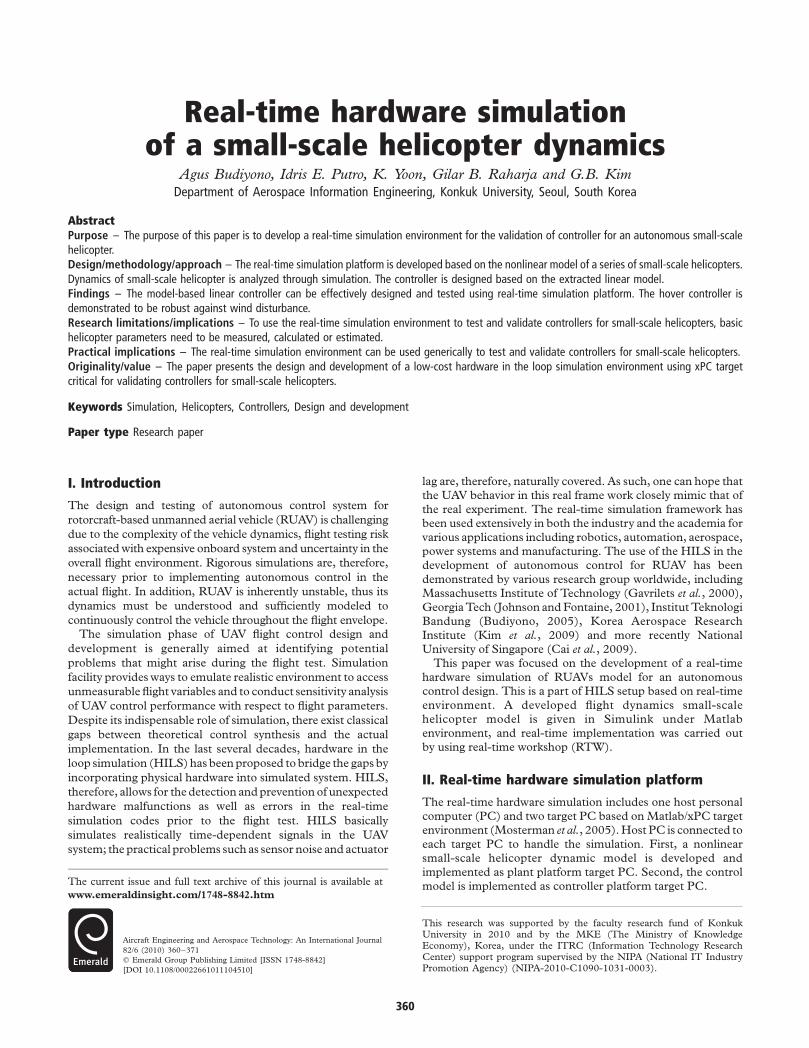
The nonlinear model of mini helicopters was developed in
Matlab/Simulink environment. The model has 15 statevariables and five inputs. The nonlinear dynamics can besimulated by an expert pilot through a joystick RC and themotion visualized in 3D space using FlightGear interface. TheSimulink model and its flight simulation interface are shownin Figure 4.
A. Voyager GR-260 PUH specifications
As illustration, the instrumented Voyager GR-260 minihelicopter is shown in Figure 5.
The specification of miniature Voyager GR-260 PUH canbe seen in Table II.
Figure 3 SBC WAFER-8522
Figure 2 Diagram of real-time hardware simulation
TCP/IP
Target SBC runsController model
Target PC runsPlant model
Host computersModel builder
Actual helicopterServo motors
RS-
232
δlong
δlat
δcol
δped
Figure 4 Nonlinear small-scale helicopter Simulink model andFlightGear simulation interface
Figure 5 Instrumented Voyager GR-260 PUH miniature helicopter
Table I Specification of host computer
Processor Intel Core 2 Duo 2.0 GHz
Memory DDR2 SDRAM 2 GB
Graphic 512 MB dynamics memory
Display 14.1 inches wide bright
Communication port Universal serial bus 2.0 and UDP port
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
362

B. Aerodynamics model
The main rotor thrust equation can be obtained by the
following expressions (Gavrilets, 2003):
TMR ¼ rðVRÞ2MRðpR2ÞMRCTMR
CTMR ¼ 1
2aMRsMR
1
2ðmZMR 2 lOMRÞ þ
1
3þ 1
2m2MR
� �uOMR
� �
lOMR ¼ WiMR
ðVRÞMR
¼ CTMR
2hw
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffim2MR þ ðlOMR 2 mZMRÞ2
q
mMR ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2a þ v2
a
pðVRÞMR
mZMR ¼ wa
ðVRÞMR
ð1Þ
The torque of main rotor can be expressed as below:
QMR ¼ rðVRÞ2MRðpR2ÞMRRMRCQMR
CQMR ¼ 1
8sMR 1 þ 7
8m2MR
� �CD0MR þ ðlOMR 2 mZMRÞCTMR
ð2Þ
Tail rotor thrust and normal velocity component to the tail
rotor can be expressed by the following equation:
TTR ¼ mY drdr þmYvvTR vTR ¼ va 2 lTRr þ hTRp ð3Þ
The tail torque will be as below:
QTR ¼ rðVRÞ2TRðpR2ÞTRRTRCQTR ð4Þ
The expressions for main rotor flapping motions are:
tdd1s ¼ 2a1s þ›a1s
ua
›mMRðVRÞMR
þ ›a1swa
›mZMRðVRÞMR
þ . . .
2 t0qþ AdLongdLong
t0h1s ¼ 2h1s 2›b1s vR
›mMRðVRÞMR
2 t0pþ RdLongdLong
ð5Þ
C. Equation of motion
The equations of motion for the small-scale helicopter
dynamics are represented by the rigid body dynamics
appended by the dynamics of the main rotor. The motion
of the vehicle in three-dimensional space is represented by the
position of the center of mass and the Euler angles describing
the vehicle attitude. This motion can be described by the
Euler-Newton equations which are derived from the law of
conservation of linear angular momentum as follows:
md kV
dt
����y
¼ kF kId kv
dt
����y
¼ kM ð6Þ
with kF ¼ ½X ;Y ;Z �T and kM ¼ ½L;M;N �T are the vector of
total forces and moments acting on the helicopter center of
gravity. These total force and moments are generated by the
main rotor, tail rotor, fuselage, horizontal fin and vertical fin,
and also gravitational force.The equation above can be presented with respect to body
coordinate system as the following equations:
m kVþmð kv £ kVÞ ¼ kF I kv2mð kv £ I kvÞ ¼ kM ð7Þ
With vector kV ¼ ½u; v;w �T and kv ¼ ½ p; q; r �T are the vehicle
velocities and angular rates in body coordinate system.For the helicopter moving in six degrees of freedom, the
above equations produce six differential equations describing
the vehicle’s translational motion and angular motion in three
references axes:
XMR þXTR þXfus ¼ mð_u2 rvþ qwÞ þmg sin u
YMR þ YTR þ Yfus ¼ mð_v2 pwþ ruÞ2mg sinw cos u
ZMR þ ZTR þ Zfus ¼ mð2 _w2 quþ pvÞ2mg cosw cos u
LMR þ LTR þ Lfus ¼ Ixx _p2 ðIyy 2 IzzÞqr
MMR þMTR þMfus ¼ Iyy _q2 ðIzz 2 IxxÞpr
NMR þNTR þNfus ¼ Izz_r2 ðIxx 2 IyyÞpq
w ¼ pþ ðq sinwþ r coswÞtan u
_u ¼ q cosw2 r sinwc ¼ ðq sinwþ r coswÞsec u
ð8Þ
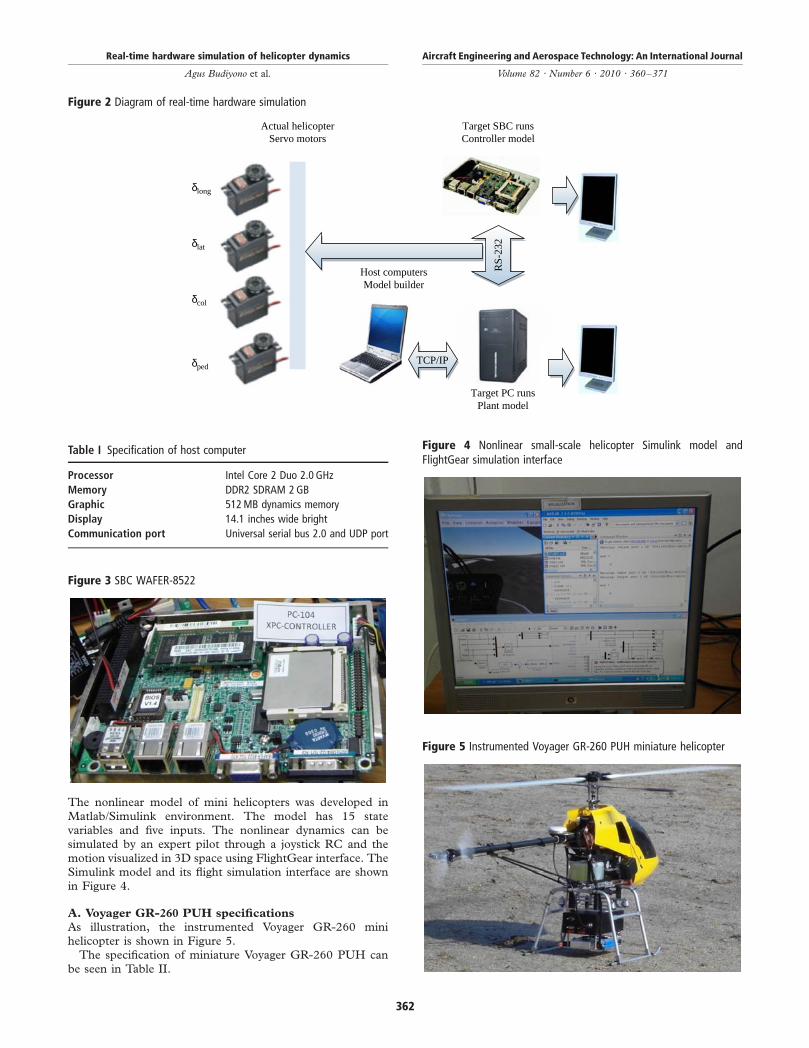
D. Flight simulator interface
FlightGear is an open-source, multi-platform and easy to use
simulator program (FlightGear, 2009). It is readily usable for
our HILS setup since it has a built-in interface with Simulink/
Matlab environment. The plant model which has been
developed under Simulink is connected through FlightGear
toolbox for the visualization of the flight simulation.Figure 6 shows the Simulink block of FlightGear visualization
(Figure 7). The block can be obtained from the Aerospace
blockset. The FlightGear visualization block contains the “Pack
net_fdm Packet for FlightGear” and “Send net_fdm Packet to
FlightGear” blocks.The Pack net_fdm Packet for FlightGear block formats a
binary structure compatible with FlightGear from model
inputs. This block receives the input signal from Simulink
model and arranges it into several signals which are required for
a 6 DoF motion visualization. The Send net_fdm Packet to
FlightGear block transmits the signal packet from Pack
net_fdm Packet for FlightGear via UDP to the specified IP
address and port while a FlightGear session awaits an incoming
data stream.
Table II Basic Voyager GR-260 parameters
Description Parameters
Helicopter mass 7.85 kg mRolling moment of inertia 0.25 kg m2 Ixx
Pitching moment of inertia 0.73 kg m2 Iyy
Yawing moment of inertia 0.52 kg m2 Izz
Main rotor radius 0.81 m RMR
Main rotor chord 0.061 m CMR
Tail rotor radius 0.11 m RTR
Tail rotor chord 0.028 m CTR
Main rotor hub height above c.g. 0.385 m hMR
Tail rotor height above c.g. 0.185 m hTR
Tail rotor hub location behind c.g. 1.11 m tTR
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
363
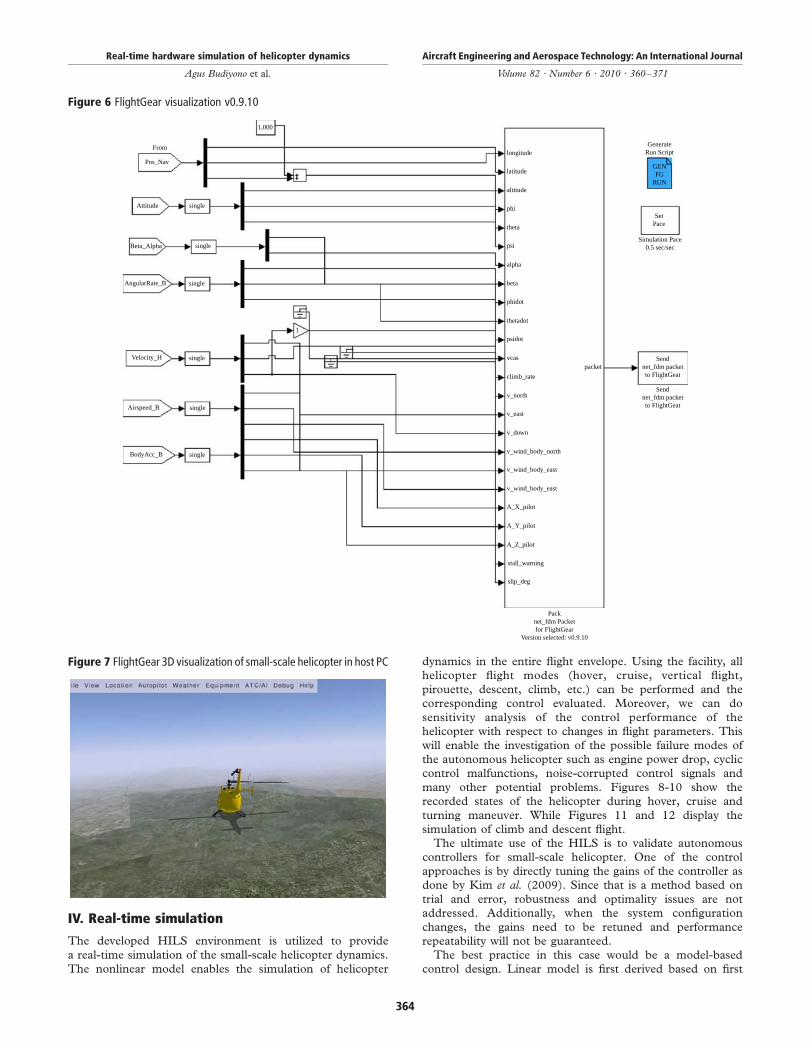
IV. Real-time simulation
The developed HILS environment is utilized to provide
a real-time simulation of the small-scale helicopter dynamics.
The nonlinear model enables the simulation of helicopter
dynamics in the entire flight envelope. Using the facility, allhelicopter flight modes (hover, cruise, vertical flight,
pirouette, descent, climb, etc.) can be performed and thecorresponding control evaluated. Moreover, we can do
sensitivity analysis of the control performance of thehelicopter with respect to changes in flight parameters. This
will enable the investigation of the possible failure modes ofthe autonomous helicopter such as engine power drop, cycliccontrol malfunctions, noise-corrupted control signals and
many other potential problems. Figures 8-10 show therecorded states of the helicopter during hover, cruise and
turning maneuver. While Figures 11 and 12 display thesimulation of climb and descent flight.
The ultimate use of the HILS is to validate autonomouscontrollers for small-scale helicopter. One of the control
approaches is by directly tuning the gains of the controller asdone by Kim et al. (2009). Since that is a method based on
trial and error, robustness and optimality issues are notaddressed. Additionally, when the system configuration
changes, the gains need to be retuned and performancerepeatability will not be guaranteed.
The best practice in this case would be a model-basedcontrol design. Linear model is first derived based on first
Figure 6 FlightGear visualization v0.9.10
From
1,000
longitude
latitude
altitude
phi
theta
psi
alpha
beta
phidot
thetadot
psidot
vcas
climb_rate
v_north
v_east
v_down
v_wind_body_north
v_wind_body_east
v_wind_body_east
A_X_pilot
A_Y_pilot
A_Z_pilot
stall_warning
slip_deg
Packnet_fdm Packetfor FlightGear
Version selected: v0.9.10
packetSend
net_fdm packetto FlightGeat
SetPace
GENFG
RUN
GenerateRun Script
Simulation Pace0.5 sec/sec
Sendnet_fdm packetto FlightGeat
Pos_Nav
Attitude
Beta_Alpha
AngularRate_B
Velocity_H
Airspeed_B
BodyAcc_B
single
single
single
single
1
single
single
Figure 7 FlightGear 3D visualization of small-scale helicopter in host PC
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
364
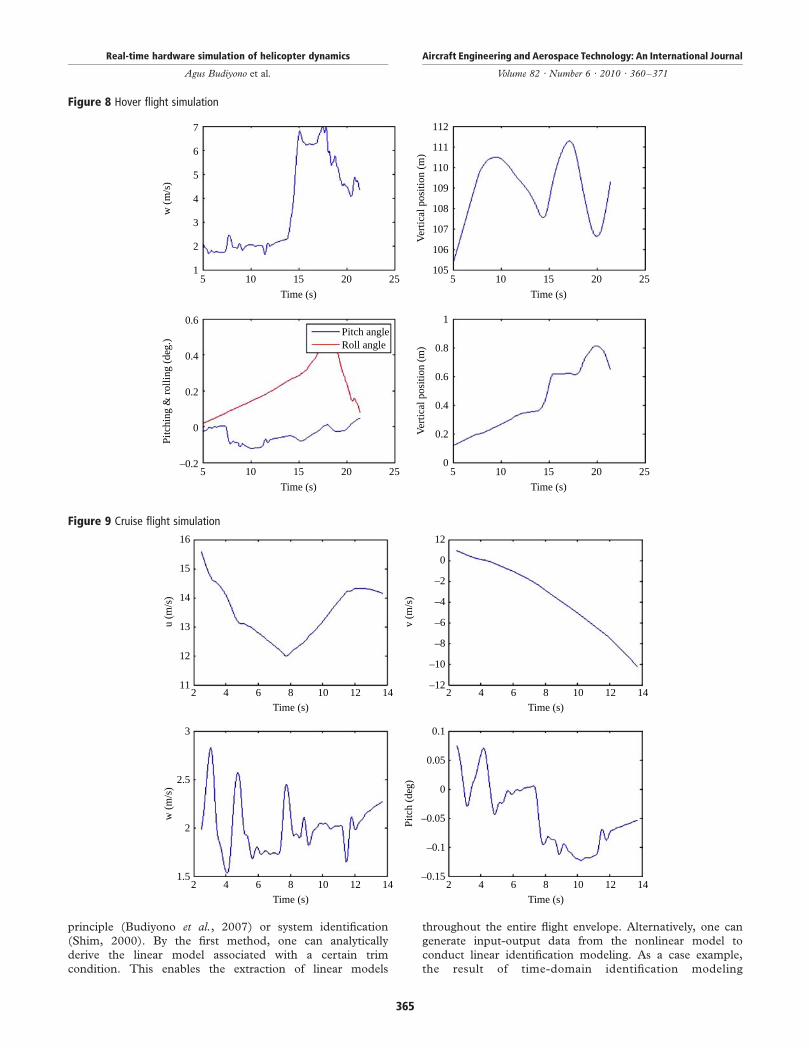
principle (Budiyono et al., 2007) or system identification
(Shim, 2000). By the first method, one can analytically
derive the linear model associated with a certain trim
condition. This enables the extraction of linear models
throughout the entire flight envelope. Alternatively, one can
generate input-output data from the nonlinear model to
conduct linear identification modeling. As a case example,
the result of time-domain identification modeling
Figure 9 Cruise flight simulation
16
u (m
/s)
15
14
13
12
112 4 6 8
Time (s)
10 12 14
12
v (m
/s)
0
–2
–4
–12
–10
–8
–6
2 4 6 8
Time (s)
10 12 14
3
w (
m/s
)
2.5
2
1.52 4 6 8
Time (s)
10 12 14
0.1
Pitc
h (d
eg)
0.05
0
–0.15
–0.1
–0.05
2 4 6 8
Time (s)
10 12 14
Figure 8 Hover flight simulation
7
w (
m/s
)
6
5
4
3
2
15 10 15
Time (s)
Pitch angleRoll angle
20 25
112
Ver
tical
pos
ition
(m
)
111
110
109
108
107
106
1055 10 15
Time (s)
20 25
0.6
Pitc
hing
& r
ollin
g (d
eg.)
0.4
0.2
0
–0.25 10 15
Time (s)
20 25
1
Ver
tical
pos
ition
(m
) 0.8
0.6
0.4
0.2
05 10 15
Time (s)
20 25
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
365
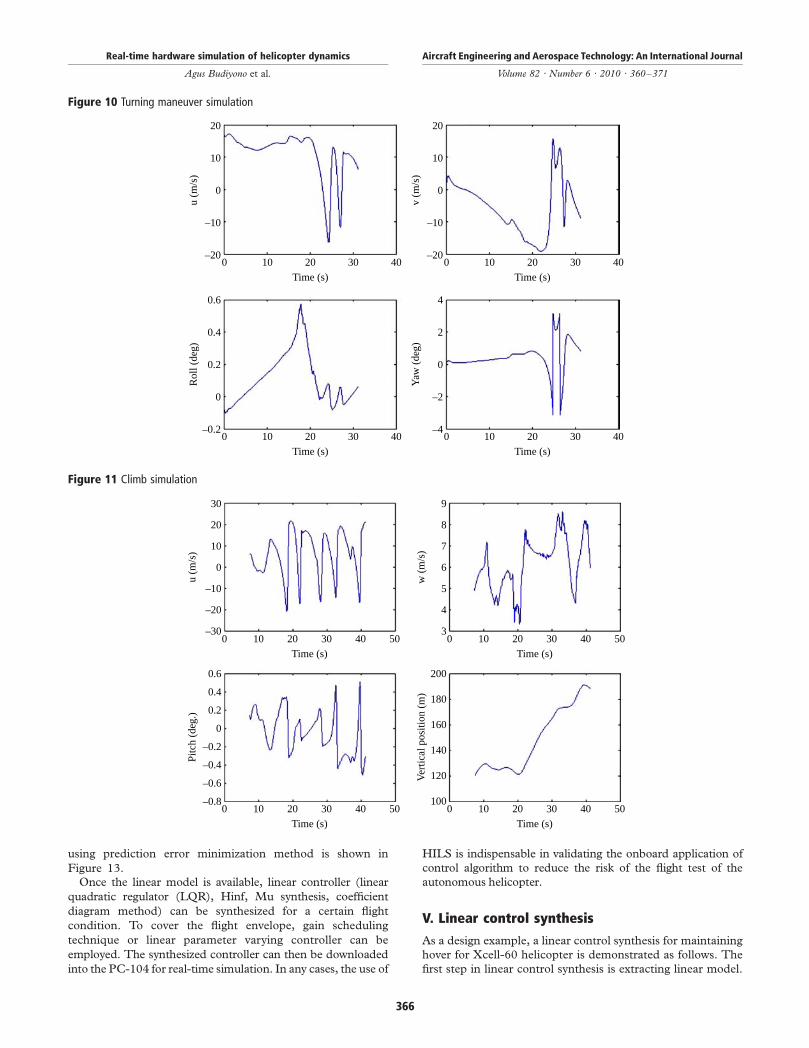
using prediction error minimization method is shown in
Figure 13.Once the linear model is available, linear controller (linear
quadratic regulator (LQR), Hinf, Mu synthesis, coefficient
diagram method) can be synthesized for a certain flight
condition. To cover the flight envelope, gain scheduling
technique or linear parameter varying controller can be
employed. The synthesized controller can then be downloaded
into the PC-104 for real-time simulation. In any cases, the use of
HILS is indispensable in validating the onboard application of
control algorithm to reduce the risk of the flight test of the
autonomous helicopter.
V. Linear control synthesis
As a design example, a linear control synthesis for maintaining
hover for Xcell-60 helicopter is demonstrated as follows. The
first step in linear control synthesis is extracting linear model.
Figure 10 Turning maneuver simulation
u (m
/s)
20
10
–20
–10
0
0 10 20
Time (s)
30 40
v (m
/s)
20
10
–20
–10
0
0 10 20
Time (s)
30 40
Rol
l (de
g)
0.6
0.4
–0.2
0
0.2
0 10 20
Time (s)
30 40
Yaw
(de
g)
4
2
–4
–2
0
0 10 20
Time (s)
30 40
Figure 11 Climb simulation
u (m
/s)
20
30
10
–30
–20
–10
0
0 10 20 30
Time (s)
40 50
w (
m/s
)
8
9
7
3
4
5
6
0 10 20 30
Time (s)
40 50
Pitc
h (d
eg.)
0.4
0.6
0.2
–0.2
–0.4
–0.6
–0.8
0
0 10 20 30
Time (s)
40 50
Ver
tical
pos
ition
(m
) 180
200
160
100
120
140
0 10 20 30
Time (s)
40 50
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
366
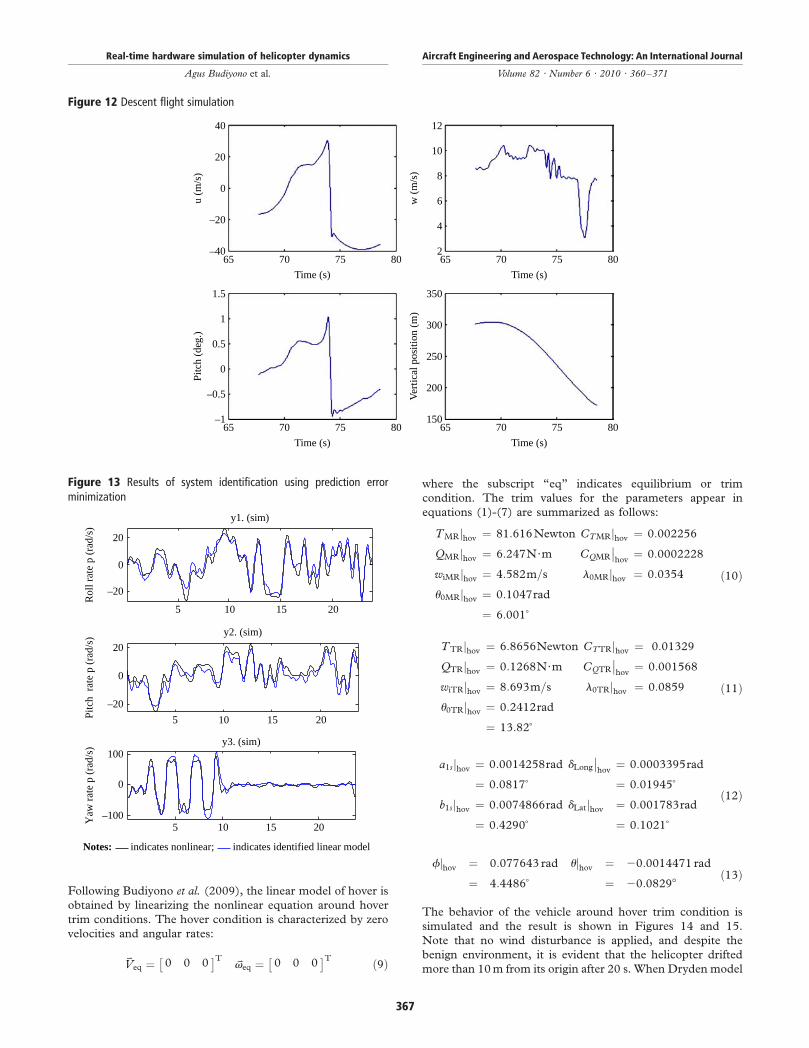
Following Budiyono et al. (2009), the linear model of hover is
obtained by linearizing the nonlinear equation around hover
trim conditions. The hover condition is characterized by zero
velocities and angular rates:
kVeq ¼ 0 0 0� �T
kveq ¼ 0 0 0� �T ð9Þ
where the subscript “eq” indicates equilibrium or trim
condition. The trim values for the parameters appear in
equations (1)-(7) are summarized as follows:
TMRjhov ¼ 81:616Newton CTMRjhov ¼ 0:002256
QMRjhov ¼ 6:247N·m CQMR
��hov
¼ 0:0002228
wiMRjhov ¼ 4:582m=s l0MRjhov ¼ 0:0354
u0MRjhov ¼ 0:1047rad
¼ 6:001+
ð10Þ
TTRjhov ¼ 6:8656Newton CTTRjhov ¼ 0:01329
QTRjhov ¼ 0:1268N·m CQTR
��hov
¼ 0:001568
wiTRjhov ¼ 8:693m=s l0TRjhov ¼ 0:0859
u0TRjhov ¼ 0:2412rad
¼ 13:82+
ð11Þ
a1sjhov ¼ 0:0014258rad dLong
��hov
¼ 0:0003395rad
¼ 0:0817+ ¼ 0:01945+
b1sjhov ¼ 0:0074866rad dLatjhov ¼ 0:001783rad
¼ 0:4290+ ¼ 0:1021+
ð12Þ
fjhov ¼ 0:077643 rad ujhov ¼ 20:0014471 rad
¼ 4:4486+ ¼ 20:08298ð13Þ
The behavior of the vehicle around hover trim condition is
simulated and the result is shown in Figures 14 and 15.
Note that no wind disturbance is applied, and despite the
benign environment, it is evident that the helicopter drifted
more than 10 m from its origin after 20 s. When Dryden model
Figure 12 Descent flight simulation
u (m
/s)
20
40
–40
–20
0
65 70 75
Time (s)
80
w (
m/s
) 8
12
10
2
4
6
65 70 75
Time (s)
80
Pitc
h (d
eg.)
1
1.5
–1
–0.5
0
0.5
65 70 75
Time (s)
80V
ertic
al p
ositi
on (
m)
250
350
300
150
200
65 70 75
Time (s)
80
Figure 13 Results of system identification using prediction errorminimization
Rol
l rat
e p
(rad
/s)
5 10 15 20
–20
0
20
y1. (sim)
Pitc
h r
ate
p (r
ad/s
)
5 10 15 20
–20
0
20
y2. (sim)
Yaw
rat
e p
(rad
/s)
5 10
Notes: indicates nonlinear; indicates identified linear model
15 20–100
0
100y3. (sim)
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
367
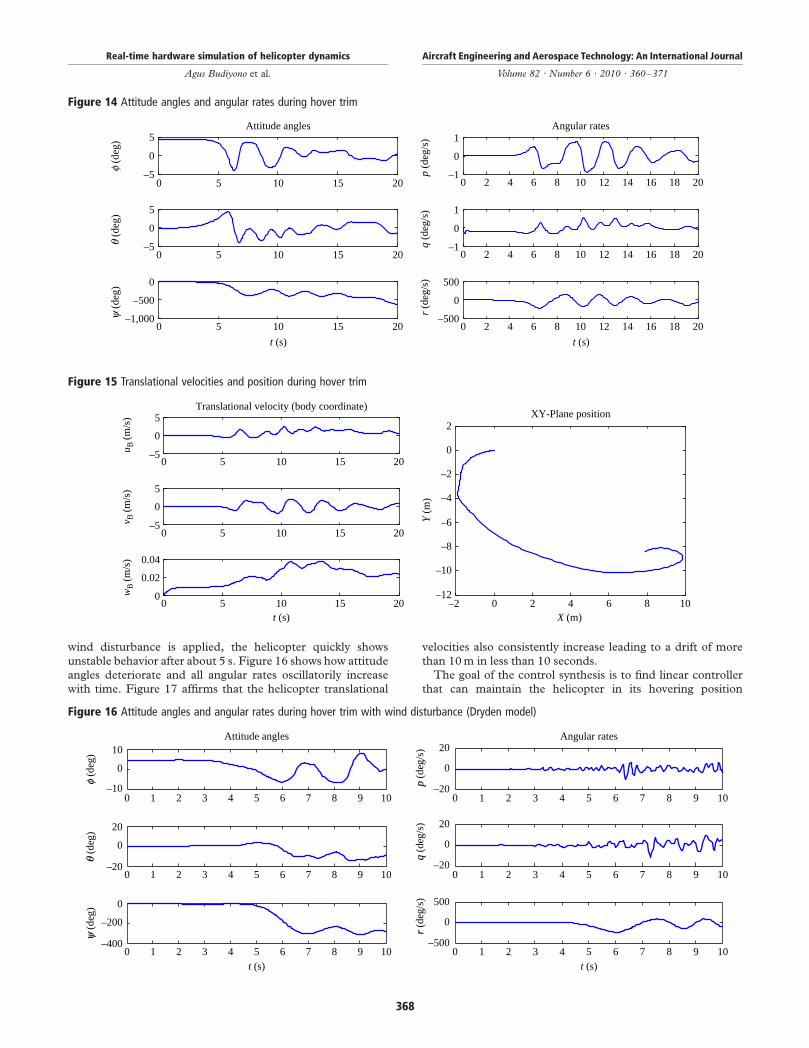
wind disturbance is applied, the helicopter quickly shows
unstable behavior after about 5 s. Figure 16 shows how attitudeangles deteriorate and all angular rates oscillatorily increasewith time. Figure 17 affirms that the helicopter translational
velocities also consistently increase leading to a drift of more
than 10 m in less than 10 seconds.The goal of the control synthesis is to find linear controller
that can maintain the helicopter in its hovering position
Figure 14 Attitude angles and angular rates during hover trim
–5
0
5Attitude angles
f (d
eg)
q (d
eg)
y (d
eg)
–5
0
5
0 5 10 15 20
0 5 10 15 20
0 5 10 15 20
–1,000
–500
0
t (s) t (s)
–1
0
1Angular rates
p (d
eg/s
)
–1
0
1
q (d
eg/s
)
0 2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10 12 14 16 18 20
–500
0
500
r (d
eg/s
)
Figure 15 Translational velocities and position during hover trim
–5
0
5Translational velocity (body coordinate)
u B (m
/s)
v B (m
/s)
wB
(m/s
)
–5
0
5
0 5 10 15 20
0 5 10 15 20
0 5 10 15 20
0
0.02
0.04
t (s)
XY-Plane position
–2 0 2 4 6 8 10–12
–10
–8
–6
–4
–2
0
2Y
(m
)
X (m)
Figure 16 Attitude angles and angular rates during hover trim with wind disturbance (Dryden model)
0 1 2 3 4 5 6 7 8 9 10
0 1 2 3 4 5 6 7 8 9 10
0 1 2 3 4 5 6 7 8 9 10
–10
0
10Attitude angles
–20
0
20
–400
–200
0
t (s) t (s)
f (d
eg)
q (d
eg)
y (d
eg)
0 1 2 3 4 5 6 7 8 9 10–20
0
20Angular rates
p (d
eg/s
)
0 1 2 3 4 5 6 7 8 9 10–20
0
20
q (d
eg/s
)
0 1 2 3 4 5 6 7 8 9 10–500
0
500
r (de
g/s)
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
368
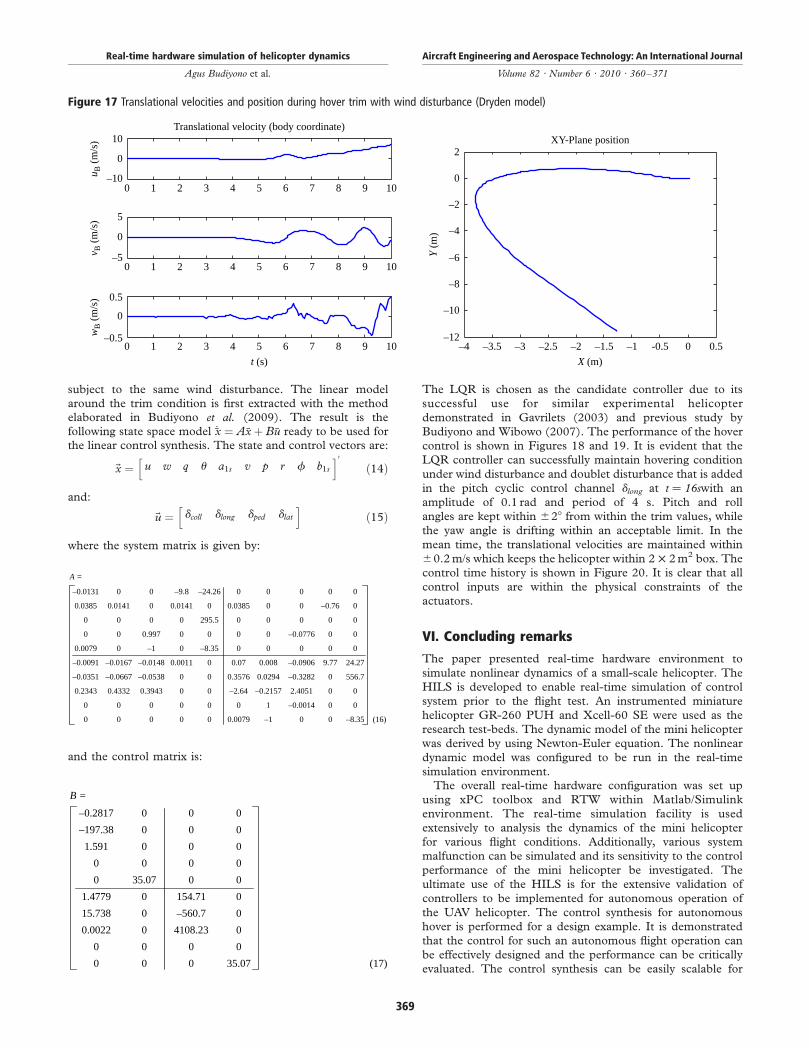
subject to the same wind disturbance. The linear model
around the trim condition is first extracted with the methodelaborated in Budiyono et al. (2009). The result is the
following state space model _�x ¼ A�xþ B �u ready to be used forthe linear control synthesis. The state and control vectors are:
~x ¼ u w q u a1s v p r f b1s
h i0
ð14Þ
and:
~u ¼ dcoll dlong dped dlath i
ð15Þ
where the system matrix is given by:
0 0 –9.8 0 0 0 0 0
0.0385 0.0141 0 0.0141 0 0.0385 0 0 0
0 0 0 0 295.5 0 0 0 0 0
0 0 0.997 0 0 0 0 0 0
0.0079 0 –1 0 –8.35 0 0 0 0 0
–0.0148 0.0011 0 0.07 0.008 9.77 24.27
–0.0538 0 0 0.3576 0.0294
A =
–0.0131 –24.26
–0.76
–0.0776
–0.0091 –0.0167 –0.0906
–0.0351 –0.0667 0 556.7
0.2343 0.4332 0.3943 0 0 –0.2157 2.4051 0 0
000 0 0 0 1 0 0
0 0 0 0 0 0.0079 –1 0 0 –8.35 (16)
–0.3282
–2.64
–0.0014
and the control matrix is:
(17)
–0.2817 0 0 0
–197.38 0 0 0
1.591 0
0 0
0
0
0
0
0 35.07 0 0
1.4779 0 154.71 0
15.738 0 –560.7 0
0.0022 0 4108.23 0
0 0 0 0
0 0 0 35.07
B =
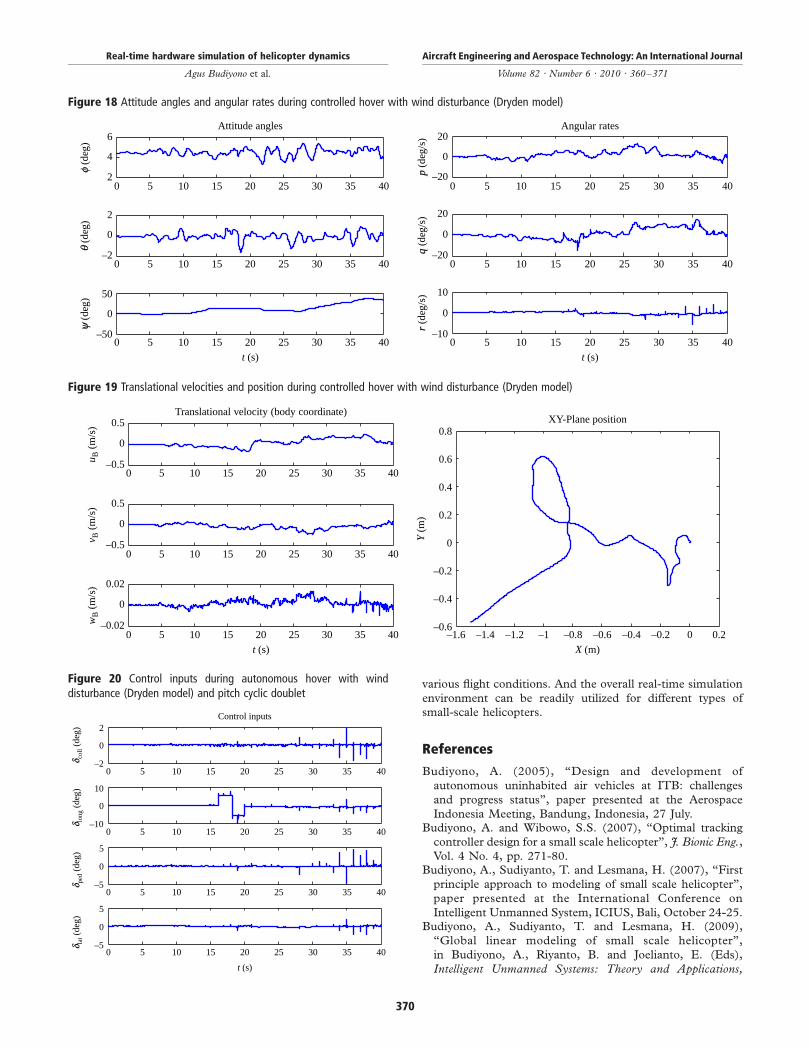
The LQR is chosen as the candidate controller due to its
successful use for similar experimental helicopter
demonstrated in Gavrilets (2003) and previous study by
Budiyono and Wibowo (2007). The performance of the hover
control is shown in Figures 18 and 19. It is evident that the
LQR controller can successfully maintain hovering condition
under wind disturbance and doublet disturbance that is added
in the pitch cyclic control channel dlong at t ¼ 16swith an
amplitude of 0.1 rad and period of 4 s. Pitch and roll
angles are kept within ^28 from within the trim values, while
the yaw angle is drifting within an acceptable limit. In the
mean time, the translational velocities are maintained within
^0.2 m/s which keeps the helicopter within 2 £ 2 m2 box. The
control time history is shown in Figure 20. It is clear that all
control inputs are within the physical constraints of the
actuators.
VI. Concluding remarks
The paper presented real-time hardware environment to
simulate nonlinear dynamics of a small-scale helicopter. The
HILS is developed to enable real-time simulation of control
system prior to the flight test. An instrumented miniature
helicopter GR-260 PUH and Xcell-60 SE were used as the
research test-beds. The dynamic model of the mini helicopter
was derived by using Newton-Euler equation. The nonlinear
dynamic model was configured to be run in the real-time
simulation environment.The overall real-time hardware configuration was set up
using xPC toolbox and RTW within Matlab/Simulink
environment. The real-time simulation facility is used
extensively to analysis the dynamics of the mini helicopter
for various flight conditions. Additionally, various system
malfunction can be simulated and its sensitivity to the control
performance of the mini helicopter be investigated. The
ultimate use of the HILS is for the extensive validation of
controllers to be implemented for autonomous operation of
the UAV helicopter. The control synthesis for autonomous
hover is performed for a design example. It is demonstrated
that the control for such an autonomous flight operation can
be effectively designed and the performance can be critically
evaluated. The control synthesis can be easily scalable for
Figure 17 Translational velocities and position during hover trim with wind disturbance (Dryden model)
0 1 2 3 4 5 6 7 8 9 10
0 1 2 3 4 5 6 7 8 9 10
0 1 2 3 4 5 6 7 8 9 10
–10
0
10Translational velocity (body coordinate)
u B (
m/s
)v B
(m
/s)
wB
(m
/s)
–5
0
5
–0.5
0
0.5
t (s)
XY-Plane position
–4 –3.5 –3 –2.5 –2 –1.5 –1 -0.5 0 0.5–12
–10
–8
–6
–4
–2
0
2
Y (
m)
X (m)
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
369
various flight conditions. And the overall real-time simulation
environment can be readily utilized for different types of
small-scale helicopters.
References
Budiyono, A. (2005), “Design and development of
autonomous uninhabited air vehicles at ITB: challenges
and progress status”, paper presented at the Aerospace
Indonesia Meeting, Bandung, Indonesia, 27 July.Budiyono, A. and Wibowo, S.S. (2007), “Optimal tracking
controller design for a small scale helicopter”, J. Bionic Eng.,
Vol. 4 No. 4, pp. 271-80.Budiyono, A., Sudiyanto, T. and Lesmana, H. (2007), “First
principle approach to modeling of small scale helicopter”,
paper presented at the International Conference on
Intelligent Unmanned System, ICIUS, Bali, October 24-25.Budiyono, A., Sudiyanto, T. and Lesmana, H. (2009),
“Global linear modeling of small scale helicopter”,
in Budiyono, A., Riyanto, B. and Joelianto, E. (Eds),
Intelligent Unmanned Systems: Theory and Applications,
Figure 18 Attitude angles and angular rates during controlled hover with wind disturbance (Dryden model)
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
2
4
6Attitude angles Angular rates
–2
0
2
–50
0
50
t (s) t (s)
f (d
eg)
q (d
eg)
y (d
eg)
0 5 10 15 20 25 30 35 40–20
0
20
p (d
eg/s
)
0 5 10 15 20 25 30 35 40–20
0
20
q (d
eg/s
)
0 5 10 15 20 25 30 35 40–10
0
10
r (de
g/s)
Figure 19 Translational velocities and position during controlled hover with wind disturbance (Dryden model)
0 5 10 15 20 25 30 35 40–0.5
0
0.5Translational velocity (body coordinate)
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
–0.5
0
0.5
–0.02
0
0.02
t (s)
XY-Plane position
–1.6 –1.4 –1.2 –1 –0.8 –0.6 –0.4 –0.2 0 0.2–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8Y
(m
)
X (m)
u B (
m/s
)v B
(m
/s)
wB
(m
/s)
Figure 20 Control inputs during autonomous hover with winddisturbance (Dryden model) and pitch cyclic doublet
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
0 5 10 15 20 25 30 35 40
–2
0
2Control inputs
–10
0
10
–5
0
5
–5
0
5
t (s)
d col
l (de
g)d l
ong
(deg
)d p
ed (
deg)
d lat
(de
g)
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
370

Studies on Computational Intelligence, Vol. 192, Springer,Berlin, pp. 27-62.
Cai, G., Chen, B.M., Lee, T.H. and Dong, M. (2009),“Design and implementation of a hardware-in-the-loopsimulation system for small-scale UAV helicopters”,Mechatronics, Vol. 19, pp. 1057-66.
FlightGear (2009), Web site: www.flightgear.orgGavrilets, V. (2003), “Autonomous aerobatic maneuvering of
miniature helicopter”, PhD thesis, Massachusetts Instituteof Technology, Cambridge, MA.
Gravilets, V., Shterenberg, A., Dahleh, M. and Feron, E.(2000), “Avionics system for a small unmanned helicopterperforming aggressive maneuvers”, paper presented atDigital Avionics Systems Conference, Philadelphia, PA,October.
Johnson, E. and Fontaine, S. (2001), “Use of flight simulationto complement flight testing of low-cost UAVs”, paperpresented at the AIAA Modeling and SimulationTechnologies Conference, Montreal.
Kim, S., Budiyono, A., Lee, J.H., Kim, D. and Yoon, K.J.
(2009), “Control system design and testing for a small scale
autonomous helicopter”, paper presented at International
Symposium on Intelligent Unmanned System, ISIUS2009,
Jeju Island.Mosterman, P.J., Prabhu, S., Dowd, A., Glass, J., Erkkinen, T.,
Kluza, J. and Shenoy, R. (2005), “Embedded real-time
control via MATLAB, Simulink, and xPC target”, Handbook
of Networked and Embedded Control Systems, Birkhauser,
Boston, MA, pp. 419-46.Shim, D. (2000), “Hierarchical control system synthesis for
rotorcraft-based unmanned aerial vehicles”, PhD thesis,
University of California, Berkeley, CA.
Corresponding author
Agus Budiyono can be contacted at: agus@[email protected]
Real-time hardware simulation of helicopter dynamics
Agus Budiyono et al.
Aircraft Engineering and Aerospace Technology: An International Journal
Volume 82 · Number 6 · 2010 · 360–371
371
To purchase reprints of this article please e-mail: [email protected]
Or visit our web site for further details: www.emeraldinsight.com/reprints