PROIECTAREA REDUCTOARELOR CU ROȚI DINȚATE
175
PROIECTAREA REDUCTOARELOR CU ROȚI DINȚATE LORENA DELEANU CĂTĂLIN PÎRVU GEORGESCU CONSTANTIN GEORGE GHIOCEL OJOC TITIRE CHIPER LARISA Universitatea “Dunărea de Jos” din Galați 2020
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of PROIECTAREA REDUCTOARELOR CU ROȚI DINȚATE

PROIECTAREA REDUCTOARELOR CUROȚI DINȚATE
LORENA DELEANUCĂTĂLIN PÎRVUGEORGESCU CONSTANTINGEORGE GHIOCEL OJOC TIT IRE CHIPER LARISA
Universitatea “Dunărea de Jos” din Galați
2020

Universitatea “Dunărea de Jos” din Galați
Proiectarea reductoarelor
cu roți dințate
Lorena Deleanu
Cătălin Pîrvu Georgescu Constantin
George Ghiocel Ojoc Titire Chiper Larisa
Galați
2020

5
Cuprins
Cuprins
Capitolul 1. Reductoare. Prezentare generală
1.1. Introducere
1.2. Caracterizarea reductoarelor
1.3. Parametrii unui reductor
1.4. Selectarea soluţiei constructive
Capitolul 2. Etapele de proiectare pentru un reductor
Capitolul 3. Evaluarea randamentului reductorului și alegerea motorului
electric
3.1. Evaluarea randamentului reductorului
3.2. Selectarea motorului electric
3.3. Repartizarea rapoartelor de transmisie pe treptele reductorului
3.4. Calculul momentului de torsiune şi turaţiei pe fiecare arbore al reductorului
Capitolul 4. Proiectarea angrenajelor cilindrice cu dinți înclinați
4.1. Etape în proiectarea unui angrenajului cu roţi cilindrice
4.2. Alegerea rapoartelor de transmisie pe fiecare treaptă (aplicație la tema
propusă)
4.3. Calculul momentului de torsiune şi turaţiei pe fiecare arbore al reductorului
4.4. Alegerea materialelor pentru roțile dințate
4.4.1. Aliajelor feroase recomandate pentru roți dințate
4.4.2. Limite admisibile ale materialului pentru roți dințate
4.4.2.1. Limita admisă pentru solicitarea de contact
4.4.2.2. Limita admisă pentru solicitarea de încovoiere la baza dintelui
4.5. Dimensionarea unui angrenaj cu dinţi înclinaţi
4.5.1. Introducere
4.5.2. Determinarea distanţei între axe din condiţia de rezistenţă la pitting
4.5.4. Standardizarea modulului și alegerea distanței între axe
4.6. Geometria roţilor cilindrice cu dinţi înclinaţi
4.7. Forțe în angrenajul cilindric cu dinți înclinați

Cuprins
6
6
Capitolul 5. Proiectarea arborilor
5.1. Etape în proiectarea arborilor
5.2. Identificarea sarcinilor (momente și forțe) pe arbori (mărime și localizare)
5.3. Selectarea materialului pentru arbori
5.4. Predimensionarea arborilor din condiția de rezistență la torsiune
5.5. Troansoanele arborilor și punctele de aplicație ale sarcinilor
5.6. Calculul reacțiunilor
5.7. Dimensionarea arborilor din condiția de rezistență la solicitări compuse
5.8. Calculul penelor
Capitolul 6. Proiectarea lagărelor cu rulmenţi
6.1. Etape în selectarea rulmenţilor
6.2. Selectarea rulmenţilor pentru arborele II
6.3. Selectarea rulmenţilor pentru arborele III
6.5. Aranjamente de rulmenți pe arbore
6.7. Selectarea etanșării
Capitolul 7. Carcasa reductorului
Capitolul 8. Selectarea lubrifiantului pentru reductor
8.1. Introducere
8.2. Selectarea lubrifiantului pentru angrenaje
8.3. Selectarea lubrifiantului pentru rulmenți
Anexe
Bibliografie

5
Capitolul 1
Reductoare. Prezentare generală
1.1. Introducere
Dezvoltarea transmisiilor cu roţi dinţate sau a angrenajelor a depins de progresele făcute
în domeniul tehnologic, în special pentru maşini-unelte specializate, de danturare. Din motive
tehnologice şi funcţionale, profilul evolventic este cel mai des utilizat, deşi mai există şi alte
forme pentru profilul dinţilor: cicloidal, arc de cerc etc.
Transmisiile cu roţi dinţate au un domeniu foarte larg de utilizare, viteze periferice ale
roţilor între 2 m/min şi 90 m/s, puteri între 0,0001 kW pentru mecanică fină şi 10000 kW în
industria grea. Dacă se respectă condiţiile de proiectare, execuţie, montaj şi exploatare,
fiabilitatea lor este mai mare decât a altor tipuri de transmisii la aceiaşi parametri de lucru.
Avantajele transmisiilor cu angrenaje sunt: siguranţa în funcţionare, raport de
transmitere constant (fără alunecări), randament ridicat (=0,90...0,98), posibilităţi de
proiectare pentru diferiţi parametri de intrare şi ieşire (viteze unghiulare şi momente de
torsiune), gabarit redus, adaptabilitate la integrarea într-un ansamblu.
Dezavantaje pot fi considerate: precizia înaltă de prelucrare şi montaj; există firme mari
specializate în producerea de transmisii cu roţi dinţate pentru că, în afara maşinilor-unelte foarte
performante dar scumpe, este nevoie de o dotare specifică pentru tratamente termo-chimice,
control dimensional şi de structură, echipament de testare. Transmisiile dinţate sunt zgomotoase
şi nu pot realiza orice raport de transmitere deoarece numărul de dinţi pentru orice roată trebuie
să fie număr întreg.
Factori de care se ține seama la proiectarea sau alegerea unei transmisii:
• parametrii de intrare şi cei de ieşire (vitezele unghiulare şi momentele de torsiune),
• randamentul,
• raportul de transmitere,
• gabarit,
• fiabilitate,
• costuri de achiziţie şi de exploatare, etc.
Fazele de funcţionare ale transmisiilor:
- repaosul: ω1 = 0 şi Mt1 = 0; sarcini există în transmisie, dar sunt datorate greutăţii proprii ale
pieselor sau tipului de montaj (de exemplu, rulmenţi pretensionaţi, şuruburi cu prestrângere etc.);
- mersul în gol: ω1 ≠ 0 şi Mt2 ≈ 0;
- funcţionare în sarcină: ω1 ≠ 0 şi Mt1 ≠ 0.

Capitolul 1
Reductoare. Prezentare generală
6
6
Pornirea şi oprirea transmisiilor constituie etape de funcţionare la care proiectantul trebuie să
acorde atenţie deoarece, funcţie de tipul transmisiei, a maşinii motoare şi a celei de lucru, între care se
află, pot apare, justificat sau nu, suprasarcini şi calculele trebuie făcute după modele care ţin seama de
aceste fenomene.
Mai simplu, dar nu întotdeauna suficient, se pot introduce coeficienţi de corecţie ai regimului
nominal, unii determinaţi experimental pentru o mai mare siguranţă.
1.2. Caracterizarea reductoarelor
Reductorul este un sistem tehnic care, pe baza soluției constructive, modifică parametrii
de ieșire, comparativ cu parametrii de intrare, după o lege impusă de proiectant.
Numele arată doar reducerea turaţiei de intrare, dar, în realitate, reductorul, ca unitate
tehnică, reduce turaţia şi creşte momentul de torsiune la ieşire.
Studenții de la inginerie mecanică au în anul II de realizat un proiect de reductor. De ce
este ales reductorul și nu alt sistem tehnic? Pentru că proiectarea acestui sistem cere cunoștințe
din cele mai multe capitole de la cursul de organe de mașini (calculul la oboseală, asamblări,
cuplaje, etanșări, lagăre cu rulmenți, arbori și angrenaje). Pentru că studentul va trebui să
calculeze sau să selecteze organe de mașini astfel încât sistemul realizat să îndeplinească
anumite cerințe.
Relaţia pentru determinarea parametrilor de ieşire se obţine din ecuaţia conservării
energiei:
P1 = P2 + PfR (1.1)
în care
P1 este puterea dată de motorul electric ataşat transmisiei,
P2 este puterea la ieşirea din reductor,
PfR este toată puterea pierdută prin frecare în reductor.
Dacă se neglijează frecarea, rezultă:
P1 = ω1 ⋅ Mt1 ≅ P2 = ω2 ⋅ Mt2, (1.2)
obţinându-se o relaţie simplă între momente şi vitezele unghiulare
ω1
ω2=
Mt2
Mt1 (1.3)
în care se recunoaşte expresia raportului de transmisie:
iR =ω1
ω2 (1.4)
Dacă se ia în considerare frecarea,
P1 = ω1 ⋅ Mt1 ≅ P2 + PfR = ω2 ⋅ Mt2 + PfR (1.5)
şi
ω2 ⋅ Mt2 = ω1 ⋅ Mt1 − PfR (1.6)

Capitolul 1
Reductoare. Prezentare generală
7
7
Conform ISO/TR 14179-1:2001 Angrenaje – Capacitatea termică. Partea 1: Evaluarea
transmisiilor cu roţi dinţate cu echilibru termic la 95°C temperatură în baie [49], pierderile prin
frecare într-un reductor includ: frecarea în angrenaje, frecarea în lagăre şi etanşări, pierderi din
cauza frecării interne în lubrifiant şi a mişcării lubrifiantului pe lângă piesele din reductor).
Reductoarele de turaţie sunt ansamble sau unităţi de construcţii mecanice independente,
cu structura formată din unul sau mai multe angrenaje, cu roţi dinţate cu axe fixe sau axe mobile
(planetare şi diferenţiale), montate într-o carcasă închise, având rolul funcţional de a transmite
energia mecanică de la motor la maşina de lucru, cu modificarea parametrilor de intrare, de la
(ω1, P1) la (ω2, P2). raportul de transmitere este constant şi va depinde de numărul de trepte
(angrenaje) şi de tipul angrenajelor componente.
Figura 1.1 prezintă sugestiv elementele componente ale unui reductor cu două trepte cu
angrenaje cilindrice cu dinţi înclinaţi: a) reprezentare în explozie, care sugerează şi ordinea de
montare a elementelor, şi b) secţiune în plan vertical [??, ??].
În principiu, un reductor are în structură:
- roţi dinţate,
- arbori,
- lagăre (de cele mai multe ori de rostogolire, dar există şi soluţii cu lagăre de alunecare,
la reductoare de putere mare, la grupurile energetice),
- carcasa,
- etanşări,
- elemente de asamblare şi monitorizare (şuruburi, piuţiţe, ştifturi, capace, vizoare de
lubrifiant, aerisiri, inele de ridicare etc.),
- elemente de asigurare a lubrifiere sau sistem de răcire+recirculare a lubrifiantului
(pentru reductoare mari),
- lubrifiantul, ca element foarte important în funcţionarea la parametrii proiectaţi; în
mecatronică există şi soluţii fără lubrifianţi lichizi sau semi-solizi (unsori) dar roţile sunt
executate de obicei din materiale plastice de calitate superioare sau din compozite cu matrice
din materiale plastice, dopate cu lubrifianţi solizi).
Există mai multe criterii de clasificare a reductoarelor.
• după numărul de angrenaje din reductor, acestea pot fi cu o treaptă, cu două, până
la 6 trepte. Cele mai des utilizate sunt cele cu 1, 2, 3 trepte, dar există şi variante cu 4, 5
şi 6 trepte [42-47].
Figura 1.1 prezintă variante de reductor cu 1, 2 și 3 trepte, cu angrenaje cilindrice.

Capitolul 1
Reductoare. Prezentare generală
8
8
a) reprezentare în explozie
1 Manșetă de etanșare
2 Carcasă
3 Pană paralelă
4 Arbore de ieșire
5 Pană paralelă
6 Rulment
7 Distanțier
8 Distanțier
9 Șurub
10 Știft cilindric
11 Garnitură
12 Șurub
13 Rulment
14 Inel de fixare
15 Pinion
16 Pană paralelă
17 Arbore de intrare cu caneluri
interioare
18 Inel de prindere
19 Rulment
20 Rulment
21 Pignon
22 Pană paralelă
23 Roată dințată
24 Rulment
25 Inel de fixare
26 Rulment
27 Roată dințată 4
28 Inel de siguranță
29 Capac la intrare în reductor
30 Șurub
31 Șaibă Grower
32 Piuliță
33 Arbore pinion cu caneluri
interioare
34 Inel de fixare
35 Manșetă de etanșare
b) reprezentare în ordinea montării
Fig. 1.1. Elementele componente ale unui reductor cu două trepte (catalog Varvel)

Capitolul 1
Reductoare. Prezentare generală
9
9
Fig. 1.2. Reductor cu o treptă, cu dantură în V
http://www.textualcreations.ca/Flash_Gallery_V20/TurboCAD_V20_Gallery.html
Fig. 1.3. Reductor cu două trepte, cu axe egale
http://powerbuildesign.blogspot.ro/

Capitolul 1
Reductoare. Prezentare generală
10
10
Fig. 1.4. Reductor cu două trepte, cu axe egale, axele în plan orizontal
http://www.123rf.com/photo_9599013_3d-cut-of-reducer-on-the-engineering-drawing.html
Fig. 1.5. Reductor cu două trepte, cu axe egale, axele în plan vertical
http://www.123rf.com/photo_11968784_3d-cut-of-reducer-on-the-engineering-drawing-
image-with-clipping-path.html

Capitolul 1
Reductoare. Prezentare generală
11
11
Fig. 1.6. Reductor cu două trepte, cu axe egale, axele în plan vertical
http://www.123rf.com/photo_12638774_the-reducer-cross-section-on-the-engineering-drawing-3d-
image.html?fromid=cXpiRTdIZEFPdFVuck9GNUxFS0xuQT09
Fig. 1.7. Reductor în trei trepte cu roți cilindrice cu dinți înclinați http://www.xh-
gearbox.com/product2013123380.html#.WD_jI9J94dU 1 - arbore de ieșire (arbore IV), 2 -
pană paralelă, 3 - manșetă de etanșare pe arborele de ieșire, 4 - inel de sprijin axial în carcasă, pentru
rulment, 5 - rulment (aici, radial cu bile), 6 - distanțier, 7 - pană paralelă, 8 - roată dințată 6, 9 - dop de
aerisire cu garnitură, 10 - distanțier, 11 - capac superior, 12 - rulment radial cu bile, 13 - inel de ridicare,
14 - inel de fixare a rulmentului pe arbore, 15 - capac lateral cu garnitură de etanșare, 16 - șurub pentru
prinderea capacului lateral, 17 - inel de siguranță pentru roata 1, 18 - roată dințată 1, 19 - Capac orb
pentru arborele III, 20 - inel de siguranță în carcasă pentru rulment, 21- rulment, 22 - arbore III, 23 -
inel de siguranță în carcasă pentru rulment, 24 - rulment, 25 - arbore II, 26 - rulment, 27 - pană paralelă,
28 - roată dințată 3, 29 - distanțier, 30 - roată dințată 2, 31 - pană paralelă, 32 - rulment, 33 - rulment, 34
- inel de siguranță în carcasă pentru rulment, 35 - capac, 36 - manșetă de etanșare pe arborele I (arborele
motorului), 37 - motor

Capitolul 1
Reductoare. Prezentare generală
12
12
Fig. 1.8. Reductor cu axele în plan orizontal, cu 4 trepte [http://www.jcl-
tech.com/design.htm]
• după tipul angrenajului utilizat, reductoarele pot avea:
- angrenaje cu roţi cilindrice cu dinţi înclinaţi sau drepţi (mai rar utilizate în prezent),
- angrenaje conice,
- angrenaje elicoidale,
- angrenaje melcate,
- angrenaje combinate.
• după poziţia arborilor, care pot fi orizontali, verticali sau înclinaţi (mai rar, dar se
obţine un gabarit mai mic vezi Nord????).
Raportul de transmisie total pe un reductor depinde de numărul de trepte şi de tipul
angrenajului sau a combinaţiei de angrenaje:
iR =∏ij
n
j=1
(1.7)
în care ij este raportul de transmisie pe treapta j. Din cauza formei roţilor (cu număr întreg de
dinţi), rapoartele de transmisie nu pot lua orice valoare, ca la transmiile cu curele late sau
profilate:
iR =∏uj
n
j=1
în care uj este raportul de transmisie real al treptei j, calculat ca raport între numerele de dinţi
ale celor două roţi care formează angrenajul j: =j2
jj1
zu
zzj1 şi zj2 sunt numărul de dinţi pe roata
conducătoare, respectiv, condusă a angrenajului j, n fiind numărul de trepte în reductor. De
Capitolul 1
Reductoare. Prezentare generală
13
13
obicei soluţiile constructive au cel mult 3...4 trepte, cele mai des întâlnite fiind cele cu două
trepte (cataloage)???.
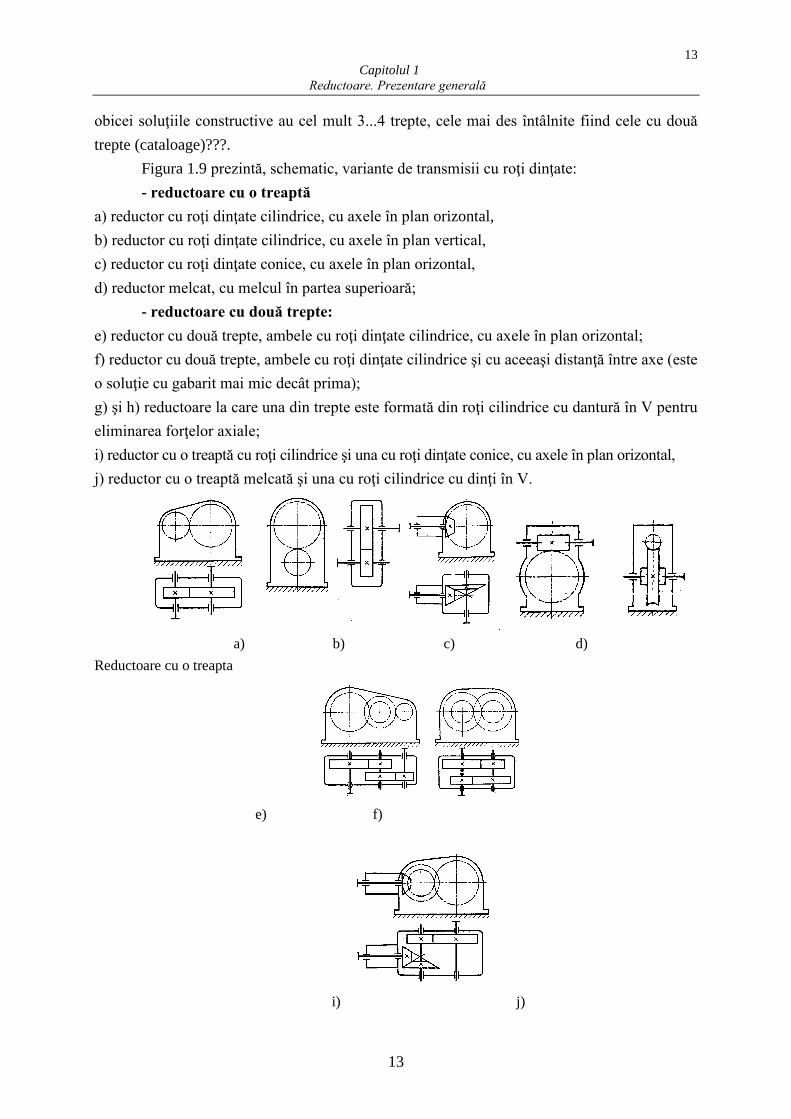
Figura 1.9 prezintă, schematic, variante de transmisii cu roţi dinţate:
- reductoare cu o treaptă
a) reductor cu roţi dinţate cilindrice, cu axele în plan orizontal,
b) reductor cu roţi dinţate cilindrice, cu axele în plan vertical,
c) reductor cu roţi dinţate conice, cu axele în plan orizontal,
d) reductor melcat, cu melcul în partea superioară;
- reductoare cu două trepte:
e) reductor cu două trepte, ambele cu roţi dinţate cilindrice, cu axele în plan orizontal;
f) reductor cu două trepte, ambele cu roţi dinţate cilindrice şi cu aceeaşi distanţă între axe (este
o soluţie cu gabarit mai mic decât prima);
g) şi h) reductoare la care una din trepte este formată din roţi cilindrice cu dantură în V pentru
eliminarea forţelor axiale;
i) reductor cu o treaptă cu roţi cilindrice şi una cu roţi dinţate conice, cu axele în plan orizontal,
j) reductor cu o treaptă melcată şi una cu roţi cilindrice cu dinţi în V.
a) b) c) d)
Reductoare cu o treapta
e) f)
i) j)

Capitolul 1
Reductoare. Prezentare generală
14
14
Fig. 1.9. Tipuri de reductoare cu două trepte
Divizarea raportului de transmitere pe trepte este o problemă de optimizare care ţine
seama de următoarele: realizarea unui ansamblu de gabarit minim, asigurarea ungerii corecte a
tuturor suprafeţelor în mişcare relativă (prin calitatea şi cantitatea lubrifiantului, forma
pieselor), condiţii de răcire şi ordonarea distanţelor între axe astfel încât să se asigure
echiportanţa la presiunea de contact. În general, valorile maxime ale raportului de transmisie
depind de tipul angrenajului şi de clasa de precizie.
Tabelul 1.1. Rapoarte de transmisie pe tipuri de angrenaje
Tipul angrenajului iR =ω1
ω2
Roţi cilindrice cu dinţi drepţi şi înclinaţi 4...8 (valori mai mari pentru clase de precizie mai
bune, puteri mai mici)
Angrenaje conice 7...10
Angrenaje melcate 10...80 (chiar 100) (au dezavantajul unui
randament mai mic decât cele de mai sus)
Literatura de specialitate [14, 16,. 32, 33] recomandă diverse criterii pentru alegerea
rapoartelor pe fiecare treaptă. Dacă se impune ca lăţimea reductorului să fie minimă, pentru un
reductor cilindric cu două trepte se poate utiliza, orientativ, relaţia:
i12 = √iRψa12
ψa34
3 − (0,01. . .0,02)iR (1.9)
în care
ψa12
este coeficientul de lăţime a roţilor, pentru prima treaptă,
ψa34
este coeficientul de lăţime a roţilor, pentru treapta II-a,
rezultând
i34 =iR
i12 (1.10)
În cazul în care se impun dimensiuni minime ale lungimii sau înălţimii reductorului,
pentru un reductor cu două trepte, cu roţi cilindrice, se poate utiliza, orientativ:
i12 =iR+ √
ψa34ψa12
3
1+ √ψa12ψa34
3 (1.11)
sau
i12 = √iRψa12
ψa34− 0,015 ⋅ iR (1.12)
Rapoartele de transmisie pe fiecare treaptă nu sunt impuse, deși în trecut acestea erau
standardizate. Astăzi, tehnologia permite realizarea cu mai multă ușurință a oricărui raport de
transmisie, evident cu restricția că este un raport de numere întregi.

Capitolul 1
Reductoare. Prezentare generală
15
15
Codificarea reductorului
Un reductor, prin codul lui, trebuie să ofere cât mai multe informaţii. Codificarea este,
de obicei, proprie fiecărei firme producătoare, de aceea este necesară existenţa unui catalog de
produs sau a unui site cu aceste informaţii ????, ????.
Tabelul 1.2
Tipul unităţii Tipul
angrenajului
Numărul de
trepte
Tipul de
montaj
Tipul
motorului
Numărul
de poli
Subsiteme
auxiliare
Reductor
sau
motoreductor
Cu flanşă
sau
Cu talpă
Frână etc.
1.3. Parametrii unui reductor
Indiferent dacă reductorul este proiectat sau selectat dintr-un catalog, acesta este
caracterizat prin mai mulți parametri, daţi în cataloagele firmelor producătoare [Nord],
[???],[???]. Deși în tema de proiect de anul II nu se impun toți acești parametri, aceștia vor fi
enumerați și definiți în continuare cu scopul de a evidenția complexitatea cunoștințelor necesare
proiectării sau selectării unui reductor.
Parametrii unui reductor sunt:
- raportul total de transmisie 𝐢𝐑,
- puterea nominală de intrare Pn1,
- puterea la ieşire din reductor, Pn2
Pn2 = ηR⋅ Pn1 (1.13)
- turaţia la intrare, n1,
- turaţia la ieşire, n2,
- momentul nominal la ieşire (cerut de mașina de lucru, în regim nominal), Mt2n,
- momentul caracteristic aplicaţiei, Mt2a
- momentul de torsiune calculat,
Mt2c = Mt2a ⋅ sf ≤ Mt2n (1.14)
în care factorul de funcţionare (de lucru) sf;
- puterea termică evacuată a reductorului, PQ, (valoare limită), corespunzând unei
funcţionări continue în sarcină, la o temperatură de θo=20 ºC a mediului ambiant, fără folosirea
unui sistem suplimentar de răcire şi fără deteriorarea elementelor reductorului şi lubrifiantului.
Dacă temperatura mediului diferă de 20ºC, relaţia de calcul pentru funcţionare la altă
temepratură a mediului este:
PQ(θo) = PQ ⋅ fQ (1.15)

Capitolul 1
Reductoare. Prezentare generală
16
16
în care fQ este un factor termic, dat în cataloagele de produs, în funcţie de timpul de funcţionare
a reductorului sub sarcină, în procente faţă de funcţionarea continuă sub sarcină;
- randamentul reductorului, ηR
ηR=
Pn2
Pn1 (1.16)
În proiectare, pe baza literaturii de specialitate [???],[???] și a cataloagelor de produs
[???],[???], se poate estima ηR = 0,95 pentru două trepte cu roţi cilindrice, ηR = 0,93 pentru
trei trepte şi ηR= 0,90 pentru patru trepte [50].
- momentul masic de inerţie, la arborele de ieşire, JR
- factorul de funcţionare (de lucru) sf; acesta se referă la funcţionarea reductorului şi
ia în considerare condiţiile zilnice de funcţionare, variaţiile sarcinii şi suprasarcinile
caracteristice maşinii de lucru.
În cataloagele firmelor producătoare [42-47, 50] sunt date grafice din care se poate
selecta factorul de funcţionare, sf în funcţie de timpul de lucru al reductorului într-o zi şi de
numărul de porniri/opriri pe oră, ZR. Curbele din graficul din Fig. 1.10 se referă la tipul
regimului de lucru: K1 - uniform, K2 - mediu, K3 - sever.
Fig. 1.10. Factorul de funcţionare pentru un reductor K1 - uniform, K2 - mediu, K3 - sever [Nord]
- factorul de accelerare a maselor, K, se folseşte pentru stabilirea facorului de
funcţionare sf şi se obţine cu relaţia:
K =Jc
Jm (1.17)
în care Jc este momentul dinamic de inerţie al maselor conduse în funcţie de viteza unghiulară
a motorului, Jm este momentul de inerţie al motorului, ambele în kg ⋅ m2. Valoarea lui K este
dată în tabele în cataloagele firmelor producătoare [45, 42] şi depinde de aplicaţie şi variază
Capitolul 1
Reductoare. Prezentare generală
17
17
între 1,25 (centrifugi etc.) şi 3,50 (pentru laminoare şi instalaţii de transport industrial etc.). Se
recomandă [50] utilizarea Fig. 1.10, în funcţie de valoarea lui K astfel:
dacă K ≤ 0,25, - curba K1 (sarcină uniformă)
dacă 0,25 < K ≤ 3, curbaK2 (sarcină cu şocuri moderate),
dacă 3 < K ≤ 10, curba K3 (sarcină cu şoc sever).
- clasa de precizie a angrenajului.
1.3. Selectarea soluţiei constructive
În general, o dată stabilită necesitatea unui reductor între mașina motoare și mașina de
lucru, parametrii de bază, care stau la baza alegerii soluției constructive pentru un reductor, sunt
- puterea la ieșire,
- turația la ieșire,
- raportul de transmisie necesar, iR,
- poziția axelor arborilor de la mașina de lucru și mașina motoare,
- forța axială și forța radială pe arborele de ieșire,
- restricții de funcționare, gabarit și de montaj,
- restricții de montaj: soluția de montare a arborilor reductorului, cote de montaj pe
arborele mașinii de lucru și a mașinii motoare, eventuala existență a cuplajelor etc.,
- fixarea reductorului; soluțiile cele mai des întâlnite sunt fixarea pe mașina de lucru
(de cele mai multe ori se optează pentru un motoreductor) și fixarea pe fundație (de obicei,
reductoare mari care deservesc utilaje de tip laminoare, reductorele navale etc.). Figura 1.??
prezintă același reductor, dar în cele două varinate, fixare pe mașină și fixare pe fundație.
Cele mai multe soluții de puteri medii se pot rezolva cu un motoreductor.
Motoreductorul este un sistem tehnic format dintr-un reductor și un motor electric, într-o
construcție unitară, și care poate deservi o anumită mașină de lucru. Soluția avantajează
montajul mașinii de lucru și faptul că utilizatorul nu mai este nevoit să verifice informații
referitoare la potrivirea motorului pe reductor (în general cote geometrice și restricții de
funcționare în diverse medii).
Tabelul 1.3. Recomandări pentru alegerea rapoartelor de transmisie pe treptele reductorului
Poziţia relativă a
arborilor de
intrare şi ieşire
Raportul de
transmitere total
ir
Numărul treptelor
paraleli
1...6(max) o treaptă cu roţi dinţate cilindrice
8...50 două trepte cilindrice cu două axe geometrice, la care intrarea
şi ieşirea sunt coaxiale
8...50
două trepte cilindrice cu trei axe geometrice, la care intrarea
şi ieşirea nu sunt coaxiale
concurenţi 1...3,55 (max. 6,3) o treaptă cu roţi dinţate conice

Capitolul 1
Reductoare. Prezentare generală
18
18
7...40 două trepte din care una cu roţi conice şi una cu roţi cilindrice
neparaleli şi
neconcurenţi
12,5...80(max. 100) o treaptă melcată
80...50 două trepte din care prima melcată şi a doua cilindrică
Tabelul 1.4. Criterii de alegere a tipului de angrenaj
Avantaje Dezavantaje
Angrenaje cilindrice
dinți drepți
dinți înclinați
• randament foarte bun
• tehnologie relativ ieftină
• angrenajele cu dinți înclinați sunt
mai silențioase și au grad de
acoperire mare (recomandat
2...2,5, dar poate fi mai mare
pentru angrenaje de clasă de
precizie mare)
• raport de transmisie limitat la 5...8a
• angrenajele cu dinți drepți sunt
zgomotoase și au grad de acoperire
mic (recomandat 1,2...1,3)
Angrenaje conice
dinți drepți
dinți înclinați
dinți curbi
• axe concurente
• raport de transmisie mare
(5...12)
• zgomotoase
• tehnologie mai sofisticată, scule
scumpe
• se înlocuiește tot angrenajul,
este scump
Angrenaje melcate • raport de transmisie mare
(10...100)
• gabarit mai mic
• axe perpendiculare în spațiu
• materiale scumpe pentru roata melcată
• randament mai slab
• încălzire; se recomandă forme
caracteristice pentru răcire (nervuri de
răcire, sistem de răcire cu ventilator
sau recirculare a lubrifiantului,
• lubrifiant mai scump
Dispunerea angrenajelor în carcasă. Dacă un reductor are mai multe trepte, cu angrenaje
diferite, se recomandă (dar nu se impune ca treapta de roți cilindrice să fie la intrarea în reductor,
angrenajul melcat sau conic urmând după treapta sau treptele cu roți cilindrice. Există și soluții
în care treapta cu roți cilindrice este la ieșire din reductor, dar acestea sunt rare.

19
Capitolul 2
Etapele de proiectare pentru un reductor
1. Stabilirea parametrilor reductorului (date de intrare) şi a soluţiei constructive
Date de proiectare pot fi parametrii de intrare: 1n (turaţie), 1tM (moment de torsiune
la intrare în angrenaj ce poate fi calculat cu ); trebuie specificate condiţiile de
funcţionare ale angrenajului, raportul de transmitere i, durata de lucru (notată de obicei cu hL
şi exprimată în ore).
2. Alegerea unei soluții constructive (dispunerea axelor reductorului, numărul de
trepte, ținând seama de raportul total de transmitere și de poziționarea reductorului între
mașina de lucru și motor.
3. Evaluarea randamentului reductorului
Se estimează randamentul transmisiei considerând componentele reductorului legate în
serie.
4. Alegerea motorului electric
Pe baza valorii calculate estimativ se alege un motor electric
Proiectarea subansamblurilor
5. Proiectarea angrenajelor
6. Proiectarea arborilor, inclusiv soluţiile de asamblare a roţilor pe arbori.
7. Proiectarea lagărelor. Pentru reductoare de putere mică și medie se recomandă
rulmenții, iar pentru reductoare de putere mare și foarte mare se pot folosi și lagăre de
alunecare.
8. Realizarea unei schite preliminare după proiectarea subansamblelor de mai
sus
9. Eventuale optimizări/bucle
- reducerea gabaritului angrenajului
- reducerea/modificarea spaţiilor dintre elemente (dintre piesele montate pe arbori,
dintre piese în mişcare şi piese în repaos etc.)
10. Sistemul de lubrifiere şi lubrifiantul. Se alege soluţia
- ungere în baie (pentru reductoare relativ mici)
Capitolul 2
Etapele de proiectare pentru un reductor
20
- ungere cu sistem de ungere (rezervor de lubrifiant, pompă, filtre, conducte, sistem de
răcire, elemente de control al debitului şi presiunii etc.). În general pentru reductoare mari, aşa
cum sunt şi reductoarele navale sau de la instalaţii portuare de putere mare, se proiectează un
sistem de ungere.
Calitatea şi cantitatea lubrifiantului.
11. Carcasa. Calculul la încălzire
12. Desenul de ansamblu şi de execuţie, caietul tehnic (documentaţia). Verificarea
funcţionării ansamblului la parametrii impuşi prin temă.
13. Verificarea
- angrenajelor (calculul de rezistență și geometria)
- arborilor
- lăgărelor,
- încălzirii
pentru că acum sunt definitivate materialele şi dimensiunile pieselor prin desenul de ansamblu
și de execuție.
Dacă se impun unele modificări, se reface și desenul de ansamblu și cele de execuție.
Utilizarea softurilor dedicate desenului tehnic ușurează realizarea modificărilor.
21
Capitolul 3
Evaluarea randamentului reductorului
și alegerea motorului electric
3.1. Evaluarea randamentului reductorului
Se consideră că motorul, reductorul şi maşina de lucru sunt subsisteme legate în serie.
Randamentul reductorului se scrie:
în care este puterea necesară acţionării maşinii de lucru (altfel scris, puterea la ieşirea
din reductor şi dată în tema de proiectare) iar este puterea furnizată de motorul
electric (altfel scris, puterea la ieşirea din motorul electric şi la intrarea în reductor). De multe
ori este notată cu . Notația pentru poate fi notată pentru un
reductor cu o singură treaptă sau, pentru un reducor cu două trepte, așa cum se va discuta în
continuare, cu
În această fază de proiectare, valoarea randamentului reductorului
se estimează pe
baza datelor din literatura de specialitate şi din cataloagele firmelor care produc reductoare.
La rândul lui, reductorul este un sistem tehnic format din elemente legate în serie:
- angrenaje (pentru această temă, reductorul are două angrenaje cu roţi dinţate cu dinţi
înclinaţi),
- lagăre cu rulmenţi, câte două pe fiecare arbore (în soluţia constructivă aleasă pentru
rezolvarea temei de proiect pot fi două sau mai multe perechi de lagăre cu rulmenţi, în funcţie
de construcţia reductorului şi de numărul de trepte). În soluţia aleasă există două perechi de
lagăre cu rulmenţi deoarece primul arbore (arborele pe care se află prima roată dinţată a
reductorului) este chiar arborele motorului), soluţia cosntructivă aleasă având doar doi arbori
şi, deci, două perechi de lagăre cu rulmenţi;
- lubrifiantul.
Mişcarea acestor subsisteme ale reductorului se face cu existenţa frecării în angrenaje,
în rulmenţi şi frecare între lubrifiant şi elementele în mişcare cu care vine în contact, existând
şi frecarea internă în lubrifiant.
Valorile pentru randamentul fiecărui subsistem care întră în alcătuirea reductorului se
aleg din literatura, astfel:

Proiectarea reductoarelor cu roți cilindrice
22
- randamentul unui angrenaj; pentru un angrenaj cu roţi cilindrice cu dinţi drepţi
sau înclinaţi, se poate considera ;
- randamentul unei perechi de rulmenţi (de pe un arbore); se poate considera
;
- randamentul asociat pierderii de putere cauzată de barbotarea uleiului în carcasa
reductorului, la trecerea roţilor prin lubrifiant deoarece lubrifiantul opune o rezistenţă,
existând frecare atât între lubrifiant şi roţi dar şi frecare internă, ca în cazul oricărui fluid care
se mişcă; se poate considera .
Deci, pentru soluţia constructivă adoptată, se poate scrie:
3.2. Selectarea motorului electric
Începând cu 16 iunie 2011 pot fi comercializate in conformitate cu Reglementarea
Comisiei Europene Nr.640/2009 din iulie 2009 numai motoarele electrice pentru uz general
care respectă condițiile de clasificare IE2.
Motoarele electrice cu eficiență mărită reduc costurile cu energia, costurile cu
exploatarea prin fiabilitate mai ridicată și downtime-ul (timpul de indisponibilitate) şi
scăderea costurilor de mentenanţă. Pierderile mai mici oferă motorului o toleranţă mai bună
la degradarea cauzată de fenomenele termice, o capacitate îmbunătăţită de a suporta
suprasarcina, o rezistenţă mai bună la condiţii anormale de funcţionare şi toleranţă mai mare
la tensiuni neconforme şi curenţi perturbatori.
Randamentul unui motor electric este definit ca raportul dintre puterea mecanică
utilizabilă şi puterea electrică absorbită din reţea. Diferenţele dintre diferitele sisteme
naţionale cu privire la domeniu şi clasificare au condus la iniţiativa Comisiei Electrotehnice
Internaţionale (IEC) de a dezvolta un standard unificat. Noul standard IEC 60034-30
defineşte şi armonizează, la nivel mondial, clasele de eficienţă IE1, IE2 şi IE3 pentru
motoarele trifazate de joasă tensiune, in gama de puteri 0.75 kW-375 kW cu 2,4 si 6 poli,
deoarece acestea consumă 70% din energia utilizată în industrie.
• IE1 = Motoare cu randamente standard (echivalent cu EFF2),
• IE2 = Motoare cu randamente ridicate (echivalent cu EFF1),
• IE3 = Motoare cu randamente superioare (premium).
Motoarele noi au avantaje de performanţă cum ar fi: niveluri de zgomot şi vibraţie
reduse, fiabilitate mai bună, mentenanţă mai ușor de realizat, flexibilitate în introducerea într-
un sistem tehnic costuri de funcţionare mai mici. Cu cât temperatura de funcţionare a
motorului este mai joasă, cu atât durata lui de viaţă şi performanţele sunt mai bune.
Motoarele sunt reproiectate pentru a asigura un flux de aer de răcire îmbunătăţit menţinând
temperaturile de funcţionare scăzute, asigurând fiablitate şi durată de viaţă mărită.
Obţinerea raportului optim între randament, creşterea de temperatură şi zgomot va
determina costuri scăzute pentru ciclurile de viaţă, costuri mai mici de funcţionare şi o
fiabilitate totală mai bună.

Capitolul 3
Evaluarea randamentului reductorului și alegerea motorului electric
23
Comparaţie între clasele IE1 (eficienţă standard) şi cele IE2 (eficienţă ridicată):
Se alege tipul de motor. Aproape 70% din sistemele tehnice care necesită motor
electric, utilizează motoare asincrone trifazate de joasă tensiune.
Având randamentul estimat calculat, se poate determina puterea minimă necesară a
motorului electric care va acţiona reductorul şi maşina de lucru:
După acest calcul este necesară consultarea unui catalog de motoare electrice. Vă
propunem catalogul Nord dar orice alt producător de motoare electrice are pe site catalogul
de produse Nord, UMB, ???. În acest ghid de proiectare explicațiile se vor da cu ajutorul
catalogului firmei Nord Gear.
Se va alege din catalogul de motoare un motor eletric asincron trifazat, care să aibă
puterea nominală mai mare sau cel puţin egală cu puterea calculată :
În practică, proiectantul preferă ca pentru că pot exista fluctuaţii ale
puterii , chiar dacă în faza de proiectare această putere este considerată constantă.
Un motor electric se caracterizează şi prin turaţia nominală şi turaţia de lucru. Dar
există și alte caracteristici de care proiectantul trebuie să țină seama (momentul la pornire,
momentul la oprire, spațiul disponibil pentru motor, masa, modul de fixare pe echipament sau
în spațiul de lucruetc., modul de funcționare )
Turaţia nominală este turaţia considerată constantă, pe care o poate atinge motorul
când funcţionează în gol (fără sarcină, în acest caz, fără a fi cuplat la maşina de lucru şi la
reductor, neavând moment rezistent pe arborele de ieşire din motor). Dacă motorul este ataşat
maşinii de lucru, şi aceasta funcţionează, necesitând puterea nominală a motorului, turaţia
motorului este puţin mai mică şi este numită turaţie de lucru. Atât turaţia nominală, cât şi
turaţia de lucru sunt date în cataloagele de produs. Motoarele electrice trifazate sunt cele mai
des utilizată motoare pentru maşini de lucru în gama puterilor date în aceste proiecte (0,15
kW... 30 kW). Gama de motoare electrice asincrone trifazate se fabrică pentru 4 valori ale
turaţiei nominale (Tabelul 3.1).

Proiectarea reductoarelor cu roți cilindrice
24
Tabelul 3.1. Turații nominale ale motoare electrice trifazate
Numărul de poli 2 4 6 8
Turația rpm 3000 1500 1000 750
Tabelul A.2.?? Tabelul A.2.?? Tabelul A.2.?? Tabelul A.2.??
Cele mai des utilizate sunt motoarele cu 4 poli și, de multe ori, sunt preferate de proiectanți
datorită termenului de livrare redus și a unui raport convenabil masă/preț.
Există și variante constructive care pot lucra la două turații nominale, în funcție de
numărul de poli activați. De exemplu, se fabrică motoare care pot funcționa la 750/1500 rpm
(Tabelul A.3.6), și 750/3000 rpm (Tabelul A.3.4), 1500/3000 rpm (Tabelul A.3.5), dar sunt
mai scumpe. Selectarea lor se justifică prin specificul mașinii de lucru iar proiectarea
sistemului pe care îl deservește se face pentru cele două sau mai multe regimuri de lucru.
Astazi motoarele pot fi dotate cu sisteme electronice de variație a turației în anumite limite,
dar și acestea sunt mai scumpe și sunt recomandate pentru anumite sisteme tehnice.
Se alege coeficientul regimului de lucru (funcționare) a motorului în funcție de
aplicație (Tabelul 3.2)
Tabelul 3.2. Regimul de lucru
Codul Observații
S1 Funcționare continuă, sub sarcină constantă
S2 Funcționare pe durate scurte (10 minute, 30 minute), sub sarcină constantă. Nu se atinge un regim
termic stabilizat. Motorul se poate conecta din nou dacă s-a răcit la o temperatură cu 2°C mai mult
decât temperatura aerului de răcire
S3
Funcționare intermitentă, constând din cicluri identice de sarcină, cu faze de sarcină constantă și
pauze între ele. Frecvența şi mărimea sarcinii la pornire nu influențează semnificativ încălzirea. Dacă
nu se specifică altfel, se presupune un ciclu de 10 minute. Perioada de funcționare a motorului trebuie
specificată ca o proporție din timpul unui ciclu de lucru (funcționare +pauză).
Examplu: S3-40% funcționare: 4 minute funcționare în sarcină - 6 minute pauză.
Recommended values for the determination: 70 %
S4 Funcționare ciclică, cu întreruperi și conectări dese (de multe ori funcționează cu ventilatoare externe)
S6
Funcționare continuă cu sarcină intermitentă, constând din cicluri identice de sarcină și apoi mers în
gol. Se precizează proporția acestora într-un ciclu de sarcină, ca la S3.
Examplu: S6-40% switch-on time. Recommended values for the determination: 80 %
S9
Funcționare continuă cu valori neperiodice pentru turație și momentul de torsiune, dar în intervale
prevăzute/permise de proiectant. Există frecvente suprasarcini care trebuie să fie mult sub sarcina
maximă.
Turația unui motor electric trifazat se modifică atunci când lucrează în sarcină. Cu cât
momentul de torsiune necesar mașinii de lucru va fi mai mare, cu atât se reduce mai mult
turația de lucru, efect mai pronunțat pentru motoare de putere mică. Valorile din cataloagele
de motoare se referă întotdeauna la puterea nominală a motorului.

Capitolul 3
Evaluarea randamentului reductorului și alegerea motorului electric
25
In short-term (S2) and intermittent operation (S3), electrc motors may be subjected to greater
loads than in continuous operation (S1). The factors for the permissible increase in power
compared withe the rated power (PN) are contained in the following table. However, in
principle, the power may only be increased to the level where the relative breakdown torque
(MK/MN) divided by the power increase factor results in a value of ≥1.6. In individual cases,
larger factors than those stated in the table may result.
Tabelul 3.3. Puterea admisă pentru funcționare cu suprasarcină un timp limitat
S2 Puterea
admisă
S3 Puterea admisă S6 Puterea
admisă
10 minute 1,4PN 25% 1,33PN 25% 1,45PN
30 minute 1,15PN 40% 1,18PN 40% 1,35PN
60% 1,08PN 60% 1,15PN
Turaţia de lucru, , este turaţia la ieşirea din motor când acesta este legat la maşina
de lucru pentru a transmite puterea nominală, . Valoarea acesteia este apropiată, dar mai
mică decât turaţia nominală. Din tabelele firmelor producătoare de motoare electrice se alege
întâi familia de motoare caracterizată printr-o anumită valoarea a turaţiei nominale, şi apoi, în
funcţie de soluţia constructivă a motorului şi în funcţie de puterea nominală necesară, se
citeşte turaţia de lucru, care va fi folosită în calcule.
Alegerea turaţiei nominale a motorului, , se face după evaluarea raportului de
transmisie pe reductor, , care are expresia:
în care este turația la ieșirea din reductor și la intrare în mașina de lucru.
Având în vedere că
- s-a impus prin tema de proiectare soluţia constructivă a reductorului (aici reductor
cu roţi cilindrice cu dinţi înclinaţi, cu două trepte, cu aceiași distanță între axe pentru cele
două trepte),
- o treaptă de angrenaje cu roţi dinţate cu dinţi înclinaţi poate avea raportul de
transmisie,
se evaluează că raportul maxim realizabil pe un astfel de reductor (cu două trepte, cu
roţi cilindrice cu dinţi înclinaţi) poate fi
Se alege turaţia nominală a motorului electric astfel încât
Din catalogul de motoare se alege motorul care are turația nominală pentru puterea
nominală şi se citeşte turaţia de lucru . Pentru motorul ales se scriu în proiect parametrii
din tabelul A.2.? pentru că aceştia sunt necesari inginerului care va proiecta reţeaua de

Proiectarea reductoarelor cu roți cilindrice
26
alimentare cu energie electrică a secţiei în care va funcţiona maşina de lucru pentru care
proiectăm reductorul. Explicațiile parametrilor sunt date înaintea tabelelor cu motoare.
Cunoscându-se şi , se calculează exact raportul de transmisie pe care ar trebui să-
l aibă reductorul:
Raportul de transmisie al reductorului este produsul rapoartelor de transmisie pe
fiecare treaptă
1, 2, 3 şi 4 sunt asociate fiecărei roţi, în ordinea în care transmit puterea în reductor. Roţile 1
şi 2 formează prima treaptă (numită şi treaptă de viteză), iar roţile 3 şi 4 formează treapta a
doua a reductorului (numită şi treaptă de putere).
În general, pentru reductoare în două trepte se recomandă .
La proiectare, valorile pentru şi se aleg astfel încât produsul lor să fie cât mai
apropiat de valoarea
.
Standardele în vigoare recomandă ca pentru transmisii mecanice uzuale, abaterea
raportului de transmisie posibil de realizat faţă de cel impus prin tema de proiectare să
fie mai mică de 0,03 (sau, dacă se exprimă în procente, 3%):
|
|
Dacă nu este îndeplinită această condiţie, se alege o altă pereche de valori
astfel încât inegalitatea să fie satisfăcută.
Tabelele pentru motoare electrice, de la Tabelul A.1 până la Tabelul A.?, conţin
informaţii din site-ul ????. Simbolurile din tabele au următoarele semnificaţii:
PN [kW] - puterea nominală a motorului
nN [rot/min] - turaţia nominală de lucru (notată în proiect și cu nl [rot/min] - turaţia de ieșire
din motor și de intrare în reductor)
[%] - randamentul motorului
IN (la o tensiune de 400 V) [A] - intensitatea nominală
IA/IN - raportul dintre intensitatea curentului la pornire şi intensitatea nominală a curentului
MN [N.m] - momentul de torsiune nominal al motorului
MA/MN - raportul dintre momentul de torsiune nominal şi momentul de torsiune la pornire
Jmax [kg.m2] - momentul de inerţie maxim al motorului
Jm [kg.m2] - momentul de inerţie al motorului
cos - factorul de putere

Capitolul 3
Evaluarea randamentului reductorului și alegerea motorului electric
27
1 Codul 13 Intervalul de tensiune admis
2 Numărul de identificare al autorităţiinotificate 14 Informații privind norme respectate de produs
3 Numărul de faze 15 Factorul de putere
4 Tipul 16 Turația nominală de lucru
5 Numărul motorului 17 Cod pentru protecția contra exploziilor
6 Anul de fabricație 18 Raport între intensitatea la pornire și intensitatea
nominală a curentului electric
7 Clasa de temperatură 19 Timpi de lucru (procente)
8 Clasa de protecție a carcasei 20 Indicaţii de lucru și standardele/normele respectate
9 Regimul de funcționare 21 Se respectă instrucţiunile de operare B1091.
10 Standarde sau norme respectate de produs 22 Puterea nominală a motorului
11 Frecvența nominală a curentului electric 23 Intensitatea nominală a curentului electric
12 Tensiunea nominală 24 Seria individuală
Fig. 3.1 Plăcuța de identificare a motoarelor NORD Exe - conform EN 60079 ????
3.3. Repartizarea rapoartelor de transmisie pe treptele reductorului
În cazul reductorului cu o singură treaptă, raportul de transmisie (care nu poate lua
orice valoare, fiind raportul a două numere întregi) se alege astfel încât abaterea de la
valoarea dată în tema de proiectare să fie cât mai mică (sub 3% pentru transmisii de uz
general):
|
|
Pentru reductoare cu mai multe trepte, valorile pentru raportul de transmisie pe fiecare
treaptă se aleg, cu unele recomandări [Drăghici] (Tabelul 2.??). În general, treapta de lângă

Proiectarea reductoarelor cu roți cilindrice
28
motor poate prelua un raport de transmisie mai mare decât următoarea treaptă, pentru că
momentul de torsiune pe această este mai mic decât pe următoarea. În plus, pentru soluţia
constructivă cu distanţa între axe aceiaşi pentru ambele trepte, această repartizare este chiar
necesară pentru a nu rezulta din calculul iniţial o diferenţă prea mare între cele două distanţe
între axe (pentru treapta 1 şi treapta 2).
Se alege şi 34i astfel încât şi să respecte condiţia:
|
|
în care
Evident, , turaţia de lucru a motorului este turaţia de intrare în reductor iar este
turaţia de ieşire din reductor (dată în tema de proiectare).
Cum reducerea turaţiei se realizează prin trepte de angrenaje, valoarea oricărui raport
de transmisie pe o treaptă este raportul numărului de dinţi pentru roţile care formează
angrenajul (acesta este raportul real de transmitere pentru o pereche de roţi dinţate și se
notează cu u).
Deci, pentru un reductor în două trepte,
pentru prima treaptă
pentru a doua treaptă
în care şi sunt numărul de dinţi pe roata 1, respectiv pe roata 2 iar şi sunt numărul
de dinţi pe roata 3, respectiv pe roata 4.
Conform teoriei angrenajelor [??, ???], pentru roţi dinţate cu dinţi drepţi, cu profil
evolventic, numărul minim de dinţi este 17, iar pentru roţi cilindrice cu dinţi înclinaţi
în care este unghiul de înclinare al danturii pe treapta respectivă.
Ghidurile de proiectare [???, ???] recomandă alegerea unui număr de dinţi pe roata
mică (de obicei conducătoare) mai mare decât numărul minim calculat, acesta fiind utilizat
doar când există condiţii mai severe de gabarit.
Unghiul se recomandă să se aleagă în faza iniţială de proiectare între 15...25°
(Tabelul 3.4).
Alegerea numărului de dinţi pe roţile mici (în tema de proiect, roţile 1 şi 3) se poate
face pe baza recomandărilor din Tabelul 3.5.

Capitolul 3
Evaluarea randamentului reductorului și alegerea motorului electric
29
Tabelul 3.4. Alegerea unghiului de înclinare al danturii
Observaţii
0...10° Nu se recomandă pentru că o înclinare prea mică a danturii nu măreşte seminificativ linia de
contact şi nici gradul de acoperire al angrenajului
15...30° Se recomandă
30...45° Se recomandă doar în cazuri particulare (dantură în V sau W) pentru că, în cazul danturii înclinate
simple, componenta axială a forţei normale pe dinte este mare şi încarcă prea mult rulmenţii
Tabelul 3.5. Numărul de dinţi recomandat pentru roata mică
1z Recomandări
1z 17...21 pentru roţi dinţate cilindrice din oţeluri durificate
1z 21...25 pentru roţi dinţate cilindrice din oţeluri îmbunătăţite
Se calculează
î [ ]
î [ ] Deci, rapoartele de transmisie reale, pe fiecare treaptă, vor fi:
pentru prima treaptă
pentru a doua treaptă
iar raportul de transmisie al reductorului va fi:
Se verifică dacă abaterea acestei valori de la tema de proiectare se încadrează în limite
admise pentru transmisii de uz general:
|
|
Dacă această condiţie nu este îndeplinită, există următoarele soluţii:
- se alege altă pereche de valori pentru rapoartele de transmisie pe fiecare treaptă, astfel
încât să se respecte condiţia sau
- se poate adăuga sau scădea un dinte de pe una sau ambele roţi conduse, astfel încât să
se respecte inegalitatea.
3.4. Calculul momentului de torsiune şi turaţiei pe fiecare arbore al reductorului
Pentru proiectarea reductoarelor cu roți cilindrice, se poate face acest calcul în ipoteza
că se neglijează frecarea, deoarece pierderea de putere prin frecare este mică, aproximativ
1...5% din puterea nominală a motorului. Altfel spus, în această ipoteză, puterea transmisă
prin reductor este aceiaşi pe fiecare arbore.

Proiectarea reductoarelor cu roți cilindrice
30
Momentul de torsiune pe primul arbore (arborele de intrare) al reductorului este:
(?)
Pe arborele II, momentul de torsiune este
Pe arborele III, momentul de torsiune este
În calculul momentului de torsiune, trebuie acordată atenţie în ce unitate de măsură se
doreşte exprimarea acestei mărimi. Relaţiile de mai sus sunt valabile în unităţi de măsură ale
sistemului internaţional de măsuri, adică momentul rezultă în N.m, dacă puterea este
introdusă în W şi viteza unghiulară este în s-1. Calculele în ingineria mecanică se fac, pentru
momente de torsiune, în N.mm. Deci, dacă introduceţi puterea în kW, viteza unghiulară în s-1
,
relaţia pentru a obţine momentul în N.mm este:
[ ]
[ ]
[ ]
Viteza unghiulară a fiecărui arbore este:
[ ] pentru arborele I
[ ] pentru arborele II
[ ] pentru arborele III

31
Capitolul 4
Proiectarea angrenajelor cilindrice cu dinți înclinați
4.1. Etape în proiectarea unui angrenajului cu roţi cilindrice
Date de intrare:
soluția constructivă (tipul angrenajului, poziția axelor, numărul treptelor în funcție de raportul
total de transmisie, i, etc.),
momentul de torsiune la intrare (sau cel de la ieşire ),
turaţia la intrare sau la ieşire (pentru o treaptă), (pentru două treapte),
raportul de transmitere i pe fiecare treaptă (de obicei raportul de transmisie primește indice
format din numărul alocat roții dințate; de exemplu, pentru o treaptă, se poate nota cu ), iar
pentru reductorul cu două trepte, și )
treapta de precizie a angrenajului (angrenajelor), (Anexa A.4.1)
durabilitatea angrenajului (de obicei în ore).
Selectarea materialelor
Se aleg materialele pentru roţile dințate (inclusiv tratamentele necesare obţinerii unei durităţi
convenabile şi se calculează ), (Anexa A.4.2).
Date de intrare pentru fiecare angrenaj, alese de proiectant
- unghiul de înclinare iniţial ,
- numărul de dinţi pentru pinion ( ). Se calculează
î [ ]. (4.1)
Se recomandă ca şi să fie numere prime între ele sau să aibă cât mai puţini divizori
comuni pentru a elimina tendinţa uzurii preferenţiale a unei perechi de dinţi. Pentru un angrenaj cu
cel puţin o roată cu număr mic de dinţi , se alege deplasarea şi modulul astfel încât să
nu apară interferenţa şi să nu se scurteze dintele. Se trece apoi direct la verificarea danturii.
- raportul real de transmitere se calculează după alegerea numărului de dinți pentru roțile
unui angrenaj
pentru un singur angrenaj (4.2)
pentru o transmisie cu două trepte (4.3)
și trebuie să respecte relaţia
| |
(4.4)
Valoarea erorii relative față de tema de proiectare, se recomandă 0,03 (sau 3%) pentru
transmisii de uz general. Pentru angrenaje speciale această valoare poate fi mai mică sau mai mare.

Capitolul 4
32
Dacă nu se respectă relația (4.4), soluţia cea mai simplă este modificarea lui cu un dinte în plus
sau în minus.
Dimensionarea unui angrenaj format din două roți dințate cilindrice cu dinți înclinați
constă în:
- calcularea distanței dintre axe minime, , pentru care angrenajul rezistă la presiune de
contact (sau pitting) cu (relaţia 6.145b);
- calcularea distanței dintre axe minime, , din condiția de rezistență la încovoiere la baza
dintelui, cu (relaţia 6.154);
- se alege ( ) pentru care dantura rezistă la ambele solicitări.
Calculul geometriei angrenajului cuprinde
- stabilirea elementelor standardizate sau normate: modulul normal și/sau distanța între axe.
De cele mai multe ori se impune și distanța dintre axe prin norme ale producătorului, dar astăzi
distanța dintre axe, mai ales pentru reductoare mari, nu se impune pentru a da proiectantului
posibilitatea de a micșora gabaritul reductorului,
- standardizarea modulului și stabilirea distanței dintre axe,
- calculul deplasărilor, dacă se stabilește că angrenajul va funcționa mai bine cu dantură
deplasată,
- calculul elementelor geometrice ale angrenajului, verificându-se lipsa interferenţei sau a
subtăierii, grosimea dintelui pe cercul de cap etc.; se calculează gradul de acoperire () şi elemente
de control ale danturii, cum ar fi cota peste N dinţi (număr determinat tot de geometria roţii).
Verificarea angrenajului (de obicei se face după realizarea desenului de ansamblu):
Se calculează
- coeficientul de siguranţă pentru durabilitatea superficială la pitting cu relaţia (4.5) scrisă
pentru fiecare roată;
; (4.5a)
(4.5b)
- la încovoiere, pentru fiecare roată:
(4.6a)
(4.6a)
Dacă una din condiţiile de mai sus nu este îndeplinită, se alege una din soluțiile următoare:
- se aleg materiale mai bune,
- se modifică (măresc) dimensiuni ( ),
- se îmbunătăţesc condiţiile de funcţionare (ungere, evacuarea căldurii etc.)
- combinații ale celor de mai sus.
Și calculul de proiectare se reface.
Dintre metodele de calcul existente, metoda ISO este preferată şi recomandată de specialişti
pentru că ia în considerare un număr mare de factori care condiţionează comportarea angrenajului şi
Proiectarea reductoarelor cu angrenaje cilindrice
33
se bazează pe multe determinări experimentale; pentru roți cilindrice cu dinți drepți sau înclinați se
găseşte în SR ISO 6336-1, SR-ISO 6336-2, ISO 6336-3 și SR ISO 6336-6 SR.
Formulele din familia de standarde ISO 6336 [ISO 6336-1], [ISO 6336-2], [ISO 6336-3],
[ISO 6336-5], [ISO 6336-6] sunt aplicabile în următoarele condiţii:
- angrenaje cu dinţi drepţi sau înclinaţi, cu gradul de acoperire mai mare de 1,0 și mai mic de
2,5;
- nu există interferenţă în funcţionare între vârfurile dinţilor şi piciorul dintelui,
- dinţii nu sunt ascuţiţi,
- jocul între dinţi nu este zero,
- viteza pe cercul de rostogolire este de peste 1 m/s, deoarece sub această valoare uzura
abrazivă trebuie să se ia în considerare.
Nu se aplică altor tipuri de deteriorări ale dinţilor: deformarea plastică, griparea (scuffingul),
exfolierea stratului tratat termo-chimic, adeziune şi uzură, şi nu se aplică în condiţii de vibraţii care
pot conduce la o rupere nepredictibilă,
4.2. Alegerea rapoartelor de transmisie pe fiecare treaptă (aplicație la tema propusă)
Cum reducerea turaţiei se realizează prin trepte de angrenaje, valoarea oricărui raport de
transmisie pe o treaptă este raportul numărului de dinţi pentru roţile care formează angrenajul (acest
raport - raportul real de transmitere pentru o pereche de roţi dinţate și se notează cu u).
Conform teoriei [Ștefănescu, ????], Jula, ????, pentru roţi dinţate cu dinţi drepţi, cu profil
evolventic, numărul minim de dinţi este 17 iar pentru roţi cilindrice cu dinţi înclinaţi
( ) (4.7)
în care este unghiul de înclinare al danturii pe treapta respectivă.
Ghidurile de proiectare [Haragâș, 2014, Rădulescu, ????] recomandă alegerea unui număr
de dinţi pe roata mică (de obicei conducătoare) mai mare decât numărul minim calculat, acesta fiind
utilizat doar când există condiţii mai severe de gabarit.
Unghiul se recomandă să se aleagă în faza iniţială de proiectare între 15...25° (Tabelul
4.1).
Alegerea numărului de dinţi pe roţile mici (în tema de proiect, roţile 1 şi 3) se poate face pe
baza recomandărilor din Tabelul 4.2.
Tabelul 4.1. Alegerea unghiului de înclinare al danturii
Observaţii
0...10° Nu se recomandă pentru că o înclinare prea mică a danturii nu măreşte seminificativ linia de contact şi
nici gradul de acoperire al angrenajului
15...30° Se recomandă pentru roți înclinate simple
30...45° Se recomandă doar în cazuri particulare (dantură în V sau W) pentru că, în cazul danturii înclinate
simple, componenta axială a forţei normale pe dinte este mare şi încarcă prea mult rulmenţii

Capitolul 4
34
Tabelul 4.2. Numărul de dinţi recomandat pentru roata mică
Recomandări
pentru roţi dinţate cilindrice din oţeluri durificate
pentru roţi dinţate cilindrice din oţeluri îmbunătăţite
Se calculează
î [ ] (4.8a)
î [ ] (4.8b)
Deci, rapoartele de transmisie reale, pe fiecare treaptă, vor fi:
pentru prima treaptă (4.9a)
pentru a doua treaptă (4.9a)
iar raportul de transmisie al reductorului va fi:
(4.10)
Se verifică dacă abaterea acestei valori de la tema de proiectare se încadrează în limite
admise pentru transmisii de uz general:
|
| (4.11)
Dacă această condiţie nu este îndeplinită, există următoarele soluţii:
- se alege altă pereche de valori pentru rapoartele de transmisie pe fiecare treaptă, astfel
încât să se respecte condiţia sau
- se poate adăuga sau scădea un dinte de pe una sau ambele roţi conduse, astfel încât să se
respecte inegalitatea.
4.3. Calculul momentului de torsiune şi turaţiei pe fiecare arbore al reductorului
Pentru proiectarea reductoarelor cu roți cilindrice, se poate face acest calcul în ipoteza că se
neglijează frecarea. Altfel spus, în această ipoteză, puterea transmisă prin reductor este aceiaşi pe
fiecare arbore. Calculul este exemplificat pentru un reductor cu două trepte. Momentul de torsiune
pe primul arbore (arborele de intrare) al reductorului este:
(4.12a)
Pe arborele II, momentul de torsiune este
(4.12b)
Pe arborele III, momentul de torsiune este
(4.12c)
În calculul momentului de torsiune, trebuie acordată atenţie în ce unitate de măsură se
doreşte exprimarea acestei mărimi. Relaţiile de mai sus sunt valabile în unităţi de măsură ale
sistemului internaţional de măsuri, adică momentul rezultă în dacă puterea este introdusă în

Proiectarea reductoarelor cu angrenaje cilindrice
35
W şi viteza unghiulară este în s-1
. Calculele în ingineria mecanică se fac, pentru momente de
torsiune, în . Deci, dacă introduceţi puterea în kW, viteza unghiulară în s-1, relaţia pentru a
obţine momentul în este:
[ ] (4.13a)
[ ] (4.13b)
[ ] (4.13c)
Viteza unghiulară a fiecărui arbore este:
[ ] pentru arborele I (4.14a)
[ ] pentru arborele II (4.14b)
[ ] pentru arborele III (4.14c)
4.4. Alegerea materialelor pentru roțile dințate
4.4.1. Aliajelor feroase recomandate pentru roți dințate
Familiile de aliajele feroase, recomandate pentru roți dințate și pentru care sunt date
informaţii în ISO 6336-5:2016, şi abrevierile lor, sunt listate în Tabelul 4.3. Valorile tensiunilor
admisibile utilizate în calcule sunt valabile pentru o probabilitate de deteriorare dată; de 1%. Acest
risc de deteriorare se reduce odată cu creşterea coeficientului de siguranţă. Pentru alte tipuri de
materiale se va consulta literatură suplimentară ????, ????.
Tabelul 4.3. Materiale [ISO 6336-5 2016]
Material Tip Abreviere
Oţeluri carbon cu conţinut mic de carbon,
normalizate / oţeluri turnate normalizate
oţeluri carbon cu conţinut redus de carbon,
forjate şi normalizate
St
oţeluri turnate St (turnat)
Fonte fonte maleabile (structură perlitică) GTS (perl.)
fonte nodulare turnate (structură perlitică,
bainitică, feritică)
GGG (perl., bai.,
ferr.)
fontă cenuşie GG
Oţeluri forjate, durificate în miez oţeluri carbon, oţeluri aliate V
Oţeluri forjate, durificate în miez oţeluri carbon, oţeluri aliate V (turnat)
Oţeluri forjate, cementate Eh
Oţeluri forjate sau turnate, durificate
superficial cu flacără sau prin inducţie
IF
Oţeluri forjate, nitrurate / de nitrurare, oţeluri
nitrurate, durificate în miez
oţeluri de nitrurare NT(nitr.)
oţeluri durificate în miez NV (nitro.)
Oţeluri forjate, nitrocementate oţeluri durificate în miez NV(nitrocar.)
Din literatura de specialitate [??], [??], s-au selectat materiale recomandate pentru roți dințate.
În Anexa A.4.1 sunt date mărci de oțel recomandate pentru roți dințate. Un material ieftin pentru

Capitolul 4
36
roți dințate duce la obținerea unor distanțe între axe mari, deci arbori cu distanțe între reazeme mai
mari, rulmenți mai mari, carcase mai voluminoase. Se recomandă oțelurile tratate termic sau
termochimic pentru roți dințate pentru că, deși acestea sunt scumpe, celelalte componente ale
reductorului vor fi mai reduse ca volum și masă, deci ansamblul reductorului va fi mai ieftin decât
în cazul folosirii unor materiale slabe pentru roțile dințate.
După ce s-a ales materialul roților, în proiect se trece
- marca, standardul sau norma de producător,
- compoziția chimică,
- tratamentul termic,
- proprietăți mecanice (pentru calculul roților dințate conform ISO 6336, este nevoie de limita
de rupere și de duritatea HBW sau HV, în cazul în care se proiectează o roată tip pinion, se scriu și
valorile rezistențelor la ososeală , , - valori necesare pentru calculul arborilor).
În Anexa A.4.2 Materiale este dat un tabel pentru echivalarea durităților, deoarece pe desene
de execuție sau în documentatția tehnică duritatea poate fi dată în unități HRC (Rockwell C).
4.4.2. Limite admisibile ale materialului pentru roți dințate
4.4.2.1. Limita admisă pentru solicitarea de contact
Valorile pentru tensiunea nominală la soliciatre de contact , şi pentru tensiunea
nominală de încovoiere la baza dintelui pot fi calculate din următoarea ecuaţie:
} (4.15)
în care x este duritatea superficială HBW sau HV, A, B sunt constante (vezi Tabelul 4.4).
Tensiunea admisibilă la contact a angrenajului real, diferă de limita determinată
experimental pentru acelaşi cuplu de materiale, pe epruvete simple. Ea este corectată cu factori de
influenţă:
(4.16)
este tensiunea admisibilă de contact, care ţine seama de influenţa materialului,
tratamentului termic şi a calităţii suprafeţei pentru roţi standard de referinţă de testare. Dacă roţile se
execută din materiale diferite, se introduce în calcul valoarea pentru materialul mai slab calitativ.
este un coeficient de siguranţă la solicitarea de contact: pentru roţi din oţel tratat
(recomndări pentru alegerea valorii coeficientului de siguranță sunt date în Anexa A.4.2, Tabelul
A.4.16.).
este factorul durabilităţii pentru tensiunea de contact a roților de testare, care ţine seama
că, pentru un număr de cicluri de încărcare limitat, capacitatea de încărcare este mai mare. Dacă
numărul de cicluri de solicitare N este situat în zona de oboseală a materialului, (vezi
curba Wöhler) [????, ????].
factorul de viteză arată influenţa vitezei periferice a roţii calculate sau verificate (care
diferă de cea impusă de determinarea experimentală a lui ).

Proiectarea reductoarelor cu angrenaje cilindrice
37
este factorul lubrifierii care ţine seama de influenţa vâscozităţii lubrifiantului, la
temperatura de regim și poate fi citit din Figura A.4.3, în funcţie de vâscozitatea nominală a
lubrifiantului la 40°C (sau 50°C) şi valoarea lui . Factorul lubrifierii pentru uleiuri
minerale (cu sau fără aditivi de extremă presiune, EP) poate fi determinat ca o funcţie de
vâscozitatea nominală la 40°C (sau 50°C) şi de valoarea lui a materialului mai moale pentru
roţile din angrenare. Valorile pentru se aplică pentru indicele de vâscozitate IV=95 şi vâscozităţi
până la 500 cSt la 40°C; pentru vâscozităţi mai mari, se foloseşte valoarea obţinută la 500 cSt la
40°C sau 300 cSt la 50°C pentru a determina valoarea lui .
este factorul de rugozitate care ţine seama de influenţa rugozităţii suprafeţei flancurilor
active; pentru danturi bine rectificate , dar există tipuri de dantură care nu se pot rectifica
(danturi conice cu dinţi curbi). În acest caz, .
este un factor ce depinde de duritatea flancurilor [????, ????]. La proiectare, pentru
ambele danturi tratate, se poate considera .
este un factor de mărime a dintelui și ţine seama că, statistic, tensiunea la care apare
deteriorarea prin oboseală descrește cu creşterea dimensiunii (un număr mai mare de puncte slabe în
structură), ca o consecinţă a influenţei defectelor de sub suprafaţă ale gradienţilor mai mici de
tensiune care apar şi a influenţei dimensiunii asupra calităţii materialului (efect al forjării, variaţiilor
de structură etc.). În SR ISO 6336, se recomandă și în alte ghiduri de proiectare se
recomandă pentru module , .

Capitolul 4
38
Tabelul 4.4. Calculul pentru şi
Nr. Material Ten-
siune
Tip Abreviere Fig. Calitatea A B Duritate
minimă maximă
1 oţel cu
conţinut
redus de
carbon, tras
şi normalizat
/ oţeluri
turnate
contact oţel cu conţinut redus de
carbon, tras şi normalizat
St 1 a) ML/MQ
ME
1,000
1,520
190
250
HBW 110
110
210
210 2
3 oţeluri turnate St (cast) 1 b) ML/MQ
ME
0,986
1,143
131
237
HBW 140
140
210
210 4
5 înco-
voiere
oţel cu conţinut redus de
carbon, tras şi normalizat
St 2 a) ML/MQ
ME
0,455
0,386
69
147
HBW 110
110
210
210 6
7 oţeluri turnate St (cast) 2 b) ML/MQ
ME
0,313
0,254
62
137
HBW 140
140
210
210 8
21 Oţeluri trase,
durificate în
miez
contact oţeluri carbon V (turnat) 7 ML/MQ
ME
0,963 283 HV 135 210
22 0,925 360 135 210
23 0,838 432 135 210
24 oţeluri aliate V (turnat) 7 ML/MQ
ME
1,131 188 HV 200 360
25 1,131 373 200 360
26 2,213 260 200 390
27 încovoie
re
oţeluri carbon V (turnat) 8 ML/MQ
ME
0,250 108 HV 115 215
28 0,240 163 115 215
29 0,283 202 115 215
30 oţeluri aliate V (turnat) 8 ML/MQ
ME
0,423 104 HV 200 360
31 0,425 187 200 360
32 0,358 231 200 390
33 oţeluri
turnate
durificate în
miez
contact oţeluri carbon V (turnat) 7 ML/MQ
ME
0,831 300 HV 130 215
34 0,951 345 130 215
35
oţeluri aliate
V (turnat) 7 ML/MQ
ME
1,276 298 HV 200 360
36 1,350 358 200 360
37 încovoie
re
oţeluri carbon V (turnat) 8 ML/MQ
ME
0,224 117 HV 130 215
38 0,286 167 130 215
39
oţeluri aliate
V (turnat) 8 ML/MQ
ME
0,364 161 HV 200 360
40 0,356 186 200 360
41 oţeluri trase
şi durificate
în cutie
contact Eh 9 ML 0,000 1300 HV 600 800
42 MQ 0,000 1500 660 800
43 ME 0,000 1650 660 800
44 înco-
voiere
duritate în miez:
≥25HRC,
mai mică
≥25HRC,
mai mare ≥30HRC,
Eh 10 ML 0,000 312 HV 660 800
45 MQ 0,000 425 660 800
46 0,000 461 660 800
47 0,000 500 660 800
48 ME 0,000 525 660 800
49 oţeluri trase
şi turnate,
durificate cu
flacără sau
prin inducţie
contact IF 11 ML 0,740 602 HV 485 615
50 MQ 0,541 882 500 615
51 ME 0,505 1013 500 615
52 înco-
voiere
IF 12 ML 0,305 76 HV 485 615
53 MQ 0,138 290 500 570
54 0,000 369 570 615
55 ME 0,271 237 500 615
56 Oţeluri trase
nitrurate /
oţeluri de
nitrurared /
oţeluri
nitrurate
durificate în
miez
oţeluri pentru nitrurare (a) NV
(nitr.)
13 a) ML 0,000 1125 HV 650 900
57 MQ 0,000 1250 650 900
58 ME 0,000 1450 650 900
59 oţeluri durificabile în
miez (b)
NV (nitr.) 13 b) ML 0,000 788 HV 450 650
60 MQ 0,000 998 450 650
61 ME 0,000 1217 450 650
62 înco-
voiere
oţeluri pentru nitrurare (a) NV (nitr.) 14 a) ML 0,000 240 HV 650 900
63 MQ 0,000 420 650 900
64 ME 0,000 468 650 900
65 oţeluri durificabile în
miez (b)
NV (nitr.) 14 b) ML 0,000 258 HV 450 650
66 MQ 0,000 363 450 650
67 ME 0,000 432 450 650
68 oţeluri trase,
nitro-
cementate
contact oţeluri durificabile în
miez
NV
(nitrocar.)
15 ML
MQ/ME
0,000 650 HV 300 650
69 1,167 425 300 450
70 0,000 950 450 650
71 înco-
voiere
oţeluri durificabile în
miez
NV
(nitrocar.)
16 ML
MQ/ME
0,000 224 HV 300 650
72 0,653 94 300 450
73 0,000 388 450 650
a în concordanţă cu ISO 4948-2; b în concordanţă cu ISO 683-1; c în concordanţă cu ISO 683-11.
d în concordanţă cu ISO 683-10; e în concordanţă cu ISO 683-1, ISO 683-10 sau ISO 683-11.
ML - cerințe minime de calitate, MQ - cerințe de calitate mai multe și mai severe, la costuri moderate , ME - cerințe mai exigente de calitate (pentru grupe de mărci de
oțeluri cerințele de calitate pentru fiecare nivel de calitate sunt date în ISO 6336-5

Proiectarea reductoarelor cu angrenaje cilindrice
39
Pentru o roată, numărul de cicluri de solicitare a unui dinte este:
(4.17)
n este turaţia (rotaţii pe minut), – durabilitatea angrenajului (ore), este numărul de cicluri
pentru un dinte la o rotaţie completă a roţii. pentru două roţi în contact, (rar mai
mult) pentru roţi intermediare ce angrenează simultan cu două sau trei roţi. Deci, pentru un reductor
cu două trepte, numărul de cicluri solicitare pe dintele unei roți va fi
Tabelul 4.5.
Roata N ( ) Observație
1
2 Roțile sunt montate pe același arbore
3
4
Dacă se cunoaște materialul roții și , se poate alege din graficul din Anexa A.4.1 sau
se calculează cu relațiile propuse în aceiași anexă.
Pelicula de lubrifiant dintre flancurile dinţilor influenţează durabilitatea suprafeţei.
Următorii factori au o influenţă semnificativă:
vâscozitatea lubrifiantului în angrenare;
suma vitezelor instantanee ale suprafeţelor dinţilor;
sarcina;
raza relativă de curbură;
relaţia între valorile combinate ale rugozităţii suprafeţei flancurilor dinţilor, şi grosimea
minimă a peliculei de lubrifiant.
După EHD (teoria elastohidrodinamică care se preocupă de caracteristicile peliculelor
lubrifiante în zonele de contact cu alunecare/rostogolire) [????, ????, ????], primii patru factori
influenţează presiunile şi dimensiunile peliculei. Natura lubrifiantului (ulei mineral, ulei sintetic),
originea lui, vârsta etc., au şi ele un efect asupra durabilităţii suprafeţei.
Tensiunile la care apare deteriorarea prin oboseală descresc cu creşterea dimensiunii (un
număr mai mare de puncte slabe în structură), ca o consecinţă a influenţei defectelor de sub
suprafaţă, ale gradienţilor mai mici de tensiune care apar (analiza teoretică a tensiunilor) şi a
influenţei dimensiunii asupra calităţii materialului (efect al forjării, variaţiilor de structură etc.).
Parametrii importanţi de influenţă sunt:
calitatea materialului (încărcătura furnalului, puritatea, forjarea),
tratamentul termic, adâncimea de durificare, distribuţia durităţii,
raza de curbură a flancului, şi
modulul, în cazul suprafeţelor durificate, adâncimea stratului durificat raportat la mărimea
dintelui (efectul de susţinere al miezului).
La proiectare, mulți dintre parametrii enumerați mai sus se consideră egali cu 1.
În concluzie, următorii parametri se pot considera 1 în faza inițială de proiectare

Capitolul 4
40
,
,
.
iar relația pentru tensiunea admisibilă la contact a angrenajului real se reduce la
(4.18)
Valoarea acestor factori se determină în faza de verificare a angrenajului, când se cunosc
materialele pentru roți, geometria angrenajului și s-a ales lubrifiantul, caracterizat prin valoarea
vâscozității acestuia la o anumită temperatură (de obicel la 40 °C și la temperatura de lucru, de
obicei, 90 °C).
4.4.2.2. Limita admisă pentru solicitarea de încovoiere la baza dintelui
Limita admisibilă la solicitarea de încovoiere poate fi exprimată în funcţie de o serie de
factori de influenţă:
(4.19)
este valoarea rezistenţei nominale (la încovoiere) din angrenajele de referinţă (vezi ISO
6336-5), care este valoarea tensiunilor la încovoiere, relevantă faţă de influenţele materialului,
tratamentului termic şi rugozităţii suprafeţei racordărilor dinţilor roţilor testate;
este coeficientul de siguranţă minim cerut pentru tensiunea de încovoiere la baza
dintelui; la roiectare se recomandă ; alte valori, în funcție de aplicație sunt date în
Tabelul .A.4.16. din Anexa A.4.2.
este factorul de corecţie a tensiunii de concentrare a tensiunii. Valorile limita pentru
tensiunea la baza dintelui, pentru materiale, după ISO 6336-6 s-au dedus din rezultatele testelor pe
roți standard de referinţă pentru care . Această valoare se folosește și la proiectare, la
calculul inițial.
este factorul de durabilitate pentru tensiunea la baza dintelui, relevant faţă de
dimensiunile roţilor testate care ia în considerare capacitatea mai mare de încărcare pentru un număr
limitat de cicluri; ţine seama de cea mai mare tensiune la baza dintelui, care poate fi tolerată pentru
o durabilitate limita (număr de cicluri de solicitare), comparativ cu tensiunea admisibilă determinată
pentru cicluri (rotații) cu o fiabilitate de 99%. Factorii de influenţă asupra lui sunt:
materialul şi tratamentul termic (vezi ISO 6336-5), numărul de cicluri de încărcare (durata de
funcţionare), , criteriul de rupere, caracterul lin cerut în funcţionare, puritatea materialului roţii,
ductilitatea şi rezilienţa şi tensiunile reziduale. poate fi citit din Figura A.4.7 pentru tensiunea
statică şi tensiunea de referinţă la oboseală, ca o funcţie de material şi de tratament termic sau se
poate calcula cu relația din Tabelul A.4.4.
Numărul de cicluri de încărcare, , este definit ca numărul contactelor de angrenare sub
sarcină, a dintelui roţii analizate. Având în vedere că este vorba de aceiași pereche de roți dințate,
este logic ca să fie același pentru în determinarea factorului și . Valorile admisibile ale
tensiunii sunt stabilite pentru cicluri pe dinte, cu o fiabilitate de 99%.
Proiectarea reductoarelor cu angrenaje cilindrice
41
este factorul relativ la sensibilitatea la crestătură, care este cotă parte din factorul la
sensibilitatea la crestătură a roţii avute în vedere împărţit la factorul roții standard de referinţă
pentru testare şi care permite să se ia în considerare influenţa sensibilităţii la crestătură a
materialului pentru roata proiectată. este factorul relativ la sensibilitatea la crestătură;
poate fi citit din Figura A.4.8. în funcţie de sau de şi de material. este parametrul
decupării pentru roţi standard de referinţă, testate).
este factorul relativ al suprafeţei care este parte din factorul rugozităţii pentru
racordările angrenajului avut în vedere împărţit prin factorul de racordare a piciorului dintelui
pentru roţile de referinţă testate (vezi subcap. 14) şi care permite să se ia în considerare influenţele
rugozităţii suprafeţei racordării dintelui; poate fi luat din Figura A.4.9 în funcţie de material
şi de rugozitatea vârf-vale pentru zona racordării de la piciorul dintelui, pentru roata dinţată
avută în vedere.
este un factor de dimensiune pentru rezistenţa la baza dintelui (vezi subcap. 15) care se
foloseşte pentru a lua în considerare influenţa dimensiunilor dintelui asupra rezistenţei la încovoiere
a dintelui. şi ia în considerare faptul că pentru solicitarea de încovoiere, rezistenţa aceluiaşi material
scade dacă dintele (sau modulul) creşte. Valorile pentru pot fi luate din Figura 15 în funcţie de
modul material şi tratament termic. poate fi calculat folosind ecuaţiile din Tabelul A.4.5, care
este în concordanţă cu curbele date în Figura A.4.10. Factorul dimensional pentru durabilitatea
limitată. se obţine cu ajutorul interpolării liniare între valorile pentru tensiune de referinţă la
oboseală şi statică.
4.5. Dimensionarea unui angrenaj cu dinţi înclinaţi
4.5.1. Introducere
Calculul de rezistenţă al angrenajelor cu dinţi înclinaţi este asemănător cu cel al angrenajelor
cu dinţi drepţi, ţinându-se seama de unele particularităţi:
- dinţii intră şi ies din angrenare progresiv, angrenarea unipară este exclusă;
- calculul de rezistenţă se face într-un plan normal pe dinte deoarece în acest plan dintele are
dimensiuni minime iar forţa normală acţionează tot în plan normal;
- pentru a se utiliza relaţia lui Hertz ca la roţi dinţate cu dinţi drepţi, se defineşte un angrenaj
echivalent cu dinţi drepţi (caracterizat prin numărul de dinți și ), care are profilul dinţilor
identic cu cel din planul normal al danturii înclinate iar solicitarea de contact este aceeaşi cu
solicitarea din dinţii reali.
Factorii , , , și depind de forţa nominală tangenţială. Ei sunt într-o
oarecare măsură interdependenţi şi, deci, trebuie calculaţi succesiv, după cum urmează:
a) cu forţa ,
b) și cu forţa ,
c) și cu forţa .
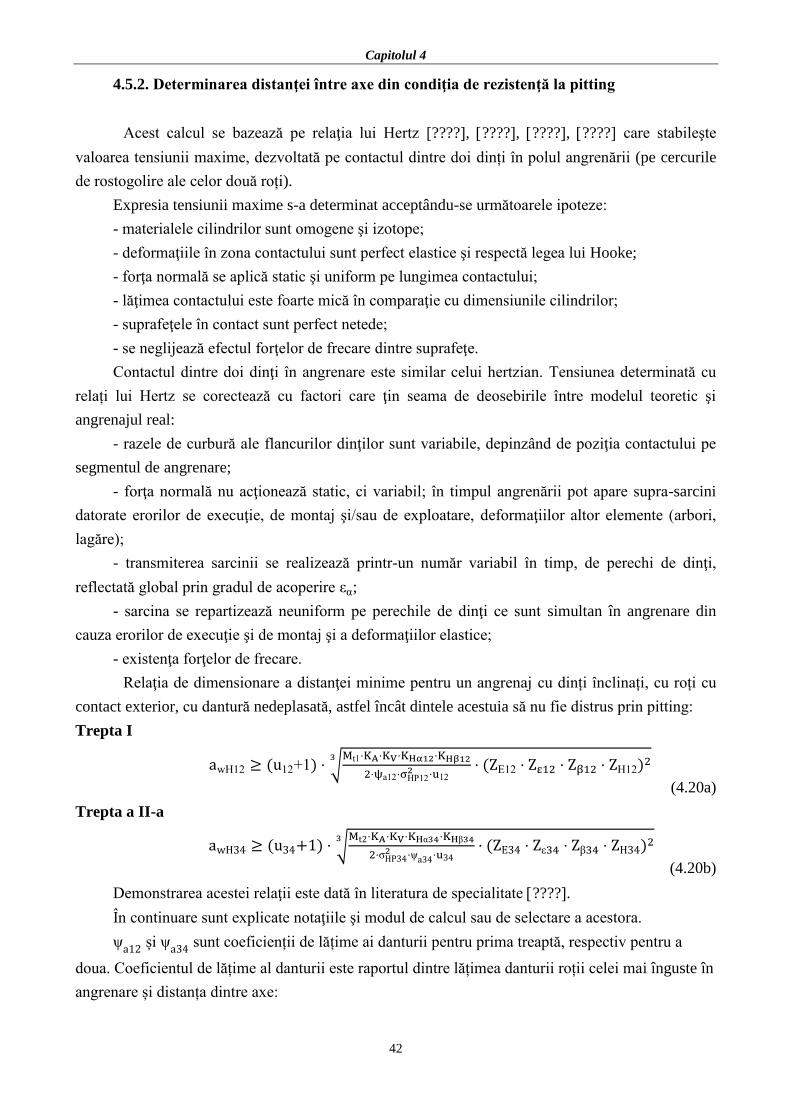
Capitolul 4
42
4.5.2. Determinarea distanţei între axe din condiţia de rezistenţă la pitting
Acest calcul se bazează pe relaţia lui Hertz [????, ????, ????, ????] care stabileşte
valoarea tensiunii maxime, dezvoltată pe contactul dintre doi dinți în polul angrenării (pe cercurile
de rostogolire ale celor două roți).
Expresia tensiunii maxime s-a determinat acceptându-se următoarele ipoteze:
- materialele cilindrilor sunt omogene şi izotope;
- deformaţiile în zona contactului sunt perfect elastice şi respectă legea lui Hooke;
- forţa normală se aplică static şi uniform pe lungimea contactului;
- lăţimea contactului este foarte mică în comparaţie cu dimensiunile cilindrilor;
- suprafeţele în contact sunt perfect netede;
- se neglijează efectul forţelor de frecare dintre suprafeţe.
Contactul dintre doi dinţi în angrenare este similar celui hertzian. Tensiunea determinată cu
relați lui Hertz se corectează cu factori care ţin seama de deosebirile între modelul teoretic şi
angrenajul real:
- razele de curbură ale flancurilor dinţilor sunt variabile, depinzând de poziţia contactului pe
segmentul de angrenare;
- forţa normală nu acţionează static, ci variabil; în timpul angrenării pot apare supra-sarcini
datorate erorilor de execuţie, de montaj şi/sau de exploatare, deformaţiilor altor elemente (arbori,
lagăre);
- transmiterea sarcinii se realizează printr-un număr variabil în timp, de perechi de dinţi,
reflectată global prin gradul de acoperire ;
- sarcina se repartizează neuniform pe perechile de dinţi ce sunt simultan în angrenare din
cauza erorilor de execuţie şi de montaj şi a deformaţiilor elastice;
- existenţa forţelor de frecare.
Relaţia de dimensionare a distanţei minime pentru un angrenaj cu dinți înclinați, cu roți cu
contact exterior, cu dantură nedeplasată, astfel încât dintele acestuia să nu fie distrus prin pitting:
Trepta I
wH12 ( 12 1) √ t1
a12 HP12 12
( E12 H12)
(4.20a)
Trepta a II-a
( ) √
( )
(4.20b)
Demonstrarea acestei relaţii este dată în literatura de specialitate ????.
În continuare sunt explicate notaţiile şi modul de calcul sau de selectare a acestora.
și
sunt coeficienții de lățime ai danturii pentru prima treaptă, respectiv pentru a
doua. Coeficientul de lățime al danturii este raportul dintre lățimea danturii roții celei mai înguste în
angrenare și distanța dintre axe:

Proiectarea reductoarelor cu angrenaje cilindrice
43
(4.21)
Se recomandă
și
. În general, se recomandă
. Alte
recomandări pentru sunt date în Tabelul A.4.?, în funcție de viteza periferică a roților din treapta
respectivă. Pentru angrenaje îmbunătățite se aleg valori spre limita superioară a intervalului
recomandat, iar pentru angrenaje tratate termo-chimic se aleg valori spre limita inferioară a
intervalului. Pentru roțile dințate plasate asimetric între reazeme, se recomandă valori spre limita
inferioar, iar pentru cele amplasate simetric se pot adopta valori spre limita superioară a
intervalului.
și sunt rapoarte de transmisie pe treapta 1, respectiv a doua.
și momentul de torsiune la intrare în angrenaj pentru treapta I, respectiv momentul de
torsiune la intrare în angrenajul al II-a.
Factorul de exploatare, , depinde de suprasarcinile dinamice ce apar în exploatarea
angrenajului din cauza perechii maşină-motoare şi mașină de lucru. Corectează forţa tangenţială
nominală . Pentru aplicaţii cum ar fi angrenajele navale şi altele supuse la momente de torsiune cu
maxime ciclice (vibraţii torsionale) şi proiectate pentru o durată de viaţă nelimitată, factorul de
exploatare poate fi definit ca raport între momentele ciclice de vârf şi momentul nominal de
torsiune considerat. Se recomandă ca producătorul/proiectantul şi beneficiarul să cadă de acord
asupra valorii factorului de exploatare. Factorul de exploatare se defineşte ca raportul între
momentul de torsiune maxim şi momentul de torsiune nominal :
(4.22)
este un factor dinamic dependent de sarcinile dinamice suplimentare datorate erorilor de
execuţie şi montaj şi deformaţiilor elastice: depinde deci de clasa de precizie a angrenajului, în
funcţie de viteză şi încărcare. Angrenajele cu clasă mare de precizie necesită o valoare mai mică
comparativ cu cele de precizie joasă. În general, se admite că sarcinile dinamice interne pe dantură
sunt influenţate de proiectare şi de fabricare:
( )
(4.23)
în care ( ) momentul de torsiune real la viteza de funcționare iar este momentul de
torsiune din proiectare (pentru un agrenaj perfect).
La proiectare, pentru că nu se cunosc valorile factorilor care îl influențează, se consideră
.
O distribuție neuniformă poate rezulta din una sau mai multe din cauzele următoare:
erori de prelucrare a dintelui roţii conducătoare, profil şi joc;
nealinierea axelor de rotaţie ale elementelor angrenajului;
deformările elastice ale elementelor roţii – arbori, lagăre, carcase şi fundaţii care suportă
angrenajul;
jocurile în lagăre;

Capitolul 4
44
contactul hertzian şi deformaţiile de încovoiere la suprafaţa dintelui inclusiv rigiditatea
variabilă a dintelui;
deformaţii termice induse de temperaturile de funcţionare (importante în special pentru
roţile cu lăţimi mari);
deformaţii din cauza forţelor centrifuge cauzate de vitezele de funcţionare;
modificările elicei inclusiv bombarea şi flancarea;
efecte ale rodajului;
sarcina totală tangenţială pe dinte (inclusiv creşteri introduse în calcul prin factoru l şi
factorul dinamic );
sarcini adiţionale pe arbore (de exemplu, de la transmisii cu curele sau cu lanţuri).
este un factor de repartizare a sarcinii pe lăţimea danturii (fig. 4.??); c) este teoretic
constantă pe lungimea dintelui; în realitate, distribuţia este neuniformă ca în d), solicitarea fiind
nefavorabil repartizată, doar pe o lungime mică a dintelui, dacă nu se respectă paralelismul între
axe; în e) este dat un exemplu de repartiţie a presiunii hertziene pentru dinţi nemodificaţi şi în f)
este o repartiţie mai avantajoasă pentru dinţi bombaţi. Expresia factorului este:
(4.24)
Fig. 4.1. Distribuția sarcinii pe lungimea dintelui
Pentru determinarea lui se citește Anexa 4, Factorii de repartizare a sarcinii pe lățime
danturii
este factorul de reparaţie a tensiunii hertziene pe flancul dintelui, în plan normal;
evidenţiază repartizarea neuniformă a sarcinii pe perechile de dinţi aflate simultan în angrenare. La
proiectare, când încă nu sunt determinate dimensiunile angrenajului, se adoptă .
și sunt factori de material pentru treapta I, respectiv a II-a.
și sunt factori ce iau în considerare mărirea lungimii liniilor de contact datorită
gradului de acoperire total al angrenajului cu dinţi înclinaţi. La proiectare nu se cunoaşte gradul de
acoperire şi se adoptă pentru dinţi drepţi şi pentru dinţi înclinaţi.
și sunt factorii unghiului de înclinare al dintelui pentru treapta I, respectiv a II-a.
√
(4.25a)
√
(4.25b)
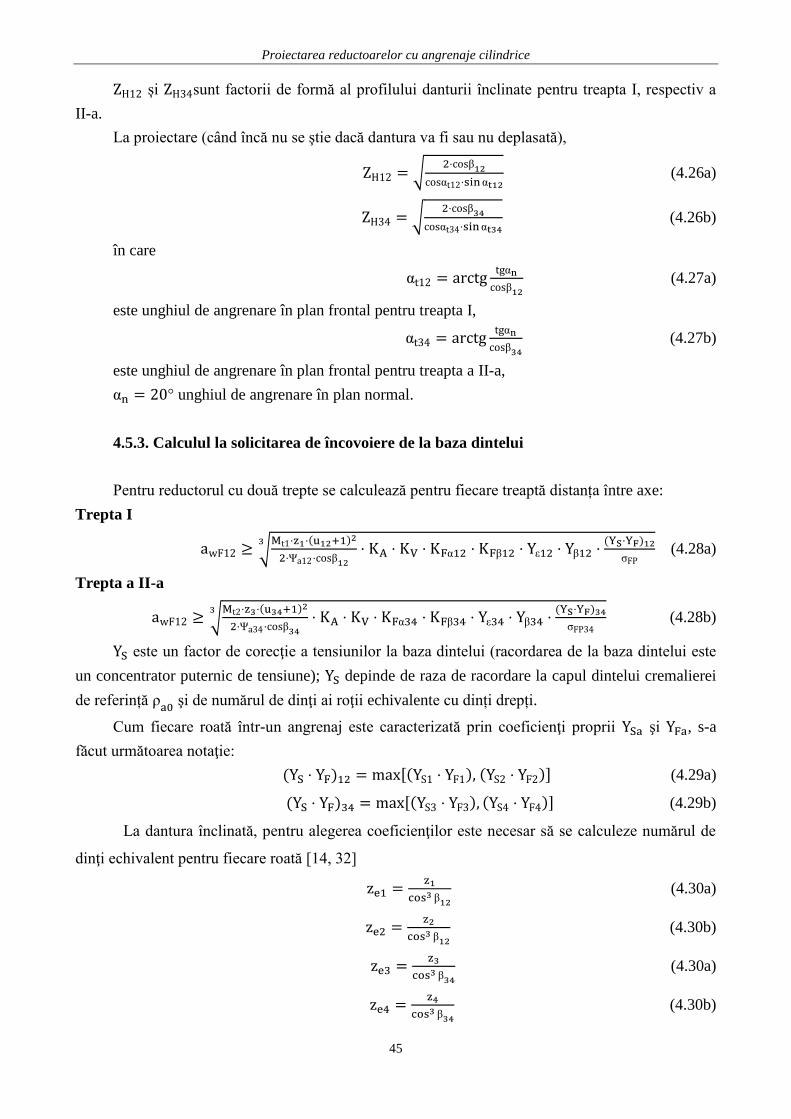
Proiectarea reductoarelor cu angrenaje cilindrice
45
și sunt factorii de formă al profilului danturii înclinate pentru treapta I, respectiv a
II-a.
La proiectare (când încă nu se ştie dacă dantura va fi sau nu deplasată),
√
(4.26a)
√
(4.26b)
în care
(4.27a)
este unghiul de angrenare în plan frontal pentru treapta I,
(4.27b)
este unghiul de angrenare în plan frontal pentru treapta a II-a,
° unghiul de angrenare în plan normal.
4.5.3. Calculul la solicitarea de încovoiere de la baza dintelui
Pentru reductorul cu două trepte se calculează pentru fiecare treaptă distanța între axe:
Trepta I
√ ( )
( )
(4.28a)
Trepta a II-a
√ ( )
( )
(4.28b)
este un factor de corecţie a tensiunilor la baza dintelui (racordarea de la baza dintelui este
un concentrator puternic de tensiune); depinde de raza de racordare la capul dintelui cremalierei
de referință
şi de numărul de dinţi ai roţii echivalente cu dinți drepți.
Cum fiecare roată într-un angrenaj este caracterizată prin coeficienţi proprii şi , s-a
făcut următoarea notaţie:
( ) [( ) ( )] (4.29a)
( ) [( ) ( )] (4.29b)
La dantura înclinată, pentru alegerea coeficienţilor este necesar să se calculeze numărul de
dinţi echivalent pentru fiecare roată [14, 32]
(4.30a)
(4.30b)
(4.30a)
(4.30b)

Capitolul 4
46
este coeficientul de formă a dintelui, incluzând caracteristici geometrice ale dintelui unei
roţi date (z, m): se alege din diagrama din Fig. A.4.8, pentru fiecare roată.
Vă recomandăm completarea Tabelului A.4.6, după calcularea numerelor de dinți ai roților
echivalente cu dinți drepți , , și .
Tabelul 4.6. Roata
( ) ( ) ( )
1 -
2 -
( ) ( ) ( )
3 -
4 -
şi sunt identici ca valoare cu cei utilizaţi la calculul de contact.
Factorii de repartiţie a sarcinii primesc indicele F şi reflectă influenţa a distribuţiei
neuniforme a sarcinii pe lungimea dintelui ( ) şi pe înălţimea lui ( ).
Influenţa gradului de acoperire este introdus prin factorul gradului de acoperire .
Recomandări privind alegerea sau calcularea lor sunt date în îndrumare de proiectare ????, ????.
Pentru reductorul cu două trepte din Figura 4.2a), se calculează
( )
( )
valorile și
putând fi diferite, în această fază de calcul. Până în acest punct, calculele sunt
aplicabile ambelor variante de reductoare prezentate în Fig. 4.2.
a) reductor cu trepte în cascadă b) reductor cu distanța între axe egale
Fig. 4.2. Soluții constructive pentru un reductor cu două trepte
Dacă soluția constructivă este cea din Figura 4.2b, se alege
( ) (4.31)
De cele mai multe ori se alege un număr întreg de milimetri pentru o distanță între axe și
această valoare se folosește pentru calculul modulului normal. Distanța între axe nu mai este
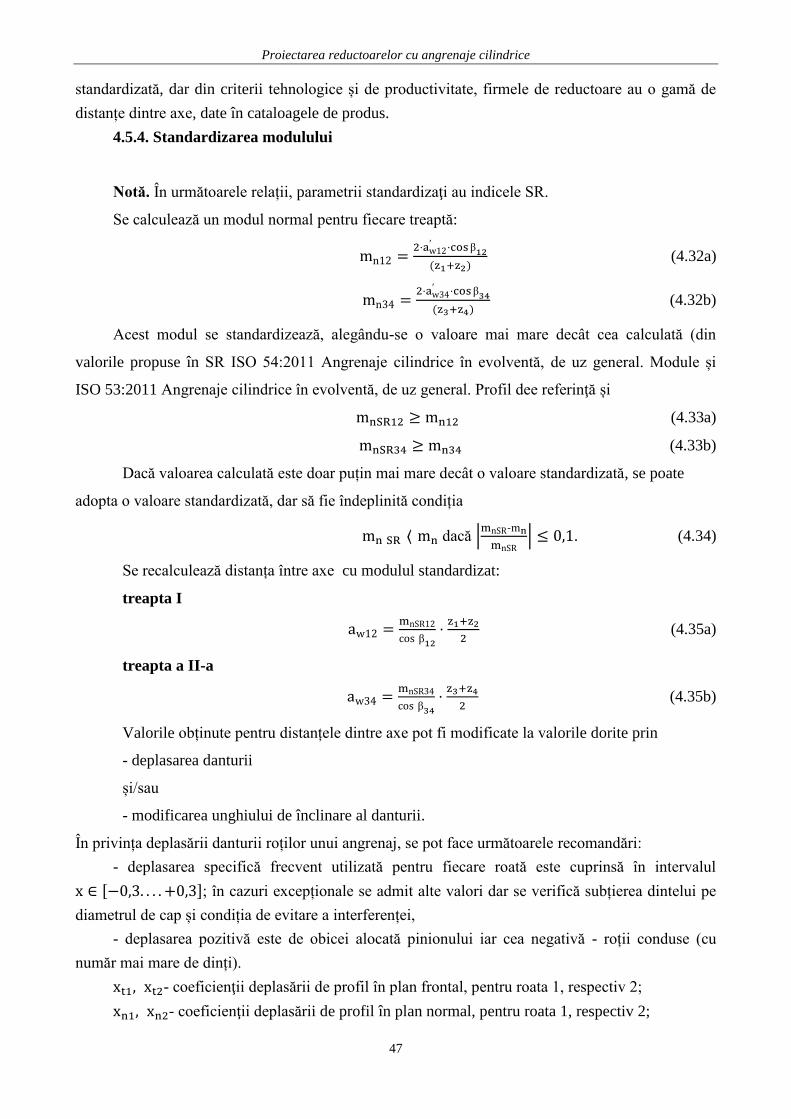
Proiectarea reductoarelor cu angrenaje cilindrice
47
standardizată, dar din criterii tehnologice și de productivitate, firmele de reductoare au o gamă de
distanțe dintre axe, date în cataloagele de produs.
4.5.4. Standardizarea modulului
Notă. În următoarele relații, parametrii standardizaţi au indicele SR.
Se calculează un modul normal pentru fiecare treaptă:
( ) (4.32a)
( ) (4.32b)
Acest modul se standardizează, alegându-se o valoare mai mare decât cea calculată (din
valorile propuse în SR ISO 54:2011 Angrenaje cilindrice în evolventă, de uz general. Module și
ISO 53:2011 Angrenaje cilindrice în evolventă, de uz general. Profil dee referinţă și
(4.33a)
(4.33b)
Dacă valoarea calculată este doar puțin mai mare decât o valoare standardizată, se poate
adopta o valoare standardizată, dar să fie îndeplinită condiția
dacă | -
| . (4.34)
Se recalculează distanța între axe cu modulul standardizat:
treapta I
(4.35a)
treapta a II-a
(4.35b)
Valorile obținute pentru distanțele dintre axe pot fi modificate la valorile dorite prin
- deplasarea danturii
și/sau
- modificarea unghiului de înclinare al danturii.
În privința deplasării danturii roților unui angrenaj, se pot face următoarele recomandări:
- deplasarea specifică frecvent utilizată pentru fiecare roată este cuprinsă în intervalul
[ ]; în cazuri excepționale se admit alte valori dar se verifică subțierea dintelui pe
diametrul de cap și condiția de evitare a interferenței,
- deplasarea pozitivă este de obicei alocată pinionului iar cea negativă - roții conduse (cu
număr mai mare de dinți).
- coeficienţii deplasării de profil în plan frontal, pentru roata 1, respectiv 2;
- coeficienţii deplasării de profil în plan normal, pentru roata 1, respectiv 2;

Capitolul 4
48
- suma coeficienţilor frontali de deplasare la un angrenaj cu dinţi înclinaţi.
- suma coeficienţilor normali de deplasare pentru un angrenaj cu dinţi
înclinaţi. Se recomandă în diagrame 10, 48, 52. Deplasarea x (în mm) a danturii cilindrice cu dinţi
înclinaţi, are aceeaşi mărime în secţiune normală şi în cea frontală; există egalităţile
(4.36)
şi
(4.37)
Deplasarea reală este aceeaşi, rezultă între coeficienţii de deplasare în plan normal şi frontal :
(4.38)
Pentru un angrenaj, suma deplasărilor specifice va fi:
(4.39)
în care
este distanța dintre axe care se va obține prin deplasarea danturii,
este distanța dintre axe, calculată cu modulul standardizat,
- deplasarea specifică pe roata 1 (poate fi pozitivă sau negativă),
- deplasarea specifică pe roata 2 (poate fi pozitivă sau negativă).
Ținând seama de recomandarea ca pe fiecare roată deplasarea specifică poate fi
[ ], rezultă
Distanța dintre axe poate fi modificată prin modificarea unghiului . Se calculează un alt
unghi, astfel
( )
(4.40)
în care
- distanța dintre axe dorită de proiectant.
Atenție! Unghiul trebuie să fie realizabil pe mașina de danturat. De obicei aceste mașini pot
realiza valori ale unghiului de înclinare a danturii care pot fi exprimate până la sfert de grad.
Recomandări
După stabilirea
( ), valoarea care se alege
este un număr întreg de milimetri, și poate fi mai mare cu câțiva milimetri decât cea calculată. De
exemplu, dacă ( ) , puteți alege
.
După alegerea modulului pentru fiecare treaptă (și, de obicei ), se
recalculează
( )
(4.41a)
și
( )
(4.41b)
Dacă unghiul de înclinare astfel recalculat

Proiectarea reductoarelor cu angrenaje cilindrice
49
- este prea mic (adică °), se poate modifica numărul de dinți pe roata 1 cu un dinte,
. Evident,
și se recalculează
, folosind ,
,
- este prea mare, se poate scădea un dinte de pe roata 1, , dar aici intervine
condiția ca
, fiind numărul minim de dinți ai roții cu dantura înclinată cu
unghiul ,
- dacă nu se găsește o soluție prin adăugarea sau scăderea unui dinte pe roata conducătoare,
diferența între distanțele dintre axe recalculate, se poate modifica modulul normal pe una din trepte,
numai în sensul creșterii acestuia, de exemplu de la 2,5 mm la 3 mm.
Fiecare temă de proiect se va analiza individual.
Pentru a calcula mai ușor geometria angrenajului, vă recomand completarea tabelului de mai
jos. Cu aceste valori, notate acum simplu, de exemplu ( ), se va face calculul geometriei
angrenajelor.
Tabelul 4.7. Valori finale necesare calculului geometriei angrenajelor
Treapta roata
conducătoare
roata
condusă
distanța
dintre axe
mm
modulul normal
mm
unghiul final de
înclinare al
danturii, °
I
II
4.6. Geometria roţilor cilindrice cu dinţi înclinaţi
În figura 4.3 sunt cotate elementele geometrice ale unui angrenaj cilindric cu dinţi înclinaţi.
Relaţiile sunt funcţie de tipul angrenajului (deplasat sau nu). Modulul este cel deja standardardizat.
Fig. 4.3. Elemente geometrice ale angrenajului cilindric cu dinți înclinați

Capitolul 4
50
Având în vedere prezentarea geometriei unui angrenaj cilindric cu dinți înclinați în ???,
??? și în standardele ????, vă recomnadăm pentru proiect completarea tabelului următor (tabelul
4.?).
În continuare, sunt date relațiile pentru geometria unei singure trepte, caracterizate prin
°, , , , și . În tabelul 4.?, notațiile sunt cele folosite în proiect pentru două trepte.
- în plan frontal,
- diametrul de divizare al roţii 1, respectiv 2.
(4.42a)
(4.42b)
- unghiul frontal de angrenare pe diametrul de divizare;
(4.43)
- diametrul de bază al roţii 1, respectiv 2.
(4.44a)
(4.44b)
Un angrenaj cu roţi deplasate se caracterizează prin:
- unghiul frontal de angrenare pe diametrul de rostogolire:
(4.45)
- diametrul de rostogolire al roţii 1, respectiv 2:
(4.46a)
(4.46b)
sau
(4.47a)
(4.47b)
- diametrul de bază al roţii 1, respectiv 2.
(4.48a)
(4.48b)
Dacă se notează a - distanţa dintre axe la un angrenaj nedeplasat, - distanţa dintre axe
pentru angrenaj deplasat, - diametrul de cap al roţii 1, respectiv 2 şi - diametrul de
picior al roţii 1, respectiv, al roții 2, rezultă:
dantură nedeplasată dantură deplasată
( )
( )
}
}
}
}
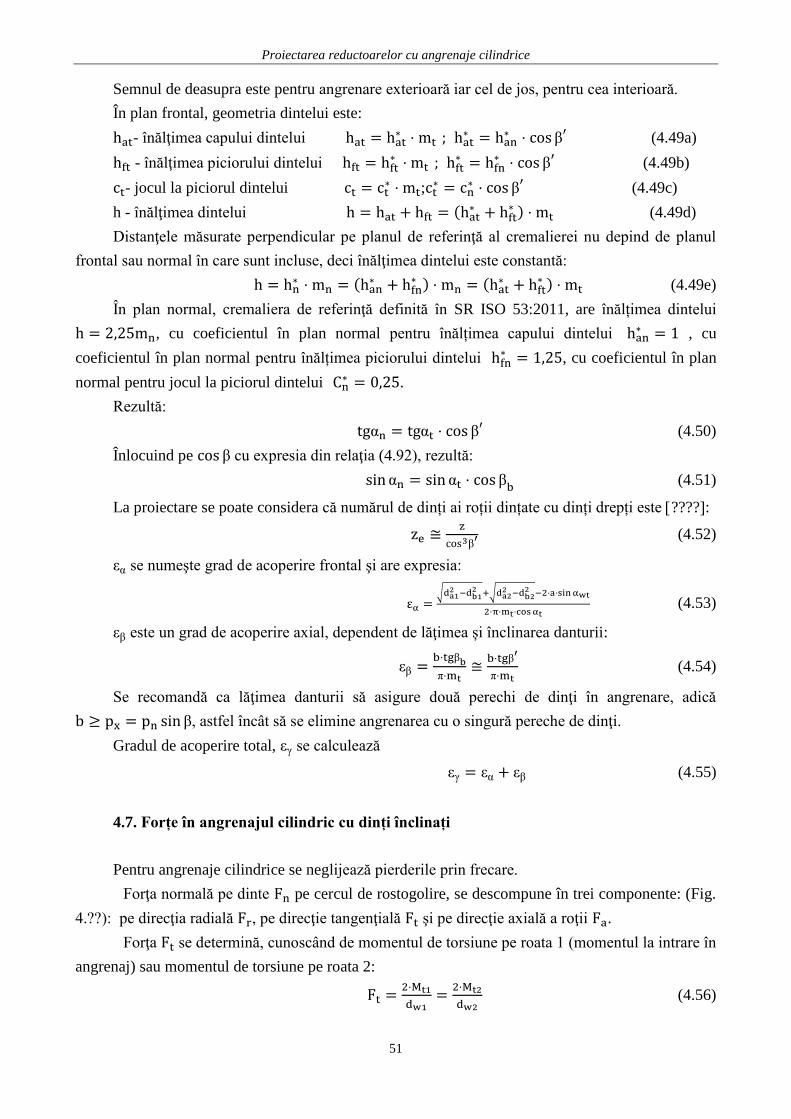
Proiectarea reductoarelor cu angrenaje cilindrice
51
Semnul de deasupra este pentru angrenare exterioară iar cel de jos, pentru cea interioară.
În plan frontal, geometria dintelui este:
- înălţimea capului dintelui
(4.49a)
- înălţimea piciorului dintelui
(4.49b)
- jocul la piciorul dintelui ;
(4.49c)
h - înălţimea dintelui (
) (4.49d)
Distanţele măsurate perpendicular pe planul de referinţă al cremalierei nu depind de planul
frontal sau normal în care sunt incluse, deci înălţimea dintelui este constantă:
(
) (
) (4.49e)
În plan normal, cremaliera de referinţă definită în SR ISO 53:2011, are înălțimea dintelui
, cu coeficientul în plan normal pentru înălțimea capului dintelui , cu
coeficientul în plan normal pentru înălțimea piciorului dintelui , cu coeficientul în plan
normal pentru jocul la piciorul dintelui .
Rezultă:
(4.50)
Înlocuind pe cu expresia din relaţia (4.92), rezultă:
(4.51)
La proiectare se poate considera că numărul de dinți ai roții dințate cu dinți drepți este ????:
(4.52)
se numeşte grad de acoperire frontal şi are expresia:
√
√
(4.53)
este un grad de acoperire axial, dependent de lăţimea și înclinarea danturii:
(4.54)
Se recomandă ca lăţimea danturii să asigure două perechi de dinţi în angrenare, adică
, astfel încât să se elimine angrenarea cu o singură pereche de dinţi.
Gradul de acoperire total, se calculează
(4.55)
4.7. Forțe în angrenajul cilindric cu dinți înclinați
Pentru angrenaje cilindrice se neglijează pierderile prin frecare.
Forţa normală pe dinte pe cercul de rostogolire, se descompune în trei componente: (Fig.
4.??): pe direcţia radială , pe direcţie tangenţială şi pe direcţie axială a roţii .
Forţa se determină, cunoscând de momentul de torsiune pe roata 1 (momentul la intrare în
angrenaj) sau momentul de torsiune pe roata 2:
(4.56)

Capitolul 4
52
Relaţia este valabilă dacă se neglijează frecările. Dacă nu se iau în considerare pierderile prin
frecare, se poate scrie, pentru un angrenaj cu două roţi cilindrice cu dinţi înclinaţi, că
,
şi
.
Fig. 4.4. Forțele pe dintele roții dințate
Iniţial, se descompune în planul normal pe dinte , fiind perpendiculară pe
dinte într-un plan tangent cilindrului de rostogolire. Rezultă:
(4.57)
se descompune pe direcţie tangenţială la cercul de rostogolire şi pe direcţia axială a roţii.
. În modul, componentele au următoarele expresii:
(4.58)
În această fază a proiectării angrenajelor nu este important sensul de rotație al roților, dar
pentru calculul arborilor, acesta contează și trebuie realizată o schiță a angrenajelor cu sensul de
rotație logic al fiecărei roți și cu direcțiile corecte ale forțelor în angrenaje.
Deci, pentru reductorul cu două trepte, propus spre proiectare, la care, în această fază, se
cunosc diametrele de rostogolire și , , și , unghiurile de înclinare ale danturii și
se calculează
forțele pentru prima treaptă de angrenare
(4.58a)
(4.59a)
(4.60a)
forțele pentru a doua treaptă de angrenare
(4.58b)

Proiectarea reductoarelor cu angrenaje cilindrice
53
(4.59b)
(4.60b)
Figura 4.? arată sensul forțelor care acționează pe roțile dințate în funcție de sensul de rotație
al arborelui conducător. Se recomandă ca rezultanta forțelor pe direcție axială să fie cât mai mică și,
de preferat sensul să nu fie spre motor. De aceea pe arborele II roțile dințate 2 și 3 vor avea dinții
înclinați în sens invers, iar forța axială pe arborele II va avea valoarea în modul | |.
a) b)
Fig. 4.5. Influența sensului de rotație al arborelui conducător asupra sensului forțelor din
angrenare
Pentru o mai bună gestionare a datelor din proiect, vă propunem un tabel pentru forțele din
angrenaje.
Tabelul 4.8. Tabel cu valorile forțelor din angrenaje, neglijând frecarea
Treapta [ ] [ ] [ ]
I
II
Atenție. În relațiile din tabel, momentele de torsiune se introduc în iar diametrele de
rostogolire în mm, rezultatul fiind în N.

Capitolul 4
54
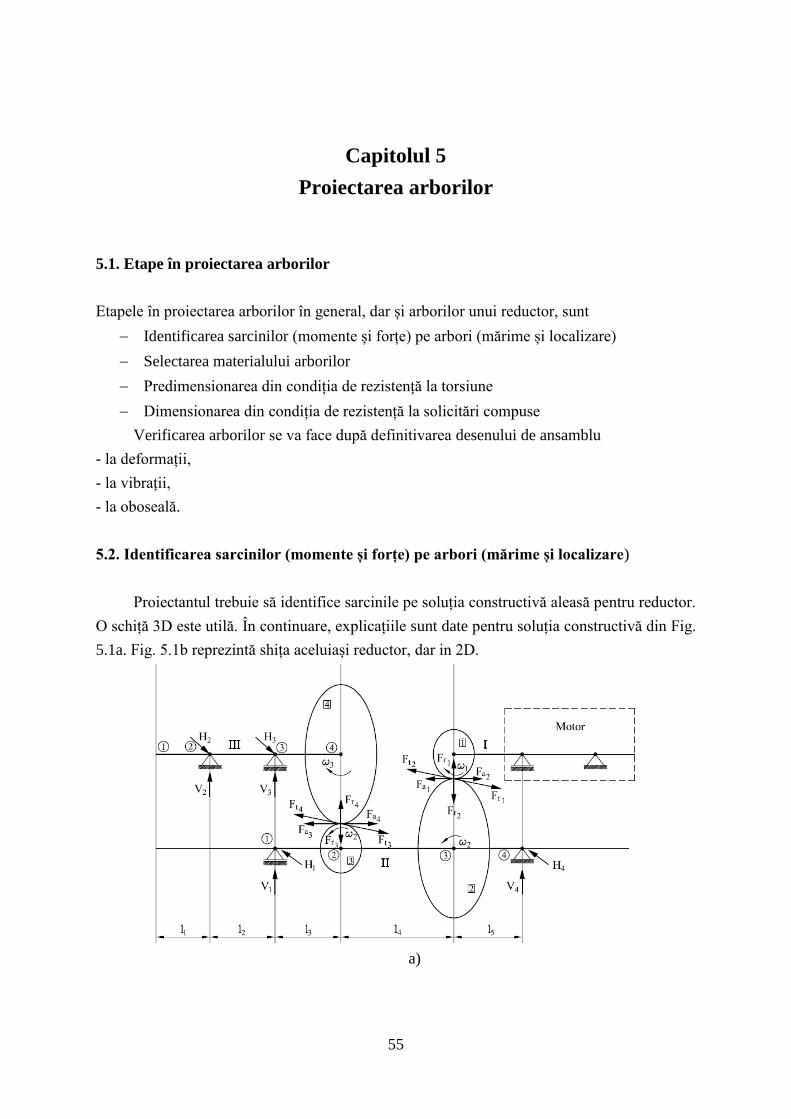
55
Capitolul 5
Proiectarea arborilor
5.1. Etape în proiectarea arborilor
Etapele în proiectarea arborilor în general, dar și arborilor unui reductor, sunt
Identificarea sarcinilor (momente și forțe) pe arbori (mărime și localizare)
Selectarea materialului arborilor
Predimensionarea din condiția de rezistență la torsiune
Dimensionarea din condiția de rezistență la solicitări compuse
Verificarea arborilor se va face după definitivarea desenului de ansamblu
- la deformații,
- la vibrații,
- la oboseală.
5.2. Identificarea sarcinilor (momente și forțe) pe arbori (mărime și localizare)
Proiectantul trebuie să identifice sarcinile pe soluția constructivă aleasă pentru reductor.
O schiță 3D este utilă. În continuare, explicațiile sunt date pentru soluția constructivă din Fig.
5.1a. Fig. 5.1b reprezintă shița aceluiași reductor, dar in 2D.
a)

Proiectarea arborilor
56
b)
Fig. 5.1. Schema forțelor determinate pe angrenaje și pe reazeme
După realizarea acestei schițe 3D se vor face shemele de încărcare pe fiecare arbore,
în plan vertical și în plan orizontal. Forțele axiale pe roțile dințate introduc momente
încovoietoare concentrate, care, pe diagramele de momente încovoietoare vor determina un
salt al momentului încovoietor.
Cu ajutorul acestor schițe se calculează reațiunile și se cotează distanțele dintre sarcini
pe axa arborilor. Notarea acestor segmente este particularizată pentru fiecare schiță a unui
Deoarece roata 1 este montată pe arborele motorului, pentru arborele 1 diametrul este dat în
catalogul de motoare, acesta fiind verificat pentru momentul nominal al motorului, se va
verifica dacă forțele de pe capătul de arbore sunt mai mici sau cel mult egale cu cele
recomandate de producătorul motorului.
Se reamintesc relațiile pentru forțele în angrenare (în ipoteza că nu se ia în considerare
frecarea)
pentru treapta I
(5.1a)
(5.2a)
(5.3a)

Capitolul 5
57
pentru treapta II
(5.1b)
(5.2b)
(5.3b)
5.3. Selectarea materialului pentru arbori
Selectarea materialului arborelui ține seama de soluția constructivă a ansamblului roată-
arbore. Acesta poate fi o construcție monobloc (denumită deseori arbore-pinion) sau din două
elemente, arborele și roata. În primul caz materialul roții dințate va fi și materialul arborelui.
În al doilea caz, materialul arborelui poate fi un alt oțel, de obicei un oțel mai ieftin decât cel
al roții dar cu caracteristici de oboseală bune.
Materialul arborelui se alege din tabele din Anexa A.5.1 pentru calculul de
dimensionare fiind necesare - rezistența la oboseală în ciclu pulsator și - rezistența la
oboseală în ciclu alternant-simetric.
5.4. Predimensionarea arborilor din condiția de rezistență la torsiune
Preliminar, pentru că nu se cunosc lungimile tronsoanelor fiecărui arbore, se face o
predimensionare din condiția de rezistență la torsiune. Se obține diametrul minim al arborelui
pentru care acesta rezistă fiind încărcat doar cu momentul de torsiune. În realitate arborele
este solicitat și la încovoiere, rezultând o solicitare compusă
Diametrul minim al unui arbore pe care acționează un moment de tosiune se
calculează din relaţia ( ) în care, ( ) este rezistenţa admisibilă la oboseală a
materialului arborelui pentru cicluri pulsatorii ( ), caracteristice solicitării de torsiune.
este modulul polar de rezistenţă pentru un arbore plin. Rezultă:
√
( )
(5.4)
( ) se calculează cu relația
( )
(5.5)
în care este rezistența la torsiune la oboseală a materialului arborelui pentru ciclul
pulsatoriu iar este coeficientul de siguranță la oboseală pentru solicitare pulsatorie. Se
recomandă . Având în vedere că acest calcul inițial nu ia în considerare
concentratorii de tensiune de pe arbore (racordări, canale de pană etc.), se recomandă
valoarea mai mare a coeficientului de siguranță.

Proiectarea arborilor
58
Uneori se folosesc arbori tubulari, pentru că sunt mai uşori şi permit introducerea, prin
ei, a altor elemente (alţi arbori, conductori electrici etc.). Pentru un arbore tubular cu
diametrul interior şi diametrul exterior , modulul polar de rezistenţă va fi
(
) (5.6)
Unul din diametre sau raportul dintre ele este impus de soluţia constructivă (de exemplu
este impus de diametrul arborelui mașinii de lucru şi relaţia (5.3) se foloseşte pentru
calcularea celuilalt. De exemplu, fie impus. Rezultă:
√
( ) ( )
(5.7)
Pentru reductorul cu două trepte, reprezentat schematic în Fig. 5.1, vă propunem completarea
următorului tabel, pentru a calcula diametrele arborilor. Diametrul arborelui nu va fi mai mic
decât această valoare. După calculul la solicitări compuse, se stabilește diametrul final al
fiecărui tronson de arbore. Dacă, la etapele de verificare, nu se obțin coeficienți de siguranță
recomandați, se modifică diametrele și se reia calculul.
Tabelul 5.1. Diametre preliminare din condiția de rezistență la torsiune
Arborele Material* ( )
Observații
I
√
( )
II
√
( )
III
√
( )
* Dacă este arbore pinion, materialul roții este și materialul arborelui
5.5. Troansoanele arborilor și punctele de aplicație ale sarcinilor
Pe fiecare arbore se identifică punctele de aplicație pentru sarcini (forțe și momente
de trosiune). Inițial, la proiectare, nu se cunoaște tipul de reazem (cu alunecare sau cu
rostogolire), dar soluția este aleasă de proiectant. Pentru gama de putere a reductoarelor date
ca teme de proiectare, se recomandă rezemarea pe rulmenți. Se consideră, inițial, că sarcina
pe reazem (reacțiunea) se aplică la mijlocul rulmentului iar forțele de pe roțile dințate se
consideră că acționează la mijlocul lățimii comune a roților în contact. Figura 5.2 prezintă
câteva variante de rezemare a unui capăt de arbore, și punctul de aplicație a reacțiunii.
Rulmeții radiali-axiali pot crește rigiditatea arborelui prin modificarea punctului de aplicație
al reacțiunii, ceea ce este benefic pentru sistem, dar sunt mai scumpi și mai pretențioși în
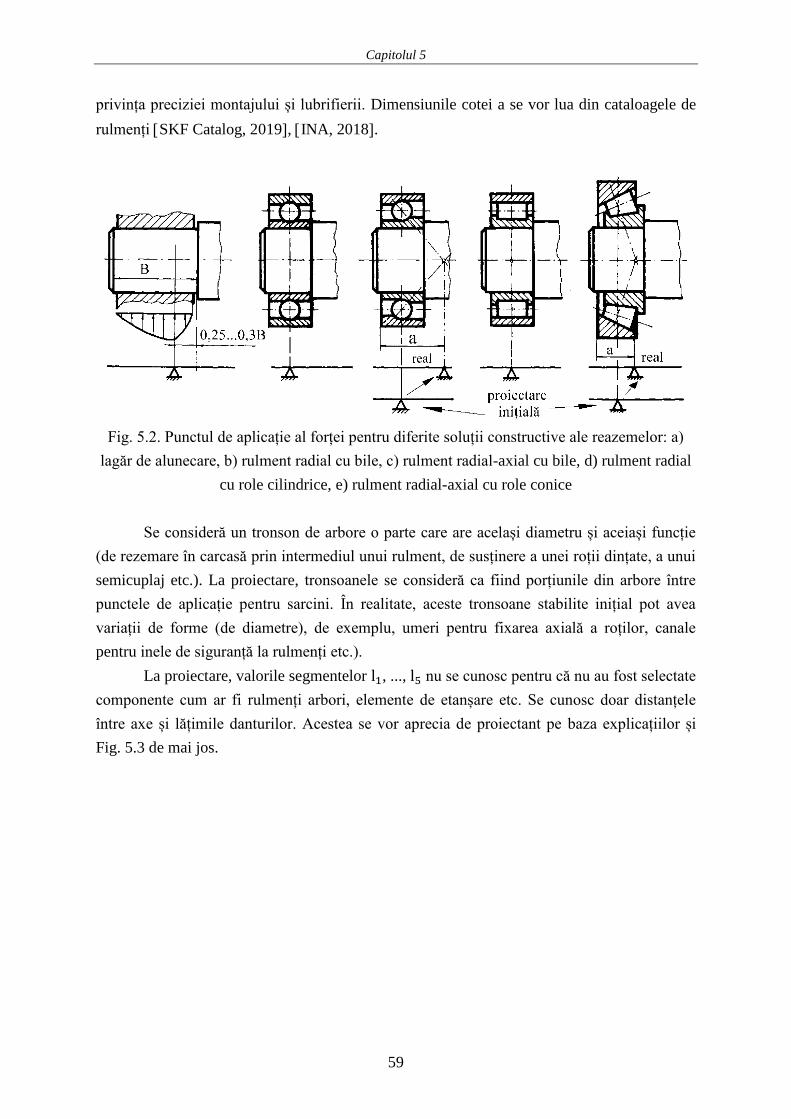
Capitolul 5
59
privința preciziei montajului și lubrifierii. Dimensiunile cotei a se vor lua din cataloagele de
rulmenți SKF Catalog, 2019, INA, 2018.
Fig. 5.2. Punctul de aplicație al forței pentru diferite soluții constructive ale reazemelor: a)
lagăr de alunecare, b) rulment radial cu bile, c) rulment radial-axial cu bile, d) rulment radial
cu role cilindrice, e) rulment radial-axial cu role conice
Se consideră un tronson de arbore o parte care are același diametru și aceiași funcție
(de rezemare în carcasă prin intermediul unui rulment, de susținere a unei roții dințate, a unui
semicuplaj etc.). La proiectare, tronsoanele se consideră ca fiind porțiunile din arbore între
punctele de aplicație pentru sarcini. În realitate, aceste tronsoane stabilite inițial pot avea
variații de forme (de diametre), de exemplu, umeri pentru fixarea axială a roților, canale
pentru inele de siguranță la rulmenți etc.).
La proiectare, valorile segmentelor , ..., nu se cunosc pentru că nu au fost selectate
componente cum ar fi rulmenți arbori, elemente de etanșare etc. Se cunosc doar distanțele
între axe și lățimile danturilor. Acestea se vor aprecia de proiectant pe baza explicațiilor și
Fig. 5.3 de mai jos.
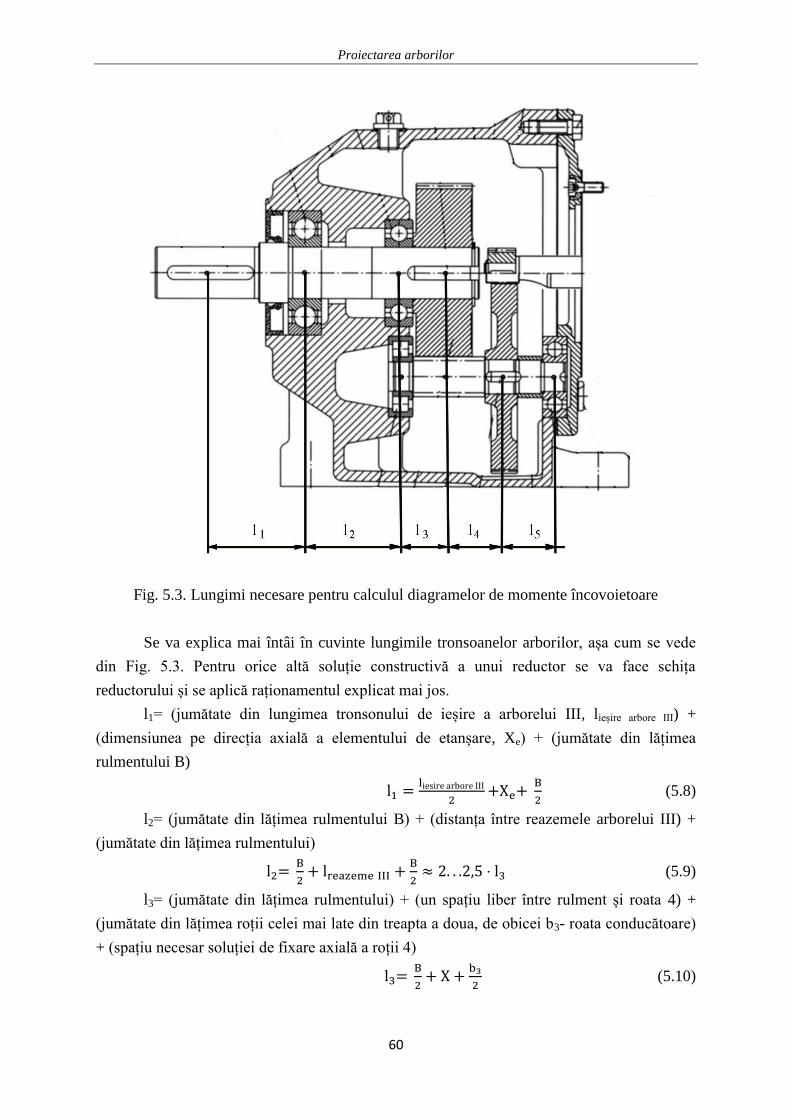
Proiectarea arborilor
60
Fig. 5.3. Lungimi necesare pentru calculul diagramelor de momente încovoietoare
Se va explica mai întâi în cuvinte lungimile tronsoanelor arborilor, așa cum se vede
din Fig. 5.3. Pentru orice altă soluție constructivă a unui reductor se va face schița
reductorului și se aplică raționamentul explicat mai jos.
l1= (jumătate din lungimea tronsonului de ieșire a arborelui III, lieșire arbore III) +
(dimensiunea pe direcția axială a elementului de etanșare, Xe) + (jumătate din lățimea
rulmentului B)
(5.8)
l2= (jumătate din lățimea rulmentului B) + (distanța între reazemele arborelui III) +
(jumătate din lățimea rulmentului)
(5.9)
l3= (jumătate din lățimea rulmentului) + (un spațiu liber între rulment și roata 4) +
(jumătate din lățimea roții celei mai late din treapta a doua, de obicei b3- roata conducătoare)
+ (spațiu necesar soluției de fixare axială a roții 4)
(5.10)

Capitolul 5
61
l4= (jumătate din lățimea roții celei mai late din treapta a doua, de obicei b3- roata
conducătoare) +(spațiu necesar soluției de fixare axială a roții 4)+ (spațiu liber între arborele I
și III) +(spațiu necesar soluției de fixare axială a roții 1) (jumătate din lățimea roții mai late
de pe treapta I, de obicei b1- roata conducătoare)
(5.11)
l5= (jumătate din lățimea roții celei mai late din treapta întâi, de obicei b1- roata
conducătoare) +(un spațiu liber între roata 2 și rulment) + (jumătate din lățimea rulmentului)
(5.12)
Spațiile libere între piese în mișcare și piese care nu se mișcă se estimează în funcție
de puterea și mărimea reductorului. Se recomandă 5...8 mm pentru puteri mici și 8...15 mm
pentru puteri mai mari.
Lățimea rulmentului depinde de diametrul arborelui în acel reazem și de tipul pe care
îl va alege proiectantul. Pe direcție axială rulmenții nu au variații mari ale dimensiunilor. Se
recomandă B/2=5...10 mm pentru puteri mici și B/2=10...20 mm pentru puteri mai mari. Sau
se consultă cataloage de rulmenți și se iau valori ale lățimor rulmenților cu diametre mai mari
decât cele obținute din predimensionarea la torsiune SKF, 2019.
Dimensiunea pe direcție axială a manșetelor de etanșare nu diferă prea mult pentru că
soluția constructivă în secțiune axială este similară, diferind doar prin dimensiunea
diametrului de contact cu arborele. De aceea se recomandă Xe=8...16 mm pentru puteri mici
și Xe=12...25 mm pentru puteri mari. Se pot consulta cataloage de manșete de etanșare și se
aleg lățimi pentru diametre egale sau mai mari decât diametrele obținute din
predimensionarea la torsiune.
5.6. Calculul reacțiunilor
Pentru modelul propus de reductor se va detalia calculul reacținilor și dimensionarea
arborilor pentru rborele II și III.
Calculul reacțiunilor pentru arborele II este dat pentru schița din Fig. 5.4. Atenție la
sensul de rotație al fiecărui arbore când se stabilesc sensurile forței.
În acest subcapitol relațiile nu sunt numerotate.

Proiectarea arborilor
62
Fig. 5.4. Schema de calcul și diagramele de momente de incovoiere și torsiune pentru
arborele II
Calculul reacțiunilor pe arborele II
Atenție! Modelul de calcul este doar un exemplu, puteți obține alte sensuri pentru
reacțiuni iar diagramele sunt doar orientative, pot avea și alte forme.
Calculul reacțiunilor se face pentru planul vertical și orizontal. Conform teoriei
[Buzdugan, 1987], suma momentelor încovoietoare față de fiecare reazem este zero.
Calculul reacțiunilor în plan vertical (se stabilește un sens pozitiv pentru momentul
încovoietor, de exemplu aici, sensul de rotire al vectorului (reacțiunii) față de reazemul 1.
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan vertical, față de reazemul 1 este
zero)
( )
( )

Capitolul 5
63
( )
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan vertical, față de reazemul 4 este
zero)
( )
( )
( )
Dacă una sau ambele reacțiuni rezultă cu semn negativ, înseamnă că sensul ei este opus
celui desenat inițial. Se obișnuiește ca pe schițe sensul real să fie trecut cu linie mai groasă
sau întreruptă.
Dacă s-au calculat corect reacțiunile, forțele care acționează în plan vertical (reacțiunile
verticale și forțele rezultate din angrenare în plan vertical își fac echilibrul) și, deci, suma lor
va fi zero sau foarte apropiată de zero, diferența mică, de ordinul 10-1
...10-3
N, rezultând din
numărul de zecimale cu care se lucrează și din rezultate cu zecimale periodice.
S-a adăugat și diagrama momentului de torsiune, , care acționează doar pe lungimea a
arborelui II, de la roata 2 până la roata 3.
Calculul reacțiunilor în plan orizontal pentru arborele II
În planul orizontal, pe acest arbore, acționează forțele tangențiale (introduse pe roțile 2 și 3)
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan orizontal, față de reazemul 1 este
zero)
( ) ( )
( )
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan orizontal, față de reazemul 4 este
zero)
( ) ( )
( )
Dacă din calcul a rezultat o valoare negativă a unei reacțiuni, aceasta are sensul invers celui
considerat la începutul calculului (din schiță).
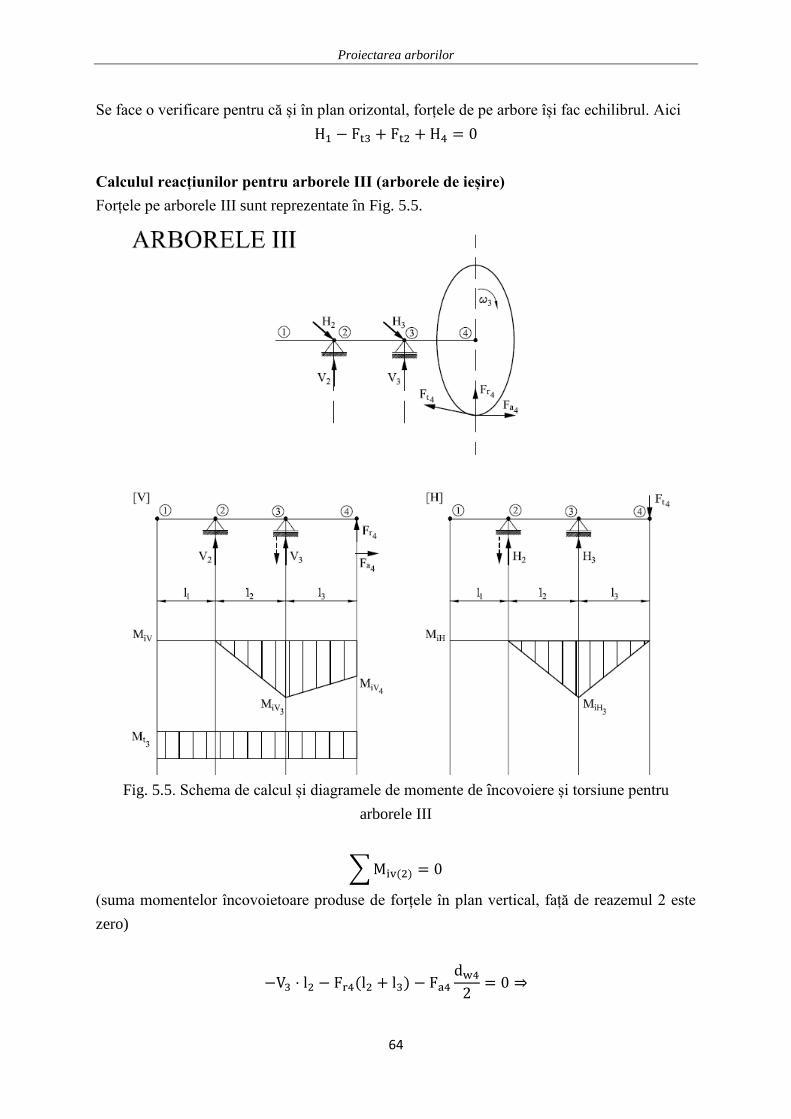
Proiectarea arborilor
64
Se face o verificare pentru că și în plan orizontal, forțele de pe arbore își fac echilibrul. Aici
Calculul reacțiunilor pentru arborele III (arborele de ieșire)
Forțele pe arborele III sunt reprezentate în Fig. 5.5.
Fig. 5.5. Schema de calcul și diagramele de momente de încovoiere și torsiune pentru
arborele III
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan vertical, față de reazemul 2 este
zero)
( )

Capitolul 5
65
( )
Dacă rezultă V3<0 sensul real al reacțiunii V3 este invers celui considerat inițial pe schița
arborelui. În Fig. 5.5, vectorul V3 este reprezentat cu linie întreruptă dacă a rezultat din calcul
o valoare negativă.
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan vertical, față de reazemul 3 este
zero)
Calculul reacțiunilor în plan orizontal
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan orizontal, față de reazemul 2 este
zero)
( )
( )
∑ ( )
(suma momentelor încovoietoare produse de forțele în plan orizontal, față de reazemul 3 este
zero)
Calculele sunt corecte dacă
Atenție la sensul vectorului . Dacă rezultă o valoare negativă, sensul vectorului este
inversat și este notat cu linie întreruptă în Fig. 5.5. Verificarea se face considerând semnul
rezultat din calcul pentru .
Pe diagramele de momente încovoietoare din Fig. 5.4 și Fig. 5.5 segmentele îngroșate
reprezintă valorile momentelor încovoietoare care vor fi necesare pentru calculul diametrelor
tronsoanelor arborilor în punctele principale.
Atenție! Forma diagramelor de momente încovoietoare este orientativă: în funcție de
sensul reacțiunilor calculate, acestea pot diferi de schițele date aici, în ghidul de proiectare.

Proiectarea arborilor
66
5.7. Dimensionarea arborilor din condiția de rezistență la solicitări compuse
Se dimensionează fiecare tronson din condiția de rezistență la solicitare compusă,
torsiune + încovoiere.
În secţiunea j a arborelui, aici pentru arborele II și arborele III, momentul
încovoietor echivalent ( ) , se determină cu relaţia:
( ) √( ) ( )
(5.13)
în care ( ) este momentul încovoietor în punctul j, este momentul de torsiune în
punctul j, iar este un coeficient care ține seama că momentul încovoietor determină tensiuni
de oboseală în ciclu alternant simetric iar momentul de torsiune determină tensiuni în ciclu
cel mult pulsator; se recomandă
(5.14)
în care este rezistența la oboseală a materialului arborelui la încovoiere (sau tracțiune) în
ciclu alternant simetric iar este rezistența la oboseală a materialului arborelui la încovoiere
(sau tracțiune) în ciclu pulsatoriu.
Se vor determina diametrele arborilor în secţiunile importante şi apoi se va stabili forma
constructivă a arborilor.
Diametrele se calculează pentru fiecare secţiune importantă, utilizându-se relaţia:
√ ( )
( )
[ ]
(5.15)
( )
[ ]
(5.16)
Dacă acţionează doar un moment de torsiune, diametrul se calculează cu relaţia:
√ ( )
( )
[ ] (5.17)
Observații
Orice forță axială concentrată (sau aplicată) într-un punct va introduce un salt de
moment încovoietor egal ca mărime cu produsul dintre forța axială și brațul ei la axa
arborelui. De exemplu, pe arborele II sunt două asemenea salturi, introduce de forțele axiale
pe dantură iar brațul fiecăruia este raza de rostogolire a roții dințate pe care este aplicată forța
axială. În cazul acestor salturi de diagrame, în calcul se ia valoarea cea mai mare a
momentului încovoietor.
De exemplu, pentru punctul 2 de pe arborele II, la stânga punctului 2
â
iar la dreapta punctului 2
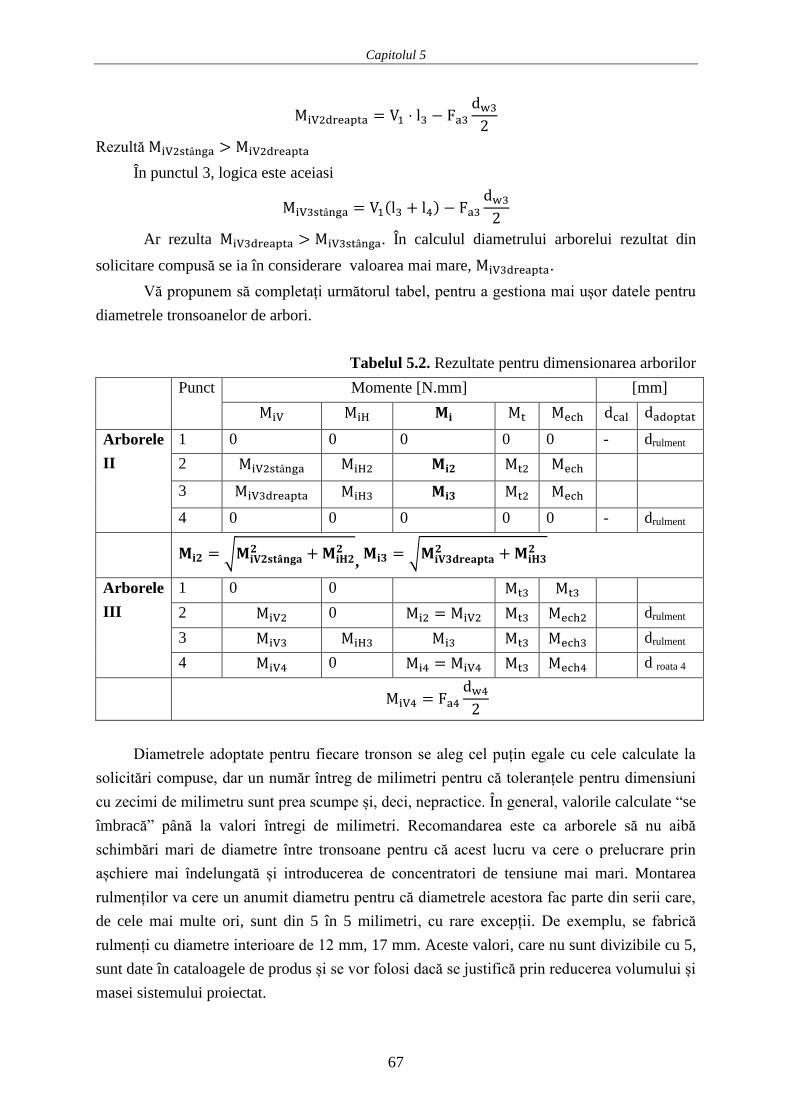
Capitolul 5
67
Rezultă â
În punctul 3, logica este aceiasi
â ( )
Ar rezulta . În calculul diametrului arborelui rezultat din
solicitare compusă se ia în considerare valoarea mai mare, .
Vă propunem să completați următorul tabel, pentru a gestiona mai ușor datele pentru
diametrele tronsoanelor de arbori.
Tabelul 5.2. Rezultate pentru dimensionarea arborilor
Punct Momente [N.mm] [mm]
Arborele
II
1 0 0 0 0 0 - drulment
2 â
3
4 0 0 0 0 0 - drulment
√
, √
Arborele
III
1 0 0
2 0
drulment
3 drulment
4 0 d roata 4
Diametrele adoptate pentru fiecare tronson se aleg cel puțin egale cu cele calculate la
solicitări compuse, dar un număr întreg de milimetri pentru că toleranțele pentru dimensiuni
cu zecimi de milimetru sunt prea scumpe și, deci, nepractice. În general, valorile calculate “se
îmbracă” până la valori întregi de milimetri. Recomandarea este ca arborele să nu aibă
schimbări mari de diametre între tronsoane pentru că acest lucru va cere o prelucrare prin
așchiere mai îndelungată și introducerea de concentratori de tensiune mai mari. Montarea
rulmenților va cere un anumit diametru pentru că diametrele acestora fac parte din serii care,
de cele mai multe ori, sunt din 5 în 5 milimetri, cu rare excepții. De exemplu, se fabrică
rulmenți cu diametre interioare de 12 mm, 17 mm. Aceste valori, care nu sunt divizibile cu 5,
sunt date în cataloagele de produs și se vor folosi dacă se justifică prin reducerea volumului și
masei sistemului proiectat.

Proiectarea arborilor
68
În zona de montare a roților pe arbore va exista o pană sau caneluri pe arbore astfel
încât roata să fie asamblată. În continuare sunt date calculele pentru alegerea penelor paralele.
Pentru alte variante de montare a roților pe arbore se va consulta literatura de specialitate.
5.8. Calculul penelor
Există două variante a sistemului arbore - roată dințată
- roata dințată se execută monobloc cu arborele și, deci, nu are nevoie de elemente de
asamblare; de obicei se numește arbore-pinion pentru că se alege această variantă când roata
dințată nu este foarte mare pe direcție radială comparativ cu diamterul arborelui; această
variante are ca avantaje reducerea masei ansamblului arbore-roată, reducerea timpului de
montaj și ca dezavantaje prețul mai mare din cauza că și arborele va fi din același material cu
roata (adică un material mai bun), iar prelucrarea formei arborelui-pinion este mai
costisitoare;
- roata dințată se montează pe arbore prin următoarele posibilități
- ajustaj cu strângere (la reductoare mici),
- prin elemente de asamblare (pene, caneluri, inele tronconice etc.).
Pentru varianta de reductor recomandată în proiect, trebuie să se evalueze mărimea
diametrului arborelui în comparație cu diametrul de rostogolire al roții, pentru fiecare din roți.
Se recomandă ca distanța dintre canalul penei din butuc și diametrul de fund al roții
dințate să fie suficient de mare pentru a nu creea un concentrator de tensiune foarte puternic.
Fig. 5.6. Grosimea butucului roții în dreptul canalului de pană
Se recomandă ca dimensiunea minimă a butucului roții (intre cercul de picior al danturii
și suprafața canalului de pană din butuc, pe direcție radială, , să fie un multiplu al modulului
normal al danturii roții, mn (Tabelul 5.3 [Haragas, 2014]).

Capitolul 5
69
Tabelul 5.3. Dimensiunea minimă recomandată pentru grosimea minimă a butucului roții dințate
mn
( ) ( ) ( ) ( ) ( )
În general discuția este pentru roțile cu diametrele de rostogolire mici dintr-un reductor,
aici 1 și 3.
Penele paralele se execută dintr-un oțel cu proprietăți ceva mai slabe decât al
materialului pentru arbore, în eventualitatea unei suprasolicitări, să fie distrusă pana, nu
arborele. De exemplu dacă pentru arbore s-a ales C45 călit și revenit, pana se poate executa
din C45 normalizat.
Calculul penei constă, de fapt, din verificarea penei alese pentru diametrul arborelui.
Pana paralelă se alege în funcţie de diametrul tronsonului de arbore pe care se face
montajul roții, dimensiunile penei şi ale canalului de pană în arbore şi butuc ( şi )
fiind date în standarde (se va utiliza tabelul din Anexa A.5.2).
Pe pana montată în secţiunea j, acţionează forţa , care se calculează cu relaţia
( )
(
) (5.18)
în care este momentul de torsiune pe tronsonul de arbore pe care se montează pana,
este diametrul arborelui (cel adoptat, acoperitor sau cel puțin egal cu cel rezultat din calcul),
este coeficientul de frecare dintre pană și arbore. În condiții de frecare uscată între două
suprafețe metalice se poate considera .
Pentru varianta constructivă a reductorului, s-au notat aici penele cu numerele 1, 2, 3
și 4, astfel
Pana 1 (indicele forței este numărul punctului de pe arbore în care este montată pana ) -
pana ce asigura asamblarea dintre roata 1 și arborele I,
Pana 2 - pana ce asigura asamblarea dintre roata 2 și arborele II,
Pana 3 - pana ce asigura asamblarea dintre roata 3 și arborele II (dacă diametrul de
rostogolire al roții 3 este mic și nu se poate avea o distanță (Vezi Fig. 5.6 și Tabelul 5.8),
roata 3 este arbore-pinion (se execută arborele și roata monobloc, deci, nu va exista pana 3)
Pana 4 - pana ce asigura asamblarea dintre roata 4 și arborele III
Pana 5 - pana ce asigură asamblarea dintre arborele de ieșire III și mașina de lucru sau
cuplajul ce va fi montat între reductor și mașina de lucru.
Arborele I
( )
(
) (5.19a)
Arborele II

Proiectarea arborilor
70
( )
(
) (dacă se alege varianta cu montaj cu pană) (5.19b)
( )
(
) (5.19c)
Arborele III
( )
(
) (5.19d)
( )
(
) (pana de pe capătul de ieșire al arborelui III) (5.19e)
a) Calculul lungimii penei din condiţia de limitare a presiunii de contact. Se
consideră că forţa determină o presiune de strivire uniform distribuită pe aria , în
care este lungimea minimă a penei din condiția de rezistență la strivire şi atunci se
calculează pentru fiecare pană:
(5.20)
- tensiunea admisibilă de contact între pană şi arbore sau butuc). Pentru arbore, pană şi
butuc din oţel, se recomandă pentru sarcini constante, fără şocuri,
pentru sarcini pulsatorii şi pentru sarcini
alternante, cu şocuri.
Fig. 5.7. Solicitarea la forfecare a penei
a) Calculul lungimii penei din condiţia de rezistenţă la forfecare (se consideră că
forţa acţionează la jumătatea înălţimii penei ca în Fig. 5.6). Pentru fiecare pană se
calculează
( ) (5.21)
în care b – lăţimea penei, mm, din tabelul A.5.2, conform ISO/R 773:1969 Rectangular or
square parallel keys and their corresponding keyways (Dimensions in millimetres); ( )
rezistenţa la forfecare, pentru solicitare pulsatorie, calculată cu relaţia (5.2), pentru materialul
penei.
( )
(5.22)
Lungimea reală a penei va fi (
) şi va fi standardizată ( )
la valoarea
imediat superioară, din tabelul. Lungimea standardizată a penei ( )
se va corela cu lăţimea
butucului în care se montează pana, ( )
( ) . Deci, lungimea penei se poate
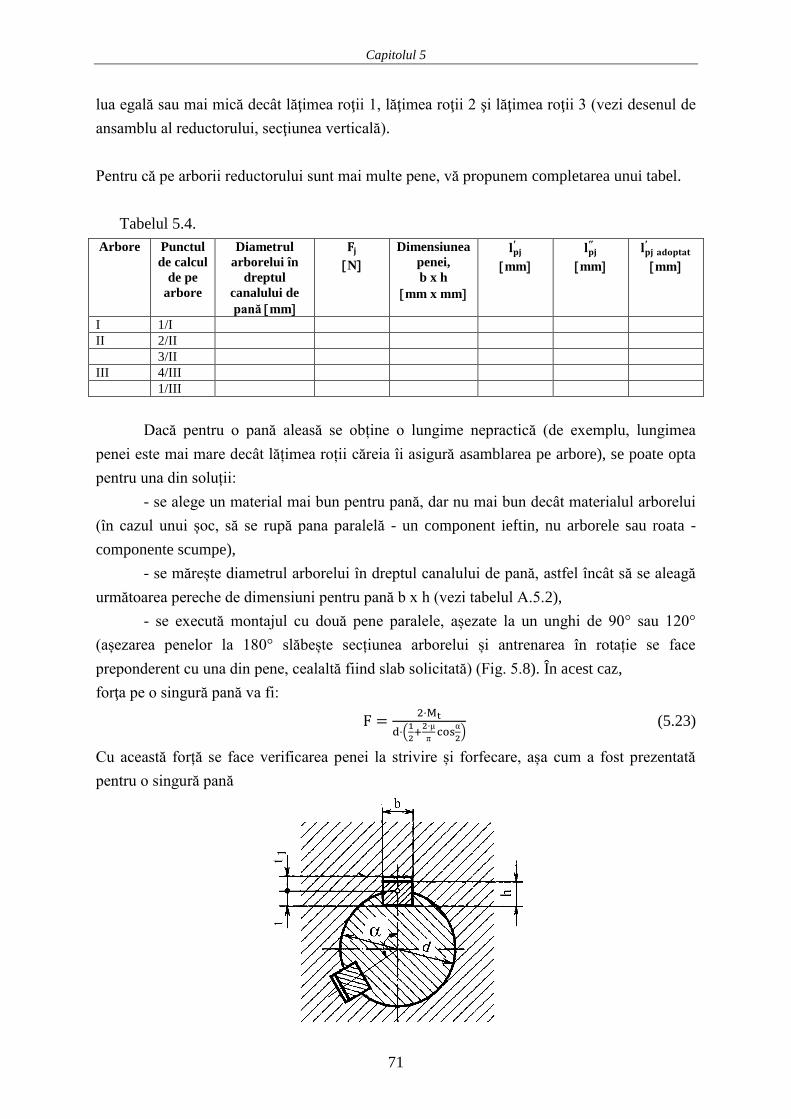
Capitolul 5
71
lua egală sau mai mică decât lăţimea roţii 1, lăţimea roţii 2 şi lăţimea roţii 3 (vezi desenul de
ansamblu al reductorului, secţiunea verticală).
Pentru că pe arborii reductorului sunt mai multe pene, vă propunem completarea unui tabel.
Tabelul 5.4.
Arbore Punctul
de calcul
de pe
arbore
Diametrul
arborelui în
dreptul
canalului de
pană mm
N
Dimensiunea
penei,
b x h
mm x mm
mm
mm
mm
I 1/I
II 2/II
3/II
III 4/III
1/III
Dacă pentru o pană aleasă se obține o lungime nepractică (de exemplu, lungimea
penei este mai mare decât lățimea roții căreia îi asigură asamblarea pe arbore), se poate opta
pentru una din soluții:
- se alege un material mai bun pentru pană, dar nu mai bun decât materialul arborelui
(în cazul unui șoc, să se rupă pana paralelă - un component ieftin, nu arborele sau roata -
componente scumpe),
- se mărește diametrul arborelui în dreptul canalului de pană, astfel încât să se aleagă
următoarea pereche de dimensiuni pentru pană b x h (vezi tabelul A.5.2),
- se execută montajul cu două pene paralele, așezate la un unghi de 90° sau 120°
(așezarea penelor la 180° slăbește secțiunea arborelui și antrenarea în rotație se face
preponderent cu una din pene, cealaltă fiind slab solicitată) (Fig. 5.8). În acest caz,
forţa pe o singură pană va fi:
(
) (5.23)
Cu această forță se face verificarea penei la strivire și forfecare, așa cum a fost prezentată
pentru o singură pană

Proiectarea arborilor
72
Fig. 5.8. Montaj arbore - roată dințată cu două pene paralele
Din Tabelul A5.1 se alege și ajustajul dintre pană și arbore (de obicei, cu strângere) și
ajustajul dintre pană și butuc (de obicei, cu joc intermediar sau cu o strângere mai mică).
Dacă nici soluția cu două pene nu este verificată, se va alege asamblarea cu caneluri.
Această asamblare este mai scumpă, dar se recomandă pentru rpoducție de serie mare sau
când se recomandă o centrare mai bună a roții pe arbore și o distribuție mai uniformă a
sarcinii pe arbore și butuc.

73
Capitolul 6
Proiectarea lagărelor cu rulmenţi
6.1 Etape în selectarea rulmenţilor
1. Date iniţiale.
2. Calculul reacţiunilor pe reazemele fiecărui arbore.
3. Alegerea tipului de montaj şi a tipului de rulment pe fiecare arbore.
4. Calculul sarcinii dinamice echivalente.
5. Calculul capacităţii dinamice minime necesare.
6. Alegerea din catalogul firmei producătoare [SKF Rolling Bearings, 2018], Timken,
2016, Schaeffer, 2020 a rulmentului care satisface simultan condiţiile:
cata logC C şi rulment arbored d .
7. Fixarea axială a rulmenţilor
8. Etanşarea şi ungerea (pentru alegerea lubrifiantului, vezi Capitolul 7).
Etapele se parcurg pentru fiecare arbore, dar în această lucrare se vor selecta rulmenţii
pentru arborel II şi arborele III.
Calculul rulmenţilor se bazează pe următoarele criterii:
- calculul durabilităţii până la distrugerea acestora prin oboseală (pitting),
- calculul la încărcarea statică, care provoacă deformaţii remanente,
- în mecatronică şi mecanică fină, în calculul rulmenţilor este important şi momentul de
frecare.
6.2. Selectarea rulmenţilor pentru arborele II
Datele inițiale sunt:
- informaţii despre ansamblul în care funcţionează rulmenţii (funcţii îndeplinite,
restricţii de gabarit, piese componente principale),
- parametrii de calcul, cum sunt sarcinile pe reazeme (modul, sens, evoluţie în timp,
rezultate din calculul arborilor), turaţia, durabilitatea ansamblului;
- informaţii despre mediul de lucru (temperatură, vibraţii, agenţi chimici);
- informaţii despre lubrifiere: dacă se face separat pentru rulmenţi sau se foloseşte
acelaşi lubrifiant ca pentru alte elemente din ansamblu (pentru acest reductor se consideră că
rulmenții sunt lubifianți cu același lubrifiant care se folosește pentru angrenaje).

Capitolul 6
74
Monatjul este în X (Fig. 6.1) este recomandat pentru sarcini între reazeme. S-a notat cu
1 rulmentul din 1 şi cu 2 rulmentul din punctul 4 (vezi diagrama de momente a arborelui II).
Se calculeză turația pe arborele II
12
12
nn
u (6.1)
și numărul de rotații al arborelui II pentru durata de viață a transmisiei, impusă în proiect
II II h 2N L L 60 n rotatii (6.2)
Forța axială exterioară rulmenților se calculează ca rezultanta forțelor axiale introduse
de roțile cu dantură înclinată. Pentru arborele II
a a3 a2F F F (6.3)
şi poate avea sensul notat cu I (linie continuă) sau cu II (linie întreruptă) în Fig. 6.1.
Din motive tehnologice, pentru simplificarea formei carcaselor şi reducerea timpului de
prelucrare a acestora, se recomandă ca rulmenţii de pe un arbore să fie aleşi identici, iar
calculul să se facă pentru cel mai solicitat (dacă se cunoaște care este cel mai solicitat, dacă nu
calculele se fac pentru rulmenții din ambele reazeme și se compară la sfârșit). Alegerea
rulmenţilor identici pe arbore are în vedere posibilitatea inversării sensului de rotaţie al
arborelui, în acest caz, schimbându-se direcţia forţei axiale aF .
Forţa rezultantă pe reazemul j (j=1, 2) se calculează astfel
2 2rj d j jF K V H (6.4)
unde jV este reacţiunea în planul vertical din reazemul j jH - reacţiunea în planul orizontal
din reazemul j; dK 1,2 - un coeficient de suprasarcină, introdus pentru că rulmenții sunt mai
sensibili la suprasarcină sau șoc).
a) rulmenți radiali-axiali cu bile b) rulmenți radiali-axiali cu role
Fig. 6.1. Montajul în X

Proiectarea lagărelor cu rulmenți
75
Deci, ținând seama de notațiile punctelor principale pe arborele II, se obține forța
radială pe rulment ca rezultantă a componentelor în plan vertical și în plan orizontal a
reacțiunii pe rulmentul 1:
2 2r1 d 1 1F K V H (6.5a)
2 2r2 d 4 4F K V H (6.5b)
V1 și H1 sunt reacțiunile în punctul 1 de pe arborele II.
V4 și H4 sunt reacțiunile în punctul 4 de pe arborele II.
Din cauza soluției constructive asimetrice în secțiunea axială, fiecare inel al rulmentului
radial axial cu bile având un umăr (Fig. 6.1), dacă asupra rulmentului radial axial acționează o
forță radială, în rulment se generează și o forță axială internă, aiF , care depinde, în modul, de
mărimea forței rF și de unghiul format de reacțiunea pe rulment și axa de rotație a rulmentului
ai rF F tg (6.6)
Unghiul este dat în catalogul de rulmenți [SKF Rolling Bearings, 2018]. În Fig. 6.2
sunt dați rulmenți recomandabili pentru preluarea unei sarcini combinate, radiale (în general,
mai mare) și a unei sarcini axiale (în general, mai mică). De exemplu, în catalogul SKF
Rolling Bearings, 2018, veți găsi rulmenți radiali axiali cu bile pe un rând, cu două valori ale
unghiului : 40 și atunci rulmenții au sufix B sau 25 și atunci rulmenții au sufix
AC. Rulmenții radiali cu bile au 5...8 iar rulmenții radiali-axiali cu role conice
10...30 . Valoarea exactă este dată în catalogul de produs.
Se calculează pentru fiecare rulment, forța axială care apare în rulment datorită soluției
constructive, care, chiar în cazul aplicării unei forțe pur radiale pe rulment, va genera și o
forță axială internă în rulment, care va acționa pe reazemul (rulmentul) celălalt. Deci,
ai1 r1 1F F tg (6.7a)
ai2 r2 2F F tg (6.7b)
De obicei, la prima proiectare, se consideră același tip de rulment în reazeme, deci
1 2 .
Fig. 6.2. Mărimea forței axiale preluate cu diferite tipuri de rulmenți (triunghiul complet roșu
- sarcină axială mare, triunghi cu linii roții și arie albă - sarcină axială mică) SKF Rolling
Bearings, 2018

Capitolul 6
76
În acest ghid de proiectare sunt discutate ambele sensuri posibile ale forței axiale, I și II,
dar în funcție de proiect, se alege numai sensul rezultat din calcule pentru proiectul respectiv.
Sensul forţei aF :
- sensul a)
a2 ai1 aF F F (6.8a)
a1 ai2 aF F F ; dacă a1F 0 se consideră a1F 0 (6.8b)
(rulmentul 1 nu este încărcat axial)
- sensul b)
a1 ai2 aF F F (6.9a)
a2 ai1 aF F F ; dacă a2F 0 se consideră a2F 0 (6.9b)
(rulmentul 2 nu este încărcat axial)
Se calculează rapoartele între forța axială pe rulment și forța radială pe același rulment
a
r 1
F
Fși
a
r 2
F
Fși se compară cu valoarea parametrului e, dat în cataloage, pentru fiecare tip
de rulment (Tabelele 6.1 și 6.2). Valoarea e reprezintă valoarea raportului între forța axială și
cea radială pe rulment, față de care se consideră dacă rulmentul este sau nu încărcat axial.
Adică, dacă
a
r
Fe
F se consideră că sarcina dinamică echivalentă P se calculează numai cu
sarcina radială (influența sarcinii axiale fiind mică). În funcție de rezultat, se aleg din
catalogul de rulmenți valorile factorilor X și Y.
Pentru rulmenți radiali cu bile pe un rând, montați în X sau în O, sarcina dinamică
echivalentă se calculează după ce se aleg coeficienții e, apoi 1Y și 2Y . La proiectarea inițială,
nu se cunosc 0f - un coeficient care caracterizează fiecare rulment și este dat în tabelele cu
dimensiuni și caracteristici ale cataloagelor și nici 0C - sarcina statică de bază pe rulment.
Se calculează 0 a 0f F /C cu valori alese din aceste tabele pentru un rulment cu diametrul
cel puțin egal cu diametrul cel mai mare rezultat pe reazemele arborelui respectiv, din condiția
de rezistență la solitări compuse. Cu valoarea rezultată, se folosește Tabelul 6.1, alegându-se
1Y și 2Y . Pentru calculul sarcinii dinamice echivalente pe fiecare rulment se folosesc relațiile
ar 1 a
r
ar 2 a
r
Fe P F Y F
F
Fe P 0,75 F Y F
F
(6.10)

Proiectarea lagărelor cu rulmenți
77
Tabelul 6.1. Coeficienți pentru calculul sarcinii dinamice echivalente pentru rulmenți radiali cu bile
SKF Rolling Bearings, 2018
0 a 0f F /C e 1Y 1Y
0,17 0,23 2,8 3,7
0,69 0,30 2,1 2,8
2,08 0,40 1,6 2,15
3,46 0,45 1,4 1,85
5,19 0,50 1,26 1,7
Pentru rulmenți radiali-axiali cu bile pe un rând, montați în X sau în O, se
calculează raportul între forța axială și forța radială pe fiecare din cei doi rulmenți:
ar 1 a
r
ar 2 a
r
Fe P F Y F
F
Fe P X F Y F
F
(6.11)
Coeficienții e, X, 1Y și 2Y se aleg din Tabelul 6.2.
Tabelul 6.2. Factori pentru calculul sarcinii dinamice echivalente pentru rulmenți radiali axiali cu bile, pe un
rând sau pe două rânduri SKF Rolling Bearings, 2018
Tipul rulmentului Coeficienți
e X 1Y 2Y 0Y
Rulment axial radial cu bile pe un rând
Rulment singular sau în tandem
Sufix B 1,4 0,35 0 0,57 0,26
Sufix AC 0,68 0,41 0 0,87 0,38
Rulment axial radial cu bile pe două rânduri
seria 32A, 33A 0,8 0,63 0,78 1,24 0,66
Seria 33D 1,34 0,54 0,47 0,81 0,44
Seria 33DNRCBM 1.14 0,57 0,55 0,93 0,52
Pentru rulmenții radiali-axiali cu role conice pe un rând, montați în X sau în O, se
calculează
ar
r
ar a
r
Fe P F
F
Fe P 0, 4 F Y F
F
(6.12)
Atenție! Factorii e și Y sunt dați pentru fiecare tipodimensiune de rulment radial-axial
cu role conice se aleg din tabelul cu date pentru rulmenții radiali-axiali cu role conice (de
exemplu, pentru acești rulmenți, în catalogul SKF Rolling Bearings 2018, sunt dați începând

Capitolul 6
78
cu pagina 694). Evident în această fază a proiectului nu se cunosc decât diametrele minime
calculate din condiția de rezistență la solicitări compuse în reazemele unde se vor monta
rulmenții. Se aleg factorii din catalog pentru rulmentul care are calculatd d . În etapa de
verificare a rulmenților, când desenul de asamblu a fost desenat prima oară, se pot alege valori
exacte pentru acești factori, pentru rulmentul ales (care, posibil, să aibă un diametru mai mare
decât cel obținut în calculul inițial).
Se calculează sarcina dinamică echivalentă pentru fiecare rulment de pe arbore, 1P și
2P .
Se calculează capacitatea dinamică de bază pentru fiecare rulment
1/p
II1 1
bază
LC P
L (6.13a)
1/p
II2 2
bază
LC P
L (6.13b)
în care p depinde de tipul contactului între corpurile de rostogolire și calea de rulare,
- punctual ( p 3 pentru rulmenţi cu bile) sau
- liniar ( p 10/ 3 pentru rulmenţi cu role ), iar 6bazăL 10 rotatii este durabilitatea
de bază a rulmentului.
Dacă se alege varianta cu ambii rulmenți identici pe reazeme, se alege din catalogul de
rulmenți un rulment care să îndeplinească ambele condiții
rulment cata log adoptat / calculat pe arbored d cu
adoptat / calculat pe arbore adoptat / calculat pe arbore(1) adoptat / calculat pe arbore(2)d max(d ,d )
cata log calculatC C
pentru fiecare rulment.
Atenție! În funcție de soluția constructivă, la același diametru d al unui rulment în
catalog veți găsi câțiva rulmenți. Se alege rulmentul care se consideră adecvat proiectului
vostru. De exemplu, la d=45 mm sunt dați 11 rulmenți. Pe care îl alegeți? Se studiază
catalogul și se înțelege semnificația prefixelor și sufixelor atașate simbolului principal. Se
preferă rulmenții cu sufix X, dar trebuie îndeplinite simulatan cele două condiții date mai sus.
Pentru fiecare rulment ales se trece în proiect simbolul din catalog. În Tabelul 6.3 este dat un
exemplu și unde sunt necesare informațiile din catalog.

Proiectarea lagărelor cu rulmenți
79
a) b)
Fig. 6.3. Dimensiuni ale rulmentului (a) și dimensiuni de montaj (b)
SKF Rolling Bearings, 2018
Tabelul 6.3. Exemplu și explicații privind alegerea rulmentului din catalog
1 2 3 4 5 6 7 8 9 10
Dimensiuni
principale
Capacități de bază Sarcina
limită la
oboseală
Turația
Masa
Soluția
constructivă de
bază/ rulmenți cu
etanșare dinamică statică de referință limită
d D B C 0C uP
mm kN kN r/min kg
25 52 15 14,8 9,3 0,4 16000 12000 0,13 7205 BE-2RZP
Tabelul 6.3. Exemplu și explicații privind alegerea rulmentului din catalog (continuare)
1 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Dimensiuni Dimensiuni de montaj pentru arbore și butuc Factori de
calcul
d 1d 2d 1 2D ,D
5D
1,2r
3,4r
a a mind
a maxd
a maxD
bmaxD
a maxr
b maxr
A rk
mm - - 25 36,1 30,8 42,7 48 1 0,6 24 30,6 35,5 46,4 47,8 1 0,6 0,00015
9
0,095
Coloana Explicații
1, 2 și 3 cote necesare desenării rulmentului în desenul de ansamblu
4 capacitatea dinamică de bază care trebuie sa fie mai mare sau cel puțin egală cu capacitatea dinamică
de bază calculată
5 capacitatea statică de bază 0C care trebuie să fie mai mare sau cel puțin egală cu capacitatea statică
de bază calculată (la reductoare de putere mică și medie cum este cazul proiectelor voastre, sarcinile
statice care includ greutățile roților și a altor elemente de pe arbore sunt relativ mici comparativ cu
carcinile din funcționare)
6 Sarcina limită la oboseală
7 turația de referință (cea utilizată pentru determinarea
8 turația limită
9 masa rulmentului, care va fi trecută în tabelul de componență a desenului de ansamblu
10 simbolul rulmentului care se trece în tabelul de componență la ”Denumirea componentei”
11, 12,
13 și 14
dimensiuni ale soluției constructive la interiorul rulmentului (nu sunt reprezentate pe desenul de
ansamblu)
15 și 16 sunt raze de racordare ale rulmentului, pe inelul interior, respectiv la inelul exterior. Sunt cote
importante pentru că raza de racordare a arborelui pe care se montează rulmentul trebuie să fie mai
mică decât 1,2r și raza de racordare a locașului trebuie să fie mai mică decât 3,4r

Capitolul 6
80
Coloana Explicații (continuare)
17 cota a reprezintă punctul de aplicație al sarcinii față de planul frontal al rulmentului; la proiectarea
inițială nu se cunoaște dar când se face verificarea rulmenților se ține seama de aceste cote;
- la montajul în X, rulmenții radiali axiali micșorează distanța între reazeme cu suma 1 2a a dacă
sunt rulmenți diferiți sau cu 2a , dacă sunt montați rulmenți identici pe reazeme;
- la rulmenții montați în O, rulmenții radiali axiali mărește distanța între reazeme cu suma 1 2a a
dacă sunt rulmenți diferiți sau cu 2a , dacă sunt montați rulmenți identici pe reazeme;
În ambele cazuri, arborele va avea săgeți și deformații unghiulare mai mici. 18 și 19
a mind și
a maxd sunt valorile minimă și, respectiv, maximă pentru diametrul umărului arborelui pe care se
montează rulmentul
20 și 21 bminD și bmaxD sunt valorile minimă și, respectiv, maximă pentru diametrul locașului în care se montează
rulmentul
22 a maxr raza de racordare maximă pe umărul arborelui, unde se va monta rulmentul, a max 1,2r r
23 b maxr raza de racordare maximă în locașul unde se va monta rulmentul, bmax 3,4r r
24 și 25 Factori de calcul pentru sarcina dinamică echivalentă, pentru calculul temperaturii sau a altor parametri (se va
consulta, obligatoriu, catalogul)
Tabelul 6.4. Exemplu de explicație a datelor pentru un rulment cu același diametru interior, d SKF, Rolling
Bearing catalog, 2018.
d
mm
Simbol Explicația simbolului
45
32009X Rulment radial-axial cu role pe un rând, seria 302 (D=75 mm, T=20 mm), simbolul
pentru diametru 09 (09x5=45 mm), X - Dimensiuni exterioare conform ISO, C=80 kN
33109 Rulment radial-axial cu role pe un rând, seria 331 (D=80 mm, T=26 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=104 kN
30209 Rulment radial-axial cu role pe un rând, seria 302 (D=85 mm, T=20,75 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=75,5 kN
32209 Rulment radial-axial cu role pe un rând, seria 322 (D=85 mm, T=24,75 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=98 kN
33209 Rulment radial-axial cu role pe un rând, seria 332 (D=85 mm, T=32 mm), simbolul pentru
diametru 09 (09x5=45 mm), C=143 kN
T7FC045 Rulment radial-axial cu role pe un rând, (D=95 mm, T=29 mm), simbolul pentru diametru
09 (09x5=45 mm), C=112 kN, cu alezaj conic 1:12; C - inel exterior cu gaură nestrăpunsă,
cu știft pentru prevenirea rotirii inelului exterior în locaș
T2ED045 Rulment radial-axial cu role pe un rând, (D=95 mm, T=36 mm), simbolul pentru diametru
09 (09x5=45 mm), C=186 kN, cu alezaj conic 1:12; D - inel exterior cu canale circulare și
orificii de ungere (TDO),
31309 Rulment radial-axial cu role pe un rând, seria 332 (D=100 mm, T=21,75 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=102 kN
30309 Rulment radial-axial cu role pe un rând, seria 332 (D=100 mm, T=21,75 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=120 kN
32309B Rulment radial-axial cu role pe un rând, seria 332 (D=100 mm, T=38,25 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=176 kN
32309 Rulment radial-axial cu role pe un rând, seria 332 (D=100 mm, T=38,25 mm), simbolul
pentru diametru 09 (09x5=45 mm), C=170 kN
6.3. Selectarea rulmenţilor pentru arborele III
Pentru puteri mici și medii se recomandă rulmenţi radiali cu bile, rulmenți radiali axiali
cu bile sau rulmenți radiali-axiali cu role conice. De multe ori, proiectantul alege pe ultimul
arbore rulmenți radiali oscilanți cu bile sau cu role butoi pentru a putea prelua abateri

Proiectarea lagărelor cu rulmenți
81
unghiulare ale montajului arborelui de ieșire din reductor cu arborele de intrare al mașinii
motoare.
Având în vedere poziţia roţii 4 şi a maşinii de lucru, montajul pe arborele III este de tip
O (Fig. 6.4).
Se cunoaște turaţia arborelui III: 13
12 34
nn [rot / min]
u u
și numărul de rotații pentru
arborele III ( III III h 3N L L 60 n rotatii ) pentru durata de viață stabilită în proiect,
hL ore .
S-au notat 1 – punctul 2 de pe schema arborelui III, 2 – punctul 3 de pe schema
arborelui III.
a) rulmenți radiali-axiali cu bile b) rulmenți radiali-axiali cu role
Fig. 6.4. Montajul în O
S-a notat
rulmentul 1 - rulmentul din punctul 2 de pe arborele III și
rulmentul 2 - rulmentul din punctul 3 de pe arborele III.
Se calculează: reacţiunile în punctele 1 și 2 (acestea acționează pe direcție radială față
de rulment) (atenție!, pe diagrama de momente încovoietoare pe arborele III, reazemele au
fost notate cu 2 și 3):
2 2r1 d 2 2F K V H (6.14a)
2 2r2 d 3 3F K V H (6.14b)
Forţa exterioară rulmenților pe arborele III este forța axială dezvoltată pe dantura roții 4,
a4F , deci
a a4F F (6.15)
Deci forţa axială exterioară va avea sensul lui a4F .

Capitolul 6
82
Se calculează sarcinile generate în rulmenți datorită construcției interne a rulmentului
(faptului că reacțiunile în rulmenți se descompun după direcția radială și axială), ap, dar
aplicându-se relația (6.6), cu valorile specificate pentru reazemele de pe arborele III:
ai1 r1 1F F tg
ai2 r2 2F F tg
De obicei, dacă rulmenții pe reazeme vor fi identici, se alege 1 2 .
Sensul a) (forța a a4F F are sensul liniei continue din Fig. 6.4)
a1 a ai2F F F (6.16a)
a2 a ai1F F F (6.16b)
Dacă a2 a2F 0 F 0 ) se consideră că rulmentul din 2 este neîncărcat axial)
Sensul b) (forța a a4F F are sensul liniei întrerupte din Fig. 6.4)
a1 a ai2F F F (6.17a)
a2 a ai1F F F (6.17b)
Dacă a1 a1F 0 F 0 ) se consideră că rulmentul din 1 este neîncărcat axial).
Atenție! Și pentru montajul în O și pentru montajul în X, calculul sarcilor axiale pe
rulment se face doar pentru sensul real al forței axiale exterioare, aF . În îndrumar sunt date
ambele variante, pentru generalitate.
Dacă sarcina axială exterioară rulmenţilor este relativ mică, se pot alege şi rulmenţi
radiali cu bile, care, evident sunt mai ieftini.
În funcție de tipul de rulment ales, se alege din Tabelul 6.1 sau Tabelul 6.2, factorul e și
coeficienții pentru calculul sarcinii dinamice echivalente, după aceiași metodologie ca la
montajul în O.
Se calculează
a
r 1
F
F și
a
r 2
F
Fși se compară cu e .
Se calculează sarcina dimanică echivalentă la fel ca în cazul montajului în O.
Pentru rulmenți radiali cu bile (vezi relațiile (6.10) și Tabelul 6.?)
ar 1 a
r
ar 2 a
r
Fe P F Y F
F
Fe P 0,75 F Y F
F
Pentru rulmenți radiali-axiali cu bile (vezi relațiile (6.11) și Tabelul 6.??))

Proiectarea lagărelor cu rulmenți
83
ar 1 a
r
ar 2 a
r
Fe P F Y F
F
Fe P X F Y F
F
Pentru rulmenți radiali-axiali cu role conice pe un rând (vezi relațiile (6.13))
ar
r
ar a
r
Fe P F
F
Fe P 0, 4 F Y F
F
Se va calcula capacitatea dinamică de bază pentru rulmenții 1 și 2:
1/ p
III1 1
bază
LC P
L
(6.18a)
1/ p
III2 2
bază
LC P
L
(6.18b)
Dacă proiectantul a hotărât că va monta rulmenți identici pe arbore, atunci alegerea
rulmentului se bazează pe valoarea cea mai mare pentru sarcina dinamică de bază
calculat 1 2C max(C ,C ) , astfel încât să se îndeplinească ambele condiții
rulment cata log adoptat / calculat pe arbored d
cata log calculatC C
cu adoptat / calculat pe arbore adoptat / calculat pe arbore(1) adoptat / calculat pe arbore(2)d max(d ,d ) și cu
calculat 1 2C max(C ,C ) .
Se estimează o funcţionare în regim stabilizat la temperatura de ~40°C...90ºC, iar
ungerea se face cu ulei în baie, prin barbotare.
Se calculează momentul de frecare pentru fiecare rulment şi puterea necesară învingerii
frecării. Coeficientul de frecare este considerat pentru peliculă continuă de lubrifiant și se
poate alege din Tabelul 6.5.
Vă propunem completarea Tabelului 6.6 pentru calculul puterii necesare învingerii
frecării în rulmenți.

Capitolul 6
84
Tabelul 6.5. Coeficientul de frecare, μ, pentru rulmenţi neetanşaţi [SKF Rolling Bearing, 2018]
Tipul rulmentului Coeficientul de frecare, μ
Rulmenți radial cu role cilindrice 0,002
Rulmenți radial-axiali cu role conice 0,02
Rulment radial-axial cu bile
pe un rând
pe două rânduri
rulment radial-axial cu
0,002
0,0024
0,0024
Alți rulmenți
Lubrifiere cu ulei mineral 0,05
Lubrifiere cu ulei sintetic 0,04
Valorile pentru coeficienţii de frecare se aleg tot din catalogul de rulmenţi [SKF Rolling
Bearing Catalog, 2018]. oK 1,02...1,12 este un coeficient ce ţine seama că momentele de
frecare în rulmenţi, la pornire, sunt mai mari decât cele obţinute în regim stabilizat. Acest
factor ţine seama şi de tipul ungerii, având valori mai mari pentru ungere cu unsoare.
Tabelul 6.6. Calculul momentului de frecare și a puterii pierdute prin frecare
Arborele Parametru 1 2
Arborele
II
Coeficientul de
frecare II1 II2
d II1d II2d
Momentul de
frecare
II1 r1 II1
fII1
F dM
2 (6.19a)
r2
fII2
F dM
2(6.19b)
Puterea necesară
învingerii frecării
în rulmenți 2
fr(r)II o 2 fII1 fII2 o fII1 fII2
nP K M M K M M
30
(6.20a)
Arborele
III
Coeficientul de
frecare III1 III2
d III1d III2d
Momentul de
frecare
III1 r1 III1
fIII1
F dM
2(6.19c)
III2 r2 III2
fIII2
F dM
2(6.19d)
Puterea necesară
învingerii frecării
în rulmenți fr(r)III o fIII fIII o fIII fIII
nP K M M K M M
3
3 1 2 1 230
(6.20b)
Puterea necesară invingerii frecării în rulment se ia în calcul și la încălzirea
reductorului, deoarece această putere se transformă în flux termic și căldura trebuie evacuată
prin carcasa reductorului.

Proiectarea lagărelor cu rulmenți
85
6.4. Alegerea fixării axiale a rulmenților
De obicei, fixarea axială nu se face numai prin alegerea unui ajustaj adecvat (cu
strângere). Fixarea axială a rulmenților se face
• pe umerii de pe arbore sau din carcasă,
• cu o piuliță filetată (Fig. 6.5a), pe arbore, care pot asigura și pretensionarea
rulmentului (în cazul rulmenților radiali-axiali cu bile și cu role conice) sau pe locaș (Fig.
6.5c); dimesiuni ale piulițelor și șaibelor de siguranță sunt date în Anexa 6.1),
• șaibe fixate cu șuruburi în capătul arborelui (Fig. 6.5b); recomandări pentru
dimensiuni și formă sunt date în Anexa 6.2,
• inele distanțiere (Fig. 6.5e, aici și cu inele de siguranță, pe arbore și în locaș).
Inelul de siguranță se alege în funcție de locul unde se va monta (pe arbore sau în
carcasă) și de diametrul arborelui sau locașului. Detalii privind forma și dimensiunile inelelor
și ale canalelor în care se montează sunt date în Anexa 6.3.
a) Inelul interior al rulmentului se sprijină pe umărul
arborelui și este fixat cu piuliță și șaibă de blocare, iar
inelul exterior este fixat cu un inel de siguranță pentru
locaș și de capacul reazemului, strâns cu șuruburi
b) Inelul interior al rulmentului se sprijină pe
umărul arborelui și este fixat cu șaibă plată, strânsă
cu șuruburi
c) Inelul exterior este poziționat prin piulița și șaibă
de blocare (poate asigura și pretensionarea
rulmentului)
d) Inelul exterior este în locașul din carcasă și este
poziționat axial cu capacul prins în șuruburi

Capitolul 6
86
e) Rulment fixat axial cu inele de siguranță și distanțier în carcasă și cu inel de siguranță și distanțier pe
arbore
Fig. 6.5. Fixarea axială a rulmenților SKF Rolling Bearings, 2018
Notă. Aceste soluții de fixare axială a rulmenților se pot aplica și pentru roțile dințate
1 și 4 ale reductorului dat în tema de proiectare. Fixarea lor axială este necesară pentru că
forțele axiale sunt suficient de mari încât să învingă frecarea statică dintre arbore și roată.
6.5. Aranjamente de rulmenți pe arbore
Într-un reductor, de obicei, aranjamentul rulmenților constă dintr-un rulment fixat
axial pe arbore și în carcasă și al doilea rulment, pe celălalt reazem, care este mobil sau
nefixat, pe arbore sau în carcasă. Rulmentul mobil poate avea deplasări axiale pe arbore sau în
carcasă. Acesta din urmă preia deplasări axiale care apar din cauza dilatării termice și
compensează compunerea toleranțelor componentelor sau mărimea jocurilor.
În acest ghid de proiectare sunt prezentate soluții de aranjare a rulmenților pentru
arbori relativ scurți, la care efectul de dilatare poate fi neglijat și pentru rulmenți care se
pretează temei de proiect, adică
- aranjamente de rulmenți la care deplasarea axială este preluată de inelul
rulmentului și locaș
- rulmenți radiali cu bile în ambele reazeme (Fig. 6.6)
- rulmenți oscilanți cu role sau cu bile pe fiecare reazem (Fig. 6.7).
- aranjamente de rulmenților cu auto-fixare: arborele este fixat axial într-o direcție
de unul din rulmenți iar în direcția opusă de celălalt rulment (fixare încrucișată); acest tip de
aranjament necesită rulmenți radiali-axiali sau oscilanți, reglarea jocurilor în rulmenți și
pretensionare la montaj:
- rulmenți radiali-axiali cu bile (Fig. 6.8),
• - rulmenți radiali-axiali cu role conice (Fig. 6.9),

Proiectarea lagărelor cu rulmenți
87
- aranjamente cu rulmenți mobili pe direcție axială: arborele se poate aluneca axial
pe distanțe mici (s), astfel încât să preia jocurile și dilatările generate de funcționarea
ansamblului:
• - cu rulmenți radiali cu bile (fig. 6.10a),
- cu rulmenți oscilanți cu role butoi (Fig. 6.10b) dar și cu bile
- cu rulmenți cu role cilindrice (Fig. 6.10c).
Fig. 6.6. Aranjament cu rulment fixat axial și
rulment mobil în locaș (Rulmenți radiali cu bile)
Fig. 6.7. Aranjament cu rulment fixat axial și rulment
mobil în locaș (rulmenți oscilanți cu role butoi)
Un aranjament de rulmenți, cu unul fixat axial și celălalt rulment mobil pe direcție
axială, poate compensa distanțe pe direcție axială, datorate compunerii tolernțelor pe direcție
axială, dilatărilor etc. (Figurile 6.6 și 6.7). În Figura 6.6, rulmentul din stânga este fixat axial,
în carcasă prin inelul de siguranță și capacul reazemului, iar pe arbore cu ajutorul umărului
arborelui și piuliței cu șaibă de blocare. Rulmentul din dreapta poate aluneca în carcasă,
valoarea maximă a acestei deplasări fiind delimitată de capătul capacului reazemului. Pe
arbore, rulmentul din dreapta este fixat axial cu inelul de siguranță. În Fig. 6.7, rulmentul din
stânga este fixat axial și pe arbore și în carcasă (la fel ca rulmentul radial cu bine din Fig. 6.6).
Rulmentul din dreapta este fixat numai pe arbore, putând aluneca, cu tot cu arbore, în locaș.
În Figura 6.8 este dat un exemplu de aranjament cu auto-fixare aixială pentru montaj
în X iar în Fig. 6.9 este dat un exemplu de aranjament cu auto-fixare pentru montaj în O.
Ambele montaje pot fi realizate cu rulmenți radiali-axiali cu bile sau cu role conice, cu
rulmenți oscilanți (tot radiali-axiali). Auto-fixarea (sau fixarea axială reciprocă nu se poate
realiza decât cu rulmenți care generează forțe axiale interne, chiar dacă sunt încărcați numai
cu forțe radiale).
Pentru montajul în X, dacă în funcționare temperatura arborelui este mai mare decât
temperatura caracasei (în majoritatea cazurilor), arborele se dilată mai mult decât carcasa, atât
pe direcție verticală, cât și pe direcție radială, rezultând o micșorare a jocurilor, și, deci, o

Capitolul 6
88
fixare mai bună a rulmenților. Nu trebuie să se depășească temperatura maximă de lucru a
rulmenților, menționată în catalog (de multe ori, 90...100 °C).
Fig. 6.8. Aranjament cu autofixare, cu rulmenți radiali-
axiali cu bile
Fig. 6.9. Aranjament cu autofixare, cu rulmenți
radiali-axiali cu role conice
În cazul montajului în O (Fig. 6.9), o dilatare prea mare pe direcție axială a arborelui
poate crește jocul în rulmenți, deplasând inelele interioare cu tot cu rolele conice spre
marginile căilor de rulare. În cazul rumenților radiali-axiali cu role conice din Fig. 6.9, soluția
constructivă de fixare pe arbori a inelelor interne ale rulmenților este făcută, de la dreapta la
stânga, cu ajutorul umărului rulmentului, o bucșă distanțieră mai lungă și inele distanțiere
înguste pentru rulmentul din stânga, o șaibă de blocare și o piuliță filetată pe capătul arborelui.
Observați că diametrul exterior al filetului de pe capătul de arbore este mai mic decât
diametrul de montaj al inelului interior al rulmentului din stânga. Decuparea arborelui între
cele două reazeme asigură o montare mai ușor de realizat pentru rulmentul din dreapta,
nefiind nevoit să se frece inelul interior pe o suprafață mai mare decât cea necesară rezemării.
În Fig. 6.10a și b sunt prezentate două exemple de aranjamente cu rulmenți alunecători
în carcasă, pe o distanță s/2 în deapta și s/2 în stânga. În cazul montajului din Fig. 6.10c, tot
un aranjament cu alunecare, mișcarea pe direcție axială se realizează între rolele cilindrice și
inele interioare ale rulmenților. Rolele sunt fixate în inelele exterioare cu ajutorul umerilor
inelelor.
Atenție! Rulmenții radiali-axiali cu bile sau cu role conice nu se pretează la
aranjament cu alunecare liberă deoarece ei funcționează corect cu pretensionare. Dacă nu
există forțe interne sau externe rulmentului care să oblige realizarea contactului dintre
corpurile de rostogolire și căile de rulare, rulmenții nu vor funcționa corect iar durata lor de
viață este redusă drastic.

Proiectarea lagărelor cu rulmenți
89
a) Aranjament cu rulmenți alunecători în
locașuri (rulmenți cu bile) b) Aranjament cu rulmenți alunecători în locașuri
(rulmenți oscilanți cu role butoi)
c) Aranjament cu rulmenți alunecători în locașuri (rulmenți radiali cu role butoi)
Fig. 6.10. Aranjamente de rulmenți cu alunecare axială SKF, site
6.6. Alegerea ajustajelor rulmenților
Rulmenții radiali și radiali-axiali sunt prelucrați cu următoarele toleranțe
- pentru diametrul inelului interior (care se fixează pe arbore): H,
- pentru diametrul inelului exterior (care se fixează în locaș): h,
Atenție! toleranța diametrelor de montaj ale rulmenților sunt date în catalog, dar pot fi
și simbolizate, h5, h6, H6, H7 etc.
Mărimea câmpului de toleranță dă clasa de precizie a rulmentului. Există rulmenți
executați în
- clasă normală de toleranță,
- clasă cu câmp de toleranțe mai mic (rulment mai precis decât cel din clasa normală):
simbolizat cu P6, ca sufix adăugat la simbolul principal al rulmentului SKF,
- - clasă cu câmp de toleranțe mai mic decât cel din clasa P6 (rulment mai precis decât
cel din clasa P6): se poate simboliza cu P6 SKF Rolling Bearing Catalog, 2018, simbolizat
cu P5.

Capitolul 6
90
Evident, rulmenții din ultimele două clase de precizie sunt mai scumpi decât cei din
clasa normală.
Figura 6.11 reprezintă posibilele ajustaje care se pot creea între arbore și inelul interior
al rulmentului și între inelul exterior al rulmentului și locașul în care se montează inelul
exterior al rulmentului.
Fig. 6.11. Ajustaje pentru arbore-rulment și rulment-locaș SKF Rolling Bearings Catalog, 2018
Tabelul 6.7. Recomandări pentru alegerea ajustajului (extras din SKF Rolling Bearings Catalog , 2018)
Tipul de rulment
Toleranțele arborelui (pentru arbori din
oțel și cu inelul interior al rulmentului în
rotație)
Toleranțele
locașului
rulmentului Aranja-
mentul
rulmen-
ților pe
arbore
Diametrul arborelui Diametrul locașului
mm
d
18
18
<d
40
40
<d
10
0
10
0<
d
140
14
0<
d
200
20
0<
d
280
28
0<
d
500
d
500
d
300
30
0<
d
500
d
500
Rulmenți radiali cu
bile (sarcini ușoare
P , C 0 06 j5 k5 k5 k6 k6
m
6 m6 m6
J6
G6
J6
G7
H7
F7
fix
mobil
Rulmenți radiali-axiali
cu bile pe un rând j5 k5 k5 m5 m6 n6 p6 p6 J6 J6 H7
fixare
reciprocă,
reglare pe
inelul
exterior
Rulmenți radial-axial
cu role conice pe un
rând
k5 k5 m
5 m5 n6 p6 p6 p6 J6 J6 H7
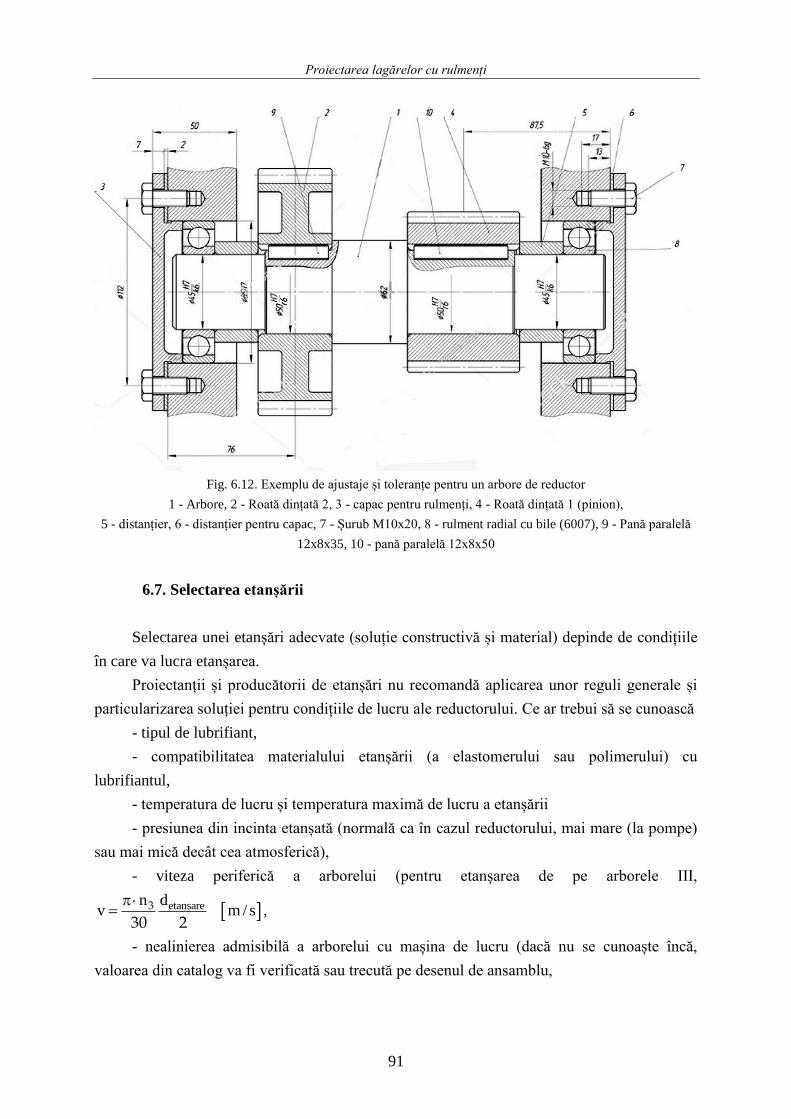
Proiectarea lagărelor cu rulmenți
91
Fig. 6.12. Exemplu de ajustaje și toleranțe pentru un arbore de reductor
1 - Arbore, 2 - Roată dințată 2, 3 - capac pentru rulmenți, 4 - Roată dințată 1 (pinion),
5 - distanțier, 6 - distanțier pentru capac, 7 - Șurub M10x20, 8 - rulment radial cu bile (6007), 9 - Pană paralelă
12x8x35, 10 - pană paralelă 12x8x50
6.7. Selectarea etanșării
Selectarea unei etanșări adecvate (soluție constructivă și material) depinde de condițiile
în care va lucra etanșarea.
Proiectanții și producătorii de etanșări nu recomandă aplicarea unor reguli generale și
particularizarea soluției pentru condițiile de lucru ale reductorului. Ce ar trebui să se cunoască
- tipul de lubrifiant,
- compatibilitatea materialului etanșării (a elastomerului sau polimerului) cu
lubrifiantul,
- temperatura de lucru și temperatura maximă de lucru a etanșării
- presiunea din incinta etanșată (normală ca în cazul reductorului, mai mare (la pompe)
sau mai mică decât cea atmosferică),
- viteza periferică a arborelui (pentru etanșarea de pe arborele III,
etansaren dv m / s
3
30 2,
- nealinierea admisibilă a arborelui cu mașina de lucru (dacă nu se cunoaște încă,
valoarea din catalog va fi verificată sau trecută pe desenul de ansamblu,

Capitolul 6
92
Se va trece simbolul, desenul din catalogul firmei producătoare și un tabel cu informații
dimensionale și de montaj.
a) b)
Fig. 6.13. Dimensiuni necesare introducerii manșetei de etanșare în desenul de ansamblu
SKF Industrial Shaft Seals 2019
Tabelul 6.8. Informații pentru manșeta de etanșare
Dimensiuni
Material Masa
d1 D b
mm kg
6 16
16
22
5
7
7
elastomer acrilo-butadienic
(cu simbolul firmei
producătoare)
Se alege materialul dintre cele propuse în catalog, ținând seama de compatibilitatea
chimică cu lubrifiantul, de intervalul de temperatură în care va fi folosit. De exemplu, pentru
etanșarea necesară pe arborele de ieșire al reductorului, intervalul de temperatură poate fi -
20...90 °C, lubrifiantul poate fi mineral sau sintetic.
Simbolizarea poate fi ca în exemplul de mai jos și simbolul se trece în caseta
”Denumirea componentei”din tabelul de componență al desenului de ansamblu.
d xDxb1 HMSA10 RG 1
diametrul arborelui x
diametrul locașului x
lățimea manșetei de etanșare
soluția constructivă
(simbolizarea din
catalog)
materialul buzei de etanșare,
aici elastomer acrilo-
butadienic SKF Rolling
Bearings, 2018
Variante față de soluția
constructivă de bază
(dacă este cazul)
Pentru calitatea suprafeței, se recomandă:
- rugozitatea suprafaței arborelui pe care se va așeza buza etanșării: Ra=0,2...0.6 m,
- rugozitatea suprafaței locașului în care se va monta manșeta: 1,6...3,2 m

Proiectarea lagărelor cu rulmenți
93
Fig. 6.14. Inel de protecție pentru arbore, pe care va
aluneca manșeta de etanșare. Cotele din figură sunt date
în cataloagele de produs SKF Industrial Shaft Seals
2019
Fig. 6.15. Soluție constructivă cu bucșă de protecție
la uzură, montat pe arbore. Manșeta este montată în
capacul reazemului cu rulment al reductorului SKF
Industrial Shaft Seals 2019
Se pot monta bucșe de protecție la uzură (Fig. 6.15), care se aleg în funcție de
diamterul arborelui (Fig. 6.14) SKF Industrial Shaft Seals 2019. Este o piesă simplă și
ieftină, dar rezultatele sunt foarte bune pentru că arborele nu se mai uzează în dreptul buzei
etanșării, deteriorarea acestuia incluzând creșterea rugozității, adeziunea materialului
etanșării, coroziune.
Pentru reductoare mici manșeta se poate monta în locașul din carcasa reductorului fără
un capac de fixare, dar pentru reductoare de puteri mai mari, se recomandă soluția cu capac de
fixare (Fig. 6.16b).
a) Manșetă de etanșare montată într-un locaș la
exteriorul capacului (înlocuirea manșetei este mult
mai ușor de făcut)
b) Manșetă de etanșare montată în locașul rulmentului
(prelucrare mai ieftină și calitatea suprafeței de așezare
a manșetei foarte bună, ca și pentru rulment).
Fig. 6.16. Variante pentru manșeta de etanșare și piesele adiacente SKF Industrial Shaft Seals 2019
Această soluție presupune ca diametrul exterior al manșetei de etanșare să fie egal cu
diametrul exterior al rulmentului. Dacă diametrul exterior al manșetei de etanșare este mai

Capitolul 6
94
mic față de diametrul exterior al rulmentului, se atașează o piesă intermediară sau locașul
pentru manșetă se va executa în capacul care se va fixa în carcasa reductorului (Fig. 6.16a).
În Figura 6.17 este dată o soluție constructivă cu montarea manșetei de etanșare în
capacul reductorului. Cotele sunt date pentru a exemplifica modul de alegere a acestora : cad
- diametrul capătului arborelui III, md1 - diametrul arborelui pe care va acționa buza manșetei
de etanșare (este dat în catalogul de etanșări, de obicei mai mic cu 1...4 mm față de diametrul
arborlui pentru montarea rulmentului, md2 - diametrul exterior al manșetei de etanșare (dat în
catalogul de etanșări), a mind - diametrul interior al capacului, mărimea lui se alege astfel încât
marginea capacului să se sprijine doar pe umărul inelului exterior al rulmentului, rD -
diametrul exterior al rulmentului, bmind - diamterul umărului de reazem al rulmentului (care
trebuie să fie mai mic decât diametrul umărului inelului interior al rulmentului.
Fig. 6.17. Soluție constructivă cu manșeta de etanșare în capacul prin care trece arborele de intrare sau de ieșire
al redutorului Tudose, 2008.

95
Capitolul 7
Carcasa reductorului
De ce este carcasa un element important pentru proiectarea gamei de reductoare?
Pentru că are următoarele caracteristici:
o piesă complicată,
scumpă,
cu prelucrări de precizie (locaşurile rulmenţilor, locaşul pentru flanşa motorului etc.,
consumatoare de timp (prelucrări în diferite secţii (turnare, prelucrare grosieră,
prelucrare de precizie, vopsire, asamblare, testare),
prelucrarea coaxială a locaşurilor de precizie este dificilă şi pretenţioasă,
în spaţiul angrenajelor se pot monta roţi dinţate diverse, asigurând astfel valori diferite
ale raportului total de transmisie
Vă propunem realizarea unei carcase similare cu cea din Fig. 7.1. Cotele trecute pe
desen sunt necesare pentru montarea moto-reductorului.
a)
Fig. 7.1. Soluţia constructivă a unei carcase cu talpă și motor atașat reductorului, pentru un
reductor cu două trepte, cu angrenaje cilindrice cu dinţi înclinaţi [Nord Catalog, ????].
Experiența de până acum în acest domeniu al transmisiilor închise recomandă grosimea
pereților

96
dar cu , turnarea fontei sau a oțelului fiind dificilă și nerentabilă sub această
valoare. pentru reductoare mari, de serie mică, se pot realiza caracasele prin asamblare prin
sudare a unor piese mai simple (pereți, nervuri, capace etc.).
Se recomandă ca grosimea fundului carcasei să fie puțin mai mare
.
Proiectantul începe desenul de ansamblu cu roțile dințate, întâi prima treaptă, adaugă
elementele necesare prinderii axiale a roții 1, apoi desenează arborele II, angrenajul cu roțile
3 și 4, avâd grijă să asigure spațiu pentru elementele de prindere a roții 4 pe arborele III.
Evident, între arborii I și III (care sunt coaxiali) trebuie să existe un spațiu liber (6...15 mm)
pentru fiecare se rotește cu turații diferite. Se desenează rulmenții (se pot desena simplificat,
adică numai conturul exterior cu linie groasă si diagonale subțiri dar în tabelul de componență
trebuie trecut simbolul corect (întreg). Se adaugă distanțierele, elementele de fixare a
rulmenților pe direcție axială.
După aceste subansamble se desenează carcasă. Ea trebuie să fie la o distanță minimă
față de corpurile în mișcare (roțile) aproximativ . În partea de jos a carcasei,
indiferent de soluția constructivă între diametrul de cap al roții mai mare și fundul carcasei
trebuie să se asigure un spațiu de 30...40 mm. Aceast spațiu este necesar pentru a asigura un
volum suficient de lubrifiant astfel încât mișcarea de rotație a roților să nu antreneze
elementuale particule de uzură, care se decantează pe fundul băii de ulei. Pe fundul băii se
poate monta (prin lipire) o bandă magnetică care să adune particulele de uzură. Aceasta se
poate curața atunci când se înlocuiște total lubrifiantul sau se poate schimba.
Se desenează apoi capacele și elementele de asamblare (șuruburi, piulițe, șaibe) pentru
fixarea acestora. Nu trebuie uitate garniturile dintre capacul lateral al reductorului și carcasă,
dintre carcasă și capacele reazemelor, cu garniturile fiecăruia.
Garniturile acestea sunt de obicei plate, de grosimi relativi mici (0,3...4 mm), care se
desenează prin îngroșare. Important este să nu se uite vreuna din ele și să fie trecute fiecare în
tabelul de componență. Materialul acestor garnituri plane trebuie să fie compatibil cu
lubrifiantul utilizat.
Carcasa trebuie să aibă un orificiu de vizitare, acoperit de un cap și cu o garnitură, prin
care să se poată vedea zonele de angrenare. Pe acest capac se poate monta (cu filet) un dop de
aerisire.
Tot pe carcasă se montează unul sau două inele de ridicare, în funcție de mărimea
reductorului, pentru că operatorul nu are voie să ridice mai mult de 10...15 kg pentru timp
scurt și atunci reductoare mai mari trebuie transportate și ridicate cu palane de atelier.
Pe carcasă, la loc vizibil trebuie să existe un vizor oval prin care să se vadă nivelul de
ulei din baie. Acest vizor este alcătuit dintr-o ramă ovală, metalică sau din alt material care
este compatibil cu lubrifiantul, un geam de sticlă sau de polimer transparent, lipit în acest
orificiu. Vizorul se fixează cu șuruburi în carcasă.

97
Bibliografie
1. *** Catalog Nord

98

98
Capitolul 8
Selectarea lubrifiantului pentru reductor
8.1. Introducere
Când se stabilește marca și cantitatea de lubrifiant pentru un reductor, proiectantul
trebuie să fi stabilit deja următoarele
- soluția de ungere (în baie sau cu recircularea lubrifiantului, ultima fiind specifică
sistemelor mai complexe și de puteri mai mari),
- intervalul de temperatură în care funcționează sistemul proiectat,
- alți parametri care pot influența alegerea lubrifiantului, cum ar fi viteza periferică a
roților dințate sau/și parametri ai rulmenților care includ de obicei produsul (nxd), adică
turația de lucru a rulmentului și diametrul interior,
- forma carcasei și a poziția rulmenților.
La umplerea inițială cu lubrifiant, nivelul de ulei se poate modifica pe durata primelor
ore de funcținare, deoarece uleiul pătrunde în galerii, în rulmenți etc. dar nivelul de ulei
trebuie să se mențină între limitele admise pe indicatorul de ulei (Fig. 8.1). Dacă există un
vizor, utilizatorul trebuie să corecteze vlum de ulei din carcasă (prin adăugare sau extragerea
unui volum care să aducă nivelul intre liniile recomandate), după aproximativ 2 ore de
funcționare. După oprirea funcționării se așteaptă să se răceascî reductorul și să se observe
clar nivelul uleiului pe vizor. Cantitățile de ulei din Tabelul sunt doar recomandări. Valorea
depinde de raportul de tansmisie și de forma carcasei.
Când se stabilește tipul și cantitatea de lubrifiant pentru un reductor (dar și pentru alte
sisteme tehnice cu lubrifiere în baie) se analizează subsistemele care trebuie lubrifiate. Pentru
un reductor cu două trepte subsistemele care trebuie unse sunt
- angrenajele (două în acest caz) și care trebuie analizate în fucnție de documentația la
care se face referire pentru alegerea lubrifiantului: unele cataloage de reductoare prezintă
tabele sau diagrame separate, pentru reductoare cu o treaptă sau cu mai multe, altele
recomandă lubrifiantul funcție de raportul de transmisie total al reductorului și de parameterii
ca puterea la ieșire, turațiile de intrare și ieșire,
- rulmenții; trebuie ținut seama de faptul că turația, mărimea și tipul rulmenților diferă
de la un arbore la altul; se poate selecta lubrifiantul pentru fiecare pereche de rulmenți în
parte, pentru că au turații și mărimi diferite.

Cap. 3. Proiectarea unui reductor din gamă
99
În final, analizându-se rezultatele pentru fiecare subsistem al reductorului (în general
vâscozitatea dinamică sau cinematică la temperatura de funcționare recomandată în cataloage
pentru subsistemul respectiv), proiectantul trebuie sa facă un compromis pentru că trebuie să
aleagă un singur lubrifiant care să deservească tot sistemul.
În continuare se va explica cum se alege lubrifiantul pentru angrenaje și apoi cum se
alege pentru rulmenți.
Următoarele recomandări sunt date în cataloage de produs (de rulmenți și reductoare)
sau în ghiduri de proiectare pentru ungerea în baie de lubrifiant.
-
8.2. Selectarea lubrifiantului pentru angrenaje
Pentru reductoare uzuale, de puteri mici și medii, cu ungere în baie, există
recomandări în cataloage, ghiduri de proiectare. Realizați calculele și respectați indicațiile
dintr-o singură sursă, cea pe care o considerați adecvată temei de proiectare.
Se calculează viteza periferică a roţilor, pe fiecare treaptă (unii proiectanți folosesc
viteza calculată pe diametrul de rostogolire):
treapta I
(8.1)
treapta a II-a
(8.2)
În general clasa de vâscozitate a unui lubrifiant pentru angrenaje poate fi aleasă în
funcție de viteza periferică, puterea de ieșire (P3 pentru tema rezolvată) și temperatura
mediului ambiant (în care va funcționa reductorul.
Dacă mediul ambiant are alte temperaturi, se poate consulta Tabelul 8.3.
Tabelul 8.1 [Nord Gear Catalogue, 2014] recomandă clasa de vâscozitate ISO VG în
funcţie de temperatura mediului ambiant pe durata funcţionării reductorului.
Fig. 8.1. Nivelul uleiului în reductor

Cap. 3. Proiectarea unui reductor din gamă
100
Cantitatea de lubrifiant se recomnadă în cataloagele de reductoare, pentru anumite
soluții constructive. Orientativ, nivelul uleiului dintr-un reductor cu două trepte, cu aceiași
distanță între axe, aşa cum este proiectat în această lucrare, este dat în Fig. 8.1. Se stabilește,
cunoscând forma caracasei, a subsistemelor care trebuie unse și a poziței lor în sistem, nivelul
de ulei și se calculează inălțimea nivelului (forma carcasei se poate aproxima la forme
geometrice simple, aici un paralelipiped). În funcție de această valoare se poziționează pe
carcasă vizorul și se stabilesc nivelul minim și maxim, de o parte și de alta a nivelului
calculat, considerat mediu.
Intervalul recomandat de lubrifiere este dat în Tabelul 8.2. Lubrifianţii pe bază de
poliglicoli, furnizaţi de unele firme producătoare de reductoare [45] nu necesită schimbarea
periodică a uleiului, pe toată durata de viaţă a ansamblului. Temperatura mediului ambiant
pentru care este permisă funcţionarea reductoarelor de uz general este între -20...40º C. La
temperaturi ale mediului ambiant de -10...-20ºC unitatea porneşte după o încălzire prealabilă
şi progresivă sau dacă porneşte şi funcţionează un timp în gol (fără sarcină); când temperatura
atinge -10ºC sau mai mult, se conectează maşina de lucru. Poziția nivelului de ulei depinde de
forma carcasei și de poziția roților dințate. Se recomandă ca pentru soluția constructivă aleasă,
roata cu diametrul cel mai mare (roata 2) să fie scufundată în ulei cel puțin pe 1/4 din
diametrul ei. trebuie verificat dacă cel puțin coroana dințată în partea cea mai de jos să fie
imersată în ulei.
Tabelul 8.1. Recomandări pentru selectarea clasei de vâscozitate
pentru reductoare cu ungere în baie [50]
Regim
Temperatura mediului ambiant
0ºC...20ºC 20ºC...40ºC
Ulei mineral
ISI VG
Ulei sintetic
ISO VG
Ulei mineral
ISI VG
Ulei sintetic
ISO VG
uşor 150 150 220 220
normal 150 150 320 220
sever 200 200 460 320
Tabelul 8.2. Recomandări pentru intervalul de schimbare a uleiului [50]
Temperatura medie a uleiului
din baie [ºC]
Intervalul între două schimburi de lubrifiant h
Ulei mineral Ulei sintetic
< 65 8000 25000
65...80 4000 15000
80...95 2000 12500
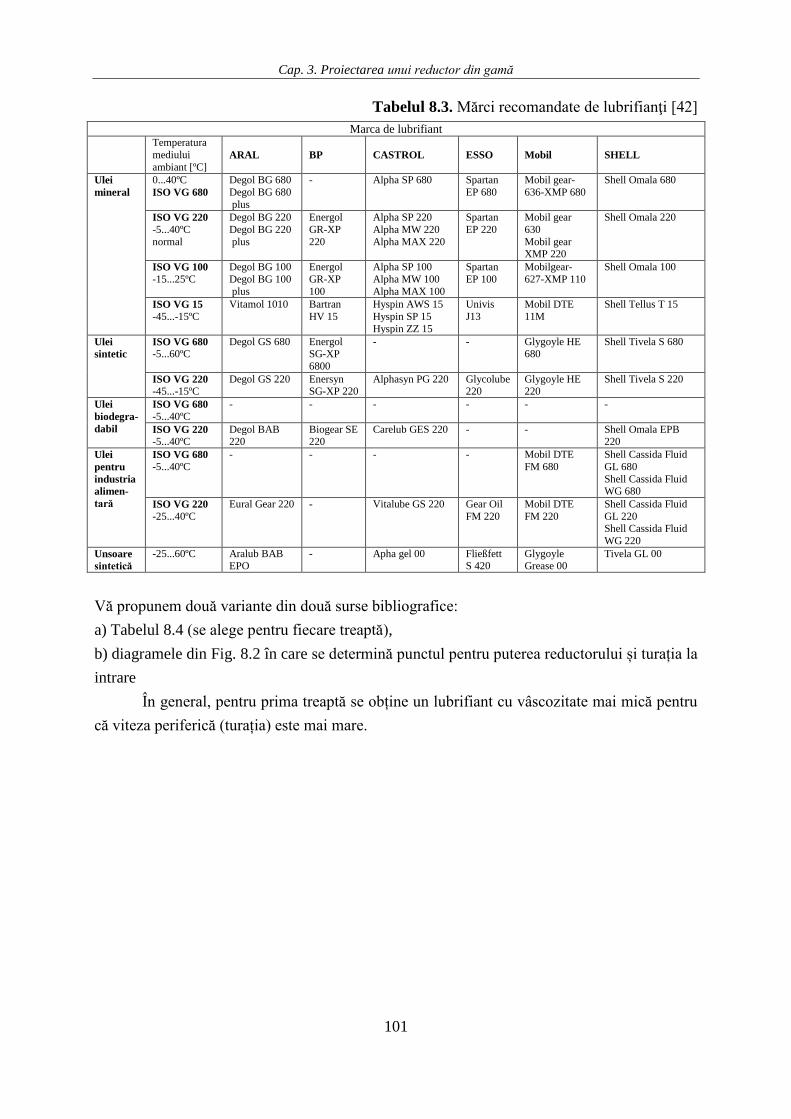
Cap. 3. Proiectarea unui reductor din gamă
101
Tabelul 8.3. Mărci recomandate de lubrifianţi [42]
Marca de lubrifiant Temperatura
mediului
ambiant [ºC]
ARAL
BP
CASTROL
ESSO
Mobil
SHELL
Ulei
mineral
0...40ºC
ISO VG 680
Degol BG 680
Degol BG 680
plus
- Alpha SP 680 Spartan
EP 680
Mobil gear-
636-XMP 680
Shell Omala 680
ISO VG 220
-5...40ºC
normal
Degol BG 220
Degol BG 220
plus
Energol
GR-XP
220
Alpha SP 220
Alpha MW 220
Alpha MAX 220
Spartan
EP 220
Mobil gear
630
Mobil gear XMP 220
Shell Omala 220
ISO VG 100
-15...25ºC
Degol BG 100
Degol BG 100
plus
Energol
GR-XP
100
Alpha SP 100
Alpha MW 100
Alpha MAX 100
Spartan
EP 100
Mobilgear-
627-XMP 110
Shell Omala 100
ISO VG 15
-45...-15ºC
Vitamol 1010 Bartran
HV 15
Hyspin AWS 15
Hyspin SP 15
Hyspin ZZ 15
Univis
J13
Mobil DTE
11M
Shell Tellus T 15
Ulei
sintetic
ISO VG 680
-5...60ºC Degol GS 680 Energol
SG-XP
6800
- - Glygoyle HE 680
Shell Tivela S 680
ISO VG 220
-45...-15ºC Degol GS 220 Enersyn
SG-XP 220 Alphasyn PG 220 Glycolube
220 Glygoyle HE 220
Shell Tivela S 220
Ulei
biodegra-
dabil
ISO VG 680
-5...40ºC
- - - - - -
ISO VG 220
-5...40ºC Degol BAB 220
Biogear SE 220
Carelub GES 220 - - Shell Omala EPB 220
Ulei
pentru
industria
alimen-
tară
ISO VG 680
-5...40ºC
- - - - Mobil DTE
FM 680
Shell Cassida Fluid
GL 680
Shell Cassida Fluid WG 680
ISO VG 220
-25...40ºC
Eural Gear 220 - Vitalube GS 220 Gear Oil
FM 220
Mobil DTE
FM 220
Shell Cassida Fluid
GL 220 Shell Cassida Fluid
WG 220
Unsoare
sintetică
-25...60ºC Aralub BAB EPO
- Apha gel 00 Fließfett S 420
Glygoyle Grease 00
Tivela GL 00
Vă propunem două variante din două surse bibliografice:
a) Tabelul 8.4 (se alege pentru fiecare treaptă),
b) diagramele din Fig. 8.2 în care se determină punctul pentru puterea reductorului și turația la
intrare
În general, pentru prima treaptă se obține un lubrifiant cu vâscozitate mai mică pentru
că viteza periferică (turația) este mai mare.

Cap. 3. Proiectarea unui reductor din gamă
102
Tabelul 8.4. Recomandări privind alegerea clasei de vâscozitate pentru un lubrifiant pentru
angrenaje cilindrice și conice, pentru uleiuri cu indice de vâscozitate IV=90 (pentru indici de
vâscozitate mai mari, se consultă ASTM 9005-E2
Temperatura
de lucru °C
Viteza periferică (
[ ])
1...2,5 2,5 5 10 15 20 25 30
10 32
15 46 32
20 68 46 32
25 68 46 32
30 100 68 46 32
35 100 100 68 46 32
40 150 100 68 46 32 32 32
45 220 150 100 68 46 32 32
50 320 220 150 100 46 46 32
55 460 220 150 100 68 68 68 46
60 460 320 220 150 68 68 68 46
65 680 420 320 220 150 100 100 68
70 1000 680 320 220 150 100 100 68
75 1500 680 460 320 150 150 100
80 2200 1000 680 460 220 220 150
85 3200 1500 1000 460 220 220 150
90 3200 2200 1000 680 460 320 320 220
95 3200 1500 1000 460 460 320 220
100 3200 2200 1000 680 460 460 320
Tabelul 8.5. Tabel pentru sinteza informa’iilor privind ungerea reductorului
Treapta I Trepta a II-a
Viteza periferică a roților
[ ]
[ ]
Turația [ []] [ []]
Temperatura lubrifiantului în baie aceiași cu temperatura lubrifiantului pentru rulmenți
lubrifiant pentru angrenaj ISO VG1 ISO VG2
Din diagramele din Fig. 8.2 se observă că pentru reductoare cu mai multe trepte, clasa
de vâscozitate a lubrifiantului este mai mare.

Cap. 3. Proiectarea unui reductor din gamă
103
a) Reductor cu o treaptă b) Reductor cu mai multe trepte
Fig. 8.2. Diagrame pentru alegerea clasei de vâscozitate a lubrifiantului pentru reductoare
https://www.machinerylubrication.com/Articles/Print/707
8.3. Selectarea lubrifiantului pentru rulmenți
Alegerea lubrifiantului constă de fapt în selectarea vâscozității acestuia, la temperatura
de lucru, considerată stabilizată de 80...90 °C. Proiectantul va observa că respectând
indicațiile din cataloagele de rulmenți (aici skf, 2021, dar informații similare se găsesc și în
alte cataloage), din cauza turațiilor și sarcinilor mult diferite pe cele două trepte, va trebui să
facă un compromis în sensul că uleiul ales va trebui sa deservească toți rulmenții din reductor,
și, în plus, și angrenajul.
https://www.skf.com/binaries/pub12/Images/0901d196802809de-Rolling-bearings---
17000_1-EN_tcm_12-121486.pdf
Pentru ungerea rulmenților, lubrifiantului se selectează după următoarele criterii:
- tipul lubrifiantului: unsoare sau ulei: soluțiile propuse spre rezolvare în acest
îndrumar acceptă lubrifiere cu ulei, în special pentru că lubrifiantul trebuie să ȚdeserveascăȚ
și angrenajul,
- intervalul de re-completare și de schimbare,

Cap. 3. Proiectarea unui reductor din gamă
104
- sistemul de ungere : în baie sau cu recirculare : soluțiile propuse spre rezolvare în
acest îndrumar acceptă lubrifiere în baie de ulei, fără recirculare, dar reductoarele navale de
puteri mari impun un sistem de răcire și filtrare a uleiului,
- vâscozitatea cinematică la temperatura de funcționare a reductorului, ,
- alte criterii care includ prețul lubrifiantului, a mentenanței legate de lubrifiere, dacă
se folosesc aditivi sau nu etc..
Se propune aici selectarea vâscozității cinematice a lubrifiantului pentru rulmenți după
catalogul SKF.
Când se alege un ulei lubrifiant pentru rulmenți, parametrii cei mai importanți sunt
vâscozitatea cinematică și indicele de vâscozitate, stabilitatea la temperatura de lucru (care
determină tipul de ulei, mineral, sintetic sau vegetal) și pachetul de aditivi (în special cei
pentru extremă presiune, anti-uzură, anti-coroziune, pentru controlul spumării)
Se definește un raport κ, dependent de condițiile de funcționare ale rulmenților
(8.?)
în care ν = vâscozitatea reală a uleiului în funcționare [mm2/s], ν1 = vâscozitatea în funcție de
diametrul mediu al rulmentului și de turație, tot în [mm2/s]
Se alege ν1 din diagrama din Fig. 8.3. Cunoscându-se temperatura lubrifiantului în
funcționare, din calculul la încălzire sau estimată pe baza catalogului de rulmenți (dacă nu o
cunoașteți se poate considera cel mult 80...90 ºC - o temperatură acceptată în funcționarea
corectă a reductoarelor) și diametrul mediu al rulmentului. Verticala ridicată din valoarea
diametrului mediu al rulmentului se oprește pe linia de turație cea mai apropiată de turația n a
rulmentului [în rpm] din proiect și trasând o line orizontală se determină vâscozitatea necesară
în funcționare, ν1.
Diametrul mediu al unui rulment se calculează cu relația
dm = 0,5 (d + D) [mm] (8.?)
în care d - diametrul interior și D - diametrul exterior se găsec în catalogul de rulmenți pentru
fiecare rulmentul selectat la capitolul anterior
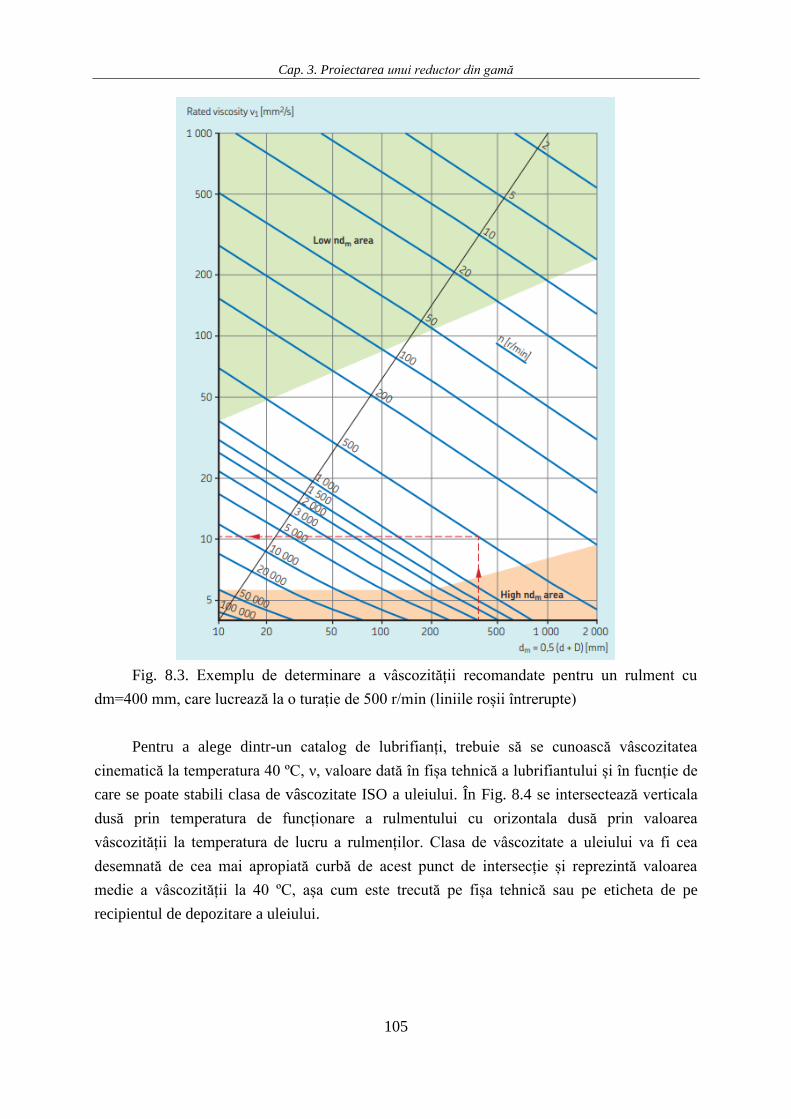
Cap. 3. Proiectarea unui reductor din gamă
105
Fig. 8.3. Exemplu de determinare a vâscozității recomandate pentru un rulment cu
dm=400 mm, care lucrează la o turație de 500 r/min (liniile roșii întrerupte)
Pentru a alege dintr-un catalog de lubrifianți, trebuie să se cunoască vâscozitatea
cinematică la temperatura 40 ºC, ν, valoare dată în fișa tehnică a lubrifiantului și în fucnție de
care se poate stabili clasa de vâscozitate ISO a uleiului. În Fig. 8.4 se intersectează verticala
dusă prin temperatura de funcționare a rulmentului cu orizontala dusă prin valoarea
vâscozității la temperatura de lucru a rulmenților. Clasa de vâscozitate a uleiului va fi cea
desemnată de cea mai apropiată curbă de acest punct de intersecție și reprezintă valoarea
medie a vâscozității la 40 ºC, așa cum este trecută pe fișa tehnică sau pe eticheta de pe
recipientul de depozitare a uleiului.
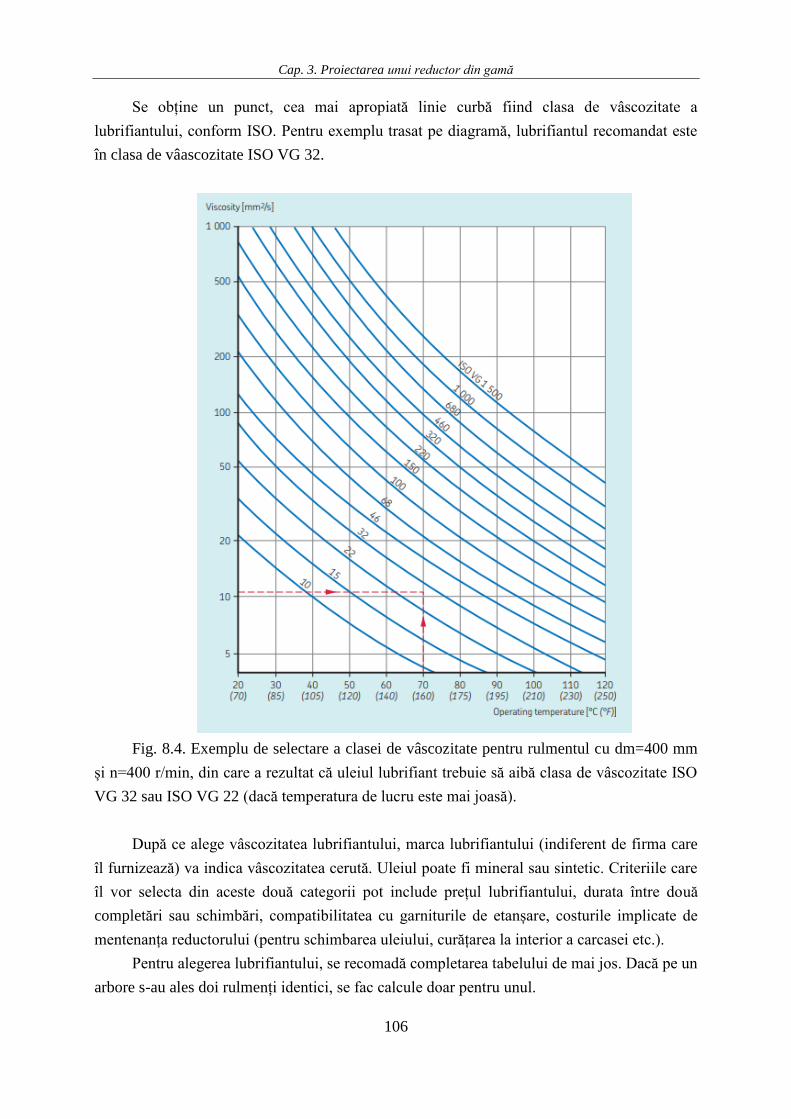
Cap. 3. Proiectarea unui reductor din gamă
106
Se obține un punct, cea mai apropiată linie curbă fiind clasa de vâscozitate a
lubrifiantului, conform ISO. Pentru exemplu trasat pe diagramă, lubrifiantul recomandat este
în clasa de vâascozitate ISO VG 32.
Fig. 8.4. Exemplu de selectare a clasei de vâscozitate pentru rulmentul cu dm=400 mm
și n=400 r/min, din care a rezultat că uleiul lubrifiant trebuie să aibă clasa de vâscozitate ISO
VG 32 sau ISO VG 22 (dacă temperatura de lucru este mai joasă).
După ce alege vâscozitatea lubrifiantului, marca lubrifiantului (indiferent de firma care
îl furnizează) va indica vâscozitatea cerută. Uleiul poate fi mineral sau sintetic. Criteriile care
îl vor selecta din aceste două categorii pot include prețul lubrifiantului, durata între două
completări sau schimbări, compatibilitatea cu garniturile de etanșare, costurile implicate de
mentenanța reductorului (pentru schimbarea uleiului, curățarea la interior a carcasei etc.).
Pentru alegerea lubrifiantului, se recomadă completarea tabelului de mai jos. Dacă pe un
arbore s-au ales doi rulmenți identici, se fac calcule doar pentru unul.

Cap. 3. Proiectarea unui reductor din gamă
107
Tabelul 8.6. Sinteza informațiilor necesare pentru selectarea clasei de vâscozitate a
lubrifiantului pentru rulmenți
Temperatura estimată (considerată aceiași pentru lubrifiant, pentru proiectul dat)
Arbore II Arbore III
Rulment Rulment
1 2 1 2
d
D
dm
n
1
ISO VG
Proiectantul trebuie să facă un compromis între clasele de vâscozitate obținute pentru
o lubrifiere de calitate a rulmenților și clasele de vâscozitate recomandate pentru lubrifierea
angrenajelor. Contează experiența lui în proiectare și exploatare și abilitățile de a consulta
cataloagele firmelor de lubrifianți.
Se completează tabelul de mai jos.
Tabelul 8.7.
Clasa de vâscozitate
recomandată pentru fiecare
subsistem
Clasa de vâscozitate aleasă
pentru tot reductorul
Treapta 1
Treapta 2
rulmenți pe arborele II
rulmenți pe arborele III
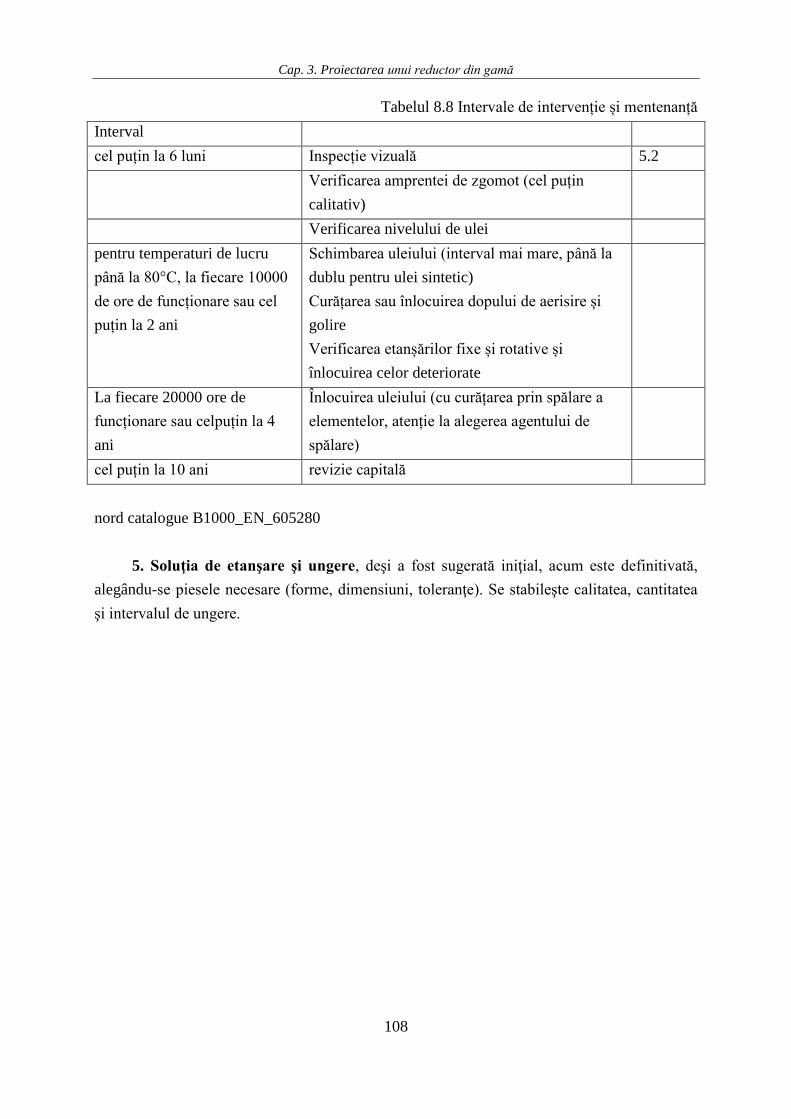
Cap. 3. Proiectarea unui reductor din gamă
108
Tabelul 8.8 Intervale de intervenție și mentenanță
Interval
cel puțin la 6 luni Inspecție vizuală 5.2
Verificarea amprentei de zgomot (cel puțin
calitativ)
Verificarea nivelului de ulei
pentru temperaturi de lucru
până la 80°C, la fiecare 10000
de ore de funcționare sau cel
puțin la 2 ani
Schimbarea uleiului (interval mai mare, până la
dublu pentru ulei sintetic)
Curățarea sau înlocuirea dopului de aerisire și
golire
Verificarea etanșărilor fixe și rotative și
înlocuirea celor deteriorate
La fiecare 20000 ore de
funcționare sau celpuțin la 4
ani
Înlocuirea uleiului (cu curățarea prin spălare a
elementelor, atenție la alegerea agentului de
spălare)
cel puțin la 10 ani revizie capitală
nord catalogue B1000_EN_605280
5. Soluţia de etanşare şi ungere, deşi a fost sugerată iniţial, acum este definitivată,
alegându-se piesele necesare (forme, dimensiuni, toleranţe). Se stabileşte calitatea, cantitatea
şi intervalul de ungere.

109
ANEXE
necesare proiectării reductoarelor cu roți
dințate cu dinți înclinați

111
Anexa A.3.1
Tabele cu parametrii motoarelor electrice trifazate
Tabelul A.3.1. Motoare cu turație nominală de 3000 rpm
3000 rpm la 50 Hz, Tambiantă=-20...+45 °C, 230/400 V și 400/690 V, 2 perechi de poli
Tip
PN nN IN cos MN MA/MN Mk/MN IA/IN J Masă
S1, S9 400 V ϕ 4/4xPN *
[kW] [rpm] [A] [%] [Nm] [kgm2] [kg]
63 S/2 0,18 2715 0,52 0,84 59,5 0,63 2,5 2,5 3,4 0,00021 3,6
63 L/2 0,25 2720 0,7 0,87 59,4 0,88 2,4 2,6 3,5 0,00028 4,2
71 S/2 0,37 2835 1,06 0,75 66,3 1,25 1,9 2,5 4 0,00035 5,4
71 L/2 0,55 2825 1,25 0,83 76,3 1,86 2,7 2,7 5,2 0,00046 6,7
80 S/2 0,75 2780 1,73 0,87 71,9 2,58 2,3 2,3 4,8 0,00067 8
80 L/2 1,1 2825 2,48 0,84 76,1 3,72 3,3 3,4 5,6 0,00089 9
90 S/2 1,5 2820 3,14 0,88 78,4 5,08 2,1 2,3 5,2 0,0014 12
90 L/2 2,2 2820 4,5 0,9 78,8 7,45 2 2,6 5,9 0,0018 14
100 L/2 3 2860 6,81 0,78 81,1 10 2,2 2,6 4,8 0,0028 18
112 M/2 4 2880 7,79 0,87 85,1 13,3 2,3 2,3 4,8 0,0055 26
132 S/2 5,5 2870 11,4 0,82 84,9 18,3 2,3 2,3 4,8 0,01 37
132 SA/2
7,5 2920 14,7 0,85 84,6 24,5 3,4 3,8 6,9 0,013 44
132 M/2 11 2885 19,5 0,92 88,7 36,4 2,0 2,2 5,3 0,019 55
Tabelul A.3.2. Motoare cu turație nominală de 1500 rpm
Tip
PN nN MN IN cos MA/MN Mk/MN IA/IN J Masă
S1
230/400
V
400/690
V 1/2xPN 4/4PN
*
[kW] [rpm] [Nm] [A] [A]
[%] [%]
[kgm2] [kg]
80 SH/4 0,55 1420 3,7 2,44/1,41 1,41/0,81 0,7 77,7 80,8 3,2 3,2 5,1 0,0014 9
80 LH/4 0,75 1415 5,06 3,05/1,76 1,76/1,02 0,75 81,6 82,4 3 3,1 5,2 0,0019 10,2
90 SH/4 1,1 1435 7,32 4,19/2,42 2,42/1,40 0,8 80,9 81,8 3,1 3,5 6,1 0,0034 15,1
90 LH/4 1,5 1415 10,1 5,8/3,5 3,35/1,93 0,79 81,3 82,8 3,3 3,5 5,8 0,0039 16,8
100 LH/4 2,2 1445 14,5 8,05/4,65 4,65/2,68 0,79 85,2 86,6 3,7 4,3 7,3 0,0075 25,2
100 AH/4 3 1425 20,1 11,4/6,59 6,59/3,80 0,77 86,4 85,6 3,1 3,5 6,3 0,0075 25,2
112 MH/4 4 1440 26,5 13,9/8,02 8,02/4,63 0,83 87,4 86,7 3,1 3,6 7,5 0,014 35,5
132 SH/4 5,5 1460 36 18,5/10,7 10,7/6,18 0,84 87,6 88,2 3,1 3,5 7,6 0,032 55
132 MH/4 7,5 1460 49 26,0/15 15/8,7 0,81 88,5 89,3 3,3 3,9 7,5 0,035 62
132 LH/4 9,2 1450 60,6 33,9/19,6 19,6/11,3 0,77 87,6 89,3 3,4 3,8 7,4 0,035 62
160 SH/4 9,2 1465 60 29,4/17 17/9,8 0,87 90,9 91,3 3,3 3,6 8,2 0,067 93
160 MH/4 11 1465 71,7 35,7/20,6 20,6/11,9 0,86 90,8 91,2 2,9 3,4 7,4 0,067 93
160 LH/4 15 1465 97,8 47,6/27,5 27,5/15,9 0,87 91,7 92 3 3,5 7,9 0,092 122
180 MH/4 18,5 1475 120 59,9/34,6 34,6/20 0,84 92,2 92,2 2,9 3,2 7,7 0,13 137
180 LH/4 22 1475 142 69,8/40,3 40,3/23,3 0,86 92,7 92,2 2,8 3,1 7,7 0,16 155
200 XH/4 30 1470 195 102/59 59/34,1 0,8 92,8 92,4 2,8 3,1 7,1 0,16 155
225 SH/4 37 1480 239 120/69,5 - 0,85 94,4 93,7 2,6 3 6,9 0,49 315
225 MH/4 45 1480 290 141/81,4 - 0,84 94,4 94 2,6 2,7 6,9 0,60 340

Proiectarea reductoarelor cu angrenaje cilindrice
112
250 WH/4 55 1480 355 172/99,3 - 0,84 94,2 94 2,7 3 7,4 0,74 380
Tabelul A.3.3. Motoare cu turație nominală de 1000 rpm
1000 rpm la 50 Hz, Tambiantă=-20...+45 °C, 230/400 V și 400/690 V, 6 perechi de poli, regim de lucru S1, S9
Tip PN nN IN cos MN MA/MN Mk/MN IA/IN J Masă
[kW] [rpm] [A] [%] [Nm] [kgm2] [kg]
63 S/6 0,09 850 0,49 0,67 39,6 1,01 2 2 1,8 0,00028 4,2
63 L/6 0,12 865 0,65 0,62 42,8 1,32 2 2,1 1,9 0,00035 4,9
71 S/6 0,18 910 0,71 0,67 54 1,89 2,2 2,3 2,8 0,00091 5,4
71 L/6 0,25 920 0,92 0,67 58,5 2,59 2,5 2,6 3,2 0,0012 6,7
80 S/6 0,37 930 1,22 0,7 62,5 3,8 2,4 2,6 3,7 0,0022 8,9
80 L/6 0,55 920 1,54 0,74 69,7 5,71 1,8 2 3,3 0,0028 9,8
90 S/6 0,75 915 2,22 0,73 66,8 7,83 2,2 2,3 3,8 0,0037 12
90 L/6 1,1 910 2,97 0,77 69,4 11,5 1,9 2,2 3,6 0,005 14
100 L/6 1,5 940 3,83 0,74 76,4 15,2 2,4 2,7 4,6 0,01 21
112 M/6 2,2 950 5,37 0,74 80,9 22,1 2,3 2,8 4,7 0,018 31,9
132 S/6 3 965 7,3 0,72 82,4 29,7 1,6 2,2 4,1 0,031 42,7
132 M/6 4 960 9,1 0,76 83,5 39,8 2,2 2,8 5,5 0,038 48,9
132 MA/6 5,5 945 12,4 0,80 80,0 55,6 2,0 2,6 4,6 0,045 56,2
Tabelul A.3.4. Motoare cu turație nominală de 750/3000 rpm
750/3000 rpm la 50 Hz, 400 V, Y/Y, 8-2 perechi de poli, cu comutator pentru poli, S3-40%
Tip PN
[kW]
nN
[rpm]
IN [A]
cos
η
[%]
MN
[Nm]
MA/MN
Mk/MN
IA/IN
J
[kgm2]
Masă
[kg]
71 S/8-2 WU 0,045 650 0,44 0,58 25,5 0,66 2,6 2,6 1,3
0,00072 5,4 0,22 2520 0,60 0,9 58,8 0,83 1,8 1,9 2,5
71 L/8-2 WU 0,06 655 0,51 0,61 27,8 0,87 2,3 2,3 1,6
0,00086 6.3 0,3 2450 0,88 0,9 54,7 1,17 1,4 1,4 2,3
80 S/8-2 WU 0,1 650 0,70 0,57 63,2 1,47 2 2 1,6
0,00109 8 0,45 2695 1,40 0,76 61,0 1,59 2 2 2,7
80 L/8-2 WU 0,13 585 0,74 0,7 36,2 2,12 1,4 1,5 1,6
0,0014 9 0,55 2620 1,47 0,88 61,4 2,00 2,1 2 3,3
90 S/8-2 WU 0,2 665 1,07 0,57 47,3 2,87 2,1 2,2 2
0,00235 12 0,8 2770 2,37 0,74 65,8 2,76 2,9 2,6 3,5
90 L/8-2 WU 0,3 640 1,31 0,6 55,1 4,48 1,9 1,9 2
0,00313 14 1,2 2770 3,05 0,79 71,9 4,14 2,1 2,3 3,5
100 L/8-2 WU 0,4 685 1,70 0,58 58,6 5,58 1,1 2,2 2,4
0,0045 18 1,6 2790 3,60 0,86 74,6 5,48 2 2,3 4
100 LA/8-2 WU 0,55 680 2,28 0,56 62,2 7,72 2,1 2,3 2,5
0,006 21
2,2 2810 4,87 0,83 78,6 7,48 2,5 2,6 4,6
112 M/8-2 WU 0,75 695 3,05 0,53 67,0 10,3 2,3 2,6 2,8
0,011
30
3 2875 6,37 0,83 81,9 9,96 2,3 3,3 5,6
132 S/8-2 WU 1 630 4,00 0,53 68,1 15,2 1,8 2 2,6
0,024 44 4 2710 8,55 0,93 72,6 14,1 2,3 2,3 4,8
132 M/8-2 WU 1,4 700 5,10 0,6 66,0 19,1 1,9 2,3 2,8 0,032 55
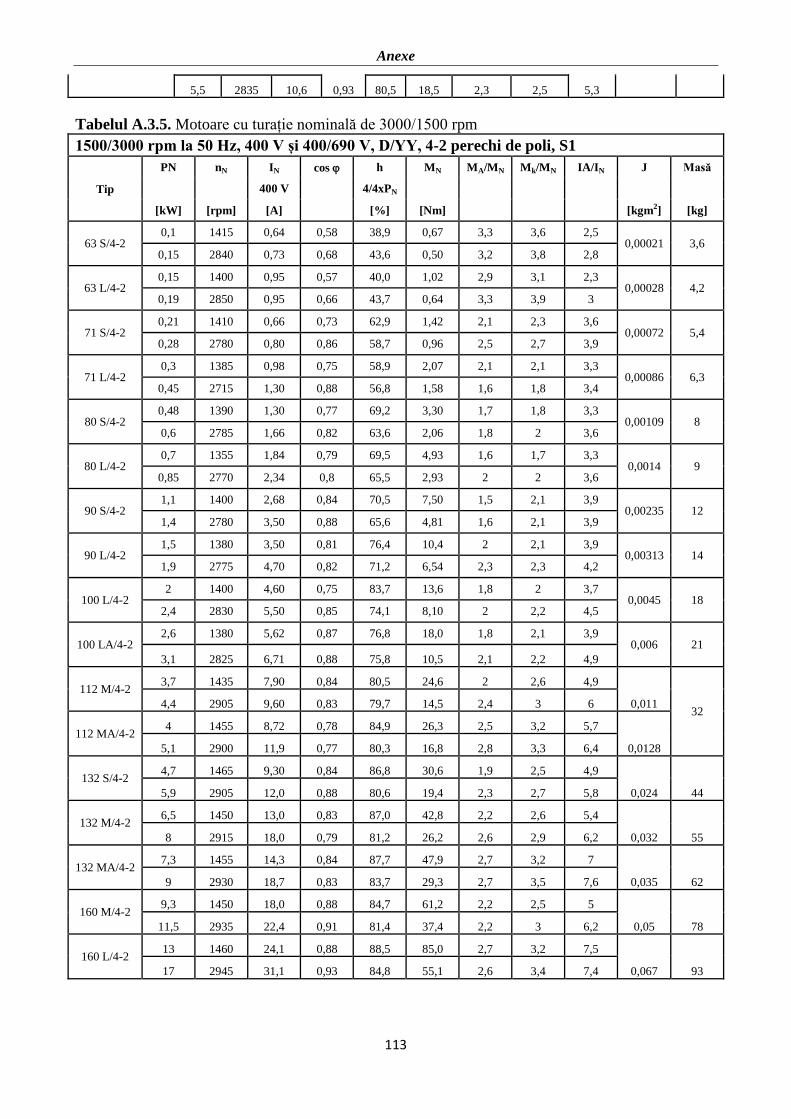
Anexe
113
5,5 2835 10,6 0,93 80,5 18,5 2,3 2,5 5,3
Tabelul A.3.5. Motoare cu turație nominală de 3000/1500 rpm
1500/3000 rpm la 50 Hz, 400 V și 400/690 V, D/YY, 4-2 perechi de poli, S1
Tip
PN nN IN cos h MN MA/MN Mk/MN IA/IN J Masă
400 V 4/4xPN
[kW] [rpm] [A] [%] [Nm] [kgm2] [kg]
63 S/4-2 0,1 1415 0,64 0,58 38,9 0,67 3,3 3,6 2,5
0,00021 3,6 0,15 2840 0,73 0,68 43,6 0,50 3,2 3,8 2,8
63 L/4-2 0,15 1400 0,95 0,57 40,0 1,02 2,9 3,1 2,3
0,00028 4,2 0,19 2850 0,95 0,66 43,7 0,64 3,3 3,9 3
71 S/4-2 0,21 1410 0,66 0,73 62,9 1,42 2,1 2,3 3,6
0,00072 5,4 0,28 2780 0,80 0,86 58,7 0,96 2,5 2,7 3,9
71 L/4-2 0,3 1385 0,98 0,75 58,9 2,07 2,1 2,1 3,3
0,00086 6,3 0,45 2715 1,30 0,88 56,8 1,58 1,6 1,8 3,4
80 S/4-2 0,48 1390 1,30 0,77 69,2 3,30 1,7 1,8 3,3
0,00109 8 0,6 2785 1,66 0,82 63,6 2,06 1,8 2 3,6
80 L/4-2 0,7 1355 1,84 0,79 69,5 4,93 1,6 1,7 3,3
0,0014 9 0,85 2770 2,34 0,8 65,5 2,93 2 2 3,6
90 S/4-2 1,1 1400 2,68 0,84 70,5 7,50 1,5 2,1 3,9
0,00235 12 1,4 2780 3,50 0,88 65,6 4,81 1,6 2,1 3,9
90 L/4-2 1,5 1380 3,50 0,81 76,4 10,4 2 2,1 3,9
0,00313 14 1,9 2775 4,70 0,82 71,2 6,54 2,3 2,3 4,2
100 L/4-2 2 1400 4,60 0,75 83,7 13,6 1,8 2 3,7
0,0045 18 2,4 2830 5,50 0,85 74,1 8,10 2 2,2 4,5
100 LA/4-2 2,6 1380 5,62 0,87 76,8 18,0 1,8 2,1 3,9
0,006 21
3,1 2825 6,71 0,88 75,8 10,5 2,1 2,2 4,9
112 M/4-2 3,7 1435 7,90 0,84 80,5 24,6 2 2,6 4,9
0,011 32
4,4 2905 9,60 0,83 79,7 14,5 2,4 3 6
112 MA/4-2 4 1455 8,72 0,78 84,9 26,3 2,5 3,2 5,7
0,0128 5,1 2900 11,9 0,77 80,3 16,8 2,8 3,3 6,4
132 S/4-2 4,7 1465 9,30 0,84 86,8 30,6 1,9 2,5 4,9
0,024 44 5,9 2905 12,0 0,88 80,6 19,4 2,3 2,7 5,8
132 M/4-2 6,5 1450 13,0 0,83 87,0 42,8 2,2 2,6 5,4
0,032 55 8 2915 18,0 0,79 81,2 26,2 2,6 2,9 6,2
132 MA/4-2 7,3 1455 14,3 0,84 87,7 47,9 2,7 3,2 7
0,035 62 9 2930 18,7 0,83 83,7 29,3 2,7 3,5 7,6
160 M/4-2 9,3 1450 18,0 0,88 84,7 61,2 2,2 2,5 5
0,05 78 11,5 2935 22,4 0,91 81,4 37,4 2,2 3 6,2
160 L/4-2 13 1460 24,1 0,88 88,5 85,0 2,7 3,2 7,5
0,067 93 17 2945 31,1 0,93 84,8 55,1 2,6 3,4 7,4

Proiectarea reductoarelor cu angrenaje cilindrice
114
Tabelul A.3.6. Motoare cu turație nominală de 750/1500 rpm
750/1500 rpm la 50 Hz, 400 V D Y/Y, 8-4 perechi de poli, cu comutator pentru poli, S1
Tip
PN nN IN cosϕ η MN MA/MN Mk/MN IA/IN J Masă
400 V
[kW] [rpm] [A] [%] [Nm] [kgm2] [kg]
71 S/8-4 0,12 670 0,72 0,69 34,9 1,71 1,4 1,8 1,7
0,00091 5,4 0,18 1410 0,50 0,79 65,8 1,22 1,7 2,3 3,8
71 L/8-4 0,18 620 0,90 0,78 37,0 2,77 1,6 1,7 2,0
0,0012 6,7 0,25 1410 0,64 0,82 68,8 1,69 1,8 2,0 3,9
80 S/8-4 0,25 690 1,24 0,75 38,8 3,46 1,5 1,7 2,6
0,0022 8,9 0,37 1380 1,14 0,71 66,0 2,56 1,5 1,6 3,8
80 L/8-4 0,37 680 1,71 0,76 41,1 5,20 1,7 1,9 2,3
0,0028 9,8 0,55 1380 1,43 0,76 73,0 3,81 1,8 2,0 3,8
90 S/8-4 0,4 700 1,81 0,8 39,9 5,46 1,6 1,7 2,7
0,0037 12 0,75 1380 2,00 0,82 66,0 5,19 1,5 1,9 3,6
90 L/8-4 0,55 700 2,47 0,7 45,9 7,50 1,8 2,0 3,1
0,005 14 1 1400 2,47 0,78 74,9 6,82 1,6 1,8 3,9
100 L/8-4 0,7 710 2,85 0,75 47,3 9,41 1,7 1,9 3,3
0,0045 18 1,4 1400 3,61 0,88 63,6 9,55 1,4 1,5 3,8
100 LA/8-4 1 690 3,88 0,61 61,0 13,8 1,4 2,1 2,5
0,006 21
1,6 1400 3,62 0,89 71,7 10,9 1,4 2,2 4,2
112 M/8-4 1,5 700 5,23 0,61 67,9 20,5 1,6 1,8 3,6
0,018 32
2,5 1410 5,23 0,85 81,2 16,9 1,5 1,7 4,0
132 S/8-4 2,2 725 7,70 0,54 76,4 29,0 2,2 2,8 4,5
0,031 42,7
3,4 1455 7,20 0,82 83,1 22,3 2,2 3,0 6,5
132 M/8-4 2,9 730 10,2 0,5 82,1 37,9 2,1 3,2 3,7
0,038 48,9
4,4 1460 9,40 0,83 81,4 28,8 2,2 3,3 6,0
Explicarea notațiilor din tabele
PN puterea nominală MN momentul nominal de torsiune nN turația nominală de lucru, la putere nominală rpm IN Intensitatea nominală a curentului electric, la tensiunea de lucru indicată cosϕ factorul de putere η randamentul motorului la putere nominală și turație nominală de lucru MN momentul nominal de lucru MA momentul de torsiune de accelerare (la pornire) Mk moment de torsiune la oprire IA intensitatea curentului la pornire J momentul de inerție al motorului

115
Anexa A.3.2
Motoare electrice trifazate
Dimensiuni
(Extras din Catalogul MOTORS M7000, disponibil la adresa:
https://www.nord.com/cms/media/documents/bw/M7000_IE1_IE2_IE3_EN_0219.pdf)
Fig. A.3.1. Motoare cu talpă
Tabelul A.3.1. Dimensiuni ale motoarelor cu talpă
Tip
Clasa de eficiență Cote de montaj pe suport Cote de gabarit
E1* E2 E3 A AA AB B BA BB HA k K AC AD AG C H HH L
63 S/L ‒ ‒ 100 21 120 80 27 105 9 12 7 123 115 100 40 63 12 215
71 S/L ‒ ‒ 112 24 136 90 24 108 10 12 7 138 124 100 45 74 20 244
80 S/L SH/LH LP 125 30 160 100 30 125 11 17 10 156 142 114 50 80 22 276
90 S/L SH/LH SP/LP 140 34 174 125 35 175 12 17 10 176 147 114 56 90 26 326
100 L/LA LH/AH LP/AP 160 37 192 140 30 175 15 22 12 194 169 114 63 100 32 366
112 M ‒ ‒ 190 40 224 140 34 175 15 22 12 218 179 114 70 112 35
386
112 ‒ MH MP 411
132 S/M/MA SH/MH/LH SP/MP 216 58 260 178 37 218 18 30 12 258 204 122 89 132 47 491
160 M MH SP/MP 254 72 318 210 52 264 25 30 14.5 310 242 186 108 160 52 602
160 L ‒ ‒ 254 308 160 ‒ LH LP 254 72 318 254 52 308 25 30 14.5 310 242 186 108 160 52 646
180 ‒ MH MP 279 88.5 340
241
281 27 30 14.5 348 259 186 121 180 54 726
180 ‒ LH LP 279 319
225 ‒ ‒ RP
356 79 443
286
66 359 20 25 20 443 347 245 149 225 94 882 225 ‒ SH SP 286
225 ‒ MH MP 311
* +Standard

Proiectarea reductoarelor cu angrenaje cilindrice
116
WE - arbore cu două ieșiri capete, RD - cu scut de protecție
Fig. A.3.2. Cote suplimentare, dependente de soluția constructivă
Tabelul A.3.2. Dimensiuni ale motoarelor cu talpă (continuare)
Tip
LC LL AS LS O D DB E EB F GA DA DC EA EC FA GC
63 238 100 123 226 M20x1,5 11 M4 23 16 4 GA 11 M4 23 16 4 12.5
71 268 100 138 255 M20x1,5 14 M5 30 20 5 16,0 11 M4 23 16 4 12,5
80 309 114 156 291 M25x1,5 19 M6 40 32 6 21,5 14 M5 30 20 5 16,0
90 373 114 176 341 M25x1,5 24 M8 50 40 8 27,0 19 M6 40 32 6 21,5
100 422 114 194 381 M32x1,5 28 M10 60 50 8 31,0 24 M8 50 40 8 27,0
112 440 114 218
401 M32x1,5 28 M10 60 50 8 31,0 24 M8 50 40 8 27,0
112 465 426
132 589 122 257 508 M32x1,5 38 M12 80 70 10 41,0 32 M12 80 70 10 35,0
160 721 186 310 619 M40x1,5 42 M16 110 90 12 45,0 42 M16 110 90 12 45,0
160
160 765 186 310 663 M40x1,5 42 M16 110 90 12 45,0 42 M16 110 90 12 45,0
180 843 186 348 741 M40x1,5 48 M16 110 100 14 51,5 48 M16 110 100 14 51,5
180
225
1002 348 348 968,5 M50x1,5 60 M20 140 125 18 64,0 55 M20 110 100 16 59,0 225
225
* +Standard

Anexe
117
Fig. A.3.3. Motoare cu flanșă
Tabelul A.3.3. Dimensiuni ale motoarelor cu flanșă
Tip Cote de montaj pe flanșă Cote de gabarit
E1* E2 E3
LA M N P S T AC AD AG HH L LC LE LL
63 S/L - - 10 115 95 140 9 3,0 123 115 100 12 215 238 23 100
71 S/L - - 10 130 110 160 9 3,5 138 124 100 20 244 268 30 100
80 S/L SH/LH LP 11 165 130 200 11 3,5 156 142 114 22 276 309 40 114
90 S/L SH/LH SP/LP 11 165 130 200 11 3,5 176 147 114 26 326 373 50 114
100 L/LA LH/AH LP/AP 15 215 180 250 13,5 4,0 194 169 114 32 366 422 60 114
112 M - - 15 215 180 25 13 4,0 218 179 114 35
386 440 60 114
112 - MH MP 411 465
132 S/M/MA SH/MH/LH SP/MP 20 265 230 300 13 4,0 258 204 122 47 491 589 80 122
160 M/L MH SP/MP 20 300 250 350 17,5 5,0 310 242 186 52
602 721 110 186
160 - LH/AH LP 646 765
180 MX - - 20 300 250 350 17,5 5,0 310 242 186 52
602 721 110 186
180 LX - - 646 765
180 - MH/LH MP/LP 14 300 250 350 17,5 5,0 348 259 186 54 726 843 110 186
200 LX XH - 14 350 300 400 17,5 5,0 348 259 186 54 726 843 110 186
225 - - RP
20 400 350 400 17,5 5,0 443 347 245 94 882 1002 140 245 225 - SH SP
225 - MH MP

Proiectarea reductoarelor cu angrenaje cilindrice
118
WE - arbore cu două ieșiri capete, RD - cu scut de protecție
Fig. A.3.4. Cote suplimentare, dependente de soluția constructivă
Tabelul A.3.4. Dimensiuni ale motoarelor cu flanșă (continuare)
Tip
AS AO LS LO O D DB E EB F GA DA DC EA EC FA GC
63 123 138 226 243,5 M20 x 1,5 11 M4 23 16 4 12,5 11 M4 23 16 4 12,5
71 138 156 255 268 M20 x 1,5 14 M5 30 20 5 16,0 11 M4 23 16 4 12,5
80 156 176 291 302 M25 x 1,5 19 M6 40 32 6 21,5 14 M5 30 20 5 16,0
90 176 194 341 357 M25 x 1,5 24 M8 50 40 8 27,0 19 M6 40 32 6 21,5
100 194 218 381 394 M32 x 1,5 28 M10 60 50 8 31,0 24 M8 50 40 8 27,0
112 218 258
401 424 M32 x 1,5 28 M10 60 50 8 31,0 24 M8 50 40 8 27,0
112 426 429
132 257 310 508 532 M32 x 1,5 38 M12 80 70 10 41,0 32 M12 80 70 70 35,0
160 310 367
619 647 M40 x 1,5 42 M16 110 90 12 45,0 42 M16 110 90 12 45,0
160 663 691
180 310 367
619 647 M40 x 1,5 48 M16 110 100 14 51,5 42 M16 110 90 12 49,0
180 663 691
180 348 403 741 794 M40 x 1,5 48 M16 110 100 14 51,5 48 M16 110 100 14 51,5
200 348 403 741 794 M40 x 1,5 55 M20 110 100 16 59,0 48 M16 110 100 14 51,5
225
348 - 968,5 - M50 x 1,5 60 M20 140 125 18 64,0 55 M20 110 100 16 59,0 225
225

Anexe
119
Anexa A.4.1.
Materiale pentru roți dințate
Pentru angrenaje pentru transmisii de serie mare, se poate utiliza același material pentru toate roțile, respectându-
se cerințele de duritate (dacă sunt diferite). Din motive economice, se recomandă să se aleagă mărci disponibile pe
piață. Următoarele tabele sunt realizate cu ajutorul datelor din standarde.
Tabelul A.4.1. Oțeluri nealiate pentru călire și revenire (extras din SR EN ISO 683-1:2016)
Marca Compoziție chimică (fracții masice) %
C Si Mn P S Cr Mo Ni Cu Cr+Mo+Ni
C25 0,22...0,29 0,10...0,40 0,40...0,70 0,045 0,045 0,40 0,10 0,40 0,30 0,63
C35 0,32…0,39 0,10…0,40 0,50…0,80 0,045 0,045 0,40 0,10 0,40 0,30 0,63 C45 0,42…0,50 0,10…0,40 0,50…0,80 0,045 0,045 0,40 0,10 0,40 0,30 0,63 C55 0,52…0,60 0,10…0,40 0,60…0,90 0,045 0,045 0,40 0,10 0,40 0,30 0,63 C60 0,57…0,65 0,10…0,40 0,60…0,90 0,045 0,045 0,40 0,10 0,40 0,30 0,63 23Mn6 0,19…0,26 0,10…0,40 1,30…1,65 0,025 0,035 0,40 0,10 0,40 0,30 0,63 36Mn6 0,33…0,40 0,10…0,40 1,30…1,65 0,025 0,035 0,40 0,10 0,40 0,30 0,63
Tabelul A.4.2. Combinații ale condițiilor de tratament termic la livrare
Tratamentul la livrare Simbol Semi-
fabricate Bare Sârme
Produse
plate
Produse
forjate
Netratat fără simbol sau U X X X X X
Tratament pentru îmbunătățirea
deformabilității +S X X - - -
Recoacere de înmuiere +A X X X X X
Normalizare +N X
Călire și revenire +QT - X - X X
X - tratament aplicabil
Tabelul A.4.3. Proprietăți în stare călită (extras din ISO 683-1:2016)
Proprietăți mecanice pentru secțiuni cu diametrul d sau pentru table cu grosimea t
Marca d 16 mm
t 8 mm
16 mm d 40 mm
8 mmt t 20 mm
40 mm d 100 mm
20 mmt t 60 mm
100 mm d 160 mm
60 mm t 100 mm
min max
eHR
min
mR eHR
min
mR eHR
min
mR eHR
min
mR HRC
C25E 370 550...700 320 500...650 - - - -
C35E 430 630...780 380 600...750 320 550..700 - - 48 58
C45E 490 700…850 430 650…800 370 630…780 - - 55 62
C55E 550 800…950 490 750…900 420 700…850 - - 58 65
C60E 580 850…1000 520 800…950 450 750…900 - - 60 67
23Mn6 550 700…850 440 650…800 400 600…750 - - 42 51
36Mn6 640 850…1000 540 750…900 460 700…800 410 650...800 51 59
Tabelul A.4.4. Proprietăți în stare normalizată (extras din ISO 683-1:2016)
Marca
Proprietăți mecanice pentru secțiuni cu diametrul d sau pentru table cu grosimea t
d 16 mm
t 8 mm
16 mm d 40 mm
8 mmt t 20 mm
100 mm d 250 mm
100 mmt t 250 mm
max
HBW
eHR
min mR eHR
min mR eHR
min mR +S +A
MPa Stare
Oțeluri carbon speciale
C25E 260 470 230 440 - - -
C35E 300 550 270 520 245 500 -
C45E 340 620 305 580 275 560 255 207
C55E 370 680 330 640 300 620 255 229
C60E 380 710 340 670 310 650 255 241
23Mn6 - - - - - - - -

Proiectarea reductoarelor cu angrenaje cilindrice
120
36Mn6 - - - - - - 229
Tabelul A.4.5. Condiții pentru tratament termic a
Marca de oțel
Temperatura de
călire c, d Agentul de călire e
Temperatura de
revenire f
Temperatura de
austenitizare în testul
de călire
(numai pentru
oțelurile speciale)
Temperatura de
normalizare
°C - °C °C °C
C25, C25E, C25R 860…900 Apă
550…660
- 880…920
C35, C35E, C35R 840…880
Apă sau ulei
870±5 860…900
C45, C45E, C45R 820…860 850±5 840…880
C55, C55E, C55R 805…845 830±5 825…865
C60, C60E, C60R 800…840 830±5 820…860
23Mn6 840…900 Apă 550…660 880±5 -
36Mn6 820…860 Ulei sau apă 540…680 840±5 - a Condițiile din tabel sunt recomandări, dar temperatura specificată pentru sfârșitul călirii este obligatorie c Temperatura mai joasă a intervalului se aplică pentru apă, iar cea mai ridicată pentru călire în ulei d Ca recomandare, timpul de austenitizare să fie cel puțin 30 minute. e Când se alege agentul de călire, influența altor parametri cum ar fi forma, dimensiunile și temperatura de călire, asupra
proprietăților și susceptibilității de fisurare trebuie luați în considerare. Se pot folosi și agenți de călire sintetici. f Ca recomandare, timpul de revenire să fie cel puțin 60 minute. g Ca recomandare, timpul de austenitizare să fie 30...35 minute.
Tabelul A.4.6. Oțeluri aliate pentru călire și revenire (extras din SR EN ISO 683-2:2018)
Marca Compoziție chimică (fracții masice) a, b, c %
C Si Mn P S Cr Mo Ni Cu Alte
34Cr4 0,30...0,37 0,10...0,40 0,60...0,90 0,025 0,035 0,90...1,20 - - 0,40 -
41Cr4 0,38…045 0,10...0,40 0,60...0,90 0,025 0,035 0,90...1,20 - - 0,40 -
25CrMo4 0,22…0,29 0,10...0,40 0,60...0,90 0,025 0,035 0,90...1,20 0,15…0,30 - 0,40 -
34CrMo4 0,30…0,37 0,10...0,40 0,60...0,90 0,025 0,035 0,90...1,20 0,15…0,30 - 0,40 -
42CrMo4 0,38…0,45 0,10...0,40 0,60...0,90 0,025 0,035 0,90...1,20 0,15…0,30 - 0,40 -
50CrMo4 0,46…0,54 0,10...0,40 0,50...0,80 0,025 0,035 0,90...1,20 0,15…0,30 - 0,40 -
41CrNiMo2 0,37…0,44 0,10...0,40 0,70…1,00 0,025 0,035 0,40…0,60 0,15…0,30 0,40 -
51CrV4 0,47…0,55 0,10...0,40 0,60…1,00 0,025 0,025 0,80…1,10 - - 0,40 V: 0,10…0,25
34CrNiMo6 0,30...0.38 0,10...0,40 d 0,50...0,80 0,025 0,035 1,30...1,70 0,15...0,30 1,30...1,70 0,40 -
20MnB5 0,17...0,23 0,40 1,10...1,40 0,025 0,035 - - - 0,40 B: 0,0008...0,0050
39MnB5 0,36...0,42 0,40 1,15...1,45 0,025 0,035 - - - 0,40 B: 0,0008...0,0050
a În cazul mărcilor cu cerințe speciale de durificare, cu excepția fosfor ului și sulfului, sunt admise abateri
nesemnificative de la limitele analizei la turnare; aceste abateri nu vor depăși 0,01% în cazul carbonului și valori date în
standard pentru elementele de aliere.
b La cerere se pot livra mărci de oțel cu prelucrabilitate îmbunătățită fie printr-un conținut mai mare de sulf până la
0,10% (inclusiv cu morfologie controlată a sulfurilor) sau plumb. În primul caz se poate crește
climita conținutului de Mn cu 0,15%. d Oțelurile pot fi livrate cu un conținut de Si mai mic. În acest caz, se vor folosi metode de dezoxidare.
Tabelul A.4.7. Oțeluri aliate pentru călire și revenire. Proprietăți în stare călită
Marca Proprietăți mecanice pentru secțiuni cu diametrul d sau pentru table cu grosimea t
, min , min mR , min
34Cr4 700 900...1100 590 800...950 460 700...850
41Cr4 800 1000…1200 660 900…1100 560 800…950
25CrMo4 700 900…1100 600 800…950 450 750…850
34CrMo4 800 1000…1200 650 900…1100 550 800..950
42CrMo4 900 1100…1300 750 1000…1200 650 900…1100
50CrMo4 900 1100…1300 780 1000…1200 700 900…1100
41CrNiMo2 840 1000…1200 740 900…1100 640 800…950
51CrV4 900 1100…1300 800 1000…1200 700 900…1100
34CrNiMo6 1000 1200…1400 900 1100…1300 800 1000…1200
20MnB5 700 900…1050 600 750…900 - -
39MnB5 900 1050…1250 700 850…1050 - -

Anexe
121
Tabelul A.4.8. Oțeluri aliate pentru călire și revenire. Proprietăți în stare călită (continuare)
Marca
Proprietăți mecanice pentru secțiuni cu diametrul d sau pentru table cu grosimea t
HRC
eHR
min mR eHR
min mR min max
34Cr4 - - - - 49 57 41Cr4 - - - - 53 61 25CrMo4 400 650...800 - - 44 52 34CrMo4 500 750...900 450 700...850 49 57 42CrMo4 550 800…950 500 750…900 53 61 50CrMo4 650 850…1000 550 800…950 58 65 41CrNiMo2 540 750…900 - - 53 60 51CrV4 650 850…1000 600 800…950 57 65 34CrNiMo6 700 900…1100 600 800…950 50 58 20MnB5 - - - - 42 50 39MnB5 - - - - 52 60
Tabelul A.4.9. Oțeluri aliate pentru călire și revenire. Condiții pentru tratament termic a
Marca de oțel
Temperatura de
călire c d
Agentul de călire
e
Temperatura de
revenire f
Temperatura de
austenitizare în
testul de călire g
°C - °C °C 34Cr4 830...870 Apă sau ulei 540...680 8505 41Cr4 820...860 Ulei sau apă 540...680 8405 25CrMo4 840...880 Apă sau ulei 540...680 8605 34CrMo4 830...870 Ulei sau apă 540...680 8505 42CrMo4 820...860 Ulei sau apă 540...680 8405 50CrMo4 820...8620 Ulei 540...680 8505 41CrNiMo2 830...860 Ulei sau apă 540...680 8455 51CrV4 820...860 Ulei 540...680 8505 34CrNiMo6 830...860 Ulei 540...680 8455 20MnB5 880...870 Apă 400...600 9005 39MnB5 840...880 Apă sau ulei 400...600 8505 a Condițiile din tabel sunt recomandări, dar temperatura specificată pentru sfârșitul călirii este obligatorie c Temperatura mai joasă a intervalului se aplică pentru apă, iar cea mai ridicată pentru călire în ulei d Ca recomandare, timpul de austenitizare să fie cel puțin 30 minute. e Când se alege agentul de călire, influența altor parametri cum ar fi forma, dimensiunile și temperatura de călire, asupra
proprietăților și susceptibilității de fisurare trebuie luați în considerare. Se pot folosi și agenți de călire sintetici. f Ca recomandare, timpul de revenire să fie cel puțin 60 minute. g Ca recomandare, timpul de austenitizare să fie 30...35 minute.
Tabelul A.4.10. Oțeluri aliate pentru cementare (extras din SR EN ISO 683-3:2018)
Marca Compoziție chimică (fracții masice) %
C Si Mn S Cr Mo Ni Cu
Oțeluri carbon
C15E 0,12-0,18 0,15-0,40 0,30-0,60
0,035 0,40 0,10 0,40 Cu: 0,30
C15R 0,020-0,040
22Mn6 0,18-0,25 0,15-0,40 1,30-1,65 0,035 0,40 0,10 0,40 Cu: 0,30
Oțeluri aliate
20Cr4 0,17-0,23 0,15-0,40 0,60-0,90 0,035 0,90-1,20 - - Cu: 0,40
28Cr4 0,24-0,31 0,15-0,40 0,60-0,90 0,035 0,90-1,20 - - Cu: 0,40
16MnCr5 0,14-0,19 0,15-0,40 1,00-1,30 0,035 0,80-1,10 - - Cu: 0,40

Proiectarea reductoarelor cu angrenaje cilindrice
122
Tabelul A.4.11. Oțeluri aliate pentru cementare (extras din SR EN ISO 683-3:2018) (continuare
Marca Compoziție chimică (fracții masice) %
C Si Mn S Cr Mo Ni Cu
Oțeluri aliate
16MnCrB5 0,14-0,19 0,15-0,40 1,00-1,30 0,035 0,80-1,10 - - Cu: 0,40
B: 0,0008-0,0050
20MnCr5 0,17-0,22 0,15-0,40 1,10-1,40 0,035 1,00-1,30 - - Cu: 0,40
18CrMo4 0,15-0,21 0,15-0,40 0,60-0,90 0,035 0,90-1,20 0,15-0,25 - Cu: 0,40
24CrMo4 0,20-0,27 0,15-0,40 0,60-0,90 0,035 0,90-1,20 0,15-0,30 - Cu: 0,40
16NiCr4 0,13-0,19 0,15-0,40 0,70-1,00 0,035 0,60-1,00 - 0,80-1,10 Cu: 0,40
17CrNi6-6 0,14-0,20 0,15-0,40 0,50-0,90 0,035 1,40-1,70 - 1,40-1,70 Cu: 0,40
15NiCr13 0,12-0,18 0,15-0,40 0,35-0,65 0,035 0,60-0,90 - 3,00-3,50 Cu: 0,40
17NiCrMo6-4 0,14-0,20 0,15-0,40 0,60-0,90 0,035 0,80-1,10 0,15-0,25 1,20-1,60 Cu: 0,40
P (fosfor) este în concentrație de 0,025 pentru toate mărcile.
Tabelul A.4.12. Limita de rupere pentru oțeluri de cementare după durificare și revenire la 200 °C
(extras din SR EN ISO 683-3:2018)
mR min,
MPa
1200 20MnCr5
17NiCrMo6-4, 17CrNi6-6,
1100 22CrMoS3-5, 18CrMo4,
20NiCrMoS2-2
17CrNi6-6,
1000 15NiCr13, 16MnCr5,
16MnCrB5, 16NiCr4
17NiCrMo6-4
900 28Cr4, 28CrS4 20MnCr5, 22CrMoS3-5
800 17Cr3, 17CrS3, C15E, C15R 18CrMo4, 15NiCr13, 16MnCr5,
16MnCrB5, 16NiCr4
17CrNi6-6, 22CrMoS3-5,
17NiCrMo6-4
700 28Cr4, 28CrS4 15NiCr13, 20MnCr5
600 17Cr3, 17CrS3, C16E,
C16R,C15E, C15R
18CrMo4, 18CrMoS4, 28Cr4,
16MnCr5, 16MnCrB5
Tabelul A.4.13. Duritatea superficială a oțelurilor de cementare, în stare tratată (SR EN ISO 683-3:2018)
Marca Tratament HRC Marca Tratament HRC min max min max C15E, C15R 18CrMo4 +H 39 47 22Mn6 24CrMo4 +H 44 52 17Cr3 +H 47 39 16NiCr4 +H 39 47 28Cr4 +H 45 53 17CrNi6-6 +H 39 47 16MnCr5, 16MnCrB5 +H 39 47 15NiCr13 +H 38 46 20MnCr5 +H 41 49 17NiCrMo6-4 +H 40 48

Anexa A.4.2
Tabelul A.4.1. Convertirea unităților de duritate
Rm
MPa
HV
(F 98 N) HB HRC
Rm
MPa
HV
(F 98 N) HB HRC
255 80 76 1155 360 342 36,6
270 85 80,7 1190 370 352 37,7
285 90 85,5 1220 380 361 38,8
305 95 90,2 1255 390 371 39,8
320 100 95 1290 400 380 40,8
335 105 99,8 1320 410 390 41,8
350 110 105 1350 420 399 42,7
370 115 109 1385 430 409 43,6
385 120 114 1420 440 418 44,5
400 125 119 1455 450 428 45,3
415 130 124 1485 460 437 46,1
430 135 128 1520 470 447 46,9
450 140 133 1555 480 (456) 47,7
465 145 138 1595 490 (466) 48,4
480 150 143 1630 500 (475) 49,1
495 155 147 1665 510 (485) 49,8
510 160 152 1700 520 (494) 50,5
530 165 156 1740 530 (504) 51,1
545 170 162 1775 540 (513) 51,7
560 175 166 1810 550 (523) 52,3
575 180 171 1845 560 (532) 53,0
595 185 176 1880 570 (542) 53,6
610 190 181 1920 580 (551) 54,1
625 195 185 1955 590 (561) 54,7
640 200 190 1995 600 (570) 55,2
660 205 195 2030 610 (580) 55,7
675 210 199 2070 620 (589) 56,3
690 215 204 2105 630 (599) 56,8
705 220 209 2145 640 (608) 57,3
720 225 214 2180 650 (618) 57,8
740 230 219 660 58,3
755 235 223 670 58,8
770 240 228 20,3 680 59,2
785 245 233 21,3 690 59,7
800 250 238 22,2 700 60,1
820 255 242 23,1 720 61,0
835 260 247 24,0 740 61,8
850 265 252 24,8 760 62,5
865 270 257 25,6 780 63,3
880 275 261 26,4 800 64,0
900 280 268 27,1 820 64,7
915 285 271 27,8 840 65,3
930 290 276 28,5 860 65,9
950 295 280 29,2 880 66,4
965 300 285 29,8 900 67,0
995 310 295 31,0 920 67,5
1030 320 304 32,2 940 68
1060 330 314 33,3
1095 340 323 34,3
1125 350 333 35,5
Numerele din paranteze indică valori de duritate care sunt în afara domeniului de definiție a încercării de duritate, dar
folosite des ca valori aproximative. Duritatea Brinell din paranteze se folosește numai când se folosește o bilă metalică
dură. HB=0,95HV
Valorile rezistenței la rupere (Rm) sunt aproximative.

124
Anexa A.4.1
Trepte de precizie pentru angrenaje
Conform ISO 1328-1:2013 Angrenaje cilindrice. Sisteme ISO de precizie. Partea 1: Definiţii şi valori
admisibile ale abaterilor pentru flancurile omoloage ale danturii, există 13 clase de precizie pentru angrenaje,
numerotate 1, 2, 3 ..., 12.
Se recomandă ca angrenajul care va fi proiectat să aibă aceaiși clasă de precizie pentru toate criteriile
enumerate.
Tabelul A.4.1. Recomandări pentru selectarea treptei de precizie
Criteriul Aplicații Treapta de precizie a angrenajului
3 4 5 6 7 8 9 10 11 12
Utilizare
Roți etalon, sisteme de măsurare, ■ ■ ■
Transmisii pentru turbine ■ ■ ■
Transmisii pentru avioane ■ ■ ■ ■
Mașini-unelte, CNC ■ ■ ■ ■ ■
Automobile ■ ■ ■ ■
Autocamioane ■ ■ ■ ■
Transmisii pentru nave mari, tractoare ■ ■ ■
Reductoare de uz general ■ ■ ■ ■
Motoare pentru ambarcațiuni ușoare ■ ■
Transmisii pentru metalurgie, locomotive ■ ■ ■ ■
Transmisii la mașini de ridicat și construcții ■ ■ ■ ■
Mașini agricole ■ ■ ■
Mașini textile ■ ■
Viteza
periferică
m/s
Angrenaje
cu dinți
drepți
v 2 ■ ■ ■ ■
2 v 5 ■ ■
5 v 10 ■ ■
10 v 40 ■
Angrenaje
cu dinți
înclinați
v 2 ■ ■ ■ ■
2 v 5 ■ ■ ■
5 v 10 ■ ■
10 v 40 ■ ■
Tehnologie de
fabricare
Rectificare □ □ ■ ■ ■
Șeveruire □ ■ ■ ■
Frezare, mortezare, rabotare □ ■ ■ ■ ■
Frezare cu freză melc □ ■ ■ ■ ■
Frezare + tratament termic □ ■
Ștanțare, broșare, presare, injectare □ ■
Sinterizare ■ ■ ■ ■
Turnare □ ■ ■
■ condiții normale de prelucrare
□ condiții speciale de prelucrare
Tabel A.4.2. Echivalența claselor de calitate a angrenajelor
Standard Clasa de precizie
ANSI/AGMA/ISO 1328-1-B14 2013 1 2 3 4 5 6 7 8 9 10 11 12
AGMA 390.03 SUA (vechi) 15 14 13 12 11 10 9 8 7 6 5 4
JIS B 1702 (Japonia) 0 1 2 3 4 5 6 7 8
KS B 1405 (Koreea) 0 1 2 3 4 5 6 7 8
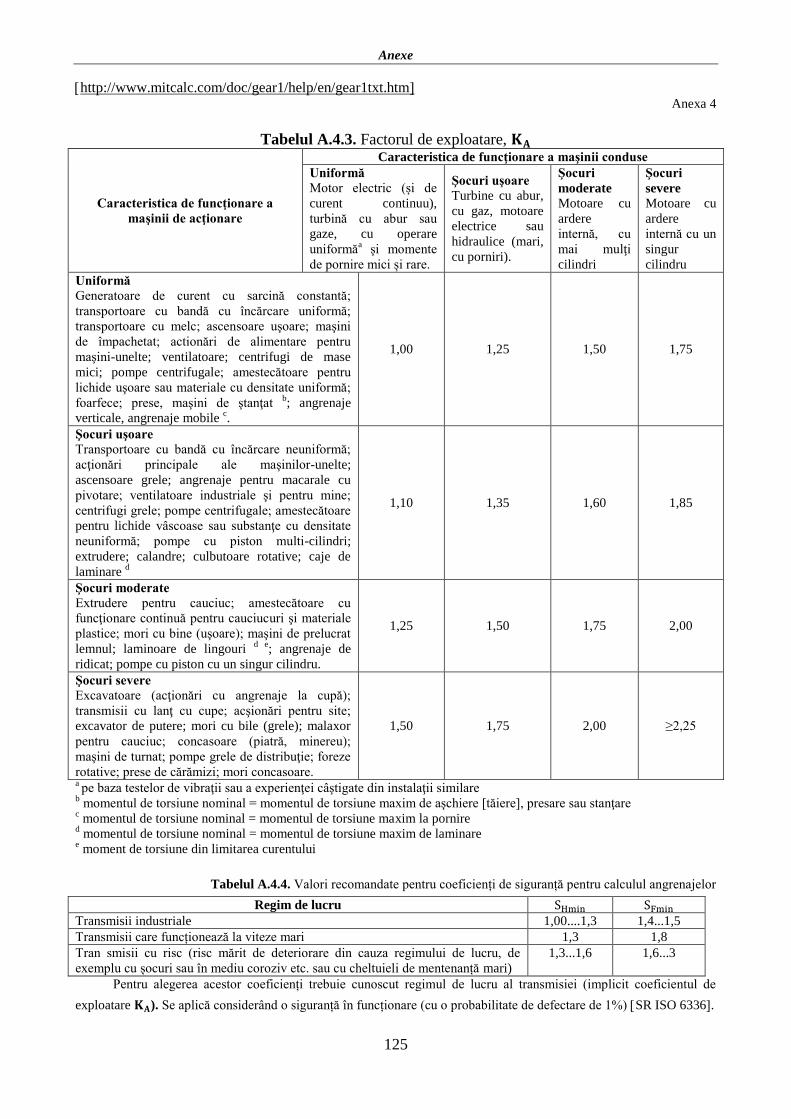
Anexe
125
http://www.mitcalc.com/doc/gear1/help/en/gear1txt.htm Anexa 4
Tabelul A.4.3. Factorul de exploatare,
Caracteristica de funcţionare a
maşinii de acţionare
Caracteristica de funcţionare a maşinii conduse
Uniformă
Motor electric (și de
curent continuu),
turbină cu abur sau
gaze, cu operare
uniformăa şi momente
de pornire mici și rare.
Şocuri uşoare
Turbine cu abur,
cu gaz, motoare
electrice sau
hidraulice (mari,
cu porniri).
Şocuri
moderate
Motoare cu
ardere
internă, cu
mai mulţi
cilindri
Şocuri
severe
Motoare cu
ardere
internă cu un
singur
cilindru
Uniformă
Generatoare de curent cu sarcină constantă;
transportoare cu bandă cu încărcare uniformă;
transportoare cu melc; ascensoare uşoare; maşini
de împachetat; actionări de alimentare pentru
maşini-unelte; ventilatoare; centrifugi de mase
mici; pompe centrifugale; amestecătoare pentru
lichide uşoare sau materiale cu densitate uniformă;
foarfece; prese, maşini de ştanţat b; angrenaje
verticale, angrenaje mobile c.
1,00 1,25 1,50 1,75
Şocuri uşoare
Transportoare cu bandă cu încărcare neuniformă;
acţionări principale ale maşinilor-unelte;
ascensoare grele; angrenaje pentru macarale cu
pivotare; ventilatoare industriale şi pentru mine;
centrifugi grele; pompe centrifugale; amestecătoare
pentru lichide vâscoase sau substanţe cu densitate
neuniformă; pompe cu piston multi-cilindri;
extrudere; calandre; culbutoare rotative; caje de
laminare d
1,10 1,35 1,60 1,85
Şocuri moderate
Extrudere pentru cauciuc; amestecătoare cu
funcţionare continuă pentru cauciucuri şi materiale
plastice; mori cu bine (uşoare); maşini de prelucrat
lemnul; laminoare de lingouri d e
; angrenaje de
ridicat; pompe cu piston cu un singur cilindru.
1,25 1,50 1,75 2,00
Şocuri severe
Excavatoare (acţionări cu angrenaje la cupă);
transmisii cu lanţ cu cupe; acşionări pentru site;
excavator de putere; mori cu bile (grele); malaxor
pentru cauciuc; concasoare (piatră, minereu);
maşini de turnat; pompe grele de distribuţie; foreze
rotative; prese de cărămizi; mori concasoare.
1,50 1,75 2,00 ≥2,25
a pe baza testelor de vibraţii sau a experienţei câştigate din instalaţii similare
b momentul de torsiune nominal = momentul de torsiune maxim de aşchiere [tăiere], presare sau stanţare
c momentul de torsiune nominal = momentul de torsiune maxim la pornire
d momentul de torsiune nominal = momentul de torsiune maxim de laminare
e moment de torsiune din limitarea curentului
Tabelul A.4.4. Valori recomandate pentru coeficienți de siguranță pentru calculul angrenajelor
Regim de lucru
Transmisii industriale 1,00....1,3 1,4...1,5
Transmisii care funcționează la viteze mari 1,3 1,8
Tran smisii cu risc (risc mărit de deteriorare din cauza regimului de lucru, de
exemplu cu șocuri sau în mediu coroziv etc. sau cu cheltuieli de mentenanță mari)
1,3...1,6 1,6...3
Pentru alegerea acestor coeficienți trebuie cunoscut regimul de lucru al transmisiei (implicit coeficientul de
exploatare ). Se aplică considerând o siguranță în funcționare (cu o probabilitate de defectare de 1%) SR ISO 6336.

126
Anexa A.4.1.
Tabelul A.4.1. Simboluri pentru materialele roților dințate, utilizate în următoarele figuri și tabele
Material Tip Abreviere
Oţeluri carbon cu conţinut mic de carbon,
normalizate / oţeluri turnate normalizate
oţeluri carbon cu conţinut redus de carbon,
forjate şi normalizate
St
oţeluri turnate St (turnat)
Fonte fonte maleabile (structură perlitică) GTS (perl.)
fonte nodulare turnate (structură perlitică,
bainitică, feritică)
GGG (perl., bain.,
ferr.)
fontă cenuşie GG
Oţeluri forjate, durificate în miez oţeluri carbon, oţeluri aliate V
Oţeluri forjate, durificate în miez oţeluri carbon, oţeluri aliate V (turnat)
Oţeluri forjate, cementate Eh
Oţeluri forjate sau turnate, durificate
superficial cu flacără sau prin inducţie
IF
Oţeluri forjate, nitrurate / de nitrurare,
oţeluri nitrurate, durificate în miez
oţeluri de nitrurare NT(nitr.)
oţeluri durificate în miez NV(nitro.)
Oţeluri forjate, nitrocementate oţeluri durificate în miez NV(nitrocar.)
Pentru determinarea factorului se folosește diagrama din Figura A.4.1 sau valorile din Tabelul
A.4.2.
Fig. A.4.1. Factorul durabilităţii, , pentru roţi standard de referinţă de testare
1 – St, V, GGG (perl, nain.), GTS(perl.), Eh, IF (când este permis un pitting limitat)
2 – St, V, GGG (perl, bain.), GTS(perl.), Eh, IF
3 – GG, GGG (ferr.), NT(nitr.), NV(nitr.)
4 – NV(nitrocar.)

Anexe
127
Tabelul A.4.2. Factorul durabilităţii, pentru calculul la solicitare de contact
Material a Numărul de cicluri de încărcare Factorul durabilităţii,
St, V, GGG(perl, bai.), GTS(perl.),
Eh, IF (numai când este permis un
anumit grad de pitting)
NL≤6·105, static 1,6
NL=107 1,3
NL=109 1,0
NL=1010
0,85...1,0b
St, V, GGG(perl., bain.),
GTS(perl.), Eh, IF
NL≤105, static 1,6
NL=5·107 1,0
NL=109 1,0
NL=1010
0,85...1,0
GG, GGG(ferr.), NT(nitr.),
NV(nitr.)
NL≤105, static 1,3
NL=2·106 1,0
NL=1010
0,85...1,0
NV(nitrocar.) NL≤105, static 1,1
NL=2·106 1,0
NL=1010
0,85...1,0b
b Valoarea mai mică a lui poate fi utilizată pentru funcţionare critică, când pittingul trebuie să fie minim.
Valorile între 0,85 şi 1,0 pot fi utilizate pentru angrenaje de uz general. Se poate utiliza 1,0 în condiții optime
de lubrifiere, materiale de calitate, experienţă şi prelucrare.
Factorul de viteză, , arată influenţa vitezei periferice a roţii calculate sau verificate (care
poate diferi de cea impusă de determinarea experimentală a lui limH ). În general, viteza periferică
se consideră viteza pe cercul de rostogolire,
[ ]
și la verificarea angrenajului se
calculează pentru fiecare roată.
Fig. A.4.2 Alegerea factorului
Alegerea factorului lubrifierii,

Proiectarea reductoarelor cu angrenaje cilindrice
128
Se alege din catalogul unei firme producătoare de lubrifianți, lubrifiantul considerat adecvat și apoi
se identifică proprietățile acestuia, inclusiv vâscozitatea la una din temperaturile de 40 °C sau 50
°C.
Fig. A.4.3 Factorul lubrifierii,
Alegerea factorului rugozității
Figura A.4.4 – Factorul rugozităţii,
De multe ori, pe desenul de execuție al roții dințate este dată rugozitatea medie Ra și nu Rz.
Ra - înălțimea medie a asperitatilor profilului față de linia de referință
Rz - (înălțimea medie în cele mai înalte 10 puncte de pe lungimea de referință/măsurare a
rugozității). Diferenta medie între cele mai inalte cinci varfuri si cele mai joase cinci vai akle
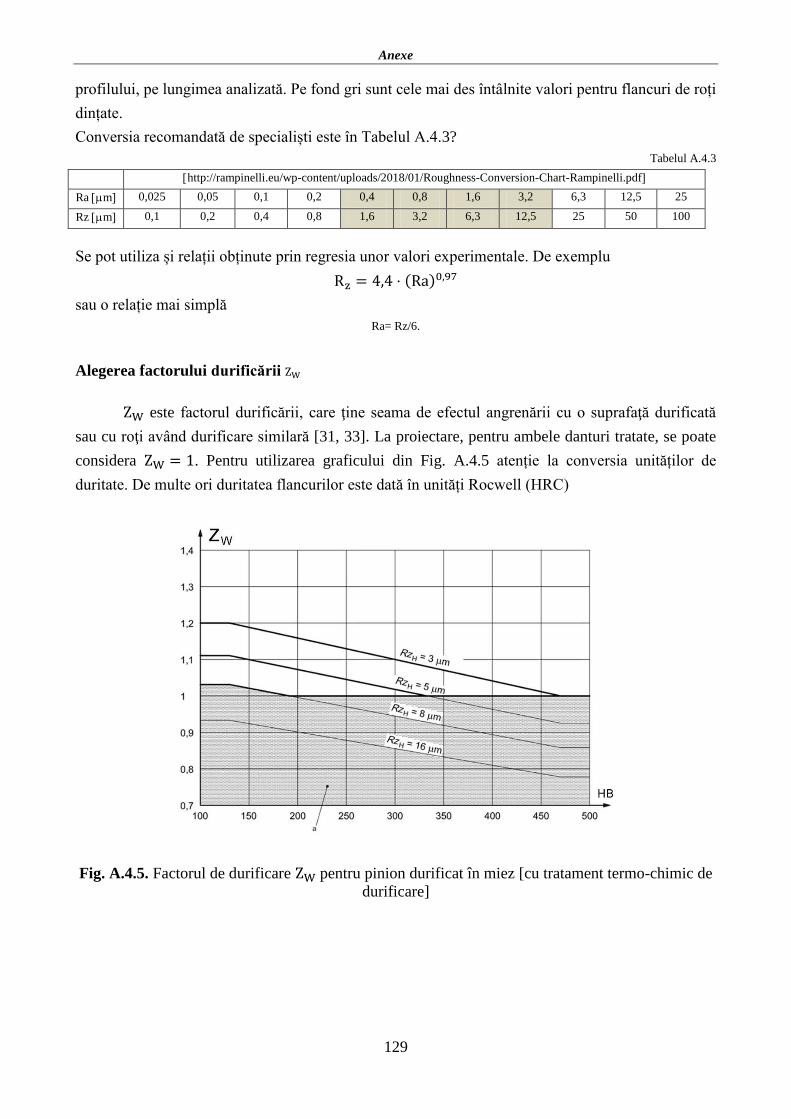
Anexe
129
profilului, pe lungimea analizată. Pe fond gri sunt cele mai des întâlnite valori pentru flancuri de roți
dințate.
Conversia recomandată de specialiști este în Tabelul A.4.3?
Tabelul A.4.3
http://rampinelli.eu/wp-content/uploads/2018/01/Roughness-Conversion-Chart-Rampinelli.pdf
Ra m 0,025 0,05 0,1 0,2 0,4 0,8 1,6 3,2 6,3 12,5 25
Rz m 0,1 0,2 0,4 0,8 1,6 3,2 6,3 12,5 25 50 100
Se pot utiliza și relații obținute prin regresia unor valori experimentale. De exemplu
( )
sau o relație mai simplă
Ra= Rz/6.
Alegerea factorului durificării
este factorul durificării, care ţine seama de efectul angrenării cu o suprafaţă durificată
sau cu roţi având durificare similară [31, 33]. La proiectare, pentru ambele danturi tratate, se poate
considera . Pentru utilizarea graficului din Fig. A.4.5 atenție la conversia unităților de
duritate. De multe ori duritatea flancurilor este dată în unități Rocwell (HRC)
Fig. A.4.5. Factorul de durificare pentru pinion durificat în miez [cu tratament termo-chimic de
durificare]
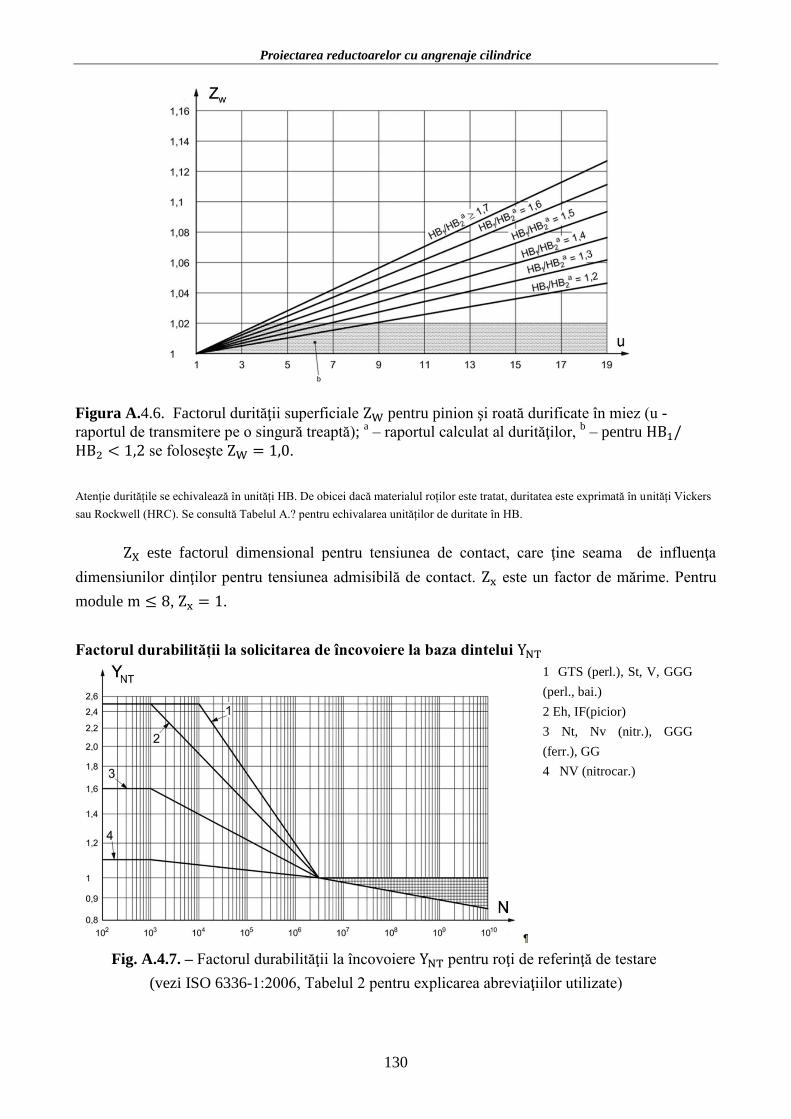
Proiectarea reductoarelor cu angrenaje cilindrice
130
Figura A.4.6. Factorul durităţii superficiale pentru pinion şi roată durificate în miez (u -
raportul de transmitere pe o singură treaptă); a – raportul calculat al durităţilor,
b – pentru
se foloseşte .
Atenție duritățile se echivalează în unități HB. De obicei dacă materialul roților este tratat, duritatea este exprimată în unități Vickers
sau Rockwell (HRC). Se consultă Tabelul A.? pentru echivalarea unităților de duritate în HB.
este factorul dimensional pentru tensiunea de contact, care ţine seama de influenţa
dimensiunilor dinţilor pentru tensiunea admisibilă de contact. este un factor de mărime. Pentru
module , .
Factorul durabilității la solicitarea de încovoiere la baza dintelui
1 GTS (perl.), St, V, GGG
(perl., bai.)
2 Eh, IF(picior)
3 Nt, Nv (nitr.), GGG
(ferr.), GG
4 NV (nitrocar.)
Fig. A.4.7. – Factorul durabilităţii la încovoiere pentru roţi de referinţă de testare
(vezi ISO 6336-1:2006, Tabelul 2 pentru explicarea abreviaţiilor utilizate)

Anexe
131
Tabelul A.4.4. Determinarea factorului durabilității la încovoiere la baza dintelui,
Material a Numărul de cicluri de încărcare, Factorul durabilităţii,
St, V, GGG (perl. bai.)
GTS (perl.)
, static 2,5
1,0
0,85 până la 1,0 b
Eh, IF (picior)
, static 2,5
1,0
0,85 până la 1,0 b
GG, GGG (ferr.)
NT, NV(nitr.)
, static 1,6
1,0
0,85 până la 1,0 b
NV (nitrocar.)
, static 1,1
1,0
0,85 până la 1,0 b a Vezi ISO 6336-1:2006, Table 2, pentru explicarea abrevierilor utilizate b valoarea mai mică pentru poate fi utilizată pentru serviciu critic, când pittingul trebuie să fie minim. Valorile între 0,85 şi 1,0 pot fi utilizate
pentru angrenaje de uz general. În condiţii optime pentru lubrifiere, material, proces de prelucrare şi experienţă, se poate utiliza 1,0.
poate fi citit din Figura A.4.8 în funcţie de sau de şi de material.
Fig. A.4.8. Factorul relativ la sensibilitatea la degajare la baza dintelui, pentru tensiunea de referinţă la oboseală
Pentru orice roata avuta în vedere, poate fi calculat folosind Ecuaţia.
Lățimea dintelui la bază se micșorează dacă deplasarea danturii este negativă și crește dacă
deplasarea este pozitivă. pentru dantură nedeplasată . Pentru calcule detaliate se va
consulta SR ISO 6336-3.

Proiectarea reductoarelor cu angrenaje cilindrice
132
poate fi luat din Figura 14 în funcţie de material şi de rugozitatea vârf-vale pentru zona
racordării de la piciorul dintelui, pentru roata dinţată avută în vedere. Acest grafic este dedus din
Figura A.1.
Fig. A.4.9.
Factorul relativ al calităţii suprafeţei
a Pentru tensiuni statice şi toate materialele, b (piciorul dintelui)
se alege din Figura A.4.10 sau din Tabelul A.4.5.
Fig. A.4.10. Factorul dimensional pentru rezistenţa la încovoiere a dintelui roţii

Anexe
133
Tabelul A.4.5. – Factorul dimensional (la picior)
Materialul a modulul normal, Factorul dimensional,
St, V
GGG(perl., bai.)
GTS(perl.)
pentru cicluri
Eh, IF(la picior)
NT, NV
GG, GGG(ferr.)
Toate materialele la solicitări statice -
a Vezi ISO 6336-1:2006, Tabelul 2 pentru explicarea abreviaţiilor utilizate.

Anexa A.4.5.
Determinarea lui Kv la verificarea angrenajului
Se calculează sarcina specifică
(Ft ∙ KA)/b (A.4.1)
în care Ft este forța tangențială în angrenare, KA este factorul de exploatare și b este lățimea
comună a roților în angrenare (de obicei, a celei conduse).
Se calculează factorul
(v ⋅ z1/100)√u2/(1 + u2) (A.4.2)
în care z1 este numărul de dinți ai roții conducătoare (considerată 1), v este viteza periferică pe
cercul de rostogolire
v = ω1dw1
2≅ ω2
dw2
2[m/s] (A.4.3.)
cu ω1 și ω2 vitezele unghiulare ale roții 1, respectiv 2, în s-1, iar dw1 și dw2 sunt diametrul de
rostogolire al roții 1, respectiv roții 2, în m. Atenție că la calculul geometriei angrenajului se lucrează
în mm. u este raportul de transmisie al perechii de roți dințate.
Se calculează 𝐊𝐯 cu relația SR ISO 6336-1
Kv = 1 + fF(K350 ⋅ N∗) (A.4.4.)
în care
fF ţine seama de influenţa sarcinii asupra factorului dinamic ,
K350 este valoarea lui Kv pentru o încărcare specifică de 350 N/mm și pentru care s-au
construit graficele din Figurile A.4.1 și A.4.2.,
N* este raportul de rezonanţă (raportul dintre turația de lucru și turația la rezonanță a
angrenajului/treptei respective). Pentru alte variante de calcul a lui Kv se va consulata SR ISO
6336-1.
Valoarea (K350 ⋅ N∗) se alege din Fig. A.4.1. sau Fig. A.4.2., în funcție de clasa de precizie
adoptată în proiectare și de valoarea (v ⋅ z1/100)√u2/(1 + u2) . Curbele pentru clasa de precizie din
Fig. 5 şi 6 sunt trasate până la valoarea (v ⋅ z1/100)√u2
(1+u2)= 3 m/s, care nu este, în general,
depăşită pentru angrenaje de uz general.
Pentru roţi cilindrice cu dinţi înclinaţi cu gradul suplimentar de acoperire (şi pentru
aproximativ εβ > 0,9), factorul de corecţie fF va fi în concordanţă cu Tabelul A.4.3. şi (K350 ∙ N)
va fi în concordanţă cu Fig. 5.
Pentru roţi cilindrice cu dinţi drepţi, factorul de corecţie fF va fi în concordanţă cu Tabelul
6 şi (K350 ∙ N) va fi în acord cu Fig. 6.
Pentru roţi dinţate cilindrice cu dinţi înclinaţi cu gradul de acoperire suplimentar εβ <
1, Kv se determină prin interpolare liniară între valorile în concordanţă cu a) şi b):
Kv = Kvα − εβ(Kvα − Kvβ) (A.4.6.)
350K
1

Proiectarea reductoarelor cu angrenaje cilindrice
2
în care
Kvα este factorul dinamic pentru angrenaj cu dinţi drepţi 9 (Tabelul 6 și Fig. A.6);
Kvβ este factorul dinamic pentru angrenaj cu dinţi înclinaţi (Tabelul 5 și Fig. A.5).
Dacă sarcina specifică de pe treapta de angrenare considerată, notată aici cu x, se încadrează
între două valori ale sarcinii specifice,x1 < x < x2, date în Tabelul 5 sau 6, având valorile
coeficientului fF, fF1 și respectiv fF2, valoarea interpolată a coeficientului fF va fi
fF =(x−x1)(fF2−fF1)
x2−x1+ fF1 (A.4.7)
Pentru tema de proiectare propusă, vă recondam completarea următorului tabel.
Tabelul A.4.1. Calculul coeficientului dinamic KV
Treapta de
precizie *
Ft b KA (Ft ⋅ KA)/b v m/s u z
Treapta 1 Ft1 b2 este același
pentru toate
treptele
reductorului
(Ft1 ⋅ KA)/b2 ω1
dw1
2
u12 z1
Treapta 2 Ft3 b4 (Ft3 ⋅ KA)/b4 ω2
dw3
2
u34 z3
* Se recomandă aceiași treaptă de precizie pentru toate roțile.
Tabelul A.4.2.
v ⋅ z1
100√
u2
1 + u2 [m/s]
εβ (K350 ⋅ N∗) fF KV
Treapta 1 v12 ⋅ z1
100√
u122
1 + u122
εβ12 KV12
Treapta 2 v34 ⋅ z3
100√
u342
1 + u342
εβ34 KV34
vK
vK
Ff
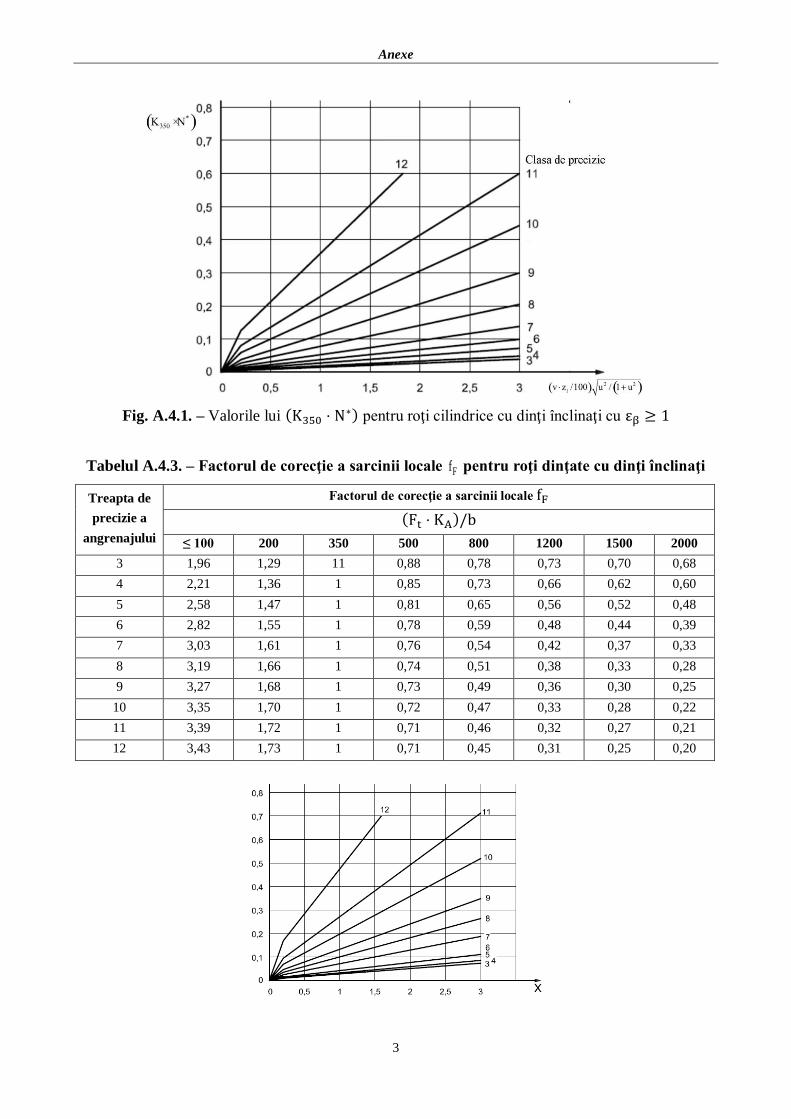
Anexe
3
Fig. A.4.1. – Valorile lui (K350 ⋅ N∗) pentru roţi cilindrice cu dinţi înclinaţi cu εβ ≥ 1
Tabelul A.4.3. – Factorul de corecţie a sarcinii locale pentru roţi dinţate cu dinţi înclinaţi
Treapta de
precizie a
angrenajului
Factorul de corecţie a sarcinii locale fF
(Ft ⋅ KA)/b
≤ 100 200 350 500 800 1200 1500 2000
3 1,96 1,29 11 0,88 0,78 0,73 0,70 0,68
4 2,21 1,36 1 0,85 0,73 0,66 0,62 0,60
5 2,58 1,47 1 0,81 0,65 0,56 0,52 0,48
6 2,82 1,55 1 0,78 0,59 0,48 0,44 0,39
7 3,03 1,61 1 0,76 0,54 0,42 0,37 0,33
8 3,19 1,66 1 0,74 0,51 0,38 0,33 0,28
9 3,27 1,68 1 0,73 0,49 0,36 0,30 0,25
10 3,35 1,70 1 0,72 0,47 0,33 0,28 0,22
11 3,39 1,72 1 0,71 0,46 0,32 0,27 0,21
12 3,43 1,73 1 0,71 0,45 0,31 0,25 0,20
Ff

Proiectarea reductoarelor cu angrenaje cilindrice
4
X (vz1/100)√u2/(1 + u2),
Y K350N
Fig. A.4.2 Valorile lui pentru roţi cilindrice cu dinţi drepţi
Tabelul A.4.4 – Factorul de corecţie a sarcinii locale pentru roţi dinţate cu dinţi drepţi
Treapta de
precizie a
angrenajului
Factorul de corecţie a sarcinii locale fF
(Ft ⋅ KA)/b
≤ 100 200 350 500 800 1200 1500 2000
3 1,61 1,18 1 0,93 0,86 0,83 0,81 0,80
4 1,81 1,24 1 0,90 0,82 0,77 0,75 0,73
5 2,15 1,34 1 0,86 0,74 0,67 0,65 0,62
6 2,45 1,43 1 0,83 0,67 0,59 0,55 0,51
7 2,73 1,52 1 0,79 0,61 0,51 0,47 0,43
8 2,95 1,59 1 0,77 0,56 0,45 0,40 0,35
9 3,09 1,63 1 0,75 0,53 0,41 0,38 0,31
10 3,22 1,67 1 0,73 0,50 0,37 0,32 0,27
11 3,30 1,69 1 0,72 0,48 0,35 0,30 0,24
12 3,37 1,71 1 0,72 0,47 0,33 0,27 0,22
Tabelul A.4.5 Coeficientul lățimii danturii, ψa Haragâș, ????
Tipul reductorului cu roți cilindrice ψa
Reductor cu o treaptă v = 8. . .25 m/s 0,3
v = 2. . .10 m/s 0,6
v = 1. .3 m/s 0,1
Reductoare cu mai multe
trepte
Treapta I 0,25...0,33
Treapta a II-a și următoarele 0,35...0,45
Factorii de repartizare a sarcinii pe lățime danturii pentru solitarea la oboseală de
contact, 𝐊𝐇𝛃, și pentru solicitarea la încovoiere la baza dintelui, 𝐊𝐅𝛃
Pentru a adopta o valoare pentru fiecare, trebuie cunoscute
- tipul angrenajului (cilindric, conic sau melcat),
- duritatea flancurilor (se echivalează duritatea flancurilor după tratament materialului în unități
HB cu ajutorul Tabelului A.4.?),
- poziția roții conducătoare pe arbore (simetrică, asimetrică sau în consolă),
- numărul de dinți ai roții conducătoare, z1,
- raportul de angrenare, u12,
350K N
Ff

Anexe
5
- factorul de lățime; atenție. În unele ghiduri de proiectare factorul de lățime este dat în funcție
de diametrul roții conducătoare ψd, sau de modulul normal, ψ
m. Relația între coeficienții de lățime
exprimați în funcție de distanța dintre axe, diametrul roții micisau modulul normal este
ψd
=u12+1
2ψ
a (A.4.8.)
ψm
=z1(1+u12)
2ψ
a (A.4.9.)
Fig. A.4.3. Codificarea poziâiei roții pe arbore (pentru tabelul A4.?) (1 - asimetric între reazeme, 2 -
simetric între reazeme, 3 - în consolă)
Tabelul A.4.6.
Duritatea flancurilor
dinților
Clasa de precizie a
angrenajului
Codul poziției roții
conducătoare pe
arbore
KHβ
HB1 ≠ HB2
HB1 ≤ 350
5, 6
5...8
5...10
7...10
9,10
2
1, 2
1, 2, 3
1, 3
3
1 + 0,1ψd
1 + 0,15ψd
1 + 0,25ψd
1 + 0,35ψd
1 + 0,5ψd
HB1 > 350
(cu tratament)
5, 6
5...8
5...10
7...10
9,10
2
1, 2
1, 2, 3
1, 3
3
1 + 0,2ψd
1 + 0,3ψd
1 + 0,5ψd
1 + 0,7ψd
1 + ψd
La încovoiere la baza dintelui KFβ se alege din diagrama din Figura A.4.4.

Proiectarea reductoarelor cu angrenaje cilindrice
6
Figura A4.4.
Pentru o ordonare eficace, vă recomadăm să completați următorul tabel (coloanele gri conțin
valori deja adoptate sau cunoscute în proiect, cele pe fond alb se calculează sau se aleg din diagrame
și tabele).
Tabelul A.4.7.
Treapta z ψa
(ales deja)
u ψd ψ
m Codul poziției
roții
conducătoare
pe arbore
KHβ KFβ
I z1 ψa12
u12 ψd12
ψm12
3 KHβ12 KFβ12
II z3 ψa34
u34 ψd34
ψm34
3 KHβ34 KFβ34
Factorii repartiției sarcinii pe înălțimea dintelui, KHα la calculul la oboseală de contact și KFβ la
calculul la încovoiere la baza dintelui
La proiectare, când încă nu sunt determinate dimensiunile angrenajului, se adoptă KHα =
1,15. . .1,40 și KHα = 1,25. . .1,45. Pentru reductoare cu două sau mai multe trepte, valorile inițiale
ale acestor factori pot fi considerate egale KHα12 ≅ KHα34 și KFα12 ≅ KFα34
La verificarea angrenajului, acești coeficienți se determină cunoscându-se
- treapta de precizie,
- factorul de exploatare KA,
- forța tangențială pe fiecare treaptă Ft1 = Ft2 și Ft3 = Ft4,
- lățimea danturii celei mai înguste din angrenaj, de obicei cea a roții conduse, b2 și b4
- gradul de acoperire frontal εα12 și εα34,
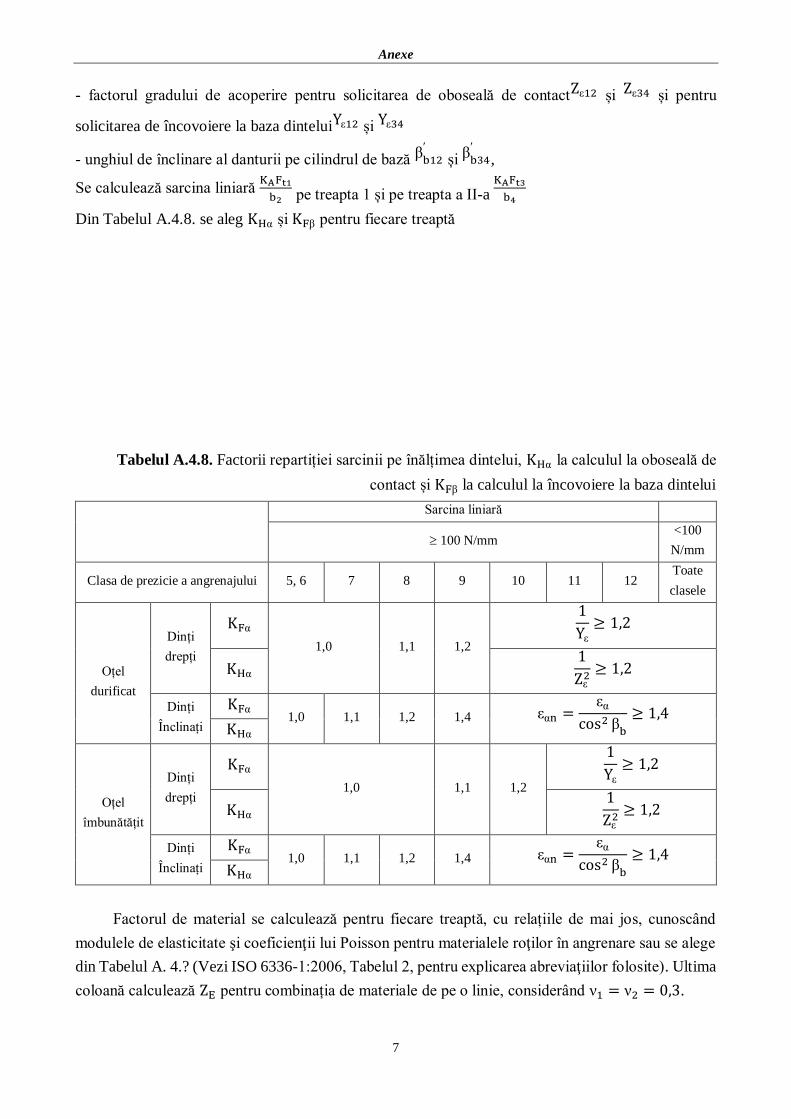
Anexe
7
- factorul gradului de acoperire pentru solicitarea de oboseală de contactZε12 și Zε34 și pentru
solicitarea de încovoiere la baza dinteluiYε12 și Yε34
- unghiul de înclinare al danturii pe cilindrul de bază βb12′
și βb34′
,
Se calculează sarcina liniară KAFt1
b2 pe treapta 1 și pe treapta a II-a KAFt3
b4
Din Tabelul A.4.8. se aleg KHα și KFβ pentru fiecare treaptă
Tabelul A.4.8. Factorii repartiției sarcinii pe înălțimea dintelui, KHα la calculul la oboseală de
contact și KFβ la calculul la încovoiere la baza dintelui
Sarcina liniară
100 N/mm <100
N/mm
Clasa de prezicie a angrenajului 5, 6 7 8 9 10 11 12 Toate
clasele
Oțel
durificat
Dinți
drepți
KFα
1,0 1,1 1,2
1
Yε
≥ 1,2
KHα 1
Zε2
≥ 1,2
Dinți
Înclinați
KFα 1,0 1,1 1,2 1,4 εαn =
εα
cos2 βb
≥ 1,4
KHα
Oțel
îmbunătățit
Dinți
drepți
KFα
1,0 1,1 1,2
1
Yε
≥ 1,2
KHα 1
Zε2
≥ 1,2
Dinți
Înclinați
KFα 1,0 1,1 1,2 1,4 εαn =
εα
cos2 βb
≥ 1,4
KHα
Factorul de material se calculează pentru fiecare treaptă, cu relațiile de mai jos, cunoscând
modulele de elasticitate şi coeficienţii lui Poisson pentru materialele roţilor în angrenare sau se alege
din Tabelul A. 4.? (Vezi ISO 6336-1:2006, Tabelul 2, pentru explicarea abreviaţiilor folosite). Ultima
coloană calculează ZE pentru combinația de materiale de pe o linie, considerând ν1 = ν2 = 0,3.

Proiectarea reductoarelor cu angrenaje cilindrice
8
ZE12 =√
1
π(1−ν1
2
E1+
1−ν22
E2)
(A.4.10.)
ZE34 =√
1
π(1−ν3
2
E3+
1−ν42
E4)
(A.4.11.)
Tabelul A.4.9. Factorul de material 𝐙𝐄 (extras din SR ISO 6332-2)
Roata 1 Roata 2 ZE
√N/mm2 Material a Modulul de
elasticitate, E,
N/mm2
Coeficientul
Poisson, ν
Material Modulul de
elasticitate, E
N/mm2
Coeficientul
Poisson, ν
St, V, Eh,
F, NT, NV
206000 0,3 St, V, Eh, F,
NT, NV
206000 0,3 189,8
St(cast) 202000 188,9
GGG, GTS 173000 181,4
GG 126000...118000 165,4...162,0
St(cast) 202000 St(cast) 202000 188,0
GGG, GTS 173000 180,5
GG 118000 161,4
GGG,
GTS
173000 GGG, GTS 173000 173,9
GG 118000 156,6
GG 126000...118000 GG 118000 146,0...143,7
Zε pentru contact cunoscut şi diverse valori ale gradului de acoperire suplimentar poate fi citit din
Figura A.4.5.
X gradul de acoperire normal, εα
Y factorul gradului de acoperire, Zε
Figura A.4.5. – Factorul gradului de acoperire, Zε.

Anexe
9
Determinarea prin calcul
a) roţi dinţate cilindrice cu dinţi drepţi:
Zε = √4−εα
3 (A.4.12.)
Valoarea Zε = 1,0 poate fi aleasă pentru roţi cilindrice cu dinţi drepţi având un grad de acoperire
mai mic decât 2,0.
b) roţi dinţate cilindrice cu dinţi înclinaţi:
Zε = √4−εα
3(1 − εβ) +
εβ
εα pentru εβ < 1 (A.4.13.)
Zε = √1
εα pentru εβ ≥ 1 (A.4.14)
Factorii înclinării danturii Zβ la solicitarea de oboseală de contact și Yβ la solicitarea de încovoiere la
baza dintelui
la predimensionarea se adoptă. La verificarea angrenajului se determină pentru fiecare treaptă.
Fig. A.4.6. Factorul înclinării danturii în funcție de unghiul de înclinare al danturii

Proiectarea reductoarelor cu angrenaje cilindrice
10
Figura A.4.7.
Pentru o ordonare eficace, vă recomadăm să completați următorul tabel (coloanele gri conțin
valori deja adoptate sau cunoscute în proiect, cele pe fond alb se calculează sau se aleg din diagrame
și tabele).
Tabelul A.4.10.
Treapta εβ
(ales deja)
u ψd ψ
m Codul poziției
roții
conducătoare
pe arbore
KHβ KFβ
I β12′
εβ12 u12 ψd12
ψm12
3 KHβ12 KFβ12
II β34′
εβ34 u34 ψd34
ψm34
3 KHβ34 KFβ34
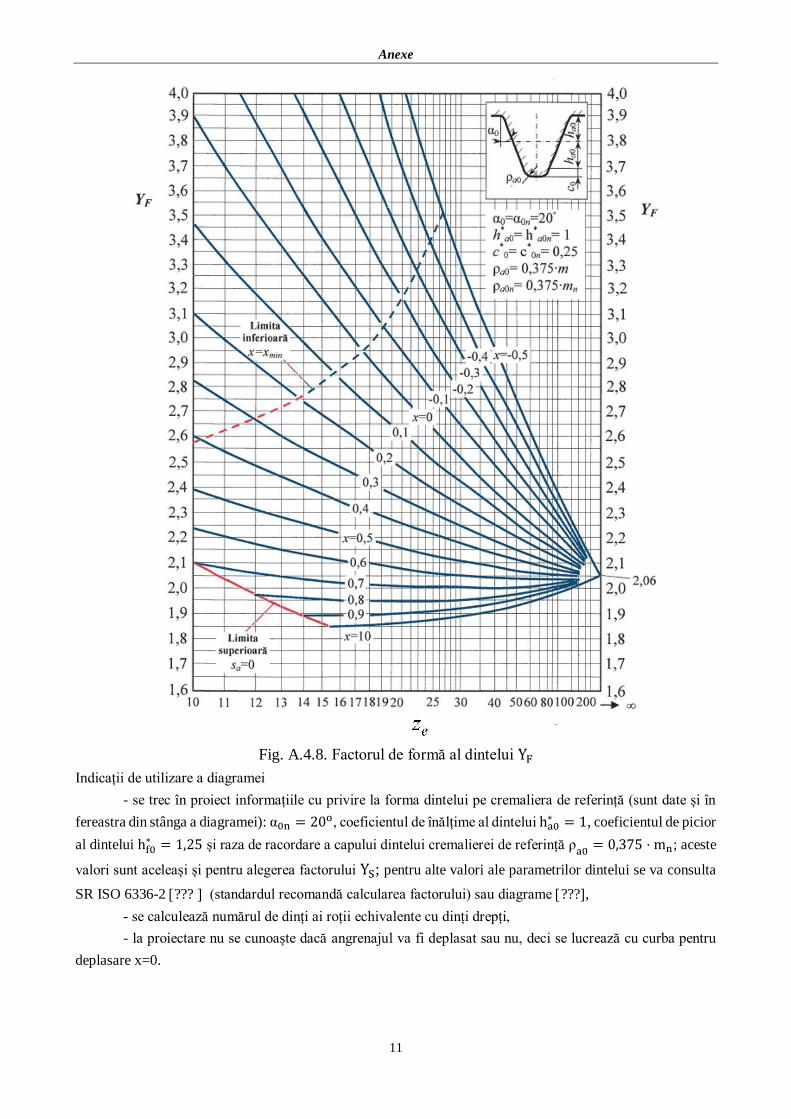
Anexe
11
Fig. A.4.8. Factorul de formă al dintelui YF
Indicații de utilizare a diagramei
- se trec în proiect informațiile cu privire la forma dintelui pe cremaliera de referință (sunt date și în
fereastra din stânga a diagramei): α0n = 20o, coeficientul de înălțime al dintelui ha0∗ = 1, coeficientul de picior
al dintelui hf0∗ = 1,25 și raza de racordare a capului dintelui cremalierei de referință ρ
a0= 0,375 ⋅ mn; aceste
valori sunt aceleași și pentru alegerea factorului YS; pentru alte valori ale parametrilor dintelui se va consulta
SR ISO 6336-2 ??? (standardul recomandă calcularea factorului) sau diagrame ???,
- se calculează numărul de dinți ai roții echivalente cu dinți drepți,
- la proiectare nu se cunoaște dacă angrenajul va fi deplasat sau nu, deci se lucrează cu curba pentru
deplasare x=0.
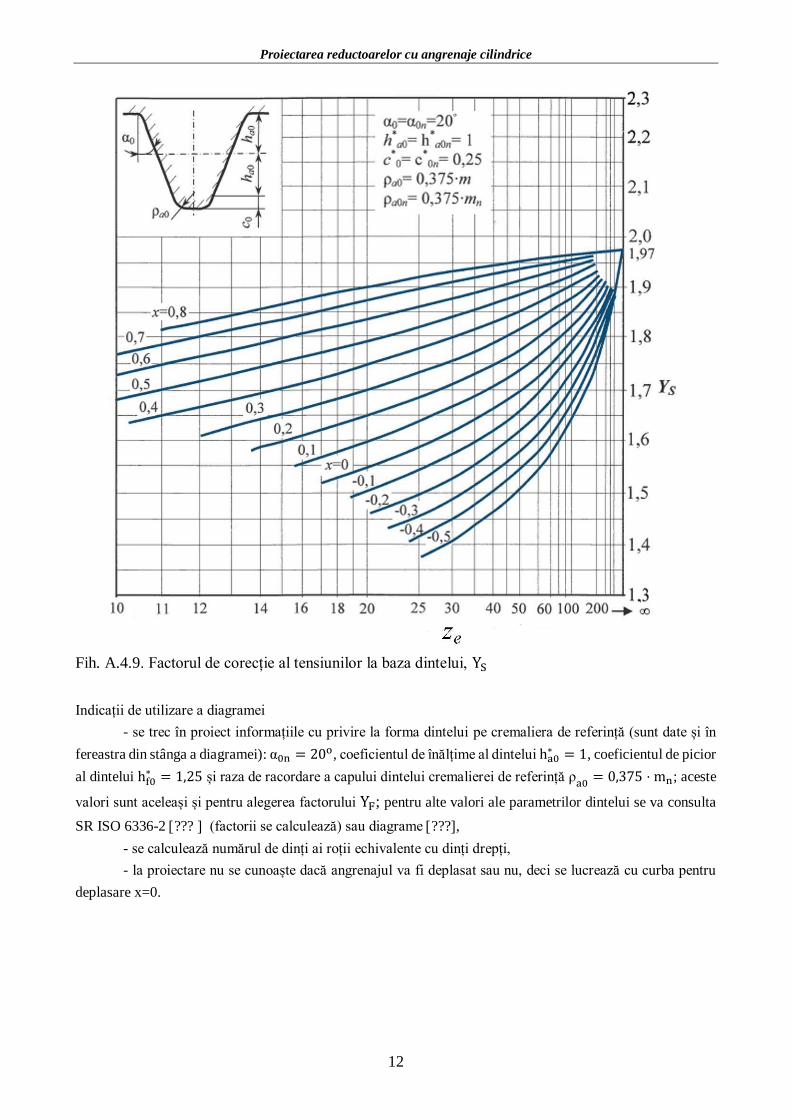
Proiectarea reductoarelor cu angrenaje cilindrice
12
Fih. A.4.9. Factorul de corecție al tensiunilor la baza dintelui, YS
Indicații de utilizare a diagramei
- se trec în proiect informațiile cu privire la forma dintelui pe cremaliera de referință (sunt date și în
fereastra din stânga a diagramei): α0n = 20o, coeficientul de înălțime al dintelui ha0∗ = 1, coeficientul de picior
al dintelui hf0∗ = 1,25 și raza de racordare a capului dintelui cremalierei de referință ρ
a0= 0,375 ⋅ mn; aceste
valori sunt aceleași și pentru alegerea factorului YF; pentru alte valori ale parametrilor dintelui se va consulta
SR ISO 6336-2 ??? (factorii se calculează) sau diagrame ???,
- se calculează numărul de dinți ai roții echivalente cu dinți drepți,
- la proiectare nu se cunoaște dacă angrenajul va fi deplasat sau nu, deci se lucrează cu curba pentru
deplasare x=0.
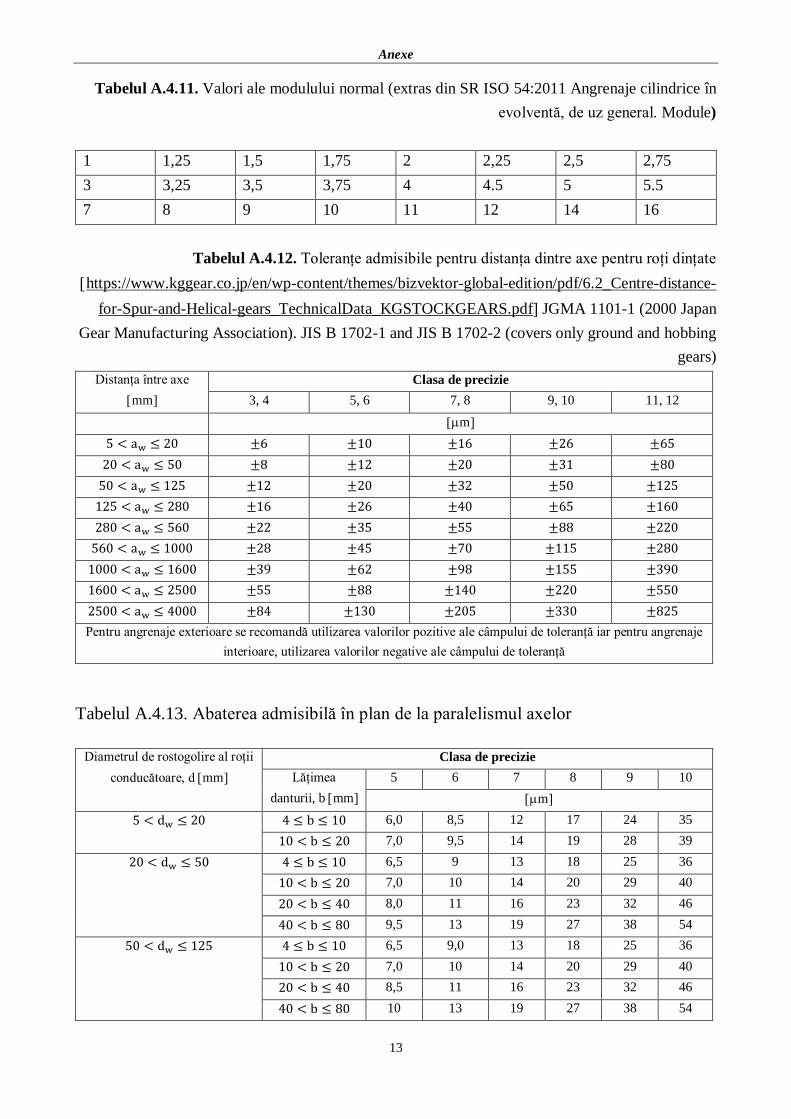
Anexe
13
Tabelul A.4.11. Valori ale modulului normal (extras din SR ISO 54:2011 Angrenaje cilindrice în
evolventă, de uz general. Module)
1 1,25 1,5 1,75 2 2,25 2,5 2,75
3 3,25 3,5 3,75 4 4.5 5 5.5
7 8 9 10 11 12 14 16
Tabelul A.4.12. Toleranțe admisibile pentru distanța dintre axe pentru roți dințate
https://www.kggear.co.jp/en/wp-content/themes/bizvektor-global-edition/pdf/6.2_Centre-distance-
for-Spur-and-Helical-gears_TechnicalData_KGSTOCKGEARS.pdf JGMA 1101-1 (2000 Japan
Gear Manufacturing Association). JIS B 1702-1 and JIS B 1702-2 (covers only ground and hobbing
gears)
Distanța între axe
mm
Clasa de precizie
3, 4 5, 6 7, 8 9, 10 11, 12
m
5 < aw ≤ 20 ±6 ±10 ±16 ±26 ±65
20 < aw ≤ 50 ±8 ±12 ±20 ±31 ±80
50 < aw ≤ 125 ±12 ±20 ±32 ±50 ±125
125 < aw ≤ 280 ±16 ±26 ±40 ±65 ±160
280 < aw ≤ 560 ±22 ±35 ±55 ±88 ±220
560 < aw ≤ 1000 ±28 ±45 ±70 ±115 ±280
1000 < aw ≤ 1600 ±39 ±62 ±98 ±155 ±390
1600 < aw ≤ 2500 ±55 ±88 ±140 ±220 ±550
2500 < aw ≤ 4000 ±84 ±130 ±205 ±330 ±825
Pentru angrenaje exterioare se recomandă utilizarea valorilor pozitive ale câmpului de toleranță iar pentru angrenaje
interioare, utilizarea valorilor negative ale câmpului de toleranță
Tabelul A.4.13. Abaterea admisibilă în plan de la paralelismul axelor
Diametrul de rostogolire al roții
conducătoare, d mm
Clasa de precizie
Lățimea
danturii, b mm
5 6 7 8 9 10
m
5 < dw ≤ 20 4 ≤ b ≤ 10 6,0 8,5 12 17 24 35
10 < b ≤ 20 7,0 9,5 14 19 28 39
20 < dw ≤ 50 4 ≤ b ≤ 10 6,5 9 13 18 25 36
10 < b ≤ 20 7,0 10 14 20 29 40
20 < b ≤ 40 8,0 11 16 23 32 46
40 < b ≤ 80 9,5 13 19 27 38 54
50 < dw ≤ 125 4 ≤ b ≤ 10 6,5 9,0 13 18 25 36
10 < b ≤ 20 7,0 10 14 20 29 40
20 < b ≤ 40 8,5 11 16 23 32 46
40 < b ≤ 80 10 13 19 27 38 54

Proiectarea reductoarelor cu angrenaje cilindrice
14
125 < dw ≤ 280 4 ≤ b ≤ 10 7,0 10 14 20 29 40
10 < b ≤ 20 8,0 11 16 22 32 45
20 < b ≤ 40 9,0 13 18 25 36 50
40 < b ≤ 80 10 15 21 29 41 58
80 < b ≤ 160 12 25 25 35 49 69
280 < dw ≤ 560 10 < b ≤ 20 8,5 12 17 24 34 48
20 < b ≤ 40 9,5 13 19 27 38 54
40 < b ≤ 80 11 15 22 31 44 62
Tabelul A.4.14. Deviația admisibilă în afara planului a paralelimului axelor
Diametrul de rostogolire al roții
conducătoare, d mm
Clasa de precizie
Lățimea
danturii, b mm
5 6 7 8 9 10
m
5 < dw ≤ 20 4 ≤ b ≤ 10 3,1 4,3 6,0 8,5 12 17
10 < b ≤ 20 3,4 4,9 7,0 9,5 14 19
20 < dw ≤ 50 4 ≤ b ≤ 10 3,2 4,5 6,5 9,0 13 18
10 < b ≤ 20 3,6 5,0 7,5 11 15 21
20 < b ≤ 40 4,1 5,5 8,5 12 17 24
40 < b ≤ 80 4,8 6,5 10 14 20 28
50 < dw ≤ 125 4 ≤ b ≤ 10 3,3 4,7 6,7 9,5 13 19
10 < b ≤ 20 3,7 5,5 7,5 11 15 21
20 < b ≤ 40 4,2 6,0 8,5 12 17 24
40 < b ≤ 80 4,9 7,0 10 14 20 28
125 < dw ≤ 280 4 ≤ b ≤ 10 3,5 5,0 7,0 10 14 20
10 < b ≤ 20 4,0 5,5 8,0 11 16 22
20 < b ≤ 40 4,5 6,5 9,0 13 18 25
40 < b ≤ 80 6,0 7,5 10 15 21 29
80 < b ≤ 160 6,0 8,5 12 17 25 35
280 < dw ≤ 560 10 < b ≤ 20 4,3 6,0 8,5 12 17 24
20 < b ≤ 40 4,8 6,5 9,5 13 19 27
40 < b ≤ 80 5,5 7,5 11 15 22 31

Anexa A.4.6. Tabelul A.4.1. Calculul unor elemente geometrice ale angrenajelor cilindrice exterioare, cu dinţi înclinaţi, nedeplasate
Ambele angrenaje sunt cilindrice cu dinţi înclinaţi, nedeplasate, şi parametrii geometrici se vor calcula cu relaţiile din
SR ISO 53:2011 Angrenaje cilindrice în evolventă, de uz general. Profil dee referinţă.
SR ISO 54:2011 Angrenaje cilindrice în evolventă, de uz general. Moduli
SR ISO 701:2011 Notaţii internaţionale ale angrenajelor. Simboluri geometrice
SR ISO 1122-1:2012 Vocabular angrenaje. Partea 1: Definiţii geometrice
SR ISO 21771:2012 Angrenaje. Roţi şi angrenaje cilindrice in evolventă - Concepte şi geometrie
Fig. 2.25. Cremaliera de bază conform SR ISO 53:2011.
Cremaliera cu dinţi înclinaţi (SR ISO 53:2011) are - profilul normal caracterizat prin mn, αn(= 20o), han∗ = 1, cn
∗ = 0,25;
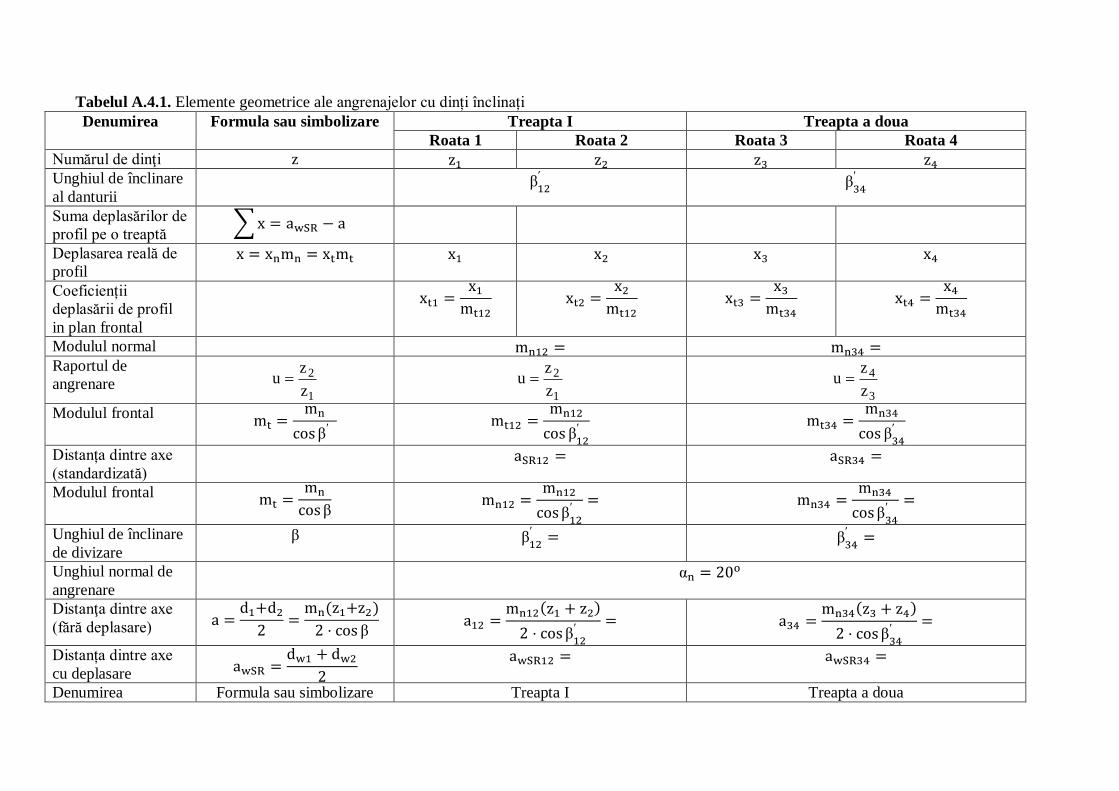
Tabelul A.4.1. Elemente geometrice ale angrenajelor cu dinți înclinați
Denumirea Formula sau simbolizare Treapta I Treapta a doua
Roata 1 Roata 2 Roata 3 Roata 4
Numărul de dinţi z z1 z2 z3 z4
Unghiul de înclinare
al danturii
β12′
β34′
Suma deplasărilor de
profil pe o treaptă ∑x = awSR − a
Deplasarea reală de
profil x = xnmn = xtmt x1 x2 x3 x4
Coeficienții
deplasării de profil
in plan frontal
xt1 =x1mt12
xt2 =x2mt12
xt3 =x3mt34
xt4 =x4mt34
Modulul normal mn12 = mn34 =
Raportul de
angrenare 1
2
z
zu
1
2
z
zu
3
4
z
zu
Modulul frontal mt =mn
cosβ′
mt12 =mn12
cos β12′
mt34 =mn34
cos β34′
Distanța dintre axe
(standardizată)
aSR12 = aSR34 =
Modulul frontal mt =mn
cosβ mn12 =
mn12
cosβ12′= mn34 =
mn34
cosβ34′
=
Unghiul de înclinare
de divizare β β
12′ = β
34′ =
Unghiul normal de
angrenare
αn = 20o
Distanţa dintre axe
(fără deplasare) a =
d1+d22
=mn(z1+z2)
2 ⋅ cos β a12 =
mn12(z1 + z2)
2 ⋅ cosβ12′
= a34 =mn34(z3 + z4)
2 ⋅ cosβ34′
=
Distanța dintre axe
cu deplasare awSR =
dw1 + dw2
2
awSR12 = awSR34 =
Denumirea Formula sau simbolizare Treapta I Treapta a doua
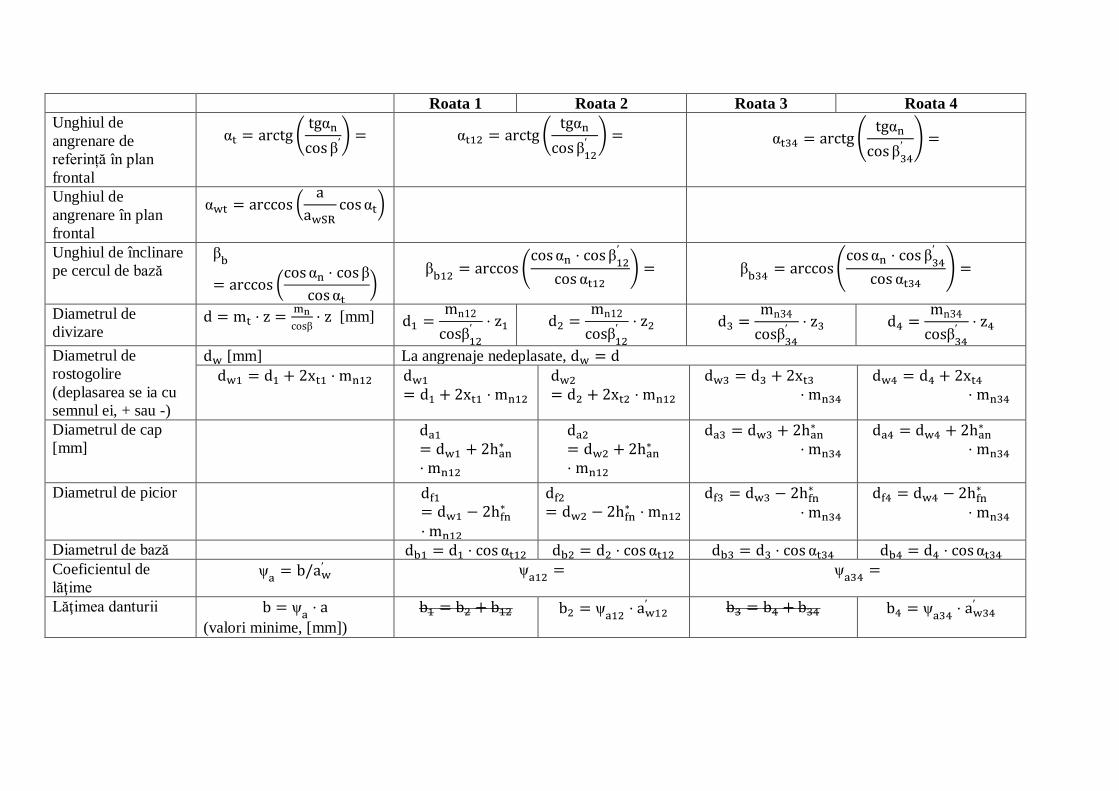
Roata 1 Roata 2 Roata 3 Roata 4
Unghiul de
angrenare de
referință în plan
frontal
αt = arctg (tgαn
cosβ′) = αt12 = arctg (
tgαn
cosβ12′) = αt34 = arctg (
tgαn
cosβ34′) =
Unghiul de
angrenare în plan
frontal
αwt = arccos (a
awSRcosαt)
Unghiul de înclinare
pe cercul de bază βb
= arccos (cosαn ⋅ cosβ
cosαt)
βb12
= arccos (cosαn ⋅ cosβ
12′
cos αt12) = β
b34= arccos(
cosαn ⋅ cos β34′
cos αt34) =
Diametrul de
divizare d = mt ⋅ z =
mn
cosβ⋅ z [mm] d1 =
mn12
cosβ12′⋅ z1 d2 =
mn12
cosβ12′⋅ z2 d3 =
mn34
cosβ34′⋅ z3 d4 =
mn34
cosβ34′⋅ z4
Diametrul de
rostogolire
(deplasarea se ia cu
semnul ei, + sau -)
dw [mm] La angrenaje nedeplasate, dw = d
dw1 = d1 + 2xt1 ⋅ mn12 dw1
= d1 + 2xt1 ⋅ mn12
dw2
= d2 + 2xt2 ⋅ mn12
dw3 = d3 + 2xt3⋅ mn34
dw4 = d4 + 2xt4⋅ mn34
Diametrul de cap
[mm]
da1= dw1 + 2han
∗
⋅ mn12
da2= dw2 + 2han
∗
⋅ mn12
da3 = dw3 + 2han∗
⋅ mn34
da4 = dw4 + 2han∗
⋅ mn34
Diametrul de picior df1= dw1 − 2hfn
∗
⋅ mn12
df2= dw2 − 2hfn
∗ ⋅ mn12
df3 = dw3 − 2hfn∗
⋅ mn34
df4 = dw4 − 2hfn∗
⋅ mn34
Diametrul de bază db1 = d1 ⋅ cos αt12 db2 = d2 ⋅ cos αt12 db3 = d3 ⋅ cos αt34 db4 = d4 ⋅ cosαt34
Coeficientul de
lăţime ψa= b/aw
′ ψa12
= ψa34
=
Lăţimea danturii b = ψa⋅ a
(valori minime, [mm])
b1 = b2 + b12
b2 = ψa12
⋅ aw12′
b3 = b4 + b34 b4 = ψa34
⋅ aw34′

Tabelul A.4.3.
Denumirea Formula sau
simbolizare
Treapta I Treapta a doua
Roata 1 Roata 2 Roata 3 Roata 4
Gradul de acoperire
total ε = εα + εβ ε12 = εα12 + εβ12 ε12 = εα12 + εβ12
Gradul de acoperire frontal
εα
=√da1
2 − db12 + √da2
2 − db22 − 2 ⋅ a ⋅ sin αwt
2 ⋅ π ⋅ mt ⋅ cosαt
εα12
=√da1
2 − db12 + √da2
2 − db22 − 2 ⋅ aw12
′ ⋅ sin αt12
2 ⋅ π ⋅ mt12 ⋅ cosαt12
εα34
=√da3
2 − db32 + √da4
2 − db42 − 2 ⋅ aw34
′ ⋅ sin αt34
2 ⋅ π ⋅ mt34 ⋅ cos αt34
Gradul de acoperire
axial t
b tg
m
εβ12min ≅
b2 ∙ tgβ12′
π ∙ mt12 εβ34min ≅
b4 ∙ tgβ34′
π ∙ mt34
Recomandare. Acest tabel poate fi completat cu datele obținute din tema de proiect și prezentat ca geometria angrenajului.
Acest tabel conține doar câteva din elementele geometrice care se prezintă într-un proiect real. Pentru cei interesați să detalieze geometria unui angrenaj,
a fiecărei roți dințate, se recomandă consultarea standardului SR ISO 21771:2012 Angrenaje. Roţi şi angrenaje cilindrice in evolventă - Concepte şi
geometrie
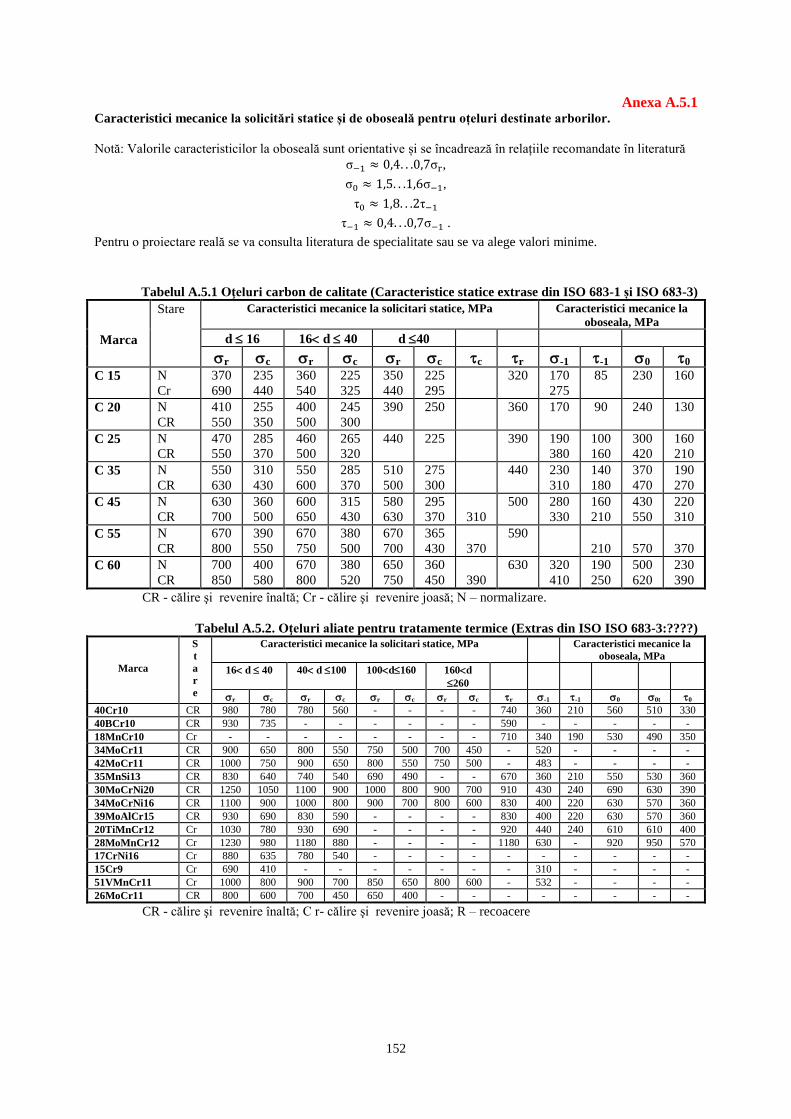
152
Anexa A.5.1 Caracteristici mecanice la solicitări statice și de oboseală pentru oțeluri destinate arborilor.
Notă: Valorile caracteristicilor la oboseală sunt orientative și se încadrează în relațiile recomandate în literatură
,
,
.
Pentru o proiectare reală se va consulta literatura de specialitate sau se va alege valori minime.
Tabelul A.5.1 Oţeluri carbon de calitate (Caracteristice statice extrase din ISO 683-1 și ISO 683-3)
Marca
Stare Caracteristici mecanice la solicitari statice, MPa Caracteristici mecanice la
oboseala, MPa
d 16 16 d 40 d 40
r c r c r c c r -1 -1 0 0 C 15 N
Cr
370
690
235
440
360
540
225
325
350
440
225
295
320 170
275
85 230 160
C 20 N
CR
410
550
255
350
400
500
245
300
390 250 360 170 90 240 130
C 25 N
CR
470
550
285
370
460
500
265
320
440 225 390 190
380
100
160
300
420
160
210
C 35 N
CR
550
630
310
430
550
600
285
370
510
500
275
300
440 230
310
140
180
370
470
190
270
C 45 N
CR
630
700
360
500
600
650
315
430
580
630
295
370
310
500 280
330
160
210
430
550
220
310
C 55 N
CR
670
800
390
550
670
750
380
500
670
700
365
430
370
590
210
570
370
C 60 N
CR
700
850
400
580
670
800
380
520
650
750
360
450
390
630 320
410
190
250
500
620
230
390
CR - călire şi revenire înaltă; Cr - călire şi revenire joasă; N – normalizare.
Tabelul A.5.2. Oţeluri aliate pentru tratamente termice (Extras din ISO ISO 683-3:????)
Marca
S
t
a
r
e
Caracteristici mecanice la solicitari statice, MPa Caracteristici mecanice la
oboseala, MPa
16 d 40 40 d 100 100d160 160d
260
r c r c r c r c r -1 -1 0 0t 0
40Cr10 CR 980 780 780 560 - - - - 740 360 210 560 510 330
40BCr10 CR 930 735 - - - - - - 590 - - - - -
18MnCr10 Cr - - - - - - - - 710 340 190 530 490 350
34MoCr11 CR 900 650 800 550 750 500 700 450 - 520 - - - -
42MoCr11 CR 1000 750 900 650 800 550 750 500 - 483 - - - -
35MnSi13 CR 830 640 740 540 690 490 - - 670 360 210 550 530 360
30MoCrNi20 CR 1250 1050 1100 900 1000 800 900 700 910 430 240 690 630 390
34MoCrNi16 CR 1100 900 1000 800 900 700 800 600 830 400 220 630 570 360
39MoAlCr15 CR 930 690 830 590 - - - - 830 400 220 630 570 360
20TiMnCr12 Cr 1030 780 930 690 - - - - 920 440 240 610 610 400
28MoMnCr12 Cr 1230 980 1180 880 - - - - 1180 630 - 920 950 570
17CrNi16 Cr 880 635 780 540 - - - - - - - - - -
15Cr9 Cr 690 410 - - - - - - - 310 - - - -
51VMnCr11 Cr 1000 800 900 700 850 650 800 600 - 532 - - - -
26MoCr11 CR 800 600 700 450 650 400 - - - - - - - -
CR - călire şi revenire înaltă; C r- călire şi revenire joasă; R – recoacere

153
Anexa A.5.2
Dimensiuni ale penelor paralele
Tabelul A.5.1
Arbore Key/Pa
nă
Canalul de pană
Diametru
nominal d
Size,
b x h
Lățime, b Adâncime Rază r
No
min
al
Ajustaj cu joc Ajustaj normal
Ajustaj
cu
strânge
re
Arbore t1 Butuc t2
Max. Min. Pes
te
pân
ă la
in
clu
siv
Arbore
(H9)
Butuc
(D10)
Arbor
e (N9)
Butuc
(JS9)a
Shaft
and
Hub
(P9)
No
min
al
To
lera
nță
No
min
al
To
lera
nță
Toleranțe
Canale pentru pene paralele
6
8
10
12
17
8
10
12
17
22
2 x 2
3 x 3
4 x 4
5 x 5
6 x 6
2
3
+0,025
0
+0.060
+0,020 -0,004 -0,029
+0,012 -0,012
-0,006
-0,031 1,2
1,8 2,5
3
3,5
+0,1
0
1
1,4 1,8
2,3
2,8
+0,1
0
0,16
0,16 0,16
0,25
0,25
0,08
0,08 0,08
0,16
0,16
4
5
6
+0,030
0
+0,078
+0,030 0
-0,030
+0,015
-0,015 -0,012
-0,042
Keyways for Rectangular Parallel Keys
22
30
38
44
50
58
65
75
85
95
110
130
150
170
200
230
260
290
330
380
440
30
38
44
50
58
65
75
85
95
110
130
150
170
200
230
260
290
330
380
440
500
8 x 7
10 x 8
12 x 8
14 x 9
16 x 10
18 x 11
20 x 12
22 x 14
25 x 14
28 x 16
32 x 18
36 x 20
40 x 22
45 x 25
50 x 28
56 x 32
63 x 32
70 x 36
80 x 40
90 x 45
100x50
8
10
12
14
16
18
20
22
25
28
32
36
40
45
50
56
63
70
80
90
100
+0,036
0
+0,098
+0,040
0
-0,036
+0,018
-0,018
-0,015
-0,051 4 5
5
5,5 6
7
7,5 9
9
10 11
+0,2 0
3,3 3,3
3,3
3,8 4,3
4,4
4,9 5,4
5,4
6,4 7,4
+0,2 0
0,25 0,40
0,40
0,40 0,40
0,40
0,60 0,60
0,60
0,60 0,60
0,16 0,25
0,25
0,25 0,25
0,25
0,40 0,40
0,40
0,40 0,40
+0,043 +0,120
+0,050
0
-0,043
+0,021
-0,021
-0,018
-0,061
+0,052 +0,149 +0,065
0 -0,052
+0,026 -0,026
-0,022
-0,074
+0,062 +0,180
-0,080
0
-0,062
+0,031
-0,031
-0,026
-0,088 12 13
15
17 20
20
22 25
28
31
+0,3
0
8,4 9,4
10,4
11,4 12,4
12,4
14,4 15,4
17,4
19,5
+0,3
0
1,00 1,00
1,00
1,00 1,60
1,60
1,60 2,50
2,50
2,50
0,70 0,70
0,70
0,70 1,20
1,20
1,20 2,00
2,00
2,00
+0,074 +0,220
+0,100
0
-0,074
+0,037
-0,037
-0,032
-0,106
+0,087
0
+0,260
+0,120
0
-0,087
+0,043
-0,043
-0,037
-0,124
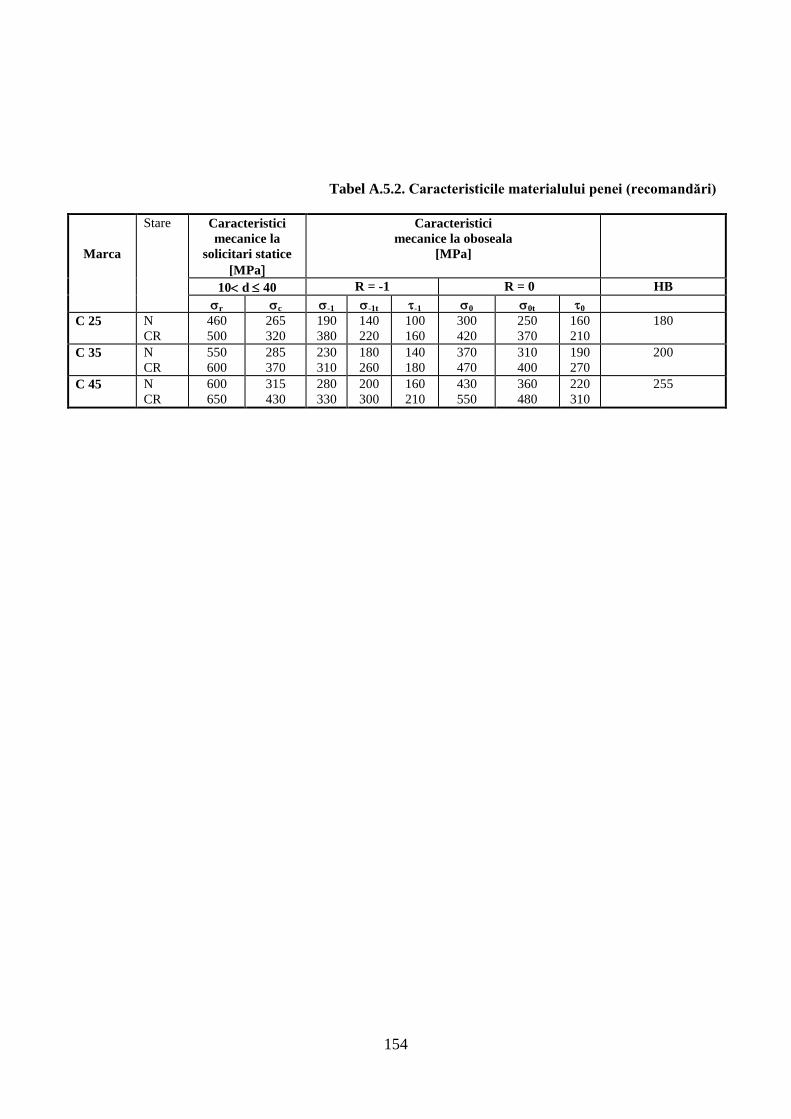
154
Tabel A.5.2. Caracteristicile materialului penei (recomandări)
Marca
Stare Caracteristici
mecanice la
solicitari statice
[MPa
Caracteristici
mecanice la oboseala
[MPa]
10 d 40 R = -1 R = 0 HB
r c -1 -1t -1 0 0t 0
C 25 N
CR
460
500
265
320
190
380
140
220
100
160
300
420
250
370
160
210
180
C 35 N
CR
550
600
285
370
230
310
180
260
140
180
370
470
310
400
190
270
200
C 45 N
CR
600
650
315
430
280
330
200
300
160
210
430
550
360
480
220
310
255

Anexa A.6.1
Dimensiuni ale piulițelor și șaibelor de blocare
Figura A.6.1.
Tabelul A.6.1.
Dimensiuni
Sarcină
axială
admisibilă
Masa Simbol
piuliță
Simbol
șaibă de
blocare
G
B b h
mm kN kg
M10x0,75 13,5 18 4 3 2 9.8 0.004 KM0 MB0
M12x1 17 22 4 3 2 11.8 0.006 KM1 MB1
M15x1 21 25 5 4 2 14.6 0.009 KM2 MB2
M17x1 24 28 5 4 2 19.6 0.012 KM3 MB3
M20x1 26 32 6 4 2 24 0.025 KM4 MB4
M25x1.5 32 38 7 5 2 31.5 0.028 KM5 MB5
M30x1.5 38 45 7 5 2 36.5 0.039 KM6 MB6
M35x1.5 44 52 8 5 2 50 0.059 KM7 MB7
M40x1.5 50 58 9 6 2.5 62 0.078 KM8 MB8
M45x1.5 56 65 10 6 2.5 78 0.11 KM9 MB9
M50x1.5 61 70 11 6 2.5 91.5 0.14 KM10 MB10
M55x2 67 75 11 7 3 91.5 0.15 KM11 MB11
M60x2 73 80 11 7 3 95 0.16 KM12 MB12
M65x2 79 85 12 7 3 108 0.19 KM13 MB13
M70x2 85 92 12 8 3.5 118 0.23 KM14 MB14
M75x2 90 98 13 8 3.5 134 0.27 KM15 MB15
M80x2 95 105 15 8 3.5 173 0.36 KM16 MB16
M85x2 102 110 16 8 3.5 190 0.41 KM17 MB17
M90x2 108 120 16 10 4 216 0.51 KM18 MB18
M95x2 113 125 17 10 4 236 0.55 KM19 MB19
M100x2 120 130 18 10 4 255 0.64 KM20 MB20
M105x2 126 140 18 12 5 290 0.79 KM21 MB21
M110x2 133 145 19 12 5 310 0.87 KM22 MB22
p 1104 si 1105, catalog SKF
Anexa 6.2.
1d 3d

Figura A.6.2.
Tabelul A.6.2.
Simbol
Dimensiuni Masa Simbol Masa
d d1 d2 B f M
d d1 d2 B f
mm kg kg
MB 0 10 13,5 21 1 3 8,5 0.001 MB21 105 126 145 1.75 12 100.5 0.083
MB 1
MB1A
12
17
17
25
25
1
1.2
3
3
10.5
10.5
0.002
0.0025 MB22 110 133 154 1.75 12 105.5 0.091
MB 2
MB2A
15
21
21
28
28
1
1.2
4
4
13.5
13.5
0.003
0.0035 MB23 115 137 159 2 12 110.5 0.11
MB 3
MB3A
17
24
24
32
32
1
1.2
4
4
15.5
15.5
0.003
0.0035
MBL24
MB24 120
135
138
152
164
2
2
14
14
115
115
0.07
0.11
MB 4
MB4A
20
26
26
36
36
1
1.2
4
4
18.5
18.5
0.004
0.005 MB25 125 148 170 2 14 120 0.12
MB 5
MB5A
25
32
32
42
42
1.25
1.8
5
5
23
23
0.006
0.0085
MBL26
MB26 130
145
149
161
175
2
2
14
14
125
125
0.08
0.12
MB 6
MB6A
30
38
38
49
49
1.25
1.8
5
5
27.5
27.5
0.008
0.011 MB27 135 160 185 2 14 130 0.14
MB 7
MB7A 35
44
44
57
57
1.25
1.8
6
6
32.5
32.5
0.011
0.016
MBL28
MB28 140
155
160
172
192
2
2
16
16
135
135
0.09
0.14
MB 8
MB8A 40
50
50
62
62
1.25
1.8
6
6
37.5
37.5
0.013
0.018 MB29 145 172 202 2 16 140 0.17
MB 9
MB9A 45
56
56
69
69
1.25
1.8
6
6
42.5
42.5
0.015
0.021
MBL30
MB30 150
170
171
189
205
2
2
16
16
145
145
0.1
0.18
MB 10
MB10A 50
61
61
74
74
1.25
1.8
6
6
47.5
47.5
0.016
0.023 MB31 155 182 212 2.5 16 147.5 0.2
MB 11
MB11A 55
67
67
81
81
1.5
2.5
8
8
52.5
52.5
0.022
0.037
MBL32
MB32 160
180
182
199
217
2.5
2.5
18
18
154
154
0.14
0.22
MB 12
MB12A 60
73
73
86
86
1.5
2.5
8
8
57.5
57.5
0.024
0.04 MB33 165 193 222 2.5 18 157.4 0.24
MB 13
MB13A 65
79
79
92
92
1.5
2.5
8
8
62.5
62.5
0.03
0.05
MBL34
MB34 170
190
193
211
232
2.5
2.5
18
18
164
164
0.15
0.24
MB 14
MB14A 70
85
85
98
98
1.5
2.5
8
8
66.5
66.5
0.032
0.053
MBL36
MB36 180
200
203
222
242
2.5
2.5
20
20
174
174
0.16
0.26
MB 15
MB15A 75
90
90
104
104
1.5
2.5
8
8
71.5
71.5
0.035
0.058
MBL38
MB38 190
210
214
232
252
2.5
2.5
20
20
184
184
0.17
0.26
MB 16
MB16A 80
95
95
112
112
1.75
2.5
10
10
76.5
76.5
0.046
0.066
MBL40
MB40 200
222
226
245
262
2.5
2.5
20
20
194
194
0.22
0.28
MB 17
MB17A 85
102
102
119
119
1.75
2.5
10
10
81.5
81.5
0.053
0.076 MB44 220 250 292 3 24 213 0.35
MB 18
MB18A 90
108
108
126
126
1.75
2.5
10
10
86.5
86.5
0.061
0.087 MB48 240 270 312 3 24 233 0.45
MB 19
MB19A 95
113
113
133
133
1.75
2.5
10
10
91.5
91.5
0.066
0.094 MB52 260 300 342 3 28 253 0.65
MB 20
MB20A 100
120
120
142
142
1.75
2.5
12
12
96.5
96.5
0.077
0.11 MB56 280 320 362 3 28 273 0.7

Inele de siguranță
Figura A.6.3
https://uk.misumi-ec.com/vona2/detail/221000767612/#
Figura A.6.4.
Tabelul A.6.3.
Mărimea
nominală
Diametrul
arborelui
Dimensiunile inelului Dimensiunile canalului[mm] Diametrul
introdus
Sarcina de
împingere
admisibilăFactor
de securitate=4[
N] Diametrul
interior Grosimea tablei
Diametrul
gauri
Diametrul
canalului
Lăţimea
canalului
D1 Toleranţa t Toleranţa d G Toleranţa W Toleranţa
JG-10 10 9.3
±0.15
1
±0.04
1.5 9.6
+0, -0.09
1.15 0.14 17 8.041
JG-(11) 11 10.2 1 1.5 10.5 1.15 0 18 8.826
JG-12 12 11.1 1 1.7 11.5 1.15 19 9.611
JG-(13) 13 12 1 1.7 12.4 0 1.15 20 9.807
JG-14 14 12.9
±0.18
1 1.7 13.4 -0.11 1.15 22 10.787
JG-15 15 13.8 1 1.7 14.3 0 1.15 23 11.768

JG-16 16 14.7 1 1.7 15.2 -0.21 1.15 24 12.749
JG-17 17 15.7 1 1.7 16.2 1.15 25 13.729
JG-18 18 16.5 1.2 1.7 17 1.35 26 16.671
JG-(19) 19 17.5 1.2
±0.05
2 18 1.35 27 17.652
JG-20 20 18.5
±0.2
1.2 2 19 1.35 28 18.633
JG-(21) 21 19.5 1.2 2 20 1.35 30 19.613
JG-22 22 20.5 1.2 2 21 1.35 31 20.594
JG-(24) 24 22.2 1.2 2 22.9 1.35 33 22.555
JG-25 25 23.2 1.2 2 23.9 1.35 34 23.536
JG-(26) 26 24.2 1.2 2 24.9 1.35 35 24.517
JG-28 28 25.9 1.5 2 26.6 1.65 38 33.343
JG-(29) 29 26.9 1.5 2 27.6 1.65 39 34.323
JG-30 30 27.9 1.5 2 28.6 1.65 40 36.285
JG-(32) 32 29.6 1.5 2.5 30.3 0 1.65 43 38.246
JG-(34) 34 31.5
±0.25
1.5 2.5 32.3 -0.25 1.65 45 41.188
JG-35 35 32.2 1.5 2.5 33 1.65 46 42.169
JG-(36) 36 33.2 1.75 2.5 34 1.9 47 50.014
JG-(38) 38 35.2 1.75
±0.06
2.5 36 1.9 50 52.956
JG-(40) 40 37
±0.4
1.75 2.5 38 1.9 53 55.898
JG-(42) 42 38.5 1.75 2.5 39.5 1.9 55 58.84
JG-45 45 41.5 1.75 2.5 42.5 1.9 58 62.763
JG-(48) 48 44.5 1.75 2.5 45.5 1.9 62 67.666
JG-50 50 45.8 2 2.5 47 2.2 64 80.415
JG-(52) 52 47.8 2 2.5 49 2.2 66 83.357
JG-55 55 50.8
±0.45
2 2.5 52 0 2.2 70 88.26
JG-(56) 56 51.8 2 2.5 53 -0.3 2.2 71 90.221
JG-58 58 53.8 2 2.5 55 2.2 73 93.163
JG-60 60 55.8 2 2.5 57 2.2 75 96.105
JG-(62) 62 57.8 2 2.5 59 2.2 77 98.067
JG-63 63 58.8 2 2.5 60 2.2 78 100.028
JG-65 65 60.8 2.5 2.5 62 2.7 81 127.488
JG-(68) 68 63.5 2.5 2.5 65 2.7 84 137.293
JG-70 70 65.5 2.5 2.5 67 2.7 86 140.235
JG-(72) 72 67.5 2.5 2.5 69 2.7 88 142.196
JG-75 75 70.5 2.5 2.5 72 2.7 92 147.1
JG-(78) 78 73.5 2.5 2.5 75 2.7 95 156.906
JG-80 80 74.5 2.5 2.5 76.5 2.7 97 159.848
JG-(82) 82 76.5 2.5 3 78.5 2.7 99 161.81
JG-85 85 79.5 3
±0.07
3 81.5 0 3.2 0.18 103 205.94
JG-(88) 88 82.5
±0.55
3 3 84.5 -0.35 3.2 0 106 210.843
JG-90 90 84.5 3 3 86.5 3.2 108 215.746
JG-95 95 89.5 3 3 91.5 3.2 114 225.553
JG-100 100 94.5 3 3 96.5 3.2 119 235.36
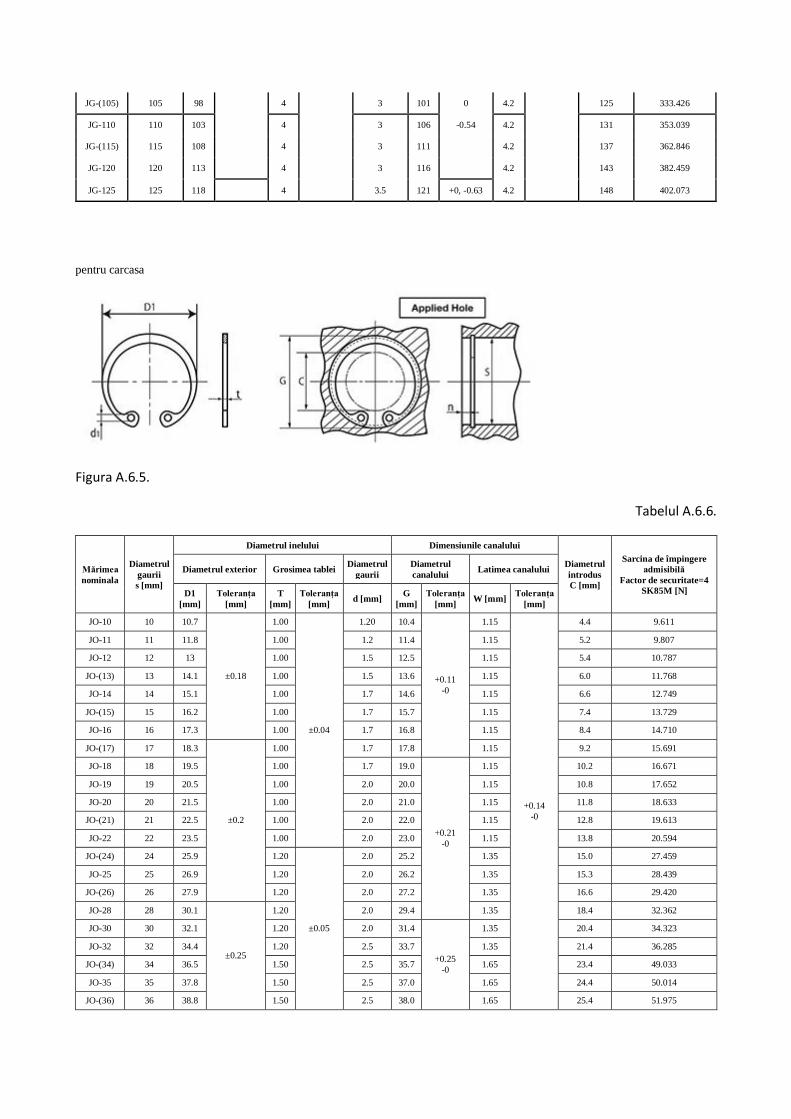
JG-(105) 105 98 4 3 101 0 4.2 125 333.426
JG-110 110 103 4 3 106 -0.54 4.2 131 353.039
JG-(115) 115 108 4 3 111 4.2 137 362.846
JG-120 120 113 4 3 116 4.2 143 382.459
JG-125 125 118 4 3.5 121 +0, -0.63 4.2 148 402.073
pentru carcasa
Figura A.6.5.
Tabelul A.6.6.
Mărimea
nominala
Diametrul
gaurii
s [mm]
Diametrul inelului Dimensiunile canalului
Diametrul
introdus
C [mm]
Sarcina de împingere
admisibilă
Factor de securitate=4
SK85M [N]
Diametrul exterior Grosimea tablei Diametrul
gaurii
Diametrul
canalului Latimea canalului
D1
[mm]
Toleranța
[mm]
T
[mm]
Toleranța
[mm] d [mm]
G
[mm]
Toleranța
[mm] W [mm]
Toleranța
[mm]
JO-10 10 10.7
±0.18
1.00
±0.04
1.20 10.4
+0.11
-0
1.15
+0.14
-0
4.4 9.611
JO-11 11 11.8 1.00 1.2 11.4 1.15 5.2 9.807
JO-12 12 13 1.00 1.5 12.5 1.15 5.4 10.787
JO-(13) 13 14.1 1.00 1.5 13.6 1.15 6.0 11.768
JO-14 14 15.1 1.00 1.7 14.6 1.15 6.6 12.749
JO-(15) 15 16.2 1.00 1.7 15.7 1.15 7.4 13.729
JO-16 16 17.3 1.00 1.7 16.8 1.15 8.4 14.710
JO-(17) 17 18.3
±0.2
1.00 1.7 17.8 1.15 9.2 15.691
JO-18 18 19.5 1.00 1.7 19.0
+0.21
-0
1.15 10.2 16.671
JO-19 19 20.5 1.00 2.0 20.0 1.15 10.8 17.652
JO-20 20 21.5 1.00 2.0 21.0 1.15 11.8 18.633
JO-(21) 21 22.5 1.00 2.0 22.0 1.15 12.8 19.613
JO-22 22 23.5 1.00 2.0 23.0 1.15 13.8 20.594
JO-(24) 24 25.9 1.20
±0.05
2.0 25.2 1.35 15.0 27.459
JO-25 25 26.9 1.20 2.0 26.2 1.35 15.3 28.439
JO-(26) 26 27.9 1.20 2.0 27.2 1.35 16.6 29.420
JO-28 28 30.1
±0.25
1.20 2.0 29.4 1.35 18.4 32.362
JO-30 30 32.1 1.20 2.0 31.4
+0.25
-0
1.35 20.4 34.323
JO-32 32 34.4 1.20 2.5 33.7 1.35 21.4 36.285
JO-(34) 34 36.5 1.50 2.5 35.7 1.65 23.4 49.033
JO-35 35 37.8 1.50 2.5 37.0 1.65 24.4 50.014
JO-(36) 36 38.8 1.50 2.5 38.0 1.65 25.4 51.975
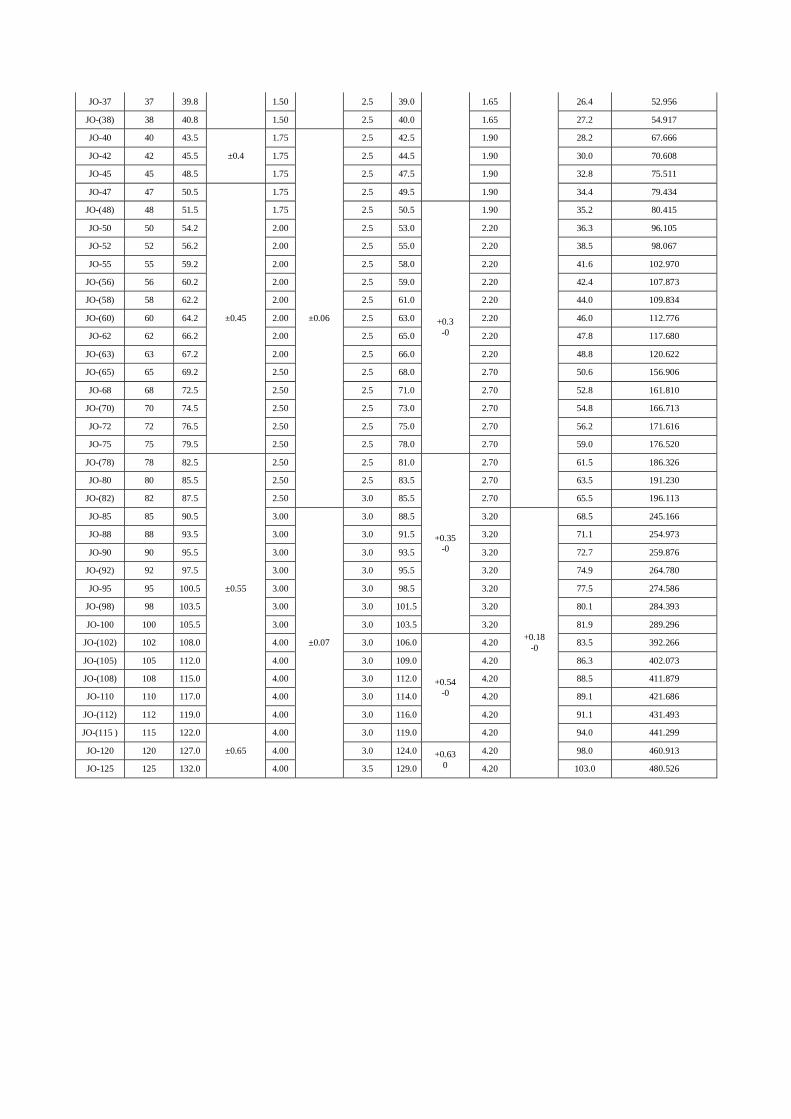
JO-37 37 39.8 1.50 2.5 39.0 1.65 26.4 52.956
JO-(38) 38 40.8 1.50 2.5 40.0 1.65 27.2 54.917
JO-40 40 43.5
±0.4
1.75
±0.06
2.5 42.5 1.90 28.2 67.666
JO-42 42 45.5 1.75 2.5 44.5 1.90 30.0 70.608
JO-45 45 48.5 1.75 2.5 47.5 1.90 32.8 75.511
JO-47 47 50.5
±0.45
1.75 2.5 49.5 1.90 34.4 79.434
JO-(48) 48 51.5 1.75 2.5 50.5
+0.3
-0
1.90 35.2 80.415
JO-50 50 54.2 2.00 2.5 53.0 2.20 36.3 96.105
JO-52 52 56.2 2.00 2.5 55.0 2.20 38.5 98.067
JO-55 55 59.2 2.00 2.5 58.0 2.20 41.6 102.970
JO-(56) 56 60.2 2.00 2.5 59.0 2.20 42.4 107.873
JO-(58) 58 62.2 2.00 2.5 61.0 2.20 44.0 109.834
JO-(60) 60 64.2 2.00 2.5 63.0 2.20 46.0 112.776
JO-62 62 66.2 2.00 2.5 65.0 2.20 47.8 117.680
JO-(63) 63 67.2 2.00 2.5 66.0 2.20 48.8 120.622
JO-(65) 65 69.2 2.50 2.5 68.0 2.70 50.6 156.906
JO-68 68 72.5 2.50 2.5 71.0 2.70 52.8 161.810
JO-(70) 70 74.5 2.50 2.5 73.0 2.70 54.8 166.713
JO-72 72 76.5 2.50 2.5 75.0 2.70 56.2 171.616
JO-75 75 79.5 2.50 2.5 78.0 2.70 59.0 176.520
JO-(78) 78 82.5
±0.55
2.50 2.5 81.0
+0.35
-0
2.70 61.5 186.326
JO-80 80 85.5 2.50 2.5 83.5 2.70 63.5 191.230
JO-(82) 82 87.5 2.50 3.0 85.5 2.70 65.5 196.113
JO-85 85 90.5 3.00
±0.07
3.0 88.5 3.20
+0.18
-0
68.5 245.166
JO-88 88 93.5 3.00 3.0 91.5 3.20 71.1 254.973
JO-90 90 95.5 3.00 3.0 93.5 3.20 72.7 259.876
JO-(92) 92 97.5 3.00 3.0 95.5 3.20 74.9 264.780
JO-95 95 100.5 3.00 3.0 98.5 3.20 77.5 274.586
JO-(98) 98 103.5 3.00 3.0 101.5 3.20 80.1 284.393
JO-100 100 105.5 3.00 3.0 103.5 3.20 81.9 289.296
JO-(102) 102 108.0 4.00 3.0 106.0
+0.54
-0
4.20 83.5 392.266
JO-(105) 105 112.0 4.00 3.0 109.0 4.20 86.3 402.073
JO-(108) 108 115.0 4.00 3.0 112.0 4.20 88.5 411.879
JO-110 110 117.0 4.00 3.0 114.0 4.20 89.1 421.686
JO-(112) 112 119.0 4.00 3.0 116.0 4.20 91.1 431.493
JO-(115 ) 115 122.0
±0.65
4.00 3.0 119.0 4.20 94.0 441.299
JO-120 120 127.0 4.00 3.0 124.0 +0.63
0
4.20 98.0 460.913
JO-125 125 132.0 4.00 3.5 129.0 4.20 103.0 480.526
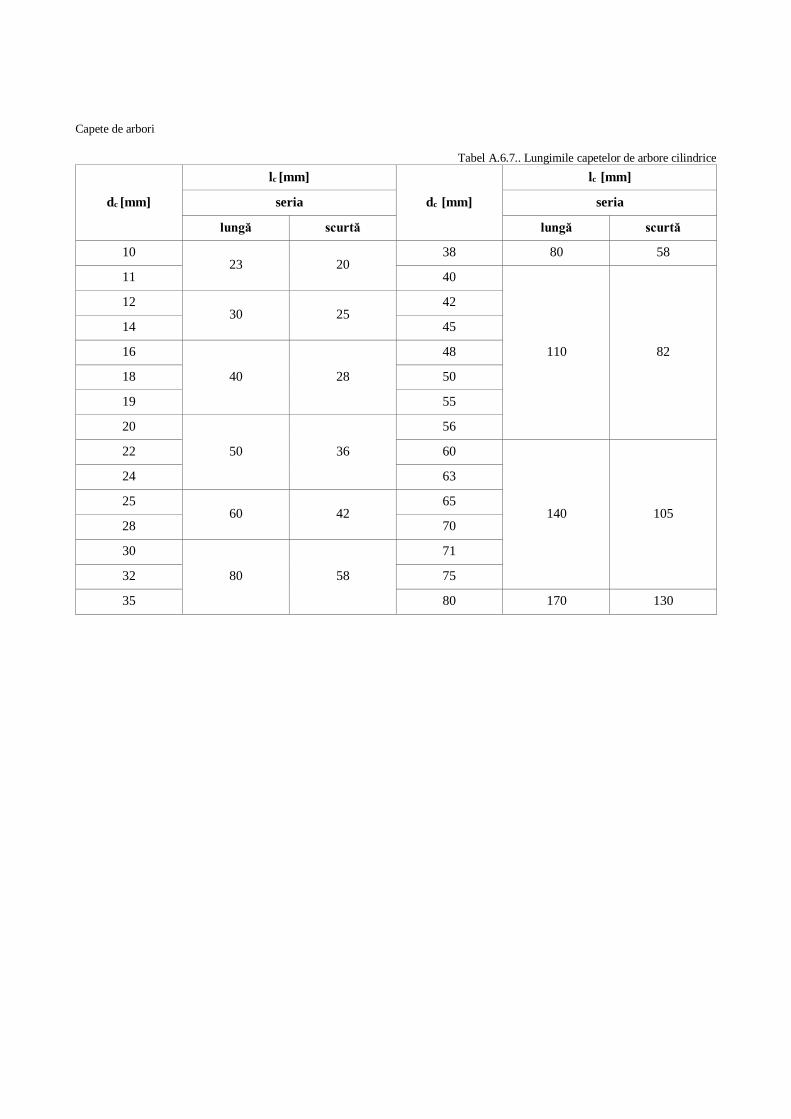
Capete de arbori
Tabel A.6.7.. Lungimile capetelor de arbore cilindrice
dc [mm]
lc [mm]
dc [mm]
lc [mm]
seria seria
lungă scurtă lungă scurtă
10 23 20
38 80 58
11 40
110 82
12 30 25
42
14 45
16
40 28
48
18 50
19 55
20
50 36
56
22 60
140 105
24 63
25 60 42
65
28 70
30
80 58
71
32 75
35 80 170 130

162
Anexa A.7.1.
Anexa A.7. Elemente pentru carcasă
Figura 7.1.1.
Tabelul 7.1.1
d
[mm]
d1
[mm]
d2
[mm]
d3
[mm]
d4
[mm]
d5
[mm]
h
[mm]
h1
[mm]
h2
[mm]
l
[mm]
f
[mm]
b
[mm]
c
[mm]
x
[mm]
r
[mm]
r1
[mm]
r2
[mm]
M8 36 20 8 20 13 18 6 5 18 2 10 1.2 2.5 2 4 4
M10 45 25 10 26 15 22 8 6 21 2 12 1.5 3 2 5 4
M12 54 30 12 30 17 26 10 7 25 2 14 1.8 3.5 2 5 6
M16 63 35 14 35 22 30 12 8 32 2 16 2 4 2 6 6
M20 72 40 16 40 28 35 14 9 38 2 19 2.5 5 3 7 8
M24 90 50 20 50 32 45 16 10 45 3 24 3 6 3 9 12
M30 108 60 24 65 39 55 18 11 54 3 28 4 7 3 11 15

163
Figura 7.1.2.
Tabelul 7.1.2.
Mărimea Pasul filetului, P [mm]
1 1.25 1.5 1.75 2 2.5 3 3.5 4
a1≥ 3.5 4 4.5 5.5 6 7 8 9 10
a2≥ 2 2.5 3 3.5 4 5 6 7 8
a3≥ 6 8 9 11 12 15 18 21 24
a4 1.5-2.5 1.5-2.5 2-3 2-3 2.5-4 2.5-4 3-5 3-5 4-6
c 1 1.6 1.6 1.6 4 2.5 2.5 2.5 3
Lungimea de înşurubare este : a≥1.25⸱d la fontă şi a≥d la oţel.
Figura 7.1.3.

164
Tabelul 7.1.3.
Mărimea d1 [mm]
d2 [mm] s [mm]
k [mm] nominal abateri nominal abateri
4 4.1 +0.48
0
6.1 1.2 ±0.20 0.15
5 5.1 7.5 1.4 0.15
6 6.1 +0.58
0
8.9 1.6 0.2
8 8.2 12.2 2 0.3
10 10.2 +0.70
0
15.2 2.5 0.3
12 12.2 18.2 3 0.4
14 14.2 20.6 3.2 ±0.24 0.4
16 16.3 23.3 3.5 0.4
18 18.3 +0.84
0
26.3 4 0.4
20 20.5 29.5 4.5 0.4
22 22.5 31.5 5 0.4
24 24.5 35.5 5.5 0.5
27 27.5 39.5 6 0.5
30 30.5 +1.00
0
43.5 6.5 ±0.29 0.8
33 33.5 47.5 7 0.8
36 36.5 52.5 8 0.8
39 39.5 56.5 8.5 0.8
42 42.5 60.5 9 0.8
45 45.5 64.5 9.5 0.8
48 48.5 68.5 10 0.8
Material: oţel de arc.

165
Figura 7.1.4.
Tabelul 7.1.4.
Filetul şurubului d [mm] D [mm]
s [mm] serie fină serie mijlocie varianta N varianta M
M4 4.3 - 9 - 0.8
M5 5.3 5.5 10 - 1
M6 6.4 6.6 12.5 - 1.6
M7 7.4 7.6 14 - 1.6
M8 8.4 9 17 15.5 1.6
M10 10.5 11 21 18 2
M12 13 14 24 21 2.5
M14 15 16 28 24 2.5
M16 17 18 30 28 3
M18 19 20 34 30 3
M20 21 22 37 34 3
M22 23 24 39 37 3
M24 25 26 44 39 4
M27 28 30 50 44 4
M30 31 33 56 50 4
Observaţii: Serie fină – simbol A; serie mijloc – simbol B;
Varianta N – pentru şuruburi cu cap hexagonal şi piuliţă hexagonală cu deschidere de cheie normală;
Varianta M – pentru şuruburi cu cap hexagonal şi piuliţă hexagonală cu deschidere de cheie redusă;
Material: S 235 SR EN 10025.
Figura 7.1.5 Şurub cu cap hexagonal mic, execuţie precisă şi semiprecisă (STAS 6403, SR ISO
4017).

166
Tabelul 7.1.5.
Filet
d
M8 M10 M12 M14 M16 M18 M20 M24
M8x1 M10x1.25 M12x1.25 M14x1.5 M16x1.5 M18x1.5 M20x1.5 M24x2
S [mm] 12 14 17 19 22 24 27 32
Dmin [mm] 13.25 15.51 18.90 21.10 24.49 26.75 30.14 35.72
k [mm] 5.5 7 8 9 10 12 13 15
d1 [mm] 8 10 12 14 16 18 20 24
rmin [mm] 0.4 0.4 0.6 0.6 0.6 0.6 0.8 0.8
*
b [mm] **
***
22
-
-
26
32
-
30
36
-
34
40
-
38
44
-
42
48
61
46
52
65
54
60
73
l [mm] 30-100 35-160 40-180 45-190 50-200 55-200 60-220 70-220
Observaţii: *- lungimi l<125; ** - lungimi 125<l<200; *** - lungimi l >200;
d2 - diametrul mediu9 al filetului; D1 = 0.95⸱S;
Lungimi tipizate:30; 35; 40; 45; 50; 55; 60; 65; 70; 75; 80; 85; 90; 100; 110; 120; 130; 140; 150; 160; 170; 180;
190; 200; 220;
Clase de calitate: 4.6; 4.8; 5.6; 5.8; 6.8; 8.8; 10.9; 12.9.
Figura 7.1.6. Şurub cu cap cilindric cu locaş hexagonal, execuţie precisă
(STAS 5144, DIN 912)

167
Tabelul 7.1.6.
Filet
d
M4 M5 M6 M8 M10 M12 M14 M16 M18 M20 M24
- - - M8x1 M10x1.25 M12x1.25 M14x1.5 M16x1.5 M18x1.5 M20x1.5 M24x2
S [mm] 3 4 5 6 8 10 12 14 14 17 19
D [mm] 7 8.5 10 13 16 18 21 24 27 30 36
k [mm] 4 5 6 8 10 12 14 16 18 20 24
d1 [mm] 4 5 6 8 10 12 14 16 18 20 24
rmin [mm] 0.2 0.2 0.25 0.4 0.4 0.6 0.6 0.6 0.6 0.8 0.8
r1~ [mm] 0.4 0.4 0.5 0.8 1 1 2 2 2 2 2
t [mm] 2 2.7 3.3 4.3 5.5 6.6 7.8 8.8 9.8 10.7 12.9
D1min [mm] 3.41 4.55 5.68 6.81 9.08 11.34 13.63 15.88 15.88 19.27 21.54
* b [mm] **
***
14
-
-
16
-
-
18
-
-
22
-
-
26
-
-
30
-
-
34
-
-
38
44
-
46
50
-
46
52
65
54
60
73
l [mm] 12-25 12-30 12-60 12-70 16-75 20-100 25-140 25-160 30-220 30-220 35-260
Observaţii:
*- lungimi l<125; ** - lungimi 125<l<200; *** - lungimi l >200;
d2 - diametrul mediu al filetului;
Lungimi tipizate:12; 14; 16; 20; 25; 30; 35; 40; 45; 50; 55; 60; 65; 70; 75; 80; 90; 100; 110; 120; 130; 140; 150;
160; 170; 180; 190; 200; 220; 240; 260;
Clase de calitate: 4.6; 4.8; 5.6; 5.8; 6.8; 8.8; 10.9; 12.9.
168
Bibliografie
1. ***** SKF Catalogue général, 2016
2. ***** SR ISO 6336-1 Calculul capacităţii de încărcare a angrenajelor cilindrice cu dinţi
drepţi şi înclinaţi. Partea 1: Principii de bază, introducere şi factori generali de influenţă
3. ***** SR ISO 6336-2 Calculul capacităţii de încărcare a angrenajelor cilindrice cu dinţi
drepţi şi înclinaţi. Partea 2: Calculul de rezistenţă la presiunea de contact (pitting)
4. ***** SR ISO 6336-3 Calculul capacităţii de încărcare a angrenajelor cilindrice cu dinţi
drepţi şi înclinaţi. Partea 3: Calcul rezistenţei la încovoiere la piciorul dintelui
5. Buiga O., L. Tudose, Optimal mass minimization design of a two-stage coaxial helical
speed reducer with Genetic Algorithms, Advances in Engineering Software 68 (2014) 25–
32
6. Buzdugan Gh., Blumenfeld M., Calculul de rezistenţă al pieselor de maşini, Editura
Tehnică, Bucureşti, 1979
7. Chişiu Al. Matieşan D., Mădărăşan T., Pop D., Organe de maşini, Editura Didactică şi
Pedagogică, Bucureşti, 1981
8. Cicone, curs OM
9. Crudu I., Stefănescu I., Panţuru D., Palaghian L., Atlas. Reductoare cu roţi dinţate, Editura
Didactică şi Pedagogică, Bucureşti, ediţia a II-a, 1982
10. Deuchtmann A.D., Michels W.J., Wilson C. E., Machine-Design - Theory and Practice,
Macmillan Publishing Co. Inc., London, 1977
11. Drăghici I., Bejan C., Moldoveanu Gh., Achiriloaie, Chişu E., Petrescu N., Ciobotă I.,
Lazăr D., Cernahoschi M., Indrumar de proiectare în construcţia de maşini, Editura
Tehnică, Bucureşti, 1982
12. Dragu D., Bădescu Gh., Sturzu A., Militaru C., Popesu I., Toleranţe şi măsurători tehnice,
Editura Didactică şi Pedagogică, Bucureşti, 1980
13. Enache Şt. şi alţii, Proiectarea formei pieselor în construcţia de maşini, Editura Tehnică,
Bucureşti, 1979
14. Florea V., Organe de maşini, vol. II, Universitatea din Sibiu, 1984
15. Gafiţanu M., Creţu S., Racocea C., Coca D., Pavelescu D., Rădulescu Gh. Coca C.,
Rădăuceanu D., Tuleaşcă C., Vornicu I., Organe de maşini, vol. II, Editura Tehnică,
Bucureşti, 1983
16. Haragas S., L. Tudose, Optimal design with genetic algorithms of the pneumatic ejectors
for plastic injection molds, Annals of the Oradea University, Fascicle of Management and
Technological Engineering, vol III, 2004, p.71+CD, ISSN 1583-0691.

Bibliografie
169
17. Hassan R., B. Cohanim, O. de Weck, A Copmarison of Particle Swarm Optimization and
the Genetic Algorithm, DOI: 10.2514/6.2005-1897
18. Jula A., Velicu D., Dudiţă F., Moldoveanu Gh., Chişu E., Diaconescu D.V. Visa I.,
Proiectarea roţilor dinţate evolventice, Editura Scrisul Românesc, 1988
19. Makwana K., Purnank Bhatt, Optimization of Gear To Improve Performance of Gearbox,
Krunalkumar Makwana*, Purnank Bhatt**
20. Manea Gh., Organe de maşini, Editura Tehnică, Bucureşti, 1970
21. Mădăraş L., Organe de maşini, Partea a II-a, vol I, II şi III, 1983
22. Mehmood R., M. H. Qazi, H. Ata, R. Zaheer, Golinski’s Speed Reducer Problem Revisited
Using Genetic Algorithm, American Scientific Research Journal for Engineering,
Technology, and Sciences (ASRJETS), ISSN 2313-4410, e-ISSN 2313-4402, pp. 55-65
23. Miloiu Gh., Dudiţă F., Diaconescu D.V., Transmisii mecanice moderne, Editura Tehnică,
Bucureşti, 1985
24. Mo S., Yidu Zhang, Qiong Wu, Haruo Houjoh, Shigeki Matsumura, Research on natural
characteristics of double-helical star gearing system for GTF aero-engine, Mechanism and
Machine Theory 106 (2016) 166–189
25. Mogal Y.K., Wakchaure V.D., A Multi-objective Optimization Approach for Bonfring,
International Journal of Man Machine Interface, vol. 3, no.1, pp. 8-12, March 2013
26. Moldovean, Gh., Bostan, I., Jula, A., Chişu, E., Vişa, I., Velicu, D., Velicu, R., Oprean, D.,
Eftimie, E. Proiectarea arborilor drepţi din transmisiile mecanice. Universitatea
Transilvania Braşov, 1995.
27. Muşat M., Stoica G., Transmisii mecanice cu reductoare într-o treaptă,
http://www.omtr.pub.ro/didactic/indrumare/indrumar_gstoica.pdf
28. Padmanabhan S., M. Chandrasekaran, V. Srinivasa Raman, Design optimization of helical
gear pair using population based swarm intelligence techniques, design optimization of
helical gear pair, International Journal of Production Technology and Management
Research, July-December 2011, vol. 2/2, US International Science Press, pp. 2229-3140
29. Palade V., Constantin V. Hapenciuc M., Reductoare cu roţi dinţate,
http://www.om.ugal.ro/om/biblioteca/Reductoare_cu_roti_dintate_Indrumar.pdf
30. Rădulescu Gh., Gheorghiu N., Muntean C., Vişa F. şi alţii, Indrumar de proiectare în
construcţia de maşini, volumul III, Editura Tehnică, Bucureşti, 1986
31. Rădulescu C.D., Achiriloaie I., Chişu E., Radu A., Organe de maşini, vol. I, Universitatea
―Transilvania‖, Braşov, 1981
32. Ripianu A., Crăciun I., Osii, arbori drepţi şi arbori cotiţi, Editura Tehnică, Bucureşti, 1977
33. Sahu S. K., C.P.Dewangan, Chitrasen Patel, Design Optimization of Helical gears using
Genetic Algorithm: A review, Advance Physics Letter
34. Salomon S., Avigad G., Purshouse R.C., Fleming P.J., Gearbox design for uncertain load
requirements using active robust optimization, Engineering Optimization, 48/4, pp. 625-

Bibliografie
170
671, 2016
35. Sastry K., David Goldberg, Graham Kendall, Genetic Algorithms, pp. 97-126, in E. K.
Burke, G. Kendall (editors), Search Methodologies. Introductory Tutorials in Optimization
and Decision Support Techniques, Spinger, ISBN-10: 0-387-28356-0 (e-book), 2005
36. Stefănescu I., Organe de maşini, vol. II, Universitatea ―Dunărea de Jos‖ din Galaţi, 1992
37. Suresh S., Sujit P.B., Rao A.K., Particle Swarm Optimization Approach for Multi-
Objective Composite Box-Beam Design, ???
38. Tamboli K., S. Patel, P.M.George, R. Sanghvi, Optimal Design of a Heavy Duty Helical
Gear Pair using Particle Swarm Optimization Technique, Procedia Technology 14 (2014)
513 519
39. Tomescu (Deleanu) L., Elemente de mecanică fină, Ed. Fundatiei Universitare ―Dunarea
de Jos‖, Galati, ISBN 973-8139-81-3, 2001
40. Tomescu L., Organe de maşini, vol. I, Editura Evrika, Brăila, 1999
41. Tudor A., Bularda Gh., Transmisii planetare cu roţi dinţate, Editura Tehnică, Bucureşti,
1970
42. Tudor A., Prodan Gh., Muntean C., Motoiu R., Durabilitatea şi fiabilitatea transmisiilor
mecanice, Editura Tehnică, Bucureşti, 1988
43. Tudose L., D. Pop, Proiectare optimală cu Algoritmi Genetici, Ed. Mediamira, Cluj-
Napoca, 2002, ISBN: 973-9358-94-2.
44. Tudose L., Haragâş, S., Jucan, D., Stănescu, C., Buiga O., Ştefanache C., Proiectarea
optimală cu algoritmi evolutivi a produselor, Ed. Napoca Star, Cluj-Napoca, ISBN 978-
973-647-726-3, 2010.
45. Tudose L., Proiectare optimală cu algoritmi genetici,
http://snom.rrv.ro/publicatii/snom05/TUDOSE.pdf, Simpozionul național de organe de
mașini, Cluj, 2015
46. Tudose L., S. Haragas, Multi-Objective optimal design with genetic algorithms of the
pneumatic ejectors of the plastic injection molds, The 9th international conference on
Mechanisms and Mechanical Transmissions MTM 2004, Acta Technica Napocensis,
series: Applied Mathematics and Mechanics, 47, vol. I, 2004, p. 375-380, ISSN 1221-
5872.
47. Wang J., Shanming Luo, DeyuSu, Multi-objective optimal design of cycloid speed reducer
based on genetic algorithm, Mechanism and Machine Theory 102 (2016) 135–148
48. Wang Y., Single Spur Gear Reducer Optimization Design Mathematical Modeling,
Applied Mechanics and Materials, ISSN: 1662-7482, Vol. 273, pp 198-202
doi:10.4028/www.scientific.net/AMM.273.198 © 2013 Trans Tech Publications,
Switzerland
Bibliografie
171
Standarde pentru transmisii cu roți dințate
Număr Titlu
ISO 9083:2001 Calculation of load capacity of spur and helical gears — Application
to marine gears
ISO/TR 14179-1:2001 Angrenaje – Capacitatea termică. Partea 1: Evaluarea transmisiilor cu
roţi dinţate cu echilibru termic la 95°C temperatură în baie
ISO/TR 18792:2008 Lubrication of industrial gear drives
ISO 53:1998 Cylindrical gears for general and heavy engineering – Standard basic
rack tooth profile
ISO 54:1996 Cylindrical gears for general engineering and for heavy engineering –
Modules
ISO 677:1976 Straight bevel gears for general engineering and heavy engineering –
Basic rack
ISO 701:1998 International gear notation – Symbols for geometrical data
ISO 1122-1:1998 Vocabulary of gear terms - Part 1: Definitions related to geometry
ISO 1122-1:1998/Cor 1:1999
ISO 1122-2:1999 Vocabulary of gear terms – Part 2: Definitions related to worm gear
geometry
ISO 1328-1:1995
Cylindrical gears – ISO system of accuracy – Part 1: Definitions and
allowable values of deviations relevant to corresponding flanks of
gear teeth
ISO 1328-2:1997
Cylindrical gears – ISO system of accuracy – Part 2: Definitions and
allowable values of deviations relevant to radial composite deviations
and runout information
ISO 1340:1976 Cylindrical gears — Information to be given to the manufacturer by
the purchaser in order to obtain the gear required
ISO 1341:1976 Straight bevel gears – Information to be given to the manufacturer by
the purchaser in order to obtain the gear required
ISO 2490:2007 Solid (mono block) gear hobs with tenon drive or axial keyway, 0,5
to 40 module – Nominal dimensions
ISO 4468:2009 Gear hobs – Accuracy requirements
ISO 6336-1:2006 Calculation of load capacity of spur and helical gears – Part 1: Basic
principles, introduction and general influence factors

Bibliografie
172
ISO 6336-1:2006/Cor 1:2008
ISO 6336-2:2006 Calculation of load capacity of spur and helical gears – Part 2:
Calculation of surface durability (pitting)
ISO 6336-2:2006/Cor 1:2008
ISO 6336-3:2006 Calculation of load capacity of spur and helical gears – Part 3:
Calculation of tooth bending strength
ISO 6336-3:2006/Cor1:2008
ISO 6336-5:2003 Calculation of load capacity of spur and helical gears – Part 5: strength
and quality of materials
ISO 6336-6:2006 Calculation of load capacity of spur and helical gears – Part 3:
Calculation of service life under variable load
ISO 6336-6:2006/Cor 1:2007
ISO 8579-1:2002 Acceptance code for gears units – Part 1: Test code of airborne sound
ISO 8579-2:1993 Acceptance code for gears – Part 2: Determination of mechanical
vibrations of gear units during acceptance testing
ISO 9083:2001 Calculation of load capacity of spur and helical gears – Application to
marine gears
ISO 9085:2002 Calculation of load capacity of spur and helical gears – Application for
industrial gears
ISO/TR 10064-
1:1992
Code of inspection practice – Part 1: Inspection of corresponding flanks
of gear teeth
ISO/TR 10064-1:1992/Cor 1:2006
ISO/TR 10064-
2:1996
Code of inspection practice – Part 2: Inspection related to radial
composite deviations, runout, tooth thickness and backlash
ISO/TR 10064-2:1996/Cor 1:2001
ISO/TR 10064-2:1996/Cor 2:2006
ISO/TR 10064-
3:1996
Code of inspection practice – Part 3: Recommendations relative to gear
blanks, shaft center distance and parallelism of axes
ISO/TR 10064-3:1996/Cor 1:2006
ISO/TR 10064-4:1998 Code of inspection practice – Part 4: Recommendations relative to
surface texture and tooth contact pattern checking
ISO/TR 10064-4:1998/Cor 1:2006

Bibliografie
173
ISO/TR 10064-5:2005 Code of inspection practice – Part 5: Recommendations relative to
evaluation of gear measuring instruments
ISO/TR 10064-5:2005/Cor 1:2006
ISO/TR 10064-6:2009 Code of inspection practice – Part 6: Bevel gear measurement
methods
ISO 10300-1:2001 Calculation of load capacity of bevel gears – Part 1: Introduction
and general influence factors
ISO 10300-2:2001 Calculation of load capacity of bevel gears – Part 2: Calculation of
surface durability (pitting)
ISO 10300-3:2001 Calculation of load capacity of bevel gears – Part 3: Calculation of
tooth root strength
ISO 10825:1995 Gears – Wear and damage to gear teeth – Terminology
ISO/TR 10828:1997 Worm gears – Geometry of worm profiles
ISO/TR 10828:1997/Cor 1:1998
ISO/TR 13593:1999 Enclosed gear drives for industrial applications
ISO/TR 13593:1999/Cor 1:2005
ISO 13691:2001 Petroleum and natural gas industries – High-speed special-purpose
gear units
ISO/TR 13989-
1:2000
Calculation of scuffing load capacity of cylindrical, bevel and hypoid
gears – Part 1: Flash temperature method
ISO/TR 13989-
2:2000
Calculation of scuffing load capacity of cylindrical, bevel and hypoid
gears – Part 2: Integral temperature method
ISO 14104:1995 Gears – Surface temper etch inspection after grinding
ISO/TR 14179-
1:2001
Gears – Thermal capacity – Part 1: Rating gear drives with thermal
equilibrium at 95oC sump temperature
ISO/TR 14179-
2:2001 Gears – Thermal capacity Part 2: Thermal load-carrying capacity
ISO 14635-1:2000 Gears – FZG test procedures – Part 1: FZG test method A/8, 3/90 for
relative scuffing load-carrying capacityof oils
ISO 14635-2:2004 Gears – FZG test procedures – Part 2: FZG step load test A10/16,
6R/120 for relative scuffing load-carrying capacity of high EP oils
ISO 14635-3:2005
Gears – FZG test procedures – Part 3: FZG test methods A/2, 8/50 for
relative scuffing load-carrying capacity and wear characteristics of
semifluid gear greases

Bibliografie
174
ISO 17485:2006 Bevel gears – ISO system of accuracy
ISO 18653:2003 Gears – Evaluation of instruments for the measurement of individual
gears
ISO/TR 18792:2008 Lubrication of industrial gear drives
ISO 21771:2007 Gears – Cylindrical involute gears and gear pairs – Concepts and
geometry
ISO 23509:2006 Bevel and hypoid gear geometry
ISO 81400-4:2005 Wind turbines – Part 4: Design and specification of gearboxes
ISO 81400-4:2005/Cor 1:2005