Presentación de PowerPoint - U-Cursos
71
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 1 Métodos Clásicos para el Diseño de Controladores: en el Dominio de la Frecuencia Elaborado por: D. Sáez R. Cárdenas Colaboradores: G. Sáez & S. Sippa
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Presentación de PowerPoint - U-Cursos

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 1
Métodos Clásicos para el Diseño
de Controladores:
en el Dominio de la Frecuencia
Elaborado por: D. Sáez
R. Cárdenas
Colaboradores: G. Sáez & S. Sippa

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 2
Análisis en Frecuencia
Si
amplitud frecuencia amplitud frecuencia
t)(Au(t) 0sin α)t(By(t) 0sin
)( jGAB )( jG
G(s) js u y

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 3
Análisis en Frecuencia
Caso general
real imaginario
)()()( jXRjG
)()()()()(
jGjGjGjG ejj
)(
)(tan)()( 1
R
XjGj
22 )()()( XRjG

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 4
Diagrama de Bode
Ganancia logarítmica
)(log20)( 10 jGA Bd
)(
)(tan)( 1
R
X

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 5
Diagrama de Bode
Ejemplo:
1
1)(
TssG
1
1)(
TjjG
2
210 )(1log10)(1
1log20)( T
TA

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 6
Diagrama de Bode
Si
frecuencia de corte
T
dBAT
TAT
dBAT
1
3)2log(10)(1
)log(20)(1
0)1log(10)(1

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 7
Diagrama de Bode
A()
()
T
10dB 0dB 3
T
1
T
1
T
10
T
0.1
20
T
0.1
º45
º90

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 8
Diagrama de Bode
Definiciones:
En los diagramas de Bode, las razones de frecuencia
se expresan en términos de octavas o décadas.
• Una octava es una banda de frecuencia de 1 a
21, en donde 1 es cualquier frecuencia
• Una década es una banda de frecuencia de 1 a
101, en donde, 1 es cualquier frecuencia.

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 9
Diagrama de Bode
Construcción de Diagrama de Bode
Factores básicos de
Ganancias K.
1. Factores de integral y de derivada
2. Factores de primer orden
3. Factores cuadráticos
)( jG
1)( j1)1( j
12
21
nn
jj

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 10
Diagrama de Bode
1. Ganancia K
KjG )(
0)(
log20)(
dBKA
dBcte
0
)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 11
Diagrama de Bode
2. Factores de de integral y de derivada
(polos y ceros en el origen).
1)( j
jjG
1)(
dBj
A log201
log20)(
º90)(
dec
dB20pendiente

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 12
Diagrama de Bode
Polo en el origen
20
0º
-90º
-180º
1
dec
dB20
pendiente
)A( )(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 13
Diagrama de Bode
Polos en origen múltiples: Nj
jG)(
1)(
dBNj
AN
log20)(
1log20)(
dec
dBNpendiente
N
20
90)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 14
Diagrama de Bode
Cero en origen jjG )(
dec
dBpendiente
dBjA
20
º90)(
log20log20)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 15
Diagrama de Bode
)A(
Cero en el origen
40
20
0
-20
-40
0.1 1 10 100 0.1 1 10 100
)(
dec
dpendiente B20
º90

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 16
Diagrama de Bode
Ceros en origen múltiples NjjG )()(
dec
dBNpendiente
N
dBNjA N
20
90)(
log20)(log20)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 17
Diagrama de Bode
40
0
1 10
log40)(log20:Ej 2 j
dec
dB40

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 18
Diagrama de Bode
3. Factores de primer orden
(Polos o ceros en eje real)
1)1( Tj
TjjG
1
1)(
221log201
1log20)( T
TjA

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 19
Diagrama de Bode
• Polo en el eje real
º90)( log20)(1
º0)( 01log20)(1
dBTAT
dBAT

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 20
Diagrama de Bode
Angulo de fase exacto del factor es:
si
y
Tj1
1
T 1tan
T
1 º451tan 1
dBA 32log20)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 21
Diagrama de Bode
-10
-45º
-20 -90º
dB
T
1
T
10
T
1
T
10
exacta
curva

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 22
Diagrama de Bode
Cero en eje real:
TjjG 1)(
TjTjA
1
1log201log20)(

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 23
Diagrama de Bode
si
º45)( 32log20)(1
º90)( log20)(1
º0)( 01log20)(1
dBAT
dBTAT
dBAT

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 24
Diagrama de Bode
20
90º
10 45º
dB
T
0
T
1
T
10T
10
T
1

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 25
Diagrama de Bode
para Sistemas Discretos
Transformación Bilineal:
w2
T1
w2
T1
Z

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 26
Plano s Plano z Plano w
wfrecuencia
Diagrama de Bode
para Sistemas Discretos

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 27
Con con
: frecuencia
El diagrama de Bode de G(j) se realiza
con el mismo procedimiento que para
sistemas continuos.
)j(G)w(G jw
Diagrama de Bode
para Sistemas Discretos

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 28
Diagrama de Bode
Ejemplo:
8187.08187.1
)01752.001873.0(2)(
2
zz
zzG
w1.01
w1.01
w2
T1
w2
T1
z
2.0T

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 29
)1j(j
10
j1
300
j12
)j(G
)1w(w
10
w1
300
w12
)w(G
Diagrama de Bode
para Sistemas Discretos

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 30
1 10 100 300 1000
decdB20
decdB40
decdB20
dB26
dB20
• Bode en Amplitud
• Graficar Bode en fase
Diagrama de Bode
para Sistemas Discretos

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 31
Sistemas de Fase Mínima
y de Fase No Mínima
Los funciones de transferencias que no tienen
polos ni ceros en el semiplano derecho del
plano s son funciones de transferencias de
fase mínima.
Las funciones de transferencias que tienen
polos y/o ceros en el semiplano derecho del
plano s son funciones de fase no mínima.

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 32
Ejemplos: Fase mínima y fase no mínima
1
1jwT1
jwT1)jw(G
1
2jwT1
jwT1)jw(G
1TT0
Τ
1
1Τ
1
1Τ
1
Τ
1
Sistemas de Fase Mínima
y de Fase No Mínima

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 33
Las dos funciones de transferencias tienen la
misma característica de magnitud, pero tienen
diferente característica de ángulo de fase.
º90
º180
1Τ
1
Τ
1
)jw(1G
)jw(G2
w
Sistemas de Fase Mínima
y de Fase No Mínima
Sistema
de fase no mínima

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 34
Sistemas con Retardo
Diagrama de Bode
El retardo tiene un comportamiento de fase no
mínima y tiene un atraso de fase excesivo sin
atenuación en frecuencias altas.
Páde:
Retardo:
2sT
2sT
sT
d
dd
1
1e
eTj
)j(G

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 35
dB 01wTsinjwTcos)jw(G
radianes wT)jw(G
Sistemas con Retardo
Diagrama de Bode

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 36
Estabilidad Relativa
• Margen de ganancia: Recíproco de la ganancia
|G(j)| para la frecuencia en el ángulo de fase
alcanza -180º (v=0). Se refiere a cuánto se debe
aumentar la ganancia para que G(j) pase por u=-1.
dBjωG20log
jωG
1M.G. 1
1

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 37
Estabilidad Relativa • Margen de fase: Se define como el ángulo de fase a
través del cual debe girar el LG G(j) para que el
punto de magnitud unitaria |G(j)|=1 pase a través del
punto (-1,0) en el plano G(j). Fase adicional que se
necesita antes de que el sistema se vuelva inestable.
|G(j2) | = 1 R(2), X(2)
2
22
ωR
ωXarctan180ºΔ

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 38
Diagrama de Bode
-180º
-90º
0º
A() dB
log()
Margen de ganancia
Margen de fase
0 dB
()
2 1

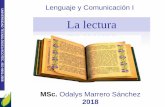
Relación entre y MF para un
Sistema de Segundo Orden IDEAL
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
Coeficiente de amortiguamiento
Mar
gen
de f
ase
(g
rado
s)
(MF en grados)/100
Para MF < 55

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 40
Estabilidad Relativa
• Para un sistema estable el Margen de ganancia
(M.G.) indica cuanto puede incrementarse la
ganancia antes de que el sistema se vuelva
inestable.
• Para un sistema inestable, el M.G. indica cuánto
debe disminuir la ganancia para que el sistema sea
estable.

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 41
Unidad 4:
Técnica de Control
en el Dominio de la Frecuencia:
Diseño de Controladores
Elaborado por: D. Sáez
Colaboradores: G. Sáez & S. Sippa

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 42
Compensador de Adelanto de Fase
αT
1s
T
1s
K1αTs
1TsαKsG ccC
αT
1polo
T
1cero
0<<1
α1
α1arcsinmax
Tα
1ωm Margen de
fase máximo

D.Sáez. EL4004 Fund. Control de
Sistemas. U. Chile
Compensador de Adelanto de Fase
• Diagrama de Bode, si =0.1
T
0.1
90º
-10
-20
A() dB
0
T
1
T
10
T
100
mωT
10
()
T
100
T
10
T
1
T
0.1
polo cero
m

Tabla de Valores Máximos
dependiendo del valor de α
α
0
0.1
0.2
0.3
0.4
0.5
Fase
(grados)
90
54.9
41.8
32.6
25.4
19.5

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 45
Compensador de Retraso de Fase
T
1s
T
1s
K1Ts
1TsKsG CCC
T
1polo
T
1cero
>1
1
1arcsinmax T
1ωm
Margen de
fase máximo

D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 46
Compensador de Retraso de Fase
-90º
10
20
A() dB
0
mωT
10
()
1
T
1
10T cero polo
m
• Diagrama de Bode, si =10.

Compensación
• La compensación por adelanto y atraso
considerando fase máxima es un buen
método de compensación. Como todos los
métodos tiene sus problemas y es que no es
posible fijar todos los parámetros.
• Por ejemplo supongamos una malla en
adelanto con α=0.1, y queremos inyectar
máxima fase en =25rads-1.

125
9.7/1
12.0
9.54
rad
T
T
m
m
Resultados Obtenidos
El cero quedo localizado en 7.9 y el polo en 79.
La fase es lo mas importante ya que la ganancia puede
ser modificada por el controlador

Compensación Donde Solamente la
Posición del Cero es Importante
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 49
No siempre se debe inyectar la fase máxima del compensador
Existen otras alternativas. Por ejemplo:
)10(
1
sPlanta
Se debe diseñar un controlador para una frecuencia de cruce de
15 rads-1 y un margen de fase de 60 grados.
Receta 1: 8.03.06.1 paracBW
Receta 2: 6.00100/ MF

-40
-30
-20
-10
0
10
Magnitu
de (
dB
)
10-1
100
101
102
103
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 50
Frecuencia de Cruce 11.3rad/s
MF=131.7 grados
Bode a lazo abierto (no sirve de mucho)

Bode planta+integrador
-100
-80
-60
-40
-20
0
20
40
Magnitu
de (
dB
)
10-1
100
101
102
103
-180
-135
-90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
Cruce en 1.43rad/s
15rad/s
MF=34 grados

Falta agregar el cero
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 52
26tan
aa
s
as c
Incluido
Por agregar
a 31

Sistema con polo y cero incluido
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 53
-40
-20
0
20
40
60M
agnitu
de (
dB
)
10-1
100
101
102
103
-125
-120
-115
-110
-105
-100
-95
-90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
15 rad/s, 5.65db
120 grados

Ajuste de la ganancia del controlador
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 54
5217.065.5)log(20 kdbkc

Sistema Compensado
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 55
-60
-40
-20
0
20
40
60M
agnitu
de (
dB
)
10-1
100
101
102
103
-125
-120
-115
-110
-105
-100
-95
-90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)

Bode a lazo cerrado
D.Sáez. EL4004 Fund. Control de Sistemas. U. Chile 56
-50
-40
-30
-20
-10
0
10M
agnitu
de (
dB
)
100
101
102
103
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)

Diseño por Cancelación
En general las reglas de cancelación de polos y
ceros del sistema siguen siendo las mismas
utilizadas al diseñar con el método del lugar de la
raíz. La cancelación debe eliminar el polo mas
lento del sistema y no se pueden cancelar polos o
ceros que se encuentren en el semiplano derecho.

Diseño por Cancelación
La dificultad se encuentra en que los
métodos de respuesta de frecuencia no
necesitan el conocimiento de la función de
transferencia de la planta.
Si no se tiene esta función de transferencia
se deben utilizar algunos procedimientos
básicos de identificación de sistemas para
encontrar la ubicación del polo a cancelar.

Diseño Por Cancelación • Para plantas tipo cero de primer orden, el polo del
sistema se encuentra en aquella frecuencia donde la
función de transferencia tiene un módulo que es un
70.7% del valor en corriente continua. Por ejemplo la
planta tipo cero de primer orden:
as
a)s(G
707.0
aa
a
aj
a)j(G
22a

• En vez del módulo de la función también puede utilizarse la fase. El polo dominante se encuentra cuando la fase es aproximadamente 45 grados.
• El identificar el polo dominante por la fase o el módulo también puede aplicarse en sistemas tipo cero de alto orden pero donde existe claramente existe un polo dominante.
Diseño Por Cancelación

• Por ejemplo, supongamos que se desea diseñar un controlador para la planta:
• Se desea implementar el controlador por cancelación. El sistema a lazo cerrado debe tener una frecuencia de cruce de 21.5rads-1 con un margen de fase de 59.2 grados.
Diseño Por Cancelación
10s
10)s(G

Diagrama de Bode

Diseño por Cancelación
• El primer paso en el diseño es colocar un
integrador en el sistema para obtener cero error
en estado estacionario a entrada escalón. El
margen de fase obtenido es de 25 grados y se
necesita un MF de 59.19 grados. Es decir se
debe inyectar 34.19 grados. Para esto se debe
utilizar una red en adelanto de la forma:

Diseño de Bode con Integrador
Frequency (rad/sec)
Pha
se (
deg);
Mag
nitu
de (
dB)
-80
-60
-40
-20
0
20
10-1
100
101
102
-180
-160
-140
-120
-100
-80
MF25
c21.4rads-1

Elección de la Red en Adelanto Por
Cancelación
as
10sGLead
Cancelación del
Polo dominante de
La planta
Elemento para completar
la malla lead-lag
19.34)a/47.21(tan)10/47.21(tan 11
Frecuencia de
cruce
Polo de la malla
En adelanto Fase entregada por
El cero
El valor de a obtenido es 35.9656.

Diagrama compensado (Falta calcular la ganancia)

Relación entre los Diagramas de Bode,
Lugar de la Raíz y Respuesta en el
Tiempo
• Recuerde, para un sistema de segundo orden IDEAL, el margen de fase y el coeficiente de amortiguamiento están relacionado con una relación no lineal, pero que puede ser linealizada a tramos (piece-wise linearisation). La demostración se encuentra en algunos libros y en alguno de mis apuntes.

A Lazo Cerrado También se Pueden
Extraer Conclusiones
Frequency (rad/sec)
Mag
nit
ud
e (
dB
)
-40
-30
-20
-10
0
10
10 0 10 2
20 log10(Mp)
r
-3db
B
En ancho de banda B nos indica que tan rápido es un sistema. Recuerde que eso
Depende también de la potencia que puede entregar el actuador con que cuenta
el sistema de control
En ancho de banda B también nos entrega una noción de que tan ruidoso es un
sistema. A mayor ancho de banda mas componentes de ruido pueden ingresar al
lazo cerrado. No incremente innecesariamente el ancho de banda.

Máximo Peak en el dominio de la
frecuencia
Frequency (rad/sec)
Mag
nit
ud
e (
dB
)
-40
-30
-20
-10
0
10
10 0 10 2
20 log10(Mp)
r
-3db
B
707.0
12
1
2
pM
El máximo peak en el dominio de la frecuencia, a lazo cerrado, está
correlacionado con el coeficiente de amortiguamiento y con el
máximo sobrepaso de la respuesta en el tiempo.

Ancho de banda y frecuencia de
cruce
• Empíricamente se puede demostrar que la frecuencia de corte y el ancho de banda están relacionados por:
• Al igual que en lugar de la raíz, el sistema de segundo orden es también la base para el diseño de controladores en el dominio de la frecuencia. El sobrepaso en el dominio de la frecuencia nos entrega otro dato interesante.
8.03.06.1 paracB

El sobrepaso en el dominio de la frecuencia y del tiempo, como una función del
coeficiente de amortiguamiento, se muestran en la siguiente tabla:
Tabla I. Sobrepaso en el dominio de la frecuencia y el tiempo.
Coeficiente de amortiguamiento
Sobrepaso en el dominio de la
frecuencia (Mp)
Sobrepaso en el dominio del
tiempo. (Mt)
0.7 1.0002 1.0460
0.6 1.0417 1.0948
0.5 1.1547 1.1630
0.4 1.3639 1.2538
0.3 1.7471 1.3723
0.2 2.5516 1.5266
0.1 5.0252 1.7292
En general existe una correlación entre el sobrepaso en el dominio de la frecuencia y el
sobrepaso en el dominio del tiempo para el sistema de segundo orden.
Recuerde: Sistema de segundo orden ideal.