PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS ...
178
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS Programa de Pós-Graduação em Engenharia Mecânica Rodrigo Bruck Cunha AVALIAÇÃO ESTRUTURAL E DINÂMICA DE UM TRICICLO ELÉTRICO DESENVOLVIDO A PARTIR DE UMA CADEIRA DE RODAS COMUM Belo Horizonte 2016
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS ...

PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Pós-Graduação em Engenharia Mecânica
Rodrigo Bruck Cunha
AVALIAÇÃO ESTRUTURAL E DINÂMICA DE UM TRICICLO ELÉTRICO
DESENVOLVIDO A PARTIR DE UMA CADEIRA DE RODAS COMUM
Belo Horizonte
2016

Rodrigo Bruck Cunha
AVALIAÇÃO ESTRUTURAL E DINÂMICA DE UM TRICICLO ELÉTRICO
DESENVOLVIDO A PARTIR DE UMA CADEIRA DE RODAS COMUM
Dissertação apresentada ao Programa de Pós-
Graduação em Engenharia Mecânica da Pontifícia
Universidade Católica de Minas Gerais como
requisito para obtenção do título de Mestre em
Engenharia Mecânica.
Orientador: Claysson Bruno Santos Vimieiro
Belo Horizonte
2016

FICHA CATALOGRÁFICA
Elaborada pela Biblioteca da Pontifícia Universidade Católica de Minas Gerais
Cunha, Rodrigo Bruck
C972a Avaliação estrutural e dinâmica de um triciclo elétrico desenvolvido a partir
de uma cadeira de rodas comum / Rodrigo Bruck Cunha. Belo Horizonte, 2016.
193 f. : il.
Orientador: Claysson Bruno Santos Vimieiro
Dissertação (Mestrado) – Pontifícia Universidade Católica de Minas Gerais.
Programa de Pós-Graduação em Engenharia Mecânica.
1. Cadeiras de rodas - Projeto. 2. Triciclos - Projetos e construção. 3.
Deficientes - Acessibilidade - Legislação. 4. Análise estrutural (Engenharia). 5.
Veículos elétricos. I. Vimieiro, Claysson Bruno Santos. II. Pontifícia Universidade
Católica de Minas Gerais. Programa de Pós-Graduação em Engenharia Mecânica.
III. Título.
CDU: 615.478.3

Rodrigo Bruck Cunha
AVALIAÇÃO ESTRUTURAL E DINÂMICA DE UM TRICICLO ELÉTRICO
DESENVOLVIDO A PARTIR DE UMA CADEIRA DE RODAS COMUM
Dissertação apresentada ao Programa de Pós-
Graduação em Engenharia Mecânica da Pontifícia
Universidade Católica de Minas Gerais como
requisito para obtenção do título de Mestre em
Engenharia Mecânica.
_______________________________________________________________
Prof. Dr. Claysson Bruno Santos Vimieiro (Orientador) – PUC-MG
_______________________________________________________________
Prof. Dr. Pedro Paiva Brito (Membro interno) – PUC-MG
_______________________________________________________________
Prof. Dr. Janes Landre Junior (Membro interno) – PUC-MG
_______________________________________________________________
Prof. Dr. Juan Carlos Horta Guitiérrez (Membro externo) – UFMG
Belo Horizonte, 25 de Fevereiro de 2016

Dedico esse trabalho a Deus e minha família

AGRADECIMENTOS
Antes de tudo agradeço imensamente a Deus, por iluminar os meus passos e dar força
para sempre continuar.
A todos que contribuíram para a realização deste trabalho, fica expressa aqui a minha
gratidão, especialmente:
À minha família, Rita de Cássia Salomão Bruck Cunha e Valter José da Cunha, que
sempre me incentivaram e apoiaram nos momentos de maiores dificuldades, cada um de sua
maneira.
À minha namorada Iara Fernandes da Silva, que me acompanha durante a jornada
sempre me apoiando com muito carinho.
Ao professor Claysson Vimieiro, pela orientação, aprendizado e apoio em todos os
momentos necessários.
Ao amigo Gabriel Goulart, por ter apresentado o projeto e por seguir junto nesta jornada.
Aos colegas da PUC-MG, pelo apoio e ajuda.
Aos meus colegas da Vision Graphic, pela rica troca de experiências.
A todos que, de alguma forma, contribuíram para esta construção.

RESUMO
Este trabalho de pesquisa consiste no desenvolvimento do projeto de um equipamento
motorizado disponibilizado em forma de acessório, capaz de proporcionar ao cadeirante maior
liberdade de movimentação sem grandes esforços físicos. Trata-se de um equipamento
eletromecânico, com estrutura física simplificada e tecnologia eletrônica aplicada. Foi realizada
uma pesquisa aprofundada sobre os diferentes modelos de equipamentos assistivos
disponibilizados no mercado, entre eles cadeira de rodas mecanomanuais e eletromecânicas, e
sistemas de tração para cadeira de rodas. A partir do Kit projetado, foram realizadas análises de
estabilidade estática e dinâmica, análises por elementos finitos para o dimensionamento
estrutural, visando direcionar a escolha dos componentes, assim como, verificar se as opções
de motorização atenderiam a necessidade do conjunto.
Palavras-Chave: Cadeira de rodas. Acessibilidade. Tração elétrica. Análise estrutural.

ABSTRACT
The present research consists to development of project of a motorized equipment available in
the form of accessory, able to provide the wheelchair user more freedom of movement without
physical exhaustion. This is an electromechanical equipment with simplified physical structure
and high-tech electronics applied. It made a deep research into the different models of assistive
devices available in the national business, including manual’s wheelchair and eletric´s
wheelchair and electromechanical drive systems for wheelchairs. From the Kit designed, Static
and dynamic stability analysis will be performed, finite element analysis to the structural
design, aiming at directing choice the best option of components, as well, as engine options
analyzed during the course of research is presented clearly and objectively.
KEYWORDS: Wheelchair.Accessibility.Electric traction,Structural analysis.

LISTA DE FIGURAS
Figura 01 - Primeira representação de Hefesto,Deus da metalurgia. ....................................... 39
Figura 02 - Representação de Hefesto, exemplo de inclusão social entre os deuses principais
da mitologia grega. ................................................................................................................... 40
Figura 03 - Cadeira de rodas do Rei Filipe II .......................................................................... 40
Figura 04 - Cadeira de rodas construída por Johann Haustach ................................................ 41
Figura 05 - Cadeira de rodas construída por volta do século XVIII, preocupação com o
conforto da pessoa e facilidade para a locomoção ................................................................... 41
Figura 06 - Cadeira de rodas construída por H.C. Jennings .................................................... 42
Figura 07 - Cadeira de rodas dobrável, leve e reclinável ......................................................... 48
Figura 08 - Cadeira para desporto e scooter ............................................................................ 48
Figura 09 - Cadeira posição ortostática denominada “LEO” ................................................... 49
Figura 10 - Cadeira de rodas de crescimento ........................................................................... 50
Figura 11 - a) Cadeira de Rodas de Banho “Clean” b) Cadeira de rodas de banho em nylon c)
Cadeira de Rodas com um maior apoio de costas para pessoa ................................................ 51
Figura 12 - Cadeira de Rodas ULX Motorizada ...................................................................... 52
Figura 13 - Modelos de cadeira de rodas eletromecânicas Freedom ....................................... 53
Figura 14 - Cadeira de Rodas Jaguaribe .................................................................................. 53
Figura 15 - Conjunto "E-fix" - Rodas Tracionárias com acionamento por joystick ................ 55
Figura 16 - Conjunto adptável power-trike .............................................................................. 55
Figura 17 - O Firefly- Kit adaptado na cadeira de rodas transformando em um triciclo ......... 56
Figura 18 - Kit adaptável a cadeira de rodas ............................................................................ 57
Figura 19 – a) Primeiro projeto do kit adaptável a cadeira rodas. b)Propostas de alterações
realizadas no Kit....................................................................................................................... 58
Figura 20 - Dimensões limites para a construção de cadeira de rodas .................................... 60
Figura 21 - Limites do alcance manual de cadeirantes ............................................................ 61
Figura 22 - Elementos finitos unidimensionais........................................................................ 64
Figura 23 - Elementos finitos bidimensionais.......................................................................... 64
Figura 24 - Elementos finitos tridimensionais ......................................................................... 65
Figura 25 - Tensões no interior de um corpo deformado ......................................................... 70
Figura 26- Módulo de referência é a projeção de 0,80 m por 1,20 m no piso, ocupada por uma
pessoa utilizando uma cadeira de rodas ................................................................................... 80
Figura 27 - Diagrama de requisitos de projeto ......................................................................... 80
Figura 28 - Cadeira Ortobrás adquirida para o projeto ............................................................ 81
Figura 29–Modelo em CAD da cadeira de rodas adquirida para o projeto ............................. 82
Figura 30 - Conjunto Fixo ........................................................................................................ 88

Figura 31 -Conjunto Fixo - a) Menor largura possível do conjunto – ...................................... 89
Figura 32 - Mecanismo regulador de largura do conjunto ....................................................... 90
Figura 33 - Conjunto fixo fechado ........................................................................................... 90
Figura 34 - Kit acoplado a cadeira de rodas ............................................................................. 91
Figura 35 - Kit acoplado a cadeira de rodas ............................................................................. 92
Figura 36 - Nova estrutura do Kit ligado a cadeira de rodas, -................................................. 93
Figura 37 - Nova estrutura do Kit, recolhido na lateral da cadeira .......................................... 94
Figura 38 - Medidas do Kit na posição direção - a)Altura das rodinhas frontais em relação ao
solo. b) Altura do guidão ao solo .............................................................................................. 95
Figura 39 - Medidas do Kit a) Na posição direção, distância longitudinal entre o toráx e o
guidão b)Comprimento lateral do conjunto quando o kit estiver recolhido ............................. 95
Figura 40 -Numeração das barras - lado direito ímpar e lado esquerdo par ............................. 96
Figura 41 - Presilha usada para conexão do Kit na cadeira ...................................................... 97
Figura 42 - Presilha e socket do conjunto "Firefly" que serão utilizados no Kit ..................... 97
Figura 43 - Barras estruturais 1 e 2 do Kit ............................................................................... 98
Figura 44 - Barras estruturais 3,4,5 e 6 do Kit ......................................................................... 99
Figura 45 - a). Cubo giratório usado na estrutura; b) Detalhamento do cubo giratório ......... 100
Figura 46 - Barras estruturais 7,8,9,10,11 e 12 do Kit ........................................................... 101
Figura 47 - Barras estruturais 13,14,15 e 16 .......................................................................... 102
Figura 48 - Conjunto Guidão utilizado no Kit ........................................................................ 103
Figura 49 - Conjunto direção utilizado no Kit ........................................................................ 104
Figura 50 - Disco de rotação utilizado no Kit ........................................................................ 105
Figura 51 - Conjunto motriz na posição de direção, com inclinação da cadeira .................... 106
Figura 52 - Barra 17 e o garfo utilizados no Kit ..................................................................... 107
Figura 53 - Barras 18,19,20 e 21 ............................................................................................ 108
Figura 54 - Bateria de Lítio 36v e 10 Ah ................................................................................ 109
Figura 55 - Microcontrolador usado para realizar interação bateria-motor............................ 110
Figura 56 - Display de LED ................................................................................................... 110
Figura 57 - Diagrama de corpo livre de uma cadeira de rodas em uma pista inclinada ......... 112
Figura 58 - Motor Brushless ................................................................................................... 116
Figura 59 - Freio a disco acoplado no motor .......................................................................... 117
Figura 60 - Eixo de tombamento TT ...................................................................................... 118
Figura 61 – a) Diagrama de corpo livre de um triciclo em uma pista inclinada (tombamento
para trás) – b) Diagrama de corpo livre de um triciclo em uma pista inclinada (tombamento
para frente) .............................................................................................................................. 118
Figura 62 - a)Diagrama de corpo livre de um triciclo em uma pista inclinada –b)Diagrama de
corpo livre de uma cadeira de rodas em uma pista inclinada ................................................. 120

Figura 63 – a)Sistemas de coordenadas utilizado para o cálculo da estabilidade dinâmica- b)
Diagrama de corpo livre para análise de estabilidade dinâmica ............................................ 121
Figura 64 - Modelo do conjunto em elementos finitos .......................................................... 124
Figura 65 - Componentes modelados no formato bidimensional (2D) .................................. 126
Figura 66 - Componentes modelados no formato tridimensional (3D) ................................. 127
Figura 67 - Modelo submetido a aceleração da gravidade de 9,81 m/s² ................................ 129
Figura 68 - Modelo construído no software Working Model ................................................ 130
Figura 69 - Resultados da simulação realizada no Working Model ...................................... 131
Figura 70 - Modelo submetido a aplicação das forças aplicadas no garfo ............................ 132
Figura 71 - Desaceleração e carregamentos atuantes no conjunto ao passar por um buraco com
a velocidade de 2,77m/s para os modelos: ............................................................................. 133
Figura 72 - Modelo submetido a aceleração .......................................................................... 133
Figura 73 - Comparativo de força de reação encontrada nos dois softwares utilizados – ..... 134
Figura 74 - Comparativo de força de reação encontrada nos dois softwares utilizados – ..... 135
Figura 75 - Resultados da simulação realizada no Working Model (velocidade de 4,16m/s)
para os modelos: a) Configuração normal b)Configuração máxima ..................................... 136
Figura 76 - Modelo submetido a aplicação das forças aplicadas no garfo ............................ 137
Figura 77 - Modelo submetido a aceleração .......................................................................... 138
Figura 78 - Modelo submetido a aplicação das forças aplicadas no guidão .......................... 139
Figura 79 - Comportamento da estabilidade estática longitudinal (eixo Pitch) quanto ao
tombamento para trás- a)Configuração normal b) Configuração máxima .......................... 143
Figura 80 - Comportamento da estabilidade estática longitudinal (eixo Pitch) quanto ao
tombamento para frente - a)Configuração normal b) Configuração máxima ...................... 144
Figura 81-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao tombamento
lateral - a)Configuração normal b) Configuração máxima .................................................. 145
Figura 82-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao tombamento
lateral - a)Configuração normal b) Configuração máxima .................................................. 146
Figura 83-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao tombamento
lateral - a)Configuração normal b) Configuração máxima .................................................. 146
Figura 84-Comportamento da estabilidade dinâmica levando em consideração os eixos
Pitch,Roll e Yaw (Raio de curvatura de 1 metro) .................................................................. 147
Figura 85-Comportamento da estabilidade dinâmica levando em consideração os eixos
Pitch,Roll e Yaw (Raio de curvatura de 5 metros) ................................................................ 148
Figura 86 - Componentes a serem avaliados na análise estrutural ........................................ 149
Figura 87 - Resultados da análise estrutural de peso próprio do conjunto nas duas
configurações - a)Configuração normal b) Configuração máxima ...................................... 150
Figura 88 - Resultados da análise estrutural do conjunto quando a cadeira passar em um
buraco (velocidade de 4,16m/s) - a)Configuração normal b) Configuração máxima .......... 151

Figura 89 - Resultados da análise estrutural do conjunto quando a cadeira passar em um
buraco (velocidade de 2,77m/s) - a)Configuração normal b) Configuração máxima .......... 152
Figura 90 - Resultados da análise estrutural do conjunto quando a cadeira passar em um
buraco (velocidade de 1,00m/s) - a)Configuração normal b) Configuração máxima .......... 154
Figura 91 - Resultados da análise estrutural do conjunto quando a cadeira passar em um
degrau (velocidade de 4,16m/s) - a)Configuração normal b) Configuração máxima .......... 156
Figura 92 - Resultados da análise estrutural do conjunto quando a cadeira passar em um
degrau (velocidade de 1,00m/s) - a)Configuração normal b) Configuração máxima .......... 158
Figura 93 - Resultados da análise estrutural do conjunto submetido a uma frenagem brusca -
a)Configuração normal b) Configuração máxima ................................................................ 159
Figura 94 - Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão em Y positivo – configuração normal ........................................................................ 160
Figura 95 - Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão em Y positivo – configuração máxima ....................................................................... 161
Figura 96 - Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão em Y negativo – configuração normal........................................................................ 162
Figura 97 - Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão em Y negativo – configuração máxima ...................................................................... 162

LISTA DE TABELAS
Tabela 1 – Medidas básicas para cadeiras de rodas (tolerância + 10mm) ............................... 60
Tabela 2 - Descrição dos limitantes do alcance manual de cadeirante .................................... 61
Tabela 3 - Comparativo de propriedades mecânicas ............................................................... 84
Tabela 4 - Propriedades Químicas da Liga de alumínio 6351 ................................................. 84
Tabela 5 - Conjunto de fatores para determinação de fator de segurança para materiais dúcteis
.................................................................................................................................................. 86
Tabela 6 - Critérios de Fator de segurança .............................................................................. 87
Tabela 7 - Valores de coeficiente de rolamento para diferentes tipos de piso ....................... 114
Tabela 8 - Resultados de carregamentos atuante devido a velocidade imposta, quando o
conjunto passar por um buraco .............................................................................................. 134
Tabela 9 - Resultados de carregamentos atuante devido a velocidade imposta, quando o
conjunto passar por um degrau .............................................................................................. 136
Tabela 10 - Dimensões da cadeira – configuração normal- e valores obtidos no cálculo da
potência necessária para tração no conjunto .......................................................................... 141
Tabela 11 - Dimensões da cadeira - configuração máxima- e valores obtidos no cálculo da
potência necessária para tração no conjunto .......................................................................... 142
Tabela 12 - Resumo dos resultados da análise estrutural do conjunto quando a cadeira passar
em um buraco ......................................................................................................................... 155
Tabela 13 - Resumo dos resultados da análise estrutural do conjunto quando a cadeira passar
em um degrau ......................................................................................................................... 158
LISTA DE SIGLAS
ADA - American with Disabilities Act
ABNT – Associação Brasileira de Normas Técnicas
CAD –Computer Aided Design
CG - Centro de Gravidade
CM - Centro de Massa
DOU - Diário Oficial da União
EUA - Estados Unidos da América
FAPEMIG – Fundação de Amparo á Pesquisa do Estado de Minas Gerais
FS - Fator de Segurança
LED – Ligth Emiting Diode
IBGE – Instituto Brasileiro de Geografia e Estátistica
IDH – Índice de Desenvolvimento Humano
INMETRO –Instituto Nacional de Metrologia
ISO –International Organization for Standardization
PUC –Pontifícia Universidade Católica de Minas Gerais
PWM-Pulse-Width Modulation
ONU – Organização Mundial das Nações Unidas
SAE - Society of Automotive Engineer

LISTA DE SÍMBOLOS
Pa – Pascal
𝜎𝑎𝑑𝑚𝑖𝑠𝑠 − Tensão admissível
𝜎𝑒𝑠𝑐𝑜𝑎 - Tensão escoamento
u – Deslocamento de acordo com o eixo de coordenada
𝑢𝑖 – Deslocamento
K – Rigidez
F - Força
E – Módulo de Elasticidade
G – Módulo de Elasticidade Transversal
ε – Deformação
𝜀𝑖 – Deformação de acordo com o eixo de coordenada
t– Tensor tensão
𝑡𝑖 – Tensor tensão de acordo com o eixo de coordenada
θ - Ângulo de inclinação para análise de tombamento longitudinal;
α-Ângulo gerado entre o eixo coordenado Y e o novo eixo de tombamento lateral para análise
estática
γ- Ângulo de inclinação para análise de tombamento lateral
δ - Ângulo efetivo de esterçamento
𝑅𝑎- Força de resistência ao ar
𝑅𝑟𝑓 − Força de resistência ao rolamento no eixo dianteiro
𝑅𝑟𝑡 − Força de resistência ao rolamento no eixo traseiro
𝜇𝑓 - Resistência de atrito ao rolamento eixo frontal
𝜇𝑡 - Resistência de atrito ao rolamento eixo traseiro

L - Distância entre eixos
𝑁𝑓 – Força normal no eixo frontal
𝑁𝑡 – Força normal no eixo traseiro
𝜌𝑎𝑟 – Densidade do ar
𝐶𝑥 - Coeficiente de penetração aerodinâmica da cadeira de rodas;
𝑣𝑥- A velocidade longitudinal do conjunto;
A - Área frontal da cadeira de rodas;
𝐹𝐹𝑃𝑀 - Força de propulsão fornecida ao conjunto pelo motor;
𝑅/𝑟 - Relação entre os raios da roda e o aro;
𝑀𝑡 − Massa total do conjunto
𝑎𝑥 −Aceleração instantânea do conjunto
h -Altura do CG em relação ao solo
Amp - Corrente elétrica
Volts – Tensão elétrica
TT - Eixo de tombamento da cadeira
g - Aceleração da gravidade;
{A} - Vetor forca inercial
{𝐴1} - Vetor forca inercial representado sobre o plano móvel
{𝐴∗} - Vetor coluna forca inercial
{E}-Vetor forca radial
{𝐸1} - Vetor forca radial representado sobre o plano móvel
{𝐸∗}-Vetor coluna forca radial
{K}-Braço de momento durante analise dinâmica;
{P} - Vetor forca peso;
{𝑃1}-Vetor forca peso representado sobre o plano móvel;
{𝑃∗} - Vetor coluna forca peso.

𝑅01 - Matriz de transformação entre o plano fixo e móvel
𝑅𝑥,γ- Matriz de transformação entre o plano fixo e móvel influenciado pelo ângulo
𝑅𝑦,θ- Matriz de transformação entre o plano fixo e móvel influenciado pelo ângulo
𝑅𝑧,α - Matriz de transformação entre o plano fixo e móvel influenciado pelo ângulo
S3 - Elemento de casca triangular
S4 -Elementos de casca fina de quatro nós
C3D4 - Elemento tetraédrico linear
C3D8 - Elemento hexaédrico linear

SUMÁRIO
1 – INTRODUÇÃO ................................................................................................................ 35
1.1 - Objetivo ........................................................................................................................... 36 1.1.1- Objetivos Específicos ..................................................................................................... 36
1.2 - Justificativa ..................................................................................................................... 36 2- FUNDAMENTOS TEÓRICOS ........................................................................................ 39 2.1- Configurações da cadeira de rodas e seus componentes .............................................. 42
2.2–Acessibilidade ................................................................................................................... 43 2.3 – Tecnologia Assistiva ...................................................................................................... 44
2.4 - Tipos de cadeiras ............................................................................................................ 47 2.4.1– Modelos atuais de cadeira de rodas .............................................................................. 48 2.4.2 - Outros tipos de Cadeira de Rodas ................................................................................ 49
2.5- Cadeira de Rodas Motorizadas ...................................................................................... 51 2.5.1 - Cadeira de Rodas ULX Motorizada - Ortobrás ............................................................ 52 2.5.2 - Cadeira de Rodas Motorizada Freedom ....................................................................... 52
2.5.3 - Cadeira de Rodas Motorizada Jaguaribe ..................................................................... 53
2.6- Sistemas de tração para cadeira de rodas ..................................................................... 54 2.6.1 – Kit “E-fix” .................................................................................................................... 54 2.6.2 – Kit “Power-trike” ......................................................................................................... 55
2.6.3 – Kit “Firefly” ................................................................................................................. 56
2.6.4 – Kit adaptável a cadeira de rodas ................................................................................. 56
2.7 - Produto para as necessidades do mercado .................................................................. 57 2.7.1 - Primeiro Projeto ........................................................................................................... 58
2.8 –Projeto de máquinas ....................................................................................................... 59 2.8.1 –Normas construtivas de construção de equipamentos assistivos .................................. 59
2.9- Princípios dos elementos finitos ..................................................................................... 62 2.9.1 – Elementos Finitos Uni, Bi e Tridimensionais ............................................................... 63
2.9.1.1 - Elementos Unidimensionais .................................................................................... 63 2.9.1.2 - Elementos Bidimensionais ....................................................................................... 64 2.9.1.3 - Elementos Tridimensionais ...................................................................................... 65 2.10 - Tipos de análise ........................................................................................................... 66 2.10.1- Análise Linear/não linear ........................................................................................... 67
2.11- Equações Básicas da Elasticidade Linear ................................................................... 67 2.11.1 – Deformações ............................................................................................................... 67 2.11.2 – Tensões ....................................................................................................................... 70
3- REVISÃO BIBLIOGRÁFICA ......................................................................................... 73 3.1 – Estudo sobre ergonomia ................................................................................................ 73 3.2 – Estudo sobre tecnologia assistiva ................................................................................. 74
3.3 – Estudo sobre a utilização de materiais ........................................................................ 75 3.4 – Estudo sobre simulações em elementos finitos ............................................................ 76 3.5 – Estudo sobre equipamentos semelhantes desenvolvidos ............................................ 76 4- METODOLOGIA .............................................................................................................. 79
4.1–Materiais a utilizar .......................................................................................................... 83 4.1.1 – Especificação de Material (Alumínio) .......................................................................... 83
4.2– Fator de segurança ......................................................................................................... 85
4.3 - Primeiro projeto ............................................................................................................. 88 4.3.1- Conjunto fixo .................................................................................................................. 88
4.4-Segundo projeto ................................................................................................................ 92 4.4.1- Componentes e mecanismos ........................................................................................... 96

4.4.1.1 - Presilha...................................................................................................................... 96
4.4.1.2 – Barras 1 e 2............................................................................................................... 97 4.4.1.3 – Barras 3,4,5 e 6......................................................................................................... 98 4.4.1.4 – Cubo giratório .......................................................................................................... 99 4.4.1.5 – Barras 7,8,9,10,11 e 12........................................................................................... 100 4.4.1.6 – Barras 13,14,15 e 16............................................................................................... 101
4.4.1.7 – Conjunto Guidão .................................................................................................... 102 4.4.1.8 – Conjunto direção .................................................................................................... 104 4.4.1.9 – Disco de rotação ..................................................................................................... 104 4.4.1.10 – Barra 17 e o garfo ................................................................................................ 106
4.4.1.11 – Barras 18,19,20 e 21............................................................................................. 107 4.4.2 – Componentes ligados a estrutura do Kit.................................................................... 108
4.4.2.1 – Bateria .................................................................................................................... 108
4.4.2.2 – Microcontrolador ................................................................................................... 109 4.4.2.3 – Display LED ........................................................................................................... 110 4.4.2.4 – Motor Brushless ..................................................................................................... 111 4.4.2.4.1 – Análise do processo de acionamento ................................................................... 112
4.4.2.5 – Freios ...................................................................................................................... 116 4.5 – Análise de estabilidade estática e dinâmica .............................................................. 117 4.5.1 – Estabilidade Estática ................................................................................................. 118
4.5.2 – Estabilidade Dinâmica ............................................................................................... 120
4.6–Modelo em elementos finitos ........................................................................................ 124 4.7 – Descrição do modelo em elementos finitos ................................................................ 125 4.7.1 – Parâmetros utilizados no modelamento ..................................................................... 127
4.8 – Análises estáticas efetuadas ........................................................................................ 128 4.8.1 – Análise de peso próprio (aceleração da gravidade) .................................................. 129 4.8.2 – Análise estrutural do conjunto quando a cadeira passar em um buraco .................. 129
4.8.3– Análise estrutural do conjunto submetido a passagem por um degrau ...................... 135 4.8.4 – Análise estrutural do conjunto submetido frenagem brusca ..................................... 137 4.8.5– Análise estrutural do conjunto submetido a uma força aplicada no guidão .............. 138
5 – RESULTADOS............................................................................................................... 141
5.1 - Resultados em relação a especificação do motor ..................................................... 141 5.2 - Resultados com relação a análise de estabilidade estática e dinâmica ................... 142 5.2.1- Tombamento longitudinal ............................................................................................ 143
5.2.1.1 – Tombamento longitudinal para trás ...................................................................... 143 5.2.1.2 – Tombamento longitudinal frontal ......................................................................... 144 5.2.2- Tombamento lateral ..................................................................................................... 145 5.2.3 – Análise de estabilidade dinâmica .............................................................................. 147
5.3 - Resultados das análises estruturais estáticas ........................................................... 148 5.3.1 – Resultados análise de peso próprio (Aceleração da gravidade) ............................... 149 5.3.2 – Resultados da análise do conjunto quando a cadeira passar em um buraco ............ 150 5.3.3 – Resultados da análise do conjunto quando a cadeira passar em um degrau ............ 155 5.3.4 – Resultados da análise estrutural do conjunto submetido frenagem brusca .............. 159
5.3.5 – Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão..................................................................................................................................... 160
6 – CONCLUSÃO ................................................................................................................ 165 6.1 – Sugestões para trabalhos futuros............................................................................... 168 REFERÊNCIAS BIBLIOGRÁFICAS ............................................................................... 169

35
1 – INTRODUÇÃO
Desde a sua invenção, por volta do século XVI, a cadeira de rodas é considerado o meio de
locomoção mais prático para pessoas que encontram dificuldade de locomoção. Além da
utilidade de locomoção, a cadeira de rodas tem a função de socializar o deficiente.
Atualmente é dado um enfoque especial à mobilidade, uma vez que, para as pessoas com
incapacidades, em nível físico e/ou mental, a cadeira de rodas pode ser o único meio de
mobilidade. Por esse motivo, torna-se fundamental a existência de cadeiras de rodas que
permitam uma melhor qualidade de vida. Apesar dos direitos das pessoas com deficiência
estarem garantidos em lei no Brasil, diferentes esferas de governo, empresas e a sociedade civil
ainda encontram dificuldades em prover mecanismos que possibilitem aos cadeirantes o amplo
acesso a tais benefícios, o que tem comprometido não apenas o direito de “ir e vir” dessas
pessoas, mas também a sua autonomia. Obstáculos para algumas pessoas muitas vezes são
despercebidos por outras. Isso porque um simples deslocamento na calçada ou na rua representa
um grande desafio. Ao deslocar-se, as pessoas normais sobem passeios, desviam-se de buracos
e caminham no meio da multidão ou em pequenos espaços. Por outro lado, já as pessoas com
deficiência não desfrutam dessa facilidade. Elas precisam ficar atentas com buracos e
irregularidades na calçada, além de enfrentarem, muitas vezes um espaço de deslocamento
reduzido devido ao tamanho da cadeira de rodas. Logo pequenos trajetos podem representar
uma luta no dia a dia.
Cota et al (2011) salientam que, na busca pela redução de custos os fabricantes de cadeira
de rodas procuram utilizar materiais e processos de fabricação mais baratos, não dando tanta
ênfase a aspectos como conforto, ergonomia, durabilidade e estabilidade. Além disso, um
grande problema causado pelo uso de materiais de baixo valor consiste no elevado peso do
produto, tornando-o mais difícil de ser manuseado e exigindo um maior esforço para
locomoção. Neste contexto, o emprego de materiais alternativos na construção das peças
componentes de cadeiras de rodas tem sido o foco de várias pesquisas, com o intuito de
solucionar os problemas gerados principalmente pelo elevado peso.
Hoje em dia a simplicidade torna-se essencial em todos os produtos para venda ao público,
por isso, existe uma atenção redobrada para melhorar os aspectos das cadeiras de rodas, assim,
alguns fabricantes permitem personalizar as cadeiras de rodas. Neste ponto, a tecnologia
assistiva é um termo ainda novo, utilizado para identificar todo o arsenal de recursos e serviços
que contribuem para proporcionar ou ampliar habilidades funcionais de pessoas com
deficiência e consequentemente promover vida independente e inclusão. Estas pessoas

36
dependem do desenvolvimento de projetos como este, ligados à tecnologia assistiva. Portanto
o projeto de um acessório para encaixe numa cadeira de rodas é uma solução para a melhoria
da qualidade de vida dos deficientes.
1.1 - Objetivo
O objetivo deste trabalho é projetar um kit adaptável para uma cadeira de rodas, de
prática operação para o usuário, transformando-a em um triciclo elétrico, com o intuito de
facilitar a locomoção dos cadeirantes, e que seja mais acessível financeiramente, diante dos
produtos já existentes no mercado.
1.1.1- Objetivos Específicos
Projetar e dimensionar a parte estrutural de um kit adaptável a uma cadeira de rodas
comum, que deverá conter a parte mecânica e elétrica necessária para transformar a
cadeira de rodas em um triciclo elétrico.
Dimensionar o sistema de acionamento/motor e o sistema de frenagem, que serão
fixados na estrutura do Kit.
Especificar o sistema de controle e parte elétrica com bateria, que serão fixados na
estrutura do Kit.
Realizar uma análise de estabilidade estática e dinâmica para o conjunto.
Criar um modelo em elementos finitos para avaliar a estrutura do kit, quanto aos
carregamentos que poderão ser submetidos durante o uso.
1.2 - Justificativa
As dificuldades encontradas por portadores de deficiência física que necessitam do uso de
cadeira de rodas para se locomover são enormes.
O Relatório Mundial sobre Pessoas com Deficiência (Pessoas com deficiência,2015),
publicado pela organização mundial de saúde, informa que 15% da população possui algum
tipo de deficiência, termo que vem sendo amplamente discutido na sociedade, especialmente
quando relacionado a outro termo, previsto na Constituição Federal Brasileira: a dignidade da
pessoa humana. Este número vem crescendo devido a vários fatores como o envelhecimento da
população (devido ao aumento da expectativa de vida), a degradação ambiental ou a subnutrição
que levam ao aparecimento de doenças crônicas, acidentes de trânsito e trabalho, guerras e

37
deficiências congénitas, contribuindo assim para a escalada do número de pessoas com
dificuldades de movimento.
Pessoas com deficiência são as que possuem impedimentos de longo prazo de natureza
física, mental, intelectual ou sensorial, as quais, em interação com diversas barreiras, podem ter
obstruída sua participação plena e efetiva na sociedade em igualdades de condições com as
demais pessoas. (INMETRO,2015)
Com o objetivo de dar resposta a problemas variados, têm surgido nos últimos anos
vários projetos ligados a sistemas de cadeiras de rodas inteligentes que não só permitam o
movimento a pessoas com problemas físicos, mas que, principalmente, o façam de forma
autónoma e independente de terceiros.
É importante e necessário garantir às pessoas com deficiência o direito de locomoção
com autonomia e independência, permitindo assim o seu fortalecimento social, político e
econômico como cidadãos. Atualmente é possível encontrar no mercado inúmeros modelos de
cadeiras de rodas, de cores e diferentes formas de funcionamento (mecânica ou elétrica). Por
outro lado, ainda existe um longo caminho a ser percorrido, como por exemplo, a necessidade
de planejamento das edificações, a correta sinalização e manutenção do trânsito e das calçadas
e também a adequação de veículos de transporte urbano.
O mercado brasileiro disponibiliza uma ampla gama de cadeira de rodas
mecanomanuais e eletromecânicas dos mais diversos fabricantes nacionais e internacionais.
Devido a grande parte da população brasileira se enquadrar na classe de baixa renda, segundo
dados do IBGE, poucos fabricantes se arriscam na fabricação de cadeira de rodas motorizadas,
consequência do baixo consumo de mercado. Tal fato explica o motivo pelo qual a maior parte
das cadeiras de rodas motorizadas e/ou seus dispositivos são importados, o que reflete no alto
custo de aquisição desses equipamentos.
Nesse contexto é que surgem ideias como este projeto, que visa disponibilizar um
equipamento que seja viável economicamente. O Kit a ser encaixado numa cadeira de rodas
deverá transformá-la em um triciclo elétrico, funcional, seguro, competitivo, manufaturável e
comerciável. Estes termos são definidos da seguinte forma:
Funcional: o produto deve apresentar um desempenho que atenda às necessidades e
expectativas;
Seguro: o produto não deve oferecer perigo aos usuários e acompanhantes
Competitivo: o produto deve ser um forte competidor no mercado.

38
Utilizável: o produto deve ser “amigável ao usuário”, acomodando-se a especificações
como tamanho, resistência, postura, alcance, força, potência e controles humanos.
Manufaturável: o produto deve ser reduzido em um número mínimo de componentes,
adequados à produção em massa, com dimensões, distorção, resistência sob controle.

39
2- FUNDAMENTOS TEÓRICOS
A cadeira de rodas é um objeto indispensável para pessoas que apresentam dificuldade
de locomoção. Pode se encontrar representação de seu uso desde o século IVAC. Na Antiga
Grécia, em alguns artefatos. Com o aprimoramento de sua fabricação ao longo do tempo,
atualmente obtém-se diversos modelos para atender as diferentes necessidades de seus usuários.
Acredita-se que os egípcios foram os primeiros a utilizarem a cadeira de rodas, como uma
espécie de carrinho de mão para transportar pessoas, entretanto em alguns objetos gregos há
gravuras feitas em torno do século IV AC. de Hefesto, conforme figura 01, retratando a
utilização da cadeira de rodas. (CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO
HISTÓRICA,2014)
Figura 01 - Primeira representação de Hefesto,Deus da metalurgia.
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
Deus grego da metalurgia, responsável por ser o ferreiro dos deuses ele era adorado por
artesões, metalúrgico e era conhecido entre os romanos por ser o deus dos vulcões. Nitidamente
na ilustração observa-se Hefesto acomodado sobre uma cadeira de rodas com aros e dois cisnes
para movimenta-la, dando alusão de ser autopropulsara e utilizável tanto em água como em
terra, ou seja, não necessitava da força do ocupante. Outra representação, conforme figura02,
encontrada na abertura de um vaso grego observa-se novamente, o deus grego Hefesto como
na primeira ilustração sobre uma cadeira de rodas, sendo recebido como um conviva entre os
demais deuses do Olimpo. (CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO
HISTÓRICA,2014)

40
Figura 02 - Representação de Hefesto, exemplo de inclusão social entre os deuses
principais da mitologia grega.
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
A história da cadeira de rodas remonta ao século XVI mais precisamente ao ano de 1595,
tendo sido construída para o Rei Filipe II de Espanha, como mostrado na figura 03, sendo
apelidada de cadeira para inválidos. Esta cadeira já possuía o seu conjunto de rodas com o
suporte para os pés, mecanismo para inclinação podendo se tornar um leito provisório.
(CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014)
Figura 03 - Cadeira de rodas do Rei Filipe II
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
Em 1655 o construtor de relógios Stephen Farfler que tinhas as duas pernas amputadas
e que viveu em Nuremberg, na Alemanha, construiu uma cadeira de rodas, conforme visto na
figura 04, que mais se assemelhava a uma espécie de triciclo. Era movida por manivelas de
mão que acionavam a roda da frente por meio de uma roda dentada interna. Acredita-se que foi
construída por Johann Haustach, que já projetara uma cadeira "movida à mão" para seu próprio
uso cerca de dez anos antes. (CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO
HISTÓRICA,2014)

41
Figura 04 - Cadeira de rodas construída por Johann Haustach
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
Houve, com o passar dos anos, muitas famílias ricas que encomendaram cadeiras de
rodas, de acordo com suas posses, que estivessem de acordo com as necessidades de seus
membros e com seu estilo de vida. Isso aconteceu por diversos séculos, durante os quais não
havia a produção sistemática de cadeiras de rodas
Sendo inexistente a produção em série de cadeiras de rodas, algumas mais sofisticadas,
como apresentado na figura 05, foram fabricadas por encomenda, numa base individual. Em
muitos casos havia preocupação com o conforto da pessoa, conforme podemos notar pelas
características dessa cadeira, com duas de suas rodas providas de aros e uma menor para tornar
mais fácil o rumo a ser tomado. Era facilmente manobrável e isso já no século XVIII.
(CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014)
Figura 05 - Cadeira de rodas construída por volta do século XVIII, preocupação com o
conforto da pessoa e facilidade para a locomoção
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
Em um passo decisivo para o objetivo desenvolvimento de cadeiras de rodas mais
versáteis, no ano de 1933 Herbert A. Everest, norte-americano, encomendou uma cadeira de
rodas que pudesse ser levada num automóvel. O engenheiro H.C. Jennings construiu para ele

42
essa primeira cadeira de rodas dobrável, conforme figura 06. Esse modelo, devidamente
patenteado como muitos outros modelos, foi utilizado por décadas, com a marca
Everest/Jennings, antes que outros surgissem no mercado. (CRFASTER - CADEIRAS DE
RODAS E SUA EVOLUÇÃO HISTÓRICA,2014)
Figura 06 - Cadeira de rodas construída por H.C. Jennings
Fonte: CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014.
As cadeiras de rodas evoluíram de uma forma surpreendente desde as primeiras Décadas
do Século XX graças ao avanço industrial e com o surgimento de matéria-prima muito mais
moldável e mais leve, além da ampliação da própria demanda. Seria tarefa impossível levantar
todos os modelos existentes, desde os manuais, dobráveis ou não, às hospitalares, às adaptadas
a situações específicas e também às motorizadas, que aos poucos vão tomando conta do
mercado. (CRFASTER - CADEIRAS DE RODAS E SUA EVOLUÇÃO HISTÓRICA,2014)
2.1- Configurações da cadeira de rodas e seus componentes
Há cadeiras de rodas para diferentes finalidades, com modos de confecção distintos. De
modo geral, as cadeiras de rodas podem ser classificadas quanto à forma de propulsão: manual
ou motorizada. Dentro desta classificação, há outras categorias relacionadas com o contexto
ambiental e as necessidades individuais. A prescrição da cadeira de rodas inicia com a escolha
da constituição mecânica da cadeira de rodas. Principalmente para pacientes com
comprometimento na mobilidade dos membros superiores, o peso do usuário é um fator
importante e deve ser considerado na seleção da estrutura da cadeira de rodas. O material da
estrutura da cadeira pode ser de aço, pintado ou cromado, de alumínio ou de material sintético.
O aço, por ser um metal de alta resistência e durabilidade apresenta seu peso elevado quando
comparado às outras possibilidades de materiais constitutivos.
Por sua vez, a cadeira de rodas pode ter sua estrutura fixa ou dobrável. Na estrutura fixa,
também denominada monobloco, o fechamento é frontal, com o encosto indo de encontro ao

43
assento, o que propicia uma dificuldade no transporte. A estrutura dobrável apresenta sua
constituição equivalente a um X, o que origina seu nome, em “X” ou “duplo X”. Por ser uma
estrutura dobrável, tem um melhor manuseio e transporte, fato que deve ser considerado na
prescrição da cadeira de rodas. A estrutura em “duplo X” tem uma maior robustez e resistência,
recomendado para pacientes obesos.
2.2–Acessibilidade
De acordo com a Lei Federal no 10.098, em seu artigo 2º, inciso I, deve ser garantida a
acessibilidade e “possibilidade e condição do alcance para a utilização, com segurança e
autonomia dos espaços, mobiliários e equipamentos urbanos, das edificações, transportes e dos
sistemas e meios de comunicação, por pessoa portadora de deficiência ou com mobilidade
reduzida” (BRASIL, 2015).
A gênese da política pública ora denominada acessibilidade se deu em 1981, quando a
ONU declarou como o Ano Internacional dos Portadores de Deficiência. Em 1982, através da
Resolução 37/82, na Assembleia Geral das Nações Unidas, foi aprovado o Programa de Ação
Mundial para Pessoas Portadoras de Deficiência, equalizando o direito das pessoas com
deficiência as mesmas oportunidades que os demais cidadãos além de usufruir das melhorias
nas condições de vida resultantes do avanço econômico e social (MACIEL & CIENA, 2015).
Devido a dimensão territorial do Brasil, suas peculiaridades regionais, geográficas,
econômicas, culturais e infraestruturas, o Instituto Nacional de Metrologia, Normalização e
Qualidade Industrial (Inmetro) tem realizado estudos aprofundados através do Programa de
Acessibilidade, com o objetivo de diagnosticar a realidade do país e encontrar as melhores
soluções técnicas para a melhoria do Índice de Desenvolvimento Humano (IDH) no país
(INMETRO, 2015). Pessoas com algum tipo de limitação deveriam contar com suportes para
que pudessem participar de forma igualitária em todas as atividades disponíveis aos demais
cidadãos, respeitando a diversidade como um valor comunitário.
A maior parte dos ambientes, sejam construídos ou não, apresenta barreiras visíveis e
invisíveis. Os impedimentos concretos, entendidos como a falta de acessibilidade dos espaços
constituem as barreiras visíveis. As invisíveis compõem a forma como as pessoas são vistas
pela sociedade, na maior parte das vezes representada pelas suas deficiências e não pelas suas
potencialidades. (OLIVETO,2011)
Por enquanto, arquitetos, engenheiros, projetistas e designers devem atentar-se a forma
de conceber os espaços de modo a concretizar as garantias constitucionais dos deficientes
físicos. Segundo a Norma Brasileira, da Associação Brasileira de Normas Técnicas

44
(ABNT/NBR 9050, 2004), promover a acessibilidade no ambiente construído e proporcionar
condições de mobilidade, com autonomia e segurança, eliminando as barreiras arquitetônicas e
urbanísticas nas cidades, nos edifícios, nos meios de transporte e de comunicação. Isto constitui
um direito universal resultante de conquistas sociais importantes, que reforçam o conceito de
cidadania.
O objetivo da acessibilidade e permitir, portanto, um ganho de autonomia e de mobilidade
a uma gama maior de pessoas, até mesmo aquelas que tenham a sua mobilidade reduzida ou
dificuldade em se comunicar, para que usufruam dos espaços e das vantagens que os ambientes
podem lhe proporcionar (MACIEL & CIENA, 2015).
2.3 – Tecnologia Assistiva
Várias são as terminologias utilizadas no Brasil para definir o que são os recursos
tecnológicos: “Assistive Technology” (EUA), “Tecnologia de Assistência”(CIF/OMS),
“Ajudas Técnicas” segundo o Ministério da Saúde, “Tecnologia de Apoio” conforme a
Comissão Europeia/ EUSTAT, “Tecnologia Adaptativa”e“Adaptações”. (ROCHA &
CASTIGLIONI, 2005).
Considerado um termo novo, a “Tecnologia Assistiva” compreende uma diversidade de
recursos e serviços que contribuem para proporcionar ou melhorar habilidades funcionais de
pessoas com deficiência física, contribuindo assim com a inclusão social e trabalhando a
questão de acessibilidade. Trata-se de um fenômeno multidimensional, que envolve aspectos
mecânicos, biomecânicos, ergonômicos, funcionais, éticos, estéticos e políticos.
(OLIVETO,2011)
Os recursos são todo e qualquer item, equipamento ou parte dele utilizado para
aumentar, manter ou melhorar as capacidades funcionais das pessoas deficientes.
Podem variar de uma simples bengala a um complexo sistema computadorizado, dentre estes,
e importante incluir brinquedos e roupas adaptadas, computadores, dispositivos para adequação
de postura, equipamentos de comunicação alternativa e outras dezenas de produtos. Já os
serviços são definidos como aqueles que auxiliam diretamente uma pessoa com deficiência a
adquirir e utilizar os recursos anteriormente abordados. Sendo definidos como atividades
transdisciplinares, envolvem profissionais de diversas áreas, tais como fisioterapia, terapia
ocupacional, fonoaudiologia, engenharia, enfermagem, medicina, arquitetura, design e muitas
outras especialidades. (CARRIEL, 2007).

45
Os equipamentos assistivos oferecem aos indivíduos que apresentam necessidades
físico-motoras uma melhoria na comunicação, na mobilidade, no controle do ambiente, além
de auxiliar no desenvolvimento de atividades comuns do cotidiano.
O termo “Tecnologia Assistiva”, foi criado oficialmente em 1988, para dar suporte
jurídico a Legislação Norte-americana, que integra um conjunto de leis denominadas
“American with Disabilities Act”, ou simplesmente especificada pela sigla “ADA”. (BERSCH,
2014).
No Brasil, o Decreto no. 3.298 de 20 de dezembro de 1999 apresenta em parágrafo
único, alguns artefatos como exemplos de “Ajudas Técnicas”.
“(...) próteses auditivas, visuais e físicas; órteses que favoreçam a adequação funcional;
equipamentos e elementos necessários a terapia e reabilitação de pessoa portadora de deficiência;
equipamentos, maquinarias e utensílios de trabalho especialmente desenhados ou adaptados para
uso por pessoa portadora de deficiência; elementos de mobilidade, cuidado e higiene pessoal
necessários para facilitar a autonomia e a segurança da pessoa portadora de deficiência;
elementos especiais para facilitar a comunicação, a informação e a sinalização para pessoa
portadora de deficiência; equipamento e material pedagógico especial para educação,
capacitação e recreação da pessoa portadora de deficiência; e adaptações ambientais e outras que
garantam o acesso, a melhoria funcional e a autonomia pessoal; bolsas coletoras para os
portadores de ostomia”. (BRASIL, 2014)
O desenvolvimento de “Tecnologia de Apoio” e os direitos do cidadão que apresentam
necessidades de objetos ou serviços assistivos, estão apoiados pelo Decreto no. 5.296, de 02 de
dezembro de 2004, publicado no Diário Oficial da União (D.O.U.), de 03 de dezembro de 2004,
cujo termo pode ser definido através do seu Artigo 61, que diz:
“(...) consideram-se ajudas técnicas, os produtos, instrumentos, equipamentos ou
tecnologias adaptados ou especialmente projetados para melhorar a funcionalidade da Em
relação a definição do Ministério da Saúde de Ajudas Técnicas os recursos tecnológicos são
problematizados a partir da inclusão, onde os equipamentos devem facilitar a participação social.
Trata-se de uma definição ampla, com caráter mais político do que uma preocupação com
aspectos técnicos ou classificatórios. Rocha e Castiglioni (2005) definem que as pessoas com
deficiências ou incapacidades vivem ainda situações de segregação e de exclusão social.
Desenhar a utopia da inclusão e antes de tudo analisar os processos de exclusão. As definições
de pessoa portadora de deficiência ou com mobilidade reduzida, favorecendo a autonomia
pessoal, total ou assistida”. (BRASIL, 2014).
Em relação a definição do Ministério da Saúde sobre Ajudas Técnicas os recursos
tecnológicos são problematizados a partir da inclusão, onde os equipamentos devem facilitar a
participação social. Trata-se de uma definição ampla, com caráter mais político do que uma
preocupação com aspectos técnicos ou classificatórios. Recursos Tecnológicos (Tecnologia

46
Assistiva, de Assistência, de Apoio e de Ajudas) apontam, por diferentes caminhos para o
paradigma da inclusão social da pessoa com deficiência. Essas abordagens inseridas em
contextos diversos podem atingir ou não a meta proposta, ou seja, apenas o acesso aos
equipamentos não garante a efetivação da finalidade proposta. (OLIVETO,2011).
Através de um conhecimento mais profundo das questões socioeconômicas envolvidas
na elaboração de novos recursos tecnológicos e a importante questão de acessibilidade
requerida em todo o nosso pais, e evidente ressaltar o interesse presente neste trabalho de
desenvolver um equipamento automotor auxiliar para locomoção de cadeirantes que contribua
para amenizar os desafios da inclusão, a partir da disponibilização de tecnologia a baixo custo,
objetivo alcançado pela viabilidade da construção do dispositivo. Acredita-se que a
disponibilização deste equipamento assistido proporcione uma presença mais ativa na
sociedade por um maior número de pessoas deficiente e idoso.
A grande importância da concepção de “Tecnologia de Apoio” e a contribuição com a
ampliação do conceito de “Tecnologia” para além dos objetos/equipamentos de auxílio na
independência pessoal, e da relação direta com o usuário, situando-se em relação aos fatores
humanos e socioeconômicos, faz com que esta se localize no âmbito dos contextos
organizacionais, tecnologias que ajudem a ultrapassar as limitações funcionais dos seres
humanos num contexto social, com propostas organizacionais e educativas da comunidade
como um todo. Assim, a questão dos recursos tecnológicos deixa de ser uma questão especifica
da pessoa com incapacidade e pessoas próximas a ela e passa a situar-se no contexto ampliado
da sociedade, envolvendo Legislação/Economia,Normalização/Qualidade, Recursos de
informação, produtores, vendedores, prestadores de serviços, organização de sistemas públicos
de educação, saúde e transporte. (OLIVETO,2011).
A cadeira de rodas tem sido um recurso extremamente benéfico para a tecnologia
assistiva, visto que é um dispositivo fundamental para portadores de deficiência motora ou
física, podendo ser de locomoção manual ou motorizada.
Como equipamento de auxílio ao deslocamento está entre uma das tecnologias assistivas
mais utilizadas por pessoas que apresentam a impossibilidade, temporária ou definitiva, de
deslocar-se utilizando os membros inferiores (MEDINA & COELHO,2015).
Esse produto assistivo pode que permite maior independência do cadeirante. E
fundamental a idealização de uma ampla gama de acessórios para aumentar as possibilidades
dos deficientes por parte de inventores, engenheiros, terapeutas e profissionais capacitados, os
quais buscam desenvolver mecanismos assistivos, desde um simples recolhedor de objetos
caídos, até um sistema automotor.

47
2.4 - Tipos de cadeiras
Existem basicamente dois grandes grupos nas cadeiras de rodas, as manuais e as
elétricas. Há dentro de cada gênero, vários subgrupos. Estes subgrupos são criados com
características especificas das cadeiras de rodas, mas podem igualmente existir cadeiras de
rodas que tenham algumas características de um determinado agrupamento e não pertencerem
a esse. Estes agrupamentos foram criados de modo a tentar satisfazer necessidades comuns e
especificas de diversos utilizadores.
Uma cadeira de rodas manual basicamente consiste num sistema que tem um quadro,
que pode apresentar diversas tipologias. Esse quadro pode ser fixo e rígido ou então dobrável,
sendo que o quadro rígido tem uma maior estabilidade e por esse motivo e mais utilizado em
cadeiras de rodas desportivas. Já o quadro dobrável permite maior facilidade no transporte das
cadeiras de rodas em carros. Este quadro é constituído por uma estrutura em cruz que pode ser
de cruz dupla ou simples. No quadro está acoplado o apoio de braços e de pernas que pode ser
regulável, no que diz respeito a sua altura. No quadro da cadeira de rodas estão igualmente
acopladas as rodas traseiras e dianteiras que podem ser de vários tamanhos e nas quais são fixos
os anéis de locomoção da cadeira. Dependendo da cadeira de rodas pode ser possível a remoção
rápida quer das rodas traseiras ou das rodas dianteiras.
As cadeiras de rodas mais comuns são designadas por padrões. Este sub agrupamento
de cadeiras manuais e normalmente constituído pelas cadeiras mais econômicas do mercado,
que permite uma mobilidade autônoma. É possível adquirir este tipo de produto numa
configuração padrão ou com pequenas alterações para um melhor ajuste no utilizador.
O mercado brasileiro disponibiliza uma ampla gama de cadeira de rodas
mecanomanuais, dos mais diversos fabricantes nacionais e internacionais. Devido à grande
parte da população brasileira se enquadrar na classe de baixa renda, poucos fabricantes se
arriscam na fabricação de cadeira de rodas motorizadas, consequência do baixo consumo de
mercado. Tal fato explica o motivo pelo qual a maior parte das cadeiras de rodas motorizadas
e/ou seus dispositivos são importados. Este fato reflete no alto custo de aquisição desses
equipamentos.

48
2.4.1– Modelos atuais de cadeira de rodas
No mercado atual se encontra uma gama muito grande de cadeira de rodas são elas:
cadeira de rodas dobrável com propulsão manual (Figura 07 - A),
cadeira leve tipo standard (Figura 07 - B),
cadeira semi-reclinável (Figura 07 - C),
cadeira posição ortostática (Figura 08),
cadeira de rodas mais sofisticadas para a prática de desportos e scooters (Figura 08).
Figura 07 - Cadeira de rodas dobrável, leve e reclinável
Fonte: HIKARI HOSPITALAR, 2010.
Figura 08 - Cadeira para desporto e scooter
Fonte: SOUZA, 2011.
Existem ainda cadeiras que proporcionam ao utilizador a possibilidade de se posicionar
verticalmente, como pode ser visto na figura 09. Este sistema tem grande vantagem permitir
um melhor acesso a armários e janelas e tornar ainda mais fácil a realização de algumas tarefas
do dia-a-dia. Estas cadeiras de rodas tem vários benefícios para a saúde do utilizador, como
uma melhoria no funcionamento do sistema renal, e uma melhoria significativa no que diz
respeito a circulação continua e ainda reduzir a perda da densidade óssea.

49
De acordo com Souza (2011), o movimento de elevação destas cadeiras de rodas é
realizado através de um sistema pneumático, e um quadro articulado. Podendo existir duas
rodas pequenas na parte traseira das cadeiras de rodas o que permite uma maior estabilidade do
ocupante, apesar de nem todos os modelos apresentarem esse elemento extra. O modelo
"LEO",visto na figura 09,não possui as rodas pequenas na parte de trás, e a sua estabilidade e
conseguida através da rotação da rodas frontais.
Figura 09 - Cadeira posição ortostática denominada “LEO”
Fonte: SOUZA, 2011.
2.4.2 - Outros tipos de Cadeira de Rodas
As cadeiras de rodas de crescimento apareceram com a necessidade de acompanhar o
crescimento das crianças sem haver a necessidade de mudar de cadeira de rodas
constantemente. Sem este tipo de produto, as famílias seriam obrigadas a comprar muitas
cadeiras de rodas durante a fase de crescimento. Os parâmetros que permitem um ajustamento
ao crescimento das crianças, estão relacionados com a largura e profundidade do assento, um
eixo ajustável que permite a variação da altura do assento tal como a alteração do comprimento
do apoio dos pés e do apoio dos braços visto na figura10. Estes ajustes geralmente são
conseguidos por um posicionamento discreto. Estas cadeiras estão separadas geralmente por
faixas etárias, dos 3 aos 6 anos e dos 6 aos 12 anos. (Esteves,2011).

50
Figura 10 - Cadeira de rodas de crescimento
Fonte: ESTEVES,2011
Existem ainda cadeira de rodas manuais denominadas por cadeiras de transporte. São os
produtos mais econômicos do mercado, e foram concebidos para o uso dentro de instituições,
como hospitais e centros de reabilitação. Sendo esta ideal para o transporte de curta distância
de pessoas com dificuldades de mobilidade ou com lesões de pequena duração.
São cadeiras de rodas geralmente mais leves e econômicas e de fácil armazenamento ou
transporte em automóveis. Esta cadeira contrariamente a grande maioria das outras cadeiras de
rodas, não possui rodas de grande dimensão na parte de trás, por esse motivo não é apropriada
para pessoas que queiram autonomia uma vez que não permite a mobilidade feita pelo
utilizador.
Tendo ainda em conta as necessidades dos utilizadores de cadeiras de rodas, foram
desenvolvidas algumas cadeiras de rodas com fins muito específicos que são utilizadas apenas
na residência. Um desses casos e a cadeira de rodas para banho, esta cadeira pode ser fabricada
de duas maneiras completamente distintas. O primeiro modelo que apareceu foi o "clean" de
uma empresa sueca, que recebeu o prêmio de design de 1988 nos EUA, sendo este
completamente construído em através da injeção de PVC conforme figura 11 a). Este modelo
serviu de inspiração ao aparecimento de outras cadeiras do mesmo gênero. Existe também
cadeira de rodas, para o banho que não são fabricadas totalmente em material PVC, estas são
constituídas por uma combinação de materiais. Tais como, o alumínio ou titânio que tem uma
elevada resistência a corrosão, e depois com alguns elementos em material polímero e ainda
com o assento e o apoio de costas em nylon visto na figura 11 b).
Existem ainda cadeiras de rodas sanitárias, estas cadeiras apresentam, várias
características importantes tal como a possibilidade de ter um maior apoio de costas para pessoa
que não possui estabilidade na parte superior do corpo, ou por outro lado estarem ou não dotadas
de apoios de braço. Estas cadeiras geralmente são fabricadas em PVC, podendo ou não ter rodas
na parte frontal conforme visto figura 11c). (Esteves,2011).

51
Figura 11 - a) Cadeira de Rodas de Banho “Clean” b) Cadeira de rodas de banho em
nylon c) Cadeira de Rodas com um maior apoio de costas para pessoa
Fonte: ESTEVES,2011
2.5- Cadeira de Rodas Motorizadas
As cadeiras de rodas eletromecânicas e eletroeletrônicas, ora denominadas cadeiras de
rodas motorizadas, apesar de terem o custo mais elevado, possuem inúmeras vantagens em
relação as cadeiras mecanomanuais, afinal sendo um modelo de autopropulsão, sua
movimentação é totalmente independente da forca física do cadeirante ou do indivíduo externo
além de apresentar outros dispositivos, tais como: sistema de elevação “stand-up”, variação de
velocidade, centro de gravidade diferenciado para amputados, comando direcional para
condução por terceiros, comando por condução pela mandíbula, almofada de encosto, cesta
para compras, guarda-chuva, mesa, mochila, pochete com coletor de urina, separador de
tornozelo, suporte para bengala, muleta, malas, oxigênio e soro, entre outros dispositivos
facilitadores.(OLIVETO,2011).
Atualmente o mercado nacional, ainda depende da tecnologia importada na concepção
do produto, principalmente por alguns componentes que demanda maior tecnologia como
bateria e o motor. Ainda assim os fabricantes brasileiros apresentam uma competitividade que
buscam ativamente a melhoria continua de seus dispositivos e implementação tecnológica em
seus diversos modelos de cadeiras de rodas eletromecânicas.
Através de uma pesquisa detalhada dos equipamentos eletromecânicos disponíveis no
mercado nacional, nota-se a predominância no consumo de três grandes marcas, Freedom,
Baxmann& Jaguaribe e Reateam Grupo Ortobrás, cada uma com suas particularidades, porém
todas com grande eficiência em seus equipamentos. São descritas abaixo seus principais
modelos e uma análise comparativa de mercado entre estes.

52
2.5.1 - Cadeira de Rodas ULX Motorizada - Ortobrás
A Cadeira de Rodas ULX Motorizada desenvolvida pela Ortobrás, conforme visto na
figura 12, é a opção ideal para quem precisa se locomover de forma independente e confortável,
com o mínimo de esforço. É construída em liga de alumínio aeronáutico de alta resistência,
proporcionando segurança e conforto. Sua bateria recarregável de 26Ah tem autonomia média
de até 15km, possui um motor de 320W de corrente contínua, e dispõe de um mostrador
eletrônico da carga disponível. Seu estofamento composto 100% em nylon, com almofada de
5cm de espessura em espuma de alta densidade, incorporada ao assento.
Construída em liga alumínio aeronáutico temperado; rolamentos blindados nas quatro
rodas, inclusive no eixo vertical do garfo; eixos de aço reforçado; estrutura dobrável em Duplo
“X” com sistema de fechamento por articuladores. Possibilita adaptação de joystick no lado
direito ou esquerdo da cadeira; capacidade de peso de 120Kg.
Figura 12 - Cadeira de Rodas ULX Motorizada
Fonte: ORTOBRÁS,2014
2.5.2 - Cadeira de Rodas Motorizada Freedom
Pioneira na fabricação de cadeiras de rodas motorizadas, a fabricante Freedom possui o
modelo eletromecânico que absorve a maior parte do mercado, este e representado pela linha
Freedom SX e suas derivações SRE/SE/SA/SG/SL. Dispondo de uma transmissão por correias
e uma motorização de 400 w de potência, além de ser indicado para uso em rampas de até 12°
e uma capacidade de carga para 150 kg oferece uma eficiência ao usuário em suas atividades
diárias. Já o modelo Millenium SX,visualizado na figura 13, apresenta uma motorização por
engrenagens padrão do mercado em uma estrutura em alumínio diferenciada pela confecção em

53
módulos sem soldagem e qualidade em seus componentes, este equipamento oferece conforto,
visual agradável e sistema confiável de estrutura e motorização.
Figura 13 - Modelos de cadeira de rodas eletromecânicas Freedom
- a) Modelo Sx b) Millenium Sx
Fonte: FREDDOM,2014
2.5.3 - Cadeira de Rodas Motorizada Jaguaribe
A fabricante Baxmann& Jaguaribe,visualizado na figura 14, apresenta um modelo
eficaz pelo uso de componentes eletrônicos e mecânicos de alta qualidade e baixa manutenção,
aliado ao conforto oferecido pela sua ótima estrutura ergonômica, no entanto limita-se em sua
capacidade de carga de 90 kg. Possui controlador com joystick (digital) microprocessado,
motorização com redutor e freio eletromagnético acoplado, regulagem de joystick para destros
e canhotos.
Figura 14 - Cadeira de Rodas Jaguaribe
Fonte: JAGUARIBE,2014

54
2.6- Sistemas de tração para cadeira de rodas
Cadeiras de rodas motorizadas são equipamentos de alta complexidade tecnológica, as
quais utilizam dispositivos mecânicos e eletrônicos muitas vezes importados, refletindo assim,
no custo elevado para aquisição destes equipamentos assistivos.
Pesquisas em desenvolvimento de tecnologia assistiva são realizadas constantemente a
fim de promover a inclusão social. Atualmente, algumas outras formas de motorização para
cadeiras de rodas são encontradas no mercado externo.
Porém, o mercado nacional ainda encontra-se atrasado em relação a essas novas formas.
Uma das maneiras de motorização de cadeira de rodas e a obtenção de acessórios independentes
que possibilitam a transformação de cadeira de rodas mecanomanual em eletromecânica.
Geralmente, é possível a instalação de tais dispositivos em grande parte dos modelos
encontrados no mercado. (OLIVETO,2011).
Este modelo de equipamento motorizado visa a multifuncionalidade de uma cadeira de
rodas. Por um lado, torna-se possível sua utilização de uma forma motorizada, a qual
proporciona comodidade ao cadeirante, já por outro, é mantido a integridade e funcionalidade
do equipamento mecanomanual.
Existem sistemas de tração para utilização exclusiva em ambientes internos, externos e
até mesmo em ambos. Há grande variação nos dispositivos encontrados nestes acessórios
motorizados, existem aqueles que mantem o tradicional “joystick” como forma de controle e
outros controlados por um volante, sendo sua condução possível tanto pelo cadeirante quanto
pelo seu acompanhante. Alguns destes sistemas de tração são apresentados abaixo para um
melhor entendimento.
2.6.1 – Kit “E-fix”
O equipamento “E-fix”, conforme visto na figura 15, permite a transformação de
qualquer cadeira de rodas manual em veículo motorizado comandado via joystick. Através de
um conjunto de rodas motorizadas individualmente e um sistema de controle facilmente
instalado, garante a mesma capacidade de movimentação que as cadeiras padrões motorizadas,
porém agrega um diferencial de praticidade em relação aos demais modelos. A fabricante Alber
determina a autonomia média e de 16 km apresentando uma velocidade máxima de 6 km/h e
superação para 20% de inclinação em rampas. Este desempenho e fornecido pelo fabricante,
considerando-se um usuário com peso máximo de 120 kg.

55
Figura 15 - Conjunto "E-fix" - Rodas Tracionárias com acionamento por joystick
Fonte: ALBER, 2014
2.6.2 – Kit “Power-trike”
O power-trike, conforme visto na figura 16, consiste em um sistema de reboque elétrico
movido por uma roda tracionada dianteira capaz de ser instalado em cerca de 80% dos modelos
de cadeiras mecanomanuais. A velocidade máxima alcançada é de 17 km/h para usuários até
90 kg.
Sua estrutura em alumínio aeronáutico garante um peso reduzido ao equipamento e
confiabilidade. O sistema de freio mecânico duplo de pastilhas garante rápida frenagem, aliado
ao sistema de controle eletrônico com duas velocidades o qual oferece grande eficiência e
dirigibilidade. A fabricante PDG determina autonomia média de 32 km durante a utilização
com as baterias em carga máxima. Indicado para utilização nos mais diversos ambientes
comuns, este equipamento assistivo garante grande liberdade de movimentação ao usuário em
suas atividades diárias.
Figura 16 - Conjunto adptável power-trike
Fonte: PDG MOBILTY,2015

56
2.6.3 – Kit “Firefly”
O Firefly, é produzido pela empresa Rio Mobility em São Francisco (EUA), ele pode ser
designado como um Kit que ao unir a uma cadeira de rodas manual, transforma em uma cadeira
de rodas elétrica. Como pode ser visto pela figura 17, o Kit é adaptado nos dois lados da cadeira
através do sistema de fixação através de presilha.
O Firefly foi projetado para ser usado na grande maioria das cadeiras de rodas do
mercado devido ao seu sistema de fixação na cadeira e possíveis para melhor ergonomia ela
possui um alcance máximo de 30 km/h.
O Firefly, como visto na figura 17, é alimentado por um motor elétrico brushless,
compacto e silencioso. Todos os comandos são de fácil acesso, ele possui 5 níveis de potência
selecionados através do visor, velocímetro, indicador do nível de bateria, sistema de freio e etc.
Figura 17 - O Firefly- Kit adaptado na cadeira de rodas transformando em um triciclo
Fonte: ROLLICK,2014
O Firefly é um projeto que serviu como base de referência para a implementação do Kit
apresentado neste trabalho.
2.6.4 – Kit adaptável a cadeira de rodas
O Kit, visto na figura 18, foi desenvolvido por engenheiro mecatrônico Júlio Oliveto
Alves, em São José dos Campos é acoplado em cadeira de rodas, transformando-a em triciclo.
O equipamento é composto basicamente por roda dianteira – as traseiras são as da cadeira
de rodas – e motor elétrico com acelerador eletrônico (pela manete direita do guidão), freio
duplo e bateria. Um par de retrovisores e iluminação, com um farol dianteiro e outro traseiro,
compõem o sistema básico de segurança. E a coluna de direção é ajustável ao tamanho do
condutor. Ela é acoplada a um suporte universal, também com ajustes que se adaptam à cadeira.

57
A fixação se dá por meio de outro suporte preso por presilhas na parte debaixo do assento.
Desde que tenha força nos braços e nas mãos, o próprio cadeirante pode fazer o acoplamento.
Figura 18 - Kit adaptável a cadeira de rodas
Fonte: ESTADO DE MINAS,2015
O kit já foi lançado levando em conta as peculiaridades de cada usuário. São 10 versões
com diferentes combinações. O motor pode gerar potência de 250 watts (kit para crianças),
350w (o padrão) ou 500w (para cadeirantes mais pesados, com até 120kg). Nesse último caso,
a velocidade pode chegar a 35km/h, mas como nas demais situações, é limitada a 20km/h por
questão de segurança. O pneu também varia entre o padrão de 20 polegadas e um menor, de 16,
para facilitar a entrada em ambientes apertados, como um elevador, por exemplo. A bateria
pode ser em formato de garrafa ou bolsa, mas de qualquer forma rende autonomia de 20
quilômetros e o carregamento é na tomada em cerca de quatro horas.
2.7 - Produto para as necessidades do mercado
Como pode ser visto as inovações realizadas nas cadeiras de rodas são bastantes úteis
para os usuários, porém o grande empecilho destes aparelhos são os preços bem elevados
devido ao valor agregado do produto. Sendo assim fazer um kit acoplável que permita
transformar uma cadeira de rodas em um triciclo elétrico é um projeto interessante, pois
facilitaria ao cadeirante desenvolver distâncias maiores num menor intervalo de tempo. Hoje
em dia uma cadeira de rodas elétrica motorizada tem um custo bastante elevado. Além disto, o
portador de deficiência não precisa comprar outra cadeira e sim, apenas o kit, tornando o
investimento ainda mais viável. Em longo prazo, este produto se tornando popular, outras
melhorias devem ser feitas nas vias e outros trabalhos serão mobilizados a fim de adequar o
produto nas cidades urbanas.

58
Um ponto negativo visto nestes kits é que em uma situação de pane no sistema motriz
ou término da bateria, o usuário teria grande dificuldade em continuar movimentando a cadeira
manualmente, pois não teria maneira de recolher o kit da parte de frente da cadeira e também
não poderia desacoplar, sendo assim ocorreria uma grande instabilidade no conjunto ao tentar
movimentar manualmente.
O produto pode interessar também a outro público alvo, ou seja, não apenas paraplégicos
possuintes de cadeira de rodas, mas também a idosos que possuem algum tipo de dificuldade
para caminhar ou hospitais que precisam de ajuda com seus pacientes. Podemos citar também
pessoas com deficiência ou mobilidade reduzida: a grávida, a pessoa obesa, a pessoa com
deficiência visual com cão-guia, a pessoa idosa com bengala, a pessoa idosa com andador, a
pessoa em cadeira de rodas, a pessoa conduzindo carrinho de bebê e a pessoa com muletas.
Com base nas informações apresentadas sobre a situação atual do mercado destinado aos
equipamentos assistivos oferecidos a população deficiente, nota-se a necessidade de
disponibilidade de produtos diferenciados em tecnologia e eficiência a baixo custo que atendam
ás necessidades dos cadeirantes.
2.7.1 - Primeiro Projeto
O início do desenvolvimento deste KIT adaptável ocorreu no trabalho de Mendes (2013).
O primeiro projeto consiste em uma estrutura que se encaixe na parte inferior da cadeira de
rodas, onde se pode regular a largura da estrutura, para que se adapte a diferentes tamanhos de
cadeira. Na estrutura há também a barra que recebe o conjunto direção, onde se permite uma
regulagem na distância longitudinal do guidão ao cadeirante.
Figura 19 – a) Primeiro projeto do kit adaptável a cadeira rodas. b)Propostas de
alterações realizadas no Kit
a) b)
Fonte: MENDES,2013

59
Porém este primeiro projeto apresentava alguns problemas como por exemplo quando
usado em cadeiras dobráveis, é necessário a retirada, pois a estrutura não permitiria a cadeira
dobrar, além de outros problemas como regulagem, ajustes e etc. A partir da análise do primeiro
projeto, visto na figura 19, foi possível realizar um novo sistema de adaptação para poder
solucionar os problemas apresentados e avançar no desenvolvimento do projeto.
2.8 –Projeto de máquinas
Muitas associações de engenharia e agências governamentais desenvolveram normas
para áreas especificas de projetos de engenharia. A maior parte delas são apenas
recomendações, no entanto, algumas tem força de lei. Tratando-se de equipamentos assistivos
no Brasil, a Associação Brasileira de Normas Técnicas (ABNT) estabelece na Norma ABNT
NBR9050/2004 critérios e parâmetros técnicos a serem observados quando do projeto,
construção, instalação e adaptação de edificações, mobiliário, espaços e equipamentos urbanos
as condições de acessibilidade. Esta norma visa proporcionar a maior quantidade possível de
pessoas, independentemente de idade, estatura ou limitação de mobilidade ou percepção, a
utilização de maneira autônoma e segura do ambiente, edificações, mobiliário, equipamentos
urbanos e elementos. (INMETRO, 2010).
2.8.1 –Normas construtivas de construção de equipamentos assistivos
Para o projeto de um equipamento assistido com capacidade de instalação em diferentes
modelos de cadeira de rodas é fundamental a utilização das dimensões referenciais, visto na
figura 20 e 21, para a definição de condições iniciais de projeto e posteriores analises
cinemáticas e dimensionamento das peças.
O Kit foi desenvolvido para poder ser utilizado em dois tipos de cadeiras conhecidas como
rígidas e dobráveis, sendo que pode ser adaptado em diferentes tamanhos de cadeiras, conforme
medidas vistas na tabela 1 e figura 20, dos dois modelos.

60
Tabela 1 – Medidas básicas para cadeiras de rodas (tolerância + 10mm)
Modelo Cadeira Infantil Cadeira Adulto Cadeira obeso
Medida(mm) Mínima Máxima Mínima Máxima Mínima Máxima
A-Largura efetiva do
assento
300 350 360 480 490 550
B- Profundidade efetiva
do assento
300 350 360 500 400 500
C-Altura da manopla do
encosto ao chão
800 900 800 1000 800 1000
D- Comprimento
máximo
800 900 900 1050 1000 1200
E-Altura da superfície do
assento na borda frontal
250 400 400 500 400 500
F- Largura máxima 400 500 500 750 700 850
Fonte: Adaptado de INMETRO, 2010
Figura 20 - Dimensões limites para a construção de cadeira de rodas
Fonte:INMETRO, 2010
Observações:
1- As dimensões A, B e E devem ser realizadas de acordo com dados do INMETRO (2010),
conforme os itens descritos acima.
2 - As dimensões C, D e F devem ser medidas nos pontos mais externos da cadeira
conforme figura 20.
Conhecer os limitantes do alcance manual para a execução de tarefas durante o uso de
cadeira de rodas, é de extrema importância no dimensionamento do equipamento assistido

61
proposto, visto que o acionamento deste será realizado por meio de um dispositivo mecânico
localizado a frente do usuário. É possível a identificação destes limitantes pela figura 21 e
tabela 2.
Figura 21 - Limites do alcance manual de cadeirantes
Fonte:BLOG DO CADEIRANTE,2014
Tabela 2 - Descrição dos limitantes do alcance manual de cadeirante
Sigla Descrição
A3 Altura do centro da mão com antebraço formando 90º com tronco
B3 Altura do centro da mão estendida ao longo do eixo longitudinal do corpo
C3 Altura mínima livre entre a coxa e a parte inferior de objetos e equipamentos
D3 Altura mínima livre para encaixe dos pés
E3 Altura do piso até a parte superior da coxa
F3 Altura mínima livre para encaixe da cadeira de rodas sob o objeto
G3 Altura das superfícies de trabalho ou mesas
H3 Altura do centro da mão com o braço estendido paralelo ao piso
I3 Altura do centro da mão com o braço estendido, formando 30º com o
piso=alcance máximo confortável
J3 Altura do centro da mão com o braço estendido, formando 60º com o
piso=alcance máximo confortável
L3 Comprimento do braço na horizontal, do ombro ao centro da mão
M3 Comprimento do antebraço (do centro do cotovelo ao centro da mão)
N3 Profundidade da superfície de trabalho necessária para aproximação total
O3 Profundidade da nádega à parte superior do joelho
P3 Profundidade mínima necessária para encaixe dos pés
Fonte: BLOG DO CADEIRANTE,2010

62
2.9- Princípios dos elementos finitos
O Método de elementos finitos são usados em muitos tipos de análises de engenharia para
analisar diversos tipos de problemas, e a expectativa é de que esse uso cresça ainda mais nos
próximos anos. O método dos elementos finitos tem sua origem há anos, porém somente com
o com o surgimento da informática, difundiu-se a utilização desta técnica. E sua configuração
atual, resulta da confluência de desenvolvimentos na mecânica, matemática, análise numérica
e computação.
Para esse método de análise, tem-se a discretização de uma estrutura ou meio contínuo
e, consequentemente, a solução do sistema discreto obtido. Devido à generalidade das
estruturas, à relativa facilidade de estabelecer as equações governantes do sistema e as boas
propriedades numéricas das matrizes do sistema foi que o Método dos Elementos Finitos
encontrou o seu campo de aplicações. Não se pode determinar a data na qual o Método dos
Elementos Finitos foi "criado", mas as raízes deste método remetem a três grupos de pesquisa
distintos: matemáticos aplicados, físicos e engenheiros. Apesar de o método ter sido publicado
anteriormente, os principais avanços se deveram aos desenvolvimentos independentes,
realizados por engenheiros. Contribuições originais importantes apareceram em meados da
década de 50, nos trabalhos de Turner et al. e de Argyris e Kelsey. O nome "elemento finito"
surgiu em 1960, a partir do trabalho de Clough, no qual a técnica foi apresentada para uma
análise de estado plano de tensões. A partir de então, uma enorme quantidade de pesquisas
voltou-se para a técnica, e um número muito grande de publicações na área está disponível.
(FABRINI,2009)
Atualmente, o conceito de elementos finitos tornou-se muito amplo. Mesmo que se
restrinja à análise de problemas da mecânica sólida, estrutural e termofluidodinâmica, o método
pode ser usado de várias formas diferentes. No entanto, a formulação mais importante, que é
largamente utilizada na solução de problemas práticos, é a do Método dos Elementos Finitos
baseados em deslocamentos. Quase todos os programas de análise genérica foram escritos
utilizando esta formulação. O Método dos Elementos Finitos baseados em deslocamentos pode
ser visto como uma extensão do método de análise de deslocamentos, que foi utilizado por
muitos anos na análise de estruturas formadas por vigas e hastes. Os passos básicos na análise
de uma estrutura de vigas e hastes utilizando o Método dos Deslocamentos são:
63
i. Idealizar a estrutura total como um conjunto de vigas e hastes que são interconectadas
nas juntas estruturais;
ii. Identificar as juntas com deslocamentos desconhecidos. Estes deslocamentos deverão
definir a resposta da estrutura idealizada;
iii. Estabelecer as equações de equilíbrio de forças correspondentes aos deslocamentos
desconhecidos, resolvendo estas equações;
iv. Com base nos deslocamentos nas extremidades das vigas e hastes, calcular a
distribuição interna de tensões;
v. Interpretar os deslocamentos e tensões calculadas, considerando as suposições feitas.
2.9.1 – Elementos Finitos Uni, Bi e Tridimensionais
Para diversas aplicações, o Método dos Elementos Finitos utiliza vários tipos diferentes
de elementos, cada um com suas aproximações e funções características, que possibilitam uma
solução apropriada para cada situação a ser estudada. Os elementos podem ser definidos de três
formatos distintos, sendo eles:
2.9.1.1 - Elementos Unidimensionais
Elementos unidimensionais (ou elementos de linha) consistem em elementos de barra e
elementos de viga. Estes elementos possuem seção transversal, mas são geralmente
representados por segmentos de linha. Elementos unidimensionais são utilizados para modelar
treliças e armações estruturais. Também são utilizados para representar parafusos, pinos, molas,
etc. O mais simples elemento unidimensional tem apenas dois nós sendo um em cada
extremidade (Figura 22a). Há também elementos unidimensionais de três nós ou mais
extremidade (Figura 22b). Estes são os elementos de ordem maior chamados de elementos
quadráticos, cúbicos (LOGAN, 2002; BOSCH, 2005).

64
Fonte: BOSCH, 2005
2.9.1.2 - Elementos Bidimensionais
Os elementos bidimensionais (ou planos) são basicamente triângulos ou quadriláteros.
Os elementos bidimensionais que possuem lados retos e nós somente nos cantos sendo um em
cada canto são chamados de elementos lineares (Figuras 23a e 23c). Há também elementos
bidimensionais de ordem maior (figuras 23b e 23d), os quais possuem nós localizados entre os
nós dos cantos adjacentes e lados curvados. Os elementos possuem 6 graus de liberdade por nó,
sendo 03 translações e 03 rotações. Entretanto, pode-se por simplificação do cálculo fazer uso da
integração numérica considerando um número de pontos de integração maior ou menor que o
número de nós, Os elementos bidimensionais podem apresentar espessura variável ou constante
(LOGAN, 2002; BOSCH, 2005).
Fonte: BOSCH, 2005
Figura 22 - Elementos finitos unidimensionais
Figura 23 - Elementos finitos bidimensionais

65
2.9.1.3 - Elementos Tridimensionais
Elementos tridimensionais aparecem, na maioria das vezes, na forma de tetraedros,
pentaedros ou hexaedros. Os elementos tridimensionais lineares são aqueles que possuem lados
retos e nós apenas nos cantos. Os elementos tridimensionais de ordem maior possuem lados em
curvados e nós localizados entre os nós dos cantos adjacentes (LOGAN, 2002; BOSCH, 2005).
Para elementos sólidos a representação das faces segue a mesma do elemento no plano.
Fonte: BOSCH, 2005.
A formulação do MEF pode ser baseada no método dos deslocamentos, em modelos de
equilíbrio, ou em métodos híbridos e mistos (Zienkiewicz e Taylor, 1989). De todos estes
métodos, aquele que apresenta uma maior simplicidade e, consequentemente, uma maior
versatilidade é o método dos deslocamentos. Associados ao método dos deslocamentos, surgem
muitos conceitos no âmbito das estruturas reticuladas, como por exemplo, as noções de grau de
liberdade, deslocamento generalizado, força generalizada, equilíbrio, matriz de rigidez, vetor
de solicitação, introdução de condições de apoio, etc. Quando surge a necessidade de resolver
um problema de análise de uma estrutura, a primeira questão que se coloca é a sua classificação
quanto à geometria, modelo do material constituinte e ações aplicadas. O modo como o MEF é
formulado e aplicado depende, em parte, das simplificações inerentes a cada tipo de problema.
Alguns aspectos importantes em que é necessário ter em consideração na fase que antecede a
análise de uma estrutura são descritos a seguir.
Figura 24 - Elementos finitos tridimensionais

66
2.10 - Tipos de análise
Nos projetos de engenharia, e em especial da área mecânica é imprescindível considerar
como atuam os carregamentos sobre as peças e conjuntos, pois, eles podem se apresentar de
maneiras diferentes e causarem falhas graves. Por exemplo, o material de uma peça quando
submetido a uma carga aplicada gradativamente e que permaneça constante ao longo do tempo,
terá um comportamento diferente daquele em que a carga seja aplicada subitamente ou que
varie de intensidade com o tempo.
No dimensionamento das peças e componentes de máquinas e estruturas devem-se
utilizar as cargas (forças e pressões) conforme se apresentarão durante sua utilização, entre
outras considerações necessárias.
Os tipos comuns de carregamento são:
Estático
Quase estático
Dinâmico
DEFINIÇÕES:
Estático: A análise estática de estruturas tem por objetivo principal quantificar a
magnitude dos esforços internos e dos deslocamentos que se manifestam em qualquer sistema
estrutural, quando o mesmo é submetido a um carregamento arbitrário, desprezando-se o efeito
das forças de amortecimento e das forças de inércia.
Quase estático: O processo quase–estático pode ser definido como um sistema em que
a energia cinética e sua variação podem ser desprezadas. Assim, na análise quase–estática as
forças inerciais e a forças decorrentes devido ao amortecimento viscoso são desprezadas.
Dinâmico: Entende-se como carregamento dinâmico todo carregamento em que o
tempo é uma das variáveis na aplicação da carga, podendo ser constante ou apresentar variações
de intensidade ao longo do tempo.
Os testes estruturais realizados no modelo, para o dimensionamento da estrutura com o
auxílio de simulação numérica por elementos finitos, serão do tipo estático. Os testes de
resistência estática simulam e quantificam a resistência dos componentes sob ação de cargas
elevadas que podem ocorrer ocasionalmente.

67
2.10.1- Análise Linear/não linear
Durante a fase de projeto de componentes automotivos, muitas análises são conduzidas
de maneira não linear, contemplando as não linearidades de contato, de geometria e do material.
Estas não linearidades são contempladas num problema oriundo de uma solicitação estática, e,
são resolvidos via algoritmo de integração implícita, que nem sempre garante convergência das
análises. A falta de convergência dificulta o entendimento das simulações, bem como o
entendimento do comportamento estrutural, deixando a engenharia de desenvolvimento de
produto sem condições de tomada de decisão.
O objetivo das análises realizadas no Kit, é que os componentes não atinjam a tensão de
adimissível do material, ou seja que permaneçam no regime linear, assim não são utilizados
curvas elastoplásticas de tensão x deformação para os materiais. As condições de contorno não
variam durante a aplicação das cargas. As cargas são constantes em magnitude, direção e
distribuição.
Porém o modelo contempla a não linearidade geométrica, na qual para valores
relativamente grandes de deslocamentos, a deflexão lateral de um membro pode trazer como
consequência, o aparecimento de momentos fletores adicionais (denominadas de segunda
ordem), em virtude da presença de um esforço normal. A esse tipo de comportamento não-
linear, dá-se o nome de não-linearidade geométrica, o que permite acontecer alterações na
rigidez causadas pelo carregamento. Há também a não linearidade de contato utilizadas para
condições de contorno de acordo com a simulação, pois as condições de limite mudam quando
o ocorre contato de carregamento. Podendo se dizer que a análise estática a ser realizada é não
linear devido a todas as condições descritas anteriormente.
2.11- Equações Básicas da Elasticidade Linear
A elasticidade linear infinitesimal trata do estudo das deformações e da distribuição dos
esforços internos de um sólido sujeito a cargas externas. As limitações da teoria restringem a
aplicação desta teoria apenas para deformações elásticas, que serão abordas nas análises, e de
magnitude muito pequena. (BIEZUNER,2015)
2.11.1 – Deformações
A partir dos deslocamentos, pode-se calcular as deformações em qualquer ponto da
estrutura. As equações deformações-deslocamentos para elasticidade infinitesimal linear
tridimensional são:

68
𝜀𝑥𝑥 = 𝜕𝑢𝑥
𝜕𝑥 (01)
𝜀𝑦𝑦 = 𝜕𝑢𝑦
𝜕𝑦 (02)
𝜀𝑧𝑧 = 𝜕𝑢𝑧
𝜕𝑧 (03)
𝜀𝑥𝑦 = 𝜀𝑦𝑥 =1
2(𝜕𝑢𝑥
𝜕𝑦+𝜕𝑢𝑦
𝜕𝑥) (04)
𝜀𝑥𝑧 = 𝜀𝑧𝑥 =1
2(𝜕𝑢𝑥
𝜕𝑧+𝜕𝑢𝑧
𝜕𝑥) (05)
𝜀𝑦𝑧 = 𝜀𝑧𝑦 =1
2(𝜕𝑢𝑦
𝜕𝑧+𝜕𝑢𝑧
𝜕𝑦) (06)
Onde ux,uy e uz são as componentes do vetor deslocamento u nas direções x, y e z
respectivamente. Segundo Biezuner (2015), estas equações representam adequadamente as
deformações somente se forem bem pequenas. Por exemplo, uma rotação de corpo rígido de
um ângulo θ em torno do eixo z é escrita como:
𝑢 = {𝑥𝑐𝑜𝑠𝜃 − 𝑦𝑠𝑖𝑛𝜃 − 𝑥𝑥𝑠𝑖𝑛𝜃 − 𝑦𝑐𝑜𝑠𝜃 − 𝑦
0
} (07)
Tem as deformações infinitesimais dadas por:
𝜀𝑥𝑥 = 𝑐𝑜𝑠𝜃 − 1 (08)
𝜀𝑦𝑦 = 𝑐𝑜𝑠𝜃 − 1 (09)
𝜀𝑧𝑧 = 0 (10)
Sendo que:
𝜀𝑥𝑦 = 𝜀𝑦𝑥 = 𝜀𝑥𝑧 = 𝜀𝑧𝑥 = 𝜀𝑦𝑧 = 𝜀𝑧𝑦 = 0 (11)

69
𝜀 = [𝑐𝑜𝑠𝜃 − 1 0 0
0 𝑐𝑜𝑠𝜃 − 1 00 0 0
] (12)
que não é zero, apesar do corpo não estar se deformando, apenas girando. Mas cos θ - 1 é muito
próximo de zero para valores na ordem de décimos de grau, que pode ser tomado como o limite
da validade da teoria infinitesimal. Se as deformações ultrapassarem a ordem de décimo-
milésimo, recomenda-se utilizar a elasticidade finita, que utiliza a definição de deformações de
Green. As equações podem ser colocadas na forma matricial {ε} = [B] {u}, onde [B] representa
a relação entre as deformações aos deslocamentos, e se faz uso de uma representação vetorial
para a deformação, somente com seis componentes. Esta notação, apesar de imprecisa, é mais
compacta. (BIEZUNER,2015)
{
𝜀𝑥𝑥𝜀𝑦𝑦𝜀𝑧𝑧2𝜀𝑥𝑦2𝜀𝑥𝑧2𝜀𝑦𝑧}
=
[ 𝜕
𝜕𝑥0 0
0𝜕
𝜕𝑦0
0 0𝜕
𝜕𝑧𝜕
𝜕𝑦
𝜕
𝜕𝑥0
𝜕
𝜕𝑧0
𝜕
𝜕𝑥
0𝜕
𝜕𝑧
𝜕
𝜕𝑦]
{
𝑢𝑥𝑢𝑦𝑢𝑧} (13)
As deformações cisalhantes, ocasionadas por uma rotação relativa no cubo (Figura 27) onde
os lados do mesmo deixam de ser perpendiculares, onde u, ʋ e w representam os deslocamentos
nas direções x, y e z, respectivamente.
𝛾𝑥𝑦 =𝜕𝑢
𝜕𝑦+
𝜕𝑣
𝜕𝑥 (14)
𝛾𝑥𝑧 =𝜕𝑢
𝜕𝑧+𝜕𝑤
𝜕𝑥 (15)
𝛾𝑦𝑧 =𝜕𝑣
𝜕𝑧+𝜕𝑤
𝜕𝑦 (16)

70
2.11.2 – Tensões
O tensor de tensão de Cauchy expressa os esforços internos em uma partícula de um
sólido, para todas as direções. A força interna distribuída de um ponto sobre seu vizinho é
determinada pela direção do vizinho n através da fórmula de Cauchy,
𝑡𝑥 = 𝜎𝑥𝑥𝑛𝑥 + 𝜎𝑥𝑦𝑛𝑦 + 𝜎𝑥𝑧𝑛𝑧 (17)
𝑡𝑦 = 𝜎𝑦𝑥𝑛𝑥 + 𝜎𝑦𝑦𝑛𝑦 + 𝜎𝑦𝑧𝑛𝑧 (18)
𝑡𝑧 = 𝜎𝑧𝑥𝑛𝑥 + 𝜎𝑧𝑦𝑛𝑦 + 𝜎𝑧𝑧𝑛𝑧 (19)
Ou:
𝑡 = 𝜎 ∗ 𝑛 (20)
{
𝑡𝑥𝑡𝑦𝑡𝑧
} = [
𝜎𝑥𝑥 𝜎𝑥𝑦 𝜎𝑥𝑧𝜎𝑦𝑥 𝜎𝑦𝑦 𝜎𝑦𝑧𝜎𝑧𝑥 𝜎𝑧𝑦 𝜎𝑧𝑧
] {
𝑛𝑥𝑛𝑦𝑛𝑧} (21)
Onde t é a força distribuída em N/m², e σ é o tensor tensão. Na superfície do corpo,
tomando nx, ny e nz como as componentes do vetor normal n à superfície, tx, ty e tz tem que
equilibrar as forças aplicadas. Biezuner (2015) diz que a tensão em um ponto tem que ser
representada por um tensor para poder expressar o vetor força em qualquer direção. Para o
estudo do estado de tensões no interior do corpo deformado, isola-se um elemento infinitesimal
de um volume de dimensões ∆x, ∆y, ∆z.As tensões atuantes sobre este elemento de volume são
mostradas na figura 25.
Figura 25 - Tensões no interior de um corpo deformado
Fonte: BIEZUNER,2015

71
Observe que, ∆σiij representam os incrementos de tensão, devido à presença das forças
de corpo ρfi (densidade do corpo), por exemplo. Substituindo os incrementos de tensão e
escrevendo as equações de equilíbrio nas direções x, y e z obtém-se as equações de equilíbrio
para tensões, também
∆𝜎𝑖𝑗 = 𝑝𝑜𝑟 𝜕𝜎𝑖𝑗
𝜕𝑥𝑘𝑑𝑥𝑘 (22)
Chamadas de equações diferenciais de equilíbrio, ou seja:
{
𝜕𝜎𝑥𝑥
𝜕𝑥+𝜕𝜎𝑦𝑥
𝜕𝑦+𝜕𝜎𝑧𝑥
𝜕𝑧+ 𝜌𝑓𝑥 = 0
𝜕𝜎𝑥𝑦
𝜕𝑥+𝜕𝜎𝑦𝑦
𝜕𝑦+𝜕𝜎𝑧𝑦
𝜕𝑧+ 𝜌𝑓𝑦 = 0
𝜕𝜎𝑥𝑧
𝜕𝑥+𝜕𝜎𝑦𝑧
𝜕𝑦+𝜕𝜎𝑧𝑧
𝜕𝑧+ 𝜌𝑓𝑧 = 0}
(23)
𝜎𝑥𝑧 = 𝜎𝑧𝑥, 𝜎𝑧𝑦 = 𝜎𝑦𝑧 , 𝜎𝑦𝑥 = 𝜎𝑥𝑦, (24)
Onde a equação 24 expressa a condição de simetria das componentes do tensor tensão.

72
73
3- REVISÃO BIBLIOGRÁFICA
Como fonte de pesquisa procurou-se orientação do que vem sendo estudado e publicado,
pode-se dizer que grande parte dos estudos apresentados abordam o tema relacionado a
ergonomia e aos benefícios do avanço em segmentos da área de tecnologia assistiva, quanto a
parte estrutural é visto estudos quanto a escolha do material a ser empregado e simulação de
impacto frontal.
Assim o apanhado de estudos encontrados é dividido de acordo com os temas
abordados:
3.1 – Estudo sobre ergonomia
Ao analisar as necessidades de deficientes físicos, é visto que as necessidades
cotidianas, conhecidas como atividades da vida diária, como locomoção de um cômodo para o
outro, necessidades fisiológicas, higiene corporal, recreação e ocupação, tornam-se verdadeiras
etapas a serem vencidas através de um intenso trabalho fisioterápico aliado ao uso de
equipamentos adequados.
Costa et.al(2010) relata experiências de pessoas que, a partir do comprometimento pela
lesão da médula, passam a ter uma vida de elaborações e transformações cotidianas, pertinentes
às modificações ocorridas em seu corpo e conclui que ainda, há a necessidade de que as políticas
públicas de atenção à pessoa com deficiência sejam constantemente aprimoradas pelas
organizações governamentais, bem como haja o cumprimento efetivo da fiscalização pela
sociedade em geral, com o intuito de minimizar as diferenças sociais, o preconceito e a
discriminação.
Nesse contexto a elaboração de projetos tende a observa certos parâmetros para
proporcionar conforto, segurança, praticidade e ergonomia para o usuário e também atenda a
requisitos de mercado, quanto a preço e adaptações a serem feitas. De acordo com Coelho
(2007), para que o profissional prescreva uma cadeira de rodas o primeiro conhecimento que
deve adquirir sobre o equipamento é quais são suas partes e as variedades de cada equipamento
que a constitui, bem como as possibilidades de adaptações que podem ser utilizadas de acordo
com o contexto em que a cadeira será utilizada, sendo estes últimos removíveis ou fixos.
O estudo da ergonomia feito por Mason et.al(2012), mostra que as configurações de
cadeiras devem satisfazer a demanda fisiológica de propulsão, ou seja, quais são as limitações
do usuário, e posteriormente quais riscos podem oferecer as novas configurações
implementadas na cadeira.

74
A prescrição de cadeira de rodas baseia-se em informações ergonômicas complexas, a
partir de dados antropométricos fundamentais para a utilização. O reconhecimento do perfil
antropométrico do usuário de cadeira de rodas é um ponto fundamental no processo de
reabilitação. A avaliação ergonômica possibilita ajustes, favorecendo uma melhor postura,
estabilidade e conforto e vários outros aspectos, além de melhorar a inserção do usuário a
sociedade. Das e Kozey (1999), abordam o estudo das medidas estruturais para cadeiras de
rodas adultos móveis, levando em consideração as medidas antropométricas para a melhor
ergonomia do usuário.
Qualharini e dos Anjos (1998), descrevem a ergonomia do espaço edificado para
pessoas com portadora de deficiência, reunindo um conjunto de informações técnicas em um
estudo metodológico sobre acessibilidade, relacionando o projeto de casas para atender
limitações físicas atuais.
Barros e Soares (2012), utlilizam a fotogrametria digital para realizar uma análise
antropométrica dos usuários de cadeira de rodas, e assim conhecer suas limitações de alcance
manual.
3.2 – Estudo sobre tecnologia assistiva
A Tecnologia Assistiva representa atualmente uma área em ascensão, impulsionada,
principalmente, pelo novo paradigma da inclusão social, que defende a participação de pessoas
com deficiência nos diversos ambientes da sociedade. Para a maioria dessas pessoas, os
recursos são essenciais para a mobilidade, atividades relacionadas à aprendizagem, trabalho,
comunicação e interação com o mundo
Nestes termos, Rodrigues e Alves (2013) destacam que diversos setores, principalmente
o acadêmico, têm um papel importante na pesquisa, desenvolvimento e disponibilização da
tecnologia assistiva. É necessário, portanto, que as mais diferentes áreas do conhecimento
voltem-se também para esse tema, e busquem uma integração de saberes em prol de efetivas
ações transformadoras das práticas excludentes de nossa sociedade. Os desafios são de
diferentes ordens, como arquitetônicos, comunicacionais, metodológicos, instrumentais,
programáticos e atitudinais. Portanto, as frentes de trabalho também devem ser múltiplas e
abrangentes.
Ferrada e Santarosa (2007) abordar elementos para elaboração de uma proposta de
investigação, que busca observar e intervir na utilização e adequabilidade de recursos de

75
tecnologia assistiva, para ampliar os processos de interação desses sujeitos em espaços
digitais/virtuais, favoráveis a sua aprendizagem e seu desenvolvimento.
Em se tratando de tecnologia assistiva para a cadeira de rodas, Bertoncello e
Gomes(2002), nota-se que a maturidade dela aconteceu no pós-guerra, por volta de 1960. De lá
até hoje, poucas transformações ocorreram no grupo das cadeiras de rodas mecanomanuais, ou
seja, há um nicho de mercado ainda não conquistado pelas empresas de produtos industriais
destinados aos portadores de deficiência física.
Mazo et.al (1994), elaboram um estudo sobre o controle eletrônico que pode ser
utilizado para guiar cadeiras de rodas motorizadas através do comando de voz permitindo assim
a utilização em pessoas tetraplégia.
As conclusões incidem sobre a necessidade de diferentes áreas do conhecimento
voltarem-se também para esse tema, visando à integração de saberes em prol de efetivas ações
transformadoras das práticas excludentes de nossa sociedade em relação às pessoas com
deficiência.
3.3 – Estudo sobre a utilização de materiais
A análise de resistência dos materiais, dimensionamento mecânico da estrutura e
elaboração de sistema eletrônico para controle, busca-se desenvolver um protótipo com
tecnologia aplicada a baixo custo. Através da construção de um protótipo universal, capaz de
ser instalado a qualquer modelo de cadeira de rodas manual, serão realizados testes para
validação do protótipo e análise das correções no sistema eletromecânico. Com tais
procedimentos busca-se alcançar alto nível de confiabilidade e eficiência do equipamento
No que se refere a escolha de materiais Cota et al. (2011) avaliar o desempenho
mecânico do emprego de materiais alternativos de alta resistência e baixa densidade, tais como
o alumínio e os compósitos laminados em fibras de vidro e carbono, no projeto de uma cadeira
de rodas fabricada usualmente com o material aço carbono, permitindo-se avaliar a eficiência
mecânica de ambos. Os resultados das simulações revelaram maior relação resistência-
densidade para os materiais compósitos, mostrando-se como alternativas eficientes a serem
empregados no projeto de cadeiras de rodas.
Cowan et al. (2009) realiza um estudo com quatro tipos distintos de cadeiras, em relação
ao peso, ou seja a relação do material a utilizar, e as superfícies onde se encontra a cadeira, e
observa as diferenças encontradas com relação a velocidade de propulsão e as forças necessárias
para a aceleração.

76
Chénier e Aissaoui (2014), citam as vibrações transmitidas ao usuário através da
comparação feita com seis materiais distintos utilizados nas cadeiras de rodas, diferenças nas
dimensões dos eixos frontal e traseiro e em três diferentes pisos.
3.4 – Estudo sobre simulações em elementos finitos
Em busca de melhor ergonomia e segurança para o usuário, são realizadas análises em
elementos finitos de uma cadeira de rodas comparando diferentes materiais que podem ser
empregados, além de análises estruturais, como por exemplo impacto frontal, que visam
observar as mudanças que podem ser realizadas, em busca de uma estrutura resistente e que
forneça segurança ao usuário.
Liu et.al (2014), realizam análises em elementos finitos de uma cadeira de rodas com
diferentes materiais compostos que podem ser utilizados, proporcionando maior rigidez, mas
também uma estrutura mais leve.
Em se tratando de modelos em elementos finitos, Sudheesh e Vivek (2012), realizam o
modelamento de uma cadeira de rodas com uma propulsão por pedais localizados próximos as
mãos do cadeirante, e o efeito na estrutura comparando três tipos diferentes de materiais.
DSouza e Bertocci (2010), realizam o desenvolvimento e validação de um modelo de
em elementos finitos para a simulação de acidente de um adulto submetido a uma colisão
frontal.
Yilmazcoban e Mimaroglu (2012), em seu artigo, realizam um estudo sobre a
deformação das estruturas das cadeiras quando submetidas a impacto frontal, considerando o
usuário adulto, comparando materiais com fibra de carbono e ligas de aço.
3.5 – Estudo sobre equipamentos semelhantes desenvolvidos
Atualmente alguns trabalhos estão sendo desenvolvidos visando a construção de um
equipamento automotor a baixo custo, disponibilizando em forma de acessório, que possa
atender as necessidades dos portadores de deficiência que utilizam cadeira de rodas para
locomoção, de forma a tornar-se uma opção de motorização acessível a uma grande parcela da
população cadeirante.
Neste contexto, Filho et.al. (2010) desenvolveram um Kit que permite transformar uma
cadeira de rodas convencional em uma motorizada com controle por joystick, na qual foi
construído um protótipo do kit de automação de cadeiras convencionais para testar o conceito.
O Kit é composto de três partes físicas, a caixa das baterias e eletrônica, o elemento de tração

77
e o joystick. A caixa desliza sobre guias para fácil remoção quando for desmontada a cadeira
para transporte. O elemento de tração é composto dos motoredutores e dos dispositivos de
acoplamento.
Silva et.al.(2010), abordam o desenvolvimento de um sistema de controle para o kit de
motorização utilizado em cadeira de rodas manuais. O denominado kit de motorização é um
dispositivo que permite que uma cadeira de rodas manual se torne uma cadeira de rodas
motorizada. O sistema de controle desenvolvido permitirá que uma cadeira siga uma rota
desenhada no chão, destinada aos casos em que o usuário utiliza a mesma trajetória repetidas
vezes ou quando deseja retornar a uma posição inicial, o usuário ao acionar o sistema o kit irá
seguir uma trajetória feita no chão.
Fernandes et.al(2005), apresentam um protótipo de um simulador capaz de gerar
comandos para uma cadeira de rodas motorizada, a partir de imagens capturadas por meio de
uma câmera Web, podendo ser aperfeiçoado para ser utilizados em cadeiras motorizadas ou kits
acoplados as cadeiras de rodas.

78

79
4- METODOLOGIA
O Kit Adaptável para cadeiras de rodas para transformá-la em um triciclo elétrico foi
desenvolvido para tornar o produto viável e principalmente prático, sendo um modo a facilitar
a interação do cadeirante com a sociedade. Assim o projeto é divido em quatro etapas:
1ª Etapa: Definir os objetivos que o projeto deverá atender, como praticidade para o usuário
ser competitivo comercialmente, além de objetivos com relação a estrutura como por exemplo
fator de segurança, definição de materiais e etc.
2ª Etapa: Dimensionar e desenhar em software de desenhos 3D a estrutura do Kit.
3ª Etapa: Análise de estabilidade estática e dinâmica, para verificação da eficiência do
produto, para que caso o conjunto suporte somente valores muito pequenos de inclinação da
pista, se avalie as dimensões empregadas na estrutura, para que ofereça segurança ao cadeirante.
4ª Etapa: Simular através do software de elementos finitos, a qual se terá a resposta dos
esforços na estrutura, quando submetida aos carregamentos impostos. Isto é de suma
importância, pois irá permitir verificar se as peças projetadas, suportam as cargas ou não,
podendo assim alterar alguns componentes se necessário.
A cadeira de rodas adquirida e que foi utilizada como modelo para as análises, possui uma
largura de 650 mm, e para a medida de comprimento, foi feito a consideração de que o apoio
de pé estaria no último ajuste, ou seja o mais baixo possível, isso faz com que a cadeira tenha
o máximo comprimento possível, ou seja, aproximadamente 1127 mm. Segundo a norma
ABNT NBR9050/2004, a área projetada no solo ocupada por uma cadeira de rodas, visto na
figura 26, denominado módulo de referência, serviu de parâmetro para se aproximar a máximo
destas dimensões, quando o mesmo, estiver recolhido lateralmente a cadeira, para que não
ocorra transtorno ao usuário. Nesta posição, recolhido lateralmente, as dimensões de todo o
conjunto obtidas foram de 764 mm de largura e 1127 de comprimento longitudinal, que é o
próprio comprimento da cadeira.

80
Figura 26- Módulo de referência é a projeção de 0,80 m por 1,20 m no piso, ocupada por
uma pessoa utilizando uma cadeira de rodas
Fonte: ACESSIBILIDADE NA PRÁTICA,2014
A partir de um diagrama de requisitos é possível delinear caminhos para a tomada de
decisões estabelecendo parâmetros físico-mecânicos os quais auxiliam no dimensionamento
estrutural e posterior iteração de resultados, além da análise dinâmica da máquina projetada.
Conforme diagrama de requisitos projetais ilustrado pela figura 27 nota-se os fatores relevantes
para o projeto de um sistema automotor para cadeira de rodas mecanomanuais.
Figura 27 - Diagrama de requisitos de projeto
Fonte: ELABORADO PELO AUTOR,2015

81
O diagrama apresentado na figura 27 trata de forma clara e objetiva, os diversos fatores
relevantes na criação, desenvolvimento e construção do objeto de estudo deste trabalho, o qual
se trata de um sistema de tração para cadeira de rodas, buscando organizar-se em subconjuntos
diferenciados em seus objetivos propostos, de tal forma a facilitar a modelagem do melhor
sistema que atenda a maior parte dos requisitos preestabelecidos.
Com base nas informações apresentadas sobre a situação atual do mercado brasileiro
destinado aos equipamentos assistidos oferecidos a população deficiente, nota-se a necessidade
de disponibilidade de produtos diferenciados em tecnologia e eficiência a baixo custo que
atendam ás necessidades dos cadeirantes. O modelo proposto neste trabalho visa atender a
parcela da população cadeirante que não apresenta deficiência em seus membros superiores,
uma vez que o equipamento assistido projetado apresenta sistema de direção e freio mecânico
o qual necessita de acionamento físico motor pelo usuário.
Conforme dito anteriormente, o início do desenvolvimento deste KIT adaptável ocorreu no
trabalho de Mendes (2013). Em uma primeira etapa foi adquirida uma cadeira de rodas manual
da marca Ortobrás, modelo Aktiva Ultra Lite X, com rodas aro 24, visto na figura 28, onde a
mesma é usada para o desenvolvimento do projeto descrito neste trabalho.
Figura 28 - Cadeira Ortobrás adquirida para o projeto
Fonte: ORTOBRÁS,2014
Esta cadeira é construída em liga alumínio aeronáutico temperado, e tem as seguintes
características:
• Rolamentos blindados nas quatro rodas, inclusive no eixo vertical do garfo;
• Eixos de aço reforçado;
• Pintura epóxi;
• Estofamento 100% nylon acolchoado com almofada de alta densidade incorporada;

82
• Estrutura dobrável em “X” com sistema de fechamento por guias;
• Rodas traseiras de 24” infláveis, raiadas;
• Rodas dianteiras de 6” maciças, com garfo de alumínio;
• Aro de impulso em alumínio com pintura epóxi;
• Sistema de desmontagem rápida “quick release” nas quatro rodas;
• Freios bilaterais;
• Protetor lateral de roupas em nylon com abas;
• Protetor de raios;
• Pedal removível com sistema “swingaway”;
• Apoio de braço escamoteável;
• Capacidade de peso de 120 Kg.
A partir dessa cadeira foi construído um modelo no software Solidworks, que foi
utilizado como base para as análises e propostas no projeto realizado.
Figura 29–Modelo em CAD da cadeira de rodas adquirida para o projeto
Fonte: ELABORADO PELO AUTOR,2015
Durante o desenvolvimento do KIT adaptável foram geradas 2 alternativas de projetos que
serão apresentadas posteriormente.

83
4.1–Materiais a utilizar
O desenvolvimento de um protótipo de sistema automotor para cadeira de rodas necessita
de uma análise minuciosa da estrutura buscando a utilização de materiais de baixo custo aliados
a um desenho otimizado com o menor peso possível, e que seja capaz de suportar as solicitações
físicas impostas pelo movimento.
4.1.1 – Especificação de Material (Alumínio)
O grande desafio tecnológico enfrentado pela indústria para a fabricação de cadeiras de
rodas manuais foi, sem dúvida, a procura por materiais de baixo peso específico. O aço
inoxidável era até bem pouco tempo a única opção. Hoje as opções são variadas como o cromo,
titânio, tubos de aço, carbono e alumínio.
Pelas suas principais características como baixo peso e também pela facilidade de
fornecimento e, especialmente, pelo baixo custo, o alumínio é o material mais utilizado pela
indústria de produtos para reabilitação. Seu uso, neste caso, é justificado pelo baixo peso do
produto final e também pela sua plasticidade. Outros materiais são mais caros e necessitam de
acabamentos mais sofisticados, que acabam por encarecer o produto final.
Este metal, por suas excelentes propriedades físico-químicas, conforme comparativo da
figura 20, entre as quais se destacam o baixo peso específico, a resistência à corrosão, a alta
condutibilidade térmica e elétrica e a infinita reciclagem, apresenta uma ampla variedade de
utilização, que o torna o metal não-ferroso mais consumido no mundo. A leveza é uma das
principais características do alumínio. Seu peso específico é de cerca de 2,70 g/cm³, essa
característica, aliada ao aumento da resistência mecânica por adição de elementos de
liga/tratamentos térmicos, torna o alumínio o metal de escolha para a indústria aeronáutica e de
transportes.
O módulo de elasticidade do alumínio é de 7030 kg/mm². O baixo módulo de
elasticidade possui a vantagem de dar às estruturas de alumínio uma capacidade elevada de
amortecer os golpes, assim como de reduzir as tensões produzidas pela variação de temperatura.
A seguir na tabela 3, um comparativo do alumínio com outros metais.

84
Tabela 3 - Comparativo de propriedades mecânicas
Propriedades físicas típicas Alumínio Aço Cobre
Densidade (g\cm³) 2,70 7,86 8,96
Temperatura de fusão (ºC) 660 1500 1083
Módulo de elasticidade(MPa) 70000 205000 110000
Coeficiente de dilatação térmica(L/ºC) 23,10^-6 11,70^-6 16,5^-6
Condutibilidade térmica a 25ºC(Cal/cm/ºC) 0,53 0,12 0,94
Condutibilidade elétrica(%IACS) 61 14,5 100
Fonte: CALLISTER,2002
O alumínio escolhido é a liga 6351 que oferece relativamente uma alta resistência e
excelentes características de união. Esta liga possui as seguintes propriedades químicas, vista
na tabela 4:
Tabela 4 - Propriedades Químicas da Liga de alumínio 6351
Análise química da liga 6351
Densidade: 2,71g/cm³
Peso(%) Elementos
Si Fe Cu Mn Mg Cr Ni Zn Ti Ga V Outros
Mínimo 0,70 -- -- 0,40 0,40 -- -- -- -- -- -- ---
Máximo 1,30 0,50 0,10 0,80 0,80 -- -- 0,20 0,20 -- -- 0,20
Liga 6351: limites de propriedades mecânicas
Têmpera
Seção específica ou Espessura de
parede
(mm)
Resistência a tração (Mpa) Alongamento
Limite de resistência a tração
Limite de escoamento
(MPa) Porcentagem Mín. em
50mm
Mín. Máx. Mín. Máx.
Têmpera padrão
T4 Até 200.000 205 ---- 110 ---- 12
T5 Até 6.30 270 ---- 230 ---- 6
6.30 --- 25.0 270 ---- 230 ---- ----
T6 Até 3.20 290 ---- 250 ---- 6
3.20 – 20.00 300 ---- 255 ---- 6
Fonte: ALCOA,2015

85
A liga 6351 possui como principais características a resistência mecânica alta, alta
resistência à corrosão, conformação mecânica fácil e soldabilidade boa. É aplicada em
estruturas submetidas a elevadas tensões; em construções navais, em veículos.
A liga 6351- é tratada termicamente –T6, onde é solubilizada e envelhecida
artificialmente - nestas condições a liga possui um limite de escoamento de 255 MPa e limite
de resistência à tração de 300 MPa.
4.2– Fator de segurança
O fator se segurança pode ser expresso de várias maneiras, sendo uma relação entra duas
quantidades de mesma unidade, portanto sempre será adimensional.
A escolha de um fator de segurança é uma difícil tarefa principalmente para o projetista
iniciante, pois são muitas variáveis a se observar, causando na maioria das vezes um
superdimensionamento no projeto tornando o projeto mais caro do que o necessário.
O fator de segurança deve ser baseado em projetos já existentes, em indicações tabeladas,
além disso, deve contar com o conhecimento teórico do projetista.
Influenciam consideravelmente o valor do FS, os seguintes fatores:
Material da peça;
Carga que atua na peça;
Perigo de vida.
O FS pode ser considerado como uma medida de incerteza do projetista nos modelos
analíticos, nas teorias de falhas, nas propriedades do material a ser utilizado. Um FS menor
poderá ser adotado quando testes extensos forem realizados na peça tanto em protótipo físico
quanto em simulações computacionais. Se as propriedades mecânicas do material não forem
testadas deverá adotar um FS maior.
Por ser difícil prever os tipos de carregamentos que um conjunto suportará em serviço,
por exemplo: Que esforços deverão suportar a estrutura do Kit? Depende do tempo de uso, do
peso, do tipo de pista onde será usada e etc.
De acordo com Norton (2011), algumas orientações para a escolha de um fator de
segurança para projetos de máquinas podem ser definidas com base na qualidade e
disponibilidade de dados adequados sobre as propriedades dos materiais, nas condições
ambientais esperadas em comparação com aquelas nas quais os dados de testes dos materiais
foram obtidas, bem como na precisão dos modelos de solicitação e de tensão desenvolvidos
para análises.

86
A tabela 5 mostra um conjunto de fatores para materiais dúcteis que podem ser
escolhidos em cada uma das três categorias listadas com base no conhecimento ou julgamento
do projetista sobre a qualidade das informações utilizadas. O coeficiente global de segurança é
tomado como o maior dos três fatores escolhidos.
Tabela 5 - Conjunto de fatores para determinação de fator de segurança para materiais
dúcteis
Fonte: NORTON,2011.
Observando os conjuntos de fatores referenciados por Norton (2011,) com relação as
informações e a qualidade das mesmas, foram adotados os seguintes critérios para determinação
do fator de segurança:
Fatores utilizados para determinar um coeficiente de segurança para materiais dúcteis Informações Qualidade das informações Fator
Dados da propriedade dos
materiais disponíveis a partir de testes
O material utilizado foi testado 1,2 Dados representativos de testes do material estão
disponíveis 2
Dados razoavelmente representativos de testes do
material estão disponíveis 3
Dados insuficiente representativos de testes do material
estão disponíveis 5+
Condições ambientais nos quais será utilizado
São idênticos ás condições dos testes de materiais 1,2 Essencialmente igual ao ambiente de teste 2 Ambiente moderadamente desafiador 3 Ambiente extremamente desafiador 5+
Modelos analíticos para forças
e tensões
Os modelos foram testados experimentalmente 1,2 Os modelos representam precisamente o sistema 2 Os modelos representam aproximadamente o sistema 3 Os modelos são aproximações grosseiras 5+

87
Tabela 6 - Critérios de Fator de segurança
INFORMAÇÕES QUALIDADE DAS INFORMAÇÕES FATOR
Dados das propriedades
dos materiais disponíveis a
partir de testes
Dados razoavelmente representativos
de testes do material estão disponíveis 3
Condições ambientais na
qual será utilizado Ambiente moderadamente desafiador 3
Modelos analíticos para
forças e tensões
Os modelos representam
aproximadamente o sistema 3
Fonte: ELABORADO PELO AUTOR,2015
Assim, conforme visto na tabela 6, pelos critérios definidos o fator de segurança
utilizado para as análises estáticas será 3.
O projeto de elementos estruturais ou mecânicos deve restringir a tensão do material a
um nível seguro, então se deve usar uma tensão segura ou admissível. Então utilizando uma
relação, para matérias dúcteis, entre o fator de segurança e a tensão de escoamento (obtida por
ensaios experimentais do material) é possível achar a tensão admissível, através da seguinte
equação:
𝜎𝑎𝑑𝑚 =𝜎𝑒𝑠𝑐𝑜
𝐹.𝑆. (25)
σadm = Tensão admissível de projeto que atua na estrutura
σesco = Tensão de escoamento do material
F.S. = Fator de segurança, determinado de acordo com requisitos de projeto

88
4.3 - Primeiro projeto
O primeiro projeto consiste em um modelo dividido em 4 conjuntos, sendo:
Conjunto fixo: que é fixado na parte de baixo da cadeira;
Conjunto encaixe: é a parte que seria encaixado no conjunto fixo
Conjunto painel: onde se teria componentes que controlaram a direção como por
exemplo o guidão, e componentes de ajustes do Kit.
Conjunto motriz: onde se tem componentes que proporcionam a locomoção da cadeira
como o motor, baterias e a roda.
4.3.1- Conjunto fixo
A estrutura do conjunto fixo (figura 30) é fixada na parte inferior da cadeira e possui
quatro peças em formato de cubo que permitiram o acoplamento do Kit na cadeira. O conjunto
apresenta um formato em “X”, que permite a rotação em torno do pino central, permitindo que
em cadeiras dobráveis, não seja necessário a retirada do conjunto para o fechamento da cadeira.
Figura 30 - Conjunto Fixo
Fonte: CUNHA,2015
A primeira regulagem ocorre devido ao deslizamento das corrediças pelo trilho com um
deslocamento retilíneo, juntamente com a rotação em torno do pino central, realizando a
abertura ou fechamento do conjunto.
Seguindo a norma ABNT NBR9050/2004, o menor comprimento possível de cadeira
de rodas é de 600mm, assim subtraindo o valor de largura da cadeira até a parte onde o Kit será
encaixado, temos a distância mínima de 400mm, conforme figura 31-a.

89
O conjunto fixo ao ser aberto totalmente, ou seja, visto na figura 31-b, pode chegar a
uma largura de 516,17mm, podendo então ser usado em cadeiras com tamanhos de 500 mm, a
qual por norma, pode chegar a ter a largura de uma cadeira adulto.
Figura 31 -Conjunto Fixo - a) Menor largura possível do conjunto –
b)Maior largura possível do conjunto
Fonte: CUNHA,2015
A outra regulagem ocorreria devido a possibilidade de deslizamento de uma barra sobre
a outra, e a partir da posição desejada, a própria cadeira, através da conexão dos cubos, não
deixaria acontecer o retorno das peças. Este deslizamento ocorreria devido ao mecanismo de
mola que interligam as barras, como mostrado na figura 32, este mecanismo, por ser tratar de
um ajuste contínuo, permitiria a regulagem para qualquer tamanho de cadeira.

90
Figura 32 - Mecanismo regulador de largura do conjunto
Fonte: CUNHA,2015
Conforme citado anteriormente o conjunto fixo, permite o fechamento do conjunto
simultâneo a cadeira,visto na figura 33, isto se deve a possibilidade de rotação das barras em
relação ao pino central. O usuário teria de acionar os pinos laterais que, através do sistema de
molas,iria recolher a trava da corrediça, permitindo assim o movimento das corrediças pelo
trilho com um deslocamento retilíneo, realizando o fechamento do conjunto fixo.
Figura 33 - Conjunto fixo fechado
Fonte: CUNHA,2015

91
O mecanismo funcionaria através de deslizamento entre peças que necessitam de
lubrificação entre componentes para um menor esforço resultante nas peças.
A príncipio o material idealizado para a estrutura do Kit é a liga de alumínio 6351, por
se tratar de um material leve e de fácil usinagem. Apesar de não ser tão resistente quanto o aço,
porém irá deixar a estrutura mais leve.
O kit seria ligado a cadeira de rodas através do conjunto fixo. Esta ligação ocorre como
mostrado na figura 34, na qual o usuário, ao fazer o encaixe iria girar uma chave que fica
próxima ao guidão e esta iria acionar o recolhemineto dos pinos, para encaixe e posteriormente
avanço, encaixando assim nos furos e possibilitando o travamento. Para a retirada o processo
seria o mesmo de girar a chave.
Figura 34 - Kit acoplado a cadeira de rodas
Fonte: CUNHA,2015
O Kit completo, conforme figura 35, se divide em mais três partes, sendo uma delas, o
conjunto encaixe, onde acontece o acoplamento do Kit a cadeira. Este conjunto é composto por
duas barras que são ligadas no conjunto fixo através de ligação por pinos conforme citado
anteriormente.
O conjunto painel é onde se encontra o guidão e outros acionamentos de mecanismos
que permitem o usuário ajustar o funcionamento do Kit, como por exemplo o mecanismo de
freio, aceleração e o sistema de acoplamento do Kit na cadeira. A última parte do Kit seria o
conjunto motriz estão as peças de tração do Kit como motor que estaria na roda, baterias para
acionamento do motor, conjunto freio e a roda.

92
Figura 35 - Kit acoplado a cadeira de rodas
Fonte: CUNHA,2015
Porém, algumas sérias limitações foram observadas. A primeira seria o impedimento da
inclinação da cadeira em relação ao Kit, pois as fixações do conjunto fixo não permitiriam o
giro da cadeira em relação ao resto do Kit, assim deixando as rodinhas dianteiras em contato
com o solo, o que não poderia ocorrer pois causaria muita instabilidade no movimento. A
segunda justificativa seria a dificuldade do sincronismo de abertura e fechamento do
mecanismo, exigindo a alta precisão dimensional das peças que o compõem.
Com estas observações uma nova proposta foi desenvolvida a procura de soluções mais
aprimoradas, o novo conceito de estrutura elaborado tem o objetivo de simplificar o Kit.
4.4-Segundo projeto
A estrutura mecânica do segundo projeto é dividida em duas partes, sendo a estrutura
base, feita em elementos de barra e a segunda é o conjunto motriz. O primeiro é constituído de
estrutura simplificada, capaz de instalação em diversos modelos de cadeira de rodas, em ambos
os lados. O conjunto motriz é acoplado a estrutura base de forma rápida e segura, e neste
dispositivo encontram-se todos os elementos eletrônicos e atuadores para a movimentação do
cadeirante. A princípio as medidas consideradas para os tubos da estrutura, foram baseadas em
tubos comerciais existentes, porém podem ser modificadas para atender exigências do projeto,
fazendo com que seja feito sob medidas especificadas.

93
Baseando-se nos limites geométricos e alcances manuais dos cadeirantes explicitados
pela norma NBR 9050, o protótipo virtual idealizado pode ser compreendido pela figura 36, a
qual é base para todo o desenvolvimento mecânico abordado.
Figura 36 - Nova estrutura do Kit ligado a cadeira de rodas, -
a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Como visto na figura 36, a cadeira permite mais de uma configuração de tamanho
conforme a melhor ergonomia para o usuário, sendo assim para as análises a serem realizadas
foram consideradas o Kit na configuração de abertura normal, de acordo com cadeira adquirida
para o projeto, e também na configuração de abertura máxima longitudinalmente.
Este modelo foi projetado com o objetivo de facilitar os movimentos do cadeirante ao
utilizar a montagem e também com intuito de simplificar os componentes a serem utilizados.
Ao se projetar a nova estrutura do Kit todos os aspectos anteriormente apontados foram
levados em consideração, e também outros pontos de referências de produtos já existentes no
mercado. Possuindo pontos de articulação que permitem o ajuste de posição, para melhor
ergonomia do usuário e recolhimento nas laterais, visto na figura 37, caso não o utilize, e possa
movimentar a cadeira manualmente.

94
Figura 37 - Nova estrutura do Kit, recolhido na lateral da cadeira
Fonte: ELABORADO PELO AUTOR,2015
Conforme já mencionado, é preciso verificar se o projeto atende a requisitos de norma
para oferecer segurança e poder ser comercializado, então a cadeira foi inclinada até as rodas
rodinhas da frente (pivotadas), ficassem a 61mm de altura do chão, ficando no modo de direção
e permitisse que o conjunto pudesse passar pequenos obstáculos, sem que haja o contato com
essas rodinhas.Com isto obteve-se as medidas de direção, visto na figura 38 e figura 39, a
altura do Kit na posição de direção é de aproximadamente 900mm, a distância entre o toráx e
guidão é de 445mm,estas medidas estão dentro dos parâmetros estabelecidos pela norma ABNT
9054, que estabelece que a altura da mão estando o braço estendido paralelo ao piso pode ter
no máximo 1100mm, e distância do guidão até o toráx pode ser no máximo de 600mm
É visto também, que quando o conjunto estiver recolhido lateralmente junto a cadeira
de rodas, o conjunto possui uma medida máxima de 764mm, ou seja dentro do parâmetro
estabelecido pelo módulo de referência que é no máximo de 800mm, lembrando que esta
medida é para uma cadeira com dimensões para um adulto, conforme tabela 1, a qual foi
baseado o projeto, ou seja cadeiras com tamanhos especiais pode ultrapassar as medidas do
módulo de referência.

95
Figura 38 - Medidas do Kit na posição direção - a)Altura das rodinhas frontais em
relação ao solo. b) Altura do guidão ao solo
Fonte: ELABORADO PELO AUTOR,2015
Figura 39 - Medidas do Kit a) Na posição direção, distância longitudinal entre o toráx e
o guidão b)Comprimento lateral do conjunto quando o kit estiver recolhido
Fonte: ELABORADO PELO AUTOR,2015
O novo projeto passou a ser estudado como sendo um Kit na qual a estrutura seria
composta por elementos de barra conforme visto na figura 40. Este modelo foi projetado com
o objetivo de facilitar os movimentos do cadeirante, buscando tornar simples a utilização de
todos os componentes.

96
Figura 40 -Numeração das barras - lado direito ímpar e lado esquerdo par
Fonte: ELABORADO PELO AUTOR,2015
Como pode ser visto (Figura 40) a estrutura seria composta por 22 barras, na qual é
fixada nos dois lados da parte frontal da cadeira, próximo ao apoio de pé. Ao utilizar o Kit, o
conjunto motriz fica na parte frontal da cadeira, de acordo com a regulagem definida pelo
usuário. Ao término do uso, os mecanismos de regulagem permitem o recolhimento do Kit
fazendo com que ele fique armazenado paralelamente a cadeira, conforme visto na figura 37.
4.4.1- Componentes e mecanismos
Como dito anteriormente, o Kit compreende a estrutura base e o conjunto motriz, e nos
próximos tópicos serão apresentados os componentes, como ocorre o funcionamento e sua
representatividade na estrutura.
4.4.1.1 - Presilha
O componente presilha, conforme figura 41, é responsável por fazer a ligação do Kit
com a cadeira de rodas. Esta peça, é a mesma usada pelo Kit “Firefly”, que foi apresentado na
figura 17, onde será adquirida para ser usada na conexão da cadeira de rodas ao Kit. A fixação
na cadeira ocorre na região próxima ao apoio de pé, em ambos os lados, sendo que a geometria
desta região é bastante comum em diversos modelos de cadeira e tendo na maioria das vezes o
mesmo formato.

97
Figura 41 - Presilha usada para conexão do Kit na cadeira
Fonte: ROLLICK,2014
Conforme visto na figura 41, a região da presilha que é conectada na cadeira possui
uma regulagem para diferentes diâmetros de tubos, através do aperto do parafuso. A fixação é
feita através de um “socket”, conforme visto na figura 42 que está conectado nas barras 1 e 2,
este dispositivo é encaixado no pino da presilha, fazendo a conexão do kit a cadeira.
Figura 42 - Presilha e socket do conjunto "Firefly" que serão utilizados no Kit
Fonte: ROLLICK,2014
O formato de ligação permite que ao movimentar a estrutura para o uso o recolhimento
lateral não seja necessário desacoplar a barra 1 da cadeira, sendo assim o desacoplamento
acontece quando o usuário desejar retirar totalmente o kit da cadeira.
4.4.1.2 – Barras 1 e 2
Estas barras possuem um diâmetro externo de 33,0mm e espessura de 5,95mm. Elas
saem da presilha, onde são acopladas em ambos os lados da cadeira, direcionando a estrutura
para as extremidades laterais da cadeira para melhor segurança e utilização dos mecanismos.
Estas barras, como visto na figura 43, possuem o comprimento de 100mm. A necessidade
destas barras é para que ao realizar o fechamento do Kit, fazendo com que a roda frontal fique
paralela a cadeira, não ocorra o toque da roda na estrutura da cadeira.

98
Figura 43 - Barras estruturais 1 e 2 do Kit
Fonte: ELABORADO PELO AUTOR,2015
Estas barras são interligadas ás barras 3 e 4, com um ângulo de 90°, por um cordão de solda.
4.4.1.3 – Barras 3,4,5 e 6
As barras 3,4,5 e 6, visto na figura 44, direciona a estrutura para frente da cadeira.
Nestas barras há um mecanismo, para o ajuste do Kit na direção longitudinal, principalmente
no instante em que estiver recolhido, para que o kit fique o mais próximo possível da roda maior
da cadeira.
Este ajuste funciona do seguinte modo: são dois tubos concêntricos que deslizando um
em relação ao outro, permitindo o ajuste do comprimento. As barras 3 e 4 de diâmetro externo
de 42,00mm com espessura de 8,10mm e as barras 5 e 6 possuem diâmetro externo de 25,40mm
e são maciças.

99
Figura 44 - Barras estruturais 3,4,5 e 6 do Kit
Fonte: ELABORADO PELO AUTOR,2015
O ajuste de comprimento é travado por quatro pinos-mola que ao ser acionados são
passantes entre os tubos, impedindo assim o deslocamento relativo de um tubo sobre o outro.
Para isto as barras 3 e 4 possuem 4 furos, por onde passa os pinos, enquanto as barras 5 e 6
possuem 16 furos, permitindo assim uma grande variedade de posições de ajustes, e por se tratar
de ajuste que pode-se denominar digital, tem-se a garantia de alinhamento do Kit.
Ao recolher o kit o cadeirante poderá realizar a regulagem destas barras para que o kit
tenha um menor comprimento quando não estiver sendo usado.
Na extremidade das barras 5 e 6, há uma articulação, denominado de cubo giratório.
Nesta articulação há um pino que é responsável por possibilitar o giro das barras seguintes para
recolhimento lateral do Kit. Quando o Kit está em funcionamento, é necessário travar as barras
seguintes por um outro pino que trava o cubo giratório.
4.4.1.4 – Cubo giratório
Este mecanismo permite o giro da estrutura motriz, ao redor das barras 3 e 4, conforme
visto na figura 37, permitindo assim que quando o cadeirante não estiver em uso do kit, fazer
o recolhimento do mesmo, posicionando na lateral da cadeira, para que o usuário possa
movimentá-la manualmente.

100
Este cubo (Figura 45) é divido em duas partes: superior e inferior. A parte inferior é
presa nas barras 5 e 6, enquanto a parte superior é presa nas barras 7 e 8. Tal cubo possui um
eixo conectado ao rolamento na parte inferior, permitindo a conexão com a parte superior.
Figura 45 - a). Cubo giratório usado na estrutura; b) Detalhamento do cubo giratório
a) b)
Fonte : ELABORADO PELO AUTOR,2015
No ponto central da face superior do cubo existe um parafuso que tem a função de
interligar as duas partes do cubo e travar ou liberar o giro da estrutura motriz. Quando o parafuso
estiver em contato com a parte inferior, irá travar o giro. Para liberar, o usuário precisa girar a
alavanca, que se encontra na face superior e está conectada ao parafuso, desconectando o
parafuso da parte inferior do cubo, e assim liberando o giro da parte superior através do
rolamento.
O eixo de giro possui um diâmetro externo de 25mm e interliga as partes superior e
inferior do cubo. Foi usado um rolamento de esferas com diâmetro interno de 25mm e externo
de 37mm.
4.4.1.5 – Barras 7,8,9,10,11 e 12
A barra 7 e 8, conectadas ao cubo giratório, são perpendiculares as barras 9 e 10.
Possuem comprimento de 30mm, diâmetro externo de 25,4mm e espessura de 5,35mm. As
barras 11, 12, possuem o comprimento de 145mm, diâmetro externo de 31,75mm e espessura
de 3,17mm. As barras 09 e 10 possuem o comprimento de 200mm, diâmetro externo de 25,4mm

101
e espessura de 5,35mm. Ao recolher o kit o cadeirante poderá realizar a regulagem destas barras
para que o kit tenha um menor comprimento quando não estiver sendo usado.
Figura 46 - Barras estruturais 7,8,9,10,11 e 12 do Kit
Fonte : ELABORADO PELO AUTOR,2015
Estas barras permitem um ajuste vertical do Kit, para que ao recolhe-lo a roda frontal não
arraste no chão travando o movimento e também serve para que o usuário possa realizar um ajuste
para a melhor ergonomia. Para travar esses tubos é utilizada uma trava de aperto, denominada
blocagem, que exerce uma força sobre o tubo externo e este por consequência pressiona o tubo
interno não permitindo assim o deslocamento. Este mecanismo é semelhante ao utilizado em ajustes
de banco de bicicleta.
4.4.1.6 – Barras 13,14,15 e 16
Estas barras permitem o alinhamento lateral do Kit, para atender a diferentes tamanhos
de cadeiras. As barras 13 e 14 são perpendiculares as barras 11 e 12, possuem um diâmetro de
25,4mm, comprimento de 210 mm e espessura de 5,35mm. As barras 15 e 16 possuem um
diâmetro de 31,75mm, comprimento de 210 mm e espessura de 3,17mm.

102
Figura 47 - Barras estruturais 13,14,15 e 16
Fonte : ELABORADO PELO AUTOR,2015
O mecanismo de alinhamento do Kit, para a roda motriz ficar centralizada centro da
cadeira, se faz necessário, pois como há diferentes tamanhos de cadeiras, permite-se atender a
uma maior variedade de modelos. Este ajuste acontece entre as barras 13 e 14, juntamente com
as barras 15 e 16, permitindo um ajuste de 125mm. Esta regulagem permite o ajuste dentro dos
limites da norma NBR 9050, de largura máxima de cadeira de rodas.
4.4.1.7 – Conjunto Guidão
Este componente pode ser divido em duas partes: mesa do guidão, e a barra 22, vista na
figura 48. Estes componentes estão fixados os freios, acelerador (que se localiza na manopla),
display de LED e a bateria (que se localiza fixado na barra 22).

103
Figura 48 - Conjunto Guidão utilizado no Kit
Fonte : ELABORADO PELO AUTOR,2015
Para melhor ergonomia do usuário, este componente é de grande importância, pois
possui um mecanismo capaz de realizar a regulagem de altura do guidão. Este ajuste é
semelhante ao usado para as barras 3,4,5 e 6, contudo a barra 22 possui 20 furos e barra 18
possui 4 furos, para se encaixar os pinos-mola, que fazem o travamento dos deslocamentos das
barras.
A barra 17 possui um comprimento de 290mm e a regulagem ocorre devido ao ajuste
dos pinos que permitem o travamento, na qual a barra 22 pode deslocar linearmente sobre a
barra 18.
O mecanismo permite um ajuste de 235mm, fazendo com que o cadeirante opte pela
melhor posição para direção. Na máxima abertura o guidão se encontra a 1037mm de altura, e
na mínima ele se encontra a 897mm.
Estando o Kit recolhido, paralelo a cadeira de rodas, o cadeirante deverá liberar os pinos
para girar o guidão a 90º, para que fique também paralelo a cadeira.
No guidão, que possui um diâmetro de 25,4mm, são conectadas as manoplas onde se
realiza a aceleração, e também os acionadores do freio.

104
4.4.1.8 – Conjunto direção
Este conjunto teve como base os acessórios utilizados em bicicletas. A caixa de direção
é o conjunto de componentes em uma bicicleta que fornece uma interface rotativa entre o garfo
da bicicleta e o cabeçote do quadro da bicicleta.
Neste Kit são usados dois rolamentos, conforme visto na figura 49, de diâmetro interno
de 32mm e externo de 40mm que estão fixados nas duas extremidades do disco giratório.
Figura 49 - Conjunto direção utilizado no Kit
Fonte : ELABORADO PELO AUTOR,2015
O rolamento, cujo anel interno realiza o giro, se encontra conectada a barra 14,
permitindo a transmissão suave de movimento do guidão para o garfo.
4.4.1.9 – Disco de rotação
Este componente permite o ajuste tanto para que ocorra melhor ergonomia para o
cadeirante quanto para a correta utilização do Kit.
O disco, visto na figura 50, permite que o conjunto motriz rotacione ao redor dele. Isto
deve acontecer para que o usuário posicione o conjunto para a utilização ou para recolher
quando não estiver em uso.

105
Figura 50 - Disco de rotação utilizado no Kit
Fonte : ELABORADO PELO AUTOR,2015
Como pode ser visto são três discos de 80 mm de diâmetro, sendo que o central possui
80mm de largura e os laterais 20mm. Pelo disco central passa a barra 17, responsável por fazer
a ligação do guidão ao garfo. Nele há também um rasgo no formato de arco. Os três discos são
interligados por um pino que passa pelos dois discos laterais e que se encaixa dentro do rasgo
no formato de arco do disco central. Esta ligação permite a rotação do disco central, e por
consequência do conjunto motriz, em relação aos discos laterais que permanecem parados.
Entre os discos há uma película de borracha, para que não haja o atrito direto entre as faces
também a borracha possa ser pressionada entre as faces garantido um melhor travamento
A rotação deste mecanismo é travado por uma blocagem que pressiona as faces dos três
discos impedindo-os de rotacionar. Basicamente o conjunto motriz necessita de três posições
de ajuste:
(a) O conjunto motriz a 90° com o chão; nesta posição o pino está no fim de
curso do arco do disco central, ou seja, o conjunto não passa desta posição. Este
posicionamento se faz necessário, para que quando o conjunto for recolhido a roda
trativa e o restante do conjunto fique paralelo a cadeira de rodas.
(b) O conjunto motriz na posição alavanca (ângulo de 50 graus em relação a
posição vertical); neste ponto o pino está no fim de curso (contrário ao batente
da posição de 90º). Esta posição se faz necessário pois, a partir dela o cadeirante
movimenta o guidão para a frente, fazendo uma alavanca na cadeira de rodas,
permitindo retirar as rodas dianteiras da cadeira de rodas do contato com o solo.
Esta inclinação, conforme visto na figura 51, pode ser variada de acordo com a
necessidade de maior ou menor altura de elevação das rodas dianteiras. Este
deslocamento é fundamental para a superação de pequenos obstáculos e pode ser

106
ajustado visando o alcance de melhores resultados. O modelo apresentado utiliza
uma elevação máxima de 50mm como requisito de projeto, definida por permitir
ao protótipo vencer pequenos obstáculos, tais como guias e pequenos objetos
localizados abaixo do equipamento.
Figura 51 - Conjunto motriz na posição de direção, com inclinação da cadeira
Fonte : ELABORADO PELO AUTOR,2015
(c) O conjunto motriz na posição direção (ângulo de 45 graus em relação a
posição vertical); O usuário, conforme a melhor ergonomia, posiciona o
conjunto motriz na posição de direção, fazendo a alavanca, descrito
anteriormente. O conjunto então posicionado pode ser travado através da
blocagem que pressiona os discos, impedindo a rotação entre os mesmos. Para
as dimensões utilizadas da cadeira a melhor posição de direção seria o conjunto
motriz a um ângulo de 45 graus com a vertical.
4.4.1.10 – Barra 17 e o garfo
A barra 17, tem o diâmetro externo de 31,75mm e espessura de 3,17mm, possui a função
de interligar o conjunto guidão ao garfo, visto na figura 52, e passa no interior do disco
giratório, por onde se tem uma redução do diâmetro que passa a ser de 30mm; fazendo com que
o conjunto motriz possa rotacionar junto com o disco, conforme explicado anteriormente.

107
A conexão ao guidão ocorre através do sistema de direção apresentando anteriormente,
e está localizado dentro do disco giratório, através dos dois rolamentos. Abaixo do disco a barra
possui um comprimento de 60mm.
Figura 52 - Barra 17 e o garfo utilizados no Kit
Fonte : ELABORADO PELO AUTOR,2015
4.4.1.11 – Barras 18,19,20 e 21
Estas barras possuem a função de fornece mais pontos de ligação entre a cadeira e o kit
e a cadeira, ou seja, mais pontos de sustentação que garante maior rigidez a estrutura como um
todo, são conectadas a cadeira pela mesma presilha utilizada na barra 1 e 2.
As barras 20 e 21, visto na figura 53, possui um diâmetro externo de 25mm,
comprimento de 140mm e espessura de 2,00mm, já as barras 18 e 19 possuem um diâmetro
externo de 31,75mm; comprimento de 188mm e espessura de 3,17mm.

108
Figura 53 - Barras 18,19,20 e 21
Fonte : ELABORADO PELO AUTOR,2015
Para seguir o mecanismo que direciona o Kit para frente, estas barras possuem um ajuste
que permite as barras 19 e 21 o deslizamento em relação as barras 18 e 20 respectivamente, para
travar o deslocamento desses tubos é utilizada a blocagem.
4.4.2 – Componentes ligados a estrutura do Kit
Conforme visto, foi apresentado todos os componentes estruturais e mecanismos que
compõem o Kit. O sistema completo é composto também por peças que permitem o
funcionamento do conjunto, e elas estão ligadas às partes da estrutura.
Estas peças podem ser adquiridas em Kits, que no mercado são vendidos para a
adaptação em bicicletas transformando-as em bicicletas elétricas. Abaixo estão listadas quais
são as peças e suas respectivas funções.
4.4.2.1 – Bateria
A bateria deve ser selecionada tendo-se em vista a sua capacidade, tamanho e peso, para
ser fixada no sistema após a sua montagem. Através de pesquisa e seguindo requisitos para a
alimentação do motor escolhido, viu-se que a bateria de lítio, apresentada na figura 54, de 36v
e 10 Ah, peso aproximadamente de 2,5kg, atendia a solicitação exigida pelo conjunto. Esta
bateria possui uma autonomia média de 30km e fácil recarga em tomadas convencionais, em
um tempo de aproximadamente 4 horas.

109
Figura 54 - Bateria de Lítio 36v e 10 Ah
Fonte: EBIKEBRASIL,2015
Esta bateria possui um comprimento de aproximadamente 400mm, e estará presa ao
conjunto na barra 13.Ela possui uma chave de partida, para que quando o usuário queira usar o
Kit, gire-a, permitindo assim o início do funcionamento do motor de 350W.
4.4.2.2 – Microcontrolador
Também chamado de módulo de controle, visto na figura 55, funciona como um
computador de bordo que controla a velocidade do motor usando dados vindos do acelerador e
também de acordo com a escolha feita pelo usuário, que pode configurar, através do painel
próximo ao guidão, módulos de velocidade que queira utilizar. É bastante utilizado em
bicicletas elétricas que possuem as mesmas configurações de bateria e motor escolhido para
este projeto, justificando a escolha deste componente para realizar o controle de motorização.
O escopo básico dessa programação baseia-se em analisar a variação de tensão enviada
pelo acelerador e realizar um controle PWM subdividido em níveis de duty-cicle buscando
produzir uma aceleração suave ao equipamento, fazendo com que não ocorra patinação no
momento da partida. A medida que os dados são analisados e direcionados as sub-rotinas PWM,
a leitura do sensor de freio é realizada em tempo real e se necessário faz-se o bloqueio imediato
de qualquer movimento dinâmico. Nota-se que a reversão do motor é realizada em conjunto
com o acionamento do sensor de freio. Tal medida obriga o usuário a parar o equipamento para
a efetivação de mudança do sentido de rotação evitando desgastes e danos ao equipamento.
Visando a segurança do cadeirante, um sensor de freio é utilizado neste controlador,
para bloquear o funcionamento do motor ao ser acionado a alavanca de freio. Dessa forma evita-
se o excesso de forca contra eletromotriz gerada pelo motor em situações em que altos níveis

110
de corrente elétrica buscam movimentar o eixo motor mesmo com o travamento desse, gerando
um aquecimento devido a alta potência do motor.
Figura 55 - Microcontrolador usado para realizar interação bateria-motor.
EBIKEBRASIL,2015
4.4.2.3 – Display LED
Localizado próximo ao guidão, para melhor uso do cadeirante, o display de LED, visto
na figura 56, permite a configuração do controle de velocidades do Kit, sendo que este sinal é
enviado ao microcontrolador e possui indicador de carga de baterias e velocímetro.
Figura 56 - Display de LED
Fonte: EBIKEBRASIL,2015

111
4.4.2.4 – Motor Brushless
Durante a escolha de um motor elétrico é necessário a análise de suas características, a
fim de se determinar qual modelo atenda às necessidades do projeto.
Antes uma breve explicação sobre a definição do centro de gravidade que será abordado
nos próximos tópicos como referência para os cálculos de estabilidade com o uso do centro de
gravidade do conjunto, e o centro de gravidade do usuário da cadeira para os cálculos
estruturais.
Centro de gravidade
Um ponto em um corpo material no qual está aplicada a resultante das forças que agem
sobre ele, em virtude da sua presença num campo gravitacional é considerado como sendo o
centro de gravidade (CG). Quando a aceleração da gravidade é a mesma para todos os pontos
do corpo, o CG coincide com o centro de massa (CM). (BEER & JOHNSTON, 1994). Esse
ponto depende da geometria do corpo e da massa das partículas que o compõe, e age como se
toda a massa inercial do sistema estivesse concentrada nele.
Beer & Johnston (1994), defendem que um dado corpo, podendo ser dividido em
diversos outros que possuem formas geométricas mais usuais é considerado um corpo
composto. Para a determinação de seu baricentro basta igualar o momento de seu peso (P) em
relação a uma referência, aos momentos dos pesos das várias partes componentes em relação a
este mesmo ponto, sendo definido pelas equações (26) a (28):
𝑋 ̅ ∑𝑃 = ∑ �̅� 𝑃 (26)
𝑌 ̅ ∑𝑃 = ∑ �̅� 𝑃 (27)
𝑍 ̅ ∑𝑃 = ∑ 𝑧̅ 𝑃 (28)
Para corpos homogêneos, o baricentro coincide com o centroide do sólido de volume V
representativo do corpo, representados pelas equações (29) a (31):
�̅�𝑉 = ∫ �̅� 𝑉 (29)
�̅�𝑉 = ∫ �̅� 𝑉 (30)
𝑧̅𝑉 = ∫ 𝑧̅ 𝑉 (31)

112
Vale salientar que sendo o corpo simétrico em um dos planos, seu centróide se localiza
neste plano, para simetria em dois planos, seu centroide estará localizado na interseção entre
ambos. Por fim, possuindo simetria nos três planos, seu ponto de simetria coincide com seu
centróide. (BEER & JOHNSTON, 1994).
4.4.2.4.1 – Análise do processo de acionamento
Baseados nos trabalhos de Becker (2000), que descreve um modelo de acionamento
manual, a modelagem do sistema do acionamento do conjunto Kit na cadeira de rodas, pode ser
exemplificado segundo o diagrama de corpo livre apresentado na figura 57.
Figura 57 - Diagrama de corpo livre de uma cadeira de rodas em uma pista inclinada
Fonte: BECKER,2000
Sendo:
P = o peso do conjunto,
θ =ângulo de inclinação da pista,
F = A força efetiva de acionamento,
h = A altura do CG do sistema,
d = a distância do CG ao eixo traseiro,
𝑅𝑎= a força de resistência aerodinâmica,
𝑅𝑟𝑓 =a força de resistência ao rolamento no eixo dianteiro,
𝑅𝑟𝑡 = a força de resistência ao rolamento no eixo traseiro
L = distância entre eixos

113
A distribuição normal do peso nos eixos é dada respectivamente, por:
𝑁𝑓 = 𝑃𝑑
𝐿𝑐𝑜𝑠𝜃 (32)
𝑁𝑡 = 𝑃(𝐿−𝑑)
𝐿𝑐𝑜𝑠𝜃 (33)
Apesar do Kit proporcionar baixa velocidade, resultando assim em um valor desprezível
de resistência aerodinâmica, o seu valor é calculado para implementação nas equações de
somatório de forças, e seu valor pode ser obtido através da equação 34:
𝑅𝑎 =1
2𝜌𝑎(𝑣𝑟)
2𝐶𝑋𝐴 (34)
Sendo:
𝜌 = 1,225 [𝐾𝑔
𝑚3],a densidade do ar
𝐶𝑥 =0,85; coeficiente de arrasto aerodinâmico da cadeira de rodas;
𝑣𝑟[m/s] = velocidade relativa entre a cadeira e o ar;
A[m²] = Área frontal da cadeira de rodas.
A resistência ao rolamento é a principal força de resistência em baixas velocidades, ela
se inicia no exato momento que o veículo começa seu movimento. Quando a roda começa a
girar ocorre uma deformação na área de contato, para que ocorra essa deformação um pouco de
energia é gasta, mas ela não é completamente recuperada no final da área de contato, conforme
o amortecimento interno do material. Segundo Genta (2015), a força de resistência ao rolamento
pode ser influenciado por diversos fatores dentre eles a pressão dos pneus, a temperatura, pela
força normal e etc. Outro fator que influencia na resistência ao rolamento é o tipo e as condições
do piso, a qual serviu como base para se obter o valor de resistência ao rolamento, conforme a
tabela 7:

114
Tabela 7 - Valores de coeficiente de rolamento para diferentes tipos de piso Tipo e condições ƒ0
Concreto muito bom 0,008-0,010
Asfalto muito bom 0,010-0,0125
Concreto médio 0,010-0,015
Pavimento muito bom 0,015
Macadame muito bom 0,013-0,016
Asfalto médio 0,018
Concreto em péssimas condições 0,02
Pavimentação em bloco muito bom 0,02
Macadame muito bom 0,018-0,023
Asfalto em condições péssimas 0,023-0,028
Macadame empoeirado 0,033-0,055
Pavimentação em pedra bom 0,045
Pavimento de pedra em péssimas condições 0,085
Neve (50mm de camada) 0,025
Neve (100mm de camada) 0,037
Rodovia natural sem manutenção 0,080-0,160
Areia 0,15-0,30
Fonte: Genta,2015
Levando em consideração os diversos tipos de piso, e as diferentes qualidades do mesmo, o tipo
escolhido foi o de asfalto médio, cujo valor é 0,018.
As forças de resistência ao rolamento:
𝑅𝑟𝑓 = 𝜇𝑓𝑁𝑓 = 𝜇𝑓𝑃𝑑
𝐿𝑐𝑜𝑠𝜃 (35)
𝑅𝑟𝑡 = 𝜇𝑡𝑁𝑡
2= 𝜇𝑡
𝑃(𝐿−𝑑)
𝐿𝑐𝑜𝑠𝜃 (36)
A força efetiva no eixo frontal (eixo acionado):
𝐹 = 𝐹𝐹𝑃𝑀𝑅
𝑟− 𝑅𝑟𝑓 (37)
Sendo:
𝐹𝐹𝑃𝑀 = força de propulsão fornecida ao conjunto pelo motor;
𝑅/𝑟 =relação entre os raios da roda e o aro;

115
Quando o movimento já se iniciou, adota-se uma potência média fornecida ao conjunto
𝑃𝐹𝑃𝑀, sendo então, o valor de 𝐹𝐹𝑃𝑀, uma função desta potência instantânea do conjunto:
𝐹𝐹𝑃𝑀 =𝑃𝐹𝑃𝑀
𝑣𝑥 (38)
Fazendo a somatória as forças atuantes no eixo x:
∑𝐹𝑥 = 𝑎𝑥𝑀𝑡 = 𝐹 − 𝑅𝑟𝑡 − 𝑃𝑠𝑖𝑛𝜃 − 𝑅𝑎 (39)
Sendo:
𝑀𝑡 = Massa total do conjunto.
Logo:
𝑎𝑥 = 𝐹−𝑅𝑟𝑡−𝑃𝑠𝑖𝑛𝜃−𝑅𝑎
𝑀𝑡 (40)
Onde:
𝑎𝑥 = é a aceleração instantânea do conjunto, visto que 𝐹𝐹𝑃𝑀 não é mais constante.
Seguindo o modelo proposto por Becker (2000), um cadeirante cujo peso do conjunto
total, ou seja, a cadeira mais o cadeirante, a ser movimentado seja de aproximadamente 100kg,
necessita de uma potência de 100w para o deslocamento no plano e 150w para deslocamento
em rampa, com inclinação de 12%, conforme norma ABNT 9054. Assim um motor de 350W,
que possui um diâmetro de aproximadamente 150 mm e um peso de 5kg, satisfaz a força trativa
necessária para movimentar a cadeira.
Considerando seus aspectos estruturais, o fato deste motor (Figura 58) não possuir
escovas, aumenta significativamente sua vida útil livre de manutenções, já que os motores
brushless, são muito mais eficientes do que motores elétricos com escovas.

116
Figura 58 - Motor Brushless
Fonte: EBIKEBRASIL,2015
A utilização deste motor dispensa a necessidade de um sistema de transmissão de
movimento entre o motor e a roda movida, visto que o eixo do motor é coincidente ao eixo da
roda trativa. O motor é ligado a roda trativa, que possui um aro de 16 polegadas, através do
enraizamento, que liga o motor a aro da roda, feito com raios que podem ser de e aço, titânio,
carbono ou alumínio. O motor juntamente com o sistema do microcontrolador não permite a
recarga quando utilizado em uma descida por exemplo.
4.4.2.5 – Freios
Um componente importante neste sistema é o projeto dos freios. Para que o sistema
permita uma velocidade segura, deverá possuir um sistema seguro de freios para evitar qualquer
possibilidade de acidentes ou quedas. Sendo assim a instalação de um freio a disco na roda
dianteira, visto na figura 59, foi idealizada por oferecer maior segurança. O motor elétrico
possui a flange que permite a instalação de um disco de freio.

117
Figura 59 - Freio a disco acoplado no motor
Fonte: EBIKEBRASIL,2015
O acionamento do freio acontece na manopla do guidão, como os de bicicletas. Visando
a segurança do cadeirante, um sensor de freio é utilizado para bloquear o funcionamento do
motor ao ser acionado a alavanca de freio. Este dispositivo impede que o motor acelere em
situações que o eixo motor esteja parado. Dessa forma evita-se o excesso de forca contra
eletromotriz gerada pelo motor em situações em que altos níveis de corrente elétrica buscam
movimentar o eixo motor mesmo com o travamento desse, gerando um aquecimento devido a
alta potência do motor.
4.5 – Análise de estabilidade estática e dinâmica
Seguindo o modelo proposto por Becker (2000) a análise de estabilidade estática e
dinâmica em cadeira de rodas é realizada a partir do somatório de momentos gerados pelas
forças atuantes sobre a mesma em relação a um eixo de referência pré-determinado TT (eixo
de tombamento), visualizado na figura 60. Para o modelo apresentado neste trabalho, é
utilizado o sistema de coordenadas XYZ, diagrama de corpo livre para cadeiras com
configuração três rodas.
Ao analisar a estabilidade de um sistema é necessário considerar os movimentos do
mesmo. Portanto para o modelo proposto é realizada a análise estática e dinâmica a fim de obter
os ângulos e velocidade limites para tombamento.

118
Figura 60 - Eixo de tombamento TT
Fonte: BECKER,2000
4.5.1 – Estabilidade Estática
A análise de estabilidade estática para as duas configurações é feita levando-se em
consideração que as cadeiras de rodas podem sofrer tombamento nos eixos Pitch e Roll,
respectivamente, eixos longitudinal e lateral, quando posicionadas em pistas inclinadas ou em
movimento retilíneo uniforme.
Figura 61 – a) Diagrama de corpo livre de um triciclo em uma pista inclinada
(tombamento para trás) – b) Diagrama de corpo livre de um triciclo em uma pista
inclinada (tombamento para frente)
Fonte: BECKER,2000
Onde:
L = Comprimento entre eixos dianteiro e traseiro
d = Distância entre o CG e o eixo tras. sobre o eixo coord. X
b = Distância entre o CG e o eixo tras. sobre o eixo coord. Y
h = Altura do CG em relação ao solo
P= Peso do sistema equipamento/usuário

119
Observando a figura 61, tem-se que a condição limite do ângulo θ (ângulo Pitch) limite
para o tombamento da cadeira de rodas é obtido através do somatório de momentos com relação
ao eixo TT (eixo de tombamento). Desta forma, para ambas as configurações tem-se:
θ = 𝑡𝑔−1 (𝑑
ℎ) (41)
Observa-se que para a análise da estabilidade longitudinal, tombamento para trás, a
configuração adotada para os chassis (três ou quatro rodas) não possui influência. O fator
determinante neste caso é a altura do CG e a sua distância ao eixo traseiro.
Para análise de estabilidade quanto ao tombamento para frente, o eixo de tombamento
TT, é alterado sendo então posicionado no eixo da roda frontal, e os cálculos feitos a partir desta
referência.
O CG da cadeira deve ser posicionado próximo ao eixo traseiro para que o tombamento
longitudinal para a frente ocorra, para ambas as configurações, apenas em rampas muito
inclinadas. O valor do ângulo θ limite pode ser calculado por:
θ = 𝑡𝑔−1 (𝐿−𝑑
ℎ) (42)
Para a estabilidade lateral, o eixo de tombamento é alterado, conforme visto na figura 62,
sendo agora, a linha que une os pontos de contato das rodas frontal e traseira com o solo. Os
ângulos limites de γ (Roll) para a configuração de três rodas são obtidos da seguinte maneira:
deve-se primeiro calcular o valor de b que juntamente com h são os braços de momentos em
relação ao eixo de tombamento TT. Assim:
γ = 𝑡𝑔−1 (𝑏
𝐿) (43)
Sendo que:
b = (𝐿 − 𝑑) sin(γ) (44)

120
Figura 62 - a)Diagrama de corpo livre de um triciclo em uma pista inclinada –
b)Diagrama de corpo livre de uma cadeira de rodas em uma pista inclinada
Fonte: BECKER,2000
Deste modo, fazendo-se a somatória de momentos em relação ao eixo TT, para situação
limite em que apenas as rodas pertencentes ao eixo TT possuem reação normal e a cadeira está
na iminência de tombar:
Phsin = 𝑃𝑏 cos(γ) (45)
Obtendo, como condição limite, o valor do ângulo
γ = 𝑡𝑔−1 (𝑏
ℎ) (46)
4.5.2 – Estabilidade Dinâmica
A análise de estabilidade dinâmica também é feita levando-se em consideração os
eixos,Roll, Pitch e Yaw. Mas neste caso, é feito um equacionamento mais geral, onde podem
ser consideradas situações mais complexas, como por exemplo, a análise da cadeira de rodas
manobrando em curva sobre uma rampa com inclinação dupla (ângulos θ e γ não nulos). Este
equacionamento utiliza uma notação matricial/vetorial e matrizes de transformação entre o
sistema de coordenadas inercial (0) e o sistema acoplado à cadeira (1), visto na figura 63. Ao
invés de utilizar as equações no sistema inercial, utiliza-se o sistema acoplado à cadeira para
realizar a somatória de momentos com relação ao eixo de tombamento TT.

121
Figura 63 – a)Sistemas de coordenadas utilizado para o cálculo da estabilidade
dinâmica- b) Diagrama de corpo livre para análise de estabilidade dinâmica
Fonte: ALVES,2010
Onde:
δ = Ângulo efetivo de esterçamento;
ρ = raio de curvatura.
Durante a manobra em curva encontra-se a presença de três forças, sendo estas a forca
radial atuante no CG, a forca inercial devido a aceleração e a forca peso, representadas
respectivamente pelos vetores (47), (48) e (49).
E = 𝑚𝑡 (𝑣𝑥
ρ) (47)
A = −𝑣𝑥𝑎𝑥 [100] (48)
P = −𝑚𝑡g [001] (49)

122
Onde:
𝑚𝑡 - Massa total (equipamento / usuário);
𝑣𝑥 - Velocidade longitudinal;
g - Aceleração da gravidade;
ax - Aceleração tangencial.
As matrizes de transformação são formuladas a partir da análise do DCL representado
na figura 63, os ângulos de rotação, e agem respectivamente sobre os eixos X, Y e Z.
𝑅𝑥,γ = [1 0 00 𝑐𝑜𝑠γ −𝑠𝑖𝑛γ0 𝑠𝑖𝑛γ 𝑐𝑜𝑠γ
] (50)
𝑅𝑦,θ = [𝑐𝑜𝑠θ 0 𝑠𝑖𝑛θ0 1 0
−sinθ 0 𝑐𝑜𝑠θ] (51)
𝑅𝑧,α = [𝑐𝑜𝑠α sinα 0sinα cosα 00 0 1
] (52)
A partir da combinação das matrizes (64), (65) e (66) e possível a obtenção da matriz
de transformação do sistema de coordenadas inercial fixo 0 para o móvel 1 (BECKER, 2000).
𝑅01 = [
𝑐𝑜𝑠α𝑐𝑜𝑠θ 𝑐𝑜𝑠α𝑠𝑖𝑛θsinγ − 𝑠𝑖𝑛α𝑐𝑜𝑠γ 𝑠𝑖𝑛α𝑠𝑖𝑛γ + 𝑐𝑜𝑠α𝑠𝑖𝑛θ𝑐𝑜𝑠γ𝑠𝑖𝑛α𝑐𝑜𝑠θ 𝑐𝑜𝑠α𝑐𝑜𝑠γ + 𝑠𝑖𝑛α𝑠𝑖𝑛θ𝑠𝑖𝑛γ 𝑠𝑖𝑛α𝑠𝑖𝑛θ𝑐𝑜𝑠γ − 𝑐𝑜𝑠α𝑠𝑖𝑛γ−𝑠𝑖𝑛θ 𝑠𝑖𝑛γ𝑐𝑜𝑠θ 𝑐𝑜𝑠γ𝑐𝑜𝑠θ
] (53)
O braço de momento do sistema e representado pelo vetor:
{𝑘} = [0 ℎ 𝑏] (54)
Com posse da matriz de transformação entre os sistemas de coordenadas e os vetores das
forças atuantes sobre o sistema fixo, torna-se possível a representação dessas forças sobre o
sistema móvel:

123
{𝐸1} = 𝑅01{𝐸0} (55)
{𝐸1} =𝑚𝑡𝑣𝑥
ρ (56)
{𝐴1} = 𝑅01{𝐴0} (57)
{𝐴1} = 𝑚𝑡𝑎𝑡 (58)
{𝑃1} = 𝑅01{𝑃0} (59)
{𝑃1} = −𝑚𝑡𝑔 (60)
Onde, os vetores colunas, {𝐸1} , {𝐴1} e {𝑃1} são representados por:
{𝐸1} = [𝑐𝑜𝑠α𝑠𝑖𝑛θsinγ − 𝑠𝑖𝑛α𝑐𝑜𝑠γ𝑐𝑜𝑠α𝑐𝑜𝑠γ + 𝑠𝑖𝑛α𝑠𝑖𝑛θ𝑠𝑖𝑛γ
𝑠𝑖𝑛γ𝑐𝑜𝑠θ] (61)
{𝐴1} = [𝑐𝑜𝑠αsinθ𝑠𝑖𝑛α𝑐𝑜𝑠θ−𝑠𝑖𝑛θ
] (62)
{𝑃1} = [𝑠𝑖𝑛α𝑠𝑖𝑛γ + 𝑐𝑜𝑠α𝑠𝑖𝑛θ𝑐𝑜𝑠γ𝑠𝑖𝑛α𝑠𝑖𝑛θ𝑐𝑜𝑠γ − 𝑐𝑜𝑠α𝑠𝑖𝑛γ
𝑐𝑜𝑠γ𝑐𝑜𝑠θ] (63)
Pelo somatório de momentos em relação ao eixo de tombamento TT igualado a zero o
qual garante a estabilidade do sistema, isolando-se o termo desta equação e possível determinar
a velocidade limite para a não ocorrência de tombamento lateral.
∑𝑀 = {𝑘}{𝐸1} + {𝑘}{𝐴1} + {𝑘}{𝑃1} = 0 (64)
𝑣𝑥 = √ρ(𝑎𝑡{𝑘}{𝐴1}+𝑔{𝑘}{𝑃1})
{𝑘}{𝐸1} (65)

124
A partir desta última equação torna-se capaz a verificação de possíveis combinações de
inclinações entre os planos do sistema coordenado móvel que ocasionem o tombamento lateral
do equipamento durante sua utilização pelo usuário.
4.6–Modelo em elementos finitos
Os modelos de elementos finitos, para a realização das análises estruturais, foram gerados
a partir do modelo geométrico existente do conjunto em questão, que foi importado no software
Hypermesh. A malha foi gerada com elementos de casca, tetraédricos e hexaédricos lineares, e
as análises foram realizadas software Abaqus.
A modelagem e análise por elementos finitos se divide em 03 etapas: pré - processamento,
análise e pós-processamento. Neste método, o domínio da solução é dividido em uma malha de
pontos ou nós discretos. Assim o sistema de equações aplicados a algum problema físico pode ser
empregado para cada nó e suas derivadas substituídas por diferenças finitas divididas.
Figura 64 - Modelo do conjunto em elementos finitos
Fonte: ELABORADO PELO AUTOR,2015

125
4.7 – Descrição do modelo em elementos finitos
Inicialmente a resolução de um problema passa pela fase de modelagem, que é uma
representação de um sistema físico real, a reprodução de alguma coisa, um fenômeno, um
produto, visando predizer o comportamento sob certas condições a serem estudadas. Assim,
simplificações, hipóteses e formulações matemáticas são estabelecidas, como é o caso da
modelagem matemática empregada através do método dos elementos finitos em problemas da
mecânica do contínuo. A modelagem computacional de elementos finitos consiste em quatro
passos:
1. Modelagem da geometria;
2. Geração da malha (Discretização);
3. Especificação das propriedades e dos materiais;
4. Especificações das condições de contorno, carregamentos, etc.
No passo de modelagem geométrica, as simplificações de geometria do modelo físico já
definem o tipo de elementos a serem empregados, a seguir são indicados como foram
modelados os componentes, sendo que o tamanho médio de elementos foi de 5mm: (Os tipos
de elementos, de acordo com o template do Abaqus, utilizado no Hypermesh):
1- Modelagem unidimensional (1D), usando elementos de barra, foi utilizado para o
modelamento de parafusos e do enraiamento das rodas.
Elementos rígidos (Kincoup):Elemento que não possui deformação quando
submetido as cargas. Possui um nó de referência que transmite o deslocamento
para o nó ou nós dependentes.
Elementos rígidos (Coup_Dis):Elemento que não possui deformação quando
submetido as cargas. Possui um nó de referência que distribui o valor da massa
ou força para o nó ou nós dependentes.
Elementos de Barra (Beam):Possuem cisalhamento e flexão. O comportamento
pode ser calculado de forma exata a partir dos deslocamentos e ângulos dos nós
de suas extremidades.
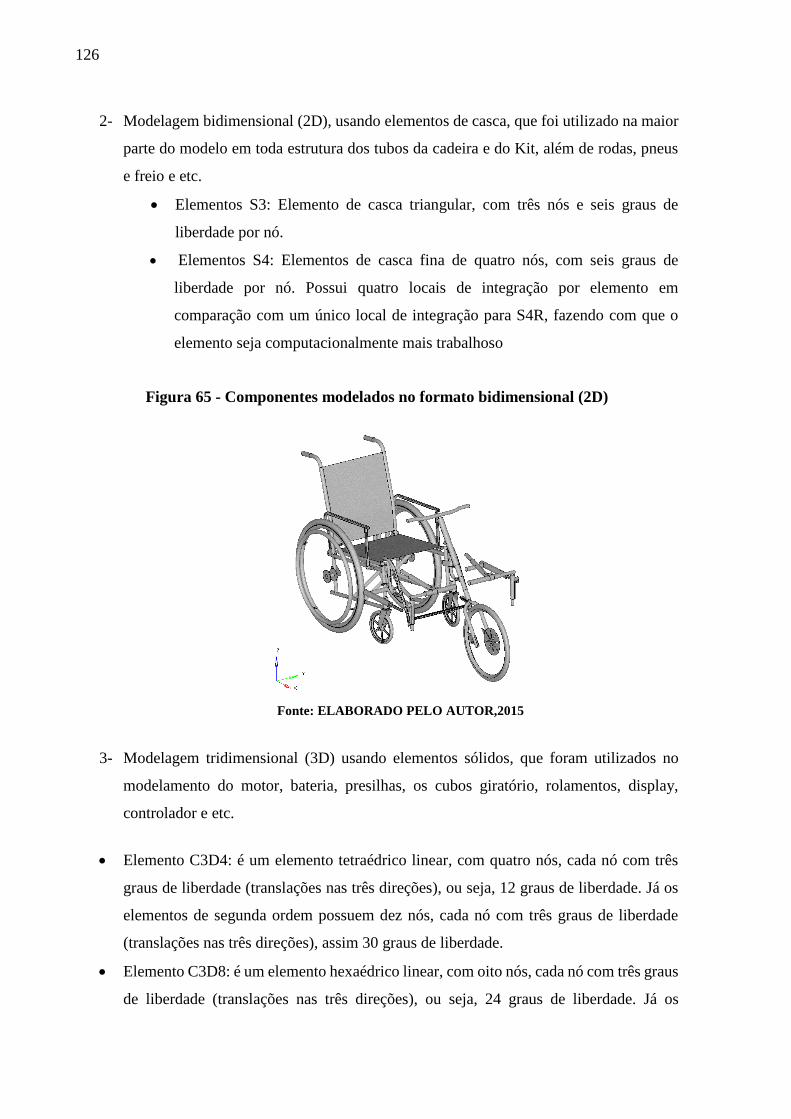
126
2- Modelagem bidimensional (2D), usando elementos de casca, que foi utilizado na maior
parte do modelo em toda estrutura dos tubos da cadeira e do Kit, além de rodas, pneus
e freio e etc.
Elementos S3: Elemento de casca triangular, com três nós e seis graus de
liberdade por nó.
Elementos S4: Elementos de casca fina de quatro nós, com seis graus de
liberdade por nó. Possui quatro locais de integração por elemento em
comparação com um único local de integração para S4R, fazendo com que o
elemento seja computacionalmente mais trabalhoso
Figura 65 - Componentes modelados no formato bidimensional (2D)
Fonte: ELABORADO PELO AUTOR,2015
3- Modelagem tridimensional (3D) usando elementos sólidos, que foram utilizados no
modelamento do motor, bateria, presilhas, os cubos giratório, rolamentos, display,
controlador e etc.
Elemento C3D4: é um elemento tetraédrico linear, com quatro nós, cada nó com três
graus de liberdade (translações nas três direções), ou seja, 12 graus de liberdade. Já os
elementos de segunda ordem possuem dez nós, cada nó com três graus de liberdade
(translações nas três direções), assim 30 graus de liberdade.
Elemento C3D8: é um elemento hexaédrico linear, com oito nós, cada nó com três graus
de liberdade (translações nas três direções), ou seja, 24 graus de liberdade. Já os

127
elementos de segunda ordem possuem vinte nós, cada nó com três graus de liberdade
(translações nas três direções), assim 60 graus de liberdade.
Figura 66 - Componentes modelados no formato tridimensional (3D)
Fonte: ELABORADO PELO AUTOR,2015
4.7.1 – Parâmetros utilizados no modelamento
Para o desenvolvimento das análises a serem realizadas alguns parâmetros são considerados no
modelo, em busca de um modelo que possua as condições mais próximas as reais. Algumas
condições são gerais, ou seja, utilizadas em todas as análises como por exemplo:
Atrito utilizado:
As blocagens, utilizadas para travar as regulagens, foram representadas como contato “tie”,
ou seja, não há escorregamento de uma superfície sobre a outra. Esta mesma representação foi
utilizada nas travas das presilhas. Os demais atritos utilizados foram utilizados de acordo com
a análise efetuada.
Materiais empregados:
O material usado para as barras estruturais da cadeira e do Kit, o cubo giratório, o disco, o
raio da roda frontal, os enraiamentos das rodas foi a liga de alumínio 6351, cujas características

128
utilizadas foram densidade 2,7kg/m³, módulo de elasticidade E = 70GPa, Poisson de ν = 0,3 e
tensão de escoamento de 280MPa.
O aço foi utilizado nos parafusos de fixações da estrutura, na mesa do guidão, nas travas da
presilha, no freio a disco da roda frontal, no rolamento do disco de rotação, e em elementos de
fixação da cadeira de rodas. As características utilizadas foram densidade 7,89kg/m³, módulo de
elasticidade E = 210GPa, Poisson de ν = 0,3 e tensão de escoamento de 210MPa.
De acordo com pesquisa realizada o material mais utilizado na fabricação de pneus é o isopreno,
que na modelagem foi utilizado nos pneus da cadeira e do Kit, cujas características utilizadas
foram densidade 0,94kg/m³, módulo de elasticidade E = 1,7GPa, Poisson de ν = 0,5.
Componentes como a bateria, o display, o motor e o controlador foram utilizadas materiais, na
qual foi calibrado a densidade até se chegar ao peso correto do componente.
O peso total do conjunto (cadeira de rodas + Kit) é de 35,80Kg; porém como no modelo
estático não foram modelado as blocagens, na qual foi utilizado contato para representar. Assim
sendo, no modelo para cálculo de potência do motor e o modelo utilizado no software Working
Model, foi adicionado uma massa de 0,5Kg, que representa o peso aproximado das blocagens,
assim o modelo passa a ter o peso total de 36,30Kg
Para as presilhas que realizam a ligação da cadeira com o Kit, foi utilizado um plástico
denominado poliestireno, que de acordo Saron (2008) apresenta as seguintes características:
densidade 1,02kg/m³, módulo de elasticidade E = 2,7GPa, Poisson de ν = 0,38.
Modelo do usuário da cadeira de rodas:
De acordo com dados do IBGE (2015), a altura média do homem brasileiro é de 1,72m
e 75kg, esses dados foram considerados na simulação, na qual foi criado um elemento de massa
de 75kg, posicionado no centro de gravidade do corpo humano, encontrado através do software
Hypermesh, na qual foi modelado um boneco, e a partir deste, encontrada as coordenadas do
ponto.
4.8 – Análises estáticas efetuadas
A análise numérica desenvolvida foi realizada, visando verificar a resistência estática do
Kit, quando submetidos a esforços particularmente elevados, que poderão ocorrer
ocasionalmente durante a sua utilização. Para tais simulações forma aplicadas condições de
contorno de acordo com a análises efetuadas. A seguir são descritas as análises efetuadas:

129
4.8.1 – Análise de peso próprio (aceleração da gravidade)
O primeiro passo do dimensionamento estrutural, é a verificação de que a estrutura
completa (cadeira de rodas + Kit) suporta o peso próprio, juntamente com a massa do usuário,
conforme dito anteriormente, um homem de 1,72m e 75kg.Sendo assim o peso total do conjunto
é de 110,80Kg.
A análise foi realizada através da aplicação aceleração da gravidade, cujo valor é de
9,81m/s², sobre todos os componentes. As condições de contorno impostas no modelo, além
das condições gerais já descritas, foram:
Resistência ao rolamento de 0,018 entre a roda frontal e a roda traseira e o solo modelado
como uma placa rígida. Este valor de fricção tem o objetivo de simular a resistência ao
rolamento da roda no solo.
Figura 67 - Modelo submetido a aceleração da gravidade de 9,81 m/s²
Fonte: ELABORADO PELO AUTOR,2015
4.8.2 – Análise estrutural do conjunto quando a cadeira passar em um buraco
Para esta análise o primeiro passo seria conhecer qual carregamento age na estrutura
quando a mesma é submetida a passagem em um buraco. Para se ter estes valores fez-se o uso
do software Working model, na qual foi modelado, de forma simplificada, em um sistema 2D

130
o conjunto (cadeira de rodas, kit, usuário), e a partir das simulações, foi definido os valores de
força agindo no sistema.
Este software é uma representação simplificada do que seria a situação real na estrutura
e pode ser utilizado para se ter referência de qual a grandeza dos esforços que estão agindo na
estrutura.
Alguns parâmetros, podem ser medidos diretamente como a posição, a velocidade, a
aceleração, o impulso, o impulso angular, força de retenção e de torção, a gravidade, a energia
cinética, energia potencial, gravitacional e a potência. Esses valores podem ser registrados e
exibidos em gráficos em tempo real. (Working Model, 2007).
A figura 68 ilustra o modelo 2D, feito em escala real.
Figura 68 - Modelo construído no software Working Model
Fonte: ELABORADO PELO AUTOR,2015
O modelo foi construído através de polígonos, que buscam representar os componentes
que são visto no conjunto. Os componentes construídos possuem tamanhos reais e foram
criados propriedades, para a adição das massas, coeficientes de atrito e elasticidade.
Para a simulação foi modelado uma pista, conforme visto na figura 68, que possui um
buraco de altura 100mm e comprimento total de 500mm.
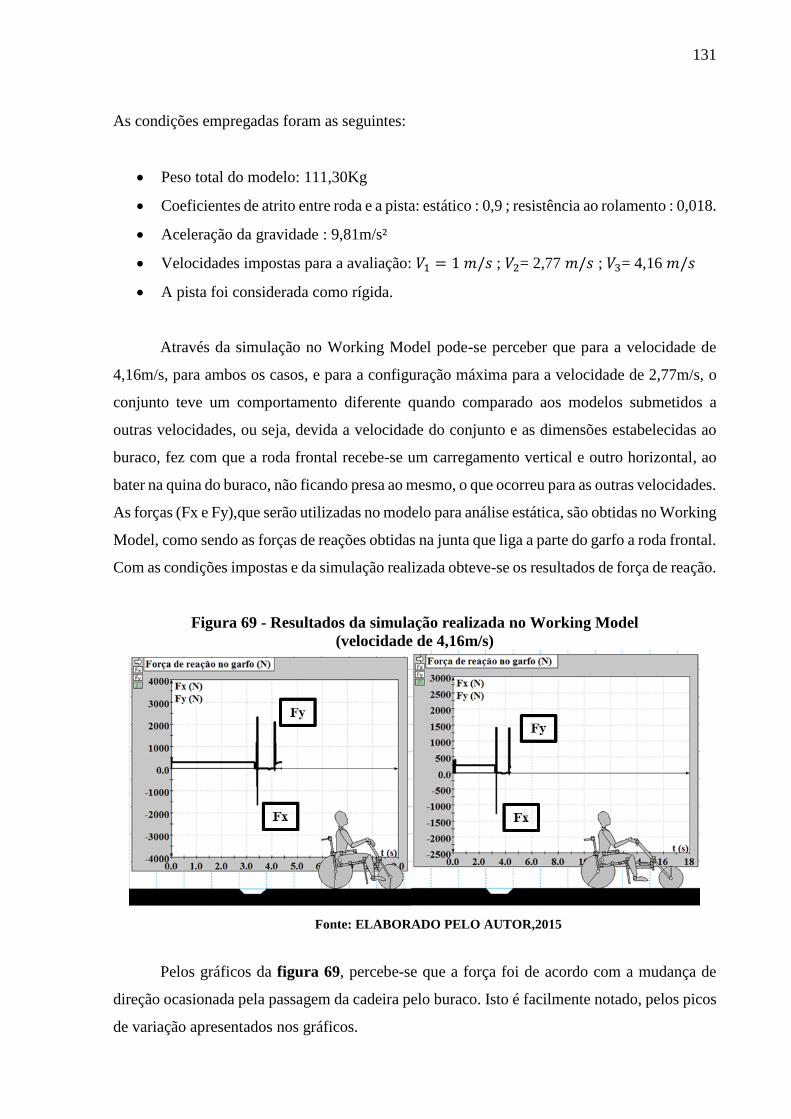
131
As condições empregadas foram as seguintes:
Peso total do modelo: 111,30Kg
Coeficientes de atrito entre roda e a pista: estático : 0,9 ; resistência ao rolamento : 0,018.
Aceleração da gravidade : 9,81m/s²
Velocidades impostas para a avaliação: 𝑉1 = 1 𝑚/𝑠 ; 𝑉2= 2,77 𝑚/𝑠 ; 𝑉3= 4,16 𝑚/𝑠
A pista foi considerada como rígida.
Através da simulação no Working Model pode-se perceber que para a velocidade de
4,16m/s, para ambos os casos, e para a configuração máxima para a velocidade de 2,77m/s, o
conjunto teve um comportamento diferente quando comparado aos modelos submetidos a
outras velocidades, ou seja, devida a velocidade do conjunto e as dimensões estabelecidas ao
buraco, fez com que a roda frontal recebe-se um carregamento vertical e outro horizontal, ao
bater na quina do buraco, não ficando presa ao mesmo, o que ocorreu para as outras velocidades.
As forças (Fx e Fy),que serão utilizadas no modelo para análise estática, são obtidas no Working
Model, como sendo as forças de reações obtidas na junta que liga a parte do garfo a roda frontal.
Com as condições impostas e da simulação realizada obteve-se os resultados de força de reação.
Figura 69 - Resultados da simulação realizada no Working Model
(velocidade de 4,16m/s)
Fonte: ELABORADO PELO AUTOR,2015
Pelos gráficos da figura 69, percebe-se que a força foi de acordo com a mudança de
direção ocasionada pela passagem da cadeira pelo buraco. Isto é facilmente notado, pelos picos
de variação apresentados nos gráficos.

132
Através destes resultados, elaborou-se o modelo estático, onde se aplicaria as forças
encontradas, para a avaliação estrutural do conjunto submetido ao carregamento.
A análise foi realizada mantendo a aplicação aceleração da gravidade, cujo valor é de
9,81m/s², sobre todos os componentes, e posteriormente aplicando os carregamentos. As
condições de contorno impostas no modelo foram:
As cargas encontradas na simulação no software Working Model, foram aplicadas na
região do garfo do kit. Sendo a aceleração aplicada em X, ou as cargas aplicadas no
garfo no eixo X e Z.
Resistência ao rolamento de 0,018 entre a roda frontal e a roda traseira e o solo,
modelado como uma placa rígida.
Figura 70 - Modelo submetido a aplicação das forças aplicadas no garfo
Fonte: ELABORADO PELO AUTOR,2015
A simulação realizada, mostrou que para ambas as configurações, o resultado
apresentou que a roda frontal recebeu um carregamento vertical e outro horizontal, conforme
visto na figura 70.
Para as velocidades de 2,77m/s e 1,0 m/s o modelo apresentou um comportamento
diferente, fazendo com que o conjunto ficasse preso a buraco, ou seja, fazendo com que o
conjunto sofresse uma desaceleração, conforme visto na figura 72, para a configuração normal.
Já para a configuração máxima, para a velocidade de 2,77m/s, a roda frontal recebeu um
carregamento vertical e outro horizontal, e para a velocidade de 1m/s o conjunto sofreu uma
desaceleração. Com isto, foi medida a desaceleração que a roda frontal recebe, e este valor foi
utilizado no conjunto para realizar a análise estática, conforme visto na figura 71. A análise foi

133
realizada sob as mesmas condições descritas anteriormente, e acrescentando uma restrição em
Y e Z no eixo das rodas traseiras para estabilidade da análise.
Figura 71 - Desaceleração e carregamentos atuantes no conjunto ao passar por um
buraco com a velocidade de 2,77m/s para os modelos:
a) Configuração normal b)Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Com isto, estes valores foram utilizados no conjunto para realizar a análise estática,
onde foi aplicado uma aceleração em X, conforme visto na figura 72, de acordo com o valor
obtido.
Figura 72 - Modelo submetido a aceleração
Fonte: ELABORADO PELO AUTOR,2015

134
Assim sendo, os valores aplicados no modelo estático podem ser vistos na tabela 8,
ressaltando que para a velocidade de 4,16m/s aplicou-se uma carga e para as demais velocidades
uma aceleração, devido ao resultado da simulação obtida no Working Model.
Tabela 8 - Resultados de carregamentos atuante devido a velocidade imposta, quando o
conjunto passar por um buraco
Velocidade
imposta ao
modelo (m/s)
Configuração Normal Configuração Máxima Desaceleração em X (G)
Força
em X (N) Força
em Z (N) Força
em X (N) Força
em Z (N) Configuração
Normal Configuração
Máxima
1 ---------- ---------- ---------- ---------- 0,8 0,85 2,77 ---------- ---------- 1850 1450 1,5 ---------- 4,16 1650 2027 2400 2150 ---------- ----------
Fonte: ELABORADO PELO AUTOR,2015
Para se verificar se o modelo elaborado estava coerente e também a precisão dos
resultados obtidos no software Working Model, foram obtidas as forças de reações nas rodas,
quando se aplica a aceleração da gravidade no modelo, e o resultado foi comparado com o
obtido na simulação do Abaqus, conforme visto na figura 73 e figura 74.
Figura 73 - Comparativo de força de reação encontrada nos dois softwares utilizados –
Configuração normal
Fonte: ELABORADO PELO AUTOR,2015

135
Figura 74 - Comparativo de força de reação encontrada nos dois softwares utilizados –
Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Pelo comparativo pode-se perceber que o software, apesar de ser uma representação
simplificada das condições reais, apresentou resultados bem compatíveis quando comparado ao
de maior recurso (ABAQUS), na análise estática. Para a configuração normal, conforme
explicado anteriormente na figura 36, os resultados apresentaram uma diferença de 0,25% para
a parte traseira da cadeira, e uma diferença de 2,19% para a parte frontal da cadeira. Para a
configuração máxima os resultados apresentaram uma diferença de 1,33% para a parte traseira
da cadeira, e uma diferença de 0,79% para a parte frontal da cadeira.
4.8.3– Análise estrutural do conjunto submetido a passagem por um degrau
Para esta análise também foi utilizado o software Working Model para se conhecer a
força que age sobre o conjunto durante a passagem da cadeira sobre o degrau.
Para a simulação foi modelado uma pista, conforme visto na figura 75, que possui um
degrau de altura 100mm e comprimento total de 500mm.
As condições empregadas foram as seguintes:
Peso total do modelo: 111,30Kg
Coeficientes de atrito entre roda e a pista: estático : 0,9 ; resistência ao rolamento : 0,018.
Aceleração da gravidade : 9,18m/s²
Velocidades impostas para a avaliação: 𝑉1 = 1 𝑚/𝑠 ; 𝑉3= 4,16 𝑚/𝑠
A pista foi considerada como rígida.

136
As forças (Fx e Fy), que serão utilizadas no modelo para análise estática, são obtidas no
Working Model, como sendo as forças de reações obtidas na junta que liga a parte do garfo a
roda frontal.Com as condições impostas e da simulação realizada obteve-se os resultados de
força de reação.
Figura 75 - Resultados da simulação realizada no Working Model (velocidade de
4,16m/s) para os modelos: a) Configuração normal b)Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Destes resultados apresentados, obteve-se as forças que atuantes que serão utilizadas na
análise estática. Os resultados são mostrados na tabela 9, de acordo com a velocidade imposta
ao modelo, para as duas configurações.
Tabela 9 - Resultados de carregamentos atuante devido a velocidade imposta, quando o
conjunto passar por um degrau
Velocidade
imposta ao
modelo (m/s)
Configuração Normal Configuração Máxima
Força
em X (N) Força
em Z (N) Força
em X (N) Força
em Z (N)
1 1100 800 800 500
4,16 4100 3727 3250 2500
Fonte: ELABORADO PELO AUTOR,2015
Através destes resultados, elaborou-se o modelo estático, onde se aplicaria as forças
encontradas, para a avaliação estrutural do conjunto submetido ao carregamento.

137
A análise foi realizada mantendo a aplicação aceleração da gravidade, cujo valor é de 9,81m/s²,
sobre todos os componentes, e posteriormente aplicando os carregamentos. As condições de
contorno impostas no modelo foram:
As forças encontradas na simulação no software Working Model, foram aplicadas na
região do garfo do kit. As cargas foram divididas por dois devido a roda frontal ser
fixada por duas regiões no garfo, e foram aplicadas em X e Z simultaneamente.
Resistência ao rolamento de 0,018 entre a roda frontal e a roda traseira e o solo modelado
como uma placa rígida.
Figura 76 - Modelo submetido a aplicação das forças aplicadas no garfo
Fonte: ELABORADO PELO AUTOR,2015
4.8.4 – Análise estrutural do conjunto submetido frenagem brusca
Ao utilizar o kit, o usuário poderá passar por situações em que se exija uma frenagem
rápida e segura. Esta frenagem, por sua vez, provoca uma aceleração acentuada em todo a
estrutura, fazendo com que a mesma, devido a inércia se desloque para a parte frontal, causando
um carregamento na estrutura. Esta análise visa avaliar como a estrutura irá responder quando
for submetido a esta carga de aceleração.
O valor da aceleração a ser aplicada no conjunto pode ser calculado analiticamente
através da fórmula de aceleração:

138
𝑎 (𝑚
𝑠²) =
𝑣(𝑚
𝑠)
𝑡(𝑠) (66)
𝑎 (𝑚
𝑠²) = aceleração a ser aplicada no conjunto
𝑣 (𝑚
𝑠) = é considerada a velocidade máxima de 4,16m/s
𝑡(𝑠) = tempo de desaceleração, considerado o valor de 0,5s.
A análise foi realizada mantendo a aplicação aceleração da gravidade, cujo valor é de
9,81m/s², sobre todos os componentes, e posteriormente aplicando a aceleração encontrada.
As condições de contorno impostas no modelo foram:
Aplicação da aceleração, cujo valor é 8,32m/s², no modelo em X positivo de acordo com
o sistema de coordenadas do modelo.
Resistência ao rolamento de 0,018 entre a rodas traseiras e o solo modelado como uma
placa rígida.
Restrição em X e Z na roda frontal, e restrição em Y e Z no eixo das rodas traseiras para
estabilidade da análise.
Figura 77 - Modelo submetido a aceleração
Fonte: ELABORADO PELO AUTOR,2015
4.8.5– Análise estrutural do conjunto submetido a uma força aplicada no guidão
Todos os dias, o usuário submete a sua cadeira de rodas a vários esforços. Estas
situações surgem até involuntariamente quando, por exemplo, o utilizador, necessita fazer uma
curva, e pode-se aplicar uma carga excessiva no guidão.

139
Sendo assim esta análise visa avaliar os esforços resultantes na estrutura quando a
mesma está sujeita a aplicação de cargas que podem ocorrer no guidão, principalmente na
direção lateral e vertical do conjunto, ou seja, nas direções Y e Z segundo o sistema de
coordenadas do modelo.
Foram gerados 2 modelos, para satisfazer as combinações de carregamentos que podem atuar
no guidão, são eles:
Dois modelos distintos com carregamento lateral em Y nas duas extremidades do
guidão, na qual o guidão da esquerda foi aplicado um carregamento para a esquerda, e
o da direita para a direita.
A análise foi realizada mantendo a aplicação aceleração da gravidade, cujo valor é de 9,81m/s²,
sobre todos os componentes, e posteriormente aplicando os carregamentos. As condições de
contorno impostas no modelo foram:
Conforme dito, as cargas foram aplicadas nas extremidades do guidão em modelos
separados.
Resistência ao rolamento de 0,018 entre a roda frontal e o solo modelado como uma
placa rígida.
Travamento das rodas traseiras em todas as direções, isto ocorre, devido a esta condição
ser a mais crítica para esta análise
Figura 78 - Modelo submetido a aplicação das forças aplicadas no guidão
Fonte: ELABORADO PELO AUTOR,2015

140

141
5 – RESULTADOS
Neste capítulo são apresentados os resultados obtidos em cada fase do trabalho, bem como
descrição de como os resultados foram extraídos e computados. Serão apresentados os
resultados obtidos para o conjunto na configuração normal e configuração de abertura máxima,
dividindo da seguinte forma:
1- Resultados com relação a especificação do motor escolhido;
2- Resultados com relação a análise de estabilidade estática e dinâmica;
3- Resultados das análises estruturais estáticas;
4- Construção do modelo.
5.1 - Resultados em relação a especificação do motor
Ao se determinar o motor a ser utilizado é necessário visualizar se o mesmo irá atender
as necessidades impostas ao mesmo. Para isso, seguindo o princípio já mencionado proposto
por Becker(2000), e utilizando as dimensões de cada configuração para execução dos cálculos,
através das equações 32 a 40 demonstradas anteriormente na seção 4.4.2.4.1, obteve-se os
seguintes resultados, de acordo com a tabela 10:
Tabela 10 - Dimensões da cadeira – configuração normal- e valores obtidos no cálculo da
potência necessária para tração no conjunto
Medidas cadeira
Potência necessária (W)
Pista plana
Rampa
inclinação
de 8 graus
d (Distância entre o CG e o eixo tras. sobre o eixo coord. x) 274,10 mm
16,98 158,09
h (Altura do CG em relação ao solo) 663,34 mm
b (Distância entre o CG e o eixo tras. sobre o eixo coord. Y) 295,95 mm
l (Comprimento entre eixos dianteiro e traseiro) 1107,84 mm
P (Peso do conjunto) 1113 N
θf 22,46 graus
θt 51,52 graus
ω 14,96 graus
b' 215,18 mm
γ 17,98 graus
Fonte: ELABORADO PELO AUTOR,2015
Como pode ser visto a potencia exigida pelo conjunto para se locomover em uma rampa
de inclinação 8º graus é de 158,09W, e para a pista plana é de 16,98W.
Através dos resultados obtidos, pode-se ver que a configuração do motor escolhido, cuja
potência é de 350W, atende com segurança a potência exigida pelo conjunto. Foram realizadas

142
as mesmas contas para o conjunto, considerando o Kit na abertura máxima, e obteve-se os
seguintes resultados, de acordo com a tabela 11:
Tabela 11 - Dimensões da cadeira - configuração máxima- e valores obtidos no cálculo
da potência necessária para tração no conjunto
Medidas cadeira
Potência necessária (W)
Pista plana
Rampa
inclinação
de 8 graus
d (Distância entre o CG e o eixo tras. sobre o eixo coord. x) 292,66 mm
16,84 157,96
h (Altura do CG em relação ao solo) 663,39 mm
b (Distância entre o CG e o eixo tras. sobre o eixo coord. Y) 295,95 mm
l (Comprimento entre eixos dianteiro e traseiro) 1257,85 mm
P (Peso do conjunto) 1113 N
θf 23,82 graus
θt 55,52 graus
ω 13,25graus
b' 221,06 mm
γ 18,43 graus
Fonte: ELABORADO PELO AUTOR,2015
Para a o conjunto na configuração máxima os resultados foram: em uma rampa de
inclinação 8º graus é de 157,96W, e em pista plana 16,84W. Pode-se ver que a configuração do
motor escolhido, cuja potência é de 350W, atende com segurança a potência exigida pelo
conjunto, em ambas as configurações.
Através dos cálculos desenvolvidos, foi visto que o motor, consegue realizar o
acionamento e assim iniciar a locomoção para um peso total do conjunto de 250Kg.
5.2 - Resultados com relação a análise de estabilidade estática e dinâmica
A análise de estabilidade estática permite vizualizar qual a inclinação máxima permitida
para que não haja o tombatmento longitudinal e lateral da cadeira,de acordo com o eixo de
tombamento criado para a análise,conforme visto na seção 4.5, estas são infomações
importantes que servem como base para que o usuário possa utilizar o conjunto com
segurança.Com posse dos dados do conjunto necessários para os cálculos e seguindo o modelo
proposto por Becker(2000),utilizou-se o Software Excel para a construção de gráficos,na qual
pode-se vizualizar como a variação de parametros pode inflenciar no resultados obtidos.
Através da posição do centro de gravidade,encontrado no software de elementos finitos, do
conjunto foi possível obter os valores que influenciam no resultado do ângulo de tombamento,
e os resultados obtidos são visto a seguir.

143
5.2.1- Tombamento longitudinal
Foram obtidos resultados com relação a tendência de tombamento longitudinal frontal
e traseiro, de acordo com o diagrama de corpo livre da figura 61 e figura 62. Foram avaliados
os dois modelos na configração normal e na configuração de abertura máxima. Nos gráficos
são avaliados as influências dos comprimentos l e d para a tendência de tombamento
longitudinal frontal, e para a tendência de tombamento longitudinal traseira froma avaliados as
influências dos comprimentos d e h.
5.2.1.1 – Tombamento longitudinal para trás
O valor do ângulo máximo para o tombamento longitudinal para trás calculado pela fórmula:
θ = 𝑡𝑔−1 (𝑑
ℎ) (67)
O valor obtido para o ângulo θ, para o conjunto na condição normal foi de:
θmáx = 22,46º
O valor obtido para o ângulo θ, para o conjunto na condição de máxima abertura foi de:
θmáx = 23,81º
Figura 79 - Comportamento da estabilidade estática longitudinal (eixo Pitch) quanto ao
tombamento para trás- a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015

144
Pelos gráficos apresentados na figura 79, pode-se observar a tendência do tombamento
da cadeira através da variação dos comprimentos d e h. A superfície obtida delimita as
condições de estabilidade para a configuração.Combinações de h e d,que resultem em pontos
sobre ou abaixo da superfície, possuem em um comportamento estável.
5.2.1.2 – Tombamento longitudinal frontal
O valor do ângulo máximo para o tombamento longitudinal frontal calculado pela fórmula:
θ = 𝑡𝑔−1 (𝐿−𝑑
ℎ) (68)
O valor obtido para o ângulo θ, para o conjunto na condição normal foi de:
θmáx = 51,52º
O valor obtido para o ângulo θ, para o conjunto na condição de máxima abertura foi de:
θmáx = 55,52º
Para se verificar o comportamento do ângulo θ, com relação ao tombamento para frente,
manteve-se o valor de h (altura do centro de gravidade), sendo fixo, com o valor de 663,34mm,
os resultados do comportamento podem ser vistos na figura 80:
Figura 80 - Comportamento da estabilidade estática longitudinal (eixo Pitch) quanto ao
tombamento para frente - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015

145
5.2.2- Tombamento lateral
Foram obtidos resultados com relação a tendênia de tombamento longitudinal frontal
traseiro.Foram avaliados os dois modelos na configração normal e na configuração de abertura
máxima. Nos gráficos são avaliados as influências dos comprimentos d e h , as influências dos
comprimentos h e b e as influências dos comprimentos l e b.
O valor do ângulo máximo para o tombamento longitudinal frontal calculado pela fórmula:
γ = 𝑡𝑔−1 (𝑏
ℎ) (69)
O valor obtido para o ângulo γ, para o conjunto na condição normal foi de:
γmáx = 17,98º
O valor obtido para o ângulo γ, para o conjunto na condição de máxima abertura foi de:
γmáx = 18,43º
Influências dos comprimentos d e h
Mantêm-se os comprimentos l e b fixos, com os valores de 1257 mm e 295,95mm
respectivamente, para se determinar curva de estabilidade do conjunto sobre a influências dos
comprimentos d e h.
Figura 81-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao
tombamento lateral - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015

146
Influências dos comprimentos h e b
Nos gráficos da figura 82,são avaliados as influências dos comprimentos h e b.
Figura 82-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao
tombamento lateral - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Influências dos comprimentos l e b
Mantêm-se os comprimentos d e h fixos, com os valores de 292,66mm e 663,39mm
respectivamente, para se determinar curva de estabilidade do conjunto sobre a influências dos
comprimentos l e b.
Figura 83-Comportamento da estabilidade lateral estática (eixo Roll) quanto ao
tombamento lateral - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015

147
5.2.3 – Análise de estabilidade dinâmica
A análise de estabilidade dinâmica permite vizualizar qual a velocidade máxima que o
conjunto pode alcançar devido a inclinção máxima na pista nos eixos Pitch e Roll para que não
haja o tombamento da cadeira, estas são infomações importantes que servem como base para
que o usuário possa utilizar o conjunto com segurança.Com posse dos dados do conjunto
necessários para os cálculos e seguindo o modelo proposto por Becker(2000),utilizou-se o
Software Excel para a construção de gráficos,na qual pode-se vizualizar como a variação de
parâmetros pode inflenciar no resultados obtidos. Nos gráficos são avaliados as influências dos
ângulos de inclinação Pitch e Roll para a tendência de tombamento do conjumto, e a variação
do raio de curvatura, verificando a influência de um raio de 1 metro e ou outro de 5 metros.
O valor da velocidade máxima para que não ocorra o tombamento é calculado pela fórmula:
𝑣𝑥 = √ρ(𝑎𝑡{𝑘}{𝐴1}+𝑔{𝑘}{𝑃1})
{𝑘}{𝐸1} (70)
As velocidades máxima forma obtidas para o raio de curvatura de 1 metro e 5 metros
respectivamente,para as configurações de tamanho normal e tamanho máximo.Para um raio de
curvatura de 1 metro, foi encontrada uma velocidade máxima de 15Km/h para as duas
configurações.
Figura 84-Comportamento da estabilidade dinâmica levando em consideração os eixos
Pitch,Roll e Yaw (Raio de curvatura de 1 metro)
- a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Para um raio de curvatura de 5 metros, foi encontrada uma velocidade máxima de
30Km/h para as duas configurações,conforme visto na figura 85.

148
Figura 85-Comportamento da estabilidade dinâmica levando em consideração os eixos
Pitch,Roll e Yaw (Raio de curvatura de 5 metros)
- a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2015
Pela análise gráfica da figura 85 é possivel a identificação de valores de velocidade
limites, os quais representam a iminência para o tombamento lateral de forma a delimitar o
limite entre condição estável e instável para o movimento, o qual demonstra a influencia
significativa do raio de curvatura sobre a estabilidade dinâmica do sistema.
Nota-se que em ambos os gráficos ocorre instabilidade do sistema por variações de gama
acima dos valores limites pré-estabelecidos durante a análise estática de tombamento lateral
abordadas no anteriormente. Apesar deste fato, os resultados obtidos pela simulação virtual
indicam alta eficiência do equipamento assistivo projetado, o qual permite alcance de
velocidades de 15km/h e 30km/h para igual a 1 e 5 metros respectivamente.
Os resultados apontam instabilidade para valores elevados de inclinacões sobre o eixo
de tombamento lateral, enquanto que apresenta grande capacidade em superar inclinacões sobre
o eixo de tombamento longitudinal.
5.3 - Resultados das análises estruturais estáticas
Através dos modelos númericos desenvolvidos para as análises estruturais estáticas,
foram desenvolvidas as respectivas condições de contorno que foram impostas aos dois
modelos (configuração normal e máxima) para a avalição de solicitação da
estrutura,considerando as duas configurações já na posição direção, ou seja a cadeira inclinada.
Para o estudo em questão, adoutou-se que a estrutura a ser avaliada nas duas
configurações da cadeira foram as barras, para a verificação da resistência estrutural quanto aos
carregamentos empregados, pelo motivo das barras terem menor rigidez e maior probablidade
de deformações que os outros componentes do modelo, que por sua vez são maciços. O objetivo

149
das análises realizadas no Kit, é que os componentes não atinjam a tensão admissível do
material, ou seja que permaneçam no regime linear. As condições de contorno não variam
durante a aplicação das cargas. As cargas são constantes em magnitude, direção e distribuição.
Figura 86 - Componentes a serem avaliados na análise estrutural
Fonte: ELABORADO PELO AUTOR,2015
O alumínio considerado para a estrutura é a liga 6351, que possui a tensão de
escoamento de 255 MPa, e conforme já mencionado anteriormente,considerando o coeficiente
de segurança com o valor de 3,tem-se que a tensão admissível a ser considerado para as análises
é de 85MPa, assim valores acima deste valor é considerado que ocoora deformação plástica na
estrutura.
A seguir são apresentados os resultados das análises para ambas as configurações.
5.3.1 – Resultados análise de peso próprio (Aceleração da gravidade)
A primeira análise da estrutura, tem como objetivo a verificação de que a estrutura
completa (cadeira de rodas + Kit) suporte o peso próprio, juntamente com a massa do usuário,
sendo o peso total do conjunto de 110,80Kg.
A análise foi realizada através da aplicação da aceleração da gravidade, cujo valor é de
9,81m/s², sobre todos os componentes. Os resultados para as duas configurações são mostrados
na figura 87.

150
Figura 87 - Resultados da análise estrutural de peso próprio do conjunto nas duas
configurações - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Através dos resultados pode-se notar que os maiores esforços ocorreram em locais
distintos ao se comparar as estruturas A e B, porém ocorreram em regiões de solda para ambas
as configurações, sendo 32,17MPa, para a configuração normal e 32,27MPa, para a
configuração máxima. As barras solicitadas em ambas as configurações são solicitadas no
sentido de flexão, e assim causando maior nível tensão próximo a região de solda, considerada
uma região mais rígida. Sendo assim de posse destes valores, e utilizando um fator de segurança
(FS) equivalente a três vezes a tensão gerada, pode-se determinar que toda a estrutura suporta
com segurança a carga de peso próprio exercida sobre a mesma.
5.3.2 – Resultados da análise do conjunto quando a cadeira passar em um buraco
Com o auxilio do working model, fez-se a simulação em três velocidades para
1m/s,2,77m/s e 4,16m/s, e assim obteve o valor e o tipo de carga a ser imposto no modelo, para
a análise estática, e simultaneamente a aplicação da aceleração da gravidade.
A seguir são mostrados na figura 88 os resultados para a velocidade de 4,16 m/s, onde
foi aplicado as cargas na direção X e Z nos dois modelos.

151
Figura 88 - Resultados da análise estrutural do conjunto quando a cadeira passar em
um buraco (velocidade de 4,16m/s) - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pode-se observar que o conjunto na configuração máxima obteve uma grande
solicitação, pelo fato desta configuração gerar um momento fletor maior, devido as maiores
distâncias entre as regiões onde há o travamento das barras no conjuto, e também pelo fato de
ter menor rigidez. Como por exemplo, as regiões onde apresetaram maiores tensões as barras
foram fletidas e os maiores valores se deram nos pontos onde ocorre os travamentos da
blocagens. Diantes dos valores obtidos;de 200,20MPa para a configuração normal e 324,49MPa
para a configuração máxima, percebe-se que a estrutura ultrapassa o valor estabelecido para de
85 MPa, ou seja pode-se afirmar que ocorre deformação plástica no conjunto.Porém
considerando que esta é uma situação crítica, devido a alguns fatores como por exemplo, as
grandes dimenões impostas ao buraco, a velociade excessiva de 15Km/h, acabam por gerar, um
grande carregamento a estrutura, para a segurança e conforto do usuário, pode-se adaptar um
limitador de velocidade para tentar evitar ao máximo que ocorra esta ocasião,fazendo com que
ande a velociades de 10Km/h, o que pode ser considerado adequado para um Kit adaptado a
uma cadeira de rodas.
Para a velocidade de 2,77m/s o conjunto teve comportamento diferente comparando as
duas configurações, sendo que para a configuração normal foi aplicada uma aceleração em X e
para a configuração máxima foi aplicada as cargas na direção X e Z. A seguir são mostrados na
figura 89 os resultados para a velocidade de 2,77 m/s.

152
Figura 89 - Resultados da análise estrutural do conjunto quando a cadeira passar em
um buraco (velocidade de 2,77m/s) - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pelos resultados obtidos pode-se observar que o conjunto na configuração máxima
obteve uma maior solicitação. As barras solicitadas em ambas as configurações são solicitadas
no sentido de flexão, e assim causando maior nível de tensão próximo a região de solda,
considerada uma região mais rígida. Para a configuração normal observa-se que a região onde
apresentou maior solicitação na análise de peso próprio, continuou tendo maior tensão para esta
análise. Percebe-se que a estrutura ultrapassa o valor estabelecido de 85 MPa ,apresentando
para a configuração normal o valor de 142,73MPa; e 199,20MPa configuração máxima,ou seja
pode-se afirmar que ocorre deformação plástica no conjunto.

153
Pelos gráficos foi visto que para estas condições de tamanho de buraco, velocidade
imposta e coeficiente de segurança, ao se linearizar a carga, juntamente com a velocidade obtida
no Working Model,a estrutura suporta com segurança a velocidade de 2,07m/s para a
configuração normal, e de 1,4m/s para a configuração máxima.
Salienta-se que alguns fatores podem ser reconsiderados, como por exemplo, o alto fator
de segurança empregado de valor 3, de acordo com a tabela 5, este valor pode ser reavaliado
ao se ter um modelo construído, pois certamente se irá ter mais dados sobre o material
adquirido, testes experimentais serão realizados, e assim possa ter mais dados que possam, levar
a ter maior conhecimento de toda a estrututura, sendo assim podendo reduzir o valor do
coeficiente de segurança empregado, podendo passar para o valor de 1,66; segundo a norma
ASME, que utiliza um limite máximo de tensão como 60% do limite de escoamento do material
para esforço axial; o que irá gerar uma tensão admissível de 153MPa.Um outro ponto a ser
considerado, são grandes dimenões impostas ao buraco, o que na prática pode ser considerado
uma situação extrema. Ou seja, levando em consideração estes parâmentros, na prática o usuário
ao se depara nesta velocidade com buracos deste tamanho ou menores, conclui-se que a
estrutura suporta com segurança a carga exercida sobre a mesma, diante dos valores obtidos
para a configuração normal sendo de 142,73MPa. Já para a configuração máxima a tensão
máxima encontrada foi de 199,90MPa, ultrapassaria o valor de tensão admissível,mesmo
adotando o fator de segurança de 1,66, contudo conforme já mencionado, deve-se levar em
consideração as grandes dimenões impostas ao buraco. Deve-se salientar que uma adição de
reforços, principalmente nas regiões de solda e onde há o travamento feito pelas blocagens, pois
foram as regiões mais solicitadas, ou a proposta de modificaçãos no dimensionamneto das
barras também podem diminuir a tensão gerada.
Para a velocidade de 1,00m/s o conjunto teve o mesmo comportamento comparando as
duas configurações, na qual foi aplicada uma aceleração em X, devido ao conjunto ficar preso
ao buraco. A seguir são mostrados na figura 90 os resultados para a velocidade de 1,00 m/s.

154
Figura 90 - Resultados da análise estrutural do conjunto quando a cadeira passar em
um buraco (velocidade de 1,00m/s) - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pelo fato desta situação poder ocorrer corriqueiramente durante o uso diário, devido a
fato da cadeira esta em uma velocidade considerada baixa 3,6Km/h, e devido as ruas possuírem
pequenas ondulações e buracos,para esta análise adota-se que não deva ocorrer deformação
plástica. Ambas as configurações são solicitadas no sentido de flexão, e assim causando maior
nível tensão próximo a região de solda, considerada uma região mais rígida. Para a configuração
normal observa-se que a região onde apresentou maior solicitação na análise de peso próprio,
continuou tendo maior tensão para esta análise. Através dos valores obtidos, de 70,11MPa para
a configuração normal e 82,50MPa para a configuração máxima, pode-se determinar que toda
a estrutura suporta com segurança a carga exercida sobre a mesma, apresentando tensões abaixo
do critério estabelecido de 85MPa.
Diante dos resultados obtidos para análise do conjunto quando a cadeira passar por um
buraco, tem-se a tabela 12 com a tabela de resumo dos resultados encontrados

155
Tabela 12 - Resumo dos resultados da análise estrutural do conjunto quando a cadeira
passar em um buraco
Velocidade
imposta ao
modelo (m/s)
Configuração Normal Configuração Máxima
Tensão (MPa) Tensão (MPa)
1 70,11 82,55
2,77 142,73 199,90
4,16 200,20 324,49
Fonte: ELABORADO PELO AUTOR,2016
É visto que a configuração máxima foi mais solicitada para todos os casos. Para a
velocidade de 1,0m/s, a estrutura respondeu bem a solicitação, apresentando tensões abaixo do
critério estabelecido de 85MPa.
5.3.3 – Resultados da análise do conjunto quando a cadeira passar em um degrau
Com o auxilio do working model,fez-se a simulação em duas velocidades para 1m/s e
4,16m/s, e assim obteve o valor e o tipo de carga a ser imposto no modelo, para a análise
estática, e simultaneamente a aplicação da aceleração da gravidade.
A seguir são mostrados na figura 91 os resultados para a velocidade de 4,16 m/s, onde
foi aplicado as cargas na direção X e Z nos dois modelos.

156
Figura 91 - Resultados da análise estrutural do conjunto quando a cadeira passar em
um degrau (velocidade de 4,16m/s) - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Nas regiões onde apresetaram maiores tensões as barras foram fletidas e os maiores
valores se deram nos pontos onde ocorrem os travamentos da blocagens Diantes dos valores
obtidos, de 433,01MPa para a configuração normal e 408,60MPa para a configuração máxima,
percebe-se que a estrutura ultrapassa o valor estabelecido para de 85 MPa , ou seja pode-se
afirmar que ocorre deformação plástica no conjunto.
Porém considerando que esta é uma situação crítica, devido a alguns fatores como por
exemplo, as grandes dimenões impostas ao degrau, a velociade excessiva de 15Km/h,acabam
por gerar, um grande carregamento a estrutura.O que na prática pode ser considerado uma

157
situação extrema, pode se adaptar um limitador de velocidade para tentar evitar ao máximo que
ocorra esta ocasião,fazendo com que ande a velociades de 10Km/h, o que pode ser considerado
adequado para um Kit adaptado a uma cadeira de rodas.
Pelos gráficos foi visto que para estas condições de tamanho de degrau, velocidade
imposta e coeficiente de segurança, ao ser linearizando a carga, juntamente com a velocidade
obtida no Working Model,a estrutura suporta com segurança a velocidade de aproximadamene
1,25m/s para ambas as configuações.
Conforme já mencionado alguns fatores podem ser reconsiderados, como por exemplo,
o alto fator de segurança empregado de valor 3, de acordo com a tabela 5 , este valor pode ser
reavaliado ao se ter um modelo construído,conforme dito anteriormente, podendo passar para
o valor de 1,66; por exemplo, o que irá gerar uma tensão adimissível de 153MPa.Sendo assim
para esta situação, o gráfico aponta que a estrutura suportaria com segurança a velocidade de
2,08m/s para ambas as configurações. Um outro ponto a ser considerado são grandes dimenões
impostas ao degrau, ou seja, levando em consideração estes parâmentros, na prática o usuário
ao se depara nesta velocidade de 2,08m/s,com buracos deste tamanho ou menores, conclui-se
que a estrutura suporta com segurança a carga exercida sobre a mesma. Contudo deve-se
salientar que uma adição de reforços, podem diminuir a tensão gerada.
Para a velocidade de 1,00m/s foi aplicada as cargas na direção X e Z. Pelo fato desta
situação poder ocorrer ocasionalmente durante o uso diário, devido a fato da cadeira esta em
uma velocidade considerada baixa 3,6Km/h, e devido as ruas possuírem pequenas ondulações
e degraus, para esta análise adota-se que não deva ocorrer deformação plástica.
A seguir são mostrados na figura 92 os resultados para a velocidade de 1,00 m/s.

158
Figura 92 - Resultados da análise estrutural do conjunto quando a cadeira passar em
um degrau (velocidade de 1,00m/s) - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Ambas as configurações são solicitadas no sentido de flexão, e assim causando maior
nível tensão próximo a região de solda, considerada uma região mais rígida. Através dos valores
obtidos, de 82,80MPa para a configuração normal e 74,40MPa para a configuração máxima,
pode-se determinar que toda a estrutura suporta com segurança a carga exercida sobre a mesma,
apresentando tensões abaixo do critério estabelecido de 85MPa.
Diante dos resultados obtidos para análise do conjunto quando a cadeira passar por um
buraco, tem-se a tabela 13 com a tabela de resumo dos resultados encontrados.
Tabela 13 - Resumo dos resultados da análise estrutural do conjunto quando a cadeira
passar em um degrau
Velocidade
imposta ao modelo
(m/s)
Configuração Normal Configuração Máxima
Tensão (MPa) Tensão (MPa)
1 82,80 74,40
4,16 433,01 408,60
Fonte: ELABORADO PELO AUTOR,2016
É visto que a configuração normal foi a mais solicitada para todos os casos. E para a
velocidade de 1,0m/s, a estrutura respondeu bem a solicitação, apresentando tensões abaixo do
critério estabelecido de 85MPa.

159
5.3.4 – Resultados da análise estrutural do conjunto submetido frenagem brusca
O usuário poderá solicitar ao conjunto uma frenagem brusca, provocando uma
aceleração acentuada em todo a estrutura, fazendo com que a mesma, devido a inércia se
desloque para a parte frontal, causando um carregamento na estrutura. A seguir são mostrados
na figura 93 os resultados para a aceleração aplicada em X no valor de 8,32m/s².
Figura 93 - Resultados da análise estrutural do conjunto submetido a uma frenagem
brusca - a)Configuração normal b) Configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pelos resultados apresentados é visto que para ambas as configurações a região mais
solicitado é o garfo, pelo fato das barras do garfo sofrer flexão, devido ao movimento de toda a
estrutura para a frente e este ponto ser uma restrição por estar conectado ao eixo do motor,
assim tendo maior nível de tensão. Para esta análise adota-se que a tensão máxima não possa
ultrapassar a tensão admissível de 85MPa, pelo fato desta situação poder ocorrer
ocasionalmente durante o uso diário, mesmo estando a 4,16m/s o usuário poderá acionar os
freios sem que ocorra dano a estrutura.Através dos valores obtidos, de 73,10MPa para a
configuração normal e 74,58MPa para a configuração máxima, pode-se determinar que toda a
estrutura suporta com segurança a carga exercida sobre a mesma, apresentando tensões abaixo
do critério estabelecido de 85MPa.

160
5.3.5 – Resultados da análise estrutural do conjunto submetido ao uma força aplicada no
guidão
Visando avaliar os esforços resultantes na estrutura quando a mesma está sujeita a
aplicação de cargas que podem ocorrer no guidão, esta análise visa avaliar qual a força
necessária aplicada ao guidão, na direção Y segundo o sistema de coordenadas do modelo, que
irá gerar na estrutura uma tensão acima do limite de escoamento do alumínio, e verificar se esta
tal situação é aceitável ou não dependendo da força. A seguir são mostrados na figura 94 e 95
os resultados para a carga aplicada em Y positivo para ambas as configurações.
Figura 94 - Resultados da análise estrutural do conjunto submetido ao uma força
aplicada no guidão em Y positivo – configuração normal
Fonte: ELABORADO PELO AUTOR,2016

161
Figura 95 - Resultados da análise estrutural do conjunto submetido ao uma força
aplicada no guidão em Y positivo – configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pelos resultados apresentados pode-se perceber que para a configuração normal a carga
na qual a estrutura ultrapassa a tensão admissível, considerado no valor de 85 MPa, é de
aproximadamente 275N, já para a configuração máxima esta carga é um pouco menor, sendo
de aproximadamente 238N. Esta diferença pode ser explicada, pelo fato da estrutura na
configuração máxima apresentar menor rigidez lateral,podendo assim fletir mais facilmente,
quando as barras estiverem posicionadas e travadas na máxima abertura do conjunto.
A seguir são mostrados na figura 96 e 97 os resultados para a carga aplicada em Y negativo
para ambas as configurações.
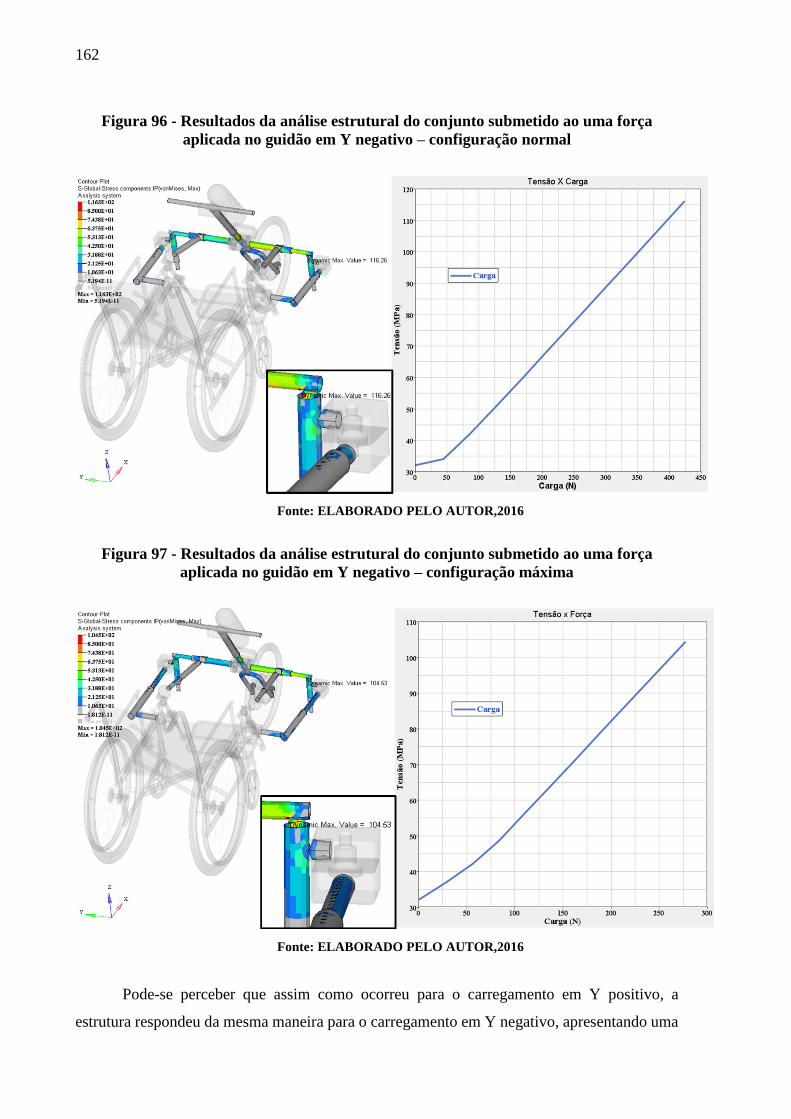
162
Figura 96 - Resultados da análise estrutural do conjunto submetido ao uma força
aplicada no guidão em Y negativo – configuração normal
Fonte: ELABORADO PELO AUTOR,2016
Figura 97 - Resultados da análise estrutural do conjunto submetido ao uma força
aplicada no guidão em Y negativo – configuração máxima
Fonte: ELABORADO PELO AUTOR,2016
Pode-se perceber que assim como ocorreu para o carregamento em Y positivo, a
estrutura respondeu da mesma maneira para o carregamento em Y negativo, apresentando uma

163
força de 235N para a configuração máxima para chegar ao escoamento do material. Sendo que
para a configuração normal a força é de aproximadamente 275N.Percebe-se também que os
valores são bem próximos quando comparamos a mesma configuração, para o carregamento
em sentido contrário, este resultado confirma a simetria na qual a estrutura foi projetada.
Conforme visto, as cargas na qual começa a ocorrer o escoamento do material, podem
ser consideradas altas, principlamente para um cadeirante, ou seja, pode-se dizer que a estrutura
respondeu bem aos carregamentos laterais.

164

165
6 – CONCLUSÃO
Com o estudo desenvolvido pode-se verificar a importância de se desenvolver projetos
na área de acessibilidade, principalmente no âmbito de produtos que sejam acessíveis as
pessoas.
A primeira proposta desenvolvida viu-se a vantagem de ser ter um mecanismo na qual
poderia ficar fixado a cadeira, mesmo em estruturas que se fecham para ser guardadas. Porém
esta estrutura não permitia a inclinação da cadeira e, outra pendência, seria a precisão e a
manutenção em termos de lubrificação devido ao grande deslizamento entre componentes.
Através desta primeira ideia e visando aprimorar mais o produto, juntamente com o diálogo
com cadeirantes, para se saber as dificuldades e quais possíveis contribuições poderiam ser
desenvolvidas, chegou-se ao projeto de um produto que facilitasse a prática na operação de
montagem e utilização, e simplificasse todos os componentes a serem utilizados, além da
implementação do recurso de ser recolher o Kit na lateral da cadeira de rodas, podendo assim
se locomover manualmente caso necessite.
Em relação ao material escolhido, sabe-se que existe materiais que apresentam maior
rigidez, e mais leves, como por exemplo a fibra de carbono, porém o alto custo que estes
materiais apresentam, poderiam aumentar mais o preço final do Kit, tornando menos
competitivo no mercado. Porém o alumínio apresentou bons resultados, e como dito, através da
construção e testes a serem realizados pode-se ter mais dados sobre a especificação do material,
podendo-se diminuir o fator de segurança. Além de poder estudar a adição de reforços na
estrutura, principalmente em regiões de solda e onde há o travamento feito pelas blocagens
Através dos cálculos desenvolvidos,pode-se ver que a configuração do motor escolhido,
cuja potência é de 350W, atende com segurança a potência exigida pelo conjunto, em ambas as
configurações, para as duas condições, tanto em pista reta, quanto em pista com inclinação
máxima de 8 graus.
Apesar da utilização de componentes mecânicos de simples usinagem, o sistema
eletrônico elevou o custo da construção deste equipamento assistido, por se tratar de uma
tecnologia atual e importada. A construção deste equipamento em série poderá diminuir
significativamente o custo de fabricação, porém são essenciais pesquisas direcionadas a criação
de baterias e motores de corrente contínua sem escovas com tecnologia nacional, podendo assim
diminuir no custo final.
A análise de estabilidade estática e dinâmica permitiu vizualizar a influência do
posicionamento do CG, pois ao diminuir a distância do CG ao eixo traseiro, poderá diminuir a

166
resitência de giro do conjunto, facilitando a propulsão da cadeira, porém resultaria em diminuir
a margem de estabilidade às inclinações de pista e raios de curvatura, principalmente pelo fato
da diminuição do ângulo de tombamento longitudinal.
Os resultados obtidos pela simulação de estabilidade indicam alta eficiência do
conjunto nas duas configurações, o qual permite alcance de velocidades de 15km/h e 30km/h
para os raios de curvatura igual a 1 e 5 metros respectivamenteestas, são infomações
importantes que servem como base para que o usuário possa utilizar o conjunto com segurança.
A partir da definição do dimensionamento estrutural dos componentes do Kit, pode-se
partir para avaliação estática. O modelo gerado em elementos finitos procurou ao máximo se
aproximar do real, realizando o modelamento em elementos de shell ou sólidos de acordo com
as respectivas geometrias, juntamente com simplificações que o software permite realizar. As
conclusões para estas análises são descritas a seguir:
Análise peso próprio: Sendo esta uma das principias análises feitas, pode-se
dizer que a estrutura respondeu bem ao carregamento do peso próprio,
apresentando flexão nas barras mais solicitadas e em regiões de soldas. Ambas
as configurações apresentaram níveis de tensões bem abaixo do valor
estabelecido de 85MPa, para que não haja o limite de escoamento do material.
Análise cadeira passando por um buraco e/ou degrau: Para a velocidade de 1m/s,
pode-se perceber, para ambas as análises, que a estrutura respondeu dentre do
limite estabelecido, de 85MPa, para ambas as configurações, apresentando
flexão nas barras, e os pontos de maior solicitação ocorrendo em regiões de solda
ou fixações de blocagem. Para a análise da cadeira passando em um buraco, para
as outras velocidades (2,77m/s e 4,16 m/s), a estrutura apresentou deformação
plástica diante do critério estabelecido. Para as circunstâncias estabelecidas nas
análises, a velocidade na qual a estrutura não apresentaria falha seria de 2,7m/s
para a configuração normal e de 1,4m/s para a configuração máxima. Porém
alguns fatores podem ser levados em consideração e reavaliados, como por
exemplo, o fator de segurança que pode ser reduzido ao se ter o conjunto
construído, pelo fato de se obter mais dados sobre material e a estrutura,
passando a ser de 1,66; e assim mudando a tensão admissível que passaria a ser
de 153MPa, salientando também as grandes dimensões estabelecidas para o
buraco. Levando em consideração estes fatores para a análise da cadeira
passando em buraco, para a velocidade de 2,77m/s, o nível de tensão apresentado
a estrutura estaria do novo critério estabelecido, para a configuração normal. É

167
visto que para a configuração máxima, mesmo utilizando o fator de segurança
de 1,66; ultrapassaria a tensão admissível. Para a análise da cadeira passando por
um degrau, ressaltando as mesmas condições descritas anteriormente, a
velocidade na qual o nível de tensão estaria dentro do critério seria de 2,5m/s.
Para a velocidade de 4,16m/s, pode-se considerar esta como sendo uma
velocidade excessiva e juntamente com as grandes dimensões estabelecidas para
o buraco e o degrau, pode-se para evitar ao máximo esta situação adaptar um
limitador de velocidade para tentar evitar ao máximo que ocorra esta
ocasião,fazendo com que ande a velociades de 10Km/h, o que pode ser
considerado adequado para um Kit adaptado a uma cadeira de rodas.Estas
análises serviram para se teruma noção das regiões que poderam ser mais
solicitadas, contudo alguns fatores utilizados na análise e na avaliação dos
resultados podem ser reavaliados, antes de se adicionar reforços a estrutura.
Análise do conjunto quando a cadeira sofrer uma frenagem brusca: Por se tratar
de uma situação que poderá ser bastante corriqueira, a estrutura não poderia
passar do critério de tensão estabelecido, e foi visto que ambas as configurações
tiveram níveis de tensões abaixo do critério, sendo que para ambas as
configurações a região mais solicitado foi na parte inferior do garfo, pelo fato
das barras sofrerem flexão, devido ao movimento de toda a estrutura para a frente
e este ponto ser uma restrição.Com isto conclui-se que a estrutura respondeu
com segurança a análise de frenagem.
Análise do conjunto submetido a uma força aplicada no guidão: Nesta análise
pretendeu-se verificar a qual carregamento na direção lateral ao guidão a
estrutura suportaria até alcançar o limite de escoamento. Pelos resultados
obtidos, entende-se que ambas as configurações suportam cargas altas; sendo a
menor encontrada no valor de 23,5Kg; principalmente para um cadeirante, ou
seja, pode-se dizer que a estrutura respondeu bem aos carregamentos laterais.
Percebe-se também que os valores são bem próximos quando comparamos a
mesma configuração, para o carregamento em sentido contrário, este resultado
confirma a simetria na qual a estrutura foi projetada.
Neste contexto pode-se dizer que para as análises desenvolvidas a estrutura apresentou
uma considerável rigidez, e considerando que a partir da construção do modelo se terá mais
dados sobre a estrutura, poderá assim reavaliar alguns critérios como o coeficiente de

168
segurança. Salienta-se o estudo de reforços que poderão ser empregados na estrutura sem que
aumente o custo final do produto e não aumente muito o peso. É aconselhável que em trabalhos
futuros seja utilizado as curvas plásticas dos materiais utilizados no Kit, para que se possa
entender o comportamento da estrutura nestas ocasiões e podendo assim evitar que haja a
ruptura de algum componente, e assim ofereça maior segurança ao usuário.
6.1 – Sugestões para trabalhos futuros
Segue abaixo as propostas de melhorias futuras que podem ser realizadas:
a) Análise de materiais que favoreçam a eficiência dinâmica do equipamento automotor;
b) Instalação de sistemas de iluminação de segurança ao equipamento;
c) Pesquisas de desenvolvimento de bateria e motor de tração brushles a baixo custo;
d) Redimensionamento estrutural para a utilização do equipamento em cadeiras de rodas
infantis.
e) Construção de um protótipo em escala real
f) Desenvolver e simular suspensões indicadas para terrenos com ondulações, evitando
assim a presença de vibrações e oscilações, com o intuituo de oferecer ainda mais
estabilidade e conforto ao usuário.
Vale lembrar que a busca de produtos que forneçam melhorias tanto na parte de
utilização, maior independência, conforto e segurança, em paralelo com a questão da
viabilidade econômica é o objetivo maior em qualquer pesquisa relacionada a acessibilidade.

169
REFERÊNCIAS BIBLIOGRÁFICAS
ABNT (org). NBR 9050: Acessibilidade a edificacoes, mobiliario, espacos e equipamentos
urbanos. 2. ed. Rio de Janeiro: ABNT, 2004.
ACESSIBILIDADE NA PRATICA,MesasAcessiveis,Disponível em
http://www.acessibilidadenapratica.com.br/tag/modulo-de-referencia/,Acesso em Março de
2014.
ALBER, Stair Wheelchair, electric-motorized Wheelchair, Mobility, Disponível em
www.alber.de/en/products/wheelchair-drives.html/,Acesso em Março de 2014
ALCOA,Cátalogo de perfis Standard- Liga de alumínio, Maio de 2015,Disponivel em:
https://www.alcoa.com/brasil/pt/resources/pdf/industria/catalogo_perfis_standard.pdf,
Acesso em outubro de 2015
ALMEIDA, A. G,Naveiro,D.M.,Baluvian,I.FJ.P,Projeto de uma cadeira de rodas para uso
em habitações, Jornal ResearchonBiomedicalEngineering,Rio de Janeiro,Vol 7N.1.1990
ALVES, Júlio Oliveto, Protótipo de sistema automotor para cadeira de rodas,
Guratinguetá, Universidade Estadual Paulista,2010,160p.;Tese(Mestrado).
ALVES FILHO, Avelino. Elementos Finitos – A Base da Tecnologia CAE. 5ª Ed. São Paulo:
Érica, 2008.
BARROS,H.O., Marcelo Márcio Soares, Using digital photogrammetrytoconductan
anthropometricanalysisofwheelchairusers,US National Library of Medicine National
Institutes of Health, Estados Unidos,pp-4053-4060,2012
BECKER, M. Aplicacao de tecnologias assistivas e tecnicas de controle em cadeira de
rodas inteligentes. Campinas: Faculdade de Engenharia Mecanica, Universidade Estadual de
Campinas, 2000, 136 p., Tese (Doutorado).
BEER, F. P; JOHNSTON, E. R. Resistência dos materiais. 5 ed. Rio de Janeiro: Makron
Books, 1994.
BERSCH, R. Introdução a tecnologia assistiva. Disponível em<www.assistiva.com.br>.
Acesso em Outubro de 2014.
BERTONCELLO,I., Luiz Vidal Negreiro Gomes., Análise diacrônica e sincrônica da
cadeira de rodas mecanomanual, Revista Produção,Brasil, v. 12 n. 1 2002
BIEZUNER,Rodney Josué; Método Dos Elementos Finitos Na Simulação De Tensão E
Elasticidade Em Placas;Belo Horizonte; Universidade Federal de Minas Gerais;Disciplina:
Geometria Analítica e Álgebra Linear,2015
BLOG DO CADEIRANTE,Medidas para cadeirante - NBR 9050,Disponivel
emhttp://www.blogdocadeirante.com.br/2010_11_01_archive.html,Acesso em Março de
2014.

170
BOSCH, ROBERT. Manual da tecnologia automotiva. Trad. de H. Madjderey, G. W.
Prokesch, E. J. Zerbini e S. Pfeferman. São Paulo: Ed. Edgard Blücher, 2005.
BRASIL, Decreto n° 5.296 de 02 de Dezembro de 2004. Regulamenta as Leis n°10.048, de 08
de Novembro de 2000 e 10.098 de 19 de Dezembro de 2000. Diario oficial da Republica do
Brasil. Disponivel em <www.planalto.gov.br/ccivil/_ato2004-2006/2004/decreto/d5296.htm>.
Acesso em Outubro de 2014.
BRASIL, Lei no 10.098. Estabelece normas gerais e critérios basicos para a promocao de
acessibilidade das pessoas portadoras de deficiencia ou com mobilidade reduzida.
Disponivel em<www.planalto.gov.br/ccivil/LEIS/L10098.htm>. Acesso em Junho de 2015.
BRASIL, Decreto n° 3.298 de 20 de Dezembro de 1999.Diario oficial da Republica do Brasil.
Disponivel em http://www.planalto.gov.br/ccivil_03/decreto/d3298.htm
Acesso em Outubro de 2014.
CALLISTER JUNIOR, W. D. Materials science and engineering: an introduction. USA:
John Wiley& Sons, 2002.
CARRIEL, I. R. R. Recomendações ergonômicas para o projeto de cadeira de rodas:
considerando os aspectos fisiológicos e cognitivos dos idosos. 244f.Dissertação [ Mestrado
em Desenho Industrial] – Universidade Paulista “Júlio Mesquita Filho”, Bauru, 2007.
CHENIÉR,F., Rachid Aissaoui,EffectofWheelchair Frame Material onUsers’
MechanicalWorkandTransmittedVibration,RevistaBioMedResearchInternational,Estados
Unidos,Article ID 609369, 12 pages,2014
CRFASTER,Cadeiras de rodas e sua evolução histórica.Disponivel em
<www.crfaster.com.br/Cadeira%20Rodas.htm> Acesso em Março de 2014
COELHO, M., A. G.; D. B. Aspectos biomecânicos e funcionais na prescrição de cadeira
de rodas. In: Congresso Brasileiro de Biomecânica, 12., 2007, São Pedro. Anais.São Paulo:
TEC ART, 2007.
COSTA,V.S.P, Representações sociais da cadeira de rodas para a pessoa com lesão da
medula espinhal, Revista Latino-Am. Enfermagem,SãoPaulo,pp 8.18.2010
COTA, de Paiva Cota;Denison Baldo; Túlio HallakPanzera; André Luis;Christoforo. Ciência
& Tecnologia: FATEC-JB, Jaboticabal, v. 3, n. 1, p. 50-69, 2011. ISSN 2178-9436,2010
COTA, de Paiva Cota;Denison Baldo; Túlio HallakPanzera; André Luis;Christoforo,Análise
estrutural de uma cadeira de rodas através do método dos elementos finitos, Nono
Simpósio de Mecânica Computacional Universidade Federal de São João Del-Rei – MG –
ABMEC,2010
COWAN,R.E.,Impactof Surface Type, WheelchairWeight, andAxle Position
onWheelchairPropulsionbyNoviceOlderAdults,Congresso Americano de Reabilitação
Médica,Estados Unidos, Vol90, Julho 2009

171
CUNHA,Rodrigo B,Gabriel Mendes,Claysson Vimiero,Pedro Britto. Development of an
Adaptive KIT for Wheelchair Turning it into na Electric Tricycle, 2nd International
Conference on Applied Mechanics and Mechanical Automation, (AMMA2015). Hong
Kong,China,2015. Revista Applied Mechanics and Mechanical Automation Vol 775 (2015) pp
98-102,(2015) Trans Tech Publications, Switzerland
DAS,B., John W. Kozey, Structuralanthropometricmeasurements for wheelchair mobile
adults, Revista Reed Elsevier. Holanda 30 (1999) 385-390
Delgado Neto, G. G; C.A;Vieira, V.C; Botilha, F. A.;Dedine, F. G; 2008, Teoria de controle
autônomo de cadeira de rodas, VI CONEM, Congresso Nacional de Engenharia Mecânica,
Campina Grande Paraíba,2010.
DSOUZA,R., G. Bertocci, Developmentandvalidationof a computer crash
simulationmodelofanoccupiedadult manual wheelchairsubjectedto a frontal
impact.Jornal Medical Engineering&Physics, Estados Unidos, 32 (2010) 272–279
EBIKEBRASIL,Produtos e serviços/Produtos para bicicleta elétrica
Disponível em: http://www.ebikebrasil.com/produtos-e-servi%C3%A7os/kit-para-
bicicleta/,Acesso em Janeiro de 2015
ESTADO DE MINAS,Vrum – noticias/bom exemplo-Disponível
em:http://estadodeminas.vrum.com.br/app/noticia/noticias/2015/04/24/interna_noticias,50849
/bom-exemplo-engenheiro-transforma-cadeira-de-rodas-em-triciclos.shtml,Acesso em Maio
de 2015
ESTEVES,Américo Luís Filgueiras,Desenvolvimento de uma Cadeira de Rodas Manual
Adaptável,Aveiro Universidade de Aveiro, Departamento de Engenharia Mecânica, 2011,
105 p., Tese(Mestrado).
FABRINI, Rodrigo Octávio França,Análise da ligação soldada em estruturas tubulares pelo
método dos elementos finitos, Belo Horizonte, Pontifícia Universidade Católica de Minas
Gerais,2009,131p.;Tese(Mestrado).
FERNANDES,B,P.,Vinicius A. S. S, Hemerson P, Protótipo de um Simulador para
Cadeiras de Rodas Guiadas por Expressões Faciais: Estudos Preliminares,III Congresso
Catarinense de Software Livre - SOLISC, Florianópolis,2005
FERRADA, R.B.H,Lucila Maria CostiSantarosa,Tecnologiaassistiva como apoio à inclusão
digital de pessoas com deficiência,ComgressoIberoamericano de informática educativa
espacial,Argentina,2007
FILHO,W,B.V. Rafael Avila, Carlos H. LlanosQuinteros, Rudi Van Els, Guilherme
Queiroga,Desenvolvimento de Kit para Automação de Cadeiras de Rodas Convencional,
VI CONEM, Congresso Nacional de Engenharia Mecânica, Campina Grande Paraíba,2010.

172
FREEDOM,Freedom SX - Linha Saúde,Disponível
em:http://www.freedom.ind.br/content/produtos/index.php?stIdioma=&boInterna=true&cat=2
&linhaid=31&produtoid=8,Acesso em Junho de 2014
GENTA, G. Motor vehicle dynamics: modeling and simulation. Cingapura: World
Scientific, 1997. 345 p. Acesso em Maio de 2015
HIKARI HOSPITALAR. (2010). Produtos - cadeira de rodas: Hikari Hospitalar.
Disponível em: http://www.hikarihospitalar.com.br/, Acesso em Janeiro de 2015
IBGE. Censo Demográfico 2010 – Características Gerais da População. Resultados da
Amostra. IBGE, 2010. Disponível em http://www.ibge.gov.br/ Acesso em 02 de maio de 2015.
INMETRO. Acessibilidade. Disponivel em
<www.inmetro.gov.br/qualidade/acessibilidade.asp> Acesso em Janeiro de 2015.
INMETRO.Requisitos de Avaliação da Conformidade para Cadeira de Rodas.
Disponivel em <www.inmetro.gov.br/normalizacao/qualidadeindustrial.asp> Acesso em
Março de 2015.
JAGUARIBE, Produtos – Cadeiras motorizadas,Disponível
em:http://www.ortopediajaguaribe.com.br/index.php/produtos,Acesso em Julho de 2014
LANDRE JÚNIOR, Jánes. Método dos Elementos Finitos. 169f. Notas de aula (Programa de Pós
Graduação em Engenharia Mecânica) – Pontifícia Universidade Católica de Minas Gerais, Belo
Horizonte.
LIU,T.J.C., Jin-WeiLiang, Wei-Long Chen, Teng-Hui Chen, Finite Element Analysis of
Composite Frames in Wheel chair under Upward Loading,JournalofMechanical,
Industrial Science andEngineering,Taiwan, Vol:8 No:1, 2014
LOGAN, D.L., A First Course in the Finite Element Method, Brooks Cole; 3a edição,
abril, 2002
MASON, B. S., Lucas H. V. van der Woude, The ErgonomicsofWheelchairConfiguration
for Optimal Performance in theWheelchairCourtSports, International Publishing
Switzerland 2012,Suiça,pp- 43:23–38
MAZO,M.,Rodriguez,F,J,Lazaro,J,L,Urella,J,Garcia,J,C.,Eletronic Control of a Wheelchair
GuidedbyVoiceCommands,JornalElservice Science,Inglaterra,pp-665-674,1994
MEDINA E COELHO, O efeito da prescrição de cadeira de rodas de basquetebol sobre o
desempenho esportivo, Rev. Bras. Ciênc. Esporte vol.33 no.4 Porto Alegre Oct./Dec. 2011,
Disponível em: http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0101-
32892011000400013 , Acesso em Maio de 2015
MENDES,Gabriel,G.M.et.al, KIT para cadeira de rodas transformando-a num triciclo
elétrico, Trabalho de conclusão de curso (Programa Graduação em Engenharia Mecânica) –
Pontifícia Universidade Católica de Minas Gerais, Belo Horizonte.2013

173
MACIEL, A. S.; CIENA, F. P. Acessibilidade: a inclusao do portador de
deficienciafisica sob um ponto de vista filosofico. Disponivel em
<www.conpedi.org/manaus/arquivos/anais/bh/alvaro_dos_santos_maciel.pdf>. Acesso em
Março de 2015.
NORTON, R. L. Projetos de máquinas; uma abordagem integrada. 4ed. New York:
Bookman, 2011.
OLIVETO, Júlio Alves,Protótipo de sistema automotor para cadeira de rodas, Campus de
Guaratinguetá, Universidade Estadual Paulista, 2011, 157 p., Tese (Mestrado).
ORTOBRÁS, Soluções/cadeira de rodas/Linha
adulto,Disponívelem:http://www.ortobras.com.br/solucoes/cadeiras-de-rodas,Acesso em
Janeiro de 2014
PESSOASCOMDEFICIENCIA,Relatório Mundial sobre a deficiência,Disponivel em
http://www.pessoacomdeficiencia.sp.gov.br/usr/share/documents/RELATORIO_MUNDIAL_
COMPLETO.pdf Acesso em Março de 2015.
PDG MOBILTY, Manual Tilt-in-Space Wheelchair, Disponivel em:
http://www.pdgmobility.com/products/index.html/ Acesso em Janeiro de 2015.
QUALHARINI,Eduardo Linhares.,Flavio Corrêa dos Anjos,Ergonomia do espaço edificado
para pessoas portadoras de deficiência,ABEPRO – Associação Brasileira de Engenharia de
Produção -1998
ROCHA , E. F.; CASTIGLIONI, M. C. Reflexoes sobre recursos tecnologicos: ajudas
tecnicas, tecnologia assistiva, tecnologia de assistencia e tecnologia de apoio. Ver. Ter.
Ocup. Univ. Sao Paulo, v.16, n. 3, p. 97-104, set/dez, 2005.
RODRIGUES,P.R.,LynnRosalina Gama Alves,Tecnologia assistiva- Uma revisão do
tema,Revista HOLLOS, Instituto Federal do Rio Grande do Norte,2013
ROLLICK,Products/ Firefly Electric Attachable bike - Rollick, Disponível em:
http://www.rollick.biz/en/products/firefly/firefly.html,Acesso em Janeiro de 2014.
SCARI,Alexandre da Silva,Análise estática de rolos cônicos aplicados aplicados em
transmissões automotivas manuais,BeloHorizonte,Pontifícia Universidade Católica de Minas
Gerais,2012,132p.;Tese(Mestrado).
SILVA,L,C.A. Geraldo Gonçalves, Viviane Vieira, Fernanda Cristina , Franco Giuseppe, Teoria de controle autônomo de uma cadeira de rodas, VI CONEM, Congresso Nacional
de Engenharia Mecânica, Campina Grande Paraíba,2010.
SIMULIA. Abaqus – Analysis User’s Manual, 2008. v. II: Analysis, version 6.8,
SOUZA,JuarezBeniciusBraga,Concepção da Estrutura do Sistema Tecnológico de uma
Cadeira de Rodas Inteligente Adaptada ao Utilizador,Porto,Faculdade de engenharia da
universidade do Porto, 2011, 99 p., Tese (Mestrado).

174
SARON CLODOALDO, Polímeros - Moodle USP do Stoa,Aula 8, 2008
http://disciplinas.stoa.usp.br/pluginfile.php/278986/mod_folder/content/0/aula%20introdutori
a.ppt?forcedownload=1. SUDHEESH, K., Vivek,Computer aided design modelingandanalysisof manual
wheelchairwithpropulsionbyhandpedalinglibre,JornalInstituo de engenharia e
tecnologia,India,2012
VIMIEIRO, Claysson Bruno Santos. Dinâmica Veicular. Notas de aula (Programa de Pós
Graduação em Engenharia Mecânica) – Pontifícia Universidade Católica de Minas Gerais, Belo
Horizonte.
YILMAZCOBAN,I,K., Abdullah Mimaroglu, Frontal impactabsorbing systems in
wheelchairslikesheet metal hood in vehicles,JornalThin-WalledStructures,Turquia, 59 (2012)
20–26.

175
APÊNDICE-A
A partir da definição do dimensionamento da estrutura, partiu-se para a construção do
modelo, com a aquisição das partes de todo o conjunto sendo elas as barras e o conjunto motriz.
Ao se adquirir as barras, algumas dificuldades foram encontradas, pois mesmo utilizando as
medidas consultadas em catálogos de tubos, algumas barras não se encontravam disponíveis no
mercado, ou então, teriam de ser feitas sob encomendas porém em grandes quantidades,
desproporcional ao tamanho do projeto. Por medidas de segurança adotou-se em adquirir as
barras com maior diâmetro e maior espessura e até mesmo em algumas ocasiões barras de aço,
para os casos das barras 3 e 4, devido a dificuldades de se encontrar essas medidas em alumínio.
Com estas propostas de alterações é possível garantir a rigidez e a segurança da estrutura a ser
construída, mesmo que proporcione um pequeno aumento de peso, mas devido aos resultados
obtidos na potência exigida para a movimentação, quanto nos cálculos de estabilidade estática
e dinâmica e nas análises estruturais, é visto que os resultados oferecem segurança quanto ao
modelo projetado, sendo que pequenas modificações não altere o comportamento do produto.
As outras partes, como disco cubo e etc, consideradas maciças, foram adquiridos em forma de
tarugos, para serem usinados e adquirem o formato do componente proposto no projeto. Foram
adquiridos também rolamentos, de acordo com a especificado em projeto, que fazem parte do
cubo giratório.
O conjunto motriz que inclui bateria, motor, freio e etc, foi adquirido no formato de kit
que inclui todos os componentes necessários para realizar a motorização, esses Kit são os
mesmos utilizados em bicicletas elétricas. O Kit foi escolhido de acordo com a especificações
do motor, conforme já mencionando anteriormente, tendo este uma potência de 350W. Todos
estes equipamentos serão fixados na estrutura e conectados entre si por fios que passam por
dentro dos tubos, por medidas de segurança, não ficando expostos.
Conforme dito anteriormente, o custo de uma cadeira de rodas elétrica motorizada é
muito elevado, sendo que um dos principais objetivos deste projeto é desenvolver um produto
acessível a toda a população. Além disto, o portador de deficiência não precisa comprar outra
cadeira e sim, apenas o kit, transformando num investimento mais viável. Assim a proposta de
custo do produto é estar na faixa de 50% a 60% do valor das cadeiras de rodas motorizadas
presentes no mercado.

176
Durante a pesquisa de preços dos produtos a serem empregados no Kit, notou-se que o
sistema eletrônico possui um custo elevado para implantação, por serem produtos importados,
e com elevada tecnologia.
É possível a redução dos custos da estrutura mecânica ao realizar uma fabricação em
série, onde as matérias primas e trabalhos de usinagem possuem valores bem reduzidos, se
comparados aos dados apresentados anteriormente.
Todos os componentes mencionados foram adquiridos com verbas da FAPEMIG, o
próximo passo é a construção do conjunto, partindo para a usinagem das barras e tarugos
adquiridos, e testes e implementação eletrônica dos componentes do Kit elétrico adquirido. O
conjunto ainda se encontra em construção até o fechamento deste texto.
Pelo fato deste trabalho envolver o desenvolvimento de um novo produto, juntamente
com a idealização de uma nova estrutura, está se buscando a patente deste projeto.

177
APÊNDICE-B
Como produto do trabalho, foi submetido e aceito o artigo para 2nd International
Conference on Applied Mechanics and Mechanical Automation (AMMA2015). O título do
artigo é Development of an Adaptive KIT for Wheelchair Turning it into na Electric Tricycle,
que mostra o desenvolvimento do conjunto fixo, que foi a primeira proposta de projeto para o
Kit adptável a cadeira de rodas.
Todos os artigos aceitos e publicados neste evento foram enviados pelos organizadores
para publicação em uma edição especial da revista Applied Mechanics and Materials.
O congresso foi realizado em Hong Kong – China, entre os dias 19 e 20 de abril de
2015.

178
APÊNDICE-C
DESENHOS DA ESTRUTURA MECÂNICA

179

180

181

182

183

184

185

186

187

188

189

190

191

192

193