Phenomenological dynamic model of a magnetostrictive actuator
14
Phenomenological dynamic model of a magnetostrictive actuator D. Davino a , C. Natale b , S. Pirozzi b , and C. Visone a,* a DING, Universit`a degli Studi del Sannio, piazza Roma, 82100 Benevento, Italy 1 b DII, Seconda Universit`a degli Studi di Napoli, via Roma 29, 81031 Aversa, Italy Abstract The paper proposes a two-stage model able to describe the dynamic behavior of a commercial magnetostrictive actuator in the frequency range of interest for fast ac- tuation purposes. The first stage is a static model of hysteresis, while the second one is a linear dynamic model. The model structure allows to define well-assessed identi- fication procedures for both stages. In particular, the identification of the dynamic stage is realized by the compensation of the transducer’s hysteresis, through the employment of a pseudo-compensator. Experimental validation of the model is also reported and further applications to other magnetostrictive actuators is addressed. Key words: hysteresis, compensator, dynamic models, magnetostrictive actuators * Corresponding author. Email address: [email protected] (C. Visone ). 1 Fax: +39-0824 30 58 40 Preprint submitted to Elsevier Science 18 July 2003
Transcript of Phenomenological dynamic model of a magnetostrictive actuator

Phenomenological dynamic model of a
magnetostrictive actuator
D. Davino a, C. Natale b, S. Pirozzi b, and C. Visone a,∗
aDING, Universita degli Studi del Sannio, piazza Roma, 82100 Benevento, Italy 1
bDII, Seconda Universita degli Studi di Napoli, via Roma 29, 81031 Aversa, Italy
Abstract
The paper proposes a two-stage model able to describe the dynamic behavior of a
commercial magnetostrictive actuator in the frequency range of interest for fast ac-
tuation purposes. The first stage is a static model of hysteresis, while the second one
is a linear dynamic model. The model structure allows to define well-assessed identi-
fication procedures for both stages. In particular, the identification of the dynamic
stage is realized by the compensation of the transducer’s hysteresis, through the
employment of a pseudo-compensator. Experimental validation of the model is also
reported and further applications to other magnetostrictive actuators is addressed.
Key words: hysteresis, compensator, dynamic models, magnetostrictive actuators
∗ Corresponding author.Email address: [email protected] (C. Visone ).
1 Fax: +39-0824 30 58 40
Preprint submitted to Elsevier Science 18 July 2003

1 Introduction
In the last years the employment of hysteresis models for modelling of systems
with memory has resulted quite effective in the field of magnetics, and in sev-
eral applications as well. Among them, applications of giant magnetostrictive
materials have been widely investigated for mechanical actuation purposes [1].
The presence of hysteresis requires accurate modelling in order to correctly
describe the behavior of real materials (magnetostrictive or ferromagnetic),
employed in control systems or in electrical machines and thus simplifying the
design of such controllers or predicting with acceptable accuracy electromag-
netic fields in such devices. The issue of hysteresis has been tackled both on a
physical and on a phenomenological ground by mathematicians, physicists and
engineers (see Mayergoyz’s book [2] and references therein). The most used
model of hysteresis is the Preisach model, whose parameters can be identified
according to different approaches [2], [3].
Actuators employing magnetostrictive materials are often applied in broad
frequency ranges owing to their fast response to external fields. For sake of
example, in applications such as fast actuation or active vibration control,
dynamic effects taking place in the actuator are not negligible and require to be
suitably modelled to help in the design of feedback control systems employing
magnetostrictive actuators. In fact, it has been shown that hysteretic effects
can negatively influence the performance of the closed-loop system [4].
To this aim, a phenomenological model of a commercial actuator, taking into
account both hysteresis and dynamic effects in the design frequency range,
is defined and its parameters are identified. Experimental validation of the
2

model is also provided.
2 Definition of the dynamic model of the actuator
The available magnetostrictive actuator, provided by Energen inc. model 4-
Rxx, has been adopted for micro-positioning tasks in [4]. In that paper the
effects of hysteresis in feedback control systems were investigated. It was shown
that the performance of the control system can be improved by resorting to
a suitable hysteresis compensation algorithm [3]. The obtained results are
referred to a low frequency range up to about 10 Hz. The present paper is
focused on applications of the same actuator on a broader frequency range
(e.g. active vibration control) up to 500 Hz.
In order to select the proper dynamic model structure, a number of measure-
ments have been performed. The compensation algorithm has been applied
to compute the driving current corresponding to a desired sinusoidal displace-
ment, λd, for the actuator, ranging from 5 Hz to 500 Hz. The actuator has been
driven by this current and the actual displacement, λ, has been measured. The
results are reported in Fig. 2 where the shapes of λd vs. λ loops resembles to
the typical elliptic-shaped of the input-output loops of a linear time-invariant
system.
This suggests that the dynamic behavior of the actuator in the above frequency
range can be described by the two-stage dynamical model as in Fig. 1. The
first stage consists of a hysteresis operator devoted to describe the static mag-
netostrictive behavior; the second stage is a linear dynamic operator able to
model the frequency dependent behavior. Specifically, the hysteresis operator
3

is a Preisach model
λ =∫∫
α≥βµ (α, β) γαβ[i] dαdβ, (1)
where i is the input current, γαβ represents the relay operator (which takes
the values +1 and -1), α and β being the ‘up’ and ‘down’ relay’s switching
values, µ(α, β) is the Preisach distribution function, which can be determined
through suitable identification procedures as described in the next section.
The dynamic system is defined as
n∑
i=1
Didiλ
dt=
n∑
i=1
Nidiλ
dt(2)
being Di and Ni parameters to be determined from measured data. For iden-
tification purposes the continuous-time model (2) is converted to the discrete-
time model in the standard ARX (AutoRegressive eXogenous) form [5]
λ(k) = z−d B(z−1)
A(z−1)λ(k) (3)
being k the time variable, z−1 the unit delay operator, d the number of samples
representing the time delay between input and output of the system, A(·) and
B(·) polynomial functions, whose degrees n and m, respectively, and their
coefficients are determined in the identification procedure.
3 Model identification and experimental validation
The parametric identification of the whole model has been carried out in two
steps. First, it is well-known that the Preisach operator defined in (1) can
be written in terms of a two-variable function, the so-called Everett integrals
E(α, β). Then, this is parameterized by resorting to a fuzzy interpolator, whose
4
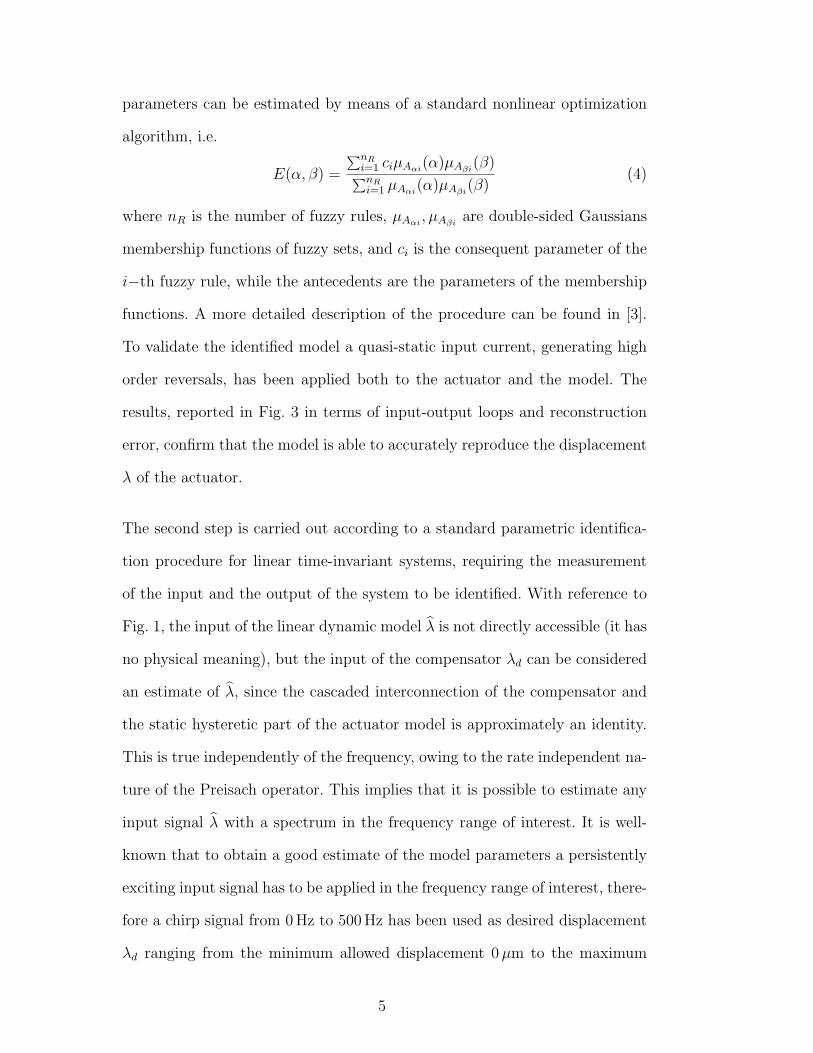
parameters can be estimated by means of a standard nonlinear optimization
algorithm, i.e.
E(α, β) =
∑nRi=1 ciµAαi
(α)µAβi(β)
∑nRi=1 µAαi
(α)µAβi(β)
(4)
where nR is the number of fuzzy rules, µAαi, µAβi
are double-sided Gaussians
membership functions of fuzzy sets, and ci is the consequent parameter of the
i−th fuzzy rule, while the antecedents are the parameters of the membership
functions. A more detailed description of the procedure can be found in [3].
To validate the identified model a quasi-static input current, generating high
order reversals, has been applied both to the actuator and the model. The
results, reported in Fig. 3 in terms of input-output loops and reconstruction
error, confirm that the model is able to accurately reproduce the displacement
λ of the actuator.
The second step is carried out according to a standard parametric identifica-
tion procedure for linear time-invariant systems, requiring the measurement
of the input and the output of the system to be identified. With reference to
Fig. 1, the input of the linear dynamic model λ is not directly accessible (it has
no physical meaning), but the input of the compensator λd can be considered
an estimate of λ, since the cascaded interconnection of the compensator and
the static hysteretic part of the actuator model is approximately an identity.
This is true independently of the frequency, owing to the rate independent na-
ture of the Preisach operator. This implies that it is possible to estimate any
input signal λ with a spectrum in the frequency range of interest. It is well-
known that to obtain a good estimate of the model parameters a persistently
exciting input signal has to be applied in the frequency range of interest, there-
fore a chirp signal from 0 Hz to 500 Hz has been used as desired displacement
λd ranging from the minimum allowed displacement 0 µm to the maximum
5

allowed displacement 26 µm (i.e. λd = 13 cos(2πkt2) + 13 µm). The driving
current i has been computed through the compensation algorithm and the ac-
tuator displacement λ has been measured with an eddy-current SMU 9000-2U
displacement sensor by Kaman. After a preprocessing of the acquired data,
the structure of the ARX model (3), is assumed with d = 1, n = 2 and m = 1.
The parametric identification, based on a least-square algorithm, determined
the following polynomials:
A(z−1) = 1− 0.4877z−1 − 0.2711z−2, B(z−1) = 1.015− 0.7727z−1
To validate the model, first, the auto-correlation of the residuals has been com-
puted; the resulting diagram is depicted in Fig. 4 and, with respect to 90%
confidence intervals, it is an impulsive function, namely the auto-correlation
of white noise, as requested for a good identification result [5]. Then, in or-
der to check the reconstruction accuracy of minor loops inside the limit cy-
cle, the model has been validated by comparing the simulated output with
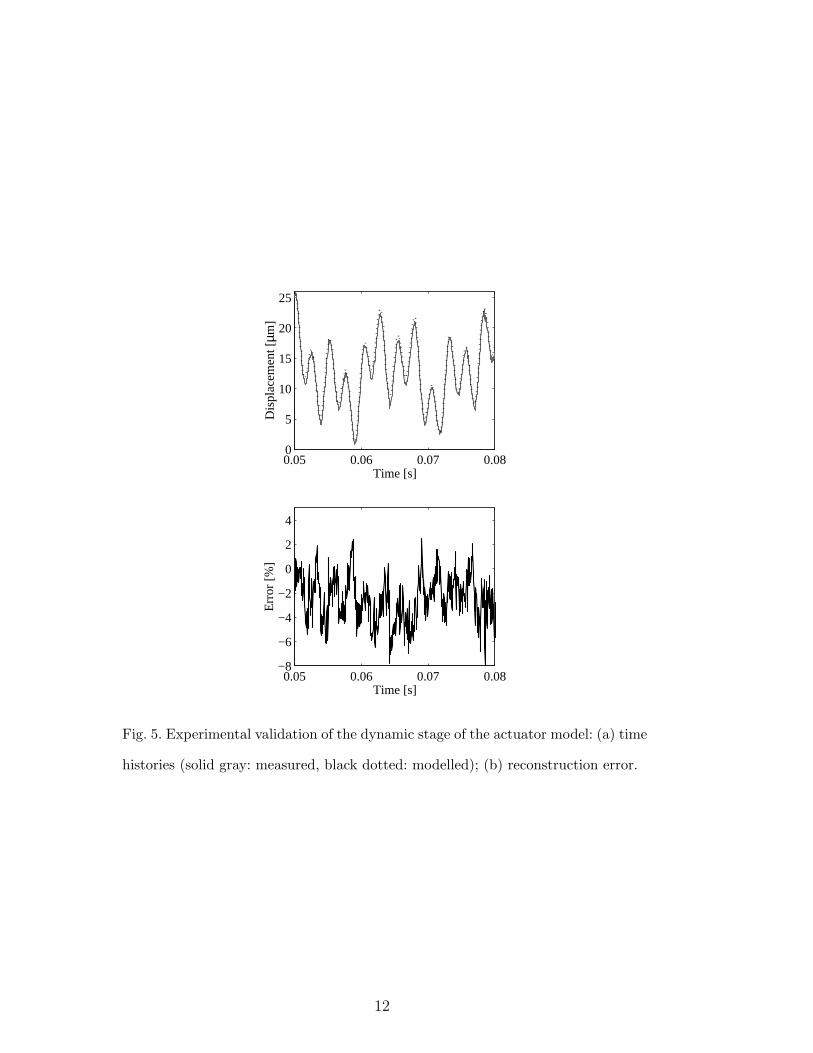
the measured one in the case of multi-sinusoidal λd signals. Fig. 5 shows the
simulated and measured output for a signal with components at frequencies
70, 180, 390 Hz. The reconstruction error is within 8 %.
Moreover, the complete dynamic model has been tested with three-harmonic
and four-harmonic periodic current inputs. The first signal has frequencies at
70 Hz, 140 Hz and 280 Hz, where the second one has an additional harmonic at
420 Hz. The input-output loops, both measured and simulated, are shown in
Fig. 6 and Fig. 7, together with the corresponding reconstruction errors. The
results confirm the accuracy of the proposed dynamic model in the considered
frequency range.
6

4 Conclusions
A novel dynamic model for a commercial magnetostrictive actuator has been
proposed. The model is structured as a series-connection of a static hysteresis
Preisach operator and a linear time-invariant dynamic system. By exploiting
the idea of the compensator of hysteresis operator, an easy identification pro-
cedure can be adopted for the dynamic stage of the model. The identification
of static stage of the model is based on a fuzzy technique, while a standard
parametric identification is used for the linear time-invariant operator. Despite
of its very simple structure, the model is able to accurately reproduce the dy-
namic behaviour of the actuator in a broad frequency range, as confirmed
by a number of experimental tests. Future work will be devoted to test such
a modelling technique on a resonant magnetostrictive actuator with a very
rich dynamics, designed for vibration reduction. In fact, for those applications
it is mandatory to take into account the nonlinear dynamics of a hysteretic
resonant actuator employed in the feedback control system.
References
[1] G. Engdahl, Handbook of Giant Magnetostrictive Materials, Academic Press,
San Diego, 1999.
[2] I. Mayergoyz, Mathematical Models of Hysteresis, Springer-Verlag, New York,
1991.
[3] C. Natale, F. Velardi, C. Visone, Identification and compensation of preisach
hysteresis models for magnetostrictive actuators, Physica B: Condensed Matter
306 (2001) 161–165.
7

[4] A. Cavallo, C. Natale, C. Pirozzi, C. Visone, Effects of hysteresis compensation in
feedback control systems, IEEE Transactions on Magnetics 39 (2003) 1389–1392.
[5] L. Ljungz, System Identification: Theory for the User, Prentice Hall, Englewood
Cliffs, 1987.
8
List of Figures
1 Dynamic model of the actuator and compensator. 10
2 Compensated cycles at increasing frequencies for sinusoidal λd. 10
3 Experimental validation of the static stage of the actuator
model: (a) input-output loops (solid gray: modelled, black
dotted: measured); (b) reconstruction error. 11
4 Correlation function of model residuals. 11
5 Experimental validation of the dynamic stage of the actuator
model: (a) time histories (solid gray: measured, black dotted:
modelled); (b) reconstruction error. 12
6 Experimental validation of the actuator model. (a) dynamic
loops corresponding to an input signal with harmonics at
70 Hz, 140 Hz, 280 Hz (solid gray: modelled, dotted black:
measured); (b) reconstruction error. 13
7 Experimental validation of the actuator model. (a) dynamic
loops corresponding to an input signal with harmonics at
70 Hz, 140 Hz, 280 Hz and 420 Hz (solid gray: modelled, dotted
black: measured); (b) reconstruction error. 14
9

λλd i Magnetostrictiveactuator
λλz - d z -1
z -1
B( )A( )
Dynamic model of the actuator
i
Fig. 1. Dynamic model of the actuator and compensator.
0 10 20 300
5
10
15
20
25
30
Desired displacement [µm]
Dis
plac
emen
t [µm
]
Fig. 2. Compensated cycles at increasing frequencies for sinusoidal λd.
10

0 0.5 1 1.5
0
5
10
15
20
25
Current [A]
Dis
plac
emen
t [µm
]
0.4 0.42 0.44 0.46 0.48−5
0
5
Time [s]
Err
or [%
]
Fig. 3. Experimental validation of the static stage of the actuator model: (a) in-
put-output loops (solid gray: modelled, black dotted: measured); (b) reconstruction
error.
0 10 20 30 40 50
0
0.2
0.4
0.6
0.8
1
Lag
Fig. 4. Correlation function of model residuals.
11
0.05 0.06 0.07 0.080
5
10
15
20
25
Time [s]
Dis
plac
emen
t [µm
]
0.05 0.06 0.07 0.08−8
−6
−4
−2
0
2
4
Time [s]
Err
or [%
]
Fig. 5. Experimental validation of the dynamic stage of the actuator model: (a) time
histories (solid gray: measured, black dotted: modelled); (b) reconstruction error.
12

0 0.5 1 1.50
5
10
15
20
25
Current [A]
Dis
plac
emen
t [µm
]
0.02 0.04 0.06 0.08
−6
−4
−2
0
2
4
6
Time [s]
Err
or [%
]
Fig. 6. Experimental validation of the actuator model. (a) dynamic loops corre-
sponding to an input signal with harmonics at 70Hz, 140 Hz, 280 Hz (solid gray:
modelled, dotted black: measured); (b) reconstruction error.
13

0 0.5 1 1.50
5
10
15
20
25
Current [A]
Dis
plac
emen
t [µm
]
0.02 0.04 0.06 0.08
−6
−4
−2
0
2
4
6
Time [s]
Err
or [%
]
Fig. 7. Experimental validation of the actuator model. (a) dynamic loops corre-
sponding to an input signal with harmonics at 70Hz, 140 Hz, 280Hz and 420Hz
(solid gray: modelled, dotted black: measured); (b) reconstruction error.
14