PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS
10
PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS Michael Yu Wang 1 and Shengyin Wang 1 Department of Automation and Computer-Aided Engineering The Chinese University of Hong Kong Shatin, NT, Hong Kong Tel.: +852-2609-8487; Fax:+852-2603-6002 [email protected] (M.Y. Wang) Abstract This paper describes a parametric optimization technique for shape and topology optimization. The proposed method is a generalization of the classical method of level sets which are represented with discrete grids. In using radial basis functions (RBFs), the proposed formulation projects the geometric motion of the level sets of an implicit function onto its parametric representation. The re- sulting method provides a set of new capabilities for general shape and topology optimization, particularly treating it as a parameter problem with the RBF im- plicit models. Numerical examples are presented in the paper, suggesting the potential of the method. Keywords: shape and topology optimization; radial basis functions; level set method; para- meter design 1. Introduction The finite element (FE) based strategy for structural topology optimization has received wide attention and experienced considerable progress recently since the seminal work of Bendsøe and Kikuchi [4]. A wide range of ap- proaches and techniques have been developed as reviewed in detail in [1, 5]. The method of implicit moving interface using the level set technique has been an emerging scheme for shape and topology optimization [2, 12, 11]. The level set method introduced by Osher and Sethian [8] is a simple and versatile method for computing and analyzing the motion of an interface in two or three dimensions. Since interfaces may easily develop sharp corners, break apart, and merge together, the level set method has a wide range of applications, in- cluding problems in fluid mechanics, combustion, solids modelling, computer animation and image processing [9].
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS

PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATIONWITH RADIAL BASIS FUNCTIONS
Michael Yu Wang1 and Shengyin Wang1Department of Automation and Computer-Aided EngineeringThe Chinese University of Hong KongShatin, NT, Hong KongTel.: +852-2609-8487; Fax:[email protected] (M.Y. Wang)
Abstract This paper describes a parametric optimization technique for shape and topologyoptimization. The proposed method is a generalization of the classical methodof level sets which are represented with discrete grids. In using radial basisfunctions (RBFs), the proposed formulation projects the geometric motion ofthe level sets of an implicit function onto its parametric representation. The re-sulting method provides a set of new capabilities for general shape and topologyoptimization, particularly treating it as a parameter problem with the RBF im-plicit models. Numerical examples are presented in the paper, suggesting thepotential of the method.
Keywords: shape and topology optimization; radial basis functions; level set method; para-meter design
1. IntroductionThe finite element (FE) based strategy for structural topology optimization
has received wide attention and experienced considerable progress recentlysince the seminal work of Bendsøe and Kikuchi [4]. A wide range of ap-proaches and techniques have been developed as reviewed in detail in [1, 5].
The method of implicit moving interface using the level set technique hasbeen an emerging scheme for shape and topology optimization [2, 12, 11]. Thelevel set method introduced by Osher and Sethian [8] is a simple and versatilemethod for computing and analyzing the motion of an interface in two or threedimensions. Since interfaces may easily develop sharp corners, break apart,and merge together, the level set method has a wide range of applications, in-cluding problems in fluid mechanics, combustion, solids modelling, computeranimation and image processing [9].

2
Along with its benefits, the discrete representation also limits the utility ofthe classical level set method. The level set function has no analytical form, andthe entire design domain must be discretized into a rectilinear grid for level setprocessing, often through a distance transform. In applying the classical levelset method for structural topology optimization, the implementation requiresan appropriate choice of the upwind scheme, extension velocity and reinitial-ization algorithm [9, 12]. Furthermore, there is no nucleation mechanism inthe conventional level set method, if the Hamilton-Jacobi equation is solvedunder a strict condition for numerical stability [10, 7]. Indeed, new holes can-not be created in the interior of a material region because the Hamilton-Jacobiequation satisfies a maximum principle and reinitialization must be appliedto the level set function to ensure its regularity [7]. Although some attemptshave been made to incorporate the topological derivatives into the level setschemes [7], it is shown to be difficult to combine the intrinsically discontinu-ous topological derivatives with the continuous shape derivatives [13]. Hence,the numerical considerations of discrete computation have severely limited theprimary advantages of the level set methods in solid optimization. Other at-tempts have also been made to use an implicit function as a regularizationmethod without invoking the discrete level set system [3].
In this paper, we describe an extension of the level set methodology with aparameterized implicit representation. The proposed scheme retains topologi-cal benefits of the implicit representation of evolving surfaces while avoidingthe drawbacks of a grided spatial discretization. In other words, we can treatshape and topology optimization as a parameter optimization problem. A para-meterized implicit surface can be propagated under an arbitrary speed function.The propagation occurs by changing the implicit’s parameters with the use ofa common search algorithm in conventional parameter optimization.
We employ the popular radial basis functions (RBFs) to provide a parame-terized implicit representation of shapes. The proposed RBF-level set methodis implemented in the framework of minimum compliance design that has beenextensively studied in the topology optimization field. Numerical examples aregiven to illustrate the success of the method for 2D structures.
2. Topology Optimization with Level Set ModelIn the level set framework, a surface is represented implicitly through a level
set function Φ(x), which is Lipschitz-continuous, and the surface itself is thezero isosurface or zero level set x ∈ Rd |Φ(x) = 0 (d = 2 or 3) [9]. Inshape and topology optimization of a solid, the solid structure is defined as
Φ(x) = 0 ∀x ∈ ∂ Ω ∩DΦ(x) < 0 ∀x ∈ Ω\∂ΩΦ(x) > 0 ∀x ∈ (D\Ω)
(1)

Parametric Shape and Topology Optimization with Radial Basis Functions 3
where D ⊂ Rd is a fixed design domain in which all admissible shapes Ω (asmooth bounded open set) are included, i.e., Ω ⊂ D.
With this implicit representation, the structural topology optimization processoperates on the implicit scalar function Φ(x) defined in Eq. (1) [12, 2], oftenusing a gradient method for the minimization of an objective function J(Φ). Inthe present study, only a relatively simple unconstrained minimum compliancedesign problem presented in [2] with a design-independent load is considered,which can be expressed as
min:Φ(x)
J(Φ) =∫
D(ε(u))TCε(u)H(−Φ) dΩ + `
∫
DH(−Φ)dΩ (2)
where u is the displacement field, ε(u) the strain field, H(Φ) the Heavisidestep function of the implicit function Φ(x), ` a positive Lagrange multiplier,and the volume V of the admissible design can be written as
V =∫
DH(−Φ)dΩ (3)
Given a local perturbation of the boundary, x for x ∈ ∂Ω, of the admissibledomain Ω, the resulting change in the objective function J(Φ) gives rise to theso-called shape derivative [12, 2], written as
dJ
d t= −
∫
∂Ω
((ε(u))TCε(u)− `
)vn ds (4)
where t is the artificial time, and vn the normal velocity representing the per-turbation vn(x) = (∇Φ) · x for x ∈ ∂Ω.
Following the development in [8], the change in the surface of the solid asa result of the normal velocity vn is captured by changing its underlying levelset function via:
∂Φ∂t
+ vn|∇Φ| = 0 (5)
This is known as the Hamilton-Jacobi equation. Hence, moving the boundaryof the shape (Φ(x) = 0) along the normal direction is equivalent to transport-ing Φ by solving the Hamilton-Jacobi equation (5).
With the above shape derivative of Eq. (4) and the time derivative of (Eq.5), it is natural to define the normal velocity vn as a descent change for theminimization of the objective function [12, 2], as
vn = −G = (ε(u))TCε(u)− ` (6)
Thus, by substituting the normal velocity vn of Eq. (6) into Eq. (5), one ob-tain the level set propagation equation that, when integrated, defines a mov-ing boundary of the solid that evolves under the minimization of the objectivefunction [12, 2].

4
3. RBF-Parameterized ImplicitsIn the conventional level set-based topology optimization, a general analyt-
ical function for Φ(t,x) is not known. Thus, it must be discretized for levelset processing, often through a distance transform. In an Eulerian approach,a numerical procedure for solving the Hamilton-Jacobi PDE is indispensable.This procedure requires appropriate choice of the upwind schemes, extensionvelocities and reinitialization algorithms, which may limit the utility of thelevel set method. Some of the limitations are discussed earlier. For example,reinitialization prevents a level set function from nucleation of holes in the in-terior of material regions [10, 7]. Another major limitation lies in the discreterepresentation.
Therefore, a better method is to retain topological benefits of the implicitrepresentation of a level set model while avoiding the drawbacks of using itsdiscrete samples on a fixed grid or mesh. In the present study, we propose togeneralize the level set function Φ(t,x) to include alternative implicit surfacerepresentations which provide a free-form representation with parameteriza-tion. To this end, a level set method using radial basis functions (RBFs) isdeveloped for structural topology optimization.
Radial basis functions are radially-symmetric functions centered at a partic-ular point [6], or knot, which can be expressed as follows:
ϕi (x) = ϕ (‖x− xi‖) , xi ∈ D (7)
where ‖ · ‖ denotes the Euclidean norm on Rd [6], and xi the position of theknot. Only a single fixed function form ϕ : R+ → R with ϕ(0) > 0 is used asthe basis to form a family of independent functions.
There is a large class of possible radial basis functions. Commonly usedRBFs include thin-plate splines, polyharmonic splines, Sobolev splines, Gaus-sians, multiquadrics, compactly supported RBFs [6], and others. Among thesecommon functions, the multiquadric (MQ) spline appears to be the overall bestperforming RBF, which can be written as
ϕi (x) =√‖x− xi‖2 + c2
i (8)
where ci is the free shape parameter which is commonly assumed to be a con-stant for all i in most applications [6].
In the present RBF implicit modelling, MQ is used to define the scalar im-plicit function Φ(x) with N MQs centered at N knot positions:
Φ(x) =N∑
i=1
αiϕi (x) + p (x) (9)
where αi is the weight, or expansion coefficient, of the radial basis functionpositioned at the i-th knot xi, and p (x) a first-degree polynomial to account

Parametric Shape and Topology Optimization with Radial Basis Functions 5
for the linear and constant portions of Φ(x) and to ensure polynomial preci-sion [6]. For three dimensional (3D) problems, p (x) is given by
p (x) = p0 + p1x + p2y + p3z (10)
in which p0, p1, p2 and p3 are the coefficients of the polynomial p (x). Becauseof the introduction of this polynomial, to ensure a unique solution, the coef-ficients in Eq. (9) must be subject to a set of orthogonality or side constraints[6]:
N∑
i=1
αi = 0;N∑
i=1
αixi = 0;N∑
i=1
αiyi = 0;N∑
i=1
αizi = 0 (11)
Thus, Eq. (9) can be re-written in a vector form as
Φ (x) = gT (x)α (12)
where
g (x) =[ϕ1(x) · · · ϕN (x) 1 x y z
]T ∈ R(N+4)×1 (13)
α =[α1 · · · αN p0 p1 p2 p3
]T ∈ RN+4 (14)
4. Radial Basis Function PropagationAs aforementioned, in the level set-based topology optimization methods,
moving the boundary of the shape along a descent gradient direction to findan optimal shape and topology is equivalent to transporting the scalar implicitfunction Φ(x) by solving the Hamilton-Jacobi equation (5) and thus the opti-mal propagation of the front is performed by solving the Hamilton-Jacobi PDE[12, 2]. In the present study with RBF implicit representation, it is assumedthat the space and time are separable and the time dependence of the implicitfunction Φ is due to the generalized expansion coefficients α of the RBFs inEq. (14). Then, the implicit function Eq. (12) becomes time dependent as fol-lows:
Φ = Φ (x, t) = gT (x) α(t) (15)
Substituting Eq. (15) into the Hamilton-Jacobi equation (5) yields
gT dα
dt+ vn|(∇φ)T α| = 0 (16)
To time advance the initial values α, a collocation method is introduced. Inthe present Eulerian type approach, all the nodes of the fixed mesh are takenas the fixed knots of the RBF interpolation for the implicit function Φ(x). Asan extension, Equation (16) is then applied to each of these knots of the RBF

6
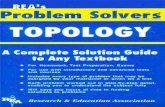
interpolation, rather than only the points at the front. The normal velocity vn
in Eq. (16) is thus extended as v en to all these knots in the design domain D.
This is illustrated in Fig. 1, where each of the grid point is considered as a knotof the RBF.
Figure 1: An extension velocity field for the level set method.
According to Eq. (6), a natural extension of the normal velocity can be ob-tained if the strain field is defined over the entire design domain D by assumingε(u) = 0,u ∈ (D\Ω). Since both the strain energy density inside the designdomain and the constraint-related Lagrange multiplier are included, this exten-sion velocity is physically meaningful.
Using Euler’s method, an approximate solution to Eq. (16) can be found.It should be noted that the ODE may be rather stiff, since its counterpart ofthe Hamilton-Jacobi PDE has a numerical stability condition known as theCourant-Friedrichs-Lewy (CFL) condition [9]. A small time step is advised.After obtaining the approximate solution at each time step, the time-dependentshape and topology can be updated by using Eq. (15). The reader is referredto [14] for details.
5. Parametric Shape and Topology OptimizationWe are further interested in the shape evolution of implicit surface repre-
sentation by a parametric method. To this end, we consider the RBF level setfunction
Φ(x(t), α(t)) = 0; (17)
as the solution x with a set of shape parameters α.Assuming the shape changes through a velocity field vn(t), we can find the
shape evolution in the form of a parameter change directly from Eq. (16) as
vn = − 1‖ ∇Φ ‖
(N∑
i=1
ϕiαi + α0
)(18)

Parametric Shape and Topology Optimization with Radial Basis Functions 7
The resulting equation couples the changes in parameters α(t) with the speedfunction vn(t) on the surface of the solid. Now, we can substitute Eq. (18) intoEq. (4). The resulting equation couples the change in parameters α with the re-sulting change in the objective function of the optimization J . Essentially, wehave derived the parametric sensitivity of the objective function with respect tothe coefficients α of the RBF implicit surface representation:
∂J
∂α=
[∂J
∂α1,
∂J
∂α2, . . .
]T
(19)
∂J
∂αi=
∫
∂ΩG
1‖ ∇Φ ‖ϕids, i = 1, 2, . . . N (20)
∂J
∂α0=
∫
∂ΩG
1‖ ∇Φ ‖ds (21)
where G is given in Eq. (6).Therefore, we have transformed the general shape and topology optimiza-
tion problem into a parameter optimization problem. This would enable us touse algorithms that are based on sensitivity analysis to derive a search strategyin the parameter space. The costly grid discretization in the classical level setmethod is thus avoided. Therefore, we may call the method presented hereparametric shape and topology optimization.
A standard search method is to use the parameter sensitivity to define asearch direction and a move step, such as the steepest descent method in math-ematical programming. More elaborate techniques such as the method of mov-ing asymptote (MMA) are also feasible.
6. Numerical Examples of a Michell Type StructureIn this section, numerical examples in two dimensions are presented to il-
lustrate the present RBF-level set method for structural topology optimization.First, we show a Michell type example with the RBF propagation scheme dis-cussed in Section 4. The Michell type structure, as shown in Fig. 2, is loadedwith a concentrated vertical force of P at the center of the bottom edge. Thebasic parameters are assumed to be L = 4, H = 1, thickness t = 1.0, loadP = 1, E = 1 for solid material, E = 1× 10−5 for void material, ν = 0.3,and the fixed Lagrange multiplier ` = 10. It is also assumed that the time stepsize τ = 10−4 and the mesh size 80× 20.
Figure 3 shows extension velocities at each knot and the front for the initialand final designs. The final design is quite similar to a truss structure withpin-like connection at some joints.
Next, we illustrate the parametric scheme discussed in Section 5. For thisscheme, we employ the inverse multi-quadric (IMQ) spline as the basis func-

8
P
H
LL
Figure 2: Definition of the minimum compliance design problem.
(a) Initial front and extension velocity (b) Final front and extension velocity
Figure 3: Front and extension velocity for the Michell type structure.
tion, defined as
ϕi (x) = 1/√‖x− xi‖2 + c2
i (22)
where ci = 0.05. The volume ratio is fixed at 0.4. The rest parameters remainthe same. For the parametric scheme, we use the method of moving asymptote(MMA) that is papular for the topology optimization problem solutions.
The initial design and the corresponding level set function are shown Fig. 4,while the final optimal solution and its corresponding level set function areshown in Fig. 5.
(a) Initial shape (b) Initial level set function
Figure 4: The initial design and level set function.

Parametric Shape and Topology Optimization with Radial Basis Functions 9
(a) Initial shape (b) Initial level set function
Figure 5: The final design and level set function.
7. ConclusionsIn this study, we focus on level set based methods for structural shape and
topology optimization. Radial basis functions are used to define a general im-plicit representation with weight coefficients as parameters. This enables levelset algorithms to avoid a costly discrete computational scheme and use a math-ematically more convenient parameter search technique instead. The formu-lation applies to the general problem of shape and topology optimization withthe surface of the solid object evolving under a speed function. Numerical ex-amples of 2D structures are given to show the success of the present method.It is suggested that the introduction of the radial basis functions to the con-ventional level set methods possesses promising potentials in parametric shapeand topology optimization.
Any serious application of the parametric optimization techniques with RBFimplicit surface representation described here requires careful numerical analy-sis for stability and convergence, and should be demonstrated on a wide varietyof situations. In particular, the capability of hole nucleation needs thoroughanalysis and verification. We plan to develop the depth of analysis requiredand investigate general 3D applications.
AcknowledgementsThis research work is supported in parts by the Research Grants Coun-
cil of Hong Kong SAR (Project Nos. CUHK4164/03E and CUHK416205),a Post-doctoral Fellowship from the Chinese University of Hong Kong (No.04/ENG/1), and the Natural Science Foundation of China (NSFC) (Grants No.50128503 and No. 50390063), which the authors gratefully acknowledge.
References

10
[1] G. Allaire. Shape Optimization by the Homogenization Method. Springer, New York,2001.
[2] G. Allaire, F. Jouve, and A.-M. Toader. Structural optimization using sensitivity analysisand a level-set method. Journal of Computational Physics, 194:363–393, 2004.
[3] T. Belytschko, S. P. Xiao, and C. Parimi. Topology optimization with implicit func-tions and regularization. International Journal for Numerical Methods in Engineering,57(8):1177–1196, 2003.
[4] M. P. Bendsoe and N. Kikuchi. Generating optimal topologies in structural design usinga homogenization method. Computer Methods in Applied Mechanics and Engineering,71:197–224, 1988.
[5] M. P. Bendsoe and O. Sigmund. Topology Optimization: Theory, Methods and Applica-tions. Springer-Verlag, Berlin, 2003.
[6] M. D. Buhmann. Radial Basis Functions: Theory and Implementations, volume 12 ofCambridge Monographs on Applied and Computational Mathematics. Cambridge Uni-versity Press, New York, NY, 2004.
[7] Martin Burger, Benjamin Hackl, and Wolfgang Ring. Incorporating topological deriva-tives into level set methods. Journal of Computational Physics, 194:344–362, 2004.
[8] S. Osher and J. A. Sethian. Front propagating with curvature dependent speed: Algo-rithms based on hamilton-jacobi formulations. Journal of Computational Physics, 78:12–49, 1988.
[9] Stanley J. Osher and Ronald P. Fedkiw. Level Set Methods and Dynamic Implicit Sur-faces. Springer-Verlag, New York, 2002.
[10] J. A. Sethian. Level Set Methods and Fast Marching Methods. Cambridge Monographson Applied and Computational Mathematics. Cambridge University Press, Cambridge,UK, 2nd edition, 1999.
[11] M. Y Wang and X. Wang. PDE-driven level sets, shape sensitivity and curvature flowfor structural topology optimization. Computer Modeling in Engineering & Sciences,6(4):373–395, 2004.
[12] M. Y. Wang, X. Wang, and D. Guo. A level set method for structural topology optimiza-tion. Computer Methods in Applied Mechanics and Engineering, 192:227–246, 2003.
[13] M. Y. Wang and P. Wei. Topology optimization with level set method incorporatingtopological derivative. In 6th World Congress on Structural and Multidisciplinary Opti-mization, Rio de Janeiro, Brazil, 2005.
[14] S. Y. Wang and M. Y. Wang. Radial basis functions and level set method for structuraltopology optimization. International Journal for Numerical Methods in Engineering,2005. in press, doi:10.1002/nme.1536.