
Nanocarbon based ionic actuators—a review
31
Nanocarbon based ionic actuators—a review This content has been downloaded from IOPscience. Please scroll down to see the full text. Download details: IP Address: 120.203.214.138 This content was downloaded on 01/10/2013 at 22:41 Please note that terms and conditions apply. 2013 Smart Mater. Struct. 22 104022 (http://iopscience.iop.org/0964-1726/22/10/104022) View the table of contents for this issue, or go to the journal homepage for more Home Search Collections Journals About Contact us My IOPscience
Transcript of Nanocarbon based ionic actuators—a review

Nanocarbon based ionic actuators—a review
This content has been downloaded from IOPscience. Please scroll down to see the full text.
Download details:
IP Address: 120.203.214.138
This content was downloaded on 01/10/2013 at 22:41
Please note that terms and conditions apply.
2013 Smart Mater. Struct. 22 104022
(http://iopscience.iop.org/0964-1726/22/10/104022)
View the table of contents for this issue, or go to the journal homepage for more
Home Search Collections Journals About Contact us My IOPscience

IOP PUBLISHING SMART MATERIALS AND STRUCTURES
Smart Mater. Struct. 22 (2013) 104022 (30pp) doi:10.1088/0964-1726/22/10/104022
Nanocarbon based ionic actuators—areviewU Kosidlo1, M Omastova2, M Micusık2, G Ciric-Marjanovic3,H Randriamahazaka4, T Wallmersperger5, A Aabloo6, I Kolaric1 andT Bauernhansl1
1 Fraunhofer Institute for Manufacturing Engineering and Automation (IPA), Germany2 Polymer Institute, Slovak Academy of Sciences, Bratislava, Slovakia3 Faculty of Physical Chemistry, University of Belgrade, Serbia4 University Paris Diderot—Paris 7—ITODYS CNRS UMR F-7086, France5 Institute of Solid Mechanics, TU Dresden, Germany6 Institute of Technology, University of Tartu, Estonia
E-mail: [email protected]
Received 12 December 2012, in final form 22 August 2013Published 20 September 2013Online at stacks.iop.org/SMS/22/104022
AbstractNanocarbons represented especially by carbon nanotubes (CNTs) and graphene have been ofgreat interest during the last two decades, both from a fundamental point of view and forfuture applications. The most eye-catching features of carbon nanostructures (CNSs) are theirelectronic, mechanical, optical and chemical characteristics, which open a way for versatileapplications. Among those future prospects, actuators are one of the promising technologies.Since 1999 when the first macroscopic actuator containing CNTs was reported, the interest ofutilizing these materials as well as other CNSs in active systems has been triggered all over theworld. This paper gives a thorough review as well as in-depth descriptions of the many aspectsof nanocarbon-based actuators. The review covers aspects of worldwide research anddevelopment of nanocarbon ionic actuators up to 2012. Materials which are covered by thisreview include CNTs and their composites, carbon nanofibres (CNFs), graphene and itsderivatives, microporous carbon materials (for example carbide derived carbons (CDCs) andcarbon aerogels) as well as the possible combinations of these materials. The consideredaspects cover the following fields: synthesis and characterization of the investigated materials,the actuation mechanism as well as modelling and simulation. Applications comprisingsystem integration and device development are also reviewed within this paper.
(Some figures may appear in colour only in the online journal)
Abbreviations and symbols
AC alternating currentACNF activated carbon nanofibreAFM atomic force microscopeAl4C3 aluminium carbideAu goldCDC carbide derived carbonCH4 methaneCNC conductor network compositeCNF(s) carbon nanofibre(s)CNS(s) carbon nanostructure(s)
CNT(s) carbon nanotube(s)CVD chemical vapour depositionDC direct currentDNA deoxyribonucleic acidEAP(s) electroactive polymer(s)EAPap electroactive paperEIS electrochemical impedance spectroscopyEmax specific energy densityEMIBF4 1-ethyl-3-methylimidazolium tetrafluoroborateEMITFSI 1-ethyl-3-methylimidazolium
bis(trifluoromethanesulfonyl)imideFe3O4 iron(II,III) oxide
10964-1726/13/104022+30$33.00 c© 2013 IOP Publishing Ltd Printed in the UK & the USA

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
FGNS graphene nanosheets functionalized with 3,5-di(trifluoromethyl)-aniline
FMWNTs functionalized multi-walled nanotubesGIC graphite intercalation compoundGNS graphene nanosheetsGO graphene oxideH2 hydrogenHCl hydrochloric acidHFP hexafluoropropyleneICP(s) intrinsically conducting polymer(s)IL(s) ionic liquid(s)IPMC ionic polymer–metal compositeLi lithiumLiBF4 lithium tetrafluoroborateLiTFSI lithium bis(trifluoromethanesulfonyl)imideMD molecular dynamicsMg(ClO4)2 magnesium perchlorateMnO2 manganese(IV) oxideMo2C molybdenum carbideMWNT(s) multi-walled carbon nanotube(s)NaCl sodium chlorideNaClO4 sodium perchlorateNMP N-methyl-2-pyrrolidonep–p peak-to-peakPANI polyanilinePDA polydiacetylenePEDOT poly(3,4-ethylenedioxythiophene)Pmax maximum powerPMMA poly(methyl methacrylate)PPy polypyrrolePSA poly(sodium 4-styrenesulfonate-co-acrylic acid)PSA-g-MWNTs
poly(sodium 4-styrenesulfonate-co-acrylic acid)grafted on multi-walled carbon nanotubes
Pt platinumPVA poly(vinyl alcohol)PVdF poly(vinylidene fluoride)PVdF-HFP
poly(vinylidene fluoride-co-hexafluoropropylene)
P(VDF-TrFE-CFE)
poly(vinylidenefluoridetrifluorethylene-chlorofluoroethylene)
RGO reduced graphene oxideRuO2 ruthenium(IV) oxideSEM scanning electron microscopySG-CNT super-grown carbon nanotubeSG-SWNT
super-grown single-walled carbon nanotube
SPE solid polymer electrolyteSSEBS sulfonated poly(styrene-b-[ethylene/butylene]-
b-styrene)SWNT(s) single-walled carbon nanotube(s)TiC titanium carbideV voltVA-MWNTs
vertically aligned multi-walled carbon nanotubes
VGCFs vapour grown carbon fibres3D three-dimensionalδmax maximum displacement
1. Introduction
An actuator is a mechanical device used for the purposeof inducing strain into a system in order to generatemotion, change its shape or to compensate disturbingvibrations. Traditional actuators include pneumatic actuators,electronic actuators, motors and hydraulic cylinders [1–3].The weight, limited size, complex transmission and restrictiveshape of such actuators have led researchers to investigatealternative technologies for more effective substitutes withlarge mechanical compliance, down-scalability, high power-to-weight and power-to-volume ratios and high efficiency [1].Electroactive polymers (EAPs) are materials that respond toelectrical stimulation with a significant size or shape changeand are emerging as a new class of actuation materials [4].EAP-based actuators show useful properties, such as sizeableactive strains and/or stresses, high mechanical flexibility,light-weight, structural simplicity and versatility, ease ofmaterial processing, scalability, no acoustic noise, and, inmost cases, low cost. The most attractive characteristic ofEAPs is their ability to emulate the operation of biologicalmuscle in high fracture toughness, large actuation strain,and inherent vibration damping. It is this ability that hasbeen the driving force behind much of the research in thefield. EAPs are commonly classified in two major families:ionic EAPs (activated by an electrically induced transportof ions and/or molecules) and electronic EAPs (activated byelectrostatic forces). These soft actuators are today broadlyused for several types of smart materials, actuation devicesand bioinspired and biomimetic systems, as well as systemsto convert mechanical energy into electrical energy for sensingand energy harvesting [5, 6].
One group of materials within the ionic EAPs are thenanocarbons, particularly carbon nanotubes (CNTs). Sincethe discovery of multi-walled CNTs (MWNTs) by Iijimain 1991 [7] and single-walled CNTs (SWNTs) two yearslater [8], CNTs have been the fastest growing domainin nanotechnology due to their exceptional physical andchemical properties. The exciting prospect of using CNTs asmechanical actuators was first proposed in 1996 [9]. Shortlythereafter, Baughman et al [10] were the first to demonstratethe use of sheets of SWNTs as actuator.
The aim of this review is to familiarize the reader withrecent developments in the area of nanocarbon-based ionicactuator technology and to encourage further research in thisfield to overcome some of its challenges and also to inspirenew and creative applications for this alternative and excitingactuator technology.
2. Principle of operation
An actuator is a device that performs a mechanical actionin response to an input signal, for example electric stimuli.The literature indicates that graphite can be intercalated byvarious reactants [11]. For example, atom of alkali metals canbe inserted between the loosed graphite layers. In this processan alkali atom transfers an electron to the carbon structure,charges it negatively, and the alkali atoms stay as positive
2

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 1. Schematic illustration of charge injection in a CNT-based electromechanical actuator. (A) An applied potential injects charge ofopposite sign into the two pictured CNT electrodes, which are in a liquid or solid electrolyte (blue background). (B) Charge injection at thesurface of a CNT bundle, which is balanced by the pictured surface layer of electrolyte cations. Reprinted with permission from [10].Copyright (1999) American Association for the Advancement of Science.
ions between the layers. Thus the overall charge is neutral,the distance between the graphite layers increases and alsothe distance between two carbon atoms of the same layerincreases. The expansion of graphite lattice as based on datacollected from the literature shows that the bond length canexpand by about 1% if about 15 electrons are transferred to100 carbon atoms [11]. Although the bond length expansionof 1% seems to be small, it is about an order of magnitudehigher than the actuator strain for high-modulus ferroelectrics,which are among the most commonly used materials foractuators [11].
The change in bond length can be understood asthat adding electrons to the graphite sheet populates stateswith anti-bonding character. Hence, it weakens the bondand increases the bond length. Removing electrons has asimilar effect: it depopulates bonding states, but it is lessefficient [11]. Based on such assumptions one may deducethat this will also be true for CNTs that tubes will change theirlength if the number of electrons sitting on a tube is changed.
To date, several different actuation mechanisms for CNTshave been reported. Among them one can find actuationby double-layer charge injection [10], electrostatic actuation[12, 13], and photothermal actuation [14]. One of thefirst, and considered as the primary mechanism for CNTactuation, is double-layer charge injection (figure 1), whereinsupercapacitor charging results in relatively large changes incovalent bond lengths. The achievable actuator strain, coupledwith excellent mechanical properties of CNTs, potentiallyoffers an actuator material with performance exceeding thatof all other actuator materials in terms of work per cycleand stress generation [4]. In the double-layer charge injectionactuation mechanism CNT acts as an electrochemicalcapacitor with charge injected into the CNT balanced by theelectrical double-layer formed by movement of electrolyteions to the CNT surface. This double-layer charge injectionis a non-Faradaic process in which changing the charge onthe carbon atoms results in changes of C–C bond lengths [15,16]. As a result, expansion/contraction of single CNT can beobserved. For low charge densities, calculations [15–18] and
experimental results [19–21] for charge transfer complexes ofgraphite and conducting polymers show that the strain dueto quantum mechanical effects is an expansion for electroninjection and a contraction for hole injection [22]. However,in the case of a high-density charge injection of either sign, anexpansion results from both quantum mechanical effects andelectrostatic double-layer charging [22].
Actuation of assemblies of CNTs can also be achieved byelectrochemical charging [22], where the CNTs are in contactwith an electrolyte. Electrochemical actuation in CNT matsinvolves non-Faradaic double-layer charging that changescarbon–carbon bond lengths [10].
As the research on carbon-based ionic actuators hasprogressed, it has been recognized that the electrochemicaldouble-layer build-up and the C–C bond length changes,defined as the primary mechanisms for the displacement,are not the only mechanisms influencing the performance ofthose actuators. As will be shown, the work on carbon-basedactuators was with time extended by combining them withother materials that also contribute to device displacement byvarious mechanisms. The first category is based on the ideaof ionic polymer–metal composites (IPMC). Actuation of thistype of actuator is caused by swelling of the ionic polymermembrane on the cathode side and shrinkage of that on theanode side due to an electric field driven flux of mobile cationsand polar solvent (typically water) [24]. The second categoryinvolves redox reaction-based materials like RuO2 or othertransition metal oxide (MnO2) [25]. RuO2 and MnO2 arecharacterized by fast and reversible redox reactions occurringat the surface of the active material particles. Metal oxideshave generally high electrical resistance, therefore metaloxide powders are often used in combination with CNTs.The third category of EAP actuators is based on conductivepolymers. Typical examples include polyaniline (PANI) [26],polypyrrole (PPy) [27] or poly(3,4-ethylenedioxithiophene)(PEDOT) [28]. Conductive polymers have advantages interms of low cost, simple synthesis, good stability in air,and high electrical conductivity. In the course of thispaper as various types of nanocarbon-based actuators are
3

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
discussed, the other mechanisms of operational principle willbe introduced.
The nanocarbon actuator is a complex system in thesense that many mechanisms may operate at the same time.In the case of the electrochemical actuator, the double-layerformation plays a crucial role because the local concentrationof ions controls the volume change inducing the bending andactuation. This ionic local concentration is governed by theelectrostatic or electrochemical properties of the double layerthat in turn depend upon the solvent properties. In other words,the electric field at the interface controls the ionic population.Thus, the dynamics of the ionic transport determines boththe volume change and the magnitude of the strain. Sincethe osmotic pressure varies with the ionic concentration, theinfluence of this later mechanism cannot be excluded. At thesame time, the bond length in the carbon may be changeddue to this huge electric field. For the bucky gel actuator,the change in the ionic population in the double layer canbe viewed as an intercalation (de-intercalation) process. Then,the strain is directly related to the charge and the capacitance.In this case, the bucky gel actuator behaves as a flexibleelectrochemical capacitor.
From the above explanations, one can observe thatvarious mechanisms are not independent and can operate atthe same time. This fact explains why a deeper modelling isnecessary to rationalize the physico-chemical processes.
From the perspective of several actuation mechanismsinfluencing the performance of nanocarbon-based actuators,several models to explain expansion have been proposed. Themost recent one is probably described as fitting of the strain(ε) as a function of charge (Q) [29]. A quadratic equation(y = A · x2) is sufficient to describe the experimental datawith a larger value for A in the case of cation insertion(Acation/Aanion = 4.1). The correlation ε ∝ |Q|2 is similar tothe relationship between the repulsive pressure of overlappingdouble layers and the square of the applied charge (P ∝ |Q|2)in the low-voltage Debye–Huckel approximation [30] but thetheory must be modified for ion crowding and overscreeningin ionic liquids [31, 32]. At high voltage, condensed layersof counterions form at the maximum density V − 1ion, andlarge steric repulsion occurs when their total width, scaling as|Q| · Vion [33, 34], becomes comparable to the pore size.
3. Modelling and simulation
Only a few approaches—being able to describe themechanical behaviour and the electromechanical coupling—exist for CNTs. The existing models can be classifiedas macroscopic models (mechano-electrical or electricalmodels) able to describe the global behaviour or morecomplex microscopic models. In most cases there remainsa gap between the physically-based microscopic and themacroscopic models.
A macroscopic RF circuit model for CNTs was publishedby Burke [35, 36]. A description was given by Odegard et alin order to derive structure–property relationships [37]. Thismethod offers a link between computational chemistry andsolid mechanics by substituting discrete molecular structures
with equivalent-continuum models. A structural mechanicsapproach for the analysis of CNTs was presented by Li andChou [38]. The key point of this concept is that the CNTis a geometrical frame-like structure and the bonds betweenthe two nearest-neighbouring atoms can be considered asbeams. By making a link between structural mechanics andmolecular mechanics, the sectional property parameters ofthese beams are obtained. Based on this method, Tserpesand Papanikos [39] presented a 3D finite element model forarmchair, zigzag and chiral SWNTs. Analytical models forthe determination of the mechanical properties of regularCNTs were developed, e.g. by Xiao et al [40] and Changand Gao [41]. The mechanical properties of CNTs werecalculated by atomistic or molecular mechanics models onthe microscale [39, 42–44]. In these works, the obtainedvalues for the Young‘s moduli are of the same order ofmagnitude, but the values for the Poisson numbers differ,as the inversion-bond deformation is often not considered.Chen et al [45] computed the radial mechanical properties ofSWNTs applying a modified molecular structural mechanicsapproach. A nonlinear structural-mechanics-based model wasgiven by Pantano et al [46] showing the modelling of structureand deformation of SWNTs and MWNTs. The elastic andplastic properties of SWNTs and MWNTs under axialtension using the molecular dynamics (MD) simulation werecomputed by Liew et al [47]. Yin and Yuan [48] investigatednumerically the effective elastic moduli of SWNTs. This(effective) macroscopic behaviour is investigated by MDsimulations in which the dynamic response and mutual forceinteraction among atoms of the nanostructures are obtainedwhen subjected to small-strain deformation. Important issuesin a MD simulation for characterizing the mechanicalproperties of CNTs are discussed by Mylvaganam andZhang [49].
The phase transformation from fullerite to amorphouscarbon at the microscopic level by a MD model waspublished by Moseler et al [50]; an atomistic simulationof CNT fracture was performed by Belytschko et al [51].It should be mentioned that calculations based on quantummechanics (e.g. ab initio MD models or models based ondensity functional theory) require a quite high computationaleffort and thus can capture only a limited amount ofparticles/atoms.
The electromechanical actuation process was alsoinvestigated. It has been reported that the kinetics ofion exchange between the nanotube tower and electrolytesolution can control the actuator performance [30]. Electro-chemical impedance spectroscopy (EIS) and potential stepchronocoulogram analyses were performed to provide anunderstanding of the complex phenomenon of nanotubeelectrochemical actuation [30]. Modelling the kinetics canprovide parameters and values for the design and optimizationof electrochemical actuators. An equivalent circuit model forthe determination of resistors and capacitors was given by Heoet al [52]. Recently, twist-spun yarns made of CNTs havebeen shown to work as electrochemical actuators and forcesensors [32]. The electrochemical response of these yarns atdifferent bias potentials was studied using EIS. Based on the
4

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 2. Visualization of a MWNT bundle within the yarn. (a) Electric field lines E initially converge towards the exposed face of MWNTbundle, while the gaps around the bundle are partially shielded. (b) With accumulation of ions that follow the electric field lines to theoutermost point of the bundle, a concentration gradient is established. (c) An artificial boundary B is drawn to visualize the process bywhich accumulated charge in the outer areas A spreads to the valley sides C under the force of the tangential electrodiffusion gradient.(d) The RC ladder circuit formed by the resistance of the MWNTs and the ionic resistance of the electrolyte along with the diffusionimpedance into the yarn. Reprinted with permission from [53]. Copyright (2009) Electrochemical Society.
EIS results, the capacitance is estimated first by directly fittinga resistance–capacitance circuit and then by fitting a circuitincluding a constant phase element (figure 2).
A technique was presented by Odegard et al fordeveloping constitutive models for polymer compositesystems reinforced with SWNTs [54]. A continuum-basedelastic micromechanics model was also developed fornanoparticle/polymer composites in order to obtain themechanical properties [55].
Macroscopic models for the actuation as well as exper-iments for bucky paper (SWNT-, double-walled nanotube-,MWNT-sheet actuators) were given by Haque et al [56–58].In these research works, the dependency of bucky paperthickness actuation on the applied electrical voltage wasinvestigated statically and dynamically. A macroscopic
electrical actuation model was derived by Riemenschneideret al [59] for bucky paper actuators; an extension of thismodel as well as a simple electromechanical coupling waspublished [60]. Refined shell models for the vibration analysisof MWNTs were recently obtained by the application ofCarrera’s Unified Formulation [61].
Modelling of CDCs and carbon aerogels is even morecomplicated due to their not well determined structures. Akinetic Monte Carlo approach was used to determine diffusionprocesses in aerogels [62]. A MD study for CDC-based EAPmaterials was carried out by Soolo et al [63]. The modelledsystem was able to actuate when the carbon was charged,which could be observed as a volume change of the MD box.It was shown that the volume expansion of the cathode andcontraction of anode occurs due to the replacement of smaller
5

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 3. Optical images of the MWNTs nanotweezers operating at various applied voltages. Adapted with permission from [64].Copyright (2001) American Institute of Physics.
anions with significantly larger cations in the cathode, andvice versa in the anode.
4. Nanocarbon actuators
4.1. Single carbon nanotube actuators
Owing to its huge elastic modulus, good conductivity andlarge free surface area per mass, a SWNT was assumed topresent optimal intrinsic actuator properties [22]. This firstresearch on single SWNTs aimed to demonstrate the viabilityof such a single-SWNT-based actuator (‘nano-actuator’). Toachieve this goal the primary focus was on how to obtain andmanipulate an isolated and suspended SWNT. The chemicalvapour deposition (CVD) turned out to be the most efficientmethod for tube growth on a pre-trenched quartz wafer [22].In this work the final and most important step was to usean atomic force microscope (AFM) to probe the deformationof the SWNT that occurred under a bias voltage in anelectrochemical cell [22].
Following the discovery of CNT nanotweezers [13], theactuation effect of single MWNTs has been used to developvarious forms of nanotweezers as shown in figure 3 [64].Nanotweezers made from individual single MWNTs couldlead to a manipulation technique on the nanoscale thatwould support progress in nanodevice development. Thesenanotweezers operate in an AFM with metal electrode alteredsilicon tips. The MWNTs are fixed to the metal electrodesthrough carbon deposition. Application of a DC voltage tothe MWNTs through the metal electrodes induces them tomove to approach each other like pincers. After reaching athreshold voltage the electrostatic effect clamps the MWNTsclosed together. Applying a negative potential versus groundreleases the MWNTs from each other. The greatest advantageof this system is that it allows construction of materialsin three dimensions as opposed to the lateral movement ofnanomaterials through conventional manipulation by an AFMtip. It can be envisioned that CNTs can also find applicationas nanomechanical switches. A CNT can actuate between twometal contacts to give two or three distinct ON/OFF states.
Another method to make a nanotweezer composed of twoMWNT arms was proposed by Lee et al [65]. In this workthe MWNT arm was fabricated by attaching a MWNT ona tungsten tip via manual assembly. The closing actuationof the nanotweezer was simulated and the simulation was
compared with experimental results. Since each MWNT armhas a macroactuator, namely a separated tweezer arm, itwas possible to close and open the nanotweezer repeatedly.The nanotweezer proposed in this work displayed betterperformance than previous nanotweezers due to the separatedsubstrate [65].
Experiments with individual CNTs are still difficulttoday, but the effect of CNT actuation can also bedemonstrated on a macroscopic scale with the use of so-calledbucky papers [10].
4.2. Bucky paper actuators
Bucky paper is a paper-like fleece macroscopic ensembleof CNT bundles. A bucky paper actuator containing SWNTbundles was the first reported CNT actuator [10]. Thebucky paper actuator used SWNT sheets as electrolyte-filled electrodes of a supercapacitor [22]. In such system,changing the applied voltage injects electronic chargeinto a SWNT electrode, which is compensated at theCNT–electrolyte interface by electrolyte ions, forming theso-called electrochemical double layer. The actuators usedimensional changes in covalently bonded directions causedby this charge injection. Thus the actuation mechanism(quantum-chemical-based expansion) does not require ionintercalation for device operation [10], however it might beexpected that the intercalation of ions in the CNT structureenhances degree of displacement.
Bucky papers, sheets of nonaligned SWNT or MWNT,were initially used to produce cantilever actuators and toenable visualization of carbon nanotubes’ potential. In suchexperiment, two bucky paper strips were fixed on a double-sided scotch tape and immersed in an aqueous electrolyte[10, 66, 67]. Applying a potential between the CNT sheetsinduced CNT length changes that provided cantilever-basedbending. In aqueous electrolyte, maximum linear actuatorstrains of ∼0.1% and ∼0.2% were observed for SWNT andMWNT sheets, respectively, with the degree of actuationvarying approximately parabolically with applied potential[10, 67, 68]. The use of organic electrolytes [69] andionic liquids (ILs) [70] having large electrochemical stabilitywindows enabled the application of higher potentials tothe CNT sheets, resulting in correspondingly increasedcharge injection and actuation (0.7% and 0.5% for SWNTand MWNT sheets, respectively, in acetonitrile-based
6

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 4. Schematic drawing of the preparation method of thebucky gel actuator by casting method. Reprinted with permissionfrom [82]. Copyright (2009) Elsevier.
electrolytes) [69, 71]. A thickness strain of ∼1% was alsoobserved by actuating a SWNT bucky paper under applicationof square wave voltage of ±0.7 V [72].
The electromechanical actuation of SWNTs and MWNTsmats as well as aligned double-walled CNTs ribbonswas analysed and compared in another study using anexperimental setup for in-plane (longitudinal) actuationstrain measurements [73]. From the experimental evidence,actuation due to quantum chemical and electrostatic effectswas distinguished. Their respective contribution to the totalactuation was proposed to depend on Young’s modulus andcharge density. While mechanical energy densities of actuatedstructures are appreciable, electromechanical conversionefficiencies were found to be impractically low [73].
Additionally, it was noted that with increasing elasticmodulus of the structure, observed actuation strain approachesthe linear strain versus charge characteristics observedin graphite intercalation compounds (GIC). This led tothe conclusion that any structure based on graphene-type constituents will fundamentally exhibit these samecharacteristics. If the structure’s modulus is lower than thatof graphene, additional electrostatic repulsion will result in anactuation strain larger than that observed in GICs [73].
Finally, for the aqueous, non-Faradaic CNT actuatorsexamined, mechanical output energies were comparableto those of piezoelectric polymers, albeit at very lowelectromechanical conversion efficiencies [73].
Although the demonstration of the macroscopic-scaleactuation of CNTs was successful from the research point ofview, bucky papers, due to the need of liquid electrolyte andtheir low mechanical stability, were judged to be unsuitablefor most of the envisaged applications. Thus, followingthe research on the bucky paper cantilever actuators, fullysolid-state bending type tri-layer actuators demonstrate theuse of solid electrolytes [74].
Figure 5. Bucky-gel-based bimorph actuator fabricated throughlayer-by-layer casting. Schematic structure of the actuator stripcomposed of a polymer-supported IL electrolyte layer sandwichedby bucky gel electrode layers, and experimental setup for cantileveroscillation. The displacements (d) at a point 10 mm (=l) away fromthe fixed position were continuously measured by a laserdisplacement meter. Reprinted with permission from [74].Copyright (2005) Wiley.
4.3. Bucky gel actuators
The first dry bending actuator fabricated simply by layer-by-layer casting, using ‘bucky gel’ [75], a gelatinousroom-temperature ionic liquid (IL) containing SWNTs, wasdemonstrated in 2005 [74], and it was followed by numerousstudies devoted to bucky gel actuators (figure 4) [75–107].The motivation of this work was to apply bucky gels tothe fabrication of soft actuators with the expectation thatsuch actuators with built-in IL components can operate inair without external electrolytes. Bucky gels can be readilyprepared by grinding SWNTs in imidazolium ion-basedILs; the heavily entangled SWNT bundles are exfoliatedby a possible cation–π interaction [76] on the SWNTsurfaces to give much finer bundles. ILs are non-volatileand characterized by their high ionic conductivities andwide potential windows, which are advantageous for rapidresponses in actuation and high electrochemical stabilities ofthe components, respectively [77, 78].
This bucky gel actuator has a bimorph configuration witha polymer-supported internal IL electrolyte layer sandwichedby bucky gel electrode layers which allow quick andlong-lived operation in air at low applied voltage (figure 5).
The maximum generated strain in the SWNT bucky gelelectrode layer was 0.95% [79], which was the result of thecantilever bending displacement and force measurements forthe actuator of 0.456 mm in thickness at an applied voltageof 2.5 V [79]. Hence, the peak-to-peak (p–p) value of themaximum strain is twice the above value, 1.9% p–p, whichwas the maximum generated strain in the SWNT bucky gelelectrode layer, applying the voltage from −2.5 to 2.5 V.
This successful demonstration of the bucky gel actuatorsperformance triggered a broad interest in the topic and
7

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
different groups conducted research to study, improveand utilize bucky gel actuators [80]. Preliminary studiesproved that the frequency of charge injection [79],thickness of layers [79] and IL type [81–84] have adirect effect on the bending efficiency of bucky gelactuators. Furthermore, the possibility of replacing SWNTswith supergrowth SWNTs (SG-SWNTs) and cross-linkedSG-SWNTs was investigated [85]. More recently, it wasreported that inclusion of millimetre-long SWNTs improvesthe performance of bucky gel actuator [86]. Limitedinvestigations so far include the elastic and fracture propertiesof bucky gel actuator, focusing on the influence ofCNT cross-linking [87]. Furthermore, the effect of threegeometrical and material parameters (layer thickness, CNTtype and components weight fraction) on the mechanicalproperties was investigated [80]. Complementarily, theeffect of electrode, electrolyte, and three-layered deviceminiaturization on actuator operating frequency and strainwas subjected to experimental studies [88].
In addition, Biso and Ricci have reported a polymer-supported MWNT-gel electrode for cantilever bendingactuators containing an IL [89]. In that paper, the useof MWNTs-based bucky gels that are not subject tochirality-related restrictions on electrical properties and aresignificantly cheaper than SWNTs for preparing actuators wasproposed. A strain of ca. 1% was achieved [89] and this resultis comparable with other works on SWNT-based bucky gelactuators [74, 79, 81].
In further investigations [90], bucky gel electrodes con-taining various IL species were prepared using SWNTs andtheir electrochemical impedance responses were measuredand analysed. Also, the electromechanical responses ofactuators composed of two bucky gel electrodes sandwichingan IL gel layer were studied by measuring the bendingdisplacement due to an applied sinusoidal voltage at variousfrequencies. All impedance data were successfully simulatedby the equivalent circuit model of a porous electrode basedon the transmission line circuit model [90]. By using thesame parameter values of the porous electrode model, thefrequency dependence of the strain generated in the buckygel actuators could be simulated. On the basis of theexperimental and simulation results, the electromechanicalresponses of the bucky gel actuator were analysed by takinginto account the electrochemical properties of the bucky gelelectrode. Accordingly, an electromechanical model for abucky gel actuator was obtained [90]. At high frequencyrange, EIS responses were dominated by the resistivecomponents whereas the electrical responses were controlledby the capacitive behaviours at low frequency. It was alsosuggested that the behaviour of bucky gel actuators canbe understood in terms of complex capacitance diagramsand the frequency dependence of the real and imaginarycomponents of the capacitance [91]. The complex capacitanceanalysis allows analysing the relationship between energystorage and energy dissipation during the operation ofthe electrochemical actuator. Bucky gel SWNT actuatorsbehave as supercapacitors [91]. Also, Randriamahazaka andAsaka observed that the mechanical responses (strains)
were correlated to the real part of the capacitance [91].Accordingly, the energy–power plot or Ragone plot expressesthe usable energy as a function of the power. In orderto visualize the relationship between mechanical behaviourand electrochemical properties, the strain–power plot wasreported. The maximum power Pmax and specific energydensity Emax of the electrochemical actuator were alsocalculated to reveal that the energy densities of bucky gelSWNT bending actuators containing an IL are of the sameorder of magnitude as those of natural muscles [91].
As much attention has been focused on activated(acid-treated) CNTs for electric double-layer capacitors thathave higher electrochemical capacitance than those based onnon-activated CNTs [92], the same were tested for applica-tion in actuators. An activated MWNT–COOH/polymer/ILbending bucky gel actuator that surpassed the performance ofthe corresponding SWNT/polymer/IL actuator in terms of thestrain and maximum generated stress was reported [93, 94].In that work the effects of the IL species and compositionon the electrochemical and electromechanical propertiesof bending actuators containing MWNT–COOH-, MWNT-and SWNT–IL gel electrodes were investigated with aconclusion that a common MWNT–COOH-based actuatorcan be used to achieve strain and maximum generated stresswithout using specialized SWNTs [93]. Complementarily, theelectrochemical and electromechanical properties of activated(amino functional group) MWNT–NH2/polymer/IL bendingactuator were compared with those of SWNT/polymer/IL andnon-activated MWNT/polymer/IL polymer actuators [95].The performance of the activated MWNT–NH2/polymer/ILbending actuator surpassed that of the SWNT/polymer/ILactuator, in terms of the strain and maximum gener-ated stress. Additionally, it was observed that for theMWNT–NH2/polymer/IL bending actuators, the strain andmaximum generated stress were dependent on the ILspecies [95].
Also, SWNTs functionalized with an aromatic diaminehave been successfully used to prepare bucky gel layersby mixing with an imidazolium-based IL, allowing thebuilding of bimorph bending actuators that significantlyoutperform those prepared by using pristine SWNTs oroxidized SWNTs [96]. The SWNT gravimetric specificcapacitance was doubled, the actuator maximum operatingfrequency became five times higher and for same injectedcharge the strain showed a fourfold increase. The origin ofsuch dramatic effects is most probably due to an enhancedbinding between the SWNT induced by their chemicalmodification [96]. The bending actuation performance ofbucky gels made using diamine functionalized SWNTs wascompared with the one achieved using pristine super-grownCNTs (SG-CNTs), which represent vertically aligned forestsof SWNTs [97]. The unique properties of SG-CNTs allowthe preparation of actuators that outperform those madefrom pristine commercial SWNTs in strain–charge andstrain–frequency response, but when SWNT-amide-basedactuators are compared with those made from SG-CNTsthey show similar performance, which stems from theincreased binding between SWNTs induced by the chemicalmodification [97].
8

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Among the various metal oxides that have beeninvestigated as possible electrode materials for high-powerelectrochemical capacitors [98], ruthenium oxide (RuO2)was seen to be very promising due to its large specificcapacitance and good conductivity compared with otheroxides [98, 99]. Consequently, the first non-activatedMWNT/polymer/IL bucky gel actuator containing RuO2was subjected to investigation and surpassed the bendingactuation performance of only-MWNT/polymer/IL and only-SWNT/polymer/IL bucky gel actuators in terms of thestrain and maximum generated stress [100, 101]. In afurther study [102] bucky gel actuators containing manganeseoxide (MnO2) were compared with those using ionic gelswith only-MWNTs, with MWNTs and RuO2 or withonly-SWNTs. The double-layer capacitance of the MWNTelectrode containing MnO2 was larger than the one with theMWNT electrode containing RuO2, only-MWNTs or only-SWNTs [102]. Furthermore, the MWNT electrode containingMnO2 exceeded the bending actuation performance of theother three actuators in terms of both strain and maximumgenerated stress [102]. Both MWNTs and MnO2 wererequired to produce large strain and quick response actuatorsthat surpassed the bending actuation performance of thepolymer-supported actuator containing only-SWNTs [102].
The general bending mechanism in polymer-supportedbucky gel actuators, proposed first by Mukai et al [79], whichis also operative in the case of PVdF(HFP)/MnO2-supportedIL-based bucky gel actuator, is shown in figure 6 [102].When a voltage is applied between two electrode layers,cations and anions in the gel electrolyte layer are transferredto the cathode and anode layers, respectively, and formelectrical double layers with negatively and positively chargedCNTs. Such ion transport will most likely result in swellingof the cathode layer and shrinkage of the anode layer.Consequently, the actuator bends to the anode side. This isan actuation principle using the CNTs as some kind of flexibleelectrode material not contributing the main share of actuationperformance.
The investigations on bucky gel actuators were notonly limited to modifications of the electrode material. Inaddition, study of the electrochemical property and actuationmechanism of an actuator using the same electrolyte andthree different electrodes (SWNT/IL/polymer gel electrode,SWNT/IL gel electrode and Au paste as an electrode) wascarried out in air to determine which of the actuators presentsthe best bending actuation performance [103]. As a result,it was shown that polymer–IL gel of the electrolyte is animportant factor in the field of the low-voltage EAP actuator,and it can be considered that these results have becomethe important design principle basis of the low-voltage EAPactuator [103].
From the different perspective of performance op-timization, the group of Asaka [104] investigated theeffects of Li salts (lithium tetrafluoroborate (LiBF4)and lithium bis(trifluoromethanesulfonyl)imide (LiTFSI)),on the electrochemical and electromechanical proper-ties of a bending actuator using a polymer-supportedSWNT–IL gel electrode. The ionic conductivities of the
Figure 6. Schematic response model for the polymer-supportedactuator based on the ion transfer mechanism. Reprinted withpermission from [102]. Copyright (2012) Elsevier.
gel electrolyte layers with molar ratios of LiBF4/1-ethyl-3-methylimidazolium tetrafluoroborate (EMIBF4) = 0.1 and0.5, and LiTFSI/1-ethyl-3-methylimidazolium bis (trifluo-romethanesulfonyl)imide (EMITFSI) = 0.1 and 0.3 werehigher than those containing only EMIBF4 and onlyEMITFSI, respectively [104]. A large capacitance value65–96 F g−1 at a slow sweep rate 1 mV s−1 was alsofound [104]. The bending actuator containing Li salt/ILperformed much better than that containing only IL. It wasconsidered that the higher ionic conductivity of the gelelectrolyte layer containing Li salt/IL produces a quick-response actuator, and that the large capacitance gives a largegenerated strain [104]. These investigations were broadenedby studies on the effect of alkaline metal or earth metalsalts on the electrochemical and electromechanical propertiesof a bending actuator using SWNT–IL gel electrode [105].Similarly to the bending actuator containing Li salt/IL, thebending actuator containing the alkaline metal salt/IL or earthmetal salt/IL also performed much better than that containingonly the IL [105]. These results could be rationalized by theelectromechanical model developed by Asaka et al [105, 106].
Not to omit the third component of bucky gel actuators,the effects of polymer species such as poly(vinylidenefluoride) (PVdF) homopolymer or poly(vinylidene fluoride-co-hexafluoropropylene) (PVdF-HFP copolymer), averagemolecular weight of the polymer, and the HFP content inPVdF-HFP on the electrochemical and electromechanicalproperties of bending actuators using polymer-supportedSWNT–IL gel electrodes were investigated [107]. For theSWNT/PVdF (Kynar 741 or 761)/IL bending actuator
9

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 7. Idealized schematic illustration of ion diffusion in a DNA/PPy/SWNT hybrid system during the actuation state: (A) view of theouter surface of DNA/PPy/SWNT hybrid fibres, and (B) ion diffusion on the inner surface of the DNA/PPy/SWNT hybrid fibres [111]. Theprinciple of DNA/PPy/SWNT actuator operation is based on combined volumetric and electrostatic effects. Reprinted with permissionfrom [111]. Copyright (2010) Elsevier.
containing EMIBF4, the generated strain was 0.90–1.05%for the frequency range of 0.01–0.005 Hz, which was overtwice as large as that for the SWNT/PVdF-HFP (KynarFlex 2801)/IL bending actuator [107]. Furthermore, it wasconsidered that the HFP content should be low (or zero) forlarge generated strain and zero for large maximum stress.The SWNT/PVdF/IL bending actuator performs much betterthan the SWNT/PVdF-HFP/IL actuator and has a quickresponse, sufficient for practical application (e.g., tactiledisplays) [107].
This research allows for making the conclusion that afavourable performance of CNT actuators can be achievedin combination with other material. Thus it is not surprisingthat a broad spectrum of research activities was performed incombining CNTs with other EAP materials, like conductingpolymers.
4.4. Carbon nanotube—conducting polymer actuators
For more than a decade, the potential creation of synergisticeffects on the actuation behaviour of CNTs and intrinsicallyconducting polymers (ICPs) e.g., PANI, PPy, and PEDOT, is adriving force for the research of the CNT/ICP nanocompositeactuators. ICPs are combined with CNS materials in order toimprove actuation properties of both ICPs and CNS materials,e.g., the incorporation of stiffer CNS materials with highYoung’s modulus and tensile strength (CNTs, etc) into theICPs with high actuation strain allows creating actuatorswith large displacement, quick response, and high mechanicalpower.
The content of CNT in CNT/ICP actuators preparedso far was in the range from 0.76 [108] to 83.3wt% [109]. Therefore, two groups of CNT/ICP actuatorscan be distinguished: (1) ICP actuators with CNT fillers(CNT/ICP wt% < 1) and (2) CNT actuators with ICP fillers(CNT/ICP wt% > 1).
The first CNS/ICP actuator was reported by Spinkset al [110], who prepared SWNT/PPy actuator by coatingSWNT mats with PPy using two different techniques:(1) chemical oxidative polymerization of pyrrole, and(2) electrochemical oxidative polymerization of pyrrole with
SWNT mat as the working electrode. It was found byusing a linear variable distance transducer to measure thechanges in length of the sample that SWNT/PPy actuatorstrains were very similar to that recorded for SWNT matsover the same potential range and the effect of appliedload on actuator strain was the same for uncoated SWNTmats and for SWNT/PPy hybrid materials [110]. Theseresults suggested that the PPy coating on the SWNTbundles has little effect on the SWNT actuation. TheSWNT/PPy actuator materials prepared by Spinks et al [110]showed the electrochemical response of PPy and retainedthe high surface area of the SWNT mats when coatingtimes were short. The redox/electrochemical response ofthe hybrid SWNT/PPy actuator was improved by theaddition of DNA [111]. The SWNT/DNA/PPy hybrid actuatorwas prepared by the chemical oxidative polymerization ofpyrrole in the aqueous dispersion containing LiTFSI as thedopant, bytron as an oxidant, and SWNT/DNA fibres [111].Improved performance of the simultaneous electrochemicallinear actuation of SWNT/PPy hybrid fibres using porousstructured DNA hydrogels has been reported [111]. Schematicrepresentation of the principle of operation is shown infigure 7. The SWNT/DNA/PPy fibres showed actuationstability with an expansion and contraction of 4.4% under alow potential (±1 V).
In other example MWNT/PPy actuator (actuation in thethickness direction of MWNT/PPy thin films) with threelayers of PPy sandwiching two layers of MWNTs hasbeen fabricated by layer-by-layer technique which includedelectrochemical deposition of PPy, i.e., electrochemicaloxidative polymerization of pyrrole and drop-casting ofaqueous suspension of MWNTs functionalized with sulfonategroups [112]. The same preparative method was employed forfabrication of multilayer MWNT/PEDOT actuator (actuationin the thickness direction of MWNT/PEDOT thin films)[112, 113], which exhibited significantly improved conduc-tivity and modulus, less creep during the course of a slowpotential sweep experiment and faster responses to potentialsquare waves in comparison with PEDOT [113]. The optimalMWNT content to eliminate creep was 10–20% (highercontent of MWNTs did not improve creep performance
10
Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
but reduced the strain) [112]. The addition of MWNTsdid not significantly alter the magnitude of the PEDOTresponse, and it was shown that MWNTs allowed betterconnectivity near the electrode contacts, while the MWNTloading was insufficient to render the PEDOT conductive atall potentials [113]. All these findings indicate actuation ofPEDOT instead of CNT actuation.
A novel route for producing multilayer MWNT/PPycomposite actuators has recently been demonstrated [114],where highly anisotropic MWNT sheets were drawn froma MWNT forest and then periodically electrochemicallylaminated with PPy. In order to obtain pore-free MWNT/PPylaminates, i.e., to completely fill the volume between MWNTfibres with PPy, current-controlled polymerization of pyrrolewas deployed in the work of Zheng et al by using a currentthat is much lower than the diffusion limit [114]. The highstrength and stiffness of such prepared MWNT/PPy laminatesresulted in their significantly higher isotonic actuation strainsunder load, as well as in doubled work per cycle, than in thecase of neat PPy [114].
The double-layer films composed of millimetre-longsuper-grown SWNT (SG-SWNT) and PPy was preparedby electropolymerization of pyrrole on the SG-SWNT filmsurface [115]. The bending actuators utilizing the millimetre-long SG-SWNT/PPy [115] double-layer films worked inaqueous solutions at scan rate higher than 1000 mV s−1. It wasproposed that the bending actuation of the SG-SWNT/PPydouble-layer films was induced by volume changes of bothSG-SWNT and PPy layers.
Layered composite SWNT/PANI/PPy/Pt fibre actuators,showing the extension/contraction of fibre, were produced bycoating SWNT/PANI nanocomposite on a PPy hollow fibrecontaining a Pt helix [116]. Electrochemically acceleratedmechanical creep of PPy was dramatically decreased byforming CNT/PPy laminates. The actuation behaviour ofSWNT/PANI/PPy composite was compared with that of neatPPy and PANI/PPy composite [116]. Components of thecomposite with low actuation strain such as PANI and/orSWNT restricted the actuation displacement of the PPysubstrate causing a reduced strain in the composite. Inparticular, a minimal quantity of SWNT (1.3 wt%) in thecomposite led to a discernible decrease in actuation strain.Sodium nitrate (1 M) aqueous solution used as an electrolytegave good actuation stability where the actuation strainwas almost independent of applied stress (5–12 MPa). Thiswas explained by the unchanged Young’s modulus at thereduced (contracted) and oxidized (expanded) states duringthe actuation process.
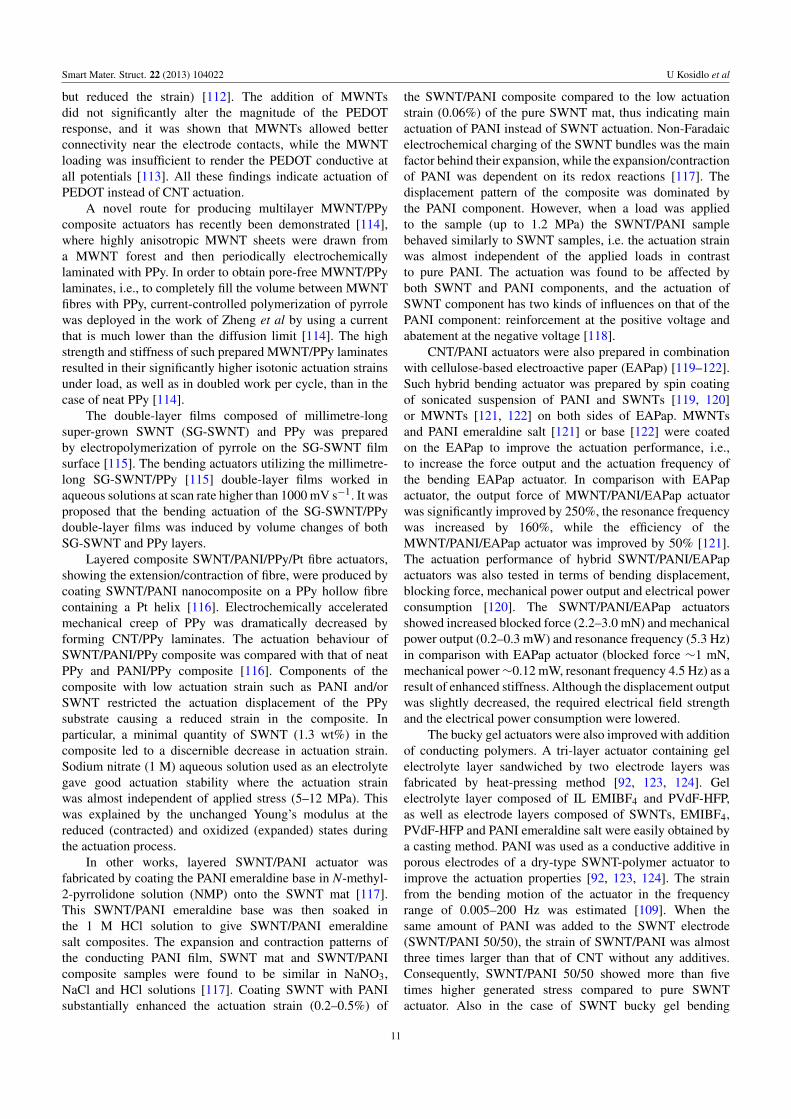
In other works, layered SWNT/PANI actuator wasfabricated by coating the PANI emeraldine base in N-methyl-2-pyrrolidone solution (NMP) onto the SWNT mat [117].This SWNT/PANI emeraldine base was then soaked inthe 1 M HCl solution to give SWNT/PANI emeraldinesalt composites. The expansion and contraction patterns ofthe conducting PANI film, SWNT mat and SWNT/PANIcomposite samples were found to be similar in NaNO3,NaCl and HCl solutions [117]. Coating SWNT with PANIsubstantially enhanced the actuation strain (0.2–0.5%) of
the SWNT/PANI composite compared to the low actuationstrain (0.06%) of the pure SWNT mat, thus indicating mainactuation of PANI instead of SWNT actuation. Non-Faradaicelectrochemical charging of the SWNT bundles was the mainfactor behind their expansion, while the expansion/contractionof PANI was dependent on its redox reactions [117]. Thedisplacement pattern of the composite was dominated bythe PANI component. However, when a load was appliedto the sample (up to 1.2 MPa) the SWNT/PANI samplebehaved similarly to SWNT samples, i.e. the actuation strainwas almost independent of the applied loads in contrastto pure PANI. The actuation was found to be affected byboth SWNT and PANI components, and the actuation ofSWNT component has two kinds of influences on that of thePANI component: reinforcement at the positive voltage andabatement at the negative voltage [118].
CNT/PANI actuators were also prepared in combinationwith cellulose-based electroactive paper (EAPap) [119–122].Such hybrid bending actuator was prepared by spin coatingof sonicated suspension of PANI and SWNTs [119, 120]or MWNTs [121, 122] on both sides of EAPap. MWNTsand PANI emeraldine salt [121] or base [122] were coatedon the EAPap to improve the actuation performance, i.e.,to increase the force output and the actuation frequency ofthe bending EAPap actuator. In comparison with EAPapactuator, the output force of MWNT/PANI/EAPap actuatorwas significantly improved by 250%, the resonance frequencywas increased by 160%, while the efficiency of theMWNT/PANI/EAPap actuator was improved by 50% [121].The actuation performance of hybrid SWNT/PANI/EAPapactuators was also tested in terms of bending displacement,blocking force, mechanical power output and electrical powerconsumption [120]. The SWNT/PANI/EAPap actuatorsshowed increased blocked force (2.2–3.0 mN) and mechanicalpower output (0.2–0.3 mW) and resonance frequency (5.3 Hz)in comparison with EAPap actuator (blocked force ∼1 mN,mechanical power∼0.12 mW, resonant frequency 4.5 Hz) as aresult of enhanced stiffness. Although the displacement outputwas slightly decreased, the required electrical field strengthand the electrical power consumption were lowered.
The bucky gel actuators were also improved with additionof conducting polymers. A tri-layer actuator containing gelelectrolyte layer sandwiched by two electrode layers wasfabricated by heat-pressing method [92, 123, 124]. Gelelectrolyte layer composed of IL EMIBF4 and PVdF-HFP,as well as electrode layers composed of SWNTs, EMIBF4,PVdF-HFP and PANI emeraldine salt were easily obtained bya casting method. PANI was used as a conductive additive inporous electrodes of a dry-type SWNT-polymer actuator toimprove the actuation properties [92, 123, 124]. The strainfrom the bending motion of the actuator in the frequencyrange of 0.005–200 Hz was estimated [109]. When thesame amount of PANI was added to the SWNT electrode(SWNT/PANI 50/50), the strain of SWNT/PANI was almostthree times larger than that of CNT without any additives.Consequently, SWNT/PANI 50/50 showed more than fivetimes higher generated stress compared to pure SWNTactuator. Also in the case of SWNT bucky gel bending
11
Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
actuators a novel hybrid material SWNT/PPy was developedin order to increase the maximum strain and efficiency ofbucky gel bending actuators and compared to the ones madeusing SWNT-based bucky gel only [125]. It was shown thatan increase of the maximum strain of 400% is possible [125].The strain was increased at any charging level and approached2400% with a strain versus stored energy improvement thatexceeded three orders of magnitudes at higher charginglevels [125].
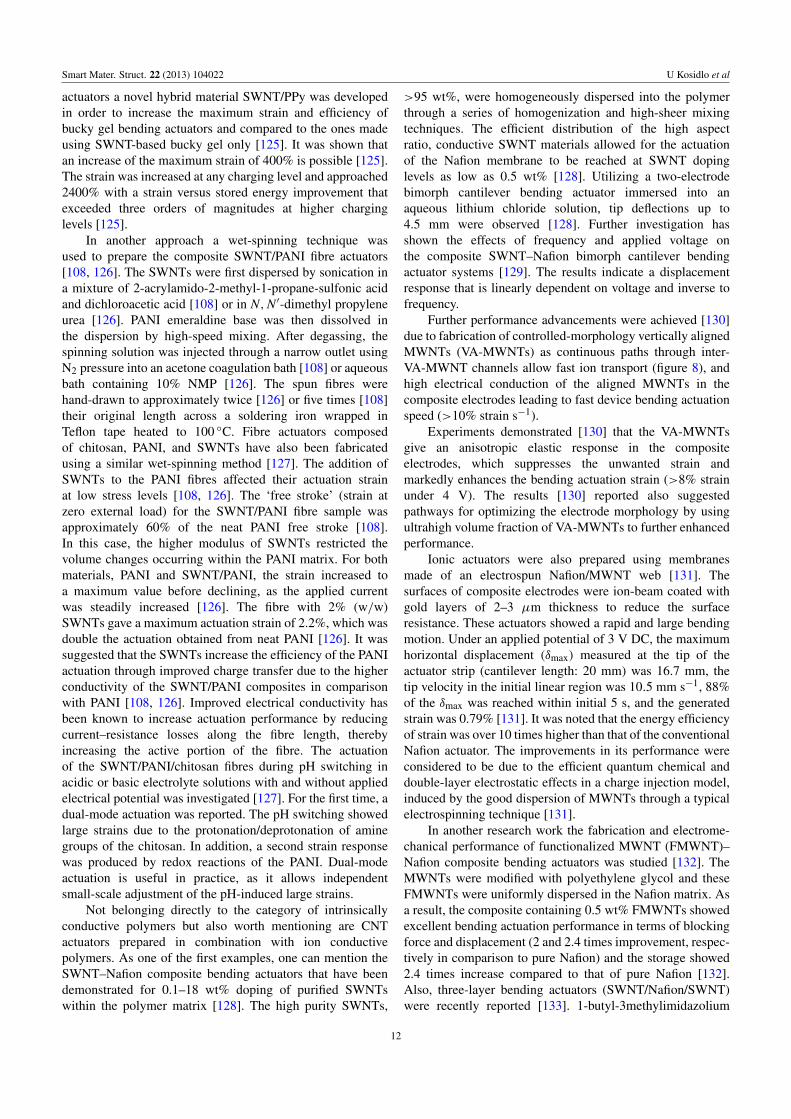
In another approach a wet-spinning technique wasused to prepare the composite SWNT/PANI fibre actuators[108, 126]. The SWNTs were first dispersed by sonication ina mixture of 2-acrylamido-2-methyl-1-propane-sulfonic acidand dichloroacetic acid [108] or in N,N′-dimethyl propyleneurea [126]. PANI emeraldine base was then dissolved inthe dispersion by high-speed mixing. After degassing, thespinning solution was injected through a narrow outlet usingN2 pressure into an acetone coagulation bath [108] or aqueousbath containing 10% NMP [126]. The spun fibres werehand-drawn to approximately twice [126] or five times [108]their original length across a soldering iron wrapped inTeflon tape heated to 100 ◦C. Fibre actuators composedof chitosan, PANI, and SWNTs have also been fabricatedusing a similar wet-spinning method [127]. The addition ofSWNTs to the PANI fibres affected their actuation strainat low stress levels [108, 126]. The ‘free stroke’ (strain atzero external load) for the SWNT/PANI fibre sample wasapproximately 60% of the neat PANI free stroke [108].In this case, the higher modulus of SWNTs restricted thevolume changes occurring within the PANI matrix. For bothmaterials, PANI and SWNT/PANI, the strain increased toa maximum value before declining, as the applied currentwas steadily increased [126]. The fibre with 2% (w/w)SWNTs gave a maximum actuation strain of 2.2%, which wasdouble the actuation obtained from neat PANI [126]. It wassuggested that the SWNTs increase the efficiency of the PANIactuation through improved charge transfer due to the higherconductivity of the SWNT/PANI composites in comparisonwith PANI [108, 126]. Improved electrical conductivity hasbeen known to increase actuation performance by reducingcurrent–resistance losses along the fibre length, therebyincreasing the active portion of the fibre. The actuationof the SWNT/PANI/chitosan fibres during pH switching inacidic or basic electrolyte solutions with and without appliedelectrical potential was investigated [127]. For the first time, adual-mode actuation was reported. The pH switching showedlarge strains due to the protonation/deprotonation of aminegroups of the chitosan. In addition, a second strain responsewas produced by redox reactions of the PANI. Dual-modeactuation is useful in practice, as it allows independentsmall-scale adjustment of the pH-induced large strains.
Not belonging directly to the category of intrinsicallyconductive polymers but also worth mentioning are CNTactuators prepared in combination with ion conductivepolymers. As one of the first examples, one can mention theSWNT–Nafion composite bending actuators that have beendemonstrated for 0.1–18 wt% doping of purified SWNTswithin the polymer matrix [128]. The high purity SWNTs,
>95 wt%, were homogeneously dispersed into the polymerthrough a series of homogenization and high-sheer mixingtechniques. The efficient distribution of the high aspectratio, conductive SWNT materials allowed for the actuationof the Nafion membrane to be reached at SWNT dopinglevels as low as 0.5 wt% [128]. Utilizing a two-electrodebimorph cantilever bending actuator immersed into anaqueous lithium chloride solution, tip deflections up to4.5 mm were observed [128]. Further investigation hasshown the effects of frequency and applied voltage onthe composite SWNT–Nafion bimorph cantilever bendingactuator systems [129]. The results indicate a displacementresponse that is linearly dependent on voltage and inverse tofrequency.
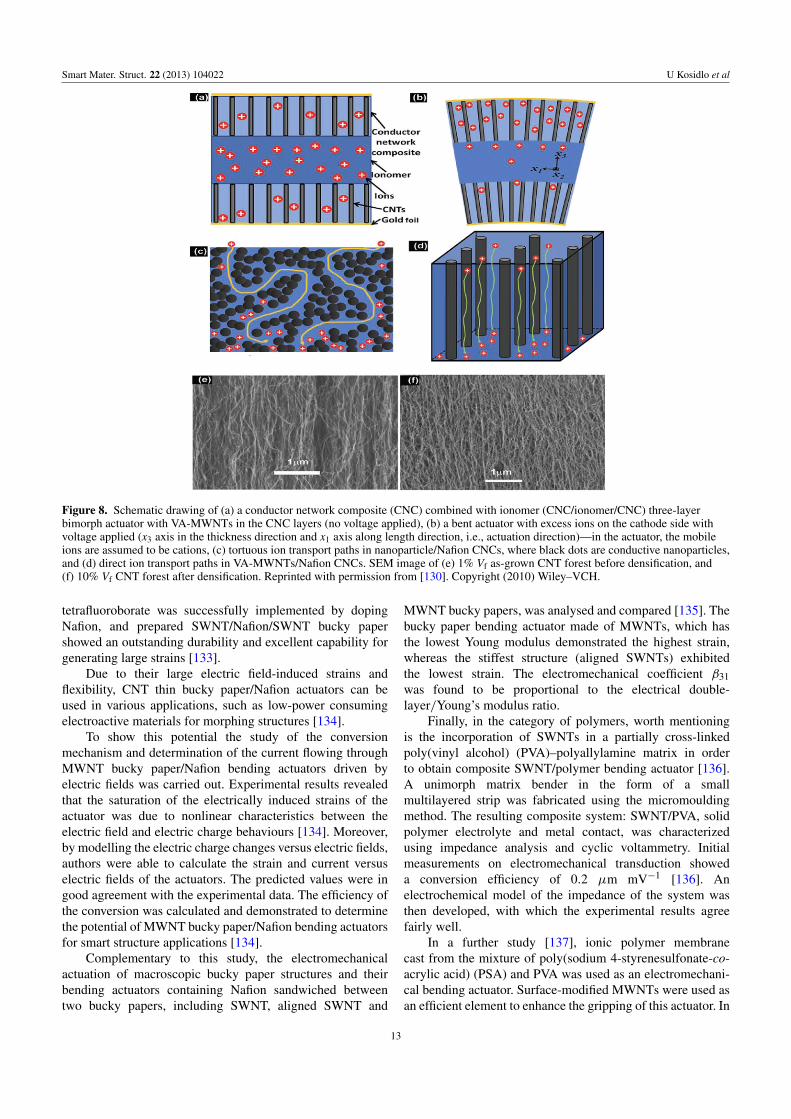
Further performance advancements were achieved [130]due to fabrication of controlled-morphology vertically alignedMWNTs (VA-MWNTs) as continuous paths through inter-VA-MWNT channels allow fast ion transport (figure 8), andhigh electrical conduction of the aligned MWNTs in thecomposite electrodes leading to fast device bending actuationspeed (>10% strain s−1).
Experiments demonstrated [130] that the VA-MWNTsgive an anisotropic elastic response in the compositeelectrodes, which suppresses the unwanted strain andmarkedly enhances the bending actuation strain (>8% strainunder 4 V). The results [130] reported also suggestedpathways for optimizing the electrode morphology by usingultrahigh volume fraction of VA-MWNTs to further enhancedperformance.
Ionic actuators were also prepared using membranesmade of an electrospun Nafion/MWNT web [131]. Thesurfaces of composite electrodes were ion-beam coated withgold layers of 2–3 µm thickness to reduce the surfaceresistance. These actuators showed a rapid and large bendingmotion. Under an applied potential of 3 V DC, the maximumhorizontal displacement (δmax) measured at the tip of theactuator strip (cantilever length: 20 mm) was 16.7 mm, thetip velocity in the initial linear region was 10.5 mm s−1, 88%of the δmax was reached within initial 5 s, and the generatedstrain was 0.79% [131]. It was noted that the energy efficiencyof strain was over 10 times higher than that of the conventionalNafion actuator. The improvements in its performance wereconsidered to be due to the efficient quantum chemical anddouble-layer electrostatic effects in a charge injection model,induced by the good dispersion of MWNTs through a typicalelectrospinning technique [131].
In another research work the fabrication and electrome-chanical performance of functionalized MWNT (FMWNT)–Nafion composite bending actuators was studied [132]. TheMWNTs were modified with polyethylene glycol and theseFMWNTs were uniformly dispersed in the Nafion matrix. Asa result, the composite containing 0.5 wt% FMWNTs showedexcellent bending actuation performance in terms of blockingforce and displacement (2 and 2.4 times improvement, respec-tively in comparison to pure Nafion) and the storage showed2.4 times increase compared to that of pure Nafion [132].Also, three-layer bending actuators (SWNT/Nafion/SWNT)were recently reported [133]. 1-butyl-3methylimidazolium
12
Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 8. Schematic drawing of (a) a conductor network composite (CNC) combined with ionomer (CNC/ionomer/CNC) three-layerbimorph actuator with VA-MWNTs in the CNC layers (no voltage applied), (b) a bent actuator with excess ions on the cathode side withvoltage applied (x3 axis in the thickness direction and x1 axis along length direction, i.e., actuation direction)—in the actuator, the mobileions are assumed to be cations, (c) tortuous ion transport paths in nanoparticle/Nafion CNCs, where black dots are conductive nanoparticles,and (d) direct ion transport paths in VA-MWNTs/Nafion CNCs. SEM image of (e) 1% Vf as-grown CNT forest before densification, and(f) 10% Vf CNT forest after densification. Reprinted with permission from [130]. Copyright (2010) Wiley–VCH.
tetrafluoroborate was successfully implemented by dopingNafion, and prepared SWNT/Nafion/SWNT bucky papershowed an outstanding durability and excellent capability forgenerating large strains [133].
Due to their large electric field-induced strains andflexibility, CNT thin bucky paper/Nafion actuators can beused in various applications, such as low-power consumingelectroactive materials for morphing structures [134].
To show this potential the study of the conversionmechanism and determination of the current flowing throughMWNT bucky paper/Nafion bending actuators driven byelectric fields was carried out. Experimental results revealedthat the saturation of the electrically induced strains of theactuator was due to nonlinear characteristics between theelectric field and electric charge behaviours [134]. Moreover,by modelling the electric charge changes versus electric fields,authors were able to calculate the strain and current versuselectric fields of the actuators. The predicted values were ingood agreement with the experimental data. The efficiency ofthe conversion was calculated and demonstrated to determinethe potential of MWNT bucky paper/Nafion bending actuatorsfor smart structure applications [134].
Complementary to this study, the electromechanicalactuation of macroscopic bucky paper structures and theirbending actuators containing Nafion sandwiched betweentwo bucky papers, including SWNT, aligned SWNT and
MWNT bucky papers, was analysed and compared [135]. Thebucky paper bending actuator made of MWNTs, which hasthe lowest Young modulus demonstrated the highest strain,whereas the stiffest structure (aligned SWNTs) exhibitedthe lowest strain. The electromechanical coefficient β31was found to be proportional to the electrical double-layer/Young’s modulus ratio.
Finally, in the category of polymers, worth mentioningis the incorporation of SWNTs in a partially cross-linkedpoly(vinyl alcohol) (PVA)–polyallylamine matrix in orderto obtain composite SWNT/polymer bending actuator [136].A unimorph matrix bender in the form of a smallmultilayered strip was fabricated using the micromouldingmethod. The resulting composite system: SWNT/PVA, solidpolymer electrolyte and metal contact, was characterizedusing impedance analysis and cyclic voltammetry. Initialmeasurements on electromechanical transduction showeda conversion efficiency of 0.2 µm mV−1 [136]. Anelectrochemical model of the impedance of the system wasthen developed, with which the experimental results agreefairly well.
In a further study [137], ionic polymer membranecast from the mixture of poly(sodium 4-styrenesulfonate-co-acrylic acid) (PSA) and PVA was used as an electromechani-cal bending actuator. Surface-modified MWNTs were used asan efficient element to enhance the gripping of this actuator. In
13

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 9. (A) Deflection as a function of frequency for two square wave voltages for the PMMA–CNF composite actuator operating in aliquid electrolyte. Adapted with permission from [147]. Copyright (2006) SAGE Publications. (B) Deflection as a function of appliedvoltage at various frequencies for the dry PMMA–CNF actuator. Adapted with permission from [148]. Copyright (2006) SAGEPublications.
particular, a thin layer of PSA with a thickness of 12 nm wasuniformly grafted on the surfaces of MWNTs. The obtainedwater soluble PSA-grafted-on-MWNTs (PSA-g-MWNTs)can be homogeneously dispersed in the PSA/PVA membranewith a loading ratio of up to 20 wt%. Such a uniformdispersion generated many unique properties in this compositemembrane, including enhanced toughness, relatively constantionic-exchange capacity, and prominent structure integrityafter water uptake. It was argued that all these novel materialproperties are due to a removal of the interface mismatchbetween the MWNTs and the polymer membrane [137]. Asa result, a much-enhanced gripping resulted from electricalstimuli, an indication of a promoted electromechanicalcoupling. When the loading of PSA-g-MWNTs reaches morethan 10 wt%, the small oscillation in the mechanical output ofthe bending actuator vanished [137].
As the field of CNT composite actuators is widelyresearched by many groups worldwide it is not feasible tomention all possible combinations in one review. Some furtherexamples include but are not limited to composites withbiopolymer chitosan [138, 139], cellulose [140, 141], andpolymeric hydrogels [142]. The mechanisms, performance,and remaining challenges associated with polymeric artificialmuscle technologies have been described in some reviewpapers [143, 23] focused on elastomers, ICPs, ion- andproton-conducting polymers, CNTs, and their combinationsas actuator active components.
Further work by the chemists and materials scientistson the development of new artificial muscle technologiesbased on CNTs and ICPs can open up new perspectives inproduction of a wide range of devices including devices fordynamic Braille displays [144], valves [145] and actuatedcatheters [146].
4.5. Carbon nanofibre versus CNT fibre and yarn actuators
CNTs and their composites received wide attention fortheir application as actuator materials; however, the researcheffort was not only restricted to those, and other carbonnanostructures such as CNFs (carbon fibres with diameter<100 nm) were considered as electrochemical actuators.Also, it is important to note that regardless of the exact type of
CNT material, it is critical to order and assemble CNTs on themacroscopic scale to optimize the materials’ properties. Thedevelopment of CNT fibres is an interesting approach towardsthis objective. CNT fibres can be easily processed into yarn,textile, cable, composite or electrode structures. Therefore,here we give an overview of CNFs as well as CNT fibre andyarn actuators.
It is important to note that the majority of commerciallyavailable CNFs (e.g., Pyrograf R©-III vapour grown CNFs),obtained most frequently by various CVD methods, are quitesimilar to MWNTs with a distinct difference that commer-cially available CNFs have a hollow core that is surroundedby a cylindrical fibre comprised of highly crystalline, graphitebasal planes stacked at about 20◦–25◦ from the longitudinalaxis of the fibre. This morphology, termed ‘stacked cup’ or‘herringbone’, generates a fibre with exposed edge planesalong the entire interior and exterior surfaces of the nanofibre.Also, cylindric carbon nanostructures with graphene layersarranged as stacked cones or plates are also referred toas CNFs. It should also be noted that CNFs obtained inthe recent period by the carbonization of various organicpolymer nanofibres have no ‘stacked cup’, ‘stacked cone’ or‘herringbone’ morphology, but have nanofibrillar morphologywithout any interior hollow structure.
Yeo-Heung et al [147, 148] were the first who claimedthe development of CNF composites for electrochemicalactuation. Two methods of fabricating CNF–PMMA actuatorswere considered [147]. In the first, a layer-by-layer method isused to build up a CNF–PMMA actuator. The second methodis to synthesize the CNF–PMMA hybrid actuator materialusing the solution casting method. These two actuator typeswere tested in an electrolyte.
This research was carried further to show that not onlyliquid-solution-based actuators of CNF–PMMA compositeare possible but that their operation is also feasible in theform of dry actuator structures [148]. For this purpose a solidpolymer electrolyte (SPE) film was prepared from PMMA,LiBF4, propylene carbonate, and acetonitrile in a castingprocess.
The data collected from both wet [147] and dry [148]CNF–PMMA composite actuators are shown in figures 9(A)
14

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 10. (A) Scanning electron micrograph of a carbon nanotubeyarn (d = 3.8 mm, a = 37◦) that was symmetrically twist-spunfrom a MWNT forest. (B) Schematic illustration of idealizedFermat (left) and Archimedean (right) scroll structures spunsymmetrically and highly asymmetrically, respectively, from acarbon nanotube forest. (C) Schematic illustration of the effect ofyarn volume expansion during charge injection on yarn length, yarndiameter, and yarn twist, where the pictures on left and right arebefore and after volume increase, respectively, and the ribbonlengths are approximately constant. The amount of yarn untwistduring yarn volume expansion is indicated by the arrow.(D) Photographs of ‘Springa-Roo’ child’s toy showing that springstretch causes spring twist to increase, which is opposite to theeffect of stretch on the carbon nanotube yarns investigated.Reprinted with permission from [153]. Copyright (2011) AmericanAssociation for the Advancement in Science.
and (B) respectively. With the increase of the square wavefrequency, the deflection of the cantilever beam actuatordecreases, and also with the increase of potential, thedeflection of the cantilever beam actuator increases. Thehigher potential causes the greater charge accumulation at theCNF electrode interface and causes the faster response andhigher strain. However, the higher voltage degrades the CNFactuator and decreases the lifetime. Therefore, there is also alimitation to increasing voltage to achieve a high strain rate.
The dry CNF–PMMA composite actuator propertiesin figure 9(B), compared to the wet actuator, have lowerbandwidth. Since the actuator is not hydrated, the actuationis slow and the amplitude is small compared to the wetactuator. Individually coating CNF and uniformly dispersing,pressure casting, and aligning CNF are techniques that willimprove actuation performance [148]. Allowing the materialto absorb a small amount of moisture would also improve theactuation [148].
A bucky gel actuator based on active electrodescomposed of activated CNFs (ACNFs), ILs and PVdF-HFP aspolymer support have been developed (ACNF-actuator) [149].The frequency dependence of the displacement was measured
for the actuators containing seven kinds of ILs. The frequencyresponses of the ACNF-actuators were one order of magnitudelower than those of the SWNT actuators [149]. The reasonfor this is attributed to the lower conductivity of the ACNF-electrode. In order to improve the response of the ACNF-actuator, the electrode of the actuator was optimized bymixing the ACNFs with SWNTs (ACNF–SWNT electrode)or vapour-grown carbon fibres (VGCFs) (ACNF–VGCFelectrode) for the purpose of increasing the conductivity of theelectrode. The performance of the actuator was improved byoptimizing the ratio of the two carbons [149]. Furthermore,Terasawa et al [150] developed electrochemical actuatorsbased on PVdF-HFP by using a VGCF—IL gel electrodecontaining RuO2. After the comparison with only-VGCF andonly-SWNT based actuators, it was shown that both VGCFsand RuO2 produce a large strain actuator that surpassed theperformance of the only-SWNT polymer actuator [150].
Also, ICPs were utilized to create hybrid actuatormaterials with CNFs. A tri-layer CNF/ICP actuator basedon CNF/carbon black/PPy nanocomposite films sandwichinga SPE, composed of polyurethane and Mg(ClO4)2, wasrecently prepared [151]. A PPy-nanocomposite film waselectrochemically polymerized from aqueous dispersionsof pyrrole containing carbon filler and sodium dodecyl-benzene sulfonate, while SPE was prepared by solutioncasting method. The electrical resistance of ICP actuatorsproduced significant power-supply voltage drop along theirlength, which could restrict the ICP actuator performance.CNF/carbon black/PPy nanocomposite actuator with 3:7 ofcarbon black/CNF co-filler content showed the maximumdisplacement due to the synergy effect, and did not involvepower-supply voltage drop when the length of actuator was25 mm [151]. In the case of CNFs, the conductivity ofPPy/SPE/PPy actuator was the highest when 0.001% (w/v)of CNFs was added to PPy, and conductivity subsequentlydecreased by adding more CNF filler [151].
In another paper [152], the CNFs were used toimprove the performance of sulfonated poly(styrene-b-[ethylene/butylene]-b-styrene) (SSEBS) composite actuator.The SSEBS actuator does not have good electromechanicalperformance because the SSEBS ionic polymer is tooflexible and soft. CNFs as a reinforcement for the polymermembranes greatly increased the bending performance ofthe SSEBS actuators [152]. The surface and cross-sectionalmorphologies of the CNF–SSEBS actuators were investigatedby SEM observation. The results show that CNFs werehomogeneously dispersed in the SSEBS polymer matrixwithout local agglomeration. The bending responses of theCNF–SSEBS composite actuators under step inputs andsinusoidal excitations were compared with those of the pureSSEBS actuator. The tip displacement of the CNF–SSEBSactuator was much faster and larger than that of the pureSSEBS actuator [152].
As an interesting example, loosely classified to the groupof fibre-based actuators, one can add those based on CNTyarns (figure 10) [53, 71, 153, 154]. It was shown [153] thatan electrolyte-filled twist-spun MWNT yarn, much thinnerthan a human hair, functions as a torsional artificial muscle
15

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 11. Muscle configurations and yarn structures for tensile and torsional actuation. Tensile load and paddle positioning for (A) atwo-end tethered, fully infiltrated homochiral yarn; (B) a two-end tethered, bottom-half infiltrated homochiral yarn; (C) a one-end tethered,fully infiltrated homochiral yarn; and (D) a two-end tethered, fully infiltrated heterochiral yarn. The depicted yarns are coiled, nanocoiled,four-ply, and two-ply, respectively. Arrows indicate the observed direction of paddle rotation during thermal actuation. Red and greenyarn-end attachments are tethers, meaning they prohibit end rotation; red attachments also prohibit translational displacement. SEMmicrographs of (E) a fully infiltrated homochiral coiled yarn, (F) a neat two-ply yarn, and (G) a neat four-ply yarn. Illustration of ideal crosssection for (H) Fermat, (I) dual-Archimedean, and (J) infiltrated four-ply Fermat yarns. Reprinted with permission from [154]. Copyright(2012) The American Association for the Advancement of Science.
in a simple three-electrode electrochemical system, providinga reversible 15 000◦ rotation and 590 rpm [153].
A hydrostatic actuation mechanism, as seen in muscularhydrostats in nature, explains the simultaneous occurrenceof lengthwise contraction and torsional rotation during theyarn volume increase caused by electrochemical double-layercharge injection. The torsional artificial muscles, fabricated byForoughi et al [153], operate by electrochemical double-layercharge injection, as seen in CNT supercapacitors. Immersing atwisted MWNT yarn and a counter-electrode in an electrolyteand applying a voltage between these electrodes causes theyarn to partially untwist. The length changes of individualMWNTs cannot explain the observed torsional actuation fortwist-spun MWNT yarns. The unexpected contraction oftwist-spun MWNT yarns was supposed to be largely drivenby internal pressure associated with ion insertion, which isreminiscent of the hydraulic actuation for McKibben-typeartificial muscles, i.e., it was postulated that hydrostatic(or quasihydrostatic) pressure is generated by change inthe relative concentrations of ions of opposite signs in theMWNT yarn volume to compensate for injected electroniccharge on the nanotubes (and associated changes in solvatingspecies). The use of a torsional MWNT yarn muscle as amixer for a fluidic chip is demonstrated [153]. As recentlyreported by Lima et al [154], electrolyte-free guest-filledtwist-spun MWNT-yarn-based artificial muscle spins a rotorat an average 11 500 rpm (20 times higher than previouslydemonstrated by Foroughi et al [153] for an artificial muscle)or delivers 3% tensile contraction at 1200 cycles min−1, and
provides up to 27.9 kW kg−1 of mechanical power densityduring muscle contraction (85 times higher than for naturalskeletal muscle) (figure 11). More than a million cycles oftensile and torsional actuation have been performed withouta significant loss of performance [154]. These actuators canoperate from cryogenic temperatures to 2500 ◦C. Electrical,chemical, or photonic excitation of hybrid yarns changes guest(paraffin wax) dimensions and generates torsional rotationand contraction of the yarn host. Demonstrations includetorsional motors, contractile muscles, and sensors that capturethe energy of the sensing process to mechanically actuate.
Other researchers [155] also considered the topic oflengthwise contraction and rotary torsion of spun MWNTfibre. In particular it was shown that the MWNT fibre exhibitsa light weight with a linear density of 100 µg m−1, muchlower than 10 mg m−1 for cotton and 20–100 mg m−1 forwool yarns, an excellent mechanical property with a specificstrength 2.9 times that of T1000 (Toray TORAYCA R© T1000carbon fibre), the strongest commercial fibre, and a specificstiffness 3.9 times that of M70J (Toray TORAYCA R© M70Jcarbon fibre), the stiffest commercial fibre, and exceptionalelectronic property with electrical conductivity up to103 S cm−1 [155]. In addition, tens to hundreds of MWNTfibres have been easily twisted into macroscopic fibres whichalso exhibit the lengthwise contraction and rotary torsion, andthe produced force could be further greatly improved, e.g.,about 20 times that of individual MWNT fibres if twentyfive were twisted together [155]. The MWNT fibre showsa reversible torsional actuation after 2400 cycles, which iscritical for actuator materials.
16

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 12. Schematic image of a linear actuator [161]. The actuatorcan create pressure more than 1 kg cm−2, but the actuation speed isslow (>5 min). The relative amplitude of actuation was about 6% oforiginal thickness of the material [161]. Reprinted from [161].(Open Access article published 2010 by MDPI.)
Finally, it is worth mentioning that assembling CNTsunder the form of composite fibres, e.g., SWNT/PANI[108, 126], SWNT/PANI/chitosan [127], SWNT/PANI/PPy/Pt[116], SWNT/DNA/PPy [111], and SWNT/PVA fibres [156],is an effective approach to orient CNTs on a large scalealong a well-defined direction. CNT alignment achievedvia fibre drawing allows the optimization of propertiesof electrochemical actuators. In particular, the mechanicalresponse of SWNT/PVA fibres to electrical stimulations wasinvestigated in liquid electrolytes [156]. It was observedthat the fibres can generate a stress one order of magnitudegreater than that achieved with unaligned assemblies ofSWNTs [156].
4.6. Carbide derived carbon actuators
Various CDCs have been obtained by thermal chlorinationof precursors of grounded metal carbides (TiC, Mo2C,Al4C3, etc). CDCs have been considered as materialsfor electric double-layer capacitor electrodes, for gasadsorbents (CH4, H2, etc) and for electron emissionsources [157]. These materials usually possess high surfacearea (1000–2000 m2 g−1). The advanced CDC materials havehigh electric double-layer capacitance (130 F g−1 and 90F cm−3 in non-aqueous electrolyte) and high electric energyconversion efficiency (up to 98%). The material is very stableand chemically inert.
Depending on the synthesis temperature and the carbideprecursor, the average pore size and the pore size distributioncan be varied. The synthesis of CDC can be very wellcontrolled and the pore size distribution of the materialscan be pre-determined [158]. Higher chlorination temperatureresults in CDC with a larger average pore size [159]. Recentlysome works have been published to explain the relationsbetween CDC porosity and generated volumetric effect [160].Although the volumetric effect is not fully explained, it hasbeen exploited for the design of actuators. The straightforwardapproach is to design a linear actuator (figure 12) [161].
Fabrication of a standard three-layer actuator (electrode–separator–electrode) is possible. However, it seems impos-sible to fabricate CDC-ionic liquid gel as it is necessaryto add some binding polymer (PVdF, Nafion) into electrodematerial [162].
By selection of ion liquid, metal carbide and synthesisconditions it is possible to reach a bending actuator withoperating frequency between 5 × 10−3–1 × 101 Hz (itis from 5 mHz to 200 Hz) and 10 Hz. The maximumstrain calculated from transducer displacement is 0.6%.CDC powders used were prepared by chlorination of TiCpowder at 400, 800 and 950 ◦C. Different electromechanicalresponse and energy consumption of selected CDC wasdemonstrated in PVdF-HFP, EMIBF4 and CDC containingcompact actuators. The highest strain (0.6%) and stress(0.3 MPa) were observed for TiC-950 based actuators. Thismaterial has a pore volume of 0.94 cm3 g−1 and specificsurface area of 1843 m2 g−1 [162].
The major disadvantage of CDC material is poor con-ductivity of electrode. However, modification of electrodeswith gold foil can enhance the properties of the actuator. Thegold-foil-modified actuators show high frequency responseand required remarkably low operating voltage (as low as±0.25 V) [163].
4.7. Graphene based actuators
With its unique and novel properties, exceeding those ofCNTs and CNFs, graphene and its composite materials havegenerated a great deal of interest in academia and industry.Since its discovery in 2004 by Geim and co-workers [164],the most attention has been directed towards graphene, whichis a two-dimensional crystal, composed of a monolayer ofcarbon atoms arranged in a honeycombed network withsix-membered rings. Graphene exhibits not only outstandingmechanical properties but also unique electrical, thermal,and optical characteristics [165–168]. It has emerged asa rapidly rising star in the field of material science. Assuch, graphene was envisioned for applications where eithermaterial multifunctionality is desirable (e.g., nanocomposites)[169, 170] or in those where new architectures are required toachieve major performance enhancements [171].
The very first graphene actuators were demonstrated byBunch et al [172]. Those nanoelectromechanical systemswere fabricated from single- and multilayer graphene sheetsby mechanically exfoliating thin sheets from graphite overtrenches in silicon oxide. Vibrations with fundamentalresonant frequencies in the megahertz range were actuatedeither optically or electrically and detected optically byinterferometry. Room-temperature charge sensitivities downto 8× 10−4 electrons per root hertz were demonstrated [172].The thinnest resonator consists of a single suspended layerof atoms and represents the ultimate limit of two-dimensionalnanoelectromechanical systems. Nanomechanical resonatorswere also reported by Shivaraman et al [173] togetherwith a method to produce free-standing graphene sheetsfrom epitaxial graphene on silicon carbide substrate. Doublyclamped nanomechanical resonators with lengths up to 20 µmwere patterned using this technique and their resonantmotion was actuated and detected optically. Resonancefrequencies of the order of tens of megahertz were measuredfor most devices, indicating that the resonators are muchstiffer than expected for beams under no tension [173].
17

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Raman spectroscopy suggests that graphene is not chemicallymodified during the release of the devices, demonstratingthat the technique is a robust means of fabricating large-areasuspended graphene structures [173].
One year later [174], fabrication of large arrays ofsuspended, single-layer graphene membrane resonators usingCVD growth followed by patterning and transfer wasintroduced. The resonators were measured using both opticaland electrical actuation and detection techniques. It wasfound that the resonators can be modelled as flat membranesunder tension, and that clamping the membranes on allsides improves agreement with model and reduces thevariation in frequency between identical resonators [174].The resonance frequency is tunable with both electrostaticgate voltage and temperature, and quality factors improvedramatically with cooling, reaching values up to 9000 at10 K [174]. These measurements showed that it is possibleto produce large arrays of CVD-grown graphene resonatorswith reproducible properties and the same excellent electricaland mechanical properties previously reported for exfoliatedgraphene [174].
In 2009 Liang et al [175] reported light-triggeredgraphene-thermoplastic polyurethane nanocomposites. Ac-cording to the authors, the nanocomposite actuators, withincorporated sulfonated functionalized graphene sheets, ex-hibited repeatable infrared-triggered actuation performance,which lifted 21.6 g weight by 3.1 cm with 0.21 N offorce and demonstrated estimated energy densities of over0.33 J g−1. In the following year, Park et al [176] presented amacroscopic graphene-based actuator that showed actuationthat depends on variation of humidity and/or temperature.The actuator in the form of free-standing ‘paper-like’ materialwas made by sequential filtration of COOH-functionalizedMWNTs and then graphene oxide (GO) platelets fromaqueous suspensions. Also in 2010, Xie et al [177] presenteda unimorph electrochemical actuator based on the monolithicgraphene film with asymmetrically modified surfaces. In thiscase the graphene film was also made by the direct filtrationof an aqueous suspension of reduced GO (RGO) colloids. Theasymmetric surface properties of a graphene film induced thedistinction of electrochemical response, which produced thedriving force responsible for the actuation behaviour.
A different approach of integrating graphene materialsin actuators was adopted by two research groups. Thefirst group of Lian et al [178] fabricated in 2010 theGO–Nafion actuators with CNTs as electrode, so thatthe GO–Nafion composite was employed as the separatorlayer in the actuator system. In the case of the secondgroup led by Jung [179], electroactive actuators basedon graphene-reinforced Nafion composite electrolytes weredeveloped. The main difference in comparison with thework of Lian’s group was the use of RGO instead ofGO. The paper presented by Zhu et al in 2011 [180] onthe subject of graphene actuators presented development ofa novel graphene-on-organic film fabrication method thatis compatible with a batch microfabrication process andcan be used for electromechanically driven microactuators.A very thin layer of graphene sheet was monolithically
integrated to produce a bimorph actuation. This enabledthe demonstration of transparent graphene-based organicmicroactuators.
The combination of CNTs and graphene as a hybridelectrode material was also approached. In one communica-tion [181], SWNT, GO, graphene and their hybrid fibres wereprepared. Mixing SWNTs and GO improved dispersion ofboth in the polymer matrix and led to the synergetic enhance-ment of the strength of the fibres. The conductivity of thefibres was increased by mixing SWNTs and GO together atthe ratio of 2:1. Adding concentrated HCl into the coagulationbath enhances the conductivity of the fibres significantly.SWNT–GO (2:1) fibres coagulated from acid PVA solutionshave both high strength and conductivity, and show excellentactuation performance [181]. Further research was conductedto develop a new electrode for ionic polymer–metal composite(IPMC) based on MWNT–graphene [182]. Experimentalresults showed that the IPMC with a pure MWNT basedelectrode exhibits higher displacement compared to theconventional IPMC with a platinum electrode. Also, theincrement of the ratio of graphene to the MWNT–grapheneelectrode decreased the resultant displacement but increasedthe fundamental natural frequency of the polymer actua-tor [182]. In another work [183], a RGO/MWNT full carbonelectrode based electrochemical actuator was introduced,which could not only take advantage of graphene’s higherstrain, but also showed improvement of the electrochem-ical charging and discharging process due to the porousstructure [183].
From another perspective, chemical unzipping ofMWNTs was used to prepare GO nanoribbons andassembled them into macroscopic mats by a vacuum filtrationprocess [184]. The prepared material exhibited unexpectedlylarge reversible contraction when heated with electricalcurrent at ambient conditions. Its exposure to water vapoursresulted in the reversible expansion. The thermally drivenGO nanoribbon actuators exhibited high work capacity (about40 J kg−1) [184], which was limited by low mechanicalstrength of the material. The dimensional changes wereassociated with the adsorption/desorption of water moleculesby the highly hydrophilic GO nanoribbons. It is expected thatthe alignment of nanoribbons in the sample and the increaseof the mat strength can substantially increase both generatedstrain and work capacity [184].
Electromechanical actuators were fabricated [185] usingflexible graphene-based paper prepared via a filtrationprocess, and the stroke of these graphene-based actuators wasdirectly measured during electrochemical double-layer chargeinjection. Actuation strain up to 0.064% was obtained forpristine graphene paper in response to an applied potentialof −1 V in 1 M NaCl solution [185]. Double-layer chargeinjection in graphene sheets is believed to induce actuationstrain through a combination of Coulombic and quantum-chemical-based expansion. To increase electrochemicaldouble-layer capacitance and actuator performance, Fe3O4nanoparticles were used to partially prevent graphene sheetsfrom restacking and allow the electrolyte ions to infiltratethe resulting magnetic graphene paper more easily [185]. The
18
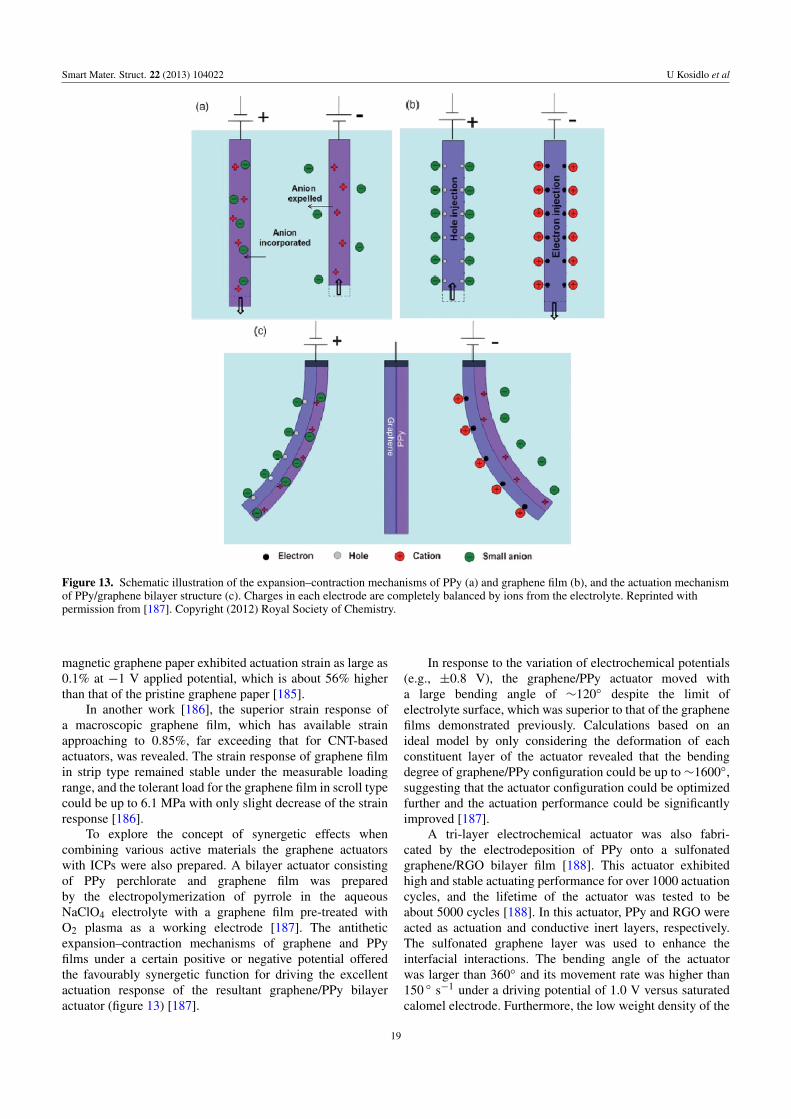
Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 13. Schematic illustration of the expansion–contraction mechanisms of PPy (a) and graphene film (b), and the actuation mechanismof PPy/graphene bilayer structure (c). Charges in each electrode are completely balanced by ions from the electrolyte. Reprinted withpermission from [187]. Copyright (2012) Royal Society of Chemistry.
magnetic graphene paper exhibited actuation strain as large as0.1% at −1 V applied potential, which is about 56% higherthan that of the pristine graphene paper [185].
In another work [186], the superior strain response ofa macroscopic graphene film, which has available strainapproaching to 0.85%, far exceeding that for CNT-basedactuators, was revealed. The strain response of graphene filmin strip type remained stable under the measurable loadingrange, and the tolerant load for the graphene film in scroll typecould be up to 6.1 MPa with only slight decrease of the strainresponse [186].
To explore the concept of synergetic effects whencombining various active materials the graphene actuatorswith ICPs were also prepared. A bilayer actuator consistingof PPy perchlorate and graphene film was preparedby the electropolymerization of pyrrole in the aqueousNaClO4 electrolyte with a graphene film pre-treated withO2 plasma as a working electrode [187]. The antitheticexpansion–contraction mechanisms of graphene and PPyfilms under a certain positive or negative potential offeredthe favourably synergetic function for driving the excellentactuation response of the resultant graphene/PPy bilayeractuator (figure 13) [187].
In response to the variation of electrochemical potentials(e.g., ±0.8 V), the graphene/PPy actuator moved witha large bending angle of ∼120◦ despite the limit ofelectrolyte surface, which was superior to that of the graphenefilms demonstrated previously. Calculations based on anideal model by only considering the deformation of eachconstituent layer of the actuator revealed that the bendingdegree of graphene/PPy configuration could be up to∼1600◦,suggesting that the actuator configuration could be optimizedfurther and the actuation performance could be significantlyimproved [187].
A tri-layer electrochemical actuator was also fabri-cated by the electrodeposition of PPy onto a sulfonatedgraphene/RGO bilayer film [188]. This actuator exhibitedhigh and stable actuating performance for over 1000 actuationcycles, and the lifetime of the actuator was tested to beabout 5000 cycles [188]. In this actuator, PPy and RGO wereacted as actuation and conductive inert layers, respectively.The sulfonated graphene layer was used to enhance theinterfacial interactions. The bending angle of the actuatorwas larger than 360◦ and its movement rate was higher than150 ◦ s−1 under a driving potential of 1.0 V versus saturatedcalomel electrode. Furthermore, the low weight density of the
19

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 14. Schematic illustration of the bending actuation for the graphene/PDA actuator without (a) and with (b) an applied dc. Opticalphotos of the bending actuation for the graphene/PDA bimorph actuator (10 mm× 2.7 mm× 10 µm) without (c) and with (d) an applied dcof 20 mA (current density a about 0.74 A mm−2). The unit of the ruler is 1 mm. Optical microscope photos of the movable end of thegraphene/PDA actuator without (e) and with (f) an applied dc of 7.5 mA (current density about 0.28 A mm−2). The bending actuation ishighly reversible. (g) Applied dc density dependence of the maximum curvature for the graphene/PDA bimorph actuator(10 mm× 2.7 mm× 10 µm). The curvature–current curve can be divided into three regions (region I, region II, and region III) [190].Reprinted with permission from [190]. Copyright (2012) American Chemical Society.
graphene-based supporting layer greatly lowered the energyor charge consumption of the actuator during electrochemicalactuation.
Recently, in combination with PPy, a three-dimensional(3D) hydrothermally converted graphene hybrid (G–PPy)electrochemical actuator was presented [189]. The 3Dpore interconnected G–PPy pillar exhibited strong actuationresponses superior to pure graphene and PPy film. In responseto the low potentials of ±0.8 V, the saturated strain of 3DG–PPy pillar can reach a record of 2.5%, which is morethan ten times higher than that of CNT film and aboutthree times that of unitary graphene film under an appliedpotential of ±1.2 V [189]. Also, the 3D G–PPy actuatorexhibits high actuation durability with high operating load asdemonstrated by an 11-day-continuous measurement. Finally,a proof-of-concept application of 3D G–PPy as smart filler foron/off switch was demonstrated, which served as indication of
the potential of the 3D G–PPy structure for advanced actuatorsystems [189].
An electromechanical bimorph actuator composed ofa layer of polydiacetylene (PDA) crystal and a layerof flexible graphene paper has recently been designedand fabricated through a simple and versatile solutionapproach [190]. The effective combination of the respectiveunique features of PDA and graphene provided an impressiveactuation performance, superior to that of conventionalelectromechanical actuators (figure 14) [190]. The distinctiveand dominant electric-induced deformation as well as thesecondary thermal-induced expansion of PDA was proposedto be the main mechanism causing the high actuationperformance of the flexible graphene/PDA actuator. Thisgraphene/PDA bimorph actuator was able to be driven atlow dc, and rapid swing behaviour was observed whileapplying an ac of high frequency. Furthermore, when the
20

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
Figure 15. Illustration of (A) ion insertion induced graphiteexpansion, (B) widely adopted configuration of graphene electrode,in which the plane of graphene is perpendicular to that of appliedelectric field and the ionic transport through the interval betweengraphene edges, (C) newly developed configuration of grapheneelectrodes. Reprinted with permission from [193]. Copyright (2012)Royal Society of Chemistry.
frequency and the value of the applied ac and the state of theactuators reached an appropriate level, a strong resonance wasgenerated. A working device consisting of a mini-robot basedon graphene/PDA paper was demonstrated.
The increase of tensile strength and/or electricalconductivity of ICP actuators was observed upon theaddition of graphene and/or its functionalized deriva-tives [187–190], e.g., the weak strength of PPy waslargely overcome by combining the PPy with graphenefilm [187], while the graphene/PDA actuator exhibitedmore than six orders of magnitude higher conductiv-ity (3000–5000 S m−1) in comparison with pure PDA(<0.001 S m−1) [190].
In a slightly different approach than those presented uptill now, flexible and transparent graphene films in the largescale via inkjet printing and vapour deposition process werefabricated for PVdF-based acoustic actuators [191]. Resultsof this work demonstrated that the graphene-based acousticactuator had much less power consumption compared to thecommercial thin film speaker, and it was expected to beused as an extremely thin and light-weight loudspeaker. Inaddition, it was also applied for the active noise cancellationsystem [191]. In principle, when a time variable voltage(ac electric field) was applied to graphene electrodes on thepiezoelectric PVdF film, it would produce a sound wave asattractive and repulsive forces between internal charge andexternal field continued to repeat [191].
One of the latest works [192] targets using first-principledensity functional calculations, so-called clamped andunzipped GO to investigate its potential as electromechanicalactuator material. Very high strains are predicted for hole
injection into GO, with reversible and irreversible values ofup to 6.3% and 28.2%, respectively [192]. The huge 28%irreversible strain is shown to be the result of a changein the atomic structure of GO from a metastable clampedto more stable unzipped configuration. Significantly, thisstrain generation mechanism makes it possible to hold aconstant strain of 23.8% upon removal of the input power,making this material ideal for long-term, low-power switchingapplications. A unique contraction of unzipped GO uponelectron injection is also observed [192]. It is shown thatthe origin of this unique behaviour is the modulation of thestructural rippling effect, which is a characteristic feature ofGO. With reversible strains and stresses in excess of 5%and 100 GPa, respectively, GO is poised to be an extremelyuseful material for micro/nanoelectromechanical systemactuators [192]. The actuator performance and usability werealso addressed from the perspective of constructing graphenenanosheet membrane of parallelled structure [193] as shownin figure 15. The volume variation ratio perpendicular tothat of the parallelled graphene membrane could reachas high as 98% by controlling its interspace distancethrough IL pre-expanding treatment, which is an order ofmagnitude higher than that of the CNT actuator [193].The reversible electrochemical actuation is linear withrespect to the half period of applied voltage and increaseswith it.
Finally, as a good example for combination of severalapproaches to the optimization of material and its perfor-mance, electroactive FGNS/P(VDF-TrFE-CFE) terpolymernanocomposite can be named [194]. Graphene nanosheets(GNS) were functionalized with 3,5-di(trifluoromethyl)-aniline to achieve homogeneous dispersion and favourableinterfacial interactions in the poly(vinylidenefluoridetrifluor-ethylene-chlorofluoroethylene) P(VDF-TrFE-CFE) terpoly-mer matrix. Such an actuator material was fabricated via acombination of solution casting and hot-pressing methods.To improve the interfacial interaction with the terpolymermatrix and ensure homogeneous dispersion, GNS werecovalently functionalized with 3,5-di(trifluoromethyl)-aniline.The dielectric constant, Young’s modulus, tensile strength,electromechanical actuation strain, and strain energy densityof the resulting nanocomposites were improved dramati-cally in comparison with the neat terpolymer [194]. Forinstance, the FGNS/terpolymer nanocomposites containingonly 1.09 vol% FGNS possessed a dielectric constant over200 times larger, a Young’s modulus 5 times higher, a 50times larger electromechanical strain (4.1 versus 0.08%), anda strain energy density 4700 times larger at a considerablylower electrical field (∼23 MV m−1) compared to that of neatterpolymer [194].
Even though both fields of actuator materials andgraphene have received a tremendous amount of attention,graphene actuators are quite a new topic of research, in whichthe aspects of electrochemical and photoelectrochemicalactivity have not been yet fully considered.
21

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
5. Discussion
5.1. Promising aspects
Compared with more common actuation materials, such aspiezoelectric, ferroelectric and conducting polymers whichmay suffer from low flexibility, high driving voltages and lowenergy efficiency, nanocarbons exhibit a series of advantages.Among others one should list actuation under low voltages,smooth and noiseless operation as well as the fact, as hasbeen shown in this review, that nanocarbon materials presenta possibility to be operated at both the nano- and macroscale.Furthermore, unique electronic properties, large surface area,high mechanical strength, and excellent chemical and thermalstability account to other advantages of carbon nanomaterialsin actuators. For example, compared with more conventionalelectroactive polymer actuation systems, the high elasticmodulus of carbon nanotubes could lead to potentially highstress generation and high work per cycle under significantlyless demanding stimulation conditions (e.g., voltage) [23].
Finally, the major advantage for using nanocarbons is alsorecognized in the possibility to design composite materialscontaining nanocarbons and polymers. In this way, it canbe possible to modify and control both the mechanical andelectrical properties. Furthermore, the chemical stability ofnanocarbon allows their use in various environments, both inliquid and air conditions.
In this review, an overview of a broad range ofresearch activities leading to the evaluation of nanocarbons’applicability as ionic actuators is provided.
It can be easily deduced that even though an enormousamount of work was already done in the field of nanocarbonmaterials, their evaluation as an actuator material is morechallenging than was expected some years ago. Thesechallenges are primarily caused by the multitude of availablenanocarbon structures and their combinations with othermaterials. Additionally, the quality of supplied material isof critical issue due to its complexity based on the factthat it is influenced by many factors during productionand post-treatment and taking into consideration manyfeatures such as size, geometry of particles, structure andmaterial purity. For this reason most of the activities arestill at the material development level and that includeseven the synthesis methods targeting the material withdesired properties. Those properties can not only be ensuredduring the production of materials but are also influencedby processing methods, additionally increasing the amountof routes to improve the actuation performance. And thetargets are set high. Carbon-based actuators, belonging tothe material group of so-called artificial muscles, are in factcompeting with natural systems where muscles can producemore than 40% strain. Great progress has been achieved forcarbon-based systems, rising from only 0.1% strain in the firstperformance demonstration [10] up to the 0.65% strain shownrecently for SG-SWNT-based actuators [109] and reaching4.4% for composite systems based on SWNT/DNA/PPyfibres [111].
With this in mind, the conclusion can be drawn thatstudies on the actuation performance of nanocarbon materials
require a very broad and interdisciplinary approach involvingexperts from various fields of research, like chemistry, physicsand material science, not forgetting to involve specialistsfrom various market sectors for the identification of realapplications and products.
5.2. Applications
Bioinspired actuation materials, also called artificial muscles,have attracted attention in recent decades for their potentialapplication in intelligent robots, biomedical devices, andmicro-electromechanical systems [183]. This final part ofthe review gives a brief overview of several applications ofactuators, which are based on CNTs, and which are the drivingforce for the continuous and broad research work carried outworldwide.
The low-voltage EAP could not only provide rectilinearmotions without any assistance from a complicated powertrain, but also the inherent flexibility of polymeric materialsoffers many engineering possibilities for creating biomimeticmachines. Therefore, the EAPs draw keen attention from therobotic engineering field [195]. In order to improve EAP’sstability and durability, the CNTs have been introduced dueto their good electrical conductivity, high specific capacitanceand structural stability [183]. Including the nanocarbonactuator, nanorobotics becomes an emerging field of roboticsat the nanometre scale. In a report from the Institute ofRobotics and Intelligent Systems, the technological progresson CNTs related to nanorobotics was presented in termsof ‘CNT-based building blocks for nanorobotic systems’,‘Nanoassembly of CNTs’, ‘Shell engineering of CNTs’ and‘Mass delivery from CNTs’ [196].
The discovery of CNTs showed also the potentialof revolutionizing the biomedical research as they canprovide superior performance due to their impressivestructural, mechanical, and electronic properties such assmall size and mass, high strength, higher electrical andthermal conductivity, etc. Thus, CNTs can offer benefitsfor both medical equipment and in-body applications.In Sinha and Yeow’s paper, the use of CNTs forbiomedical applications was reported, which can be dividedinto four categories—‘Diagnostic Tools and Devices’,‘Biopharmaceutics’, ‘Implantable Materials and Devices’(which include the actuator) and ‘Surgical Aids’ [197].
Actuators based on CNTs could not only extendthe capabilities of artificial muscles to giant strokes andstrain rates at extreme temperatures, but also provide otherapplication possibilities that relate to the structural changeof the CNT sheets during large-stroke actuation. The CNTsdiffract light perpendicular to the alignment direction, whichcan be dynamically modulated at over kilohertz frequenciesfor optical applications. The ability to tune the density ofCNT sheets and then freeze this actuation is being usedfor optimizing CNT electrodes for organic light-emittingdisplays, solar cells, charge stripping from ion beams, andcold electron field emission [198].
There are several steps that have to be taken beforeCNT-based actuators can be applied in technical applications.
22

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
A sufficient formalism has to be found to describe thesystem’s behaviour. The macroscopic CNT structure has to beimproved in such a way that the superb structural properties ofindividual CNTs can be transferred to macroscopic structures.Another step towards the realization of a CNT-based actuatoris the incorporation of solid-state electrolytes [199]. The mainreason for the development of the dry actuator is to bringCNT actuator technology closer to the industry. Until nowplenty of research has been devoted to this material focusingon the generation of fundamental knowledge, understandingof the actuation mechanisms and systematic characterization.Its value should not be underestimated; however, such anapproach is often not sufficient to explain the potential ofCNTs as actuators.
For this reason, functional models, utilizing macroscopicactuators, were designed and introduced [200]. One exampleis a simple drum brake system where stacks of dry actuatorsare used as the components moving the brake parts as well asgenerating the force to stop the drum from rotation [201].
Nanocarbon-based actuators, although appropriate fromthe performance point of view, have not yet reached themedical market due to the unknown interactions betweenCNTs and living organisms. However, the achievementsobtained in the development of CNT actuators highlightthe potential for applications in other market sectors. CNTactuators could be used as positioning systems, valves andpumps, switches and brakes.
Despite the described research progress and advantages,there are still many challenges to develop tailored practicaldevices mainly because of the uncontrollable propertiesof actuators based on CNTs. Usually, the unevennessin length and difficulty in processing bundles of non-oriented CNTs has restricted their applications and makesCNT-based actuators often too complex to be describedby models and simulated [53, 202]. One solution toimprove conductive carbon-based actuators is to use materialthat has more identifiable characteristics, such as carbidederived carbon (CDC) [158, 203, 204]. CDC is highlyrated in electrochemical capacitor applications, havingremarkable volumetric capacitance and tunable pore sizedistribution [205, 206]. Although from this perspective CDCmay turn out to be more suitable for market application,currently the developments of products is, as in the case ofCNTs, not fully underway.
In the case of graphene there are also still somechallenges waiting to be addressed, such as increasing theactuation strain, energy conversion efficiency and life cycle.With more progress in material optimization and novel devicedesign, it is believed that graphene-based actuators will leadto a wide range of applications, including artificial muscles,robots, micro-electromechanical systems and so on [207].In terms of the electrical properties, the two-dimensionalnature of graphene will give lower resistance. Compositesbased on graphene and CNT will allow the development of3D electroactive materials which will facilitate the chargetransport and exhibit large surface area, an important propertyfor increasing the double-layer capacitance. Also, withgraphene-based actuators it should be possible to consider
various actuation mechanisms, such as thermoelectrical andelectrochemical actuation, within the same devices. However,better control of the graphene material and the possibility ofcheap and large-scale production are important aspects forgraphene-based actuators.
5.3. Challenges
This review paper has presented more than a few examplesof successful implementation of carbon-based nanomaterialsin actuators. However, it has to be recognized that all of thecurrent activities are taking place at the basic and materialresearch level only. Progress towards the development ofnanocarbon-based actuator technology from the perspectiveof their applicability in commercial markets can only beachieved when the remaining challenges have been overcome.
Challenges include lack of standardization in respect tothe materials used, composition and geometry of actuators,their processing, construction and, probably most importantly,the fact that characterization and measurement proceduresmaking it almost impossible to provide comparison betweenthe results obtained from various research groups. Activitiesin this area are already underway. For example, in the case ofbending actuators, it is known that the displacement (δ) of theactuator tip is one of the most commonly reported parametersfor bending actuators. It is related to the cathode–anode straindifference (ε) as follows:
ε =2dδ
L2 + δ2 ,
where d is the actuator strip thickness and L is the length.Such a definition of strain is, however, biased by the geometryof the structure—e.g. a thick device is much more difficult tobend than a thin one.
In order to achieve a proper characterization of EAP-based bending actuators by including at least a parameterwhich is a feature of the material itself or of the pairelectrode–electrolyte, and that does not depend on thestructure, a simple model capable of taking into account boththe material and the actuator structure was formulated byAlici et al [208] for three-layer PPy-based actuators, and lateradopted by Mukai et al [79] for bucky gel devices. The modelis based on the momentum equilibrium of a beam subjectedto bending caused by the electrode deformation. It assumesisotropic elastic behaviour of all the materials, negligiblethickness variation and no distortion of the cross-sectionsalong the structure. The generated strain (α) is assumed tobe constant, and is defined as follows:
α =EI
RE1wt1(t1 + t2),
where EI is the flexural stiffness (the resistance to bending) ofthe whole actuator, R is the curvature radius, E1 is the Youngmodulus of the bucky gel layer, w is the actuator width, andt1 and t2 are the thickness of the bucky gel and electrolyte,respectively.
However, it should be noted that even the α, especially athigh frequency, depends on the electrical conductance of both
23

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
electrodes and electrolyte, as the ion diffusion path dependson their thickness [87]. Thus α is still affected by the structuregeometry, although not as strongly as the ε or the blockingforce.
Currently the comparison of actuator performance canbe only provided for the research results of each groupinternally. It would be highly recommended to achieveworldwide consensus on the standardized procedure for theevaluation of actuator performance. In this way the potentialsof different nanocarbon technologies could be much morequickly recognized and transferred to the next levels ofdevelopment with the target of reaching commercial markets.
On the way towards commercialization, extendedresearch on the processing and integration of actuators has tobe performed. Currently, in most cases the nanocarbon-basedactuators are only available as single samples processedwith laboratory equipment. As a result, the technologyappears to be unappealing to industrial companies. In orderto attract more attention from the potential users of thetechnology the appropriate processes should be developed toprovide the actuators or their nanocarbon-based componentsin industry-feasible amounts, with the required properties and,not least important, with a high degree of reproducibility.
Having a standardized evaluation system that will allowfor a clear definition and comparison of performance aswell as the suitability for commercial manufacturing willtrigger greater discussion about the real applications of thosematerials and speed up the transfer of research results intoreal-life applications.
6. Conclusions and perspectives
In the last 15 years an extraordinary amount of researchactivities and experiments leading to the incorporation ofcarbon nanomaterials into actuator structures has taken placeworldwide. This review set out to provide an overview ofthis work. However, it is not feasible to include all theavailable results in the scope of such a document. Overthe years an enormous progress of the technology has beenobserved. It started from the theoretical and experimentalwork with a purpose of understanding the primary mechanismof actuation, through the evaluation of various types ofmaterials (carbon nanotubes, carbon nanofibres, carbidederived carbons and graphene) and variations in their form(single tubes, Bucky Papers, bucky gels, CNT fibres andyarns, and polymer based composites) and composition (incombination with conducting polymers, or with additionof other materials like metal oxides), and moved on toconsiderations of actuator applicability in a broad range ofmarket sectors.
The research work carried out to date proves thatthere are many and exciting opportunities ahead for thenanocarbon materials, and their use as ionic actuators is justone of many potential applications. Although the studieson electromechanical actuation using graphene attract mostattention, still much more work is needed to understandthe actuation mechanism and improve the fabrication ofactuators for more practical, large-scale devices. With more
progress in the material optimization and novel devicedesign, it is believed that nanocarbon-based actuatorswill lead to a wide range of applications. Nanocarbonactuators provide a great potential for implementationin various fields and markets. Those include, but arenot limited to haptic, virtual reality, organic robotics,automotive, and biomedical devices. However, in orderto develop integrated devices a better understanding ofthe physico-chemical processes (mechanical, electrical, andchemical) involved in the actuation is necessary. Basically,the field of nanocarbon actuator implies multidisciplinaryresearch and the combination of experimental, theoretical andengineering approaches is helpful. Thus, the development ofan electromechanical model is of interest from this point ofview.
With the rapid development of nanocarbon actuators,it is anticipated that novel concepts of actuation will bedeveloped for new devices. In the future nanocarbon-basedionic actuators may perform functions that are much moresignificant, far beyond what is being achieved at present.
Acknowledgments
This work was supported by European Cooperation in Scienceand Technology (COST) in the framework of ESNAM(European Scientific Network for Artificial Muscles)—COSTAction MP1003.
This work was also partly financially supported by VEGA2/0064/10 (Slovakia).
References
[1] O’Halloran A, O’Malley F and McHugh P 2008 A review ondielectric elastomer actuators, technology, applications,and challenges J. Appl. Phys. 104 071101
[2] Jendritza D J 2005 Technischer Einsatz Neuer Aktoren:Grundlagen, Werkstoffe, Designregeln undAnwendungsbeispiele (Renningen: Expert)
[3] Janocha H (ed) 2004 Actuators—Basics and Applications(Berlin: Springer)
[4] Bar-Cohen Y (ed) 2004 Electroactive Polymer (EAP)Actuators as Artificial Muscles: Reality, Potential, andChallenges 2nd edn (Bellingham, WA: SPIE OpticalEngineering Press)
[5] Kim K J and Tadokoro S 2009 Electroactive Polymers forRobotic Applications—Artificial Muscles and Sensors(London: Springer)
[6] Carpi F and Smela E 2009 Biomedical Applications ofElectroactive Polymer Actuators (Chichester: Wiley)
[7] Iijima S 1991 Helical microtubules of graphitic carbonNature 354 56–8
[8] Iijima S 1993 Single-shell carbon nanotubes of 1-nmdiameter Nature 363 603–5
[9] Baughman R H 1996 Conducting polymer artificial musclesSynth. Met. 78 339–53
[10] Baughman R H et al 1999 Carbon nanotube actuatorsScience 284 1340–4
[11] Roth S and Baughman R H 2002 Actuators of individualcarbon nanotubes Curr. Appl. Phys. 2 311–4
[12] Li C and Chou T 2006 Charge-induced strains insingle-walled carbon nanotubes Nanotechnology17 4624–8
24

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
[13] Kim P and Lieber C M 1999 Nanotube nanotweezers Science286 2148–50
[14] Zhang Y and Iijima S 1999 Elastic response of carbonnanotube bundles to visible light Phys. Rev. Lett.82 3472–5
[15] Chan C T, Kamitakahara W A, Ho K M and Eklund P C1987 Charge-transfer effects in graphite intercalates: abinitio calculations and neutron-diffraction experimentPhys. Rev. Lett. 58 1528–31
[16] Pietronero L and Strassler S 1981 Bond-length change as atool to determine charge transfer and electron–phononcoupling in graphite intercalation compounds Phys. Rev.Lett. 47 593–6
[17] Kertesz M 1985 Changes of lattice geometries upon chargetransfer Mol. Cryst. Liq. Cryst. 126 103
[18] Baughman R H, Murthy N S, Eckardt H and Kretesz M 1992Charge oscillations and structure for alkali-metal-dopedpolyacetylene Phys. Rev. B 46 10515
[19] Nixon D E and Perry G S 1969 The expansion of thecarbon–carbon bond length in potassium graphites J. Phys.C: Solid State Phys. 2 1732
[20] Murakami Y, Kishimoto T and Suematsu H 1990 Structureof high-stage donor–acceptor hetero-structure graphiteintercalation compounds J. Phys. Soc. Japan 59 571
[21] Flandrois S, Hauw C and Mathur R B 1990 Charge transferin acceptor graphite intercalation compounds Synth. Met.34 399
[22] Fraysse J, Minett A I, Jaschinski O, Duesberg G S andRoth S 2002 Carbon nanotubes acting like actuatorsCarbon 40 1735–9
[23] Qu L, Peng Q, Dai L, Spinks G M, Wallace G G andBaughman R H 2008 Carbon nanotube electroactivepolymer materials: opportunities and challenges MRSBull. 33 215–24
[24] Shahinpoor M and Kim K J 2001 Ionic polymer–metalcomposites: I fundamentals Smart Mater. Struct.10 819–33
[25] Akle B J, Bennett M D, Leo D J, Wiles K B and McGrath J E2007 Direct assembly process: a novel fabricationtechnique for large strain ionic polymer transducersJ. Mater. Sci. 42 7031–41
[26] Gao H et al 2012 Monolithic polyaniline/polyvinyl alcoholnanocomposite actuators with tunable stimuli-responsiveproperties Sensors Actuators B 145 839–46
[27] Foroughi J, Spinks G M and Wallace G G 2011 High strainelectromechanical actuators based on electrodepositedpolypyrrole doped with di-(2-ethylhexyl)sulfosuccinateSensors Actuators B 155 278–84
[28] Ikushima K, John S, Ono A and Nagamitsu S 2012PEDOT/PSS bending actuators for autofocus micro lensapplications Synth. Met. 160 1877–83
[29] Kaasik F, Tamm T, Hantel M M, Perre E, Aabloo A, Lust E,Bazant M Z and Presser V 2013 Anisometric chargedependent swelling of porous carbon in an ionic liquidElectrochem. Commun. 34 196–9
[30] Biesheuvel P M 2001 Simplification of thePoisson–Boltzmann equation for the electrostaticinteraction of close hydrophilic surfaces in waterJ. Colloid Interface Sci. 238 362
[31] Bazant M Z, Storey B D and Kornyshev A A 2011 Doublelayer in ionic liquids: overscreening versus crowdingPhys. Rev. Lett. 106 046102
[32] Kornyshev A A 2007 Double-layer in ionic liquids: paradigmchange? J. Phys. Chem. B 111 5545
[33] Alpha A L, Ralph H C and Alexei A K 2013 Statics anddynamics of electroactuation with single-charge-carrierionomers J. Phys.: Condens. Matter 25 082203
[34] Kilic M S, Bazant M Z and Ajdari A 2007 Steric effects inthe dynamics of electrolytes at large applied voltages: I.Double-layer charging Phys. Rev. E 75 021502
[35] Burke P J 2002 Luttinger liquid theory as a model of thegigahertz electrical properties of carbon nanotubes IEEETrans. Nanotechnol. 1 836–9
[36] Burke P J 2003 An RF circuit model for carbon nanotubesIEEE Trans. Nanotechnol. 2 55–8
[37] Odegard G M, Gates T S, Nicholson L M and Wise K E 2002Equivalent-continuum modeling of nanostructuredmaterials Compos. Sci. Technol. 62 1869–80
[38] Li C and Chou T-W 2003 A structural mechanics approachfor the analysis of carbon nanotubes Int. J. Solids Struct.40 2487–99
[39] Tserpes K I and Papanikos P 2005 Finite element modelingof single-walled carbon nanotubes Composites B36 468–77
[40] Xiao J R, Gama B A and Gillespie J W Jr 2005 An analyticalmolecular structural mechanics model for the mechanicalproperties of carbon nanotubes Int. J. Solids Struct.42 3075–92
[41] Chang T and Gao H 2003 Size-dependent elastic propertiesof a single-walled carbon nanotube via a molecularmechanics model J. Mech. Phys. Solids 51 1059–74
[42] Muc A 2010 Design and identification methods of effectivemechanical properties for carbon nanotubes Mater. Des.31 1671–5
[43] Theodosiou T C and Saravanos D A 2007 Molecularmechanics based finite element for carbon nanotubemodeling Comput. Model. Eng. Sci. 19 121–34
[44] Wu C J, Chou C Y, Han C N and Chiang K N 2009Estimation and validation of elastic modulus of carbonnanotubes using nano-scale tensile and vibrationalanalysis Comput. Model. Eng. Sci. 41 49–68
[45] Chen W, Cheng H and Liu Y 2010 Radial mechanicalproperties of single-walled carbon nanotubes usingmodified molecular structural mechanics Comput. Mater.Sci. 47 985–93
[46] Pantano A, Boyce M C and Parks D M 2003 Nonlinearstructural mechanics based modeling of carbon nanotubedeformation Phys. Rev. Lett. 91 145504
[47] Liew K M, He X Q and Wong C H 2004 On the study ofelastic and plastic properties of multi-walled carbonnanotubes under axial tension using molecular dynamicssimulation Acta Mater. 52 2521–7
[48] Jin Y and Yuan F G 2003 Simulation of elastic properties ofsingle-walled carbon nanotubes Compos. Sci. Technol.63 1507–15
[49] Mylvaganam K and Zhang L C 2004 Important issues in amolecular dynamics simulation for characterising themechanical properties of carbon nanotubes Carbon42 2025–32
[50] Moseler M, Riedel H, Gumbsch P, Staring J and Mehlig B2005 Understanding of the phase transformation fromfullerite to amorphous carbon at the microscopic levelPhys. Rev. Lett. 94 165503
[51] Belytschko T, Xiao S P, Schatz G C and Ruoff R S 2002Atomistic simulation of nanotube fracture Phys. Rev. B65 235430
[52] Heo S, Kim K J, Lee D Y, Vemuri S and Lee M-H 2005Multiwalled carbon nanotube/IPMC nanocompositesProc. SPIE 5759 194–202
[53] Mirfakhrai T, Oh J, Kozlov M, Fang S, Zhang M,Baughman R H and Madden J D W 2009 Carbonnanotube yarn actuators: an electrochemical impedancemodel J. Electrochem. Soc. 156 K97–103
[54] Odegard G M, Gates T S, Wise K E, Park C and Siochi E J2003 Constitutive modeling of nanotube–reinforcedpolymer composites Compos. Sci. Technol. 63 1671–87
[55] Odegard G M, Clancy T C and Gates T S 2005 Modeling ofthe mechanical properties of nanoparticle/polymercomposites Polymer 46 553–62
25

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
[56] Haque M H, Kolaric I, Vohrer U, Wallmersperger T andKroplin B 2004 Carbon nanotube sheet actuator:theoretical and experimental investigations Proc. SPIE5385 249–59
[57] Haque M H, Kolaric I, Vohrer U, Wallmersperger T,D’Ottavio M and Kroplin B 2005 Multiwalledcarbon-nanotubes-sheet actuators: theoretical andexperimental investigations Proc. SPIE 5759 203–13
[58] Haque M H, Hying K, Kolaric I, Wallmersperger T andKroplin B 2006 Theoretical and experimentalinvestigations of fundamental effects in carbon nanotubesheet actuators Proc. SPIE 6168 61681I
[59] Riemenschneider J, Opitz S, Sinapius M and Monner H P2009 Modeling of carbon nanotube actuators: partI—modeling and electrical properties J. Intell. Mater. Syst.Struct. 20 245–50
[60] Riemenschneider J, Opitz S, Sinapius M and Monner H O2009 Modelling of carbon nanotube actuators: partII—mechanical properties, electro-mechanical couplingand vibration of the model J. Intell. Mater. Syst. Struct.20 253–63
[61] Cinefra M, Carrera E and Brischetto S 2011 Refined shellmodels for the vibration analysis of multiwalled carbonnanotubes Mech. Adv. Mater. Struct. 18 476–83
[62] Chathoth S M, Mamontov E, Melnichenko Y B andZamponi M 2010 Diffusion and adsorption of methaneconfined in nano-porous carbon aerogel: a combinedquasi-elastic and small-angle neutron scattering studyMicropor. Mesopor. Mater. 132 148–53
[63] Soolo E, Brandell D, Liivat A, Kasemagi H, Tamm T andAabloo A 2012 Molecular dynamics simulations ofEMI-BF4 in nanoporous carbon actuators J. Mol.Modeling 18 1541–52
[64] Akita S, Nakayama Y, Mizooka S, Takano Y, Okawa T,Miyatake Y, Yamanaka S, Tsuji M and Nosaka T 2001Nanotweezers consisting of carbon nanotubes operating inan atomic force microscope Appl. Phys. Lett. 79 1691
[65] Lee J and Kim S 2005 Manufacture of a nanotweezer using alength controlled CNT arm Sensors Actuators A120 193–8
[66] Gao M, Dai L, Baughman R H, Spinks G M andWallace G G 2000 Electrochemical properties of alignednanotube arrays: basis of new electromechanical actuatorsProc. SPIE 3987 18
[67] Fraysse J, Minett A I, Gu G, Roth S, Rinzler A G andBaughman R H 2001 Towards the demonstration ofactuator properties of a single carbon nanotube Curr. Appl.Phys. 1 407–11
[68] Hughes M and Spinks G M 2005 Multiwalled carbonnanotube actuators Adv. Mater. 17 443–6
[69] Spinks G M, Wallace G G, Fifield L S, Dalton L R,Mazzoldi A, De Rossi D, Khayrullin I I andBaughman R H 2002 Pneumatic carbon nanotubeactuators Adv. Mater. 14 1728–32
[70] Barisci J N, Wallace G G, MacFarlane D R andBaughman R H 2004 Investigation of ionic liquids aselectrolytes for carbon nanotube electrodes Electrochem.Commun. 6 22–7
[71] Mirfakhrai T, Oh J, Kozlov M, Fok E C W, Zhang M,Fang S, Baughman R H and Madden J D W 2007Electrochemical actuation of carbon nanotube yarns SmartMater. Struct. 16 S243
[72] Vohrer U, Kolaric I, Haque M H, Roth S andDetlaff-Weglikowska U 2004 Carbon nanotube sheets forthe use as artificial muscles Carbon 42 1159–64
[73] Suppiger D, Busato S, Ermanni P, Motta M and Windle A2009 Electromechanical actuation of macroscopic carbonnanotube structures: mats and aligned ribbons Phys.Chem. Chem. Phys. 11 5180–5
[74] Fukushima T, Asaka K, Kosaka A and Aida T 2005 Fullyplastic actuator through layer-by-layer casting withionic-liquid-based bucky gel Angew. Chem. Int. Edn44 2410–3
[75] Fukushima T, Kosaka A, Ishimura Y, Yamamoto T,Takigawa T, Ishii N and Aida T 2003 Molecular orderingof organic molten salts triggered by single-walled carbonnanotubes Science 300 2072–4
[76] Ma J C and Dougherty D A 1997 The cation–π interactionChem. Rev. 97 1303–24
[77] Lu W et al 2002 Use of ionic liquids for π -conjugatedpolymer electrochemical devices Science 297 983–7
[78] Ding J, Zhou D, Spinks G M, Wallace G G, Forsyth S A,Forsyth M and MacFarlane D R 2003 Use of ionic liquidsas electrolytes in electromechanical actuator systemsbased on inherently conducting polymers Chem. Mater.15 2392–8
[79] Mukai K, Asaka K, Kiyohara K, Sugino T, Takeuchi I,Fukushima T and Aida T 2008 High performance fullyplastic actuator based on ionic-liquid-based bucky gelElectrochim. Acta 53 5555–62
[80] Ghamsari A K, Jin Y and Woldesenbet E 2012 Mechanicalcharacterization of bucky gel morphing nanocomposite foractuating/sensing applications Smart Mater. Struct.21 045007
[81] Takeuchi I, Asaka K, Kiyohara K, Sugino T, Terasawa N,Mukai K, Fukushima T and Aida T 2009Electromechanical behavior of fully plastic actuatorsbased on bucky gel containing various internal ionicliquids Electrochim. Acta 54 1762–8
[82] Terasawa N, Takeuchi I and Matsumoto H 2009Electrochemical properties and actuation mechanisms ofactuators using carbon nanotube–ionic liquid gel SensorsActuators B 139 624–30
[83] Terasawa N, Takeuchi I, Matsumoto H, Mukai K andAsaka K 2011 High performance polymer actuator basedon carbon nanotube–ionic liquid gel: effect of ionic liquidSensors Actuators B 156 539–45
[84] Terasawa N, Takeuchi I, Mukai K and Asaka K 2010 Theeffects of alkaline earth metal salts on the performance ofa polymer actuator based on single-walled carbonnanotube–ionic liquid gel Sensors Actuators B 150 625–30
[85] Biso M, Ansaldo A, Futaba D N, Hata K and Ricci D 2011Cross-linking super-growth carbon nanotubes to boost theperformance of bucky gel actuators Carbon 49 2253–7
[86] Mukai K, Asaka K, Sugino T, Kiyohara K, Takeuchi I,Terasawa N, Futaba D N, Hata K, Fukushima T andAida T 2009 Highly conductive sheets frommillimeter-long single-walled carbon nanotubes and ionicliquids: application to fast-moving, low-voltageelectromechanical actuators operable in air Adv. Mater.21 1582–5
[87] Ceseracciu L, Biso M, Ansaldo A, Futaba D N, Hata K,Barone A C and Ricci D 2011 Mechanics and actuationproperties of bucky gel-based electroactive polymersSensors Actuators B 156 949–53
[88] Biso M, Ansaldo A and Ricci D 2012 Geometry dependentperformance of bucky gel actuators: increasing operatingfrequency by miniaturization Phys. Status Solidi b249 2361–4
[89] Biso M and Ricci D 2009 Multi-walled carbon nanotubesplastic actuator Phys. Status Solidi b 246 2820–3
[90] Takeuchi I, Asaka K, Kiyohara K, Sugino T, Mukai K andRandriamahazaka H 2010 Electrochemical impedancespectroscopy and electromechanical behavior of bucky-gelactuators containing ionic liquids J. Phys. Chem. C114 14627–34
[91] Randriamahazaka H and Asaka K 2010 Electromechanicalanalysis by means of complex capacitance of bucky-gel
26
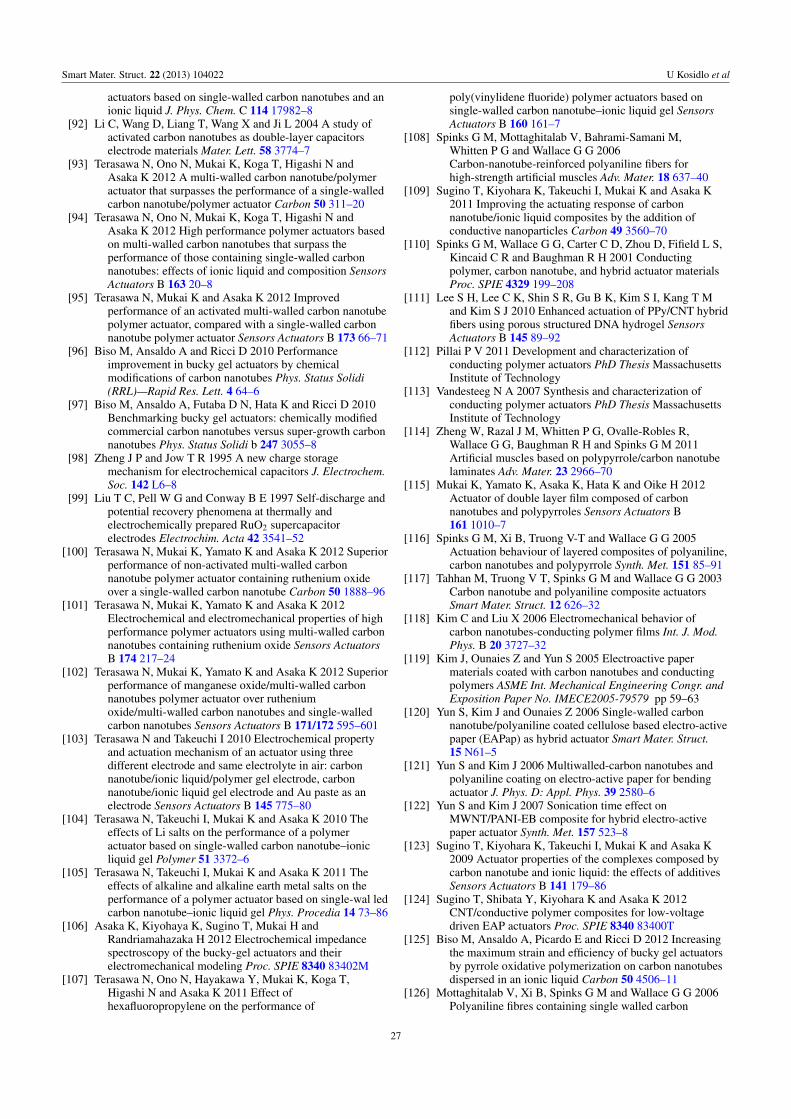
Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
actuators based on single-walled carbon nanotubes and anionic liquid J. Phys. Chem. C 114 17982–8
[92] Li C, Wang D, Liang T, Wang X and Ji L 2004 A study ofactivated carbon nanotubes as double-layer capacitorselectrode materials Mater. Lett. 58 3774–7
[93] Terasawa N, Ono N, Mukai K, Koga T, Higashi N andAsaka K 2012 A multi-walled carbon nanotube/polymeractuator that surpasses the performance of a single-walledcarbon nanotube/polymer actuator Carbon 50 311–20
[94] Terasawa N, Ono N, Mukai K, Koga T, Higashi N andAsaka K 2012 High performance polymer actuators basedon multi-walled carbon nanotubes that surpass theperformance of those containing single-walled carbonnanotubes: effects of ionic liquid and composition SensorsActuators B 163 20–8
[95] Terasawa N, Mukai K and Asaka K 2012 Improvedperformance of an activated multi-walled carbon nanotubepolymer actuator, compared with a single-walled carbonnanotube polymer actuator Sensors Actuators B 173 66–71
[96] Biso M, Ansaldo A and Ricci D 2010 Performanceimprovement in bucky gel actuators by chemicalmodifications of carbon nanotubes Phys. Status Solidi(RRL)—Rapid Res. Lett. 4 64–6
[97] Biso M, Ansaldo A, Futaba D N, Hata K and Ricci D 2010Benchmarking bucky gel actuators: chemically modifiedcommercial carbon nanotubes versus super-growth carbonnanotubes Phys. Status Solidi b 247 3055–8
[98] Zheng J P and Jow T R 1995 A new charge storagemechanism for electrochemical capacitors J. Electrochem.Soc. 142 L6–8
[99] Liu T C, Pell W G and Conway B E 1997 Self-discharge andpotential recovery phenomena at thermally andelectrochemically prepared RuO2 supercapacitorelectrodes Electrochim. Acta 42 3541–52
[100] Terasawa N, Mukai K, Yamato K and Asaka K 2012 Superiorperformance of non-activated multi-walled carbonnanotube polymer actuator containing ruthenium oxideover a single-walled carbon nanotube Carbon 50 1888–96
[101] Terasawa N, Mukai K, Yamato K and Asaka K 2012Electrochemical and electromechanical properties of highperformance polymer actuators using multi-walled carbonnanotubes containing ruthenium oxide Sensors ActuatorsB 174 217–24
[102] Terasawa N, Mukai K, Yamato K and Asaka K 2012 Superiorperformance of manganese oxide/multi-walled carbonnanotubes polymer actuator over rutheniumoxide/multi-walled carbon nanotubes and single-walledcarbon nanotubes Sensors Actuators B 171/172 595–601
[103] Terasawa N and Takeuchi I 2010 Electrochemical propertyand actuation mechanism of an actuator using threedifferent electrode and same electrolyte in air: carbonnanotube/ionic liquid/polymer gel electrode, carbonnanotube/ionic liquid gel electrode and Au paste as anelectrode Sensors Actuators B 145 775–80
[104] Terasawa N, Takeuchi I, Mukai K and Asaka K 2010 Theeffects of Li salts on the performance of a polymeractuator based on single-walled carbon nanotube–ionicliquid gel Polymer 51 3372–6
[105] Terasawa N, Takeuchi I, Mukai K and Asaka K 2011 Theeffects of alkaline and alkaline earth metal salts on theperformance of a polymer actuator based on single-wal ledcarbon nanotube–ionic liquid gel Phys. Procedia 14 73–86
[106] Asaka K, Kiyohaya K, Sugino T, Mukai H andRandriamahazaka H 2012 Electrochemical impedancespectroscopy of the bucky-gel actuators and theirelectromechanical modeling Proc. SPIE 8340 83402M
[107] Terasawa N, Ono N, Hayakawa Y, Mukai K, Koga T,Higashi N and Asaka K 2011 Effect ofhexafluoropropylene on the performance of
poly(vinylidene fluoride) polymer actuators based onsingle-walled carbon nanotube–ionic liquid gel SensorsActuators B 160 161–7
[108] Spinks G M, Mottaghitalab V, Bahrami-Samani M,Whitten P G and Wallace G G 2006Carbon-nanotube-reinforced polyaniline fibers forhigh-strength artificial muscles Adv. Mater. 18 637–40
[109] Sugino T, Kiyohara K, Takeuchi I, Mukai K and Asaka K2011 Improving the actuating response of carbonnanotube/ionic liquid composites by the addition ofconductive nanoparticles Carbon 49 3560–70
[110] Spinks G M, Wallace G G, Carter C D, Zhou D, Fifield L S,Kincaid C R and Baughman R H 2001 Conductingpolymer, carbon nanotube, and hybrid actuator materialsProc. SPIE 4329 199–208
[111] Lee S H, Lee C K, Shin S R, Gu B K, Kim S I, Kang T Mand Kim S J 2010 Enhanced actuation of PPy/CNT hybridfibers using porous structured DNA hydrogel SensorsActuators B 145 89–92
[112] Pillai P V 2011 Development and characterization ofconducting polymer actuators PhD Thesis MassachusettsInstitute of Technology
[113] Vandesteeg N A 2007 Synthesis and characterization ofconducting polymer actuators PhD Thesis MassachusettsInstitute of Technology
[114] Zheng W, Razal J M, Whitten P G, Ovalle-Robles R,Wallace G G, Baughman R H and Spinks G M 2011Artificial muscles based on polypyrrole/carbon nanotubelaminates Adv. Mater. 23 2966–70
[115] Mukai K, Yamato K, Asaka K, Hata K and Oike H 2012Actuator of double layer film composed of carbonnanotubes and polypyrroles Sensors Actuators B161 1010–7
[116] Spinks G M, Xi B, Truong V-T and Wallace G G 2005Actuation behaviour of layered composites of polyaniline,carbon nanotubes and polypyrrole Synth. Met. 151 85–91
[117] Tahhan M, Truong V T, Spinks G M and Wallace G G 2003Carbon nanotube and polyaniline composite actuatorsSmart Mater. Struct. 12 626–32
[118] Kim C and Liu X 2006 Electromechanical behavior ofcarbon nanotubes-conducting polymer films Int. J. Mod.Phys. B 20 3727–32
[119] Kim J, Ounaies Z and Yun S 2005 Electroactive papermaterials coated with carbon nanotubes and conductingpolymers ASME Int. Mechanical Engineering Congr. andExposition Paper No. IMECE2005-79579 pp 59–63
[120] Yun S, Kim J and Ounaies Z 2006 Single-walled carbonnanotube/polyaniline coated cellulose based electro-activepaper (EAPap) as hybrid actuator Smart Mater. Struct.15 N61–5
[121] Yun S and Kim J 2006 Multiwalled-carbon nanotubes andpolyaniline coating on electro-active paper for bendingactuator J. Phys. D: Appl. Phys. 39 2580–6
[122] Yun S and Kim J 2007 Sonication time effect onMWNT/PANI-EB composite for hybrid electro-activepaper actuator Synth. Met. 157 523–8
[123] Sugino T, Kiyohara K, Takeuchi I, Mukai K and Asaka K2009 Actuator properties of the complexes composed bycarbon nanotube and ionic liquid: the effects of additivesSensors Actuators B 141 179–86
[124] Sugino T, Shibata Y, Kiyohara K and Asaka K 2012CNT/conductive polymer composites for low-voltagedriven EAP actuators Proc. SPIE 8340 83400T
[125] Biso M, Ansaldo A, Picardo E and Ricci D 2012 Increasingthe maximum strain and efficiency of bucky gel actuatorsby pyrrole oxidative polymerization on carbon nanotubesdispersed in an ionic liquid Carbon 50 4506–11
[126] Mottaghitalab V, Xi B, Spinks G M and Wallace G G 2006Polyaniline fibres containing single walled carbon
27

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
nanotubes: enhanced performance artificial muscles Synth.Met. 156 796–803
[127] Spinks G M, Shin S R, Wallace G G, Whitten P G, Kim I Y,Kim S I and Kim S J 2007 A novel ‘dual mode’ actuationin chitosan/polyaniline/carbon nanotube fibers SensorsActuators B 121 616–21
[128] Landi B J, Raffaelle R P, Heben M J, Alleman J L,VanDerveer W and Gennett T 2002 Single wall carbonnanotube–Nafion composite actuators Nano Lett.2 1329–32
[129] Landi B J, Raffaelle R P, Heben M J, Alleman J L,VanDerveer W and Gennett T 2005 Development andcharacterization of single wall carbon nanotube–Nafioncomposite actuators Mater. Sci. Eng. B 116 359–62
[130] Liu S, Liu Y, Cebeci H, Guzman de Villoria R, Lin J-H,Wardle B L and Zhang Q M 2010 High electromechanicalresponse of ionic polymer actuators withcontrolled-morphology aligned carbon nanotube/nafionnanocomposite electrodes Adv. Funct. Mater. 20 3266–71
[131] Lee J-W and Yoo Y-T 2011 Preparation and performance ofIPMC actuators with electrospun Nafion R©–MWNTcomposite electrodes Sensors Actuators B 159 103–11
[132] Lian H, Qian W, Estevez L, Liu H, Liu Y, Jiang T, Wang K,Guo W and Giannelis E P 2011 Enhanced actuation infunctionalized carbon nanotube–Nafion compositesSensors Actuators B 156 187–93
[133] Chen I W P, Cottinet P-J, Tsai S-Y, Foster B, Liang R,Wang B and Zhang C 2012 Improved performance ofcarbon nanotube bucky paper and ionic-liquid-in-Nafionactuators for rapid response and high durability in theopen air Sensors Actuators B 171/172 515–21
[134] Cottinet P-J, Souders C, Labrador D, Porter S, Liang Z,Wang B and Zhang C 2011 Nonlinear strain–electric fieldrelationship of carbon nanotube buckypaper/Nafionactuators Sensors Actuators A 170 164–71
[135] Cottinet P-J, Souders C, Tsai S-Y, Liang R, Wang B andZhang C 2012 Electromechanical actuation of buckypaperactuator: material properties and performancerelationships Phys. Lett. A 376 1132–6
[136] Mazzoldi A, Tesconi M, Tognetti A, Rocchia W, Vozzi G,Pioggia G, Ahluwalia A and Rossi D D 2008 Electroactivecarbon nanotube actuators: soft-lithographic fabricationand electro-chemical modelling Mater. Sci. Eng. C28 1057–64
[137] Du F-P, Tang C-Y, Xie X-L, Zhou X-P and Tan L 2009Carbon nanotube enhanced gripping in polymer-basedactuators J. Phys. Chem. C 113 7223–6
[138] Li J, Ma W, Song L, Niu Z, Cai L, Zeng Q, Zhang X,Dong H, Zhao D, Zhou W and Xie S 2011Superfast-response and ultrahigh-power-densityelectromechanical actuators based on hierarchal carbonnanotube electrodes and chitosan Nano Lett. 11 4636–41
[139] Lu L and Chen W 2010 Biocompatible composite actuator: asupramolecular structure consisting of the biopolymerchitosan, carbon nanotubes, and an ionic liquid Adv.Mater. 22 3745–8
[140] Yun S and Kim J 2008 Characteristics and performance offunctionalized MWNT blended cellulose electro-activepaper actuator Synth. Met. 158 521–6
[141] Yun S and Kim J 2011 Mechanical, electrical, piezoelectricand electro-active behavior of aligned multi-walled carbonnanotube/cellulose composites Carbon 49 518–27
[142] Shi J, Guo Z-X, Zhan B, Luo H, Li Y and Zhu D 2005Actuator based on MWNT/PVA hydrogels J. Phys. Chem.B 109 14789–91
[143] Mirfakhrai T, Madden J D W and Baughman R H 2007Polymer artificial muscles Mater. Today 10 30–8
[144] Spinks G M, Wallace G G, Ding J, Zhau D, Xi B, Scott T Rand Truong V T 2003 Ionic liquids and polypyrrole helix
tubes: bringing the electronic Braille screen closer toreality Proc. SPIE 5051 372
[145] Pettersson P F, Jager E W H and Inganas O 2000 Surfacemicromachined polymer actuators as valves in PDMSmicrofluidic systems 1st Int. IEEE-EMBS Special TopicConf. on Microtechnology in Medicineand Biologyed A Dittmar and D Beebe, pp 334–5
[146] Della Santa A, Mazzoldi A and de Rossi D 1996 Steerablemicrocatheters actuated by embedded conducting polymerstructures J. Intell. Mater. Syst. Struct. 7 292
[147] Yeo-Heung Y et al 2006 Carbon nanofiber hybrid actuators:part I—liquid electrolyte-based J. Intell. Mater. Syst.Struct. 17 107–16
[148] Yeo-Heung Y et al 2006 Carbon nanofiber hybrid actuators:part II—solid electrolyte-based J. Intell. Mater. Syst.Struct. 17 191–7
[149] Takeuchi I, Asaka K, Kiyohara K, Sugino T, Terasawa N,Mukai K and Shiraishi S 2009 Electromechanical behaviorof a fully plastic actuator based on dispersednano-carbon/ionic-liquid–gel electrodes Carbon47 1373–80
[150] Terasawa N, Mukai K and Asaka K 2012 Superiorperformance of a vapor grown carbon fiber polymeractuator containing ruthenium oxide over a single-walledcarbon nanotube J. Mater. Chem. 22 15104–9
[151] Jo N-J, Lim H-O, Park M-Y, Park H, Lee I-W and Chun H-H2011 The effect of carbon filler type on actuation behaviorof conducting polymer actuator Funct. Mater. Lett. 4 75–8
[152] Wang X-L, Oh I-K and Kim J-B 2009 Enhancedelectromechanical performance of carbon nano-fiberreinforced sulfonated poly(styrene-b-[ethylene/butylene]-b-styrene) actuator Compos. Sci. Technol. 69 2098–101
[153] Foroughi J et al 2011 Torsional carbon nanotube artificialmuscles Science 334 494
[154] Lima M D et al 2012 Electrically, chemically, andphotonically powered torsional and tensile actuation ofhybrid carbon nanotube yarn muscles Science 338 928
[155] Guo W, Liu C, Zhao F, Sun X, Yang Z, Chen T, Chen X,Qiu L, Hu X and Peng H A 2012 Novel electromechanicalactuation mechanism of a carbon nanotube fiber Adv.Mater. 24 5379–84
[156] Viry L, Mercader C, Miaudet P, Zakri C, Derre A, Kuhn A,Maugey M and Poulin P 2010 Nanotube fibers forelectromechanical and shape memory actuators J. Mater.Chem. 20 3487–95
[157] Dash R, Chmiola J, Yushin G, Gogotsi Y, Laudisio J,Singer J, Fischer J and Kucheyev S 2006 Titanium carbidederived nanoporous carbon for energy-related applicationsCarbon 44 2489–97
[158] Thomberg T, Janes A and Lust E 2010 Energy and powerperformance of electrochemical double-layer capacitorsbased on molybdenum carbide derived carbonElectrochim. Acta 55 3138–43
[159] Leis J, Arulepp M, Kaarik M and Perkson A 2010 The effectof Mo2C derived carbon pore size on the electricaldouble-layer characteristics in propylene carbonate-basedelectrolyte Carbon 48 4001–8
[160] Hantel M M, Presser V, Koetz R and Gogotsi Y 2011 In situelectrochemical dilatometry of carbide-derived carbonsElectrochem. Commun. 13 1221–4
[161] Torop J, Arulepp M, Leis J, Punning A, Johanson U,Palmre V and Aabloo A 2010 Nanoporous carbide-derivedcarbon material-based linear actuators Materials 3 9–25
[162] Torop J, Palmre V, Arulepp M, Sugino T, Asaka K andAabloo A 2011 Flexible supercapacitor-like actuator withcarbide-derived carbon electrodes Carbon 49 3113–9
28

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
[163] Torop J, Sugino T, Asaka K, Janes A, Lust E and Aabloo A2012 Nanoporous carbide-derived carbon based actuatorsmodified with gold foil: prospect for fast response and lowvoltage applications Sensors Actuators B 161 629–34
[164] Novoselov K S, Geim A K, Morozov S V, Jiang D, Zhang Y,Dubonos S V, Grigorieva I V and Firsov A A 2004Electric field effect in atomically thin carbon films Science306 666–9
[165] Geim A K 2009 Graphene: status and prospects Science324 1530–4
[166] Rao C N R, Sood A K, Subrahmanyam K S andGovindaraj A 2009 Graphene: the new two-dimensionalnanomaterial Angew. Chem. Int. Edn 48 7752–77
[167] Allen M J, Tung V C and Kaner R B 2012 Honeycombcarbon: a review of graphene Chem. Rev. 110 132–45
[168] Zhu Y, Murali S, Cai W, Li X, Suk J W, Potts J R andRuoff R S 2012 Graphene and graphene oxide: synthesis,properties, and applications Adv. Mater. 22 3906–24
[169] Cai D and Song M 2012 Recent advance in functionalizedgraphene/polymer nanocomposites J. Mater. Chem.20 7906–15
[170] Bai H, Li C and Shi G 2011 Functional composite materialsbased on chemically converted graphene Adv. Mater.23 1089–115
[171] Rao C N R, Sood A K, Rakesh V and Subrahmanyam K S2012 Some novel attributes of graphene J. Phys. Chem.Lett. 1 572–80
[172] Bunch J S, van der Zande A M, Verbridge S S, Frank I W,Tanenbaum D M, Parpia J M, Craighead H G andMcEuen P L 2007 Electromechanical resonators fromgraphene sheets Science 315 490–3
[173] Shivaraman S et al 2009 Free-standing epitaxial grapheneNano Lett. 9 3100–5
[174] van der Zande A M, Barton R A, Alden J S, Ruiz-Vargas C S,Whitney W S, Pham P H Q, Park J, Parpia J M,Craighead H G and McEuen P L 2010 Large-scale arraysof single-layer graphene resonators Nano Lett. 10 4869–73
[175] Liang J, Xu Y, Huang Y, Zhang L, Wang Y, Ma Y, Li F,Guo T and Chen Y 2009 Infrared-triggered actuators fromgraphene-based nanocomposites J. Phys. Chem. C113 9921–7
[176] Park S, An J, Suk J W and Ruoff R S 2010 Graphene-basedactuators Small 6 210–2
[177] Xie X, Qu L, Zhou C, Li Y, Zhu J, Bai H, Shi G and Dai L2010 An asymmetrically surface-modified graphene filmelectrochemical actuator ACS Nano 4 6050–4
[178] Lian Y, Liu Y, Jiang T, Shu J, Lian H and Cao M 2010Enhanced electromechanical performance of graphiteoxide–Nafion nanocomposite actuator J. Phys. Chem. C114 9659–63
[179] Jung J-H, Jeon J-H, Sridhar V and Oh I-K 2011Electro-active graphene–Nafion actuators Carbon49 1279–89
[180] Zhu S-E, Shabani R, Rho J, Kim Y, Hong B H, Ahn J-H andCho H J 2011 Graphene-based bimorph microactuatorNano Lett. 11 977–81
[181] Wang R, Sun J, Gao L, Xu C and Zhang J 2011 Fibrousnanocomposites of carbon nanotubes and graphene oxidewith synergetic mechanical and actuative performanceChem. Commun. 47 8650–2
[182] Yang W, Choi H, Choi S, Jeon M and Lee S-Y 2012 Carbonnanotube–graphene composite for ionic polymer actuatorsSmart Mater. Struct. 21 055012
[183] Lu L, Liu J, Hu Y, Zhang Y, Randriamahazaka H andChen W 2012 Highly stable air working bimorph actuatorbased on a graphene nanosheet/carbon nanotube hybridelectrode Adv. Mater. 24 4317–21
[184] Oh J, Kozlov M E, Carretero-Gonzalez J, Castillo-Martınez Eand Baughman R H 2011 Thermal actuation of grapheneoxide nanoribbon mats Chem. Phys. Lett. 505 31–6
[185] Liang J, Huang Y, Oh J, Kozlov M, Sui D, Fang S,Baughman R H, Ma Y and Chen Y 2011Electromechanical actuators based on graphene andgraphene/Fe3O4 hybrid paper Adv. Funct. Mater.21 3778–84
[186] Xie X, Bai H, Shi G and Qu L 2011 Load-tolerant, highlystrain-responsive graphene sheets J. Mater. Chem.21 2057–9
[187] Liu J, Wang Z, Xie X, Cheng H, Zhao Y and Qu L 2012 Arationally-designed synergetic polypyrrole/graphenebilayer actuator J. Mater. Chem. 22 4015–20
[188] Liu A, Yuan W and Shi G 2012 Electrochemical actuatorbased on polypyrrole/ sulfonated graphene/graphenetri-layer film Thin Solid Films 520 6307–12
[189] Liu J, Wang Z, Zhao Y, Cheng H, Hu C, Jiang L and Qu L2012 Three-dimensional graphene–polypyrrole hybridelectrochemical actuator Nanoscale 4 7563–8
[190] Liang J et al 2012 Electromechanical actuator withcontrollable motion, fast response rate, andhigh-frequency resonance based on graphene andpolydiacetylene ACS Nano 6 4508–19
[191] Shin K-Y, Hong J-Y and Jang J 2011 Flexible andtransparent graphene films as acoustic actuator electrodesusing inkjet printing Chem. Commun. 47 8527–9
[192] Rogers G W and Liu J Z 2012 High-performance grapheneoxide electromechanical actuators J. Am. Chem. Soc.134 1250–5
[193] Lu L, Liu J, Hu Y and Chen W 2012 Large volume variationof an anisotropic graphene nanosheet electrochemical–mechanical actuator under low voltage stimulation Chem.Commun. 48 3978–80
[194] Javadi A, Xiao Y, Xu W and Gong S 2012 Chemicallymodified graphene/P(VDF-TrFE-CFE) electroactivepolymer nanocomposites with superior electromechanicalperformance J. Mater. Chem. 22 830–4
[195] Kim K J and Tadokoro S 2007 Electroactive Polymers forRobotic Applications: Artificial Muscles and Sensors(London: Springer)
[196] Dong L, Subramanian A and Nelson B J 2007 Carbonnanotubes for nanorobotics Nano Today 2 12–21
[197] Sinha N and Yeow J T-W 2005 Carbon nanotubes forbiomedical applications IEEE Trans. Nanobiosci.4 180–95
[198] Aliev A E et al 2009 Giant-stroke, superelastic carbonnanotube aerogel muscles Science 323 1575–9
[199] Riemenschneider J, Mahrholz T, Mosch J, Monner H P andMelcher J 2005 Carbon nanotubes—smart material of thefuture: experimental investigation of the system responseII Eccomas Thematic Conf. on Smart Structures andMaterials (Lisbon, July) ed C A Mota Soares et al
[200] Kosidlo U and Kolaric I 2009 Carbon Nanotube ActuatorApplications (Tokyo: Fraunhofer)
[201] Kosidlo U, Addinall R, Glanz C and Kolaric I 2011 Carbonnanotube actuators and their applications on example of adrum brake 6th World Congr. on Biomimetics, ArtificialMuscles and Nano-Bio 2011 (Oct. 2011) (France:Universite de Cergy-Pontoise)
[202] Kiyohara K, Sugino T and Asaka K 2010 Electrolytes inporous electrodes: effects of the pore size and thedielectric constant of the medium J. Chem. Phys.132 144705
[203] Arulepp M, Leis J, Latt M, Miller F, Rumma K, Lust E andBurke A F 2006 The advanced carbide-derived carbonbased supercapacitor J. Power Sources 162 1460–6
29

Smart Mater. Struct. 22 (2013) 104022 U Kosidlo et al
[204] Frackowiak E 2007 Carbon materials for supercapacitorapplication Phys. Chem. Chem. Phys. 9 1774–85
[205] Presser V, Heon M and Gogotsi Y 2011 Carbide-derivedcarbons- from porous networks to nanotubes and grapheneAdv. Funct. Mater. 21 810–33
[206] Presser V, Zhang L, Niu J J, McDonough J, Perez C, Fong Hand Gogotsi Y 2011 Flexible nano-felts of carbide-derived
carbon with ultra-high power handling capability Adv.Energy Mater. 1 423–30
[207] Huang Y, Liang J and Chen Y 2012 The application ofgraphene based materials for actuators J. Mater. Chem.22 3671
[208] Alici G and Huynh N 2006 Predicting force output of trilayerpolymer actuators Sensors Actuators A 132 616–25
30




















