
Amplified Piezoelectric Actuators: Static & Dynamic Applications
12
Ferroelectrics, 351:3–14, 2007 Copyright © Taylor & Francis Group, LLC ISSN: 0015-0193 print / 1521-0464 online DOI: 10.1080/00150190701351865 Amplified Piezoelectric Actuators: Static & Dynamic Applications FRANK CLAEYSSEN, ∗ R. LE LETTY, F. BARILLOT, AND O. SOSNICKI Cedrat Technologies S.A., Inovall´ ee, 38246 Meylan Cedex, France Amplified Piezoelectric Actuators offer the advantage of large deformation (up to 8%) and large strokes. Because of a prestress applied to the piezo ceramics and an effi- cient mechanical amplifier, they can produce large strokes both in static and dynamic conditions including resonance. For these reasons, these actuators can be used for mi- cro positioning, structure shaping, structure active damping, vibration generation, fluid control functions or energy harvesting, in various domains such as spacecraft, aircraft, instrumentation, optics, machine tools & production equipment. This paper presents these actuators, explains their properties as regard amplification and dynamic forces, and describes some applications. Keywords Amplified piezoelectric actuators; strain; limits; applications Introduction Piezo actuators can be classified in three main categories: stack-type actuators, exter- nal/internal leveraged actuators and frequency-leveraged actuators (such as stepping motors and ultrasonic motors) [1]. Although Cedrat Technologies has developed several solutions using multilayered piezo ceramics and shell-based structures [2, 3], Amplified Piezo Actu- ators have today received the largest market interest. The amplified piezo actuator APA is an external leveraged actuator based on a shell used both for the ceramic pre stress and for the ceramic motion magnification. The amplification leads to an actuator offering large deformation (up to 8%) and large strokes (up to 1000 μm). In spite of the amplification, it produces as much energy output density as conventional stack- type actuator, high electromechanical performances to mass ratios and higher robustness. The pre stress provided by the shell allows the actuator to bear large stresses and thus large deformation, even around resonance. This gives abilities to operate in dynamic applications, including long lifetime applications (up to 10 10 cycles) and to withstand external loads, which is meet in embedded mechanisms (launching vibrations, centrifugal forces). For these reasons, as shown by several examples, these actuators are advantageously used for micro positioning, structure shaping, structure damping, vibration generation, fluid control functions or energy harvesting. These functions are used in spacecraft, aircraft, instrumentation, optical applications, machine tools & production equipment ... New applications like micro scanning in IR cameras, active damping of skis, or sound Received September 5, 2006; revised October 3, 2006; accepted October 6, 2006. ∗ Corresponding author. E-mail: [email protected] 3
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Amplified Piezoelectric Actuators: Static & Dynamic Applications

Ferroelectrics, 351:3–14, 2007
Copyright © Taylor & Francis Group, LLC
ISSN: 0015-0193 print / 1521-0464 online
DOI: 10.1080/00150190701351865
Amplified Piezoelectric Actuators:Static & Dynamic Applications
FRANK CLAEYSSEN,∗ R. LE LETTY, F. BARILLOT,
AND O. SOSNICKI
Cedrat Technologies S.A., Inovallee, 38246 Meylan Cedex, France
Amplified Piezoelectric Actuators offer the advantage of large deformation (up to 8%)and large strokes. Because of a prestress applied to the piezo ceramics and an effi-cient mechanical amplifier, they can produce large strokes both in static and dynamicconditions including resonance. For these reasons, these actuators can be used for mi-cro positioning, structure shaping, structure active damping, vibration generation, fluidcontrol functions or energy harvesting, in various domains such as spacecraft, aircraft,instrumentation, optics, machine tools & production equipment. This paper presentsthese actuators, explains their properties as regard amplification and dynamic forces,and describes some applications.
Keywords Amplified piezoelectric actuators; strain; limits; applications
Introduction
Piezo actuators can be classified in three main categories: stack-type actuators, exter-
nal/internal leveraged actuators and frequency-leveraged actuators (such as stepping motors
and ultrasonic motors) [1]. Although Cedrat Technologies has developed several solutions
using multilayered piezo ceramics and shell-based structures [2, 3], Amplified Piezo Actu-
ators have today received the largest market interest.
The amplified piezo actuator APA is an external leveraged actuator based on a shell used
both for the ceramic pre stress and for the ceramic motion magnification. The amplification
leads to an actuator offering large deformation (up to 8%) and large strokes (up to 1000 μm).
In spite of the amplification, it produces as much energy output density as conventional stack-
type actuator, high electromechanical performances to mass ratios and higher robustness.
The pre stress provided by the shell allows the actuator to bear large stresses and thus large
deformation, even around resonance. This gives abilities to operate in dynamic applications,
including long lifetime applications (up to 1010 cycles) and to withstand external loads,
which is meet in embedded mechanisms (launching vibrations, centrifugal forces).
For these reasons, as shown by several examples, these actuators are advantageously
used for micro positioning, structure shaping, structure damping, vibration generation,
fluid control functions or energy harvesting. These functions are used in spacecraft,
aircraft, instrumentation, optical applications, machine tools & production equipment . . .
New applications like micro scanning in IR cameras, active damping of skis, or sound
Received September 5, 2006; revised October 3, 2006; accepted October 6, 2006.∗Corresponding author. E-mail: [email protected]
3
4 F. Claeyssen et al.
generators for underground pipe detection have also been recently studied taking benefit
of space experience.
This paper present the Amplified Piezo Actuators principle and the amplification ratios.
It underlines the interest of their prestress for managing large dynamic displacements. Their
properties are illustrated by several recent applications using them in static, dynamic or
resonant conditions.
Structure and Properties of Amplified Piezoelectric Actuators
The Amplified Piezo Actuators (APA) are external leveraged actuators initially developed
for Space applications with the support of the French and the European Space Agencies
(CNES & ESA) [4]. This design has been proven definitively valid since this actuator
technology is flying onboard ROSETTA spacecraft [5].
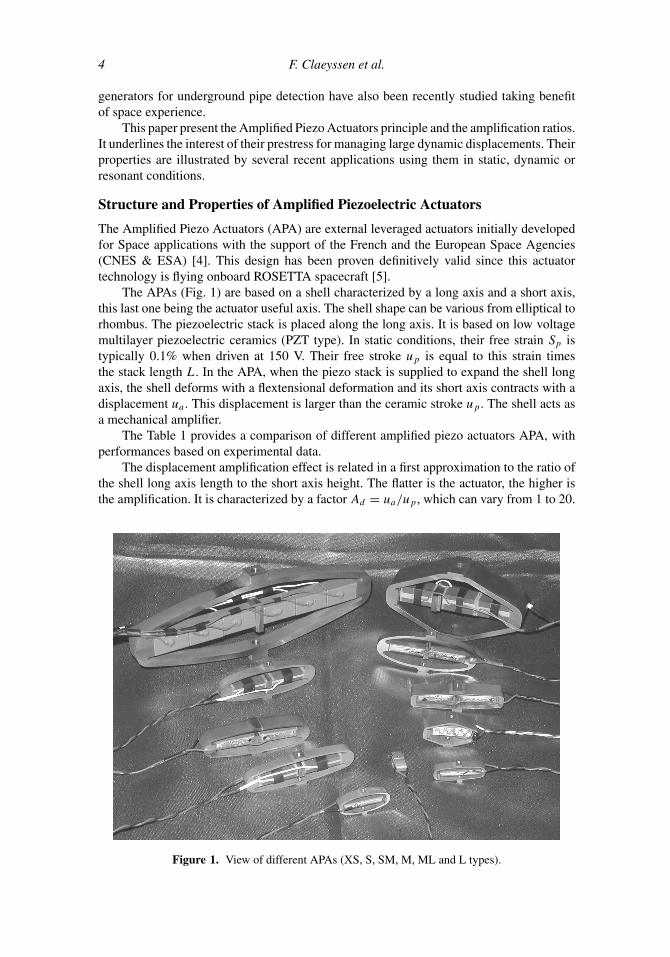
The APAs (Fig. 1) are based on a shell characterized by a long axis and a short axis,
this last one being the actuator useful axis. The shell shape can be various from elliptical to
rhombus. The piezoelectric stack is placed along the long axis. It is based on low voltage
multilayer piezoelectric ceramics (PZT type). In static conditions, their free strain Sp is
typically 0.1% when driven at 150 V. Their free stroke u p is equal to this strain times
the stack length L . In the APA, when the piezo stack is supplied to expand the shell long
axis, the shell deforms with a flextensional deformation and its short axis contracts with a
displacement ua . This displacement is larger than the ceramic stroke u p. The shell acts as
a mechanical amplifier.
The Table 1 provides a comparison of different amplified piezo actuators APA, with
performances based on experimental data.
The displacement amplification effect is related in a first approximation to the ratio of
the shell long axis length to the short axis height. The flatter is the actuator, the higher is
the amplification. It is characterized by a factor Ad = ua/u p, which can vary from 1 to 20.
Figure 1. View of different APAs (XS, S, SM, M, ML and L types).
Amplified Piezo Actuators: Static & Dynamics 5
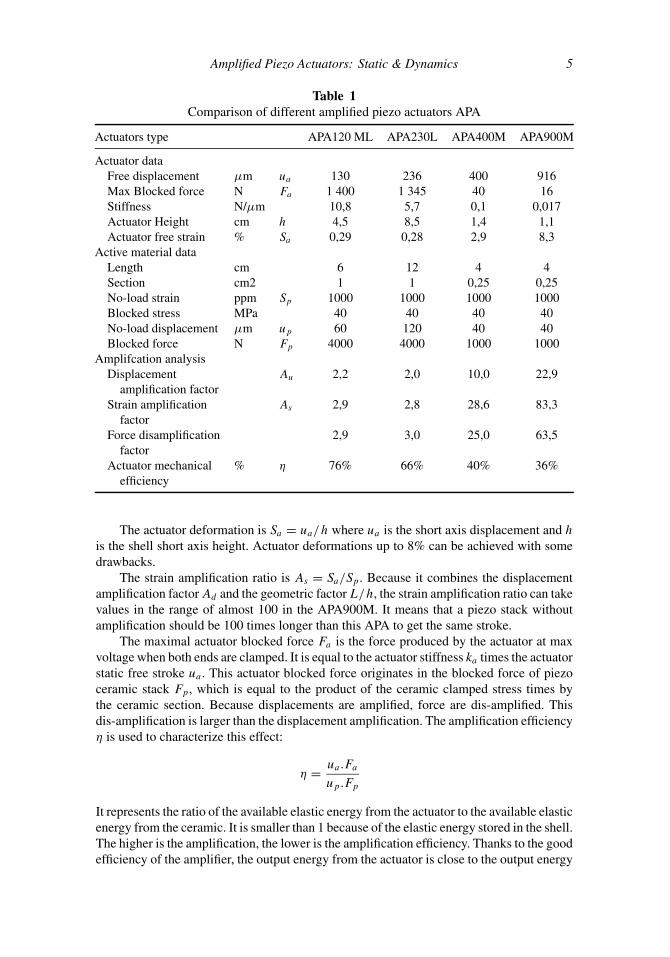
Table 1Comparison of different amplified piezo actuators APA
Actuators type APA120 ML APA230L APA400M APA900M
Actuator data
Free displacement μm ua 130 236 400 916
Max Blocked force N Fa 1 400 1 345 40 16
Stiffness N/μm 10,8 5,7 0,1 0,017
Actuator Height cm h 4,5 8,5 1,4 1,1
Actuator free strain % Sa 0,29 0,28 2,9 8,3
Active material data
Length cm 6 12 4 4
Section cm2 1 1 0,25 0,25
No-load strain ppm Sp 1000 1000 1000 1000
Blocked stress MPa 40 40 40 40
No-load displacement μm u p 60 120 40 40
Blocked force N Fp 4000 4000 1000 1000
Amplifcation analysis
Displacement Au 2,2 2,0 10,0 22,9
amplification factor
Strain amplification As 2,9 2,8 28,6 83,3
factor
Force disamplification 2,9 3,0 25,0 63,5
factor
Actuator mechanical % η 76% 66% 40% 36%
efficiency
The actuator deformation is Sa = ua/h where ua is the short axis displacement and his the shell short axis height. Actuator deformations up to 8% can be achieved with some
drawbacks.
The strain amplification ratio is As = Sa/Sp. Because it combines the displacement
amplification factor Ad and the geometric factor L/h, the strain amplification ratio can take
values in the range of almost 100 in the APA900M. It means that a piezo stack without
amplification should be 100 times longer than this APA to get the same stroke.
The maximal actuator blocked force Fa is the force produced by the actuator at max
voltage when both ends are clamped. It is equal to the actuator stiffness ka times the actuator
static free stroke ua . This actuator blocked force originates in the blocked force of piezo
ceramic stack Fp, which is equal to the product of the ceramic clamped stress times by
the ceramic section. Because displacements are amplified, force are dis-amplified. This
dis-amplification is larger than the displacement amplification. The amplification efficiency
η is used to characterize this effect:
η = ua .Fa
u p.Fp
It represents the ratio of the available elastic energy from the actuator to the available elastic
energy from the ceramic. It is smaller than 1 because of the elastic energy stored in the shell.
The higher is the amplification, the lower is the amplification efficiency. Thanks to the good
efficiency of the amplifier, the output energy from the actuator is close to the output energy
6 F. Claeyssen et al.
of the ceramic it self. This leads to high energy density actuators finding a strong interest
in air & space applications [6, 7].
Piezoceramics can bear large compressive stress (generally more than 200 MPa) but
they can not bear tensile forces with a good reliability. This is a problem in dynamic
applications because of inertial forces. The usual way to solve this limitation consists
in prestressing the ceramics by maintaining a compressive stress. This introduces another
force limit: If the internal dynamic forces are above the prestress, the actuator is endangered
because of the ceramic goes in tensile stress and also the ceramic stack looses contact with
the shell interface. This is the force limit due to the prestress.
The APA shells have been designed to provide such a prestressing function in ad-
dition to the amplification function. To mount the actuator, the shell is pressed along its
short axis, which enlarges the long axis, then the piezo stack is inserted in combination
with the play recovery mechanism, and at last the shell is relaxed. Because of the shell
stiffness, the initial deformation of the shell is converted into a prestressing force on the
ceramic.
When designing an APA, the stress analysis accounts for 3 possible stresses budgets
into the shell :
− the prestress stress : static stresses from the prestress process.
− the actuation stress : stresses produced in the shell when the ceramic is supplied.
− the external force stress : stresses due to external vibrations or shock or applied forces.
The initial APAs from Cedrat Technologies such as the APA230L or the APA120 ML
have been designed to meet space constrains accounting for ECSS standards. In this en-
vironment, external vibrations are large. Therefore a good prestress is required. For this
reason the APA shells are rather stiff and don’t include weak parts as flexural hinges or
hertzian pivots as used in other design, which generates high stress concentration [8]. How-
ever the higher the prestress, the stiffer is the shell, which tends to reduce the actuator
amplification efficiency. A compromise consists in choosing a prestress level comparable
to half the blocked stress of the piezo ceramic. In this case the amplitude of maximal
applicable external force Fmax is close to half the actuator blocked force Fa/2. This crite-
ria can be used to analyze the limitation of the actuator in dynamic conditions, including
resonance.
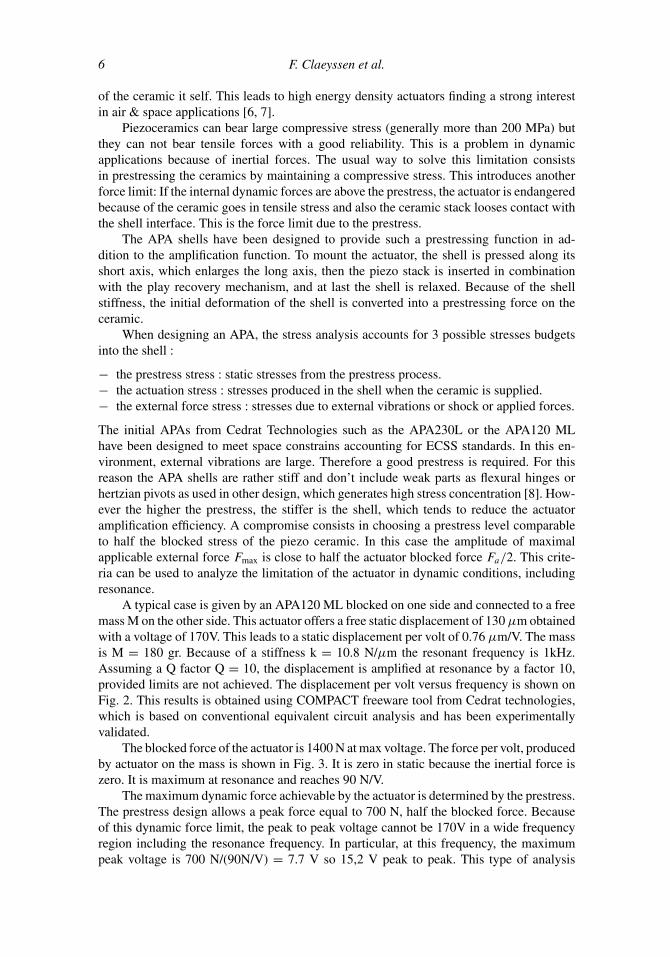
A typical case is given by an APA120 ML blocked on one side and connected to a free
mass M on the other side. This actuator offers a free static displacement of 130 μm obtained
with a voltage of 170V. This leads to a static displacement per volt of 0.76 μm/V. The mass
is M = 180 gr. Because of a stiffness k = 10.8 N/μm the resonant frequency is 1kHz.
Assuming a Q factor Q = 10, the displacement is amplified at resonance by a factor 10,
provided limits are not achieved. The displacement per volt versus frequency is shown on
Fig. 2. This results is obtained using COMPACT freeware tool from Cedrat technologies,
which is based on conventional equivalent circuit analysis and has been experimentally
validated.
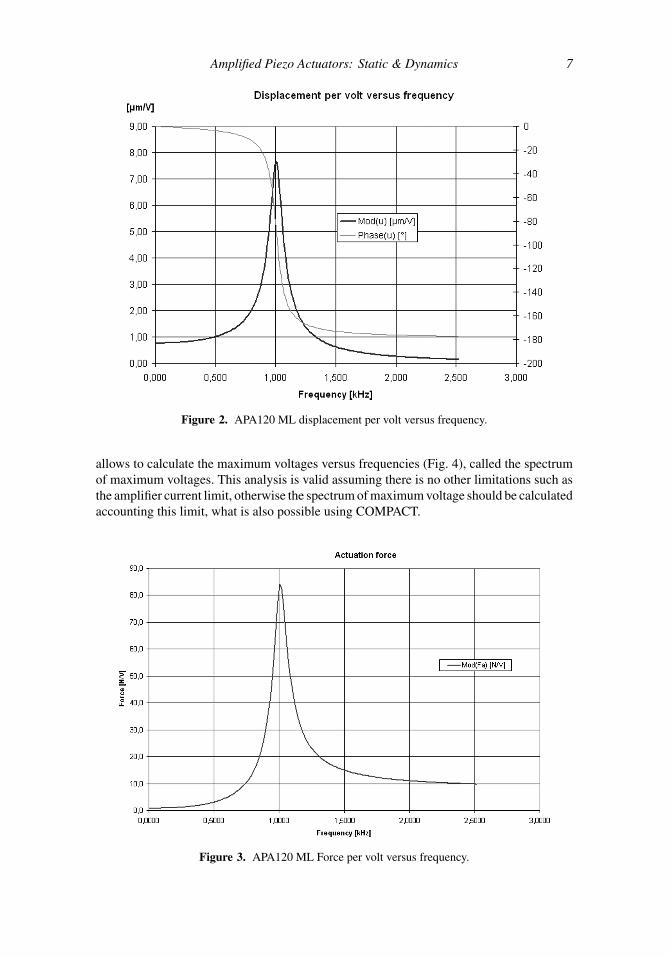
The blocked force of the actuator is 1400 N at max voltage. The force per volt, produced
by actuator on the mass is shown in Fig. 3. It is zero in static because the inertial force is
zero. It is maximum at resonance and reaches 90 N/V.
The maximum dynamic force achievable by the actuator is determined by the prestress.
The prestress design allows a peak force equal to 700 N, half the blocked force. Because
of this dynamic force limit, the peak to peak voltage cannot be 170V in a wide frequency
region including the resonance frequency. In particular, at this frequency, the maximum
peak voltage is 700 N/(90N/V) = 7.7 V so 15,2 V peak to peak. This type of analysis
Amplified Piezo Actuators: Static & Dynamics 7
Figure 2. APA120 ML displacement per volt versus frequency.
allows to calculate the maximum voltages versus frequencies (Fig. 4), called the spectrum
of maximum voltages. This analysis is valid assuming there is no other limitations such as
the amplifier current limit, otherwise the spectrum of maximum voltage should be calculated
accounting this limit, what is also possible using COMPACT.
Figure 3. APA120 ML Force per volt versus frequency.
8 F. Claeyssen et al.
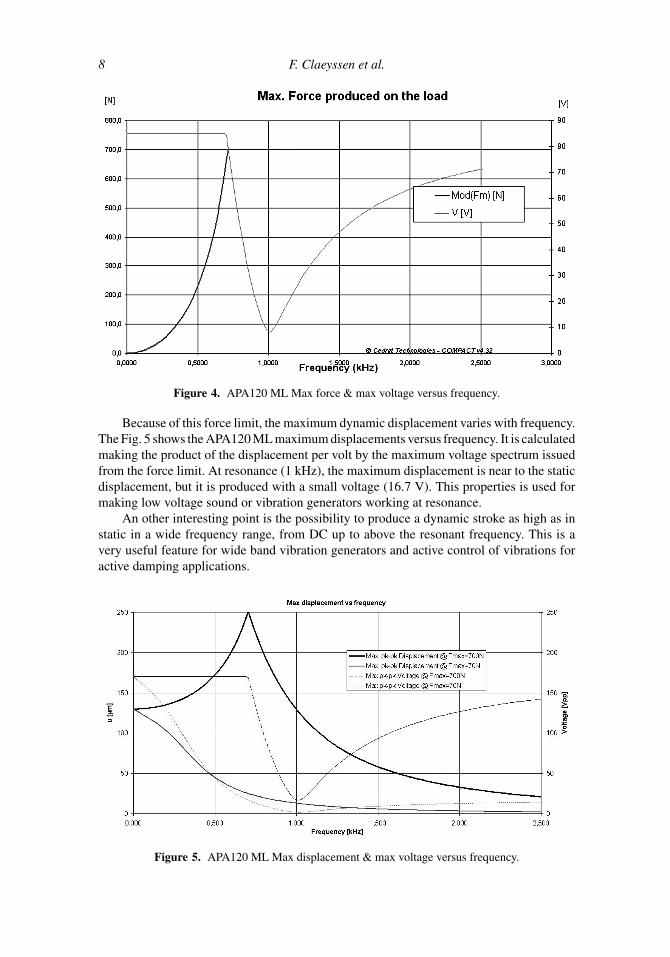
Figure 4. APA120 ML Max force & max voltage versus frequency.
Because of this force limit, the maximum dynamic displacement varies with frequency.
The Fig. 5 shows the APA120 ML maximum displacements versus frequency. It is calculated
making the product of the displacement per volt by the maximum voltage spectrum issued
from the force limit. At resonance (1 kHz), the maximum displacement is near to the static
displacement, but it is produced with a small voltage (16.7 V). This properties is used for
making low voltage sound or vibration generators working at resonance.
An other interesting point is the possibility to produce a dynamic stroke as high as in
static in a wide frequency range, from DC up to above the resonant frequency. This is a
very useful feature for wide band vibration generators and active control of vibrations for
active damping applications.
Figure 5. APA120 ML Max displacement & max voltage versus frequency.

Amplified Piezo Actuators: Static & Dynamics 9
It is even possible to get higher displacement than in static when working below reso-
nance. The same effect has been already demonstrated experimentally in a magnetostrictive
transducer [9]. It can be used noting the requested reactive power is rather high.
This Fig. also compares the APA120 ML with a similar actuator but assuming a 10 times
less dynamic force limit, due to a 10 times smaller prestress. It appears that its maximum
displacement is the same as the APA120 ML in quasi-static conditions but it is much smaller
in dynamic conditions, even outside resonance.
This shows the importance of a high prestress for dynamic applications. This is true
both for vibrations produced by the actuator or exerted on the actuator. The ability to manage
dynamic forces is also important in transient (on-off) applications because of displacement
overshot and associated high stresses.
Micro-Scanning Application
The APAs are actuators offering a large deformation. It allows to produce the requested
stroke in a small volume. This is used in several optics instruments for positioning
or scanning applications where compactness and reliability to external vibrations are
required.
A typical compact configuration obtained with APAs is the XY stages. The first APA
based XY stages have been developed for the European Space Agency for the ROSETTA MI-
DAS space AFM instrument. It uses 8 APA50Ss and 1 Parallel Prestress Actuator PPA10M.
It has successfully passed the launching on Ariane 5 in March 2004 and is now flying. Using
this space heritage, several XY mechanisms are in progress.
One application is a XY micro-scanning stage used in THALES Infra Red CATHERINE
MP and XP cameras [10]. The interest of such microscanning stage is to improve by a factor
of 4 the resolution of the camera sensor by over sampling technique.
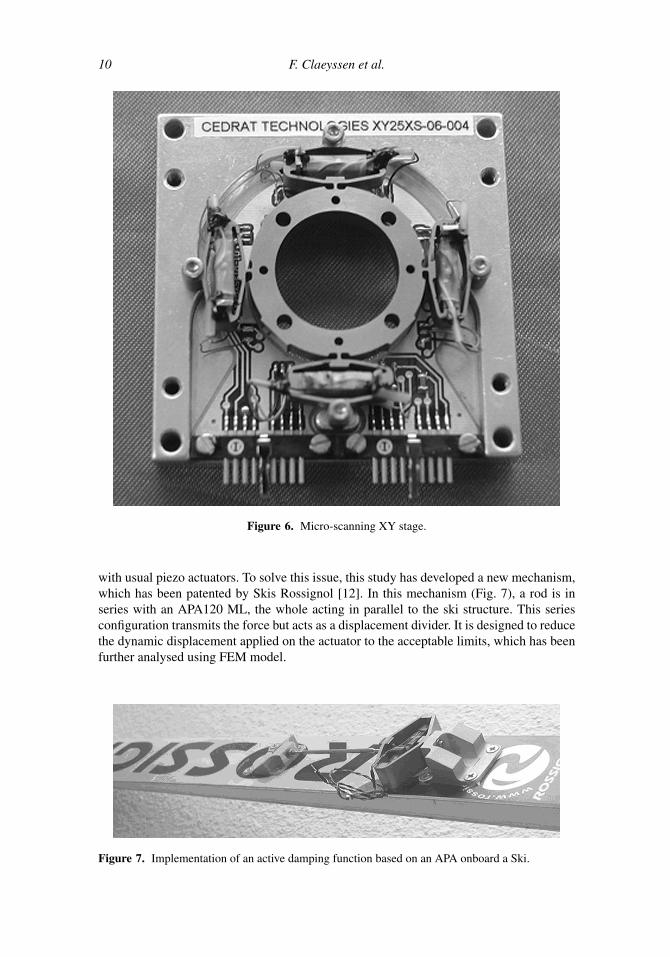
The typical structure of a microscanner is shown on Fig. 6. There are 4 micro actuators
APA25XS acting in a push-pull configuration. An APA25XS is about 6mm in height and
2 gr in mass. The central frame which supports the lens can move in X and Y directions with
a displacement amplitude of + or −10 μm, which corresponds to one half the sensor pixel
size. Because of the stiffness of the actuator, the unloaded resonant frequency is 2.2kHz and
can stay above 1kHz with a lens. As the actuators are prestressed and keep their force in
dynamic operation, the micro scanning can be performed at high frequency, above 100Hz.
The prestress also allows the XY stages to pass the qualification vibration tests, as requested
in the military environment.
Active Damping Application
Because of ability to withstand large external vibration while producing large dynamic
strokes and large forces, APAs are good candidates for several active vibration damping
applications.
The active damping of skis vibrations, studied for Skis Rossignol is a good example of
application of the APA space heritage [11]. To assess such a concept, a selected application
was the ski speed record in the KL race. Except wind resistance, vibrations are the only
most important element limiting the top speed. That is why an active damping of vibrations
has been studied.
In this application, the vibrations level may reach up to +/−40 mm (30 g) at the tip of
the ski on the first resonant mode (near 15 Hz), which is very large and is not compatible
10 F. Claeyssen et al.
Figure 6. Micro-scanning XY stage.
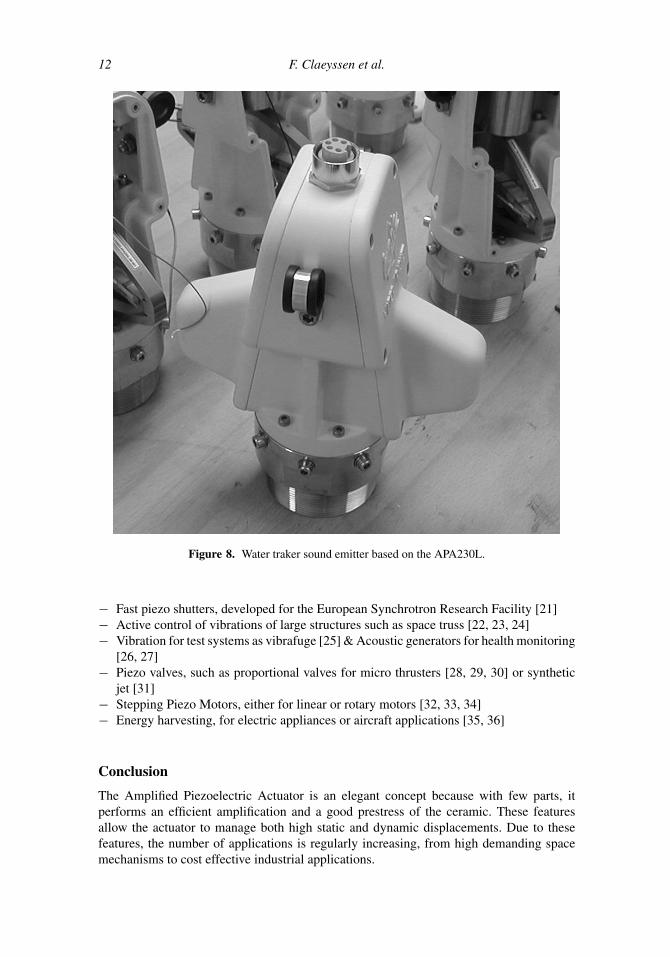
with usual piezo actuators. To solve this issue, this study has developed a new mechanism,
which has been patented by Skis Rossignol [12]. In this mechanism (Fig. 7), a rod is in
series with an APA120 ML, the whole acting in parallel to the ski structure. This series
configuration transmits the force but acts as a displacement divider. It is designed to reduce
the dynamic displacement applied on the actuator to the acceptable limits, which has been
further analysed using FEM model.
Figure 7. Implementation of an active damping function based on an APA onboard a Ski.

Amplified Piezo Actuators: Static & Dynamics 11
A FEM model was created to analyze the behavior of the structure coupled with this
actuator during a static load and dynamic range. It shows that this mechanism allows to act
on the ski structure without any significant modification on the position of the structural
mode. This FEM analysis gives the frequencies of the flexible and torsion modes and the map
of at least 7 modes. Major points of the mechanical design were the damping performances
in dynamic domain and the robust behaviour in static domain to maintain the pre-stress on
the actuator during the curves and / or the static stress from the snow, especially the first
mode.
The principle of the active control of vibration is to create a bending moment via the
piezoelectric actuator in opposite phase with the vibration measured on the tip of the ski.
For that purpose, an accelerometer sensor is implemented on the tip of the ski and
provides a velocity feedback. The detail of the control method is presented in [13]. Once the
stability was guaranteed, the study analysed the performance in term of damping. According
to this analysis, the amplification of the stroke was reduced by 30dB on the first mode. The
complete system was embedded on a pair of ski to realise real field tests including the
mechanism and the electronic circuits powered by an accumulator for 25 minutes. The tests
on the snow showed an attenuation of the vibration up to 32dB on the 1st mode without any
effects due to the saturation of the actuator.
Resonant Application
Amplified Piezoelectric Actuators can be used for making generators of vibration and sound,
operating at resonance.
The Water Tracker commercialized by MADE SA gives a new example of such type.
Water Tracker is a system designed and developed for tracking and identifying underground
water pipes in cities. It is based on the propagation of acoustic waves. A sound emitter injects
an acoustic wave in on side of a pipe. The pattern of the underground pipes connected to this
pipe is discovered using sound receivers and a signal processing. The sound is emitted by a
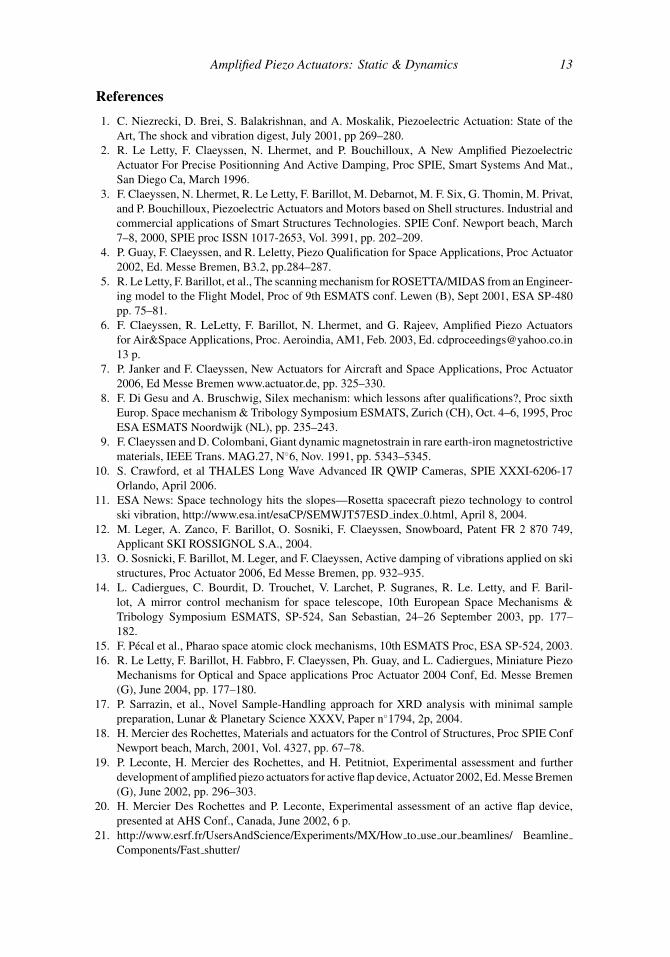
compact low frequency high power transducer developed by Cedrat Technologies (Fig. 8).
Its size is less than 100 × 100 × 200 mm, which makes it practical to hold and install. It
is based on an APA230L fixed on one side to a front membrane and on the other side to a
back mass, the whole being placed into an housing. The front membrane is able both to bear
static water pressures up to 10Bars and bear high vibration amplitude to generate sound in
the pipe water. The APA230L displacement in quasi static conditions is 236 μm @ 170 V.
In this application, this stroke is produced at resonance using less than 10 V, which produces
a front displacement of 110 μm. The low excitation voltage is compatible with the 12 V
available onboard vehicles. The resonance frequency is below 1 kHz, which allows to have
long propagation and detection range, up to 300 m.
Other Applications
There are several other applications taking benefits of APA compactness, high deformation
and ability to manage high forces:
− Space mechanims, such as space telescopes 5 dof mechanisms or miniature tilts for
ISS/ACES/Pharao space experiment, delivered to EADS [ 14, 15, 16]
− Sample holders such as APAs for Mars MSL delivered to NASA JPL [17]
− Control of shape such as ONERA helicopter flap control where the APA based flap
passed 2000g centrifugal tests and mach 1 wind tunnel tests [18, 19, 20]
12 F. Claeyssen et al.
Figure 8. Water traker sound emitter based on the APA230L.
− Fast piezo shutters, developed for the European Synchrotron Research Facility [21]
− Active control of vibrations of large structures such as space truss [22, 23, 24]
− Vibration for test systems as vibrafuge [25] & Acoustic generators for health monitoring
[26, 27]
− Piezo valves, such as proportional valves for micro thrusters [28, 29, 30] or synthetic
jet [31]
− Stepping Piezo Motors, either for linear or rotary motors [32, 33, 34]
− Energy harvesting, for electric appliances or aircraft applications [35, 36]
Conclusion
The Amplified Piezoelectric Actuator is an elegant concept because with few parts, it
performs an efficient amplification and a good prestress of the ceramic. These features
allow the actuator to manage both high static and dynamic displacements. Due to these
features, the number of applications is regularly increasing, from high demanding space
mechanisms to cost effective industrial applications.
Amplified Piezo Actuators: Static & Dynamics 13
References
1. C. Niezrecki, D. Brei, S. Balakrishnan, and A. Moskalik, Piezoelectric Actuation: State of the
Art, The shock and vibration digest, July 2001, pp 269–280.
2. R. Le Letty, F. Claeyssen, N. Lhermet, and P. Bouchilloux, A New Amplified Piezoelectric
Actuator For Precise Positionning And Active Damping, Proc SPIE, Smart Systems And Mat.,
San Diego Ca, March 1996.
3. F. Claeyssen, N. Lhermet, R. Le Letty, F. Barillot, M. Debarnot, M. F. Six, G. Thomin, M. Privat,
and P. Bouchilloux, Piezoelectric Actuators and Motors based on Shell structures. Industrial and
commercial applications of Smart Structures Technologies. SPIE Conf. Newport beach, March
7–8, 2000, SPIE proc ISSN 1017-2653, Vol. 3991, pp. 202–209.
4. P. Guay, F. Claeyssen, and R. Leletty, Piezo Qualification for Space Applications, Proc Actuator
2002, Ed. Messe Bremen, B3.2, pp.284–287.
5. R. Le Letty, F. Barillot, et al., The scanning mechanism for ROSETTA/MIDAS from an Engineer-
ing model to the Flight Model, Proc of 9th ESMATS conf. Lewen (B), Sept 2001, ESA SP-480
pp. 75–81.
6. F. Claeyssen, R. LeLetty, F. Barillot, N. Lhermet, and G. Rajeev, Amplified Piezo Actuators
for Air&Space Applications, Proc. Aeroindia, AM1, Feb. 2003, Ed. [email protected]
13 p.
7. P. Janker and F. Claeyssen, New Actuators for Aircraft and Space Applications, Proc Actuator
2006, Ed Messe Bremen www.actuator.de, pp. 325–330.
8. F. Di Gesu and A. Bruschwig, Silex mechanism: which lessons after qualifications?, Proc sixth
Europ. Space mechanism & Tribology Symposium ESMATS, Zurich (CH), Oct. 4–6, 1995, Proc
ESA ESMATS Noordwijk (NL), pp. 235–243.
9. F. Claeyssen and D. Colombani, Giant dynamic magnetostrain in rare earth-iron magnetostrictive
materials, IEEE Trans. MAG.27, N◦6, Nov. 1991, pp. 5343–5345.
10. S. Crawford, et al THALES Long Wave Advanced IR QWIP Cameras, SPIE XXXI-6206-17
Orlando, April 2006.
11. ESA News: Space technology hits the slopes—Rosetta spacecraft piezo technology to control
ski vibration, http://www.esa.int/esaCP/SEMWJT57ESD index 0.html, April 8, 2004.
12. M. Leger, A. Zanco, F. Barillot, O. Sosniki, F. Claeyssen, Snowboard, Patent FR 2 870 749,
Applicant SKI ROSSIGNOL S.A., 2004.
13. O. Sosnicki, F. Barillot, M. Leger, and F. Claeyssen, Active damping of vibrations applied on ski
structures, Proc Actuator 2006, Ed Messe Bremen, pp. 932–935.
14. L. Cadiergues, C. Bourdit, D. Trouchet, V. Larchet, P. Sugranes, R. Le. Letty, and F. Baril-
lot, A mirror control mechanism for space telescope, 10th European Space Mechanisms &
Tribology Symposium ESMATS, SP-524, San Sebastian, 24–26 September 2003, pp. 177–
182.
15. F. Pecal et al., Pharao space atomic clock mechanisms, 10th ESMATS Proc, ESA SP-524, 2003.
16. R. Le Letty, F. Barillot, H. Fabbro, F. Claeyssen, Ph. Guay, and L. Cadiergues, Miniature Piezo
Mechanisms for Optical and Space applications Proc Actuator 2004 Conf, Ed. Messe Bremen
(G), June 2004, pp. 177–180.
17. P. Sarrazin, et al., Novel Sample-Handling approach for XRD analysis with minimal sample
preparation, Lunar & Planetary Science XXXV, Paper n◦1794, 2p, 2004.
18. H. Mercier des Rochettes, Materials and actuators for the Control of Structures, Proc SPIE Conf
Newport beach, March, 2001, Vol. 4327, pp. 67–78.
19. P. Leconte, H. Mercier des Rochettes, and H. Petitniot, Experimental assessment and further
development of amplified piezo actuators for active flap device, Actuator 2002, Ed. Messe Bremen
(G), June 2002, pp. 296–303.
20. H. Mercier Des Rochettes and P. Leconte, Experimental assessment of an active flap device,
presented at AHS Conf., Canada, June 2002, 6 p.
21. http://www.esrf.fr/UsersAndScience/Experiments/MX/How to use our beamlines/ Beamline
Components/Fast shutter/

14 F. Claeyssen et al.
22. A. Preumont and N. Loix, Some perspectives of applications of active control to large space
structures, Proc 5th Int Conf on Motion and Vibration Control, MOVIC2000, Autralia, dec 2000,
10p.
23. H. J. Karkosh and A. Preumont, Recent Advance in Active Damping and Vibration Control, Proc
Actuator 2002, Ed. Messe Bremen, B2.0, pp. 248–253.
24. A. Abu-Hanieh, M. Horodinca, A. Preumont, N. Loix, and J. P. Verschuren, Stiff and soft Stewart
Platforms for Active Damping and Active Isolation of Vibrations, Proc Actuator 2002, Ed. Messe
Bremen, B2.1, pp. 254–257.
25. D. VanGoethem, et al., Vibrafuge: Re-Entry and launch Test Simulation in a combined Linear
Acceleration and Vibration Environment, Proc 44th AIAA 2006-1318 Aerospace Sc. M., Reno,
Jan. 2006.
26. P. Koakowski, L. E. Mujica, and J. Vehı,? Two Approaches to Structural Damage Identification:
Model Updating vs. Soft Computing, JISS, 2005, 25p.
27. A. Khalid, European-sponsored NDT Research at TWI Ltd NDT.net—June 2002, Vol. 7, n◦6
http://www.ndt.net/article/v07n06/khalid/khalid.htm.
28. I. Kalsch, Chemical spacecraft propulsion in ESA current activities, Proc 3rd Int Conf on Space-
craft Propulsion, Cannes, 10-13 oct 2000, ESA SP-465 Dec. 2000, pp. 41–47.
29. R. Le Letty, N. Lhermet, G. Patient, F. Claeyssen, M.Lang, Valves Based on Amplified Piezo-
electric Actuators, Proc Actuator 2002, Ed. Messe Bremen (G), June 2002, pp. 141–144.
30. M. Lang, et al., Piezo valves for Micro propulsion for Space Application, Proc NanoTech 2002
conf, Houston, 2002.
31. D. Ahmad, et al., Local Surface Modulation to Prevent Flow Separation Over an Airfoil, Proc.
of ISSS 2005, Int. Conf. on Smart Mat. Struct. & Syst. Bangalore, In, July 2005.
32. M. Vaughan and D. J. Leo, Integrated piezoelectric linear motor for vehicule applications, Proc
IMECE02/TTRST-32942, ASME Symp., New Orlean US, Nov. 17–22, 2002, 9p.
33. G. Donnier-Valentin, O. Cugat, and Ch. Cartier-Million, Hybrid magnetostrictive / piezoelectric
Inchworm rotary actuator; Proc ACTUATOR 2004 Conf, Ed. Messe Bremen (G), June 2004, pp.
694–697.
34. M.-F. Six, R. LeLetty, P. Coste, et al., Rotating Step by Step Piezomotor for Nanopositioning and
Space Applications, Proc Actuator 2006.
35. F. Claeyssen, F. Barillot, M. Debarnot, and J. P. Cousy, Piezo active component, apparatus and
systems including it, FR 2 826 204 Applicant LEGRAND, 2001.
36. O. Sosnicki, N. Lhermet, and F. Claeyssen, Vibration energy harvesting in aircraft using piezo-
electric actuators, Proc Actuator 2006, Pub Messe Bremen (G), pp. 968–971.




















