Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach
14
International Journal of Information Acquisition Vol. 7, No. 2 (2010) 151–164 c World Scientific Publishing Company DOI: 10.1142/S0219878910002130 MODELING PNEUMATIC MUSCLE ACTUATORS: ARTIFICIAL INTELLIGENCE APPROACH PRASHANT JAMWAL ∗ , S. Q. XIE, SHAHID HUSSAIN and KEAN AW Department of Mechanical Engineering The University of Auckland Auckland, New Zealand ∗ [email protected] Received 20 April 2010 Accepted 26 July 2010 Robot human interaction requires use of safe, compliant and light weight actuators. Con- ventional linear motors and pneumatic cylinders are normally used to actuate robots to assist and augment human motions. Lately it has been realized that these actuators are not suitable and safe for applications involving human actor. Their large weight, size and stiffer design raise concerns. Pneumatic muscle actuators (PMA) on the other hand are very light weight, compact and have inherent compliance which make them potential candidate for applications involving robot human interaction. Taking on the advantages, these actuators are now being experimented for a variety of medical and rehabilitation applications. However they are not very popular due to their highly nonlinear and time dependent behavior which poses control problems. In this paper, an attempt is being made to accurately predict the uncertain and ambiguous characteristics of PMA using Artificial Intelligence (AI). Conventional tools such as analytical and numerical methods can only model a nonlinear system which is time independent. Time varying nonlinear system characteristics can be best modeled using artificial intelligence-based regression models. In this research, Artificial Neural Network (ANN), Mamdani Fuzzy Inference System (FIS) and Takagi-Sugeno (TS)-based fuzzy system are developed after carefully analyzing the time series data obtained from a real system. To achieve higher accuracy from these models, their parameters are tuned. Parameters of ANN are tuned using back propagation algorithm whereas fuzzy parameters are tuned using three different methods, namely, gradient descent method (GD), genetic algorithms (GA) and Modified Genetic Algorithm (MGA). It was found that the TS fuzzy inference system tuned by MGA pro- vides better accuracy and can also model the time dependent behavior of PMA. The proposed TS fuzzy system is found to perform better in terms of accuracy and maximum deviation when compared to the previous approaches in the literature. Keywords : Pneumatic muscle actuators; artificial intelligence modeling; modified genetic algorithm. 151 Int. J. Inf. Acquisition 2010.07:151-164. Downloaded from www.worldscientific.com by UNIVERSITY OF AUCKLAND LIBRARY - SERIALS UNIT on 05/26/15. For personal use only.
Transcript of Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
International Journal of Information AcquisitionVol. 7, No. 2 (2010) 151–164c© World Scientific Publishing CompanyDOI: 10.1142/S0219878910002130
MODELING PNEUMATIC MUSCLE ACTUATORS:ARTIFICIAL INTELLIGENCE APPROACH
PRASHANT JAMWAL∗, S. Q. XIE, SHAHID HUSSAIN and KEAN AWDepartment of Mechanical Engineering
The University of AucklandAuckland, New Zealand∗[email protected]
Received 20 April 2010Accepted 26 July 2010
Robot human interaction requires use of safe, compliant and light weight actuators. Con-ventional linear motors and pneumatic cylinders are normally used to actuate robots toassist and augment human motions. Lately it has been realized that these actuators arenot suitable and safe for applications involving human actor. Their large weight, sizeand stiffer design raise concerns. Pneumatic muscle actuators (PMA) on the other handare very light weight, compact and have inherent compliance which make them potentialcandidate for applications involving robot human interaction. Taking on the advantages,these actuators are now being experimented for a variety of medical and rehabilitationapplications. However they are not very popular due to their highly nonlinear and timedependent behavior which poses control problems. In this paper, an attempt is beingmade to accurately predict the uncertain and ambiguous characteristics of PMA usingArtificial Intelligence (AI). Conventional tools such as analytical and numerical methodscan only model a nonlinear system which is time independent. Time varying nonlinearsystem characteristics can be best modeled using artificial intelligence-based regressionmodels. In this research, Artificial Neural Network (ANN), Mamdani Fuzzy InferenceSystem (FIS) and Takagi-Sugeno (TS)-based fuzzy system are developed after carefullyanalyzing the time series data obtained from a real system. To achieve higher accuracyfrom these models, their parameters are tuned. Parameters of ANN are tuned using backpropagation algorithm whereas fuzzy parameters are tuned using three different methods,namely, gradient descent method (GD), genetic algorithms (GA) and Modified GeneticAlgorithm (MGA). It was found that the TS fuzzy inference system tuned by MGA pro-vides better accuracy and can also model the time dependent behavior of PMA. Theproposed TS fuzzy system is found to perform better in terms of accuracy and maximumdeviation when compared to the previous approaches in the literature.
Keywords : Pneumatic muscle actuators; artificial intelligence modeling; modified geneticalgorithm.
151
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
152 P. Jamwal et al.
1. Introduction
Pneumatic Muscle Actuators (PMA) have beenrecently used in the fields of rehabilitationrobotics and industrial applications and appar-ently gaining popularity over conventional lin-ear actuators and pneumatic cylinders. Apartfrom other advantages, the main reason of theirincreasing use is that these actuators are simpleand easy to construct. Normally, a thin walledrubber (preferably latex or non-vulcanized rub-ber) bladder is confined into a braided sheath.One of the ends of the rubber tube is closedwhereas an air hose is inserted into the otherend to inflate or deflate. The braided sheath ismade of flexible but inextensible threads andis compliant along radial direction though ithas high axial stiffness. When the inner rubbertube is inflated, it expands and the diameterof the rubber-sheath combine, called “muscle”commonly, easily increases. Since the exter-nal sheath is inextensible, the muscle lengthdecreases axially, exerting large axial force atthe actuating end of the muscle. If a mechan-ical load is attached to this end of the muscleand an external work is done at a higher rateon the load, very high power is produced. Whencompared with conventional actuators such asDC motor driven linear actuators and pneu-matic cylinders, PMA exhibit several advan-tages [Tondu and Lopez, 1995]. Primarily, PMAare very economic and easy to construct; theyare light in weight and are inherently flexible.Therefore they can provide safe and soft inter-action due to high compliance and are moresuitable for robot-human interactions applica-tions. These actuators are characterized veryclose to skeletal muscles hence can be used toactuate rehabilitation robots. Prominently, theyhave very high power to weight ratio (400:1)and higher volume to weight ratio thus aresuitable especially for wearable robotic applica-tions. Despite the above advantages, it has beenobserved that PMA are not extensively used inthe past due to its inherent drawbacks.
Owing to their construction PMA exhibithighly nonlinear dynamic characteristics. TheLatex bladder used in PMA has significanthysteresis and hence the muscle show differentcharacteristics during inflating and deflating.
This hysteresis is more pronounced at higherfrequency actuation. Moreover the dynamiccharacteristics of PMA are affected from thetemperature variation arising out of friction.Thus the muscle behavior is no more con-sistent with time. The driving force in thePMA is obtained from pressurized air/gas, andthe inherent compliance of air/gas is diffi-cult to comprehend which poses control relatedproblems.
However, if an accurate dynamic model ofPMA is constructed, the above drawbacks canbe addressed effectively. Several attempts havebeen made in the past to model the dynamicsof these muscles and relevant control schemesare proposed. Various models proposed in theliterature are categorized as Analytical model-ing, Numerical modeling and Artificial intelli-gence modeling, and a brief discussion on theiroutcomes is given below.
1.1. Analytical modeling
The axial length of a pneumatic muscle is short-ened when it is inflated. The muscle exerts aforce on its free end while contracting which canbe used to perform useful work. Some portionof the input work also gets stored in the rubberbladder in the form of the changed strain energydensity (∆W ). Thus for a small change in PMAlength, the input work done can be accountedas below [Colbrunn et al., 2001]:
P∆V = F∆L + Ve∆W. (1)
Here initial volume and the inflation pressure ofthe muscle are Ve and P , respectively. Changein muscle volume is indicated by ∆V whereasforce and axial displacements are shown as Fand ∆L. By rearranging and writing the aboveequation in the differential form we get:
F = PdV
dL− Ve
dW
dL. (2)
In Chow et al. [Chou and Hannaford, 1994] alinearized model relating extension and force ofPMA has been derived at constant pressure.They have also provided a useful comparison ofPMA with skeletal muscles to evaluate the for-mer’s use in biologically inspired robots. Later,
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 153
Tsagarakis and Caldwell [2000] improved uponthis model by introducing an end correctionterm to the actual force considering the coni-cal shape of the actuator at the ends. Similarly,Tondu and Lopez [1995] also suggested inclusionof a parameter “k” (k ≤ 1) which amplifies thecontraction ratio and provides end correction.Subsequently, Colbrunn et al. [2001] proposed amodel for actuator stiffness and also proposeda correction factor called effectiveness (a func-tion of pressure) to account for hysteresis in themuscles.
Problems of large modeling errors and asso-ciated low operating bandwidth of PMA havebeen researched by Davis et al. [2003] suggestingmodifications in the pneumatic muscle design.A three-element model (mass-spring-damper)describing the dynamic characteristic of PMAhas been proposed by Reynolds et al. [2003].Stiffness of PMA, which is a function of mus-cle pressure and length, has been modeled in[Sugisaka and Zhao, 2007]. In another inter-esting research, an increase in load carryingcapabilities of PMA has been reported by Kuet al. [2008] when water is used as the workingmedium in place of air or gas.
For the first time, the changed strain energydensity was considered by Manuello and Ruggiu[2004] and the nonlinear Moony–Rivlin materi-als model was used to account for the storedelastic energy. Similar work has been proposedby Li et al. [2006] and the modeling resultsare compared with experimental outcomes.Reasons for large modeling errors have beenexplained.
Quantifiable amount of work has beendone to analytically model the pneumatic mus-cles, however the accurate prediction of theirdynamic behavior could not be done. This is dueto lack of insight into the muscle behavior due toits conical ends, friction between the inner tubeand outer sheath. Modeling of valves and fluidflow characteristics is also difficult to obtain andthe large hysteresis present in these actuatorsposes a challenge in the construction of an accu-rate dynamic model. Several numerical models,discussed below, are proposed by researchers toenhance accuracy.
1.2. Numerical modeling
In order to use finite element method to modelpneumatic muscles [Manuello and Ruggiu, 2004]have discretized its latex tube by a meshof hyper elastic incompressible elements witheight nodes having two degrees of freedomeach. Mooney–Rivlin’s energy function with twomodel parameters has been considered. A posi-tion control scheme of PMA has been proposedby Schindele and Aschemann [2008] wherein thenonlinear force characteristics is approximatedinto a polynomial using static measurements.Later, a numerical technique called NonlinearModel Prediction Control (NMPC) is used tominimize a tracking error between predicted anddesired states at each time step (defined as pre-diction horizon TP ). As this work has been donefor position control, a change in the force on theactuators is not considered.
1.3. Artificial intelligencemodeling
A number of techniques such as Artificial NeuralNetwork (ANN), Fuzzy Inference, Genetic Algo-rithm (GA) and their variants can effectivelymodel, systems showing nonlinearity and uncer-tainties. From the discussion in the precedingsection it is evident that the conventional toolscannot fully comprehend the nonlinear and timedependent muscle characteristics. PMA, there-fore are good candidates for the application ofAI techniques and quantifiable work has beendone in this direction. A recurrent neuro-fuzzymodel has been proposed by Chang and Lilly[2003]. A comprehensive Neuro-Fuzzy model-ing of PMA has been done by Ahn and Ahn[2009]. Initially a low-order linear approxima-tion of PMA has been done using a ARX (AutoRegressive with Exogenous Input) model [Ahnand Anh, 2007a]. The parametric values of theARX model have been optimized using modi-fied GA (MGA). Later, a recurrent NN struc-ture has been used with ARX model [Ahn andAnh, 2007b]. Recently, MGA-based nonlinearARX (NARX) fuzzy model [Anh and Ahn, 2009]has been proposed to model PMA behavior.Superiority of MGA-based NARX fuzzy model
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
154 P. Jamwal et al.
has been established and MSE from this model(when compared with empirical outputs) wasfound to be 10%.
It can be asserted from the above discussionthat there are at least two vital issues that needto be properly addressed. Firstly, majority ofthe research on PMA modeling has been donefor constant loading, or in other words, PMAhas not been subjected to varying loads. It isshown later in the following section that thepressure-length characteristics of PMA greatlydepend on the applied loads which cannot betaken as invariable. Secondly, the predictionaccuracy from the previous models also needsto be improved in view of the more precise andsophisticated applications of PMA such as sur-gical and rehabilitation robots.
To exploit these opportunities of improve-ment, in the proposed work, two possible AIapproaches, namely, ANN and FIS are used toperform dynamic modeling of PMA. A multi-layer feed forward neural network with a sin-gle hidden layer is developed and used owing toits suitability in the present application. Sim-ilarly a TSK-based FIS, which is capable ofproviding enhanced accuracy, is developed andimplemented. The parameters of a fuzzy sys-tem are tuned using the gradient descent (GD)method, genetic algorithm (GA) and a modifiedGA (MGA) approach.
Results from ANN and three types of FISare analyzed and compared for a final selectionof a suitable approach to model the complexbehavior of PMA. Prior to the implementationof the above approaches, rigorous experimentsare performed with PMA on a test rig shown inFig. 1 to obtain a database. The database con-sists of instantaneous sensor readings for pres-sure, length and actuator force for the PMA.
Details of the experimental setup anddeployment of various sensors are provided inthe following Sec. 2. Implementation of artificialintelligence methods comprising of the feed for-ward neural network and the FIS are discussedin Sec. 3. Methodology used in parameter tun-ing of FIS is also presented in Sec. 3. Simulationresults from the NN and FIS approaches alongwith the experimental results are discussed andcompared in Sec. 4. Finally, Sec. 5 entails
Fig. 1. Experimental set-up for testing a single muscle.
the important conclusions drawn from thepresent research and infers future work in PMAmodeling.
2. Experimental Setup
Tests are conducted on a single pneumatic mus-cle which is placed in a test rig as shown inFig. 1. A robust structure is developed to posi-tion and support the muscle assembly. Linearpotentiometer (Fig. 2) is positioned parallel tothe muscle to record and display instantaneouschange in muscle length.
To ensure proper alignment of the linearpotentiometer with the muscle, a guide rail is
Fig. 2. Arrangement of sensors with the PMA.
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 155
provided as shown in the figure below. A pres-sure sensor is connected close to the muscleinflating port. All the three sensors (position,force and pressure) were duly calibrated by fit-ting suitable curves for their recorded values. Aload cell is used to measure the actuator forcedynamically and is connected to the muscle atits point of suspension. Loads are applied using ahanger attached to the muscle on its unactuatedend. The muscle was loaded with an incrementof 50 N.
Pneumatic muscle is inflated by connectingit to the pressure supply from a compressor. Thesupply pressure was fixed at two bar and twopressure regulating valves are used to controlpressure inside the muscle.
These valves are capable of providing aswitching frequency with a period of 10 ms andare used to fill, leave inflated and empty themuscle actuator. A Shadow Pneumatic ControlUnit (SPCU) is used to communicate with sen-sors and valves. All the codes to read and writesensors and valves are written in Matlab andrealized in Real Time Windows Target which isa library of Matlab.
It is important to note here that pressure,force and position sensors produce analoguesignal.
On the other hand the pressure regulatingvalves have digital I/O’s and are controlled usinga PID controller built-in with the SPCU.
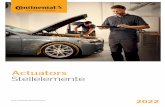
As discussed earlier, by virtue of its con-struction and actuation, PMA exhibit highlynonlinear and time dependent behavior. Pri-marily, the extension in the muscle is highlynonlinear because it is made of viscoelasticmaterial. Secondly, during operation, the muscletemperature increases with time due to inher-ent friction which severely affects its dynamiccharacteristics. A compliant air/gas used toinflate the muscle further augments its uncertainbehavior. The relation between the sensors read-ings obtained while performing experiments,was plotted (Figs. 3 and 4).
Experimental findings (Fig. 3) show that thecharacteristic between length and pressure ofPMA is nonlinear. Moreover, the trait is dif-ferent while inflating and deflating the mus-cle and a significant hysteresis is observed. The
0 1 2 3 4 50.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
Pressure in Pneumatic Muscle Actuator (Bar)
Pne
umat
ic M
uscl
e A
ctua
tion
(met
ers)
Inflation
Deflation
Fig. 3. Length characteristics of PMA during inflationand deflation.
0 0.5 1 1.5 2 2.50.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
Pressure in Pneumatic Muscle Actuator (Bar)
Pne
umat
ic M
uscl
e A
ctua
tion
(Met
ers)
100N600N
Fig. 4. Length characteristics of PMA at varying loads.
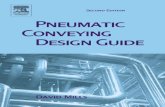
variable external loading on the muscle alsoaffects the characteristic considerably which isapparent from Fig. 4. The overall system config-uration including the PMA, various sensors andthe SPCU is shown in Fig. 5.
The experimental setup is arranged accord-ing to the hardware configuration as shown inFig. 5 to obtain exhaustive data for instanta-neous length and pressure of PMA at differentactuator loads.
Continuing our discussion from the previoussection, it can be concluded that the analyti-cal and numerical approaches cannot completelymodel the muscle behavior.
AI approaches, on the other hand, can beused to comprehend a higher degree of uncer-tainty and ambiguity. Fuzzy logic and ANN arethe two popular AI approaches generally used
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
156 P. Jamwal et al.
Pneumatic Supply
Pressure RegulatingValve
Position Sensor (Linearpotentiometer)
Force Sensor(Load Cell)
Micro Controller UnitSPCU
NI –DAQCard
FuzzyInference System
(Simulink)
Shadow’sPneumatic
Controller Unit
PressureSensor
Crisp PressureValues
Fig. 5. Overall system configuration.
to establish a mapping between input patternsand their associated output patterns. Funda-mentally, there are two architectures used forANN modeling, namely, feed forward networkand recurrent networks. It has been mentionedin the literature that the recurrent networkshave limited performance compared to the feedforward architect of ANN [Dematos et al., 1996].
The feedback loop of a recurrent networkpasses the data back and forth thus sometimesresulting in instability. Thus a multilayered feedforward ANN is used in this paper to modelPMA. Similarly there are two kinds of fuzzymodels available, namely, Mamdani fuzzy modeland TSK fuzzy model [Pratihar, 2008]. In thisresearch the TSK fuzzy model is used owing toits better accuracy. Both these AI approachesare described in the following section.
3. Artificial Intelligence Modeling
3.1. Artificial neural networks
Artificial Neural Networks are massively paralleldistributed processing systems which are madeup of intensely interconnected artificial neuronsmimicking biological neuron system.
In the literature they are commonly referredas the Parallel Distributed Processors, Con-nectionist Network and Neuro-computers, etc.[Rajasekaran and Vijayalakshami, 2003]. Theyshow strong mapping capabilities and learn byexample, or in other words, they can be trained
using known examples and can later be used toinfer unknown instances of a problem.
Multilayered feed forward networks, as thename suggests are made up of three or morelayers consisting of input, output and one ormore hidden layers. The mathematical relation-ship between the layers is expressed in termsof several weights which are called as input-hidden layer weights and hidden-output layerweights. Algebraic computations are performedat the hidden layer before passing the inputs tothe output layer. Identification of correct weightmatrices is the key to the accuracy of an ANN.Various learning methods such as Reinforcedlearning, Hebbian learning, Stochastic learningand Gradient Descent (GD) learning, etc., areused by researchers to identify weight matri-ces and other key parameters of ANN. Back-propagation learning is implemented in thepresent research to identify ANN parameters.
The multilayered feed forward network usedin the present application has a single hiddenlayer. Size or the number of neurons for this layeris found to be eight by manual tuning, in orderto achieve best accuracy.
To evaluate the hidden layer a hyperbolictangent sigmoid transfer function is selected toclosely emulate the nonlinear behavior of theconduction current mechanism of a biologicalneuron. The linear transfer function is used forthe output layer as a usual practice. As statedabove, the network is trained using the back
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 157
propagation algorithm wherein weights and biasare updated using the Levenberg–Marquardtoptimization routine. The model developed formodeling the PMA has three input variableswhich are instantaneous values of actuator force,length and change in the length of PMA. Pres-sure in the PMA is considered as the outputvariable or the control variable. The databaseobtained from the system is divided into threeparts and these data segments are used to train,validate and test the model. Results from thenetwork on the test data after being trained for50 epochs are displayed in Figs. 8 and 10. TheMean Squared Error from the model in pressureprediction is found to be 0.0016 bars, which isapproximately 0.08% of the maximum pressurevalue. Further the maximum deviation in pres-sure values from the model is obtained as 13%.
The ANN-based approach can be more accu-rate but it requires a large volume of datato train the inference mechanism. Moreover, itlacks interpolation and extrapolation accuracies.Fuzzy logic on the contrary requires a lesservolume of training data set and owing to its con-tinuous MFs, has better interpretability. How-ever, the accuracy from a FIS, to a great extentdepends on the proper selection of its parame-ters. Typically, a gradient-based error minimiza-tion method popularly called “back propagationapproach” is used to obtain fuzzy parameters forenhanced accuracy. Recently genetic algorithm(GA) is also used for fuzzy system parametertuning in some isolated cases [Pratihar and Hui,2007]. Apparently, fuzzy systems tuned usingGA have shown better prediction accuracy overother gradient-based approaches.
Constituent blocks of FIS are explained inthe following section in context to the dynamicmodeling of PMA.
3.2. Fuzzy modeling of PMA
3.2.1. Fuzzification
Although there are a number of fuzzyapproaches that evolved during last two decades,fundamentally they all can be classified intotwo main categories of fuzzy system modeling,i.e. linguistic fuzzy modeling and precise fuzzymodeling [Pratihar and Hui, 2007]. Linguistic
fuzzy modeling is popularly known as Mam-dani Approach and has high interpretability butlacks accuracy. Conversely, precise fuzzy mod-eling also known as Takagi and Sugeno’s (TS)Approach provides higher accuracy but with lowinterpretability. Interpretability can be definedas a measure of understanding system behaviorand ability to express it in a model. Simi-larly, accuracy can be explained as the devia-tion between the fuzzy model predictions andthe real time measurements obtained from a sys-tem. Mamdani fuzzy system does not require ainput-output database for tuning, however someexpertise in the form of operator experience,past data analyses or the understanding of thephysical interaction between system variables isrequired to construct a rule-base. Fuzzy systemsbased on the Mamdani inference exhibit abilityto interpret system behavior between the dis-crete data. On the other hand, the TS fuzzysystem requires a large database with high reso-lution to tune the fuzzy model and adjust fuzzyparameters as it lacks interpretability. Anotherfundamental distinction between the two kindsof fuzzy approaches is that, in the Mamdaniapproach both input and output are fuzzy vari-ables and some sort of defuzzification is requiredto apply fuzzy outputs to a real system. TheSugeno approach, in contrast, uses fuzzy inputvariables and crisp output variables and there-fore defuzzification of outputs is not required.In the present work, both types of fuzzy mod-els are developed and tuned. Results obtainedfrom both these models are compared with theoutcomes of ANN approach.
Fuzzy inferencing consists of three majorbuilding blocks, which are Fuzzification, Rule-base and the inference engine. These main build-ing blocks of fuzzy model [Pratihar, 2008] arebriefly explained below. Initially, input variablesof the system are converted into fuzzy vari-ables and represented by their respective fuzzysets. For the dynamic modeling of PMA, inputvariables are loaded on the muscle, its lengthactuation and change in length, whereas the out-put or the control variable is the instantaneouspressure inside the muscle. For the purpose offuzzification three Gaussian membership func-tion, linguistically named as Low, Medium and
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
158 P. Jamwal et al.
100 200 300 400 500 6000
0.5
1
Actuator Force (N)
Me
mb
ers
hip
Va
lue
s
0.02 0.04 0.06 0.08 0.1 0.120
0.5
1
Length of PMA (mtrs)
Me
mb
ers
hip
Va
lue
s
-0.04 -0.02 0 0.02 0.040
0.5
1
Change in Length (mtrs)
Me
mb
ers
hip
Va
lue
s
Fig. 6. Initial membership functions of antecedentvariables.
High were used to represent each of the inputvariables. A total of nine MFs and their initialarrangement are shown in Fig. 6. Similarly, theoutput variable (to be used by Mamdani fuzzymodel) which is pressure inside PMA has beenrepresented as a fuzzy variable and the initialarrangement of its fuzzy MFs before the tun-ing is shown in Fig. 7. In order to get betteraccuracy from the Mamdani type fuzzy system,pressure is represented by five fuzzy MFs. TheseMFs are linguistically defined as Very Low, Low,
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
Pressure inside PMA (Bar)
Mem
bers
hip
Val
ues
Fig. 7. Initial membership functions of consequent vari-able (Pressure) for the Mamdani fuzzy model.
Medium, High and Very High. Output or con-sequent parameters for TS fuzzy model on theother hand are not fuzzy variables but are realnumbers. These real numbers are obtained in theprocess of fuzzy parameter tuning, as explainedlater in Sec. 3.3.1. Both types of fuzzy modelsuse different format for their rule-base as well,which is discussed next.
3.2.2. Rule-base
Typical Mamdani and TS fuzzy rule-bases havethe following structures, respectively:
If F is Ai1 and L is Ai2 and ∆L is Ai3
then P is Bi1.If F is Ai1 and L is Ai2 and ∆L is Ai3
then P is ri1.
Here i, (i = 1, . . . , n) denotes the number ofrules, Ai1, . . . , Ai3 are the membership or acti-vation functions in the antecedent part whereasBi1 and ri1 are the activation functions forthe consequent part of Mamdani and TS fuzzymodels (singletons in case of TS fuzzy model),respectively. Further, F,L and ∆L are, respec-tively, the input load, instantaneous length andchange in length for the PMA. However the totalnumber of rules for both types of fuzzy modelsis the same and is given as below.
R =N∏
k=1
mk, (3)
where R is the total number of rules, N is num-ber of input variables and mk is the number oflinguistic terms of kth input variable. In thepresent case the total number of rules is 33,which turns out to be 27.
3.2.3. Inference engine
The output of the fuzzy model is evaluated usingthe inference engine which uses a two-step pro-cedure. Fundamentally, it is based on a weightedaverage defuzzifier. First of all for a given set ofinput variables, the degrees of fulfilment of allthe rules are calculated using a product opera-tion. Equation (4) can be used to calculate thedegree of fulfilment of all the rules. Later, thefinal output (6) is computed taking the weighted
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 159
average of all the rule fulfilments. The two-stepprocedure to find the output of the fuzzy modelcan be stated with the help of the followingequations.
wi =m∏
k=1
Aik(Ik), (4)
Aik(Ik) = ae− (Ik−Iik)2
2σik , (5)
P =∑n
i=1 wi · ri∑ni=1 wi
, (6)
Hxj =1N
N∑p=1
[12(|pp
j | − |prpj |)2
]. (7)
In the above equations, wi is the Gaussianmembership value of ith inference rule and Istands for the input variables. The number ofMFs to represent a variable or the number oflinguistic terms is defined by “k”. As is evident,all the activation functions Aik can be definedby two variables such as mean Iik and standarddeviation σik. The vector of consequent vari-ables for TS fuzzy model is denoted by ri. Hxj
is the mean squared error between the xth ref-erence signal (prp
j ) and the signal obtained fromthe fuzzy model (pp
j ) for the same set of inputdata. While using the TS fuzzy model the out-put variable is crisp whereas the Mamdani fuzzymodel gives out a fuzzy output which needs to bedefuzzified and transformed into a real number.A centroid method [Pratihar, 2008] is used in thepresent work owing to its simplicity and exact-ness. For a fuzzy model of a system/process,there exists an optimal set of fuzzy parame-ters (Iik, σik) and using these parameters, themodel can emulate the system with finer accu-racy. Researchers in the past have attempted toidentify the parameters of the fuzzy model anda comprehensive review illustrating the applica-tion of various nonlinear optimization schemescan be found in [Pratihar and Hui, 2007].
To identify the fuzzy parameters of bothmodels, we have used three approaches, namely,gradient descent (GD)-based method, geneticalgorithm (GA)-based method and a Modi-fied Genetic Algorithm (MGA) method. Geneticalgorithm is a global optimization approach but
it has been found [Reynolds et al., 2003] that itcannot further fine tune the results after reach-ing in the close vicinity of the global solution.Thus we have suggested two important mod-ifications (explained in the following section)in the conventional GA approach to enhanceits local search potential and overall speed ofconvergence.
3.3. Fuzzy model tuning
As mentioned in the previous section, the fuzzyparameters require tuning to provide accurateinferences. In the present application there arenine and 12 fuzzy activation functions to betuned for TS and Mamdani fuzzy models respec-tively. Each of these Gaussian MFs is definedusing two variables which are the mean andstandard deviation. Thus, correspondingly, 18and 24 nonlinear variables are required to betuned. Further as mentioned in the previous sec-tion, the TS fuzzy model has 27 constants repre-senting the consequent variables which also needto be tuned. A brief discussion on the method-ologies adopted has been provided for a quickglance.
3.3.1. Gradient descent method
A back propagation algorithm is used to imple-ment a gradient-descent method. The numericalmethod updates the fuzzy parameters in orderto minimize an objective error function Hxj,explained in the previous section (Eq. 7). Theupdate rule for nonlinear parameters is statedas below.
pik(t + 1) = pik(t) − α
N
n∑j=1
∂Hxj
∂pik. (8)
Here Pik represents the nonlinear parame-ters of the fuzzy activation functions, t is thenumber of epochs, constant α is the learningrate, which decides the quantum of change inthe parameters after each iteration. Here N isthe number of training patterns. Following theprocedure of the TS fuzzy algorithm its con-sequent variables are not tuned using gradi-ent descent approach but are mathematicallyidentified using the Singular Value Decomposi-tion (SVD) method. Other regression techniques
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
160 P. Jamwal et al.
such as Least square regression, LU decomposi-tion, Quantile regression, etc., can also be usedin place of SVD. Nevertheless, it has been found[Pratihar, 2008] that these methods sometimesover fit the function which is being approxi-mated, and therefore we have not considered.
3.3.2. Conventional genetic algorithm
This algorithm randomly generates a populationof 100 binary strings. Nonlinear fuzzy parame-ters have been represented by a binary stringwherein 12 bits are assigned for each of the vari-able. The solution accuracy of the order of 10−4
can be achieved with 12 bits. A fitness functiongiven by Eq. (9) is used to find the fitness of thegenerated strings.
F =1
1 + MSE. (9)
Based on the fitness values, better stringsfrom the population are selected and multiplecopies (in proportion to their fitness values) ofthese solutions are created using Roulette-wheelselection method. Later, two important opera-tors of GA, namely, crossover and mutation withprobabilities of 0.95 and 0.01, respectively, areperformed on the solutions. The strings obtainedare once again evaluated and their fitness calcu-lated. The process is repeated until the requiredaccuracy or the number of epochs is achieved.Consequent variables of the TS fuzzy modelare once again identified using Singular ValueDecomposition (SVD) method as in the previ-ous method.
3.3.3. Modified genetic algorithm
Two modifications are proposed in the conven-tional GA [Jamwal et al., 2009]. Firstly, an eli-tist approach has been used to ensure that thebest solution from a generation does not becomeextinct in the process of evolution. A copy of thebest solution from a generation is stored sepa-rately and is considered during fitness evalua-tion of the succeeding generation. Secondly, toincrease the speed of convergence, a two-stepselection process has been used. Initially, theconventional Roulette-wheel selection method isused and when GA stops to converge the error,
the selection method shifts to the Gradient-based selection. In the gradient-based selectionmethod the best fit solution of the iteration isfound and all other solutions are moved in thedirection of the best fit solution. The shifts in thesolutions are a fraction (λ < 1) of their gradi-ent towards the best fit solution. This modifica-tion helps the algorithm to fine tune the globaloptimal point. To investigate the performanceof the modified GA, it has been compared withthe gradient-based method and the conventionalGA while tuning the newly designed FLC. In thesubsequent sections, results obtained from theseapproaches are analyzed and compared.
4. Experiment Results andDiscussion
Initially the database obtained from the exper-imental setup (Fig. 1) is divided in three partssuch that 70% data is used to train the modelsand remaining 30% of the data is used for bothvalidation and testing purposes.
The multilayered feed forward ANN model,discussed in Sec. 3 is trained and validated.Results from the testing database showed that
0 50 100 150 2000
2
4
0 50 100 150 2000
2
4
0 50 100 150 2000
2
4
0 50 100 150 2000
2
4
Sample Data
Ref
eren
ce a
nd M
odel
Pre
ssur
e O
utpu
ts (
Bar
)
ReferenceFuzzy MGA
ReferenceFuzzy GA
ReferenceFuzzy GD
ReferenceNeural Network
Fig. 8. Estimation of trajectory (experimental data),using three types of optimization approaches for TS fuzzymodel.
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 161
the MSE and maximum deviation from the ANNmodel are 0.0016 bars and 13%, respectively.Subsequently, fuzzy models is developed andtrained as discussed in Sec. 4 and checked withthe testing database. MSE and maximum devi-ation from the TS fuzzy model tuned by gra-dient descent approach is obtained as 0.0102bars and 13%, respectively. When tuned usingGA, this fuzzy model showed improvements onboth the MSE and maximum deviation. Thevalues obtained are 0.0012 bars and 10% cor-respondingly. The MGA tuned TS fuzzy modelwas later used with test data and MSE of4.33e-05 and maximum deviation of 1.6% wereobtained. This has shown an improvement com-pared to the previous models and a similar work[Chang and Lilly, 2003] wherein 23,340 itera-tions were required to achieve a MSE of 0.0011.The proposed MGA-based fuzzy model also per-formed better in terms of the maximum devia-tion over the MGA-based NARX fuzzy model[Anh and Ahn, 2009] wherein the MD achievedwas 10%.
Although the Mamdani fuzzy model showedacceptable trajectory following trend but failedto provide good accuracy as the MSE obtained is0.3787. This is due to the fact that the rule-basefor this fuzzy model was designed intuitively byanalyzing the sensor data from the test rig andwas not tuned. It is recommended for the futureresearch that the rule base of Mamdani fuzzymodel be also tuned. For future research it willalso be interesting to see if the interpretabil-ity feature of Mamdani fuzzy approach andaccuracy of TS fuzzy models can be achievedcollectively.
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5
Sample Data
Ref
eren
ce a
nd M
odel
Pre
ssur
e O
utpu
t (B
ar)
ReferenceFuzzy Mamdani
Fig. 9. Estimation of trajectory (experimental data),from Mamdani fuzzy model tuned using MGA.
The proposed work is significant since for thefirst time the change in the external load on themuscle is studied and modeled accurately. Theresults obtained for the estimation of trajectoryusing ANN and the two types of fuzzy mod-els tuned using GD, GA and MGA optimizationmethods are shown in Fig. 10.
Clearly, the MGA method-based fuzzymodel shows improved tracking performancecompared to other models. Apart from bet-ter prediction accuracy, the MGA-based fuzzymodel is able to emulate the predominant hys-teresis effect of the PMA. This fact is evidentfrom Fig. 11 wherein a cycle of inflation anddeflation of the PMA is closely followed bythe model. The trajectory following error iscalculated from the reference pressure data(obtained from the experiments) and the modeloutputs for the same set of inputs. Outputsfrom ANN and three kinds of fuzzy models arecompared from the experimental pressure val-ues. The resulting prediction error from var-ious models is plotted for comparison. Theresults displayed in Fig. 10 clearly show thatthe prediction from the TS fuzzy model ismore accurate than the comparable ANN model.
0 50 100 150 200-0.5
0
0.5
0 50 100 150 200-0.5
0
0.5
0 50 100 150 200-0.5
0
0.5
0 50 100 150 200-0.2
0
0.2
Sample Data
Err
or in
Pre
ssur
e P
redi
ctio
n by
Mod
els
(Bar
)
ANN
Fuzzy GD
Fuzzy GA
Fuzzy MGA
Fig. 10. Trajectory following errors for the experimentaldata, obtained using three types of fuzzy models.
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
162 P. Jamwal et al.
0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.110
0.5
1
1.5
2
2.5
Extension length of PMA in meters
Pre
ssur
e in
PM
A (
Bar
)
ReferenceModel
Fig. 11. Hysteresis in the pneumatic muscle closelymodeled using fuzzy modeling (MGA).
Noticeable subsequent reduction in the predic-tion error for three kinds of fuzzy models tunedwith GD, GA, and MGA-based methods is alsoillustrated in Fig. 10.
5. Conclusions
Artificial neural networks and two types ofFuzzy model (Mamdani and TS fuzzy mod-els) are developed to accurately predict thenonlinear and time dependent characteristics ofPneumatic Muscle Actuators (PMA). The dis-tinctive feature of the present research is thatthe model duly incorporates the effect of vary-ing load on the PMA while modeling the pres-sure. To tune the parameters of fuzzy mod-els three approaches, namely, Gradient Descent(GD) method, Genetic Algorithm (GA) andModified Genetic Algorithm (MGA) are used.Results obtained from the ANN and the fuzzymodels are plotted and analyzed in terms oftheir MSE and maximum deviation. The MGA-based TS fuzzy model is found to be more accu-rate, which could accurately predict the map-ping between force, length, change in length andthe pressure inside PMA.
Acknowledgments
The research was funded by the FacultyResearch and Development Fund of the Univer-sity of Auckland, Auckland, New Zealand.
References
Ahn, K. K. and Anh, H. P. H. [2007a] “A newapproach for modeling and identification of thepneumatic artificial muscle manipulator basedon recurrent neural networks,” in Proc. Institu-tion of Mechanical Engineers. Part I: Journal ofSystems and Control Engineering 221(8), 1101–1121.
Ahn, K. K. and Anh, H. P. H. [2007b] “System iden-tification and self-tuning pole pacement control ofthe two-axes pneumatic artificial muscle manip-ulator optimized by genetic algorithm,” in Proc.IEEE International Conference on Mechatronicsand Automation, pp. 2604–2609.
Anh, H. P. H. and Ahn, K. K. [2009] “Identifica-tion of pneumatic artificial muscle manipulatorsby a MGA-based nonlinear NARX fuzzy model,”Mechatronics 19(1), 106–133.
Chang, X. and Lilly, J. H. [2003] “Fuzzy control forpneumatic muscle tracking via evolutionary tun-ing,” Intelligent Automation and Soft Computing9(4), 227–244.
Chou, C.-P. and Hannaford, B. [1994] “Staticand dynamic characteristics of McKibben pneu-matic artificial muscles,” in Proc. IEEE Interna-tional Conference on Robotics and Automation,pp. 281–286.
Colbrunn, R. W., Nelson G. M. et al. [2001] “Mod-eling of braided pneumatic actuators for roboticcontrol,” in Proc. International Conference onIntelligent Robots and Systems, Oct. 29th–Nov. 3rd.
Davis, S., Tsagarakis, N. et al. [2003] “Enhancedmodeling and performance in braided pneu-matic muscle actuators,” International Journal ofRobotics Research 22(3–4), 213–227.
Dematos, G., Boyd, M. S. et al. [1996] “Feedforwardversus recurrent neural networks for forecastingmonthly Japanese yen exchange rates,” Finan-cial Engineering and the Japanese Markets 3(1),59–75.
Jamwal, P., Xie, S. Q. et al. [2009] “Dynamicmodeling of pneumatic muscles using modifiedfuzzy inference mechanism,” International Con-ference on Robotics and Biomimetics Guilin,China, IEEE, pp. 1451–1456.
Ku, K. K. K., Bradbeer, R. et al. [2008] “Explo-ration for novel uses of air muscles as hydraulicmuscles for underwater actuator,” OCEANS’08MTS/IEEE Kobe-Techno-Ocean’08 — Voyagetoward the Future, OTO’08.
Li, S., Jin, J. et al. [2006] “Modelling and assessmentof pneumatic artificial muscle,” International
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
Modeling Pneumatic Muscle Actuators: Artificial Intelligence Approach 163
Journal for Engineering Modelling 19(1–4),95–100.
Manuello Bertetto, A. and Ruggiu, M. [2004]“Characterization and modeling of air muscles,”Mechanics Research Communications 31(2),185–194.
Pratihar, D. K. [2008] Soft Computing (Oxford,Alpha Science International Ltd).
Pratihar, D. K. and Hui, N. B. [2007] “Evolutionof fuzzy controllers and applications,” Studies inComputational Intelligence 66, 47–69.
Rajasekaran, S. and Vijayalakshami, G. A. [2003]Neural Networks, Fuzzy Logic and Genetic Algo-rithms (New Delhi, Prentice Hall of India).
Reynolds, D. B., Repperger, D. W. et al. [2003]“Modeling the dynamic characteristics of pneu-matic muscle,” Annals of Biomedical Engineering31(3), 310–317.
Schindele, D. and Aschemann, H. [2008] “Non-linear model predictive control of a high-speed
linear axis driven by pneumatic muscles,” in Proc.American Control Conference, pp. 3017–3022.
Sugisaka, M. and Zhao, H. [2007] “The characteris-tics of McKibben muscle based on the pneumaticexperiment system,” Artificial Life and Robotics11(2), 223–226.
Tondu, B. and Lopez, P. [1995] “Theory of an arti-ficial pneumatic muscle and application to themodeling of McKibben artificial muscle,” Theoried’un muscle artificiel pneumatique et applicationa la modelisation du muscle artificiel de McKibben320(3), 105–114.
Tsagarakis, N. and Caldwell, D. G. [2000] “Improvedmodeling and assessment of pneumatic muscleactuators,” in Proc. IEEE International Con-ference on Robotics and Automation, pp. 3641–3646.
Biography
Prashant Jamwal obtained his Master of Technology degree from I.I.T., Roorkee, India, and hisBachelor in Engineering from M.N.N.I.T., Allahabad, India. He is employed as Sr. Assistant Pro-fessor in Rajasthan Technical University, India, since 1995. He has over fifteen years experience inteaching and in the industry. Currently, he is working with the Medical and Rehabilitation Roboticsgroup as a doctoral student in the Mechanical Engineering Department at The University of Auck-land. His research interests are advance manufacturing, fuzzy inferencing, evolutionary algorithms,optimization and parallel robots. He acts as a reviewer for few international journals and conferencesof repute.
S. Q. Xie received his Ph.D. from Huazhong University of Science and Technology (China), and theUniversity of Canterbury (New Zealand). He is an Associate Professor at the University of Auckland,New Zealand. His research interests include intelligent mechatronics systems, vision techniques andapplications, smart sensors and actuators, bio-mechatronics and biomedical robotics. He has morethan 15 years of teaching and research experience in mechatronics, medical robotics and advancedmanufacturing technology. He is the Editor of two international journals, Guest Editor, EditorialBoard Member, Reviewer and Scientific Advisory for many international journals and conferences.He has also published more than 150 papers in refereed international journals and conferences.
Shahid Hussain received his Bachelor of Engineering degree in Mechatronics and Control Engi-neering from University of Engineering and Technology Lahore, Pakistan in 2007, and the Masterof Engineering degree in Mechanical Engineering from The University of Auckland, New Zealand,in 2009. Currently he is working with the Medical and Rehabilitation Robotics group as a doctoralstudent at The University of Auckland. His research interests are dynamic modeling, adaptive controland robot assisted gait rehabilitation.
Kean Aw is a Senior Lecturer in the Department of Mechanical Engineering at The Universityof Auckland. He gained his M.Sc. in Advanced Manufacturing Systems from Brunel Universityand earned his Ph.D. in Applied Physics. He has over a decade of industrial experiences at Intel,
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.

September 7, 2010 15:43 WSPC-IJIA S0219878910002130.tex
164 P. Jamwal et al.
Altera and Navman before joining this university. He teaches undergraduate courses and super-vises post-graduate research in Mechatronics Engineering. His current research interests are bio-mechatronics, micro-systems, smart materials and mechatronics devices. He is an Editorial BoardMember of Int. J. of Biomechatronics and Biomedical Robotics and the Editor-in-Chief for TheUniversity of Auckland Undergraduate Mechatronics Research Journal.
Int.
J. I
nf. A
cqui
sitio
n 20
10.0
7:15
1-16
4. D
ownl
oade
d fr
om w
ww
.wor
ldsc
ient
ific
.com
by U
NIV
ER
SIT
Y O
F A
UC
KL
AN
D L
IBR
AR
Y -
SE
RIA
LS
UN
IT o
n 05
/26/
15. F
or p
erso
nal u
se o
nly.