La posición de las cláusulas temporales con cuando - Dialnet
Upload
khangminh22Category
view
0download
0
Proyecto Fin de CarreraIngeniería de Telecomunicación
Formato de Publicación de la Escuela TécnicaSuperior de Ingeniería
Autor: F. Javier Payán Somet
Tutor: Juan José Murillo Fuentes
Dep. Teoría de la Señal y ComunicacionesEscuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2013
Trabajo Fin de GradoIngeniería Aeroespacial
Mantenimiento de un satélite en posiciónpara cumplimiento de una misión en órbitabaja
Autor: María del Mar Núñez HaroTutor: Eduardo José Sanz De Lucas
Dpto. Ingeniería de la Construcción y Proyectos deIngeniería
Escuela Técnica Superior de IngenieríaUniversidad de Sevilla
Sevilla, 2021


Trabajo Fin de GradoIngeniería Aeroespacial
Mantenimiento de un satélite en posición paracumplimiento de una misión en órbita baja
Autor:
María del Mar Núñez Haro
Tutor:
Eduardo José Sanz De LucasProfesor Asociado
Dpto. Ingeniería de la Construcción y Proyectos de IngenieríaEscuela Técnica Superior de Ingeniería
Universidad de SevillaSevilla, 2021

Trabajo Fin de Grado: Mantenimiento de un satélite en posición para cumplimiento de unamisión en órbita baja
Autor: María del Mar Núñez HaroTutor: Eduardo José Sanz De Lucas
El tribunal nombrado para juzgar el trabajo arriba indicado, compuesto por los siguientes profesores:
Presidente:
Vocal/es:
Secretario:
acuerdan otorgarle la calificación de:
El Secretario del Tribunal
Fecha:


Agradecimientos
En primer lugar, gracias a mi familia por todo su cariño y apoyo incondicional.
A mis amigos, por hacer que confiase en mí en los momentos más difíciles y acompañarme en estaexperiencia.
A mi tutor Eduardo Sanz, por darme la oportunidad de hacer el proyecto de fin de carrera con él, ofrecermesu ayuda y compartir conmigo sus conocimientos.
María del Mar Núñez Haro
Sevilla, 2021
I


Resumen
El estudio del mantenimiento en posición para un satélite en órbita baja lleva consigo la evaluación de nume-rosos factores entre los que destacan la altitud orbital y el valor de densidad según la fecha de lanzamiento, elcual será determinante para calcular el tiempo de decaimiento del satélite.
Este proyecto de fin de carrera consta de tres objetivos principales; diseñar el sistema propulsivo paracumplir el perfil de misión dado, estudiar el impacto que tiene añadir el sistema en el satélite y comparardistintos finales para la misión de forma que no se supere el límite de fin de vida de 25 años.
Para llevar a cabo este estudio, se realizará un proceso iterativo en el que se parte de la masa final delsatélite, los impulsos a realizar y un valor de densidad dependiente de la altitud, con el fin de calcular la masade propulsante necesaria y diseñar el sistema de propulsión al completo.
Finalmente, se rediseña el vehículo tras el acoplamiento del sistema propulsivo y se plantea el final de vidaóptimo para el satélite en estudio.
III


Abstract
The study of the maintenance of the position of a satellite in low orbit involves the evaluation of severalaspects, among which the orbital altitude and the density value according to the launch date stand out andwill be decisive in the calculation of the satellite’s ′orbit decay′.
This final year project has three main objectives; the first is to design the propulsion system to meet thegiven mission profile, the second is to study the impact of adding this system to the satellite, and the last is tocompare different mission endings so that the 25-year end-of-life limit is not exceeded.
To carry out this study, an iterative process will be done. Starting with the final mass of the satellite, theimpulses and a density value for each altitude, the required propellant mass will be calculated and the entirepower system will be designed.
Finally, after adding the propulsive system, the vehicle will be redesigned and the optimal operational endwill be proposed.
V


Índice
Resumen IIIAbstract V
Índice de Figuras IXÍndice de Tablas XINotación XIII
1 Introducción 11.1 Motivación y objetivos generales 11.2 Necesidad de un sistema propulsivo 31.3 Requisitos principales de diseño 4
2 Descripción del perfil de misión a cumplir 52.1 Perfil de misión proyectado 52.2 Análisis y justificación de órbitas 5
Elementos orbitales 7Trazas y repetitividad 9
2.2.1 Orbitas preliminares 102.2.2 Eclipses 142.2.3 Tiempos de visibilidad y cobertura 162.2.4 Elección de la base de lanzamiento y vehículo lanzador 18
Vehículo lanzador 21Descripción del vehículo 22
2.2.5 Ventanas de lanzamiento 242.2.6 Maniobras previas a la inyección en la primera órbita nominal 282.2.7 Maniobras para el cambio de órbita 302.2.8 Otras maniobras 312.2.9 Tipos de órbitas más adecuadas para cumplir la misión 32
3 Descripción preliminar del satélite objeto de estudio 333.1 Masa e inercias 333.2 Geometría 363.3 Tipo de Estabilización 393.4 Subsistemas 40
4 Perturbaciones orbitales 414.1 Efectos del armónico J2 424.2 Efectos de la resistencia atmosférica 43
4.2.1 Decaimiento orbital 444.3 Otras perturbaciones 46
VII
VIII Índice
5 Entorno espacial 495.1 Vacío Espacial 49
5.1.1 Vacío total 495.1.2 Vacío parcial 49
5.2 Entorno Térmico 505.3 Radiación espacial 505.4 Microgravedad 505.5 Meteoroides y basura espacial 515.6 Actividad solar 51
6 Estrategia de mantenimiento de altitud orbital 536.1 ∆V necesario 53
6.1.1 Órbita nominal de 200 km de altitud 54Actividad solar baja 54Actividad solar alta 55
6.1.2 Cambio de órbita nominal 556.1.3 Órbita nominal de 480 km de altitud 56
Actividad solar baja 56Actividad solar alta 56Actividad solar media 57
6.1.4 Resultados finales 586.2 Tipos de sistemas RCS y elección 606.3 Diseño conceptual del RCS necesario 63
7 Modificaciones a realizar en el diseño del vehículo y subsistemas asociados 697.1 Nuevos valores de masa, inercias y geometría del satélite 697.2 Efectos de introducir el subsistema RCS sobre: 70
7.2.1 Subsistema de control de actitud 707.2.2 Subsistema de Comandos y Gestión de Datos 717.2.3 Subsistema de Telemetría, Telemando y Comunicaciones 727.2.4 Subsistema de Potencia 737.2.5 Subsistema de Control Térmico 74
7.3 Rediseño final del satélite tras introducir el sistema RCS 77
8 Final operativo: Estrategias a seguir 798.1 Opciones de desorbitado 80
9 Conclusiones y trabajos futuros 83
Apéndice A Lanzamiento 85A.1 Restricciones de la base de Vandenberg 85A.2 Ventanas de lanzamiento 86
Apéndice B Maniobras orbitales 87B.1 Maniobra de cambio de plano 87B.2 Transferencia de Hohmann 88
Apéndice C Decaimiento 91C.1 Ciclo solar y valores de densidad 91
Bibliografía 95

Índice de Figuras
1.1 Comparativa de órbitas según su altitud 11.2 Proceso para estimar la vida útil de la órbita, [6] 21.3 Sistema propulsivo de la nave espacial Messenger [23] 3
2.1 Sistema de referencia geocéntrico inercial 62.2 Trigonometría esférica [21] 62.3 Sistema de referencia perifocal [21] 72.4 Representación de elementos orbitales en órbita directa [21] 82.5 Representación de elementos orbitales en órbita retrógrada 92.6 Heliosincronismo 112.7 Órbita alrededor de La Tierra según el valor de δ [21] 112.8 Método de la fracción continua 122.9 Traza de la órbita nominal 1 durante un día 132.10 Traza de la órbita nominal 2 durante un día 132.11 Situación geométrica [21] 142.12 Periodo de eclipses representado en STK para la órbita de inyección 152.13 Estudio de la visibilidad [21] 162.14 Círculo de visibilidad para un satélite de órbita circular 172.15 Geometría esférica 182.16 Cálculo del azimut de lanzamiento 192.17 Ilustración de los lanzadores en estudio 212.18 Lanzadores Delta II 232.19 Tipos de cofia 232.20 Plano del satélite desde el espacio 252.21 Representación del RAAN 252.22 Periodo de eclipses representado en STK para la órbita nominal 1 272.23 Periodo de eclipses representado en STK para la órbita nominal 2 272.24 Perfil de misión de despegue en LEO 282.25 Fases del lanzador Delta II 282.26 Maniobra de Hohmann entre órbitas nominales 30
3.1 Prisma rectangular para inercias 343.2 Dimensiones del satélite 363.3 Explosionado de los elementos del satélite 363.4 Sección X-Y e Y-Z 373.5 Anillo de transición 373.6 Medidas de los paneles solares laterales 383.7 Descomposición en partes del lanzador 383.8 Volante de inercia 39
4.1 Tipos de variaciones 42
IX
X Índice de Figuras
4.2 Circularización de la órbita inicial 434.3 Modelos de densidad atmosférica [5] 45
5.1 Basura espacial 51
6.1 Decaimiento de la órbita nominal 1 de 205km a 195km 546.2 Decaimiento de la órbita nominal 1 de 205km a 195km 556.3 Decaimiento de la órbita nominal 2 de 485km a 475km 566.4 Decaimiento de la órbita nominal 2 de 485km a 475km 576.5 Decaimiento de la órbita de inyección hasta los 205km 596.6 Propulsores químicos, [22] 606.7 Impulso específico según la disociación del amoniaco, [4] 616.8 Configuración de un monopropulsante de hidracina, [9] 616.9 Configuración de un bipropulsante de hidracina 626.10 Thruster Ariane 20N, [3] 636.11 Sistema de control a reacción a tres ejes (RCS) con 4 propulsores, [22] 646.12 Tanque esférico, [4] 656.13 Tanque esférico 66
7.1 Fuente externa de calor [22] 757.2 Geometría interna del satélite 77
8.1 Reentrada en dirección X 808.2 Reentrada en dirección Y con paneles retraídos 818.3 Reentrada en dirección Y con paneles extraídos 81
B.1 Maniobra de cambio de plano 87B.2 Transferencia de Hohmann, caso elíptico 88B.3 Transferencia de Hohmann, caso circular 89
C.1 Manchas solares 91C.2 Predicción de manchas solares para el ciclo 25 [16] 92C.3 Variaciones de densidad según la intensidad del ciclo [14] 93
Índice de Tablas
2.1 Clasificación de órbitas según su inclinación 82.2 Fases de la misión 122.3 Repetitividad 122.4 Valor de x para el método de la fracción continua. 122.5 Repetitividad 132.6 Datos de las bases de lanzamiento 192.7 Inclinaciones disponibles según la base de lanzamiento 202.8 Valores de Azimut para la inclinación deseada 202.9 Datos de lanzadores comerciales 222.10 Cronología de la misión 262.11 Cronología de la misión 262.12 Impulso necesario tras la inyección 292.13 Valores de altitud e inclinación para ambas órbitas nominales 302.14 Impulso necesario para el cambio de órbita nominal 302.15 Valores del impulso de Hohmann para el mantenimiento 312.16 Valores de altitud e inclinación para la órbita de inyección y la nominal 1 312.17 Valores del incremento de velocidad en las distintas maniobras 32
3.1 Inclinaciones disponibles según la base de lanzamiento 333.2 Dimensiones del satélite 353.3 Inercias con la masa seca 35
6.1 Valores para la órbita nominal 1 en actividad solar baja 546.2 Valores para la órbita nominal 1 en actividad solar alta 556.3 Valores para el cambio de órbita 556.4 Valores para la órbita nominal 2 en actividad solar baja 566.5 Valores para la órbita nominal 2 en actividad solar alta 566.6 Valores para la órbita nominal 2 en actividad solar media 576.7 Número de impulsos y valor de ∆V total 586.8 Valores de masas durante la misión 586.9 Valor de densidad según la altitud 586.10 Cronología 596.11 Thrusters monopropulsantes de Ariane Group, [3] 626.12 Especificaciones del thruster elegido, [3] 626.13 Tiempos de combustión límite 636.14 Tiempos de pulso 646.15 Combustible necesario 656.16 Hidracina 656.17 Volumen de combustible 666.18 Propiedades del Titanio 666.19 Espesor y radio exterior 67
XI
XII Índice de Tablas
6.20 Peso de los tanques de combustible 676.21 Componentes del subsistema RCS 67
7.1 Inercias con la masa inicial 697.2 Efecto de las maniobras en el ADCS [22] 707.3 Actuadores típicos del sistema ADCS [22] 707.4 Componentes del subsistema ADCS [22] 717.5 Componentes del subsistema CyDH [22] 727.6 Interfaz del subsistema TTyC [22] 727.7 Componentes del subsistema TTyC [22] 737.8 Subsistema de potencia [22] 737.9 Tipos de baterías 747.10 Rango de temperaturas de subsistemas [22] 757.11 Componentes del subsistema térmico [22] 77
8.1 Reentrada del satélite 82
A.1 Ventana de lanzamiento 86
C.1 Valores de densidad según altitud para actividad solar baja y alta 92

Notación
LEO Órbita bajaMEO Órbita mediaGEO Órbita geosíncronaSSO Órbita heliosíncronaRAAN Ascensión recta del nodo ascendenteVAFB Base de lanzamiento de VandenbergADCS Subsistema de control de atitudT TyC Subsistema de comunicacionesCyDH Subsistema de gestión de datosDOD Profundidad de descarga de la bateríaφ Latitudλ Longitudi Inclinación orbitalS Superficiea Semieje orbitale ExcentricidadΩ Ascensión recta del nodo ascendenteω Argumento del perigeoθ Anomalía mediaM Anomalía mediaTsat Periodo orbitalR⊕ Radio de la Tierrahsat Altitud del satéliteAz Azimutµ⊕ Parámetro gravitacional de la Tierrar Radio∆V Impulso de velocidadg GravedadIsp Impulso específicoA Áreamo Masa total del satélitem f Masa de combustible del satéliteV VolumenI InerciaTH Periodo de transferecia de HohmannaH Semieje de la órbita de transferecia de HohmannD Fuerza de resistencia atmosféricaρ DensidadB Coeficiente balísticoCD Coeficiente de resistenciatvisibilidad Tiempo de visibilidad
XIII

XIV Notación
Γ Ángulo esféricoδ0 Declinación del punto antipodalAR0 Ascensión recta del punto antipodalδ Declinación del SolAR Ascensión recta del Solω⊕ Velocidad angular de la TierraGSTo Tiempo sidéreo de GreenwichApanel Área del panel solarCsolar Constante solarPsatlite Potencia del satélitet EspesorT Temperatura; Par torsorσ TensiónF Fuerza
1 Introducción
1.1 Motivación y objetivos generales
Las órbitas desarrolladas por los satélites artificiales que orbitan en torno a La Tierra tienen una influenciadirecta sobre el diseño del control de órbita y el mantenimiento de altitud. Estas órbitas se pueden
clasificar según su altitud en diferentes regiones. El hecho de que exista este número limitado de tipos de órbitase debe a que cada una de ellas tiene unas características diferentes que permiten cumplir una misión según elobjetivo de la misma, existiendo una relación directa entre las perturbaciones exteriores y la altitud de la órbita.
Se dispone de la siguiente clasificación según la altitud [7].
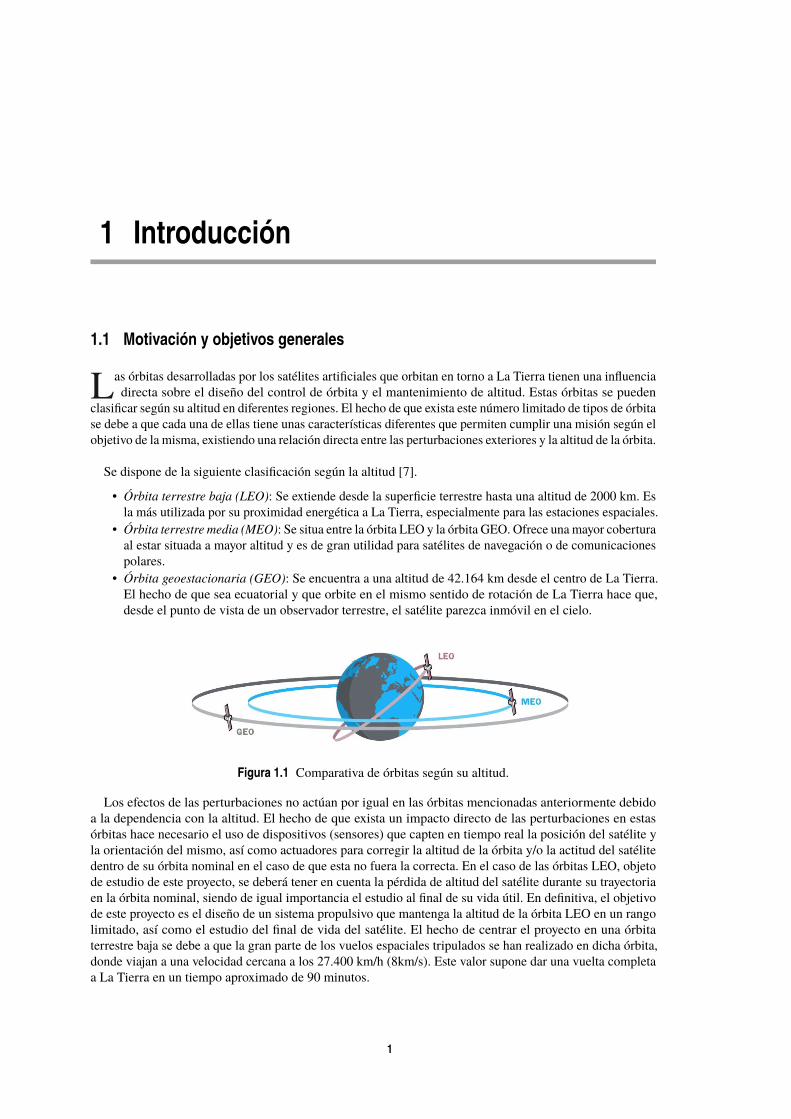
• Órbita terrestre baja (LEO): Se extiende desde la superficie terrestre hasta una altitud de 2000 km. Esla más utilizada por su proximidad energética a La Tierra, especialmente para las estaciones espaciales.
• Órbita terrestre media (MEO): Se situa entre la órbita LEO y la órbita GEO. Ofrece una mayor coberturaal estar situada a mayor altitud y es de gran utilidad para satélites de navegación o de comunicacionespolares.
• Órbita geoestacionaria (GEO): Se encuentra a una altitud de 42.164 km desde el centro de La Tierra.El hecho de que sea ecuatorial y que orbite en el mismo sentido de rotación de La Tierra hace que,desde el punto de vista de un observador terrestre, el satélite parezca inmóvil en el cielo.
Figura 1.1 Comparativa de órbitas según su altitud.
Los efectos de las perturbaciones no actúan por igual en las órbitas mencionadas anteriormente debidoa la dependencia con la altitud. El hecho de que exista un impacto directo de las perturbaciones en estasórbitas hace necesario el uso de dispositivos (sensores) que capten en tiempo real la posición del satélite yla orientación del mismo, así como actuadores para corregir la altitud de la órbita y/o la actitud del satélitedentro de su órbita nominal en el caso de que esta no fuera la correcta. En el caso de las órbitas LEO, objetode estudio de este proyecto, se deberá tener en cuenta la pérdida de altitud del satélite durante su trayectoriaen la órbita nominal, siendo de igual importancia el estudio al final de su vida útil. En definitiva, el objetivode este proyecto es el diseño de un sistema propulsivo que mantenga la altitud de la órbita LEO en un rangolimitado, así como el estudio del final de vida del satélite. El hecho de centrar el proyecto en una órbitaterrestre baja se debe a que la gran parte de los vuelos espaciales tripulados se han realizado en dicha órbita,donde viajan a una velocidad cercana a los 27.400 km/h (8km/s). Este valor supone dar una vuelta completaa La Tierra en un tiempo aproximado de 90 minutos.
1

2 Capítulo 1. Introducción
El satélite estará sometido a perturbaciones como el efecto del armónico J2, la presión de radiación solar,el efecto de un tercer cuerpo o la resistencia armosférica terrestre, siendo este último el efecto más relevantepara una órbita terrestre baja. El estudio de las perturbaciones se llevará a cabo en el capítulo 4. La resistenciaatmosférica afecta a la órbita nominal del satélite por lo que se necesitarán ciertas correciones durante lavida del mismo para poder mantener la órbita dentro de unos valores de altitud dados. Otra consideraciónimportante para un satélite en órbita baja es su disposición tras la orbita final. En el espacio, la cantidad debasura espacial almacenada es tan grande que se ha limitado el tiempo de vida de un satélite en órbita. Lasastronaves cuya altitud de perigeo en su órbita final sea inferior a 200 km, podrán ser eliminadas mediante lareentrada atmosférica [6]. Gracias a la resistencia atmosférica, se puede optimizar el proceso de reentradadel satélite, así como las maniobras de aerofrenado. Debido a la fricción, el satélite pierde su energía yalgunos de sus elementos orbitales (semieje mayor de la órbita, a y excentricidad, e) varían hasta el puntode provocar la reentrada del satélite, este proceso debe ser estudiado en detalle, ya que la ruptura y la vo-latización del propio satélite se considera un grave peligro en caso de que esta ocurra por encima de los 200km.
Para lograr una misión dentro de los límites recomendados se estudiará el tiempo de vida de la órbita definal de misión y las condiciones que tiene que cumplir el satélite en la reentrada. Se puede definir como eltiempo medido entre un instante en el cual el satélite tiene una altura, posición y elementos orbitales determi-nados y el instante al que llega a la altitud conocida como altitud de reentrada. El Comité de Coordinacióninterconstitucional de Desechos Espaciales ha fijado 25 años como un tiempo de vida límite razonable,limitando también la cantidad de desechos que pueden caer en las regiones inhabitadas durante al reentrada.Un punto de gran importancia en el estudio del final de misión es la eliminación de toda fuente de energíaguardada en el satélite para reducir la posibilidad de desintegración de dichos sistemas. Este proceso seconoce como pasivación y algunas medidas pueden incluir acciones como descargar las baterias o quemar elexceso del propulsor [6].
Figura 1.2 Proceso para estimar la vida útil de la órbita, [6].
Los factores que afectan principalmente al tiempo de vida son la condición inicial del satélite, es decir, suselementos orbitales en la época. También influirán las diferentes perturbaciones a las que está sometido elvehículo, especialmente la perturbación del J2 y la resistencia atmosférica. En el caso de la perturbacióndel J2, se debe mencionar que este efecto es deseado ya que permite al satélite estar en una órbita síncronaal Sol; por otro lado, la resistencia atmosférica provoca un efecto no deseado durante el mantenimiento dealtitud frenando al satélite, lo cual sí podrá ayudar a poner fin a la vida del mismo disminuyendo el tiempode caída hasta la reentrada. Para poder estudiar la influencia de la fricción con la atmósfera será necesariollevar a cabo un estudio riguroso del modelo atmosférico en el que influirá en gran medida la actividad solary geomanética de larga duración. Por último, será necesario estudiar el Coeficiente Balístico del satélitedurante la caída (CdA/M), donde A es la superficie en contacto con la atmosfera y M la masa del satélite enel momento de la reentrada, que será aproximadamente el valor de masa del satélite al inicio de misión yaque se habrá quemado todo el combustible durante la misión. Otros parámetros como la actividad solar o elíndice geomagnético también serán tenidos en cuenta ya que su influencia en el tiempo de vida total paraórbitas tan bajas es determinante.
1.2 Necesidad de un sistema propulsivo 3
Existen tres métodos para predecir el tiempo de vida orbital de la orbita de final de misión, el primeroconsiste en propagaciones a largo plazo usando integración semi-analítica, el segundo en integración numéricay el tercero y último consiste en una estimación a partir de euaciones empíricas. Para este problema se va ahacer una estimación empírica preliminar para luego refinar los resultados con cálculos numérico.
Teniendo en cuenta estos puntos claves propios de una órbita baja, se va a partir de un perfil de misión acumplir y de una configuración preliminar del satélite y, mediante un método iterativo, se diseñará el sistemade mantenimiento en órbita al completo, incluyendo las maniobras necesarias desde el inicio de misión hastael desorbitado controlado.
1.2 Necesidad de un sistema propulsivo
La necesidad de un sistema propulsivo surge tanto del mantenimiento del satélite en órbita como de lasmaniobras de corrección, rotación, traslación y el fin de la vida del satélite.
Como se comentó anteriormente, se deben realizar una serie de impulsos durante las órbitas nominales conel fin de que el satélite se encuentre en un rango de altitud deseado durante el periodo de tiempo necesariode misión. Para ello se necesita un sistema de propulsión con combinaciones de motores, conocidos comothrusters. Estos motores pueden ser o de gran empuje para las maniobras de mantenimiento de altitud orbital,para las maniobras de transferencia orbital y para la correcciones de órbita, o pueden ser de bajo empuje queserán empleados en las maniobras de corrección de actitud y de orientación. Deben estar situados estratégica-mente en el vehículo para evitar modificar la posición del centro de gravedad y conseguir una flexibilidaden la rotación de 360º. El estudio del propulsante del thruster se debe hacer teniendo en cuenta que elsistema debe ser capaz de suministrar un incremento de velocidad lo suficientemente elevado como para cam-biar el tipo de órbita y lo suficientemente pequeño como para realizar correcciones de actitud y de orientación.
Uno de los objetivos de este proyecto será realizar un primer diseño del Sistema de Control de Reacción(RCS) (Capítulo 6) partiendo de los datos preliminares de un satélite en su primera fase.
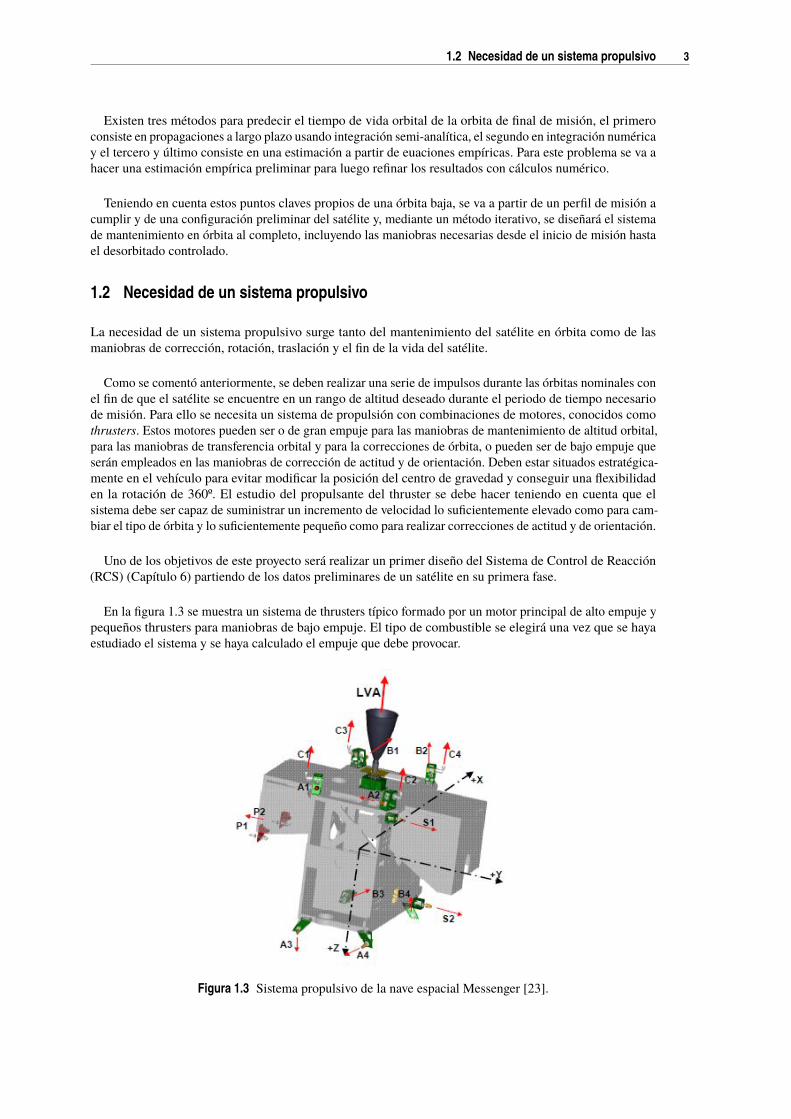
En la figura 1.3 se muestra un sistema de thrusters típico formado por un motor principal de alto empuje ypequeños thrusters para maniobras de bajo empuje. El tipo de combustible se elegirá una vez que se hayaestudiado el sistema y se haya calculado el empuje que debe provocar.
Figura 1.3 Sistema propulsivo de la nave espacial Messenger [23].
4 Capítulo 1. Introducción
Para el diseñod del Sistema de Control de Reacción se va a determinar en primer lugar el tipo de sistema apartir de los impulsos necesarios para llevar a cabo la misión completa, así como las maniobras o movimientospara el desorbitado controlado. Estos propulsores deben ser capaces de ejercer un par de reacción con elevadarapidez, aunque tienen un uso limitado ya que dependen de la cantidad de combustible disponible y la masade propulsante necesaria para cumplir la misión. Una vez que se conozcan los impulsos y se elija el conjuntode thrusters, se estimará el tiempo de propulsión necesario, el cual debe ser mucho menor que el periodoorbital para poder demostrar la hipótesis de que las maniobras realizadas durante la misión son instantáneas.
1.3 Requisitos principales de diseño
Los datos de diseño que se ofrecen para la misión son requisitos y condiciones de entrada impuestos porel fabicante del satélite, el cual proporciona un valor de masa seca estimada de 850kg. La masa seca es ladel satélite sin incluir la masa de combustible ni la del sistema propulsivo; para una primera estimaciónse supondrá que la masa al final de la misión es aproximadamente igual a la masa seca ya que se habráconsumido todo el combustible. Estos resultados deberán ser corregidos con mayor detalle una vez que seconozca la masa del RCS y se añada al estudio.
La posición del centro de masas está en el centro del prisma por lo que a la hora de añadir la masa decombustible y el sistema RCS se tendrá en cuenta la distribución de masas dentro del satélite. Se va amantener invariable el centro de masas ya que una alteración en su posición supondría modificar el sis-tema que controla la actitud y el torque de la nave. Para orientarse, el satélite contará con un subsistemade determinación y control de actitud que captará los datos a partir de sensores y corregirá la orientaciónautomaticamente con los actuadores. Además, contará con los subsistemas de Telemetría, Telemando y Comu-nicaciones, con el de Comandos y Gestión de Datos, con el de Potencia y por último con el de control Térmico.
Respecto al sistema de potencia, se impone un diseño de con paneles solares contenidos en el planoorbital. Su función es obtener energía eléctrica a partir del efecto fotovoltaico y su intensidad dependerá dela radiación solar y del ángulo de incidencia, el cual sebe ser lo más perpendicular posible al plano orbitaldurante toda la misión. Esto implica que, al tener paneles fijos, habrá que controlar la actitud del satélite paraque apunten al Sol el máximo tiempo posible. Aún así, estos no son válidos durante los eclipses por lo que elvehículo podrá contar con una batería como fuente de potencia para situaciones en los que la intensidad deradiación solar sea escasa o nula. Sus capacidades se estudiarán en el capítulo 7.
Por último, la geometría del satélite consta de un cuerpo estructural prismático central, que albergará lamayor parte de instrumentos y equipos mientras que los paneles solares y las antenas de comunicaciones iránmontados en la estructura principal.

2 Descripción del perfil de misión a cumplir
En este capítulo se va a exponer el perfil de misión proyectado y algunos datos conocidos a partir deestudios anteriores. Se van a analizar los tipos de órbitas posibles y se determinará, de forma justificada,
el tipo de órbita adecuada para la misión propuesta. Por otro lado, con el fin de encontrar el momento adecuadopara empezar la misión, se va a realizar un análisis preliminar de los eclipses en la órbita de inyección y delos tiempos de visibilidad y cobertura, lo cual ofrecerá datos importantes para el análisis de las ventanasy bases de lanzamiento, así como para la selección del vehículo lanzador. Por último, se compararán losdistintos tipos de maniobras y transferencias posibles en el proyecto de misión dado y se buscará el óptimoque minimice los impulsos a realizar y, por tanto, contribuya al ahorro de combustible.
2.1 Perfil de misión proyectado
En primer lugar, se va a realizar un lanzamiento e inserción en órbita a una altitud de 280km. Para ello se vaa estudiar el lanzador y la posibilidad de inyectar más arriba de la órbita nominal en el caso de que existieranerrores de inyección. El satélite, seguidamente, se dejará caer hasta una altitud nominal de misión de 200km.Deberá permanecer en dicha órbita durante 6 meses. Una vez terminada la misión anterior, se realizará uncambio de plano orbital para alcanzar una órbita nominal de 480km, donde deberá permanecer durante 12meses. El error de altitud permitido por los instumentos en ambas órbitas es de ± 5000 metros y el tiempocompleto de la misión científica será como máximo de dos años. Con estos datos de entrada se van a estudiarlos distintos tipos de órbitas posibles y se va a buscar la óptima; para ello, será necesario hacer una breveintroducción a la geometría espacial.
2.2 Análisis y justificación de órbitas
Para poder realizar un análisis del tipo de órbita óptimo para la misión en estudio, se va a introducir lossistemas de referencia más comunes, los elementos orbitales que definen la posición de cualquier objeto en elespacio y el concepto de traza.
En la definición de geometría espacial, es necesario una especificación del centro del sistema y del elementorespecto al cual se encuentra fijo. Es el Sistema de Referencia Inercial centrado en la Tierra (Sistema decoordenadas celestes) el que se emplea típicamente para llevar a cabo problemas de órbitas terrestres debidoa su configuración sencilla. Este sistema se muestra en la figura 2.1.
En este sistema el eje Z apunta en dirección al polo y coincide con el eje de rotación de la Tierra. El planoOXY contiene al Ecuador mientras que el eje X apunta al primer punto de Aries. Este apuntado tiene ladirección de una línea ficticia que une la Tierra con el Sol el primer día de primavera, cuando el Sol cruzael plano del ecuador terrestre de sur a norte. Este punto cambia de posición con un periodo de 26000 añosdebido al fenómeno conocido como precesión de los equinoccios, variando su posición respecto a las estrellasfijas con un ratio de 0.014 grados por año. Debido a estos cambios, las coordenadas celestes deben ser estable-cidas en función de una fecha concreta, la cual lleva asociada una posición específica del primer punto de Aries.
5

6 Capítulo 2. Descripción del perfil de misión a cumplir
Figura 2.1 Sistema de referencia geocéntrico inercial.
El sistema no es realmente inercial ya que se está despreciando el movimiento de la Tierra en torno al Soly el movimiento propio del Sol respecto a las estrellas, pero es una buena aproximación.
Para determinar la posición de un objeto en el espacio se va a asumir que el observador se encuentrasiempre en el centro de la esfera celeste. Además, cada punto de la esfera celeste puede definirse con un vec-tor unitario centrado en el origen de coordenadas con dirección las dos coordenadas de su posición en la esfera.
Por otro lado, es importante definir los términos nadir y zenit; el nadir es el punto que representa ladirección al centro de la Tierra, mientras que la dirección opuesta a ésta se denomina zenit.
Para poder dividir la esfera celeste, se define un círculo mayor o gran círculo como la intersección de unplano que pasa por el centro de la esfera con la esfera, mientras que cualquier otro círculo de la esfera seconocerá como círculo menor. Un hecho curioso es que en la geometría esférica, no existe el paralelismodebido a que las rectas esféricas (circulos mayores) siempre se cortarán en al menos un punto y el ánguloentre dos de ellas siempre viene dado por el ángulo entre las tangentes en el punto de corte.
Una vez planteado el problema de la trigonometría esférica, se va a determinar el triángulo esférico a partirde tres rectas esféricas. Los ángulos en los vértices del triángulo reciben el nombre de ángulos de rotación oángulos diédricos. Un triángulo esférico viene caracterizado por seis ángulos; los formados entre las rectasen los vértices, que llamaremos α , β y γ (los cuales suman 180º) y tres ángulos interiores, a, b, y c, que seoponen a los anteriores. Esta cofiguración se muestra en la figura 2.2.
Figura 2.2 Trigonometría esférica [21].

2.2 Análisis y justificación de órbitas 7
A partir de los elementos orbitales conocidos, la trigonometría esférica permite determinar cantidades deintéres en misiones planetocéntricas. Algunos ejemplos son el cálculo de latitud/declinación de un satéliteconociendo su anomalía verdadera y el argumento del perigeo o la determinación de la inclinación de unaórbita a partir del azimuth de lanzamiento y de la latitud de la base. Estos cálculos se realizarán más adeantea la hora de determinar la base y la ventana de lanzamiento.
Elementos orbitales
Los elementos orbitales se pueden definir como el conjunto mínimo de datos que, junto a la época (tiempoinicial t0) permite determinar la posición de un cuerpo en una órbita en cualquier instante de tiempo.
Los elementos clásicos (keplerianos) son los siguientes:
• a (o p): semieje mayor de la órbita, describe el tamaño de la misma.
• Excentricidad, e: se encarga de describir la forma de la órbita.
• Inclinación, i: mide el ángulo (entre 0 y 180º) entre el plano de referencia y el plano orbital, con elsentido indicado por el vector nodo, el cual se verá en el siguiente punto.
• Argumento del perigeo, w: ángulo que orienta la linea de ápsides en la dirección del vector excentricidad;se mide en la dirección del movimiento del satélite.
• Ascensión recta del nodo ascendente (RAAN), Ω: ángulo desde el primer punto de Aries al nodoascendente de la órbita. El nodo ascendente es el punto en el que el satélite pasa por el plano delecuador en dirección de Sur a Norte.
• Anomalía verdadera, θ : es el ángulo entre el vector excentricidad y el vector de posición del satélitemedido en la dirección del movimiento del satélite.
Para poder determinar una órbita en el espacio es necesario ubicarla primero en un plano. Para ello se haceuso del sistema de referencia perifocal (OxF yF zF ) centrado en el foco del plano y que coincide con el planode la órbita.
Figura 2.3 Sistema de referencia perifocal [21].
Se van a necesitar tres parámetros para determinar la órbita en el plano (a, e y w) y un cuarto parámetropara determinar la posición del tiempo (θ , E, M o ∆t).
Por otra parte, para una orbita arbitraria en el espacio, es necesario ubicar el plano orbital respecto aun plano de referencia. Para ello son necesarios dos parámetros más, conociéndose los 6 parámetros en suconjunto como elementos orbitales.

8 Capítulo 2. Descripción del perfil de misión a cumplir
El plano de referencia que se observa en la figura 2.4 será distinto según el tipo de misión, de forma que setomará el plano ecuatorial del planeta para órbitas planetocéntricas y el plano de la eclíptica para órbitasheliocéntricas [18].
Figura 2.4 Representación de elementos orbitales en órbita directa [21].
La intersección entre el plano orbital y el de referencia determina la línea de nodos. Por otro lado, laórbita corta la línea de nodos en dos puntos, determinando el nodo ascendente (aquel donde la trayectoria“asciende”) y el nodo descendente (donde esta "desciende"). El vector nodo −→n es un vector unitario en ladirección del nodo ascendente.
Según el valor de la inclinación las órbitas se pueden dividir en:
Tabla 2.1 Clasificación de órbitas según su inclinación.
Inclinación (º) Tipo de órbita
0 Ecuatorial
≈ 90 Polar
< 90 Directa
> 90 Retrógrada
En la figura 2.5 se muestra la misma órbita que en la 2.4 pero con sentido contrario en su movimiento.Puesto que el nodo ascendente se encuentra opuesto al caso anterior, el ángulo se mide al revés, obteniéndoseuna inclinación mayor de 90º. Dado que el nodo ascendente está en el lado opuesto, el RAAN es 180º mayormientras que el argumento del perigeo es suplementario y θ cambia de signo. El término retrógrado se debea que el movimiento del cuerpo se opone a la rotación del cuerpo central.
En el caso de que la órbita sea circular, esto es, e = 0 , se define el ángulo de argumento de latitud, u = w+θ .Por otro lado, si la órbita es ecuatorial, con inclinación nula, se define la longitud de perigeo como w+Ω.Por último, si se tiene que la órbita es circular y ecuatorial al mismo tiempo, se define la longitud verdaderacomo el ángulo entre el eje X y el vector de posición del satélite.
2.2 Análisis y justificación de órbitas 9
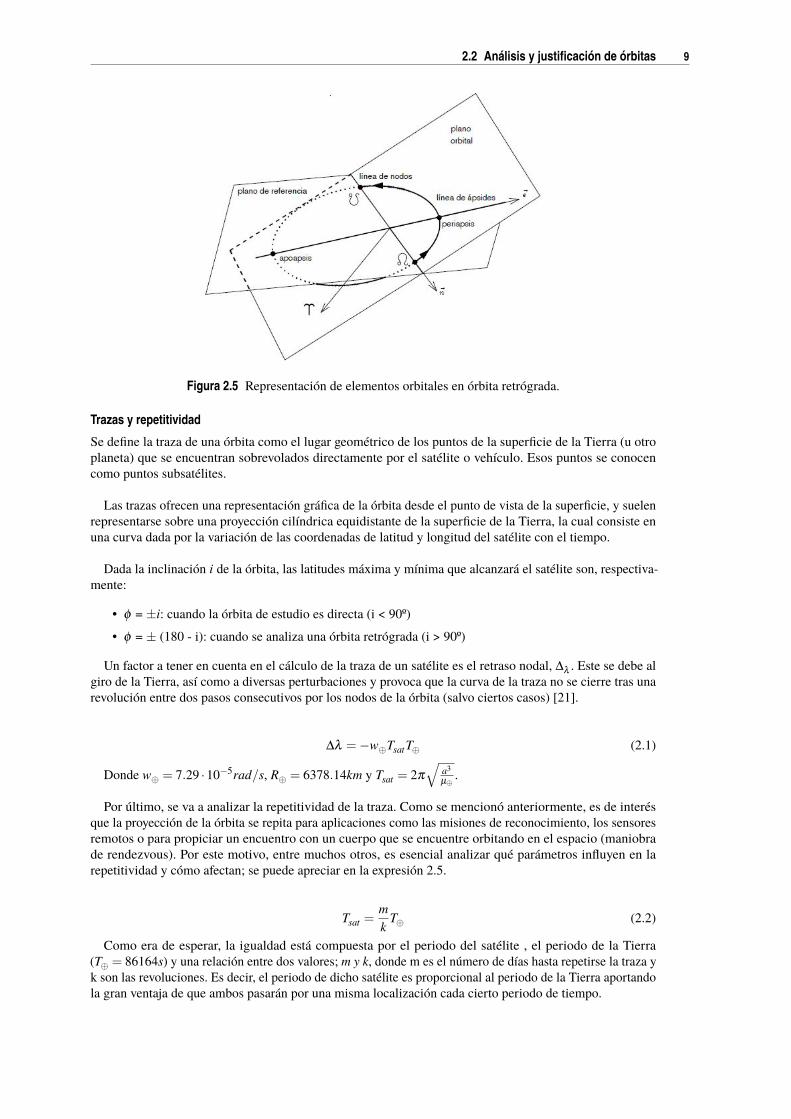
Figura 2.5 Representación de elementos orbitales en órbita retrógrada.
Trazas y repetitividad
Se define la traza de una órbita como el lugar geométrico de los puntos de la superficie de la Tierra (u otroplaneta) que se encuentran sobrevolados directamente por el satélite o vehículo. Esos puntos se conocencomo puntos subsatélites.
Las trazas ofrecen una representación gráfica de la órbita desde el punto de vista de la superficie, y suelenrepresentarse sobre una proyección cilíndrica equidistante de la superficie de la Tierra, la cual consiste enuna curva dada por la variación de las coordenadas de latitud y longitud del satélite con el tiempo.
Dada la inclinación i de la órbita, las latitudes máxima y mínima que alcanzará el satélite son, respectiva-mente:
• φ = ±i: cuando la órbita de estudio es directa (i < 90º)
• φ = ± (180 - i): cuando se analiza una órbita retrógrada (i > 90º)
Un factor a tener en cuenta en el cálculo de la traza de un satélite es el retraso nodal, ∆λ . Este se debe algiro de la Tierra, así como a diversas perturbaciones y provoca que la curva de la traza no se cierre tras unarevolución entre dos pasos consecutivos por los nodos de la órbita (salvo ciertos casos) [21].
∆λ =−w⊕TsatT⊕ (2.1)
Donde w⊕ = 7.29 ·10−5rad/s, R⊕ = 6378.14km y Tsat = 2π
√a3
µ⊕.
Por último, se va a analizar la repetitividad de la traza. Como se mencionó anteriormente, es de interésque la proyección de la órbita se repita para aplicaciones como las misiones de reconocimiento, los sensoresremotos o para propiciar un encuentro con un cuerpo que se encuentre orbitando en el espacio (maniobrade rendezvous). Por este motivo, entre muchos otros, es esencial analizar qué parámetros influyen en larepetitividad y cómo afectan; se puede apreciar en la expresión 2.5.
Tsat =mk
T⊕ (2.2)
Como era de esperar, la igualdad está compuesta por el periodo del satélite , el periodo de la Tierra(T⊕ = 86164s) y una relación entre dos valores; m y k, donde m es el número de días hasta repetirse la traza yk son las revoluciones. Es decir, el periodo de dicho satélite es proporcional al periodo de la Tierra aportandola gran ventaja de que ambos pasarán por una misma localización cada cierto periodo de tiempo.

10 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.1 Orbitas preliminares
Como se ha comentado anteriormente, el gran objetivo de este proyecto es el primer diseño del sistemade control de reacción de un satélite. Este sistema será de gran utilidad durante toda la misión ya que nosolo actuará en las maniobras de cambio de órbita o cambio de plano, sino que también será esencial en elmantenimiento de altitud del satélite.
Para poder diseñar el RCS es indispensable estudiar todos y cada uno de los impulsos a realizar durante lavida del satélite. A la hora de calcular un impulso, es imprescindible saber que tipo de órbita tiene el satéliteantes del mismo y cual quiere alcanzar despúes, estos datos definirán las energías y velocidades orbitales. Enel primer caso de estudio, tenemos una órbita a 200km de altitud durante 6 meses con un error de altitud de± 5000 metros. Este error tiene una clara implicación en la excentricidad de la órbita, exigiendo que sealo más circular posible y pudiendo descartar así las órbitas de alta excentricidad como pueden ser la órbitaTundra o la Molniya. Otro punto de importante consideración es la visibilidad y cobertura terrestre, parapoder aumentar la exactitud del momento a aplicar el impulso, se deberán considerar órbitas de traza repetida,así se sobrevolarán los mismos puntos cada cierto tiempo. Por último, para simplificar el apuntado de lospaneles solares al Sol, la órbita debería ser polar. En la práctica no es posible alcanzar exactamente los 90ºinclinación, pero se pueden conseguir órbitas muy próximas que tendrán más ventajas y funcionarán mejoren órbitas tan bajas.
Con el estudio preliminar que se acaba de realizar, se llega a la conclusión de que la órbita heliosíncrona oSSO (Sun-Synchronous Orbit) es la que se adapta mejor a todos los requisitos de partida.
Las órbitas heliosíncronas tienen su aplicación practica gracias a los efectos seculares del achatamientoterrestre, consecuencia de la perturbación del J2 que se estudiará en el capítulo 4. Este efecto hace que lalínea de nodos ya no sea paralela a sí misma, la hace girar a una velocidad angular Ω. Si se consigue que estavelocidad sea la misma que la de la rotación de la línea Tierra-Sol (Ω = ARM), el ángulo entre dicha línea yla de nodos permanecerá constante a lo largo del año; ese ángulo es δ y se representará en la figura 2.6. Dadaesta condición, se tendrá que verificar que:
cos(i) =−0.0989(Rtierra
Rtierra+hsat
)7/2 (2.3)
La igualdad expresada en la ecuación 2.3 llevará a un valor de inclinación mayor de 90º para cada va-lor de altitud, llegando a la conclusión de que existen múltiples órbitas heliosíncronas y todas ellas seránretrógradas. Esto tiene grandes ventajas para la misión. Una de ellas es la similitud entre las condicionesde iluminación de la superficie terrestre de órbita a órbita que permiten un gran ahorro en el sistema debaterías a emplear y en los mecanismos de apuntamiento de los paneles solares. Por otro lado, sus órbitas ca-si polares ofrecen una gran cobertura global de la esfera terrestre, haciendo que sean usadas ampliamente [21].
Para la representación de órbitas heliosíncronas se proyecta el Sol medio sobre un punto de una esfera conla Tierra en su centro y se traza el Meridiano Solar Medio. Este punto se desplaza en sentido antihorario conuna velocidad de 360/365.25 (º/dia), es lo que se conoce como la velocidad de la Ascensión Recta del SolMedio ARM .
En la figura 2.6 se pueden observar los elementos principales y necesarios para entender la órbita heliosín-crona; es importante tener en cuenta que en dicha representación los valores de los elementos orbitales sonarbitrarios por lo que no muestra una idea precisa de, por ejemplo, la inclinación, ya que debe ser mayor de90º. El parámetro mostrado como α corresponde con la Ascensión Recta del Sol medio.
La Ascensión Recta del Nodo Ascendente Ω, varía debido a las perturbaciones a las que está sometida laórbita y lo hará de igual forma que la Ascensión Recta del Sol Medio. Si definimos δ como la diferenciaentre ambas: δ = Ω−ARM , debe cumplirse δ = cte para toda órbita heliosíncrona, esto implica que la HoraSolar y la Hora Solar Media sean aproximadamente iguales.

2.2 Análisis y justificación de órbitas 11
Figura 2.6 Heliosincronismo.
El hecho de que δ sea constante también permite identificar una órbita heliosíncrona concreta:
• Si δ = 0: la órbita recibe el nombre de 12h-24h. El Nodo Ascendente cruzará el Ecuador al mediodíamedio y el Nodo Descendente lo hará a medianoche media.
• Si δ = 90: la órbita se conoce como 18h-6h y el Nodo Ascendente cruzará el Ecuador al atardecermedio mientras que el Nodo Descendente lo hará al amanecer medio.
Figura 2.7 Órbita alrededor de La Tierra según el valor de δ [21].
En el segundo caso expuesto de la figura 2.7 (δ = 90º) se da una configuración que será de gran utili-dad para esta misión ya que la ascensión recta del Sol y la RAAN del satélite forman aproximadamente90º, una perpendicularidad en los rayos solares que aportará gran eficiencia a los paneles solares. El estu-dio del RAAN se realizará en este capítulo en el momento de elección de la ventana de lazamiento ya queva a depender de la Ascensión Recta del Sol medio y esta, a su vez, del día del año que se realiza el lanzamiento.
Una vez que se han definido los conceptos básicos de la geometría espacial, se van a especificar todos losparámetros anteriores de acuerdo a la misión.
Se ha visto que el satélite se dejará caer desde una órbita de inyección a una nominal a 200 km de altitud,dónde pasará 6 meses realizando sus correspondientes maniobras de correción de altitud para luego subir auna órbita de 480 km. En dicha altitud se situará durante 12 meses más sin poder superar el tiempo de misiónde 2 años. Para estas distintas fases, se va a estudiar la altitud, inclinación, velocidad orbital, periodo delsatélite, el semieje mayor de la órbita (al ser heliosíncrona de baja excentricidad se considera circular) y laslatitudes cubiertas.

12 Capítulo 2. Descripción del perfil de misión a cumplir
Tabla 2.2 Fases de la misión.
Órbita Inyección Nominal 1 Nominal 2
Altitud (km) 280 200 400
Inclinación (º) 96.6 96.326 97.325
Latitudes cubiertas (φ ) ± 83.4 ± 83.67 ± 82.67
a (km) 6658.14 6578.14 6858.14
Periodo (s) 5406.8 5309.6 5652.2
Velocidad (km/s) 7.374 7.784 7.624
A continuación, se van a calcular las relaciones entre el periodo del satélite y el periodo de la Tierra paraanalizar la repetitividad de la traza. Si m es el número de días que tarda en repetirse la traza y k el número derevoluciones hasta que se repita, se tiene que Tsat = m/k ·T⊕.
Tabla 2.3 Repetitividad.
Órbita Nominal 1 Nominal 2
Relación (k/m) 16.228 15.244
Duración (meses) 6 12
Para hallar un número entero de revoluciones, se va renunciar a limitar el número de días que tarda enrepetirse la traza, por lo que será necesario un algoritmo matemático para la obtención de dicha altitud. Estealgoritmo recibe el nombre de “Método de la fracción continua”. Se toma como x = m/k:
Tabla 2.4 Valor de x para el método de la fracción continua..
Órbita Nominal 1 Nominal 2
Relación (m/k) 0.0616219 0.065599
Figura 2.8 Método de la fracción continua.
Cuantos más coeficientes tomemos, más cercana será la solución a la altura dada. En este caso, se van atomar tres coeficientes para la primera órbita nominal y tres para la segunda.
Como se puede apreciar en la tabla 2.5, el valor de k/m para la órbita nominal 1 es 211/13, o lo que es lomismo, dicha órbita realizará 211 revoluciones a la Tierra cada 13 días. Por otro lado, la relación k/m de laórbita nominal 2 es 3811/250 lo que quiere decir que realizará 3811 revoluciones cada 250 días. La trazavolverá a repetirse una vez pasados los días.
2.2 Análisis y justificación de órbitas 13
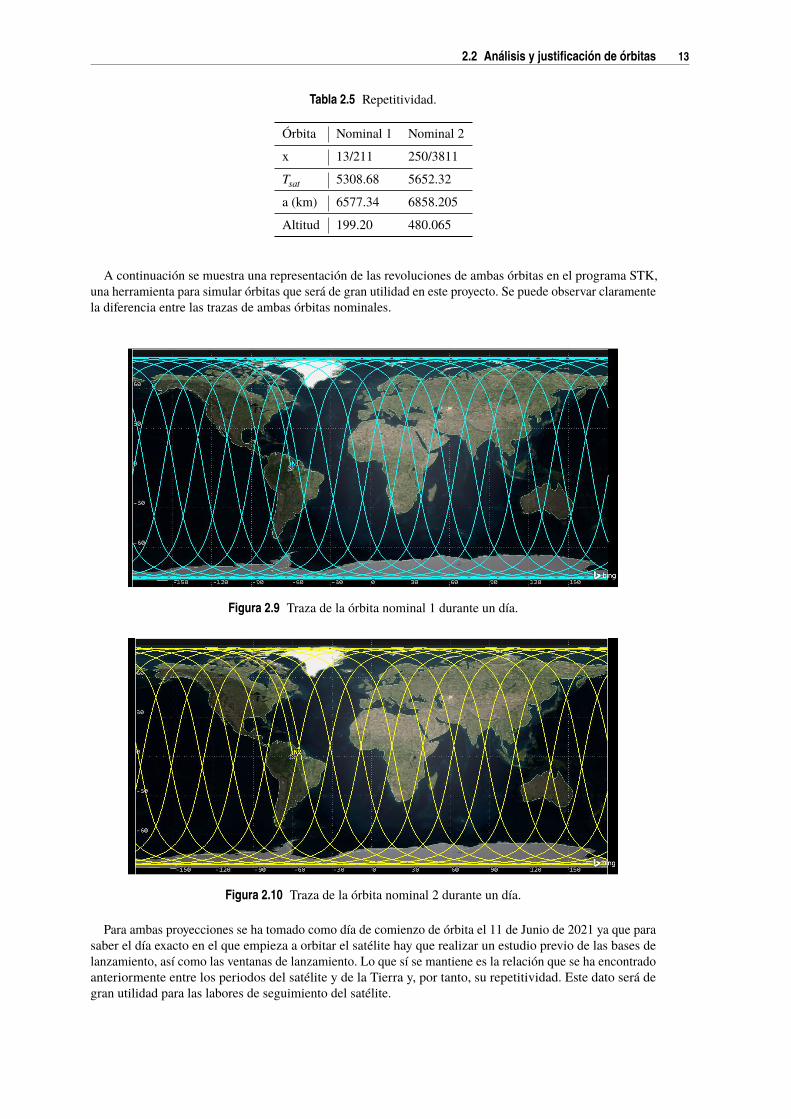
Tabla 2.5 Repetitividad.
Órbita Nominal 1 Nominal 2
x 13/211 250/3811
Tsat 5308.68 5652.32
a (km) 6577.34 6858.205
Altitud 199.20 480.065
A continuación se muestra una representación de las revoluciones de ambas órbitas en el programa STK,una herramienta para simular órbitas que será de gran utilidad en este proyecto. Se puede observar claramentela diferencia entre las trazas de ambas órbitas nominales.
Figura 2.9 Traza de la órbita nominal 1 durante un día.
Figura 2.10 Traza de la órbita nominal 2 durante un día.
Para ambas proyecciones se ha tomado como día de comienzo de órbita el 11 de Junio de 2021 ya que parasaber el día exacto en el que empieza a orbitar el satélite hay que realizar un estudio previo de las bases delanzamiento, así como las ventanas de lanzamiento. Lo que sí se mantiene es la relación que se ha encontradoanteriormente entre los periodos del satélite y de la Tierra y, por tanto, su repetitividad. Este dato será degran utilidad para las labores de seguimiento del satélite.

14 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.2 Eclipses
El estudio de eclipses es fundamental en un vehiculo espacial para poder determinar los gradientes detemperaturas, la posible inutilización de los paneles solares, el dimensionamiento de sistemas de baterías, etc.Permite que los mecanismos de apuntado de los paneles solares al Sol se simplifiquen considerablemente yse posibilitan largos periodos de iluminación solar. Por este motivo, el objetivo de esta sección es encontrarla circunferencia esférica que forma la sombra de la Tierra, a una determinada altura h, un cierto día del año.Para ello se van a realizar las siguientes hipótesis:
• Se considera la Tierra esférica.
• Se desprecian los efectos de refracción.
• Se supone el Sol a una distancia "infinita" e inmóvil durante todo el día.
Para abarcar el problema del estudio de eclipses, se parte de las coordenadas del Sol para el día dado a unaaltura h: (δ,AR).
Para calcular la circunferencia de eclipse se usa el sistema geocéntrico inercial ecuatorial con el fin de notener que introducir el movimiento de rotación de la Tierra. Además, se considera la situación más favorable,en la que el Sol se encuentra en el mismo plano que la órbita del satélite, tal y como se muestra en la figura2.22.
Figura 2.11 Situación geométrica [21].
En primer lugar se va a calcular Γ a partir de la figura 2.22:
sinΓ =R⊕
R⊕+h(2.4)
Seguidamente, si llamamos O al punto antipodal al punto solar:
δO =−δ (2.5)
ARO = AR+180 (2.6)
Para cada valor de Azimuth, Az ∈ [0. 360º] se tendrá que:
senδ = senδO cosΓ+ cosδO senΓcosAz (2.7)
cos∆(AR) =cosΓ− senδO senδ
senδO senδ(2.8)

2.2 Análisis y justificación de órbitas 15
Los parámetros de las ecuaciones 2.7 y 2.8 delimitan totalmente la circunferencia donde se experimentaríael eclipse a una altura h. Por lo tanto, se producirá el eclipse si:
AR ∈ [ARO−∆(AR),ARO +∆(AR)] (2.9)
Se va a realizar un análisis de los periodos de eclipse con el programa STK durante un año y medio, elresultado se muestra en la figura 2.12.
Figura 2.12 Periodo de eclipses representado en STK para la órbita de inyección.
Como puede observarse en la figura, el primer periodo de elipses solares dura desde el 18 de Octubrede 2021 (23:13:04.695 UTCG) al 22 de Febrero de 2022 (14:43:39.353 UTCG) y el segundo desde el 19Oct 2022 (06:05:11.483 UTCG) en adelante. Luego hay un periodo de eclipse lunar el 30 de Abril de 2022que dura desde las 19:42:54.938 UTCG a las 22:36:30.734 UTCG, con sus distintos periodos de Umbra yPenumbra. El día 21 de Diciembre de 2021 se produce el eclipse más largo, con una duración de 1625.596segundos (27 minutos).
Una vez analizada la situación general, es lógico tener en cuenta para el lanzamiento este periodo deeclipses, siendo necesario realizar el lanzamiento a partir del día 22 de Febrero de 2021 y antes del 19 deOctubre de 2022. Además, es conveniente evitar también el periodo de eclipse lunar del día 30 de Abril de2022 por lo que finalmente los días de lanzamiento disponibles se encuentran entre el 23 de Febrero y el 30de Abril de 2022.
Si se realizan ahora los calculos analíticamente se tiene que en el momento de la inyección, el satélitealcanzará una altitud de 280 km de forma que el valor del ángulo de eclipse que se obtiene es Γ = 73.32º.Para calcular la posición antipodal del Sol se va a partir de que el lanzamiento se realiza el 23 de Febrero de2021 y, con los datos del solsticio de verano, se ha calculado δ y AR. Con estas coordenadas y Γ se llega ala conclusión de que el satélite se encontrará eclipsado si δ = 21.927º y ∆AR = 71.68º.
El tiempo de eclipse en cada órbita se puede calcular con la expresión 2.10 por ser una órbita circular.
teclipse = 5406.8 · 71.68 ·2360
= 2153.11s (2.10)
En conclusión, el satélite en estudio permanecería eclipsado aproximadamente 36 minutos en cada órbita.
Un aspecto a tener en cuenta es el tipo de órbita que tendrá el satélite. Este se encuentra en una órbitaheliosíncrona con el Sol practicamente en la perpendicular, por lo que la situación estudiada no coincidiráexactamente con la situación real mientras que la mostrada en el análisis de STK que logra resultados másexactos y realistas.
16 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.3 Tiempos de visibilidad y cobertura
El hecho de que la hora solar y la hora solar media sean aproximadamente iguales implica que las condicionesde iluminación en el paso por el Ecuador sea casi constantes. Además, la Hora Solar Media (HSM) en elpaso por una latitud cualquiera al atravesar un paralelo también es constante. Esta propiedad es muy útil paralas tareas de observación y reconocimiento. Con el fin de establecer la posición del satélite y su velocidad enun cierto instante se usa la navegación o determinación de la órbita, mientras que para ajustar los parámetrosde la órbita y cumplir unas características determinadas se implantará el guiado y el control. Existen dosformas posibles de determinar la órbita de un satélite [21]:
• Determinación en tiempo real: proporciona la mejor de las estimaciones sobre la localización delsatélite en el momento presente.
• Determinación definitiva de la órbita: método muy útil para conocer los elementos orbitales en unaépoca ya pasada.
Para poder conocer la posición de un satélite en un tiempo futuro se propaga la la órbita a través de unproceso de integración de las ecuaciones del movimiento.
El proceso es el siguiente:
1. La estación proporciona los datos de las ecuaciones integradas a los centros de operación de misión.
2. Se realizan estimaciones sobre la posición del satélite en órbita.
3. Se pasa a la fase de guiado donde se envían órdenes de movimiento al satélite con el fin de ajustar suórbita.
Para ello, se emplearán datos para la estimación de la órbita siendo los principales la distancia de la estacióncorrespondiente al satélite cuya posición se quiere estimar y la velocidad de la línea de visión del satélitedurante su sobrevuelo de la estación. El sistema de tierra tendrá la función de dar soporte al satélite y recogerlos datos de misión generados por los instrumentos de a bordo del satélite y enviados a la estación, ademásde dar órdenes para su control.
Respecto a las estaciones de tierra, se podrá hacer uso de redes de estaciones de soporte en tierra yaestablecidas y utilizadas en otras misiones con anterioridad con la gran ventaja de reducir cuantiosamentelos costes de la misión, además de contar con un horario de disponibilidad amplio (se hará uso de la red ILRS).
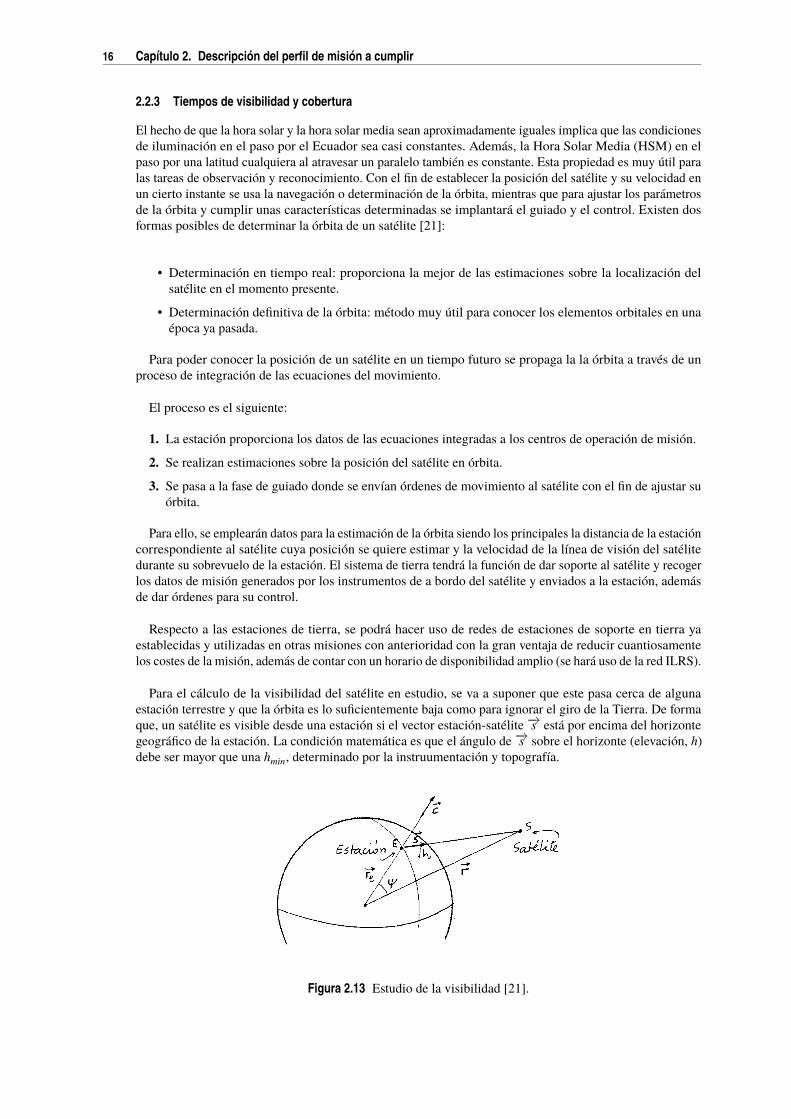
Para el cálculo de la visibilidad del satélite en estudio, se va a suponer que este pasa cerca de algunaestación terrestre y que la órbita es lo suficientemente baja como para ignorar el giro de la Tierra. De formaque, un satélite es visible desde una estación si el vector estación-satélite −→s está por encima del horizontegeográfico de la estación. La condición matemática es que el ángulo de −→s sobre el horizonte (elevación, h)debe ser mayor que una hmin, determinado por la instruumentación y topografía.
Figura 2.13 Estudio de la visibilidad [21].

2.2 Análisis y justificación de órbitas 17
De la figura 2.13 se tiene que:
h = arcsin−→s ·−→c (2.11)
Donde c =−→reR⊕
apunta al Cénit.
Por otro lado:
−→s =−→r −−→re√
r2 +R2⊕−2R⊕rcosψ
(2.12)
Por lo tanto, la expresión de la elevación se observa en la ecuación 2.13 y la condición de visibilidad esh > hmin
h = arcsinr cosφ −R⊕√
r2 +R2⊕−2R⊕rcosψ
(2.13)
Existe un análisis con el que es posible calcular la llamada "función de visibilidad" que proporciona laelevación para cada valor de t. Para el caso circular el análisis se simplifica y se pueden obtener directamentede las trazas del satélite. En este caso la circunferencia de visibilidad será la intersección entre el cono devisibilidad (de ángulo 90º - εmin y vértice en la estación) y una esfera de radio R⊕+hSAT , que luego hay queproyectar sobre la Tierra. En este caso se ha considerado la elevación como ε .
Figura 2.14 Círculo de visibilidad para un satélite de órbita circular.
Como se puede observar en la figura 2.14, el satélite será visible desde la estación en tierra siempre ycuando el ángulo de elevación que experimenta el radio vector que une la estación y el satélite (ε) supere uncierto ángulo denominado elevación mínima (εmin). Para poder establecer comunicaciones, el satélite debesuperar típicamente un valor de εmin = 5 sobre el horizonte.
A partir de el mínimo establecido anteriormente, es posible definir el ángulo máximo central de la tierra(λmax), y el ángulo de nadir máximo (nmax), medidos en el satélite desde la dirección de nadir a la estación detierra, así como el rango máximo en que el satélite será visible.
λmax = 90− εmin +nmax (2.14)
sinnmax = sinΓcosεmin (2.15)
Donde Γ es el radio angular que forma el vector que une el satélite y el centro de la Tierra con el vectorque une la estación y el centro de la Tierra (visto como ψ en 2.14).
Por otro lado, con el fin de obtener el tiempo de paso de cobertura de un satélite desde una estación, seintroduce el polo instantáneo de la órbita o el polo del plano de la órbita en el instante de observación. Lascoordenadas de este punto vienen dadas por:
φpolo = 90− i (2.16)

18 Capítulo 2. Descripción del perfil de misión a cumplir
λpolo = Lnodo−90 (2.17)
Donde Lnodo es la longitud del nodo ascendente de la órbita. De tal forma que, conociendo la longitud y lalatitud de la estación de Tierra, se puede calcular el ángulo central mínimo de la Tierra λmin:
sinλmin = sinφpolo sinφestacin + cosφpolo cosφestacin cos∆λ (2.18)
Con ∆λ = λestacin−λpolo y tiempo de visibilidad:
tvisibilidad =Tsat
180arccos
(cosλmax
cosλmin
)(2.19)
Donde TSAT es el periodo orbital del satélite.
Con la hipótesis planteada anteriormente de que el satélite en su órbita pasa justo por la vertical de laestación se pueden simplificar los cálculos dado que λmin = 0.
Respecto a la cobertura del satélite, hay que tener en cuenta que se está trabajando en una órbita baja locual tiene una clara implicación en el mayor número de estaciones terrestres que serán necesarias para podergarantizar la comunicación cada poco tiempo. Por lo tanto, los requisitos impuestos limitarán tanto el númerode antenas que debe portar el satélite como el número de estaciones. Una vez lanzado el satélite, se debeconseguir su máxima cobertura durante las primeras fases de la misión (despegue y primeras órbitas), de talforma que se garantice la inyección y el correcto funcionamiento del satélite en la órbita. Una vez que elsatélite se encuentre totalmente operativo en órbita y se verifique su correcto funcionamiento, el seguimientopasará a cargo de la estación correspondiente continuar con el desarrollo de la misión.
2.2.4 Elección de la base de lanzamiento y vehículo lanzador
En esta sección del proyecto se va a determinar la localización del cosmódromo más adecuado según el tipode órbita elegido.
A través de la aplicación de la trigonometría esférica, se puede determinar la inclinación de una órbita apartir del azimut de lanzamiento y de la latitud de la base de lanzamiento. Para ello, se van a partir de lassiguientes hipótesis:
• La trayectoria de lanzamiento es coplanaria con la órbita.
• Se desprecia el efecto de rotación de la Tierra.
Partiendo de la figura 2.15 que se muestra a continuación:
Figura 2.15 Geometría esférica.

2.2 Análisis y justificación de órbitas 19
Se deduce la siguiente ecuación tras aplicar la Ley de cosenos a la inclinación:
cos(i) =−cos(Az)cos(90)+ sen(Az)sen(90)cos(φ) (2.20)
Puesto que:
cos(i) = sen(Az)cos(φ) (2.21)
Para un Azimut = 90º, se tiene un valor de inclinación igual al de φ . En cualquier otro caso, i>φ .
Cada una de las bases posee un azimut máximo y mínimo de lanzamiento por razones geográficas,estratégicas y de seguridad. Además, para una mayor precisión, sería conveniente añadir la velocidad derotación de la Tierra en la base, con dirección Este:
vL = ωtierra · r · cosφ ≈ ωtierra ·Rtierra · cosφ (2.22)
Para el estudio de la base de lanzamiento, se van a considerar diez de los prncipales cosmódromos operativosactualmente; en la tabla 2.6 se pueden ver las coordenadas, así como sus valores máximos y mínimos deAzimut:
Tabla 2.6 Datos de las bases de lanzamiento.
Base Longitud (º) Latitud (º) Az mínimo (º) Az máximo (º)
Vandenberg -120.6 34.7 147 201
Kennedy -80.55 28.5 37 112
Kourou -52.8 5.2 -20 100
Pletsek 40.6 62.8 -30 90
Wallops -75.47 37.85 30 125
San Marco 40.2 -2.93 50 150
Baikonur 63.4 45.6 -20 90
Srisharikota 80.25 13.7 100 290
Kagoshima 131.083 31.233 20 150
Xichang 102.2 28.25 94 105
El proceso para encontrar la base que más se ajuste a nuestra órbita consiste en determinar el ángulo delanzamiento de forma que la inclinación sea la deseada o lo más cercana posible. Se va a partir de la ecuación2.21, donde la inclinación tendrá valores entre 0º y 180º y el azimut entre 0º y 360º, saliendo del Norte y ensentido horario. Seguidamente, a partir de la figura (2.5) se va a realizar una clasificación según el valor deAzimut.
Figura 2.16 Cálculo del azimut de lanzamiento.

20 Capítulo 2. Descripción del perfil de misión a cumplir
• Si 90º ∈ [Azmin,Azmax], imin = φ .
• Si 90º /∈ [Azmin,Azmax], imin se obtiene de la ecuación.
• Si 270º ∈ [Azmin,Azmax], imax = 180−φ .
• Si 270º /∈ [Azmin,Azmax], imax se obtiene de la ecuación.
De tal forma que, aplicando dicha figura y condiciones a cada una de las bases de estudio y, considerandoel valor de inclinación de la órbita en ambas altitudes calculado en una sección anterior (i = 96’6º), se haobtenido el siguiente rango de inclinaciones:
Tabla 2.7 Inclinaciones disponibles según la base de lanzamiento.
Base Inclinación mínima (º) Inclinación Máxima (º) Posibilidad de utilización
Vandenberg 63.40 107.14 Posible
Kennedy 28.50 58.07 No posible
Kourou 5.20 109.91 Posible
Pletsek 62.80 103.21 Posible
Wallops 37.85 66.74 No posible
San Marco -2.93 60.04 No posible
Baikonur 45.6 103.21 Posible
Srisharikota 16.90 166.30 Posible
Kagoshima 31.23 72.99 No posible
Xichang 28.51 31.69 No posible
Como se puede ver en la tabla 2.7, los lugares dónde se pueden alcanzar la inclinación deseada son:Vandenberg, Korou, Pletsek, Baikonur y Sriharikota. Se va a calcular para dichas bases los valores del azimutde lanzamiento con el valor de inclinación deseado, de tal forma se podrán descartar las bases cuyo valornecesario no pertenezca al intervalo de azimut permitido por seguridad y obteniendo un único valor posiblepara cada base. El resultado obtenido se muestra en la tabla 2.8.
Tabla 2.8 Valores de Azimut para la inclinación deseada.
Base Valores de Az (º) Valor posible
Vandenberg -8.02 188.02 188.02
Kourou -6.62 186.62 -6.62
Pletsek -14.56 194.56 -14.56
Baikonur -9.45 196.18 -9.45
Srisharikota -6.79 186.79 186.79
De los valores obtenidos, los que presentan signo negativo serían usados para inyectar al satélite en el nodoascendente de la órbita, mientras que los positivos corresponderían a la inyección en el nodo descendentede la misma. Para elegir la base más apropiada para la misión en cuestión, se van a estudiar los vehículoslanzadores posibles. Posteriormente, una vez se tenga el vehículo óptimo en cuanto a fiabilidad, precisión,capacidad y coste, se estudiarán las bases desde las que pueden ser lanzados.
2.2 Análisis y justificación de órbitas 21
Vehículo lanzador
Una vez obtenidas las bases desde las que es posible realizar un lanzamiento y alcanzar la órbita deseada, sevan a comparar los vehículos lanzadores que puedan operar en dichas zonas y se escogerá el óptimo para estetipo de misión.
Los lanzadores son vehículos cohete con misión de inyectar una carga de pago determinada en una órbitaconcreta. Estos se pueden clasificar según diferentes aspectos:
• El uso propio:– Convencionales o desechables: tienen un único uso.
– Reutilizables: es posible volver a utilizar algunas partes.
• Número de etapas:– Monoetapa.
– Multietapa.
• Tipo de combustible:– Combustible líquido.
– Combustible sólido.
En el caso de estudio se van a comparar vehículos multietapas ya que actualmente no es posible inyectaren órbita baja con una única etapa. Además, los escalonamientos permitiran un sistema propulsivo propiopara cada etapa, una mayor capacidad de carga de pago, un menor coste y el alivio de peso correspondienteal desprendimiento, así como su mayor aceleración.
Por otra parte, es necesario tener en cuenta el impulso específico que es capaz de proporcionar cadamotor, asumiendo que para un motor propulsor con mayor impulso específico característico, la cantidad decombustible consumido sería menor (menor peso en el vehículo y mayor alcance). Por lo que es convenienteutilizar vehículos lanzadores con un alto impulso específico.
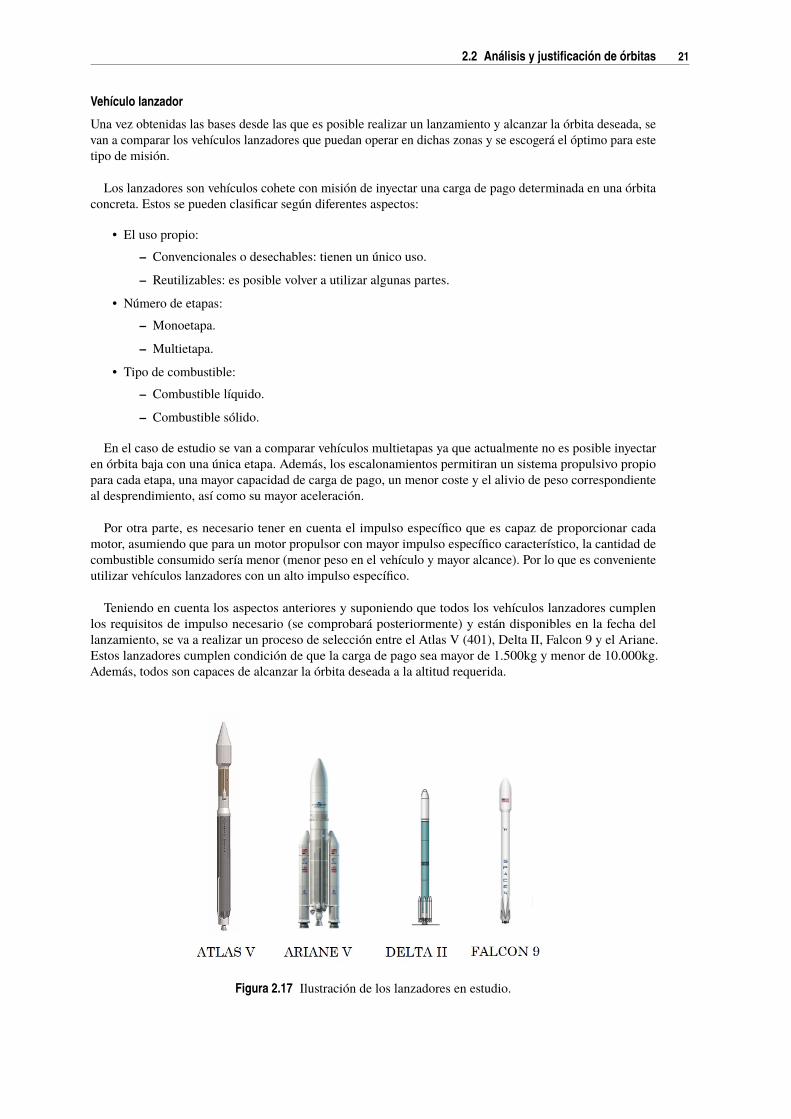
Teniendo en cuenta los aspectos anteriores y suponiendo que todos los vehículos lanzadores cumplenlos requisitos de impulso necesario (se comprobará posteriormente) y están disponibles en la fecha dellanzamiento, se va a realizar un proceso de selección entre el Atlas V (401), Delta II, Falcon 9 y el Ariane.Estos lanzadores cumplen condición de que la carga de pago sea mayor de 1.500kg y menor de 10.000kg.Además, todos son capaces de alcanzar la órbita deseada a la altitud requerida.
Figura 2.17 Ilustración de los lanzadores en estudio.
22 Capítulo 2. Descripción del perfil de misión a cumplir
Tanto el Atlas V como el Delta II y el Falcon 9 son vehículos lanzadores de origen Estadounidense,mientras que el Ariane V es de origen Europeo. Este aspecto tiene una clara implicación en las bases delanzamiento que pueden ser utilizadas, estando disponibles las de Cabo Cañaveral y Vandenberg para loscohetes americanos y las de Kourou y Guayana francesa para el Europeo.
Dado que la base de lanzamiento de Kourou y la de Vandenberg son dos sitios desde los que es posiblealcanzar la inclinación deseada según el estudio realizado anteriormente, cualquiera de los cuatro cohetesserían válidos para la misión. Por ese motivo, se va a proceder con una selección rigurosa. Se va a tomar comocriterio la capacidad de carga peso que tiene cada vehículo para inyectar en la órbita Heliosíncrona (SSO), lafiabilidad y los errores de inyección, suponiendo que el efecto de las fuerzas externas y vibraciones cumplen ellímite establecido para el satélite de estudio. Los valores asociados a cada lanzador se muestran en la tabla 2.9.
Tabla 2.9 Datos de lanzadores comerciales.
Vehículo lanzador Atlas V (401) [17] Ariane V [12] Delta II [2] Falcon 9 [24]
Capacidad SS0 (kg) 7392 9500 3200 5200
Fiabilidad (%) 100 94.6 100 90.9
Altitud de apogeo (km) ±586 ±80 ±9.3 ±15
Altitud de perigeo (km) ±4.6 ±1.3 ±25 ±10
Precisión inclinación (º) ±0.025 ±0.04 ±0.05 ±0.1
Coste (M$) 200 51 54 155
Como se puede observar en la tabla comparativa, todos los cohetes permiten lanzar la carga de pagoa la órbita requerida por lo que este factor no será determinante en el proceso de selección. Respecto ala fiabilidad, destaca el Atlas V y el Delta II con un 100% de lanzamientos exitosos. Seguidamente, enlo que se refiere a la precisión en la inserción, se puede observar que el Falcon 9 y el Delta II son losque tienen más precisión en términos generales ya que en el Ariane V y Atlas V, la altitud de perigeotiene un amplio rango de kilómetros, siendo este último el menos preciso en cuanto a dicha altitud. Porúltimo, se puede apreciar que los costes del Atlas V y el Falcon 9 supera con creces al del Ariane V y el Delta II.
Teniendo todos estos puntos en cuenta, se ha llegado a la conclusión de que entre los cuatro vehículoslanzadores comparados, es el Delta II la elección más razonable para la misión del proyecto. Además, debidoa que el vehículo lanzador elegido es de origen estadounidense, la base de lanzamiento más apropiada de lasdisponibles será, finalmente, la de Vandenberg.
Descripción del vehículo
El programa de lanzamiento de los vehículos Delta fue iniciado a finales de la década de 1950 por la NASA(National Aeronautics and Space Administration). Su diseño y desarrollo empezó siendo responsabilidad deuna compañía de sistemas perteneciente a la compañía Boeing, hasta que el 1 de diciembre del año 2006pasó a manos de United Launch Alliance. Este vehículo se configura en varias fases:
Fase I: Primera etapa con tanques de combustible de queroseno y oxígeno líquido que alimentan el motorprincipal RS 27 para iniciar el ascenso. Paralelamente, se usan boosters con un motor confeccionado congrafito epoxy (GEM). Según el número de boosters empleados (entre tres y nueve) se obtienen las diferentesversiones de configuración.
Fase II: La segunda etapa utiliza tanques con el combustible y oxidante necesarios para alimentar unmotor hipergólico Aerojet, capaz de encenderse y apagarse varias veces en vuelo.
Fase III: Esta última etapa es opcional y está formada por un motor de combustible sólido ATK Thiokolque proporciona la mayor parte del incremento en velocidad en inyecciones interplanetarias.
2.2 Análisis y justificación de órbitas 23
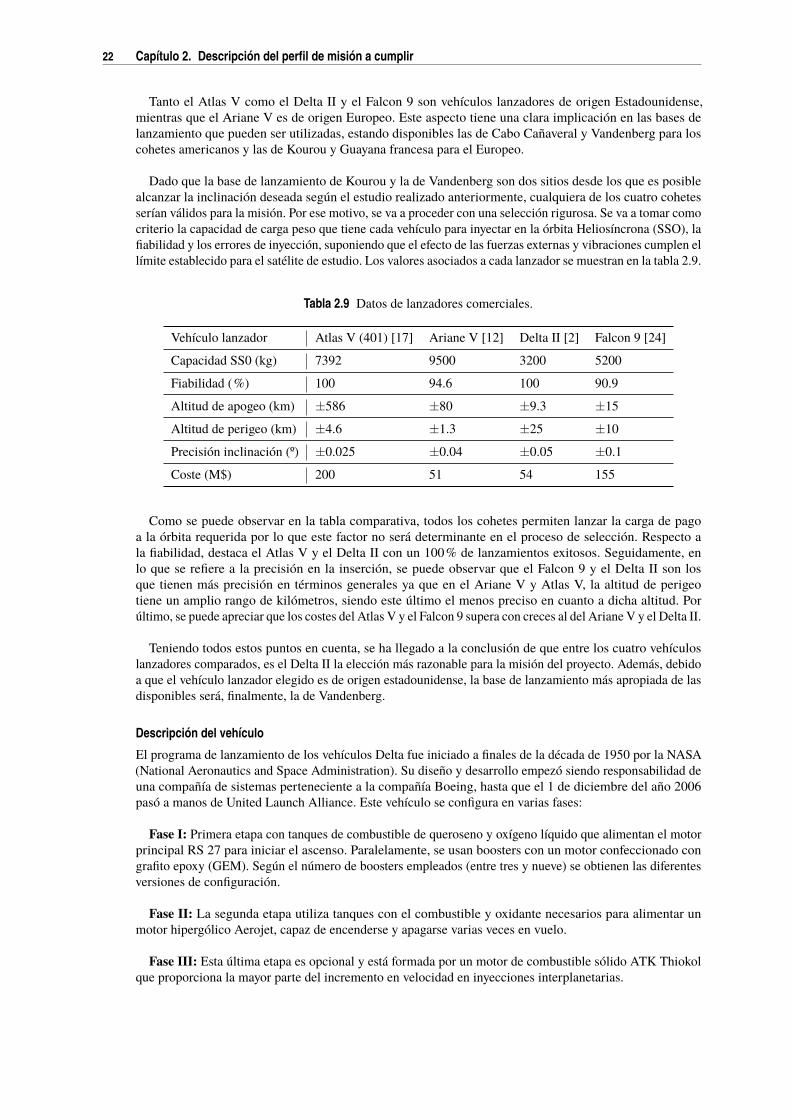
Figura 2.18 Lanzadores Delta II.
La interfaz entre el lanzador y el satélite se realiza a partir de un adaptador que actúa de elemento de uniónentre la carga del lanzador, e incorpora los sistemas de separación requeridos para desvincular el satélite dellanzador. Otra posibilidad de este lanzador es realizar un lanzamiento compartido con otra carga de pago,teniendo que emplear en ese caso un adaptador dual. Esta opción resulta útil en el caso en que la capacidadde carga del lanzador sea muy superior a la masa de la carga de pago a poner en órbita.
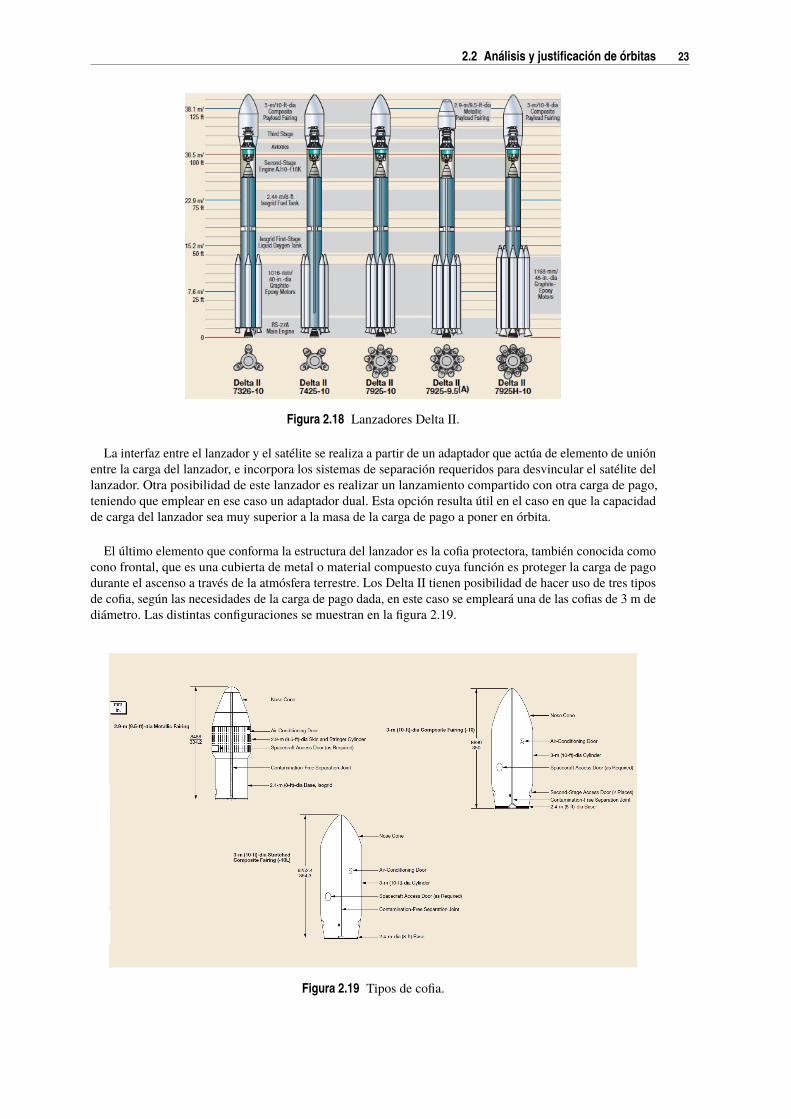
El último elemento que conforma la estructura del lanzador es la cofia protectora, también conocida comocono frontal, que es una cubierta de metal o material compuesto cuya función es proteger la carga de pagodurante el ascenso a través de la atmósfera terrestre. Los Delta II tienen posibilidad de hacer uso de tres tiposde cofia, según las necesidades de la carga de pago dada, en este caso se empleará una de las cofias de 3 m dediámetro. Las distintas configuraciones se muestran en la figura 2.19.
Figura 2.19 Tipos de cofia.

24 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.5 Ventanas de lanzamiento
En cuanto al ámbito de misiones espaciales, se denomina ventana de lanzamiento al periodo de tiempo en elque debe ser lanzada la carga de pago correspondiente con el fin de ser inyectada en la órbita adecuada. Estágeneralmente acotado entre dos fechas y determina dicho intervalo horario a partir de valores de la AscensiónRecta del Nodo Ascendente. Si se pierde la oportunidad de realizar el lanzamiento en dicho periodo, esnecesario esperar a la siguiente oportunidad, es decir, a la siguiente ventana de lanzamiento. Según el objetivode la misión, se deberá calcular el momento exacto en el cual realizar el lanzamiento con el fin de que elobjeto llegue a su destino en un momento exacto en el tiempo y siendo una tarea crítica en el caso de que senecesite coincidencia con otro objeto que también se encuentre en movimieto.
Para una una órbita baja heliosíncrona, el lanzamiento debe tener lugar en el momento en el que la órbita aalcanzar pase sobre el lugar de lanzamiento. Además, la posición de la base debe intersectar con el planoorbital al menos una vez al día, dando lugar a que:
• No existirá ninguna ventana de lanzamiento si:– En órbitas directas: φ > i
– En órbitas retrógradas: φ > 180− i
• Existe una ventana de lanzamiento si:– En órbitas directas: φ = i
– En órbitas retrógradas: φ = 180− i
• Existen dos ventanas de lanzamiento si:– En órbitas directas: φ < i
– En órbitas retrógradas: φ < 180− i
En el caso de estudio, el lanzamiento se realiza desde la base de lanzamiento de Vanderberg, cuya latitudes: φ = 34º 43’58”N = 34.7º. Además, como se trabaja con una órbita retrógrada con i = 96.6º:
φ = 34.7 < 180− i = 83.674 (2.23)
De forma que se tendrán dos ventanas de lanzamiento al día que se calcularán gracias a la trigonometríaesférica, representada en la figura 2.15.
En el momento de la inyección del satélite se necesita que este no esté eclipsado. De igual forma, habráque evaluar la actitud del mismo y desplegar los paneles en dirección perpendicular al Sol, es decir, que elplano del satélite forme 90º con la línea Tierra-Sol con el fin de asegurar un suministro de energía suficientepara toda la misión. Se puede observar un esquema en la figura 2.20. Para lograr esta configuración, habráque sumar 90º a la ascensión recta del Sol, obteniendo así el RAAN requerido para la órbita (expresión 2.24).
RAAN : Ω = ARSOL +90 (2.24)
Debido a las perturbaciones existentes en el espacio, el plano del satélite varía con la expresión 2.25:
Ω =−32
nR2
tierra
p2 J2(5cos i2−1) (2.25)
Para que el plano del satélite y el plano Tierra-Sol formen durante toda la primera fase un ángulo casiperpendicular se va a tomar un valor del RAAN ligeramente superior:
RAAN : Ω = ARSOL +120 (2.26)
De esta forma el ángulo estará entre 90±30, totalmente suficiente para abastecer al vehículo espacial.En capítulos posteriores se calcularán los días que tarda el satélite en caer de 280km a 205km y se estudiará siel valor del RAAN pertenece a dicho rango. Si no se cumpliese, habrá que realizar una maniobra de cambiode RAAN. El mismo estudio debe hacerse tras el cambio de órbita nominal.

2.2 Análisis y justificación de órbitas 25
Figura 2.20 Plano del satélite desde el espacio.
Figura 2.21 Representación del RAAN.
Basándonos en la figura representativa de la geometría espacial, se tiene que el ángulo formado entre labase de lanzamiento y el primer punto de Aries será Ω+λu. Aplicando la Ley de Cosenos:
cos(Az) =−cos(i)cos(90)+ sen(i)sen(90)cos(λu) (2.27)
cos(λu) =cos(Az)
sen(i)(2.28)
sen(λu) =sen(Az)sen(φ)
sen(i)(2.29)
Se debe cumplir la siguiente relación:
Ω+λu = LST = GST +λ = GST0 +λ +ωtierra · t (2.30)
t =Ω+λu−λ −GST0
ωtierra(2.31)
Además del factor de los paneles solares y su perpendicularidad al Sol, hay que tener en cuenta las propiasrestricciones de la base a la hora de llevar a cabo un lanzamiento. Este estudio se recoge en el Apéndice Ay se llega a la conclusión de que habría que evitar las épocas del año en las que el tiempo es lluvioso o nublado.

26 Capítulo 2. Descripción del perfil de misión a cumplir
Considerando dichas restricciones y dado que el satélite se vale de la energía captada por los panelessolares para su correcto funcionamiento, la inyección no puede ser llevada a cabo si en ese instante el satélitese encuentra eclipsado. Por otro lado, el factor más influyente a la hora de elegir una ventana de lanzamientoes la densidad atmosférica que, como se verá posteriormente, depende en gran medida de factores externosdefinidos según el día y año.
En el apéndice C.1 se estudia detalladamente el ciclo solar de 11 años y su repercusión en la densidad auna cierta altitud orbital según la fecha del año. Esto quiere decir que el estudio de eclipses no es el únicofactor a tener en cuenta a la hora de calular una ventana de lanzamiento si no que también afectarán lasperturbaciones, las cuales han sido estudiadas detalladamente para poder disminuir el combustible invertidoen la propulsión del mantenimiento en órbita.
La fechas permitidas para el lanzamiento según el período de eclipses van del 23 de Febrero de 2022 al 30de Abril de 2022, mientras que el estudio del ciclo solar afirma que las fechas con una intensidad de radiaciónsolar baja se encuentran entre Julio de 2021 y Agosto de 2023, cuanto antes se realice el lanzamiento teniendoen cuenta las restricciones, menor será la actividad solar y por tanto la resistencia atmosférica. Por esta razón,se ha decidido realizar el lanzamiento el 23 de Febrero de 2022.
Basándo el estudio de la misión en la duración de cada fase calculada en el capítulo 6, se tienen lassiguientes fechas:
Tabla 2.10 Cronología de la misión.
Fase Fecha
Lanzamiento 23/02/2022
Inyección 24/02/2022
Llegada a órbita nominal 1 24/05/2022
Fin de la órbita nominal 1 24/11/2022
Llegada a órbita nominal 2 26/11/2022
Fin de la órbita nominal 2 26/11/2023
En cada una de esas órbitas se producen eclipses, en la sección anterior se ha estudiado el periodo deeclipses en la lanzamiento con el fin de asegurar que el satélite no está eclipsado en ese momento; en estecaso, se va a estudiar para la órbita nominal 1 y la órbita nominal 2. Este análisis permite calcular el númerode días totales en los que el satélite está eclipsado y así dimensionar el sistema de baterías como fuente depotencia si fuera necesario.
El número de días que se encuentra el satélite eclipsado se muestra en la tabla 2.11.
Tabla 2.11 Cronología de la misión.
Fase Primer tramo Segundo tramo Total
Órbita nominal 1 56 días 40 días 96 días
Órbita nominal 2 57 días 25 días 82 días
Como se puede observar, ambas órbitas tienen periodos de tiempo en las que están eclipsadas durante untramo de segundos/minutos durante el día. En el capítulo 7 se estudiará la viabilidad del sistema de bateríasmencionado anteriormente.
Por otro lado, se va a analizar la ventana de lanzamiento para lanzar en una hora permitida por la base.

2.2 Análisis y justificación de órbitas 27
Figura 2.22 Periodo de eclipses representado en STK para la órbita nominal 1.
Figura 2.23 Periodo de eclipses representado en STK para la órbita nominal 2.
Para el cálculo de λu, al ser la órbita retrógada, se escoge la segunda solución del coseno, es decir: λu =184.566º. Los demás parámetros de la ecuación son w⊕ = 0.004178 º/s (velocidad angular de la Tierra) yλbase = -120.6º (longitud de la base de lanzamiento, en este caso Vanderberg). El signo negativo es debido aque esta base se encuentra al oeste.
Por último, se va a proceder a realizar el cálculo de GST0 el día del lanzamiento, para ello se va a partir delvalor conocido del GST0 el 1 de Enero de 2000, 280.46º, y vamos a propagarlo hasta el día del lanzamiento.Será necesario conocer los Días Julianos correspondientes a ambas fechas.
GST 0(t0) = 280.46 (2.32)
GST 0(tl) = GST 0(t0)+w⊕ ·∆t (2.33)
Donde ∆t = JD(23/02/2022) - JD(01/01/2000) = 4868.5 días y tl es el tiempo de lanzamiento, de formaque:
GST 0(tl) = 187.7 (2.34)
Las ventanas de lanzamiento se muestran en el Apéndice A.

28 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.6 Maniobras previas a la inyección en la primera órbita nominal
Como se ha podido calcular en capítulos anteriores, el lanzamiento se realizará desde la base de Vandenbergy hacia el suroeste, con un azimut de lanzamiento de Az = 188.02º con el fin de poder alcanzar una altitud de280km y una inclinación del plano orbital de 96.6º.
El perfil de vuelo típico para la misión de dos etapas se presenta a continuación:
Figura 2.24 Perfil de misión de despegue en LEO.
Como se vió anteriormente, el perfil de misión de despegue del vehículo lanzador Delta II tiene tres fasesdivididas según las igniciones de sus motores cohete. Cuando se produce el primer corte del motor de lasegunda etapa o SECO 1 (Second stage Engine CutOff), el vehículo describe una trayectoria de Hohmann quellevará al satélite a la órbita deseada. Cuando el vehículo se encuentra bastante cerca de la órbita a alcanzar,se efectúa un nuevo encendido de la segunda etapa, el cual proporciona el impulso necesario para inyectar elsatélite en la órbita en cuestión. Unos segundos después se produce el segundo corte de este motor o SECO 2y finalmente se procede a la separación del vehículo satélite del resto del conjunto. El proceso que se acabade describir se puede observar en la figura 2.25.
Figura 2.25 Fases del lanzador Delta II.

2.2 Análisis y justificación de órbitas 29
Se van a estudiar las maniobras y transferencias utilizadas en la actualidad para llevar a cabo un cambio deórbita. Para ello, es esencial definir la diferencia entre maniobra y transferencia:
• Maniobra: pueden realizarse siempre y cuando las órbitas inicial y final tengan algún punto en común.Se va a aplicar la maniobra de cambio de plano, cuyo análisis está implementado en el Apéndice B,apartado 1.
• Transferencia: si la órbita final no tiene ningún punto en común con la órbita inicial, no es posiblerealizar la maniobra con un solo impulso si no que será necesario realizar una transferencia con almenos dos maniobras intermedias de un sólo impulso. Las más utilizada en órbitas de baja altitud es latransferencia de Hohmann, Apéndice B, apartado 2.
Dado que el vehículo lanzador no tiene el 100% de precisión en el momento de la inserción orbital, esnecesario realizar maniobras de corrección. Se vió anteriormente en el Manual del lanzador Delta II quehabía un rango de ±25 km en la altitud del perigeo, en cuanto a la altitud del apogeo existe una imprecisiónde ± 9.3km y ±0.05º para la inclinación.
Los errores en la inclinación de la órbita requerida se corregirán por medio de una maniobra de cambio deplano mientras que los errores de inyección en apogeo o perigeo dan lugar a que sea necesario realizar unatransferencia de Hohmann. De forma que el satélite realiza primero la maniobra de cambio de plano asociadaa la inclinación para luego realizar una transferencia de Hohmann entre la órbita final y la inicial una vez queambas se enmarcan dentro del mismo plano, o viceversa. Los impulsos correspondientes a la inyeción semuestran en la tabla 2.35.
Tabla 2.12 Impulso necesario tras la inyección.
Elemento Imprecisión Maniobra ∆V (km/s)
i ±0.05º Cambio de plano 0.006752
a +25 km Transferencia de Hohmann 0.014485
a -25 km Transferencia de Hohmann 0.014567
Se ha calculado que es necesario un impulso de 6.75 m/s para lograr un cambio de plano orbital con∆i=0.05º si este se realiza en la órbita final. Por otro lado, se han estudiado los dos casos que pueden darseen la inserción, que el satélite quede a una altitud mayor de la deseada o a una altitud menor, siendo el másrestrictivo el que tiene un error de -25 km. Este resultado era de esperar ya que el satélite se encontrará máscerca de la Tierra y por tanto la atracción gravitatoria es mayor, resultando más costoso impulsar el satélite auna órbita superior. En conclusión, el impulso necesario para corregir la inyección es:
∆Viny = 0.02132kms
(2.35)
Estos impulsos mantienen al satélite en la altitud e inclinación deseada en el momento de la inyecciónen el caso en el que este sea inyectado con el máximo error, asegurando así que se tendrá el combustiblesuficiente incluso para el peor de los casos.
Una vez que el satélite ha sido insertado en la órbita de inyección, hay que dejar que el vehículo caiga porsu propia pérdida de energía por rozamiento con la atmósfera hasta que alcance la altitud de la órbita nominal.Esta bajada se va a realizar en primera instancia por caída libre con el objetivo de no incluir más propulsanteen el satélite y aumentar su masa inicial. No obstante, en el capítulo 6 se va a calcular cuanto tiempo tardaríaen llega al satélite a su primera órbita nominal de 200km y si este valor fuera muy alto se consideraría elhecho de aplicar un impulso que lleve al satélite a dicha órbita en menos tiempo.

30 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.7 Maniobras para el cambio de órbita
Por otro lado, debido a que en una órbita heliosíncrona un cambio de altitud lleva asociado un cambiode inclinación, en el paso de una órbita heliosíncrona de 200km de altitud (órbita inicial) a otra órbitaheliosíncrona de 480 km de altitud (órbita final) se tendrá hi,h f , ii, i f , que son, respectivamente, las altitudese inclinaciones inicial y final.
Para la misión planteada, se tiene que la configuración que se presenta en la tabla 2.13.
Tabla 2.13 Valores de altitud e inclinación para ambas órbitas nominales.
Órbita Altitud (km) Inclinación (º)
Inicial 200 96.326º
Final 480 97.325º
Dado que hay que realizar tanto un cambio de plano como un cambio de altitud, se va a realizar de nuevouna transferencia de Hohmann para pasar a los 480km de altitud sobre el radio de la Tierra y posteriormenteun cambio de plano en la órbita de 480km, se elige este orden ya el valor del impulso de la maniobra decambio de plano depende de la velocidad y esta disminuye cuando aumenta la altitud; es la maniobra máscostosa y conviene minimizar su impulso asociado. En la tabla 2.36 viene reflejado el valor del impulsonecesario para la transferencia.
Tabla 2.14 Impulso necesario para el cambio de órbita nominal.
Elemento Maniobra ∆V (km/s)
a Transferencia de Hohmann 0.16054
i Cambio de plano 0.13292
Finalmente se calcula que el incremento de velocidad necesario total es:
∆Vnom = 0.29346kms
(2.36)
Figura 2.26 Maniobra de Hohmann entre órbitas nominales.

2.2 Análisis y justificación de órbitas 31
2.2.8 Otras maniobras
En este apartado hay que determinar los tipos de maniobras más adecuadas para mantener la altitud delvehículo, realizar correcciones e implementar giros.
En cuanto al mantenimiento de la altitud orbital que se debe llevar a cabo durante los 6 meses en la órbitanominal 1 y el año en la órbita nominal 2, debido a que la órbita correcta no tendría ningún punto en comúncon las órbitas resultantes, no sería posible alcanzar la órbita original con una maniobra de un solo impulso.Por dicho motivo, se realizará una transferencia de Hohmann desde los 195km a los 205km en la primeraórbita nominal y desde los 475km a los 485km en la segunda órbita nominal. Los incrementos de velocidadesnecesarios para realizar estos impulsos se muestran en la tabla 2.15.
Tabla 2.15 Valores del impulso de Hohmann para el mantenimiento.
Órbita ∆Viny (km/s)
Nominal 1 0.00591676
Nominal 2 0.00555814
El número de impulsos correspondiente a esta transferencia serán calculados en el capítulo 6, cuando sehaga el estudio sobre el decaimiento del satélite y del periodo de tiempo entre impulsos. Es necesario conocerprimero valores como la densidad de la atmósfera a dicha altitud, o la masa total con el propulsante incluido;una vez conocidos estos parámetros se hará un proceso iterativo para estimar la masa total necesaria y así,conocer el número de impulsos que se tendrán que realizar a lo largo de la misión.
Por otro lado, para las correcciones suelen darse pequeños impulsos que cambien el valor de la altitud o dela inclinación de manera ínfima. Centrándonos en el momento de la caída libre del satélite desde la órbita deinyección de 280km a la órbita nominal 1 de 200km se tiene la siguiente configuración:
Tabla 2.16 Valores de altitud e inclinación para la órbita de inyección y la nominal 1.
Órbita Altitud (km) Inclinación (º)
Inyección 280 96.6º
Nominal 1 200 96.326º
Como se puede ver en la tabla 2.17, hay un cambio tanto de inclinación como de altitud de una órbita aotra. El cambio de altitud se realizará con la caída libre, sin aplicar impulsos, mientras que el cambio deinclinación habrá que aplicarlo mediante un cambio de plano al llegar a la primera órbita nominal, cuyo valorde incremento de velocidad es:
∆Vpren1 = 0.037226kms
(2.37)
Finalmente, el estudio de las maniobras para los giros se va a centrar especialmente en los cambios deorientación de los ejes del satélite al cambiar de órbita con el fin de mantenerlos en la dirección deseada yaque interesa que el eje z apunte durante toda la misión al centro de la Tierra y, como el eje x va en la direcciónde vuelo, el eje y apuntea la dirección opuesta de los rayos solares. Estos impulsos se realizarán duranteun periodo muy corto de tiempo mediante thrusters. Otra maniobra que necesita del sistema de propulsiónes la de orientar el vehículo a la hora de realizar una maniobra, por ejemplo, en el caso de que se quierafrenar el satélite, habrá que orientarlo en la sentido opuesto a su trayectora para que ese impulso reste velocidad.

32 Capítulo 2. Descripción del perfil de misión a cumplir
2.2.9 Tipos de órbitas más adecuadas para cumplir la misión
Tras haber realizado el estudio sobre las maniobras más adecuadas según el cambio de órbita, se va a mostraruna tabla con los impulsos necesarios para corregir el error del lanzador, situarse en la inclinación correctaen la órbita nominal, pasar de los 195km a los 205km, pasar de la órbita de 200km a la órbita de 480km ypasar de los 475km a los 485km:
Tabla 2.17 Valores del incremento de velocidad en las distintas maniobras.
Maniobra ∆Viny (m/s)
Corrección de altitud en la inyección 14.567
Corrección de inclinación en la inyección 6.752
Corrección a la órbita nominal 1 37.226
Nominal 1 5.91676
Cambio de órbita nominal (altitud) 160.54
Cambio de órbita nominal (inclinación) 132.92
Nominal 2 5.55814
Como se ha mencionado anteriormente, estos valores de incremento de velocidad no son los totales ya queel de la nominal 1 y la 2 necesitan ser repetidos varias veces durante su periodo de misión a dicha altitud. Enel capítulo 6 se analizarán los incrementos de velocidades para el mantenimiento de la altitud orbital.
3 Descripción preliminar del satélite objetode estudio
El objetivo de este capítulo es realizar una descripción de las características del satélite en cuestión. Seva a partir de un satélite con una geometría, masa e inercias determinadas basadas en los requisitos
particulares de cada uno de sus elementos y los datos de la misión, proporcionados directamente por elfabricante del vehículo espacial. Tras un proceso iterativo sobre el estudio del mantenimiento en órbita delsatélite y del peso necesario para el sistema propulsivo (combustible y RCS), en el capítulo 7 se van a adaptarlos valores proporcionados de masa y geometría a unos valores nuevos, si fuera necesario, de forma que seobtengan los óptimos de acuerdo a los resultados. Por otro lado, las capacidades del lanzador y su espaciodisponible para la carga de pago imponen limitaciones directas tanto a la masa del satélite como a su volumen,por lo que el lanzador deberá ajustarse a los valores que se muestren a continuación.
3.1 Masa e inercias
La masa, el centro de gravedad y los momentos de inercia del vehículo son las propiedades másicas másrelevantes en el diseño de la misión espacial y del propio satélite. Uno de los factores más importantes atener en cuenta es el hecho de que el satélite debe ser compatible con el vehículo lanzador y no excederlas limitaciones expuestas por el mismo, por este motivo, conocer la masa del satélite es de significativaimportancia, incluso si el valor del peso no es particularmente crítico. Por otro lado, es necesario asegurarque el satélite lleva a bordo la cantidad de propulsante requerida para las maniobras de propulsión.
Teóricamente, la masa de la carga de pago suele estar entre el 17% y 50% de la masa seca del satélite(masa total sin considerar la masa de propulsante), presentando como promedio un 30% aproximadamente.
En el caso de estudio, se tiene una masa seca (sin propulsante ni sistema de propulsión) de 850kg, siendola masa B.O.L (Principio de vida) la masa seca más la de propulsante y la del subsistema para el Control deÓrbita y Actitud (RCS) que no podrá ser calculada hasta que se analicen todos los incrementos de velocidadesnecesarios para cumplir la misión y se diseñe al completo el sistema de control a reacción. Teniendo encuenta que al final de la vida del satélite este habrá consumido toda la masa de propulsante, se obtendrá denuevo una masa E.O.L (End of life) practicamente igual a la masa seca.
Tabla 3.1 Inclinaciones disponibles según la base de lanzamiento.
Masa Seca 850kg
Masa B.O.L ≈Masa seca + Masa propulsante + Masa sistema RCS
Masa E.O.L ≈Masa seca
33
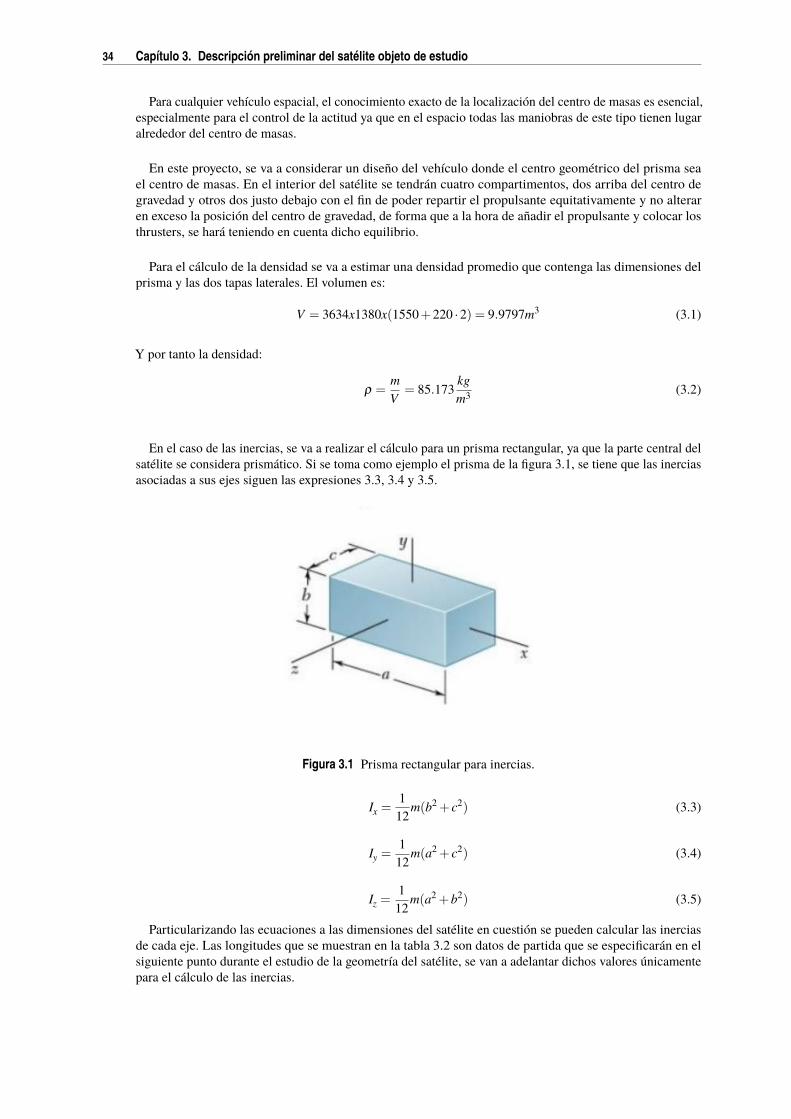
34 Capítulo 3. Descripción preliminar del satélite objeto de estudio
Para cualquier vehículo espacial, el conocimiento exacto de la localización del centro de masas es esencial,especialmente para el control de la actitud ya que en el espacio todas las maniobras de este tipo tienen lugaralrededor del centro de masas.
En este proyecto, se va a considerar un diseño del vehículo donde el centro geométrico del prisma seael centro de masas. En el interior del satélite se tendrán cuatro compartimentos, dos arriba del centro degravedad y otros dos justo debajo con el fin de poder repartir el propulsante equitativamente y no alteraren exceso la posición del centro de gravedad, de forma que a la hora de añadir el propulsante y colocar losthrusters, se hará teniendo en cuenta dicho equilibrio.
Para el cálculo de la densidad se va a estimar una densidad promedio que contenga las dimensiones delprisma y las dos tapas laterales. El volumen es:
V = 3634x1380x(1550+220 ·2) = 9.9797m3 (3.1)
Y por tanto la densidad:
ρ =mV
= 85.173kgm3 (3.2)
En el caso de las inercias, se va a realizar el cálculo para un prisma rectangular, ya que la parte central delsatélite se considera prismático. Si se toma como ejemplo el prisma de la figura 3.1, se tiene que las inerciasasociadas a sus ejes siguen las expresiones 3.3, 3.4 y 3.5.
Figura 3.1 Prisma rectangular para inercias.
Ix =1
12m(b2 + c2) (3.3)
Iy =1
12m(a2 + c2) (3.4)
Iz =1
12m(a2 +b2) (3.5)
Particularizando las ecuaciones a las dimensiones del satélite en cuestión se pueden calcular las inerciasde cada eje. Las longitudes que se muestran en la tabla 3.2 son datos de partida que se especificarán en elsiguiente punto durante el estudio de la geometría del satélite, se van a adelantar dichos valores únicamentepara el cálculo de las inercias.

3.1 Masa e inercias 35
Tabla 3.2 Dimensiones del satélite.
a 3634 mm
b 1380 mm
c 1790 mm
De forma que las inercias del satélite sin la masa de propulsante ni la del sistema RCS (masa seca) son losque se muestran en la tabla 3.3.
Tabla 3.3 Inercias con la masa seca.
Ix 361.85 kg ·m2
Iy 1162.38 kg ·m2
Iz 1070.31 kg ·m2
La cantidad de combustible total que necesita el vehículo para realizar las distintas maniobras se va estimara partir de las siguientes expresiones:
∆V = gIsp lnm0m f
= gIsp lnmm +m f
m f(3.6)
mm = m f
[e∆V/gIsp −1
]= m0
[1− e∆V/gIsp
](3.7)
Donde mm es la masa de combustible considerado, m f es la masa seca del satélite, m0 la masa total delvehículo, Isp el impulso específico y g la aceleración de la gravedad. El impulso específico es el impulsototal por unidad de peso de propulsor; define el rendimiento de un sistema de propulsión de cohetes, a mayornúmero de impulso específico, un mejor rendimiento.
Dado que es necesario conocer todos los impulsos que hay que realizar para poder estimar la masa depropulsante total, se va a partir de una masa de propulsante estimada para poder realizar un estudio iterativosobre la cantidad propulsante en el capítulo 6, en el cual también se va a diseñar el sistema RCS y se conocerántodos y cada uno de los ∆V . Por otro lado, como el propulsante se va a repartir equitativamente en el interiordel vehículo no habrá cambios en el centro de masas del mismo.
Dicha masa de propulsante se va a estimar a partir de un método iterativo implementado en MatLab.Consiste en partir de la masa final del satélite, considerada anteriormente como aproximadamente el valor dela masa seca; y mediante un proceso inverso se procede al cálculo de la masa en el momento justo anterior arealizar el incremento de velocidad conocido. Así, sucesivamente se consigue llegar al inicio de la misión conun valor estimado de la masa inicial. La diferencia entre la masa inicial y la final será la cantidad de propul-sante consumido. Para poder hacer este análisis se deberá conocer el número de impulsos a aplicar en cadauna de las órbitas nominales para lograr el mantenimiento del satélite, es por ello que consiste en un proce-so iterativo entre las dos funciones hasta encontrar el valor de masa inicial más próximo a la solución de ambas.
Este valor de la masa es una estimación que deberá perfeccionarse en el momento en el que se dimensioneel sistema de control de acitud (RCS) ya que el peso del mismo no ha sido tenido en cuenta para el cálculodel propulsante. Aún así, es una buena aproximación inicial.
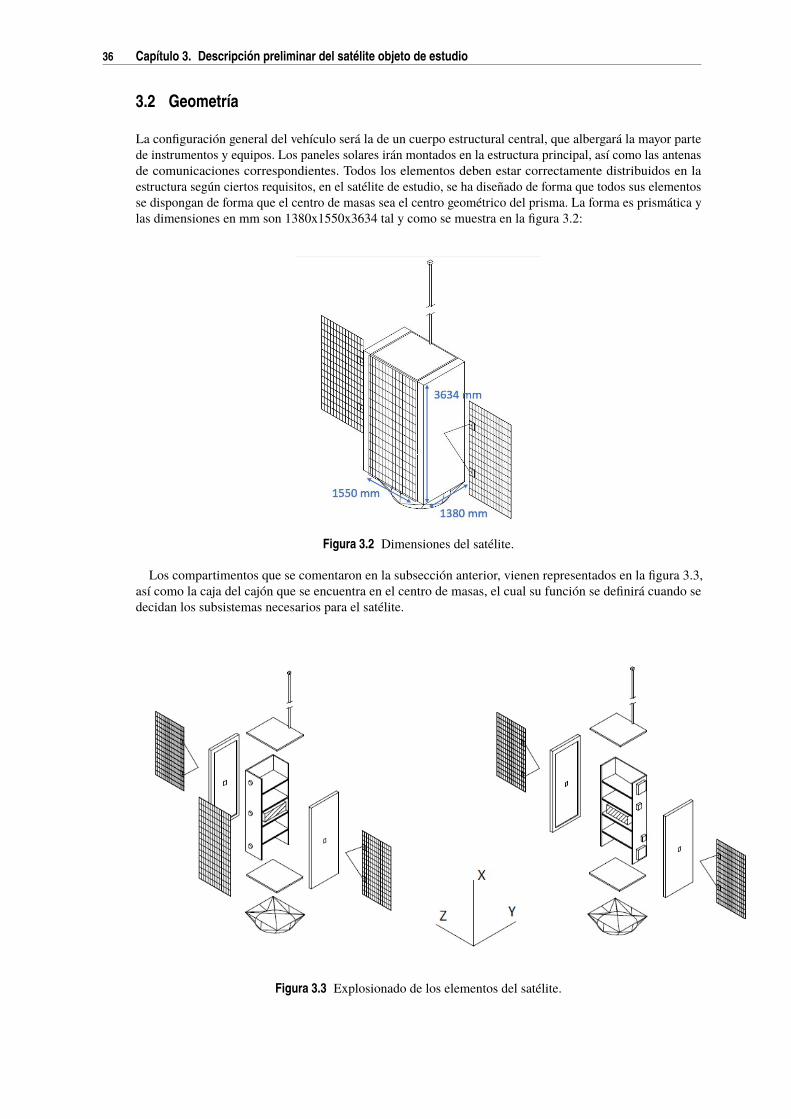
36 Capítulo 3. Descripción preliminar del satélite objeto de estudio
3.2 Geometría
La configuración general del vehículo será la de un cuerpo estructural central, que albergará la mayor partede instrumentos y equipos. Los paneles solares irán montados en la estructura principal, así como las antenasde comunicaciones correspondientes. Todos los elementos deben estar correctamente distribuidos en laestructura según ciertos requisitos, en el satélite de estudio, se ha diseñado de forma que todos sus elementosse dispongan de forma que el centro de masas sea el centro geométrico del prisma. La forma es prismática ylas dimensiones en mm son 1380x1550x3634 tal y como se muestra en la figura 3.2:
Figura 3.2 Dimensiones del satélite.
Los compartimentos que se comentaron en la subsección anterior, vienen representados en la figura 3.3,así como la caja del cajón que se encuentra en el centro de masas, el cual su función se definirá cuando sedecidan los subsistemas necesarios para el satélite.
Figura 3.3 Explosionado de los elementos del satélite.

3.2 Geometría 37
Las tapas que se observan a los lados del satélite tienen la función de proteger los diferentes sistemas, enla figura 3.4 se pueden ver las medidas dichas tapas (220 mm), así como las secciones X-Y y Y-Z.
Figura 3.4 Sección X-Y e Y-Z.
En la parte más baja del plano Y-Z del satélite se observa el anillo de transición (planos en la figura 3.5),cuya función es asegurar la unión de la base del satélite al vehículo lanzador. Tras una comprobación de lasmedidas de la carga de pago disponible a través del Manual del lanzador Delta II, se confirma que es posibleintroducir el satélite en su interior y realizar el acople del mismo con el vehículo lanzador. Al final de estasección se muestran las partes internas del mismo, figura 3.7.
Figura 3.5 Anillo de transición.
Analizando ahora la parte superior del satélite puede observarse una estructura longitudinal que se conocecomo Boom. El Boom contiene un sistema de despliegue que, una vez que el satélite está en el espacio, despla-za la estructura que sostiene a la masa en un extremo. Este puede ser una estructura rígida como un larguero, opuede extenderse con un cable. Las longitudes del boom varían desde algunos metros (en satélites pequeños)hasta centenares de metros dependiendo de la órbita, la masa del satélite, y de la masa extendida. Cuantomás longitud tenga el boom, menos interactuarán los sensores colocados en el mismo con el propio vehícu-lo, de forma que se evitan perturbaciones e interferencias. En el caso de estudio, el boommide unos dos metros.
Por último, se han dimensionado los paneles solares laterales de acuerdo a la figura 7.2.4. En la vista A sepuede apreciar el mecanismo de sujeción que tiene el panel con la estructura (tubo hueco), este mecanismopermitirá el movimiento de los paneles para proceder a su despliegue una vez alcanzada la órbita de inyección.Por otro lado, la vista B muestra el tipo de sujeción de la estructura al vehículo. Adicionalmente, el satélitecuenta con un panel solar colocado sobre el plano frontal X-Z cuyas medidas son las mismas que las delprisma en dicho plano (1550x3634mm).

38 Capítulo 3. Descripción preliminar del satélite objeto de estudio
Figura 3.6 Medidas de los paneles solares laterales.
El pliegue de los paneles solares tiene como objetivo que este quepa en el vehículo lanzador, así comoevitar que se dañen durante el lanzamiento. En la figura 3.7 se muestra el interior del vehículo lanzador ycomo iría colocado el satélite.
Figura 3.7 Descomposición en partes del lanzador.

3.3 Tipo de Estabilización 39
3.3 Tipo de Estabilización
El satélite necesita un sistema para orientarse a pesar de las perturbaciones. Este sistema capta las irregulari-dades gracias a sensores y a partir de los actuadores corrige la orientación del mismo. La masa es el factormás importante a la hora de calcular size y torques, por lo que habrá que conocer el centro de gravedad exactoy como cambian estas propiedades con el tiempo, así como referencias externas.
En cuanto a los métodos de control de la actitud, se puede distinguir entre métodos de control pasivo ymétodos de control activo. A continuación se muestran los principales métodos de cada tipo:
• Métodos de control pasivo: se basan en el aprovechamiento de fenómenos físicos naturales para realizarel control de la actitud y puede incorporar, en algunas ocasiones, algún elemento activo complementario.No necesitan procesamiento e información alguna para su funcionamiento y se clasifican en:
– Estabilización por rotación (spin stabilized systems).
– Estabilización por rotación doble (dual spin stabilized systems).
– Estabilización por gradiente gravitatorio
– Estabilización por volante de inercia (bias momentum stabilized systems).
– Estabilización por momentos magnéticos.
• Métodos de control activo: es necesario un sistema de control que sea activo, tanto energéticamentecomo estructuralmente, precisando de una fuente de energía y una lógica de control ("estabilizado entres ejes"). Esto es consecuencia de que todos los vehículos espaciales necesitan realizar maniobras deactitud, ajustes de la velocidad de rotación y maniobras de apuntamiento a una estación o base. Estesistema será primario en misiones que requieran gran precisión en la actitud, se tiene:
– Sistema de control de reacción (RCS).
– Sistemas de intercambio de momento cinético.
Además de lo explicado al principio de esta sección, la necesidad de un sistema de estabilización surge porla dirección fija que deben mantener los ejes del satélite durante toda la misión. En el caso de estudio, eleje X sigue la dirección de vuelo y el eje Z se dirige al centro de la Tierra, de forma que el eje Y llevará ladirección contraria al Sol. Esta posición no se mantiene fija a lo largo de una misión ya que hay que alteraraltitudes e inclinaciones; además aunque estas se mantuvieran constantes (como ocurre en el periodo durantelas órbitas nominales) la actitud se ve influencida por perturbaciones externas. Uno de los sistemas de controlpasivo más utilizados es el volante de inercia (figura 3.8) aunque el más preciso y el que se implementará eneste estudio es el sistema de control activo de estabilizado en tres ejes.
Figura 3.8 Volante de inercia.

40 Capítulo 3. Descripción preliminar del satélite objeto de estudio
3.4 Subsistemas
Es esencial para el diseño de un satélite conocer los sistemas que va a llevar asociados, así como sus compo-nentes y como afectan al desempeño de la misión.
Los subsistemas satélite que se considerarán y su función principal se detallan a continuación [10]:
Subsistema de determinación y control de actitud (ADCS): este sistema mantiene tanto la posición or-bital y orientación del satélite mediante correcciones periódicas como la correcta estabilización y orientaciónde las antenas a Tierra y de los paneles solares hacia el Sol. Es un elemento esencial en las maniobras decorrección del satélite. Sus características principales son las tolerancias de alabeo, cabeceo y guiñada (roll,pitch y yaw).
Subsistema de propulsión: proporciona el empuje necesario para cambiar la velocidad traslacional delsatélite o la torsión para modificar su momento angular. Corrige desviaciones en la posición orbital y laorientación. El equipamiento del subsistema de propulsión incluye motores, tanques, sistemas de distribucióny presurización y controles de propulsante y sus parámetros más importantes son el impulso específico, masade propulsante y aceleración.
Subsistema de potencia: está constituido por una fuente de potencia, que suelen ser paneles solares yun sistema de almacenamiento de potencia, como baterías, todo ello acompañado de un equipamiento dedistribución y conversión de la potencia. Proporciona el suministro de energía eléctrica a todos los equipos delsatélite, con niveles adecuados de tensión y corriente, en condiciones normales de operación o en presenciade eclipses, por lo que será necesario tener en consideración este periodo durante la misión.
Subsistema de control térmico: cumple la función de regular la temperatura a bordo del vehículo me-diante diversos dispositivos de disipación o absorción de calor que permiten equilibrar el calor absorbido porel vehículo proveniente. Para ello, el subsistema toma los datos a partir del rango de temperatura media delsatélite y rangos para componentes críticos.
Subsistema de estructura y mecanismos: aloja a todos los equipos y proporciona rigidez y consistenciaal conjunto.
Subsistema de comandos y Gestión de datos (CyDH): Proporciona control y distribución de la informa-ción entre los diferentes subsistemas. Realiza mediciones de parámetros orbitales, estado del satélite y secomunica con el centro en Tierra correspondiente, proporcionando el control para el correcto funcionamientodel satélite.
Subsistema de telemetría, Telemando y Comunicaciones (TTyC): permite la interacción del satélitecon los medios de tierra o con otro satélite. La información que se dirige al satélite,"uplink", consiste enuna serie de comandos y tonos. Por su parte, la información proveniente del satélite, "downlink", incluyetambién datos sobre la carga útil. Las antenas capturan y radian las señales de radiofrecuencia desde y ha-cia las zonas donde tiene asignada cobertura teniendo en cuenta el ancho de banda, potencia del transmisor, etc.

4 Perturbaciones orbitales
El hecho de que exista un gradiente gravitatorio y numerosas fuerzas además de la fueza gravitatoria noslleva a la conclusión de que el modelo de dos cuerpos es escasamente realista.
Dichas fuerzas adicionales surgen a partir del efecto de un tercer cuerpo, como el Sol o La Luna en el casode satélites con órbitas geocéntricas, además de por la resistencia atmosférica, por las fuerzas propulsivasque se suelen dar durante las maniobras y por la presión de radiación solar.
En cuanto al gradiente gravitatorio, su existencia es producto de la no esfericidad ni homogeneidad de loscuerpos, ya que es conocido que:
• Tanto los planetas como el Sol no son esferas perfectas. La Tierra tiene una forma elipsoidal debido asu achatamiento en los polos que se explicará en a siguiente sección.
• Los satélites tampoco son esferas perfectas y se pueden ver gravemente influenciados por el gradientegravitatorio.
Respecto a las metodologías de estudio de las perturbaciones, encontramos el método de perturbacionesgenerales y el método de perturbaciones especiales. En este proyecto, se tomará el primer método en el quese estudiará la variación en el tiempo de los diferentes elementos orbitales.
Las perturbaciones que afectan al vehículo espacial durante su tiempo de vida dan lugar a que la órbitaresultante no sea kepleriana, lo que dificulta en gran medida su estudio. Tras el análisis de esta consecuencia,se ha llegado a la conclusión de que este efecto es pequeño y, por tanto, se va a considerar una órbita kepleriana(órbita osculante) que varía con el tiempo.
Si se define el vector de elementos orbitales como: −→α = [Ω, i,w,a,e,M]
Se demostró que en una órbita kepleriana:
dΩ
dt=
didt
=dwdt
=dadt
=dedt
= 0 (4.1)
dMdt
= n (4.2)
En una órbita no kepleriana,−→α define la órbita, variando los elementos:
•−→α =
−→F (−→α ,−→γp) : Ecuaciones planetarias que permiten predecir el movimiento de los planetas.
•−→α =
−→F (−→α ,
−→Up) : Ecuaciones planetarias de Lagrange que derivan de un potencial.
•−→α =
−→F (−→α ,R,S,W ) : Ecuaciones planetarias de Gauss. Son las más generales.
41

42 Capítulo 4. Perturbaciones orbitales
Para estudiar las perturbaciones se van a considerar las siguientes distinciones:
• Cambios seculares: producen un crecimiento monótono con el tiempo.• Cambios periódicos: se distinguen entre los de largo periodo y los de corto.
Figura 4.1 Tipos de variaciones.
Va a interesar estudiar las variaciones seculares ya que al integrar las variaciones periódicas, ya sean decorto o largo periodo, no me van a afectar a la órbita mientras que los seculares si la habrán variado. Paraseparar estos términos se utiliza la expansión de la serie de Fourier.
4.1 Efectos del armónico J2
En el estudio del potencial gravitatorio de un cuerpo esférico con simetría de revolución, se suele despreciartodos los armónicos excepto el segundo, considerándose como un elipsoide de revolución. Este armónico,conocido como el J2, es lo que produce el achatamiento de La Tierra por los polos. Es un efecto de granintensidad y dominante en órbitas LEO durante pequeños intervalos de tiempo.
Si expresamos el potencial gravitatorio en función de los elementos orbitales, se puede apreciar que laúnica dependencia la tiene con la excentricidad, la inclinación y el semieje mayor. Esto implica que el efectodel J2 no produce variaciones seculares en estos elementos, y por tanto:
dadt
=didt
=dedt
= 0 (4.3)
Sin embargo, Ω, w y M si que varían de forma secular y permiten observar dos fenómenos característicosde esta perturbación:
• Regresión de los nodos ( dΩ
dt ): este fenómeno cambia el plano de la órbita de forma continua. El satélitepercibe una acumulación de masa en torno al ecuador que genera una fuerza nueva y produce un parque cambia el plano. En caso de órbitas polares, dónde la inclinación sea de 90º, no se produce esteefecto.
• Avance del perigeo ( dwdt ): modifica la localización geográfica de la línea de ápsides y, por tanto, los
puntos de la órbita en el que permanecen más tiempo (apogeo) y en el que permance menos (perigeo).Este efecto se da en órbitas elípticas.
En el caso de estudio, se tiene una órbita heliosíncrona casi circular por lo que el efecto del avance delperigeo se anula existiendo únicamente el efecto de la regresión de los nodos y de M. Se puede apreciar queesta perturbación ofrece un efecto deseado ya que gracias a la no esfericidad de la Tierra, se permite alcanzarórbitas síncronas al Sol.
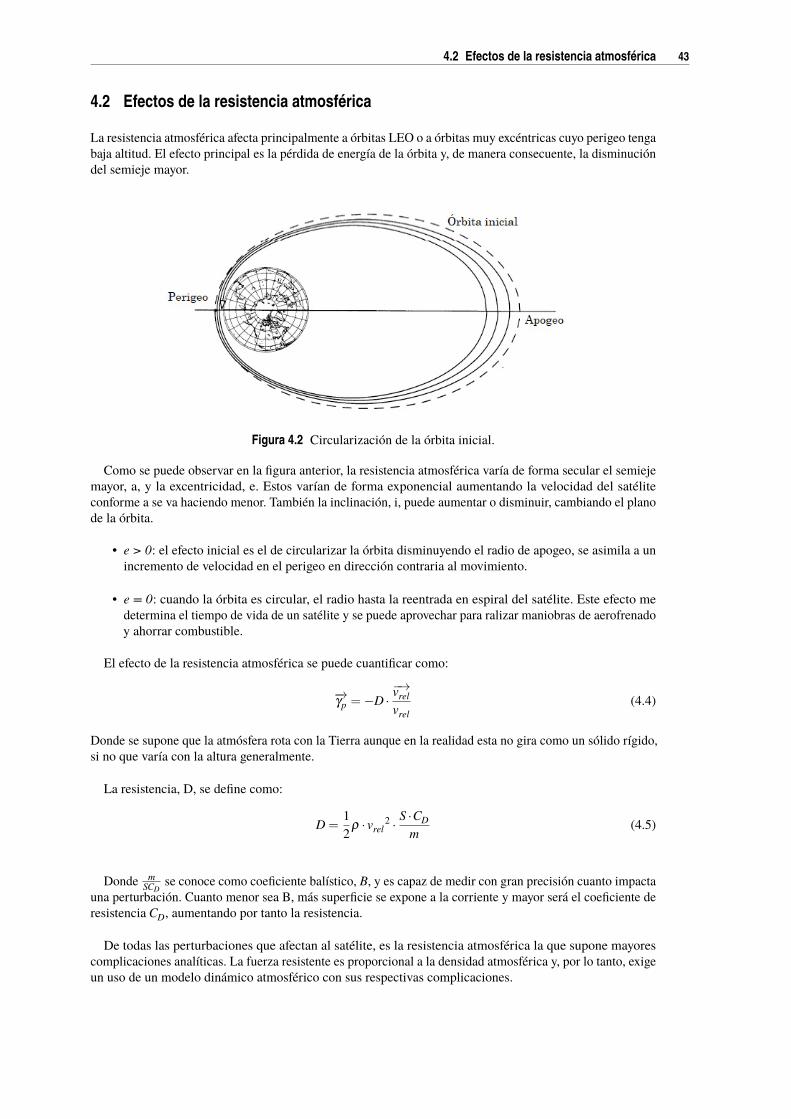
4.2 Efectos de la resistencia atmosférica 43
4.2 Efectos de la resistencia atmosférica
La resistencia atmosférica afecta principalmente a órbitas LEO o a órbitas muy excéntricas cuyo perigeo tengabaja altitud. El efecto principal es la pérdida de energía de la órbita y, de manera consecuente, la disminucióndel semieje mayor.
Figura 4.2 Circularización de la órbita inicial.
Como se puede observar en la figura anterior, la resistencia atmosférica varía de forma secular el semiejemayor, a, y la excentricidad, e. Estos varían de forma exponencial aumentando la velocidad del satéliteconforme a se va haciendo menor. También la inclinación, i, puede aumentar o disminuir, cambiando el planode la órbita.
• e > 0: el efecto inicial es el de circularizar la órbita disminuyendo el radio de apogeo, se asimila a unincremento de velocidad en el perigeo en dirección contraria al movimiento.
• e = 0: cuando la órbita es circular, el radio hasta la reentrada en espiral del satélite. Este efecto medetermina el tiempo de vida de un satélite y se puede aprovechar para ralizar maniobras de aerofrenadoy ahorrar combustible.
El efecto de la resistencia atmosférica se puede cuantificar como:
−→γp =−D ·
−→vrel
vrel(4.4)
Donde se supone que la atmósfera rota con la Tierra aunque en la realidad esta no gira como un sólido rígido,si no que varía con la altura generalmente.
La resistencia, D, se define como:
D =12
ρ · vrel2 · S ·CD
m(4.5)
Donde mSCD
se conoce como coeficiente balístico, B, y es capaz de medir con gran precisión cuanto impactauna perturbación. Cuanto menor sea B, más superficie se expone a la corriente y mayor será el coeficiente deresistencia CD, aumentando por tanto la resistencia.
De todas las perturbaciones que afectan al satélite, es la resistencia atmosférica la que supone mayorescomplicaciones analíticas. La fuerza resistente es proporcional a la densidad atmosférica y, por lo tanto, exigeun uso de un modelo dinámico atmosférico con sus respectivas complicaciones.

44 Capítulo 4. Perturbaciones orbitales
4.2.1 Decaimiento orbital
Un punto muy importante en este proyecto es el análisis del decaimiento orbital del satélite, el ratio quedefine el decaimiento de la órbita depende de la densidad atmosférica, que varía según diversos factores queno permiten concluir un valor preciso de la misma.
La ecuación que define la aceleración de la resistencia es:
a =−12
ρV 2 CDSm
iv (4.6)
Donde S es el área proyectada efectiva del satélite, iv un vector unitario de la velociad ym lamasa del satélite.
La densidad a cierta altura varía acorde al ciclo solar de 11 años, además de que se exhibe a un ritmodía-noche alcanzando un máximo durante medio día y un mínimo entre media noche y el amanecer. Por otrolado, existe un ciclo de 27 días causado por la extrema radiación ultravioleta que varía el valor de la densidad.Existen numerosos modelos, siendo los más utilizados los siguientes [5]:
• El modelo ARDC, 1959: modelo estático basado en datos de densidad inferidos de las primeras obser-vaciones satelitales.
• La atmósfera estándar de EE. UU., 1962: es una media idealizada de latitud media durante todo el añosobre el rango de actividad solar entre los mínimos y máximos de las manchas solares. Este modelotambién es estático, siendo los valores de densidad menores que el modelo ARDC 1959 en variasaltitudes.
• El modelo dinámico Jacchia, 1964: da cuenta del modelo diurno, de 27 días, y ciclos de 11 años y hasido ampliamente utilizado para un arrastre preciso.
• El modelo de Jacchia, 1971: es un modelo dinámico con precisión mejorado utilizado especialmentepara las predicciones de desintegración de la órbita.
• El modelo de densidad MSIS90E: se considera el modelo de densidad más preciso, conteniendo unperfil de densidad que se extiende hasta la superficie de la Tierra.
En la gráfica 4.3 se muestran los valores de densidad según la altitud para los distintos modelos mencionados.Para órbitas circulares, el ratio de decaimiento de órbita se puede expresar con:
dadt
=−√
µaBρ (4.7)
Siendo B el coeficiente balístico.
Si se integra la expresión 4.7 en un período orbital, las variaciones seculares producidas por esta perturba-ción siguen las expresiones 4.8 y 4.9.
∆a =−2π ·a2B ·ρ =−2π ·a2 CD ·Sm·ρ (4.8)
∆e = 0 (4.9)
Como se puede observar en las expresiones anteriores, el incremento de altitud al que se ve sometido elsatélite por estar expuesto a la resistencia atmosférica depende del coeficiente balístico, de la altitud y dela densidad. Desde el punto de vista del diseño del vehículo, se puede contribuir a atenuar el efecto dedecaimiento considerando una superficie frontal pequeña para el vehículo (coeficiente balístico elevado),de forma que se disminuya la fuerza de resistencia sobre el mismo. En el caso de estudio, como el satéliteviene dado con sus dimensiones de diseño, se va a hacer un estudio iterativo considerando distintos valores

4.2 Efectos de la resistencia atmosférica 45
Figura 4.3 Modelos de densidad atmosférica [5].
de densidad y, una vez elegido, se va a analizar las fechas en las que se da esa configuración.
Con el fin de facilitar el estudio, para una primera estimación se va a despreciar la velocidad angular atmos-férica y se aproximará la densidad, ρ , con un modelo exponencial en el que su valor decae exponencialmentecon el incremento de altitud, tal y como se define en la siguiente ecuación:
ρ = ρ0 · eh−h0
H (4.10)
Donde ρ0 es la densidad de referencia correspondiente a la altitud de referencia H0, h la altitud del satélitey H la altitud de escala.
A continuación se muestran las expresiones de la variación de altitud y de a excentricidad teniendo encuenta el modelo anterior.
∆a =−2π ·a2 CD ·Sm·ρ0 · e
h−h0H (4.11)
∆e = 0 (4.12)
Este modelo simplifica notablemente las ecuaciones para el cálculo del decaimiento, liberando la depen-dencia de la densidad con el ciclo solar de 11 años y el ciclo de 27 días causado por la radiación ultravioleta.
Una vez que se haya calculado la primera estimación, se hará el estudio del ciclo solar de 11 años (ApéndiceC) y se calcularán los valores de densidad con precisión para ofrecer valores del decaimiento realistas.

46 Capítulo 4. Perturbaciones orbitales
4.3 Otras perturbaciones
Existen en el espacio exterior otras perturbaciones de gran magnitud de las cuales podemos destacar laconocida como presión de radiación solar y el efecto gravitatorio de un tercer cuerpo.
En lo que se refiere a la presión de radiación solar, surge del efecto mecánico producido por la incidenciade la luz solar en una superficie y decrece a razón del cuadrado de la distancia al Sol.
Para una distancia de 1 AU (Unidad Astronómica) que corresponde con la distancia de la Tierra al Sol,el valor de la intensidad de la presión de radiación solar es Itierra = 1367W/m2. Para otras distancias, secalculará con la siguiente ecuacuación:
I = Itierra ·(
Ltierra
L
)2
(4.13)
Donde Ltierra corresponde con la distancia de la Tierra al Sol (Ltierra = 1AU) y L es la distancia al Sol delplaneta que estemos estudiando.
Aplicando la expresión para el cálculo de la presión, se tiene que P = Ic , siendo c≈ 3 ·106 la velocidad de
la luz y, por tanto:
Ptierra =Itierra
c= 4.5 ·10−6 (4.14)
Si escribimos la ecuación de la Fuerza provocada por la radiación en una placa plana:
F = p ·A · (1+ ε) · cosϕ0 (4.15)
Donde ε es el coeficiente de reflectividad que se encuentra entre -1 y 1 y depende la capacidad reflectantedel cuerpo en cuestión y ϕ es el ángulo de incidencia de los rayos del Sol.
Finalmente, se obtiene que el efecto de la perturbación de la presión de radiación solar es:
−→γp ≈−
Fm · v·−→e0 (4.16)
Esta perturbación produce cambios seculares en Ω y w mientras que las demás variaciones ocurren deforma periódica con periodo de aproximadamente un año. Además, este efecto depende en gran medida delperiodo de eclipses, del albedo de la Tierra y de su sombra. Permite aplicaciones como uso de velas solarespara obtener propulsión o como mecanismo de cambio de actitud añadiendo flaps solares.
Para un satélite LEO, su efecto principal es la variación del vector excentricidad pero este cambia de formaperiódica. Además, Se ha visto en la ecuación de la presión que depende especialmente del ratio área/masa,el cual en nuestro caso no es elevado por lo que hace que el efecto de esta perturbación, comparado con el dela resistencia atmosférica, sea despreciable.
Por otro lado, es necesario estudiar la influencia de un tercer cuerpo. Si se considera la fuerza de per-turbación generada por un tercer cuerpo sobre un satélite, por ejemplo, el Sol, como la expresión 4.17 yse compara con la fuerza kepleriana 4.18, se puede obtener una estimación del orden de magnitud de unarespecto a la otra y ver si es despreciable o no.
−→γp = µ
−→rr3
(4.17)
−→γk = µ⊕
−→rr3 (4.18)

4.3 Otras perturbaciones 47
Para el estudio es necesario conocer el radio Tierra-Sol, r = 1AU = 149.597.870.700km y el parámetrogravitacional del Sol µ = 132.712.440.000km2s−2. Para una órbita LEO, se han sustituido estos valores enlas expresiones anteriores y se ha obtenido la siguiente relación:∣∣∣∣∣
−→γp−→γk
∣∣∣∣∣= µµ⊕·−→r
r3odot
= 3 ·10−9 (4.19)
Por lo que se puede confirmar que en órbitas bajas, la atracción de un tercer cuerpo comparada con lafuerza kepleriana es despreciable.


5 Entorno espacial
Uno de los aspectos fundamentales a considerar en el diseño de un vehículo espacial es el estudio delentorno espacial y su influencia en el satélite. El espacio cercano a la Tierra y el ambiente atmosférico
influyen fuertemente en el rendimiento y la vida de los sistemas espaciales ya que afectan en gran medida altamaño, peso, complejidad y coste. Algunas interacciones ambientales también limitan el potencial técnico deestos sistemas y pueden conducir a malfuncionamientos costosos o incluso a la pérdida de componentes o delos mismos subsistemas. El estudio del medio espacial implica un análisis profundo y complejo, donde hay quetomar en consideración multitud de factores. Algunos de los elementos más importantes a los que se enfrentael vehículo espacial pueden ser la gravedad, el campo geomagnético, la resistencia atmosférica, la radiaciónelectromagnética, el vacío, etc. Todos estos efectos se definen en base al estándar ECSS-E-ST-10-04C de laAgencia Espacial Europea, ESA.
5.1 Vacío Espacial
5.1.1 Vacío total
En el vacío total, los gases (vapor de agua) absorbidos en capas exteriores del vehículo son liberados. Elhecho de que la presión del ambiente sea igual a la presión de vapor del material, produce la evaporaciónde las capas superficiales del propio material, proceso conocido como Desgasificación u Outgassing. Se vealtamente afectado por la temperatura, siendo de mayor consideración cuando esta es alta.
Como consecuencia, las capas de pintura pierden sus propiedades térmicas y los instrumentos de a bordose condensan afectando a las medidas. Existen otros efectos como la abrasión, descamación o soldadura enalgunas partes móviles del vehículo que se producen por la liberación de oxígeno en ciertos materiales.
Para evitar en la medida de lo posible estos efectos, se considera una buena elección de materiales ylubricantes, además de una buena preparación de los mismos con calentamiento al vacío (’bakingout’).
5.1.2 Vacío parcial
Existe una atmósfera residual en las órbitas terrestes de baja altitud que interactúa con el vehículo de formasignificativa pudiendo provocar:
• Modificación de la órbita por rozamiento (órbit decay’).
• Oxidación y erosión.
Esta última se produce por la presencia del oxígeno monoatómico, que al ser muy reactivo produce unarápida oxidación en los materiales de la capa externa del satélite. Estos materiales pueden sufrir erosióndebido a las altas velocidades relativas a las que está sometido el vehículo, provocando un halo visiblealrededor del mismo. Además, la ionización de gases provoca arco eléctricos y dañan los equipos electrónicosde a bordo.
49
50 Capítulo 5. Entorno espacial
5.2 Entorno Térmico
Las cargas térmicas a las que se encuentra sometido el vehículo espacial son realmente extremas, teniendoque soportar gradientes térmicos cercanos a los 300K. Este valor tan alto se produce durante el rozamientoatmosférico en órbitas muy bajas.
La energía de radiación térmica que recibe el satélite puede provenir de tres fuentes:
• Radiación solar directa.
• Radiación solar reflejada en un cuerpo cercano (albedo).
• La propia radiación emitida por la Tierra y su atmósfera.
Es posible observar que la radiación emitida por la Tierra y su atmósfera está en equilibrio con la recibidadel Sol. Sin embargo, este equilibrio no ocurre por igual en todo el globo terráqueo y se producen variacionesimportantes con el tiempo, geografía y condiciones atmosféricas locales. Este entorno térmico da lugar a quesea requerido un sistema de control térmico preciso en el vehículo, mitigando los cambios de temperaturaque podrían provocar fatiga en los materiales, cables o uniones soldadas.
Para evitar que puedan darse estos efectos en el vehículo existen medidas como el empleo de radiadores uotros elementos que tengan la capacidad de enfriar los componentes electrónicos más sensibles.
5.3 Radiación espacial
En el entorno espacial existen un gran número de fuentes de radiación. Entre ellas encontramos el vientosolar, la radiación electromagnética procedente del Sol y los cinturones de Van Allen, la radiación cósmicadel espacio interestelar, las erupciones solares y la radiación ultravioleta.
Las principales consecuencias de la radiación espacial recaen sobre los equipos electrónicos embarcados,asi como en los recubrimientos. También afecta a los seres humanos y puede generar materiales radiactivos.De hecho, la luz Ultravioleta provoca lo que se conoce como ”embrittlement”, oscureciendo el material porla pérdida de sus apacidades reflectantes. Producirá cambios en la resistividad y en las propiedades ópticasintrínsecas de los paneles solares.
En los equipos semiconductores disminuye la eficacia y los efectos por la partícula del tipo "single effectevent" (SEE):
• Single-event upset (SEU): Son fallos "suaves" en el que un circuito da una única respuesta equivocada.Es imposible garantizar al 100% que no existirán estos fallos.
• Single-event latch-up (SEL): Fallos en los que se generan corrientes parasitarias que pueden quemarlos dispositivos ellectrónicos.
Como solución, se utiliza el apantallamiento para disminuir la tasa de error estándar: 10−10 errores/día.También se hace uso de la redundancia, de circuitos con tests internos periódicos o de circuitos que detectany corrigen errores. Para órbitas terrestres bajas, como es el caso de estudio, la radiación no es un requisito dediseño gracias al campo magnético de la Tierra que disminuye el número de partículas cargadas que llegan aesa zona.
5.4 Microgravedad
Las fuerzas a las que se encuentra sometido el vehículo en órbita son del orden de 10−3 y 10−11 g, espor ello que puede considerarse como ingravidez. Se debe a la atracción gravitatoria y a otros efectos deperturbación como la presión de radiación solar y el rozamiento. Afecta especialmente al trato con liquidos,siendo necesario en algunos casos el uso de sistemas de vaciado y convección forzada. No obstante, lamicrogravedad tiene beneficios a nivel de estructura pudiendo trabajar con una ligereza mucho mayor.

5.5 Meteoroides y basura espacial 51
5.5 Meteoroides y basura espacial
El hecho de que existan pequeños objetos flotando en el espacio supone un gran problema para los vehículosespaciales. El choque con micrometoroides puede suponer el cambio en la actitud del vehículo, así como ladestrucción del mismo si la velocidad del micrometeoroide es lo suficientemente alta. En general, existenzonas en el sistema solar donde se encuentran reunidos un gran número de meteoroides, como por ejemplo elcinturón de asteroides, situado entre Martes y Júpiter. Esta zona supone una grave amenaza para las misionesinterplanterarias. No obstante, hay otros meteoroides que no pertenecen al cinturón y llevan una dirección yvelocidad esporádica, lo cual implica que sea muy dificil predecir si puede ser una amenaza para la misión.
Por otro lado, hay que sumar el creciente problema de la basura espacial especialmente en órbita baja. Laprincipal fuente de la basura espacial es la fragmentación de objetos espaciales, lo cual da lugar a toneladasde restos de diferentes vehículos y sistemas lanzados al espacio. Además, también forma parte de la basuraespacial los desprendimientos de masa y de pintura protectora erosionados por la influencia del medio espacial.
Ya que es imposible, mayoritariamente, predecir el movimiento de dichos meteoroides o cuantificar lacantidad de basura espacial en una órbita, se implementan escudos protectores para los vehículos espaciales.
En la figura 5.1 se puede apreciar la cantidad de basura espacial que se encuentra orbitando actualmente laTierra.
Figura 5.1 Basura espacial.
5.6 Actividad solar
Fuera de la atmósfera la radiación ultravioleta no es absorbida ya que no existe el Ozono. Las manchas solaresprovocadas por las perturbaciones incidentes en el campo magnético del Sol indican el nivel de actividadsolar en un cierto instante de tiempo, lo cual influye en gran medida en la densidad y en la temperatura a unadeterminada altitud. Estas tienen un periodo de 11 años debido a una inversión del campo magnético quesucede cada 22 años.
En el apéndice C se explica detalladamente la curva de la radiación solar, el ciclo solar de 11 años y suinfluencia en la densidad. Este estudio es decisivo para escoger la ventana de lanzamiento que coincida conla época del año donde la densidad sea menor y por tanto se necesite menos impulsos en la maniobra demantenimiento orbital.

6 Estrategia de mantenimiento de altitudorbital
El objeto de este proyecto es diseñar el sistema para el mantenimiento en órbita de un satélite en órbitabaja, para ello se ha partido de un diseño y geometría inicial del mismo y se han calculado todos los
datos preliminares necesarios para la misión como la base de lanzamiento, el vehículo lanzador, las ventanasde lanzamiento y las maniobras necesarias para cumplir con el perfil de misión. Este capítulo se va a centraren el cálculo de los impulsos para mantener la altitud del satélite y se va a diseñar el sistema RCS.
6.1 ∆V necesario
Dado que el efecto que produce la resistencia atmosférica sobre el satélite durante la misión es un efecto deperturbación no deseado, es necesario establecer una estrategia para contrarrestar dicho efecto en el periodoconsiderado. La estrategia de llevar al satélite a su altitud original se realiza con maniobras orbitales mediantepropulsión, proporcionada por el correspondiente conjunto de thrusters del subsistema de propulsión delvehículo. Esta propulsión se puede asimilar a un impulso instantáneo en la velocidad, ya que el tiempo decombustión es muy pequeño en relación al periodo orbital del satélite. Es una simplificación que habrá quedemostrar cuando se calcule el empuje asociado a los impulsos.
El satélite deberá permanecer en la primera órbita nominal a 200km de altitud durante 6 meses con unatolerancia de ±5 km. Igualmente, se mantendrá este rango de tolerancias para la segunda órbita nominal de480km durante 1 año. Partiendo de los datos característicos de coeficiente de resistencia, CD, coeficientebalístico, B, y área de superficie frontal, S, que se muestran a continuación, se podrá calcular los impulsosnecesarios para el mantenimiento.
CD = 2.2 (6.1)
B =S ·CD
m=
kgm2 (6.2)
S = 2.7462m2 (6.3)
Por otro lado, la especificación completa de decaimiento orbital no es posible debido a la incertidumbre enla predicción de la posición del satélite pero con la ecuación del decaimiento (6.4) analizada a priori en elcapítulo 4, se va a calcular cual es la disminución de altitud aproximada, ∆a, en cada periodo. El estudio delciclo solar actual, 25, y su influencia en los valores de densidad según si la actividad solar es alta o baja se harealizado en el apéndice C.
∆a =−2πCD ·S
ma2
ρ (6.4)
Por último, si se hace una primera estimación del Isp necesario para la misión del proyecto, considerandoun ∆V total de unos 900 m/s tras varias iteraciones y se tiene en cuenta que los valores típicos para la relación
53

54 Capítulo 6. Estrategia de mantenimiento de altitud orbital
masa de combustible partido de la masa seca del satélite debe estar entre 0.6 y 0.8, el Isp debe estar en tornoa 200s.
6.1.1 Órbita nominal de 200 km de altitud
Centrando el estudio en la órbita heliosíncrona de 200 km de altitud, se ha estimado que el satélite tendrá unamasa al inicio de la órbita nominal 1 m1 y una masa despúes de los 6 meses m2 tal que la diferencia entreambas sea el propulsante que se ha utilizado durante la maniobra de correción de altitud.
Se va a aplicar la formulación anterior para cada periodo y cuando la suma de los distintos ∆a sea mayorde 10 km, se realizará un impulso para volver a alcanzar la órbita de 205km. La transferencia que se va arealizar para volver a la órbita nominal es una transferencia de Hohmann (apéndice B.2), de forma que elimpulso necesario para realizarla desde los 195km a los 205km es: ∆V = 5.91676 m/s (Capítulo 2.2)Este ciclo se repetirá las veces que sean necesarias hasta cumplir el tiempo de misión en cada órbita nominal.
Para el cálculo del decaimiento se ha programado una función en MatLab que es capaz de calcular elnúmero de impulsos a aplicar en la órbita nominal a partir de unos valores de masa y densidad iniciales adicha altitud, de forma iterativa hasta que los valores coincidan. Los valores según la intensidad de radiaciónsolar se muestran a continuación.
Actividad solar baja
A continuación se va a mostrar una gráfica del decaimiento del satélite a dicha altitud:
Figura 6.1 Decaimiento de la órbita nominal 1 de 205km a 195km.
Tabla 6.1 Valores para la órbita nominal 1 en actividad solar baja.
Impulsos ρm días en caer 10km
86 2.255·10−10 2.397
Lo que supondría una masa al inicio de la órbita nominal 1 de 1421.9kg y una masa al final de la órbitanominal 1 de 1093.8kg, según el modelo propulsivo.
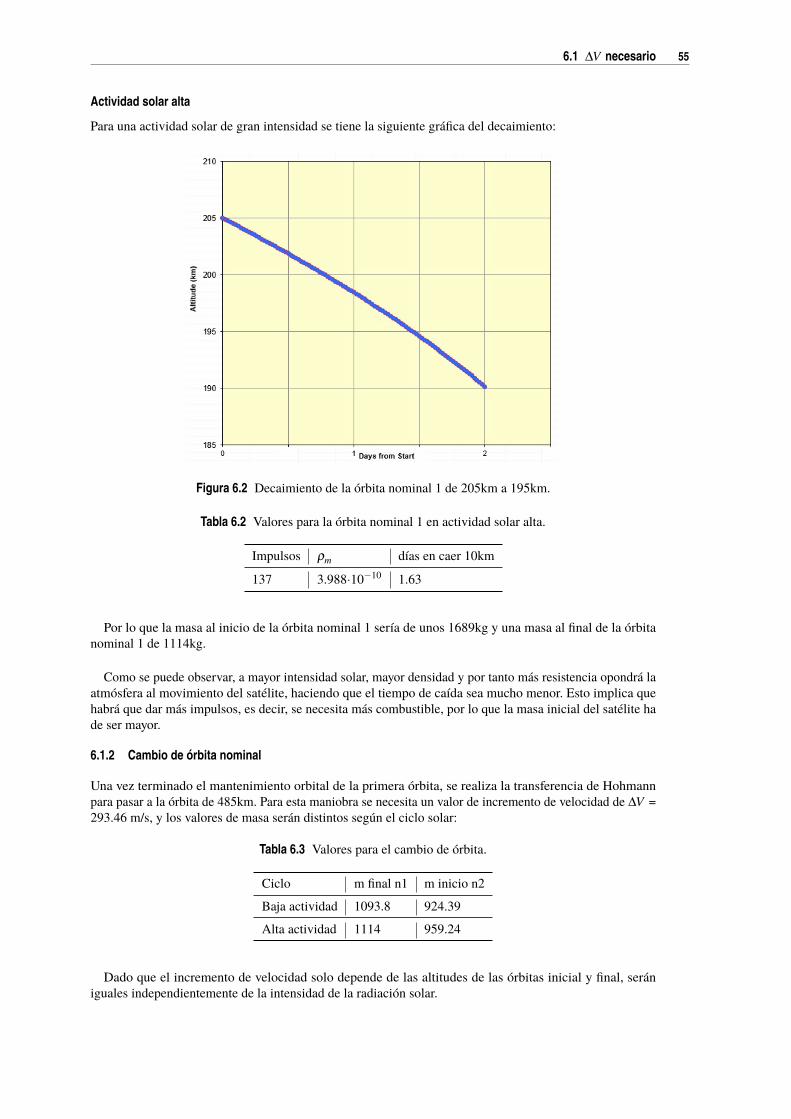
6.1 ∆V necesario 55
Actividad solar alta
Para una actividad solar de gran intensidad se tiene la siguiente gráfica del decaimiento:
Figura 6.2 Decaimiento de la órbita nominal 1 de 205km a 195km.
Tabla 6.2 Valores para la órbita nominal 1 en actividad solar alta.
Impulsos ρm días en caer 10km
137 3.988·10−10 1.63
Por lo que la masa al inicio de la órbita nominal 1 sería de unos 1689kg y una masa al final de la órbitanominal 1 de 1114kg.
Como se puede observar, a mayor intensidad solar, mayor densidad y por tanto más resistencia opondrá laatmósfera al movimiento del satélite, haciendo que el tiempo de caída sea mucho menor. Esto implica quehabrá que dar más impulsos, es decir, se necesita más combustible, por lo que la masa inicial del satélite hade ser mayor.
6.1.2 Cambio de órbita nominal
Una vez terminado el mantenimiento orbital de la primera órbita, se realiza la transferencia de Hohmannpara pasar a la órbita de 485km. Para esta maniobra se necesita un valor de incremento de velocidad de ∆V =293.46 m/s, y los valores de masa serán distintos según el ciclo solar:
Tabla 6.3 Valores para el cambio de órbita.
Ciclo m final n1 m inicio n2
Baja actividad 1093.8 924.39
Alta actividad 1114 959.24
Dado que el incremento de velocidad solo depende de las altitudes de las órbitas inicial y final, serániguales independientemente de la intensidad de la radiación solar.
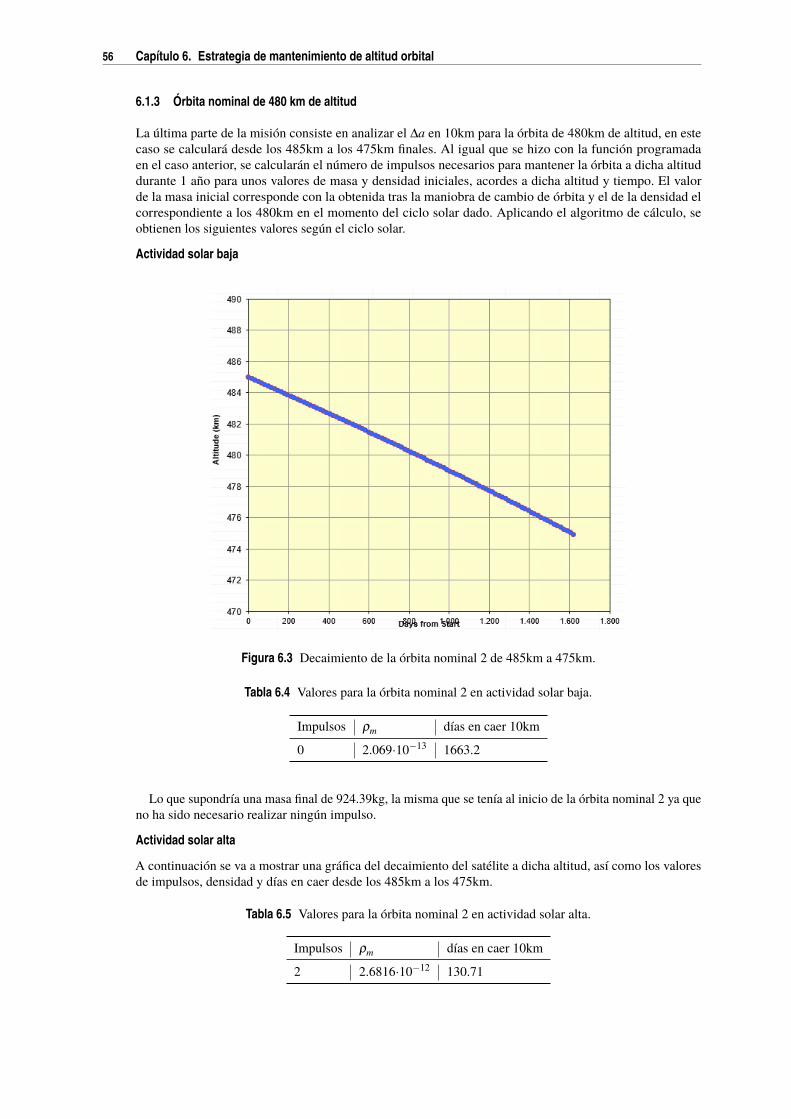
56 Capítulo 6. Estrategia de mantenimiento de altitud orbital
6.1.3 Órbita nominal de 480 km de altitud
La última parte de la misión consiste en analizar el ∆a en 10km para la órbita de 480km de altitud, en estecaso se calculará desde los 485km a los 475km finales. Al igual que se hizo con la función programadaen el caso anterior, se calcularán el número de impulsos necesarios para mantener la órbita a dicha altituddurante 1 año para unos valores de masa y densidad iniciales, acordes a dicha altitud y tiempo. El valorde la masa inicial corresponde con la obtenida tras la maniobra de cambio de órbita y el de la densidad elcorrespondiente a los 480km en el momento del ciclo solar dado. Aplicando el algoritmo de cálculo, seobtienen los siguientes valores según el ciclo solar.
Actividad solar baja
Figura 6.3 Decaimiento de la órbita nominal 2 de 485km a 475km.
Tabla 6.4 Valores para la órbita nominal 2 en actividad solar baja.
Impulsos ρm días en caer 10km
0 2.069·10−13 1663.2
Lo que supondría una masa final de 924.39kg, la misma que se tenía al inicio de la órbita nominal 2 ya queno ha sido necesario realizar ningún impulso.
Actividad solar alta
A continuación se va a mostrar una gráfica del decaimiento del satélite a dicha altitud, así como los valoresde impulsos, densidad y días en caer desde los 485km a los 475km.
Tabla 6.5 Valores para la órbita nominal 2 en actividad solar alta.
Impulsos ρm días en caer 10km
2 2.6816·10−12 130.71

6.1 ∆V necesario 57
Figura 6.4 Decaimiento de la órbita nominal 2 de 485km a 475km.
Estos valores indican que la masa final del satélite, tras haber realizado la maniobra de mantenimiento dela segunda órbita nominal para un ciclo solar alto es de 951.12kg.
Actividad solar media
En el caso de la órbita nominal 2 se va a estudiar la actividad solar media ya que, como bien puede verseen la representación del ciclo mostrada en el apéndice C, la actividad alcanza un máximo en el ecuador delciclo, por lo que aunque se empiece la misión en un momento de baja actividad solar, esta irá aumentandoconforme pasen los meses.
Se ha tenido en cuenta este factor cíclico y se ha calculado el mantenimiento orbital para un ciclo conactividad solar media en la órbita nominal 2, llegando a la conclusión de que la densidad será mayor que laque existe en el periodo del ciclo con baja actividad solar y el satélite tardará menos en caer de los 485kma los 475km. En la tabla 6.6 se muestran los valores de densidad, número de impulsos y días que tarda elsatélite en caer hasta dicha altitud. Este número de días sigue siendo mayor que el periodo de tiempo quedebe estar en la órbita nominal 2 por lo que no habrá que realizar impulsos durante el mantenimiento.
Tabla 6.6 Valores para la órbita nominal 2 en actividad solar media.
Impulsos ρm días en caer 10km
0 7.856 ·10−13 385
En definitiva, los resultados que se obtienen para un ciclo solar bajo o un ciclo solar medio en la órbitanominal 2 son similares debido a que el número de impulsos es el mismo en ambas situaciones, 0.
Aunque es cierto que considerar un periodo de baja actividad solar o uno de media no tiene implicaciones enel mantenimiento de la órbita nominal 2, si que afectará al tiempo de caída de los 475km hasta la reentrada porser el efecto de la densidad más relevante a bajas altitudes. Este estudio se realizaría en capítulos posterioresen el caso de que se pusiera fin a la vida del satélite con un desorbitado controlado.

58 Capítulo 6. Estrategia de mantenimiento de altitud orbital
6.1.4 Resultados finales
Tras haber realizado el estudio de ambos tipos de actividad solar, es evidente que conviene realizar el lanza-miento en un periodo de baja actividad solar con el fin de disminuir la resistencia atmosférica que se ejercesobre el satélite y por tanto el número de impulsos. Un número de impulsos menor lleva asociado una grandisminución en la masa de combustible consumido. En este caso para realizar la misión en un periodo dealta actividad solar se requieren 200kg más de combustible y, por lo tanto, más inversión de dinero para elpropulsante. Por estos motivos, se ha decidido hacer la misión en un periodo de baja actividad solar, siendolos valores finales los que se muestran en las siguientes tablas.
En la primera tabla (6.7), se muestran los incrementos de velocidades necesarios para mantenerse en lasórbitas nominales, así como el número de impulsos a realizar en cada una de ellas. Ambos valores nos dan elimpulso total que habría que dar para lograr el mantenimiento orbital.
Tabla 6.7 Número de impulsos y valor de ∆V total.
Órbita nominal ∆V (m/s) (1 impulso) tiempo decaimiento (días) Nº impulsos ∆VT (m/s)
1 5.91676 2.397 86 ≈ 509
2 5.55814 1663.2 0 ≈ 0
Por otro lado, todos los valores de masas correspondientes a la misión completa se clasifican en la tabla6.8. La masa al final de la misión es prácticamente la masa seca del satélite, se ha dejado un margen de 90 kgaproximadamente con el fin de poder repartir dicha masa para el sistema propulsivo, teniendo en cuenta elpropulsante residual, el sistema de thrusters y tanques de combustible de forma aproximada.
Tabla 6.8 Valores de masas durante la misión.
Valor Órbita Masa (kg)
m0 Lanzamiento ≈ 1465
m1 Inicio nominal 1 ≈ 1421.9
m2 Final nominal 1 ≈ 1093.8
m3 Inicio nominal 2 ≈ 939.18
m4 Final nominal 2 ≈ 939.18
Respecto a la densidad, para que puedan darse los valores mostrados en la tabla 6.9 la actividad solardebe ser de baja intensidad, de forma que la ventana de lanzamiento se encuentre entre Octubre de 2021 yDiciembre de 2023. Las fechas analizadas en el capítulo 2 se encuentran dentro de la ventana de lanzamientode forma que a partir del estudio de eclipses realizado en dicho capítulo, se puede confirmar que el día delanzamiento será el 23 de Feberero de 2022.
Tabla 6.9 Valor de densidad según la altitud.
Altitud (km) Densidad (kg/m3)
205 ≈ 1.85 ·10−10 kg/m3
195 ≈ 2.7014 ·10−10 kg/m3
485 ≈ 1.8705 ·10−13 kg/m3
475 ≈ 2.2658 ·10−13 kg/m3

6.1 ∆V necesario 59
En cuanto al decaimiento del satélite, quedaría por analizar el tiempo de bajada entre la altitud de inyecciónen órbita (280km) y el inicio del mantenimiento en la primera órbita nominal (195km). Con la expresión 6.4y una densidad a dicha altitud de ρ = 1.8653 ·10−11 kg/m3 se obtiene que el satélite tarda en bajar 75kmunos 88.32 días. La caída se muestra en la figura 6.5.
Figura 6.5 Decaimiento de la órbita de inyección hasta los 205km.
Teniendo en cuenta que el tiempo de lanzamiento es aproximadamente un día hasta que alcance la órbitade 280 km y que los impulsos se consideran instantáneos comparados con la duración de la misión, se tienela siguiente cronología:
Tabla 6.10 Cronología.
Órbita Tiempo
280 km tras lanzamiento 1 día
Caída hasta 195km 89 días
Nominal 1 6 meses
Nominal 2 1 año
Total ≈ 2 años
La duración total de la misión es de 2 años aproximadamente, por lo que podrá realizarse sin necesidad derealizar maniobras de frenado en la caída de los 280km a los 205km.
Respecto al fin de vida del satélite, en el capítulo 8 se estudiarán las diferentes opciones que existen en laindustria espacial para poner fin a una misión y se eligirá la óptima para la del proyecto. En este caso si queserá relevante tomar una actividad solar media en vez de una actividad solar baja debido a que en este puntode la misión el ciclo solar se encontrará próximo a su ecuador.

60 Capítulo 6. Estrategia de mantenimiento de altitud orbital
6.2 Tipos de sistemas RCS y elección
Un sistema de control de reacción (RCS), a veces denominado sistema de pilotaje de chorro de gas en francés,es un sistema de un vehículo espacial que es capaz de proveer pequeñas cantidades de impulso en la direccióno combinación de direcciones que se desee y de proveer torque para controlar a rotación. En el modo "giro",la nave puede girar en cualquiera de sus ejes, con cualquier velocidad de rotación, utilizando una combinaciónde estos propulsores, sin cambiar la trayectoria de la nave. En el modo de "traslación" la nave no gira, peropuede acelerar en cualquier dirección sin cambiar su orientación, usando una combinación diferente de estosmismos propulsores, cambiando así su trayectoria o su órbita. Para controlar estos movimientos, los vehículosespaciales utilizan combinaciones de toberas (vernier) grandes y pequeñas [13].
Los sistemas de control de reacción de vehículos espaciales son utilizados en las siguientes funciones:
• Control de actitud durante el re-ingreso.
• Mantenimiento de la nave en la órbita deseada.
• Maniobras de corto alcance durante procedimientos de acoplamiento de naves en el espacio.
• Control de orientación o apuntamiento.
• Sistema alternativo para dejar la órbita para regresar a la Tierra.
• Motores de vacío (Ullage motor) para preparar el combustible para el encendido del motor principal.
En el caso de estudio, además de las funciones que se acaban de mencionar se va a estudiar la posibilidadde realizar con el mismo sistema las maniobras de cambio orbital. El primer paso para el dimensionamientodel sistema es la elección del propulsante, el sistema de control a reacción emplea un conjunto de propulsoresdistribuidos por la nave que en función del propelante utilizado pueden ser de gas frío, propulsión química opropulsión eléctrica. Los sistemas RCS basados en propulsión química sólo pueden ser activados en modo “to-do o nada”, no existen propulsores químicos que proporcionen un par de control lineal, continuo y suave. Estehecho complica la formulación analítica del sistema de control que implemente propulsores como actuadoresde actitud. Sin embargo, existe otro tipo de sistemas RCS que permite un par de control continuo y suave, losbasados en propulsión eléctrica. Estos sistemas tienen la particularidad de ser pesados y caros, con nivelesde momento máximo pequeños. Por último, el propulsante de gas frío es un sistema de propulsión simple,de muy bajo coste pero con bajo nivel de empuje, no suficiente para realizar maniobras de cambio de órbita [9].
Tras esta comparación, se ha decidido que se va a diseñar un sistema de control a reacción con un propulsantequímico. A continuación, en la tabla 6.6 se muestran los diferentes propelentes para este tipo de sistema.
Figura 6.6 Propulsores químicos, [22].
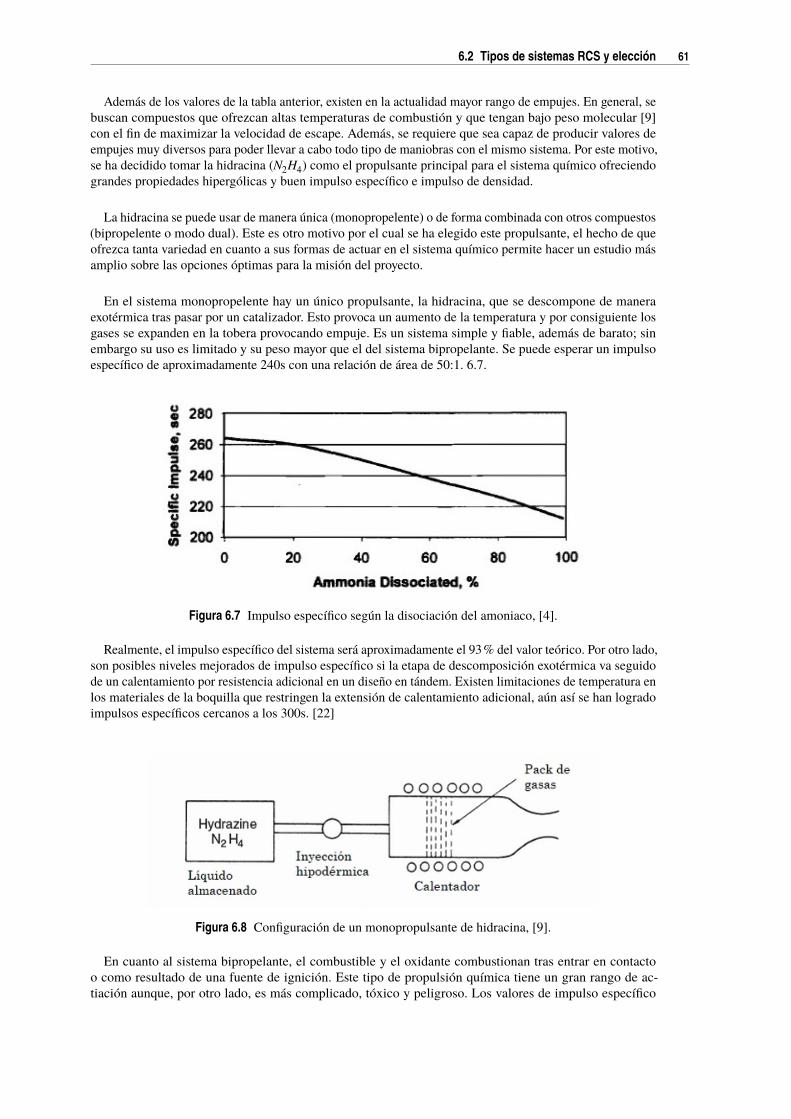
6.2 Tipos de sistemas RCS y elección 61
Además de los valores de la tabla anterior, existen en la actualidad mayor rango de empujes. En general, sebuscan compuestos que ofrezcan altas temperaturas de combustión y que tengan bajo peso molecular [9]con el fin de maximizar la velocidad de escape. Además, se requiere que sea capaz de producir valores deempujes muy diversos para poder llevar a cabo todo tipo de maniobras con el mismo sistema. Por este motivo,se ha decidido tomar la hidracina (N2H4) como el propulsante principal para el sistema químico ofreciendograndes propiedades hipergólicas y buen impulso específico e impulso de densidad.
La hidracina se puede usar de manera única (monopropelente) o de forma combinada con otros compuestos(bipropelente o modo dual). Este es otro motivo por el cual se ha elegido este propulsante, el hecho de queofrezca tanta variedad en cuanto a sus formas de actuar en el sistema químico permite hacer un estudio másamplio sobre las opciones óptimas para la misión del proyecto.
En el sistema monopropelente hay un único propulsante, la hidracina, que se descompone de maneraexotérmica tras pasar por un catalizador. Esto provoca un aumento de la temperatura y por consiguiente losgases se expanden en la tobera provocando empuje. Es un sistema simple y fiable, además de barato; sinembargo su uso es limitado y su peso mayor que el del sistema bipropelante. Se puede esperar un impulsoespecífico de aproximadamente 240s con una relación de área de 50:1. 6.7.
Figura 6.7 Impulso específico según la disociación del amoniaco, [4].
Realmente, el impulso específico del sistema será aproximadamente el 93% del valor teórico. Por otro lado,son posibles niveles mejorados de impulso específico si la etapa de descomposición exotérmica va seguidode un calentamiento por resistencia adicional en un diseño en tándem. Existen limitaciones de temperatura enlos materiales de la boquilla que restringen la extensión de calentamiento adicional, aún así se han logradoimpulsos específicos cercanos a los 300s. [22]
Figura 6.8 Configuración de un monopropulsante de hidracina, [9].
En cuanto al sistema bipropelante, el combustible y el oxidante combustionan tras entrar en contactoo como resultado de una fuente de ignición. Este tipo de propulsión química tiene un gran rango de ac-tiación aunque, por otro lado, es más complicado, tóxico y peligroso. Los valores de impulso específico
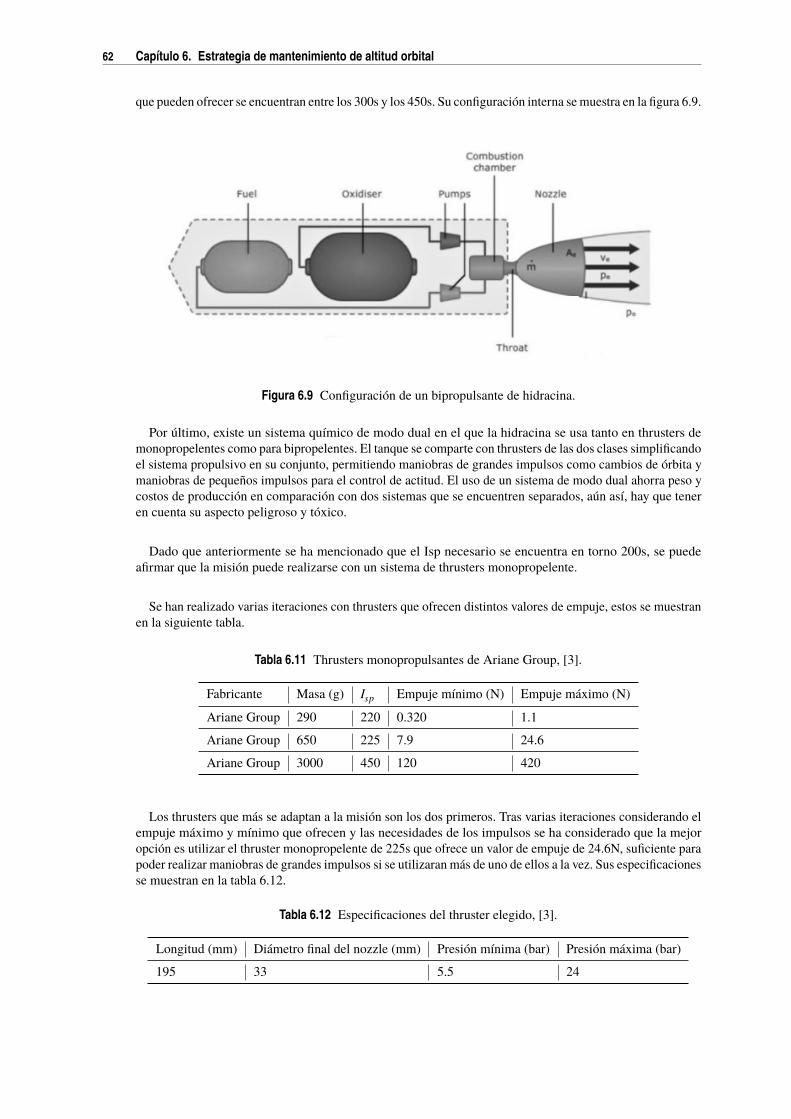
62 Capítulo 6. Estrategia de mantenimiento de altitud orbital
que pueden ofrecer se encuentran entre los 300s y los 450s. Su configuración interna se muestra en la figura 6.9.
Figura 6.9 Configuración de un bipropulsante de hidracina.
Por último, existe un sistema químico de modo dual en el que la hidracina se usa tanto en thrusters demonopropelentes como para bipropelentes. El tanque se comparte con thrusters de las dos clases simplificandoel sistema propulsivo en su conjunto, permitiendo maniobras de grandes impulsos como cambios de órbita ymaniobras de pequeños impulsos para el control de actitud. El uso de un sistema de modo dual ahorra peso ycostos de producción en comparación con dos sistemas que se encuentren separados, aún así, hay que teneren cuenta su aspecto peligroso y tóxico.
Dado que anteriormente se ha mencionado que el Isp necesario se encuentra en torno 200s, se puedeafirmar que la misión puede realizarse con un sistema de thrusters monopropelente.
Se han realizado varias iteraciones con thrusters que ofrecen distintos valores de empuje, estos se muestranen la siguiente tabla.
Tabla 6.11 Thrusters monopropulsantes de Ariane Group, [3].
Fabricante Masa (g) Isp Empuje mínimo (N) Empuje máximo (N)
Ariane Group 290 220 0.320 1.1
Ariane Group 650 225 7.9 24.6
Ariane Group 3000 450 120 420
Los thrusters que más se adaptan a la misión son los dos primeros. Tras varias iteraciones considerando elempuje máximo y mínimo que ofrecen y las necesidades de los impulsos se ha considerado que la mejoropción es utilizar el thruster monopropelente de 225s que ofrece un valor de empuje de 24.6N, suficiente parapoder realizar maniobras de grandes impulsos si se utilizaran más de uno de ellos a la vez. Sus especificacionesse muestran en la tabla 6.12.
Tabla 6.12 Especificaciones del thruster elegido, [3].
Longitud (mm) Diámetro final del nozzle (mm) Presión mínima (bar) Presión máxima (bar)
195 33 5.5 24

6.3 Diseño conceptual del RCS necesario 63
6.3 Diseño conceptual del RCS necesario
El sistema RCS de propelente líquido está formado por una o más cámaras de empuje, uno o más tanquespara almacenar combustible, un mecanismo de alimentación para forzar los propelentes de los tanques a lascámaras de empuje, una fuente de energía para el mecanismo de alimentación, plomería o tuberías adecuadaspara transferir los líquidos, una estructura para transmitir la fuerza de empuje y dispositivos de control parainiciar y regular el empuje. En algunas aplicaciones también puede incluir un sistema de control de vector deempuje, varia instrumentación y propelente residual (atrapado en tuberías, válvulas o humectantes paredesdel tanque) [20].
El motor seleccionado se muestra en la figura 6.10.
Figura 6.10 Thruster Ariane 20N, [3].
Respecto al control de actitud del sistema RCS se conoce que debe controlarse alrededor de tres ejesperpendiculares entre sí, cada uno con dos grados de libertad (rotación en sentido horario y antihorario),dando un total de seis grados de libertad de rotación. El control de cabeceo aumenta o baja el morro delvehículo, los pares de guiñada inducen un movimiento hacia la derecha o la izquierda, y los pares de girorotarán el vehículo sobre su eje, ya sea en el sentido de las agujas del reloj o en sentido antihorario. Paraaplicar un par verdadero es necesario utilizar dos cámaras de empuje exactamente igual y tiempos de inicio yparada iguales, colocados a la misma distancia del centro de masa. Con esta configuración el número mínimode thrusters es 12 (cuatro propulsores para la rotación alrededor de cada eje, redundantes) [20].
Para que el sistema de thrusters sea válido, se debe garantizar que genera el empuje suficiente como pararealizar la maniobra con mayor impulso y la de menor impulso en tiempos considerables en comparación conel periodo orbital. Si esto es posible, todas las demás podrán realizarse. Además, habrá que demostrar quedicho empuje no lleva a un tiempo de combustión demasiado pequeño en la maniobra de menor impulso.
En esta misión la maniobra que necesita mayor ∆V es la del cambio de órbita nominal, siendo ∆V = 160m/s.La masa de combustible necesaria para realizar esta maniobra es de 82.2kg mientras que para la de mínimoimpulso es de 2.78kg. El rango de empuje del motor principal está entre 7.9N y 24.6N, siendo su Isp es de225s, por lo que para que se obtengan tiempos de combustión razonables en comparación con la duración dela misión se necesitarán como mínimo 14 thrusters.
Los valores de tiempo de propulsión para las maniobras de mayor y menor impulso son los que se muestranen la tabla 6.13. Estos valores son razonables y de pequeño valor en comparación con el periodo orbital(≈ 90 minutos) por lo que la hipótesis de considerar las maniobras como impulsivas son razonables.
Tabla 6.13 Tiempos de combustión límite.
Impulso Valor (m/s) Combustible consumido (kg) Tiempo de propulsión
Máximo 160.54 85.9 7.92 minutos
Mínimo 5.56 2.78 17.4 segundos

64 Capítulo 6. Estrategia de mantenimiento de altitud orbital
Para saber si es suficiente el empuje que generan estos thrusters para gestionar el control de actitud, se va aestimar el tiempo de pulso máximo en el que deberá estar activo y se comprobará que este sea razonable.
El tiempo de pulso se calcula según la expresión 6.5.
tp =
√2θ InFL
(6.5)
Donde θ (rad) es el ángulo, n el número de motores actuando a la vez, F (N) la fuerza que ejerce cadamotor y L (m) la distancia del motor al centro de gravedad.
Si se escoge la situación más desfavorable se tendría un ángulo máximo (180º), una inercia máxima yun total de dos motores actuando (lo mínimo admisible). Para el cálculo de las inercias se va a tomar lamasa inicial (1420kg) por ser la mayor y se van a tener en cuenta tanto el caso de paneles retraídos comoextendidos.
Tabla 6.14 Tiempos de pulso.
Paneles x (m) y (m) z (m) Imax Valor (kg ·m2) tp (s)
No 3.634 1.38 1.79 Iy 1941.86 33.45
Sí 3.634 1.38 4.89 Iy 4392.29 50.3
Se puede ver en la tabla 6.14 que incluso el tiempo de pulso del caso más desfavorable es razonable yaque está por debajo de los 100s. De este modo, se afirma que los thrusters con empuje de 7.9N pueden serutilizados para este tipo de maniobras.
Por otro lado, es igualmente necesario conocer el orden de magnitud de las fuerzas de perturbación, consi-derando tras un análisis el par gravitatorio como el momento de mayor magnitud y suponiendo una distanciadel propulsor al centro de masas de entre 0.1m y de 1m; se tiene que la fuerza a ejercer por un thruster some-tido a las distintas perturbaciones del espacio sería realmente pequeña, por lo que el dimensionamiento delsistema estará mayormente condicionado por la velocidad de rotación, que se situa típicamente entre 0,1 y 1 º/s.
Es cierto que existen algunos sistemas más sofisticados que permiten el control en tres ejes con sólocuatro propulsores formando un tetraedro (figura 6.11), pero estos cuentan con el inconveniente de nopermitir el incremento lineal de velocidad angular en cualquier eje del vehículo. No obstante, el sistema ele-gido es el más común entre los vehículos espaciales y más que suficiente y efectivo para la misión del proyecto.
Figura 6.11 Sistema de control a reacción a tres ejes (RCS) con 4 propulsores, [22].
Como último paso del diseño del sistema propulsivo, se van a diseñar los tanques de combustible segúnlos requisitos de la misión. Respecto a la geometría, la forma óptima de un tanque de propulsor es esféri-
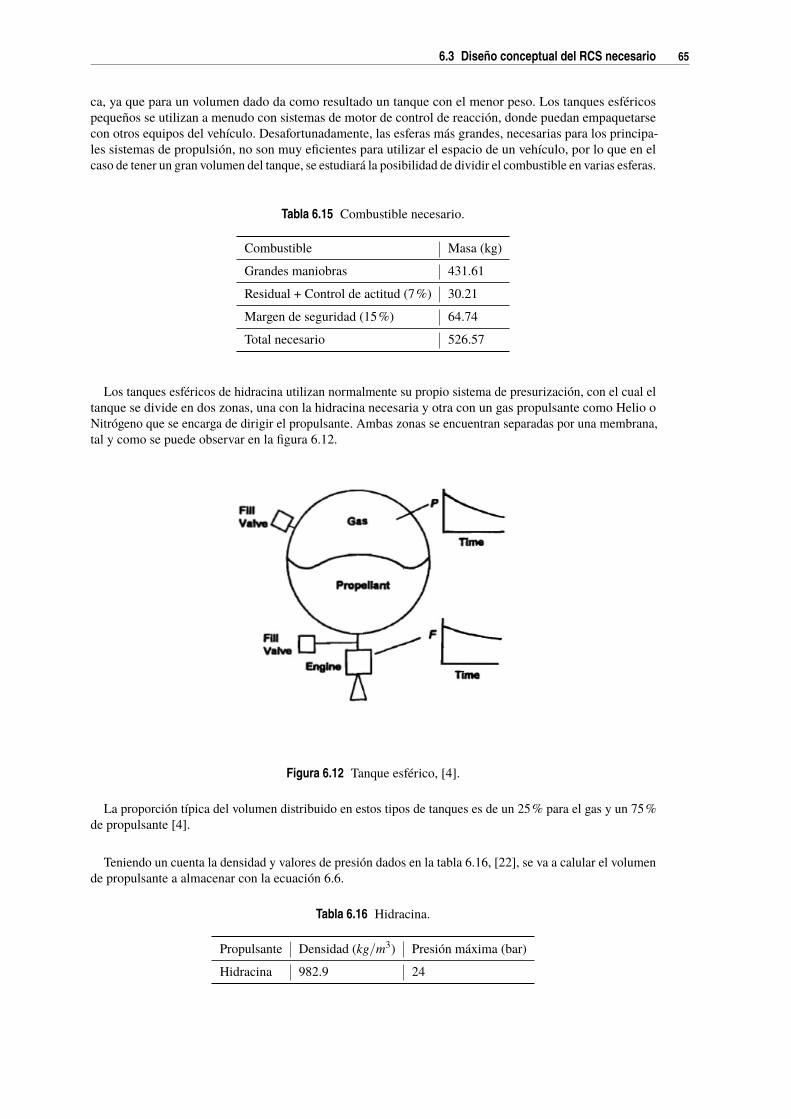
6.3 Diseño conceptual del RCS necesario 65
ca, ya que para un volumen dado da como resultado un tanque con el menor peso. Los tanques esféricospequeños se utilizan a menudo con sistemas de motor de control de reacción, donde puedan empaquetarsecon otros equipos del vehículo. Desafortunadamente, las esferas más grandes, necesarias para los principa-les sistemas de propulsión, no son muy eficientes para utilizar el espacio de un vehículo, por lo que en elcaso de tener un gran volumen del tanque, se estudiará la posibilidad de dividir el combustible en varias esferas.
Tabla 6.15 Combustible necesario.
Combustible Masa (kg)
Grandes maniobras 431.61
Residual + Control de actitud (7%) 30.21
Margen de seguridad (15%) 64.74
Total necesario 526.57
Los tanques esféricos de hidracina utilizan normalmente su propio sistema de presurización, con el cual eltanque se divide en dos zonas, una con la hidracina necesaria y otra con un gas propulsante como Helio oNitrógeno que se encarga de dirigir el propulsante. Ambas zonas se encuentran separadas por una membrana,tal y como se puede observar en la figura 6.12.
Figura 6.12 Tanque esférico, [4].
La proporción típica del volumen distribuido en estos tipos de tanques es de un 25% para el gas y un 75%de propulsante [4].
Teniendo un cuenta la densidad y valores de presión dados en la tabla 6.16, [22], se va a calular el volumende propulsante a almacenar con la ecuación 6.6.
Tabla 6.16 Hidracina.
Propulsante Densidad (kg/m3) Presión máxima (bar)
Hidracina 982.9 24

66 Capítulo 6. Estrategia de mantenimiento de altitud orbital
Vp =mc
ρc(6.6)
Con la expresión 6.7 se puede calcular el radio interior del tanque. Estos datos se muestran en la tabla 6.17.
Ri =3
√3
4πV (6.7)
Tabla 6.17 Volumen de combustible.
Tipo Vol Teórico (m3)
Fuel 0.5357
Gas 0.1786
Por lo que si solo se utilizara un tanque el volumen interno sería de 0.7143m3 y el radio interior de 0.5545m.Estos valores son altos para el espacio disponible, por lo que se va a dimensionar a partir de las medidas delos cajones. La altitud de cada cajón es de unos 0.726 metros, de forma que el radio exterior del tanque debeser como mucho de 0.35m. Tras un análisis de los tanques disponibles en la actualidad se ha seleccionadoel Modelo OST 31-0 de Ariane [11], con capacidad de 78 Litros de propulsante y con 0.293m de radioexterior. Teniendo en cuenta el volumen de propulsante que se puede almacenar en cada tanque (0.078m3) yel volumen de propulsante que se debe almacenar (0.7143m3), se llega a la conclusión de que se necesitaránal menos 10 tanques distribuidos uniformemente entre los cajones tanto por la parte superior como por laparte inferior.
Figura 6.13 Tanque esférico.
Cada uno de los 10 tanques almacenará 0.07143 m3 de propulsante a presión, estarán hechos de Titanio; estematerial es típico para la fabricación de los tanques por las buenas características que ofrece en situacionesextremas de temperatura y presión, además de por su fácil fabricación.
Tabla 6.18 Propiedades del Titanio.
Material Presión máxima (bar) Tensión superficial (KPa) Densidad (kg/m3)
Titanio 24 690000 4429.89

6.3 Diseño conceptual del RCS necesario 67
El cálculo del espesor del tanque sigue la expresión 6.8, que depende del radio interior y que podemosrelacionar con el radio exterior sabiendo que el radio exterior es igual al interior más el espesor máximo depared. Dicha ecuación ofrece el valor de espesor mínimo posible para el tanque. Por motivos de seguridad, sesuele proponer un rango de espesor para aumentar la fiabilidad del tanque, de esta forma los valores posiblesde espesor que se deben utilizar son los que aparecen en la tabla 6.19.
t =P · ri
2 ·σ(6.8)
Tabla 6.19 Espesor y radio exterior.
Espesor mínimo (mm) Ri (m)
1.6 0.277
Por lo que para poder estimar el peso del tanque, a partir de la ecuación 6.9, se obtienen los valores de latabla 6.20.
W = ρt ·43
π(R3e−R3
i ) (6.9)
Tabla 6.20 Peso de los tanques de combustible.
Peso (kg) Número de tanques
6.4 10
En resumen, el sistema tiene los siguientes componentes:
Tabla 6.21 Componentes del subsistema RCS.
Componente Tipo Cantidad Masa total (kg)
Thrusters Ariane 14 9.1
Tanque de combustible OST 31-0 10 64
Combustible Hidrazina No aplica 526.57
De forma que el peso del sistema de propulsión que no formaba parte de la masa seca del satélite en laprimera estimación es de 73.1kg.


7 Modificaciones a realizar en el diseño delvehículo y subsistemas asociados
Al inicio del estudio se partió de unos datos de partida de masa y geometría para el satélite, ofrecidos porel fabricante del mismo. Estos valores han permitido calcular los impulsos y la cantidad de combustible
necesaria para llevar a cabo la misión completa, así como dimensionar el sistema de propulsión. En estepunto del proyecto, una vez realizado los cálculos, se va a estudiar como afecta el sistema de propulsión quese ha diseñado a la masa, inercias y geometría del satélite, además de a los subsistemas embarcados.
7.1 Nuevos valores de masa, inercias y geometría del satélite
Se conocía en primera instancia que la masa seca del satélite, es decir, la masa sin tener en cuenta el combus-tible ni el sistema propulsivo, era de 850kg. Este valor ha permitido realizar un proceso iterativo, de atráshacia delante, con los valores de impulsos a lo largo de la misión ya que se conocía que al final de la misiónla masa del satélite era aproximadamente la masa seca. Es una buena aproximación para empezar a iterar,aunque hay que tener en cuenta que esto no es totalmente cierto, si no que la masa al final de la misión será lamasa seca más la del sistema propulsivo, sin contar el combustible, pero sí thrusters y tanques. Conformese estimó la masa de los thrusters y los tanques de combustible, se realizó el mismo proceso iterativo, deatrás hacia delante, pero esta vez imponiendo que la masa al final de la misión tuviera en cuenta este sistema.Así, tras realizar el proceso completo calculando los impulsos exactos y la masa inicial aproximada, se hizoel proceso inverso para calcular la masa final del satélite, obteniendo 924.39kg exclusivos de masa seca,thrusters y tanques de combustible.
Teniendo en cuenta que el sistema de propulsión tiene una masa de 73.1 kg. Se obtiene que la masa seca delsatélite es aproximadamente 850kg, afirmando que el proceso iterativo para el cálculo de masas e impulsosse ha realizado correctamente.
Para el cálculo de las inercias, se aplican las ecuaciones que se comentaron en el capítulo 3 con una masaal inicio de misión de 1465kg y se obtienen los siguientes valores:
Tabla 7.1 Inercias con la masa inicial.
Ix 623.659 kg ·m2
Iy 2003.396 kg ·m2
Iz 1844.710 kg ·m2
Es necesario establecer la localización de este sistema con el fin que no altere el centro de gravedad, asícomo la localización de los thrusters respecto al eje de actuación, ya que supone una decisión crítica dediseño respecto al momento, además de su dependencia con la instrumentación de abordo, de forma que nose dañen paneles solares o sensores ópticos con el chorro eyectado. Distancias menores permiten niveles de
69

70 Capítulo 7. Modificaciones a realizar en el diseño del vehículo y subsistemas asociados
momento más pequeños, consiguiendo un control más preciso, a costa de una menor eficiencia en el uso decombustible. Los thrusters se colocarán en el vehículo de forma que existan 4 por cada eje, resultando en unaconfiguración estable y sin cambios en el centro de gravedad.
Por último, respecto a la geometría, hay que analizar si el sistema de propulsión tiene el tamaño que se exigepara que entre dentro del satélite. Según la configuración estudiada en el capítulo 3, el satélite cuenta concuatro cajones vacíos en los que se pueden almacenar los tanques de combustible. Por temas de estabilidady con vistas a no mover el centro de masas de la estructura, la configuración elegida para los tanques es lade 2 tanques tanto en el cajón superior como en el inferior y 3 tanques en los dos cajones intermedios. Lasdimensiones de los tanques se adaptan sin problema a la geometría del satélite, por lo que su incorporaciónno provocará cambios en la misma.
7.2 Efectos de introducir el subsistema RCS sobre:
7.2.1 Subsistema de control de actitud
El sistema ADCS es necesario para permitir al vehículo orientarse a pesar de las perturbaciones. Los datos deentrada son los requisitos de misión, el perfil, el tipo de inserción, la carga de pago y necesidades de energía,perturbaciones, geometría y modelos solares, así como el tiempo de vida [10].
Tabla 7.2 Efecto de las maniobras en el ADCS [22].
Requisito Efecto en el vehículo Efecto en el ADCS
Cambio de órbita Gran número de thrusters y estabili-zación por spin
Elección de actuadores, sensores, le-yes de control y guiado por navega-ción
Cambios de plano ThrustersLey de control, actuadores a medidasegún perturbaciones y referencia deactitud a bordo
Mantenimiento en órbita Set de thrusters Ley de control y referencia de actituda bordo
El hecho de que afecte al número de thrusters hace que el sistema de propulsión también se vea modificadopor la instalación de este sistema.
Para el apuntamiento del vehículo a las direcciones requeridas explicadas anteriormente también hay quehacer uso de este sistema, lo cual supondrá el uso de la estabilización de 3 ejes con una referencia vertical ylocal terrestre como efecto en el vehículo. Para el sistema ADCS, se necesitará un sensor de horizonte para lareferencia vertical y local terrestre, un sensor de referencia solar/estelar, ruedas de reacción precisas, un siste-ma de control a reacción, torques magnéticos y una medida inercial para maniobras y determinación de actitud.
Tabla 7.3 Actuadores típicos del sistema ADCS [22].
Actuador Rango de actuación Peso (kg) Potencia (W)
Thrusters de hidracina < 24.6N 9.1 No aplica
Ruedas de reacciónde 0.4 a 400 N · my torque máximo de0.01 a 1 N ·m
de 1 a 20 entre 1 y 10
Giroscopios (GMC) de 25 a 500 N ·m > 10 de 90 a 150
Torques magnéticos de 1 a 4000 A ·m2 > de 0.4 a 50 de 0.6 a 16
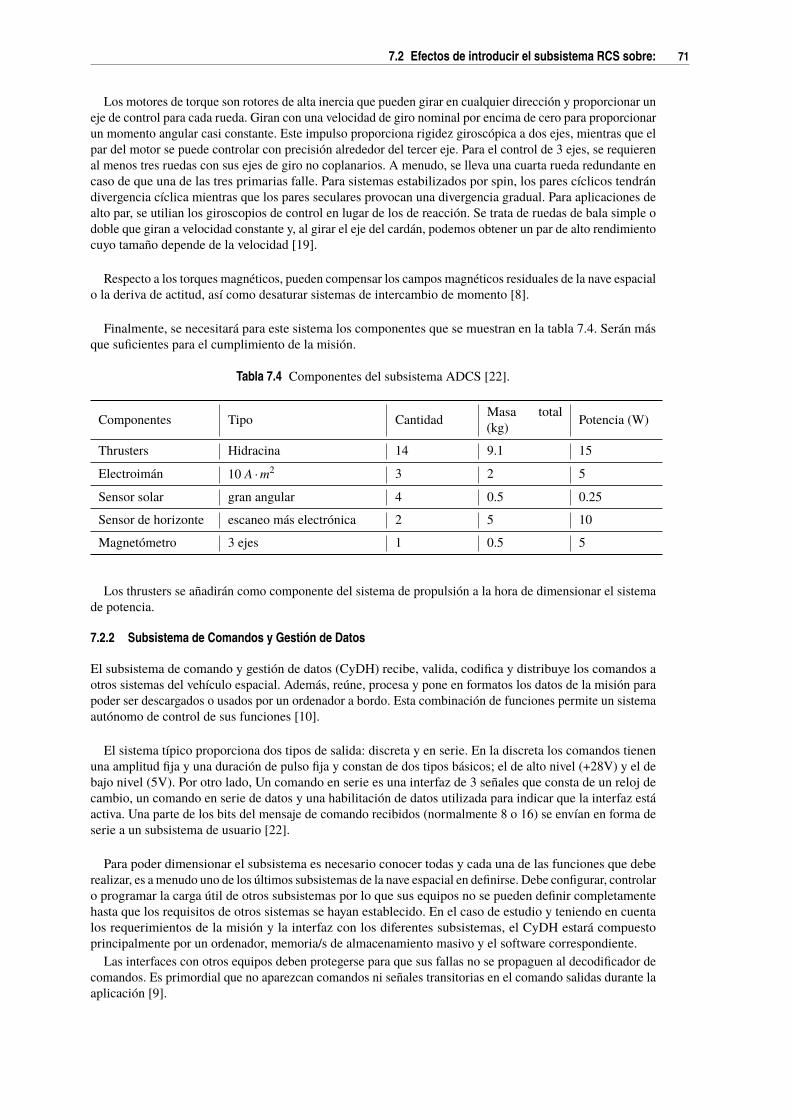
7.2 Efectos de introducir el subsistema RCS sobre: 71
Los motores de torque son rotores de alta inercia que pueden girar en cualquier dirección y proporcionar uneje de control para cada rueda. Giran con una velocidad de giro nominal por encima de cero para proporcionarun momento angular casi constante. Este impulso proporciona rigidez giroscópica a dos ejes, mientras que elpar del motor se puede controlar con precisión alrededor del tercer eje. Para el control de 3 ejes, se requierenal menos tres ruedas con sus ejes de giro no coplanarios. A menudo, se lleva una cuarta rueda redundante encaso de que una de las tres primarias falle. Para sistemas estabilizados por spin, los pares cíclicos tendrándivergencia cíclica mientras que los pares seculares provocan una divergencia gradual. Para aplicaciones dealto par, se utilian los giroscopios de control en lugar de los de reacción. Se trata de ruedas de bala simple odoble que giran a velocidad constante y, al girar el eje del cardán, podemos obtener un par de alto rendimientocuyo tamaño depende de la velocidad [19].
Respecto a los torques magnéticos, pueden compensar los campos magnéticos residuales de la nave espacialo la deriva de actitud, así como desaturar sistemas de intercambio de momento [8].
Finalmente, se necesitará para este sistema los componentes que se muestran en la tabla 7.4. Serán másque suficientes para el cumplimiento de la misión.
Tabla 7.4 Componentes del subsistema ADCS [22].
Componentes Tipo Cantidad Masa total(kg) Potencia (W)
Thrusters Hidracina 14 9.1 15
Electroimán 10 A ·m2 3 2 5
Sensor solar gran angular 4 0.5 0.25
Sensor de horizonte escaneo más electrónica 2 5 10
Magnetómetro 3 ejes 1 0.5 5
Los thrusters se añadirán como componente del sistema de propulsión a la hora de dimensionar el sistemade potencia.
7.2.2 Subsistema de Comandos y Gestión de Datos
El subsistema de comando y gestión de datos (CyDH) recibe, valida, codifica y distribuye los comandos aotros sistemas del vehículo espacial. Además, reúne, procesa y pone en formatos los datos de la misión parapoder ser descargados o usados por un ordenador a bordo. Esta combinación de funciones permite un sistemaautónomo de control de sus funciones [10].
El sistema típico proporciona dos tipos de salida: discreta y en serie. En la discreta los comandos tienenuna amplitud fija y una duración de pulso fija y constan de dos tipos básicos; el de alto nivel (+28V) y el debajo nivel (5V). Por otro lado, Un comando en serie es una interfaz de 3 señales que consta de un reloj decambio, un comando en serie de datos y una habilitación de datos utilizada para indicar que la interfaz estáactiva. Una parte de los bits del mensaje de comando recibidos (normalmente 8 o 16) se envían en forma deserie a un subsistema de usuario [22].
Para poder dimensionar el subsistema es necesario conocer todas y cada una de las funciones que deberealizar, es a menudo uno de los últimos subsistemas de la nave espacial en definirse. Debe configurar, controlaro programar la carga útil de otros subsistemas por lo que sus equipos no se pueden definir completamentehasta que los requisitos de otros sistemas se hayan establecido. En el caso de estudio y teniendo en cuentalos requerimientos de la misión y la interfaz con los diferentes subsistemas, el CyDH estará compuestoprincipalmente por un ordenador, memoria/s de almacenamiento masivo y el software correspondiente.
Las interfaces con otros equipos deben protegerse para que sus fallas no se propaguen al decodificador decomandos. Es primordial que no aparezcan comandos ni señales transitorias en el comando salidas durante laaplicación [9].

72 Capítulo 7. Modificaciones a realizar en el diseño del vehículo y subsistemas asociados
Tabla 7.5 Componentes del subsistema CyDH [22].
Componente Cantidad Masa total (kg) Potencia (W)
Computador + buses + me-moria sólida 2 13 46
7.2.3 Subsistema de Telemetría, Telemando y Comunicaciones
Este subsistema se encarga de la detección y recepción de señal, ranging, carrier tracking, mantener el estadodel subsistema. En sus funciones específicas encontramos las que se muestran a continuación [22]:
• Carrier Tracking: comunicación coherente bidireccional, comunicación bidireccional no coherente ycomunicación 1-way.
• Recepción y detección de comandos: adquirir y rastrear portadora de enlace ascendente, demodularportadora y subportadora, derivar tiempos de bits y detectar bits de datos, resolver la ambigüedad de lafase de datos si existe y reenviar datos de comando, reloj e indicador de bloqueo al subsistema paracomando y manejo de datos.
• Modulación y transmisión de telemetría: recibir flujos de datos de telemetría desde el subsistema o losdatos de comando y manejo de datos, modular subportadora y portadora con telemetría de misión ociencia y transmitir señal compuesta a la estación terrestre o satélite de retransmisión.
• Ranging: detectar y retransmitir código pseudoaleatorio de rango o señales de tono de rango y retrans-mitir la fase de forma coherente o no coherente.
• Operaciones del subsistema: recibir comandos del subsistema para el manejo de comandos y datos,proporcionar telemetría de estado y salud al subsistema CyDH, realizar la orientación de la antena,realizar operaciones de secuencia de misión según la secuencia de software almacenada, seleccionarde forma autónoma la omni-antena cuando se pierde la actitud de la nave espacial, detectar fallos deforma autónoma y recuperar las comunicaciones mediante la secuencia de software almacenada.
Algunos de los requisitos destacados de este subsistema como interfaz con otros subsistemas se muestranen la tabla 7.6. Se ve altamente influenciado porel sistema ADCS, no teniendo ninguna restricción el sistemade propulsión.
Tabla 7.6 Interfaz del subsistema TTyC [22].
Requisitos Restricciones
Apuntado para antena gimbal, apun-tado del menor ancho de banda y re-querimiento de apuntamiento de bu-cle cerrado
Conocimiento de la actitud yapuntado de antenas fijas eimprecisión de estimaciones
Se va a considerar, por tanto, una arquitectura de comunicaciones formada por un único satélite quealmacene y transmita los datos a las estaciones de Tierra debido a su simplicidad y al menor coste asociado.Estará formado por transpondedores y antenas.
• Transpondedores: son dispositivos con capacidad de transmisión y recepción de información, adaptandola señal de entrada / salida a la frecuencia requerida.
• Antenas: son dispositivos diseñados para emitir y/o recibir ondas electromagnéticas en el espacio.
Se van a usar duplexores, de tal forma que cada antena tenga la capacidad de emitir y recibir informaciónal mismo tiempo y usar únicamente dos antenas redundantes. El tipo de modulación será digital por su mayorprecisión, sencillez y seguridad. Los componentes se muestran en la tabla 7.7.

7.2 Efectos de introducir el subsistema RCS sobre: 73
Tabla 7.7 Componentes del subsistema TTyC [22].
Componentes Cantidad Masa total(kg) Potencia (W)
Transpondedor 2 4.6 16
Duplexor 2 9.8 No aplica
PEC Antena 2 0.8 No aplica
Antena Helicoidal 2 2 No aplica
7.2.4 Subsistema de Potencia
El sistema de potencia o EPS se encarga de proporcionar, almacenar, distribuir y controlar la potencia eléctricaen el satélite, destacando las siguientes funciones:
• Controlar y distribuir la potencia eléctrica de la nave.
• Suministrar una fuente continua de potencia eléctrica a la carga del satélite durante el tiempo de vidade la misión.
• Capacidad de satisfacer los requisitos de potencia demandados por los distintos subsistemas.
• Proteger la carga de pago frente a posibles fallos del EPS.
En esta misión se utiliza como fuente de potencia principal paneles fotovoltaicos por ser de corta duracióny en órbita LEO heliosíncrona, con la que se puede conseguir grandes períodos de iluminación solar. Adicio-nalmente, se opta por el uso de dispositivos de almacenamiento de energía (baterías) como fuente secundariade potencia para periodos de eclipses cuando los paneles solares no se encuentren iluminados. Además, estasbaterías serán utilizadas como fuente primaria tras el lanzamiento, pasando a usarse los paneles una vezactivos todos los subsistemas.
Las baterías tienen la característica de ser recargables durante los periodos de iluminación, aunque su capa-cidad disminuye con los ciclos de carga. Por este motivo, es importate estudiar los periodos de carga y descarga.
Para dimensionar, se va a considerar el hecho de que todos los subsistemas están activos y consumiendopotencia a la vez, los valores de potencias de cada subsistema se muestran en la tabla 7.8. El hecho de imponerun margen del 15% se ha basado en la madurez de diseño y en la práctica.
Tabla 7.8 Subsistema de potencia [22].
Subsistema Potencia (W)
ADCS 20.25
CyDH 46
TTyC 16
RCS 14
Potencia 10
Total 106.25
Total con margen (15%) 122.1875
A continuación, se va a comprobar que los paneles solares ofrecen suficiente potencia como para abasteceral satélite y sus subsistemas.

74 Capítulo 7. Modificaciones a realizar en el diseño del vehículo y subsistemas asociados
Partiendo de la ecuación 7.2.4:
Apanel =Ppanel
ε ·Csolar= 0.27m2 (7.1)
Donde Csolar es la constante solar y ε la eficiencia.
Algunas células fotovoltaicas han llegado a tener una eficiencia energética de hasta el 30%, aun así, se vana tener en cuenta las condiciones de funcionamiento y la degradación al final de la vida útil de las mismas,dando un valor de eficiencia entre el 5% y el 15%, considerando para esta primera estimación un valor mediodel 10%. Por otro lado, el valor de Csolar es de 1367W/m2.
Dado que el área de cada panel del vehículo es de 5.6 m2, se tiene que la potencia es P = 765.52W porcada panel, más que suficiente para llevar a cabo la misión.
Para periodos de poca iluminación o en eclipses, se debe disponer de baterías que experimenten proce-sos de carga en periodos de iluminación y descarguen energía cuando sea necesario. En órbitas tan bajas,el satélite es capaz de experimentar hasta 15 periodos de eclipses al día, es decir, las baterías serán car-gadas y descargadas unas 5000 veces al año con una profundidad de descarga (DOD) de valor medio 20% [22].
La capacidad de una batería se puede estimar como:
Cr =Te ·Pe
DOD ·N ·n≈ 380.75W ·h (7.2)
Donde se ha considerado un voltaje típico de 28V, 1 sola batería (N=1) y eficiencia de transmisión entrebatería y carga (n) del 90%.
Para la elección de las baterías, se pueden distinguir entre los siguientes tipos:
Tabla 7.9 Tipos de baterías.
Tipo Energía específica W ·h/kg Descripción breve
NiCd 25-30 Primeras en implementarse en satélites. Poco eficientes.
NiH2 35-60 Poco pesadas y buena tolerancia a descargas.
Li− Ion 70-110 Muy eficientes, reducción de peso considerable y modulares.
Comparando distintas baterías de Ion-Litio, ya que son las que ofrecen una mejor configuración, se hadecidido embarcar la batería QL015KA de Quallion, de 0.38kg. Ofrece una potencia de 54W ·h por lo quese necesitarán 6 baterías para poder abastecer a todos los subsistemas cuando no se encuentre el satélite enperiodos de iluminación.
La lista componentes de cada uno de los sistemas está basada en la experiencia [22].
7.2.5 Subsistema de Control Térmico
La función del subsistema de control térmico (TCS) es mantener a nave, componentes y subsistemas dentrode sus límites de temperatura requeridos para cada fase de misión. Los límites de temperatura incluyen unatemperatura fría y una temperatura caliente que el componente no debe superar [10].
Se definen de forma frecuente dos límites: los límites operacionales dentro de los cuales el componentedebe permanecer durante la operación y los límites de supervivencia en los que debe permanecer en todomomento, incluso cuando no está en funcionamiento. Exceder los límites de temperatura de supervivenciapuede resultar en un daño permanente de los elementos en lugar de un rendimiento fuera de tolerancia cuandoestá operativo [22].
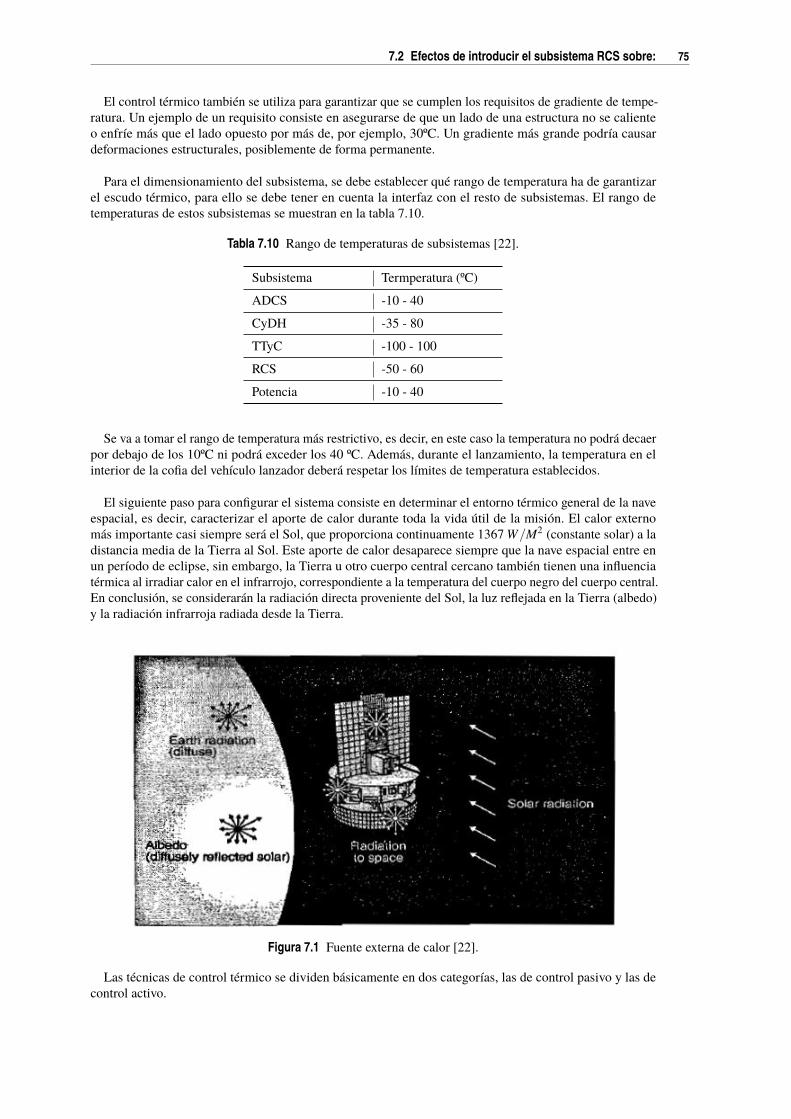
7.2 Efectos de introducir el subsistema RCS sobre: 75
El control térmico también se utiliza para garantizar que se cumplen los requisitos de gradiente de tempe-ratura. Un ejemplo de un requisito consiste en asegurarse de que un lado de una estructura no se calienteo enfríe más que el lado opuesto por más de, por ejemplo, 30ºC. Un gradiente más grande podría causardeformaciones estructurales, posiblemente de forma permanente.
Para el dimensionamiento del subsistema, se debe establecer qué rango de temperatura ha de garantizarel escudo térmico, para ello se debe tener en cuenta la interfaz con el resto de subsistemas. El rango detemperaturas de estos subsistemas se muestran en la tabla 7.10.
Tabla 7.10 Rango de temperaturas de subsistemas [22].
Subsistema Termperatura (ºC)
ADCS -10 - 40
CyDH -35 - 80
TTyC -100 - 100
RCS -50 - 60
Potencia -10 - 40
Se va a tomar el rango de temperatura más restrictivo, es decir, en este caso la temperatura no podrá decaerpor debajo de los 10ºC ni podrá exceder los 40 ºC. Además, durante el lanzamiento, la temperatura en elinterior de la cofia del vehículo lanzador deberá respetar los límites de temperatura establecidos.
El siguiente paso para configurar el sistema consiste en determinar el entorno térmico general de la naveespacial, es decir, caracterizar el aporte de calor durante toda la vida útil de la misión. El calor externomás importante casi siempre será el Sol, que proporciona continuamente 1367 W/M2 (constante solar) a ladistancia media de la Tierra al Sol. Este aporte de calor desaparece siempre que la nave espacial entre enun período de eclipse, sin embargo, la Tierra u otro cuerpo central cercano también tienen una influenciatérmica al irradiar calor en el infrarrojo, correspondiente a la temperatura del cuerpo negro del cuerpo central.En conclusión, se considerarán la radiación directa proveniente del Sol, la luz reflejada en la Tierra (albedo)y la radiación infrarroja radiada desde la Tierra.
Figura 7.1 Fuente externa de calor [22].
Las técnicas de control térmico se dividen básicamente en dos categorías, las de control pasivo y las decontrol activo.
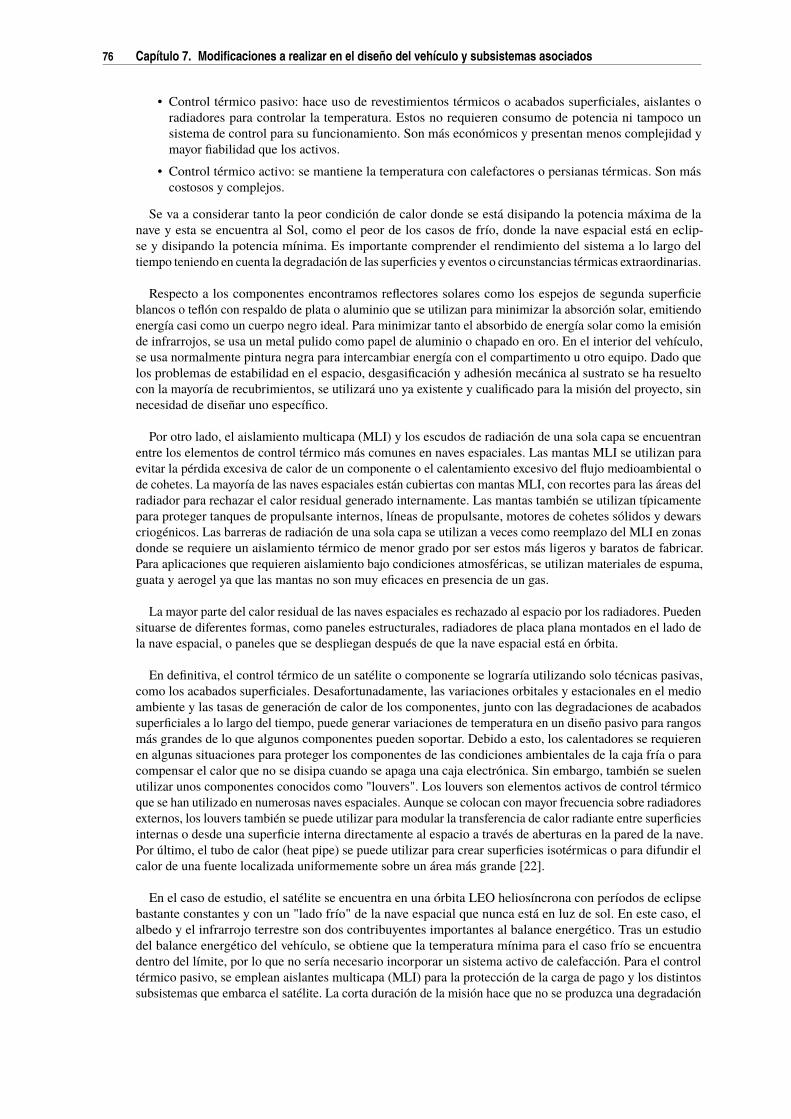
76 Capítulo 7. Modificaciones a realizar en el diseño del vehículo y subsistemas asociados
• Control térmico pasivo: hace uso de revestimientos térmicos o acabados superficiales, aislantes oradiadores para controlar la temperatura. Estos no requieren consumo de potencia ni tampoco unsistema de control para su funcionamiento. Son más económicos y presentan menos complejidad ymayor fiabilidad que los activos.
• Control térmico activo: se mantiene la temperatura con calefactores o persianas térmicas. Son máscostosos y complejos.
Se va a considerar tanto la peor condición de calor donde se está disipando la potencia máxima de lanave y esta se encuentra al Sol, como el peor de los casos de frío, donde la nave espacial está en eclip-se y disipando la potencia mínima. Es importante comprender el rendimiento del sistema a lo largo deltiempo teniendo en cuenta la degradación de las superficies y eventos o circunstancias térmicas extraordinarias.
Respecto a los componentes encontramos reflectores solares como los espejos de segunda superficieblancos o teflón con respaldo de plata o aluminio que se utilizan para minimizar la absorción solar, emitiendoenergía casi como un cuerpo negro ideal. Para minimizar tanto el absorbido de energía solar como la emisiónde infrarrojos, se usa un metal pulido como papel de aluminio o chapado en oro. En el interior del vehículo,se usa normalmente pintura negra para intercambiar energía con el compartimento u otro equipo. Dado quelos problemas de estabilidad en el espacio, desgasificación y adhesión mecánica al sustrato se ha resueltocon la mayoría de recubrimientos, se utilizará uno ya existente y cualificado para la misión del proyecto, sinnecesidad de diseñar uno específico.
Por otro lado, el aislamiento multicapa (MLI) y los escudos de radiación de una sola capa se encuentranentre los elementos de control térmico más comunes en naves espaciales. Las mantas MLI se utilizan paraevitar la pérdida excesiva de calor de un componente o el calentamiento excesivo del flujo medioambiental ode cohetes. La mayoría de las naves espaciales están cubiertas con mantas MLI, con recortes para las áreas delradiador para rechazar el calor residual generado internamente. Las mantas también se utilizan típicamentepara proteger tanques de propulsante internos, líneas de propulsante, motores de cohetes sólidos y dewarscriogénicos. Las barreras de radiación de una sola capa se utilizan a veces como reemplazo del MLI en zonasdonde se requiere un aislamiento térmico de menor grado por ser estos más ligeros y baratos de fabricar.Para aplicaciones que requieren aislamiento bajo condiciones atmosféricas, se utilizan materiales de espuma,guata y aerogel ya que las mantas no son muy eficaces en presencia de un gas.
La mayor parte del calor residual de las naves espaciales es rechazado al espacio por los radiadores. Puedensituarse de diferentes formas, como paneles estructurales, radiadores de placa plana montados en el lado dela nave espacial, o paneles que se despliegan después de que la nave espacial está en órbita.
En definitiva, el control térmico de un satélite o componente se lograría utilizando solo técnicas pasivas,como los acabados superficiales. Desafortunadamente, las variaciones orbitales y estacionales en el medioambiente y las tasas de generación de calor de los componentes, junto con las degradaciones de acabadossuperficiales a lo largo del tiempo, puede generar variaciones de temperatura en un diseño pasivo para rangosmás grandes de lo que algunos componentes pueden soportar. Debido a esto, los calentadores se requierenen algunas situaciones para proteger los componentes de las condiciones ambientales de la caja fría o paracompensar el calor que no se disipa cuando se apaga una caja electrónica. Sin embargo, también se suelenutilizar unos componentes conocidos como "louvers". Los louvers son elementos activos de control térmicoque se han utilizado en numerosas naves espaciales. Aunque se colocan con mayor frecuencia sobre radiadoresexternos, los louvers también se puede utilizar para modular la transferencia de calor radiante entre superficiesinternas o desde una superficie interna directamente al espacio a través de aberturas en la pared de la nave.Por último, el tubo de calor (heat pipe) se puede utilizar para crear superficies isotérmicas o para difundir elcalor de una fuente localizada uniformemente sobre un área más grande [22].
En el caso de estudio, el satélite se encuentra en una órbita LEO heliosíncrona con períodos de eclipsebastante constantes y con un "lado frío" de la nave espacial que nunca está en luz de sol. En este caso, elalbedo y el infrarrojo terrestre son dos contribuyentes importantes al balance energético. Tras un estudiodel balance energético del vehículo, se obtiene que la temperatura mínima para el caso frío se encuentradentro del límite, por lo que no sería necesario incorporar un sistema activo de calefacción. Para el controltérmico pasivo, se emplean aislantes multicapa (MLI) para la protección de la carga de pago y los distintossubsistemas que embarca el satélite. La corta duración de la misión hace que no se produzca una degradación

7.3 Rediseño final del satélite tras introducir el sistema RCS 77
significativa del escudo. Adicionalmente, se deberán emplear ciertos acabados superficiales en zonas en lasque se requiera una protección térmica determinada. Se utilizará un radiador de unos 3.3 kg según valorestípicos y pintura negra para la superficie interior y blanca para la superficie exterior.
Tabla 7.11 Componentes del subsistema térmico [22].
Componentes Masa total (kg)
MLI 0.8
Radiador (1) 3.3
7.3 Rediseño final del satélite tras introducir el sistema RCS
La nueva configuración de los cajones del satélite se muestra en la figura 7.2.
Figura 7.2 Geometría interna del satélite.


8 Final operativo: Estrategias a seguir
Una vez realizada la misión, es necesario establecer un final para la vida del satélite. Las posibles opcionespara el final operativo son las siguientes:
• Destrucción del satélite en órbita: en este caso se trataría de equipar un sistema pirotécnico a bordo delvehículo que permita realizar su detonación controlada en un instante determinado. De esta forma sedespejaría rápidamente la órbita funcional en la que se encontraba, permitiendo así ocupar nuevamentedicha altitud.
• Desorbitar el satélite: esta solución consiste en sacar al satélite de su órbita de operación medianteimpulsos, bien haciendo que el vehículo se dirija hacia el espacio profundo o enviándolo en direcciónhacia la Tierra para que se produzca su reentrada en la atmósfera del planeta, sufriendo casi con totalprobabilidad la desintegración de todos sus componentes.
• Decaimiento libre del satélite: dado que el combustible del satélite es limitado, una posible soluciónsería permitir que el satélite efectuase un movimiento de caída libre (gracias a la resistencia atmosférica)una vez agotado el combustible. En el caso de que este método sea el elegido para poner fin a la vidadel satélite, habría que calcular el período aproximado en el que entraría en modo de decaimientoorbital. En la realidad se obtendría un periodo menor debido a que el calculado hace referencia altiempo que tardaría el satélite en llegar a la superficie de la Tierra sin que se produjese su integración.
• Órbita cementerio: esta estrategia consiste en colocar el satélite en una órbita cementerio mediante unamaniobra de transferencia. Este tipo de órbitas, situadas a unos 300 km por encima de las órbitas deoperación de la mayoría de satélites, se usan en la actualidad para situar satélites que ya han cumplidosu vida útil,apartándolo así de las órbitas funcionales.
En primera instancia, todas las opciones mencionadas anteriormente serían factibles para ponerle fin ala vida del satélite, aun así hay varios puntos que hay que analizar con el fin de elegir la forma óptima de hacerlo.
Por un lado hay que tener en cuenta la basura espacial existente ahora mismo en la órbita de la Tierra.Siempre que sea posible habría que evitar desorbitar el satélite o las órbita cementerio ya que estos métodossolo aumentarían la cantidad de basura espacial. La opción de la destrucción del satélite en órbita tambiéndaría lugar a restos, además de que embarcar el sistema pirotécnico a bordo supondría un aumento en la masainicial del satélite.
Por otro lado, es importante partir de la base que el satélite estudiado se encuentra en una órbita LEOque, tal y como se explicó anteriormente, a esas altitudes se da el efecto de perturbación de la resistenciaatmosférica que provoca la pérdida de energía del satélite y la variación de sus elementos orbitales, hastallevarlo a la reentrada en la Tierra. Este hecho induce a inclinarse por el método de desorbitado controladocomo final para la vida del satélite. En la mayoría de los casos se indica que dicha reentrada se origina entrelos 120 km y los 160 km de altitud; de forma que se escogerá esos 160km como límite comenzando realmentela reentrada unas pocas horas más tarde [6].
79

80 Capítulo 8. Final operativo: Estrategias a seguir
8.1 Opciones de desorbitado
Para llevar a cabo la desorbitación del satélite se puede dejar caer el mismo hasta que llegue a la altitud dereentrada o se pueden plantear varias opciones que aceleren el proceso. Una primera opción sería el frenadopropulsivo, realizar un impulso en el sentido contrario al movimiento de la astronave permitiría frenar elvehículo para así disminuir el tiempo de caída. Otra configuración posible sería aumentar la superficie frontalen la dirección de vuelo con el fin de exponer más superficie a la resistencia atmosférica y así provocarel frenado del vehículo de manera más rápida. Es evidente que la mejor opción sería la de exponer mássuperficie y no dar más impulsos, de forma que no habría que realizar cambios en la masa de combustibleque lleva el vehículo y, por tanto, en todo el sistema propulsivo. En este estudio se van a estudiar las opcionesen el siguiente orden: bajada sin cambios, bajada con aumento de superficie y bajada con impulso solo sifuese necesario.
Es importante establecer las limitaciones de este método, siendo necesario antes de la reentrada unapasivación de todas las fuentes de energía, es decir, agotarlas con el fin de evitar la desintegración de dichossistemas. Algunos ejemplos de pasivación son ventilar o quemar el exceso de propulsante, descargar lasbaterías o aliviar los recipientes a presión. El objetivo será garantizar que se tomen las medidas necesariaspara proteger el vehículo antes de que se pierdan los sistemas críticos. El plan debe incluir criterios quedefinan cuándo se tomarán las acciones de seguridad, el fundamento de cada criterio y un cronograma paralas acciones de seguridad. [6]
Conociendo la masa al final de la misión, 924.39kg, y considerando un valor de densidad atmosféricacorrespondiente a un ciclo solar medio, se van a calcular los días de decaimiento para distintas orientacionesdel vehículo.
Eje X como dirección de vuelo:
Figura 8.1 Reentrada en dirección X.
El satélite tiene la misma orientación que durante la realización de la misión, es la menor superficie devuelo, 2.7462 m2 por lo que tardará varios años en caer, exactamente 5 años y casi 10 meses.
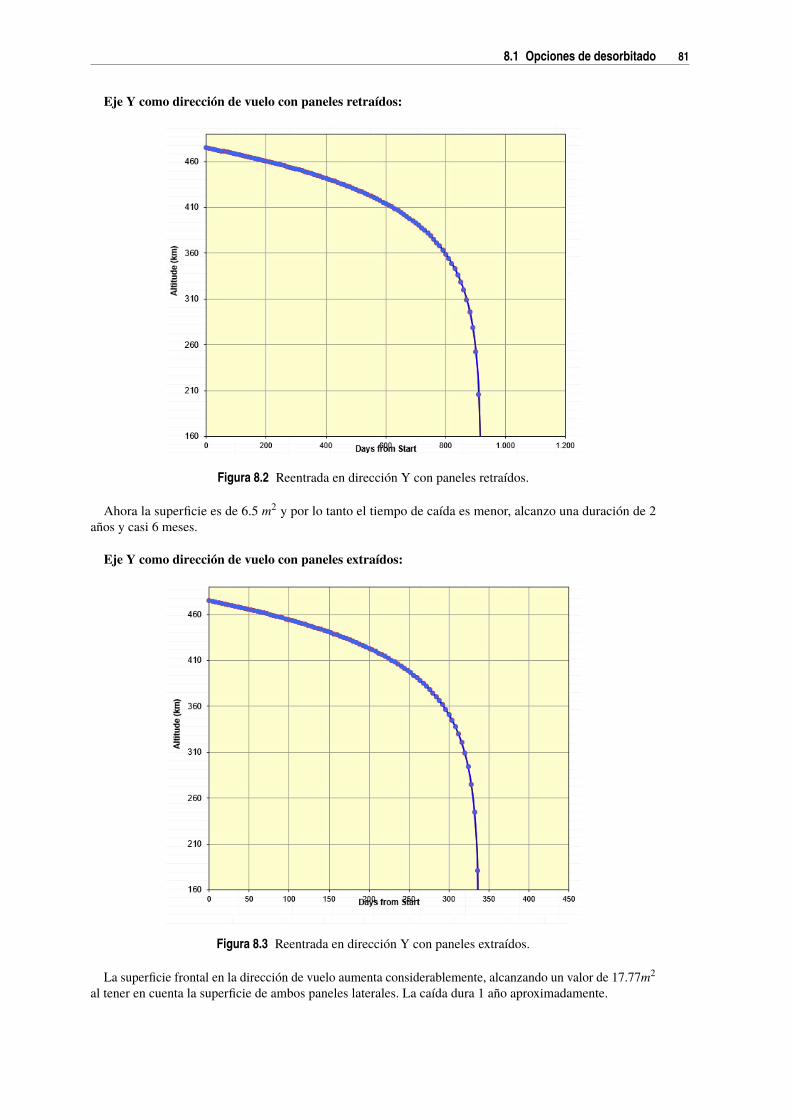
8.1 Opciones de desorbitado 81
Eje Y como dirección de vuelo con paneles retraídos:
Figura 8.2 Reentrada en dirección Y con paneles retraídos.
Ahora la superficie es de 6.5 m2 y por lo tanto el tiempo de caída es menor, alcanzo una duración de 2años y casi 6 meses.
Eje Y como dirección de vuelo con paneles extraídos:
Figura 8.3 Reentrada en dirección Y con paneles extraídos.
La superficie frontal en la dirección de vuelo aumenta considerablemente, alcanzando un valor de 17.77m2
al tener en cuenta la superficie de ambos paneles laterales. La caída dura 1 año aproximadamente.
82 Capítulo 8. Final operativo: Estrategias a seguir
Para ninguna de las opciones anteriores sería necesario aplicar un impulso de frenado para aumentar lavelocidad de decaimiento ya que el tiempo de bajada no sobrepasa el tiempo límite de fin de vida de satélites,25 años [6]. Las diferencias entre ambas configuraciones son fácilmente detectables, siendo la última opciónla más rápida y sin necesidad de impulsos. Además, los paneles ya estarían extendidos en el momento deldecaimiento por lo que al inicio de la caída únicamente habría que orientar el satélite con el eje Y tangente ala dirección de vuelo. Al igual que en las órbitas nominales, el satélite se encuentra rotando sobre sí mismo ala velocidad orbital con el fin de mantener la dirección de vuelo siempre tangente a la órbita, en este caso,esa velocidad de rotación debe aumentar conforme disminuye la altitud ya que la velocidad orbital del mismoserá mayor cuanto menor es el radio. Este hecho ya se ha tenido en cuenta para el diseño del sistema decontrol de actitud al añadirse la estabilización de 3 ejes con una referencia vertical y local terrestre.
En el estudio no se ha tenido en cuenta el efecto del J2, si no que solo se ha considerado la resistenciaatmosférica. El incluir el achatamiento de la tierra supondría que la órbita tarda menos tiempo en caer porlo que si se puede realizar este método para el fin de vida sin tenerlo en cuenta, también podrá hacerseconsiderando su efecto.
En la siguiente tabla se muestran los valores finales de la reentrada, donde se ha tenido en cuenta que eneste estudio hay un nivel de incertidumbre debajo del 10 % de la vida restante del satélite debajo del cual nose puede predecir el decaimiento. Este porcentaje será tenido en cuenta en el cálculo del tiempo de fin devida.
Tabla 8.1 Reentrada del satélite.
Desorbitado Altura inicial Altura final Días
Con paneles 480 160 380
En definitiva, la caída hasta la reentrada se producirá en 1 año y un mes aproximadamente si se tiene encuenta la incertidumbre del 10%.
9 Conclusiones y trabajos futuros
Para concluir el proyecto de fin de carrera, se va a describir en este punto las conclusiones que se pueden ob-tener del estudio realizado y se van a proponer diversas mejoras que se podrán llevar a cabo en trabajos futuros.
El estudio del mantenimiento en altitud para un satélite en órbita baja, no es, como ha podido observarse,un proceso trivial. Existen diversos factores a tener en cuenta que son determinantes a la hora de obtener elresultado óptimo en el proceso iterativo.
En este proyecto se ha llegado a la conclusión de que el tipo de órbita que más se adapta al perfil de misiónen todos lo tramos es la órbita heliosíncrona, realizando un lanzamiento directo hacia el Sur con el vehículoDelta II desde la base de Vandenberg. Tras haber realizado el estudio del ciclo solar, se ha demostrado que elmejor momento para el lanzamiento se da cuando el valor de densidad sea menor, es decir, al principio ofinal del ciclo, por ese motivo se ha decidido que el lanzamiento se realice el 23 de Febrero de 2022, dondeademás coincide con un periodo sin eclipses y máxima iluminación solar.
A partir de los requisitos y limitaciones impuestos en la misión, así como la geometría, masas y perfila cumplir y tras un análisis del entorno y de las perturbaciones, se han calculado los impulsos necesariospara realizar todas las maniobras orbitales. Con el valor de incremento de velocidad de la misión completay considerando una relación de masas sin propulsante y con él de 0.8 aproximadamente, se ha estimado elimpulso específico de los motores. Este valor, junto a el del número de impulsos estimado y la densidada cierta altitud, han permitido realizar el proceso iterativo para el cálculo de la masa del populsante totalnecesaria para realizar todas y cada unas de las maniobras orbitales.
Como se ha podido observar, ha sido un proceso iterativo con el número de impulsos como variable yel valor de masa final como dato que conducían a la obtención de un primer valor de masa, el cual variabael número de impulsos estimado en un principio. Ese valor de impulsos actualizado se ha introducido denuevo en el algoritmo que calcula la masa inicial a partir de la final y que proporcionaba otro nuevo valor.Esta iteración se ha realizado hasta que ha convergido hacia una única solución, es decir, unos valores deimpulsos para las órbitas de mantenimiento oribital y un valor de masa de propulsante total y coherente.
Seguidamente, con la masa de propulsante obtenida y el impulso específico, se ha demostrado que unsistema monopropelente de thrusters es capaz de satisfascer la misión y se han diseñado todos los tanquesde combustible de acuerdo al mismo, siendo necesarios 14 thrusters y 10 tanques de combustible. Con losnuevos valores de masa total del satélite al inicio de misión y los elementos del sistema se ha llevado a caboel rediseño geométrico y el estudio del impacto en los otros subsistemas.
Finalmente, se han comparado diversos finales para la misión y se ha concluido que el óptimo es la caídalibre con la posterior reentrada en la atmósfera y consecuente desintegración del satélite. Este final cumpliríael límite de 25 años para el final de vida del satélite y no aumentaría la cantidad de basura espacial en lasórbitas cementerio.
Como mejora para un diseño futuro del sistema propulsivo de un satélite se propone un estudio riguroso dela toxicidad del propulsante y evitar utilizar uno que suponga peligros de contaminación. Normalmente, los
83

84 Capítulo 9. Conclusiones y trabajos futuros
RCS utilizan hidracina y tetróxido de dinitrógeno (NTO) como propulsores. Estos son propulsores de cohetestradicionales probados que ahora están vigilados y limitados debido al gran crecimiento de la industriaespacial y al peligro que suponen para la salud humana y el medio ambiente, el NTO es muy tóxico ycorrosivo, y la hidracina es tóxica, cancerígena y mutágena. Además, esta toxicidad los hace muy costosos detransportar y manipular. Por otro lado, su uso aumentan significativamente la masa y el volumen del satélitecon respecto a otros propulsores Eco, aumentando consecuentemente los costes de lanzamiento. Por lo tanto,se propone el reemplazo de estos propulsores por otros ecológicos y seguros como los ECO-Thrust, RCSlimpio y seguro para satélites que consumen propelente verde de peróxido de hidrógeno (H2O2) y que sepuede utilizar como monopropelente o como oxidante con combustible verde (como etanol o biodiésel) enpropulsores bipropelentes.
Otra posible mejora que se puede llevar a cabo en trabajos futuros es perfeccionar el cálculo de la caídadel satélite debido al efecto de la resistencia atmosférica. En este proyecto se ha considerado el ciclo solarpara estimar un modelo atmosférico, sin embargo en la realidad existen numerosos factores que tambiénson determinantes como las variaciones diurnas, el ciclo de rotación solar, las variaciones estacionales ycíclicas, rotación atmosférica y vientos solares, variaciones por tormentas magnéticas y de corto periodo y porúltimo las mareas. Existen numerosos modelos de densidad que han sido desarrollados en las últimas décadascon dos enfoques principales; el primero combinando leyes de conservación y modelos de constituciónatmosférica en modelos físicos y el segundo usando conceptos físicos simplificados desarrollados a partir dedatos o medidas in-situ y datos de satélites. Se propone como un avance el uso de algún modelo variante en eltiempo, como el atmosférico Jacchia-Roberts, el cual es más completo pero complicado computacionalmente,además de que es necesario conocer los datos de la época. Por otro lado, también se afinarían los resultadossi además se considerara la perturbación del J2 en la caída del satélite, lo cual la aceleraría disminuyendo eltiempo de caída respecto al estudio que no tiene en cuenta el J2.
Por último, comomejora para el satélite en su totalidad, se podrían optimizar los subsistemas propuestos, asícomo su dimensionamiento y su operatividad. Además, es posible estudiar en profundidad las comunicacionesentre subsistemas y mejorar las interacciones entre los mismos.
Apéndice ALanzamiento
Debido a que el plano orbital está fijo en el espacio inercial, la ventana de lanzamiento es el momento enel que el lugar de lanzamiento en la superficie de la Tierra gira a través del plano orbital. Para elegir unaventana de lanzamiento de manera coherente, se van a describir las restricciones para el lanzamiento queexisten en la base de Vandenberg, [1].
A.1 Restricciones de la base de Vandenberg
• Prohibido efectuar el lanzamiento si existen rachas de viento superiores a 28 nudos.
• Prohibido efectuar el lanzamiento con viento cruzado que pueda provocar problemas en el control delvehículo lanzador.
• Prohibido efectuar el lanzamiento si existen precipitaciones o nubosidad en presencia de precipitaciones.
• Prohibido efectuar el lanzamiento a través de una capa nubosa de 4500 pies de espesor, que se extiendaa temperaturas bajo cero.
• Prohibido efectuar el lanzamiento a través de nubosidad que se extienda de 5 a 10 millas náuticas, concimas que se extiendan a temperaturas bajo cero.
• Prohibido efectuar el lanzamiento a 10 millas náuticas de una tormenta que esté produciendo rayosdurante 30 minutos, después de que se haya observado el último rayo.
• Prohibido efectuar el lanzamiento durante los 30 minutos posteriores a la observación de un rayo a 10millas náuticas desde la plataforma de lanzamiento o la trayectoria de vuelo.
• Prohibido efectuar el lanzamiento si, dentro de 5 millas náuticas desde la plataforma, las lecturas delos instrumentos de medición de campo eléctrico exceden de ±1500 voltios.
• Prohibido efectuar el lanzamiento a través de una nube tormentosa. Si ésta se encuentra a 10 millasnáuticas del lugar de lanzamiento, prohibido efectuar el lanzamiento hasta 30 minutos después de quese observe el último rayo.
• Prohibido efectuar el lanzamiento a través de nubes formadas como resultado o directamente unidas acolumnas de humo.
85

86 Capítulo A. Lanzamiento
A.2 Ventanas de lanzamiento
En el capítulo 2 se eligió el vehículo lanzador y la base de lanzamiento, a continuación, se va a estudiar laventana de lanzamiento para el día 23 de febrero de 2022.
En dicha fecha se tienen los siguientes valores de coordenadas del Sol:
AR = 3.8985 (A.1)
δ = 1.6936 (A.2)
Dado que se ha impuesto que Ω = AR+120 para mantener la casi perpendicularidad de los panelessolares con los rayos de sol, el valor de la ascensión recta del nodo ascendente debe ser el siguiente:
Ω = 123.89 (A.3)
De forma que aplicando la ecuación del lanzamiento que se estudió en el capítulo 2:
t =Ω+λu−λ −GST0
ω⊕(A.4)
Se tiene que t = 37.33s.
Por otro lado, se va a imponer un rango de error de la ascensión recta del nodo ascendente de ±5,obteniendo los resultados de la tabla A.1.
Tabla A.1 Ventana de lanzamiento.
Día Tiempo Horas Minutos Segundos
22/02/2022 Mínimo 23 40 41
23/02/2022 Máximo 00 20 34

Apéndice BManiobras orbitales
B.1 Maniobra de cambio de plano
En el caso en el que ambas órbitas (final e inicial) tengan algún punto en común y se quiera hacer un cambiode inclinación o de RAAN, se realizará una maniobra de cambio de plano para ir de la órbita inicial a la final.Partiendo de la figura B.1 y aplicando trigonometría esférica, se obtienen las expresiones B.1 y B.2.
Figura B.1 Maniobra de cambio de plano.
cos∆A = cos ii cos i f + sin ii sin i f cosΩ f −Ωi (B.1)
sinφ =sin ii sin i f cosΩ f −Ωi
sin∆A(B.2)
Por lo que el incremento de velocidad necesario para poder realizar la maniobra de cambio de plano será∆V :
∆V = 2V sin∆A2
(B.3)
Donde V es la velocidad tanto inicial como final de la maniobra ya que esta permanece constante y suvalor es:
V =
√2µ
r− µ
a(B.4)
Y considerando el caso circular, donde a = r:
V =
õ
r(B.5)
87

88 Capítulo B. Maniobras orbitales
La maniobra de cambio de plano se puede particularizar para el caso en el que la ascensión recta semantenga constante en ambas órbitas y solo exista un cambio de inclinación, entonces:
cos∆A = cos ii cos i f + sin ii sin i f = cos ii− i f (B.6)
Por lo que ∆i = ii− i f y φ = 0. En este caso, se obtendría el siguiente incremento de velocidad:
∆V = 2V sin∆i2
(B.7)
En todo el estudio de la maniobra de cambio de plano se consideran los elementos orbitales a,e,ω,θconstantes.
B.2 Transferencia de Hohmann
En el caso en el que las órbitas final e inicial no tengan puntos en común, no podemos hacer maniobras de unsolo impulso. En esos casos, se realizará una transferencia en la que se pasará a una órbita intermedia antesde alcanzar la órbita final deseada.
El hecho de que existan infinitas transferencias para pasar de una órbita a otra lleva a la necesidad de buscarla óptima. En este proyecto se va a estudiar la Transferencia de Hohmann ya que en numerosos estudios se hademostrado que es mejor que la bielíptica o biparabólica cuando la relación de radio final entre radio iniciales pequeña. Concretamente, este tipo de transferencia deja de ser la óptima en cuanto a costes cuando:
λ =r f
ri> 11.94 (B.8)
En la misión que se está analizando, ese ratio es menor que 11.94 por lo que se justifica la elección de estetipo de transferencia.
Entre dos órbitas elípticas se puede hallar una maniobra óptima tipo Hohmann en términos de ahorro deincrementos de velocidad. La regla consiste en elegir el mayor de los apogeos como punto donde el vehículointersecta a la órbita de transferencia. Corresponde con la elipse de transferencia 1 de la figura B.2.
Figura B.2 Transferencia de Hohmann, caso elíptico.
Para el caso de una órbita circular, se realiza la transferencia de Hohmann de dos impulsos, uno paraalcanzar una órbita con radio igual al radio de la órbita final y un segundo impulso para circularizar la órbita.La transferencia se puede observar en la figura B.3.
La elipse de transferencia de Hohmann cumple:
aH =ri‘+ r f
2(B.9)

B.2 Transferencia de Hohmann 89
Figura B.3 Transferencia de Hohmann, caso circular.
Por lo que los incrementos de velocidades correspondientes son:
∆V1 =
√2µ
ri− µ
aH−√
µ
ri(B.10)
∆V2 =
õ
r f−√
2µ
r f− µ
aH(B.11)
Por lo que finalmente, el incremento de velocidad asociado a esta transferencia es:
∆Vtotal = ∆V1 +∆V2 (B.12)

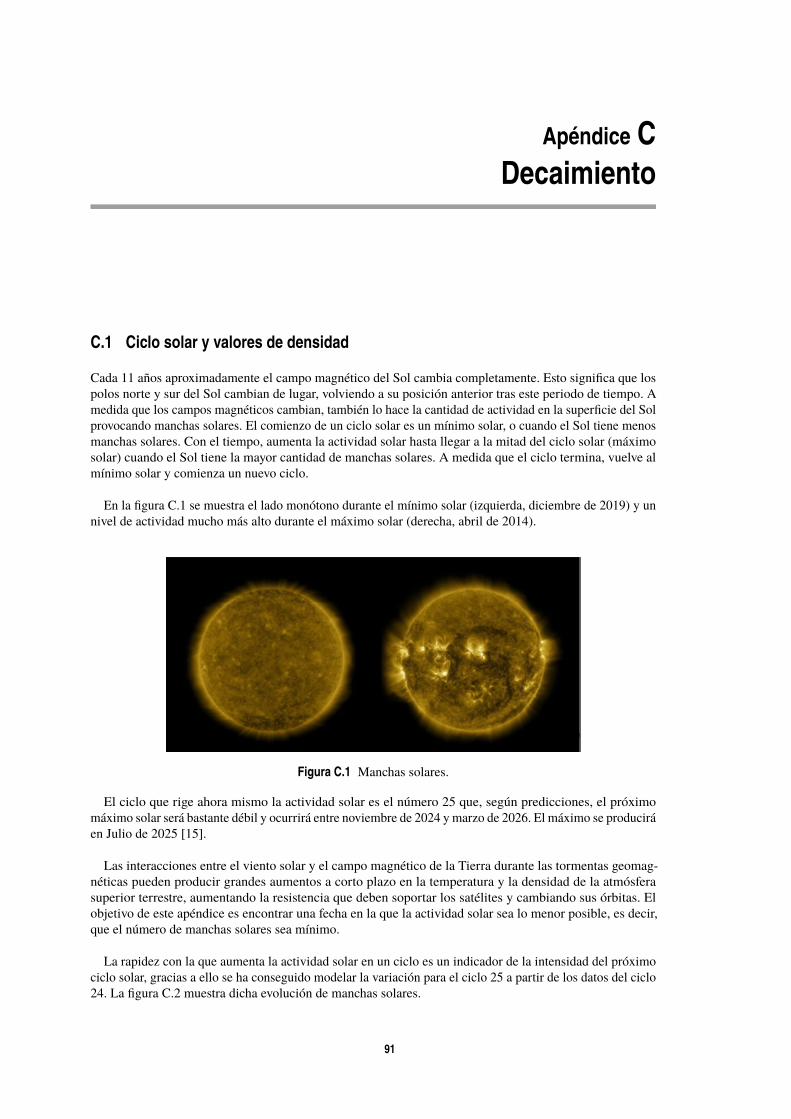
Apéndice CDecaimiento
C.1 Ciclo solar y valores de densidad
Cada 11 años aproximadamente el campo magnético del Sol cambia completamente. Esto significa que lospolos norte y sur del Sol cambian de lugar, volviendo a su posición anterior tras este periodo de tiempo. Amedida que los campos magnéticos cambian, también lo hace la cantidad de actividad en la superficie del Solprovocando manchas solares. El comienzo de un ciclo solar es un mínimo solar, o cuando el Sol tiene menosmanchas solares. Con el tiempo, aumenta la actividad solar hasta llegar a la mitad del ciclo solar (máximosolar) cuando el Sol tiene la mayor cantidad de manchas solares. A medida que el ciclo termina, vuelve almínimo solar y comienza un nuevo ciclo.
En la figura C.1 se muestra el lado monótono durante el mínimo solar (izquierda, diciembre de 2019) y unnivel de actividad mucho más alto durante el máximo solar (derecha, abril de 2014).
Figura C.1 Manchas solares.
El ciclo que rige ahora mismo la actividad solar es el número 25 que, según predicciones, el próximomáximo solar será bastante débil y ocurrirá entre noviembre de 2024 y marzo de 2026. El máximo se produciráen Julio de 2025 [15].
Las interacciones entre el viento solar y el campo magnético de la Tierra durante las tormentas geomag-néticas pueden producir grandes aumentos a corto plazo en la temperatura y la densidad de la atmósferasuperior terrestre, aumentando la resistencia que deben soportar los satélites y cambiando sus órbitas. Elobjetivo de este apéndice es encontrar una fecha en la que la actividad solar sea lo menor posible, es decir,que el número de manchas solares sea mínimo.
La rapidez con la que aumenta la actividad solar en un ciclo es un indicador de la intensidad del próximociclo solar, gracias a ello se ha conseguido modelar la variación para el ciclo 25 a partir de los datos del ciclo24. La figura C.2 muestra dicha evolución de manchas solares.
91

92 Capítulo C. Decaimiento
Figura C.2 Predicción de manchas solares para el ciclo 25 [16].
Como se puede observar, la cantidad máxima de manchas solares se obtendrá en Julio de 2025 con unnúmero de 115.3 manchas como máximo. Para disminuir el número de impulsos durante el mantenimiento delas órbitas nominales, se debe realizar la misión durante un periodo de tiempo donde el número de manchassolares sea menor de un cierto valor, por ejemplo 85, entre Julio de 2021 (15.56 manchas) y Agosto de 2023(83.1 manchas) ya que un número de manchas menor implica una actividad solar baja y, por tanto, menorresistencia atmosférica en la órbita LEO.
En este proyecto se van a estudiar los valores de densidad tanto para un ciclo solar de alta actividad comopara uno de baja actividad por lo que se procede a calcular los valores de densidad a las altitudes de lasórbitas nominal para ambos ciclos según estimaciones de modelos matemáticos que tienen en cuenta losprincipales parámetros de la actividad solar.
Tabla C.1 Valores de densidad según altitud para actividad solar baja y alta.
Altitud (km) ρ (kg/m3) baja actividad ρ (kg/m3) alta actividad
195 2.7014 ·10−10 4.568 ·10−10
205 1.85 ·10−11 3.409 ·10−10
media a 200 2.255 ·10−11 3.988 ·10−10
475 2.2658 ·10−13 2.5012 ·10−12
485 1.8705 ·10−13 2.873 ·10−12
media a 400 2.069 ·10−13 2.6816 ·10−12
Con los valores de densidad representados en la tabla C.1 se procederá a calcular la caída del satélite tanto

C.1 Ciclo solar y valores de densidad 93
para un ciclo solar de alta actividad como para uno de baja actividad y se estimará la cantidad de combustiblenecesario para lograr el mantenimiento orbital y todas las maniobras en el periodo de tiempo impuesto. Esteestudio se hará en el capítulo 6 donde además se seleccionará uno de los dos tipos de ciclo para hacer unestudio más riguroso sobre las masas necesarias al inicio de la misión, la cantidad de combustible y el diseñodel sistema RCS.
En la figura C.3 se muestra la relación del índice de manchas solares con la densidad para dos años, 2000con un ciclo de alta actividad solar y 2006 para un ciclo de baja actividad solar, ambos para 400km de altitud.Se puede observar claramente la diferencia en los valores de densidad para cada tipo de ciclo, los cualescorresponden con los de la tabla C.1.
Figura C.3 Variaciones de densidad según la intensidad del ciclo [14].


Bibliografía
[1] National Aeronautics and Space Administration, Delta 2 launch weather criteria.
[2] United Launch Alliance, Delta II payload planner’s guide, 2006.
[3] Arianegroup, Chemical monoproppellant thruster family, Susana Cortés.
[4] Charles D. Brown, Elements of spacecraft design, American institute of Aeronautics and Astronautics.
[5] Vladimir A. Chobotov, Orbital mechanics, 3ª ed., Air Force Institute of Technology, 2002.
[6] Air Force Space Command, Fin de vida de satélites en órbita baja, 1ª ed., Space and missiles systemcenter, 2010.
[7] Tomás Elices Concha, Introducción a la dinámica espacial, 1ª ed., Madrid, INTA, 1991.
[8] Control de actitud pasivo, Prediseño del sistema de control de actitud pasivo, 1ª ed., UniversidadNacional del Comahue.
[9] Peter Fortescue, Spacecraft systems engineering, 1ª ed., Wiley, 2011.
[10] Michael D. Griffin and James R. French, Space vehicle design, 2ª ed., Virginia Polytecnic Insitute andState University, 2004.
[11] Ariane group, Tank model OST 310, Robert Koch.
[12] Ariane Group, Ariane 5 user’s manual, 2016.
[13] https://es.xcv.wiki/wiki/Reaction_control_system, Reaction control system.
[14] https://www.mathworks.com/matlabcentral/fileexchange/56163-jacchia-bowman-atmospheric-density model, Modelo atmosférico jacchia.
[15] https://www.spaceweatherlive.com/es/actividad-solar/ciclo solar.html, Space weather live.
[16] https://www.swpc.noaa.gov/products/solar-cycle progression, Solar cycle progression.
[17] United launch Alliance, Atlas V launch services user’s guide, 2010.
[18] A. E. Roy, Orbital motion, 2ª ed., University of Glasgow, 1982.
[19] M. J. SIDI, Spacecraft dynamics and control, 7ª ed., Cambridge University Press, 1997.
[20] George P. Sutton, Rocket propulsion elements, 7ª ed., Wiley-lnterscience.
[21] Rafael Vázquez Valenzuela, Mecánica espacial y vehículos espaciales, Universidad de Sevilla, 2021.
[22] James R. Wertz, Space mission analysis and design, Space Technology Library, 1999.
[23] Sam Wiley, Design and development of the messenger propulsion system, American Institute of Aero-nautics and Astronautics, 2003.
[24] Space X, Falcon 9 launch vehicle payload user’s guide, 2009.
95
Copyright © 2022 FDOKUMEN