
machine learning based spectrum decision in cognitive radio
115
MACHINE LEARNING BASED SPECTRUM DECISION IN COGNITIVE RADIO NETWORKS by KOUSHIK ARASEETHOTA MANJUNATHA FEI HU, COMMITTEE CHAIR SUNIL KUMAR, COMMITTEE CO-CHAIR AIJUN SONG SHUHUI LI MIN SUN A DISSERTATION Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Electrical and Computer Engineering in the Graduate School of The University of Alabama TUSCALOOSA, ALABAMA 2018
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of machine learning based spectrum decision in cognitive radio

MACHINE LEARNING BASED SPECTRUM DECISION IN COGNITIVE RADIO
NETWORKS
by
KOUSHIK ARASEETHOTA MANJUNATHA
FEI HU, COMMITTEE CHAIRSUNIL KUMAR, COMMITTEE CO-CHAIR
AIJUN SONGSHUHUI LIMIN SUN
A DISSERTATION
Submitted in partial fulfillment of the requirementsfor the degree of Doctor of Philosophy
in the Department of Electrical and Computer Engineeringin the Graduate School of
The University of Alabama
TUSCALOOSA, ALABAMA
2018

Copyright Koushik Araseethota Manjunatha 2018ALL RIGHTS RESERVED

ABSTRACT
The cognitive radio network (CRN) is considered as one of the promising solutions to
address the issue of spectrum scarcity and effective spectrum utilization. In a CRN the Secondary
User (SU) is allowed to occupy the spectrum which is temporarily not used by the Primary User
(PU). Frequent interruptions from the PUs is the fundamental issue in CRN. The interruption
forces SU to perform handoff to another idle channel. On the other hand, spectrum handoff can
occur due to the mobility of the node. Hence, CRNs needs a smart spectrum decision scheme to
timely switch the channels. An important issue in spectrum decision is spectrum handoff. Since
the SU’s spectrum usage is constrained by the PU’s traffic pattern, it should carefully choose the
right handoff time. To increase the overall performance of the SU in the long term we use several
machine learning algorithms in spectrum decision and compare it with the myopic decision which
tries to achieve maximum performance in the short run.
ii

DEDICATION
This dissertation is dedicated to my lovely Parents who sacrificed everything in their life
for me as well as to all my Gurus(Teachers) from my schooling to doctorate study.
iii

ACKNOWLEDGMENTS
Firstly, I would like to express my sincere gratitude to my advisor Dr. Fei Hu for the
continuous support of my Ph.D study and allowing me to think freely on the research, for his
patience, concerns over students, motivation, and immense knowledge. His guidance helped me
in all the time of research and writing of this thesis. I could not have imagined having a better
advisor and mentor for my Ph.D study.
Secondly, I would like to express my sincere gratitude to my co-advisor Dr. Sunil Kumar
for his support and guidance throughout my PhD study for the better research work, for his
patience, motivation, and immense knowledge. His guidance on conducting research work and
more importantly presenting those work through journals and articles helped me to improve my
research skills, and make this thesis look outstanding.
Besides, I would like to thank the rest of my thesis committee: Dr.Aijun Song, Dr. Shuhui
Li, and Prof. Min Sun, for their insightful comments and encouragement, but also for the hard
question which incented me to widen my research from various perspectives.
My sincere thanks also goes to Mr. John D. Matyjas, U.S Air Force Research Lab(AFRL)
who provided me an opportunity to do the research for them and present the work at their lab.
Without they precious support it would not be possible to conduct this research.
I thank my fellow labmates in for the stimulating discussions, fun we have had in the last
four years. In addition, I would like to thank all my friends and undergrad and graduate professors
for their support and motivation to pursue PhD study.
Last but not the least, I would like to thank my family: my parents, cousins and all family
friends for supporting me spiritually throughout writing this thesis and my life in general.
iv

CONTENTS
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
DEDICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
CHAPTER 1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
CHAPTER 2 INTELLIGENT SPECTRUM MANAGEMENT BASED ON TRANSFERACTOR-CRITIC LEARNING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Channel Selection Metric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1 Channel Utilization Factor (CUF) . . . . . . . . . . . . . . . . . . . . . . 7
2.3.2 Non-Preemptive M/G/1 Priority Queueing Model . . . . . . . . . . . . . . 8
2.3.3 Throughput Determination in Decoding-CDF based Rateless Transmission 9
2.4 Overview of Q-Learning based intelligent Spectrum Management(iSM) . . . . . . 12
2.5 TACT based intelligent Spectrum Management(iSM) . . . . . . . . . . . . . . . . 14
2.6 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6.1 Channel Selection: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6.2 Average Queueing Delay: . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.6.3 Decoding CDF Learning: . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6.4 TACT Enhanced Spectrum Management Scheme: . . . . . . . . . . . . . . 23
2.7 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
v

CHAPTER 3 CHANNEL/BEAM HANDOFF CONTROL IN MULTI-BEAM ANTENNABASED COGNITIVE RADIO NETWORKS . . . . . . . . . . . . . . . . . . . . . . . 27
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2.1 Parallel and Independent Queueing Model for MBSA based Networks . . . 30
3.2.2 Packet Detouring in CRNs: . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2.3 Spectrum Handoff: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Queueing Model with Discretion Rule . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5 Beam Handoff via Packet Detouring . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.6 FEAST-based CBH Scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.6.1 SVM-based Learning Model . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.6.2 FEAST Learning Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.7 Performance Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.7.1 Average Queueing Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.7.2 Beam Handoff Performance . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7.3 FEAST-based Spectrum Decision Performance . . . . . . . . . . . . . . . 49
CHAPTER 4 A HARDWARE TESTBED ON LEARNING BASED SPECTRUM HAND-OFF IN COGNITIVE RADIO NETWORKS . . . . . . . . . . . . . . . . . . . . . . . 54
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3 Reinforcement Learning for Spectrum Handoff . . . . . . . . . . . . . . . . . . . 57
4.4 Transfer Learning for Spectrum Handoff . . . . . . . . . . . . . . . . . . . . . . . 59
4.5 Testbed Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.5.1 Testbed environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.5.2 Network Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.5.3 Implementation of Reinforcement Learning Scheme . . . . . . . . . . . . . 64
4.5.4 Implementation of Transfer Learning Algorithm . . . . . . . . . . . . . . . 66
vi

4.5.5 Design Challenges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.6 Expertimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.6.1 Channel Sensing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.6.2 Reinforcement Learning Performance . . . . . . . . . . . . . . . . . . . . 68
4.6.3 Transfer Learning Performance . . . . . . . . . . . . . . . . . . . . . . . . 71
4.6.4 Video Transmission Performance . . . . . . . . . . . . . . . . . . . . . . . 73
4.6.5 Comparision between Reinforcement learning and Transfer learning . . . . 73
CHAPTER 5 MULTI-HOP QUEUEING MODEL FOR UAV SWARMING NETWORK 75
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.4 Mixed PRP-NPRP M/G/1 priority repeat Queueing model . . . . . . . . . . . . . . 80
5.4.1 Packet Arrival rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.4.2 Service time and rate for Queues . . . . . . . . . . . . . . . . . . . . . . . 82
5.4.3 Average Queueing Delay and Packet Dropping Rate . . . . . . . . . . . . . 83
5.5 Performance Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.5.1 Average Multihop Queueing Delay . . . . . . . . . . . . . . . . . . . . . . 84
CHAPTER 6 FUTURE RESEARCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6.0.1 UAV deployment parameters . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.0.2 Jamming condition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.1 DQN based UAV track management . . . . . . . . . . . . . . . . . . . . . . . . . 90
CHAPTER 7 CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
vii

LIST OF TABLES
2.1 Simulation Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Confusion matrix comparison between the FEAST and No-FEAST models. . . . . 52
4.1 Network Parameters for CRN testbed . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.2 Q-table description and reward for best and wrong actions for each state-action pair. 65
4.3 Comparison between self-learning and Transfer Learning. . . . . . . . . . . . . . . 74
5.1 Network Parameters List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.2 Average end-to-end queueing delay for each source data of hop 1 . . . . . . . . . . 86
viii

LIST OF FIGURES
2.1 The big picture of iSM concept. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 The Q-learning based iSM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Gephi-simulated expert SU search. . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 TACT based SU-to-SU teaching. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5 The channel selection parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Comparison of the proposed and random channel selection schemes. Here, FDrepresents the frame duration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.7 Comparison of the proposed channel selection scheme with [11] and [17]. . . . . . 21
2.8 Average delay for the non-preemptive M/G/1 priority queueing model and non-prioritized model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.9 Estimated CDF for different SNR levels. . . . . . . . . . . . . . . . . . . . . . . 22
2.10 Channel throughput estimation for Raptor codes for Rayleigh fading channel. . . . 23
2.11 Zoomed-in section of Figure 10 (for time 61-73 ms). . . . . . . . . . . . . . . . . 23
2.12 The MOS performance for slow moving node. . . . . . . . . . . . . . . . . . . . . 24
2.13 The MOS performance for fast moving node. . . . . . . . . . . . . . . . . . . . . 24
2.14 The MOS performance comparison without the decoding-CDF. . . . . . . . . . . . 24
2.15 The MOS performance with the use of decoding-CDF . . . . . . . . . . . . . . . . 24
2.16 The effect of transfer rate, ω on learning performance. . . . . . . . . . . . . . . . . 24
2.17 The comparison of our TACT model with RL [75] and AL [74]. . . . . . . . . . . 24
3.1 FEAST “Channel + Beam” spectrum handoff model in MBSA-based CRNs. . . . . 30
3.2 Multi-beam sector antenna model (left), and multi-beam antenna lobes (right). . . . 32
3.3 Queueing model in CRNs with MBSAs. . . . . . . . . . . . . . . . . . . . . . . . 33
ix

3.4 Using detour path: distribution of packets among different beams in a 2-hop relaycase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.5 Data classification achieved by the support vector machine (SVM). . . . . . . . . . 40
3.6 FEAST-based CBH scheme, which mainly consists of SVM, LTRE, and RRE mod-ules to take the long-term and short-term decisions. . . . . . . . . . . . . . . . . . 43
3.7 The comparison of (a) mixed PRP/NPRP vs. NPRP, and (b) mixed PRP/NPRP vs.PRP queueing models, with λp = 0.05, E[Xp] = 6 slots, and E[Xs] = 5 slots. . . . . 46
3.8 Effect of the discretion threshold (φ) on the average queueing delay for differentpriorities of SUs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.9 (Ideal case) Percentage of packet detour vs. achieved source data rate. Here, everybeam has the same percentage of packet detouring and latency requirements. . . . . 47
3.10 MOS performance for different source rate rb when each detour beam has a channelcapacity of Ci=4.5Mbps and it’s own data rate Ri=3Mbps. . . . . . . . . . . . . . 47
3.11 MOS performance for different source rates and different numbers of detour beams.Each detour beam has a channel capacity of Ci=4.5Mbps and its own data rateRi=3Mbps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.12 MOS performance for different source rates, rb and detour beam’s own data rates, Ri 49
3.13 Performance comparison of our previous learning schemes, RL, AL, and MAL. . . 50
3.14 Performance analysis of the FEAST-based spectrum handoff scheme. . . . . . . . 50
3.15 Performance comparison of FEAST-based spectrum handoff scheme with MAL-based scheme for 100 iterations (packet transmission). . . . . . . . . . . . . . . . . 51
3.16 The FEAST model performance for the linear SVM and RBF SVM kernels. . . . . 52
3.17 Number of support vectors generated in the FEAST model. . . . . . . . . . . . . . 53
4.1 Q-learning based spectrum handoff in Cognitive Radio Network. . . . . . . . . . . 59
4.2 Transfer learning based handoff in cognitive radio environment. . . . . . . . . . . . 60
4.3 GNU Radio Architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4 Architecture of the USRP module [21]. . . . . . . . . . . . . . . . . . . . . . . . . 63
4.5 The Network Setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.6 The reinforcement learning setup for CRN testbed. . . . . . . . . . . . . . . . . . 64
4.7 Transfer Learning setup for CRN testbed. . . . . . . . . . . . . . . . . . . . . . . 66
x

4.8 Channel sensing result at center frequency 2.45GHz. . . . . . . . . . . . . . . . . 68
4.9 The performance of RL scheme in terms of the expected reward for the number ofpackets sent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.10 Performance variation when there is an arrival of PU (after around 20000 packets)and when there is an interruption from another node (after around 40,000 packets). 69
4.11 Q-table variation during transmission. X-axis defines the state-action pair as ex-plained in the table Q- table (Table 4.2). H-F : Handoff, Tx- Transmission. ChannelStates: Occupied, idle, Bad, Good. . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.12 ’Hello’ message received by the expert node. . . . . . . . . . . . . . . . . . . . . . 71
4.13 (Left) "Q-table received" message at the learner node after Q-table is received fromthe expert node; (Right) Message shown at the learner node when no expert nodeis found. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.14 The transfer learning performance in terms of the expected reward for the numberof packets sent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.15 Performance variations in transfer learning scheme due to the arrival of PU (ataround 20,000 packets) and interruption from another SU (at around 180,000 pack-ets). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.16 Q-table variation during transmission at the learner node. . . . . . . . . . . . . . . 73
4.17 The impact of interference and spectrum handoff on video quality . . . . . . . . . 73
4.18 Comparison between the performance of RL, TL, and greedy algorithms for first30 packets transmissions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.1 UAV swarming pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2 UAV Network Model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.3 Mixed Pre-emptive Repeat M/G/1 queueing model in a multi-hop network. . . . . . 81
5.4 Elementary network structure for the simulation . . . . . . . . . . . . . . . . . . . 84
5.5 Average Waiting delay at each hop for the source data as well as relay data com-pared with FIFO queuing method . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.6 Locally zoomed version of the figure 5.5 . . . . . . . . . . . . . . . . . . . . . . . 85
5.7 Average Waiting delay for all the source data for the given elementary networkstructure [hop1: Video, hop2: Skype, hop3: HD Video, hop4: Voice] . . . . . . . . 86
6.1 Gray scale image of UAV swarming. . . . . . . . . . . . . . . . . . . . . . . . . . 90
xi

6.2 Gray scale image of link quality between a gateway node and the tail end node[Black line indicates the link connecting different nodes] . . . . . . . . . . . . . . 90
6.3 DQN based UAV deployment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
xii

CHAPTER 1
INTRODUCTION
Firstly, in our work, we combined network models of a cognitive radio network (CRN)
with the models of machine learning algorithms. Spectrum decision based on Transfer
Actor-Critic Learning (TACT) is formulated by considering the idle duration of an idle channel,
packet dropping rate (PDR), and throughput of the channel in a distributed network. CUF is
estimated by a spectrum quality modeling scheme, which includes parameters spectrum sensing
accuracy and channel holding time. PDR is calculated from non-preemptive (NPRP) M/G/1
queueing model for CRN by considering SU contention with different latency requirements to
occupy the channel. Using NPRP M/G/1 queueing model, highest priority is given to low latency
data (ex. Real-time voice transmission) and low priority is given to high latency data (ex. file
download). And the flow throughput is estimated the statistics of history of symbol transmission
called as decoding-CDF along with rateless codes. TACT learning can adapt to the varying
conditions on its own and outperforms myopic based spectrum decisions. This research answered
the problem of tackling myopic decisions, delay induced in learning the spectrum strategies on its
own from the scratch.
Secondly, we analyzed the "channel+beam handoff" in Multibeam Smart
Antennas(MBSAs) based CRN. Here I formulated preemptive (PRP)/NPRP M/G/1 queueing
model with discretion rule, independently for each beam. In the proposed queueing model, the
high priority user with low latency requirement can interrupt the service of a low priority user if
the remaining service time of the low priority user is above a threshold. Here the high priority
user will not suffer large queueing delay and low priority user doesn’t undergo multiple
interruptions during their service. In addition, for the interruption duration, we detour the
interrupted packets (beam handoff) through neighbor beams over 2-hop relay. We formulated the
1

packet detouring as an optimization problem and determine the best way of selecting the
detouring paths using channel capacity and buffer level at each beam. This work answers the
problem of receiver keeping idle for long time when its sender node is being interrupted.
Moreover, using beam handoff, the interrupted user can finish its task just by detouring its data
during the interruption period.
Thirdly, we investigate how the transfer learning algorithms can improve the performance
of the network as compared to self-learning algorithms like Q-learning. Here, I developed a CRN
testbed for spectrum decision using machine learning algorithms with GNU Radio and USRP
modules. Practically implemented and tested transfer learning algorithm with simple 4 node
network. Here also we verified that using Transfer learning algorithm the node can quickly learn
the spectrum decision strategies and can outperform self-learning algorithm based on
reinforcement learning, and myopic decisions. To determine the performance of the testbed under
different learning algorithms, we used real-time video transmission. This work was presented to
US Air Force Lab (AFRL) as part of our research work.
Lastly, we extended our proposed Queueing models to multi-hop scenario, where each
node has its own data to transmit to central controller and it takes the help from its next hop to
forward its data to central node. Hence, each node will have its own data along with the relay data
to forward to the next node until it reaches the destination. We analyzed such multi-hop network
using preemptive M/G/1 Repeat queueing model where the priorty is assigned to each packet
based on the remaining time to live(TTL) of each. Any packet can be preempted by other packet
if it has very strict delay deadline than the earlier one. We analyzed the performance of such
queueing model by considering different data applications such as real-time voice, real-time
video(Skype), HD preencoded video(Youtube), and a File download(email). It was proved that
the proposed model outperforms the traditional First In First Out(FIFO) queueing model in such
mutlihop networks.
2

CHAPTER 2INTELLIGENT SPECTRUM MANAGEMENT BASED ON TRANSFER
ACTOR-CRITIC LEARNING
Chapter summary: In Chapter 2 we mentioned about the TACT-based spectrum handoff scheme.
In this chapter we discuss an intelligent spectrum mobility in cognitive radio networks (CRNs). Spectrum
mobility could be real spectrum handoff (i.e., the user jumps to a new channel) or wait-and-stay (i.e., the
user pauses the transmission for a while until the channel quality becomes good again. An optimal
spectrum mobility strategy needs to consider its long-term impact on the network performance, such as
flow throughput and packet dropping rate, instead of adopting a myopic scheme that optimizes only the
short-term throughput. We thus propose to use a promising machine learning scheme, called Transfer
Actor-Critic Learning (TACT), for the spectrum mobility strategies. Such a TACT-based scheme shortens a
user’s spectrum handoff delay, due to the use of a comprehensive reward function that considers the channel
utilization factor (CUF), packet error rate (PER), packet dropping rate (PDR), and flow throughput. Here,
the CUF is estimated by a spectrum quality modeling scheme, which considers spectrum sensing accuracy
and channel holding time. The PDR is calculated from NPRP M/G/1 queueing model, and the flow
throughput is estimated from a link-adaptive transmission scheme, which utilizes the rateless codes. Our
simulation results show that the TACT algorithm along with the decoding-CDF model achieves optimal
reward value in terms of Mean Opinion Score (MOS), compared to the myopic spectrum decision scheme.
2.1 Introduction
The spectrum mobility management is very important in cognitive radio networks (CRNs) [14].
Although a secondary user (SU) does not know exactly when the primary user (PU) will take the channel
back, it wants to achieve a reliable spectrum usage to support its quality of service (QoS) requirements. If
the quality of the current channel degrades, the SU can take one of the following three decisions: (i) Stay in
the same channel waiting for it to become idle again (called stay-and-wait); (ii) Stay in the same channel
and adjust to the varying channel conditions (called stay-and-adjust); (iii) Switch to another channel that
3

meets its QoS requirement (called spectrum handoff). Generally, if the waiting time is longer than the
channel switching delay plus traffic queueing delay, the SU should switch to another channel [75].
In this paper, we design an intelligent spectrum mobility management (iSM) scheme. To
accurately measure the channel quality for spectrum mobility management, we define a channel selection
metric (CSM) based on the following three important factors: (i) Channel Utilization Factor (CUF)
determined based on the spectrum sensing accuracy, false alarm rate, and channel holding time (CHT) [78];
(ii) Packet Dropping Rate (PDR) determined by evaluating the expected waiting delay for a SU in the
queue associated with the channel; (iii) Flow throughput which uses the decoding-CDF [34], along with
the prioritized Raptor codes (PRC) [77].
The spectrum management should maximize the performance for the entire session instead of
maximizing only the short-term performance. Motivated by this, we design an iSM scheme by integrating
the CSM with machine learning algorithms. The spectrum handoff scheme based on the long-term
optimization model, such as Q-learning used in our previous work [75], can determine the proper spectrum
decision actions based on the SU state estimation (including PER, queueing delay, etc.). However, the SU
does not have any prior knowledge of the CRN environment in the beginning. It starts with a trial-and-error
process by exploring each action in every state. Therefore, the Q-learning could take considerable time to
converge to an optimal, stable solution. To enhance the spectrum decision learning process, we use the
transfer learning schemes in which a newly joined SU learns from existing SUs which have similar QoS
requirements [74]. Unlike the Q-learning model that asks a SU to recognize and adapt to its own radio
environment, the transfer learning models pass over the initial phase of building all the handoff control
policies [25, 74].
The transfer actor-critic learning (TACT) method used in this paper is a combination of actor-only
and critic-only models [44]. While the actor performs the actions without the need of optimized value
function, the critic criticizes the actions taken by the actor and keeps updating the value function. By using
TACT, a new SU need not perform iterative optimization algorithms from scratch. To form a complete
TACT-based transfer learning framework, we solve the following two important issues: Selection of an
expert SU and transfer of policy from the expert to the learner node. We enhance the original TACT
algorithm by exploiting the temporal and spatial correlations in the SU’s traffic profile, and update the
value and policy functions separately for easy knowledge transfer. A SU learns from an expert SU in the
4

beginning; Thereafter, it gradually updates its model on its own. The preliminary results of this scheme
appeared in [41].
The CSM concept as well as the big picture of our iSM model is shown in Fig. 1. After the CSM is
determined, the TACT model will generate CRN states and actions, which consist of three iSM options
(spectrum handoff, stay-and-wait, or stay-and-adjust).
Goal: Intelligent
Spectrum Mobility
Spectrum Handoff
Stay and Adjust
Stay and Wait
State
Action
CSM
Transfer Actor-Critic Learning
(TACT )CUF: Channel
Utilization Factor
PDR: Packet
Dropping Rate
Link Throughput
Spectrum Sensing
Accuracy
NPRP M/G/1
Queueing Model
Rateless codes with
decoding-CDF
Figure 2.1: The big picture of iSM concept.
The main contributions of this paper are:
1) Teaching based spectrum management is proposed to enhance the spectrum decision process.
Previously, we proposed an apprenticeship learning based transfer learning scheme for CRN [74], which
can be further improved in some areas. For example, the exact imitation of the expert node’s policy should
be avoided since each node in the network may experience different channel conditions. Therefore, it is
helpful to consider a TACT-based transfer learning algorithm which uses the learned policy from the expert
SU to build its own optimized learning model by fine tuning the expert policy according to the channel
conditions it experiences. More importantly, we connect the Q-learning with TACT to receive the learned
policy from the expert node, which greatly enhances the teaching process without introducing much
overhead to the expert node.
2) Decoding-CDF with prioritized Raptor codes (PRC) are used to perform the high-throughput
spectrum adaptation. Due to mobility, the SU may experience fading and poor channel conditions. In order
to improve the QoS performance, we introduce spectrum adaptation by using the decoding-CDF along with
machine learning. Initially, the decoding-CDF was proposed for use with the Spinal codes [53], whereas
we use the decoding-CDF along with our prioritized Raptor codes (PRC) [77]. Our PRC model considers
the prioritized packets and allocates better channels to high-priority traffic.
5

The rest of this paper is organized as follows. The related work is discussed in Section II. The
channel selection metric is described in Section III, followed by an overview of the Q-learning based iSM
scheme in Section IV. Our TACT-based iSM scheme is described in Section V. The performance evaluation
and simulation results are provided in Section VI, followed by a discussion in Section VII. Finally, the
conclusions are given in Section VIII.
2.2 Related Work
In this section, we review the literature related to our work, which includes the three aspects:
a. Learning-based Wireless Adaptation: The strategy of learning from expert SUs was proposed in
our previous work, called the apprenticeship learning based spectrum handoff [74], which was further
extended in [76] as the multi teacher apprenticeship learning where the node learns spectrum handoff
strategy from multiple nodes in the network. Other related work in this direction includes the concept of
docitive learning (DL) [10, 25], reinforced learning (RL) used in CRNs [57], RL-based cooperative
spectrum sensing [47], and Q-learning based channel allocation [11, 32, 74]. DL was successfully used for
interference management in femtocell [25]. However, it did not consider the concrete channel selection
parameters. Also, it does not have clear definitions of expert selection process and node-to-node similarity
calculation functions. A channel selection scheme was implemented on GNU radio in [34]. But the CHT
and PDR were not used for channel selection. The same drawback exists in [32] and [11]. The TACT
learning scheme is superior to RL since it can use both node-to-node teaching and self-learning to adapt to
the complex CRN spectrum conditions.
b. Channel Selection Metric: The concept of channel selection metric in CRN was proposed
in [17,74]. A SU selects an idle channel based on the channel conditions and queueing delay. A QoS-based
channel selection scheme was proposed in [79], but the channel sensing accuracy and CHT were not
considered. Note that the CHT determines the period over which a SU can occupy the channel without
interruption from the PU. Further, authors in [70] proposed OFDM based MAC protocol for spectrum
sensing and sharing which reduces the sharing overhead, but they did not consider the kind of channel that
should be selected by the SU for transmission. Our spectrum evaluation scheme considers the channel
dynamics with respect to the interference, fading loss, and other channel variations.
c. Decoding-CDF based Spectrum Adaptation: The rateless codes have been used in wireless
6

communications due to its property of recovering the original data with low error rate. The popular rateless
codes include the Spinal codes [53,54], Raptor codes [61] and Strider codes [20,24,27]. The rateless codes
for CRNs were proposed in [10, 85]. Authors in [10] proposed a feedback technique for rateless codes
using multi-user MIMO to improve the QoS and to provide delay guarantee. Authors in [34] used
decoding-CDF with the Spinal codes. In this paper, we use decoding-CDF along with our prioritized
Raptor codes (PRC) [77] to perform spectrum adaptation.
2.3 Channel Selection Metric
In order to select a suitable channel for spectrum handoff, the SU should consider the time varying
and spatial channel characteristics. The time-varying channel characteristics comprise of CHT and PDR,
which are mainly observed due to PU interruption and SU contentions, and the spatial characteristics
comprise of achievable throughput and PER observed due to the SU mobility. As mentioned in Section I,
the CSM comprises of CUF, PDR and flow throughput which are described below.
2.3.1 Channel Utilization Factor (CUF)
If a busy channel is detected as idle, this misinterpretation is called as false alarm, which is a key
parameter of spectrum sensing accuracy. We use the spectrum sensing accuracy and CHT for evaluating the
effective channel utilization. From [78], we know that a higher detection probability, Pd, has a low false
alarm probability, P f . Hence we express the spectrum sensing accuracy as
MA = Pd(1−P f ) (2.1)
If T denotes the total frame length and τ is the channel sensing time, the transmission period is T -
τ. We assume that the PU arrival rate λph follows the Poisson distribution and the CHT with duration t has
the following probability distribution,
f (t) = λphe−(λph)t (2.2)
Since PU’s arrival time is unpredictable, it can interfere with the SU’s transmission. Hence, the
7

predictable interruption duration can be determined as [66],
y(t) =
T −τ− t, 0 ≤ t ≤ (T −τ)
0, t ≥ (T −τ)(2.3)
The SU transmits the data with an average collision duration [66] as,
y(T ) = 1−∫ T−τ
0(T −τ− t) f (t)d(t) = (T − t)− t(1− e(− (T−τ)
t )) (2.4)
Hence, the probability that a SU experiences the interference from a PU within its frame transmission
duration is given by
Pps =
y(T )(T −τ)
= 1−t
(T −τ)
(1− e
(−
(T−τ)t
))(2.5)
The total channel utilization (CUF) is determined by using CHT and probability of interference from PU as,
CUF = MA(T −τ)
T(1−Pp
s) (2.6)
Substituting the results from (6) in (7), the CUF can be defined as follows,
CUF = MA.tT
(1− e
(−
(T−τ)t
))(2.7)
The CUF can be used to represent the spectrum evaluation results for the selection of an optimal channel.
According to IEEE 802.22 recommendations, the probability of correct detection, Pd = [0.9,0.99] and the
probability of false alarm, P f = [0.01,0.1]. Therefore, the probability of spectrum sensing accuracy is
Pd(1−P f ) = [0.81,0.99].
2.3.2 Non-Preemptive M/G/1 Priority Queueing Model
We use a non-preemptive M/G/1 priority queueing model where a lower priority SU accesses
channel without interruption from higher priority SUs. We denote j=1 (or N) as the highest (or lowest)
priority SU. However, any SU transmissions can be interrupted by a PU. When the channel becomes idle, a
higher priority SU will be served. When a SU is interrupted by a PU, it can either stay-and-wait in the same
8

channel until it becomes idle again, or handoff to another suitable channel.
Let Delay j,i be the delay of a S U j connection due to the first (i−1) interruptions. A S U j packet
will be dropped if its delay exceeds the delay deadline d j. In our previous work [75], we deduced the
PDR(k)j,i as the probability of packet being dropped during the ith interruption for channnel k with packet
arrival rate, λ, and mean service rate, µ. It equals to the probability of handoff delay E[Dkj,i] being larger
than d j−Delay j,i [75].
PDR(k)j,i = ρ(k)
j,i .exp(−ρ(k)
j,i × (d j−Delay j,i)
E[D(k)j,i ]
) (2.8)
Here, ρ(k)j,i is the normalized load of channel k caused by type j SU. It is defined as follows,
ρ(k)j,i =
λi
µk≤ 1 (2.9)
2.3.3 Throughput Determination in Decoding-CDF based Rateless Transmission
After we identify a high-CUF channel, the next step is to transmit the SU’s packets in this channel.
Even a channel with high CUF can experience the time varying link quality due to the mobility of SU.
Therefore, link adaptation is important to avoid frequent spectrum handoffs. Generally, the sender needs to
adjust its data rate depending on the channel conditions since a poor link (lower channel SNR) can result in
a higher packet loss rate. For example, in IEEE 802.11, the sender uses the channel SNR to select a
suitable modulation constellation and forward error correcting (FEC) code rate from a set of discrete
values. Such a channel adaptation cannot achieve a smooth rate adjustment since only a limited number of
adaptation rates are available. Because channel condition variations can occur on very short time scales
(even at the sub-packet level), it is challenging to adapt to the dynamic channel conditions in CRNs.
Rateless codes have shown promising performance improvement in multimedia transmission over
CRNs [77]. At the sender side, each group of packets is decomposed into symbols with certain redundancy
such that the receiver can reconstruct the original packets as long as enough number of symbols are
received. The sender does not need to change the modulation and encoding schemes. It simply keeps
9

sending symbols until an ACK is received from the receiver, signaling that enough symbols have been
received to reconstruct the original packets. The sender then sends out the next group of symbols. For a
well-designed rateless code, the number of symbols for packets closely tracks the changes in the channel
conditions.
In this paper, we employ our unequal error protection (UEP) based prioritized Raptor codes
(PRC) [77]. In PRC, more symbols are generated for the higher priority packets than the lower priority
packets. As a result, PRC can support higher reliability requirements of more important packets. We
describe below how we can achieve cognitive link adaptation through a self-learning of ACK feedback
statistics (such as inter-arrival time gaps between two feedbacks). We also show how a SU can build a
decoding-CDF by using the previously transmitted symbols and how it can be used for channel selection
and link adaptation.
CDF-Enhanced Raptor Codes
In rateless codes, after sending certain number of symbols, the sender pauses the transmission and
waits for a feedback (ACK) from the receiver. No ACK is sent if the receiver cannot reconstruct the
packets, and the sender needs to send extra symbols. Each pause for ACK introduces overhead in terms of
the total time spent on symbol transmission plus ACK feedback [34]. The decoding-CDF defines the
probability of decoding a packet successfully from the received symbols. In the CDF-enhanced rateless
codes, the sender can use the statistical distribution to determine the number of symbols it should send
before each pause. The CDF distribution is sensitive to the code parameters, channel conditions, and code
block length. Surprisingly, only a small number of records on the relationship between n (number of
symbols sent between two consecutive pauses) and τ (ACK feedback delay) are needed to obtain the CDF
curve [34].
In order to speed up the CDF learning process, the Gaussian approximation can be used which
provides a reasonable approximation at low channel SNR, and its maximum likelihood (ML) requires only
mean (µ) and variance (σ2). In addition, we introduce the parameter α, which ranges from 0 (means no
memory) to 1 (unlimited memory), to represent the importance of past symbols in the calculation. This
process has two advantages: the start-up transition dies out quickly, and the ML estimator is well behaved
for α = 1. The Algorithm 1 defines the Gaussian CDF learning process.
10

Algorithm 1 : Decoding CDF Estimation by Gaussian Approximation1: Input: alpha, % learning rate [0,1]2: Step-1: Initialization3: NS =1 % encoded samples4: sum = 05: sumsq = sum2 + 06: Step-2: Update % updating sum and samples7: NS = NS*alpha +18: sum = sum*alpha + NS9: sumsq=sumsq*alpha + NS2
10: Step-3: Get CDF: % estimating CDF by mean & variance11: mean = sum/NS12: variance= sumsq/NS - mean2
13: estimate CDF
Using Algorithm 1, the decoding-CDF can be estimated by using the following standard equation,
F(x) =
∫ NS
0
1
σ√
2πe−
(NS−µ)2
2σ2 dx (2.10)
Here, NS, µ and σ are the number of symbols, mean and variance, respectively.
For the observed link SNR, we can determine the number of symbols that need to be transmitted in
order to decode the packet successfully. When the channel condition degrades in-terms of PER but
PDR ≤ PDRth, the additional symbols are transmitted to adapt to the current channel conditions, which
avoids unnecessary spectrum handoff. After the number of transmitted symbols reaches the maximum
value, (NS )max, the SU should perform spectrum handoff to a new channel. This is called as link adaptation
using decoding-CDF.
After determining the number of symbols per packet (NS), which are required to successfully
decode a packet, we can calculate the rateless throughput (TH) of channel k in a Rayleigh fading channel
as [34],
T Hk =2× fs× (NS )
tsymbols/s/Hz (2.11)
Where fs and t are the sampling frequency and transmission time, respectively. The value of NS
varies over time due to the Rayleigh fading channel and number of symbols per packet estimated using the
decoding-CDF curve. Since each node observes either time spreading of digital pulses or time-varying
11

behavior of the channel due to mobility, Rayleigh fading channel is appropriate due to its ability to capture
both variations (time spreading and time varying).
The normalized throughput is:
(T Hk)norm =T Hk
(T Hk)ideal(2.12)
Here, (T Hk)ideal is the ideal throughput calculated via Shannon capacity theorem.
Now we can integrate the above three models together into a weighted channel selection metric for
ith interruption in kth channel for the S U with priority j [32],
U(k)i j = w1?CUF + w2? (1−PDR(k)
i j ) + w2? (T Hk)norm (2.13)
Where w1,w2 and w3 are weights representing the relative importance of the channel quality, PDR and
throughput, respectively. Here w1 + w2 + w3 = 1. Their setup depends on application QoS requirements. For
real-time applications, the throughput is more important than PDR. On the other hand, PDR is the most
important factor for the FTP applications. For video applications, CHT (part of CUF model) is more
important.
2.4 Overview of Q-Learning based intelligent Spectrum Management(iSM)
In this paper, the Q-learning scheme is used to compare the performance of our proposed
TACT-based learning scheme for intelligent spectrum mobility management. More details about Q-learning
based spectrum decisions are available in [75]. The Q-learning uses special Markov Decision Process
(MDP), which can be stated as a tuple (S ,A,T,R) [57]. Here, S depicts the set of system states; A is the set
of system actions at each state; T represents the transition probability, where T = {P(s,a, s′)}, and P(.) the
probability of transition from state s to s′ when action a is taken; and R : S ×A 7→ R is the reward or cost
function for taking an action a ∈ A in state s ∈ S . In MDP, we intend to find the optimal policy π∗(s) ∈ A,
i.e., a series of actions {a1,a2,a3, ...} for state s, in order to maximize the total discount reward function.
States: For S Ui, the network state before ( j + 1)th channel assignment is depicted as
si j = {χ(k)i j , ξ
(k)i j ,ρ
(k)i j ,φ
(k)i j }. Here k is the channel being used; χ(k)
i j depicts the channel status (idle or busy); ξ(k)i j
12

is the channel quality (CSM); ρ(k)i j indicates the traffic load of channel; and φ(k)
i j represents the QoS priority
level of S Ui.
Actions: Three actions are considered for iSM scheme - stay-and-wait, stay-and-adjust and
spectrum handoff. We denote ai j = {β(k)i j } ∈ A as the candidate of actions for S Ui on state si j after the
assignment of ( j + 1)th channel, and β(k)i j represents the probability of choosing action ai j.
The Q-learning algorithm aims to find an optimal action which minimizes the expected cost of the
current policy π∗(si, j,ai, j) for ( j + 1)th channel assignment to S Ui. It is based on the value function Vπ(s)
that determines how good it is for a given agent to perform a certain action under a given state. Similarly,
we use the action value function, Qπ(s,a); It defines which action has low cost in the long term. Bellman
optimality equation gives the high and discounted long-term rewards [56]. For the sake of simplicity, in
further sections we consider si, j as s, action ai, j as a, and state si, j+1 as s′.
Rewards: The reward R of an action is defined as the predicted reward function for data
transmission, for a certain channel assignment. For multimedia data, we use the mean opinion score (MOS)
metric. Based on our previous work [75], the MOS can be calculated as follows,
R = MOS =a1 + a2FR + a3ln(S BR)
1 + a4T PER + a5(T PER)2 (2.14)
where FR, SBR and TPER are the frame rate, sending bit rate, total packet error rate, respectively. The
parameter ai, i ∈ {1,2,3,4,5} is estimated using the linear regression process. MOS varies from 1 (lowest)
to 5 (highest). When the channel status is idle, ’transmission’ is an ideal action to take, which would
achieve MOS close to 5. On the other hand, when PDR (State: traffic load) or PER (State: channel quality)
is high, low MOS would be achieved which reflects poor performance in the acquired channel.
The estimation of expected discounted reinforcement of taking action a in state s, Q∗(s,a) can be
written as [75],
Q∗(s,a) = E(Ri, j+1) +γ∑
s′
Ps,s′(a)maxa′∈A
Q∗(s,a) (2.15)
We adopt softmax policy for long-term optimization. π(s,a), which determines the probability of taking
13

action a, can be determined by utilizing Boltzmann distribution as [75]
π(s,a) =exp( Q(s,a)
τ )∑a′∈A exp( Q(s,a′)
τ )(2.16)
Here, Q(s,a) defines the affinity to select action a at state s; it is updated after every iteration. τ is the
temperature. The Boltzman distribution is chosen to avoid jumping into exploitation phase before testing
each action in every state. The high temperature indicates the exploration of the unknown state-action
values, whereas the low temperature indicates the exploitation of known state-action pairs. If τ is close to
infinity, the probability of selecting an action follows the uniform distribution, i.e., the probability of
selecting any action is equal. On the other hand, when τ is close to zero, the probability of choosing an
action associated with the highest Q-value in a particular state is one.
Fig. 2.2 shows the procedure of using Q-learning for iSM. Here the dynamic spectrum conditions
are captured by the states, which are used for policy search in order to maximize the reward function. The
optimal policy determines the corresponding spectrum management action in the current round.
Cognitive Radio
EnvironmentTransmission Rate,
SINR,
PU s signal
StatesStates
Q-table
Q(s,a)
Q-table
Q(s,a)
1. Throughput
2. Channel status
3. PDR
Information Update
1. Throughput
2. Channel status
3. PDR
Information UpdateReward
MOS
Spectrum
Decision
Action
Spectrum
Decision
ActionCognitive Radio
EnvironmentTransmission Rate,
SINR,
PU s signal
States
Q-table
Q(s,a)
1. Throughput
2. Channel status
3. PDR
Information UpdateReward
MOS
Spectrum
Decision
Action
Q-learning machine
Cognitive Radio
EnvironmentTransmission Rate,
SINR,
PU s signal
States
Q-table
Q(s,a)
1. Throughput
2. Channel status
3. PDR
Information UpdateReward
MOS
Spectrum
Decision
Action
Q-learning machine
𝒂𝒊𝒋
𝒂𝒊𝒋
Sta
tes
𝝅(𝒔
,𝒂)
𝝆𝒊𝒋(𝒌)
(𝜺𝒊𝒋(𝒌)
)
Figure 2.2: The Q-learning based iSM.
2.5 TACT based intelligent Spectrum Management(iSM)
The Q-learning based MDP algorithm could be very slow due to two reasons: (1) It requires the
selection of suitable initial state/parameters in the Markov chain; (2) It also needs proper settings of
Markov transition matrix based on different traffic, QoS and CRN conditions.
Let us consider a new SU which has just joined the network, and needs to build a MDP model.
14

Instead of using trial-and-error to find the appropriate MDP settings, it may find a neighboring SU with
similar traffic and QoS demands, and request it to serve as "expert" (or teacher) and transfer its optimal
policies. Such teaching or transfer based scheme can considerably shorten the learning (or convergence)
time.
We use the TACT model for the knowledge transfer between SUs, which consists of three
components: actor, critic and environment [44] [41]. For a given state, the actor selects and executes an
action in a stochastic manner. This causes the system to transition from one state to another with a reward
as feedback to the actor. Then the critic evaluates the action taken by the actor in terms of time difference
(TD) error, and updates the value function. After receiving the feedback from the critic, the actor updates
the policy. The algorithm repeats until it converges.
To apply TACT in our spectrum management scheme, we solve the following two issues:
(1) Selection of the Expert SU: We consider a distributed network without a central coordinator.
When a new SU joins the network, it performs the localized search broadcasting the Expert-Seek messages.
The nearby nodes may be located in the area covered by the same PU(s), and thus have similar spectrum
availability. The SU should select a critic SU based on its relevance to the application, level of expertise,
and influence of an action on the environment. To find the expert SU, the SUs share the following three
types of information among them, i.e., channel statistics (such as CUF), node statistics (node mobility,
modulation modes, etc.), and application statistics (QoS, QoE, etc.). The similarity of the SUs can be
evaluated in an actor SU by using the manifold learning [74], which uses the Bregman Ball concept to
compare the complex objects. The Bregman ball comprises of a center (µ(k)) and a radius (R(k)). The data
point Xp which lies inside the ball possesses strong similarity with µ(k). We define their distance as [74],
B(µk,Rk) = {Xt ∈ X : Dφ(Xt,µk) ≤ Rk} (2.17)
Here D(p,q) is known as the Bregman Divergence, which is the manifold distance between two
signal points (the expert SU and learning SU). If the distance is less than a specified threshold, we conclude
that p and q are similar to each other. All distances are visualized in Gephi (a network analysis and
visualization software) [4], as shown in Fig. 2.3. The similarity calculation between any two SUs includes
three metrics: (1) The application statistics, which mainly refer to the QoS parameters such as the data
15

rates, delay, etc.; (2) The node statistics, which include the node modulation modes, location, mobility
pattern, etc.; (3) The channel statistics, which include the channel parameters such as bandwidth, SNR, etc.
The SU with the highest similarity value with the learning SU is chosen as the expert SU. In Fig. 2.3, SU3
is selected as the expert SU (i.e., the critic) since it has stronger similarity to the learning SU (SU1)
compared to the rest of the SUs.
Figure 2.3: Gephi-simulated expert SU search.
(2) The Knowledge Transfer via TACT Model: The actor-critic learning updates the value function
and policy function separately, which makes it easier to transfer the policy knowledge compared to the
other critic-only schemes, such as Q-learning and greedy algorithm. We implement the TACT-based iSM
as follows:
(i) Action Selection: When a new SU joins the network, the initial state is si j in channel k. In order
to optimize the performance, the SU chooses suitable actions to balance two explicit functions: a)
searching for the new channel if the current channel condition degrades (exploration), and b) finding an
optimal policy by sticking to the current channel (exploitation). This also enables the SU to not only
explore a new channel but also to find the optimal policy based on its past experience. The probability of
taking an action a in state s is determined, as mentioned in equation (2.16).
(ii) Reward: The MOS from equation (16) is evaluated as the reward resulting out of an action
a ∈ {A} taken in state s ∈ {S }.
(iii) State-Value Function Update: Once the SU chooses an action in channel k , the system
changes the state from s to s′ with a transition probability,
P(s′|s,a) =
1, s′ ∈ S
0, otherwise(2.18)
16

The total reward for the taken action would be Rs.a. The time difference (TD) error can be calculated from
the difference between (i) the state-value function, V(s) estimated in the previous state, and (ii) Rs,a + V(s′)
at the critic [38],
δ(s,a) = Rs,a +γ∑s′∈S
P(s′|s,a)V(s′)−V(s)
= Rs,a +γV(s′)−V(s) (2.19)
Subsequently, the TD error is sent back to the actor. By using TD error, the actor updates its state-value
function as
V(s′) = V(s) +α(ν1(s,m))δ(s,a) (2.20)
Where ν1(s,m) indicates the occurrence time of state s in these m stages. α(.) is a positive step-size
parameter that affects the convergence rate. V(s′) remains as V(s) in case of s , s′.
(iv) Policy Update: The critic would employ the TD error to evaluate the selected action by the
actor, and the policy can be updated as [28],
p(s,a) = p(s,a)−β(ν2(s,a,m))δ(s,a) (2.21)
Here ν2(s,a,m) denotes the occurrence time of action a at state s in these m stages. β(.) denotes the positive
step size parameter defined by (m∗ logm)−1 [44]. Equations (2.16) and (2.21) ensure that an action in a
specific state can be selected with a higher probability, if we reach the highest minimum reward, i.e.,
δ(s,a) < 0.
If each action is executed for infinite times in each state and the learning algorithm follows a
greedy exploration, the value function V(s) and the policy function π(s,a) will ultimately converge to V∗(s)
and π∗, respectively, with a probability of 1.
(v) Formulation of Transfer Actor-Critic Learning: Initially, the expert SU shares its optimal policy
with the new SU. Let p(s,a) denote the likelihood of taking action a in state s. When the process
eventually converges, the likelihood of choosing a particular action a in a particular state s is relatively
higher than that of other actions. In other words, if the spectrum handoff is performed based on a learned
17

strategy by S Ui, the reward will be high in the long term. However, in spite of the similarities between the
two SUs, they might have some differences, such as in the QoS parameters. This may make an actor SU
take more aggressive action(s). To avoid these problems, the transferred policy should have a decreasing
impact on the choice of certain actions, especially after the SU has taken its action and learned an updated
policy. This is the basic idea of TACT-based knowledge transfer and self-learning.
ActionAction
Figure 2.4: TACT based SU-to-SU teaching.
The new policy update follows TACT principle (see Fig. 2.4), in which the overall policy of
selecting an action is divided into a native policy, pn and an exotic policy, pe. Assume at stage m, the state
is s and the chosen action is a. The overall policy can be updated as [8]:
p(m+1)o (s,a) = [(1−ω(ν2(s,a,m))p(m+1)
n (s,a)
+ω(ν2(s,a,m))p(m+1)e (s,a)]pt
−pt(2.22)
Where [x]ba with b > a, indicates the Euclidean distance of interval [a,b], i.e., [x]b
a = a if x < a;
[x]ba = b if x > b and [x]b
a = x if a≤ x ≤ b. In this scenario, a = −pt and b = pt. In addition,
p(m+1)0 (s,a) = p(m)
0 (s,a), ∀a ∈ A but a , ai j. And pn(s,a) updates itself according to equation (2.21).
During the initial learning process, the exotic policy pe(s,a) is dominant. Therefore, when the SU
enters a state s, the presence of pe(s,a) forces it to choose the action, which might be optimal based on the
expert SU. Subsequently, the proposed policy update strategy can improve the performance. We define
ω ∈ (0,1) as the transfer rate, and ω 7→ 0 as the number of iterations goes to∞. Thus the impact of exotic
policy pe(s,a) is decreased. Algorithm 2 describes our proposed TACT-based iSM scheme.
18

Algorithm 2 : TACT-based Spectrum Decision SchemeInput: Channel, Node and Application statisticsOutput: best policy π(s,a) of S UiPart-I
1: Initialization2: if node is new then3: if there is expert then4: Perform TACT algorithm from Part-II5: else6: Determine the channel k status and CUF from (8).7: Find PDR from (9) and (T H)norm from (13).8: Calculate U(k)
i j using (14) and select the best channel9: Perform Q-learning itself
10: end if11: else12: Perform TACT algorithm from Part-II13: if channel condition is below the threshold then14: Perform one of the three actions: stay-and-wait, stay-and-adjust, or Handoff
15: end if16: end if
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Part-IIInput: Channel, Node and Application statisticsOutput: best policy π(s,a) of S Ui
1: Initialize Vπ(s) arbitrarily.2: Exchange node information among node i and its neighbors.3: Using manifold learning to find the expert.4: Get the expert policy, i.e., exotic policy Pe(s,a), from expert SU.5: Initialize native policy, pn(s,a) .6: Repeat:7: Choose an action based on the initial policy π(0).8: Calculate MOS, update TD error using (20), state-value function (21), and native and overall
policy using (22) and (23), respectively.9: Update the strategy function using (17).
10: end
19

2.6 Performance Evaluation
In this section, we evaluate the performance of our proposed scheme, including the channel
selection, decoding CDF and enchanced TACT learning model.
2.6.1 Channel Selection:
We first examine our channel selection scheme (described in Section III), including the effect of
spectrum sensing accuracy (MA) and CHT. We setup the parameters as shown in Table I.
Parameters ValuesNumber of time slots, (T) 100
False Alarm Probability,P f [0.01,0.1]Detection probability, Pd [0.9,0.99]
Exponential distribution rate λpi, i = 0,1 [0.02,1]Temperature, τ 1000
Discount factor, γ 0.001Transfer rate, ω 0.7
The number of channels 10Learning rate, α (decoding CDF) [0.9,0.8,0.99]
Packet aggregation cost, n f 10
Table 2.1: Simulation Parameters
We consider N=10 PUs, each of them possessing one primary channel, and randomly select the
probability parameters given in Table I. Fig. 2.5a and 2.5b represent MA and CHT, respectively. By
considering both MA and CHT, the SU determines the CUF for each channel and ranks them in the
decreasing order as shown in Fig. 2.5c.
CH1CH2
CH3CH4
CH5CH6
CH7CH8
CH9CH10
Channels
0.0
0.2
0.4
0.6
0.8
1.0
Accu
racy
(a) Spectrum sensing accuracy
CH1CH2
CH3CH4
CH5CH6
CH7CH8
CH9CH10
Channels
0
10
20
30
40
50
time
(ms)
(b) PU idle duration (CHT)
CH2CH9
CH4CH8
CH3CH10 CH5
CH7CH1
CH6
Channels
0.0
0.1
0.2
0.3
0.4
0.5
Chan
nel u
tiliz
atio
n fa
ctor
(c) Channel utilization factor
Figure 2.5: The channel selection parameters.
Fig. 2.6 shows the normalized throughput of the system that can be achieved by our channel
selection scheme (BIGS) for different frame rates and PU idle durations (CHT). Here, BIGS refers to the
20

Figure 2.6: Comparison of theproposed and random channel se-lection schemes. Here, FD repre-sents the frame duration.
Figure 2.7: Comparison ofthe proposed channel selectionscheme with [11] and [17].
500 1000 1500 2000 2500Traffic intensity per node (Kbps)
0
1000
2000
3000
4000
5000
6000
7000
Aver
age
dela
y (m
s)
priority=1priority=2priority=3priority=4average (without Priority)
Figure 2.8: Average delay forthe non-preemptive M/G/1 pri-ority queueing model and non-prioritized model.
channel sensing using Bayesian Inference with Gibbs Sampling [78]. For comparison, we also show the
normalized throughput achieved by a random channel selection (RCS) scheme. Our scheme achieves better
throughput than RCS because it selects the channel with high sensing accuracy as well as high CHT,
whereas RCS does not consider the CHT and is also prone to channel miss detection and false alarm.
In Fig. 2.7, we compare the normalized throughput of our channel selection model with [11]
and [17]. In our scheme, the SU senses the channel and ranks them based on the channel sensing accuracy
and CHT. Similarly, authors in [17] performed the channel sensing based on the energy detection, and
categorized the channels based on their CHT. In addition, they considered the directional antenna whereas
we use the omni-directional antenna. Therefore, [17] has higher channel sensing accuracy than our scheme
as the interference level is much lower in directional communication as compared to the omni
communication. As a result, the throughput of [17] is higher than ours. To compare our schemne with [11],
we consider that the channel can use one band at a time and also assume that the Q-learning has achieved
the optimal condition. Alongside we also consider that SU communicates in its current channel until it is
occupied by other users. Since the channel selection is random in [11], the SU may select a channel with
small CHT even when a channel with longer CHT is available. Therefore, though its sensing accuracy is
close to ours, the throughput is lower. Channel selection based on the channel ranking is very important to
achieve smooth communication and to avoid frequent spectrum handoffs.
2.6.2 Average Queueing Delay:
We assume that the service time of SUs follows the exponential distribution, and the number of
channels is 10. The maximum transmission rate of each channel is 3Mbps, and the PER varies from 2% to
21
10%. Different priorities are assigned to the SUs depending on the delay constraint of their flow. The
highest priority (priority = 1) is assigned to the interactive voice data with rate of 50Kbps and strict delay
constraint of 50ms. Priority 2 is assigned to the interactive Skype call with rate of 500Kbps and delay
constraint of 100ms. Priority 3 is assigned to the video-on-demand streaming data with rate of > 1Mbps
and delay constraint of 1sec. Finally, the lowest priority (priority = 4) is assigned to the data without any
delay constraint (e.g., file download). Fig. 2.8 shows that the non-preemptive M/G/1 priority queueing
model outperforms the non-prioritized model. The idle channels are assigned based on the priority of the
applications in priority model. The higher priority user(s) (such as voice data and real-time video) will get
more channel access opportunities, which decreases their average queueing delay, whereas the lower
priority user(s) experiences a longer average waiting time. In the non-prioritized model, all the applications
are given the same priority, which leads to an increase in the average delay. Therefore, the priority based
queueing model is suitable for SUs with different delay constraints.
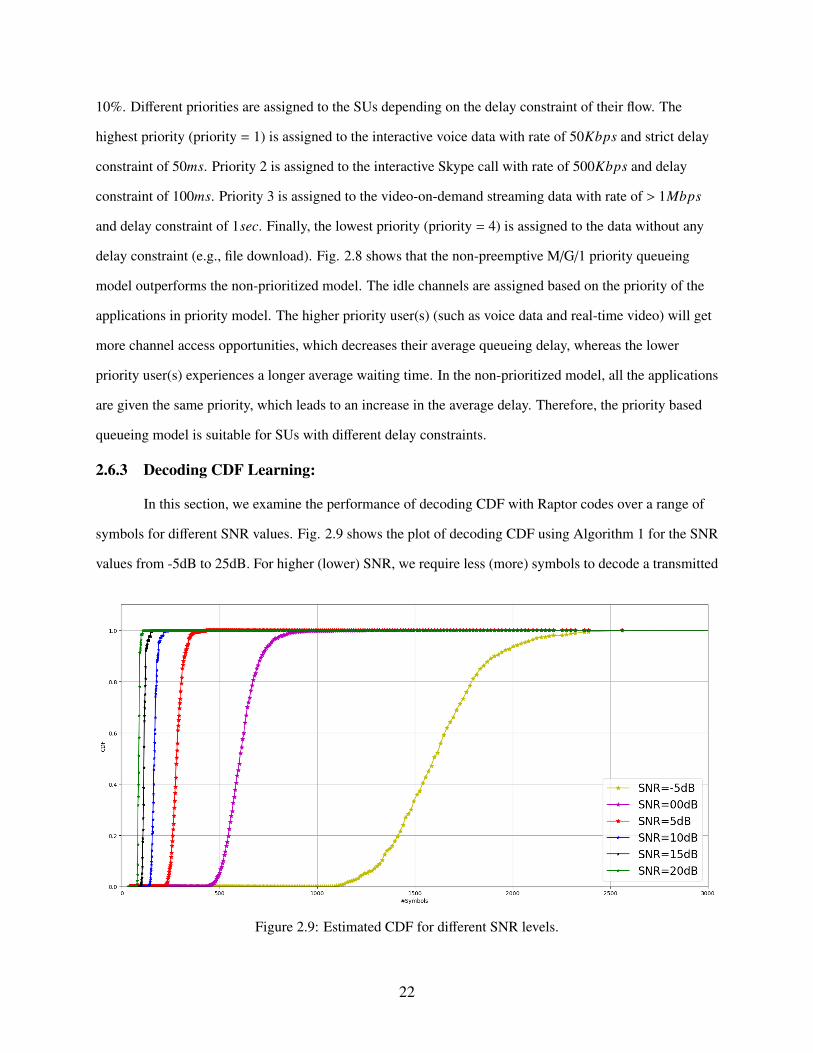
2.6.3 Decoding CDF Learning:
In this section, we examine the performance of decoding CDF with Raptor codes over a range of
symbols for different SNR values. Fig. 2.9 shows the plot of decoding CDF using Algorithm 1 for the SNR
values from -5dB to 25dB. For higher (lower) SNR, we require less (more) symbols to decode a transmitted
Figure 2.9: Estimated CDF for different SNR levels.
22

packet. The Rayleigh fading channel is used.
Using the decoding CDF, we examine the throughput for Raptor codes in Fig. 2.10. For better
visualization, Fig. 2.11 zooms in a section of Fig. 2.10. As mentioned before, the decoding CDF enables
us to find the optimal feedback strategy, i.e., when to pause for feedback and how many symbols should be
transmitted before the next pause. The throughput is examined for a SU moving at a speed of 10 m/s over
Rayleigh fading channel at 2.4GHz (channel S NR = 15dB) within a time range of 100 ms with a packet
aggregation cost n f = 10, which decides the number of packets to be aggregated to send an ACK. The
throughput is estimated offline using Algorithm 1 with learning rate parameter, α, set to 0.9. It can be seen
from Fig. 2.10 and 2.11 that α need not to be close to 1 to obtain a good performance. The throughput
achieved by the Raptor codes is almost half of the Shannon capacity [34]. The decoding CDF performance
is close to that of the ideal learning which is determined based on receiving ACKs from the receiver.
0 20 40 60 80 100Time (ms)
0
20
40
60
80
100
Thr
ough
put (
Mbp
s)
Channel capacity Raptor codes: Ideal Learning α=0.90 α=0.80 α=0.99
Figure 2.10: Channel throughput estimation for Raptor codes for Rayleigh fading channel.
62 64 66 68 70 72Time (ms)
0
20
40
60
80
100
Thr
ough
put (
Mbp
s)
Channel capacity Raptor codes: Ideal Learning α=0.90 α=0.80 α=0.99
Figure 2.11: Zoomed-in section of Figure 10 (for time 61-73 ms).
2.6.4 TACT Enhanced Spectrum Management Scheme:
In this section, we study the performance of our TACT-based spectrum mobility scheme. For 10
available channels with capacity of 3Mbps each, we assume there are 10 different PUs with different data
rates for transmission which can interrupt the SU transmission. Different SUs contending for the channel
23

0 1 2 3 4 5 6 7 8 9 10
x 104
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Time slot
Exp
ecte
d M
ean
opin
ion
scor
e
MyopicQ−learningTACT
Figure 2.12: The MOS performance for slow movingnode.
0 1 2 3 4 5 6 7 8 9 10
x 104
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Time slot
Exp
ecte
d M
ean
opin
ion
scor
e
MyopicQ−learningTACT
Figure 2.13: The MOS performance for fast movingnode.
4 5 6 7 8 9 10 11 12 13 14 15
x 104
3
3.2
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
Time slot
Exp
ecte
d M
ean
opin
ion
scor
e
Q−learningTACT
Figure 2.14: The MOS performance comparisonwithout the decoding-CDF.
4 5 6 7 8 9 10 11 12 13 14 15
x 104
3
3.2
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
Time Slot
Exp
ecte
d M
ean
Opi
nion
Sco
re
Q−learningTACT
Figure 2.15: The MOS performance with the use ofdecoding-CDF
0 1 2 3 4 5
Time slot 104
2
2.5
3
3.5
4
4.5
5
Exp
ecte
d M
ean
opin
ion
scor
e
TACT- = 0.2TACT- = 0.5TACT- = 0.8
Figure 2.16: The effect of transfer rate, ω on learningperformance.
0 1 2 3 4 5
Time slot 104
2
2.5
3
3.5
4
4.5
5
Exp
ecte
d M
ean
opin
ion
scor
e
[2]- Reinforcement Learning[6]- Apprenticeship LearningTACT- = 0.7
Figure 2.17: The comparison of our TACT modelwith RL [75] and AL [74].
24

access also have different data rates. We study the performance of a SU which is supporting a Skype video
call at 500 Kbps and has a priority of 2. All SUs use the Raptor codes, and the expert SU teaches a new SU
about its transmission strategy based on the decoding-CDF profile. We consider the following four cases.
Case 1: The newly joined SU moves very slowly at <5mph; Case 2: The SU moves fast (>50mph) and
experiences different channel conditions; Case 3: The SU moves fast but does not use the decoding CDF
and pause control for transmission. Instead, it manually changes the symbol sending rate based on the
current channel conditions; Case 4: The SU moves fast and uses the decoding CDF. We use the
low-complexity MOS metric to estimate the received quality.
In Fig. 2.12 (for Case 1), the Q-learning based spectrum decision scheme outperforms the myopic
approach, because the former takes spectrum decisions to maximize the long-terms reward (i.e., MOS)
whereas the latter considers only the immediate reward. Further, our proposed TACT-based scheme
outperforms the Q-learning scheme since the newly joined SU can learn from the expert SU, and thus
spends less time in estimating the channel dynamics. Without the expert node, the node in Q-learning
scheme learns everything by itself, and thus needs more time to converge to a stable solution. Fig. 2.13
shows the result for fast moving SU for Case 2, which experiences channel condition variations with time.
Our proposed TACT scheme still performs better than the Q-learning scheme.
Fig. 2.14 depicts the Case 3 where the SU moves fast but does not use the decoding-CDF concept
for Raptor codes. Since the SU is moving fast, it experiences different channel conditions. Once the SU
attains the convergent state it achieves a high MOS value. But this does not guarantee that it will stay in the
optimal state during the entire communication due to variations in channel conditions. Without the use of
decoding-CDF, the SU is unable to adapt to the channel variations which results in the lower MOS value of
around 4. In Fig. 2.15 (Case 4), the SU uses the CDF curve to learn the strategy of transmitting more
symbols with lower overhead, and achieves a higher MOS of around 4.4. In both cases we can see that the
MOS drops due to the change in channel condition at time slot 7. But CDF helps to quickly improve the
MOS value to around 4.4.
Figure 2.16 shows the effect of transfer rate, ω on learning performance. We observe that the
transfer rate has impact only at the beginning. Higher the transfer rate (ω = 0.8), faster the adaptation to the
network with less MOS variations. Whereas lower the transfer rate (ω = 0.2), slower is the adaptation to
the network and more are fluctuations in the MOS value. The performance converges after some iterations
25

as the SU gradually builds up its own policy using the expert node.
Figure 2.17 shows that our TACT based spectrum decision scheme outperforms the Q (or RL)
scheme [75] and the apprenticeship based transfer learning scheme [74]. In AL scheme, the student node
uses the expert node’s policy for its own spectrum decision. This model works well if both the student and
expert nodes experience the same channel and traffic conditions. Our TACT based model, on the other
hand, can tune the expert policy according to its own channel conditions in a few iterations.
2.7 Discussion
Main concern in transfer learning approach is the overhead introduced by the expert search and the
transfer of its knowledge (optimal policy) to the learner node. The proposed TACT learning-based spectrum
decision requires a ’learner node’ to communicate only with the closest neighbors, since only these nearby
nodes are likely to have similar PU traffic distribution and channel conditions. This communication with
neighbors can be easily achieved by the MAC (medium access control) protocols. It is also possible to
piggyback this information exchange in the node discovery messages. Similarly, route discovery messages
could also be used for this purpose. In this process, the learner node has more involvement and does not put
much burden of transfer of the expert strategies on most other nodes in the network.
In fact, a node which is new to the network needs to exchange the control messages with its
neighbors to find an expert node only in the beginning. If there is a new transmission task for an existing
node, it might be able to use the policy it has learned over the previous transmissions without the need of
triggering a new round of expert search. More importantly, the policy π(s,a) is just an array of size 4
(≈ 20bytes), which does not add much overhead to the packet size.
26

CHAPTER 3CHANNEL/BEAM HANDOFF CONTROL IN MULTI-BEAM ANTENNA BASED COGNITIVE
RADIO NETWORKS
Chapter summary: In Chapter 3, a novel spectrum handoff scheme, called Feature Stacking
(FEAST), is proposed to achieve the optimal “channel + beam” handoff (CBH) control in cognitive radio
networks (CRNs) with multi-beam smart antennas (MBSAs). FEAST uses the online supervised learning
based on the support vector machine (SVM) to maximize the long-term quality of experience (QoE) of user
data. The spectrum handoff uses the mixed preemptive/non-preemptive M/G/1 queueing model with a
discretion rule in each beam, to overcome the interruptions from the primary users (PU) and to resolve the
channel contentions among different classes of secondary users (SUs). A real-time CBH scheme is
designed to allow the packets in an interrupted beam of a SU to be detoured through its neighboring beams,
depending their available capacity and queue sizes. The proposed scheme adapts to the dynamic channel
conditions and performs spectrum decision in time- and space-varying CRN conditions. The simulation
results demonstrate the effectiveness of our CBH-based packet detouring scheme, and show that the
proposed FEAST-based spectrum decision can adapt to the complex channel conditions and improves the
quality of real-time data transmissions compared to the conventional spectrum handoff schemes.
3.1 Introduction
In this paper, we study the spectrum handoff issues in cognitive radio networks (CRN) where the
wireless nodes are equipped with multi-beam smart antennas (MBSAs). In CRN, the secondary users
(SUs) use the spectrum opportunistically whenever the licensed user (i.e., a primary user (PU)) is not
active. Hence, CRNs need a smart spectrum handoff scheme to switch the channels in a timely
manner [75]. At the same time, the user mobility introduces the time- and space-varying channel
conditions, which make the spectrum handoff challenging.
Unlike the omnidirectional antennas that can cause interference to all the neighboring nodes, a
directional antenna can transmit data towards a specific receiver over a long range without causing interfere
27

to its neighboring nodes. This also enables the spatial reuse that brings higher network throughput. In a
CRN consisting of the nodes equipped with MBSAs, each beam may occupy a different channel (i.e.,
frequency band) at the same time to reduce the interference with the PUs [84]. For the beams occupying
the same channel, those beams should either be in all-Tx (transmission) or all-Rx (reception) mode at any
given time [84].
If the channel being used by a beam of the SU is occupied by a PU, the beam can either switch to
another channel, or its traffic can be sent via other beam(s) of the node. We call the former as the “channel
handoff”, and the latter as the “beam handoff”. Together they are called as the "channel + beam" handoff
(CBH). In [39], we briefly discussed the following three issues related to CBH: 1) Multi-class handoff to
handle PU or SU interruptions, based on a mixed PRP/NPRP M/G/1 queueing model with a discretion
rule [12]. 2) Multiple handoff decisions: When a beam of SU is interrupted by a PU or a higher priority SU,
three handoff options are available: (a) stay-and-wait, (b) channel switching, and (c) beam handoff. 3)
Throughput-efficient beam handoff to select the detour paths by considering the channel capacity and
queue size of each beam. In this paper, the beam handoff process of forwarding the data of an interrupted
beam via other beam(s) of the node is also known as the packet detouring, and the paths taken by those
packets are known as the detour paths.
This paper significantly extends our preliminary study in [39] to a comprehensive CBH model, as
discussed below.
First, we study the beam handoff and solve the packet detouring issue through an optimal rate
allocation scheme among the available beams. When a beam is interrupted, its buffered data is detoured
through the neighboring beams depending on their channel capacity and queue sizes. The nodes which are
one-hop away from both the sender and receiver are used for packet detouring. We formulate the packet
detouring as an optimization problem to achieve the desired QoS level. Our optimization model considers
detouring beam’s traffic, channel capacity, and queue level.
Second, we then build a complete spectrum handoff model based on the analysis of beam queueing
delay. We also consider the space-varying characteristics of the SUs, such as the mobility-caused
multi-path fading, which introduces significant variations in the packet error rates (PERs) and thus
seriously affects the QoS. The SU collects the network parameters (e.g., handoff delay, channel status,
PER, etc.) to make the spectrum handoff decision during the interruption. The spectrum decision
28

performance is measured by the Mean Opinion Score (MOS).
Third, we propose a supervised learning-based scheme to achieve CBH in dynamic channel
conditions. Existing intelligent spectrum decision schemes in CRNs use the unsupervised learning to
improve the long-term performance. For example, the reinforcement learning (RL)-based unsupervised
learning scheme uses the Markov Decision Process (MDP) to build the optimal spectrum decision model
over the long term [75]. Since the CRN conditions are dynamic due to the user mobility, multipath fading,
and channel condition changes, a learning model will be built to learn the radio environment on the fly.
However, because the arrival time of a PU or a high-priority SU is uncertain, the SU node cannot spend too
much time in learning the spectrum handoff strategies. Therefore, we propose a no-regret online learning
model, called FEAST (Feature Stacking), which performs the appropriate spectrum handoff on the fly by
mapping the observed CRN features to one of the optimal classifiers in support vector machine (SVM)
model. Specifically, the Rapid Response Engine (RRE) takes the fast decisions as a short-term handoff
control policy based on the previously built learning model. When the observed spectrum handoff
performance falls below a threshold, the node invokes the Long Term Response Engine (LTRE), which
collects the current CRN features, combines them with the previous feature set, and updates the model as a
long-term handoff control policy, which is then transferred to RRE. Thus FEAST can learn and adapt to the
dynamic CRN channel conditions on the fly by adding the newly observed radio characteristics to the
dataset in order to improve the spectrum decision accuracy in each iteration. Figure 3.1 illustrates the
FEAST-based spectrum handoff model.
The rest of this paper is organized as follows: The related work is discussed in Section II. The
assumed network model is described in Section III, followed by the queueing model descriptions in Section
IV. The beam handoff principle via beam detouring is discussed in Section V, followed by the
FEAST-based CBH scheme in Section VI. Section VII provides the performance analysis of the proposed
handoff schemes, followed by the conclusions in Section VIII.
29

MBSA based Cognitive Radio Network
Time varying
characteristics
Channel-kChannel-kChannel-k
Mixed PRP/NPRP M/G/1
Queueing Model
𝝁𝒌
PU interruption, Priority SUs arrival
𝝀𝒃
Time varying
characteristics
Channel-k
Mixed PRP/NPRP M/G/1
Queueing Model
𝝁𝒌
PU interruption, Priority SUs arrival
𝝀𝒃
Time varying
characteristics
Channel-k
Mixed PRP/NPRP M/G/1
Queueing Model
𝝁𝒌
PU interruption, Priority SUs arrival
𝝀𝒃
Space varying
characteristics
Mobility, Fading, Signal Attenuation
Space varying
characteristics
Mobility, Fading, Signal Attenuation
Average Waiting Delay Channel Capacity
FEAST
PDR PERDetour Beams PrioriyChannel Status PDR PERDetour Beams PrioriyChannel Status PDR PERDetour Beams PrioriyChannel Status𝐷′
𝐷′ Feature
vector
𝑫 ← 𝑫 ∪𝑫′ CRN
FeaturesSVM(D A)
Spectrum Decision
Stay-and-Wait
Channel Handoff
Beam Handoff
Stay-and-Wait
Channel Handoff
Beam Handoff
Spectrum Decision
Stay-and-Wait
Channel Handoff
Beam Handoff
Y-A
xis
X-Axis
Y-A
xis
X-Axis
Y-A
xis
X-Axis
SINR
Figure 3.1: FEAST “Channel + Beam” spectrum handoff model in MBSA-based CRNs.
3.2 Related Work
3.2.1 Parallel and Independent Queueing Model for MBSA based Networks
Only a few studies have addressed the scheduling issues in directional communication systems. A
distributed scheduling algorithm based on queue length changes was presented in [9]. The algorithm
stability was analyzed through a mean drift analysis. In [8], an optimal scheduling scheme was proposed
for a multi-antenna UAV central node, which collects channel state information from multiple distributed
UAVs, and the beam scheduling problem is solved via beamforming models.
The above-mentioned schemes considered only general directional antennas, and are thus not
suitable to the MBSA-based CRNs. In our previous work on MBSA-based CRNs, we proposed a
non-preemptive resume priority (NPRP) M/G/1 queueing model [74], where the high priority node cannot
interrupt low priority nodes being served. The drawback of this model is that high priority users with low
latency traffic may suffer from long queueing delay, which eventually degrades the user’s
quality-of-experience (QoE). A preemptive resume priority (PRP) M/G/1 queueing model was proposed
for CRNs with multi-priority SU connections in [69]. This model gives ample spectrum access
opportunities to high priority users, but the low priority SUs can experience multiple interruptions.
Recently, we have proposed a mixed PRP-NPRP M/G/1 queueing model in [76]. If the remaining service
time of an SU is above a predefined threshold, it operates in the PRP mode; otherwise, it operates in the
30

NPRP mode. In this paper, we use the mixed PRP/NPRP M/G/1 queuing model, and consider the
multi-beam queuing service time as a part of the discretion rule and formulate a parallel and independent
queueing model for the SU with MBSA.
3.2.2 Packet Detouring in CRNs:
A packet detouring scheme based on the link quality observations in a diamond-like network
topology was presented in [39]. It considered the multi-hop communications in a Rayleigh fading channel
for omni-directional communication. A QoE-oriented data relay scheduling problem in CRNs was studied
in [73] to achieve the optimized performance in terms of high capacity and low packet loss rate. It detours
the packets through multiple neighboring nodes when there is an interruption from the PU. Similar work
was done in [35], where beamforming was used among the relay nodes, PUs, and other SUs, to determine
the channel state information (CSI) to detour the packets upon interruption from PUs. However, these
schemes on packet detouring in CRNs considered the interruptions from the PU only, without considering
the multi-SU contention case. In this paper, the packet detouring is used whenever there is an interruption
from a PU or high priority SU, and the packets are detoured only during the interruption time interval,
which is determined by using the mixed PRP/NPRP M/G/1 queuing model with a discretion threshold.
3.2.3 Spectrum Handoff:
In our previous works [41, 74–76], we designed the RL-based spectrum handoff schemes by
considering the channel status (measured by packet drop rate (PDR)), channel quality (measured by packer
error rate (PER)), and the SU priorities. The main drawback of the Markov decision based RL model is that
it needs many iterations to converge to an optimal solution, which is not affordable in the network where
the channel access time is very limited. Another limitation of these approaches is that they cannot adapt to
the channel variations on the fly. Our proposed FEAST-based spectrum decision model learns and acts
according to the complex channel conditions on the fly, through the SVM-based learning model. A few
other schemes have also used the SVM for spectrum handoff. A SVM-based spectrum handoff scheme was
presented in [28], where the nodes can predict the handoff time proactively before the channel is occupied
by the PUs. However, the scheme did not consider different channel characteristics (PDR, PER, etc.)
before switching the channel. In [71], the proposed spectrum mobility prediction was used by considering
the time-varying channel characteristics. However, such a learning scheme cannot be performed on the fly.
31

3.3 Network Model
We assume a CRN consisting of n SUs equipped with MBSAs. The MBSA can form beams in M
sectors (see Fig 3.2) with each sector having a beamwidth of 360M degrees. The sectorization provides higher
interference suppression and efficient frequency reuse.
Beam-1
Bea
m-
M-1
Beam-5
Bea
m-3
SU
𝜃𝑎𝑟𝑐 =𝑀
360°
SU-1 SU-2
Side lobe
Main lobe
Figure 3.2: Multi-beam sector antenna model (left), and multi-beam antenna lobes (right).
All the beams can select the same or different channels since the interference between the adjacent
beams is assumed to be negligible in a MBSA. In each beam, the SU communicates with a different SU in
the network. Without the loss of generality, we consider that the sender SU can reach out to the receiving
SU through direct transmission or over a 2-hop detour path through relay node(s). Each relay node also has
its own data to transmit to other nodes in the network.
3.4 Queueing Model with Discretion Rule
We consider an MBSA with M beams that can handle independent flows. Figure 3.3 shows the
schematic diagram of a queueing model for a MBSA-equipped node. Each beam maintains a queue with
packet arrival rate λb (arrivals/slot) and mean service rate Xb (slots/arrival), b ∈ {1,2, ..M}. These queues are
analyzed individually through the mixed PRP/NPRP M/G/1 queueing model [76]. We assume that K flows
(K ≤ M) are sent to different SUs at time instance t, where the associated signal vector can be represented
as s(t) = [s1(t), s2(t), ...., sK(t)]T .
In addition, we assume that there are N randomly located neighbors around the SU. Each beam of
the SU selects an appropriate channel with long channel holding time (CHT) and high
signal-to-interference-and-noise ratio (SINR). These beams can transmit different types of traffic with
various priority levels. The beam with the packets with the smallest delay deadline is assigned with the
highest priority ( j = 2) (note that j = 1 is reserved for PU), whereas the beam serving the packets with the
longest delay deadline is assigned with the lowest priority ( j = C). Note that the channel selected by a
32

SUs with Priority and PU-(k+1)
Channel-(k+1)
SUs with Priority and PU-(k+1)
Channel-(k+1)
𝝁(𝒌+𝟏)′
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-(k-1)
Channel-k-1Channel-k-1
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-k
𝝁𝒌
Channel-k
SUs with Priority and PU-(k+1)
Channel-k+1
SUs with Priority and PU-(k-1)
Channel-(k-1)
SUs with Priority and PU-(k-1)
Channel-(k-1)
SUs with Priority and PU-k
Channel-k
𝝁𝒌′
𝝁(𝒌+𝟏)
𝝁(𝒌−𝟏)′ 𝝁(𝒌−𝟏)
𝝀(𝒃−𝟏)
Beam Handoff
Beam Handoff
Stay and wait Switch over to channel k q𝒓𝒃
p𝒓𝒃
𝝀𝒃
𝝀(𝒃+𝟏)
SU-i bth beam
𝑹𝒃−𝟏
𝑹𝒃+𝟏
𝒓𝒃
SUs with Priority and PU-(k+1)
Channel-(k+1)
𝝁(𝒌+𝟏)′
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-(k-1)
Channel-k-1
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-k
𝝁𝒌
Channel-k
SUs with Priority and PU-(k+1)
Channel-k+1
SUs with Priority and PU-(k-1)
Channel-(k-1)
SUs with Priority and PU-k
Channel-k
𝝁𝒌′
𝝁(𝒌+𝟏)
𝝁(𝒌−𝟏)′ 𝝁(𝒌−𝟏)
𝝀(𝒃−𝟏)
Beam Handoff
Beam Handoff
Stay and wait Switch over to channel k q𝒓𝒃
p𝒓𝒃
𝝀𝒃
𝝀(𝒃+𝟏)
SU-i bth beam
𝑹𝒃−𝟏
𝑹𝒃+𝟏
𝒓𝒃
FIFO Queue
FIFO Queue
SUs with Priority and PU-(k+1)
Channel-(k+1)
𝝁(𝒌+𝟏)′
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-(k-1)
Channel-k-1
Ch
an
nel
uti
liza
tio
n b
y P
Us
an
d S
Us
wit
h d
iffe
ren
t p
rio
rit
y
SUs with Priority and PU-k
𝝁𝒌
Channel-k
SUs with Priority and PU-(k+1)
Channel-k+1
SUs with Priority and PU-(k-1)
Channel-(k-1)
SUs with Priority and PU-k
Channel-k
𝝁𝒌′
𝝁(𝒌+𝟏)
𝝁(𝒌−𝟏)′ 𝝁(𝒌−𝟏)
𝝀(𝒃−𝟏)
Beam Handoff
Beam Handoff
Stay and wait Switch over to channel k q𝒓𝒃
p𝒓𝒃
𝝀𝒃
𝝀(𝒃+𝟏)
SU-i bth beam
𝑹𝒃−𝟏
𝑹𝒃+𝟏
𝒓𝒃
FIFO Queue
FIFO Queue
Figure 3.3: Queueing model in CRNs with MBSAs.
beam may be interrupted due to the arrival of a PU or higher-priority SU’ traffic.
In the PRP queueing scheme, the lower priority SU’s service can be interrupted at any time by a
PU or a higher priority SU. But the service of the low-priority SU cannot be interrupted by a higher priority
SU in the NPRP model. Our queueing scheme uses the mixed PRP/NPRP model with a discretion rule,
based on the remaining service time of the low priority SU [76]. We assume that the interrupted SU can
resume its transmission from the point where it was interrupted as soon as a channel becomes available.
Figure 3.3 depicts the mixed PRP/NPRP M/G/1 queueing model for a SU with MBSA.
We classify the CRN nodes using a given channel into three classes [83]: type α, j and β. Type α
refers to any PU or higher priority SUs, 1 ≤ α ≤ j−1. Type j refers to the SUs with priority j. A Type β SU
has a priority β, j + 1 ≤ β ≤C. Type β users can be in protection mode based on their remaining service
time. Hence, a new type j SU using a particular channel (or a SU that has been handed off to this channel),
has to wait in the queue if there is any higher priority user (or a user in the non-preemptive mode) ahead of
it in the queue; otherwise, it can immediately take over the channel.
Discretion Rule: To reduce the queueing delay (which is a major part of the entire handoff delay)
of a low-priority SU, we adopt a discretion rule that does not allow its transmission to be interrupted if its
remaining service time is below a threshold (i.e., on the verge of completing its service) [76]. The total
service time of an SU, S j, is determined by the preemptive duration S A j and the non-preemptive duration
S B j [76], as follows:
33

S j = S A j + S B j (3.1)
For a threshold τ j, the discretion rule can be defined as
S A j = max[0,S j−τ j] and S B j = min[S j, τ j] (3.2)
For a PU, we have S B1 = 0 and S A1 = S 1 since it is allowed to interrupt any SU.
Spectrum Handoff Delay: We define the type j connection as the secondary connection that has
experienced i interruptions, 0 ≤ i ≤ nmax, where nmax is the maximum allowable number of interruptions.
When the beam b j of an SU that is using channel k, is interrupted by a high-priority user, it may either stay
in the same channel and wait for it to become available again (i.e., stay-and-wait case), or move to another
channel k′ (i.e., the channel switching case), depending upon the channel switching time and channel
holding time.
The handoff delay E[W′j,i(k)], starting from the instance of ith interruption to the instance when the
interrupted service is resumed in channel k, can be determined as [76],
E[W′j,i(k,b)] =
E[W′j
(k)], if stay-and-wait in channel k
E[W(k)j ] + Ts, if switches from channel k to k’
Here, E[W′(k)j ] (or E[W (k)
j ]) is the average delay of the ith interruption, if the interrupted beam of
SU chooses to stay at the same channel k (or switch over to another channel k′). Ts is the channel switching
time (a constant value determined by the hardware properties). The detailed process of computing the
handoff delay for both cases is described in [76]. For simplicity, the average queueing delay of the
interrupted beam, E[W′j,i(k,b)], is denoted as E[W] in the rest of this paper.
3.5 Beam Handoff via Packet Detouring
During the spectrum handoff, the interrupted beam of an SU may stay idle when it is either in the
stay-and-wait mode or its packets are waiting in the queue during the channel handoff. The proposed beam
34

handoff scheme can eliminate or reduce this waiting/queueing delay by allowing the data packets of the
interrupted beam to be detoured to the destination through the neighboring beams of the node. Let N
represent the number of available detour beams that form a parallel queueing system.
Figure 3.4 shows a typical packet detouring scenario among N neighboring beams of SU. In
addition to detouring the packets from other beams, each detour beam also has its own data packets to be
sent to the next-hop node or destination. The packets in the queue of a beam are served using the
first-in-first-out (FIFO) order. Recall that all the beams of an SU should be synchronized, i.e., all the beams
should either send or receive the packets at a given time. Without the loss of generality, we assume in Fig.
3.4 that the traffic of the interrupted beam of the source node S (which was connected to the destination
node D via a one-hop link before interruption) is detoured by using its other beams which are connected to
the destination D through the 2-hop links via relay nodes. In practice, the detour beams can also use more
than two hops.
𝑹𝑰Ñ𝑫 + 𝒑Ñ
𝑹𝑰𝟏𝑫 + 𝒑𝟏
S
2
Ñ
D
𝑹𝑺𝑰Ñ + 𝒑Ñ
𝑹𝑺𝑰𝟐 + 𝒑𝟐
𝑹𝑰𝟐𝑫 + 𝒑
𝟐
𝑹𝑺𝑰𝟏 + 𝒑𝟏
I_1
Ñ-1
𝑹𝑺𝑰Ñ−𝟏 + 𝒑
Ñ−𝟏 𝑹𝑰Ñ−𝟏𝑫 +
𝒑Ñ−𝟏
Figure 3.4: Using detour path: distribution of packets among different beams in a 2-hop relay case.
For a 2-hop detour path (e.g., S − Ii−D) in Fig. 3.4, the source SU S is in the transmission mode
(Tx) and the relay SU Ii is in the reception mode (Rx) in the first phase. In the second phase, Ii is in Tx
mode and D is in the Rx mode. Here, additional delay is introduced due to the use of 2-hop paths through
the relay nodes. Therefore, the aggregate data rate at the relay node Ii is:
Ragg,S Ii = RS Ii + pi bits/sec f or i ∈ {1,2, ..., N} (3.3)
The aggregate data rate at D from the relay node Ii is:
35

Ragg,IiD = RIiD + pi bits/sec f or i ∈ {1,2, ..., N} (3.4)
where, RS Ii is the data rate of the source S to the relay node Ii, and RIiD is the own data rate of the
relay node Ii to the destination D, on beam i. We assume that rb is the source data rate in the interrupted
beam b that will be sent to the destination D through the detour beams. pi is the fraction of rb that can be
detoured through beam i and i , b, i ∈ {1,2, ..., N}. Hence, (3.3) and (3.4) represent the traffic loads in each
link.
Our goal is to compute the value of pi that can be transmitted over the detour path i. Since the
channel conditions of a link are instantaneous and its corresponding transmission rate may not meet the
current application requirements, each link can have outage and all the packets to/from the relay SU may
not be detoured successfully.
The SINR observed at beam b for the channel k can be written as [41],
S INRk,b =(1/nk)|hkub|
2
σ2 +∑nk
i,b(1/nk)|hkui|2
(3.5)
where nk denotes the number of neighboring beams, hk denotes the gain in channel k, and ub (or ui)
denotes the unit power assigned to beam b (or i where i , b). The link capacity associated with the detour
beam i, for the S INRk′,i and bandwidth B in channel k′, is defined as
Ci = B∗ log2(1 + S INRk′,i) bits/sec f or i ∈ {1,2, ..., N} (3.6)
Thus the maximum available link capacity in the detour link i is
Ci = min(CS Ii ,CIiD) bits/sec f or i ∈ {1,2, ..., N} (3.7)
Since it is assumed that each detour beam also has its own data to send, the minimum capacity
36

required for the successful transmission of detour beam’s own data in link i is
Ri = max(RS Ii ,RIiD) bits/sec f or i ∈ {1,2, ..., N} (3.8)
where RS Ii (RIiD) is the detour beam’s own data rate on detour path i.
On a 2-hop path, an SU has to switch from Tx to Rx mode, and vice versa, during the available
transmission period (E[W]). Since the MBSA beams are synchronized, we assume that each detour path
has equal Tx and Rx durations. Therefore, the fraction of the maximum data that can be detoured on path i
over two hops is
pCi =12
[1−
Ri
Ci
]f or i ∈ {1,2, ..., N} (3.9)
In (3.9), the control packet overhead and the transmission mode switching delay are ignored. Each
detour beam has an independent queue to serve the data packets. Since the detoured packets, together with
the original packets, will increase the packet accumulation level in the queue, the number of packets that
can be detoured on a beam should be selected such that the queue does not overflow. We assume that the
maximum queue size of a beam is L packets. The queue level at beam i due to its own data at any instance,
t, can be computed as
Li =Ri
Lp×E[Wi]×Lt, i ∈ {1,2, ..., N} (3.10)
where Ri is from (3.8), Lp is the packet size, Lt is the length of the time slot, and E[Wi] is the
average queueing delay in path i (from the FIFO queue of beam i). To avoid the packet drops due to queue
overflow, Li should be less than L. Let PDRi be the total packet drop rate observed at the detour path i, then
the fraction of data rate of beam b that can be detoured on link i is
pi = (1−PDRi)∗ pCi ∗ rb bits/sec, f or i ∈ {1,2, ..., N} (3.11)
For successful packet detouring, an optimization procedure to determine the detour path with the maximum
37

achievable average throughput can be defined as
max1
E[W]
∫ E[W]
t=0MOS t
bdt
s.t : i.N∑
i=1
pit ≤ rb,
ii. Cti −Rt
i − pit ≥ 0,
iii. (L−Li)Lp ≥ (Ci−Ri)Lt,
iv. min(CHT ti1,CHT t
i2) ≥ E[W], f or i ∈ {1,2, ..., N} (3.12)
Here rb is the source data rate of the interrupted beam, b, which is supposed to be detoured; Rti is the detour
beam’s own data rate at instance t, either from the source node to the relay node, or from the relay node to
the destination node. The MOS [59] is used to measure the quality of audio and video data transmissions.
Constraint (iv) in the above equation defines the condition of checking the detour path’s interruption time.
CHT ti1 is the channel holding time (CHT ) in the first hop of the detour path, and CHT t
i2 is the CHT in the
second hop of the detour path which reaches the destination node. Here, the minimum CHT of the detour
path should be greater than or equal to the total waiting time (detour duration, E[W]) of the interrupted
beam. This ensures that the interrupted data can be successfully transmitted over the available 2-hop detour
path without the detoured packets getting stuck in a loop without reaching the destination.
3.6 FEAST-based CBH Scheme
In this section, we address the intelligent spectrum handoff using FEAST, an SVM-based learning
model that considers the multi-channel, multi-beam, and multi-SU (3M) scenario. When a new SU joins
the network, it can make a spectrum handoff decision by using the available time and spatial characteristics
of the channel in beam b. Since the channel is time-varying, the previously learnt CBH model may not fit
well at a new time instant, which would introduce the spectrum decision errors over time. Therefore, we
propose a learning model which can make the optimal CBH decisions on the fly.
38

3.6.1 SVM-based Learning Model
The SVM is a supervised learning approach that has been applied to the data classification
problems and regression analysis [71]. SVM is popular in statistical learning that adopts structural risk
minimization algorithms, and has been shown to outperform the traditional neural network based
classification [7, 71]. The SVM is very effective in high-dimensional spaces. Different kernel functions can
be used in SVM, including the customized kernels. The training dataset consists of N f pairs of input and
output labels that can be represented as
(xi,yi), i = 1,2, .......,N f ; xi ∈ Rd,yi ∈ R. (3.13)
Here, xi is the input vector containing multiple features, and yi ∈ [−1,+1] is the output data or class
indicator. For the training samples xit at time instant t with t = 1,2, ..T , the SVM maps the inputs to outputs,
and predicts an output [-1,+1] (for a 2-class problem) by finding a hyperplane which has the maximum
separation from the support vectors:
w · x + c = 0 (3.14)
The largest margin satisfies the following conditions:
w · xit + c ≥ 1 f or yit = 1
w · xit + c ≤ −1 f or yit = −1 (3.15)
Here, w is a vector perpendicular to the hyperplane which represents the hyperplane orientation,
and c = w0 represents the hyperplane position (also called as offset argument), which describes the
perpendicular distance between the origin and hyperplane, as shown in Fig. 3.5. The main objective is to
maximize the difference between the hyperplane and the support vectors of the two data classes, which is
given by 2||w|| . To avoid the overfitting problem and reduce the misclassification errors, we introduce a slack
variable ξit [3, 71] to produce a classifier as follows,
39

yit (w · xit + c) ≥ 1− ξit ; ξit ≥ 0 (3.16)
Here, ξit = 0 indicates that the dataset is correctly classified, and those data points are either on the
margin or on the correct side of classification margin; 0 < ξit ≤ 1 means the dataset is inside the margin and
correctly classified. To avoid the misclassifications (i.e.,∑
it ξit > 1), we can impose an upper bound on the
number of training errors. Therefore, to achieve the minimum classification error, the distance between the
support vectors (SVs) and the hyperplane should be maxmized.
𝑥1
𝑥2 2
| 𝑤 |
1
2
3
4
Margin
Y = +1
Y = -1
• 1,2,3, and 4 are support vectors
𝝃
Figure 3.5: Data classification achieved by the support vector machine (SVM).
3.6.2 FEAST Learning Model
Machine learning techniques have been used in CRNs to build a cognitive system that can adapt to
the dynamic RF environment. Such a cognitive system relies on the accurate dynamic models that can
predict the long-term consequences of various spectrum decisions (actions) and suitable reward functions.
But modeling an uncontrollable network environment is challenging. In addition, the previous
models [41, 74–76] built for spectrum decision are mostly based on the assumption that the inputs (or
observations) used in prediction follow the same underlying distribution during both training and testing
phases. However, this assumption may not hold in dynamic RF environment, and can lead to poor QoS
performance due to inaccurate spectrum decision in the long run.
To overcome this issue, we propose the FEAST, which uses an online learning model. We
represent each beam of the SU in the CRN as a tuple denoted by < D′,A,R >, where:
a) States, D′: The states S ∈ Rd are called as the observations of CRN. In our model, the states in
40

bth beam of a SU consist of the following five aspects: (1) ρ(k)b , which represents the SU priority in bth beam
in channel k; (2) Channel status χ(k)b , i.e., whether the channel is occupied or idle; (3) Channel condition
υ(k)b , which determines the channel quality in terms of PER; (4) Traffic load on the channel, δ(k)
b , which is
already determined in Section V in terms of PDR; and (5) The number of neighboring beams (Nb) for
packet detouring in case of interruption. Collectively all the states can be represented as
D′ = {ρ(k)b ,χ(k)
b ,υ(k)b , δ(k)
b , N(k)b }.
b) Actions, A: The actions are used to change the behavior of SU in response to the states. They
are executed sequentially. If the states do not change significantly, the SU continues its operation in the
current beam and channel. When the transmission of an SU is interrupted, the action set consists of the
stay-and-wait at the current channel k, the spectrum handoff to another channel k′, and the beam handoff to
detour the packets through the neighboring beams.
c) Policy Set, π: We denote the class of learned policies for a beam b by π. At any time t, the
distribution of states for an executed policy π from time 0 to t−1 is represented by dtπ. Furthermore, the
average distribution of the states over a period T is
dπ =1T
T∑t=1
dtπ (3.17)
d) Reward, R: The reward determines how well an SU is performing CBH in its beam b under the
current network conditions. We measure the reward in terms of MOS, which represents the quality of
experience (QoE). MOS value ranges from 0 to 5, where the value close to 5 (0) indicates that the SU is
performing very well (very poor). The MOS can be represented as follows [59],
R = MOS =a1 + a2FR + a3ln(S BR)
1 + a4T PER + a5(T PER)2 (3.18)
where FR, SBR and TPER are the frame rate, sending bit rate, and total packet error rate (calculated as
T PER = PER2 + PDR2−PER∗PDR), respectively. The parameter ai, i ∈ {1,2,3,4,5} is estimated by using
the linear regression.
Main Components of FEAST: FEAST mainly consists of two parts: (1) Rapid Response Engine
41

Algorithm 3 : FEAST-based CBH schemeInitialization, D← ∅ and RepeatPart-I: LTREInput: D′: RF State vector, {ρ(k)
b ,χ(k)b ,υ(k)
b , δ(k)b , N(k)
b }
Output: SVM: Decision model for RRE.1: if |D| > MAXIMUMINS T ANCES then2: Remove oldest Instance, D from D3: end if4: D← D∪D′ % Append current instance to D5: MOS = S V M(L,D) = <w ·x> + c % Retrain the model6: TRANSFER updated SVM to RRE- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -Part-II: RREInput: D′: RF State vector, {ρ(k)
b ,χ(k)b ,υ(k)
b , δ(k)b , N(k)
b }
Input: τ: Error threshold on MOSInput: Updated SVM model, newS V MOutput: Optimal policy, π∗
1: S V M← newS V M % Receive newSVM from LTRE2: Obtain new state observation, D′
3: if |MOS t−1−MOS t| > τ then4: Trigger LTRE to Retrain5: end if6: for a ∈ A do7: πa = S V M(D′,a) % prediction on each action8: end for9: π∗ = argmax(a,πa) % Optimal Policy
10: End
42

Multibeam Cognitive
Radio Network Priority
Channel Status
PER
PDR
Detour Beam-Ñ
Priority
Channel Status
PER
PDR
Detour Beam-Ñ
Priority
Channel Status
PER
PDR
Detour Beam-Ñ
CRN States
Priority
Channel Status
PER
PDR
Detour Beam-Ñ
CRN States
LTRESVM
RRESpectrum Decision
Mixed PRP/NPRP Queueing Model
Priority,Queue LengthChannel Status
Reward, RMOS
𝑹 ≥ 𝑹𝒕𝒉
𝑹 < 𝑹𝒕𝒉
𝑹 < 𝑹𝒕𝒉 SINR,
Secondary User Contention,
Primary Users
𝜋
𝐷′ 𝑫 ← 𝑫∪ 𝑫′
𝜋* 𝐷′
(PER,PDR)
Figure 3.6: FEAST-based CBH scheme, which mainly consists of SVM, LTRE, and RRE modules to takethe long-term and short-term decisions.
(RRE), and (2) Long-Term Response Engine (LTRE) [29].
Real-Time Decision Engine, RRE
It performs the spectrum decision rapidly in real-time based on the best action that is chosen from
the SVM-based prediction scheme managed by LTRE module. If the observed reward (viz MOS) at
instance t, is below the threshold value (Rth), the RRE instructs LTRE to retrain the SVM model, based on
the collected feature vectors. Then RRE compares the new action with the current model, and selects a
suitable action with the best model.
Long-Term Decision Engine, LTRE
Long-term response model updates the learning model by collecting the network parameters as
mentioned before. This model collects the newly observed network parameters (such as PDR, PER etc.)
into its database and updates the SVM model. This model mainly performs two functions: (1) Collect and
add the new network conditions (i.e., feature vector, D′) to its old dataset D← D∪D′, and (2) Calculate
the new kernel values (i.e., compute the hyperplane), and update the SVM model using (3.19), which is
then used by the RRE to perform the spectrum decisions. To avoid the dataset overflow, the old dataset is
overwritten with feature vectors circularly after the data acquisition bound is reached.
Figure 3.6 illustrates our FEAST-based CBH model in CRN. Each beam observes both
time-varying and space-varying channel variations in CRNs. Based on the observed channel variations,
each beam collects CRN states and uses them as feature vectors D′. In the beginning, the feature vectors
43

are fed to LTRE as D← D∪D′ to build the decision model, πa. This model is used by RRE to perform
handoff decision. If the MOS falls below the threshold, Rth, the observed state vector D′ is added to the
feature stack, D, and the model is retrained and updated at LTRE. The performance of the updated policy is
compared with the old policy, and the optimal policy π∗ is used as the best policy for each state-action pair,
and the process continues.
Algorithm 1 illustrates the process of FEAST model. At time instance t, a SU in beam b chooses an
action a ∈ A for an observation, D′, to maximize the performance of the spectrum decision (in terms of
MOS) by using the learned model as follows:
πa = S V M(D′,a) =
Nsv∑sv=1
(αsv−α∗sv)φ(xsv, x) + c (3.19)
Here, αsv and α∗sv are the Lagrange multipliers, Nsv is the number of support vectors, and φ(xsv, x)
is the kernel, a non-linear mapping function that transforms RF features to a high-dimensional space and
produces a linear separation to obtain a perfect hyperplane if the feature vector observed at instance t is
non-linear. xsv is an instance in the training data, selected as a support vector to define the hyperplane, and
x is the instance that we attempt to predict via the learned model.
When the drop in MOS value is above τ, the RRE selects the best policy that can achieve the
highest MOS, as follows:
π∗ = argmax(a,πa), a ∈ A (3.20)
3.7 Performance Analysis
In this section, we evaluate the performance of: (i) the mixed PRP/NPRP M/G/1 queueing model
in terms of the average queueing delay, which specifies how long a beam waits when it is interrupted by the
high priority users, (ii) the beam handoff in terms of packet detouring, and (iii) the proposed FEAST model
that achieves integrated “channel+beam” handoff. The performance of our FEAST model is also compared
with our previous learning-based spectrum handoff schemes, i.e., the reinforcement learning (RL) [75],
apprenticeship learning (AL) [74], and multi-teacher apprenticeship learning (MAL) [76].
In our simulations, we consider 3 PUs and 8 SUs, which communicate over 3 channels. Each SU is
44

equipped with an MBSA with 8 beams, where each beam has a beamwidth of 45◦, whereas PUs are
equipped with omni-directional antennas. As the Rician fading channel model covers both multipath and
line-of-sight (LOS) effects, we assume that each node is experiencing Rician fading conditions [50], with at
least one LOS signal component, and the channel capacity is determined as in (3.6) and (3.7). To determine
the PDR due to queueing delay, we use the equation (19) from [75], and the PER varies from 2%−10%
with the packet size of Lp = 1500 bytes. The slot duration is Lt = 50ms. When the interference takes place,
the sender SU uses other beams or channels to forward the interrupted data to the destination SU through
the relay node(s).
3.7.1 Average Queueing Delay
We evaluate the performance in terms of the average queueing delay (during handoff) upon
interruption from a PU or high priority SUs. Different priorities are assigned to the SUs depending on the
delay constraint of their flow. The highest priority (priority = 1) is assigned to the interactive voice data
with a rate of 50Kbps and strict delay constraint of 50ms. Priority 2 is assigned to the interactive Skype
call with a rate of 500Kbps and delay constraint of 100ms. Priority 3 is assigned to the video-on-demand
(VoD) streaming data with a rate of > 1Mbps and delay constraint of 1sec. Finally, the lowest priority
(priority = 4) is assigned to the data without any delay constraint (e.g., file downloading service). Since the
SU priorities depend on the delay requirements of their data, we describe the channel access as a
priority-based queueing model.
Figures 3.7a and 3.7b compare the average delay of the mixed PRP/NPRP queueing model with the
NPRP and PRP models, respectively, for different traffic classes (priorities). Here, the PU arrival rate is set
to λp = 0.05 arrival/slot, its service rate is set to E[Xp] = 6 slots/arrival, and E[Xs] = 5 slots/arrival
is set as the service rate for SU. We observe that the mixed PRP/NPRP queueing model can serve as a fair
scheduling model, because it gives more spectrum access to the higher priority SUs by interrupting only
those low priority SUs whose remaining service time is above a threshold. As a result, the low priority SUs
which are close to completing their service are not interrupted. On the other hand, the NPRP queueing
model does not allow the higher priority SUs to interrupt the lower priority SUs at all. As a result, the
higher priority SUs experience slightly higher delay and lower priority SUs experience lower average
delay, compared to the mixed PRP/NPRP queueing model. In the PRP model, on the other hand, the lower
priority SUs suffer from higher queueing delay due to frequent interruptions from higher priority SUs.
45

500 1000 1500 2000 2500SU bitrate, Kbps
5
10
15
20
25
Averag
e Qu
eueing
Delay
(tim
e slo
ts)
Average Queueing Delay for Different Priorities of SUMixed,Class-1Mixed,Class-2Mixed,Class-3Mixed,Class-4NPRP,Class-1NPRP,Class-2NPRP,Class-3NPRP,Class-4
(a) NPRP v/s Mixed PRP-NPRP model
500 1000 1500 2000 2500SU bitrate, Kbps
5
10
15
20
25
Aver
age
Queu
eing
Del
ay (t
ime
slots
)
Average Queueing Delay for Different Priorities of SUMixed,Class-1Mixed,Class-2Mixed,Class-3Mixed,Class-4PRP,Class-1PRP,Class-2PRP,Class-3PRP,Class-4
(b) PRP v/s Mixed PRP-NPRP model
Figure 3.7: The comparison of (a) mixed PRP/NPRP vs. NPRP, and (b) mixed PRP/NPRP vs. PRP queueingmodels, with λp = 0.05, E[Xp] = 6 slots, and E[Xs] = 5 slots.
Figure 3.8 demonstrates the effect of the discretion threshold, φ, on average queueing delay, when
φ changes from 0 to 1. Here, φ = 0 and 1 represent the NPRP and PRP modes, respectively, and 0 > φ > 1
represents the mixed PRP/NPRP model. The queueing delay of the lowest priority SU (Priority 4) becomes
longer when the discretion threshold increases, because a higher-priority SU can easily interrupt it. Based
on the traffic delay constraint, the parameter φ can be tuned to meet the QoS requirements of SUs.
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9Discretion threshold, φ
0
5
10
15
20
25
30
35
Averag
e Qu
eueing
Delay
(tim
e slo
ts)
PRP-mode
NPRP-mode
NPRP-mode
PRP-mode
Class-1Class-2Class-3Class-4
Figure 3.8: Effect of the discretion threshold (φ) on the average queueing delay for different priorities ofSUs.
46

0% 5% 10% 15% 20% 25% 30% 35% 40%Percentage of Packet Distribution in each path
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Total d
ata rate achieve
d, r b
Mbp
s
1-Detour Path2-Detour Path3-Detour Path4-Detour Path
Figure 3.9: (Ideal case) Percentage of packet detour vs. achieved source data rate. Here, every beam has thesame percentage of packet detouring and latency requirements.
3.7.2 Beam Handoff Performance
Figure 3.9 shows an ideal case where all the detour beams have the same available channel
capacity for transmitting the detour packets. Here, the source data rate (rb) is 3Mbps. The plot shows the
total data rate that can be achieved with different number of detour paths when each beam carries the same
percentage of detoured source data. A higher data rate is obtained by either increasing the number of
detour beams or the data carried on each beam, until 100% detour data is transmitted.
50 500 1000 1500 2000 2500 3000Source data rate, rb, Kbps
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Mea
n Op
inion Sc
ore (M
OS)
3.93.38
2.72 2.77 2.8 2.8 2.8
Figure 3.10: MOS performance for different source rate rb when each detour beam has a channel capacityof Ci=4.5Mbps and it’s own data rate Ri=3Mbps.
Figure 3.10 shows the variations in MOS for different types of source data, when each detour beam
has a channel capacity of Ci = 4.5Mbps and its own data rate is Ri = 3Mbps. In this case, four detour
beams are available for forwarding the interrupted beam’s data. The Priority 1 data of the interrupted beam
47

(with source rate, rb = 50Kbps, and delay deadline = 50ms) is detoured with a high MOS score of 4, since
it requires less channel capacity but with stringent delay constraint. Also note that each packet on the
detour beam travels through two hops, which increases the delay and leads to the packet drops. The
Priority 2 traffic in the interrupted beam (with source rate, rb = 500Kbps, and delay deadline = 100ms) is
detoured with a slightly lower MOS. The Priority 3 traffic in the interrupted beam (with source rate, rb ≥
1000Kbps, and delay deadline = 1sec) achieves MOS < 3, because it requires more channel resources and
does not have a priority higher than the detour beam’s own data (which also has priority 3). An interesting
trend is observed for the Priority 3 traffic: as the data rate increases, the MOS also slightly increases. This
is because MOS is logarithmically proportional to the source bit rate.
In Figure 3.11, the number of available detour beams as well as the source data rate are changed.
Using more detour beams improves MOS score when the source data rate of the interrupted beam is
>500Kbps. When the data rate is higher and more packets are detoured through a beam, packet drop rate
increases due to the packet expiry in the queue over two hops. As the packets are distributed among more
detour beams, the load on each beam is reduced, and thus leads to a lower PDR that provides a higher
MOS.
50 500 1000 1500 2000 2500 3000bth Source data rate, rb Kbps
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Mea
n Op
inion Sc
ore (M
OS)
1-detour path2-detour paths3-detour paths4-detour paths
Figure 3.11: MOS performance for different source rates and different numbers of detour beams. Eachdetour beam has a channel capacity of Ci=4.5Mbps and its own data rate Ri=3Mbps.
Figure 3.12 shows the MOS score when both the source data rate, rb, and each detour beam’s own
data rate, Ri, vary over the range of 50Kbps to 3Mbps. Here, four detour paths are available. No variation
in the performance is observed for the higher priority data (Priority 1 data @50Kbps and Priority 2 data
@500Kbps), when the detour beam’s own data rate (Ri) is varied from 50Kbps to 3Mbps. Similar trend is
observed for the source rate of 1Mbps and 1.5Mbps, but the MOS score is lower because the source data
48

Ri, Kbps
5050010001500200025003000
rb , Kbps
5050010001500200025003000
Mean Opinion Score (M
OS)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Figure 3.12: MOS performance for different source rates, rb and detour beam’s own data rates, Ri
priority is 3, which is the same as the detour beam’s own data. Whereas, for the source rate rb ≥ 2Mbps
(which also corresponds to priority 3) and Ri ≥ 2Mbps, we observe a further drop in the MOS score
because the load on each beam increases and the packets experience a higher delay (i.e., higher PDR).
3.7.3 FEAST-based Spectrum Decision Performance
We then study performance of the cognitive spectrum handoff by using our FEAST based CBH
model. We generate one feature vector at a time to train the FEAST model. A feature vector consists of
PER, PDR, detour-status, channel-status, and flow priority. An observed feature vector can belong to one
of the three classes: stay-and-wait, channel handoff, and beam handoff. In our simulations, the PER varies
from 2% to 10%, and PDR is calculated using the queueing model. The arrival rate and the service time of
the SU and PU connections are set as λp = 0.05 arrivals/slot, E[Xp] = 6 slots/arrival,
λs = 0.05 arrivals/slot, and E[Xs] = 8 slots/arrival. In addition, we consider the availability of three
channels and four detour beams, and the number of traffic priority classes is 4. Based on the training
model, the node takes the spectrum decisions with respect to the observed RF conditions. When there is a
continuous degradation in the performance, the observed feature vector is added to the feature set and the
model is retrained.
Our main goal is to show that the proposed supervised learning algorithm, FEAST, can outperform
the unsupervised learning based schemes (e.g., RL, AL, and MAL), in terms of the number of iterations
needed to achieve the optimal condition. Here, we consider an iteration as the packet transmission attempt
and analyze the performance of our model by considering two scenarios: slow-moving and fast-moving
nodes.
49

To compare different learning-based schemes, we use the soft-max policy with a temperature rate
(1/K), where K is the number of iterations and discount rate γ = 0.6. The temperature value decreases with
the number of iterations to ensure that the learning model goes through the exploration and exploitation
phases for each state-action pair.
0 200 400 600 800 1000Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Sco
re, E
[MOS]
RL-1AL-1
MAL-1
RL-2AL-2
MAL-2
RL-3AL-3
MAL-3
RL-4AL-4
MAL-4
Slow Moving node
RL:priority-1AL:priority-1MAL:priority-1
RL:priority-2AL:priority-2MAL:priority-2
RL:priority-3AL:priority-3MAL:priority-3
RL:priority-4AL:priority-4MAL:priority-4
(a) Slow Moving Node
0 200 400 600 800 1000Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Sco
re, E
[MOS]
RL-1
AL-1
MAL-1
RL-2AL-2
MAL-2
RL-3AL-3
MAL-3
RL-4AL-4
MAL-4
Fast Moving node
RL:priority-1AL:priority-1MAL:priority-1
RL:priority-2AL:priority-2MAL:priority-2
RL:priority-3AL:priority-3MAL:priority-3
RL:priority-4AL:priority-4MAL:priority-4
(b) Fast Moving Node
Figure 3.13: Performance comparison of our previous learning schemes, RL, AL, and MAL.
0 200 400 600 800 1000Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expected Mean Opinion Score, E[MOS]
FEAST: Slow Moving node
FEAST -1No FEAST-1
FEAST -2No FEAST-2
FEAST -3No FEAST-3
FEAST -4No FEAST-4
(a) Slow Moving Node
0 200 400 600 800 1000Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Score, E
[MOS]
FEAST: Fast Moving node
FEAST -1No FEAST-1
FEAST -2No FEAST-2
FEAST -3No FEAST-3
FEAST -4No FEAST-4
(b) Fast Moving Node
Figure 3.14: Performance analysis of the FEAST-based spectrum handoff scheme.
Figures 3.13a and 3.13b show the number of iterations needed for achieving the optimal
performance (measured by MOS) for the traffic of four priorities for the slow-moving and fast-moving
scenarios, respectively. For both scenarios, the reinforcement learning (RL)-based spectrum decision [75]
needs more than 200 iterations to converge. For the apprenticeship learning (AL)-based spectrum
decision [74], the performance is slightly better (the node achieves optimal performance within 200
50

0 20 40 60 80 100Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Score, E
[MOS]
Slow Moving node
FEAST:priority-1MAL:priority-1
FEAST:priority-2MAL:priority-2
FEAST:priority-3MAL:priority-3
FEAST:priority-4MAL:priority-4
(a) Slow Moving Node
0 20 40 60 80 100Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Score, E
[MOS]
Fast Moving node
FEAST:priority-1MAL:priority-1
FEAST:priority-2MAL:priority-2
FEAST:priority-3MAL:priority-3
FEAST:priority-4MAL:priority-4
(b) Fast Moving Node
Figure 3.15: Performance comparison of FEAST-based spectrum handoff scheme with MAL-based schemefor 100 iterations (packet transmission).
iterations). The multi-teacher apprenticeship learning (MAL)-based spectrum decision [76] needs only
about 50 iterations to reach the optimal performance. Further, the slow-moving SU needs less number of
iterations to achieve the optimal performance, compared to the fast-moving SU.
The performance of the proposed FEAST model-based spectrum decision scheme is shown in Fig.
3.14a (for slow-moving SU) and 3.14b (for fast-moving SU). The FEAST-based spectrum decision scheme
needs only about 15 iterations to achieve the optimal MOS value for the traffic of all the four priorities. Fig.
3.15b shows the zoomed version for FEAST and MAL [76] schemes for the first 100 iterations. We can
easily see that the FEAST model achieves a significant improvement compared to the MAL-based model.
In addition, the FEAST model also outperforms the No-FEAST model which does not use online learning
( [71]), shown in Fig. 3.14a and 3.14b.
Note that the number of iterations taken by the spectrum decision scheme to converge to the
optimal performance is very important for the SUs with delay-sensitive traffic. Requiring more iterations
for deciding the handoff would also degrade the performance (such as throughput) for dynamic channel
conditions. More importantly, a CR node does not have much time for handoff operations since the
availability of channel also varies with time. Although the AL and MAL do not require the exploration
phase for each state-action pair, they need more time to search and receive the optimal strategy from
multiple nodes, which affects the utilization of the available spectrum. The proposed FEAST model takes
only a few iterations without the need for other nodes’ information, unlike the MAL model.
51

0 200 400 600 800 1000Number of packets
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Expe
cted
Mea
n Opinion
Score, E
[MOS]
Slow Moving node
FEAST-linear:priority-1FEAST-RBF:priority-1
FEAST-linear:priority-2FEAST-RBF:priority-2
FEAST-linear:priority-3FEAST-RBF:priority-3
FEAST-linear:priority-4FEAST-RBF:priority-4
Figure 3.16: The FEAST model performance for the linear SVM and RBF SVM kernels.
Finally, we compare our spectrum handoff results for the linear SVM and the SVM with RBF
kernel, and found no difference in their performance (i.e., both curves overlap in Fig. 3.16) since the data
are linearly separable. We observed that our handoff application is a linear SVM problem as the use of
other kernels did not improve the performance. In addition, the linear SVM has lower implementation
complexity.
ALPL
Stay-and-WaitChannelHandoff
BeamHandoff
Stay-and-WaitFEAST 246 2 1
No-FEAST 142 97 76
ChannelHandoff
FEAST 2 211 3
No-FEAST 108 135 81
BeamHandoff
FEAST 3 5 527
No-FEAST 103 73 185
Table 3.1: Confusion matrix comparison between the FEAST and No-FEAST models.
Table I shows the confusion matrix for the spectrum handoff schemes based on the FEAST and
No-FEAST models, determined by using the actual labels (AL) and predicted labels (PL) for 1000
iterations. The true positive (TP) values are along the diagonal direction and the off-diagonal elements
represent the false positive (FP) and false negative (FN) values. To compute the confusion matrix, the
predicted labels from all three folds are combined into one vector, and are compared to the actual labels of
the dataset. In the FEAST model, 984 out of 1000 predictions are TP for all the three classes. In the
No-FEAST model [71], the total number of TPs are only 491, which is less than 50% of the actual
52

predictions, exemplifying the need for online learning. When adding a new feature D′ to the feature stack,
D← D∪D′, if the number of feature vectors belonging to one class dominates the feature vectors of other
classes, the model will be biased towards the dominant class. Therefore, maintaining an equal proportion
of feature vectors for each class during data aggregation reduces the risk of bias towards a particular class.
Finally, Fig. 3.17 demonstrates the number of support vectors (SVs) used during spectrum handoff
process for the traffic of four priority classes. The number of SVs increases almost monotonically with the
number of training vectors (counted in terms of the number of packet transmissions), strengthening the
decision boundary for each class.
0 200 400 600 800 1000Number of packets
0
5
10
15
20
25
30
35
# of Sup
port Vectors
FEAST-1FEAST-2
FEAST-3FEAST-4
Figure 3.17: Number of support vectors generated in the FEAST model.
53

CHAPTER 4A HARDWARE TESTBED ON LEARNING BASED SPECTRUM HANDOFF IN COGNITIVE
RADIO NETWORKS
Chapter summary: In Chapter 4, We present a real-time Cognitive Radio Network (CRN)
platform by using USRP GNU radio to demonstrate the use of both self-learning and transfer learning in
the implementation of spectrum handoff scheme, which can switch channels to adapt to the various QoS
requirements of the multimedia applications. By considering channel status (idle or occupied) and channel
condition (in terms of packet error rate), the sender node performs the learning-based spectrum handoff. In
our implementation, we use reinforcement learning as a self-learning strategy to learn the complex CRN
conditions. However, the number of network observations it takes to achieve the optimal solution to a
handoff task is often prohibitively high in real-time applications. Every time when the node experiences
new channel conditions, the learning process is restarted from scratch even though the similar channel
condition has been experienced before. In this regard, we implement transfer learning based spectrum
handoff that enables a node to acquire knowledge from different neighboring nodes to improve its own
spectrum handoff performance. In transfer learning, at the beginning the node searches for the expert node
in the network. If there is no expert node in the network the node learns the spectrum handoff strategy on
its own by using Reinforcement learning. When there is already an expert node in the network then the new
node requests the Q-table from the expert node and uses that in its spectrum handoff. Our hardware
experiment results show that machine learning based spectrum handoff performs better in the long term and
effectively utilizes the available spectrum. In addition, our hardware testbed shows that transfer learning
requires less number of packet transmissions to achieve optimal condition as compared to self-learning that
takes considerably more packet transmissions to achieve the optimal condition.
4.1 Introduction
The cognitive radio network (CRN) is considered as a promising solution to address the issue of
spectrum scarcity and effective spectrum utilization. In CRN, the secondary users (SU) are allowed to
54

occupy the spectrum when it is not used by the primary users (PU), which is known as the dynamic
spectrum access (DSA) [16]. However, the frequent interruptions from PUs in CRN force the SUs to
perform handoff to other idle channels. The spectrum handoff can also occur due to node
mobility [68] [62] [43]. Thus, it is very important for SUs to keep monitoring the link status (due to
temporal mobility) and link quality (spatial mobility).
In this paper, we implement the spectrum handoff process in a CRN testbed using the universal
software radio peripheral (USRP) boards and GNU Radio. Our main goal is to enable each SU node to
learn the spectrum handoff based on its past observations. Since CRN is able to learn and reason the radio
environment through a cognitive engine, the use of machine learning algorithms can enhance the learning
and reasoning of the spectrum handoff process. Here, a learning model represents the process of acquiring
the knowledge by interacting with the environment, to improve the future decisions. In recent years, the
machine learning algorithms have been widely used in CRN [33] [5].
In this paper, we implement the reinforcement learning (RL) and transfer learning (TL) based
spectrum handoff schemes in CRN, by using the GNU Radio programming environment [37] for
multimedia transmissions (such as real-time video). Note that a myopic spectrum handoff scheme may not
achieve the best performance in the long-term, since it tends to select the channels which maximize the
short-term reward. When an SU learns about the spectrum handoff decisions on its own by using the RL
algorithm [75], it typically needs more time to converge to the optimal solution, which is undesirable for
real-time data transmission. Instead, a new node can seek help from other nodes in the network, which are
termed as the ’expert nodes’ [18, 23, 26]. Specifically, when a new (or learning) node joins the network, it
searches for an expert node in the network by using the control channel. If an expert node is found, it
shares its optimal strategy with the new node to help with the spectrum handoff decisions. This is termed as
the ’transfer learning’ (TL). When the communication tasks are similar between the learning and expert
nodes, the knowledge transferred from the expert node enables the learning node to start communications
from the optimal condition without taking much time to acquire knowledge about the RF environment,
which significantly enhances its performance. If there is no expert node in the network, the new node
learns about the environment on its own and builds the optimal strategy by using RL.
We address the following issues in building a hardware testbed for intelligent spectrum handoff. (i)
How often should the node sense the channel? (ii) How often should the learning algorithm be updated?
55

(iii) How long should the learning node wait for the response from the expert node? Since the GNU Radio
software does not have any pre-defined machine learning functions, all the modules need to be built from
the scratch. The main contributions of this paper are twofold:
Real-time CRN Testbed
The USRP and GNU Radio based testbed, which uses the directional antennas, is built for
multimedia data transmissions. Using USRP 210 series we have implemented spectrum sensing, spectrum
handoff and other CRN functions. All the communication modules are built using Python and C ++ in the
GNU Radio environment. In addition, we have implemented the machine learning modules using Python
on the host level of GNU Radio. Thus our CRN testbed serves as a platform for implementing the
advanced CRN protocols and machine learning algorithms.
TL-based spectrum handoff
RL is used when the node is new to the network and cannot find an expert node. In our testbed, we
use the Q-learning as the RL scheme to perform spectrum handoff due to its ability to explore and exploit
the best actions for each state. To enhance the process of adaptation to the radio environment and to
achieve optimal condition faster, we have implemented TL algorithm. There are several TL approaches,
such as the inverse RL, apprenticeship learning, etc. We have used a typical Docitive learning model,
where the optimal Q-table is transferred from the expert node to the learning node.
The rest of this paper is organized as follows: The related work is summarized in Section II. The
RL and TL based spectrum handoff schemes are explained in Sections III and IV, respectively. The CRN
testbed set up and design challenges are described in Section V. The experimental results are presented in
Section VI, followed by the conclusions in Section VII.
4.2 Related work
Several CRN testbeds using USRP and GNU Radio, with spectrum sensing, dynamic spectrum
access and interference management functions, have been discussed in [1, 16, 67]. A CRN testbed with
spectrum sensing function was implemented in [37]. The authors also extended their work to observe the
56

burst errors in OFDM using Markov traffic models, and implemented a 4-node CRN network to observe the
effect of interference on the delay performance. A comparative study of different spectrum sensing
techniques using the USRP and GNU Radio was performed in [23]. Researchers at UC Berkeley [48]
designed a CRN testbed by using BEE2 and a multi-FPGA emulation engine, to verify different sensing
processes at the physical layer in real-time system. They developed two CRN testbeds with 8 WARP nodes
and 11 USRP nodes. A large-scale CRN testbed with distributed spectrum sensing was developed in [55].
The researchers at Virginia Tech [51] developed the VT-CORNET testbed, for the development, testing and
evaluation of several cognitive radio applications.
However, only a few testbeds have used the machine learning algorithms in CRN. Authors in [2]
developed machine learning plugins (i.e., linear logistic regression classifiers), by using the GNU Radio
companion and Python coding. A Q-learning based interference management in cognitive femtocell
networks was developed in [19] using the USRP and GNU Radio. A practical signal detection and
classification scheme in GNU Radio was developed in [19] by using the artificial neural networks (ANN).
The fusion of signal detection and classification algorithms. A Q-learning based channel allocation
platform was proposed in [52] for a 4-node CRN, where each node acts individually without collaborating
with other nodes, to avoid the overhead introduced in cooperative spectrum access. In [31, 58], a
Q-learning based spectrum management system for a Markovian modeled, large-scale multi-agent network
was implemented, and the success rate of packet transmission was improved.
Most of the existing testbeds have used the RL based models. Ours is the first testbed to implement
a transfer learning algorithm to enhance the learning speed of the network, which can tune its strategy to
the dynamic variations of the channel.
4.3 Reinforcement Learning for Spectrum Handoff
The RL [64] is a prominent unsupervised learning schemes, which can enable a node to learn
autonomously in CRN environment [5, 63]. The RL is a special case of the Markov decision process
(MDP), which can be stated as a tuple (S, A, T, R). Here S corresponds to the finite set of states for the
node. A is the finite set of actions available for a node in each state. T defines the transition probability,
(s j|si,a) , from state, si ∈ S to state, s j ∈ S , after the action a ∈ A is being taken. R denotes the Reward,
57

R(s,a) , observed when action, a ∈ A is performed while in state, s ∈ S . After a series of actions, a ∈ A for
state, s ∈ S , the system reaches an optimal condition by building an optimal policy π(s,a), which defines
the probability of taking an action a in state s.
In our cognitive radio testbed, for spectrum handoff, the tuple (S, A, T, R) are defined as follows:
States, S: for the node, when occupying a channel at iteration t, the node observes the state as ξt,φt.
Where, ξt denotes the condition of the channel in terms of packet error rate (PER). φt denotes the status of
the channel (idle or busy).
Action, A: The following actions are considered for the spectrum handoff: (1) a1: stay and transmit
in the same channel. (2) a2: perform spectrum handoff to another vacant channel upon interruption from
PU or if channel condition becomes worse.
Reward, R: the reward is defined as the immediate reward incurred for the multimedia
transmission. In our testbed, when the channel condition is good and the action taken is transmission (a1),
then we assign the reward of 10. When channel condition is bad and the action taken is spectrum handoff
(a2), the reward is 5. For any other combination of state and action the reward is set to -5. Reward -5 is
assumed because that action may not be desired in the observed state at that instance.
In our cognitive radio testbed, we adopt Q-learning based handoff for a node that cannot find any
expert node to transfer the knowledge to it. The Q-learning algorithm estimates Q-values, Q(s,a) of the
joint state-action pairs (s,a). Q-table determines how good it is for a given agent to perform a certain action
under a given state. The one-step Q-table update equation is defined as:
Q(st,at)← Q(st,at) +α[Rt+1 +γmaxa
Qst+1,a−Q(st,at] (4.1)
Where Rt, st and at are, reward, state and action at tth iteration of the learning process. And
γ ∈ [0,1) is the discount factor that maximizes the total expected rewards by controlling the influence of the
previous reward on current action. And α ,0 ≤ ≤ 1, is the learning rate defining how much of the newly
acquired information can be used to strengthen Q− value, and it keeps updating and eventually attains the
optimal value, Q∗. However, it is required that all the state-action pairs need to be updated continuously to
attain the correct optimal condition. This can be ensured either by using ε−greedy algorithm or so f t−max
58

policy to update all state-action pairs to lead to the optimal policy, π∗.
Figure 4.1 shows the typical diagram of Q-learning based RL in spectrum handoff control of CRN
testbed.
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
Q-table
Q(s,a)
1. Channel status
2. PER
Observations
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
1. Transmit
2. Handoff
Action
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
Figure 4.1: Q-learning based spectrum handoff in Cognitive Radio Network.
4.4 Transfer Learning for Spectrum Handoff
The TL [18, 23, 26] is analogous to multi-agent learning where an existing node in the network
serves as a teacher to the newly joined nodes. Initially, RL is used which needs no knowledge about its
environment. Thus, the node learns about its environment by itself and builds the acquired knowledge. To
achieve this, the node experiments with each available action,a ∈ A, in every encountered state, and records
the reward, R(t). This phase is called "exploration". After exploring all the state-action pairs, the node
starts to strengthen the set of state-action pairs which are given the highest reward compared to other
state-action pairs. This is called the "exploitation" phase.
In CRN, an SU uses the available idle spectrum and cannot afford to spend lot of time in
understanding the radio environment. So the node should curb the exploration phase to effectively utilize
the available idle duration of the channel. Therefore, we implement the TL in our testbed, where a new
node in the network (called learning node) learns the spectrum handoff strategy from an existing node
(called the expert node).
Figure 4.2 shows the typical structure of TL, where the node first learns the optimal policy through
its experience and actions (by using RL), and in the second stage it shares its handoff strategy with the new
59

node in the network. To accept the handoff knowledge transferred from the expert node, the new node must
have similar requirements (such as QoS) and face similar RF environment as the expert node. However, in
dynamic channel conditions, the expert node cannot match exactly with the learning node. In order to keep
track of the dynamic channel conditions, the learning model, therefore, needs to be updated, either by the
node itself or by taking help of expert nodes, to increase the spectrum efficiency. More importantly, the
learning node should be able to fine tune the expert knowledge according to its own channel conditions.
The red dashed line in Fig. 4.2 represents the process where the expert node continuously helps the new
node to solve new tasks.
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
Q-table
Q(s,a)
1. Channel status
2. PER
Observations
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
1. Transmit
2. Handoff
Action
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
Expert Node
Optimal Strategy. Π* or Q*
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
Q-table
Q(s,a)
1. Channel status
2. PER
Observations
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
1. Transmit
2. Handoff
Action
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
Expert Node
Optimal Strategy. Π* or Q*
Learning Node
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
Q-table
Q(s,a)
1. Channel status
2. PER
Observations
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
1. Transmit
2. Handoff
Action
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
Expert Node
Optimal Strategy. Π* or Q*
Learning Node
Knowledge Transfer
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
Q-table
Q(s,a)
1. Channel status
2. PER
Observations
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
1. Transmit
2. Handoff
Action
Cognitive Radio
Environment
1. Channel Status
2. Channel Condition,
PER
States Q-table
Q(s,a)
1. Channel status
2. PER
ObservationsReward, R(t)
(10,5,-5)
1. Transmit
2. Handoff
Action
Expert Node
Optimal Strategy. Π* or Q*
Learning Node
Knowledge Transfer
Figure 4.2: Transfer learning based handoff in cognitive radio environment.
We consider spectrum handoff as a Markov decision process (MDP) with tuple (S, A, T, R) and
share the same action space S ×R. KLs represents the knowledge collected from the L node’s spectrum
handoff schemes and Kt represents the knowledge which the expert node may acquire (if any) when
continuously helping the learning node. Hence the transfer phase is defined as [23],
S Htrans f er : KLs ×Kt→ Ktrans f er (4.2)
60

Where, Ktrans f er is the final knowledge acquired by the expert node, and Kt is zero in our case
since the expert’s knowledge is received only once and no further updates are given based on future RF
conditions that the new node encounters. The learning algorithm of the new node can be defined as:
S Hlearner : Ktrans f er ×Kt→ Klearner (4.3)
Typically, every expert node was a learning node in the beginning. The node becomes expert node
either by learning on its own or from another expert node in the network. During learning the node visits
each state-action pair. For all s ∈ S and a ∈ A, the learning rate {α(st,at)} is defined such that [23]
∑t
α(st,at) =∞ and,∑
t
α(st,at)2 <∞ (4.4)
The node eventually becomes an expert node when Q-learning algorithm converges with
probability 1. Taking the finite advice from the expert, the learning node adopts the Q-learning algorithm,
and each state-action pair is visited for some time.
The expert node shares the optimal strategy with the learner node by means of ’Q-table’ exchange.
The learner node adds the optimal Q-table to its initialized Q-table as follows,
Qlearner(s,a) = Qinitialized(s,a) + Qexpert(s,a) (4.5)
Above method is also called "early advising" [23] since the expert node shares its knowledge with
the learning node at the beginning of the connection and stops guiding it down the course of its connection.
In our testbed implementation, when the new node joins the network, it broadcasts a "Hello
message" to all the nodes in the network to search the expert node, and requests for optimized Q-value, Q∗.
The expert node in the network, upon receiving the "Hello message", shares its currently updated and
optimized Q-value with the new node. The new node can directly use the received Q-value in its
transmission and update its Q-values according to the channel conditions it experiences. Eventually the
61

new node changes its role from a learning node to an expert node and can share its learned Q-values with
another new node(s).
4.5 Testbed Implementation
4.5.1 Testbed environment
GNU radio [6] is an open source programming platform for implementing the communication and
signal processing applications in software defined radio (SDR). The GNU radio applications are mainly
written and developed in Python, which is an object-oriented high-level language. It provides a
user-friendly front end platform. The core applications are written in C++ and Python from the backend by
using simplified wrapper and interface grabber (SWIG). The advantage of using Python at the front end is
that it need not be compiled every time it executes the code, thereby reducing the delay introduced due to
compilation. In addition, Python can easily run the C codes as the natively compiled codes by using SWIG.
In the USRP board, very high speed hardware description language (VHDL) is used, in the front end of the
field programmable array (FPGA). The basic GNU radio architecture is shown in Fig. 4.3.
Python
(Rapid changes)
C++
(Long compilation)
SWIG
Signal Processing and
Communication Blocks
Verilog/VHDL
FPGA
PC USRP
USRP
frontend
antenna
Python
(Rapid changes)
C++
(Long compilation)
SWIG
Signal Processing and
Communication Blocks
Verilog/VHDL
FPGA
PC USRP
USRP
frontend
antenna
Figure 4.3: GNU Radio Architecture.
The USRP [21] has a small motherboard containing up to four 14-bit 128M sample/sec DACs and
12-bit 64M sample/sec ADCs.The motherboard supports four daughter boards, two for transmission and
two for reception, as shown in Fig. 4.4.
62

Antenna
RF front endRF front end
Antenna
Receive Daughterboard
Transmit Daughterboard
Receive Daughterboard
Transmit Daughterboard
AD
CD
AC
AD
CD
AC
FPGA
USB 2 Controller
Antenna
RF front endRF front end
Antenna
Receive Daughterboard
Transmit Daughterboard
Receive Daughterboard
Transmit Daughterboard
AD
CD
AC
AD
CD
AC
FPGA
USB 2 Controller
Figure 4.4: Architecture of the USRP module [21].
4.5.2 Network Setup
Our network setup is shown in Fig. 4.5. It can be easily extended to a larger network. We have
used 3 channels, CH-C, CH1 and, CH2, and a real-time video transmission with a data rate of 720kbps
encoded by H.264 AVC encoder. Out of 3 channels, one channel is control channel and the remaining 2
channels are data channels. Control channel, CH-C is used by (1) the receiver node to send ACK to the
sender node, (2) the learning node to request the optimal strategy from the expert node using ’Hello
Message’, and (3) the expert node to share its optimal strategy with the learning node. The data channel is
used to transmit the multimedia video. Table 1 shows the network parameters used in our cognitive radio
testbed. They can be adjusted based on the user’s network conditions.
Parameters ValuesNumber of secondary users 4
Number of PUs 1Common Control Channel 2.4 GHzAvailable Data Channels 2.425 GHz, 2.475 GHz
Modulation GMSKData Rate 720 KbpsPacket size 1500 bytes
ACK 1NACK 0 or ’P’
Hello-Message ’Q’Type of data H.264 encoded real time video
Table 4.1: Network Parameters for CRN testbed
63

Receiver-2
Receiver-1
Expert node /
Primary User
(only during interruption)
Learner node /
Primary User
(only during interruption)
Receiver-2
Receiver-1
Expert node /
Primary User
(only during interruption)
Learner node /
Primary User
(only during interruption)
Transmitter node Receiver node Interfering node
Warning message
InterferenceData
Figure 4.5: The Network Setup.
4.5.3 Implementation of Reinforcement Learning Scheme
Our self-learning scheme is based on Q-learning based RL algorithm. Figure 4.6 shows the
experimental setup for implementing self-learning.
Python Coding
1.Spectrum Handoff
2.Transmit,
Actions
1.Channel Status
2.Channel Condition,
States
GNU Radio(Reinforcement
learning)
[Q-table]
USRP CRN channel
Python Coding
1.Spectrum Handoff
2.Transmit,
Actions
1.Channel Status
2.Channel Condition,
States
GNU Radio(Reinforcement
learning)
[Q-table]
USRP CRN channel
Figure 4.6: The reinforcement learning setup for CRN testbed.
Figure 6 shows the experimental setup for implementing RL, which is based on Q learning
algorithm. We define and set up the following parameters - State (S) is defined based on two parameters
explained in Section IV: (1) Channel condition (s0) is based on the PER value of the link sent by the
receiver during the communications. A value of 0 (1) represents poor (good) channel, where a poor channel
condition implies a possible interruption from other SUs; (2) Channel status (s1) is based on PU traffic
patterns, with a value of 0 (channel is busy), or 1 (channel is idle). The action set (A) represents one of two
actions: (1) Spectrum handoff (a0): When the channel is busy or experiencing strong interruption from
other nodes, the node changes the channel from channel CH1 to channel CH2; (2) Transmit (a1): When the
64

channel is idle, the node transmits data. For all the state-action pairs, the Q-table is shown in Table 4.2.
States,[s0, s1]Channel
ConditionR
Best ActionR
Wrong Action
[0,0]–>1 Very Poor (5)Spectrum Handoff 1(Action: Transmit)
[0,1]–>2 Poor (5)Spectrum Handoff 1(Action: Transmit)
[1,0]–>3 Poor (5)Spectrum Handoff 1(Action: Transmit)
[1,0]–>4 Very Good (10)Transmit -5(Action: Handoff)
Table 4.2: Q-table description and reward for best and wrong actions for each state-action pair.
In addition to the above parameters, a few more parameters need to be set up: discount factor γ,
learning rate α, and temperature τ. The discount factor exemplifies how much the future reward has an
impact on achieving the optimal solution. Typically, a smaller value (close to 0) of γ does not help to
achieve an optimal value in a good channel condition because it considers only the current rewards.
Authors in [31] have demonstrated that for γ ≥ 0.5 the network achieves a similar performance and makes
only little difference in the number of iterations that the node would take to reach the optimal condition. As
far as the learning rate α is concerned, no matter what initial value is chosen, as long as there is a robust
selection of γ [31], the node achieves the optimal condition. Finally, the temperature τ is set to ( 1000k ),
where k is the number of iterations of the learning algorithm. As the number of iteration progresses, τ
decreases by increasing the probability of choosing the action which can cause the highest reward.
Initially, the new node selects the channel CH1 and senses the status of the channel. If the channel
is idle, the node starts transmitting; if the channel is busy, it switches over to a new channel CH2. If there is
no expert node in the network, the new node should learn the channel characteristics on its own. In the
beginning, the Q-table matrix is set zero. In our implementation, until the node reaches the optimal
condition, in each iteration the node transmits one packet; after the optimal condition, the node transmits
multiple packets per iteration. For every iteration, the sending node senses the channel and determines the
channel status. In addition, for every 500 packets, the receiver node sends the feedback to the sender
indicating the condition of the channel. In each iteration, the node encounters a state, s ∈ S , and takes
action a ∈ A, and immediately gets a reward, R. In each iterations the Q-table is updated with new reward
value, and it strengthens an action for a particular state. If there is a primary user in the network, the sender
65

node detects it by sensing the channel. If there is an interruption from other secondary nodes and there is a
high packet error rate, then receiver node sends NACK with a sequence of 0s indicating that there is an
interruption. Once the sender node receives NACK or detects the presence of a primary user, it performs
spectrum handoff to another idle channel. If the receiver node sends ACK with a sequence of 1s, it
continues its transmission.
4.5.4 Implementation of Transfer Learning Algorithm
In TL-based scheme, an expert node in the network shares its optimal Q-table with the new node.
In the beginning, a new node uses a control channel to send the ’Hello’ message containing a sequence of
character ’Q’, and waits for 5 seconds. If an expert node receives the ’Hello’ message, it sends the Q-table
to the new node, with the packet header containing the character ’Q’ that indicates it is different from every
other packet (data packet, ACK, or NACK). If the Q-table is not received within 5 seconds, the new node
assumes that no expert node is available and shifts to the RL mode. Upon receiving the Q-table from the
expert node, the new node selects the channel, CH1 and senses its status. If CH1 is occupied, it takes action
a0 to perform spectrum handoff to CH2. Eventually, the new node builds up its own Q-table. Figure 4.7
shows the CRN testbed setup with TL scheme.
Python Coding
1.Spectrum Handoff
2.Transmit,
Actions
1.Channel Status
2.Channel Condition,
States
GNU Radio(Reinforcement learning)
[Q-table]
USRP CRN channel
Python Coding
1.Spectrum Handoff
2.Transmit,
Actions
1.Channel Status
2.Channel Condition,
States
GNU Radio(Reinforcement learning)
[Q-table]
USRP CRN channel
Expert Node(Reinforcement learning)
[Q-table]
Learner Node
Q-table Transfer
Python Coding
1.Spectrum Handoff
2.Transmit,
Actions
1.Channel Status
2.Channel Condition,
States
GNU Radio(Reinforcement learning)
[Q-table]
USRP CRN channel
Expert Node(Reinforcement learning)
[Q-table]
Learner Node
Q-table Transfer
Figure 4.7: Transfer Learning setup for CRN testbed.
4.5.5 Design Challenges
Our implementation has addressed the following issues:
(1) How often the node should sense the channel: This is a crucial part of our testbed
implementation. If the channel is sensed too frequently, the packet dropping rate (PDR) is increased and
the network performance goes down. On the other hand, if the channel sensing interval is too long, the
66

node will not be able to detect the interference or the presence of the PU in the network, which can reduce
the performance and also cause interference to other nodes. Therefore, in our testbed implementation, the
node changes from transmit mode to receive mode and senses the channel to determine the presence of PU
after transmitting 500 packets. In addition, the node changes its frequency to the common control channel
(CCC) to receive the value of current PER from the receiver node.
Upon detecting a PU, the node immediately performs handoff; Otherwise, it waits for the feedback
from the receiver node about the channel condition. If there is no response or the feedback is 1, the node
continues its transmission; Otherwise, if the feedback is 0 which indicates the presence of an interruption,
it performs spectrum handoff to an idle channel.
(2) How often the learning algorithm should be updated: Updating the learning algorithm
frequently helps the algorithm to converge quickly at the cost of decreased performance as each packet
experiences more delay. On the other hand, a larger update interval prevents the learning algorithm from
converging quickly, and the performance of the node keeps varying until the node converges to a stable
status. To achieve a tradeoff between these two cases, we update the learning algorithm for each packet
transmission until it converges. Once it converges, the update interval is increased to 500 packets so that
the packets do not suffer more delay and, at the same time, the node does not take wrong actions. When the
algorithm is being updated per packet transmission, a few packets may be dropped until the node reaches a
stable status.
(3) How long the learning node should wait for the response from the expert node: Waiting for too
long can keep the packet waiting in the queue beyond its time to live (TTL) duration, whereas waiting for a
short period of time may result in missing the expert’s response. Thus, we choose almost half of the RL
time as the waiting time to receive the expert’s response.
Note that the USRP 210 boards have limited processing capacity to support high speed
calculations. Also, they do not support the modification of the modules at the FPGA level. Therefore, the
complex and advanced machine learning function modules have been implemented at the host level of
GNU Radio so that it is easy to modify them according to the application requirements.
67

4.6 Expertimental Results
4.6.1 Channel Sensing
Figure 4.8 shows the result of channel sensing at around 2.45 GHz. A high peak (of amplitude 18)
is observed which indicates the presence of a PU or SU node. Since our channel selection is based on the
energy detection scheme, we consider the channel as idle when the noise amplitude is below 5.
Figure 4.8: Channel sensing result at center frequency 2.45GHz.
4.6.2 Reinforcement Learning Performance
In the beginning, we set {S tate,Action} = {0,0} to initiate the process of occupying a new idle
channel. The sender senses the channel for each packet transmission to enhance the speed of learning in the
beginning. After the optimal condition is achieved, the sender senses the channel after every 500 packet
transmissions and waits for the feedback from receiver. The PER value received as part of the feedback
helps in determining the channel condition. Based on the channel sensing result and the receiver feedback,
the node performs spectrum handoff.
Figure 4.9 shows the achieved average reward for the number of packets sent. On average, the RL
algorithm takes about 15-packet transmission time to achieve the optimal condition. Fig.4.9a shows some
variations in the reward during the transmission of first 15 packets, indicating that the node has not found
the best action for the state of the channel, although the channel was found to be idle. After achieving the
optimal reward, the node chooses the action, a1-Transmit, which gives the highest reward to the node (see
Fig. 4.14b).
68

(a) Performance for the first 15 packets transmission (b) Long term Performance
Figure 4.9: The performance of RL scheme in terms of the expected reward for the number of packets sent.
Figure 4.10 shows the performance of RL scheme when there is an interruption from a PU or other
SUs. When PU is present (at 20,000 packets) or an interruption from other SUs is encountered (around
40,000 packets), the spectrum handoff is performed, and the performance drops as a reward of 5 is assigned
for spectrum handoff. The figure also illustrates that the right action (viz. spectrum handoff) is being
performed during the interruption, otherwise the performance would have reached zero at the interruption
points. The node quickly recovers from the dip in the performance and achieves optimal transmission.
Figure 4.10: Performance variation when there is an arrival of PU (after around 20000 packets) and whenthere is an interruption from another node (after around 40,000 packets).
Figure 4.11 shows the Q-value bar graph for each state-action pair. When the channel is good and
69

idle, the best action is ’transmit’ and the higher Q-value is achieved as more packets are transmitted. The
yellow bar has negative values because a wrong action (i.e., handoff (H-F)) was taken when the channel
was good and received a reward of -5, during the early stages of learning process when the node was in the
exploration phase. On the other hand, the blue bar shows the positive value for spectrum handoff when the
channel is not good, due to which the node received reward of +5. The blue bar is much smaller compared
to the rest of the bars because we did not introduce frequent interruptions during our transmissions, and
therefore the machine learning algorithm didn’t encounter that state more than once. Importantly, multiple
black lines on each bar line (e.g., below 0 value in the red bar) indicate that during the course of
transmission the node went through the exploration phase and learnt the strategy on its own.
Figure 4.11 shows the bar graph of each state-action pair of the Q-table. It can be seen that, when
the channel is good and idle, the best action is transmitting, and it achieves the higher Q-value as the more
number of packets are transmitted.
Figure 4.11: Q-table variation during transmission. X-axis defines the state-action pair as explained in thetable Q- table (Table 4.2). H-F : Handoff, Tx- Transmission. Channel States: Occupied, idle, Bad, Good.
We observe that the node immediately performs spectrum handoff when it senses a bad channel as
seen from the drop in rewards and quick improvement in it (shown in Fig 10). The spectrum handoff would
take at the most 500 packet transmission time if channel condition is bad because the channel is sensed
after 500 packet transmissions.
70

4.6.3 Transfer Learning Performance
As shown in Fig. 4.12, when the expert node receives the ’Hello’ message from a new (learner)
node, a window pops up at the expert node showing that a learner node is searching for the expert node and
requesting the Q-table. Upon receiving the ’Hello’ message, the expert node shares its Q-table with the
learner node. If the learner node receives the Q-table within its waiting time, it displays a window message
as shown in Fig. 4.13 (left). If no expert node is found or if the Q-table is not received, a window message
pops up at the learner node indicating that no expert is found as shown in Fig. 4.13(right).
Figure 4.12: ’Hello’ message received by the expert node.
Figure 4.13: (Left) "Q-table received" message at the learner node after Q-table is received from the expertnode; (Right) Message shown at the learner node when no expert node is found.
Figure 4.14 illustrates the learning performance of TL algorithm. Figure 4.14a shows that TL,
unlike RL, requires only 3 packet transmissions to reach the optimal (stable) condition because the new
node need not go through the exploration phase. In Fig.??, the node is continuously choosing action,
a1-transmit, which is giving the highest reward.
Figure 4.15 shows the performance of the TL-based handoff during the interruptions from PU or
71

(a) Performance for the first 10 packet transmissions (b) Long term performance
Figure 4.14: The transfer learning performance in terms of the expected reward for the number of packetssent.
other SUs. When a PU arrives (at 20,000 packets) or an interruption occurs from another SU, the spectrum
handoff is performed, resulting in the performance drop, since the spectrum handoff is assigned a reward of
5. In addition, the figure also illustrates that the right action (viz. spectrum handoff) is performed during
the interruption, otherwise the performance would have reached zero at the interruption points.
Figure 4.15: Performance variations in transfer learning scheme due to the arrival of PU (at around 20,000packets) and interruption from another SU (at around 180,000 packets).
In Fig.4.16, Q-table values are shown in bar graphs. It is evident that, the TL continues to
strengthen the Q-table after it was received from the expert node. Notably, there are no multiple black lines
(unlike in Fig. 4.11) on each bar line (below 0 value in red bar), which indicates that the node did not go
72

through the exploration phase.
Figure 4.16: Q-table variation during transmission at the learner node.
4.6.4 Video Transmission Performance
The performance of our spectrum handoff scheme using the RL scheme is shown in Fig.4.17. It
clearly shows that when an interference signal is detected, the video quality becomes unacceptable. After
performing the spectrum handoff, the video quality recovers with zero error rate. The same performance is
observed for the arrival of PU.
(a) Video quality before the interfer-ence
(b) Video quality after interference (c) Video transmission after spectrumhandoff
Figure 4.17: The impact of interference and spectrum handoff on video quality
4.6.5 Comparision between Reinforcement learning and Transfer learning
Since we consider each packet transmission as an iteration until the node achieves the optimal
condition, approximately 1.5 seconds are required to transmit a packet in each iteration since the device
must sense the channel for a second and change its mode of operations (transmit and receive). An
additional duration of 5 seconds is needed to receive the Q-table from expert node in TL since the machine
learning algorithm is written at the host level, which makes the system slow to respond to the commands.
In RL scheme, an average of 20-packet transmission time is required to achieve the optimal condition,
73

whereas only 3-packet transmission is required to achieve the optimal condition in TL scheme. Based on
these observations, the total time required to achieve the optimal condition in both the learning schemes is
shown in Table 4.3. It is observed that RL takes approximately twice the time taken by TL to achieve the
optimal condition.
Algorithms# of packet transmission
to achieve optimality Q-table receive durationTotal time to achieve
optimal condition
Self-learning20 packet transmission
so, 20*1.5 = 30 sec 0 30 sec
Transfer-learning3 packet transmission
so, 3*1.5 ≈ 4 sec ≈ 12 sec 16 sec
Table 4.3: Comparison between self-learning and Transfer Learning.
In Fig.4.18, we compare the performance of the RL and TL schemes with greedy learning. When a
node experiences a new CRN environment, the RL takes long time to adjust its learning parameters to
achieve the optimal condition. TL outperforms both the RL and greedy learning schemes as it receives the
knowledge of the channel conditions (in terms of Q-table) from an expert node. The greedy algorithm takes
fewer iterations than RL to achieve optimal solution since we have used simple channel conditions. In [75],
we showed that the RL based spectrum decision outperforms the greedy learning for the complex channel
condition and network set up.
Figure 4.18: Comparison between the performance of RL, TL, and greedy algorithms for first 30 packetstransmissions.
74

CHAPTER 5
MULTI-HOP QUEUEING MODEL FOR UAV SWARMING NETWORK
5.1 Introduction
As the definition of swarming defines [13], UAV swarming is collection of autonomous individuals
relying on a local sensing and the global behaviors emerge from the reactive interactions among those
individuals. UAV swarming is inherently resilient,versatile, and are highly scalable meaning that in the
swarming, more nodes can be added to the swarming network and the redundant nodes can be removed to
achieve the effective communication and energy cost. Unmanned air vehicles are increasingly playing a
prominent role in defense, strategic and surveillance purposes. In these applications, many UAVs are
deployed in a certain region of interest an the UAVs are allowed to swarm in a particular pattern. Most
widely used UAV swarming patterns are spiral and semi circular where the UAVs are equally spaced with a
certain distance. Increasing the distance between the UAVs results in high transmission cost whereas
decreased distance brings increased UAV deployment cost.
Communication and networking among UAVs are essential to establish team behavior,
co-ordination and achieve the desired task out of UAV swarming [30]. Maintaining a stable communication
link as well as the stable swarming pattern is crucial under dynamic channel conditions. In our case, we
consider UAV swarming region as a low layer where the nodes (say manned air vehicles (MANs)) in the
upper layer are communicating with the lower layer nodes by selecting multiple gateway nodes among the
swarming UAVs and each gateway node. So, UAV swarming nodes selects the best gateway node of either
one hop or several hops away to send its data to the higher layer. The upper layer nodes are connected to
the powerful control station through a satellite connection.
But when the UAV nodes are in swarming, maintaining their optimal position under adversarial
network conditions is crucial. Since, 2 UAVs should be separated at a certain distance, that distance would
not be optimal under the fading and multipath effects of the channel conditions. Hence, to compensate for
the improvement of the link quality, the distance between the UAV node and its next communicating node
75

should be optimized. Similarly, under jamming scenario, the UAV node should be moved away from the
jamming area re-establish communication between the UAV and the gateway node.
We model the problem of UAV position management under adversarial network conditions by a
Markov Decision Process(MDP) based algorithm, Reinforcement learning. Specifically, we use Deep
Q-learning network (DQN) to perform the positioning of the UAV positioning actions. Motivated by the
Deep minds [49] work on Atari game, where the DQN is a combination of Deep convolutional network and
Q-learning with images being the input to the convolutional network. Similarly, we consider the images of
the UAV swarming and network condition as the input to the DQN network to determine the optimal
Q-function for the UAV positioning action.
To determine the UAV swarming pattern, we assume the each UAVs are GPS enabled and the
central control station is able to draw the UAV swarming graph with accurate position mapping. On the
other hand, to determine link quality we consider link quality in terms of Signal to Interference Noise
Ratio(SINR) level assuming the UAVs are equipped with a directional antenna and face Rayleigh fading
channel. Furthermore, to determine the jamming conditions over communication link, we not only just
consider the observed SINR level, we also consider the MAC layer level information in terms of Packet
Dropping Rate(PDR) over a multihop link by analyzing the problem of sending data packets to gateway
node interms of M/G/1 Preemptive(PRP) Repeat priority Queueing model. Here priority is assigned to data
packets based on the latency requirement of the data packets. Why multihop Queuing model? the reason
being, the UAV node has to reach out to the gateway node which is few hops away, multihop queueing
model helps the UAV to choose the best gateway node which satisfies its QoS requirements, and in
addition, multihop queueing model helps to assess which all the links are affected by the jamming.
Finally, we convert the link information interms of SINR and jamming information from the
Queuing model into a gray scale image w.r.t the UAV swarming pattern image and we feed those 2 graphs
as an input to DQN. Moreover, traditional Q-learning [36] algorithms are not able to keep track of the
different pattern of the UAV swarming and channel condition graphs. Even the algorithms we proposed in
our previous works [40, 76] cannot learn the changes to the network graph pattern. Hence, we adopt
memory replay mechanism where the control station maintains the memory of the different patterns of the
UAV swarming and channel conditions and uses it retrain the convolutional layer when the UAV is unable
to choose an optimal action. Replay buffer [45] is maintained at the central controller level and the optimal
76

Q-function values are sent to UAV nodes to perform an optimal action. By doing so, the burden of finding
the optimal Q-function with large data set of network graph is no more on the power limited UAVs.
The main contributions of our work are:
M/G/1 Preemptive Repeat Priority Queueing model
To deliver the sensed data, UAVs have to select a particular gateway node which are several hops
away from it. Similarly, the intermediate nodes acts as source + relay nodes including gateway node. The
data that needs to be delivered through gateway node are classified into different priority levels based on
their latency requirements. At each relay node, the packets are forwarded to the next hop based on their
priority. This queueing model not only considers the physical layer parameters in terms of channel capacity
but also considers the MAC layer information about the number of retransmission available for each packet
under the interruption from high priority packets.This queueing model not only helps the UAVs to choose
their best gateway node based on the Traffic density, latency requirement, but also helps the central
controller to determine the jamming level at different hops which is one of the input parameters for our
learning algorithm.
5.2 Related Work
M/G/1 Preemptive Repeat Priority Queueing model
There are several works that have modeled multihop Queueuing model. Author in [60] have
proposed the Prp M/G/1 repeat priority queueing model for the multihop network for the video
transmission. The video packets are prioritized based on their importance parameters in a multi-source and
multi-receiver wireless networks. Where as in our case we extended the priorities out to different level of
data including voice, reat-time video and pre-encoded video and latency free data transmissions by
considering the waiting time induced in channel access as well. Delay and Rate based priority scheme for
multihop network is proposed in the work [65]. This work doesn’t consider the packet level retransmission
in the network to meet the desirable QoS. On the other hand, authors in [46] proposed a location based
multi-hop queueing model where packets are forwarded to the next hop based on the closeness of the
source node to the gateway node but the packet priorities are not considered in this work.
77

5.3 Network Model
We assume a UAV swarming network consists of M nodes arranged in a circular pattern with
radius r in a spiral fashion of S spirals as shown in figure 5.1.The distance between a node ni,s and its
immediate neighbors ui−1,s′ and ui+1,s′ have the minimum separation Di j ≥ Dmin, where Dmin is the
minimum separation that the two nodes should maintain. Where i ∈ {M},s, s′ ∈ {S }, s ∈ {s′}, and s′ ⊂ {S }.
Out of S nodes, the central controller chooses L nodes as the gateway nodes where the sensed data from the
individual node is delivered to the central controller over a multihop link of maximum 5 hops with each
swarming node acting either as just source node or source and relay node. In addition, we assume the exact
location of each swarming node is known to the central controller using GPS service. The ability of
tracking each UAV location helps the controller to build the swarming graph which becomes the basic
input parameter for our deep reinforcement learning based UAV position and pattern maintenance in the
case of poor channel condition and jamming events.
Leader node
Follower
node
𝑫𝒊𝒋
𝑫𝒊𝒋
i j
(𝒙𝒊,𝒚𝒊)
(𝒙𝒋,𝒚𝒋)
Leader node
Follower
node
𝑫𝒊𝒋
𝑫𝒊𝒋
i j
(𝒙𝒊,𝒚𝒊)
(𝒙𝒋,𝒚𝒋)
Figure 5.1: UAV swarming pattern.
Upper Layer (UL)
Inter layer
communication
Ground Control Station
Satellite
Gateway
node
Gateway
node
UAV swarming
Manned Air Vehicles
Lower Layer (LL)
Upper Layer (UL)
Inter layer
communication
Ground Control Station
Satellite
Gateway
node
Gateway
node
UAV swarming
Manned Air Vehicles
Lower Layer (LL)
Figure 5.2: UAV Network Model.
78

At the UAV, we assume each UAV is equipped with a directional antenna and every node in the
network is assigned a transmission bandwidth of B and communication between UAVs are dominated by
Line-of-sight(LoS) links. Furthermore, the Doppler effect due to the mobility of UAVs is assumed to be
perfectly compensated. Every swarming node can move with a constant speed of V and positioned at
(xi,yi) of 2D plane A. For ease of exposition, we assume the total time is divided in to discrete time slots of
length NT with T = NT ∗δt, where δt is the length of a time slot chosen sufficiently small to make sure that
the UAV location is constant within each time slot. We also assume that
|(xi,yi)n+1− (xi,yi)n| ≤ Vδt ≈ V,n = 1,2, ...,NT −1 [81].
As far as the channel modeling is considered, we assume the link between the two nodes located at
(xi,yi) and (x j,y j) has the fast Rayleigh fading,hi j, a Gaussian distribution N(0,1). The associated channel
response at time slot n,n = 1,2, ....,NT is given by
Gi j[n] =Ci j[n]|hi j[n]|2
(Di j[n])α(5.1)
The associated Signal to interference ratio (SINR) level observed between the two nodes (xi,yi)
and (x j,y j) at time slot n can be defined as
γi j[n] =P j[n]Gi j[n]∑M
j′=1 j′, j P j′[n]Gi j′[n] +σ2i
, n = 1,2, ....,NT (5.2)
Where P j is the transmit power of the node j and P′j is the transmit power of node P j′ causing interference
to the node i. Thus, the achievable average rate observed at the node i over the interval T is given by
Ri =1N
NT∑n=1
Ri[n] =1N
NT∑n=1
Blog2(1 +γi j[n]
)(5.3)
79

Parameters List
Parameters Description
H Maximum number of hops, H is also the gateway node
di Delay deadline of the packet with priority i, i ∈ {1,2,3,4}
λi,s,h Source packets at hth hop, h ∈ {1,2,3, ..,H} with priority i
λi,r,h Relay packets at hth hop with priority i
Li Packet length with priority i, i ∈ {1,2,3,4}
Ri Bit rate of packet with priority i
Wa,h Channel access delay at node h
Wi,h Queueing delay due to packet priority,i at node h
ρi,h,h+1 PER for priority i between nodes h and h + 1
Ch,h+1 Channel capacity between nodes h and h + 1
γi,h,h+1 Maximum number of re-transmission for priority i between nodes h and h + 1
Table 5.1: Network Parameters List
5.4 Mixed PRP-NPRP M/G/1 priority repeat Queueing model
There are four priority classes of the packets: 1. Real time Voice data 2. Real time Video data
(Skype) 3. Non-Real time video packets 4. Normal data. Let, di, i ∈ {1,2, ..,4} is the delay deadline of the
each priority packets, where, d1 < d2 < d3 < d4.
To make our queueing model more general, we do not consider any special MAC layer protocol
but we assume channel access is granted based on one of our queueing model proposed in our previous
work [76]. Each node in the network associated with two queues, one is for its own data with arrival
rate,λs,h and another for relay packets with arrival rate λr,h to the gateway node. Node,h=H is considered as
the gateway node,G talking to the top layer network. The gateway node takes the responsibility of
delivering the relay plus source data to the higher layer.
To meet the delay constraints of each packets while transmitting over multi-hop network, we
further study queueing model for a multi-hop network based on the packet priority defined earlier in the
section.
We assume each node is equipped with a directional antenna, hence each node transmit in only one
direction. The depiction of our queueing model is shown in figure 5.3.
To analyze the queueing effects in the multi-hop environment, the parameters from the different
80

Hop h Hop h+k
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝒉
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝒉+𝒌
Hop 1
Application(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Application(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Priority Users
Packets𝝀𝒊,𝒋
𝝁𝒊,𝒋
𝑳𝒊,𝒋,𝒅𝒊,𝒋
𝑻𝒊,𝒋,𝝆𝒊,𝒋
𝜷𝒊,𝒋
𝝋𝒊,𝒋 Application
(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Priority Users
Packets𝝀𝒊,𝒋
𝝁𝒊,𝒋
𝑳𝒊,𝒋,𝒅𝒊,𝒋
𝑻𝒊,𝒋,𝝆𝒊,𝒋
𝜷𝒊,𝒋
𝝋𝒊,𝒋 Application
(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Priority Users
Packets𝝀𝒊,𝒋
𝝁𝒊,𝒋
𝑳𝒊,𝒋,𝒅𝒊,𝒋
𝑻𝒊,𝒋,𝝆𝒊,𝒋
𝜷𝒊,𝒋
𝝋𝒊,𝒋
𝝀𝒉
𝝀𝒉+𝒌
𝝀𝑹𝒉
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝟏
Leader Node
𝝀𝟏
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝟏
Leader Node
𝝀𝟏
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝟏
Leader Node
𝝀𝟏
𝝀𝑹𝟏
Relay Node
Follower Node
Hop h Hop h+k
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝒉
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝒉+𝒌
Hop 1
Application(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Application(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Priority Users
Packets𝝀𝒊,𝒋
𝝁𝒊,𝒋
𝑳𝒊,𝒋,𝒅𝒊,𝒋
𝑻𝒊,𝒋,𝝆𝒊,𝒋
𝜷𝒊,𝒋
𝝋𝒊,𝒋 Application
(User Priority, Packet
deadline)
Network(Relay selecting
parameter)
MAC-PHY(#Retransmission,
SINR, PER)
PRP/NPRP
Preemptive Repeat
M/G/1 Queueing
Service-time
analysis
Priority Users
Packets𝝀𝒊,𝒋
𝝁𝒊,𝒋
𝑳𝒊,𝒋,𝒅𝒊,𝒋
𝑻𝒊,𝒋,𝝆𝒊,𝒋
𝜷𝒊,𝒋
𝝋𝒊,𝒋
𝝀𝒉
𝝀𝒉+𝒌
𝝀𝑹𝒉
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝟏
Leader Node
𝝀𝟏
Ch
an
nel co
nte
ntio
n
fro
m o
ther
use
rs
𝝁𝟏
Leader Node
𝝀𝟏
𝝀𝑹𝟏
Relay Node
Follower Node
Figure 5.3: Mixed Pre-emptive Repeat M/G/1 queueing model in a multi-hop network.
layers need to taken into consideration.
Application layer
In this layer, the packet priority is determined by the relay node before it is being relayed to the
next hop.
Network Layer
The routing scheme considered in our scheme is shortest path routing with an assumption that each
node can find atleast one path to the gateway node. The ratio of total nodes which are h hops away in the
network is represented as X(h) =N(h)
N . Where N(h) defines the number of nodes which are h hop away from
gateway node,H. In addition, while picking any relay node, the node should consider the following
parameters: 1) long channel idle duration, 2) minimum contention from the neighboring nodes for the
channel access and, 3)Minimum transmission power required to reach the relay node.
MAC Layer
In our work we do not consider any specific MAC protocol. Instead, we consider p(h) as the
probability of successfull channel access probability for the h−hop node. p(h) should be determined based
on considerng the channel interference, channel contention, number of available channels and the MAC
protocol.Hence, in this case we assume the MAC protocol has been designed based on the scheduling
algorithms [76]. More importantly, the node which is close to the gateway or the gateway node,H itself
needs be given more channel access opportunities due to its large amount of relayed traffic. Besides,We
81

consider γi,h,h+1 as the maximum number of re-transmission allowed for the priority i packet between link h
and h + 1. The optimal number of re-transmission is decided based on the delay deadline associated with
the priority packets.
Physical layer
In link h, the available transmission capacity and packet error rate is defined by Ch,h+1 and ρi,h,h+1.
Hence, over H-hops, the end-to-end packet dropping rate for priority i packet is given by
Ψi = 1−(1−Ψi,0
) H∏h=1
1−Ψi,h
(5.4)
where,Ψi,h is the packet loss probability incurred due to delay expiration during a specific hop h,
given the packet was relayed from the previous hop without being dropped. Parameter Ψi,0 is the initial
packet dropping rate observed at the source node while accessing the channel (this waiting delay
determined using our previous work [76]).
5.4.1 Packet Arrival rate
Let any packet with priority i arrives at hop h having PDR Ψh,i,recursively, expected packet arrival
rate is given by
(1−Ψi,h)λi,r,h =
h∏h=1
(1−Ψi,h)λi,s,h (5.5)
5.4.2 Service time and rate for Queues
Estimation of the service time distribution at the each hop is dependent on the following
parameters:
1. Available channel idle duration due to channel contention from neighboring nodes denoted
E[Wh]. In other words, we approximated the interarrival time as E[Wh] determined using our previous
work [42, 76] as an exponential random variable with mean 1µs(h) . Thus, the arrival rate of transmission
opportunities for node h is given by
µs(h) =1tc
ln(
11− p(h)
)(5.6)
82

Gateway node, H and nodes close to it should be given higher chance so that E[Wh] is small.
2. Service time associated each packet with priority i in h hop node. Assuming the geometric
distribution of the service time, the first moment of the packet service time at hop h can be expressed
E[Xi,h] =Li(1−ρ
γi,h,h+1i,h,h+1)
Ti,h,h+1(1−ρi,h,h+1)(5.7)
Assuming (1−ργi,h,h+1i,h,h+1) ≈ 1, we have
E[Xi,h] =Li
Ti,h,h+1(1−ρi,h,h+1)(5.8)
The second moment of the service time for priority-i user is given by,
E[X2i,h] =
L2i (1−ρi,h,h+1)
T 2i,h,h+1(1−ρi,h,h+1)2
(5.9)
Hence, average service time of the priority packet at hop-h is given by
E[S i,h] = E[Wh] + E[Xi,h] (5.10)
5.4.3 Average Queueing Delay and Packet Dropping Rate
Let E[Wi,h] is the average Queueing delay of priority i packet seen at hop h. Based on the priority
queueing analysis for the preemptive priority M/G/1 queueing model [15], we get
E[Wi,h] =
4∑i=1λi,hE[S 2
i,h]
2(1−
4−1∑i=1λi,hE[S 2
i,h])(
1−4∑
i=1λi,hE[S 2
i,h]) (5.11)
Hence, end to end packet dropping rate seen from source node to the gateway node is determined as
83

Ψi,h = Prob(Wi,h > di−
h−1∑j=0
E[Wi, j])
=
( 4∑i=1
λi,hE[S i,h])exp
−(di−
h∑j=1
E[Wi, j])(
4∑i=1λi,hE[S i,h]
)E[Wi,h]
(5.12)
5.5 Performance Analysis
5.5.1 Average Multihop Queueing Delay
In this section, we analyze the performance of our proposed multihop queueing model for UAV
swarming. We considered four types of data transmission such as 1) Voice data with bitrate 50 Kbps and
latency constraint of 50 ms, 2) Real-time Video(ex: Skype) with bitrate 500 Kbps and latency constraint of
100 ms, 3) Pre-encoded video (HD Video) with bitrate 3 Mbps and playback delay deadline 1 sec, 4) Data
without any delay constraint (Ex: File download: 2 Mbps). In the simulation, total packet length Lk is upto
1000 bytes. In addition, link capacity at each hop varies from 5 Mbps to 10 Mbps with PER=1%.
We analyze the performance of multihop Queueing model in terms of end-to-end average waiting
time based on the link quality, PER and channel capacity,T and we compare the result with FIFO queueing
model [46] where the packet priority based on the latency requirement is not considered at each. For the
sake of simplicity, we consider average waiting delay in channel access for each node h is E[Wh] = 0 .
𝝁𝟏 𝝁𝟏 𝝁𝟏 𝝁𝟏 𝝁𝟏 𝝁𝟏 𝝁𝟏 𝝁𝟏
Hop 1: Voice data Hop 2: Skype Video Hop 3: HD Video Hop 4: Voice data
To the control node
Relay data Relay data Relay data
Figure 5.4: Elementary network structure for the simulation
We consider an elementary network structure as shown in Fig. 5.4 with each hop has its own
source data and relays the data forwarded from the previous hop node with a link capacity of 5 Mbps. In
the elementary structure, the source data at each hop are real-time voice, Skype video, HD video and
real-time voice respectively over a 4-hop link. The analytical expected end-to-end queueing delay for
priority k, E[Wk] are shown in figure 5.5. Since, the hop-1 source data is a voice data with a very narrow
latency requirement, it is given a higher priority at all hops hence it experienced almost zero queueing
delay at all hops. Similary, Skype video has given the second priority since its latency requirement is bit
84

hop-1 hop-2 hop-3 hop-4Hop
0
500
1000
1500
2000
Averaging Qu
eueing
Delay
(ms)
VoiceRT-VideoHD VideoVoiceAverage:FIFO
Figure 5.5: Average Waiting delay at each hop for the source data as well as relay data compared with FIFOqueuing method
higher than the voice. But, as we observe from figure 5.5, at hop-4, the source data is a voice data has given
a priority less than Skype video as Skype video experiencing more queueing delay. Besides, hop-3 source
data is a HD video with a high play-back time thus it is given least priority due to which it experiences
higher queueing delay than any other data, which is acceptable. Moreover, the proposed model performs
better than the FIFO model [46] for the higher priority packets to meet the delay requirements. Fig. 5.6 is
zoomed version of 5.5. Finally, figure 5.7 depicts the expected end-to-end Queueing delay experienced by
the source data of each hop. As stated earlier, HD video at hop-3 experiences highest delay as whereas the
voice data at hop-1 experiences least delay. Table-II shows the end-to-end delay experienced by each
source data at each hop when source data at hop-1 are varied for the elementary network defined in figure
5.4.
hop-1 hop-2 hop-3 hop-4Hop
0
500
1000
1500
2000
Averaging Qu
eueing
Delay
(ms)
VoiceRT-VideoHD VideoVoiceAverage:FIFO
Figure 5.6: Locally zoomed version of the figure 5.5
85
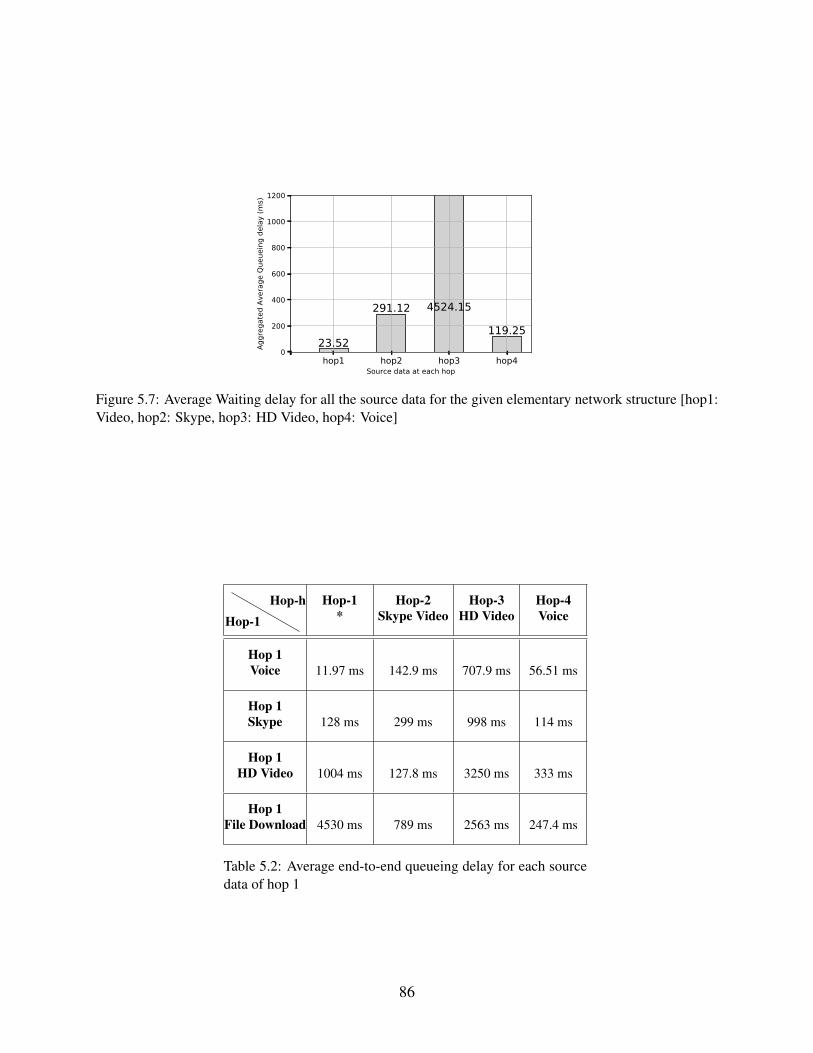
hop1 hop2 hop3 hop4Source data at each hop
0
200
400
600
800
1000
1200
Aggreg
ated
Ave
rage
Que
ueing de
lay (m
s)
23.52
291.12 4524.15
119.25
Figure 5.7: Average Waiting delay for all the source data for the given elementary network structure [hop1:Video, hop2: Skype, hop3: HD Video, hop4: Voice]
Hop-hHop-1
Hop-1*
Hop-2Skype Video
Hop-3HD Video
Hop-4Voice
Hop 1Voice 11.97 ms 142.9 ms 707.9 ms 56.51 ms
Hop 1Skype 128 ms 299 ms 998 ms 114 ms
Hop 1HD Video 1004 ms 127.8 ms 3250 ms 333 ms
Hop 1File Download 4530 ms 789 ms 2563 ms 247.4 ms
Table 5.2: Average end-to-end queueing delay for each sourcedata of hop 1
86

CHAPTER 6
FUTURE RESEARCH
Deep Q-learning Network based UAV position management
We model the problem of UAV position management under adversarial network conditions by a
Markov Decision Process(MDP) based algorithm, Reinforcement learning. Specifically, we use Deep
Q-learning network (DQN) to perform the positioning of the UAV positioning actions. Motivated by the
Deep minds [49] work on Atari game, where the DQN is a combination of Deep convolutional network and
Q-learning with images being the input to the convolutional network. Similarly, we consider the images of
the UAV swarming and network condition as the input to the DQN network to determine the optimal
Q-function for the UAV positioning action.
To determine the UAV swarming pattern, we assume the each UAVs are GPS enabled and the
central control station is able to draw the UAV swarming graph with accurate position mapping. On the
other hand, to determine link quality we consider link quality in terms of Signal to Interference Noise
Ratio(SINR) level assuming the UAVs are equipped with a directional antenna and face Rayleigh fading
channel. Furthermore, to determine the jamming conditions over communication link, we not only just
consider the observed SINR level, we also consider the MAC layer level information in terms of Packet
Dropping Rate(PDR) over a multihop link by analyzing the problem of sending data packets to gateway
node interms of M/G/1 Preemptive(PRP) Repeat priority Queueing model. Here priority is assigned to data
packets based on the latency requirement of the data packets. Why multihop Queuing model? the reason
being, the UAV node has to reach out to the gateway node which is few hops away, multihop queueing
model helps the UAV to choose the best gateway node which satisfies its QoS requirements, and in
addition, multihop queueing model helps to assess which all the links are affected by the jamming.
Finally, we convert the link information interms of SINR and jamming information from the
Queuing model into a gray scale image w.r.t the UAV swarming pattern image and we feed those 2 graphs
as an input to DQN. Moreover, traditional Q-learning [36] algorithms are not able to keep track of the
87

different pattern of the UAV swarming and channel condition graphs. Even the algorithms we proposed in
our previous works [40, 76] cannot learn the changes to the network graph pattern. Hence, we adopt
memory replay mechanism where the control station maintains the memory of the different patterns of the
UAV swarming and channel conditions and uses it retrain the convolutional layer when the UAV is unable
to choose an optimal action. Replay buffer [45] is maintained at the central controller level and the optimal
Q-function values are sent to UAV nodes to perform an optimal action. By doing so, the burden of finding
the optimal Q-function with large data set of network graph is no more on the power limited UAVs.
We use a different approach which is influenced by google’s deep mind work [49] to optimize the
UAV position in the swarming. Based on the UAVs location determined using GPS, information on link
quality and jamming condition are converted into a gray scale image. In addition, the UAV swarming graph
is also taken in a gray scale image and fed as an input along with the link quality + jamming image to the
DQN. The DQN selects an optimal positioning action by improving the Q-function estimation accuracy.
More importantly, the replay buffer helps to improve the decision accuracy under decreased performance.
This method not only reduces the intense calculations at the UAV side and leaves the whole training burden
to the central controller. To the best of our knowledge, we are the first to approach UAV position
management similar to playing an Atari game demonstrated by google deep mind [49].
Authors in [80, 81] proposed optimization theory for UAV position optimization by considering
both energy and communication throughput considering a single UAV which acts a relay node between
source and destination nodes. Similar work was seen in [82] where the UAV is considered as a relay node
its performance optimization formulation was proposed for uplink and downlink rate optimization. These
works consider the problem of single UAV deployment and its trajectory optimization. On the other hand,
the UAV swarming with routing optimization is proposed in [72] with a hueristic approach to solve
improve the information control plane(ICP) ensures the high quality routes between static nodes and then
physical control plane guides the nodes to reconfigure the position according to ICP. In our case, we
assume the routing path has been already established for the for the current swarming setup and we
optimize the position of the nodes based on the information flow. Interestingly, a time varying formation
tracking protocol with Riccati equation is proposed using neighboring UAVs information in a follower
UAVs following a leader UAV strategy. Interestingly,authors in [22] proposed path planning of the mobile
robots with target using the prediction of the wireless links built using a supervised learning approach
88

together with information collected from the neighbor robots. All of the above works are done in a
distributed manner where the each UAV has to perform complex operations to be inline with the swarming
pattern as well as maintain a good link quality to communicate effectively.
6.0.1 UAV deployment parameters
UAV swarming requires the UAV nodes are placed in such a way that the swarming pattern is
preserved. Hence, the UAV deployment and its position optimization while swarming under different
network condition is crucial. Our main parameters to maintain the UAV swarming pattern are
Channel Condition
Channel condition should be assessed in terms of path loss and multipath fading models as both
these characteristics depend on the fact that the signal is obstructed, reflected and scattered by the presence
of obstacles in the region of interest. Hence, we consider the Rayleigh fading channel model to assess the
channel condition in the specific area around the access point regions. The quality of the channel can be
decided based on the minimum SINR, γ required to maintain a minimum link quality. The probability of
successful transmission on link-ij can be defined using 5.3 and 5.3 as
P(γi j > γ
)= exp
σ2i Dα
i j
1
(6.1)
6.0.2 Jamming condition
Since we assume UAV swarming network is built upon a shared medium which is prone to
adversarial nodes launch jamming-style attacks, dodging these areas to increase the performance of the
network and establish communication among the UAVs and ground based nodes is important. Hence, we
determine the presence of a jamming environment from the perspective of UAV deployment and the UAVs
should be re-positioned to avoid the jammed areas. To determine the presence of the jamming effect we use
the result from multi-hop queueing model which we modelled in section IV. Since, Received Signal
Strength(RSSI) alone cannot be used as a metric to conclude the presence of the jamming, we use total
packet error ratio (TPER), TPER = PDR+ PER-PDR*PER which captures the MAC layer information in
89

terms of number of successful attempts made to in packet transmission. More importantly, we collect the
information of TPER at each node for the high priority packets because high priority packets are given
higher chance to access the channel. Hence the presence of jamming attack is decided based on the
presence of high TPER and low RSSI. The estimated TPER for priority 1 packets determined for N
retransmission in Ts time slots at hop-h.
6.1 DQN based UAV track management
Figure 6.1: Gray scale image of UAV swarming.
Figure 6.2: Gray scale image of link quality between a gateway node and the tail end node [Black lineindicates the link connecting different nodes]
In this section, we model the task of positioning the UAV node under different dynamics of the
channel condition. Motivated by the work done by deep mind group in [49], we model the whole network
dynamics into 2 graphs. Each graph is a grey scale image in which the first graph depicts the UAV
swarming pattern where all the nodes are mapped into a connected graph as shown in Fig. 6.1. Whereas,
the second graph defines dynamics of the UAV network in terms of low signal noise ratio and high queueing
90

delay in the case of high fading effect and jamming conditions. To map UAV swarming pattern we denote
the nodes and whole nodes in a white color as shown in 6.1. For the second graph, we use the TPER
determined using our multihop queueing model and the determined SINR level and denote those multihop
links by a white space where there is jamming condition and the positions will be marked with a grey color
to determine those areas as the high fading regions as shown in figure [add figure]. Finally, we give the
input images into our DQN network to optimally place the UAV node to achieve maximum throughput.
We represent the whole swarming condition with respect to UAV−i as a tuple denoted as {s, x,R},
where,
State,s
In the dynamic optimal UAV positioning game, the UAV can apply Q-learning to derive the
optimal policy to determine the optimal positioning pattern under the case of low channel quality and
jamming scenarios. The action of the SU is selected based on the current system state at time slot n denoted
by sn, which represents the UAV swarming graph, Network condition graph determined in terms of TPER
and SINR. More specifically, at time slot n, the system state sk consists of the information regarding
swarming graph and network condition for the time slot [n−1], i.e., sn = {Networkgrahs,S INR}(n−1).
Action,x
The actions are used to change the behavior of the UAV in response to the states seen at time slot n.
They are executed sequentially. To optimally deploy the UAVs, we consider the basic moves as the action
of the UAV under different network states defined earlier. The action set in UAV consists of the following
moves a) North, b)South, c) East, d) West, and e) Stay.
Reward,R
The reward defines how well the positioning of the UAV in the current state s for the action x in
time slot [n]. Hence, when the DQN optimizes the position of the UAV by maximizing SINR. In our model
we use total SINR as a parameter to quantify the optimal positioning of the UAV which is defined as
follows,
91

R = γi j[n] =P j[n]Gi j[n]
P jam f (T PER) +∑M
j′=1 j′, j P j′[n]Gi j′[n] +σ2j
,
n = 1,2, ....,NT (6.2)
where f (T PER) is an indicator function defining the presence of jamming condition.
UAV network: Gateways, Ground nodes, and Relays
UAV network states
Network Load
Traffic load
Link Quality
Jamming condition
UAV network states
Network Load
Traffic load
Link Quality
Jamming condition
𝑠𝑘 = {𝜉𝑟 , 𝜈𝑟}
𝜑𝑘 = (𝑠𝑘−𝑤 ,𝑥𝑘−𝑤 ,…… . 𝑥𝑘−1, 𝑠𝑘)
Replay memoryReplay memory
(𝜑1 ,𝑥1 ,𝑢1 ,𝜑2)
(𝜑𝑘 ,𝑥𝑘 ,𝑢𝑘 ,𝜑𝑘+1) Minibatch
CNN
Conv_1: 4x4x20Conv_2: 3x3x20
FC_1 : 180 FC_2 : N+1
DQN loss and gradient
Action xk with ϵ − greedy Q-function
UAV position
optimizationUAV sector
Rew
ard
𝐔𝐩𝐝𝐚𝐭𝐞 𝛉
(𝑥𝑑 ,𝑢𝑑 ,𝜑𝑑+1)
𝜑𝑘
𝜑𝑑
UAV network: Gateways, Ground nodes, and Relays
UAV network states
Network Load
Traffic load
Link Quality
Jamming condition
𝑠𝑘 = {𝜉𝑟 , 𝜈𝑟}
𝜑𝑘 = (𝑠𝑘−𝑤 ,𝑥𝑘−𝑤 ,…… . 𝑥𝑘−1, 𝑠𝑘)
Replay memory
(𝜑1 ,𝑥1 ,𝑢1 ,𝜑2)
(𝜑𝑘 ,𝑥𝑘 ,𝑢𝑘 ,𝜑𝑘+1) Minibatch
CNN
Conv_1: 4x4x20Conv_2: 3x3x20
FC_1 : 180 FC_2 : N+1
DQN loss and gradient
Action xk with ϵ − greedy Q-function
UAV position
optimizationUAV sector
Rew
ard
𝐔𝐩𝐝𝐚𝐭𝐞 𝛉
(𝑥𝑑 ,𝑢𝑑 ,𝜑𝑑+1)
𝜑𝑘
𝜑𝑑
Figure 6.3: DQN based UAV deployment.
There are mainly 2 components in DQN: (1) Convolutional Neural Network,(CNN) (2) Q-learning
based decision model. As depicted in the figure 6.3, the system uses the CCN to enhance the learning
speed of Q-learning as the UAV swarming network and network dynamics keep changing over time.
Similar to Q-learning, DQN updates Q-function for each state-action pair, which is the expected discounted
long term reward for state s and action x at time slot n which is given by
Q(s, x) = Es′
[Rs +γmax
x′Q(s′, x)|s, x
](6.3)
Where Rs is the reward received at the state s for action x which resulted in the next state s′ with a
discount factor γ, defining the uncertainty of the SU about the future reward.
As a matter of fact, Q-function can be approximated using Deep-CNN by tuning weight
92

parameters, a non-linear approximator for each action. However due to the dynamics of the network, the
CNN model needs to be retrained to adapt to the instabilities in the UAV swarming. Hence, a replay buffer
is used with the collection of past experienced state-action pairs and their respective rewards. The CNN
consists of 2 convolutional layers and 2 fully connected (FC) layers. For the first convolutional layer, it
consists of 20 filters each with size of 3×3 and stride 1, and the second convolutional layer consists of 40
filters with size 2×2 and no change to stride value. Rectified linear units (ReLU) is used as an activation
function in each layers including FC layers. In addition, first FC layer consists of 180 ReLU units and the
second FC has 5 ReLU units. At time slot [n], the weight of the filter in each layer is denoted by θn.
Further more, at time slot [n], the observed state sequence for the current state andW system
state-action pairs is denoted as ϕn = {sn−W, xn−W, ..., xn−1, sn}. Input to the CCN is given from the replay
buffer by reshaping the state sequence into 6×6 matrix to estimate the Q(ϕn, x|θn),
x ∈ {North,S outh,East,West,S tay}. The state sequence in replay buffer is chosen randomly from the
experience memory pool, D = {e1, .....,en}, where en = (ϕn, xn,Rns ,ϕ
n+1). Basically, experience replay
chooses an experience ed randomly, with 1 ≤ d < n to update weight parameter θn according to Stochastic
Gradient Descent (SGD) method. Updating θn results in minimized mean-squared error of the target
optimal Q-function with the minibatch updates, and the following loss function can be denoted as
L(θn) = Eϕn,x,Rs,ϕn+1
[(QTarget −Q(ϕn, x : θn+1)
)2]
(6.4)
Where QTarget is the target optimal Q-fucntion, which is given by
QTarget = Rs +γmaxx′
Q(ϕn+1,x′;θn−1) (6.5)
The weights θn are updated by using the gradient of the loss function L w.r.t to the weights θn. The
loss gradient ∇θnL(θn) can be expressed as
∇θnL(θn) = Eϕn,x,Rs,ϕn+1[QT∇θn Q(ϕn, x : θn)
]−Eϕn,x,Rs,ϕn+1
[Q(ϕn, x : θn)∇θn Q(ϕn, x : θn)
](6.6)
The weight parameter θn is updated for every time slot which repeats B times by randomly
93

selecting the experiences from the experience pool. Finally, with the updated Q-function, the action xn is
chosen in state sn according to the ε-greedy algorithm. The optimal action is chosen from the set of
Q-functions with the probability 1− ε as x∗ = argmaxx′ Q(ϕn, x′). When the UAV takes any move, the UAV
observes the SINR as a reward information from the environment and according to the next state
determined in terms of UAV swarming graph and network graph, the UAV stores the new experience
{ϕn, xn,Rns ,ϕ
n+1} in the memory pool D as shown in Fig. 6.3.
94

CHAPTER 7
CONCLUSION
In chapter 2, we have comprehensively implemented an iSM scheme through machine learning methods.
Our target is to achieve an intelligent spectrum handoff decision during rateless multimedia transmissions
in dynamic CRN links. The handoff operation needs to have a good knowledge of channel quality such that
it knows which channel to switch to. For accurate channel quality evaluation, we calculate the CUF that
can comprehensively measure the link quality. To adapt to the dynamic CRN channel conditions, we have
used CDF-enhanced, UEP-based Fountain Codes to achieve intelligent link adaptation. A good link
adaptation strategy can significantly reduce the spectrum handoff events.
Our final goal is make a correct iSM decision, which could be a spectrum handoff or wait-and-stay.
The iSM decision is based on a teaching-and-learning based cognitive method, called TACT, to make
optimal spectrum handoff in different SU states. The proposed cognitive learning methods can achieve real
"cognitive" radio networks, not only in spectrum mobility tasks, but also in many other CRN topics, such
as multimedia streaming over CRN, dynamic routing establishment, and others.
Our next-step research topic in this direction is to further enhance our TACT-based model, by
using budget-limited teaching process, in order to efficiently transfer important parameters from an expert
SU to a learning SU within time constraint. The expert searching model will be based on Manifold learning
and NMF (non-negative matrix factorization) pattern extraction/recognition schemes. Thus a better expert
SU can be found in the neighborhood of a learning SU.
In chapter 3, we have studied FEAST-based CBH in MBSA-based CRNs. By considering
independent and parallel preemptive PRP/NPRP M/G/1 queueing model with discretion rule, the average
waiting delay during the interruption of beam-b can be determined. During the waiting time, the
interrupted beam’s data is detoured through the neighboring beams over 2-hop relay. The packet detouring
performance has been analyzed using MOS by varying source data rate as well as the detouring beam’s
own data rate. Performance analysis has showed that more detouring paths with enough detouring rate can
help to achieve the optimal performance. The extension of spectrum decision to online learning model
95

using FEAST could enhance the performance of spectrum decision. Our model achieves better
performance in terms of expected MOS and also takes less iterations to achieve optimal condition. In
addition, the node adapts to the changes of the network parameters, and tunes its handoff policy
accordingly to maximize the handoff performance. This is very important in dynamic CRN environments.
In chapter 4, we have implemented the CRN testbed with intelligent spectrum handoff by using
GNU Radio and USRP. We have implemented Reinforcement learning based spectrum handoff as a
self-learning method, by considering Transmit and Spectrum Handoff as the actions and Channel
condition/status as the parameters of the states of the learning method. It is shown that self-learning
method takes a long time to achieve optimal condition. Hence, to enhance the learning process we have
adopted Transfer Learning where the learning node receives optimal strategy (Q-table) from the expert
node and uses it to perform spectrum handoff. From the results, it is evident that Transfer Learning takes
less time to achieve optimal condition. As a future work, we will build a large-scale (>50 nodes) CRN
testbed and test the performance of our handoff schemes. We will consider dynamic channel conditions and
test the performance of both self-learning and Transfer Learning in such a large network testbed.
Finally, in chapter 5 we formulated multihop queueing model for UAV swarming management
using Preemptive Repeat M/G/1 queueing model at each relay node. The single path multihop network
delivers its data to a central controller through a gateway node. The performance analysis shows that the
packets are relayed based on their remaining delay deadline to meet the QoS requirement of the user.
96

REFERENCES
[1] Adnan Aftab and Muhammad Nabeel Mufti. Spectrum sensing through implementation of usrp2,2011.
[2] R Anil, R Danymol, Harsha Gawande, and R Gandhiraj. Machine learning plug-ins for gnu radiocompanion. In Green Computing Communication and Electrical Engineering (ICGCCEE), 2014International Conference on, pages 1–5. IEEE, 2014.
[3] Olusegun Peter Awe, Ziming Zhu, and Sangarapillai Lambotharan. Eigenvalue and support vectormachine techniques for spectrum sensing in cognitive radio networks. In Conf. Technologies andApplications of Artificial Intelligence (TAAI), pages 223–227, 2013.
[4] Mathieu Bastian, Sebastien Heymann, and Mathieu Jacomy. Gephi: An open source software forexploring and manipulating networks, 2009.
[5] Mario Bkassiny, Yang Li, and Sudharman K Jayaweera. A survey on machine-learning techniques incognitive radios. IEEE Communications Surveys & Tutorials, 15(3):1136–1159, 2013.
[6] Eric Blossom. Gnu radio: tools for exploring the radio frequency spectrum. Linux journal,2004(122):4, 2004.
[7] Evgeny Byvatov, Uli Fechner, Jens Sadowski, and Gisbert Schneider. Comparison of support vectormachine and artificial neural network systems for drug/nondrug classification. J. ChemicalInformation and Computer Sciences, 43(6):1882–1889, 2003.
[8] Batu K Chalise, Yimin D Zhang, and Moeness G Amin. Multi-beam scheduling for unmanned aerialvehicle networks. In IEEE/CIC Intl. Conf. Comm. in China (ICCC), pages 442–447, 2013.
[9] Arpan Chattopadhyay and A Chockalingam. Past queue length based low-overhead link scheduling inmulti-beam wireless mesh networks. In Intl. Conf. Signal Processing and Comm. (SPCOM), pages1–5, 2010.
[10] Xiaoming Chen and Chau Yuen. Efficient resource allocation in a rateless-coded MU-MIMOcognitive radio network with QoS provisioning and limited feedback. IEEE Trans. VehicularTechnology, 62(1):395–399, 2013.
[11] Zhe Chen and Robert C Qiu. Q-learning based Bidding Algorithm for Spectrum Auction in CognitiveRadio. In IEEE Southeastcon, pages 409–412, 2011.
[12] You Ze Cho and Chong K Un. Analysis of the M/G/1 queue under a combinedpreemptive/nonpreemptive priority discipline. IEEE Trans. Comm., 41(1):132–141, 1993.
[13] Bruce T Clough. Uav swarming? so what are those swarms, what are the implications, and how dowe handle them? Technical report, AIR FORCE RESEARCH LAB WRIGHT-PATTERSON AFBOH AIR VEHICLES DIRECTORATE, 2002.
97

[14] Federal Communications Commission. Spectrum Policy Task Force Report, Nov. 2002.
[15] R Walter Conway, William L Maxwell, and Louis W Miller. Theory of scheduling. eading.Massachussets: Addison-Wesley, 1967.
[16] Alice Crohas. Practical implementation of a cognitive radio system for dynamic spectrum access.PhD thesis, University of Notre Dame, 2008.
[17] Ying Dai and Jie Wu. Sense in Order: Channel Selection for Sensing in Cognitive Radio Networks.In 8th IEEE Intl. Conf. Cognitive Radio Oriented Wireless Networks (CROWNCOM), pages 74–79,2013.
[18] Mischa Dohler, Lorenza Giupponi, Ana Galindo-Serrano, and Pol Blasco. Docitive networks: Anovel framework beyond cognition. IEEE Communications Society, Multimdia Communications TC,E-Letter, 5(1):1–3, 2010.
[19] Medhat HM Elsayed and Amr Mohamed. Distributed interference management using q-learning incognitive femtocell networks: new usrp-based implementation. In New Technologies, Mobility andSecurity (NTMS), 2015 7th International Conference on, pages 1–5. IEEE, 2015.
[20] Uri Erez, Mitchell D Trott, and Gregory W Wornell. Rateless Coding for Gaussian Channels. IEEETrans. Information Theory, 58(2):530–547, 2012.
[21] M Ettus. Universal software radio peripheral (usrp), ettus research llc, 2008.
[22] Eduardo Feo Flushing, Michal Kudelski, Luca M Gambardella, and Gianni A Di Caro. Spatialprediction of wireless links and its application to the path control of mobile robots. In IndustrialEmbedded Systems (SIES), 2014 9th IEEE International Symposium on, pages 218–227. IEEE, 2014.
[23] Ana Galindo-Serrano, Lorenza Giupponi, Pol Blasco, and Mischa Dohler. Learning from experts incognitive radio networks: The docitive paradigm. In Cognitive Radio Oriented Wireless Networks &
Communications (CROWNCOM), 2010 Proceedings of the Fifth International Conference on, pages1–6. IEEE, 2010.
[24] Robert G Gallager. Low-density parity-check codes. IEEE Trans. Information Theory, 8(1):21–28,1962.
[25] Lorenza Giupponi, Ana Galindo-Serrano, Pol Blasco, and Mischa Dohler. Docitive networks: Anemerging paradigm for dynamic spectrum management. IEEE Trans. Wireless Communication,17(4):47–54, 2010.
[26] Lorenza Giupponi, Ana Galindo-Serrano, Pol Blasco, and Mischa Dohler. Docitive networks: anemerging paradigm for dynamic spectrum management [dynamic spectrum management]. IEEEWireless Communications, 17(4), 2010.
[27] Aditya Gudipati and Sachin Katti. Strider: Automatic Rate Adaptation and Collision Handling. InACM SIGCOMM Computer Communication Review, volume 41, pages 158–169, 2011.
[28] Jinghua Guo, Hong Ji, Yi Li, and Xi Li. A novel spectrum handoff management scheme based onSVM in cognitive radio networks. In 6th Intl. ICST Conf. Comm. and Networking in China(CHINACOM), pages 645–649, 2011.
[29] Karen Zita Haigh, Allan M Mackay, Michael R Cook, and Li L Lin. Parallel Learning and DecisionMaking for a Smart Embedded Communications Platform, 2015. Accessed on April 10, 2017.
98

[30] Zhu Han, A Lee Swindlehurst, and KJ Ray Liu. Optimization of manet connectivity via smartdeployment/movement of unmanned air vehicles. IEEE Transactions on Vehicular Technology,58(7):3533–3546, 2009.
[31] Neil Hosey, Susan Bergin, Irene Macaluso, and Diarmuid P O’Donoghue. Q-learning for cognitiveradios. In Proceedings of the China-Ireland Information and Communications TechnologyConference (CIICT 2009). ISBN 9780901519672. National University of Ireland Maynooth, 2009.
[32] Neil Hosey, Susan Bergin, Irene Macaluso, and Diarmuid O’Donohue. Q-Learning for CognitiveRadios. In Proc. China-Ireland Information and Communications Technology Conf., ISBN9780901519672, 2009.
[33] Peter Hossain, Adaulfo Komisarczuk, Garin Pawetczak, Sarah Van Dijk, and Isabella Axelsen.Machine learning techniques in cognitive radio networks. arXiv preprint arXiv:1410.3145, 2014.
[34] Peter Anthony Iannucci, Jonathan Perry, Hari Balakrishnan, and Devavrat Shah. No symbol leftbehind: A link-layer protocol for rateless codes. In 18th ACM Annual Intl. Conf. Mobile Computingand Networking, pages 17–28, 2012.
[35] Kommate Jitvanichphaibool, Ying-Chang Liang, and Rui Zhang. Beamforming and power control formulti-antenna cognitive two-way relaying. In IEEE Wireless Comm. and Networking Conf., pages1–6, 2009.
[36] Leslie Pack Kaelbling, Michael L Littman, and Andrew W Moore. Reinforcement learning: A survey.Journal of artificial intelligence research, 4:237–285, 1996.
[37] Chen Ke-Yu and Zhi-Feng Chen. Gnu radio. Department of Electrical Computer Engineering,University of Florida, Gainesville, Florida, 2006.
[38] Vijaymohan R Konda and Vivek S Borkar. Actor-Critic–Type Learning Algorithms for MarkovDecision Processes. SIAM J. Control and Optimization, 38(1):94–123, 1999.
[39] AM Koushik, Fei Hu, and Sunil Kumar. Multi-Class "Channel+ Beam" Handoff in Cognitive RadioNetworks with Multi-Beam Smart Antennas. In IEEE Global Comm. Conf. (GLOBECOM), pages1–6, 2016.
[40] AM Koushik, Fei Hu, and Sunil Kumar. Intelligent Spectrum Management based on TransferActor-Critic Learning for Rateless Transmissions in Cognitive Radio Networks. IEEE Trans. onMobile Computing, 2017.
[41] AM Koushik, Fei Hu, Ji Qi, and Sunil Kumar. Cognitive Spectrum Decision via Machine Learning inCRN. In Conf. Information Technology: New Generations, pages 13–23. Springer, 2016.
[42] AM Koushik, John D Matyjas, Fei Hu, and Sunil Kumar. Channel/beam handoff control inmulti-beam antenna based cognitive radio networks. IEEE Transactions on CognitiveCommunications and Networking, 2017.
[43] Krishan Kumar, Arun Prakash, and Rajeev Tripathi. Spectrum handoff in cognitive radio networks: Aclassification and comprehensive survey. Journal of Network and Computer Applications,61:161–188, 2016.
[44] Rongpeng Li, Zhifeng Zhao, Xianfu Chen, Jacques Palicot, and Honggang Zhang. TACT: A TransferActor-Critic Learning Framework for Energy Saving in Cellular Radio Access Networks. IEEETrans. Wireless Communications, 13(4):2000–2011, 2014.
99

[45] Ruishan Liu and James Zou. The effects of memory replay in reinforcement learning. arXiv preprintarXiv:1710.06574, 2017.
[46] Tehuang Liu and Wanjiun Liao. Location-dependent throughput and delay in wireless meshnetworks. IEEE Transactions on Vehicular Technology, 57(2):1188–1198, 2008.
[47] Brandon F Lo and Ian F Akyildiz. Reinforcement Learning based Cooperative Sensing in CognitiveRadio Ad Hoc Networks. In 21st IEEE PIMRC, pages 2244–2249, 2010.
[48] Shridhar Mubaraq Mishra, Danijela Cabric, Chen Chang, Daniel Willkomm, Barbara Van Schewick,Adam Wolisz, and Robert W Brodersen. A real time cognitive radio testbed for physical and linklayer experiments. In New Frontiers in Dynamic Spectrum Access Networks, 2005. DySPAN 2005.2005 First IEEE International Symposium on, pages 562–567. IEEE, 2005.
[49] Volodymyr Mnih, Koray Kavukcuoglu, David Silver, Andrei A Rusu, Joel Veness, Marc GBellemare, Alex Graves, Martin Riedmiller, Andreas K Fidjeland, Georg Ostrovski, et al.Human-level control through deep reinforcement learning. Nature, 518(7540):529–533, 2015.
[50] Michael L Moher and John H Lodge. TCMP-A modulation and coding strategy for Rician fadingchannels. IEEE J. Selected Areas in Communications, 7(9):1347–1355, 1989.
[51] Timothy R Newman, An He, Joseph Gaeddert, Ben Hilburn, Tamal Bose, and Jeffrey H Reed.Virginia tech cognitive radio network testbed and open source cognitive radio framework. In Testbedsand Research Infrastructures for the Development of Networks & Communities and Workshops, 2009.TridentCom 2009. 5th International Conference on, pages 1–3. IEEE, 2009.
[52] Timothy J O’shea, T Charles Clancy, and Hani J Ebeid. Practical signal detection and classification ingnu radio. In Sdr forum technical conference, page 143, 2007.
[53] Jonathan Perry, Hari Balakrishnan, and Devavrat Shah. Rateless Spinal Codes. In 10th ACMWorkshop on Hot Topics in Networks, page 6, 2011.
[54] Jonathan Perry, Peter A Iannucci, Kermin E Fleming, Hari Balakrishnan, and Devavrat Shah. SpinalCodes. In ACM SIGCOMM Conf. Applications, Technologies, Architectures, and Protocols forComputer Communication, pages 49–60, 2012.
[55] Robert C Qiu, Changchun Zhang, Zhen Hu, and Michael C Wicks. Towards a large-scale cognitiveradio network testbed: spectrum sensing, system architecture, and distributed sensing. J. Commun,7(7):552–566, 2012.
[56] A David Redish, Steve Jensen, Adam Johnson, and Zeb Kurth-Nelson. Reconciling ReinforcementLearning Models with Behavioral Extinction and Renewal: Implications for Addiction, Relapse, andProblem Gambling. Psychological Review, 114(3):784, 2007.
[57] Yu Ren, Pawel Dmochowski, and Peter Komisarczuk. Analysis and implementation of reinforcementlearning on a GNU radio cognitive radio platform. In 5th Intl. Conf. Cognitive Radio OrientedWireless Networks and Communications, Cannes, France, 2010.
[58] Yu Ren, Pawel Dmochowski, and Peter Komisarczuk. Analysis and implementation of reinforcementlearning on a gnu radio cognitive radio platform. In Cognitive Radio Oriented Wireless Networks &
Communications (CROWNCOM), 2010 Proceedings of the Fifth International Conference on, pages1–6. IEEE, 2010.
100

[59] Flávio Ribeiro, Dinei Florêncio, Cha Zhang, and Michael Seltzer. Crowdmos: An approach forcrowdsourcing mean opinion score studies. In IEEE Intl. Conf. Acoustics, Speech and SignalProcessing (ICASSP), pages 2416–2419, 2011.
[60] Hsien-Po Shiang and Mihaela Van Der Schaar. Multi-user video streaming over multi-hop wirelessnetworks: a distributed, cross-layer approach based on priority queuing. IEEE Journal on SelectedAreas in Communications, 25(4), 2007.
[61] Amin Shokrollahi. Raptor Codes. IEEE Trans. Information Theory, 52(6):2551–2567, 2006.
[62] Yi Song and Jiang Xie. On the spectrum handoff for cognitive radio ad hoc networks withoutcommon control channel. In Cognitive Radio Mobile Ad Hoc Networks, pages 37–74. Springer, 2011.
[63] Matthew D Sunderland. Software-defined radio interoperability with frequency hopping waveforms.2010.
[64] Richard S Sutton and Andrew G Barto. Reinforcement learning: An introduction, volume 1. MITpress Cambridge, 1998.
[65] S Tamilarasan and P Kumar. Dynamic resource allocation using priority queue scheduling inmulti-hop cognitive radio networks. In Computational Intelligence and Computing Research(ICCIC), 2016 IEEE International Conference on, pages 1–5. IEEE, 2016.
[66] Wuchen Tang, Muhammad Zeeshan Shakir, Muhammad Ali Imran, Rahim Tafazolli, and M-SAlouini. Throughput Analysis for Cognitive Radio Networks with Multiple Primary Users andImperfect Spectrum Sensing. IET Communications, 6(17):2787–2795, 2012.
[67] Venkat vinod Patcha. Experimental study of cognitive radio test-bed using usrp. 2011.
[68] Li-Chun Wang and Chung-Wei Wang. Spectrum handoff for cognitive radio networks:Reactive-sensing or proactive-sensins? In Performance, Computing and CommunicationsConference, 2008. IPCCC 2008. IEEE International, pages 343–348. IEEE, 2008.
[69] Li-Chun Wang, Chung-Wei Wang, and Chung-Ju Chang. Modeling and analysis for spectrumhandoffs in cognitive radio networks. IEEE Trans. Mobile Computing, 11(9):1499–1513, 2012.
[70] Lu Wang, Kaishun Wu, Jiang Xiao, and Mounir Hamdi. Harnessing frequency domain forcooperative sensing and multi-channel contention in CRAHNs. IEEE Trans. WirelessCommunications, 13(1):440–449, 2014.
[71] Yao Wang, Zhongzhao Zhang, Lin Ma, and Jiamei Chen. SVM-based spectrum mobility predictionscheme in mobile cognitive radio networks. The Scientific World J., 2014.
[72] Ryan K Williams, Andrea Gasparri, and Bhaskar Krishnamachari. Route swarm: Wireless networkoptimization through mobility. In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJInternational Conference on, pages 3775–3781. IEEE, 2014.
[73] Kun Wu, Li Guo, Hua Chen, Yonghua Li, and Jiaru Lin. Queuing based optimal schedulingmechanism for QoE provisioning in cognitive radio relaying network. In 16th Intl. Symp. WirelessPersonal Multimedia Comm. (WPMC), pages 1–5, 2013.
[74] Yeqing Wu, Fei Hu, Sunil Kumar, John Matyjas, Qingquan Sun, and Yingying Zhu. Apprenticeshiplearning based spectrum decision in multi-channel wireless mesh networks with multi-beamantennas. IEEE Trans. Mobile Computing, 16(2):314–325, 2017.
101

[75] Yeqing Wu, Fei Hu, Sunil Kumar, Yingying Zhu, Ali Talari, Nazanin Rahnavard, and John DMatyjas. A learning-based QoE-driven spectrum handoff scheme for multimedia transmissions overcognitive radio networks. IEEE J. Selected Areas in Comm., 32(11):2134–2148, 2014.
[76] Yeqing Wu, Fei Hu, Yingying Zhu, and Sunil Kumar. Optimal spectrum handoff control for CRNbased on hybrid priority queuing and multi-teacher apprentice learning. IEEE Trans. VehicularTechnology, 66(3):2630–2642, 2017.
[77] Yeqing Wu, Sunil Kumar, Fei Hu, Yingying Zhu, and John D Matyjas. Cross-layer Forward ErrorCorrection Scheme Using Raptor and RCPC Codes for Prioritized Video Transmission over WirelessChannels. IEEE Trans. on Circuits and Systems for Video Technology, 24(6):1047–1060, 2014.
[78] Xiaoshuang Xing, Tao Jing, Yan Huo, Hongjuan Li, and Xiuzhen Cheng. Channel quality predictionbased on Bayesian inference in cognitive radio networks. In IEEE INFOCOM, pages 1465–1473,2013.
[79] Luca Zappaterra. QoS-Driven Channel Selection for Heterogeneous Cognitive Radio Networks. InACM Conf. CoNEXT Student Workshop, pages 7–8, 2012.
[80] Yong Zeng and Rui Zhang. Energy-efficient uav communication with trajectory optimization. IEEETransactions on Wireless Communications, 16(6):3747–3760, 2017.
[81] Yong Zeng, Rui Zhang, and Teng Joon Lim. Throughput maximization for mobile relaying systems.In Globecom Workshops (GC Wkshps), 2016 IEEE, pages 1–6. IEEE, 2016.
[82] Pengcheng Zhan, Kai Yu, and A Lee Swindlehurst. Wireless relay communications with unmannedaerial vehicles: Performance and optimization. IEEE Transactions on Aerospace and ElectronicSystems, 47(3):2068–2085, 2011.
[83] Caoxie Zhang, Xinbing Wang, and Jun Li. Cooperative cognitive radio with priority queueinganalysis. In IEEE Intl. Conf. Comm., pages 1–5, 2009.
[84] Yimin Zhang, Xin Li, and Moeness G Amin. Multi-channel smart antennas in wireless networks. In40th IEEE Asilomar Conf. on Signals, Systems and Computers, pages 305–309, 2006.
[85] Xi-Yun Zhi, Zhi-Qiang He, and Wei-Ling Wu. A Novel Cooperation Strategy based on RatelessCoding in Cognitive Radio Network. Intl. J. Advancements in Computing Technology, 4(8):333–347,2012.
102




















