
ЛГТУ - Липецкий государственный технический...
170
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of ЛГТУ - Липецкий государственный технический...


2
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ .............................................................................................................. 5
1. ОСОБЕННОСТИ ПОСТРОЕНИЯ АВТОМАТИЗИРОВАННЫХ
ЭЛЕКТРОПРИВОДОВ МОБИЛЬНЫХ РОБОТОВ И СИСТЕМ
УПРАВЛЕНИЯ С НЕЙРОСЕТЕВЫМИ ЭЛЕМЕНТАМИ ....................... 12
1.1. Обзор систем электропривода постоянного тока и асинхронного
электропривода, предназначенных для применения на мобильных
роботах ........................................................................................................... 12
1.2. Анализ систем электроприводов постоянного и переменного тока
мобильных роботов как объектов для нейросетевого управления и
коррекции ....................................................................................................... 20
1.3. Обзор основных типов нейронных сетей и возможности их
применения в системах автоматизированного электропривода .............. 32
Выводы ................................................................................................................... 49
2. ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ
АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ПОМОЩЬЮ МАТЕ-
МАТИЧЕСКИХ МОДЕЛЕЙ ........................................................................ 50
2.1. Математические модели асинхронного двигателя для анализа
динамических и установившихся режимов ................................................ 50
2.2. Структурная модель асинхронного двигателя при питании от
источника тока ............................................................................................... 54
2.3. Анализ динамики асинхронного двигателя при питании от
источника тока ............................................................................................... 57
2.4. Формирование момента асинхронного электропривода в
установившемся режиме .............................................................................. 63
Выводы ................................................................................................................... 68
3. РАЗРАБОТКА И ИССЛЕДОВАНИЕ СИСТЕМ ИДЕНТИФИКАЦИИ
И КОРРЕКЦИИ ПЕРЕМЕННЫХ АСИНХРОННЫХ ЭЛЕКТРО-
ПРИВОДОВ С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ ................... 69

3
3.1. Построение и коррекция системы векторного управления
асинхронным электроприводом .................................................................. 69
3.2. Система асинхронного электропривода с частотно-токовым
управлением ................................................................................................... 75
3.3. Идентификация угла между вектором тока статора и вектором
намагничивающей переменной ................................................................... 82
3.4. Системы асинхронного электропривода с частотно-токовым
управлением и коррекцией сигналов задания амплитуды и частоты
тока статора.................................................................................................... 91
Выводы ................................................................................................................. 101
4. ИССЛЕДОВАНИЕ ДИНАМИКИ ЭЛЕКТРОПРИВОДОВ С
НЕЙРОСЕТЕВЫМИ ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРЕД-
НАЗНАЧЕННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ НА МОБИЛЬНЫХ
РОБОТАХ .................................................................................................... 102
4.1. Экспериментальные исследования систем электропривода
постоянного тока c нейросетевыми регуляторами скорости и методов
их обучения .................................................................................................. 102
4.2. Формирование требуемых пусковых характеристик электропривода
промышленных транспортных механизмов с помощью
пропорционально-интегрального и нейросетевого регулятора
скорости ....................................................................................................... 119
4.3. Исследования систем частотного асинхронного электропривода на
экспериментальной установке и методом математического
моделирования............................................................................................. 130
4.4. Исследование динамических характеристик систем частотного
асинхронного электропривода методом математического
моделирования............................................................................................. 136
Выводы ................................................................................................................. 145
ЗАКЛЮЧЕНИЕ ................................................................................................... 146
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ............................................................... 148

4
ПРИЛОЖЕНИЯ ................................................................................................... 160
Приложение 1. СИСТЕМА ПОДЧИНЕННОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА .................................. 160
Приложение 2. ПРАВИЛО ДЛЯ НЕКАСАЮЩИХСЯ КОНТУРОВ
(ТЕОРЕМА МЕЙСОНА) ............................................................................ 161
Приложение 3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ БЛОКА ВЫЧИСЛЕНИЯ
УГЛА 0 ....................................................................................................... 162
Приложение 4. МАТЕМАТИЧЕCКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ
ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА С ИМПУЛЬСНЫМ
УПРАВЛЕНИЕМ И БЛОКОМ ЭЛЕКТРИЧЕСКОГО ТОРМО-
ЖЕНИЯ ........................................................................................................ 163
Приложение 5. ЭКСПЕРИМЕНТАЛЬНЫЕ ГРАФИКИ ИЗМЕНЕНИЯ
ПЕРЕМЕННЫХ АСИНХРОННОГО ДВИГАТЕЛЯ, ПИТАЮЩЕ-
ГОСЯ ОТ ПЧ SINAMICS S120 .................................................................. 165

5
ВВЕДЕНИЕ
Актуальность. Устойчивая тенденция внедрения в промышленность
устройств с адаптивным управлением, к которым можно отнести мобильные
роботы, определяет необходимость продолжения работ по совершенствова-
нию систем и алгоритмов управления их электроприводами, в том числе реа-
лизуемых на базе нейроконтроллеров. При этом, несмотря на значительный
объем исследований в области электроприводов постоянного и переменного
тока, применяемых на механизмах передвижения мобильных роботов, рабо-
тающих в условиях изменяющихся параметров и возмущающих воздействий
разного уровня, вопросы создания эффективных систем с адаптивным регу-
лятором скорости, в качестве которого может применяться нейроконтроллер,
решены не полностью. Актуальными являются задачи проведения сравни-
тельных исследований систем электропривода постоянного тока и асинхрон-
ного электропривода с релейным регулированием тока в обмотках
двигателей и нейросетевым регулированием скорости, а также разработки
новых систем частотно-токового управления асинхронным электроприводом
с дополнительными нейросетевыми корректирующими устройствами, улуч-
шающими их динамические и энергетические характеристики, делающими
их конкурентоспособными электроприводу постоянного тока.
Работа выполнена при поддержке гранта РФФИ №17-48-480492 «Ана-
лиз, математическое моделирование и оптимизация управления электромеха-
ническими системами с электроприводами переменного тока мехатронных
устройств, манипуляторов и грузоподъемных механизмов».
Объектом исследования являются системы нейросетевого управления
электроприводами, выполненными на базе двигателя постоянного тока с не-
зависимым возбуждением и асинхронного двигателя, имеющими релейно-
гистерезисные системы формирования токов в обмотках двигателей, предна-
значенные для использования на механизмах передвижения мобильных ро-
ботов.

6
Цель работы. Разработка и исследование систем нейросетевого управ-
ления электроприводами постоянного тока и асинхронными электроприво-
дами мобильных роботов с обеспечением заданных пусковых и
регулировочных механических характеристик, достигаемых в асинхронном
электроприводе с частотно-токовым управлением за счет использования
нейросетевых блоков коррекции.
Идея работы. Заключается в создании систем нейросетевого управле-
ния электроприводами постоянного тока и асинхронными электроприводами
с векторным и скалярным частотно-токовым управлением, имеющих внут-
ренний контур релейно-гистерезисного регулирования токов в обмотках дви-
гателей и внешний контур регулирования скорости, на базе
унифицированных преобразующих и управляющих элементов, с применени-
ем в асинхронных электроприводах нейросетевой коррекции взаимного по-
ложения моментообразующих векторов, что позволяет улучшить
динамические и энергетические характеристики систем электропривода ме-
ханизмов передвижения мобильных роботов.
Для достижения сформулированной цели требуется решение следую-
щих задач:
- анализ систем нейросетевого управления и выбор наилучших вариан-
тов для построения нейроконтроллеров, управляющих скоростью электро-
привода, коррекцией пусковых характеристик, математическое
моделирование и экспериментальные исследования динамических процессов
в электроприводах мобильных роботов с нейросетевым управлением;
- разработка и исследование систем нейросетевого управления элек-
троприводами мобильных роботов: постоянного тока с релейно-
гистерезисным регулированием тока якоря и асинхронного электропривода с
векторным управлением с релейно-гистерезисным регулированием тока ста-
тора, с улучшенными пусковыми характеристиками;
- структурно-топологический анализ векторной модели асинхронного
двигателя и исследование возможности повышения его устойчивости в си-
стемах частотного электропривода за счет применения корректирующих
средств;

7
- разработка и исследование систем идентификации взаимного положе-
ния моментообразующих векторов переменных асинхронного двигателя на
базе наблюдателей углов между векторными переменными и принципов кор-
рекции системы управления асинхронным электроприводом с частотно-
токовым управлением;
- разработка и исследование систем частотно-токового управления
асинхронным двигателем с использованием нейросетевых корректирующих
средств, обеспечивающих улучшенные пусковые характеристики для повы-
шения конкурентоспособности электропривода при применении на мобиль-
ных роботах.
Методы исследования. В работе использовались методы структурных
преобразований теории автоматического управления, корневой метод анали-
за динамических свойств систем, методы математического моделирования
нелинейных динамических систем с применением пакетов прикладных про-
грамм и численных методов решения, методы экспериментального подтвер-
ждения.
Научная новизна работы:
- на основании анализа структурной модели асинхронного двигателя
установлено, что для подавления колебаний переменных в электромагнитной
системе асинхронного двигателя и стабилизации момента двигателя необхо-
дима нелинейная коррекция скольжения и амплитуды тока статора двигате-
ля, направленная на стабилизацию взаимного положения векторов тока
статора и потокосцепления ротора;
- установлено, что энергетические показатели асинхронного электро-
привода с векторным управлением, работающего в установившемся режиме с
неполной статической нагрузкой, могут быть улучшены и достигнуто сниже-
ние в среднем на 5% отношения «ток статора / момент двигателя», путем
коррекции сигнала задания проекции вектора тока статора на ось ортого-
нальной системы координат, положение которой совпадает с положением
вектора потокосцепления ротора, отличающейся тем, что действие системы

8
коррекции основано на сравнении проекций вектора тока статора на обе ко-
ординатные оси и направленно на достижение равенства этих проекций;
- доказано, что нейросетевые регуляторы скорости обеспечивают адап-
тивную настройку контуров регулирования скорости двигателя постоянного
тока и асинхронного двигателя с векторным управлением с необходимым
быстродействием, за чего достигается лучшее качество управления при резко
изменяющихся управляющих и возмущающих воздействиях и изменении
момента инерции электропривода по сравнению с использованием типовых
пропорционально-интегральных регуляторов скорости.
Теоретическая значимость работы состоит:
- в достижении повышенного быстродействия при формировании пус-
ковых и регулировочных характеристик электропривода постоянного тока с
релейно-гистерезисным регулированием тока якоря за счет применения
нейросетевого регулятора скорости, обеспечивающего отработку управляю-
щих и возмущающих воздействий без перерегулирования;
- в разработке принципа нейросетевой встречно-параллельной коррек-
ции асинхронного электропривода с частотно-токовым управлением, обеспе-
чивающего стабилизацию пускового момента двигателя, путем воздействия с
помощью нейроконтроллера на сигналы задания амплитуды и частоты тока
статора, с выработкой корректирующих сигналов на основе наблюдения за
углом между векторами тока статора и основного потокосцепления, опреде-
ляемого путем обработки сигналов измеренных мгновенных значений тока и
напряжения статора;
- в обеспечении лучшей стабилизации пусковых и регулировочных ха-
рактеристик асинхронного электропривода с векторным управлением с внут-
ренним контуром релейно-гистерезисного регулирования фазных токов
статора за счет применения нейросетевого регулятора скорости, реализую-
щего отработку управляющих и возмущающих воздействий без перерегули-
рования.

9
Практическая значимость работы. Разработан асинхронный электро-
привод с частотно-токовым управлением, в котором в установившемся ре-
жиме работы отношение «ток статора / момент» двигателя снижено в
среднем на 5%, что повышает временной ресурс работы аккумуляторной ба-
тареи, питающей электропривод мобильного робота.
Достоверность полученных результатов. Подтверждается математиче-
ским обоснованием разработанных моделей, хорошей сходимостью резуль-
татов теоретических и экспериментальных исследований с погрешностью не
более 5-7%, сопоставимостью полученных результатов с положениями об-
щей теории электропривода.
Реализация результатов работы. Диссертация выполнена в ФГБОУ ВО
«Липецкий государственный технический университет» (ЛГТУ). Результаты,
полученные в диссертационной работе, внедрены на ООО «Промэлектрони-
ка» г. Липецк и в учебный процесс ЛГТУ.
Новые научные положения, выносимые на защиту:
- результаты сравнительного анализа и экспериментальных исследова-
ний систем управления электроприводом постоянного тока: с нейроконтрол-
лером, установленным только в прямом канале управления; с косвенным
управлением, в которой нейронная сеть используется как модель системы;
- нейросетевая система управления скоростью импульсно-
регулируемого электропривода постоянного тока, имеющего внутренний
контур релейно-гистерезисного регулирования тока якоря, математическая
модель и результаты моделирования электропривода;
- аналитические выражения, устанавливающие связи между перемен-
ными асинхронного двигателя в динамических режимах, полученные с ис-
пользованием математической модели системы «источник тока -
асинхронный двигатель», представленной в структурном виде во вращаю-
щейся со скоростью магнитного поля статора ортогональной системе коор-
динат Х,У;

10
- принципы построения и функциональные схемы наблюдателей, осу-
ществляющих идентификацию угла между векторами тока статора и пото-
косцепления ротора (или основного потокосцепления) асинхронного
двигателя при частотно-токовом управлении;
- нейросетевая система формирования входных сигналов в асинхрон-
ном электроприводе с векторным управлением, математическая модель и ре-
зультаты экспериментальных исследований асинхронного электропривода с
векторным управлением;
- система асинхронного электропривода с частотно-токовым управле-
нием, с внутренним контуром релейно-гистерезисного регулирования фазных
токов статора, внешним контуром управления скоростью, и нейросетевым
корректирующим устройством, влияющим на сигналы задания частоты и ам-
плитуды тока статора.
Апробация работы. Основные положения диссертационной работы до-
кладывались и обсуждались на: 9-й Всероссийской школе и конференции
молодых ученых "Управление большими системами". Липецк. 21-24 мая
2012; Региональной научно-технической конференции «Автоматизация и ро-
ботизация технологических процессов» Воронеж. 16-17 ноября 2012 г.; 11-й
Международной научо-технической конференции "Информационные систе-
мы и технологии" Нижний Новгород. 17 апреля 2015 г.; 12-й Международной
научо-технической конференции "Информационные системы и технологии".
Нижний Новгород. 22 апреля 2016; 13-й Международной научно-
технической конференции "Информационные системы и технологии" Ниж-
ний Новгород. 21 апреля 2017 г.; Международной научно-технической кон-
ференции Фундаментальные и прикладные проблемы модернизации
современного машиностроения и металлургии. Липецк. 2012 г.; 7-й Между-
народной конференции АЭП 2012. Иваново 2-4 октября 2012 г.; Междуна-
родной научно-технической конференции "Проблемы повышения
эффективности электромеханических преобразователей в электроэнергетиче-
ских системах". Севастополь, 14-19 сентября 2014 г.; Международной науч-

11
но-практической конференции "Современная металлургия начала нового ты-
сячелетия" . 17-21 ноября 2014 г.; 5-й Международной научно-практической
конференции «Металлургия нового тысячелетия». Липецк. 8-10 декабря
2015 г.; 16-й Международной научно-технической конференции "Электро-
приводы переменного тока". Екатеринбург. 05 сентября 2015 г.; 10-й Всерос-
сийской мультиконференции по проблемам управления. Дивноморское.
Геленджик. 11-16 сентября 2017 г.
Публикации. По теме диссертации опубликовано 27 печатных работ,
из них 7 статей в изданиях, рекомендованных ВАК, 1 статья в издании, вхо-
дящем в систему цитирования СКОПУС, 14 тезисов докладов на конферен-
циях и статей в других изданиях, 5 патентов.
Структура и объём диссертации. Диссертация состоит из введения, че-
тырех глав, заключения, списка литературы и 7 приложений. Общий объём
диссертации - 170 страниц, в том числе 159 страниц основного текста, 74 ри-
сунков, 4 таблицы, список литературы из 107 наименований.

12
1. ОСОБЕННОСТИ ПОСТРОЕНИЯ АВТОМАТИЗИРОВАННЫХ
ЭЛЕКТРОПРИВОДОВ МОБИЛЬНЫХ РОБОТОВ И СИСТЕМ
УПРАВЛЕНИЯ С НЕЙРОСЕТЕВЫМИ ЭЛЕМЕНТАМИ
1.1. Обзор систем электропривода постоянного тока и асинхронного
электропривода, предназначенных для применения на мобильных роботах
Мобильные роботы осуществляют автоматические перемещения по-
лезной нагрузки и рабочих объектов в пространстве. По области применения
роботы подразделяют на промышленные, военные и роботы специального
назначения [1-5]. Они предназначены для воспроизведения двигательных
функций человека при выполнении производственных операций. Мобильные
промышленные роботы представляют собой автономные автоматические
устройства с системой привода, памятью и программным управлением, в их
состав входят мобильные, манипуляционные и информационные системы
[1,6,7].
В ГОСТ 25685-ПР-83 выделены 3 группы роботов, которые различают
по характеру выполняемых технологических операций [1]:
- технологические (производственные) роботы, осуществляющие тех-
нологические операции;
- вспомогательные (подъемно-транспортные) роботы, выполняющие
функции переноса объектов в вертикальной и горизонтальной плоскостях;
- универсальные роботы, осуществляющие основные и вспомогатель-
ные технологические операции.
Мобильные роботы выполняют различные подъемно-транспортные
операции, они используются как внутрицеховой и межцеховой транспорт,
могут производить все виды работ на складах.
По грузоподъемности роботы подразделяют на: сверхлегкие – до 1 кг.;
легкие – до 10 кг.; средние – до 200 кг.; тяжелые – до 1000 кг.; сверх тяже-
лые – свыше – 1000 кг. [1].

13
Существуют следующие типы силового привода робота: электриче-
ский, гидравлический, пневматический и комбинированный привод [1,4,5].
На мобильных роботах с источником питания в виде аккумуляторной бата-
реи преимущественно используется электрический привод.
В процессе работы мобильных роботов осуществляется регулирование
скорости, частые пуски, торможения, изменение направления движения. В
случае перемещения грузов разного веса после окончания погрузочно-
разгрузочных работ изменяются параметры механической части электропри-
вода, что приводит к изменению приведенного момент инерции электропри-
вода и статического момента на валу. Электропривод транспортной системы
робота связан с колесами либо через редуктор, либо непосредственно, тор-
можение механизма может осуществляться электроприводом или дополни-
тельными тормозами [1,8,9].
На рисунке 1.1, а показан общий вид одной из конструкций мобильного
робота. Механизмы передвижения имеют кинематические цепи, содержащие
блок «двигатель - колесо», при этом двигатель может быть связан с колесом
непосредственно (рисунок 1.1,б) или через редуктор. Любые используемые
на мобильных роботах системы электропривода должны иметь похожие ме-
ханические характеристики, обеспечивающие пуск с заданным ускорением,
основную стабильную рабочую частоту вращения и одну или несколько ре-
гулировочных характеристик для обеспечения пониженной частоты враще-
ния.
Современные системы управления электроприводами постоянного и
переменного тока строятся по модульному принципу на базе унифицирован-
ных силовых электронных блоков, аппаратных и программных средств
[10,11]. Основной управляемой переменной электропривода является ско-
рость, другая переменная - момент на валу М, в установившемся режиме
определяется нагрузкой на валу, действующей со стороны механизма, а в пе-
реходных режимах обычно формируется системой электропривода в зависи-
мости от предъявляемых требований к динамике [11-13].

14
щеточный узел
1 4 5 6 7 8
Термо-
контакт
Ручной
режимстоп
сигналы от
PLC
быстро
медленно Переключение
обмоток АД Быстро 2p=2
Медленно 2p = 8
Силовая плата
1 2 3 4 5
Плата логики
Эл
ект
ро
-м
еха
ни
че
ски
й
тор
мо
з
t°
Датчик противо-
столкновения(конечный
выключтель)
Датчик противо-
столкновения(конечный
выключтель)
а) б)
Рисунок 1.1 – Мобильный робот: а – общий вид робота;
б – блок «двигатель - колесо»
Для реверсивных механизмов необходима работа электропривода в че-
тырех квадрантах плоскости механических характеристик. Требуемая точ-
ность поддержания скорости электропривода в установившихся и
динамических режимах обеспечивается при построении замкнутого контура
регулирования скорости [13,14]. При изменении параметров механической
части привода целесообразно применять адаптивный, например, нейросете-
вой регулятор скорости.
На механизмах передвижения мобильных роботов, промышленных ма-
нипуляторов, и др. применяются системы регулируемого электропривода как
постоянного, так и переменного тока.
Применение силовых полностью управляемых ключевых элементов,
например, IGBT - транзисторов и GTO – тиристоров, позволяет строить ти-
повые силовые схемы, применимые для систем электропривода постоянного
и переменного тока. При питании регулируемого электропривода постоянно-
го тока от сети постоянного тока или от аккумуляторной батареи использу-

15
ются системы импульсного управления двигателем [15]. Импульсное регули-
рование целесообразно использовать при питании электроприводов мобиль-
ных транспортных систем, например, мобильных роботов.
Известны реверсивные системы электропривода постоянного тока, в
которых применяется релейно-импульсный принцип регулирования питаю-
щего двигатель напряжения, и соответственно осуществляется импульсное
регулирование тока якоря [15]. Схема силовой части электропривода посто-
янного тока с релейно-импульсным управлением приведена на рисунке 1.2, а.
Питание электропривода осуществляется от трехфазной сети переменного
тока через тиристорный выпрямитель. Реверсивный управляемый преобразо-
ватель реализован на четырех транзисторах К1, К1*, К2, К2*. В двигательном
режиме электропривода при работе, например, «вперед» выключены транзи-
сторы КТ, К2, К2*, включены транзисторы КИ, К1*, а транзистор К1 работает
в релейно-импульсном режиме с задаваемой системой управления скважно-
стью. В режиме динамического торможения транзистор КИ выключен, тран-
зистор КТ включен, обмотка якоря двигателя замкнута через обратные диоды
на резистор RT.
Схема силовой части электропривода постоянного тока с релейно-
импульсным управлением, обеспечивающая рекуперацию энергии в сеть при
торможении приведена на рисунке 1.2, в. В схеме используется активный
преобразователь, выполненный на IGBT - транзисторах, его инвертор в дви-
гательном режиме отключен, а при торможении двигателя через инвертор
энергия отдается в питающую сеть. Для обеспечения плавного пуска и регу-
лирования скорости двигателя постоянного тока необходимо выполнять за-
мкнутую систему регулирования с внутренним контуром регулирования
тока, подчиненным внешнему контуру регулирования скорости.
Все более широкое использование частотно-регулируемых приводов с
преобразователями частоты (ПЧ), в том числе на мобильных роботах, опре-
деляется достигнутыми успехи в области силовой электроники, что послужи-
ло причиной разработки множества различных топологий построения ПЧ

16
K1 K2
K2* K1*
TR
TKДПТ
ОВ
+
-
ИK
K1 K2
K2* K1*
+
-
TR
TKДПТ
ОВ
+
-
ИK
КОММУТАТОР
а) б)
K1 K2
K2* K1*
ДПТ
ОВ
+
-
в)
Рисунок 1.2 – Схемы силовой части реверсивного электропривода постоян-
ного тока с импульсным регулированием питающего напряжения:
а – при питании от сети переменного тока; б – при питании от источника
напряжения постоянного тока; в – реализующая рекуперацию энергии в сеть
1 3 5
4 6 2
TR
TK
И
C
1 3 5
4 6 2
TR
TK
ИНВЕРТОР
C
а) б)
1 3 5
4 6 2
И
C
1 3 5
4 6 2
Пр
в)
Рисунок 1.3 – Схемы силовой части частотного асинхронного электропривода:
а – на базе инвертора напряжения с тормозным резистором; б – на базе
инвертора тока при питании от источника напряжения постоянного тока;
в – реализующая рекуперацию энергии в сеть

17
и систем электропривода. Построению конструктивных вариантов преобра-
зователей частоты посвящено большое количество работ российских и зару-
бежных авторов [16-22].
Среди множества различных типов преобразователей частоты можно
выделить две основные группы, различающиеся по способу связи промыш-
ленной трехфазной питающей сети переменного тока и двигателя [23]:
– непосредственные преобразователи частоты (НПЧ) [24,25];
– двухзвенные преобразователи частоты (ДПЧ) с промежуточным зве-
ном постоянного тока [26].
Достоинствами НПЧ являются [27,28]:
– высокий КПД, что определятся однократным преобразованием энер-
гии;
– возможность двустороннего обмена энергией через преобразователь
между статором двигателя и питающей сетью, что обеспечивает и двигатель-
ный и тормозной режимы с рекуперацией энергии в сеть;
– возможность реализации естественной коммутации вентилей;
– получение низких частот выходного напряжения с обеспечением рав-
номерного вращения двигателя на малых оборотах;
Недостатками НПЧ являются [27,28]:
– ограничение максимального значения выходной частоты на уровне
порядка 2/3 от частоты питающей сети;
– гармонические искажения в составляющих выходного тока и напря-
жения при неблагоприятных соотношениях частот на входе и выходе ПЧ;
– низкий коэффициент мощности, несинусоидальность входных токов
ПЧ, что делает его неблагоприятным потребителем для системы электро-
снабжения;
– сложность силовых цепей с большим числом вентилей и цепей
управления, что приемлемо лишь при большой мощности ПЧ.
Указанные недостатки НПЧ ограничивают область его применения в
основном регулируемыми тихоходными синхронными и асинхронными элек-

18
троприводами средних и больших мощностей. Значительно большее приме-
нение, в том числе и на транспортных механизмах находят преобразователи
частоты со звеном постоянного тока [28-31]. Силовая схема этих ПЧ содер-
жит два основных элемента:
– преобразователь переменного напряжения источника питания в по-
стоянное напряжение;
– преобразователь постоянного напряжения в переменное напряжение
требуемой частоты и амплитуды.
Достоинствами ПЧ с промежуточным звеном постоянного тока явля-
ются:
– возможность получения выходных частот ПЧ, изменяющихся в
большом диапазоне, не зависящем от частоты питающей сети;
– относительная простота и унификация силовых схем и систем управ-
ления преобразователями частоты для систем электропривода с невысокими
требованиями к диапазону регулирования частоты вращения, быстродей-
ствия и т.д.;
– возможность введения дополнительных элементов в схемы силовой
части и системы управления при повышении уровня требований к электро-
приводу;
– возможность реализации различных алгоритмов управления, которые
удовлетворяют требованиям, предъявляемым к ЭП различного применения;
– простота перенастройки ПЧ для работы в установках с питанием
электрооборудования от автономных источников либо локальной сети посто-
янного тока.
Недостатки ДПЧ с промежуточным звеном постоянного тока:
– двукратное преобразование энергии, снижающее КПД и определяю-
щее повышенные массогабаритные показатели ПЧ;
– необходимость включения в звено постоянного тока силового филь-
тра, выполняемого для систем с автономным инвертором напряжения (АИН)

19
в виде батареи конденсаторов большой емкости, а для систем с автономным
инвертором тока (АИТ) в виде реактора с большой индуктивностью.
В ПЧ с АИН выпрямитель обычно нерегулируемый, т.к. регулирование
амплитуды и частоты напряжения выполняется с помощью инвертора. В
АИТ выпрямитель регулируемый, он выполняется на базе управляемых си-
ловых полупроводниковых элементов [28,31]. Для мобильных роботов с си-
стемой асинхронного электропривода и электроснабжением от
аккумуляторной батареи наиболее перспективной является система асин-
хронного электропривода, показанная на рисунке 1.3, б. Данная система
электропривода разработана и исследована в работах [32,33]. Системы им-
пульсного управления электроприводом переменного тока рассматриваются
в работах [34,35]. При построении импульсной системы управления токами в
обмотках двигателей применяют замкнутый контур с релейным регулятором
тока. Силовая часть частотного асинхронного электропривода, выполненного
на базе инвертора напряжения, в которой при торможении энергия рассеива-
ется на резисторе RT, приведена на рисунке 1.3, а. На рисунке 1.3, б показана
схема, обеспечивающая инвертирование энергии в сеть при торможении.
Анализируя схемы силовой преобразовательной части электроприво-
дов постоянного (рисунок 1.2, а) и переменного тока (рисунок 1.3, а), питаю-
щихся от источника постоянного тока, например, аккумуляторной батареи,
можно отметить общий принцип импульсного формирования тока в обмот-
ках двигателей и использование унифицированных силовых преобразова-
тельных элементов.
Системы автоматического управления скоростью электроприводов по-
стоянного тока и асинхронных электроприводов традиционно выполняются
на базе общего принципа подчиненного управления [14] с внутренним кон-
туром регулирования токов в обмотках двигателя и внешним контуром регу-
лирования скорости.

20
1.2. Анализ систем электроприводов постоянного и переменного тока
мобильных роботов как объектов для нейросетевого управления и коррекции
В регулируемом электропривода постоянного тока используются
наиболее простые системы управления, поскольку в двигателе постоянного
тока с независимым возбуждением, магнитный поток формируется обмоткой
возбуждения. Момент М двигателя определяют по формуле [11]
М к Ф I , (1.1)
где I – ток якоря; k – конструктивная постоянная двигателя; Ф – магнитный
поток.
Скалярный характер уравнения (1.1), характеризующего зависимость
момента двигателя от тока якоря и магнитного потока, определяется кон-
структивными особенностями двигателя постоянного тока, в частности нали-
чием коллекторно–щеточного узла, обеспечивающими ортогональность
положения векторов тока якоря и магнитного потока, имеющей место в лю-
бых режимах работы двигателя.
Управление скоростью электропривода постоянного тока в основном
осуществляется с помощью вентильных преобразователей, выполняющих
требуемое изменение эдс ЕП управляемого преобразователя (УП1), питающе-
го обмотку якоря двигателя, ограничение на величину пускового тока, вы-
полняется с помощью блока ограничения на выходе регулятора скорости
(рисунок 1.4). В разомкнутой системе электропривода постоянного тока
уравнение статической механической характеристики имеет вид [8]:
ЯЦП
2
M RЕω
к Ф (к Ф)
, (1.2)
где ЕП – эдс преобразователя; ПКОДПЯЯЦ
RRRRR – суммарное со-
противление цепи якоря двигателя, включающее сопротивление преобразо-
вателя RП.

21
Система управления электроприводом, выполненным на базе двигателя
постоянного тока независимого возбуждения с тиристорным преобразовате-
лем, питающимся от трехфазной промышленной сети, обеспечивающая
плавный пуск и регулирование скорости, имеет типовую двухконтурную
структуру управления [14] с внутренним контуром регулирования тока, под-
чиненным внешнему контуру регулирования скорости. В Приложении1 при-
ведены схема и передаточные функции регуляторов системы подчиненного
управления электроприводом постоянного тока. Такая система электропри-
вода используется на ряде транспортных систем, например, на механизме пе-
редвижения металлургического сталевоза, она может использоваться на
мобильных роботах, работающих в помещении, при условии возможности
электроснабжения через гибкий кабель.
При стандартном подходе к синтезу контуров регулирования применя-
ют пропорционально–интегральный «ПИ–регулятор» тока, пропорциональ-
ный «П–регулятор» скорости или в двухкратно–интегрирующей системе –
«ПИ–регулятор» скорости [14].
При питании электропривода от аккумуляторной батареи применяют
системы импульсного регулирования напряжения питания двигателя Функ-
циональная схема электропривода постоянного тока с транзисторным комму-
татором в цепи якоря двигателя показана на рисунке 1.4. Обмотка якоря
двигателя питается от источника постоянного напряжения через ключевой
элемент КИ, при включенном состоянии которого ток от источника протекает
через обмотку якоря и дроссель ДР. При выключенном состоянии ключа КИ
за счет энергии, накопленной в индуктивных элементах цепи, ток протекает
через обмотку якоря, дроссель ДР и обратный диод Д. Протекающий по об-
мотке якоря двигателя ток имеет две составляющие – постоянную и пульси-
рующую (рисунок 1.3,б). Система автоматического управления может быть
настроена так, что в установившемся режиме амплитуда пульсаций тока со-
ставляет около 5% от среднего значения тока якоря двигателя.

22
TR
TK
ДПТ
ОВ
+
-
ИK
- -
САУ
ДТ
ДC
ДP
Д
OTI +
-
ос
Рисунок 1.4 – Функциональная схема нереверсивного электропривода
постоянного тока с коммутатором в цепи якоря двигателя
0
dI,u
dI
u
tT T2
Рисунок 1.5 – Временные диаграммы импульсного напряжения питания
и тока якоря двигателя
При выборе электропривода для мобильных роботов необходимо учи-
тывать, что асинхронные двигатели характеризуются простотой конструк-
ции, большей надежностью, меньшими масса–габаритными показателями,
меньшей стоимостью, меньшей инерцией ротора [36,37]. При питании ча-
стотного асинхронного электропривода от источника постоянного тока вы-
прямитель не требуется выпрямитель, для управления двигателем
используется только автономный инвертор.
Достижения в области силовой электроники и микропроцессорной тех-
ники позволили создать надежные преобразователи частоты, что послужило
импульсом к широкому применению регулируемого частотного асинхронно-

23
го электропривода [28,36-38], обеспечивающего необходимые регулировоч-
ные возможности, а также приемлемые энергетические показатели. Исследо-
ванию систем частотного асинхронного электропривода посвящено большое
количество работ зарубежных авторов, например, [18,20-22].
Известно множество различных методов управления инвертором, бази-
рующихся на принципе широтно–импульсной модуляции (ШИМ). Разработ-
ке и анализу алгоритмов управления посвящено большое количество работ
[21,22,39-41].
Известны следующие виды ШИМ:
– синусоидальная ШИМ;
– ШИМ с релейно–гистерезисными регуляторами напряжения или
тока;
– ШИМ с выборочным исключением гармоник;
– трапецеидальная ШИМ;
– ШИМ с минимальными пульсациями тока;
– синусоидальная ШИМ с непосредственным контролем тока.
Для систем частотного асинхронного электропривода с частотно–
токовым управлением перспективным является построение системы управ-
ления с релейно–гистерезисными регуляторами тока, работающими на осно-
ве сравнения заданного и измеренного значений токов статора. Когда
разница между этими сигналами превысит пороговое значение, формируется
импульс на переключение ключа инвертора [42]. Если инвертор преобразова-
теля частоты с АИН управляется с помощью замкнутых контуров с релейно–
гистерезисными регуляторами фазных токов, то такой ПЧ является для дви-
гателя источником тока. Гармонический состав выходного тока зависит от
ширины петли гистерезиса и параметров силового фильтра, чем уже петля
гистерезиса, тем больше частота срабатывания ключей, тем меньше уровень
амплитуды гармоник и выше синусоидальность выходного тока. С появлени-
ем современных IGBT транзисторов решена проблема требуемой высокоча-
стотной (до 2,5…5 кГц и выше) коммутации ключевых элементов инвертора

24
[42]. При релейном принципе формирования тока в обмотке двигателя за-
мкнутый контур тока можно считать близким к инерционному звену первого
порядка с малой постоянной времени Т [14,32].
Сложность построения системы управления асинхронным двигателем,
обеспечивающей качественное управление его координатами, связана с тем,
что асинхронный двигатель, как объект регулирования, обладает большим
количеством нелинейных перекрестных связей между каналами. Математи-
ческое описание асинхронного двигателя и его динамические характеристики
рассмотрены в ряде работ, например, [43,44].
При построении системы управления необходимо учитывать ряд осо-
бенностей:
– электромагнитный момент двигателя определяется как произведение
двух векторов АД;
– взаимное влияние переменных в фазах АД;
– для наиболее эффективного формирования момента следует воздей-
ствовать на основной магнитный поток, используя доступные каналы регу-
лирования.
Наиболее распространенными являются следующие системы управле-
ния асинхронным двигателем:
– скалярное управление;
– векторное управление (классическое и с использованием нечеткой
логики, нейронных сетей и т.д.);
– прямое управление моментом.
Для регулирования скорости и момента асинхронного двигателя на ме-
ханизмах передвижения промышленного транспорта применяют системы
скалярного и векторного управления [36-40].
Среди указанных систем самыми простыми и, следовательно, перспек-
тивными для применения на мобильных роботах, являются системы скаляр-
ного частотно–токового управления, динамические свойства которых

25
должны быть улучшены с помощью корректирующих, например, нейросете-
вых элементов.
Скалярное управление асинхронным двигателем происходит путем ре-
гулирования необходимой амплитуды и частоты питающего двигатель
напряжения. Если регулируются частота и амплитуда тока статора, то способ
называется – частотно–токовое управление [16,45,46]. Поскольку асинхрон-
ный двигатель является нелинейным объектом управления, применяются
корректирующие элементы, улучшающие динамические и статические свой-
ства электропривода, но усложняющие систему автоматического регулиро-
вания [40].
Системы скалярного управления частотным асинхронным электропри-
водом выполняются разомкнутыми и замкнутыми. Разомкнутые скалярные
системы частотного электропривода в основном используют на механизмах с
вентиляторным характером нагрузки (вентиляторах, насосах, компрессорах),
на которых не предъявляются требования к высокой точности поддержания
скорости и широкому диапазону ее регулирования. В этих электроприводах
сигналы задания на частоту и амплитуду напряжения изменяются по пропор-
циональному закону.
В замкнутой системе скалярного управления при постоянном статиче-
ском моменте для обеспечения диапазона регулирования скорости до 20:1,
для сохранения перегрузочной способности асинхронного двигателя по мо-
менту, необходимо вводить IR – компенсацию [40,46], изменяя соотношение
между частотой и амплитудой напряжения и компенсируя падение напряже-
ния на активном сопротивлении обмоток статора. При реализации данного
способа управления асинхронным двигателем его динамические свойства
определяются не только конструктивными параметрами (количеством полю-
сом, сопротивлениями статора, ротора и т.д.), но и воздействием на регули-
руемые переменные [40].
В ряде известных разработок замкнутых систем скалярного управления
осуществляется поддержание на заданном уровне таких параметров, как по-

26
токосцепление (главного, или статора, или ротора) и абсолютного скольже-
ния АД [47]. Для обеспечения требуемого качества переходных процессов
асинхронного двигателя, при скалярном управлении необходимо осуществ-
лять дополнительный контроль за амплитудными значениями переменных и
углами между моментообразующими векторами [27], что характерно для
векторных систем управления [39-41].
Известны работы [48-52] посвященные оптимизации систем частотного
управления, направленные на достижение максимального электромагнитного
момента при фиксированном значении тока статора. Основная идея оптими-
зации заключается в поддержании постоянства угла между вектором тока
статора и потокосцепления ротора на уровне близком к 4 , что позволяет
снизить ток статора до 10% и суммарные потери до 10–12% при пониженной
нагрузке на валу двигателя. В ряде исследованиях [45,46] показано, что
наибольший момент при ненасыщенной магнитной системе и фиксированной
величине модуля вектора тока статора двигателя достигается при угле между
векторами тока статора и потокосцепления ротора /
0 =450.
Выполненные разработки [53-55] позволили обеспечить энергосбере-
гающие режимы работы асинхронных электроприводов со скалярным управ-
лением, однако колебательные динамические процессы, возникающие в
процессе регулирование их координат, осложняют их использование на ме-
ханизмах, выполняющих ответственные операции, и требуют разработки и
применения дополнительных средств коррекции систем управления.
Системы векторного управления асинхронным электроприводом, тре-
бующие построения более сложных структур регулирования координат,
имеют внешний контур регулирования скорости, построенный аналогично
электроприводу постоянного тока [40,52,53].
Момент асинхронного двигателя может быть определен через пере-
менные, представленные в ортогональной вращающейся со скоростью поля
статора системе координат, показанной на векторной диаграмме (рисунок
1.6), характеризующей взаимное положение моменообразующих векторов –

27
тока статора и потокосцепления ротора, в которой вектор потокосцепления
ротора 2 находится на оси d, при этом 2 2d [40]:
n 2 2d 1q
3M= p k Ψ I
2, (1.3)
где k2 = 2m L/L – коэффициент равный отношению взаимной индуктивности
обмоток статора и ротора и индуктивности ротора; 1qI – проекция вектора
тока статора на ось q.
В настоящее время разработано большое количество схемных решений
для управления скоростью и моментом двигателя [43-45]. Известны системы
управления, обеспечивающие стабилизацию взаимного положения векторов
тока статора и потокосцепления ротора, за счет косвенного определения и
стабилизации угла /
0 , показанного на рисунке 1.6 [40].
1I
2
d
q
1dI
1qI
0
Рисунок 1.6 – Взаимное положение векторов тока статора и
потокосцепления ротора
Системы векторного управления асинхронным двигателем имеют
большое разнообразие схемных реализаций, результаты их разработки и ис-
следования изложены в большом количестве публикаций [40,41,45,46].
Анализ функциональных схем векторного управления асинхронным
двигателем показывает, что внешний контур скорости построен так же, как и
в электроприводе постоянного тока [40,45]. Сравнение структурных схем,
описывающих взаимосвязи переменных, влияющих на момент и скорость

28
электропривода постоянного тока (рисунок 1.7, а) и асинхронного электро-
привода (рисунок 1.7, б), выполненное в [40], показывает возможность при-
менения универсального подхода при построении систем управления
моментом и скоростью электроприводов.
а)
Lm
-
2dΨ (p)
)p(
1pT
1
2
1qI (p)
1dI (p)
pJ
1
2nkp2
3)p(M
)p(MC
б)
Рисунок 1.7 – Структурные схемы, описывающие связи между переменными
формирующими момент: а – двигателя постоянного тока при постоянстве
магнитного потока; б – асинхронного двигателя
Следует отметить, что в асинхронном электроприводе формирование
замкнутых контуров регулирования во многих случаях требует использова-
ния наблюдателей переменных, работа которых построена на математиче-
ских моделях двигателя, выполняющих вычисления в режиме реального
времени, это усложняет систему управления [40,43,44]. При условии стаби-
лизации магнитного потока асинхронного двигателя, обеспечиваемой при
построении векторных систем управления асинхронным двигателем, управ-
ление моментом и скоростью асинхронного двигателя осуществляется по тем
же принципам, что и в электроприводе постоянного тока.
-
Ф
)p()p(I
Вi
pJ
1
К
)p(M
)p(MC
ФкВU
BR
1

29
Метод прямого управления моментом (DTC) был предложен и реали-
зован в середине 90–х годов фирмой ABB, он достаточно подробно рассмот-
рен в [40]. Достоинством данного способа управление в сравнении с
классическим векторным управлением является достаточно простая структу-
ра управления с разделением каналов регулирования переменных, однако
при этом для реализации алгоритмов управления требуется повышенная
мощность вычислительного процессора.
Для мобильных роботов и промышленных транспортных механизмов
требуются достаточно простые и надежные системы асинхронного электро-
привода, вместе с тем обеспечивающие требуемые пусковые режимы, регу-
лирование скорости в заданном диапазоне и поддержание скорости на
заданном уровне при изменении нагрузки на валу двигателя. Системы асин-
хронного электропривода с векторным управлением в основном удовлетво-
ряют данным требованиям и могут применяться на механизмах
передвижения мобильных роботов. Однако они являются более сложными,
чем скалярные системы, поэтому необходимо исследовать возможность со-
здания более простых систем частотного асинхронного электропривода, что
требует детального изучения динамических свойств асинхронного двигателя.
Системы асинхронного электропривода со скалярным частотно–токовым
управлением при наличии датчика скорости обеспечивают требуемый для
мобильных роботов диапазон регулирования скорости до 10:1. Однако дина-
мические процессы при пуске и регулировании частоты вращения являются
колебательными.
При построении систем управления частотными асинхронными элек-
троприводами обычно стремятся применять унифицированные принципы по-
строения замкнутых контуров регулирования переменных двигателей с
линейными регуляторами и блоками ограничения переменных, обеспечива-
ющими приемлемое качество регулирования координат электропривода. Из-
вестные системы асинхронного электропривода со скалярным частотно–
токовым управлением не обеспечивают хорошей стабилизации пускового

30
момента, поэтому для их применения на промышленных транспортных ме-
ханизмах требуется их исследование и доработка.
При построении систем управления асинхронным электроприводом
наряду с классическими принципами подчиненного и модального управления
все более широко используют нечеткую логику и нейронные сети. Алгорит-
мы управления, использующие нейронные сети, обычно реализованы в про-
граммируемых логических контроллерах программным способом. В
настоящее время нейросетевые системы управления электроприводами по-
стоянного и особенно переменного тока изучены недостаточно подробно, ис-
следования в этом направлении являются актуальными. Целесообразно
рассмотреть возможность улучшения с помощью нейронных сетей показате-
лей быстродействия и точности управления асинхронного электропривода со
скалярным управлением, имеющих более простую схемную реализацию, что
важно для мобильных роботов. Преимущества нейронных сетей заключаются
в их способности к обучению, способности компенсации нелинейности объ-
екта управления и высокой степени параллельности передачи сигналов, что
важно при настройке и работе регуляторов.
Выполненный обзор литературных источников показывает, что асин-
хронный электропривод со скалярным управлением в настоящее время явля-
ется самым востребованным на механизмах с невысокими требованиями к
его динамическим свойствам, однако для применения на мобильных роботах
требуется улучшение его динамических свойств. Необходимо провести ис-
следования возможности реализации в системах скалярного управления ча-
стотным асинхронным электроприводом принципов коррекции, разработан-
ных для векторных систем, с целью улучшения энергетических и динамиче-
ских характеристик.
На рисунке 1.8 систематизированы системы электропривода, применя-
емые на механизмах передвижения мобильных роботов, и выделены системы
электропривода, применяемые и имеющие перспективы применения на мо-

31
бильных роботах, с системой питания от аккумуляторной батареи, исследуе-
мые в диссертационной работе в качестве объекта для нейроуправления.
Импульс-ный
электро-привод
постоян-ного тока
Тиристор-ный
электро-привод
постоян-ного тока
Асинхрон-ный
электро-привод с
векторным управле-
нием
На базе АИН и
АИТ без выпрямите
ля
На базе АИТ с регули-руемым
выпрями-телем
На базе АИН с
нерегули-руемым
выпрями-телем
Источник нерегулируемого
напряжения постоянного тока
Трехфазная сеть
Тип системы электро-привода
Тип источника
питания
Асинхронный электропривод
с частотно-токовым управлением
Рисунок 1.8 – Классификация систем электропривода, применяемых и
перспективных для применения на мобильных роботах
Таким образом, выполненный обзор существующих разработок систем
частотного асинхронного электропривода позволяет сделать вывод о необхо-
димости продолжения исследований скалярного частотно–токового управле-
ния асинхронным электроприводом, методов и систем коррекции
динамических свойств. Целесообразно унифицировать систему управления
частотно–токовым асинхронным электроприводом в соответствие со струк-
турами, характерными для асинхронных электроприводов с векторным
управлением и электроприводов постоянного тока, позволяющими использо-
вать нейросетевые регулирующие элементы, обеспечивающие требуемые ди-
намические механические характеристики.

32
1.3. Обзор основных типов нейронных сетей и возможности их применения
в системах автоматизированного электропривода
1.3.1. Общие сведения о нейронных сетях. Искусственные нейронные
сети изначально являлись упрощенными математическими моделями мозга,
работа которого основана на функционировании биологических нейронов.
Нейроны выполняют функции приема, преобразования и передачи сигналов
посредством синаптических связей. Нейронное сети – это суперпозиция эле-
ментарных функций, которые реализуются отдельными нейронами, с помо-
щью операций сложения и умножения на константу [56].
Теория искусственных нейронных сетей берет начало в 1943 году. В
работе [57] Мак Каллок и Питтс впервые предложили сеть, состоящую из ис-
кусственных нейронов, способных выполнять логические и арифметические
операции. На данный момент разработано большое количество архитектур
нейронных сетей и алгоритмов обучения. Можно выделить следующие типы
нейронных сетей [58,59]:
сети прямого распространения;
сети радиально–базисных функций;
самоорганизующиеся карты Кохонена;
сети векторного квантования;
рекуррентные: сети Хопфилда, сети Элмана/Джордана, сети с долгой
краткосрочной памятью (long short term memory, LSTM);
нейронные сети с глубоким обучением: глубокие нейронные сети,
сверточные нейронные сети, глубокие сети доверия.
Нейронные сети находят применение во многих областях науки и тех-
ники, таких как робототехника, автоматизация, статистика, экономика, меди-
цина, связь и интернет. Нейронные сети являются универсальным
инструментом, так как представляют собой «черный ящик», и могут быть
применены для задач моделирования, управления, классификации, распозна-
вания, анализа. Нейронные сети, нелинейные по своей природе, позволяют

33
создавать и исследовать сложные нелинейные математические модели, вос-
производящие сложные зависимости между переменными, что особенно
важно при большом числе переменных. На производстве и в различных про-
мышленных системах интеллектуальные нейросетевые контроллеры могут
применятся для управления производственными процессами, а также распо-
знавать потенциально опасные ситуации, уведомлять о них людей и прини-
мать своевременные меры.
На данный момент основные области применения нейронных сетей в
промышленности: управление технологическими процессами, идентификация
параметров, контроль качества, прогнозирование свойств, оптимальное пла-
нирование, обнаружение повреждений, прогнозирование потребления энер-
гии [60]. Нейросетевые технологии искусственного интеллекта находят
возрастающее применение при разработке интеллектуальных датчиков и раз-
витых промышленных систем обработки информации в стратегически важ-
ных отраслях производства.
Адаптивные нейросетевые регуляторы могут применяться в системах
управления сложными автоматизированными электроприводами, построен-
ными, например, на базе электродвигателей различного типа.
1.3.2. Модель нейрона. Модель нейрона состоит из следующих элемен-
тов: синапсы, сумматор и функция активации. Каждый синапс имеет вес, на
который умножается входной сигнал. Произведение входных сигналов на ве-
са складываются на сумматоре, к полученной сумме применяется функция
активации.
Рассмотрим математическую модель описанного процесса [53].
На рисунке 1.9 изображена модель нейрона. Введены следующие
обозначения: m0
x...x – входные сигналы; km0k
w...w – синаптические веса
(весовые коэффициенты); k
b – пороговый элемент; – сумматор; k
–
линейная комбинация входных сигналов; – функция активации; k
y –
выходной сигнал
Сигналы входа умножаются на соответствующие веса и суммируются:

34
1
0jjkjk
xw .
Полученный сигнал проходит через активационную функцию, и выход
нейрона равен:
kk
y .
Пороговый элемент k0k
bw предназначен для увеличения или умень-
шения входного сигнала.
Рисунок 1.9 – Модель нейрона
Таким образом, нейрон осуществляет отображение (обычно нелиней-
ное) из пространства Rn в пространство R. Нейрон полностью описывается
своими весами wkm и функцией активации .
В качестве функции активации обычно используется одна из следую-
щих [56,58]:
Хэвисайда (пороговая, функция единичного скачка) (рис.1.10 а)
0z,0
0z,1)z( ;

35
кусочно–линейная (рис. 1.10 б)
1z,
z
z
1z,z
)z( ;
сигмоидальная (рис. 1.10 в)
ze1
1)z(S
;
гиперболический тангенс (рис. 1.10 г)
z2
z2
e1
e11)z2(S2
;
логарифмическая (рис. 1.10 д)
1zzlog 2 .
а) б) в)
г) д)
Рисунок 1.10 – Функции активации: a – пороговая; б – кусочно–линейная;
в – сигмоидальная; г – гиперболический тангенс; д – логарифмическая
1
0
-1
-
1
2
0
-2
-
1
-2 0 2
-1
-2 0 2
-1
-2 0 2
-1
-2 0 2
-1
-2 0 2
-1
1
0
-1
-
1
1
0
-1
-
1
1
0
-1
-
1

36
1.3.3. Многослойные нейронные сети. Обычно нейронные сети состоят
из множества нейронов, которые образуют входной слой; одного или не-
скольких скрытых слоев нейронов и одного выходного слоя. На рисунке 1.11
представлена трехслойная нейронная сеть [61].
Рисунок 1.11 – Представление многослойной нейронной сети в Matlab
Определение числа слоев и числа нейронов в каждом слое является
важной задачей при построении многослойных нейронных сетей [53].
Многослойная нейронная сеть может моделировать функцию практи-
чески любой степени сложности. Нейронные сети прямого распространения с
одним скрытым слоем могут аппроксимировать любую непрерывную функ-
цию многих переменных с любой точностью [57]. Нейронные сети обладают
рядом достоинств и недостатков перед традиционными методами моделиро-
вания. Основные преимущества нейронных сетей [58, 60]:
нелинейность нейронных сетей позволяют реализовывать задачи с
существенными нелинейностями;
нейронные сети могут обучаться любым функциям;
адаптивность за счет подстройки весовых коэффициентов позволяет
адаптироваться к изменяющимся внешним условиям;

37
параллельность нейронных сетей обеспечивает высокую производи-
тельность.
Недостатки нейронных сетей:
переобучение нейронной сети может привести к тому, что при по-
ступлении новых данных, не входящих в обучающую выборку нейронная
сеть будет выдавать неадекватные результаты;
на данный момент не разработан универсальный способ выбора ар-
хитектуры и проектирования нейронных сетей, поэтому используется эври-
стический подход;
для корректной работы нейронной сети требуется качественная обу-
чающая выборка, часто сбор данных является трудозатратным.
обучение нейронных сетей может занимать продолжительное время,
хотя использование графический процессоров GPU может сократить время
обучения в десятки раз [59].
1.3.4. Обучение нейронных сетей. Главное свойство нейронных сетей
заключается в способности к обучению. Обучение представляется собой ите-
ративный процесс, на каждом шаге которого происходит подстройка весовых
коэффициентов согласно заданному правилу. Существует множество алго-
ритмов обучения нейронных сетей, при этом невозможно однозначно выде-
лить наилучший. Алгоритмы отличаются способом настройки весовых
коэффициентов. Основные модели обучения: на основе коррекции ошибок, с
использованием памяти, конкурентное обучение, Хеббовское обучение, ме-
тод Больцмана [58]. Основные парадигмы обучения: обучение с учителем и
обучение без учителя. Одним из наиболее эффективных алгоритмов обратно-
го распространения ошибки является алгоритм Левенберга–Марквардта. Ал-
горитм является сочетанием метода наискорейшего спуска (минимизация
вдоль градиента) и метод Ньютона (использование квадратичной модели для
ускорения поиска минимума функции) [63].

38
Задача обучения нейронной сети рассматривается как требование ми-
нимизировать целевую функцию wE . Целевая функция представлена в ви-
де:
2M
1ii
we2
1wE
, (1.4)
где iii
d)w(ye ; y – вектор фактических выходных сигналов; w –
весовые коэффициенты; d – вектор ожидаемых выходных сигналов.
Используем следующие обозначения вектора we и Якобиана wJ :
)w(e
...
)w(e
)w(e
we
M
2
1
,
n
m
2
m
1
m
n
2
2
2
1
2
n
1
2
1
1
1
w
e...
w
e
w
e............
w
e...
w
e
w
e
w
e...
w
e
w
e
wJ ,
тогда вектор градиента и аппроксимированная матрица Гессиана, соот-
ветствующие целевой функции, определяются следующим образом:
wewJwg
;
wRwewJwG
,
где R(w) – компоненты Гессиана, содержащие высшие производные относи-
тельно w.
Подход Левенберга–Марквардта заключается в аппроксимации R(w) с
помощью регуляризационного фактора 1, в котором переменная (пара-
метр Левенберга–Марквардта) скалярная величина, изменяющаяся в процес-
се оптимизации. Исходя из этого, аппроксимированная матрица Гессиана на
шаге k имеет вид:
1vwewJwGk
. (1.5)

39
Алгоритм Левенберга–Марквардта можно представить в следующем
виде:
вычислить Якобиан;
вычислить градиент ошибки wewJwg
;
аппроксимировать Гессиан JJH ;
решить g)IH( , найти ;
обновить веса w, используя , kk
1
kk1keJ)IJJ(ww
;
пересчитать среднеквадратичную ошибку, используя обновленные
веса;
если среднеквадратичная ошибка не уменьшилась, отменить новые
веса, увеличить , используя , перейти к нахождению ;
иначе уменьшить , используя , остановиться.
Универсальный алгоритм обучения нейронной сети [64] представлен на
рисунке 1.12.
Недостаточный объем обучающего множества, слишком долгое обуче-
ние, или излишне сложная структура нейронной могут привести к переобу-
чению. Особенность обучения заключается в том, что параметры нейронной
сети подстраиваются под обучающее множество. При этом если на вход бу-
дут поданы новые данные, отличающиеся от обучающего множества, ошибка
нейронной сети будет значительна. Для борьбы с переобучением обучающее
множество разделяют на выборки, которые не должны пересекаться: обуча-
ющая и тестовая. Обучающая выборка предназначена для обучения нейрон-
ной сети – настройки весовых коэффициентов, тестовая выборка
предназначена для проверки модели. Для того чтобы не допустить переобу-
чение модели, необходимо проверять изменение ошибки на обоих множе-
ствах. На первых шагах обучения ошибка на обучающей и на тестовой
выборке будет уменьшаться, но на определенном шаге ошибка на тестовом
множестве начнет возрастать, в то время как на обучающем множестве будет
уменьшаться. Это может служить критерием остановки процесса обучения.

40
Подготовить обучающую выборку
Выбрать архитектуру НС, количество слоев, нейронов и
функции активации
Инициализировать весовые коэффициенты
случайными числами
Подать на вход НС набор входных данных
Вычислить выход НС
Ошибка допустима?
Подать на вход НС новый набор входных данных
Ошибка допустима?
Проверить работу сети на тестовой выборке
Нейронная сеть готова к использованию
Изменить веса согласно алгоритма обучения
Изменить количество нейронов в скрытом слое
или количество слоев
НЕТ
ДА
НЕТ
ДА
Рисунок 1.12 – Алгоритм обучения нейронной сети

41
Основные шаги при проектировании нейронной сети [19]:
Проанализировать задачу и установить, требуется ли применение
нейронных сетей для ее решения. Рассмотреть альтернативные подходы.
Если требуется представить статическую функцию, трехслойной
нейронной сети будет достаточно. Для представления динамической функ-
ции следует выбрать или рекуррентную нейронную сеть RNN (recurrent
neural network), или нейронную сеть с временными задержками TDNN (Time
Delay Neural Network). Необходимо иметь информацию о структуре и поряд-
ке динамической системы.
Выбрать количество входных и выходных сигналов, для нейронной
сети прямого распространения выбрать начальное значение скрытых нейро-
нов (обычно среднее значение от количества входов и выходов).
Создать набор входов/выходов с экспериментальной установки или
ее модели.
Нормализовать сигналы.
Для системы с однополярным выходом выбрать сигмоидальную
функцию активации, для системы с двуполярным выходом – гиперболиче-
ский тангенс.
Выбрать среду разработки, к примеру, Neural Network Toolbox в
Matlab.
Выбрать соответствующие коэффициент обучения и моментум.
Выбрать критерии остановки обучения: приемлемую ошибку обу-
чения и количество эпох.
После завершения обучения проверить работу нейронной сети на
тестовом множестве.
Сохранить веса и применить нейронную сеть.
1.3.5. Применение нейронных сетей для задач управления. Традицион-
ные методы управления, как правило, основаны на теории линейных систем.
Нейронные сети являются нелинейными структурами, что позволяет успеш-
42
но их применять для задач управления сложными нелинейными
объектами [60].
Наиболее распространёнными на производстве являются PID–
контроллеры. Они отличаются простотой и надежностью, но в тоже время
имеют ряд недостатков. При изменении характеристик процесса требуется
перенастройка регулятора.
Системы управления, выполненные на основе нейронных сетей, c экс-
пертными адаптивными регуляторами и системами с ассоциативной памя-
тью, относятся к интеллектуальным технологиям управления и обработки
информации. Благодаря этим технологиям становится возможным решение
плохо формализованных задач управления сложными динамическими объ-
ектами с внутренними перекрестными связями, к которым можно отне-
сти асинхронные электроприводы мобильных роботов, в тех случаях, когда
традиционные методы не справляются с задачей управления.
Применение многослойных сетей для задач управления электроприво-
дами обусловлено их основными свойствами:
– универсальные аппроксимационные свойства нейронных сетей поз-
воляют реализовывать нелинейные системы управления;
– адаптивные свойства нейронных сетей, являющиеся следствием спо-
собности нейронных сетей к обучению, позволяют создавать адаптивные си-
стемы управления;
– способность нейронных сетей к параллельной обработке сигналов
важна и благоприятна для реализации управления многомерными объектами.
Многослойные нейронные сети могут применяться для идентификации
и управления систем электропривода. Нейронная сеть может выполнять вы-
ступать в качестве адаптивного регулятора в системе управления электро-
приводом. В процессе обучения формируется оптимальное управляющее
воздействие, которое поступает на вход системы. Оптимальное это воздей-
ствие будет в смысле минимизации требуемой целевой функции.

43
Тип и структура нейронной сети определяются в зависимости от зада-
чи. Существуют оптимальные конфигурации для некоторых задач, а также
рекомендации для выбора типа нейронной сети. В случае, если задачу не
удается привести к известной, требуется синтез новой конфигурации.
Несмотря на разнообразие разработанных и применяемых нейронных
сетей, наиболее приемлемыми для построения адаптивной системы управле-
ния электроприводом являются динамические нейронных сети (рекуррент-
ные и с задержкой времени) [64].
Разработано множество схем нейросетевого управления. Существуют
прямые методы, в которых нейронные сети применяются непосредственно
для управления процессом, непрямые, в которых нейронные сети служат для
коррекции, идентификации или фильтрации. В [60,65] приведены обзоры ме-
тодов управления с помощью нейронных сетей.
Схема обобщенного инверсного нейроуправления приведена на рисун-
ке 1.13.
Объект
управления
Инверсный
нейроэмулятор
Случайный
процесс
TDL
u y
Обучение
Инверсный
нейроэмулятор
Объект
управления
u yr
Управление
TDL
а) б)
Рисунок 1.13 – Схема обобщенного инверсного нейроуправления:
а – обучение инверсного нейроэмулятора; б – режим управления объектом
В качестве контроллера выступает инверсный нейроэмулятор [60].
Процесс обучения (рисунок 1.13 а) строится следующим образом: для созда-
ния обучающего множества на вход объекта управления подается случайный
процесс. Обучающее множество формируется из входных управляющих воз-

44
действий u и выходных реакций y , поданных с задержкой TDL (tapped delay
line). Нейронная сеть обучается на этих данных, и в результате обучается ин-
версной модели объекта. В процессе управления (рисунок 1.13 б) на вход
обученной нейронной сети подается опорный сигнал r и задержанные сигна-
лы с выхода объекта, на выходе нейронная сеть выдает сигнал управления.
Другой подход к управлению – подражающее нейроуправление [65,66]
приведен на рисунке 1.14. В процессе обучения (рисунок 1.14 а) нейронная
сеть обучается на входных и выходных данных с обычного контроллера
(например, ПИД). После обучения нейронная сеть ставится на место кон-
троллера и выдает управляющие сигналы (рисунок 1.14 б). Таким образом,
нейронная сеть «подражает» работе обычного контроллера.
Объект
управления
Нейронная
сеть
Обычный
контроллер
TDL
u y
Обучение
Нейронная
сеть
Объект
управления
u yr
Управление
TDL
Обычный
контроллер
r
а) б)
Рисунок 1.14 – Схема подражающего нейроуправления:
а – режим обучения нейронной сети; б – режим управления
Системы управления с нейронными сетями относят к адаптивным си-
стемам управления, среди них различают замкнутые и разомкнутые адаптив-
ные системы. Наиболее распространенной схемой замкнутой системы
управления является схема с эталонной моделью, показанная на
рисунке 1.13. Данная нейросетевая система управления может быть приме-
нена для управления системами электропривода постоянного и переменного
тока.

45
1.3.6. Нейросетевой регулятор NARMA–L2 (нелинейная авторегрессия
со скользящим средним). Первым шагом является идентификация объекта.
Нейронная сеть обучается прямой динамике системы. Модель нелинейной
авторегрессионной скользящей средней (NARMA) используется для пред-
ставления общих нелинейных систем с дискретным временем:
)]1nk(u),...,1k(u),k(u),1nk(y),...,1k(y),k(y[N)dk(y ,
где )k(u – вход, )k(y – выход.
Если стоит задача проектирования следящей систему, обеспечивающей
движение по заданной траектории
)dk(y)dk(y r ,
следующим шагом будет разработка нелинейного контроллера вида:
)]1nk(u),....1k(u,0dk(y),1nk(y),...1k(y),k(y[G)k(u r .
Для обучения нейронной сети функции G и минимизации среднеквад-
ратичной ошибки необходимо использовать динамический метод обратного
распространения ошибки. Это может потребовать много вычислений. В [63]
предложено использование приближенных моделей для представления си-
стемы. Контроллер основан на приближенной модели NARMA–L2:
)k(u)]1nk(u),...,1k(u),1nk(y),...,1k(y),k(y[g
)]1nk(u),...,1k(u),1nk(y),...,1k(y),k(y[f)dk(y
.
В этой модели следующий вход контроллера u (k) не содержится внут-
ри нелинейности. Текущее управление можно непосредственно вычислить,
если известна желаемая траектория ry , предшествующие значения управле-
ния, и предшествующие и текущее значения выхода:
)]1nk(u),....1k(u),1nk(y),...1k(y),k(y[g
)]1nk(u),....1k(u),1nk(y),...1k(y),k(y[f)dk(y)k(u r

46
В данном случае сигнал управления u(k) зависит от текущего значения
выхода y(k), что затрудняет использование регулятора. Поэтому будет ис-
пользоваться следующая модель
1)+1)]u(k+n-u(k,…1),-u(ku(k), 1),+n-y(k,…1),-y(kg[y(k),
+1)]+n-u(k,…1),-u(ku(k),1),+n-y(k,…1),-y(kf[y(k),=d)+y(k
,
где d ≥ 2.
На рисунке 1.15 показана структура представления нейронной сети.
Используя модель NARMA–L2 можно получить следующий контроллер:
))1nk(u),....1k(u),1nk(y),...k(y(g
))1nk(u),....1k(u),1nk(y),...1k(y),k(y(f)dk(y)1k(u r
,
где d ≥ 2.
Рисунок 1.15 – Модель NARMA–L2
Нейросетевая аппроксимация g( )
Нейросетевая аппроксимация f( )

47
На рисунке 1.16 показана блок–схема контроллера NARMA–L2. Этот
контроллер может быть реализован с ранее идентифицированной моделью
NARMA–L2, как показано на рисунке 1.15.
f g
+ /
TDLTDL
Объект
+
Эталонная модель
u y
r
e+
-
Рисунок 1.16 – Блок–схема контроллера NARMA–L2
Рисунок 1.17 – Контроллер NARMA–L2
Нейросетевая аппроксимация g( )
Нейросетевая аппроксимация f( )

48
Обучение контроллера NARMA–L2 в Matlab может осуществляться в
соответствие с рассмотренным ранее алгоритмом Левенберга– Марквардта и
на основе других типовых алгоритмов. Процесс обучения нейронной сети в
Matlab Simulink останавливается при выполнении одного из следующих
условий:
достигнуто максимальное количество эпох;
достигнуто максимальное количество времени;
функция качества минимизирована до значения GOAL.
градиент функции качества ниже значения MINGRAD;
MU достигает значения MU_MAX.
Выполненный анализ разработок в области нейронных сетей позволяет
рекомендовать при синтезе систем управления электроприводов мобильных
роботов использование нейрорегуляторов, выполненных на базе многослой-
ных нейронных сетей.

49
Выводы
1. Для обеспечения различных скоростных режимов движения мобиль-
ных роботов при использовании системы питания от аккумуляторной бата-
реи могут применяться системы электропривода постоянного тока и
асинхронного электропривода с импульсным управлением токами в обмот-
ках двигателей и внешним замкнутым контуром регулирования скорости.
2. Система асинхронного электропривода с векторным управлением
имеет типовую структуру, близкую к системе управления электроприводом
постоянного тока, в этих системах можно применять нейрорегулятор скоро-
сти для обеспечения точности поддержания скорости при изменении пара-
метров электропривода.
3. Для использования систем асинхронного электропривода со скаляр-
ным частотно–токовым управлением необходимо выполнить коррекцию ди-
намических характеристик, что может быть выполнено с использованием
нейросетевых элементов
4. Благодаря возможности обучения, параллельности и адаптации
нейронные сети, отличающиеся простым и быстрым алгоритмом обучения,
могут успешно применяться в задачах моделирования и управления система-
ми электропривода.

50
2. ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ
АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ПОМОЩЬЮ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
2.1. Математические модели асинхронного двигателя для анализа
динамических и установившихся режимов
Асинхронный короткозамкнутый двигатель, несмотря на простую кон-
струкцию, характеризуется сложным процессом формирования результиру-
ющего магнитного потока и имеет достаточно сложное математическое
описание [11,43,44]. Уравнения баланса напряжений в цепях статора и ротора
трехфазного АД, записанные для обобщенных пространственных векторов в
естественной трехфазной системе координат АВС, имеют вид:
,dt
dRI0
;dt
dIRU
222
1111
(2.1)
c2
b2
a2
2
c2
b2
a2
2
c1
b1
a1
1
c1
b1
a1
1
c1
b1
a1
1 ;
i
i
i
I;;
I
I
I
I;
U
U
U
U ;
где 21 R;R - активное сопротивление статора и приведенное к статору актив-
ное сопротивление ротора; c2b2a2c1b1a1c2b2a2c1b1a1 ,,,,;,I,I,I,I,I,I - фазные
токи и потокосцепления статора и ротора.
Фазные напряжения питания и другие гармонические переменные, от-
носящиеся к цепи статора, имеют круговую частоту ЭЛ1 ,
),3/2tsin(UU
;)3/2tsin(UU
;)tsin(UU
ЭЛ1m1c1
ЭЛ1m1b1
ЭЛ1m1a1
(2.2)

51
а в цепи ротора частоту sЭЛ1ЭЛ2 , прямо пропорциональную скольжению s.
Потокосцепления определяются
,ILIL
;ILIL
221m2
2m111
(2.3)
где ;LLL ;LLL m22m11 m1 L,L - индуктивность рассеивания статора и
взаимная индуктивности фаз статора и ротора; 2L - приведенная к статору
индуктивность рассеивания ротора.
Уравнение электромагнитного момента при его определении через
произведение обобщенных пространственных векторов тока статора и пото-
косцепления ротора имеет вид [11,43]:
*
21
2
mn IIm
'L
Lp
2
3M . (2.4)
Основное потокосцепление и потокосцепление ротора определяются по
формулам
mmm21m LILII ; (2.5)
m122m12m22 LILILI)LL(I . (2.6)
При анализе систем частотного асинхронного электропривода удобно
использовать относительные величины:
ЭЛ0ЭЛ1H11 /f/f ; (2.7)
2 1нβ= f f ; (2.8)
н11 UU , (2.9)
где - относительная частота; - абсолютное скольжение; - относительное
напряжение; f1- частота питающего статор напряжения; f1H – номинальная
частота питающего статор напряжения; f2 – частота тока ротора; ЭЛ1 - круго-

52
вая частота питающего статор напряжения; ÝË0 - круговая частота номи-
нального напряжения.
Переменные двигателя, характеризующие вращающийся ротор, связа-
ны соотношениями [12]
111 //)(S ; (2.10)
S0 ; (2.11)
11 /S ; (2.12)
n1nэл11 p/f2p/ ; (2.13)
nэл122эл psf2 , (2.14)
где 0 частота вращения поля статора при номинальной частоте н1f ; 1 - ча-
стота вращения поля статора при частоте 1f ; ЭЛ1 - круговая частота напряже-
ния статора; - абсолютное отклонение угловой скорости ротора;
2nЭЛ p - круговое электрическое абсолютное отклонение угловой
скорости ротора, равное круговой частоте эдс и тока ротора.
Угол между векторами тока статора и главного потокосцепления (см.
рисунок 2.1), равный углу между векторами тока и эдс ротора определяется
2
эл2
2
2
2
2
R
Larctg
R
xarctgs
R
xarctg
. (2.15)
Анализ установившегося режима работы асинхронного двигателя про-
водят с использованием схемы замещения (рисунок 2.1), которая использует-
ся для анализа работы асинхронного двигателя только в установившемся
режиме.
В соответствии со схемой замещения справедливо выражение
/
2m
m1
/
2ZZ
ZII
, (2.16)

53
Рисунок 2.1 – Схема замещения асинхронного двигателя
при частотном управлении
где mZ = jxm - комплексное сопротивление контура намагничивания (потерями
в стали пренебрегаем и считаем mP = 0); 2Z = s/Rxj 22 - приведенное ком-
плексное сопротивление обмотки ротора.
В результате совместного решения уравнений (2.6), (2.16) можно полу-
чить выражение, связывающее ток статора и потокосцепление ротора в уста-
новившемся режиме
1
s/R
Lj
1LI
1s/R
xjjx
1LILIL
s/Rxjjx
jxI
2
20m1
2
2mm1m12
22m
m12
. (2.17)
Постоянной времени ротора при питании от источника называют от-
ношение параметров двигателя
2σ m 2σЭT
2 2
L +L LT = =
R R
. (2.18)
Рассматривая соотношение между переменными в частотной области, и
учитывая, что в соответствии с (2.7) эл10 , получим выражение спра-
ведливое для установившегося режима
)T(arctg
ЭЛЭТ
m12ЭЛЭТe
1T
1L)(I)(
. (2.19)
Уравнение фазовой характеристики, записанное для установившегося
режима, имеет вид
54
2
ЭЛm2
ЭЛЭТ0R
)LL(arctg)T(arctg)(
. (2.20)
Системы частотно-токового управления асинхронным двигателем, в
которых осуществляется непосредственное управление током статора с ис-
пользованием замкнутого контура регулирования, можно считать, в первом
приближении, близкими к системам питания асинхронного двигателя от иде-
ального источника тока [11,40].
2.2. Структурная модель асинхронного двигателя при питании
от источника тока
Для аналитических исследований динамики систем частотно-токового
управления удобна векторная модель асинхронного двигателя, построенная в
системе координат Х, У [11], вращающейся со скоростью электромагнитного
поля статора К 1ω =ω , т.к. в этой модели входной сигнал - ток статора, пред-
ставляется скачкообразной функцией. Асинхронный двигатель, питающийся
от источника тока при допущении о постоянстве потокосцепления статора
[11], рассматриваемый в системе координат x , y , вращающейся со скоро-
стью электромагнитного поля статора )p(1 , при расположении прямоуголь-
ной системы координат таким образом, чтобы вектор тока pI1 находился на
оси Х, описывается следующими основными уравнениями, в которых все пе-
ременные представляют в операторной форме:
,0pI
;const)]p(dt
)p(d)p(U[
R
1pI
y1
y1ЭЛ1x1
x1
1
x1 (2.21)
где )p(I x1 , )p(I y1 − проекции вектора тока статора на оси Х,У.

55
Уравнения (2.16) показывает, что напряжение на выходе преобразова-
теля частоты изменяется таким образом, что в любой момент времени ток
статора асинхронного двигателя является постоянным. Во вращающейся си-
стеме координат Х,У все переменные двигателя становятся негармонически-
ми величинами [70]. Баланс напряжений в цепи ротора выражается
уравнениями:
,)p(dt
)p(dR)p(I0
;)p(dt
)p(dR)p(I0
x2ЭЛ2
y2
2y2
y2ЭЛ2x2
2x2
(2.22)
где )p(I x2 , )p(I y2 − проекции вектора тока ротора на оси Х,У; 2R − приведен-
ное активное сопротивление ротора, px2 , py2 − проекции вектора по-
токосцепления ротора на оси Х,У; ЭЛ2 - скорость вращения системы
координат Х,У относительно вектора тока ротора.
Скорость вращения системы координат Х,У относительно вектора тока
ротора равна круговой частоте тока ротора
ЭЛnЭЛ1ЭЛ2 p . (2.23)
В системе частотного асинхронного электропривода с принудительным
формированием скольжения [73] частота напряжения статора формируется
системой управления как сумма частоты вращения ротора, приведенной к
круговой электрической частоте напряжения статора, и задаваемой разности
частот вращения поля статора и ротора
.pnЭЛЭЛ1 (2.24)
Взаимное положение векторов тока статора и потокосцепления ротора
показано на рисунке 2.2. Здесь приведены две системы вращающихся коор-
динат: система координат Х,У связана с вектором тока статора, который

56
Рисунок 2.2 – Взаимное положение векторов тока статора и потокосцепления
ротора и их проекции на оси координат
расположен на оси Х, а система координат d,q связана с вектором потокос-
цепления ротора, который расположен на оси d ( 0, q2d22 ).
Уравнения для проекций потокосцепления ротора запишутся:
.IL
;ILIL
y22y2
x1mx22x2 (2.25)
Из рисунка 2.2 видно, что проекция x2I имеет отрицательное значение.
Выполним преобразование уравнений (2.17), (2.18) и представим их в
операторной форме:
;pRpIp
1p y2ЭЛ2x2x2 (2.26)
;pRpIp
1p x2ЭЛ2y2y2 (2.27)
;L
ILppI
2
x1mx2x2
(2.28)
.L
ppI
2
y2
y2
(2.29)
1I
2
0
XY
d
q
0d1I
q1I
X2
Y2
m2I
22 LI mI
m1E

57
Уравнение (2.4) для момента двигателя можно представить в виде
)p()p(IL
Lp
2
3)p(M Y2X1/
2
mп . (2.30)
Уравнение движения электропривода имеет вид:
)p(Jp)p(M)p(M c , (2.31)
где )p(Mc - операторное изображение статического момента нагрузки на валу
двигателя; J – приведенный момент инерции электропривода.
Уравнения (2.24)-(2.31) являются исходными при построении структур-
ной схемы асинхронного электропривода, питающегося от источника тока.
2.3. Анализ динамики асинхронного двигателя при питании
от источника тока
Решение задач синтеза и коррекции систем управления, требует анали-
за динамических свойств асинхронного двигателя. Наглядной математиче-
ской моделью асинхронного двигателя является структурная схема, в
которой в качестве переменных, формирующих момент двигателя, рассмат-
риваются проекции: тока статора на координатную ось Х и потокосцепления
ротора на координатную ось У. В качестве входного воздействия, подаваемо-
го по первому каналу, рассматривается сигнал pI1X - проекция вектора тока
статора на ось Х. В качестве входного сигнала, подаваемого по второму ка-
налу, принят сигнал )p(ЭЛ , который может задаваться системой управления
электроприводом. Частота напряжения статора )p(ЭЛ1 формируется в соот-
ветствие с выражением (2.24). Структурная схема асинхронного двигателя
при его питании от источника тока, построенная на основании уравнений
(2.23)-(2.30), приведена на рисунке 2.3.

58
Lm
-1/p
1/p
)p(x2-
-
)p(Y2
)p()p( ЭЛy2
)p(ЭЛ
)p(I x2
)p(I x1
-
)p(I Y2
)p(M
2
mn
L2
Lp3
-2L/1 2L/1
2R
2R
Рисунок 2.3 – Структурная схема асинхронного двигателя при питании
от идеального источника тока
Структурная схема содержит блоки перемножения переменных
2X ЭЛΨ (р) ω (p) и 2Y ЭЛΨ (р) ω (p) . Асимптотическая линеаризация систем
возможна в случае рассмотрения электромагнитных переходных процессов,
возникающих при изменении амплитуды тока pI1X при постоянстве частот
вращения поля статора и ротора ( 1элω const ; constω ; элω const ). Такое
допущение справедливо, если электромеханическая постоянная времени дви-
гателя мT намного больше электромагнитной постоянной времени двигателя
ЭTT , то есть электромагнитный момент двигателя изменяется намного быст-
рее, чем скорость ротора.
Структурная схема АД при сделанных допущениях принимает вид, по-
казанный на рисунке 2.4.
В литературе [11] введено понятие критического скольжения при пита-
нии асинхронного двигателя от источника тока
элэтэл1эт
ктT
s
T
1s
. (2.32)

59
Lm
- -
1/p1/p
)p(y2)p(x2-
-ЭЛy2 )p(
const
)p(ЭЛ
const
)p(ЭЛ
)p(I x2
)p(I Y2
)p(I x1
2
mn
L2
Lp3
)p(M
2L/1 2L/1 2R
2R
Рисунок 2.4 – Линеаризованная структурная схема электромагнитной части
асинхронного двигателя при питании от источника тока
Можно преобразовать данное выражение к виду
кт
эл1этs
sT . (2.33)
Линеаризованная структурная схема асинхронного двигателя может
быть исследована аналитическими методами.
Применив правила преобразования структурных схем, например, фор-
мулу Мейсона для некасающихся контуров [69], приведенную в
Приложении 2, можно для схемы (рисунок 2.5) определить реакцию основ-
ных переменных двигателя на изменение модуля тока статора pI x1 .
)p(I)T(1pT2pT
)1pT(L)p( X12
ЭТЭТ
22
ЭT
ЭТmX2
; (2.34)
)p(I)S/S(1pT2pT
TL)p(I
)T(1pT2pT
TL)p( X12
KTЭТ
22
ЭT
ЭТmX12
ЭТЭТ
22
ЭT
ЭТmY2
; (2.35)
)p(I)T(1pT2pT
L)p( X1
2
ЭТЭТ
22
ЭT
m2
Y2
2
X22
. (2.36)

60
Выражения (2.34)-(2.36) характеризуют колебательный характер изме-
нения модуля и проекций на оси Х,У вектора потокосцепления ротора при
скачкообразном изменении тока статора. При условии постоянства круговой
частоты тока ротора constf2)p( 2ЭЛЭЛ получено выражение для
приращения )p(tg 0
.1pT
T
)T(1pT2pT
)1pT(L/
)T(1pT2pT
TL
)p(
)p()p(tg
ЭТ
ЭЛЭT
2
ЭТЭТ
22
ЭT
ЭТm
2
ЭТЭТ
22
ЭT
ЭТm
X2
Y20
(2.37)
Данное выражение показывает, что при ступенчатом приращении
входного сигнала )p(I приращение )p(tg 0 изменяется по апериодическому
закону. В установившемся режиме
ЭЛЭТ0 Ttg . (2. 38)
Характеристический многочлен, с учетом (2.33) имеет вид
2
кт
эт
2
эт
2
элэтэт
2
этs
s1pT2pT)T(1pT2pT)p(
. (2.39)
В таблице 2.1 приведены характеристическое уравнение, его корни и
обобщенные параметры системы ИТ-АД и дано сравнение данной системы с
типовым колебательным звеном [75].
Корни характеристических уравнений являются комплексными с отри-
цательной действительной частью, поэтому динамические режимы работы
асинхронного двигателя при частотном управлении сопровождаются затуха-
ющими колебательными переходными процессами.

61
Таблица 2.1
Обобщенные параметры систем
Тип системы Типовое колеба-
тельное звено
Система ИТ - АД
Характери-
стическое
уравнение
01Тр2рТ 22 0T)1pT(2
этЭЛ
2
эт ;
2
ЭЛэтэт
22
эт )T(1pT2pT =0;
01p)T(1
T2p
)T(1
T2
ЭЛэт
эт2
2
ЭЛэт
2
эт
Корни харак-
теристиче-
ского
уравнения T
-1j
T
jΩαр
2
1,2
ЭЛ
эт
2,1 jT
1jp
Постоянная
времени T
2
2эт
R
LT
.
Коэффициент
затухания ко-
лебаний
2
ЭТЭЛ )T(1
1
Резонансная
частота T
-1Ω
2
ЭЛΩ
Анализ характеристического уравнения системы ИТ - АД позволяет
сделать следующие выводы:
- в системах асинхронного электропривода характер переходных про-
цессов при управляющих и возмущающих воздействиях колебательный;
- частота колебаний возрастает, а коэффициент затухания колебаний
снижается при увеличении разности электрических частот вращения поля
статора и ротора равной круговой частоте тока ротора ЭЛ .
Для анализа особенностей динамических свойств системы ИТ-АД рас-
смотрим структурную схему, приведенную на рисунке 2.5. Структурная схе-
ма имеет три замкнутых контура и содержит перекрестные обратные связи.
Такая структура характерна для колебательной системы 2-го порядка [75].

62
Lm
-1/p
1/p
)p(x2-
-
)p(Y2
)p()p( *
ЭЛy2
)p(ЭЛ
)p()p(f ЭЛКУ
)p(I x2
)p(I x1
)p(ICK
x1-
)p(I Y2
)p(M
2
mn
L2
Lp3
-2L/1 2L/1
2R
2R
1КУ2КУ
)p(I)p(f 2КУ
Рисунок 2.5 – Структурная схема системы «источник тока – асинхронный
двигатель» с корректирующим устройством
Для подавления колебаний система автоматического управления элек-
троприводом должна поддерживать постоянство сигнала должен изменяться
с помощью корректирующих средств )p()p(f ЭЛКУ (рисунок 2.5), в случае
изменения )p(Y2 - проекции вектора потокосцепления ротора на ортого-
нальную вектору тока статора ось У. Такие системы управления требуют
разработки специальных корректирующих устройств. Колебания в системе
будут подавлены при выполнении условия
const)p()p( элY2 . (2.40)
В системах векторного управления [76-80] осуществляется взаимосвя-
занное управление потокосцеплением ротора 2 и круговой частотой враще-
ния ЭЛ1 , а также ЭЛ , что обеспечивает стабилизацию и подавление
колебаний пускового момента электропривода.
Из уравнения (2.38) следует, что в установившемся режиме /
0tg связан
прямой зависимостью с ЭЛ , поэтому, регулируя величину ЭЛ , можно

63
влиять на /
0tg . В свою очередь, контролируя отклонение /
0tg от заданного
значения, можно определить требуемый сигнал коррекции. Сигнал задания
может быть сформирован в соответствии с выражением
*
ЭЛ ЭЛ ЭЛΔω (p)=Δω (p)+δΔω (p) . (2.41)
Анализируя структурную схему асинхронного двигателя (рисунок 2.5)
можно отметить, что на момент двигателя можно влиять путем регулирова-
ния амплитуды тока статора, вводя «амплитудную коррекцию» или регули-
рования , и, следовательно, скольжение двигателя, вводя «частотную
коррекцию». Выполненные исследования показывают, что при построении
системы автоматического управления асинхронным двигателем, с целью по-
вышения устойчивости системы, необходимо компенсировать действие
внутренних перекрестных связей, приводящих к колебательным процессам.
2.4. Формирование момента асинхронного электропривода в
установившемся режиме
Полученные при анализе векторной модели асинхронного двигателя
обобщенные выражения характеризуют не только динамические режимы, но
и частный случай – статический режим, для этого в операторных выражениях
принимают условие р = 0. Уравнение (2.3) для момента двигателя можно
представить в виде (2.30). Подстановка выражений (2.32) – (2.37) в (2.30)
позволяет получить известное выражение для момента [11]
2
2n m1x
22 αктэт
α кт
3p L 1M p = I (p)
2 L SS(T p+1) +
S S
. (2.42)
Для установившегося режима уравнение (2.42) принимает вид [11]

64
22'
2
2'
2m
2
m
эл0
'
2n
2
1
кт
кт
2
x1'
2
2
mn
/Rxx
xR3pI
s
s
s
s
1I
L
L
2
p3M
, (2.43)
где 2/I2/II 1X11 .
Преобразуем известные выражения для момента двигателя к более
удобному для анализа виду
элэт
2
эт
элэт
2
x1'
2
2
mn
T1pTT
1
1I
L
L
2
p3)p(M
; (2.44)
1pT)p(tg1
1)p(I
L
L
2
p3)p(M
эт
'
0
2
1'
2
2
mn
. (2.45)
В статическом режиме работы (р = 0) из формул (2.44)-(2.45) получим
1
2
1
2
2
mn
2'
0
'
02
1
2
2
mn
элэт
элэт
2
1
2
2
mn F)p(IL
L
2
p3
)tg1(
tg)p(I
L
L
2
p3
TT
1
1)p(I
L
L
2
p3)p(M
, (2.46)
где
2
элэт
элэт
2'
0
01
)T(1
T
tg1
tgF
, (2.47)
Выражение (2.45) имеет максимум при оптимальном значении
00 ОПТtgφ = 1, (2.48)
при этом

65
0 ОПТtgφ = 450; (2.49)
20 ОПТ 0 ОПТЭЛ ОПТ I
ЭT 2
R1Δω tgφ tgφ
T L
. (2.50)
Из выражения (2.51) видно, что при выполнении соотношений (2.48)-
(2.50) в статическом режиме обеспечивается минимум отношения «ток ста-
тора / момент двигателя». Такой оптимальный режим работы асинхронного
двигателя в системе частотного электропривода может быть реализован при
ненасыщенной магнитной цепи двигателя, например, при неполной статиче-
ской нагрузке двигателя, когда МСМН.
Настройка системы управления для работы электропривода в опти-
мальном режиме может проводиться по одному из выбранных критериев:
минимума отношения «ток статора / момент двигателя» или «минимум по-
терь энергии в меди двигателя», рассмотренных в [76]. Сравнение основных
энергетических показателей при настройке систем асинхронного электропри-
вода на работу в энергосберегающем режиме приведено в Приложении 3.
Для электропривода мобильного робота, питающегося от аккумуляторной
батареи, настройка на энергосберегающий режим, например достижения
min1I , позволит повысить временной ресурс работы аккумуляторной батареи.
Полученные результаты анализа математической модели асинхронного
двигателя при его описании в системе координат Х,У будут справедливы и
для системы координат d,q, в которой традиционно описываются системы
векторного управления [39,41]. На векторной диаграмме (рисунок 2.6) пока-
заны положения вектора тока статора при различных режимах, в том числе в
режиме неполной статической нагрузки, когда ток намагничивания снижает-
ся пропорционально току статора. При номинальном токе статора и опти-
мальном угле 1IОПТ0
= 450 магнитная цепь двигателя близка к режиму
насыщения.

66
mI
mψ
пуск1I
1E
пуск0
2
H1I
насmI
C1I
опт0
d
q
H2I
Рисунок 2.6 – Векторная диаграмма асинхронного электродвигателя
при изменении тока статора с учетом насыщения магнитопровода
При пуске асинхронных двигателей, устанавливаемых на механизмах
общепромышленного назначения, обычно требуется повышенный пусковой
момент, превышающий номинальное значение МпускМН. Для обеспечения
требуемой кратности пускового момента необходимо увеличивать ток статора
и ротора до значений больших номинального. Поэтому в пусковом режиме
при необходимости обеспечения кратности пускового тока больше единицы
необходимо настраивать систему управления электроприводом на режим
увеличения угла 0 450. Однако электроприводы передвижения мобильных
роботов работают в интенсивном повторно-кратковременном режиме с ПВ =
60% и более. В этих условиях пусковой момент двигателя должен быть вы-
бран близким к номинальному значению при этом не будет глубокого насы-
щения магнитной цепи асинхронного двигателя, статический момент будет
меньше номинального значения.
Проведем сравнительный анализ выражений для расчета момента дви-
гателя в установившемся режиме в системах электропривода постоянного то-
ка и асинхронного электропривода, приведенных в таблице 2.2.

67
Таблица 2.2
Выражения для расчета момента двигателя в установившемся режиме
Двигатель по-
стоянного тока
Асинхронный двигатель в
разомкнутой системе электро-
привода
Асинхронный двига-
тель в системе вектор-
ного управления
кM
22
n m1
2эт ЭЛ
эт ЭЛ
3p L 1M= I
12 L+T Δω
T Δω
q12n'
2
m IpL
L
2
3M
Момент двигателя постоянного тока при постоянном возбуждении
прямо пропорционален току якоря. Момент асинхронного двигателя при ча-
стотно-токовом управлении пропорционален квадрату тока статора, но ста-
билизация только тока статора не обеспечивает стабилизацию момента
двигателя, зависящего также от круговой частоты тока ротора. Из выражений
(2.42), (2.44) следует, что в динамических режимах в разомкнутых системах
электропривода момент асинхронного двигателя изменяется по колебатель-
ному закону. В векторной системе управления асинхронным двигателем ре-
гулирование момента двигателя может осуществляться путем изменения
ортогональной составляющей тока статора I1q при поддержании постоянства
потокосцепления ротора 2 . Возможно также одновременное изменение пе-
ременных I1q и 2 , при этом уравнение связи между проекцией тока статора
I1q и моментом двигателя М становится нелинейным.
Эти особенности формирования электромагнитного момента асин-
хронного двигателя необходимо учитывать при построении систем коррек-
ции асинхронного электропривода со скалярным частотно-токовым
управлением, в том числе с использованием нейросетевых элементов.

68
Выводы
1. Асинхронный двигатель является нелинейным колебательным зве-
ном, корни характеристического уравнения, полученные при условиях лине-
аризации, являются комплексными с отрицательной действительной частью,
поэтому динамические режимы работы асинхронного двигателя при частот-
ном управлении сопровождаются затухающими колебательными переходны-
ми процессами.
2. Устойчивость системы управления асинхронным электроприводом
повышается в результате компенсации системой управления действия внут-
ренних перекрестных связей, приводящих к колебательным процессам.
3. При условии компенсации внутренних перекрестных связей в ча-
стотном асинхронном электроприводе можно управлять моментом двигателя,
регулируя амплитуду тока статора, что может быть выполнено с помощью
внешнего контура регулирования скорости электропривода, который строит-
ся по универсальным принципам, используемым в электроприводе постоян-
ного тока.
4. Для повышения временного ресурса работы аккумуляторной батареи
целесообразно выполнять настройку электропривода на реализацию опти-
мального режима - минимум отношения «ток статора - момент», который до-
стигается при оптимальном значении разности между угловыми скоростями
вращения поля статора и ротора, в этом случае оптимальный угол между век-
торами тока статора и потокосцепления ротора составляет IОПТ
= 450 .
5. В режиме пуска для обеспечения требуемой кратности пускового
момента система управления электроприводом с учетом насыщения магнит-
ной цепи двигателя настраивается на режим с увеличенным значением угла
0 450.

69
3. РАЗРАБОТКА И ИССЛЕДОВАНИЕ СИСТЕМ ИДЕНТИФИКАЦИИ И
КОРРЕКЦИИ ПЕРЕМЕННЫХ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ
С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ
3.1. Построение и коррекция системы векторного управления асинхронным
электроприводом
Высокое качество регулирование момента в асинхронном
электроприводе может быть получено с помощью векторной системы
управления. Переменные двигателя в векторных системах управления
электроприводами переменного тока принято рассматривать в системе
координат d,q, в которой вектор потокосцепления ротора находится на оси d.
Взаимное расположение векторов тока статора и потокосцеплений
асинхронного двигателя отображено на векторной диаграмме, показанной на
рисунке 3.1.
mId
q
0
02I
1I
d1I
q1I
d22
Рисунок 3.1 – Векторная диаграмма асинхронного двигателя
в системе координат d,q
Модуль вектора потокосцепления ротора, при расположении вектора
потокосцепления ротора на оси d, определяется величиной продольной со-
ставляющей вектора тока статора [40].
ЭТ
md12
pT1
LI
. (3.1)

70
При построении системы управления в качестве сигнала задания мож-
но использовать сигнал продольной составляющей тока статора, определен-
ный в установившемся режиме при насыщенной магнитной цепи
*
d1I =насm
нас2
L
. (3.2)
Момент асинхронного двигателя в соответствие с (2.4) можно опреде-
лить по формуле
q12n
2
m IpL
L
2
3M
. (3.3)
Данное выражение показывает, что при обеспечении постоянства пото-
косцепления ротора для управления моментом двигателя достаточно управ-
лять ортогональной составляющей тока статора.
Преобразовав выражение (3.3) определим требуемый сигнал задания
поперечной составляющей тока статора
2nm
2**
q1pL
L
3
2MI
. (3.4)
В настоящее время разработано большое количество систем векторного
управления асинхронным электроприводом [77-82]. Рассмотрим систему век-
торного управления асинхронным двигателем, показанную на рисунке 3.2,
разработанную и исследованную в [83], и дополненную более постой и эф-
фективной системой коррекции сигнала задания продольной составляющей
тока статора.
Асинхронный электропривод содержит трехфазный инвертор, датчики
тока. На валу двигателя установлен датчик скорости, подающий сигнал об-
ратной связи на вход регулятора скорости РС. Передаточные функции ПИ –
регулятора тока *
q1I и ПИ – регулятора скорости при стандартной настройке
контура регулирования скорости [14] определяется по выражениям

71
Рисунок 3.2 – Функциональная схема частотного асинхронного
электропривода с коррекцией по продольной составляющей тока статора
рт рт
u1
1W (p) k
Т p ; (3.5)
pT
1k(p)W
uc
PCРС , (3.6)
где oт п
u1 1 п
1э
k kT a T
R - постоянная времени интегрирования ПИ – регулятора то-
ка; kРТ = TЭ1 / T и1 - передаточный коэффициент пропорциональной части ре-
гулятора тока; Tп - эквивалентная постоянная времени цепи управления
преобразователем; TЭ1 - эквивалентная постоянная времени цепи обмотки
статора; I
a 2 4 ; Tис - постоянная времени интегрирования ПИ – регулятора
скорости; рс от п 2 oc 1 п
k 2Jk /(3p k k a a Т )
- передаточный коэффициент пропорци-
ональной части регулятора скорости; 42a
.
Выход регулятора скорости задает сигнал задания по каналу формиро-
вания поперечной Iq* составляющей тока статора. В канале формирования Iq
*
сигнал задания момента поступает на первый вход блока деления, на второй
76
1 2
a b c8
9
1415
5
10
12
11
1
dI
qI
2dψ
*
qI*M
*
1aI
*
1bI
*
1cI
1aI
1bI
1cI1
3:
БЗId
*
dI
РС
4Id
**
13БО
KÓ I
1
PT*
K
БО

72
вход которого поступает сигнал d2 , выход блока деления соединен с входом
блока расчета поперечной составляющей тока статора Iq*. Второй канал фор-
мирует требуемую продольную составляющую тока статора Id*. Канал зада-
ния частоты тока статора в системе реализован с помощью блоков 10 и 12.
Выход блока 3 и блока ограничения БО, установленного в канале задания
продольной составляющей тока статора, соединены с двумя входами блока 5,
в котором происходит преобразование координат dq в ABC по уравнениям:
.π3
4sinIπ
3
4cosII
;π3
2sinIπ
3
2cosII
;sinIcosII
1
*
q1
*
d
*
1c
1
*
q1
*
d
*
1b
1
*
q1
*
d
*
1а
(3.7)
где 1 - угол поворота вращающейся системы координат dq относительно
неподвижной системы координат.
В блоке 10 выполняются обратные преобразования координат ABC в
dq по уравнениям:
.π3
4sinIπ
3
2sinIsinI
3
2I
;π3
4cosIπ
3
2cosIcosI
3
2I
11c11b11а1q
11c11b11а1d
(3.8)
Угол поворота системы координат qd, рассчитывается в блоке 12
2
2d2
m1q1 ω
ψT
LI
p
1. (3.9)
Выходы трех заданных фазных токов с блока 5 поступают на три входа
регулятора тока 6. Шесть выходов которого соединены с шестью управляю-
щими входами трехфазного инвертора 7, формирующего заданный ток ста-
тора асинхронного двигателя 14. Управление очередностью включения

73
силовых IGBT транзисторов инвертора осуществляется регуляторами тока
блока 6. Второй вход блока 12 соединен со вторым выходом блока 10, третий
вход блока 12 соединен с датчиком скорости 15, выход блока 12 соединен с
четвертым входом блока 10, который преобразует токи статора из системы
координат ABC в dq и определяет продольную и поперечную составляющие
тока статора.
Первичные сигналы мгновенных значений фазных токов статора по-
ступают с датчиков тока. В блоке 11 рассчитывается потокосцепление рото-
ра. Выход блока 11 соединен с первым входом блока 12, где производится
расчет текущего угла θ1 системы координат dq по следующим формулам [40]:
dt
dp K1
nЭЛЭЛ1
; (3.11)
p
ЭЛ11
; (3. 12)
d22
mq1ЭЛ
T
LI
. (3.13)
В соответствии с (3.13) в случае изменения поперечной активной со-
ставляющей тока статора Id происходит изменение , так чтобы выполня-
лось условие (2.45) const)p()p(2 . В этом случае, как было показано в
разделе 2.4, обеспечивается требуемая устойчивость асинхронного электро-
привода с векторным управлением.
Выполненные многочисленные исследования [78-80] показывают, что в
системах асинхронного электропривода с векторным принципом управления
при построении несколько различающихся между собой вариантов схем
управления обеспечиваются динамические характеристики, близкие к анало-
гичным характеристикам электропривода постоянного тока.
В то же время применение системы коррекции задания на ток статора,
показанной на рисунке 3.2, а позволяет поддерживать угол между векторами
тока статора и потокосцепления ротора на заданном уровне, например, 450,

74
что обеспечивает энергосбережение в электроприводе, работающем преиму-
щественно в статическом режиме при неполной статической нагрузке
[50,51,85-87]. В установившемся режиме при заданном статическом моменте
на валу асинхронного двигателя, осуществив корректировку продольной со-
ставляющей тока статора I1d, определяющей потокосцепление ротора 2 ,
можно добиться изменения положения результирующего вектора тока стато-
ра, а также угла между током статора и потокосцеплением ротора, и в конеч-
ном итоге изменения скольжения sα.
В схеме частотного асинхронного электропривода (рисунок 3.2, а) сиг-
нал Id* корректируется в функции угла 0 с помощью системы коррекции,
включающей сумматор 13, а также блоки 16,17,18,19 следующим образом.
Вычисленное в блоке 16 отношение проекций тока на оси d и q статора по-
ступает в блок 17, в котором рассчитывается d1q10 I/Itg , и 0
)I/I(arctg
I/Itg
d1q10
d1q10
(3.14)
На узле сравнения определяется 0
*
00 . Сигнал Id*, рассчитыва-
ется в блоке 19, представляющем собой пропорциональное звено, коэффици-
ент которого уточняется при наладке. Корректирующий сигнал Id*
поступает на сумматор 13, который вносит коррекцию в канал задания про-
дольной составляющей тока статора.
В процессе выполненных исследований система коррекции была усо-
вершенствована за счет исключения из схемы блока деления измеренных пе-
ременных. Было установлено, что в области малых значений статического
момента на валу двигателя при ненасыщенной магнитной цепи в системе
векторного управления целесообразно одновременно пропорционально сни-
жать задание на величины продольной и поперечной составляющих тока ста-
тора, обеспечивая поддержание угла 0 =45o.

75
Учитывая, что при этом значении угла 0 обе проекции вектора тока
статора на координатные оси одинаковы
I1d= I1q, (3.15)
корректирующий сигнал можно определить
qd
*
dIII . (3.16)
Схема узла коррекции сигналов задания продольной и поперечной со-
ставляющих вектора тока статора приведена на рисунке 3.2, б. Сигнал кор-
рекции тока может подаваться не только по оси d, но и одновременно и по
оси q.
Анализ литературных источников показал, что динамические свойства
типовых систем асинхронного электропривода с векторным управлением
удовлетворяют требованиям, предъявляемым механизмами с циклическим
режимом работы. Поэтому разработанные системы коррекции частотного
асинхронного электропривода с векторным управлением целесообразно при-
менять для электроприводов, работающих преимущественно в статическом
режиме при неполной статической нагрузке.
3.2. Система асинхронного электропривода с частотно-токовым
управлением
Частотные асинхронные электроприводы со скалярным управлением,
характеризуются простотой системы управления, однако уступают вектор-
ным системам управления по возможностям формирования динамических
характеристик. Они находят применение в основном на механизмах, работа-
ющих в длительном режиме. Для успешного использования асинхронного
электропривода со скалярным управлением на мобильных роботах, необхо-

76
димо улучшить их динамические свойства за счет применения корректиру-
ющих устройств. Среди большого количества известных систем асинхронно-
го электропривода со скалярным управлением [23,45,87,88] наиболее
близкими по принципам построения к регулируемому электроприводу посто-
янного тока и асинхронному электроприводу с векторным управлением [39-
41] являются системы асинхронного электропривода с частотно-токовым
управлением [46,73] с принудительным заданием скольжения, выполненные
на базе преобразователя частоты со звеном постоянного тока, содержащего
мостовой инвертор, оснащенные датчиком скорости.
Функциональная схема силовой части электропривода с блоками, обес-
печивающими построение контуров регулирования переменных АД, пока-
зана на рисунке 3.3, а, где введены следующие обозначения: 1 - инвертор;
2, 3 - датчики тока; 4 - асинхронный двигатель; 5 - датчик скорости 5; 6 -
блок формирователя импульсов. Инвертор 1, в зависимости от его кон-
струкции и типа источника питания, может подключаться к выходу выпря-
мителя или к источнику напряжения постоянного тока. По конструкции и
принципу работы инверторы разделяются на автономные инверторы
напряжения (АИН) и автономные инверторы тока (АИТ). Схема силовой
части АИН приведена на рисунке 3.3,б, схема силовой части АИТ приведе-
на на рисунке 3.3,в. Асинхронный электропривод с частотно-токовым ска-
лярным управлением может быть выполнен как на базе АИН, так и на базе
АИТ. Частотные асинхронные электроприводы малой и средней мощности
обычно выполняются на базе АИН, мощные электроприводы – на базе АИТ
[17,18].
Функциональная схема асинхронного электропривода с частотно-
токовым управлением с принудительным формированием величины абсо-
лютного скольжения и частоты тока ротора показана на рисунке 3.4. Двухка-
нальная система управления содержит канал регулирования скорости,
построенный по принципу подчиненного управления с внутренними конту-
рами релейного управления фазными токами статора и с внешним контуром

77
16
a b c
2
3
45
71bI
1aI
1cI
*
1cI
*
1bI
*
1aIа1I
в1I
сI1
аI1
вI1
-
-
-
c1I
а) в)
Рисунок 3.3 – Элементы асинхронного электропривода с частотно-токовым
управлением: а – функциональная схема контура регулирования фазных
токов статора: б – схема инвертора напряжения; в – схема инвертора тока
БЗ
*PC
pn
167
A B C2
3
45
1BI
1AI
1CI
*
1CI
*
1BI
*
1AI
БО
*
1IA1I
B1I
C1I
*
*
ЭЛ1
*
1
*М
A1I
B1I
-
-
-
C1I
FM
2*
1I
*БЗ
Рисунок 3.4 – Функциональная схема асинхронного электропривода
с частотно-токовым управлением
aвc
T1
T2
T3 T5
T4 T6
б)L АИТ
aв
с

78
управления скоростью.
Мгновенные значения сигналов задания на фазные токи формируются
блоком формирователя 7, на вход которого поступают: по первому каналу -
сигнал задания модуля тока статора *
1I , по второму каналу - сигнал задания
частоты *
1 . Функциональная схема блока формирователя мгновенных значе-
ний тока статора приведена на рисунке 3.5.
sin
sin
sin
х
Х
Х
Σ
Σ
const
Рисунок 3.5 – Функциональная схема блока - формирователя мгновенных
значений тока статора
Формулы, описывающие работу систему формирователя сигналов за-
дания на ток, имеют следующий вид:
).3/2tsin(II
;)3/2tsin(II
;)tsin(II
*
1
*
m1
*
C1
*
1
*
m1
*
B1
*
1
*
m1
*
A1
(3.17)
На входе блока формирователя импульсов 6 установлены узлы сравне-
ния задаваемых и измеренных значений фазных токов статора, в которых
определяются сигналы рассогласований
79
.I*II
;I*II
;I*II
C1C1C1
B1B1B1
A1A1A1
(3.18)
Блок формирователя импульсов может быть выполнен с использовани-
ем принципа широтно-импульсной модуляции (ШИМ) [40] или релейно-
гистерезисного регулирования [92]. Замкнутый контур фазного тока статора
можно считать близким к инерционному звену первого порядка с малой по-
стоянной времени Т .
;pT1
1(p)WЗАМК
(3.19)
PTf
1T . (3.20)
где PTf = 2,5 кГц – частота коммутации ключей инвертора.
Точность поддержания заданного значения мгновенных значений тока
статора, определяется заданным допустимым значением отклонения тока
(например, = 0,05IH).
При реализации в асинхронном электроприводе замкнутого контура
регулировании тока статора и поддержании тока на постоянном уровне, что
выполняется, например, в пусковом режиме, можно принять допущение о
том, что двигатель питается от источника тока.
В соответствии с выражениями (2.49)-(2.51) момент асинхронного дви-
гателя М зависит от квадрата тока статора I1 и имеет сложную функциональ-
ную зависимость от частоты тока ротора ЭЛ . Наличие колебательной
динамической характеристики (рисунок 3.6, а), связывающей переменные АД
сложно, поэтому принцип построения системы управления может быть сле-
дующим. В прямом канале системы управления (рисунок 3.6, б) используется
блок, представляющий уравнение связи момента М и тока статора I1 при фик-
сированном значении ЭЛ в статическом режиме, а динамические свойства

80
системы управления улучшаются с помощью параллельных корректирующих
устройств.
-
M(p)1
JpРCW
CK
-
замкнутый контур
)p(WзамкI
OC
)p((p)
MC(p)
х
I1
2
I1
p( )
)p( (p))p(
*
FM
)p(I 2*
1 )p(I*
1)p(M
ЭЛэт
2
эт
ЭЛэт
2
2
mn
T)1pT)(T
1(
1
L
L
2
p3
1
а)
-
M(p)1
Jp
1I
РCW
CK
-M
F
замкнутый контур
)p(WзамкI
OC
)p(
( p )
MC(p)
х
I1
2I1
p( )
)p((p))p(*
FM
)p(I 2*
1 )p(I*
1)p(M1
(p)
б)
Рисунок 3.6 – Структурные схемы регулирования скорости асинхронного
электропривода: а – при учете динамической зависимости М(t) = f [ )t(I2
1 ];
б - при учете статической зависимости М = f )I( 2
1
На основании (2.51) уравнение, связывающее ток статора с моментом в
установившемся режиме, можно представить в следующем виде
2
mn
эл
/
2
/
2эл
/
2m1
Lp3
/RR/)L(L2MI
. (3.21)
Обозначим функцию, находящуюся под корнем
2
mn
эл
/
2
/
2эл
2/
2mM
L3p
/RR/)L(L2F
. (3.22)

81
В выражение для FM входит значение ЭЛ , которое может изменяться
в процессе работы электропривода, это усиливает нелинейность системы,
снижает ее устойчивость и осложняет стабилизацию момента при пуске.
Второй канал в системе, показанной на рисунке 3.4, осуществляет
управление частотой вращения поля статора. Сигнал задания на частоту тока
статора формируется в соответствии с выражением, полученным из (2.31)
n
**
ЭЛ1 p)( , (3.23)
где оптимальное значение * определяется по выражению (2.55).
Используя стандартный подход к синтезу контура регулирования ско-
рости применительно к системе электропривода переменного тока (рисунке
3.6, б), при настройке на технический оптимум можно получить передаточ-
ную функцию П-регулятора скорости в виде [14]
сμ
П
РСk2T
J(p)W . (3.24)
Передаточная функция ПИ-регулятора скорости имеет вид [14]
2
ПИ
РС8pT
p)J4T(1(p)W
. (3.25)
Таким образом, частотно-токовый асинхронный электропривод с при-
нудительным формированием скольжения с релейным регулированием фаз-
ных токов статора имеет типовую структуру внешнего контура управления
скоростью двигателя, аналогичную системе асинхронного электропривода с
векторным управлением и электропривода постоянного тока. Однако в отли-
чие от системы асинхронного электропривода с векторным управлением си-
стема частотно-токового управления обеспечивает колебательный
переходный процесс при формировании электромагнитного момента двига-
теля, и для получения приемлемого качества переходных процессов в дина-
мических режимах необходима разработка дополнительных
корректирующих устройств.

82
3.3. Идентификация угла между вектором тока статора и вектором
намагничивающей переменной
Построение систем коррекции динамических свойств асинхронного
электропривода с частотно-токовым управлением может быть выполнено на
основании идентификации угла или тангенса угла между векторами тока ста-
тора и потокосцеплениями – основным (угол 0 ) или ротора (угол 0 ). Анализ
формул (2.49), (2.51) показывает, что регулировать момент двигателя можно
путем изменения амплитуды тока статора и угловой частоты тока ротора
ЭЛ , а контролировать этот процесс и влиять на него можно косвенным пу-
тем на основании расчета угла или тангенса угла между векторами тока ста-
тора и потокосцеплениями – основным или ротора.
3.3.1. Метод идентификации угла 0 и его тангенса 0tg на основании
информации о фазных напряжениях и токах статора. Векторная диаграмма
двигателя, построенная для установившегося режима работы, приведена на
рисунке 3.7. При ненасыщенном двигателе в соответствии с выражением
(2.32) оптимальное значение угла между векторами тока статора и потокос-
цепления ротора составляет 0
опт0 45 .
В соответствии с векторной диаграммой угол между векторами тока
статора и основным потокосцеплением определяется
00 . (3.26)
Среднее значение угла для асинхронных двигателей малой мощности
при номинальном скольжении составляет около 60 [47,82]. При уменьшении
нагрузки на валу двигателя от номинального значения до режима холостого
хода, когда двигатель находится в ненасыщенном состоянии, происходит
снижение тока статора от номинального значения до тока холостого хода,
при этом скольжение, частота тока ротора и угол уменьшаются. В точке
идеального холостого хода угол приближается к нулю.

83
Рисунок 3.7 – Векторная диаграмма асинхронного двигателя
В соответствии с выражением (2.60) 0
опт0 45 , тогда при =60 опти-
мальные значения углов составляют:
0
опт0 39 ; 0
опт0
0
опт0 5190 . (3.27)
Угол зависит от скольжения в соответствии с выражением (2.15), для
малых значений этого угла можно принять
tg . (3.28)
Поскольку значение угла мало, при построении системы коррекции в
большинстве случаев можно принять =0, 1ctgtg ОПТОПТ0 . Это упрощает
построение системы коррекции переменных двигателя.
Анализ векторной диаграммы (рисунок 3.7) позволил разработать из-
мерительную систему для идентификации угла опт0 (патент № 2512873) [87].
Рассматривая векторную диаграмму можно отметить, что ctgtg 0
1I
2I
m
2I
0 mI
1U 11 ХIj
11 RI
О
2
0
mE
m2E
2
2
R
sxarctg
XY
X1UY1U
mYEmXE
d
q

84
111
111
mX
mY0
RIsinU
ХIсоsU
E
Ectgtg
, (3.29)
где - угол между векторами напряжения и тока статора, равный углу сдви-
га фаз между мгновенными значениями первой гармоники синусоидальных
кривых этих переменных.
Блок-схема компьютерной модели, предназначенной для определения
угла , на основании измерений мгновенных значений задаваемого напря-
жения и протекающего по обмоткам статора тока, входящего в выражение
(2.63), реализованная с помощью пакета прикладных программ МАТLАВ
приложение Simulink, приведена в Приложении 3.
Поскольку в системе частотного электропривода с АИН и ШИМ-
модуляцией при пульсациях выходного напряжения непосредственное изме-
рение выходного напряжения затруднено, то для оценки реальной величины
угла 0 в патенте [87] было предложено в системе коррекции систем скаляр-
ного частотного управления для идентификации угла 0 , использовать сиг-
налы задания напряжения статора *
1U , которые можно взять из системы
управления. Функциональная схема блока идентификации угла 0 приведена
на рисунке 3.8, а. Угол 0 вычисляется
)ХIsinU
RIсоsU(arctg)
RIсоsU
ХIsinU(arctg9090
11
*
11
*
11
*
11
*
00
0
1
1
1
1
. (3.30)
Следует отметить, что во многих конструкциях типовых преобразовате-
лей частоты нет доступа к сигналам задания мгновенных значений фазных
напряжений *
1U . Вместе с тем в системах асинхронного электропривода, вы-
полненных на базе инвертора тока релейными регуляторами фазных токов
[92] легко выделить первую гармоническую составляющую в гармонических
кривых напряжения и тока статора, поэтому для идентификации угла 0
можно использовать сигналы измеренных мгновенных значений реальных

85
напряжения 1U и тока статора 1I , после соответствующей фильтрации. На ос-
новании идентификации угла 0 в патентах № 2512873 [87], №2582202 [90]
разработаны системы коррекции линейного закона частотного управления.
Функциональная схема блока идентификации угла 0 приведена на рисунке
3.8, б. Вычисление угла проводится по формуле (3.5).
Рассмотренные системы идентификации угла 0 предназначены для ис-
пользования в системах коррекции законов частотного управления, осу-
ществляемого при снижении статической нагрузки на валу асинхронного
двигателя, работающего преимущественно в установившемся режиме.
not
БФИ
ai
ci
bi
СУ
au
bu
cunot
not
БВ
-
-
f
UАИН
0
АД
АИТ
c
PPT
СУ
a b c
Дт
Дт
АД
1bI
1aI
1cI
БР
Фильтр
тока
Фильтр
напряж
ения
1bU
1aU
1cU
Дн
Дн
Дн
0
а) б)
Рисунок 3.8 – Функциональные схемы блока идентификации угла 0 :
а – с использованием сигналов задания фазных напряжений;
б – с использованием измеренных фазных напряжений

86
3.3.2. Метод идентификации угла 0 на основании информации об изме-
ренных фазных токах статора и рассчитанных фазных потокосцеплениях ро-
тора. Угол /
0 можно определить на основании измерения угла сдвига фаз
между мгновенными фазными значениями синусоид измеренного тока стато-
ра и рассчитанного потокосцепления ротора.
На рисунке 3.9, а показана функциональная схема блока идентифика-
ции угла /
0 , предназначенного для использования в асинхронном электро-
приводе с частотно-токовым управлением, разработанном в патенте №
2447573 [86].
45
14
18
19
10
13
БЗ
15
16
S
*
a2
*
в2*
с2
*
*
1
0
16
A B C
2
A1I
B1I
C1I
-
-
-
3
*C1I
*B1I
*A1I
STЭ
ФИКАЦИИ
ИДЕНТИ
БЛОК
*1
:
12
A1I
B1I
C1I
-
22 R/LS
p
1
а) б)
Рисунок. 3.9 – Идентификация угла 0 : а - функциональная схема блока
идентификации; б - структурная схема апериодического звена с переменной
постоянной времени
В данной разработке для обеспечения стабилизации пускового момента
двигателя предложена система коррекции сигналов задания переменных дви-
гателя. В системе возможно изменение одного или одновременно двух сиг-

87
налов задания - момента (или амплитуды тока статора) и частоты тока стато-
ра. Выработка корректирующего сигнала базируется на основе идентифика-
ции угла /
0 .
Передаточные функции блоков 14, 15, 16 (рисунок 3.7,а), соответству-
ют апериодическому звену, и в соответствие с (2.18), (2.19) имеют вид
.1R/Lps
1
1psT
1
1pT
1Lik
2
3
;1R/Lps
1
1psT
1
1pT
1Lik
2
3
;1R/Lps
1
1psT
1
1pT
1Lik
2
3
22Э
m
*
C1c
*
C2
22Э
m
*
B1c
*
B2
22Э
m
*
A1c
*
A2
(3.31)
Структурная схема, обеспечивающая регулирование постоянной вре-
мени Т, реализованная в блоках 14,15,16, показана на рисунке 3.3,б. Относи-
тельное скольжение рассчитывается в блоке 12 (рисунок 3.7,а)
*
*
*
*
1
1 )(s , (3.32)
где * - сигнал задания на превышение скорости вращения поля статора от-
носительно скорости вращения ротора; - сигнал коррекции частоты вра-
щения поля статора.
Полученные сигналы мгновенных значений потокосцеплений фаз и изме-
ренные сигналы фазных токов статора поступают в блок 10, в котором на осно-
вании сравнения мгновенных значений синусоидальных кривых циклически
определяется угол сдвига фаз 0 между этими гармоническими функциями.
3.3.3. Метод идентификации 0tg в асинхронном двигателе с фазным ро-
тором на основании информации об измеренных фазных токах статора и ро-
тора. В асинхронном двигателе с фазным ротором может быть измерен не
только ток статора, но и ток ротора (патент № 2528612) [88]. Измерительная
часть функциональной схемы электропривода с частотно-токовым управле-

88
нием асинхронным двигателем с фазным ротором приведена на рисунке
3.10, а.
16
a b c
2
3
4
71bI
1aI
1cI
*
1cI
*
1bI
*1aI
БИ
19
20
21
16
a b c
4
1bU
1aU
1cU
*
1cU
*
1bU
*1aU
БИ
19
20
21
а) б) в)
Рисунок 3.10 – Идентификация 0tg : а – путем измерения мгновенных
значений токов статора и ротора; б – векторная диаграмма;
в – путем измерения частоты тока ротора
Блок БИ, осуществляющий идентификацию 0tg , работает следующим
образом. На входы блока БИ поступают измеренные мгновенные значения
фазных токов статора и ротора. На основании использования треугольника
токов, приведенного на векторной диаграмме (рисунок 3.10, б) используя из-
вестное тригонометрическое соотношение можно получить выражение
1e
20
Ik
cosδIarcsin , (3.33)
где kе - коэффициент трансформации двигателя.
Угол мал, поэтому можно принять 1cos . Учитывая известные
соотношения между обратными тригонометрическими функциями

89
)υ1υarctg(arcsinυ 2 , (3.34)
получим выражение тангенса угла 0 в виде
2
1e
2
1e
2
1e
20 )
Ik
I(1
Ik
I)
Ik
Itg(arcsintg . (3.35)
Модули токов статора и ротора можно определить на основании фор-
мул преобразования переменных трехфазной системы координат в двух-
фазную неподвижную систему , .
;I2
3I
3
2
2
3Ik
2
3I АААcα (3.26)
)I-(I2
1)I-(I
3
2
2
3)I-(Ik
2
3I СВСВСВcβ ; (3.37)
2
β
2
α III , (3.38)
где ck - согласующий коэффициент пропорциональности, выбор которого
осуществляется из условий инвариантности мощности реальной трехфазной
машины и приведенной двухфазной машины ( 32k c ).
3.3.4. Метод идентификации 0tg в асинхронном двигателе с фазным
ротором на основании информации о частоте тока ротора. В асинхронном
двигателе с фазным ротором может быть измерена частота тока ротора. Из-
мерительная часть функциональной схемы частотного асинхронного элек-
тропривода на базе двигателя с фазным ротором, защищенная патентом на
полезную модель №132282 [91] приведена на рисунке 3.10, в.
Уравнение (2.38) устанавливает зависимость между переменными в
динамических режимах

90
1pT
T)p(tg
ЭТ
ЭЛЭT
0
.
Переходя от операторной формы записи к частотным характеристикам,
учитывая, что рассматривается изменение частоты тока ротора ЭЛ2 , по-
лучим
1)T(
T)(tg
2
ЭЛЭТ
ЭЛЭTЭЛ0
. (3.39)
В измерительной части функциональной схемы (рисунок 3.10,в) изме-
ряются мгновенные значения фазных токов ротора, которые подаются в блок
идентификации 0tg , в котором производится непрерывное определение кру-
говой частоты тока ротора ЭЛ2 . Величина tg определяется по выраже-
нию (3.39).
3.3.5. Метод идентификации 0tg в асинхронном двигателе на основа-
нии информации о проекции вектора тока статора на ортогональные оси
вращающейся системы координат d,q. В системе управления современных
преобразователей частоты имеется возможность выбора режима скалярного
или векторного управления. При выборе векторной системы управления
асинхронным двигателем в процессе управления используется выходные
информационные сигналы преобразователя частоты, пропорциональные
намагничивающей I1d и активной I1q составляющих тока статора, определя-
емые во вращающейся системе координат d,q, ось d которой совмещена с
вектором потокосцепления ротора.
На рисунке 3.1 показана векторная диаграмма, на которой приведены
сигналы I1d и I1q, полученные с соответствующих выводов системы управле-
ния преобразователем частоты. Используя сигналы, имеющиеся в системе
управления можно рассчитать d1q10 I/Itg и определить по формуле (3.14)

91
величину угла 0 . Полученный сигнал может использоваться для построения
систем коррекции.
Рассмотренные системы коррекции позволяют за счет поддержания на
оптимальном уровне угла 0 добиться приближения двигателя к энергосбе-
регающему режиму работы в установившемся режиме, в качестве которого в
данной работе выбран минимум отношения «ток статора / момент двигате-
ля». Кроме того, улучшается стабилизация пускового момента асинхронного
двигателя.
3.4. Системы асинхронного электропривода с частотно-токовым
управлением и коррекцией сигналов задания амплитуды и частоты тока
статора
Для обеспечения конкурентоспособности систем частотно-токового
управления, например при применении на различных транспортных тележках
и мобильных роботах, необходимо рассмотреть возможность лучшей стаби-
лизации и ограничения колебаний пускового момента двигателя.
Функциональная схема асинхронного электропривода с частотно-
токовым управлением, выполненным на базе типового автономного инверто-
ра напряжения (АИН) с коррекцией сигнала задания требуемого момента
двигателя и, соответственно амплитуды тока статора, защищенная патентом
№ 2447573 [86], приведена на рисунке 3.11. Асинхронный электропривод,
питается от автономного инвертора напряжения 1, в схеме реализована двух-
канальная система управления содержащая: канал регулирования скорости,
имеющий два контура подчиненного управления, с внешним контуром
управления скоростью, вырабатывающим сигнал задания модуля тока стато-
ра и внутренними контурами релейного регулирования фазных токов стато-
ра; канал задания частоты *
1 .

92
Мгновенные значения сигналов задания на фазные токи формируются
блоком формирователя 7 (см. рисунок 3.3,а), на входы которого поступают
сигнал задания модуля тока статора *
1I и сигнал задания частоты *
1 .
БЗ
11
9
PC
pn
7
45
14
18
19
10
13
17
БО
15
16
S)Т(Sα
*
A2*
B2
*
C2
*
*
ЭЛ1
*М
М
КОРРЕКЦИИБЛОК
0*
0
АИН6
A B C
2
1BI
1AI
1CI
A1I
B1I
C1I
-
-
-
3
*C1I
*B1I
*A1I
18
0
1
БЗ
*
*1
:
*
1
12
FM
*
1I2
*
1I
Рисунок 3.11 – Функциональная схема асинхронного электропривода
с частотно-токовым управлением блоками коррекции сигналов задания
переменных на основании идентификации потокосцепления ротора
При частотно-токовом управлении асинхронным двигателем имеется
принципиальная возможность раздельной или совмещенной коррекции сиг-
налов задания тока статора и частоты тока ротора. Для компенсации нели-
нейности и лучшей стабилизации момента двигателя выполнена коррекция
сигнала задания на ток двигателя в функции угла между векторами тока ста-
тора и потокосцепления ротора. Второй канал в системе, показанной на ри-
сунке 3.11, осуществляет управление частотой вращения поля статора.
Сигнал задания на частоту тока статора формируется согласно выражению

93
n
**
ЭЛ1 p)( . (3.40)
Здесь * целесообразно задавать на оптимальном уровне, соответ-
ствующем выражению (2.55), что обеспечивает минимизацию тока статора.
Таким образом, при задании величины * , формируется частота тока стато-
ра *
1 .
В системах асинхронного электропривода с частотно-токовым управ-
лением формирование необходимых регулировочных характеристик элек-
тропривода требует управления моментом асинхронного двигателя. Из
выражений (2.49), (2.50) и
видно, что на основании информации о значениях /
0 и, соответственно, /
0tg ,
получаемой из системы идентификации, можно управлять моментом, коррек-
тируя в системе автоматического управления либо сигнал задания на величи-
ну тока статора, либо сигнал задания на величину скольжения или .
Выполненные исследования показали, что лучшие результаты достигаются
при одновременной коррекции обоих сигналов.
Расчет угла 0 в блоке идентификации происходит циклически путем
анализа графиков гармонических функций каждой фазе с последующей пе-
редачей информации в систему управления на узел сравнения 16, где опреде-
ляется сигнал рассогласования
0
*
00 . (3.41)
При небольших значениях 0 можно принять
)1pT(tg1
tg)p(I
L
L
2
p3
T)1pT)(T
1(
1)p(I
L
L
2
p3pM
эт
2
0
02
x1
2
2
mn
ЭЛэт
2
эт
ЭЛэт
2
x1
2
2
mn

94
00tg . (3.42)
Из выражения (2.50) можно получить выражение, связывающее пере-
менные при небольшие отклонениях
)1pT()p(tg1
)p(tg)p(I
L
L
2
p3pM
эт
2
0
02
x1
2
2
mn
. (3.43)
Полученное выражение является нелинейным, что затрудняет практи-
ческое определение требуемого сигнала коррекции в реальной схеме управ-
ления. Сигнал коррекции задания момента *M можно определить в
соответствии с поисковым алгоритмом, разработанным в патенте № 2447573
[86], заключающемся в последовательном выполнении следующих операций.
При неоптимальном значении угла 0 образуется сигнал 0tg , посту-
пающий с блока сравнения 9 на вход блока 17, который вырабатывает кор-
ректирующий сигнал задания момента двигателя *M . Если 0tg <0, то
происходит уменьшение сигнала коррекции задания момента двигателя *M
с шагом приращения ξ=0.0005Мн, пока угол φ0 не станет равным 450, если
0tg >0, то происходит увеличение сигнала коррекции задания момента дви-
гателя *M с шагом убывания ξ=0.0005, если )(tg 0 =0, то значение задания
на момент не изменяется. Считывание мгновенных значений 0tg и расчет
0tg происходит циклически с дискретностью, определяемой быстродей-
ствием системы. Следует отметить, что данный алгоритм расчета, достаточно
сложен и требует значительной мощности от вычислительного процессора.
Для улучшения динамических свойств системы электропривода поми-
мо коррекции амплитуды тока статора, разработанной в [86], целесообразно
использовать дополнительную систему коррекции частоты тока статора. В
системе частотно токового управления (рисунок 3.11) возможно совмещение
коррекции сигналов задания на амплитуду *
m1I и частоту *
1 тока статора. Из
выражений (2.49), (2.50) следует, что величины и 0tg влияют на момент

95
двигателя. Воздействовать на взаимное положение моментообразующих век-
торов и момент асинхронного двигателя можно путем изменения величины
. Существует прямая функциональная зависимость, выражаемая уравне-
нием (2.55), между оптимальными величинами 0tg и , поэтому сигнал
коррекции, влияющий на , должен быть направлен на приближение к оп-
тимуму величины 0tg .
ЗначениеОПТЭЛ , определяемое по выражению (2.55), справедливого
для статического режима. В динамических режимах при резком изменении
скорости двигателя реальное значение ЭЛ может отличаться от заданного,
что приводит к появлению погрешности. Температурный дрейф сопротивле-
ния ротора и степень насыщения магнитопровода влияют на оптимальное
значение ЭЛ , но оптимальное значение 0tg остается неизменным.
Если величина 0 идентифицирована, то величину 0tg определяют
по выражению (3.26). Сигнал коррекции можно определить по формуле
/
2
/
2
/
0
L
Rtg . (3.44)
Однако, на основании исследований, выполненных методом математи-
ческого моделирования, установлено, что регулятор корректирующего сиг-
нала можно выбирать пропорционально-интегрального (ПИ) или
нейросетевого типа с блоком ограничения. Параметры регулятора должны
уточняться при настройке.
При работе системы коррекции сигнал задания круговой частоты тока
статора определяется
n
**
ЭЛ1 p)( . (3.45)
Действие корректирующих элементов реализует теоретически обосно-
ванный принцип коррекции, показанный на рисунке 2.8, основанный на ста-

96
билизации сигнала const)p(y2 , что приводит к стабилизации динамиче-
ских процессов в системе электропривода.
Следует отметить, что наблюдатель угла 0 , используемый в системе
асинхронного электропривода (рисунок 3.11), имеет сложные структуру и ал-
горитм работы, что повышает требование к вычислительной мощности
управляющего контроллера.
Идентифицировать величину тангенса угла между векторами тока ста-
тора и основного потокосцепления 0tg с меньшим количеством вычисли-
тельных операций можно на основании измерения мгновенных значений
фазных токов и напряжений статора. Однако следует учитывать, что сигна-
лы, получаемые с датчиков тока и напряжения необходимо фильтровать, т.к.
они содержат высшие гармонические составляющие. Наиболее близкая к си-
нусоидальной форма напряжения статора обеспечивается при использовании
с автономного инвертора тока (АИТ) и с релейным регулятором тока (РРТ)
[92-94]. Для частотных электроприводов малой и средней мощности в [90]
разработана конструкция автономного инвертора тока (патент на полезную
модель №132282), выполненного на высокочастотных IGBT-транзисторах с
дополнительными отсекающими диодами, показанная на рисунке 3.12.
AД
3
2
4
ba
c
1
Рисунок 3.12 – Схема АИТ на базе IGBT – транзисторов с дополнительными
отсекающими диодами

97
Контуры регулирования фазных токов статора выполнены на базе ре-
лейных регуляторов тока (РРТ). Блок-схема двухпозиционного гистерезисно-
го регулятора тока приведена на рисунке 3.13.
*1aI
1aI
1bI
1cI
1
1
1
К и
нвер
то
ру
1
2
3
4
5
6
7
8
9
*1cI
*1bI
Рисунок 3.13 – Функциональная схема двухпозиционного релейно-
гистерезисного регулятора тока
В релейных регуляторах тока, подающих сигналы на переключение
транзисторов IGBT-модуля, задается уровень рассогласования заданного и
измеренного значений фазных токов статора в соответствии с уравнениями
(3.18) Состояние сигналов на выходе РРТ следующее:
(1); состояние активное выходе на ,2/1
I если
(0); состояние активное выходе на ,2/1
I если (3.45)
100
I2τ 1н , (3.46)
где - модуль гистерезиса, задаваемый из условия точности поддержания то-
ка статора и устойчивости работы системы регулирования; 1нI - действующее
значение номинального тока статора.
Замкнутый контур фазного тока статора имеет нелинейные характери-
стики, однако можно ввести допущение и считать, что он описывается пере-
даточной функцией (3.3), соответствующей инерционному звену первого

98
порядка с малой постоянной времени Т , определяемой по выражению (3.4).
При использовании данного АИТ с РРТ формы фазных токов и напряжений
статора близки к синусоидальным графикам, они имеют малый уровень выс-
ших гармонических составляющих, что позволяет идентифицировать тангенс
угла между векторами тока статора и основного потокосцепления 0tg на ос-
нове измерения мгновенных значений тока и напряжения статора.
Функциональная схема частотного асинхронного электропривода с ча-
стотно-токовым управлением и двухканальной системой коррекции сигналов
задания амплитуды и частоты тока статора на основе измерения тока и
напряжения статора приведена на рисунке 3.14.
Рисунок 3.14 – Функциональная схема частотного асинхронного
электропривода с двухканальной системой коррекции сигналов задания
амплитуды и частоты тока статора на основе измерения тока и
напряжения статора
ЗУ
PC
np
АИТ
c
PPT
ФИ
Форм
ирова
тель
A B C
Дт
Дт
АДДС
БО MF
Фильтр
1 РЕГУЛЯТОР
2 РЕГУЛЯТОР
БИ
Фильтр
тока
Фильтр
напряж
ения
1bU
1aU
1cU
Дн
Дн
Дн
БЗ
БЗ
КОРРЕКТИРУЮЩИЙ
НЕЙРОКОНТРОЛЛЕР
99
В электроприводе используется система идентификации 0tg , рассмот-
ренная в разделе 3.3.1.
В соответствие с выражением (3.11) 00 , при реально существу-
ющих в системах асинхронного электропривода малых значениях 60,
можно принять
00 tgtg . (3.47)
При принятом допущении можно строить систему коррекции сигналов
задания, формирующих момент двигателя в электроприводе, выполнив иден-
тификацию 0tg . Сигналы, поступающие на вход блока идентификации БИ,
содержат высшие гармонические составляющие, поэтому их необходимо
фильтровать. Сигнал, получаемый с выхода блока идентификации БИ, также
целесообразно фильтровать, что повышает устойчивость системы, однако,
при этом происходит некоторое снижение быстродействия стабилизации мо-
мента двигателя.
В функциональной схеме частотно-токового асинхронного электро-
привода с каналом задания скольжения, показанной на рисунке 3.14, возмож-
на одновременная коррекция сигналов задания амплитуды и частоты тока
статора - *
1I и * на основе идентификацию 0tg . Возможно использование
только одного из каналов коррекции или одновременная согласованная ра-
бота двух каналов коррекции. Сложность получения простых аналитических
зависимостей между 0tg и корректирующими сигналами связана с нелиней-
ным характером уравнений связывающих переменные асинхронного двига-
теля.
Выбор структуры и настройку регуляторов в каналах коррекции зада-
ющих сигналов амплитуды и частоты тока статора можно осуществить ис-
пользуя метод математического моделирования.
Требуемый сигнал на выходе регулятора 1, осуществляющего выработ-
ку сигнала коррекции задания частоты, можно определить по выражению

100
(3.29), в этом случае регулятор будет П-типа. Возможно использование регу-
лятора ПИ-типа, в котором пропорциональная часть настраивается с исполь-
зованием выражения (3.29), а интегральная часть настраивается путем
компьютерного моделирования. На выходе регулятора 1 целесообразно уста-
новить блок ограничения сигнала БО1, чтобы исключить резкое изменение
частоты тока статора при достаточно быстрых изменениях сигнала 0tg , про-
исходящих в начальный момент пуска.
Требуемый сигнал на выходе регулятора 2, осуществляющего выработ-
ку сигнала коррекции задания амплитуды тока статора I1 в функции 0tg ,
аналитически определить сложно, например, в полученном выражении (2.39)
присутствует переменная величина ЭЛ , а в полученном выражении (3.28),
момент двигателя зависит и от тока статора I1 и от 0tg . Проведенные иссле-
дования методом математического моделирования показали, что регулятор 2,
осуществляющий выработку сигнала коррекции амплитуды тока I1 , может
быть выполнен в виде ПИ-регулятора, его настройка выполняется при моде-
лировании и уточняется при наладке. На выходе регулятора 2 целесообразно
установить блок ограничения сигнала БО2, чтобы исключить нарастание
сигнала коррекции выше допустимого уровня.
Таким образом, в рассмотренной системе асинхронного электроприво-
да с частотно-токовым управлением с коррекцией амплитуды и частоты тока
статора управление скоростью двигателя реализуется с помощью типовой
двухконтурной системы подчиненного управления, при синтезе внешнего
контура управления скоростью используются принципы, разработанные для
электропривода постоянного тока.
В данной системе асинхронного электропривода с частотно-токовым
управлением для улучшения динамических свойств и подавления колебаний
момента асинхронного двигателя может быть использован нейросетевой кор-
ректирующий блок.

101
Выводы
1. В системе векторного управления частотным асинхронным элек-
троприводом за счет стабилизации продольной и поперечной составляющих
тока статора обеспечивается стабилизация электромагнитного момента дви-
гателя, замкнутый контур управления скоростью двигателя построен по
принципу, используемому в электроприводе постоянного тока.
2. В системе частотно-токового асинхронного электропривода воздей-
ствовать на величину момента двигателя можно за счет изменения амплиту-
ды I1 и круговой частоты ЭЛ1 тока статора, определяемой как сумма частоты
вращения ротора np , приведенной к круговой электрической частоте
напряжения статора, и частоты тока ротора ЭЛ .
3. Идентификация угла между векторами тока статора и основного
потокосцепления или угла между векторами тока статора и потокосцепления
ротора позволяет осуществить коррекцию системы управления частотно-
токовым асинхронным электроприводом и улучшить его динамические ха-
рактеристики.
4. Для компенсации колебаний момента асинхронного электропривода
в системе частотно-токового асинхронного электропривода были разработа-
ны системы коррекции задания на момент (или ток статора двигателя), а так-
же частоту тока ротора в функции рассчитываемого угла между векторами
тока статора и основного потокосцепления.
5. Поддержание угла между векторами тока статора и потокосцепле-
ния ротора на оптимальном уровне позволяет снизить до минимально воз-
можного уровня величину тока статора, что обеспечивает энергосбережение.
6. Система асинхронного электропривода с частотно-токовым управ-
лением, принудительным формированием скольжения и с системой коррек-
ции имеет типовую структуру канала управления скоростью двигателя,
аналогичную системе электропривода постоянного тока.

102
4. ИССЛЕДОВАНИЕ ДИНАМИКИ ЭЛЕКТРОПРИВОДОВ С
НЕЙРОСЕТЕВЫМИ ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ,
ПРЕДНАЗНАЧЕННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ НА МОБИЛЬНЫХ
РОБОТАХ
4.1. Экспериментальные исследования систем электропривода постоянного
тока c нейросетевыми регуляторами скорости и методов их обучения
4.1.1. Общие принципы построения и обучения нейросетевого регуля-
тора скорости. Процесс обучения нейроконтроллера, управляющего систе-
мой электропривода постоянного тока с датчиком скорости на валу двигателя
и замкнутым контуром регулирования скорости с частично неизвестными
параметрами, можно осуществить в несколько этапов следующим образом.
Первоначально составляется нейромодель объекта управления, в каче-
стве которого в данном исследовании будем принимать электропривод по-
стоянного тока, содержащий вентильный преобразователь и двигатель. Будем
полагать, что параметры вентильного преобразователя и двигателя неизвест-
ны. Известными или доступными для задания и измерения являются времен-
ной график сигнала на входе преобразователя и выходной график изменения
скорости двигателя во времени. На основании этих данных строится и обуча-
ется нейромодель объекта, выходные сигналы которой будут максимально
приближены к выходным сигналам реального объекта. Затем с помощью
нейромодели объекта выполняется синтез нейроконтроллера. Для настройки
нейроконтроллера целесообразно использовать модель объекта, поскольку
настройку и тестирование контроллера непосредственно на объекте выпол-
нять сложнее. В процессе обучения необходимо получать значение выход-
ного сигнала системы, то есть отрабатывать управляющий сигнал. При этом
нейроконтроллер на первых итерациях обучающего процесса может выда-
вать значения управляющего сигнала, недопустимые для электропривода.
Поэтому настройка нейроконтроллера должна производиться на модели объ-

103
екта. Для выполнения имитационного моделирования объекта управления
можно использовать нейромодель объекта. Эта нейронная сеть используется
в качестве идентификатора системы.
Нейроуправление динамическими объектами, к которым относится
электропривод постоянного тока, является комбинацией методов автомати-
ческого управления и методов искусственного интеллекта. Нейронные сети
могут обучаться любым функциональным зависимостям, если в процессе
обучения предоставлен достаточно большой объем информации, способны
адаптироваться к изменению свойств объекта управления и внешней среды,
пригодны для управления в условиях существенных неопределенностей.
4.1.2. Описание экспериментальной установки электропривода посто-
янного тока. Экспериментальная проверка предлагаемого метода нейро-
управления осуществлялась с использованием системы DE Lorenzo, DL 2125.
Данная установка, показанная на рисунке 4.1, представляет собой двигатель
постоянного тока, питающийся от регулируемого вентильного преобразова-
теля, осуществляющим управление скоростью двигателя, на валу двигателя
установлен датчик скорости. Система состоит из двигателя постоянного тока,
тахогенератора, энкодера и ручного тормоза. Регулирование скорости вклю-
чает в себя два контура управления: внутренний контур тока и контур скоро-
сти с внешним управлением ПЛК.
На вход вентильного преобразователя может подаваться напряжение в
диапазоне 0 В и +5 В , а выходной сигнал датчика скорости находится в диа-
пазоне значений 0 В и 10 В.
Рассматриваемый объект управления — электропривод постоянного
тока с датчиком скорости на валу двигателя. Принимаем, что параметры вен-
тильного преобразователя напряжения и двигателя неизвестны. Данный объ-
ект является нелинейным, что затрудняет построение его модели.

104
Рисунок 4.1 – Установка DE Lorenzo, DL 2125
с электроприводом постоянного тока
Благодаря таким свойствам нейронных сетей, как нелинейность и
быстродействие, моделирование и управление сложных электроприводов яв-
ляется очень эффективным. Нейронные сети позволяют создать модель объ-
екта, точно передающую его динамику, при этом не требуя дополнительных
знаний о структуре и параметрах объекта. Необходимыми данными являются
только значения входных и выходных сигналов, таким образом, объект пред-
ставляется в виде черного ящика.
Примем условие, что в исследуемом электроприводе доступными для
измерения являются сигнал задания и выходной сигнал - скорость двигателя,
измеряемая с помощью датчика скорости, установленного на валу двигателя.
4.1.3. Построение нейросетевой модели электропривода постоянного
тока. Для построения нейросетевой модели, в первую очередь, необходимо
создать обучающий и тестовый наборы данных. Эти данные представляют
собой измерения входных и выходных сигналов – переменных электропри-
вода. На вход подается PRBS сигнал (псевдослучайная двоичная последова-
тельность) принимающий значения от 3В до 5В. Длительность измерений
составляет 2 минуты. Для обучающий выборки подается входной PRBS сиг-

105
нал, состоящий из 1000 значений, с частотами от 0 до 0.04 (частоты полосы
пропускания, выраженные в долях частоты Найквиста), величиной
от 3 до 4 В:
Ue = idinput(1000,'PRBS',[0 0.04],[3.0 4.0]).
Входной сигнал тестовой выборки состоит из 1000 значений, с часто-
той от 0 до 0.06 и величиной от 3 до 4 В:
Uv = idinput(1000,'PRBS',[0 0.06],[3.0 4.0]).
На рисунке 4.2 и рисунке 4.3 представлены обучающая и тестовая вы-
борки соответственно. Вверху показан управляющий сигнал, под ним соот-
ветствующий ему выходной сигнал с объекта (скорость двигателя).
Рассмотрим схему обучения нейромодели, представленную на рисунке
4.4. На вход объекта (электропривода) подается входной PRBS сигнал управ-
ления u . Выходной сигнал объекта y – скорость двигателя, выходной сигнал
нейромодели – оценка скорости y . Разность этих значений является ошибкой
e , которая пропускается через нейронную сеть в обратном направлении и
используется для корректировки ее весовых коэффициентов. Внутренняя
структура нейронной сети представлена на рисунке 4.5. В качестве нейрон-
ной сети была выбрана многослойная нейронная сеть с динамической памя-
тью. Для данной задачи выбрана структура нейронной сети, состоящая из
двух слоев — внутреннего и выходного (рисунок 4.6). Внутренний слой со-
стоит из 4 нейронов, выходной слой состоит из 1 нейрона, который передает
выходной сигнал объекта. На вход нейронной сети должны подаваться про-
шлые значения входов и выходов системы, для того чтобы обеспечить пра-
вильную передачу динамики системы [57]. Нейронная сеть с активной
динамической памятью представляет собой модель NARX (нелинейной авто-
регрессии с экзогенными входом) и описывается следующим образом:

106
Рисунок 4.2 – Обучающая выборка: а - управляющий PRBS сигнал;
б - выходной сигнал
Рисунок 4.3 – Тестовая выборка: а - управляющий PRBS сигнал;
б - выходной сигнал
б
а
0 100 200 300 400 500 600 700 8003
3.5
4
4.5
5
0 100 200 300 400 500 600 700 8001.5
2
2.5
3
3.5
4
u(k), В
y(k), В
k
k
а)
б)
0 100 200 300 400 500 600 700 8003
3.5
4
4.5
5
0 100 200 300 400 500 600 700 8001.5
2
2.5
3
3.5
4
u(k), В
y(k), В
k
k
а)
б)

107
объект
нейромодель
+
-
выход y
ошибка e
оценка y
вход u
Рисунок 4.4 – Схема обучения нейромодели
Рисунок 4.5 – Многослойная нейронная сеть с динамической памятью
Рис. 4.6 – Структура нейронной сети в Matlab
))nk(u),...,2k(u),1k(u),nk(y),...,2k(y),1k(y(f)k(yba
, (4.1)
то есть выходной сигнал в момент k зависит от предыдущих выходных сиг-
налов y в моменты )nk)...(1k(a
и входных сигналов управления u в момен-
ты )nk)...(1k(b
.
Таким образом, входными сигналами нейронной сети являются
)]1k(u)1k(y[)k(x , выходным - )k(y .
Нейронная сеть описывается уравнением

108
b)k(xWtghW)k(y12
, (4.2)
где y – выход нейронной сети; x — вход нейронной сети; W1 - матрица ве-
совых коэффициентов 1-го слоя; b – вектор смещения; W2 - вектор весовых
коэффициентов 2-го слоя; tgh – функция активации .
Задача обучения нейронной сети заключается в нахождении значений
W1, W2 и b, имея набор данных x и y. Для этого будет применен итерацион-
ный алгоритм обучения. Нейронная сеть обучается на основе этих данных с
использованием алгоритма Левенберга — Марквардта. Этот алгоритм наибо-
лее часто показывает лучшие результаты по сравнению с другими алгорит-
мами, хотя и требует большего объема памяти [63,64]. Была выбрана
структура нейронной сети, позволяющая наиболее точно описать динамику
системы. Процесс обучения в среде Matlab показан на рисунке 4.7. Конфигу-
рация нейронной сети описана в таблице 4.1.
Таблица 4.1.
Конфигурация нейронной сети — модели объекта
Тип нейронной сети Сеть с прямым распространением сиг-
нала и обратным распространением
ошибки
Количество слоев 2
Количество нейронов 1 слой — 4
2 слой — 1
Функция активации 1 слой - 'tansig' гиперболический тан-
генс
2 слой — 'purelin' линеная
Функция качества обучения Среднеквадратичная ошибка
Алгоритм обучения нейронной
сети
Левенберга — Марквардта
Количество эпох 1000
Максимальное время inf
Целевое значение функции каче-
ства
-510
Минимальный градиент функции
качества
-110
MU -310
Максимальное количество оши-
бок при проверке
5

109
Рисунок 4.7 – Обучение нейромодели в программное среде Matlab
4.1.5. Результаты моделирования электропривода постоянного тока. В
результате обучения нейронной сети были настроены ее параметры, а именно
весовые коэффициенты W1, W2 и вектор b. Эти параметры определяют
нейронную сеть, являющуюся нейромоделью объекта.
9813.40190.3
3535.02802.0
2223.01928.0
9794.40167.7
W1
;
9105.02098.01258.08485.3W2
;
9368.3
0198.40
2258.58
9222.11
b .

110
На вход модели электропривода подадим управляющий сигнал u(t) из
обучающего множества, показанный на рисунке 4.8 (верхний график). Ожи-
даемый выходной сигнал приведен на рисунке 4.8 (нижний график) (синий),
а также моделируемый с помощью нейронной сети выходной сигнал (голу-
бой).
0 100 200 300 400 500 600 700 800
65.5
54.5
43.5
32.5
2
u(k), В
k
43.5
32.5
21.5
1
y(k), В
0 100 200 300 400 500 600 700 800 k
Рисунок 4.8 – Обучение нейромодели многослойной нейронной сети
с динамической памятью: а – управляющий сигнал; б – выходной сигнал
объекта (ступенчатый) и выходной сигнал нейромодели (нелинейный)
Как видно из рисунка 4.8, нейронная сеть, являющаяся моделью элек-
тропривода, правильно вырабатывает выходной сигнал на обучающем мно-
жестве. Для проверки адекватности модели необходимо смоделировать
выходной сигнал системы на тестовом множестве. Исходя из результатов
моделирования на тестовом множестве, можно заключить, что нейромодель
вырабатывает выходной сигнал, соответствующий ожидаемому сигналу, при
этом ошибка является минимальной. Нейронная сеть способна передать ди-
намику процесса.
а
б
а)
б)

111
4.1.6. Инверсно-прямое управление электроприводом постоянного то-
ка. В инверсно-прямом методе управления (Direct Inverse Control), представ-
ленном на рисунке 4.9, нейроконтроллер реализует обратную динамику
объекта управления. На вход нейронной сети подается опорный сигнал )k(r и
предыдущие входные )nk(u)...2k(ub
и выходные )nk(y)...1k(ya
сигналы
с объекта, выход нейронной сети - сигнал управления, передаваемым на объ-
ект.
Нейро-контроллер
ОбъектВход Выход
Рисунок 4.9 – Схема инверсно-прямого управления
Если обозначить соответствие между входом и выходом как )u(fyp
,
тогда нейронная сеть реализует обратное отображение )y(fu 1
p
. Таким обра-
зом, если подать на нейронную сеть опорный сигнал r , то выходной сигнал
объекта управления y принимает значение r , так как
r))r(f(f)u(fy 1
ppp . (4.3)

112
Основная идея заключается в том, чтобы обучить нейронную сеть, или
нейроконтроллер, инверсной модели системы, и использовать ее в качестве
контроллера. Определим входные и выходные сигналы нейроконтроллера. В
практических задачах управления соответствие «вход-выход» должно пред-
ставляться динамическим отображением. На вход должен подаваться опор-
ный сигнал r, в качестве обратной связи выходные сигналы y в предыдущие
моменты времени, а также предыдущие управляющие сигналы u. Таким об-
разом, входной вектор нейроконтроллера имеет следующий вид:
)]1k(y)k(r)2k(u[)k(x . (4.4)
Для обучения нейроконтроллера в качестве опорного сигнала r(k) ис-
пользуется выходной сигнал y(k). Входной вектор нейроконтроллера описы-
вается следующим образом:
)]1k(y)k(y)2k(u[)k(x . (4.5)
Выходом нейроконтроллера является управляющее воздействие u(k).
Алгоритм обучения нейроконтроллера:
Шаг 1: Установить начальные значения весов и вектора смещения
Шаг 2: Подать на вход нейронной сети опорный (желаемый) сигнал,
сигналы управления и выходные сигналы объекта в предыдущие моменты
времени, вычислить значения управляющего сигнала )1t(u и выходного
сигнала )t(y . Затем вычислить значение ошибки. Если выполнен критерий
останова, перейти на шаг 4.
Шаг 3: Изменить значения весовых коэффициентов по правилам алго-
ритма обучения.
Шаг 4: Завершить алгоритм.

113
В качестве нейроконтроллера предлагается использовать нейронную
сеть с прямым распространением сигнала и обратным распространением
ошибки, в качестве обучающего алгоритма – алгоритм Левенберга — Марк-
вардта. Параметры сети описанны в таблице 4.2.
Таблица 4.2
Конфигурация нейронной сети — контроллера
Тип нейронной сети Сеть с прямым распространением
сигнала и обратным
распространением ошибки
Количество слоев 2
Количество нейронов 1 слой — 4
2 слой — 1
Функция активации 1 слой - 'tansig' гиперболический
тангенс
2 слой — 'purelin' линеная
Функция качества обучения Среднеквадратичная ошибка
Алгоритм обучения нейронной сети Левенберга — Марквардта
Количество эпох 1000
Максимальное время inf
Целевое значение функции качества 10-5
Минимальный градиент функции
качества
10-1
MU 10-3
Максимальное количество ошибок
при проверке
5
В результате обучения нейроконтроллера получены динамические ха-
рактеристики, представленные на рисунке 4.10.
После обучения нейроконтроллера проверим его действие на модели
объекта, полученной в предыдущем пункте. В качестве модели объекта вы-
ступает нейромодель, полученная в 4.1.3. На вход нейроконтроллера подает-
ся опорный сигнал с амплитудой {2; 2.5; 2; 3.5; 3.0} V, каждый

114
длительностью 20 с. На рисунке 4.11 представлены временные зависимости
переменных, характеризующие работу контроллера.
0 100 200 300 400 500 600 700 800
5.55
4.54
3.53
2.5
u(k), В
k
4
3.5
3
2.5
2
1.5
y(k), В
0 100 200 300 400 500 600 700 800 k
Рисунок 4.10 – Обучение нейроконтроллера: а – желаемый ступенчатый
управляющий сигнал и выходной сигнал управления, получаемый
с нейроконтроллера; б – выходной сигнал объекта управления
На верхнем графике показан управляющий сигнал с компенсацией, на
нижнем графике — опорный сигнал и выходной сигнал с нейромодели. Ис-
следуемый нейроконтроллер достаточно эффективно работает совместно с
нейромоделью электропривода. Выходной сигнал нейромодели изменяется
по закону близкому к апериодическому.
После обучения нейроконтроллера проверим его действие на экспери-
ментальной установке DE Lorenzo, DL 2125 (рисунок 4.1).
а)
б)
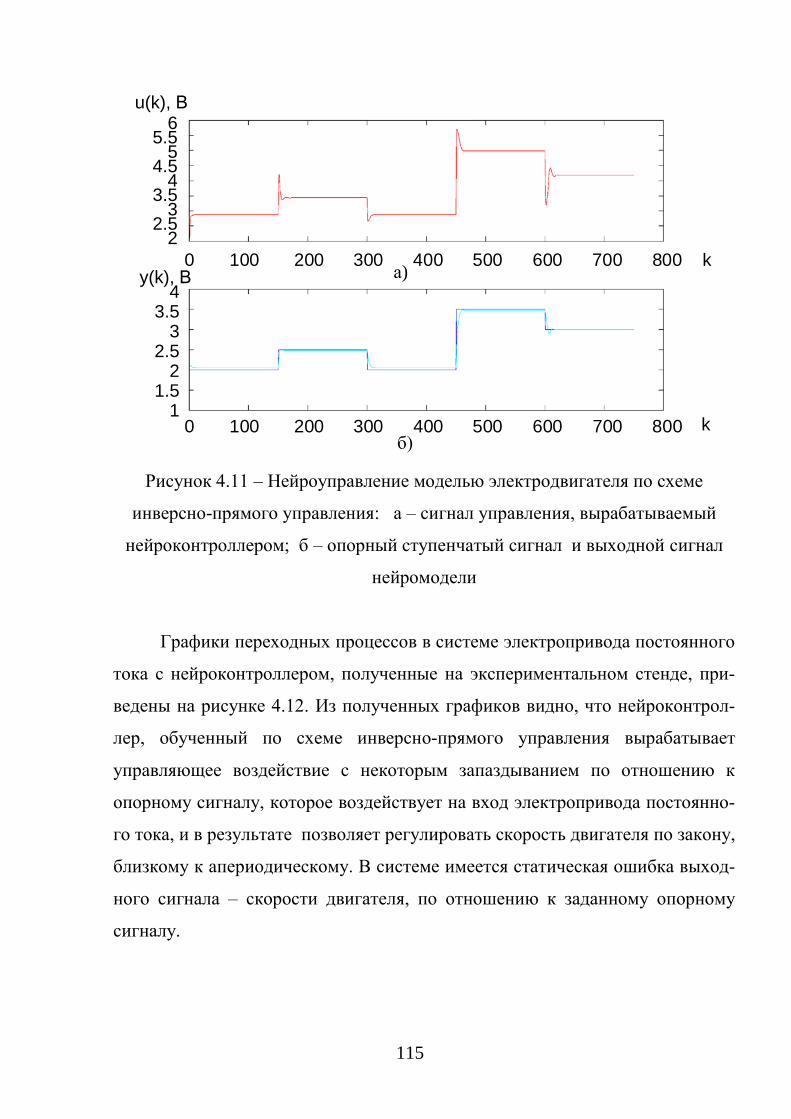
115
0 100 200 300 400 500 600 700 800
65.5
54.5
43.5
32.5
2
u(k), В
k
43.5
32.5
21.5
1
y(k), В
0 100 200 300 400 500 600 700 800 k
Рисунок 4.11 – Нейроуправление моделью электродвигателя по схеме
инверсно-прямого управления: а – сигнал управления, вырабатываемый
нейроконтроллером; б – опорный ступенчатый сигнал и выходной сигнал
нейромодели
Графики переходных процессов в системе электропривода постоянного
тока с нейроконтроллером, полученные на экспериментальном стенде, при-
ведены на рисунке 4.12. Из полученных графиков видно, что нейроконтрол-
лер, обученный по схеме инверсно-прямого управления вырабатывает
управляющее воздействие с некоторым запаздыванием по отношению к
опорному сигналу, которое воздействует на вход электропривода постоянно-
го тока, и в результате позволяет регулировать скорость двигателя по закону,
близкому к апериодическому. В системе имеется статическая ошибка выход-
ного сигнала – скорости двигателя, по отношению к заданному опорному
сигналу.
а)
б)

116
0 100 200 300 400 500 600 700 800
5
4
3
2
u(k), В
k
4
3
2
1
y(k), В
0 100 200 300 400 500 600 700 800 k
Рисунок 4.12 – Экспериментальные графики, полученные при
инверсно-прямом нейроуправлении двигателем: а – сигнал управления,
вырабатываемый нейроконтроллером; б – опорный ступенчатый сигнал и
выходной сигнал изменения двигателя во времени
Основным преимуществом инверсно-прямого метода управления явля-
ется простота реализации. Нейроконтроллер может быть оптимизирован для
следования заданной траектории. Тем не менее, данный метод управления
имеет ряд недостатков. Данный метод не пригоден для систем с нестабиль-
ной инверсной динамикой, высока чувствительность к возмущениям и шуму,
в случае изменений параметров объекта или внешней среды необходимо пе-
реобучать нейронную сеть. Существуют другие методы нейроуправления,
например, адаптивное управление, позволяющее бороться с перечисленными
проблемами.
а)
б)

117
4.1.7. Косвенное адаптивное управление электроприводом постоянно-
го тока. Другой подход к нейронному управлению – косвенное адаптивное
управление (управление с пассивной адаптацией или косвенным измере-
нием возмущений), в зарубежной литературе известен под названием
Internal Model Control (IMC). Этот метод позволяет производить компенса-
цию возмущений. Для оценки возмущений вычисляется разность регистри-
руемого выхода объекта y(t) и модели (рисунок 4.12). Величина
рассогласования e(t), вычитаемая из сигнала уставки r(t), используется для
оценки возмущения d(t). Данная схема часто применяется в сочетании с
классическими подходами к синтезу систем управления, к примеру, ПИД -
регулятором [9].
Нейро -
контроллер
Объект
управления
Нейромодель
r(k) e(k) u(k-1) y(k)
ynn(k)
d(k)
em(k)
-
-
Рисунок 4.13 – Схема адаптивного косвенного управления
В этой схеме для управления объектом используются две нейронные
сети – нейроконтроллер и нейромодель. При этом нейромодель является
прямой моделью объекта, а нейроконтроллер является инверсной моделью и
предназначен для выработки управляющего сигнала. Эта архитектура
нейронного управления использует алгоритм обратного распространения и
обеспечивает более точное непосредственное обучение нейроконтроллера,
так как ошибка может распространятся в обратном направление через
нейромодель в каждой выборке [56].
В качестве нейромодели будем использовать модель электропривода,
полученную в разделе 4.1.3. Разность выхода объекта управления y(k) (с уче-
том возмущения d(k)) и выхода модели ynn(k) является ошибкой управления

118
y(k)-(k)y=(k)ennm
. На вход нейроконтроллера поступает разность опорного
сигнала r(k) и ошибки управления em(k), сигнал )k(e)k(r)k(em
. Нейро-
контроллер генерирует значение управляющего сигнала u(k-1), который идет
на вход объекта управления и модели. После прохождения нейромодели
ошибка далее распространяется через нейроконтроллер, где происходит кор-
ректировка весовых коэффициентов. Таким образом, на вход нейроконтрол-
лера подается сигнал
)]1k(y)k(e)2k(u[)k(x . (4.6)
Как и при реализации метода инверсно-прямого управления, при кос-
венном адаптивном управлении вначале необходимо обучить нейроконтрол-
лер. Далее следует проверка нейроконтроллера непосредственно на
исследуемом процессе.
0 100 200 300 400 500 600 700 800
6
5
4
3
2
u(k), В
k
4
3
2
1
y(k), В
0 100 200 300 400 500 600 700 800 k
Рисунок 4.14 – Экспериментальные графики, полученные при адаптивном
косвенном нейроуправлении двигателем: а – сигнал управления,
вырабатываемый нейроконтроллером; б – опорный ступенчатый сигнал и
выходной сигнал изменения скорости двигателя во времени
а)
б)

119
На рисунке 4.14 представлены экспериментальные графики пуска и ре-
гулирования скорости электропривода постоянного тока, полученные на
установке DE Lorenzo, DL 2125, при реализации системы нейросетевого
адаптивного косвенного управления. Настройка нейроконтроллера осу-
ществлялась в соответствии с ранее рассмотренным методом.
Анализ полученных графиков (рисунки 4.12 и 4.14) показывает, что в
схеме адаптивного косвенного нейроуправления обеспечивается наибольшее
быстродействие и минимальная, приближающаяся к нулю статическая ошибка
регулирования выходной переменной объекта управления - скорости электро-
привода постоянного тока при скачкообразном изменении входного сигнала.
4.2. Формирование требуемых пусковых характеристик электропривода
промышленных транспортных механизмов с помощью пропорционально-
интегрального и нейросетевого регулятора скорости
Мобильные роботы работают в повторно-кратковременном режиме зача-
стую с изменяющимися циклами выполняемых операций. В зависимости от
технологических режимов диапазон регулирования скорости может изме-
няться достаточно широко. На рисунке 4.15 показаны статические механиче-
ские характеристики системы электропривода, обеспечивающие ограничение
момента двигателя при пуске (линия 1), максимальную (линия 2), промежу-
точную (линия 3) и пониженную (линия 4) угловые скорости вращения, тор-
можение может осуществляться механическим тормозом или путем перевода
двигателя в генераторный режим работы (линия 5). Требуемые динамические
пуско-тормозные характеристики формируются путем построения замкнутых
систем электропривода.
В мобильных транспортных системах, в частности на мобильных робо-
тах, выполняющих операции, требующие перемещения робота на достаточно
большие расстояния, находит применение электропривод постоянного тока с
источником питания в виде аккумуляторной батареи.

120
Рисунок 4.15 – Статическая механическая характеристика замкнутой
системы электропривода: линия 1 – пусковой участок механической
характеристики; линия 2 – рабочий участок механической характеристики;
линии 3 и 4 – регулировочные характеристики;
линия 5 – характеристика торможения
Регулирование частоты вращения осуществляется за счет изменения
напряжения, получаемого от аккумуляторной батареи с использованием
принципа релейно-импульсного управления.
Релейно-импульсное управление используется в электроприводах по-
стоянного и переменного тока [15,32,33,93,95]. Известны реверсивные систе-
мы электропривода постоянного тока, в которых применяется релейно-
импульсный принцип регулирования питающего двигатель напряжения, и
соответственно осуществляется импульсное регулирование тока якоря [15]. В
публикации [32] рассмотрена схема электропривода с транзисторным клю-
чом между неуправляемым выпрямителем и входом автономного инвертора.
В патенте [33] разработан способ управления вентильным двигателем с ис-
пользованием транзисторного ключа в цепи постоянного тока инвертора
напряжения. В системах электропривода [15,33] частота коммутации транзи-
сторного ключа, как и ключей инвертора, регулируется с использованием
принципа ШИМ-модуляции. В системе вентильного электропривода [32]

121
применен релейный принцип регулирования входного тока инвертора и фаз-
ных токов статора и векторная двухконтурная система
управления скоростью двигателя.
Функциональная схема нереверсивного электропривода постоянного
тока с релейно-импульсным управлением током якоря и внешним контуром
регулирования скорости приведена на рисунке 4.16,а.
TR
TK
ДПТ
ОВ
+
-
ИK- -РС БО ФИз
ДC
PPT
ДP
Д
OTI
ЗI
+
-
ДТ
ос
а)
- -
РС БО ФИ
K1 K2
K2* K1*
+-
ДПТ
ОВ
+
-ДТ
Др
БЛОК
РЕВЕРСА
б)
Рисунок 4.16 – Функциональные схемы электропривода с релейно-
гистерезисным управлением током якоря:
а – нереверсивного; б – реверсивного
В соответствие с уравнением (1.2) для регулирования скорости элек-
тропривода необходимо изменять эдс ЕП управляемого преобразователя
(УП1), питающего обмотку якоря двигателя. В замкнутой системе управле-
ния ограничение пускового тока, выполняется с помощью блока ограниче-

122
ния, установленного на выходе регулятора скорости. Питание электроприво-
да осуществляется от аккумуляторной батареи.
Функциональная схема реверсивного электропривода постоянного тока
с релейно-гистерезисным управлением приведена на рисунке 4.16, б.
Система реверса реализована на четырех транзисторах К1, К1*, К2,
К2*. В двигательном режиме электропривода при работе, например, «впе-
ред» выключены транзисторы КТ, К2, К2*, постоянно включены транзисторы
К1, К1*, а транзистор КИ работает в релейно-импульсном режиме с задавае-
мой системой управления скважностью (рисунок 1.3, б). Если система элек-
тропривода нереверсивная, то из схемы исключается блок реверса,
реализованный на ключах К1, К1*, К2, К2*. В режиме динамического тор-
можения транзистор КИ выключен, транзистор КТ включен, обмотка якоря
двигателя замкнута через обратные диоды на резистор RT.
Система управления содержит внутренний контур релейного регулиро-
вания тока, подчиненный внешнему контуру регулирования скорости. В ре-
лейном регуляторе тока (РРТ), подающем сигналы на переключение IGBT-
модуля, задается уровень рассогласования заданного и измеренного значе-
ний тока
IIΔI * ; (4.7)
(1); состояние активное выходе на ,2/I если
(0); состояние активное выходе на ,2/I если (4.8)
100
I2τ 1н
, (4.9)
где - модуль гистерезиса, задаваемый из условия точности поддержания то-
ка статора и устойчивости работы системы регулирования; 1нI - действующее
значение номинального тока двигателя.

123
Замкнутый контур тока с релейным регулятором в первом приближе-
нии можно считать приведенным к апериодическому звену с малой посто-
янной времени Т [14,94], его передаточная функция имеет вид
1pT
1)p(WPT
; (4.10)
PTf
1T . (4.11)
где fРТ = 2,5 кГц – допустимая частота коммутации ключей инвертора.
Внешний контур регулирования скорости при реализации двухкратно
– интегрирующей системы содержит «ПИ-регулятор», имеющий переда-
точную функцию [9]
cЯЦ
2
TMПИ
РСkRTp8
KkT)1pT4()p(W
, (4.12)
где 2
ЯЦM K/RJT – электромеханическая постоянная времени электропри-
вода; kT – коэффициент обратной связи по току; kc - коэффициент обратной
связи по скорости; К – постоянный коэффициент двигателя, определенный
при номинальном потоке; ЯЦ
R – суммарное сопротивление цепи якоря.
Система электропривода постоянного тока с релейно-импульсным ре-
гулированием тока без блока реверсирующих ключей с внешним контуром
регулирования скорости была исследована методом математического моде-
лирования. Блок-схема математической модели электропривода построенная
с использованием пакета прикладных программ MATLAB с приложением
Simulink [100,101], приведена на рисунке 4.17.
Для построения регулятора производится идентификации электропри-
вода постоянного тока [102-104], где в качестве модели выступает нейронная

124
сеть, далее нейронная сеть применяется для синтеза регулятора. Обучение
производится следующим образом:
- на модель двигателя подается сигнал PRBS (псевдослучайная двоич-
ная последовательность) для получения обучающего множества входных и
выходных данных;
- производится выбор структуры нейронной сети и ее обучение;
- осуществляется проверка работы модели.
Рисунок 4.17 – Блок-схема математической модели электропривода
На основе метода математического моделирования было выполнено
исследование динамики системы при использовании ПИ-регулятора скорости
и нейросетевого регулятора скорости и проведено сравнение результатов.
Нейросетевой регулятор построен на основе модели авторегрессии со сколь-
зящим средним NARMA-L2 Controller [100-101] (рисунки 4.18 – 4.19). Обу-
чающее множество состоит из входных данных – ток якоря и выходных –
скорость.

125
Рисунок 4.18 – Нейросетевой регулятор скорости NARMA-L2 Controller
Рис. 4.19 – Настройка нейросетевого регулятора NARMA-L2 Controller
Методом математического моделирования были получены временные
зависимости скорости, тока и момента двигателя. Уровень рассогласования
заданного и измеренного значений тока задавался равным H
I05,0ΔI ,
при этом частота коммутаций ключевого элемента составляла около 1 кГц. В
результате моделирования было установлено, что релейно-гистерезисная си-
стема обеспечивает поддержание тока якоря в пределах заданного уровня от-
клонения ±5% при частоте коммутации ключевого элемента 1 кГц. В
реальной схеме электропривода ключевой элемент может быть выполнен,

126
например, на базе типового IGBT-транзистора, допускающего частоту ком-
мутаций до 2,5 кГц.
На рисунках 4.20 - 4.21 приведены результаты моделирования процесса
пуска системы с ПИ-регулятором скорости, на рисунке 4.22 –системы с
нейросетевым регулятором скорости.
Рисунок 4.20 – Результаты математического моделирования пуска системы
электропривода с ПИ-регулятором скорости: )t(f ; )t(fI
а) б)
Рисунок 4.21 – График динамической механической характеристики
электропривода )]t(M[f)t( : а - с ПИ-регулятором скорости;
б – с нейрорегулятором скорости

127
Рисунок 4.22 - Результаты математического моделирования пуска системы
электропривода с нейросетевым регулятором скорости: )t(f ; )t(fI
Анализ полученных графиков переходных процессов показывает, что
нейросетевой регулятор скорости формирует переходный процесс пуска дви-
гателя с заданным ускорением без перерегулирования по скорости и по току,
за счет чего время переходного процесса сокращено по сравнению с исполь-
зованием типового ПИ-регулятора, при использовании которого имеется пе-
ререгулирование по скорости и по току. Повышение быстродействия
системы можно оценить, определив время вхождения графика скорости в си-
стеме в заданную 5% зону отклонения, составившее в рассматриваемом при-
мере в системе с ПИ – регулятором скорости 0,28 с, а в системе с
нейрорегулятором скорости 0,2 с.
На данной математической модели при использовании ПИ-регулятора
и нейросетевого регулятора скорости были получены графики переходных
процессов (рисунки 4.23 – 4.24), возникающих при резком набросе и сбросе
нагрузки, а также при скачкообразном изменении сигнала задания на ско-
рость.

128
На мобильных роботах торможение может осуществляться с помощью
механических, электрогидравлических, электрических и других устройств. В
математической модели (рисунок 4.17) торможение электропривода осу-
ществлялось на самовыбеге. В Приложении 5 приведена блок-схема модели с
дополнительным тормозным ключом, управляемым релейно-гистерезисным
регулятором тока. В такой системе обеспечивается более быстрое электриче-
ское торможение двигателя с импульсным регулированием тормозного тока
и момента двигателя.
а)
б)
Рисунок 4.23 – Результаты математического моделирования, пуск и наброс
нагрузки: а – с ПИ-регулятором скорости; б – с нейросетевым регулятором
скорости

129
а)
б)
Рисунок 4.24 – Результаты математического моделирования в системах:
а – с ПИ-регулятором скорости; б – с нейросетевым регулятором скорости
0 1 2 3 4 5 6 7 8 9 10 t, c
160
140
120
100
80
60
40
20
Задание на скорость
Скорость с ПИ-регулятором
Скорость с нейрорегулятором
ω, рад/с
Рисунок 4.25 – Графики ступенчатого сигнала задания скорости и скорости
)t(f при использовании: сплошная линия – нейрорегулятора скорости;
пунктирная линия – ПИ- регулятора скорости
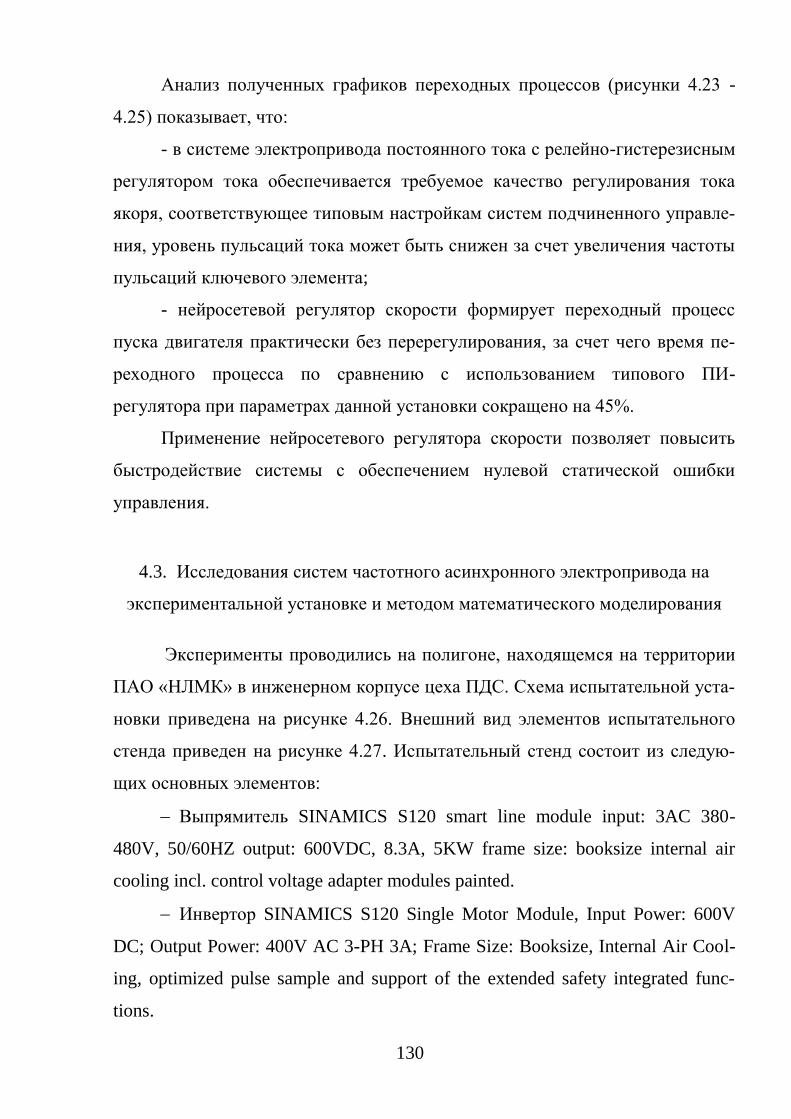
130
Анализ полученных графиков переходных процессов (рисунки 4.23 -
4.25) показывает, что:
- в системе электропривода постоянного тока с релейно-гистерезисным
регулятором тока обеспечивается требуемое качество регулирования тока
якоря, соответствующее типовым настройкам систем подчиненного управле-
ния, уровень пульсаций тока может быть снижен за счет увеличения частоты
пульсаций ключевого элемента;
- нейросетевой регулятор скорости формирует переходный процесс
пуска двигателя практически без перерегулирования, за счет чего время пе-
реходного процесса по сравнению с использованием типового ПИ-
регулятора при параметрах данной установки сокращено на 45%.
Применение нейросетевого регулятора скорости позволяет повысить
быстродействие системы с обеспечением нулевой статической ошибки
управления.
4.3. Исследования систем частотного асинхронного электропривода на
экспериментальной установке и методом математического моделирования
Эксперименты проводились на полигоне, находящемся на территории
ПАО «НЛМК» в инженерном корпусе цеха ПДС. Схема испытательной уста-
новки приведена на рисунке 4.26. Внешний вид элементов испытательного
стенда приведен на рисунке 4.27. Испытательный стенд состоит из следую-
щих основных элементов:
Выпрямитель SINAMICS S120 smart line module input: 3AC 380-
480V, 50/60HZ output: 600VDC, 8.3A, 5KW frame size: booksize internal air
cooling incl. control voltage adapter modules painted.
Инвертор SINAMICS S120 Single Motor Module, Input Power: 600V
DC; Output Power: 400V AC 3-PH 3A; Frame Size: Booksize, Internal Air Cool-
ing, optimized pulse sample and support of the extended safety integrated func-
tions.

131
Рисунок 4.26 – Схема для снятия характеристик системы ПЧ-АД
на полигоне, находящемся на территории «ПАО НЛМК» в инженерном
корпусе цеха ПДС
а) б) в)
Рисунок 4.27 – Внешний вид элементов испытательного стенда:
а – преобразователь частоты SINAMICS S120; б – двигатели АИР71В4УЗ и
ДП-12; в – преобразователь SIMOREG

132
АДКЗ АИР71В4УЗ.
Нагрузочный двигатель постоянного тока ДП-12.
Преобразователь SIMOREG DC MASTER с микропроцессорным
управлением, для 4-x квадрантного привода; питание: 400v, управляемый
выпрямитель возбуждения d420/15 mreq-geg6v62 выход: dc 420v, 15a. выход
us-rating: dc420v, 14а. возбуждение: вход 400v, выход 325v, 3.
Параметры используемых двигателей представлены в таблице 4.1 и 4.2.
Таблица 4.1
Параметры АДКЗ
Тип двигателя АИР71В4УЗ
Синхронная частота вращения n, об/мин 1350
Число пар полюсов pп 2
Номинальный ток Iн, А 1,9
Номинальный момент Мн, Нм 112
Номинальная механическая мощность Pн, кВт 0,75
Номинальное линейное напряжение питания U, B 380
КПД в номинальном режиме н 75%
Коэффициент мощности двигателя cos н 0,75
Кратность максимального момента λ 2,2
Кратность пускового момента kпм 2,2
Кратность пускового тока kпт 5
Момент инерции двигателя Iдв, кгм2 0,0025
Таблица 4.2
Параметры ДПТ
Тип двигателя ДП-12
Синхронная частота вращения n, об/мин 1200
Номинальная механическая мощность Pн , кВт 3
Напряжение якоря Uян, B 220
Ток якоря Iян, A 17,5
Сопротивление якоря Rя, Ом 1,43
Напряжение возбуждения Uян, B 220
Ток возбуждения Iян, A 0,65
Сопротивление возбуждения Rя, Ом 260
Момент инерции двигателя Iдв, кгм2 0,05

133
Измеренные сигналы снимались и записывались в программной обо-
лочке Drive Monitor. При исследовании скалярной системы частотного элек-
тропривода на инвертор подаются два сигнала: задание на частоту вращения
поля статора; задание на напряжение.
В процессе экспериментов осуществлялось изменение сигнала задания
частоты вращения испытуемого асинхронного двигателя, происходил разгон
двигателя до заданной установившейся частоты вращения. Затем производи-
лось изменение нагрузки на валу с помощью нагрузочного двигателя. Осу-
ществлялся вывод на компьютер ортогональных составляющих тока статора
Id , Iq, снимаемых с выводов инвертора SINAMICS S120 [107]. Тангенс угла
между векторами тока статора и потокосцепления ротора определялся по вы-
ражению (3.14).
При исследовании векторной системы управления асинхронным двига-
телем в преобразователе частоты, выполненном на базе инвертора
SINAMICS S120, порядок проведения экспериментов не изменялся.
Результаты экспериментальных исследований частотного асинхронно-
го электропривода при ступенчатом изменении задающей частоты и ампли-
туды питающего напряжения и изменении нагрузки на валу АД: со
скалярным управлением приведены на рисунке 4.28, а с векторным управле-
нием - на рисунке 4.29. Остальные графики, полученные при других управ-
ляющих воздействиях, приведены в Приложении 5.
В результате анализа графиков, характеризующих работу системы ска-
лярного управления частотным асинхронным электроприводом, полученных
экспериментальным путем, можно выделить следующие закономерности. В
области малых нагрузок намагничивающая составляющая тока статора Id
значительно преобладает над активной составляющей тока статора Iq. При
увеличении нагрузки на валу двигателя возрастают Iq , I1, 0tg и снижается Id.
При статической нагрузке на валу двигателя близкой к номинальному значе-
нию МСМН, 1tg 0 .
134
Рисунок 4.28 – Скалярное управление АД - ступенчатое регулирование
сигнала задания частоты (f 1= 17 Гц; f1 = 20 Гц; f1 = 23 Гц; f1 = 25 Гц)
и изменение нагрузки на валу
10000 20000 30000 t,мс 10000 20000 30000 t,мс
10000 20000 30000 t,мс 10000 20000 30000 t,мс
10000 20000 30000 t,мс 10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс

135
Рисунок 4.29 – Векторное управление - ступенчатое регулирование сигнала
задания частоты (f 1 = 10 Гц; f 1 = 20 Гц; f1 = 24 Гц; f1 = 25,5 Гц; f 1= 30 Гц)
и изменение нагрузки на валу
10000 20000 t,мс 10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс

136
При анализе графиков, характеризующих работу системы векторного
управления частотным асинхронным электроприводом, можно отметить, что
при регулировании частоты вращения асинхронного двигателя намагничи-
вающая составляющая тока статора Id остается практически постоянной. В
области малых нагрузок намагничивающая составляющая тока статора Id
значительно преобладает над активной составляющей тока статора Iq. При
увеличении нагрузки на валу двигателя возрастают Iq , I1, 0tg а Id остается
практически неизменным.
Типовые настройки систем скалярного и векторного управления асин-
хронными электроприводами не предусматривают возможность реализации
энергосберегающих режимов - наименьшего потребления тока статора из се-
ти, или минимизации потерь энергии в электроприводе, позволяющих в
среднем на 4-5% уменьшить ток статора [50,80], потребляемый от источника
питания, при статическом моменте на валу двигателя меньшем номинального
значения.
4.4. Исследование динамических характеристик систем частотного
асинхронного электропривода методом математического моделирования
Динамические характеристики систем частотного асинхронного элек-
тропривода можно исследовать, используя метод математического модели-
рования.
Блок – схема математической модели частотного асинхронного элек-
тропривода с векторным управлением в программе Simulink MatLab приве-
дены на рисунке 4.30, а. В этой модели применен ПИ-регулятор скорости.
Структурная математическая модель нейросетевого регулятора скорости, по-
строенная на базе блока NARMA L2, на выходе которого установлены блок
ограничения и фильтрующее апериодическое звено, приведена на рисунке
4.30, б.

137
а)
б)
Рисунок 4.30 – Блок-схемы математических моделей: а - частотного
асинхронного электропривода с векторным управлением в программе
Simulink MatLab; б – нейросетевого регулятора скорости
138
Модель электропривода с векторной системой управления строилась на
базе асинхронного двигателя с короткозамкнутым ротором МТКМ 512-8, 28
кВт. Двигатель пускался со статическим моментом Мс = 350 Н∙м. На рисунке
4.31 показаны динамические характеристики, характеризующие пуск элек-
тропривода с ПИ- регулятором скорости, на рисунке 4.32 - с нейросетевым
регулятором скорости. Асинхронный электропривод с векторной системой
управления обеспечивает поддержание постоянства пускового момента дви-
гателя. По качеству регулирования скорости данный электропривод не усту-
пает электроприводу постоянного тока (см. рисунок 4.22). Применение
нейросетевого регулятора скорости повышает устойчивость электропривода
при работе на рабочем участке механической характеристики. Не только ста-
тическая, но и динамическая ошибка по скорости в системе с нейросетевым
регулятором скорости равна нулю.
Асинхронный электропривод с частотно-токовым управлением и си-
стемой коррекции (см. рисунок 3.14) имеет более простую систему управле-
ния, чем асинхронный электропривод с векторным управлением. Схема
компьютерной модели асинхронного электропривода со скалярной системой
частотно-токового управления и блоками коррекции, реализованной в про-
грамме Simulink MatLab, приведена на рисунке 4.33.
Модель асинхронного электропривода с системой частотно-токового
управления строилась на базе асинхронного двигателя с короткозамкнутым
ротором типа МТКМ 512-8, 28 кВт. Статический момент двигателя прини-
мался равным Мс = 350 Н∙м. Результаты математического моделирования
динамических процессов пуска асинхронного электропривода с векторным
управлением, регулирования частоты вращения и процессов скачкообразного
наброса-сброса нагрузки на валу двигателя приведены на рисунках 4.31 -
4.32.

139
а) б)
в) г)
д)
Рисунок 4.31 – Динамические характеристики частотного асинхронного
электропривода с векторным управлением с ПИ- регулятором скорости:
а – М = f(t) и )t(f при пуске с J=1,32 2мкг ; б - М = f(t) и )t(f при
пуске с J= 2,65 2мкг и набросе и сбросе нагрузки; в - )]t(M[f)t( при пуске
до максимальной скорости; г - )]t(M[f)t( при пуске до пониженной
скорости; д – )t(f и М = f(t) при ступенчатом
изменении сигнала задания на скорость

140
а) б)
в) г)
д)
Рисунок 4.32 – Динамические характеристики частотного асинхронного
электропривода с векторным управлением с нейросетевым регулятором
скорости: а – М = f(t) и )t(f при пуске с J=1,32 2мкг ; б - М = f(t) и
)t(f при пуске с J= 2,65 2мкг и набросе и сбросе нагрузки;
в - )]t(M[f)t( при пуске до максимальной скорости; г - )]t(M[f)t( при
пуске до пониженной скорости; д – )t(f и М = f(t) при ступенчатом
изменении сигнала задания на скорость

141
Рисунок 4.33 – Блок-схема модели асинхронного электропривода со
скалярной системой управления c пропорционально интегральными блоками
коррекции и нейросетевым корректирующим блоком
а) б)
в) г)
Рисунок 4.34 – Переходные процессы пуска асинхронного электропривода со
скалярным управлением без коррекции:
а - )t(fU и )t(fI ; б - )]t(M[f)t( ; в - )t(f0 ; г - )t(f и )t(fM

142
а) б)
в) г)
Рисунок 4.35 – Переходные процессы пуска асинхронного электропривода со
скалярным управлением с ПИ-корректирующим звеном:
а - )t(fU и )t(fI ; б - )]t(M[f)t( ; в - )t(f0 ; г - )t(f и )t(fM
а) б)
в) г)
Рисунок 4.36 – Переходные процессы пуска асинхронного электропривода со
скалярным управлением с нейросетевым корректирующим звеном:
а - )t(fU и )t(fI ; б - )]t(M[f)t( ; в - )t(f0 ; г - )t(f и )t(fM

143
Рассматривая полученные динамические характеристики асинхронного
электропривода с частотно-токовым управлением (рисунок 4.34), можно от-
метить, что в нескорректированной системе момент асинхронного двигателя
при пуске изменяется по колебательному закону. При постоянном заданном
значении ЭЛΔω постоянство пускового момента не обеспечивается, в процессе
разгона двигателя момент возрастает. Угол между векторами тока статора и
потокосцепления ротора изменяется по колебательному закону и составляет
после окончания переходного процесса около 500.
Введение корректирующих устройств с выходным линейным звеном
ПИ-типа и нейросетевого корректирующего устройства позволяет стабили-
зировать пусковой момент двигателя. В скорректированной системе угол
между векторами тока статора и потокосцепления ротора составляет после
окончания переходного процесса 450. Сравнивая графики изменения момента
во времени, приведенные на рисунках 4.35 - 4.36, можно отметить лучшую
работу системы коррекции на базе нейроконтроллера, по сравнению с ис-
пользованием ПИ-звена. В системе с ПИ-корректирующими звеньями коле-
бания момента асинхронного двигателя при пуске больше, чем при
использовании системы нейрокоррекции. Полученные на математической
модели динамические характеристики скорректированного электропривода,
реализованные на базе ПИ-звеньев и нейрорегулятора, подтверждают резуль-
таты аналитических исследований.
Достигнутые с помощью систем коррекции динамические свойства
асинхронного электропривода с частотно-токовым управлением делают его
конкурентоспособным системам асинхронного электропривода с векторным
управлением и электроприводу постоянного тока при использовании на мо-
бильных роботах. В скорректированной системе угол между векторами тока
статора и потокосцепления ротора составляет после окончания переходного
процесса 450, что обеспечивает работу электропривода в энергосберегающем
режиме. Это особенно важно в случае питания электропривода мобильного
робота от аккумуляторной батареи.

144
Таким образом, разработанные системы коррекции асинхронного
электропривода с частотно-токовым управлением решают задачи повышения
его энергоэффективности и улучшения динамических свойств.
Выполненные исследования систем электропривода применяемых и
перспективных для применения на мобильных роботах и систем нейросете-
вого управления позволили провести их классификацию как объектов для
нейросетевого управления, показанную на рисунке 4.37.
Импульс-ный
электро-привод
постоян-ного тока
Тиристор-ный
электро-привод
постоян-ного тока
Асинхрон-ный
электро-привод с
векторным управле-
нием
На базе АИН и
АИТ без выпрямите
ля
На базе АИТ с регули-руемым
выпрями-телем
На базе АИН с
нерегули-руемым
выпрями-телем
Источник нерегулируемого
напряжения постоянного тока
Трехфазная сеть
Тип системы электро-привода
Тип источника
питания
Асинхронный электропривод
с частотно-токовым управлением
Нейросетевой регулятор скорости
Нейросетеваякоррекция
Тип нейро-сетевой системы управления
Рисунок 4.37. Классификация систем электропривода и систем нейросетевого
управления с точки зрения их совместимости при использовании на
мобильных роботах
Из рассмотренных систем электропривода, которые могут применяться
на мобильных роботах, оснащенных системой питания от аккумуляторной
батареи, меньшими весогабаритными показателями обладают системы, по-
строенные на базе асинхронного короткозамкнутого двигателя, при этом
наиболее простой является система асинхронного электропривода с частот-
но-токовым управлением.

145
Выводы
1. Нейросетевой регулятор скорости, используемый в электроприводе
постоянного тока и асинхронном электроприводе с векторным управлением,
может быть настроен методом обучения нейронной свети, при этом в зави-
симости от предъявляемых требований может быть обеспечены заданные
быстродействие и точность регулирования.
2. Использование нейросетевого регулятора скорости позволяет
настроить контур регулирования скорости без перерегулирования с нулевой
статической ошибкой, что повышает быстродействие контура скорости по
сравнению с использованием ПИ-регулятора. При использовании нейрорегу-
лятора скорости время переходного процесса в электроприводе постоянного
тока при формировании скорости снижено на 40%. при требовании вхожде-
ния в 5% зону отклонения выходного сигнала.
3. В типовых системах электропривода со скалярным и векторным
управлением угол между векторами тока статора и потокосцепления ротора
изменяется в широких пределах и отклоняется от оптимального значения 450
в переходных и установившихся режимах. Использование корректирующих
устройств обеспечивает работу асинхронного двигателя в энергосберегаю-
щем режиме с углом, близким к оптимальному значению 450.
4. Система нейросетевой коррекции асинхронного электропривода с
частотно-токовым управлением позволяет наилучшим образом подавлять ко-
лебания электромагнитного момента и осуществлять его стабилизацию в
пусковом режиме.

146
ЗАКЛЮЧЕНИЕ
Диссертация представляет собой научно-квалификационную работу, в
которой на основании выполненных исследований разработаны теоретиче-
ские положения в совокупности представляющие собой научные достижения
в области нейросетевого управления электроприводами передвижения мо-
бильных роботов. При этом решена научная задача и обоснованы техниче-
ские и конструктивные параметры новых технических решений, имеющих
важное хозяйственное значение.
1. На основании сравнительного анализа системы управления с нейро-
контроллером, включенным только в прямой канал управления, и системы с
косвенным управлением, в которой нейронная сеть используется как модель
системы, установлено, что система с косвенным управлением имеет боль-
шую надежность, низкую чувствительность к шуму и редкую частоту сбоев,
что позволят выбрать ее в качестве наиболее приемлемого варианта построе-
ния нейроконтроллеров, управляющих скоростью электропривода и коррек-
цией пусковых характеристик. Для моделирования динамических процессов
выбрана система, работающая на основе модели авторегрессии со скользя-
щим средним.
2. Разработана и исследована унифицированная система нейросетевого
управления скоростью электроприводов, построенных на базе двигателя по-
стоянного тока, и асинхронным двигателем с векторным управлением, обес-
печивающая пуск электропривода с постоянным моментом, отсутствие
перерегулирования по скорости при пуске и регулировании скорости элек-
тропривода.
3. Выполнен структурно-топологический анализ векторной модели
асинхронного двигателя и исследованы возможности повышения его устой-
чивости в системах частотного электропривода за счет применения коррек-
тирующих средств, доказано, что для подавления колебаний переменных в
электромагнитной системе двигателя, необходима одновременная коррекция
147
амплитуды тока статора и скольжения двигателя, направленная на стабили
зацию взаимного положения векторов тока статора и потокосцепления рото-
ра.
4. Разработаны системы идентификации взаимного положения момен-
тообразующих векторов переменных асинхронного двигателя, позволяющие
вырабатывать входные сигналы для блоков нейросетевой коррекции асин-
хронного электропривода с частотно-токовым управлением.
5. Разработана и исследована система частотно-токового управления
асинхронным двигателем с использованием нейросетевых корректирующих
средств, обеспечивающих улучшенные пусковые характеристики электро-
привода со стабилизацией пускового момента, что делает этот электропривод
конкурентоспособным при использовании на мобильных роботах.

148
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Машков, К.Ю. Состав и характеристики мобильных роботов. Ч.1 / К.
Ю.Машков, В. И. Рубцов, И. В. Рубцов // М.: Изд-во МГТУ им. Н. Э. Баума-
на. – 2014. – 52 с.
2. Мартыненко, Ю.Г. Управление движением мобильных колёсных
роботов / Ю. Г. Мартыненко // Фундаментальная и прикладная математика,
2005. – Т. 11. – № 8, – С. 29-80.
3. Пашинский, И.О. Интеллектуальная система управления
электроприводом в задачах навигации мобильного робота / И. О. Пашинский,
А. В. Юдин // Сборник научных трудов. 13-ая молодежная научно-
техническая конференция “Наукоемкие технологии и интеллектуальные
системы 2011”. М.: Изд-во МГТУ им. Н.Э. Баумана. – С. 258-262.
4. Лапшов, В.С. Опыт создания автономных мобильных робототехни-
ческих комплексов специального назначения / В. С. Лапшов, И. В. Рубцов и
др. /, М.: Изд-во Оборонная техника. 2008. – № 1,2. – С. 15-23.
5. Лапшов, В.С. Опыт создания автономных мобильных робототехни-
ческих комплексов специального назначения / В. С. Лапшов, В.П. Носков,
И. В. Рубцов // Вестник МГТУ. Специальный выпуск Специальная робото-
техника и мехатроника. 2011. – С. 7-24.
6. Siegwart, R. Introduction to Autonomous Mobile Robots / R . Siegwart,
I. R. Nourbakhsh // The MIT Press (Vol. 23). URL:
http://home.deib.polimi.it/gini/robot/docs/siegwart.pdf (дата обращения:
25.08.2017).
7. Correia, M. Probabilistic Constraints for Robot Localization / M. Correia,
O. Meshcheryakova, A. Pedro, C. Sousa, J. Cruz // Progress in Artificial Intelli-
gence - 17th Portuguese Conference on Artificial Intelligence, {EPIA} 2015,
Coimbra, Portugal, September 8-11, 2015. Proceedings. – P. 480-486.
8. Анучин, А.С. Состояние и перспективы развития гибридного и элек-
трического тягового электротранспорта в России / А.С. Анучин, Д.И. Алям-

149
кин, В.Ф. Козаченко и др. // Тр. VIII Международной конференции по авто-
матизированному электроприводу АЭП-2014. Т.1 Саранск: Изд-во Мордов-
ского ун-та. – 2014. С.24-27.
9. Мещеряков, В.Н. Вентильный электропривод для робототехнических
систем с релейным регулированием входного тока инвертора и фазных токов
статора / В.Н. Мещеряков, В.Н Воеков, О.В. Мещерякова //Материалы 10-й
Всероссийской мультиконференции по проблемам управления МПКУ-2017.
с. Дивноморское. Геленджик. 11-16 сентября 2017. – С. 167 - 171.
10. Белов, М.П. Автоматизированный электропривод типовых произ-
водственных механизмов и технологических комплексов: учебник для студ.
Высш. Учеб. заведений/ М.П. Белов, В.А. Новиков. – 3-е изд., испр. – М.: Из-
дательский центр «Академия». – 2007. – 576 с.
11. Ключев, В.И. Теория электропривода: учеб. для вузов. 2-е изд., пе-
рераб. и доп. / В. И. Ключев. – М.: Энергоатомиздат. – 2001. – 704 с.
12. Ковчин, С.А. Теория электропривода / С.А. Ковчин, Ю.А. Сабинин.
- СПб.: Энергоатомиздат. Спб отд. – 1994. – 496 с.
13. Онищенко, Г.Б. Электрический привод. Учеб. для вузов. / Г. Б.
Онищенко. – М.: РАСХН. – 2003. – 320с. ил.
14. Елисеев, В.А. Справочник по автоматизированному электроприводу
/ под. ред. В.А. Елисеева, А.В. Шинянского.- М.: Энергоатомиздат. – 1983. –
616 с.
15. Колоколов, Ю.В. Динамика и синтез регуляторов тока импульсных
автоматизированных электроприводов / Ю.В. Колоколов, С.Л. Косчинский.
М.: Машиностроение Т. 1. – 2006. – 97 с.
16. Сандлер, А. С. Автоматическое частотное управление асинхронны-
ми двигателями / А. С. Сандлер, В. С. Сарбатов. – М.: Энергия. – 1974. –
328 с.
17. Дацковский, Л. Х. Современное состояние и тенденции в асинхрон-
ном частотно-регулируемом электроприводе (краткий аналитический обзор) /
Л. Х. Дацковский [и др.] // Электротехника. – 1996. – № 10. – С. 18-28.

150
18. Зобов, И.Б. Семь различий преобразователей частоты и систем ча-
стотного регулирования / И.Б. Зобов, Е.А. Киселева // Теплоэнергоэффектив-
ные технологии. – 2007. – № 2. – С. 11-18.
19. Bose, B. K. Modern power electronics and AC drives / B. K. Bose. –
New Jersey, USA: Prentice Hall PTR. – 2002. – 711 p.
20. Wu, B. High power converters and AC drives / B. Wu. - New Jersey,
USA: A John Wiley and Sons, Inc. – 2006. – 333 p.
21. Blaschke, F. Das Prinzip der Feldorientiening die Grundlage fur die
TRANSVECTOR - Regelung von Asynchronmaschienen [Text] / F. Blaschke
//Siemens-Zeitschrift. - 1971. – №45. – P.757.
22. Trzynadlowski, A.M. Control of induction motors / A. M.
Trzynadlowski. - San Diego, USA: Academic press. – 2001. – 228 р.
23. Narendra, K.S. Adaptive Control Using Neural Networks and Approxi-
mate Models / K.S., Narendra, S. Mukhopadhyay // IEEE Transactions on Neural
Networks, Vol. 8, 1997, Р. 475–485.
24. Осипов, О. И. Частотно-регулируемый асинхронный электропривод
/ О. И. Осипов. – М.: издательство МЭИ. – 2004. – 80 с.
25. Петров, Л.П. Тиристорные преобразователи напряжения для асин-
хронного электропривода / Л.П. Петров [и др.] - М.: Энергоатомиздат. – 1986.
– 200 с.
26. Яцук, В.Г. Принципы построения частотно-регулируемых электро-
приводов на базе ТПЧ со звеном постоянного тока / Яцук. В. Г. [и др.] // Ист-
ринское отд. ВНИИ электромеханики. Пром. Энергетика. – 1978. – №11. –
с. 39.
27. Дацковский, Л.X. Синтез систем подчиненного регулирования в
асинхронных электроприводах с непосредственным преобразователем часто-
ты / Дацковский Л. X., Тарасенко Л. М., Кузнецов И. С., Бабичев Ю. Е. //
Электричество. – 1975. – №9. – с. 48 - 56.
28. Жемеров, Г.Г. Тиристорные преобразователи частоты с непосред-
ственной связью / Г.Г. Жемеров // М.: Энергия, 1977. – 280 с.

151
29. Гречко, Э.Н. Автономные инверторы модуляционного типа / Гречко
Э. Н., Тонкаль В. Е. - Киев : Наук. думка. – 1983. – 304 с.
30. Хасаев, О.И. Транзисторные преобразователи напряжения и часто-
ты / О.И. Хасаев. – М.: Наука. – 1986. – 176 с.
31. Розанов, Ю.К. Электронные устройства электромеханических си-
стем / Ю. К. Розанов, Е. М. Соколова. – М.: Энергоатомиздат. – 2004. – 272 с.
32. Патент ПМ №166655. Устройство для управления электроприводом
переменного тока// Мещеряков В.Н., Воеков В.Н. / Опубл. 10.12.2016. Бюл.
№34.
33. Патент №2207700. Способ управления вентильным электродвига-
телем / Алекперов В.Ю., Маганов Р.У., Лесничий В.Ф., Грайфер В.И., Беззу-
бов А.В., Хохлов Н.П., Гинзбург М.Я., Павленко В.И., Сагаловский В.И.,
Сагаловский А.В., Волков В.М., Агапова Г.Л. / Опубл. 27.06. 2003.
34. Алиевский, Б.Л. Вентильный генератор для автономных систем
электроснабжения постоянного тока / Б.Л. Алиевский, С.А. Щербаков, С.Р.
Мизюрин // Электричество, 2003. – №1. – С. 27-32.
35. Мещеряков, В.Н. Векторная система управления вентильным элек-
троприводом на базе автономного инвертора напряжения с релейным регу-
лированием входного тока инвертора и фазных токов статора / В.Н.
Мещеряков, В.Н. Воеков // Вестник Южно-уральского гос. техн ун-та. Серия
энергетика // 2017. Т.17. – №2. – с.48-57.
36. Бородина, И.В. Автоматический регулируемый по скорости элек-
тропривод с АС-машиной. / И. В. Бородина, А. М. Вейнгер, И.М. Серый, А.
А. Янко-Триницкий // Электричество № 7. – 1975. – С. 41- 46.
37. Ильинский, Н.Ф. Перспективы развития регулируемого электро-
привода / Н. Ф. Ильинский // Электричество. – 2003. – № 2 – С. 2-7.
38. Терехов, В.М. Системы управления электроприводов / В.М. Тере-
хов, О.И. Осипов.- М.: Академия, 2005. – 304 c.

152
39. Рудаков, В.В. Асинхронный электропривод с векторным управле-
нием / И. М. Столяров, В. А. Дартау. – Л.: Энергоатомиздат, Ленинг. отд. –
1992. – 296 с.
40. Соколовский, Г.Г. Электроприводы переменного тока с частотным
регулированием / Г. Г. Соколовский. – М.: Академия. – 2006. –272 с.
41. Виноградов, А.Б. Векторное управление приводами переменного
тока /А. Б. Виноградов. – Иваново: ИГЭУ им. В.И. Ленина. – 2008. – 298 с.
42. Мещеряков, В.Н. Системы электропривода переменного тока с ча-
стотно-токовым релейным управлением / В.Н. Мещеряков. Липецк. ЛФ
МИКТ – 2011. – 104 с.
43. Копылов, И.П. Математическое моделирование электрических ма-
шин: учебник для вузов. 3-е изд., перераб. и доп. / И. П. Копылов. – М.: Выс-
шая школа. – 2001. – 327 с.
44. Войнова, Т.В. Математическая модель для исследования трехфазно-
го асинхронного двигателя с короткозамкнутым ротором как объекта регули-
рования и для прямого процессорного управления / Т.В. Войнова //
Электротехника. - 1998. – №6. – С.51-61.
45. Поздеев, А.Д. Электромагнитные и электромеханические процессы
в частотно-регулируемых асинхронных электроприводах / А.Д. Поздеев. -
Чебоксары: Изд-во Чуваш. ун-та, –1998. – 172 с.
46. Бродовский, В.Н. Приводы с частотно-токовым управлением / Под
ред. В.Н. Бродовского. – М.: Энергия. – 1974. – 168 с.
47. Мещеряков, В.Н. Система частотного асинхронного электроприво-
да, обеспечивающая взаимную ориентацию моментообразующих векторов /
В.Н. Мещеряков, В.А. Корчагина, О.В. Мещерякова // Приборы и системы.
Управление, контроль, диагностика. – №3. – 2010. – с. 31-36.
48. Боченков, Б.М. Алгоритм управления, обеспечивающий желаемое
сочетание энергетических и динамических свойств электропривода перемен-
ного тока / Боченков Б.М., Филюшов Ю.П.// Электротехника. – 2011. – №6. –
С. 53-58.

153
49. Браславский, И.Я. Энергосберегающий асинхронный электропри-
вод / И. Я. Браславский, З. Ш. Ишматов, В. Н. Поляков. - М.: Академия. –
2004. – 256 с.
50. Патент РФ №2132110 РФ, кл. Н02 Р 21/00. Способ оптимального
векторного управления асинхронным электродвигателем и электропривод
для осуществления этого способа / Мищенко В.А., Мищенко Н.И., Мищенко
А.В. Опубл. 20.06.1999. Бюл. №6.
51. Патент №2254666. Электропривод переменного тока / П.Н. Левин,
В.Н. Мещеряков. МКИ Н02Р 7/42. 20.06.2005. Бюл. № 17.
52. Козярук, А.Е. Современное и перспективное алгоритмическое обес-
печение частотно-регулируемых электроприводов / А. Е. Козярук, В. В. Ру-
даков; под. общ. ред. А. Г. Народицкого. – С.-Петербург. – 2001. – 126 с.
53. Башарин, А.В. Управление электроприводами / А.В. Башарин, В.А.
Новиков, Г. Г. Соколовский. – Л.: Энергоиздат. – Ленингр. отд-е. – 1982. –
392 с.
54. Krishnan, R. Electric motor drives: modeling, analysis and control / R.
Krishnan // New Jersey, USA: Prentice Hall PTR. – 2001. – 626 pp.
55. Mohan, N. Power Electronics. Converters, application and design. Sec-
ond edition / N. Mohan, T. M. Undeland, W. P. Robbins. – New Jersey, USA: A
John Wiley and Sons, Inc. – 2006. – 802 p.
56. Дьяконов, А.Г. Анализ данных, обучение по прецедентам, логиче-
ские игры, системы WEKA, RapidMiner и MatLab (Практикум на ЭВМ ка-
федры математических методов прогнозирования): Учебное пособие / А.Г.
Дьяконов М.: Издательский отдел факультета ВМК МГУ имени М.В. Ломо-
носова, – 2010. – 278 с.
57. McCulloch, W.S. A logical calculus of the ideas immanent in nervous
activity / W. S. McCulloch, W. Pitts // Bull. Math. Biophys. vol. 5, no. 4, 1943. Р.
115–133.
58. Хайкин, С. Нейронные сети: полный курс / С. Хайкин. - Москва:
Издательский дом “Вильямс,” – 2006. – 1104 с.

154
59. Schmidhuber, J. Deep Learning in neural networks: An overview,” / J.
Schmidhuber/ Neural Networks. vol. 61, 2015. Р. 85–117.
60. Омату, C. Нейроуправление и его приложения / С. Омату, М. Ха-
лид, Р. Юсоф // Москва: ИПРЖР. – 2000. – 272 с.
61. Hagan, M.T. Neural networks for control / M. T. Hagan and H. B.
Demuth // Proc. 1999 Am. Control Conf. (Cat. No. 99CH36251), vol. 3, 1999. Р.
1642–1656.
62. Cybenko, G. Correction: Approximation by Superpositions of a
Sigmoidal Function / G. Cybenko // Mathematics of Control, Signals, and Systems.
vol. 2. 1989. Р. 303–314.
63. Осовский, С. Нейронные сети для обработки информации / Пер. с
польского И.Д. Рудинского. М.: Финансы и статистика. – 2002. — 344 с.
64. Макаров, И.М. Интеллектуальные системы автоматического управ-
ления / Под ред/ И. М. Макарова, И В. Лохина – М. ФИЗМАТЛИТ. – 2001. –
575 с.
65. Чернодуб, А.Н. Oбзор методов нейроуправления / А. Н. Чернодуб,
Д. А. Дзюба // Проблемы программирования, vol. 2, 2011. – С. 79–94.
66. Cheon, K. On Replacing PID Controller with Deep Learning Controller
for DC Motor System,” / K. Cheon, J. Kim, M. Hamadache, D. Lee // J. Autom.
Control Eng., vol. 3, no. 6, 2015. – Р. 452–456.
67. Мещеряков, В.Н. Математическое моделирование и управление
процессами в системах автоматизации промышленных установок с помощью
многозначных нейронных сетей / В.Н. Мещеряков, П.В. Сараев, О.В. Меще-
рякова // Проблемы управления. – 2013. – №6. – С.71-73.
68. Мещерякова, О.В. Построение модели нейросетевой системы управ-
ления электроприводом постоянного тока / Материалы 13-й Международной
научно-технической конференции "Информационные системы и технологии"
Нижний Новгород. 21.04.2017. – С. 251-255.
69. Мещерякова, О.В. Применение нейронных сетей для управления
электроприводом постоянного тока / Материалы 11-й Международной научо-

155
технической конференции "Информационные системы и технологии" Ниж-
ний Новгород. 17.04.2015. – С.156.
70. Беспалов, В.Я. Математическая модель асинхронного двигателя в
обобщённой ортогональной системе координат / В.Я.Беспалов, Ю.А. Мощин-
ский, А.П. Петров // Электричество. – 2002. – №8. – С. 33-39.
71. Мещеряков, В.Н. Математическая векторная модель и структурно-
топологический анализ асинхронного двигателя / В.Н. Мещеряков, О.В. Ме-
щерякова // Сборник научных трудов Международной научно-технической
конференции Фундаментальные и прикладные проблемы модернизации со-
временного машиностроения и металлургии. Липецк. 2012. – С.171-175.
72. Meshcheryakov, V.N. Mathematical vector model of induction motor
and structural-topological analysis of the model / V.N. Meshcheryakov, O.V.
Meshcheryakova // Вести вузов Черноземья. 2014. – №2. – С. 19-22.
73. Орлов, И.Н. Бесконтактный электропривод летательных аппаратов /
И.Н. Орлов, В.Н. Тарасов // - М.: МЭИ. – 1992. – 111 с.
74. Борцов, Ю.А. Тиристорные системы электропривода с упругими
связями / Ю.А. Борцов, Г.Г.Соколовский. - Л.: Энергия, Ленингр. Отд.-ние,
1979. – 160 с.
75. Бессекерский, В.А. Теория систем автоматического управления /
В.А. Бессекерский, Е.П. Попов. - Санкт-Петербург: Профессия. – 2004. –
747 с.
76. Мещеряков, В.Н. Системы асинхронного электропривода на базе
инвертора тока и инвертора напряжения с оптимальным частотным управле-
нием / Монография. Липецк. ЛФ МИКТ – 2013. – 112 с.
77. Мищенко, В.А. Перспективы развития векторного управления элек-
троприводами / В.А.Мищенко // V Международная (XVI всероссийская)
конференция по автоматизированным электроприводам. АЭП-2007. Санкт-
Петербург,18-21 сентября 2007. – С.60-63.

156
78. Шрейнер, Р.Т. Адаптивная система векторного управления асин-
хронным электроприводом с ориентацией поля ротора / Р.Т. Шрейнер, В.А.
Поляков // Электротехника. –1998. – №2. – С.23-29.
79. Виноградов, А.Б. Адаптивно-векторная система бездатчикового
асинхронного электропривода серии ЭПВ / А.Б.Виноградов, А.А.Сибирцев,
Ю.И.Колодин // Силовая электроника. –2006. –№3. – С. 46-51.
80. Мещеряков, В.Н. Оптимизация взаимного положения векторов тока
статора и магнитного потока асинхронного двигателя при векторном управ-
лении / В.Н.Мещеряков, П.Н.Левин // Известия вузов Электромеханика. –
2006. – №1. – С.25-27.
81. Мещеряков, В.Н. Оптимизация взаимного положения векторов тока
статора и главного потокосцепления асинхронного двигателя при векторном
управлении / В.Н. Мещеряков, В.С. Черкасова, О.В. Мещерякова // Вести ву-
зов Черноземья. – 2011. – №2. – С.45-49.
82. Мещеряков, В.Н., Черкасова В.С., Мещерякова О.В. Коррекция си-
стемы векторного управления асинхронным электроприводом / Системы
управления и информационные технологии, №3(61), – 2015. – С. 36-38.
83. Мещеряков, В.Н. Разработка и исследование частотного асинхрон-
ного электропривода / В.Н. Мещеряков, А.М. Башлыков, А.А Муравьев, О.В.
Мещерякова // Труды 16-й Международной научно-технической конферен-
ции "Электроприводы переменного тока". Екатеринбург. 05.09.15. –
С.175-178.
84. Мещеряков, В.Н. Асинхронный электропривод с поддержанием оп-
тимального угла между моментообразующими векторами / В.Н. Мещеряков,
П.Е. Цветков, О.В. Мещерякова // Вести вузов Черноземья. – 2013. – №1. –
С.17-21.
85. Патент РФ №2132110 РФ, МКП. Н02 Р 21/00. Способ оптимального
векторного управления асинхронным электродвигателем и электропривод
для осуществления этого способа / Мищенко В.А., Мищенко Н.И., Мищенко
А.В. Опубл. 20.06.1999. Бюл. №6.
157
86. Патент № 2447573. Электропривод переменного тока / Мещеряков
В.Н., Зотов В.А., Мещерякова О.В. Заявл. 02.11.10. Опубл. 10.04.12, Бюл
№10.
87. Патент № 2512873. Электропривод переменного тока / Мещеряков
В.Н., Синюкова Т.В., Мещерякова О.В. Заявл. 09.01.13. Опубл. 10.04.14. Бюл.
№10.
88. Патент № 2528612. Электропривод переменного тока / Мещеряков
В.Н., Бойков А.И. Мещерякова О.В. Заявл. 26.12.12. Опубл.10.07.14. Бюл.
№19.
89. Патент № 2539347 Способ управления автономным асинхронным
двигателем / Мещеряков В.Н., Мещерякова О.В. Заявл. 26.07.13. Опубл.
20.01.15. Бюл. №2.
90. Патент РФ №2582202 Электропривод переменного тока / Мещеря-
ков В.Н., Мещерякова О.В. Опубл. 20.04.16 Бюл. №11.
91. Патент РФ №132282 на полезную модель. Устройство для управле-
ния асинхронным двигателем с фазным ротором / Мещеряков В.Н., Синюко-
ва Т.В., Мещерякова О.В. Заявл. 09.01.2013. Опубл. 10.09.2013. Бюл №25.
92. Мещеряков, В.Н. Система управления автономным инвертором то-
ка с релейным формированием напряжения на конденсаторах выходного
фильтра для частотно-управляемых асинхронных электроприводов /
В.Н.Мещеряков, Д.В.Пешков // Известия вузов Электромеханика. – 2010. –
№2. – С.39-42.
93. Мещеряков, В.Н. Системы скалярного и векторного управления ча-
стотными электроприводами с релейным регулятором тока / В.Н. Мещеря-
ков, А.М. Башлыков, A.C. Абросимов, М.М. Лосихин, О.В. Мещерякова //
Труды 7-й Международной конференции АЭП 2012. Иваново 2-4 октября
2012. – С. 37-41.
94. Абросимов, А.С. Система управления асинхронным электроприво-
дом с помощью автономного инвертора тока с релейным регулятором / A.C.
Абросимов, В.Н. Мещеряков, О.В. Мещерякова Сборник научных трудов

158
Международной научно-практической конференции "Современная металлур-
гия начала нового тысячелетия». 17-21.11.2014. Ч.2. – С. 88-93.
95. Мещеряков, В. Н. Анализ систем управления электроприводом на
базе автономного инвертора тока с релейными регуляторами тока и релей-
ными регуляторами напряжения со сглаживающим емкостным фильтром / В.
Н. Мещеряков, А. C. Абросимов // Электротехнические комплексы и системы
управления. – Воронеж, ВГТУ. – 2011. – №3. – С. 64-68.
96. Мещеряков, В.Н. Система управления асинхронным электроприво-
дом на базе автономного инвертора тока с релейным регулятором напряже-
ния / В.Н. Мещеряков, О.В. Мещерякова // Электротехнические системы и
комплексы: Международный сборник научных трудов. Изд-во Магнитогор-
ского государственного технического университета им. Г.И. Носова. – 2013.
– С. 130-137.
97. Мещеряков, В.Н. Системы частотно-каскадного асинхронного
электропривода, выполненные на базе инвертора напряжения / В.Н. Мещеря-
ков, А.М. Башлыков, В.А. Зотов, О.В. Мещерякова // Вести вузов Чернозе-
мья. – 2011. – №4. – С.21-25.
98. Мещеряков, В.Н. Система векторного управления асинхронным
электроприводом, применяемым в металлургии / В.Н. Мещеряков, О.В. Ме-
щерякова, Д.В. Ласточкин // Материалы 5-й Международной научно-
практической конференции «Металлургия нового тысячелетия». Ч.1. Липецк.
8-10 декабря 2015 г. – С.120 -124.
99. Мещерякова, О.В. Применение многозначных нейронных сетей /
Материалы 9-й Всероссийской школы конференции молодых ученых
"Управление большими системами". т.2. Липецк. 21-24 мая 2012. – С.58-59.
100. Дьяконов, В. Matlab 6/6.1/6.5 + Simulink 4/5 в математике и моде-
лировании. Полное руководство пользователя // М.: Солон-Пресс. – 2003 –
576 с.

159
101. Герман-Галкин, С.Г. Компьютерное моделирование полупровод-
никовых систем MATLAB 6.0 / С.Г. Герман-Галкин. - СПб.: КОРОНА. –
принт – 2001. – 320 c.
102. Айзенберг, Н.Н. Нейросети на многозначных нейроэлементах:
обучение, обработка и распознавание изображений / Н.Н. Айзенберг, И.Н.
Айзенберг, Г.А. Кривошеев // Компьютерная оптика. 1995. № 14-15. С.179-
186.
103. Aizenberg I. Complex-Valued Neural Networks with Multi-Valued
Neurons / I. Aizenberg // Berlin : Springer. – 2011. – 264 p.
104. Aizenberg, N.N. CNN Based on Multi-Valued Neuron as a Modelof
Associative Memory for Gray-Scale Images / N.N. Aizenberg, I.N. Aizenberg //
Proceedings of the 2-d International Workshop on Cellular Neural Networks and
their Applications. Munich. – 1992. – P. 36–41.
105. Мещерякова, О.В. Применение нейронных сетей для управления
мобильными роботами / Материалы 12-й Международной научо-технической
конференции "Информационные системы и технологии". Нижний Новгород.
22.04.2016. – С.210.
106. Мещерякова, О.В. Нейронные сети и их применение в системах элек-
тропривода и автоматизации промышленных установок Материалы региональ-
ной научно-технической конференции «Автоматизация и роботизация
технологических процессов» Воронеж. 16-17 ноября 2012 г. – С. 14-16.
107. Омельченко, Е.Я. Преобразователи частоты Sinamics / Е.Я. Омель-
ченко, В.О. Моисеев, С.С. Енин. // Магнитогорск: Изд-во Магнитогорск. гос.
техн. ун-та им. Г.И. Носова. – 2015. – 195 с.

160
ПРИЛОЖЕНИЯ
Приложение 1.
СИСТЕМА ПОДЧИНЕННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
ПОСТОЯННОГО ТОКА
а
б
Рисунок П1.1 - Электропривод постоянного тока: а - функциональная
схема; б - структурная схема двухконтурной системы подчиненного управле-
ния
Таблица П.1.
Постоянные времени электропривода и передаточные функции регуляторов
Постоянная
времени
цепи якоря
Электромеханиче-
ская постоянная
времени
ПИ – регулятор
тока Регулятор скорости
ЯЦ
ЯЦ
ЯR
LT
2
H
ЯЦ
M)Ф(к
RJT
pkk2T
R1)p(T(p)W
TП
ЯЦЯПИ
РT
сЯЦ
MTП
РСkRT2
KTk(p)W
cЯЦ
2
TMПИ
РСkRTp8
KkT)1pT4()p(W
- -БЗС РС РТ
ДрД
ДТ
УП1ДС
БО
-
-
ОВ-
--
-
- УП2

161
Приложение 2.
ПРАВИЛО ДЛЯ НЕКАСАЮЩИХСЯ КОНТУРОВ (ТЕОРЕМА МЕЙСОНА)
Передача между любым входом Хвх (р) и любым выходом Хвых(р)
структурной схемы определяется:
,p
ppW
рх
рxpW
ii
вх
вых
где
...)p(W)p(W)p(W1p3k2k1k
)p(W1k
- сумма передач всех контуров;
)p(W2k
- сумма произведений передач некасающихся друг друга пар
контуров;
)p(W3k
- сумма произведений передач некасающихся друг друга
троек контуров и т.д.;
Wi (p) - передача i – го прямого пути, равная произведению переда-
точных функций всех звеньев этого прямого пути от Хвх (р) к Хвых(р);
)p(W1ik
- сумма передач всех контуров не касающихся i – го прямого
пути от Хвх (р) к Хвых(р);
)p(W2ik
- сумма произведений передач всех пар контуров не каса-
ющихся i – го прямого пути от Хвх (р) к Хвых(р) и друг друга;
)p(W3ik
- сумма произведений передач всех троек контуров не ка-
сающихся i – го прямого пути от Хвх (р) к Хвых(р) и друг друга и т.д.;
...)p(W)p(W)p(W1)p(3ik2ik1iki

162
Приложение 3.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ БЛОКА ВЫЧИСЛЕНИЯ УГЛА 0
Рисунок П.4 - Структурная схема модели «Вычисление 0 »
в блоках MATLAB приложение Simulink

163
Приложение 4.
МАТЕМАТИЧЕCКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ
ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА С ИМПУЛЬСНЫМ
УПРАВЛЕНИЕМ И БЛОКОМ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ
Рисунок. П 4.1. Схема математической модели
Рисунок. П 4.2 – График )]t(M[f)t(

164
Рисунок. П 4.3 - Графики изменения во времени: скорости; тока якоря;
тока аккумуляторной батареи

165
Приложение 5.
ЭКСПЕРИМЕНТАЛЬНЫЕ ГРАФИКИ ИЗМЕНЕНИЯ ПЕРЕМЕННЫХ
АСИНХРОННОГО ДВИГАТЕЛЯ, ПИТАЮЩЕГОСЯ ОТ ПЧ SINAMICS S120
Рисунок П 5.1 – Скалярное управление АД - включение и отключение
сигнала задания частоты (f1= 10 Гц) и изменение нагрузки на валу
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс
5000 10000 15000 20000 t,мс 5000 10000 15000 20000 t,мс

166
Рисунок П 5.2 – Скалярное управление АД - включение и отключение
сигнала задания частоты (f1= 20 Гц) и изменение нагрузки на валу
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс
10000 20000 30000 t,мс

167
Рисунок П 5.3 – Векторное управление - ступенчатое регулирование
сигнала задания частоты (f 1= 10,5 Гц; f 1= 11 Гц; f1 = 12,5 Гц) и изменение
нагрузки на валу
20000 30000 t,мс 20000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс

168
Рисунок П 5.4 – Векторное управление - ступенчатое регулирование
сигнала задания частоты (f 1= 4 Гц; f 1= 10 Гц; f1 = 20 Гц; f1 = 23 Гц) и
изменение нагрузки на валу
10000 20000 t,мс 10000 20000 t,мс
10000 20000 t,мс 10000 20000 t,мс
10000 20000 t,мс 10000 20000 t,мс
10000 20000 t,мс
10000 20000 t,мс

169
Приложение 6.
АКТ ВНЕДРЕНИЯ В ПРОИЗВОДСТВО

170
Приложение 7.
АКТ ВНЕДРЕНИЯ В УЧЕБНЫЙ ПРОЦЕСС




















