Laporan Dasar Sistem Kontrol (Pengatur Proporsi)
12
LAPORAN PRAKTEK DASAR SISTEM KONTROL PERCOBAAN I PENGATUR PROPORSI Disusun oleh : Nama : Lyla Diah Susanti NIM : 41412110113 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS MERCU BUANA JAKARTA
Transcript of Laporan Dasar Sistem Kontrol (Pengatur Proporsi)

LAPORAN PRAKTEK
DASAR SISTEM KONTROLPERCOBAAN I
PENGATUR PROPORSI
Disusun oleh :
Nama : Lyla Diah Susanti
NIM : 41412110113
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA

Laporan Praktikum Dasar Sistem Kontrol 2013
2013
PRAKTIKUMDASAR SISTEM KONTROL Q
No. Dokumen DistribusiTgl. Efektif Jurusan Teknik
Elektro
PERCOBAAN I
PENGATUR PROPORSI
TUJUAN
Setelah melaksanakan percobaan ini, Anda diharapkan
dapat :
1. Memahami sifat dari pengatur proporsi
2. Memahami metode dari pengoperasian pengatur proporsi
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 2

Laporan Praktikum Dasar Sistem Kontrol 2013
Nama Fungsi Paraf
Dibuat olehKepala Laboratorium Teknik
ElektroDisetujui
olehKepala Prodi Teknik Elektro
PERCOBAAN I
PENGATUR RPOPORSI (Pengatur P)
I. Tujuan
Setelah menyelesaikan topik ini diharapkan anda
dapat menjelaskan metode dari pengoperasian
pengatur proporsi (Pengatur P).
II. Pendahuluan
Sifat dari pengatur P yaitu bahwa sinyal output
pada rangkaian pengatur P ini adalah berbanding
lurus dengan sinyal inputnya, sehingga secara
matematis dapat ditulis:
Eout = Av.E¿
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 3

Laporan Praktikum Dasar Sistem Kontrol 2013
Av =EoutE¿
Dimana Av ini adalah factor penguatan dari pengatur
ini, artinya apabila tegangan input berubah secara
linier maka tegangan outputnya akan berubah secara
linier pula.
Perhatikan rangkaian pengatur P seperti yang
diperlihatkan pada gambar berikut ini.
Dari rangkaian di atas dapat diperoleh turunan
sebagai berikut:
E¿ = I¿ . R1 …………………………………… I¿ = E¿
R1
Eout = If (R2+R3) …………………………… If = Eout
R2+R3
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 4

Laporan Praktikum Dasar Sistem Kontrol 2013
Selanjutnya karena I¿ = If maka:
E¿
R1 =
Eout
R2+R3
Sehingga:
EoutE¿
= R2+R3
R1
Kemudian karena:
EoutE¿
= Av
Maka
Av=R2+R3
R1
Besarnya Av atau faktor penguatan ini pada sistem
pengaturan disebut dengan koefisien kerja proporsi
dengan singkatan Kp sehinga dalam hal ini
Kp= R2+R3
R1
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 5

Laporan Praktikum Dasar Sistem Kontrol 2013
Selanjutnya dalam sistem pengaturan yang memakai
rangkaian pengatur P akan selalu ada selisih
statis, dimana selisih statis ini tidak dapat
dihilangkan sebab sistem pengaturannya dikendalikan
oleh selisih ini. Namun selisih statis ini akan
semakin kecil jika koefisien kerja proporsi atau
penguatnnya semakin besar.
Selisih statis ini pada sistem penguatan dikenal
sebagai deviasi dari sistem tersebut yang disingkat
dengan e, dimana:
e = tegangan input – tegangan feedback
sehingga
e=w−Xr
dimana:
e = Deviasi
w = Tegangan input
Xr = Tegangan feedback
Selanjutnya karena
w = −E1
Xr = E2
Maka
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 6
Laporan Praktikum Dasar Sistem Kontrol 2013
e = −E1−E2
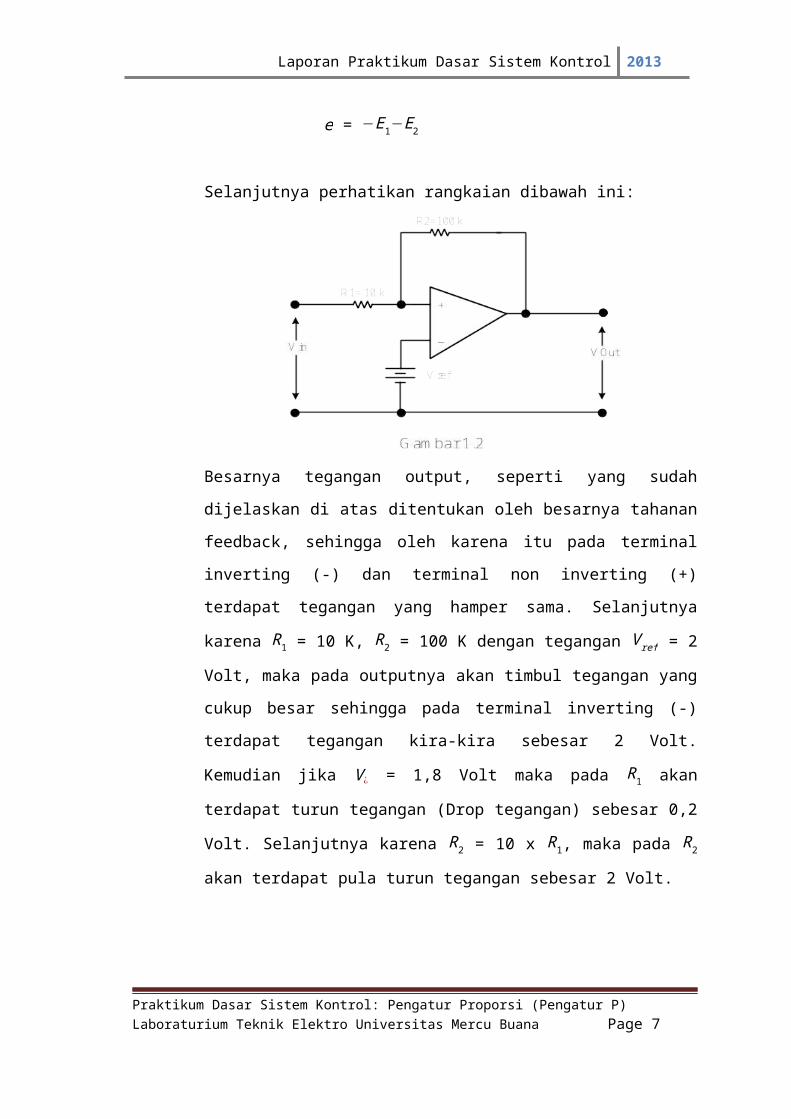
Selanjutnya perhatikan rangkaian dibawah ini:
Besarnya tegangan output, seperti yang sudah
dijelaskan di atas ditentukan oleh besarnya tahanan
feedback, sehingga oleh karena itu pada terminal
inverting (-) dan terminal non inverting (+)
terdapat tegangan yang hamper sama. Selanjutnya
karena R1 = 10 K, R2 = 100 K dengan tegangan Vref = 2
Volt, maka pada outputnya akan timbul tegangan yang
cukup besar sehingga pada terminal inverting (-)
terdapat tegangan kira-kira sebesar 2 Volt.
Kemudian jika V¿ = 1,8 Volt maka pada R1 akan
terdapat turun tegangan (Drop tegangan) sebesar 0,2
Volt. Selanjutnya karena R2 = 10 x R1, maka pada R2
akan terdapat pula turun tegangan sebesar 2 Volt.
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 7

Laporan Praktikum Dasar Sistem Kontrol 2013
Arus yang mengalir lewat R1 dan R2 mempunyai arah
dari kanan ke kiri sehingga terminal sebelah kana
pada R2 adalah positif.
Besarnya tegangan output Vout adalah penjumlahan
dari tegangan pada R2 dan tegangan pada pada
terminal inverting, sehinggan Vout = 2 + 2 = 4 Volt.
Rangkaian di atas akan lebih nyata apabila kita
buat semacam table dengan kondisi sebagai berikut:
Kalau V¿ = 1,9 Volt maka Vout = 3 Volt
V¿ = 2 Volt maka Vout = 2 Volt
V¿ = 2,1 Volt maka Vout = 1 Volt
V¿ = 2,2 Volt maka Vout = 0 Volt
V¿ = 2,3 Volt maka Vout = -1 Volt
Dari harga V¿ dan Vout di atas apabila dibuat
grafiknya maka hasilnya adalah seperti yang
digambarkan di bawah ini:
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 8

Laporan Praktikum Dasar Sistem Kontrol 2013
Dari grafik di atas ternyata bahwa perubahan
tegangan output adalah berbanding lurus dengan
perubahan pada tegangan inputnya, karena itu
rangkaian seperti diatas disebut sebagai rangkaian
pengatur proporsi (Pengatur P).
III. Alat dan bahan yang digunakan:
1. Pesawat latih
2. OP-AMP 741
3. Multimeter (2 buah)
4. Rheostat 10 KΩ
5. Rheostat 100 KΩ
6. Resistor 1 KΩ
7. Resistor 3,3 KΩ
8. Resistor 10 KΩ
9. Resistor 2,2 KΩ
10. Resistor 33 KΩ
11. Resistor 100 KΩ
12. Resistor 220 KΩ
13. Resistor 330 KΩ
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 9

Laporan Praktikum Dasar Sistem Kontrol 2013
IV. Diagram Rangkaian
V. Langkah Kerja
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 10

Laporan Praktikum Dasar Sistem Kontrol 2013
1. Buatlah rangkaian seperti yang diperlihatkan pada
diagram gambar rangkaian gambar 1.5 di atas.
2. Atur tegangan input V¿ sebesar 10 Volt dan
pertahankan tegangan ini tetap selama percobaan
berlangsung.
3. Pasang resisrtor-resistor R1 dan R2 dengan harga
sesuai tabel yang tersedia.
4. Selanjutnya ukurlah besarnya tegangan outputnya
dari tegangan tersebut kemudian hitung besarnya
penguatan tegangan. Catat hasil pengukuran dan
perhitungan pada tabel.
5. Modifikasi rangkaian di atas menjadi rangkaian
seperti yang diperlihatkan pada diagram rangkaian
gambar 1.6.
6. Atur besarnya tegangan input sebesar 1 Volt dan
Rvar sebesar 0 Ω.
7. Selanjutnya ukurlah besarnya tegangan output.
8. Perbesar harga Rvar besarnya kira-kira 12 dari
harga output yang diharapkan.
9. Ulangi percobaan ini untuk bermacam harga R1 dan
R2.
VI. Pertanyaan
1. Jelaskan fungsi dari rangkaian penguat inverting
sebagai rangkaian pengatur P!
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 11

Laporan Praktikum Dasar Sistem Kontrol 2013
2. Pada penguat inverting dihasilkan outputnya
sebesar – 10 Volt. Berapakah tegangan inputnya
jika R1 = 100 KΩ dengan tahanan feedback sebesar
1 MΩ?
3. Hitung besarnya tegangan output jika pada penguat
inverting diketahui besarnya tegangn input
sebesar 0,5 Volt dengan tahanan inputnya sebesar
20 KΩ dan tahanan feedback sebesar 100 KΩ!
4. Gambarlah grafik hubungan antara tegangan input
dengan tegangan output!
Praktikum Dasar Sistem Kontrol: Pengatur Proporsi (Pengatur P)Laboraturium Teknik Elektro Universitas Mercu Buana Page 12