INERTIALSENSOREN IN DER BIOMECHANISCHEN GANG ...
165
INERTIALSENSOREN IN DER BIOMECHANISCHEN GANG- UND LAUFANALYSE – ANFORDERUNGEN AN SENSOREN UND ALGORITHMIK D i s s e r t a t i o n zur Erlangung des akademischen Grades doctor rerum naturalium (Dr. rer. nat.) vorgelegt der Fakultät für Human- und Sozialwissenschaften der Technischen Universität Chemnitz von Christian Mitschke, geboren am 21.11.1984 in Karl-Marx-Stadt Chemnitz, den 26.03.2018 Gutachter: Prof. Dr. Thomas L. Milani (Technische Universität Chemnitz) Prof. Dr.-Ing. Andrés Kecskeméthy (Universität Duisburg-Essen) Tag der Disputation: 23.05.2018 URL: http://nbn-resolving.de/urn:nbn:de:bsz:ch1-qucosa2-214834
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of INERTIALSENSOREN IN DER BIOMECHANISCHEN GANG ...

INERTIALSENSOREN IN DER BIOMECHANISCHEN
GANG- UND LAUFANALYSE –
ANFORDERUNGEN AN SENSOREN UND ALGORITHMIK
D i s s e r t a t i o n
zur Erlangung des akademischen Grades
doctor rerum naturalium
(Dr. rer. nat.)
vorgelegt der Fakultät für Human- und Sozialwissenschaften der
Technischen Universität Chemnitz
von Christian Mitschke, geboren am 21.11.1984 in Karl-Marx-Stadt
Chemnitz, den 26.03.2018
Gutachter:
Prof. Dr. Thomas L. Milani (Technische Universität Chemnitz)
Prof. Dr.-Ing. Andrés Kecskeméthy (Universität Duisburg-Essen)
Tag der Disputation: 23.05.2018
URL: http://nbn-resolving.de/urn:nbn:de:bsz:ch1-qucosa2-214834

ii
Bibliografische Beschreibung
Mitschke, Christian
Inertialsensoren in der biomechanischen Gang- und Laufanalyse – Anforderungen an Sensoren
und Algorithmik
Technische Universität Chemnitz
91 Seiten1, 150 Literaturangaben2, 18 Abbildungen, 8 Anlagen
Kurzreferat:
Im Fokus dieser kumulativ angefertigten Dissertation stehen vier methodenorientierte biomechani-
sche Studien, in welchen die potentiellen Fehlerquellen analysiert werden, die beim Einsatz von Iner-
tialsensoren in der biomechanischen Gang- und Laufanalyse auftreten können. In den einzelnen Bei-
trägen werden die Einflüsse der Inertialsensoraufnahmefrequenz (Studie I) und des Messbereichs der
Beschleunigungssensoren (Studie II) auf die kinematischen, kinetischen und räumlich-zeitlichen Pa-
rameter systematisch untersucht. Des Weiteren wird sich kritisch mit der Genauigkeit verschiedener
Detektionsmethoden des initialen Bodenkontaktes (Studie III) sowie mit der Aussagekraft der maxi-
malen Eversionsgeschwindigkeit (Studie IV) auseinandergesetzt. Um ein umfassendes Bild der Ein-
flussgrößen zu erhalten, wurde in den Studien II, III und IV untersucht, ob die Materialcharakteristik
der Laufschuhsohle die Genauigkeit der biomechanischen Parameter beeinflusst. Zudem wurde in
Studie III geprüft, welchen zusätzlichen Effekt der Laufstil (Vor- und Rückfußlaufen) auf die Genau-
igkeit der initialen Bodenkontaktbestimmung hat sowie welchen Einfluss die Bewegungsgeschwin-
digkeit (Gehen und Laufen) auf die maximale Eversionsgeschwindigkeit nehmen kann (Studie IV).
Die Ergebnisse der vier Untersuchungen werden am Ende dieser Arbeit in einem gemeinsamen Kon-
text diskutiert. Auf Grundlage der Erkenntnisse konnte eine Übersicht erstellt werden, welche sowohl
1 Seitenzahl des kumulativen Anteils der Arbeit 2 Zahl der im Literaturverzeichnis ausgewiesenen Literaturangaben

iii
die Mindestanforderungen an Inertialsensoren als auch die Einflussgrößen auf die Genauigkeit der
biomechanischen Parameter enthält. Mit diesem Überblick erhalten Nutzer von Inertialsensoren (z.B.
Sportler, Trainer, Mediziner und Wissenschaftler) bei der Planung einer Bewegungsanalyse die Un-
terstützung, die Sensoren mit der passenden Sensorspezifikation in Kombination mit den präzisesten
Auswertealgorithmen auszuwählen. Zudem können die Informationen aus dieser Dissertation dazu
genutzt werden, Erkenntnisse bereits publizierter Studien kritisch zu hinterfragen.

iv
Abstract
In previous studies, inertial sensors were used to investigate kinematic, kinetic, and spatio-temporal
parameters during walking and running. The present cumulative doctoral thesis consists of four meth-
odological studies. Two of the studies examine the influence of inertial sensor sampling rate (study
I) and accelerometer operating range (study II) on the accuracy of biomechanical parameters. Another
study investigated whether different published foot strike detection methods can accurately detect the
time of initial ground contact (study III). The final study examined whether a single gyroscope can
be used to accurately determine peak eversion velocity (study IV). In order to obtain a comprehensive
view of the influencing factors, studies II, III and IV also investigated whether the material charac-
teristics of the running shoe sole also influence the accuracy of the biomechanical parameters. Addi-
tionally, the effect of running style (forefoot or rearfoot) on the accuracy of foot strike detection
methods was investigated in study III, and the effect of locomotion speed (walking, running slow up
to running fast) on the accuracy of peak eversion velocity was examined in study IV. The results of
the four investigations will be summarized and discussed in a common context. Based on the findings,
an overview was prepared which contains both the minimum requirements for inertial sensors and
also the influencing variables on the accuracy of the biomechanical parameters. This overview may
assist users of inertial sensors (e.g. athletes, trainers, physicians, or scientists) in planning gait and
running analyses to select inertial sensors with the appropriate specification in combination with the
most accurate algorithms. In addition, the information from this dissertation can be used to critically
consider the findings of published studies.
Keywords: micro-electro-mechanical-sensor, inertial sensor, inertial measurement unit, sampling
rate, sensor operating range, initial ground contact, peak tibial acceleration, stride length, peak ever-
sion velocity

Inhaltsverzeichnis
v
Inhaltsverzeichnis
INHALTSVERZEICHNIS ........................................................................................................................................................... V
ABBILDUNGSVERZEICHNIS .................................................................................................................................................... VII
TABELLENVERZEICHNIS ......................................................................................................................................................... IX
ABKÜRZUNGSVERZEICHNIS.................................................................................................................................................... X
1 EINFÜHRUNG .......................................................................................................................................................... 1
2 GRUNDLAGEN DER INERTIALSENSOREN ......................................................................................................................... 9
2.1 HISTORISCHE ENTWICKLUNG DER INERTIALSENSOREN .................................................................................................... 10
2.2 FUNKTIONSWEISE AUSGEWÄHLTER INERTIALSENSOREN .................................................................................................. 13
2.2.1 DER BESCHLEUNIGUNGSSENSOR .......................................................................................................................... 13
2.2.2 DAS GYROSKOP ................................................................................................................................................ 17
2.3 PARAMETER IN DER BIOMECHANISCHEN GANG- UND LAUFANALYSE ................................................................................. 20
2.3.1 TIBIALE SPITZENBESCHLEUNIGUNG ........................................................................................................................ 20
2.3.2 MAXIMALE EVERSIONSGESCHWINDIGKEIT .............................................................................................................. 23
2.3.3 INITIALER BODENKONTAKT, ENDE BODENKONTAKT, BODENKONTAKTDAUER UND DOPPELSCHRITTDAUER ........................... 25
2.3.4 FUßAUFSATZWINKEL .......................................................................................................................................... 27
2.3.5 MITTLERE LAUFGESCHWINDIGKEIT UND DOPPELSCHRITTLÄNGE .................................................................................. 31
2.4 INERTIALSENSOREN VERSUS „GOLDSTANDARD“ ............................................................................................................ 35
2.4.1 TIBIALE SPITZENBESCHLEUNIGUNG ........................................................................................................................ 35
2.4.2 MAXIMALE EVERSIONSGESCHWINDIGKEIT .............................................................................................................. 36
2.4.3 INITIALER BODENKONTAKT, ENDE BODENKONTAKT, BODENKONTAKTDAUER UND DOPPELSCHRITTDAUER ........................... 37
2.4.4 FUßAUFSATZWINKEL .......................................................................................................................................... 38
2.4.5 MITTLERE LAUFGESCHWINDIGKEIT UND DOPPELSCHRITTLÄNGE .................................................................................. 39
3 METHODISCHE HINWEISE ZUR UMSETZUNG DER STUDIEN .............................................................................................. 41
3.1 PROBANDENKOLLEKTIV ............................................................................................................................................ 42
3.2 QUANTIFIZIERUNG DER MECHANISCHEN MATERIALEIGENSCHAFTEN DER LAUFSCHUHE ......................................................... 42
3.3 STUDIENDESIGNPLANUNG UND PUBLIKATION ............................................................................................................... 44
4 EIGENE BEITRÄGE ZUR BESTIMMUNG DER ANFORDERUNGEN AN INERTIALSENSOREN UND ALGORITHMIK BEIM EINSATZ IN DER
BIOMECHANISCHEN GANG- UND LAUFANALYSE....................................................................................................................... 46
4.1 THE INFLUENCE OF INERTIAL SENSOR SAMPLING FREQUENCY ON THE ACCURACY OF MEASUREMENT PARAMETERS IN REARFOOT
RUNNING ........................................................................................................................................................................ 47
4.2 THE EFFECT OF THE ACCELEROMETER OPERATING RANGE ON BIOMECHANICAL PARAMETERS: STRIDE LENGTH, VELOCITY, AND
PEAK TIBIAL ACCELERATION DURING RUNNING ...................................................................................................................... 51

Inhaltsverzeichnis
vi
4.3 WHICH METHOD DETECTS FOOT STRIKE IN REARFOOT AND FOREFOOT RUNNERS ACCURATELY WHEN USING AN INERTIAL
MEASUREMENT UNIT? ...................................................................................................................................................... 55
4.4 A SINGLE GYROSCOPE CAN BE USED TO ACCURATELY DETERMINE PEAK EVERSION VELOCITY DURING LOCOMOTION AT DIFFERENT
SPEEDS AND IN VARIOUS SHOES .......................................................................................................................................... 59
5 ABSCHLUSSDISKUSSION, ZUSAMMENFASSUNG UND AUSBLICK ......................................................................................... 63
5.1 ABSCHLUSSDISKUSSION ........................................................................................................................................... 64
5.2 ZUSAMMENFASSUNG .............................................................................................................................................. 76
5.3 AUSBLICK .............................................................................................................................................................. 80
LITERATURVERZEICHNIS ...................................................................................................................................................... 82
ANHANG ......................................................................................................................................................................... 92

Abbildungsverzeichnis
vii
Abbildungsverzeichnis
ABBILDUNG 2.1.1: NINTENDO WII-CONTROLLER, MIT UND OHNE OBERSCHALE, MIT INTEGRIERTEN 3D-BESCHLEUNIGUNGSSENSOR ZUR
ERFASSUNG DER BESCHLEUNIGUNGEN (ACC X, Y UND Z) UND DEM ZUSATZMODUL „MOTIONPLUS“ MIT ZWEI INTEGRIERTEN
GYROSKOPEN (2D UND 1D) ZUR ERFASSUNG DER ROTATORISCHEN BEWEGUNGEN (ROLL, NICK UND GIER). (EIGENE DARSTELLUNG) . 12
ABBILDUNG 2.2.1.1: SCHEMATISCHE DARSTELLUNG EINES FEDER-MASSE-DÄMPFER-SYSTEMS ZUR VEREINFACHTEN VERANSCHAULICHUNG
DER ARBEITSWEISE EINES BESCHLEUNIGUNGSSENSORS. EINE BESCHLEUNIGUNG FÜHRT ZUR AUSLENKUNG DER MASSE M, WELCHE
EINER DÄMPFUNG C UNTERLIEGT. (EIGENE DARSTELLUNG) .................................................................................................. 14
ABBILDUNG 2.2.1.2: VEREINFACHTE DARSTELLUNG EINES KAPAZITIVEN 1D-BESCHLEUNIGUNGSAUFNEHMERS AUS SILICIUM MIT ZWEI FESTEN
UND EINER BEWEGLICHEN ELEKTRODE. ELEKTRODENABSTÄNDE D1 UND D2 ÄNDERN SICH AUFGRUND EINER BESCHLEUNIGUNG ,
SENKRECHT WIRKEND ZUR SEISMISCHEN MASSE. (MODIFIZIERT NACH GLOBISCH [21]) ............................................................. 15
ABBILDUNG 2.2.1.3: VEREINFACHTE DARSTELLUNG EINES KAPAZITIVEN BESCHLEUNIGUNGSAUFNEHMERS MIT SEINER KAMMARTIGEN
STRUKTUR, EINER SCHWINGUNGSFREI GELAGERTEN METALLISIERTEN MITTELPLATTE (ELEKTRODEN SYMBOLISCH BLAU DARGESTELLT)
UND FESTSTEHENDEN ELEKTRODEN (GRÜN) AM FIXIERTEN RAHMEN. (EIGENE DARSTELLUNG) .................................................... 16
ABBILDUNG 2.2.2.1: LINKES BILD: VISUALISIERUNG DER TRAJEKTORIE (BLAU DARGESTELLT) EINER SICH MIT DER GESCHWINDIGKEIT LINEAR
BEWEGENDEN MASSE M (SCHWARZ DARGESTELLT) AUFGRUND DER CORIOLISKRAFT (FCORIOLIS) FÜR EINEN UM DIE Z-ACHSE MIT DER
WINKELGESCHWINDIGKEIT 𝜔 MITROTIERENDEN BEOBACHTER IM BEZUGSSYSTEM XYZ. (EIGENE DARSTELLUNG) ............................ 19
ABBILDUNG 2.2.2.2: RECHTES BILD: SCHEMATISCHE DARSTELLUNG EINES FEDER-MASSE-DÄMPFER-SYSTEMS ZUM MESSEN DER
WINKELGESCHWINDIGKEIT 𝜔. DER INNERE RAHMEN DIENT DER ERZEUGUNG DER PRIMÄRBEWEGUNG (ROTER PFEIL) UND DER
ÄUßERE RAHMEN ZUM KAPAZITIVEN MESSEN DER CORIOLISKRAFT (GRÜNER PFEIL) ÜBER KAMMELEKTRODEN (DARGESTELLT
DUNKELGRÜN UND BLAU). BEIDE RAHMEN STEHEN ORTHOGONAL ZUEINANDER UND SIND MECHANISCH ENTKOPPELT. (MODIFIZIERT
NACH BEEBY [25])....................................................................................................................................................... 19
ABBILDUNG 2.3.1.1: ANBRINGUNG DER INERTIALSENSOREN AM PROBANDEN: A) VORDERANSICHT MIT 1D-BESCHLEUNIGUNGSSENSOR AN DER
VORDEREN TIBIAKANTE DES RECHTEN BEINES ZUR MESSUNG DER TIBIALEN SPITZENBESCHLEUNIGUNG UND B) RÜCKANSICHT MIT EINER
IMU (6DOF) ANGEBRACHT AN DER FERSENKAPPE DES RECHTEN SCHUHS. (EIGENE DARSTELLUNG) ............................................. 22
ABBILDUNG 2.3.1.2: SIGNALE EINES 3D-BESCHLEUNIGUNGSSENSORS FÜR ZWEI DOPPELSCHRITTE – AUSZUG AUS EINEM DAUERLAUF UNTER
FELDBEDINGUNGEN. KENNZEICHNUNG DER TIBIALEN SPITZENBESCHLEUNIGUNG (LONGITUDINALER RICHTUNG DER TIBIA) FÜR JEDEN
SCHRITT DURCH EIN ROTES KREUZ (PTA1 BIS PTA3). (EIGENE DARSTELLUNG) ......................................................................... 23
ABBILDUNG 2.3.2.1: DARSTELLUNG DER A) SUPINATIONS- SOWIE B) PRONATIONSSTELLUNG DES FUßES IM UNBELASTETEN ZUSTAND IN DER
RÜCKANSICHT. (MODIFIZIERT NACH GRÜNEWALD [150]) ................................................................................................... 23
ABBILDUNG 2.3.2.2: SIGNALE EINES WINKELGESCHWINDIGKEITSVERLAUFS IN DER FRONTALEBENE FÜR ZWEI DOPPELSCHRITTE – AUSZUG AUS
EINEM DAUERLAUF UNTER FELDBEDINGUNGEN. KENNZEICHNUNG DER MAXIMALEN EVERSIONSGESCHWINDIGKEIT FÜR JEDEN SCHRITT
DURCH EIN ROTES KREUZ (EVVEL1 BIS EVVEL3). (EIGENE DARSTELLUNG) ................................................................................ 25
ABBILDUNG 2.3.4.1: EXEMPLARISCHER VERLAUF DES FUßANSTELLWINKELS IM RAUM IN DER SAGITTALEBENE FÜR ZWEI DOPPELSCHRITTE IN
EINEM LABORTEST AUF DER LAUFSTRECKE. (EIGENE DARSTELLUNG) ...................................................................................... 30

Abbildungsverzeichnis
viii
ABBILDUNG 2.3.5.1: EXEMPLARISCHER VERLAUF DER HORIZONTALEN (VORWÄRTS-GERICHTETEN) GESCHWINDIGKEIT DES FUßES FÜR ZWEI
DOPPELSCHRITTE IN EINEM LABORTEST AUF DER LAUFSTRECKE; DARSTELLUNG DES INITIALEN BODENKONTAKTES DURCH ROTE KREUZE
(TD1 UND TD2). (EIGENE DARSTELLUNG) ........................................................................................................................ 34
ABBILDUNG 3.2.1: EXEMPLARISCHE HYSTERESEKURVE FÜR DIE LAUFSCHUHE: ADIDAS ADISTAR (ADISTAR), ASICS GEL NIMBUS 12 (ASGEL),
PUMA SPEED 600 (SPEED600), ERMITTELT IM FERSENBEREICH. (EIGENE DARSTELLUNG)........................................................ 44
ABBILDUNG 4.2.1: DARSTELLUNG DER RESULTIERENDEN HORIZONTALEN FUßGESCHWINDIGKEIT (VORWÄRTSBEWEGUNG) FÜR EINEN
EXEMPLARISCHEN SCHRITT, BERECHNET MIT EINEM MESSBEREICH DES BESCHLEUNIGUNGSSENSORS VON ±70 G (SCHWARZE LINIE),
±16 G (GRAUE GESTRICHELTE LINIE) UND ±8 G (GRAUE LINIE). DIE VERTIKALEN LINIEN KENNZEICHNEN DAS ABHEBEN DER ZEHEN VOM
BODEN (LINKS), GEFOLGT VON DER SCHWUNGPHASE UND DEM INITIALEN BODENKONTAKT (RECHTS). (DARSTELLUNG AUS MITSCHKE ET
AL. [133]) ................................................................................................................................................................. 54
ABBILDUNG 4.3.1: EXEMPLARISCHE DARSTELLUNG DER BESTIMMUNG DES INITIALEN BODENKONTAKTES MITTELS DER VIER METHODEN (M1
BIS M4), WELCHE MIT HILFE DER BEIDEN IMU-DATEN BERECHNET WURDEN, SOWIE DER REFERENZ (KRAFTMESSPLATTE). DIE
VERTIKALEN, GRAU GESTRICHELTEN LINIEN KENNZEICHNEN DEN ZEITPUNKT DES INITIALEN BODENKONTAKTES MITTELS
KRAFTMESSPLATTE FÜR DEN RÜCK- (LINKS: RFS) UND VORFUßLAUFSTIL (RECHTS: FFS). (DARSTELLUNG AUS MITSCHKE ET AL. [131])
................................................................................................................................................................................ 57
ABBILDUNG 5.1.1: VISUALISIERUNG DER ABHÄNGIGKEITEN DER BIOMECHANISCHEN PARAMETER VOM
BESCHLEUNIGUNGSSENSORMESSBEREICH (OR), DER AUFNAHMEFREQUENZ (SF), DER GENAUIGKEIT DER INITIALEN
BODENKONTAKTDETEKTION (TD) SOWIE DER BESTIMMUNG DER MAXIMALEN EVERSIONSGESCHWINDIGKEIT (EVVEL). (EIGENE
DARSTELLUNG) ........................................................................................................................................................... 67
ABBILDUNG 5.1.2: EXEMPLARISCHE DARSTELLUNG DES VERTIKALEN BESCHLEUNIGUNGSSIGNALS DER AN DER FERSENKAPPE DES SCHUHS
ANGEBRACHTEN IMU FÜR 500 HZ (GRAUE LINIE) UND 500 HZ, MIT 1 MS VERSCHOBENER TD-DETEKTION (SCHWARZE LINIE).
(DARSTELLUNG AUS MITSCHKE ET AL. [125]) ................................................................................................................... 69
ABBILDUNG 5.1.3: DARSTELLUNG DER RESULTIERENDEN HORIZONTALEN FUßGESCHWINDIGKEIT (VORWÄRTSBEWEGUNG) FÜR EINEN
EXEMPLARISCHEN SCHRITT, BERECHNET MIT EINER AUFNAHMEFREQUENZ VON 1000 HZ (SCHWARZE LINIE) UND 250 HZ (GRAU
GEPUNKTETE LINIE, FÜR DIE ZEITLICHE ÜBEREINSTIMMUNG INTERPOLIERT). (DARSTELLUNG AUS MITSCHKE ET AL. [125]) ............... 75

Tabellenverzeichnis
ix
Tabellenverzeichnis
TABELLE 3.2.1: VARIABLEN ZUR CHARAKTERISIERUNG DER MECHANISCHEN LAUFSCHUHEIGENSCHAFTEN. (MODIFIZIERT NACH HEIDENFELDER
[104]) ...................................................................................................................................................................... 43
TABELLE 5.1.1: ÜBERSICHT DER BIOMECHANISCHEN PARAMETER MIT DEN RICHTWERTEN FÜR DEN BESCHLEUNIGUNGSSENSORMESSBEREICH
(OR) UND DIE AUFNAHMEFREQUENZ (SF) SOWIE DEN EINFLUSSGRÖßEN: MATERIALCHARAKTERISTIK DES LAUFSCHUHS,
GESCHWINDIGKEIT UND LAUFSTIL. (EIGENE DARSTELLUNG) ................................................................................................. 76

Abkürzungsverzeichnis
x
Abkürzungsverzeichnis
1D, 2D, 3D eindimensional, zweidimensional, dreidimensional
ACC Beschleunigung (engl. acceleration)
bzw. beziehungsweise
ca. circa
COP Kraftangriffspunkt (engl. center of pressure)
DoF Freiheitsgrade (engl. degrees of freedom)
ebd. ebenda
evVel maximale Eversionsgeschwindigkeit (engl. peak eversion velocity)
Fa. Firma
FSA Fußaufsatzwinkel (engl. foot strike angle)
g Erdschwerebeschleunigung (g = 9,80665 m/s²)
IMU Räumliche Kombination von mehreren Inertialsensoren mit mindestens zwei
Freiheitsgraden (engl. inertial measurement unit)
MEMS Mikro-elektro-mechanische Systeme
MOCAP optische markerbasierte 3D-Bewegungsanalyse (engl. motion capturing)
ω Winkelgeschwindigkeit
OR Messbereich der Beschleunigungssensoren (engl. operating range)
PHA vertikale Spitzenbeschleunigung, gemessen an der Fersenkappe des Schuhs
(engl. peak vertical heel acceleration)
PTA Tibiale Spitzenbeschleunigung (engl. peak tibial acceleration)
runVel mittlere Laufgeschwindigkeit (engl. running velocity)
SF Aufnahmefrequenz (engl. sampling frequency oder sampling rate)
staDur Bodenkontaktdauer (engl. stance duration)
stepLen Schrittlänge (engl. step length)
strDur Schrittdauer (engl. stride duration)
strLen Schrittlänge eines Doppelschrittes (engl. stride length)
t Zeit
t_evVel Zeitpunkt, wann die maximale Eversionsgeschwindigkeit auftritt (engl. time
until peak eversion velocity)
TD initialer Bodenkontakt (engl. touchdown)

Abkürzungsverzeichnis
xi
θ Fußanstellwinkel im Raum in der Sagittalebene
TO Abheben der Zehen vom Boden (engl. toe-off)
tplan Zeitpunkt der plantaren Phase des Fußes während des Bodenkontaktes
u.a. unter anderem
vgl. vergleiche
vh resultierende Horizontalgeschwindigkeit
vh(0) Geschwindigkeit zur Berechnung der Offsetkorrektur
z.B. zum Beispiel


Einführung
1
Kapitel 1
1 Einführung

Einführung
2
„In der Wissenschaft gleichen wir alle nur den Kindern, die am Rande des Wissens
hie und da einen Kiesel aufheben, während sich der weite Ozean des Unbekannten
vor unseren Augen erstreckt.“
- Isaac Newton1 -
Um dieses Unbekannte Stück für Stück, oder nach Newtons Worten Kiesel für Kiesel, weiter zu er-
schließen, gibt es ein stetiges Streben nach neuen Erkenntnissen. Dazu gehört es auch, die menschli-
che Bewegung in ihren vielen Facetten wissenschaftlich zu untersuchen. Zur Quantifizierung der ki-
nematischen, kinetischen und räumlich-zeitlichen Parameter kommen im Forschungsgebiet der Bio-
mechanik eine Vielzahl an Messverfahren zur Anwendung, egal ob im klinischen Bereich oder z.B.
bei der Forschung und Entwicklung von Sportschuhen.
Für die Erhebung kinematischer und räumlich-zeitlicher Messdaten haben sich in der Vergangenheit
kamerabasierte 3D-Bewegungsanalysesysteme (engl. motion capturing, MOCAP) als „Goldstan-
dard“ etabliert, wobei die Probanden mit aktiven oder passiven Markern an relevanten Körperstellen
versehen werden [1–3]. Als Vertreter für MOCAP-Systeme seien hier Vicon (Oxford Metrics, Lon-
don, England) und Qualisys (Medical AB, Göteborg, Schweden) genannt. Durch die Digitalisierung
der Markerpositionen im Raum und anschließende Analyse dieser Positionsdaten mittels verschiede-
ner Berechnungsalgorithmen können Gelenkwinkelverläufe sowie zeitlich-räumliche Gangparameter
der Probanden bestimmt werden. Jedoch sind MOCAP-Systeme mit starken Einschränkungen ver-
bunden. So erfordern sie beispielsweise einen hohen zeitlichen Aufwand, um die Probanden mit re-
flektierenden Markern an den anatomisch relevanten Stellen zu palpieren. Zudem sind die Messungen
weitgehend an Laborräume gebunden, da z.B. Sonnenstrahlung das Erkennen der Marker im Aufnah-
meraum stark beeinträchtigen kann (Infrarotanteil im Sonnenlicht) oder Regentropfen zu fehlerhaften
Reflektionen führen können. Des Weiteren können reflektierende Elemente an der Sportbekleidung
(z.B. Reflektoren am Schuh) sowie die verhältnismäßig langsamen Aufnahmefrequenzen (zwischen
50 und 500 Hz) gerade bei schnellen dynamischen Bewegungen das Ergebnis stark negativ beein-
flussen. Soll im Speziellen die Kinematik der unteren Extremitäten näher betrachtet werden, z.B. die
des Fußes, kann es aufgrund der beim initialen Bodenkontakt auftretenden hohen Kräfte zu einem
1 Englischer Mathematiker, Physiker und Astronom (1643 - 1727)
Einführung
3
Schwingen der Marker kommen. Aufgrund dessen, dass die auf dem Fuß und Unterschenkel appli-
zierten Marker nicht starr miteinander verbunden sind und sich somit individuell bewegen bzw.
schwingen können, kann die Berechnung der kinematischen Parameter, z.B. des Rückfußwinkels in
der Frontalebene, zusätzlich verfälscht werden [4].
Steht die Kinematik des Fußes im Mittelpunkt der Untersuchung, können als Alternative zu MOCAP-
Systemen auch Elektrogoniometer zum Einsatz kommen. Dabei wird an der Ferse bzw. der Fersen-
kappe des Schuhs sowie an der Unterschenkelrückseite des Probanden ein flexibler Arm angebracht.
Ein Potentiometer2 verbindet den unteren Teil des flexiblen Arms sowie die Ferse/Schuhkappe mit-
einander. Somit ist es möglich, den Rückfußwinkel in der Frontalebene – der Winkel zwischen Un-
terschenkel und Fuß im Subtalargelenk – zu erheben [2,5–8]. Der Vorteil des Elektrogoniometers
gegenüber dem MOCAP-System ist zum einen die deutlich höhere Aufnahmefrequenz (etwa
1000 Hz) und zum anderen die Möglichkeit, auch außerhalb des Labors messen zu können. Nachteilig
kann sich jedoch z.B. bei längeren Läufen das Gewicht der Apparatur auswirken. Ebenso verfügt das
Elektrogoniometer weder über einen internen Speicher noch über eine eigene Stromversorgung,
wodurch ein zusätzlicher Datenlogger getragen bzw. das Gerät über ein Kabel mit einem PC verbun-
den werden muss.
Im Bereich der kinetischen Messverfahren zählen Kraftmessplatten zum „Goldstandard“. Mit deren
Hilfe können die Kräfte beim Gehen und Laufen untersucht werden, welche in Wechselwirkung zwi-
schen Proband und Untergrund auftreten – sogenannte Bodenreaktionskräfte. Kraftmessplatten kön-
nen weiterhin zum Einsatz kommen, wenn die Bodenkontaktdauer bestimmt werden soll oder, wenn
der exakte Zeitpunkt des initialen Bodenkontaktes als Referenz für ein weiteres Messsystem benötigt
wird. So wird z.B. bei der Auswertung von elektromyographischen Signalen der Muskel-Onset in
Relation zum initialen Bodenkontakt untersucht. Bei der Kraftmessplatte wird jedoch ausschließlich
die Bodenkontaktphase untersucht, also der Zeitraum vom initialen Bodenkontakt (engl. touchdown,
TD) über das Abrollen des Fußes bis zum Abheben der Zehen vom Boden (engl. toe-off, TO). Die
Kraftmessplatten sind dabei zumeist einzeln oder in zweifacher Ausführung hintereinander in Gang-
analyselaboren in den Boden eingelassen. Das hat zur Folge, dass die Messungen ebenfalls an das
2 Elektrischer Widerstand, der durch eine Drehung des Schleifers eine Widerstandswertänderung erfährt.

Einführung
4
Labor gebunden sind und, dass nur einzelne Schritte untersucht werden können. Ebenso ist anzumer-
ken, dass der „künstliche Zwang“, die in den Boden eingelassene Kraftmessplatte treffen zu müssen,
das natürliche Laufmuster der Probanden beeinflusst und somit das Untersuchungsergebnis verfäl-
schen kann [9].
Eine Alternative zu den oben genannten Messverfahren stellen seit wenigen Jahren mikro-elektro-
mechanische Systeme (MEMS) dar. Sie gehören der Gruppe der Mikrotechnologien an und setzen
sich aus mikromechanischen sowie mikroelektronischen Bauteilen zusammen. Die Vorteile der
MEMS sind ihre leichte, kompakte und damit portable Bauweise, der geringe Herstellungspreis sowie
die Möglichkeit, hochfrequente Messungen durchführen zu können. Einsatzgebiete dieser innovati-
ven Systeme sind unter anderem die sogenannten Inertialsensoren, welche nach dem physikalischen
Prinzip der Trägheitskraft arbeiten, respektive dem 2. Newton‘schen Axiom [10]. Zur Gruppe der
Inertialsensoren zählen wiederum z.B. Beschleunigungssensoren (oder auch Beschleunigungsaufneh-
mer, Akzelerometer, Accelerometer), die die Beschleunigung3 messen, sowie Gyroskope (oder auch
Drehratensensoren, Gyrometer), welche die Winkelgeschwindigkeit4 erfassen. Der Gruppe der
MEMS können weiterhin Magnetometer (oder Magnetfeldsensoren) zugeordnet werden, mit deren
Hilfe z.B. die Ausrichtung des Sensors zum Erdmagnetfeld ermittelt werden kann. Die räumliche
Kombination verschiedener Inertialsensoren kann auch in einem gemeinsamen Gehäuse erfolgen, so-
dass sie dann eine inertiale Messeinheit bilden (engl. inertial measurement unit, IMU).
In einer Vielzahl wissenschaftlicher Untersuchungen wurden Inertialsensoren eingesetzt, um die
menschliche Bewegung unter verschiedenen Aspekten zu analysieren. Je nach Umfang der zu analy-
sierenden Parameter kamen dabei einfache oder komplexe Sensorsysteme zur Anwendung. Wurden
beispielsweise Belastungen auf die unteren Extremitäten untersucht, kam ein 1D-Beschleunigungs-
sensor zum Einsatz, welcher auf der Tibia angebracht wurde und die Beschleunigungen in longitudi-
naler Achse der Tibia erfasste [6,11]. Ein in die Mittelsohle integriertes 1D-Gyroskop wurde bei-
spielsweise dazu genutzt, die maximalen Eversionsgeschwindigkeiten des Schuhs in der Frontalebene
(evVel) zu bestimmen [12]. Zusätzlich konnte das Gyroskop dazu genutzt werden, in langen und
3 Bezeichnet das „Maß für die Änderung der Geschwindigkeit von Bewegung.“ [148] Einheit: m/s²; g 4 Ist „definiert als der in der Zeiteinheit t überschrittene Winkel α eines zentrifugalgerichteten Strahls.“ [149] Einheit: Grad/s; rad/s

Einführung
5
kontinuierlichen Datensätzen, z.B. bei längeren Messungen unter Feldbedingungen mit mehreren
Schrittzyklen hintereinander, Schritte voneinander zu separieren. In Studien von Mayagoitia et al.
[13] und Takeda et al. [14] wurde die Kinematik der gesamten unteren Extremitäten mittels Iner-
tialsensoren untersucht, indem alle Gelenkwinkel berechnet wurden. Dazu wurde auf jedem Segment,
welches ein zu untersuchendes Gelenk einschloss, ein Sensor appliziert, der die Winkelgeschwindig-
keiten sowie Beschleunigungen dreidimensional erfasste. Anschließend wurden die Sensordaten in
einem Algorithmus zur Gelenkwinkelberechnung weiterverarbeitetet. Zusätzlich kann in Kombina-
tion mit Gyroskopen und Beschleunigungssensoren das Magnetometer bei komplexen Gelenkwin-
kelberechnungen zur Hilfe genommen werden, um die Güte der berechneten Gelenkwinkel zu opti-
mieren und Driftfehler zu korrigieren [15,16]. Durch das Magnetometer können Driftfehler behoben
werden, indem die Sensoren mit Hilfe des Erdmagnetfeldes wieder im kartesischen Koordinatensys-
tem oder auch zueinander ausgerichtet werden [15,17]. Die Driftfehler können aufgrund eines Be-
rechnungsfehlers beim Integrieren von Winkelgeschwindigkeiten zum Winkel entstehen, u.a. auf-
grund des elektrischen Rauschens, und äußeren sich in unphysiologischen Gelenkwinkelverläufen.
Des Weiteren hat das Gyroskop den Nachteil, dass es nach der numerischen Integration keinen abso-
luten Bezugswinkel zum globalen Koordinatensystem herstellen kann, da der Ausgangswinkel vor
der Integration nicht bekannt ist. Auch hier kann unter Zuhilfenahme eines Magnetometers die Ori-
entierung des Sensors im Raum bestimmt werden.
Beim Betrachten der aktuellen Studienlage ist der Trend erkennbar, dass Inertialsensoren immer häu-
figer für biomechanische Bewegungsanalysen unter verschiedenen Bedingungen eingesetzt werden
[18–20]. Es scheint, als wäre mit den Inertialsensoren, mit denen man biomechanische Parameter
unter standardisierten Laborbedingungen sowie unter realen Bedingungen außerhalb des Labors er-
heben kann, eine gute Alternative und Ergänzung zu den bisherigen „Goldstandards“ gefunden. Nor-
ris und Kollegen [20] weisen in ihrem Review jedoch darauf hin, dass die mit Inertialsensoren dur-
geführten Studien methodologisch sehr verschieden sind. Aufgrund der variierenden methodischen
Vorgehensweisen stellt sich somit die Frage nach der Vergleichbarkeit bisheriger Studienergebnisse.
Ebenso ist bei der Planung eines neuen Studiendesigns, in welchem Inertialsensoren für die Analyse
biomechanischer Parameter eingesetzt werden sollen, kritisch zu hinterfragen, an welchen Richtlinien
sich zu orientieren ist, damit potentielle Fehlerquellen reduziert werden können und die Wirklichkeit
nahezu real abgebildet werden kann.

Einführung
6
Dazu sollten vorab die folgenden Punkte näher beleuchtet werden:
Die Sensorspezifikationen: Aufnahmefrequenz und Sensormessbereich
Wie von Norris und Kollegen [20] beschrieben und in der Studienlage ersichtlich, wurden die Mess-
daten mit unterschiedlichen Inertialsensoren erhoben. Teils kamen selbstentwickelte Sensoren zum
Einsatz, teils wurden kommerzielle Sensorsysteme, wie beispielsweise Achillex (Xybermind GmbH,
Tübingen, Deutschland), Shimmer (Shimmer Sensing, Dublin, Irland) oder XSens (Xsens Technolo-
gie, Enschede, Niederlande), genutzt. Jeder dieser Sensoren besitzt individuelle Spezifikationen. So
unterscheiden sie sich u.a. hinsichtlich ihrer Aufnahmefrequenz (engl. sampling frequency, SF), die
zumeist zwischen 1 Hz und 3750 Hz liegt sowie im Sensormessbereich (engl. operating range, OR),
welcher zwischen ±2 g und ±70 g liegt. In bisherigen Untersuchungen wurde jedoch nicht berück-
sichtigt, welche Auswirkungen diese beiden Sensoreigenschaften auf die betrachteten biomechani-
schen Parameter beim Laufen haben können und welchen Einfluss die mechanischen Eigenschaften
des Laufschuhs auf die Genauigkeit der biomechanischen Parameter nehmen.
Der richtige Algorithmus zur Bodenkontaktdetektion
Die Bestimmung des TD, also dem Zeitpunkt, an welchem der Fuß auf den Boden auftrifft, sollte so
genau wie möglich erfolgen. Ist dies nicht der Fall, können biomechanische Parameter, welche in
Relation zu diesem Zeitpunkt definiert werden (z.B. Schrittdauer, Fußaufsatzwinkel oder Muskelak-
tivität), nicht akkurat bestimmt werden. Zur Bestimmung des TD gibt es eine Vielzahl an Algorith-
men, welche die Messdaten der Inertialsensoren am Schuh oder Unterschenkel nutzen. Wie akkurat
diese Algorithmen unter verschieden Bedingungen funktionieren – z.B. beim Vor- und Rückfußlau-
fen oder unter Einfluss unterschiedlicher Schuhbedingungen – ist bisher noch nicht untersucht.
Die Bestimmung der maximalen Eversionsgeschwindigkeit
Die maximale Eversionsgeschwindigkeit des Fußes in der Frontalebene wird in einigen Studien mit
einem an der Fersenkappe des Schuhs angebrachten Gyroskop gemessen. Bisher ist jedoch unklar,
ob die mit dem Gyroskop an der Fersenkappe des Schuhs gemessene Winkelgeschwindigkeit wirklich
die Eversionsgeschwindigkeit, also die Winkelgeschwindigkeit im unteren Sprunglenk, repräsentiert.

Einführung
7
Wie oben erwähnt gibt es bisher keine Hinweise, ob und in welchem Umfang diese vier potentiellen
Fehlerquellen (Aufnahmefrequenz, Sensormessbereich, Bodenkontaktdetektion, maximale Eversi-
onsgeschwindigkeit) einen Einfluss auf die Genauigkeit der biomechanischen Parameter bei Gang-
und Laufanalysen haben. Weiterhin finden sich in der Literatur sehr wenige Informationen, die Auf-
schluss darüber geben, welchen Einfluss die Materialcharakteristik der Laufschuhe auf die Genauig-
keit der oben genannten mit Inertialsensoren erhobenen Parameter hat. Gerade beim Barfußlaufen
oder beim Laufen in Minimalschuhen bzw. Schuhen mit einer harten Zwischensohle wirken hohe
Kräfte mit hohen Kraftanstiegsraten auf die unteren Extremitäten und somit auch auf die am Schuh
oder Unterschenkel angebrachten Inertialsensoren. Welche Auswirkungen die starken Stöße, insbe-
sondere zu Beginn der initialen Bodenkontaktphase, auf die Genauigkeit der mit Inertialsensoren un-
tersuchten biomechanischen Parameter haben, wurde bis dato nicht untersucht.
Das Ziel dieser Arbeit ist daher, mit Hilfe von vier methodenorientierten biomechanischen Untersu-
chungen die oben genannten möglichen Fehlerquellen, die beim Einsatz von Inertialsensoren in der
biomechanischen Gang- und Laufanalyse auftreten können, systematisch zu untersuchen.
Die Ergebnisse dieser Arbeit stellen für Nutzer von Inertialsensoren (z.B. Sportler, Trainer, Thera-
peuten, Mediziner und Wissenschaftler) bei der Planung einer Bewegungsanalyse eine Orientierung
dar, das richtige Messsystem mit der passenden Sensorspezifikation in Kombination mit den präzi-
sesten Auswertealgorithmen auszuwählen. Zusätzlich können die Informationen dazu genutzt wer-
den, Erkenntnisse bereits publizierter Studien kritisch zu hinterfragen.
Fragestellungen der Arbeit
1. Inwieweit beeinflussen die Inertialsensorspezifikationen sowie die Auswertealgorithmen
die Genauigkeit der biomechanischen Parameter?
2. Welchen zusätzlichen Einfluss nehmen die Materialcharakteristik der Laufschuhe, die Ge-
schwindigkeit sowie der Laufstil auf die Genauigkeit der biomechanischen Parameter?

Einführung
8
Nach der Einführung in Kapitel 1 werden in Kapitel 2 dieser Dissertation die Grundlagen der Iner-
tialsensoren sowie deren Einsatzgebiete bei menschlichen Bewegungsanalysen näher erläutert. Die
Darstellung der grundlegenden Funktionsweise der Sensoren soll dem allgemeinen Verständnis der
recht technischen Thematik beitragen und so helfen, die späteren Anwendungsfelder, aber auch die
methodischen Probleme beim Einsatz der Sensoren besser nachvollziehen zu können. Zu Beginn er-
folgt ein kleiner historischer Exkurs zur Entwicklung der Inertialsensoren, gefolgt von der Funkti-
onsweise der beiden Inertialsensortypen, welche in dieser Arbeit im Speziellen betrachtet werden:
Beschleunigungssensoren und Gyroskope. Im Anschluss daran werden die Anwendungsfelder der
Inertialsensoren bei der Analyse relevanter biomechanischer Parameter in Gang- und Laufanalysen
vorgestellt. Abgeschlossen wird das Kapitel mit der Thematik „Inertialsensoren vs. Goldstandard“.
Darin soll sich kritisch mit der Frage auseinandergesetzt werden, wie valide Inertialsensoren bei bio-
mechanischen Studien eingesetzt werden können. Dazu werden Studien vorgestellt, die mittels Iner-
tialsensoren biomechanische Parameter berechnet und mit Standardverfahren, wie z.B. MOCAP-Sys-
temen oder Kraftmessplatten, verglichen haben. Da sich die Methodik der vier durchgeführten Stu-
dien stark ähnelt und Redundanzen vermieden werden sollen, werden vorab in Kapitel 3 einige me-
thodische Vorgehensweisen erläutert, wie beispielsweise Informationen über das Probandenkollektiv
sowie Informationen für die Charakterisierung der mechanischen Eigenschaften der Laufschuhe. In
Kapitel 4 erfolgt die Darstellung der eigenen Untersuchungen, wobei sich die Publikationen selbst im
Anhang befinden. Im abschließenden Teil dieser Arbeit, Kapitel 5, werden die Erkenntnisse der im
Rahmen dieser kumulativen Arbeit durchgeführten Studien zusammengeführt und in einem gemein-
samen Kontext diskutiert. Weiterhin wird eine Übersicht mit Empfehlungen für die Anwendung von
Inertialsensoren in der biomechanischen Gang- und Laufanalyse bereitgestellt.

Grundlagen der Inertialsensoren
9
Kapitel 2
2 Grundlagen der Inertialsensoren

Historische Entwicklung der Inertialsensoren
10
2.1 Historische Entwicklung der Inertialsensoren
Zu den Schlüsseltechnologien des 21. Jahrhunderts zählen die Mikrotechnologien, denen auch wei-
terhin hohe wirtschaftliche Wachstumsraten vorausgesagt werden [21]. Es handelt sich dabei um ein
interdisziplinäres Feld, das zur Entwicklung und Fertigung Kenntnisse aus vielen Fachbereichen wie
der Physik, Chemie, Elektrotechnik, dem Maschinenbau und der Informatik voraussetzt (ebd.). Wie
bereits in Kapitel 1 angeführt, entspringen die MEMS diesen Mikrotechnologien und vereinen mik-
romechanische sowie mikroelektronische Bauteile in einem miniaturisierten System. Das Prädikat
„mikro“ weist hier auf die Dimensionen der Bauteile hin (Dicke oder laterale Ausdehnung), die im
Mikrometer- bis Millimeterbereich liegen können [22]. Das „System“ steht für die Verbindung meh-
rerer Komponenten, die für sensorische (Datenerfassung), aktorische (Aktoren) und verarbeitende
Prozesse genutzt werden können.
Die Historie des elektrischen Messens nichtelektrischer Größen geht bis weit in die 70er Jahre zurück.
Zu Beginn hing die Qualität der erfassten Daten stark von den handwerklichen Fähigkeiten des Her-
stellers ab, der die Feinmechanik mit der elektrischen Signalaufnahme koppelte [23]. Bei einem der
ersten elektro-feinmechanischen Systeme wurde beispielsweise ein Sensorsystem zur Druckmessung
entwickelt, bei dem ein Potentiometer und eine Rohrfeder miteinander gekoppelt wurden [23,24]. Mit
der späteren Entdeckung der piezoelektrischen Eigenschaften von Silizium und des Hall-Effekts star-
tete die Entwicklung der ersten Sensoren, welche Beschleunigung, Druck sowie Magnetfelder messen
konnten. Mitte der 70er Jahre wurden erstmalig Halbleiter als Sensoren genutzt und die ersten Druck-
sensoren aus Silizium kommerziell vertrieben [23]. Ende der 70er bis Mitte der 80er Jahre war es
aufgrund der fortschreitenden Entwicklung der Mikroelektronik und der integrierten Schaltkreise
möglich, miniaturisierte Sensorsysteme herzustellen. Unter der Nutzung mikroelektronischer Ferti-
gungstechnik und der verbesserten Produktionsinfrastruktur bei der Herstellung der Sensorelemente,
war von nun an eine kostengünstige Massenproduktion möglich. Die Basis für die MEMS wurde in
den 80er Jahren durch die rasant fortschreitende Entwicklung der Mikroelektronik sowie der deutlich
verbesserten Mikrostrukturierungs- und Bearbeitungstechniken gelegt (ebd.). Auf der Grundlage der
Mikroelektronik begann sich fortan die Mikromechanik zu entwickeln. Es konnten nun Bauteile ent-
wickelt werden, die aufgrund ihrer spezifischen mechanischen Eigenschaften als Sensoren und Ak-
toren in Mikrosystemen zum Einsatz kamen [21]. Durch die voranschreitende Prozessoptimierung
bei der Fertigung, die bis heute ungehindert anhält, die Verbesserung der Halbleitertechnologien und

Historische Entwicklung der Inertialsensoren
11
die Weiterentwicklung der mikromechanischen Bauteile, wurden die elektro-feinmechanischen
Messsysteme weitestgehend ersetzt. Mit den neusten Generationen der MEMS lassen sich heutzutage
Beschleunigungen bis zu ±60.000 g dreidimensional messen, wobei Frequenzbereiche bis 10.000 Hz
zur Verfügung stehen (http://www.pcbpiezotronics.co.uk). Die Bauteilgröße beträgt bei diesen Sen-
soren etwa 6,35 * 11,8 * 11,8 mm (L * B * H). Eine – allerdings nicht mehr ganz aktuelle – Übersicht
von verschiedenen Herstellern und deren Portfolio an Sensoren kann Beeby [25] entnommen werden.
Durch geringe Fertigungskosten, die aufgrund der zeitgleichen Herstellung hunderter bis tausender
Bauteile möglich sind (Batchfertigung), und der Vielfältigkeit der Sensoren, werden MEMS derzeit
in unterschiedlichsten Bereichen eingesetzt. Sie werden überall dort eingesetzt, wo Beschleunigungen
(mittels Beschleunigungssensoren) oder Winkelgeschwindigkeiten (mittels Gyroskopen) gemessen
werden sollen. So finden sich beispielsweise Beschleunigungssensoren im Auto, die im Falle eines
starken Aufpralls eine sehr hohe Beschleunigung registrieren, infolgedessen der Airbag ausgelöst
wird. Im Handy sind u.a. ein Gyroskop sowie ein Beschleunigungssensor verbaut, welche zur Lage-
bestimmung des Gerätes genutzt werden. Die Bildschirmanzeige des Handys wird gedreht, wenn das
Gerät einer Rotation unterliegt. Auch in der Unterhaltungselektronik werden Inertialsensoren einge-
setzt. So zum Beispiel in der Fernbedienung der Nintendo Wii-Spielekonsole (Abbildung 2.1.1 oben).
Mittels in der Fernbedienung verbauter 3D-Beschleunigungssensoren (Abbildung 2.1.1 oben rechts)
können Bewegungen erfasst und an die Konsole weitergeben werden. Durch das „MotionPlus“ Zu-
satzmodul (Abbildung 2.1.1 unten), in dem zwei Gyroskope verbaut sind (Abbildung 2.1.1 unten
rechts), kann erweiternd die Rotation der Fernbedienung um die drei Raumachsen erfasst werden
(nick: Querachse [X], roll: Längsachse [Y] sowie gier: Hochachse [Z]). Durch den in der Fernbedie-
nung integrierten 3D-Beschleunigungssensor und die beiden Gyroskope (1D und 2D) sowie die Echt-
zeitübertragung und -auswertung der Sensordaten erhält man eine komplexe Analyse der menschli-
chen Hand- bzw. Armbewegungen mit 6DoF (6 Freiheitsgrade, engl. degrees of freedom), die zum
interaktiven Steuern und Spielen genutzt werden kann.

Historische Entwicklung der Inertialsensoren
12
Im Bereich der biomechanischen Untersuchungen wurde bereits 1968 in einer Studie die Stoßerschüt-
terung, welche auf den Bewegungsapparat wirkt, unter Zuhilfenahme eines 1D-Beschleunigungs-
sensors ermittelt [26]. Ein Ziel der Untersuchung war es, Faktoren zu bestimmen, welche die Stoßer-
schütterung beeinflussen. Hierzu wurden Geschlecht, Körpergewicht und Bodenbeschaffenheit un-
tersucht. Zusätzlich wurde untersucht, wie sich die Stoßwelle von den Füßen aus im menschlichen
Körper ausbreitet. In dieser Studie wurden piezoelektrische Beschleunigungsmesser verwendet
(Firma Bruel & Kjaer, Typ 4333), welche eine Höhe von 14 mm, einen Durchmesser von 14 mm
sowie ein Gewicht von 13 Gramm hatten und an Schuhabsatz, Becken und Kopf angebracht wurden.
In aktuellen biomechanischen Gang- und Laufanalysen finden weiterentwickelte Beschleunigungs-
sensoren und Gyroskope einzeln oder kombiniert in einer IMU Anwendung. Ein Review von Cuesta-
Vargas und Kollegen [27] zeigt, dass bei Bewegungsanalysen IMUs mit einer Größe zwischen
12 * 12 * 15 mm (kleinere Sensoren) bis 64 * 64 * 25 mm (größere Sensoren) zum Einsatz kamen,
die ihre Daten sowohl kabellos als auch per Kabel an einen Datenlogger oder PC übertragen konnten.
Im folgenden Abschnitt soll die Funktionsweise der Inertialsensoren näher erläutert werden.
Abbildung 2.1.1: Nintendo Wii-Controller, mit und ohne Oberschale, mit integrierten 3D-Beschleunigungs-sensor zur Erfassung der Beschleunigungen (ACC X, Y und Z) und dem Zusatzmodul „MotionPlus“ mit zwei integrierten Gyroskopen (2D und 1D) zur Erfassung der rotatorischen Bewegungen (roll, nick und gier). (Ei-gene Darstellung)

Funktionsweise ausgewählter Inertialsensoren
13
2.2 Funktionsweise ausgewählter Inertialsensoren
Durch seine Sinne ist es dem Menschen möglich, Umweltreize wahrzunehmen. Dies als Vorbild wur-
den technische Sinnesorgane – die „Sensoren“ – entwickelt, welche als entsprechende Messfühler
agieren, Informationen aus der Umwelt sammeln und diese als elektrische Signale weiterleiten [23].
2.2.1 Der Beschleunigungssensor
Wenn Beschleunigungen translatorischer Bewegungen gemessen werden sollen, kommen Beschleu-
nigungssensoren zum Einsatz. Vereinfacht dargestellt bestehen die Sensoren aus einer seismischen
Masse m, welche mittels einer mechanischen Feder in einem Rahmen aufgehängt wird (Abbildung
2.2.1.1). Wirkt eine Beschleunigung auf das System erfolgt eine translatorische Verschiebung der
Masse in Relation zum Gehäuse. Die Auslenkung der Masse ist dabei nur in Richtung der Feder
möglich, wobei die Auslenkung durch die Luft im Gehäuse gedämpft wird (Dämpfer c). Nach Been-
digung der Beschleunigung kehren seismische Masse und Feder in ihren Ausgangszustand zurück.
Das Übertragungsverhalten von den Beschleunigungen auf die Masse kann durch die beschriebene
Dämpfung des Systems stark beeinflusst werden [23]. Eine zu große Dämpfung reduziert den nutz-
baren Frequenzbereich, wobei eine zu geringe Dämpfung dazu führen kann, dass das System im Re-
sonanzfall zerstört wird (ebd.).
Grundlage für das Messen der Beschleunigung bietet das zweite Newton‘sche Axiom, siehe Formel
2.2.1.1 [28]. Die Auslenkung der Masse kann dabei mittels kapazitiver, piezoelektrischer und piezo-
resistiver Verfahren ermittelt werden. Für die Inertialsensoren haben die kapazitiven Messverfahren
die größte technische Bedeutung erlangt [23]. Aus diesem Grund und, weil ausschließlich kapazitive
Inertialsensoren in dieser Arbeit Anwendung fanden, soll an dieser Stelle nur auf dieses Verfahren
eingegangen werden. Informationen zu weiteren Messverfahren können beispielsweise bei Beeby
[25] nachgeschlagen werden.
�� = m ∗ 2.2.1.1

Der Beschleunigungssensor
14
Kapazitive Beschleunigungsaufnehmer
Die Funktionsweise der kapazitiven Beschleunigungssensoren orientiert sich am Prinzip eines Plat-
tenkondensators, welcher aus festen und beweglichen Elektroden besteht. Aufgrund der unterschied-
lichen Ladungen zwischen festen und beweglichen Elektroden wird bei einer Abstandsänderung ein
elektrisches Feld erzeugt. Verringert sich der Abstand der Elektroden, verringert sich die Kapazität
des Kondensators und vice versa. Durch das bestehende Verhältnis zwischen Elektrodenabstand und
Kapazität, kann auch umgekehrt die Aussage getroffen werden, wie sich der Abstand zwischen den
Elektroden verhält hat, wenn nur die Kapazität bekannt ist.
Der vereinfachte Aufbau eines kapazitiven Sensors, welcher Beschleunigungen in einer Richtung
erfassen kann, ist in Abbildung 2.2.1.2 dargestellt. Auf der Trägerstruktur wird meist eine Metall-
schicht aufgebracht (z.B. Silicium), die als feste Elektrode dient [21]. An einem schmalen und ein-
seitig befestigten Balken wird am freien Balkenende eine zusätzliche Masse – eine seismische Masse5
– angebracht. Mit der zusätzlichen Masse am Balkenende wird die Empfindlichkeit des Sensors er-
höht. Die seismische Masse wird metallisiert und dient als bewegliche Elektrode. Als Dielektrikum
wird in der Regel Luft genutzt, welche sich zwischen der beweglichen und den festen Elektroden
befindet. Die nichtleitenden Glasscheiben dienen als Isolator zwischen den Siliciumbauteilen. Über
5 seismisch griech. für erschüttern
Abbildung 2.2.1.1: Schematische Darstellung eines Feder-Masse-Dämpfer-Systems zur vereinfachten Veran-schaulichung der Arbeitsweise eines Beschleunigungssensors. Eine Beschleunigung führt zur Auslenkung der Masse m, welche einer Dämpfung c unterliegt. (Eigene Darstellung)

Der Beschleunigungssensor
15
Leiterbahnen, die zumeist aus dem gleichen Material bestehen wie die Elektroden, wird der elektri-
sche Kontakt zu festen Elektroden hergestellt, wohingegen die bewegliche Elektrode direkt elektrifi-
ziert wird [21].
Wirkt eine wie in Abbildung 2.2.1.2 dargestellte Beschleunigung senkrecht zu der Ebene, in der
die seismische Masse liegt, wird diese Masse proportional zur Beschleunigung ausgelenkt. Auf-
grund dessen ändern sich die Abstände zwischen den festen und der beweglichen Elektrode. Die Ab-
stände d1 und d2 verhalten sich dabei gegenläufig, was dazu führt, dass sich die beiden ermittelten
Kapazitäten C1 und C2 ebenfalls gegenläufig ändern (Formel 2.2.1.2 und 2.2.1.3, A: Elektrodenflä-
che, d: Abstand der Platten, ε0: elektrische Feldkonstante des Vakuums [8,854*10-12 (As)/(Vm)], εr:
die materialabhängige relative Dielektrizitätskonstante des Dielektrikums [z.B. Luft/Vakuum: 1 und
Quarzglas: 3,5]) [28]. Die gegenläufigen Kapazitäten werden in einer Brückenschaltung ausgewertet,
wobei die Ausgangsspannung des kapazitiven Spannungsteilers linear von der Beschleunigung ab-
hängig ist [23]. Wenn die Kapazität des Differentialkondensators bekannt ist, kann auf die Auslen-
kung der seismischen Masse zurückgeschlossen werden, welche sich proportional zur wirkenden Be-
schleunigung verhält.
Abbildung 2.2.1.2: Vereinfachte Darstellung eines kapazitiven 1D-Beschleunigungsaufnehmers aus Silicium mit zwei festen und einer beweglichen Elektrode. Elektrodenabstände d1 und d2 ändern sich aufgrund einer Beschleunigung , senkrecht wirkend zur seismischen Masse. (Modifiziert nach Globisch [21])

Der Beschleunigungssensor
16
= ε ∗ ε ∗ Ad 2.2.1.2
= ε ∗ ε ∗ Ad 2.2.1.3
Um die Empfindlichkeit des Sensors zu verbessern, ist es möglich, die Kapazität des Kondensators
durch die Flächenvergrößerung der Elektroden zu erhöhen. Dies kann beispielsweise durch eine Pa-
rallelschaltung vieler Einzelkapazitäten in einer kammförmigen Struktur erreicht werden, wie bei-
spielhaft in Abbildung 2.2.1.3 dargestellt. Bei der Kammstruktur wird die seismische Masse durch
eine bewegliche Mittelplatte mit vielen Ausläufern gebildet (metallisiert), wobei die Ausläufer wie
Finger ineinandergreifen. Über kleine Federn wird die seismische Masse an Befestigungspunkten
verankert. Wirkt eine Beschleunigung senkrecht in der Ebene der seismischen Masse, ändern sich
alle Abstände zwischen den festen (in Abbildung 2.2.1.3 grün dargestellt) und beweglichen Elektro-
den (symbolisch blau dargestellt) im selben Ausmaß.
Abbildung 2.2.1.3: Vereinfachte Darstellung eines kapazitiven Beschleunigungsaufnehmers mit seiner kamm-artigen Struktur, einer schwingungsfrei gelagerten metallisierten Mittelplatte (Elektroden symbolisch blau dargestellt) und feststehenden Elektroden (grün) am fixierten Rahmen. (Eigene Darstellung)

Das Gyroskop
17
Durch eine sogenannte „closed-loop“-Schaltung wird über die Differentialkapazitäten jede kleine
Auslenkung der seismischen Masse registriert, durch eine entsprechende Auswerteelektronik verar-
beitet und mit umgekehrten Vorzeichen auf die Kondensatorplatten zurückgekoppelt [22]. Durch
diese Schaltung erfolgt eine Stabilisierung der Ruhelage der seismischen Masse, sodass eine maxi-
male Auslenkung von nur ca. 0,01 µm auftritt. Durch dieses Rückkopplungsschleife wird eine ver-
besserte Linearität des Sensors, eine hohe Empfindlichkeit, ein größerer Beschleunigungsbereich so-
wie eine gleichzeitig höhere Schockfestigkeit erzielt [22,29].
2.2.2 Das Gyroskop
Gyroskope, auch Drehratensensoren genannt, werden zur Messung von Winkelgeschwindigkeiten
einer rotatorischen Bewegung entlang einer Drehachse verwendet. Wie in Abbildung 2.1.1 am Bei-
spiel des Nintendo Wii-Controllers aufgezeigt, werden die drei Drehraten Nick-, Roll- und Gierrate
genannt, welche um die Raumachsen der Quer- (x), Längs- (y) und Hochachse (z) rotieren. Bei mik-
romechanischen Drehratensensoren wird die Winkelgeschwindigkeit ω mit Hilfe der Corioliskraft6
(��𝐶 𝑖 𝑙𝑖 ) ermittelt. Die Corioliskraft ist eine Trägheitskraft, in diesem Fall auch Scheinkraft genannt,
welche in einem sich relativ zu einem rotierenden System bewegten Körper auftritt [30,31]. Diese
Trägheitskraft scheint nur dann auf einen Körper in einem rotierenden Bezugssystem zu wirken, wenn
sich der Körper mit einer Geschwindigkeit senkrecht zur Winkelgeschwindigkeit relativ zu diesem
drehenden Bezugssystem bewegt [30,32] (Abbildung 2.2.2.1). In diesem Fall erfährt der Körper eine
Beschleunigung senkrecht zur relativen Geschwindigkeit und zwar mit dem Faktor 2 der Richtungs-
änderung der relativen Geschwindigkeit aufgrund der Winkelbeschleunigung, da zum einen der Ge-
schwindigkeitsvektor gedreht wird, zum anderen der Ortswechsel im mitdrehenden System ebenfalls
eine Beschleunigung quer zur Geschwindigkeit zur Folge hat. Diese Beschleunigung wird Coriolis-
beschleunigung genannt und erzeugt eine entsprechend entgegengesetzt wirkende Scheinkraft, wel-
che Corioliskraft genannt wird. Die wirkende Corioliskraft bzw. Coriolisbeschleunigung kann mit
den Formeln 2.2.2.1 und 2.2.2.2 berechnet werden, wobei sich die Coriolisbeschleunigung aus der
negativen Corioliskraft dividiert durch die Masse des Körpers ergibt [30].
6 Benannt nach dem Entdecker dieses Effektes Gaspard G. de Coriolis (1792-1843), französischer Mathematiker.

Das Gyroskop
18
��𝐶 𝑖 𝑙𝑖 = ∗ m ∗ × ω 2.2.2.1
𝐶 𝑖 𝑙𝑖 = ∗ ω × 2.2.2.2
In den Gyroskopen wird das Phänomen der Corioliskraft genutzt, indem die Masse m schwingungs-
fähig in einem Feder-Masse-Dämpfer-System gelagert wird, das jedoch im Gegensatz zu den Be-
schleunigungsaufnehmern Auslenkungen in zwei verschiedene Richtungen zulässt. Wie in Abbildung
2.2.2.2 beispielhaft dargestellt, besteht der Sensor aus einem inneren sowie einem äußeren Rahmen,
welche orthogonal zueinander ausgerichtet, mechanisch entkoppelt und durch Mikrofedern miteinan-
der verbunden sind. Im inneren Rahmen erfolgt die Primärschwingung, wobei die Masse m durch
einen Aktor zu einer Schwingung mit sich periodisch ändernden Geschwindigkeiten angeregt wird
[22]. Als Aktor können beispielsweise elektrostatische, elektromagnetische oder piezoelektrische
Verfahren genutzt werden, welche die Masse in Schwingen versetzen. Im äußeren Rahmen können
dann die aufgrund der Corioliskraft auftretenden Schwingungen (Sekundärschwingung) mittels ka-
pazitiver, resistiver und piezoelektrischer Verfahren erfasst werden. Wie bereits im Abschnitt 2.2.1
erwähnt, haben die kapazitiven Messverfahren die größte technische Bedeutung erlangt, die Lageän-
derung einer Masse in einem Feder-Masse-Dämpfer-System zu registrieren. Aus diesem Grund soll
auch an dieser Stelle nur auf dieses Verfahren eingegangen werden.
Kapazitives Verfahren im Gyroskop
Wie beim Beschleunigungssensor beschrieben, wird auch beim Gyroskop die Beschleunigung aus-
gewertet, die senkrecht zu der Ebene wirkt, in der die seismische Masse liegt. Die seismische Masse
ist in diesem Fall jedoch der gesamte innere Rahmen mit all seinen Bestandteilen, welcher aufgrund
der Corioliskraft in x-Richtung ausgelenkt wird, wenn der Sensor um die z-Achse rotiert – die Se-
kundärschwingung (Abbildung 2.2.2.2, grün dargestellt). Die Amplitude der Auslenkung steht auf-
grund des Corioliseffektes jedoch immer in direkten Zusammenhang mit der Auslenkung der Masse
m im inneren Rahmen (y-Achse) – der Primärschwingung (Abbildung 2.2.2.2, rot dargestellt). Die
Sekundärschwingung kann über entsprechende Kammelektroden im äußeren Rahmen erfasst werden.
Die Änderung der Spannung, welche von den Differentialkondensatoren ausgegeben wird, verhält
sich proportional zur Winkelgeschwindigkeit. Die grundsätzliche Funktionsweise der kapazitiven

Das Gyroskop
19
Sensoren im äußeren Rahmen des Gyroskops verhält sich analog zur Funktionsweise der kapazitiven
Sensoren in den Beschleunigungssensoren und kann im Abschnitt 2.2.1 nachgelesen werden.
Wie Beschleunigungssensoren können auch Gyroskope im „closed-loop“-Modus betrieben werden,
was die Bandbreite gegenüber dem „open-loop“-Modus (keine Stabilisierung der Ruhelage der seis-
mischen Masse aufgrund einer Rückkopplung) deutlich erhöht [22].
Abbildung 2.2.2.1: Linkes Bild: Visualisierung der Trajektorie (blau dargestellt) einer sich mit der Ge-schwindigkeit linear bewegenden Masse m (schwarz dargestellt) aufgrund der Corioliskraft (FCoriolis) für einen um die z-Achse mit der Winkelgeschwindigkeit �� mitrotierenden Beobachter im Bezugssystem xyz. (Eigene Darstellung)
Abbildung 2.2.2.2: Rechtes Bild: Schematische Darstellung eines Feder-Masse-Dämpfer-Systems zum Messen der Winkelgeschwindigkeit ��. Der innere Rahmen dient der Erzeugung der Primärbewegung (roter Pfeil) und der äußere Rahmen zum kapazitiven Messen der Corioliskraft (grüner Pfeil) über Kam-melektroden (dargestellt dunkelgrün und blau). Beide Rahmen stehen orthogonal zueinander und sind me-chanisch entkoppelt. (Modifiziert nach Beeby [25])

Parameter in der biomechanischen Gang- und Laufanalyse
20
2.3 Parameter in der biomechanischen Gang- und Laufanalyse
Im folgenden Abschnitt werden biomechanische Parameter vorgestellt, welche mittels Inertialsenso-
ren erhoben werden können. Einige dieser Parameter können direkt aus den Rohdaten für jeden ein-
zelnen Schritt abgeleitet werden (z.B. tibiale Spitzenbeschleunigung und maximale Eversionsge-
schwindigkeit), wohingegen andere Parameter aufwändige Algorithmen zur Berechnung dieser er-
fordern (z.B. Fußaufsatzwinkel und Schrittlänge). Um den bestmöglichen Überblick über die prakti-
sche Relevanz der biomechanischen Parameter aufzeigen zu können, wurden im folgenden Abschnitt
zusätzlich Studien aufgenommen, die auf alternative Messverfahren zurückgreifen. Zu den alternati-
ven Messverfahren zählen beispielsweise Elektrogoniometer, MOCAP-Systeme, Kraft- sowie Druck-
messplatten (vgl. Kapitel 1).
2.3.1 Tibiale Spitzenbeschleunigung
Beim Gehen und Laufen werden zum Zeitpunkt des Fußaufsatzes auf den Untergrund, also zu Beginn
der initialen Bodenkontaktphase, hohe Kräfte erzeugt, die aufgrund der abrupten Abbremsbewegung
des Fußes und des Unterschenkels zustande kommen [33]. Die Schockwelle, die dabei entsteht, wird
von Fuß bis Kopf durch den gesamten Körper geleitet. Die Stoßdämpfung wird zum einen passiv
Zusammenfassung Inertialsensoren
• Sowohl Beschleunigungssensoren als auch Gyroskope gehören zur Gruppe der Iner-
tialsensoren.
• Beschleunigungen bzw. Winkelgeschwindigkeiten können aufgrund der Trägheits- bzw.
Corioliskraft ermittelt werden.
• Beschleunigungssensoren sowie Gyroskope, von ein- bis zu dreidimensional messend,
können gemeinsam in einem Gehäuse kombiniert werden. Zusammen bilden sie dann eine
IMU, die mit bis zu 6DoF messen kann (Beschleunigung entlang der drei Achsen sowie
die Rotation um diese).
• Die neueste Generation der Sensoren ist klein, sehr leicht und kann in größeren Menge
kostengünstig hergestellt werden.

Tibiale Spitzenbeschleunigung
21
durch die Strukturen im Körper (Sehnen, Bänder, Muskeln und Deformation des Fersenfettpolsters)
und zum anderen aktiv über Muskelaktivierung und Gelenkwinkeländerung erreicht [34–36]. Bei
Gang- und Laufanalysen kann mit Hilfe der Messung der tibialen Spitzenbeschleunigung (engl. peak
tibial acceleration, PTA) eine Aussage darüber getroffen werden, wie sich diese Schockwelle in den
unteren Extremitäten ausbreitet und es können Rückschlüsse gezogen werden, welche inneren Kräfte
wirken [11,37–39]. So wird in verschiedenen Studien u.a. ein Zusammenhang zwischen der erhöhten
PTA und potentiellen Überlastungsschäden gesehen, wie z.B. der tibialen Stressfraktur [40–43].
Diese Stressfraktur stellt mit etwa 42,9 Prozent der Überlastungsschäden beim Dauerlauf das größte
Verletzungsrisiko dar [44]. Die PTA wird etwa zwischen 20 und 35 ms nach dem initialen Boden-
kontakt erreicht [45,46], wobei sich Zeitpunkt und Höhe der Amplitude durch verschiedene Faktoren
beeinflussen lassen. So untersuchten beispielsweise Arbeitsgruppen um Mercer [39] sowie Mizrahi
[47], wie sich Ermüdung auf die PTA auswirkt. Gruber et al. [37] untersuchten, welchen Einfluss der
Laufstil (Rück- und Vorfußlaufen) auf die PTA hat. Im Bereich der Sportschuhforschung untersuch-
ten verschiedene Forschergruppen beispielsweise den Einfluss verschiedener Materialien bzw. Ma-
terialeigenschaften der Schuhzwischensohle auf die PTA [6,8,48,49]. Des Weiteren wurde von Clark
und Kollegen [50] der Einfluss des Menstruationszyklus auf die Variabilität der PTA untersucht.
Für die Erhebung der tibialen Spitzenbeschleunigung werden ein- oder mehrachsige Beschleuni-
gungsaufnehmer mit doppelseitigen Klebeband auf der Haut an der vorderen Tibiakante angebracht
(Abbildung 2.3.1.1a). Das Gewicht des Sensors sollte so gering wie möglich sein, nach Erfahrungs-
werten verschiedener Autoren um ca. 3 Gramm [51]. Um ein Ablösen und eine ungewollte Vibration
des Sensors zu vermeiden, sollte der Sensor zusätzlich mit einem elastischen Band fixiert und gestützt
werden. Die sensible Achse des Beschleunigungsaufnehmers liegt bei der Untersuchung der PTA
parallel zur longitudinalen Richtung der Tibia. Es wird also untersucht, welche Beschleunigungen
entlang des Tibiaknochens wirken. In einigen Studien wurde neben dieser Beschleunigung auch die
medio-laterale sowie anterio-posteriore Beschleunigung untersucht [46,50].

Tibiale Spitzenbeschleunigung
22
Für die Bestimmung der tibialen Spitzenbeschleunigungen, unabhängig von der zu untersuchenden
Achse, wird der höchste Messwert genommen, welcher von dem Beschleunigungssensor für den je-
weiligen Schritt in der Bodenkontaktphase aufgezeichnet wurde (Abbildung 2.3.1.2). Neben reinen
Beschleunigungsaufnehmern können für valide Analysen von PTA auch hochfrequente IMUs genutzt
werden (Auswertung der integrierten Beschleunigungssensoren), wie eine Studie von Provot und
Kollegen zeigt [52]. Ein typischer Verlauf der während eines Dauerlaufs im Feld mit einer IMU auf-
gezeichneten 3D-Beschleunigungssignale ist ausschnittsweise für zwei Doppelschritte in Abbildung
2.3.1.2 dargestellt. Die jeweilige individuelle Kurvencharakteristik ist für jede der drei Beschleuni-
gungsrichtungen ersichtlich. Die höchsten Beschleunigungswerte wurden bei diesem Lauf (Ge-
schwindigkeit ca. 3,5 m/s) in z- und y-Richtung ermittelt.
Abbildung 2.3.1.1: Anbringung der Inertialsensoren am Probanden: a) Vorderansicht mit 1D-Beschleuni-gungssensor an der vorderen Tibiakante des rechten Beines zur Messung der tibialen Spitzenbeschleunigung und b) Rückansicht mit einer IMU (6DoF) angebracht an der Fersenkappe des rechten Schuhs. (Eigene Dar-stellung)

Maximale Eversionsgeschwindigkeit
23
2.3.2 Maximale Eversionsgeschwindigkeit
Die Kombination aus Pronations- und Supinationsbewegung des Fußes (3D-Winkelstellung des Fu-
ßes im Raum) ist ein natürlicher Dämpfungsmechanismus, welcher dazu dienen soll, die beim Gehen
und Laufen auftretenden Stoßbelastungen beim Auftreffen des Fußes auf den Untergrund zu reduzie-
ren. Die Komplexbewegungen Pronation und Supination lassen sich jeweils in drei Teilbewegungen
untergliedern: die Supination in Plantarflexion, Adduktion und Inversion sowie die Pronation in Dor-
salextension, Abduktion und Eversion (vgl. Abbildung 2.3.1.2).
Abbildung 2.3.1.2: Signale eines 3D-Beschleunigungssensors für zwei Doppelschritte – Auszug aus einem Dauerlauf unter Feldbedingungen. Kennzeichnung der tibialen Spitzenbeschleunigung (longitudinaler Richtung der Tibia) für jeden Schritt durch ein rotes Kreuz (PTA1 bis PTA3). (Eigene Darstellung)
Abbildung 2.3.2.1: Darstellung der a) Supinations- sowie b) Pronationsstellung des Fußes im unbelasteten Zustand in der Rückansicht. (Modifiziert nach Grünewald [150])
Maximale Eversionsgeschwindigkeit
24
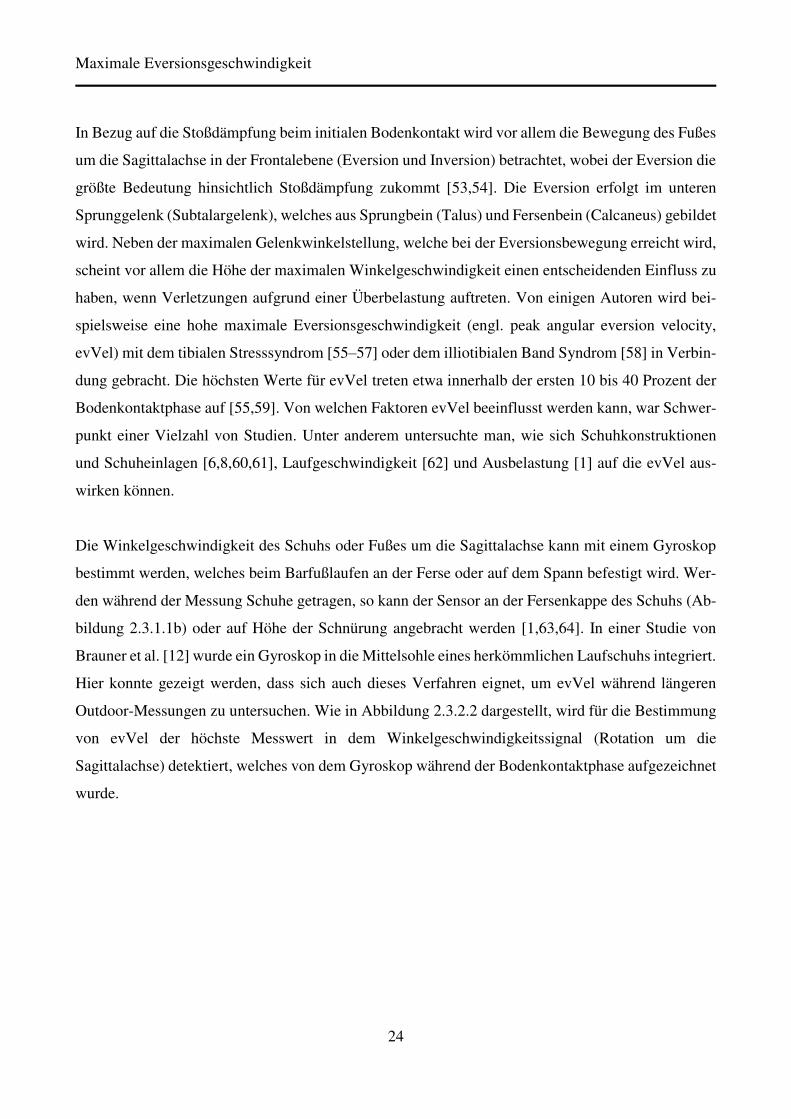
In Bezug auf die Stoßdämpfung beim initialen Bodenkontakt wird vor allem die Bewegung des Fußes
um die Sagittalachse in der Frontalebene (Eversion und Inversion) betrachtet, wobei der Eversion die
größte Bedeutung hinsichtlich Stoßdämpfung zukommt [53,54]. Die Eversion erfolgt im unteren
Sprunggelenk (Subtalargelenk), welches aus Sprungbein (Talus) und Fersenbein (Calcaneus) gebildet
wird. Neben der maximalen Gelenkwinkelstellung, welche bei der Eversionsbewegung erreicht wird,
scheint vor allem die Höhe der maximalen Winkelgeschwindigkeit einen entscheidenden Einfluss zu
haben, wenn Verletzungen aufgrund einer Überbelastung auftreten. Von einigen Autoren wird bei-
spielsweise eine hohe maximale Eversionsgeschwindigkeit (engl. peak angular eversion velocity,
evVel) mit dem tibialen Stresssyndrom [55–57] oder dem illiotibialen Band Syndrom [58] in Verbin-
dung gebracht. Die höchsten Werte für evVel treten etwa innerhalb der ersten 10 bis 40 Prozent der
Bodenkontaktphase auf [55,59]. Von welchen Faktoren evVel beeinflusst werden kann, war Schwer-
punkt einer Vielzahl von Studien. Unter anderem untersuchte man, wie sich Schuhkonstruktionen
und Schuheinlagen [6,8,60,61], Laufgeschwindigkeit [62] und Ausbelastung [1] auf die evVel aus-
wirken können.
Die Winkelgeschwindigkeit des Schuhs oder Fußes um die Sagittalachse kann mit einem Gyroskop
bestimmt werden, welches beim Barfußlaufen an der Ferse oder auf dem Spann befestigt wird. Wer-
den während der Messung Schuhe getragen, so kann der Sensor an der Fersenkappe des Schuhs (Ab-
bildung 2.3.1.1b) oder auf Höhe der Schnürung angebracht werden [1,63,64]. In einer Studie von
Brauner et al. [12] wurde ein Gyroskop in die Mittelsohle eines herkömmlichen Laufschuhs integriert.
Hier konnte gezeigt werden, dass sich auch dieses Verfahren eignet, um evVel während längeren
Outdoor-Messungen zu untersuchen. Wie in Abbildung 2.3.2.2 dargestellt, wird für die Bestimmung
von evVel der höchste Messwert in dem Winkelgeschwindigkeitssignal (Rotation um die
Sagittalachse) detektiert, welches von dem Gyroskop während der Bodenkontaktphase aufgezeichnet
wurde.

Initialer Bodenkontakt, Ende Bodenkontakt, Bodenkontaktdauer und Doppelschrittdauer
25
2.3.3 Initialer Bodenkontakt, Ende Bodenkontakt, Bodenkontaktdauer
und Doppelschrittdauer
Die Bewegungsformen Gehen und Laufen sind zyklische und rhythmische Aneinanderreihungen von
Teilkörperbewegungen, welche grob in Stütz- und Schwungphase differenziert werden können [65–
67]. Dabei beginnt die Standphase mit dem initialen Bodenkontakt (TD), dem Zeitpunkt, an dem der
Fuß auf dem Boden auftritt (mit Vor-, Mittel- oder Rückfuß), und endet nach dem Abrollvorgang des
Fußes mit dem Ablösen der Zehen vom Boden (TO). Die sich direkt anschließende Schwungphase
endet mit dem nächsten TD des selbigen Fußes. Als Schrittdauer, genauer definiert die Doppelschritt-
dauer (engl. stride duration, strDur), wird die Zeit definiert, welche zwischen zwei aufeinanderfol-
genden TD des selbigen Fußes verstreicht. Die verstrichene Zeit in der Standphase, dementsprechend
die Zeit zwischen dem TD und dem TO, wird auch als Bodenkontaktdauer (engl. stance duration,
staDur) bezeichnet. Die Genauigkeit der Berechnung der strDur und staDur steht dabei im engen
Zusammenhang mit der Genauigkeit der Bestimmung von dem TD und dem TO. Wird beispielsweise
der TD falsch detektiert, werden folglich die staDur und strDur falsch berechnet.
Unter anderem untersuchten Chen et al. [68], welchen Einfluss die Vorfuß-Biegesteifigkeit eines
Schuhs auf staDur nehmen kann. Die Autoren fanden heraus, dass der im Vorfußbereich elastischere
Schuh beim Gehen (1,5 m/s) und langsamen Laufen (2,5 m/s) zu einer signifikant geringeren staDur
führen kann, wohingegen beim schnelleren Laufen (3,5 m/s) kein signifikanter Effekt gefunden
Abbildung 2.3.2.2: Signale eines Winkelgeschwindigkeitsverlaufs in der Frontalebene für zwei Doppelschritte – Auszug aus einem Dauerlauf unter Feldbedingungen. Kennzeichnung der maximalen Eversionsgeschwindig-keit für jeden Schritt durch ein rotes Kreuz (evVel1 bis evVel3). (Eigene Darstellung)

Initialer Bodenkontakt, Ende Bodenkontakt, Bodenkontaktdauer und Doppelschrittdauer
26
wurde. In einer weiteren Studie untersuchten Castro et al. [69], welchen Einfluss die Laufgeschwin-
digkeit u.a. auf strDur und Schrittfrequenz hat. Die Autoren konnten nachweisen, dass strDur mit
abnehmender Laufgeschwindigkeit (60 und 80 Prozent der maximalen Geschwindigkeit) signifikant
kleiner wurde, wohingegen die Schrittfrequenz signifikant zunahm. Reenalda und Kollegen [70] un-
tersuchten in ihrer Studie die Schrittfrequenzänderung der Läufer während eines Marathons. Die Au-
toren konnten zeigen, dass sich diese beim ersten und letzten Streckenabschnitt läuferspezifisch un-
terscheidet. Zwei Probanden zeigten eine signifikante Abnahme der Schrittfrequenz, ein Proband eine
signifikante Zunahme. Bei abnehmender Schrittfrequenz kann davon ausgegangen werden, dass sich
die strDur vergrößert, da sich beide Größen umgekehrt proportional verhalten (Formel 2.3.3.1).
= ℎ 𝑖 𝑖 2.3.3.1
Für die Bestimmung von TD, TO, strDur und staDur finden sich in der Literatur eine Vielzahl ver-
schiedener Methoden. Neben der Möglichkeit, die genannten Parameter mit MOCAP-Systemen [71–
73], einfachen Videobildanalysen [69,74] oder Kraftmessplatten [68,75–79] zu bestimmen, können
auch an verschiedenen Körperstellen positionierte Inertialsensoren zur Ermittlung von strDur und
staDur eingesetzt werden. So nutzten beispielsweise Lee et al. [80] einen Inertialsensor, welcher am
Sacrum (S1) angebracht war. Sinclair et al. [81] sowie Mercer et al. [39] brachten einen Beschleuni-
gungssensor an der Tibia an, Sabatini et al. [63], Reenalda [70] und Strohrmann et al. [82] setzten
eine auf dem Spann des Schuhs angerachte IMU ein. Die Forschergruppen um Maiwald [83] sowie
Zaumseil [38] befestigten eine IMU an der Fersenkappe des Schuhs. Um Redundanzen zu vermeiden,
wird an dieser Stelle auf die genaue Beschreibung der TD- und TO-Detektionsalgorithmen der ver-
schiedenen Autoren verzichtet und auf Abschnitt 2.4.3 verwiesen.
Wie bereits oben erwähnt, ist es für eine genaue Berechnung von strDur und staDur wichtig, dass die
TD- und TO-Events mit einer hohen Genauigkeit bestimmt werden. Daneben ist die exakte zeitliche
Bestimmung von TD- und TO-Events ebenso von sehr großer Bedeutung, wenn beispielsweise wei-
tere Parameter, wie die Muskelaktivierungszeit oder der Fußaufsatzwinkel, in Relation zum TD oder
TO gesetzt werden, wie u.a. in Studien von Rao [79], Guidetti [84], Heidenfelder et al. [85], Hollander
et al. [86] und Hein & Grau [87] geschehen. Eine ungenaue Detektion der Gangevents würde zu

Fußaufsatzwinkel
27
fehlerhaften Rückschlüssen der abgeleiteten Parameter führen. Wie z.B. in Abbildung 2.3.4.1 ersicht-
lich, wird die Stellung des Fußes im Raum zum Zeitpunkt des initialen Bodenkontaktes (Fußaufsatz-
winkel) aus dem Winkelverlauf der globalen Orientierung des Fußes im Raum abgeleitet (Sagittal-
ebene). Würde der Zeitpunkt des TD zu früh oder zu spät detektiert, würde der Winkel stark unter-
oder überschätzt werden. Ein Vergleich verschiedener Bedingungen, wie z.B. beim Vergleich von
verschiedenen Schuhmodellen, unterläge somit einem großen Messfehler.
2.3.4 Fußaufsatzwinkel
Als Fußaufsatzwinkel (engl. foot strike angle, FSA) ist der Winkel definiert, welcher zwischen der
plantaren Fußfläche und dem Laufuntergrund zum Zeitpunkt des TD gemessen wird [88,89]. Einige
Autoren definieren den FSA auch als den Winkel zwischen der horizontalen Raumachse in Laufrich-
tung und dem fünften Metatarsus-Kopf [90]. Mit Hilfe des FSA kann beispielsweise eine Aussage
über den Laufstil getroffen werden, also mit welcher Fußregion der Laufuntergrund zuerst getroffen
wurde. Ab welchen FSA genau vom Rück-, Mittel-, oder Vorfußlaufstil gesprochen wird, unterschei-
det sich in der Literatur teilweise erheblich. So definieren Daoud et al. [89], dass wenn beim Laufen
ein positiver FSA ermittelt wird, so kann von einem Rückfußlaufstil ausgegangen werden. Bei diesem
Laufstil berührt die Ferse zuerst den Boden. Ist der FSA negativ, so erfolgt der erste Kontakt mit dem
Laufuntergrund über den Vorfuß bzw. Fußballen. Man spricht hierbei vom Vorfußlaufstil. Ist der
Winkel gegen null Grad und Ferse sowie Fußballen treffen etwa zur gleichen Zeit auf den Boden auf
(innerhalb eines 2 ms Fensters), so wird der FSA als Mittelfußlaufstil klassifiziert (ebd.). Dementge-
gen definieren Eskofier et al. [91] den Vorfußlaufstil ab einem FSA kleiner -8 Grad, Mittelfußlaufen
mit einem Winkel zwischen -8 und 0 Grad und Rückfußlaufen ab einem Winkel größer 0 Grad. Alt-
man & Davis [92] sowie Gaudel et al. [93] deklarieren einen Laufstil als Vorfußlauf bei einem FSA
kleiner -1,6 Grad, als Mittelfußlauf zwischen -1,6 und 8 Grad sowie als Rückfußlauf bei einem Win-
kel größer 8 Grad.
Im Bereich der Laufanalysen wurde eine Vielzahl an Studien durchgeführt, deren Ziel es war, zu
untersuchen, inwieweit sich Laufuntergrund [94], Laufgeschwindigkeit [90,95] oder Laufschuh
[85,87,88,90,96] auf den FSA auswirken. Heidenfelder et al. [85] konnten beispielsweise zeigen, dass
die Mittelsohlenhärte des Laufschuhs den FSA beeinflussen kann, wobei die Läufer in dem Schuh
mit der geringsten Dämpfung den kleinsten FSA zeigten. Weiterhin fand Larson [96] beim Vergleich
Fußaufsatzwinkel
28
zwischen Barfußlaufen und Laufen im Minimalschuh, dass Barfußläufer den Vorfußlaufstil bevorzu-
gen, wohingegen Minimalschuhläufer zum Großteil über die Ferse laufen. In Ergänzung dazu zeigten
Ahn et al. [90], dass Läufer beim Barfußlaufen vermehrt auf dem Vorfuß landen und beim Laufen in
einem herkömmlichen Laufschuh in den meisten Fällen den Boden zuerst mit der Ferse berühren.
Zusätzlich stellten Ahn et al. [90] in ihrer Studie fest, dass der FSA mit zunehmender Geschwindig-
keit leicht ansteigt. Demgegenüber zeigten Forrester & Townend [95], dass es drei Gruppen an Läu-
fern gibt, die Ihren FSA unterschiedlich an die Laufgeschwindigkeit anpassen. So zeigte Gruppe 1
bei zunehmender Laufgeschwindigkeit (von 2,2 bis 6,1 m/s) zuerst einen zunehmenden FSA, bis etwa
ab 4,4 m/s ein Plateau erreicht wurde. Bei Gruppe 2 nahm der FSA, nach einem ähnlichen Anstieg
wie bei Gruppe 1, ab 4,4 m/s stark ab. Ab einer Laufgeschwindigkeit von 5,3 m/s tendierten die Läu-
fer im Mittel gesehen eher zu einem Mittelfußlaufstil. In Kontrast zu den Gruppen 1 und 2 zeigte
Gruppe 3 im Mittel über alle Läufer sowie das gesamte Geschwindigkeitsspektrum hinweg einen
Mittelfußlaufstil, welcher kaum eine Veränderung über die verschiedenen Geschwindigkeiten auf-
wies.
Für die Bestimmung des FSA finden sich in der Literatur verschiedene Verfahren. Neben der Bestim-
mung des FSA mittels Inertialsensoren [38,63] nutzten beispielsweise die Autorengruppen um Ahn
[90], Liebermann [88] und Daoud [89] videobasierte 2D-Kamerasysteme, wohingegen beispielsweise
Hein & Grau [87] und Heidenfelder et al. [85] auf MOCAP-Systeme zurückgriffen. Eine weitere
Möglichkeit ist es, unter Berechnung des „Stride Indexes“ den Laufstil mittels Kraftmessplatte zu
bestimmen. Der „Stride Index“ gibt Aufschluss darüber, mit welchem Bereich des Fußes oder Schuhs
der Boden zuerst berührt wird [92,97,98]. Bei diesem Verfahren wird zum Zeitpunkt des TD die
Position des Kraftangriffspunktes (engl. center of pressure, COP), gemessen mit einer Kraftmess-
platte, ins Verhältnis zur Schuh- bzw. Fußlänge gesetzt. Liegt der COP zum Zeitpunkt des TD im
Bereich zwischen 0 und 33 Prozent der Fußlänge, so spricht man vom Rückfußlaufen, bei einem
Erstkontakt zwischen 34 und 67 Prozent von Mittelfußlaufen und bei 68 bis 100 Prozent von Vorfuß-
laufen [92,97,98]. Altman & Davis [92] fanden einen großen Zusammenhang zwischen dem mit ei-
nem MOCAP-System berechneten FSA und dem Fußaufsatzmuster (ermittelt über den „Stride In-
dex“) beim Laufen in Schuhen (r = 0,92) und beim Barfußlaufen (r = 0,86).

Fußaufsatzwinkel
29
Für die Berechnung des FSA mittels Inertialsensoren wird ein komplexer Algorithmus mit mehreren
Berechnungsschritten benötigt, um valide Ergebnisse zu erhalten [38,63]. Vor allem bietet diese Me-
thode jedoch den Vorteil, dass die Messungen auch außerhalb des Labors durchgeführt werden kön-
nen und sie unabhängig von weiteren Messverfahren sind. Sabatini et al. [63] nutzten für die Bestim-
mung des FSA z.B. eine auf dem Spann des Schuhs befestigte IMU, wohingegen Zaumseil [38] eine
an der Fersenkappe des Schuhs befestigte IMU nutzte. Die Funktionsweise des Gyroskops (vgl. Ab-
satz 2.2.2), welches in der IMU verbaut ist und für die Berechnung des FSA genutzt wird, stellt hierbei
jedoch ein Problem dar. Für die Berechnung des Fußanstellwinkels im Raum (θ) wird das Signal des
Gyroskops genutzt, welches die Winkelgeschwindigkeit (ω um die definierte y-Achse in der
Sagittalebene erfasst (Nick, vgl. Abbildung 2.3.2.2). Bei der numerischen Integration von ω zu θ (vgl.
Formel 2.3.4.1) kommt es zu einer Drift im berechneten Winkel (u.a. aufgrund des elektrischen Rau-
schens, vgl. Kapitel 1) sowie zu einem zusätzlich Offset (siehe Abbildung 2.3.4.1 oben).
Der Winkeloffset entsteht, da die absolute Orientierung des Sensors bzw. des Fußes im Raum vor der
numerischen Integration nicht bekannt ist. Winkeloffset und Driftfehler können jedoch behoben wer-
den, indem die plantare Phase des Fußes während der Bodenkontaktphase jeden Schrittes bestimmt
wird [38,63]. Zum Zeitpunkt der plantaren Phase (tplan) bleibt der Fuß des Läufers für einen kurzen
Zeitraum – für wenige Millisekunden – komplett still am Boden stehen. θ beträgt zu diesem Zeitpunkt
0 Grad und gilt als Referenz für die weiteren Berechnungen (θ(0)). Ist tplan bekannt, kann für jeden
Doppelschritt eine lineare Trendbereinigung der Daten vorgenommen werden [38]. Das heißt, es wird
die Differenz von θ zwischen zwei aufeinanderfolgenden plantaren Phasen ermittelt und in einem
Anstiegsdreieck mit tplan verrechnet (vgl. Formeln 2.3.4.2 bis 2.3.4.4). In Abbildung 2.3.4.1 (unten)
wird der trendbereinigte und offsetkorrigierte zeitliche Verlauf des Fußanstellwinkels – als Auszug
aus einem Lauf im Labor – in zwei Doppelschritten dargestellt. Wie bereits oben geschrieben, ist der
FSA der Winkel, der zwischen der plantaren Fußfläche und dem Laufuntergrund zum Zeitpunkt des
TD gemessen wird. Dieser Wert kann abschließend zum Zeitpunkt des TD aus dem Verlauf des drift-
und offsetbereinigten Fußanstellwinkels entnommen werden.

Fußaufsatzwinkel
30
θ t = ∫ 𝜔 + θ 2.3.4.1
= θ 𝑙𝑎 𝑎 𝑒 𝑃ℎ𝑎 𝑒 𝑆𝑐ℎ 𝑖 − θ 𝑙𝑎 𝑎 𝑒 𝑃ℎ𝑎 𝑒 𝑆𝑐ℎ 𝑖 t 𝑙𝑎 𝑆𝑐ℎ 𝑖 − 𝑙𝑎 𝑆𝑐ℎ 𝑖 2.3.4.2
n = θ 𝑙𝑎 𝑎 𝑒 𝑃ℎ𝑎 𝑒 𝑆𝑐ℎ 𝑖 2.3.4.3
Abbildung 2.3.4.1: Exemplarischer Verlauf des Fußanstellwinkels im Raum in der Sagittalebene für zwei Dop-pelschritte in einem Labortest auf der Laufstrecke. (Eigene Darstellung)
oben: Winkelverlauf des integrierten Gyroskopsignals (Signal von IMU, fixiert an Fersenkappe des Schuhs) in der Sagittalebene; Kennzeichnung der plantaren Phasen von Schritt 1 und Schritt 2 durch schwarze Kreuze;
unten: drift- und offsetkorrigierter Fußanstellwinkel; Darstellung des Fußaufsatzwinkels zum Zeitpunkt des initialen Bodenkontaktes durch rote Kreuze (FSA1 und FSA2) und Kennzeichnung der plantaren Phasen von Schritt 1 und 2 durch schwarze Kreuze.

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
31
𝑦 = mx + n 2.3.4.4
Die vorgestellte Methode zur Bestimmung des FSA mittels Inertialsensoren eignet sich jedoch nur,
um den Fußanstellwinkel für Rück- sowie Mittelfußläufer zu berechnen, da bei beiden Laufstilen eine
plantare Phase des Fußes in der Standphase gewährleistet werden kann. Beim Vorfußlaufstil wird je
nach Laufstil des Vorfußläufers entweder nur der Kontakt zwischen Fußballen und Laufuntergrund
oder zwischen Fußballen sowie anschließend der Ferse und dem Untergrund hergestellt. Es kann da-
bei also nicht immer eine plantare Phase gewährleistet werden [38]. Diese ist jedoch notwendig, um
Drift- und Offsetkorrekturen vorzunehmen. Hier muss auf alternative Methoden zurückgegriffen wer-
den, wie z.B. die Ermittlung der Sensororientierung im Raum mit Unterstützung von Magnetfeld-
sensoren [15,16].
Soll nur eine Klassifizierung des Laufstils in Vor-, Mittel- oder Rückfußlaufstil mittels Inertialsenso-
ren vorgenommen werden, kann dies etwa mit zwei 1D-Beschleunigungssensoren erfolgen, welche
im Fersenbereich des Schuhs sowie im Vorfußbereich (z.B. fünfter Metatarsus) angebracht werden
[93,99]. Über die zeitliche Differenz der beiden Spitzenbeschleunigungen kann auf den Laufstil ge-
schlossen werden. So wurde von den Autorengruppen eine zeitliche Differenz der beiden Spitzenbe-
schleunigungen größer 15,2 ms als Rückfußlaufen, zwischen 15,2 und -5,49 ms als Mittelfußlaufen
und kleiner -5,49 ms als Vorfußlaufen definiert.
2.3.5 Mittlere Laufgeschwindigkeit und Doppelschrittlänge
Die Schrittgeschwindigkeit des Fußes, gemittelt zur durchschnittlichen Laufgeschwindigkeit (engl.
running velocity, runVel), und die Schritt- (engl. step length, stepLen) sowie Doppelschrittlänge
(engl. stride length, strLen) zählen zu den räumlich-zeitlichen Parametern. Beispielsweise fanden De
Wit et al. [74] beim Vergleich vom Barfußlaufen und Laufschuhlaufen, dass sich die stepLen beim
Barfußlaufen reduziert. Die Autoren erklären dies mit der veränderten Fußaufsatzkinematik der Läu-
fer. Ähnliche Ergebnisse erhielten Bonacci et al. [100]. Die Autoren ermittelten für das Barfußlaufen
die signifikant kleinsten Werte für strLen, verglichen mit einem Minimallaufschuh und einem Leicht-
gewichtslaufschuh. In einer Untersuchung von Kulmala et al. [101], in welcher der Schwerpunkt

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
32
hauptsächlich auf einem Vergleich der im Knie wirkenden Kräfte beim Vor- und Rückfußlaufen lag,
konnte kein signifikanter Unterschied der stepLen zwischen beiden Laufstilen gefunden werden.
Welche Auswirkung ein Ausbelastungstest auf dem Laufband u.a. auf die strLen haben kann, unter-
suchten Mercer et al. [39]. Die Autoren konnten keinen signifikanten Unterschied der strLen zwi-
schen Pre- und Posttest feststellen.
Die Festlegung auf eine bestimmte runVel bzw. die Überwachung dieser wird dazu genutzt, um die
Untersuchungsbedingung innerhalb der jeweiligen Studien zu standardisieren und die Ergebnisse mit
anderen Studien vergleichbar zu machen [102–104]. Brauner konnte beispielsweise an der Rückfuß-
bewegung zeigen, dass bereits Geschwindigkeitsunterschiede von 0,6 m/s zu signifikanten Unter-
schieden in den Winkelamplituden sowie in den maximalen Winkelgeschwindigkeiten führen. Soll
der Einfluss der Materialeigenschaften eines Laufschuhs auf die Bodenreaktionskräfte untersucht
werden, so fordert Heidenfelder [104] sogar, dass der Geschwindigkeitsbereich kleiner 0,25 m/s sein
sollte, damit der Einfluss der Laufgeschwindigkeit auf die Stoßbelastung so gering wie möglich ist.
Ein zu großer Geschwindigkeitsbereich bzw. die Vernachlässigung einer bestimmten Geschwindig-
keitsvorgabe würde demnach dazu führen, dass Unterschiede in den untersuchten biomechanischen
Parametern nicht eindeutig der Versuchsbedingung zuzuordnen sind, sondern auch der unterschied-
lichen Gang- oder Laufgeschwindigkeit geschuldet sind. Neben der Möglichkeit, die runVel in Lab-
ordesigns auf einer Indoor-Laufstrecke mittels Lichtschranken zu überwachen [5,8,55,105] bzw.
diese beim Laufbandlaufen direkt am Laufband einzustellen und abzulesen [39,106,107] können un-
ter Feldbedingungen auch Geräte mit GPS7- oder GLONASS8- Empfänger genutzt werden [70].
Des Weiteren besitzen auch eine Vielzahl an Messverfahren das Potential, strLen akkurat und reliabel
zu bestimmen. So wurde beispielsweise die Schrittlänge von De Wit et al. [74] mittels 2D-Videobild-
analyse berechnet. Die Autoren gaben die Genauigkeit von stepLen mit 0,01 m an. Mercer und Kol-
legen [39] detektierten den TD jeden Schrittes mittels eines Beschleunigungssensors an der Tibia
(vgl. Abschnitt 2.3.3), berechneten die verstrichene Zeit t zwischen zwei TD und damit über die de-
finierte Laufbandgeschwindigkeit die strLen (vgl. Formel 2.3.5.1).
7 Global Positioning System; dt. Globales Positionsbestimmungssystem 8 Global Navigation Satellite System; dt. Globales Satellitennavigationssystem

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
33
= ∗ t 2.3.5.1
Ein vergleichbares Prinzip für die Berechnung der strLen wandten Reenalda und Kollegen [70] bei
einem Marathonlauf an. Die Autoren nutzten statt der Geschwindigkeitsangabe des Laufbandes die
einer GPS-Uhr, welche vom Probanden während des Laufes getragen wurde. Die Autorengruppen
u.a. um Bonacci [100], Kulmala [101] und Hollander [86] setzten für die Berechnung von strLen bzw.
stepLen MOCAP-Systeme ein. Danion und Kollegen [108] führten ihre Berechnung von strLen mit
Hilfe eines Potentiometers durch. Dieses Potentiometer, welches am Rahmen des Laufbandes fest
fixiert wurde, war auf der anderen Seite über ein Band mit der Fußspitze in Höhe des fünften Mittel-
fußknochens verbunden. Durch die Vor- und Rückbewegung des Fußes während der Laufzyklen än-
derte sich der Widerstand des Potentiometers, womit nach einer Kalibration auf die strLen zurückge-
schlossen werden konnte. Neben den genannten Möglichkeiten können die strLen, stepLen und run-
Vel auch ausschließlich mittels Inertialsensoren berechnet werden. So nutzten u.a. Sabatini et al. [63],
Chew et al. [109], Hamacher et al. [110] und Brahms et al. [111] eine auf dem Spann und Zaumseil
[38] eine an der Fersenkappe des Laufschuhs angebrachte IMU, um diese räumlich-zeitlichen Para-
meter zu berechnen. Die Forschergruppe um Yang [112] hingegen befestigte eine IMU auf dem Un-
terschenkel der Probanden und bei Doheny et al. [113] wurde an selber Stelle ein Gyroskop ange-
bracht.
Sollen die runVel und strLen mittels Inertialsensoren bestimmt werden, sind eine Vielzahl an Berech-
nungsschritten nötig. Im ersten Schritt wird der Fußanstellwinkel im Raum θ benötigt, damit aus den
Anteilen der gemessenen Fußbeschleunigung in horizontaler (ACC_X) und vertikaler Richtung
(ACC_Z) die raumfesten Beschleunigungen bestimmt werden können. Dazu nutzten Zaumseil [38]
und Chew et al. [109] das integrierte Gyroskopsignal einer IMU (vgl. Abschnitt 2.3.4). Im zweiten
Schritt berechneten die Autoren mit Hilfe der Koordinatentransformation (vgl. Formel 2.3.5.2) aus
ACC_X sowie ACC_Z und θ die raumfeste horizontale Beschleunigung (ACC_h) sowie die vertikale
Beschleunigung (ACC_v). Durch die numerische Integration von ACC_h (vgl. Formel 2.3.5.3) wurde
die resultierende Horizontalgeschwindigkeit (vh) berechnet [19,38,63,109,110]. Wie unter Abschnitt

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
34
2.3.4 bei der Berechnung des Fußanstellwinkels im Raum beschrieben, kommt es auch bei der nume-
rischen Integration von ACC_h zu vh zu einer Drift der Daten sowie zu einem Integrationsoffset (Ab-
bildung 2.3.5.1 oben). Da davon ausgegangen werden kann, dass die Geschwindigkeit zum Zeitpunkt
der plantaren Phase gegen null m/s geht [77], kann eine lineare Trendbereinigung von vh zwischen
zwei aufeinanderfolgenden plantaren Phasen durchgeführt werden, um die Offset- und Driftkorrektur
vorzunehmen [38,110] (Abbildung 2.3.5.1 unten). Für die Berechnung der mittleren Fußgeschwin-
digkeit wird der Mittelwert aus vh gebildet (vgl. Formel 2.3.5.4), was mit der mittleren Laufgeschwin-
digkeit (runVel) gleichgesetzt werden kann. Abschließend kann durch die numerische Integration von
vh (vgl. Formel 2.3.5.5) die Doppelschrittlänge (strLen) zwischen zwei aufeinanderfolgenden plant-
aren Phasen des Fußes berechnet werden [19,38,109].
Abbildung 2.3.5.1: Exemplarischer Verlauf der horizontalen (vorwärts-gerichteten) Geschwindigkeit des Fu-ßes für zwei Doppelschritte in einem Labortest auf der Laufstrecke; Darstellung des initialen Bodenkontaktes durch rote Kreuze (TD1 und TD2). (Eigene Darstellung)
oben: Geschwindigkeitsverlauf des integrierten Beschleunigungssignals – berechnete resultierende horizon-tale Beschleunigung; Kennzeichnung der plantaren Phasen von Schritt 1 und Schritt 2 durch schwarze Kreuze;
unten: drift- und offsetkorrigierte horizontale Geschwindigkeit des Fußes; Darstellung der durchschnittlichen Geschwindigkeit des Fußes zwischen zwei plantaren Phasen durch rote gestrichelte Linie (runVel = 3,4 m/s).

Inertialsensoren versus „Goldstandard“
35
[𝐴 _ℎ𝐴 _ ] = [ sin θ cos θcos θ − 𝑖 𝜃 ] [𝐴 _𝑋𝐴 _ ] − [𝑔] 2.3.5.2
ℎ 𝑖 = ∫ 𝐴 _ℎ + ℎ 2.3.5.3
𝑉 = ∑ ℎ 𝑖𝑖= 2.3.5.4
t = ∫ ℎ 2.3.5.5
2.4 Inertialsensoren versus „Goldstandard“
Im folgenden Abschnitt sollen Studien vorgestellt werden, welche die unter Abschnitt 2.3 beschrie-
benen biomechanischen Parameter mittels Inertialsensoren erhoben und mit bisherigen Standardver-
fahren als Referenz verglichen haben. Zu den sogenannten „Goldstandards“ gehören u.a. Kraftmess-
platten oder 2D- bzw. 3D-Bewegungsanalysesysteme.
2.4.1 Tibiale Spitzenbeschleunigung
Mit einer Kraftmessplatte können die beim Bodenkontakt auftretenden Kräfte ermittelt werden. Da
eine Verwendung von Kraftmessplatten unter Feldbedingung jedoch nur schwer realisierbar ist, ins-
besondere dann, wenn mehrere zusammenhängende Schritte hintereinander ausgewertet werden sol-
len, wird ein alternatives Verfahren benötigt. Wie bereits in Kapitel 2.3.1 erwähnt, kann über die PTA
indirekt darauf zurückgeschlossen werden, welche Kräfte während der Bodenkontaktphase über die
Füße auf den Körper übertragen werden und, wie sich die Schockwelle, welche beim TD erzeugt
wird, über die unteren Extremitäten ausbreitet. So fanden beispielsweise Lafortune et al. [114], dass
es beim Laufen mit einer Geschwindigkeit von 4,5 m/s einen Zusammenhang zwischen erster Kraft-
spitze der vertikalen Bodenreaktionskraft und der PTA gibt. Für den gleichen Geschwindigkeitsbe-

Maximale Eversionsgeschwindigkeit
36
reich fanden Hennig & Lafortune [115] einen hohen Zusammenhang zwischen maximaler Kraftan-
stiegsrate (zwischen TD und erster Kraftspitze) und PTA (r = 0,87). In Ergänzung dazu fanden Hen-
nig und Kollegen [11], dass es beim Laufen mit 3,30 ± 0,01 m/s einen hohen Zusammenhang zwi-
schen der PTA und maximaler Kraftanstiegsrate der vertikalen Bodenreaktionskraft gibt (r = 0,98).
Die Autoren nutzten 19 unterschiedliche Laufschuhe in ihrem Test. Hennig und Kollegen [11] kom-
men in ihrer Studie abschließend zu der Erkenntnis, dass beim Laufen von einem starken Zusammen-
hang zwischen den Daten der vertikalen Bodenreaktionskraft und der PTA ausgegangen werden kann.
Als Ergänzung dazu konnte die Forschergruppe um Thiel [116] in ihrer Studie zeigen, dass es möglich
ist, mittels am Unterschenkel applizierter IMUs (Auswertung der 3D-Beschleungigungs- sowie Gy-
roskopdaten) die vertikalen Bodenreaktionskräfte bei Sprintern vorherzusagen (r > 0,85). Das Beson-
dere an dieser Studie war, dass die Autoren ihre Untersuchung auf einer 90 m langen Laufstrecke
durchführen konnten, in welcher 54 Kraftmessplatten hintereinander geschalten wurden. Somit war
es möglich, mehrere aufeinanderfolgende Schritte auszuwerten.
2.4.2 Maximale Eversionsgeschwindigkeit
Das Ziel der Studie von Shih et al. [1] war es, zu untersuchen, wie sich die Kinematik des Fußes
während einer intensiven und für die Probanden individuellen Belastung von 30 Minuten verändert.
Die Geschwindigkeit lag im Mittel bei 3,2 ± 0,4 m/s. Des Weiteren untersuchten die Autoren in ihrer
Studie, inwieweit die Daten eines 3D-Gyroskops (an der Schuhschnürung fixiert) mit den Daten eines
MOCAP-Systems übereinstimmen. Für die maximale Winkelgeschwindigkeit, gemessen in der Fron-
talebene, fanden die Autoren moderate Zusammenhänge zwischen beiden Messsystemen von r = 0,65
(zu Beginn) und r = 0,70 (am Ende des 30-minütigen Dauerlaufs). Im Gegensatz zu Shih et al. [1]
nutzten Lederer et al. [64] ein an der Fersenkappe des Schuhs befestigtes dreiachsiges Gyroskop. Ziel
dieser Studie war es, die Rückfußkinematik beim Laufen mit 4,0 ± 0.2 m/s zwischen Gyroskop und
MOCAP-System zu vergleichen. Die Autoren fanden einen hohen Zusammenhang zwischen beiden
Messsystemen für die maximale Winkelgeschwindigkeit in der Frontalebene (r > 0,85). Brauner et
al. [2] verglichen in ihrer Studie die Kinematik des Fußes in der Frontalebene beim Laufen mit einer
Geschwindigkeit von 3,5 ± 0.1 m/s. Drei Messsysteme kamen in dieser Studie zum Einsatz. Der erste
Vergleich wurde zwischen einem MOCAP-System und einem an der Fersenkappe des Schuhs befes-
tigten Elektrogoniometer durchgeführt, der zweite zwischen dem MOCAP-System und einem eben-

Initialer Bodenkontakt, Ende Bodenkontakt, Bodenkontaktdauer und Doppelschrittdauer
37
falls an der Fersenkappe befestigten Gyroskop. Ein Vergleich zwischen Gyroskop und Elektrogoni-
ometer wurde nicht vorgenommen. Bei Gegenüberstellung von Elektrogoniometer und MOCAP-Sys-
tem (r = 0,77) sowie Gyroskop und MOCAP-System (r = 0,72) erhielten die Autoren hohe Zusam-
menhänge für evVel. Als Ergänzung zu den bisher vorgestellten Studien fanden Gaudel und Kollegen
[117] beim Vergleich zwischen evVel, erhoben mittels IMU an der Fersenkappe des rechten Schuhs,
und Fußaufsatzwinkel in der Fontalebene, ermittelt mit einem MOCAP-System, keine signifikanten
Zusammenhänge für die drei unterschiedliche Laufgeschwindigkeiten 2,8 m/s, 3,3 m/s und 4,2 m/s
(r = 0,07, r = 0,02 und r = -0,07).
2.4.3 Initialer Bodenkontakt, Ende Bodenkontakt, Bodenkontaktdauer
und Doppelschrittdauer
Für die Detektion von TD und TO nutzten Lee et al. [80] die lokalen positiven Spitzenbeschleuni-
gungen (Beschleunigung in anterio-posteriorer Richtung), welche mit einem am Sacrum (S1) befes-
tigten 3D-Beschleunigungssensor aufgenommenen wurden. Die Autoren verglichen ihre Ergebnisse
mit den ermittelten Gangevents einer Kraftmessplatte und einem MOCAP-System. Die Forscher-
gruppe fand für die Standdauer, Schritt- und Doppelschrittdauer sehr hohe Zusammenhänge beim
Vergleich der drei Messmethoden (im Mittel: r = 0,91). Sinclair und Kollegen [81] nutzten einen
distal an der Tibia befestigten Beschleunigungsaufnehmer, welcher die Beschleunigungen in longitu-
dinaler Richtung der Tibia erfasste. Für die Detektion des TD nutzen die Autoren einen fixen Schwell-
wert von 0 g, welcher überschritten werden musste, bevor die Spitzenbeschleunigung erreicht wurde.
Als TO wurde ein charakteristisches Plateau im Beschleunigungsverlauf genutzt, welches kurz vor
einem lokalen Minimum auftritt. Für staDur erhielten die Autoren einen sehr hohen Zusammenhang
zwischen Beschleunigungssensordaten und Bodenkontaktdetektion mittels Kraftmessplatte
(r = 0,96). In einer weiteren Studie um die Forschergruppe von Mo [118] wurden die Probanden mit
fünf IMUs (MyoMOTION MR3, Noraxon, Scottsdale, AZ, USA) ausgestattet: an Becken, jeweils
linker und rechter Tibia (distal) sowie an der Schnürung der Schuhe. Für die mit den IMUs bestimm-
ten TD- und TO-Events sowie für die staDur-Berechnung dienten den Autoren ebenfalls Kraftmess-
platten als Referenz. Für die Detektion der TD- und TO-Events wurde auf bereits publizierte Metho-
den zurückgegriffen [39,80,119]. Für die TD-Bestimmung war jene Methode am genausten, bei wel-
cher der Zeitpunkt der Spitzenbeschleunigung der aufsummierten resultierenden IMU-Beschleuni-
gungssignale am Fuß genutzt wurde. Für die TO-Detektion zeigte die Methode mit der Auswertung

Fußaufsatzwinkel
38
der Tibiabeschleunigung (lokales Minimum zum ungefähren Zeitpunkt des TOs) die größte Genau-
igkeit. Laut den Autoren würde für die genauste Übereinstimmung zwischen IMU- und Kraftmess-
platten-Eventdetektion die Kombination der beiden genannten Methoden sprechen (r > 0,86). Dies
würde jedoch bedeuten, dass die Probanden während der Durchführung der Messungen mit vier IMUs
ausgestattet werden müssten, damit staDur für beide Beine akkurat bestimmt werden kann. Neben
den Beschleunigungssignalen können auch Winkelgeschwindigkeiten dazu genutzt werden, TD- und
TO-Events zu bestimmen. Sabatini et al. [63] nutzten eine auf der Schnürung des Schuhs fixierte
IMU. Im Signal des Gyroskops (Sagittalebene) wurden im zu erwartenden Zeitraum für den initialen
Bodenkontakt sowie des Abhebens des Fußes vom Boden lokale Minima für die Bestimmung von
TD und TO gesucht. Als Referenz nutzten die Autoren Drucksensoren, welche unter dem Calcaneus
sowie unter dem Hallux im Schuh verbaut wurden. Für die TD wurde eine Differenz von -2 ms zwi-
schen IMU und Drucksensoren ermittelt und für den TO eine Differenz von 35 ms.
2.4.4 Fußaufsatzwinkel
Für die Klassifizierung des Laufstils, also ob Rück-, Mittel- oder Vorfußfußlauf, verglichen Giando-
lini et al. [99] und Gaudel et al. [93] ihre zeitlichen Differenzen zwischen den beiden Spitzenbe-
schleunigungen (aufgenommen mit zwei 1D-Beschleunigungssensoren: einer an Fersenkappe des
Schuhs sowie einer im Vorfußbereich) mit dem Fußaufsatzstil, welcher als Referenz in 2D-Video-
aufzeichnungen bestimmt wurde. Insgesamt konnte bei Gaudel et al. [93] eine Übereinstimmung der
beiden Verfahren von 94,84 Prozent festgestellt werden, wobei jedoch vor allem der Mittelfußlaufstil
nicht eindeutig zugeordnet werden konnte. Giandolini et al. [99] fanden ebenfalls eine sehr hohe
Übereinstimmung (r ≥ 0,86) bei unterschiedlichen Konditionen (z.B. verschiedene Geschwindigkei-
ten, bergauf und bergab). Ausnahmen gab es für die schnellen Laufgeschwindigkeiten (3,9 bzw.
4,4 m/s) sowie den Vorfußlaufstil (r = 0,19). Die Autoren erklären den fehlenden Zusammenhang
damit, dass die Läufer bei dem Vorfußlaufstil und der hohen Laufgeschwindigkeit den Boden nicht
mit der Ferse berührt haben und somit eine falsche Spitzenbeschleunigung im Signal des Sensors an
der Fersenkappe als Bodenkontakt deklariert wurde. Eskofier et al. [91] nutzten einen 3D-Beschleu-
nigungssensor, welcher fest an den Schnürsenkeln des rechten Schuhs der Läufer befestigt wurde, um
den Fußaufsatzstil zu bestimmen. Den Autoren diente zur Klassifikation des Laufstils eine „Support
Vector Machine“, in welcher verschiedene Parameter verrechnet wurden. Die drei Laufstile (Vor-,
Mittel- oder Rückfußlaufstil) stimmten zu 93,2 Prozent mit einer 2D-Videobildanalyse überein. Als

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
39
Alternative zu den Beschleunigungssensoren kann auch ein auf dem Spann des Schuhs befestigtes
Gyroskop genutzt werden [82]. Die Autoren fanden eine sehr gute Übereinstimmung zwischen cha-
rakteristischen Merkmalen im Winkelgeschwindigkeitsverlauf in der Sagittalebene (zeitliche Diffe-
renz zwischen Minimum- und Maximumpeak zum Zeitpunkt des TD) und dem jeweiligen Laufstil.
2.4.5 Mittlere Laufgeschwindigkeit und Doppelschrittlänge
Für die Berechnung der runVel nutzten Yang und Kollegen [112] eine am Unterschenkel fixierte
IMU. Die Autoren verglichen die Ergebnisse ihrer angewandten Berechnungsmethode für die runVel
mit der Laufbandgeschwindigkeit für die Geschwindigkeiten 2,50, 2,75, 3,00, 3,25 und 3,50 m/s. Es
wurden Abweichungen zwischen 0,08 und 0,11 m/s ermittelt, wobei die selbstberechnete runVel zu-
meist leicht unterschätzt wurde. Doheny et al. [113] nutzten ebenfalls eine am Unterschenkel befes-
tigte IMU zur Berechnung der Schrittlänge sowie der Geschwindigkeit, wobei ausschließlich die Da-
ten des Gyroskops verarbeitet wurden. Als Referenz diente den Autoren in dieser Studie eine Druck-
messplatte, über welche ausschließlich gegangen wurde. Es konnten sowohl für die Schrittlänge
(r = 0,92) als auch für die Geschwindigkeit (r = 0,96) hohe Zusammenhäng ermittelt werden. Chew
und Kollegen [109] nutzten eine auf dem Schuh befestigte IMU, um die runVel und strLen zu be-
rechnen. Die Untersuchung wurde auf dem Laufband durchgeführt, wobei die Geschwindigkeiten
2,22, 2,50, 2,80 und 3,06 m/s ausgewertet wurden. Als Referenz diente den Autoren ein MOCAP-
System. Die Unterschiede zwischen den beiden Messsystemen lagen für die strLen zwischen 0,14
und 0,46 m, wobei die größte Differenz für die schnellste Laufgeschwindigkeit gefunden wurde. Für
runVel ermittelten Chew et al. [109] Unterschiede zwischen 0,02 und 0,11 m/s, wobei auch hier die
größte Abweichung für die schnellste Laufgeschwindigkeit festgestellt wurde. Auch Brahms und
Kollegen [111] setzten eine auf dem Spann des Schuhs befestigte IMU ein, um die Schrittlänge zu
berechnen. Die Autoren testeten die Genauigkeit ihres Algorithmus‘ für die Schrittlängenberechnung
über ein breites Geschwindigkeitsspektrum, welches sich von 2,71 bis 4,36 m/s erstreckte. Die Be-
sonderheit ihres Algorithmus‘ war, dass die Sensorposition, -lage sowie -orientierung mittels eines
Kalman-Filters geschätzt und korrigiert wurden. Die Ergebnisse wurden ebenfalls mit einem MO-
CAP-System verglichen. Zwischen den beiden Messsystemen wurde ein sehr hoher Zusammenhang
von r = 0,96 gefunden, was einer mittleren Differenz von 0,05 m gleichkommt.

Mittlere Laufgeschwindigkeit und Doppelschrittlänge
40
Zusammenfassung Messung biomechanischer Parameter mittels Inertialsensoren
Es konnte gezeigt werden, dass Inertialsensoren in verschiedenen Testszenarien Anwendung fin-
den, um kinematische (Fußaufsatzwinkel und maximale Eversionsgeschwindigkeit), kinetische
(tibiale Spitzenbeschleunigung) und räumlich-zeitliche Parameter (Doppelschrittlänge, mittlere
Laufgeschwindigkeit und Doppelschrittdauer) in Gang- und Laufanalysen zu bestimmen.
Zudem konnte in Hinblick auf die „Goldstandards“ gezeigt werden, dass es hohe Zusammen-
hänge zwischen diesen Standardmessverfahren und den Inertialsensoren gibt:
• für die tibiale Spitzenbeschleunigung und die vertikale Bodenreaktionskraft (z.B. Kraft-
anstiegsrate)
• für die maximale Eversionsgeschwindigkeit mittels Gyroskop und MOCAP-System
• für die Doppelschrittdauer mittels Beschleunigungssensoren und Gyroskopen im Ver-
gleich zu MOCAP-Systemen und Kraftmessplatten
• für die Doppelschrittlänge und die mittlere Laufgeschwindigkeit mittels IMU im Ver-
gleich zur Druckmessplatte

Methodische Hinweise zur Umsetzung der Studien
41
Kapitel 3
3 Methodische Hinweise zur Umsetzung der Studien

Probandenkollektiv
42
Im Rahmen dieser Dissertation wurden vier Studien im Labor durchgeführt, welche in Kapitel 4 wie-
dergegeben werden und im Anhang im Original nachgelesen werden können. Da sich die Studiende-
signs der vier Einzelstudien zum Teil wiederholen und Redundanzen vermieden werden sollen, wird
an dieser Stelle zusammengefasst die grundsätzliche Methodik erläutert.
3.1 Probandenkollektiv
Die rekrutierten Probanden, welche an den Studien teilgenommen haben, setzten sich hauptsächlich
aus Studenten der Technischen Universität Chemnitz und aktiven Läufern aus Laufvereinen zusam-
men. Die Teilnehmer mussten zum Zeitpunkt der Datenaufnahme volljährig sein und durften zudem
keine akuten Verletzungen der unteren Extremitäten aufweisen. Alle Probanden erhielten vor Beginn
der Studie eine ausführliche Einweisung, in welcher die Ziele sowie der Ablauf der Untersuchung
erläutert wurde. Zudem wurden sie darauf hingewiesen, dass sie die Studie jederzeit ohne Angabe
von Gründen beenden können. Im Anschluss gaben die Probanden ihr Einverständnis zur Teilnahme
an der Studie sowie zur Speicherung ihrer Daten in anonymisierter Form, welche zu wissenschaftli-
chen Zwecken weitergenutzt werden können. Die Studiendesigns wurden von der Ethikkommission
der Fakultät für Human- und Sozialwissenschaften der Technischen Universität Chemnitz für ethisch
unbedenklich eingestuft (V-055-17-HS-CM-Fersenlauf-24062014, V-103-17-HS-CM-Bodenkon-
takt-25082015 und V-152-17-TM-CM-Lauftest-01092016).
3.2 Quantifizierung der mechanischen Materialeigenschaften der Laufschuhe
Für die Bestimmung der mechanischen Materialeigenschaften im Vor- und Rückfußbereich der Lauf-
schuhe kam basierend auf der Methode von Heidenfelder [104] und Schwanitz & Odenwald [120]
eine servohydraulische Prüfmaschine (HC10, Zwick GmbH & Co. KG, Ulm, Deutschland) zum Ein-
satz. Jeder Schuh wurde zehnmal getestet, wobei jeweils 103 Testzyklen absolviert wurden, aber nur
der 101. Zyklus ausgewertet wurde. Aus den zehn Versuchen wurde für jeden Schuh der Mittelwert
für die erhobenen Parameter berechnet (vgl. Tabelle 3.2.1). Eine Studie von Heidenfelder [104] ergab,
dass es reicht, einen Zyklus nach dem 100. Durchgang auszuwerten, um reliable Ergebnisse zu erhal-
ten (Reliabilitätskoeffizient von 4,1 ± 1,7 Prozent). Das Kraft-Zeit-Profil, mit welchem die Kraft in
den Vor- bzw. Rückfußbereich des Laufschuhs appliziert wurde, wurde aus biomechanischen Studien

Quantifizierung der mechanischen Materialeigenschaften der Laufschuhe
43
gewonnen, in welchen die Probanden mit einer Geschwindigkeit von 3,5 ± 0,1 m/s über eine Kraft-
messplatte liefen [104,121]. Die Verformung des Schuhmaterials (Deformation) sowie die im Ver-
hältnis dazu applizierte Kraft (durch einen kleinen Kraftaufnehmer in der servohydraulischen Prüf-
maschine ermittelt) wurden mit einer Aufnahmefrequenz von 1000 Hz aufgezeichnet. Über die bei-
den Größen Kraft und Verformung konnten die Hysterese (Abbildung 3.2.1) sowie die Variablen zur
Charakterisierung der mechanischen Laufschuheigenschaften berechnet werden. In Anlehnung an
Heidenfelder [104] können die in Tabelle 3.2.1 gelisteten Parameter mittels der servohydraulischen
Prüfmaschine bestimmt werden, welche dazu dienen, die Laufschuhe nach ihren mechanischen Ma-
terialeigenschaften zu charakterisieren. In den Studien der vorliegenden Dissertation wurden jedoch
ausschließlich die Fersenhöhe sowie die Steifigkeit 2 im Vor- und Rückfußbereich näher betrachtet.
Über die Steifigkeit 2 können u.a. Rückschlüsse darauf gezogen werden, wie sich die Härten der
Schuhe in Relation zueinander verhalten. So kann bei einem Schuhvergleich beispielsweise ein Lauf-
schuh mit einer geringen Steifigkeit 2 als relativ weich angesehen werden, wohingegen ein Laufschuh
mit höherer Steifigkeit 2 als relativ hart definiert wird.
Tabelle 3.2.1: Variablen zur Charakterisierung der mechanischen Laufschuheigenschaften. (Modifiziert nach Heidenfel-der [104])
Bezeichnung Einheit Abkürzung Erklärung / Berechnung
Fersenhöhe [mm] Fh Materialhöhe bei 50 N Vorkraft im Fersenbereich
Vorfußhöhe [mm] Vh Materialhöhe bei 50 N Vorkraft im Vorfußbe-
reich
Maximale Deformation [mm] MaxDef Minimale Höhe des jeweiligen Schuhbereichs bei
1550 N Last
Relative Deformation [%] MaxDef_rel (MaxDef / Fh) * 100%
(MaxDef / Vh) * 100%
Steifigkeit 1 [N/mm] S1 Anstieg der Kraft zwischen 200 und 400 N
Steifigkeit 2 [N/mm] S2 Anstieg der Kraft zwischen 1000 und 1500 N
Progression - Prog S2 / S1
Energieeingang [J] Ein Absoluter Energieeingang
Energieausgang [J] Eout Absoluter Energieausgang
Relativer Energieverlust [%] Ever Fläche der Hysteresekurve zwischen Ein und
Eout

Studiendesignplanung und Publikation
44
3.3 Studiendesignplanung und Publikation
Im Rahmen der Laufschuhforschung für die Fa. Puma® Inc., Deutschland, bestand der Anspruch, die
Adaption des Laufstils an die unterschiedlichen Laufschuhe und die damit verbundenen Änderungen
der biomechanischen Parameter unter Feldbedingungen beurteilen zu können. Um die Messungen
jedoch außerhalb der standardisierten Laborumgebung stattfinden lassen zu können, musste vorab
das passende Messsetup ausgewählt werden. Bei einer umfangreichen Literaturanalyse wurde ersicht-
lich, dass vor allem Inertialsensoren für dieses Einsatzgebiet geeignet sind (vgl. Abschnitt 2.3 und
2.4). So galt es im nächsten Schritt, die Anforderungscharakteristik an die Sensoren sowie Algorith-
men zu definieren, mit der es möglich ist, die biomechanischen Parameter so akkurat wie möglich zu
erheben. Die für die vier Untersuchungen benötigten Messsysteme – Inertialsensoren, Elektrogonio-
meter, Lichtschranken (zum Überwachen der Gang- bzw. Laufgeschwindigkeit), Kraftmessplatten
sowie Highspeed-Kameras – wurden vom Labor der Professur Bewegungswissenschaft der Techni-
schen Universität Chemnitz bereitgestellt. Die im Versuchsaufbau verwendeten Laufschuhe wurden
seitens der Fa. Puma® zur Verfügung gestellt. Bei der Erstellung des Studiendesigns sowie dem Ver-
Abbildung 3.2.1: Exemplarische Hysteresekurve für die Laufschuhe: Adidas AdiStar (ADISTAR), Asics Gel Nimbus 12 (ASGEL), Puma Speed 600 (SPEED600), ermittelt im Fersenbereich. (Eigene Darstellung)

Studiendesignplanung und Publikation
45
fassen des Manuskriptes waren alle Autoren der jeweiligen Publikation involviert, wobei der Erstau-
tor den überwiegenden Anteil daran geleistet hat. Die Studiendurchführung wurde von studentischen
Hilfskräften sowie dem Autor dieser Dissertation umgesetzt. Die erhobenen Messdaten wurden im
Postprocessing ausgewertet. Das heißt, dass diese erst nach Absolvieren der Messdurchgänge des
Probanden von dem Versuchsleiter auf eine PC übertragen, aufbereitet und ausgewertet wurden. Die
Berechnung der biomechanischen Parameter wurde anschließend auf Grundlage der unter Abschnitt
2.3 vorgestellten Algorithmen durch selbstgeschriebene MATLAB-Skripte (MATLAB R2016b,
MathWorksTM, Natick, MA, USA) vom Autor dieser Dissertation durchgeführt. Eine detaillierte
Beschreibung der Algorithmen kann in der jeweiligen Publikation nachgelesen werden.
Im folgenden Abschnitt werden die vier publizierten Studien in Kurzform vorgestellt. Die dazugehö-
rigen vollständigen Publikationen befinden sich im Anhang dieser Dissertation.

Eigene Beiträge zur Bestimmung der Anforderungen an Inertialsensoren und Algorithmik beim Einsatz in der biomechanischen Gang- und Laufanalyse
46
Kapitel 4
4 Eigene Beiträge zur Bestimmung der Anforderungen an Inertialsensoren und
Algorithmik beim Einsatz in der biomechanischen Gang- und Laufanalyse

The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running
47
4.1 The influence of inertial sensor sampling frequency on the accuracy of
measurement parameters in rearfoot running
Der Einfluss der Aufnahmefrequenz von Inertialsensoren auf die Genauigkeit von
Messparametern beim Rückfußlaufen
Autoren: Christian Mitschke, Falk Zaumseil, Thomas L. Milani
Erschienen in: Computer Methods in Biomechanics and Biomedical Engineering
(2017), Vol. 20 (14), doi:10.1080/10255842.2017.1382482
In dieser Studie konnte gezeigt werden, dass Beschleunigungssensoren und Gyroskope – einzeln oder
auch kombiniert in einem Gehäuse zu einer IMU – genutzt werden, um räumlich-zeitliche, kinetische
und kinematische Parameter zu erheben. Bei der Literaturanalyse konnte zudem aufgezeigt werden,
dass eine große Bandbreite an verschiedenen Aufnahmefrequenzen (SF) genutzt wird, um die biome-
chanischen Parameter zu bestimmen. Dabei versteht man unter SF, in welcher zeitlichen Taktung
Informationen vom Sensor abgerufen werden (Angabe in Hz). Für räumlich-zeitliche sowie kinema-
tische Parameter wurden SF zwischen 60 Hz [70] und 1000 Hz [1,12] genutzt, wohingegen die SF
für die Bestimmung der kinetischen Parameter zwischen 100 Hz [122] bis 2000 Hz [48,50] deutlich
höher waren. Es konnten in der Literatur keine Hinweise gefunden werden, wie hoch die SF für Iner-
tialsensoren mindestens sein sollte, damit die Parameter so genau wie möglich bestimmt werden kön-
nen.
Fragestellung Studie I
Beeinflusst die Aufnahmefrequenz der Inertialsensoren die Genauigkeit der biomechanischen Pa-
rameter?

The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running
48
Das Ziel dieser Studie war es daher, systematisch zu überprüfen, welchen Einfluss verschiedene SF
auf die Genauigkeit der a) kinematischen Parameter (Fußaufsatzwinkel und maximale Eversionsge-
schwindigkeit), b) räumlich-zeitlichen Parameter (Doppelschrittlänge und Doppelschrittzeit) und c)
kinetischen Parameter (tibiale Spitzenbeschleunigung und maximale vertikale Beschleunigung an der
Ferse) haben. Zusätzlich sollte untersucht werden, welchen Einfluss die SF auf die Detektion des
initialen Bodenkontaktes hat.
Für diese Studie liefen 21 männliche Probanden mit einem vom Labor bereitgestellten Laufschuh
(Puma Faas 500) im Rückfußlaufstil mit 3,5 ± 0,1 m/s insgesamt 30 Mal über die Laufstrecke im
Labor. Die Probanden wurden mit einem 1D-Beschleunigungssensor auf dem Tibiaplateau (etwa auf
2/3-Höhe zwischen medialen Malleolus und Tibiakondyle) und einer IMU, bestehend aus einem 2D-
Beschleunigungssensor und einem 2D-Gyroskop, an der Fersenkappe des rechten Schuhs ausgestat-
tet. SF betrug während der Datenaufnahme für alle Sensoren sowie für die Kraftmessplatte 1000 Hz.
Im Postprocessing wurden im ersten Schritt die Beschleunigungssignale 100 Hz (4. Ordnung) und
die Winkelgeschwindigkeitssignale 50 Hz (4. Ordnung) mit einem Butterworth Tiefpassfilter ohne
Phasenverschiebung gefiltert, um Signalrauschen zu entfernen. Die Filterung der Daten wurde vor
der Datenreduktion durchgeführt, damit sich die hochfrequenten Rauschanteile nicht in dem redu-
zierten Nutzfrequenzbereich widerspiegeln. Dies wurde durch einen Algorithmus umgesetzt, welcher
für 500 Hz jeden zweiten Datenpunkt aus dem Referenzdatensatz (1000 Hz) auswählte, für 333 Hz
jeden dritten Datenpunkt, für 250 Hz jeden vierten, für 200 Hz jeden fünften und für 100 Hz jeden
zehnten Datenpunkt. Anschließend wurden auf Grundlage der sechs verschiedenen SF die biomecha-
nischen Parameter berechnet. Die Reduzierung der SF sowie Berechnung der biomechanischen Pa-
rameter auf Grundlage der reduzierten SF wurde bis zu zehnmal durchgeführt (für 100 Hz), um alle
theoretisch möglichen Ergebnisse zu berechnen. Final ausgewertet wurde für jeden Parameter jedoch
nur die größte Abweichung zum Referenzwert, welcher mit 1000 Hz berechnet wurde.
Der Vergleich zwischen der Referenz-SF und den reduzierten SF zeigt deutliche Unterschiede in der
Genauigkeit der berechneten biomechanischen Parameter, wobei sich die Höhe der SF unterschied-
lich auf die verschiedenen biomechanischen Parameter auswirkte. Generell konnte festgestellt wer-
den, dass je geringer die SF ist, desto mehr Informationen verloren gehen und desto geringer die
Genauigkeit der Parameter wird. Für die kinematischen Daten wurde gefunden, dass eine SF von

The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running
49
mindestens 200 Hz genutzt werden sollte, um die maximale Eversionsgeschwindigkeit (absoluter
Fehler ≤ 25,6 Grad/s) und den Fußaufsatzwinkel (absoluter Fehler ≤ 0,4 Grad) präzise zu bestimmen.
Für die räumlich-zeitlichen Parameter wird ebenfalls eine SF von 200 Hz für die Berechnung der
Doppelschrittdauer (absoluter Fehler ≤ 11,8 ms) und 333 Hz für die Bestimmung der Doppelschritt-
länge (absoluter Fehler ≤ 7,2 cm) benötigt, damit beide Parameter akkurat bestimmt werden können.
Für die beiden kinetischen Parameter, welche in dieser Studie untersucht wurden, konnten große Un-
terschiede in der Höhe der benötigten SF festgestellt werden. Zur Bestimmung der tibialen Spitzen-
beschleunigung genügt es demnach, einen Inertialsensor mit einer SF von 200 Hz zu nutzen (absolu-
ter Fehler ≤ 1,05 g). Demgegenüber sollte bei der Verwendung des vertikalen Beschleunigungssig-
nals der an der Fersenkappe des Schuhs angebrachten IMU eine möglichst hohe SF genutzt werden.
Bereits eine Reduzierung der Referenz-SF auf 500 Hz resultierte in einer deutlich geringeren
Amplitude der maximalen vertikalen Beschleunigung mit einem absoluten Fehler von ≤ 1,69 g. Dem-
nach könnte eine zu geringe Abtastrate bei der IMU an der Fersenkappe zur Folge haben, dass die
von diesem Sensor abgeleiteten Parameter, wie z.B. die Doppelschrittlänge, fehlerhaft berechnet wer-
den. Zudem zeigte sich, dass mit geringer werdender SF die Detektion des initialen Bodenkontaktes
ungenauer wurde. Die Genauigkeit der Detektion des initialen Bodenkontaktes wurde mittels einer in
den Boden integrierten Kraftmessplatte überprüft. Für 1000 Hz wurde ein Unterschied zwischen
Kraftmessplatte und IMU-Detektionsalgorithmus von 0,7 ± 2,6 ms ermittelt, welcher sich bereits bei
einer geringeren SF von 500 Hz auf 4,5 ± 5,3 ms vergrößerte und bis 42,2 ± 24,4 ms bei einer SF von
100 Hz anstieg. Kann der initiale Bodenkontakt demnach aufgrund einer geringen SF nur ungenau
bestimmt werden, unterliegen auch hier die Parameter, welche mittels initialen Bodenkontakt zu ei-
nem bestimmten Zeitpunkt definiert werden (z.B. Doppelschrittdauer und Fußaufsatzwinkel), einem
zusätzlichen Fehler. Zudem kann eine verzögerte Detektion des initialen Bodenkontaktes dazu füh-
ren, dass beispielsweise die tibiale Spitzenbeschleunigung nicht gemessen werden kann, da diese in-
nerhalb der ersten 50 ms nach dem initialen Bodenkontakt auftritt. Die Ergebnisse dieser Studie zei-
gen, dass die SF die Genauigkeit der biomechanischen Parameter stark beeinflussen kann, sodass die
Ergebnisse anderer Studien, welche ihre Parameter mit einer SF unterhalb der hier bestimmten mini-
malen SF erhoben haben, kritisch betrachtet werden sollten.

The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running
50
Zusammenfassung der Ergebnisse Studie I
Biomechanische Parameter benötigen unterschiedliche SF
• kinetische Daten: 500 Hz bei der vertikalen Spitzenbeschleunigung an der Fersenkappe
bzw. 200 Hz bei der tibialen Spitzenbeschleunigung
• kinematische Daten: 200 Hz beim Fußaufsatzwinkel sowie der maximalen Eversionsge-
schwindigkeit
• räumlich-zeitliche Parameter: 333 Hz bei der Doppelschrittlänge sowie 200 Hz für die
Doppelschrittdauer

The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running
51
4.2 The Effect of the Accelerometer Operating Range on Biomechanical Pa-
rameters: Stride Length, Velocity, and Peak Tibial Acceleration During
Running
Der Einfluss des Messbereichs von Beschleunigungssensoren auf die biomechani-
schen Parameter: Doppelschrittlänge, Geschwindigkeit und tibiale Spitzenbe-
schleunigung beim Laufen
Autoren: Christian Mitschke, Pierre Kiesewetter, Thomas L. Milani
Erschienen in: Sensors (2018), Vol. 18 (1), doi:10.3390/s18010130
Beschleunigungssensoren finden oftmals bei der Bestimmung räumlich-zeitlicher (z.B. Doppel-
schrittlänge) und kinetischer Parameter (tibiale Spitzenbeschleunigung) Anwendung. Dabei liegt die
Bandbreite des Messbereichs der genutzten Beschleunigungssensoren bei Gang- und Laufanalysen
zwischen ±2 und ±70 g, wobei g die Gravitationsbeschleunigung darstellt [18,19,42,123,124]. Jedoch
wirken gerade beim Laufen innerhalb der ersten 50 ms des Bodenkontaktes hohe Beschleunigungen,
sowohl in vertikaler als auch horizontaler Richtung (anterior-posterior), welche die Gravitationsbe-
schleunigung um ein Vielfaches überschreiten [37,125]. Ist der Sensormessbereich der Beschleuni-
gungssensoren niedriger als die wirkenden Beschleunigungen, werden die Spitzenbeschleunigungen
abgeschnitten. Im einfachsten Fall würde das beispielsweise für die tibiale Spitzenbeschleunigung
bedeuten, dass die Messwerte beim maximalen Sensormessbereich liegen und die Variabilität verlo-
ren geht. Für komplexere Parameter, wie z.B. Doppelschrittlänge und Fußgeschwindigkeit, ist der
Fehler beim Überschreiten des Messbereichs nicht zu prognostizieren und wurde bis dato nicht un-
tersucht. Weiterhin ist unbekannt, wie sich die Materialcharakteristik der Schuhsohle auf die Para-
meter auswirkt. Es konnten in der Literatur keine Empfehlungen dazu gefunden werden, wie hoch
der Sensormessbereich der Beschleunigungssensoren mindestens sein sollte, damit die biomechani-
schen Parameter so genau wie möglich bestimmt werden können.

The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running
52
Das Ziel dieser Studie war es daher, systematisch zu untersuchen, welchen Einfluss der Sensormess-
bereich der Beschleunigungssensoren auf die Genauigkeit der beiden räumlich-zeitlichen Parameter
Doppelschrittlänge und Laufgeschwindigkeit sowie auf die tibiale Spitzenbeschleunigung hat. Zu-
sätzlich sollte untersucht werden, welchen Einfluss die mechanischen Eigenschaften der Laufschuhe
auf die untersuchten Parameter haben.
An dieser Studie nahmen insgesamt 21 männliche Probanden teil, welche in ihrem eigenen bevor-
zugten Trainingstempo (im Mittel 3,60 ± 0,4 m/s) mit den drei vom Labor gestellten Laufschuhen
(Adidas AdiStar, Puma Speed 600, Asics Gel Nimbus 12) jeweils fünfmal mit dem Rückfußlaufstil
über die Laufstrecke im Labor liefen. Da der Rückfußlaufstil der meist genutzte Laufstil ist und zu-
dem bei diesem mit hohen Beschleunigungen sowie Kraftanstiegsraten zu rechnen ist, wurden aus-
schließlich Rückfußläufer untersucht. Alle Probanden wurden mit einer IMU (2D-Beschleunigungs-
sensor und 2D-Gyroskop) ausgestattet, welche an der Fersenkappe des rechten Schuhs fixiert wurde.
Zusätzlich wurde ein 1D-Beschleunigungssensor auf dem Tibiaplateau des rechten Beines angebracht
(etwa auf 2/3-Höhe zwischen medialen Malleolus und Tibiakondyle). Die Beschleunigungssensoren,
sowohl in der IMU als auch der an der Tibia, nutzten einen Messbereich von ±70 g, wobei eine Auf-
nahmefrequenz von 1000 Hz angewandt wurde. Im Postprocessing wurden die Messdaten der Be-
schleunigungssensoren bei ±32, ±16 und ±8 g abgeschnitten, woraufhin die Berechnung der biome-
chanischen Parameter für die vier verschiedenen Sensormessbereiche (±70, ±32, ±16 und ±8 g) rea-
lisiert wurde.
Die Vergleiche der biomechanischen Parameter, welche mit ±70 g und geringeren Messbereichen
berechnet wurden, zeigten deutliche Unterschiede in der Genauigkeit. Es konnte festgestellt werden,
dass je geringer der Messbereich des Beschleunigungssensors ist, desto mehr Informationen verloren
gehen und desto geringer die Genauigkeit der untersuchten Parameter ist. Aus den Ergebnissen dieser
Studie wird ersichtlich, dass für die Berechnung der Doppelschrittlänge sowie der Fußgeschwindig-
keit Beschleunigungssensoren mit einem Messbereich von mindestens ±32 g genutzt werden sollten.
Fragestellung Studie II
Beeinflusst der Sensormessbereich der Beschleunigungssensoren die Genauigkeit der biomecha-
nischen Parameter?

The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running
53
Aufgrund der abgeschnittenen horizontalen und vertikalen Beschleunigungsamplituden der IMU-Be-
schleunigungssensoren, wird eine zu geringe resultierende horizontale Beschleunigung errechnet,
welche im folgenden Berechnungsschritt – der numerischen Integration von der Beschleunigung zur
Geschwindigkeit – ebenfalls zu einer zu geringen resultierenden horizontalen Geschwindigkeit führt
(vgl. Abbildung 4.2.1). Dieser Fehler zeigt sich schließlich auch bei der Bildung des Mittelwertes zur
mittleren Laufgeschwindigkeit (zwischen zwei plantaren Phasen) sowie in der Berechnung der Dop-
pelschrittlänge (durch erneute nummerische Integration der resultierenden horizontalen Geschwin-
digkeit des Fußes über die Zeit zur Doppelschrittlänge). Gerade in Studien, wo die Schrittlänge vieler
zusammenhängender Schritte ausgewertet werden soll, z.B. bei einem Marathonlauf [70], kann ein
zu kleiner Sensormessbereich dazu führen, dass die Doppelschrittlänge kontinuierlich falsch berech-
net wird und es aufgrund dessen zu einer Unterschätzung der Gesamtdistanz kommt. Zudem kann der
zu geringe Messbereich sich ebenso in einer zu geringen Variabilität der Doppelschrittlänge äußern,
was z.B. zu Fehlinterpretationen bei der Beurteilung der Ermüdung führen könnte. Soll sich während
eines Laufes an den mit den IMUs berechneten Laufgeschwindigkeiten orientiert werden, z.B. um
die Geschwindigkeit zwischen verschiedenen Messbedingungen konstant zu halten, würde ein zu ge-
ringer Sensormessbereich zu einer Unterschätzung der Laufgeschwindigkeit führen und einen Ver-
gleich der Versuchsbedingungen untereinander nicht zulassen bzw. verfälschen.
Die Ergebnisse dieser Studie zeigen zudem, dass für die tibiale Spitzenbeschleunigung Beschleuni-
gungssensoren mit einem Messbereich von mindestens ±16 g ausreichen, um diesen Parameter im
Mittel akkurat zu bestimmen. Aufgrund der Hautverschiebung, der stoßdämpfenden Eigenschaften
des Fersenfettpolsters sowie des Pronationsverhaltens des Fußes werden die hohen Beschleunigungen
zu Beginn des Bodenkontaktes stark abgedämpft. Somit kann im Vergleich zum Beschleunigungs-
sensormessbereich der IMU an der Fersenkappe des Schuhs ein geringerer Sensormessbereich zum
Messen der PTA zum Einsatz kommen. Bezüglich des Einflusses der Materialeigenschaften der Lauf-
schuhe wurde gefunden, dass die drei unterschiedlichen Schuhmodelle keinen zusätzlichen Einfluss
auf die Genauigkeit der berechneten biomechanischen Parameter haben. Laut den Erkenntnissen die-
ser Studie kann abschließend geschlussfolgert werden, dass der Sensormessbereich der Beschleuni-
gungssensoren mindestens ±32 g sein sollte, damit alle Parameter akkurat berechnet werden können.
Die Ergebnisse aus anderen Studien, in denen ein geringerer Sensormessbereich für die Berechnung
der hier vorgestellten Parameter genutzt wurde, sollten kritisch betrachtet werden.

The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running
54
Abbildung 4.2.1: Darstellung der resultierenden horizontalen Fußgeschwindigkeit (Vorwärtsbewegung) für einen exemplarischen Schritt, berechnet mit einem Messbereich des Beschleunigungssensors von ±70 g (schwarze Linie), ±16 g (graue gestrichelte Linie) und ±8 g (graue Linie). Die vertikalen Linien kennzeichnen das Abheben der Zehen vom Boden (links), gefolgt von der Schwungphase und dem initialen Bodenkontakt (rechts). (Darstellung aus Mitschke et al. [133])
Zusammenfassung der Ergebnisse Studie II
• Messbereich für eine genaue Berechnung der Doppelschrittlänge sowie der mittleren
Laufgeschwindigkeit mindestens ±32 g.
• Messbereich für eine genaue Bestimmung der tibialen Spitzenbeschleunigung mindestens
±16 g.
• Es konnte kein zusätzlicher Einfluss der Schuhbedingungen auf die Genauigkeit der Pa-
rameter gefunden werden.

Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Accurately when Using an Inertial Measurement Unit?
55
4.3 Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Ac-
curately when Using an Inertial Measurement Unit?
Welche Methode detektiert für Rück- und Vorfußläufer den initialen Bodenkontakt
mittels einer inertialen Messeinheit am genausten
Autoren: Christian Mitschke, Tobias Heß, Thomas L. Milani
Erschienen in: Applied Sciences (2017), Vol. 7 (9), doi:10.3390/app7090959
Die Bestimmung des initialen Bodenkontaktes (TD), also dem Zeitpunkt, an welchem der Fuß nach
der Schwungphase auf den Boden auftrifft, sollte so genau wie möglich erfolgen. Ist dies nicht der
Fall, können biomechanische Parameter, welche in Relation zu diesem Zeitpunkt definiert werden
(z.B. Fußaufsatzwinkel, Schrittfrequenz, Schrittdauer oder Muskelaktivität), nicht akkurat bestimmt
werden. Für die Bestimmung des TD finden sich in der Literatur eine Vielzahl an Verfahren. Der
„Goldstandard“ dafür ist die Nutzung einer Kraftmessplatte, welche beim Überschreiten eines Grenz-
wertes den TD signalisiert. Die Kraftmessplatten haben jedoch den Nachteil, dass sie weitestgehend
an das Labor gebunden sind, bei einer einzelnen Kraftmessplatte nur ein einzelner Schritt ausgewertet
werden kann und, dass das Treffen der Kraftmessplatte das natürliche Laufmuster beeinflussen kann
[9]. Alternativ dazu finden sich in der Literatur verschiedene Ansätze, in denen Autorengruppen den
TD mittels direkt am Körper (Unterschenkel oder Sacrum) oder am Schuh (Fersenkappe oder Schuh-
spann) applizierter Inertialsensoren bestimmt haben. Bis dato gibt es jedoch keine Information dar-
über, welchen Einfluss der Laufstil, also ob Rück- oder Vorfußlaufstil, sowie die Mittelsohlenhärte
des Laufschuhs auf die Genauigkeit dieser TD-Detektionsverfahren haben.
Fragestellung Studie III
Unterscheiden sich verschiedene publizierte Methoden zur Detektion des initialen Bodenkontak-
tes in ihrer Genauigkeit?

Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Accurately when Using an Inertial Measurement Unit?
56
Das Ziel dieser Studie war es daher, die Genauigkeit von vier publizierten und bereits zitierten Me-
thoden [39,63,81,83] unter dem Einfluss des Laufstils sowie der Laufschuhmittelsohlenhärte zu über-
prüfen. Eine Kraftmessplatte wurde als Referenz genutzt, wobei ein Grenzwert von 10 N für den TD
festgelegt wurde [75]. Um die Genauigkeit der Algorithmen möglichst hochauflösend abbilden zu
können, wurde für alle Messsysteme (Inertialsensoren und Kraftmessplatte) eine hohe Aufnahmefre-
quenz von 3750 Hz gewählt.
An dieser Studie nahmen 12 Rück- und 11 Vorfußläufer teil. Die Probanden liefen in ihrem eigenen
bevorzugten Trainingstempo (Geschwindigkeit im Mittel: Rückfußläufer: 3,26 ± 0,4 m/s, Vorfußläu-
fer: 3,38 ± 0,4 m/s) mit den drei bereitgestellten Laufschuhen (Puma Speed 100, Puma Speed 500,
Puma Speed 1000) jeweils fünfmal über die Laufstrecke im Labor. Die Probanden wurden mit jeweils
einer IMU, bestehend aus 3D-Beschleunigungssensor und 3D-Gyroskop, auf dem Tibiaplateau (etwa
auf 2/3-Höhe zwischen medialen Malleolus und Tibiakondyle) sowie an der Fersenkappe des rechten
Schuhs versehen. Beide IMUs wurden genutzt, um die vier Algorithmen zur Bestimmung des TD zu
validieren (vgl. Abbildung 4.3.1).
Methode 1 (M1) wurde in Anlehnung an Sinclair et al. [81] durchgeführt, wobei das vertikale Be-
schleunigungssignal der IMU an der Tibia 60 Hz Tiefpass-gefiltert wurde. Als TD wurde ein Über-
schreiten des fixen Grenzwertes von 0 g angenommen, welcher kurz vor (innerhalb eines 20 ms-
Fensters) der der tibialen Spitzenbeschleunigung auftritt (vgl. Abbildung 4.3.1, oben). In Anlehnung
an Mercer et al. [39] wurde der TD für Methode 2 (M2) ermittelt. Dabei wurde der untere Umkehr-
punkt vor dem Anstieg zur tibialen Spitzenbeschleunigung als TD deklariert (vgl. Abbildung 4.3.1,
zweite Abbildung von oben). Für Methode 3 (M3) wurden die Daten der IMU an der Fersenkappe
des Schuhs genutzt [83]. Das Beschleunigungssignal wurde im ersten Schritt 80 Hz Hochpass-gefil-
tert und anschließend der erste positive Peak in dem gefilterten Signal als TD deklariert (vgl. Abbil-
dung 4.3.1, dritte Abbildung von oben). Methode 4 (M4) wurde in Anlehnung an Sabatini et al. [63]
durchgeführt. Das Gyroskopsignal (Sagittalebene) der IMU an der Fersenkappe des Schuhs wurde
15 Hz Tiefpass-gefiltert und das erste Tal im gefilterten Signal als TD definiert (vgl. Abbildung 4.3.1,
zweite Abbildung von unten). Die ermittelten Zeitpunkte des TD wurden für die vier genutzten Me-
thoden mit der Kraftmessplatte als Referenz verglichen (vgl. Abbildung 4.3.1, unten).
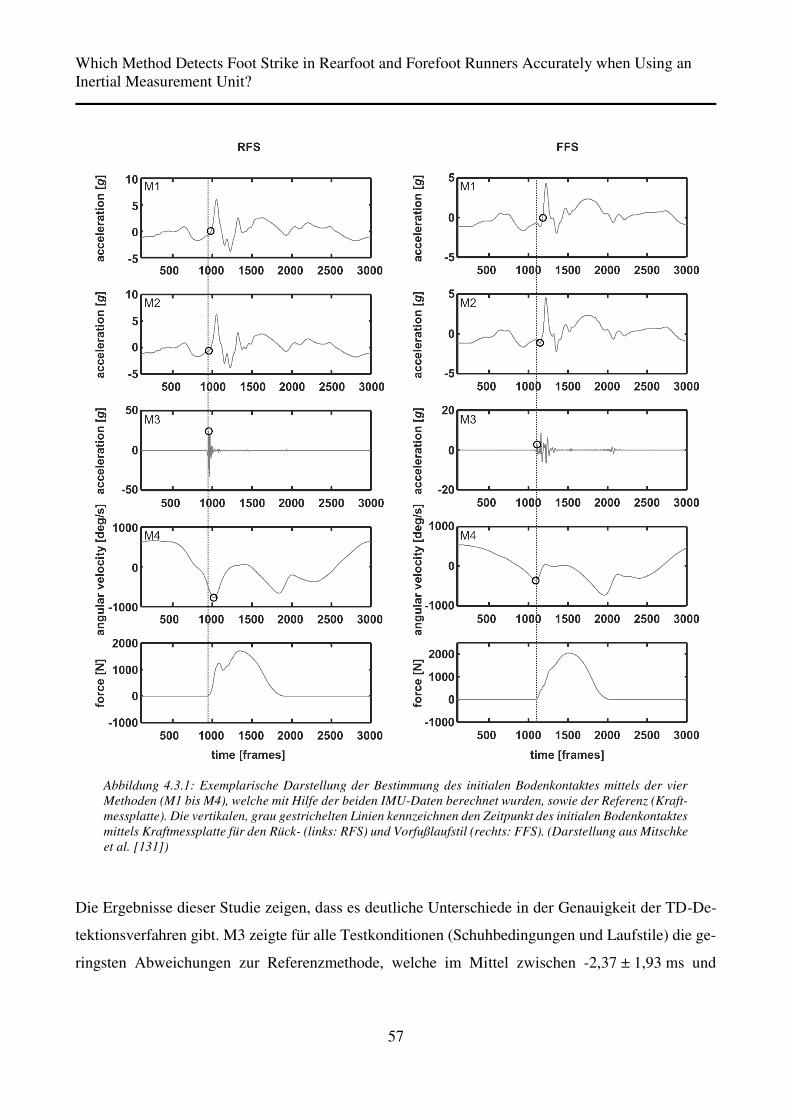
Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Accurately when Using an Inertial Measurement Unit?
57
Die Ergebnisse dieser Studie zeigen, dass es deutliche Unterschiede in der Genauigkeit der TD-De-
tektionsverfahren gibt. M3 zeigte für alle Testkonditionen (Schuhbedingungen und Laufstile) die ge-
ringsten Abweichungen zur Referenzmethode, welche im Mittel zwischen -2,37 ± 1,93 ms und
Abbildung 4.3.1: Exemplarische Darstellung der Bestimmung des initialen Bodenkontaktes mittels der vier Methoden (M1 bis M4), welche mit Hilfe der beiden IMU-Daten berechnet wurden, sowie der Referenz (Kraft-messplatte). Die vertikalen, grau gestrichelten Linien kennzeichnen den Zeitpunkt des initialen Bodenkontaktes mittels Kraftmessplatte für den Rück- (links: RFS) und Vorfußlaufstil (rechts: FFS). (Darstellung aus Mitschke et al. [131])

Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Accurately when Using an Inertial Measurement Unit?
58
0,70 ± 0,26 ms lagen. Aufgrund der sehr stabilen Fixierung der IMU an der Schuhfersenkappe konn-
ten die negativen Beschleunigungen (Abbremsbeschleunigungen des Schuhs) beim initialen Boden-
kontakt ohne große Verzögerung erfasst werden. Interessanterweise wurde beim Vorfußlaufstil der
TD mittels IMU im Mittel immer später detektiert als mit der Kraftmessplatte und im Vergleich zum
Rückfußlaufstil. Zusätzlich viel der Trend auf, dass mit weicher werdenden Schuh die Differenz zwi-
schen IMU- und Kraftmessplatten-TD-Detektion weiter anstieg. Die Autoren vermuten, dass die
Schockwelle beim Aufprall des Schuhs auf dem Untergrund beim weicheren Schuh mehr gedämpft
wird und es somit zu einer leichten Verzögerung bei der Detektion des TD kommt. Die Methoden 1,
2 und 4 offenbarten deutlich größere Abweichungen zum Referenzsystem. Die Differenzen lagen für
M1 zwischen -15,28 ± 3,94 ms und -11,47 ± 4,21 ms, für M2 zwischen -15,84 ± 10,29 ms und
1,08 ± 10,65 ms sowie für M4 zwischen -20,59 ± 3,28 ms und 8,43 ± 4,28 ms, wobei alle Methoden
eine hohe Standardabweichung zeigen. Aus den Ergebnissen dieser Studie kann geschlussfolgert wer-
den, dass sich M3 sehr gut für die genaue Bestimmung des TD eignet. Soll beispielsweise die maxi-
male Muskelaktivierung in Relation zum TD bestimmt werden, welche nach Guidetti et al. [84] z.B.
für den Musculus rectus femoris9 nach 6,8 ± 2,8 ms auftritt, gemessen werden, liefert diese Methode
die genausten Ergebnisse. Im Vergleich dazu würde es bei M1, M2 und M4 zu fehlerhaften Zeitpunk-
ten kommen, relativ zu TD gesehen. Aufgrund der hohen Standardabweichungen sowie hohen Wie-
derholbarkeitskoeffizienten der drei Methoden kann zudem nicht von einem kontinuierlichen Offset
ausgegangen werden. Daraus resultiert, dass die Ergebnisse, z.B. bei der Untersuchung des Einflusses
der Schuhbedingung auf die maximale Muskelaktivierung, unbrauchbar werden. Ergebnisse anderer
Studien, welche M1, M2 oder M4 nutzen, um biomechanische Parameter in Relation zum TD zu
berechnen (z.B. Fußaufsatzwinkel oder Schrittfrequenz) oder dies als Referenz für andere Messgeräte
nehmen (z.B. Elektromyographie), sollten daher kritisch betrachtet werden.
9 Ein Anteil vom Musculus quadriceps femoris – dt. Oberschenkelmuskel
Zusammenfassung der Ergebnisse Studie III
• Nur eine der vier Methoden (M3) bestimmte den TD akkurat über alle Schuhbedingungen
hinweg sowie für beide Laufstile: mittlere Differenz zwischen -2,37 ± 1,93 ms und
0,70 ± 0,26 ms.
• M1, M2 und M4 zeigten Unterschiede in der TD-Detektionen bis zu -20,59 ± 3,28 ms.

A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes
59
4.4 A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion
Velocity during Locomotion at Different Speeds and in Various Shoes
Mittels eines einzelnen Gyroskops kann die maximale Eversionsgeschwindigkeit bei
verschiedenen Geschwindigkeiten und unterschiedlichen Schuhbedingungen akkurat
bestimmt werden
Autoren: Christian Mitschke, Matthias Öhmichen, Thomas L. Milani
Erschienen in: Applied Sciences (2017), Vol. 7 (7), doi:10.3390/app7070659
Beim Gehen und Laufen stellt die Pronationsbewegung des Fußes einen natürlichen Dämpfungsme-
chanismus dar, welcher dazu dienen soll, die auf die unteren Extremitäten wirkenden Stoßbelastungen
beim initialen Bodenkontakt zu reduzieren. Der Eversionsbewegung, als ein Teil der Pronationsbe-
wegung des Fußes, wird dabei eine große Bedeutung hinsichtlich der Stoßdämpfung beigemessen.
So werden von einigen Autoren beispielsweise hohe maximale Eversionsgeschwindigkeiten (evVel)
mit dem tibialen Stresssyndrom in Verbindung gebracht [55–57]. Die Bestimmung von evVel kann
mittels MOCAP-Systemen, Elektrogoniometern oder Gyroskopen erfolgen [2,6,7,12]. Die Nachteile
beim „Goldstandard“-Verfahren, dem MOCAP-System, sind u.a. der hohe zeitliche Aufwand bzw.
mögliche Ungenauigkeiten bei der Palpation der jeweiligen anatomischen Stellen sowie bei der An-
bringung der Marker an diesen, die geringen Aufnahmefrequenzen und, dass die Messungen zumeist
an Laborräume gebunden sind. Als Alternative zum Standardverfahren können auch Elektrogonio-
meter genutzt werden. Bei diesem Messsystem verbindet ein flexibler Arm die Unterschenkelrück-
seite mit einem an der Fersenkappe des Schuhs angebrachten Potentiometer. Aufgrund der sich än-
dernden Stellung des Hebelarms während der Bewegung, ändert sich folglich die Stellung des Po-
tentiometers, was in einer Widerstandsänderung resultiert. Über die Widerstandsänderung können
der Winkel und die Winkelgeschwindigkeit abgeleitet werden. Die Rotationsachse der Messeinheit
spiegelt die Rotationsbewegung im unteren Sprunggelenk wider, also die Eversion [6,7]. Nachteile
des Elektrogoniometers sind u.a. die Masse der gesamten Apparatur (Potentiometer und flexibler
Arm), der mechanische Verschleiß des Goniometerarms sowie der Anschlüsse an Potentiometer- und

A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes
60
Unterschenkelbefestigung. Als weitere Alternative können auch Gyroskope zur Bestimmung von
evVel eingesetzt werden [1,2,64]. Die Autorengruppen verglichen ihre mit dem Gyroskop aufge-
zeichneten Daten mit einem MOCAP-System. Es wurden moderate [1], akzeptable [2] und gute Über-
einstimmungen [64] zwischen den beiden Messsystemen gefunden, wobei jedoch nur ein kleines Ge-
schwindigkeitsspektrum zwischen 3,2 ± 0,4 m/s und 4,0 ± 0,2 m/s untersucht wurde. Langsamere
Geschwindigkeiten wurden nicht untersucht. Zudem ist bis dato keine Studie existent, welche be-
schreibt, wie sich die Materialcharakteristik der Laufschuhsohle auf die Genauigkeit von evVel aus-
wirkt.
Die Zielsetzung dieser Studie war es, systematisch zu überprüfen, welchen Einfluss die Gang- und
Laufgeschwindigkeit sowie die Materialcharakteristik drei verschiedener Laufschuhe auf die Genau-
igkeit der mit einem Gyroskop bestimmten evVel haben. Des Weiteren sollte überprüft werden, wel-
chen Einfluss die beiden Faktoren (Geschwindigkeit und Materialcharakteristik) auf die Genauigkeit
des Zeitpunktes haben, an dem evVel auftritt (t_evVel). Als Referenz kam ein Elektrogoniometer zur
Anwendung, da es im Vergleich zu MOCAP-Systemen mit deutlich höheren Aufnahmefrequenzen
Daten aufzeichnen kann und zudem keine Markerartefakte zu Beginn der Bodenkontaktphase zu er-
warten sind, welche sich negativ auf die Genauigkeit auswirken können.
An dieser Studie nahmen insgesamt 24 männliche Probanden teil, welche bei 1,50 ± 0,1 m/s,
2,50 ± 0,1 m/s, 3,50 ± 0,1 m/s und ihrem eigenen bevorzugten Trainingstempo (Geschwindigkeit im
Mittel 3,63 ± 0,3 m/s) mit drei Laufschuhen (Adidas AdiStar, Asics Gel Nimbus 12, Puma Speed
600) jeweils fünfmal über die Laufstrecke im Labor liefen. Die Probanden wurden mit einer IMU
(2D-Beschleunigungssensor und 2D-Gyroskop) ausgestattet, welche an der Fersenkappe des rechten
Schuhs fixiert wurde. Zusätzlich wurde an dieser Stelle sowie an der Oberschenkelrückseite ein Elekt-
rogoniometer so angebracht, dass der Winkel des unteren Sprunggelenkes gemessen wurde [6,7]. Ein
neutraler Rückfußwinkel wurde für jeden Probanden in einem statischen Versuch definiert, indem
sich die Probanden auf ein Kalibrationsbrett stellten [5,7]. Während im Postprocessing evVel und
Fragestellung Studie IV
Kann mittels eines 1D-Gyroskops an der Fersenkappe des Schuhs die maximale Winkelgeschwin-
digkeit im unteren Sprunggelenk ermittelt werden?

A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes
61
t_evVel direkt aus dem Gyroskopsignal in der Frontalebene abgelesen werden konnten, erfolgte für
das Elektrogoniometersignal die Bildung der ersten Ableitung nach der Zeit vom gemessenen Winkel
zur Winkelgeschwindigkeit. Anschließend konnten evVel sowie t_evVel während der Bodenkon-
taktphase in diesen Daten abgelesen werden. Die Aufnahmefrequenz betrug für Elektrogoniometer
sowie IMU 1000 Hz.
Es konnte in dieser Studie bestätigt werden, dass die Geschwindigkeit und die Materialcharakteristik
der Laufschuhe evVel beeinflussen, was mit der Literatur konform ist [6,7,60,62,126]. Für die höchste
Geschwindigkeit wurde im Mittel die höchste evVel ermittelt und adäquat für die langsamste Ge-
schwindigkeit die geringste evVel. Zudem wurde für den weichsten Laufschuh (Asics) eine deutlich
niedrigere evVel beobachtet als für den härtesten Schuh (Adidas). Beim Vergleich der beiden Mess-
systeme wurden Unterschiede zwischen -33,7 ± 49,0 Grad/s und 49,8 ± 46,9 Grad/s für evVel gefun-
den. Zudem konnten Unterschiede zwischen 1,0 ± 6,6 ms und 5,3 ± 3,5 ms für t_evVel beobachtet
werden. Der Korrelationskoeffizient nach Bravais-Pearson zeigte signifikante und hohe Zusammen-
hänge zwischen beiden Messsystemen für evVel (r ≥ 0,88) und t_evVel (r ≥ 0,71). Die Ursache, für
die in dieser Studie über alle Bedingungen gefundenen höheren Übereinstimmungen zwischen den
beiden Messsystemen gegenüber der Studien um die Autorengruppen Shih [1], Brauner [2] und Le-
derer [64], wird in dem verwendeten Referenzmesssystem gesehen. In dieser Studie arbeiteten beide
Systeme mit einer Aufnahmefrequenz von 1000 Hz, was deutlich höher war als in den Vergleichs-
studien (MOCAP-Systeme zwischen 200 und 250 Hz). Womöglich konnten die hochfrequenten Win-
keländerungen mit den langsameren Aufnahmefrequenzen bei der Nutzung der MOCAP-Systeme
nicht korrekt abgebildet werden. Zudem konnten Markerartefakte in dieser Studie ausgeschlossen
werden, was die Ergebnisse der oben zitierten Studien möglicherweise ebenfalls negativ beeinflusst
haben könnte. In den Ergebnissen dieser Studie wurde für evVel der Trend beobachtet, dass mit Aus-
nahme für den weichsten Laufschuh (Asics) das Elektrogoniometer beständig höhere Winkelge-
schwindigkeiten aufnahm als das Gyroskop – bei allen drei Laufgeschwindigkeiten (2,50 m/s,
3,50 m/s sowie das eigene Trainingstempo). Es konnte jedoch nicht final geklärt werden, weshalb
sich die Differenz zwischen den beiden Messsystemen für diesen Laufschuh gegensätzlich zu den
anderen Laufschuhen verhielt. Ein möglicher Ansatz ist, dass es aufgrund der wirkenden Kräfte beim
initialen Bodenkontakt zu einer größeren Hautverschiebung bei den Läufen mit den härteren Schuhen
(Adidas und Puma) kam. Der flexible Arm des Goniometers, welcher an der Unterschenkelrückseite

A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes
62
angebracht war, könnte infolgedessen negativ beeinflusst worden sein, was sich in einer verzögerten
bzw. gedämpften Rotation äußerte. Für t_evVel wurde beobachtet, dass der Zeitpunkt von evVel mit
dem Gyroskop für alle Geschwindigkeiten und alle Schuhbedingungen immer später detektiert
wurde, als mit dem Elektrogoniometer. Die Höhe des Offsets unterschied sich dabei stets zwischen
den Geschwindigkeiten und den Schuhbedingungen, wobei kein Trend erkennbar war. Es konnte we-
der eine Beziehung zur Härte noch zur Höhe des Laufschuhs hergestellt werden. Aber aufgrund des-
sen, dass alle in dieser Studie gefunden Differenzen zwischen den beiden Messsystemen kleiner als
der Wiederholbarkeitskoeffizient waren und zudem hohe Korrelationen zwischen beiden Systemen
gefunden wurden, lässt sich schließen, dass evVel und t_evVel mittels eines an der Fersenkappe des
Schuhs angebrachten 1D-Gyroskops akkurat bestimmt werden können, unabhängig der Schuhbedin-
gung und Geschwindigkeit. Somit reicht ein 1D-Gyroskop an der Fersenkappe aus, um beispielsweise
den Einfluss verschiedener Schuhbedingungen auf evVel und t_evVel zu untersuchen und Rück-
schlüsse auf Ermüdung oder pathologische Befunde zu ziehen.
Zusammenfassung der Ergebnisse Studie IV
Unterschiede zwischen Gyroskop und Elektrogoniometer:
• für evVel bis zu 49,8 ± 46,9 Grad/s
• für t_evVel bis zu 5,3 ± 3,5 ms
Zusammenhänge zwischen beiden Messsystemen:
• für evVel: r ≥ 0,88
• für t_evVel: r ≥ 0,71
Kein Einfluss der Schuhbedingung oder Geschwindigkeit

Abschlussdiskussion, Zusammenfassung und Ausblick
63
Kapitel 5
5 Abschlussdiskussion, Zusammenfassung und Ausblick

Abschlussdiskussion
64
5.1 Abschlussdiskussion
„Gegenüber jeder Aktion steht eine Reaktion.“
- Isaac Newton -
Neben der klassisch-mechanischen Beschreibung des dritten Newton‘schen Axioms, welches auch
Wechselwirkungsprinzip genannt wird, können Newtons Worte übertragen auch folgendermaßen in-
terpretiert werden: Die Bewegung des Menschen beim Gehen oder Laufen – die Aktion – bewirkt die
Änderung des Zustands eines zweiten Körpers – die Reaktion –, wobei hier als der zweite Körper das
Messgerät verstanden werden kann. Um die kinematische, kinetische oder räumlich-zeitliche Reak-
tion wirklichkeitsnah mit dem Messverfahren abbilden zu können, sollten je nach der zu analysieren-
den (Bewegungs-)Aktion entsprechend geeignete Methoden zum Einsatz kommen. Aber was sind
geeignete Methoden, um die biomechanischen Parameter wirklichkeitsnah abzubilden?
In Kapitel 1 wurden verschiedene Messverfahren zum Erheben biomechanischer Parameter vorge-
stellt, welche in den Kapiteln 2.3 und 2.4 mit Beispielen belegt wurden. So können sowohl kinema-
tische (u.a. FSA und evVel) als auch räumlich-zeitliche Parameter (u.a. strLen und strDur) mittels
MOCAP-Systemen bestimmt werden [48,61,64,79,85–87,90,92,100,127]. Es wurde aber auch ge-
zeigt, dass sich diese Verfahren ausschließlich für Labormessungen eignen und somit nur unter stan-
dardisierten Bedingungen zur Anwendung kommen können. Des Weiteren besteht bei den MOCAP-
Systemen das Problem, dass es aufgrund der beim initialen Bodenkontakt wirkenden Kräfte zu einem
Schwingen der Marker kommen kann, was zu Ungenauigkeiten bei der Bestimmung der biomecha-
nischen Parameter führt [4]. Aufgrund der Stoßdämpfung, dem Resultat der passiven Strukturen im
Körper (Sehnen, Bänder, Muskeln und Deformation des Fersenfettpolsters) sowie der Muskelaktivie-
rung und Gelenkwinkeländerung [34–36], kommt es bei den weiter distal applizierten Markern zu
größeren Schwingungen im Vergleich zu den weiter proximal applizierten. Die größeren Schwingun-
gen der Marker können sich speziell bei der Berechnung der Winkel im Sprunggelenk, z.B. des Rück-
fußwinkels in der Frontalebene oder der Plantarflexion/Dorsalextension, negativ auf die Genauigkeit
auswirken. Westblad und Kollegen [128] verglichen in ihrer Studie in den Knochen verschraubte
Marker mit auf der Haut applizierten. Die Autoren fanden bereits für das Gehen Gelenkwinkelunter-
schiede bis zu 5 Grad, welche auf die Hautverschiebung während der Standphase zurückzuführen

Abschlussdiskussion
65
sind [129]. Werden zusätzlich zu den kinematischen Parametern kinetische Parameter mit der Kraft-
messplatte erhoben, z.B. die Kraftanstiegsrate, kann zudem der künstliche Zwang diese Platte treffen
zu müssen, dazu führen, dass das natürliche Laufmuster der Probanden beeinflusst und somit das
Untersuchungsergebnis verfälscht wird [9]. Des Weiteren stehen auch Kraftmessplatten in den meis-
ten Untersuchungen nur in Laborstudiendesigns zur Verfügung (ausgenommen der genannten Studie
von Thiel und Kollegen [116], vgl. Abschnitt 2.4.1), da sie in den Laufuntergrund integriert sind.
All die in den Abschnitten zuvor vorgestellten Standardmessverfahren haben neben weiteren Störein-
flüssen vor allem den gemeinsamen Nachteil, dass die Messungen weitestgehend an das Labor ge-
bunden sind und somit ein Abbild der realen Gang- oder Laufprozesse wie unter Feldbedingungen
mittels biomechanischer Messverfahren nicht möglich ist. Da aber gezeigt werden konnte, dass die
menschliche Laufbewegung von einer großen Variabilität gekennzeichnet ist, was die Interpretation
der Ergebnisse aus Laborstudiendesigns mit wenigen Versuchsdurchgängen erschwert bzw. ver-
fälscht [130], sollten die Messungen mit einer größeren Schrittanzahl unter realen Bedingungen au-
ßerhalb des Labors stattfinden. Womöglich auch aus diesem Grund kommen seit einigen Jahren ne-
ben der Standardverfahren ebenso Inertialsensoren als Alternative zum Einsatz, wobei u.a. gezeigt
werden konnte, dass Beschleunigungssensoren und Gyroskope eine preisgünstige Alternative zu MO-
CAP-Systemen sind [13]. Unter verschiedenen Bedingungen konnte demonstriert werden, dass sich
diese Sensoren dazu eignen, die Standardverfahren zu ergänzen bzw. zu ersetzen. So konnten mehrere
Autorengruppen mit ihren Verfahren für die Bestimmung der räumlich-zeitlichen Parameter, unter
Nutzung von Inertialsensoren, hohe Zusammenhänge zu Referenzsystemen feststellen [109,111–
113]. Des Weiteren fanden diverse Autoren, dass z.B. anstatt einer Kraftmessplatte ein an der Tibia
angebrachter 1D-Beschleunigungssensor mit Ausrichtung der sensiblen Achse parallel zum Tibi-
aknochen (longitudinale Achse) unter verschiedenen Bedingungen dazu genutzt werden kann, um auf
die Kräfte rückschließen zu können, welche auf die unteren Extremitäten wirken. Die Autoren fanden
hohe Zusammenhänge zwischen der maximalen Kraftanstiegsrate der vertikalen Bodenreaktionskraft
und der PTA [11,115]. Die PTA ist der Parameter, welcher bei überhöhten Werten u.a. mit der tibialen
Stressfraktur in Verbindung gebracht wird [40–43] und daher für aussagekräftige Schlussfolgerungen
möglichst genau bestimmt werden sollte. Neben räumlich-zeitlichen sowie kinetischen Parametern
ist es ebenso möglich, verschiedene kinematische Parameter mittels Inertialsensoren zu erheben
[1,2,12,38,63,64]. Der Vorteil der Inertialsensoren gegenüber anderen Messverfahren ist, dass sie

Abschlussdiskussion
66
klein, leicht und tragbar sind sowie die kinetischen, kinematischen und räumlich-zeitlichen Parameter
zeitgleich ermitteln können. Demnach ist es sogar möglich, komplexe biomechanische Laufanalysen
außerhalb der standardisierten Laborbedingungen unter realen Bedingungen, wie z.B. während eines
Marathons, durchzuführen [70]. Beim Betrachten der Studienlage fällt jedoch auf, dass eine große
Vielfalt in der Methodik (Sensorspezifikation, Algorithmik etc.) der einzelnen Studiendesigns vor-
liegt [20].
Der Vorteil dieses neuen und innovativen Messverfahrens ist demnach, dass es aufgrund der geringen
Sensorgröße sowie der Ortsungebundenheit unter realen Bedingungen zum Einsatz kommen kann.
Nachteil jedoch, dass es bisher keine Erkenntnisse über verschiedene Einflussgrößen sowie Mindest-
anforderung an die Sensorspezifikationen bzw. Algorithmen gibt. Die Klärung der fehlenden Kennt-
nisse war somit von großer Relevanz, damit bisherige Studienergebnisse korrekt interpretiert werden
können. Des Weiteren können die Erkenntnisse dieser Arbeit bei Planungen neuer Studiendesigns, in
welchen Inertialsensoren für die Analyse biomechanischer Parameter eingesetzt werden sollen, als
Richtwerte sowohl für die Sensoren- als auch für die Algorithmen-Auswahl dienen.
Zur Klärung der methodischen Richtlinien waren die übergeordneten Fragestellungen dieser Arbeit:
Um diese Fragen abschließend beantworten zu können, sollen im Folgenden die Erkenntnisse der im
Rahmen dieser kumulativen Arbeit durchgeführten Studien zusammengeführt und in einem gemein-
samen Kontext dargestellt werden. Der Zusammenhang zwischen den kinematischen, kinetischen und
räumlich-zeitlichen Parametern sowie den in den einzelnen Studien untersuchten Einflussgrößen ist
1. Inwieweit beeinflussen die Inertialsensorspezifikationen sowie die Auswertealgorithmen
die Genauigkeit der biomechanischen Parameter?
2. Welchen zusätzlichen Einfluss nehmen die Materialcharakteristik der Laufschuhe, die Ge-
schwindigkeit sowie der Laufstil auf die Genauigkeit der biomechanischen Parameter?

Abschlussdiskussion
67
in Abbildung 5.1.1 dargestellt und soll im Folgenden für die einzelnen biomechanischen Parameter
näher erläutert werden:
• Aufnahmefrequenz – Studie I
• Messbereich des Beschleunigungssensors – Studie II
• Detektion vom initialen Bodenkontakt – Studie III
• Bestimmung der maximalen Eversionsgeschwindigkeit – Studie IV
Die Bestimmung des initialen Bodenkontaktes
Aus den Untersuchungen zur Bestimmung des TD geht die Erkenntnis hervor, dass die Genauigkeit
dieses Parameters von der SF (Studie I) sowie vom Detektionsalgorithmus (Studie III) abhängig ist
und durch den Laufstil sowie die Materialcharakteristik der Laufschuhsohle beeinflusst werden kann
[125,131]. Beim direkten Vergleich verschiedener Methoden zur TD-Detektion konnte nur ein Ver-
fahren den initialen Bodenkontakt über alle Bedingungen mit einer hohen Genauigkeit bestimmen
Abbildung 5.1.1: Visualisierung der Abhängigkeiten der biomechanischen Parameter vom Beschleunigungs-sensormessbereich (OR), der Aufnahmefrequenz (SF), der Genauigkeit der initialen Bodenkontaktdetektion (TD) sowie der Bestimmung der maximalen Eversionsgeschwindigkeit (evVel). (Eigene Darstellung)

Abschlussdiskussion
68
(vgl. Abschnitt 4.3). Dies war das Verfahren nach Maiwald et al. [83]. Die Unterschiede zur Refe-
renzmethode – Kraftmessplatte – lagen im Mittel zwischen -2,37 ± 1,93 ms und 0,70 ± 0,26 ms, wo-
bei der TD beim Vorfußlaufstil im Vergleich zum Rückfußlaufstil im Mittel etwas später detektiert
wurde. Da die IMU in dieser Studie an der Fersenkappe das Schuhs angebracht war, wie in der Refe-
renz beschrieben [83], wird vermutet, dass dieser Trend aufgrund der Ausbreitungszeit der Schock-
welle beim TD vom Vorfuß hin zur Fersenkappe des Schuhs zustande kommt. Die deutlich höhere
Streuung innerhalb der Zeiten für das Vorfußlaufen, dargestellt durch die hohen Standardabweichun-
gen sowie Wiederholbarkeitskoeffizienten, könnte auf die Variabilität beim Vorfußlaufstil hindeuten,
also ob z.B. die Ferse den Boden berührt oder nicht. Ob der Fersen-Boden-Kontakt eine positive oder
negative Auswirkung auf die Genauigkeit dieser Methode hat, wurde jedoch nicht untersucht. Beim
Rückfußlaufen wurden für diese Methode über alle Schuhbedingungen hinweg Unterschiede zwi-
schen 0,48 ± 0,26 ms und 0,70 ± 0,26 ms ermittelt, wobei in dieser Studie (III) eine sehr hohe SF von
3750 Hz genutzt wurde. Vergleicht man diese Zeiten mit den Ergebnissen aus der Studie I zum „Ein-
fluss der Aufnahmefrequenz auf biomechanische Parameter“ [125] – unter Zuhilfenahme der glei-
chen TD-Detektionsmethodik – , so sind die Ergebnisse für die SF von 1000 Hz vergleichbar
(0,7 ± 2,6 ms). Dementsprechend ist eine SF von 1000 Hz ausreichend hoch, um den TD akkurat zu
bestimmen. Bei geringeren Aufnahmefrequenzen, z.B. 500 Hz, steigt die Differenz zur Referenz be-
reits deutlich an (4,5 ± 5,3 ms) und vergrößert sich auf bis zu 42,2 ± 24,4 ms bei einer SF von 100 Hz.
Aus den Ergebnissen dieser beiden Studien kann geschlussfolgert werden, dass sich die beschriebene
Methode sehr gut für eine akkurate Bestimmung des TD eignet, wenn eine SF von mindestens
1000 Hz genutzt wird.
Für welche biomechanischen Parameter die genaue TD-Detektion von großer Wichtigkeit ist, kann
Abbildung 5.1.1 entnommen werden. Im Speziellen trifft dies direkt für die Berechnung des FSA, der
strDur, je nach Berechnungsmethode für die strLen sowie runVel zu, wobei eine TD-Detektion zum
falschen Zeitpunkt eine direkte Ungenauigkeit dieser vier Parameter zur Folge hat. Eine genaue TD-
Detektion ist auch in Hinblick auf weitere biomechanische Parameter wichtig, wenn diese nahe des
TD erhoben werden sollen. So treten beispielsweise evVel, PTA oder PHA innerhalb der ersten 50 ms
nach dem TD auf [45,46,55,59,125,132]. Wie in Abbildung 5.1.2 beispielhaft für die Bestimmung
der PHA aufgezeigt, würde eine verspätete TD-Detektion von etwa 15 bis 20 ms (wie bei den Me-
thoden 1, 2 und 4 in Studie III geschehen) oder von bis zu 42 ms aufgrund einer zu geringen SF (wie

Abschlussdiskussion
69
in Studie I aufgezeigt) dazu führen, dass die Spitzenbeschleunigung während des TD nicht korrekt
wiedergegeben werden könnte. Aufgrund der ungenauen TD-Detektion würde die nächste Spitzen-
beschleunigung, wie am Beispiel in Abbildung 5.1.2 dargestellt, entweder ca. 75 ms-2 (TD-Detekti-
ons-Verzögerung von etwa 15 bis 20 ms) oder ca. 25 ms-2 (TD-Detektions-Verzögerung von etwa
42 ms) betragen. Demnach würde die PHA während des tatsächlichen TD deutlich unterschätzt und
im Folgenden falsch interpretiert werden.
Zudem konnte in der Studie IV „Mittels eines einzelnen Gyroskops kann die maximale Eversionsge-
schwindigkeit […] akkurat bestimmt werden“ (vgl. Abschnitt 4.4) gezeigt werden, dass die evVel
über alle Geschwindigkeitsbereiche und Schuhbedingungen im Mittel zwischen 13,6 ± 4,5 ms und
27,8 ± 7,6 ms auftritt [132]. Hier würde die teilweise zu späte Detektion des TD dazu führen, dass
evVel nicht über alle Versuche hinweg akkurat bestimmt werden könnte und dadurch inkonsistente
Ergebnisse zustande kämen. Eine valide Aussage über den Einfluss von beispielsweise Schuheinla-
gen, Schuhkonstruktionen oder Laufgeschwindigkeiten auf evVel, wie von verschiedenen Autoren-
gruppen untersucht [6,8,60–62], könnte somit nicht getroffen werden. Gleiches trifft ebenfalls zu,
wenn andere Messverfahren in Relation zum TD bestimmt werden, wie z.B. bei der Elektromyogra-
phie. Soll die maximale Muskelaktivierung im Verhältnis zum TD bestimmt werden, wie u.a. bei
Abbildung 5.1.2: Exemplarische Darstellung des vertikalen Beschleunigungssignals der an der Fersenkappe des Schuhs angebrachten IMU für 500 Hz (graue Linie) und 500 Hz, mit 1 ms verschobener TD-Detektion (schwarze Linie). (Darstellung aus Mitschke et al. [125])

Abschlussdiskussion
70
Guidetti et al. [84] geschehen, muss der TD reliabel und valide bestimmt werden, damit aussagekräf-
tige Ergebnisse ermittelt werden können.
Doppelschrittdauer
Wie bereits im Absatz zuvor beschrieben, bestand die Annahme, dass die TD-Detektion einen direk-
ten Einfluss auf die Genauigkeit der strDur nehmen kann. Dazu wird für die Bestimmung von strDur
die zeitliche Differenz zwischen zwei aufeinanderfolgenden TD des selbigen Fußes berechnet.
Ebenso bereits angeführt, konnte in der Studie III gezeigt werden, dass die verschiedenen Detekti-
onsmethoden erhebliche Unterschiede in der Genauigkeit aufweisen, welche durch den Laufstil und
die Materialcharakteristik der Laufschuhe zum Teil zusätzlich beeinflusst wurden [131]. Für die beste
Methode (M3) wurden im Mittel Differenzen zwischen der Referenzmethode, der Kraftmessplatte
und dem IMU-TD-Detektionsverfahren von bis zu -2,37 ± 1,93 ms gefunden. Die Methoden 1, 2 und
4 offenbarten deutlich größere Abweichungen zum Referenzsystem. Für M1 wurden Abweichungen
bis zu -15,28 ± 3,94 ms, für M2 bis zu -15,84 ± 10,29 ms und für M4 bis zu -20,59 ± 3,28 ms ermit-
telt. Aufgrund der hohen Variationskoeffizienten10 über alle Bedingungen für die Methoden M1, M2
und M4 kann nicht davon ausgegangen werden, dass es sich bei den Methoden um einen systemati-
schen Offset handelt. Daher kann angenommen werden, dass der Bestimmung des TD eine große
Variabilität zugrunde liegt, womit die Genauigkeit der strDur reduziert wird. Die hohe Variabilität in
der TD-Bestimmung kann sich zudem in einer hohen Variabilität der strDur äußern, was fälschlicher-
weise als intra-11 oder interindividuelle12 Variabilität der Probanden verstanden werden kann. Wei-
terhin konnte gezeigt werden, dass die Genauigkeit der strDur durch die SF bestimmt werden kann
(Studie I), wobei eine SF von mindestens 200 Hz notwendig ist, um diesen Parameter akkurat zu
bestimmen (absoluter Fehler ≤ 11,8 ms) [125]. Demgegenüber steht der Vorteil der unter Abschnitt
4.1 und Abschnitt 4.3 vorgestellten TD-Detektionsmethode nach Maiwald et al. [83], dass diese Me-
thode unabhängig vom OR ist, da aufgrund des Hochpass-Filters ausschließlich hochfrequente Sig-
naländerungen wahrgenommen werden und die Höhe der Amplitude keine Relevanz hat.
10 Der Variationskoeffizient, auch relative Standardabweichung genannt, berechnet sich aus der Standardabweichung der fünf Messversuche eines Probanden dividiert durch Mittelwert dieser fünf Versuche. Im Anschluss erfolgt die Bildung des Mittelwertes über alle Probanden [8]. 11 Intraindividuelle Variabilität: Schwankungen innerhalb eines Probanden, z.B. bei der Analyse zur Änderung der Schrittlänge während eines Dauerlaufs innerhalb eines Probanden. 12 Interindividuelle Variabilität: Schwankungen zwischen verschiedenen Probanden, z.B. beim Vergleich der Schritt-länge von Probanden mit einer Einlage im Schuh zu Probanden ohne Schuheinlage.

Abschlussdiskussion
71
Der Fußaufsatzwinkel
Im Abschnitt 2.3.4 wurde die Methodik zur Berechnung des offset- und driftkorrigierten Fußanstell-
winkels im Raum in Anlehnung an Zaumseil [38] und Sabatini et al. [63] ausführlich erläutert. Für
die Definition des FSA wird der Winkel zum Zeitpunkt des TD aus den Daten dieses Fußanstellwin-
kels abgeleitet, wobei eine fehlerhafte TD-Detektion zu einem entsprechend falschen FSA führen
würde (vgl. Abbildung 2.3.4.1). Des Weiteren bestand die Vermutung, dass neben der Genauigkeit
der TD-Detektion, die Güte vom FSA ebenfalls durch eine hohe SF bestimmt wird. In Studie I konnte
jedoch gezeigt werden, dass der FSA bereits mit einer SF von 200 Hz akkurat bestimmt werden kann
(absoluter Fehler ≤ 0,4 Grad). Demnach kann für den FSA geschlussfolgert werden, dass auch bei
einer SF von 200 Hz genügend Stützstellen im Datensatz des Fußanstellwinkels vorhanden sind, um
die jeweiligen plantaren Phasen für die Offset- und Driftkorrektur korrekt zu definieren und anschlie-
ßend den FSA mit einer hohen Genauigkeit zu bestimmen. Dabei kann zusätzlich gesagt werden, dass
die Genauigkeit der TD-Detektion bei einer SF von 200 Hz ausreichend hoch ist, um den FSA in dem
offset- und driftkorrigierten Datensatz zu definieren.
Maximale Eversionsgeschwindigkeit
Als ein weiterer kinematischer Parameter wurde die evVel in Studie I und Studie IV untersucht
[125,132]. Wie in Kapitel 2.2.2 bei der Funktionsweise der Inertialsensoren beschrieben, misst ein
Gyroskop auf Grundlage der Corioliskraft die Winkelgeschwindigkeit einer rotatorischen Bewegung
entlang einer festen Drehachse. Damit die Winkelgeschwindigkeit um die Achse im unteren Sprung-
gelenk gemessen werden kann, ist es wichtig, dass das Gyroskop korrekt angebracht und ausgerichtet
wird, wie beispielsweise in Abbildung 2.3.1.1b ersichtlich. Wird der Sensor außermittig der Fersen-
kappe des Schuhs oder verdreht appliziert, kann es zu einem Crosstalk13 der Drehachsen kommen.
Dies hat zur Folge, dass Anteile der eigentlich zu ermittelnden Winkelgeschwindigkeit auch auf den
anderen Achsen des Gyroskops liegen. Somit kann evVel nicht korrekt aus dem Signal abgeleitet
werden, speziell, wenn nur ein 1D-Gyroskop genutzt wird. Die richtige Gyroskop-Positionierung so-
wie die akkurate TD-Detektion als gesetzt angenommen, konnte in Studie IV gezeigt werden, dass
ein an der Fersenkappe des Schuhs befestigtes Gyroskop bei verschiedenen Geschwindigkeiten und
mit unterschiedlichen Schuhkonditionen genutzt werden kann, um die maximale Eversionsgeschwin-
13 dt. Übersprechen

Abschlussdiskussion
72
digkeit im unteren Sprunggelenk aufzuzeichnen [132]. Die hohen Korrelationswerte (r ≥ 0,88), wel-
che in der Studie IV ermittelt wurden und im Vergleich zu weiteren Studien zum Teil deutlich höher
waren [1,2,64], wurden u.a. in der höheren Aufnahmefrequenz begründet, welche in der eigenen Stu-
die genutzt wurde (1000 Hz im Vergleich zu 200 bis 250 Hz). Diese Aussage kann mit der Studie I
zum „Einfluss der Aufnahmefrequenz auf biomechanische Parameter“ (vgl. Abschnitt 4.1) widerlegt
werden [125]. Die Ergebnisse der genannten Studie zeigen, dass eine SF von 200 Hz ausreicht, um
diesen Parameter mit einer hohen Genauigkeit zu bestimmen (absoluter Fehler ≤ 25,6 Grad/s). Die
Unterschiede liegen somit nicht in den unterschiedlichen SF, sondern womöglich in den Markerarte-
fakten bei den MOCAP-Systemen, welche aufgrund der starken Erschütterungen beim initialen Bo-
denkontakt aufgetreten sein können oder in der unterschiedlichen Gyroskopanbringung (Position und
Befestigung).
Tibiale Spitzenbeschleunigung und Spitzenbeschleunigung an der Fersenkappe
In den Abschnitten 2.3.1 sowie 2.4.1 wurde die Notwendigkeit der Bestimmung der PTA näher be-
leuchtet. Wie auch bei der Ermittlung der evVel, ist es sowohl für die PTA als auch die PHA notwen-
dig, dass der TD akkurat detektiert und zudem die Ausrichtung des Sensors beachtet wird, damit
beide Parameter zum korrekten Zeitpunkt und mit der richtigen Amplitude bestimmt werden können
(vgl. Abbildung 5.1.2). Ist der Beschleunigungssensor z.B. verdreht angebracht, erfährt die seismi-
sche Masse im Sensorgehäuse eine zu geringe Auslenkung in der zu betrachtenden vertikalen (PHA)
bzw. longitudinalen Achse (PTA), was sich in der zu geringen maximalen Amplitude äußert und
somit in einer Unterschätzung der PTA sowie PHA (vgl. Abschnitt 2.2.1). Zudem sind beide Para-
meter neben der Sensoranbringung und der TD-Detektion stark von der SF sowie dem OR abhängig
[125,133]. Für die PTA konnte gezeigt werden, dass bereits eine SF von 200 Hz (absoluter Fehler ≤
1,05 g) und ein OR von ±16 g (absoluter Fehler ≤ 0,59 g) ausreichend sind, um den Parameter mit
einer hohen Genauigkeit zu berechnen. Anzumerken ist jedoch, dass in der Studie I zum „Einfluss
der Aufnahmefrequenz auf die biomechanischen Parameter“ nur ein Laufschuh (Puma Faas 500) ge-
testet wurde, welcher vergleichbare mechanische Eigenschaften mit dem Laufschuh (Puma Speed
600) in der Studie II zum „Einfluss des Messbereichs von Beschleunigungssensoren auf die biome-
chanischen Parameter“ hat. In der zweitgenannten Studie konnte gezeigt werden, dass mit einem
signifikant härteren Laufschuh (Adidas AdiStar) höhere PTA erreicht werden können, was von ande-

Abschlussdiskussion
73
ren Autorengruppen ebenso beim schnelleren Laufen oder beim Laufen in Barfußschuhen bzw. Mi-
nimallaufschuhen beobachtet wurde [5,134,135]. Zudem deuten die Ergebnisse von Lucas-Cuevas
und Kollegen [33] darauf hin, dass die Anbringungshöhe des Beschleunigungssensors an der Tibia
die PTA beeinfluss kann. Die Autoren fanden, dass ein weiter distal platzierter Sensor eine höhere
PTA aufzeichnete, als ein mehr proximal an der Tibia applizierter Sensor. Da bei höheren Spitzenbe-
schleunigungen auch mit größeren Anstiegsraten zu rechnen ist, wird trotz der in Studie I gefundenen
Ergebnisse für die PTA eine höhere SF als 200 Hz empfohlen, damit dieser Parameter genau ermittelt
werden kann. Dies wird von den gefundenen Ergebnissen für die PHA gestützt [125]. Mit dem Be-
schleunigungssensor an der Fersenkappe des Schuhs wurden im Mittel 24,62 ± 4,1 g ermittelt, im
Gegensatz zu der PTA 9,93 ± 2,7 g. Der Vergleich innerhalb der SF ergab, dass für die PHA eine SF
von mindestens 500 Hz genutzt werden sollte, damit dieser Parameter akkurat bestimmt werden kann.
Jedoch konnte bereits bei der Halbierung der SF von 1000 Hz auf 500 Hz ein absoluter Fehler von
1,69 g festgestellt werden. Des Weiteren zeigen die absoluten Werte für die PHA auch, dass für diesen
Beschleunigungssensor deutlich größere Messbereiche zum Einsatz kommen müssen, als für den
Sensor an der Tibia. Nach den Erkenntnissen aus der Studie I zum „Einfluss der Aufnahmefrequenz
auf die biomechanischen Parameter“ sollte ein Messbereich von ±32 g ausreichend hoch sein, damit
alle Beschleunigungsspitzen erfasst werden. Allerdings sei auch hier angemerkt, dass ein härterer
Schuh (z.B. ein Minimallaufschuh) zu noch höheren Beschleunigungswerten führen könnte. Hierbei
stellt sich jedoch die Frage, ob die Läufer in einem solchen Fall den Rückfußlaufstil beibehalten oder,
wie bereits in Studien gezeigt, eher zum Mittel- oder Vorfußlaufen wechseln, um die hohen Belas-
tungsspitzen zu meiden [97,136,137]. In diesem Kontext vermuten Divert und Kollegen [138] zudem,
dass in Labortests, wenn nur wenige Schritte hintereinander ausgeführt werden, die Laufstiländerung
vermieden und die hohen Stoßbelastungen „ertragen“ werden, wohingegen es bei einem längeren
Lauf zu einer Umstellung des Laufstils vom Rück- zum Mittel- oder Vorfußlaufstil kommt. Im Um-
kehrschluss würde dies bedeuten, dass der Sensormessbereich des Beschleunigungsaufnehmers für
die Labormessung höher sein müsste als für die Messung im Feld. Inwieweit die Ergebnisse dann
noch zwischen dem Laufen im Labor (Laufband oder Laufstrecke) und dem Laufen unter Feldbedin-
gungen verglichen werden können, kann beispielsweise in den Arbeiten von Zaumseil [38], Reinisch
et al. [139], und Oriwol et al. [140] nachgelesen werden.
Abschlussdiskussion
74
Doppelschrittlänge und mittlere Laufgeschwindigkeit
Neben der Bestimmung für die PHA wird der vertikalmessende Beschleunigungssensor, zusätzlich
zu dem horizontalmessenden Beschleunigungssensor in der IMU an der Fersenkappe des Schuhs,
dazu genutzt, die strLen sowie runVel zu berechnen (vgl. Abschnitt 2.3.5). Wie unter Abschnitt 2.3.5
beschrieben, wird mit Hilfe der Koordinatentransformation (vgl. Formel 2.3.5.2) aus ACC_X sowie
ACC_Z und dem Fußanstellwinkel θ u.a. die raumfeste horizontale Beschleunigung ACC_h berech-
net [19,38,63,109,110]. Es konnte in den Studien I und II gezeigt werden, dass die beiden Sensorspe-
zifikationen SF und OR die Genauigkeit von ACC_h stark beeinflussen können [125,133]. Ist eine
der beiden Sensorspezifikationen zu gering, führt die numerische Integration von ACC_h zur resul-
tierenden Horizontalgeschwindigkeit vh zu Fehlern, wie in Abbildung 4.2.1 und Abbildung 5.1.3 er-
sichtlich. In beiden Abbildungen wird deutlich, dass vh aufgrund der fehlenden Informationen durch
zu geringe SF sowie OR niedriger ausfällt. Demzufolge werden die aus vh hergeleiteten Parameter
runVel und strLen fehlerhaft berechnet, in beiden Studien nachweislich unterschätzt. Die Ergebnisse
aus den beiden Studien zeigen, dass die runVel und die strLen mit mindestens einem OR von ±32 g
(absoluter Fehler ≤ 0,01 m/s bzw. 0,38 cm) und einer SF von 333 Hz (absoluter Fehler ≤ 7,2 cm)
erhoben werden müssen, damit die Parameter realistisch abgebildet werden können [125,133]. Eine
Abhängigkeit der runVel von der SF wurde nicht direkt untersucht. Da jedoch die strLen mittels
numerischen Integration von vh hergeleitet wurde, kann davon ausgegangen werden, dass eine SF
von 333 Hz ebenfalls für eine akkurate Bestimmung der runVel ausreichend ist. Ein Einfluss der
Materialcharakteristik der Laufschuhe auf die runVel und die strLen konnte nicht nachgewiesen wer-
den, wenn eine ausreichend hohe OR genutzt wird [133].
Neben der fehlerhaften Bestimmung der runVel und strLen aufgrund der zu geringen OR und SF,
kann jedoch auch ein falsch detektierter TD zu Ungenauigkeiten beider Parameter führen. Werden
wie zum Beispiel in Abbildung 5.1.3 dargestellt beide Parameter zwischen zwei aufeinanderfolgen-
den TD berechnet, würde ein zu spät detektierter zweiter TD dazu führen, dass z.B. die strLen zu lang
berechnet wird. Um dieses Problem zu minimieren, sollte die Bestimmung der strLen und runVel
zwischen zwei aufeinanderfolgenden plantaren Phasen des Fußes erfolgen, wie in Abbildung 2.3.5.1
dargestellt und von verschiedenen Autorengruppen umgesetzt [19,38,109].

Abschlussdiskussion
75
Kommen bei der Bestimmung der strLen weitere Geräte zum Einsatz, wie z.B. bei Mercer et al. [39]
ein Laufband oder bei Reenalda et al. [70] eine GPS-Uhr, kann mittels der verstrichenen Zeit zwi-
schen zwei aufeinanderfolgender TD und der definierten Laufband- bzw. GPS-Geschwindigkeit die
strLen berechnet werden (vgl. Formel 2.3.5.1). Auch hier würde es aufgrund mindestens einer unge-
nauen TD-Detektion zu fehlerhaften Ergebnissen der strLen kommen. Als Beispiel sei die Studie von
Reenalda und Kollegen [70] genannt. In dieser Studie wurde zur TD-Detektion eine SF von 60 Hz
genutzt, wobei eine auf dem Fuß befestigte IMU verwendet wurde, um diesen zu bestimmen. Den
Autoren diente für die TD-Bestimmung ein Algorithmus, bei welchem die maximale Amplitude der
aufsummierten Spitzenbeschleunigungen der drei Raumachsen (ACC_X, ACC_Y und ACC_Z) als
TD gewertet wurde [119]. Da diese Methode in der Studie III „Welche Methode detektiert für Rück-
und Vorfußläufer den initialen Bodenkontakt mittels einer inertialen Messeinheit am genausten“ (vgl.
Abschnitt 4.3) nicht untersucht wurde, kann keine Aussage über die grundsätzliche Genauigkeit die-
ses Verfahrens getroffen werden. Jedoch ist anzunehmen, dass die genutzte SF von 60 Hz zu gering
ist, um den TD akkurat zu detektieren, vergleicht man die Genauigkeit dieser Methode mit der, wel-
che in der Studie I zum „Einfluss der Aufnahmefrequenz auf die biomechanischen Parameter“ (vgl.
Abschnitt 4.1) mit 100 Hz genutzt wurde (absoluter Fehler 42,2 ± 24,4 ms). Folglich stellt sich die
Frage, mit welcher Genauigkeit darauf basierend die strLen berechnet werden konnte.
Abbildung 5.1.3: Darstellung der resultierenden horizontalen Fußgeschwindigkeit (Vorwärtsbewegung) für einen exemplarischen Schritt, berechnet mit einer Aufnahmefrequenz von 1000 Hz (schwarze Linie) und 250 Hz (grau gepunktete Linie, für die zeitliche Übereinstimmung interpoliert). (Darstellung aus Mitschke et al. [125])

Zusammenfassung
76
Auf Grundlage der Ergebnisse der durchgeführten Studien kann abschließend eine Übersicht, eine
Art Anforderungskatalog, für ausgewählte kinematische, kinetische und räumlich-zeitliche Parameter
zusammengestellt werden (vgl. Tabelle 5.1.1), welche in Ergänzung zu Abbildung 5.1.1 die Mindest-
anforderungen sowie die Einflüsse aufgrund der Laufschuheigenschaften, Geschwindigkeit sowie des
Laufstils detailliert aufschlüsselt.
Tabelle 5.1.1: Übersicht der biomechanischen Parameter mit den Richtwerten für den Beschleunigungssensormessbe-reich (OR) und die Aufnahmefrequenz (SF) sowie den Einflussgrößen: Materialcharakteristik des Laufschuhs, Geschwin-digkeit und Laufstil. (Eigene Darstellung)
Parameter SF
[Hz]
OR
[g]
Materialcharakteristik
des Laufschuhs
Geschwindigkeit Laufstil
TD* 1000 - - k.A. -
PTA 200 ±16 - k.A. k.A.
PHA 500 ±32 k.A. k.A. k.A.
FSA 200 k.A. k.A. k.A. k.A.
evVel 200 k.A. - - k.A.
strDur* 200 - k.A. k.A. k.A.
strLen 333 ±32 - k.A. k.A.
runVel 333 ±32 - k.A. k.A.
Erklärung:
* Bezieht sich auf Methode 3 nach Mitschke et al. [131] und Maiwald et al. [83]
k.A. keine Angabe, da nicht getestet
- kein Einfluss
5.2 Zusammenfassung
In der vorliegenden Arbeit konnte gezeigt werden, dass Inertialsensoren in verschiedenen Testszena-
rien Anwendung finden, um biomechanische Parameter in Gang- und Laufanalysen zu bestimmen.
Bisherige Untersuchungen, in welchen die Inertialsensoren zum Einsatz kamen, vernachlässigten je-
doch beispielsweise, welchen Einfluss die Aufnahmefrequenz der Messverfahren auf die Genauigkeit
der untersuchten Parameter hat. Weiterhin variierten sowohl die Algorithmen für die TD-Detektion,
die Sensorpositionen als auch weitere -spezifikationen (z.B. Sensormessbereich) bei der Bestimmung
der biomechanischen Parameter. Informationen darüber, welchen Einfluss die Bewegungsgeschwin-
digkeit, der Laufstil sowie die Materialcharakteristik der Laufschuhmittelsohle auf die Genauigkeit

Zusammenfassung
77
der mit Inertialsensoren erhobenen kinematischen, kinetischen sowie räumlich-zeitlichen Parameter
haben, gab es bis dato ebenfalls keine.
Aus den oben genannten potentiellen Fehlerquellen ergab sich die Fragestellung nach der Beeinflus-
sung der biomechanischen Parameter durch die Inertialsensorspezifikationen, Materialcharakteristik
der Laufschuhe, Geschwindigkeit sowie den Laufstil. Beantwortet werden konnte sie mit den vier
vorgestellten methodenorientierten biomechanischen Untersuchungen dieser kumulativen Arbeit.
In Studie I konnte nachgewiesen werden, dass alle untersuchten biomechanischen Parameter von der
Höhe der Inertialsensor-SF beeinflusst werden können. Demnach sollte für die Erhebung der kineti-
schen Daten mittels Beschleunigungssensoren an der Fersenkappe des Schuhs, wie z.B. der PHA,
eine SF von mindestens 500 Hz genutzt werden. Eine SF von mindestens 333 Hz wird für die akku-
rate Berechnung von strLen benötigt, wohingegen eine Mindestaufnahmefrequenz von 200 Hz für
die Bestimmung von strDur, evVel, FSA und PTA genutzt werden sollten.
Die Ergebnisse von Studie II zeigen, dass der Sensormessbereich der Beschleunigungssensoren so-
wohl an der Tibia als auch an der Fersenkappe des Schuhs die Ergebnisse der untersuchten biome-
chanischen Parameter beeinflussen kann. Für die Berechnung der strLen als auch runVel wurden mit
einem Sensormessbereich von ±32 g Ergebnisse mit einer hohen Genauigkeit erzielt, wohingegen für
die PTA ein Sensormessbereich von ±16 g ausreichte. Ein zusätzlicher Einfluss der Schuhbedingun-
gen auf die biomechanischen Parameter konnte nicht festgestellt werden.
Fragestellung Studie I
Beeinflusst die Aufnahmefrequenz der Inertialsensoren die Genauigkeit der biomechanischen Pa-
rameter?
Fragestellung Studie II
Beeinflusst der Sensormessbereich der Beschleunigungssensoren die Genauigkeit der biomecha-
nischen Parameter?

Zusammenfassung
78
In Studie III konnte gezeigt werden, dass nur eine der getesteten Methoden über alle Bedingungen
hinweg akkurate Ergebnisse bei der zeitlichen Bestimmung des TD lieferte. Im Mittel wurden Ab-
weichungen zur Referenzmethode zwischen -2,37 ± 1,93 ms und 0,70 ± 0,26 ms gefunden. Der Lauf-
stil (Vor- oder Rückfuß) sowie die Schuhkonditionen hatten bei dieser Methode keinen entscheiden-
den Einfluss auf die Genauigkeit der TD-Detektion. Die restlichen Methoden zeigten eine verzögerte
TD-Detektion im Mittel von bis zu -20,59 ± 3,28 ms, wobei diese Verfahren außerdem von einer
großen Variabilität gekennzeichnet waren.
Die Ergebnisse von Studie IV zeigen, dass ein an der Fersenkappe des Schuhs angebrachtes 1D-
Gyroskop dazu genutzt werden kann, die Winkelgeschwindigkeit im unteren Sprunggelenk zu erfas-
sen und die beiden Größen evVel und t_evVel daraus abzuleiten. Sowohl die Schuhbedingung als
auch die Bewegungsgeschwindigkeit nahmen keinen zusätzlichen negativen Einfluss auf die Genau-
igkeit von evVel und t_evVel.
Zusammenfassend lässt sich feststellen, dass sowohl die Sensorspezifikationen als auch die Algorith-
men einen Einfluss auf die Genauigkeit der untersuchten kinematischen, kinetischen und räumlich-
zeitlichen Parameter nehmen können. Demnach gilt es beim Einsatz der Inertialsensoren in biome-
chanischen Studien zu beachten, welche SF und welcher Messbereich von den Beschleunigungs-
sensoren genutzt wird. Auf Grundlage der Erkenntnisse der vier Untersuchungen konnte eine Über-
sicht mit den Mindestanforderungen an die Inertialsensorsysteme entworfen (vgl. Tabelle 5.1.1) und
zudem eine Abhängigkeit der Parameter untereinander aufgezeigt werden (vgl. Abbildung 5.1.1). In
zukünftigen von Trainern, Medizinern oder Wissenschaftlern durchgeführten biomechanischen
Fragestellung Studie III
Unterscheiden sich verschiedene publizierte Methoden zur Detektion des initialen Bodenkontak-
tes in ihrer Genauigkeit?
Fragestellung Studie IV
Kann mittels eines 1D-Gyroskops an der Fersenkappe des Schuhs die maximale Winkelgeschwin-
digkeit im unteren Sprunggelenk ermittelt werden?

Zusammenfassung
79
Gang- sowie Laufanalysen kann die Genauigkeit der Ergebnisse und somit die Aussagekraft der Un-
tersuchungen erhöht werden, wenn sich bei der Auswahl der Inertialsensorspezifikationen sowie der
biomechanischen Parameter an den Erkenntnissen dieser Arbeit orientiert wird (vgl. Abbildung 5.1.1
und Tabelle 5.1.1). Für Trainer könnte zum Beispiel relevant sein, wie sich die strLen und strDur
während eines Trainingslaufes oder Wettkampfes verändern, um Rückschlüsse auf die Ermüdung
ziehen zu können [47,111]. Um valide Ergebnisse zu erhalten, benötigen Trainer ein Messverfahren,
was den TD akkurat über einen längeren Zeitraum bestimmen kann. Die Ergebnisse dieser Arbeit
zeigen, dass sich eine kleine an der Fersenkappe des Schuhs befestigte IMU (OR ≥ ±32 g und SF ≥
333 Hz) dazu eignen würde. Werden sowohl an der rechten als auch an der linken Fersenkappe der
Schuhe solche IMUs appliziert, können zusätzliche Aussagen über die Symmetrie, Ermüdung und
das Verletzungspotential getroffen werden [141]. Eher für Wissenschaftler und Mediziner relevant,
kann beispielsweise über einen am Unterschenkel angebrachten Beschleunigungssensor die PTA un-
tersucht werden, welche bei überhöhten Werten u.a. mit der tibialen Stressfraktur in Verbindung ge-
bracht wird [40–43]. Die Ergebnisse aus dieser Arbeit zeigen, dass die Genauigkeit dieses Parameters
stark von der SF und dem OR abhängt. Ist bei der Wahl des Inertialsensors die SF geringer als 200 Hz
oder der OR kleiner als ±16 g (vgl. Tabelle 5.1.1), werden womöglich in den Untersuchungen die
maximalen Amplituden abgeschnitten und die Aussagekraft dieses Parameters geht verloren. Dem-
entsprechend ist eine Verbindung zwischen hohen PTA-Werten und Verletzungsbildern/Befunden
nicht möglich. Bei der Analyse der Belastungen auf die unteren Extremitäten mittels Inertialsensoren
ist weiterhin ein großer Vorteil, dass die Sensoren klein, leicht und tragbar sind, was es ermöglicht,
biomechanische Parameter auch unter realen Bedingungen im Feld zu untersuchen. Demzufolge
könnte die Untersuchung, z.B. der PTA, neben dem standardisierten klassischen Labordesign mit fünf
gültigen Versuchen, dem Treffen der Kraftmessplatte sowie dem Einhalten eines Geschwindigkeits-
bereichs auch beispielsweise bei einem Dauerlauf im Training oder Wettkampf erfolgen. Hohe Zu-
sammenhänge zwischen der maximalen Kraftanstiegsrate der vertikalen Bodenreaktionskraft und der
PTA konnten zuvor nachgewiesen werden [11,115]. Zudem vermuten einige Autoren, dass in Labor-
designs eine Laufstilanpassung vermieden wird und Schmerzen, z.B. aufgrund eines zu harten Lauf-
schuhs, „ertragen“ werden, da nur wenige Schritte hintereinander pro Versuch absolviert werden
müssen [138]. Aus diesem Grund und auch wegen der hohen Variabilität in der menschlichen Lauf-
bewegung [130] ist es notwendig, für validere Aussagen über die Zusammenhänge von intrinsischen

Ausblick
80
(z.B. Geschlecht, Laufstil, Ermüdung, Verletzungen und muskuloskelettale Disposition) und extrin-
sischen Einflussfaktoren (z.B. Laufschuhbedingung, Bekleidung, Streckenprofil und klimatische Be-
dingung) mit den biomechanischen Parametern höhere Schrittanzahlen unter möglichst realen Bedin-
gungen zu untersuchen – also am besten unter Trainings- oder Wettkampfbedingungen.
Des Weiteren bestehen in der Studienlage Kontroversen in Hinblick auf verschiedene laufassoziierte
Verletzungen, wie z.B. dem Schienbeinkantensyndrom (engl. medial tibial stress syndrome), der
Plantarfasziitis und der Achillessehnenentzündung (engl. achilles tendinitis). So wurden beispiels-
weise von Messier & Pitalla [58], Willems et al. [142] und Barner et al. [143] signifikant höhere
Werte der evVel für die Gruppe der verletzten Läufer gegenüber der Kontrollgruppe festgestellt.
Demgegenüber fanden Kuhman et al. [144] im Mittel eine signifikant niedriger evVel für die Gruppe
der verletzten Läufer sowie Hreljac et al. [145], Dierks et al. [146] und Becker [147] überhaupt keine
signifikanten Unterschiede zwischen den beiden Gruppen. Die konträren Ergebnisse könnten eben-
falls ein Resultat der unterschiedlichen methodologischen Herangehensweisen sein. So wurden die
genannten Studien zwar alle im Labor durchgeführt, die Datenaufnahme erfolgte jedoch teils auf einer
Laufstrecke, teils auf dem Laufband, wobei die evVel entweder mit einfachen 2D-Videobildanalysen
oder mit MOCAP-Systemen (SF zwischen 60 und 500 Hz) untersucht wurde. Für ein besseres Ver-
ständnis der Verletzungssymptomatik, nicht nur in Hinblick auf die evVel sondern auch auf andere
biomechanische Parameter, sollten zukünftige Studien somit mit einem geeigneten Messsystem au-
ßerhalb des Labors durchgeführt werden. Somit könnten Unterschiede zwischen Gruppen mit zurück-
liegenden bzw. kurz bevorstehenden laufassoziierten Verletzungen [144] sowie den Kontrollgruppen
deutlicher herausgestellt werden. Die in dieser Studie gefunden Erkenntnisse können Trainer, Medi-
ziner und Wissenschaftler bei der Auswahl des geeigneten Messsystems mit den korrekten Sensor-
spezifikationen und Algorithmen unterstützen.
5.3 Ausblick
Aufbauend auf den Erkenntnissen dieser Arbeit müssen weitere Untersuchungen zur Klärung der
Einflüsse verschiedener „Störgrößen“ auf die Genauigkeit der biomechanischen Parameter folgen.
Wie in Tabelle 5.1.1 ersichtlich, konnten nicht alle Einflussgrößen untersucht werden (gekennzeich-
net mit k.A.). Auch die Interaktion der Einflussgrößen untereinander konnte nicht in allen Fällen
vollends geklärt werden. Zudem wurde bei der Literaturanalyse ersichtlich, dass bei der Verarbeitung
Ausblick
81
der von den Inertialsensoren gelieferten Rohdaten sehr stark variierende Filter zur Anwendung ka-
men. So wurden z.B. bei der Analyse der PTA Tiefpass-Filter zwischen 50 und 200 Hz genutzt, wobei
auch Filterordnungen zwischen der 2. und 4. Ordnung angewandt wurden. Zudem wurden in einigen
Studien keine spezifischen Angaben dazu gemacht, ob ein Filter zum Einsatz kam oder, ob die Daten
ungefiltert weiterverarbeitet wurden. In den Studien I und II dieser Arbeit kamen ebenfalls unter-
schiedliche Filterfrequenzen zum Einsatz (Studie I: 100 Hz; Studie II: 200 Hz). Bei der Auswahl der
Filterfrequenz wurde sich an der Qualität der Daten orientiert, wobei mit den Filtern offensichtliche
Störsignale (z.B. elektrisches Rauschen) entfernt, aber die grundsätzliche Kurvencharakteristik bei-
behalten werden sollte. Welchen Einfluss die Filterung der Daten von Inertialsensoren auf die Ergeb-
nisse der biomechanischen Parameter hat, z.B. der PTA, ist bis dato unklar. Weiterhin wurden in
dieser Arbeit nur der FSA und die evVel als kinematische Parameter berechnet. In Folgestudien soll-
ten weitere Winkelberechnungen durchgeführt werden, wie beispielsweise der Eversionswinkel des
Fußes oder auch der Knie- bzw. Sprunggelenkswinkel. Hierbei stellt vor allem die Problematik des
Driftfehlers sowie des Winkeloffsets eine komplexe Problemstellung dar, welche freilich im Interesse
der klinischen aber auch der sportwissenschaftlichen Forschung steht.

Literaturverzeichnis
82
Literaturverzeichnis
1. Shih, Y.; Ho, C.-S.; Shiang, T.-Y. Measuring kinematic changes of the foot using a gyro sensor during intense running. J. Sports Sci. 2014, 32, 550–566, doi:10.1080/02640414.2013.843013.
2. Brauner, T.; Sterzing, T.; Milani, T. L. Ankle Frontal Plane Kinematics Determined By Goniometer, Gyrometer and Motion Analysis System: a Measurement Device Validation. In XXII Congress of the International Society of Biomechanics; Cape Town, South Africa, 2009; Vol. 41.
3. Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis. Measurement 2009, 42, 978–988, doi:10.1016/j.measurement.2009.02.002.
4. Robertson, G.; Caldwell, G.; Hamill, J.; Kamen, G.; Whittlesey, S. Research Methods in Biomechanics; 1. Auflage.; Human Kinetics: Champaign, 2004; ISBN 073603966X.
5. Heidenfelder, J.; Sterzing, T.; Milani, T. L. Systematically modified crash-pad reduces impact shock in running shoes. Footwear Sci. 2010, 2, 85–91, doi:10.1080/19424281003781543.
6. Milani, T. L.; Hennig, E. M.; Lafortune, M. A. Perceptual and biomechanical variables for running in identical shoe constructions with varying midsole hardness. Clin. Biomech. 1997, 12, 294–300, doi:10.1016/S0268-0033(97)00008-9.
7. Milani, T. L.; Schnabel, G.; Hennig, E. M. Rearfoot Motion and Pressure Distribution Patterns during Running in Shoes with Varus and Valgus Wedges. J. Appl. Biomech. 1995, 11, 177–187, doi:10.1123/jab.11.2.177.
8. Oriwol, D.; Sterzing, T.; Milani, T. L. The position of medial dual density midsole elements in running shoes does not influence biomechanical variables. Footwear Sci. 2011, 3, 107–116, doi:10.1080/19424280.2011.613857.
9. Challis, J. H. The Variability in Running Gait Caused by Force Plate Targeting. J. Appl. Biomech. 2001, 17, 77–83, doi:10.1123/jab.17.1.77.
10. Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283, doi:10.3390/s120202255.
11. Hennig, E. M.; Milani, T. L.; Lafortune, M. A. Use of ground reaction force parameters in predicting peak tibial accelerations in running. J. Appl. Biomech. 1993, 9, 306–314.
12. Brauner, T.; Oriwol, D.; Sterzing, T.; Milani, T. L. A single gyrometer inside an instrumented running shoe allows mobile determination of gait cycle and pronation velocity during outdoor running. Footwear Sci. 2009, 1, 25–26, doi:10.1080/19424280902977095.
13. Mayagoitia, R. E.; Nene, A. V.; Veltink, P. H. Accelerometer and rate gyroscope measurement of kinematics: An inexpensive alternative to optical motion analysis systems. J. Biomech. 2002, 35, 537–542, doi:10.1016/S0021-9290(01)00231-7.
14. Takeda, R.; Tadano, S.; Todoh, M.; Morikawa, M.; Nakayasu, M.; Yoshinari, S. Gait analysis using gravitational acceleration measured by wearable sensors. J. Biomech. 2009, 42, 223–233, doi:10.1016/j.jbiomech.2008.10.027.
15. Picerno, P.; Cereatti, A.; Cappozzo, A. Joint kinematics estimate using wearable inertial and magnetic sensing modules. Gait Posture 2008, 28, 588–595, doi:10.1016/j.gaitpost.2008.04.003.
16. Agostini, V.; Gastaldi, L.; Rosso, V.; Knaflitz, M.; Tadano, S. A wearable magneto-inertial system for gait analysis (H-gait): Validation on normalweight and overweight/obese young healthy adults. Sensors 2017, 17, doi:10.3390/s17102406.

Literaturverzeichnis
83
17. Roetenberg, D.; Luinge, H. J.; Baten, C. T. M.; Veltink, P. H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405, doi:10.1109/TNSRE.2005.847353.
18. Fong, D. T. P.; Chan, Y. Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565, doi:10.3390/s101211556.
19. Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors 2012, 12, 6102–6116, doi:10.3390/s120506102.
20. Norris, M.; Anderson, R.; Kenny, I. C. Method analysis of accelerometers and gyroscopes in running gait: A systematic review. Proc. Inst. Mech. Eng. Part P J. Sport. Eng. Technol. 2014, 228, 3–15, doi:10.1177/1754337113502472.
21. Globisch, S. Lehrbuch Mikrotechnologie: für Ausbildung, Studium und Weiterbildung; 1. Auflage.; Carl Hanser Verlag GmbH & Co. KG: München, 2011; ISBN 3446425608.
22. Mescheder, U. Mikrosystemtechnik: Konzepte und Anwendungen; Teubner Verlag: Wiesbaden, 2004; ISBN 3519162563.
23. Glück, M. MEMS in der Mikrosystemtechnik: Aufbau, Wirkprinzipien, Herstellung und Praxiseinsatz mikroelektromechanischer Schaltungen und Sensorsysteme; 1. Auflage.; Teubner Verlag: Wiesbaden, 2005; ISBN 3-519-00520-4.
24. Schanz, G. W. Sensoren: Sensortechnik für Praktiker; Hüthig Verlag: Heidelberg, 2004; ISBN 3778528874.
25. Beeby, S. MEMS Mechanical Sensors; Artech House: Norwood, 2004; ISBN 1580535364. 26. Günther, R. Über Stoßerschütterungen beim Gang des Menschen. Eur. J. Appl. Physiol. Occup.
Physiol. 1968, 25, 130–141. 27. Cuesta-Vargas, A. I.; Galán-Mercant, A.; Williams, J. M. The use of inertial sensors system
for human motion analysis. Phys. Ther. Rev. 2010, 15, 462–473, doi:10.1179/1743288X11Y.0000000006.
28. Hering, E.; Schönfelder, G. Sensoren in Wissenschaft und Technik; Springer, 2012; ISBN 3658125616.
29. Laible, M. Mechanische Größen, elektrisch gemessen: Grundlagen und Beispiele zur technischen Ausführung; 7. Auflage.; expert verlag: Renningen, 2009; ISBN 3816932150.
30. Giancoli, D. C. Physik: Lehr-und Übungsbuch; 3. Auflage.; Pearson Deutschland GmbH, 2010; Vol. 4023; ISBN 978-3868940237.
31. Hauger, W.; Schnell, W.; Gross, D. Technische Mechanik; Springer-Verlag: Berlin Heidelberg, 1990; Vol. 3; ISBN 978-3-540-53019-0.
32. Eichler, J. Physik: Grundlagen für das Ingenieurstudium-kurz und prägnant; 3. Auflage.; Springer-Verlag, 2007; ISBN 978-3834802231.
33. Lucas-Cuevas, A. G.; Encarnación-Martínez, A.; Camacho-García, A.; Llana-Belloch, S.; Pérez-Soriano, P. The location of the tibial accelerometer does influence impact acceleration parameters during running. J. Sports Sci. 2017, 35, 1734–1738.
34. Hardin, E. C.; Van Den Bogert, A. J.; Hamill, J. Kinematic Adaptations during Running: Effects of Footwear, Surface, and Duration. Med. Sci. Sport. Exerc. 2004, 36, 838–844, doi:10.1249/01.MSS.0000126605.65966.40.
35. Potthast, W.; Brüggemann, G. P.; Lundberg, A.; Arndt, A. The influences of impact interface, muscle activity, and knee angle on impact forces and tibial and femoral accelerations occurring after external impacts. J. Appl. Biomech. 2010, 26, 1–9, doi:10.1123/jab.26.1.1.

Literaturverzeichnis
84
36. Wang, L.; Hong, Y.; Xian Li, J. Muscular Activity of Lower Extremity Muscles Running on Treadmill Compared with Different Overground Surfaces. Am. J. Sport. Sci. Med. 2014, 2, 161–165, doi:10.12691/ajssm-2-4-8.
37. Gruber, A. H.; Boyer, K. A.; Derrick, T. R.; Hamill, J. Impact shock frequency components and attenuation in rearfoot and forefoot running. J. Sport Heal. Sci. 2014, 3, 113–121, doi:10.1016/j.jshs.2014.03.004.
38. Zaumseil, F. Einfluss des Experimentalraums auf biomechanische Messungen beim Laufen in unterschiedlichen Laufschuhen, Technische Universität Chemnitz, 2017.
39. Mercer, J. A.; Bates, B. T.; Dufek, J. S.; Hreljac, A. Characteristics of shock attenuation during fatigued running. J. Sport. Sci. 2003, 21, 911–919, doi:http://dx.doi.org/10.1080/0264041031000140383.
40. Milner, C. E.; Ferber, R.; Pollard, C. D.; Hamill, J.; Davis, I. S. Biomechanical factors associated with tibial stress fracture in female runners. Med. Sci. Sports Exerc. 2006, 38, 323–328, doi:10.1249/01.mss.0000183477.75808.92.
41. Davis, I.; Milner, C. E.; Hamill, J. Does increased loading during running lead to tibial stress fractures? A prospective study. Med. Sci. Sports Exerc. 2004, 36.
42. Zifchock, R. A.; Davis, I.; Higginson, J.; McCaw, S.; Royer, T. Side-to-side differences in overuse running injury susceptibility: A retrospective study. Hum. Mov. Sci. 2008, 27, 888–902, doi:10.1016/j.humov.2008.03.007.
43. Zifchock, R. A.; Davis, I.; Hamill, J. Kinetic asymmetry in female runners with and without retrospective tibial stress fractures. J. Biomech. 2006, 39, 2792–2797, doi:10.1016/j.jbiomech.2005.10.003.
44. Brunkner, P.; Bradshaw, C.; Khan, K. M.; White, S.; Crossley, K. Stress Fractures: A Review of 180 Cases. Clin. J. Sport Med. 1996, 6, 85–89.
45. Giandolini, M.; Arnal, P. J.; Millet, G. Y.; Peyrot, N.; Samozino, P.; Dubois, B.; Morin, J. B. Impact reduction during running: Efficiency of simple acute interventions in recreational runners. Eur. J. Appl. Physiol. 2013, 113, 599–609, doi:10.1007/s00421-012-2465-y.
46. Lafortune, M. A. Three-dimensional acceleration of the tibia during walking and running. J. Biomech. 1991, 24, 887–886, doi:10.1016/0021-9290(91)90166-K.
47. Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151, doi:10.1016/S0167-9457(00)00013-0.
48. Chambon, N.; Delattre, N.; Gueguen, N.; Berton, E.; Rao, G. Is midsole thickness a key parameter for the running pattern? Gait Posture 2014, 40, 58–63, doi:10.1016/j.gaitpost.2014.02.005.
49. Fong Yan, A.; Sinclair, P. J.; Hiller, C.; Wegener, C.; Smith, R. M. Impact attenuation during weight bearing activities in barefoot vs. shod conditions: A systematic review. Gait Posture 2013, 38, 175–186, doi:10.1016/j.gaitpost.2012.11.017.
50. Clark, R. A.; Bartold, S.; Bryant, A. L. Tibial acceleration variability during consecutive gait cycles is influenced by the menstrual cycle. Clin. Biomech. 2010, 25, 557–562, doi:10.1016/j.clinbiomech.2010.03.002.
51. Forner-Cordero, A.; Mateu-Arce, M.; Forner-Cordero, I.; Alcántara, E.; Moreno, J. C.; Pons, J. L. Study of the motion artefacts of skin-mounted inertial sensors under different attachment conditions. Physiol. Meas. 2008, 29, N21-31, doi:10.1088/0967-3334/29/4/N01.

Literaturverzeichnis
85
52. Provot, T.; Chiementin, X.; Oudin, E.; Bolaers, F.; Murer, S. Validation of a high sampling rate inertial measurement unit for acceleration during running. Sensors 2017, 17, 1–12, doi:10.3390/s17091958.
53. Walther, M.; Mayer, B. Aktuelle trends in der sportschuhentwicklung. Dtsch. Z. Sportmed. 2008, 59, 12–16.
54. Ferber, R.; Macdonald, S. Running mechanics and gait analysis; Human Kinetics, 2014; ISBN 9781450424394.
55. Stacoff, A.; Reinschmidt, C.; Nigg, B. M.; Bogert, A. J. van den; Lundberg, A.; Denoth, J.; Stüssi, E.; Van Den Bogert, A. J.; Lundberg, A.; Denoth, J.; Stüssi, E. Effects of foot orthoses on skeletal motion during running. Clin. Biomech. 2000, 15, 54–64, doi:10.1016/S0268-0033(99)00028-5.
56. Segesser, B.; Nigg, B. M. Insertionstendinosen am Schienbein, Achillodynie und Überlastungsfolgen am Fuss. - Ätiologie, Biomechanik, therapeutische Möglichkeiten. Orthopäde 1980, 9, 207–214.
57. Vtasalo, J. T.; Kvist, M. Some biomechanical aspects of the foot and ankle athletes with and without shin splints. Am. J. Sports Med. 1983, 11, 125–130.
58. Messier, S. P.; Pittala, K. A. Etiologic factors associated with selected running injuries. Med. Sci. Sports Exerc. 1988, 20, 501–505, doi:3193867.
59. Maclean, C. L.; Davis, I. S.; Hamill, J. Short- and Long-Term Influences of a Custom Extremity Dynamics. Clin. J. Sport Med. 2008, 18, 338–343.
60. De Wit, B.; De Clercq, D.; Lenoir, M. The effect of varying midsole hardness on impact forces and foot motion during foot contact in running. J. Appl. Biomech. 1995, 11, 395–406.
61. O’Connor, K. M.; Hamill, J. The role of selected extrinsic foot muscles during running. Clin. Biomech. 2004, 19, 71–77, doi:10.1016/j.clinbiomech.2003.09.001.
62. Struzik, A.; Konieczny, G.; Grzesik, K.; Stawarz, M.; Winiarski, S.; Rokita, A. Relationship between lower limbs kinematic variables and effectiveness of sprint during maximum velocity phase. Acta Bioeng. Biomech. 2015, 17, 131–138, doi:10.5277/ABB-00290-2015-02.
63. Sabatini, A. M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494, doi:10.1109/TBME.2004.840727.
64. Lederer, P.; Blickhan, R.; Schlarb, H. Rearfoot Angle Velocities During Running - a Comparison Between Optoelectronic and Gyroscopic Motion Analysis. Port. J. Sport Sci. 2011, 11, 903–906.
65. Hannon, P. R.; Rasmussen, S. A.; DeRosa, C. P. Electromyographic patterns during level and inclined treadmill running and their relationship to step cycle measures. Res. Q. Exerc. Sport 1985, 56, 334–338.
66. Nilsson, J.; Thorstensson, A.; Halbertsma, J. Changes in leg movements and muscle activity with speed of locomotion and mode of progression in humans. Acta Physiol. Scand. 1985, 123, 457–475, doi:10.1111/j.1748-1716.1985.tb07612.x.
67. Marquard, M. Laufen und Laufanalysen; Stuttgart: Georg-Thieme-Verlag, 2012; ISBN 978-3-13-153641-9.
68. Chen, C. H.; Tu, K. H.; Liu, C.; Shiang, T. Y. Effects of forefoot bending elasticity of running shoes on gait and running performance. Hum. Mov. Sci. 2014, 38, 163–172, doi:10.1016/j.humov.2014.10.002.

Literaturverzeichnis
86
69. Castro, A.; LaRoche, D. P.; Fraga, C. H. W.; Gonçalves, M. Relationship between running intensity, muscle activation, and stride kinematics during an incremental protocol. Sci. Sport. 2013, 28, 85–92, doi:10.1016/j.scispo.2012.11.002.
70. Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J. H. (Jaap) Continuous three dimensional analysis of running mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in running mechanics. J. Biomech. 2016, 49, 3362–3367, doi:10.1016/j.jbiomech.2016.08.032.
71. Maiwald, C.; Sterzing, T.; Mayer, T. A.; Milani, T. L. Detecting foot-to-ground contact from kinematic data in running. Footwear Sci. 2009, 1, 111–118, doi:10.1080/19424280903133938.
72. Fellin, R. E.; Rose, W. C.; Royer, T. D.; Davis, I. S. Comparison of methods for kinematic identification of footstrike and toe-off during overground and treadmill running. J. Sci. Med. Sport 2010, 13, 646–650, doi:10.1016/j.jsams.2010.03.006.
73. Smith, L.; Preece, S.; Mason, D.; Bramah, C. A comparison of kinematic algorithms to estimate gait events during overground running. Gait Posture 2015, 41, 39–43, doi:10.1016/j.gaitpost.2014.08.009.
74. De Wit, B.; De Clercq, D.; Aerts, P. Biomechanical analysis of the stance phase during barefoot and shod running. J. Biomech. 2000, 33, 269–278, doi:10.1016/S0021-9290(99)00192-X.
75. Laughton, C. A.; McClay Davis, I.; Hamill, J. Effect of strike pattern and orthotic intervention on tibial shock during running. J. Appl. Biomech. 2003, 19, 153–168, doi:10.1123/jab.19.2.153.
76. Paquette, M.; Zhang, S.; Baumgartner, L. Acute effects of barefoot, minimal shoes and running shoes on lower limb mechanics in rear and forefoot strike runners. Footwear Sci. 2013, 5, 9–18, doi:10.1080/19424280.2012.692724.
77. Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994, doi:10.1016/j.jbiomech.2011.04.035.
78. Hunter, J. P.; Marshall, R. N.; McNair, P. J. Relationships between ground reaction force impulse and kinematics of sprint-running acceleration. J. Appl. Biomech. 2005, 21, 31–43, doi:10.1123/jab.21.1.31.
79. Rao, G.; Chambon, N.; Guéguen, N.; Berton, E.; Delattre, N. Does wearing shoes affect your biomechanical efficiency? J. Biomech. 2015, 48, 413–417, doi:10.1016/j.jbiomech.2014.12.038.
80. Lee, J. B.; Mellifont, R. B.; Burkett, B. J. The use of a single inertial sensor to identify stride, step, and stance durations of running gait. J. Sci. Med. Sport 2010, 13, 270–273, doi:10.1016/j.jsams.2009.01.005.
81. Sinclair, J.; Hobbs, S. J.; Protheroe, L.; Edmundson, C. J.; Greenhalgh, A. Determination of gait events using an externally mounted shank accelerometer. J. Appl. Biomech. 2013, 29, 118–122, doi:10.1123/jab.29.1.118.
82. Strohrmann, C.; Harms, H.; Tröster, G.; Hensler, S.; Müller, R. Out of the lab and into the woods. Proc. 13th Int. Conf. Ubiquitous Comput. - UbiComp ’11 2011, 119–122, doi:10.1145/2030112.2030129.
83. Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A simple method to detect stride intervals in continuous acceleration and gyroscope data recorded during treadmill running. Footwear Sci. 2015, 7, S143–S144, doi:10.1080/19424280.2015.1038656.
84. Guidetti, L.; Rivellini, G.; Figura, F. EMG patterns during running: Intra-and inter-individual variability. J. Electromyogr. Kinesiol. 1996, 6, 37–48, doi:10.1016/1050-6411(95)00015-1.
Literaturverzeichnis
87
85. Heidenfelder, J.; Sterzing, T.; Bullmann, M.; Milani, T. L. Heel strike angle and foot angular velocity in the sagittal plane during running in different shoe conditions. J. Foot Ankle Res. 2008, 1, O16, doi:10.1186/1757-1146-1-S1-O16.
86. Hollander, K.; Argubi-Wollesen, A.; Reer, R.; Zech, A. Comparison of minimalist footwear strategies for simulating barefoot running: A randomized crossover study. PLoS One 2015, 10, 1–11, doi:10.1371/journal.pone.0125880.
87. Hein, T.; Grau, S. Can minimal running shoes imitate barefoot heel-toe running patterns? Acomparison of lower leg kinematics. J. Sport Heal. Sci. 2014, 3, 67–73, doi:10.1016/j.jshs.2014.03.002.
88. Lieberman, D. E.; Venkadesan, M.; Werbel, W. A.; Daoud, A. I.; D’Andrea, S.; Davis, I. S.; Mang’Eni, R. O.; Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010, 463, 531–535, doi:10.1038/nature08723.
89. Daoud, A. I.; Geissler, G. J.; Wang, F.; Saretsky, J.; Daoud, Y. A.; Lieberman, D. E. Foot strike and injury rates in endurance runners: A retrospective study. Med. Sci. Sports Exerc. 2012, 44, 1325–1334, doi:10.1249/MSS.0b013e3182465115.
90. Ahn, A. N.; Brayton, C.; Bhatia, T.; Martin, P. Muscle activity and kinematics of forefoot and rearfoot strike runners. J. Sport Heal. Sci. 2014, 3, 102–112, doi:10.1016/j.jshs.2014.03.007.
91. Eskofier, B. M.; Musho, E.; Schlarb, H. Pattern classification of foot strike type using body worn accelerometers. In Body Sensor Networks (BSN), IEEE International Conference; 2013; pp. 1–4.
92. Altman, A. R.; Davis, I. S. A kinematic method for footstrike pattern detection in barefoot and shod runners. Gait Posture 2012, 35, 298–300, doi:10.1016/j.gaitpost.2011.09.104.
93. Gaudel, J.; Oriwol, D.; Maiwald, C.; Dannemann, A. Classification of foot strike pattern using single accelerometers. Footwear Sci. 2015, 7, S132–S133.
94. Gruber, A. H.; Silvernail, J. F.; Brueggemann, P.; Rohr, E.; Hamill, J. Footfall patterns during barefoot running on harder and softer surfaces. Footwear Sci. 2013, 5, 39–44, doi:10.1080/19424280.2012.742141.
95. Forrester, S. E.; Townend, J. The effect of running velocity on footstrike angle - A curve-clustering approach. Gait Posture 2015, 41, 26–32, doi:10.1016/j.gaitpost.2014.08.004.
96. Larson, P. Comparison of foot strike patterns of barefoot and minimally shod runners in a recreational road race. J. Sport Heal. Sci. 2014, 3, 137–142, doi:10.1016/j.jshs.2014.03.003.
97. Cavanagh, P. R.; Lafortune, M. A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406, doi:10.1016/0021-9290(80)90033-0.
98. Williams, K. R.; Cavanagh, P. R. Relationship between distance running mechanics, running economy, and performance. J. Appl. Physiol. 1987, 63, 1236–1245, doi:10.1152/jappl.1987.63.3.1236.
99. Giandolini, M.; Poupard, T.; Gimenez, P.; Horvais, N.; Millet, G. Y.; Morin, J. B.; Samozino, P. A simple field method to identify foot strike pattern during running. J. Biomech. 2014, 47, 1588–1593, doi:10.1016/j.jbiomech.2014.03.002.
100. Bonacci, J.; Saunders, P. U.; Hicks, A.; Rantalainen, T.; Vicenzino, B. G. T.; Spratford, W. Running in a minimalist and lightweight shoe is not the same as running barefoot: a biomechanical study. Br. J. Sports Med. 2013, 47, 387–92, doi:10.1136/bjsports-2012-091837.
101. Kulmala, J. P.; Avela, J.; Pasanen, K.; Parkkari, J. Forefoot strikers exhibit lower running-induced knee loading than rearfoot strikers. Med. Sci. Sports Exerc. 2013, 45, 2306–2313, doi:10.1249/MSS.0b013e31829efcf7.

Literaturverzeichnis
88
102. Brauner, T. Rückfußbewegung beim Laufen - Einflussfaktoren, Messmethodik und innovative Messsysteme, Technische Universität Chemnitz, 2010.
103. Oriwol, D. Methodologische Aspekte biomechanischer Messungen unter Laborbedingungen - Eine kritische Betrachtung des gängigen Messprotokolls des Ausdauerlaufens, 2012.
104. Heidenfelder, J. Entwicklung eines dynamischen Tests zur Prüfung der Rückfußdämpfung von Laufschuhen mittels biomechanischer Messmethoden, Technische Universität Chemnitz, 2010.
105. Stefanyshyn, D.; Stergiou, P.; Lun, V.; Meeuwisse, W. Dynamic Variables and Injuries in Running. In Symposium on Footwear Biomechanics; Zuerich, 2001; pp. 74–75.
106. Shorten, M. R.; Winslow, D. S. Spectral analysis of impact shock during running. Int. J. Biomech. 1992, 8, 288–304.
107. Kubo, K.; Miyazaki, D.; Tanaka, S.; Shimoju, S.; Tsunoda, N. Relationship between Achilles tendon properties and foot strike patterns in long-distance runners. J. Sports Sci. 2015, 33, 665–669, doi:10.1080/02640414.2014.962576.
108. Danion, F.; Varraine, E.; Bonnard, M.; Pailhous, J. Stride variability in human gait: The effect of stride frequency and stride length. Gait Posture 2003, 18, 69–77, doi:10.1016/S0966-6362(03)00030-4.
109. Chew, D.-K.; Ngoh, K. J.-H.; Gouwanda, D.; Gopalai, A. A. Estimating running spatial and temporal parameters using an inertial sensor. Sport. Eng. 2017, 1–8, doi:10.1007/s12283-017-0255-9.
110. Hamacher, D.; Hamacher, D.; Taylor, W. R.; Singh, N. B.; Schega, L. Towards clinical application: Repetitive sensor position re-calibration for improved reliability of gait parameters. Gait Posture 2014, 39, 1146–1148, doi:10.1016/j.gaitpost.2014.01.020.
111. Brahms, C. M.; Zhao, Y.; Gerhard, D.; Barden, J. M. Stride length determination during overground running using a single foot-mounted inertial measurement unit. J. Biomech. 2018, doi:10.1016/j.jbiomech.2018.02.003.
112. Yang, S.; Mohr, C.; Li, Q. Ambulatory running speed estimation using an inertial sensor. Gait Posture 2011, 34, 462–466, doi:10.1016/j.gaitpost.2011.06.019.
113. Doheny, E. P.; Foran, T. G.; Greene, B. R. A single gyroscope method for spatial gait analysis. 2010 Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. EMBC’10 2010, 1300–1303, doi:10.1109/IEMBS.2010.5626397.
114. Lafortune, M. A.; Lake, M. J.; Hennig, E. M. Transfer function between tibial acceleration and ground reaction force. J. Biomech. 1995, 28, 113–117, doi:10.1016/0021-9290(95)80014-X.
115. Hennig, E. M.; Lafortune, M. A. Relationships between ground reaction force and tibial bone acceleration parameters. Int. J. Sport Biomech. 1991, 7, 303–309.
116. Thiel, D. V.; Shepherd, J.; Espinosa, H. G.; Kenny, M.; Fischer, K.; Worsey, M.; Matsuo, A.; Wada, T. Predicting Ground Reaction Forces in Sprint Running Using a Shank Mounted Inertial Measurement Unit. Multidiscip. Digit. Publ. Inst. Proc. 2018, 2, 199, doi:10.3390/PROCEEDINGS2060199.
117. Gaudel, J.; Koska, D.; Maiwald, C. The influence of foot strike and speed on the validity of inertial sensors to analyse rearfoot kinematics during running. Footwear Sci. 2017, 9, S88–S89.
118. Mo, S.; Chow, D. H. K. K. Accuracy of three methods in gait event detection during overground running. Gait Posture 2018, 59, 93–98, doi:10.1016/J.GAITPOST.2017.10.009.

Literaturverzeichnis
89
119. Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Tröster, G. Monitoring Kinematic Changes With Fatigue in Running Using Body-Worn Sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990, doi:10.1109/TITB.2012.2201950.
120. Schwanitz, S.; Odenwald, S. Long-term cushioning properties of running shoes (P152). In The Engineering of Sport 7; 2008; pp. 95–100.
121. Brückner, K.; Odenwald, S.; Schwanitz, S.; Heidenfelder, J.; Milani, T. L. Polyurethane-foam midsoles in running shoes - Impact energy and damping. Procedia Eng. 2010, 2, 2789–2793, doi:10.1016/j.proeng.2010.04.067.
122. García-Pérez, J. A.; Pérez-Soriano, P.; Llana Belloch, S.; Lucas-Cuevas, Á. G.; Sánchez-Zuriaga, D. Effects of treadmill running and fatigue on impact acceleration in distance running. Sport. Biomech. 2014, 13, 1–8, doi:10.1080/14763141.2014.909527.
123. Alvarez, J. C.; González, R. C.; Alvarez, D.; López, A. M.; Rodríguez-Uría, J. Multisensor approach to walking distance estimation with foot inertial sensing. In Annual International Conference of the IEEE Engineering in Medicine and Biology - Proceedings; 2007; pp. 5719–5722.
124. Jasiewicz, J. M.; Allum, J. H. J.; Middleton, J. W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R. C. T. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture 2006, 24, 502–509, doi:10.1016/j.gaitpost.2005.12.017.
125. Mitschke, C.; Zaumseil, F.; Milani, T. L. The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed. Engin. 2017, 20, 1502–1511, doi:10.1080/10255842.2017.1382482.
126. Lohman, E. B.; Balan Sackiriyas, K. S.; Swen, R. W. A comparison of the spatiotemporal parameters, kinematics, and biomechanics between shod, unshod, and minimally supported running as compared to walking. Phys. Ther. Sport 2011, 12, 151–163, doi:10.1016/j.ptsp.2011.09.004.
127. Perl, D. P.; Daoud, A. I.; Lieberman, D. E. Effects of footwear and strike type on running economy. Med. Sci. Sports Exerc. 2012, 44, 1335–1343, doi:10.1249/MSS.0b013e318247989e.
128. Westblad, P.; Halvorsen, K.; Hashimoto, T.; Winson, I. G.; Lundberg, A. Ankle-joint complex motion during stance phase of walking as measured by skin or bone anchored markers. In Proceedings of the 6th International Symposium on 3D Analysis of Human Movement; 2000; pp. 49–51.
129. Leardini, A.; Chiari, A.; Della Croce, U.; Cappozzo, A. Human movement analysis using stereophotogrammetry Part 3. Soft tissue artifact assessment and compensation. Gait Posture 2005, 21, 212–225, doi:10.1016/j.gaitpost.2004.05.002.
130. Oriwol, D.; Milani, T. L.; Maiwald, C. Methodological issues associated with the mean value of repeated laboratory running measurements. Footwear Sci. 2012, 4, 183–190.
131. Mitschke, C.; Heß, T.; Milani, T. L. Which Method Detects Foot Strike in Rearfoot and Forefoot Runners Accurately when Using an Inertial Measurement Unit? Appl. Sci. 2017, 7, 959, doi:10.3390/app7090959.
132. Mitschke, C.; Öhmichen, M.; Milani, T. L. A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes. Appl. Sci. 2017, 7, 659, doi:10.3390/app7070659.

Literaturverzeichnis
90
133. Mitschke, C.; Kiesewetter, P.; Milani, T. L. The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running. Sensors 2018, 18, 1–12, doi:10.3390/s18010130.
134. Montgomery, G.; Abt, G.; Dobson, C.; Smith, T.; Ditroilo, M. Tibial impacts and muscle activation during walking, jogging and running when performed overground, and on motorised and non-motorised treadmills. Gait Posture 2016, 49, 120–126, doi:10.1016/j.gaitpost.2016.06.037.
135. Mcnair, P. J.; Marshall, R. N. Kinematic and kinetic parameters associated with running in different shoes. Br. J. Sports Med. 1994, 28, 256–261, doi:10.1136/bjsm.28.4.256.
136. Divert, C.; Mornieux, G.; Freychat, P.; Baly, L.; Mayer, F.; Belli, A. Barefoot-Shod Running Differences: Shoe or Mass Effect? Int. J. Sports Med. 2008, 29, 512–518, doi:10.1055/s-2007-989233.
137. Hennig, E. M.; Valiant, G. A.; Liu, Q. Biomechanical variables and the perception of cushioning for running in various types of footwear. J. Appl. Biomech. 1996, 12, 143–150, doi:10.1123/jab.12.2.143.
138. Divert, C.; Mornieux, G.; Baur, H.; Mayer, F.; Belli, A. Mechanical comparison of barefoot and shod running. Int. J. Sports Med. 2005, 26, 593–598, doi:10.1055/s-2004-821327.
139. Reinisch, M.; Schaff, P.; Hauser, W.; Rosemeyer, B. Laufband versus Feldversuch. Sport. Sport. 1991, 5, 60–73.
140. Oriwol, D.; Dannemann, A.; Gaudel, J.; Maiwald, C. Comparing movement variability between outdoor vs. treadmill running across 1500 strides. Footwear Sci. 2015, 7, S30–S32, doi:10.1080/19424280.2015.1038310.
141. Lee, J. B.; Sutter, K. J.; Askew, C. D.; Burkett, B. J. Identifying symmetry in running gait using a single inertial sensor. J. Sci. Med. Sport 2010, 13, 559–563, doi:10.1016/j.jsams.2009.08.004.
142. Willems, T. M.; De Clercq, D.; Delbaere, K.; Vanderstraeten, G.; De Cock, A.; Witvrouw, E. A prospective study of gait related risk factors for exercise-related lower leg pain. Gait Posture 2006, 23, 91–98, doi:10.1016/j.gaitpost.2004.12.004.
143. Barnes, A.; Wheat, J.; Milner, C. E. Forefoot-rearfoot kinematics in recreational runners with a history of tibial stress injury. In American Society of Biomechanics; Long Beach,CA, 2011; pp. 1–3.
144. Kuhman, D. J.; Paquette, M. R.; Peel, S. A.; Melcher, D. A. Comparison of ankle kinematics and ground reaction forces between prospectively injured and uninjured collegiate cross country runners. Hum. Mov. Sci. 2016, 47, 9–15, doi:10.1016/j.humov.2016.01.013.
145. Hreljac, A.; Marshall, R. N.; Hume, P. A. Evaluation of lower extremity overuse injury potential in runners. Med. Sci. Sport. Exerc. 2000, 32, 1635–1641, doi:10.1097/00005768-200009000-00018.
146. Dierks, T. A.; Manal, K. T.; Hamill, J.; Davis, I. Lower extremity kinematics in runners with patellofemoral pain during a prolonged run. Med. Sci. Sports Exerc. 2011, 43, 693–700, doi:10.1249/MSS.0b013e3181f744f5.
147. Becker, J. Towards an understanding of prolonged pronation: Implications for medial tibial stress syndrome and achilles tendinopathy, University of Oregon, 2013.
148. Röthig, P.; Prohl, R. Sportwissenschaftliches Lexikon; 7. Auflage.; Hofmann: Schorndorf, 2003; ISBN 3778044974.
149. Nachtigall, W. Biomechanik. Grundlagen, Beispiele, Übungen, 2.; 2. Auflage.; Vieweg: Braunschweig/Wiesbaden, 2001; ISBN 3528139269.

Literaturverzeichnis
91
150. Grünewald, K. Übungsbuch zur podologischen Biomechanik; 1. Auflage.; Neuer Merkur GmbH, 2017; ISBN 978-3-95409-039-6.


Anhang
92
Anhang

Anhang
93
Diese Dissertation enthält acht Anlagen, bestehend aus den in Kapitel 4 vorgestellten Publikationen,
dem wissenschaftlichen Lebenslauf, einer Liste der eigenen Veröffentlichungen, der Danksagung so-
wie der Selbstständigkeitserklärung.
In dieser kumulativen Dissertation verwendete Publikationen, in der Reihenfolge, wie sie in
Kapitel 4 vorgestellt wurden:
Mitschke, C.; Zaumseil, F.; Milani, T.L.: The influence of inertial sensor sampling frequency on the
accuracy of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed.
Engin. 2017, 20, 1502–1511, doi:10.1080/10255842.2017.1382482.
Mitschke, C.; Kiesewetter, P.; Milani, T.L.: The Effect of the Accelerometer Operating Range on
Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running.
Sensors. 2018, 18, 1–12, doi:10.3390/s18010130.
Mitschke, C.; Heß, T.; Milani, T.L.: Which Method Detects Foot Strike in Rearfoot and Forefoot
Runners Accurately when Using an Inertial Measurement Unit? Appl. Sci. 2017, 7, 959,
doi:10.3390/app7090959.
Mitschke, C.; Öhmichen, M.; Milani, T.L.: A Single Gyroscope Can Be Used to Accurately Deter-
mine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes. Appl.
Sci. 2017, 7, 659, doi:10.3390/app7070659.

Original Article
Note:
This is an Accepted Manuscript of an article published by Taylor & Francis in Computer Meth-
ods in Biomechanics and Biomedical Engineering on 26 September 2017, available at
https://www.tandfonline.com/doi/full/10.1080/10255842.2017.1382482
The influence of inertial sensor sampling frequency on the accuracy of
measurement parameters in rearfoot running
Christian Mitschke1, Falk Zaumseil1, Thomas L. Milani1 1Chemnitz University of Technology, Institute of Human Movement Science and Health, De-
partment of Human Locomotion
Corresponding author:
Christian Mitschke
Chemnitz University of Technology
Faculty of Behavioural and Social Sciences
Institute of Human Movement Science and Health
Department of Human Locomotion
09107 Chemnitz
Germany
Phone: +49 371 531 32196
Fax: +49 371 531 27629
Email: [email protected]
Falk Zaumseil
Chemnitz University of Technology
Email: [email protected]
Phone: +49 176 633-85155
Thomas L. Milani
Chemnitz University of Technology
Email: [email protected]
Phone: +49 371 531-34536

Manuscript: The influence of inertial sensor sampling frequency
2
Abstract
Increasingly, inertial sensors are being used for running analyses. The aim of this study was to
systematically investigate the influence of inertial sensor sampling frequencies (SF) on the ac-
curacy of kinematic, spatio-temporal, and kinetic parameters. We hypothesized that running
analyses at lower SF result in less signal information and therefore the inability to sufficiently
interpret measurement data. Twenty-one subjects participated in this study. Rearfoot strikers
ran on an indoor running track at a velocity of 3.5 ± 0.1 ms−1. A uniaxial accelerometer was
attached at the tibia and an inertial measurement unit was mounted at the heel of the right shoe.
All sensors were synchronized at the start and data was measured with 1000 Hz (reference SF).
Datasets were reduced to 500, 333, 250, 200, and 100 Hz in post-processing. The results of this
study showed that a minimum SF of 500 Hz should be used to accurately measure kinetic pa-
rameters (e.g. peak heel acceleration). In contrast, stride length showed accurate results even at
333 Hz. 200 Hz were required to calculate parameters accurately for peak tibial acceleration,
stride duration, and all kinematic measurements. The information from this study is necessary
to correctly interpret measurement data of existing investigations and to plan future studies.
Keywords: inertial measurement units, inertial sensor, sampling frequency, rearfoot running,
acceleration, angular velocity

Manuscript: The influence of inertial sensor sampling frequency
3
1. Introduction
Previous studies use gyroscopes and accelerometers to analyze spatio-temporal, kinematic and
kinetic parameters during treadmill running (e.g. Mizrahi et al. 2000; Mercer et al. 2002; Gian-
dolini et al. 2013; Gruber et al. 2014; Mercer and Chona 2015; Maiwald et al. 2015) and over-
ground running (e.g. Milani et al. 1997; Heidenfelder et al. 2010; Meardon et al. 2011; Oriwol
et al. 2011; Sinclair et al. 2013; Chambon et al. 2014). In these studies, individually configured
sensors or commercially available inertial measurement units (IMU: e.g. Achillex, Shimmer,
or XSens) with various sampling frequencies (SF) were used.
To examine kinematic or spatiotemporal parameters during running, Brauner et al. (2009); Shih
et al. (2014); Mitschke et al. (2017) used inertial sensors with SF of 1000 Hz, whereas Maiwald
et al. (2015) (400 Hz), Struzik et al. (2015) (200 Hz), and Reenalda et al. (2016) (60 Hz) used
sensors with distinctly lower SF. In these studies, sensors were attached to the dorsal side of
the shoe at the midpoint of the second metatarsal bone to observe kinematic changes during
intense running (Shih et al. 2014), or at the heel cup and shank to detect stride intervals in
continuous data (Maiwald et al. 2015), and to investigate peak eversion velocity (Mitschke et
al. 2017). A gyroscope was placed inside the midsole of a regular running shoe by Brauner et
al. (2009) to investigate whether using of a single gyroscope is sufficient to detect gait cycle
and maximum pronation velocity during outdoor running. Struzik et al. (2015) and Reenalda et
al. (2016) equipped their runners with a higher number of sensors (n > 7) at the lower limbs and
trunk. Struzik et al. (2015) investigated angles and angular velocities in ankle, knee, and hip
joints during sprint phases, whereas Reenalda et al. (2016) investigated running technique dur-
ing the course of an actual marathon.
For kinetic measurements, e.g. to examine impact behavior during running, the maximum tibial
acceleration at impact was measured using high SF of up to 2000 Hz (Clark et al. 2010; Cham-
bon et al. 2014). Other authors used SF of 1667 Hz (Mizrahi et al. 2000), 1500 Hz (Montgomery
et al. 2016), 1200 Hz (Gruber et al. 2014), 1000 Hz (Milani et al. 1997; Mercer et al. 2002;
Heidenfelder et al. 2010; Meardon et al. 2011; Oriwol et al. 2011; Giandolini et al. 2013; Sin-
clair et al. 2013; Mercer and Chona 2015), 960 Hz (Laughton et al. 2003), and 100 Hz (García-
Pérez et al. 2014) to measure accelerations during running. Accelerometers were mounted at
different medial aspects of the tibia.

Manuscript: The influence of inertial sensor sampling frequency
4
As shown, inertial sensors have been used in various experimental protocols with different SF.
To the best of our knowledge, effects of SF on the accuracy of calculated spatio-temporal, kin-
ematic, and kinetic parameters have never been explored for motion capture systems or for
inertial sensors. However, this information is necessary to measure these parameters as accu-
rately as possible and to correctly interpret the sensor signals. Examining these parameters with
an SF that is too low can cause maximum values to be underestimated, e.g. maximum eversion
velocity or peak tibial acceleration, and can result in a high standard deviation and low reliabil-
ity.
Therefore, the purpose of this study was to systematically investigate the influence of different
inertial sensor SF on (a) kinematic parameters (heel strike angle, maximum eversion velocity),
(b) spatio-temporal parameters (stride length, stride time), and (c) kinetic parameters (peak heel,
and peak tibial acceleration) during rearfoot running. The research questions addressed were
whether lower SF affect touchdown detection, maximum angular velocities and derived angles,
accelerometer signal information, and stride length and duration. We also provide recommen-
dations for how to measure and analyze these parameters without losing relevant information.
2. Materials and methods
2.1. Participants
Twenty-one male subjects (age: 28.9 ± 10.8 years; height: 177.0 ± 5.2 cm; weight: 74.4 ± 7.1
kg) participated in this study. The faculty’s Ethics Committee declared no ethical objections to
this study (V-055-17-HS-CM-Fersenlauf-24062014). The subjects were given written infor-
mation about the purpose and design of the study, signed an informed consent document, and
completed a form with their personal data. Participants were recreational runners, free of injury
for the last six months, rearfoot strikers, and wore a neutral running shoe during the test pro-
vided by the laboratory in men’s UK size 8 (PUMA Faas 500). To confirm rearfoot running
pattern, running was controlled visually according to Giandolini et al. (2013). The presence of
the impact peak in vertical ground reaction data was checked.
2.2. Experimental setup
To measure vertical acceleration, double-sided adhesive tape was used to attach a uniaxial light-
weight accelerometer (ADXL78, Analog Devices, mass 8 g, measurement range ± 687 ms−2)
to the shaved skin at the medial aspect and mid location between malleolus and plateau of the
right tibia. Furthermore, an elastic strap was used to stabilize the accelerometer and prevent

Manuscript: The influence of inertial sensor sampling frequency
5
excessive movements due to its own weight. The sensate axis was aligned with the longitudinal
axis of the tibia according to Hennig et al. (1993) (azT, Figure 1). The sensor remained at the
same position during the whole measurement for each subject. In addition, an IMU, combining
a biaxial accelerometer (ADXL278, Analog Devices, measurement range ± 687 ms−2) and a
biaxial gyroscope (IDG-650, InvenSense, measurement range ± 2000°s−1), was affixed to the
heel cup of the right shoe (Figure 1). The sensitive axes of the IMU accelerometer measured
horizontal (axS) and vertical (azS) acceleration of the shoe. The two sensitive axes of the gyro-
scope measured the angular velocities in the frontal plane around the x-axis (ω2), and in the
sagittal plane around the y-axis (ω1). All sensors operated synchronously and data were rec-
orded at 1000 Hz by a data logger, secured in a waist belt. Data logger and PC were connected
via a 10 m cable. Ground reaction force measurements were simultaneously performed using a
force platform (Kistler®, 9287 BA, 60 × 90 cm, 1000 Hz) that was synchronized with the iner-
tial sensors.
Figure 1. Schematic representation of the measurement setup. the uniaxial accelerometer is located at the tibia of the right leg with the sensate axis in line with the longitudinal axis, rep-resented in lateral view by azT. The IMU, combining a biaxial accelerometer and a biaxial gy-roscope, is attached to the heel of the right shoe. Sensitive axes are represented by arrows - axS horizontal and azS vertical acceleration. The gyroscope measured the angular velocity around the y-axis (ω1) to calculate foot angle, and around the x-axis (ω2) to evaluate maximum eversion velocity (represented in rear view).
Manuscript: The influence of inertial sensor sampling frequency
6
2.3. Test procedure
After an individual warm-up of 10 min and familiarization with the measurement setup, 30
successful runs at a controlled speed of 3.5 ± 0.1 ms−1 on a 15 m indoor running track were
recorded for all subjects. Speed was monitored using two light barriers placed four meters apart.
Additionally, ground reaction forces of the right foot were measured to monitor rearfoot footfall
pattern. The analysis of the spatio-temporal, kinematic, and kinetic parameters was based on
two complete strides of the right leg, starting with touchdown (TD) on the force plate.
2.4. Data analyses
Data from the inertial sensors were analyzed in post-processing for the time between 500 ms
before TD on the force plate until 1000 ms after TD. Prior to all processing steps, data were
filtered using MATLAB R2016b (MathWorksTM, Massachusetts, USA) with a zero-lag But-
terworth low-pass filter (accelerometers: 4th at 100 Hz; gyroscopes: 4th at 50 Hz; force plate:
2nd at 50 Hz) to remove noise. In the next step, data were reduced from 1000 Hz to 500, 333,
250, 200, and 100 Hz by selecting every second data point of the default SF for 500 Hz, every
third for 333 Hz, every fourth for 250 Hz, every fifth for 200 Hz, and every tenth for 100 Hz.
For all reduced SF, each data reduction was done up to ten times with different start frames to
determine the largest difference to the reference sampling frequency of 1000 Hz (RSF). After
data reduction, all running parameters were calculated for all six SF separately, as described
below.
2.5. Calculated running parameters
2.5.1. Foot touchdown detection
Vertical acceleration data from the IMU (azS) was 80 Hz high pass filtered using a zero-lag
Butterworth filter, and the first positive peak in filtered signal was declared as TD (Maiwald et
al. 2015). Vertical ground reaction data from the force plate was used to verify this method.
According to Laughton et al. (2003), the threshold of the force plate was set at 10 N to determine
TD. The difference between force plate TD detection and IMU-based TD detection was calcu-
lated. A positive difference between both TD detection methods implies that force plate TD
was detected before IMU-based TD detection. Similarly, a negative difference implies that
IMU-based TD was detected before force plate TD detection.

Manuscript: The influence of inertial sensor sampling frequency
7
2.5.2. Kinematic parameters
Foot orientation angle in the sagittal plane (θ) was calculated using integrated data from angular
velocity in the sagittal plane (ω1) with the formula shown in Figure 2 (Figure 3 – dotted line).
To eliminate integration offset and drift error, a nulling algorithm was applied to the orientation
angle: it provides the offset estimated by the angles where the foot was flat relative to the ground
in two consecutive stance phases (θoff−s1 and θoff−s2). θoff−s1 and θoff−s2 were detected by finding
the minimum change in θ magnitude for each stride (Figure 3). The measured angle differences
between θoff−s1 and θoff−s2 were used to eliminate drift error and integration offset. Thereby, a
linear function (θoff) was calculated between θoff−s1 and θoff−s2 and subtracted from the foot ori-
entation angle (Figure 3 – continuous black line). Heel strike angle (HSA) was defined as the
final foot angle θ at the time of TD.
Furthermore, according Mitschke et al. (2017), peak eversion velocity (evVel) was defined as
the maximum positive angular velocity in the frontal plane (ω2) (Figures 1 and 2).
2.5.3. Spatio-temporal parameters
The time between two consecutive TD of the right foot was defined as stride duration (strDur).
Horizontal (axS) and vertical (azS) accelerometer signals from the heel sensor and the foot ori-
entation angle θ were used to calculate the resulting horizontal acceleration of the right foot (ax)
(Figure 2) (Sabatini et al. 2005). Horizontal velocity (vx) was calculated using numerical inte-
gration of ax and the horizontal acceleration offset (ax mean). The stride length (strLen) between
two consecutive TD was calculated using integrated data from vx.
2.5.4. Kinetic parameters
Peak tibial acceleration (PTA) was defined as the maximum acceleration of the accelerometer
at the tibia (azT), and peak heel acceleration (PHA) was defined as the maximum acceleration
of azS (Figures 1 and 2).
2.6. Statistical analyses
Only the largest differences to RSF were analyzed for all parameters. Means, standard devia-
tions (SD) and 95% confidence intervals (CI) were calculated for each subject at each SF and
parameter. Group averages were calculated from subject values. Due to normal distribution,
tested with the Shapiro-Wilk-test, paired sample t-tests were used to compare the RSF with the

Manuscript: The influence of inertial sensor sampling frequency
8
reduced SF for PHA, PTA, and strLen. Due to non-normal distribution, the nonparametric Wil-
coxon test for dependent samples was used to compare the RSF with the reduced SF for evVel,
HSA, and strDur. A Bonferroni correction was used to adjust the p-values (p = 0.05/6 = 0.0083)
in relation to the number of SF which were investigated (n = 6). Absolute (ABS) and relative
(REL) mean differences between RSF and the reduced SF were calculated. To describe within-
subject variation, the coefficient of variation (CV = SD/mean × 100%) was calculated for each
subject at each parameter and SF. Group averages of CV were calculated from subject values.
The practical relevance of statistically significant results for comparisons between RSF and
reduced SF should be critically discussed due to the magnitude of CV values for RSF. There-
fore, REL was related to CV of RSF. If REL between RSF and reduced SF was greater than the
group CV for RSF, then the effect due to the reduced SF was greater than the variability within
the subjects. Based on Oriwol et al. (2011), this suggests that the range of averaged values
which were calculated between each SF and RSF exceeds the range of single values obtained
from each subject. Then it becomes clear that reduced SF is the influencing factor.
Figure 2. Flow chart for calculated running parameters in post-processing.

Manuscript: The influence of inertial sensor sampling frequency
9
Figure 3. Foot angle (sagittal plane) of one representative trial after integration (dotted line), and after integration, drift, and offset correction (continuous line). The points where the right foot was flat relative to the ground at stride one and two are represented by θoff−s1 and θoff−s2.
3. Results
3.1. Foot touchdown detection
The comparison between force plate and IMU-based TD detection revealed high accuracy of
0.7 ± 2.6 ms at RSF. A decreasing accuracy was observed with decreasing SF. Reducing SF led
to greater differences between both TD detection methods: 4.5 ± 5.3 ms for 500 Hz, 4.9 ± 4.3 ms
for 333 Hz, 7.9 ± 5.8 ms for 250 Hz, 11.2 ± 9.5 ms for 200 Hz, and 42.2 ± 24.4 ms for 100 Hz.
3.2. Kinematic parameters
The calculation of HSA at RSF resulted in an angle of 31.1 ± 3.9°, which was significantly
greater than the angle after reduction to 100 Hz (28.0 ± 4.1°) (Tables 1 and 2). Increasing CV
was observed with decreasing SF. When com paring RSF and 100 Hz, REL (9.9%) was higher
than CV at RSF (6.2%).
EvVel at RSF was 493.5 ± 87.2°s−1. This was significantly higher than for 100 Hz (405.5 ±
72.9°s−1). Interestingly, with decreasing SF, the CV of evVel also decreased. REL between RSF
and 100 Hz (17.8%) was higher than CV at RSF (17.7%).

Manuscript: The influence of inertial sensor sampling frequency
10
Table 1. Mean, standard deviation (SD), 95% confidence intervals (lower and upper CI), and coefficient of variation (CV) of all SF and parameters.
Mean (SD) CV (SD) CI [%] lower upper HSA [°] 1000Hz 31.1 (±3.9) 6.2 (±2.3) 30.4 - 31.8 500Hz 31.1 (±3.9) 6.2 (±2.3) 30.4 - 31.7 333Hz 31.0 (±4.0) 6.3 (±2.4) 30.3 - 31.7 250Hz 30.9 (±4.0) 6.3 (±2.4) 30.2 - 31.6 200Hz 30.7 (±4.0) 6.4 (±2.4) 30.0 - 31.4 100Hz 28.0 (±4.1) 7.5 (±3.2) 27.3 - 28.8 evVel [°s-1] 1000Hz 493.5 (±87.2) 17.7 (±8.5) 462.9 - 524.2 500Hz 490.7 (±86.7) 17.7 (±8.5) 460.3 - 521.1 333Hz 485.3 (±85.5) 17.5 (±8.5) 455.5 - 515.1 250Hz 477.3 (±84.1) 17.4 (±8.6) 448.3 - 506.4 200Hz 467.9 (±82.3) 17.1 (±8.6) 440.0 - 495.8 100Hz 405.5 (±72.9) 14.8 (±8.2) 384.8 - 426.2 strDur [ms] 1000Hz 741.3 (±35.7) 2.6 (±1.3) 734.4 - 748.2 500Hz 738.6 (±36.2) 2.7 (±1.3) 731.4 - 745.7 333Hz 736.8 (±36.4) 2.8 (±1.2) 729.6 - 744.1 250Hz 733.2 (±36.9) 2.8 (±1.3) 725.9 - 740.6 200Hz 729.4 (±37.8) 3.1 (±2.3) 721.4 - 737.4 100Hz 717.9 (±39.1) 3.5 (±2.4) 709.1 - 726.8 strLen [cm] 1000Hz 251.6 (±11.8) 4.9 (±2.8) 247.1 - 256.0 500Hz 248.5 (±11.5) 4.9 (±2.8) 244.1 - 252.9 333Hz 244.4 (±11.0) 4.9 (±2.7) 240.1 - 248.7 250Hz 233.2 (±10.3) 5.4 (±2.7) 228.7 - 237.8 200Hz 218.5 (±10.3) 6.5 (±4.5) 213.4 - 223.7 100Hz 201.3 (±12.2) 7.8 (±4.5) 195.7 - 206.9 PHA [ms-2] 1000Hz 241.5 (±40.5) 8.9 (±2.9) 233.8 - 249.2 500Hz 224.9 (±35.8) 9.3 (±2.5) 217.4 - 232.4 333Hz 197.1 (±34.2) 9.1 (±2.0) 190.7 - 203.5 250Hz 174.8 (±29.0) 10.0 (±2.4) 168.5 - 181.0 200Hz 143.4 (±31.6) 10.4 (±2.3) 138.2 - 148.6 100Hz 94.9 (±18.7) 16.9 (±7.3) 89.3 - 100.4 PTA [ms-2] 1000Hz 97.4 (±26.7) 14.5 (±4.1) 92.3 - 102.5 500Hz 96.3 (±26.2) 14.4 (±4.1) 91.3 - 101.2 333Hz 94.1 (±24.9) 14.1 (±4.0) 89.4 - 98.9 250Hz 91.0 (±23.5) 13.6 (±3.9) 86.6 - 95.5 200Hz 87.0 (±21.3) 13.2 (±3.5) 82.9 - 91.1 100Hz 60.5 (±10.7) 9.3 (±2.2) 58.5 - 62.6

Manuscript: The influence of inertial sensor sampling frequency
11
Table 2. Absolute (ABS) and relative (REL) mean differences of comparisons between RSF and reduced SF; Significant differences (p < 0.0083) between SF were marked with +, and ef-fects due to the reduced SF (REL > CV(1000 Hz)) were marked with *.
Mean differences p ABS REL [%]
HSA [°] 1000-500Hz 0.907 0.1 0.2 1000-333Hz 0.803 0.1 0.4 1000-250Hz 0.666 0.2 0.7 1000-200Hz 0.480 0.4 1.4 1000-100Hz 0.001+ 3.1 9.9* evVel [°s-1] 1000-500Hz 0.803 2.8 0.6 1000-333Hz 0.516 8.2 1.7 1000-250Hz 0.228 16.2 3.3 1000-200Hz 0.078 25.6 5.2 1000-100Hz <0.0001+ 88.0 17.8* strDur [ms] 1000-500Hz 0.083 2.7 0.4 1000-333Hz 0.001+ 4.4 0.6 1000-250Hz <0.0001+ 8.0 1.1 1000-200Hz <0.0001+ 11.8 1.6 1000-100Hz <0.0001+ 23.4 3.2* strLen [cm] 1000-500Hz <0.0001+ 3.0 1.2 1000-333Hz <0.0001+ 7.2 2.9 1000-250Hz <0.0001+ 18.3 7.3* 1000-200Hz <0.0001+ 33.0 13.1* 1000-100Hz <0.0001+ 50.3 20.0* PHA [ms-2] 1000-500Hz <0.0001+ 16.6 6.9 1000-333Hz <0.0001+ 44.3 18.4* 1000-250Hz <0.0001+ 66.7 27.6* 1000-200Hz <0.0001+ 98.1 40.6* 1000-100Hz <0.0001+ 146.6 60.7* PTA [ms-2] 1000-500Hz <0.0001+ 1.1 1.1 1000-333Hz <0.0001+ 3.3 3.3 1000-250Hz <0.0001+ 6.4 6.5 1000-200Hz <0.0001+ 10.3 10.6 1000-100Hz <0.0001+ 36.8 37.8*
3.3. Spatio-temporal parameters
The calculation of strDur at RSF resulted in 741.3 ± 35.7 ms per stride (Table 1). Reduction of
SF to 333, 250, 200, and 100 Hz led to significantly lower strDur (Table 2). The CV of strDur
increased with decreasing SF. REL between RSF and 100 Hz was 3.2% (ABS: 23.4 ms) and
was greater than the CV at RSF (2.6%).

Manuscript: The influence of inertial sensor sampling frequency
12
StrLen at RSF resulted in 251.6 ± 11.8 cm per stride. This was significantly higher than all
reduced SF. The CV of strLen increased with decreasing SF. REL between RSF and 250 Hz
(7.3%), RSF and 200 Hz (13.1%), and RSF and 100 Hz (20.0%) was greater than the CV at
RSF (4.9%).
3.4. Kinetic parameters
For PHA, accelerations of 241.5 ± 40.5 ms−2 were found at RSF. Reduction of the SF resulted
in significantly lower PHA at all SF. CV of PHA increased with decreasing SF. REL between
RSF and 333 Hz (18.4%), RSF and 250 Hz (27.6%), RSF and 200 Hz (40.6%), and RSF and
100 Hz (60.7%) was greater than the CV at RSF (8.9%). For PTA, statistical significance was
found between RSF (97.4 ± 26.7 ms−2) and all reduced SF. Similar to evVel, CV of PTA de-
creased with decreasing SF. Only REL between RSF and 100 Hz (37.8%) was lower than CV
at RSF (14.5%).
4. Discussion
Based on the development of small, light-weight, and low-cost sensors, wearable motion sen-
sors are an inexpensive alternative to optical motion capture systems (Mayagoitia et al. 2002).
The use of individually configured sensors or commercially available systems leads to meas-
urements with various SF which may affect the accuracy of the examined parameters. The aim
of the present study was to systematically investigate this influence.
4.1. Kinematic parameters
As representatives of kinematic parameters, HSA and evVel were examined in this study. Both
parameters revealed accurate results for SF ≥ 200 Hz (Tables 1 and 2). When investigating the
HSA during running, SF should be at a minimum of 200 Hz to generate accurate results with
ABS of 0.4° and REL of 1.4%. Furthermore, at 200 Hz, a CV of 6.4% was found, which was
similar to the CV at RSF and apparently not influenced by SF. This implies that SF of 200 Hz
can be used to calculate HSA and to investigate within-subject variation as accurately as at
higher SF. When investigating HSA, it was observed that HSA was affected mostly by the
correct detection of θoff−s1 and θoff−s2, the points where the right foot was flat relative to the
ground. With lower SF, fewer data points for θ were available, which increases the difficulty
of finding the minimum change in θ magnitude for each stride. When at least one of these two

Manuscript: The influence of inertial sensor sampling frequency
13
points was inaccurate, the subsequent linear drift correction of the foot angle was imprecise.
Consequently, the imprecise foot angle θ led to an incorrect HSA at TD. Furthermore, with an
incorrectly determined TD due to the lower SF (difference between force plate and IMU-based
TD detection at 100 Hz: 42.2 ± 24.4 ms), HSA was defined at the incorrect time in foot angle
θ, which also led to inaccurate HSA.
For evVel, 493.5 ± 87.2°s−1 was measured at RSF, which was significantly higher than when
measured at 100 Hz (405.5 ± 72.9°s−1). When observing the high SD (± 87.2°s−1), CV (17.7%)
and the wide range of 95% CI (462.9 – 524.2°s−1), evVel was characterized by a high variability
at RSF. With decreasing SF, SD and CV decreased down to 72.9°s−1 and 14.8%, respectively,
for 100 Hz. This may be the result of the altered signal characteristic at lower SF. When meas-
uring at RSF, the signal of evVel was characterized by rapid peaks, especially in the first 50 ms
after TD. With lower SF, especially at 100 Hz, the spikes used to determine evVel were lost,
the signal became more homogeneous, and the signal variability of ω2 decreased. Additionally,
comparisons between force plate and IMU-based TD detection revealed a great positive differ-
ence at 100 Hz (42.2 ± 24.4 ms) and distinctly lower positive differences (≤11.2 ms) at higher
SF. Positive differences between both TD detection methods implies that force plate TD was
mainly detected before IMU-based TD, and with further reduction of SF this time shift in-
creased. The delayed IMU-based TD detection could result in a lower evVel if TD is detected
later than the maximum in ω2 actually occurs. It seems that lower evVel and lower variability
at reduced SF are the result of delayed TD detection and the more homogenous signal charac-
teristic of ω2. Therefore, measurements of evVel should be performed with SF of at least 200 Hz
to obtain acceptable results.
Various SF have been used in studies investigating foot kinematics using inertial sensors (e.g.
Brauner et al. 2009; Shih et al. 2014; Struzik et al. 2015; Reenalda et al. 2016; Mitschke et al.
2017) or optical motion analyses systems (e.g. Heidenfelder et al. 2008; Hein and Grau 2014;
Koblbauer et al. 2014). In Brauner et al. (2009), maximum pronation velocity was investigated
during outdoor running with an SF of 1000 Hz. Furthermore, Mitschke et al. (2017) investigated
the accuracy of a single axis gyroscope (SF: 1000 Hz) during locomotion at different speeds
and in various footwear conditions. Shih et al. (2014) also used an SF of 1000 Hz to investigate
kinematic changes (e.g. peak angular velocity in the frontal and sagittal plane) during intense
running. Based on the results of our study, the kinematics were captured with great accuracy in

Manuscript: The influence of inertial sensor sampling frequency
14
these three studies. Struzik et al. (2015) used inertial sensors with an SF of 200 Hz to investigate
ankle inversion-eversion velocities and dorsi-plantar flexion angles in sprint runs. The results
of our study show that used SF by Struzik et al. (2015) can provide accurate results. However,
our study was performed at speeds of 3.5 ms−1, which is considerably slower than sprint runs.
In contrast, Reenalda et al. (2016) used SF of 60 Hz to evaluate kinematics (e.g. ankle angle)
during the course of an actual marathon. This SF seems to be relatively low compared to our
results. Heidenfelder et al. (2008) and Hein and Grau (2014) investigated kinematic parameters
(e.g. HSA, ankle dorsiflexion/plantarflexion, and rearfoot inversion/eversion) under different
conditions (shoe conditions, barefoot vs. shod) at running speeds of 3.5 and 3.1 ms−1, respec-
tively, with SF at 240 and 250 Hz. Our study confirms the accuracy of their results regarding
SF and running speed. Koblbauer et al. (2014) used SF of 100 Hz to investigate lower extremity
kinematics (e.g. plantar flexion and pronation), during a steady state running-induced fatigue
protocol. SF of 100 Hz seems too low to investigate kinematics, especially at higher speeds
during the fatigue protocol.
4.2. Spatio-temporal parameters
The high pass filtered signal of azS was utilized to detect TD of two consecutive strides, and
subsequently stride start and end. Due to the lower SF, the characteristic first peak in the filtered
signal indicating initial touchdown can be shifted slightly backwards in time compared to RSF.
This was shown in the comparisons between force plate and IMU-based TD detection. When
calculating strDur, the time between two consecutive TD, the reduction of SF may affect the
accuracy of strDur twice, especially if the height of the time shift differ between the two con-
secutive TD. For strDur, we found significant differences between RSF and all SF < 500 Hz.
However, based on the low REL (up to 1.6% for 200 Hz), which were lower than the CV at
RSF (2.6%), we can say that measurements of strDur with a minimum SF of 200 Hz lead to
accurate and acceptable results (ABS < 11.8 ms compared to RSF). When measuring with SF
lower than 200 Hz, the effect due to the reduced SF was higher than the CV at RSF. Therefore,
when inertial sensors were used in studies with SF lower than 200 Hz, time of stride duration
should be considered carefully. Generally, for strDur subjects demonstrated an average CV of
only 2.6% (± 1.3%) within a narrow range (95% CI: 734.4 – 748.2 ms) measured at RSF. This
may be the result of the consistent running speed of 3.5 ± 0.1 ms−1.

Manuscript: The influence of inertial sensor sampling frequency
15
In contrast to strDur, higher SF should be used for measuring strLen. For RSF, the average
strLen of 251.65 ± 11.8 cm was significantly higher than all reduced SF. Reducing to 500 and
333 Hz led to REL of 1.2 and 2.9%, which were lower than the CV at RSF (4.9%). Therefore,
when measuring with 500 Hz (3.0 cm) and 333 Hz (7.2 cm) the differences compared to RSF
are in an acceptable range. Besides differences in acceleration magnitudes for azS and axS espe-
cially at lower SF (<333 Hz), acceleration patterns showed considerable alteration in signal
characteristics. Consequently, the calculated horizontal acceleration (ax) became more impre-
cise. As a result of the inaccurate ax, the numerical integration to the horizontal stride velocity
(vx) and strLen cannot be calculated correctly. Figure 4 shows one representative example of
how SF influences the integration of vx. Considerable differences can be detected between RSF
(black line) and 250 Hz (grey dotted line), which were the result of altered signal characteristics
of ax at lower SF before numerical integration. Furthermore, as mentioned for strDur, the re-
duced SF can influence the accuracy of TD detection. When one of the two TD is detected at
an incorrect point in time, then the calculated strLen may end up being too short or too long.
Considering the high effects of the accelerometer signals when calculating strLen and the in-
fluence of TD detection, SF at 333 Hz or greater should be used to achieve a measurement error
for strLen lower than 7.2 cm (Tables 1 and 2).
Figure 4. Horizontal velocity of the foot (vx) for one representative stride at 1000 Hz (black line), and at 250 Hz (grey dotted line) (interpolated to match time).
Reenalda et al. (2016) used an SF of 60 Hz to determine TD, toe off, step frequency, and step
length. The results can be influenced by the too low SF, especially for step detection and cal-
culated step length. In the studies by Brauner et al. (2009); Maiwald et al. (2015), 1000 and

Manuscript: The influence of inertial sensor sampling frequency
16
400 Hz were used to detect stride intervals in continuous signals. Both SF were higher than our
suggestion and therefore, their results can be assumed accurate.
4.3. Kinetic parameters
Generally, PHA and PTA can be easily determined by finding the maximum amplitude in the
acceleration signal. When observing azS (e.g. Figure 5), data indicate rapid and temporally short
spikes at the beginning of ground contact, and the maximum value occurs within the first 25 ms.
The typical signal characteristic of azS is the result of the high force rising rate after TD for the
rearfoot pattern, which was shown by Lieberman et al. (2010); Laughton et al. (2003), and the
stable fixation of the IMU at the heel cap of the right shoe.
Figure 5. The vertical acceleration signals (azS) of one representative trial at 1000 Hz reduced to 500 Hz showing signal differences when two different start times are used to calculate signal amplitudes: the grey line is identical to the signal shown at 1000 Hz and the black line shows lower (apparent) maximum amplitude.
When PHA was measured at RSF, every change in signal characteristic and the full amplitudes
of the accelerations were recorded (241.5 ± 40.5 ms−2). With lower SF, e.g. 500 Hz compared
to RSF, only every second frame was analyzed, which resulted in a significantly lower PHA of
224.9 ± 35.8 ms−2 (ABS: 16.6 ms−2; REL: 6.9%). Based on the lower SF - half of RSF - the
probability of measuring the same signal amplitudes as at RSF decreased down to 50%, which
is demonstrated in Figure 5 for one representative trial. However, due to the high SF (maximum
amplitude was measured 0.001 s earlier or later for 500 Hz), adjacent values only differed
slightly from the maximum amplitude, which resulted in low differences compared to RSF. In

Manuscript: The influence of inertial sensor sampling frequency
17
contrast, with further reduction of SF, even more signal information was lost, and the differ-
ences to RSF increased. When measuring with 100 Hz, the probability of measuring identical
signal amplitudes as at RSF is only 10%, which is shown in large ABS of 146.6 ms−2 and REL
of 60.7%. Furthermore, similar to evVel, the accuracy of TD detection could also influence
PHA. As mentioned above, the maximum value of azS occurred within the first 25 ms, and we
found TD delays of 4.5 ms (500 Hz), 4.9 ms (333 Hz), 7.9 ms (250 Hz), 11.2 ms (200 Hz), and
42.2 ms (100 Hz). When TD was detected too late, the maximum acceleration which occurred
during heel strike could not be measured and another positive peak acceleration was captured.
Therefore, to accurately determine PHA (REL < 6.9% < CV(RSF)), a minimum SF of 500 Hz
should be used. Reducing SF to 333, 250, 200, and 100 Hz led to considerably higher absolute
mean differences up to 60.7% (100 Hz) in comparison to RSF.
In contrast to PHA, PTA showed accurate results for a wide range of SF. Reducing SF to 500,
333, 250 and 200 Hz resulted in ABS up to 10.3 ms−2 (REL: 10.6%) on average compared to
RSF (Tables 1 and 2). REL of 200 Hz was lower than CV at RSF (14.5%) and therefore, meas-
urements with SF of 200 Hz and higher revealed an acceptable accuracy of PTA. Due to lower
acceleration amplitudes and the temporally longer spikes at the beginning of ground contact for
azT, the influence of TD detection was small and only SF ≤ 100 Hz led to considerable differ-
ences (ABS: 36.8 ms−2; REL: 37.8%) in contrast to RSF. In addition, the affixed IMU at the
heel cup of the right shoe was stable in comparison to the accelerometer at the tibia. Despite
double-sided adhesive tape and an elastic strap to affix the accelerometer to the tibia, the lower
amplitude and delayed accelerations were effects of wobbling relative to the bone. Furthermore,
due to the cushioning effect of the shoe and anatomical structures of the ankle and foot, lower
forces acted on the sensor. Based on the result of the kinetic data, SF < 500 Hz for PHA, and <
200 Hz for PTA resulted in inaccurate measurements. For kinetic measurements, e.g. to exam-
ine impact behavior during running, the maximum tibial acceleration at impact is measured in
a wide range from 100 Hz (García-Pérez et al. 2014) up to 2000 Hz (Clark et al. 2010; Chambon
et al. 2014). However, most studies examined PTA at an SF of 1000 Hz (Milani et al. 1997;
Mercer et al. 2002; Heidenfelder et al. 2010; Meardon et al. 2011; Oriwol et al. 2011; Giandolini
et al. 2013; Sinclair et al. 2013; Mercer and Chona 2015), slightly below at 960 Hz (Laughton
et al. 2003), or slightly above at 1200 Hz (Gruber et al. 2014). In the study by García-Pérez et
al. (2014), an SF of 100 Hz was used to compare the effects of treadmill and overground running

Manuscript: The influence of inertial sensor sampling frequency
18
on peak tibial and head acceleration, and shock attenuation under pre- and post-fatigue condi-
tions. Compared to our results, the SF which was used in this study was too low to generate
accurate results, especially for peak tibial acceleration.
4.4. Limitations
One limitation of the present study may be the RSF of 1000 Hz. Especially for PHA, it is pos-
sible that an SF e.g. of 2000 Hz would result in higher differences to SF of 500 Hz and lower.
Another limitation is the investigated speed. With increasing speeds, greater impacts and higher
rising rates act on the inertial sensors which can also influence the accuracy of the parameters.
On the other hand, when slower running speeds or walking is estimated in clinical trials, e.g.
using inertial sensor to differentiate the gait patterns of hemiparetic stroke patients compared
with able-bodied counterparts (Scheffer and Cloete 2012), lower SF may generate accurate re-
sults. With lower SF, prolonged data acquisition (e.g. of one day) could be enabled by saving
battery life and data storage. Studies investigating walking using inertial sensors with SF of
200 Hz (e.g. Sabatini et al. 2005; Mariani et al. 2010), 125 Hz (e.g. Catalfamo et al. 2011),
100 Hz (e.g. Alvarez et al. 2007; Acharya et al. 2013), and 25 Hz (e.g. Jasiewicz et al. 2006).
The accuracy of these SF should be confirmed in further studies.
5. Conclusion
Our results show that SF can influence the accuracy of calculated parameters in varying de-
grees. It is possible to measure spatio-temporal, kinematic and kinetic parameters accurately
using SF lower than 1000 Hz. Even at low SF of 200 Hz, evVel (ABS ≤ 25.6°s−1) and HSA
(ABS ≤ 0.4°) could be calculated precisely. To accurately determine strLen (ABS ≤ 7.2 cm)
and strDur (ABS ≤ 11.8 ms), minimum SF of 333 Hz and 200 Hz, respectively, are recom-
mended to avoid the effects caused by SF which are too low. When investigating PHA or pa-
rameters which are directly derived from accelerometer signal azS (e.g. TD), SF should be as
high as possible or at a minimum of 500 Hz. Due to the lower acceleration amplitudes and the
temporally longer spikes in azT, SF of 200 Hz are recommended for accurate measurements
(ABS ≤ 10.3 ms−2) of PTA. In general, comparisons between force plate TD and IMU-based
TD detection methods revealed decreasing accuracy with reducing SF up to 42.2 ± 24.4 ms
(100 Hz), which could have a great impact on accurately determining the spatio-temporal, kin-
ematic, and kinetic parameters. During rearfoot running, high rising rates and high amplitudes
in acceleration signals (shoe sensor) and angular velocity signals, respectively, occurred within

Manuscript: The influence of inertial sensor sampling frequency
19
the first 50 ms of ground contact. Therefore, SF should be as high as possible to minimize
measurement errors due to the delayed TD detection. Finally, the information from this study
could help to correctly interpret measurement data from existing investigations and to plan fu-
ture studies. Furthermore, additional studies should investigate the influence of running speed
on the accuracy of the calculated parameters, as well as the forefoot strike pattern and the in-
fluence of mechanical shoe properties.
Disclosure statement
No potential conflict of interest was reported by the authors.
Funding
This work was supported by Puma® Inc., Germany.
Acknowledgement
The authors would like to thank Lisa Peterson for proofreading the paper as a native speaker.
References
Acharya UR, Sree SV, Lim CM, Ang PCA, Sekine M, Tamura T. 2013. Comparison of walking parameters obtained from the young, elderly and adults with support. Comput Methods Bio-mech Biomed Engin. 16:1202–1212.
Alvarez JC, González RC, Alvarez D, López AM, Rodríguez-Uría J. 2007. Multisensor ap-proach to walking distance estimation with foot inertial sensing. Annu Int Conf IEEE Eng Med Biol - Proc.:5719–5722.
Brauner T, Oriwol D, Sterzing T, Milani TL. 2009. A single gyrometer inside an instrumented running shoe allows mobile determination of gait cycle and pronation velocity during out-door running. Footwear Sci. 1:25–26.
Catalfamo, P, Ghoussayni S, Ewins D. 2011. Gait Event Detection on Level Ground and Incline Walking Using a Rate Gyroscope. Sensors. 10:5683–5702.
Chambon N, Delattre N, Gueguen N, Berton E, Rao G. 2014. Is midsole thickness a key pa-rameter for the running pattern? Gait Posture. 40:58–63.
Clark RA, Bartold S, Bryant AL. 2010. Tibial acceleration variability during consecutive gait cycles is influenced by the menstrual cycle. Clin Biomech. 25:557–562.
García-Pérez JA, Pérez-Soriano P, Llana Belloch S, Lucas-Cuevas ÁG, Sánchez-Zuriaga D. 2014. Effects of treadmill running and fatigue on impact acceleration in distance running. Sport Biomech. 13:1–8.
Giandolini M, Horvais N, Farges Y, Samozino P, Morin JB. 2013. Impact reduction through long-term intervention in recreational runners: Midfoot strike pattern versus low-drop/low-heel height footwear. Eur J Appl Physiol. 113:2077–2090.

Manuscript: The influence of inertial sensor sampling frequency
20
Gruber AH, Boyer K a., Derrick TR, Hamill J. 2014. Impact shock frequency components and attenuation in rearfoot and forefoot running. J Sport Heal Sci. 3:113–121.
Heidenfelder J, Sterzing T, Bullmann M, Milani TL. 2008. Heel strike angle and foot angular velocity in the sagittal plane during running in different shoe conditions. J Foot Ankle Res. 1:O16.
Heidenfelder J, Sterzing T, Milani TL. 2010. Systematically modified crash-pad reduces impact shock in running shoes. Footwear Sci. 2:85–91.
Hein T, Grau S. 2014. Can minimal running shoes imitate barefoot heel-toe running patterns? Acomparison of lower leg kinematics. J Sport Heal Sci. 3:67–73.
Hennig EM, Milani TL, Lafortune M a. 1993. Use of ground reaction force parameters in pre-dicting peak tibial accelerations in running. J Appl Biomech. 9:214–306.
Jasiewicz JM, Allum JHJ, Middleton JW, Barriskill A, Condie P, Purcell B, Li RCT. 2006. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture. 24:502–509.
Koblbauer IF, van Schooten KS, Verhagen E a., van Dieën JH. 2014. Kinematic changes during running-induced fatigue and relations with core endurance in novice runners. J Sci Med Sport. 17:419–424.
Laughton C a., McClay Davis I, Hamill J. 2003. Effect of strike pattern and orthotic intervention on tibial shock during running. J Appl Biomech. 19:153–168.
Lieberman DE, Venkadesan M, Werbel W a, Daoud AI, D’Andrea S, Davis IS, Mang’eni RO, Pitsiladis Y. 2010. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature. 463:531–535.
Maiwald C, Dannemann A, Gaudel J, Oriwol D. 2015. A simple method to detect stride inter-vals in continuous acceleration and gyroscope data recorded during treadmill running. Foot-wear Sci. 7:143–144.
Mariani B, Hoskovec C, Rochat S, B??la C, Penders J, Aminian K. 2010. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J Biomech. 43:2999–3006.
Mayagoitia RE, Nene A V., Veltink PH. 2002. Accelerometer and rate gyroscope measurement of kinematics: An inexpensive alternative to optical motion analysis systems. J Biomech. 35:537–542.
Meardon S a., Hamill J, Derrick TR. 2011. Running injury and stride time variability over a prolonged run. Gait Posture. 33:36–40.
Mercer J a., Chona C. 2015. Stride length-velocity relationship during running with body weight support. J Sport Heal Sci. 4:127–131.
Mercer J a., Vance J, Hreljac A, Hamill J. 2002. Relationship between shock attenuation and stride length during running at different velocities. Eur J Appl Physiol. 87:403–408.
Milani TL, Hennig EM, Lafortune M a. 1997. Perceptual and biomechanical variables for run-ning in identical shoe constructions with varying midsole hardness. Clin Biomech. 12:294–300.
Mitschke C, Öhmichen M, Milani TL. 2017. A Single Gyroscope Can Be Used to Accurately Determine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes. Appl Sci. 7:659.

Manuscript: The influence of inertial sensor sampling frequency
21
Mizrahi J, Verbitsky O, Isakov E, Daily D. 2000. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum Mov Sci. 19:139–151.
Montgomery G, Abt G, Dobson C, Smith T, Ditroilo M. 2016. Tibial impacts and muscle acti-vation during walking, jogging and running when performed overground, and on motorised and non-motorised treadmills. Gait Posture. 49:120–126.
Oriwol D, Sterzing T, Milani TL. 2011. The position of medial dual density midsole elements in running shoes does not influence biomechanical variables. Footwear Sci. 3:107–116.
Reenalda J, Maartens E, Homan L, Buurke JH (Jaap). 2016. Continuous three dimensional analysis of running mechanics during a marathon by means of inertial magnetic measure-ment units to objectify changes in running mechanics. J Biomech. 49:3362–3367.
Sabatini AM, Martelloni C, Scapellato S, Cavallo F. 2005. Assessment of walking features from foot inertial sensing. IEEE Trans Biomed Eng. 52:486–494.
Scheffer C, Cloete T. 2012. Inertial motion capture in conjunction with an artificial neural net-work can differentiate the gait patterns of hemiparetic stroke patients compared with able-bodied counterparts. Comput Methods Biomech Biomed Engin. 15:285–294.
Shih Y, Ho C-S, Shiang T-Y. 2014. Measuring kinematic changes of the foot using a gyro sensor during intense running. J Sports Sci. 32:550–566.
Sinclair J, Hobbs SJ, Protheroe L, Edmundson CJ, Greenhalgh A. 2013. Determination of gait events using an externally mounted shank accelerometer. J Appl Biomech. 29:118–122.
Struzik A, Konieczny G, Grzesik K, Stawarz M, Winiarski S, Rokita A. 2015. Relationship between lower limbs kinematic variables and effectiveness of sprint during maximum ve-locity phase. Acta Bioeng Biomech. 17:131–138

sensors
Article
The Effect of the Accelerometer Operating Range onBiomechanical Parameters: Stride Length, Velocity,and Peak Tibial Acceleration during Running
Christian Mitschke * ID , Pierre Kiesewetter and Thomas L. Milani
Department of Human Locomotion, Chemnitz University of Technology, 09126 Chemnitz, Germany;[email protected] (P.K.); [email protected] (T.L.M.)* Correspondence: [email protected]; Tel.: +49-371-531-32196
Received: 11 November 2017; Accepted: 4 January 2018; Published: 5 January 2018
Abstract: Previous studies have used accelerometers with various operating ranges (ORs) whenmeasuring biomechanical parameters. However, it is still unclear whether ORs influence the accuracyof running parameters, and whether the different stiffnesses of footwear midsoles influence thisaccuracy. The purpose of the present study was to systematically investigate the influence of OR on theaccuracy of stride length, running velocity, and on peak tibial acceleration. Twenty-one recreationalheel strike runners ran on a 15-m indoor track at self-selected running speeds in three footwearconditions (low to high midsole stiffness). Runners were equipped with an inertial measurementunit (IMU) affixed to the heel cup of the right shoe and with a uniaxial accelerometer at the righttibia. Accelerometers (at the tibia and included in the IMU) with a high OR of ±70 g were used asthe reference and the data were cut at ±32, ±16, and at ±8 g in post-processing, before calculatingparameters. The results show that the OR influenced the outcomes of all investigated parameters,which were not influenced by tested footwear conditions. The lower ORs were associated with anunderestimation error for all biomechanical parameters, which increased noticeably with a decreasingOR. It can be concluded that accelerometers with a minimum OR of ±32 g should be used to avoidinaccurate measurements.
Keywords: operating range; accelerometer; stride length; peak tibial acceleration; running velocity;wearable sensors
1. Introduction
With the further advancement of sensor technologies and data analyzing techniques,micro-electro-mechanical sensors (MEMS) have become useful tools for biomechanical research andclinical practice [1]. It has been reported that these wearable motion sensors are an inexpensivealternative to optoelectronic systems and force plates, that they are simple to handle, cost-effective,and are suitable for field measurements [2–6]. When using these sensors, spatio-temporal andkinetic parameters during walking and running can be analyzed in clinical as well as in sportiveapplications. For kinetic measurements, for example, when investigating the impact loads on lowerlimbs during running under various conditions (e.g., footwear conditions or the influence of fatigue),the peak tibial acceleration (PTA) was examined by some authors using MEMS [7–20]. Thereby,unidirectional accelerations along the longitudinal axis of the tibia, as well as medio-lateral andanterior-posterior accelerations of the tibia were examined. Furthermore, the determination of stridefrequency, of walking or running velocity (runVel), and of stride length (strLen) have also beenthe focus of research that utilizes MEMS [21–25]. To investigate these biomechanical parameters,individually configured sensors or commercially available inertial measurement units (IMUs: e.g.,Shimmer, Achillex, or XSens) were used, which combine accelerometers and gyroscopes. In this
Sensors 2018, 18, 130; doi:10.3390/s18010130 www.mdpi.com/journal/sensors

Sensors 2018, 18, 130 2 of 12
context, Provot et al. [26] compared a calibrated industrial accelerometer (considered as the goldstandard) to an IMU accelerometer in two tests: (a) on a shaker, and (b) on the distal anteromedialaspect of the subject’s tibia during running at 3.33 m/s. They concluded that IMUs can be used forvalid measurements of tibial acceleration during running.
Besides the different sensor types, sensor locations, and the various sampling rates, sensors withconsiderably different accelerometer operating ranges (ORs) have also been used. When investigatingwalking or running, some studies used ORs between ±2 and ±70 g, with g being the acceleration ofgravity [27–32]. However, high accelerations act on the sensor in vertical and anterior–posterior directionsduring the swing phase and in the first 50 ms after foot strike [11,32]. These accelerations can distinctlyexceed the gravitational acceleration of 1 g. For instance, vertical accelerations of 24.62 ± 4.1 g weremeasured with a heel-mounted IMU accelerometer during heel strike, when running at 3.5 ± 0.1 m/s in aneutral running shoe (PUMA FAAS 500) [32]. If the accelerations exceeded the accelerometer OR, a loweraccuracy and an underestimated variability of biomechanical parameters derived from accelerometersignals could result. In this context, Ziebart et al. [33] investigated the influence of accelerometer OR andof a sampling rate on peak acceleration during seven jumping tasks. They used a tri-axial accelerometer(Model 7267A, Endevco Corporation, San Juan Capistrano, CA, USA) with a high OR of ±260 g as thereference and compared the peak accelerations with two commercially available tri-axial accelerometerswith an OR of ±6 g (device1: ActiGraph GT3X+, ActiGraph LLC, Pensacola, FL, USA and device2:X6-2mini, Gulf Coast Data Concepts, Waveland, MS, USA). They found that the peak impact accelerationwas underestimated by up to 35%. Furthermore, the underestimation error was greater for tasks with agreater impact acceleration.
It is currently still unclear whether, and to what extent, high accelerations can influence theaccuracy of running parameters when exceeding the accelerometers’ OR. However, this informationis necessary to determine whether differences in the investigated biomechanical parameters strLen,runVel, and in the PTA between conditions are caused by measurement errors due to an accelerometerOR that is too low, or by the investigated conditions themselves.
In addition, the sensor signal characteristics of the IMU accelerometer, which is affixed to the heelcup of a running shoe, can be influenced by the midsole stiffness of footwear [5]. The authors foundthat a decreasing midsole stiffness resulted in an increasing delay in specific signal characteristics,when determining the time of foot touchdown. At this time, it is still unclear whether the accuracies ofstrLen and runVel are also influenced by altering acceleration signal characteristics due to a change inmidsole stiffness.
Since acceleration variables are related to running injuries, information about whether the ORsinfluences running parameters is highly relevant and could assist coaches, researchers, and cliniciansin selecting the most appropriate accelerometer specification for their investigations.
Therefore, the aim of the present study was to investigate the influence of the accelerometer ORon running parameters when reducing the OR stepwise from ±70 g to ±8 g. We hypothesized that therapid and short spikes at the beginning of ground contact and the high accelerations during the swingphase influenced the accuracy of strLen (H1), runVel (H2), and PTA (H3) significantly, depending onthe footwear conditions. The running parameters were determined based on previously publishedmethods, and accelerometers with a high OR of ±70 g were used as the reference.
2. Materials and Methods
2.1. Participants
Twenty-one recreational male heel strike runners (age: 24.4 ± 4.2 years; height: 178.2 ± 4.0 cm;weight: 74.1 ± 6.5 kg; running experience: 8.9 ± 3.3 years; training hours: 3.5 ± 1.7 h per week), freeof injury for the last six months, participated in this study. High force rising rates can be observedafter foot touchdown during rearfoot running [34], which results in a higher PTA for rearfoot runnersthan for forefoot runners [11]. Therefore, to determine the greatest effect of the reduced OR, only

Sensors 2018, 18, 130 3 of 12
heel strike runners were investigated. This study was approved by the university’s Ethics Committee(V-103-17-HS-CM-Bodenkontakt-25082015), and participants gave written informed consent to theirparticipation in the study.
2.2. Test Procedure
During the test, participants wore three different commercially available running shoes, whichwere provided by our laboratory in men’s UK size 8: Adidas AdiStar (ADIDAS); PUMA Speed 600(PUMA); Asics Gel Nimbus 12 (ASICS). After an individual warm-up and familiarization with themeasurement setup, five repeated trials were recorded on a 15-m indoor track in the three footwearconditions. The footwear conditions were investigated in a randomized order. The running speed wasindividual and self-selected (on average 3.60 ± 0.4 m/s), however it was constant (range: ±0.1 m/s)for each subject, for all of the 15 trials (three footwear conditions, each having five trials). Runningspeed was monitored using two light barriers placed 4 meters apart.
2.3. Experimental Setup
An individually configured IMU, combining a biaxial accelerometer (ADXL278, Analog Devices,OR ±70 g) and a biaxial gyroscope (IDG-650, InvenSense, OR ±2000 deg/s), was affixed to the heel cupof the right shoe (Figure 1). Wobble-free sensor fixation was achieved using double-sided adhesive tapeand an inelastic strap. The sensitive axes of the IMU accelerometer measured the horizontal—forwarddirection—(acc_x) and the vertical (acc_z) acceleration of the shoe. The two sensitive axes of thegyroscope measured the angular velocities in the sagittal (ω1), and the frontal planes. Furthermore,to measure accelerations along the longitudinal axis of the tibia (acc_T), double-sided adhesive tapewas used to attach a uniaxial lightweight accelerometer (ADXL78, Analog Devices, OR ±70 g) tothe shaved skin at the medial aspect mid-distance between the malleolus and the plateau of theright tibia [12,35]. An elastic strap was used to stabilize the accelerometer and to prevent excessivemovements due to its own weight. All sensors operated synchronously, and the data were transmittedby cable to a data logger, which recorded these data. The data logger was secured in a waist belt.To avoid any effects from a sampling rate that was too low, the sensor sampling rate was set to 1000 Hz,which exceeds the minimum requirements to measure these parameters accurately [32].
Sensors 3 of
03- -HS-CM-Bodenkontakt-2 5), and p rticipants gave written informed consent to their
participation in the study.
2.2. Test Procedure
During the test, participants wore three different commercially available running shoes, which
were provided by our l boratory in men’s UK size Adidas AdiSt r (ADIDAS) PUMA Speed 6
(PUMA); Asics Gel Nimbus (ASICS). After an individu l w rm-up and f miliarization with the
measurement setup five repeated trials were recorded on -m indoor track in the three footwear
conditions. The footwear conditions were investigated in randomized order. The running speed
was individual and self-selected (on average m/s), however it w s const nt (range: m/s)
for each subject for all of the 15 tri ls (three footwear conditions, each having five trials). Running
speed w s monitored using two light barriers placed 4 meters apart.
3. Experimental Setu
An individu lly configured IMU, combining a biaxi l accelerometer (ADXL Analog Devices
OR g) and a biaxial gyroscope (IDG- , InvenSense, OR 000 deg/s) was affixed to the heel cup
of the right shoe (Figure 1). Wobble-free sensor fix tion w s achieved using double-sided adhesive
tape and an inelastic str p The sensitive axes of the IMU accelerometer measured the horizontal -
forward direction - ( cc_x) and the vertical (acc ) acceler tion of the shoe. The two sensitive axes of
the gyroscope measured the angular velocities in the sagittal (ω1) and the front l planes
Furthermore to measure acceler tions along the longitudinal axis of the tibia (acc_T), double-sided
dhesive tape was used to attach a uni xial lightweight accelerometer (ADXL 8, Analog Devices, OR
g) to the shaved skin at the medial aspect mid-distance between the malleolus and the plateau of
the right tibi [ ] An elastic strap was used to stabilize the accelerometer and to prevent excessive
movements due to its own weight. All sensors operated synchronously, and the dat were
transmitted by cable to a data logger, which recorded these dat The dat logger w s secured in
waist belt. To avoid any effects from sampling rate th t w s too low the sensor s mpling r te w s
set to 1000 H , which exceeds the minimum requirements to measure these p rameters accurately
[32]
Figure 1. A schematic representation of the sensor setup. Sensitive axes of the accelerometer in the
heel cup inertial measurement unit are represented by arrows: horizontal forward direction (acc_x)
and vertical acceleration (acc_z). The angular velocity of the shoe was measured in the sagittal (ω1)
and frontal plane using a gyroscope. The accelerometer, located at the tibia, measured accelerations
along the longitudinal axis of the tibia (acc_T).
4. Data Analyses
Figure 1. A schematic representation of the sensor setup. Sensitive axes of the accelerometer in theheel cup inertial measurement unit are represented by arrows: horizontal forward direction (acc_x)and vertical acceleration (acc_z). The angular velocity of the shoe was measured in the sagittal (ω1)and frontal plane using a gyroscope. The accelerometer, located at the tibia, measured accelerationsalong the longitudinal axis of the tibia (acc_T).

Sensors 2018, 18, 130 4 of 12
2.4. Data Analyses
Data from the sensors were analyzed in post-processing using MATLAB R2016b (MathWorksTM,Natick, MA, USA). Prior to all of the processing steps, the data were filtered using a zero-lagButterworth low-pass filter (accelerometers: 4th order at 200 Hz; gyroscopes: 4th order at 50 Hz)to remove noise. In the next step, accelerations measured with an OR of ±70 g were cut at ±32, ±16,and at ±8 g when exceeding their respective thresholds. After the data cutting, running parameterswere calculated for all four ORs (±70, ±32, ±16, and ±8 g) separately, as described below.
To separate the strides of the right foot in continuous data, the accelerometer signal of the IMU atthe heel cup (vertical axis) was 80 Hz zero-lag high pass filtered and the first peak in the filtered signalwas defined as the foot touchdown [5,36].
For each stride, the orientation angle of the shoe in the sagittal plane (θ) was calculated usingintegrated data from ω1. A nulling algorithm was then applied to the orientation angle of the shoe toeliminate errors resulting from integration offset and from drift error [32]. The time of two consecutiveflat shoe phases (flat relative to the ground) was detected by finding the lowest absolute angularvelocity in ω1 for each stride. The shoe orientation angles at these reference times were used in alinear drift model to eliminate the drift error and the integration offset. Based on Sabatini et al. [21]and Mitschke et al. [32], acc_x, acc_z, and the orientation angle θ were used to calculate the resultinghorizontal acceleration (acc_hor) of the right shoe (see Equation (1); Figure 1).
acc_hor = acc_x·cos(θ) − acc_z·sin(θ) (1)
Subsequently, the horizontal velocity of the shoe (v_x) was calculated using a numericalintegration of acc_hor. To eliminate the drift error and the integration offset of the shoe velocity,the velocity of the shoe during the flat shoe phases was assumed to be temporarily equal to zero [37].Therefore, velocity was reset to zero as the stride start condition and for error back-propagation with alinear drift model [32,38]. The mean running velocity (runVel) was calculated by averaging v_x overtime between two consecutive flat shoe phases. Furthermore, the stride length (strLen) between twoconsecutive flat shoe phases was calculated using integrated data from v_x.
For kinetics, the positive peak tibial acceleration (PTA) was defined as the maximum accelerationvalue of the accelerometer at the tibia (Figure 1: acc_T) [12,35].
2.5. Footwear Conditions
To quantify the shoe midsole stiffness, shoes were tested in a servo-hydraulic testing device(HC10; Zwick GmbH & Co. KG; Ulm, Germany) as described in Schwanitz and Odenwald [39].Each footwear condition underwent a total of ten load tests of 103 load cycles each. Load cycleswere applied to the heel of each running shoe by a spherically shaped stamp (50 mm). The load-timeprofile was derived from biomechanical measurements of ground reaction force while running at avelocity of 3.5 ± 0.1 m/s [40]. For each footwear condition, midsole deformation at the 101st loadcycle was analyzed for each of the ten test sessions. Internal studies have shown that the cycles afterthe 100th cycle represent reliable results when testing shoes mechanically [41]. The sampling ratewas 1000 frames per second, and the data were analyzed using MATLAB R2016b (MathWorksTM,Natick, MA, USA) in post-processing. The midsole stiffness in the rearfoot area between 1000 and1500 N was calculated for each footwear condition using Equation (2).
stiffness =
1500 N − 1000 NdeformationF=1500 N − deformationF=1000 N
(2)
2.6. Statistical Analyses
To compare footwear stiffness, the mean and standard deviations (mean ± SD) were calculated.Given that parameters were normally distributed, a one-way analysis of variance (ANOVA) followed

Sensors 2018, 18, 130 5 of 12
by Bonferroni post hoc tests were used to determine whether differences existed between mechanicalfootwear characteristics. The level of significance was set to an alpha of 0.05. Furthermore, the meansof the five trials for each subject and for each footwear condition were used to calculate the groupmeans and the standard deviations (mean ± SD), and the 95% confidence intervals (95% CI) for strLen,runVel, PTA, and all ORs. Due to normal distribution, paired sample t tests were used to compare thereference (±70 g) with the three lower ORs (±32, ±16, and ±8 g) for strLen and runVel for each ofthe three footwear conditions. In addition, Wilcoxon tests were used to compare the reference withthe lower OR for PTA for each footwear condition. A Bonferroni correction was used to adjust thep-values (p = 0.05/3/3 = 0.006) in relation to the number of comparisons between the investigatedOR (n = 3) and the investigated biomechanical parameters (n = 3). The effect size (Cohen’s d) wascalculated to quantify the magnitude of differences between the shoe characteristics and the magnitudeof differences between the biomechanical parameters examined with different ORs. The coefficientswere interpreted as a trivial effect (d < 0.2), a small effect (d < 0.5), a medium effect (d < 0.8), and alarge effect (d ≥ 0.8) [42]. Additionally, mean differences (MDs), relative mean differences in percent(MD_rel), and root mean square errors (RMSEs) were calculated between the reference OR and each ofthe lower ORs.
3. Results
3.1. Footwear Characteristics
All pair-wise comparisons reached statistical significance (p < 0.001). Cohen’s d showed largeeffects (d ≥ 0.8) in all footwear conditions. The lowest rearfoot stiffness was found for ASICS(156.9 ± 0.1 N/mm) and the highest stiffness was found for ADIDAS (210.3 ± 0.4 N/mm) (Table 1).
Table 1. Group mean ± standard deviation (SD) for rearfoot stiffness of the three footwear conditions;statistical significance (p < 0.05) and large effects (d ≥ 0.8) were found in all footwear conditions.
Footwear ConditionStiffness (N/mm)
Mean SD
ADIDAS 210.3 0.4PUMA 177.8 0.4ASICS 156.9 0.1
3.2. Biomechanical Parameters: Stride Length, Running Velocity, and Peak Tibial Acceleration
For each footwear condition, results of the strLen and the runVel calculations, as well as the PTAvalues are represented in Figures 2–4 for the reference OR and for the lower ORs.
When comparing the OR of ±70 g and ±32 g, no significant differences were found for runVelfor all three footwear conditions (Table 2). Distinctly greater differences to the reference were foundusing the ORs of ±16 g and ±8 g. Setting the OR to ±16 g resulted in significant differences, up to3.48% (ADIDAS: MD: 0.13 m/s; p < 0.001), and large effects (d ≥ 0.86) for all three footwear conditions.When using an OR of ±8 g, a significantly lower runVel of up to 9.68% (ADIDAS: MD: 0.36 m/s;p < 0.001) was found.
When comparing strLen, calculated using ORs of ±70 g and ±32 g, no significant effects were foundfor ADIDAS, PUMA, or ASICS (Table 2). When using sensors with a lower OR, strLen calculations resultedin significant differences for all footwear conditions (MD > 2.62 cm; MD_rel > 0.99%; p < 0.001), showinglarge effects for all comparisons (d > 0.84). The highest strLen difference between the reduced OR and thereference was found for Adidas. An OR of ±8 g resulted in a 9.68% lower stride length in comparison tothe reference OR (MD: 26.15 cm; p < 0.001).
No significant differences were found for PTA when comparing an OR of ±70 g and ±32 g,and of ±70 g and ±16 g for all footwear conditions (Table 2). The comparison of the OR ±70 g

Sensors 2018, 18, 130 6 of 12
and ±8 g revealed significant differences for all footwear conditions of at least 9.76% on average(ASICS: MD: 0.61 g), which resulted in a medium effect (d = 0.60). The greatest difference betweenthe OR of ±70 g and ±8 g was found for ADIDAS (MD: 2.65 g; MD_rel: 28.17%; p = 0.002; d = 0.65).In general, we found that with higher midsole stiffnesses, the differences increased between thereference OR and ±16 g, as well as between the reference OR and ±8 g (Figure 4 and Table 2).Sensors 6 of
Figure 2. A boxplot of the three footwear conditions for running velocity (runVel), calculated with
different accelerometer operating ranges of ± nd ±8 g. Significant differences between
stride lengths are m rked with ** ( 001).
Figure 3. A boxplot of the three footwear conditions for stride length (strLen), calculated with
different accelerometer operating ranges of ± nd ±8 g. Significant differences between
running velocities are marked with ** ( 01).
Figure 2. A boxplot of the three footwear conditions for running velocity (runVel), calculated withdifferent accelerometer operating ranges of ±70, ±32, ±16, and ±8 g. Significant differences betweenstride lengths are marked with ** (p < 0.001).
Sensors 6 of
Figure 2. A boxplot of the three footwear conditions for running velocity (runVel), calculated with
different accelerometer operating ranges of ± nd ±8 g. Significant differences between
stride lengths are m rked with ** ( 001).
Figure 3. A boxplot of the three footwear conditions for stride length (strLen), calculated with
different accelerometer operating ranges of ± nd ±8 g. Significant differences between
running velocities are marked with ** ( 01).
Figure 3. A boxplot of the three footwear conditions for stride length (strLen), calculated with differentaccelerometer operating ranges of ±70, ±32, ±16, and ±8 g. Significant differences between runningvelocities are marked with ** (p < 0.001).

Sensors 2018, 18, 130 7 of 12Sensors 7 of
Figure 4. A boxplot of the three footwear conditions for the positive peak tibial acceleration (PTA)
determined using different accelerometer operating ranges of ±16, and ±8 g. Significant
differences between peak tibial accelerations are marked with * ( 006) and ** ( 1).
Table 2 Mean differences (MDs), relative mean differences (MD_rel), -values of pair-wise
comparisons, effect size (Cohen’s ), and root mean square errors (RMSEs) between stride lengths
(strLen), running velocities (runVel), and PTA, each determined using different accelerometer
operating ranges of 16, and ±8 g.
Footwear
ConditionADIDAS PUMA ASICS
Operating
ranges ±32 g ±16 g ±8 g ±32 g ±16 g ±8 g
±32 g ±16 g ±8 g
runVel
MD (cm)
MD_rel (%)
Cohen’s - - -
RMSE (cm)
strLen
MD (m/s)
MD_rel (%)
Cohen’s - - -
RMSE (m/s)
PTA
MD (g)
MD_rel (%)
Cohen’s - - - - - -
RMSE (g)
4. Discussion
The aim of the present study w s to investigate the influence of the accelerometer OR on stride
length, running velocity, and on peak tibi l cceleration when reducing the OR stepwise from g
to nd ± g. Biomechanic l p r meters were determined based on previously published
methods, nd accelerometers (attached at the heel cup nd at the tibia) with a high OR of 0 g were
used as the reference
Figure 4. A boxplot of the three footwear conditions for the positive peak tibial acceleration (PTA),determined using different accelerometer operating ranges of ±70, ±32, ±16, and ±8 g. Significantdifferences between peak tibial accelerations are marked with * (p < 0.006) and ** (p < 0.001).
Table 2. Mean differences (MDs), relative mean differences (MD_rel), p-values of pair-wise comparisons,effect size (Cohen’s d), and root mean square errors (RMSEs) between stride lengths (strLen), runningvelocities (runVel), and PTA, each determined using different accelerometer operating ranges of ±70,±32, ±16, and ±8 g.
FootwearCondition
ADIDAS PUMA ASICS
Operatingranges
±70–±32 g ±70–±16 g ±70–±8 g ±70–±32 g ±70–±16 g ±70–±8 g ±70–±32 g ±70–±16 g ±70–±8 g
runVel
MD (cm) 0.01 0.13 0.36 0.00 0.04 0.18 0.00 0.09 0.29MD_rel (%) 0.14 3.48 9.68 0.00 1.00 4.88 0.05 2.64 8.18
p 0.029 <0.001 <0.001 1 <0.001 <0.001 0.110 <0.001 <0.001Cohen’s d - 0.86 0.95 - 0.84 0.92 - 0.85 0.94
RMSE (cm) 0.01 0.11 0.27 0.00 0.03 0.14 0.00 0.08 0.22
strLen
MD (m/s) 0.38 9.43 26.15 0.00 2.62 12.87 0.12 6.92 21.22MD_rel (%) 0.14 3.49 9.68 0.00 0.99 4.85 0.05 2.67 8.17
p 0.024 <0.001 <0.001 1 <0.001 <0.001 0.096 <0.001 <0.001Cohen’s d - 0.86 0.95 - 0.84 0.92 - 0.85 0.94
RMSE(m/s)
0.57 7.75 19.44 0.00 2.19 9.88 0.23 5.75 15.98
PTA
MD (g) 0.00 0.59 2.65 0.00 0.31 2.08 0.00 0.00 0.61MD_rel (%) 0.00 6.25 28.17 0.00 3.48 23.02 0.00 0.04 9.76
p 1 0.043 0.002 1 0.109 <0.001 1 0.317 0.005Cohen’s d - - 0.65 - - 0.77 - - 0.60RMSE (g) 0.00 1.23 3.39 0.00 0.83 2.72 0.00 0.01 1.13
4. Discussion
The aim of the present study was to investigate the influence of the accelerometer OR on stridelength, running velocity, and on peak tibial acceleration when reducing the OR stepwise from ±70 gto ±32, ±16, and ±8 g. Biomechanical parameters were determined based on previously publishedmethods, and accelerometers (attached at the heel cup and at the tibia) with a high OR of ±70 g wereused as the reference.

Sensors 2018, 18, 130 8 of 12
The results of this study revealed that OR influences the outcomes of stride length, runningvelocity, and peak tibial acceleration, which were not dependent on tested footwear conditions. LowerORs were associated with an underestimation error for all biomechanical parameters, which increasedwith decreasing OR. These results confirm hypotheses H1 (strLen), H2 (runVel), and H3 (PTA).Our results show that a sensor OR needs to be carefully considered when interpreting biomechanicalparameters of existing investigations and when planning future studies.
Using accelerometers with an OR of ±32 g resulted in small errors, on average of up to 0.14%for strLen and 0.14% for runVel (ADIDAS). However, insignificant differences and low RMSE valueswere found for all footwear conditions, and therefore, the observed differences can be consideredirrelevant. The accelerations during running that were measured in our study did not critically exceedthe ±32 g threshold. However, our results show that when the sensor OR was limited to ±16 gor ±8 g, distinctly higher differences, when compared to the reference, were found for runVel andstrLen. Due to the lower vertical and horizontal forward accelerations (set to ±16 g and ±8 g whenexceeding the respective thresholds), the resulting horizontal forward velocity of the shoe (v_x) wascalculated inaccurately when using the numerical integration of acc_hor. Figure 5 shows v_x forone representative stride. When observing the velocity curve progression, it seems there was a drifterror after the numerical integration (frame 120 to 520), which would explain the significantly lowerrunVel for the OR of ±16 g and ±8 g when compared to the reference. However, to eliminate anydrift error and integration offset, the shoe velocity during the flat shoe phases was assumed to betemporarily equal to zero [37]. Therefore, the velocity was reset to zero as the stride start conditionand for error back-propagation with a linear drift model [32,38]. As shown in Figure 5, the horizontalforward velocity of the foot was reset to zero in both of the flat shoe phases and no additional offsetwas observed for these phases. We presume, therefore, that the lower velocities were the result of ORswhich were too low and were not due to a drift error.
Additionally, the results show that the stiffnesses of the tested footwear conditions do not appearto noticeably influence the accuracy of runVel. Due to the high impact loads during rearfoot running,we expected that the footwear with the highest midsole stiffness in the rearfoot area (ADIDAS) wouldshow distinctly greater differences between ±70 g and the lower ORs, than the footwear with the loweststiffness (ASICS). However, whereas ADIDAS revealed the highest differences between the referenceOR and the reduced ORs, the ASICS shoe showed higher differences between the reference OR andthe reduced ORs than PUMA (medium stiffness) did. Furthermore, similar significant differences(p < 0.001) and effect sizes between the reference OR and the OR of ±16 g and ±8 g were found forall of the footwear conditions. Therefore, due to the high accelerations which occurred during theheel strike while running in footwear with differing midsole stiffnesses, sensors with an OR greaterthan ±32 g should be used to measure these accelerations accurately and to calculate runVel with highaccuracy (errors lower than 0.14%).
Despite the different acceleration magnitudes which occurred during heel strike for the threefootwear conditions, the calculated velocities (OR: ±70 g) were comparable using the measurementstaken by the light barriers (3.60 ± 0.4 m/s): ADIDAS: 3.70 ± 0.3 m/s; PUMA: 3.66 ± 0.4 m/s; ASICS:3.60 ± 0.3 m/s. Therefore, the method for calculating runVel can be used when the OR is >±32 g.
For strLen, effects due to the lower OR were also observed. StrLen was calculated between twoconsecutive flat shoe phases using the integrated data from v_x. As expected, lower velocities forthe reduced ORs also resulted in shorter strLen. The values of MD_rel and the significant differencesbetween the reference and the reduced ORs, including effect sizes, were similar for strLen and runVel.This is the result of the numerical integration of v_x between two consecutive flat shoe phases whencalculating strLen. Additionally, tested footwear conditions did not influence strLen calculations whenusing an OR of ±32 g. It seems that the critical accelerations in anterior–posterior and in verticaldirections do not critically exceed the OR of ±32 g during heel strike, regardless of the midsole stiffness.However, using an OR of ±16 g can lead to strLen differences of 3.49% (MD: 9.43 cm) for each stridewhen running in the ADIDAS shoe. In contrast, when running in the PUMA shoe, differences of

Sensors 2018, 18, 130 9 of 12
only 0.99% (MD: 2.62 cm) were found. With a further decrease in the OR, the differences betweenthe calculated strLen of PUMA and of ADIDAS increased. When investigating mechanical midsolecharacteristics of footwear in biomechanical tests (e.g., benchmark tests) using an OR that is too low(<±32 g), errors in the strLen calculation can lead to incorrect conclusions. Therefore, to avoid effectsof an OR that is too low, an OR of at least ±32 g should be used to measure strLen as accurately aspossible and independently from the midsole stiffness of footwear.
Sensors 9 of
midsole characteristics of footwear in biomechanic l tests (e.g. benchmark tests) using an OR that is
too low ( g), errors in the strLen c lculation c n lead to incorrect conclusions. Therefore, to avoid
effects of an OR that is too low, an OR of at least 2 g should be used to measure strLen as accurately
as possible and independently from the midsole stiffness of footwear.
Figure 5. The horizontal velocity (forward direction) of the shoe for one representative stride with an
accelerometer operating range of ±70 g (black line), ±16 g (grey dotted line), and of ±8 g (grey line),
subdivided in swing phase and foot contact (until toe off, exceeding 2 g in the horizontal acceleration
signal [43] and after the foot touchdown [5,36]).
For PTA, none of the subjects in this study gener ted higher pe k tibial acceler tions than g
when running in the three provided footwear conditions (MD rel: 0%; RMSE: g). However,
faster running velocities (e.g., sprint runs), running in shoes with a higher midsole stiffness (e.g
barefoot or minim l shoes), or running barefoot m y increase peak tibial acceleration [1 4]. In
some c ses, acceler tions could then exceed 32 g and may lead to inaccur te results when measuring
with an OR that is too low. Our results for PTA show that ccur cy decreased up to 17% (ADIDAS:
±8 g) with lower OR. Thereby, we found that a higher midsole stiffness generally decreased the
accur cy of PTA. The footwear condition with the stiffest midsole (ADIDAS) showed the greatest
PTA for the reference OR (mean ± SD: 3 g) whereas the footwear with the softest midsole
configuration (ASICS) showed the lowest PTA (me n ± SD 0 g). When observing the mean
values of PTA for e ch footwear condition, the minimum OR can be derived from these results.
To accur tely determine PTA, distinctly lower OR (≥±16 g) can be used in contrast to the strLen
and runVel (≥ 2 g). Due to various influencing factors (e.g., heel fat pad cushioning, foot pronation,
shoe midsole deform tion, skin displ cement, and sensor wobbling), measured accelerations at the
tibia were d mped and were attenuated in contrast to the wobble-free sensor at the heel cup.
Therefore a distinctly lower OR is necessary for the ccelerometer pl ced t the tibia to determine
PTA without significant loss of information. However, different locations of the accelerometers on
the tibia c n also influence the temporal and spectral p r meters of PTA. Luc s-Cuevas et al. [45]
found that dist lly placed accelerometer measured a gre ter PTA and shock attenuation compared
to a proximal accelerometer. In our study, the accelerometer was placed at the medial aspect mid-
distance between the m lleolus and plateau of the right tibia according to Henning et al. [35] nd
Milani et al. [12]. Therefore, a more distal sensor ttachment m y require a greater OR than was
recommended in our study.
Figure 5. The horizontal velocity (forward direction) of the shoe for one representative stride with anaccelerometer operating range of ±70 g (black line), ±16 g (grey dotted line), and of ±8 g (grey line),subdivided in swing phase and foot contact (until toe off, exceeding 2 g in the horizontal accelerationsignal [43] and after the foot touchdown [5,36]).
For PTA, none of the subjects in this study generated higher peak tibial accelerations than±32 g when running in the three provided footwear conditions (MD_rel: 0.0%; RMSE: 0.0 g).However, faster running velocities (e.g., sprint runs), running in shoes with a higher midsole stiffness(e.g., barefoot or minimal shoes), or running barefoot may increase peak tibial acceleration [10,15,44].In some cases, accelerations could then exceed 32 g and may lead to inaccurate results whenmeasuring with an OR that is too low. Our results for PTA show that accuracy decreased up to28.17% (ADIDAS: ±8 g) with lower OR. Thereby, we found that a higher midsole stiffness generallydecreased the accuracy of PTA. The footwear condition with the stiffest midsole (ADIDAS) showedthe greatest PTA for the reference OR (mean ± SD: 9.41 ± 5.3 g), whereas the footwear with the softestmidsole configuration (ASICS) showed the lowest PTA (mean ± SD: 6.28 ± 3.0 g). When observing themean values of PTA for each footwear condition, the minimum OR can be derived from these results.
To accurately determine PTA, a distinctly lower OR (≥±16 g) can be used in contrast to the strLenand runVel (≥±32 g). Due to various influencing factors (e.g., heel fat pad cushioning, foot pronation,shoe midsole deformation, skin displacement, and sensor wobbling), measured accelerations at thetibia were damped and were attenuated in contrast to the wobble-free sensor at the heel cup. Therefore,a distinctly lower OR is necessary for the accelerometer placed at the tibia to determine PTA withouta significant loss of information. However, different locations of the accelerometers on the tibia canalso influence the temporal and spectral parameters of PTA. Lucas-Cuevas et al. [45] found that adistally placed accelerometer measured a greater PTA and shock attenuation compared to a proximalaccelerometer. In our study, the accelerometer was placed at the medial aspect mid-distance betweenthe malleolus and plateau of the right tibia according to Henning et al. [35] and Milani et al. [12].

Sensors 2018, 18, 130 10 of 12
Therefore, a more distal sensor attachment may require a greater OR than was recommended inour study.
5. Conclusions
In literature, various accelerometers with ORs between ±2 g and ±70 g have been used to determinebiomechanical parameters, although some studies did not state the OR used. In the present study,the influence of OR on biomechanical parameters was investigated. Our results are important for coaches,researchers, and clinicians in selecting the best accelerometer specification for their future investigations.Our study shows that an accelerometer OR that is set too low results in an inaccurate determination ofstrLen, runVel, and PTA. Especially in prolonged runs, when investigating a large number of continuousstrides (e.g., a marathon [24]), an OR that is too low leads to an underestimation of strLen for eachstride, which results in great differences in the total distance. Furthermore, when investigating strLen orPTA variability during prolonged runs in the context of fatigue, a low PTA or strLen variability can bemisinterpreted due to an OR that is too low. Additionally, the midsole stiffnesses of the footwear conditionsdid not influence the accuracy of biomechanical parameters when the OR was ≥±32 g. Furthermore,significant differences and effect sizes between the reference OR and the reduced ORs (±16 g and ±8 g)were similar for all footwear conditions. However, our results show that when investigating mechanicalfootwear characteristics in biomechanical tests (e.g., benchmark tests), an OR that is too low (for strLenand runVel < ±32 g, for PTA < ±16 g) can lead to an approximation of biomechanical parameters,which leads to incorrect conclusions. Finally, when examining biomechanical parameters during runningusing accelerometers with an OR lower than ±32 g, these results should be considered carefully.
Acknowledgments: The authors would like to thank Lisa Peterson for proofreading the paper as a native speaker.This research was supported by Puma® Inc., Germany. The publication costs of this article were funded by theGerman Research Foundation/DFG and the Technische Universität Chemnitz, Chemnitz, Germany, through thefunding program Open Access Publishing.
Author Contributions: Christian Mitschke, Pierre Kiesewetter, and Thomas L. Milani conceived and designedthe experiments; Christian Mitschke and Pierre Kiesewetter performed the experiments; Christian Mitschke,Pierre Kiesewetter, and Thomas L. Milani analyzed the data; Thomas L. Milani contributed reagents/materials/analysistools; Christian Mitschke, Pierre Kiesewetter, and Thomas L. Milani wrote the paper.
Conflicts of Interest: The authors declare no conflicts of interest. The funding sponsors had no role in the designof the study, in the collection, analyses, or in the interpretation of data, in the writing of the manuscript, or in thedecision to publish the results.
References
1. Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283.
[CrossRef] [PubMed]
2. Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis.
Measurement 2009, 42, 978–988. [CrossRef]
3. Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Accelerometer and rate gyroscope measurement of kinematics:
An inexpensive alternative to optical motion analysis systems. J. Biomech. 2002, 35, 537–542. [CrossRef]
4. Mitschke, C.; Öhmichen, M.; Milani, T.L. A single gyroscope can be used to accurately determine peak
eversion velocity during locomotion at different speeds and in various shoes. Appl. Sci. 2017, 7, 659.
[CrossRef]
5. Mitschke, C.; Heß, T.; Milani, T.L. Which method detects foot strike in rearfoot and forefoot runners accurately
when using an inertial measurement unit? Appl. Sci. 2017, 7, 959. [CrossRef]
6. Shih, Y.; Ho, C.-S.; Shiang, T.-Y. Measuring kinematic changes of the foot using a gyro sensor during intense
running. J. Sports Sci. 2014, 32, 550–566. [CrossRef] [PubMed]
7. Clark, R.A.; Bartold, S.; Bryant, A.L. Tibial acceleration variability during consecutive gait cycles is influenced
by the menstrual cycle. Clin. Biomech. 2010, 25, 557–562. [CrossRef] [PubMed]

Sensors 2018, 18, 130 11 of 12
8. Chambon, N.; Sevrez, V.; Ly, Q.H.; Guéguen, N.; Berton, E.; Rao, G. Aging of running shoes and its effect
on mechanical and biomechanical variables: Implications for runners. J. Sports Sci. 2014, 32, 1013–1022.
[CrossRef] [PubMed]
9. Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in
long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [CrossRef]
10. Montgomery, G.; Abt, G.; Dobson, C.; Smith, T.; Ditroilo, M. Tibial impacts and muscle activation during
walking, jogging and running when performed overground, and on motorised and non-motorised treadmills.
Gait Posture 2016, 49, 120–126. [CrossRef] [PubMed]
11. Gruber, A.H.; Boyer, K.A.; Derrick, T.R.; Hamill, J. Impact shock frequency components and attenuation in
rearfoot and forefoot running. J. Sport Health Sci. 2014, 3, 113–121. [CrossRef]
12. Milani, T.L.; Hennig, E.M.; Lafortune, M. Perceptual and biomechanical variables for running in identical
shoe constructions with varying midsole hardness. Clin. Biomech. 1997, 12, 294–300. [CrossRef]
13. Mercer, J.A.; Vance, J.; Hreljac, A.; Hamill, J. Relationship between shock attenuation and stride length during
running at different velocities. Eur. J. Appl. Physiol. 2002, 87, 403–408. [CrossRef] [PubMed]
14. Mercer, J.A.; Bates, B.T.; Dufek, J.S.; Hreljac, A. Characteristics of shock attenuation during fatigued running.
J. Sports Sci. 2003, 21, 911–919. [CrossRef] [PubMed]
15. Heidenfelder, J.; Sterzing, T.; Milani, T.L. Systematically modified crash-pad reduces impact shock in running
shoes. Footwear Sci. 2010, 2, 85–91. [CrossRef]
16. Meardon, S.; Hamill, J.; Derrick, T.R. Running injury and stride time variability over a prolonged run.
Gait Posture 2011, 33, 36–40. [CrossRef] [PubMed]
17. Oriwol, D.; Sterzing, T.; Milani, T.L. The position of medial dual density midsole elements in running shoes
does not influence biomechanical variables. Footwear Sci. 2011, 3, 107–116. [CrossRef]
18. Giandolini, M.; Horvais, N.; Farges, Y.; Samozino, P.; Morin, J.B. Impact reduction through long-term
intervention in recreational runners: Midfoot strike pattern versus low-drop/low-heel height footwear.
Eur. J. Appl. Physiol. 2013, 113, 2077–2090. [CrossRef] [PubMed]
19. Sinclair, J.; Hobbs, S.J.; Protheroe, L.; Edmundson, C.J.; Greenhalgh, A. Determination of gait events using an
externally mounted shank accelerometer. J. Appl. Biomech. 2013, 29, 118–122. [CrossRef] [PubMed]
20. García-Pérez, J.A.; Pérez-Soriano, P.; Llana Belloch, S.; Lucas-Cuevas, Á.G.; Sánchez-Zuriaga, D. Effects of
treadmill running and fatigue on impact acceleration in distance running. Sports Biomech. 2014, 13, 1–8.
[CrossRef] [PubMed]
21. Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial
sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [CrossRef] [PubMed]
22. Mercer, J.A.; Chona, C. Stride length-velocity relationship during running with body weight support.
J. Sport Health Sci. 2015, 4, 127–131. [CrossRef]
23. Yang, S.; Mohr, C.; Li, Q. Ambulatory running speed estimation using an inertial sensor. Gait Posture 2011,
34, 462–466. [CrossRef] [PubMed]
24. Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J.H. Continuous three dimensional analysis of running
mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in
running mechanics. J. Biomech. 2016, 49, 3362–3367. [CrossRef] [PubMed]
25. Watanabe, T.; Saito, H.; Koike, E.; Nitta, K. A preliminary test of measurement of joint angles and stride
length with wireless inertial sensors for wearable gait evaluation system. Comput. Intell. Neurosci. 2011, 2011,
6. [CrossRef] [PubMed]
26. Provot, T.; Chiementin, X.; Oudin, E.; Bolaers, F.; Murer, S. Validation of a high sampling rate inertial
measurement unit for acceleration during running. Sensors 2017, 17, 1958. [CrossRef] [PubMed]
27. Fong, D.T.P.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics
studies: A systematic review. Sensors 2010, 10, 11556–11565. [CrossRef] [PubMed]
28. Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors
2012, 12, 6102–6116. [CrossRef] [PubMed]
29. Alvarez, J.C.; González, R.C.; Alvarez, D.; López, A.M.; Rodríguez-Uría, J. Multisensor approach to walking
distance estimation with foot inertial sensing. In Proceedings of the Annual International Conference of the
IEEE Engineering in Medicine and Biology, Lyon, France, 22–26 August 2007; pp. 5719–5722.

Sensors 2018, 18, 130 12 of 12
30. Jasiewicz, J.M.; Allum, J.H.J.; Middleton, J.W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R.C.T. Gait event
detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured
individuals. Gait Posture 2006, 24, 502–509. [CrossRef] [PubMed]
31. Zifchock, R.A.; Davis, I.; Higginson, J.; McCaw, S.; Royer, T. Side-to-side differences in overuse running
injury susceptibility: A retrospective study. Hum. Mov. Sci. 2008, 27, 888–902. [CrossRef] [PubMed]
32. Mitschke, C.; Zaumseil, F.; Milani, T.L. The influence of inertial sensor sampling frequency on the accuracy
of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed. Eng. 2017, 20, 1502–1511.
[CrossRef] [PubMed]
33. Ziebart, C.; Giangregorio, L.M.; Gibbs, J.C.; Levine, I.C.; Tung, J.; Laing, A.C. Measurement of peak impact
loads differ between accelerometers—Effects of system operating range and sampling rate. J. Biomech. 2017,
58, 222–226. [CrossRef] [PubMed]
34. Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’eni, R.O.;
Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010,
463, 531–535. [CrossRef] [PubMed]
35. Hennig, E.M.; Milani, T.L.; Lafortune, M. Use of ground reaction force parameters in predicting peak tibial
accelerations in running. J. Appl. Biomech. 1993, 9, 214–306. [CrossRef] [PubMed]
36. Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A simple method to detect stride intervals in continuous
acceleration and gyroscope data recorded during treadmill running. Footwear Sci. 2015, 7, 143–144. [CrossRef]
37. Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial
measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech.
2011, 44, 1991–1994. [CrossRef] [PubMed]
38. Hamacher, D.; Hamacher, D.; Taylor, W.R.; Singh, N.B.; Schega, L. Towards clinical application: Repetitive
sensor position re-calibration for improved reliability of gait parameters. Gait Posture 2014, 39, 1146–1148.
[CrossRef] [PubMed]
39. Schwanitz, S.; Odenwald, S. Long-term cushioning properties of running shoes (P152). In The Engineering of
Sport 7; Springer: Paris, France, 2008; pp. 95–100.
40. Brückner, K.; Odenwald, S.; Schwanitz, S.; Heidenfelder, J.; Milani, T. Polyurethane-foam midsoles in running
shoes—Impact energy and damping. Procedia Eng. 2010, 2, 2789–2793. [CrossRef]
41. Heidenfelder, J. Entwicklung Eines Dynamischen Tests zur Prüfung der Rückfußdämpfung von Laufschuhen Mittels
Biomechanischer Messmethoden; TU Chemnitz: Chemnitz, Germany, 2011.
42. Cohen, J. Quantitative methods in psychology. Psychol. Bull. 1992, 112, 155–159. [CrossRef] [PubMed]
43. Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Tröster, G. Monitoring kinematic changes with fatigue in
running using body-worn sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [CrossRef] [PubMed]
44. Mcnair, P.J.; Marshall, R.N. Kinematic and kinetic parameters associated with running in different shoes.
Br. J. Sports Med. 1994, 28, 256–261. [CrossRef] [PubMed]
45. Lucas-Cuevas, A.G.; Encarnación-Martínez, A.; Camacho-García, A.; Llana-Belloch, S.; Pérez-Soriano, P.
The location of the tibial accelerometer does influence impact acceleration parameters during running.
J. Sports Sci. 2017, 35, 1734–1738. [CrossRef] [PubMed]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).
applied sciences
Technical Note
Which Method Detects Foot Strike in Rearfoot andForefoot Runners Accurately when Using an InertialMeasurement Unit?
Christian Mitschke * ID , Tobias Heß and Thomas L. Milani
Department of Human Locomotion, Chemnitz University of Technology, Chemnitz 09126, Germany;[email protected] (T.H.); [email protected] (T.L.M.)* Correspondence: [email protected]; Tel.: +49-371-531-32196
Received: 17 August 2017; Accepted: 15 September 2017; Published: 19 September 2017
Abstract: Accelerometers and gyroscopes are used to detect foot strike (FS), i.e., the moment whenthe foot first touches the ground. However, it is unclear whether different conditions (footwearhardness or foot strike pattern) influence the accuracy and precision of different FS detection methodswhen using such micro-electromechanical sensors (MEMS). This study compared the accuracy offour published MEMS-based FS detection methods with each other and the gold standard (forceplate) to establish the most accurate method with regard to different foot strike patterns and footwearconditions. Twenty-three recreational runners (12 rearfoot and 11 forefoot strikers) ran on a 15-mindoor track at their individual running speed in three footwear conditions (low to high hardness).MEMS and a force plate were sampled at a rate of 3750 Hz. Individual accuracy and precision of FSdetection methods were found which were dependent on running styles and footwear conditions.Most of the methods were characterized by a delay which generally increased from rearfoot toforefoot strike pattern and from high to low midsole hardness. It can be concluded that only one ofthe four methods can accurately determine FS in a variety of conditions.
Keywords: foot strike detection; accelerometer; gyroscope; rearfoot running; forefootrunning; footwear
1. Introduction
Biomechanical investigations of running require accurate detection methods of foot strike (FS),i.e., the exact moment when the foot touches the ground. This is of great importance to determine theFS angle in continuous kinematic data stream signals of foot orientation in the sagittal plane. This wasperformed by Heidenfelder et al. [1], Hein and Grau [2], and Hollander et al. [3] when investigatingthe FS angle under various conditions (footwear conditions or barefoot vs. shod) in the laboratory.Furthermore, the accuracy of electromyographical (EMG) investigations (EMG onset and EMG peakvalue) of lower limb muscles is based on an accurately determining FS. Relative to FS, Guidetti et al. [4]found EMG peaks of 6.8 ± 2.8 ms for rectus femoris, 11.1 ± 5.3 ms for gastrocnemius, and 9.5 ± 4.7 msfor tibialis anterior muscles when running at 4.2 m/s. The short latency between FS and EMGpeak emphasizes the importance of accurate and precise FS detection. Moreover, exact FS detectionenhances data accuracy and consequently minimizes defective variability in running parameters, e.g.,stride length and stride frequency, which have been investigated by various authors [3,5–8].
To detect FS, force plates are frequently used as the method of choice. However, force plates areoften restricted to indoor use in specific gait laboratories and limited to a small number of consecutivegait cycles for each trial. In addition, force plate targeting of subjects results in slightly adjusting thenatural running pattern in order to hit the force plate, which may distort accuracy of running data [9].
Appl. Sci. 2017, 7, 959; doi:10.3390/app7090959 www.mdpi.com/journal/applsci

Appl. Sci. 2017, 7, 959 2 of 10
On the other hand, micro-electromechanical sensors (MEMS) can be an alternative for detectingthe moment of FS when force plates are not available. These wearable motion sensors (e.g., gyroscopesand accelerometers) are easy to use, low-cost, and suitable for field measurements [10–13]. Furthermore,these sensors offer the advantages of collecting multiple consecutive gait cycles and eliminatethe issue of targeting. Numerous authors have already used MEMS to detect FS in a variety ofconditions [8,14–20]. Nevertheless, just one study was found which investigated the accuracy of MEMSfor detecting FS during running by comparing those data to a synchronized force plate signal [21].Those authors used a shank-mounted accelerometer, measuring accelerations along the longitudinalaxis of the tibia in sixteen rearfoot runners (4.0 m/s). They found an average error of 1.68 ms (95% CI:−2.94 to 6.25 ms) and an absolute error of 5.46 ms (95% CI: 1.89 to 9.03 ms), respectively. Furthermore,Sabatini et al. [17] used a gyroscope signal (sagittal plane) to determine FS during walking (0.83 to1.7 m/s). The accuracy of FS was compared to footswitches (small force sensors—Tekscan A201),which were placed under the calcaneus (heel) and the hallux (big toe), respectively. Authors foundan average difference of −2 ms (95% CI: −16 to 12 ms). Further studies compared stride and stanceduration during running by using inertial sensors, however they did not mention the accuracy fordetermining FS [19,22].
To the best of the authors’ knowledge, there are currently no studies which address whetherpublished FS detection methods are able to accurately detect the initial ground contact for forefootstrike (FFS) pattern. In contrast to rearfoot strike (RFS) pattern, the FFS pattern is characterized byaltered kinematics of the lower limbs, resulting in initial ground contact with the ball of the foot [23].This running style is becoming more popular among runners due to presumed protection againstimpact-related injuries [23,24]. Consequently, this increases the necessity for more research on theaccurate and precise detection of the moment when the foot touches the ground, related to, e.g.,kinematics, muscle activity, and spatio-temporal parameters.
Therefore, the purpose of the present study was to examine whether four published FS detectionmethods can accurately define the time of initial ground contact for RFS and FFS running styles.A synchronized force plate was used as the reference. Moreover, this study aims to analyze theinfluence of various footwear material properties on the accuracy of the different FS detection methods.These results are required to determine whether differences in investigated parameters (e.g., foot strikeangle, EMG onset, stride length) between footwear conditions are caused by errors in FS detectionmethods or by the investigated conditions themselves. It was hypothesized that all investigated andpublished FS detection methods are sufficient to accurately detect the RFS pattern (H1), and the FFSpattern (H2), independently from the footwear conditions.
2. Materials and Methods
2.1. Participants
Twelve recreational RFS runners (age: 24.8 ± 4.5 years; height: 176.0 ± 5.4 cm; weight:72.3 ± 7.8 kg; running experience: 8.3 ± 5.9 years; training hours: 2.6 ± 2.1 h per week)and eleven recreational FFS runners (age: 26.3 ± 3.2 years; height: 177.0 ± 3.6 cm; weight:74.5 ± 7.5 kg; running experience: 7.8 ± 5.0 years; training hours: 2.1 ± 1.1 h per week)participated in this study. All procedures were approved by the local ethics committee(V-103-17-HS-CM-Bodenkontakt-25082015). The participants were required to give written informedconsent before participating in the study.
2.2. Testing Procedure
Participants wore three different running shoes during the tests, which were investigated in arandomized order. All shoes were provided by the laboratory in men’s UK size 8: PUMA Speed 100(PU100); PUMA Speed 500 (PU500); PUMA Speed 1000 (PU1000). According to Mitschke et al. [13],after an individual warm-up and familiarization with the measurement setup, five repeated running

Appl. Sci. 2017, 7, 959 3 of 10
trials were recorded on a 15-m indoor running track. The running speed was individual andself-selected, close to their personal standard training velocity: 3.26 ± 0.4 m/s (range: 2.8 to 3.9 m/s)for the RFS runners and 3.38 ± 0.4 m/s (range: 2.7 to 4.0 m/s) for the FFS runners. Velocities weremonitored using two light barriers placed four meters apart. Trials were rated as successful whenathletes ran within their individual velocity range and when FS was in the middle of the force plate.
2.3. Experimental Setup
A lightweight inertial measurement unit (ICM-20601, InvenSense, San Jose, CA, USA, mass 4 g),combining a tri-axial accelerometer (measurement range ±353 m/s/s) and a tri-axial gyroscope(measurement range ±4000 deg/s), was attached to the shaved skin at the medial aspect andmid-distance between the malleolus and the plateau of the runner’s right tibia [25]. An elastic strapwas used to stabilize the sensor to prevent excessive movements due to its own weight. Additionally,the same sensor type was affixed to the heel cap of the right shoe. All sensors operated synchronouslyand data were sampled at 3750 Hz by a data logger, secured in a waist belt. The data logger andPC were connected via a 10-m cable. To confirm FS pattern of the runners, running was controlledvisually using high-speed video (Exilim EX-F1, Casio, Tokyo, Japan, 300 Hz). Ground reaction forcemeasurements were simultaneously recorded using a force plate (9287 BA, 0.6 × 0.9 m, 3750 Hz, Kistler,Winterthur, Switzerland), which was synchronised with the inertial sensors. Data post-processing wasdone using MATLAB R2016b (MathWorksTM, Natick, MA, USA).
2.4. Foot Strike Detection Methods
To determine FS, a total of four different methods were compared. Method 1 (M1) was conductedaccording to Sinclair et al. [21]. The tibial acceleration signal, acceleration along the longitudinal axisof the tibia, was smoothed using a 60 Hz low pass zero-lag filter (4th order). FS was identified whencrossing a threshold of zero g, before peak tibial acceleration occurred (by a maximum 20 ms beforepeak tibial acceleration, to prevent false detection, Figure 1). Method 2 (M2) was conducted accordingto Mercer et al. [14]. The tibial acceleration signal along the longitudinal axis of the tibia was alsoused to detect FS. The minimum acceleration before the peak tibial acceleration was declared as FS(Figure 1). Method 3 (M3) was conducted according to Maiwald et al. [15]. The accelerometer signalof the heel sensor, the vertical axis, was 80 Hz zero-lag high pass filtered (third order) and the firstpeak in the filtered signal was defined as FS (Figure 1). Method 4 (M4) was based on Sabatini et al. [17].The gyroscope signal of the heel sensor was 15 Hz zero-lag low pass filtered (second order). FS wasdetermined as the time when the angular velocity reached the minimum value for the first time in thegait cycle (Figure 1).
The accuracy of the four methods was determined by comparing time of FS to the gold standardmethod—determining FS using a force plate. According to Laughton et al. [26], the threshold of thevertical ground reaction force was set to 10 N to determine FS accurately (Figure 1).

Appl. Sci. 2017, 7, 959 4 of 10Appl. Sci. 4 of
Figure 1. Foot strike detection methods M1 to M4 (O) and reference method (vertical component of
ground reaction forces >20 N is represented by dotted line) for rearfoot strike pattern (RFS) and
forefoot strike pattern (FFS), for one representative trial (s mpling rate 3750 Hz).
2.5. Footwear Conditions
Differences between midsole m terials for the rearfoot and forefoot areas for all three shoes were
quantified using servo-hydraulic testing device (HC10; Zwick GmbH and Co. KG; Ulm, Germany)
as described in Schwanit and Odenw ld [ 7] and Schwanitz et al. [28]. Each shoe w s tested
mechanically ten times. The stiffness between 1 and N for the rearfoot and forefoot areas
were analysed Within the three footwear conditions, the footwear with high mechanical stiffnesswas
defined as rel tively h rd, and footwear with lower mechanical stiffness s rel tively soft
6. Statistical Analyses
The means and stand rd deviations (me n ± SD) were calculated to compare footwear stiffness
Given that p rameters were normally distributed, a one-way analysis of variance (ANOVA) followed
by Bonferroni post-hoc tests were used to determine whether there are differences between
mechanical footwear char cteristics
For the comparison of MEMS-based FS detection methods (M to M ) and force plate FS
detection, accuracy (me n) and precision (standard deviation: SD), 95% confidence intervals ( %
Figure 1. Foot strike detection methods M1 to M4 (O) and reference method (vertical component ofground reaction forces >20 N is represented by dotted line) for rearfoot strike pattern (RFS) and forefootstrike pattern (FFS), for one representative trial (sampling rate 3750 Hz).
2.5. Footwear Conditions
Differences between midsole materials for the rearfoot and forefoot areas for all three shoeswere quantified using a servo-hydraulic testing device (HC10; Zwick GmbH and Co. KG; Ulm,Germany) as described in Schwanitz and Odenwald [27] and Schwanitz et al. [28]. Each shoe wastested mechanically ten times. The stiffness between 1000 and 1500 N for the rearfoot and forefootareas were analysed. Within the three footwear conditions, the footwear with high mechanical stiffnesswas defined as relatively hard, and footwear with lower mechanical stiffness as relatively soft.
2.6. Statistical Analyses
The means and standard deviations (mean ± SD) were calculated to compare footwear stiffness.Given that parameters were normally distributed, a one-way analysis of variance (ANOVA) followedby Bonferroni post-hoc tests were used to determine whether there are differences between mechanicalfootwear characteristics.
For the comparison of MEMS-based FS detection methods (M1 to M4) and force plate FS detection,accuracy (mean) and precision (standard deviation: SD), 95% confidence intervals (95% CI), and therepeatability coefficient (RC) were calculated. According to Oriwol et al. [29], RC was calculated betweenthe five trials for each subject to assess the variability of the detection method between the five runningtrials. Consequently, RCs were averaged over all footwear conditions and running patterns, respectively.
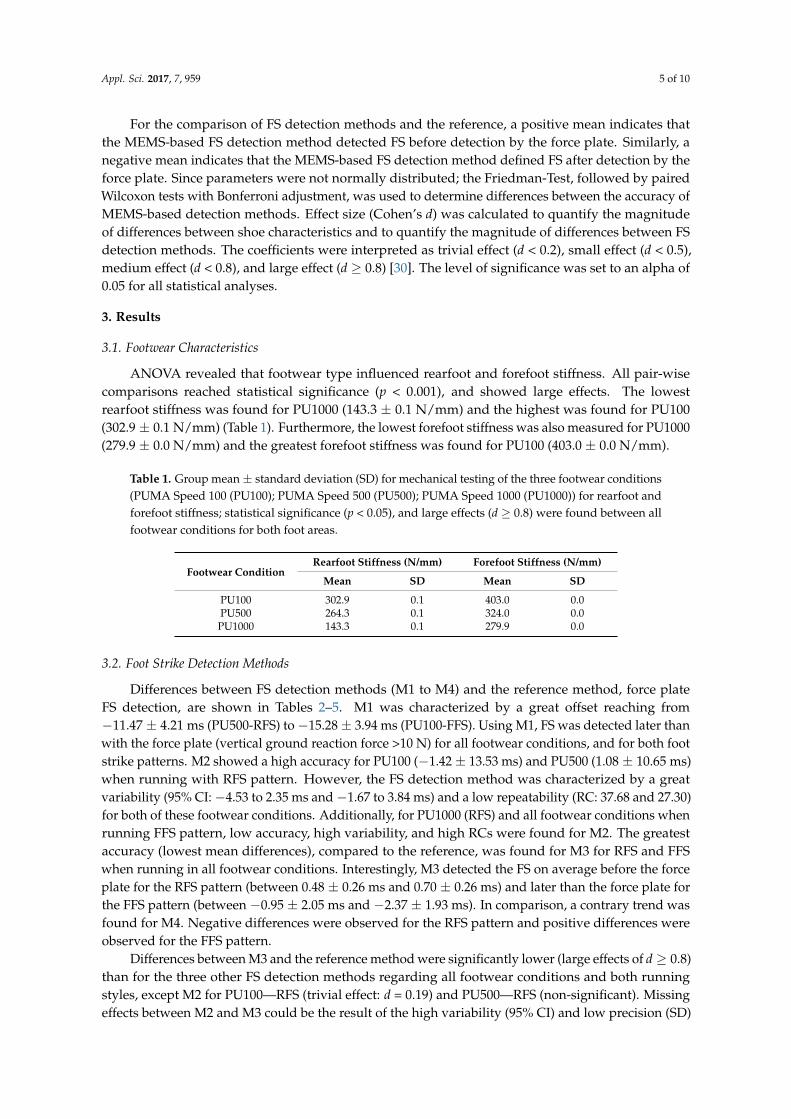
Appl. Sci. 2017, 7, 959 5 of 10
For the comparison of FS detection methods and the reference, a positive mean indicates thatthe MEMS-based FS detection method detected FS before detection by the force plate. Similarly, anegative mean indicates that the MEMS-based FS detection method defined FS after detection by theforce plate. Since parameters were not normally distributed; the Friedman-Test, followed by pairedWilcoxon tests with Bonferroni adjustment, was used to determine differences between the accuracy ofMEMS-based detection methods. Effect size (Cohen’s d) was calculated to quantify the magnitudeof differences between shoe characteristics and to quantify the magnitude of differences between FSdetection methods. The coefficients were interpreted as trivial effect (d < 0.2), small effect (d < 0.5),medium effect (d < 0.8), and large effect (d ≥ 0.8) [30]. The level of significance was set to an alpha of0.05 for all statistical analyses.
3. Results
3.1. Footwear Characteristics
ANOVA revealed that footwear type influenced rearfoot and forefoot stiffness. All pair-wisecomparisons reached statistical significance (p < 0.001), and showed large effects. The lowestrearfoot stiffness was found for PU1000 (143.3 ± 0.1 N/mm) and the highest was found for PU100(302.9 ± 0.1 N/mm) (Table 1). Furthermore, the lowest forefoot stiffness was also measured for PU1000(279.9 ± 0.0 N/mm) and the greatest forefoot stiffness was found for PU100 (403.0 ± 0.0 N/mm).
Table 1. Group mean ± standard deviation (SD) for mechanical testing of the three footwear conditions(PUMA Speed 100 (PU100); PUMA Speed 500 (PU500); PUMA Speed 1000 (PU1000)) for rearfoot andforefoot stiffness; statistical significance (p < 0.05), and large effects (d ≥ 0.8) were found between allfootwear conditions for both foot areas.
Footwear ConditionRearfoot Stiffness (N/mm) Forefoot Stiffness (N/mm)
Mean SD Mean SD
PU100 302.9 0.1 403.0 0.0PU500 264.3 0.1 324.0 0.0PU1000 143.3 0.1 279.9 0.0
3.2. Foot Strike Detection Methods
Differences between FS detection methods (M1 to M4) and the reference method, force plateFS detection, are shown in Tables 2–5. M1 was characterized by a great offset reaching from−11.47 ± 4.21 ms (PU500-RFS) to −15.28 ± 3.94 ms (PU100-FFS). Using M1, FS was detected later thanwith the force plate (vertical ground reaction force >10 N) for all footwear conditions, and for both footstrike patterns. M2 showed a high accuracy for PU100 (−1.42 ± 13.53 ms) and PU500 (1.08 ± 10.65 ms)when running with RFS pattern. However, the FS detection method was characterized by a greatvariability (95% CI: −4.53 to 2.35 ms and −1.67 to 3.84 ms) and a low repeatability (RC: 37.68 and 27.30)for both of these footwear conditions. Additionally, for PU1000 (RFS) and all footwear conditions whenrunning FFS pattern, low accuracy, high variability, and high RCs were found for M2. The greatestaccuracy (lowest mean differences), compared to the reference, was found for M3 for RFS and FFSwhen running in all footwear conditions. Interestingly, M3 detected the FS on average before the forceplate for the RFS pattern (between 0.48 ± 0.26 ms and 0.70 ± 0.26 ms) and later than the force plate forthe FFS pattern (between −0.95 ± 2.05 ms and −2.37 ± 1.93 ms). In comparison, a contrary trend wasfound for M4. Negative differences were observed for the RFS pattern and positive differences wereobserved for the FFS pattern.
Differences between M3 and the reference method were significantly lower (large effects of d ≥ 0.8)than for the three other FS detection methods regarding all footwear conditions and both runningstyles, except M2 for PU100—RFS (trivial effect: d = 0.19) and PU500—RFS (non-significant). Missingeffects between M2 and M3 could be the result of the high variability (95% CI) and low precision (SD)

Appl. Sci. 2017, 7, 959 6 of 10
of M2 for the respective conditions. Furthermore, M3 revealed the lowest RC for the RFS and FFSpattern for all footwear conditions.
Table 2. Accuracy (mean) ± precision (standard deviation: SD), 95% confidence intervals (95% CI),and repeatability coefficient (RC) of foot strike detection methods (M1 to M4) for PUMA Speed 100(PU100) and rearfoot (RFS) and forefoot strike (FFS) pattern.
PU100 (ms)RFS FFS
M1 M2 M3 M4 M1 M2 M3 M4
mean −13.28 −1.42 0.70 −19.27 −15.28 −15.84 −0.95 5.13
SD 3.97 13.53 0.26 3.91 3.94 10.29 2.05 3.01
95% CI−12.25 2.35 0.77 −18.26 −14.21 −13.06 −0.39 5.94
−14.31 −4.53 0.63 −20.28 −16.34 −18.63 −1.50 4.32
RC 10.90 37.68 1.01 9.34 7.54 23.10 5.60 9.87
Table 3. Accuracy (mean) ± precision (standard deviation: SD), 95% confidence intervals (95% CI),and repeatability coefficient (RC) of foot strike detection methods (M1 to M4) for PUMA Speed 500(PU500) and rearfoot (RFS) and forefoot strike (FFS) pattern.
PU500 (ms)RFS FFS
M1 M2 M3 M4 M1 M2 M3 M4
mean −11.47 1.08 0.54 −16.68 −14.90 −14.65 −1.46 7.42
SD 4.21 10.65 0.28 2.73 4.18 9.43 2.23 3.74
95% CI−10.38 3.84 0.61 −15.98 −13.77 −12.10 −0.86 8.43
−12.56 −1.67 0.46 −17.39 −16.04 −17.20 −2.07 6.41
RC 10.34 27.30 1.16 7.37 8.76 30.69 8.60 14.13
Table 4. Accuracy (mean) ± precision (standard deviation: SD), 95% confidence intervals (95% CI),and repeatability coefficient (RC) of foot strike detection methods (M1 to M4) for PUMA Speed 1000(PU1000) and rearfoot (RFS) and forefoot strike (FFS) pattern.
PU1000 (ms)RFS FFS
M1 M2 M3 M4 M1 M2 M3 M4
mean −12.49 −10.49 0.48 −20.59 −14.84 −15.81 −2.37 8.43
SD 5.58 10.09 0.26 3.28 4.36 14.48 1.93 4.28
95% CI−11.05 −7.88 0.54 −19.74 −13.66 −11.89 −1.85 9.58
−13.94 −13.09 0.41 −21.44 −16.02 −19.72 −2.89 7.27
RC 19.73 29.16 1.23 7.79 9.00 41.36 6.52 11.50
Table 5. p-values of the pair-wise Wilcoxon test; significant differences (p < 0.05) between foot strikedetection methods M1 to M4 were marked with *; large effects (d ≥ 0.8) were found for all significantdifferences, except comparison M2 vs. M3 for PU100—RFS (trivial effect d = 0.19).
PU100 PU500 PU1000
RFS FFS RFS FFS RFS FFS
M1 vs. M2 <0.001 * 0.963 <0.001 * 1 1 1M1 vs. M3 <0.001 * <0.001 * <0.001 * <0.001 * <0.001 * <0.001 *M1 vs. M4 0.003 * <0.001 * 0.170 <0.001 * <0.001 * <0.001 *M2 vs. M3 0.043 * <0.001 * 0.337 <0.001 * <0.001 * <0.001 *M2 vs. M4 <0.001 * <0.001 * <0.001 * <0.001 * <0.001 * <0.001 *M3 vs. M4 <0.001 * 0.001 * <0.001 * <0.001 * <0.001 * <0.001 *

Appl. Sci. 2017, 7, 959 7 of 10
4. Discussion
The aim of the present study was to examine whether four published foot strike detectionmethods—using wearable sensors—can accurately define the time when the foot touches the groundinitially for distinctive running styles and different footwear conditions. A synchronized force platewas used as the reference. To determine FS as accurately as possible, a fast sampling rate of 3750 Hz wasused for all methods. Inaccurate determination of FS can produce subsequent errors in investigatedrunning and gait parameters (e.g., kinematics, muscle activity, and spatio-temporal parameters).We found that the analyzed FS detection methods showed large differences in accuracy and precision,which depends on running style and footwear condition.
Test method M1 was conducted according to previously published procedures by using anaccelerometer mounted to the tibia [21]. Authors also compared the accuracy of their FS detectionalgorithm with the vertical component of the ground reaction forces. They found differences in meanof 1.68 ms (95% CI: −2.94 to 6.25 ms) when investigating rearfoot runners. This difference is distinctlylower than what we found for the RFS pattern. The threshold they used to detect FS with the forceplate was 20 N, whereby in the present study the threshold was set to 10 N. This threshold and the highsampling rate in our procedure could potentially explain the greater differences we found between M1and the force plate in contrast to the results of Sinclair et al. [21]. However, the different force platethresholds do not explain all differences, due to the high force rising rates at the beginning of groundcontact. It seems that there is a continuous offset in the RFS pattern, which is slightly higher in theFFS pattern (Tables 2–4). As a result of various influencing factors (sensor wobbling, shoe midsoledeformation, heel fat pad cushioning, and foot pronation), accelerations were attenuated and capturedwith a delay. Interestingly, we found that different footwear hardness does not seem to influencethe accuracy of FS detection (range between shoes—RFS: 1.8 ms; FFS: 0.4 ms), whereas the runningstyle influences accuracy of FS detection slightly (within differences between RFS and FFS—PU100:2.0 ms; PU500: 3.4 ms; PU1000: 2.4 ms). Due to the altered kinematics of the lower limbs for the FFSpattern, accelerations (crossing a threshold of zero g before peak tibial acceleration occurred) weremeasured with a greater delay, which also increased the difference to the reference method. Finally,it can be stated for M1 that when only one sensor (placed at the tibia) is available to detect FS, it can bedetected with a low error of ±4 ms under various conditions when subtracting 14 ms (mean of ourfound differences) from the detected FS.
For M2, tibial acceleration along the longitudinal axis of the tibia was also used to detect FS [14].Thereby, minimum acceleration before the peak tibial acceleration defined FS. We found that FSdetection with this method is characterized by a low precision, shown by the great SD and lowrepeatability (RC). Despite this, great accuracy of mean <−1.42 ms was found for RFS when wearingthe harder shoes PU100 and PU500. However, for PU1000 (RFS) and all footwear conditions whenrunning with the FFS pattern, substantial differences up to −15.84 ms were observed between M2and the reference method. As discussed for M1, accelerations measured at the tibia revealed delayedacceleration patterns, which resulted in the negative values for the differences between M2 and thereference method. Interestingly, the shoe with the lowest stiffness in the rearfoot area (PU1000) showedthe lowest accuracy (−10.49 ± 10.09 ms) for the RFS pattern. For the FFS pattern, the delay due toaltered lower limb kinematics was more prominent (>14.65 ms) than the influence of the footwearconditions (range between shoes: 1.2 ms). Additionally, in a few trials, the tibial acceleration data offorefoot runners showed a double peak. This was especially true in runners who touched the groundwith the ball of the foot first, but then touched the ground with the heel during mid-stance phase. Thesecond measured peak could influence the automatic detection of FS, leading to FS detection errorswhen the minimum acceleration before the false peak tibial acceleration was used.
M3 was conducted according to Maiwald et al. [15], by using the vertical accelerometer axis ofa heel mounted inertial measurement unit. This method revealed a great accuracy and the lowestdifference compared to the reference method for RFS and FFS when running in all footwear conditions.Due to the wobbling-free attachment to the heel cap of the shoe, impact accelerations can be measured

Appl. Sci. 2017, 7, 959 8 of 10
without delay. For the RFS pattern, no influence of the shoe hardness in the rearfoot area on accuracyof FS detection could be found. However, a trend was found for the FFS pattern: the footwear with thehardest midsole in the forefoot area (PU100) showed the highest accuracy between the FS detectionmethod and reference method (−0.95 ± 2.05 ms), whereas the footwear with the softest midsole inthis area (PU1000) showed the greatest delay (−2.37 ± 1.93 ms). It seems that the impact attenuationis related to midsole hardness and—therefore—influences the accuracy of this FS detection methodslightly during forefoot running. In contrast to this, precision and repeatability were not influenced byforefoot hardness of the shoes for the FFS pattern.
M4 was based on previously published findings by Sabatini et al. [17]. In contrast to M1,M2, and M3, gyroscope data (measured angular velocity in the sagittal plane) were used insteadof the accelerometer signal to detect FS. Our results revealed a negative detection error between−16.68 ± 2.73 ms (PU500) and −20.59 ± 3.28 ms (PU1000) for the RFS pattern and a positive detectionerror between 5.13 ± 3.01 ms (PU100) and 8.43 ± 4.28 ms (PU1000) for the FFS pattern. It shows thatthe accuracy of this method is distinctly higher for the FFS pattern than for the RFS pattern. However,accuracy of M4 was significantly lower than accuracy of M3 for all footwear conditions and bothfoot strike patterns. Sabatini et al. [17] compared their FS detection algorithm to footswitches andfound a distinctly lower difference on average of −2 ms (95% CI: −16 to 12 ms). They investigatedwalking in a range between 0.83 and 1.7 m/s. Due to the altered lower limb kinematics when changinglocomotion speed from walking to running, the angular velocity was modified slightly and a phaseshift was observed. It seems that the signal characteristics which were used to define FS (angularvelocity reaching the minimum value for the first time in the gait cycle; Figure 1) changed considerably.Additional phase shift was found when comparing the RFS and FFS pattern, which led to the opposeddifferences to the reference method between both running styles. Furthermore, accuracy of M4 wasinfluenced by the midsole hardness in the forefoot area, when running with the FFS pattern. As alreadyfound for M3, the footwear with the hardest midsole in the forefoot area (PU100) revealed the highestaccuracy between the FS detection method and reference method (5.13 ± 3.01 ms), and the footwearwith the softest midsole (PU1000) showed the greatest delay (8.43 ± 4.28 ms). Presumably, due todifferent midsole hardness, foot strike angle varied during forefoot running and therefore, angularvelocity phases and magnitudes were also influenced. However, foot strike angle was not monitoredand cannot be further investigated. However, it can be stated that besides acceleration signals measuredat the heel cap, gyroscope signals were also influenced by footwear hardness FFS running patterns.
Four published FS detection methods were tested to determine whether they can accurately detectFS for distinctive running styles and different footwear conditions when running at a self-selectedvelocity. Due to the low accuracy and precision of some FS detection methods, hypotheses H1 (RFSpattern) and H2 (FFS pattern) have to be rejected.
When applying the current study’s results to the elecromyographical investigations in theliterature, EMG peaks relative to FS of 6.8 ± 2.8 ms for the rectus femoris, and 9.5 ± 4.7 ms forthe tibialis anterior muscles were found [4]. Based on the current study’s results, it can be statedthat M3 is the only method which can be used to define these EMG peaks accurately relative to FS.When using the other methods (M1, M2, or M4) to detect FS, the relative moment of EMG peakswill not be detected accurately, which can result in errors when comparing different conditions (e.g.,footwear conditions). Furthermore, considering muscle activity within a defined time range relativeto FS, incorrect FS detection can result in misinterpreted muscle activity relative to the gait cycle: tooearly—no activity during swing phase; or too late—muscle activity during mid-stance.
A limitation of the current study is that only subjects’ individual running velocity was investigated.Further studies should also examine whether slower and faster velocities influence accuracy andprecision of the FS detection algorithms.
In conclusion, these results are important when investigating running parameters which aredependent on an exact detection of FS. Individual accuracy and precision of FS detection methods werefound, which are dependent on running styles and footwear conditions. Therefore, it can be concluded

Appl. Sci. 2017, 7, 959 9 of 10
that M3 can be used to determine FS in a variety of conditions, accurately (e.g., to compare the influenceof footwear conditions on muscle activity, foot strike angle and stride duration in prolonged field runs).When investigating running parameters which are related to FS detection algorithms M1, M2, and M4,the results should be considered carefully.
Acknowledgments: The authors would like to thank Lisa Peterson for proofreading the paper as a native speaker.This research was supported by Puma® Inc., Germany. The publication costs of this article were funded by theGerman Research Foundation/DFG and the Technische Universität Chemnitz, Chemnitz, Germany, through thefunding program Open Access Publishing.
Author Contributions: Christian Mitschke and Thomas L. Milani conceived and designed the experiments;Christian Mitschke performed the experiments; Christian Mitschke, Tobias Heß and Thomas L. Milani analyzedthe data; Thomas L. Milani contributed reagents/materials/analysis tools; Christian Mitschke, Tobias Heß andThomas L. Milani wrote the paper.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Heidenfelder, J.; Sterzing, T.; Bullmann, M.; Milani, T.L. Heel strike angle and foot angular velocity in the
sagittal plane during running in different shoe conditions. J. Foot Ankle Res. 2008, 1, O16. [CrossRef]
2. Hein, T.; Grau, S. Can minimal running shoes imitate barefoot heel-toe running patterns? Acomparison of
lower leg kinematics. J. Sport Health Sci. 2014, 3, 67–73. [CrossRef]
3. Hollander, K.; Argubi-wollesen, A.; Reer, R.; Zech, A. Comparison of Minimalist Footwear Strategies for
Simulating Barefoot Running: A Randomized Crossover Study. PLoS ONE 2015, 10, 1–11. [CrossRef]
[PubMed]
4. Guidetti, L.; Rivellini, G.; Figura, F. EMG patterns during running: Intra-and inter-individual variability.
J. Electromyogr. Kinesiol. 1996, 6, 37–48. [CrossRef]
5. Meardon, S.A.; Hamill, J.; Derrick, T.R. Running injury and stride time variability over a prolonged run.
Gait Posture 2011, 33, 36–40. [CrossRef] [PubMed]
6. Riley, P.O.; Dicharry, J.; Franz, J.; Croce, U.D.; Wilder, R.P.; Kerrigan, D.C. A kinematics and kinetic
comparison of overground and treadmill running. Med. Sci. Sports Exerc. 2008, 40, 1093–1100. [CrossRef]
[PubMed]
7. Bonacci, J.; Saunders, P.U.; Hicks, A.; Rantalainen, T.; Vicenzino, B.G.T.; Spratford, W. Running in a minimalist
and lightweight shoe is not the same as running barefoot: A biomechanical study. Br. J. Sports Med. 2013, 47,
387–392. [CrossRef] [PubMed]
8. Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J.H. (Jaap) Continuous three dimensional analysis of running
mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in
running mechanics. J. Biomech. 2016, 49, 3362–3367. [CrossRef] [PubMed]
9. Challis, J.H. The Variability in Running Gait Caused by Force Plate Targeting. J. Appl. Biomech. 2001, 17,
77–83. [CrossRef]
10. Shih, Y.; Ho, C.-S.; Shiang, T.-Y. Measuring kinematic changes of the foot using a gyro sensor during intense
running. J. Sports Sci. 2014, 32, 550–566. [CrossRef] [PubMed]
11. Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis.
Measurement 2009, 42, 978–988. [CrossRef]
12. Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Accelerometer and rate gyroscope measurement of kinematics:
An inexpensive alternative to optical motion analysis systems. J. Biomech. 2002, 35, 537–542. [CrossRef]
13. Mitschke, C.; Öhmichen, M.; Milani, T.L. A Single Gyroscope Can Be Used to Accurately Determine Peak
Eversion Velocity during Locomotion at Different Speeds and in Various Shoes. Appl. Sci. 2017, 7, 659.
[CrossRef]
14. Mercer, J.A.; Bates, B.T.; Dufek, J.S.; Hreljac, A. Characteristics of shock attenuation during fatigued running.
J. Sport. Sci. 2003, 21, 911–919. [CrossRef]
15. Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A simple method to detect stride intervals in continuous
acceleration and gyroscope data recorded during treadmill running. Footwear Sci. 2015, 7, 143–144. [CrossRef]

Appl. Sci. 2017, 7, 959 10 of 10
16. Brauner, T.; Oriwol, D.; Sterzing, T.; Milani, T.L. A single gyrometer inside an instrumented running shoe
allows mobile determination of gait cycle and pronation velocity during outdoor running. Footwear Sci. 2009,
1, 25–26. [CrossRef]
17. Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial
sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [CrossRef]
18. Giandolini, M.; Poupard, T.; Gimenez, P.; Horvais, N.; Millet, G.Y.; Morin, J.B.; Samozino, P. A simple field
method to identify foot strike pattern during running. J. Biomech. 2014, 47, 1588–1593. [CrossRef]
19. Lee, J.B.; Mellifont, R.B.; Burkett, B.J. The use of a single inertial sensor to identify stride, step, and stance
durations of running gait. J. Sci. Med. Sport 2010, 13, 270–273. [CrossRef]
20. Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Tröster, G. Monitoring Kinematic Changes With Fatigue in
Running Using Body-Worn Sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [CrossRef]
21. Sinclair, J.; Hobbs, S.J.; Protheroe, L.; Edmundson, C.J.; Greenhalgh, A. Determination of gait events using an
externally mounted shank accelerometer. J. Appl. Biomech. 2013, 29, 118–122. [CrossRef] [PubMed]
22. Norris, M.; Kenny, I.C.; Anderson, R. Comparison of accelerometry stride time calculation methods.
J. Biomech. 2016, 49, 3031–3034. [CrossRef] [PubMed]
23. Lieberman, D.E.; Venkadesan, M.; Werbel, W.A.; Daoud, A.I.; D’Andrea, S.; Davis, I.S.; Mang’eni, R.O.;
Pitsiladis, Y. Foot strike patterns and collision forces in habitually barefoot versus shod runners. Nature 2010,
463, 531–535. [CrossRef] [PubMed]
24. Williams, D.S.; McClay, I.S.; Manal, K.T. Lower extremity mechanics in runners with a converted forefoot
strike pattern. J. Appl. Biomech. 2000, 16, 210–218. [CrossRef]
25. Milani, T.L.; Hennig, E.M.; Lafortune, M.A. Perceptual and biomechanical variables for running in identical
shoe constructions with varying midsole hardness. Clin. Biomech. 1997, 12, 294–300. [CrossRef]
26. Laughton, C.A.; McClay Davis, I.; Hamill, J. Effect of strike pattern and orthotic intervention on tibial shock
during running. J. Appl. Biomech. 2003, 19, 153–168. [CrossRef]
27. Schwanitz, S.; Odenwald, S. Long-term cushioning properties of running shoes. Eng. Sport 7 2008, 2, 95–100.
[CrossRef]
28. Schwanitz, S.; Möser, S.; Odenwald, S. Comparison of test methods to quantify shock attenuating properties
of athletic footwear. Procedia Eng. 2010, 2, 2805–2810. [CrossRef]
29. Oriwol, D.; Sterzing, T.; Milani, T.L. The position of medial dual density midsole elements in running shoes
does not influence biomechanical variables. Footwear Sci. 2011, 3, 107–116. [CrossRef]
30. Cohen, J. Quantitative Methods in Psychology. Psychol. Bull. 1992, 112, 155–159. [CrossRef] [PubMed]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).

applied sciences
Technical Note
A Single Gyroscope Can Be Used to AccuratelyDetermine Peak Eversion Velocity during Locomotionat Different Speeds and in Various Shoes
Christian Mitschke * , Matthias Öhmichen and Thomas L. Milani
Department of Human Locomotion, Chemnitz University of Technology, 09126 Chemnitz, Germany;[email protected] (M.Ö.); [email protected] (T.L.M.)* Correspondence: [email protected]; Tel.: +49-371-531-32196
Academic Editors: Bjoern Eskofier and Sunghoon Ivan LeeReceived: 30 May 2017; Accepted: 23 June 2017; Published: 27 June 2017
Abstract: Gyroscopes have been used in previous studies to measure the peak angular velocity of theshoe or foot in the frontal plane (evVel). However, it is not clear whether different test conditions(footwear hardness or locomotion speed) can influence the accuracy of evVel. The purpose of thepresent study was to compare the accuracy of gyroscopes and electrogoniometers when measuringevVel and the time until evVel (t_evVel) in 12 different conditions using a single axis gyroscopeattached to the heel cap. Twenty-four recreational runners were instructed to walk and run on a 15-mindoor track at four locomotion speeds (1.5, 2.5, and 3.5 m/s, and individual running speed) and inthree footwear conditions (low to high hardness). The gyroscope data and electrogoniometer datawere sampled at a rate of 1000 Hz. Comparisons between both measurement devices showed smallmean differences up to 49.8 ± 46.9 deg/s for evVel and up to 5.3 ± 3.5 ms for t_evVel. Furthermore,strong relationships between gyroscope and electrogoniometer data were found for evVel as well asfor t_evVel for all conditions. It can be concluded that gyroscopes can be used to accurately determineevVel and t_evVel under a variety of conditions.
Keywords: peak eversion velocity; gyroscope; electrogoniometer; running speed; footwear;material characteristics
1. Introduction
Foot pronation is a natural damping mechanism during walking and running, whereby theeversion—a part of pronation—plays a crucial role in reducing the acting forces on the lower limbs.Eversion velocity seems to be more decisive for critical loading than the maximum angular excursion.In this context, studies have reported that high eversion velocities could be associated with medialtibial stress syndrome [1–3]. Aside from investigating injuries, previous studies examined the influenceof footwear construction or foot orthoses [1,4–7], exhaustion [8], and running pace [9] on maximumeversion velocity and the time until it occurs.
To investigate kinematics, optoelectronic systems (e.g., Vicon, Qualisys) have been established asthe gold standard [8,10,11]. However, time-intensive preparation of subjects, considerable laboratorysize, and high prices are the disadvantages of these systems. Furthermore, data capturing is restrictedto indoor laboratory measurements. Low sampling rates between 50 and 500 Hz and marker-artifactsdue to wobbling can also influence the accuracy of calculated parameters, especially when observingkinematics in the frontal and transversal planes.
In comparison, electrogoniometers are considered an easy-to-use alternative when investigatingrearfoot motion in relation to the shank in the frontal plane [5,10,12]. The electrogoniometer is attachedto the heel cap of the shoe and at the posterior lower leg to accurately measure the rotation about
Appl. Sci. 2017, 7, 659; doi:10.3390/app7070659 www.mdpi.com/journal/applsci

Appl. Sci. 2017, 7, 659 2 of 8
the subtalar joint axis at distinctly higher sampling rates of up to 1000 Hz [5,12]. The disadvantageof this system is the flexible arm between the shoe or foot and the attachment at the lower leg.During long-term measurements in the field, the system’s mass can influence walking and runninggait. Furthermore, material wear of the flexible arm connections can occur due to the continuousmechanical stress during prolonged runs.
The third option is to use micro-electromechanical sensors (MEMS). Wearable motion sensors(e.g., gyroscopes and accelerometers) are an inexpensive alternative to optoelectronic systems [13].These sensors are simple to handle, cost-effective, and suitable for field measurements [8,11,13].
A few studies investigated the accuracy of MEMS when comparing angles or angular velocitieswith optoelectronic systems [8,10,14]. When examining the agreement of the maximum angularvelocity of the shoe in the frontal plane (eversion velocity), they found moderate [8], acceptable [10],and good [14] agreement between the systems. Investigated running speeds were in a narrow rangebetween 3.2 ± 0.4 and 4.0 ± 0.2 m/s. The influence of locomotion speed (walking or running) orfootwear characteristics on the accuracy of the maximum angular velocity was not investigated.However, this information is necessary to determine whether differences in angular velocities betweenfootwear conditions as well as between locomotion speeds are caused by measurement errors of thegyroscopes or by the investigated conditions themselves.
Therefore, the aim of this study was to compare the accuracy of a gyroscope and an electrogoniometerin quantifying peak eversion velocity (evVel) and the time until evVel (t_evVel). To avoid effects dueto different sampling rates and marker-artifacts, the gyroscope data in this study were compared tothe electrogoniometer data. Four locomotion speeds and three different footwear conditions wereinvestigated. We hypothesized that evVel measured with a gyroscope is related to evVel measuredwith electrogoniometer (H1). Furthermore, we hypothesized that t_evVel with the gyroscope is relatedto t_evVel with the electrogoniometer (H2).
2. Materials and Methods
2.1. Participants
Twenty-four recreational rearfoot runners (age: 24.7 ± 4.1 years; height: 178 ± 9.7 cm; weight:74.0 ± 6.0 kg; running experience: 8.5 ± 3.9 years; training hours: 3.3 ± 2.0 h per week) participated inthis study. This study was approved by the Ethics Committee of the Faculty of Behavioural and SocialSciences of the university (V-103-17-HS-CM-Bodenkontakt-25082015). The participants gave writteninformed consent to their participation in the study.
2.2. Test Procedure
During the test, participants wore three different running shoes, which were provided by thelaboratory in men’s UK size 8: Adidas AdiStar (AD); Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU).After an individual warm-up and familiarization with the measurement setup, five repeated runningand walking trials were recorded on a 15-m indoor running track at four different velocities (1.5 ± 0.1,2.5 ± 0.1, 3.5 ± 0.1 m/s, and self-selected individual speed, close to their personal standard trainingvelocity) in each footwear condition. The three footwear conditions and the four velocities wereinvestigated in randomized order. Individual speed was in mean 3.63 ± 0.3 m/s. Velocities weremonitored using two light barriers placed eight meters apart.
2.3. Experimental Setup
To measure the angular velocity of the shoe in the frontal plane, a gyroscope (IDG-650, InvenSense,TKD, Tokyo, Japan, measurement range ±2000 deg/s) in a small box was attached to the heel cap ofthe right shoe. The positive peak eversion velocity (evVel_Gyro) was defined as the maximum positiveangular velocity from the gyroscope signal during ground contact.

Appl. Sci. 2017, 7, 659 3 of 8
As reference, a light-weight electrogoniometer (Megatron MP10) was attached to the heel cap ofthe right shoe (potentiometer), next to the gyroscope box, and at the posterior lower leg parallel tothe Achilles tendon (flexible arm) to measure the rearfoot motion of the shoe in relation to the shankin the frontal plane [5,12]. The axis of rotation was adjusted to represent the approximate positionof the subtalar joint axis [5,12]. A neutral rearfoot angle was individually defined for each subject ineach footwear condition during a static trial on a calibration plate [12,15]. The angular velocity of thegoniometer signal was obtained by simple numerical differentiation of the goniometer signal duringground contact. The maximum positive angular velocity was declared as evVel_Gonio. Furthermore,the elapsed time between initial ground contact and evVel_Gonio and evVel_Gyro were determined(t_evVel_Gonio and t_evVel_Gyro).
Gyroscope and goniometer operated synchronously and data were recorded at 1000 Hz bya data logger, secured in a waist belt. Data logger and PC were connected via a 10-m cable.To confirm rearfoot strike pattern, running was controlled visually according to Giandolini et al. [16].The presence of the impact peak in vertical ground reaction data was checked. Ground reaction forcemeasurements were simultaneously recorded using a force plate (9287 BA, 0.6 × 0.9 m, 1000 Hz,Kistler, Winterthur, Switzerland) that was synchronized with the gyroscope and electrogoniometer.According to Laughton et al. [17], the threshold of the force plate was set at 10 N to determine foottouchdown. To remove noise, raw data were filtered with a zero-lag Butterworth low-pass filter(gyroscope and goniometer: 4th order at 50 Hz; force plate: 2nd order at 50 Hz). Data post-processingwas done using MATLAB R2016b (MathWorksTM, Natick, MA, USA).
2.4. Footwear Conditions
To quantify the differences of the materials of the rearfoot area, the three shoes were tested ina servo-hydraulic testing device (HC10; Zwick GmbH & Co. KG; Ulm, Germany) as described inSchwanitz & Odenwald [18] and Schwanitz et al. [19]. Each shoe was tested mechanically ten times.We analysed the heel height (Heelheight) and the stiffness in the rearfoot area (stiffness) between1000 and 1500 N as described in Schwanitz & Odenwald [18]. Footwear with high mechanical stiffnesscould be described as relatively hard, and footwear with lower mechanical stiffness as relatively soft.
2.5. Statistical Analyses
For the footwear comparison of Heelheight and stiffness, the mean and standard deviations(mean ± SD) were calculated. Given that parameters were normally distributed according to theShapiro–Wilk test, a one-way analysis of variance (ANOVA) followed by Bonferroni post-hoc tests wereused to determine whether differences existed between mechanical footwear characteristics. Effectsize (Cohen’s d) was calculated to quantify the magnitude of differences between shoe characteristics.The coefficients were interpreted as trivial effect (d < 0.2), small effect (d < 0.5), medium effect (d < 0.8),and large effect (d ≥ 0.8) [20]. For the comparison of gyroscope and goniometer data, mean differences(MDs) and standard deviations (SDs) between evVel_Gonio and evVel_Gyro were calculated for evVelas well as for t_evVel. For evVel, a positive MD would indicate greater evVel measured by gyroscope,negative MD would indicate greater evVel measured by electrogoniometer. Furthermore, a positiveMD of t_evVel would indicate that evVel was measured earlier with the electrogoniometer thanwith the gyroscope. Finally, evVel_Gyro was related to evVel_Gonio with correlation and regressionanalyses for evVel and t_evVel. Pearson’s correlation coefficient was interpreted as trivial (r ≤ 0.1),small (r ≤ 0.3), moderate (r ≤ 0.5), large (r ≤ 0.7), very large (r ≤ 0.9), and extremely large (r > 0.9) [21].Statistical significance was set at α = 0.05 for all statistical analyses.

Appl. Sci. 2017, 7, 659 4 of 8
3. Results
3.1. Footwear Characteristics
ANOVA revealed that rearfoot stiffness and Heelheight were influenced by footwear type,with all pair-wise comparisons reaching statistical significance (p < 0.001). Cohen’s d showed largeeffects in all pair-wise comparisons. The lowest rearfoot stiffness was found for AS (156.9 ± 0.1 N/mm)and the highest was found for AD (210.3 ± 0.4 N/mm) (Table 1). Furthermore, the greatest Heelheight
was measured for AS (30.4 ± 0.0 mm) and the lowest Heelheight was found for AD (22.7 ± 0.0 mm).
Table 1. Group mean ± standard deviation (SD) for mechanical testing of the three footwear conditions(Adidas AdiStar (AD); Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU)) for rearfoot stiffness andheel height; statistical significance (p < 0.05) and large effects (d ≥ 0.8) were found between all shoeconditions for both parameters.
Footwear ConditionStiffness (N/mm) Heelheight (mm)
Mean SD Mean ±SD
AD 210.3 0.4 22.7 0.0AS 156.9 0.1 30.4 0.0PU 177.8 0.4 24.2 0.0
3.2. Peak Eversion Velocity
The largest evVel was found for the individual speed and the shoe with the hardest soleconfiguration and the lowest heel height (footwear AD: evVel_Gonio: 526.7 ± 129.0 deg/s; evVel_Gyro:565.1 ± 142.9 deg/s; Figure 1). Generally, the comparison of evVel_Gonio and evVel_Gyro revealedan MD up to 49.8 ± 46.9 deg/s (Table 2: footwear AD at 3.5 m/s). Larger evVel was found in nineconditions for evVel_Gyro. Only AS revealed lower evVel_Gyro for the three running conditions.Pearson’s correlation coefficient showed very large positive correlations (0.7 < r ≤ 0.9) for PU (2.5,3.5 m/s and individual speed), and extremely large positive correlations (r > 0.9) for all other conditions.The regression analysis revealed that evVel_Gonio was strongly related to evVel_Gyro at all velocitiesand all footwear conditions (p < 0.001).
Appl. Sci. 4 of
highest w s found for AD ( 4 N/mm) (Table 1). Furthermore, the greatest Heelheight was
measured for AS (30.4 ± 0.0 mm) nd the lowest Heelheight was found for AD (2 mm)
Table 1. Group mean ± standard deviation (SD) for mechanical testing of the three footwear
conditions (Adid s AdiSt r (AD); Asics Gel Nimbus 1 (AS); PUMA Speed (PU)) for re rfoot
stiffness and heel height; statistical significance ( < 0.05) and large effects ( ) were found
between all shoe conditions for both parameters.
Footwear
Condition
Stiffness (N/mm) Heelheight (mm)
Mean SD Mean ±SD
AD 210.3
AS 156.9
PU 177.8
Peak E ersion Velocity
The largest evVel w s found for the individual speed and the shoe with the hardest sole
configuration and the lowest heel height (footwear AD: evVel_Gonio: 0 deg/s evVel_Gyro:
deg/s Figure 1). Generally, the comparison of evVel Gonio and evVel Gyro revealed
an MD up to deg/s (Table footwear AD at 5 m/s) Larger evVel was found in nine
conditions for evVel Gyro. Only AS revealed lower evVel Gyro for the three running conditions.
Pearson’s correlation coefficient showed very large positive correlations (0.7 r 0.9) for PU (2 m/s
and individual speed), and extremely large positive correlations (r ) for all other conditions.
The regression analysis revealed that evVel_Gonio was strongly related to evVel Gyro at ll
velocities and ll footwear conditions ( )
Figure 1. Boxplot of maximum positive angular velocity (evVel_Gonio, grey) and positive peak
eversion velocity (evVel_Gyro, white) for the four velocities and three footwear conditions: Adidas
AdiStar (AD) Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU)
Figure 1. Boxplot of maximum positive angular velocity (evVel_Gonio, grey) and positive peak eversionvelocity (evVel_Gyro, white) for the four velocities and three footwear conditions: Adidas AdiStar (AD);Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU).

Appl. Sci. 2017, 7, 659 5 of 8
Table 2. Mean differences (MD) and standard deviations (SD) between evVel_Gonio and evVel_Gyroof the four velocities and the three footwear conditions: Adidas AdiStar (AD), Asics Gel Nimbus12 (AS), PUMA Speed 600 (PU); Pearson’s correlation coefficient was interpreted as trivial (r ≤ 0.1),small (r ≤ 0.3), moderate (r ≤ 0.5), large (r ≤ 0.7), very large (r ≤ 0.9), and extremely large (r > 0.9).
Speed Footwear Condition MD (deg/s) SD (deg/s) r R2
1.5 m/sAD 23.7 55.9 0.96 1 0.92 2
AS 10.4 49.3 0.94 1 0.87 2
PU 26.2 50.8 0.91 1 0.82 2
2.5 m/sAD 30.3 26.0 0.93 1 0.86 2
AS −30.6 27.2 0.94 1 0.87 2
PU 20.5 30.5 0.89 1 0.79 2
3.5 m/sAD 49.8 46.9 0.97 1 0.94 2
AS −30.9 35.8 0.91 1 0.83 2
PU 12.3 45.0 0.88 1 0.76 2
Individual speedAD 38.4 44.3 0.92 1 0.84 2
AS −33.7 49.0 0.91 1 0.81 2
PU 23.7 58.8 0.88 1 0.77 2
1 Pearson’s correlation coefficient: p < 0.001; 2 Regression analyses: p < 0.001.
3.3. Time Until Peak Eversion Velocity
Peak eversion velocity occurred between 13.6 ± 4.5 ms (footwear AD: 3.5 m/s) and 27.8 ± 7.6 ms(footwear AS: 2.5 m/s) after initial ground contact for evVel_Gonio, and between 16.8 ± 3.4 ms(footwear AD: 3.5 m/s) and 29.4 ± 7.3 ms (footwear AS: 2.5 m/s) after initial ground contact forevVel_Gyro (Figure 2). EvVel_Gyro was detected later than evVel_Gonio in all 12 conditions (Table 3).The comparison of t_evVel_Gonio and t_evVel_Gyro revealed an MD of up to 5.3 ± 3.5 ms (footwearPU at 1.5 m/s). Pearson’s correlation coefficient showed an extremely large positive correlation (r > 0.9)for AD (3.5 m/s and individual speed) and AS (3.5 m/s). Very large positive correlations (0.7 < r ≤ 0.9)were found for all other comparisons of t_evVel_Gonio and t_evVel_Gyro. Regression analysis revealedthat t_evVel_Gyro was strongly related to t_evVel_Gonio at all velocities and all footwear conditions(p < 0.001).
Appl. Sci. 5 of
Table 2. Mean differences (MD) and standard deviations (SD) between evVel_Gonio and evVel_Gyro
of the four velocities and the three footwear conditions: Adidas AdiStar (AD), Asics Gel Nimbus
(AS), PUMA Speed 600 (PU); Pearson’s correlation coefficient was interpreted as trivial (r 0.1), small
(r 0.3), moder te (r ), l rge (r 0.7) very large (r 9), and extremely large (r 9)
Speed Footwear
Condition
MD
(deg/s)
SD
(deg/s) r R²
1.5 m/s
AD 23.7
AS 10.4
PU 26.2
2.5 m/s
AD 30.3
AS −PU 20.5
3.5 m/s
AD 49.8
AS −PU 12.3
Individual
speed
AD 38.4
AS −PU 23.7
Pearson’s correlation coefficient: Regression analyses
3.3. Time Until Peak E ersion Velocity
Peak eversion velocity occurred between 13.6 5 ms (footwear AD: m/s) nd 27.8 ± 7.6 ms
(footwear AS 5 m/s) after initi l ground contact for evVel Gonio, and between 1 4 ms
(footwear AD: 3.5 m/s) and 29 7.3 ms (footwear AS: 2.5 m/s) after initial ground contact for
evVel_Gyro (Figure 2). EvVel_Gyro was detected later than evVel_Gonio in all 12 conditions (Table 3)
The comparison of t evVel Gonio and t evVel Gyro revealed an MD of up to 5 ms (footwear
PU at m/s) Pearson’s correlation coefficient showed an extremely l rge positive correlation (r 0.9) for
AD (3 m/s and individual speed) and AS (3.5 m/s). Very large positive correlations (0.7 < r 0.9) were
found for all other comp risons of t evVel Gonio and t_evVel_Gyro. Regression analysis revealed th t
t_evVel_Gyro was strongly related to t evVel Gonio at ll velocities and ll footwear conditions
( 0.001)
Figure 2. Boxplot of time until evVel_Gonio (t_evVel_Gonio, grey) and time until evVel_Gyro
(t_evVel_Gyro, white) for the four velocities and three footwear conditions Adidas AdiStar (AD);
Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU)
Figure 2. Boxplot of time until evVel_Gonio (t_evVel_Gonio, grey) and time until evVel_Gyro(t_evVel_Gyro, white) for the four velocities and three footwear conditions: Adidas AdiStar (AD);Asics Gel Nimbus 12 (AS); PUMA Speed 600 (PU).

Appl. Sci. 2017, 7, 659 6 of 8
Table 3. Mean differences (MD) and standard deviations (SD) between t_evVel_Gonio andt_evVel_Gyro of the four velocities and the three footwear conditions: Adidas AdiStar (AD), Asics GelNimbus 12 (AS), PUMA Speed 600 (PU); Pearson’s correlation coefficient was interpreted as trivial(r ≤ 0.1), small (r ≤ 0.3), moderate (r ≤ 0.5), large (r ≤ 0.7), very large (r ≤ 0.9), and extremely large(r > 0.9).
Speed Footwear Condition MD (ms) SD (ms) r R2
1.5 m/sAD 4.1 2.4 0.88 1 0.77 2
AS 5.2 4.4 0.78 1 0.60 2
PU 5.3 3.5 0.86 1 0.73 2
2.5 m/sAD 3.4 3.4 0.89 1 0.77 2
AS 1.6 3.7 0.88 1 0.76 2
PU 1.0 6.6 0.71 1 0.49 2
3.5 m/sAD 3.2 2.0 0.91 1 0.83 2
AS 2.8 2.2 0.92 1 0.84 2
PU 1.9 4.3 0.83 1 0.67 2
Individual speedAD 3.3 1.8 0.94 1 0.87 2
AS 2.5 2.4 0.89 1 0.79 2
PU 1.3 4.0 0.85 1 0.72 2
1 Pearson’s correlation coefficient: p < 0.001; 2 Regression analyses: p < 0.001.
4. Discussion
The purpose of the present study was to compare the accuracy of gyroscopes andelectrogoniometers when measuring evVel and t_evVel.
The results of evVel revealed a small MD between 10.4 ± 49.3 and 49.8 ± 46.9 deg/s, which waslower than the difference reported by Brauner et al. [10]. They compared angular velocities inthe frontal plane obtained from an optoelectronic system and a gyroscope and found an MD of77.9 deg/s. The greatest MD found in our study (49.8 ± 46.9 deg/s) was distinctly lower than therepeatability coefficient found by Oriwol et al. [7] when investigating within-subject variability ofthe maximum eversion velocity (169.0 deg/s). This means that our MDs were within the limitsof total measurement variability, and therefore were considered non-relevant. Furthermore, highstandard deviations—in some cases higher than MD—show that there was also a high variabilitywithin the subjects. One reason could be the individual walking and running gait of the subjects,which can slightly influence the measurement of evVel_Gonio and evVel_Gyro. Additionally, footwearconditions and locomotion velocities can influence rearfoot motion of subjects [4,5,9,12,22]. In ourstudy, the softest shoe (AS) showed the lowest evVel compared to the harder shoes (PU and AD).This is in line with previous findings [4,5,23]. While MD was similar for the footwear conditions duringwalking, there was a general trend of decreasing differences between evVel_Gyro and evVel_Gonioseen for all running velocities with decreasing footwear stiffness (AD > PU > AS) (Table 2 and Figure 1).MD was even negative for the softest shoe (AS), which means that higher evVel was measuredwith the electrogoniometer than with the gyroscope. It seems that MD is influenced by footwearconditions and locomotion velocities. We could not conclusively determine which measurementdevice was influenced by which conditions. However, as mentioned, MD was small and withinthe variability, and therefore, MD can be declared non-relevant, regardless of positive or negativevalues. Furthermore, Pearson’s correlation coefficient showed a very large positive correlation of atleast r ≥ 0.88 for all tested footwear conditions and locomotion speeds between evVel_Gonio andevVel_Gyro. The correlations in our study are larger than those reported in previous studies comparingmaximum angular velocities of gyroscopes with optoelectronic systems [8,10,14]. One reason for thelower correlations in the mentioned studies may be marker-artifacts due to wobbling during initialground contact and the subsequent problematic foot model calculations by the respective software.In our study, both devices were attached firmly to the heel cap of the right shoe to minimize wobbling,

Appl. Sci. 2017, 7, 659 7 of 8
and the angular velocities were measured at this position in the frontal plane directly. However, the flexarm of the goniometer—which was attached at the posterior lower leg—can be slightly influenced byskin displacement during initial ground contact, especially at higher velocities and with harder shoes.Furthermore, Brauner et al. [10], Shih et al. [8], and Lederer et al. [14] used lower sampling rates tocompare optoelectronic systems and gyroscopes, resulting in less data, which could have influencedtheir results. In our study, data of both devices were recorded with a high sampling rate of 1000 Hz,and an effect due to different or too low sampling rates can therefore be excluded. Due to the verylarge and extremely large positive correlations, and the strong relationships between evVel_Gyro andevVel_Gonio, we can confirm hypothesis H1.
T_evVel_Gyro was determined later than t_evVel_Gonio for all footwear conditions andall locomotion speeds. This offset differs between footwear conditions and locomotion speeds.Surprisingly, two trends were observed. First, the largest MD was found for the walking condition(for all three footwear conditions). Second, the hardest footwear condition (AD) revealed the largestMD and PU the lowest MD for all running velocities. Thus, this offset seems unrelated to rearfootstiffness or Heelheight, and another unknown factor must be influencing t_evVel_Gyro. In addition,very large and extremely large positive correlations as well as strong relationships of t_evVel_Gyroand t_evVel_Gonio were found. Therefore, our hypothesis H2 can be confirmed.
One limitation of the current study is that only rearfoot strike runners were investigated. Furtherstudies should also investigate midfoot and forefoot strikers. Especially during initial ground contactwith the forefoot first, the changed orientation of the gyroscope can lead to a crosstalk of the sensitiveaxes. This can influence the subsequently derived maximum angular velocities.
In conclusion, the results of this study are necessary when interpreting peak angular velocitiesfor different footwear conditions and locomotion speeds which were measured with a heel-mountedgyroscope in the frontal plane. The results of the present study showed strong relationships betweenevVel_Gyro and evVel_Gonio for locomotion at 1.5, 2.5, 3.5 m/s, and at individual speed, and for threedifferent footwear conditions. Furthermore, strong relationships of t_evVel_Gyro and t_evVel_Goniowere found for all 12 conditions. Based on our results, it can be concluded that gyroscopes canaccurately determine peak eversion velocity and time until peak eversion velocity during a variety ofconditions (e.g., to compare the influence of footwear conditions on evVel in prolonged field runs).
Acknowledgments: The authors would like to thank Lisa Peterson for proofreading the paper as a nativespeaker. This research was supported by Puma® Inc., Germany. The publication costs of this article werefunded by the German Research Foundation/DFG and the Technische Universität Chemnitz, Chemnitz, Germany,through the funding program Open Access Publishing.
Author Contributions: Christian Mitschke and Thomas L. Milani conceived and designed the experiments;Christian Mitschke performed the experiments; Christian Mitschke, Matthias Öhmichen and Thomas L. Milanianalyzed the data; Thomas L. Milani contributed reagents/materials/analysis tools; Christian Mitschke,Matthias Öhmichen and Thomas L. Milani wrote the paper.
Conflicts of Interest: The authors declare no conflicts of interest. The funding sponsors had no role in the designof the study, in the collection, analyses, or interpretation of data, in the writing of the manuscript, or in the decisionto publish the results.
References
1. Stacoff, A.; Reinschmidt, C.; Nigg, B.M.; van den Bogert, A.J.; Lundberg, A.; Denoth, J.; Stüssi, E. Effects of
foot orthoses on skeletal motion during running. Clin. Biomech. 2000, 15, 54–66. [CrossRef]
2. Segesser, B.; Nigg, B.M. Insertionstendinosen am Schienbein, Achillodynie und Überlastungsfolgen am
Fuss.-Ätiologie, Biomechanik, therapeutische Möglichkeiten. Orthopäde 1980, 9, 207–214. [PubMed]
3. Vtasalo, J.T.; Kvist, M. Some biomechanical aspects of the foot and ankle athletes with and without shin
splints. Am. J. Sports Med. 1983, 11, 125–130. [CrossRef] [PubMed]
4. De Wit, B.; De Clercq, D.; Lenoir, M. The effect of varying midsole hardness on impact forces and foot motion
during foot contact in running. J. Appl. Biomech. 1995, 11, 395–406. [CrossRef]

Appl. Sci. 2017, 7, 659 8 of 8
5. Milani, T.L.; Hennig, E.M.; Lafortune, M.A. Perceptual and biomechanical variables for running in identical
shoe constructions with varying midsole hardness. Clin. Biomech. 1997, 12, 294–300. [CrossRef]
6. O’Connor, K.M.; Hamill, J. The role of selected extrinsic foot muscles during running. Clin. Biomech. 2004,
19, 71–77. [CrossRef]
7. Oriwol, D.; Sterzing, T.; Milani, T.L. The position of medial dual density midsole elements in running shoes
does not influence biomechanical variables. Footwear Sci. 2011, 3, 107–116. [CrossRef]
8. Shih, Y.; Ho, C.-S.; Shiang, T.-Y. Measuring kinematic changes of the foot using a gyro sensor during intense
running. J. Sports Sci. 2014, 32, 550–566. [CrossRef] [PubMed]
9. Struzik, A.; Konieczny, G.; Grzesik, K.; Stawarz, M.; Winiarski, S.; Rokita, A. Relationship between lower
limbs kinematic variables and effectiveness of sprint during maximum velocity phase. Acta Bioeng. Biomech.
2015, 17, 131–138. [CrossRef] [PubMed]
10. Brauner, T.; Sterzing, T.; Milani, T.L. Ankle Frontal Plane Kinematics Determined By Goniometer, Gyrometer
and Motion Analysis System: A Measurement Device Validation. In Proceedings of the 22nd Congress of the
International Society of Biomechanics, Cape Town, South Africa, 5–9 July 2009.
11. Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis.
Measurement 2009, 42, 978–988. [CrossRef]
12. Milani, T.L.; Schnabel, G.; Hennig, E.M. Rearfoot Motion and Pressure Distribution Patterns during Running
in Shoes with Varus and Valgus Wedges. J. Appl. Biomech. 1995, 11, 177–187. [CrossRef]
13. Mayagoitia, R.E.; Nene, A.V.; Veltink, P.H. Accelerometer and rate gyroscope measurement of kinematics:
An inexpensive alternative to optical motion analysis systems. J. Biomech. 2002, 35, 537–542. [CrossRef]
14. Lederer, P.; Blickhan, R.; Schlarb, H. RearfootAngle Velocities During Running—A Comparison Between
Optoelectronic and Gyroscopic Motion Analysis. Port. J. Sport Sci. 2011, 11, 903–906.
15. Heidenfelder, J.; Sterzing, T.; Milani, T.L. Systematically modified crash-pad reduces impact shock in running
shoes. Footwear Sci. 2010, 2, 85–91. [CrossRef]
16. Giandolini, M.; Horvais, N.; Farges, Y.; Samozino, P.; Morin, J.B. Impact reduction through long-term
intervention in recreational runners: Midfoot strike pattern versus low-drop/low-heel height footwear.
Eur. J. Appl. Physiol. 2013, 113, 2077–2090. [CrossRef] [PubMed]
17. Laughton, C.A.; McClay Davis, I.; Hamill, J. Effect of strike pattern and orthotic intervention on tibial shock
during running. J. Appl. Biomech. 2003, 19, 153–168. [CrossRef]
18. Schwanitz, S.; Odenwald, S. Long-term cushioning properties of running shoes. Eng. Sport 2008, 7, 95–100.
[CrossRef]
19. Schwanitz, S.; Möser, S.; Odenwald, S. Comparison of test methods to quantify shock attenuating properties
of athletic footwear. Procedia Eng. 2010, 2, 2805–2810. [CrossRef]
20. Cohen, J. Quantitative Methods in Psychology. Psychol. Bull. 1992, 112, 155–159. [CrossRef] [PubMed]
21. Hopkins, W.G.; Marshall, S.W.; Batterham, A.M.; Hanin, J. Progressive statistics for studies in sports medicine
and exercise science. Med. Sci. Sports Exerc. 2009, 41, 3–12. [CrossRef] [PubMed]
22. Lohman, E.B.; Sackiriyas, K.S.B.; Swen, R.W. A comparison of the spatiotemporal parameters, kinematics,
and biomechanics between shod, unshod, and minimally supported running as compared to walking.
Phys. Ther. Sport 2011, 12, 151–163. [CrossRef] [PubMed]
23. Nigg, B.M.; Bahlsen, H.A.; Luethi, S.M.; Stokes, S. The influence of running velocity and midsole hardness
on external impact forces in heel-toe running. J. Biomech. 1987, 20, 951–959. [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).

Anhang
95
Wissenschaftlicher Lebenslauf
Diplom Sportwissenschaftler Christian Mitschke, geboren am 21.11.1984 in Karl-Marx-Stadt
Werdegang
Seit 01/2012 Wissenschaftlicher Mitarbeiter an der Professur für Bewegungswis-
senschaft, Fakultät für Human- und Sozialwissenschaften, Techni-
sche Universität Chemnitz
09/2009 – 03/2011
(mit Unterbrechung)
Studentische Hilfskraft am Lehrstuhl für Bewegungswissenschaft,
Institut für Sportwissenschaft, Friedrich-Schiller-Universität Jena
10/2006 – 06/2011 Studium an der Friedrich-Schiller-Universität Jena
Fachrichtung: Sportwissenschaft mit dem Schwerpunkt: Bewegung
und Leistung
Thema der Diplomarbeit: Ebene Lokomotion von Ameisen (For-
mica polyctena) – 3d-Kinematik
10/2005 – 09/2006 Studium an der Technischen Universität Chemnitz
Fachrichtung: Elektrotechnik
08/2001 – 07/2004 Technisches Gymnasium Chemnitz
Akademische Tätigkeiten
Lehre
• Programmentwicklung zur Datenanalyse und -interpretation (Übung)
• Bewegungswissenschaftliche Messverfahren (Vorlesung)
• Grundlagen der Biomechanik und Bewegungswissenschaft (Übung)
• Bewegungswissenschaftliche Aspekte des Fitnesssports (Übung)
• Bewegungswissenschaftliche Aspekte des Behindertensports (Seminar)

Anhang
96
Sonstiges
• Koordination Webauftritt des Instituts für Angewandte Bewegungswissenschaften der Tech-
nischen Universität Chemnitz und Verantwortlicher der Homepage der Professur Bewegungs-
wissenschaft
Anhang
97
Liste der eigenen Veröffentlichungen
Artikel (referiert)
Mitschke, C.; Kiesewetter, P.; Milani, T.L.: The Effect of the Accelerometer Operating Range on
Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration During Running.
Sensors. 2018, 18, 1–12.
Mitschke, C.; Heß, T.; Milani, T.L.: Which Method Detects Foot Strike in Rearfoot and Forefoot
Runners Accurately when Using an Inertial Measurement Unit? Appl. Sci. 2017, 7, 959.
Mitschke, C.; Zaumseil, F.; Milani, T.L.: The influence of inertial sensor sampling frequency on the
accuracy of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed.
Engin. 2017, 20, 1502–1511.
Mitschke, C.; Öhmichen, M.; Milani, T.L.: A Single Gyroscope Can Be Used to Accurately Deter-
mine Peak Eversion Velocity during Locomotion at Different Speeds and in Various Shoes. Appl.
Sci. 2017, 7, 659.
Mitschke, C. and Milani, T.L.: Soccer: Detailed Analysis of Played Passes in the UEFA Euro 2012.
Int J Sports Sci Coach. 2014, 9, 1019-1031.
Buchbeiträge
Mitschke, C. & Horn, C.: Schussgeschwindigkeit im Fußball - beeinflussende Faktoren. In T. L.
Milani, C. Maiwald & D. Oriwol (Hrsg.), Neue Ansätze in der Bewegungsforschung: Jahrestagung
der dvs-Sektion Biomechanik vom 13.-15. März 2013 in Chemnitz. Hamburg: Feldhaus, 2014.

Anhang
98
Konferenzbeiträge
Heß, T., Mitschke, C., Milani, T.L., Meixensberger, J., Krause, M.: Postural instability in patients
with idiopathic normal pressure hydrocephalus: effects of shunting. 41st Annual Meeting of the
American Society of Biomechanics (ASB), Boulder, CO, USA, August 8th – 11th., 2017. (Poster)
Teibl, E., Mitschke, C., Milani, T.L.: Einfluss der Schuhgröße von Fußballschuhen auf die Schuss-
geschwindigkeit und Schussgenauigkeit. Jahrestagung der dvs-Kommission Fußball 28.-30. Septem-
ber 2017 in Bochum, 2017. (Vorträge)
Niklaus, L., Mitschke, C., Milani, T.: Gehtraining mit Teilbelastung auf dem Anti-Schwerkraft-Lauf-
band AlterG? Analyse plantarer Druckverteilung und der vertikalen Bodenreaktionskraft. 10. Jahres-
tagung der deutschen Gesellschaft für Biomechanik. Hannover, 2017. (Poster)
Böhme, A., Mitschke, C., Milani, T.L.: Entwicklung eines Messplatzes zur Bestimmung der Schuss-
genauigkeit - mittels optischen Trackingverfahrens. Jahrestagung der dvs-Kommission Fußball 19.-
21. November 2015 in Erlangen, 2015. (Poster)
Karger, K., Mitschke, C., Milani, T.L.: Influence of different mechanical properties of running shoes
on performance of highly trained runners under aerobe and anaerobe conditions. 7th World Congress
of Biomechanics, 06.-11.07.2014, Boston, USA, 2014. (Poster)
Mitschke, C., Zaumseil, F., Milani, L.T.: Optimierung der Aufnahmefrequenz von Inertialsensoren
beim Fersenlauf. 10. Symposium der dvs - Sektion Sportinformatik, 10.-12.09.2014, Wien, Öster-
reich, 2014. (Vorträge)
Mitschke, C. & Horn, C.: Schussgeschwindigkeit im Fußball - beeinflussende Faktoren. dvs-Tagung
Sektion Biomechanik 2013 in Chemnitz, 2013. (Poster)

Anhang
99
Danksagung
Da eine wissenschaftliche Arbeit nie nur die Leistung eines Einzelnen ist, möchte ich mich an dieser
Stelle abschließend bei all denen bedanken, die mich während meiner Promotion begleitet und unter-
stützt haben.
Zuerst gebührt mein besonderer Dank Prof. Dr. Thomas L. Milani, der mich in meinem Promotions-
vorhaben stets unterstützte sowie mit seinen wertvollen Anregungen und seiner konstruktiven Kritik
zum erfolgreichen Abschluss dieser Arbeit beitrug. Zudem danke ich ihm für die Schaffung und Be-
reitstellung der hervorragenden Forschungs- und Arbeitsbedingungen. Weiterhin danke ich Prof.
Andrés Kecskeméthy für die Bereitschaft, diese Arbeit als Zweitgutachter zu beurteilen sowie für die
Disputation nach Chemnitz zu kommen.
Insbesondere möchte ich mich auch bei Dr. Falk Zaumseil dafür bedanken, dass er mich in die Welt
der Inertialsensoren einführte und stets ein kompetenter Ansprechpartner bei Fragen und Problemen
war. Mein Dank gilt auch Renato Germano und Tobias Heß für die langjährige tolle Bürogemein-
schaft mit den vielen (nicht-)fachlichen Diskussionen sowie Philip Schulze und Ralph Dörfler, die
mir mit ihrem technischen Knowhow stets mit Rat und Tat zur Seite standen. Herzlichen Dank auch
an die gesamte Arbeitsgruppe für die tolle Arbeitsatmosphäre und die vielen gewinnbringenden Dis-
kussionen.
Für das Englisch-Korrekturlesen der vier Artikel möchte ich mich im Besonderen bei Lisa Peterson
bedanken, die mit ihrer Unterstützung einen nicht zu verkennenden Anteil daran hatte, dass die Pub-
likationen in den internationalen Fachzeitschriften accepted wurden.
Ebenso gilt mein Dank Pierre Kiesewetter und Daniel Hascher für die stets engagierte und zuverläs-
sige Unterstützung bei der Datenerhebung sowie den unzähligen Probanden, die ihre Zeit und Geduld
investierten, damit die Datenbasis dieser Arbeit zustande kam. Ohne ihre Bereitschaft, wäre diese
Dissertation nicht entstanden.
Der Fa. Puma® Inc., Deutschland danke ich, dass ich im Rahmen des spannenden Forschungsfeldes
der Lauf- und Fußballschuhentwicklung mein Hobby und Beruf verbinden konnte.

Anhang
100
Meiner Familie möchte ich für ihre großartige Unterstützung in allen Lebensbereichen herzlich dan-
ken. Sie legten damit den Grundstein für diese Promotion bereits vor langer Zeit.
Zu guter Letzt danke ich Jana Weißflog nicht nur für das Korrekturlesen dieser Arbeit, sondern auch
für ihre Geduld und Motivation in den letzten Monaten, die letzten 15 wunderbaren Jahre sowie
Zoey, die einen alle Anstrengungen des Alltags vergessen lässt, sobald sie lacht.
Anhang
101
Selbstständigkeitserklärung
Ich, Christian Mitschke, am 21.11.1984 in Karl-Marx-Stadt geboren, erkläre gegenüber der Techni-
schen Universität Chemnitz, dass ich die vorliegende Dissertation selbstständig und ohne Benutzung
anderer als der angegebenen Quellen und Hilfsmittel angefertigt habe.
Die vorliegende Arbeit ist frei von Plagiaten. Alle Ausführungen, die wörtlich oder inhaltlich aus
anderen Schriften entnommen worden, habe ich als solche kenntlich gemacht.
Datum: _________________ Unterschrift: ___________________________