Gravity Disturbing Torque Treatment in a Spacecraft Slew Maneuver Task (in Russian)
34
Министерство образования и науки Российской Федерации Московский физико-технический институт (государственный университет) Факультет Аэрофизики и Космических Исследований Кафедра управления движением (Специализация «прикладная физика и математика») Исследование разворотов Международной Космической Станции с учетом гравитационного момента сил Бакалаврская работа студента 832 группы Узбекова Богдана Анузаровича Научный руководитель Богачев Алексей Викторович г. Долгопрудный 2012
Transcript of Gravity Disturbing Torque Treatment in a Spacecraft Slew Maneuver Task (in Russian)

Министерство образования и науки Российской Федерации
Московский физико-технический институт (государственный университет)
Факультет Аэрофизики и Космических Исследований
Кафедра управления движением
(Специализация «прикладная физика и математика»)
Исследование разворотов
Международной Космической Станции
с учетом гравитационного момента сил
Бакалаврская работа
студента 832 группы
Узбекова Богдана Анузаровича
Научный руководитель
Богачев Алексей Викторович
г. Долгопрудный
2012
Бакалаврская работа. Узбеков Б.А. 2
Оглавление Введение..................................................................................................................................... 3
Постановка задачи .................................................................................................................... 4
Глава 1. Основные положения ................................................................................................. 5
§1 Гравитационный момент сил .......................................................................................... 5
§2 Используемые системы координат................................................................................. 6
§3 Кватернионный способ задания ориентации ................................................................ 7
§4 Кинематические и динамические уравнения Эйлера ................................................... 9
§5 Некоторые параметры МКС .......................................................................................... 10
Глава 2. Математическая формулировка задачи .................................................................. 12
§1 Центральная система ОДУ ............................................................................................ 12
§2 Постановка краевой задачи ........................................................................................... 15
§3 Исследование корректности задачи Коши .................................................................. 15
Глава 3. Идеи и методы решения задачи .............................................................................. 17
§1 Частный случай .............................................................................................................. 17
§2 Общий случай. Метод стрельбы по трем параметрам................................................ 23
§3 Выбор начального приближения .................................................................................. 26
§4 Влияние гравитационного момента сил на процесс разворота ................................. 29
Заключение .............................................................................................................................. 33
Список литературы ................................................................................................................. 34

Бакалаврская работа. Узбеков Б.А. 3
Введение
В обычных задачах механики, связанных с ее техническими приложениями, ускорения
силы тяжести в различных точках материального тела считаются равными как по величине,
так и по направлению. Это сразу приводит к известному положению о совпадении центра
масс и центра тяжести материального тела и, как следствие, к равенству нулю момента грави-
тационных сил относительно центра масс. На самом деле векторы ускорения силы тяжести в
различных точках тела всегда различны вследствие того, что все они направлены к центру
Земли, а следовательно, если рассматриваемые точки не лежат на одной прямой, идущей че-
рез центр притяжения (центр Земли), то векторы не параллельны, а если точки лежат на од-
ной такой прямой, то имеют различное удаление от центра притяжения и, значит, соответст-
вующие ускорения отличаются по величине [1].
В данной работе рассматривается влияние гравитационного момента сил на процесс
разворота космического аппарата на околоземной орбите. Примером такого аппарата служит
Международная Космическая Станция (в дальнейшем станция или МКС), и в следующих
ниже расчетах фигурируют параметры именно этого объекта. В силу того, что рассматривае-
мый аппарат не подвержен действию больших внешних моментов, пренебрежение малыми в
обычной технике моментами (гравитационными, связанными со световым давлением и т.п.)
уже не будет законным. Более того, как будет показано ниже, влияние гравитационного мо-
мента на процесс разворота космического аппарата на околоземной орбите является сущест-
венным.
На сегодняшний день для того, чтобы изменить ориентацию станции (развернуть ее
около центра масс), бортовым компьютером вычисляется вектор угловой скорости, который
необходимо сообщить станции для перехода в заданное положение. Однако в существующих
алгоритмах создания такого управляющего импульса гравитационный момент сил никак не
учитывается, и является возмущающим фактором, отклоняющим станцию от «заданного кур-
са» разворота. Это приводит к необходимости дополнительных включений двигателей и, как
следствие, нежелательному расходу рабочего тела на борту.
Таким образом, проблема учета гравитационного момента при формировании управ-
ляющего импульса в задаче разворота космического аппарата около центра масс в заданное
положение представляет практическую ценность, причем не только для МКС, но и для любо-
го космического аппарата на околоземной орбите.

Бакалаврская работа. Узбеков Б.А. 4
Постановка задачи
Как уже стало ясно, целью работы является исследование процесса разворота МКС с
учетом гравитационного момента сил. В частности, ставится задача о создании алгоритма
вычисления начальной угловой скорости, необходимой для изменения ориентации станции
из текущего положения в любое заданное при учете гравитационного момента. Существен-
ным является тот факт, что рассматриваемая задача решается для больших углов поворота, то
есть линеаризация системы уравнений, описывающих движение твердого тела около центра
масс, не проводится.
Упрощением является рассмотрение орбиты станции как круговой (с высотой 400 км) и
не эволюционирующей с течением времени, то есть принимается, что станция вращается в
фиксированной неподвижной относительно Земли плоскости. МКС рассматривается как аб-
солютно твердое тело, хотя на практике оказывается, что это далеко не так. Еще одно упро-
щение связано с самой моделью разворота, а именно рассматривается маневр с двумя вклю-
чениями двигателей управления: первое - для сообщения станции угловой скорости в началь-
ный момент времени, и второе – для погашения этой скорости в момент времени со-
вершения заданного маневра. Принимается, что угловая скорость сообщается станции и га-
сится мгновенно. Такое допущение оправдано тем, что время разгона станции до заданной
угловой скорости и время торможения ее углового движения малы в сравнении с характер-
ными временами маневров изменения ориентации МКС.
В данной работе ориентация МКС формально задается единичным кватернионом опре-
деляющим поворот орбитальной системы координат (опорный базис) к системе координат
жестко связанной со станцией, называемой связанной системой координат. Кинематика и ди-
намика рассматриваемого тела при движении около центра масс описывается соответственно
кинематическими и динамическими уравнениями Эйлера, образующими в совокупности сис-
тему обыкновенных дифференциальных уравнений (в дальнейшем ОДУ).
Интересующая нас задача в принятых упрощениях - это перевод станции из начальной
ориентации в любую заданную за фиксированное время . Формально это означает, что сис-
тема ОДУ, составленная из кинематических и динамических уравнений Эйлера, получает
граничные условия в начальный ( ) и конечный ( ) моменты времени. Решение
этой краевой задачи, как станет ясно в дальнейшем, и приведет нас к ответу на вопрос о на-
правлении и длине вектора угловой скорости, которую необходимо сообщить станции в на-
чальный ( ) момент времени для желаемого изменения ориентации.

Бакалаврская работа. Узбеков Б.А. 5
Глава 1. Основные положения
§1 Гравитационный момент сил
Как уже упоминалось во введении, гравитационный момент сил, действующий на тело,
обусловлен не совпадением точек центра масс и центра гравитации рассматриваемого тела.
Для определения количественного соотношения для гравитационного момента сил, рассмот-
рим твердое тело в гравитационном поле Земли. Пусть точка - центр притяжения (смотри
рисунок ниже), – центр масс рассматриваемого тела, – центр гравитации (точка прило-
жения к телу силы гравитации). Пусть также .
Тогда на рассматриваемое тело относительно центра масс действует гравитационный момент,
равный , где - сила гравитации, действующая на рассматриваемой тело со
стороны Земли, приложенная к точке и направленная по вектору .
Чтобы получить точную формулу для гравитационного момента, необходимо разбить
рассматриваемое тело на маленькие кусочки, записать гравитационный момент, создаваемый
каждым таким маленьким кусочком относительно центра масс и проинтегрировать получив-
шееся соотношение по всему телу. Подробный вывод приведен в [1], здесь же выпишем лишь
результат:
где - гравитационная постоянная, - масса притягивающего тела (Земли в нашем
случае),
, - тензор инерции рассматриваемого тела для центра масс, - угловая
скорость орбитального движения рассматриваемого тела.

Бакалаврская работа. Узбеков Б.А. 6
§2 Используемые системы координат
Для задания ориентации твердого тела необходимо ввести две системы координат. Одна
– опорная система, относительно которой собственно и задается ориентация рассматриваемо-
го тела, и вторая – система координат, жестко связанная с телом.
В качестве опорной системы выберем орбитальную систему координат (в дальнейшем
ОСК), которую зададим следующим образом: начало положим в центре масс рассматривае-
мого космического аппарата, ось направлена по вектору скорости аппарата, ось – по
вектору направленному от притягивающего центра к аппарату, ось достраивает систему
до правой системы координат (смотри рисунок ниже).
Заметим, что в силу своего определения, ОСК не является инерциальной системой коорди-
нат.
Что касается связанной системы координат (в дальнейшем ССК), выбрать ее можно
по-разному, руководствуясь соображениями удобства. Наиболее удобным выбором ССК яв-
ляется система координат с началом в центре масс рассматриваемого тела и осями, направ-
ленными по главным центральным осям инерции тела. В этом случае, тензор инерции приоб-
ретает диагональный вид. В дальнейшем будем пользоваться именно такой ССК, которая
обеспечит диагональность тензора инерции и, вследствие, значительно упростит вид уравне-
ний движения. Это, вообще говоря, является еще одним упрощением в рассматриваемой за-
даче, так как оси ССК МКС не совпадают с главными центральными осями инерции станции
и, следовательно, тензор инерции не является диагональным.

Бакалаврская работа. Узбеков Б.А. 7
§3 Кватернионный способ задания ориентации
В данной работе для задания ориентации твердого тела используются кватернионы - че-
тырехмерные гиперкомплексные числа со специальными правилами умножения. Такой спо-
соб задания ориентации твердого тела имеет ряд преимуществ по сравнению с другими спо-
собами. С помощью кватернионов эффективно решаются задачи на определение параметров
конечного поворота твердого тела и задачи сложения поворотов. Кинематические уравнения
движения твердого тела в кватернионах не вырождаются, как в углах Эйлера, и не содержат
тригонометрических функций, а число этих уравнений существенно меньше, чем число урав-
нений в направляющих косинусах (четыре против девяти).
Формально кватернионы записываются выражениями следующего вида:
где - произвольные действительные числа, называемые компонентами ква-
терниона Λ, а – кватернионные единицы (суть базис в котором задан кватернион
). Правила перемножения кватернионов определяет таблица умножения кватернионных
единиц, которую можно найти, к примеру, в [2]. Операцию перемножения кватернионов в
дальнейшем будем обозначать символом « ».
Абстрактная алгебра кватернионов допускает различные интерпретации, важнейшей из
которых является геометро-числовая интерпретация. В этой интерпретации орт отождеств-
ляется с вещественной единицей, а орты являются ортами некоторого базиса в трех-
мерном евклидовом пространстве. Таким образом, любой кватернион может быть записан в
виде:
Важной формой записи кватернионов, определяющей в совокупности с теоремой, при-
веденной ниже, их физический смысл, является тригонометрическая форма записи кватер-
нионов:

Бакалаврская работа. Узбеков Б.А. 8
где – это норма кватерниона, определяющаяся, как сумма квадратов всех компонент ква-
терниона, а вектор есть единичный вектор.
В [2] подробно описано, почему и каким образом поворот твердого тела описывается
кватернионом
с единичной нормой. Здесь же ограничимся лишь форму-
лировкой теоремы из [2], на которой основан кватернионный способ задания ориентации
твердого тела и которая раскрывает физический смысл кватернионов: поворот, определяемый
кватернионом в , есть поворот вокруг вектора на угол . Направление же, задаваемое
единичным вектором называется осью Эйлера разворота, задаваемого кватернионом .
Важным обстоятельством является тот факт, что ориентация твердого тела, однозначно
задается тремя компонентами кватерниона. Действительно, пусть ориентация рассматривае-
мого тела задана единичным кватернионом Λ поворота от опорного базиса (в нашем случае
ОСК) к ССК. В силу сказанного выше, такой кватернион имеет вид:
Повернем ССК на угол вокруг вектора относительно текущей ССК. Понятно, что ориен-
тация рассматриваемого тела не изменится, однако формально кватернион, задающий новую
(совпадающую со старой) ориентацию имеет вид:
поэтому каждому положению тела соответствует два значения кватерниона Λ, отличающиеся
знаком. Вспомним теперь, что компоненты кватерниона, задающего поворот, связаны соот-

Бакалаврская работа. Узбеков Б.А. 9
ношением:
А значит, ориентация твердого тела однозначно за-
дается тремя компонентами кватерниона, что и требовалось доказать.
§4 Кинематические и динамические уравнения Эйлера
Произвольное движение тела всегда можно разложить на движение некоторой точки те-
ла и движение тела с неподвижной точкой (вращение). Выберем в данной работе в качестве
такой точки центр масс, и обсудим в этом параграфе уравнения, описывающие движения
твердого тела с неподвижной точкой.
При задании ориентации твердого тела при помощи углов Эйлера выражения, связы-
вающие проекции мгновенной угловой скорости тела, движущегося вокруг неподвижной
точки, на оси ССК с углами Эйлера и их производными, называются кинематическими урав-
нениями Эйлера. Их вывод представлен в любом учебнике по теоретической механике, на-
пример, в [3]. Кинематические уравнения при задании ориентации в углах Эйлера имеют вид:
Нас, однако, интересует вид этих уравнений в кватернионах:
где - единичный кватернион поворота от опорного базиса (ОСК) к ССК, - абсолютная
угловая скорость, записанная в ССК, - орбитальная угловая скорость, записанная в ОСК:
. Член здесь обусловлен неинерциальностью опорного базиса (ОСК).
Динамическими уравнениями Эйлера называются уравнения движения твердого тела с
неподвижной точкой, которые выводятся из теоремы об изменении кинетического момента
рассматриваемого тела ([3]). В векторной форме динамические уравнения Эйлера имеют вид:

Бакалаврская работа. Узбеков Б.А. 10
где – абсолютная угловая скорость, – тензор инерции рассматриваемого тела для центра
масс, – единичный вектор, направленный от притягивающего центра к центру масс тела,
– главный момент внешних сил относительно центра масс.
Кинематические и динамические уравнения в совокупности дают систему обыкновен-
ных дифференциальных уравнений (ОДУ) для угловых скоростей и углов поворота рассмат-
риваемого тела, полностью описывающих движение тела с неподвижной точкой.
§5 Некоторые параметры МКС
Как уже говорилось выше, существенным упрощением в данной работе является то, что
орбита МКС принимается круговой, с высотой , и не эволюционирующей с те-
чением времени. Угловая скорость орбитального движения составляет в этом случае
.
Тензор инерции для центра масс МКС в осях ССК российского сегмента имеет вид:
Как видно, в тензоре инерции станции присутствуют центробежные моменты инерции. Одна-
ко в данной работе будем считать, что тензор инерции для центра масс рассматриваемого те-
ла диагонален и имеет вид:
Такой вид тензора инерции значительно упрощает уравнения движения и выкладки, что не-
обходимо на начальном этапе исследования поставленной в работе задачи.
Ориентация МКС относительно ОСК поддерживается постоянной в следующем поло-
жении. Ось абсцисс ССК станции направлена противоположно вектору скорости станции, ось
ординат ССК совпадает с осью ординат ОСК, а ось аппликат достраивает ССК до правой сис-

Бакалаврская работа. Узбеков Б.А. 11
темы координат. Поэтому в дальнейшем, если не указано иного, кватернион, задающий ори-
ентацию рассматриваемого тела в начальный момент времени имеет вид:

Бакалаврская работа. Узбеков Б.А. 12
Глава 2. Математическая формулировка задачи
§1 Центральная система ОДУ
Итак, рассматривается твердое тело, движущееся по круговой околоземной орбите, не
эволюционирующей во времени. С телом связана система координат с началом в центре масс
тела (ССК). Задача состоит в оптимальном развороте рассматриваемого тела, использующем
гравитационный момент сил. В этом параграфе формализуем задачу и получим систему
обыкновенных дифференциальных уравнений, описывающих процесс разворота твердого те-
ла с учетом гравитационного момента сил.
Динамические уравнения движения Эйлера, рассмотренные в параграфе 4 главы 1, в
векторной форме записываются следующим образом:
(1)
Где – абсолютная угловая скорость, – тензор инерции рассматриваемого тела для центра
масс, – единичный вектор, направленный от притягивающего центра к центру масс тела, и,
наконец, - это орбитальная угловая скорость рассматриваемого тела. Член
здесь обусловлен гравитационным моментом сил.
В ССК имеем:
,
, (2)
где p, q и r – это проекции угловой скорости на оси ССК, являющиеся, вообще говоря, функ-
циями времени, - вектор , записанный в ССК, а - записанный в ОСК, – единичный
кватернион поворота от опорного базиса (ОСК) к ССК. Из определения вектора и ОСК,
данных выше, заключаем, что вектор является постоянным во времени и имеет компо-
ненты .
Кинематические уравнения Эйлера, обсуждавшиеся в параграфе 4 главы 1, в кватерни-
онной записи имеют вид:

Бакалаврская работа. Узбеков Б.А. 13
(3)
где по-прежнему - единичный кватернион поворота от опорного базиса (ОСК) к ССК, -
абсолютная угловая скорость, записанная в ССК, - орбитальная угловая скорость, запи-
санная в ОСК:
.
Заметим, что векторное уравнение (1) эквивалентно трем скалярным уравнениям, а
уравнение в кватернионном виде (3) содержит четыре скалярных уравнения. Таким образом,
система уравнений (1) и (3) является системой семи скалярных обыкновенных дифференци-
альных уравнений (ОДУ), неизвестными функциями времени для которой являются компо-
ненты угловой скорости в выбранном базисе (нас интересует базис, задающий ССК) и
компоненты кватерниона , задающих ориентацию рассматриваемого тела относительно
опорного базиса (в нашем случае ОСК).
Займемся теперь получением этих семи скалярных уравнений. Спроецируем векторное
уравнение (1) на оси ССК. Воспользуемся далее соотношениями (2) и правилом перемноже-
ния кватернионов. Тогда получим:
,
, (1')
,
где за , и обозначены проекции гравитационного момента сил (относительно центра
масс тела) на оси связанной системы координат. Эти моменты равны:
,
, (4)
,
где , , и - это компоненты кватерниона Λ.
Как видим, учет гравитационного момента приводит к появлению в уравнениях (1') по-
линомов четвертой степени по компонентам кватерниона задающего ориентацию, а значит,

Бакалаврская работа. Узбеков Б.А. 14
уже на этом этапе решения задачи ясно, что аналитического решения найти не удастся, и на-
деяться приходится на численные методы. Заметим также, что члены , и , ответст-
венные за гравитационный момент сил, имеют порядок , что обуславливает их малость
(для орбиты МКС угловая скорость орбитального движения была оценена в параграфе 5 гла-
вы 1 и составляет примерно ).
Обратимся теперь к уравнению (3) и перепишем его в виде четырех скалярных уравне-
ний. Применив правила перемножения кватернионов и проделав необходимые выкладки, по-
лучим:
,
, (3')
,
,
Таким образом, центральная в данной работе система обыкновенных дифференциаль-
ных уравнений получена и имеет вид:
,
,
,
, (5)
,
,
,
где моменты , заданы соотношениями (4). Неизвестными функциями для этой
системы являются проекции p(t), q(t r(t) угловой скорости на оси ССК, и компоненты
, , и кватерниона Λ, задающего ориентацию рассматриваемого тела.

Бакалаврская работа. Узбеков Б.А. 15
§2 Постановка краевой задачи
В предыдущем параграфе получена центральная система ОДУ, описывающая процесс
разворота твердого тела (в нашем случае космического аппарата на околоземной орбите)
около центра масс с учетом гравитационного момента. Вспомним теперь, в чем состоит по-
ставленная в данной работе задача. Необходимо определить вектор начальной угловой ско-
рости для перевода рассматриваемого тела из состояния, задаваемого кватернионом
Λ(0) в любое заданное состояние Λ(T) за время . Формально это значит, что система
уравнений (5) получает граничные условия при и при . Обратим внимание на
тот факт, что количество уравнений в системе (5) – семь, а с учетом того, что кватернион –
это четырехмерный объект, получаем восемь скалярных граничных условий. Однако из тео-
рии дифференциальных уравнений известно, что для однозначного разрешения системы ОДУ
первого порядка из N уравнений, необходимо N граничных (либо начальных) условий, если
же условий больше чем N, то необходимо убедиться в том, что они не противоречат друг
другу. Остановимся на этом вопросе подробнее.
Вспомним, что кватернион, задающий ориентацию твердого тела – это единичный ква-
тернион, то есть его норма
Эта связь формально понижает по-
рядок системы (5) до шести уравнений. Вспомним также, что ориентация тела может быть
однозначно задана тремя компонентами кватерниона, что обсуждалось в параграфе 3 главы
1, а значит количество независимых граничных условий для системы (5), также как и количе-
ство независимых уравнений в ней, равно шести. Таким образом, вопрос о корректности по-
становки краевой задачи для системы (5) решен.
На основании сказанного в этом и предыдущем параграфах, можно заключить, что по-
ставленная в работе задача полностью формализована и заключается в следующем. Необхо-
димо решить краевую задачу - систему ОДУ (5) с условиями в краях Λ(0) и Λ(T). Решение
такой краевой задачи – это функции p(t), q(t), r(t), , , и . Значение функ-
ций p(t), q(t) и r(t) в нуле и есть решение поставленной задачи.
§3 Исследование корректности задачи Коши
Как будет показано в дальнейшем, для того, чтобы решить поставленную в параграфе 2
краевую задачу для системы уравнений (5), неизбежно придется решать задачу Коши для
этой системы, то есть задачу с заданными начальными данными p(0), q(0), r(0), , ,

Бакалаврская работа. Узбеков Б.А. 16
и . Из теории дифференциальных уравнений известно, что лишь корректные зада-
чи Коши могут служить математической моделью для реальных физических процессов, так
как данные этих процессов, как правило, определяются лишь приближенно и, следовательно,
необходимо быть уверенным в том, что решение задачи Коши мало изменяется при малых
изменениях данных задачи Коши. Исследуем в этом параграфе вопрос о корректности задачи
Коши для системы уравнений (5), и начнем с некоторых определений вводимых в [4].
Задача Коши называется корректной, если найдется такой промежуток , что для
решение задачи Коши существует, единственно и непрерывно зависит от данных
задачи Коши (правых частей системы и начальных данных). Здесь y есть вектор-функция, со-
ставленная из искомых скалярных функций .
Согласно доказанной в [4] теореме задача Коши является корректной, если вектор-
функция, составленная из правых частей исследуемой системы ОДУ является непрерывной
функцией своих аргументов и удовлетворяет условию Липшица по y равномерно по t.
Говорят, что функция в области удовлетворяет условию Липшица относитель-
но равномерно по , если число такое, что для лю-
бых точек и . Здесь область и – это вектор-функция, со-
ставленная из правых частей исследуемой задачи.
Таким образом, для того, чтобы исследовать задачу Коши для системы (5) на коррект-
ность, необходимо, во-первых, разрешить эту систему относительно производных, а затем,
проверить вектор функцию, составленную из правых частей получившейся системы на не-
прерывность и удовлетворение условию Липшица.
В силу вида системы уравнений (5) и соотношений (4) вектор-функция, составленная из
правых частей системы (5), будет непрерывной по своим аргументам. Можно также показать,
что эта функция удовлетворяет условию Липшица относительно равномерно по , однако, в
силу громоздкости, эти выкладки здесь не проделываются.
Таким образом, решение задачи Коши для системы уравнений (5) непрерывно зависит
от начальных данных и правых частей (является корректно поставленной), а значит, такая
система дифференциальных уравнений может служить математической моделью реального
физического процесса, а именно процесса разворота космического аппарата на околоземной
орбите. Более того, тот результат, что решение задачи Коши для (5) непрерывно по началь-
ным данным, будет использоваться в дальнейшем при построении методов решения краевой
задачи для системы уравнений (5).

Бакалаврская работа. Узбеков Б.А. 17
Глава 3. Идеи и методы решения задачи
§1 Частный случай
Решим краевую задачу для системы уравнений (5) главы 2 в существенном упрощении:
рассмотрим развороты лишь вокруг оси Oz ССК при совпадении в начальный момент време-
ни осей ССК рассматриваемого тела с осями ОСК. То есть
. Напомним, что полу-
ченная во главе 2 центральная система ОДУ имеет вид:
,
,
,
, (1)
,
,
,
где моменты , по-прежнему определены соотношениями (4) главы 2. Граничные
условия для этой системы:
Естественно предположить, что для разворота рассматриваемого тела в заданное поло-
жение Λ(T) за фиксированное время необходимо сообщить начальную угловую скорость
вдоль оси ССК. Действительно, в силу диагональности тензора инерции рассматриваемо-
го тела, при сообщении ему начальной угловой скорости вдоль оси ССК, вращений по
осям и ССК с течением времени не появится, а значит, разворот будет происходить
вокруг оси ССК, что и требуется. Заметим также, что в силу сделанных упрощений и фи-

Бакалаврская работа. Узбеков Б.А. 18
зического смысла компонентов кватерниона (параграф 3 главы 1), и
будут неиз-
менны в процессе рассматриваемого разворота и останутся тождественными нулями:
Вспомним далее, что ориентация твердого тела относительно выбранного опорного ба-
зиса (в нашем случае это ОСК) однозначно задается тремя компонентами кватерниона пово-
рота. В силу этого обстоятельства, выберем первые три компоненты кватерниона Λ для зада-
ния ориентации рассматриваемого в этом параграфе тела. Тогда последнее уравнение систе-
мы (1) можно исключить из рассмотрения, а получившаяся краевая задача примет вид:
,
,
, (1')
,
,
,
(2')
В силу физических соображений, приведенных выше, некоторые решения для искомых
в этой системе функций можно выписать сразу: . Тогда
краевая задача (1') - (2') упростится и примет вид:
, (1'')
,

Бакалаврская работа. Узбеков Б.А. 19
, (2'')
, (3)
В силу приведенных в параграфе 3 главы 1 рассуждений о знаке компонентов кватер-
ниона, выбор знака в соотношении не имеет значения, поэтому выберем для
определенности знак «+», тогда, наконец, получим:
, (1''')
,
, (2'')
Для рассматриваемого случая диагональности тензора инерции и разворотов вокруг оси
Oz ССК (при совпадении в начальный момент времени осей ССК с осями ОСК) получили
краевую задачу (1''') - (2''). Заметим, сто система (1''') ОДУ является нелинейной, поэтому по-
иск аналитического решения крайне затруднен и приходиться обращаться к численным мето-
дам решения краевых задач для ОДУ. Одним из таких методов является метод стрельбы,
описанный в [5], [6] и заключающийся в следующем. Поставим для системы обыкновенных
дифференциальных уравнений (1''') задачу Коши (задачу с начальными данными):
Тогда решение задачи Коши (1''') с начальными данными (4) будет функцией времени и па-
раметра α:

Бакалаврская работа. Узбеков Б.А. 20
а в силу того, что нас интересует именно ориентация твердого тела, то будем рассматривать
лишь решение . Это решение на правом краю (t=T) есть функция лишь парамет-
ра α:
но тогда решение краевой задачи (1''') - (2'') сводится к нахождению такого , при котором
выполняется:
где есть решение задачи Коши (1''') с начальными данными (4) на правом краю (в
точке t = T). Уравнение (5) формально есть нелинейное уравнение вида , решить ко-
торое можно методом деления отрезка пополам, подробно описанным в [5], [6]. Здесь же
опишем основную идею метода.
Как и любой численный метод решения нелинейных алгебраических уравнений, метод
деления отрезка пополам заключается, во-первых, в локализации корней исследуемого урав-
нения, и, во-вторых, в уточнении этих корней с необходимой точностью. Что касается лока-
лизации корней, общих подходов к решению этой задачи нет, и на этом этапе используют,
как правило, физическое содержание задачи или ЭВМ для построения приближенного графи-
ка функции . Пусть задача о локализации корней решена, и нас интересует корень, при-
надлежащий отрезку . Уточним этот корень следующим образом. Выберем точки
и такие, что и . Далее вычисляем
, и ес-
ли , то
, а если , то
. Продолжая последовательно
вычислять описанным способом, будем приближаться к решению , лока-
лизованному на отрезке .
Для демонстрации построенного метода рассмотрим конкретный пример. Пусть в сово-
купности со всеми допущениями, сделанными в этом параграфе, разворот совершается на
угол и вектор начальной угловой скорости сонаправлен с осью Oz, то есть
. За-
дадим также время разворота . Как было показано выше, задача о нахождении

Бакалаврская работа. Узбеков Б.А. 21
вектора начальной угловой скорости для разворота рассматриваемого тела из положения
в положение за время сводится к решению краевой задачи (1''') – (2'')
при и В свою очередь эта задача решается методом деления отрезка
пополам уравнения , где , а . Первое, что нужно сде-
лать, это локализовать интересующий нас корень. Сделаем это исходя из физических сооб-
ражений задачи.
Если пренебречь неинерциальностью опорного базиса ОСК и гравитационным момен-
том, то начальная угловая скорость, которую необходимо сообщить рассматриваемому телу
для его разворота на угол π за время находится моментально:
( ). Это начальное приближение для задачи, учитывающей неинерциальность ОСК и
гравитационный момент сил. Подчеркнем здесь, что система уравнений (1''') без учета не-
инерциальности опорного базиса ОСК и гравитационного момента сил, принимает простой
вид:
, (6)
,
Построим теперь график решения задачи Коши для системы ОДУ (1''') с началь-
ными условиями , проведя численное интегрирование методом, осно-
ванным на формулах Рунге – Кутта четвертого и пятого порядка точности. Сравним его с
графиком решения задачи Коши для системы (6), не учитывающей гравитационного момента
и неинерциальности опорного базиса ОСК, с теми же начальными.

Бакалаврская работа. Узбеков Б.А. 22
Из полученного графика видно, что при учете неинерциальности ОСК и гравитационно-
го момента, рассматриваемому телу для разворота на угол π за время необходимо
сообщить начальную угловую скорость большую, чем .
Решим снова задачу Коши для системы ОДУ (6) с начальными данными
, где и приведем график решения для функции .
Из графика видно, что на этот раз начальная угловая скорость слишком велика и разво-
рот на угол рассматриваемого тела происходит быстрее, чем необходимо.
Замечаем теперь, что и (напомним, что ).
Очевидно также, что искомый корень локализован на отрезке . Поэтому
далее применяем метод деления отрезка пополам, описанный выше, и уже на третьем шаге
получаем решение с точностью .

Бакалаврская работа. Узбеков Б.А. 23
Таким образом, поставленная в работе задача, полностью решена для простого случая,
предполагающего диагональность тензора инерции рассматриваемого тела, развороты вокруг
оси Oz ССК и совпадение в начальный момент времени осей ОСК и ССК. Заметим, однако,
что для справедливости всех полученных результатов в этом параграфе совпадение осей ОСК
и ССК в начальный момент времени не требуется, а необходимо выполнение менее жесткого
условия – совпадение в начальный момент времени осей аппликат ОСК и ССК, что понятно
из физических соображений.
§2 Общий случай. Метод стрельбы по трем параметрам
Рассмотрим теперь общую задачу о развороте космического аппарата на околоземной
орбите, учитывающем гравитационный момент. В параграфе 1 главы 2 была получена цен-
тральная система ОДУ, описывающая процесс разворота рассматриваемого тела:
,
,
,
, (1)
,
,
,
где моменты , заданы соотношениями:
,
, (2)
,

Бакалаврская работа. Узбеков Б.А. 24
Будем считать, что в начальный момент времени оси ССК рассматриваемого тела на-
правлены относительно осей ОСК так же, как оси ССК МКС, а кватернион конечного состоя-
ния имеет произвольный вид, то есть имеем граничные условия:
Как было показано в параграфе 2 главы 2, решение поставленной в работе задачи фор-
мально сводится к решению краевой задачи для системы ОДУ (1) с граничными условиями
(3). Займемся в этом параграфе исследованием вопроса о численном решении такой краевой
задачи.
В предыдущем параграфе при решении краевой задачи для системы двух ОДУ первого
порядка был применен метод стрельбы, описанный подробно в [5], [6]. Адаптируем этот ме-
тод для системы уравнений (1) с граничными условиями (3). Следую логике рассуждений
предыдущего параграфа, поставим задачу Коши (то есть зададим начальные данные) для сис-
темы уравнений (1):
, (4)
Тогда решение задачи Коши для (1) будет функцией времени и параметров α, β и γ, а
значит, значения решений задачи Коши для компонентов кватерниона на правой границе
(при ) будут функциями одних лишь параметров α, β и γ. Таким образом, краевая задача
для системы (1) с граничными условиями (3) сводится к нахождению таких значений пара-
метров и γ, при которых выполняется:
,
, (5)
,
,

Бакалаврская работа. Узбеков Б.А. 25
Формально система уравнений (5) является нелинейной системой уравнений, с той
лишь особенностью, что функции не
заданы явно, а являются решениями задачи Коши для системы (1) с начальными данными (4).
Вспомним теперь, что ориентация твердого тела однозначно задается тремя компонентами
кватерниона, а значит, оставим в системе (5) лишь первые три уравнения. Получим тогда
систему из трех нелинейных уравнений с тремя неизвестными α, β и γ:
,
, (5')
,
которая подлежит, вообще говоря, численному решению. Однако методы численного реше-
ния нелинейных систем уравнений требуют явного задания функций, стоящих в правых час-
тях этих уравнений (в нашем случае это функции ,
,
). Будем решать, поэтому, систему уравнений (5') иначе. Используем то об-
стоятельство, что решения системы (5') и уравнения
совпадают. Функция , стоящая в правой части уравнения (6), имеет глобальный
минимум в точке , где - решения системы (5') и уравнения (6), то есть
. Таким образом, задача о решении (5') (или (5)) сводится к нахождению
глобального минимума функции
. Из курса математического анализа известно,
что необходимым условием экстремума функции является:

Бакалаврская работа. Узбеков Б.А. 26
что позволяет искать значения последовательно. Остановимся подробнее на алго-
ритме поиска этих значений.
Выберем, во-первых, начальное приближение (в нашей задаче это можно
сделать исходя из физических соображений, как это и проделывалось в предыдущем пара-
графе). Далее фиксируем параметры , и получаем, таким образом, функцию
. Варьируя параметр α в окрестности с необходимым шагом, на-
ходим , дающее минимум функции и глобальный минимум функции с
заданной точностью. Найдя решение , фиксируем его и приближение . Получаем, таким
образом, функцию . И снова, варьируя параметр β в окрестности с необходимым
шагом, находим решение с заданной точностью. Таким же образом находим решение .
Найденные значения дают решение краевой задачи для системы ОДУ (1) с гра-
ничными условиями (3), а значит, и решение задачи, поставленной в работе.
Однако есть некоторая трудность, связанная с тем, что в алгоритме нахождения реше-
ний , описанном выше, предполагалось, что функция не имеет локаль-
ных минимумов. Однако это может быть не так. В этом случае нужно быть уверенным в том,
что начальное приближение выбрано с хорошей точностью, в том смысле, что оно находится
в окрестности глобального минимума функции , и достаточно далеко от локальных
минимумов, чтобы не «попасть в них».
§3 Выбор начального приближения
При моделировании разворота в поставленной задаче есть два возмущающих фактора.
Первый – это гравитационный момент сил, действующий на рассматриваемое тело и откло-
няющий его от «заданного курса» разворота. Второй возмущающий фактор – это неинерци-
альность ОСК, которая, в нашем случае, является опорным базисом для задания ориентации
рассматриваемого тела. Важно отметить, что возмущение, вызванное гравитационным мо-
ментом сил, является, как будет показано ниже (параграф 4), малым на временах порядка
(это характерное время маневров изменения ориентации МКС). Неинерциальность же
опорного базиса ОСК на таких временах уже существенно возмущает угловое движение рас-
сматриваемого тела. Действительно, в нашей задаче орбитальная угловая скорость движения
составляет а это значит, что ОСК совершает полный оборот около собст-
венной оси Oz за время
. Таким образом, для определения хороше-

Бакалаврская работа. Узбеков Б.А. 27
го начального приближения необходимо учесть неинерциальность ОСК, чем и займемся в
этом параграфе.
Пусть имеется инерционный базис (ИСК), привязанный к центру масс тела. Пусть так-
же, ориентация ОСК относительно ИСК в начальный момент времени задана кватернионом
(смотри рисунок ниже), а в момент времени кватернионим , ориентация рассмат-
риваемого тела относительно осей ОСК задается кватернионом в начальный момент вре-
мени и кватернионом в момент времени совершения маневра изменения ориентации
тела. И, наконец, ориентация ССК относительно ИСК в начальный момент времени задана
кватернионом , а в момент времени кватернионом .
И
Тогда справедлива цепочка равенств (используются правила сложения поворотов в тер-
минах кватернионов, подробно описанные в [2]):
где - это кватернион перехода от . Далее, с одной стороны,
а с другой,

Бакалаврская работа. Узбеков Б.А. 28
где – это и есть искомый кватернион перехода от , который, в конечном счете,
даст нам достаточно точное начальное приближение, учитывающее неинерциальность ОСК.
В силу записанных выше соотношений, для R имеем:
Несложно определить компоненты кватерниона . Действительно, ОСК вращается
вокруг собственной оси Oz с угловой скоростью , а значит, за время угол поворота ОСК
составит . Тогда, в силу физического смысла компонент кватерниона поворота, описан-
ного в параграфе 3 главы 1, имеем:
Тогда для кватерниона окончательно имеем:
Напомним, что в этом параграфе мы ищем начальное приближение для вектора началь-
ной угловой скорости, переводящей рассматриваемое тело из ориентации в ориентацию
. При заданных ориентациях в начальный и конечный моменты времени, а также при за-
данном времени разворота кватернион , задающий поворот от легко счита-
ется по полученной формуле (7). Далее, вспоминая физический смысл кватерниона, задающе-
го поворот твердого тела, а именно:

Бакалаврская работа. Узбеков Б.А. 29
находим угол разворота и единичный вектор
, задающий ось Эйлера разворота.
Понятно, что вектор приближения начальной угловой скорости должен быть направлен по
вектору и иметь модуль
. Тогда имеем:
§4 Влияние гравитационного момента сил на процесс разворота
Как было замечено в параграфе 1 главы 2, малость влияния гравитационного момента
сил обусловлена множителем при этих моментах в динамических уравнениях движения
Эйлера ( здесь – угловая скорость орбитального движения). В этом же параграфе была по-
лучена система дифференциальных уравнений, описывающая процесс разворота твердого те-
ла на околоземной орбите с учетом гравитационного момента. Исследуем в этом параграфе
вопрос о влиянии гравитационного момента на процесс разворота тела с диагональным тен-
зором инерции, выбирая для системы уравнений (1) начальные условия и решая полученную
задачу Коши численно методом, использующим формулы Рунге – Кутта четвертого и пятого
порядка точности.
Для начала, посмотрим, как влияет гравитационный момент на уход ССК от ОСК в ходе
орбитального движения космического аппарата. Пусть в начальный момент времени оси ОСК
совпадают с ССК, а ориентация рассматриваемого аппарата относительно ОСК не поддержи-
вается. Начальные условия для такой задачи:

Бакалаврская работа. Узбеков Б.А. 30
. Решив задачу с учетом и без учета гравитационного момента числен-
но, получим решения для компонент кватернионов, приведенные на графике ниже (в силу
физических соображений, – тождественные нули):
Из приведенного графика видно, что решения с учетом и без учета гравитационного
момента расходятся, в данном случае, начиная уже с 1000( ). Важно также заметить, что рас-
хождение решений растет с течением времени.
Характерная скорость угловых поворотов МКС – . При такой угловой скорости
характерное время разворота на угол составляет 1200( ), а значит, пренебрежение гравита-
ционным моментом сил при моделировании процесса разворота станции не является оправ-
данным.
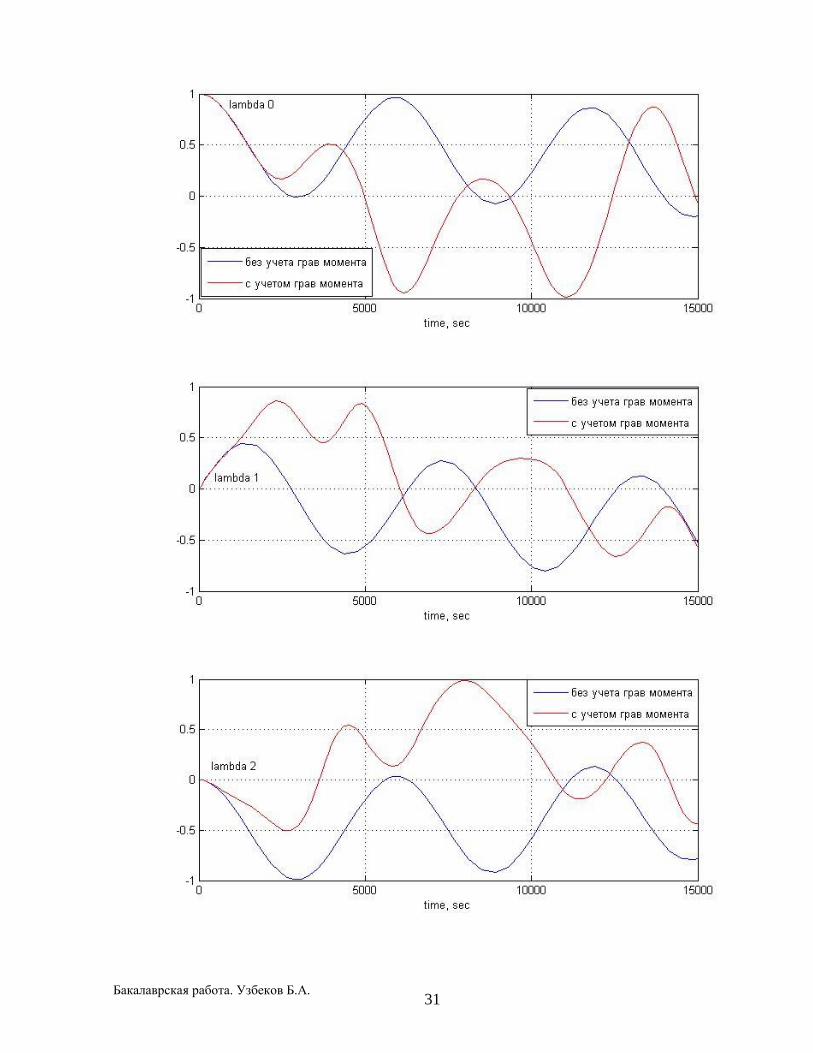
Рассмотрим еще один пример, показывающий существенность влияния гравитационно-
го момента сил при маневрах изменения ориентации космических аппаратов. Решим систему
уравнений (1) с учетом и без учета гравитационного момента с начальными данными:
. Произведя чис-
ленное интегрирование системы (1) с такими начальными данными, получим решения для
компонент кватерниона разворота, графики которых представлены ниже:
Бакалаврская работа. Узбеков Б.А. 31

Бакалаврская работа. Узбеков Б.А. 32
На приведенных выше графиках видно, что, как и для задачи ухода ССК от ОСК, начиная со
времен порядка решения, учитывающие и не учитывающие гравитационный момент
сил, начинают существенно отличаться.
Примеры, рассмотренные в этом параграфе, показывают, что учет гравитационного мо-
мента сил для космических аппаратов на околоземной орбите является актуальной задачей, а
не учет этого возмущения приводит к существенным ошибкам.

Бакалаврская работа. Узбеков Б.А. 33
Заключение
В настоящей работе сформулирован подход к решению поставленной в работе задачи -
определение вектора начальной угловой скорости для разворота МКС около центра масс в
заданное положение за заданный промежуток времени. Разработан алгоритм определения
вектора начальной угловой скорости для осуществления такого разворота. Результаты работы
справедливы не только для станции, но и для любого космического аппарата на околоземной
орбите. Детальная реализация алгоритма, его дополнение и адаптация для бортового приме-
нения составляет предмет дальнейшей работы и исследований.
При этом необходимо отойти от принятых в работе допущений о диагональности тензо-
ра инерции для центра масс рассматриваемого тела и о круговой не эволюционирующей с
течением времени орбите станции. Следует также учесть, что модель МКС как абсолютно
твердого тела, вообще говоря, не применима и что угловая скорость сообщается станции и
гасится не мгновенно.
Важно отметить, что учет всех указанных факторов лишь изменит вид системы ОДУ,
описывающих процесс разворота рассматриваемого тела. При этом алгоритм численного
решения краевой задачи для такой системы уравнений, предложенный в данной работе, оста-
нется неизменным.

Бакалаврская работа. Узбеков Б.А. 34
Список литературы
1. Управление ориентацией космических аппаратов. Раушенбах Б.В., Е.Н. Токарь, Изд-во
«Наука», Главная редакция физико-математической литературы, М., 1974, 600 стр.
2. Журавлев В.Ф. Основы теоретической механики. Изд. 2-е, перераб. – М.: Издательство
Физико-математической Литературы, 2001. – 320 с. – ISBN 5-94052-041-3.
3. Маркеев А.П. Теоретическая механика: Учебник для университетов. – Ижевск: НИЦ
«Регулярная и хаотическая динамика», 2001, 592 стр. – ISBN 5-93972-088-9.
4. Романко В. . Курс дифференциальных уравнений и вариационного исчисления. – 2-е
изд. – М.: Лаборатория Базовых Знаний, 2001 – 344 с.: ил. – ISBN 5-93208-097-3.
5. Рябенький В. . Введение в вычислительную математику: Учеб. пособие: Для вузов. –
М.: Физматлит, 1994. – 336 с. – ISBN 5-02-014544-0.
6. осарев В.И. 12 лекций по вычислительной математике (вводный курс): Учеб. посо-
бие: Для вузов. Изд. 2-е, испр. и доп. – М.: Изд-во МФТИ, 2000. – 224 с. – ISBN 5-
89155-053-9.