Infrastructure Redesign and Instructional Reform in Mathematics
Upload
independentCategory
view
0download
0
IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003 35
GA-Based Intelligent Digital Redesign ofFuzzy-Model-Based Controllers
Wook Chang, Jin Bae Park, and Young Hoon Joo
Abstract—Intelligent digital redesign involves converting a con-tinuous-time fuzzy-model-based controller into an equivalent dis-crete-time counterpart for the digital control of continuous-timenonlinear systems by using the Takagi–Sugeno (TS) fuzzy models.In this paper, authors present a new global state-matching intelli-gent digital redesign method for nonlinear systems by using geneticalgorithms (GAs). More precisely, the intelligent digital redesignproblem is converted to an equivalent optimization problem, andthen GAs are adopted to find a solution. The search space, in whicheach problem variable is defined for GAs, are systematically ob-tained by the interval arithmetic operations. The proposed methodresults in global matching of the states of the analogously con-trolled system with those of the digitally controlled system whilethe conventional intelligent digital redesign method does not. TheChen’s chaotic system is used as an illustrative example to showthe effectiveness and the feasibility of the developed method. Theproposed method provides a new approach for the digital redesignof a class of fuzzy-model-based controllers.
Index Terms—Chen’s chaotic attractor, fuzzy-model-based con-troller, genetic algorithms (GAs), intelligent digital redesign.
I. INTRODUCTION
A LARGE number of real physical dynamic systems aredescribed in continuous-time setting. On the other hand,
as the advanced microprocessors and microcomputers becomeeasily available, implementing controllers with digital devicesis highly desirable. In view of theoretical aspects, however,continuous-time (analog) control theories are quite suitable forthe practical continuous-time systems although discrete-time(digital) controllers may actually be involved in the real con-trol-loop. In addition, the design of continuous-time controllersis often required to meet some control specifications describedin the continuous-time frameworks. The so-called digitalredesign is to design an analog controller first and then convertthe obtained analog controller to the equivalent digital con-troller maintaining the properties of the analogously controlledsystem, by which the benefits of both continuous-time con-trollers and the advanced digital technology can be achieved.
Many analytic digital redesign methods have been studied forlinear systems [1]–[7]. Thanks to the extensive research worksof various kinds of digital redesign techniques by Shiehet al.[1], [3], [5], [6], the digital redesign technique for linear sys-
Manuscript received July 7, 2001; revised March 12, 2002 and May 20, 2002.This work was supported by the Brain Korea 21 Project.
W. Chang is with the Samsung Advanced Institute of Technology, Suwon440-600, Korea (e-mail: [email protected]).
J. B. Park is with the Department of Electrical and Electronic Engineering,Yonsei University, Seoul 120-749, Korea (e-mail: [email protected]).
Y. H. Joo is with the School of Electronic and Information Engi-neering, Kunsan National University, Chonbuk 573-701, Korea (e-mail:[email protected]).
Digital Object Identifier 10.1109/TFUZZ.2002.806315
tems become attractive for the practical implementation of dig-ital controllers. However, there are relatively less research workson the digital redesign of nonlinear systems [8]–[10] since itis very difficult, if not impossible, to derive an analytical so-lution of the digital redesign of complex nonlinear systems.Yokoyamaet al. [8] applied a digital redesign technique forthe motion control of a nonlinear robot manipulator system byusing the linear approximation technique. Xuet al. [9] suc-cessfully established a digitally redesigned controller for thechaotic Chua’s circuit. In their method, the chaotic Chua’s cir-cuit is represented by multiple linear systems and the conven-tional digital redesign technique is applied to each system. Al-though the digital redesign technique is successfully applied tosome nonlinear systems, it is still needed to develop the digitalredesign method for the more general nonlinear systems. For-tunately, the Takagi–Sugeno (TS) fuzzy model is helpful in thiscase since it combines the fuzzy inference rules with some locallinear state-space models, which allows the easy application ofvarious linear system theories to nonlinear systems. Jooet al.[10] developed an intelligent digital redesign technique for thedigital control of the chaotic Chua’s circuit with the TS fuzzymodel and a fuzzy-model-based controller where each digitalcontrol rule is determined by applying the conventional digitalredesign technique to each local closed-loop system. This ap-proach is very appealing to the digital redesign of nonlinear sys-tems since many nonlinear systems can be represented by theTS fuzzy models [10], [11]. Although this allows the designerto take advantage of the classical digital redesign techniquesfor nonlinear systems, it may lead to undesirable and/or inac-curate results since the digital redesign is considered for eachsubclosed-loop system and does not guarantee the global equiv-alence between the analogously controlled system and the dig-itally controlled counterpart. However, the analytic global dig-ital redesign of fuzzy-model-based controllers is difficult due totheir nonlinear behaviors.
Genetic algorithms (GAs), on the other hand, have shownto be flexible and robust optimization tools for many non-linear optimization problems, where the relationship betweenadjustable parameters and the resulting objective function isassumed to exist but mathematical relationship is not clear [12].Thus, the aforementioned intelligent digital redesign problemis effectively solvable by GAs since it can be converted toan optimization problem. For linear systems, Hsuet al. [4]suggested an algorithm to obtain a digitally redesigned con-troller with GAs and applied it to a second-order linear system.Recently, Shiehet al. [13] implemented a GA-based digitalredesign method for uncertain linear systems. However, all ofthe above approaches have focused on the digital redesign forlinear systems, and the digital redesign technique for complexnonlinear systems has not been fully investigated yet.
1063-6706/03$17.00 © 2003 IEEE

36 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003
In this paper, we propose a GA-based intelligent digitalredesign method for the digital control of complex contin-uous-time nonlinear systems with the TS fuzzy models andfuzzy-model-based controllers. For this purpose, we considerthat the continuous-time TS fuzzy model and the well-designedcontinuous-time fuzzy-model-based controller are availablefor the given continuous-time nonlinear system. Then, wedevelop the GA-based intelligent digital redesign technique ofthe continuous-time fuzzy-model-based controller so that thestates of the original continuous-time system and the digitallyredesigned system are closely matched.
The proposed method improves the performance of theintelligent digital redesign method authored by Jooet al. [10],in which only the local intelligent digital redesign has beenproposed. More specifically, we convert the intelligent digitalredesign problem into the equivalent nonlinear optimizationproblem, which GAs are applied to solve. The conversionof the problem can be justified since the digital redesign ofa given analogously controlled system intends to match thestates or outputs of the original analogously controlled systemwith those of the resulting digitally controlled counterpart. Forthe application of GAs to the given intelligent digital redesignproblem, GAs need to know the search space in which eachvariable is defined for the given optimization problem. There-fore, we also present a new systematic procedure to determinethe intervals by adopting the interval arithmetic operations [3].In addition, we use the problem-specific information to obtainthe better solution.
The main contribution of this paper is to establish the system-atic digital redesign algorithm for the digital control of contin-uous-time nonlinear systems by using GAs and fuzzy controltheory. The proposed method carried out in this work can beapplied to any nonlinear systems represented by the TS fuzzymodels. Since various modeling and identification algorithmsfor the TS fuzzy model are available in the literature [10], [14],[15], our results are not limited by some specific nonlinear sys-tems. Our simulation results convincingly show that the digitallyredesigned controller can provide a satisfactory global state-matching property compared with that of the previous work[10]. We should also note that the proposed method surpris-ingly outperform the conventional method although the solutionis found numerically, i.e., by GAs, which appeals to the practicalrealization of the digital controllers of nonlinear systems.
The rest of this paper is organized as follows. Section IIdescribes two representative fuzzy model structures, namely,the continuous-time and discrete-time TS fuzzy models. Thelocal intelligent digital redesign method is also briefly re-viewed. The GA-based intelligent digital redesign of complexnonlinear systems with the TS fuzzy models is discussed inSection III. Then, in Section IV, the TS fuzzy model of theChen’s chaotic system is constructed and used as a test examplefor the proposed method. Finally, conclusions are drawn inSection V with some discussion.
II. PRELIMINARIES
This section reviews two representative fuzzy model struc-tures, namely, continuous-time and discrete-time TS fuzzymodels, and the concept of the local intelligent digital redesignmethod is also presented.
A. Two Representative TS Fuzzy Model Structures
Consider a continuous-time nonlinear dynamical system
(1)
where is the state vector, is the con-trol vector, and and are nonlinear vector functions.This nonlinear system can be approximated or represented bythe continuous-time TS fuzzy model, which is composed of aset of fuzzy inference rules and some local linear state-spacemodels of the system over a certain region of the state space[11], [16]. We use the following TS fuzzy model to representa complex, multiple-input–multiple-output (MIMO), nonlinearsystem:
Rule IF is and and is
THEN
(2)
where ( ) is the fuzzy set of theth premisevariable, is the number of fuzzy rules, ,
, and are the premise variables. Usingthe center-average defuzzification, product inference, and sin-gletone fuzzifier, the global dynamics of (2) can be describedby
(3)
where
and is the grade of membership of in . Weuse the fuzzy-model-based controller as shown by
Rule IF is and and is
THEN (4)
where is the feedback gain in theth fuzzy subspace, whichis to be predesigned. The defuzzified output of the fuzzy-model-based controller is given by
(5)
where

CHANG et al.: GA-BASED INTELLIGENT DIGITAL REDESIGN OF FUZZY-MODEL-BASED CONTROLLERS 37
The rule structure of the corresponding discrete-time TSfuzzy model is
Rule IF is and and is
THEN
(6)
where ,, and are the premise variables, andis
the sampling period.Similarly, the global dynamics of (6) can be described by
(7)where
and is the grade of membership of in .The corresponding discrete-time fuzzy-model-based controllerhas the following structure:
IF is and and is
THEN
for (8)
where is the feedback gain to be digitally redesigned in theth fuzzy subspace. The defuzzified output of the fuzzy-model-
based controller is given by
(9)
where
B. Local Intelligent Digital Redesign
The conventional digital redesign method tries to match theclosed-loop state at with the digitally controlledstate at , which has been developed mainly forlinear systems. In [10], Jooet al.proposed an intelligent digitalredesign technique for nonlinear systems by using the TS fuzzymodels. In this paper, we rename the intelligent digital redesignmethod in [10] as the local intelligent digital redesign method
to differentiate it from the newly proposed GA-based intelligentdigital redesign method.
This local intelligent digital redesign technique was success-fully applied to the digital control of the chaotic Chua’s circuit.This method, however, may give the degraded performancesince it focuses not on the digital redesign of the globalclosed-loop system but on that of the local closed-loop systems.Therefore, the intelligent digital redesign method achieving theglobal state matching is necessary. As stated before, obtainingthe more precise and analytic intelligent digital redesign ofthe fuzzy-model-based controller is very difficult. However, itis evident that there is some hidden, underlying relationshipbetween the analogously controlled system and the digitallycontrolled system. In Section III, we propose a GA-basedintelligent digital redesign algorithm to resolve this problem.
III. GA-B ASED INTELLIGENT DIGITAL REDESIGN OF
FUZZY-MODEL-BASED CONTROLLERS
A. Problem Description
The intelligent digital redesign problem can be stated as fol-lows: Given the continuous-time nonlinear system (1), the con-tinuous-time fuzzy-model-based controller (4) and the samplingtime , design a discrete-time fuzzy-model-based controller (8)to minimize the cost function defined by
(10)
where is the final time of interest, and are the thstate variables of the state vectors and , respectively,
with a sufficiently large integer , andand are the th state variables of the state vectorsand evaluated at , respectively. The intersam-pling behavior of the analogously controlled system can alsobe considered by the objective function (10). We also note thatthe above objective function considers the global state-matchingbetween the analog and the digital system. The given intelli-gent digital redesign problem is stated as following optimiza-tion problem:
find to minimize (11)
where is the digital gain found by the proposed GA-basedintelligent digital redesign method. Fig. 1 illustrates the conceptof the proposed GA-based intelligent digital redesign method.
B. Determination of Search Space by Interval ArithmeticOperations
The problem of applying GAs to the intelligent digital re-design is that GAs need to know the search space in whicheach problem variable is defined. More precisely, the intervalsof entries of gains have to be determined. To resolve thisproblem, we adopt the interval arithmetic operations to deter-mine the search space for the GA-based intelligent digital re-design. The notes on interval arithmetics are found in [6].

38 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003
Fig. 1. GA-based intelligent digital redesign.
The fuzzy system (3) is represented as the following intervalsystem:
(12)
and the closed-loop system controlled by the continuous-timefuzzy-model-based controller (5) is given by
(13)
where , , andare interval matrices. In order to
obtain the interval matrices and , we first need to de-fine some important bounds of the continuous-time TS fuzzymodel (3) and fuzzy-model-based controller (5). Each entry ofthe upper and lower bounds of , , and
are defined by
(14)
where , , , , , , , , and are the, th entry of , , , , , , , , and , respec-
tively. In the following discussion, we call this bounds theac-curate bounds, and the consequently obtained interval matricesaccurate interval matrices. These bounds play a key role in de-termining the search space for the GA-based intelligent digitalredesign algorithm. Since the accurate bounds can not be ob-tained easily, we may choose conservative bounds and intervalmatrices calledapproximate boundsandapproximate intervalmatrices, respectively. We propose the following algorithm tosearch for the practical approximate interval matrices.
Approximate interval matrix searchingalgorithmStep 1) Define the following intervalnumber:
(15)
Step 2) The approximate interval matricescan be obtained by
(16)
We now have the interval system (12) and (13) of the zeroinput and the controlled TS fuzzy model (3) from the above pro-

CHANG et al.: GA-BASED INTELLIGENT DIGITAL REDESIGN OF FUZZY-MODEL-BASED CONTROLLERS 39
cedure, respectively. In the sequel, we evaluate the discrete-timerepresentation of (13) as follows:
(17)
where will be determined later.The integral term in (17) can be approximately evaluated
using the trapezoidal rule approximation method [6] and the fol-lowing assumption.
Assumption 1:The sampling period is sufficiently small sothat during any interval [ ] the degree of fulfillmentof the th fuzzy rule can be approximated by .
With the Assumption 1 and the trapezoidal rule approxima-tion method, we obtain
(18)
where will be calculated in the followings.Substituting (18) into (17) yields
(19)The next step is to find a discrete-time interval representation
of the continuous-time TS fuzzy model (3) controlled by digitalcontrol input. The discrete-time interval system is representedas follows:
(20)
where and such that
By using a geometric-series approximation method togetherwith the interval arithmetics, the unstructured approximants
and are calculated as follows [6]:
for
(21)
(22)
Thus, we can conclude that the system matrices of the dis-crete-time model of the continuous-time TS fuzzy model (3) arein the intervals given by the matrices and determinedin (21) and (22). Based on the obtained interval matrices, wenow determine the intervals where the gains of discrete-timefuzzy-model-based controller are included.
Then, the hybrid state equation of the digital system which isobtained from the continuous-time TS fuzzy system (3) and thediscrete-time fuzzy-model-based controller (7) is
(23)and the corresponding discrete-time interval system (23) is ap-proximated as follows:
(24)
where is determined from the same procedure described in(15) and (16).
Let the state in (19) closely match the statein (24). Then, we obtain
(25)
Solving (25) for gives
(26)
Therefore, any digitally redesigned gains must satisfy thefollowing constraint:
(27)
Thus, we obtain the interval matrix where optimal digitally re-designed gains are included. The optimization problem (11)is modified as follows:
Find to minimize
subject to (28)
C. Structure of the Chromosome
GAs represent the parameters for the given problem by thechromosome which may contain one or more substring(s).Each chromosome, therefore, contains a possible solution to theproblem.
In the proposed GA-based intelligent digital redesign, thevariables of interest are and each chromosome must con-tain the information about the gains of the discrete-time fuzzy-model-based controller. The convenient way to represent the in-formation into the chromosome is concatenating theth rows ofth gain, which is shown as
(29)
where is the binary coded substrings encoding theth digitalgain of the fuzzy-model-based controller and is the ,entry of . Fig. 2 shows the structure of the chromosome forthe proposed GA-based intelligent digital redesign method.
D. Initial Population
The initial population is randomly generated within the givensearch space. However, the aforementioned developed interval

40 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003
Fig. 2. The structure of the chromosome for digital redesign.
method might give conservative results due to the use of intervalarithmetic operations. Therefore, the performance of GAs maybe degraded due to the insufficient reduction of the search space.To avoid this problem, we use the following scaled interval ma-trix in generating the initial population:
(30)
where is the scaling factor.In addition, we also utilize another domain knowledge avail-
able, that is, the digital gains by the local intelligent digital re-design method [10] are first constructed and inserted into thepopulation for the fast evolution of GAs. For the readers’ con-venience, we rewrite the result of the local intelligent digital re-design in the following equation:
(31)
where is the digital gain by the local intelligent digital re-design method.
In summary, the initial population is randomly generatedwithin the interval given in (30), and the local optimal solutionis also inserted. Note that the reduced search space (30) is usedonly for the initialization of the population.
E. Evaluation of Individual Fitness
Since the GAs guide the optimal solution to the direction ofmaximizing the fitness function value, it is necessary to map theobjective function (10) to the fitness function form by
(32)
where is the coefficient to prevent the large raw fitness func-tion value.
The raw fitness function in (32), however, may cause the earlyconvergence of the solution due to the individual with the veryhigh fitness value generated by the local intelligent digital re-design method. To avoid this problem, the individuals are sortedaccording to their raw fitness values, and the new fitness valuesare determined by their ranks as follows:
(33)
where is the ranking of the individual and is the pop-ulation size.
F. Algorithm Description
The GA-based intelligent digital redesign algorithm can besummarized as follows.
Step 1) Set the values of the parame-ters for GA: maximum number of generation( ), population size ( ), crossoverrate ( ), and mutation rate ( ).
Step 2) Construct initial populationwith randomly generated individuals. Inthis paper, we use binary coded chromo-somes to represent the solution param-eters and each chromosome is generatedto put the parameters of a discrete-timefuzzy-model-based controller within theinterval given by (30) .
Step 3) Decode the chromosome of eachindividual in the population and deter-mine the discrete-time fuzzy-model-basedcontroller. Evaluate the determined dis-crete-time fuzzy-model-based controllerby (10) and give a fitness value to eachindividual in the population by (33) .
Step 4) Evolve the new populationby reproduction, crossover and mutation.If the offsprings violate the constraints(28) , the reproduction is repeated togenerate the offstrings satisfying theconstraints.
Step 5) Increase the generation number byreplacing old generation with new gener-ation . During the replace-ment, preserve an individual which hasthe maximum fitness value by the elitistreproduction.
Step 6) Repeat Steps 3)–5) until one ofthe following conditions is satisfied:a) the satisfactory population appears;b) the generation number is reached to
;c) the fitness function is not increasedfor the prescribed number of generations.
Remark 1: In the initialization and the evolution of thepopulation, the feasibility of each chromosome must bechecked to avoid creating infeasible chromosomes. This can bedone by checking whether or not the chromosome violates theconstriaints (28) or (30) in the initialization or the evolution,respectively. Besides these constraints, the stability of thefuzzy-model-based controller must be also checked by stabilitychecking algorithms or numerical simulation. In this paper,stability checking algorithms in [17] are used to check thefeasibility of chromosomes.
Remark 2: If an infeasible chromosome is generated in theinitialization of population, the chromosome is simply regen-erated randomly until the feasible chromosome appears. In the

CHANG et al.: GA-BASED INTELLIGENT DIGITAL REDESIGN OF FUZZY-MODEL-BASED CONTROLLERS 41
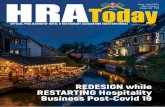
Fig. 3. Phase portrait of the Chen’s chaotic attractor with initial conditionx (0) = 1, x (0) = 1, andx (0) = 1.
evolution of the population, the backtracking algorithm pre-sented in [18] is used to replace the infeasible chromosome.
IV. SIMULATIONS
To show the effectiveness of the proposed GA-based intel-ligent digital redesign method in designing the discrete-timefuzzy-model-based controller, the Chen’s chaotic attractor isused as a test bed. The dynamics of the Chen’s chaotic attractorare as follows [19]:
(34)
where , , and . Fig. 3 shows the phaseportrait of the Chen’s chaotic attractor with initial condition
, from to . Inorder to construct a TS fuzzy model, the range of state variablesis set to be . These boundaries arefound by the numerical simulation of the chaotic attractor, usingthe given parameter values. The TS fuzzy model of the con-trolled system is [20]
Rule IF is THEN
(35)
where
Fig. 4. Membership function.
The input matrix is arbitrarily selected such that { }is controllable. Membership functions are shown in Fig. 4 andgiven by
(36)
Using the approximate interval matrix searching algorithm inSection III, the interval model of the continuous-time TS fuzzymodel (35) is represented as follows:
(37)
where
By using (21) and (22), the corresponding discrete-time intervalsystem can be obtained as
(38)
where the first equation shown at the bottom of the next pageholds.
We first need the analog controller for the given contin-uous-time TS fuzzy model (35) to find the search space inwhich GAs find the optimal digital gain . The rule structureof a continuous-time fuzzy-model-based controller is
Rule IF is THEN(39)
Choosing the closed-loop eigenvalues [15, 15, 15], we get
The stability of the analogously controlled system is easily ver-ified by finding a common matrix [17]. We find the interval

42 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003
matrix for GA optimization procedure based on (39), which areobtained by using (26) as shown in (40) at the bottom of thepage. By using the interval model (38) and the interval gainmatrix (40), we are now ready to design the digital controller byGAs. The sampling time is 0.05 (s), the number of maximumgeneration is 50, the population size is 50, crossover rate
is 0.8, mutation rate is 0.1, the number of bits of eachchromosome is 100, the number of leaving elites is 2, the scalingfactor and is 1. We scale the interval gain matrix (40)to avoid the conservatism of the interval arithmetic operations.In the evolution of the population, the one point crossover oper-ator and the roulette wheel selection method are employed. Forthe evaluation of each individual, is 1 (s). Since the Chen’schaotic attractor with the continuous-time fuzzy-model-basedcontroller is stabilized within 1 s, the simulation time is suffi-cient for the evaluation of each individual. To generate the initialpopulation, we use the reduced search space by (30). We againemphasize that the reduced search space is used only for the ini-tialization of the population, and (40) is used instead during theevolution of the population. We also insert an additional indi-vidual generated by the local intelligent digital redesign algo-rithm [10]. The obtained digital gains are as follows:
(41)
To show the improvement of GA by the proposed method, wecompare the performance of the proposed method with that ofthe usual GA method which does not utilize the predeterminedsearch space and problem-specific information proposed in thispaper. All the values of parameters for the usual GA methodare the same as those of the proposed method. Since it is as-sumed that all the information provided by the proposed methodcannot be used for the usual GA method, the search space ofthe usual GA method is determined from the original contin-uous-time fuzzy-model-based controller. We estimate that thevalues of entries of the gain matrices of the digitally redesignedfuzzy-model-based controller is within 50% of those of theircorresponding entries of gain matrices of the original contin-
Fig. 5. Change of the fitness functiont values by the proposed method (solidline) and the usual GA method (dashed line).
uous-time fuzzy-model-based controller. When the value of theentry of the continuous-time gain matrix is zero, the searchspace is set to .
Figs. 5 and 6 show the change of the fitness function valuesand the change of the objective function values during the evo-lution, respectively. The figures showed that the convergenceof the proposed method was improved by the reduction of thesearch space and other problem specific information comparedwith that of the usual GA method.
The obtained discrete-time fuzzy-model-based controller bythe proposed GA-based intelligent digital redesign method isgiven by
Rule IF is THEN
(42)
where
(40)

CHANG et al.: GA-BASED INTELLIGENT DIGITAL REDESIGN OF FUZZY-MODEL-BASED CONTROLLERS 43
Fig. 6. Change of the objective functiont values by the proposed method (solidline) and the usual GA method (dashed line).
TABLE ICOMPARISON OFOBJECTIVE FUNCTION VALUE
Fig. 7. Responses of the statex of the controlled Chens’ chaotic attractorby the proposed method (solid line), the local intelligent digital redesign(dash-dotted line), and the analog controller (dashed line), with initial conditionx (0) = 1, x (0) = 1, x (0) = 1.
In Table I, we compare the performance of the proposedmethod with the local intelligent digital redesign method[10]. For comparison, we select 1000 random initial pointsin the interval , and the simulationtime as (s). Although the proposed GA-based methoduses only one initial value, the performance of the proposedmethod is quite superior to the local intelligent digital redesignalgorithm. This result also shows the generalization property
Fig. 8. Responses of the statex of the controlled Chens’ chaotic attractorby the proposed method (solid line), the local intelligent digital redesign(dash-dotted line), and the analog controller (dashed line), with initial conditionx (0) = 1, x (0) = 1, x (0) = 1.
Fig. 9. Responses of the statex of the controlled Chens’ chaotic attractorby the proposed method (solid line), the local intelligent digital redesign(dash-dotted line), and the analog controller (dashed line), with initial conditionx (0) = 1, x (0) = 1, x (0) = 1.
of the proposed GA-based intelligent digital redesign method.In the following, computer simulation with the obtained digitalcontroller is performed. Figs. 7 – 9 show the simulation resultswith the initial condition .
As shown in all the simulation results, the proposed methodis quite successful, even for the highly complex Chen’s chaoticattractor which is known to have a higher topological dimen-sion. The closed-loop dynamics are closely matched with thatof the analogously controlled system although the sampling pe-riod s is relatively large for the digital control of theChen’s chaotic attractor.
V. CONCLUSION
A new approach to controlling nonlinear systems via the in-telligent digital redesign of a fuzzy-model-based controller has

44 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 11, NO. 1, FEBRUARY 2003
been developed with the aid of GAs. The proposed method com-bines GAs with the conventional digital redesign algorithmsto enhance the previously developed local intelligent digitalredesign method. The intelligent digital redesign problem isconverted to the equivalent optimization problem taking intoaccount the intersampling behavior and global state-matching.We also developed a new method to determine the search spaceof GAs by using the interval arithmetic operations, which isused for the initialization and evolution of the population. Toimprove the performance of GAs, some other problem-specificinformation, such as the reduction of the search space andthe insertion of the local optimal solution, is also utilized.Using the newly developed method, the resulting states of thedigitally controlled sampled-data nonlinear systems are ableto match closely those of the original analogously controlledcontinuous-time nonlinear systems. Computer simulationsshow the improved performance of the digitally redesignedcontroller by the proposed method compared with that of thelocal intelligent digital redesign algorithm. They also revealthat the proposed method has great potential for the digitalcontrol of complex nonlinear dynamical systems even withhigher dimensions and the longer sampling period.
REFERENCES
[1] L. S. Shieh, X. M. Zhao, and J. W. Sunkel, “Hybrid state-space self-tuning control using dual-rate sampling,”Proc. Inst. Elect. Eng. D, vol.138, pp. 50–58, Jan. 1991.
[2] L. E. Sheen, J. S. H. Tsai, and L. S. Shieh, “Optimal digital redesignof continuous-time systems with input time delay and/or asynchronoussampling,”J. Franklin Inst., vol. 335B, no. 4, pp. 605–616, 1996.
[3] L. S. Shieh, B. B. Decrocq, and J. L. Zhang, “Optimal digital redesignof cascaded analogue controllers,”Opt. Control Appl. Meth., vol. 12, pp.205–219, Dec. 1991.
[4] C.-C. Hsu, K.-M. Tse, and C.-H. Wang, “Digital redesign of continuoussystems with improved suitability using genetic algorithms – Electronicsletters,”Electron. Lett., vol. 33, pp. 1345–1347, July 1997.
[5] L. S. Shieh, W. M. Wang, and J. W. Sunkel, “Digital redesign of cas-caded analogue controllers for sampled-data interval systems,”Proc.Inst. Elect. Eng.—Control Theory Appl., vol. 143, pp. 489–498, Nov.1996.
[6] L. S. Shieh, X. Zou, and N. P. Coleman, “Digital interval model conver-sion and simulation of continuous-time uncertain systems,”Proc. Inst.Elect. Eng.—Control Theory Appl., vol. 142, pp. 315–322, July 1995.
[7] N. Rafee, T. Chen, and O. P. Malik, “A technique for optimal digitalredesign of analog controllers,”IEEE Trans. Control Syst. Technol., vol.5, pp. 89–99, Jan. 1997.
[8] T. Yokoyama, K. Kosuge, and K. Furuta, “Digital redesign of robot con-trol,” in Proc. IECON ’89, 15th Ann. Conf. IEEE, vol. 2, 1989, pp.409–414.
[9] J. Xu, G. Chen, and L. S. Shieh, “Digital redesign for controlling thechaotic Chua’s circuit,”IEEE Trans. Aerospace Elect. Syst., vol. 32, Oct.1996.
[10] Y. H. Joo, G. Chen, and L. S. Shieh, “Hybrid state-space fuzzy model-based controller with dual-rate sampling for digital control of chaoticsystems,”IEEE Trans. Fuzzy Syst., vol. 7, pp. 394–408, Aug. 1999.
[11] T. Takagi and M. Sugeno, “Fuzzy identification of systems and itsapplications to modeling and control,”IEEE Trans. Fuzzy Syst., vol.FUZZ-15, pp. 116–132, Feb. 1985.
[12] D. E. Goldberg,Genetic Algorithms in Search, Optimization, and Ma-chine Learning. Reading, MA: Addison-Wesley, 1989.
[13] L. S. Shieh, W. Wang, and J. S. H. Tsai, “Optimal digital redesign ofhybrid uncertain systems using genetic algorithms,”Proc. Inst. Elect.Eng.—Control Theory Appl., vol. 146, pp. 119–130, Mar. 1999.
[14] J. S. R. Jang, C. T. Sun, and E. Mizutani,Neuro-Fuzzy and Soft Com-puting. Upper Saddle River, NJ: Prentice-Hall, 1997.
[15] J. Theocharis and G. Vachtsevanos, “Identification of discrete-time dy-namical systems via recurrent fuzzy models,”J. Intell. Fuzzy Syst., vol.5, pp. 167–191, 1997.
[16] M. Sugeno and G. T. Kang, “Structure identification of fuzzy model,”Fuzzy Sets Syst., vol. 28, pp. 15–33, 1988.
[17] H. O. Wang, K. Tanaka, and M. Griffin, “An approach to fuzzy controlof nonlinear systems: Stability and design issues,”IEEE Trans. FuzzySyst., vol. 4, pp. 14–23, Feb. 1996.
[18] S. A. Kennedy, “Five ways to a smarter genetic algorithm,”AI Expert.,pp. 35–38, Dec. 1993.
[19] G. Chen and T. Ueta, “Yet another chaotic attractor,”Int. J. Bifur. Chaos,vol. 9, no. 7, pp. 1465–1466, 1999.
[20] H. J. Lee, J. B. Park, and G. Chen, “Robust fuzzy control of nonlinearsystems with parametric uncertainties,”IEEE Trans. Fuzzy Syst., vol. 9,pp. 369–379, Apr. 2001.
Wook Chang received the B.S., M.S., and Ph.D. de-grees in electrical and electronic engineering fromYonsei University, Seoul, Korea, in 1994, 1996, and2001, respectively.
Since September 2001, he has been with SamsungAdvanced Institute of Technology, Suwon, Korea,where he is currently a Member of the ResearchStaff. He has worked in several areas, includingfuzzy modeling, genetic algorithms, neural net-works, and fuzzy logic control. His current researchinterests are in the design and synthesis of wearable
computers and other devices for ubiquitous computing enviroments.
Jin Bae Park received the B. E. degree in electricalengineering from Yonsei University, Seoul, Korea,and the M.S. and Ph.D. degrees in electrical engi-neering from Kansas State University, Manhattan, in1977, 1985, and 1990, respectively.
Since 1992, he has been with the Departmentof Electrical and Electronic Engineering, YonseiUniversity, Seoul, Korea, where he is currentlya Professor. His research interests include robustcontrol and filtering, nonlinear control, mobilerobot, fuzzy logic control, neural networks, genetic
algorithms, and Hadamard-transform spectroscopy.Dr. Park is serving as the Director for theTransactions of the Korean Insti-
tute of Electrical Engineers (KIEE)(1998-2003) and the Institute of Control,Automation, and Systems Engineers (1999-2003).
Young Hoon Jooreceived the B.S., M.S., and Ph.D.degrees in electrical engineering from the YonseiUniversity, Seoul, Korea, in 1982, 1984, and 1995,respectively.
He worked with Samsung Electronics Company,Seoul, Korea, from 1986 to 1995, as a Project Man-ager. He was with University of Houston, Houston,TX, from 1998 to 1999, as a Visiting Professor in theDepartment of Electrical and Computer Engineering.He is currently Associate Professor in the School ofElectronic and Information Engineering, Kunsan Na-
tional University, Korea. His major interest is mainly in the field of mobilerobots, fuzzy modeling and control, genetic algorithms, intelligent control, andnonlinear systems control.
Dr. Joo is serving as the Associate Editor and Director for theTransactionsof the Korean Institute of Electrical Engineers (KIEE)(2000–2003) and theJournal of Fuzzy Logic and Intelligent Systems(1999–2003).
Copyright © 2022 FDOKUMEN