Forecast combination through dimension reduction techniques
28
Forecast Combination through Dimension Reduction Techniques Pilar Poncela, Julio Rodrguez, Roco SÆnchez-Mangas Dept. AnÆlisis Econmico: Economa Cuantitativa Universidad Autnoma de Madrid Avenida TomÆs y Valiente, 5. 28049 Madrid. SPAIN Eva Senra Dept. Estadstica, Estructura Eca. y O.E.I. Universidad de AlcalÆ Plaza de la Victoria 2. 28802 AlcalÆ de Henares, Madrid. SPAIN. July 7, 2008 1
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Forecast combination through dimension reduction techniques

Forecast Combination through Dimension Reduction
Techniques
Pilar Poncela, Julio Rodríguez, Rocío Sánchez-Mangas
Dept. Análisis Económico: Economía Cuantitativa
Universidad Autónoma de Madrid
Avenida Tomás y Valiente, 5. 28049 Madrid. SPAIN
Eva Senra
Dept. Estadística, Estructura Eca. y O.E.I.
Universidad de Alcalá
Plaza de la Victoria 2. 28802 Alcalá de Henares, Madrid. SPAIN.
July 7, 2008
1

Abstract:
The combination of individual forecasts is often a useful tool to improve forecast accuracy.
This paper considers several methods to produce a single forecast from several individual fore-
casts. We compare "standard" but hard to beat combination schemes (like the average at each
period of time or consensus forecast and OLS-based combinations schemes) to more sophisticated
alternatives that involve dimension reduction techniques. First, we will compare it to dimension
reduction techniques that do not take into account the previous values of the variable of interest
y (the one we want to forecast) as principal components and dynamic factor models, but only the
forecasts being made (the X�s). Secondly, we compare it to dimension reduction techniques that
take into account not only the forecasts made by the experts (the X�s), but also the previous
values of the variable being forecast y; as Partial Least Squares and Sliced Inverse Regression.
We will use the Survey of Professional Forecasters as the source of forecasts. Therefore, we do not
know how the forecasts were made. The survey provides forecasts for the main US macroeconomic
aggregates.
We have obtained that both PLS and PC regression are good alternatives to the average of
forecasts, while factor models are always outperformed by one of the previous two alternatives
considered.
Keywords:
Combining forecasts, dimension reduction, factor analysis, PLS, principal components, SIR,
Survey of Professional Forecasters
2

1 Introduction
There is nowadays a growing literature about combination of forecasts since from the early
work of Bates and Granger (1969) it has been proven to improve forecast accuracy. Surveys
on this topic are Clemen (1989), Diebold and Lopez (1996), de Menezes et al (2000), Newbold
and Harvey (2001) and more recently, Timmerman (2006), among others. The recent literature
(see, for instance, Clements and Hendry, 2004 and Timmerman , 2006) has stressed the lack
of optimality of the individual forecasts (for instance, due to mis-speci�cation, mis-estimation,
non-stationarities, breaks, partial information or di¤erent loss functions of the forecasters) so the
forecast combination can improve, in terms of forecasting accuracy, the performance of individual
forecasts. The most commonly used technique for forecast combination is the equal weights for
all the individual forecasts (mean), that it is hard to beat by most sophisticated alternatives, like
basing the weighting mechanism in the variance-covariance matrix of the forecast errors or ridge
regressions, among others, (see, for instance, Stock and Watson, 2004).
To be more precise, let yt+1jt;i be the 1 period ahead forecast, with information up to time t,
given by forecaster i; i = 1; 2; :::; N ; and let yt+1jt = (yt+1jt;1; :::; yt+1jt;N )0 be a N -dimensional
vector of 1-step ahead forecasts at time t of a certain variable. Our purpose is to produce at time
t; with information up to time t; a single combined forecast ft, from the N initial forecasts, that
is,
ft = w01yt+1jt
where w1 = (w11; :::; w1N )
0 is the weighting vector. A constant might be added to the previous
combining scheme in order to correct the possible bias of the combined forecast. The key question
is to reduce the dimension of the problem from N forecasts to just a single one ft:
3

Sometimes, the �nal combined forecast is built with more than one linear combination of the
forecasters. In that case, let fit = w0iyt+1jt and let ft = (f1t; :::; frt)
0 be the �rst estimated r
linear combinations or "prediction factors" coming from the expert opinions. The combining rule
to produce a unique one step ahead forecast by�t+1jt from all the sources of information is given by
by�t+1jt = b�0 + b�1f1t + � � �+ b�rfrt; (1)
where b� = (b�0; :::; b�r)0 is the ordinary least squares estimate from the regression
�t = �0 + �1f1t�1 + � � �+ �rfrt�1 + ut; (2)
with �t the observed variable at time t: Notice that by�t+1jt is a true ex-ante forecast since thecoe¢ cients �i are estimated only with information up to time t and do not include any information
of the forecasting sample. We are most interested in (i) �rst, how to build fit; i = 1; ::; r; that
is, how to determine the weighting vectors wi; (ii) second, the forecasting performance of the
di¤erent approaches; and (iii) third, how this performance depends on the number of linear
combinations or "prediction factors" r chosen.
We will consider several multivariate dimension reduction techniques to produce the r linear
combinations (f1t; :::; frt) that we classify into two groups: some that do not use the information
available in the variable (�t) we are forecasting to form the prediction factors (f1t; :::; frt), that
is, to compute the weighting vectors wi; like principal components analysis and dynamic factor
analysis related techniques; other ones that use the information available in the variable being
forecast (�t) to compute the weighting vectors wi as Partial Least Squares and Sliced Inverse
Regression.
In fact, we are interested in analyzing the performance of di¤erent combination schemes when
applied to surveys. We do not know the models (if any) used to produce the forecasts, so we are
4

concentrating on the formation of the linear combinations (f1t; :::; frt) given the forecasts of the
variable. We do not enter, neither know, the process of production of forecasts. Particularly, we
will consider the individual forecasts for several US macroeconomic aggregates from the Survey
of Professional Forecasters (SPF from now on). The Survey was started in 1968 by the American
Statistical Association and the National Bureau of Economic Research and in 1990 was relaunched
by the Federal Reserve Bank of Philadelphia. This Survey gives regular macroeconomic forecasts
from private sector economists (Wall Street �nancial �rms, banks, economic consulting and other
private �rms). The survey is conducted quarterly, and at each moment in time, it provides the
last observed value and forecasts for one to �ve quarters ahead of the variable of interest, that
allows us to have actual forecasts.
Several papers have attempt to make partial or related comparisons of some of the above
techniques with large data sets of observed variables. See, for instance, Stock andWatson (2002b),
Boivin and Ng (2006), Heij et al (2007), Lin and Tsay (2007), and Wang (2008) among the most
recent ones. All of them use the Stock and Watson�s (2002b) database. None of the previous
papers has analyzed the performance of the dimension reduction techniques where the variables
being reduced are themselves forecasts of the same variable. This might condition the number of
combined forecasts r used and, of course, their interpretation. While in the Stock and Watson�s
(2002b) database the variables being combined are heterogeneous (for instance, some of them
are real economic activity variables, while other ones are monetary of �nancial variables, or some
other might be classi�ed as prices or in�ation related), a key feature of these survey data is that
all the variables being combined are alike. All of them are forecasts of the same macroeconomic
indicator, giving a particular correlation structure, di¤erent from the one that might be found
when combining heterogenous measured variables.
5

Some recent papers related to the combination of forecasts with survey data are Poncela
and Senra (2006) that use factor related techniques to combine forecasts of in�ation, Nolte and
Pohlmeier (2007) that compare probability methods and regression methods and Issler and Lima
(2007) that use data panel models in order to correct the bias of the consensus forecast.
Finally, when using these type of techniques more emphasis is put in the common information.
To be more speci�c, when using factor models the variables of the factor model are represented
as linear combinations of the common factors plus speci�c or idiosyncratic errors
yt+1jt = Pf t + et; (3)
where P is a N � r factor loading matrix, and et = (e1t; :::; eNt)0 is the vector of speci�c
errors. Therefore, all the common correlated information comes through the common factors,
ft, and the vector et contains information speci�c to each individual. Recall that in our case the
yt+1jt are themselves forecasts. Usually, the only information used to combine is the correlated
information among forecasters. No attempt has been made to evaluate the loss from not using
the contribution of the speci�c or idiosyncratic information (that part of the forecast that is new
or uncorrelated to other forecasters).
We can summarize the contributions of this paper as follows: First, to provide a unifying
framework for forecast comparisons using reducing dimension techniques in order to produce the
�nal combined forecast and relate them under the "umbrella" of principal components. Second,
to point out the di¤erences in scope and results when using techniques that take into account
the information in the variable being forecast and the ones that do not. We will check, for
instance, how the results might be a¤ected by the number r of linear combinations of the forecasts.
Third, to interpret the resulting combinations since we apply it to the SPF data where all the
6

variables being combined are themselves forecasts. Fourth, to evaluate the loss from not using
the uncorrelated information among forecasters when forming the �nal combination.
The article is organized as follows: section 2 describes the di¤erent dimension reduction
techniques in a unifying framework; section 3 describes the data and applies the techniques
presented in 2 to the SPF; section 4 evaluates the loss from not using uncorrelated information
from the forecasters and �nally, section 5 concludes.
2 Multivariate reduction dimension techniques
We classify the multivariate techniques for the reduction of the dimension in two groups: the ones
that take into account the variable being forecast in the process of reduction of the dimension
and the ones that do not take it into account. On the latest group we will examine principal
components and factor models, on the �rst one we will consider partial least squares and sliced
inverse regression. All of them will be compared to benchmark models as the average of forecasts
and crude OLS combinations. We will brie�y review each of these techniques. In what follows we
are assuming stationarity. Therefore, if the variables being forecast and the forecasts themselves
are not stationary, we will transform them in order to achieve stationarity. We will end this
section with a comparison of the di¤erent techniques considered.
2.1 Principal components
Given a set of variables X1; :::; XN , we can de�ne N linear combinations of these variables,
orthogonal among each other, such that the �rst linear combination is in the direction of maximum
variability among the data. The second linear combination, being orthogonal to the �rst one, is in
7

the second direction of maximum variability, and so on. These linear combinations are obtained
solving the following eigenvalue problem. Let �X ; be the variance-covariance matrix of the Xs
and let c = (c1; :::; cN )0 a vector of dimension N �1. The direction of maximum variation among
the Xs is given by the solution of
maxcc0�Xc (4)
c0c = 1
where it is required that the modulus of c is equal 1, in order to obtain a �nite solution. It is
well known that they will be given by the eigenvector c in
�X c = �c
and the corresponding eigenvalue, �; will be the variance of the linear combination. The remaining
principal components are de�ned by the ordered eigenvalues (from the 2nd onwards) and their
corresponding eigenvectors. Notice that in our case the Xs are forecasts of a certain variable and
that in the process of extracting the principal components (linear combinations of the forecasts)
we have not taking into account the variable being forecast, besides the information contained
in the forecasts themselves. For forecast combination we will use principal component regression
which is a two step procedure based on principal components. First, we will extract the principal
components of our set of forecasts. Then, we will retain a small number of them r < N; that
will be used as our prediction factors ft = (f1t; :::; frt)0; as indicated indicated on equations
(1) and (2) in the introduction. Notice that in our case the Xs are the forecasts contained in
yt+1jt; t = 1; :::; T:
8

2.2 Factor analysis
A generalization of the idea of linear combinations with useful properties is the Dynamic Factor
model. In this model, the N -dimensional vector of observed time series is generated by a set of
r non-observed common factors and N speci�c components as follows:
yt+1jt = P f t + et;
N � 1 N � r r � 1 N � 1(5)
where f t is the r-dimensional vector of common factors, P is the factor loading matrix, and et is
the vector of speci�c components. Thus, all the common dynamic structure comes through the
common factors, f t, whereas the vector et explains the speci�c dynamics for each component. If
there is no speci�c dynamic structure, et is reduced to white noise. We assume univariate linear
time series models for each of the latent variables in f t and noises in et: In particular, using the
VARMA(p; q) representation, the common factors will be given by
�(B) f t = �(B) at;
r � r r � 1 r � r r � 1(6)
where B is the backshift operator, such that Bxt = xt�1, and (i) the r � r diagonal matrices
�(B) = I ��1B � � � � � �pBp and �(B) = I � �1B � � � � � �qBq have the roots of the
determinantal equations j�(B)j = 0 and j�(B)j = 0 outside the unit circle; and (ii) at � (0;�a)
is serially uncorrelated, E(ata0t�h) = 0, h 6= 0: To take into account the remaining correlation, if
any, we also assume that the noise et also follows a diagonal VARMA model
�e(B)et = �e(B)ut; (7)
where �e(B) and �e(B) are N �N diagonal matrices with �e(B) = I ��e1B � � � � ��emBm
and �e(B) = I ��e1B � � � � ��enBn: The roots of the determinantal equations j�e(B)j = 0
9

and j�e(B)j = 0 are also outside the unit circle. Therefore, each speci�c component follows a
univariate ARMA(mi; ni), i = 1; 2; � � � ; N , being m=max(mi) and n=max(ni), i = 1; 2; � � � ; N .
The sequence of vectors ut have zero mean and diagonal covariance matrix �u. We assume that
the noises from the common factors and speci�c components are also uncorrelated for all lags,
that is, 8h E(atu0t�h) = 0:When et is white noise, model (5) and (6) is the factor model studied
by Peña and Box (1987). In the nonstationary case, the model was studied by Peña and Poncela
(2004, 2006). The model as stated is not identi�ed since for any r� r full rank matrix H, the set
of factors Hf t can generate the same covariance structure on the variables yt+1jt:We can choose
either �a = I or P 0P = I; although the model is not yet identi�ed under rotations. Harvey
(1989) imposes the additional condition that pij = 0 for j > i, where P = [pij ].
2.3 Partial Least Squares
Partial Least Squares (PLS from now on) dates back to the 60�s and was originally proposed by
Wold (1966). It is a sequential procedure where the correlation of the variable being forecast (up
to time t, in order to get true ex-ante forecasts) and the forecasts themselves with information
up to time t serves as a guide to form the PLS components as follows: the �rst PLS component is
obtained projecting the covariance between the variable being forecast and the forecast themselves
in the direction of the forecasts, that is
f1t�NXi=1
cov(yi;tjt�1; �t)yi;tjt�1;
being the constant of proportionality depending on the normalization chosen. Next, regress �t
and each of the forecasts, yi;tjt�1; i = 1; :::; N over f1t and a constant and retain the residuals
which contain all the information orthogonal to the �rst PLS component, f1t: LetM1yi;tjt�1 and
M1�t be the residuals of the simple regressions of the forecasts yi;tjt�1 and the variable being
10

forecast �t over the �rst PLS component, respectively. To construct the second PLS component
we will use this information orthogonal to f1t and build a new linear combination
f2t�NXi=1
cov(M1yi;tjt�1;M1�t)M1yi;tjt�1:
The next PLS component will use the information orthogonal to the �rst two PLS components.
Regress �t and each of the forecasts, yi;tjt�1; i = 1; :::; N over a constant, f1t and f2t and retain the
residuals M2yi;tjt�1 and M2�t: Use these residuals as above to de�ne the third PLS component
as
f3t�NXi=1
cov(M2yi;tjt�1;M2�t)M2yi;tjt�1:
which contain all the information orthogonal to the �rst and second PLS components. Proceed
in a similar way to de�ne r PLS components. These components will be used as our prediction
factors in (1) and (2).
2.4 Sliced Inverse Regression
The Sliced Inverse Regression (SIR) also uses the information in �t (up to time t) to build the
prediction factors for the forecasts made at t for t + 1: Instead of the direct regression (2) con-
sider the inverse regressions of yi;tjt�1; i = 1; :::; N over �t: Partition the �t into several slices
and partition the whole data set of forecasts according to the slices of �t: Compute the sample
means of the forecasts according to these slices. This gives a crude estimate of the expectation
E(ytjt�1j�t): Finally, apply principal component analysis over the sample sliced means of ytjt�1:
Then, retain a small number of them r < N; that will be used as our prediction factors ft as
indicated indicated on equations (1) and (2) in the introduction. Notice that the information con-
tained in �t is used to de�ne the slices and, therefore, a¤ects the principal components extracted
11

from the sample sliced means of ytjt�1:
2.5 A comparison
In the recent literature there is a growing presence of large dynamic factor models, that is, factor
models for large N , sometimes even larger than T (the time span considered). In these later
models, the assumption of orthogonality across the noises is relaxed allowing for some degree of
cross correlation (see, for instance, Stock and Watson, 2002a, and Forni et al. 2000, 2005). In this
case, the common factors are consistently estimated by principal components as both N;T !1:
Moreover, in the papers by Forni et al the speci�c or idiosyncratic noises are related to dynamic
principal components associated to the smallest eigenvalues. These results are asymptotic and if
we do not want to impose the restriction of N ! 1; but derive results for �nite N; we have to
impose uncorrelation among the speci�c components for identi�cation.
To relate both techniques for any N �nite, �rst let us suppose that the idiosyncractic com-
ponents are white noise. Assume for simplicity zero mean variables and let �y(0) and �f (0) be
the variance-covariance matrix of the vectors of 1-step ahead forecasts ytjt�1 and the common
factors ft, respectively. Let �y(k) be the autocovariance (lagged k covariance) matrices between
ytjt�1 and yt�kjt�k�1 for k = 1; 2; ::: De�ne �f (k) in a similar way for the common factors. As
we are assuming that the speci�c noises are white noise, the factor model implies
�y(0) = P�f (0)P0 +�e (8)
�y(k) = P�f (k)P0; k = 1; 2; ::: (9)
which means that although the zero-lagged covariance matrix of ytjt�1 will be in general of full
rank, the lagged covariance matrices will at most of rank r: Furthermore, they will be symmetric
12

and will have real eigenvalues and associated eigenvectors. Assume now that we have imposed
the identi�cation condition P0P = Ir (for instance, this is the one imposed in large factor models
when estimating the common factors through principal components). Recall that �f (k) is a
diagonal matrix whose i-th element is the autocovariance between fit and fi;t�k, i = 1; :::; r and
denote it by �i(k): Let P? be the N � (N � r) matrix which de�nes the null space of P; such
that P0P? = 0; postmultiplying (9) by P?we have
�y(k)P? = 0; k = 1; 2; :::
This means that the columns of P? (the matrix that de�nes the orthogonal space to the one
de�ned by the columns ofP) are eigenvectors associated to the zero eigenvalues of �y(k): Consider
now the i�th column of the factor loading matrix, pi, i = 1; ::; r. By (9) all the �y(k) are
symmetric and have real eigenvectors and postmultiplying (9) by pi we have
�y(k)pi = �i(k)pi; k = 1; 2; :::
Therefore, the columns of P are the eigenvectors associated to the �rst r eigenvalues. These
eigenvectors are common for all k 6= 0; k = 1; 2; ::: and have associated eigenvalues the auto-
covariances or order k, k 6= 0; k = 1; 2; ::: of the common factors. So, factor analysis is like
performing principal components to all lagged covariance matrices of ytjt�1 at once except for
lag zero and retaining the �rst r principal components. The principal components de�ned in this
way are the same for all lags, but k = 0; and will be associated to nonzero eigenvalues if the
autocovariances of the common factors for lag k are di¤erent from zero.
Assume now that we have speci�c components that are not white noise. Assume that they
are associated to processes with shorter memory than the common factors; then, equation (9)
will be true for a certain lag K when the autocovariances of the noises have already died out.
13

Therefore, all of the previous conclusions will be true for k � K: Of course, if the memory of the
speci�c components does not die out before the one from the common factors, the above is not
true, but this seems not to be the case in our context.
Assume now that the factor model is static, that is, neither the common factors nor the
speci�c components have dynamic structure. Then (9) is trivially ful�lled and we do no obtain
any conclusion about the columns of P: Only if �y(0) � P�f (0)P0 (which means that the
variance of the speci�c components is very small compared to the variance associated to the
common component) we will obtain similar conclusions and when performing principal component
analysis over �y(0) we will obtain N � r very small eigenvalues and r big ones, with associated
eigenvectors that might not be very di¤erent from the columns of P? and P; respectively.
As regards SIR it is naturally related to principal components since it implies the application
of principal components not over ytjt�1 but the sliced averages of ytjt�1:
To compare PLS, denote by (�j ;vj) the corresponding eigenvalues and eigenvectors of the
variance-covariance matrix of ytjt�1;�y(0). Then, by the spectral decomposition theorem we can
write
�y(0) =
NXj=1
�jvjv0j :
Recall that the eigenvectors vj de�ne the principal components. PLS gives an approximation
of the eigen pairs (�j ;vj), known as Ritz pairs (�j ;qj) such that we obtain an approximation of
�y(0) of rank r < N ,
�y(0) 'rXj=1
�jqjq0j :
(see Kondylis and Whittaker, 2008, for further details). Principal components solve the problem
14

given in (4) with �X = �y(0) while PLS related algorithms solve
maxcc0�y� (10)
c0c = 1
where �y� is the covariance between the predictors and the variable being forecast. In fact, the
� estimator of equation (2) can be expressed as
b� = (Z 0Z)�1 Z 0�with Z = yR, being y the data matrix of T � N 1-step ahead forecasts, � the vector of T � 1
observed or measured values of the variable we are forecasting and R of rank r: In the case of
principal components R is given by r eigenvectors of �y(0), that is,
R = Rr = (v1; :::;vr) ;
and in the case of PLS R is given by
R = (q1; :::;qr)
where q1 = Y 0� and qi is de�ned recursively for i = 2; :::; r as qi = Y 0��Y 0Y Ri�1(R0i�1Y 0Y Ri�1)�1
R0i�1Y0�: See, for instance, Stone and Brooks (1990), Almoy (2004) and Elden (2004) to relate
principal component regression and PLS.
3 The SPF
This paper considers the individual forecasts for several US macroeconomic aggregates from
the Survey of Professional Forecasters, provided since 1990 by the Federal Reserve Bank of
Philadelphia. This Survey gives regular macroeconomic forecasts from private sector economists
15

(Wall Street �nancial �rms, banks, economic consulting and other private �rms). It is distributed
free of charge and its forecasts are widely watched as they are reported in major newspapers like
the Wall Street Journal and on �nancial newswires. The forecasts are anonymous and do not
re�ect the ideas of the institutions they belong to. The survey is conducted quarterly, and at
each moment in time, it provides the last observed value and forecasts for one to �ve quarters
ahead of the variable of interest, that allows us to have real one period ahead forecasts. Other
surveys like the Livingston Survey, the Blue Chip Economic Indicators, the National Association
of Business Economists (NABE) or the Consensus Forecast do not �ll our requirements because
of their periodicity or because they provide the forecasts for the mean of the year and in that
case the forecasts are updated for the same time period but with di¤erent information sets.
The Survey of Professional Forecasters has been thoroughly analyzed. At the web page
http://www.philadelphiafed.org/econ/spf/bibliography.cfm there is a list that contains academic
articles that either discuss or use the data generated by the SPF. Zarnowitz and Braun (1993)
found that the forecast combination of many of these individuals provided a consensus forecast
with lower average errors than most individual forecasts. More recently, Harvey and Newbold
(2003) have checked the non-normality of some of the forecast errors and Clements (2007) studies
the relation between disagreement and uncertainty in the SPF.
We consider one period ahead forecasts from the third quarter of 1991 until the last quarter
of 2003 of the main U.S. Business Indicators at quarterly periodicity used in this paper that are
shown in table 1. Information on the variables and their transformations in order to achieve
stationarity are also given in table 1, where � denotes de di¤erence operator, ln is the natural
logarithm, sa means seasonally adjusted, and ar means annual rate. The initial number of
panelists provided by the Survey has to be reduced to those individuals that systematically
16

collaborate, that is, they have been in the panel for a minimum of seven years and did not miss
more than 4 consecutive forecasts.
Table 1: Information on the variables and their transformations. � denotes de di¤erence
operator, sa means seasonally adjusted, and ar means annual rate. N is the number of panelists
(cross forecasts) at each time considered.
Variable Acronysm Transformation N
Gross Domestic Product (saar, $billions) NGDP � lnNGDP 14
Civilian Unemployment Rate (sa, percent) UNEMP � lnUNEMP 16
Housing Starts (saar, millions, monthly) HOUSING � lnHOUSING 14
Consumer Price Index, CPI-U (saar, percent) CPI CPI 14
Treasury Bill Rate (three month, secondary market
rate, discount basis percent)
TBILL � lnTBILL 14
AAA Corporate Bond Yield, Moody�s (percent) BOND �BOND 14
Regarding the treatment of missing data, we have estimated the unavailable one step ahead
forecast by the two steps ahead forecasts made by the same individual in the previous quarter.
With these considerations in mind, we ended up with 14 to 16 forecasters, depending on the
variable, for the sample from 1991-III to 2003-IV. We are going to use only the �rst part of the
sample, from 1991-III to 1999-IV to estimate the models, and leave the remaining data to produce
true ex-ante forecasts. We have checked that the results are quite robust to di¤erent samples.
The benchmark forecast for comparison will be the average forecast of all the panelists. Results
from plain OLS combination of the forecasts plus a constant are also given. The procedure to
analyze the di¤erent combinations of forecasts is as follows:
1. Estimate the di¤erent models described in section 2 for the time span 1991-III to 1999-IV.
17

2. Generate one-step-ahead forecasts for the years in our forecasting sample, 2000-I to 2003-
IV. In order to obtain one step-ahead forecasts, models will be reestimated adding one data point
at the time, using all previous data prior to each forecast period.
3. Compute forecast errors for each forecast period. The root mean squared errors (RMSEs)
by model will be computed to verify the forecasting performance of alternative combinations of
forecasts.
4. Compare the RMSE of a particular model with the benchmark model by calculating the
ratio between them.
RMSE(model)RMSE(average)
If this ratio is less than one, then the alternative model improves the average of forecasts. We
have extended the forecasting sample to 2000-I to 2003-IV and obtained very similar results, so
we only present the results for one of the samples.
Table 2 compares the forecasting results in terms of the ratio of the RMSE of the di¤erent
models over the RMSE of the average forecast (benchmark forecast). A ratio less than one
means that the model considered improves the benchmark forecast. The rows show the RMSE
ratios for the di¤erent models considered: OLS combinations of all forecasts; 1, 2 and 3 principal
component regression (named after PC1,PC2 and PC3); static factor analysis estimated by the
principal factor method with 1 to 3 common factors (named FA1, FA2 and FA3); dynamic
factor analysis as in Peña and Box (1987) where we extract the common factors as the linear
combinations given by the eigenvectors of the lagged 1 (L1FA1, L1FA2, L1FA3) and lagged 5
(L5FA1, L5FA2, L5FA3) autocovariance matrices; and dynamic factor models estimated in state
space form, via the Kalman �lter, with the EM algorithm to estimate the unknown parameters
(named as DFA1 and DFA2); PLS with 1 to 3 components (named as PLS1, PLS2 and PLS3) and
18

SIR. The last number of each name denotes the number of components or "prediction factors"
used for forecast combination. For instance, PC2 means retaining 2 principal components to
generate the �nal forecast combination.
� lnNGDP � lnUNEMP � lnHOUSING CPI � lnTBILL �BOND
OLS 1.018 1.434 0.898 1.111 1.049 1.107
PC1 0.952 0.885 0.815 1.047 0.690 0.947
PC2 0.957 0.939 0.807 1.012 0.681 0.947
PC3 0.989 0.936 0.814 1.045 0.682 0.961
FA1 0.930 0.956 0.798* 1.080 0.581* 0.933*
FA2 0.910 0.957 0.794 1.085 0.702 0.941
FA3 0.932 0.997 0.741 0.980 0.795 0.899
L1FA1 1.080 1.457 0.829 1.036 0.701 1.102
L1FA2 0.946 1.015 0.824 1.085 0.729 0.950
L1FA3 0.900 0.971 0.831 1.089 0.728 0.908
L5FA1 0.951 1.281 0.832 0.972* 0.782 0.952
L5FA2 0.876 0.965 0.811 1.032 0.740 0.882
L5FA3 0.811 0.900 0.807 1.001 0.786 0.841
DFA1 0.927* 0.975 0.810 1.159 0.581* 0.934
DFA2 0.895 1.014 0.819 0.994 0.708 0.914
PLS1 0.935 0.881* 0.809 1.018 0.683 0.940
PLS2 0.909 0.977 0.829 1.022 0.626 0.962
PLS3 0.950 1.045 0.859 1.074 0.826 1.015
Table 2: RMSE ratios of 1-step ahead forecasts for the di¤erent models considered over the
average of forecasts at each time t: Forecasting sample: 2000:I-2003:IV. Bold �gures indicate the
procedure that ranks �rst while italic �gures indicate the procedure that ranks second.
Some comments are in order:
1) It seems that all three procedures (PLS, factor analysis and principal components) are
good alternatives to the average of forecasts but plain OLS estimates of equation (2) that only
outperforms the average of forecasts for � lnHOUSING.
19
2) The best models, in terms of giving the smallest RMSEs, are the di¤erent versions of factor
analysis, although this conclusion cannot be fare, since we tried several versions of factor analysis.
It ranked �rst in 5 out of 6 times and second in 4 out of 6 times.
3) The performance of PLS and PC regression seems quite good and comparable to factor
analysis. PLS ranks �rst in 1 out 6 possible cases and ranks second in 1 out of 6. PC regression
ranks second in 1 out of 6 cases.
4) As regards the number of components, not always more components mean better results.
In fact, the best overall results with PLS are obtained with 1 and 2 components and never with 3,
while in 2 out 6 times one principal component gives better results than 2 principal components.
The same type of conclusions regarding the number of factors can be drawn from the factor
models performance.
5) All the methods but the crude average of forecasts include a constant on the regression
(2), which might indicate that the comparison is not fair in terms of bias. Nevertheless, the
good performance of the multivariate dimension reduction techniques cannot be assigned to bias
correction since plain OLS combinations of all the panelists also include a constant for bias
correction and overall it performs worst than the remaining alternatives, even worst that the
average of forecasts at each time t:
4 Uncorrelated information
In this section we want to evaluate the loss (if any) in forecasting accuracy measured in terms of
RMSE from not using the speci�c components for forecast combination in the context of factor
models. Since principal component regression and PLS, both give better results than factor
20

analysis, we wonder what might be the reason. A possible reason could be that the dynamic
structure in the forecasts is not useful to estimate a combined forecast and trying to estimate the
parameters associated to it might introduce too much uncertainty. We have already checked this
conjecture since we have performed both static and dynamic factor analysis over the data set of
forecasts and found very similar results for both of them. Therefore, we discard it. An alternative
conjecture that we want to explore is that factor models separate the information of the forecasters
into correlated among them and uncorrelated or speci�c to each of them, and we are only using
the correlated part in the combining regression (2) when estimating the ft as common factors. To
check this conjecture we have performed a small experiment and estimated factor models with 1 to
4 common factors for all the variables considered using the principal factor estimation technique
adding as regressors in (2) those speci�c components whose share of the variance is larger than
a certain value a; for values of a between 0 and 1, increasing in 0.05 steps. For brevity we show
the results for a = 1; 0:8; 0:6; 0:4; 0:2 and 0. We have computed the RMSE and for easiness of
comparison we have calculated its ratio over the average of forecasts. The results are given in
table 3, where we have shown by rows the results for factor models with 1 to 4 common factors
(named as AF1 to AF4) and by columns the results of adding speci�c components based on their
share of the variance. For instance, the last column of each subpanel represents those models
that add as additional regressors in equation (2) those speci�c components whose share of the
variance is greater than a = 0. In this case, this means all the speci�c components. Therefore,
for a = 0, we add all the information contained on the original predictors, although decomposed
as correlated (common factors) and uncorrelated (speci�c components) and, therefore, we obtain
the same results as plain OLS combination weights. On the contrary, the second column shows
the RMSE ratios for values of a greater than 1, that is, with no speci�c components (trivially,
21
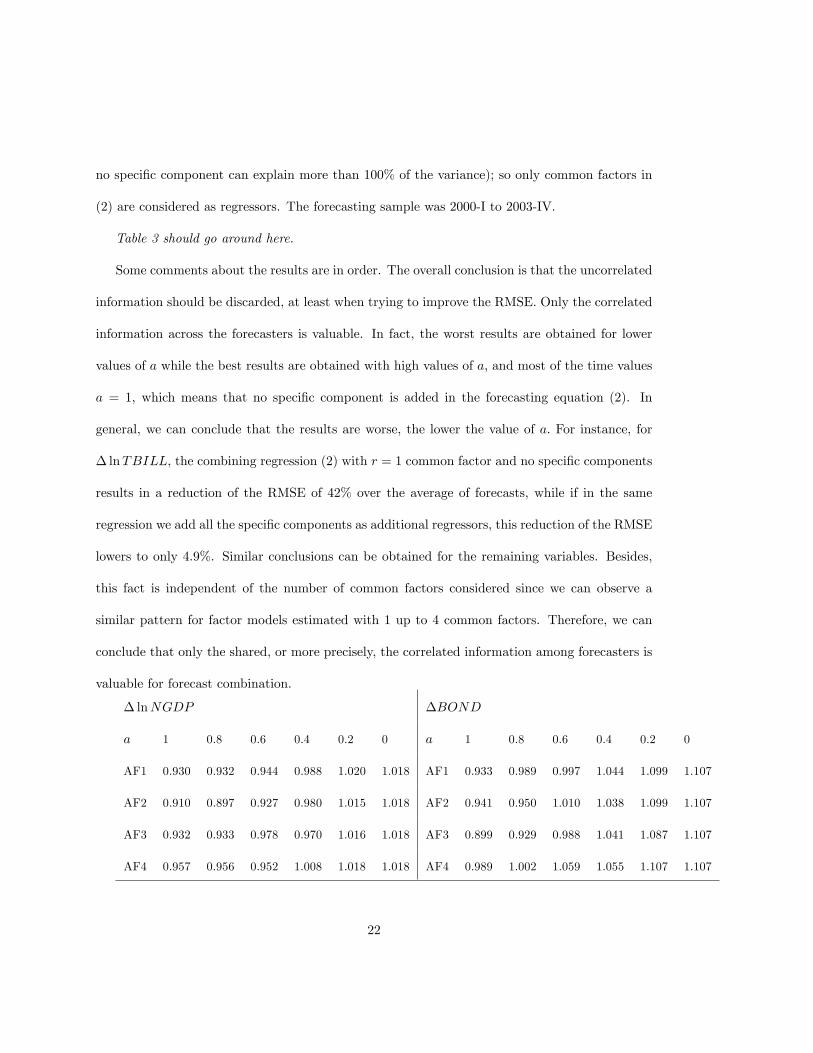
no speci�c component can explain more than 100% of the variance); so only common factors in
(2) are considered as regressors. The forecasting sample was 2000-I to 2003-IV.
Table 3 should go around here.
Some comments about the results are in order. The overall conclusion is that the uncorrelated
information should be discarded, at least when trying to improve the RMSE. Only the correlated
information across the forecasters is valuable. In fact, the worst results are obtained for lower
values of a while the best results are obtained with high values of a, and most of the time values
a = 1, which means that no speci�c component is added in the forecasting equation (2). In
general, we can conclude that the results are worse, the lower the value of a: For instance, for
� lnTBILL, the combining regression (2) with r = 1 common factor and no speci�c components
results in a reduction of the RMSE of 42% over the average of forecasts, while if in the same
regression we add all the speci�c components as additional regressors, this reduction of the RMSE
lowers to only 4.9%. Similar conclusions can be obtained for the remaining variables. Besides,
this fact is independent of the number of common factors considered since we can observe a
similar pattern for factor models estimated with 1 up to 4 common factors. Therefore, we can
conclude that only the shared, or more precisely, the correlated information among forecasters is
valuable for forecast combination.
� lnNGDP
a 1 0.8 0.6 0.4 0.2 0
AF1 0.930 0.932 0.944 0.988 1.020 1.018
AF2 0.910 0.897 0.927 0.980 1.015 1.018
AF3 0.932 0.933 0.978 0.970 1.016 1.018
AF4 0.957 0.956 0.952 1.008 1.018 1.018
�BOND
a 1 0.8 0.6 0.4 0.2 0
AF1 0.933 0.989 0.997 1.044 1.099 1.107
AF2 0.941 0.950 1.010 1.038 1.099 1.107
AF3 0.899 0.929 0.988 1.041 1.087 1.107
AF4 0.989 1.002 1.059 1.055 1.107 1.107
22

� lnUNEMP
a 1 0.8 0.6 0.4 0.2 0
AF1 0.956 1.112 1.090 1.338 1.434 1.439
AF2 0.957 1.038 1.060 1.193 1.227 1.439
AF3 0.997 1.040 1.089 1.225 1.479 1.439
AF4 1.001 1.015 1.096 1.121 1.477 1.439
� lnHOUSING
a 1 0.8 0.6 0.4 0.2 0
AF1 0.798 0.798 0.865 0.935 0.960 0.898
AF2 0.794 0.794 0.794 0.903 0.985 0.898
AF3 0.741 0.741 0.741 0.764 0.997 0.898
AF4 0.752 0.752 0.752 0.808 0.985 0.898
� lnTBILL
a 1 0.8 0.6 0.4 0.2 0
AF1 0.581 0.607 0.671 0.996 1.033 1.049
AF2 0.704 0.709 0.721 0.724 1.129 1.049
AF3 0.795 0.815 0.815 0.808 1.067 1.049
AF4 0.644 0.645 0.645 0.662 0.882 1.049
CPI
a 1 0.8 0.6 0.4 0.2 0
AF1 1.080 1.115 1.037 1.092 1.111 1.111
AF2 1.085 1.097 1.095 1.208 1.111 1.111
AF3 0.980 0.988 1.018 1.218 1.111 1.111
AF4 0.980 0.978 1.023 1.122 1.111 1.111
Table 3: RMSE ratios of 1 step ahead forecasts of factor models over the average of forecasts.
Factor models are estimated with 1 to 4 common factors. In the combined forecasts we have
added as additional regressors the speci�c components whose share of the variance is greater
than a: Bold �gures indicate the model that has the lower RMSE for each variable.
5 Conclusions
We have compared several methods for dimension reduction and relate them under the prism
of principal components. The methods can be divided in two groups: the ones that take into
account the past values of the variable being forecast in the process of dimension reduction as
PLS and SIR, and the ones that do not take them into account as factor models and principal
23

components. We have check their performance accuracy in forecasting using the SPF and found
that the methods that do take into account the values of the variable being forecast did not
outperform the ones that did not. A possible reason for this could be that the past values of the
observed variables are already incorporated in the forecasts themselves and do not add any more
valuable information in the construction of the �nal combined forecast. They may have a better
behavior with other data sets where the variables being combined are not themselves forecasts.
We have found that for the SPF forecasts all the methods outperformed the average of forecasts
and this might not be due simply to bias correction implied by equation (2) since plain OLS over
the forecasts and a constant for possible bias does not. In fact, plain OLS combinations of all
the forecasters give the overall worst results (worst than the average of forecasts).
As regards the uncorrelated information among forecasters, it is not useful for to improve
forecast accuracy, at least, in terms of reduction of the RMSE. Only the correlated information
among forecasters is valuable.
We have found that PLS, factor analysis and principal components work very well for fore-
cast combination. A possible reason for this might be that all three methods imply shrinkage
estimates and that can be the ultimate reason for forecast improvement. This is left for further
research.
24

6 References
Almoy, T. (2004) A simulation study on comparison of prediction methods when only a few
components are relevant. Computational Statistics and Data Analysis, 21, 87-107.
Bates, J.M. and C.W.J. Granger (1969) The combination of forecasts, Operations Research
Quarterly, 20, 451-468.
Boivin, J. and S. Ng (2006) Are more data always better for factor analysis? Journal of Econo-
metrics, 132, 169-194.
Clemen, R.T. (1989) Combining forecasts: A review and annotated bibliography, International
Journal of Forecasting, 5, 559-583.
Clements, M. (2007) Consensus and uncertainty: Using forecast probabilities of output declines.
International Journal of Forecasting, doi:10.1016/j.iforecast.2007.06.003.
Clements, M. and Hendry, D. (2004) Pooling of forecasts (2004). Econometrics Journal, 7, 1-31.
de Menezes, L. Bunn, D. and Taylor, J. (2000) Review of guidelines for the use of combined
forecasts. European Journal of Operational Research, 120, 190-204.
Diebold, F.X. and J.A. López (1996) Forecast Evaluation and Combination, Handbook of Sta-
tistics, vol. 14, 241-268 (North-Holland, Amsterdam).
Eldén, L. (2004) Partial least-squares vs. Lanczos bidiagonalization� I: analysis of a projection
method for multiple regression. Computational Statistics & Data Analysis, 46, 11-31.
Forni, M., M. Hallin, M. Lippi and L. Reichlin (2000) The generalized factor model: Identi�ca-
tion and estimation, Review of Economic and Statistics, 82, 540-554.
25

Forni, M., M. Hallin, M. Lippi and L. Reichlin (2005) The Generalized Dynamic Factor Model:
One-Sided Estimation and Forecasting. Journal of the American Statistical Association,
Vol. 100, No. 471, 830-840 .
Harvey, D. and Newbold, P. (2003) The non-normality of some macroeconomic forecast errors
International Journal of Forecasting, Volume 19, Issue 4, 635-653.
Heij, C. van Dick, D. and Groenen, P. (2007) Forecast comparison of principal component
regression and principal covariate regression, Computational Statistics and Data Analysis,
51, 3612-3625.
Issler, J.V. and L.R. Lima (2007) A panel data approach to economic forecasting: The bias-
corrected average forecast. Mimeo.
Kondylis, A. and Whittaker, J. (2008) Spectral preconditioning of Krylov spaces: Combining
PLS and PC regression. Computational Statistics and Data Analysis, 52, 2588-2603.
Lin, J.L. and R. Tsay (2007). Comparisons of forecasting models with many predictors. Mimeo.
Newbold, P. and D.I. Harvey (2001) Forecasting combination and encompassing in A companion
to economic forecasting (Eds.) M. Clements and D. Hendry, Blackwells, Oxford, pp. 268-
283.
Nolte, I. and W. Pohlmeier (2007) Using forecasts of forecasters to forecast. International
Journal of Forecasting, 23, 15-28.
Peña, D., Box, G. (1987). Identifying a simplifying structure in time series. J. Am. Statist.
Ass., 82, 836-43.
26

Peña, D. and Poncela, P. (2004). Forecasting with nonstationary dynamic factor models. Jour-
nal of Econometrics 119, 291-321.
Peña, D. and Poncela, P. (2006) Nonstationary dynamic factor analysis. Journal of Statistical
Planning and Inference, 136, 1237-1257.
Poncela, P. and Senra, E. (2006) A two factor model to forecast US in�ation. Applied Economics,
Volume 38, Issue 18, 2191-2197.
Stock, J.H. and M. Watson (2002a) Forecasting using principal components from a large number
of predictors, Journal of the American Statistical Association, 97, 1167-1179.
Stock, J.H., M. Watson (2002b) Macroeconomic Forecasting Using Di¤usion Indexes, Journal
of Business & Economic Statistics, 20, 147-163
Stock, J.H., M. Watson (2004) Combination forecasts of output growth in a seven-country data
set. Journal of Forecasting, 23, 405-430.
Stone, M. and R.J. Brooks (1990) Contiuuum regression: Cross-validated sequentially con-
structed prediction embrancing ordinary least squares, partial least squares and principal
components regression. Journal of the Royal Statistical Society B, 52, 237-269.
Timmerman, A. (2006) Forecast combinations, in Handbook of Economic Forecasting (Eds.)
G. Elliot, C.W.J. Granger and A. Timmerman, North-Holland, Amsterdam, chapter 4,
135-196.
Wang, C. (2008) Dimension reduction techniques for forecasting: An empirical comparison.
Mimeo.
27

Zarnowitz, V. and P. Braun (1993) Twenty-two years of the NBER-ASA quarterly economic
Outlook Survey: Aspects and Comparisons of Forecasting Performance, in Business Cycles,
Indicators and Forecasting (Eds.) J. Stock and M. Watson, The University of Chicago Press,
Chicago, pp. 11-93.
28