Evaluation of Dynamic Behavior a Machine Tool Spindle ...
7
Abstract—The spindle system is one of the most important components of machine tool. The dynamic properties of the spindle affect the machining productivity and quality of the work pieces. Thus, it is important and necessary to determine its dynamic characteristics of spindles in the design and development in order to avoid forced resonance. The finite element method (FEM) has been adopted in order to obtain the dynamic behavior of spindle system. For this reason, obtaining the Campbell diagrams and determining the critical speeds are very useful to evaluate the spindle system dynamics. The unbalance response of the system to the center of mass unbalance at the cutting tool is also calculated to investigate the dynamic behavior. In this paper, we used an ANSYS Parametric Design Language (APDL) program which based on finite element method has been implemented to make the full dynamic analysis and evaluation of the results. Results show that the calculated critical speeds are far from the operating speed range of the spindle, thus, the spindle would not experience resonance, and the maximum unbalance response at operating speed is still with acceptable limit. ANSYS Parametric Design Language (APDL) can be used by spindle designer as tools in order to increase the product quality, reducing cost, and time consuming in the design and development stages. Keywords—ANSYS parametric design language (APDL), Campbell diagram, Critical speeds, Unbalance response, The Spindle system. I. INTRODUCTION HE most important components in machine tool system is the system of spindle. The dynamic properties of the spindle directly affect the machining productivity and quality of the product. Thus it is important and necessary to determine the dynamic behaviors of spindles in the design and development stages of spindle system in order to avoid resonance due to machining operations. To obtain dynamic analysis of spindle system analytically in the early design stage, the finite element method (FEM) has been frequently adopted in modeling rotor dynamics. Basically, the FEM model for the spindle systems of machine tools is similar to those developed in rotor dynamic. However, the spindle shafts used in machine tools usually have smaller shaft diameters and bearings, and possess disk-like in turbomachine components. Khairul Jauhari is with the University of Diponegoro, Semarang, Indonesia (phone: +62 815 65 45792; e-mail: [email protected]). Khairul Jauhari is with the Agency for The Assessment and Application of Technology, Center for Machine Tools, Production & Automation, Tangerang Selatan, Indonesia (phone: +62 21 702 86019; e-mail: [email protected]). Ahcmad Widodo and Ismoyo Haryanto are with with the University of Diponegoro, Semarang, Indonesia (e-mail: [email protected]). Thus, in this paper we attempt to review some researches relating to the field of rotordynamics. Lin et al. [1] stated that the most popular approach for modeling the dynamic behavior of a spindle shaft is the finite element method (FEM), because of its capability to manage complex geometry and boundary condition and the calculation approaches save time and money while solving the finite element system equation. Lin [2] developed a genetic algorithm (GA) optimization approach to search the optimal location of bearings on the motorized spindle shaft. The goal is to maximize its first-mode natural frequency (FMNF). In order to achieve the results, dynamic model of the spindle- bearing system is formulated by finite element method (FEM) that was developed in the rotordynamics. Nelson and McVaugh [3], and Nelson [4] employed the Timoshenko beam theory to establish the matrix of systems for analyzing the dynamics of rotor systems including the effects of rotational inertia, gyroscopic moments, shear deformation, and axial load. Zorzi and Nelson [5] presented the influences of damping on the rotating systems dynamics. Cao and Altintas [6] proposed a general method that can be used for the modeling of the spindle-bearing systems. The spindle shaft and housing are modeled as Timoshenko’s beam element by including the centrifugal force and gyroscopic effect. The stiffness matrix of the bearing, the contact angle, preload and deflection of spindle shaft and housing are all coupled in the finite element model of the spindle assembly. Erturk et al. [7] proposed an analytical method that uses the inverse of dynamics stiffness matrix coupling and structural modification for modeling spindle-holder-tool assemblies. All components of the spindle-holder-tool assembly are modeled as multi- segment Timoshenko beams and Euler-Bernoulli beam model, and the results are compared with those formulation. They found that Euler-Bernoulli model may yield inaccurate results at high frequencies. Chateled et al. [8] studied the modeling approaches are used in a modal analysis method for calculating the dynamic characteristics (frequencies and mode shapes) of the rotating assemblies of turbo-machines. They compared the results of modeling approaches are obtained from the 3D finite element and 1D finite element. The results show that the behavior of such systems may be inaccurate modeled using one-dimensional beam. Whalley and Abdul- Ameer [9], by using simple harmonic response methods, calculated the critical speed and rotational frequency of shaft- rotor systems where the shaft profiles are contoured. Taplak and Parlak [10] studied the evaluation of gas turbine rotor Evaluation of Dynamic Behavior a Machine Tool Spindle System through Modal and Unbalance Response Analysis Khairul Jauhari, Achmad Widodo, Ismoyo Haryanto T World Academy of Science, Engineering and Technology International Journal of Industrial and Manufacturing Engineering Vol:9, No:2, 2015 400 International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193 International Science Index, Industrial and Manufacturing Engineering Vol:9, No:2, 2015 waset.org/Publication/10002193
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Evaluation of Dynamic Behavior a Machine Tool Spindle ...

Abstract—The spindle system is one of the most important
components of machine tool. The dynamic properties of the spindle
affect the machining productivity and quality of the work pieces.
Thus, it is important and necessary to determine its dynamic
characteristics of spindles in the design and development in order to
avoid forced resonance. The finite element method (FEM) has been
adopted in order to obtain the dynamic behavior of spindle system.
For this reason, obtaining the Campbell diagrams and determining the
critical speeds are very useful to evaluate the spindle system
dynamics. The unbalance response of the system to the center of
mass unbalance at the cutting tool is also calculated to investigate the
dynamic behavior. In this paper, we used an ANSYS Parametric
Design Language (APDL) program which based on finite element
method has been implemented to make the full dynamic analysis and
evaluation of the results. Results show that the calculated critical
speeds are far from the operating speed range of the spindle, thus, the
spindle would not experience resonance, and the maximum
unbalance response at operating speed is still with acceptable limit.
ANSYS Parametric Design Language (APDL) can be used by spindle
designer as tools in order to increase the product quality, reducing
cost, and time consuming in the design and development stages.
Keywords—ANSYS parametric design language (APDL),
Campbell diagram, Critical speeds, Unbalance response, The Spindle
system.
I. INTRODUCTION
HE most important components in machine tool system is
the system of spindle. The dynamic properties of the
spindle directly affect the machining productivity and quality
of the product. Thus it is important and necessary to determine
the dynamic behaviors of spindles in the design and
development stages of spindle system in order to avoid
resonance due to machining operations. To obtain dynamic
analysis of spindle system analytically in the early design
stage, the finite element method (FEM) has been frequently
adopted in modeling rotor dynamics. Basically, the FEM
model for the spindle systems of machine tools is similar to
those developed in rotor dynamic. However, the spindle shafts
used in machine tools usually have smaller shaft diameters and
bearings, and possess disk-like in turbomachine components.
Khairul Jauhari is with the University of Diponegoro, Semarang, Indonesia
(phone: +62 815 65 45792; e-mail: [email protected]).
Khairul Jauhari is with the Agency for The Assessment and Application of
Technology, Center for Machine Tools, Production & Automation, Tangerang Selatan, Indonesia (phone: +62 21 702 86019; e-mail:
Ahcmad Widodo and Ismoyo Haryanto are with with the University of Diponegoro, Semarang, Indonesia (e-mail: [email protected]).
Thus, in this paper we attempt to review some researches
relating to the field of rotordynamics.
Lin et al. [1] stated that the most popular approach for
modeling the dynamic behavior of a spindle shaft is the finite
element method (FEM), because of its capability to manage
complex geometry and boundary condition and the calculation
approaches save time and money while solving the finite
element system equation. Lin [2] developed a genetic
algorithm (GA) optimization approach to search the optimal
location of bearings on the motorized spindle shaft. The goal
is to maximize its first-mode natural frequency (FMNF). In
order to achieve the results, dynamic model of the spindle-
bearing system is formulated by finite element method (FEM)
that was developed in the rotordynamics. Nelson and
McVaugh [3], and Nelson [4] employed the Timoshenko beam
theory to establish the matrix of systems for analyzing the
dynamics of rotor systems including the effects of rotational
inertia, gyroscopic moments, shear deformation, and axial
load. Zorzi and Nelson [5] presented the influences of
damping on the rotating systems dynamics. Cao and Altintas
[6] proposed a general method that can be used for the
modeling of the spindle-bearing systems. The spindle shaft
and housing are modeled as Timoshenko’s beam element by
including the centrifugal force and gyroscopic effect. The
stiffness matrix of the bearing, the contact angle, preload and
deflection of spindle shaft and housing are all coupled in the
finite element model of the spindle assembly. Erturk et al. [7]
proposed an analytical method that uses the inverse of
dynamics stiffness matrix coupling and structural modification
for modeling spindle-holder-tool assemblies. All components
of the spindle-holder-tool assembly are modeled as multi-
segment Timoshenko beams and Euler-Bernoulli beam model,
and the results are compared with those formulation. They
found that Euler-Bernoulli model may yield inaccurate results
at high frequencies. Chateled et al. [8] studied the modeling
approaches are used in a modal analysis method for
calculating the dynamic characteristics (frequencies and mode
shapes) of the rotating assemblies of turbo-machines. They
compared the results of modeling approaches are obtained
from the 3D finite element and 1D finite element. The results
show that the behavior of such systems may be inaccurate
modeled using one-dimensional beam. Whalley and Abdul-
Ameer [9], by using simple harmonic response methods,
calculated the critical speed and rotational frequency of shaft-
rotor systems where the shaft profiles are contoured. Taplak
and Parlak [10] studied the evaluation of gas turbine rotor
Evaluation of Dynamic Behavior a Machine Tool
Spindle System through Modal and Unbalance
Response Analysis Khairul Jauhari, Achmad Widodo, Ismoyo Haryanto
T
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
400International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93

dynamic analysis using finite element method. They obtained
the critical speeds, Campbell value and the response of the
rotor to the center of mass unbalance in the compressor. A
program named Dynrot was used to make full dynamic
analysis and the evaluation of the results. For this purpose, a
gas turbine rotor with certain geometrical and mechanical
properties was modeled and its dynamic analysis was made by
Dynrot program. Jalali et al. [11] performed the full rotor
dynamic analysis of a high speed rotor-bearing system using
3D finite element model generated by ANSYS, one-
dimensional model beam type model and experimental modal
test. They obtained the Campbell diagram, critical speeds, and
unbalance response with the use of both beam model and 3D
FE model. The results were compared and good agreement
between the theoretical and experimental result indicates the
accuracy of the finite element model. Villa et al. [12] have
been investigated the behavior of nonlinear flexible
unbalanced rotor which supported by roller bearings. In this
case, the method of harmonic balance was used to find a
periodic response of this non-linear system. In frequency
form, stability of the system was identified based on a
perturbation applied method. They stated that the method of
harmonic balance with the AFT application can be used to
obtain harmonic solutions. Bai and colleagues [13] examined
the dynamic behaviors of hydroturbine main shaft by using a
program named ANSYS. They developed ANSYS Parametric
Design Language to generate the geometry model of 3D,
analysis of modal, and obtaining critical speed at the spin
speed. By using ANSYS Parametric Design Language, critical
speed determination and analysis of unbalance response for a
multi segment rotor have been presented by [14] and [15].
They showed the advantage of using this method is that by
typing one of the input script as example shaft diameter, rotor
segment length, loads experienced by the rotor, the command
of ”ANTYPE,MODAL”, and ”HARMIC” command, all of
these commands can be read as variable input and execution
command of the program. These scripts are executed by
ANSYS Programming Design Language. Results of these
programming languages are validated with results of
theoretical and measurement, which are a good agreement of
the acceptable limits.
This paper presents an alternative procedure called a full
rotor-dynamics analysis for investigating the modal and
harmonic analysis of the spindle systems. For this reason,
obtaining the Campbell diagrams and determining the critical
speeds are very useful to evaluate the spindle system
dynamics. The unbalance response of the system to the center
of mass unbalance at the cutting tool is also calculated to
investigate the dynamic behavior practically and to verify the
critical speeds obtained from the modal analysis. In this study,
a program named ANSYS Parametric Design Language
(APDL) has been implemented to make the dynamic analysis
and evaluation of the results. For this purpose, a grinding
spindle system with certain geometrical and mechanical
properties is modeled and its dynamic analysis was made by
ANSYS (APDL). The results show that the calculated critical
speeds are far enough from the operating speed range of the
spindle, thus, the spindle would not experience resonance, and
the maximum unbalance response is still with acceptable limit.
II. THEORETICAL AND PRACTICAL FORMULATION
In this paper, a Leadwell STD V-30 spindle system of
grinding machine tool is shown in Fig. 1. The spindle is
designed to operate at up 8,000 rev/min with a 5.6 kW motor
connected to the shaft with a pulley-belt system. In this model,
cutting tool, tool-holder, spindle shaft, and bearings were
included. All components of cutting tool-holder-spindle-
bearings assembly are modeled as an assemblage of discrete
disk and bearings and the multi-segment beams with
distributed mass and elasticity. Since the finite element
discretization procedure is well documented in many
literatures [16]-[18], the detail of equations will not be derived
here and only the general equation of motion is presented
below.
A. Equation of the Element Motion
The shaft element is modeled as a Timoshenko beam with a
constant circular cross-section. The finite element used has
two nodal points and having eight degree of freedom elements
which are two translations and two rotations at each nodal
point of the element. Each shaft element has a translational
mass matrix (MeT), a rotational mass matrix (Me
R), a
gyroscopic matrix (Ge), a stiffness matrix (Ke), and a force
vector (Fe). The equation of motion in a fixed frame, for one
shaft element rotating with a constant speed Ω can be
expressed as
( )T R
e e e e e e eeM M q G q K q F•• •
+ − Ω + = (1)
where qe is the nodal displacement vector, containing the eight
degrees-of-freedom of the shaft element (two translations and
two rotations in each node). By combining the individual
matrices of each shaft element, one can obtain the global
matrices that represent the whole shaft, thus resulting to the
following equation of motion:
( )T R
G G G G GM M q G q K q F•• •
+ − Ω + = (2)
where (MT) is the global translational mass matrix, (M
R) is the
global rotational mass matrix, (G) is the global gyroscopic
matrix, (K) is the global stiffness matrix, (F) is the global
force vector acting on the shaft element, and (q) is the
displacement vector containing all 4(ne + 1) degrees-of-
freedom of the shaft elements that represent the physical shaft
(ne is the number of shaft elements).
Mass elements are modeled as rigid disk. The rigid disk is
required to be located at a finite element nodal point. For the
rotating speed Ω is assumed to be constant then here qd is the
nodal displacement vector of the disk center. The equation can
be expressed as
( )T R
d d d d ddM M q G q F
•• •
+ − Ω = (3)
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
401International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93

where (MdT) is the disk element translational mass matrix,
(MdR) is the disk element rotational mass matrix, (G) is the
disk element gyroscopic matrix.
The dynamic characteristics of the bearings can be
represented by stiffness and damping coefficients. The forces
acting on the shaft can be expressed as
br br br br brC q K q F•
+ = (4)
where (Cb) and (Kb) are the bearing damping and stiffness
matrices, and (Fb) is the bearing force acting on the shaft.
B. Equation of Global System and Analysis of Eigenvalue
Based on the motion equations of elements in (2), (3), and
(4) then a certain global element equation can be established
and other global equations also can be generated for the other
elements. These elements are constructed to form the general
equation, which represents the behavior of the whole system.
Then here, the motion equation of the damped system for
global coordinates which can expressed as
G G G GM q C q K q F•• •
+ + = (5)
Here,
CG = Cbr- ΩGe- ΩGd, KG = Ke+ Kbr, FG = Fg+ Fu + Fa+ Fh
In order to obtain the natural frequency of system, then
eigenvalue must be solved and expressed by (5); the system
equation can be set as a state variable vector.
0s sA x B x•
+ = (6)
where the matrices of As, Bs, and displacement x consist of
element matrices given as
0
G G
s
M CA
I
=
,
0
0
G
s
KB
I
= −
, qxq
• =
For assuming harmonic solution 0
tx x eλ= of (6), the
solution of an eigenvalue problem is
0( ) 0s sA B xλ + = (7)
To obtain the matrix solution of (7) then the determinant of
this matrix equation must be equal to zero
0aI Cλ + = (8)
where, Ca = As-1
Bs and λ is an eigenvalue. The eigenvalues are
usually as the complex number and conjugate roots.
k k kiλ α ω= ± (9)
Here, αk and ωk are the stability factor of growth and the kth
mode of damped frequencies, respectively.
C. Response of Unbalance
The forces of mass unbalance (Fu) which is shown in (5)
can be expressed as
2
max
i t
u uF F e Ω= Ω (10)
The response of unbalance mass is considered to be as the
form
i t
uP P e Ω= (11)
Substituting (10) and (11) into (5), the equation can be
expressed as
2 2( ) u uK M i C p F− Ω + Ω = Ω (12)
By solving (12), the response of steady state can be
obtained.
D. ANSYS Parametric Design Language (APDL)
In this paper, a practical APDL macro scripting language
has been developed to generate all the required results,
containing amplitude plots and frequency plots at all the nodes
of the model, with minimal effort of the user. The algorithm
incorporated in the macro is as
1) Setup the model. Impose the boundary conditions and
apply excitation force.
2) Performing the analysis of modal for obtaining the
natural frequencies and the critical speeds. Set solution
using “ANTYPE, MODAL” command. Retrieve mode
frequency and critical speed frequency using ‘*GET’
command and store in using ‘*VFILL’ command.
3) Perform harmonic analysis for obtaining unbalance
response and provides validation for the frequency found
by modal analysis through harmonic analysis. Set
solution using ”HARMIC” command and set the range of
excitation frequencies to increment from 0 to maximum
operating speed in a number of steps (using ”NSUBST”
command).
4) Solve for unbalance response. Plot results to get an
unbalance response at nodal point ‘n’.
5) Increment parameter ‘n’ by 1. If n > 18 (since the
spindle-bearing system model here contains 18 nodal
points), if ok then go to the next step. Otherwise, go back
to step 3.
6) End of program.
III. THE MODEL OF FINITE ELEMENT
Table I describes the mechanical and geometrical properties
of shaft element. In this study, the spindle shaft is modeled
into 17 elements of beam and points of node at the end of each
element. Two-masses of the cutting tool and the pulley-belt
components can be considered as 1 and 3 elements of rigid
disk, respectively. These elements of rigid disk are located at
the nodal point of number 1, 14, 15 and 16. The parameters of
the mass element are tabulated in Table II. In addition the two
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
402International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93

sets of bearings, located at the nodal points 5 and 12. These
bearings are modeled as symmetric isotropic bearings and stiff
elastic constraints. Table III shows a model of bearing
elements. A schematic of the spindle's finite element model is
shown in Fig. 2.
Fig. 1 Cross section geometry of spindle system
TABLE I
MECHANICAL PROPERTIES AND GEOMETRICAL OF THE SHAFT ELEMENT
Element numbers 1 2 3 4 5 6 7 8 9
Diameter Do (mm) 88 88 70 70 70 70 64.5 64.5 64.5
Length L (mm) 20.5 20.5 43.75 43.75 43.75 43.75 34 34 34
ρ (kg/m3) 7800 7800 7800 7800 7800 7800 7800 7800 7800
E (GPa) 210 210 210 210 210 210 210 210 210
Element numbers 10 11 12 13 14 15 16 17 18
Diameter Do (mm) 60 60 60 60 54.5 54.5 50.4 50.4 -
Length L (mm) 18.25 18.25 18.25 18.25 63.5 63.5 21 21 -
ρ (kg/m3) 7800 7800 7800 7800 7800 7800 7800 7800 -
E (GPa) 210 210 210 210 210 210 210 210 -
TABLE II
MODEL PROPERTIES OF DISK ELEMENT
Mass numbers 1 2 3 4
Nodal numbers 1 14 15 16
m (kg) 15.866 2.415 2.415 2.415
Jp (kg.m2) 0.486 0.005 0.005 0.005
Jt (kg.m2) 0.247 0.003 0.003 0.003
TABLE III MODEL PROPERTIES OF THE BEARING ELEMENT
Bearing number 1 2
Nodal number 5 12
Kyy (N/m) 1.911×108 2.476×108
Cyy (N.m/s) 191.10×102 247.60×102
Kzz (kg.m2) 1.911×108 2.476×108
Czz (N.m/s) 191.10×102 247.60×102
Fig. 2 Discretization model of the STD V-30 grinding spindle
As can be described in Fig. 3, a three-dimensional geometry
model of the spindle-bearing system is established with the
APDL (ANSYS Parametric Design Language) program. The
spindle shaft is considered as the elements of BEAM188 with
an internal node and the function of quadratic shape to
increase the element accuracy. The characteristic of
BEAM188 has two nodal points and having twelve degrees of
freedom at each element; the motions are translated in the x, y
and z axis direction and rotation about x, y and z axis. The
element of MASS21 is used for modeling of disk element
(mass of rigid disk) and element of COMBIN14 is used for
modeling the symmetry bearings. The nodal points, elements,
material properties, real constants, boundary conditions and
other physical system-defining features that constitute the
model have been created by using APDL commands such as
RO, PEX, PGXY, MP, ET, MAT, K, N, LSTR, R, RMORE,
LATT, LESIZE and E.
Shear effect cannot be ignored in the spindle shaft. The
constraints are applied to the element motions of displacement
in the x axis direction and rotation about the x axis, thus the
spindle shaft would not experience any displacements of
translation and twist motion about the x axis direction.
Parameters for the material and element properties of this
spindle shaft model are the same as in the beam finite element
model.
A modal analysis is performed on a spindle-bearing system
with QRDAMP method to determine the whirl speeds and
Campbell value, the CORIOLIS command is activated in a
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
403International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93

stationary reference frame to apply “Coriolis Effect” to the
rotating structure. The whirl speeds for slope (excitation per
revolution) 1x is determined. Harmonic analysis also
performed with SYNCHRO command to determine amplitude
response values.
Fig. 3 3D view finite element of spindle shaft generated by APDL
program
IV. RESULTS
In this paper, in order to investigate the dynamic behavior
of the spindle at operating speeds, the Campbell diagrams,
critical speeds, and unbalance response are obtained. The
numerical analyzes are performed considering speeds ranging
from 0 to 27000 rpm. Table IV shows the damped natural
frequencies of the spindle assembly (at operating speed 8000
rpm) obtained by the APDL FE model. Fig. 6 shows the
Campbell diagrams obtained by the finite element (FE) model
constructed in APDL program. Also, the operating deflection
shapes at two speeds are obtained in Figs. 4 and 5.
TABLE IV
NATURAL FREQUENCIES AT OPERATING SPEED (AT 8000RPM)
No Nat. Frequencies APDL Model (Hz)
1 Mode 1 (1stbackward whirling) 137.518
2 Mode 2 (1stforward whirling) 186.467
3 Mode 3 (2ndbackward whirling) 321.266
4 Mode 4 (2ndforward whirling) 338.133
5 Mode 5 (3rdbackward whirling) 514.517
6 Mode 6 (3rdforward whirling) 683.315
Fig. 4 Deflection shape corresponding to 1stFW mode
Fig. 5 Deflection shape corresponding to 2nd FW mode
Fig. 6 Campbell diagram from APDL model
As can be seen from Table V, the speeds which are the
coincidence of the spindle rotating speed and the rotating
natural frequencies of the spindle are obtained from the APDL
finite element models. There are three backward whirls (BW)
and two forward whirls (FW) modes were considered. They
are 1st backward whirl, 1st forward whirl, 2nd backward whirl,
2nd
forward whirl, and 3rd
backward whirl, respectively critical
speeds. We also obtained the deflection of mode shapes
relating to these five critical speeds. The shape of deflection at
critical speed relating to 1st backward whirl, 1
st forward whirl,
2nd
backward whirl, 2nd
forward whirl, and 3rd
backward whirl
are shown in Figs. 7-11.
TABLE V CRITICAL SPEEDS AT SPEED RANGE
No Critical Speed APDL Model (Rpm)
1 1st backward whirl 8215.225
2 1st forward whirl 11751.541
3 2nd backward whirl 18610.909
4 2nd forward whirl 21017.776
5 3rd backward whirl 26033.467
186.467 Hz
FW (Forward Whirl)
338.133 Hz
FW (Forward Whirl)
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
404International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93
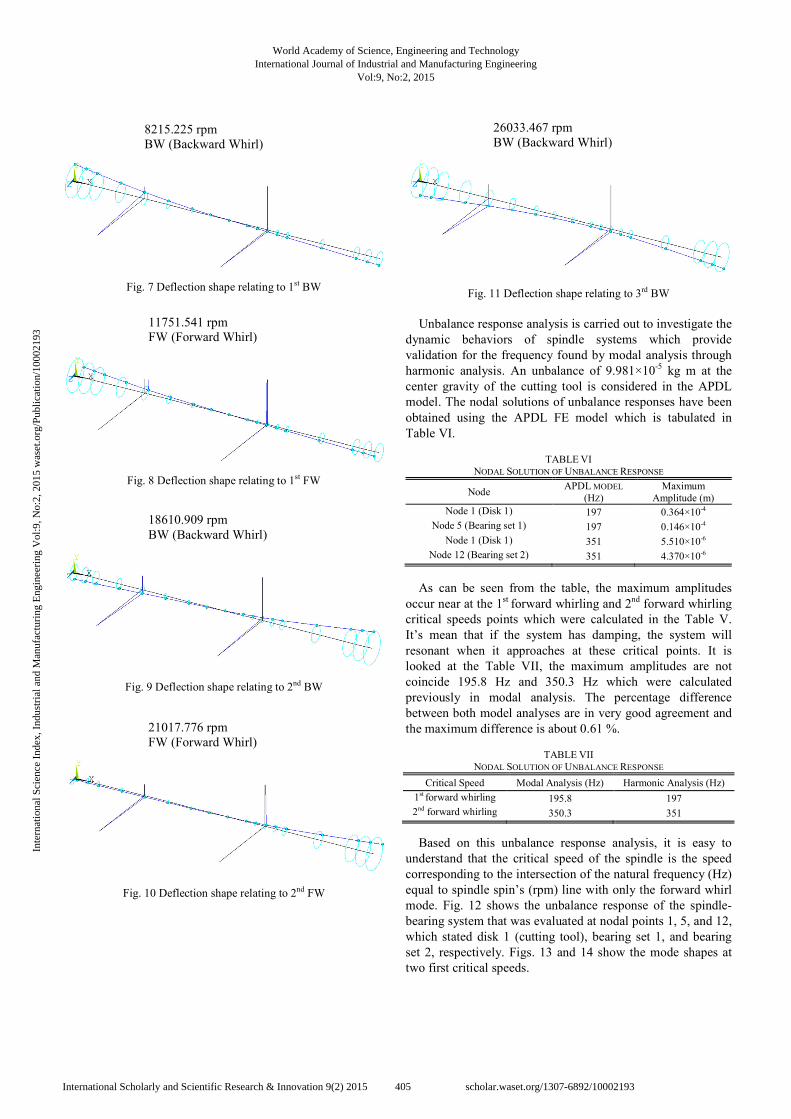
Fig. 7 Deflection shape relating to 1st BW
Fig. 8 Deflection shape relating to 1st FW
Fig. 9 Deflection shape relating to 2nd BW
Fig. 10 Deflection shape relating to 2nd FW
Fig. 11 Deflection shape relating to 3rd BW
Unbalance response analysis is carried out to investigate the
dynamic behaviors of spindle systems which provide
validation for the frequency found by modal analysis through
harmonic analysis. An unbalance of 9.981×10-5
kg m at the
center gravity of the cutting tool is considered in the APDL
model. The nodal solutions of unbalance responses have been
obtained using the APDL FE model which is tabulated in
Table VI.
TABLE VI
NODAL SOLUTION OF UNBALANCE RESPONSE
Node APDL MODEL
(HZ)
Maximum
Amplitude (m)
Node 1 (Disk 1) 197 0.364×10-4
Node 5 (Bearing set 1) 197 0.146×10-4
Node 1 (Disk 1) 351 5.510×10-6
Node 12 (Bearing set 2) 351 4.370×10-6
As can be seen from the table, the maximum amplitudes
occur near at the 1st
forward whirling and 2nd
forward whirling
critical speeds points which were calculated in the Table V.
It’s mean that if the system has damping, the system will
resonant when it approaches at these critical points. It is
looked at the Table VII, the maximum amplitudes are not
coincide 195.8 Hz and 350.3 Hz which were calculated
previously in modal analysis. The percentage difference
between both model analyses are in very good agreement and
the maximum difference is about 0.61 %.
TABLE VII
NODAL SOLUTION OF UNBALANCE RESPONSE
Critical Speed Modal Analysis (Hz) Harmonic Analysis (Hz)
1st forward whirling 195.8 197
2nd forward whirling 350.3 351
Based on this unbalance response analysis, it is easy to
understand that the critical speed of the spindle is the speed
corresponding to the intersection of the natural frequency (Hz)
equal to spindle spin’s (rpm) line with only the forward whirl
mode. Fig. 12 shows the unbalance response of the spindle-
bearing system that was evaluated at nodal points 1, 5, and 12,
which stated disk 1 (cutting tool), bearing set 1, and bearing
set 2, respectively. Figs. 13 and 14 show the mode shapes at
two first critical speeds.
8215.225 rpm
BW (Backward Whirl)
11751.541 rpm
FW (Forward Whirl)
18610.909 rpm
BW (Backward Whirl)
21017.776 rpm
FW (Forward Whirl)
26033.467 rpm
BW (Backward Whirl)
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
405International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93
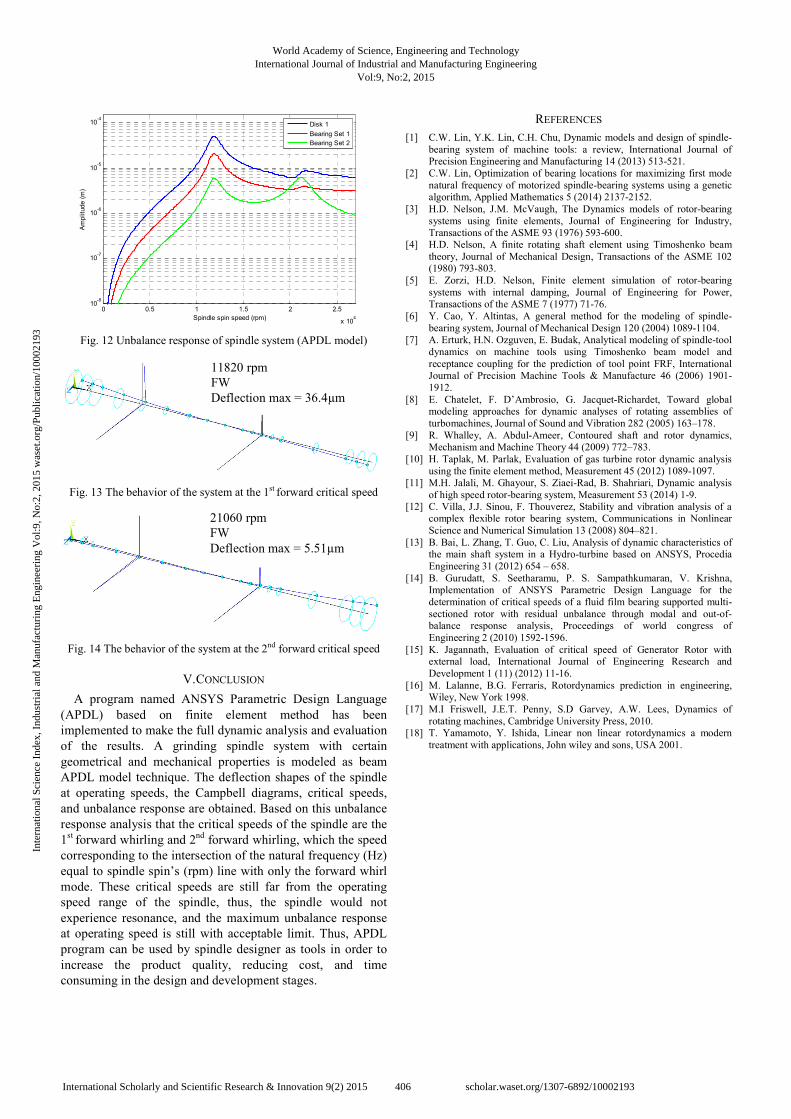
Fig. 12 Unbalance response of spindle system (APDL model)
Fig. 13 The behavior of the system at the 1st forward critical speed
Fig. 14 The behavior of the system at the 2nd forward critical speed
V. CONCLUSION
A program named ANSYS Parametric Design Language
(APDL) based on finite element method has been
implemented to make the full dynamic analysis and evaluation
of the results. A grinding spindle system with certain
geometrical and mechanical properties is modeled as beam
APDL model technique. The deflection shapes of the spindle
at operating speeds, the Campbell diagrams, critical speeds,
and unbalance response are obtained. Based on this unbalance
response analysis that the critical speeds of the spindle are the
1st
forward whirling and 2nd
forward whirling, which the speed
corresponding to the intersection of the natural frequency (Hz)
equal to spindle spin’s (rpm) line with only the forward whirl
mode. These critical speeds are still far from the operating
speed range of the spindle, thus, the spindle would not
experience resonance, and the maximum unbalance response
at operating speed is still with acceptable limit. Thus, APDL
program can be used by spindle designer as tools in order to
increase the product quality, reducing cost, and time
consuming in the design and development stages.
REFERENCES
[1] C.W. Lin, Y.K. Lin, C.H. Chu, Dynamic models and design of spindle-
bearing system of machine tools: a review, International Journal of Precision Engineering and Manufacturing 14 (2013) 513-521.
[2] C.W. Lin, Optimization of bearing locations for maximizing first mode
natural frequency of motorized spindle-bearing systems using a genetic algorithm, Applied Mathematics 5 (2014) 2137-2152.
[3] H.D. Nelson, J.M. McVaugh, The Dynamics models of rotor-bearing
systems using finite elements, Journal of Engineering for Industry, Transactions of the ASME 93 (1976) 593-600.
[4] H.D. Nelson, A finite rotating shaft element using Timoshenko beam
theory, Journal of Mechanical Design, Transactions of the ASME 102 (1980) 793-803.
[5] E. Zorzi, H.D. Nelson, Finite element simulation of rotor-bearing
systems with internal damping, Journal of Engineering for Power, Transactions of the ASME 7 (1977) 71-76.
[6] Y. Cao, Y. Altintas, A general method for the modeling of spindle-
bearing system, Journal of Mechanical Design 120 (2004) 1089-1104. [7] A. Erturk, H.N. Ozguven, E. Budak, Analytical modeling of spindle-tool
dynamics on machine tools using Timoshenko beam model and
receptance coupling for the prediction of tool point FRF, International Journal of Precision Machine Tools & Manufacture 46 (2006) 1901-
1912.
[8] E. Chatelet, F. D’Ambrosio, G. Jacquet-Richardet, Toward global modeling approaches for dynamic analyses of rotating assemblies of
turbomachines, Journal of Sound and Vibration 282 (2005) 163–178.
[9] R. Whalley, A. Abdul-Ameer, Contoured shaft and rotor dynamics, Mechanism and Machine Theory 44 (2009) 772–783.
[10] H. Taplak, M. Parlak, Evaluation of gas turbine rotor dynamic analysis
using the finite element method, Measurement 45 (2012) 1089-1097. [11] M.H. Jalali, M. Ghayour, S. Ziaei-Rad, B. Shahriari, Dynamic analysis
of high speed rotor-bearing system, Measurement 53 (2014) 1-9. [12] C. Villa, J.J. Sinou, F. Thouverez, Stability and vibration analysis of a
complex flexible rotor bearing system, Communications in Nonlinear
Science and Numerical Simulation 13 (2008) 804–821.
[13] B. Bai, L. Zhang, T. Guo, C. Liu, Analysis of dynamic characteristics of the main shaft system in a Hydro-turbine based on ANSYS, Procedia
Engineering 31 (2012) 654 – 658.
[14] B. Gurudatt, S. Seetharamu, P. S. Sampathkumaran, V. Krishna, Implementation of ANSYS Parametric Design Language for the
determination of critical speeds of a fluid film bearing supported multi-
sectioned rotor with residual unbalance through modal and out-of-balance response analysis, Proceedings of world congress of
Engineering 2 (2010) 1592-1596.
[15] K. Jagannath, Evaluation of critical speed of Generator Rotor with external load, International Journal of Engineering Research and
Development 1 (11) (2012) 11-16.
[16] M. Lalanne, B.G. Ferraris, Rotordynamics prediction in engineering, Wiley, New York 1998.
[17] M.I Friswell, J.E.T. Penny, S.D Garvey, A.W. Lees, Dynamics of
rotating machines, Cambridge University Press, 2010. [18] T. Yamamoto, Y. Ishida, Linear non linear rotordynamics a modern
treatment with applications, John wiley and sons, USA 2001.
0 0.5 1 1.5 2 2.5
x 104
10-8
10-7
10-6
10-5
10-4
Spindle spin speed (rpm)
Am
plit
ude
(m
)
Disk 1
Bearing Set 1
Bearing Set 2
11820 rpm
FW
Deflection max = 36.4µm
21060 rpm
FW
Deflection max = 5.51µm
World Academy of Science, Engineering and TechnologyInternational Journal of Industrial and Manufacturing Engineering
Vol:9, No:2, 2015
406International Scholarly and Scientific Research & Innovation 9(2) 2015 scholar.waset.org/1307-6892/10002193
Inte
rnat
iona
l Sci
ence
Ind
ex, I
ndus
tria
l and
Man
ufac
turi
ng E
ngin
eeri
ng V
ol:9
, No:
2, 2
015
was
et.o
rg/P
ublic
atio
n/10
0021
93