IAI_RCP4-S_24V-stepper-actuator-slede_catalogus.pdf - ATB ...

IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012 1133
Energy-Based Key-On Control of a Double MagnetElectromechanical Valve ActuatorMario di Bernardo, Senior Member, IEEE, Alessandro di Gaeta,
Carlos Ildefonso Hoyos Velasco, Student Member, IEEE, and Stefania Santini
Abstract—The aim of this paper is to design, analyze, andvalidate via experiments the control of a double magnet electro-mechanical valve actuator (EMVA). Such actuators have shownto be a promising solution to actuate engine valves during normalengine cycle. Their use can increase engine power, reduce fuelconsumption and pollutant emissions, and improve significantlyengine efficiency. To this aim, this actuator needs to be properlycontrolled at the engine startup for the first valve lift (key-oncontrol). Mathematically, the EMVA system can be described asa highly nonlinear piecewise-smooth mechanical oscillator. Theproposed control law is based on an energy control approach.Bifurcation analysis of the closed-loop system is carried out tocharacterize the nonlinear dynamics of the valve and to tunethe controller. The numerical and theoretical analysis is in goodagreement with the experimental results.
Index Terms—Bifurcation analysis, camless engine, electro-mechanical valve actuator (EMVA), energy control, key-oncontrol.
I. INTRODUCTION
T O meet current and future exhaust gas emission standardswhile accomplishing customer expectations in terms of
fuel reduction and performance, new spark ignition enginesare necessary [1], [2]. Currently, the intake and exhaust valveswhich control the flow of gases are mechanically operated bythe camshaft. Hence, once the cam-follower mechanism hasbeen designed during the engine development, it is not possibleto adjust or adapt in real time the main features of the valves(opening duration, maximum lift and anchoring) [3]. On thecontrary, using an active control approach, it would be possibleto implement variable valve timing (VVT) and hence improvefuel consumption [4], torque production [3], [5], engine effi-ciency [1], and reduce emissions [6].Over the last decade, different devices (mechanical [7],
electro-hydraulic [8], pneumatic [9], motor-driven [10]–[12]
Manuscript received August 29, 2010; revisedMarch 09, 2011; accepted June14, 2011. Manuscript received in final form July 12, 2011. Date of publicationAugust 15, 2011; date of current version June 28, 2012. Recommended by As-sociate Editor L. Del Re.M. di Bernardo is with the Department of Systems and Computer Engi-
neering, University of Naples Federico II, Naples 80125, Italy, and also withthe Department of Engineering Mathematics, University of Bristol, BristolBS8 1UB, U.K. (e-mail: [email protected]).A. di Gaeta is with the Istituto Motori, National Research Council, Naples
80125, Italy (e-mail: [email protected]).C. I. Hoyos Velasco and S. Santini are with the Department of Systems and
Computer Engineering, University of Naples Federico II, Naples 80125, Italy(e-mail: [email protected]; [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TCST.2011.2162332
and electromechanical [5], [6], [13], [14]) have been proposedto implement VVT. A key problem is to design and test singlevariable valve actuators, which are robust and reliable so as tobe used in the next generation of camless valvetrains.Advantages and disadvantages of electromechanical valve
actuators (EMVA) have been extensively discussed in [15].The benefits of using an EMVA include an improvement of thelow-end torque from 10% to 20% and an increase of the fueleconomy of about 16%–19% with a substantial reduction ofemissions [5]. Typically, a double magnet based EMVA consistsof a ferromagnetic armature mounted between two opposingsets of springs and electromagnets. Valve motion is achieved byappropriately driving the current on upper and lower magneticcoils according to the desired behavior of the engine. Theeffectiveness of the EMVA depends on achieving precise valveclosing/opening and fast valve seating. An electronic controlsystem is required to command each valve properly at everyengine speed. The control must account for the behavior of thesystem which is strongly affected by many nonlinearities, dueto the presence of friction and motion constraints, which canseriously alter its dynamics. A major problem is the possiblepresence of impacts between fixed and moving parts (namely,when the valve hits the valve seat or the armature hits the coilcore). “Soft landing” of the valve must be ensured by specificcontrol techniques (see, for example, the ones proposed in[16]–[18]).Friction phenomena strongly dominate the system dynamics,
particularly at low velocities, as it happens for instance duringthe engine startup phase (the armature is at rest at the middle po-sition) and during the closing or opening phases. An extremelydelicate stage is the so-called key-on control that has to be de-signed in order to move the valve from its rest position (themiddle of the stroke) to one end of the stroke with low energyconsumption requirements and avoiding impacts [16]. This firstmaneuver is critical since the armature starts at the central po-sition and the magnetic force is strongly nonlinear with respectto air gaps and currents. Hence, high power is required to ini-tiate the valve motion and this makes the first lift hard to be ac-complished with feasible coil currents provided by automotiveelectrical power circuits [19], [20]. To overcome this problemdifferent technological solutions have been adopted, based on aspecial design of the EMVA itself or on the addition of furtheractuation to attain the first lift maneuver with admissible coilcurrents. For example, the use of permanent magnets (PMs) hasbeen proposed in [21] and [22]. Alternatively, in [11] and [12] anelectrical motor, driven by an open-loop control input, is addedto operate the device. Obviously, with this kind of solutions,the complexity of the overall system increases. Recently, the
1063-6536/$26.00 © 2011 IEEE

1134 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
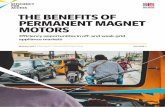
Fig. 1. EMVA System. (a) Schematic description of the EMVA. (b) Experi-mental setup.
first catching problem has been tackled in [18] and [20] by ex-ploiting the mechanical resonance of EMVA to drive the systemduring first lift. In this case, the model-based control law re-quires good knowledge of the system resonance frequency andsuffers from parameter uncertainties mainly due to the frictionvariations. Note that, in this scenario, an effective solution of thefirst catching problem can help the industry to overcome obsta-cles for a low-cost mass production of camless technology, re-cently announced by automotive components industry [5].In this paper, we design, analyze, and test experimentally a
nonlinear feedback control law aimed at solving the key-on con-trol problem satisfying the practical constraints for the possibleapplication in a commercial engine. The proposed control lawis based on the energy control approach presented in [23] andreferences therein.The controller is designed using a nonlinear model of the dy-
namic behavior of the EMVA system, that explicitly takes intoaccount the effects of friction on the valve motion and the mag-netic force modeled as in [24]. The resulting control strategyis itself nonsmooth. The closed-loop dynamics is then studiedusing bifurcation analysis [25]–[28]. The closed-loop bifurca-tion diagram is validated experimentally and used as a tool totune the controller gain. The experimental analysis and valida-tion are carried out using an EMVA prototype (see Section II-Afor further details).
II. EMVA SYSTEM
The EMVA consists of two opposed magnets and two bal-anced springs working in parallel [see Fig. 1(a)]. Each magnetconsists of a coil and a core, where upper and lower magneticforces are induced by means of appropriate upper and lower coilcurrents. An armature, directly connected to the engine valve bya non-ferromagnetic thin stem, is placed between the two mag-nets. Both bodies are rigidly connected via preloaded springs,yielding a single moving part. Hence, in what follows, we willrefer indifferently to valve or armature motion. Note that, in theabsence of current, the armature rests at the intermediate posi-tion between the two coils due to the presence of two balancedsprings. When the system is at work, one of the electromagnetsholds the valve in one of the two extremal positions. For in-
stance, when the valve is closed, the upper magnet pulls up andholds the armature, while both springs store the potential en-ergy. Once the upper magnet is deactivated, the elastic potentialenergy is released and the valve starts to move in free evolutionas an harmonic oscillator. Then, the valve can be captured andheld by the lower electromagnet when the armature reaches adistance from it that is less than 1 mm (valve open).A similar series of events occurs when the moving part is
opened and is released from the lower electromagnet towardsthe upper magnet that then holds it (close). In general, electro-magnets can exert high forces at low distances, hence, powerrequirements of the system are quite low in this specific situa-tion. High currents are required instead to drive the system if thearmature is far away from the electromagnet (corresponding toan air gap greater than 1 mm).Despite its apparent simplicity, the behavior of the EMVA is
affected by many nonlinear phenomena which can dramaticallyalter its dynamics. The key sources of nonlinearity in the systemare: friction; impacts occurring when one of the moving bodiesin the system (valve, armature) hits the mechanical constraints;nonlinear electromagnetic and back-electromotive forces [24].A further nonlinear effect is due to gas pressure forces acting onthe engine valve during the enginemotion [17]. Such an externalforce acts as a disturbance on the valve motion, but its effect canbe neglected at the engine key-on, before the first combustionhappens.Note that, due to the high stiffness of the spring, it is admis-
sible to neglect backlash effects (see [29]) in the system so that,it is reasonable to assume that the entire system behaves as arigid body, with the valve position coinciding with the armaturegap [see Fig. 1(a)].
A. Description of the EMVA Prototype and Experimental Setup
This work relies on the electromechanical valve prototypedesigned in [15], [24] and developed at the Istituto Motori ofthe National Research Council of Italy in cooperation with theDell’Orto S.p.A company. The valve actuator has standard di-mensions so as to be mounted in a 2-liter gasoline engine.A picture of the experimental setup used in this work is shown
in Fig. 1(b). The setup consists of the mechanical valve coupledwith the two magnetic coils. A commercial 12 V car batteryfeeds the actuation power circuit, which is composed by twoclosed-loop subsystems, each one controlled via double bandhysteresis control aimed at tracking a reference current (see [18]for further details).Since the EMVA needs to be properly controlled during en-
gine valve operations, a rapid control prototype (RCP) systemis used for real time testing of different control laws. The RCPstation is a dSPACE-based system equipped with the DS1005processor board, an analog I/O board DS2201 and a digital I/Oboard DS4002. A laser position sensor LD1627 (MICROEP-SILON) [working in the range 0–10 (mm) with cutoff frequencyof 37 kHz] is used for the online measurement of the valve posi-tion, while the velocity is reconstructed from position informa-tion by a purposely designed numerical filter (see Appendix Afor details). The high frequency measurements necessary for theanalysis are taken by using the acquisition board NI6123 (Na-tional Instrument) that samples at 500 (kS/s) per channel. Note

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1135
TABLE IPARAMETER VALUES OF THE EMVA MODEL
that the control input is the magnetic force that must be inducedindirectly into the system by means of the electrical power ac-tuator. Hence, given a desired magnetic force to be provided tothe system, the RCP station computes online the correspondingreference values for the lower and upper coil currents by usingthe inversion algorithm presented in [18].
III. MATHEMATICAL MODEL
A. Mechanical Model
The EMVA schematically depicted in Fig. 1(a) can be mod-elled using Newton’s law under the single-mass assumption andconsidering equal preloaded linear springs with the same stiff-ness. The dynamic behavior of the system can be mathemati-cally described as that of a mechanical oscillator with frictiongiven by
(1)
where (m) is the armature position (coinciding with the valveposition); (m/s) is the armature (or valve) velocity; (N/m) isthe total stiffness; (kg) is the combined mass of the armatureand the valve; (m) is the position of the valve at rest in theabsence of external forces; (N) is the friction force; (N) isthe electromagnetic force assumed to be the system input (seeTable I for the parameter values).To ensure that the valve is suitably airtight on its seat during
the closing phase, the armature position can only vary in the fi-nite interval , with being themax-imum air gap between the armature and one coil core. Note that
is strictly bigger than 0, since the armature never touchesthe upper magnet during the closing phase. Furthermore,and correspond to residual air gaps between thearmature, the valve and the upper and lower magnets, respec-tively. Such gaps are carefully specified in the design to dealwith possible dilation phenomena (system performs in high tem-perature conditions) and the necessity to reduce the magneticforces in the valve holding conditions. Furthermore, the nom-inal value of is given by .
B. Magnetomotive Force Model
Since there is a maximum upper bound for the magnitude ofthe current that flows into the coils (A), the effective elec-tromagnetic force is bounded. Hence, under the hypothesis of
symmetry in the behavior of the valve actuator, we can assumethat the signal must belong to the following set:
(2)where the magnetic force in a given coil is assumed tobe a known nonlinear function of the current (upper boundedby ) in the coil and the air gap . Such a function was de-rived from a hybrid analytical-FEM approach presented in [24],as
(3)where , , , and are some shape co-efficients (see [24] for further details). Different approaches todescribe the electromagnetic force neglecting higher order ef-fects of flux saturation and leakage can be found in [14] and[16].
C. Friction Force Model
To complete the model derivation, it is now necessary tochoose an expression for the friction force in system (1).Existing friction models are essentially aimed at explaining theoccurrence of different friction-induced phenomena [30]–[33].Specifically, some models are better suited to predict stick-slipmotions, others are better to study hysteresis or presliding dis-placement. Therefore, the first modeling issue is to find a properfriction model that fits the specific experimental behavior of thesystem under investigation. Obviously, the choice of a modelis always a trade-off between accuracy and simplicity. Frictionmodels can be divided into two categories (according to the clas-sification proposed in [32], [34]–[36]): static frictionmodels anddynamic friction models. The dynamic models (as LuGre model[32], [37]) are usually complex and based on the average deflec-tion of bristles describing the interaction between the asperitiesof the surfaces in contact [30]. Static friction models are simpler,as for example, the well know Coulomb model and combinedCoulomb and viscous friction model [35].Most of the mathematical models proposed in the literature
describe the EMVA system as a mechanical oscillator equippedwith a simple linear friction model, e.g., [14], [16]–[18], [24],and [38]. More complex nonlinear approaches have also beenproposed to describe the friction effect on valve motion as, forexample in [39], where a nonlinear friction force is consideredto describe both dry friction and damping forces.To conjugate the simplicity of the model with its accuracy, in
what follows the friction force is described by a static Coulombmodel modified in order to include the Stribeck effect [35],[40]–[42] as
(4)
where (N) is the Coulomb sliding friction constant force;(N) is themaximum static friction force, assumed to be constant;
m/s is the inverse of the sliding speed coefficient; isa scalar quantity (here assumed to be 1) and (Ns/m) is theviscous friction coefficient.

1136 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
D. Impact Model
Finally, to model possible impacts between the armature andthe mechanical constraints, a collision rule can be added to(1). In particular, letting be the generic time instant whena generic impact occurs, such a rule gives the post impactvelocity, say , as a function of the pre-impact velocity,
. In general, we have
(5)
where the dimensionless factor is the so called restitution co-efficient. Note that the coefficient of restitution is a parameterdescribing how elastic a collision is, which in general is a func-tion itself of the impact velocity [43]. The simplest approach isto consider, as we do here, as a constant coefficient between 0and 1.
E. Parameter Identification and Validation Results
Model (1) has been identified and validated using differentsets of experimental data acquired during free oscillations ofthe valve, starting from the closed position. Specifically, the be-havior predicted by the model is compared to the experimentaldata and the parameter values are adjusted in order to minimizethe disagreement between the two computed in terms of the costfunction
where is the valve position predicted by the mathematicalmodel, is the experimental trajectory, is the vector ofall parameter to be identified, namely , andis a time instant large enough for the valve to reach its equilib-rium position, i.e., , . Note that, all other param-eter values were derived from direct knowledge of the experi-mental prototype or on the basis of straightforward geometricaland physical considerations. When dealing with nonlinear sys-tems, the objective function usually displays a large numberof local optima. Furthermore, variable measurements are al-ways strongly affected by noise. Hence, here, a genetic algo-rithm (GA) [44] is used to select the near-optimal region, whilea nonlinear least squares method based on the Levenberg–Mar-quardt algorithm [45] is then used to seek the optima locally.The effectiveness of the identification procedure is shown in
Fig. 2 where the model ability to capture the system behavioris presented, not only during transients, but also during steady-state conditions. The identified values of the system parametersare summarized in Table I.As always happens, the actual parameter values cannot be as-
sumed to be known precisely, but they may vary within someranges of uncertainty. Thus, the effects of parameter uncertain-ties in the calculated result must be assessed. Once the sensitiv-ities to all parameters are available, they can be used for variouspurposes, such as: 1) to rank the respective parameters in orderof their relative importance to the response; 2) to assess changesin the response due to parameter variations; 3) to perform un-certainty analysis; or 4) for data adjustment. Even if a precisesensitivity analysis is beyond the scope of this work, which is
Fig. 2. Validation results. Experimental data (solid line) versus model predic-tions (dashed line): (a) time history of the valve position; (b) phase portrait.
focussed on the control and its ability to cope with the unavoid-able presence of uncertain parameter and unmodeled dynamics,here we briefly asses the effects of parameter variations on theopen-loop model. The analysis has been performed numericallyvarying the selected parameters around the identified nominalvalues, say , and comparing the model predictions for the per-turbed parameter set with respect to the nominaltrajectories. The effect of parameter variations has been evalu-ated in terms of the following mean square normalized error:
(6)
where and are normalization factors chosen equal to themaximum valve position and the maximum valve speed
obtained with the nominal model during the free oscilla-tion, respectively.In Fig. 3, the variation of index (6) in correspondence of vari-
ations of each model parameter in the range 20% around itsnominal value is shown. As expected, is the parameter respon-sible for the largest relative changes in the responses. Moreover,for small variations of the parameters, say within 10%, smallvariations in the system trajectories are observed with errors thatnever exceed 3%. Finally, the maximum error, for a simulta-neous variations of all parameters of interest in our analysis,never exceed 6%. The effect of a simultaneous parameter vari-ation, both on steady-state and transient behavior, is also evi-dent from the time history of the perturbed trajectory reportedin Fig. 4.

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1137
Fig. 3. Percentage variation of mean square normalized error (6) for modelparameters variation in the range 20% around their nominal values.
Fig. 4. Time history of the valve position for a variation of all the frictionmodel parameters. For both pictures, nominal model behavior corresponds tosolid lines: (a) for dotted and dashed line, respectively; (b)
for dotted and dashed line, respectively.
IV. KEY-ON CONTROL
During key-on, the armature must be driven from its rest po-sition to a sufficiently small neighborhood ofone of the extremal positions with a sufficiently small velocityin order to avoid impacts [14], [16], [18], [39] (first catchingma-neuver). Once the armature is near the magnetic coil boundary,a different control strategy must be used to catch the armature.Here, we focus on the first phase of such a control action.
Fig. 5. Schematic representation of the admissible target regions ( and) in state-space. Here ; ;
; .
Fig. 6. Nonlinear friction force as a function of the valve velocity .
TABLE IITARGET REGION PARAMETERS
A. Problem Statement and SpecificationsConsider the EMVA nonlinear model (1) with initial condi-
tions . Let
(7)
be the target region in state space we wish the valve dynamicsto enter, where is the state vector; (m) and(m/s) are the radius of the ellipsoids centered in .Note that in general , while can be set alternatively to
or depending on whether we want toopen or close the valve at start. The target regions, respectively,close to the valve open or closed position, are named asand (see also Fig. 5 and Table II for the parameter values).Once the target region has been selected, the time instant,
say , when the trajectory first enters that region is definedas key-on time and and are the valuesassumed by the armature position and velocity, respectively, atthat time instant.

1138 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
The key-on control problem is to find a feedback control lawaimed at destabilizing the stable rest equilib-
rium and driving the valve towards the desiredphase-space region in a finite time , so that, while it holds:
(8)
where corresponds to the natural rise time of the EMVAsystem, is the maximum admissible bound on the key-ontime , and are the upper and lower coil currents, respec-tively, and is the maximum admissible value of coil cur-rents provided by the actuators.
B. Key-On Control Design
The key idea behind the approach is to control the overallmechanical energy of the EMVAmechanical system (1), definedas
(9)
where and are the kinetic and the potential energy, respec-tively.Differentiating (9), the overall energy rate is given by
(10)
Substituting (1) into (10), we then obtain
(11)
The above expression for the total energy rate clearly confirmsthat the energy can be directly controlled by means of the elec-tromagnetic force being fed to the system. To destabilize thestable equilibrium position and then drive the armature to theselected target region , the control action must provide theEMVA with a force large enough to compensate all the dissipa-tive effects due to friction .To proceed with the control design, here we use the candidate
Lyapunov function:
(12)
where is expressed as in (9) and is the energy evaluatedwhen the valve is at its closing or opening position, namely
or , respec-tively. Here we assume that .Clearly, is continuous and differentiable. Moreover
for all with . Hence, we have thatin the domain
(13)(The boundary for subset denoted by is shown in Fig. 5.)
Differentiating expression (12) and then using (11), aftersimple algebraic manipulations, we get
(14)
To destabilize system (1), we need in (14) to be negativein . Since the term in (14) is always negative in ,the control signal must be chosen according to the sign of
so that
ifif .
(15)
Note that, as always happens in physical devices, the valvevelocity is bounded to a certain maximum admissible value,say . Thus, according with the friction model in (4), the non-linear friction force is bounded too. Hence, the controller(15) is chosen as
(16)
where is the absolute value of the control signal to be chosenappropriately to compensate the nonlinear friction effect. Witha slight abuse of terminology, in what follows we will refer toas the control gain.Note that due to the presence of limits on the maximum ad-
missible current, the effective control action to the plant willbe saturated as follows:
ififif .
(17)
where andaccording to expression (2). The bounds and are dy-namic, as they strongly depend on the actual valve position .Thus, they have to be computed online by using the model ofthe magnetic force (3)Note that, in view of a future industrialization, the purpose
of the design is to keep the controller structure the simplestpossible, while guaranteeing the achievement of the control ob-jectives. Obviously, different control approaches, based for ex-ample on friction compensation, could also be considered, butthey would lead to amuchmore complicated controller structureand a possible lack of robustness due to the unavoidable pres-ence of uncertainties and identification errors on the parametervalues.
V. CLOSED-LOOP ANALYSIS
In this section, bifurcation analysis is used as a tool to tunethe behavior of the closed-loop process (considering the controlgain in (16) as a bifurcation parameter). Note that, if the max-imum friction force to be compensated were perfectly known, itwould be possible, at least theoretically, to compute exactly theamount of energy necessary to compensate friction and, conse-quently, to select the minimum additional control effort able todestabilize the system. However, there can be large mismatchesand uncertainties in the friction estimate and thus, in practice, anacceptable tuning cannot be achieved via a simple model based

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1139
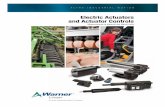
Fig. 7. Numerical bifurcation diagram of the closed-loop system. Empty-cir-cles branches correspond to unstable limit cycle, solid-circles branches to stablelimit cycles, crosses-branch to stable equilibrium set and dotted-branch to un-stable equilibrium set. The dashed-line refers to the minimum value ofwithin the target region (as detailed in Section V-B).
design. Conversely, the design of the control action via bifur-cation analysis provides a robust way to calibrate such an ac-tion against all possible model uncertainties/mismatches. Fur-thermore, it provides an insight into both the performance ofthe tuned system and the nonlinear dynamics of the closed-loopprocess for a wide range of values of the control gain .
A. Numerical Bifurcation Analysis
Fig. 7 shows the closed-loop bifurcation diagram of theEMVA with respect to variations of the control gain , whilethe maximum value of the admissible current is fixed ac-cording to the physical actuator constraints ( 18 (A), seeSection II-A for further details on the experimental setup).A Poincaré section defined by
and orwas used to capture the asymptotic solutions of the system,considering also possible impacting behavior. For each valueof the control gain the last 40 samples of the armature motion
were stored. The diagram was derived in two stages:firstly was varied from zero (corresponding to an open-loopcondition) to 30 (N) obtaining the forward bifurcation diagram.A second numerical bifurcation diagram was then derivedwith being decreased from 30 (N) to 0 (N) (backward dia-gram). The complete bifurcation diagram was then obtainedby overlapping the forward and backward diagrams, so as tohighlight hysteretic phenomena. The location of the unstablelimit cycle was obtained using an approximate technique basedon a describing function analysis. For the sake of brevity, thedetailed analysis is omitted here and can be found in [46].The numerical bifurcation diagram in Fig. 7 shows that the
closed-loop EMVA exhibits coexisting solutions and several bi-furcations. The diagram is characterized by four regions of dif-ferent qualitative behavior, associated with different values of. In what follows, we study each of these scenarios in greaterdetail, complementing the bifurcation diagram with time-seriesand phase plane portraits at the most significant values of thecontrol gain.Region I: For friction losses are not compen-
sated by the control action and the asymptotic behavior of thesystems is characterized by a stable equilibrium set (see thebranch marked with the symbol “ ” in the bifurcation diagram).
Fig. 8. Region I. Equilibrium set: phase space plot for .
Fig. 9. Numerical evidence of the saddle-node bifurcation of limit cycles.Phase portrait: (a) 4.4 (N); (b) 4.8 (N).
This phenomenon depends on the nonsmooth set-valued natureof friction and the equilibrium set corresponds to a stationarymode for which the friction elements are sticking. Numericalevidence for the presence of the equilibrium set is provided inFig. 8, where it is shown that, for a given value of , trajec-tories originating from different initial conditions are attractedtowards different points on the equilibrium set. The analyticalcharacterization of this phenomenon can be studied using Fil-ippov analysis [26]. A more general description of friction-in-duced equilibrium sets and their attractivity has been studied inthe case of multi-degree-of-freedommechanical systems in [33]and [47].When the key-on control action starts to weakly
compensate the friction force and a saddle-node bifurcation ofcycles is observed to occur, with two limit cycles one stable,the other unstable being formed. Notice that the origin remainsstable throughout and it is not involved in this bifurcation sce-nario. The half stable limit cycle divides the phase space intotwo regions (referred as external and internal). Valve motionconverges to the stable limit cycle when the initial conditionbelongs to the external region, while it is attracted towardsthe equilibrium set, when it starts from an initial conditionbelonging to the internal region as shown in Fig. 9.Region II: For , the system shows a more com-
plex dynamic behavior characterized by the coexistence of twoattractors and one repeller. Namely, one unstable and one stablelimit cycle coexist with the equilibrium set. In this region, asincreases, the equilibrium set shrinks to the fixed point[for 13.9 (N)]. This behavior is shown in Figs. 10 and 11.For 13.9 (N) a subcritical Hopf bifurcation [25] oc-
curs. The unstable limit cycle shrinks to zero amplitude and en-gulfs the stable fixed point rendering it unstable (seeFig. 12). Note that the critical point is reached when the con-trol gain assumes a value that coincides with the maximum

1140 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
Fig. 10. Equilibrium set. Phase space plot: (a) 7 (N); (b) 10.5 (N).Increasing the equilibrium set tends to be shrunk. The different trajectoriesare originated from different perturbed initial conditions.
Fig. 11. Equilibrium set for (N). For 13.9 (N) thesystem shows a fixed point at .
Fig. 12. Numerical evidence of the subcritical Hopf bifurcation. Phase portrait:(a) (N); (b) (N).
static friction force 13.9 (N) according to the es-timated value reported in Table I. Specifically, in this conditionthe key-on control action is able to compensate the static fric-tion force so that even a small disturbance is enough to take thevalve out from its equilibrium state. It turns out that in this sit-uation, it is easy for the key-on control to move the valve fromits release state to a regime of stable oscillations.Region III: For in Fig. 7, the unstable
fixed point (dotted line) stemming from the subcritical Hopf bi-furcation is surrounded by a stable limit cycle (solid circle line).As the value of increases, the amplitude of the limit cyclegrows until it grazes one of the physical constraints limiting thearmature motion. The grazing bifurcation occurs when the valvetouches the boundaries ( or ) with zerovelocity for 19.45 (N) as shown in Fig. 13(b).Region IV: For 19.45 (N) there is evidence of a multi-
impacting behavior [see Fig. 13(d)] coexisting with the unstableequilibrium (respectively, solid-circle line and dotted line in thebifurcation diagram in Fig. 7). Obviously, increasing , impactsbecome more energetic, hence region IV is not acceptable forthe operation of the electromechanical system.At this stage of the analysis, it is important to characterize the
behavior of the system with respect to one of the most relevant
Fig. 13. Numerical evidence of the grazing bifurcation: phase portraits for (a)18 (N), (b) 19.45 (N), and (c) 21 (N). Example of the valve
motion in the impacting region IV: (d) phase portrait for 30 (N).
sources of uncertainties in the EMVA working conditions, i.e.the ability of the electrical power circuit to provide the neces-sary current. To better characterize how different values of themaximum current affects the observed behavior, we re-peated the bifurcation analysis at the most significant values ofthe maximum current , that can be effectively provided toexcite the EMVA. Results are summarized in Table III where itis evident that, in spite of possible uncertainties on the systemconditions, the same dynamic phenomena are observed in thesame range of the bifurcation parameter . The only notableexception is for the value of at which the transition from re-gion III to region IV happens. This is not surprising, since, in-creasing the value of , essentially corresponds to increasingthe ability of delivering power and increasing the quantity of en-ergy pumped into the system, thus allowing wider oscillationsthat can more easily reach and graze the boundaries for lowervalues of when is larger.
B. Controller Tuning via Bifurcation Analysis
We can now use bifurcation analysis to tune the gain of thecontrol action so as to achieve the specifications summarizedin the definition of the target region (see Section IV-A andTable II). According to the EMVA working principle, once thevalve moves from its rest position in the middle of the stroke,it can be easily transferred to the open [close] condition by ex-ploiting all the energy stored in the spring and feeding into thesystem just the small amount of energy, required to compensatefriction losses. Here we locate the target ellipsoid region of thestate space close to the open position of the valve, i.e., we set
6.45 (mm) .Referring to the numerical bifurcation diagram for
18 (A) in Fig. 7, the minimum value of at which trajectoryenters the region is 16.25 N, for steady-state valve position
6.05 (mm) (dashed line in the bifurcationdiagram) and velocity 0 (m/s).Since control specifications impose an additional constraint
on the maximum key-on time [less than 100 (ms)], furthernumerical investigations showed that this requirement cannot besatisfied in the range . Hence, the admissible

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1141
TABLE IIICHARACTERIZATION OF THE DYNAMIC SCENARIO FOR DIFFERENT VALUES OF THE MAXIMUM ADMISSIBLE CURRENT
TABLE IVCONTROL RANGES
Fig. 14. Simultaneous variation of 20% in the friction parameters values(namely, , , , ). A variation of 20% corresponds to the dotted line,20% to the dashed line, while the solid line corresponds to the nominal values.
(a) Representation of the friction force . (b) Closed-loop valve trajectorywhen and 12 (A).
control gain should be greater than 17.6 (N) and belong to re-gions III and IV of the bifurcation diagram. Note that, althoughbig values of , around 30 (N), are theoretically possible, theymust be discarded so as to reduce the control effort and avoid thehigh energy impacting zone. For 18 (A), we found suchrange of admissible values to be . We then re-peated a similar analysis for other values of , yielding theadmissible ranges given in Table IV.From the results summarized in Table IV, the control action
has been set so as to be sufficiently high to satisfy control speci-fications for all values of above 12 (A). Hence, the control
Fig. 15. Comparison between the numerical and the experimental closed-loopbifurcation diagram. Green markers refer to experimental results obtainedvarying forward, from 0 (N) to 30 (N) and starting from the release state,while the red ones correspond to the case when valve starts near the closeposition [ 1 (mm) and 0 (m/s)] and was varied backwardfrom 30 (N) to 0 (N).
gain has been set in the range [19, 22] (N), so that, the targetregion is reached with 100 ms for all values of 12A.The robustness of the control against system parameter
variations has been also investigated via numerical simulations.Here, as an example, we show that introducing an uncertaintyof 20% in the friction parameters with respect to the nominalvalues in Table I [as shown in Fig. 14(a)], the control algorithmis still able to guarantee the required specifications. Note that,as reported in Fig. 14(b), the trajectory of the closed-loopsystem still enters the region, but for greater values of , stillwithin the admissible control region.
VI. EXPERIMENTAL RESULTS
A. Experimental Bifurcation Diagram
As in our approach the controller design strongly relies on thebifurcation diagram, in this section we experimentally validateour bifurcation analysis. Comparison results are reported inFig. 15, where it is apparent that agreement between the numer-ical and the experimental bifurcations diagrams is remarkabledespite the unavoidable presence of unmodelled dynamics(such as dissipative effects) or the influence of specific exper-imental conditions (for example, environment temperature).Specifically, the numerical and experimental diagram show thesame qualitative dynamics, such as for example the coexistenceof different solutions. Furthermore, all main bifurcations eventsare also detected experimentally.Note that experiments necessary to build the bifurcations di-
agram were performed starting the valve from different initialconditions, namely from the release state or around

1142 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
Fig. 16. Experimental evidence of the equilibrium set for 2 (N): detail ofthe valve position at steady state.
Fig. 17. Experimental results in region II and III. Time history of the valveposition and phase portrait: (a)–(b) 13.5 (N); (c)–(d) 15 (N); (e)–(f)
20 (N).
valve closing 1 mm . The steady-state position of thearmature has been measured for different values of and sam-ples have been plotted on the numerical diagram to comparethe experimental behavior of the device with the model predic-tions. In so doing the different stable solutions, characterizedby different basins of attraction, have been experimentally de-tected. To complement the bifurcation analysis, some represen-tative experimental trajectories are reported here for the sake ofcompleteness. Namely, in Fig. 16 it is shown that, for a value ofbelonging to Region I, the valve converges to the equilibrium
set as predicted from the numerical analysis.Fig. 17 shows examples of the experimental behavior of the
valve position when the control parameter belongs to RegionsII and III of the bifurcation diagram. In particular, as predictedby the numerical analysis, it is evident that the amplitude of thestable limit cycle grows as increases [see Fig. 17(a)–(d)].
Fig. 18. Region II. 14 (N). Experimental evidence of the coexistence ofequilibrium set, stable, and unstable limit cycles.
For a greater value of , a grazing bifurcation is experimen-tally detected and reported in Fig. 17(e) and (f). Here the orbitgrazes the lower constraint with a zero velocity.(Note that experimentally this velocity value is almost zero, dueto the unavoidable presence of noise in the velocity signal esti-mated on line from position measurements.)Although it is not possible to detect experimentally the
presence of unstable solutions, the coexistence of the stablelimit cycle, the unstable limit cycle and the equilibrium canbe validated by starting the system from different initialconditions and then analyzing the behavior of the resultingtrajectories. An example is shown in Fig. 18 where is chosenequal to 14 (N) (Region II). Here the trajectory rooted at
mm m/s (red solid line) con-verges to the fixed point, while the motion corresponding to theinitial condition mm m/s (blacksolid line) converges to the stable limit cycle. The unstablelimit cycle exists in the white region shown in Fig. 18, whichseparates the basins of attraction of the equilibrium set and thatof the stable limit cycle.
B. Closed-Loop Experimental Results
The closed-loop experiments have been performed using theresults of the bifurcation analysis used for the controller tuning,namely choosing . Themotion of the valve is shownin Fig. 19 when 22 (N). Here, the closed loop valve trajec-tory under the action of the key-on control strategy is shown toeffectively reach the desired region (with ).Once the target region is reached [as it is also apparent from theexperimental phase portrait depicted in Fig. 19(a)], the key-oncontrol is deactivated and a simple feed forward action is ac-tivated. It switches on the upper coil while the lower coil isswitched off in order to catch the valve. The region, locatednear the open position mm , is reached for
, with 6.17 mm and 0.07 m/s, whilethe overall valve closing is performed in 70.2 (ms), within thecontrol specifications as Fig. 19(b) shows.The overall control effort is represented in Fig. 19(c), where
the dotted line refers to the upper and lower dynamic bounds,and , respectively, for the control input [see (17)
and (2)], while the solid line is the saturated control action .It is worth mentioning here that, the experimental key-on con-
trol seems to be robust and fulfills the control specificationsguaranteeing a closed-loop dynamic behavior that remarkably

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1143
Fig. 19. Experimental validation of the key on control when 22 (N). (a) Phase portrait. Time history of the: (b) valve position; (c) saturated control signal(solid line), upper and lower dynamic bounds and , respectively (dotted line).
Fig. 20. Schematics of the key-on control.
agrees with the one predicted by the numerical analysis. Thisis achieved despite the presence of dynamic saturations of thecontrol actuator (considered ideal during the design), the un-modeled dynamics (such as the ones of the dynamic filter usedto reconstruct the velocity from the position information), nonsmooth nonlinearities (the dead zone necessary for the imple-mentation of the control action, as detailed in Appendix A), andthe presence of both noise and parameter uncertainties.
VII. CONCLUSION
We presented the analysis and design of a key-on controller tosolve the first lift manoeuvre in a double magnet EMVA system.The analysis of closed-loop nonlinear dynamics and induced bi-furcation phenomena were characterized analytically, numeri-cally and moreover tested experimentally. Bifurcation analysiswas used as a tool to tune the key-on controller, whose effective-ness and performance was verified directly in the experimentalprototype.
APPENDIX ADETAILS ON THE CONTROLLER IMPLEMENTATION
Based on the hardware described in Section II, the key-oncontrol described in Section IV-A has been implemented digi-tally using the functional block scheme shown in Fig. 20. Sam-pling time of the control task was set to 70 s .The key-on control requires feedback of both the state
variables. Since the velocity of the armature is not available,a proper derivative filter (velocity estimator block) has to beused to reconstruct the velocity signal. In so doing, unavoidablenoise and delays are introduced in the closed-loop system alongthe velocity channel. Here, a simple filter is designed accordingto the well known trade-off between accuracy of the estimationand delay in the required information. Obviously, differentapproaches, like for example the use of a state observer, are
also possible. Since the philosophy of our control design isto keep the controller structure as simple as possible, here weavoid the use of a nonlinear observer in the control loop thatwould be extremely costly to design and highly nonlinear be-cause of the structure of the system model and its nonlinearity.Experimental results confirm that this simple filtering choicedoes not affect the overall performance of the controller.According with the implementation scheme in Fig. 20, the
control action requires a specific magnetic force to be produced.This signal should be obviously saturated according with thephysical limits of the system (as already discussed in Section II).The dynamic limits are computed online as a function of the ac-tual gaps according to (17). Since we cannot directly impose acertain magnetic force, this is done in terms of equivalent cur-rents by the Force-To-Current block implementing the inversealgorithm [18] for the force model (3). These currents and
then become the reference inputs of the current controllersdriving the coils of the EMVA.Note that the presence of the ‘sign’ function in the control law
(16) introduces high switching frequency due to the unavoidablepresence of noise in the estimate of the velocity signal. To re-duce high frequency switching, the control law has been imple-mented trough a predetermined dead zone function, , insteadof the signum nonlinearity, i.e.,
(18)
with
ififif
(19)
where the amplitude of the dead zone, m/s , hasbeen set according to the experimental evaluation of the levelof noise in the velocity signal around the zero value.

1144 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 20, NO. 5, SEPTEMBER 2012
Given that valve motion starts from its rest position, where , the use of a dead-zone (18)
requires an additional action to reach a velocity value greaterthan . In practice, to solve this problem, a “kick-off” controlaction defined by
ififif
(20)
was added to the control variable so as to activate the upperand lower coils only during a short time , with being ap-propriately selected according to the experimental behavior ofthe system so as to be sufficient for the activation of EMVA atkey-on. Note that, in our experiments, kick-off control was per-formed over an interval ms .
ACKNOWLEDGMENT
The authors would like to thank the engineers of the R&DGroup, Dell’Orto S.p.A., Naples, Italy, for their valuable coop-eration and the Power Electronic Group, “Second University ofNaples”, for implementing the power circuits of the coils.
REFERENCES[1] M. M. Schechter and M. B. Levin, “Camless engine,” SAE, Warren-
dale, PA, Tech. Paper 960581, 1996.[2] L. Guzzella, “Automobiles of the future and the role of automatic con-
trol in those systems,” Annu. Rev. Control, vol. 33, pp. 1–10, 2009.[3] K. Nagaya, H. Kobayashi, and K. Koike, “Valve timing and valve
lift control mechanism for engines,” Mechatronics, vol. 16, no. 2, pp.121–129, Mar. 2006.
[4] R. Flierl, D. Gollasch, A. Knecht, and W. Hannibal, “Improvements toa four cylinder gasoline engine through the fully variable valve lift andtiming system univalve,” SAE, Warrendale, PA, Tech. Paper 2006-01-0223, 2006.
[5] V. Picron, Y. Postel, E. Nicot, and D. Durrieu, “Electro-magnetic valveactuation system: first steps toward mass production,” SAE, Warren-dale, PA, Tech. Paper 2008-01-1360, 2008.
[6] M. Pischinger, F. V. D. Staay, H. Baumgarten, and H. Kemper, “Ben-efits of the electromechanical valve train in vehicle operation,” SAE,Warrendale, PA, Tech. Paper 2000-01-1223.
[7] C. Bruestle and D. Schwarzenthal, “Variocam Plus—A highlight ofthe Porsche 911 Turbo engine,” SAE, Warrendale, PA, Tech. Paper2001-01-0245, 2001.
[8] M. Battistoni, L. Foschini, and L. P. M. Cristiani, “Development of anelectro-hydraulic camless VVA system,” SAE, Warrendale, PA, Tech.Paper 2007-24-0088, 2007.
[9] J. Ma, H. Schock, U. Carlson, A. Hoglund, and M. Hedman, “Analysisand modeling of an electronically pneumatic hydraulic valve for anautomotive engine,” SAE,Warrendale, PA, Tech. Paper 2006-01-0042,2006.
[10] R. H. Rassern, “Single-cylinder engine test of a motor-driven vari-able valve actuator,” SAE,Warrendale, PA, Tech. Paper 2001-01-0241,2001.
[11] Y. H. Qiu, T. A. Parlikar, W. S. Chang, M. D. Seeman, T. A. Keim, D.J. Perreault, and J. G. Kassakian, “Design and experimental evaluationof an electromechanical engine valve drive,” in Proc. 35th Annu. IEEEPower Electron. Specialists Conf., 2004, pp. 4838–4843.
[12] T. A. Parlikar, W. S. Chang, Y. H. Qiu, M. D. Seeman, D. J. Perreault,J. G. Kassakian, and T. A. Keim, “Design and experimental implemen-tation of an electromagnetic engine valve drive,” IEEE/ASME Trans.Mechatronics, vol. 10, no. 5, pp. 482–494, Oct. 2005.
[13] Y. Wang, A. G. Stefanopoulou, M. Haghgooie, I. Kolmanovsky, andM. Hammoud, “Modeling of an electromechanical valve actuator fora camless engine,” presented at the 5th Int. Symp. Adv. Veh. Control(AVEC), MI, 2000.
[14] C. Tai, A. Stubbs, and T.-C. Tsao, “Control of an electromechanical ac-tuator for camless engines,” in Proc. IEEE Amer. Control Conf., 2003,pp. 3113–3118.
[15] V. Giglio, B. Iorio, G. Police, and A. di Gaeta, “Analysis of advantagesand of problems of electromechanical valve actuators,” SAE Trans. J.Engines, vol. 111, no. 3, pp. 1768–1779, Mar. 2002.
[16] K. S. Peterson and A. G. Stefanopoulou, “Extremum seeking controlfor soft landing of an electromechanical valve actuator,” Automatica,vol. 40, no. 6, pp. 1063–1069, Jan. 2004.
[17] R. R. Chladny and C. R. Koch, “Flatness-based tracking of an electro-mechanical variable valve timing actuator with disturbance observerfeedforward compensation,” IEEE Trans. Control Syst. Technol., vol.16, no. 4, pp. 652–663, Jul. 2008.
[18] A. di Gaeta, V. Giglio, and G. Police, “Model-based decoupling controlof a magnet engine valve actuator,” SAE Int. J. Engines, vol. 2, no. 2,pp. 254–271, Mar. 2010.
[19] R. E. Clark, G. W. Jewell, S. J. Forrest, J. Rens, and C. Maerky, “De-sign features for enhancing the performance of electromagnetic valveactuation systems,” IEEE Trans. Magn., vol. 41, no. 3, pp. 1163–1168,Mar. 2005.
[20] A. di Gaeta, U. Montanaro, S. Massimino, and C. I. Hoyos-Velasco,“Experimental investigation of a double magnet EMVA at key-on en-gine: A mechanical resonance based control strategy,” SAE Int. J. En-gines, vol. 3, no. 2, pp. 352–372, Dec. 2010.
[21] H. J. Ahn, S. Y. Kwak, J. U. Chang, and D. C. Han, “A new EMVsystem using a PM-EM hybrid actuator,” in Proc. IEEE Int. Conf.Mechatronics (ICM05), 2005, pp. 816–821.
[22] K. J. and D. K. Lieu, “Designs for a new quick-response latching elec-tromagnetic valve,” in Proc. IEEE Int. Conf. Electric Mach. Drives,2005, pp. 1773–1779.
[23] K. Sakurama, S. Hara, and K. Nakano, “Swing-up and stabilizationcontrol of a cart pendulum system via energy control and controlledLagrangian methods,” Elect. Eng. Japan, vol. 160, no. 4, pp. 24–31,2007.
[24] A. di Gaeta, L. Glielmo, V. Giglio, and G. Police, “Modeling of anelectromechanical engine valve actuator based on a hybrid analyt-ical-FEM approach,” IEEE/ASME Trans. Mechatronics, vol. 13, no.6, pp. 625–637, Dec. 2008.
[25] S. H. Strogatz, Nonlinear Dynamics and Chaos. Cambridge, MA:Westview Press, 2001, 978-0738204536.
[26] M. di Bernardo, C. Budd, A. R. Champneys, and P. Kowalczyk, Piece-wise-Smooth Dynamical Systems, Theory and Applications. NewYork: Springer, 2008.
[27] G. Chen, J. L. Moiola, and H. O. Wangz, “Bifurcation control theories,methods, and applications,” Int. J. Bifurcation Chaos, vol. 10, no. 3,pp. 511–548, 2000.
[28] J. Hahn, M. Möonnigmann, and W. Marquardt, “On the use of bifur-cation analysis for robust controller tuning for nonlinear systems,” J.Process Control, vol. 18, no. 3–4, pp. 408–420, 2008.
[29] M. Schebitz, “Electromagnetic cylinder valve actuator having a valvelash adjuster,” U.S. Patent 5 762 035, Jun. 9, 1998.
[30] C. C. deWit, H. Olsson, K. J. Astrom, and P. Lischinsky, “A newmodelfor control of systems with friction,” IEEE Trans. Autom. Control, vol.40, no. 3, pp. 419–425, Mar. 1995.
[31] R. I. Leine, D. H. van Campen, A. de Kraker, and L. van den Steen,“Stick-slip vibrations induced by alternate friction models,” NonlinearDyn., vol. 16, no. 1, pp. 41–54, May 1998.
[32] R. H. A. Hensen, M. J. G. van de Molengraft, and M. Steinbuch, “Fric-tion induced hunting limit cycles: A comparison between the lugre andswitch friction model,” Automatica, vol. 39, no. 12, pp. 2131–2137,Dec. 2003.
[33] N. van de Wouw and R. I. Leine, “Attractivity of equilibrium sets ofsystems with dry friction,” Nonlinear Dyn., vol. 35, no. 1, pp. 19–39,2004.
[34] B. A.-H. Louvry, P. Dupont, and C. C. de Wit, “A survey of models,analysis tools and compensation methods for the control of machineswith friction,” Automatica, vol. 30, no. 7, pp. 1083–1138, Jul. 1994.
[35] S. Andersson, A. Soderberg, and S. Bjorklund, “Friction models forsliding dry, boundary and mixed lubricated contacts,” Tribology Int.,vol. 40, no. 4, pp. 580–587, Apr. 2007.
[36] M. Zubieta, M. J. Elejabarrieta, and M. M. Bou-Ali, “Characterizationand modeling of the static and dynamic friction in a damper,” Mech.Mach. Theory, vol. 44, no. 8, pp. 1560–1569, Aug. 2009.
[37] N. P. Hoffmann, “Linear stability of steady sliding in point contactswith velocity dependent and lugre type friction,” J. Sound Vibr., vol.311, no. 3–5, pp. 1023–1034, 2007.
[38] J. J. Liu, Y. P. Yang, and J. H. Xu, “Electromechanical valve actu-ator with hybrid MMF for camless engine,” in Proc. 17th IFAC WorldCongr., 2008, pp. 10 698–10 703.

DI BERNARDO et al.: ENERGY-BASED KEY-ON CONTROL OF A DOUBLE MAGNET ELECTROMECHANICAL VALVE ACTUATOR 1145
[39] P. Eyabi and B. Washington, “Modeling and sensorless control of anelectromechanical valve actuator,” Mechatronics, vol. 16, no. 6, pp.159–175, Nov. 2006.
[40] M. di Bernardo, A. di Gaeta, U. Montanaro, and S. Santini, “Syn-thesis and experimental validation of the novel LQ-NEMCSI adap-tive strategy on an electronic throttle valve,” IEEE Trans. Control Syst.Technol., vol. 18, no. 6, pp. 1325–1337, Nov. 2010.
[41] M. di Bernardo, U. Montanaro, S. Santini, A. di Gaeta, and V. Giglio,“Design and validation of a novel model reference adaptive algorithmto control ETB for drive-by-wire applications,” SAE Int. J. PassengerCars—Mechan. Syst., vol. 2, no. 1, pp. 1268–1284, Oct. 2009.
[42] M. di Bernardo, A. di Gaeta, U. Montanaro, and S. Santinic, “Compar-ative study of the new LQ-MCS control on an automotive electro-me-chanical system,” in Proc. IEEE Int. Symp. Circuits Syst. (ISCAS),2008, pp. 552–555.
[43] R. Alzate, M. di Bernardo, U. Montanaro, and S. Santini, “Experi-mental and numerical verification of bifurcations and chaos in cam-fol-lower impacting systems,”Nonlinear Dyn., vol. 50, no. 3, pp. 409–429,Dec. 2007.
[44] L. D. Davis, Handbook of Genetic Algorithms. New York: Van Nos-trand Reinhold Company, 1991.
[45] K. Madsen, H. Nielsen, and O. Tingleff, Methods for Non-LinearLeast Squares Problems, 2nd Edition. Technical Univ. Denmark:Informatics and Mathematical Modelling, 2004.
[46] M. di Bernardo, A. di Gaeta, C. I. H. Velasco, and S. Santini, “Ex-perimental nonlinear dynamics of a double magnet electro-mechanicalvalve actuator (EMVA),” presented at the 7th Euro. Nonlinear Dyn.Conf. (ENOC), Rome, Italy, 2011.
[47] R. I. Leine and N. van de Wouw, “Dry friction induced attractivity ofequilibrium sets in mechanical multibody systems,” in Proc. DesignEng. Techn. Conf. Comput. Inform. Eng. Conf. (DETC), ASME Symp.Nonlinear Dyn. Eng. Syst., 2005, pp. 1–6.
Mario di Bernardo (SM’06) is currently an Asso-ciate Professor of automatic control with the Univer-sity of Naples Federico II, Naples, Italy. He is also aProfessor of nonlinear systems and control with theUniversity of Bristol, Bristol, U.K. He is VP for Fi-nancial Activities of the IEEE Circuits and SystemsSociety and President of the Italian Society for Chaosand Complexity. From 2001 to 2004, he was an As-sistant Professor of automatic control with the Uni-versity of Sannio, Sannio, Italy. His research interestsinclude the broad area of nonlinear systems, on both
dynamics and control. He authored and co-authored over 150 international sci-entific publications and is internationally recognized for his work on the analysisand control of piecewise smooth systems and complex networks. On the 28th ofFebruary 2007, he was honoured with the title of “Cavaliere della Repubblica
Italiana” (equivalent to a British OBE) for scientific merits by the President ofItaly.
Alessandro di Gaeta received the “Laurea” degree(M.Sc.) in computer science engineering and thePh.D. degree in automatic control from the Univer-sity of Naples “Federico II”, Naples, Italy, in 1999and 2002, respectively.Since 2003, he has been a Researcher with the Isti-
tutoMotori of the National Research Council of Italy,Naples, Italy, where he is presently with the SparkIgnition Engines Division. His research interests in-clude modeling and control of internal combustionengines and of mechatronic systems.
Carlos Ildefonso Hoyos Velasco (S’07) receivedthe degree (with honors) in electronics engineeringand the Master’s degree in industrial automationfrom National University of Colombia, Manizales,Columbia, in 2005 and 2007, respectively. He iscurrently pursuing the Ph.D. degree in computerscience and automatic control from the Departmentof Systems and Computer Science, University ofNaples Federico II, Naples, Italy, with a researchgrant by Istituto Motori of the National ResearchCouncil of Italy.
His research interests include the modelling, analysis, and control of non-smooth dynamical systems, with application within a broad area of automaticprocess, particularly in power electronics and automotive engineering.Mr. Hoyos Velasco is a member of the IEEE Control System Society.
Stefania Santini received the “Laurea” degree(M.Sc.) in control engineering and the Ph.D. degreein automatic control from the University of NaplesFederico II, Naples, Italy, in 1996 and 1999, respec-tively.In 1999, she was a Visiting Researcher with
the Measurement and Control Laboratory (ETHZuerich), Svizzera. In 2001, she became an AssistantProfessor of automatic control with the Departmentof Systems and Computer Engineering, Universityof Naples Federico II. Her current research interests
include the analysis and control of nonsmooth dynamical systems and automo-tive control.Dr. Santini is a member of the Technical Committee on Automotive Controls
of the IEEE Control System Society.
Copyright © 2022 FDOKUMEN