

mbf 841 course title: emerging technologies in information ...
Upload
khangminh22Category
view
9download
0
4th National Conference on
“EMERGING TECHNOLOGIES &
APPLICATIONS OF UAVs”
Courtesy: CSIR-NAL
22nd and 23rd March 2017
CONFERENCE REPORT

National Conference on
“Emerging Technologies & Applications of UAVs”
Jointly Organized by
Supported by


Preface
International Institute of Aerospace Engineering and Management, Jain University organized the two
day conference on "Emerging Technologies and Applications of UAVs” – during 22nd and 23rd March
2017. The event was co-sponsored by Indian National Academia of Engineering and Karnataka
Knowledge Commission and supported by Aeronautical Research and Development board and the
National Aerospace Laboratories. The conference brought together the leading researchers
academicians and entrepreneurs in the field of UAVs who shared their knowledge and experience with
the participants through technical lectures and post session discussions. The event also included the
mission based field demonstrations organized by National Aerospace Laboratories and the industries.
The panel discussion during the closing session specifically addressed the challenges associated with
the implementation of the UAV technology for the civil governance and the way forward. The pre-
conference workshop conducted in association with National Aerospace laboratories, Bangalore
provided a good insight on the design and development of fixed wing mini UAV for autonomous mission
mode performance and was well received in the student’s community.
The salient points of the presentations at the inaugural, plenary and technical sessions are briefly
summarized in this report. A brief write up on the field demonstration is also provided. Some of the
major outcomes from this conference is provided in a separate section. This report in a way has
consolidated the current level of technologies in the field of UAV in the country, the challenges in the
implementation of UAV for civilian applications, the engagement of academia and industry in the
development of UAV technologies to meet the growing needs of these technologies in various civilian
sectors.

1 | P a g e
Contents
1 Scope ............................................................................................................................................... 2
2 Introduction .................................................................................................................................... 2
3 Relevance ........................................................................................................................................ 3
4 Objective ......................................................................................................................................... 4
5 Deliberations of the Conference ..................................................................................................... 4
5.1 Inaugural Session .................................................................................................................... 4
6 Field demonstrations ...................................................................................................................... 7
7 Post-inaugural Plenary session ....................................................................................................... 7
7.1 UAVs- Charting the Roadmap for future: ................................................................................ 7
7.2 Comprehensive UAS Solutions: .............................................................................................. 8
7.3 Futuristic Research on Micro & Nano UAV: ............................................................................ 8
8 Session on Major R&D .................................................................................................................... 9
8.1 UAVs of the World and Challenges of indigenous Development ........................................... 9
8.2 Civil UAV applications ........................................................................................................... 10
8.3 Mini UAVs for ISR Applications ............................................................................................. 10
8.4 Mini & Micro UAV Program at CSIR-NAL .............................................................................. 10
8.5 Honeywell technologies for unmanned aerial systems ........................................................ 10
9 Session on UAV Industries ............................................................................................................ 11
9.1 Aerial Mapping and UAV Applications .................................................................................. 11
9.2 Methodologies for Agriculture Monitoring using UAVs:. ..................................................... 11
9.3 Payload for UAV & DELOPT Activities: .................................................................................. 11
9.4 Use of UAV in Crop Protection: ............................................................................................. 13
10 Session on Academic Research on UAV’s ................................................................................. 15
10.1 Drone Research at IISc: ......................................................................................................... 15
10.2 UAV Maintenance- A Concept: ............................................................................................. 15
10.3 Numerical Validation of low Re Airfoil for UAV: ................................................................... 16
10.4 Evolution of UAV Technology an overview: .......................................................................... 16
11 PANEL DISCUSSION ................................................................................................................... 17
12 Outcomes of the Conference .................................................................................................... 19
13 Summary of Recommendations ................................................................................................ 20
Appendix A: Workshop program
Appendix B: List of Participants
Acknowledgement

2 | P a g e
1 Scope This document provides the summary of the proceedings as well as highlights of a two day
conference on “Emerging Technologies and Applications of UAVs”, which was jointly
organized by International Institute for Aerospace Engineering and Management under Jain
University, Indian National Academy of Engineering (INAE) and the Society of Indian
Aerospace Technologies and Industries (SIATI) and sponsored by Karnataka Jnana Aayoga,
and Aeronautics Research and Development Board (AR&DB).
2 Introduction Unmanned Aerial Vehicles had been receiving in recent times an ever increasing focus for
developments in industry as well as for academic research and also widely diversifying their
applications. UAVs are basically a component of an unmanned aircraft system (UAS), which
comprise of a ground- based controller, an unmanned air vehicle, and communication system
between the two. Due to their advantages of relative simplicity, flexibility and affordability for
a wide range of missions and applications, advances in the field of UAVs assume high
relevance. Based on this potential, a two day National Level Conference was jointly organized
at the Jain Global Campus by International Institute of Aerospace Engineering Management
(IIAEM), Jain University, Indian National Academy of Engineering (INAE) and Society of
Indian Aerospace Technologies and Industries on the theme of “Emerging Technologies &
Applications of UAVs” on 22nd and 23rd March 2017. The event was cosponsored by Karnataka
Jnana Aayoga, and AR&DB SIGMA panel, while Rotary Club of Bangalore, Israel Aerospace
Industries (IAI), and National Design and Research Forum (NDRF) Bangalore assisted. The
conference was participated by over 250 participants that included 55 industry and government
agency delegates and the rest from various academic institutions. Fig 1 depicts the assembly of
the participants at the conference.
Figure 1: Delegates present in the event
Karnataka had been in the forefront of the efforts to unfold the potential of UAVs as
instruments to invigorate innovation in the state and to establish their beneficial value for

3 | P a g e
governance. Karnataka Jnana Aayoga (KJA) through a study group of eminent personalities,
had undertaken deliberations on the technologies involved, applications and policies relevant
to Unmanned Aerial Systems. The opportunity for democratizing flying and bringing
breathtaking aviation experience to citizens’ hands is a dimension that was explored. With
advantage of the easiness of building, the unmanned aerial systems had gained importance
through numerous applications such as ground and aerial surveys, disaster mitigation, precision
agriculture, forestry, environment monitoring, infrastructure planning and so on. These
applications in tandem with advances in technologies of the platform, sensors, communications
and computing can contribute greatly to improved governance. The unique capability of this
technology for “at-will” data acquisition allows its integration with the City Geographical
Information Systems. The need of the hour is the validation of application systems and
missions, which are scalable and which foster indigenous developments and innovations.
Hence, a special KJA panel discussion was integrated into the conference programme.
The conference was divided into seven sessions including (i) a plenary session focusing on
comprehensive UAS solutions and futuristic research, (ii) a session on major R&D
challenges for Indigenous development and UAV applications, (iii) two sessions for mission
mode field demonstration of applications, (iv) a session dedicated to UAV Industries-
expounding the methodologies for civilian applications, (v) a session devoted to Academic
Research on UAV’s and (vi) Karnataka Jnana Aayoga Panel discussion- on way forward
for Pilot project demonstrations for applications relevant to governance and development. In
order to promote capacity building in young students in the field of technologies and
applications of UAVs, a preconference workshop was also organized through scientists of
CSIR-NAL. The program for the conference can be found in Appendix A and the complete list
of participants is presented in Appendix B of this report.
3 Relevance Unmanned Aerial Vehicles (UAVs) have extensively been utilized in military operations
during the last decade for surveillance, monitoring enemy activities, collecting information,
and even attacking military targets and terrorist hideouts. They are also increasingly finding
uses in civil applications, such as policing and firefighting and nonmilitary work, such as
inspection of power lines and pipelines. Furthermore, corporations utilized them in commercial
applications, such as agriculture, logistics, delivering small packages to rough terrain locations,
and medication to emergency locations. So UAVs are often preferred for missions that are too
dull or dangerous for manned aircraft.
The combination of greater flexibility, lower capital and lower operating costs of UAS in the
present day have also seen advantages of longer operational duration, less maintenance and
higher energy efficiency. These aircraft can be deployed in a variety of terrain conditions and
without requiring expensive and prepared runways.
Also, there is considerable potentials for new job creation. In order to provide a trained
workforce capable of meeting all demands that drones can fulfil, it is necessary to develop
human resources to work with many cutting edge technologies relevant to UAS.

4 | P a g e
4 Objective The main objective of this National Conference is to consider issues involving diverse
stakeholders as to how the UAV technologies and applications can be positioned for
contemporary societal needs and how to achieve leadership in this field.
The other objectives pursued through this conference were to:
Debate on programs that could help to promote and accelerate innovation.
Collaborative interaction and engagement among industries, academic and research
organizations.
Encouraging and empowering research activities to speeden indigenous developments and
development of an ecosystem in the state and the country.
Establish ways in which UAS can be utilized to improve people's lives, for example:
o Unmanned Air Systems for assisting police, infrastructure status and development,
town planning, agriculture, forestry, disaster mitigation and monitoring, traffic
management and so on
Discussions on the growth trends and market perspectives.
Challenges relating to technology advances and possible solutions around them.
Issues of policy and regulations
The Conference brought together the leading academicians, scientists, researchers, industry
experts and students to exchange and share their experiences on Unmanned Aircraft Systems.
It also provided a balanced interdisciplinary platform for researchers, practitioners and
educators to present and to discuss on recent innovations, trends and practical challenges and
to seek solutions in the field of unmanned aircraft systems.
5 Deliberations of the Conference
5.1 Inaugural Session The Inaugural session was presided by Dr. V. K. Aatre, Former Scientific Advisor to
Raksha Mantri and Fellow, INAE. The Chief Guest was Shri T. Suvarna Raju, Chairman,
HAL. The inaugural also witnessed the august presence of, Dr. C. G. Krishnadas Nair, the
Chancellor of Jain University and Fellow, INAE.
The Vice-Chancellor of Jain University, Dr. N. Sundararajan and Rtn. V. S. Ranga Rao,
President Rotary Club, Bangalore welcomed the gathering. Dr. N. Sundararajan in his
address highlighted the role of universities in advancing knowledge and technologies to
confront the challenges of contemporary society. He provided examples of the unique
achievements of Jain University and acknowledged the initiative of Karnataka Knowledge
Commission, INAE, DRDO, Rotary Club, and SIATI in organizing the present conference as
a continuity of earlier conferences/ airshows involving UAVs.

5 | P a g e
Rtn. V. S. Ranga Rao, in his address highlighted the valuable contributions of Rotary Club,
Bangalore, with its 82 old year record of exceptional services to the needy in the society.
He mentioned that prime concern of the year 2016-2017 for the club is “HAPPY 100
SCHOOLS” which benefits approximately 15000 students. He also expressed appreciation for
the collaboration extended by Jain University over the years for its student programs.
Dr. C. G. K. Nair, Chancellor Jain University/INAE, in his address highlighted the key
challenges in the field of UAV’s and emphasized the needs of focused R&D and the policy and
regulatory initiatives needed.
Figure 2: Distinguished Speakers during the inaugural session
The chief guest Shri T. Suvarna Raju, Chairman, HAL spoke on some of the major efforts
and projects on the anvil on UAV’s at HAL. He mentioned on the opportunities for competent
industries and academic research institutions for working with HAL for indigenous
developments in this field. He highlighted the advantage of such cooperation for the
counterparts of HAL in terms of access to R&D fund created by HAL, productionising and
marketing support. He expressed that industry-academia interaction can lead to quantum jump
in technological developments and gave examples, from across the world, where this
mechanism has yielded excellent results.
In his presidential address, Dr. V. K. Aatre provided insights on policy drivers hitherto that
resulted into many interesting developments in respect of micro and mini UAV’s. He traced
the rapid developments which had taken place in the global scene and underscored the need for
a strategic approach and working in a collaborative environment. He emphasized that the
The urgent needs of India in the field of UAV’s are the policies and regulations, our
own sensor systems and manufacturing units - Dr. C. G. Krishnadas Nair

6 | P a g e
choice of goals should be relevant to the contemporary times and posed a challenge to
universities to work on designing of dragon fly UAV. He emphasized on numerous innovative
contributions made by different universities across the world.
In his Keynote Address, Mr. V. Ashok Rangan, PD, UAV, ADE, gave a detailed exposure of
the national scene of UAV’s. Various developments historically at ADE were traced. The
Current application possibilities both in the civilian and non-civilian domains were touched
upon. The technical perspectives of design requirements, the design philosophy and levels
autonomy were analyzed. Finally, the address dealt with likely future developments including
the solar mini UAV and attendant challenges to be overcome. Fig. 3 illustrate UAVs in the
reconnaissance applications.
Vote of thanks was given by Prof. K. R. Sridhara Murthi, Director, IIAEM, Jain University
addressing the Chief Guest, Speakers and Delegates.
Figure 3: UAVs in the Reconnaissance mission
Dragonfly wing morphing and maneuvering is fascinating. Creativity is more important than
technology even if it can’t be commercialized and Universities should generate more ideas.
Dr. V.K. Aatre,
INAE.

7 | P a g e
6 Field demonstrations The first leg of Field demonstration of UAS technology was organized immediately after the
inaugural session on the day 1 of the conference. In this programme, there were demonstrations
of the flying from CSIR-NAL’s Suchan, Asteria Aerospace’s A400 and different UAV’s from
NDRF who flew fixed wing, Quadcopter and multicopters. Suchan, whose range is 10km with
a safe altitude of 150m, is capable of returning home if the communication is lost as it is
equipped with indigenous GCS, Autopilot, object detection and tracking systems. The A400
has a range of 4km and is designed to fly with a payload of 1kg. NDRF flew a Quadcopter that
was capable of performing transition from a quad to hexa and hexa to octacopter configuration.
All the UAVs were equipped with video cameras and communication modules. It was possible
to change the orientation of the cameras to gather different perspectives. The important aspect
of their design is the flexibility when the payloads are varying such as for crop spraying. Their
applications include pipeline monitoring, civic, traffic and military applications, for mining,
mapping, disaster management, border surveillance, agriculture, water logging, LASER and
archaeology. The field demonstration on both the days attracted lots of attention from the
participants.
7 Post-inaugural Plenary session The technical sessions in the conference were organized diverse aspects of UAS, i.e
technological, applications and policies. The initial plenary session set tone for the key focus
areas that addressed the future possibilities and pathways. The session, chair was Dr A R
Upadhya, Former Director, NAL.
7.1 UAVs- Charting the Roadmap for future: Dr. Mukund Rao, Member-Secretary, KJA, addressed on this theme. The main focus of this
talk is how UAS technologies are democratizing flying and bringing the exhilarating
experience of aviation to citizen hands. He has compared the UAS systems with the ground
surveys, aerial surveys and the satellite images on various parameters such as technology,
sensors, image granularity, coverage, timeliness, repeatability and stressed the UAS
technology is better for Governance among all others. The speaker illustrated how the wide
spectrum of systems and sensors that are available, which is also inexpensive, can enable data
collection at the grass-root level, and for instance crop assessment for every panchayat, which
in turn would lead to a better governance. Attention was paid to how this technology can be
integrated with the City Geographical Information Systems (City- GIS) for “at-will” data
acquisition in the form of images and maps. In this regard, a cost comparison was also made,
as shown in Fig. 4, and was convincingly demonstrated that UAS technologies would actually
cheaper than the use of satellites or aircraft. The speaker has shown how the UAV technology
used in Wine Grapes Harvesting, Crop Monitoring etc. The speaker also emphasized the need
for a clear policy of the usage of UAS as it is only this way that the large civilian market can
be tapped. This would result in a spurt in education and research in this field and hence the
development of manufacturing capabilities. He has shared the roadmap for Karnataka on UAV
applications.

8 | P a g e
Figure 4: Quick crop assessment for every panchayat “at will” monitoring of cropped areas
7.2 Comprehensive UAS Solutions:
Moshe Ephrati, Israel Aerospace Industries spoke on this theme. In this talk, the speaker
focused on numerous practical applications of UAV’s with respect to their category. He started
the talk by briefing on the establishment of IAI in the year 1953. His talk focused mainly on
IAI’s contributions in the field of UAV. He described different class of UAV’s, their
applicability, endurance and durability. In the Medium Altitude Long Endurance (MALE)
category he described briefly about their UAV’s with examples which included: 1. Super Heron
HF (1000-1500Kg), 2. Regular Heron I – Multi Payload MALE. Secondly he concentrated on
Tactical UAV’s (500-1000Kg). The other important points made by the speaker was in the
Vertical Take-off Landing (VTOL) UAV (5-100Kg) which included:
i. Panther UAV with special features such as tilted propellers which is used to perform two
operations, take off and glide with propellers tilting accordingly.
ii. Hover mast (Quadcopter). The most important talk by the speaker was on Mini UAV’s (5-
50Kg) with examples being 1. Bird Eye 400, 2. Bird Eye 650D- Long endurance was achieved
for this UAV by increasing the span by 1m. The speaker stressed on communication modes
which concentrated on two modes: 1. Line of Sight, 2. Satellite Communication (SATCOM).
His talk was completely application oriented focusing on Urban welfare, Strategic mission,
Paramilitary etc.
7.3 Futuristic Research on Micro & Nano UAV:
Lt. Gen. (Dr.) V J Sundaram, INAE/NDRF presented on the theme. The speaker focused on
current challenges in terms of Micro and Nano UAV. He elaborated on 1. Vision Based control,
Navigation & Guidance for exploration of enclosed spaces, Caves, Tunnels, 2. Location of
persons trapped under landslides and collapsed buildings as in Fig. 5, 3.Detection of explosives
& other Hazardous Material, buried underground or hidden.
Further he briefly spoke on usage and incorporation of technology which included 1.
Integration of Micro, Nano, Bio, Info & Cogno, 2.Brain like Computing, 3. Sensors, 4.

9 | P a g e
Biological Networks, 5. Brain Computer Interface, 6. Cyborgs. As an example, mind
controlling Drone is depicted in the Fig. 6.
Figure 5: People trapped under collapsed building Figure 6: Mind controlled Drone
The speaker also stressed on being Truthful, Trustworthy, Transparency, Time and Team work. He
insisted on deliver systems useful to the society by appropriate, feasible combination of technologies
and allies. The speaker made a strong point on major requirement being national and international
collaboration and cooperation of for benefit of mankind.
8 Session on Major R&D The session was chaired by Sri P S Krishnan, former Director, ADE
8.1 UAVs of the World and Challenges of indigenous Development The speaker Ms. Nemichandra, Chief designer, UAV, ARDC, of HAL emphasized on military
applications. Her talk was mainly on Sonars and Sonar Buoys sensors. The speaker stressed on
the importance and applicability of these sensors. The speaker spoke on how UAV’s are used
in dropping Sonar Buoys into the ocean for submarine detection and illegal entries. The speaker
also gave historical war details which included 1. Bosnian War (1992-1995) wherein UAV’s
were used for border surveillance, anti-smuggling movement of ammunitions. 2. Operation
Enduring Freedom Afghanistan ( 2001- 2014) wherein MALE UAV “PREDATOR” and
HALE “GLOBAL HAWK” were extensively used and made a point that it was the first time
in the history that a man surrendered in front of Robot. 3. Iraq War (2003-2011). The speaker
emphasized on development of Electro optical system, Day & Night sighting system and EO
system & ATGM missile. The talk gave brief information on Global Hawk UAV taking over
Multidisciplinary approach to combine micro, nano, bio, info and cognitive
technologies will open up enormous wealth of application possibilities
Lt Gen Dr Sundaram

10 | P a g e
manned Lockheed Martin used in World War II. The talk further dealt with her upcoming
works which included Unmanned Combat Aerial Vehicles (UCAV) with main features being
Stealth Mode, Weapons do not hangout i.e. will be placed in inner bae etc.
8.2 Civil UAV applications Dr. K. Senthil Kumar, Director, CAR MIT, Chennai, presented on disaster management
solution, early warning rescues and post analysis using UAV. He mentioned about his work
Mission Dhaksha which had played a major role in rescuing people during Chennai building
collapse, Chennai flood, and Makara Jyothi event surveillance. His talk mainly focused on civil
applications. The important points made by the speaker was on UAV mapping wherein the
UAV follows the coordinates of selected mapped region and clicks continuous photographs,
the steps of operation included Image Acquisition and Image Processing. The speaker also
emphasized on flood preparedness UAV’s and its tremendous usefulness. His talk further
focused on 3D modelling of the pictures captured from the UAV mapping. The Strong point
of his works in the field of UAV’s is the avoidance of real time surveillance by UAV mapping
followed by 3D modeling with image qualities better than satellite based images. The talk also
dealt with tethered copters for surveillance purpose wherein the UAV will be Stationary on Air
and power is supplied to the UAV from the ground station.
8.3 Mini UAVs for ISR Applications Mr. B P Shashidhara GD, ADE the talk focusing on smaller UAV development applications
for border surveillance in 8kg Fixed Wing mini UAV and Rotary UAV in 10Kg category. The
speaker gave brief idea on important major sub systems of UAV which included Aero
Mechanical systems, Propulsion & Actuators, Electric/I C Engines, Avionics- Auto Pilot, Data
link radio frequency subsystem- Airborne/Ground and Image exploitation capability. The talk
further dealt with military applications and usage of UAV’s to the fullest for the purpose of
surveillance. The speaker also spoke relatively on safety of the UAV’s.
8.4 Mini & Micro UAV Program at CSIR-NAL Mr. P. V. Satya Narayana Murthy, Head MAV Unit, CSIR-NAL spoke briefly on NAL’s
contribution in the development of UAV’s with few examples of their work which included
MAV-3, Black Kite, Golden Hawk, Pushpak and Slybird mini UAV in collaboration with
ADE. The speaker focused on the user requirements: 1. Better Endurance, 2. Better Range, 3.
Better Payload, 4. Better Video Stabilization etc. The talk also gave brief idea on their very
own Mini UAV “SUCHAN” with payloads- Gimbal stabilized interchangeable. The talk gave
importance on the research facilities available at NAL, Micro Air Vehicle Aerodynamics
Research Tunnel which included Pressure & Force measurement, automatic positioning, motor
propeller characterization, laser cutting machine, foam cutting machines, thermoforming etc.
and also mentioned how students from the academic institutions can make use of these
available resources at NAL.
8.5 Honeywell technologies for unmanned aerial systems
Dr. Shrikant Rao, Honeywell Tech, the speaker emphasized on UAS classification with
examples, Ro-11 Raven (0 - 20lbs), Scan Eagle (21 - 551lbs). The talk focused mainly on
technologies in development in and across the world which included Alternate Navigation,

11 | P a g e
Low cost Surveillance, Sense and Avoid, Low cost Avionics, Hybrid Propulsion, GPS Denied,
Secure Remote Connectivity and Autonomous Cooperative Control. The speaker spoke about
the works being carried out at Honeywell and their main focus is on Alternate Navigation.
Further the talk dealt with Autonomous Vision aided take-off and landing. The speaker was
keen in collaborating with other organizations to tackle the challenges and also showcased it
through his talk.
Day 2
9 Session on UAV Industries The session chair was Dr Sudhakar, former Professor, IIT, Mumbai
9.1 Aerial Mapping and UAV Applications Mr. Pritam, Founder EDAL Systems, spoke on aerial mapping and UAV applications. The
speaker spoke regarding their work and accuracy at which they deliver work as required by the
clients. The talk dealt with high accuracy aerial survey by UAV for civil construction. Basically
the speaker focused on railway tracks validation and deliverables according to the client
requirement. The talk also focused on monitoring of shift in the railway track in comparison to
their initial position of existing railway tracks through aerial mapping. The important things
the speaker mentioned in the talk was about Track Center and Control Point validation and
accuracy related to AutoCAD models. The talk was completely civil construction based.
9.2 Methodologies for Agriculture Monitoring using UAVs:. Mr. K. Kulkarni, Director, Haribon presented on 1.5Kg class UAV’s for agricultural
monitoring. Initially the talk was on advantages of using UAV in agriculture monitoring which
included Low cost, easily deployable, better resolution than satellite images, Repeatability “ON
DEMAND” at any time, Adaptability to pay load & condition etc. With these advantages the
talk focused how to understand the problems such as Health of the crop, Impact of weather and
surrounding, crop stress due to calamity etc. Depending on these problems variable
consideration such as agricultural land use, land cover from UAV, selection & calibration of
sensors, crack growth damage, leaf index etc. The speaker highlighted on their work based on
three views, 1. UAV point of view, 2. Crop point of view, 3. Image processing point of view.
The speaker stressed upon variables of image capture (crop point of view) which included,
moisture content level, growth rate & yield index, soil nutrient, infestation of pests & diseases
and crop type. The important point mentioned in the talk was benefits of agricultural monitoring
which gives information on crop failure if any 15 to 20days in prior so that the farmers can
come up with suitable back up crop depending on the failure of the existing one.
9.3 Payload for UAV & DELOPT Activities: Dr MR Sheshadri, MD DELOPT, initially focused on military missions along with missile
detection, RADAR based long range target detection, chemical detection & warfare. Also civil
missions were considered like homeland security, aqua culture, wildlife census/protection etc.
The speaker gave an insight on payloads for UAV such as, Conventional Imaging(UV, Laser,
Visible-CCD), Non-Imaging ( Search & tracking spectrometers system), Laser( LD Imaging,

12 | P a g e
LRF), Signal intelligence(Data links), Target tracking etc. The talk highlighted on current
challenges like, Stealth features – low visibility, Air space integration, Evolving Standards,
Limited availability of sensors. The speaker spoke on their work with respect to UAV payload
activities such as thermal imager, Gimbal systems, Laser pointing systems, video analytics etc.
The Fig. 7 shows thermal imager, payload control and gimbal systems for UAVs.
Thermal Imager for UAV
Gimbal for mini UAV’s Payload Control
Figure 7: Thermal imager, Payload control and Gimbal system
Current challenges and opportunities for India are stealth features and interoperability
Dr MR Sheshadri,
MD DELOPT

13 | P a g e
Figure 8: Automatic Laser pointing Systems
The speaker also focused on automatic video trackers like miniature trackers for UAV’s and trackers
for tethered balloons. The Fig 8 shows the Intruding UAV detection, tracking and destroyer by laser
pointing system & the Fig. 9 shows an Automatic Tracker of Aircraft takeoff and landing system.
Figure 9: Automatic Tracker of Aircraft takeoff and landing
9.4 Use of UAV in Crop Protection: Mr Babu K S, Tata Sons Ltd, highlighted on Precision Agriculture (PA) i.e. correct amount of inputs
like water, fertilizers, pesticides to the crops for productivity and maximizing its yield. The main focus
was on driving factors for PA which included Small land holdings, acute shortage of water, Low
mechanization which increases productivity by 12-34%. The talk further dealt with some of the
advantages such as, less labor dependency, reduction in application time as UAV covers large area in
short durations, less water requirement, timely intervention, targeted spray, autonomous spraying
operation etc. The conventional and UAV based spraying is shown in the Fig. 10. With these advantages
the talk took over on the challenges in drone based spraying such as, high initial investment, trained
operator, low endurance, and low payload capacity. The talk completely gave importance to crop
protection and crop yielding.

14 | P a g e
Figure 10: Conventional & UAV Based Spraying

15 | P a g e
10 Session on Academic Research on UAV’s The session was chaired by Prof Manoj Veetil of Cranfield University, UK
10.1 Drone Research at IISc: Prof. S N Omkar, IISc, the speaker presented on the drone research work being carried out at
IISC. Hybrid transition UAV has been developed by the speaker and his team whose operations
include vertical take-off and forward transition like fixed wing. The speaker also spoke on
octocopter UAV with payload, H8copter for visual based application. The speaker gave an
insight on Modular UAV which are easy to assemble, no tools required, ease of manufacturing
etc. The talk also covered topics on Drones in Agriculture with Low Altitude Remote Sensing
(LARS). The talk also highlighted on lot of application oriented UAV’s which they have
developed such as, UAV power line inspection, Carbon fiber truss aircraft, real time control of
UAV’s using Brain Control Interface, Amphibious aircrafts to check water pollution level and
Radiation monitoring UAV’s.
10.2 UAV Maintenance- A Concept: Dr. Air Cmdr. PK Choudhary (Retd), Founder Director, General Aeronautics, who was the
speaker highlighted facts on Advances in reliability & maintenance, ineffective hard time
maintenance wherein 11% aircraft components get affected, on condition maintenance, task
oriented approach etc. The talk also focused on some of the critical issues observed such as
complacency, demand of wide skill envelope, packaging, disassembly and transportation, poor
maintenance, human error rather than machine failure underlies more aviation accidents and
incidents and machinability evaluation. The percentage cost of Aircraft Maintenance over the
years is shown in the Fig. 11. The talk completely dealt with safety and logistic related facts
which play major role in UAV maintenance.
Figure 11: The percentage cost of Aircraft Maintenance over the years

16 | P a g e
10.3 Numerical Validation of low Re Airfoil for UAV: Ashish Kumar Gupta, Prof, IIAEM, the speaker, in his talk spoke about the low speed
aerodynamics which is different from conventional aircraft aerodynamics because of the low
chord based Reynolds’s number. And told 10000 to 300000 range of the Reynold’s number is
of great importance for the aerofoil applications involving UAVs and small and medium wind
turbines. He also pointed out that the knowledge of the existence and prediction of the extent
of the separated region is vital for characterizing the airfoil performance.
A typical Reynold’s number vs Weight and Reynold’s number vs L/D is shown in the Fig. 12.
Further he showed the numerical simulations for NACA 0018 airfoil for Reynold’s number
varying from 80000 to 160000 and validations using 4 turbulence models k-ω SST, k-ω SST
with low Re correction, transition SST and K-KI-ω turbulence model to assess the aerodynamic
characteristics and in particular the laminar separation bubble. He concluded that, in general
transition SST and K-KI-ω turbulence model perform better than the other methodologies.
Figure 12: Reynold’s number vs Weight and L/D
10.4 Evolution of UAV Technology an overview:
Dr. Ravindra Kulkarni, HOD-Aerospace Engineering, RVCE, spoke on UAVs, originated
mostly for military applications are expanding their use in commercial, scientific, recreational,
agricultural, research and other applications. Civilian drones now vastly outnumber military
drones. Providing simple, cheap, rapid, efficient and flexible ways for data acquisition, analysis
and transmission, recent advancements in UAV technology are changing how we look at
UAVs. We now have UAVs with high endurance, capable of autonomous flights, high
resolution video transmission and payload deployment. Modern UAVs now include the best
technology available in Aerodynamics, Material science, Control systems, Computing and
Networking. The speaker gave glimpses of the progress and achievements in UAV technology
over the years that now contribute to the UAVs we see today. Modern UAVs are a result of
innovation done in various fields like aerodynamics, material sciences, telecommunication,
artificial intelligence etc., and their integration into one. The talk also focused on pioneers in
UAV technology, The Austrian Balloons as shown in Fig. 13, Unmanned Zeppelins (1st radio
controlled aircraft), development of fixed wing UAV’s, UAV’s with pulsejet engines, UAV’s

17 | P a g e
with turbojet engines as shown in Fig 14, UAV on Autonomous Mode etc. The speaker also
highlighted their work “VAYU” search and rescue drone as shown in Fig. 15, “SENTINEL”
octocopters for surveillance as shown in Fig. 16.
Figure 13: Austrian Balloons Figure 14: UAV’s with turbojet engines
Figure 15: Vayu- Search & Rescue Drone Figure 16: Octocopter- For Surveillance
11 PANEL DISCUSSION KJA Panel on Pilot Projects of UAVs towards establishing applications for
Governance in Karnataka
The ultimate substantial part of the conference was the discussion by a panel of experts
representing different stakeholder groups. The panel was moderated by Dr. Mukund Rao,
Member Secretary KJA and other members included Mr. P.V. Satyanarayana Murthy, Head
MAV unit CSIR – NAL, Dr Senthil Kumar, Director CAR, MIT, Chennai, Prof K R Sridhara
18 | P a g e
Murthi, Director – IIAEM, Mr. A.Pritam, Founder – Edall Systems, and Prof. G Ramesh,
Former Scientist, NAL and visiting faculty, IIAEM.
The panel considered following important issues- namely, (i) steps to make government utilise
more and more of UAS, (ii) what should constitute UAS pilot-project for governance? (iii)
UAS policy issues – eco-system policy issues, flight guidelines, security/safety,
standards/certification, (iv) what are research areas that can also be examined in pilot-project?,
and (v) establishing a manufacturing eco-system for UAS – design, development and
productionising – UAS systems, sensors, maintenance.
. The speakers highlighted the key areas of monitoring which would evince keen interest of the
government for using UAS. Among those key areas, few of them which could bring in major
impact are:
Timely identification and information on any crash/accidents
Forest fires/deforestation incidents
Information relevant to insurance for crop failure
Information relevant to tax collection on land property
Land Survey to check for deviations in approved plans.
Three critical conditions that would encourage government to utilize UAS are:
Technology to be better than the existing one.
Timely/speedy delivery capability.
Demonstration of the effectiveness of the application, training in skills and scalability
The panel further took up discussion on whether certain platform and other technical
characteristics of UAVs influence the application mission goals and whether some preferences
could be relevant
The participants’ views converged on certain general preferences for categories as follows,
while more details are to be considered based on specific missions:
Urban (Fixed wing UAV) – Autonomous property tax estimation.
Agriculture (Rotor & wing based UAV) – Autonomous farm level crop estimation.
Archaeology(Rotor based UAV)- 3D Heritage management plan
Police (Rotor based UAV)- Civil operations and traffic management
A view was expressed that with reference to present context, following information, if derived
from UAVs, it could make their use compelling.
Updating of land records based on who owns what.
Transfer of paper data to electronic data
Virtual measurements of physical assets (like building)
Vote of Thanks was given by Prof. V. Parameswaran, H.O.D IIAEM, Jain University
addressing all the distinguished speakers and delegates. He said that the conference was
successful in achieving all of the objectives which were set. He also mentioned that the
challenge now before all is to embrace the new ideas and approaches that were revealed during
the course of the conference.

19 | P a g e
12 Outcomes of the Conference UAVs offer numerous benefits and vast potential in the academic community both for
developing new programs of study and for augmenting research in existing fields. However,
the realization of these benefits has proved challenging, as the rapidly increasing pace of this
technology and the multitude of application needs in different areas have to be integrated
constantly and these are to be properly diffused. Seminars, workshops and conferences do
help in bridging these gaps and as demonstrated, the present two day conference on “Emerging
Technologies and Applications of UAVs” have met the major objectives of throwing light on
the current state of UAV technologies at the national level and even at international level to
some extent. The conference brought together the leading scientists, engineers from
laboratories and industries, research scholars from academia, and the experts from user
departments who shared their expertise on recent developments, needs, potentials and trends
in this field. In addition, the preconference workshop for the student delegates and the field
demonstration from the Indian UAV developers made unique impression and drew good
response from the participants.
The major outcomes from this event can be enumerated as follows:
1. HAL’s commitment towards indigenous developments as well as towards production and
marketing support to innovative MSMEs / technology development organizations through TOT
or any other bilateral arrangement.
2. Recommendation that the micro and Nano UAV programs should be supported by the
Government through its research funding and it should be largely directed to academic
institutions.
3. Long standing developments in UAV technology in India were due to the programs at ADE
and they represent unique resource for productionisation effort.
4. The Karnataka state Knowledge Commission enlisted growing opportunities of UAVs in
civilian domain and expressed that the state government will shortly be opening up pilot
projects for the deployment of indigenously developed system for various civilian applications.
5. The plenary session recognized a number of challenging and multi-disciplinary research
areas which can revolutionize applications. These would also involve converging of
technologies relating to biological sciences with advances in aeronautics
6. UAVs have an enviable role in net centric warfare system.
7. The session on “Major R&D programs in UAV” had discussed the developments of UAVs
for both strategic as well as for the civilian sector, the subsystem technologies, the challenges
related to the failsafe operations, indigenous technology base and so on.
8. Opportunities for the students to come out with innovative design ideas and take up research
positions in the universities were presented.
9. The session on titled “Industries in the UAV development” has been enriched by
participation from a number of industries from Karnataka. The variety of applications in fields
like agriculture, pipe line survey, urban policing, 3D estimation of structures and building,
railway track survey, crowd monitoring were discussed and the progress made in different
applications were taken into account.
10. The session titled “Academic research on UAVs” highlighted the increasing presence of
academic institutions in UAV research. The major support under National Program on MAV

20 | P a g e
was instrumental in promoting Micro UAV research in academic institutions. Some of the
research topics discussed included Low Reynolds number Aerodynamics for MAV, Mission
based approach for Multicomputer design, Development of special purpose payloads etc.
11. The panel discussion centered on the promotion of UAV technologies for the civil
governance by way of encouraging indigenous solution development in industry, academia and
research labs. The panel reiterated the relevance and needs of pilot projects with examples of
the requirements from departments of survey, forests, urban planning, and agriculture.
Suggestions included setting up center of studies in the universities, training of personal in the
use of UAVs, introduction of courses related to UAVs, promotion of indigenous design and
manufacturing etc.
13 Summary of Recommendations
The industry involved in UAV development in the country is at their early stages and the lack
of regulation and certification of UAVs are also a major impediment to the growth of the
industry. The Government should support the indigenization program using consortium
approach where the user department can fund the development of mission specific UAVs to
meet their requirement. The academic institutions can also be part of this consortium to provide
required research base for this activity.
In the west, a majority of the technologies of small UAVs in the last decade have been
developed in the university environment and mainly funded by government agencies. A few of
the universities have also started introducing special courses and degrees in the UAV related
areas. Considering the enormous opportunities as well the challenges associated with the
development of mission capable systems it is time in our country especially at the universities
we take a proactive role in developing the technologies as well the human resources in this
multidisciplinary area.
Since the technologies underlying the development of these vehicles and sensors have been
constantly improving, the universities should be well prepared to look at complete system
solutions in addition to engaging in research in selected areas of contemporary relevance. State
should fund this research and development thereby meeting the aspirations of the young
research community as well as to meet its demand from indigenous development. The
conference recognized the need for a proactive approach to expand the role of universities and
academia to engage in research and innovation through the support of government for
enhancing the value addition in the country in the manufacture and applications of UAS.
The manufacturing base for the high precision small components (micro fabrication) is also a
key requirement for the growth in this sector. Government can set up some pilot plants in the
university incubation centers to promote this technology. Advanced fabrication using
composites should also be part of this activity.

21 | P a g e
Cost factor and trained manpower for the advanced manufacturing methods need to be looked
into closely. We always ended up on the negative side on the weight budget on the structure
and the cost of production for limited volume made us less competitive.
On the development of new designs / improved design we need to look at multidisciplinary
optimization methods and we are just evolving in this field for the small UAV class. The R&D
support to promote this in the academic environment will result in robust designs coming out.
Another key issue is sourcing high reliability sub systems and electronics and appropriate
evaluation of them. The government should get into agreement with foreign principles to
source some of the critical components that are not made in the country so that the consortium
partners use them for establishing reliable systems.
The software and simulation is a good option to the academic institutions as we have good
resources both in terms of manpower and tools. Keeping the total solution in focus this group
can also diversify meet the requirement related to post-operative payload data processing and
analysis.
Encouraging the establishment of a few centres of excellence in the environment of university
and research organization is a good idea. But requires good mentoring and some hand holding
from experts from within the country and abroad. Training of faculty, setting up of
infrastructural facilities, space for experimental flight trials and bench marking ground
simulations are essential part. Such centres could be built around pools of expertise existing in
VTU, Jain University, NAL and others

22 | P a g e
Appendix A Conference Program
Program Schedule
DAY 1 - 22nd March 2017
Time Session Speaker Organization
Start End
8:30 9:30 Registration/Breakfast/Tea
9:30 11:00 Inaugural Session
09:30 09:35 Invocation
09:35 09:45 Welcome Address 1.Dr.N.Sundararajan
2. Shri. Rtn. V S Ranga Rao
VC, JU President Rotary Club
09:45 09:55 Address by Chancellor, JU Dr. C G Krishnadas
Nair Jain University/ INAE
09:55 10:10 Address by Chief Guest Shri T Suvarna Raju Chairman, HAL
10:10 10:25 Presidential address Dr V.K. Aatre INAE
10:25 10:45 Key note address Mr V. Ashok Rangan PD, UAV, ADE
10:45 10:50 Vote of Thanks Prof. K R Sridhara
Murthi Director, IIAEM
10:50 11:05 Tea Break/Exhibition/ Networking
11:15 12:05
Session I Field Demonstration I
Fixed Wing/Multi Rotor/Mini UAV For Mission Mode
Field Demonstration NAL, Asteria Aerospce, Ms Edall Systems
12:15 13:15 Session II – Plenary
Session Dr A.R. Upadhya Former Director- NAL
12:15 12:35 UAVs- Charting a
Roadmap for future Dr. Mukund K. Rao Member-Sec KJA
12:35 12:55 Comprehensive UAS
Solutions Moshe Ephrati IAI
12:55 13:15 Futuristic Research on
Micro & Nano UAV Lt. Gen. (Dr.) V.J.
Sundaram INAE/NDRF
13:15 14:00 Lunch Break/Exhibition/Networking
14:15 16:00 Session III - Major R&D
Mr P.S. Krishnan
Former Director- ADE
14:20 14:40 UAVs of the World and
Challenges of Indigenous Development
Ms. Nemichandra Chief Designer, UAV,
ARDC, HAL
14:40 15:00 Civil UAV applications Dr.K. Senthilkumar Director, CAR MIT,
Chennai
15:00 15:20 Mini UAVs for ISR
Applications Mr B P Shashidhara GD, ADE
15:20 15:40 Mini & Micro UAV Program
at CSIR-NAL
Mr P V Satyanarayana
Murthy
Head MAV Unit CSIR-NAL
15:40 16:00 Honeywell technologies for unmanned aerial systems
Dr Shrikant Rao Honeywell Tech.
16:00 16:15 Tea Break

23 | P a g e
DAY 2 – 23rd March 2017
Time Session Speaker Organization
Start End
8:30 9:00 Breakfast / Tea / Exhibition
9:00 11:00
Session VI - Field Demonstration-II
Fixed Wing/Multi Rotor/Mini UAV For Mission Mode Field
Demonstration
Asteria Aerospace, Tata Advanced Systems, NDRF, Haribon
11:00 11:30 Tea/Exhibition/Networking
11:30 13:00 Session IV – UAV
Industries Dr K.Sudhakar Former Prof IITB
11:30 11:45 Avionics Challenges facing
Modern UAV Mr. Neel Mehta
Director & Co-Founder Asteria
11:45 12:00 Areal Mapping & UAV
Applications Mr. A Pritam
Founder EDAL Systems
12:00 12:15 Methodologies for
Agriculture Monitoring using UAVs
Mr K Kulkarni Director, Haribon
12:15 12:30 Payload for UAV & DELOPT Activities
Dr M R Sheshadri MD DELOPT
12:30 12:45 Use of UAV in Crop
Protection Mr. Babu K.S. Tata Sons Ltd
12:45 01:00 Technologies and
applications of unmanned Aerostats and Airships
Prof R. Pant IITB
13:00 13:45 Lunch Break / Exhibition/Networking
13:45 14:45 Session – V Academic
Research on UAVs Shri Jitendar J Jadhav Director NAL
13:45 14:00 Drone Research at IISc Prof S N Omkar IISc
14:00 14:15 UAV maintenance – A
concept
Dr. Air Cmdr PK
Choudhary (Retd.)
Founder Director,
General Aeronautics
14:15 14:30 Validation of Low Re Airfoil
for UAV Prof Ashish Gupta IIAEM- JU
14:30 14:45 Evolution of UAV
Technology an over view Dr Ravindra Kulkarni
HOD – Aerospace
Engg., RVCE
14:45 15:45 Session- VI Panel
Discussion Karnataka Jnana Aayoga
14:45 15:55
KJA Panel on Pilot Projects of UAVs towards
establishing applications for Governance in
Karnataka
KJA
15:55 16:00 Vote of Thanks IIAEM
16:00 16:30 Tea Break
24 | P a g e
Appendix B
List of Participants
A: Delegation for the Conference:
S.No Delegate Name Designation & Organization
1. Dr. C. G. Krishnadas Nair Chancellor,
Jain University
2. Shri. Rtn. V S Ranga Rao President Rotary Club
3. Shri T Suvarna Raju Chairman, HAL
4. Dr V.K Aatre INAE
5. Mr V. Ashok Rangan Program Director, UAV, ADE
6. Dr. A. R Upadhya Former Director-NAL
7. Dr. Mukund K. Rao Member-Sec KJA
8. Moshe Ephrat IAI
9. Lt.Gen. (Dr) V.J. Sundaram INAE/NDRF
10. Mr. P.S.Krishnan Former Director-ADE
11. Ms. Nemichandra Chief Designer, UAV, ARDC,
HAL
12. Dr.K.Sentilkumar, Director, CAR MIT, Chennai
13. Mr B P Shashidhara GD,ADE
14. Mr. P V Satyanarayana Murthy Head MAV Unit CSIR NAL
15. Dr. Shrikant Rao Honeywell Tech
16. Mr. Neel Metha, Asteria Director &Co-Founder
17. Mr.A Pritam Founder EDAL System
18. Mr. K Kulkarni Director, Haribon
19. Dr.M R Sheshadri MD DELOPT
20. Mr. Babu K.S Tata Sons Ltd
21. Prof R.Pant Professor, IITB
22. Shri Jitendra J Jadhav Director NAL
23. Prof S N Omkar Professor, IISc

25 | P a g e
24. Dr.Air Cmdr PK Choudhary (Retd) Founder Director, General
Aeronautics
25. Prof Ashish Gupta Professor, IIAEM-JU
26. Dr Ravindra Kulkarni HOD-Aerospace Engg, RVCE.
27. Dr.N.Sundararajan Vice-Chancellor, Jain university
28. Prof K R Sridhara Murthi Director, IIAEM
29. Prof B Dattaguru Professor, IIAEM
30. Prof. V. Parameswaran HOD(Aerospace), IIAEM
31. Dr. Ramesh.G IIAEM-JU
32. Dr C. Y. Allamaprabhu Assistant Professor, IIAEM
33. Vijay Krishna NDRF
34. Roshan Antony NAL, MAV unit
35. Mr M S Parswanath Director,
Projects and Facilities, JGI
36. Mr. Sulakshan Arya Assistant Professor, IIAEM
37. Mrs. S.Charulatha Assistant Professor, IIAEM
38. Mr. Vishwanath, Assistant Professor, IIAEM
39. Mr. Vamsi Krishna Chowduru Assistant Professor, IIAEM
40. Mr. Yasas Visiting Faculty, IIAEM
41. Mr. Indranil Roy Visiting Faculty, IIAEM
42. Mr. Bharat , Research Assistant, IIAEM
Other Faculty, Staff of IIAEM.
B: Participants from Industry & Research Laboratories.
S.No Research Labs & Industries Participants
1. National Aerospace Laboratories 16
2. Hindustan Aeronautics Limited 6
3. Aeronautical Development Establishment 3
4. Indian National Academy of Engineering 14
5. Karnataka Jynana Yoga 11

26 | P a g e
6. Asteria Aerospace 3
7. Edall Systems 2
8. Ananth Technologies 2
9. Southern Electronics Pvt Ltd 1
C: Student participants from Other Colleges & Jain Campuses (SET & IIAEM):
S.No Name of the Participant Designation & Organization
1. Sparsh Sharma R V College of engineering
2. Ankit yadav R V College of engineering
3. Abhishek R V College of engineering
4. Chandra Prakash R V College of engineering
5. Chaithanya Kumar K L R V College of engineering
6. Rohit Priyadarshi MVJ College of Engineering
7. GS Sumogh MVJ College of engineering
8. Omkar Lawate MVJ College of Engineering
9. Sathyanarayanan R MVJ college of engineering
10. Kirubakaran V MVJ college of engineering
11. Veeresh B .L.J MVJ college of engineering
12. Ragu priya.R Rajalakshmi Engineering college
13. Monisha Rajalakshmi Engineering college
14. Pavithrabalan.S Rajalakshmi Engineering college
15. Shebinraaj EA Rajalakshmi Engineering college
16. Thillai Ananthi.N Rajalakshmi Engineering college
17. Adithya M P Rajalakshmi Engineering college
18. Reshma yalagi Shree Devi Institute of
technology

27 | P a g e
19. Divya H C Shree Devi Institute of
technology
20. Punyashree T Shree Devi Institute of
technology
21. Allwyn John Shree Devi Institute of
technology
22. Nagini.S Shree Devi Institute of
technology
23. Suhas j Shree Devi Institute of
technology
24. Suraj T K Shree Devi Institute of
technology
25. Bharath N Shree Devi Institute of
technology
26. Arpith harshe East West college of engineering
27. Mithil Sai M S East west college of engineering
28. Amit East West college of engineering
29. Prabhuraj East west college of engineering
30. Ehrar Ahamed Shariff East West College Of
Engineering
31. Masood Ahmed East West College of Engineering
32. Soumalya Sinha Indian Institute of Engineering
Science and Technology Shibpur
33. Mishra Krushna Dharmichand Dayananda Sagar College Of
Engineering
34. Sharhabeel M.M Dayananda Sagar College Of
Engineering
35. Preethi C R Dayananda sagar college of
engineering
36. Sandeep R Petlur Dayananda Sagar College of
Engineering
37. Hemanth Kumar.R Dayananda Sagar College of
Engineering
38. Akarsh Rayu Dayananda Sagar College of
Engineering
39. Amogh A S Dayananda Sagar College of
Engineering
40. Ande Rajashekar Reddy Dayananda Sagar College of
Engineering
41. K Narayana Reddy Dayananda Sagar College of
Engineering
28 | P a g e
42. Chaithanya K Shree Devi Institute of
Technology
43. Devi Mayavathi A Shree Devi Institute of
technology
44. Shambhu Chaudhary Shree Devi Institute of
Technology
45. Timmanagouda Kellur Shree Devi Institute of
Technology
46. Prakashagoda Shree Devi Institute of
Technology
47. Vineeth Shree Devi Institute of
Technology
48. Anup Patil Shree Devi Institute of
Technology
49. B R Lakshmi Shree Devi Institute of
Technology
50. Ashish Hajare Shree Devi Institute of
Technology
51. Sarvesh Shree Devi Institute of
Technology
52. Manoj C R Student, VTU, Belgaum
53. Pavanrs Student, VTU, Belgaum
54. Laxman Student, VTU, Belgaum
55. Divakar Ganesh Student, VTU, Belgaum
56. Jeevan R Student, VTU, Belgaum
57. Abhinandan Kulkarni Student, VTU, Belgaum
58. Shashank M K Student, VTU, Belgaum
59. Samarth S Kulkarni Student, VTU, Belgaum
60. Shambavi S Student, VTU, Belgaum
61. Shruti S Patil Student, VTU, Belgaum
62. Sudharshan Sk Student, VTU, Belgaum
63. Sachin S Student, VTU, Belgaum
64. Madhu Sai P Student, VTU, Belgaum

29 | P a g e
65. Manu.S Student, VTU, Belgaum
66. Radha Ramanagouda Patil Student, VTU, Belgaum
67. Nishal Sanil Monteiro Student, VTU, Belgaum
68. Praveen lamani Shree Devi Institute of
Technology
69. Vaishnavi chakravarthy Shree Devi Institute of
Technology
70. Yashwanth Kumar n Shree Devi Institute of
Technology
71. Arun krishnan Shree Devi Institute of
Technology
72. Aafiya zarnain khansa Shree Devi Institute of
Technology
73. Nikhila Priyadarshini Student, IIAEM-Jain University
74. Mohammed Rafat M Student, IIAEM-Jain University
75. Rana Shamail N Student, IIAEM-Jain University
76. Rahul Deshmukh Student, IIAEM-Jain University
77. Rakshith Yadav N Student, IIAEM-Jain University
78. Mrutyunjaya Behera Student, IIAEM-Jain University
79. Sujeet Kumar Pandey Student, IIAEM-Jain University
80. Anan Anilkumar Christian Student, IIAEM-Jain University
81. Shivam Sharma Student, IIAEM-Jain University
82. Namana N Jain Student, IIAEM-Jain University
83. Mohith L G Student, IIAEM-Jain University
84. Poorna Chandra Thejaswi Student, IIAEM-Jain University
85. Harshith T N Student, IIAEM-Jain University
86. Syed Shoiab Student, IIAEM-Jain University
87. Renganath. R Student, IIAEM-Jain University

30 | P a g e
88. A K Surya Student, IIAEM-Jain University
89. Denzil-Mathew Student, IIAEM-Jain University
90. Sandhya V S Student, IIAEM-Jain University
91. Sastikar Monika Shashikant Student, IIAEM-Jain University
92. Debayan Roy Student, IIAEM-Jain University
93. Joshua Daniel Student, IIAEM-Jain University
94. Monika P K Student, IIAEM-Jain University
95. Sachin H S Student, IIAEM-Jain University
96. Shubham Shukla Student, IIAEM-Jain University
97. N.Sai Sumanth Student, IIAEM-Jain University
98. Bhimaray Biradar Student, IIAEM-Jain University
99. A Suraj Kumar Student, IIAEM-Jain University
100. Gowrishree .H Student, IIAEM-Jain University
101. Divya M Student, IIAEM-Jain University
102. Rohini P Student, IIAEM-Jain University
103. Goutham S Student, IIAEM-Jain University
104. Patel Dixit Student, IIAEM-Jain University
105. Shashwath Gowda Student, IIAEM-Jain University
106. Bhargavi G S Student, IIAEM-Jain University
107. Suheabt Student, IIAEM-Jain University
108. Abhinaya.B.Aski Student, IIAEM-Jain University
109. Aishwarya Yallappa Badami Student, IIAEM-Jain University
110. Hamsa GR Student, IIAEM-Jain University

31 | P a g e
111. Shaik Mansoor Ali Student, IIAEM-Jain University
112. Akshath Gowda B M Student, IIAEM-Jain University
113. Ujjal Das Student, IIAEM-Jain University
114. Kiran Kumar P Student, IIAEM-Jain University

32 | P a g e
Acknowledgements
On behalf of the IIAEM, Jain University, I would like to acknowledge and extend the gratitude
to the Advisory committee, Organizing committee, the distinguished chief guest and speakers,
who contributed to ensure that the conference was a success.
The Advisory Committee comprised the following:
Dr. C.G. Krishnadas Nair, Chancellor, JU
Dr. N. Sundararajan, Vice Chancellor, JU
Lt. Gen Dr. V.J. Sundaram, INAE, NDRF
Sri. P.S. Krishnan, Former Director ADE & Chairman SIGMA Panel
Sri. Jadhav, Director NAL
Prof. Dattaguru, IIAEM, JU
Dr. Upadhya, Fellow INAE
Dr. Mukund Rao, Member Sec – KJA
Dr. Aatre, INAE
Mr. Ranga Rao, President, Rotary Club.
The Organizing Committee comprised of the following:
Dr.N.Sundararajan, Vice-Chancellor, Jain university
Prof K R Sridhara Murthi, Director, IIAEM
Prof B Dattaguru, IIAEM
Prof. V. Parameswaran
Dr. Ramesh.G, IIAEM-JU
Prof Ashish Gupta, IIAEM-JU
Dr C. Y. Allamaprabhu, Assistant Professor, IIAEM
Vijay Krishna, NDRF
Roshan Antony, NAL, MAV unit
Mr M S Parswanath, Director, Projects and Facilities, Jain Group
Mr. Sulakshan Arya, Assistant Professor, IIAEM
Mrs. S.Charulatha, Assistant Professor, IIAEM
Mr. Vishwanath, Assistant Professor, IIAEM
Mr. Bharat, Research Assistant, IIAEM
Mr. Vamsi Krishna, Assistant Professor, IIAEM
Mr. Yasas, Visiting Faculty, IIAEM
Mr. Indranil Roy, Visiting Faculty, IIAEM
Gratitude is due to INAE, AR & DB – SIGMA panel, KJA, SIATI, NDRF and Rotary Club
of Bangalore for supporting in organizing the Conference.

33 | P a g e
For more information, contact:
Head of Department
International Institute for Aerospace Engineering and Management, Jain University
Jain Global Campus, NH-209, Jakkasandra Post.
Kanakapura Taluk, Ramanagara District, Karnataka 562 112
Phone: +918027577231 / 232
Email: [email protected]
Website: http://iiaem.jainuniversity.ac.in/index.html

Presentation Overview

To create synergy in the efforts of research and development organizations, ordnance factories, public sector units and industries of the country to achieve self-reliance in defense systems
VISION AND MISSION STATEMENT
To develop state of the art technology
To achieve self-reliance in defense technologies and systems and provide indigenous systems to defense services
A MULTI-DISCLIPINARY PRODUCT ORIENTED ORGANIZATION
About 6% of defense budget
About 7000 scientists
23000 technical cadre
DRDO HEADQUARTERS
About DRDO

GTRE
Armaments
Life Sciences
Computer Science
Electronics
Materials
Naval Research & Development
Missiles
Combat Vehicles & Engineering
ADE ADRDE CABS CEMILAC
Aeronautics
DRDO
DG Aero
DRDO Family
ADA

• Founded on 5th Jan 1959
• Started as DRDO Aero base in Bangalore
• D&D of unmanned aerial platforms
•Engaged in Combat Aerial systems since 90’s
• Multi-disciplinary
•ISO 9001 : 2008
About ADE
UAVs targets UAV surveillance
Flight Simulators
LCA • FCS • Cockpit Display
Thrust Areas

Aerodynamics •Configuration design including WT Models, propellers etc
Structures •Airframe design, analysis, composte fabrication and structural testing
Propulsion •Propulsion system integration including fuel management
FCS & Simulation •DFBWFCS, FCC, SW, HILS, PILS, CDS & Flight simulation
FTTT •Tele-command, tracking, telemetry, GCS
Payloads •Gimbal assembly, image exploitation etc.
Systems •System engineering, system design & configurational management
Integration •Air vehicle integration, flight testing
ADE: The Core Technologies
Aero - Mechanical
Flight Controls
Avionics
System Design Mosaic
Aero - Mechanical
Flight Controls
Avionics
System Design Mosaic
System Design Mosaic

ADE Project Management
Industry Participation
Academica Participation
ADE Involvement
Judicious Mix
Product designed
at ADE
+ -
Manufacturer
+ +
Incremental Technology required to achieve
desired product
Technology already available at ADE
Technology Development
Transfer of Technology
To User Desired Product by User
Product Loop
Technology Loop
ADE: The Collaborative Paradigm

1959 1990 2000 2010 2020 1960 1980 1970
HOVERCRAFT
MT PTA
CADS
LCA FCS
NISHANT
SIMULATORS
SIMULATORS
UCAV
MCA FCS
SOLAR HALE
LAKSHYA & NISHANT
VARIANTS
RUSTOM-II
ATR
MAV
RUSTOM-1
KAPOTHAKA
ADE: 50+ Years of Fascinating Flights

Uninterrupted Surveillance on Area of Interest Spy satellites provide episodic coverage of area of interest, whereas UAVs have high battlefield persistence
One UAV for every 175 Manned aircraft
One hour of UAV for every 300 hrs of manned flight
CURRENT STATUS
This ratio will increase tremendously in future
USPs of UAVs The 3 Ds
Can work on high threat survivability environment
Can stay on-station far longer period
Can perform evasive maneuvers (High g’s- UCAVs)
Reduced size and weight - lower operating and unit cost
Why UAVs

Intelligence, Surveillance and Reconnaissance (ISR) The ability to gather accurate and timely information
on enemy forces is an essential enabler of modern military operations with “network centric” war fighting concepts, the importance of accurate and timely information will grow

UAVs possess the capability to provide long-dwell surveillance by loitering over targets of interest for extended periods of time. Moreover, high-flying UAVs can act as ”a poor man‘s satellite‘ by providing a high altitude (40-60K‘), look-down perch for sensors to scan targets of interest
UAVs have the advantage over satellites in that they are more easily retasked, reconfigured, and upgraded to take advantage of different payloads or new sensor technology
satellite orbits are predictable--allowing adversaries to anticipate satellite surveillance, whereas UAVs have greater ability to alter their flight paths and coverage
UAV vs Satellite

Commands Corp
Division Brigade
Battalion Company Platoon Soldiers
WAR THEATRE THE STAGE & THE ACTORS
War Commander
Land Systems Aero Systems
Supports to Land & Naval systems
Combat Platforms
Space Based Directed Energy Weapons(DEWs)
Manned UCAVs
Intelligence Platforms
UAVs Aerostats Space Based Satellites
Naval System
12

UAV FOR EVERYONE
Commands
Corp
Division
Brigade
Battalion
Company
Platoon
Soldiers
The UAV Roadmap

Reconnaissance Surveillance and Wide Area Aerial surveillance(WAAS) Target Acquisition Artillery fire correction – DOOAF Battle field Damage Assessment- BDA NBC monitoring Land mine detection Elimination of unexploded IED and land mines Battle field situation awareness and understanding Illumination of targets by laser designations Psychological impact on militants Combat roles- SEAD/DEAD Swarms and Electronic intelligence
Unmanned System – Military Tasks

UAVs Applications- Civil • Aerial photography • Agriculture • Coastguard • Conservation • Customs and exercises • Electricity companies • Fire Services and Forestry • Fisheries • Gas and oil supply companies
• Information services • Local authorities • Meteorological services • Traffic agencies • Oil companies • Ordinance Survey • Police Authorities-CRPF • Rivers Authorities • Survey organisations • Water Boards
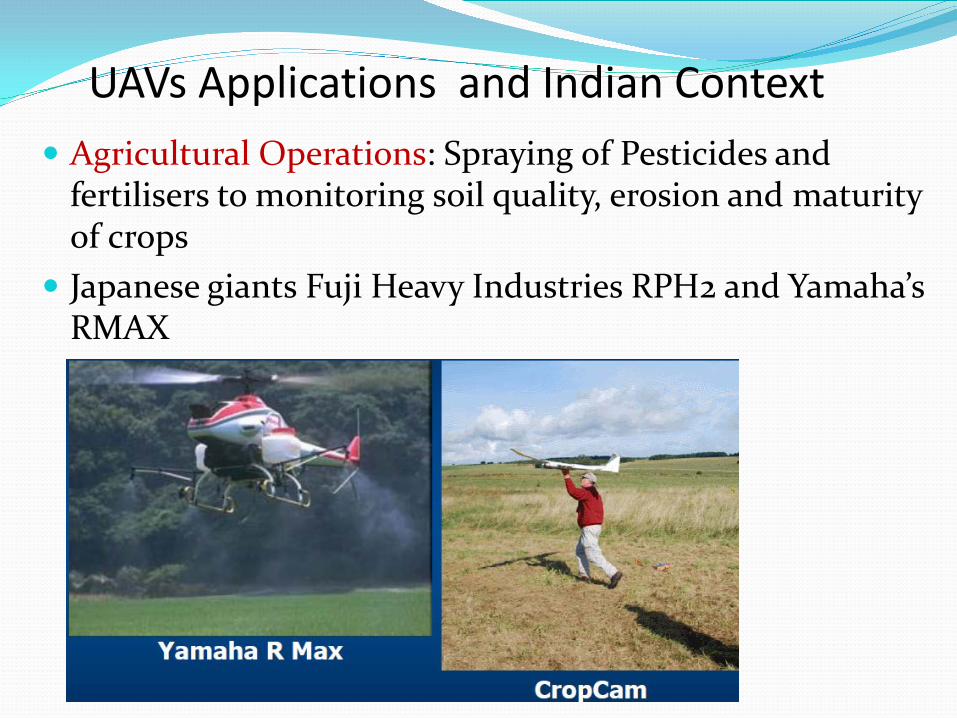
Agricultural Operations: Spraying of Pesticides and fertilisers to monitoring soil quality, erosion and maturity of crops
Japanese giants Fuji Heavy Industries RPH2 and Yamaha’s RMAX
UAVs Applications and Indian Context

Forest and Wildlife: Netra UAV (IdeaForge-DRDO) for tracking a killer leopard in Uttarakhand, for the tiger census Monitoring the situation in riot hit areas
UAVs Applications and Indian Context
Mapping and Monitoring: Garuda Robotics-Pulkit Jaiswal, Delhi
High-end software and algorithms – customising specific tasks like monitoring green cover, 3D mapping, meteorology, ecological audit and soil quality testing
During the Sept 2014 Kashmir floods and 2013 June flash floods in Uttarakhand- NDMA(National Diasater Management Authority) deployed four UAVs to scan ,rescue and reilef work
Panna Tiger Reserve in Madhya Pradesh
UAVs Applications and Indian Context

Law and Order: UP is one of the more proactive Indian States to deploy drones and UAVs to monitor sensitive communal situations, spray pepper powder, phosporous element
Ramadam Procession- Lucknow Kumbh Mela 2014- Networked drones Ganesh Chaturthi Processions- Mumbai Police Anti-Moist Operations- Nishant UAV Demonstration at
Jagadalpur, Chattishgarh Coastal and Maritime Security – Rustom-1 Demonstration
at Rameshwaram, Tamilnadu
UAVs Applications and Indian Context

Design Philosophy for UAV

COMPARISON : MANNED AND UNMANNED AIRCRAFT
IF UAV STRUCTURES ARE COMPARED TO STRUCTURES OF MANNED AIRCRAFT, FIRST OF ALL THE WEIGHT
CLASS OF THE VEHICLES AND THEIR FLIGHT ENVELOPE SHOULD BE SIMILAR

GENERAL DESIGN REQUIREMENTS
Design for UAV essentially follows the same rules as for Manned Air Systems but
Requirement s may be narrowed down or relaxed because No safety requirements for crew / passengers Specialised usage Possibly restricted flight areas Small fleets of aircraf Orientation to all composite structures ( fatigue , corrosion ) Autonomous Flight Control Systems
Requirement s might be more demanding because there is no pilot intelligence Bird strike, icing, lightning CAT 2 & 3 Certification ( flying over populate area / civil airspace)

REQUIREMENTS CAPTURING To really make UAVs cheaper, it is important not to overload specifications Detailed analysis of cost against performance has to be established. Spiral development cycles will provide faster to operational service with less than optimums but steeper learning curve with closer link between field experience and design upgrades Role change or atleast adaptation –. Spiral Development is possible even if the requirements for certain future capabilities cannot be formulated at the time being Leads to a more rapid procedure to put air vehicles into service and profits by future technological developments Constantly developing avionic equipment and varying requirements for mission make UAVs a favourable candidate for spiral development

TYPICAL REQUIREMENTS / GUIDELINES
Structures General MIL – Spec. A-886X and A – 83444 Series CS 23 and CS 25 (Tailored) DEF STAN 970 LTF 1550 – 001 , Issue 1 USAR 3.0 Composites FAA AC 20 – 107A “Composite Aircraft Structure” (FAA Advisory Circular) MIL – HDBK 17 (only Composite – mil / civil) German Guidelines (comparable to FAA AC)

REQUIREMENTS : MALE / HALE
Low Speed – Cruise Speed of 125 – 150 kmph Sailplane like transport aircraft attributes Mission Altitude – (< 35,000 ft for MALE and > 35,000 ft for HALE UAV) Long Endurance > 20 Hrs Low maueuvre load factors and low roll velocity Structural Design driven by Gust conditions Geometric Design driven mission payload requirements Fatigue Requirements – High sortie per year & Life time > 20 years

REQUIREMENTS : URAV
Low Altitude mission ≥ 1000 ft Subsonic flight envelope More agile air systems increase of g and roll velocity compared to MALE / HALE Structural design driven by maneuvre loads Geometric design driven by payload requirements Fatigue Requirements – Low sortie per year & Life time > 20 years Combat capability – External stores / internal weapon bay / small weapons Stealth Requirements – RCS , IR ?

REQUIREMENTS : UCAV
Design for - Subsonic / Transonic / Supersonic Flight Envelope - Multi Functional Structures , Morphing Structures Agile Air Vehicle - Equivalent to Manned Fighter Aircraft - Even higher agility is required Geometric Design is driven by Mission Performance High Combat capability - External weapons and / or Internal Weapon Bay Fatigue Requirements - Very Low Sortie Rate pr Year - Use of UCAVs in War times only - Fatigue loads in short period during war missions and storage requirements Stealth Requirements – RCS , IR ?

SPECIAL CONDITIONS
Bird Strike Ensure that bird strike does not affect the integrity of the structure (like wing tank) or impair functionality (Equipment) Lightning strike Protect structure and equipment against lightning strike Use copper foil or copper mesh an electrical bonding Icing Icing spoils aerodynamic characteristics and may lead to loss of air vehicle Deicing capability will be required in many regions Fluid or electrical deicing required

DIFFERENCES : MANNED / UNMANNED AV
Crash Conditions Manned aircraft are designed to crash conditions (attachment of Ejection Seat, Cockpit, Fuselage Fuel Tank, Bulkhead etc) Not applicable for UAV as it involves no pilot Protected Envelope FCS has to control UAV to reach a comparable level of safety as for manned systems - flying over populated areas Transport by Land , Air and Sea Normally not necessary for manned systems but unmenned systems (upto intermediate size) will be transported close to operation area. Use of UCAV primarily in war times Long term storage necessary Storage time and storage requirements (maintenance ) to be defined

MODULARITY
UAVs operational requirements may change fast. Hence, the modularity is always a major design aspect.
Modular payloads for easy change from one mission to other Replacement of internal weapon bay for a payload bay. Modularity to solve the obsolescence problem (Electronics, Sensors) Modularity may also be a means to change the airframe performance characteristics Modularity of structural components as prerequisite for easy transportation Storage time and storage requirements (maintenance ) to be defined
INTEGRATION OF SENSORS & ANTENNAS Possible next generation integration aspects - Conformal Load Bearing Antennas - Radomes included in load carrying structures - Shape / Vibration control of antennas (Beam steering , sidelobe level) - Thermal management problems from embedded electronic sub systems - Structural / System health sensing systems
Possible consequences on system level - Integration of production shop environment & sensor clean room - Combined qualification concepts on sensors & structures

TRANSPORTATION / MAINTAINABILITY
Assemble / Disassemble Size limitations of Transport vehicle are limiting factor Transports add design load cases to load envelope of structure and system layout Usage of standard containers ( 40 ft containers) Clear hoisting and jacking concept including emergency conditions during transport Convenient mission payload maintenance ( special compartment and / or container) Easy access to panels, bays, system interfaces.

System Configuration Unmanned
System
Mission Unmanned
Aerial Vehicle
Ground Support System
AGCS
ALRS
GDT
Power Suppl
y Logistic
s
EO/SAR/ ESM/STILL
CAMERAS/ADR
Payloads

UAV AUTONOMY LEVELS WAY TO GO
34
Level - 10 : Fully autonomous systems Level - 09 : Group strategic control Level - 08 : Distributed control Level - 07 : Group tactical goals Level - 06 : Group tactical replan Level - 05 : Group coordination Level - 04 : Onboard route replan Level - 03 : Adapt to flight and failure conditions Level - 02 : Real Time health diagnosis Level - 01 : Remotely Guided Level - 00 : Remotely Piloted
Source :
M.Suresh and D.Ghose, “ Role of information and communication in redefining UAV autonomous control levels”, Proc. IMechE, Vol.224, Part-G:Journal of Aerospace Engineering, pp. 171-197 DOI: 10.1243/09544100JAERO606
Solo
Aut
onom
y G
roup
Aut
onom
y
Source :
UAS Roadmap (2005-2030) by DoD, USA

UAV Development Phases

Products

Over 70 nos. produced and successfully flown
•Air launched target for SAMs
•Speed: 0.7M
•Altitude: SL to 9 Km
•First flight: 1974
•Flight time: 5 to 7 mins
•Feature: Fire and Forget
ULKA Air Launched Missile Target/Drone
The Early Birds
•All up weight: 130 Kg
•First Flight: 1986
•Endurance: 90 min
•Payload: TV & Panaromic Cameras
Successful demonstration of Take-off, Para recovery & GCS
KAPOTHAKA Mini RPV Demonstrator

Products (1) Lead Specs •Zero Length Launcher/ Booster assisted •First Flight: 1986 •Speed: 0.5 to 0.7 M •Altitude: 9 Km •Payload: 2 Tow targets •Endurance: 50 minutes •Three axis autopilot •Analog implementation •GCS command •Recovery: Parachute (Land & Sea)
Used by all 3 Services 42 nos. delivered & more on order
Lakshya-2 completed field evaluation
LAKSHYA Pilotless Target Aircraft
Upgrade Vision
Higher endurance (90 mins) with STFE
Weaponization (2 x 45 kgs; pylon mounted)

Products (2) Lead Specs
•Day/ Night Reconnaissance
•First Flight: 1995
•Launch: Mobile Hydro-Pneumatic
•Altitude: 3600m AMSL
•Flight Endurance: 4 ½ Hrs
•Command Range: 175 Km (160km)
•Recovery: Parachute/Landing Bags
•All up weight: 370 Kgs
4 nos. already delivered to Army
NISHANT Multi Mission Tactical UAV
Upgrade Vision
Wheeled & hybrid versions
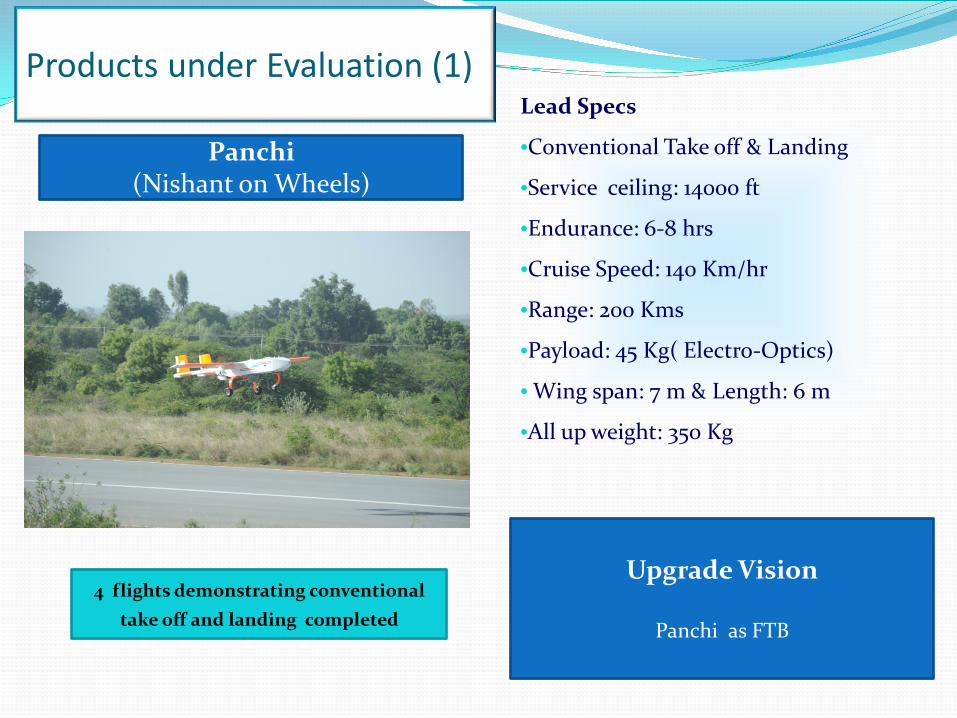
Products under Evaluation (1)
Panchi (Nishant on Wheels)
Lead Specs
•Conventional Take off & Landing
•Service ceiling: 14000 ft
•Endurance: 6-8 hrs
•Cruise Speed: 140 Km/hr
•Range: 200 Kms
•Payload: 45 Kg( Electro-Optics)
• Wing span: 7 m & Length: 6 m
•All up weight: 350 Kg
4 flights demonstrating conventional take off and landing completed
Upgrade Vision
Panchi as FTB

Products under Evaluation (2)
RUSTOM-1 Short Range UAV
Lead Specs
•Conventional Take off & Landing
•Service ceiling: 25000 ft
•Endurance: 12-15 hrs
•Cruise Speed: 150 Km/hr
•Range: 250 Kms
•Payload: 75 Kg( Electro-Optics)
• Wing span: 7.9 m & Length: 5.1 m
•All up weight: 750 Kg
Max endurance of 10 hrs & altitude 20,000 ft achieved through ∼ 50 flights
Demo Flights for Navy and Coast guard completed

Products under Evaluation (2)
R1 with Helina Missiles Status: Taxi trials completed
Upgrade Vision
Weaponization (2 x 50 kg HELINA)
GPA Mk-IV ver 1.0 MREO Gimbal (GPA Mk-V))
R1 with Gimbal Mk –V with capabilites of laser designator and increased range and altitude of operation
R1 with variable pitch propeller for increased endurance

Few other Products under Evaluation
Mini & Micro UAVs
Controlled Aerial Delivery System (CADS)
LCA (Mk-I)
Flight Control Systems
Cockpit Display System
Head-up Display
Pilot Mental Workload Evaluation Simulator (PMWLES)
Computerized Pilot selection system (CPSS)

Products under Development (1)
Upgrade Vision
Weapon integration
HALE First Flight Nov 2016
RUSTOM-II MALE UAV
•Lead Specs
•Conventional Take off Landing
•Service Ceiling: 32,000 ft
•Endurance: > 24 hrs
•Cruise Speed: 150 Km/hr
•Range: >200 Kms
•Payload: 350 Kg (Electro-Optics, RWR, IFF, SAR, MPR, ELINT, COMINT etc.)
Wing span: 20.6 m Length: 9.5 m AUW: 2400 Kg
Products for Future (1)
Upgrade Vision
UCAV
Conceptual design completed (partner with ADA)
Unmanned Strike Aircraft Lead Specs •Range : >2000 km •Max Speed : 0.8 Mach •Endurance : 3-4 hrs •AUW: 11 / 14 tons •Service Ceiling: 11 km •Payload : 500 / 1000 kg

Products for Future (2)
Upgrade Vision
RUAV (10 kg class)
NRUAV (2 ton class)
Comprehensive project proposal in joint collaboration with HAL and IIT – Kanpur sanctioned for “Autonomous Rotary Aerial Vehicle (RUAV 10 Kg)”
Rotary UAV
VTOL UAV flying in any direction
RUAV NRUAV
Solar powered UAV and other Non-conventional energy sources to power UAVs: Initiatives in ADE
•Ground demonstration completed •25-30 watts harvested during peak hours of solar radiation •All on-board avionics powered using solar power •MPPT allows Li-Po battery to be charged in-line •One prototype ready for flight trial
Endurance enhancement for Indian Eagle (IE) Fixed Wing Mini UAV

Development of Solar Mini UAV Objective
Solar powered Mini UAV with large wingspan to harvest sufficient solar power Use most of the technologies/systems proven using Indian Eagle prototype Achieve enhanced endurance to the order of 24 hours
Development Plan (Split into two phases: Phase I & Phase II) Phase I
Development of Mini UAV prototype with 6m span wing Characterization of solar power harvesting system via ground & flight testing Demonstrate enhanced endurance of 12 hours using harvesting solar power
Phase II Demonstrate endurance to the order of 24 hours
Status Development of Conops of Solar Mini UAV Finalization of weight budget and airframe geometry & performance
requirements Study of UAV power requirements v/s power harvested using wing solar panels

Challenges for UAVs in future Interoperability: To maximize potential Unmanned
Systems must be capable of operating seamlessly with each other & with manned systems across the air, ground & maritime domains
Autonomy: Future UAVs will be more autonomous and capable of detection, identification and execution of target.
Communications: Significant improvement in communication transmission efficiencies; better bandwidth efficiencies; transmitter and receiver efficiencies; and in size and weight of communication systems (which require less power, and provide more efficient cooling to operate) is desired

Challenges for UAVs in future (contd..)
Propulsion and Power: UAVs are propelled by combustion engines which are powered by, jet engines, electric systems etc. Future UAVs will have fuel cells, solar power and hybrid power systems for longer operations.
Man-Unmanned teaming: Centralized command and control is required to ensure functional integration (Intel, ops & communications) that synchronizes manned-unmanned aircrafts operations is the need of the hour.
Airspace Integration: As the UAV usage increases they have to be integrated in existing civil and military airspace.

Aero-mech. Core
• Aerodynamics • Propulsion • Structures
• Others
FCS Core • DFCC • Sensors
• Actuators FCS • RTS
Avionics Core
• AED • Power supply • Mission
Computers • Avionics

The Eyes in the Sky
X
RUSTOM-2 (MALE UAV) Altitude: 10-11 Kms AMSL Footprint:10-11 Kms
NISHANT Altitude: 3-4 Kms AMSL Footprint: 3-4 Kms
Micro Air Vehicle Altitude: 100-200 m AMSL Footprint: 100-200 m
Foot
prin
ts o
f UAV
Imag
es
UAVs
in R
econ
naiss
ance
Miss
ions
RUSTOM-1 Altitude: 7-8 Kms AMSL Footprint:7-8 Kms

AERONAUTICS @ 2020 THEN & THEREAFTER
2020
Then
LCA Variants
AMCA
UCAVs
Solar UAVs
MALE & HALE UAV Variants
Aerostat
SSCV Variants
AEW&Cs
Thereafter
Manned Aircraft???
Networked UAVS & MAVs of Autonomy
Level 4+
UCAVs (Stealthy & 8g maneuverable)



28-06-2017
1
FUTURISTIC RESEARCH ON MICRO AND NANO UAV
Lt Gen (Dr) V J Sundaram, PVSM, AVSM, VSM, (Retd.)INAE / NDRF (IEI)
22 March 2017
Conference Emerging Technologies and Applications of UAVs
INAE Jain University
Venue International Institute for aerospace Engineering and
Management , Jain University
Disaster Management & Response
- Fire
- Floods
- Explosions
- NBC/Explosive/Mine - Detection
- Earthquakes
- Landslides
- Gas Leaks
- Search & Rescue
Security
- Surveillance
- Recce
- Communication Relay
- Explosive /Mine detection
- Riot Control
CIVILIAN APPLICATIONS OF UAVs
Civil Governance, Commercial
- Agriculture, Survey, Mapping
- Monitoring Crowds, Stampedes, Illegal Mining, Intruders
- Traffic Control
- Photography/TV/ Cinema
Research & Development- Evaluation of new concepts
- Fusion of GPS & IMU
- MAV Traffic Management
- Detection of Unauthorized/ Hostile MAVs by CivilianAgencies and Police
Damage
Assessment

28-06-2017
2
Miniature Air Vehicle (MAV) Family
Can Provide Links
Mini Air Vehicles 1500 mm
Micro Air Vehicles 300 mm
DARPA (PalmTop) 150 mm Nano Air Vehicles 25 mm
Types - Fixed Wing- Rotary Wing- Flapping Wing
MISSING LINKS
Links to Tahsildar / Control Centre
MINI / MICRO / NANO AIR VEHICLES
Sl.
No
Item Mini Air
Vehicle
Micro Air
vehicle
Nano Air
Vehicle
1 Max. Dimension (mm) 1500 300 75
2 All UpWeight Max. 4 - 7 kg 350 gm 25 gm
3 Payload (gms) 300 - 500 40 - 60 3
4 Range (km) 10 - 12 1 - 2 0.2
5 Endurance (Mins) 30 - 60 5 - 30 2
6 Altitude (m) 200 - 350 50 - 150 20
SYSTEM STUDIES

28-06-2017
3
CYBORG
Hostage Building
Mine
Hide
Obstacle
Participants Australia, France, Germany, Japan,
India (NAL, IIT-B, NDRF -Consortium) Netherlands,
Spain, USA
1st US - Asian Demo for
Micro Air Vehicles-Agra, March 2008
AIM -Demonstrate MICAV Techys
- Identify Working Groups
MISSION: Search & Rescue Hostages
Held By Terrorists
Max.Size of Micro Air Vehicle
Fit into 300 mm sphere
Sponsors
USA - Army, Navy, Air Force
India - CSIR, DRDO
Overall Coordination - NAL
Local Organization - ADRDE (DRDO)
Networking - NDRF
1.2 km
Control
Centre
2008
AGILITY ACROSS INTERNATIONAL BOUNDARIES

28-06-2017
4
Mini Air Vehicles Autonomous Touch down (Landing)
7 Aug 09
DC
View of the tent house, and vehicles at site. (Vehicle 230m Above Ground Level )
DC 7 Aug 09

28-06-2017
5
Idea ForgeNAL
Tatas
SP,
Kolar NDMA
Director
ADE NDRF
7 Aug 09
MAV Demo (Kolar) to National Disaster Management Authority
Aurora Systems DC
EnterprisesNDRF
MAV Demo (Kolar)
Other Institutions : Swallow Systems , GujaratSpeck (Hyderabad), Sree Sai Aerotech Innovations Pvt Ltd · Chennai

28-06-2017
6
1. Fixed Wing, 300mm & 150mm
2. Rotary Wing, 300mm
3. Flapping Wing, 300mm, 150mm, 75mm
4. Entomopter
5. Swarm Operations
6. Cooperation with unmanned surface and
submerged vehicles {R&DE (Engrs),
VRDE, CVRDE, NSTL, NIOT}
National Programme - Micro Air VehiclesDRDO & DST 2010-2016
GOALS
PROGRAMME CENTER - ADE
Programme Director : Shri V. S. Chandrasekhar
1. National Aerospace Laboratories (NAL)
2. Indian Institute of Science (IISc)
3. IIT (Bombay)
4. IIT (Kanpur)
5. National Design & Research Forum (Consortium),
- The Institution of Engineers (India)
• Anna University Coimbatore• Jain Group of Institutions• MS Ramaiah School of Advanced Studies (MSRSAS)• Jawaharlal Nehru Centre for Advanced Scientific Research• Institute of Robotics & Intelligent Systems (IRIS)• National Centre for Biological Sciences (NCBS)• bigtec Pvt. Ltd• NDRF Project Center
Project Centers :

28-06-2017
7
National Flying Competition for Micro Air Vehicles
(8 - 11 January 2014) : 11 Teams
Shelter
Base
Micro Air Vehicles to enter shelter and send pictures
Successful Teams
1. DC Enterprises &
Drone Aerospace
2. IIT Bombay
3. NDRF
4. ADA
Fig 12

28-06-2017
8
Years 1 2 3 4 5
Collaborative Missions
Swarm Control
(Relay Control Drone)
Flying
Competition
Air-Air,
Air-Grd
NAL, ADE, NDRF (C), IISc, IITsFlight Demo
Naval Link
RDE, VRDE, CVRDE, CAIRArmy, Navy, Air Force
Indian Missions done for Civil Governance1. Uttarakhand Floods Idea Forge
2. Chennai Floods MIT Chennai
3. Illegal Mining (Karnataka) DC Enterprises
4. Granite Mining MIT Chennai
5. Tower Inspections MIT Chennai
6. NETRA (for Explosive Disposal) Idea Forge/R&D Engs
7. Traffic / Crowd Monitoring by Police ADE, NAL
8. Aerial Photos (Sravanabelagola) NAL
9. Bhimavaram (Agricultural Applications) NDRF
10. Emergency Medicine Delivery (Concept) Throttle
11. Organ Transplants (TPT Concepts) NDRF / IISc/Agragami
Surveillance for Army (Global Tender) Idea Forge
Defence
EXAMPLES

28-06-2017
9
Scope – Service to Govt. Departments• Videography• Orthomosaic 2D Maps
Cameras & S.W Analytics
• Surface Models• 3D Models (VR)
Point Cloud Technique
• Forest Fire• Human Movement• Illegal Activity – Poaching• Rescue• Power Lines condition
Thermal Sensors to indicate hotspots and heat maps
• Vegetative Index• Soil Moisture• Weed & Pest Infestation• Other Crop Health Parameters
Multi-Spectral & Hyper Spectral Sensors
• Monitoring People, Activity Loitering, People count color based tracking, Vehicle Movement
Aerial Images & High endanalytics
CURRENT CHALLENGES
1. Vision Based control, Navigation & Guidance for exploration of enclosed spaces, Caves, Tunnels
2. Location of persons trapped under landslides and collapsed buildings
3. Detection of explosives & other Hazardous Material, buried underground or hidden
TECHNOLOGIES• Integration of Micro, Nano, Bio, Info & Cogno• Brain like Computing• Sensors• Biological Networks• Brain Computer Interface• Cyborgs

28-06-2017
10
SPECIFIC NAV MISSIONS
Intelligence, Search & Rescue (ISR)
• Inside buildings
• Caves
• Tunnels
• Jungle
Transmit Images - Dormant
- Perched
- In Flight
Detect - Movement
- NBC Toxins
- Noise
• Trapped Persons
- Collapsed Buildings
- Landslides
Building Collapse, Bellandur, Bangalore, Oct 2016
Police Dog trying to locate Survivors
Inspector waiting
to give decision

28-06-2017
11
Futuristic Research ProjectsMicro-Nano UAVs
Nano UAV application Projects for Civil Governance (Societal Applications)
1. Emerging Technologies2. Future Technologies
NANO AIR VEHICLESSize (mm) Flight time (Mins)
1. DC Enterprises (Bangalore) 200 12
2. Aerovironment (Humming bird) 165 11
3. DC Enterprises (Bangalore) & 125 05
Dr. Sanjay Sane, NCBS
4. Del Fly (Micro) 100 04
5. DC Enterprises (Bangalore) 75 02 (Estimated)
• Flight duration limited by current Li-ion/LIPO Batteries
• Alternate Power Sources
Fuel Cells - Microwave power - transmission - Ni-23 radio isotope
200 175 Size 150 (mm) 125 100 75
1210
8642
TimeMins

28-06-2017
12
SMELL / ODOUR
Food Safety Engineering Program
Richard LintonPurdue university
Arun Bhunia Food Science
Rashad Bashir
Electrical Computer, Biomedical
Michael Ladisch
Biomedical Agricultural, Biological
Micro, Nano, Biotechnology, Biomimetics
Mating silicon Computer with Biological Proteins
MICROFLUDIC BIOCHIP
Advanced Sensors to detect dangerous microorganisms and bacteria that contaminate Foods.
Quality Control Applications : Standard Chip with 38 Sensors

28-06-2017
13
INSECT AND ANIMAL SENSORS
1. Bees & Wasps – get distracted by other nectars2. Dogs – well known & utilised3. Rats
- More Functional genes in Olfactory system than any other mammal
- Noses closer to ground than dogs where Vapour Pressure Highest Wind Speed Lowest
- Can go to areas inaccessible to dogs
• Columbia – Also trained rats for detection of Explosives & Land Mines
• National Centre for Biological Sciences (Bangalore) Dr Bhalla - Worked on Rats - pursue further
FROGS CAN SEE COLOURS IN THE DARKUnique in having rods in the eye with different
sensitivities
Ref: Philosophical Transactions of the Royal Society B: Biological Sciences.
The Hindu : 2 March 2017

28-06-2017
14
AFRICAN POUCH RATS Trained by Bart Weetgens
2400 mines detected in Mozambique
• APOPO – Belgium NGO trains the rats in specific areas / environment • Accredited against International Mine Action Standard (IMAS)• Team of 34 rats & 50 persons used in Gaza• Supported by Govts of Belgium and Tanzania, Antwerp University
and UNDP
A Physical / Biological System for use in Society
POWER
TARGET ITEM
SENSORHW
MECHANICALELECTRICALOPTI CALACOUSTICCHEMICALBIO
PROCESSINGHW CCT SWMECHANICALELECTRICALCHEMICALBIO
DISPLAY
MECHANICALELECTRICALOPTI CALACOUSTICBIO
CONTROLCCT
HW SW
MECHANICALELECTRICALBIOSYSTEM LEVEL
- Micro, Nano and Bio Technologies - Complementary
- Knowledge of all three - Essential
SYSTEMS

28-06-2017
15
MICROSITAR, SCL
Nano-IISc, IIT(B)
Info
Cogno Bio
•DNA Computers• Proteins - Detectors
- Memories
Cell Phone Technology
Blue tooth, www
Sensor
Brain
Interface
Quantum Devices
• Wells - Detectors/ Lasers• Dots• Computers
Carbon
Nano Tubes
ADE,CAIRPvt. Companies
CCMB NCBSDEBELDRDEBigtecIISc
IISc, IITs, Acad/PvtNational Brain
Research Centre-CAIR, NIAS, DEBEL
IISc – Private IITs - Public
Academic
GovtPvt
Acad Lab
Govt / Lab
INTEGRATION OF MICRO-NANO-BIO-INFO-COGNO TECHNOLOGIES
IIT-M, DMSRDE
SyntheticBiologyNCBS
IISc, IITs
INERTIAL MEASUREMENT UNIT & CONTROLLER
IMU & CONTROLLER
(for Micro Air Vehicles)
Now < 50 gms
Required Single Chip Solution < 5 gms)
MEMS AccelerometerImported :
(RCI , BEL)
MEMS GYRO• Imported
• RCI
GPS
(ASIC)Nav. Solution
Processor
(TI/ADSP)
Controller
System Engineering
& Interfacing
ADE
Coral - NAL
Idea Forge (IIT-B)
Whirly Bird
(IIT- Kanpur)
Drone Aerospace
DC Enterprises
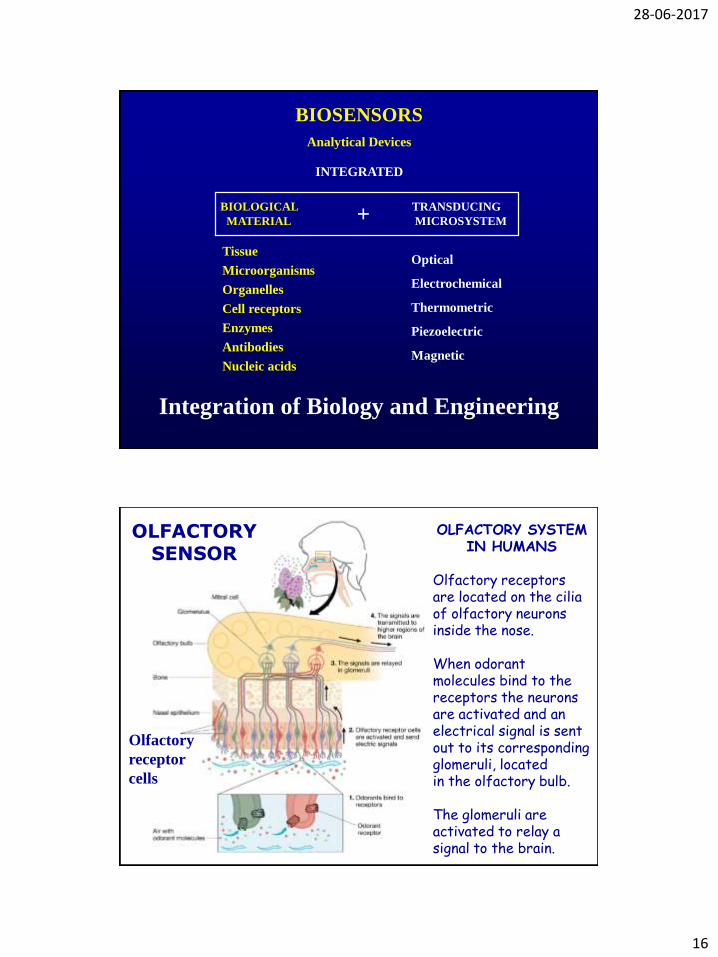
28-06-2017
16
BIOSENSORS
INTEGRATED
BIOLOGICAL TRANSDUCING
MATERIAL MICROSYSTEM+
Tissue
Microorganisms
Organelles
Cell receptors
Enzymes
Antibodies
Nucleic acids
Optical
Electrochemical
Thermometric
Piezoelectric
Magnetic
Integration of Biology and Engineering
Analytical Devices
OLFACTORY SYSTEM IN HUMANS
Olfactory receptors are located on the cilia of olfactory neurons inside the nose.
When odorant molecules bind to the receptors the neurons are activated and an electrical signal is sent out to its corresponding glomeruli, located in the olfactory bulb.
The glomeruli are activated to relay a signal to the brain.
OLFACTORYSENSOR
Olfactory
receptor
cells

28-06-2017
17
Enzyme Biosensor
Superoxide Dismutase
Activation of Guanylyl Cyclase with Nitrc Oxide sets off a cascade of reactions leading to chemiluminescence
Reproduced using commercially available proteins
Woldman et al, Free Radical Biology and Medicine, vol 47, pp 1339 – 1345 (2009)
NDRF
Dr. Muralikrishna Reddy
Mrs. Prasanthi . B
IISc
Dr. Manoj Verma
Abexome
Dr. Manjula Das
Data for 1.5pM (equivalent to 0.5ppb) Nitric Oxide Delivered
0
100000
200000
300000
400000
500000
600000
0 200 400 600 800 1000 1200 1400
Series1Nitric oxide introduction
Rel
ativ
e L
um
ines
cence
Unit
s
Time in seconds
Basal Activity of Enzyme in the Absence of Nitric Oxide
Increase in Luminescence after introduction of nitric oxide
Device - bigtec

28-06-2017
18
BRAIN LIKE COMPUTING Europe : Human Brain Program (HBP)Furber – SPiNNeker – DigitalMeier – Spikey – AnalogIndiveri – Neuromorphic – Chip
USA DARPA’s SYNAPSE HRL & IBM
Systems of Neuromophic Adaptive Plastic Scalable Electronics
Goal – Computer with Form, Function & Power Consumption similar to Mammalian Brain
Create – 10 billion, Neurons, - 100 Trillion Synapses
Fabricate - Multi-Chip Neural System & Instal in Robot
HRLMemristor – Resistance depends on past states.
Used to mimic synapses in a brain
Srinivasa – Memristor Array Integrated on CMOS Chip - Low Power
- Memory & Logic Units same (Like Brain Neural Circuit)
- Density – 30 G bits/ cm2
- Hybrid Cross bar/CMOS Arrays System–Store 1600 Pixel
- Scale Chip to Support Emulations of Images• Millions of neurons• Billions of synapses

28-06-2017
19
IBMPrincipal Investigator – Narendra ModhaInternational Joint Conference on Neural Networks
August 2013 at Dallas• Neurosynaptic Core – Neurons (1272 gates)
- Synapses- Dendrites- Axons
• Data from Sensors analysed by parallel Algorithms• “Corelets” developed by IBM for Neurosynaptic functions
Eg: Motion Detection• Corelet Language likened by Modha to FORTRAN will be
used on IBM’s Cognitive Computers• Corelets available in Corelet Library- Eg:Optic Flow
(used by Insects)More will follow
Special Silicon
Circuits
NEUROMORPHIC ARCHITECTUREAndrew Nere, Umberto Olcese, David Balduzzi, Giulio Tononi - May 2012
(Other contributors Dharmendra Modha and Steve Esser)
RETINA
AttentionDecision
100
16

28-06-2017
20
TUMBLEWEED - Autonomous Spherical Robot Multimodal Sensing
• Image & Sound• Including Microphone
& Speakers Deploy in Disaster area
for Search & Rescue Identify persons in need Communicate
- Vision- Hearing- Smell- Touch- Taste
Probably enable seeing a seene / object/event more holistically and make operation of unmanned intelligent systems easier.Eg - Vision based control, nav & guidance without a human in the loop
IBM
5 in 5(Senses) (Years)
IBM NATURE
BIOLOGICAL NETWORKS
Neural Networks Cultured using control tissue (fromRat brains). Their computational capacity & leaningbehaviours studied using (8x8) Multi-electrode Array(MEA) by Kevin Warwick
- Simulation done using MATLAB
- Closed Loop system Created between Cultured neuralN/w and a Mobile Robotic Platform
- Actual experiments performed to avoid a wall
- 50% success compared to Simulation
- Better model to be developed
- Similar feasibility studies initiated with Prof. Sikdar& Prof. Amruthur Bharadwaj at IISc.

28-06-2017
21
Motion
EncoderSonar 200 µm
Mobile RobotMulti Electrode Array
(MEA)
Center of
Array
x 4
Neuronal Cells
close to Electrode
x 40
Robot With Neuronal Controller
K. Warwick et al (Univ of Reading)
DSJ January 2010
Online Experimentation
Communication over LAN. Server deals
with robot movement commands and
sensory data acquisition, off-loading some
processing load of the system. Simulator
and spike detection client communicate
with robot client, providing a closed-loop
link between culture/robot.
Offline Analysis (incl. online capabilities / “Mex” files
Simulator
Program
( C++)
MEABenchRobot Data
Acquisition
Client (C ++)
Connectivity Layout
Bluetooth
Miabot
Receiver
Bluetooth
TC
P/I
P S
ock
ets
Robot Server (C++)
VirtualSerial Port (nfcomm)
WebrotsRobot Server
(C++)
TCP/IPClient
ROBOT NEURO SYSTEM

28-06-2017
22
BRAIN MACHINE / COMPUTER INTERFACE
• Brain Machine Interface projectinitiated by NDRF funded by DRDOto IISc and National BrainResearch Centre, Manesar
• EEG signals used by Prof. Bin He’sGroup University of Minnesota toFly Quad Copter
• EMG signals used in a Thought based control project(AR&DB) by Sanjiv Sambandham, IISc and MaheshJayachandra, NDRF for application to Micro air Vehicle.
• BCI work being done at DEBEL
Mind Controlled Drone

28-06-2017
23
BUMBLEBORG
(SIGMA – Concept) 2008
CENS (RCI/CSIO)
IISc IISER (Tvm)Imtech
NAL
Fuel CellsCECRI, NMRL, MVJ
MSRSAS
Energy Harvesting (PZT) - NAL, SITAR
EAP (Elector Active Polymer)
Agri. Univs.
Cyborg – Both Cybernetic and Organic Parts• Capabilities of Biological Creatures-Insects, Rodents,
Humans can be enhanced by SYNAPSE, BCI, for- Vision based control, navigation, guidance- Location of - buried explosives
- persons trapped under rubble
Project Cyborg 1 & 2• Kevin Warwick & Irena
- Implanted silicon chips in their arms- Studied brains capability to adapt & process signals
from one person to aother
Cyborg Tissue CNT & Plant/Fungal cells Sensors & EM Shielding
CYBORGS

28-06-2017
24
INSECT CYBORGS
• Insect Cyborgs will solve Power requirement for longer flight duration
Beetles & moths fly longer – Naturally
No external power for flight
Micro-energy sources for micro electronics only
- Micro batteries (Jennifer Lewis-Harward) – 10 mg
- Magnesium and Sea water has also been tried
• Energy harvesting possible from Environment and Muscle movement
Remote Neuronal Control of InsectsHybrid Insect – MEMs (HI – MEMS) Programme – DARPA Aims – Prof. Amit Lal
1. Reliable Bio-electromechanical interfaces to Insects – Si – Neural Interface for gas sensors implanted in pupa
2. Locomotion control using MEMS UWB radio connected to Neurostimulator
3. Scavenge power from Insects from wing movements of beetle
Erkan Aktakka
• Final Milestone – Fly to within 5m of target at 100m Control - GPS Coordinates- RF, Optical or Ultrasonic – Remote Control
University of Michigan Professor Khalil Najafi,
Erkan Aktakka

28-06-2017
25
MECINORHINA BEETLE CYBORGRange: 10-50 m depending on LOS
Live beetle
Controller’s PC
RF (2.48 GHz)Transmitter
Dipole Antenna
Pronotum
Basaler Flight Muscle (20 µw)
Stimulating electrodes at optic Lobes
(500 µw)
(Response time < 1 Sec)
RF Receiver77 mW)
University of California Nanyang Univ., Singapore
RF SYSTEM FOR INSECT FLIGHT CONTROL • Radio Control of Mecynorhina Beetle - 8cm
(Neural stimulation of muscles) - 19 gm
• Sato, Berry, Maharbiz - University of California (Berkeley)
- University of Michigan
• Weight Distribution of RF Receiver
mg
Micro Controller 130
Antenna (Dipole) 74
Micro Battery (8.5 mAH) & Avionics 350
PCB + Misc Components 687
Adhesive 90
Total 1331
DemoFlight initiation Cessation Turning in FlightUse of Basilar Flight Muscles

28-06-2017
26
ENTOMOPTERS
CRAWLING + Short Flight InsectsCockroaches
• Backyard Brains - (Gage & Marzullo)• Cockroach steered by electrodes introduced
into cockroach leg• Controlled by a “Spiker Box”• NAL (Kukillaya) has studied biomechanics of
Cockroach locomotion
Dragonfly Model with Optogenetic Insect Control Backpack
Micro Nav / Guidance + Neuro Technology + Synthetic Biology
Wt of Dragon Fly - 600mgAcceleration - 9 gCan cover long distances
OptrodesActivate Steering Neurons with light pulses
Draper Lab + Howard Hughes Medical Institute

28-06-2017
27
RODENT CYBORG
• John Chapin SUNY – NEW YORK
• Utilized excellent olfactory capability of Rats
• Electrode assembly to pick up Radio Signals & Steer rat to suspected area
• Back pack with requisite electronics to control rat’s movements remotely
• Strapped to rat by harness
• Steering cues - Electrodes implanted in somatosensory cortex region for processing touch signals
• Reward for correct movement - Pulse to MFB (Medial Forebrain Bundle) – region for processing pleasure -Found faster than conventional food rewards
India – St. John’s Research Centre / NDRF, Bangalore
OPTOGENETICSOpsins - Light sensitive molecules which convert
sunlight into energy
Rhodopsin - Human eye - Responsible for vision
Bacteriorhodopsin (bR) made by Bacteria
Optogenetics makes use of Opsins to control `neurons within intact mammalian neural tissue with both temporal & cellular precision
Crick - Foresaw this requirement in 1979
- Not achieved with electrical excitation
- Now possible with Optogenetics Tools
• Virus modified with Opsin genes injected into Mouse Brain whichthen produces its own opsins to act as light sensitive channels inMembrane.
• Mouse then controlled through a non-invasive helmet with anarray of LEDs

28-06-2017
28
Spectral Response of Photocurrent from indigenous (IIT-B) bacteriorhodopsin Film
12 hour exposure to air1 hour exposure to air
Response to 532 nm
100µW/cm2
- 50 pA
Lo
ck
-In
ph
oto
cu
rre
nt
(pA
)
Input light power 1-5 pW
chopper freq 15Hz
Vacuum
- Dr.K.S.NarayanJNCASR
- IIT (Bombay)
(nm)
12 hour exposure to air
1 hour exposure to air
Response to 532 nm
100µW/cm2
- 50 pA
Response of bR to Light
Centre for
DNA Finger
Printing &
Diagnosis
Hyderabad
CDFD
BACTERIORHODOPSINThis Opsin has been widely studied supported in India by DBT & DST• IIT-Mumbai, IISc , Jawaharlal Nehru Center for Advanced Scientific
Research, Dayalbagh University, Agra, Dharwad University, Institute ofMicrobial Technology, Chandigarh
Shift of Spectral Peaks of bR by BIASApplications of bR have not been pursued further research for its
application in Optogenetics should be taken up
Spectral Response : bR on Conducting Polymer Effect of BiasPhD Thesis Manoj A.G. - JNCASR : August 2003
(Now in IISER – Trivandrum)

28-06-2017
29
OPTOGENETIC TOOL FAMILY
• Conducts Captions • Depolarizes Neurons
• Yellow Light conducts Chloride ions
• Polarizes Target Neuron by activation
Channel Rhodopsin Halo Rhodopsin
(bR is a HR)
OPTOGENETIC NEURAL CONTROL OF RODENT MOVEMENT BY WIRELESS
• Wentz & Boyden (MIT) – Head borne device for Mouse 2gms and 1cm2
• Head borne LEDs controlled by microcontroller
• Receives power using resonant power link & stores energy in adaptive super capacitors

28-06-2017
30
EMERGING CIVILIAN
APPLICATIONS
GOODS DELIVERY BY UAS (MAV) ACROSS URBAN AREAS
Core Requirement - Safety , Security, Accuracy
Safety - Qualification- Certification- GPS Backup- UAS Traffic Management (UTM)- Collision Avoidance, (eg: Ultra Sound)
Accuracy - GPS Loss reduces accuracy
Security - Detection of Unauthorized / Hostile
MAVs by Civilian Agencies and Police
- Identification, RFID, Micro Transponders - Disabling Unauthorized UAS
Seminar to be held during September 2017

28-06-2017
31
FUTURISTIC CIVILIAN
APPLICATIONS
Suggested Projects(Micro-Nano-Bio UAVs)
INDIAN INSECT CYBORGS (Proposed)
• FlyingCyborg
- Hawk Moth National Centre for Biological Sciences
CrawlingCyborg
- Anthia Sexguttata University of Agricultural Sciences (Raichur), Inst. of Wood Science, SITAR, NDRF
• Jumping Cyborg
- Crickets – NDRF, IISc, University of Hyderabad
• Centre of Excellence for Cyborgs
- IISc
• Insect Cyborg Swarms
- Phase 2

28-06-2017
32
FLYING CYBORGS - NATIONAL CENTRE FOR BIO SCIENCES
Phase - 1 : Live measurements from Flying Moths using Integrated Electronics (2 Years)
• Head stabilization is a critical behaviour for flying insects to haveblur free vision.
• To study the process of head stabilization in free flight, a sensorbackpack for moths will give us wireless real time feedback of themoth's thorax and head angles.
• All components for this backpack are available off the shelf.• Minimal lightweight circuit using Inertial Measurement Units
(IMUs) to measure linear acceleration and angular velocities,• Surface mount microcontroller with built in Bluetooth module to
interface with the IMU and report back the data wirelessly.• Use the data gathered from free flight studies to understand the role
of head stabilization in insect flight.• By using various perturbations, we can also study the effect of
various sensory stimuli on head stabilization.Phase – 2 : Control and Guidance of Hawkmoth in Flight (2 Years)• Same setup, we can even stimulate muscles remotely during free
flight.
Scaled Diagram of Sensor Backpack for Hawkmoth

28-06-2017
33
ACTIVITY CHART – Total Time – 2 Years
Hawkmoth - Measurements in Flight
Anthia Sexguttata

28-06-2017
34
Activity Chart for Beetle Cyborg
MEMS
Backpack
System Engineering
System Studies
BMI for Control
Ultra Low Wt Control, Nav Guidance
Cybernetic Implants
Base Station
Sensors
Energy
Harvesting
SLAM
Integration
& Trials
CONCLUDING REMARKS• Major challenges addressed are
- Location of trapped persons
- Detection of buried hazardous material
• Vision based control, Navigation & Guidance in enclosed space
• Today in better position to tackle these by integrating technologies
From – Micro, Nano, bio, info & cogno
To – Brain like computing, Neurosynaptic Chips and Optogenetics
Use Allies - Insects, Rodents & Cyborgs
• Truth, Trust, Transparency, Time, Team work
• Deliver systems useful to Society by an appropriate, feasible combination of technologies & allies
Major Requirement for Collaboration & Cooperation benefit of Mankind National & International

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
1
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
PERSPECTIVES FOR CIVILIAN UTILISATION OF UAS
Mukund Rao
Member Secretary, KJA
Presentation at Conference on Emerging Technologies and Applications of UAVs
Jain UniversityMarch 22-23, 2017
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• UAS TECHNOLOGY IS “DEMOCRATISING” FLIGHT-CONTROL EXPERIENCE -
BRINGING EXHILIRATING-EXPERIENCE OF AVIATION TO “CITIZEN HANDS”
• LOW-COST AND EASY-EXPERIENCE OF FLIGHT-CONTROL
• “MINIATURISATION” FOOT-PRINTS OF AIRCRAFT
• WIDE-RANGE OF SENSORY-TECHNOLOGY ADAPTATION/INTEGRATION
• UAS-BASED DATA COLLECTION AT GRASS-ROOT LEVEL – LOCAL-
MANAGER, ADMINISTRATOR, VILLAGER, CITIZEN
• WIDE RANGE OF CIVILIAN APPLICATIONS
• BENEFIT TO GOVERNMENT, SOCIETY, CITIZENS
• EXCELLENT “SYSTEMIC EXPERIENCE” TO EDUCATION AND R&D
• GOOD REGULATIONS AND CIVILIAN UAS POLICIES ARE REQUIRED
• RULES, REGULATION AND ADMINISTER
• INTEGRATED EDUCATION “PLATFORM”
• LARGE BUSINESS OPPORTUNITY
UAS – DEMOCRATIC-OPPORTUNITY…..
UAS IS KJA FOCUS AREA FOR
KNOWLEDGE AND INNOVATION

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
2
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• “AT WILL” IMAGING AND DATA ACQUISITION
• “MAXIMAL” USER-CONTROL - LESS DEPENDANT ON OTHER
SYSTEMS
• DATA-GATHERING OF “REQUIRED-AREA”
• EASY AMENABILITY TO MAPPING AND METRICS
• DIRECT INGEST TO GIS
• VARIETY OF “SENSORS”:
• IMAGING CAMERAS, LIDARS, POLLUTION MEASURING
INSTRUMENTS, GEOPHYSICAL ETC
• COST TO USER - “PERCEPTION OF LESS”:
• ONE-TIME COST OF UAV SYSTEMS PROCUREMENT
• OPERATIONAL AND RUNNING COST??
UAS FOR AUTONOMOUS DATA-ACQ…. THE POSITIVES
3
“DEMOCRATISATION” OF
INFORMATION
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
FIRST TIME: COMPREHENSIVE REPORT ON UAS POTENTIALS FOR
KARNATAKA
FIRST TIME: UAS DEMONSTRATION
PROJECTS
FIRST TIME: UAS IN HIGHER EDUCATION
IN KARANTAKA
URBAN AGRI
CIVIC OPS K-GIS
FOREST
?????
KJA TASK FORCE ON UAS
•1st UAS Workshop: Jain
University in Feb 2015
•2nd UAS Workshop:
NIAS in October 2016
•Dr Baldev Raj, NIAS & Dr BV
Naidu, KJA as Co-Chairs
•NDRF-IIE; NAL; DGCA; GoK;
Jain Univ; IIT-K; Team Indus;
IGIT….

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
3
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
NO PARAMETER GROUND SURVEYS AERIAL SURVEYS SATELLITE IMAGES UAS APPLICATIONS
1 TECHNOLOGY MATURE – OPERATIONAL MATURE – LESS IN INDIA MATURE – OPERATIONAL ***TO BE TESTED AND PROVEN
2 SENSORS TS; GPS – CM LEVEL PAN AND XS CAMERAS; LIDAR
PAN AND XS CAMERAS PAN AND XS CAMERAS; LIDAR; VIDEO; NV CAMERAS; AGRI
3 GRANULARITY (RESOLUTION)
FEW CMS 10-20 CMS ~1M (INDIAN)~0.5M (US)
~5-10 CM
4 GRANULARITY (ELEVATION)
FEW CMS 10-20 CMS 4-5 M (INDIAN)2-3M (US)
~FEW TO 10 CMS
5 COVERAGE AT A TIME
~50-60 SQ KMS ~200-300 SQ KMS ~50+ SQ KMS **AT-WILL; FEW-25 SQ KMS
6 TIMELINESS AT-WILL – ~6 MONTHS 2-3 MONTHS TA 1-2 MONTHS TA **AT-WILL?? FEW DAYS
7 MOBILISE EFFORT MODERATE HIGH LOW ***AT-WILL LEAST
8 SURVEY EFFORT VERY-HIGH HIGH MODERATE **LESS??
9 REPEATBILITY DIFFICULT (5 YRS) DIFFICULT (1-2 YRS) EASY (6 MTHS) ** WHEN REQUIRED??
10 WEATHER IMPEDE SOME EXTENT HIGH HIGH **AT-WILL LESS
11 POLICY FOR GOVT. AT STATE LEVEL DGCA/DEFENCE (2-3 MTHS EASILY)
NRSC – DIRECT DGCA/DEFENCE (1-2 MTHS)
12 BASE MAPPING YES (1:500 SCALE) YES (1:2KSCALE) YES (1:8-10000 SCALE) YES (1:500-2000 SCALE)
13 MONITORING NO MAYBE (YEARLY) YES (6 MTHS) **WHEN REQUIRED
14 FEATURES POSSIBLE FIELD-LEVEL AND FARMER-LEVEL CROP STATISTICSBUILDINGS, ROADS, TOPOGRAPHY,ELEVATION
CROP TYPES, FIELDS/ CADASTRES, + LANDUSE BUILDINGS, ROADS, TOPOGRAPHY,ELEVATION+ LANDUSE
CROPPED AREA, CROPSTRESS/DROUGHT ONSETBUILDINGS, ROADS, TOPOGRAPHY, ELEVATION + lANDUSE
CROP TYPES, INDIVIDUAL FIELDS/ CADASTRES, CROP CONDITION, + BUILDINGS, ROADS, TOPOGRAPHY,ELEVATION+ LANDUSE + POLLUTION
15 COST HIGH HIGH MODERATE **MODERATE-LOW
POSITIVES OF UAS FOR GOVERNANCE…. ESTABLISHING
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
Category Item AVG TOP-END ROTOR
HARDWARE Type fixed wing fixed wing Rotary Wing
Weight <2.5 kg 10-20 kg -
Wingspan 100 cm (39.4 in) 100 cm (39.4 in) -
Wing area 34 dm2 34 dm2 -
Maximum takeoff mass <5 kg 20-50 kg5 kg (11lb)
Payload capability 2-5 kg- 2-5-10 kg 2.3 kg (5.1lb)
Dimensions100 x 65 x 10.5 cm(39.4 x 26 x 4.1 in)
100 x 65 x 10.5 cm(39.4 x 26 x 4.1 in)
85 x 49 cm(33.5 x 19.3)
MaterialEPP foam; carbon structure;
composite elementsEPP foam; carbon structure;
composite elementscarbon frame structure
Propulsionelectric pusher propeller;
brushless 700 W motorelectric pusher propeller,brushless 1400 W motor
electric pusher propeller; 6 brushless motor
Battery 14.8 V, 6000 mAh 14.8 V, 6600 mAh 2 x 6600 mAh 14.8 V
Payload
Video CameraColour/XS Camera with
custom fLidar
Colour/XS Camera with custom f
LidarNight ImagerPoll Sesnosr
Video CameraColour/XS with
interchangeable lens
IN-BUILT SOFTWARE Mission planning multiple flights multiple flights multiple flightsAutomated pre-flight checks √ √ √Auto take off/flight/landing √ √ √
Auto P/L OPs √ √ √Automated fail-safe routines √ √ √User controlled fail-safe Ops √ √ √Automated post-flight checks √ √Image Processing Integration √ √
UAS …. SOME IMPORTANT SPECS

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
4
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
Category Item AVG TOP-END ROTOR
OPERATION Endurance1 30-45 min 60 min 20 minRange1 60 km (37 mi) 60 km (32 mi) -
Cruise speed 80 km/h (50 mph) 85 km/h (53 mph) -Maximum ceiling2 5000 m (16,404 ft) 5000 m (16,404 ft) 3000 m (9,843 ft) AMSL
Pre-flight setup time 5 min 5 min 5 minTake off type Vertical/Catapult Catapult VerticalTake off angle Vertical/30 deg 30 deg -Landing type Vertical/Belly landing Belly landing Vertical
Landing angle Nadir/14 deg 14 deg -Landing space (L x W) 50 x 30 m (164 x 98 ft) 50 x 30 m (164 x 98 ft) -
Weather limit<60 km/h wind & light
rain<60 km/h wind & light
rainStable in winds up to
36 km/hCommunication & control frequency
2.4 GHz 2.4 GHz 2.4 GHz
Communication & control range
up to 3 km (3.1 mi) up to 10 km (6 mi) up to 2 km (1.2 miles)
ACQUISITION
PERFORMANCECamera/XS Resolution
(GSD)2.0mm - 19.5 cm 1.0mm - 25 cm 1.0 mm to 19.5 cm
Height above take off location (AGL)
75 - 750 m 75 - 750 m 5 - 750 m
Hovering - - Yes
UAS …. SOME IMPORTANT SPECS
UAS TECHNOLOGY: NAL-INDIA COMMERCIAL IIT-K
UAS MARKETPLACE: AGGRESSIVE; DISRUPTIVE AND “CONFUSING”
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
Air Quality Sensor
CO2, CO, HS,
Methane, SO2 etc
XS Sensor
Vis, NIR
FLIR and LWIR
Thermal Camera
50X DSL Optical
Camera
Agri Bird-Scarer
Payload
NDVI Cameras
(Precision Ag)
Lidar – Elevation data
Gas Sniffers –
Methane/CNG

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
5
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• City/Urban
• City Mapping – Buildings, Streets…..
• Urban Digital Elevation Models
• Pollution Measurement
• Construction Monitoring
• Industrial Monitoring
• Solid Waste Site Monitoring
• Monitoring
• Survey and Mapping
• Waterways and shipping
• Forestry Monitoring
• Rural Areas Monitoring
• Waterways – Rivers/Canals
• Archeology Sites Mapping
• Civic Operations
• Policing and Control
• Aerial Reconnaissance
• Crowd Monitoring
• Aerial Traffic Watch
• Search and Rescue
• Pollution Monitoring
• Agriculture
• Field-level Crop Monitoring
• Precision Farming
• Drought Monitoring
• Agricultural Practices – Spraying
• Disaster Management
• Disaster Area Mapping
• Disaster damage estimation
• Infrastructure
• Railways Survey
• Telecommunications Infra Mapping
• Telecom relay and signal coverage
survey
• Oil and Gas Exploration and Production
• Mineral exploration
• Geophysical surveys
CIVILIAN UAS APPLICATIONS
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
URBAN AREAS …. IMAGE/DATA IS IMPORTANT
10
~101+ FEATURES
CITY-GIS ASSET
NATION-WIDE, 10k
CITIES SEAMLESS,
YEARLY IMAGES
AND MAPS
SPOT-AREA, “AT-
WILL” IMAGES
AND MAPS
Civil UAS Market by 2025 - ~
$65 billion (Construction, Agri,
Energy, Industrial, Urban,
Consumer….)
Teal 2016 Global Civil UAV Market :
Max Market for images acquisition:
Satellite 1m – Whole country – 2/3 times
Aircraft 0.1m – Large areas once
UAS 0.1m – Small areas At-Will
Cost of images acquisition:
Satellite 1m - ~10-40$ per sq km
Aircraft 0.1m - ~100-200$ per sq km
UAS 0.1m - ~1-2$ per sq km
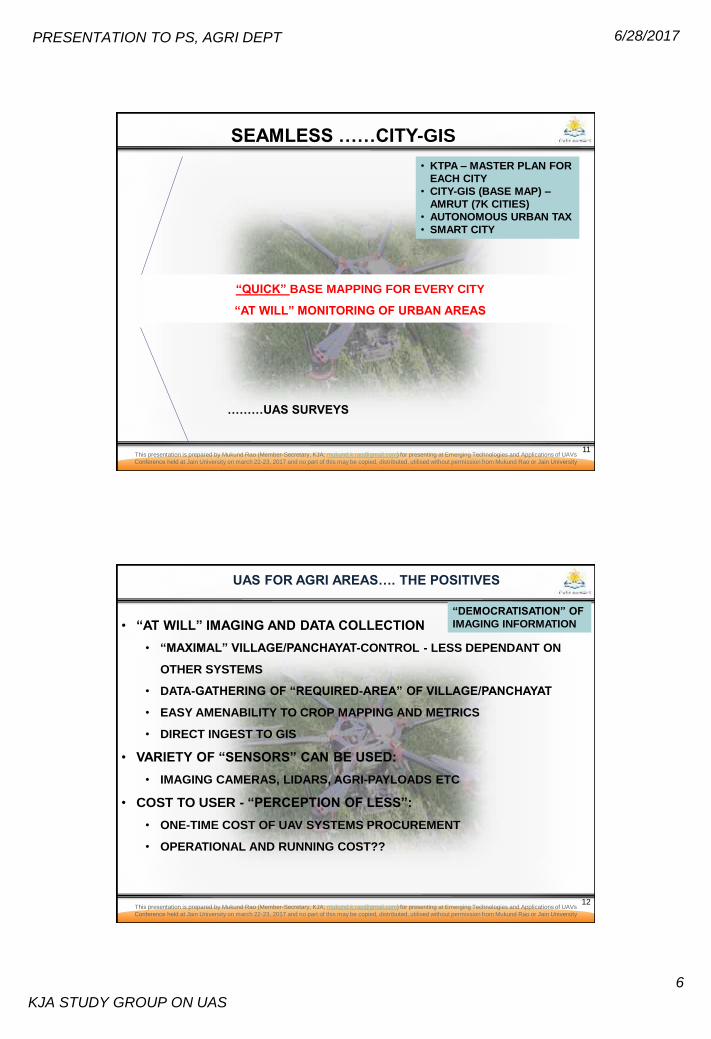
PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
6
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
SEAMLESS ……CITY-GIS
11
“QUICK” BASE MAPPING FOR EVERY CITY
“AT WILL” MONITORING OF URBAN AREAS
• KTPA – MASTER PLAN FOR
EACH CITY
• CITY-GIS (BASE MAP) –
AMRUT (7K CITIES)
• AUTONOMOUS URBAN TAX
• SMART CITY
………UAS SURVEYS
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• “AT WILL” IMAGING AND DATA COLLECTION
• “MAXIMAL” VILLAGE/PANCHAYAT-CONTROL - LESS DEPENDANT ON
OTHER SYSTEMS
• DATA-GATHERING OF “REQUIRED-AREA” OF VILLAGE/PANCHAYAT
• EASY AMENABILITY TO CROP MAPPING AND METRICS
• DIRECT INGEST TO GIS
• VARIETY OF “SENSORS” CAN BE USED:
• IMAGING CAMERAS, LIDARS, AGRI-PAYLOADS ETC
• COST TO USER - “PERCEPTION OF LESS”:
• ONE-TIME COST OF UAV SYSTEMS PROCUREMENT
• OPERATIONAL AND RUNNING COST??
UAS FOR AGRI AREAS…. THE POSITIVES
12
“DEMOCRATISATION” OF
IMAGING INFORMATION

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
7
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
SEAMLESS ……AGRI-GIS
13
“QUICK” CROP ASSESSMENT FOR EVERY PANCHAYAT
“AT WILL” MONITORING OF CROPPED AREAS
• AUTONOMOUS FIELD-
LEVEL CROP ASSESSMENT
• FARMER-GIS (FARMER
LEVEL)
• CROP INSURANCE
• CROP PRODUCTION
………UAS SURVEYS
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
Type(@<1km ht)
Lens GSD * Area Coverage # Flight Lines Flight Time # Pictures (60% Overlap)
AVG END 15mm 20 cm 100 km² 16 132 minutes(~50 min
ENDURANCE)
384
TOP END 35mm 10 cm 100 km² 25 192 minutes(~60 min
ENDURANCE)
600
ROTOR 14mm 25 cm 100 km² 21 1263 minutes(max 20 min ENDURANCE)
565
UAS IMAGING …. FOR URBAN/CROPS…EXAMPLE
UAS DATA ACQ
REAL-TIME AUTOMATED
UAS DATA PROCESSING
QUICK USER-ORIENTED
GIS-READY INFORMATION
TIME T
T + 12 HRS
T + 24 HRS

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
8
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS …. IMAGE GRANULARITY
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS …. WINE GRAPES IN INDIA – HARVEST-PLAN
http://agribotix.com/casestudies/#wineindia

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
9
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS …. AGRI IMAGE GRANULARITY
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS …. PRECISION MINE MEASUREMENTS
• Image
• Dem/DSM
• Contouring
• Volume Est
• Surface
removal
• Change
Detection
• Mining
• Quarry
• Maps
• GIS Ingest
• Analytics

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
10
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
Earth Removal - Volume Calculation
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS
Gimbal Autopilot Airframe Communication Propulsion Sensors
Essential Desirable
Aero / Mech Marine (Water)
Electronics Insect Mechanics
Control engineering Biological systems (Fish, Bird)
Computer systems Electronics(RF, DSP, Embedded)
Materials engineering Manufacturing
Sensors (MEMS) MEMS & Nano
UAS IN EDUCATION …. TOTAL SYSTEMS EXPERIENCE
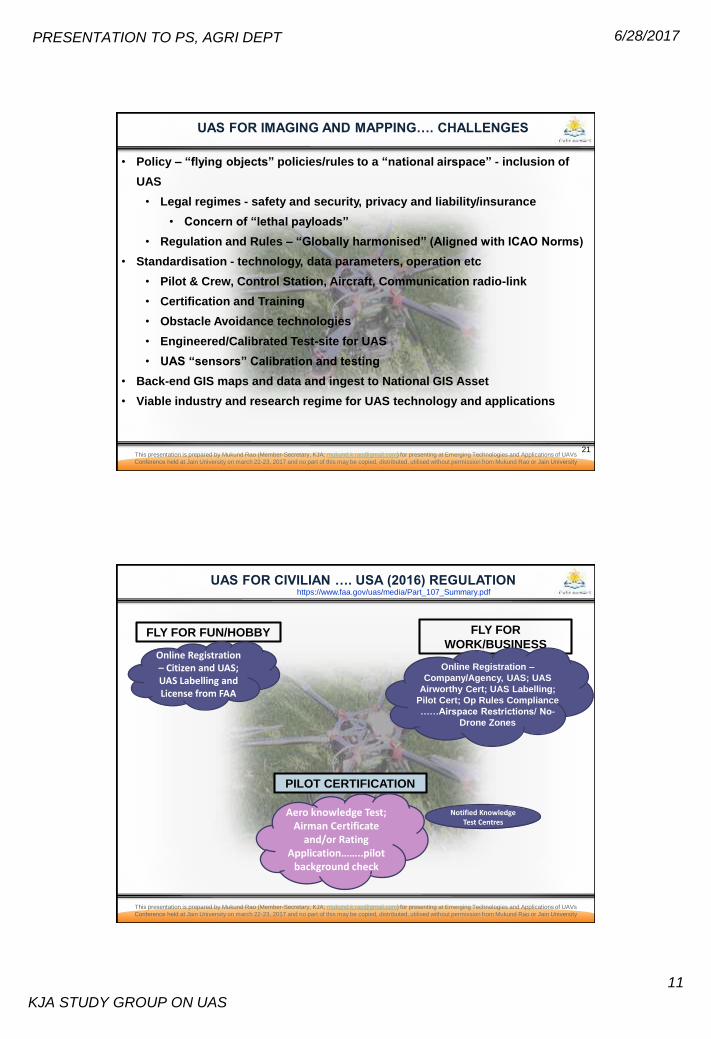
PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
11
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• Policy – “flying objects” policies/rules to a “national airspace” - inclusion of
UAS
• Legal regimes - safety and security, privacy and liability/insurance
• Concern of “lethal payloads”
• Regulation and Rules – “Globally harmonised” (Aligned with ICAO Norms)
• Standardisation - technology, data parameters, operation etc
• Pilot & Crew, Control Station, Aircraft, Communication radio-link
• Certification and Training
• Obstacle Avoidance technologies
• Engineered/Calibrated Test-site for UAS
• UAS “sensors” Calibration and testing
• Back-end GIS maps and data and ingest to National GIS Asset
• Viable industry and research regime for UAS technology and applications
UAS FOR IMAGING AND MAPPING…. CHALLENGES
21
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
UAS FOR CIVILIAN …. USA (2016) REGULATION
FLY FOR FUN/HOBBY FLY FOR
WORK/BUSINESSOnline Registration – Citizen and UAS; UAS Labelling and License from FAA
https://www.faa.gov/uas/media/Part_107_Summary.pdf
PILOT CERTIFICATION
Aero knowledge Test; Airman Certificate
and/or Rating Application……..pilot
background check
Notified Knowledge Test Centres
Online Registration –
Company/Agency, UAS; UAS
Airworthy Cert; UAS Labelling;
Pilot Cert; Op Rules Compliance
……Airspace Restrictions/ No-
Drone Zones

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
12
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• DGCA PERMISSION – PERMISSION/CLEARANCE OF UAS FLIGHT
• TO BE APPLIED BY GOVT. DEPARTMENT
• POLICE CLEARANCE - safety and security
• OTHER ISSUES - liability/insurance
• UAS IMAGE/DATA CLEARANCE (MOH COMMITTEE)
• GRANTED TO GOVT. DEPT.
UAS …. INDIA POLICY AND OPERATIONAL STATUS
23
Oct 7, 2014 notification
http://dgca.nic.in/public_notice/PN-UAS.pdf
Apr 21, 2016 Draft UAS guidelines
http://dgca.nic.in/misc/draft%20circular/AT_Ci
rcular%20-
%20Civil_UAS(Draft%20April%202016).pdf
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• Categorise UAS Operations :
• Hobby/Entertainment purposes: Low-weight (<2kgs) and low-flying (<75 ft);
Individuals/UAS-Clubs
• Basic Survey/Data Collection: Medium weight (<25 kgs) and moderate flying (<700
ft); Government/Companies/Academia-Res
• Advanced Survey/Governance: Large weight (<100 kg) and high-flight (<1000 ft);
Government/Companies/Academia-Res
• All UAS to be registered at Point Of Sale with Unique Identification Number (UIN).
• Cat I operations just with Registration number.
• Cat II operations with one-time Operational fixed- period Permission.
• Cat III operations with submission of flight plan and clearance for each operation.
• Low altitude air space up to 700ft/1000ft AGL, be designated as Civilian UAS air-space
• All UAS Flights in day time, in visual line of sight, in fair weather conditions:
• Specific Zone restrictions
• National/Regional UAS Test Ranges
• Pilot Certification mandatory
• Air worthy Certification of UAS
• Basic and 3rd party UAS Insurance mandatory
UAS …….. SOME POLICY TENETS UNDER DISCUSSION IN KJA
•Auto-detect of UAS flights
•UAS Traffic Management
•Collision Avoidance
•……
Questions for Research topics:

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
13
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
GOOD CIVIL UAS POLICIES
LARGE CIVIL APPLICATIONS MARKET
SPUR TO “SYSTEM DESIGN” EDUCATION
LARGE UAS+SENSORS DEMAND
DEVELOP MANUFACTURING CAPABILITY
IN SUMMARY: UAS – OPPORTUNITY …..
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
• Study/Report: Study Report on Civil UAS Technology, Applications and Policies
• Technology Detailing – document technology aspects of UAS
• Applications Potentials – List and document all possible applications
• Education Potentials – How UAS can be embedded into HE system
• UAS Commercialization and Manufacturing Opportunities
• Policies – what best way to regulate UAS
• Pilot-Project:
• 3-4 Application Pilot-projects under regulated guidelines (DGCA)
• 4-5 Depts of GOK: Agriculture, Urban, Forests, Police, Archaeology etc – As per GOK Dept.
needs of Governance
• UAS R&D Project in few Universities
• UAS Education Curriculum
• Recommendations: Roadmap for Karnataka
• Technology and Manufacture
• Applications and User domain
• Education and Research
• Integration into National Civil UAS Regulations (Hobby, Public, Commercial, Education)
• UAS Certification, flight standards, AT requirements
• Pilot Certification and Test Centres
• Calibration Test Ranges/Sites
UAS …….. KARNATAKA CIVIL UAS PLAN
26
• Type of UAS
• Class of UAS
• Payload capability
• Endurance
• Guidance & Navigation

PRESENTATION TO PS, AGRI DEPT 6/28/2017
KJA STUDY GROUP ON UAS
14
This presentation is prepared by Mukund Rao (Member-Secretary, KJA; [email protected]) for presenting at Emerging Technologies and Applications of UAVs
Conference held at Jain University on march 22-23, 2017 and no part of this may be copied, distributed, utilised without permission from Mukund Rao or Jain University
THANK YOU!!!
27

28-06-2017
1
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 1
Payloads for UAVs & DELOPT Activities
by
Dr.M.R.SHESHADRIDELOPT
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 2
Scheme of presentation• Global Scenario
• Missions
• Payloads
• DELOPT UAV payload activities
• India Scenario
• Conclusion

28-06-2017
2
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 3
Global Scenario
• 100s of manufacturers of UAVs / Drones
• Over 60 countries using for military / civilian applications
• Types – Nano, Micro, mini to large UAVs
• Range – Few meters to 1000+ KM
• Payload’s weight – few 10s of grams to 250+ kgs
• Current focus : Integration and Standardisation
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 4
Military Missions• Imaging for Intelligence, Surveillance Target Acquisition and
Reconnaissance (ISTAR)
• LASER Designation, Intrusion Detection & Laser Weapons
• Real time situation awareness
• Communication and Electronic Intelligence
• Missile detection at launch phase
• Combat Missions, Kamakaze Role
• RADAR based Long range target detection
• Chemical detection and warfare

28-06-2017
3
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 5
Civilian Missions• Home Land Security
• Disaster management, Search & rescue
• Agricultural crop estimation, early disease detection
• Forest fire detection /deforestation surveillance
• Wild life census / protection
• Ground surveys – GIS Mapping, 3D mapping
• Aqua Culture
• Commercial applications, Delivery – amazon
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 6
Payloads for UAVs• Conventional
Imaging• • UV, Visible- CCD, HDTV, SWIR, MWIR,
LWIR, Hyper spectral, Laser, SAR & MPAR
• Non-imaging • • IRST, MTI, Spectrometers
• Laser • • LRF, LD Imaging, LIDAR,
• SignalIntelligence
• • ELINT, COMINT, Data Links
• Target Tracking • • Video Tracker (single & multiple targets)

28-06-2017
4
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 7
Indian Scenario – Imported UAVs• Searcher - Shot range multi mission UAV
• Heron - MALE UAV – used by Army, Navy
• Herop - Loiter with anti radar war Head
• T Hawk - VTOL
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 8
Opportunities in India• Estimated UAV requirements:
– Military : 5000+ nos.– Civilian : 1000+ nos. (?)
• Development and production of payloads:– TI, CCDs– Real-time video analytics– ELINT and COMINT systems– EO counter measures
• Integration of payloads on UAVs• Servicing and Maintenance

28-06-2017
5
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 9
Current challenges• Stealth features – low visibility
• Interoperability – Between UAVs and manned a/c, between UAVs and ground stations
• Integration of communication – Data communication, video information, command & control network, encryption & BW
• Air space integration
• Evolving standards
• Limited availability of sensors
• Training
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 10
DELOPT UAV payload activities
• Thermal Imager
• Automatic Video Tracker (Single & multiple targets)
• Gimbal Systems
• Laser Pointing Systems
• Video Analytics
• Modems for Data Links
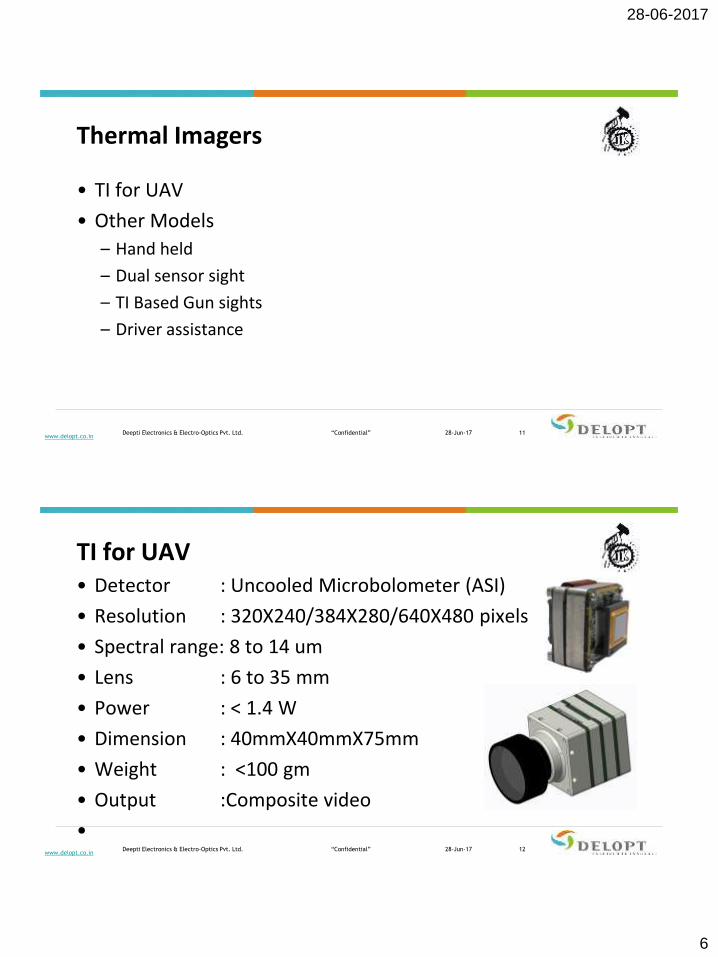
28-06-2017
6
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 11
Thermal Imagers
• TI for UAV
• Other Models
– Hand held
– Dual sensor sight
– TI Based Gun sights
– Driver assistance
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 12
TI for UAV• Detector : Uncooled Microbolometer (ASI)
• Resolution : 320X240/384X280/640X480 pixels
• Spectral range: 8 to 14 um
• Lens : 6 to 35 mm
• Power : < 1.4 W
• Dimension : 40mmX40mmX75mm
• Weight : <100 gm
• Output :Composite video
•

28-06-2017
7
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 13
Monocular Hand Held Thermal Sight
• Detector : Uncooled Microbolometer (ASI)• Resolution : 320X240/384X280/640X480 pixels• Spectral range : 8 to 14 um• FOV : 8X6 degree• View finder : OLED Eye piece• Digital zoom : 2x/4x• Weight : < 1.2 kg• Output :Composite video• Recorder : Inbuilt Video recorder
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 14
Dual Sensor Camera
Parameter CCD TI
Detector ¼ inch Uncooled Microbolometer (ASi)
Resolution (HxV) pixles 976X582 320X240/384X280/640X480
Spectral range 0.4 to 0.7 um 8 to 14 um
Video output PAL PAL
Focal length 33mm to 119 mm continuous 45mm &135mm switchable
Zoom 36X optical 2x/4x digital

28-06-2017
8
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 15
Automatic Video Trackers
• Experience over 15 years
• AVT Models:
– Miniature Trackers for UAVs
– Trackers for tethered balloons
– LRU for MBT Arjun
– Integrated VT on TI
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 16
Salient specifications of AVT
• Selectable two video inputs
• Algorithms: Correlation, centroid and edge
• Tracking accuracy: 1 pixel
• Speed: 20 pixels per frame
• Error update rate: 25 Hz
• Auto window size
• Break-lock coasting
• PID platform filter
• Card Form factor: 70 mm X 55 mm, Weight < 50 g.
Auto tracking of
aircraft
landing/take-off

28-06-2017
9
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 17
Gimbal for mini UAVs• Nose mounted • Payloads : TI and CCD Camera• Stabilization : 2 Axis stabilization• Pointing Accuracy : 15 minutes (1/4 degree)• Freedom of movement : 2 Axis
a) +/- 120° in azimuth/panb) 0 to -100° in elevation/tilt
• Angular rate/Slew rate : 100 deg/sec• Dimensions : Dia. 160 mm, Height 160 mm• Weight : 1 Kg (including payloads)
Payload control
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 18
Automatic Laser Pointing System (ALPS)
• Used for steering higher power laser beam
• Two Axis platform
• Payloads 100 kg - CCD sensor, LRF and Telescope (600 mm)
• Video Tracker for target acquisition and automatic tracking
• DSP based digital control electronics
• Control console
Intruding UAV
Detection,
Tracking &
Destruction

28-06-2017
10
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 19
Video Analytics
• Zonal Analysis:
– Intrusion detection Entry/Exit/Presence in restricted zones
– Missing object detection
– Left object detection
• Target tracking
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 20
Modem for Data Link
• RF modem card for Link II
– HF algorithms for 9600 and 2400 kbps
– Hardware design and development
– Qualified for Avionics
– Supplied over 2000 Modems

28-06-2017
11
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 21
Other EO Systems
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 22
Gimbal Systems
• Automatic Laser Pointing System
• Pan & Tilt for target tracking
• Gimbal for LIDAR
• Pan & Tilt for Anti-mine operations

28-06-2017
12
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 23
Seeker for CLGM
• Seeker with two axis gimbal system
• MEMS gyro stabilization
• Quadrant detector laser signal processing with high end FPGA
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 24
GLSTS
• Two axis MEMS based stabilized gimbal
• Range: ±30 degree in Az & El
• Accuracy: 0.1 degrees
• Quadrant detector & FPGA based laser pulse processing
• DSP based servo system

28-06-2017
13
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 25
About JK Organisation• DELOPT is part of JK Group
• Over 130 year old Indian group
• Legacy of nation building
• USD 4 billion annual sales
• 30000 employees
• 22 plants in India and overseas
• Global presence - Exports to 80 countries
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 26
Conclusion
• Lot of opportunities and challenges for Indigenous UAV programmes
• DELOPT is keen to participate in EO systems and data link for UAVs
• DELOPT has technology and roadmap
• New Govt. policies to support indigenous programmes on UAVs

28-06-2017
14
www.delopt.co.inDeepti Electronics & Electro-Optics Pvt. Ltd. “Confidential” 28-Jun-17 27
THANK YOU

28-06-2017
1
Evolution of UAV Technology
Dr. Ravindra S Kulkarni
Prof. and Head, Dept. of Aerospace Engineering
R V College of Engineering, Bengaluru
Unmanned Aerial Vehicles
• UAVs, originated mostly for military applications are expanding their use in commercial, scientific, recreational, agricultural, research and other applications. Civilian drones now vastly outnumber military drones.
• Providing simple, cheap, rapid, efficient and flexible ways for data acquisition, analysis and transmission, recent advancements in UAV technology are changing how we look at UAVs.
• We now have UAVs with high endurance, capable of autonomous flights, high resolution video transmission and payload deployment.
• Modern UAVs now include the best technology available in Aerodynamics, Material science, Control systems, Computing and Networking.

28-06-2017
2
Evolution of UAV Technology
• We will trace the progress and achievements in UAV technology over the years that now contribute to the UAVs we see today.
• Modern UAVs are a result of innovation done in various fields like aerodynamics, material sciences, telecommunication, artificial intelligence etc., and their integration into one.
Pioneers in UAV Technology
The Austrian balloons
During Austrian siege of Venice on August 22, 1849
Balloons loaded with explosive charges held with electromagnets and control by long copper wires.
Unmanned Zeppelins found similar use during World war I. They were the earliest radio controlled aircraft.

28-06-2017
3
Invention of Fixed wing flight
Wright brothers, with their Wright Flyer in 1903, demonstrate the first sustained and controlled heavier-than-air powered flight
Development of Fixed wing UAVs
Kettering Bug, a small biplane flying “torpedo” which flew in a set
direction up to 120 kilometres from its launch point, first flew in 1918
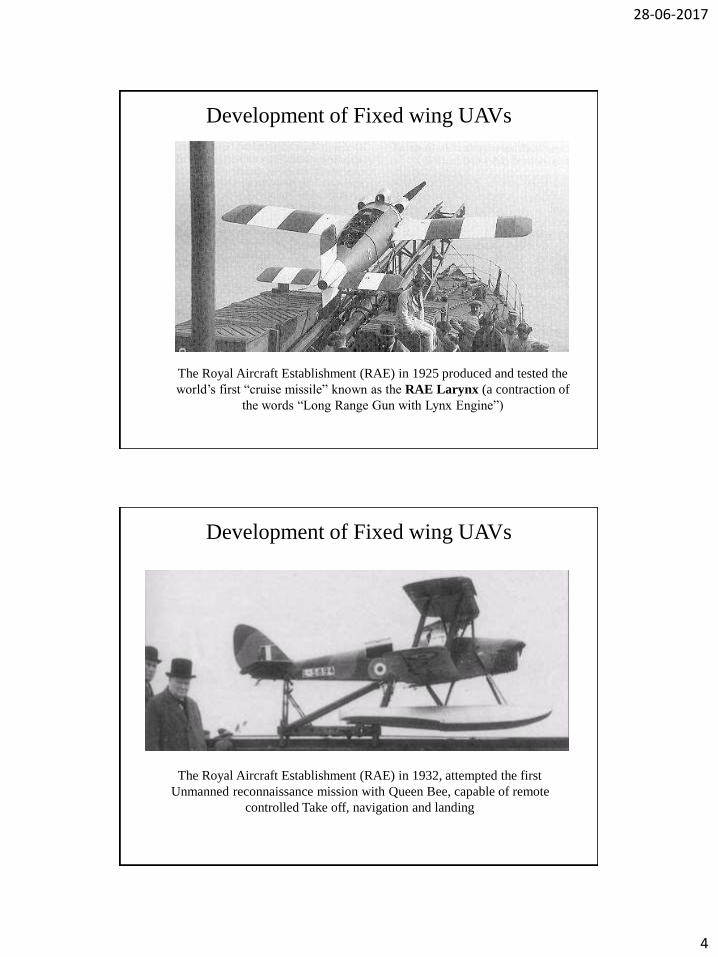
28-06-2017
4
Development of Fixed wing UAVs
The Royal Aircraft Establishment (RAE) in 1925 produced and tested the
world’s first “cruise missile” known as the RAE Larynx (a contraction of
the words “Long Range Gun with Lynx Engine”)
Development of Fixed wing UAVs
The Royal Aircraft Establishment (RAE) in 1932, attempted the first
Unmanned reconnaissance mission with Queen Bee, capable of remote
controlled Take off, navigation and landing

28-06-2017
5
UAVs with Pulsejet engines
V-1 flying bomb (German: Vergeltungswaffe 1 “Vengeance Weapon 1”)
was a German made aircraft to use a pulsejet for power for first time and
was developed in 1944.
UAVs with Turbojet engines
Ryan Firebee was a series of target drones developed from 1951 powered
with turbo jet engines. With cameras and communications equipment to
feed real-time battlefield intelligence for targeting and damage assessment.

28-06-2017
6
UAVs with Turbojet engines
Ryan Firebees would be dropped from a mothership like a The DC-130
that could launch, track and control the Firebees in flight
UAV as long endurance platforms
The Israeli Tadiran Mastiff, which first flew in 1973, is seen by many as
the first modern battlefield UAV, due to its data-link system, endurance-
loitering, and live video-streaming

28-06-2017
7
Advancements in CFD and Material Sciences
Development of CFD techniques now vastly reduce the time and effort
required to design a UAV
Development of Fibre composites and Super alloys now allow for
development of lighter and stronger structures
Boeing Condor, with a a wingspan of over 200 feet was one of the first
Aircraft with Carbon-fibre composite materials making up the bulk of the
Condor's fuselage and wings
In 1989, the Condor set the world piston-powered aircraft altitude record of
67,028 ft (20,430 m) and was the first aircraft to fly a fully automated flight
from takeoff to landing and also setting an unofficial endurance world record
in 1988 by flying continuously for more than 50 hours

28-06-2017
8
UAVs capable of Autonomous flight
Modern UAVs such as IAF Heron and Global Hawk have autonomous
flight capabilities. Autonomy in flight has become an essential and
necessary part of any UAV
UAVs for Civilian Applications
Applications in aerial photography, search and rescue, relief operations,
mapping and surveillance, wildlife monitoring and control, profiling of oil
and mineral resources, crop mapping and crop health monitoring, and
powerline and pipeline management

28-06-2017
9
Vayu – Search & Rescue Drone
A plane with a wingspan of
2.4m, weight of 4.5 kg &
endurance of 45min, it can
carry an additional payload of
3kg. Made of Carbon fiber and
Balsa wood structure
It is capable of Autonomous flight,
high resolution video transmission
over a range of 5km. It is also
augmented with on board and on
ground computer for image
processing and actionable
intelligence
Vayu – Search & Rescue Drone
It can deploy an emergency kit weighting 500g with a parachute during
search operations and disaster relief.

28-06-2017
10
Sentinel – Octacopter for surveillance
An Octacopter with total weight of 2.5 kg with camera & gimbal stabilization. It is capable of taking off and
hovering in tight spaces to transmit high resolution video.
Thank you

28-06-2017
1
Numerical Validation of Low Re Airfoil for UAV
By
Ashish Kumar GuptaP. A. Aswatha Narayana
Introduction:
Low speed aerodynamics is significantly different from that of conventional aircraft
aerodynamics, because low chord based Reynolds number as in case of MAV. Figure 1
shows the Reynolds number versus the mass of the flying object. It can be seen that
as the mass decreases, the Reynolds number decreases.
Within the Reynolds number range of 10,000 to 300,000, the airfoil performance is
of great interest for applications involving small to medium wind turbines and
unmanned aerial vehicles.
After peak suction, the flow experiences adverse pressure gradient causing the
laminar boundary layer to separate on upper surface. The separated boundary layer
undergoes transition to turbulent flow, reattaching on airfoil surface for Reynolds
number greater than 30e03. For Reynolds number below 30,000, the flow does not
reattach. Independent of the flow regime, the laminar separation bubble has
detrimental effect on the airfoil performance (figure 2). Thus the knowledge of the

28-06-2017
2
Figure-1 Reynolds number versus weight Figure-2 Reynolds number versus L/D
existence and prediction of the extent of separated region is vital for characterizing
the airfoil performance.
From experimental measurement (2, 3), it is found that the length of separation
bubble, formed on the upper surface of airfoil, reduces when the Reynolds number
is increased. Furthermore, the location of laminar separation propagates towards
the leading edge with increasing the angle of attack until stall.
A recent experimental study by Gerakopulos and Boutilier (4) et. al. addresses the
above issue of low Reynolds number aerodynamics and associated flow problems.
In this experimental study, they have carried out pressure measurements on the
upper and lower surface of NACA0018 airfoil for angle of attack varying from 0 to
18 deg. for Reynolds number varying from 80,000 to 200,000. From this they have
obtained the lift coefficient and location and length of separation bubble on the
suction surface.

28-06-2017
3
Numerical simulation over NACA 0018 airfoil has been carried out for moderate to
high Reynolds number. In the paper by Elia Daniele (5), numerical simulation has
been carried out using K-Kl-ω turbulence model for Reynolds number from 115,000
to 290,000.
In the present work, we have carried out numerical simulation for NACA 0018 airfoil
using Fluent for Reynolds number varying from 80e03 to 160e03. We have used four
turbulence models viz. k- ω SST, k- ω SST with low Re correction, Transition SST
model and K-Kl-ω turbulence model to assess the prediction capability of
aerodynamic characteristics and in particular the Laminar Separation Bubble (LSB).
Model Geometry & Domain:
The NACA 0018 geometry and the domain used are shown in figure 3. The chord of
the airfoil is taken as 0.2 m. The upstream and far-field boundary is extended by 15c,
whereas the down stream boundary is extended by 18c. A segment of airfoil
thickness is considered and this has been taken as 8 mm.
Figure-3a computational domain Figure-3b Naca 0018 airfoil segment
Mesh and CFD model:
The CFD domain was meshed with unstructured tetra mesh with prism layers for
resolving the boundary layers. For k- ω SST turbulence model, 19 prism layers were
used (Average Y+ value 1) whereas for transition models 33 prism layers were used
such that every where the Y+ was less than 1. The node counts for the two cases
were 288022 and 318253. Figure 4 shows the view of the mesh for typical case.
Pressure based incompressible flow solver is used to setup the CFD case. Since the
flow speed is small, energy equation is not solved. Velocity inlet BC was used at inlet

28-06-2017
4
Figure-4 View of the mesh over the airfoil
and far field boundary whereas, at pressure outlet be was used at outlets boundary.
Turbulence models mentioned earlier were used for flow simulation.
Grid independence studies has been carried out for k- ω SST model. Three grid of
size 220e03, 236e03 and 262e03 is used to predict lift and drag coefficients. Figure 5a
and 5b shows the plot for lift and drag coefficient. We find that the results do not
change for node count 281,000 and 315,000. Hence grid size of 281,000 has been
considered for airfoil performance prediction.
Figure-5a Cl versus node count Figure-5b Cd versus node count
CFD calculations have been carried out for the four turbulence models and three
Reynolds numbers viz Re=80,000, Re=120,000 and Re=160,000. The angle of attack is
varied from 0 deg. 10 deg. For higher angle of attacks, flow field was found to be
unsteady. The solutions has converged to residual value of 1e-04 for all cases.
Results:
Lift and drag coefficient have been obtained from above CFD analysis for all the four
turbulence models. Lift coefficient is compared with experimental results obtained by

28-06-2017
5
Gerakopulos et. al (Figure 6). The drag data is compared with experimental data due
to Sherman (1937).
It can be seen from the Cl plot that K-Kl-ω and transition SST turbulence models
prediction is good compared to other turbulence models, but K-Kl-ω model
prediction is better among all. For Re=80,000 and Re=160,000, drag predicted by
transition SST model matches well with experimental data at low to moderate α,
whereas high α, the comparison is poor. Comparison of K-Kl-ω model is poor at low to
moderate α, it is better at higher α.
Figure-6a Cl versus Angle of attack Figure-6b Cd versus Angle of attack
Re= 80,000
Figure-6c Cl versus Angle of attack Figure-6d Cd versus Angle of attack
Re= 120,000
Re= 160,000
Figure-6e Cl versus Angle of attack Figure-6f Cd versus Angle of attack

28-06-2017
6
Comparison of Cp:
Cp plot has been obtained for 2, 6 and 10 deg. angle of attack. Here we show , in
figure 7(a-f), the Cp plot for 2 and 10 only and its comparison with experimental Cp
plot on the suction surface of airfoil. It is found that transition models are able to
capture the laminar separation bubble, as it can be seen from Cp plot. Again K-Kl-ω
model show better comparison with experimental data.
Figure-7a Cp versus X/C Figure-7b Cd versus X/C
Re= 80,000
Re= 160,000
Figure-7e Cp versus X/C Figure-7f Cp versus X/C
Figure-7c Cp versus X/C Figure-7d Cp versus X/C
Re= 120,000

28-06-2017
7
Re= 80,000
Figure-8a X/C versus AOA Figure-8b X/C versus AOA
Separation and Re-attachment Location:
The separation and re-attachment location has been extracted from the CFD results
and they have been compared with experimental data as shown in figure 8(a-f). They
are obtained from the plot of τ-xx-component of shear stress versus X/C location. The
location where τ-xx changes sign from positive to negative, separation of flow occurs.
When it goes from negative to positive, re-attachment of flow is assumed to occurs.
These values are obtained for the four turbulence models for four angle of attack
corresponding to each Reynolds number. The separation (X/C)s and re-attachment
Re= 120,000
Re= 160,000
Figure-8c X/C versus AOA Figure-8d X/C versus AOA
Figure-8e X/C versus AOA Figure-8f X/C versus AOA

28-06-2017
8
Separation and Re-attachment Location:
(X/C)r location is plotted for each Reynolds number versus angle of attack and
compared against the experimentally obtained data from reference (4).
It is seen that K-Kl-ω turbulence model over predicts separation and re-attachment
location while transition SST model compares very well with experimental data.
Conclusion
It is seen that while K-Kl-ω transition model prediction of Cl matches well with
experimental data, transition SST model prediction of drag has better match with
experimental data, while the Cl prediction is also good. It is also seen that location
and extent of laminar separation bubble prediction match well with experimental
data. Thus none of the models are giving good prediction capability for all
parameters, but in general K-Kl-ω turbulence model and transition SST model
perform better than others.
References:
1. Mueller T. J. , DeLaurier J.D., Aerodynamics of small Vehicles” Annual Review of fluid Mechanics, Vol 35, 2003,pp 89-111.
2. Brendel M and Mueller T., J., “Boundary Layer Measurements on an Airfoil at Low Reynolds number”, Jl. ofAircraft, Vol. 25, No. 7, 1988.
3. O’Meera, M. M. and Mueller T. J., “Laminar Separation Bubble Characteristics on an Airfoil at Low Reynoldsnumber”, AIAA Jl., Vol. 25, No. 8, 1987.
4. R. Gerakopulos, Boutilier, M. S. H., “Aerodynamic Characterization of a NACA 0018 Airfoil at Low ReynoldsNumbers”, 10th Fluid Dynamics Conference and Exhibit, 26 June – 1 July, 2010, Chicago, Illinois.
5. Elia Daniele, “Numerical and experimental investigation of low Reynolds number wind turbine airfoils understall and post-stall conditions”, PhD Thesis, Department of Industrial Engineering Universoty of NaplesFederico II Naples, April 2013.
6. G. E. Hassan, A. Hassan , M. E. Youssef, “Numerical Investigation of Medium Range Re Number AerodynamicsCharacteristics for NACA0018 Airfoil”, CFD Letters, Vol. 6 (4) – December 2014.
7. Ji Yaoa*, Weibin Yuanb, jianliang Wanga, Jianbin Xiec , Haipeng Zhoub , Mingjun Pengd, Yong Sund, “Numericalsimulation of aerodynamic performance for two dimensional wind turbine airfoils”, International Conferenceon Advances in Computational Modeling and Simulation, Procedia Engineering 31 (2012) 80 – 86.
8. M. Serdar Genç, Ünver Kaynak, Hüseyin Yapici, “Performance of transition model for predicting low Re aerofoilflows without/with single and simultaneous blowing and suction”, European Journal of Mechanics B/Fluids 30(2011) 218–235.
9. Ilyas Karasu, M. Serdar Genç and H. Hakan Açikel, “Numerical Study on Low Reynolds Number Flows Over anAerofoil”, Jl. Appl Mech Eng Volume 2 • Issue 5 • 1000131.

28-06-2017
9
References:
10. Charmichael, B. H., Low Reynolds number Airfoil Survey”, NASA CR No. 165803, Vol. 1, 1981.
11. Jacobs E. N., and Sherman A., “Airfoil Section Characteristics as affected by variations of the ReynoldsNumber”, NACA TR No. 586,1937
12. Trimmer W. A., “Two dimensional Low Re Number wind Tunnel Results for Airfoil NACA 0018”, Wind Engg.Volume 32, 2008, pp 525-537.

28-06-2017
1
UAV BASED AERIAL
SPRAYING
TATA SONS
GROUP TECHNOLOGY AND
INNOVATION OFFICE
CONTENT
PRECISION AGRICULTURE
Background, need for precision agriculture
UAV BASED AERIAL SPRAYING
Operation and challenges
APPLICATIONS
Listing advantages and disadvantages
COLLABRATION AND PARTNERSHIP
Partnering companies

28-06-2017
2
Precision Agriculture
Precision Agriculture (PA) refers to application of precise
and correct amount of inputs like water, fertilizers,
pesticides to the crops for increasing productivity and
maximizing its yields.
Precision Agriculture
Small land holdings 80% farms < 2 Ha (5 acres)
Growing labour shortage and cost1
Share of Agri in total work force: 58% (2005-06) 41% (2019-20)
Low mechanization2
Economic advantages of mechanisation, increases productivity by 12-34%
Acute shortage of water
How to leverage technology to enable
sustainable, high-productivity agriculture?1 Labour in Indian Agriculture: A Growing Challenge - FICCI, 2 Central institute of agricultural engineering

28-06-2017
3
5
Spraying methods in India
UAV BASED SPRAYING
UAV based aerial sprayer
(leverage components of
PA and trend towards
mechanization)
BENEFITS
Considerable reduction in application time, covers large
area in short duration
Less labour dependency

28-06-2017
4
UAV BASED SPRAYING
Less water requirement
Timely-intervention
Operator health and safety
Autonomous spraying
operation
Targeted spray
UAV BASED SPRAYING

28-06-2017
5
DRONE BASED SPRAYING
CHALLENGES
High initial investment
Need trained person to
operator
Low payload capacity of the
current platforms in market
Reconfiguring the sprayer parameters for different crops
Clearance from DGCA
COLLABRATION AND
PARTNERSHIP
TATA
Precision Agriculture
CSIR NALFluid Flow Experiments
GTIOProject Management, System Engineering,
Technology Roadmap
RallisAgricultural Practices,
ANSYSCFD Modelling and
Simulation
EdallManpower

28-06-2017
6
Thank You

28 June 2017
1
INNOVATION IN AVIATION
UAV MAINTENANCE
A
CONCEPT
Air Cmde PK Choudhary VSM (Retd)
INNOVATION IN AVIATION
SCOPE
Introduction
Aviation Maint Philosophy
UAV Maintainability
Conclusion

28 June 2017
2
INNOVATION IN AVIATION
INNOVATION IN AVIATION
• In the early days the basic maintenance philosophy
utilized in aviation industry was to undertake
maintenance and overhaul after a fixed span of
Vehicle life.
• It believed, the reliability of any equipment was
inversely related to its operational life. It therefore
concluded, more frequently an equipment was
overhauled, the better protected it was against
failure.
Advances in Reliability and Maintainability

28 June 2017
3
INNOVATION IN AVIATION
Conservative Excessive
Belief More Maintenance
Increase Reliability
Genaralised
Intrusive
Hard Time
Maintenance
INNOVATION IN AVIATION
• Age-reliability patterns of Vehicle components /
systems were studied, reliability finding indicated that
for majority Vehicle Hard-Time an ineffective
maintenance practice.
• Attempts were made to collate data from different
Reliability Program to identify potential failure. A
concept thus emerged :
• Preventive maintenance at a fixed interval but
undertake activities condition based.

28 June 2017
4
INNOVATION IN AVIATION
On-Condition Maintenance
Slant criteria decides the clearance of
blades to fly 100, 200 or 300 hrs
Slant Check
Value (x)
Blades cleared to fly
100h
Value (Y)
Blades cleared to fly
200h
Value (Z)
Blades Cleared to fly
300h
INNOVATION IN AVIATION
On-Condition Maintenance
Greater Reliance on Measurable Conditions
Unobtrusive
Data Driven
Ageing
Mechanism
Understood

28 June 2017
5
INNOVATION IN AVIATION
• Further Reliability, maintainability and redundancy
studies have evolved Task-oriented Maintenance.
• It uses ‘Top Down’ or ‘Consequence of Failure’
approach to identify suitable Preventive Scheduled
Maintenance tasks to prevent failures and sustain
reliability of the system.
• To perform Maintenance Tasks identify:
• Maintenance Significant Item
• Structure Significant Item
• Zone
INNOVATION IN AVIATION
Task-Oriented ApproachLevel 1
F. FAILURE
SAFETY?
OPERATIONAL
SAFETY?
1
2 3
LUBRICATIONSERVICING?
OPERATIONALVISUAL?
INSPECTIONFUNCTIONAL
RESTORATION?
DISCARD?
APPLICABILITYOF TASKS
5
4
7
6
8
9
Economic
Evident Hidden
Yes
Yes
Yes
No
No
YesNo
Non Safety
Level 2
• Lub/servicing task to maintain
sat operation
• Ops/visual check – failure
finding task
• Inspection/Functional check –
Insp to find potential failure
and functional check compare
degradation if any.
• Restoration – Minor rep to OH.
• Discard – on completion of
specified useful life
28 June 2017
6
INNOVATION IN AVIATION
UAV / UAS Maintenance
• No Regulatory Authority defining design
and certification criterion.
• Neither there is any group functioning to
study and analyze the maintenance and
support needs for UAV.
• In absence of such formal maintenance
study program for UAV each operators
establishes needs requirement individually.
INNOVATION IN AVIATION
• Some of the critical issues observed are:
• No formal study / regulation on human factor for
Unmanned Ariel Vehicle
• Poor Maintenance Documentation and Software
Management
• Operator and Maintainer sometimes same person
• Complacency
• Demand of Wide Skill Envelope
• Packaging, Disassembly and Transportation

28 June 2017
7
INNOVATION IN AVIATION
UAV Maintenance
• Although NO formal maintenance program
outlined by any Regulatory Authority, the
notion of Airworthiness a responsibility of the
operator clearly articulated
• Be a manned or unmanned in Ariel Vehicle
‘Safety the most Important Objective’
• Second the ‘Economy of Effort’ – longer down
time means commercially not viable.
INNOVATION IN AVIATION
Livewire (You):
Physical, Knowledge, Attitudes,
Culture, Stress
Hardware:
Reliability & Maintainability
Study
Livewire:
Teamwork, Leadership, Teamwork,
Norms
Software:Procedures,
policies, Rules, Manuals
Human Error, Rather Than Machine Failure
Underlies More Aviation Accidents And Incidents

28 June 2017
8
INNOVATION IN AVIATION
The Maintainability Concept
• Human is the most important and last safety
element in the system.
.
Behavior: Habits, Stress, Emotion,
Group dynamics
Cognitive: Decision making, Learning
Ability, Perception, Knowledge,
Interpretation, Reasoning, Memory
Culture: Exceptions, Language,
Education, Customs
Environment: Space, Shape, lighting ,
Texture, Color, Hazards, Noise
Population Type: Sex, Race, Profession. Protective Equipment: Gloves, Clothing. Range in Population: Percentile.
Work Envelope: Reach, Vision, Access Capability / limits
Bio-Mechanical: Structure, Posture
Operating Environment:
Temperature, Vibration, Noise, Jet Lag
Performance: Strength, Endurance,
Speed, Reaction
Sensory Input: Vision, Smell, Touch
INNOVATION IN AVIATION
Switches Designed to Overcome Human Weaknesses of Short
Memory. These switches are forced to ‘ON’ position when cover
panel, to cover them, is closed, if mistakenly they are left off.

28 June 2017
9
INNOVATION IN AVIATION
Width of opening (A) and
depth of the opening (D)
affect the average work
time required for the
maintenance. Note for the
aperture size less than 10in
there is drastic increase in
work time and even more
so for a depth of 18in than
06in.
Dimensions are in
cm
INNOVATION IN AVIATION
Verification
Testability Complexity
Visibility
InterchangeabilitySimplicity
Maintainability Evaluation

28 June 2017
10
INNOVATION IN AVIATION
UAV
Maintenance Approach
Optimisation
Lifecycle Approach to
Data Management
Process Management
and Feedback
Integrated Best
Business and
Technology practice
Focused Maintenance
INNOVATION IN AVIATION

28 June 2017
11
INNOVATION IN AVIATION

• STEPS TO MAKE GOVERNMENT UTILISE MORE AND MORE OF UAS:
• SECTORS, SERVICES DELIVERY AND CATERING EFFECTIVELY?
• WHAT SHOULD CONSTITUTE UAS PILOT-PROJECT FOR GOVERNANCE:
• UAS TECHNOLOGY – EVALUATE DIFFERENT UAS, SENSORS, FLIGHT PLANS;
MODALITIES - PROCURE VS SERVICES
• UAS APPLICATIONS – EMBEDDED INTO GOVERNANCE, WHAT APPLICATION AREAS,
AUTONOMOUS DECISION SUPPORT, END-TO-END SERVICES
• URBAN – AUTONOMOUS PROPERTY TAX ESTIMATION
• AGRICULTURE – AUTONOMOUS FARM-LEVEL CROP ESTIMATION
• ARCHAEOLOGY – 3D HERITAGE MANAGEMENT PLAN
• POLICE – CIVIC OPERATIONS AND TRAFFIC MANAGEMENT
• UAS POLICY ISSUES – ECO-SYSTEM POLICY ISSUES, FLIGHT GUIDELINES,
SECURITY/SAFETY, STANDARDS/CERTIFICATION
• WHAT ARE RESEARCH AREAS THAT CAN ALSO BE EXAMINED IN PILOT-PROJECT:
• RESEARCH ELEMENTS, INVOLVE UNIVERSITY, EDUCATION AND CURRICULA
• ESTABLISH A MANUFACTURING ECO-SYSTEM FOR UAS – DESIGN, DEVELOPMENT AND
PRODUCTIONISING – UAS SYSTEMS, SENSORS, MAINTENANCE
• INDIGENUOUS COMMERCIAL ORIENTATION OF UAS END-TO-END UAS SERVICES
UAS PILOT PROJECT – PANEL POINTS…..
Copyright © 2022 FDOKUMEN




















