Effect of mobility parameters on the inaccuracy of the position information of position-based MANET...
10
68 Int. J. Wireless and Mobile Computing, Vol. 7, No. 1, 2014 Copyright © 2014 Inderscience Enterprises Ltd. Effect of mobility parameters on the inaccuracy of the position information of position-based MANET routing Raed Alsaqour* and Maha Abdelhaq School of Computer Science, Faculty of Information Science and Technology, Universiti Kebangsaan Malaysia, 43600 Bangi, Selangor, Malaysia Email: [email protected] Email: [email protected] *Corresponding author Rashid Saeed Department of Electronics Engineering, Faculty of Engineering, Sudan University of Science and Technology (SUST), Khartoum, Sudan Email: [email protected] Mohammed Al-Hubaishi Faculty of Computer Science & Information System, Thamar University, Thamar, Republic of Yemen and LAB, FCT-DEEI, Universidade do Algarve Portugal, Faro, Portugal Email: [email protected] Ola Alsaqour Department of Computer Engineering, Faculty of Engineering and Technology, The University of Jordan, 11942 Amman, Jordan Email: [email protected] Mueen Uddin Kulliah of Information and Communication Technology, International Islamic University Malaysia, Kuala Lumpur, Malaysia and Asia Pacific University of Technology and Innovation, Kuala Lumpur, Malaysia Email: [email protected] Tariq Alahdal Faculty of Computer Science & Information System, Thamar University, Thamar, Republic of Yemen Email: [email protected]
-
Upload
effatuniversity -
Category
Documents
-
view
0 -
download
0
Transcript of Effect of mobility parameters on the inaccuracy of the position information of position-based MANET...

68 Int. J. Wireless and Mobile Computing, Vol. 7, No. 1, 2014
Copyright © 2014 Inderscience Enterprises Ltd.
Effect of mobility parameters on the inaccuracy of the position information of position-based MANET routing
Raed Alsaqour* and Maha Abdelhaq School of Computer Science, Faculty of Information Science and Technology, Universiti Kebangsaan Malaysia, 43600 Bangi, Selangor, Malaysia Email: [email protected] Email: [email protected] *Corresponding author
Rashid Saeed Department of Electronics Engineering, Faculty of Engineering, Sudan University of Science and Technology (SUST), Khartoum, Sudan Email: [email protected]
Mohammed Al-Hubaishi Faculty of Computer Science & Information System, Thamar University, Thamar, Republic of Yemen and LAB, FCT-DEEI, Universidade do Algarve Portugal, Faro, Portugal Email: [email protected]
Ola Alsaqour Department of Computer Engineering, Faculty of Engineering and Technology, The University of Jordan, 11942 Amman, Jordan Email: [email protected]
Mueen Uddin Kulliah of Information and Communication Technology, International Islamic University Malaysia, Kuala Lumpur, Malaysia and Asia Pacific University of Technology and Innovation, Kuala Lumpur, Malaysia Email: [email protected]
Tariq Alahdal Faculty of Computer Science & Information System, Thamar University, Thamar, Republic of Yemen Email: [email protected]
Effect of mobility parameters on the inaccuracy 69
Abstract: Position-based routing protocols have become increasingly popular in mobile ad-hoc networks because they can use geographical node position information to route data packets to their destinations. Each node periodically sends its geographical position information to its neighbours by using beacon packets. Data packet routing in position-based routing protocols uses the neighbours’ position information that is stored in the node’s neighbour list to route the data packet from the source to the destination. Most recent studies on position-based routing protocols assume that the position information in the node’s neighbour list is accurate, although only a rough estimate of this position information is actually available to the nodes. In general, inaccuracy occurs when inaccurate geographical position information is used. This study presents an analysis and a simulation to examine the influence of position information inaccuracy caused by beacon packet interval-time and node speed mobility parameters on the performance of position-based routing protocols.
Keywords: MANET; position-based protocols; position information inaccuracy; beacon packet interval-time; node speed.
Reference: to this paper should be made as follows: Alsaqour, R., Abdelhaq, M., Saeed, R., Al-Hubaishi, M., Alsaqour, O., Uddin, M. and Alahdal, T. (2014) ‘Effect of mobility parameters on the inaccuracy of the position information of position-based MANET routing’, Int. J. Wireless and Mobile Computing, Vol. 7, No. 1, pp.68–77.
Biographical notes: Raed Alsaqour is an Assistant Professor in the Computer Science Department, Faculty of Information Science and Technology, Universiti Kebangsaan Malaysia, Malaysia. He received his BSc degree in Computer Science from Mu’tah University, Jordan, in 1997, MSc degree in Distributed System from University Putra Malaysia, Malaysia, in 2003 and his PhD degree in Wireless Communication System from Universiti Kebangsaan Malaysia, Malaysia, in 2008. His research interests include wireless network, ad hoc network, vehicular network, routing protocols, simulation, and network performance evaluation. He also has a keen interest in computational intelligence algorithms (fuzzy logic and genetic) applications and security issues (intrusion detection and prevention) over network.
Maha Abdelhaq received her Bachelor and Master degrees in Computer Science in 2006 and 2008 from Jordan University (Amman, Jordan). She expected to receive her PhD degree in Wireless Ad Hoc Network Security in December 2013 from Universiti Kebangsaan Malaysia, Malaysia. Her research interests include ad hoc network, routing protocols, network security, artificial computational intelligence and network performance evaluation.
Rashid Saeed received his PhD majoring in Communications and Network Engineering, UPM, Malaysia. He is senior Assistant Professor since 2008 in SUST, Sudan. He was senior researcher in Telekom Malaysia™, Research and Development (TMRND) and MIMOS Berhad, in 2007, 2010, respectively. His areas of research interest include wireless broadband, WiMAX Femtocell. He has been successfully awarded ten patents (two are US) in these areas. He is an IEEE member since 2001 and IEM Member.
Mohammed Al-Hubaishi is a Lecturer in Faculty of Computer Science & Information Systems, Thamar University, Thamar, Republic of Yemen. He received his BSc degree in Computer Science from Thamar University, Yemen, in 2002, MSc degree in Informatics Engineering from Algarve University, Portugal, in 2010. His research interests include wireless networks, routing protocols design, quality of service and network performance evaluation.
Ola Alsaqour is a technical support and web development engineer in GIS & Remote Sensing Department, General Computer and Electronics Company, Amman, Jordan. She received her BSc degree in Computer Engineering from Jordan University, Jordan, in 2010. She currently is acquiring her MSc degree in Computer Engineering from Jordan University, Amman, Jordan. Her research interests include wireless network, ad hoc network, computer architecture, remote sensing and geographical information system.
Mueen Uddin is Senior Lecturer at Asia Pacific University KL Malaysia. He has his PhD from Universiti Teknologi Malaysia UTM in 2012. His research interests include green IT, energy efficient data centres, green metrics, global warming effects, virtualisation, cloud computing, digital content protection and deep packet inspection, intrusion detection and prevention systems, MANET routing protocols. He has BS & MS in Computer Science from Isra University Pakistan with specialisation in Information Networks. He has published more than 35 international journal papers in indexed and reputed journals.
Tariq Alahdal is an Assistance Professor in Faculty of Computer Science & Information Systems, Thamar University, Thamar, Republic of Yemen. He received his BSc degree in Computer Science from Baghdad University, Iraq, in 1998, MSc degree in Distributed Computing from

70 R. Alsaqour et al.
University Putra Malaysia, Malaysia, in 2004 and his PhD degree in Computer Networks and Protocol Design from University Putra Malaysia, Malaysia, in 2008. His research interests include wireless networks, protocols design, and network performance evaluation.
1 Introduction
In Mobile Ad-hoc Networks (MANETs) position-based routing protocols, such as Distance Routing Effect Algorithm for Mobility (DREAM), Location-Aided Routing (LAR), and Greedy Perimeter Stateless Routing (GPSR) (Mauve et al., 2001), the data packet routing decision is purely based on the local geographical position information of the node’s neighbours. To use a position-based routing approach, each node that forms the network must be able to determine its own geographical position information (x, y coordinates) by using a Global Positioning System (GPS) service (Kaplan and Hegarty, 2006). The routing function in a node must also know the position of all its neighbours within its transmission range by using a periodic beaconing (PB) strategy. In a PB strategy, each node periodically sends beacon packets to test and verify connectivity and availability.
In position-based routing protocols, each node selects the subsequent hop for data packet routing through neighbouring nodes by accessing the neighbour list. Only the geographical position information is required for the geographic routing of data packets from the source to the destination node, and thus, the accuracy of the available geographical position information in the nodes’ neighbour list is crucial and fundamental in determining protocol performance.
Neighbourhood topologies frequently change because of node mobility and of the time interval of periodic beacon packets that cause regular network topology changes in MANET. Frequently, the position information in the nodes’ neighbour list does not reveal the real positions of the neighbouring nodes such that retransmission and rerouting are required, thus degrading the performance of position-based routing protocols. For example, if the Beacon Packet Interval-Time (BPIT) is adequately short compared with the degree to which a node changes its present position, the node position information will be accurate, but network resources, such as battery life, will be exhausted. Otherwise, the position information in the nodes’ neighbour list will be inaccurate, but fewer network resources, such as battery life, will be consumed. Thus, BPIT has to be balanced with the node position changing.
This study presents an analysis and a simulation to examine the effect of position information inaccuracy caused by different mobility parameters on the GPSR position-based routing protocol. This study investigated the following two main mobility parameters, which are sources of inaccuracy in the position information in the nodes’ neighbour list:
1 Node BPIT: Nodes periodically send beacon packets to update their position information. The time interval between position information updates is generally longer
than the time required to search the information for route selection, and thus, the time gap is inevitable.
2 Node speed (NS): A node’s speed is one of the most effective parameters that represent the degree of node mobility. The degree of node mobility is the most obvious challenge in MANET routing because the nodes can move at different speeds, and the maximum NS is a critical factor that influences position information inaccuracy.
2 Position-based routing protocols background
In this study, a well-known position-based protocol called the GPSR protocol is considered to simplify and understand the general mechanism of position-based routing protocols. The GPSR is an efficient and scalable routing protocol in MANETs (Jain et al., 2001; Karp and Kung, 2000). In the GPSR protocol, a node routes a data packet by using the locations of its one-hop neighbours. When a node needs to send a data packet, it transmits the data packet to the neighbour closest to the destination node among all neighbours within its transmission range.
The GPSR protocol uses two forwarding strategies, namely greedy forwarding and perimeter forwarding, to route a data packet to its destination. In greedy forwarding, the GPSR makes forwarding decisions by using position information of immediate neighbours in the network topology. In Figure 1, node x wants to send a data packet to node D, and thus, it sends the data packet to node y because node y is listed in its neighbour list, as shown in Table 1, and because the distance between nodes y and D is less than that between node D and any of x’s other neighbours. This greedy forwarding process is repeated by nodes y, k, z, and w until the data packet reaches node D.
Figure 1 GPSR protocol; greedy forwarding strategy
The greedy forwarding strategy fails when the routing node cannot find a neighbour closer to the destination than itself within its transmission range. Figure 2 shows an example of such topology, where node x is closer to destination node D than its neighbours w and y. Although two paths to D exist,

Effect of mobility parameters on the inaccuracy 71
namely x-y-z-D and x-w-v-D, x will not forward the data packet to w or y by using greedy forwarding. The protocol declares node x as the local maximum to D and the shaded region without nodes as a void region. In this case, the GPSR protocol shifts from the greedy forwarding strategy to the perimeter forwarding strategy to forward the data packet around the void region. In the perimeter forwarding strategy, the protocol constructs a planarised graph for node x’s neighbours and routes the data packet around the void region by using the right-hand rule. The right-hand rule states that when the data from y arrive at node x, the next traversed edge is the one sequentially counter clockwise about x from the edge (x, y). Applying the right-hand rule in Figure 2, node x forwards the data packet to node w.
Table 1 Node x’s neighbour list
Node ID Neighbour (x, y coordinates)
A A (x1, y1)
B B (x2, y2)
C C (x3, y3)
F F (x4, y4)
Figure 2 GPSR protocol; perimeter forwarding strategy
3 Related work
Related studies have addressed the effect of position information inaccuracy in position-based routing protocol. Alsaqour et al. (2012) identified and investigated the effects of network parameters, such as BPIT, NS, network density, transmission range, and network area size, on a wireless link breakage between the sender and its neighbours. The authors proposed a neighbour wireless link break prediction model to predict the accurate position of a routing neighbouring node in the sender’s neighbour list.
Alsaqour et al. (2011) modelled the four types of metrics for position information inaccuracy that may observed in position-based routing protocols. These metrics are: inaccuracy in node position information (INACC_NPI), inaccuracy in node distance information (INACC_NDI),
inconsistency in node position information (INCON_NPI) and inconsistency in node distance information (INCON_ NDI). In addition, the authors showed the effect of these metrics in degrading the performance of position-based routing protocols in terms of average end-to-end delay, non-optimal route, false local maximum problem, and routing loop problem. Raed et al. (2011) provided analysis study to realise the effect of position information inaccuracy caused by different mobility parameters on GPSR position-based routing protocol.
Peng and Kemp (2011) and Peng et al. (2009b) analysed the effects of location errors on geographic routing and determined that location errors lead to a substantial performance degradation in terms of energy consumption. In a preliminary study reported by Seada et al. (2007) examined a face position-based routing protocol in the presence of position inaccuracy in static Wireless Sensor Networks (WSNs). WSNs are MANETs with static nodes. They showed that location errors in the nodes’ neighbour list could lead to incorrect behaviour and remarkable degradation in the protocol data packet delivery rate. Son et al. (2004a, 2004b) also investigated the effects of location errors on WSNs and concluded that node mobility has a significant effect on WSN data packet delivery performance.
Shah et al. (2005) provided an analysis and a simulation study to understand the effect of a GPS localisation system error on the GPSR protocol. They observed a degradation of GPSR protocol performance in terms of packet delivery ratio and the nodes’ power consumption. Kwon and Shroff (2006) investigated location errors in the greedy forwarding strategy. They discovered that the difference between the real (accurate) and false (inaccurate) node position information in the nodes’ neighbour list significantly degrades the successful packet-delivery rate. Peng et al. (2009a) reported that location errors caused transmission failure and sub-optimal relay of data packets (Abdullah et al., 2012; Alahdal et al., 2013). These effects resulted in lost data packets and increased node energy consumption. Kim et al. (2004) reported that location errors degrade the performance of the perimeter forwarding strategy in terms of data packet drops, optimal routing, and routing loop rate, particularly in high-density network environments.
The current study extended the scope of other studies by performing an analysis and a simulation on the effect of position information inaccuracy in the nodes’ neighbour list on the GPSR protocol performance. In addition, a dynamic beacon packet strategy was proposed using an FL approach. The results of this study can serve as bases for studying and improving other MANET routing protocols.
4 Effects of mobility parameters on position information inaccuracy
Tsumochi et al. (2003) classified various mobility parameters, such as BPIT and NS, which can affect the performance of routing protocols in MANETs. This section discusses the effects of mobility parameters when position information inaccuracy is introduced into the GPSR protocol.

72 R. Alsaqour et al.
4.1 Effect of BPIT
Node BPIT is one of the parameters that control the determination of node connectivity in position-based routing protocols (Chakeres and Belding-Royer, 2002). BPIT specifies the maximum time interval between transmissions of beacon packets among nodes. Each node in a position-based routing protocol periodically broadcasts beacon packets to its neighbours to provide the neighbours its geographical position information (x y coordinates). Receiving nodes within the range of the beacon packet sender transmission create or update the neighbour list and use the beacon packets’ position information for future routing processes. The position information carried by beacon packets becomes inaccurate as the BPIT increases. In addition, the accuracy level of the position information that nodes associate with their neighbours decreases between beacon packets as these neighbours move.
Figure 3 shows the effect of BPIT on position information inaccuracy in the GPSR protocol. In Figure 3, node s recognises its neighbouring node n1 at position n1 from the beacon packet information, which arrived at time t1. When n1 broadcasts its beacon packet, the position information accuracy level for n1 in node s’s neighbour list will decrease if BPIT2 at time t3 is used rather than BPIT1 at time t2, where BPIT2 > BPIT1 and t3 > t1. Thus, it can be concluded that the position information accuracy level for the neighbouring nodes decreases with increasing BPIT.
Figure 3 Effect of BPIT on position information inaccuracy. t1, t2, and t3 represent the times beacon packets are sent, BPIT2 > BPIT1
4.2 Effect of NS
A change in NS indicates a change in the level of node mobility (Saqour et al., 2007; Shanudin et al., 2005), which, in turn, affects the inaccuracy in node position information. Nodes can move at different speeds, and NS is one of the parameters that determine the accuracy level of position information.
Figure 4 shows the effect of NS on the accuracy level of position information in the GPSR protocol. As shown in Figure 4, node s recognises n1 in its neighbour list at position n1 from the beacon packet information which arrives at time t1. If n1 moves using NS1 rather than NS2, where NS2 > NS1 and t2 > t1, n1 is expected to travel a longer distance, and the
accuracy level of the position information for n1 in node s’s neighbour list will decrease. Thus, it can be concluded that the accuracy level of the position information for the neighbouring nodes decreases with increasing NS.
Figure 4 Effect of NS on position information inaccuracy. t1 and t2 are the times beacon packets are sent; NS2 > NS1
Figure 5 shows the average inaccuracy value of the position information in the neighbour list versus different BPIT and NS values. When the NS and BPIT values increase, the inaccuracy between the real (accurate) and false (inaccurate) positions in the nodes’ neighbour list increases in terms of distance (metres).
Figure 5 Average node position information inaccuracy in the nodes’ neighbour list, BPIT versus NS
5 Analysis of the effect of position information inaccuracy
This section analyses the problems that may occur because of inaccurate node position information in the GPSR protocol. Figure 6 shows the increase in the end-to-end delay of a data packet through its source–destination route, which is one of the problems associated with the inaccuracy in node position information. In Figure 6, node s recognises its neighbouring node n in its neighbour list at the false

Effect of mobility parameters on the inaccuracy 73
position n(xn, yn), whereas the real node n position is n(xn, yn). Node s may transmit the data packet several times to node n, which is outside node s’s transmission range. If the routing protocol has a backup mechanism, such as the data packet acknowledgement scheme (Karp and Kung, 2000), the backup mechanism will report that node n is unreachable and that a data packet loss has occurred. Transmitting the data packet several times before the backup mechanism announces delivery failure results in a significant data packet end-to-end delay.
Figure 6 End-to-end delay problem. n(xn, yn) false position; n(xn, yn) real position
The non-optimal route problem, which represents the non-shortest route (number of hops) experienced by each data packet through its route from node i to node j, is the second problem associated with the inaccuracy in the GPSR protocol.
Figure 7 shows the non-optimal route problem. The false positions of routing neighbouring n1 and n2 are n1 and n2, respectively, whereas the real positions of n1 and n2 are n1 and n2, respectively. The real position of destination node d is d (xd, yd). In such instance, node s recognises n1 in its neighbour list at the false position n1 as the neighbour closest to d, even though node n2 is actually the closest neighbour to d. The use of n1 as a routing node in place of n2 increases the number of routing hops towards the destination and directs the data packet along a non-optimal route.
The false local maximum problem within the range of the destination node is the third problem associated with the inaccuracy in node position information in the GPSR protocol. A false local maximum problem occurs when the routing node cannot find a neighbour closer to the destination node among its neighbours other than itself, even though the routing node actually has a neighbour closer to the destination node. Figure 8 shows the false local maximum problem, where node l recognises d in its neighbour list at position dl, while source node s recognises d at position ds. Thus, d will be at dl when the data packet reaches node l. When the data packet arrives at node l carrying the d position from s at ds, node l will not find a neighbour closer to the destination than itself, even though the destination is actually the neighbour of node l at position dl. This situation generates the false local maximum
problem by allowing node l to route the data packet to node p via the perimeter routing strategy (Figure 2). Thus, a false local maximum occurs when the distance between dl and ds is greater than that between l and ds.
Figure 7 Non-optimal route problem. n1, n2 real position; n1, n2 false position
Figure 8 False local maximum problem. dl is recognised by l when the data packet is forwarded by l; ds is recognised by s when the data packet is forwarded by s
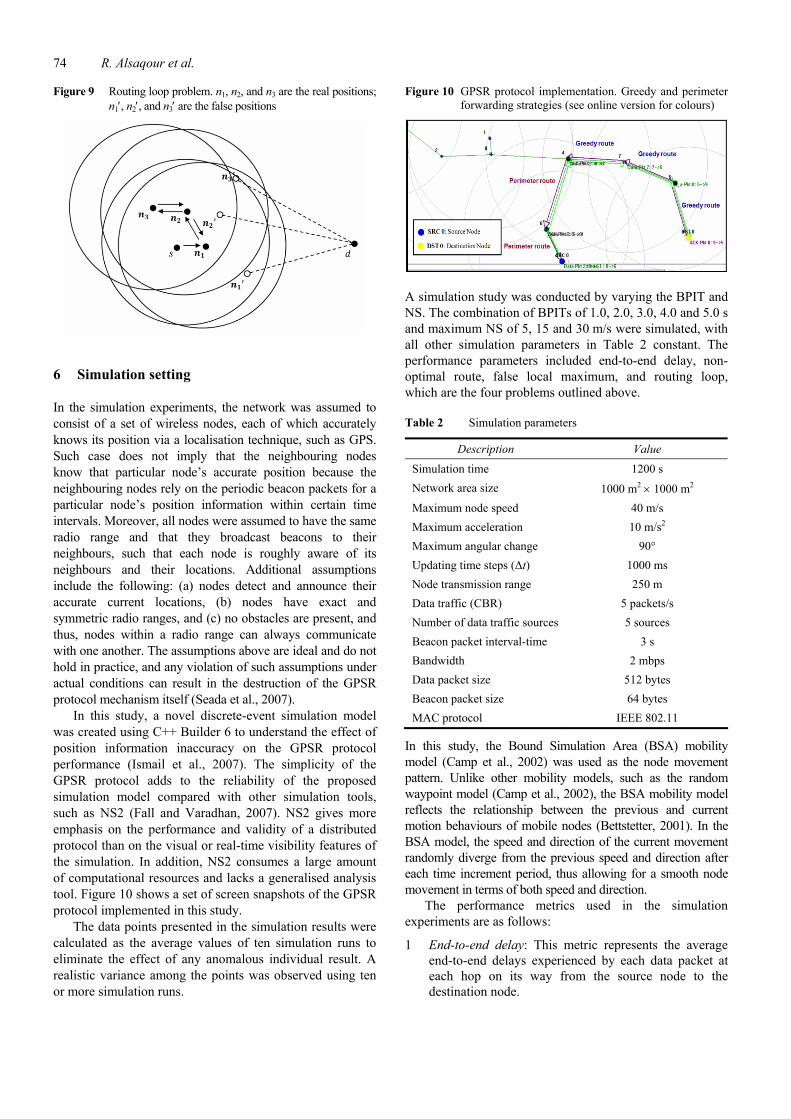
The routing loop problem is the fourth problem associated with the inaccuracy in node position information in the GPSR protocol. A routing loop is a type of network failure in which data packets are continuously routed in an endless circle rather than reaching their destinations. Figure 9 shows the routing loop problem, where the nodes recognise one another in their neighbours’ list at false positions n1, n2, n3, whereas the real positions of these nodes are: n1, n2, and n3. Node s assumes that n1 at n1 is the neighbour closest to d and routes the data packet to its real position n1. n1 assumes that n2 at false n2 is the neighbour closest to d and forwards the data packet to n2 at real position n2. n2 then assumes that n3 at n3 is the neighbour closest to d and forwards the data packet to n3 at real position n3. In turn, n3 assumes that n2 at n1 is the neighbour closest to d and reroutes the data packet to n2 at real position n2, which, in turn, causes n2 to assume that n1 is the neighbour closest to d, and thus, node n2 reroutes the data packet to n1. This situation causes the data packet to loop indefinitely between routing nodes.
74 R. Alsaqour et al.
Figure 9 Routing loop problem. n1, n2, and n3 are the real positions; n1, n2, and n3 are the false positions
6 Simulation setting
In the simulation experiments, the network was assumed to consist of a set of wireless nodes, each of which accurately knows its position via a localisation technique, such as GPS. Such case does not imply that the neighbouring nodes know that particular node’s accurate position because the neighbouring nodes rely on the periodic beacon packets for a particular node’s position information within certain time intervals. Moreover, all nodes were assumed to have the same radio range and that they broadcast beacons to their neighbours, such that each node is roughly aware of its neighbours and their locations. Additional assumptions include the following: (a) nodes detect and announce their accurate current locations, (b) nodes have exact and symmetric radio ranges, and (c) no obstacles are present, and thus, nodes within a radio range can always communicate with one another. The assumptions above are ideal and do not hold in practice, and any violation of such assumptions under actual conditions can result in the destruction of the GPSR protocol mechanism itself (Seada et al., 2007).
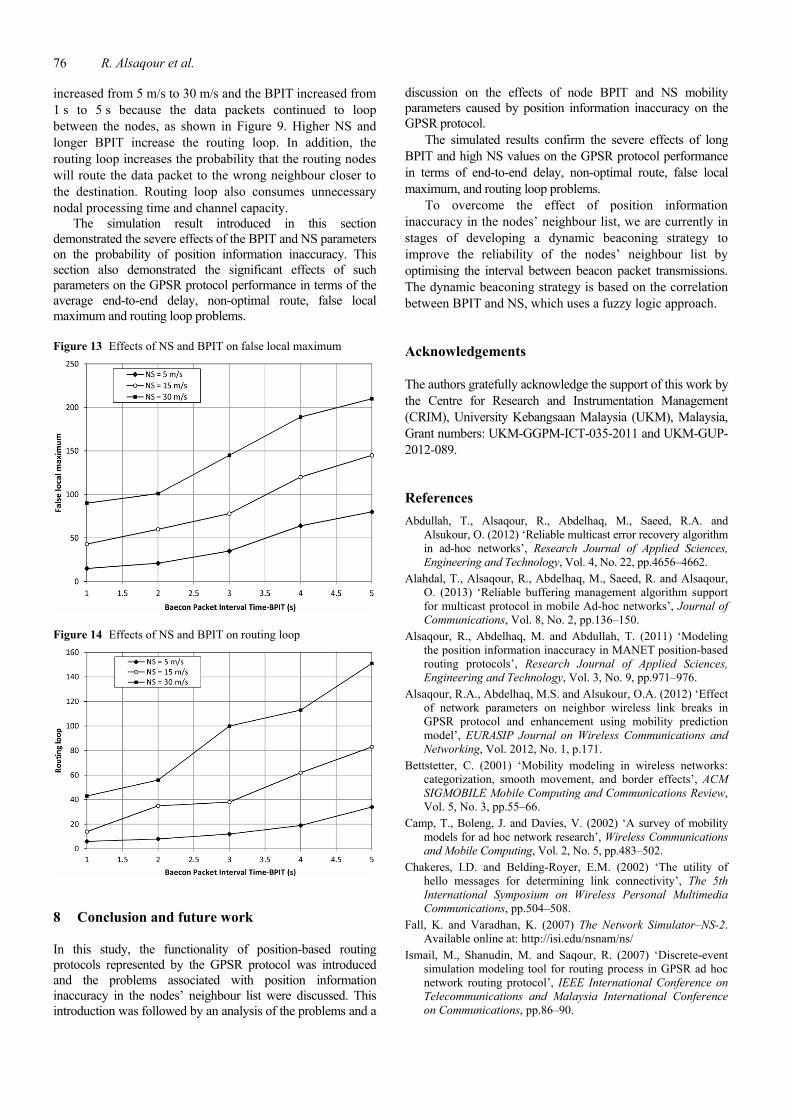
In this study, a novel discrete-event simulation model was created using C++ Builder 6 to understand the effect of position information inaccuracy on the GPSR protocol performance (Ismail et al., 2007). The simplicity of the GPSR protocol adds to the reliability of the proposed simulation model compared with other simulation tools, such as NS2 (Fall and Varadhan, 2007). NS2 gives more emphasis on the performance and validity of a distributed protocol than on the visual or real-time visibility features of the simulation. In addition, NS2 consumes a large amount of computational resources and lacks a generalised analysis tool. Figure 10 shows a set of screen snapshots of the GPSR protocol implemented in this study.
The data points presented in the simulation results were calculated as the average values of ten simulation runs to eliminate the effect of any anomalous individual result. A realistic variance among the points was observed using ten or more simulation runs.
Figure 10 GPSR protocol implementation. Greedy and perimeter forwarding strategies (see online version for colours)
A simulation study was conducted by varying the BPIT and NS. The combination of BPITs of 1.0, 2.0, 3.0, 4.0 and 5.0 s and maximum NS of 5, 15 and 30 m/s were simulated, with all other simulation parameters in Table 2 constant. The performance parameters included end-to-end delay, non-optimal route, false local maximum, and routing loop, which are the four problems outlined above.
Table 2 Simulation parameters
Description Value
Simulation time 1200 s
Network area size 1000 m2 1000 m2
Maximum node speed 40 m/s
Maximum acceleration 10 m/s2
Maximum angular change 90°
Updating time steps (Δt) 1000 ms
Node transmission range 250 m
Data traffic (CBR) 5 packets/s
Number of data traffic sources 5 sources
Beacon packet interval-time 3 s
Bandwidth 2 mbps
Data packet size 512 bytes
Beacon packet size 64 bytes
MAC protocol IEEE 802.11
In this study, the Bound Simulation Area (BSA) mobility model (Camp et al., 2002) was used as the node movement pattern. Unlike other mobility models, such as the random waypoint model (Camp et al., 2002), the BSA mobility model reflects the relationship between the previous and current motion behaviours of mobile nodes (Bettstetter, 2001). In the BSA model, the speed and direction of the current movement randomly diverge from the previous speed and direction after each time increment period, thus allowing for a smooth node movement in terms of both speed and direction.
The performance metrics used in the simulation experiments are as follows:
1 End-to-end delay: This metric represents the average end-to-end delays experienced by each data packet at each hop on its way from the source node to the destination node.

Effect of mobility parameters on the inaccuracy 75
2 Non-optimal route: This metric represents the number of hops experienced by each data packet along its route from the source node to the destination as it passes through the intermediate nodes.
3 False local maximum: This metric represents the number of times the routing node was not able to find a neighbour closer to the destination node than itself, even though a neighbour is actually closer to the destination node.
4 Routing loop: This metric represents the number of times the data packet was continuously transmitted within a series of nodes without ever reaching its intended destination.
7 Simulation results and evaluation
7.1 End-to-end delay
Figure 11 shows the effects of BPIT and NS on the average end-to-end delay in the GPSR protocol. The average end-to-end delay significantly increases with higher NS and longer BPIT. The average end-to-end delay increases by 6.8%, 28.5% and 48.8% when the BPIT increased from 1 s to 5 s and the NS increased from 5 m/s to 30 m/s. These results may be attributed to the fact that the sender node picks from its neighbour list the one closest to the destination and routes the data packet to that neighbour. This particular neighbour is closer to the sender’s transmission range boundary, and thus, there is a high probability that the neighbour may not exist within the sender’s transmission range and leaves the sender’s transmission boundary. Higher NS and longer BPIT increase the probability of routing the data packet to a neighbour that leaves the sender’s transmission range, although this neighbour remains in the sender’s neighbour list (as represented in Figure 6). This situation leads to the retransmission of the data packet several times to the unreachable neighbour and increases the packet end-to-end delay.
Figure 11 Effects of NS and BPIT on average end-to-end delay
7.2 Non-optimal route
Figure 12 shows the effects of NS and BPIT on the non-optimal route in the GPSR protocol. The non-optimal route significantly increases with higher NS and longer BPIT. The non-optimal route increased by 12.3%, 27.8% and 50.5% when the BPIT increased from 1 s to 5 s and the NS increased from 5 m/s to 30 m/s. Figure 7 indicates that the non-optimal route is caused by the discrepancy in the real distance and the false distance between the routing and destination nodes. The increment in the non-optimal route increases the inaccuracy of the selection of the neighbour closest to the destination. Higher NS and longer BPIT increase the inaccuracy between the routing neighbour’s false distance in the sender’s neighbour list and the routing neighbour’s real distance, resulting in an increase in the probability of a data packet being routed to the wrong closest neighbour.
Figure 12 Effects of NS and BPIT on the non-optimal route
7.3 False local maximum
Figure 13 shows the effects of NS and BPIT on the false local maximum in the GPSR protocol. The false local maximum significantly increases with higher NS and longer BPIT. The false local maximum increased by 17.2%, 35.7% and 58.8% when the BPIT increased from 1 s to 5 s and the NS increased from 5 m/s to 30 m/s. Figure 8 shows that the false local maximum occurred when the routing node was not able to find a neighbour closer than itself to the destination node. Higher NS and longer BPIT increase the false local maximum, resulting in an increase in the probability that the last-hop node will face a false local maximum in the perimeter routing strategy.
7.4 Routing loop
Figure 14 shows the effects of NS and BPIT on the routing loop in the GPSR protocol. The routing loop significantly increases with higher NS and longer BPIT. The routing loop increased by 9.9%, 29.0% and 57.9% when the NS
76 R. Alsaqour et al.
increased from 5 m/s to 30 m/s and the BPIT increased from 1 s to 5 s because the data packets continued to loop between the nodes, as shown in Figure 9. Higher NS and longer BPIT increase the routing loop. In addition, the routing loop increases the probability that the routing nodes will route the data packet to the wrong neighbour closer to the destination. Routing loop also consumes unnecessary nodal processing time and channel capacity.
The simulation result introduced in this section demonstrated the severe effects of the BPIT and NS parameters on the probability of position information inaccuracy. This section also demonstrated the significant effects of such parameters on the GPSR protocol performance in terms of the average end-to-end delay, non-optimal route, false local maximum and routing loop problems.
Figure 13 Effects of NS and BPIT on false local maximum
Figure 14 Effects of NS and BPIT on routing loop
8 Conclusion and future work
In this study, the functionality of position-based routing protocols represented by the GPSR protocol was introduced and the problems associated with position information inaccuracy in the nodes’ neighbour list were discussed. This introduction was followed by an analysis of the problems and a
discussion on the effects of node BPIT and NS mobility parameters caused by position information inaccuracy on the GPSR protocol.
The simulated results confirm the severe effects of long BPIT and high NS values on the GPSR protocol performance in terms of end-to-end delay, non-optimal route, false local maximum, and routing loop problems.
To overcome the effect of position information inaccuracy in the nodes’ neighbour list, we are currently in stages of developing a dynamic beaconing strategy to improve the reliability of the nodes’ neighbour list by optimising the interval between beacon packet transmissions. The dynamic beaconing strategy is based on the correlation between BPIT and NS, which uses a fuzzy logic approach.
Acknowledgements
The authors gratefully acknowledge the support of this work by the Centre for Research and Instrumentation Management (CRIM), University Kebangsaan Malaysia (UKM), Malaysia, Grant numbers: UKM-GGPM-ICT-035-2011 and UKM-GUP-2012-089.
References
Abdullah, T., Alsaqour, R., Abdelhaq, M., Saeed, R.A. and Alsukour, O. (2012) ‘Reliable multicast error recovery algorithm in ad-hoc networks’, Research Journal of Applied Sciences, Engineering and Technology, Vol. 4, No. 22, pp.4656–4662.
Alahdal, T., Alsaqour, R., Abdelhaq, M., Saeed, R. and Alsaqour, O. (2013) ‘Reliable buffering management algorithm support for multicast protocol in mobile Ad-hoc networks’, Journal of Communications, Vol. 8, No. 2, pp.136–150.
Alsaqour, R., Abdelhaq, M. and Abdullah, T. (2011) ‘Modeling the position information inaccuracy in MANET position-based routing protocols’, Research Journal of Applied Sciences, Engineering and Technology, Vol. 3, No. 9, pp.971–976.
Alsaqour, R.A., Abdelhaq, M.S. and Alsukour, O.A. (2012) ‘Effect of network parameters on neighbor wireless link breaks in GPSR protocol and enhancement using mobility prediction model’, EURASIP Journal on Wireless Communications and Networking, Vol. 2012, No. 1, p.171.
Bettstetter, C. (2001) ‘Mobility modeling in wireless networks: categorization, smooth movement, and border effects’, ACM SIGMOBILE Mobile Computing and Communications Review, Vol. 5, No. 3, pp.55–66.
Camp, T., Boleng, J. and Davies, V. (2002) ‘A survey of mobility models for ad hoc network research’, Wireless Communications and Mobile Computing, Vol. 2, No. 5, pp.483–502.
Chakeres, I.D. and Belding-Royer, E.M. (2002) ‘The utility of hello messages for determining link connectivity’, The 5th International Symposium on Wireless Personal Multimedia Communications, pp.504–508.
Fall, K. and Varadhan, K. (2007) The Network Simulator–NS-2. Available online at: http://isi.edu/nsnam/ns/
Ismail, M., Shanudin, M. and Saqour, R. (2007) ‘Discrete-event simulation modeling tool for routing process in GPSR ad hoc network routing protocol’, IEEE International Conference on Telecommunications and Malaysia International Conference on Communications, pp.86–90.

Effect of mobility parameters on the inaccuracy 77
Jain, R., Puri, A. and Sengupta, R. (2001) ‘Geographical routing using partial information for wireless ad hoc networks’, Personal Communications, Vol. 8, No. 1, pp.48–57.
Kaplan, E.D. and Hegarty, C.J. (2006) Understanding GPS: Principles and Applications, Artech House Publishers, Norwood, MA.
Karp, B. and Kung, H.T. (2000) ‘GPSR: greedy perimeter stateless routing for wireless networks’, Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, pp.243–254.
Kim, Y., Lee, J.J. and Helmy, A. (2004) ‘Modeling and analyzing the impact of location inconsistencies on geographic routing in wireless networks’, ACM SIGMOBILE Mobile Computing and Communications Review, Vol. 8, No. 1, pp.48–60.
Kwon, S. and Shroff, N.B. (2006) ‘Geographic routing in the presence of location errors’, Computer Networks, Vol. 50, No. 15, pp.2902–2917.
Mauve, M., Widmer, A. and Hartenstein, H. (2001) ‘A survey on position-based routing in mobile ad hoc networks’, Network, Vol. 15, No. 6, pp.30–39.
Peng, B. and Kemp, A. (2011) ‘Energy-efficient geographic routing in the presence of localization errors’, Computer Networks, Vol. 55, No. 3, pp.856–872.
Peng, B., Kemp, A. and Maheshwari, H. (2009a) ‘Impact of location errors on energy-efficient geographic routing in wireless sensor networks’, 15th Asia-Pacific Conference on Communications, pp.830–833.
Peng, B., Kemp, A. and Maheshwari, H.K. (2009b) ‘Power-saving geographic routing in the presence of location errors’, IEEE International Conference on Communications, pp.1–5.
Raed, A., Mohamad, S., Mahamod, I. and Maha, A. (2011) ‘Analysis of mobility parameters effect on position information inaccuracy of GPSR position-based MANET routing protocol’, Journal of Theoretical and Applied Information Technology, Vol. 28, No. 2, pp.114–120.
Saqour, R., Shanuldin, M. and Ismail, M. (2007) ‘Prediction schemes to enhance the routing process in geographical GPSR ad hoc protocol’, Mobile Information Systems, Vol. 3, No. 3, pp.203–220.
Seada, K., Helmy, A. and Govindan, R. (2007) ‘Modeling and analyzing the correctness of geographic face routing under realistic conditions’, Ad Hoc Networks, Vol. 5, No. 6, pp.855–871.
Shah, R.C., Wolisz, A. and Rabaey, J.M. (2005) ‘On the performance of geographical routing in the presence of localization errors [ad hoc network applications]’, IEEE International Conference on Communications, Vol. 5, pp.2979–2985.
Shanudin, M., Ismail, M. and Saqour, R. (2005) ‘Impact of mobility metrics on geographical greedy ad hoc network routing protocol and improvement using angular prediction model’, Proceeding of the IEEE Malaysia International Conference on Communications (MICC) and the IEEE International Conference on Networks (ICON), pp.262–267.
Son, D., Helmy, A. and Krishnamachari, B. (2004a) ‘The effect of mobility-induced location errors on geographic routing in ad hoc networks: analysis and improvement using mobility prediction’, IEEE Transactions on Mobile Computing, Vol. 3, No. 3, pp.189–194.
Son, D., Helmy, A. and Krishnamachari, B. (2004b) ‘The effect of mobility-induced location errors on geographic routing in mobile ad hoc sensor networks: analysis and improvement using mobility prediction’, IEEE Transactions on Mobile Computing, Vol. 3, No. 3, pp.233–245.
Tsumochi, J., Masayama, K., Uehara, H. and Yokoyama, M. (2003) ‘Impact of mobility metric on routing protocols for mobile ad hoe networks’, IEEE Pacific Rim Conference on Communications, Computers and signal Processing (PACRIM), pp.322–325.
Venkatesh, V. and Davis, F.D. (2000) ‘A theoretical extension of the technology acceptance model: four longitudinal field’, Management Science, Vol. 46, pp.186–204.
Vrechopoulos, A.P., Constantiou, I.D., Mylonopoulos, N. and Sideris, I. (2002) ‘Critical success factors for accelerating mobile commerce diffusion in Europe’, Proceedings of the 15th Bled Electronic Commerce Conference, Bled, Slovenia.
Wei, T.T., Marthandan, G., Chong, A.Y.L., Ooi, K.B. and Arumugam, S. (2009) ‘What drives Malaysian m-commerce adoption? An empirical analysis’, Industrial Management & Data System, Vol. 109, pp.370–388.
Wu, P.F. (2009) ‘Opening the black boxes of TAM: towards a mixed methods approach’, ICIS 2009. Available online at: http:// aisle.aisnet.org/icis2009/101
Wu, J.H. and Wang, S.C. (2005) ‘What drives mobile commerce? An empirical evaluation of the revised technology acceptance model’, Information & Management, Vol. 42, pp.719–729.