
Performance Analysis of V2V Dynamic Anchor Position-based Routing Protocols
21
1 23 Wireless Networks The Journal of Mobile Communication, Computation and Information ISSN 1022-0038 Wireless Netw DOI 10.1007/s11276-014-0825-8 Performance analysis of V2V dynamic anchor position-based routing protocols Mohammad Reza Jabbarpour, Alireza Marefat, Ali Jalooli, Rafidah Md Noor, Rashid Hafeez Khokhar & Jaime Lloret
Transcript of Performance Analysis of V2V Dynamic Anchor Position-based Routing Protocols

1 23
Wireless NetworksThe Journal of Mobile Communication,Computation and Information ISSN 1022-0038 Wireless NetwDOI 10.1007/s11276-014-0825-8
Performance analysis of V2V dynamicanchor position-based routing protocols
Mohammad Reza Jabbarpour, AlirezaMarefat, Ali Jalooli, Rafidah Md Noor,Rashid Hafeez Khokhar & Jaime Lloret

1 23
Your article is protected by copyright and all
rights are held exclusively by Springer Science
+Business Media New York. This e-offprint is
for personal use only and shall not be self-
archived in electronic repositories. If you wish
to self-archive your article, please use the
accepted manuscript version for posting on
your own website. You may further deposit
the accepted manuscript version in any
repository, provided it is only made publicly
available 12 months after official publication
or later and provided acknowledgement is
given to the original source of publication
and a link is inserted to the published article
on Springer's website. The link must be
accompanied by the following text: "The final
publication is available at link.springer.com”.
Performance analysis of V2V dynamic anchor position-basedrouting protocols
Mohammad Reza Jabbarpour • Alireza Marefat •
Ali Jalooli • Rafidah Md Noor • Rashid Hafeez Khokhar •
Jaime Lloret
� Springer Science+Business Media New York 2014
Abstract Recently, vehicular ad hoc networks (VA-
NETs) have received more attention in both academic and
industry settings. One of the challenging issues in this
domain is routing protocols. VANETs’ unique character-
istics such as high mobility with the constraint of road
topology, fast network topology changes, frequently dis-
connected networks, and time-sensitive data exchange
makes it difficult to design an efficient routing protocol for
routing data in vehicle-to-vehicle (V2V) and vehicle-to-
infrastructure communications. Designing routing proto-
cols for V2V commutations are more challenging due to
the absence of infrastructure nodes in the communication
procedure. They become even more challenging, when
they get benefit from dynamic anchor computation method
in which the anchor nodes (junctions or basic nodes for
routing) are dynamic in their routing procedure. Position-
based routing protocols have been proven to be superior
and outperform the other protocols since there is no
requirement to establish and save a route between source
and destination during the routing process which is suitable
for dynamic nature of vehicular networks. In this paper, the
performance of V2V dynamic anchor position-based rout-
ing protocols, which are proposed for the most challenging
condition of packet routing in VANET, are investigated
and evaluated under two different scenarios (i.e. various
vehicle densities and velocities) through NS-2. The
obtained results are then illustrated based on average delay,
packet delivery ratio and routing overhead as routing per-
formance indicators. Our objective is to provide a quanti-
tative assessment of the applicability of these protocols in
different vehicular scenarios. The comparison provided in
this paper makes the research contribution of this survey
paper quite higher than a regular survey paper only with
explanations.
Keywords Vehicular ad hoc networks � Position-based
routing � Anchor-based � Vehicle-to-vehicle
1 Introduction
Informing drivers about abnormal and hazard conditions on
the road such as accidents, work zones, weather conditions,
special events (e.g. sports), and emergencies (e.g. bushfire,
flood), is crucial to safety and regulate the vehicle traffic
flow. Having real-time and accurate information related to
traffic mobility (e.g. vehicle density, direction, accident and
velocity as well as weather condition) is essential for
obtaining this goal. VANETs can gather and provide this
information using vehicle-to-vehicle (V2V) and vehicle-to-
infrastructure (V2I) communication technologies [1–3].
M. R. Jabbarpour (&) � A. Marefat � A. Jalooli � R. M. Noor
Faculty of Computer Science and Information Technology,
University of Malaya, 50603 Kuala Lumpur, Malaysia
e-mail: [email protected]
A. Marefat
e-mail: [email protected]
A. Jalooli
e-mail: [email protected]
R. M. Noor
e-mail: [email protected]
R. H. Khokhar
School of Computing and Mathematics, Charles Sturt
University, Wagga Wagga, NSW 2678, Australia
e-mail: [email protected]
J. Lloret
Department of Communications, Polytechnic University
of Valencia, Camino Vera s/n, 46022 Valencia, Spain
e-mail: [email protected]
123
Wireless Netw
DOI 10.1007/s11276-014-0825-8
Author's personal copy

Vehicular ad hoc networks (VANET) is a subclass of
mobile ad hoc network (MANET) that integrates the
potentials of new generation wireless networks into vehicle
[4–7]. These kinds of networks have attracted automobile
industry and researchers due to rapid increase in number of
vehicles on the roads. The use of VANETs can increase the
drivers’ and passengers’ safety and comfort. VANET
devices (e.g. on-board unit) enable vehicles to send/receive
messages between each other via radio propagation. By
delivering these messages on time, drivers can make better
decisions and avoid mishaps before any incident. Proper
message delivery needs appropriate routing mechanism.
Although VANET is similar to MANET in terms of self-
organization, low bandwidth and unreliable communica-
tion media, it has its own unique characteristics such as
high mobility with the constraint of road topology, fast
network topology changes, abundant energy and storage
source, frequently disconnected networks, and time-sensi-
tive data exchange [8–11]. These characteristics have
introduced several research challenges to the design of a
proper routing protocol for VANETs.
For decades, several routing protocols have been pro-
posed for vehicular networks that we addressed and clas-
sified them in Sect. 2. Among them, position based
protocols have been proven to be superior and outperform
the other protocols since there is no requirement to estab-
lish and save a route between source and destination during
the routing process which is suitable for dynamic nature of
vehicular networks [12, 13]. In addition, they improve
scalability and control message overhead as compared with
others routing protocols [14]. Moreover, the performance
of various routing protocols (such as AODV [15] and DSR
[16]) is compared against the position-based routing pro-
tocols in a number of studies such as [17, 18], which
confirm that position-based routing protocols are the most
promising routing paradigm for VANETs.
Vehicles velocity, position, direction, density and dis-
tance are the main factors that have predominant role in
VANET routing protocols and finding the next-hop nodes
for forwarding the packets [19]. Various combinations of
these factors are considered in a number of studies in order
to propose suitable position-based routing protocols for
vehicular networks. Position-based routing protocols are
classified into two categories, namely, V2V and V2I.
Navigation system contains pre-loaded digital maps
through which street level navigation information can be
extracted. By the aid of navigation systems, different
junctions or anchors are identified by position-based rout-
ing protocols and are used to apply different routing
algorithm [4, 20]. Position-based routing protocols for V2V
commutations are more challenging than the protocols that
proposed for V2I communications due to the absence of
infrastructure nodes in the communication procedure [21].
They even become more challenging if they use dynamic
anchor computation method in which the anchor nodes are
dynamic. Therefore, the main contribution of this paper is
analyzing and evaluating various position-based routing
protocols that are proposed for V2V communication mode
and utilize dynamic anchor computation method. These
algorithms are evaluated based on different contributing
factors such as average delay packet delivery ratio, and
routing overhead.
Moreover, we present a deep survey on position based
routing protocols for vehicular environments. Although
some other researchers such as [22–26] that attempted to
give an overview over VANET position based routing
protocols, our overview is different from them due to the
following reasons: (1) A new taxonomy is proposed for this
type of protocols. (2) A specific group of position-based
routing protocols (i.e. V2V Dynamic Anchor Protocols) are
compared with each other instead of comparing all posi-
tion-based routing protocols. (3) Each of these protocols is
discussed in more technical details considering their rout-
ing strategy. (4) These protocols are evaluated based on
different contributing factors such as average delay packet
delivery ratio, and routing overhead. (5) Simulation envi-
ronment with real road map is used for evaluation purpose
in order to increase simulation results’ validity and reality.
The rest of this paper is organized as follows. An
overview of VANET routing protocols is presented in
Sect. 2. Section 3 discusses our proposed taxonomy for
position-based VANET routing protocols considering V2V
and V2I communication modes. In addition, V2V position-
based routing protocols that utilize dynamic anchor com-
putation method in their packet forwarding procedure are
represented in more details. Section 4 explains the simu-
lation setup, scenarios, evaluation metrics as well as an
illustration of the acquired results. Finally, Sect. 5 con-
cludes the paper.
2 VANET routing protocols
In this section, the VANET routing protocols are classified
into six categories named topology-based (ad hoc) routing,
position based routing, cluster based routing, geo-cast
based routing, multicast-based routing and broadcast based
routing on the basis of the strategies used to route the
packet from source to destination. The following context
briefly discusses each category.
2.1 Topology-based protocols
This type of protocols find the links information between
nodes and place them in neighboring table for further
sending of data. Topology based protocols can be further
Wireless Netw
123
Author's personal copy

classified into proactive, reactive and hybrid protocols.
Proactive routing also known as table-driven primarily
relies of the shortest path algorithm. Although this class of
topology-based routing do not have discovery delay, but it
suffers from high overhead due to its periodic topology
updates. Destination-sequenced distance vector (DSDV)
[27], Global state routing protocol (GSPR) [28], Fisheye
state routing (FSR) [29] and Optimized link state routing
(OLSR) [30] are different kinds of proactive routing.
Reactive protocols also known as on-demand protocols
employ a flooding method for route discovery. However,
this method causes routing overhead and makes this class
of routing inappropriate for security applications in VA-
NET [31]. Temporally ordered routing algorithm (TORA)
[32], Ad hoc on-demand distance vector (AODV), Pre-
diction-based AODV (PRAODV) [33], Dynamic source
routing (DSR) and preferred group broadcasting
(AODV ? PGB) [34] are some examples of this class of
routing. The last class of topology-based routing, as its
name suggests, merges reactive and proactive routing
protocols to reduce network overhead. However, the hybrid
routing protocols are unsuitable for conditions with the
highly dynamic nodes such as VANET. Different kind of
hybrid routing protocols include Zone routing protocol
(ZRP) [35] and Hybrid ad hoc routing protocol (HARP)
[36].
2.2 Position-based protocols
This type of protocols utilize geographic positioning
information in order to find the successive forwarding
nodes, thus, there is no requirement to establish and keep a
route between source and destination as all nodes in these
routing protocols are aware of locations of their own and
their neighbors [37]. This study deeply concentrates on
position-based routing protocols by dividing them into two
chief categories under V2V and V2I. Therefore, in sub-
sequent section we propose taxonomy for position-based
routing protocols and discuss on each of them in extensive
details.
2.3 Cluster-based protocols
In this type of protocols, the vehicles which are in vicinity
of each other try to create cluster of nodes and choose on
vehicle as the cluster header which has the responsibility to
manage the cluster by using the intra/inter cluster com-
munications. Scalability is the advantage of cluster based
protocols, while, high overhead and delay are their disad-
vantages in high mobility networks like VANETs. Cluster-
based routing (CBR) [38], Cluster-based directional rout-
ing protocol (CBDRP) [39–42], Location routing algorithm
with cluster-based flooding (LORA-CBF) [43], Clustering
for open IVC network (COIN) [43], Traffic infrastructure-
based cluster routing protocol with handoff (TIBCRPH)
[44], are some examples of this class.
2.4 Geocast-based protocols
This type of protocols sends packets to a group of vehicles in a
specific geographical area called zone of relevance (ZOR) [45]
thus nodes that are located outside the ZOR are not received
any packet [46]. This type of routing protocols is position-
based multicast routing employed to send packet to all the
nodes in a stationary topological area. Identification of the
forwarding zone leads to reduction in message overhead and
network congestion. However, the disadvantage of this kind of
routing protocols is separation of network and the presence of
undesirable neighbors that may discard the forwarding packets
[47]. Different kinds of geocast-based routing protocols are
Inter-vehicle geocast (IVG) [48], Cached geocast routing
(CGR) [49], Abiding geocast routing (AGR) [50], Robust
vehicular routing (ROVER) [51] and Mobicast [52].
2.5 Multicast-based routing protocols
This type of protocols intends to forward packet from a
single source to multiple destinations in a particular area.
The transmission process is generally carried out through
geocast routing. Traditional multicast protocols are not
suitable for VANET environment as they were merely
designed for wired networks [53]. Therefore, multicast
protocols should be enhanced in a way that can support
high node mobility and frequent topological changes which
is required for networks such as VANET. In VANET,
vehicles can perform complex computational tasks as they
do not require maintaining power as vehicles offer con-
siderable power supply for long period. Various multicast
protocols are proposed for MANET that the majority of
them are also suitable for VANETs [54, 55]. Multicast ad
hoc on-demand distance vector (MAODV) [56], Adaptive
demand-driven multicast routing (ADMR) [57], Multicast
with ant colony optimization for VANETs based on
MAODV (MAV-AODV) [58], The multicast optimized
link state routing (MOLSR) [59], On-demand multicast
routing protocol (ODMRP) [60] and Destination driven on
demand multicast routing protocol (D-ODMRP) [61], are
the most common kinds of multicast routing protocols.
2.6 Broadcast-based protocols
This type of protocols uses flooding of the packet on the
network area in which each node forwards the received
message to other nodes. Broadcast-based protocols are
frequently used in VANETs for different purposes such as
data or traffic information sharing, advertisements and
Wireless Netw
123
Author's personal copy

emergency news. The chief advantage of using this kind of
protocols is the assurance of delivering the messages to all
destinations. The broadcast-based protocols are mostly
proper for the network with small number of nodes in the
network as flooding method resulted high overhead cost.
Flooding in a network with great number of nodes requires
more message broadcast which causes collisions and higher
bandwidth utilization. BROADCOMM, Distributed vehic-
ular broadcast (DV-CAST) [62], Edge-aware epidemic
protocol (EAEP) [63], Hybrid data dissemination (HyDi)
[64] and Density-aware reliable broadcasting (DECA) [65],
are some example of broadcast-based routing protocols.
3 Position-based VANET routing protocols
This paper classifies the position-based routing protocols
based on vehicular communications into two main cate-
gories namely V2V and V2I as depicted in Fig. 1. Each
mentioned communication mode comprises the numerous
routing protocols. Further, V2V communication position-
based routing protocols are categorized into three types for
computing the anchor path, consisting dynamic anchor,
static anchor and no anchor computations. Navigation
system contains pre-loaded digital maps through which
street level navigation information can be extracted. By the
aid of navigation systems, different junctions or anchors
are identified by position-based routing protocols and are
used to apply different routing algorithm. In anchor-based
routing, the source node includes into each packet a route
vector composed of a list of anchors or fixed geographic
points, through which packets must pass.
On the other hand, V2I communication for position-
based routing protocols divided into two types of dynamic
and static Road Side Units (RSUs). This means that RSUs
are either dynamic or fix in terms of mobility. Every single
routing protocol performs routing action through a specific
forwarding strategy. Accordingly, variety of forwarding
strategies including greedy forwarding, improved, direc-
tional and predictive directional greedy forwarding strate-
gies are considered for each position-based routing
protocol in our proposed taxonomy in Fig. 1 and are dis-
cussed as follows:
• Greedy forwarding: In this strategy, source node, S,
always selects the closest node in its communication
range to the destination, D, as next-hop node.
RoutingProtocols
Forwarding Strategy
Position-basedRouting
Communication
No anchor computation
Static anchor computation
Dynamic RSUs
Static RSUs
V2V
V2I
GyTARAMAREBGRB-MFRMOPR
GPSR
DGR
PDGR
Dynamic anchor computation
GSR
A-STAR
MGRP
MIBR
SADV
IAGR
Improved Greedy forwardingDirectional greedy forwardingDirectional greedy forwarding
Greedy forwardingPredictive directional greedy
Forwarding
Greedy forwarding
Directional greedy forwardingPredictive directional greedy
forwarding
Greedy forwarding
Greedy forwarding
Greedy forwarding to mobile gateway
Greedy forwarding to buses
Directional greedy forwarding &Greedy forwarding
Greedy forwarding to RSUs
Fig. 1 Taxonomy of position based routing protocols
Wireless Netw
123
Author's personal copy

• Improved greedy forwarding: In this strategy, source
node, S, initially searches its neighbouring table and
estimates the future position of all nodes in its
neighbouring table according to their velocity and
direction. Afterwards, it selects the closest node in its
communication range to the destination, D, as next-hop
node.
• Directional greedy forwarding: In this strategy, source
node, S, always selects closest node in its communi-
cation range which is moving towards the destination,
D, as next-hop node. In other words, direction is the
only factor that is considered in this strategy.
• Predictive directional greedy forwarding: In this strat-
egy, source node, S, considers the information of its
two-hop neighbours. Then, it searches its neighbouring
table and estimates the future position of all its
neighbours (one-hop and two-hop) according to their
velocity and direction. Afterwards, it selects the closest
node in its communication range which is moving
towards the destination, D, as next-hop node.
As mentioned earlier, our main concentrate is on posi-
tion based routing protocols that are proposed for V2V
communication mode and utilizes dynamic anchor com-
putation method. Each of these protocols is discussed in
more details in the next subsection, while, the other men-
tioned routing protocols in Fig. 1 are discussed in the fol-
lowing paragraphs.
Greedy perimeter stateless routing (GPSR) [28] is a
well-known position based routing protocol for highways
where the nodes are uniformly distributed. In GPSR each
node maintains the knowledge of its hop neighbours. The
routing approach of GPSR depends on greedy and perim-
eter modes [13]. Greedy mode is used when the sender
node finds a node in its routing table which is closer to the
destination than the sender node, while, perimeter mode,
also known as recovery mode, is utilized when there is not
any neighbouring node in the routing table which is closer
to destination node. This condition is known as local
maximum problem. GPSR is not desire for urban envi-
ronment due to the lack of direct communication between
nodes as well as using recovery mode which routes the
packets through the extended path instead of shortest path,
which leads more delays [66, 67].
Geographic source routing (GSR) [68] combines the
position-based routing and topological information. To
achieve information regarding the destination nodes’
location, GSR uses the reactive location service (RLS)
[69]. Basically, the querying node floods the network with
a position demand for a particular node identifier. Once the
node obtains the position demand, it replies the position to
the querying node. This protocol employs digital maps
which enables the source to be aware of all the links to the
destination. GSR utilizes the Dijkstra shortest path algo-
rithm [70] to calculate the shortest path from the source to
destination. Simulation results showed that the packet
delivery ratio is improved in GSR in comparison with
AODV and DSR [18]. However, since this routing protocol
uses hello beacons as a control message, it suffers from
high routing overhead.
Anchor-based street and traffic aware routing (A-STAR)
[71] is exclusively designed for inter-vehicle communica-
tion for an urban environment. A-STAR uses street map to
measure the series of junctions through which a message
pass to arrive at the destination. As a position based routing
protocol, A-STAR employs static or dynamic rated maps to
determine an anchor route with high packet delivery con-
nectivity ratio. In other words, Using statistically rated
maps by considering the quantity of city bus paths on every
street to determine the anchor paths for providing optimum
connectivity, or using dynamically rated maps derived
from dynamically analyzing the state of the latest traffic to
recognize the best anchor routs [13]. A-STAR provides a
new recovery technique which computes a new anchor path
from the local maximum through where the packets are
routed. Consequently, A-STAR routing protocol over-
comes the drawbacks of GPSR and GSR by applying traffic
awareness and mentioned recovery technique, it finally
becomes time consuming as the routing path might not be
optimal since its existence along with the anchor path.
Directional greedy routing (DGR) [72] intends to min-
imize end-to-end delay by reducing the number of hops
packet passing to reaches its destination. DGR uses posi-
tion first forwarding and direction first forwarding as its
forwarding strategies. The first strategy attempts to find the
closet node towards destination as the next hop. However,
using singly this strategy results routing loop as it is not
able to recognize the direction of nodes movement. For
instance, node A intends to forward a packet to destination
which is along its moving direction while node B is moving
in the opposite direction. Node A forwards its packet to
node B regardless of its direction. Node B then forwards
the received packet to node A as it is found A as the
suitable next hope. The second forwarding strategy how-
ever selects the nodes moving toward destination. Among
those nodes, the one closet to the destination is chosen as
the next hope. This strategy attempts to reduce the routing
loop in the forwarding process. Therefore, DGR takes both
position and direction into consideration when choosing
next hope.
Prediction direction greedy routing (PDGR) [72]
enhances DGR with prediction and proposes a predictive
approach. Although a further prediction by considering the
packet carrier’s possible future neighbours can make
routing more efficient, DGR merely considers the packet
Wireless Netw
123
Author's personal copy

carrier’s current neighbour. In DGR, next hop is selected
by calculating a value called weighted score which is
performed for the packet carrier and its current neighbours.
In PDGR the calculation is performed not only for the
packet carrier and its current neighbours but also for its
possible future neighbours. Beacon messages are used to
achieve the knowledge of possible future neighbours as the
packet carriers require the information of its two-hop
neighbours.
Static node-assisted adaptive (SADV) [73] is proposed
to enhance the data delivery performance in sparse vehic-
ular networks by taking advantage of deployed static
infrastructures (e.g. RSUs) at intersections. Packets are
forwarded to these static nodes when there is no vehicle
available to deliver the packets through the optimal path.
The packets are stored in static nodes until the optimal
delivery path becomes available. It is worth noting that
each vehicle is aware of its location via GPS and each
static node has access to its surrounding digital map (i.e.
roads and streets). SADV encompasses three parts, namely
Static Node Assisted Routing (SNAR), Link Delay Update
(LDU), and Multi-Path Data Dissemination (MPDD). Road
maps are converted to graphs where the intersections and
the streets play the role of nodes and edges of the graph,
respectively. SNAR utilizes optimal paths, which are found
from the extracted graphs, for packet forwarding. The
measured delay of packet delivery between static infra-
structures is stored in LDU to update the delay matrix.
Finally, multi-path routing mechanism is performed by
MPDD. The delay caused by static infrastructures is the
main drawback of this protocol.
Infrastructure assisted geo-routing (IAGR) [74] is
another position based routing protocol which uses static
and fixed nodes at intersections to enhance the operation,
performance and range of multi-hop geo-routing protocols.
IAGR uses GSR to investigate the potential advantage of
V2I over V2V communication. Similar to SADV, GPS is
used to find the vehicles’ location and each static node has
access to its surrounding digital map. A weight will be
assigned to each edge of the extracted graph from the road
map based on the distance between its two nodes. This
distance among static infrastructure units should be omitted
from routing procedure since these units are connected
through reliable and high bandwidth wired networks. In
order to achieve this issue in IAGR, all nodes on the graph
that represent static infrastructure can be considered as
only one node referred as backbone gate [75]. As a result,
vehicles consider all static infrastructures as one node and
compute the optimal paths for packet forwarding by using
this unique characteristic.
Mobile infrastructure based VANET routing protocol
(MIBR) is a new position-based reactive routing protocol
which is suitable for urban VANETs which buses play an
essential rule during route selection and data transfer.
Therefore, MIBR estimates every road segments density,
based on the bus line information to select road segment
[76]. MIBR assumes every bus as the forwarding node to
ordinary nodes. To do so, all buses are equipped with two
wireless interfaces, and a single interface comprises other
vehicles. Throughout routing, the protocol approximates
next road segment and hop counts, then stores the infor-
mation in a routing table [13, 77, 78]. Whilst development
of such a routing protocol both the transmission quality of
each road segment and different transmission abilities of
numerous vehicles are considered in the algorithm of
MIBR [76]. In addition, this routing protocol contains two
main parts. Feature of street awareness is the first part that
leads to select the most efficient path through a sequence of
road segments with the best estimated transmission quality.
The second part is optimal forwarding of the packets hop
by hop through every road segment. The only drawback
here refers to the connectivity which is limited by their
scheduling time and the area covered by the bus routes.
Mobile gateway routing protocol (MGRP) assumes the
presence of a GPS and a digital map similar to other
position based routing protocols. In MGRP, each vehicle
builds its neighbor table which includes neighboring
vehicles, headings, and speeds that would have essential
contribution in the task of routing. Similar to MIBR routing
protocol which utilized buses as a mobile gateway, MGRP
also is based on the concept of mobile gateways but it uses
vehicles as mobile gateways (like taxis). Mobile gateways
substituted of fixed RSUs to guarantee larger connectivity
coverage. In this particular, mobile gateways consist of two
interfaces; IEEE 802.11 for V2 V and 3G for V2I com-
munications. The IEEE 802.11 is utilizing while V2V
communications like communicating with neighboring
vehicles which are missing 3G interface or are not mobile
gateways. In addition, whilst mobile gateways received the
packets from IEEE 802.11 interface, they forward the
packet to the base station via 3G and base station forwards
the packets to the gateway controller in turn [13]. Conse-
quently, Pan et al. in [79] believe that MGRP increase the
packet delivery ratio as well as decrease the average hop
count by exploit both inter-vehicle-based and infrastruc-
ture-based communication to route packets.
4 Overview of V2V dynamic anchor position-based
routing protocols
In this section, we discuss the routing procedure of V2V
dynamic anchor position-based routing protocols, namely
Movement prediction-based routing (MOPR), Improved
Greedy Traffic Aware Routing (GyTAR), Border-node
based Most Forward within Radius (B-MFR), Edge node
Wireless Netw
123
Author's personal copy

Based Greedy Routing (EBGR) and Adaptive Movement
Aware Routing (AMAR) in more details. At the end of this
section, we compare all the V2V dynamic anchor position-
based routing protocols.
4.1 Movement prediction-based routing (MOPR)
Famous position-based routing protocols such as Greedy
perimeter stateless routing (GPSR) [28] and Movement-
based Routing Algorithm (MORA) [80], benefit from a
vehicle current position along with its movement direction
in order to select a next hope for forwarding data. Although
these contributing factors are necessary for a robust posi-
tion-based routing process, they are not enough. Menouar
et al. [81–83] believe that a vehicle speed also play a
dominant role in the process of selecting a vehicle as the
next hope for sending data. The so-called Movement Pre-
diction-based Routing (MOPR) concept has been proposed
by them in order to improve the prediction strength of
existing position-based routing protocols [84]. They stip-
ulated that a vehicle velocity can be used for a precise
estimate of link stability. In other words, MOPR brings a
vehicle speed, position, and movement direction into
account to estimate the probability of link failure during a
communication session. Thus, it can be guaranteed that a
vehicle, which will be out of the effective communication
range, is not selected as the next hope for sending/for-
warding data. Moreover, the retransmission overhead in
each node of the network will be reduced drastically. All in
one, MOPR is capable of improving the position-based
routing protocols by considering a vehicle speed as an
influencing factor on predicting the possible prospective
VANET topology.
Another issue to be addressed in the procedure of
MOPR is that employing MOPR will lead each vehicle to
appraise communication link stability before selecting next
hop for sending data among other vehicles nearby. Firstly,
the link lifetime will be indicated in connection to the total
estimation time. In other words, it will be estimated how
long it takes for two neighbour vehicles to get out of their
effective communication range. Then, by dividing the
estimated communication lifetime by the route validity
time, which is a constant, the link stability will be out as
the result.
In terms of formula, it can be assumed that two vehicles
are moving in two different directions from time t0 to time
t1 and with the speed of v1 and v2 respectively. D0 repre-
sents the distance between the vehicles in the time t0 with
their coordinate of A0 (xi0, yi0) and B0 (xj0, yj0), while D1
denotes the distance in the time t1 with the vehicles’
position of A1 (xi1, yi1) and B1 (xj1, yj1). The lifetime of the
communication link (LifeTime [i,j]) is consistent with
estimated time Dt = t1 - t0 and explains how long it takes
for D1 to be equal or greater than communication range.
Equation 1 is used to forecast the future position of each
vehicle (i.e. A1 and B1) from its current position (i.e. A0 and
B0) and speed (i.e. v1 and v2).
Bx1 ¼ Bx0 þ Vbx:Dt
By1 ¼ By0 þ Vby:Dt
Ax1 ¼ Ax0 þ Vax:Dt
Ay1 ¼ Ay0 þ Vay:Dt
8>><
>>:
9>>=
>>;
ð1Þ
By having the position of each vehicle, it is possible to
calculate the future distance between them, D1, via Eq. 2:
D21 ¼ Ax1 � Bx1j j2þ Ay1 � By1j j2 ð2Þ
By combining Eqs. 1 and 2, we have Eq. 3 as follows:
Figure 2 illustrates a schematic feature which can be
used for communication lifetime prediction for two
neighbor vehicles.
4.2 Improved greedy traffic aware routing (GyTAR)
GSR [15] and A-STAR [85] are two well-known proposed
greedy position-based routing protocols for VANETs.
i
j
j
i
Y t0 t1 time
Yj1
VyjYj0
Yi1
VyiYi0
X
Y Xi0 Vxi Xj0 Vxj Xj0 Xj0
X
D1
Vi
Vj
D0
Fig. 2 Link lifetime estimation
D1 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
j Ax0 � Bx0Þ þ ðVax � Vbxð ÞDtj2 þ j Ay0 � By0Þ þ ðVay � Vby
� �Dtj2
q
ð3Þ
Wireless Netw
123
Author's personal copy

Different ways are used to improve the routing issue in
vehicular networks by these approaches including simple
greedy forwarding, amalgamating the topology-based proto-
cols with position-based protocols and city bus route infor-
mation. However, vehicle density, speed and direction are
three main criteria which play an important role in data rout-
ing, they are being neglected by above mentioned protocols.
Therefore, Jerbi et al. in [81] offered a new vehicular ad hoc
routing protocol, so-called Improved Greedy Traffic Aware
Routing (GyTAR), based on vehicle density and distance from
destination node. GyTAR includes two phases: (1) Junction
selection and (2) Sending data between junctions.
In the first phase, GyTAR uses anchor based routing
algorithm like other position based protocols for data for-
warding. Dynamic junction selection instead of a static one
is the main difference between GyTAR and other proto-
cols. In dynamic junction selection, intermediate junctions
between source and destination are selected one by one
based on vehicles’ density and distance to destination.
While in static one, all of the intermediate junctions are
selected in the source node regardless of vehicle density in
the future. Jerbi et al. used following notations in Table 1
for finding the junctions’ score in multi junction condition.
Therefore, score of each junction (Sj) is calculated by
using Eq. 4:
Sj ¼ a � 1 � Dp
� �þ b � Nv½ � ð4Þ
Figure 3 illustrates junction selection phase based on
vehicle direction and density at real environment (e.g.
road, street). In the second phase, an improved greedy
algorithm is used for data forwarding among desired
junctions. Each vehicle broadcasts beacon messages to its
neighbors, periodically. Beacons include the information
such as vehicle’s speed, direction and position. Therefore,
each vehicle creates its own neighboring table based on
this information. Thus, in this protocol, the sender/for-
warder vehicle can predict the co-vehicles topology and
position for the next Dt seconds, then select the next
nearest hop to destination, similar to MOPR protocol. If
Table Used notation in GyTAR protocol
Variable Definition
J The subsequent nomination junction
I The current junction
Dj The distance between nomination junction J and
destination
Di The distance between current junction and destination
Dp = Dj/
Di
It represents the closeness of the nomination junction to
the destination
Nv Total number of nodes (vehicles) between two junction
I and J
a, b Utilized to score criteria for distance and vehicle density,
respectively
J3
J2
J1
Highly dense Moderately denseJunction Lightly dense
Current junction
Destination vehicle
Fig. 3 Junction selection phase
in GyTAR
Wireless Netw
123
Author's personal copy
the sender be the nearest vehicle to the next junction (local
optimum problem), it should carry the data until it reaches
that junction.
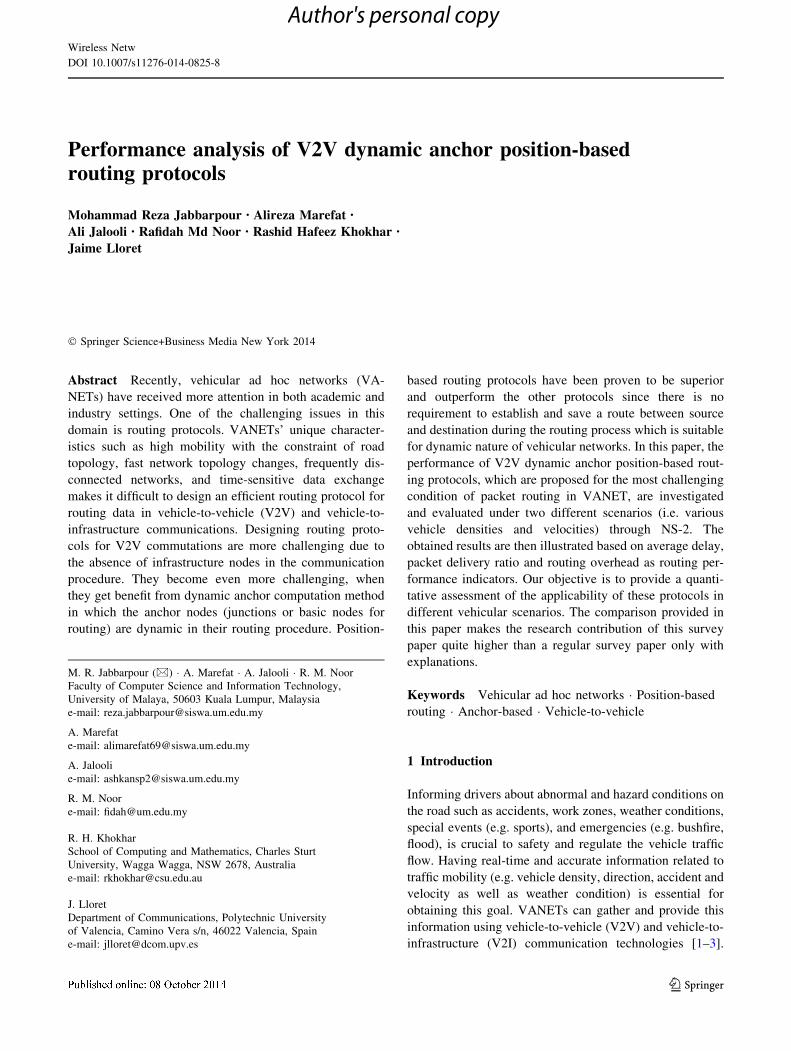
4.3 Border-node based most forward within radius (B-
MFR)
Border-node based most forward within radius (B-MFR)
[86] is a position-based routing protocol that enhances
Most Forward within Radius (MFR) [87] in terms of end-
to-end delay. B-MFR employs the concepts of boarder-
node of sender’s communication range to reduce the
number of hops between sender and receiver. In B-MFR,
nodes are categorized into interior, border and outer nodes.
Figure 4 depicts this layout. Nodes in B-MFR achieve
information from their neighbours via the periodic beacon
messages that are exchanged. All nodes that are located in
the transmission range of the source called one-hope
neighbour. Once the one-hop neighbours are recognized by
the source, it chooses the next hop for forwarding its
message to convey to the destination. Source node chooses
the border node as the next hop since it is the only node
that is closest to the destination and also furthest node to
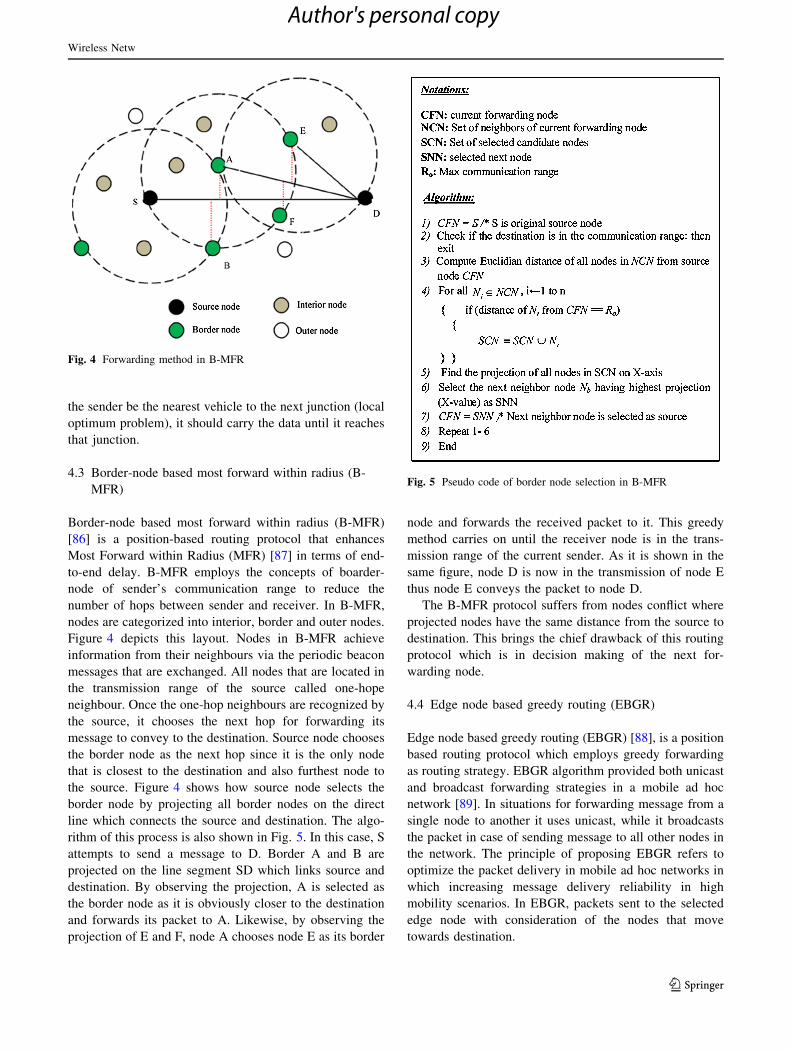
the source. Figure 4 shows how source node selects the
border node by projecting all border nodes on the direct
line which connects the source and destination. The algo-
rithm of this process is also shown in Fig. 5. In this case, S
attempts to send a message to D. Border A and B are
projected on the line segment SD which links source and
destination. By observing the projection, A is selected as
the border node as it is obviously closer to the destination
and forwards its packet to A. Likewise, by observing the
projection of E and F, node A chooses node E as its border
node and forwards the received packet to it. This greedy
method carries on until the receiver node is in the trans-
mission range of the current sender. As it is shown in the
same figure, node D is now in the transmission of node E
thus node E conveys the packet to node D.
The B-MFR protocol suffers from nodes conflict where
projected nodes have the same distance from the source to
destination. This brings the chief drawback of this routing
protocol which is in decision making of the next for-
warding node.
4.4 Edge node based greedy routing (EBGR)
Edge node based greedy routing (EBGR) [88], is a position
based routing protocol which employs greedy forwarding
as routing strategy. EBGR algorithm provided both unicast
and broadcast forwarding strategies in a mobile ad hoc
network [89]. In situations for forwarding message from a
single node to another it uses unicast, while it broadcasts
the packet in case of sending message to all other nodes in
the network. The principle of proposing EBGR refers to
optimize the packet delivery in mobile ad hoc networks in
which increasing message delivery reliability in high
mobility scenarios. In EBGR, packets sent to the selected
edge node with consideration of the nodes that move
towards destination.
Fig. 4 Forwarding method in B-MFR
Fig. 5 Pseudo code of border node selection in B-MFR
Wireless Netw
123
Author's personal copy

EBGR routing protocol follows three essential algo-
rithms key functions. In the following a detail description
prepared for Neighbor Node Identification (NNI), Node
Direction Identification (NDI) and Edge node Selection
(ENS) which is aforementioned algorithms that EBGR uses
in packet transmission procedure.
1. Neighbor node identification (NNI)
Neighbor node identifier algorithm proposed to iden-
tify any other vehicles within its transmission range as
a neighbor. Neighbors hold details of each other in a
neighbor set table and update it frequently owing to
high mobility. EBGR sends beacon message periodi-
cally neighbor node identification. These beacon
messages contain variety of information such as node
ID, node location, and timestamp.
In case of sending a message, source node informs
others in the transmission range be sending beacon
message every l seconds. Then each receiver node
updates the neighbor set table. In case of time out
occurrence after a * l seconds for a known node (A is
the number of beacon messages that a node is allowed
to miss) and, it will be removed from the neighbor set
table.
2. Node direction identification (NDI)
Node direction identification algorithm is responsible
to determine the node’s (vehicle’s) direction which is
moving towards destination. In this particular, poten-
tial score (PS) calculates to identify the direction of all
vehicles and present into the limited transmission
range (LTR). Accordingly, the appropriate edge node
with which contain largest PS considered as moving
towards the destination node (D) and that specific node
selected as next hop for forwarding packet to D. PS is
calculated through Eq. 5 and the notations are as
follows.
PSi Potential score of node i
q, x Two potential factors
Let q 1 x = 1 and q > xDi Shortest distance from edge node i to
destination D
Dc Shortest distance from packet forwarding
node c to destination D
Vi Vector for velocity of edge node i
li, d Vector for the location of the edge node i to
the location of destination node D
Cos(Vi, lI,d) Cosine value of angle made by these vectors
PSi ¼ q � 1� Di
Dc
� �
þ x � cosðVi; li;dÞ ð5Þ
3. Edge node Selection (ENS)
As it is clear from the name of this algorithm, it
chooses the edge node for packet forwarding which is a
node with shortest distance to the destination node D in
comparison with others within LTR. The edge node is
responsible to store received packets in forwarding
table and transfer while the nodes gain new neighbors.
4.5 Adaptive Movement Aware Routing (AMAR)
Adaptive Movement Aware Routing (AMAR) [90] is a
greedy position-based routing protocol which uses move-
ment aware greedy forwarding scheme to find the suitable
next-hop node in packet routing procedure. AMAR solve
the problem of B-MFR by taking advantage of more
information about the vehicle movement comprising the
position, speed and direction for assisting the source to find
the suitable node in its propagation range which is close to
the destination. AMAR obtains this information via GPS or
navigation system. It computes a weight score, Wi, for
neighbor node i considering three mentioned metrics (i.e.
position, speed and direction) as follows (Eq. 6):
Wi ¼ aPm þ bDm þ cSm ð6Þ
where Pm, Dm and Sm represent neighbor node’s (vehicle’s)
position, direction and speed, and a, b, c weight the
importance of these metrics with a ? b ? c = 1.
The procedure of considering position metric, Pm, in
finding the neighbor node is depicted in Fig. 6. The
neighbor nodes i and j are projected on the line segment SD
which connects source and destination nodes. The position
function that measures the progress of node i toward the
destination node is defined as Pr and calculated via Eq. 7.
Pr ¼D2
c þ d2 � d02
2Dc
ð7Þ
where Dc is the shortest distance between source and
destination nodes, d and d’ are the distances from inter-
mediate node i to source and destination, respectively.
Thus, position metric can be computed by Eq. 8.
Fig. 6 Impact of position metric in finding next-hop forwarding node
Wireless Netw
123
Author's personal copy

Pm ¼Pr
Dc
ð8Þ
The direction metric, Dm, is utilized to find the optimal
direction of forwarding by selecting nodes moving towards
the destination node and is obtained by Eq. 9.
Dm ¼ cos2 h; if h\p2
0; otherwise
(
ð9Þ
where h is the angle between intermediate node movement
direction and the straight line connecting this node to the
destination node. Finally, the intermediate node with
higher speed is more favorable to be selected as next-hop
node. The speed metric for a node wit moving speed of Vi
is calculated by Eq. 10.
Sm ¼ Normðdiff ðViÞÞ ¼diff ðviÞ �Min
Max�Minð10Þ
where Min and Max represent the minimum and maximum
values of speed metric for all neighbor nodes of i, the
difference of speeds between node i and source node is
defined as diff and is computed via Eq. 11.
diff ðviÞ ¼ vi � vs ð11Þ
Norm function in Eq. 10 is used to normalized the speed
metric’s value (i.e. Sm 2 [0, 1]) similar to the other two
metrics (i.e. Pm and Dm).
A sorted list of next-hop candidate nodes is created
according to the calculated weight score, Wi, and the node
with the highest score is selected as the next-hop node for
packet forwarding. Although AMAR overcomes the prob-
lem of B-MFR, its next-hop selection procedure faces with
difficulty whenever the weight score of two nodes are equal.
5 Simulation and results
5.1 Simulation setup
A 2,000 m 9 2,000 m area is extracted from OpenStreet-
Map [91] to simulate different scenarios. The selected area
is shown in Fig. 7 while its statistical specifications are
demonstrated in Table 2. SUMO [92] is highly portable
microscopic traffic simulator which is selected to create the
vehicle traffic and movement patterns on the extracted
map. SUMO Netconvert tool is used to convert the map
into a net.xml which is the proper format for SUMO.
Furthermore, Krauß mobility model [93] is employed to
create the movements for the simulated vehicles in order to
take advantage of collision avoidance vehicular mobility
model. Using this model allows us to avoid collisions along
the road where vehicles traveling at the safest maximum
speed. In this paper, we do not measure the initial 60 s of
SUMO output in order to achieve more accurate and reli-
able results. We also take advantage of using TraNSLite
for converting the generated traffic scenario into a proper
format for NS-2.33.
Table 3 indicates the parameters used for network
operation. All the parameters for PHY and MAC are
Fig. 7 Layout of the study road map
Table Statistic specifications of road map
Specification Value
Dimension 2,000 m 9 2,000 m
Map area 4 km2
Streets/km2 240.25
Junction/km2 178.5
Avg. street length 105.3 m
Avg. lanes/street 1.8
Table Configuration parameters in the simulation
Parameter Value
Simulation time 450 s
Packet sending rate 5 s
Size of message 256–300 bytes
Vehicle speed 50–150 km/h
MAC/PHY IEEE 802.11p
Mobility model Krauß model
Max. transmission range 400 m
SBR distance threshold 250 m
Channel capacity 3 Mbps
Traffic model 15 CBR connections
Propagation model Nakagami
Wireless Netw
123
Author's personal copy

configured as IEEE 802.11p spectrum. Since the lower data
rates offers superior resistance against interferences and
noises, we use data rate of 3 Mb/s for packet broadcasting
in terms of physical layer. Moreover, the street broadcast
reduction (SBR) scheme [94] is used to minimize the
broadcast storm problem in the simulations. Two types of
packets are defined in this study; one is the beacon packets
which are transmitted by all the vehicles in specific time
interval of five packets per second, while another, which is
warning packets, are merely transmitted by 10 % of the
vehicles in every 1 s. Focusing on warning packets for
evaluation of routing protocols allows us to have more
realistic results. In other words, beacon packets are con-
tinually sent in real world, thus considering these types of
packets for evaluating a routing protocol can merely
increase the inconsistency of the results. The simulation
results are averaged over 25 runs in order to obtain more
accurate results.
Table 4 compares aforementioned V2V dynamic anchor
position-based routing protocols based on different
characteristics.
5.2 Simulation scenarios
This paper evaluates dynamic position-based routing pro-
tocols performance in two different scenarios realizing
which algorithm has the most efficient performance in
terms of average delay, routing overhead ratio (ROR) and
packet delivery. Particularly, these parameters evaluates in
two conditions of various vehicles density and various
vehicle velocity to turn into a realistic urban environment
scenario. These two simulation scenarios are chosen to
work on due to their predominant role in VANETs routing
algorithms [19, 95].
1. Various vehicle density
The precision of acquired results influences by various
key factors principally vehicle density, speed and
roadmap topology. As a realistic urban environment
scenario, this paper considered a complex real road
map of Kuala Lumpur city. In this particular, an area of
2,000 m 9 2,000 m allocated as road map topology.
In various vehicle density analyses, the performance of
dynamic position-based routing protocols such as
GyTAR, B-MFR, EBGR, MOPR and AMAR were
evaluated in different vehicle densities of 100
(25 vehicles/km2), 150 (37.5 vehicles/km2), 200
(50 vehicles/km2), 250 (62.5 vehicles/km2) and 300
(75 vehicles/km2) which each assessed with the aver-
age vehicle speed of 80 km/h.
2. Various vehicle velocity
As mentioned above, the other essential factor which
affects the accuracy of obtained results is vehicle
speed. In this scenario, performance evaluation of
aforementioned routing protocol in a same size road
topology map of 2,000 m 9 2,000 m of Kuala Lumpur
real road map is considered with vehicles speed
variation. To do so, the evaluation has based on
various vehicle velocities of 50, 75, 100, 125 and
150 km/h with considering the average vehicle number
of 200 nodes.
5.3 Evaluation metrics and results
Packet Delivery Ratio (PDR), Delay (D) and Routing
overhead ratio (ROR) are three evaluation metrics which
are used to evaluate and compare the performance of the
discussed routing protocols in Sect. 4 (i.e. GyTAR, MOPR,
EGBR, B-MFR and AMAR).
• Packet delivery ratio (PDR): is the number of success-
fully received packets by destination vehicle over the
whole number of sent packets by source node (vehicle).
• Delay (D): is the average time that takes for a packet to
pass the intermediate nodes in the network from source
node until reaching the destination node.
• Routing overhead ratio (ROR): defined as the ratio of
number of packets correctly received at the destina-
tion, to the total number of the packets send in the
network using the routing protocol, during the simu-
lation time.
Table Comparison among V2 V dynamic anchor position-based routing protocols
Position-
based
routing
Forwarding strategy Recovery strategy Position
information
Mobility model Network
simulator
Simulation
scenario
MOPR Predictive directional greedy
forwarding
Right hand rule Packet forwarding Realistic mobility model NS-2 Urban
GyTAR Improved greedy forwarding Carry and forward Packet forwarding Realistic mobility model NS-2 Urban
B-MFR Greedy forwarding End node awareness Packet forwarding Realistic mobility model NS-2 Urban
EBGR Directional greedy forwarding End node awareness Packet forwarding Manhattan mobility model NCTUns 5.0 Urban
AMAR Directional greedy forwarding Movement awareness Packet forwarding Unknown NS-2 Urban
Wireless Netw
123
Author's personal copy

These algorithms are compared based on two above
mentioned scenarios (i.e. various vehicle densities and
velocities). Detailed analysis of the simulation results are
given in the following considering pre-defined evaluation
metrics.
5.3.1 Packet delivery ratio (PDR)
Figures 8 and 9 illustrate the obtained results for studied
protocols based on various vehicle densities and velocities,
respectively. After pondering the results in Fig. 8, GyTAR
obtained the higher delivery ratio in compare to other
protocols for the first scenario (i.e. various vehicle densi-
ties). This is because of two main reasons: (1) it considers
vehicle density in its packet forwarding process and (2) the
process of end to end route tracking before sending packets
is eliminated. In contrast, vehicle density is ignored by
other routing protocols.
PDR is increased gradually for all protocols by
increasing the vehicles density. This phenomenon is rea-
sonable since in higher densities, vehicles are well-con-
nected and messages are exchanged easily among them.
Whereas, communication among vehicles in lower densi-
ties is very difficult due to the wireless signal dis-connec-
tivity caused by far distances among the vehicles.
However, PDR is decreased for all protocols when the
vehicle density overtakes a specific value (i.e.[250) owing
to radio interference and high number of packet collision.
On the other hand, the obtained results in Fig. 9 for
second scenario (i.e. various vehicle velocities) shows that
MOPR outperforms the other approaches in terms of PDR
for high vehicle velocity ([100 km/h), while, for lower
speeds, GyTAR guarantees higher PDR. This is because,
MOPR and GyTAR consider vehicles velocity and density
in their packet routing procedure, respectively. Although
AMAR also considers vehicles’ velocity in its routing
procedure, its next-hop selection procedure faces with
difficulty whenever the weight score of two nodes are
equal. And this is the reason of lower PDR for AMAR
compared with MOPR. EBGR has the lowest PDR due to
considering only the direction of nodes for finding next-hop
node and ignoring the other factors such as nodes velocity,
density and position. Generally, GyTAR delivers more
packets in both defined scenarios and it is the best choice to
route infotainment or non-safety messages where the
number of receivers is important.
5.3.2 Delay (D)
In this part, we compare the performance of all studied
routing protocols in terms of average delay experienced by
data packets. As shown in Fig. 10, EBGR and B-MFR
achieve much lower delay than the other protocols con-
sidering various vehicle densities. In both B-MFR and
EBGR border nodes and edge nodes are selected for for-
warding packet that significantly reduces the number of
intermediate nodes in the packet routing procedure. Thus,
in B-MFR and EBGR, the time taken to deliver the packet
from source to destination (delay) is reduced in any traffic
scenarios. For lower densities (\200 nodes), AMAR has
the worst performance, while, for higher densities, GyTAR
obtained the highest delay among the others. This is
because of following reasons: (1) Although considering
vehicles speed, position and direction in packet forwarding
procedure increases PDR of AMAR, it also causes some
delay, and (2) Further, in GyTAR as the node density
increases, the number of intermediate node in routing
Fig. 8 Packet delivery ratio comparison between GyTAR, MOPR,
AMAR, B-MFR and EBGR considering various vehicle densities
Fig. 9 Packet delivery ratio comparison between GyTAR, MOPR,
AMAR, B-MFR and EBGR considering various vehicle velocities
Wireless Netw
123
Author's personal copy

procedure increases as compared to the other approaches
which leads more delays, respectively. Similar results
obtained for scenario with various vehicle velocities. These
results are depicted in Fig. 11. Both Figures shows
ascending trend for all protocols considering delay as
evaluation metric. However, this slope is sharper in the
second scenario due to usage of store-and-forward mech-
anism instead of finding next-hop node by all protocol.
This is because; gaps between the vehicles increase and the
number of involved vehicles in the forwarding process
reduce as the vehicles velocity increase. It is worth noting
that packets are routed with lower delay by using EBGR in
both defined scenarios and it is the best choice to route
safety messages among vehicles where on-time delivery is
important.
5.3.3 Routing overhead ratio (ROR):
Figure 12 depicts the evaluation of five routing protocols
as function of vehicle density. As shown, the routing
overhead gradually increased for all the protocols with
increase in number of vehicles. This is rational as higher
vehicle density resulted less gap between vehicles which
causes more conflicts in data transmission. Consequently,
ratio of routing overhead is increased in all the protocols in
case of higher vehicle density. However, we have wit-
nessed this increment is less for some protocols in specific
vehicle density of 150. The reason is in such conditions the
gaps between vehicles are more sensible (not too far and
not too close), thus the procedure of delivering the packets
to their destination successfully perform. This avoids re-
transmitting the data packets to vehicles and therefore
routing overhead ratio is reduced. Same Figure shows
GyTAR had less routing overhead ratio in comparison with
others. This is owing to consideration of density for
selecting the next hop. Figure 13 confirms that the routing
overhead gradually reduced for all the protocols with
increase in speed. This is expected since higher speed of
vehicles means less vehicle density which leads to have
more gap between the vehicles on road. Some routing
protocols however retransmit the packet if they found that
the packet did not receive to the destination. In such pro-
tocols overhead is increased owing to packet flooding.
Contrary, protocols like GyTAR, MOPR, AMAR, B-MFR
and EBGR uses carry and forward method which prevent
of packet flooding in such conditions. This is the reason
Fig. 10 Average packet delay comparison between GyTAR, MOPR,
AMAR, B-MFR and EBGR considering various vehicle densities
Fig. 11 Average packet delay comparison between GyTAR, MOPR,
AMAR, B-MFR and EBGR considering various vehicle velocities
Fig. 12 Routing overhead ratio comparison between GyTAR,
MOPR, AMAR, B-MFR and EBGR considering various vehicle
densities
Wireless Netw
123
Author's personal copy

that routing overhead ratio is reduced where vehicle speed
is higher. Result showed that GyTAR protocol has better
performance in terms of routing overhead considering
higher vehicle velocity ([80 km/h). This is because the
higher speed leads to have less vehicle density which
avoids the vehicles to be well-connected. In this condition
routing the packet through the path with higher density
increases the packet delivery and consequently reduces the
routing overhead.
6 Conclusions
This paper addresses packet routing, which is one of the
major challenges in VANETs. Packet routing is affected by
VANETs’ unique characteristics such as high mobility with
the constraint of road topology, fast network topology
changes, frequently disconnected networks, and time-sen-
sitive data exchange. A taxonomy is proposed for position-
based routing protocols based on vehicular communica-
tions, namely, V2V and V2I. The performance of V2V
dynamic anchor position-based routing protocols (i.e. Gy-
TAR, MOPR, AMAR, B-MFR and EBGR) are investigated
and evaluated under two different scenarios (i.e. various
vehicle densities and velocities) through NS-2. These
routing protocols are selected since they address the most
challenging condition of packet routing in VANET due to
the absence of infrastructure nodes as well as dynamicity of
anchor nodes in the communication procedure. Based on
the literature review, vehicles velocity, position, direction,
density and distance from distance from destination node
are the main factors that are used by these protocols in
routing and finding the next-hop nodes for forwarding the
packets. Various combinations of these factors are con-
sidered in a number of studies in order to propose suitable
position-based routing protocols for vehicular networks.
Performance of studied protocols are compared and
evaluated in two different scenarios (i.e. various vehicle
densities and velocities) considering average delay, routing
overhead ratio (ROR) and packet delivery as evaluation
metrics. Based on the obtained results, GyTAR and EBGR
outperform the other protocols in terms of packet delivery
ratio and average delay, respectively. As a result, GyTAR
and EBGR are the best choices to route non-safety and
safety messages, respectively, in VANET scenarios. The
comparison provided in this paper makes the research
contribution of this survey paper quite higher than a regular
survey paper only with explanations. Further studies might
focus on designing a smarter routing protocol which
combines all the mentioned factors including vehicles
velocity, position, direction, density and distance from
distance from destination node for existing protocols.
Besides, by examining these protocols in simulation envi-
ronment which considers obstacles (i.e. visibility model
along with the attenuation model) such as trees or building,
we can contribute to obtain more realistic experimental
results in our future work.
Acknowledgments This research is supported by UM High Impact
Research MoE Grant UM.C/625/1/HIR/MOHE/FCSIT/09 from the
Ministry of Education Malaysia.
References
1. Jalooli, A., Shaghaghi, E., Jabbarpour, M.R., Md Noor, R., Yeo,
H., & Jung, J.J. (2014). Intelligent advisory speed limit dedication
in highway using VANET. The Scientific World Journal, 2014,
629412.
2. Jalooli, A., Hussin, N., Noor, R.M, & Jung, J.J. (2014). Public
alerts on landslide natural disaster using vehicular communica-
tions. International Journal of Distributed Sensor Networks.
doi:10.1155/2014/969864.
3. Vasilakos, A.V. (2008). Special issue: Ambient Intelligence.
Information Sciences, 178(3), 585–587.
4. Sattari, M. R. J., Noor, R. M., & Ghahremani, S. (2013). Dynamic
congestion control algorithm for vehicular ad hoc networks.
International Journal of Software Engineering and Its Applica-
tions, 7(3), 95–108.
5. Cheng, X., Wang, C.-X., Laurenson, D. I., Salous, S., & Vasi-
lakos, A. V. (2009). An adaptive geometry-based stochastic
model for non-isotropic MIMO mobile-to-mobile channels. IEEE
Transactions on Wireless Communications, 8(9), 4824–4835.
6. Li, M., Li, Z., & Vasilakos, A.V. (2013). A survey on topology
control in wireless sensor networks: Taxonomy, comparative
study, and open issues. Proceedings of the IEEE, 101(12),
2538–2557.
7. Cheng, X., Wang, C.X., Laurenson, D.I., Salous, S., Vasilakos,
A.V. (2011). New deterministic and stochastic simulation models
for non isotropic scattering mobile to mobile Rayleigh fading
channels. Wireless Communications and Mobile Computing,
11(7), 829–842.
Fig. 13 Routing overhead ratio comparison between GyTAR,
MOPR, AMAR, B-MFR and EBGR considering various vehicle
velocities
Wireless Netw
123
Author's personal copy

8. Jiang, D., & Delgrossi, L. (2008). IEEE 802.11 p: Towards an
international standard for wireless access in vehicular environ-
ments. In IEEE Vehicular Technology Conference (pp.
2036–2040). VTC Spring 2008.
9. Lloret, J., Canovas, A., Catala, A., & Garcia, M. (2013). Group-
based protocol and mobility model for VANETs to offer internet
access. Journal of Network and Computer Applications, 36(3),
1027–1038.
10. Whaiduzzaman, M., Sookhak, M., Gani, A., Buyya, R. (2014). A
survey on vehicular cloud computing. Journal of Network and
Computer Applications, 40, 325–344.
11. Bilal, S. M., Khan, S. U., Madani, S. A., Nazir, B., Othman, M.
(2014). Road oriented traffic information system for vehicular ad
hoc networks. Wireless Personal Communications, 77(4),
2497–2515.
12. Cho, K.-H., & Ryu, M.-W. (2012). A survey of greedy routing
protocols for vehicular ad hoc networks. Smart CR, 2(2),
125–137.
13. Sharef, B. T., Alsaqour, R. A., & Ismail, M. (2014). Vehicular
communication ad hoc routing protocols: A survey. Journal of
Network and Computer Applications, 40, 363–396.
14. Ghafoor, K. Z., Mohammed, M. A., Lloret, J., Bakar, K. A., &
Zainuddin, Z. M. (2013). Routing protocols in vehicular ad hoc
networks: Survey and research challenges. Network Protocols
and Algorithms, 5(4), 39–83.
15. Perkins, C.E., & Royer, E.M. (1999). Ad hoc on-demand distance
vector routing. In Proceeding of Second IEEE Workshop on Mobile
computing systems and applications, WMCSA’99 (pp. 90–100).
16. Johnson, D.B., & Maltz, D.A. (1996). Dynamic source routing in
ad hoc wireless networks. In Mobile computing (pp. 153–181).
Heidelberg: Springer.
17. Liu, G., Lee, B-S., Seet, B-C., Foh, C-H., Wong, K-J., & Lee,
K-K. (2004). A routing strategy for metropolis vehicular com-
munications. In Information networking. networking technologies
for broadband and mobile networks (Lecture notes in computer
science, pp. 134–143, Vol. 3090). Berlin, Heidelberg: Springer.
18. Fußler, H., Mauve, M., Hartenstein, H., Kasemann, M., & Voll-
mer, D. (2003). Mobicom poster: Location-based routing for
vehicular ad-hoc networks. ACM SIGMOBILE Mobile Comput-
ing and Communications Review, 7(1), 47–49.
19. Hui, F. (2005). A survey on the characterization of Vehicular Ad
Hoc Networks routing solutions. In ECS (pp. 1–15).
20. Jabbarpour, M. R., Md Noor, R., Khokhar, R. H., & Ke, C.-H.
(2014). Cross-layer congestion control model for urban vehicular
environments. Journal of Network and Computer Applications,
44, 1–16.
21. Khokhar, R.H., Zia, T., Ghafoor, K.Z., Lloret, J., Shiraz, M.
(2013). Realistic and Efficient Radio Propagation Model for V2X
Communications. KSII Transactions on Internet & Information
Systems, 7(8). doi:10.1007/978-3-319-04283-1.
22. Fonseca, A., & Vazao, T. (2013). Applicability of position-based
routing for VANET in highways and urban environment. Journal
of Network and Computer Applications, 36(3), 961–973.
23. Nikumbh, M. D., & Bhoi, M. A. (2013). A survey of positioned
based routing protocol in VANET. International Journal of
Modern Engineering Research (IJMER), 3(2), 1015–1018.
24. da Silva Camoes, A. R. (2013). Geographic location and routing
in vehicular networks. Master, tecnicolisboa.
25. Raw, R. S., & Das, S. (2011). Performance comparison of Posi-
tion based routing Protocols in vehicle-to-vehicle (V2V) Com-
munication. International Journal of Engineering Science and
Technology, 3(1), 435–444.
26. Hassan, A. N., Abdullah, A. H., Sheet, D. K., & Qureshi, K. N.
(2014). Comparison of position based routing protocols of
vehicular AD HOC network. World Applied Sciences Journal,
31(3), 341–345.
27. He, G. (2002). Destination-sequenced distance vector (DSDV)
protocol. Networking Laboratory: Helsinki University of
Technology.
28. Karp, B., & Kung, H-T. (2000). GPSR: Greedy perimeter state-
less routing for wireless networks. In Proceedings of the 6th
annual international conference on Mobile computing and net-
working (pp. 243–254). ACM.
29. Gerls, M. (2002). Fisheye State Routing (FSR) for Ad Hoc
Networks. Internet Draft, draft-ietf-manet-fsr-03 txt.
30. Clausen, T., Jacquet, P., Adjih, C., Laouiti, A., Minet, P., Muh-
lethaler, P., Qayyum, A., & Viennot, L. (2003). Optimized link
state routing protocol (OLSR).
31. Attar, A., Tang, H., Vasilakos, A. V., Yu, F. R., & Leung, V. C.
(2012). A survey of security challenges in cognitive radio net-
works: solutions and future research directions. Proceedings of
the IEEE, 100(12), 3172–3186.
32. Park, V., & Corson, M.S. (1997). Temporally-ordered routing
algorithm (TORA) version 1 functional specification. Internet-
Draft, draft-ietf-manet-tora-spec-00. Txt.
33. Namboodiri, V., Agarwal, M., & Gao, L. (2004). A study on the
feasibility of mobile gateways for vehicular ad-hoc networks. In
Proceedings of the 1st ACM International Workshop on Vehic-
ular ad hoc networks (pp. 66–75). ACM.
34. Patel, V. J., & Anuradha, P. G. (2012). A review on routing
overhead in broadcast based protocol on VANET. International
Journal of Engineering and Innovative Technology (IJEIT), 2(5),
109–113.
35. Beijar, N. (2002). Zone routing protocol (ZRP). Finland: Net-
working Laboratory, Helsinki University of Technology.
36. Nikaein, N., Bonnet, C., & Nikaein, N. (2001). Harp-hybrid ad
hoc routing protocol. In Proceedings of International Symposium
on Telecommunications (IST) (pp 56–67).
37. Mauve, M., Widmer, J., & Hartenstein, H. (2001). A survey on
position-based routing in mobile ad hoc networks. IEEE Network,
15(6), 30–39.
38. Krishna, P., Vaidya, N. H., Chatterjee, M., & Pradhan, D. K.
(1997). A cluster-based approach for routing in dynamic net-
works. ACM SIGCOMM Computer Communication Review,
27(2), 49–64.
39. Song, T., Xia, W., Song, T., Shen, L. (2010). A cluster-based
directional routing protocol in VANET. In 12th IEEE Interna-
tional Conference on Communication Technology (ICCT) (pp.
1172–1175).
40. Zeng, Y., Xiang, K., Li, D., & Vasilakos, A. V. (2013). Direc-
tional routing and scheduling for green vehicular delay tolerant
networks. Wireless Networks, 19(2), 161–173.
41. Spyropoulos, T., Rais, R. N., Turletti, T., Obraczka, K., & Vas-
ilakos, A. (2010). Routing for disruption tolerant networks:
Taxonomy and design. Wireless Networks, 16(8), 2349–2370.
42. Vasilakos, A. V., Zhang, Y., & Spyropoulos, T. (2012). Delay
tolerant networks: Protocols and applications. Boca Raton: CRC
Press.
43. Aquino, R., & Edwards, A. (2006). A reactive location routing
algorithm with cluster-based flooding for inter-vehicle commu-
nication. Computacion y Sistemas, 9(4), 297–313.
44. Wang, T., & Wang, G. (2010). TIBCRPH: traffic infrastructure
based cluster routing protocol with handoff in VANET. In 19th
Annual IEEE Wireless and Optical Communications Conference
(WOCC) (pp. 1–5).
45. Kihl, M., Sichitiu, M., & Joshi, H.P. (2008). Design and evalu-
ation of two geocast protocols for vehicular ad-hoc networks.
Journal of Internet Engineering, 2(1), 127–135.
46. Allal, S., & Boudjit, S. (2012). Geocast routing protocols for
vanets: Survey and guidelines. In Sixth International Conference
on Innovative Mobile and Internet Services in Ubiquitous Com-
puting (IMIS) (pp. 323–328).
Wireless Netw
123
Author's personal copy

47. Ghafoor, K. Z., Abu Bakar, K., Lloret, J., Khokhar, R. H., & Lee,
K. C. (2013). Intelligent beaconless geographical forwarding for
urban vehicular environments. Wireless Networks, 19(3),
345–362.
48. Ibrahim, K., Weigle, M.C., & Abuelela, M. (2009). p-IVG:
Probabilistic inter-vehicle geocast for dense vehicular networks.
In IEEE 69th Vehicular Technology Conference. VTC Spring
2009. (pp 1–5).
49. Park, S., Lee, E., Park, H., Lee, H., & Kim, S.-H. (2010). Mobile
geocasting to support mobile sink groups in wireless sensor
networks. IEEE Communications Letters, 14(10), 939–941.
50. Chaurasia, N., Sharma, S., & Soni, D. (2011). Review study of
routing protocols and versatile challenges of MANET. Interna-
tional Journal, 1(2), 150–157.
51. Kihl, M., Sichitiu, M., Ekeroth, T., & Rozenberg, M. (2007)
Reliable geographical multicast routing in vehicular ad-hoc net-
works. In Wired/wireless internet communications (Lecture notes
incomputer science, pp. 315–325, Vol. 4517). Berlin, Heidelberg:
Springer.
52. Chen, Y.-S., Lin, Y.-W., & Lee, S.-L. (2010). A mobicast routing
protocol in vehicular ad-hoc networks. Mobile Networks and
Applications, 15(1), 20–35.
53. Junhai, L., Liu, X., & Danxia, Y. (2008). Research on multicast
routing protocols for mobile ad-hoc networks. Computer Net-
works, 52(5), 988–997.
54. Li, P., Guo, S., Yu, S., & Vasilakos, A.V. (2012). CodePipe: An
opportunistic feeding and routing protocol for reliable multicast
with pipelined network coding. In INFOCOM, 2012 Proceedings
IEEE (pp. 100–108).
55. Yen, Y.-S., Chao, H.-C., Chang, R.-S., & Vasilakos, A. (2011).
Flooding-limited and multi-constrained QoS multicast routing
based on the genetic algorithm for MANETs. Mathematical and
Computer Modelling, 53(11), 2238–2250.
56. Royer, E.M. (2000). Multicast ad hoc on-demand distance vector
(MAODV) routing. IETF Internet Draft, draft-ietf-manet-maodv-
00 txt.
57. Jetcheva, J.G., & Johnson, D.B. (2001). Adaptive demand-driven
multicast routing in multi-hop wireless ad hoc networks. In
Proceedings of the 2nd ACM International Symposium on Mobile
ad hoc networking & computing (pp. 33–44). ACM.
58. Patel, A., Latifi, M., Souza, A.B., Xavier, F.A., Celestino, J., &
Oliveira, F.D. (2013). Stable multicast trees based on Ant Colony
optimization for vehicular Ad Hoc networks. In Proceedings of
the 2013 International Conference on Information Networking
(ICOIN), IEEE Computer Society (pp. 101–106).
59. Laouiti, A., Jacquet, P., Minet, P., Viennot, L., Clausen, T., &
Adjih, C. (2003) Multicast optimized link state routing. INRIA
research report RR–4721.
60. Lee, S.-J., Su, W., & Gerla, M. (2002). On-demand multicast
routing protocol in multihop wireless mobile networks. Mobile
Networks and Applications, 7(6), 441–453.
61. Tian, K., Zhang, B., Mouftah, H., Zhao, Z., & Ma, J. (2009).
Destination-driven on-demand multicast routing protocol for
wireless ad hoc networks. In ICC’09 IEEE International Con-
ference on Communications, 2009 (pp. 1–5).
62. Tonguz, O. K., Wisitpongphan, N., & Bai, F. (2010). DV-CAST:
A distributed vehicular broadcast protocol for vehicular ad hoc
networks. IEEE Wireless Communications, 17(2), 47–57.
63. Nekovee, M., & Bogason, B.B. (2007). Reliable and effcient
information dissemination in intermittently connected vehicular
adhoc networks. In IEEE 65th Vehicular Technology Conference
(pp. 2486–2490). VTC2007-Spring.
64. Maia, G., Aquino, A.L., Viana, A., Boukerche, A., & Loureiro,
A.A. (2012). HyDi: A hybrid data dissemination protocol for
highway scenarios in vehicular ad hoc networks. In Proceedings
of the second ACM international symposium on Design and
analysis of intelligent vehicular networks and applications (pp.
115–122). ACM.
65. Nakorn, N.N., & Rojviboonchai, K. (2010). DECA: Density-
aware reliable broadcasting in vehicular ad hoc networks. In 2010
International Conference on Electrical Engineering/Electronics
Computer Telecommunications and Information Technology
(ECTI-CON) (pp. 598–602).
66. Zhou, L., Chao, H.-C., & Vasilakos, A. V. (2011). Joint forensics-scheduling strategy for delay-sensitive multimedia applications
over heterogeneous networks. Selected Areas in Communications,
IEEE Journal on, 29(7), 1358–1367.
67. Yao, Y., Cao, Q., & Vasilakos, A.V. (2013). EDAL: An energy-
efficient, delay-aware, and lifetime-balancing data collection
protocol for wireless sensor networks. In IEEE 10th International
Conference on Mobile Ad-Hoc and Sensor Systems (MASS), 2013
(pp. 182–190).
68. Lochert, C., Hartenstein, H., Tian, J., Fussler, H., Hermann, D., &
Mauve, M. (2003). A routing strategy for vehicular ad hoc net-
works in city environments. In Proceedings of the IEEE Intelli-
gent Vehicles Symposium, 2003 (pp. 156–161).
69. Kasemann, M., Fußler, H., Hartenstein, H., & Mauve, M. (2002).
A reactive location service for mobile ad hoc networks. Citeseer.
70. Chen, J-C. (2003). Dijkstra’s shortest path algorithm. Journal of
Formalized Mathematics 15.
71. Seet, B-C., Liu, G., Lee, B-S., Foh, C-H., Wong, K-J., Lee, K-K.
(2004). A-STAR: A mobile ad hoc routing strategy for metropolis
vehicular communications. In NETWORKING 2004. Networking
technologies, services, and protocols; performance of computer
and communication networks; mobile and wireless communica-
tions (pp. 989–999). New York: Springer.
72. Gong, J., Xu, C-Z., & Holle, J. (2007). Predictive directional
greedy routing in vehicular ad hoc networks. In IEEE 27th
International Conference on Distributed Computing Systems
Workshops, 2007. ICDCSW’07 (pp. 2–2).
73. Ding, Y., Wang, C., & Xiao, L. (2007). A static-node assisted
adaptive routing protocol in vehicular networks. In Proceedings
of the fourth ACM international workshop on Vehicular ad hoc
networks. ACM (pp. 59–68).
74. Borsetti, D., & Gozalvez, J. (2010) Infrastructure-assisted geo-
routing for cooperative vehicular networks. In IEEE Vehicular
Networking Conference (VNC) (pp. 255–262).
75. Cianfrani, A., Eramo, V., Listanti, M., Polverini, M., & Vasila-
kos, A. V. (2012). An OSPF-integrated routing strategy for QoS-
aware energy saving in IP backbone networks. IEEE Transac-
tions on Network and Service Management, 9(3), 254–267.
76. Luo, J., Gu, X., Zhao, T., & Yan, W. (2010). A mobile infra-
structure based VANET routing protocol in the urban environ-
ment. In IEEE 2010 International Conference on
Communications and Mobile Computing (CMC) (pp. 432–437).
77. Xiang, L., Luo, J., & Vasilakos, A. (2011). Compressed data
aggregation for energy efficient wireless sensor networks. In 8th
Annual IEEE Communications Society Conference on Sensor,
Mesh and Ad Hoc Communications and Networks (SECON) (pp.
46–54).
78. Cheng, H., Xiong, N., Vasilakos, A. V., Tianruo Yang, L., Chen,
G., & Zhuang, X. (2012). Nodes organization for channel
assignment with topology preservation in multi-radio wireless
mesh networks. Ad Hoc Networks, 10(5), 760–773.
79. Pan, H-Y., Jan, R-H., Jeng, A.A-K., Chen, C., & Tseng, H-R.
(2011) Mobile gateway routing for vehicular networks. In Pro-
ceedings of the 8th IEEE Asia Pacific wireless communication
symposium (APWCS 2011).
80. Granelli, F., Boato, G., & Kliazovich, D. (2006). MORA: A
movement-based routing algorithm for vehicle ad hoc networks.
In IEEE Workshop on Automotive Networking and Applications
(AutoNet 2006), San Francisco, USA.
Wireless Netw
123
Author's personal copy

81. Menouar, H., Lenardi, M., & Filali, F. (2007). Movement pre-
diction-based routing (MOPR) concept for position-based routing
in vehicular networks. In 66th IEEE Vehicular Technology
Conference, VTC-2007 Fall 2007 (pp. 2101–2105).
82. Menouar, H., Lenardi, M., & Filali, F. (2006). An intelligent
movement-based routing for VANETs. In ITS world congress,
London.
83. Menouar, M., Lenardi, M., & Filali, F. (2005). A movement
prediction based routing protocol for vehicle-to-vehicle commu-
nications. Communications, 21, 07–2005.
84. Wei, G., Ling, Y., Guo, B., Xiao, B., Vasilakos, A.V. (2011)
Prediction-based data aggregation in wireless sensor networks:
Combining grey model and Kalman filter. Computer Communi-
cations, 34(6), 793–802.
85. Luo, Y., Zhang, W., & Hu, Y. (2010). A new cluster based
routing protocol for VANET. In IEEE Second International
Conference on Networks Security Wireless Communications and
Trusted Computing (NSWCTC) (pp. 176–180).
86. Raw, R.S., & Lobiyal, D. (2010). B-MFR routing protocol for
vehicular ad hoc networks. In IEEE International Conference on
Networking and Information Technology (ICNIT) (pp. 420–423).
87. Stojmenovic, I., Ruhil, A. P., & Lobiyal, D. (2006). Voronoi
diagram and convex hull based geocasting and routing in wireless
networks. Wireless communications and mobile computing, 6(2),
247–258.
88. Prasanth, K., Duraiswamy, K., Jayasudha, K., & Chandrasekar,
C. (2009). Edge node based greedy routing for VANET with
constant bit rate packet transmission. International Journal of
Recent Trends in Engineering, 2(4), 14–19.
89. Wang, X., Vasilakos, A. V., Chen, M., Liu, Y., & Kwon, T. T.
(2012). A survey of green mobile networks: Opportunities and
challenges. Mobile Networks and Applications, 17(1), 4–20.
90. Brahmi, N., Boussedjra, M., Mouzna, J., & Bayart, M. (2009).
Adaptative movement aware routing for vehicular ad hoc net-
works. In Proceedings of the International Conference on
Wireless Communications and Mobile Computing: Connecting
the World Wirelessly (pp. 1310–1315). New York: ACM.
91. Haklay, M., & Weber, P. (2008). Openstreetmap: User-generated
street maps. IEEE Pervasive Computing, 7(4), 12–18.
92. Behrisch, M., Bieker, L., Erdmann, J., & Krajzewicz, D. (2011).
Sumo-simulation of urban mobility-an overview. In SIMUL 2011,
The Third International Conference on Advances in System
Simulation (pp. 55–60).
93. Baumgart, I., Heep, B., & Krause, S. (2007). OverSim: A flexible
overlay network simulation framework. In IEEE Global Internet
Symposium (pp. 79–84).
94. Martinez, F. J., Toh, C.-K., Cano, J.-C., Calafate, C. T., &
Manzoni, P. (2011). A street broadcast reduction scheme (SBR)
to mitigate the broadcast storm problem in VANETs. Wireless
Personal Communications, 56(3), 559–572.
95. Youssef, M., Ibrahim, M., Abdelatif, M., Chen, L., & Vasilakos,
A. (2013). Routing metrics of cognitive radio networks: A survey.
IEEE Communications Surveys & Tutorials, 16(1), 92–109.
Mohammad Reza Jabbarpouris currently a Ph.D. candidate
and Research Assistant in the
System and Technology
Department, Faculty of Com-
puter Science and Information
Technology at University of
Malaya, Malaysia. He received
his Master of Data Communi-
cation and Networking in 2012
at the same university. He is the
author of various articles and
serving as member of editorial
board and reviewers in interna-
tional journals and conferences.
His current research interests include Vehicular and Mobile Ad Hoc
Network (Architectures, Protocols, Security, and Algorithms),
Vehicular Cloud Computing, Vehicle Traffic Routing Systems,
Artificial Intelligence and Swarm Intelligence.
Alireza Marefat is pursuing his
master’s degree in Computer
Science at University of
Malaya, Malaysia, Kuala Lum-
pur and in 2012 he received his
bachelor’s degree in Informa-
tion Technology with special-
ism in Networking from
Staffordshire University. His
current interests comprise
Vehicular Ad hoc Network, ITS
in road safety and vehicle traffic
routing systems.
Ali Jalooli received his bache-
lor’s degree in computer science
from the Staffordshire Univer-
sity in 2012. He is currently
completing his master’s degree
in computer science and works
as research assistant since May
2013 at University of Malaya,
Malaysia. His research interests
include Vehicular ad hoc net-
work, quality of service, vehicle
traffic routing and applications
of intelligent transportation
system.
Wireless Netw
123
Author's personal copy

Rafidah Md Noor received her
BIT from University Utara
Malaysia in 1998, and M.Sc. in
Computer Science from Uni-
versity Technology Malaysia in
2000, and Ph.D. in Computing
from Lancaster University in
2010. She is currently a Senior
Lecturer at Computer System
and Technology Department at
the Faculty of Computer Sci-
ence and Information Technol-
ogy, University of Malaya. Her
research interests include net-
work mobility, vehicular net-
works, mobile IP, quality of service and quality of experience.
Rashid Hafeez Khokhar is
working as Lecturer in the
School of Computing and
Mathematics, Faculty of Busi-
ness, Charles Sturt University
(CSU). He received his Ph.D. in
Computer Science from Uni-
versity Technology Malaysia
(Malaysia) in 2011. He also
received his M.S. in Computer
Science (by research) from the
same university in 2005. Earlier,
he did his M.S. (Information
Technology) and M.S. (Statis-
tics) from Preston University
(Pakistan) and University of the Punjab (Pakistan) in 2003 and 1999
respectively. He is the author of various articles and serving as
member of editorial board and reviewers in international journals and
conferences. He is a member of IEEE and ACM. His areas of interest
are Vehicular and Mobile Ad Hoc Network (Architectures, Protocols,
Security, and Algorithms), Mobile Cloud Computing, Artificial
Intelligence and Real-Time Communications, and High Performance
Computing.
Jaime Lloret received his
M.Sc. in Physics in 1997, his
M.Sc. in electronic Engineering
in 2003 and his Ph.D. in tele-
communication Engineering
(Dr. Ing.) in 2006. He is a Cisco
Certified Network Professional
Instructor. He worked as a net-
work designer and administrator
in several enterprises. He is
currently Associate Professor in
the Polytechnic University of
Valencia. He is the head of the
research group ‘‘communica-
tions and remote sensing’’ of the
Integrated Management Coastal Research Institute and he is the head
of the ‘‘Active and collaborative techniques and use of technologic
resources in the education (EITACURTE)’’ Innovation Group. He is
the director of the University Expert Certificate ‘‘Redes y Comuni-
caciones de Ordenadores’’, the University Expert Certificate ‘‘Tec-
nologıas Web y Comercio Electronico’’, and the University Master
‘‘Digital Post Production’’. He is currently Chair of the Internet
Technical Committee (IEEE Communications Society and Internet
society). He has authored 12 books and has more than 240 research
papers published in national and international conferences, interna-
tional journals (more than 80 with ISI Thomson Impact Factor). He
has been the co-editor of 15 conference proceedings and guest editor
of several international books and journals. He is editor-in-chief of the
international journal ‘‘Networks Protocols and Algorithms’’, IARIA
Journals Board Chair (8 Journals) and he is associate editor of several
international journals. He has been involved in more than 200 Pro-
gram committees of international conferences and in many organi-
zation and steering committees. He led many national and
international projects. He is currently the chair of the Working Group
of the Standard IEEE 1907.1. He has been general chair (or co-chair)
of 19 International workshops and conferences (chairman of SEN-
SORCOMM 2007, UBICOMM 2008, ICNS 2009, ICWMC 2010,
eKNOW 2012, SERVICE COMPUTATION 2013, COGNITIVE
2013, and ADAPTIVE 2013, and co-chairman of ICAS 2009,
INTERNET 2010, MARSS 2011, IEEE MASS 2011, SCPA 2011,
ICDS 2012, 2nd IEEE SCPA 2012, GreeNets 2012, 3rd IEEE SCPA
2013, SSPA 2013 and local chair of MIC-WCMC 2013). He is cur-
rently co-chair of AdHocNow 2014, MARSS 2014, SSPA 2014, and
local chair of IEEE Sensors 2014. He is IEEE Senior and IARIA
Fellow.
Wireless Netw
123
Author's personal copy




















