Polyurethane from Liquefied Wheat Straw as Coating Material ...
Upload
khangminh22Category
view
1download
0
EFFECT OF GRAIN TYPE AND STRAW TYPE ON
SEPARATION IN COMBINES
by
AKHIL SHANDILYA, B.E.
A THESIS
IN
AGRICULTURAL ENGINEERING
Submitted to the Graduate Faculty of Texas Tech University in
Partial Fulfillment of the Requirements for
the Degree of
MASTER OF SCIENCE
IN
AGRICULTURAL ENGINEERING
Approved
Accepted
December, 1987

/ ):'7
/';. 165 , ACKNOWLEDGMENTS
I wish to thank with sincere gratitute the following people for
their generous contributions towards this thesis completion.
I first would like to thank my chairman Dr. James M. Gregory for
his "big time" patience, his expert research guidance in helping me
write this thesis. My appreciation also goes out to Dr. Clifford
Feddler for being such an encouragement in getting this thesis
completed and also serving as a coimnittee member. My thanks also goes
out to Dr. Timothy A. Wiggins for his willingness to serve as a
committee member and for his practical questions that helped in
improving this thesis. My special thanks to Mr. James Snyder, for his
assistance and sound technical advice in building the shaker.
My special thanks to Mr. Marvin Dvoracek for being such a 'gem of a
man' in lending me his printer to type this thesis. Also I would like
to thank the Department of Agricultural Engineering for supporting me
financially during the course of my studies here.
11

TABLE OF CONTENTS
ACKNOWLEDGMENTS ii
LIST OF TABLES iv
LIST OF FIGURES v
CHAPTER
I. INTRODUCTION 1
Objectives of This Study 3
II. LITREATURE REVIEW 4
Basic Research on Combines 4
Cylinder Threshing and Separation 5
Separation on Straw Walkers 7
Effects of Crop Characterstics on separation . 10
Separation Models 13
Typical Laboratory Test Device 15
III. PROCEDURE 16
Construction of The Shaker 16
Experimental Procedure 19
Fraction of Cover Measurements 20
Parameters of Grains 23
IV. RESULTS AND DISCUSSION 25
Model Verification 28
V. SUMMARY AND CONCLUSION 38
REFERENCES 41
APPENDIX 44
111

LIST OF TABLES
TABLE
3.1. Values for k as, calculated by MERV and in litreature .... 22
3.2. Dimensions of grains used in the experiments 24
4.1. Measured values of static and dynamic resistances 26
4.2. Predicted steady state resistance using equation 2.5 31
IV

LIST OF FIGURES
FIGURE
3.1. Shaker apparatus used to gather separation data 17
4.1. Bar graph of static and dynamic resistances 27
4.2. Effect of three types of straw on two types on grain 29
4.3. Effect of five types of grains on separation through wheat straw 30
4.4. Predicted vs measured resistances with three straw types (wheat, soybean and sorghum) 32
4.5. Predicted vs measured resistances with two straw types (wheat and soybean) 33
4.6. Correlation between static and dynamic measured resistances 35
4.7. Mass retained vs longest grain dimension squared 36

CHAPTER I
INTRODUCTION
Harvesting by combines is a major practice in most of the developed
countries. High labor costs and short harvesting periods (because of
weather) have caused many countries to sponsor research to develop
mechanized methods of harvesting. This has improved the efficiency of
harvesting; has drastically reduced the harvest time involved; and has to
a certain extent standardized the quality of the harvested product.
During the earlier stages of development of harvesting machines,
cutters were pulled by horses and the harvested material was brought to a
hog thresher to separate the grain from the straw. Later when engines
were invented, the process of cutting, threshing, and separating was
built into one machine, the combine, which could be operated by a single
person. There are many types of combines available in various sizes and
shapes; but there are two main categories of combines; the pull type and
the push or self-propelled type. Many improvements have been made to
improve the efficiency of the combine and make it adaptable to numerous
crop and land conditions since its initial development.
Modern combines harvest many crops. Some of the major crops are
soybeans, wheat, barley, rice, corn, sorghum and peanuts. Combines
separate the seed from the plant material. A typical self-propelled
combine performs four basic functions: cutting, threshing, separating and

cleaning. The components that perform these functions are the following;
an intake mechanism consisting of reel, cutterbar and an auger (helps in
picking up the plant and feeding it to the next part), the cylinder
consists of a drum and a beater (threshes the grain from the plant), the
separator consists of walkers (moves the threshed straw mat forward
allowing the grain to separate), and the sieves usually located below the
walkers separate chaff from seed. On the floor of the combine is the
seed container which holds the seed. From here grains are fed to a
bigger container for storage.
Due to variations in crop and land conditions during harvesting,
continuous adjustments of various components on the combine are required
for maximum efficiency. Sophisticated quick-response mechemisms can
increase harvesting efficiency and reduce energy consumption, but the
goal is to get maximum harvest for least cost. Optimization requires an
understanding of the threshing and separation processes. Losses in a
combine are natural and occurs in all four beusic operations; cutting,
threshing, separating and cleaning. Even though all of these are carried
out by the combine, the latter three can be added together and termed
combine losses. Major reasons for these losses are the following:
1. Improper clearance in the cylinder
2. Improper feedrate
3. High moisture content
4. Short walker lengths
5. Improper maintenance, e.g., clogged sieves

Even though major research has been done in areas of reducing losses,
there are no standard designs or management procedures to achieve an
optimum harvest of grain in present machines. This can be attributed to
a limited understanding of the major variables affecting the process.
The process of separation occurs in two major sections of the
combine, the cylinder and at the straw walkers. Cylinder separation
occurs immediately after the threshing process of setting free the grains
attached to the plant material. The straw walker performs only the
separation process. There are many factors influencing the process of
separation at both stages and these factors have been studied and
mathematical models have been derived to predict separation at these
stages. Two recent authors Gregory and Fedler (1986) have developed an
equation to predict separation on straw walkers. They have determined
that straw type and grain type should affect grain separation. Because
insufficient data is available to evaluate the affect of straw type and
grain type, there is a need for further research to substantiate this
theory.
Objectives of This Study
(1) To study the effect of grain and straw type on separation
including the construction of a laboratory test apparatus and the
collection of experimental data, and (2) to use collected data to test
the proposed separation model reported by Gregory and Fedler (1987).

CHAPTER II
LITREATURE REVIEW
Basic Research on Combines
Man's quest for automation of labor intensive farm jobs has caused
major changes since the early 1800's, especially in the area of
harvesting and separation of the edible from the inedible (John Deere
Manual). The achievement of this automation has involved many man hours
of research and experiments in the laboratory as well as in the field.
During the process of automation it is necessary to acquire extensive
knowledge of the material being processed in order to adapt machinery for
the various natural conditions that exist in crops (Stephens and Rabe,
1977). Boyce et al. (1974) are of the opinion that designs of combines
have reached their limits with respect to their lateral sizes. They
suggested that further improvements should occur by making each component
more efficient. One way to make separation more efficient is to develop
a more detailed knowledge of the effect of plant material properties on
separation.
Separation begins with threshing, which is the action of beating the
grain out of the pod or off the cob. Separation of grain from straw
begins immediately after the grain is detached. Approximately ninety
I>ercent of separation can occur in this early stage before the material
reaches the straw walkers (Arnold, 1964 and John Deere Manual). This
early stage consists of a cylinder and a concave. The cylinder rotates

while the concave remains stationary. The concave may be solid or have
open slots. Separation is enhanced with open slots (Arnold and Lake,
1964). The beater which is located above the cylinder exit, pushes the
threshed material onto the straw walkers where the next stage of
separation occurs. Walkers spread and mix the material, allowing the
grains to fall through the straw and sieves. The trash or material other
than grain (MOG) is moved through and out the combine. While literature
on performance of cylinder, concave, and straw walkers is available, very
little research has been reported that deals with the basics of
separation or the modeling of the process.
Cylinder Threshing and Separation
Threshing can be accomplished by (a) repeated impacting on the
material, (b) rubbing action, (c) squeezing the grain out of pod, (d)
centrifugal force to separate heavier grain from the stalks, or (e) a
combination of two or more of these actions (Kepner et al., 1982). The
most used methods are the centrifugal and impact methods of threshing.
The three basic mechanisms used for threshing are cross-flow rasp-bar
cylinders, axial-flow rasp-bar cylinders and spike-tooth cylinders
(Kepner et al., 1982). The usual dimensions of rasp-bar and spike-tooth
cylinders are in the range of 0.48 to 0.61 m in diameter and, 0.69 to
1.53 m in width. The concave length varies from 0.33 to 0.51 m.
Gasparetto et al. (1977) using high-speed motion picture, studied the
mechanism of threshing and separation at the cylinder and concave. They
observed that the major cause of threshing is the shattering action
produced by the impacting of the rasp-bar at high speeds. The primary

function of the concave is to hold and feed straw for repeated impacts by
the rasp-bar (Arnold, 1964). The clearance between the cylinder and
concave is of importance to control the amount of threshing and the
quality of grains detached. The larger the spacing, the farther into the
concave the material moves before threshing occurs (Kepner et al., 1982).
Concave spacing is typically wedge shaped. This shape helps provide
smooth feeding of the straw and prevents clogging at the exit. The
spacing is adjusted by trial and error by looking at the trash (MOG)
output from the combine. First the concave spacing is adjusted for non
crushing of both straw and grain. Then the cylinder speed is adjusted
for maximum separation of grain without breakage (John Deere Manual).
Logically, the spacing is big for large grains and small for small
grains. A maximum clearance of 4 to 5 cm is used for corn (Kepner et
al., 1982). The grains that are detached fall through the concave grate
and are fed to the shoe area for cleaning before flowing into the storage
bin. Arnold and Lake (1964) compared open and closed concaves. They
found open concaves performed better giving good results with respect to
amount of iindamsiged seeds and separation.
Goss et al. (1958) conducted experiments on conventional combines
with the objective of determining optimum adjustments and operating
conditions for each crop in order to minimize seed losses and seed
damage. They found that increasing the cylinder speed reduced the walker
losses because more separation occurred at the cylinder. Also the walker
losses were independent of the concave settings when the walker
efficiency was considered from the amount of seed, straw and chaff
delivered on to the walker entrance. With two different grain/non-grain

ratios, they found the higher grain/non-grain ratio yielded more chaff
and straw on to the walkers and increased the grain loss at the rear of
the ccMobine.
Studies were conducted on separation characteristics by Wurbleski and
Smith (1980) on three types of combines: conventional John Deere 6600
(cylinder and concave with straw walkers), non-conventional Western Roto
Thresh (cylinder and concave with perforated drum) and Sperry New Holland
TR70 (axial threshing and separating rotors). Their results showed that
the centrifugal tjrpe (TR70) of separation was the most efficient for
barley and wheat. The amount of seed damaged WEUS also the least in the
centrifugal type (TR70). Nothing was mentioned about the crop
properties.
Separation on Straw Walkers
Only loose grains are separated on straw walkers. Straw walkers
can be of two types; the rotary type and the multiple-section straw
walkers. Multiple-section straw walkers are made up of three to five
straw walkers mounted side by side and connected by two multi-throw
crankshafts at the extreme ends. These are used in conventional
combines. The walker bottom has different kinds of openings for grain to
fall through. Rectangular, square and hooded type openings are common
(John Deere Manual). Straw walkers have to be mounted at an angle for
longer dwell time and better separation of grains. In order to prevent
backsliding of straw the edges of the walkers are provided with fishbacks
or fins (Boyce et al., 1974). For each throw of the crankshaft the straw
mat is thrown up and rolled further to the rear of the machine. Through

8
this motion, the grains are separated from the straw mat. Boyce et al.
(1974) studied separation on straw walkers and found that separation was
maximum at one third the straw walker length and separation was low at
the extreme ends. They concluded that more fundamental research was
needed to explain the phenomenon of separation. The typical dimensions
of straw walkers are 0.2 m to 0.31 m wide and about 2.4 to 3.05 m long
with a throw of 0.10 m (Kepner et al., 1982).
Much has been done to predict the rate of separation on straw walkers
by many authors over the last two decades. Reed et al. (1974) predicted
that smaller amounts of grain were left on the walkers if the length of
straw walker was increased. This was based on the previous work done by
the same group in which they found that the separation followed a
exponetial decay pattern over the length of straw walkers. Wang et al.
(1985) did further work in this area and provided a means of calculating
the constant *b' which was called the attenuation coefficient used in the
prediction equation. They reported this coefficient to be numerically
equal to the separation efficiency over a very small length of the
walker. They also set a standard to do comparison work on separation
performance of combines. Gregory and Fedler (1986) also derived a
separation predicting equation. They used the fundamentals of diffusion
and included material properties such as seed size and straw type.
Non-conventional rotary separators are of two major types. The first
is stationary grates and rotors where the rotors spin at high speeds
forcing the grain out through the grates as the straw and grain are
pushed back by the rotor blades. The second is a perforated drum type

which has a rotating drum with smaller openings than the stationary
grates and an auger mounted close to the drum surface. The auger pulls
the straw and grains off the surface and thus agitates the straw mat and
helps in separating the grain from straw. A detailed study of this
system has been done by Jan et al. (1974) at Saskatchewan. They found
this to be an efficient separating device at different feed rates. A
blower is used to push the thrash out through the rear of the combine.
The speed of the drum is considerably slower than the rotor speed. The
difference in centrifugal forces between the two types is of the order of
two hundred times the force of gravity (Kepner et al., 1982). Both
threshing and separation can be achieved with two hundred times the force
produced by gravity when conditions are dry enough (Kepner et al., 1982).
The idea of integrating both threshing and separation was first tested by
Lamp and Buchele (1960). Jan et al. (1974) observed that high
centrifugal forces caused the plant material to block the holes in their
perforated drum experiment. Buchanan and Johnson (1964), in their
experiments with a conical threshing and separating device, cautioned
against grain damage caused by grains hitting the collecter surface after
going through the screen. It was also difficult to provide axial motion
to the crops at high centrifugal forces. Long et al. (1969) obsereved
that separation was higher when there was an ample amount of agitation
with the centrifugal force. Srivastava et al. (1974) found that the
problem of obtaining agitation and movement of material along the drum
surface could be solved by changing auger blade angles and screen to
blade speed ratio. The usual diemensions of these separators are about
0.45 m in diameter and about 2.75 m in length (Kepner et al., 1982).

10
Effects of Crop Characterstics on Separation
Some of the major crop characterstics that affect the performance of
separators are :
1. Thickness of straw mat,
2. Moisture content of crop,
3. Type of grain and straw,
4. Grain to non-grain ratio, and
5. Straw length.
Thickness of straw mat. If the thickness of the straw mat increases,
there is a reduction in the amount of threshing in the cylinders. To
compensate, the material must move further along the concave before
threshing is completed. Delayed threshing delays grain separation in the
cylinder and increases the amount of non-threshed grains, hence high
losses at the cylinder (John Deere Manual). Delayed threshing also
increases the amount of grain to be separated on the straw walker. The
thickness of the straw mat also affects the straw walker directly. The
time taken for a grain to go through 5 cm of straw is smaller than for a
10 cm thick mat for the same shaking speed (Long et al., 1969).
Moisture content of crops. A higher moisture content of up to 20% wet
basis has been tested for separation on straw walkers by Reed and Zoerb
(1972). They found no change in the efficiency of walker performance
associated with grain moisture using two different types of straw
walkers. It was found that germination is reduced when grains are
threshed at moisture contents other than the normal range of 17 to 22%.
High moisture content appears to affect threshing (Arnold and Lake, 1964)

11
but not separation (Reed and Zoerb, 1972). Srivastava et al. (1974)
noted that in the case of conical or cylindrical thresher and separator
the axial movement of straw matter was sensitive to the moisture content
of the crop.
Type of grain and straw. Few researchers have investigated the effect
of type of grain and straw on separation. Stephens and Rabe (1977)
stressed the need for more study on crop physical characterstics and
conditions to improve productivity in mechanical harvesting. There is
mention of type of grain and straw having effect on separation by Huisman
(1977). Gregory and Fedler (1986) stated that both straw mat thickness
and grain size affects separation in a combine. Huisman (1977) noted
that particle size distribution of straw has more affect than straw bulk
density on separation. From the literature it appears that more research
is needed in this area.
Grain to non-grain ratio. Increasing the non-grain (MOG) content
decreases seed damage, but reduces detachment and separation at the
cylinder. An increase in the grain/non-grain ratio at a constant feed
rate decreases both cylinder and walker losses for most grains (Reed et
al., 1974 and Kepner et al., 1982).
Length of straw. Long straws tend to cause poor separation at both
the cylinder and straw walker (John Deere Manual). This also could add
chaff into the grain bin, or cause the combine shoe to get clogged.
Straws tend to break when they are long and their moisture content is low
(Reed and Zoerb, 1972). This can lead to low efficiency of separation at

12
the straw walkers, and also at the shoe. Long straw lengths increase the
MOG to grain ratio and are thus undesirable for machine harvesting.
The major factors that affect threshing and separation have been
reviewed at this point. One fact which should be noted is a constant
crop condition is hard to find in the field (Huisman, 1977). Enough
research has been done in the field to determine the technical
feasibility and optimum operational parameters of different components of
the combine in relation to crops under varying conditions (Nyborg et al.,
1969). However, insuffecient data exists to fully evaluate the effect of
straw type and grain type on separation. This could highly influence the
efficiency of harvesting grains.
Grain separation in general can be visualized as grain movement
through the open spaces that occur in the complex arrangement of straw
matter. If the amount of open spaces are large then practically all the
grains should flow through the straw mat. Similarly if the open spaces
are small and less in number, then the amount of grains that can flow
through is very small. In other words, fraction of cover of straw per
unit area determines the amount of grains that can flow through that unit
area. Using this principle, Gregory and Fedler (1987) have developed, an
equation to predict the amount of grain that can be retained given the
area of cover, the type of straw, its thickness and the size of grain.

13
Separation Models
Reed et al. (1974) presented a simple model to predict grain
separation (eqn 2.1). This model was developed by curve fitting data
points obtained experimentally.
Gr/Go = e-^^ [2.1]
Gr = Grain remaining on the walkers.
Go = Grain onto walkers,
b = F(feedrate, MOG/grain, moisture content, crop variety and
walker design),
L = Length of walkers.
The model developed by Gregory and Fedler (1987) to predict the rate
of separation of grains on a straw walker was derived using Picks law of
diffusion (eqn 2.2). Note the similarity to eqn 2.1 in term of the
length variable.
Gf/Gi = e-[((P/X2) Va W BdM0G/M)e-»^C3M/(w v>] L [2.2]
Gf = Final mass of grain,
Gi = Initial mass of grain,
P = Machine vibration energy constant,
X = Diameter of grain,
Va = Average velocity of particle,
W = Width of the separation area,
BdMOG = Bulk density of MOG,
M = Mass per unit area of MOG,
k = Projected area/mass for a average piece of MOG,

14
C3 = A constant to reduce the total mass to an effective mass,
V = Flow velocity,
L = Length of separation area.
In equation 2.2 the power term is the lumped diffusion constant (Lc)
also called the attenuation coefficient in equation 2.1. This lumped
constant can be reduced to eqn 2.3 by holding all variables constant
except for the size of grain and straw type.
Lc = (Bi/X2)e-B2»^. [2.3]
In this equation Bi and B2 are constants and Lc represents the lumped
diffusion coefficient b, which contains the diffusion constant. The
reciprocal of this factor should be the resistance. Taking the inverse of
this gives equation 2.4.
1/Lc = (X2/Bi)eB2»^. [2.4]
The resistance (1/Lc) is in a sense a measure of the ease with which
the grain tumbles to the bottom of the straw mat. When the straw
material is not remixed, grains become trapped in the straw and do not
easily separate from the straw. For this condition the grain moves
through layers of straw with some grain stopping at every obstacle in the
flow path. Each layer has a thickness of the length dimension of grain.
For this condition, B2 is equal to M * X / DT or mass per unit area
divided by the ratio of total thickness of straw (DT) by longest grain

15
dimension (X). The unit resistance offered for each layer [X̂ *
eM*k*x/DT] is multiplied by DT / X to predict resistance for the whole
thickness of straw mat. Substitution of a unit value for Bi and the
above relationship for B2, gives the following equation for resistance.
1/Lc = (X2/l)*e<M*tc*x/DT)*DT/x. [2.5]
Typical Laboratory Test Device
To study the process of separation on straw walkers Reed and Zoerb
(1972) and Reed et al. (1974) used straw walker parts to build their
experimental device in the laboratory. This used a lot of crop material
and needed special equipment to maintain constant material conditions.
Other authors have successfully carried out research with smaller devices
which do not actually duplicate the action of the straw walker assembly.
Baader et al. (1969) used a crank mechanism to give a vertical motion to
their experimental setup. Huisman (1977) also used a vertical motion to
conduct his experiments on the process of grain separation. Gregory and
Fedler (1986) used a small hand shaker to verify their exponential decay
model for grain separation. Since a straw walker assembly and a large
amount of material was not available, it was decided to construct a
simple device that could shake and hold less amount of material for this
research.
This study will focus on collecting more data to test the equation
developed by Gregory and Fedler (1987) (equ 2.4). Equation 2.4 will be
tested indirectly by varying only the size of grain and type of straw
using eqn 2-5.

CHAPTER III
PROCEDURE
Construction of The Shaker
A mechanized shaker was built to investigate the effect of straw and
grains on separation. The design objectives of the shaker were (a) keep
size small so a minimum of crop materials would be needed to perform
tests, (b) keep cost low and (c) produce a test procedure that could
easily detect the effects of grain size and straw type.
The shaker was built using materials available in the Agriculture
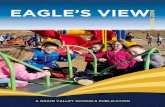
Engineering Department. The device, as shown in figure 3.1, was
constructed as a wooden box 0.5 m by 0.5 m and 15 cm deep using plywood.
A wire mesh of 1.3 cm square openings was attached to the bottom of the
box with the help of a sheet metal frame. This box was supported by a
square angle-iron frame mounted on a tripod of three flat strips of iron
legs of approximately 0.6 m in length, 2.5 cm in width and 0.5 cm in
thickness. To the bottom of these legs was welded another larger frame
which could support the shaker, the electric motor, and the cam shaft
assembly. A 186 W electric motor was used to power the shaker. The
motor had a rotation speed of 1725 RPM. A belt pulley mechanism was used
to reduce the speed to about 200 RPM. The larger pulley was mounted on
one end of a shaft 1.2 cm in diameter. This shaft mounted between two
bush bearings also had two cam with a throw of 2.5 cm welded on to it,
converting the rotary motion to a shaking action. The cam moved against
16

17
Fig 3.1 Shaker apparatus used to gather separation data.

18
the two flat strips of iron flats which supported the box frame. The
grain was recovered through a hopper built of sheet metal beneath the
sieve. The hopper was mounted to the bottom of the wooden box. The
square opening of the hopper was 6.25 cm^. The motor assembly was
provided with slots on the bottom of the mounting plate to adjust the
tension on the belts.
The construction of the sample collector was done after many trials
of different types of straw and grain combination runs. The amount of
grain collected for about ten seconds decided the size of the sample
boxes (10 cm X 15 cm x 5 cm deep). Eight sample boxes were held in
sequence and aligned on a guide to collect samples. The frame to hold
the plastic boxes was built using plywood. The eight boxes were placed in
little compartments placed side by side on its 10 cm side. This sample
collector was pulled against sheet metal restrictors which were mounted
on a rectangular plate. The plate was mounted on to the frame. Grains
were collected at the center of the plastic boxes to avoid grain
scattering out. The sample collector was pulled by hand at every sample
collection interval.
The shaker was first intended to study the exponential decay model
devoloped by Gregory and Fedler (1986). Due to non-mixing of straw and
grain during sample collection it failed to provide a true exponential
decay of grains through straw. Also grain ceased to separate out after
two minutes of shaking. Based on this observation and assuming that the
amount of trapped grain was an indication of resistance to separation,
the study was modified to the following procedure.

19
Experimental Procedure
Three types of straw and five types of grains were used in the data
collection process. The straw types were sorghum, wheat, and soybean.
The five types of grains were birdseed, sorghum, cottonseed (treated),
blackeye peas and corn. The thickness of straw was kept constant at
three inches and the initial amount of grain was kept at one kilogram.
For each type of straw, all five types of grains were run through. Five
replications of each type of seed with eight sample collections were run
with each type of straw. The time interval of collecting samples was as
follows; the first sample was for a three second duration, the next six
samples were of a ten second duration, and the last sample was of sixty
seconds. This experimental design provided independence between the
variables of grain size and straw type. The use of natural materials
(each grain in its own straw) would not achieve independent evaluation
and would have hindered statistical evaluation.
One kilogram of grain was weighed and poured evenly over the straw
mat. The grain that fell through the mat were collected and poured back
over the mat. This was done three times for full grain saturation of
straw. The grain that over flowed and fell through (OF) after the third
time was weighed and the remaining grain on the straw mat was termed the
static resistance (SR) (the resistance offered by the straw mat to the
grains when the shaker is static). Next, the shaker was turned on and
samples were collected in sequence for the time intervals explained
above. The samples were then weighed consecutively, substracting the
initial amount of grain on top of the straw mat before shaking (SR) and
the total amount of grain collected after shaking (TGC), the remaining

20
amount of grain in the straw mat was calculated and was termed dynamic
resistance (DR) (the resistance offered by the straw mat to the initial
saturated grain content after it has undergone shaking). The data of
grain masses collected was run through a simple basic program to do the
mathematics to print out the average of grains collected at every sample
box and the average of static and dynamic resistances offered by the
straw to that particular type of grain, using the following
relationships.
1000 - OF = SR [3.1]
SR - TGC = DR [3.2]
Quality of Straw and Grains. The straw and grains were dry with an
average moisture content of 8.8Si. Expcept for wheat straw, the other two
types of straw were harvested trash out of combines. They were clean and
free of chaff. The wheat straw was baled after cutting for cattle feed.
It had some wheat kernels and chaff in the straw. The length of wheat
straw was 20 to 25 cm. The other straws consisted of highly mixed
lengths.
Fraction of Cover Measurements
During the course of the experiment and analysis it was necessary to
measure the fraction of cover because the standard k factor data provided
in litreature for the straws did not include wheat straw with chaff and
kernels. Fraction of cover for all three straws were measured by using a
wooden frame one meter square laid on the floor. Into it was randomly
scattered a small amount of straw. Then a yard stick was placed over the

21
straw cover and the number of points out of 25 covered by straw were
recorded. An average of eight such random measurements inside the wooden
frame was used as the fraction of cover. The ratio of the number of
points covered by the total number of points, namely 25, gives the
fraction of cover.
Evaluation of k Factor. After the fraction of cover measurement was
made, the amount of straw inside the meter square area was weighed to
calculate the k factor. The fraction of cover (F) and mass (M) in kg/ha
were plugged into the fraction of cover prediction equation as developed
by Gregory, (1982), eqn 3.3.
F = 1 - exp(-k * M) [3.3]
where, F = Fraction of cover,
k = Coefficient,
M = Mass of straw in kg/ha.
Using the above equation, the k value was easily calculated. This
was carried out for several different fraction of covers for all three
types of straws. Fraction of cover ranged from 0.21 to 0.90. To
calculate the best k value, the model with the data points were evaluated
by using MERV, a statistical evaluation program (Gregory and Fedler,
1985). The model fit the measured data with an R2 equal to 0.865 or
better for all three types of straw and with a significance level of
greater than 0.05. The k values obtained were reasonably close to
published data (see table 3.1).

22
Table 3.1. Values for k as, calculated by MERV and in litreature.
STRAW TYPE
WHEAT
SOYBEAN
k VALUE MEASURED
0.000652«
0.000227*
k VALUE PUBLISHED REFERENCE
0.0005<»«
0.0002*
Gregory (1982)
Gregory (1982)
SORGHUM 0.000171* 0.00006* Greb (1967)
* - Combine trash, # - stem only, © - baled wheat, ©@ - standard value.

23
Parameters of Grains
The length, breadth and thickness or the dimensions along the X,Y and
Z axis of grains were available in litreature for all tjrpes of seeds
except cottonseed and birdseed. Actual measurements were made for the
two types of seeds. An average of ten ramdom sample measurements of
three sides of the grain, made by a digital slide calliper were taken as
the standard dimensions of the grains used. These dimensions are
presented in table 3.2.

24
Table 3 . 2 . Dimensions of grains used in the experiments (cm).
GRAIN TYPE REFERENCE
BIRDSEED
SORGHUM SEED
COTTON SEED
BLACKEYE PEAS
CORN
0.228
0.443
0.8635
0.8785
1.086
0.220
0.367
0.539
0.6845
0.777
0.1715
0.255
0.484
0.561
0.500
Measured
Mohsenin,
Measured
Mohsenin,
Mohsenin,
1986
1986
1986

CHAPTER IV
RESULTS AND DISCUSSION
One of the main objectives of this study was to collect data to
verify the model as developed by Gregory and Fedler (1987) as shown by
equation 2.4. The experiments were conducted with three types of straw
and five types of grains as explained in chapter III. The data collected
is presented in the Appendix along with the results obtained by the basic
program. The results contain the static and dynamic resistances of the
grain and straw combinations along with the mass collected in each sample
box. The static and djmamic resistances of the different treatments are
tabulated in table 4.1.
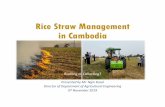
The static and dynamic resistance data are plotted as a bar graph as
shown in figure 4.1, the straws and grains are arranged in descending
order of average thickness and lengths. The graph clearly shows the
effect of straw type and grain type in both the static and dynamic
sections of the graph. The larger the size of straw the lower the
resistance offered and the smaller the straw, the higher the resistance
offered, irrespective of grain size in both sections of the graph.
Looking at the graph from the grain perspective in the dynamic section,
the larger the grain size, the higher the resistance and the smaller the
grain size the lower the resistance to movement irrespective of the straw
size. In combination, small size straw and big grain sizes offer higher
magnitudes of resistances than a large size straw and small size grains.
25

26
Table 4.1 Measured values of static and dynamic resistances. (all values in grams)
GRAIN TYPE
STRAW TYPE CORN BLACKEYE PEAS
COTTON SEED
SORGHUM SEED
BIRDSEED
WHEAT STATIC
DYNAMIC
1000 1000
394.6 245
1000
279
1000
58
716
13
STATIC SOYBEAN
DYNAMIC
STATIC SORGHUM
DYNAMIC
929
155
624
49
942
158
485
82
954
97
670
59
468
27
495
43
140
21
208
25

27
K..W(^<<<«^# K \ \ \
^ ^
I . J
n c; o c CD
09 •H 00
u
U I •H .p >»
(0 *
o
CD
to u m m
tc •H
( • p U O B D O m ) ( a i 6 ) NIVUO JO SSVIN a 3 N I V i 3 »

28
Indirectly the fraction of cover of straw matter in the box has a lot to
do with the resistance offered to grains. Since the effects are evident
in the dynamic section of the graph it clearly shows the prevalence of
the effects even after the process has reached steady state. The steady
state process can easily be seen in the plot of mass collected vs time in
figure 4.2. This graph also shows the effect of straw types on different
grain sizes (corn and blackeye peas). Figure 4.3 shows the plot of one
type of straw and five different grains vs time. It clearly shows that
different grain sizes influence the process of separation by the
different decay slopes.
Model Verification
The model (Gregory and Fedler, 1987) was developed for the steady
state process and equation 2.5 has been utilized to predict the
coefficient 1/Lc in this study. The predicted data has been tabulated in
table 4.2. The model was verified with a linear relationship between the
predicted and measured data using a statistical package MERV ( Gregory
and Fedler, 1985). The result was an R̂ of 0.852 with a significance
level alpha of 0.001. This proved that the model fit the data well.
After plotting the data on a graph (figure 4.4) it was observed that the
sorghum data was causing much of the scatter. The model tended to
overpredict the sorghum data. When this data was removed from the
analysis, the R̂ increased to 0.961 (figure 4.5). The significance
remained high (alpha = 0.001) even though the number of data points were
reduced. The overpredict ion of the sorghum straw data could be due to
many reasons. It could be an inadequacy of the model to account for some
other factors that are affecting the process, when the fraction of cover

29
c c c a a c 0 >» > o cj m m u 1 I I I o o £ JC
o o o
n cu
o
c o
OD
u n
<H o n
u
<H 03 O C
•P (0
o u
b3 O
eg
\30 • H Ex.
(B) aaioamoo SSVH

30
c o •H
CO u CO a oo c o B
•H (0
O
05 •
* * •»->
03 4)
>H fl CH «)
V o (H i-i (H J C
CO t
to • H E>4
(0) a3io3"noo SSVH

31
Table 4.2 Predicted steady state resistance using equation 2.5.
GRAIN TYPE
CORN
BLACKEYE PEAS
COTTON SEED
SORGHUM SEED
BIRD SEED
SORGHUM STRAW
1175
890
870
390
187
SOYBEAN STRAW
1302
966
943
406
191
WHEAT STRAW
2928
1863
1797
565
227

32
CD .
•P to
•H LI
* g §
go 3 •H 4) OS . p
u, o 09
0) « U -P 9 CO
SI H ^
00 > OD
9)
-o a 4) >^
. a , •O CO 4) IM
Pu 09
to •H &C4
o o o en
o o ID Ol
o o o Ol
o o lO «-l
o o o ^^
o o lO
Ol/T lN3I0Idd300 03iOI03Ud

33
o o o m
o o in C\i
o o o (U
o o in wi
o o o ^<
o o in
i •P •H %
09 4) O
g OB
•H «9 4)
4) ki
s
4)
•6 O OQ
S •P CO 4)
i 09 > 09
4) •̂ a 4) >»
4-> - p
•H 2 t3 CO 4) U U -M
QL, n
to •H
OVT iN3I0I4J300 a310ia3bd

34
of straw is very small. Since most of the grains were being held by the
sorghum head and the sides of the shaker, it is reasonable to assume that
the small amount of trapped grain on the sides of the shaker starts to
dominate when total trapped grain is small proving that at this stage the
equipment fails to give true data. From a practical point of view, this
type of material does not limit separation in combines. Errors, even
though they seem relatively large on the graphs are of little practical
significance in the field.
From the observation of static and dynamic resistances from the bar
graph (figure 4.1) there appears to be some similarity between the two
resistances. For analysis, some of the static resistance data points had
to be neglected because the experiment was restricted by the amount of
grain poured (1 kg) on to the surface of the straw mat. Therefore, the
data points with static resistainces of 1 kg had to be removed for
analysis. After doing the statistical analysis it showed a linear
functional relationship with an R2 of 0.509 (figure 4.6). While the R2
was much lower than the other results, the relationship was 95*
significant or alpha = 0.05.
Gregory and Fedler (1987) resistance equation (eqn 2.4) was further
established by the data collected. The equation resistance term 1/Lc is
directly proportional to the square of the longest grain size. The mass
retained in grams vs the square of the longest grain dimension clearly
shows a linear relationship (figure 4.7). Wheat and soybean straws gave
an R2 of 0.989 (alpha = 0.001) and 0.85 (alpha = 0.01)

35
o o 4) U 3 09 CO 0) B o
•H
o in £
•«
UJ
z < 1 -
100
ES
IS
s u
lAM
i
> Q
o in
•1-1
CD 4^ CD
C3 4)
1 •4J 4)
.D io
n ce
s.
CO o i-H 4-> 4> 09 (M - H Ui 09 0 9> O I-
CO
to •H
o o o o in i^
o o in
o in m
(6) 33NVlSIS3b] 3I1V1S

36
in (VI ^
§J3 - ^ * « i
E E
^^
Q (L < 3
Z O M
cn z UJ z M
^ Q O in z M
GR
A
I -(fl LLI (0
• •u 4) U CO 3 C 09
B 0
• H OS B 4) B
• H
-o B
• H CO ( N
to 4J 09 4) to B o
f i
m >
•o 4) B
• H
reta
09 CQ CO
z (VI o
to •H
(0) 03NIV13d SSVH

37
respectively, but sorghum did not show a significant linear relationship.
The experimental error for this study appears to have been too large to
detect the small slope for the grain sorghum.
The major analysis thus far has been on the dynamic resistance. This
resistance appears to be closely related to the resistance of grain
separation in combines. While the static resistance may not be important
for combines, it may have application in aerial seeding of crops over
soil covered with residue. This practice is used some in conservation
tillage and by the highway department along road sides.
The most important result is that the static resistance is more than
twice as high as the dynamic resistance. When possible, seeding should
be performed before mulching, especially when large seeds and thick
mulches are to be used. If this is not possible, then it is important
to switch to dynamic conditions by disking or some other method of
shaking the straw.
The second most important result is that at least a weak linear
relationship exists between static and dynamic resistance. Since we have
an equation to predict dynamic resistance, interms of seed size, straw
type and straw thickness, it is possible to first predict dynamic
resistance then use dynamic resistance to predict static resistance. The
computed static resistance can then be subtracted from the amount of
grain applied to obtain the amount of grain reaching the soil.

CHAPTER V
SUNWARY AND CONCLUSION
From the literature, it was established that more research was needed
to determine the effect of crop materials on grain separation in
ccnnbines. From the separation model proposed by Gregory and Fedler
(1987), two variables were selected to characterize crop materials: grain
size and a residue coverage coefficient, k. The objective of this study
were to vary these two variables and measure their effect on grain
separation.
A simple shaking device was constructed in the shop to make the
tests. Originally the experimental device was constructed to study the
exponential decay of grain separation as a function of time. But, due to
the non-mixing of the straw material, this procedure was modified; and
the amount of grain retained after two minutes of vibration was used as a
measure of resistance to separation. With the data collected, it was
clearly verified that grain size affected separation (figure 4.6). Straw
type was also shown to affect separation (figure 4.1). This was further
established by the statistical and numerical evaluations done using the
data collected with the help of statistical packages. The level of
significance and the R2 provided by the results proved the adequacy of
the proposed separation model by Gregory and Fedler, (1987).
38

39
From the above results with different sized grains and straw types,
it is concluded that crops with long grains such as oats will be the most
difficult to separate. Crops with high crop coefficients (k), such as
barley, wheat, oats or straw with green broad leaf weeds will be the most
difficult material through which grain separation can occur. Coupling
these two ideas, a crop such as oats with green broad leaf weeds would
give the most difficult separation problems and would be a good material
to test separation capacity of a new combine design.
More values of crop coefficients are needed to apply prediction
equation to other crops, therefore it is recommended that crop
coefficients be evaluated for other crops not considered in this research
or previously published. This being a laboratory experiment, it is also
reconmiended that further field research be conducted to provide final
verification of the separation model. Because threshing in the cylinder
of either a cross flow or axial flow type of combine affects the
beginning of separation, it is recommended that a computer model be
developed to integrate threshing and separation. This could quickly
evaluate the outcome of different combine design concepts. This model
would be useful in teaching both design and management ideas to students
as well as providing a quick way to check the performace on new designs.
Finally, as a spin-off of the combine separation problem, a procedure
was suggested to evaluate the amount of seed, fertilizer, or other
granular material that would reach the soil through different types and
amounts of residue cover. This has direct application to conservation
tillage conditions and should be evaluated further with field research.

40
As a final summary, it was concluded that grain size and straw type
were two important crop variables affecting separation. Even though the
apparatus did not duplicate true walker motion, the research verified the
effects of grain and straw types on separation. By verifying the cause
and effect relationship, the effect of grain size and straw type on
separation can be applied to a cylinder and concave system as well as a
straw walker. Finally, it was concluded that the separation model by
Gregory and Fedler (1987) does adequately describe the affects of
material properties on grain separation in combines.

REFERENCES
Arnold, R. E. Experiments with rasp bar threshing drum I: Some factors affecting performance. J. agric. Engng Res., 9(2): 99-131, 1964.
Arnold, R. E. and Lake, J. R. Experiments with rasp bar threshing drum II: Comparison of open and closed concaves. J. agric. Engng Res., 9(2): 250-251, 1964.
Baader, W., Sonnenberg, H. and Peters, H. Die entmischung eines komgutfasergut-haufwerkes auf einer vertikal schwingenden, horizontalen unterlage. Grundl. Landtechn. Bd. 19(5): 149-157, 1969.
Boyce, B. H., Pringle, R. T. and Wills, B. M. D. The separation characteristics of a combine harvester and a comparison of straw walker performace. J. agric. Engng Res., 19: 77-84, 1974.
Buchanan, J. D. and Johnson, W. H. Functional characteristics and analysis of a centrifugal threshing and separation mechanism. Transactions of the ASAE. 7: 460-463, 1965.
Fundamentals of machine operation: Combine harvesting. Moline, IL: John Deere service publications, 1973.
Gasparetto, Ettore, Zen, Marcello and Guadagnin, Antonio. Ultra-high speed movie observation of a conventional threshing mechanism (cylinder-concave-rear beater working on wheat). Proceedings of the first international grain and forage conference ASAE, St. Joseph, MI 49085. p 104-111, 1977
Gerb, B. W. Percent soil cover by six vegetative mulches. Agronomy J. 59(6): 610-611, 1967.
Goss, J. R., Kepner, R. A. and Jones, L. G. Performance charact--eristics of the grain combine in barley. Agricultural Engineering. 39(11): 697-702, 1958.
Gregory, J. M. Soil cover prediction with various amounts and types of crop residue. Transactions of the ASAE. 25(5): 1333-1337, 1982.
Gregory, J. M. and Fedler, C. B. Mathematical relationship predicting grain separation in combines. Paper presented at winter meeting ASAE, Chicago, IL. Paper No. 86-1522, 1986.
Gregory, J. M. and Fedler, C. B. Model evaluation and research verification (MERV). Unpublished Paper presented at winter ASAE conference, San Luis Obispo, CA. 1986.
41

42
Gregory, J. M. and Fedler, C. B. Mathematical relationship predicting grain separation in combines. Unpublished paper. Texas Tech University, Lubbock, Tx 79409. 1987.
Huisman, W. Moisture content, coefficient of friction and modulus of elasticity of straw in relation to walker losses in a combine harvester. Proceedings of the first international grain and forage conference ASAE, St. Joseph, MI 49085. p 49-54, 1977.
Jan, E. Z., Zoerb, G. C., Reed, W. B. and Bigsby, F. W. Separation of grain-straw mixture with a rotating perforated drum. Paper presented at winter meeting ASAE, Chicago, IL. Paper No. 74-1582, 1974.
Kepner, R. A., Bainer, Roy. and Barger, E. L. Principles of Farm Machinery. 3'"<* ed, AVI publishing company Inc, West port. Connect icut. 1982.
Lamp, B. J., Jr and Buchele, W. F. Centrifugal threshing of small grains. Transactions of the ASAE. 3(2): 24-28, 1960.
Long, J. D., Hamdy, M. Y. and Johnson, W. H. Centrifugal force and wheat separation. Agricultural Engineering. 50(10): 578-580, 1969.
Mohsenin, N. N. Physical Properties of Plant and Animal Materials. Gordon and Breach Science Publisher's Inc. New York. 1986.
Nyborg, E. 0., McColly, H. F. and Hinkle, R. T. Grain-combine loss characteristics. Transactions of the ASAE. 12(6): 727-732, 1969.
Reed, W. B. and Zoerb, G. C. A laboratory study of straw walker efficiency. Paper presented at winter meeting ASAE, Chicago, IL. Paper No. 72-638, 1972.
Reed, W. B., Zoerb, G. C. and Bigsby, F. W. A laboratory study of grain-straw separation. Transactions of the ASAE. 17(3): 453-460, 1974.
Srivastava, A. K., Hamdy, M. Y., Nelson, G. L., Roller, W. L. and Huber, S. G. Centrifugal grain-straw separation: Part I-theoritical analysis. Transactions of the ASAE. (2): 198-201, 1974.
Stephens, L. E. and Rabe, D. L. Crop properties data for harvesting research. Proceedings of the first international grain and forage conference ASAE, St. Joseph, MI 49085. p 32-33, 1977.

43
Wang, G., Zoerb, G. C. and Bigsby, F. W. A new concept in combine separation analysis. Paper presented at winter meeting ASAE, Chicago, IL. Paper No. 85-1576, 1985.
Wrubleski, P. D. and Smith, L. G. Separation characteristics of conventional and non-conventional grain combines. Tansactions of the ASAE. 23(3): 530-534, 1980.

APPENDIX
44

4 5
Straw Tvpe !Hheat 5" 340 gis Brain Type rCorn 1000 QIS
INPUT DATA
TiM (sec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 10 10 10 10 10 10 60
16 111 212 303 343 376 398 510
34 184 324 407 461 531 588 722
45 156 221 280 334 380 429 625
12 49 84 125 157 206 265 509
26 108 184 277 355 425 478 661
RESULTS
i«e
3 10 10 10 10 10 10 60
Grains Collected
26.60 95.00 83.40 73.40 51.60 53.60 48.00 173.80
Static Resistance 1000 Oynatic Resistance 394.6

4 6
StraM Type :Wheat 3* 340 gis Brain Type :Blackeye peas 1000 gii
Tile (sec)
3 10 10 10 10 10 10 60
Tr 1
38 204 317 429 503 560 610 703
INPUT DATA
Tr 2
59 323 485 596 656 692 710 783
Tr 3
71 298 422 534 603 644 682 760
Tr 4
52 223 355 435 510 564 609 707
Ir :
59 271 449 573 646 704 740 824
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 1000
Srains Collected
55.80 208.00 141.80 107.80 70.20 49.20 37.40 85.20
Dynaiic Resistance 244.6

4 7
StraM Type :Hheat 3' 340 gis 6rain Type iCottonitid 1000 gti
INPUT DATA
Tiie Isec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 10 10 10 10 10
43 189 323 435 521 578
47 290 428 524 601 658
42 204 293 388 459 525
43 187 289 378 453 504
40 183 277 352 431 477
10 60
625 693 581 553 777
517 790 723 668 646
RESULTS
Tiae
3 10 10 10 10 10 10 60
Static Resistance 1000
Grains Collected
43.00 167.60 111.40 93.40 77.60 55.40 45.40 127.00
Dynaiic Resistar

4 8
StrtN Typt iMhfit 3* 340 qii Sriin Type iBorghui 1000 gis
INPUT DATA
Tiie (sec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 10 10 10 10 10 10
353 801 890 911 920 927 932
297 756 861 897 912 920 924
241 679 790 841 870 889 901
278 724 829 868 887 899 910
330 774 864 897 916 927 935
60 946 942 929 934 957
RESULTS
Tiie
3 10 10 10 10 10 10 60
ic Resistance 1000
Srains Collected
299.80 447.00 100.00 36.00 18.20 11.40 8.00 21.20
Dynaiic Resistan 58.4

4 9
StraM Type iMheat 3" 340 gis Briin Type iBirdteed 1000 gis
Tiie (sec)
3 10 10 10 10 10 10 60
Tr 1
457 538 544 547 548 549 550 553
INPUT DATA
Tr 2
500 590 596 598 600 601 602 604
Tr 3
656 773 779 781 783 784 785 788
Tr 4
630 731 738 740 742 743 744 748
Tr 5
690 807 813 815 817 819 820 823
RESULTS
Static
Tiie
0
10 10 10 10 10 10 60
istance 716
Sraii ns Collected
586.60 101.20 6.20 2.20 1.80 1.20 1.00 3.00
Dynaiic Resistance 12.8

5 0
StraM Type :Sorghui 3' 360 gis Grain Type iCorn 1000 gis *°---BSaS8aSS8SaBS333SSSBSSS8aBSSBSSS3SSSBSSSSSSSS8SSSS8SSSSSBS8SBSS:
Tiie (sec)
3 10 10 10 10 10 10 60
Tr I
351 498 512 520 523 525 526 534
INPUT DATA
Tr 2
395 599 611 619 623 625 627 632
Tr 3
431 618 633 641 647 650 652 657
Tr 4
350 507 513 520 522 525 527 534
Tr :
331 479 491 498 503 508 510 518
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 624.4
Grains Collected
371.60 168.60 11.80 7.60 4.00 3.00 1.80 6.60
Dynaiic Resistan 49.4

5 1
StriH Type iSorghui 3" 360 qii 6rain Typi iBiackeyi peat 1000 gii
INPUT DATA
Tiie (sec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 285 227 251 234 312 10 10 10 10 10 10 60
376 392 401 406 409 412 420
369 394 405 410 416 418 429
338 361 371 376 378 381 388
317 330 336 340 343 346 355
382 398 40? 412 415 417 425
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 485.4
Grains Collected
261.80 94.60 18.60 9.00 4.80 3.40 2.60 8.60
Dynaiic Resistance 82

5 2
8triM lypi iSorghui 3" 360 gii Brain Type iCottonseed 1000 gas
Tiie (sec)
3 10 10 10 10 10
Tr 1
368 542 564 575 581 584
INPUT DATA
Tr 2
388 535 564 573 578 581
Tr 3
385 585 607 620 627 631
Tr 4
396 556 574 583 589 594
Tr ;
367 553 572 580 587 592
10 587 585 633 598 595 60 601 594 644 609 604
RESULTS
Tiie
3 10 10 10 10 10 10 60
ic Resistance 669.6
Grains Collected
380.80 173.40 22.00 10.00 6.20 4.00 3.20 10.80
Dynaiic Resistance 59.2

5 3
StraM Type sSorghui 3" 360 gis Grain Type iBirdiitd 1000 git
Tiie (sec)
3 10 10 10 10 10 10 60
Tr 1
140 175 179 181 182 184 184 187
INPUT DATA
Ir 2
158 191 196 199 200 201 202 205
Tr 3
129 168 174 177 178 179 179 182
Tr 4
146 176 181 183 184 185 186 189
fr !
118 143 147 149 150 151 152 154
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 208.4
Grains Collected
138.20 32.40 4.80 2.40 1.00 1.20 0.60 2.80
Dynaiic Resistar 25

5 4
Straw Type :Sorghua 3" 360 gis Grain Type :Sorghui 1000 gis
INPUT DATA
Tiie (sec) Tr 1 Tr 2 Tr 3 Tr 4 Ir 5
60
330
494
326 284
481 388
283
410
326 10 10 10 10 10 10
456 474 480 484 487 488
443 457 465 469 472 473
355 366 371 375 378 380
374 387 393 398 401 404
450 466 474 477 479 481 488
RESULTS
fine
3 10 10 10 10 10 10 60
ic Resistance 495
Grains Collected
309.80 105.80 14.40 6.60 4.00 2.80 1.80 7.00
Dynaiic Resistan 42. B

5 5
Straw Type :Soybean 3* 350 git 6riin Type iCorn 1000 git :ass
Tiie (sec)
3 10 10 10 10 10 10 60
Tr 1
374 641 689 708 719 724 729 752
INPUT DATA
Tr 2
466 706 749 769 777 784 791 811
Tr 3
378 688 736 754 760 766 773 791
Tr 4
372 646 690 711 728 739 743 763
Tr f
464 665 703 725 730 734 738 751
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 929
Grains Collected
410.80 258.40 44.20 20.00 9.40 6.60 5.40 18.80
Dynaiic Resistance 155.4

5 6
StraM Type iSoybean 3* 350 git Griin Typi iBUckiye p»i§ 1000 gii
INPUT DATA
Tiie (sec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 10 10 10 10 10 10 60
333 576 645 679 694 702 710 737
332 669 721 751 767 773 778 800
407 663 725 754 769 778 785 804
300 631 677 698 716 727 733 758
429 705 745 766 782 790 795 820
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 942
Grains Collected
360.20 288.60 53.80 27.00 16.00 8.40 6.20 23.60
Dynaiic Resistance 158.2

5 7
Straw Type iSoybean 3" 350 qis Grain Type iCottonieed 1000 gas
Tiie (sec)
3 10 10 10 10 10 10
Tr 1
299 702 789 816 829 636 845
INPUT DATA
Tr 2
428 747 784 796 804 809 817
Tr 3
421 776 812 829 841 848 852
Tr 4
308 726 810 830 839 843 848
Tr !
358 729 790 812 824 833 839
60 863 831 869 863 862
RESULTS
Tiie
3 10 10 10 10 10 10 60
Static Resistance 954.2
Grains Collected
362.80 373.20 61.00 19.60 10.80 6.40 6.40 17.40
Dynaiic Resistance 96.6

5 8
StriM Type iSoybean 3' 350 gis Grain Type iSorghui 1000 gis S S 8 S a S S S 8 3 S S S S S S S S S S S S S 3 S S S X 8 S S 3 a 8 S 8 a a 8 8 B S a Z 8 8 a S 8 S 3 3 8 g
INPUT DATA
Tiie (sec) Tr 1 Tr 2 Tr 3 Tr 4 Tr 5
3 10 10 10 10 10 10 60
332 406 416 421 423 425 426 431
295 395 403 408 411 413 414 419
346 436 448 453 456 458 460 464
346 416 426 431 434 436 437 443
349 425 435 439 441 442 443 447
RESULTS
Tiie
3 10 10 10 10 10 10 60
Grains Collected
333.60 82.00 10.00 4.80 2.60 1.80 1.20 4.80
Static Resistance 467.8 Dynaiic Resistance 27

5 9
StraM Type iSoybean 3' 350 git Grain Type iBirdieed iOoo fit
Tiie (sec)
3 10 10 10 10 10 10 60
Tr 1
90 111 115 117 118 119 119 121
INPUT DATA
Tr 2
77 91 94 95 96 97 97 101
Tr 3
94 108 112 114 115 116 116 119
Tr 4
84 103 107 109 110 110 111 113
Tr !
112 131 135 137 138 139 139 142
RESULTS
Tiie
3 10 10 li) 10 10 10 60
Static Resistance 140
Grains Collected
91.40 17.40 3.80 1.80 1.00 0.80 0.20 2.80
Dynaiic Resistance 20.8

PERMISSION TO COPY
In presenting this thesis in partial fulfillment of the
requirements for a master's degree at Texas Tech University, I agree
that the Library and my major department shall make it freely avail
able for research purposes. Permission to copy this thesis for
scholarly purposes may be granted by the Director of the Library or
my major professor. It is understood that any copying or publication
of this thesis for financial gain shall not be allowed without my
further written permission and that any user may be liable for copy
right infringement.
Disagree (Permission not granted) Agree (Permission granted)
Student's signature Student's signature
Date Date


Copyright © 2022 FDOKUMEN