
Dominio de tiempo (1)
48
ESCUELA POLITÉCNICA NACIONAL FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA SISTEMAS DE CONTROL MODERNO Departamento de Automatización y Control Industrial Última revisión: marzo 2009
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Dominio de tiempo (1)

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
SISTEMAS DE CONTROL MODERNO
Departamento de Automatizacióny Control Industrial
Última revisión: marzo 2009

ANÁLISIS DE SISTEMAS DE CONTROL
Característicasde Respuesta de
Sistemas Dinámicos

ANÁLISIS DE SISTEMAS DE CONTROL
Robustez Confiabilidad alta Sensibilidad baja Rechazo a perturbaciones
Estabilidad Características BIBO Absoluta y Relativa Global y Local Sentido de Lyapunov
Respuesta Transitoria Estado estable

ANÁLISIS DE SISTEMAS DE CONTROL
DISEÑO:Especificaciones de respuesta de
Sistemas Dinámicos Ajuste de ganancia Esquemas de compensación Redes de compensación Controladores PID

ANÁLISIS DE SISTEMAS DE CONTROLMÉTODOS:Respuesta Temporal RTLugar Geométrico de Raíces LGR
Respuesta de Frecuencia RF

ANÁLISIS DE SISTEMAS DE CONTROL
Por qué REALIMENTACIÓN? Rechazo a perturbaciones Lazo abierto
donde:
entonces:

ANÁLISIS DE SISTEMAS DE CONTROL Lazo cerrado
donde:
considerando:

ANÁLISIS DE SISTEMAS DE CONTROL
Control con precisión
donde:
si:
HYRa = error actuante
YREH a 1 = error de precisión

ANÁLISIS DE SISTEMAS DE CONTROL Inestabilidad del Sistema ?Para estabilidad absoluta se requiere que los POLOS del Sistema tengan su parte real negativa y estén ubicados en el Semi Plano Izquierdo SPI del plano “s”
donde:
)(sG = Función de Transferencia en lazo abierto

ANÁLISIS DE SISTEMAS DE CONTROL
Lazo abierto
El Sistema es ESTABLE porque los
POLOS se ubican en el SPI del plano
complejo “s”

ANÁLISIS DE SISTEMAS DE CONTROL Lazo cerradoLa estabilidad dependerá de la ubicación de
los nuevos POLOS en lazo cerrado.Donde la Función de Transferencia es:

ANÁLISIS DE SISTEMAS DE CONTROL Reducción de la ganancia y la constante de tiempo
Lazo abierto:donde:
1
sKGH 1H con realimentación unitaria
K = ganancia en lazo abierto
= constante de tiempo en lazo abierto

ANÁLISIS DE SISTEMAS DE CONTROL Lazo cerrado:
donde: = ganancia en lazo cerrado == constante de tiempo en lazo cerrado =
111
11
111
1 1
c
c
H sK
sK
KK
KsK
sK
sK
GHG
RY
cK
c
1KK
1K

ANÁLISIS DE SISTEMAS DE CONTROL Sensibilidad Lazo abierto:
donde:
entonces:
yGr
RGY .GGG
YYY
RGYRGGYY .).()(

ANÁLISIS DE SISTEMAS DE CONTROL
Lazo cerrado:
donde:
entonces:
si pequeño:
RGHGY .1
RHGGGH
GYRHGG
GGYY .]).(1)[1(.).(1
G RGHGY .)1( 2

ANÁLISIS DE SISTEMAS DE CONTROL Sensibilidad: Cuantificación
donde para variaciones pequeñas, se tiene:
GKS = sensibilidad del Sistema G con respecto
al parámetro K
KG
GK
KG
GK
KK
GG
S GK
..
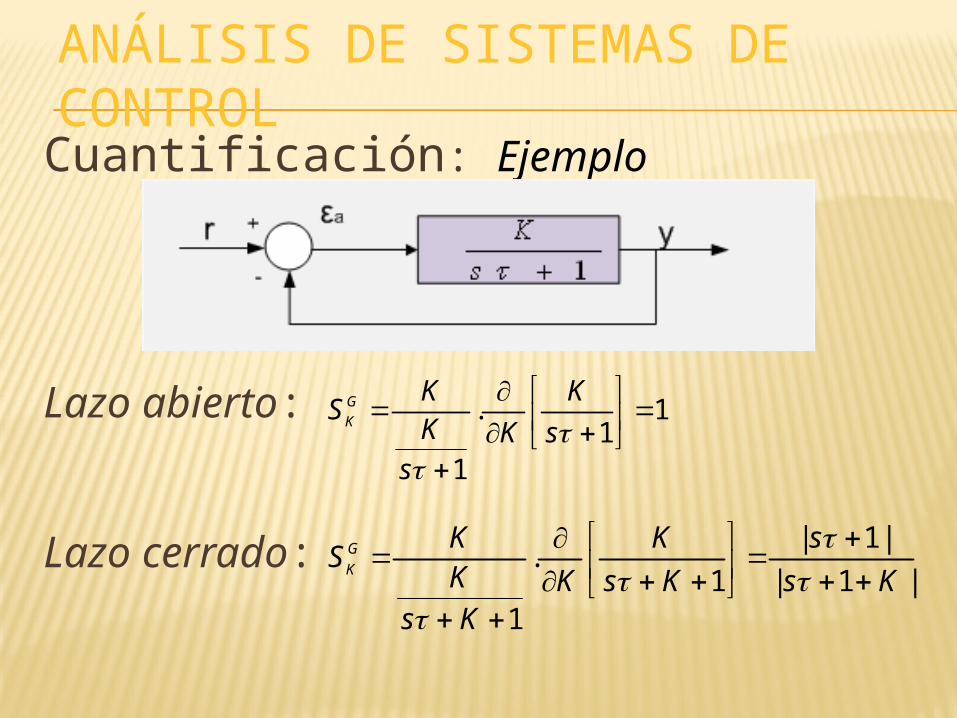
ANÁLISIS DE SISTEMAS DE CONTROLCuantificación: Ejemplo
Lazo abierto:
Lazo cerrado:
11.
1
s
KK
sKKS G
K
|1||1|
1.
1Ks
sKs
KK
KsKKS G
K

ANÁLISIS DE SISTEMAS DE CONTROLSISTEMAS DE PRIMER ORDEN
puesto que:
entonces:
1H
11
1
sGHG
RY

ANÁLISIS DE SISTEMAS DE CONTROL
La respuesta en el tiempo esta dada por:
Si t=, entonces:

ANÁLISIS DE SISTEMAS DE CONTROL
Respuesta a una entrada paso

ANÁLISIS DE SISTEMAS DE CONTROLPara un servomecanismo (motor DC)
donde:
si:
)1)(1(
ema ssK
E
m = constante de tiempo sistema mecánico
e = constante de tiempo sistema eléctrico
][][ msegseg em )1(
ma sK
E

ANÁLISIS DE SISTEMAS DE CONTROL
SISTEMAS DE SEGUNDO ORDEN
donde: 22
2
21 nn
n
ssGHG
RY
naturalfrecuencian
ientoamortiguamdeíndice
ientoamortiguamdeecoeficientn

ANÁLISIS DE SISTEMAS DE CONTROL
a) Sobre amortiguado:
b) Críticamente amortiguado:
c) Subamortiguado:
d) Oscilatorio sin amortiguamiento:
1
122,1 nnp
np 2,1
dnn jjp 22,1 1
aamortiguadnaturalfrecuenciad
1
10
0

ANÁLISIS DE SISTEMAS DE CONTROL
CASO SOBREAMORTIGUADOo Polos reales, negativos y
diferentes
o La respuesta paso está dada
o Si es apreciablemente mayor a la unidad, uno de los términos exponenciales disminuye más rápido

ANÁLISIS DE SISTEMAS DE CONTROLSistema de segundo orden sobreamortiguado
ANÁLISIS DE SISTEMAS DE CONTROL
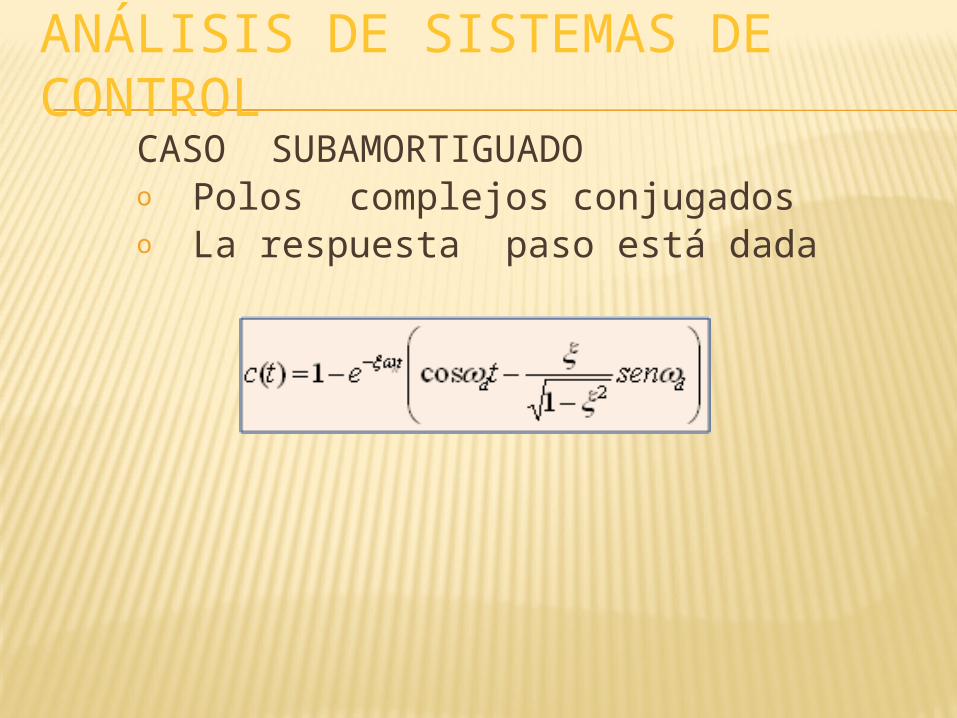
CASO SUBAMORTIGUADOo Polos complejos conjugadoso La respuesta paso está dada

ANÁLISIS DE SISTEMAS DE CONTROLSistema de segundo orden subamortiguado

COMPORTAMIENTO DINÁMICORespuesta transitoria: Sistema de primer orden se conoce como
constante de tiempo, mientras más pequeña la respuesta es más rápida
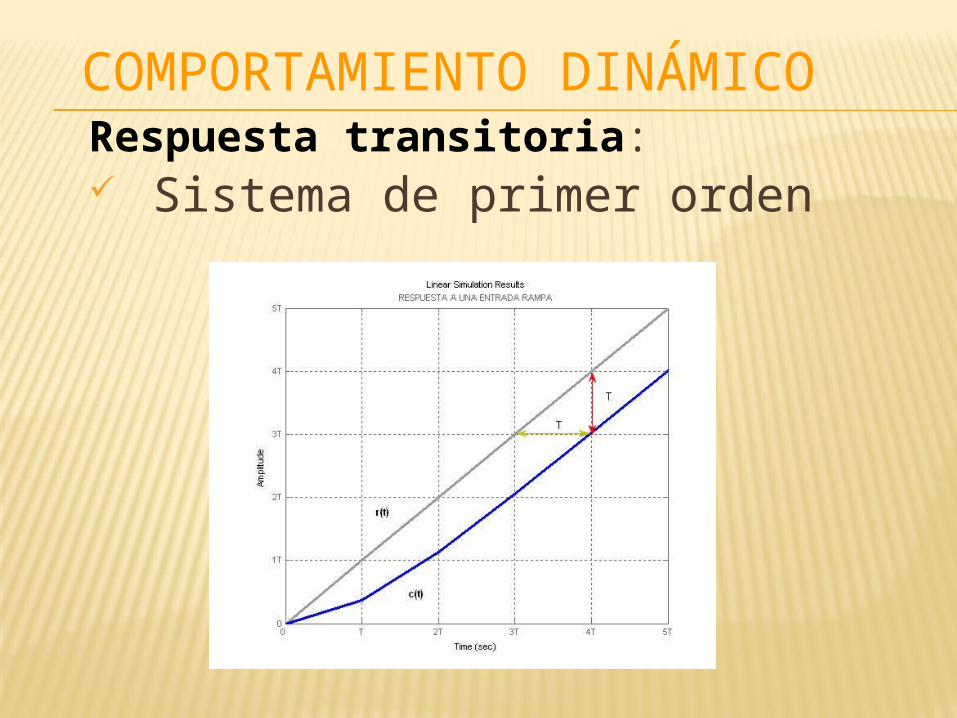
COMPORTAMIENTO DINÁMICORespuesta transitoria: Sistema de primer orden

COMPORTAMIENTO DINÁMICORespuesta transitoria: Sistema de primer orden

COMPORTAMIENTO DINÁMICO Sistema de segundo orden

COMPORTAMIENTO DINÁMICOSISTEMAS DE TERCER ORDEN
En general se tiene:
La respuesta en el tiempo esta dada por:
Donde Ko es el valor en estado estable
22
2
2 nn
n
ss
psp
)1)(1)(1( 321 sssK
3/3
2/2
1/10)( ttt eKeKeKKty

COMPORTAMIENTO DINÁMICOSISTEMAS DE TERCER ORDEN
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1G = 6 / [(s+1)(s+2)(s+3)]
Tiempo (sec)
Amplitud

COMPORTAMIENTO DINÁMICOSISTEMAS DE ORDEN SUPERIOR
Dependerá de los denominados:
POLOS DOMINANTES

COMPORTAMIENTO DINÁMICO
Respuesta transitoria
Rapidez de respuesta (duración del transitorio)
ts = tiempo de establecimiento tr = tiempo de subida τ = constante de tiempo ωn = frecuencia natural

COMPORTAMIENTO DINÁMICORespuesta transitoria ts tiempo que se requiere para que la curva
alcance su valor final
tr es el tiempo requerido par que la respuesta pase del 10 al 90% o de 0 a 100%
COMPORTAMIENTO DINÁMICO
Respuesta transitoria
Estabilidad relativa (oscilación del sistema)
Mp = máximo sobreimpulso tp = tiempo de máximo
sobreimpulso ξ = índice de amortiguamiento
COMPORTAMIENTO DINÁMICORespuesta transitoriaMp Es el valor pico de la respuesta medido a partir del
valor final en estado estable
Tp Es el tiempo requerido para alcanzar el primer pico de sobreelongación
%20100%21
epM

COMPORTAMIENTO DINÁMICORespuesta transitoria

COMPORTAMIENTO DINÁMICO
Respuesta estable (estado permanente)
Precisión:
Ep = error de posición (entrada escalón)
Ev = error de velocidad (entrada rampa)
Ea = error de aceleración (entrada parabólica)

COMPORTAMIENTO DINÁMICO
donde:
La medida del error de la señal de actuación del
Sistema para
viene dada por:
)(.)()(11)(.)()(1
)()()()()()( sRsHsG
sRsHsG
sHsGsRsYsHsRa
1)( sH
)()(11)( sR
sGsE

ERROR EN ESTADO ESTABLEPara , considerando el
Teorema del ValorFinal, el error en estado estable
está dado por:
donde:
N = tipo de orden del Sistema
1)( sH
q
ii
N
m
ll
zss
zsKsG
1
1
)(
)()(
)(.)(11.lim)(.lim)(lim
00sR
sGssEsete
sssst

ERROR EN ESTADO ESTABLEEscalón unitario:Para N = 0
donde:
Para N≥1 , el error de posición será:
)(lim0
sGKsp
pp K
E
11
= coeficiente estático de error de posición
= error de posición
0pE
psss EssG
ses
sR
1.)(11.lim1)(
0
posicióndeerrorKG
Ep
p
11
)0(11

ERROR EN ESTADO ESTABLERampa unitaria:
vsssss EssGssGsssG
ses
sR
)(
1lim)(1lim1.)(1
1.lim1)(00202
velocidaddeerrorKssG
Ev
sv
1)(
1lim0
velocidaddeerrordeestáticoecoeficientssGKsv
)(lim0

ERROR EN ESTADO ESTABLERampa unitaria:
Para N = 0, el error tiende al infinito
Para N = 1, el error de velocidad será:
Para N≥2 , el error de velocidad será:
v
q
ii
m
llssv EpzKssGsK 0.lim)(.lim
1100
q
ii
m
ll
q
ii
m
llssv pzKpz
sKssGsK
111100.lim)(.lim
0vE

ERROR EN ESTADO ESTABLEParábola unitaria:
asssss EsGssGssssG
ses
sR
)(
1lim)(1lim1.)(1
1.lim1)( 20220303
naceleraciódeerrorKsGs
Ev
sa
1)(
1lim 20
naceleraciódeerrordeestáticoecoeficientsGsKsa
)(.lim 20

ERROR EN ESTADO ESTABLEParábola unitaria:
Para N = 0 y 1, el error tiende al infinito
Para N = 2
Para N ≥ 3 , el error de aceleración será: 0aE
0.lim.lim)(.lim11
011
20
20
q
ii
m
lls
q
ii
m
llssa pzKspz
sKssGsK
q
ii
m
ll
q
ii
m
llssa pzKpz
sKssGsK
11112
20
20
.lim)(.lim

ERROR EN ESTADO ESTABLE Entrada
TipoSistema
Escalón Rampa Parábola
0
1
2
)(tu )(ttu )(221 tut
pp K
E
11
KK p vE0vK
aE0aK
0pEpK
vv K
E 1
KK v aE0aK
0pEpK
0vEvK
aa K
E 1
KK a




















