
Bilateral symmetry of distortions of tactile size perception

Electric Power Systems Research 79 (2009) 1145–1154
Contents lists available at ScienceDirect
Electric Power Systems Research
journa l homepage: www.e lsev ier .com/ locate /epsr
Distortions identification and compensation based on artificial neural networksusing symmetrical components of the voltages and the currents
D. Fliellera, D. Ould Abdeslamb, P. Wirab,∗, J. Merckléb
a Institut National Supérieur des Sciences Appliquées de Strasbourg, Laboratoire GREEN (UMR 7037, CNRS) Antenne de Strasbourg,24 Bd de la Victoire, 67084 Strasbourg Cedex, Franceb Université de Haute-Alsace, Laboratoire MIPS-TROP, 4 rue des Frères Lumière, 68093 Mulhouse Cedex, France
a r t i c l e i n f o
Article history:Received 18 July 2007Received in revised form 14 May 2008Accepted 17 February 2009
Keywords:Artificial neural networksActive power filtersHarmonic detectionHarmonic compensation
a b s t r a c t
The problem of harmonics identifying and compensating has been of great interest in recent years. A newneural identification scheme for an active power filter (APF) is proposed. This scheme identifies the direct,inverse and zero sequence components of both the voltages and the currents of the power network. Thecomponents result from a new and generic decomposition of a three-phase signal which can be eitherthe voltage or the current. For one signal, the direct components extraction requires two independentAdaline networks, and the inverse components extraction two other Adalines. The voltage and currentcomponents are used to on-line compute the instantaneous direct, inverse and zero sequence powers.The proposed decomposition is a new formulation of the instantaneous powers and is also appropriatefor unbalanced systems. The reference compensation currents can be determined according to differ-ent compensation objectives. The resulting compensation currents are then re-injected phase-opposite
Power qualityAdaptive control through the APF in real-time. The performance is evaluated through several simulation examples andthrough different experiments. The results show that the proposed neural method outperforms other
venti
1
rdepwg
thean
In
pi
0d
methods, such as the con
. Introduction
Power quality but also current and voltage waveforms haveeceived increased attention since the increasing use of nonlinearevices such as rectifiers, variable speed transmissions, lighting,tc. Indeed, nonlinear loads absorb nonsinusoidal currents androduce harmonic currents which circulate in electrical supply net-ork, disturb the correct operation of the components and can even
enerate their destruction.Active power filters (APFs) are recognized as advanced solu-
ions for eliminating harmonic distortions [1]. An APF identifies thearmonic currents in the power distribution network and injectsqual-but-opposite harmonic components into the power line. APFre attractive, they do not require any changes on the installationeither of the energy supplier nor that of the consumer.
The performances of APFs depend on the identification method.f the harmonic currents are badly identified, the control device will
ever be able to make the sufficient corrections.Identification methods based on the well known instantaneousower theory (IPT, also known as the pq-method) are largely used
n active filtering systems [2]. The IPT was also associated to Ada-
∗ Corresponding author. Tel.: +33 389336082; fax +33 389336084.E-mail address: [email protected] (P. Wira).
378-7796/$ – see front matter © 2009 Elsevier B.V. All rights reserved.oi:10.1016/j.epsr.2009.02.008
onal instantaneous power theory.© 2009 Elsevier B.V. All rights reserved.
line neural networks with different methods to identify distortionharmonics [3]. Significant improvements were obtained in simu-lation and also on real-time applications. The identification of theharmonics with the IPT strongly depends on the quality of the volt-age waveform of the electrical power system. APFs based on theIPT therefore need a phase-locked loop (PLL) to obtain the voltagedirect component.
This paper proposes a new formulation of the IPT for identifyingthe harmonic distortions. The objective is to improve the compen-sation of both the harmonics and the imbalance. The proposedapproach relies on artificial neural networks (ANNs) to computethe direct, inverse and zero sequence components of both the volt-ages and currents from a three-phase system. Moreover, ANNs areused to learn an original decomposition of a three-phase signal. Thissignal, i.e., the voltage or the current, is converted into the ˛ˇ- andDQ-spaces with respectively the Concordia and Park transforms.The DQ-space allows to decompose the signal in linear expressionsand to separate the AC-components from the DC-components.
Based on Adalines, the proposed architecture is developed tolearn linear expressions of the signals. By their on-line learning
capabilities [4,5], Adalines are able to estimate the direct, inverseand zero sequence components of the voltages and the currents.These components allow to compute the instantaneous powers, i.e.,pd, pi and po which are referred to as the symmetrical componentsof the power. Through this new formulation, the IPT method can be
1 ystem
uImim
ectrfriSmtd6is
2
2
vevt[pdTehs
2
tcIdS[o
oaipimsttowfsnc
a
146 D. Flieller et al. / Electric Power S
sed even under non-balanced and non-symmetrical conditions.ndeed, the symmetrical components of the power allow to deter-
ine the APF reference compensation currents which are injectedn the power network. The proposed method also allows to transfer
ore or less available power to the nonlinear load.In Section 2, we shortly present the symmetrical components
xtraction with a PLL, we discuss the IPT and the use of ANNs foromponent extraction in APF schemes. In Section 3, we formulatehe new decomposition of a signal in order to extract its symmet-ical components. This section further introduces the basic trans-orms and describes the different steps in extracting the symmet-ical components. Section 4 introduces the filtering of the signalsn order to separate the AC-components from the DC-components.ection 5 shows how to apply the proposed neural identificationethod to the harmonics identification problem in a power sys-
em supply. This section also formulates the learning problem andescribes how the compensation objectives are achieved. Sectionreports the results of the method in demonstration applications
n a simulated environment and in real-time experiments. Finally,ome concluding remarks are given in Section 7.
. Symmetrical components extraction
.1. PLL for active power filtering
PLL are simple but very efficient systems and had thus becameery popular for synchronizing signals. PLL-based systems are gen-rally included in the architecture of current compensators andoltage controllers. The synchronization of the APF control law withhe voltages of the electrical source is generally achieved with a PLL6]. The PLL allows to estimate the direct voltage of a three-phaseower system, and the APF’s voltage measurement unit can thus beriven to recover the balanced voltages from an electrical network.his is necessary in APF schemes based on the IPT, or more gen-rally when the identification of the voltage components or of thearmonic currents strongly depends on the quality of the measuredignals.
.2. Instantaneous power terms with components extraction
The concept of instantaneous power initiated by Akagi [2] ledo an efficient method for active power filtering. The mathemati-al fundamentals of the IPT have been reported in [7]. Since, thePT and some specific extensions became some theoretical tools forefining and characterizing the properties of three-phase systems.ome concepts have been recently clarified but also discussed in8]. It is now established that this interesting theory was originallynly able to handle with balanced three-phase power systems.
In the last decade, the IPT was extended into different ways inrder to work under non-symmetrical conditions, i.e., for unbal-nced three-phase power systems. In [9], a generalized theory ofnstantaneous reactive power for three-phase power systems is pro-osed and discussed. A harmonic and reactive power compensator
s deduced from this new theory. The efficiency of the proposed har-onic and reactive power compensator is demonstrated through
imulation tests and experiments with nonsinusoidal, unbalancedhree-phase systems with also zero-sequence components. Fur-hermore, the work proposed in [10] compares four other methodsf evaluating the compensating currents for an APF supposed toork under non-symmetrical conditions. If the performances of the
our methods are very close with a balanced sinusoidal three-phase
ystem, only one method gives acceptable results under nonsi-usoidal and unbalanced conditions. The comparison has beenonduced with simulation tests.Basically, methods based on the power components, i.e., pd, pi
nd po, which are also referred to as the symmetrical components of
s Research 79 (2009) 1145–1154
the power, are able to compensate for the harmonic currents gener-ated by nonlinear loads under nonsinusoidal and non-symmetricalconditions. This method can be used in an APF scheme even withunbalanced systems. The symmetrical components of the instanta-neous powers allow determining the APF reference compensationcurrents which are injected in real-time in the power network. Fromthis postulate, a new formulation of the symmetrical components ofthe power is proposed in Section 3. This formulation is also based onlearning theories, i.e., ANNs, in order to learn and approximate somebehaviors and characteristics of the three-phase power system.
2.3. ANNs for component extraction in APF schemes
The performance of the APF can significantly be improved byusing ANNs. Indeed, techniques based on ANNs have been devel-oped and introduced in power/voltage control [11,12]. Applied inpower systems, these techniques now represent a good alterna-tive to conventional strategies in different tasks, e.g., distortionharmonic filtering, frequency estimation, control, etc.
Multi-layer perceptrons (MLPs) are used in [13] for the controlof shunt and series APFs. These two APFs use a first MLP to estimatethe harmonics and/or sags present in the three-phase system. Theextracted harmonics and/or signal sags are used by a second MLP toprovide accurate switching signals for controlling the pulse widthmodulated (PWM) voltage source inverter of the APF. Some com-puter simulations show that the shunt and series APF controlledby the ANNs are adaptive to various changes of the three-phasepower system, and that both are able to compensate for harmonicdistortions under balanced and unbalanced conditions.
The Adaline neural network is one of the simplest neural unitof artificial neural networks. This linear learning block has a sin-gle output which is a linear weighted combination of the inputswhere the weights are iteratively adapted with a very simple andefficient learning algorithm [4,5]. Due to its simple architectureand learning algorithm, the Adaline is fast and suitable to real-timeapplications. A modular APF based on Adalines is proposed in [14] inorder to improve the power quality in a three-phase power system.This APF scheme is based on three stages. The first one extractsand separates the frequency content from the line currents. TheAPF’s reference currents are then calculated and are at last injectedin the three-phase power system with a converter. The Adalinesare used in the first stage, as initially indicated by [15], to esti-mate the time-varying magnitudes and phases of the fundamentaland all individual harmonics in a distorted waveform under bal-anced conditions. The work in [15] is also used for power qualityevent detection in [16] where Adalines are used in the same way.Adalines are also employed in [17] for the command of invertersin distributed generation systems. In this last approach, the Ada-lines act as selective noise cancelers for each individual harmonicfor a local compensation, i.e., in the point of common coupling ofthe node voltage. The results are valid with a three-phase powersystem that contains harmonic distortions from a nonlinear loadunder balanced conditions. These works rely on the signal harmonicdecomposition based on its Fourier expansion. The signal harmonicdecomposition is thus a linear expression which can be learned byAdalines.
New decompositions of the currents, voltages or powers inpower system problems are important in the sense that it changesthe point of view of the problem and brings thus new solutions.A new decomposition is thus proposed in [18] to recover the volt-age components, i.e., the direct, inverse and zero sequence voltage
components. The decomposition is learned with Adaline neuralnetworks and good results are obtained with a disturbed andunbalanced three-phase power system. The original decomposi-tion developed in [19] is different. The voltage components areachieved through linear expressions learned with Adalines which
ystem
uamiwta“tAtaicAbA
tamlp
3s
p(cnc
3
bbzltMntx
x
x
x
C
P
D. Flieller et al. / Electric Power S
ses at different level the instantaneous phases, i.e., �̂d and �̂i, whichre estimated on-line with a conventional phase estimator. Thisethod efficiently compensates for fluctuating distortion harmon-
cs and time-varying nonlinear loads. The method was evaluatedith simulations and experiments using unbalanced and disturbed
hree-phase power systems. An harmonic distortion identificationnd filtering scheme also based on Adalines is associated to anAdaline-based disturbance voltage regulation” in [3]. The objec-ive of this work is clearly to develop a complete and unified neuralPF scheme for identifying and compensating for the harmonic dis-
ortions introduced by nonlinear loads in power systems [3]. Thepproach results in a modular decomposition where each modules based on an original decomposition of either the voltages, of theurrents or of the powers. Each decomposition is then learned withdalines. The approach has demonstrated its efficiency and relia-ility in estimating and compensating for harmonic distortions inC lines [20].
By their learning capabilities, ANNs are able to take into accountime-varying parameters, i.e., nonlinear load changes, and thusppreciably improve the performance of traditional compensatingethods. We will use these worthwhile properties of the ANNs to
earn and approximate simple and linear expressions of a three-hase signal in order to estimate its symmetrical components.
. A neural-based decomposition to extract theymmetrical components
Our harmonic current compensation scheme utilizes a three-hase system components identification. The root mean squareRMS) value and the phase of the direct, inverse and zero sequenceomponents of a three-phase system are extracted. These compo-ents allows then to use the IPT to compute the APF compensationurrents.
.1. Unbalanced system model
The voltages or the currents of every three-phase system canasically be expressed and decomposed exactly into a sum of threealanced three-phase systems which are the direct, inverse and aero sequence system. The signal xL which will be used in the fol-owing developments can therefore alternatively represents bothhe voltages or the currents of a three-phase unbalanced system.
easured on the nonlinear load side, xL is polluted and xh, a compo-ent representative of the harmonic distortions, must be added tohe direct, inverse and zero sequence components, i.e., respectivelyd, xi and xo. Consequently, one can write:
L = [xL1xL2xL3]T = xd + xi + xo + xh. (1)
The direct component is then given by:
d =
⎡⎢⎣
xd1
xd2
xd3
⎤⎥⎦ = Xd
√2
⎡⎢⎣
cos(�d)
cos(�d − 2�/3)
cos(�d + 2�/3)
⎤⎥⎦ , (2)
and
√ [1]
d = Xd 2C32P(�d)0
. (3)
Eq. (3) and the followings use the general expression of thelarke and Concordia transforms with:
(�) =[
cos(�) − sin(�)sin(�) cos(�)
],
s Research 79 (2009) 1145–1154 1147
C32 =
⎡⎢⎣
1 0
−1/2√
3/2
−1/2 −√
3/2
⎤⎥⎦ ,
and C31 in Eq. (6) is a unit vector, i.e., C31 = [1 1 1]T , with thefollowing properties:
CT32C31 = [0 0]T and CT
32C32 = 32
[1 0
0 1
].
In the same way as for Eq. (3), the inverse component isexpressed by:
xi = Xi
√2
⎡⎢⎣
cos(�i)
cos(�i + 2�/3)
cos(�i − 2�/3)
⎤⎥⎦ , (4)
and thus
xi = Xi
√2C32P(−�i)
[1
0
]. (5)
The zero sequence component can be written as
xo = Xo√
2
⎡⎢⎣
cos(�o)
cos(�o)
cos(�o)
⎤⎥⎦
= 13
(xL1 + xL2 + xL3)C31.
(6)
Xd, �d, Xi, �i and Xo and �o are respectively the RMS value and thephase of the direct, inverse and zero sequence components.
If �d, �i and �o represent the instantaneous phases of the com-ponents, the instantaneous pulsation of the power system ω can beexpressed as follows in the steady state:
ω = d�d
dt= d�i
dt= d�o
dt(7)
The three-phase system xL of Eq. (1) can be written with xd, xi
and xo, as follows:
xL1 = Xd
√2 cos(�d) + Xi
√2 cos(�i)
+X0√
2 cos(�0) + xh1
xL2 = Xd
√2 cos(�d − 2�/3)
+Xi
√2 cos(�i + 2�/3) + X0
√2 cos(�0) + xh2
xL3 = Xd
√2 cos(�d + 2�/3)
+Xi
√2 cos(�i − 2�/3) + X0
√2 cos(�0) + xh3
3.2. Extraction of the symmetrical components in the DQ-space
Extracting the symmetrical components is equivalent to esti-mating the RMS value Xd and Xi and the phases �d and �i. The RMSvalue and phase of the zero sequence component can be deducedfrom Eq. (6). The signal of the nonlinear load, xL , will be expressedin the DQ-space where its AC-component can easily be separatedfrom its DC-component. xL is first converted into the ˛ˇ-space withthe Concordia transform using T32 =
√2/3C32:[
x˛
x
]= TT
32xL = Xd
√3P(�d)
[1
0
]
ˇ+Xi
√3P(−�i)
[1
0
]+ TT
32xh
= x˛ˇd + x˛ˇi + TT32xh
(8)

1 ystem
s
wc
[
t
w[
ipaa
fi[
148 D. Flieller et al. / Electric Power S
According to the Clarke and the Concordia transforms, the ˛ˇ-pace allows to eliminate the zero sequence component.
The resulting signals x˛ and xˇ are converted into the DQ-space
ith the Park transform with an estimated angle −�̂d. The directomponents of the DQ-signals thus are:[
xdD
xdQ
]= P(−�̂d)
[x˛
xˇ
]
=[
Xd
√3 cos(�d − �̂d) + Xi
√3 cos(−�i − �̂d)
Xd
√3 sin(�d − �̂d) + Xi
√3 sin(−�i − �̂d)
]
+P(−�̂d)TT32xh
=[
xdD
xdQ
]DC
+[
xdD
xdQ
]AC
,
(9)
with the following DC- and AC-components:
xdD
xdQ
]DC
=[
Xd
√3 cos(�d − �̂d)
Xd
√3 sin(�d − �̂d)
], (10)
[xd
Dxd
Q
]AC
=[
Xi
√3 cos(−�i − �̂d)
Xi
√3 sin(−�i − �̂d)
]
+P(−�̂d)TT32xh
. (11)
The inverse components on the DQ-signals are calculated withhe Park transform with an estimated angle �̂i, and thus[
xiD
xiQ
]= P(�̂i)
[x˛
xˇ
]
=[
Xd
√3 cos(�d + �̂i) + Xi
√3 cos(−�i + �̂i)
Xd
√3 sin(�d + �̂i) + Xi
√3 sin(−�i + �̂i)
]
+P(�̂i)TT32xh
=[
xiD
xiQ
]DC
+[
xiD
xiQ
]AC
,
(12)
ith the following DC- and AC-components:
xiD
xiQ
]DC
=[
Xi
√3 cos(−�i + �̂i)
Xi
√3 sin(−�i + �̂i)
], (13)
[xi
D
xiQ
]AC
=[
Xd
√3 cos(�d + �̂i)
Xd
√3 sin(�d + �̂i)
]
+P(�̂i)TT32xh.
(14)
Now, the objectives consist in suppressing the AC-componentsn respectively Eqs. (9) and (12) and in estimating the instantaneoushases �̂d and �̂i from the DC-components. These two steps allow topproximate Eqs. (9) and (12) with respectively Eqs. (15) and (16)s indicated hereafter.
Indeed, one can see that an estimation �̂d very close to �d after
ltering and at steady state leads to:xdD
xdQ
]DC
≈[
Xd
√3
Xd
√3(�d − �̂d)
]. (15)
s Research 79 (2009) 1145–1154
Similarly, if �̂i is very close to �i after filtering and at steady state,then[
xiD
xiQ
]DC
≈[
Xi
√3
Xi
√3(−�i + �̂i)
]. (16)
The filtering step is explained in Section 4 and the phases areestimated on-line with two phase estimators as detailed in Section3.3.
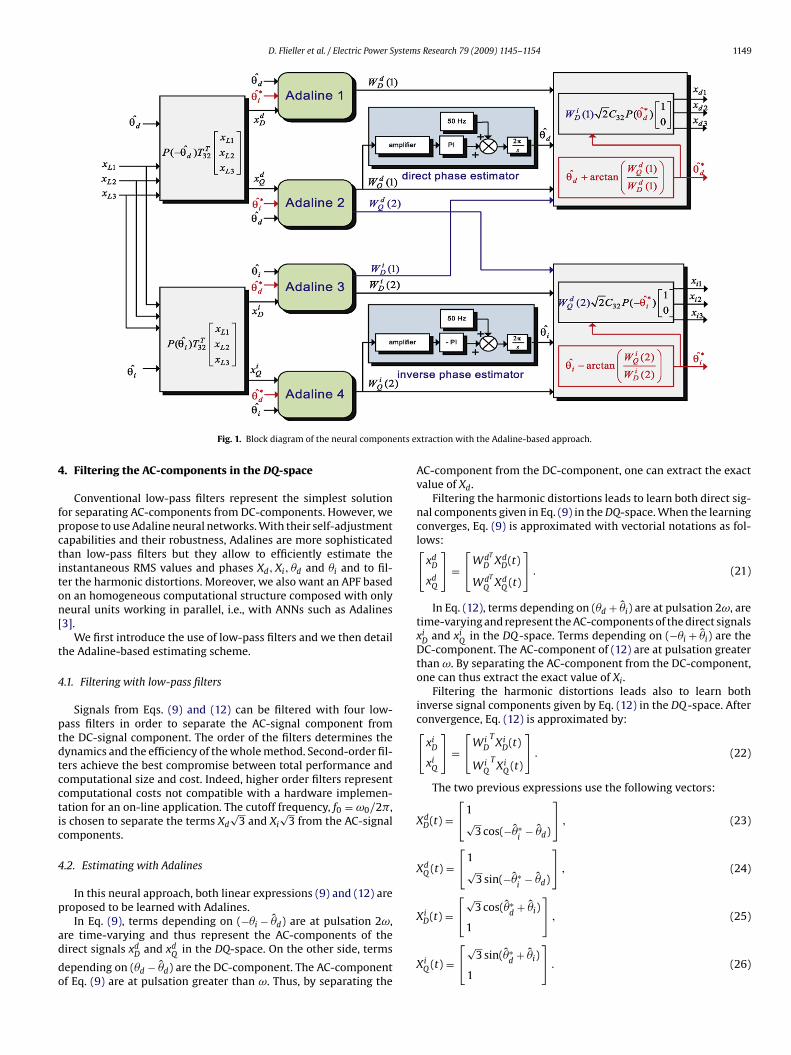
The resulting expressions, (15) and (16), allow to estimate theRMS values Xd and Xi. The complete decomposition is shown indetail in Fig. 1. This block-diagram needs on-line estimates of theinstantaneous phases �̂d and �̂i estimated by phase estimators andexpressions (15) and (16) are learned with Adalines.
3.3. On-line estimation of the instantaneous phases
The estimation of the instantaneous phases �d and also �i relieson a PLL. Indeed, a PLL is phase locked on the input signal and runsat the same rate as the reference signal (at 50 Hz in France, butcan be replaced by 60 Hz). Changes in the input enforce the phasedetector to produce an error voltage. This error then enforces theoscillator to shift in frequency and track the input frequency. Theloop gain in the PLL structure controls the dynamic of the tracking.Conventional and enhanced PLL can be used [6] as well as ANNs, assuggested in [21] about 10 years ago.
Two kinds of voltage-controlled oscillator (VCO) compatiblewith the real-time constraint are used in this work to deliver on-lineestimates of the instantaneous phases �d and �i. These estimatedphases, namely �̂d and �̂i, are used at different levels in the archi-tecture of Fig. 1.
The phase estimator devoted to estimate �̂d takes as an inputthe DC-component of xd
Q from (10) which tends to Xd
√3(�d − �̂d).
This term is estimated by an Adaline’s weight at steady state, i.e.,Wd
Q (1) as indicated by expressions (21) and (28). This means that thephase estimator is able to deliver a good estimation of �d when thelearning has converged. Once estimated, the values of �̂d is correctedby:
�̂∗d = �̂d + arctan
(Wd
Q (1)
WdD(1)
)+ ε(�). (17)
�i is estimated with a second phase estimator locked on theDC-component of xi
Q from Eq. (13) which tends to Xi
√3(−�i + �̂i) =
−Xi
√3(�i − �̂i) from Eq. (16). The input of the inverse phase estima-
tor is inversed with the “−PI”-block of Fig. 1 to ensure the stability ofthe estimator. This is possible after the convergence of the learningwith Wi
Q (2) given in Eqs.(22) and (30). Once estimated, the values
of �̂d is corrected by:
�̂∗i = �̂i − arctan
(Wi
Q (2)
WiD(2)
)+ ε(�). (18)
Finally, at steady state, i.e., after the convergence of the Adalineslearning, we have:
�̂∗d
= �̂d + arctan
(Xd
√3 sin(�d − �̂d)
Xd
√3 cos(�d − �̂d)
)+ ε(�)
= �d,
(19)
�̂∗i
= �̂i − arctan
(Xi
√3 sin(−�i + �̂i)
Xi
√3 cos(−�i + �̂i)
)+ ε(�)
= �i,
(20)
D. Flieller et al. / Electric Power Systems Research 79 (2009) 1145–1154 1149
ents e
4
fpctiton[
t
4
ptdtcctic
4
p
ad
do
Fig. 1. Block diagram of the neural compon
. Filtering the AC-components in the DQ-space
Conventional low-pass filters represent the simplest solutionor separating AC-components from DC-components. However, weropose to use Adaline neural networks. With their self-adjustmentapabilities and their robustness, Adalines are more sophisticatedhan low-pass filters but they allow to efficiently estimate thenstantaneous RMS values and phases Xd, Xi, �d and �i and to fil-er the harmonic distortions. Moreover, we also want an APF basedn an homogeneous computational structure composed with onlyeural units working in parallel, i.e., with ANNs such as Adalines3].
We first introduce the use of low-pass filters and we then detailhe Adaline-based estimating scheme.
.1. Filtering with low-pass filters
Signals from Eqs. (9) and (12) can be filtered with four low-ass filters in order to separate the AC-signal component fromhe DC-signal component. The order of the filters determines theynamics and the efficiency of the whole method. Second-order fil-ers achieve the best compromise between total performance andomputational size and cost. Indeed, higher order filters representomputational costs not compatible with a hardware implemen-ation for an on-line application. The cutoff frequency, f0 = ω0/2�,s chosen to separate the terms Xd
√3 and Xi
√3 from the AC-signal
omponents.
.2. Estimating with Adalines
In this neural approach, both linear expressions (9) and (12) areroposed to be learned with Adalines.
ˆ
In Eq. (9), terms depending on (−�i − �d) are at pulsation 2ω,re time-varying and thus represent the AC-components of theirect signals xdD and xdQ in the DQ-space. On the other side, terms
epending on (�d − �̂d) are the DC-component. The AC-componentf Eq. (9) are at pulsation greater than ω. Thus, by separating the
xtraction with the Adaline-based approach.
AC-component from the DC-component, one can extract the exactvalue of Xd.
Filtering the harmonic distortions leads to learn both direct sig-nal components given in Eq. (9) in the DQ-space. When the learningconverges, Eq. (9) is approximated with vectorial notations as fol-lows:[
xdD
xdQ
]=[
WdT
D XdD(t)
WdT
Q XdQ (t)
]. (21)
In Eq. (12), terms depending on (�d + �̂i) are at pulsation 2ω, aretime-varying and represent the AC-components of the direct signalsxi
D and xiQ in the DQ-space. Terms depending on (−�i + �̂i) are the
DC-component. The AC-component of (12) are at pulsation greaterthan ω. By separating the AC-component from the DC-component,one can thus extract the exact value of Xi.
Filtering the harmonic distortions leads also to learn bothinverse signal components given by Eq. (12) in the DQ-space. Afterconvergence, Eq. (12) is approximated by:[
xiD
xiQ
]=[
WiD
TXi
D(t)
WiQ
TXi
Q (t)
]. (22)
The two previous expressions use the following vectors:
XdD(t) =
[1√
3 cos(−�̂∗i
− �̂d)
], (23)
XdQ (t) =
[1√
3 sin(−�̂∗i
− �̂d)
], (24)
Xi (t) =[√
3 cos(�̂∗d
+ �̂i)]
, (25)
D1XiQ (t) =
[√3 sin(�̂∗
d+ �̂i)
1
]. (26)
1 ystem
Ae
livtc
W
W
W
W
uLt
W
aa
watE
a
li
afit
4
lxa�E
150 D. Flieller et al. / Electric Power S
We propose to learn the linear expressions (21) and (22) withdalines neural networks. The components resulting from linearxpressions, xd
D, xdQ , xi
D and xiQ , are respectively learned with Ada-
ines 1, 2, 3 and 4 from Fig. 1. XdD(t), Xd
Q (t), XiD(t) and Xi
Q (t) are thenputs of the different Adalines. These inputs are generated time-arying signals. Vectors Wd
D, WdQ , Wi
D and WiQ represent the weights,
he learning process enforces the Adaline weights to converge to theorresponding terms:
dT
D = [Xd
√3 cos(�d − �̂d)Xi], (27)
dT
Q = [Xd
√3 sin(�d − �̂d)Xi], (28)
iTD = [XdXi
√3 cos(−�i + �̂i)], (29)
iTQ = [XdXi
√3 sin(−�i + �̂i)]. (30)
An on-line learning process based on the LMS learning rule issed to train the Adalines. More precisely, the following modifiedMS learning rule is utilized to update the generic weight Wk, wherehe index k corresponds to the instant kT (T is the sampling period):
k+1 =
⎧⎨⎩
Wk + �εkYk
� + XkT Yk
if XkT Yk /= 0
Wk if XTk
Yk = 0
(31)
where � is the learning rate of the neuron, Yk = (sgn(Xk) + Xk)/2nd � is an appropriate not-null constant to ensure Eq. (31) to avoiddivision by zero.
The learning is based on an error minimization algorithm [4],ith εk = dk − yk which is the error between the desired output dk
nd the calculated output of the Adaline, yk = WTk
Xk. Xk representshe generic input vector. For the four Adalines, they are given inqs. (23)–(26), and the desired outputs are respectively xd
D, xdQ , xi
D
nd xiQ .
Adalines are very simple and powerful neural networks. On-lineearning can thus be achieved to estimate Xd, Xi, �d and �i. The learn-ng of the Adalines converges fast enough to ensures that �̂∗
d= �d
nd �̂∗i
= �i. Furthermore, the Adaline learning structure enables tolter the harmonic terms in Eqs. (15) and (16). This neural architec-ure is well suited for a real-time hardware implementation.
.3. Discussion
The proposed decomposition previously detailed allows to on-
ine estimate the direct and inverse components of the signal, i.e.,o and xi. The zero sequence signal component, xo, defined by Xond �o can be deduced from the estimated values of Xd, Xi, �d andi through expression (1) but it can also be deduced directly fromq. (6).
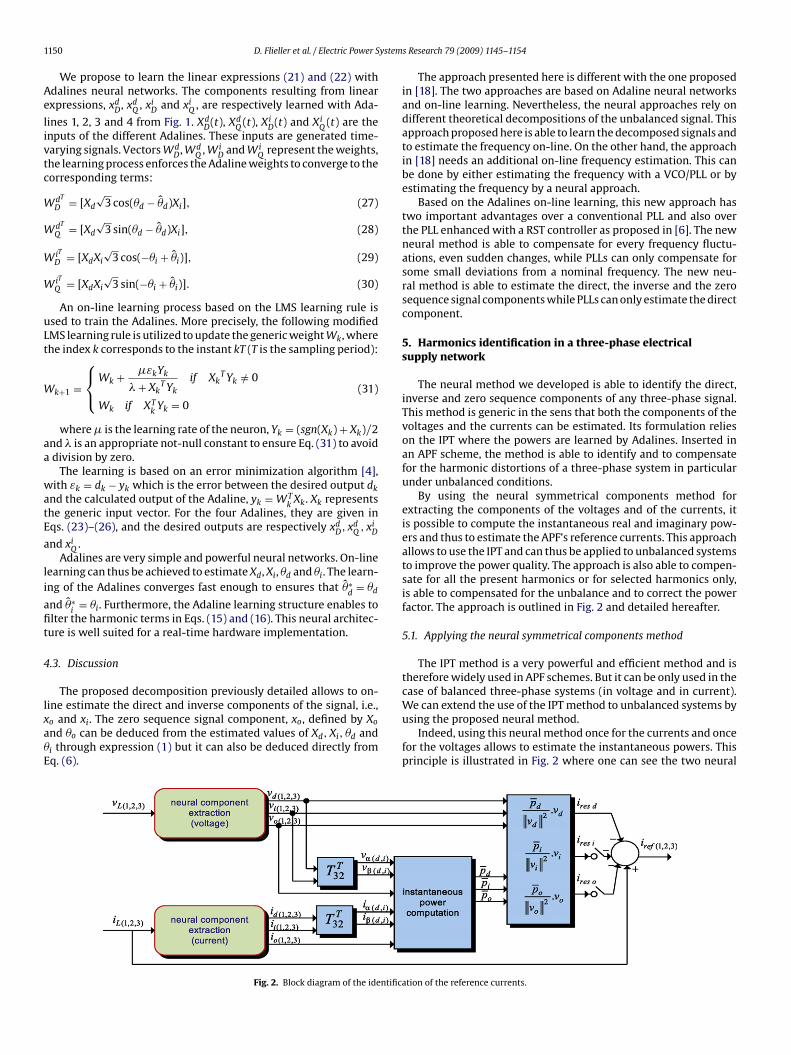
Fig. 2. Block diagram of the identific
s Research 79 (2009) 1145–1154
The approach presented here is different with the one proposedin [18]. The two approaches are based on Adaline neural networksand on-line learning. Nevertheless, the neural approaches rely ondifferent theoretical decompositions of the unbalanced signal. Thisapproach proposed here is able to learn the decomposed signals andto estimate the frequency on-line. On the other hand, the approachin [18] needs an additional on-line frequency estimation. This canbe done by either estimating the frequency with a VCO/PLL or byestimating the frequency by a neural approach.
Based on the Adalines on-line learning, this new approach hastwo important advantages over a conventional PLL and also overthe PLL enhanced with a RST controller as proposed in [6]. The newneural method is able to compensate for every frequency fluctu-ations, even sudden changes, while PLLs can only compensate forsome small deviations from a nominal frequency. The new neu-ral method is able to estimate the direct, the inverse and the zerosequence signal components while PLLs can only estimate the directcomponent.
5. Harmonics identification in a three-phase electricalsupply network
The neural method we developed is able to identify the direct,inverse and zero sequence components of any three-phase signal.This method is generic in the sens that both the components of thevoltages and the currents can be estimated. Its formulation relieson the IPT where the powers are learned by Adalines. Inserted inan APF scheme, the method is able to identify and to compensatefor the harmonic distortions of a three-phase system in particularunder unbalanced conditions.
By using the neural symmetrical components method forextracting the components of the voltages and of the currents, itis possible to compute the instantaneous real and imaginary pow-ers and thus to estimate the APF’s reference currents. This approachallows to use the IPT and can thus be applied to unbalanced systemsto improve the power quality. The approach is also able to compen-sate for all the present harmonics or for selected harmonics only,is able to compensated for the unbalance and to correct the powerfactor. The approach is outlined in Fig. 2 and detailed hereafter.
5.1. Applying the neural symmetrical components method
The IPT method is a very powerful and efficient method and istherefore widely used in APF schemes. But it can be only used in thecase of balanced three-phase systems (in voltage and in current).
We can extend the use of the IPT method to unbalanced systems byusing the proposed neural method.Indeed, using this neural method once for the currents and oncefor the voltages allows to estimate the instantaneous powers. Thisprinciple is illustrated in Fig. 2 where one can see the two neural
ation of the reference currents.
ystem
ctOvetsa
i
i
i
davecn
5
dmrmta
i
i
i
ctilmi(tc
malmaPe
6
6
ree
able to detect the transients and to identify the effects introducedby the changing nonlinear load. The proposed neural method can beconsidered to be fast as shown in Fig. 5. This figure plots the directcomponent Vd estimation with different methods and the proposedneural method is the faster one. Measuring the time response to
D. Flieller et al. / Electric Power S
omponent extraction blocks involved to compute the voltage andhe current components, respectively vd, vi and vo and id, ii and io.n this figure, vL and iL represent respectively the disturbed loadoltage and the current. The instantaneous real and imaginary pow-rs are then estimated from the currents and the voltages fromhe ˛ˇ-space. The average values of the direct, inverse and zeroequence active powers, i.e., respectively p̄d, p̄i and p̄o are deducednd used to compute the following resulting currents:
res d = p̄d
‖vd‖2vd, (32)
res i = p̄i
‖vi‖2vi, (33)
res o = p̄o
‖vo‖2vo, (34)
where ‖vd‖2, ‖vi‖2 and ‖vo‖2 are respectively the norms of theirect, inverse and zero sequence voltage components, and p̄d, p̄i
nd p̄o are the DC-components of respectively the powers pd =Tdid = vT
˛ˇdi˛ˇd, pi = vT
iii = vT
˛ˇii˛ˇi and po = vT
o io. The APF’s refer-nce currents can thus be deduced by subtracting (or not) theurrents ires d, ires i and ires o from iL , the disturbed current at theonlinear load.
.2. Choosing the compensation objectives
The proposed method allows to compensate for the harmonicistortions with different objectives. In all the cases, the proposedethod allows to compensate for the harmonics currents and to
ecover sinusoidal waveforms for the currents. It is possible to trans-it more or less available power to the nonlinear load by defining
he APF’s reference currents with the resulting currents ires d, ires i
nd ires o. Indeed, we distinguish the three following cases:
ref = iL − ires d, (35)
ref = iL − ires d − ires i, (36)
ref = iL − ires d − ires i − ires o. (37)
One can see that reference currents resulting from Eq. (35)ontain only one power component. This means that the powerransmitted to the nonlinear load is minimum. Furthermore, thembalance of the three-phase system is also compensated. Calcu-ating the APF’s reference currents from Eq. (36) leads to transmit
ore power to the nonlinear load than in the first case. However, thembalance of the three-phase system is not compensated with Eq.36). Finally, expression (37) provides reference currents that willransfer more power to the nonlinear load than the two previousases but the imbalance of the three-phase system is maintained.
In all the cases, the sinusoidal source currents are recovered. Theethod is thus able to compensate for the current harmonics, but
lso to recover balanced source currents and to transfer more oress available power to the nonlinear load. A suitable compromise
ust be found between the imbalance of the three-phase systemnd the available power to be transmitted to the nonlinear load.ower quality is a crucial challenge for the future, just as well asnergy transmission.
. Results
.1. Simulation results
The performance and the effectiveness of the proposed neu-al approach are demonstrated through both simulation tests andxperiments. An APF with the proposed scheme is used under sev-ral conditions. Various distinct disturbances which can occur on
s Research 79 (2009) 1145–1154 1151
an electrical supply network are thus voluntarily generated and theperformance of an APF using the proposed scheme is studied.
In the simulation tests, an electrical network composed of athree-phase power supply with a frequency of 50 Hz and a samplingperiod T = 0.5 ms is implemented. This power supply is connectedto a nonlinear load with resistive and capacitive parts with RL = 2�and CL = 45 mF. The neural method is inserted to on-line compen-sate for the harmonics under different changes. The performanceof the signal components identification are compared to thoseobtained with a PLL enhanced with a RST controller as proposed in[6] and with those obtained with the neural approach introducedin [18]. The PLL method will serve as a reference in terms of perfor-mance, a constant learning rate � =0.008 is therefore used for allthe Adalines included in the neural approach.
We carried out a series of test with this new identification tech-nique. Several variants of disturbances which can appear on anelectrical supply network were voluntarily generated. Two cases arelisted in this part in order to illustrate each type of defect: changesof the nonlinear load, and sudden changes of the frequency. Thedynamic response of the neural approach is evaluated in on-lineestimating the voltage and the current components and in the APF’sreference current to be re-injected phase-opposite into the powerline.
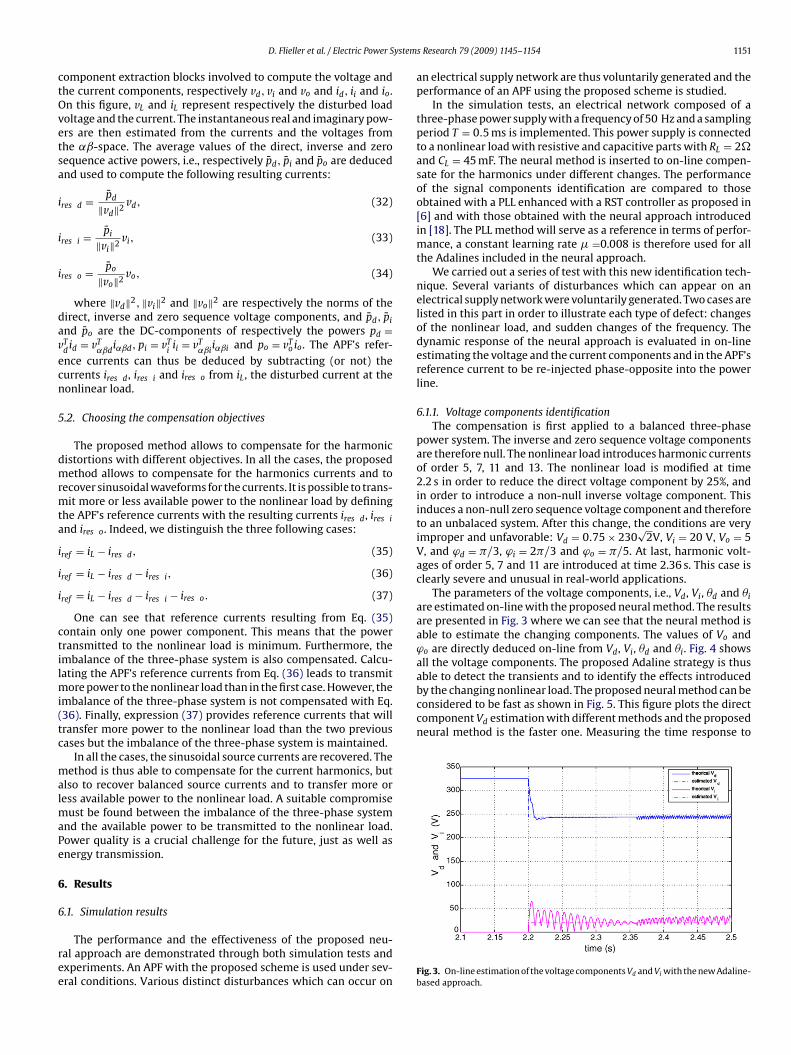
6.1.1. Voltage components identificationThe compensation is first applied to a balanced three-phase
power system. The inverse and zero sequence voltage componentsare therefore null. The nonlinear load introduces harmonic currentsof order 5, 7, 11 and 13. The nonlinear load is modified at time2.2 s in order to reduce the direct voltage component by 25%, andin order to introduce a non-null inverse voltage component. Thisinduces a non-null zero sequence voltage component and thereforeto an unbalaced system. After this change, the conditions are veryimproper and unfavorable: Vd = 0.75 × 230
√2V, Vi = 20 V, Vo = 5
V, and ϕd = �/3, ϕi = 2�/3 and ϕo = �/5. At last, harmonic volt-ages of order 5, 7 and 11 are introduced at time 2.36 s. This case isclearly severe and unusual in real-world applications.
The parameters of the voltage components, i.e., Vd, Vi, �d and �i
are estimated on-line with the proposed neural method. The resultsare presented in Fig. 3 where we can see that the neural method isable to estimate the changing components. The values of Vo andϕo are directly deduced on-line from Vd, Vi, �d and �i. Fig. 4 showsall the voltage components. The proposed Adaline strategy is thus
Fig. 3. On-line estimation of the voltage components Vd and Vi with the new Adaline-based approach.
1152 D. Flieller et al. / Electric Power Systems Research 79 (2009) 1145–1154
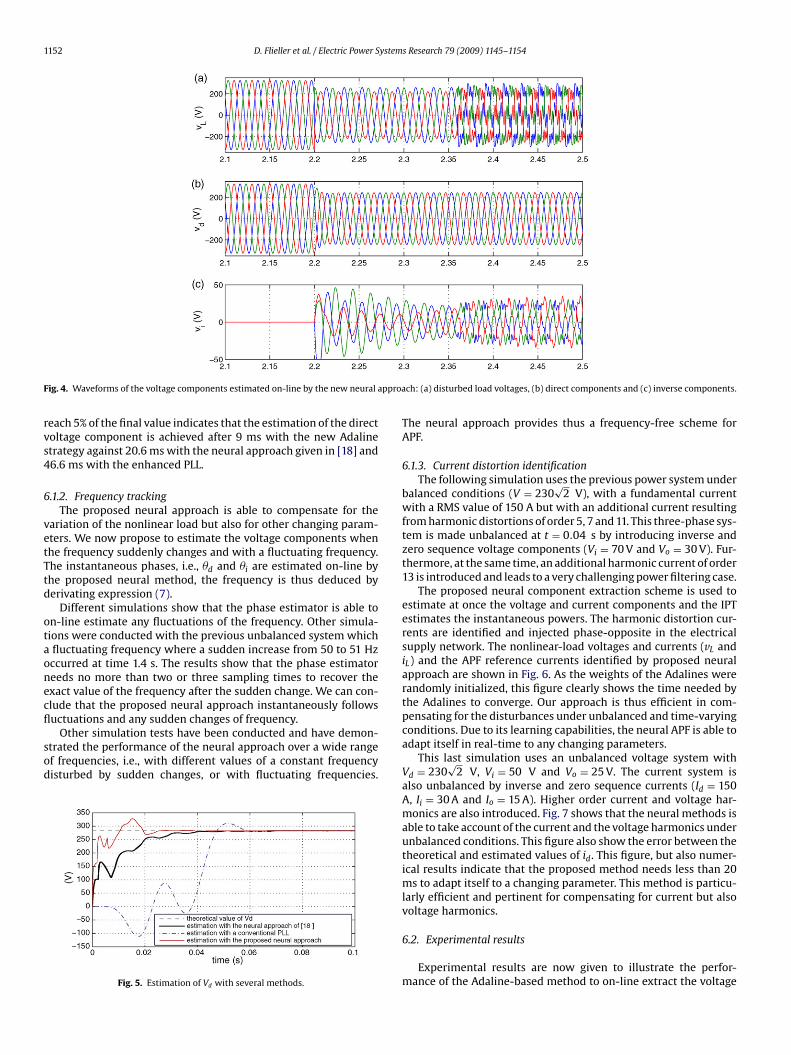
F pproa
rvs4
6
vetTtd
otaonecfl
sod
ig. 4. Waveforms of the voltage components estimated on-line by the new neural a
each 5% of the final value indicates that the estimation of the directoltage component is achieved after 9 ms with the new Adalinetrategy against 20.6 ms with the neural approach given in [18] and6.6 ms with the enhanced PLL.
.1.2. Frequency trackingThe proposed neural approach is able to compensate for the
ariation of the nonlinear load but also for other changing param-ters. We now propose to estimate the voltage components whenhe frequency suddenly changes and with a fluctuating frequency.he instantaneous phases, i.e., �d and �i are estimated on-line byhe proposed neural method, the frequency is thus deduced byerivating expression (7).
Different simulations show that the phase estimator is able ton-line estimate any fluctuations of the frequency. Other simula-ions were conducted with the previous unbalanced system whichfluctuating frequency where a sudden increase from 50 to 51 Hzccurred at time 1.4 s. The results show that the phase estimatoreeds no more than two or three sampling times to recover thexact value of the frequency after the sudden change. We can con-lude that the proposed neural approach instantaneously followsuctuations and any sudden changes of frequency.
Other simulation tests have been conducted and have demon-trated the performance of the neural approach over a wide rangef frequencies, i.e., with different values of a constant frequencyisturbed by sudden changes, or with fluctuating frequencies.
Fig. 5. Estimation of Vd with several methods.
ch: (a) disturbed load voltages, (b) direct components and (c) inverse components.
The neural approach provides thus a frequency-free scheme forAPF.
6.1.3. Current distortion identificationThe following simulation uses the previous power system under
balanced conditions (V = 230√
2 V), with a fundamental currentwith a RMS value of 150 A but with an additional current resultingfrom harmonic distortions of order 5, 7 and 11. This three-phase sys-tem is made unbalanced at t = 0.04 s by introducing inverse andzero sequence voltage components (Vi = 70 V and Vo = 30 V). Fur-thermore, at the same time, an additional harmonic current of order13 is introduced and leads to a very challenging power filtering case.
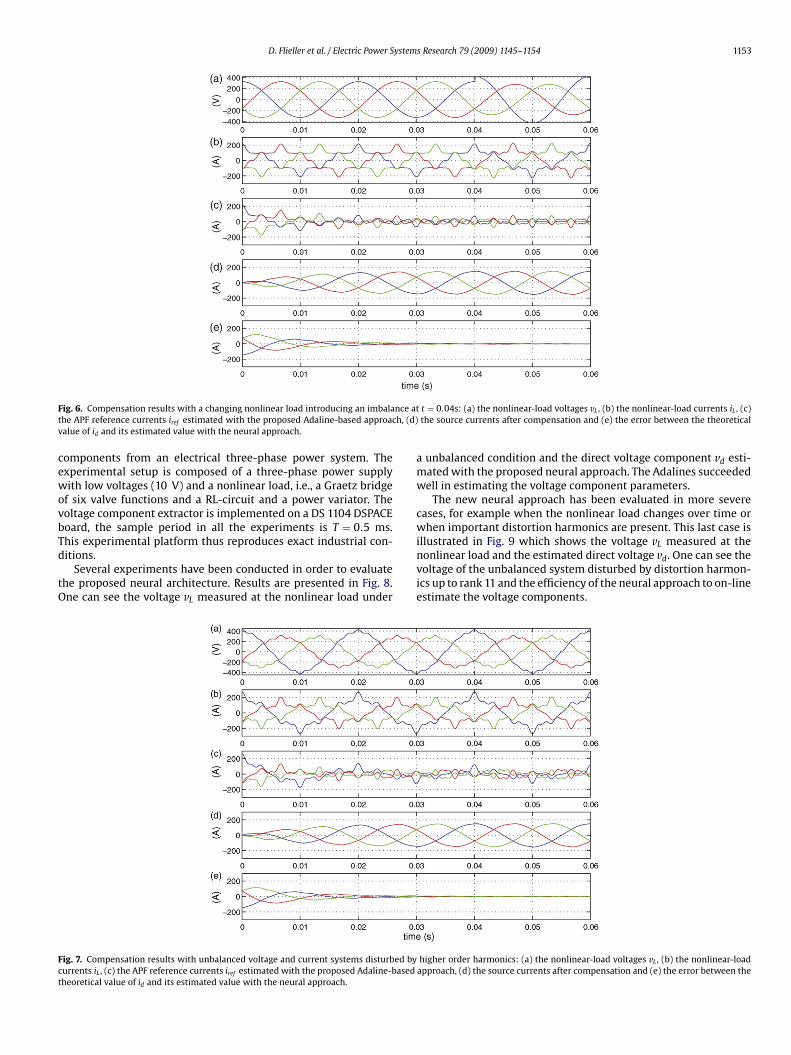
The proposed neural component extraction scheme is used toestimate at once the voltage and current components and the IPTestimates the instantaneous powers. The harmonic distortion cur-rents are identified and injected phase-opposite in the electricalsupply network. The nonlinear-load voltages and currents (vL andiL) and the APF reference currents identified by proposed neuralapproach are shown in Fig. 6. As the weights of the Adalines wererandomly initialized, this figure clearly shows the time needed bythe Adalines to converge. Our approach is thus efficient in com-pensating for the disturbances under unbalanced and time-varyingconditions. Due to its learning capabilities, the neural APF is able toadapt itself in real-time to any changing parameters.
This last simulation uses an unbalanced voltage system withVd = 230
√2 V, Vi = 50 V and Vo = 25 V. The current system is
also unbalanced by inverse and zero sequence currents (Id = 150A, Ii = 30 A and Io = 15 A). Higher order current and voltage har-monics are also introduced. Fig. 7 shows that the neural methods isable to take account of the current and the voltage harmonics underunbalanced conditions. This figure also show the error between thetheoretical and estimated values of id. This figure, but also numer-ical results indicate that the proposed method needs less than 20ms to adapt itself to a changing parameter. This method is particu-larly efficient and pertinent for compensating for current but alsovoltage harmonics.
6.2. Experimental results
Experimental results are now given to illustrate the perfor-mance of the Adaline-based method to on-line extract the voltage
D. Flieller et al. / Electric Power Systems Research 79 (2009) 1145–1154 1153
F nce att h, (d)v
cewovbTd
tO
Fct
ig. 6. Compensation results with a changing nonlinear load introducing an imbalahe APF reference currents iref estimated with the proposed Adaline-based approacalue of id and its estimated value with the neural approach.
omponents from an electrical three-phase power system. Thexperimental setup is composed of a three-phase power supplyith low voltages (10 V) and a nonlinear load, i.e., a Graetz bridge
f six valve functions and a RL-circuit and a power variator. Theoltage component extractor is implemented on a DS 1104 DSPACEoard, the sample period in all the experiments is T = 0.5 ms.
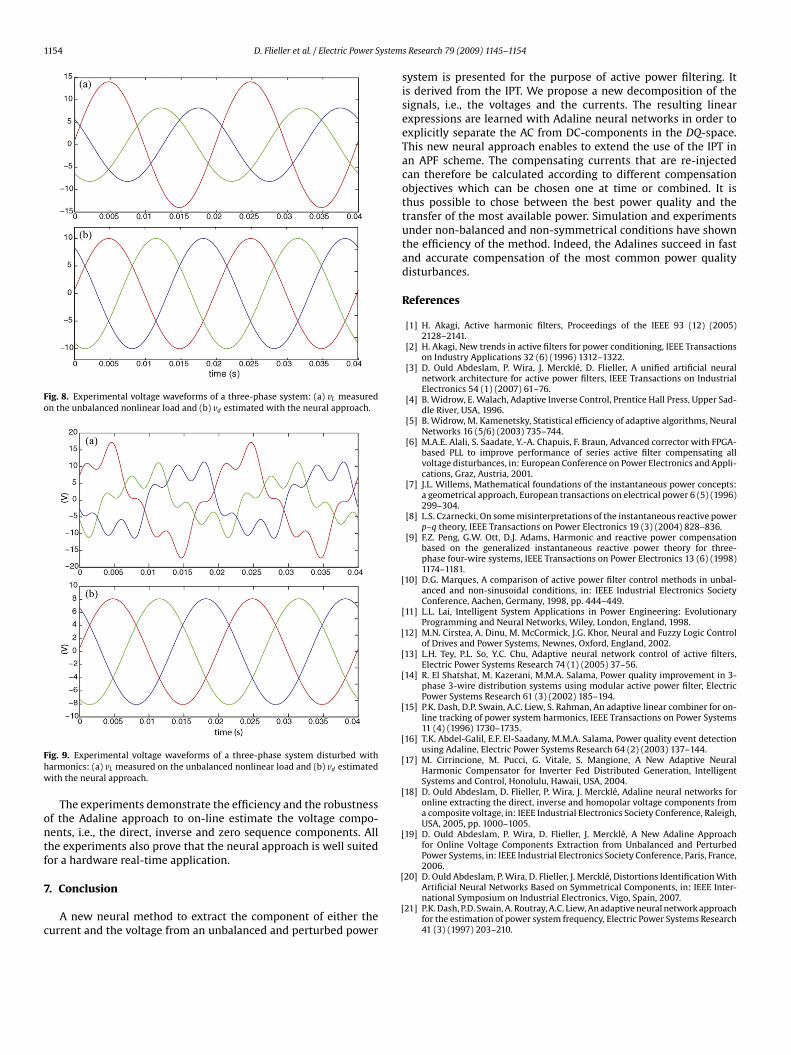
his experimental platform thus reproduces exact industrial con-itions.Several experiments have been conducted in order to evaluatehe proposed neural architecture. Results are presented in Fig. 8.ne can see the voltage vL measured at the nonlinear load under
ig. 7. Compensation results with unbalanced voltage and current systems disturbed byurrents iL , (c) the APF reference currents iref estimated with the proposed Adaline-basedheoretical value of id and its estimated value with the neural approach.
t = 0.04s: (a) the nonlinear-load voltages vL , (b) the nonlinear-load currents iL , (c)the source currents after compensation and (e) the error between the theoretical
a unbalanced condition and the direct voltage component vd esti-mated with the proposed neural approach. The Adalines succeededwell in estimating the voltage component parameters.
The new neural approach has been evaluated in more severecases, for example when the nonlinear load changes over time orwhen important distortion harmonics are present. This last case is
illustrated in Fig. 9 which shows the voltage vL measured at thenonlinear load and the estimated direct voltage vd. One can see thevoltage of the unbalanced system disturbed by distortion harmon-ics up to rank 11 and the efficiency of the neural approach to on-lineestimate the voltage components.higher order harmonics: (a) the nonlinear-load voltages vL , (b) the nonlinear-loadapproach, (d) the source currents after compensation and (e) the error between the
1154 D. Flieller et al. / Electric Power System
Fig. 8. Experimental voltage waveforms of a three-phase system: (a) vL measuredon the unbalanced nonlinear load and (b) vd estimated with the neural approach.
Fhw
ontf
7
c
[
[
[
[
[
[
[
[
[
[
ig. 9. Experimental voltage waveforms of a three-phase system disturbed witharmonics: (a) vL measured on the unbalanced nonlinear load and (b) vd estimatedith the neural approach.
The experiments demonstrate the efficiency and the robustnessf the Adaline approach to on-line estimate the voltage compo-ents, i.e., the direct, inverse and zero sequence components. Allhe experiments also prove that the neural approach is well suitedor a hardware real-time application.
. Conclusion
A new neural method to extract the component of either theurrent and the voltage from an unbalanced and perturbed power
[
[
s Research 79 (2009) 1145–1154
system is presented for the purpose of active power filtering. Itis derived from the IPT. We propose a new decomposition of thesignals, i.e., the voltages and the currents. The resulting linearexpressions are learned with Adaline neural networks in order toexplicitly separate the AC from DC-components in the DQ-space.This new neural approach enables to extend the use of the IPT inan APF scheme. The compensating currents that are re-injectedcan therefore be calculated according to different compensationobjectives which can be chosen one at time or combined. It isthus possible to chose between the best power quality and thetransfer of the most available power. Simulation and experimentsunder non-balanced and non-symmetrical conditions have shownthe efficiency of the method. Indeed, the Adalines succeed in fastand accurate compensation of the most common power qualitydisturbances.
References
[1] H. Akagi, Active harmonic filters, Proceedings of the IEEE 93 (12) (2005)2128–2141.
[2] H. Akagi, New trends in active filters for power conditioning, IEEE Transactionson Industry Applications 32 (6) (1996) 1312–1322.
[3] D. Ould Abdeslam, P. Wira, J. Mercklé, D. Flieller, A unified artificial neuralnetwork architecture for active power filters, IEEE Transactions on IndustrialElectronics 54 (1) (2007) 61–76.
[4] B. Widrow, E. Walach, Adaptive Inverse Control, Prentice Hall Press, Upper Sad-dle River, USA, 1996.
[5] B. Widrow, M. Kamenetsky, Statistical efficiency of adaptive algorithms, NeuralNetworks 16 (5/6) (2003) 735–744.
[6] M.A.E. Alali, S. Saadate, Y.-A. Chapuis, F. Braun, Advanced corrector with FPGA-based PLL to improve performance of series active filter compensating allvoltage disturbances, in: European Conference on Power Electronics and Appli-cations, Graz, Austria, 2001.
[7] J.L. Willems, Mathematical foundations of the instantaneous power concepts:a geometrical approach, European transactions on electrical power 6 (5) (1996)299–304.
[8] L.S. Czarnecki, On some misinterpretations of the instantaneous reactive powerp–q theory, IEEE Transactions on Power Electronics 19 (3) (2004) 828–836.
[9] F.Z. Peng, G.W. Ott, D.J. Adams, Harmonic and reactive power compensationbased on the generalized instantaneous reactive power theory for three-phase four-wire systems, IEEE Transactions on Power Electronics 13 (6) (1998)1174–1181.
10] D.G. Marques, A comparison of active power filter control methods in unbal-anced and non-sinusoidal conditions, in: IEEE Industrial Electronics SocietyConference, Aachen, Germany, 1998, pp. 444–449.
11] L.L. Lai, Intelligent System Applications in Power Engineering: EvolutionaryProgramming and Neural Networks, Wiley, London, England, 1998.
12] M.N. Cirstea, A. Dinu, M. McCormick, J.G. Khor, Neural and Fuzzy Logic Controlof Drives and Power Systems, Newnes, Oxford, England, 2002.
13] L.H. Tey, P.L. So, Y.C. Chu, Adaptive neural network control of active filters,Electric Power Systems Research 74 (1) (2005) 37–56.
14] R. El Shatshat, M. Kazerani, M.M.A. Salama, Power quality improvement in 3-phase 3-wire distribution systems using modular active power filter, ElectricPower Systems Research 61 (3) (2002) 185–194.
15] P.K. Dash, D.P. Swain, A.C. Liew, S. Rahman, An adaptive linear combiner for on-line tracking of power system harmonics, IEEE Transactions on Power Systems11 (4) (1996) 1730–1735.
16] T.K. Abdel-Galil, E.F. El-Saadany, M.M.A. Salama, Power quality event detectionusing Adaline, Electric Power Systems Research 64 (2) (2003) 137–144.
17] M. Cirrincione, M. Pucci, G. Vitale, S. Mangione, A New Adaptive NeuralHarmonic Compensator for Inverter Fed Distributed Generation, IntelligentSystems and Control, Honolulu, Hawaii, USA, 2004.
18] D. Ould Abdeslam, D. Flieller, P. Wira, J. Mercklé, Adaline neural networks foronline extracting the direct, inverse and homopolar voltage components froma composite voltage, in: IEEE Industrial Electronics Society Conference, Raleigh,USA, 2005, pp. 1000–1005.
19] D. Ould Abdeslam, P. Wira, D. Flieller, J. Mercklé, A New Adaline Approachfor Online Voltage Components Extraction from Unbalanced and PerturbedPower Systems, in: IEEE Industrial Electronics Society Conference, Paris, France,2006.
20] D. Ould Abdeslam, P. Wira, D. Flieller, J. Mercklé, Distortions Identification WithArtificial Neural Networks Based on Symmetrical Components, in: IEEE Inter-national Symposium on Industrial Electronics, Vigo, Spain, 2007.
21] P.K. Dash, P.D. Swain, A. Routray, A.C. Liew, An adaptive neural network approachfor the estimation of power system frequency, Electric Power Systems Research41 (3) (1997) 203–210.
Copyright © 2022 FDOKUMEN




















