Diseño de un controlador PID en tiempo discreto
7
Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID Control Digital 1 Resumen— El presente documento muestra el proceso de creación y sintonización de un controlador PID para una planta. Dicho controlador está configurado para trabajar en tiempo discreto, esto quiere decir que es un controlador digital. Además mediante el método gráfico se buscara conocer las constantes de Kp, Ki y Kd para una sintonización óptima de dicho controlador. Se utilizara la herramienta Matlab para comprobar el comportamiento de la planta a una respuesta escalón y dicho programa servirá para comprobar la diferencia de los sistemas en tiempo continuo y en tiempo discreto. Índice de Términos—Muestreo, Planta, Sintonizador, PID, Tiempo discreto, Retenedores. I. INTRODUCCIÓN En los años recientes, ha habido un rápido incremento en el uso de controladores digitales en los sistemas de control, estos se utilizan con el fin de adquirir un funcionamiento óptimo en la planta controlada. Las tendencias actuales se inclinan al uso de sistemas digitales, sustituyendo paulatinamente a los sistemas analógicos, esto debido al costo reducido y a las ventajas que este tipo de sistemas ofrecen. Los controladores digitales, a diferencia de los de tiempo continuo trabajan con señales muestreadas las cuales tienen que ser reconstruidas por los retenedores de orden cero o de primer orden para poder trabajar con estas. Una de las ventajas de los controladores digitales es la de que además de ahorrar espacio al estar contenidas en un computador personal, estos ahorran costo para los desarrolladores del sistema de control, además, el monitoreo de un sistema digital se vuelve mucho más sencillo a comparación de un sistema análogo. La principal desventaja de un controlador digital, es la pérdida de información entre los datos muestreados, la cual, debido a la amplia gama de procesadores computacionales es mínima. [1] II. OBJETIVOS Aplicar de manera práctica los conocimientos previamente adquiridos en el aula. Tener una mejor comprensión de los controladores PID. Conocer de mejor manera la diferencia entre los sistemas análogos y digitales. Utilizar las herramientas de control disponibles en el mercado. Lograr la correcta interpretación de las señales muestreadas obtenidas mediante Matlab®. III. CONTROLADORES PID. El esquema de control PID análogo ha sido usado satisfactoriamente durante más de medio siglo. El principio básico de los controladores PID es actuar sobre la variable que va a ser manipulada mediante la correcta combinación de tres acciones de control. Estas acciones de control son el control proporcional donde la señal de control es proporcional al error, el control integral donde la acción de control es proporcional a la integral de la señal del error, y la señal de control derivativa donde la señal de control es proporcional a la derivada de la señal del error. La ecuación del control PID análogo está dada por: (1) La ecuación anterior describe el sistema de control PID solamente para sistemas en tiempo continuo. Para poder trabajar con controladores digitales es necesario discretizar dicha ecuación, la cual aplicando la transformada z resulta en: (2) En un controlador PID sintonizado mediante métodos gráficos es necesario experimentar con los valores de las constantes kp, ki y kd, los cuales tendrán efectos diversos sobre la respuesta de la planta controlada. Por ejemplo, en un controlados P la constante k al ser modificada actúa directamente sobre el tiempo de elevación de la respuesta. Por su parte el controlador I será el encargado de regular la estabilidad del sistema en estado estacionario y a su vez el controlador D reducirá el sobre pico, mejorará la respuesta transitoria y por lo tanto la estabilidad del sistema. [2] Rodríguez Robledo Carlos E. [email protected] Instituto Tecnológico de Culiacán Diseño de un controlador PID en tiempo discreto.
-
Upload
itculiacan -
Category
Documents
-
view
0 -
download
0
Transcript of Diseño de un controlador PID en tiempo discreto

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
1
Resumen— El presente documento muestra el proceso de
creación y sintonización de un controlador PID para una planta.
Dicho controlador está configurado para trabajar en tiempo
discreto, esto quiere decir que es un controlador digital. Además
mediante el método gráfico se buscara conocer las constantes de
Kp, Ki y Kd para una sintonización óptima de dicho controlador.
Se utilizara la herramienta Matlab para comprobar el
comportamiento de la planta a una respuesta escalón y dicho
programa servirá para comprobar la diferencia de los sistemas
en tiempo continuo y en tiempo discreto.
Índice de Términos—Muestreo, Planta, Sintonizador, PID,
Tiempo discreto, Retenedores.
I. INTRODUCCIÓN
En los años recientes, ha habido un rápido incremento en el
uso de controladores digitales en los sistemas de control, estos
se utilizan con el fin de adquirir un funcionamiento óptimo en
la planta controlada. Las tendencias actuales se inclinan al uso
de sistemas digitales, sustituyendo paulatinamente a los
sistemas analógicos, esto debido al costo reducido y a las
ventajas que este tipo de sistemas ofrecen.
Los controladores digitales, a diferencia de los de tiempo
continuo trabajan con señales muestreadas las cuales tienen
que ser reconstruidas por los retenedores de orden cero o de
primer orden para poder trabajar con estas. Una de las ventajas
de los controladores digitales es la de que además de ahorrar
espacio al estar contenidas en un computador personal, estos
ahorran costo para los desarrolladores del sistema de control,
además, el monitoreo de un sistema digital se vuelve mucho
más sencillo a comparación de un sistema análogo. La
principal desventaja de un controlador digital, es la pérdida de
información entre los datos muestreados, la cual, debido a la
amplia gama de procesadores computacionales es mínima.
[1]
II. OBJETIVOS
Aplicar de manera práctica los conocimientos
previamente adquiridos en el aula.
Tener una mejor comprensión de los controladores
PID.
Conocer de mejor manera la diferencia entre los
sistemas análogos y digitales.
Utilizar las herramientas de control disponibles en el
mercado.
Lograr la correcta interpretación de las señales
muestreadas obtenidas mediante Matlab®.
III. CONTROLADORES PID.
El esquema de control PID análogo ha sido usado
satisfactoriamente durante más de medio siglo. El principio
básico de los controladores PID es actuar sobre la variable que
va a ser manipulada mediante la correcta combinación de tres
acciones de control. Estas acciones de control son el control
proporcional donde la señal de control es proporcional al
error, el control integral donde la acción de control es
proporcional a la integral de la señal del error, y la señal de
control derivativa donde la señal de control es proporcional a
la derivada de la señal del error.
La ecuación del control PID análogo está dada por:
(1) La ecuación anterior describe el sistema de control PID
solamente para sistemas en tiempo continuo. Para poder
trabajar con controladores digitales es necesario discretizar
dicha ecuación, la cual aplicando la transformada z resulta en:
(2) En un controlador PID sintonizado mediante métodos
gráficos es necesario experimentar con los valores de las
constantes kp, ki y kd, los cuales tendrán efectos diversos
sobre la respuesta de la planta controlada. Por ejemplo, en un
controlados P la constante k al ser modificada actúa
directamente sobre el tiempo de elevación de la respuesta. Por
su parte el controlador I será el encargado de regular la
estabilidad del sistema en estado estacionario y a su vez el
controlador D reducirá el sobre pico, mejorará la respuesta
transitoria y por lo tanto la estabilidad del sistema. [2]
Rodríguez Robledo Carlos E.
Instituto Tecnológico de Culiacán
Diseño de un controlador PID en tiempo discreto.

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
2
IV. DESARROLLO.
El problema descrito por este documento trata sobre el
control de una planta utilizando técnicas de control PID de
manera digital. El diagrama de bloques de dicha planta se
muestra en la figura 1.
La planta dada para este diagrama de bloques se describe en
la ecuación 3.
(3)
Para dicha planta es necesario obtener la transformada z
para la discretización de dicho sistema, además, es necesario
la inclusión de un retenedor el cual servirá para unir los datos
muestreados y reconstruir la señal a una señal digitalizada.
Dicha función de transferencia en tiempo discreto con el
retenedor de orden cero incluido resulta de la siguiente
manera.
(4) Después de la obtención de la función de transferencia de la
planta en tiempo discreto, es necesario aplicarle una entrada
escalón para ver su comportamiento en lazo cerrado, así
también es necesario modificar las constantes, para lo cual por
usos prácticos serán modificados mediante un programa de
Matlab para su correcto análisis, dicho programa se anexa a
continuación.
clear; clc; T=input('Tiempo de muestreo (Seg)>>'); fprintf('PID Rodríguez Robledo Carlos Eduardo\n');
for compara = 1:1:2 Kp=input('Valor de Kp>>'); Ki=input('Valor de Ki>>'); Kd=input('Valor de Kd>>'); Gps = zpk([ ], [0 -39], 1) Gz =c2d(Gps, T,'zoh'); Gz = tf (Gz);
GPID =tf([ Kp+Ki+Kd -(Kp +2*Kd) Kd], [1 -1 0], T); Flazo_abierto = GPID*Gz; Flazo_cerrado =feedback(Flazo_abierto,1) step(Flazo_cerrado); grid; title('Respuesta a entrada escalon') hold on
end
El programa tiene como función comparar dos
respuestas a una entrada escalón, esto con el fin de poder ver
la diferencia entre las constantes k. La interfaz de usuario es
básica y a su vez amigable, esta pregunta las constantes k
deseadas para el controlador PID además de preguntarle al
usuario el tiempo de muestreo deseado, a su vez aparece la
función de transferencia de la ecuación 3, y el cálculo de la
transformada z de Gp con el retenedor. Después aparecerá la
gráfica con la respuesta a escalón del sistema, y se repetirá el
procedimiento para poder comparar el funcionamiento de los
dos controladores trabajando.
V. ANÁLISIS DE RESULTADOS
Para el correcto análisis de la planta controlada es necesario
la utilización de las herramientas computacionales que hay a
nuestra disposición, es por eso que se creó un programa en
Matlab el cual es capaz de sintonizar el controlador PID
mediante la manipulación de las constantes k y el tiempo de
muestreo, dicho programa a su vez cuenta con la virtud de
comparación de dos gráficas para la elección del controlador
más óptimo y el que muestre mejor estabilidad a una entrada.
En este documento se abordara el análisis de distintas
comparaciones de PID, así también se compararan
comparadores P, PI, PD y PID, en las figuras siguientes se anexarán los resultados obtenidos.
Fig. 1. Diagrama de bloques de la planta a controlar.
Fig. 2. Interfaz de usuario para PID
Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
3
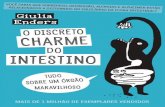
Fig. 3. Respuesta a una entrada escalón
Como se puede observar en la Figura 3, hay una respuesta a
una entrada escalón la cual tiene las constantes Kp=2 Ki=1 y
Kd=1.5 con un tiempo de muestreo de 1 seg Es notable
observar que estas constantes no satisfacen las necesidades de
diseño al haber un sobre pico muy elevado y el tiempo de
establecimiento de estabilidad es muy alto (150 seg.
Aproximadamente.)
Se cambiarán los valores de las constantes a Kp=4, Ki= 2 y
Kd=3 para ver la respuesta y poder observar el cambio del
controlador para poder saber la tendencia a tomar para
seleccionar las constantes correctamente.
En esta figura se observa que con las constantes nuevas la
respuesta es satisfactoria, aunque aún no es la óptima, pero
cabe destacar que el sobre pico y la reacción de la respuesta
son menores, así como el error en estado estable disminuye.
Entonces la tendencia indica que se deben seguir aumentando
los valores de K para tener un mejor comportamiento.
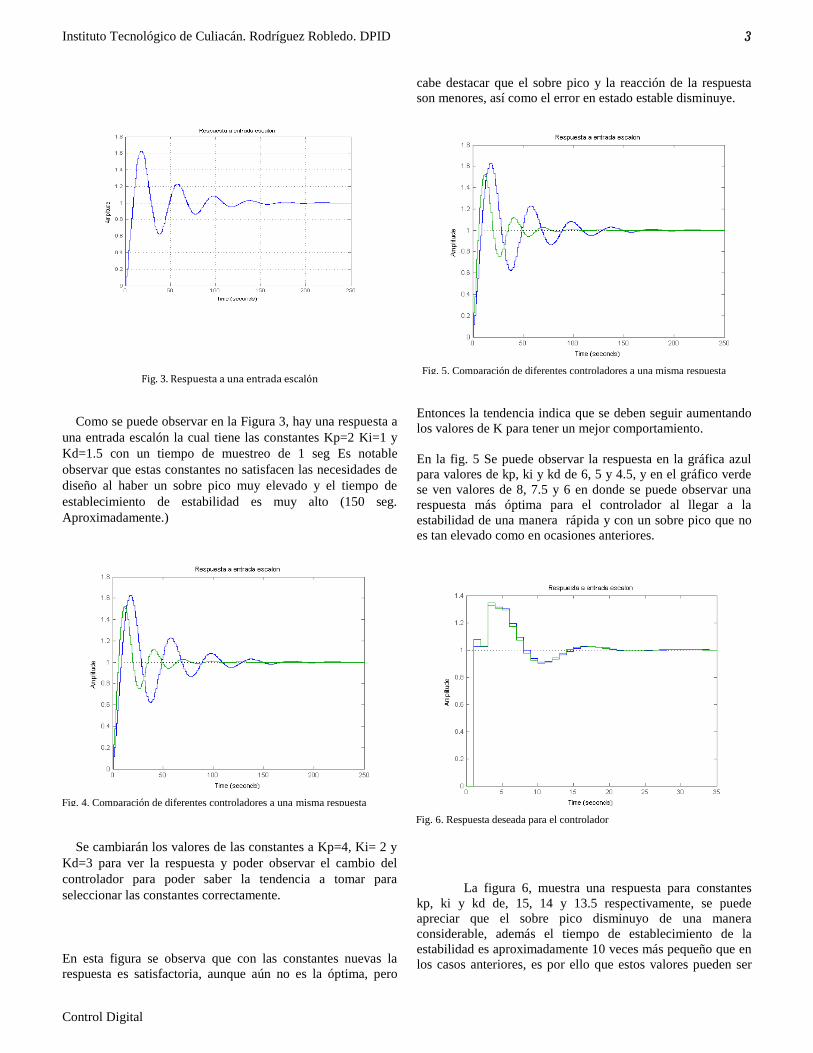
En la fig. 5 Se puede observar la respuesta en la gráfica azul
para valores de kp, ki y kd de 6, 5 y 4.5, y en el gráfico verde
se ven valores de 8, 7.5 y 6 en donde se puede observar una
respuesta más óptima para el controlador al llegar a la
estabilidad de una manera rápida y con un sobre pico que no
es tan elevado como en ocasiones anteriores.
La figura 6, muestra una respuesta para constantes
kp, ki y kd de, 15, 14 y 13.5 respectivamente, se puede
apreciar que el sobre pico disminuyo de una manera
considerable, además el tiempo de establecimiento de la
estabilidad es aproximadamente 10 veces más pequeño que en
los casos anteriores, es por ello que estos valores pueden ser
Fig. 4. Comparación de diferentes controladores a una misma respuesta
Fig. 5. Comparación de diferentes controladores a una misma respuesta
Fig. 6. Respuesta deseada para el controlador

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
4
los ideales para el controlador, aunque se pueden buscar otros
sin llegar a afectar el error en estado estable o la velocidad de
respuesta de la planta.
A continuación se harán comparaciones con distintos
tipos de controladores para ver la respuesta y poder conocer si
el PID es la solución para controlar óptimamente la planta, o si
existen otros modelos de control (PD, PI) los cuales sirvan
para obtener una mejor respuesta a la entrada escalón.
La figura 7 muestra la comparación del controlador
PID con las constantes mostradas en la figura 6 junto con un
controlador PD (verde) y PI (Rojo) con los mismos valores de
constantes, se puede observar que aunque sean los mismos
valores para k, la respuesta varia de una manera considerable,
haciendo a simple vista el controlador PD el más ideal por tener una respuesta sin sobre pico y que se estabiliza de
manera satisfactoria en menor tiempo.
De igual manera es conocido que un controlador I o
D por sí solo no es capaz de controlar una planta, pero por
fines didácticos se establecieron valores de kp, ki y kd de 0, 14
y 13.5 respectivamente para conocer el comportamiento del
sistema a una entrada escalón, la figura 8 muestra dicho
comportamiento.
Al observar que la planta no puede ser controlada por un
controlador ID es lógico pensar que dicha planta tampoco
puede ser estabilizada por un controlador I o un D por
separado, siempre es necesario llevar la acción proporcional
del controlador, la cual es indispensable, incluso se puede
llegar a controlar una planta sin la acción integrativa o
derivativa, aunque puede haber un sobre pico o error en estado
estable, en las siguientes figuras se mostraran respuestas de un
controlador proporcional a distintas constantes kp.
VI. TEOREMA DE SHANNON.
En el año de 1948 en la revista de los laboratorios Bell se
publica el artículo titulado “Una teoría matemática de
comunicación” por el investigador Claude E. Shannon. En
dicho artículo se establece una relación de la velocidad
máxima en bits por segundo que se pueden alcanzar en los
sistemas de comunicación real.
En dicha investigación se establece la siguiente ecuación.
(5)
Donde C establece la velocidad máxima de muestreo,
B es el ancho de banda en Hz y s/n es la relación señal a ruido.
En cualquier sistema la velocidad de muestreo tiene
un límite el cual no se puede sobrepasar, esto se puede
entender mejor con una analogía como la temperatura, donde
no pueden existir valores menores al cero absoluto. Para
sistemas digitales con una relación de ruido señal, este límite no se puede sobrepasar ni se podrá lograr en el futuro. [3]
Fig. 7. Comparación entre 3 controladores.
Fig. 8. Respuesta a una entrada escalón de un controlador ID.
Fig. 9. Respuesta de un controlador integral. En azul kp=3, en verde kp=13

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
5
En este documento se comprobará a manera de
simulación, sin realizar ningún cálculo matemático como
afecta una velocidad de muestreo mayor a un sistema de
control y a su respuesta escalón, para dicho ejemplo se
utilizara el controlador PID con las constantes de la fig. 6, el
cual hay que recordar que tuvo una respuesta óptima, la única
diferencia será que se sustituirá la velocidad de muestreo de 1
segundo a .0000000000001 segundos, lo cual es una velocidad
de muestreo muy elevada para un sistema de control. La
siguiente figura describe el comportamiento de la planta.
Se puede observar que la respuesta a una entrada
escalón con un tiempo de muestreo demasiado bajo se
distorsiona de una manera considerable, desestabilizando la
señal, es por eso que se recomiendan tiempos de muestreo de
señales en el orden de los mili segundos.
VII. CONCLUSION
Los controladores digitales han tenido un gran auge en la
denominada segunda revolución industrial, esto gracias a su
gran versatilidad y sus ventajas tantos económicas como en el
ahorro de espacio. Es bien sabido que durante las últimas
décadas el control PID ha sido sumamente importante en el
desarrollo del control automático, este es el esquema de
control más utilizado actualmente. Puede no ser el control más
óptimo existente, pero es seguro que este tipo de control es de
los más versátiles.
El desarrollo de esta actividad conllevo la utilización de
los conocimientos adquiridos en el curso de Control Digital,
como la discretización de sistemas, la utilización de software
para calcular funciones de transferencia, interpretación de
gráficos, etc. En este documento también se compararon
distintas condiciones de controlador para que el lector sea
capaz de conocer cómo afecta el cambio de constantes de k en
una respuesta de lazo cerrado, dicha respuesta es la cual estará
manipulando la planta que se desea controlar.
Esta investigación sirvió para probar las habilidades de
comprensión y análisis de un sistema de control, más enfocado
a la parte digital en donde las señales son muestreadas, sería
totalmente interesante observar cómo responde el mismo
sistema con las mismas condiciones en tiempo continuo y en
tiempo discreto, pero el alcance de este documento no aborda
dicho tema.
VIII. REFERENCIAS.
[1] Ogata, Katsuhiko, Introduction to discrete time
control systems, Discrete-Time Control Systems.
[2]http://portal.ku.edu.tr/~cbasdogan/Courses/Robotics/project
s/Discrete_PID.pdf
[3] http://telefonia.blog.tartanga.net/shannon-nyquist-fourier-
y-otros/el-teorema-de-shannon/
Carlos E. Rodríguez oriundo de Culiacán
Sinaloa, México, nacido en el año de
1993. Actualmente estudia el grado de
Ingeniería Mecatrónica en el Instituto
Tecnológico de Culiacán con especialidad
en robótica y automatización.
Entre sus trabajos de investigación
destacan “Uso de LabVIEW para
desarrollar un laboratorio virtual para el
curso de vibraciones mecánicas” desarrollado en la
Universidad Politécnica de Sinaloa, “Diseño Mecánico de
robot de Combate”, “Easy Vibrations Analizer” y “Diseño,
Control y Manufactura de Un brazo Robótico tipo SCARA”.
En 2014 participó como ponente en congresos nacionales de
investigación en las ciudades de Bahía de Banderas, Nayarit y
Mazatlán, Sinaloa, México.
Fig. 9. Respuesta de un controlador integral. En azul kp=3, en verde kp=13

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
6

Instituto Tecnológico de Culiacán. Rodríguez Robledo. DPID
Control Digital
7