Diseño
40
Universidad del Magdalena, Narváez Jorge, Diseño de controles Diseño, Modelamiento e Implementación de controles mediante amplificadores operacionales usando SISOTOOL, SIMULINK y PROTEUS Jorge Narváez Cavadía 2008219051 [email protected] Resumen: A continuación se presenta un informe sobre el diseño de controles por el método de LGR (Lugar geométrico de las raíces) utilizando el toolbox “sisotool” de MATLAB. Los controles serán implementados utilizando amplificadores operacionales y se realiza su simulación en PROTEUS y modelación en SIMULINK. El diseño de todos los controles presentados a continuación tiene como objetivo mejorar la respuesta transitoria de una planta, la cual también se modela mediante amplificadores operacionales. Palabras clave: Sisotool, Simulink, LGR, controlador, compensador, Proteus. PROCEDIMIENTO: 1. Definición y moldeamiento de la Planta: La planta que se quiere controlar no es más que un filtro pasa bajos de segundo orden implementado con amplificadores operacionales.
Transcript of Diseño

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Diseño, Modelamiento e Implementación decontroles mediante amplificadores
operacionales usando SISOTOOL, SIMULINK yPROTEUS
Jorge Narváez Cavadía2008219051
Resumen:
A continuación se presenta un informe sobre el diseño de
controles por el método de LGR (Lugar geométrico de las
raíces) utilizando el toolbox “sisotool” de MATLAB. Los controles
serán implementados utilizando amplificadores operacionales y
se realiza su simulación en PROTEUS y modelación en SIMULINK.
El diseño de todos los controles presentados a continuación
tiene como objetivo mejorar la respuesta transitoria de una
planta, la cual también se modela mediante amplificadores
operacionales.
Palabras clave: Sisotool, Simulink, LGR, controlador,
compensador, Proteus.
PROCEDIMIENTO:
1. Definición y moldeamiento de la Planta: La planta que se
quiere controlar no es más que un filtro pasa bajos de
segundo orden implementado con amplificadores operacionales.

OP1P
R13.61k
C226.67nF
C110nF
R31.8k
R23.61k
R10k
OP1P
R10k
OUT
IN
Universidad del Magdalena, Narváez Jorge, Diseño de controles
En la Figura 1.1 se muestra un esquema en PROTEUS de la
planta.
Figura 1.1. Planta.
La función de transferencia de la planta a controlar está
definida a continuación y de ahora en adelante la llamará
G(s).
G (s)= R2 /R11+sC1 (R2+R3+R2R3 /R1 )+s2R2R3C1C2
Para diseñar un controlador con SISOTOOL se debe definir
primero G(s) en MATLAB. El código utilizado para tal fin se
muestra a continuación, donde se utiliza la función tf para
definir a G(s) a partir de su numerador y su denominador.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
% PLANTA.m
% Definicion de G(s)
%
%Definicion de resistencias y condensadores
R1=3.61e3;
R2=3.61e3;
R3=1.8e3;
C1=10e-9;
C2=26.67e-9;
%numerador de G(s)
num= R2/R1;
%denominador de G(s)
den=[R2*R3*C1*C2 C1*(R2+R3+R2*R3/R1) 1];
%se genera la función de transferencia
G=tf(num,den);
%**************************************************
Este script llamado PLANTA.m debe ejecutarse antes de iniciar
con los pasos posteriores, pues estos de basan en él.
Ahora que ya se ha definido G(s) podemos obtener una grafica
de su respuesta transitoria mediante el comando step (G); La
grafica obtenida se muestra en la Figura 1.2.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 1.2. Respuesta transitoria de G(s).
Para modelar G(s) en SIMULINK se crea un subsistema que está
definido por la función de transferencia de G(s) y recibe el
nombre de G. el diagrama del subsistema se muestra en la
Figura 1.3.
Figura 1.3. Modelado de G(s) en simulink.
2. Definición de la arquitectura de control y de los
objetivos del control: se usará una arquitectura de control
lo más simple posible con el fin de simplificar el diseño y
Universidad del Magdalena, Narváez Jorge, Diseño de controles
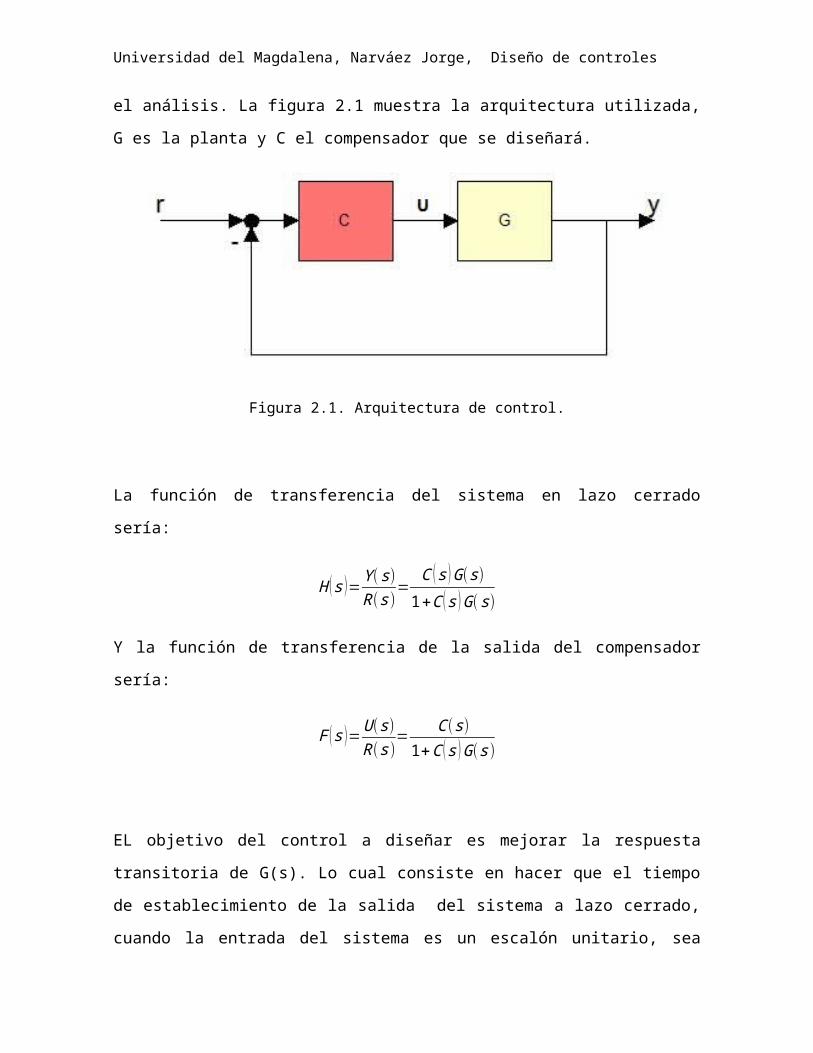
el análisis. La figura 2.1 muestra la arquitectura utilizada,
G es la planta y C el compensador que se diseñará.
Figura 2.1. Arquitectura de control.
La función de transferencia del sistema en lazo cerrado
sería:
H (s )=Y(s)R(s)
=C (s )G(s)
1+C (s )G(s)
Y la función de transferencia de la salida del compensador
sería:
F (s )=U(s)R(s)
=C(s)
1+C (s )G(s)
EL objetivo del control a diseñar es mejorar la respuesta
transitoria de G(s). Lo cual consiste en hacer que el tiempo
de establecimiento de la salida del sistema a lazo cerrado,
cuando la entrada del sistema es un escalón unitario, sea

Universidad del Magdalena, Narváez Jorge, Diseño de controles
menor que el tiempo de establecimiento de la salida del
sistema a lazo abierto, pero sin generar un sobre pico
demasiado alto.
Con el fin de saber con qué tipo de control se obtiene una
mejor respuesta, se diseñaran cuatro tipos de control
diferentes para comparar los resultados obtenidos con cada
uno. Los tipos de control a diseñar son: Control P, control
PD, Control PI y Control PID.
3. Procedimiento general para el diseño de los compensadores
utilizando sisotool: sisotool es una poderosa herramienta de
MATLAB que facilita en gran medida el diseño de controles. En
sisotool se trabaja de forma grafica usando el método LGR
(lugar geométrico de las raíces), y puede mostrar en tiempo
real las variaciones producidas en la respuesta del sistema
generadas por los cambio que el usuario realice en el LGR.
Para ejecutar sisotool basta con llamarlo desde la línea de
comandos de MATLAB escribiendo “sisotool”.
AL abrir sisotool se muestran dos ventanas, “Control and
Estimation Tool Manager” y “SISO Desing for SISO Desing
Task”. En “Control and Estimation Tool Manager” se escoge la
arquitectura de control a utilizar. En la pestaña
“Architecture”, al dar clic en el botón “Control Achitecture”
se despliega una ventana que muestra una lista de las
arquitecturas disponibles. Pero ninguna coincide con la

Universidad del Magdalena, Narváez Jorge, Diseño de controles
arquitectura que se desea utilizar (figura 2.1). Sin embargo
También se puede usar la arquitectura que se encuentra al
principio de la lista y que se muestra en la figura 3.1.
Figura 3.1. Ventana desplegada por el botón “Control Achitecture”.
Haciendo F=1 y H=1 esta arquitectura se reduce a la que se
desea utilizar.
Después de seleccionar la arquitectura, se importa la función
de transferencia de G(s) desde la ventana “SISO Desing for
SISO Desing Task”, con la opción “importar” del menú “File”.
AL dar clic en “importar” Se despliega una ventana (Figura
3.2) en donde se muestra una lista de los sistemas de la
arquitectura seleccionada: G, H, C y F que por defecto tienen
el valor de “1”, el cual es el valor que deben tener “F” y
“H”. Se selecciona “G” y se presiona “Browser” y aparece otra
ventana (Figura 3.3) que muestra una lista de las funciones
de transferencia que se encuentran en el WorkSpace y en donde
debe estar la función “G” definida en el script “PLANTA.m”

Universidad del Magdalena, Narváez Jorge, Diseño de controles
que se describió anteriormente. Entonces se selecciona “G” se
presiona “import”, se cierra esta ventana y por último se
presiona “OK” en la ventana anterior.
Para visualizar la grafica de la respuesta del sistema en
lazo cerrado se selecciona la opción “Response to step
command” del menú “Analysis”. Con esto se abre la ventana que
se muestra en la Figura 3.4.
Figura 3.2. Ventana de Import.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
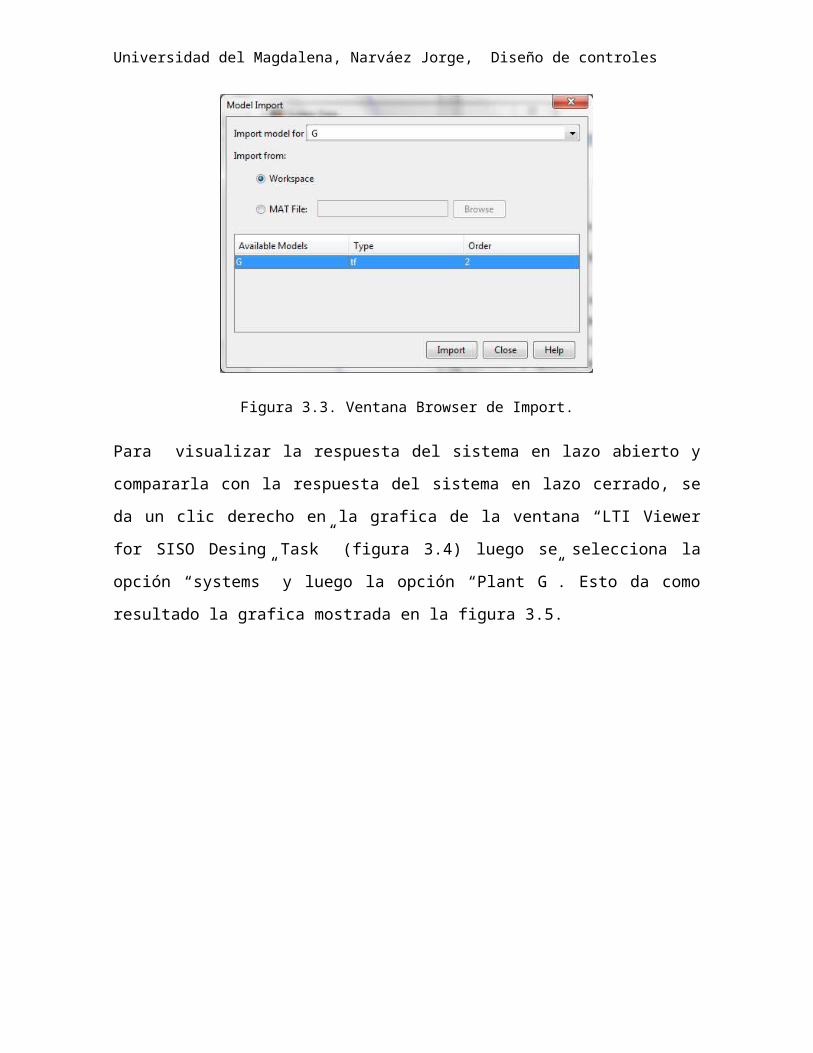
Figura 3.3. Ventana Browser de Import.
Para visualizar la respuesta del sistema en lazo abierto y
compararla con la respuesta del sistema en lazo cerrado, se
da un clic derecho en la grafica de la ventana “LTI Viewer
for SISO Desing Task” (figura 3.4) luego se selecciona la
opción “systems” y luego la opción “Plant G”. Esto da como
resultado la grafica mostrada en la figura 3.5.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
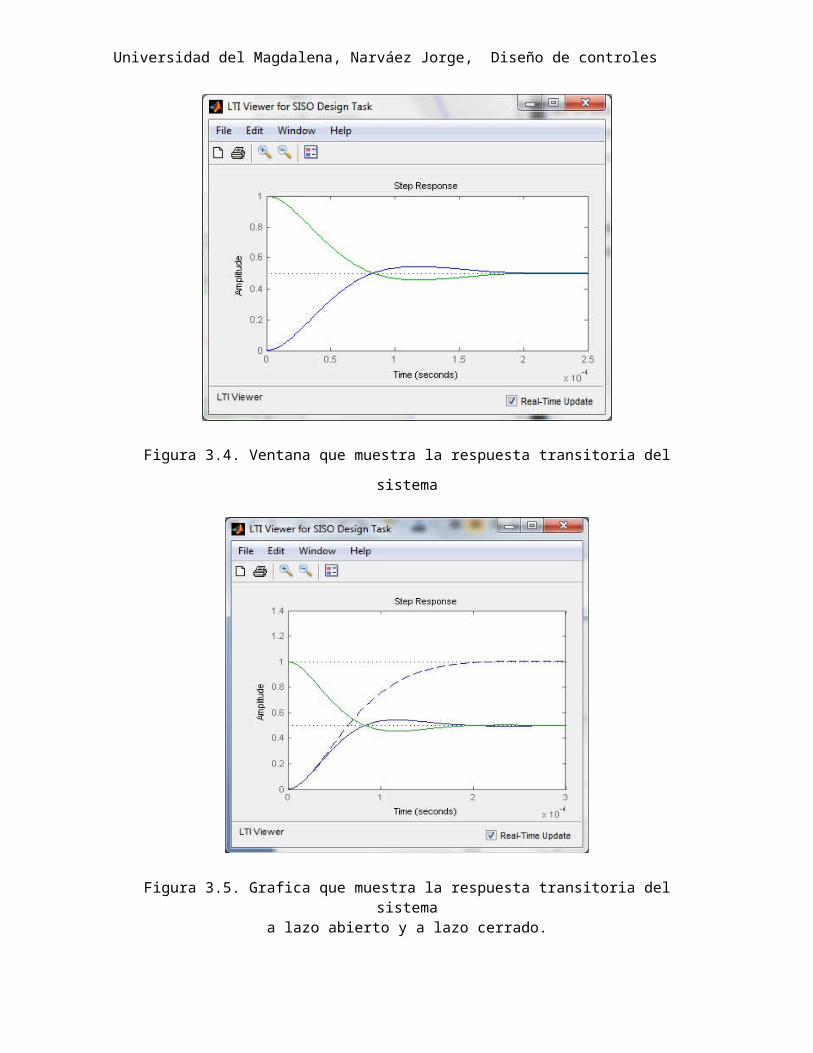
Figura 3.4. Ventana que muestra la respuesta transitoria del
sistema
Figura 3.5. Grafica que muestra la respuesta transitoria delsistema
a lazo abierto y a lazo cerrado.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
En esta ventana (Figura 3.5) ahora se muestran tres graficas.
La grafica de color azul continua es la respuesta
transitoria del sistema a lazo cerrado, la grafica de color
azul discontinua es la respuesta transitoria del sistema a
lazo abierto y la grafica de color verde es la salida del
compensador. Si La opción “Real-Time Update” en la parte
inferior derecha de la ventana (Figura 3.5) está activada
entonces la grafica de la respuesta se actualiza
automáticamente cuando se cambia algún parámetro del LGR.
La ventana de trabajo, en donde se realiza el diseño del
compensador es la ventana “SISO Desing for SISO Desing Task”
que es una de las ventanas que de abren al ejecutar sisotool.
Esta ventana se muestra en la Figura 3.6. La grafica en la
parte superior izquierda en la grafica del LGR y es la que se
utilizará para el diseño. Después de importar la función de
transferencia “G” la ventana de trabajo se ve tal cual está
en la figura 3.6.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 3.6. Ventana de trabajo de sisotool.
El proceso de diseño del compensador mediante el método LGR
consiste en agregar polos o ceros al compensador para
modificar el LGR de tal forma que pase por los puntos
determinados en donde deben estar los polos dominantes para
obtener la respuesta deseada. Después de que esto de
consigue, se arrastran los polos hasta estos puntos, y

Universidad del Magdalena, Narváez Jorge, Diseño de controles
entonces la grafica de la respuesta del sistema debe
coincidir con la respuesta deseada. Pero puede que esto no
ocurra, y seguramente se debe a que los polos ubicados en
estos puntos no son los dominantes. Para determinar en qué
puntos se deben ubicar los polos dominantes para obtener la
respuesta deseada se deben ingresar los requerimientos de
diseño. Para este caso los requerimientos de diseño son dos,
el tiempo de establecimiento y el sobrepaso. Para agregar un
requerimiento de diseño se da clic derecho se escoge la
opción “Desing Requirements” y luego la opción “New”.
EL tiempo de establecimiento o “Settling time” se escoge de
manera que sea menor que el tiempo de establecimiento del
sistema a lazo abierto. Pues lo que se quiere es mejorar la
respuesta transitoria del sistema. Pero no puede ser
exageradamente pequeño porque será imposible de cumplir. EL
porcentaje de sobrepaso o “Percent overshoot” determina en
que porcentaje el valor pico de la respuesta del sistema
sobrepasa el valor de establecimiento o valor final del
sistema ante una entrada escalón. Para algunos tipos de
control, entre más rápida se hace la respuesta del sistema
mas es el porcentaje de sobrepaso, y Un valor muy grande de
sobrepaso no es deseable.
Ejemplo: Al diseño se le agregaron los siguientes
requerimientos:
Universidad del Magdalena, Narváez Jorge, Diseño de controles
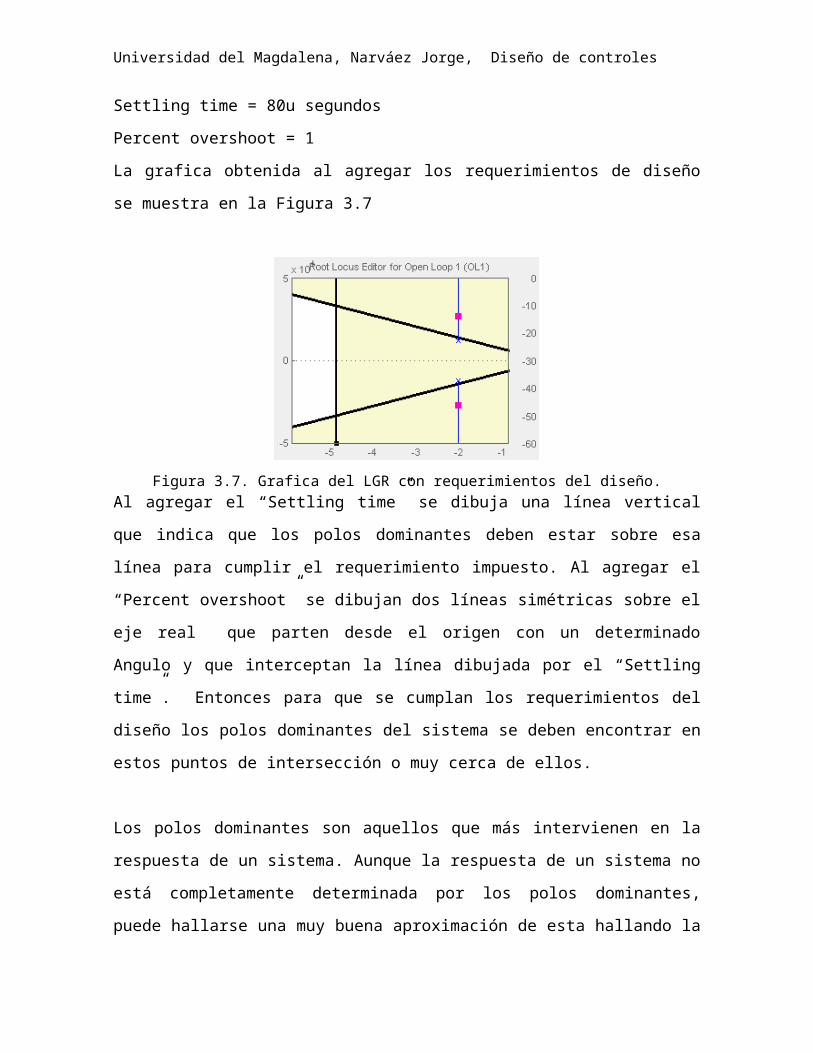
Settling time = 80u segundos
Percent overshoot = 1
La grafica obtenida al agregar los requerimientos de diseño
se muestra en la Figura 3.7
Figura 3.7. Grafica del LGR con requerimientos del diseño.Al agregar el “Settling time” se dibuja una línea vertical
que indica que los polos dominantes deben estar sobre esa
línea para cumplir el requerimiento impuesto. Al agregar el
“Percent overshoot” se dibujan dos líneas simétricas sobre el
eje real que parten desde el origen con un determinado
Angulo y que interceptan la línea dibujada por el “Settling
time”. Entonces para que se cumplan los requerimientos del
diseño los polos dominantes del sistema se deben encontrar en
estos puntos de intersección o muy cerca de ellos.
Los polos dominantes son aquellos que más intervienen en la
respuesta de un sistema. Aunque la respuesta de un sistema no
está completamente determinada por los polos dominantes,
puede hallarse una muy buena aproximación de esta hallando la
Universidad del Magdalena, Narváez Jorge, Diseño de controles
respuesta solo a partir de la contribución de estos polos.
Como regla general se toman como polos dominantes aquellos
que están más cerca al origen, pues son los que más influyen
en la respuesta.
Para agregar polos o ceros, se seleccionan alguna de las
opciones de la parte superior izquierda de la ventana de
trabajo donde se encuentran X,O, XX, OO que corresponden
respectivamente a: adicionar un polo en el eje real,
adicionar un cero en el eje real, adicionar un par de polos
complejos conjugados y adicionar un par de ceros complejos
conjugados. Todo el proceso de diseño se realiza
gráficamente, agregando polos o ceros y moviendo la posición
de los polos sobre el lugar geométrico de las raíces. Por lo
que es imprescindible tener conocimiento acerca de cómo se
dibuja el LGR porque esto brinda la capacidad de predecir los
cambios producidos en el LGR por la adición de polos o ceros.
Cuando finalmente se consigue un diseño satisfactorio se
puede ver la función de transferencia del compensador “C” con
la opción “Edit Conpensador” del menú “Designs”.
4. Diseño de controles P, PD, PI y PID con sisotool:
Universidad del Magdalena, Narváez Jorge, Diseño de controles
4.1. Control P: Para el control P el compensador “C(s)” es
solo una constante, por lo tanto no hay que agregar ningún
polo ni cero. Es por esto el tipo de control más sencillo de
implementar. Entonces “C(s)” puede escribirse de la forma:
C (s)=KpPara determinar la respuesta del sistema solo hay que variar
el valor de la constante Kp hasta encontrar una respuesta
satisfactoria. Aunque es bastante probable que no se
encuentre.
Variar las constante Kp equivale a mover los polos sobre el
LGR, moviendo los polos y observando la respuesta del sistema
a laso cerrado en la grafica que proporciona sisotool.
Después de realizar varias pruebas con la posición de los
polos se determinó que la respuesta del control P que más se
ajusta a los objetivos propuestos es la que se muestra en la
figura 4.1 ya que es una respuesta más rápida que la
respuesta del sistema a laso abierto, no tiene un sobrepaso
demasiado alto y no introduce un error de estado estacionario
muy grande.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 4.1. Grafica de la respuesta obtenida con el control P(Azul continuo) y de la respuesta a lazo abierto (Azul
discontinuo).
Esta respuesta (Figura 3.8) se obtiene con el compensador:
C=14.48.
4.2. Control PD: la función de transferencia del compensador
de un control PD puede escribirse como C(s)=Kp(1+Tds) y se
puede obtener solo agregando un cero. EL LGR de este control
para la PLANTA en cuestión se muestra en la figura 4.2 y se
obtuvo agregando un cero y moviéndolo hasta conseguir que el
LGR pasara por los puntos señalados por los requerimientos
del diseño.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
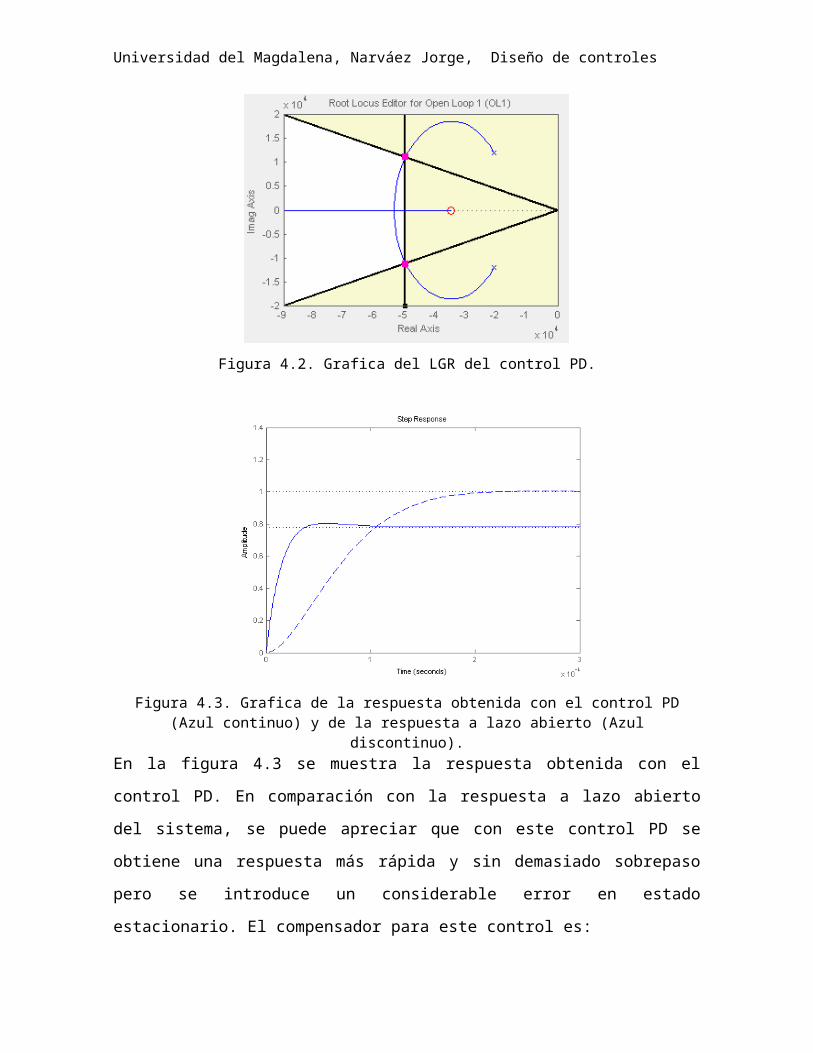
Figura 4.2. Grafica del LGR del control PD.
Figura 4.3. Grafica de la respuesta obtenida con el control PD(Azul continuo) y de la respuesta a lazo abierto (Azul
discontinuo).En la figura 4.3 se muestra la respuesta obtenida con el
control PD. En comparación con la respuesta a lazo abierto
del sistema, se puede apreciar que con este control PD se
obtiene una respuesta más rápida y sin demasiado sobrepaso
pero se introduce un considerable error en estado
estacionario. El compensador para este control es:

Universidad del Magdalena, Narváez Jorge, Diseño de controles
C (s)=3.5523 (1+2.9∗10−5s)
Y la función de transferencia de la salida del compensador
seria:
F (s )=U(s)R(s)
=C(s)
1+C (s )G(s)
Como G(s) es una función con dos polos y ningún cero, la
función de transferencia de la salida del compensador tendrá
un mayor número de ceros que de polos. Entonces si se desea
visualizar la grafica de la salida del compensador en
sisotool no se podrá hacer, porque MATLAB solo puede generar
graficas de las respuestas de sistemas con número de polos
mayor o igual que el número de ceros. 4.3. Control PI: La función de transferencia del compensador
de un control PI se escribe como C (s)=Kp(1+1
Tis ) y puede
reescribirse como C (s)=K (s+a )s . Es decir que para construir el
control PI se debe agregar un cero en el eje real y un polo
en el origen. EL LGR del control PI para la PLANTA en
cuestión se muestra en la figura 4.4 y la respuesta obtenida
en la figura 4.5. Este control PI no mejora la respuesta
considerablemente en comparación con el control P pero al

Universidad del Magdalena, Narváez Jorge, Diseño de controles
contrario de los controles P y PD este no genera error en
estado estacionario. Inclusive es posible corregir el error
de estado estacionario del sistema a lazo abierto si es que
lo hubiere.
Figura 4.4. Grafica del LGR del control PI.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 4.5. Grafica de la respuesta obtenida con el control PI(Azul continuo) y de la respuesta a lazo abierto (Azul
discontinuo).
El compensador para este control es:
C (s)=31536 (1+2.5∗10−5s)s
4.4. Control PID: La función de transferencia del compensador
de un control PID se escribe como C (s)=Kp(1+1
Tis+Tds) y puede
reescribirse como:
C (s)=K (s+a ) (s+b)s
O como:
C (s)=K (s2+as+b )s
Es decir que hay dos formas de realizar el control PID, la
primera es adicionando dos ceros en el eje real y un polo en
el origen y la segunda es adicionando un par de ceros
complejos conjugados y un polo en el origen.
PID Forma 1:

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Adicionando dos ceros en el eje real y un polo en el origen
se obtuvo un control PID con el LGR mostrado en la figura
4.6, obteniendo la respuesta que se muestra en la figura 4.7.
Para este caso el polo dominante es el que se agregó en el
origen y que se desplaza sobre el eje real, en consecuencia
la respuesta no se puede determinar agregando los
requerimientos del diseño y haciendo coincidir los dos polos
conjugados que se muestran en el LGR (figura 4.6) con los
puntos indicados por las intersecciones de las líneas
trazadas por los requerimientos del diseño. Por lo que no se
añadieron criterios de diseño y se procedió a elegir el
compensador visualmente según las graficas de la respuesta
del sistema que proporciona sisotool.
Figura 4.6. Grafica del LGR del control PID 1.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 4.7. Grafica de la respuesta obtenida con el control PID 1(Azul continuo) y de la respuesta a lazo abierto (Azul
discontinuo).
El compensador para este controlador PID es:
C (s)=1.1307∗105 (1+5.1∗10−5s) (1+2.8∗10−5s)s
PID Forma 2: Adicionando un par de ceros complejos conjugados
y un polo en el origen se obtuvo un control PID con el LGR
mostrado en la figura 4.8, obteniendo la respuesta que se
muestra en la figura 4.9. Para este caso si se utilizaron las
graficas de los requerimientos de diseño.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
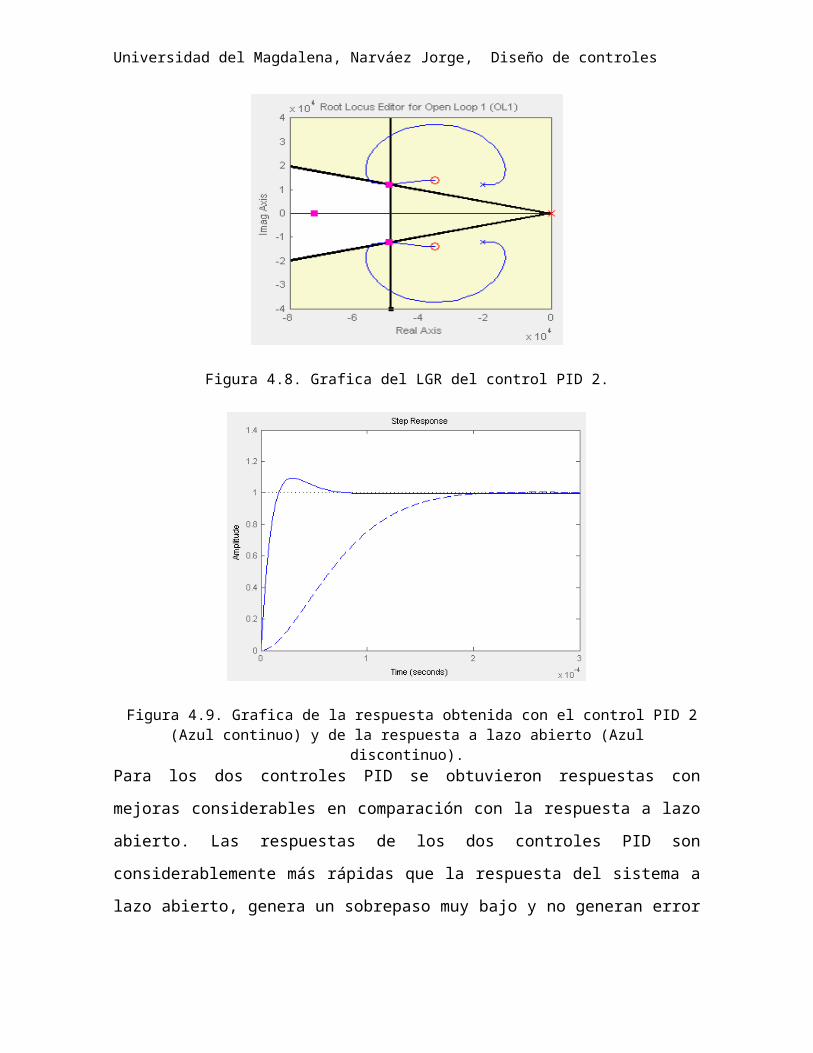
Figura 4.8. Grafica del LGR del control PID 2.
Figura 4.9. Grafica de la respuesta obtenida con el control PID 2(Azul continuo) y de la respuesta a lazo abierto (Azul
discontinuo).Para los dos controles PID se obtuvieron respuestas con
mejoras considerables en comparación con la respuesta a lazo
abierto. Las respuestas de los dos controles PID son
considerablemente más rápidas que la respuesta del sistema a
lazo abierto, genera un sobrepaso muy bajo y no generan error
Universidad del Magdalena, Narváez Jorge, Diseño de controles
de estado estacionario. En definitiva este control es mejor
que los otros 3.
El compensador para este controlador PID es:
C (s)=3.2757∗105(1+4.9∗10−5s+(2.6∗10−5s)2)
s
AL igual que para el control PD, con los controles PID para
la planta que se está controlando, la función de
transferencia de la salida del compensador tendrá un mayor
número de ceros que de polos y no se podrá visualizar una
grafica de la salida del compensador con sisotool.
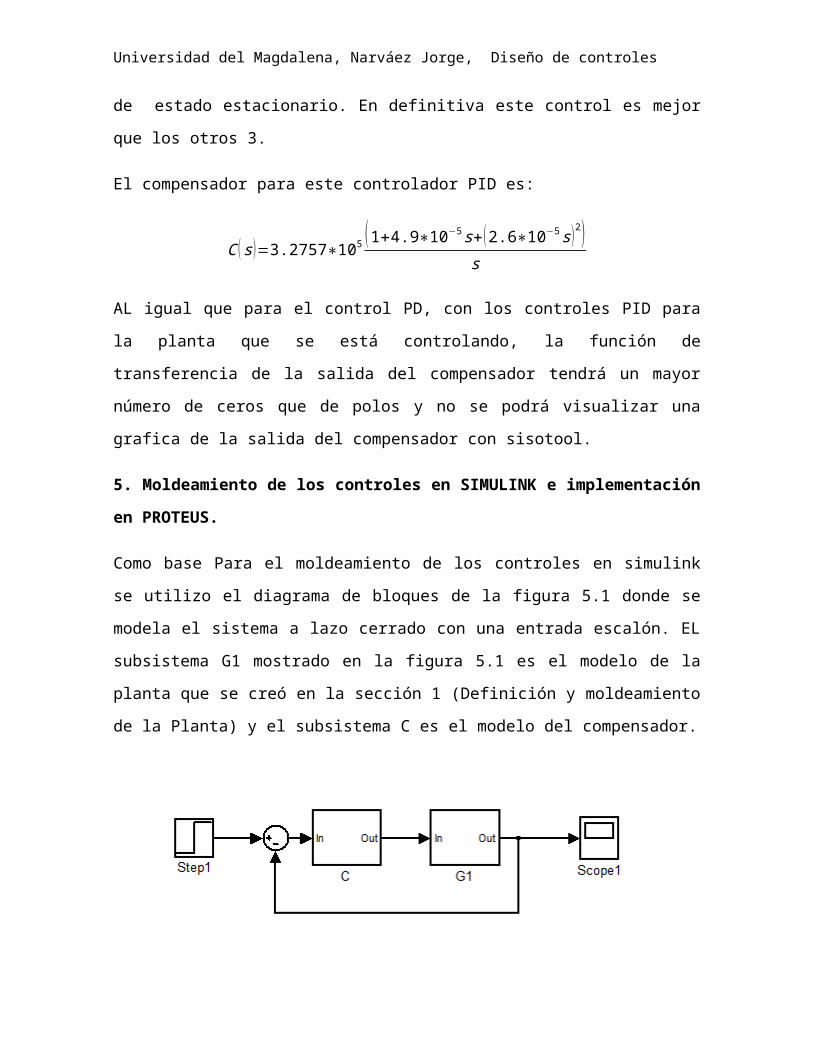
5. Moldeamiento de los controles en SIMULINK e implementación
en PROTEUS.
Como base Para el moldeamiento de los controles en simulink
se utilizo el diagrama de bloques de la figura 5.1 donde se
modela el sistema a lazo cerrado con una entrada escalón. EL
subsistema G1 mostrado en la figura 5.1 es el modelo de la
planta que se creó en la sección 1 (Definición y moldeamiento
de la Planta) y el subsistema C es el modelo del compensador.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.1. Base para el modelamiento de los controles.
Para tener la posibilidad de comparar las respuestas del
sistema a lazo cerrado y a lazo abierto y además poder
observar la señal a la salida del compensador se modifico el
diagrama de bloques de la figura 5.1 dando como resultado el
diagrama mostrado en la figura 5.2.
Figura 5.2. Diagrama utilizado para el modelamiento de los
controles.
La función de transferencia del compensador de un control PID
se escribe como C (s)=Kp(1+1
Tis+Tds) . Esta función encierra
las funciones de los otros tres filtros tratados.
Para anular la acción integral de debe hacer la constante Ti
igual a infinito y para anular la acción derivativa se debe
hacer la constante Td igual a cero. Así para un control “P”

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Ti=inf y Td =0, para el control “PD” Ti=inf y para el
control “PI” Td=0.
Por lo tanto se pueden modelar los cuatro tipos de controles
vistos, P, PD, PI y PID con el mismo modelo de compensador.
El diagrama del modelo utilizado para el compensador se
muestra en la figura 5.3 y es simplemente un Control PID
definido por la constantes Kp, Ti y Td y cuya función de
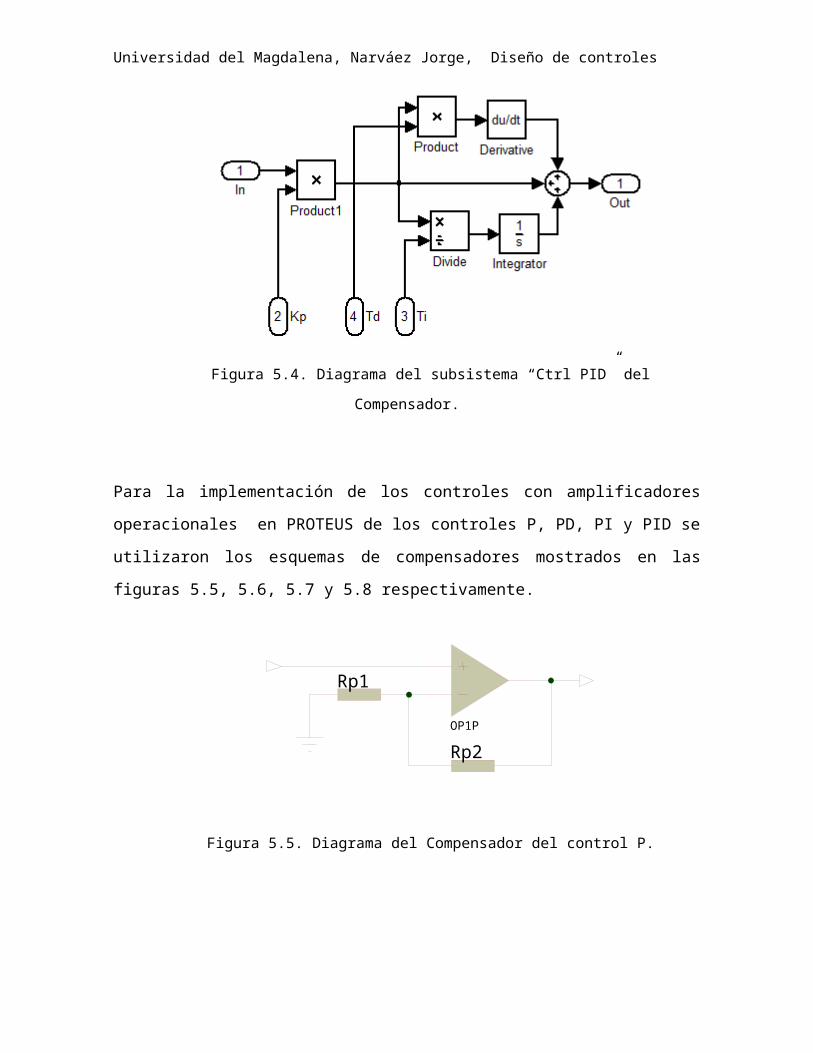
transferencia es la mencionada anteriormente. El modelo del
subsistema “Ctrl PID” que se muestra en la figura 5.3 puede
verse en la figura 5.4 y es simplemente la suma de las tres
acciones, proporcional, integral y derivativa.
Figura 5.3. Diagrama del Compensador.
OP1P
Rp1
Rp2
Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.4. Diagrama del subsistema “Ctrl PID” del
Compensador.
Para la implementación de los controles con amplificadores
operacionales en PROTEUS de los controles P, PD, PI y PID se
utilizaron los esquemas de compensadores mostrados en las
figuras 5.5, 5.6, 5.7 y 5.8 respectivamente.
Figura 5.5. Diagrama del Compensador del control P.

OP1P
CD
RD
R1
OP1P
R2
R1
OP1P
R
R
OP1P
RI R1
OP1P
R2
R1
OP1P
R
R
Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.6. Diagrama del Compensador del control PD.
Figura 5.7. Diagrama del Compensador del control PI.

OP1P
CD
RD
R1
OP1P
R2
R1
OP1P
R
ROP1P
R1
CI
RI
R
RR
R
OP1P
BA
Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.8. Diagrama del Compensador del control PID.
El circuito que realiza la funcion de restar la entrada y la
salida para generar la realimentación no es más que un
amplificador diferencial con ganancia unitaria. Este se
muestra en la figura 5.9.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.9. Diagrama del Circuito de resta.
Un ejemplo de cómo queda el esquema completo de un control
con amplificadores operacionales se muestra en la figura 5.10
en donde se encuentra una imagen del control PID completo. En
la imagen se puede ver la planta, el compensador y el lazo de
realimentación.
Figura 5.10. Diagrama de un control PID.
5.1. Control P: En la sección 4.1 se encontró que el
compensador para el control P debe ser C=14.18. Para modelar
este control en simulink hacemos Kp=14.18, Ti=inf y Td=0. Y
se obtiene la grafica de la figura 5.11.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.11. Respuesta del control P en simulink.
La grafica color purpura de la imagen 5.11 es la respuesta
del sistema en lazo cerrado, la grafica de color azul es la
respuesta del sistema a laso abierto. La grafica de color
amarillo de la parte superior es la entrada del sistema y la
grafica de color amarillo inferior es la salida del
compensador. Es importante que antes de ejecutar SIMULINK se
ejecute el script PLANTA.m que se mostró en la sección 1 y
que define los valores de las resistencias y condensadores.
La funcion de transferencia del compensador P con
amplificadores operacionales es:
C (S)=1+Rp2Rp1
=14.18

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Escogiendo Rp1=5,1K tenemos que Rp2= 68.748k. Las graficas
generadas por Proteus se muestran en la figura 5.12 y
coinciden con las graficas generadas por simulink y sisotool.
Figura 5.12. Respuesta del control P en Proteus.
5.2. Control PD: En la sección 4.2 se encontró que el
compensador para el control PD debe ser
C(s)=3.5523(1+2.9∗10−5s). Entonces en simulink hacemos:
Kp=3.5523, Ti=inf, y Td=2.9*10 -5. LA respuesta obtenida se
muestra en la figura 5.13.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.13. Respuesta del control PD en simulink.
La función de transferencia del compensador PD con
amplificadores operacionales es:
C (S)=R2R1 (1+RdCds )=3.5523(1+2.9∗10−5s)
SI R1=10K entonces R2 será de 35.523K, si Cd=1nF entonces Rd
será de 29K. La respuesta obtenida se muestra en la figura
5.12 y coincide con la respuesta obtenida en simulink y
sisotool. Aun cuando los amplificadores operacionales se
saturan, tal como se muestra en la grafica inferior de la
figura 5.14. Que corresponde a la salida del compensador.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.14. Respuesta del control PD en Proteus.
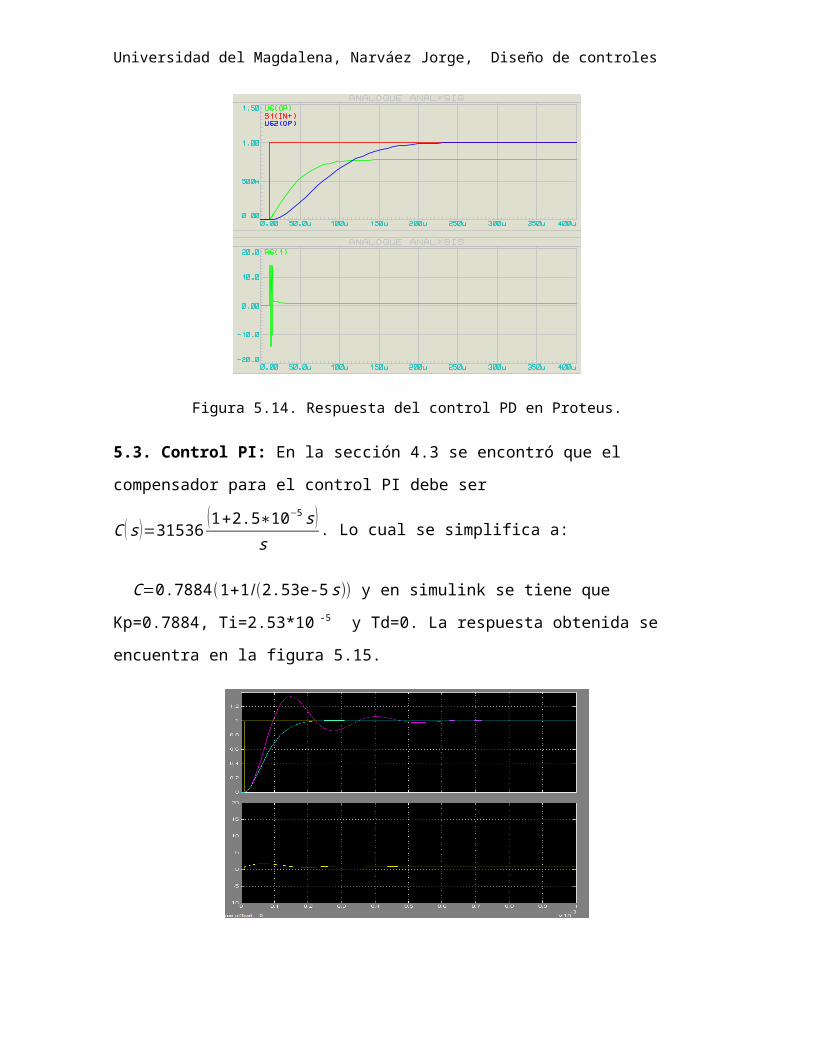
5.3. Control PI: En la sección 4.3 se encontró que el
compensador para el control PI debe ser
C (s)=31536 (1+2.5∗10−5s)s
. Lo cual se simplifica a:
C=0.7884(1+1 /(2.53e-5s)) y en simulink se tiene que
Kp=0.7884, Ti=2.53*10 -5 y Td=0. La respuesta obtenida se
encuentra en la figura 5.15.

Universidad del Magdalena, Narváez Jorge, Diseño de controles
Figura 5.15. Respuesta del control PI en simulink.
En Proteus se hace RiCi=Ti. Se calculan las resistencias y
condensadores y se obtiene la grafica de la respuesta del
sistema que se muestra en la figura 5.16.
Figura 5.16. Respuesta del control PI en proteus.
La respuesta de Proteus coincide con la de simulink y
sisotool para el control PI.
5.4 Control PID: Al simplificar las ecuaciones de los
compensadores de los dos controles PID se obtiene la funcion

Universidad del Magdalena, Narváez Jorge, Diseño de controles
C(s)=8.9325(1+1 /(7.9e-5s)+1.8076e-5s) Para el control PID 1
y la funcion C(s)=16.051(1+1 /(4.9e-5s)+1.3796e-5s) para el
control PID 2.
Las graficas de las respuestas de los controles PID 1 y PID 2
obtenidas con simulink se muestran en las figuras 5.17 y
5.18 respectivamente.
Figura 5.17. Respuesta del control PID 1 en Simulink.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
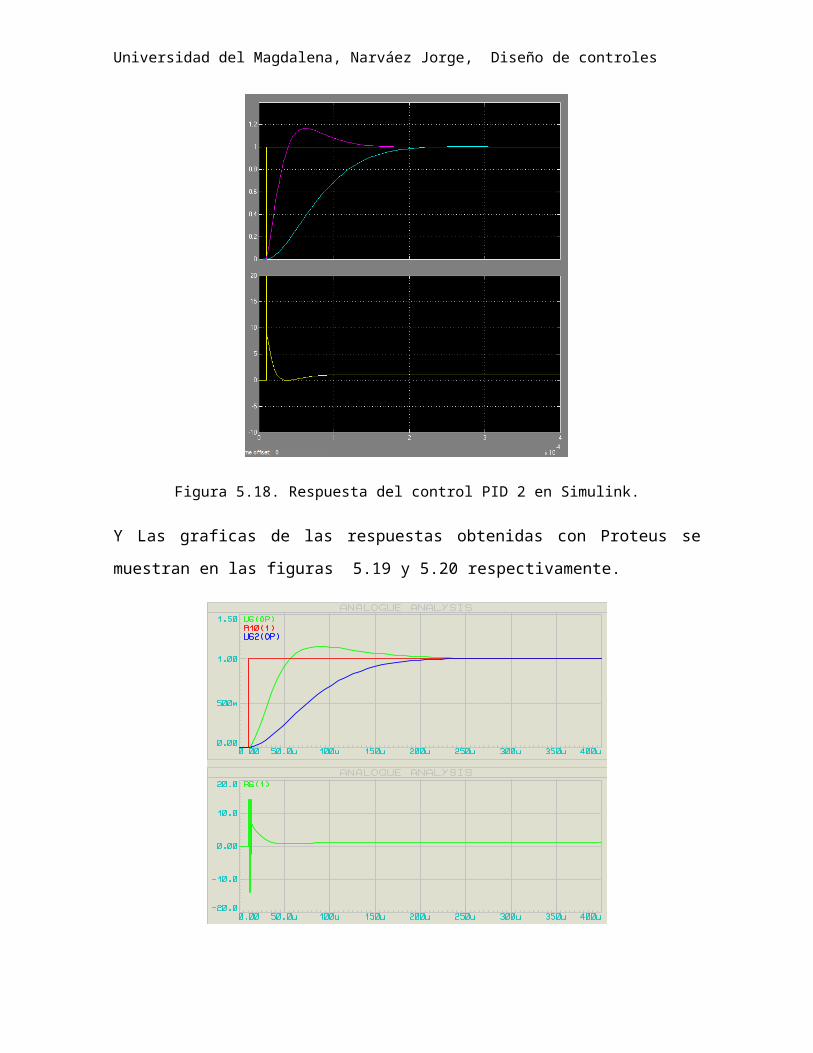
Figura 5.18. Respuesta del control PID 2 en Simulink.
Y Las graficas de las respuestas obtenidas con Proteus se
muestran en las figuras 5.19 y 5.20 respectivamente.
Universidad del Magdalena, Narváez Jorge, Diseño de controles
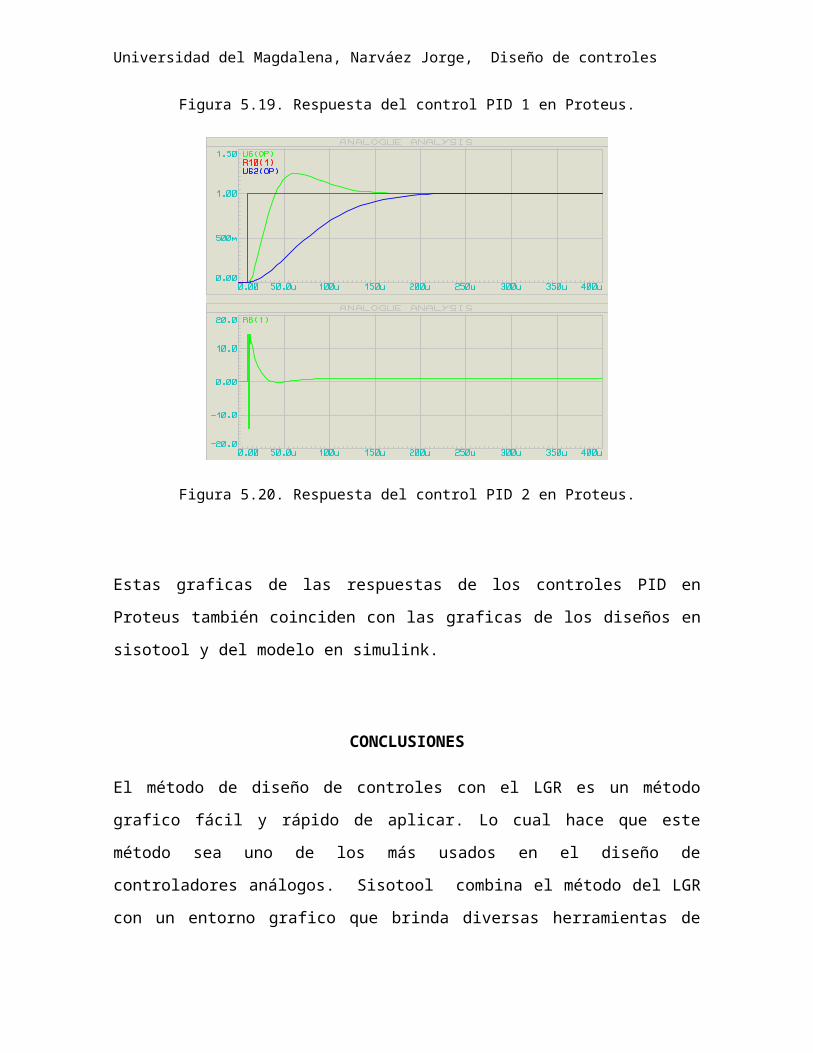
Figura 5.19. Respuesta del control PID 1 en Proteus.
Figura 5.20. Respuesta del control PID 2 en Proteus.
Estas graficas de las respuestas de los controles PID en
Proteus también coinciden con las graficas de los diseños en
sisotool y del modelo en simulink.
CONCLUSIONES
El método de diseño de controles con el LGR es un método
grafico fácil y rápido de aplicar. Lo cual hace que este
método sea uno de los más usados en el diseño de
controladores análogos. Sisotool combina el método del LGR
con un entorno grafico que brinda diversas herramientas de

Universidad del Magdalena, Narváez Jorge, Diseño de controles
diseño por lo que se convierte en una poderosa herramienta
que facilita en gran medida el diseño de diferentes tipos de
controles en diversas arquitecturas. En cuanto a la
implementación de los controles diseñados mediante
amplificadores operacionales. La respuesta final de estos
controles dependerá en gran medida del rendimiento de los
amplificadores operacionales.