Development of an embedded vehicle safety system for frontal crash detection
10
PLEASE SCROLL DOWN FOR ARTICLE This article was downloaded by: [Hannan, M. A.] On: 10 September 2008 Access details: Access Details: [subscription number 902343191] Publisher Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK International Journal of Crashworthiness Publication details, including instructions for authors and subscription information: http://www.informaworld.com/smpp/title~content=t778188386 Development of an embedded vehicle safety system for frontal crash detection M. A. Hannan a ; A. Hussain a ; A. Mohamed a ; S. A. Samad a a Department of Electrical, Electronic and Systems Engineering, National University of Malaysia, Selangor, Malaysia Online Publication Date: 01 October 2008 To cite this Article Hannan, M. A., Hussain, A., Mohamed, A. and Samad, S. A.(2008)'Development of an embedded vehicle safety system for frontal crash detection',International Journal of Crashworthiness,13:5,579 — 587 To link to this Article: DOI: 10.1080/13588260802316714 URL: http://dx.doi.org/10.1080/13588260802316714 Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf This article may be used for research, teaching and private study purposes. Any substantial or systematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expressly forbidden. The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
-
Upload
nuardiblogspot -
Category
Documents
-
view
0 -
download
0
Transcript of Development of an embedded vehicle safety system for frontal crash detection

PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [Hannan, M. A.]On: 10 September 2008Access details: Access Details: [subscription number 902343191]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of CrashworthinessPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t778188386
Development of an embedded vehicle safety system for frontal crash detectionM. A. Hannan a; A. Hussain a; A. Mohamed a; S. A. Samad a
a Department of Electrical, Electronic and Systems Engineering, National University of Malaysia, Selangor,Malaysia
Online Publication Date: 01 October 2008
To cite this Article Hannan, M. A., Hussain, A., Mohamed, A. and Samad, S. A.(2008)'Development of an embedded vehicle safetysystem for frontal crash detection',International Journal of Crashworthiness,13:5,579 — 587
To link to this Article: DOI: 10.1080/13588260802316714
URL: http://dx.doi.org/10.1080/13588260802316714
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

International Journal of CrashworthinessVol. 13, No. 5, October 2008, 579–587
Development of an embedded vehicle safety system for frontal crash detection
M.A. Hannan∗, A. Hussain, A. Mohamed and S.A. Samad
Department of Electrical, Electronic and Systems Engineering, National University of Malaysia, Selangor, Malaysia
(Received 16 April 2008; final version received 23 July 2008)
Automobiles crashes are becoming a source of increasing social concern, which instigates government bodies to imposestringent requirements on vehicle safety. The development of the embedded intelligent safety system (ISS) platform is adifficult task and involves many factors such as generation and interconnection of the hardware that support the executionof software. This paper deals with high-performance computing to detect and monitor frontal vehicle crash using a sensingalgorithm which has been embedded in the proposed vehicle safety system for frontal collision. It also describes the mech-anism for generating the frontal collisions data using a pneumatic device. The crash characteristics of precision collision,detection algorithm and computational model enhances the sensing algorithm that is embedded for real-time application.The embedded structure is developed based on a hardware platform, a system interface and a software driver. In this work,the artificial crash data generated using the pneumatic device are used for three main purposes. First, it is used to validatethe effectiveness of the proposed sensing algorithm. Secondly, we use it to evaluate the performance of the ISS for detectionand lastly, we use the data to monitor the effectiveness of the developed embedded safety in an automotive application.
Keywords: vehicle crash detection; sensing algorithm; embedded intelligent safety system
1. IntroductionAutomobile crashes cost billions each year and this does notinclude losses or defects due to fatalities and environmentaleffects [15,27]. For that reason, crash data are being usedto prioritise functional performance objectives such as toprovide collision warning and to extend driver’s awarenessof hazardous driving conditions using head-up display [27].As a result, vehicle safety requirements for crash detectionare gaining significant importance. Vehicle crash detectionis a preventative measure meant for preventing accidentsand collision to minimise human injury when an accidentoccurs [23].
To meet the driver, passenger and/or vehicle safetyrequirements, several technologies are now available toreduce accident statistics by reducing the occurrence ofcrashes. These vehicle safety systems are designed to helpdrivers avoid vehicle crashes by detecting impending col-lisions or unsafe driving conditions, providing warning tothe driver, improving his/her ability to control the car andthus preventing the accident [27]. However, most of thesetechnologies are very costly and low in precision in termsof facilitating precise control over the vehicle.
Vehicle crash-avoidance/warning systems have resultedin significant improvement in road traffic safety. However,these vehicle crash-warning systems are greatly influencedby behavioural reactions. To improve the vehicle crash-warning system, Fujii et al. [8] introduced an embedded
∗Corresponding author. Email: [email protected]
design logic framework to infer dangerous states that con-siders human behaviour. However, the criteria for trigger-ing a warning will always represent some trade-off betweenbroader protection and the frequency of undesired warningbased on information about the crash sensor [1].
In the warning system, upon receiving the triggeringsignal from the vehicle crash sensors the sensing algorithmmust determine and evaluate the level of crash severityprior to the occurrence of any damages [4]. A number ofalgorithms involving various system implementation ap-proaches for sensing crash data and vehicle parameters [5]have used Kalman’s algorithm to establish an optimal trig-gering condition. However, thus far the studies on crash-sensing systems are neither complete nor well proven [17].
Usually, vehicle crashes occur at various speeds andmodes. The data collected during the numerous crash testscannot fully characterise the crash performance of the ve-hicle. Therefore, in order to further improve the robustnessof a detection procedure, more crash data sets are neededin system development and validation [14]. Collision andaccident avoidance systems (CAAS) are important compo-nents of the advanced vehicle automatic control systems toenhance safety and increase highway throughput [2]. How-ever, due to several automation requirements the CAAScan decrease driver situation awareness, comfort and evensafety [13]. Therefore, for improvement, the design solu-tion must take into account not only the capabilities of
ISSN: 1358-8265Copyright C© 2008 Taylor & FrancisDOI: 10.1080/13588260802316714http://www.informaworld.com
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

580 M. A. Hannan et al.
the automation system but also the abilities of the driver.Accordingly, Goodrich and co-workers introduced human-centred design principles that invoke automation actionsprojecting safety enhancement to justify the operator’s au-tonomy [6,10,11,18].
Today, vehicle crashworthiness evaluation is the primesafety guideline for various crash impacts from the view-point of protecting human life as well as the environment.However, in terms of cost, using actual models is im-practical and costly for the crashworthiness test. Accord-ingly, Yang et al. [29] introduced the finite element methodand numerical calculation technique to evaluate, optimiseand assess the robustness of crashworthiness. In addition,Hesseling et al. [12] designed a numerical simulation sys-tem for simulating crashes to assess the safety performanceof the vehicle crashworthiness.
Crash analysis can be very helpful to road vehicle acci-dents experts, as their simulations and data are very closeto reality. As such, energy equivalent speed calculation andthe test method based on crash analysis simulation using 3Dinformation and detection algorithm are given in [19,26].However, the development of these simulations requireslarge and complex computer programs to ensure passen-gers’ safety.
Japan has developed several commercialised intelligenttransport systems (ITS) that help to study and develop ac-tive safety systems to prevent collisions. However, to datethese studies have not produced satisfactory results [20].Similarly, Toyota Motor Corporation has introduced theAdvanced Safety Vehicle using ITS, which operates welleven in rough conditions using an image sensor to achievean active safety system for crash detection. However, thisexperimental system faced challenges during mass produc-tion [16] due to the sensor’s size which is unreasonable andnot feasible. Accordingly, a pre-crash safety (PCS) systemwas developed, which activates safety devices to mitigatethe crash severity by deploying passive and/or active safetymeasures before a collision occurs [24]. However, the PCStest is very safety critical, often characterised by trial anderror, not reproducible and difficult to analyse. Moreover,it is time consuming and costly [9].
To overcome the drawbacks and to further improve therobustness of a detection procedure, this paper presents acomprehensive discussion on the development of a vehi-cle crash simulator and its sensing algorithm. The crash-sensing algorithm is embedded within the ISS to enhanceits conventional functions and to create synergy with othersensing or electronic devices on board. In this work, a pneu-matic crash-generating device has been developed to sim-ulate a vehicle crash and an accelerometer was deployed todetect the frontal crash in the application to provide infor-mation for airbag deployment and seat belt tension.
The embedded ISS fires a signal to set off the applicationwhen it detects a deceleration corresponding to the gener-ated impact from the crash; and the accelerometer mounted
on the crash-generating device collects the simulated crashdata using a Peripheral Component Interconnect (PCI) dataacquisition (DAQ) card and characterises the crash beingdetected. The PCI DAQ consists of both hardware and soft-ware and serves as an embedded ISS. The interface programfor the sensor output is developed using Borland C++. It isdemonstrated that real-time operation can be achieved withthe embedded ISS system.
2. Problems of crash detection
In this section, the problem of interest involving crash de-tection is viewed as an analysis of crash data. The design ofa crash sensor depends primarily on the type of crash pulsesthat the sensor receives. The crash pulses, in turn, are af-fected by the installation position of the sensor. Therefore,the performance requirements of crash sensors are tied instrongly with the intended location [4]. Consequently, thisneeds detail analysis on the features revealed in crash sig-nals at different locations and performance requirements ofcrash sensors, which is outlined later to provide guidelinesfor sensor design.
The approach in developing crash detection is to min-imise the maximum occupant deceleration. However, suchsophisticated devices do not exist except at the level ofa numerical simulation in which the requirements can beeasily fulfilled. Nowadays, the approach to address crashdetection problem is by precisely formulating and ensuringthat the deceleration error between the vehicle and occu-pant is small [12]. High occupancy vehicle crashes are mostsevere during peak travel periods in the highways. To af-ford dedicated safety enforcement, the functionality of acrash detector is evaluated on the basis of the vehicle typeand crash under various environmental conditions such asduring heavy downpour and immediately after, darkness,sunlight reflections and vehicles at high speeds. These canpose high-risk problems resulting in damages and fatalities.Several attempts have been made to develop an automatedsystem for detecting vehicle crash considering the aboveproblems. However, the attempts neither are feasible norreach the level adequate for day-to-day use [21].
Crash-detecting problems are associated with the designof a crash-sensing system, for example, the occupant outof position and the sensing method. Out of position impliesthat the occupant may either be too close to the safetydevice or the occupant torso is not facing front and uprightduring a low to medium speed crash. This may result insevere inflation injuries when deployed wrongly and in anuntimely way at the occupant. Additionally, the sensingmethod may have difficulties to differentiate non-fire low-speed impacts from marginal to medium soft impacts ofmodern cars [3]. Therefore, modifications to the sensingcriteria and strategies are needed in order to implement anintelligent crash detection system.
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

International Journal of Crashworthiness 581
Broadcasting is one of the most important problemsencountered in the design and implementation of crashrecovery distributed systems. Generally, in a crash recov-ery model, it initially processes crash followed by recov-ery. However, it loses the content of its volatile memoryand the set of messages that need to be delivered during acrash. Such a problem exists in processes dealing with datacommunication resulting in broadcasting failure and unde-livered a messages [25]. So to reliably broadcast, it needsa suitable algorithm to guarantee broadcast and delivery ofmessages in any situation.
With increasing market forces towards safer vehicleoperation through sensing devices, decision algorithms,restraint devices and active safety measures, the design,optimisation and validation of vehicle safety system arebecoming more challenging. At the same time, there is anintense pressure for such systems to be of low cost withhigh reliability and short cycle time development. How-ever, because of the wide variety of control, a large libraryof crashes is needed and thus, makes it more expensive tolaunch a platform that considers all demands [22]. To ex-tract most of these demands, the launched platform needsrobust algorithms and calibration processes to optimise andvalidate the vehicle safety system.
3. Crash generation device
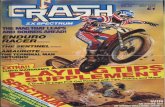
The crash generation unit used in this work is a rigid leverpole impact with the bumper attached to a rigid frame. Thepole impact was centred on the bumper. The loading con-ditions were chosen to produce significant force withoutexceeding the ultimate failure strength of the bumper. Thistype of crash generation is important when validating themodel behaviour for spring load oriented velocity frontalimpacts. The bumper behaviour also plays a significant rolein the collision behaviour when impacting the side of alighter vehicle. The bumping speed was determined withan average resistance force of approximately 30 km/h at 8kgf/cm or 145 psi with one spring. The maximum speedat the bumper can be generated at approximately 80 km/husing five spring coils connected to the lever. In the cal-culation, the lever bump force was approximately higher,contributing to the overall bumper speed.
Pneumatic devices are found in numerous embeddedprocesses such as assembling, arranging components orauxiliary devices. Our crash-generating device consists ofpneumatic drives with a mini compressor, cylinder, solenoidvalve, piston connecting with a one-way switch and a lever.The compressor supplies the compressed air in the double-acting cylinder required to move the piston inwards andoutwards. The type of valve is a 3/2-way solenoid valve,with three connections and two switch positions. Whenvalve V1 opens while valve V2 is being closed, air flowsfrom the compressor to the cylinder, forcing the air to escape
Figure 1. Crash-generating equipment function.
from the cylinder through valve V2 vent, and this pushesthe piston outwards as shown in Figure 1.
On the other hand, opening valve V2 and closing valveV1 makes the piston move inwards. These operations of thevalves cause the piston to move inwards and outwards. Thespring-loaded lever is used to generate a crash by applyingan impact to the bumper of the vehicle. To do that, valve V2must be opened and valve V1 closed, that is, the solenoidvalve must close, to cause pull back of the cylinder inwardsalong the lever and up to a certain distance before beingreleased. As a result, the spring-loaded lever hits the bumperof the vehicle at a speed of 30 km/h as recorded by theaccelerometer mounted on top of the lever. The sensor thensent the output to the DAQ card to process the crash data tothe system.
4. Crash-sensing algorithm
In this section, the crash-sensing algorithm design is dis-cussed by analysing the accelerometer crash data in terms ofits performance, robustness, flexibility and complexity. Theaccelerometer provides vital information about the crashand its signal consists of two components, namely the ac-celeration component, a(t), and the noise component, n(t).During a crash, the vehicle acceleration component, a(t),is a negative number (i.e. deceleration). The noise compo-nent, on the other hand, depends on several factors, suchas the accelerometer placement, vibration and vehicle de-formation during a crash. A well-designed crash-sensingalgorithm must have the following characteristics: (i) a pre-cise collision model, (ii) a crash detection algorithm and(iii) a computational model [5,7].
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

582 M. A. Hannan et al.
4.1. Precise collision model
Precise collision model (PCM) is one of the required fea-tures in a crash detection system and it serves as a mecha-nism to trigger the airbag deployment decision and reducescrash severity. According to the NHTSA (National HighwayTraffic Safety Administration), the airbag must be deployedif the collision force is equivalent to a frontal collision witha stationary barrier at a speed of 22.54 km/h or higher. Onthe other hand, if the collision force is equivalent to a bar-rier crash at a speed of 12.88 km/h or less, then the airbagshould not be deployed. If the collision force is between12.88 km/h and 22.54 km/h, then we can safely assume thatthe crash has occurred in the neutral zone. In such a case,there is no requirement as far as the triggering of the airbagis concerned, which implies that a deployment or a non-deployment of the airbag is equally acceptable. Therefore,in developing the crash-sensing algorithm, 22.54 km/h hasbeen set as the threshold velocity Vth for an effective crashdetection task.
Crash detection algorithm
The change in vehicle velocity, �v(t), is obtained by com-puting the integration of the acceleration signal. This vari-able is an essential parameter in crash detection and canbe found in almost all algorithms. Selecting �v(t) as a pa-rameter for crash detection, a threshold value of the vehiclevelocity, Vth, is therefore required to facilitate the decisionmaking of whether or not an effective crash has occurred.Such a threshold, Vth, value can easily be determined fromthe lowest speed of an effective crash defined by NHTSA,that is, 22.54 km/h. In order to detect a crash, the followingalgorithm is developed. The basic structure of the algorithmconsists of two states: NORMAL and DETECT. Initially,it determines the change of velocity, �v(t), and checkswhether it exceeds or equals the threshold (�v(t) ≥ Vth) ornot (�v(t) < Vth). Accordingly, the crash detection algo-rithm steps are as follows:
(i) If �v(t) ≥ Vth, then output = ‘1’; DECISION: Effectivecrash is detected.
(ii) If �v(t) < Vth, then output = ‘0’; DECISION: Effectivecrash is not detected.
An increase in vehicle speed during a crash increases thecrash severity factor. The change of velocity, �v(t), over aperiod of time, T , at the detection state can be computed byintegrating a(t) signal as the integral over the noise compo-nent is approximately zero. The circuit for computing �v(t)can be designed using systolic architecture to achieve thereal-time speed. The output of the detection state is fed intoa DAQ card for system development.
4.3. Computational model
To develop the computational model of the crash-sensingalgorithm, we utilise the basic parameters of mass, grav-ity, spring constant and damping constant to determinedisplacement, velocity and acceleration. Displacement, ve-locity and acceleration are used to determine vehicle crashseverity. The computational algorithm of the embedded sys-tem mainly involves the calculation of total exerted force,Ft, of the spring, which is basically the accumulation ofspring force, Fs, gravitational force, Fg, and damping force,Fd. Mathematically, the total exerted force is as follows:
Ft = −Fs + Fg − Fd. (1)
According to Hooke’s law, a spring generates a force pro-portional to how far it is being stretched and in oppositedirection to the stretch. Therefore,
Fs = −kx(t), (2)
where k is the spring constant and x(t) is the displacement.The spring constant k can be determined using the followingequation,
k = Gd4
8nD3, (3)
where G is the modulus rigidity of the spring material, d
is the wire diameter, n is the number of active coils andD is the mean diameter of the coil, that is, the differencebetween the outer diameter and the wire diameter of thecoil. Additionally, gravity has a great influence on the totalforce. Hooke’s law on gravity states that gravity pulls amass downwards with a gravitational force proportional tothe mass. Thus, the gravitational force is
Fg = mg, (4)
where g = 9.8 m/s2, the acceleration due to earth’s gravity,and m is the mass.
Similarly, the damping force is proportional to the ve-locity of the object but opposite in direction. Thus, dampingforce Fd is related to the velocity v(t) by
Fd = −bv(t), (5)
where b is the damper constant and v(t) represents thevelocity of the object, which is the derivative of the dis-placement x(t), that is v(t) = dx(t)/dt.
To get the total force, Newton’s law of motion, F =ma, in which acceleration, a, can be defined as the secondderivative of displacement, that is a = d2x(t)/dt2 is combi-nation of Hooke’s laws of Fs, Fg and Fd. Thus, we get
Ft = ma = −kx (t) + mg − bv (t) (6)
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

International Journal of Crashworthiness 583
and
md2
dt2x (t) = −kx (t) + mg − bv (t) . (7)
Physically, the spring is neither dampened nor driven; so,with no damping (i.e. b = 0), the net force is simply
md2
dt2x (t) = −kx (t) + mg. (8)
Therefore, the displacement x(t) of the above differentialequation can be found as
x (t) = A cos (ωt + δ) , (9)
where A is the amplitude, δ is the phase shift, and ω is theangular frequency in which ω = (k/m)1/2.
Velocity of the system is the derivative of displacement.As such, rewriting it in terms of displacement, we obtained
v (t) = d
dtx (t) = −A sin (ωt + δ) . (10)
Since acceleration a(t) is the derivative of velocity v(t),a(t) can be rewritten in terms of velocity v(t) as
a (t) = d
dtv (t) = −Aω2 cos (ωt + δ) . (11)
The change of velocity, �v(t), is the integration of theacceleration signal. Since the integral over the noise com-ponent is approximately zero, the parameter �v(t) is theessential parameter for the crash detection algorithm and iswritten as
�v (t) =∫
a (t) dt = −Aω2∫
cos (ωt + δ). (12)
In the crash-sensing algorithm, this change of velocity,�v(t), is compared to the threshold value, Vth, to providethe effective crash detection decision.
5. Embedded safety system
An embedded system is an electronically controlled systemthat combines both hardware and software components.The intelligent vehicle crash safety embedded platformutilises both hardware and software systems execution en-vironment. The development of the embedded platform isa complex process and it involves many factors includinghardware development and generation of hardware inter-connections to support the execution of the software. Suit-able interfaces for the hardware together with their softwaredriver are required and need to be developed. The structureof the embedded system can be defined from three points of
Figure 2. System architecture for effective crash detection.
view, namely the hardware platform, system interface andsoftware driver. The hardware platform associates a set ofhardware objects to the processors. The system interfacethen provides a high level of interface between softwareobjects running on various processors. Finally, the softwaredriver is required to control the hardware associated withthe processors to complete the design tool. In short, thehigh-level embedded system structure can be viewed ashaving three main components of hardware architecture,system interface and software driver.
5.1. Hardware architecture
The hardware prototype is a vital representation of the finaldesign of an embedded system, guaranteeing its real-timebehaviour. This is why it is a crucial step in the wholehardware architectural design of an embedded system. Thissystem implementation is developed through the physicalinterconnections between hardware objects such as sen-sors, processors and display unit using the standard hard-ware design technique as shown in Figure 2. The developedhardware architecture is illustrated with a detail sensor de-scription, embedded acquisition card and display unit.
5.1.1. Sensor description
The generated crash is measured using a low-cost, general-purpose and linear acceleration 3-axis LP series accelerom-eter sensor. The sensor provides a direct high-level analoguevoltage at a range of ±10 g, operates on a single +5-V DCpower supply, requires no external signal-conditioning elec-tronics and easy to interface to standard DAQ-embeddedsystems. The sensor is designed with a 5-pin female con-figuration of the voltage supply, ground and the 3-axis out-puts voltage. The scale factor and the zero-g output levelare both ratiometric to the power supply; hence, the ac-celerometer output is Vout = [Vs/2 + (sensitivity × Vs/5 ×acceleration)]. However, for zero-g, the output is propor-tional to Vs/2. The analogue output of the sensor feeds tothe DAQ card with programmable input ranges to providethe decision.
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

584 M. A. Hannan et al.
Figure 3. Schematic of embedded PCI-9111 DAQ card.
5.1.2. Embedded acquisition card
The PCI-9111 DAQ cards are widely used in the embeddedsystem due to their multi-function, cost-effectiveness andreliable DAQ capabilities for a broad variety of applications[13]. The PCI-9111 comes equipped with a digital signalinput, CN1 and a digital signal output, CN2 located onboard while the analogue input, analogue output, extendeddigital I/O and timer/counter’s signals, CN3 are all locatedat the rear plate. Figure 3 shows the schematic of the em-bedded acquisition card platform. The integrated PCI-buscontroller provides the base addresses and the PCI standardinterrupt assigned by system BIOS. It is also connectedto the on-board peripheral chips. The on-board peripher-als include A/D and D/A converters, analogue multiplexer,analogue device, interrupt controller, timer, etc. To provideflexibility to users, the on-board peripherals signals are mul-tiplexed either to the analogue I/O pins or to the digital I/Opins or to both in order to expedite the embedded systemdevelopment.
5.1.3. Display unit
The display unit provides real-time monitoring responsesto the human operator. This would enable recognition ofeach specified target event such as crash detection of theembedded system. Monitoring the responses is equallyimportant both in the embedded system applications andtime-dependent process interaction in order to determinewhich predicates should be active and which should not.The display unit shall provide observed execution be-haviour to satisfy real-time target execution of an embeddedsystem.
Hardware Software Decision
Accelerometer
PCI-DG 9111
Borland C++
Program
Algorithm No
No Crash
Yes
Fusion
Detect
AirbagDeploy
Crash generation
Fusion with occupant class and position detection
Crash detection& alarming system
Detection by comparing
v (t) and threshold Vth
v (t) Vth
v (t) th
Effectivcrash
Figure 4. Software and hardware interfacing flow diagram.
5.2. System interface
The system interface is developed using a Borland C++program. Figure 4 shows the interfacing flow diagram ofthe software and hardware which consists of a display unit.In this work, we will limit our discussion on the interfac-ing; thus, discussion on fusion and airbag deployment is ex-cluded. The system interface starts from the hardware mod-ule that utilises an accelerometer to acquire data through thePCI-DG 9111 using a Borland C++ program. The programdetermines the change of velocity, �v(t), and compares it tothe threshold value, Vth, to determine whether or not a crashhas happened. In order to detect a crash, the change of ve-locity �v(t) measurement data is used to provide analogueoutput of the accelerometer sensor with logic combination.We have considered that if the change of velocity ��v(t)is greater than or equal to the threshold value Vth, that is,��v(t) ≥ Vth, then the decision is such that an effectivecrash is detected and it displays the decision on the monitoras well as provides an alarm. However, if �v(t) is less thanVth, then the decision is that there is no crash.
5.3. Software driver
A software driver of an embedded system is important inorder to have a real product and in enhancing the com-petitiveness of the embedded system development. ThePCIS-DASK software driver is used for the NuDAQ PCI-bus DAQ card. It is a high-performance DAQ driver for
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

International Journal of Crashworthiness 585
developing custom application in a Windows environment.PCIS-DASK is constructed to provide a simple program-ming interface to allow communication with the DAQcards.
6. Principle embedded operation
In this principle embedded operation, the crash-generatingunit, sensor function, DAQ and adopted software are usedto deal with the vehicle frontal crash detection. After gen-erating a crash by applying the computational model ofthe crash-sensing algorithm, the micro-machine capacitivesensor measures the crash velocity, compares it with thethreshold value and then provides an analogue output volt-age based on Equation (12), that is, ratiometric and propor-tional to the crash velocity. Ratiometricity simply meansthat the output analogue voltage and sensitivity will scalelinearly with the applied force to the bumper, that is, thevelocity of the crash. That is, as the velocity of the crash in-creases, the output voltage increases linearly and vice versa.The output is an analogue value, which makes it simple tointerface to a microprocessor. In order to detect a crash, wehave developed an algorithm to acquire data from the sen-sor through PCI-9111 DG using a Borland C++ program.Once the detection is made, its decision can be applied tothe fusion of occupant classification and position detectionfor a smart airbag deployment.
7. Experimental results and discussion
7.1. Experimental set-up
In this work, we have generated crash data and appliedcrash-sensing algorithm to realise an embedded intelligentsafety system for vehicle crash detection and monitoring.We used our own crash-generating device, MEMS (micro-electromechanical systems) accelerometer and its technol-ogy along with a PCI-9111 DG card for DAQ. An interfacesystem algorithm is developed with Borland C++ programfor the sensor output and PCI card.
The proposed sensing system prototype is implementedand its performance is analysed. To illustrate the perfor-mance, some sample results obtained from the embeddedsystem are demonstrated. The illustration shows the effec-tive static crash detection, when the crash-generating deviceproduces an impact to the bumper of the vehicle. It alsodemonstrates that the vehicle crash velocity and reactionforce can be determined for the consideration of safety is-sues in airbag application or for measuring the crash level.In our program, a crash is detected only when the crash-generating device hits the vehicle’s bumper at a velocitygreater than 22.54 km/h. This generated crash is analogousto a head on vehicle collision with an object at the samevelocity.
Figure 5. Vehicle crash sensor output voltage.
7.2. Results and discussions
In the interface system algorithm, the accelerometer data areanalysed to determine the effect associated with the mea-surement such as to measure the vehicle crash response andto compute the crash velocity from the acceleration inte-gration or displacement differentiation. The accelerometeroutput voltage of the test vehicle is shown in Figure 5. A10g accelerometer was used to get the frontal crash re-sponse of the vehicle. The accelerometer data are recordedusing a PCI-9111 DG DAQ card with a full-scale potentialrange of ±2.5 V at zero-g and the sensitivity of 200 mV/g.Figure 6 shows the characteristic of an early accelerometerresult of approximately 2.5 V followed by a crash and a sub-sequent average output of 2.5 V. However, during a crash,the accelerometer output records the following results: onthe x-, y- and z-axis, the voltage magnitudes vary from 3.5V to 4.5 V, respectively, at 50 s to 80 s.
The vehicle crash velocity, obtained from the differen-tiation of the displacement data, is shown in Figure 6.
It shows that the crash velocity magnitude varies be-tween 5.5 m/s and 7.75 m/s during the repeated crash re-sponse approximately 50–80 s. Subsequent velocity showsthat it has dropped at an average rate equal to a zero-g de-celeration. The experimental crash velocity data also showan approximate linear acceleration of initial velocity to thecrash velocity that is greater than 22.54 km/h. However,after 80 s it decelerated linearly to the initial velocity.
Next, we generated frontal static crash using the crash-generating device and implemented the experiments usingthe interface program. The experimental result of the crashreaction force being applied to generate a crash is as shown
Figure 6. Vehicle crash velocity sensor output voltage.
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

586 M. A. Hannan et al.
Figure 7. Vehicle crash reaction force.
in Figure 7. We have also measured the reaction forces ofa repeated crash condition that occurs in between the timeof 51–80 s. From Figure 7, we found that during repeatedcrashes, the vehicle gained a huge force of ∼1000–/5800N/m and as such the crash velocity immediately beforethe crash is definitely greater than 22.54 km/h. The reac-tion force depends on the crash velocity of the system. Itis stated that as the velocity increases the reaction forcealso increases, which in turn increases the crash sever-ity. This is a situation that put the occupant at a higherrisk.
8. Conclusion
This paper has described the implementation of an em-bedded ISS that uses generated crash data measured bya MEMS accelerometer and with crash-sensing algorithmthat detects and monitors vehicle crash. Surely, the keycontributors to the success of the embedded system are thecrash generation, its sensing algorithm, the system inter-face and the performance evaluation that are unique androbust. The embedded ISS system described in this workhas been developed with the aim to ensure frontal crashdetection is properly addressed and to provide crash datainformation for the application of automotive safety link-age to airbag empowering and depowering, seat belt issuesand comfort level. With the development of the embeddedISS, a crashworthiness study has been performed at a re-duced cost since accidental impacts are being done using asimulator.
Acknowledgement
The authors would like to thank the Malaysian Ministryof Science, Technology and Innovation (MOSTI) for fund-ing this work through IRPA research grant 03-02-02-0017-SR0003/07-03.
References[1] D. Behzad and K. Fujimura, A framework for driver spe-
cific inference of danger at signalized intersections, in Pro-ceedings of the IEEE/IEEJ/JSAI Conference on IntelligentTransportation Systems, Tokyo, Japan, 5–8 October 1999,pp. 195–200.
[2] A. Burgett, Crash avoidance holds key to safer US highways,IEEE Trans. on Intelligent Transportation System 5 (1996),pp. 94–98.
[3] C.Y. Chan, Sensing problems in automotive occupant re-straint systems, in Proceedings of the IEEE Intelligent Vehi-cles Symposium, MI, USA, 25–26 September 1995, pp. 60–65.
[4] C.Y. Chan, On the detection of vehicular crashes – systemcharacteristics and architecture, IEEE Trans. Veh. Technol.51 (1) (2002), pp. 180–193.
[5] C.Y. Chan, A treatise on crash sensing for automotive airbag systems, IEEE/ASME Trans. Mechatronics 7 (5) (2002),pp. 220–234.
[6] J.W. Crandall, M.A. Goodrich, D.R. Olsen, and C.W.Nielsen, Validating human-robot interaction schemes inmultitasking environments, IEEE Trans. Syst. Man Cybern.35 (4) (2005), pp. 438–449.
[7] J.S. Francisco, G. Javier, and F.G. Daniel, Behaviour analysisof parallel, real-time and embedded systems for monitoringand optimizing industrial processes, in Proceedings of the4th IEEE International Workshop on Parallel and DistributedReal-time Systems, Gijon, Spain, 15–16 April 1996, pp. 75–79.
[8] H. Fujii, O. Hayashi, and N. Nakagata, Experimental re-search on inter-vehicle communication using infrared rays,in Proceedings of the IEEE Intelligent Vehicles Symposium,Tokyo, Japan, 19–20 Sept 1996, pp. 266–271.
[9] O.J. Gietelink, K. Labibes, D.J. Verburg, A.F. Oostendorp,S. Tokoro, K. Kuroda, S. Kawakubo, K. Fujita, and H. Fuji-nami, Pre-crash system validation with PRESCAN and VE-HIL, in Proceedings of the IEEE Intelligent Vehicles Sym-posium, Parma, Italy, 14–17 June 2004, pp. 913–918.
[10] M.A. Goodrich and E.R. Boer, Designing human-centeredautomation: tradeoffs in collision avoidance system design,IEEE Trans. Intell. Transp. Syst. 1 (1) (2000), pp. 40–54.
[11] M.A. Goodrich and E.R. Boer, Model-based human-centered task automation: a case study in ACC system de-sign, IEEE Trans. Syst. Man Cybern. 33 (3) (2003), pp.325–336.
[12] R.J. Hesseling, M. Steinbuch, F.E. Veldpaus, and T. Klisch,Identification and control for future restraint systems, inProceedings of the 42nd IEEE Conference on Decisionand Control, Hawaii, USA, December 2003, pp. 173–192.
[13] A.D. Horowitz and T.A. Dingus, Warning signal design: akey human factors issue in an in-vehicle front-to-rear-endcollision warning system, in Proceedings of the Human Fac-tors Society 36th Annuual Meeting, Atlanta, GA, October1992, pp. 1011–1013.
[14] C.A. Mark, J.B. Drummond, and B.J. Daniel, Vehicle crashdata generator, U.S. Patent 5 608 629, 1997.
[15] T. Marunaka, T. Kimura, M. Taguchi, T. Yoshikawa,H. Kumamoto, and K. Kishida, Study on the crashworthinessof rail vehicles, in Proceedings of the IEEE/ASME RailroadConference, Ontario, Canada, 17–19 April 2001, pp. 251–257.
[16] T. Matsumoto, N. Yoshitsugu, and Y. Hori, TOYOTA ad-vanced safety vehicle (T0YOTA ASV), TOYOTA Tech. Rev.46 (1) (1996), pp. 56–63.
[17] G.W. McIver, Method and apparatus for sensing a vehiclecrash condition using velocity enhanced acceleration crashmetrics, U.S. Patent 5 587 906, 1996.
[18] C.W. Nielsen, M.A. Goodrich, and R.W. Ricks, Ecologicalinterfaces for improving mobile robot tele-operation, IEEETrans. Robot. Autom. 23 (5) (2007), pp. 927–941.
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008

International Journal of Crashworthiness 587
[19] A. Rovid and G. Melegh, Modelling of road vehicle bodydeformation using EES values detection, in Proceedings ofthe IEEE Conference on Intelligent Signal Processing, Bu-dapest, Hungary, 4–6 Sept 2003, pp. 149–154.
[20] H. Satonaka, Y. Hashimoto, Y. Yamada, and T. Kakinami,A study of sensor fusion technology for collision avoidancesystem, Proc. IEEE ITS World Congr. 111 (1995), pp. 1108–1115.
[21] S. Schijns, Automated vehicle occupancy monitoring sys-tems for HOV/HOT facilities, McCormick Rankin Corpora-tion, Ontario, Canada, 2004, pp. 1–107.
[22] P.J. Schubert, D. Nichols, E.J. Wallner, H. Kong, and J.K.Schiffmann, Electronics and algorithms for rollover sensing,in SAE International World Congress, Michigan, MI, 8–11March 2004, 2004-01-0343.
[23] M. Shiraishi, H. Sumiya, and Y. Ysuchiya, Crash zonesbased on driver’s collision avoidance operation for ITS, inProceedings of the IEEE Conference on Intelligent Trans-portation System, Singapore, 3–6 September 2002, pp. 210–215.
[24] S. Tokoro, K. Kuroda, A. Kawakubo, K. Fujita, and H.Fujinami, Electronically scanned millimeter-wave radar for
pre-crash safety and adaptive cruise control system, inProceedings of the IEEE Intelligent Vehicles Symposium,Columbus, OH, USA, 9–11 June 2003, pp. 304–309.
[25] P. Urban, N. Hayashibara, A. Schiper, and T. Katayama,Performance comparison of a rotating coordinator and aleader based consensus algorithm, in Proceedings of the23rd IEEE International Symposium on Reliable DistributedSystems, Florianpolis, Brazil, 18–22 October 2004, pp. 4–17.
[26] A.R. Varkonyi-Koczy, A. Rovid, and R.M. da-Graca, Soft-computing-based car body deformation and EES determi-nation for car crash analysis systems, IEEE Trans. Instrum.Meas. 55 (6) (2006), pp. 2304–2312.
[27] J.W. Weber, C.A. Mullins, R.W. Schumacher, and C.D.Wright, A systems approach to the development ofan integrated crash avoidance vehicle, in Proceedingsof the IEEE Vehicle Navigation and Information Sys-tem, Yokohama, Japan, 31 August–2 September 1994,pp. 431–434.
[28] R.J. Yang, A. Akkerman, D.F. Anderson, O.M. Farque andG. Lei, Robustness optimization for vehicular crash simula-tions, Comput. Sci. Eng. 12 (2000), pp. 8–13.
Downloaded By: [Hannan, M. A.] At: 02:33 10 September 2008