desarrollo de nuevos algoritmos de - Tesis IPN
519
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA Y ARQUITECTURA UNIDAD TICOMÁN “CIENCIAS DE LA TIERRA” “DESARROLLO DE NUEVOS ALGORITMOS DE TRANSFORMACIÓN PARA LA REPRESENTACIÓN COMPLETA DE LA REPÚBLICA MEXICANA EN LA PROYECCIÓN TRANSVERSA DE MERCATOR O GAUSS-KRÜGER.” TESIS Que para obtener el título de: INGENIERO TOPÓGRAFO Y FOTOGRAMETRISTA. Presenta: GABRIEL ADRIÁN HERNÁNDEZ DE LA ROSA. Director de Tesis. ING. FERNANDO BARRERA TREJO. Ciudad de México, DICIEMBREDD DICIEMBRE DE 2016
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of desarrollo de nuevos algoritmos de - Tesis IPN

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA Y ARQUITECTURA
UNIDAD TICOMÁN “CIENCIAS DE LA TIERRA”
“DESARROLLO DE NUEVOS ALGORITMOS DE
TRANSFORMACIÓN PARA LA REPRESENTACIÓN
COMPLETA DE LA REPÚBLICA MEXICANA
EN LA PROYECCIÓN TRANSVERSA DE
MERCATOR O GAUSS-KRÜGER.”
TESIS
Que para obtener el título de:
INGENIERO TOPÓGRAFO Y FOTOGRAMETRISTA.
Presenta:
GABRIEL ADRIÁN HERNÁNDEZ DE LA ROSA.
Director de Tesis.
ING. FERNANDO BARRERA TREJO.
Ciudad de México,
DICIEMBREDD DICIEMBRE DE 2016


III

IV

V

VI

DEDICATORIAS
VII
Los encantos de esta ciencia sublime, las matemáticas, sólo se le revelan a
aquellos que tienen el valor de profundizar en ella.
Carl Friedrich Gauss.
En realidad un mapa ofrece a quienes lo contemplan, la posibilidad de ver el
mundo desde los cielos y así mismo adoptar una perspectiva divina de la creación
terrenal. Simple y llanamente;
"Los Cartógrafos no sólo producen el mundo, sino que también lo
construyen".
Jerry Brotton.

DEDICATORIAS
VIII
DEDICATORIAS
A dios, aquel ser celestial que gracias a su divino poder, me concedió la
fortaleza, conocimiento, capacidad y fe para afrontar esta última prueba.
Con mi máxima admiración y respeto para usted; “Ingeniero de ingenieros”
A mis padres Adrián Manuel y Antonia María
A mi hermano y hermanas
Porque a pesar de las caídas y tropiezos, estuvieron siempre conmigo
hasta el final de este camino, nunca perdieron y perderán la fe y el amor en mí, y
ya que sin el apoyo de cada uno de ellos, esto no hubiera sido posible.
Gracias por la oportunidad, gracias por creer en mí, esto es por y para
ustedes.
¡Es un orgullo ser su hijo!
A mis amigos y compañeros
Por darme la oportunidad de crecer y estar con ustedes.
Y finalmente en memoria Gerardus Mercator, Johann Heinrich Lambert,
Johann Carl Friedrich Gauss, Johannes Heinrich Louis Krüger y Paul D. Thomas.
Por forjar los cimientos de una nueva concepción divina y matemática del
mundo.
Gabriel Adrián Hernández De La Rosa.

AGRADECIMIENTOS.
IX
AGRADECIMIENTOS.
Doy gracias primeramente a Dios, padre celestial, Arquitecto del Universo y
el más grande de todos los Ingenieros por darme la dicha de vivir y la oportunidad
de culminar un ciclo y empezar uno nuevo. Por brindarme, las fuerzas, destreza y
el conocimiento suficiente para haber sacado adelante este proyecto y mostrarme
así del potencial que puede alcanzar el conocimiento geográfico en manos de un
topógrafo.
A aquellos ángeles que estuvieron siempre conmigo en todo momento y a
los cuales debo este gran logro, a mis amados padres, por brindarme sus
sagrados y amorosos esfuerzos, apoyo y palabras de aliento, los cuales me
impulsaron para terminar con éxito esta parte de mi vida, mi carrera universitaria.
Estaré siempre en deuda con ustedes, gracias por ayudarme a llegar más allá de
donde mis ojos me permitieron ver.
A mi alma mater, el Instituto Politécnico Nacional por haberme dado la dicha
de estudiar y aprender en las aulas de su escuela ESIA Ticoman y a los
magníficos profesores que conocí a lo largo de mi estancia y trayectoria en esta
hermosa escuela. Que con su legado puedo ahora poner en alto el nombre de
esta gloriosa institución y en especial que; tanto la técnica y la topografía, están y
estarán siempre al servicio de mi patria, México.
A los profesores: M. en C. Elda Ordaz, Ing. Paola Dolores Ortega Flores,
Ing. Sara Carolina de América Mariscal López, Ing. Miguel Ángel Chavarría Nieto
por su confianza, tiempo, apoyo y sus valiosos y oportunos comentarios,
aportados para el enriquecimiento de esta tesis, pero especialmente al Ing.
Fernando Barrera Trejo, director de tesis, por la oportunidad otorgada para el
desarrollo y estudio de este tema. Finalmente a mis grandes amigas y profesoras
de inglés Aranza Korey Yee Manrique (Lli Master) y Danisa Gómez Barrera (Dani
Master) por su apoyo en la traducción de textos y bibliografía utilizada en esta
investigación, gracias por su paciencia niñas, son las mejores.

X
RESUMEN.
Una de las representaciones cartográficas más fieles en la cual el hombre
puedo confiar la tarea de representación detallada del elipsoide o esferoide
terrestre, ha sido la Proyección Transversa de Mercator o Representación
Conforme de Gauss-Krüger, debido a su estructura geométrica y su relación y
comportamiento con el elipsoide.
Desde su concepción hasta hoy en día el sistema proyectivo Gauss-Krüger
ha sido uno de los más utilizados, estudiados y modificados, esto con el fin de
garantizar la exactitud de representación del dato geográfico. Sin embargo y a
pesar de dichas modificaciones y aportaciones por dichos estudios, sólo se ha
conseguido obtener una exactitud o precisión parcial de representación de la
superficie terrestre, la cual se limita a obtener precisiones del orden del milímetro
en bandas meridianas, zonas o husos de 6º hasta 8º de longitud.
Esta situación se debe a que los términos que conforman las fórmulas o
algoritmos de transformación para el sistema Gauss-Krüger y la cobertura de
mapeo con respecto a un Meridiano Central (Δλ) se vinculan y trabajan en
conjunto. Lo que quiere decir que los términos de las fórmulas ideadas para este
sistema son directamente proporcional a la precisión o exactitud. Aunque en la
actualidad ya existen desarrollos y fórmulas de transformación alternos a los
originales que ofrecen precisiones por debajo del milímetro, estos son puramente
confusos, debido a que se construyen mediante exagerados términos, coeficientes
y cambios de variable.
En virtud de lo anterior en el presente trabajo se presenta la amplificación y
continuidad del desarrollo en serie de las fórmulas originales de la representación
Gauss-Krüger, con el fin de obtener la representación de toda la extensión de los
Estados Unidos Mexicanos (32º de longitud o Δλ =16º) en este sistema y asegurar
una precisión milimétrica o mayor, así mismo tratando de enriquecer y mejorar los
trabajos de cartografía, geodesia y topografía en el país.

XI
ABSTRACT.
One of the most faithful cartographic representations in which man can trust
the activity of detailed ellipsoid or terrestrial spheroid representation, has been the
Mercator Transverse projection or Gauss-Krüger’s Conformal representation, due
to its geometric structure, relationship and behavior with the ellipsoid.
Since its conception until today, the Gauss-Krüger projective system has
been one of the most used, studied and modified, in order to ensure accurate
representation of geographic data. However, despite changes and contributions by
such studies, it has only been able to get one accurate or partial precision of the
earth's surface, which is limited to obtain accuracies of millimeter orders in
meridional bands, areas or zones 6º up to 8º in length.
This situation is because the terms that make the transformation formulas or
algorithms on the Gauss-Krüger system and map coverage in regard to a Central
Meridian (Δλ) are linked and they work together. Which means that the designed
formulas terms for this system are directly proportional to the precision or
preciseness. Although there are developments and transformation formulas that
offer under one millimeter preciseness, these are purely confused due to the fact
that they are constructed on overemphasized terms,with coefficients and variable
changes.
Under the mentions above on this thesis it is presented the amplification and
serial continuity of the original Gauss-Krüger representation formulas in order to
obtain the representation of the full United Mexican States extent (32º length or Δλ
= 16°) in this system with millimetric precision or less, also trying to enrich and
improve cartography, geodesy and topography work in the country.

ÍNDICE.
XII
ÍNDICE.
DEDICATORIAS ................................................................................................................. VIII
AGRADECIMIENTOS. .......................................................................................................... IX
RESUMEN. ............................................................................................................................. X
ABSTRACT. .......................................................................................................................... XI
ÍNDICE. ................................................................................................................................. XII
ÍNDICE DE FIGURAS. ....................................................................................................... XVI
ÍNDICE DE TABLAS. ......................................................................................................... XIX
I. PROTOCOLO DE INVESTIGACIÓN .......................................................................... 1
1.1 Introducción. .......................................................................................................... 2
1.2 Justificación. .......................................................................................................... 5
1.3 Objetivos. ............................................................................................................... 9
1.3.1 Objetivo General. ............................................................................................. 9
1.3.2 Objetivos Particulares. ..................................................................................... 9
II. ANTECEDENTES HISTÓRICOS .............................................................................. 11
2.1 Introducción. ........................................................................................................ 12
2.2 El Mundo en un Cilindro. La Idea de Mercator. ................................................ 14
2.3 El Cilindro Transverso. Los Trabajos de Lambert, Gauss y Krüger. ............. 27
2.4 Trabajos Posteriores. .......................................................................................... 37
III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES. ....................................... 43
3.1 Introducción. ........................................................................................................ 44
3.2 La Proyección Mercator. ..................................................................................... 45
3.2.1 Transformación Directa de Coordenadas. ..................................................... 59
3.2.2 Transformación Inversa de Coordenadas. ..................................................... 65
3.2.3 Transformación Directa en el Elipsoide. ........................................................ 68
3.2.4 Transformación Inversa en el Elipsoide. ........................................................ 78
3.3 Proyección Transversa de Mercator Caso Esférico (Modelo de Lambert). ... 83
3.3.1 Transformación Directa de Coordenadas. ..................................................... 88
3.3.2 Transformación Inversa de Coordenadas. ..................................................... 95
3.4 La Longitud de Arco de la Elipse Meridiana. .................................................. 101
3.4.1 Formulas de Conversión. .................................................................................. 102
3.5 Proyección Transversa de Mercator Caso Elipsoidal (Gauss-Krüger). ....... 105
3.5.1 Transformación Directa de Coordenadas. ................................................... 111
3.5.2 Transformación Inversa de Coordenadas. ................................................... 131
3.1.1 La Convergencia de Meridianos en la Representación GK. ........................ 145

ÍNDICE.
XIII
3.6 La Proyección Universal Transversa de Mercator (UTM). ............................. 153
3.6.1 Sistema de Proyección. ............................................................................... 168
3.6.2 Transformación Directa de Coordenadas. ................................................... 175
3.6.3 Transformación Inversa de Coordenadas. ................................................... 180
3.7 La Proyección Transversa Modificada Ejidal (TME). ..................................... 183
3.7.1 Transformación Directa de Coordenadas. ................................................... 188
3.7.2 Transformación Inversa de Coordenadas. ................................................... 189
IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO. ............................ 191
4.1 Introducción. ...................................................................................................... 192
4.2 Relación entre Amplitud Meridiana y Precisión. ............................................ 193
4.3 De la Zona de Estudio. ...................................................................................... 202
4.3.1 Ubicación Geográfica. .................................................................................. 203
4.3.2 Límites y Fronteras. ..................................................................................... 206
4.3.3 Extensión Territorial. .................................................................................... 208
4.3.4 División Política. ........................................................................................... 212
4.3.5 Husos Horarios............................................................................................. 215
4.3.6 Autoridad Encargada de la Elaboración de Cartografía Nacional. .............. 218
4.3.7 Proyecciones y Escalas Cartográficas para la República Mexicana. .......... 220
4.3.8 Sistemas de Referencia Geodésicos Oficiales para la Elaboración de
Cartografía Mexicana. .................................................................................. 224
4.4 Fórmulas de Derivación Modificadas. ............................................................... 228
4.5 Fórmulas de Transformación Gauss-Krüger Amplificadas a la Derivada de
Orden Doce. ......................................................................................................... 245
4.5.1 Amplificación Directa. ................................................................................... 246
4.5.2 Amplificación Inversa. .................................................................................. 253
4.6 Pruebas de Error y Exactitud. ............................................................................ 263
4.6.1 Aplicación de las formulas amplificadas a un Δλ máximo para el territorio
mexicano. ..................................................................................................... 263
4.6.2 Latitudes Crecientes. ................................................................................... 283
4.6.3 Número de términos necesarios en función de Δλ. ..................................... 288
4.6.4 Comparación de resultados con los algoritmos de Karney. ........................ 305
4.6.5 Error máximo alcanzado. ............................................................................. 311
4.7 Nuevos Algoritmos de Transformación para la Proyección GK. ................. 314
4.7.1 Fórmulas de Transformación Directa. .......................................................... 315
4.7.2 Fórmulas de Transformación Inversa. ......................................................... 319
4.8 Representación Cartográfica de los Estados Unidos Mexicanos en la
Proyección Transversa de Mercator. ................................................................. 324

ÍNDICE.
XIV
V. CONCLUSIONES Y RECOMENDACIONES.......................................................... 326
5.1 Conclusiones. .................................................................................................... 327
5.2 Aplicaciones y Trabajos a Futuro. ................................................................... 329
VI. ANEXOS. ................................................................................................................ 332
6.1 Introducción. ...................................................................................................... 333
6.2 La Integral de la Latitud Isométrica (Proyección Mercator Caso Elipsoidal). ...
............................................................................................................................. 333
6.3 La Integral Elíptica para la Longitud de Arco de Meridiano.......................... 340
6.4 Derivadas Consecutivas para la Representación GK. .................................. 348
6.4.1 El método de derivación de Paul D. Thomas. .............................................. 348
6.4.2 Derivadas de orden superior para el proceso directo. ................................. 351
6.4.3 Derivadas de orden superior para el proceso inverso. ................................ 360
6.4.4 Derivadas de orden superior de 𝐅𝚽 para el proceso inverso. ..................... 368
6.5 Desarrollo de las Doce Derivadas Consecutivas para la Representación GK.
............................................................................................................................. 372
6.5.1 Derivadas de orden superior para el proceso directo. ................................. 372
Para 𝒇′𝚽. ................................................................................................................... 372
Para 𝒇′′𝚽.................................................................................................................... 372
Para 𝒇′′′𝚽. .................................................................................................................. 373
Para 𝒇𝐈𝐕𝚽. ................................................................................................................. 374
Para 𝒇𝐕𝚽. .................................................................................................................. 375
Para 𝒇𝐕𝐈𝚽. ................................................................................................................. 377
Para 𝒇𝐕𝐈𝐈𝚽. ............................................................................................................... 380
Para 𝒇𝐕𝐈𝐈𝐈𝚽. .............................................................................................................. 384
Para 𝒇𝐈𝐗𝚽. ................................................................................................................. 390
Para 𝒇𝐗𝐈𝚽. ................................................................................................................. 408
Para 𝒇𝐗𝐈𝐈𝚽................................................................................................................. 418
6.5.2 Derivadas de orden superior para el proceso inverso. ................................ 430
Para 𝐅′𝒚 ..................................................................................................................... 430
Para 𝐅′′𝒚 .................................................................................................................... 430
Para 𝐅′′′𝒚 ................................................................................................................... 431
Para 𝐅𝐈𝐕𝒚 ................................................................................................................... 432
Para 𝐅𝐕𝒚 .................................................................................................................... 433
Para 𝐅𝐕𝐈𝒚 ................................................................................................................... 435
Para 𝐅𝐕𝐈𝐈𝒚 ................................................................................................................. 438
Para 𝐅𝐕𝐈𝐈𝐈𝒚 ................................................................................................................ 442

ÍNDICE.
XV
Para 𝐅𝐈𝐗𝒚 ................................................................................................................... 447
Para 𝐅𝐗𝒚 .................................................................................................................... 453
Para 𝐅𝐗𝐈𝒚 ................................................................................................................... 460
Para 𝐅𝐗𝐈𝐈𝒚 ................................................................................................................. 470
6.5.3 Derivadas de orden superior de 𝐅′𝚽 para el proceso inverso. .................... 481
Para 𝐅′𝚽 .................................................................................................................... 481
Para 𝐅′′𝚽.................................................................................................................... 481
Para 𝐅′′′𝚽 ................................................................................................................... 482
Para 𝐅𝐈𝐕𝚽 .................................................................................................................. 483
Para 𝐅𝐕𝚽 ................................................................................................................... 485
Para 𝐅𝐕𝐈𝚽 .................................................................................................................. 488
VII. BIBLIOGRAFÍA ....................................................................................................... 493

ÍNDICE DE FIGURAS.
XVI
ÍNDICE DE FIGURAS.
Fig. I.1 Número de términos necesarios para la proyección Gauss-Krüger en función de ... 8
Fig. II.1 Gerardus Mercator de Rupelmonde. ....................................................................... 15
Fig. II.2 Loxodrómica en un grabado de Escher, 1958. ....................................................... 18
Fig. II.3 Explicación del principio de la proyección de Mercator, según Thomas Wright en su
Certaine Errors of Navigation, Londres, 1599. ..................................................................... 21
Fig. II.4 Nova et aucta orbisterrae descriptio ad usum navigantium emendate accomodata,
Mercator 1569. Fuente: http://gallica.bnf.fr/ark:/12148/btv1b7200344k/f14.item ................. 25
Fig. II.5 Johann Heinrich Lambert, o Jean-Henri Lambert (1728-1777)............................... 28
Fig. II.6 Modelo Cilíndrico Transverso. Fuente Gómez Moreno 2003. ................................ 29
Fig. II.7 Johann Carl Friedrich Gauss ................................................................................... 32
Fig. II.8 Apariencia de la Proyección Transversa de Mercator ............................................ 34
Fig. II.9 Johannes Heinrich Louis Krüger ............................................................................. 35
Fig. III.1 Esquema Geométrico de la Proyección Mercator. ................................................. 45
Fig. III.2 Línea loxodrómica sobre la esfera. ........................................................................ 47
Fig. III.3 Loxodrómica en la esfera, vista de perfil. ............................................................... 47
Fig. III.4 Proyección cilíndrica conceptual. ........................................................................... 48
Fig. III.5 Proyección Mercator. .............................................................................................. 49
Fig. III.6 Representación de la loxodrómica y ortodrómica en la proyección Mercator. ...... 50
Fig. III.7 Representación mundial en la proyección Mercator. Fuente: NASA 2015. ........... 51
Fig. III.8 Representación de América del Sur en la Proyección Mercator, MC= 75º W. ...... 52
Fig. III.9 Valores del factor de escala (ko) en la proyección Mercator. ................................. 54
Fig. III.10 Carta náutica en la proyección Mercator.............................................................. 58
Fig. III.11 Representación de un cuadrilátero esférico en el cilindro. ................................. 60
Fig. III.12 Proyección del cuadrilátero esférico sobre el cilindro. ......................................... 60
Fig. III.13 Radio de un paralelo distinto al Ecuador. ............................................................ 61
Fig. III.14 Esquema geométrico de la proyección Mercator para el elipsoide. .................... 69
Fig. III.15 Porción de arco de meridiano. ............................................................................. 70
Fig. III.16 Teorema de Meusnier. ......................................................................................... 72
Fig. III.17 Cilindro secante al elipsoide pero tangente a un paralelo distinto del ecuador ... 78
Fig. III.18 Desarrollo cilíndrico transverso a la esfera. ......................................................... 83
Fig. III.19 Representación mundial en la proyección Transversa de Mercator. ................... 86

ÍNDICE DE FIGURAS.
XVII
Fig. III.20 Elementos geométricos de la proyección Transversa de Mercator. .................... 89
Fig. III.21 Triángulo esférico. ................................................................................................ 90
Fig. III.22 Cilindro transverso al elipsoide. ......................................................................... 106
Fig. III.23 Desarrollo de la representación Gauss-Krüger. ................................................. 107
Fig. III.24 Banda meridiana en la representación Gauss-Krüger ....................................... 107
Fig. III.25 Valores del factor de escala (ko) en la representación GK ................................ 110
Fig. III.26 Sistemas complejos de deducción. .................................................................... 113
Fig. III.27 Representación de la longitud de arco de meridiano en el elipsoide y el plano GK
......................................................................................................................................................... 121
Fig. III.28 Representación del punto de expansión en ambos sistemas. ........................... 135
Fig. III.29 Relación de la convergencia de meridianos con el Norte Geográfico (NG), el
Norte Cartográfico (NC) y Norte Magnético (MC) .............................................................. 145
Fig. III.30 Convergencia de Meridianos en una banda meridiana GK. .............................. 146
Fig. III.31 Convergencia de meridianos en un sistema infinitesimal. ................................. 147
Fig. III.32 Sistema UTM, cilindro secante al elipsoide. ...................................................... 153
Fig. III.33 Vista en planta del sistema UTM. ....................................................................... 154
Fig. III.34 Zonas UTM para Sur América. ........................................................................... 155
Fig. III.35 Zonas UTM para todo el planeta tierra............................................................... 158
Fig. III.36 Sistema de coordenadas UTM para los dos hemisferios de la tierra. ............... 161
Fig. III.37 Fajas UTM para todo el planeta tierra. ............................................................... 163
Fig. III.38 Zonas y Fajas UTM asignadas a la República Mexicana. ................................. 164
Fig. III.39 Carta topográfica escala 1:50 000 en la proyección UTM. ................................ 167
Fig. III.40 Factores de escala en la proyección GK. .......................................................... 169
Fig. III.41 Factor de escala en el sistema TM. ................................................................... 170
Fig. III.42 Factor de escala en el sistema UTM. ................................................................. 173
Fig. III.43 Factor de escala en un huso UTM. .................................................................... 174
Fig. III.44 Zona ejidal en la proyección TME. ..................................................................... 184
Fig. III.45 Plano ejidal en la proyección TME. .................................................................... 187
Fig. IV.1 Coordenadas extremas de la República Mexicana. Rojo – Oficiales, Naranja –
Continentales, Verde – ZEEM. Fuente: INEGI, 2015. ........................................................ 205
Fig. IV.2 Límites fronterizos de la República Mexicana. .................................................... 208
Fig. IV.3 Extensión territorial de la República Mexicana. ................................................... 212
Fig. IV.4 División política de los Estados Unidos Mexicanos. ............................................ 213

ÍNDICE DE FIGURAS.
XVIII
Fig. IV.5 Husos horarios y tiempo oficial para la República Mexicana. ............................. 217
Fig. IV.6 Red de coordenadas para el proceso de conversión. ......................................... 265
Fig. IV.7 Primera aproximación de L en kilómetros............................................................ 289
Fig. IV.8 Segunda aproximación de L en kilómetros. ......................................................... 290
Fig. IV.9 Tercera aproximación de L en kilómetros. ........................................................... 290
Fig. IV.10 Cuarta aproximación de L en kilómetros. .......................................................... 291
Fig. IV.11 Quinta aproximación de L en metros. ................................................................ 291
Fig. IV.12 Sexta aproximación de L en metros. ................................................................. 292
Fig. IV.13 Séptima aproximación de L en metros. ............................................................. 292
Fig. IV.14 Octava aproximación de L en metros. ............................................................... 293
Fig. IV.15 Novena aproximación de L en metros. .............................................................. 293
Fig. IV.16 Decima aproximación de L en metros. .............................................................. 294
Fig. IV.17 Decimo primera aproximación de L en metros. ................................................. 294
Fig. IV.18 Decimo segunda aproximación de L en metros. ............................................... 295
Fig. IV.19 Primera aproximación de l en grados decimales. .............................................. 295
Fig. IV.20 Tercera aproximación de l en minutos decimales. ............................................ 296
Fig. IV.21 Segunda aproximación de l en grados decimales, siendo 0.20 igual a 12’. ...... 296
Fig. IV.22 Cuarta aproximación de l en minutos decimales, siendo 0.50 igual a 30”. ....... 297
Fig. IV.23 Quitan aproximación de l en minutos decimales, siendo 0.10 igual a 6”. .......... 297
Fig. IV.24 Sexta aproximación de l en segundos decimales. ............................................. 298
Fig. IV.25 Séptima aproximación de l en segundos decimales. ......................................... 298
Fig. IV.26 Octava aproximación de l en segundos decimales. .......................................... 299
Fig. IV.27 Novena aproximación de l en segundos decimales. ......................................... 299
Fig. IV.28 Decima aproximación de l en segundos decimales. .......................................... 300
Fig. IV.29 Decimo primera aproximación de l en segundos decimales. ............................ 300
Fig. IV.30 Decimo segunda aproximación de l en segundos decimales. ........................... 301
Fig. IV.31 Primera aproximación de m en minutos decimales, siendo 0.20 igual a 12". ... 301
Fig. IV.32 Segunda aproximación de m en segundos decimales. ..................................... 302
Fig. IV.33 Tercera aproximación de m en segundos decimales. ....................................... 302
Fig. IV.34 Cuarta aproximación de m en segundos decimales. ......................................... 303
Fig. IV.35 Quinta aproximación de m en segundos decimales. ......................................... 303
Fig. IV.36 Sexta aproximación de m en segundos decimales. .......................................... 304

ÍNDICE DE TABLAS.
XIX
ÍNDICE DE TABLAS.
Tabla III.1 Zonas UTM de cobertura mundial. .................................................................... 157
Tabla III.2 Fajas UTM de cobertura mundial ...................................................................... 162
Tabla IV.1 Comparación de algoritmos de transformación, GK – Thomas. ....................... 196
Tabla IV.2 Transformación directa GK. .............................................................................. 197
Tabla IV.3 Transformación Inversa GK. ............................................................................. 198
Tabla IV.4 Errores de cálculos entre transformaciones. .................................................... 198
Tabla IV.5 Coordenadas extremas de la república mexicana. ........................................... 205
Tabla IV.6 Extensión territorial de la república mexicana. ................................................. 211
Tabla IV.7 Entidades federativas de los estados unidos mexicanos. Fuente INEGI 2015. 215
Tabla IV.8 Husos horarios de la república mexicana. Fuente CENAM 2016. ................... 217
Tabla IV.9 Escalas y proyecciones cartográficas para la república mexicana. Fuente INEGI
2006 .................................................................................................................................... 224
Tabla IV.10 Principales constantes geométricas y físicas del elipsoide GRS 80. Fuente
INEGI 2006 ......................................................................................................................... 226
Tabla IV.11 Parámetros base de transformación. .............................................................. 230
Tabla IV.12 Parámetros Base e Igualdades. ...................................................................... 244
Tabla IV.13 Fórmulas de derivación modificadas. ............................................................. 245
Tabla IV.14 Radios de curvatura y demás parámetros geométricos para φ de 14º N....... 266
Tabla IV.15 Valores de los doce términos con respecto a φ y λ expresados en metros. .. 266
Tabla IV.16 Coordenadas finales expresadas en el sistema GK. ...................................... 266
Tabla IV.17 Radios de curvatura y demás parámetros geométricos para las latitudes de los
puntos de expansión de cada coordenada GK. ................................................................. 267
Tabla IV.18 Valores de los términos inversos con respecto a X y Y.................................. 268
Tabla IV.19 Coordenadas geodésicas transformadas. ...................................................... 268
Tabla IV.20 Errores de transformación entre conversiones. .............................................. 269
Tabla IV.21 Radios de curvatura y demás parámetros geométricos para φ de 20º N....... 270
Tabla IV.22 Valores de los doce términos con respecto a φ y λ expresados en metros. .. 270
Tabla IV.23 Coordenadas finales expresadas en el sistema GK. ...................................... 270
Tabla IV.24 Radios de curvatura y demás parámetros geométricos para las latitudes de los
puntos de expansión de cada coordenada GK. ................................................................. 271
Tabla IV.25 Valores de los términos inversos con respecto a X y Y.................................. 272
Tabla IV.26 Coordenadas geodésicas transformadas. ...................................................... 272

ÍNDICE DE TABLAS.
XX
Tabla IV.27 Errores de transformación entre conversiones. .............................................. 273
Tabla IV.28 Radios de curvatura y demás parámetros geométricos para φ de 26º N....... 274
Tabla IV.29 Valores de los doce términos con respecto a φ y λ expresados en metros. .. 274
Tabla IV.30 Coordenadas finales expresadas en el sistema GK. ...................................... 274
Tabla IV.31 Radios de curvatura y demás parámetros geométricos para las latitudes de los
puntos de expansión de cada coordenada GK. ................................................................. 275
Tabla IV.32 Valores de los términos inversos con respecto a X y Y.................................. 276
Tabla IV.33 Coordenadas geodésicas transformadas. ...................................................... 276
Tabla IV.34 Errores de transformación entre conversiones. .............................................. 277
Tabla IV.35 Radios de curvatura y demás parámetros geométricos para φ de 33º N....... 278
Tabla IV.36 Valores de los doce términos con respecto a φ y λ expresados en metros. .. 278
Tabla IV.37 Coordenadas finales expresadas en el sistema GK. ...................................... 278
Tabla IV.38 Radios de curvatura y demás parámetros geométricos para las latitudes de los
puntos de expansión de cada coordenada GK. ................................................................. 279
Tabla IV.39 Valores de los términos inversos con respecto a X y Y.................................. 280
Tabla IV.40 Coordenadas geodésicas transformadas. ...................................................... 280
Tabla IV.41 Errores de transformación entre conversiones. .............................................. 281
Tabla IV.42 Errores de conversión para latitudes crecientes siendo Δλ de 24º el valor
máximo de amplitud meridiana........................................................................................... 284
Tabla IV.43 Errores de conversión para latitudes crecientes siendo Δλ de 60º el valor
máximo de amplitud meridiana........................................................................................... 285
Tabla IV.44 Precisiones máximas y mínimas para latitudes crecientes en un rango de Δλ de
12º a 30º ............................................................................................................................. 287
Tabla IV.45 Número de términos de conversión necesarios en función de Δλ. ................ 305
Tabla IV.46 Comparativa de coordenadas entre los algoritmos amplificados de GK y los de
Karney – Krüger (Ka – Kr) .................................................................................................. 308
Tabla IV.47 Diferencia entre las coordenadas obtenidas con los algoritmos amplificados de
GK y Ka – Kr. ...................................................................................................................... 309
Tabla IV.48 Aplicación de los algoritmos de Karney a las coordenadas obtenidas en los
algoritmos amplificados GK. ............................................................................................... 310
Tabla IV.49 Conversión de coordenadas oficiales y de la ZEE pertenecientes a la
República Mexicana utilizando los algoritmos básicos GK. ............................................... 312
Tabla IV.50 Conversión de coordenadas oficiales y de la ZEE pertenecientes a la
República Mexicana utilizando los algoritmos amplificados GK. ....................................... 313

ÍNDICE DE TABLAS.
XXI
Tabla IV.51 Parámetros y nomenclatura base para el proceso directo. ............................ 315
Tabla IV.52 Parámetros y nomenclatura base para el proceso inverso. ........................... 319

I. PROTOCOLO DE INVESTIGACIÓN
1
I. PROTOCOLO DE
INVESTIGACIÓN

I. PROTOCOLO DE INVESTIGACIÓN
2
1.1 Introducción.
Desde la antigüedad la supervivencia del ser humano ha estado vinculada
con la necesidad de conocer y comprender con el mayor detalle posible el lugar en
el que habita y el entorno que lo rodea. Asimismo, le ha permitido explorar y
descubrir lugares más allá de lo que el horizonte le permitía observar. En algún
momento del proceso de desarrollo de la civilización, el ser humano tuvo la
necesidad de plasmar este conocimiento territorial sobre alguna superficie dando
lugar a los primeros “mapas1” de la historia. Estas representaciones fueron
talladas en roca, arcilla, madera o tela dando origen a la cartografía2.
En 1963 el arqueólogo James Mellart descubrió durante una excavación en
la meseta de Anatolia, Turquía, lo que podría ser la obra cartográfica más antigua,
que trata de un plano mural de unos 3 metros de largo y que su descubridor
considera muestra el plano de una ciudad y que fue datado en el año de 6200 a.c.
(Millán Gamboa, 2006).
Sin embargo, es posible que la primera representación del mundo conocido
realizada con un propósito específico y por considerado como mapa es una tablilla
de arcilla que describe la zona norte de la antigua Mesopotamia, incluyendo el Rio
Eufrates. Fue encontrada en Yorgan Tepe, actual ciudad del norte de Irak y se le
asigna una antigüedad aproximada que la sitúa cronológicamente en el año 3800
a.c. (Millán Gamboa, 2006). Esta tablilla aún se conserva en el Museo Británico
(Lorenzo Martinez, 2004).
1 Joly (1988) define mapa como una representación geométrica plana, simplificada y convencional, de toda la superficie terrestre o parte de ella, dentro de una relación de similitud que llamamos escala. Por su parte, la International Cartographic Association ICA, establece que es una imagen convencional que representa las propiedades y características de la realidad geográfica y que son diseñados para satisfacer la necesidad del conocimiento de las relaciones espaciales de una región. 2 La ICA la define en 1967 como “Arte, Ciencia y tecnología empleados en la confección de mapas, así como su estudio como documentos científicos y trabajos artísticos.

I. PROTOCOLO DE INVESTIGACIÓN
3
Desde entonces y a lo largo de toda la historia, los mapas han acompañado
el desarrollo y avance de las diferentes civilizaciones, imprimiendo en ellos el sello
de su cultura, religión e interpretación del mundo. Griegos y romanos realizaron
grandes aportaciones al progreso del conocimiento del territorio y su
representación, conformando las bases de la Cartografía, encargada del proceso
de elaboración y confección de mapas.
En la antigua Grecia ya se suponía que la Tierra era esférica destacando el
tratado titulado Geographia (150 dc) así como la confección de un mapa del
mundo conocido, ambos atribuidos al astrónomo, matemático y geógrafo griego
Claudio Ptolomeo.
La cartografía romana tiene un uso más práctico, aplicándose en la
administración territorial y con propósitos militares, así como para el desarrollo de
comunicaciones más eficientes dentro de sus extensos dominios (Millán Gamboa,
2006).
Durante la edad media se abre un prolongado periodo de decadencia y
abandono del pensamiento científico lo que se traduce en un estancamiento del
progreso de la Cartografía en Europa, determinado por el modelo de organización
política y social profundamente influenciado por el tema religioso.
En este periodo de estancamiento europeo en todos los niveles, debe
destacarse los trabajos desarrollados por los navegantes árabes, que realizaron
cartas geográficas de gran calidad métrica. De acuerdo con Ruiz & Ruiz (2000) la
proliferación de traducciones de textos griegos, especialmente de Ptolomeo,
aumento el interés de los sabios árabes y musulmanes por las ciencias
geográficas.

I. PROTOCOLO DE INVESTIGACIÓN
4
Es hasta el Siglo XV que se observa el resurgimiento de la Cartografía,
fuertemente impulsado por el tráfico marítimo que demando la producción de
mapas para la navegación y además apoyado por un invento de gran
trascendencia para la difusión de los mapas: La imprenta.
El arribo de Cristóbal Colon a tierras de América creyendo haber llegado a
tierras asiáticas, simbólico acontecimiento de esta época de descubrimientos,
proporciona un gran impulso a grandes aportaciones innovaciones en la
cartografía, en el afán de representar esta nueva realidad de los territorios
descubiertos.
El periodo del renacimiento caracterizado por el resurgimiento de todas las
ciencias no podía ser ajeno a la cartografía y le imprime a su desarrollo dos
características que bastaron para darle un matiz especial y definirla como la más
artística de todas las ciencias. Por un lado, personajes como Waldesmuller,
Homen, Reine, Ribero y Cassini aportaron trabajos que convirtieron a los mapas
en verdaderas manifestaciones artísticas y finalmente los matemáticos como
Gauss, Lagrange, Euler, Lambert, Albers, Godde, Winkell y otros que con
dedicación y esfuerzo aportaron el componente racional y científico para
perfeccionar el legado cartográfico proporcionando la base analítica y matemática
para crear mapas con cualidades métricas. Estaba surgiendo así la Cartografía
Matemática encargada de estudiar los procedimientos analíticos y matemáticos
que permiten representar toda o una porción de la superficie terrestre en un mapa.
Estos procedimientos analíticos y matemáticos han sido llamados Proyecciones
Cartográficas y son esenciales en los mapas, pues en función de ellas se les
asignan cualidades geométricas específicas. Además, las proyecciones
cartográficas le aportan a la elaboración del mapa la estructura geométrica que le
da sus propiedades métricas.

I. PROTOCOLO DE INVESTIGACIÓN
5
1.2 Justificación.
En este proceso histórico de evolución de la cartografía, los cartógrafos y
sus proyecciones, destaca de manera relevante uno que revolucionó en su
momento el universo de la cartografía con su creación: Gerardus Mercator que
logró construir una proyección del mundo en su totalidad sobre un cilindro que
envuelve en condición tangente a la tierra a lo largo de su Ecuador y que fue
denominada Proyección Mercator o Proyección de Mercator.
Esta proyección debe su fama a que en principio resuelve un problema
básico de orientación de la navegación marítima, al representar sobre el mapa
trayectorias rectas entre los diferentes puntos del mismo que son equivalentes a
las trayectorias de sus correspondientes puntos sobre la esfera terrestre. Esto le
permite al navegante viajar con certeza a partir de rumbos observados sobre el
mapa, es decir viajar a lo largo de una ruta sin tener que cambiar la dirección de la
brújula.
Asimismo, es de destacar que aun cuando en la actualidad sabemos que la
solución matemática de esta proyección pasa por el uso de los logaritmos y del
cálculo infinitesimal, en 1569 cuando Mercator publica su mapa ninguno de los dos
existía.
Posteriormente, en 1772 el matemático y cartógrafo suizo Johann Heinrich
Lambert público un tratado donde expone 7 nuevas proyecciones, dentro de las
cuales destaca una que fue construida utilizando como superficie de proyección un
cilindro tangente a la esfera terrestre pero en posición transversa a la utilizada por
Mercator, dando con ello lugar a su nomenclatura con la que ahora se identifica:
Proyección Transversa de Mercator (Osborne, 2013).
Posteriormente, la generalización de esta proyección sobre el elipsoide fue
desarrollada por Carl Friedrich Gauss en 1818 caracterizándose por ser una
proyección conforme que conservaba la escala sobre un meridiano. Sin embargo,

I. PROTOCOLO DE INVESTIGACIÓN
6
Gauss dejo incompletos algunos detalles de su trabajo que finalmente Krüger en
1912 desarrolla dos expresiones de transformación para esta proyección
(Osborne, 2013). La primera se perfecciono a partir del desarrollo en serie de
potencias de la distancia al meridiano central, también conocido como ∆λ,
mientras que la segunda lo hizo desarrollando una serie de potencia del parámetro
que describe el achatamiento del elipsoide3.
De acuerdo con Osborne (2013) el primero de los métodos se extendió
tanto en Europa, como en América, dando lugar a trabajos como los de Lee (1945)
y Readfearn (1948) en Gran Bretaña y Thomas (1952) en Estados Unidos4.
En dichos trabajos, la determinación de las expresiones para la
transformación de coordenadas en modo directo e inverso5 de un punto cualquiera
pasa por la aplicación de la serie de Taylor en las proximidades de dicho punto
tomando como argumento de desarrollo, la distancia ∆λ al meridiano central.
Sin embargo, cuanto mayor es la separación entre dicho punto cualquiera y
el meridiano central, mayor ha de ser el número de términos que deberán tomarse
en cuenta en el desarrollo de las series de potencia del parámetro ∆λ, para
asegurar que las transformaciones sean precisas. Para la proyección UTM6,
donde la amplitud máxima es de 3° a cada lado del meridiano central, suele ser
suficiente utilizar hasta los términos 5 y 6 de la serie de potencias, pero en los
casos donde la proyección se extiende más allá de los 3° es conveniente utilizar
hasta los términos 7 y 8 (Mena Barrios, 2008).
3 Por esta razón la Proyección Transversa de Mercator a menudo es conocida también como Gauss-Kruger. 4 El segundo método de solución planteado por Kruger ha sido desarrollado por Karney (2011) y sugiere un resultado más preciso. 5 Se considera transformación directa cuando las coordenadas geodésicas de un punto cualquiera se transforman en coordenadas planas de la proyección y la transformación inversa es el proceso contrario. 6 Variante de la Proyección Transversa de Mercator o de Gauss-Kruger pero aplicada en forma sistemática a porciones iguales de 6° de longitud de la superficie terrestre y que por su cobertura universal ha derivado en ser la proyección más utilizada en el mundo actualmente.

I. PROTOCOLO DE INVESTIGACIÓN
7
Es en este sentido que Karney (2011) afirma que el algoritmo basado en las
formulas desarrolladas a partir el método de serie de potencias de ∆λ es
impreciso y sugiere no utilizarlo. Deakin, Hunter & Karney (2010) consideran que
este método de transformación solo garantiza precisión milimétrica con valores de
∆λ menores a 6°.
Por su parte, y de manera contrastante, Turiño (2009) indica que las
formulas basadas en funciones elípticas, si bien ofrecen mejor precisión conllevan
el uso de largas series con diferentes tipos de coeficiente, integración numérica e
iteraciones. Por su mayor sencillez, defiende el planteamiento de la aplicación de
la serie desarrollada a partir del parámetro ∆λ por utilizar solo una clase de
coeficiente.
En México la autoridad encargada de elaborar y difundir la cartografía
nacional en sus diferentes escalas y presentaciones es el Instituto Nacional de
Estadística y Geografía (INEGI), el cual considera a la Proyección Transversa de
Mercator, en conjunto con la Proyección Cónica Conforme de Lambert con dos
paralelos tipo, como oficial para la representación de la República Mexicana en la
carta a escala 1:4 000 0007. A pesar de ello no ha divulgado, al menos disponible
al público en general, algún documento técnico donde se describan los algoritmos
a utilizar para las transformaciones de coordenadas geográficas en la Proyección
Transversa de Mercator, o bien una calculadora propia parecida a TMCalc8 , pero
con aplicación para una extensión de longitud ∆λ suficiente para cubrir toda la
extensión territorial del país, que en este caso debe ser de aproximadamente
16.5° a ambos lados del meridiano central, que para esta proyección se ha
establecido como 102° W.
7 Escala cartográfica oficial para la representación completa de la República Mexicana. 8 Calculadora desarrollada por INEGI y disponible al público en general de manera libre en el portal http://www.inegi.org.mx/geo/contenidos/catastro/tm_presentacion.aspx y consiste en una aplicación para realizar las siguientes transformaciones de coordenadas : Geodésicas a TME (Transversa Modificada Ejidal), TME a Geodésicas, Geodésicas a UTM (Universal Transversa de Mercator), UTM a Geodésicas, TME a UTM, UTM a TME, transformación de zonas TME y transformación de zonas UTM. El valor máximo de ∆𝜆 en estas transformaciones es de 3°.

I. PROTOCOLO DE INVESTIGACIÓN
8
Fig. I.1 Número de términos necesarios para la proyección Gauss-Krüger en función de ∆𝛌 Fuente: Enriquez Turiño, 2009.
A partir de lo expuesto por Mena (2008), para poder aplicar la Proyección
Transversa de Mercator para la representación de la República Mexicana sería
necesario desarrollar la serie de potencias de ∆λ hasta los términos necesarios,
acorde el valor máximo de ∆λ, para garantizar la calidad métrica de las
transformaciones. La respuesta a este planteamiento la presenta Turiño (2009), al
afirmar que para alcanzar una precisión de 0.001 m en la transformación de
coordenadas en la Proyección Transversa de Mercator tanto en el proceso directo
como el inverso, el número de términos de la serie de Taylor necesarios está en
función de los valores de la latitud φ y distancia al meridiano central ∆λ de un
punto cualquiera, de acuerdo a la siguiente tabla:

I. PROTOCOLO DE INVESTIGACIÓN
9
1.3 Objetivos.
1.3.1 Objetivo General.
Analizando lo anterior, y para el caso de la República Mexicana donde
∆𝜆Max = 16° 30", y considerando que el territorio nacional se extiende en latitud
desde los 14° hasta los 33° podemos asumir que el número de términos de la
serie de Taylor necesarios para establecer, con calidad métrica de 0.001m, las
expresiones matemáticas para la transformación de coordenadas en modo directo
e inverso en la Proyección Transversa de Mercator, es de entre 11 y 12 términos.
En virtud de que en la búsqueda documental no se detectó trabajo escrito
alguno que desarrollara las ecuaciones de transformación más allá de los términos
7 y 8 de la serie de Taylor y que de acuerdo con Mena (2008) y Deakin, Hunter &
Karney (2010) solo garantizan calidad métrica para valores del parámetro ∆λ de
entre 3° y 6°, es por ello que la presente tesis tiene por objetivo principal:
- Establecer las ecuaciones de trasformación de coordenadas directa e
inversa en la Proyección Transversa de Mercator para su aplicación en la
representación cartográfica de la totalidad de la República Mexicana
donde el valor del parámetro ∆λ es 16.5°.
1.3.2 Objetivos Particulares.
- Desarrollar hasta el término 12 la serie de potencias del parámetro ∆λ
para establecer los algoritmos de transformación directa e inversa de la
Proyección Transversa de Mercator aplicables a la representación de la
República Mexicana.
- Evaluar la calidad métrica de las transformaciones basadas en dichos
algoritmos para el espacio geográfico de la República Mexicana.

I. PROTOCOLO DE INVESTIGACIÓN
10
- Difundir el desarrollo completo de todos los términos, componentes y
procedimientos que conformen y se vinculen con los algoritmos y fórmulas de
transformación de la Proyección Gauss- Krüger para la cobertura total de la
República Mexicana.
Para verificar la calidad métrica de las transformaciones de coordenadas
obtenidas mediante la aplicación de algoritmos de la manera descrita, se puede
aplicar el método detallado por Osborne (2013) y Deakin, Hunter & Karney (2010)
y que consiste en transformar inicialmente las coordenadas geodésicas φ, λ de un
punto en coordenadas planas de la proyección X, Y y posteriormente a partir de
estas últimas regresar a las coordenadas geodésicas. Dado que deberíamos
regresar a las coordenadas iniciales, la calidad métrica de las ecuaciones de
transformación dependerá de la diferencia entre las coordenadas de partida y las
coordenadas de regreso.
Asimismo, en http://www.mygeodesy.id.au/map-projection/ se encuentra una
calculadora para transformar coordenadas geodésicas en coordenadas planas en
la Proyección Transversa de Mercator desarrollada de acuerdo a la formulación
matemática de Karney-Kruger propuesta en Deakin (2014), que permitirá
comparar los resultados obtenidos en este trabajo.
Dado que el desarrollo de las ecuaciones de transformación de
coordenadas aquí propuesto exige una enorme cantidad de cálculos algebraicos,
es importante apoyarse en alguna de las aplicaciones disponibles para la
manipulación de estos datos. Por su eficiencia para el manejo de expresiones
analíticas en este trabajo se utilizará Mathematica®.

II. ANTECEDENTES HISTÓRICOS
11
II. ANTECEDENTES
HISTÓRICOS

II. ANTECEDENTES HISTÓRICOS
12
2.1 Introducción.
A través de la historia, muchos fueron los esfuerzos de grandes científicos
(cartógrafos, geógrafos, navegantes, topógrafos, geodestas, etc.) por tratar de
representar al mundo en un papel, en un lienzo el cual fuera capaz de explicar de
manera detallada y casi exacta la ubicación de todos los lugares conocidos por el
hombre de aquella época. Fue una labor difícil pero más no imposible, impulsados
por la sed de conocimiento y la curiosidad de descubrir lo nunca antes
descubierto, hombres de ciencia, navegantes y conquistadores, destacados por su
diferente e interesante forma de pensar y sobre todo un increíble intelecto, durante
mucho tiempo lograron crear los más preciados tesoros de la geografía, los
mapas, y plasmar sobre ellos el conocimiento adquirido durante varios siglos.
En esta odisea por lograr la máxima representación del esferoide azul en un
mapa de manera fiel y precisa, infinidad de científicos y personas afines a ciencias
relacionadas con la medición de la tierra se enfrentaron con el principal y más
difícil desafío de la cartografía; trasladar la información existente sobre la
superficie terrestre que originalmente es afectada por una curvatura muy distinta a
la de una esfera perfecta a una superficie totalmente plana.
Con el aporte de cada uno de estos intelectuales es que nacen las
proyecciones cartográficas, proyecciones que como bien lo dice su nombre, son
simplemente el reflejo y la visión del mundo visto desde una diferente perspectiva
pero todas compartiendo un mismo fin, poner al mundo sobre un mapa. Sin duda
alguna de este puñado de hombres, las proyecciones e infinidad de mapas que
con ellos surgen destaca solo uno, Gerardus Mercator el hombre que revolucionó
el universo de la cartografía y que con su máxima creación, la proyección
bautizada con el nombre, la “Proyección Mercator” o “Proyección de Mercator”,
logro representar a la tierra en su totalidad, mejorando e innovando el
conocimiento geográfico, así mismo impulsando a la navegación marítima.

II. ANTECEDENTES HISTÓRICOS
13
La Proyección Mercator, durante cuatrocientos años ha sido aceptada como la
verdadera representación plana de nuestro planeta (Ingeniería de Mapas, 2013).
La cual fue creada originalmente para mostrar rumbos de la brújula para viajes en
el mar, siendo una característica adicional de esta proyección que todas las
formas locales son exactas y definidas claramente (ESRI, 2013).
A pesar de las carencias tecnológicas y el poco conocimiento sobre la
verdadera forma de la tierra, de su extraña curvatura y los avances matemáticos
sobre geometría y cálculo diferencial que en el tiempo del renacimiento existía,
Mercator logra construir una proyección del mundo sobre un cilindro pero con la
desventaja de que en ella existían distorsiones muy notables sobre los territorios
proyectados. Sin embargo dadas estas carencias y para inhibir dicha deformación
geométrica, matemáticos y científicos como lo fueron Lambert, Gauss y Krüger
logran desaparecer esta problemática perfeccionando la idea de Mercator.
La complejidad de encontrar una figura geométrica que se aproximara más
a la forma real de la tierra, trajo consigo diversos cambios a la estructura
matemática de esta proyección, dicha situación dio como resultado nuevas
modificaciones y aportaciones al trabajo de Mercator. De estos ajustes surgieron
variantes de la proyección, los cuales facilitan más la comprensión y análisis de la
información geoespacial del territorio pero todas ellas conservando la esencia de
la idea original de su creador.
La proyección Mercator, es sin duda una de las más perdurables y exitosas
proyecciones cartográficas creadas durante el siglo XVI. Desde su creación hasta
la actualidad la proyección de Mercator y todas sus variantes han sido las más
utilizadas, que más se ajusta a las necesidades de la cartografía y especialidades
a fines a ella como lo son la topografía, geodesia y cartografía, esencialmente. Es
por esta razón que en este capítulo se explicaran los rasgos históricos en torno a
esta proyección y sus principales aportaciones y variantes.

II. ANTECEDENTES HISTÓRICOS
14
2.2 El Mundo en un Cilindro. La Idea de Mercator.
La sublevación de los Países Bajos contra el dominio español en la famosa
Guerra de los Ochenta Años9 dio un fuerte impulso a la cartografía bélica. Los
ejércitos rebeldes necesitaban mapas informativos los cuales estuvieran
actualizados en cuanto a las últimas operaciones, expediciones, batallas y demás
información militar que les permitirá organizar y planear estrategias que
garantizaran la victoria sobre las tropas enemigas. Además de satisfacer esta
necesidad los cartógrafos de aquel entonces se daban a la tarea de crear mapas
actualizados en los cuales se plasmaran la ampliación de las ciudades debido al
enorme crecimiento demográfico del siglo XV y XVI, la ramificación de las redes
fluviales y terrestres, la desecación de los pólderes y sobre todo las rutas
comerciales terrestres y marítimas (Toscano, 2000).
Antes de los sucesos ocurridos durante la lucha de independencia, en los
Países Bajos la actividad cartográfica era nula, debido a que durante el reinado
español se le daba prioridad a las cuestiones políticas y religiosas. Se tiene
conocimiento que a mediados del siglo XV existieron grandes aportaciones y
trabajos de cartógrafos en Flandes, sin embargo fueron aquellas circunstancias las
que obligan a abandonar este florecimiento y la enorme difusión del producto
cartográfico que consigo llevan.
Durante la mitad del siglo XV e inicios del siglo XVI Amberes era la capital
comercial de toda Europa y gozaba de una gran actividad mercantil y portuaria. En
aquellos tiempos los mercaderes y armadores, en su interés por conocer nuevas
rutas y nuevas localizaciones de donde proveerse a la vez que situar sus
productos, provocan una creciente demanda del saber geográfico (Colección de
Cartografía Antigua GM, 2015). El trazar nuevas rutas de navegación hacía que
los Países Bajos golpearan económicamente a la corona española, generando un
9 Conflicto bélico entre las diecisiete provincias que conformaban Los Países Bajos en
contra de la Monarquía Española, iniciando en el año 1568 y finalizando en 1648.

II. ANTECEDENTES HISTÓRICOS
15
bloqueo comercial y una fuga enorme de riqueza, patrimonio, cultura y
principalmente de conocimiento, donde los principales beneficiados era el bloque
enemigo. Dicho de otra manera estas nuevas rutas comerciales serian la
independencia económica de España.
Es así que durante los primeros años del movimiento de independencia
flamenca es cuando se da la mayor aportación para la ciencia de los mapas, el
nacimiento de una de las innovaciones cartográficas más importantes de todos los
tiempos. Este triunfo científico fue forjado por uno de los hombres más célebres e
ilustres que la cartografía y geografía flamenca pudo haber concebido, siendo su
nombre Gerhard Kremer o mejor conocido por su traducción al latín como
Gerardus Mercator de Rupelmonde.
Fig. II.1 Gerardus Mercator de Rupelmonde.
II. ANTECEDENTES HISTÓRICOS
16
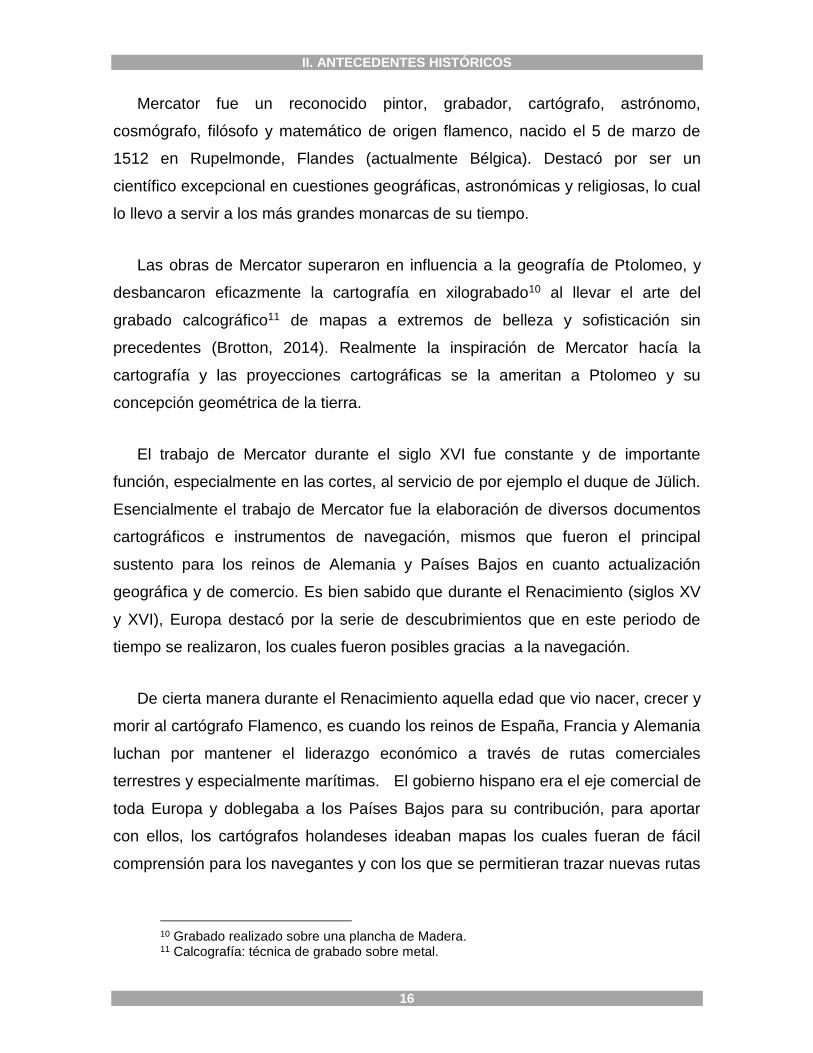
Mercator fue un reconocido pintor, grabador, cartógrafo, astrónomo,
cosmógrafo, filósofo y matemático de origen flamenco, nacido el 5 de marzo de
1512 en Rupelmonde, Flandes (actualmente Bélgica). Destacó por ser un
científico excepcional en cuestiones geográficas, astronómicas y religiosas, lo cual
lo llevo a servir a los más grandes monarcas de su tiempo.
Las obras de Mercator superaron en influencia a la geografía de Ptolomeo, y
desbancaron eficazmente la cartografía en xilograbado10 al llevar el arte del
grabado calcográfico11 de mapas a extremos de belleza y sofisticación sin
precedentes (Brotton, 2014). Realmente la inspiración de Mercator hacía la
cartografía y las proyecciones cartográficas se la ameritan a Ptolomeo y su
concepción geométrica de la tierra.
El trabajo de Mercator durante el siglo XVI fue constante y de importante
función, especialmente en las cortes, al servicio de por ejemplo el duque de Jülich.
Esencialmente el trabajo de Mercator fue la elaboración de diversos documentos
cartográficos e instrumentos de navegación, mismos que fueron el principal
sustento para los reinos de Alemania y Países Bajos en cuanto actualización
geográfica y de comercio. Es bien sabido que durante el Renacimiento (siglos XV
y XVI), Europa destacó por la serie de descubrimientos que en este periodo de
tiempo se realizaron, los cuales fueron posibles gracias a la navegación.
De cierta manera durante el Renacimiento aquella edad que vio nacer, crecer y
morir al cartógrafo Flamenco, es cuando los reinos de España, Francia y Alemania
luchan por mantener el liderazgo económico a través de rutas comerciales
terrestres y especialmente marítimas. El gobierno hispano era el eje comercial de
toda Europa y doblegaba a los Países Bajos para su contribución, para aportar
con ellos, los cartógrafos holandeses ideaban mapas los cuales fueran de fácil
comprensión para los navegantes y con los que se permitieran trazar nuevas rutas
10 Grabado realizado sobre una plancha de Madera. 11 Calcografía: técnica de grabado sobre metal.

II. ANTECEDENTES HISTÓRICOS
17
marítimas las cuales fueran confiables y de cierta manera de fácil acceso, mismos
que invitaran e impulsaran a los marinos de aquella época a adentrarse en aguas
profundas erradicando el temor de perderse en ellas.
Estos mapas deberían dar fidelidad y certeza a los capitanes de que su navío
fuera en la dirección correcta al lugar o zona deseada para el arribo, dirección que
era previamente trazada en el mapa, es por ese motivo que los cartógrafos de
aquel entonces lidiaron por crear el mapa ideal que cumpliera este primordial
requisito y así evitar que los navíos naufragaran en el inmenso océano.
Los nautas deseaban que sus barcos siguieran una dirección constante sin
importar la distancia recorrida (en aquel tiempo era un poco complicada estimar la
distancia), más bien les interesaba seguir un rumbo fijo el cual existía entre su
puerto de partida hasta su punto de anclaje o llegada. El rumbo fijo era de fácil
obtención si la tierra fuese un platillo, pero debido a su forma casi esférica era
difícil encontrar esa relación angular. Esta línea de rumbo fijo en la realidad no se
manifiesta como una recta, más bien es una línea la cual contempla la curvatura
terrestre, lo que la vuelve curva. A esta línea los antiguos matemáticos griegos la
bautizaron con el nombre de loxodromia o línea loxodrómica que
etimológicamente significa loxós “oblicuo” y dromos que quiere decir “curso”.
La línea loxodrómica o loxodromia se caracteriza por ser una línea curva sobre
la superficie terrestre y diagonal en un plano, que en cualquier de estos escenarios
tiene un azimut, rumbo o dirección constante, la cual corta a los meridianos bajo el
mismo ángulo.
En tiempos de Mercator y antes de la invención de su proyección los marinos
utilizaban otros sistemas de navegación los cuales carecían de la fidelidad de la
orientación angular, por este motivo los viajes en la mayoría de casos se
realizaban siguiendo el criterio de la exploración y la experimentación. Sin
embargo Jerry Brotton (2014) afirma que a pesar de que las líneas de rumbo
garantizaran rutas confiables estas no constituían el único método para navegar a

II. ANTECEDENTES HISTÓRICOS
18
través de la superficie terrestre, los otros métodos que los antiguos navegantes
utilizaban eran los sistemas tradicionales de navegación como la navegación por
círculo máximo y la navegación por línea recta al estilo portulano.
En ambos casos la precisión angular era nula, debido que en estos dos
sistemas la curvatura del arco de rumbo propuesto cambiaba constantemente, lo
que lo obligaba a los pilotos a justar una y otra vez su dirección. Este problema se
generaba debido a que los mapas anteriores a Mercator en su mayoría estaban
referidos a proyecciones de tipo codiforme o a la clásica proyección ptolémica,
provocando que los marinos no pudieran trazar una línea de rumbo constante
sobre ellos.
Mercator era consciente de las deficiencias de estos mapas, en los cuales no
se reflejaba con precisión la curvatura de la Tierra, donde el dibujo de la superficie
terrestre sobre una superficie bidimensional plana provocaba inevitablemente
distorsiones no deseadas que inducían al error de cualquiera que quisiera trazar
Fig. II.2 Loxodrómica en un grabado de Escher, 1958.

II. ANTECEDENTES HISTÓRICOS
19
con precisión un curso entre dos puntos (Evans, 2015). Con esto Mercator
conceptualiza un sistema de proyección en él cual se pudiera rectificar el problema
de la distorsión angular, mismo que en los mapas ptomelicos se generaban, así
mismo poder trazar en el la línea loxodrómica, la cual era de vital importancia y de
principal estudio, para sí cumplir con la demanda requerida por los navegantes,
mercaderes y comerciantes de los Países Bajos.
Realmente la problemática de poder proyectar la línea loxodrómica sobre un
mapa en el cual se conservara la cantidad angular con la que estos cortaran a los
meridianos, fue que los mapas ptomelicos representaban a los meridianos y
paralelos con un cierto grado de curvatura, en donde los meridianos convergían en
los polos (tal como se comportan en la realidad) y los paralelos se extendían de
este a oeste perdiéndose en el infinito, esta circunstancia hacía imposible trazar y
obtener la dirección de cualquier rumbo así mismo el valor angular que se formaba
al cortar a los meridianos que atravesaba aquella línea. Mercator da fin a esta
problemática que desde la antigüedad había aquejado a los marinos del viejo
mundo, siendo un cilindro envolvente a la superficie terrestre el que diera solución
a este enigmático problema.
La idea de Mercator fue sencilla aunque paradójicamente compleja para los
escasos avances tecnológicos y científicos de su tiempo. Gracias a su experiencia
como grabador y elaborador de globos, Mercator encuentra la relación entre estos
y los lienzos con los que realizaba sus mapas. El observo que colocando un lienzo
enrollado de forma cilíndrica alrededor de un globo, siendo el diámetro del cilindro
el mismo que el del globo, los meridianos y los paralelos se enderezaban
convirtiéndose en líneas totalmente rectas, donde los meridianos se proyectarían
de norte a sur pero con la peculiaridad de que no convergerían en los polos como
en los mapas tradicionales, más bien estos se proyectarían de tal forma que
pareciera que se perdieran en el infinito, de igual manera sucedía con los
paralelos pero en dirección este oeste, este efecto provocaba que los meridianos
fueran perpendiculares con los paralelos en cada una de sus intersecciones. Si

II. ANTECEDENTES HISTÓRICOS
20
este cilindro es cortado por el largo de un meridiano y posteriormente extendido se
obtiene la proyección cilíndrica.
Dicho de otra manera con un sentido más técnico y de acuerdo a lo que
estipulan Lapaine y Usery (2008). La proyección Mercator representa los
meridianos como líneas paralelas entre sí, uniformemente espaciadas
(equidistantes), siendo los paralelos desigualmente espaciados, y que están más
juntos cuanto más cerca se encuentran del ecuador y los cuales son
perpendiculares a los meridianos. Los polos Norte y Sur no se pueden mostrar. La
escala es verdadera a lo largo del ecuador o a lo largo de dos paralelos
equidistantes del ecuador. Se produce una distorsión significativa del tamaño en
las latitudes. Realmente a lo largo del ecuador y zonas cercanas a él la
deformación lineal no se manifiesta debido que en el experimento de Mercator es
la zona donde el globo toca directamente al cilindro, como está directamente
empalmando con él, el ecuador presenta sus dimensiones reales como si fuese
un sello marcado en un papel. A este comportamiento del ecuador sobre el cilindro
los matemáticos y cartógrafos lo definieron “Paralelo de Contacto”.
Con este experimento Mercator concibe la primera de las proyecciones
cilíndricas, se ha de mencionar que estas proyecciones realmente se crean
matemáticamente y no desde un cilindro (solo sirve de apoyo), el punto de vista
final puede sugerir una construcción cilíndrica. Bajo este contexto y a su
experimento Mercator desarrolla la explicación matemática de este nuevo sistema.
Según Régules (2010) con el enderezamiento de meridianos y paralelos en
esta proyección, Mercator introdujo una distorsión de las distancias en la dirección
Este-Oeste que aumentaba de nula en el ecuador (donde no había sido necesario
hacerles nada a los meridianos) a infinita en los polos. Al separar los meridianos
en forma creciente con la latitud, Mercator deformó los continentes en el sentido
horizontal como si fueran figuras pintadas en una membrana de hule que se estira
hacia los lados. Para corregir la deformación se vio obligado a estirar cada grado
de latitud en la misma proporción en que había estirado los de longitud para

II. ANTECEDENTES HISTÓRICOS
21
enderezar los meridianos. Como resultado de estas manipulaciones las
loxodromias se convertían en rectas, pero las distancias y por lo tanto los tamaños
de los continentes se inflaban desmesuradamente en las latitudes superiores.
El cilindro y el globo fueron para Mercator un experimento gráfico que sustento
la concepción de su idea de proyectar la línea loxodrómica, pero en realidad el
trabajo matemático fue el esencial para que su idea funcionara y se pusiera en
marcha. Debido al poco avance científico en geodesia Mercator utilizo la figura
geométrica de la esfera para representar al planeta, de acuerdo a su observación
e hipótesis el proyección de los meridianos sobre el cilindro se comportaban de
manera regular con una distancia constante entre ellos, el problema re caía sobre
los paralelos, debido que en ellos la distancia que los separaba era irregular y no
constante como el caso de los meridianos.
Fig. II.3 Explicación del principio de la proyección de Mercator, según Thomas Wright en su Certaine Errors of Navigation, Londres, 1599.

II. ANTECEDENTES HISTÓRICOS
22
Para ello Mercator matemáticamente estimo y calculo la distancia en la que
deberían estar separados cada uno de ellos y de esta manera cumplir con la
importantísima demanda requerida que era la conservación de la línea de rumbo
constante. Esta situación generaba que la distancia entre dos meridianos
cualesquiera en el ecuador fuera el doble de la misma distancia a lo largo que
discurre a un paralelo 60º Norte, debido a la convergencia de los meridianos. De
acuerdo a lo que afirma Brotton, la solución a este problema fue que Mercator
ensancho el paralelo 60º Norte al doble de su dimensión real, asegurando así que
un ángulo oblicuo que lo atravesara pasara a ser recto. Este artificio matemático lo
aplico a todos los paralelos generando así el alargamiento de cada uno de ellos,
provocando que cualquier línea que atravesara los meridianos y el ángulo formado
entre esta y los meridianos fuera constante.
El razonamiento y cálculo matemático que Mercator utilizo para su invención
fue apoyándose sobre la geometría euclidiana extendida, debido que durante el
renacimiento, los trabajos y avances sobre geometría analítica y calculo
infinitesimal aun no existían.
Con este nuevo logro Mercator (el máximo de todos los que puedo haber
hecho), por fin pudo resolver el problema de direcciones en la navegación,
facilitando a todos los marinos poder trazar la dirección de su navío con
simplemente una brújula, una escuadra y un mapa con su proyección, pero
además de este triunfo logro conseguir la conformidad en un mapa, un innovación
matemática que cambiaría el rumbo de la cartografía.
Fue en 1564 mientras ejercía en el Tribunal Cosmographer a servicios del
Duque Wilhelm de Cleve, cuando Mercator conceptualiza esta proyección y
elabora el primer mapa con ella, pero no fue cinco años más tarde, en 1569
cuando su más grande obra se revela ante el mundo de la ciencia y la navegación.

II. ANTECEDENTES HISTÓRICOS
23
En 1569 los avances geográficos sobre el viejo mundo y el descubrimiento de
América comienzan a resaltar en Europa haciendo trabajar a marchas forzadas a
los cartógrafos de todas las naciones europeas en especial de aquellas naciones
conquistadoras, este detonante es lo que propicia a Mercator a desarrollar un
documento en cual contemplara todo aquel conocimiento y representara la
información geográfica existente del mundo hasta ese momento, creando con ello
un mapamundi. Es así que en vísperas de La Guerra de los Ochenta Años, en el
año de 1569, Mercator publica su mapa el cual llevaría por título; “Nova et aucta
orbisterrae descriptio ad usum navigantium emendate accomodata”, cuya
traducción sería “Nueva y más completa representación del globo terrestre
correctamente adaptada para el uso de los navegantes”. Como su nombre lo
recalca y debido al avance sobre la línea loxodrómica que en él se muestra fue
destinada exclusivamente para la navegación.
Este mapa consta de dieciocho hojas separadas, que al unirlas forman un
mural en el cual se presentaría dicho mapa, mismas que aparecen identificadas
por el clásico procedimiento, de uso en los mapas actuales, consistente en dos
coordenadas perpendiculares, una con números del 1 al 6 y otra con las letras A,
B y C.
El mapamundi está confeccionado en escala 1:20’000,000 en el ecuador, con
una cobertura comprendida entre las latitudes 80º N y 66º S. El casquete polar
norte está representado separadamente. La carta se inspira en Ptolomeo y tuvo en
cuenta los datos cartográficos de su época trasladados por navegantes
holandeses, portugueses y españoles.
Tiene sin embargo notorios errores como colocar una gran e imaginaria isla de
Frislant al sur de Islandia, representar el casquete polar norte en la forma de
cuatro islas, la imaginativa recreación del reino del Preste Juan, la colocación del
polo magnético en el estrecho de Bering, la presencia de la gran roca polar, las
imaginarias islas de Pequeña Java y de los Romeros (sur de Madagascar),
etcétera. Además de esto la Carta de Mercator presenta numerosas ilustraciones,

II. ANTECEDENTES HISTÓRICOS
24
llamadas cartelas, leyendas, cartuchos, etcétera, junto con abundantes notas
escritas, que se presentan distribuidas un tanto irregularmente. Es una de las
cartas más profusamente documentadas del Renacimiento. Algunas de estas
leyendas son sumamente breves, pero suelen ser de denso contenido y casi todas
presentan el aspecto común de que van destinadas principalmente para satisfacer
necesidades de los navegantes. (Surroca Carrascosa, 2012). De estas leyendas
resalta una en la cual Mercator hace mención del objetivo de la representación de
los meridianos y paralelos en forma recta y su relación con la línea de rumbo
constante.
... propagación en un plano de la superficie de una esfera de tal manera que
las posiciones de todos los lugares corresponderán a todas las partes entre sí
tanto en lo que respecta a cierta dirección y la distancia se refiere y lo que se
refiere a ciertas longitudes y latitudes. Gerardus Mercator de Rupelmonde, 1569.
Algunos volúmenes de su obra magna nunca verían la luz, otros serían
publicados en diferentes plazos durante el resto de su vida. El detalle, letras
precisa, las numerosas leyendas y la simetría compositiva del enorme mapa
crearían un espectáculo y una de las más bellas obras cartográficas a pesar de
contener errores geográficos, especialmente en lo inexplorado y sobre los
márgenes del mundo conocido.
Surroca Carrascosa (2012), menciona que de esta carta solo se conservan tres
impresiones originales, que se encuentran en el Museo Marítimo Príncipe Enrique
de Róterdam, en la Biblioteca Nacional de Francia y en la Universidad de Basilea.
En el Museo Nacional de Varsovia se encuentra una copia realizada antes de que
se quemara, durante la Segunda Guerra Mundial, una cuarta copia original que
existía en la biblioteca estatal de Berslau (Wrocaw). En el Museo Naval de Madrid
existe una copia facsimilar, editada por el museo de Róterdam.

II. ANTECEDENTES HISTÓRICOS
25
Fig
. II
.4 N
ova
et
au
cta
orb
iste
rra
e d
esc
rip
tio
ad
usu
m n
avig
an
tiu
m e
me
nd
ate
ac
co
mo
da
ta, M
erc
ato
r 1
56
9. F
ue
nte
: h
ttp
://g
all
ica
.bn
f.fr
/ark
:/1
21
48/b
tv1
b7
200
344
k/f
14
.ite
m

II. ANTECEDENTES HISTÓRICOS
26
Además Surroca señala que en la época de la edición esta obra tuvo
dificultades de comercialización y difusión porque, según se cree, las
explicaciones que en ella aparecen no convencieron a los navegantes. Pero según
datos de Régules (2010), el mapa de Mercator adquirió mucha popularidad y
prestigio en los siglos XVII y XVIII. Era el mapa de los navegantes y éstos
gozaban de mucha estimación en una época en que el barco era el medio de
transporte más socorrido, tanto para mercancías valiosas como para ejércitos
conquistadores.
Es así como Mercator en plena guerra de independencia flamenca revela al
mundo la más grande de sus obras, “La Proyección de Mercator” o “Proyección
Mercator Simple”, una de las joyas más valiosas de la cartografía, una de las
primeras proyecciones de tipo conforme y el cilindro que cambiaría el sentido del
mundo.
Un dato curioso que es importante señalar que a pesar de llevar su nombre,
Mercator probablemente no haya sido la primera persona en utilizar esta
proyección ya que se cree que con este tipo de proyección se diseñaron algunos
relojes de sol (Manassero, 2011). Enríquez Turiño (2009) afirma que hay indicios
que se utilizó en China en el año 940 por Ch’ien Lo-Chih y se supone que se
aplicó en Europa por primera vez en 1511 por Erhard Etzlaub de Nuremberg.
Mercator solo hereda al mundo la esencia de un trabajo que por muchos años
será motivo de sinnúmero de estudios, dicha circunstancia traerá consigo que
varios cartógrafos, matemáticos, geógrafos y demás científicos fueran los
responsables de perfeccionar dicha obra y llevarla a su punto cumbre.
El propio Mercator admitió al final de su vida que los marinos no habían
entendido su carta y que esta carecía de una clara y detallada explicación. Así se
lo exponía a su amigo y biógrafo Walter Ghym, pero no fue que hasta en 1597 en
su Navigator’s supply Ghym, explica cómo construir la. No obstante la explicación
del método seguido por Mercator fue aclarado 20 años después de su publicación

II. ANTECEDENTES HISTÓRICOS
27
en 1599 por el cosmógrafo irlandés Edward Wright, reconocido como el que dio un
verdadero impulso a los mapas de latitudes crecientes (Ruiz Morales, 1998).
En el año de 1599 en la ciudad de Londres Edward Wright publica su libro
“Certain Errors in Navigation Detected and Corrected”, o por su traducción
“Certaine Errores Detectados y Corregidos para la Navegación”, en el cual explica
las ecuaciones analíticas de la proyección de Mercator, además del cálculo y
estimación del valor preciso ocupado por Mercator de la distancia de
espaciamiento para los paralelos en su proyección (“partes meridionales”) a partir
de sumas de Riemann. Sin embargo, Alonso Lerch (1986) afirma que fue solo 5
años después, en 1616, cuando Wright publica una tabla de latitudes dando
números que expresaban las longitudes de los arcos de meridianos, la cual se
obtuvo agregando las secantes de 1”,2”,3”, etc.
De esta manera es como la idea de Mercator de envolver al mundo en un
cilindro cambia el curso de la cartografía, posicionando al mundo al fin en el mapa
y dándole un rumbo constante. Es así como este excepcional cartógrafo flamenco
pasa a la historia como el cartógrafo de cartógrafos. Su proyección trascendió en
el mundo de los marinos y navegantes y a partir de ese momento se empleó para
todo.
2.3 El Cilindro Transverso. Los Trabajos de Lambert, Gauss y Krüger.
Después de las correcciones realizadas por Edward Wright la proyección
Mercator se convirtió en uno de los sistemas más fiable para la navegación
marítima siendo utilizada en casi toda Europa por su facilidad en el trazado de
rutas, sin embargo está aún adolecía de la gran deformación geométrica de los
continentes o territorios los cuales se encontraban muy cerca de los polos, misma
que iba incrementando conforme se alejaba del Ecuador.

II. ANTECEDENTES HISTÓRICOS
28
Esta exagerada deformación impedía su uso para la representación fiel y
precisa de las regiones polares aunque en ellas se conservaban los valores
angulares de la línea loxodrómica, su representación en el sistema Mercator era
de casi el doble a su tamaño real. Cartográficamente hablando en estas zonas el
factor de escala o de deformación lineal era de casi las dos unidades.
Es esta circunstancia es la que motiva el matemático, físico, astrónomo,
cartógrafo y filósofo alemán Johann Heinrich Lambert hace una de las
modificaciones más significativas e importantes a la proyección Mercator. La cual
daría un nuevo rumbo a las proyecciones conformes cilíndricas.
Fig. II.5 Johann Heinrich Lambert, o Jean-Henri Lambert (1728-1777)

II. ANTECEDENTES HISTÓRICOS
29
Fig. II.6 Modelo Cilíndrico Transverso. Fuente Gómez Moreno 2003.
Para inhibir la problemática de deformación Lambert ideo un sistema alterno
tomando como referencia el modelo proyectivo original de Mercator, el nuevo
modelo se trataba de una modificación al cilindro que envolvía al globo terrestre.
En su nuevo sistema, Lambert colocaría el mismo cilindro pero de forma horizontal
haciendo coincidir el eje transversal del cilindro con el ecuador, de tal manera que
este giro provocaría que el ecuador ya no fuera el punto de contacto entre la
esfera y el cilindro, sino un meridiano cualquiera que sería elegido arbitrariamente,
este meridiano en la práctica cartográfica recibe el nombre de Meridiano Central o
Meridiano de Referencia.
Dado que el eje transversal coincide con el ecuador es que esta proyección
modificada recibe el nombre de Proyección Transversa de Mercator.
Una solución más apropiada fue presentada por Lambert y consistió en
variar la proyección Mercator sobre la esfera y utilizar un cilindro transverso
tangente a un meridiano en lugar de uno directo tangente al Ecuador, lo que dio
lugar a la proyección transversa de Mercator (Millán Gamboa, 2006).

II. ANTECEDENTES HISTÓRICOS
30
De esta manera se logra que en la proyección original de Mercator
desaparezcan el error de deformación en las zonas polares pero dado la rotación
del cilindro hace que dicha distorsión se traslade en sentido este-oeste,
comportándose de igual manera que en el modelo original, lo que quiere decir que
la distorsión va aumentando gradualmente conforme la zona a mapear se va
alejando del punto de contacto o Meridiano de Referencia.
En esta modificación el comportamiento de los meridianos y paralelos es
distinto al modelo original, en el sistema transverso estos dejan de ser líneas
rectas salvo la excepción del Ecuador, el Meridiano de Referencia y los demás
meridianos que se encuentran separados a cada 90º con respecto a este último.
Siendo el resto de los paralelos y meridianos representados mediante curvas
complejas.
Lambert destaca de esta proyección dos características principales: el
meridiano central es una línea recta subdividida homogéneamente y que el
Ecuador también es una línea recta, la cual corta perpendicularmente a los
meridianos. Adicionalmente se debe cumplir que los meridianos deben cortar a los
paralelos en ángulo recto y que la latitud es correcta y proporcional a la longitud
(Gómez Moreno, 2003).
Al igual que en el sistema original, Lambert desarrolla esta modificación
tomando a la esfera como modelo geométrico de representación terrestre, esto
debido a que para aquel entonces el conocimiento y desarrollo matemático sobre
el elipsoide de revolución era muy escaso por el grado de complejidad de dicha
figura. Las fórmulas de transformación fueron deducidas de forma analítica
utilizando como base de desarrollo el cálculo infinitesimal.
Mediante el desarrollo y deducción analítica es como se forja que la
proyección Transversa conserve una de las características fundamentales de su
modelo de origen, el cual es que sea conforme, por lo tanto es que en este nuevo

II. ANTECEDENTES HISTÓRICOS
31
sistema las direcciones y cantidades angulares sean las mismas que se reflejen
en la esfera terrestre como en el plano.
Esta proyección fue presentada en Alemania en el año de 1772 en la obra
de Lambert titulada “Beyträge zum Gebrauche der Mathematik und deren
Anwendung” que por su traducción “Beyträge para el uso de las Matemáticas y
sus Aplicaciones”. La proyección Transversa fue uno de los siete modelos
proyectivos que Lambert pública en su libro.
La proyección modificada de Mercator fue la tercera de las siete nuevas
proyecciones que Lambert describió en su clásico Beyträge. Al mismo tiempo, él
también describe a las hoy conocidas Cilíndrica Equivalente, Cónica Conforme de
Lambert y Lambert Azimutal Equivalente. Lambert describe a la Transversa de
Mercator como una adaptación conforme de la proyección Sinusoidal, misma que
comúnmente se usa. La derivación de Lambert fue en base a una tabla de
coordenadas y un mapa de las Américas dibujado de acuerdo a esta proyección
(Snyder, 1987).
Lambert realmente no nombra a su modelo modificado como Transversa de
Mercator, este nombre es asignado más tarde, a mediados del siglo XIX.
Como bien se dijo, las fórmulas de transformación que desarrolló Lambert
fueron exclusivamente de aplicación para la esfera, esta aportación fue viable
hasta cierto punto, pero la evolución del conocimiento científico acerca de la forma
de la tierra y su comportamiento, generó que el modelo proyectivo de Lambert
fuera modificado. Esto debido a que tiempo después de su concepción, el avance
científico sobre la figura geométrica que más se aproximaba a la forma real de la
tierra, el elipsoide, ya había arrojado estudios, teorías y teoremas matemáticos
fundamentados en el cálculo infinitesimal para su fácil entendimiento.

II. ANTECEDENTES HISTÓRICOS
32
Fig. II.7 Johann Carl Friedrich Gauss
Es con estas investigaciones es que se logra establecer de manera oficial al
elipsoide de revolución como figura ideal para el estudio geométrico de la
superficie terrestre. Esta aportación fue muy importante para el mundo de la
geodesia misma que repercutía directamente y de manera exorbitante en la
cartografía, teniendo como resultado que todos los nuevos mapas deberían estar
referidos y proyectados en este nuevo modelo geométrico.
Esta situación fue la detonante para que a mediados del siglo XIX, el
científico y matemático alemán Johann Carl Friedrich Gauss (1777-1855) o
también conocido en el vocablo español como Carlos Federico Gauss fuera quien
modificara y aplicara la proyección de Lambert utilizando el elipsoide.

II. ANTECEDENTES HISTÓRICOS
33
Gauss fue uno de los matemáticos más sobresalientes de su época, aplicó
sus conocimientos de matemáticas al desarrollo y estudio de la geodesia, tanto de
forma teórica como en forma práctica. Pero fue hasta el año 1822 que realiza una
investigación acerca de las proyecciones conformes, en la cual aborda el tema de
la proyección cilíndrica transversa de Lambert, en esta investigación es cuando
toma como modelo de representación terrestre al elipsoide para dicha proyección
estableciendo las fórmulas de trasformación para la misma.
Para la deducción de sus fórmulas, Gauss recurrió a la geometría esférica,
analítica y el teorema en serie de Taylor. El resultado de sus investigaciones
fueron publicados en tres tomos, el primero en 1827 con el nombre de
“Disquisitiones Generales Circa Superficies Curvas” que traducido al español se
conoce como: “Investigaciones Generales Sobre Superficies Curvas”, los dos
últimos fueron publicados en los años 1844 y 1847 respectivamente, en un tratado
dividido en dos tomos conocido como “Untersuchungen über Gegenstände der
Höheren Geodäsie” o “Los Estudios Sobre los Sujetos con Mayor Geodesia”.
En estas obras, Gauss estipula las modificaciones y fórmulas de
transformación realizadas a la proyección de Transversa Cilíndrica de Lambert,
dónde dicha proyección es estructurada para el elipsoide y aplicada a los trabajos
geodésicos y cartográficos llevados a cabos por él en la triangulación de
Hannover, Alemania. En estos tres tratados Gauss aborda tres grandes problemas
y su solución: la medida de la curvatura, la representación conforme y la
aplicabilidad de superficies (Millán Gamboa, 2006).
Las características de la representación conforme de gauss, la hacen
apropiada para su uso y aplicación como paso intermedio entre el elipsoide y el
plano, en la ejecución de las triangulaciones geodésicas.
El desarrollo de las fórmulas de transformación para el elipsoide, fueron
fundamentadas esencialmente en el desarrollo en serie que ofrece el teorema de
Taylor, mismo que se sigue vigente en la actualidad. Como bien se sabe y como

II. ANTECEDENTES HISTÓRICOS
34
Fig. II.8 Apariencia de la Proyección Transversa de Mercator
se explicara más adelante, este método numérico ofrece una aproximación
mediante una serie de iteraciones o repeticiones de cálculo hasta encontrar un
valor deseado o al que más se aproxime a una función matemática en específico.
Siguiendo esta condición es como Gauss establece dichas fórmulas de
transformación utilizando la quinta aproximación o término de la serie de Taylor
para la representación del elipsoide.
Con esta modificación es que se concibe una de las primeras proyecciones
cilíndricas aplicadas al elipsoide, procurando que en ella todas las características
de conformidad de origen se conserven.
Posterior a ello y de acuerdo a lo que dice Enriquez Turiño (2009), en 1866
es cuando Schreiber publica también la teoría de esta proyección. Más tarde en
1880, desarrolló una proyección conforme del elipsoide a la esfera, conservando la
latitud, y proyectando la esfera en el plano a través de la proyección Transversa
de Mercator. Donde el meridiano central no era automecoico. Este sistema de

II. ANTECEDENTES HISTÓRICOS
35
Fig. II.9 Johannes Heinrich Louis Krüger
doble proyección, conocido como la proyección Gauss-Schreiber, lo utilizó para la
elaboración del catastro de Prusia.
Las aportaciones de Gauss fueron el principal sustento de esta proyección
para su uso y aplicación al elipsoide pero no fue ochenta y cinco años después, en
el año de 1912 que el Doctor, matemático y topógrafo alemán Johannes Heinrich
Louis Krüger (1857-1923) o conocido simplemente como Louis Krüger, realiza una
de las investigaciones y aportaciones más relevantes y significativas a esta
proyección.
Krüger fue un apasionado científico e investigador sobre temas de
geodesia, topografía, cartografía y demás ciencias afines a la medición y
comprensión de la superficie terrestre. Su pasión fue tanta que en el año 1903 lo
llevo a concluir con el estudio de la proyección Transversa que su predecesor
Gauss había iniciado.

II. ANTECEDENTES HISTÓRICOS
36
Durante el estudio de los trabajos de Gauss, Krüger logra deducir y
complementar las fórmulas de la proyección Transversa para el elipsoide,
utilizando una notación más simple y extendiendo las ecuaciones de
transformación añadiendo tres términos más a la serie de Taylor, misma con la
cual su predecesor Gauss había fundamentado sus investigaciones.
Como bien se dijo, los trabajos de investigación de Krüger inician en 1903
pero estos ven la luz nueve años después en su trabajo titulado “Konforme
Abbildung Des Erdellipsoids in Der Ebene” o conocido también como "Mapeo de
Conformación del Elipsoide de la Tierra en el Plano" o "La Representación
Conforme de la Tierra Elipsoide en el Plano".
El trabajo más relevante sobre la proyección Mercator transversa fue hecho
por Krüger (1912) a partir del cual se derivaron la mayoría de las fórmulas en uso
actualmente. Krüger (1912) presentó dos fórmulas para la transformación de
coordenadas, una para el método directo y otra para el inverso. Las series
desarrolladas por Krüger, tienen una convergencia muy pobre y es fuente de
inconsistencias a medida que los puntos representados se alejan del meridiano
central. Sin embargo fue la que primero se aplicó para las cartas topográficas
oficiales (Orihuela S. , 2014).
Las series de Krüger fueron las primeras en ser implementadas, debido a
que eran mucho más fáciles de evaluar en las calculadoras de mano de mediados
del siglo XX. Estas series solo satisfacían una precisión y un grado de
deformación mínimo e ideal en una cierta porción del elipsoide terrestre, es por
eso que otra de las modificaciones que realiza Krüger a la proyección Transversa,
es el uso y división de zonas o bandas meridianas para así facilitar la
representación precisa y no distorsionada de la superficie terrestre.

II. ANTECEDENTES HISTÓRICOS
37
Es como de esta manera Louis Krüger complementa las fórmulas de
transformación para la proyección Transversa de Mercator, realizando una de las
más grandes contribuciones y uno de los legados más significativos en el mundo
de la cartografía, geodesia y topografía.
Enríquez Turiño (2009) afirma que la proyección de Gauss-Kruger se
empezó a utilizar en mapas topográficos en el siglo XIX poco después de que
Gauss la desarrollara en uno de sus principales estudios.
Por esta razón, esta proyección es conocida en Europa como proyección
conforme de Gauss o proyección de Gauss-Kruger, mientras que en Estados
Unidos y en general en Latinoamérica se le conoce como proyección Transversa
de Mercator, lo que a decir de Millán Gamboa (2009) es poco afortunado ya que
se presta a confusión con la presentada originalmente por Lambert (Barrera Trejo,
2015). Así mismo Enríquez Turiño (2009) menciona que para casos prácticos la
proyección transversa aplicada a la esfera sea llamada Transversa de Mercator y
Gauss-Krüger para el caso elipsoidal.
La actual división del mundo en coordenadas de latitud y longitud, la imagen
de la tierra en las cartas planas, se basa esencialmente en su investigación, el
desarrollo en serie de Johannes Heinrich Louis Krüger (Abu Ajamieh, 2016).
2.4 Trabajos Posteriores.
Después de la oportuna aportación de Krüger al modelo cilíndrico de
Lambert, la proyección Transversa de Mercator se convirtió en un uno de los
sistemas proyectivos más eficientes para la elaboración de cartografía, dada su
facilidad de aplicación para el mapeo de zonas y/o territorios alargados de forma
vertical, así mismo que en la representación de estas zonas el índice de error de
deformación y precisión era mínimo.

II. ANTECEDENTES HISTÓRICOS
38
Siendo el desarrollo de Krüger realizado de forma analítica, sus fórmulas de
transformación presentan un grado de complejidad debido a que se conforman por
términos que trabajan en conjunto o son parte de un método de cálculo en serie o
aproximaciones.
El método de Krüger fue un nuevo método de cálculo para la transformación
de coordenadas, esta aportación propició que varios científicos e investigadores
dedujeran y recalcularan sus fórmulas para de esta manera cerciorar, optimizar,
confirmar y enriquecer el conocimiento de esta proyección. Los primeros
científicos en realizar esta tarea fueron Lee L. P. y Redfearn casi al mismo tiempo.
Fue en 1945 cuando L. P. Lee confirma y recalcula las fórmulas de Krüger
proponiendo su uso para Gran Bretaña, pero tres años después en 1948 Redfearn
mediante un estudio llega a la conclusión que dichas fórmulas de transformación
son inexactas para bandas meridianas mayores de 3º de longitud designadas por
Krüger, generando así errores mayores al milímetro.
Para dar solución a esta problemática Redfearn extiende la serie de Taylor
utilizada por Krüger hasta el octavo orden, examinando los términos que eran
necesarios para alcanzar una precisión de 1 mm.
Readfearn en un artículo dedicado exclusivamente a la proyección Gauss-
Krüger (Redfearn, 1948) y publicado en el Empire surver Review plantea el
problema que puede presentar la omisión de ciertos términos en la exactitud de
las fórmulas (Enríquez Turiño, 2009).
Más tarde un estudio similar fue realizado por Paul D. Thomas en el año
1952, en el cual se amplificaban los algoritmos de Krüger hasta el término ocho
para ambos casos transformación, directa e inversa, esto con el fin de aplicar
dichas fórmulas a la proyección UTM en el territorio de Estados Unidos. La
investigación fue publicada en su libro “Conformal Projections in Geodesy and
Cartography”.

II. ANTECEDENTES HISTÓRICOS
39
Redfearn (1948) y Thomas (1952) derivan fórmulas idénticas, que extienden
(un poco) las ecuaciones de Krüger, y la actualización de la notación y
formulación. Estas son consideradas como el estándar para las transformaciones
entre el elipsoide y la proyección TM (Intergovernmental Committe on Surveying
and Mappin, 2009).
Las fórmulas de Krüger y Readfearn tienen fundamento en un desarrollo en
serie que ocasiona un tedioso y repetitivo proceso de cálculo si este se desea
hacer de forma manual, este fue un problema común a mediados del siglo XX
debido a que en aquellos años el avance tecnológico en cuanto a calculadoras u
otro método que pudiera automatizar estos cálculos era muy escasos.
Sin embargo no fue hasta 1972 que Lee desarrolla un nuevo método de
cálculo para la transformación de coordenadas en el sistema Gauss-Krüger, este
método fue ideado de manera alterna al método de Krüger, las nuevas fórmulas
de Lee omitían los desarrollos en serie por fórmulas de cálculo cerradas. Enriquez
Turiño (2009) señala que; Lee solo presenta las fórmulas de trasformación
omitiendo algunos aspectos para su uso y aplicación en el campo de la ingeniería.
Pero no fue hasta 1976 que aplica funciones elípticas para establecer nuevas
fórmulas de conversión en esta proyección solucionando las omisiones dejadas en
su anterior investigación, su trabajo fue expuesto en la Empire surver Review con
el título de “The Transverse Mercator Projection of Spheroid”.
Las fórmulas de Lee permitían el cálculo de coordenadas para todo el
elipsoide con un rango de precisión aceptable, sin embargo estas presentaban
más términos y coeficientes que las originales deducidas por Krüger, siendo ese
su principal inconveniente.
Tras este hallazgo, fueron muchos investigadores los cuales buscaron
compactar las ecuaciones de Krüger y encontrar ecuaciones que permitieran la
transformación en el sistema transverso de Mercator para el elipsoide de forma

II. ANTECEDENTES HISTÓRICOS
40
más sencilla, basándose en la teoría de Lee (1972). Algunos de estos trabajos
fueron presentados por Jackson en 1978 y Snyder en 1979.
Sus aportaciones no fueron las suficientes para cumplir con la condición de
precisión, sin embargo fueron las suficientes para seguir con las investigaciones
sobre esta proyección y la representación de todo el elipsoide o la amplificación de
las zonas o bandas meridanas propuestas por Krüger.
No fue hasta el año de 1980 que Jeff Dozier pública su trabajo “Improved
Algorithm for calculation of UTM and Geodetic Coordinates” en el cual aplica las
fórmulas de Lee (1972) mediante el uso de ordenadores para amplificar las
bandas o zonas de la proyección UTM, con el fin de ser utilizadas por los satélites
A-G de la National Oceanic and Atmospheric Administration (NOAA).
El método publicado por Dozier permite la representación de elementos
geográficos que se encuentren en una longitud de hasta 90º con respecto al
meridiano de referencia o meridiano central (∆λ).
La expresión de las ecuaciones para la proyección UTM (Gauss-Krüger) en
términos de las funciones elípticas Jacobianas, en lugar de los desarrollos en
serie, permiten ser utilizadas en zonas más amplias que las 6º de longitud
estándar, y por lo tanto hacen que sean aplicables a los satélites en esta
proyección o un sistema geodésico. Se desarrollan utilizando una versión
compleja aritmética del método de Newton. El método puede ser utilizado para
longitudes de hasta 90 grados desde el meridiano central (Dozier, 1980).
Posterior al trabajo de Dozier (1980) se desarrollaron más aportaciones a
las fórmulas para la proyección Gauss-Krüger eliminando los desarrollos en serie
de Krüger y amplificando las ecuaciones expuestas por Lee para todo el elipsoide.
Autores como lo son: Bugayevsky y Snyder (1995), Engsager y Poder (2007),
Bermejo-Solera y Otero (2009), Karney (2011b) y Deakin et al. (2011), fueron los

II. ANTECEDENTES HISTÓRICOS
41
encargados de estos trabajos, siendo sus soluciones los más aceptados y oficiales
en algunos países (Orihuela S. , 2012).
Uno de los trabajos más actuales y significativos en torno a las ecuaciones
de Lee (1972) fue realizado por Charles F. F. Karney en el año 2011, en el cual
presenta un desarrollo exacto para la representación del elipsoide. Esta solución,
es aplicada para obtener precisiones de representación muy por debajo del
milímetro, siendo su uso y aplicación al territorio de Gran Bretaña.
A este método Karney lo bautiza con el nombre de “Karney-Krüger
Equations” o “Ecuaciones de Karney-Krüger” el cual fue publicado en un artículo
titulado “Transverse Mercator with an accuracy of a few nanometers” en la revista
científica Journal of Geodesy.
Aunque el método de Lee (1972) predomino en el mundo de la cartografía y
geodesia por casi cuarenta años opacando los trabajos de Krüger (1912), no fue
dos años atrás a los trabajos de Karney (2011) que el ingeniero español Carlos
Enriquez Turiño retoma los desarrollos en serie de Krüger (1912) para la
representación del elipsoide en la proyección Transversa de Mercator con
precisiones inferiores al milímetro.
En su trabajo de investigación Enriquez Turiño (2009) estipula un método
que permite determinar el número de términos necesarios que se deben utilizar
para obtener una representación precisa (dependiendo el estudio o aplicación) de
la superficie terrestre en función de las coordenadas geodésicas y su alejamiento
del meridiano central.
La esencia de la investigación de Turiño (2009) se basa en la carencia de
precisión que existe en la representación del elemento geográfico en la proyección
Gauss-Krüger, mismo incrementa de forma gradual de acuerdo a su alejamiento
con el meridiano central. Para dar solución a esto, Turiño (2009) determina que la
precisión trabaja en conjunto con el número de términos que componen a la serie

II. ANTECEDENTES HISTÓRICOS
42
de Taylor ocupada por Krüger (1912) para el desarrollo de sus fórmulas. Con esto
Turiño (2009) establece el número de términos necesarios para asegurar una
precisión milimétrica para una determinada banda meridiana, apoyando sus
cálculos en softwares de manipulación algebraica y el álgebra simbólica.
El trabajo de Turiño (2009) revive los desarrollos en serie de Krüger (1912)
debido a que en la actualidad el avance tecnológico en cuanto a algoritmos de
transformación y su automatización mediante softwares y equipos de cómputo ya
son una realidad, facilitando así el cálculo y trasformación de coordenadas. No
obstante pese a este avance, Turiño (2009) sólo especifica los términos que debe
de cumplir cada fórmula para una respectiva banda meridiana omitiendo las
fórmulas de transformación completas y parámetros relacionadas a ellas para
cada caso.
Enriquez Turiño (2009) publica el resultado de sus estudios en sus tesis
doctoral titulada “Desarrollo de Nuevos Algoritmos para el Cálculo de la
Proyección Gauss-Krüger” en el año 2009 en Madrid España, el cual es el que se
basa la investigación de este documento.
En la actualidad la proyección Transversa de Mercator o Gauss-Krüger es
el pilar fundamental de las proyecciones cilíndricas transversales aplicadas al
elipsoide, dada su versatilidad está ha sido empleada para los trabajos geodésicos
y topográficos realizados en México y en el mundo, siendo la que más cumple y
satisface con las demandas de poca deformación en zonas específicas.
Generando así que muchos países la tomen como la base cartográfica para sus
territorios.
Dada su concepción y su capacidad de representación, el sistema Gauss-
Krüger se ha convertido en uno de los sistemas proyectivos más estudiados y
mejorados, esto con el fin de asegurar la representación fiel y precisa de los
elementos geográficos que componen el elipsoide terrestre.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
43
III. DE LA CONCEPCIÓN
GEOMÉTRICA, DEDUCCIONES.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
44
3.1 Introducción.
El conocimiento histórico sobre cualquier legado científico, tecnológico o
cultural con lleva la obligación de describir y determinar los sucesos auténticos y
naturales en torno al hecho y las acciones previas y posteriores a él. La verdad en
la Historia no es geométrica ni unitaria, ya que no lo es la realidad. Las
explicaciones deben hacer comprender cómo era la época y explicarla, pero la
verdad es parcial.
Sin embargo lo que convierte en una verdad única y total a los datos
históricos que así se redactan, es el análisis matemático en torno a ellos. De
manera objetiva y siendo el fundamento matemático su principal fuerte, se puede
deducir, determinar y dar veracidad de aquellos trabajos realizados por Gauss-
Krüger y de sus predecesores, donde los métodos actuales son el notable
colaborador. Siendo así, las ecuaciones matemáticas la inmortalidad de su
creador.
Teniendo en cuenta esto y dando énfasis al entendimiento y comprensión
del tema de investigación acerca de la Proyección de Gauss-Krüger que en esta
tesis se estipula, será necesario deducir y desarrollar los algoritmos, formulas y
todo aquel procedimiento matemático existente que engloben a dicha proyección,
y de aquellos modelos geométricos que fueron pioneros y descendientes a él. Es
por eso que en este capítulo se desarrollaran las ecuaciones de transformación
que se contemplan en el capítulo anterior.
A continuación se mostraran los procedimientos matemáticos necesarios
para la obtención de las fórmulas de transformación de coordenadas de la
proyección Mercator y todas sus variantes, haciendo especial énfasis en la
proyección de estudio de este documento, la representación Gauss-Kruger, esto
con el fin de profundizar y hacer más fácil el entendimiento a esta investigación.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
45
Fig. III.1 Esquema Geométrico de la Proyección Mercator.
3.2 La Proyección Mercator.
La Proyección de Mercator o también conocida como Proyección Mercator
Simple, es una de las proyecciones cartográficas más famosas y utilizadas para el
trazo y localización de rutas de navegación marítimas o aéreas, debido a su
sistema de proyección geométrico simple. Gracias a este sistema, esta proyección
ha sido la más estudiada por sin número de especialistas en cuestiones
cartográficas y geográficas (tal y como se muestra en el capítulo II de este
documento), esto con el fin de perseguir una representación más fiel y precisa de
los elementos geográficos y topográficos que conforman la superficie terrestre.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
46
La representación que ideo Mercator se basa en un sistema de proyección
cilíndrico perspectivo o de condiciones ideales, donde la figura geométrica del
cilindro se posiciona de manera vertical envolviendo a la esfera o elipsoide, siendo
el único punto de contacto entre estos dos elementos un paralelo que se elige
arbitrariamente (dependiendo la posición de la zona de estudio), que debido a las
condiciones ideales siempre será el Ecuador, el cual recibe el nombre de
Paralelo de Contacto (PC). Debido a que el cilindro y la figura geométrica de
representación terrestre comportan el mismo origen, da como resultado que este
se vuelva el punto de proyección, lo que significa que el sistema Mercator es de
tipo gnómico.
De manera conceptual, se puede decir que la proyección Mercator es una
proyección cilíndrica la cual es modificada para cumplir con la demanda de su
creador, conservar direcciones, azimuts, rumbos y demás cantidad angular, para
apoyo a la navegación, siendo las líneas loxodrómicas la base fundamental de
dicha modificación.
En esta proyección se toman como referencias las líneas loxodrómicas,
debido a que en la esfera o elipsoide dichas líneas cortan a todos los meridianos
donde intersecten con un ángulo constante, por lo que, si esta condición se
cumple en el plano, facilitaría la determinación de la dirección angular o rumbo que
existe entre dos puntos mediante cualquier instrumento de navegación, pero
sacrificando las distancias reales. En general, una loxodrómica no es el camino
más corto entre dos puntos en la esfera, pero es aquel que facilita la navegación.
Para lograr que las loxodrómicas conserven su valor angular en el plano, en
la proyección Mercator se obliga que dicha línea se transforme en una línea
totalmente recta.
La proyección Mercator no es la proyección de una esfera sobre un cilindro,
sino una modificación de esta clase de representaciones y su propiedad más

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
47
Fig. III.3 Loxodrómica en la esfera, vista de perfil.
importante es la de ser el único sistema en que todos los azimutes o loxodrómicas
se convierten en líneas rectas (Caire Lomelí, Cartografía Básica, 2002).
Fig. III.2 Línea loxodrómica sobre la esfera.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
48
Fig. III.4 Proyección cilíndrica conceptual.
Para forjar que las cantidades angulares se conserven en el plano de
proyección, fue necesario realizar una modificación totalmente analítica al sistema
cilíndrico perspectivo, siendo el principal cambio, la representación de los
meridianos y paralelos.
En las proyecciones cilíndricas ecuatoriales como ya se mencionó, el
cilindro de proyección es tangente con el Ecuador, generando que la
transformación de los meridianos y paralelos sean mediante líneas totalmente
rectas haciendo intersección perpendicularmente entre sí. Al desarrollar el cilindro,
los meridianos resultan equidistantes proporcionalmente a los arcos del Ecuador
comprendidos entre ellos, mientras que los paralelos se representan en diferente
porción, donde esta cantidad será totalmente diferente de acuerdo al tipo de
estudio al que sea sometido la esfera o el elipsoide.
De acuerdo a lo anterior y satisfaciendo la condición impuesta para la
conservación de direcciones y cantidades angulares, la modificación realizada al
sistema cilíndrico fue tomando la relación constante de las líneas loxodrómicas
entre los incrementos rectificados de latitud y longitud, los cuales deben de
subsistir en la representación sobre el plano, generando que el incremento de la

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
49
Fig. III.5 Proyección Mercator.
longitud se amplificara correspondiendo a las dimensiones del Ecuador y el
paralelo correspondiente. De igual manera el incremento afectara a los paralelos,
generando así que los arcos de meridiano y el espaciamiento entre ellos
incremente gradualmente hacia los polos (Sánchez & Bustamente, 1964).
Dicho de manera simple, para que la línea loxodrómica pueda
representarse en una línea recta sin distorsionar su valor angular, la modificación
requerida obligara a que los meridianos se transformen en rectas verticales,
paralelas y equidistantes, que corten en un ángulo recto a los paralelos, cuyo
espaciamiento aumenta a medida que se alejan del Ecuador y se acerquen a los
polos. La relación de proporcionalidad que hay entre los paralelos será distinta de
acuerdo a la latitud del punto o región que se desea representar, debido a que el
punto de proyección coincide con los centros geométricos de la esfera y el cilindro.
Como las distancias sobre el plano pierden toda fidelidad las líneas geodésicas u
ortodrómicas se transformaran en curvas complejas.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
50
Fig. III.6 Representación de la loxodrómica y ortodrómica en la proyección Mercator.
Con este artificio matemático la proyección Mercator se convierte en una
proyección de tipo conforme, donde cualquier representación angular no sufrirá
ninguna cambio o alteración en su valor real, sin embargo el cumplir con esta
demanda provocara que las distancias y formas se sacrifiquen, generando en ellas
una deformación geométrica en sentido Norte-Sur y viceversa (estiramiento
vertical), a excepción de aquellos elementos que se encuentren muy cerca del PC
o en el caso general del Ecuador.
El grado de deformación que se presenta en el sistema Mercator es
directamente proporcional al valor de la latitud donde el objeto o entidad que se
desee representar se encuentre, siendo el PC o Ecuador el único lugar donde la
deformación lineal o factor de escala es equivalente a la unidad. Esta situación
deriva a que las zonas polares sean las más castigadas, siendo estas proyectadas
en el plano al infinito, propiciando a que se pierda en ellas todo atributo
geométrico.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
51
Fig. III.7 Representación mundial en la proyección Mercator. Fuente: NASA 2015.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
52
Fig. III.8 Representación de América del Sur en la Proyección Mercator, MC= 75º W.
Fuente: Guía de Proyecciones Cartográficas, Gómez Moreno, 2003.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
53
La distorsión que se genera en latitudes crecientes es la principal razón por
la cual el sistema Mercator no sea el ideal para representar a toda la superficie
terrestre en el plano, un claro ejemplo de este fenómeno es lo que ocurre con los
paralelos 60º y 80º de latitud Norte o Sur. El paralelo 60º hace su trasformación en
el plano mediante una línea recta cuya magnitud es igual a la circunferencia del
Ecuador, es decir se alarga al doble provocando que el valor superficial de las
zonas, objetos o entidades cercanas a este paralelo incrementen cuatro veces.
Mientras que para el paralelo 80º de longitud una superficie se amplifique 36
veces.
El ejemplo más notorio y al que siempre pone en tela de juicio a la
proyección Mercator, es el análisis de la deformación que en ella se genera,
mediante la comparación de regiones que se encuentran aledañas al Ecuador y
las zonas próximas a las regiones polares, tal y como se muestra a continuación:
Europa con una superficie de 10.18 millones de km2 aparece mayor
que América del Sur, la cual cuenta con una superficie 17.82
millones de km2 (casi el doble).
Groenlandia con una superficie equivalente a 2.166 millones de km2
aparece con un tamaño similar al de África, siendo que este
continente es 14 veces más grande, donde su superficie es 30.22
millones de km2, o:
Alaska que se representa con un tamaño similar a Brasil, cuando
este último es cinco veces el tamaño de Alaska.
Debido a esta exagerada deformación en la elaboración de mapas el
elipsoide o esfera se acota en los paralelos 80º de longitud Norte y Sur, generando
así, que las regiones polares se desprecien, donde las zonas con latitudes
mayores a estas tendrán un factor de escala por encima de las dos unidades.
Mientras que las regiones que se encuentren dentro de los paralelos 15º Norte y
Sur, se representaran con una forma geométrica casi equivalente y casi

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
54
Fig. III.9 Valores del factor de escala (ko) en la proyección Mercator. Fuente: Guía de Proyecciones Cartográficas, Gómez Moreno, 2003.
equidistante, debido a que en esa franja de latitud el factor de escala oscila entre 1
y 1.01.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
55
Esta última condición es aprovechada para la representación fidedigna de
elementos que se encuentren fuera de los 15º de latitud Norte-Sur, por lo que para
representar dichos elementos evitando grandes valores en la distorsión se recurre
al artificio de determinar dos paralelos equidistantes del Ecuador o PC, de esta
manera mantener sobre esa franja un factor de escala no mayor a la unidad. Este
artificio recibe el nombre de latitud media.
En síntesis las condiciones generales de la proyección Mercator son las
siguientes:
Es una proyección cilíndrica modificada, gnómica, donde el cilindro
es tangente a la esfera o al elipsoide atreves del Ecuador o PC.
Se trata de un proyección conforme, donde la representación de las
cantidades angulares o direcciones azimutales en el plano son
iguales a su valor angular geodésico o esférico.
El factor de escala en el Ecuador o PC es igual a 1.
El factor de escala no excede a la unidad en una franja de latitud
impuesta por dos paralelos equidistantes al Ecuador o PC (latitud
media).
Los meridianos en el plano se transforman en líneas rectas verticales
equidistantes y paralelas entre sí, siendo normales a la transformada
del Ecuador.
Los paralelos se representan en líneas rectas horizontales, paralelas
a la transformada del Ecuador pero desigualmente espaciadas entre
sí, donde el valor de espaciamiento va aumentando conforme se
aleje del Ecuador y se acerque a los polos.
Los meridianos y paralelos son perpendiculares entre sí.
La representación de líneas de rumbo constante o loxodrómicas son
mediante un segmento de línea recta, la cual conserva su valor
angular pero no su distancia.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
56
Las líneas geodésicas u ortodrómicas se representan en el plano
mediante curvas complejas, donde su distancia en el plano no será
igual a su longitud real.
El fenómeno de distorsión geométrica se manifiesta en sentido
Norte-Sur y viceversa tomando como referencia el Ecuador, por lo
que la deformación incrementa de manera exagerada conforme el
elemento a representar se va alejando del Ecuador o PC.
Dada la excesiva exageración de distorsión del elemento geográfico,
los polos se proyectaran hacia el infinito por lo que en la
representación cartográfica la esfera o el elipsoide se acotaran en los
paralelos 60º Norte y 60º Sur de longitud, para mejor manipulación
de la información geométrica.
Debido a la conformidad que esta proyección presenta, genera que
las direcciones cardinales N, S, E y W siempre señalen la misma
dirección en el plano, originando que esta proyección sea ideal para
la elaboración de cartografía náutica.
De acuerdo a lo que menciona Gómez Moreno (2003), para facilitar el
sistema de coordenadas en la proyección Mercator, es recomendable hacer las
siguientes modificaciones:
Debido a que el Ecuador es el origen de las ordenadas genera una
confusión por el número de decimales en las coordenadas del eje Y
para latitudes mayores a 14º, por lo que al valor de las ordenadas se
les asignara un valor de origen arbitrario al que se le denominara
Falso Norte.
Para las abscisas ocurrirá lo mismo, se añadirá un valor arbitrario a
todas las coordenadas del eje X, el cual estará definido por un
meridiano de origen, este valor recibe el nombre de Falso Este.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
57
En la actualidad la proyección Mercator es utiliza para fines asociados a la
navegación, siendo esta un estándar desde 1910 para el Servicio de
Guardacostas y el Servicio de Relevamientos Geodésicos (NGS) de los Estados
Unidos para la elaboración de cartas destinadas a la navegación. La proyección
Mercator ha sido utilizada también para mapear porciones de planetas como;
Marte, Mercurio, el lado oscuro de la Luna y algunos satélites de Júpiter y Saturno.
Además de ello la aplicación Google Earth utiliza este sistema para desplegar sus
imágenes cuando las latitudes son inferiores a los 85º de latitud Norte o Sur
(Gende & Constanza Manassero, 2011).
El sistema Mercator es frecuentemente la base para mapamundis y atlas,
pero como esta proyección fue concebida exclusivamente para la navegación, su
utilidad reside fundamentalmente en ese aspecto, generando así, que su
aplicación no sea la adecuada para la representación topográfica debido a la
variación de escala que sufre a latitudes crecientes o altas.
En México esta proyección ha sido durante muchos años el pilar
fundamental con la que se elabora la cartografía náutica y aeronáutica oficial,
misma que rige las rutas marítimas y áreas del país, donde instituciones como la
Secretaría de Comunicaciones y Transportes (SCT), la Secretaría de Marina
(SEMAR), la Secretaría de Defensa Nacional (SEDENA), el Instituto Nacional de
Estadística y Geografía (INEGI), son las encargadas de la regularización, control,
verificación para la adecuada manufacturación de documentos cartográficos sobre
este sistema.
La proyección de Mercator es probablemente la más famosa proyección
cartográfica que se haya diseñado jamás, la cual ha permanecido en pie por más
de tres siglos, no solo por su utilidad para la navegación, sino también porque de
ella emergen los sistemas universales que hoy rigen la cartografía mundial, las
proyecciones Transversa de Mercator o Gauss-Krüger y Universal Transversa de
Mercator (las cuales se hablara y se desarrollaran más adelante).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
58
Fig. III.10 Carta náutica en la proyección Mercator.
Fuente: SEMAR 2015.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
59
3.2.1 Transformación Directa de Coordenadas.
El problema clásico de la cartografía es la transformación de coordenadas
de un sistema geodésico o esférico a un sistema plano de proyección y viceversa,
donde el sistema Mercator no queda exento a dicha situación. Para lograr una
representación fiel y de precisión del dato geoespacial y geográfico de la superficie
terrestre se recurre a la cartografía matemática, la cual ofrece esta posibilidad,
basándose en artificios, deducciones y análisis algebraicos, geométricos que en la
mayoría de casos es mediante el cálculo infinitesimal. Con esto se logra este
traslado de información con un margen de error mínimo, que en muchos casos es
despreciable. Es por eso que en subtema se abordara el desarrollo y análisis de
las fórmulas de transformación de coordenadas de un sistema geodésico a un
sistema plano y de forma inversa para la proyección Mercator.
Para este primera parte se determinaran las ecuaciones para los algoritmos
de transformación sobre esta proyección, tomando como figura geométrica de
representación terrestre a la esfera, debido a que el modelo original y modificado
de Mercator fue concebido en tiempos cuando se creía que la figura de la tierra
era semejante a una esfera perfecta, por lo que el desarrollo de los artificios
matemáticos de transformación tendrán base fundamental en la geometría clásica
y el cálculo infinitesimal.
Entonces de acuerdo a lo anterior y en primera instancia, se analizara el
caso de trasformación directa, el cual será en función de las coordenadas
geodésicas o esféricas angulares (𝜆, 𝜑) para su representación en un sistema
ortogonal de proyección (𝑥, 𝑦).
El análisis partirá del modelo ideal para proyecciones cilíndricas, en el cual
el centro de la esfera y los ejes del cilindro (transversal y longitudinal) coinciden,
siendo este último tangente a la esfera a través de un círculo máximo, que para
este caso será el Ecuador. La representación en el plano se hará tomando un
cuadrilátero esférico, donde el largo de dicha figura corresponderá a una porción

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
60
Fig. III.12 Proyección del cuadrilátero esférico sobre el cilindro.
Fig. III.11 Representación de un cuadrilátero esférico en el cilindro.
de longitud medida a partir de un meridiano de referencia u origen (∆𝜆) y el
ancho estará dado por las latitudes de los vértices que componen el cuadrilátero,
tal y como se muestra en las siguientes figuras.
J
J’

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
61
Fig. III.13 Radio de un paralelo distinto al Ecuador.
Se aprecia que la representación del cuadrilátero esférico en el plano es
mediante un rectángulo cuyas bases son igual al valor de la de ∆𝜆 en metros,
donde este último se traduce como al arco de paralelo que se forma entre los
puntos K y L, el cual corresponde a una sección del Ecuador. Tomando en cuenta
esto, se puede hacer la siguiente igualación.
KL = G′H′ = I′J′
Como la distancia KL es un arco de círculo máximo, este se puede calcular
como el producto del radio por el ángulo que subtiende al arco.
KL = R ∙ ∆𝜆
El valor de KL se determina en función del radio del Ecuador, por lo que
será necesario encontrar el valor del radio para los otros dos paralelos que
conforman el cuadrilátero, mismos que se deducen del siguiente esquema.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
62
Se tiene que.
sin(90 − 𝜑) =OP
QP=𝑟
R ∴ 𝑟 = R ∙ sin(90 − 𝜑)
Dónde:
sin(90 − θ) = sin 90 ∙ cos θ − sin θ ∙ cos 90
sin(90 − θ) = 1 ∙ cos θ − sin θ ∙ 0
sin(90 − θ) = cos θ
Por lo tanto:
𝑟 = R ∙ cos 𝜑
Se tiene que el radio para el paralelo que intersecta a los puntos G y H se
interpreta como:
𝑟 = R ∙ cos 𝜑𝐺
De acuerdo a lo anterior se puede decir que:
GH = 𝑟 ∙ ∆𝜆 = R ∙ cos 𝜑𝐺 ∙ ∆𝜆
Pero como el producto del radio por el incremento de longitud es la
distancia KL y esta última equivale a las bases del cuadrilátero, se determina.
GH = KL ∙ cos 𝜑𝐺
GH = G′H′ ∙ cos 𝜑𝐺 ∴ G′H′ =GH
cos𝜑𝐺

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
63
El problema ahora reside en convertir el cilindro de proyección perspectivo
en un sistema conforme, para ello se obligara que el factor de escala en el PC o
Ecuador (𝑘𝐸) sea igual al factor de escala al meridiano de origen (𝑘𝑀), en este
caso será el Meridiano Central (MC), siendo este último el que pasa por los punto
G e I.
Recordando que el valor del factor de escala lineal es igual a la relación del
valor más largo entre el más corto, que para este caso será la división del
elemento proyectado entre el valor real del mismo sobre la esfera. Entonces para
MC su valor de 𝑘0, será igual al eje ordenado de los puntos G′ e I′ entre el arco de
meridiano que se subtiende entre dichos puntos sobre la esfera.
𝑘𝑀 =G′I′
GI=
𝑦
R ∙ 𝜑
Mientras que el factor de escala en el Ecuador será igual a la unidad, pero
dada su equivalencia con las bases del cuadrilátero, este se puede interpretar
como:
𝑘𝐸 = 1 =K′L′
KL=G′H′
GH
𝑘𝐸 =R ∙ ∆𝜆
R ∙ ∆𝜆 ∙ cos 𝜑=
1
cos𝜑
Igualando ambos factores se tiene que:
𝑘𝑀 = 𝑘𝐸
𝑦
R ∙ 𝜑=
1
cos𝜑

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
64
Para satisfacer esta situación será necesario que el desarrollo del modelo
cilíndrico perspectivo se realice en un sistema infinitesimal, por lo que la igualación
de los factores de escalas se expresaran de la siguiente forma:
𝑑𝑦
𝑅 ∙ 𝑑𝜑=
1
cos𝜑∙ 𝑑𝜑
Despejando 𝑑𝑦 se lograra que la separación entre los paralelos sea la
necesaria para conservar la proporcionalidad entre la esfera y el plano.
𝑑𝑦 =R
cos𝜑∙ 𝑑𝜑 = R ∙ sec 𝜑 ∙ 𝑑𝜑
La ecuación anterior se define como la derivada del eje las ordenadas para
un punto cualquiera, por lo tanto para determinar el valor de 𝑦 será necesario
integrar dicha función, tomando como limites el Ecuador y la latitud del punto de
estudio.
𝑑𝑦 = 𝑅 ∙ sec 𝜑 ∙ 𝑑𝜑 ∴ ∫ 𝑑𝑦 = ∫ 𝑅 ∙ sec 𝜑 ∙ 𝑑𝜑𝜑
0
𝑦 = ln[sec 𝜑 + tan𝜑]
Finalmente y recordando que el desarrollo se hizo en torno a la esfera como
modelo geométrico de representación terrestre, las fórmulas de trasformación
directas serán multiplicadas por el valor del radio de la esfera (𝑅), quedando de la
siguiente manera.
𝐗 = 𝐑 ∙ ∆𝛌 𝐘 = 𝐑{𝐥𝐧[𝐬𝐞𝐜𝛗 + 𝐭𝐚𝐧𝛗]}

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
65
Donde la amplitud meridiana (∆𝜆) será igual a la diferencia del meridiano
de origen o para el caso general el meridiano central (MC) y el meridiano que pasa
sobre el punto de estudio o representación (𝜆P).
∆𝜆 = MC − 𝜆P
Esta fórmula se considerara sólo si, el cálculo se realiza sin tomar en
cuenta el signo de la longitud del punto y el MC, sin embargo muchos autores re
escriben esta fórmula tomando en cuenta los signos de los valores de longitud
para ambos término.
∆𝜆 = 𝜆P −MC
3.2.2 Transformación Inversa de Coordenadas.
En el sub tema anterior se definieron las fórmulas de transformación directa
para la proyección Mercator, con las cuales se es posible realizar el traslado de
información de cualquier elemento sobre la esfera a un sistema plano de
proyección, originando que la primera fase de conversión de coordenadas de un
sistema a otro fuera completada (problema clásico de la cartografía), por lo que la
parte final de esta metodología es determinar las fórmulas de transformación
inversa, deducir las ecuaciones que permitan que las coordenadas sobre el
sistema ortogonal (𝑥, 𝑦) puedan ser representadas en su forma natural o de
origen, coordenadas esféricas angulares (𝜆, 𝜑). Por lo que a continuación se
deducirán las fórmulas de transformación inversa para la proyección Mercator.
Dado a que el desarrollo de las fórmulas de transformación directa fue
desarrollada tomando como modelo matemático a la esfera, dando como resultado
ecuaciones sencillas, generara que para la deducción de las ecuaciones del
método inverso sea simplemente mediante despejes de los valores de latitud y

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
66
longitud que conforman dichas formulas. Entonces recordando las fórmulas de
transformación método directo se tiene que:
X = R ∙ ∆𝜆 = R ∙ (𝜆P −MC), Y = R{ln[sec 𝜑 + tan𝜑]}
Despejando el valor de la longitud del punto de estudio de la ecuación de la
abscisa se determina que:
X = R ∙ (𝜆P − MC) ∴ X
R+ MC = 𝜆𝑃
En cuanto a la latitud, se puede observar que la fórmula para las ordenadas
sitúa dicho parámetro en los argumentos de la secante y tangente, haciendo difícil
el despeje de dicho valor. Para obtener el valor de esta variable será necesario
recurrir a la transformación de la fórmula de la ordenada a una ecuación más
simple, en la cual el método de despeje sea más sencillo. Para satisfacer dicho
cambio, será necesario recurrir a las entidades trigonométricas, tal y como se
muestra a continuación.
Y = R{ln[sec 𝜑 + tan𝜑]}
Expresando la ecuación en función de senos y cosenos se tiene que:
𝑦 = ln [1
cos 𝜑+sin 𝜑
cos 𝜑] = ln [
1 + sin𝜑
cos 𝜑]
𝑦 = ln [1 + sin𝜑
sin(90 − 𝜑)]
Convirtiendo los grados en radianes y racionalizando por (2
2) el argumento
del seno que conforma el denominador.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
67
𝑦 = ln [1 + sin𝜑
sin (𝜋2− 𝜑)
] = ln
[
1 + sin 𝜑
sin ((𝜋2− 𝜑) (
22))]
= ln [1 + sin𝜑
sin (2 (𝜋4−𝜑2))]
Dónde:
sin 2𝑥 =2 sin 𝑥 cos 𝑥 , sin 𝑥 + sin 𝑦 = 2 sin (𝑥 + 𝑦
2) ∙ cos (
𝑥 − 𝑦
2)
sin𝜋
2= 1
Aplicando.
𝑦 = ln [sin
𝜋2+ sin𝜑
2 sin (𝜋4−𝜑2) ∙ cos (
𝜋4−𝜑2)] = ln [
sin𝜋2+ sin𝜑
2 sin (𝜋4−𝜑2) ∙ cos (
𝜋4−𝜑2)]
𝑦 = ln [2 sin (
𝜋4+𝜑2) ∙ cos (
𝜋4−𝜑2)
2 sin (𝜋4−𝜑2) ∙ cos (
𝜋4−𝜑2)] = ln [
sin (𝜋4+𝜑2)
sin (𝜋4−𝜑2)]
𝑦 = ln [sin (
𝜋4+𝜑2)
cos (𝜋2− (
𝜋4−𝜑2))] = ln [
sin (𝜋4+𝜑2)
cos (𝜋4+𝜑2)]
𝐲 = 𝐥𝐧 [𝐭𝐚𝐧 (𝛑
𝟒+𝛗
𝟐)] = 𝚽
A esta ecuación recibe el nombre de latitud creciente (Φ) debido a que esta
aumenta o hace crecer el incremento de los paralelos al alejarse del Ecuador
(Barrera Trejo, 2015). Con esta nueva ecuación se podrá obtener el valor de la
latitud sin ningún inconveniente, por lo que solo resta realizar el despeje de dicho
valor.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
68
Y = R {ln [tan (𝜋
4+𝜑
2)]} ∴
Y
R= ln [tan (
𝜋
4+𝜑
2)]
Arctan (𝑒YR) =
1
2(𝜋
2+ 𝜑) ∴ 2 Arctan (𝑒
YR) −
𝜋
2= 𝜑
Entonces finalmente las fórmulas para el método inverso se expresan
como:
𝛌𝐏 =𝐗
𝐑+𝐌𝐂 𝛗 = 𝟐𝐀𝐫𝐜𝐭𝐚𝐧 (𝒆
𝐘𝐑) − 𝟗𝟎°
3.2.3 Transformación Directa en el Elipsoide.
Como bien se sabe el modelo matemático que más se asemeja a la
verdadera forma de la tierra es el elipsoide o esferoide, siendo la esfera totalmente
obsoleta para esta tarea, esta circunstancia deriva que en la actualidad toda la
cartografía y geodesia nacional e internacional este referida a este modelo
matemático. Todos los modelos, sistemas y proyecciones cartográficas sin
excepción, que en un principio fueron desarrollados sobre la esfera, hoy en día se
manifiestan en este nuevo modelo matemático, donde las curvas complejas con
diferentes radios de curvatura son su principal esencia. Debido a esta
circunstancia se tendrá la obligación de presentar el desarrollo de las formulas de
la proyección Mercator para el elipsoide de revolución.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
69
La analogía para el elipsoide al igual que en la esfera partirá posicionando
al modelo cilíndrico perspectivo en un sistema infinitesimal, mismo que se hará en
torno de un cuadrilátero.
Conociendo esto se realizará la igualdad de los factores de escala del
Ecuador y del MC o meridiano de referencia.
𝑘𝑀 = 𝑘𝐸
G′I′
GI=G′H′
GH
Fig. III.14 Esquema geométrico de la proyección Mercator para el elipsoide.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
70
Fig. III.15 Porción de arco de meridiano.
Donde estos valores en la esfera son:
𝑑𝑦
R ∙ 𝑑𝜑=
1
cos𝜑∙ 𝑑𝜑
Pero debido al cambio de modelo geométrico representativo terrestre, se
tendrán que realizar las modificaciones correspondientes a estas igualaciones, en
base a la geometría del elipsoide.
El factor de escala sobre el MC, se deduce como la relación de la ordenada
que comparten los puntos G′ − I′, entre su valor real en el elipsoide, donde este
último es igual al radio de curvatura del meridiano que pasa entre dichos puntos.
Este planteamiento se logra gracias a que el desarrollo se hace sobre un sistema
infinitesimal, lo que origina que la distancia entre estos dos puntos sea lo
suficientemente pequeña para ser despreciada por un segmento mayor de arco de
meridiano, por lo que dicha cantidad pueda ser obtenida mediante la fórmula del
radio para una porción de arco de meridiano (𝜌), tal y como se muestra en el
siguiente esquema.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
71
La intersección de los radios de curvatura del primer vertical o Normal
Mayor (N) de los puntos A y B, forman la diferencia angular de las latitudes de
dichos puntos (∆φ), así mismo la distancia que separa a estos puntos sobre el
elipsoide, equivale a una longitud de arco de meridiano (S). Siendo 𝜌 la distancia
que existe del punto P y cualquiera de los otros dos puntos que subyacen al arco
de meridiano.
Pero recordando que el desarrollo del elipsoide es en torno a un sistema
infinitesimal, se puede decir que la longitud de arco de meridiano es una porción
muy pequeña similar a un segmento de círculo máximo. El cual puede ser
calculado por el producto del radio por el ángulo que subtiende al arco, donde el
radio corresponderá al valor de 𝜌.
∆φ = φA − φB = 𝑑φ
𝑟 = PA = PB = 𝜌
Dónde:
S = 𝑟 ∙ ∆φ ∴ S = 𝜌 ∙ 𝑑φ
Dado este planteamiento el factor de escala en el MC (𝑘𝑀) se interpreta
como:
𝑘𝑀 =G′I′
GI=
𝑑𝑦
𝜌 ∙ 𝑑𝜑
Mientras que para el factor de escala del paralelo de referencia o PC, este
será concebido de la relación entre un segmento de longitud de arco del Ecuador
entre y el arco de paralelo que forma cualquiera de las bases del cuadrilátero
elipsoídico, que para este caso serán los vértices GH.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
72
Fig. III.16 Teorema de Meusnier.
𝑘𝐸 =R ∙ 𝑑∆𝜆
𝑟 ∙ 𝑑∆𝜆=R
𝑟
Para obtener los radios correspondientes se recurrirá al teorema de
Meusnier (Fig. III.16), el cual menciona que el radio de curvatura 𝑟 de una sección
inclinada es igual al radio de curvatura del primer vertical o Normal Mayor (𝑁),
multiplicado por el coseno del ángulo que se subtiende entre esas secciones, que
para este caso será la latitud geodésica (H. Rapp, 2001).
Del esquema anterior se deduce que.
sin(90 − 𝜑) =OP
QP=𝑟
𝑁 ∴ 𝑟 = N sin(90 − 𝜑)
Pero.
sin(90 − 𝜃) = cos 𝜃

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
73
Entonces el radio de un paralelo cualquiera que no sea el Ecuador se
expresara como:
𝑟 = N cos𝜑
Mientras que el radio del ecuador R será el semieje mayor del elipsoide.
R = 𝑎
Sustituyendo estas modificaciones en la ecuación del factor de escala del
PC.
𝑘𝐸 =R
𝑟=
𝑎
N ∙ cos 𝜑
Teniendo los coeficientes que componen ambos factores de escala al fin se
podrá realizar la igualación para convertir el sistema cilíndrico perspectivo en
conforme.
kM = kE
𝑑𝑦
𝜌 ∙ 𝑑𝜑=
𝑎
N cos𝜑
Despejando 𝑑𝜑.
𝑑𝑦 = 𝑎𝜌
N cos𝜑∙ 𝑑𝜑 = 𝑎
𝜌
Nsec𝜑 ∙ 𝑑𝜑
Dónde.
N =𝑎
(1 − 𝑒2 sin2 𝜑)12
; 𝜌 =𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
74
Reduciendo términos se logra obtener una ecuación permisible al proceso
de integración, tomando como variable a la altitud geodésica y como límites a ella
y al Ecuador (0).
∫𝑑𝑦 = ∫ 𝑎 [1 − 𝑒2
1 − 𝑒2 sin2 𝜑] sec 𝜑 ∙ 𝑑𝜑
𝜑
0
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2 sin2 𝜑) cos 𝜑∙ 𝑑𝜑
𝜑
0
Dada la dificultad de la ecuación solo se presentara el resultado final, el
desarrollo completo de esta integral se describe en el Anexo 6.2 que se encuentra
en la parte final de este documento.
𝑦 = 𝑎 ∙ ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Si se omite el valor del semi eje mayor de esta ecuación, esta se convierte
en la ecuación de la latitud, creciente o isométrica para el elipsoide.
Φ = ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Es así como se determina la ecuación de transformación para la ordenada
de un punto sobre el elipsoide, ahora bien, para el caso de las abscisas, estas
serán calculadas bajo el fundamento de la ecuación de un arco círculo, el cual
menciona que dicha distancia es igual al producto del radio del PC por la amplitud
meridiana del punto en cuestión y el MC o el ángulo que subtiende al arco. Para
ambas ecuaciones el PC que se tomara será el Ecuador siendo el radio de
curvatura el valor del semi eje mayor del elipsoide. Por lo que finalmente las
ecuaciones de transformación directa se expresan como:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
75
𝐗 = 𝒂 ∙ ∆𝛌 𝐘 = 𝒂 ∙ 𝐥𝐧 [𝐭𝐚𝐧 (𝟒𝟓° +𝛗
𝟐) ∙ (
𝟏 − 𝒆 𝐬𝐢𝐧𝛗
𝟏 + 𝒆 𝐬𝐢𝐧𝛗)
𝒆𝟐]
Dónde:
∆𝛌 = 𝛌𝐏 −𝐌𝐂
𝒂 = 𝐒𝐞𝐦𝐢 𝐞𝐣𝐞 𝐦𝐚𝐲𝐨𝐫.
La analogía anterior fue entorno al modelo cilíndrico perspectivo ideal, en el
cual dicha figura es tangente al Ecuador, generando que en una franja de latitud
de 30º formada por los paralelos 15º N y 15º S la cual envuelve al Ecuador, el
factor de escala en esa zona es factible para representar los rasgos geométricos
que la conforman. Pero como se mencionaba previamente, en la elaboración
cartográfica de elementos geográficos que se encuentren más allá de esa franja
de latitud, se realiza la modificación de ocupar un PC que se encuentre en la zona
media del o los elementos a proyectar, por lo que el Ecuador se desprecia para
esta modificación, siendo el radio de curvatura del PC el que sustituye al valor del
semi eje mayor del elipsoide en las fórmulas de transformación.
Entonces:
X = 𝑟 ∙ ∆λ, Y = 𝑟 ∙ ln [tan (45° +𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Dónde:
𝑟 = N ∙ cos𝜑0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
76
Por lo tanto.
𝐗 = 𝐍 ∙ 𝐜𝐨𝐬𝛗𝟎 ∙ ∆𝛌
𝐘 = 𝐍 ∙ 𝐜𝐨𝐬𝛗𝟎 ∙ 𝐥𝐧 [𝐭𝐚𝐧 (𝟒𝟓° +𝛗
𝟐) ∙ (
𝟏 − 𝒆 𝐬𝐢𝐧𝛗
𝟏 + 𝒆 𝐬𝐢𝐧𝛗)
𝒆𝟐]
Dónde:
𝐍 =𝒂
(𝟏 − 𝒆𝟐 𝐬𝐢𝐧𝟐𝛗𝟎)𝟏𝟐
∆𝛌 = 𝛌𝐏 −𝐌𝐂
𝛗𝟎 = 𝐋𝐚𝐭𝐢𝐭𝐮𝐝 𝐝𝐞𝐥 𝐏𝐚𝐫𝐚𝐥𝐞𝐥𝐨 𝐝𝐞 𝐑𝐞𝐟𝐞𝐫𝐞𝐧𝐜𝐢𝐚 (𝐏𝐂).
Mediante esta modificación es como se derivan las fórmulas de
correspondencia directa de un punto cualquiera tomando un PC distinto al
Ecuador. Sin embargo si se hiciera el cálculo mediante estas fórmulas de un punto
A con coordenadas (λA, 𝜑A) pero tomando como PC al Ecuador, se tendría lo
siguiente:
Datos.
∆λ = 𝜆A −MC; 𝜑0 = 0
Calculando el radio del PC
𝑟 = N ∙ cos𝜑0 ∴ 𝑟 =𝑎
(1 − 𝑒2 sin2 0)12
∙ cos 0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
77
Pero.
sin 0 = 0 𝑦 cos 0 = 1
Se tiene que:
𝑟 =𝑎
(1 − 𝑒2 ∙ 0)12
∙ 1 =𝑎
(1 − 0)12
= 𝑎
Aplicando las fórmulas de transformación.
X = 𝑎 ∙ ∆λ
Y = 𝑎 ∙ ln [tan (45° +𝜑A2) ∙ (
1 − 𝑒 sin 𝜑A1 + 𝑒 sin 𝜑A
)
𝑒2]
Mediante esta analogía se deduce que las fórmulas modificadas pueden
también ser utilizadas tomando como PC al Ecuador, generando que durante el
cálculo no existan alteraciones o diferencias que afecten a los valores finales de
las coordenadas ortogonales para el sistema Mercator, esto gracias a la relación
trigonométrica que existe en la fórmula del radio para un paralelo cualquiera.
Realmente la modificación matemática que se le hace al cilindro para un PC
distinto al Ecuador, es obligar a que este sea tangente al PC, pero debido a la
posición de este paralelo arbitrario, provocara que el cilindro sea secante al
elipsoide. En pocas palabras el cilindro será envuelto por el elipsoide donde sus
únicos puntos de contacto con él serán los PC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
78
Fig. III.17 Cilindro secante al elipsoide pero tangente a un paralelo distinto del ecuador
3.2.4 Transformación Inversa en el Elipsoide.
En la primera etapa de deducción se determinó la metodología y fórmulas
de transformación correspondientes para la conversión de coordenadas de un
sistema angular geodésico al sistema proyectivo Mercator, entonces, para
culminar con la fase de deducción para esta proyección, se desarrollarán y
estipularán las ecuaciones y funciones necesarias para las fórmulas de
trasformación en el caso inverso. Para cumplir con ello, dichas formulas se
obtendrán despejando las variables de latitud y longitud de las formulas directas,
de manera similar como en el caso esférico.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
79
Fórmulas de transformación directa
X = 𝑎 ∙ ∆λ, Y = 𝑎 ∙ ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Despejando el valor de la longitud de la ecuación de la abscisa.
X = 𝑎 ∙ ∆λ = 𝑎 ∙ (𝜆P −MC)
X
𝑎= (𝜆P −MC) ∴
X
𝑎+ MC = 𝜆P
Ahora para el valor de la latitud.
Y = 𝑎 ∙ ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Y
𝑎= ln [tan (
𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
eY𝑎 = e
ln[tan(𝜋4+𝜑2)∙(1−𝑒 sin𝜑1+𝑒 sin𝜑
)
𝑒2]
∴ eY𝑎 = tan (
𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2
eY𝑎
(1 − 𝑒 sin 𝜑1 + 𝑒 sin 𝜑
)
𝑒2
= tan (𝜋
4+𝜑
2) ∴ Arctan
[
eY𝑎
(1 − 𝑒 sin 𝜑1 + 𝑒 sin 𝜑
)
𝑒2
]
=𝜋
4+𝜑
2
𝜑 = 2
{
Arctan
[
eY𝑎
(1 − 𝑒 sin 𝜑1 + 𝑒 sin 𝜑
)
𝑒2
]
−𝜋
4
}
= 2 ∙ Arctan
[
eY𝑎
(1 − 𝑒 sin 𝜑1 + 𝑒 sin 𝜑
)
𝑒2
]
−𝜋
2
Se aprecia que en la ecuación para determinar el valor de la latitud, se
encuentra en función de si misma, lo que implica que no exista posibilidad alguna
del despeje adecuado de dicha variable. Para dar solución a esta paradoja, se

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
80
recurre al método matemático de la iteración, en el cual por medio de un
determinado número de aproximaciones sucesivas se encuentra el valor
requerido, mismo que estará regido por un rango de error y precisión.
Entonces para la primera aproximación se hará despreciando los términos
que contengan la variable de latitud, la cual se expresara como:
𝜑1 = 2 ∙ Arctan (eY𝑎) −
𝜋
2
Teniendo el valor numérico de la primera aproximación de 𝜑, se aplicara a
la formula completa. Teniendo como resultado lo siguiente.
𝜑2 = 2 ∙ Arctan
[
eY𝑎
(1 − 𝑒 sin 𝜑11 + 𝑒 sin 𝜑1
)
𝑒2
]
−𝜋
2, 𝜑3 = 2 ∙ Arctan
[
eY𝑎
(1 − 𝑒 sin 𝜑21 + 𝑒 sin 𝜑2
)
𝑒2
]
−𝜋
2
Las iteraciones se realizarán hasta que el valor de 𝜑𝑛 tenga una diferencia
con la iteración anterior de 1 x 10-5 segundos, que equivale a poco menos que un
milímetro en el elipsoide (Gómez Moreno, 2003). Esta condición se cumple
cuando la última y penúltima iteración sean iguales.
𝜑𝑛 = 𝜑𝑛−1
En la práctica para encontrar el valor requerido de latitud solo son
necesarias seis iteraciones, es decir:
𝜑5 = 𝜑6
Entonces finalmente las fórmulas de correspondencia inversa para la
proyección Mercator caso elipsoidal se expresan como:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
81
𝝀 =𝐗
𝒂+𝐌𝐂 𝛗𝒏 = 𝛗𝟔
Siendo.
𝝋𝟏 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧 (𝐞𝐘𝒂) − 𝟗𝟎°, 𝝋𝟐 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧
[
𝐞𝐘𝒂
(𝟏 − 𝒆 𝐬𝐢𝐧𝝋𝟏𝟏 + 𝒆 𝐬𝐢𝐧𝝋𝟏
)
𝒆𝟐
]
− 𝟗𝟎°
𝝋𝟑 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧
[
𝐞𝐘𝒂
(𝟏 − 𝒆 𝐬𝐢𝐧𝝋𝟐𝟏 + 𝒆 𝐬𝐢𝐧𝝋𝟐
)
𝒆𝟐
]
− 𝟗𝟎°
𝛗𝟒; 𝛗𝟓; 𝛗𝟔
Dónde:
𝒂 = 𝐒𝐞𝐦𝐢 𝐞𝐣𝐞 𝐦𝐚𝐲𝐨𝐫 𝐝𝐞𝐥 𝐞𝐥𝐢𝐩𝐬𝐨𝐢𝐝𝐞.
𝒆 = 𝐄𝐱𝐜𝐞𝐧𝐭𝐫𝐢𝐜𝐢𝐝𝐚𝐝 𝐝𝐞𝐥 𝐞𝐥𝐢𝐩𝐬𝐨𝐢𝐝𝐞.
𝐞 = 𝐁𝐚𝐬𝐞 𝐝𝐞 𝐥𝐨𝐬 𝐥𝐨𝐠𝐚𝐫𝐢𝐭𝐦𝐨𝐬 𝐧𝐞𝐩𝐞𝐫𝐢𝐚𝐧𝐨𝐬.
Estas fórmulas solo aplican para el caso cuando el PC es el Ecuador,
mientras que las formulas cuando el PC es distinto a este círculo máximo se
expresan como:
𝝀 =𝐗
𝒓+𝐌𝐂 𝛗𝒏 = 𝛗𝟔

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
82
Siendo:
𝝋𝟏 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧 (𝐞𝐘𝒓) − 𝟗𝟎° 𝝋𝟐 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧
[
𝐞𝐘𝒓
(𝟏 − 𝒆 𝐬𝐢𝐧𝝋𝟏𝟏 + 𝒆 𝐬𝐢𝐧𝝋𝟏
)
𝒆𝟐
]
− 𝟗𝟎°
𝝋𝟑 = 𝟐 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧
[
𝐞𝐘𝒓
(𝟏 − 𝒆 𝐬𝐢𝐧𝝋𝟐𝟏 + 𝒆 𝐬𝐢𝐧𝝋𝟐
)
𝒆𝟐
]
− 𝟗𝟎°
𝛗𝟒; 𝛗𝟓; 𝛗𝟔
𝒓 = 𝐍 ∙ 𝐜𝐨𝐬𝝋𝟎 ; 𝐍 =𝒂
(𝟏 − 𝒆𝟐 𝐬𝐢𝐧𝟐𝝋𝟎)𝟏𝟐
Dónde:
𝑎 = Semi eje mayor del elipsoide.
𝑒 = Excentricidad del elipsoide.
e = Base de los logaritmos neperianos.
N = Radio de curvatura del Primer Vertical.
𝜑0 = Latitud geodésica del PC.
Para ambos casos, es importante que de principio se conozcan los valores
angulares de MC y PC, ya que sin estos valores el cálculo no se puede llevar
acabo.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
83
Fig. III.18 Desarrollo cilíndrico transverso a la esfera.
3.3 Proyección Transversa de Mercator Caso Esférico (Modelo de
Lambert).
La proyección Transversa de Mercator (TM), es una de las primeras
variantes realizadas (de las que se tiene registro) a la proyección original del
cartógrafo flamenco Kremer, es la más importante de todas ellas, debido al
sistema de coordenadas que esta proyección presenta, la convierte en el pilar
fundamental de los sistemas de proyección que se utilizan hoy en día para el
trabajo cartográfico.
Fue construida por Johann Heinrich Lambert en el año 1772, con el objetivo
de reducir el grado exagerado de distorsión vertical que se presentaba en la
proyección Mercator, el cual va aumentando conforme el dato geográfico se va
alejando del Ecuador y se acerca a las zonas polares, donde la información
geométrica del elemento a proyectar, se representa totalmente estirada más allá
de los 15º de latitud norte y sur. Para corregir este estiramiento, Lambert realizo
una modificación a la proyección cilíndrica perspectiva de Mercator mediante un
artificio matemático.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
84
La idea de Lambert fue sencilla, el artificio matemático que utilizo fue el de
girar 90º el cilindro del modelo perspectivo, colocándolo de forma vertical al
modelo geométrico de representación terrestre (transverso), donde el origen de
esta figura coincide con la intersección de los ejes transversal y longitudinal del
cilindro, siendo el único punto de contacto entre el cilindro y el modelo terrestre el
meridiano de origen o Meridiano de Greenwich, por lo que se puede decir que el
cilindro es tangente a lo largo del Meridiano 0º.
Al igual que en el sistema de origen, Lambert hace el desarrollo y
modificación de esta proyección en torno a la esfera, debido a la escasez de
información acerca a la forma real de la tierra. Así mismo, en la proyección TM
tiene su punto de proyección en el centro de la esfera, siendo una proyección de
tipo gnomónica.
Desde el centro de la tierra se llevan las direcciones a la superficie terrestre
continuándolas hasta el cilindro, el cual posteriormente se desarrolla (Caire
Lomelí, Cartografía Matemática II. Proyección Cartográfica para la República
Mexicana, 1983).
A pesar de las modificaciones hechas al modelo original, la proyección TM
conserva la esencia principal que Mercator forjó en su sistema de proyección, el
cual es la conservación de direcciones y cantidades angulares en el plano de
representación, siendo la proyección TM una proyección del tipo conforme. Donde
esta subsistencia se logra gracias a la aplicación del cálculo diferencial e integral a
los algoritmos de transformación del sistema Mercator.
La modificación del cilindro de proyección en el modelo perspectivo, genera
que el sentido de la distorsión cambie de dirección, manifestándose en sentido
Este-Oeste, la deformación se comporta de manera similar que en el sistema
Mercator con la diferencia que en la proyección TM, el grado de deformación
aumenta gradualmente cada vez que el elemento geográfico se va alejando del

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
85
meridiano de contacto o MC. Esta situación provoca que los elementos a
proyectados presenten con un estiramiento geométrico de manera horizontal.
El grado de distorsión es nulo a lo largo del meridiano de contacto, por lo
que el factor de escala en las zonas situadas sobre la tangencia entre la esfera y
el cilindro serán igual a la unidad. Para inhibir exageraciones en el factor de
escala, esta proyección es recomendable utilizarse en bandas meridianas no
mayores a 30º de longitud, dado a que en un espaciamiento de 15º de longitud
con respecto al MC (Este u Oeste) todas las distancias, direcciones, formas y
áreas son exactas, donde el factor de escala para los elementos ubicados en esta
franja meridiana no rebasan el valor 1.02, más allá de estos límites toda precisión
geométrica se pierde. Esta situación se atribuye a que la proyección es de tipo
conforme, sin embargo, los elementos geométricos de un objeto dentro de los
límites de cualquier área pequeña (tales como aquellas mostradas por un plano
topográfico), son esencialmente reales (Gutiérrez Palacios, 2005).
Siendo el MC el único punto de tangencia en el modelo de Lambert, hará
que su transformada en el plano sea mediante una línea totalmente recta y
vertical, conservándose sobre ella las magnitudes lineales en su verdadera
dimensión (línea automecoica), los meridianos restantes se convertirán en curvas
complejas de distinto radio con concavidad hacia respecto al MC. El Ecuador y los
paralelos 90º N y 90º S se convierten en líneas rectas horizontales,
perpendiculares al MC, mientras que los paralelos distintos a estos, se
transformaran en curvas cóncavas desigualmente separadas, donde la
representación completa de cada uno de ellos formara una elipse.
Además de la tangencia que ocurre a lo largo del MC, en el esfera este
meridiano es el origen de las longitudes y el Ecuador el origen de las latitudes, por
lo que en el sistema de coordenadas ortogonales de esta proyección, el MC se
convierte en el eje de las ordenadas, mientras que el Ecuador se convierte en el
origen de las abscisas, observándose condiciones de simetría con respecto al MC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
86
Fig. III.19 Representación mundial en la proyección Transversa de Mercator.
Fuente: NASA 2015.
En síntesis, las condiciones generales de la proyección TM son las
siguientes:
► Se trata de una modificación a la proyección cilíndrica de Mercator,
donde el cilindro es posicionado de manera horizontal a la esfera,
siendo tangente a un meridiano de referencia o Meridiano Central
MC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
87
► La representación de las cantidades angulares o direcciones
azimutales en el sistema TM son iguales al valor angular geodésico
en la esfera, dicho de otra forma, la representación es de tipo
conforme.
► En el plano, el meridiano de referencia se transforma en un
segmento de recta en el cual el valor de las distancias se conservan
(línea automecoica), por lo que el factor de escala o de deformación
lineal (L) es 1.
► El fenómeno de distorsión geométrica se manifiesta en sentido Este-
Oeste y viceversa tomando como referencia el MC, por lo que la
deformación incrementa de manera exagerada conforme el elemento
a representar se va alejando de dicho meridiano.
► La proyección es simétrica con respecto al meridiano de referencia.
► La transformación del meridiano de referencia y el Ecuador en el
plano se dan por medio de dos líneas rectas, las cuales son
perpendiculares entre sí. En donde el meridiano central se convierte
en el eje de las ordenadas y el Ecuador en el eje de las abscisas.
► El resto de meridianos y paralelos en el plano, se convierten en
curvas complejas. Donde la representación completa de un paralelo
es mediante una elipse.
► En la esfera, el MC será el origen de las longitudes, mientras tanto el
Ecuador se considerara como el origen de las latitudes.
► El valor de la coordenada norte (Y) estará dada por la longitud de
arco de meridiano, partiendo esta desde el Ecuador, para el caso de
las coordenadas en el eje de las X, estarán dadas directamente por
el valor encontrado respecto a la amplitud de banda que separen al
objeto del meridiano central, por lo que se tendrán coordenadas con
valores positivos y negativos.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
88
De acuerdo a lo que menciona Enriquez Turiño (2009), esta proyección
adopta el nombre de Transversa de Mercator solo cuando el modelo de
representación terrestre es la esfera, pero si la superficie de referencia elegida es
el elipsoide, esta proyección se le asigna el nombre de Gauss-Krüger (GK), la cual
es el motivo de estudio de este documento.
En la antigüedad el uso de la proyección TM se vio limitado durante mucho
tiempo a la representación cartográfica de zonas, países o regiones que
presentaban una forma alargada y estrecha en el sentido Norte – Sur, pero dado
el comportamiento de la deformación geométrica, esta proyección es ideal para
mapear elementos que su lado más largo sea el vertical. Hoy en día el sistema
TM para la esfera ha dejado de utilizarse debido a la aparición del elipsoide de
revolución.
3.3.1 Transformación Directa de Coordenadas.
Como se mencionaba previamente el modelo transverso de Lambert se
desarrolló en torno a la esfera terrestre, de la misma manera que el modelo
original de Mercator. Dada esta situación, la deducción de las fórmulas de
transformación directa correspondientes a esta proyección se harán tomando
dicho modelo.
El análisis partirá de las fórmulas de transformación caso directo de la
proyección Mercator.
X = R ∙ ∆𝜆 Y = R{ln[sec 𝜑 + tan𝜑]} = R {ln [tan (𝜋
4+𝜑
2)]}
Dado que el cilindro es girado 90º generara que los ejes del sistema
cartesiano de proyección transverso cambien de posición, provocando que el eje
de las abscisas de la proyección Mercator se convierte en el eje de las ordenadas
de la proyección TM y viceversa.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
89
Fig. III.20 Elementos geométricos de la proyección Transversa de Mercator.
XM = YTM; YM = XTM
Por lo que las formulas en el sistema TM se expresan como:
XTM = R{ln [tan (𝜋
4+𝜑
2)]} ; YTM = R ∙ ∆𝜆
Siendo el cilindro transverso a la esfera provocara que el único punto de
contacto entre estas dos figuras sea un meridiano arbitrario al que se le dominara
MC, dada esta situación las ecuaciones anteriores serán modificadas de acuerdo
al valor de arco de dicho meridiano. Para lograr esto se recurrirá a la siguiente
figura.
El desarrollo se hará tomando un triángulo esférico, el cual que se forma
entre el espaciamiento de una banda meridiana con respecto al MC y un paralelo
arbitrario distinto al Ecuador, tal y como se muestra en la siguiente figura.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
90
Fig. III.21 Triángulo esférico.
Donde los ángulos interiores de este triángulo son los siguientes:
N = ∆λ, G =𝜋
2, H = θ
Y los valores de sus lados se interpretaran como:
n = φ′, g =𝜋
2− φ, h =
𝜋
2− λ′
Dado que los lados del triángulo dependen de la latitud de meridiano y
paralelo arbitrario (λ′, φ′), se tendrá que obtener el valor de cada uno de ellos
para que de esta manera expresar las fórmulas de transformación en función de
una sola latitud y longitud (λ, φ).
Tomando en cuenta lo anterior, las fórmulas de transformación se pueden
expresar como:
III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
91
XTM = R{ln [tan (𝜋
4+n
2)]} ; YTM = R ∙ h
Recurriendo a la trigonometría esférica (ley de senos, consenos y teorema
de Bessel) e identidades trigonométricas de apoyo se podrá determinar los valores
requeridos.
sin N
sin n=sin G
sin g=sin H
sin h;
cos n = cos g ∙ cos h + sin g ∙ sin h ∙ cos N ;
cos g = cos n ∙ cos h + sin n ∙ sin h ∙ cos G ;
cos h = cos n ∙ cos g + sin n ∙ sin g ∙ cos H ;
sin n ∙ cos G = cos g ∙ sin h − cos h ∙ sin g ∙ cos N ;
sin n ∙ cos H = cos h ∙ sin g − cos g ∙ sin h ∙ cos N ;
sin g ∙ cos N = cos n ∙ sin h − cos h ∙ sin n ∙ cos G ;
sin g ∙ cosH = cosH ∙ sin n − cos n ∙ sin h ∙ cos G ;
sin h ∙ cos G = cos g ∙ sin n − cos n ∙ sin g ∙ cos H ;
sin h ∙ cos N = cos n ∙ sin g − cos g ∙ sin n ∙ cos H ;
sin𝜋
2= 1; cos
𝜋
2= 0; sin (
𝜋
2− φ) = cosφ ; cos (
𝜋
2− φ) = sinφ
Conociendo esto se pueden calcular los valores de los lados del triángulo
en función de la latitud y longitud.
Para φ′.
sin N
sin n=sin G
sin g ∴ sin n =
sin N ∙ sin g
sin G
n = Arcsin (sin N ∙ sin g
sin G)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
92
Sustituyendo valores.
φ′ = Arcsin [sin ∆λ ∙ sin (
𝜋2− φ)
sin𝜋2
] = Arcsin (sin ∆λ ∙ cosφ
1)
n = φ′ = Arcsin(sin ∆λ ∙ cosφ)
Para λ′.
cos g = cos n ∙ cos h + sin n ∙ sin h ∙ cos G ;
Sustituyendo valores.
cos (𝜋
2− φ) = cosφ′ ∙ cos (
𝜋
2− λ′) + sinφ′ ∙ sin (
𝜋
2− λ′) ∙ cos
𝜋
2
sinφ = cosφ′ ∙ sin λ ′ + sinφ′ ∙ cos λ′ ∙ cos 0
sinφ = cosφ′ ∙ sin λ ′
Aplicando el teorema de Bessel.
sin (𝜋
2− φ) ∙ cos ∆λ = cosφ′ ∙ sin (
𝜋
2− λ′) − cos (
𝜋
2− λ′) ∙ sinφ′ ∙ cos
𝜋
2
cosφ ∙ cos ∆λ = cosφ′ ∙ cos λ′ − sin λ′ ∙ sin φ′ ∙ cos 0
cosφ ∙ cos ∆λ = cosφ′ ∙ cos λ′
Dividiendo.
sinφ
cosφ ∙ cos ∆λ=cosφ′ ∙ sin λ ′
cosφ′ ∙ cos λ′
tanφ ∙ sec∆λ = tan λ′
h = λ′ = Arctan(tanφ ∙ sec∆λ)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
93
Sustituyendo en las fórmulas para directas.
XTM = R{ln [tan (𝜋
4+n
2)]} = R {ln [tan (
𝜋
4+φ′
2)]}
YTM = R ∙ h
Entonces.
XTM = R{ln [tan (𝜋
4+Arcsin(sin ∆λ ∙ cos φ)
2)]}
YTM = R ∙ Arctan(tanφ ∙ sec∆λ)
Sin embargo para la fórmula de la ordenada, está puede re escribirse en
una forma más sencilla. Teniendo en cuenta lo siguiente:
XTM = R {ln [tan (𝜋
4+φ′
2)]} = R{ln[secφ′ + tanφ′]}
XTM = R{ln[secφ′ + tanφ′]} = R {ln [1
cosφ′+sinφ′
cosφ′]}
XTM = R {ln [1 + sinφ′
cosφ′]}
Dónde:
cosφ′ = (1 − sin2 φ′)12 = [(1 − sinφ′)(1 − sinφ′)]
12
cosφ′ = (1 + sinφ′)12(1 − sinφ′)
12

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
94
Aplicando.
XTM = R {ln [1 + sinφ′
(1 − sin2φ′)12
]} = R {ln [1 + sinφ′
(1 + sin φ′)12(1 − sinφ′)
12
]}
XTM = R{ln [(1 + sinφ′)
12
(1 − sinφ′)12
]} = R{ln [1 + sinφ′
1 − sinφ′]
12
}
XTM = R {1
2ln [
1 + sinφ′
1 − sinφ′]}
Por lo que se puede decir.
Φ =1
2ln [
1 + sinφ′
1 − sinφ′]
Pero.
sinφ′ = sin ∆λ ∙ cosφ
Se tiene que:
XTM = R {1
2ln [
1 + sin ∆λ ∙ cosφ
1 − sin ∆λ ∙ cosφ]}
Entonces realizado este último cambio, las fórmulas de transformación para
la proyección TM se expresan como:
𝐗 =𝐑
𝟐{𝐥𝐧 [
𝟏 + 𝐬𝐢𝐧 ∆𝛌 ∙ 𝐜𝐨𝐬𝛗
𝟏 − 𝐬𝐢𝐧 ∆𝛌 ∙ 𝐜𝐨𝐬𝛗]} ; 𝐘 = 𝐑 ∙ 𝐀𝐫𝐜𝐭𝐚𝐧(𝐭𝐚𝐧𝛗 ∙ 𝐬𝐞𝐜∆𝛌)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
95
3.3.2 Transformación Inversa de Coordenadas.
La deducción de las ecuaciones para la conversión de coordenadas del
sistema TM al sistema esférico geodésico de origen, se realizara mediante el
despeje de los valores de latitud y longitud a partir de las ecuaciones directas ya
conocidas.
X =R
2{ln [
1 + sin ∆λ ∙ cosφ
1 − sin ∆λ ∙ cosφ]} ; Y = R ∙ Arctan(tanφ ∙ sec∆λ)
Para facilitar dicho proceso, se recurrirá a varios artificios matemáticos, los
cuales permitan expresar las formulas anteriores en una forma sencilla, permisible
a un despeje algebraico. Para lograr esto, se hará un previo análisis a la ecuación
de la latitud creciente para la esfera.
Φ = ln [tan (𝜋
4+φ
2)]
Recordando que esta se puede expresar como:
Φ = ln [tan (𝜋
4+φ
2)] = ln[secφ + tanφ]
Eliminando el logaritmo se tiene.
Φ = ln[secφ + tanφ] ∴ eΦ = secφ + tanφ
Obteniendo su forma inversa.
e−Φ = secφ − tanφ

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
96
Teniendo las funciones exponenciales de la latitud creciente, permitirá
realizar un cambio de variable utilizando las funciones trigonométricas
hiperbólicas. Para este caso solo se utilizaran las funciones fundamentales y la
inversa del coseno.
Para el seno.
sinhΦ =eΦ − e−Φ
2
Sustituyendo valores.
sinhΦ =secφ + tanφ − (secφ − tanφ)
2=2 ∙ tanφ
2
sinhΦ = tanφ ∴ Φ = Arcsinh(tanφ)
Para el coseno.
coshΦ =eΦ + e−Φ
2
Sustituyendo valores.
coshΦ =secφ + tanφ + (secφ − tanφ)
2=2 ∙ secφ
2
coshΦ = sec φ ∴ Φ = Arccosh(sec φ)
Para la tangente.
tanhΦ =sinhΦ
coshΦ

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
97
Sustituyendo valores.
tanhΦ =tanφ
secφ=
sinφcosφ1
cosφ
=sinφ ∙ cos φ
cosφ
tanhΦ = sinφ ∴ Φ = Arctanh(sinφ)
Y finalmente para la secante.
sechΦ =1
coshΦ
Sustituyendo valores.
sechΦ =1
secφ=
1
1cosφ
sechΦ = cosφ ∴ Φ = Arcsech(cosφ)
Con la anterior se puede decir que:
Φ = Arcsinh(tanφ) = Arccosh(secφ) = Arctanh(sinφ) = Arcsech(cosφ)
Pero además.
Φ = ln [tan (𝜋
4+φ
2)] = ln[sec φ + tanφ] =
1
2ln [
1 + sinφ
1 − sinφ]
Con estas igualdades se hará una modificación unicamente a la ecuación
de transformación para las abscisas, tomando en cuenta la latitud arbitraria
desarrollada en el subtema anterior.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
98
XTM = R{ln [tan (𝜋
4+φ′
2)]} = R ∙ Arctanh(sinφ′)
Recordando que:
sinφ′ = sin ∆λ ∙ cosφ
Sustituyendo.
XTM = R ∙ Arctanh(sin ∆λ ∙ cosφ)
Con este cambio, las fórmulas de transformación directa también pueden
expresarse como
X = R ∙ Arctanh(sin ∆λ ∙ cosφ) Y = R ∙ Arctan(tanφ ∙ sec∆λ)
Con estas ecuaciones la obtención de los valores de latitud y longitud será
más sencilla. Para obtener el valor de la longitud y latitud se realizara el despeje
de la función trigonométrica que tenga como argumento dichas variables
tanh (X
R) = sin ∆λ ∙ cos φ tan (
Y
R) = tanφ ∙ sec∆λ
tanh (XR)
cosφ= sin ∆λ
tan (YR)
sec∆λ= tanφ
sec φ = coth (X
R) ∙ sin ∆λ tanφ = tan (
Y
R) ∙ cos ∆λ
sin ∆λ = tanh (X
R) ∙ secφ cos ∆λ = cot (
Y
R) ∙ tanφ

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
99
Las ecuaciones han sido expresadas en función de la secante y tangente,
seno y coseno de los valores angulares deseados, en base a este cambio se
recurrirá al despeje de estos argumentos, apoyándose de las identidades
trigonométricas pitagóricas ordinarias e hiperbólicas.
sin2 𝑥 + cos2 𝑥 = 1, sec2 𝑥 − tan2 𝑥 = 1, csc2 𝑥 − cot2 𝑥 = 1
cosh2 𝑥 − sinh2 𝑥 = 1, tanh2 𝑥 + sech2 𝑥 = 1, coth2 𝑥 −csch2 𝑥 = 1
Para la longitud.
sec2 𝜑 − tan2 𝜑 = 1
[coth (X
R) ∙ sin ∆𝜆]
2
− [tan (Y
R) ∙ cos ∆𝜆]
2
= 1
coth2 (X
R) ∙ sin2 ∆𝜆 = 1 + tan2 (
Y
R) ∙ cos2 ∆𝜆
coth2 (XR) ∙ sin2 ∆𝜆 − 1
cos2 ∆𝜆= tan2 (
Y
R)
coth2 (X
R) ∙ tan2 ∆𝜆 − sec2 ∆𝜆 = tan2 (
Y
R)
coth2 (X
R) ∙ tan2 ∆𝜆 − sec2 ∆𝜆 = sec2 (
Y
R) − 1
coth2 (X
R) ∙ tan2 ∆𝜆 + 1 − sec2 ∆𝜆 = sec2 (
Y
R)
coth2 (X
R) ∙ tan2 ∆𝜆 − (sec2 ∆𝜆 − 1) = sec2 (
Y
R)
coth2 (X
R) ∙ tan2 ∆𝜆 − tan2 ∆𝜆 = sec2 (
Y
R)
tan2 ∆𝜆 [coth2 (X
R) − 1] = sec2 (
Y
R)
tan2 ∆𝜆 [csch2 (X
R)] = sec2 (
Y
R)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
100
tan2 ∆𝜆 =sec2 (
YR)
csch2 (XR) ∴ tan ∆𝜆 = sinh (
X
R) ∙ sec (
Y
R)
𝜆P −MC = Arctan [sinh (X
R) ∙ sec (
Y
R)]
𝜆P = Arctan [sinh (X
R) ∙ sec (
Y
R)] + MC
Para la latitud.
sin2 ∆λ + cos2 ∆λ = 1
[tanh (X
R) ∙ sec φ]
2
+ [cot (Y
R) ∙ tanφ]
2
= 1
tanh2 (X
R) ∙ sec2 φ = 1 − cot2 (
Y
R) ∙ tan2φ
tanh2 (X
R) ∙ sec2φ − 1 = −cot2 (
Y
R) ∙ tan2φ
tanh2 (XR) ∙ sec2 φ − 1
tan2φ= −cot2 (
Y
R)
tanh2 (X
R) ∙ csc2φ − cot2φ = −cot2 (
Y
R)
tanh2 (X
R) ∙ csc2φ − (csc2φ − 1) = −cot2 (
Y
R)
tanh2 (X
R) ∙ csc2φ − csc2 φ + 1 = −cot2 (
Y
R)
csc2φ [tanh2 (X
R) − 1] = − cot2 (
Y
R) − 1
csc2φ =−cot2 (
YR) − 1
[tanh2 (XR) − 1]
=− [cot2 (
YR) + 1]
− [1 − tanh2 (XR)]=csc2 (
YR)
sech2 (XR)
csc2φ =csc2 (
YR)
sech2 (XR)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
101
Para facilitar el cálculo de la latitud, la cosecante será expresada en su
forma inversa.
1
sin2 φ=csc2 (
YR)
sech2 (XR) ∴ sin2 φ =
sech2 (XR)
csc2 (YR)
φ = Arcsin [sech (X
R) ∙ sin (
Y
R)]
De acuerdo a lo anterior las fórmulas de correspondencia inversa para la
proyección TM se expresan como:
𝛌 = 𝐀𝐫𝐜𝐭𝐚𝐧 [𝐬𝐢𝐧𝐡 (
𝐗𝐑)
𝐜𝐨𝐬 (𝐘𝐑)] + 𝐌𝐂 𝛗 = 𝐀𝐫𝐜𝐬𝐢𝐧 [
𝐬𝐢𝐧 (𝐘𝐑)
𝐜𝐨𝐬𝐡 (𝐗𝐑)]
3.4 La Longitud de Arco de la Elipse Meridiana.
Hasta el momento se han analizado y desarrollado las fórmulas de
transformación para la proyección de origen, proyección Mercator y una de sus
variantes construida por Lambert, la proyección Transversa de Mercator. Donde
dicho desarrollo ha sido mediante elementos y procesos matemáticos sencillos
(por decirlo de algún modo), donde los algoritmos resultado de estos análisis, son
conformados por formulas sencillas, no muy exageradas en cuanto a términos.
Sin embargo la proyección la cual es motivo de estudio en esta
investigación, la proyección Gauss-Krüger o Proyección Transversa de Mercator
caso elipsoidal, se satisface con fórmulas geodésicas más complejas, donde la
esencia de precisión y exactitud de estas ecuaciones reside en el número de
términos o funciones que se utilicen para dicho cálculo.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
102
Una de estas expresiones geodésicas es la ecuación de la longitud de arco
de una elipse meridiana o mejor conocida como longitud de arco de meridiano,
esta ecuación es requerida dada a la modificación analítica que se le realiza al
cilindro en torno al meridiano de referencia que hace contacto con el elipsoide, tal
y como se mostraba en el subtema anterior refiriéndose a la esfera.
Dada su importancia y complejidad en el sistema transverso para el
elipsoide, será forzosamente necesario estudiar y deducir la estructura de su
fórmula previamente. Por lo que en el siguiente subtema se expondrán los
procedimientos matemáticos necesarios para obtener las ecuaciones que
satisfagan dicho requerimiento.
3.4.1 Formulas de Conversión.
El análisis y desarrollo matemático que se presenta a continuación fue
tomado de la obra Cartografía Matemática del Ing. Fernando Barrera Trejo (2015),
como apoyo para el desarrollo de esta investigación.
Se trata de determinar la longitud de un arco S de elipsoide entre dos
puntos A y B que se encuentran sobre un mismo meridiano tal y como se
mostraba en la figura del tema.
Se sabe que la longitud de un arco es equivalente al radio por el ángulo que
subtiende al arco, pero si se logra dividir dicho arco en infinitesimales fracciones
se puede escribir:
𝑑s = 𝜌 ∙ 𝑑𝜑
Donde 𝜌 corresponde al radio de curvatura de una porción de la elipse
meridiana, por lo tanto para encontrar el valor completo del arco de meridiano
formado entre a y b, se deben de sumar todas las fracciones 𝑑𝑠 desde el punto a
y hasta el punto b. Siendo la forma más viable, integrar dicha función.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
103
S = ∫ 𝜌 ∙ 𝑑𝜑b
a
= ∫𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
b
a
∙ 𝑑𝜑
Para facilitar la solución a esta integral se supondrá que el punto a se
encuentra sobre el Ecuador y el punto b sobre un paralelo cualquiera (𝜑), mismo
que intersecte al meridiano de estudio. Además de esto, el numerador de la
fracción de 𝜌 será visto es su forma inversa.
S = ∫ 𝑎(1 − 𝑒2)(1 − 𝑒2 sin2 𝜑)−32
𝜑
0
∙ 𝑑𝜑
Desarrollando y simplificando términos, el resultado de la integral elíptica se
presenta como:
𝐒 = 𝒂(𝟏 − 𝒆𝟐)
[ (𝟏 +
𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖)𝝋
−(𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖) 𝐬𝐢𝐧𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟏𝟓
𝟑𝟐𝒆𝟒 +
𝟏𝟕𝟓
𝟑𝟖𝟒𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟐𝟗𝟓𝟕𝟔𝒆𝟖) 𝐬𝐢𝐧𝟑𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟑𝟓
𝟗𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟔𝟏𝟒𝟒𝒆𝟖) 𝐬𝐢𝐧𝟓𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟑𝟏𝟓
𝟏𝟎𝟐𝟒𝒆𝟖) 𝐬𝐢𝐧𝟕𝝋 ∙ 𝐜𝐨𝐬𝝋 ]
Sin embargo, dado que esta fórmula está en función del seno y coseno de
la latitud y en virtud de que en la bibliografía existente, esta fórmula no es
reportada, es factible de simplificarse mediante la consideración de las siguientes
identidades trigonométricas:
sin 𝜑 ∙ cos 𝜑 =1
2∙ sin 2𝜑, sin2 𝜑 =
1
2−1
2∙ cos 2𝜑,
sin 𝜑 ∙ cos 𝛽 =1
2[sin(𝜑 − 𝛽) + sin(𝜑 + 𝛽)]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
104
Aplicando se tiene finalmente:
S = 𝑎(1 − 𝑒2)
[ (1 +
3
4𝑒2 +
45
64𝑒4 +
175
256𝑒6 +
11025
16384𝑒8)𝜑
−(3
8𝑒2 +
15
32𝑒4 +
525
1024𝑒6 +
2205
4096𝑒8) sin 2𝜑
+(15
256𝑒4 +
105
1024𝑒6 +
2205
16384𝑒8) sin 4𝜑
−(35
3072𝑒6 +
315
12288𝑒8) sin 6𝜑
+(315
131072𝑒8) sin 8𝜑 ]
Para simplificar un poco más esta ecuación, se harán los siguientes
cambios de variable.
𝐒 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗]
Siendo.
𝐀 = 𝟏 +𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
𝐁 = − [𝟑
𝟒𝒆𝟐 +
𝟏𝟓
𝟏𝟔𝒆𝟒 +
𝟓𝟐𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐂 =𝟏𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟎𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖
𝐃 = − [𝟑𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐄 =𝟑𝟏𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
El desarrollo completo de estas integrales se encuentra en el anexo 6.3.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
105
3.5 Proyección Transversa de Mercator Caso Elipsoidal (Gauss-
Krüger).
La proyección Gauss-Krüger (GK) o también conocida como Transversa de
Mercator (TM) tiene su origen y fundamento en la proyección modificada que ideó
Lambert en 1772, pero con la variante de que esta toma como modelo matemático
al elipsoide para la representación terrestre.
Esta diferencia genera que la transformación de coordenadas y el proceso de
proyección de un sistema a otro resulte complejo, debido a que el elipsoide a
comparación de la esfera, posee distintos radios de curvatura en cualquier punto
de su superficie. Esta inextricable situación tiene como consecuencia que para
esta proyección, el desarrollo y deducción de sus fórmulas de transformación, en
cualquiera de sus dos procedimientos (directo o inverso), requiera más que el
análisis de la geometría clásica y habitual, por lo que es forzoso recurrir a los
métodos que cálculo infinitesimal ofrece, para la solución de problemas donde
interfieren elementos geométricos con curvaturas irregulares. Dicho de otra
manera, las fórmulas de transformación se obtienen mediante procedimientos
puramente analíticos disueltos totalmente de cualquier concepto geométrico, razón
por la cual no se le asigna el nombre de Proyección sino el de Representación
(Barrera Trejo, 2015).
Apoyados del cálculo infinitesimal se logra conseguir que esta proyección
cumpla con la condición de conformidad, misma que ha sido y es la esencia de la
proyección Mercator. Es decir, se logra mantener la magnitud de los ángulos
infinitesimales formados en el elipsoide (Zepeda Godoy, 2003).
La representación GK cuenta con el mismo sistema que la proyección
Transversa (donde su propio nombre la delata). Se desarrolla sobre un cilindro el
cual es posicionado de forma horizontal o transversa al elipsoide, siendo este
tangente a lo largo de un meridiano que se elige de manera arbitraria y al que se
le denomina meridiano central o meridiano de origen que a su vez es

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
106
Fig. III.22 Cilindro transverso al elipsoide.
perpendicular al Ecuador. A diferencia de su proyección de origen, en la
representación GK, la distorsión se manifiesta en dirección este-oeste o viceversa,
la cual va aumentando gradualmente a medida que la información geoespacial
que se desee simbolizar se va alejando del meridiano de origen. La deformación
es directamente proporcional a la distancia que separa al objeto del meridiano
central.
Para evitar el grado de deformación, algunos países recurrieron al artificio
matemático de subdividir la superficie terrestre en franjas meridianas de 3º grados
de amplitud, generando así 120 husos o bandas iguales, pero cada una referida a
un meridiano central distinto, además de estar referidas todas ellas al Ecuador
(Enríquez Turiño, 2009).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
107
Fig. III.24 Banda meridiana en la representación Gauss-Krüger
.
Fig. III.23 Desarrollo de la representación Gauss-Krüger.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
108
El comportamiento de la deformación sobre la extensión del meridiano
central y en las dos franjas meridanas adyacentes de un grado treinta minutos,
que se conciben a partir de este mismo meridiano (una franja de lado este y la
otra en la zona oeste), se tornan o se consideran casi nulas, por lo que se pueden
llegar a despreciar, más allá de esta magnitud meridional el dato geográfico pierde
totalmente su precisión.
El valor máximo de dicha distorsión en estas bandas meridianas no excede
más allá del 10%, por lo que para una amplitud de 1º 30” el factor de escala será
de 1.003, mientras que en el MC su valor será igual a la unidad. Dada esta
condición se puede decir que los objetos representados sobre esta amplitud de
banda meridiana, conservaran ángulos, distancias y formas.
Además de la particularidad de distorsión, en la representación GK es
regida por las siguientes condiciones geométricas generales.
La representación de las cantidades angulares o direcciones
azimutales en el sistema GK deben de ser iguales al valor angular
geodésico, dicho de otra forma, la representación debe de ser
conforme.
En el plano, el meridiano de referencia se debe de transformar en un
segmento de recta en el cual el valor de las distancias se conservan
(línea isométrica automecoica), por lo que el factor de escala o de
deformación lineal (L) es 1.
Las bandas meridianas son simétricas respecto al meridiano de
referencia.
La transformación del meridiano de referencia y el Ecuador en el
plano se dan por medio de dos líneas rectas, las cuales son
perpendiculares entre sí. En donde el meridiano central se convierte
en el eje de las ordenadas y el Ecuador en el eje de las abscisas.
El resto de meridianos y paralelos en el plano, se convierten en
curvas complejas.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
109
En el elipsoide, el meridiano central correspondiente a cada banda
meridiana será el origen de las longitudes, mientras tanto el Ecuador
se considerara como el origen de las latitudes.
El valor de la coordenada norte (Y) estará dada por la longitud de
arco de meridiano, partiendo esta desde el Ecuador, para el caso de
las coordenadas en el eje de las X, estarán dadas directamente por
el valor encontrado respecto a la amplitud de banda que separen al
objeto del meridiano central, por lo que se tendrán coordenadas con
valores positivos y negativos.
La representación GK es ideal para mapear objetos o porciones terrestres
que tengan una gran extensión en sentido norte-sur (latitud) y una extensión
pequeña en longitud (que sean más largos que anchos), quizás el ejemplo más
cercano que podemos encontrar de esto serían las representaciones de países
como Chile y Argentina.
Hoy por hoy, la representación GK es una de las más utilizadas de todas las
proyecciones, de acuerdo a la recomendación de la Asociación Internacional de
Geodesia y Geofísica. En países como Argentina, Chile, Colombia, España,
Australia, el Reino Unido y Alemania, por mencionar algunos, la representación
GK es la más utilizada. En Europa esta representación es conocida por el nombre
de Proyección Gauss-Krüger, mientras en países del continente americano es
conocida como Proyección Transversa de Mercator (Hernández López, 2009).
Otro dato trascendente que es importante mencionar, es que la
representación GK es el pilar fundamental de dos de las proyecciones más
utilizadas a nivel mundial y nacional, la proyección UTM y la TME.
Estas dos proyecciones pertenecen a la familia de proyecciones cilíndricas
transversas que de igual forma toman al elipsoide como figura geométrica de
referencia para la representación terrestre. Debido a que la representación GK es
la arteria principal de estos sistemas proyectivos, provoca que las fórmulas de

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
110
Fig. III.25 Valores del factor de escala (ko) en la representación GK Fuente: Guía de Proyecciones Cartográficas, Gómez Moreno, 2003
transformación correspondientes para cada uno de ellos sean similares con ligeras
modificaciones pero conservando la esencia del sistema original.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
111
3.5.1 Transformación Directa de Coordenadas.
Como se mencionaba, para obtener el desarrollo de las fórmulas de
transformación de coordenadas de un sistema geodésico a un sistema plano y
viceversa para la representación GK, se necesitara de un desarrollo puramente
analítico, el cual permita cumplir adecuadamente con las condiciones generales
impuestas por la representación. Para efectuar dichos requerimientos, la
deducción analítica partirá de la teoría de conformidad de proyecciones
empleando el análisis de funciones de la variable compleja.
Antes de iniciar con la deducción de fórmulas de transformación, es
necesario mencionar y dejar en claro el término de la variable compleja.
Como bien se sabe dentro del extenso universo de las matemáticas y
primordialmente del mundo de los números, existe una división única y especial
que relaciona dos dimensiones (por decirlo de alguna manera) de números, los
números reales (ℝ) y los números imaginarios (𝑖), a este bloque se le da el
nombre de números complejos. En este segmento numérico encontramos a todos
aquellos números reales que son los más comunes y que cuentan con la facilidad
de manipulación en cualquier operación o análisis matemático, y por otro lado se
encuentran los números imaginarios, mismos que de acuerdo a la lógica
convencional, no pueden existir, sin embargo, pueden ser el resultado de
operaciones matemáticas comunes. Donde la representación gráfica más fiel de
ambos sistemas sea a través de un plano cartesiano, donde el eje de las 𝑥
representa a la parte real y el plano 𝑦 a la parte imaginaria.
Conociendo esto se puede dejar en claro que una función 𝑦 = 𝑓(𝑥) forma
parte del bloque de números reales, solo si su variable, dominio (𝑥) o imagen (𝑦)
siempre será un número real, pero si estos tres elementos o alguno de ellos son
números complejos, se dice que es una función de variable compleja o

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
112
simplemente que es una función compleja, misma que se expresa de la siguiente
manera:
𝑤 = 𝑓(𝑧)
Dónde:
w = Imagen z = Dominio.
Sabiendo que:
𝑧 = 𝑥 + 𝑦𝑖,
Además que 𝑦 es un número complejo, 𝑤 se representa como:
𝑤 = 𝑓(𝑧) = 𝑢 + 𝑣𝑖 ∴ 𝑤 = 𝑢(𝑥, 𝑦) + 𝑣(𝑥, 𝑦)𝑖
Viéndolo en su forma inversa se tiene que:
𝑧 = 𝑓(𝑤) = 𝑦(𝑢, 𝑣) + 𝑥(𝑢, 𝑣)𝑖
De acuerdo a lo que menciona Barrera Trejo (2015), mediante un análisis
geométrico, se puede decir que el inverso de una función compleja, sitúa al punto
𝑦 con coordenadas (𝑢, 𝑣) sobre un eje o plano de números reales, mientras que
para un punto 𝑥𝑖 con las mismas coordenadas, lo establece en un eje imaginario,
pudiéndose decir; que una función compleja es aquella que hace corresponder a
cada punto (𝑦,𝑥𝑖) de un plano origen con un punto (𝑢, 𝑣𝑖) de un plano imagen.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
113
Tomando en cuenta esta hipótesis e iniciando con la deducción de
fórmulas, se pueden declarar dos planos complejos. Uno que sea un sistema
isométrico que represente al elipsoide, cuyas coordenadas dependan de la latitud
creciente o latitud isométrica y del incremento de la longitud geodésica con
respecto al meridiano de origen (∆λ,Φ), mientras que el otro, nuevamente en un
sistema isométrico ortogonal, cuya superficie sea el plano cartesiano que proyecte
a la representación GK, mismo que dependa de (𝑥, 𝑦) para el establecimiento de
sus coordenadas.
Dada esta situación se puede decir que las funciones para ambos planos se
interpretan como:
𝑤 = ∆λ𝑖 + Φ 𝑧 = 𝑥𝑖 + 𝑦
𝑤 = 𝑓(𝑧) 𝑧 = 𝑓(𝑤)
𝑤 = ∆λ(𝑥, 𝑦)𝑖 + Φ(𝑥, 𝑦) 𝑧 = 𝑥(Φ, ∆λ)𝑖 + 𝑦(Φ, ∆λ)
Fig. III.26 Sistemas complejos de deducción.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
114
Se considera esta igualdad de acuerdo al Teorema de la Representación
Conforme de Riemann, el cual menciona “Que si dos superficies admiten una
representación conforme siempre que a un sistema isométrico (𝑢, 𝑣) de una de
ellas le corresponda un sistema isométrico de la otra (α, β).”
Para cumplir con la condición de conformidad para proyecciones que
estipula Riemann, se es necesario recurrir a la siguiente función compleja.
α + β𝑖 = 𝑓(𝑢 + 𝑣𝑖)
Partiendo de la función anterior se puede determinar la condición de
conformidad para proyecciones y de igual manera su forma inversa.
𝒚 + 𝒙𝒊 = 𝒇(𝚽 + ∆𝛌𝒊) 𝚽 + ∆𝛌𝒊 = 𝑭(𝒚 + 𝒙𝒊)
Según Hernández López (2009), de esta manera es como se logra obtener
dos funciones puramente analíticas las cuales son permisibles a un proceso de
derivación.
Con estas funciones se cumple con una de las condiciones fundamentales
de conformidad, la cual menciona que: “Para que una proyección sea conforme se
es necesario que existan funciones analíticas”, conociendo esto y dadas las
funciones 𝐹 y 𝑓, el problema se reduce, a encontrar una relación de estas
funciones y los sistemas complejos. El cual satisfaga dos de los importantes
principios de conformidad para la proyección TM, los cuales mencionan que:
En el plano, el meridiano de referencia se debe de transformar en un
segmento de recta en el cual el valor de las distancias se conserven.
El Ecuador se debe de convertir en una línea recta perpendicular al
meridiano central.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
115
Para conseguir el cumplimiento de estos principios, el método de apoyo a
utilizar será el teorema de Taylor, suponiendo que:
𝑧 = 𝑓(𝑤) = 𝑓(Φ + ∆λ𝑖)
El desarrollo de la serie de Taylor se hará en torno a la latitud creciente,
debido a que esta se vincula con la transformada del meridiano central en el plano
ortogonal de proyección. Por lo que para ello se tendrá en cuenta que λ = 0,
debido a que el meridiano central es el origen de las longitudes.
𝑤0 = (0,Φ) = Φ ∴ 𝑓(𝑤0) = 𝑓(Φ)
Restando 𝑤 y 𝑤0, se tiene que:
∆𝑤 = 𝑤 − 𝑤0 = Φ+ ∆λ𝑖 − Φ
∆𝑤 = ∆λ𝑖
Por lo que se interpreta que:
∆λ = MC − λ𝑝
Conociendo lo anterior y recordando que el MC es el origen de las
longitudes (0), se concretara lo siguiente.
∆λ = 0 − λ𝑝 = −λ𝑝
Conociendo esto, se recurrirá al desarrollo de la función 𝑓(𝑤) a través de la
serie de Taylor en torno al punto que corresponde a la latitud creciente (Φ).
Mediante este método se logra por fin relacionar las funciones complejas del
elipsoide y del plano.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
116
El resultado del desarrollo de la función 𝑓(𝑤) mediante la serie de Taylor,
dará como resultado términos reales e imaginarios, debido a que dicha función es
una variable compleja, ambos términos se igualaran entre sí obteniendo de esta
manera las fórmulas de transformación para las coordenadas rectangulares en el
plano (𝑥, 𝑦) en función de (∆λ,Φ) y en definitiva en (∆λ, 𝜑), coordenadas
geodésicas (Enríquez Turiño, 2009).
Se recurre al método numérico de la serie de Taylor debido a que en su
desarrollo, las funciones de tipo real son extensibles y se pueden vincular con
funciones de variable compleja. Además de esto, otra de las particularidades que
deben cumplir cualquier tipo de función para el pleno desarrollo de este método es
que, dichas funciones cuenten con derivadas de orden superior o sucesivo.
Recordando la ecuación de la serie de Taylor.
𝑓(𝑥) = 𝑓(𝑎) +𝑓′(𝑎)
1!(𝑥 − 𝑎) +
𝑓′′(𝑎)
2!(𝑥 − 𝑎)2 +
𝑓′′′(𝑎)
3!(𝑥 − 𝑎)3 +⋯
+𝑓𝑛(𝑎)
𝑛!(𝑥 − 𝑎)𝑛
Dónde:
𝑎 = Punto aproximado donde se quiere evaluar la función.
𝑥 = Variable a evaluar.
𝑓′, 𝑓′′, 𝑓′′′𝑦 𝑓𝑛 = Derivadas consecutivas de la variable 𝑎
Entonces aplicando el teorema de Taylor a la función compleja 𝑓(𝑤) pero
tomando como punto aproximado a 𝑤0, se tiene que:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
117
𝑓(𝑤) = 𝑓(𝑤) +𝑓′(𝑤)
1!(𝑤 −𝑤0) +
𝑓′′(𝑤)
2!(𝑤 −𝑤0)
2 +𝑓′′′(𝑤)
3!(𝑤 −𝑤0)
3 +⋯
+𝑓𝑛(𝑤)
𝑛!(𝑤 −𝑤0)
𝑛
Siendo.
𝑓(𝑤0) = 𝑓(Φ), ∆𝑤 = 𝑤 − 𝑤0 = ∆λ𝑖
Se puede notar que las derivadas sucesivas son multiplicadas por ∆λ,
misma que es afectada por un número imaginario 𝑖, las cuales potencialmente van
incrementando de acuerdo al valor de su derivada consecutiva. Esta situación
conduce a una propiedad de los números imaginarios, la cual menciona que, “Si
un número imaginario es elevado a una potencia par, esta perderá su parte
imaginaria, mientras que con las potencias impares sucederá lo contrario”, esta
propiedad se verifica mediante el siguiente teorema.
𝑖0 = 1, 𝑖 = 𝑖, 𝑖2 = −1, 𝑖3 = −𝑖, 𝑖4 = 1
Por lo que la formula se puede expresar como:
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!(∆λ𝑖) +
𝑓′′(Φ)
2!(∆λ𝑖)2 +
𝑓′′′(Φ)
3!(∆λ𝑖)3 +⋯+
𝑓𝑛(Φ)
𝑛!(∆λ𝑖)𝑛
El resultado de las derivadas de la variable compleja no deben variar en
función de la dirección en la que esta se acerque al punto de estudio, es decir las
iteraciones mediante las derivadas consecutivas se deben aproximar a un
resultado óptimo y preciso de acuerdo a un punto deseado.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
118
Esta condición permite obtener las derivadas de cualquier punto del plano
complejo en el elipsoide. Para el caso del desarrollo directo se calculara hasta la
octava derivada, pretendiendo obtener coordenadas ortogonales con una precisión
al milímetro, por lo que la serie de Taylor se representaría de la siguiente manera:
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!(∆λ𝑖) +
𝑓′′(Φ)
2!(∆λ𝑖)2 +
𝑓′′′(Φ)
3!(∆λ𝑖)3 +
𝑓4(Φ)
4!(∆λ𝑖)4
+𝑓5(Φ)
5!(∆λ𝑖)5 +
𝑓6(Φ)
6!(∆λ𝑖)6 +
𝑓7(Φ)
7!(∆λ𝑖)7 +
𝑓8(Φ)
8!(∆λ𝑖)8
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!∆λ𝑖 +
𝑓′′(Φ)
2!∆λ2(−1) +
𝑓′′′(Φ)
3!∆λ3(−𝑖) +
𝑓4(Φ)
4!∆λ4(1)
+𝑓5(Φ)
5!∆λ5(𝑖) +
𝑓6(Φ)
6!∆λ6(−1) +
𝑓7(Φ)
7!∆λ7(−𝑖) +
𝑓8(Φ)
8!∆λ8(1)
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!∆λ𝑖−
𝑓′′(Φ)
2!∆λ2 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓4(Φ)
4!∆λ4 +
𝑓5(Φ)
5!∆λ5𝑖
−𝑓6(Φ)
6!∆λ6 −
𝑓7(Φ)
7!∆λ7𝑖 +
𝑓8(Φ)
8!∆λ8
Efectuando los cambios de acuerdo al teorema de números imaginarios se
puede apreciar que solo las derivadas impares aún se encuentran sujetas por el
producto de ∆λ𝑖, debido a esta situación la función 𝑓(𝑤) se puede interpretar en
su forma original, la condición de conformidad.
𝑓(𝑤) = 𝑧 = 𝑦(Φ,∆λ)+ 𝑥(Φ, ∆λ)𝑖
Sustituyendo se tiene que:
𝑓(𝑤) = 𝑦(Φ, ∆λ)+ 𝑥(Φ, ∆λ)𝑖
= 𝑓(Φ) +𝑓′(Φ)
1!∆λ𝑖 −
𝑓′′(Φ)
2!∆λ2 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓4(Φ)
4!∆λ4
+𝑓5(Φ)
5!∆λ5𝑖 −
𝑓6(Φ)
6!∆λ6 −
𝑓7(Φ)
7!∆λ7𝑖 +
𝑓8(Φ)
8!∆λ8

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
119
Representando la función de variable compleja en su forma original se
podrá realizar el despeje y eliminación de 𝑖, mediante la igualación y agrupación
de la parte real e imaginaria.
𝑦(Φ, ∆λ) = 𝑓(Φ) −𝑓′′(Φ)
2!∆λ2 +
𝑓4(Φ)
4!∆λ4 −
𝑓6(Φ)
6!∆λ6 +
𝑓8(Φ)
8!∆λ8
𝑥(Φ, ∆λ)𝑖 =𝑓′(Φ)
1!∆λ𝑖 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓5(Φ)
5!∆λ5𝑖 −
𝑓7(Φ)
7!∆λ7𝑖
Factorizando 𝑖 de la ecuación.
𝑥(Φ, ∆λ)𝑖 =𝑓′(Φ)
1!∆λ𝑖 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓5(Φ)
5!∆λ5𝑖 −
𝑓7(Φ)
7!∆λ7𝑖
𝑥(Φ, ∆λ)𝑖 = 𝑖 [𝑓′(Φ)
1!∆λ −
𝑓′′′(Φ)
3!∆λ3 +
𝑓5(Φ)
5!∆λ5 −
𝑓7(Φ)
7!∆λ7]
𝑥(Φ, ∆λ)𝑖
𝑖=𝑓′(Φ)
1!∆λ −
𝑓′′′(Φ)
3!∆λ3 +
𝑓5(Φ)
5!∆λ5 −
𝑓7(Φ)
7!∆λ7
Es así como finalmente se tienen las fórmulas de transformación directa
para la representación GK.
𝒙 =𝒇′(𝚽)
𝟏!∆𝛌 −
𝒇′′′(𝚽)
𝟑!∆𝛌𝟑 +
𝒇𝟓(𝚽)
𝟓!∆𝛌𝟓 −
𝒇𝟕(𝚽)
𝟕!∆𝛌𝟕
𝒚 = 𝒇(𝚽)−𝒇′′(𝚽)
𝟐!∆𝛌𝟐 +
𝒇𝟒(𝚽)
𝟒!∆𝛌𝟒 −
𝒇𝟔(𝚽)
𝟔!∆𝛌𝟔 +
𝒇𝟖(𝚽)
𝟖!∆𝛌𝟖
Las formulas anteriores contemplan la conversión de coordenadas
geodésicas a ortogonales pero sin embargo no cumplen con una de las
condiciones generales de la proyección TM, la cual alude a la transformación del

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
120
MC en el plano debe de ser mediante una línea automecoica, donde su factor de
escala en todos sus puntos debe de ser la unidad (𝑘0 = 1).
El cumplimiento de esta condición se concebirá a través de las formulas
previamente halladas, la cual se logra considerando dos puntos sobre el
elipsoide, O y P, donde el punto O es aquel que se sitúa en el origen de los
meridianos y los paralelos, en la intersección del MC con el Ecuador, siendo sus
coordenadas (0,0), mientras que para el punto P se ubicara sobre un paralelo
arbitrario que intersecte al MC, cuyas coordenadas sean (∆λ, Φ), pero como dicho
punto se encuentra sobre el MC se puede decir que ∆λ = 0, debido a que no
existe amplitud de banda meridiana. Se consideran las coordenadas del punto 𝑃,
para hacer cumplir con la condición de conformidad del MC.
Aplicando las fórmulas de transformación se pueden calcular las
coordenadas planas para dichos puntos de la siguiente manera.
Para 𝑂.
𝑂 {Φ = 0∆λ = 0
Sustituyendo en las formulas, se tiene que.
𝑥 =𝑓′(0)
1!0 −
𝑓′′′(0)
3!03 +
𝑓5(0)
5!05 −
𝑓7(0)
7!07
𝑥 = 0
𝑦 = 𝑓(0) −𝑓′′(0)
2!02 +
𝑓4(0)
4!∆λ4 −
𝑓6(0)
6!06 +
𝑓8(0)
8!08
𝑦 = 0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
121
Fig. III.27 Representación de la longitud de arco de meridiano en el elipsoide y el plano GK
Por lo que las coordenadas planas para el punto 𝑂 y 𝑃 , son:
𝑂 {𝑥 = 0𝑦 = 0
𝑃 {Φ = Φ∆λ = 0
Sustituyendo los valores de ∆λ y Φ
𝑥 =𝑓′(Φ)
1!0 −
𝑓′′′(Φ)
3!03 +
𝑓5(Φ)
5!05 −
𝑓7(Φ)
7!07
𝑥 = 0
𝑦 = 𝑓(Φ) −𝑓′′(Φ)
2!02 +
𝑓4(Φ)
4!04 −
𝑓6(Φ)
6!06 +
𝑓8(Φ)
8!08
𝑦 = 𝑓(Φ)
Entonces las coordenadas de 𝑃 en el plano se expresan como:
𝑃 {𝑥 = 0
𝑦 = 𝑓(Φ)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
122
Se aprecia que las coordenadas de O en el elipsoide coinciden con el
origen de coordenadas en el plano, el punto P en el plano se sitúa sobre el eje de
las ordenadas con una abscisa arbitraria que intersecta dicho eje, tal y como se
muestra en el esquema III.27.
Concretando la transformación del MC, se admitirá que la distancia S que
existe entre los puntos 𝑂 y 𝑃 será igual en los dos sistemas.
OP(Δλ,Φ) = OP(x,y) = S
Pero como la distancia S en el elipsoide recorre un segmento del MC, este
valor será igual a la longitud de arco de meridiano que se subtiende entre los
puntos en cuestión, el cual se interpretara como:
𝑂𝑃(Δλ,Φ) = 𝑦(0, ∆λ) = 𝑓(Φ) = S
Recordando la fórmula para el cálculo de arco de meridiano, la cual se
representara en su forma explícita para facilitar la deducción.
𝑆 = ∫ 𝜌 𝑑𝜑𝜑
0
Considerando el factor de escala sobre el segmento de meridiano para
conservar la distancia, se conjetura lo siguiente:
𝑦(0, ∆λ) = 𝑓(Φ) = 𝑘0∫ 𝜌 𝑑𝜑𝜑
0
𝑘0 = 1
𝑓(Φ) = ∫ 𝜌 𝑑𝜑𝜑
0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
123
Se aprecia que el valor de 𝑓(Φ) es la integral del radio de curvatura sobre
el meridiano, por lo que para obtener solo el valor de dicho radio será necesario
aplicar la operación derivada a ambos términos de la función y poder cancelar el
desarrollo de la integral.
Derivando 𝑓(Φ).
𝑑[𝑓(Φ)]
𝑑𝜑= 𝜌∫ 𝑑𝜑
𝜑
0
∴ 𝑑[𝑓(Φ)]
𝑑𝜑= 𝜌
Es así como se logra cumplir la condición de conformidad para el MC, a
través de una ecuación diferencial, por lo que solo resta terminar el desarrollo de
las fórmulas de transformación con el desarrollo de las ocho derivadas que
conforman la serie de Taylor.
La primera derivada se calcula como:
𝑓′(Φ) = [𝑑(𝑓(Φ))
𝑑Φ]
′
∴ 𝑓′(Φ) =𝑑[𝑓(Φ)]
𝑑𝜑∙𝑑𝜑
𝑑Φ
La cual se puede interpretar como:
𝑑Φ =𝜌
𝑟𝑑𝜑 ∴
𝑑𝜑
𝑑Φ=𝑟
𝜌
Sustituyendo.
𝑓′(Φ) = 𝜌 ∙𝑟
𝜌 ∴ 𝑓′(Φ) = 𝑟

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
124
Recordando que:
𝑟 = 𝑁 cos𝜑
Por lo que finalmente se obtiene la primera derivada de la latitud isométrica.
𝑑(𝑓(Φ))
𝑑𝜑∙𝑑𝜑
𝑑Φ= 𝑓′(Φ) = 𝑁 cos𝜑
Es así, que de manera puramente analítica se desarrolla la primera
derivada de la función compleja, por lo que el proceso deducción continúa
mediante la resolución de las derivadas restantes por los métodos clásicos de
diferenciación. Recordando que las derivadas consecutivas serán siempre
multiplicadas por el valor de 𝑑𝜑
𝑑Φ.
Siguiendo esta condición, las derivadas consecutivas se realizaran tomando
a la latitud geodésica como variable.
𝑓′′(Φ) = −𝑁 sin 𝜑 cos 𝜑, 𝑓′′′(Φ) = 𝑁 [tan2 𝜑 −𝑁
𝜌] cos3 𝜑
𝑓4(Φ) = 𝑁 [4 (𝑁
𝜌)2
+𝑁
𝜌− tan2 𝜑] cos3 𝜑 sin 𝜑
𝑓5(Φ) =𝑁
16
{
2 [1 − 2 (
𝑁
𝜌) + 13 (
𝑁
𝜌)2
− 4(𝑁
𝜌)3
] cos 𝜑
− [3 − 2 (𝑁
𝜌) + 3 (
𝑁
𝜌)2
− 44 (𝑁
𝜌)3
] cos(3𝜑)
+ [1 + 2 (𝑁
𝜌) − 7 (
𝑁
𝜌)2
+ 28 (𝑁
𝜌)3
] cos(5𝜑)}

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
125
𝑓6(Φ) = −𝑁
32
{
[5 − 6 (
𝑁
𝜌) − 91 (
𝑁
𝜌)2
+ 364 (𝑁
𝜌)3
− 136 (𝑁
𝜌)4
] sin(2𝜑)
−4 [1 − (𝑁
𝜌)2
+ 28 (𝑁
𝜌)3
− 88 (𝑁
𝜌)4
] sin(4𝜑)
+ [1 + 2 (𝑁
𝜌) + 33 (
𝑁
𝜌)2
− 196 (𝑁
𝜌)3
+ 280 (𝑁
𝜌)4
] sin(6𝜑)}
𝑓7(Φ)
= −𝑁
64
{
− [5 − 9 (
𝑁
𝜌) + 279(
𝑁
𝜌)2
− 1911(𝑁
𝜌)3
+ 2044(𝑁
𝜌)4
− 680 (𝑁
𝜌)5
] cos𝜑
+ [9 − 9 (𝑁
𝜌) + 267(
𝑁
𝜌)2
− 2831(𝑁
𝜌)3
+ 6076(𝑁
𝜌)4
− 2280(𝑁
𝜌)5
] cos(3𝜑)
− [5 + 3 (𝑁
𝜌) − 97(
𝑁
𝜌)2
+ 293(𝑁
𝜌)3
+ 1708(𝑁
𝜌)4
− 3592(𝑁
𝜌)5
] cos(5𝜑)
+ [1 + 3 (𝑁
𝜌) − 85(
𝑁
𝜌)2
+ 1277 (𝑁
𝜌)3
− 4116(𝑁
𝜌)4
+ 3640(𝑁
𝜌)5
] cos(7𝜑)}
𝑓8(Φ) =𝑁
128
{
−2[7 − 9(
𝑁
𝜌) − 819(
𝑁
𝜌)2
+ 12413(𝑁
𝜌)3
− 36984(𝑁
𝜌)4
+ 33648(𝑁
𝜌)5
− 10240(𝑁
𝜌)6
] sin(2𝜑)
+2 [7 − 3 (𝑁
𝜌) − 279 (
𝑁
𝜌)2
+ 7243(𝑁
𝜌)3
− 38568(𝑁
𝜌)4
+ 58512(𝑁
𝜌)5
− 20864(𝑁
𝜌)6
] sin(4𝜑)
−6 [1 + (𝑁
𝜌) + 91(
𝑁
𝜌)2
− 1381(𝑁
𝜌)3
+ 2872(𝑁
𝜌)4
+ 3344(𝑁
𝜌)5
− 7168 (𝑁
𝜌)6
] sin(6𝜑)
+ [1 + 3(𝑁
𝜌) + 279(
𝑁
𝜌)2
− 7235(𝑁
𝜌)3
+ 44136(𝑁
𝜌)4
− 90384(𝑁
𝜌)5
+ 58240(𝑁
𝜌)6
] sin(8𝜑)}
El desarrollo de las derivadas restantes se encuentra en el anexo 6.4.2
De esta manera se ha concluido el proceso de derivación para la obtención
de las fórmulas de transformación directa de la representación GK, sin embargo
las derivadas que aquí se muestran están en función del sin(𝑛𝜑), cos(𝑛𝜑) y 𝑁
𝜌, y
en virtud de que en la bibliografía existente dichas formulas se desconocen, será

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
126
necesario una simplificación mediante la consideración de las siguientes
entidades.
sin 𝜑 ∙ cos 𝜑 =1
2∙ sin 2𝜑, sin2 𝜑 =
1
2(1 − cos 2𝜑)
sin 𝜑 ∙ cos 𝜃 =1
2[sin(𝜑 − 𝜃) + sin(𝜑 + 𝜃)],
2 ∙ sin(𝑛 ∙ 𝜑) ∙ cos 𝜃 = sin(𝑛 + 1)𝜑 + sin(𝑛 − 1)𝜑,
2 ∙ cos(𝑛 ∙ 𝜑) ∙ cos 𝜃 = cos(𝑛 + 1)𝜑 + cos(𝑛 − 1)𝜑,
2 ∙ cos(𝑛 ∙ 𝜑) ∙ sin 𝜃 = sin(𝑛 + 1)𝜑 − sin(𝑛 − 1)𝜑,
2 ∙ sin(𝑛 ∙ 𝜑) ∙ sin 𝜃 = cos(𝑛 + 1)𝜑 − cos(𝑛 − 1)𝜑.
Además para 𝑁
𝜌 se encuentra la siguiente relación.
𝑁
𝜌=1 − 𝑒2 sin2 𝜑
1 − 𝑒2
𝑁
𝜌=1 − 𝑒2(1 − cos2 𝜑)
1 − 𝑒2=1 − 𝑒2 + 𝑒2cos2 𝜑
1 − 𝑒2
𝑁
𝜌= 1 +
𝑒2cos2 𝜑
1 − 𝑒2
Entonces de acuerdo a lo anterior las derivadas se rescriben de la siguiente
manera.
𝑓′(Φ) = 𝑁 cos𝜑, 𝑓′′(Φ) = −𝑁 sin𝜑 ∙ cos 𝜑
𝑓′′′(Φ) = −𝑁 [1 − tan2 𝜑 +𝑒2cos2 𝜑
1 − 𝑒2] cos3 𝜑
𝑓4(Φ) = 𝑁 [5 − tan2 𝜑 + 9(𝑒2cos2 𝜑
1 − 𝑒2) + 4 (
𝑒2cos2 𝜑
1 − 𝑒2)
2
] cos3 𝜑 ∙ sin 𝜑

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
127
𝑓5(Φ) = 𝑁
[
5 − 18 tan2 𝜑 + tan4 𝜑
+14(𝑒2cos2 𝜑
1 − 𝑒2) + 58(
𝑒2cos2 𝜑
1 − 𝑒2) tan2 𝜑
+13(𝑒2cos2 𝜑
1 − 𝑒2)
2
− 64(𝑒2cos2 𝜑
1 − 𝑒2)
2
tan2 𝜑
+4(𝑒2cos2 𝜑
1 − 𝑒2)
3
− 24(𝑒2cos2 𝜑
1 − 𝑒2)
3
tan2 𝜑]
cos5 𝜑
𝑓6(Φ) = −𝑁
[
61 − 58 tan2 𝜑 + tan4 𝜑
+270𝑒2cos2 𝜑
1 − 𝑒2− 330
𝑒2cos2 𝜑
1 − 𝑒2tan2 𝜑
+445(𝑒2cos2 𝜑
1 − 𝑒2)
2
− 680(𝑒2cos2 𝜑
1 − 𝑒2)
2
tan2 𝜑
+324(𝑒2cos2 𝜑
1 − 𝑒2)
3
− 600(𝑒2cos2 𝜑
1 − 𝑒2)
3
tan2 𝜑
+88(𝑒2cos2 𝜑
1 − 𝑒2)
4
− 192(𝑒2cos2 𝜑
1 − 𝑒2)
4
tan2 𝜑]
cos5 𝜑 ∙ sin 𝜑
𝑓7(Φ)
= −𝑁
[
61 − 479 tan2𝜑 + 179 tan4 𝜑 − tan6𝜑
+331(𝑒2cos2 𝜑
1 − 𝑒2) − 3262 (
𝑒2cos2 𝜑
1 − 𝑒2) tan2𝜑 + 1771 (
𝑒2cos2 𝜑
1 − 𝑒2) tan4𝜑
+715 (𝑒2cos2 𝜑
1 − 𝑒2)
2
− 8655 (𝑒2cos2 𝜑
1 − 𝑒2)
2
tan2𝜑 + 6080 (𝑒2cos2 𝜑
1 − 𝑒2)
2
tan4𝜑
+769(𝑒2cos2 𝜑
1 − 𝑒2)
3
− 10964 (𝑒2cos2 𝜑
1 − 𝑒2)
3
tan2 𝜑 + 9480 (𝑒2cos2 𝜑
1 − 𝑒2)
3
tan4 𝜑
+412 (𝑒2cos2 𝜑
1 − 𝑒2)
4
− 6760 (𝑒2cos2 𝜑
1 − 𝑒2)
4
tan2𝜑 + 6912 (𝑒2cos2 𝜑
1 − 𝑒2)
4
tan4𝜑
+88(𝑒2cos2 𝜑
1 − 𝑒2)
5
− 1632 (𝑒2cos2 𝜑
1 − 𝑒2)
5
tan2𝜑 + 1920 (𝑒2cos2 𝜑
1 − 𝑒2)
5
tan4𝜑]
cos7 𝜑

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
128
𝑓8(Φ)
= 𝑁
[
1385 − 3111 tan2𝜑 + 543 tan4 𝜑 − tan6 𝜑
+10899(𝑒2cos2𝜑
1 − 𝑒2) − 32802(
𝑒2cos2𝜑
1 − 𝑒2) tan2𝜑 + 9219(
𝑒2cos2𝜑
1 − 𝑒2) tan4 𝜑
+34419(𝑒2cos2𝜑
1 − 𝑒2)
2
− 129087(𝑒2cos2𝜑
1 − 𝑒2)
2
tan2𝜑 + 49644(𝑒2cos2𝜑
1 − 𝑒2)
2
tan4 𝜑
+56385(𝑒2cos2𝜑
1 − 𝑒2)
3
− 252084(𝑒2cos2𝜑
1 − 𝑒2)
3
tan2 𝜑 + 121800(𝑒2cos2𝜑
1 − 𝑒2)
3
tan4𝜑
+50856(𝑒2cos2𝜑
1 − 𝑒2)
4
− 263088(𝑒2cos2𝜑
1 − 𝑒2)
4
tan2 𝜑 + 151872(𝑒2cos2𝜑
1 − 𝑒2)
4
tan4𝜑
+24048(𝑒2cos2𝜑
1 − 𝑒2)
5
− 140928(𝑒2cos2𝜑
1 − 𝑒2)
5
tan2𝜑 + 94080(𝑒2cos2𝜑
1 − 𝑒2)
5
tan4 𝜑
+4672(𝑒2cos2𝜑
1 − 𝑒2)
6
− 30528(𝑒2cos2𝜑
1 − 𝑒2)
6
tan2 𝜑 + 23040(𝑒2cos2𝜑
1 − 𝑒2)
6
tan4𝜑]
cos7𝜑 sin𝜑
Para finalizar y presentar las derivadas en expresiones más simples se
recurrirán a los siguientes cambios de variable.
𝑓′(Φ) = 𝐴1 , 𝑓′′′(Φ)
6= 𝐴3,
𝑓5(Φ)
120= 𝐴5 ,
𝑓7(Φ)
5040= 𝐴7
𝑓(Φ) = 𝑆, 𝑓′′(Φ)
2= 𝐵2 ,
𝑓4(Φ)
24= 𝐵4 ,
𝑓6(Φ)
720= 𝐵6 ,
𝑓8(Φ)
40320= 𝐵8
𝒕 = 𝐭𝐚𝐧𝝋 , 𝒆′𝟐=
𝒆𝟐
𝟏 − 𝒆𝟐, 𝜼𝟐 = 𝒆′
𝟐𝐜𝐨𝐬𝟐𝝋
Finalmente sustituyendo y reescribiendo las formulas se tiene que.
𝐗 = 𝐀𝟏∆𝛌 + 𝐀𝟑∆𝛌𝟑 + 𝐀𝟓∆𝛌
𝟓 + 𝐀𝟕∆𝛌𝟕
𝐘 = 𝐒 + 𝐁𝟐∆𝛌𝟐 + 𝐁𝟒∆𝛌
𝟒 + 𝐁𝟔∆𝛌𝟔 + 𝐁𝟖∆𝛌
𝟖

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
129
𝐀𝟏 = 𝐍𝐜𝐨𝐬𝛗, 𝐀𝟑 =𝐍𝐜𝐨𝐬𝟑𝛗
𝟔[𝟏 − 𝐭𝟐 + 𝛈𝟐]
𝐀𝟓 =𝐍𝐜𝐨𝐬𝟓𝛗
𝟏𝟐𝟎[𝟓 − 𝟏𝟖𝐭𝟐 + 𝐭𝟒 + 𝟏𝟒𝛈𝟐 − 𝟓𝟖𝛈𝟐𝐭𝟐
+𝟏𝟑𝛈𝟒 − 𝟔𝟒𝛈𝟒𝐭𝟐 + 𝟒𝛈𝟔 − 𝟐𝟒𝛈𝟔𝐭𝟐]
𝐀𝟕 =𝐍𝐜𝐨𝐬𝟕𝛗
𝟓𝟎𝟒𝟎
[
𝟔𝟏 − 𝟒𝟕𝟗𝐭𝟐 + 𝟏𝟕𝟗𝐭𝟒 − 𝐭𝟔 + 𝟑𝟑𝟏𝛈𝟐 − 𝟑𝟐𝟗𝟖𝛈𝟐𝐭𝟐
+𝟏𝟕𝟕𝟏𝛈𝟐𝐭𝟒 + 𝟕𝟏𝟓𝛈𝟒 − 𝟖𝟔𝟓𝟓𝛈𝟒𝐭𝟐 + 𝟔𝟎𝟖𝟎𝛈𝟒𝐭𝟒
+𝟕𝟔𝟗𝛈𝟔 − 𝟏𝟎𝟗𝟔𝟒𝛈𝟔𝐭𝟐 + 𝟗𝟒𝟖𝟎𝛈𝟔𝐭𝟒 + 𝟒𝟏𝟐𝛈𝟖 − 𝟔𝟕𝟔𝟎𝛈𝟖𝐭𝟐
+𝟔𝟗𝟏𝟐𝛈𝟖𝐭𝟒 + 𝟖𝟖𝛈𝟏𝟎 − 𝟏𝟔𝟑𝟐𝛈𝟏𝟎𝐭𝟐 + 𝟏𝟗𝟐𝟎𝛈𝟏𝟎𝐭𝟒 ]
𝐁𝟐 =𝐍𝐜𝐨𝐬𝛗 𝐬𝐢𝐧𝛗
𝟐, 𝐁𝟒 =
𝐍𝐜𝐨𝐬𝟑𝛗𝐬𝐢𝐧𝛗
𝟐𝟒[𝟓 − 𝐭𝟐 + 𝟗𝛈𝟐 + 𝟒𝛈𝟒]
𝐁𝟔 =𝐍𝐜𝐨𝐬𝟓𝛗𝐬𝐢𝐧𝛗
𝟕𝟐𝟎[
𝟔𝟏 − 𝟓𝟖𝐭𝟐 + 𝐭𝟒
+𝟐𝟕𝟎𝛈𝟐 − 𝟑𝟑𝟎𝛈𝟐𝐭𝟐 + 𝟒𝟒𝟓𝛈𝟒 − 𝟔𝟖𝟎𝛈𝟒𝐭𝟐
+𝟑𝟐𝟒𝛈𝟔 − 𝟔𝟎𝟎𝛈𝟔𝐭𝟐 + 𝟖𝟖𝛈𝟖 − 𝟏𝟗𝟐𝛈𝟖𝐭𝟐]
𝐁𝟖
=𝐍𝐜𝐨𝐬𝟕𝛗𝐬𝐢𝐧𝛗
𝟒𝟎𝟑𝟐𝟎
[
𝟏𝟑𝟖𝟓 − 𝟑𝟏𝟏𝟏𝐭𝟐 + 𝟓𝟒𝟑𝐭𝟒 − 𝐭𝟔
+𝟏𝟎𝟖𝟗𝟗𝛈𝟐 − 𝟑𝟐𝟖𝟎𝟐𝛈𝟐𝐭𝟐 + 𝟗𝟐𝟏𝟗𝛈𝟐𝐭𝟒 + 𝟑𝟒𝟒𝟏𝟗𝛈𝟒
−𝟏𝟐𝟗𝟎𝟖𝟕𝛈𝟒𝐭𝟐 + 𝟒𝟗𝟔𝟒𝟒𝛈𝟒𝐭𝟒 + 𝟓𝟔𝟑𝟖𝟓𝛈𝟔 − 𝟐𝟓𝟐𝟎𝟖𝟒𝛈𝟔𝐭𝟐
+𝟏𝟐𝟏𝟖𝟎𝟎𝛈𝟔𝐭𝟒 + 𝟓𝟎𝟖𝟓𝟔𝛈𝟖 − 𝟐𝟔𝟑𝟎𝟖𝟖𝛈𝟖𝐭𝟐 + 𝟏𝟓𝟏𝟖𝟕𝟐𝛈𝟖𝐭𝟒
+𝟐𝟒𝟎𝟒𝟖𝛈𝟏𝟎 − 𝟏𝟒𝟎𝟗𝟐𝟖𝛈𝟏𝟎𝐭𝟐 + 𝟗𝟒𝟎𝟖𝟎𝛈𝟏𝟎𝐭𝟒 + 𝟒𝟔𝟕𝟐𝛈𝟏𝟐
−𝟑𝟎𝟓𝟐𝟖𝛈𝟏𝟐𝐭𝟐 + 𝟐𝟑𝟎𝟒𝟎𝛈𝟏𝟐𝐭𝟒 ]
𝐒 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗]
𝐀 = 𝟏 +𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
𝐁 = − [𝟑
𝟒𝒆𝟐 +
𝟏𝟓
𝟏𝟔𝒆𝟒 +
𝟓𝟐𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐂 =𝟏𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟎𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖
𝐃 = − [𝟑𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐄 =𝟑𝟏𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
130
Las formulas anteriores cumplen con la condición de conformidad, donde el
MC se transforma en una línea automecoica en el plano con un factor de escala 1
a lo largo de ella, siendo que esta línea define al eje de origen de las ordenadas.
Mientras que para la segunda condición de conformidad donde el Ecuador se
debe de transformar en una línea recta perpendicular a la transformada del MC, se
es necesario considerar un punto con coordenadas sobre el elipsoide donde el
valor de la latitud sea cero (𝜆, 0).
Entonces si aplicamos estos valores en las formulas deducidas, se aprecia
que para el valor de 𝑦 este será igual a cero, debido a que las derivadas que
conforman la fórmula de 𝑦 son afectadas por el sin 𝜑, pero como el valor de 𝜑 =
0, por consiguiente el producto del sin 0 por cualquier otro elemento será igual a
cero. Mientras que para el valor de la abscisa no sucede lo mismo, debido a que
los coeficientes que conforman la fórmula 𝑥 de carecen de la función sin 𝜑.
Por lo que se puede decir que:
𝑥 = 𝑓(𝜆) 𝑦 = 0
Es así como se corrobora que las formulas deducidas cumplen con todas
las condiciones de conformidad que la proyección TM requiere.
Las fórmulas que se demuestran mediante esta deducción aseguran una
precisión milimétrica en su transformación directa, solo si el punto, zona o
elemento geográfico de estudio que se desea representar se encuentre
posicionado sobre una amplitud meridiana (∆λ) de 3º a partir del MC (dirección
Este-Oeste), por lo que es viable aplicar dichas ecuaciones de transformación en
una banda meridiana no mayor a 6º. Más allá de este límite es cuando la
deformación actúa y se manifiesta de manera exagerada, misma que va
aumentando gradualmente conforme el objeto se vaya alejando del MC, esta

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
131
circunstancia forja a que todos los elementos que se encuentren en dichas zonas
carezcan de precisión milimétrica si se aplican estas fórmulas de transformación.
Para dar fidelidad y asegurar la precisión milimétrica de la representación
del dato geográfico sobre esta proyección Paul D. Thomas (1952), Mena Berrios
(2008) y Enríquez Turiño (2009), aseguran que solo si se utilizan términos con
exponencial mayores a 8 (mismos que conforman las derivadas de la serie de
Taylor) se podrá alcanzar la precisión deseada para bandas meridianas mayores a
3º, mientras que para bandas menores a este valor las formulas se podrán truncar
hasta los términos elevados a la quinta y sexta potencia.
3.5.2 Transformación Inversa de Coordenadas.
Se ha demostrado y dado respuesta a uno de los problemas clásicos que
toda proyección cartográfica padece, el obtener las fórmulas de transformación
que permita representar a la tierra en un sistema ortogonal de coordenadas,
siendo este sistema la representación cilíndrica de GK, entonces el inconveniente
pendiente por resolver es; el encontrar el método matemático que permita
convertir estas coordenadas ortogonales al sistema de coordenadas geodésico de
origen. Atendiendo esta demanda en este subcapítulo se deducirán y pondrán en
claro dichas formulas además de los procesos matemáticos y analíticos que su
mismo desarrollo requiera.
El desarrollo de las fórmulas de correspondencia inversa se efectuara de
manera similar que en el proceso directo, mediante métodos puramente analíticos.
Para iniciar con este análisis será necesario recurrir a la función de variable
compleja que relaciona los dos sistemas complejos (elipsoide y plano ortogonal de
proyección), misma que da origen a la deducción para la conversión directa.
𝑓(𝑤) = 𝑓(∆λ𝑖 + Φ) = 𝑖(Φ, ∆λ)𝑥 + 𝑦(Φ, ∆λ)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
132
Pero como esta vez el proceso de transformación se realizara del sistema
GK al elipsoide será necesario encontrar el inverso de dicha función.
𝐹(𝑧) = 𝐹(𝑖𝑥 + 𝑦) = 𝑖(𝑥, 𝑦)∆λ + Φ(𝑥, 𝑦)
Esta situación conduce al desarrollo de esta función nuevamente utilizando
la serie de Taylor, pero esta vez tomando como punto aproximado al componente
real de esta nueva función compleja, suponiendo que el valor de la abscisa será
igual a cero (𝑥 = 0), (Hernández López, 2009). Por lo que se puede demostrar lo
siguiente.
𝐹(𝑧0) = 𝐹(𝑖 ∙ 0 + 𝑦) = (0, 𝑦)
Dada esta situación y recordando los parámetros de conformidad para las
proyecciones TM, se aprecia que dicho punto corresponde a la transformada del
MC en el sistema GK. El cual se expresa como:
𝑧0 = 𝑦
Una vez conocido el punto aproximado, la serie de Taylor para el proceso
inverso será el siguiente:
𝐹(𝑧) = 𝐹(𝑧0) +𝐹′(𝑧0)
1!(∆𝑧) +
𝐹′′(𝑧0)
2!(∆𝑧)2 +
𝐹′′′(𝑧0)
3!(∆𝑧)3 +⋯+
𝐹𝑛(𝑧0)
𝑛!(∆𝑧)𝑛
Pero como.
∆𝑧 = 𝑧 − 𝑧0 = (𝑖𝑥 + 𝑦) − 𝑦 = 𝑖𝑥
Se puede decir que:
𝐹(𝑧) = 𝐹(𝑧0) +𝐹′(𝑦)
1!(𝑖𝑥) +
𝐹′′(𝑦)
2!(𝑖𝑥)2 +
𝐹′′′(𝑦)
3!(𝑖𝑥)3 +⋯+
𝐹𝑛(𝑦)
𝑛!(𝑖𝑥)𝑛

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
133
En la representación GK el desarrollo de la serie de Taylor para ambos
procesos de transformación requerirá el mismo número de derivadas, esto con el
fin de garantizar la precisión milimétrica en ambos sistemas, por lo que se tendrá
desarrollar hasta la octava derivada de 𝐹(𝑦) para esta nueva serie.
𝐹(𝑧) = 𝐹(𝑦) +𝐹′(𝑦)
1!(𝑖𝑥) +
𝐹′′(𝑦)
2!(𝑖𝑥)2 +
𝐹′′′(𝑦)
3!(𝑖𝑥)3 +
𝐹4(𝑦)
4!(𝑖𝑥)4
+𝐹5(𝑦)
5!(𝑖𝑥)5 +
𝐹6(𝑦)
6!(𝑖𝑥)6 +
𝐹7(𝑦)
7!(𝑖𝑥)7 +
𝐹8(𝑦)
8!(𝑖𝑥)8
Aplicando el teorema exponencial para números imaginarios se tiene que:
𝐹(𝑧) = 𝐹(𝑦) +𝐹′(𝑦)
1!𝑖𝑥 −
𝐹′′(𝑦)
2!𝑥2 −
𝐹′′′(𝑦)
3!𝑖 ∙ 𝑥3 +
𝐹4(𝑦)
4!𝑥4 +
𝐹5(𝑦)
5!𝑖 ∙ 𝑥5
−𝐹6(𝑦)
6!𝑥6 −
𝐹7(𝑦)
7!𝑖 ∙ 𝑥7 +
𝐹8(𝑦)
8!𝑥8
Pero recordando que:
𝐹(𝑧) = 𝑖(𝑥, 𝑦)∆λ + Φ(𝑥, 𝑦)
Sustituyendo.
𝑖(𝑥, 𝑦)∆λ + Φ(𝑥, 𝑦)
= 𝐹(𝑦) +𝐹′(𝑦)
1!𝑖𝑥 −
𝐹′′(𝑦)
2!𝑥2 −
𝐹′′′(𝑦)
3!𝑖 ∙ 𝑥3 +
𝐹4(𝑦)
4!𝑥4 +
𝐹5(𝑦)
5!𝑖
∙ 𝑥5 −𝐹6(𝑦)
6!𝑥6 −
𝐹7(𝑦)
7!𝑖 ∙ 𝑥7 +
𝐹8(𝑦)
8!𝑥8
Agrupando términos reales e imaginarios.
𝑖(𝑥, 𝑦)∆λ =𝐹′(𝑦)
1!𝑖𝑥 −
𝐹′′′(𝑦)
3!𝑖 ∙ 𝑥3 +
𝐹5(𝑦)
5!𝑖 ∙ 𝑥5 −
𝐹7(𝑦)
7!𝑖 ∙ 𝑥7

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
134
𝑖(𝑥, 𝑦)∆λ = 𝑖 [𝐹′(𝑦)
1!𝑥 −
𝐹′′′(𝑦)
3!𝑥3 +
𝐹5(𝑦)
5!𝑥5 −
𝐹7(𝑦)
7!𝑥7]
Por lo que finalmente las fórmulas de correspondencia inversa se
interpretan como:
∆𝛌(𝒙, 𝒚) =𝑭′(𝒚)
𝟏!𝒙 −
𝑭′′′(𝒚)
𝟑!𝒙𝟑 +
𝑭𝟓(𝒚)
𝟓!𝒙𝟓 −
𝑭𝟕(𝒚)
𝟕!𝒙𝟕
𝚽(𝒙, 𝒚) = 𝑭(𝒚) −𝑭′′(𝒚)
𝟐!𝒙𝟐 +
𝑭𝟒(𝒚)
𝟒!𝒙𝟒 −
𝑭𝟔(𝒚)
𝟔!𝒙𝟔 +
𝑭𝟖(𝒚)
𝟖!𝒙𝟖
También será necesario tomar en cuenta la propiedad de la proyección TM,
en donde que el valor del MC en cualquiera de los dos sistemas será el mismo
(geodésico y de proyección) y que su transformada en el plano será mediante una
línea recta, siendo esta el origen de las ordenadas. Esta condición solo se cumple
si el punto de estudio se sitúa en el sistema GK sobre las coordenadas (0, 𝑦).
∆λ =𝐹′(𝑦)
1!0 −
𝐹′′′(𝑦)
3!03 +
𝐹5(𝑦)
5!05 −
𝐹7(𝑦)
7!07
Φ = 𝐹(𝑦) −𝐹′′(𝑦)
2!02 +
𝐹4(𝑦)
4!04 −
𝐹6(𝑦)
6!06 +
𝐹8(𝑦)
8!08
∆λ = 0, Φ = 𝐹(𝑦)
Se aprecia que las formulas inversas cumplen con la condición ya señalada
pero de igual forma y para un valor 𝑦 traerá consigo un valor de latitud isométrica.
Entonces el problema reside ahora en calcular el valor de esta latitud, para ello se
recurrirá al método que utiliza Barrera Trejo (2015).
Barrera Trejo menciona que se debe recurrir al cálculo de la latitud
isométrica para el elipsoide mediante la fórmula ya conocida.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
135
Fig. III.28 Representación del punto de expansión en ambos sistemas.
Φ = ln [tan (𝜋
4+𝜑
2) (1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
El único detalle que interfiere para la aplicación de esta fórmula es que el
valor de la latitud isométrica está en función de la altitud geodésica la cual se
desconoce. La solución más conveniente y la que plantea el autor es que; el
cálculo de esta se deberá ser con el apoyo de una latitud geodésica auxiliar o
también conocido como punto de expansión, el cual se obtiene mediante el
siguiente planteamiento.
Se supondrá dos puntos en ambos sistemas, un punto 𝑄 con coordenadas
(∆λ, 𝜑) en el elipsoide y (𝑥, 𝑦) en el plano, mientras que el otro punto 𝑃 será el
auxiliar situado en el plano sobre el eje de las abscisas con una ordenada
arbitraria (0, 𝑦), mientras que su transformada en el elipsoide se ubicara sobre el
MC con la intersección de un paralelo arbitrario distinto al que se desea
encontrar(0, 𝜑0). Tal y como se muestra en el siguiente esquema.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
136
Se observa que para ambos puntos en el plano se cumple que la distancia
𝑆 es la longitud de arco del MC desde el ecuador hasta un cierto paralelo, no
obstante ambos puntos en el plano tienen el mismo valor de 𝑆 pero estos no
comparten el mismo paralelo pero se cumple que:
𝑦 = 𝑆
Conociendo esto es posible calcular el valor de la latitud auxiliar utilizando
la fórmula para la longitud de arco de meridiano.
S = 𝑎(1 − 𝑒2) [A𝜑0 +B
2sin 2𝜑0 +
C
4sin 4𝜑0 +
D
6sin 6𝜑0 +
E
8sin 8𝜑0]
La opción más coherente para calcular la latitud es despejar 𝜑0 pero debido
a que la latitud auxiliar es argumento de las funciones trigonométricas que esta
ecuación conforma hace imposible realizar este proceso, por lo que el método más
viable será calcular dicho valor mediante el método de iteraciones hasta encontrar
su valor más aproximado.
Entonces para el cálculo de la primera aproximación de 𝜑0, la fórmula de
arco de meridiano se truncara tomando en cuenta su primera aparición.
S = 𝑎(1 − 𝑒2)A𝜑0
Pero.
A = 1 +3
4𝑒2 +
45
64𝑒4 +
175
256𝑒6 +
11025
16384𝑒8
Sustituyendo.
S = 𝑎(1 − 𝑒2) (1 +3
4𝑒2 +
45
64𝑒4 +
175
256𝑒6 +
11025
16384𝑒8)𝜑0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
137
Truncando la fórmula de arco de meridiano se obtiene una ecuación más
sencilla permisible al despeje de 𝜑0.
𝜑0 =S
𝑎(1 − 𝑒2) (1 +34 𝑒
2 +4564 𝑒
4 +175256
𝑒6 +1102516384 𝑒
8)
Pero como 𝑦 = S, la primera aproximación de la latitud auxiliar se interpreta
como:
𝜑1 =𝑦
𝑎(1 − 𝑒2) (1 +34𝑒2 +
4564𝑒4 +
175256
𝑒6 +1102516384
𝑒8)
Una vez obtenido el valor de la primera iteración de 𝜑0 el paso siguiente
será calcular el valor de la longitud de arco de meridiano utilizando la formula
completa.
S1 = 𝑎(1 − 𝑒2) [A𝜑1 +B
2sin 2𝜑1 +
C
4sin 4𝜑1 +
D
6sin 6𝜑1 +
E
8sin 8𝜑1]
Con este último valor se determinara el error generado por esta primera
aproximación y el valor real de la longitud de arco de meridiano para el punto 𝑂.
∆1= 𝑦 − S1
Además será necesario obtener dicho valor en una cantidad angular.
∆𝜑1 =∆1
𝑎(1 − 𝑒2) (1 +34𝑒2 +
4564𝑒4 +
175256
𝑒6 +1102516384
𝑒8)
El valor de la segunda aproximación de 𝜑0 será igual a la suma de la
primera aproximación y la diferencia entre esta y el valor real de 𝜑0.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
138
𝜑2 = 𝜑1 + ∆𝜑1
Con 𝜑2 se calculara el valor de arco de meridiano y la diferencia de
aproximación en metros y grados.
𝑆2 = 𝑎(1 − 𝑒2) [A𝜑2 +B
2sin 2𝜑2 +
C
4sin 4𝜑2 +
D
6sin 6𝜑2 +
E
8sin 8𝜑2]
∆2= 𝑦 − 𝑆2 ∆𝜑2 =∆2
𝑎(1 − 𝑒2) (1 +34𝑒2 +
4564𝑒4 +
175256
𝑒6 +1102516384
𝑒8)
𝜑3 = 𝜑2 + ∆𝜑2
Las iteraciones se realizaran hasta que el valor de la aproximación de ∆𝑛
sea igual a cero cumpliendo con la condición que S = S′n. Para satisfacer esta
demanda, se realizara solo hasta la quinta iteración.
∆5= 𝑦 − S4 = 0 ∴ S = S5
El cálculo de esta latitud auxiliar permitirá determinar la latitud del punto 𝑂,
el cual se desarrollara más adelante. Recordando que para cualquier latitud
geodésica corresponderá una latitud isométrica o creciente. Por lo que para 𝜑0 se
tendrá:
Φ0 = ln [tan (𝜋
4+𝜑0
2) (1 − 𝑒 sin𝜑
0
1 + 𝑒 sin𝜑0
)
𝑒2
]
Poniendo en claro esto solo resta encontrar las derivadas consecutivas de
las formulas inversas, para ello se tendrá que hacer uso de una notación alterna
de la latitud de creciente del punto de expansión, tal y como lo menciona
Hernández López (2009).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
139
Φ0 = ∫𝜌
𝑟
𝜑0
0
𝑑𝜑0
Derivando.
𝑑Φ0 =𝜌
𝑟𝑑𝜑
0 ∴
𝑑Φ0
𝑑𝜑0
=𝜌
𝑟
Además como S = y, se deduce lo siguiente.
𝑦 = ∫ 𝜌
𝜑0
0
𝑑𝜑0
𝑑𝑦 = 𝜌𝑑𝜑0 ∴
𝑑𝜑0
𝑑𝑦=1
𝜌
Cumpliendo con las condiciones de conformidad la primera derivada se
interpreta como:
𝐹′(𝑦) =𝑑Φ0
𝑑𝜑0
∙𝑑𝜑
0
𝑑𝑦 ∴ 𝐹′(𝑦) =
𝜌
𝑟∙1
𝜌=1
𝑟
Donde.
𝑟 = 𝑁 cos𝜑0
Por lo tanto.
𝐹′(𝑦) =1
𝑁 cos𝜑0

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
140
La primera derivada se desarrolla de manera analítica por lo que para las
derivadas restantes se recurrirán a los métodos de derivación clásicos, tomando
en cuenta su multiplicación final por 𝑑𝜑0
𝑑𝑦.
Siendo los resultados finales de dichas derivadas, los siguientes:
𝐹′′(𝑦) =𝑡
𝑁2 cos 𝜑0 𝐹′′′(𝑦) =
1 + 2𝑡2 + 𝜂2
𝑁3 cos𝜑0 𝐹4(𝑦) =
𝑡[5 + 6𝑡2 + 𝜂2 − 4𝜂4]
𝑁4 cos𝜑0
𝐹5(𝑦) =1
𝑁5 cos 𝜑0[5 + 28𝑡2 + 24𝑡4 + 6𝜂2 + 8𝜂2𝑡2
−3𝜂4 + 4𝜂4𝑡2 − 4𝜂6 + 24𝜂6𝑡2]
𝐹6(𝑦) =𝑡
𝑁6 cos 𝜑0[61 + 180𝑡2 + 120𝑡4 + 46𝜂2 + 48𝜂2𝑡2 − 3𝜂4
−36𝜂4𝑡2 + 100𝜂6 − 96𝜂6𝑡2 + 88𝜂8 − 192𝜂8𝑡2]
𝐹7(𝑦) =1
𝑁7 cos 𝜑0[ 61 + 662𝑡2 + 1320𝑡4 + 720𝑡6 + 107𝜂2 + 440𝜂2𝑡2
+336𝜂2𝑡4 + 43𝜂4 − 234𝜂4𝑡2 − 192𝜂4𝑡4 + 97𝜂6
−772𝜂6𝑡2 + 408𝜂6𝑡4 + 188𝜂8 − 2392𝜂8𝑡2
+1536𝜂8𝑡4 + 88𝜂10 − 1632𝜂10𝑡2 + 1920𝜂10𝑡4 ]
𝐹8(𝑦) =𝑡
𝑁8 cos 𝜑0
[ 1385 + 7266𝑡2 + 10920𝑡4 + 5040𝑡6 + 1731𝜂2
+4416𝜂2𝑡2 + 2688𝜂2𝑡4 − 573𝜂4 − 1830𝜂4𝑡2
−1536𝜂4𝑡4 − 2927𝜂6 + 5052𝜂6𝑡2 + 744𝜂6𝑡4
−8808𝜂8 + 27456𝜂8𝑡2 − 7872𝜂8𝑡4 − 11472𝜂10
+53952𝜂10𝑡2 − 24960𝜂10𝑡4 − 4672𝜂12
+30528𝜂12𝑡2 − 23040𝜂12𝑡4 ]
El desarrollo completo de estas derivadas se encuentra en el anexo
6.4.3.
Las derivadas se desarrollaron tomando en cuenta a la latitud geodésica
auxiliar como variable, así mismo estas constituyen los términos para las fórmulas
de transformación inversa de la representación GK, pero con la condición que;

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
141
solo satisfacen el cálculo en un sistema de coordenadas isométrico para un punto
(∆λ, Φ0).
Entonces el problema ahora reside en encontrar los valores de 𝜑 y Φ del
punto en cuestión tomando en cuenta los valores conocidos de 𝜑0 y Φ0.
El desarrollo del cálculo de estos nuevos valores será muy distinto al
planteado anteriormente, para ello nuevamente se empleará una de las funciones
inversas que constituye la serie de Taylor, misma que relaciona a la latitud
geodésica con su correspondiente latitud isométrica.
𝜑 = 𝐹(Φ) = ∫𝑟
𝜌
Φ
0
Derivando.
𝑑𝜑
𝑑Φ=𝑟
𝜌= (
𝑁
𝜌) cos 𝜑,
𝑑𝐹(Φ)
𝑑𝜑= 1
El desarrollo para esta serie de Taylor será entorno a un incremento de
latitud isométrica, es decir:
∆Φ = Φ−Φ0 ∴ 𝜑 = F(Φ) = F[Φ + (Φ − Φ0)]
Por lo que la serie de Taylor para la latitud geodésica del punto en cuestión
se interpretara como:
𝜑 = 𝐹(Φ) = 𝐹(Φ0) +∆Φ
1!𝐹′(Φ) +
(∆Φ)2
2!𝐹′′(Φ) +
(∆Φ)3
3!𝐹′′′(Φ)
+ ⋯(∆Φ)𝑛
𝑛!𝐹𝑛(Φ)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
142
Entonces para F′(Φ).
𝐹′(Φ) =𝑑𝐹(Φ)
𝑑𝜑∙𝑑𝜑
𝑑Φ
𝐹′(Φ) = 1 [(𝑁
𝜌) cos 𝜑] = (
𝑁
𝜌) cos 𝜑
Efectuando el cambio de variable.
𝐹′(Φ) = (1 + 𝜂2) cos 𝜑
Para este caso solo se recurrirá hasta la tercer derivada de F′(Φ)
𝐹′′(Φ) = −(1 + 4𝜂2 + 3𝜂4) sin 𝜑 cos𝜑
𝐹′′′(Φ) = −(1 − 𝑡2 + 5𝜂2 − 13𝜂2𝑡2 + 7𝜂4
−27𝜂4𝑡2 + 3𝜂6 − 15𝜂6𝑡2) cos3 𝜑
Sustituyendo se tiene el valor de la latitud geodésica requerida.
𝜑 = 𝜑0 +∆Φ
1!𝐹′(Φ) +
(∆Φ)2
2!𝐹′′(Φ) +
(∆Φ)3
3!𝐹′′′(Φ)
Con este último procedimiento se da por finalizado la deducción de fórmulas
para el caso inverso de la representación GK, no obstante los términos que
estructuran estás formulas hacen un poco confusa su comprensión y análisis, para
resolver este inconveniente las formulas se presentaran en una forma más
conveniente.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
143
Fórmulas de Correspondencia Inversa GK
∆𝛌 = 𝑪𝟏𝒙 − 𝑪𝟑𝒙𝟑 + 𝑪𝟓𝒙
𝟓 − 𝑪𝟕𝒙𝟕
𝚽 = 𝚽𝟎 − 𝑫𝟐𝒙𝟐 + 𝑫𝟒𝒙
𝟒 − 𝑫𝟔𝒙𝟔 + 𝑫𝟖𝒙
𝟖
Latitud del punto de expansión.
𝝋′𝟏=
𝒚
𝒂(𝟏 − 𝒆𝟐) (𝟏 +𝟑𝟒𝒆𝟐 +
𝟒𝟓𝟔𝟒
𝒆𝟒 +𝟏𝟕𝟓𝟐𝟓𝟔
𝒆𝟔 +𝟏𝟏𝟎𝟐𝟓𝟏𝟔𝟑𝟖𝟒
𝒆𝟖)
𝑺′𝟏 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗′𝟏 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗′𝟏 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗′𝟏 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗′𝟏 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗′𝟏]
∆𝟏= 𝒚 − 𝑺′𝟏
∆𝝋′𝟏=
∆𝟏
𝒂(𝟏 − 𝒆𝟐) (𝟏 +𝟑𝟒𝒆𝟐 +
𝟒𝟓𝟔𝟒
𝒆𝟒 +𝟏𝟕𝟓𝟐𝟓𝟔
𝒆𝟔 +𝟏𝟏𝟎𝟐𝟓𝟏𝟔𝟑𝟖𝟒
𝒆𝟖)
𝛗′𝟐= 𝛗′
𝟏+ ∆𝛗′
𝟏
𝛗′𝟐; 𝐒′𝟐; ∆𝟐; ∆𝛗
′𝟐
𝛗′𝟑; 𝐒′𝟑; ∆𝟑; ∆𝛗
′𝟑
𝛗′𝟒; 𝐒′𝟒; ∆𝟒; ∆𝛗
′𝟒
𝛗′𝟓= 𝛗𝟎
𝚽𝟎 = 𝐥𝐧 [𝐭𝐚𝐧 (𝛑
𝟒+𝛗𝟎
𝟐) (𝟏 − 𝐞 𝐬𝐢𝐧𝛗𝟎
𝟏 + 𝐞 𝐬𝐢𝐧𝛗𝟎
)
𝒆𝟐]
𝐂𝟏 =𝟏
𝐍𝐜𝐨𝐬𝛗𝟎
, 𝐂𝟑 =𝟏 + 𝟐𝐭𝟐 + 𝛈𝟐
𝟔𝐍𝟑 𝐜𝐨𝐬𝛗𝟎
𝐂𝟓 =𝟏
𝟏𝟐𝟎𝐍𝟓 𝐜𝐨𝐬𝛗𝟎
[𝟓 + 𝟐𝟖𝐭𝟐 + 𝟐𝟒𝐭𝟒 + 𝟔𝛈𝟐 + 𝟖𝛈𝟐𝐭𝟐
−𝟑𝛈𝟒 + 𝟒𝛈𝟒𝐭𝟐 − 𝟒𝛈𝟔 + 𝟐𝟒𝛈𝟔𝐭𝟐]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
144
𝐂𝟕 =𝟏
𝟓𝟎𝟒𝟎𝐍𝟕 𝐜𝐨𝐬𝛗𝟎
[ 𝟔𝟏 + 𝟔𝟔𝟐𝐭𝟐 + 𝟏𝟑𝟐𝟎𝐭𝟒 + 𝟕𝟐𝟎𝐭𝟔 + 𝟏𝟎𝟕𝛈𝟐 + 𝟒𝟒𝟎𝛈𝟐𝐭𝟐
+𝟑𝟑𝟔𝛈𝟐𝐭𝟒 + 𝟒𝟑𝛈𝟒 − 𝟐𝟑𝟒𝛈𝟒𝐭𝟐 − 𝟏𝟗𝟐𝛈𝟒𝐭𝟒 + 𝟗𝟕𝛈𝟔
−𝟕𝟕𝟐𝛈𝟔𝐭𝟐 + 𝟒𝟎𝟖𝛈𝟔𝐭𝟒 + 𝟏𝟖𝟖𝛈𝟖 − 𝟐𝟑𝟗𝟐𝛈𝟖𝐭𝟐
+𝟏𝟓𝟑𝟔𝛈𝟖𝐭𝟒 + 𝟖𝟖𝛈𝟏𝟎 − 𝟏𝟔𝟑𝟐𝛈𝟏𝟎𝐭𝟐 + 𝟏𝟗𝟐𝟎𝛈𝟏𝟎𝐭𝟒 ]
𝐃𝟐 =𝐭
𝟐𝐍𝟐 𝐜𝐨𝐬𝛗𝟎
, 𝐃𝟒 =𝐭[𝟓 + 𝟔𝐭𝟐 + 𝛈𝟐 − 𝟒𝛈𝟒]
𝟐𝟒𝐍𝟒 𝐜𝐨𝐬𝛗𝟎
𝐃𝟔 =𝐭
𝟕𝟐𝟎𝐍𝟔 𝐜𝐨𝐬𝛗𝟎
[𝟔𝟏 + 𝟏𝟖𝟎𝐭𝟐 + 𝟏𝟐𝟎𝐭𝟒 + 𝟒𝟔𝛈𝟐 + 𝟒𝟖𝛈𝟐𝐭𝟐 − 𝟑𝛈𝟒
−𝟑𝟔𝛈𝟒𝐭𝟐 + 𝟏𝟎𝟎𝛈𝟔 − 𝟗𝟔𝛈𝟔𝐭𝟐 + 𝟖𝟖𝛈𝟖 − 𝟏𝟗𝟐𝛈𝟖𝐭𝟐]
𝐃𝟖 =𝐭
𝟒𝟎𝟑𝟐𝟎𝐍𝟖 𝐜𝐨𝐬𝛗𝟎
[ 𝟏𝟑𝟖𝟓 + 𝟕𝟐𝟔𝟔𝐭𝟐 + 𝟏𝟎𝟗𝟐𝟎𝐭𝟒 + 𝟓𝟎𝟒𝟎𝐭𝟔 + 𝟏𝟕𝟑𝟏𝛈𝟐
+𝟒𝟒𝟏𝟔𝛈𝟐𝐭𝟐 + 𝟐𝟔𝟖𝟖𝛈𝟐𝐭𝟒 − 𝟓𝟕𝟑𝛈𝟒 − 𝟏𝟖𝟑𝟎𝛈𝟒𝐭𝟐
−𝟏𝟓𝟑𝟔𝛈𝟒𝐭𝟒 − 𝟐𝟗𝟐𝟕𝛈𝟔 + 𝟓𝟎𝟓𝟐𝛈𝟔𝐭𝟐 + 𝟕𝟒𝟒𝛈𝟔𝐭𝟒
−𝟖𝟖𝟎𝟖𝛈𝟖 + 𝟐𝟕𝟒𝟓𝟔𝛈𝟖𝐭𝟐 − 𝟕𝟖𝟕𝟐𝛈𝟖𝐭𝟒 − 𝟏𝟏𝟒𝟕𝟐𝛈𝟏𝟎
+𝟓𝟑𝟗𝟓𝟐𝛈𝟏𝟎𝐭𝟐 − 𝟐𝟒𝟗𝟔𝟎𝛈𝟏𝟎𝐭𝟒 − 𝟒𝟔𝟕𝟐𝛈𝟏𝟐
+𝟑𝟎𝟓𝟐𝟖𝛈𝟏𝟐𝐭𝟐 − 𝟐𝟑𝟎𝟒𝟎𝛈𝟏𝟐𝐭𝟒 ]
Obtención de coordenadas geodésicas.
𝛌 = 𝐌𝐂 + ∆𝛌
𝛗 = 𝛗𝟎 + 𝐆𝟏∆𝚽 − 𝐆𝟐(∆𝚽)𝟐 − 𝐆𝟑(∆𝚽)
𝟑
∆𝚽 = 𝚽−𝚽𝟎
𝐆𝟏 = (𝟏 + 𝛈𝟐) 𝐜𝐨𝐬𝛗𝟎 𝐆𝟐 =𝟏 + 𝟒𝛈𝟐 + 𝟑𝛈𝟒
𝟐∙ 𝐬𝐢𝐧𝛗𝟎 𝐜𝐨𝐬𝛗𝟎
𝐆𝟑 =𝐜𝐨𝐬𝟑𝛗𝟎
𝟔∙ (𝟏 − 𝐭𝟐 + 𝟓𝛈𝟐 − 𝟏𝟑𝛈𝟐𝐭𝟐 + 𝟕𝛈𝟒
−𝟐𝟕𝛈𝟒𝐭𝟐 + 𝟑𝛈𝟔 − 𝟏𝟓𝛈𝟔𝐭𝟐)

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
145
3.1.1 La Convergencia de Meridianos en la Representación GK.
Hasta este punto se han demostrado y obtenido de manera matemática y
analítica las fórmulas de correspondencia directa e inversa para la transformación
de coordenadas en las proyecciones transversas cilíndricas, sin embargo existe un
elemento que influye de manera gradual sobre las direcciones y ángulos de los
objetos plasmados en estas representaciones cartográficas, el cual debido a su
valor numérico no debe de pasar desapercibido. Este elemento faltante lleva por
nombre, Convergencia de Meridianos (CM).
En geodesia se denomina como CM al ángulo (γ) que difiere al Norte
Geográfico o Geodésico (NG) del Norte de Cuadrícula o Cartográfico (NC), pero
cartográficamente hablando y para las proyecciones transversas cilíndricas el CM
Fig. III.29 Relación de la convergencia de meridianos con el Norte Geográfico (NG), el Norte Cartográfico (NC) y Norte
Magnético (MC)
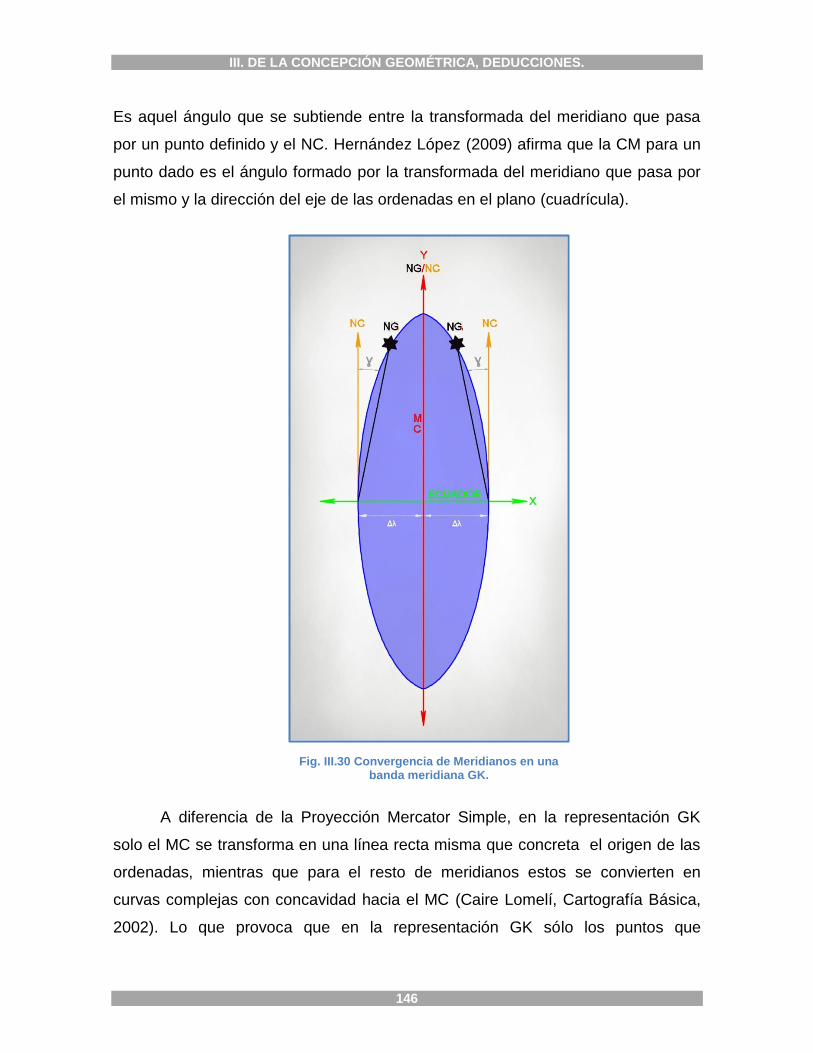
III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
146
Fig. III.30 Convergencia de Meridianos en una banda meridiana GK.
Es aquel ángulo que se subtiende entre la transformada del meridiano que pasa
por un punto definido y el NC. Hernández López (2009) afirma que la CM para un
punto dado es el ángulo formado por la transformada del meridiano que pasa por
el mismo y la dirección del eje de las ordenadas en el plano (cuadrícula).
A diferencia de la Proyección Mercator Simple, en la representación GK
solo el MC se transforma en una línea recta misma que concreta el origen de las
ordenadas, mientras que para el resto de meridianos estos se convierten en
curvas complejas con concavidad hacia el MC (Caire Lomelí, Cartografía Básica,
2002). Lo que provoca que en la representación GK sólo los puntos que

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
147
Fig. III.31 Convergencia de meridianos en un sistema infinitesimal.
conforman o se establezcan sobre lo largo del MC carecerán del valor angular de
la CM (γ = 0), debido a que a lo largo de esta línea el NG y el NC coinciden.
Para iniciar con la analogía de deducción se partirá con el hecho de situar
en el sistema GK un punto 𝑃, representando el meridiano y paralelo que pasan por
él.
De la figura anterior se aprecia que la CM se expresa como:
γ = θ + α
Dónde:
θ = Ángulo que se subtiende entre el eje de la ordenada de 𝑃 y el NG.
α = Ángulo formado entre el meridiano que paso por 𝑃 y el NC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
148
Esta es la representación más sencilla que se puede obtener del ángulo γ,
sin embargo calcular los ángulos que la conforman resulta una tarea compleja,
debido a que estos presentan el mismo problema que la CM, además de que
ninguno de estos valores se conoce.
Para solucionar esto, se recurrirá a un análisis infinitesimal, imaginando que
la intersección que compone el paralelo y el meridiano que pasan por 𝑃, forman un
triángulo rectángulo, pero recordando que la representación GK es conforme se
podrá aplicar una semejanza de ángulos obteniendo así el valor γ de con valores
conocidos. Dicho de manera simple el valor de γ se manifiesta entre la tangente
de la transformada del paralelo sobre el meridiano y la línea paralela al eje de las
abscisas que pasa por el punto 𝑃 (Barrera Trejo, 2015). Por lo tanto se puede
expresar que:
tan γ =
𝑑𝑦𝑑𝜆𝑑𝑥𝑑𝜆
Se aprecia que el valor de γ queda en función de la as derivadas de la
longitud geodésica con respecto de las coordenadas ortogonales del punto.
Entonces dada esta situación se tendrán que derivar las fórmulas de
transformación directa tomando como variable ∆𝜆.
Recordando que.
X = A1∆λ + A3∆λ3 + A5∆λ
5 + A7∆λ7
Y = S + B2∆λ2 + B4∆λ
4 + B6∆λ6 + B8∆λ
8
Derivando.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
149
𝑑𝑥
𝑑𝜆= A1 + 3A3∆λ
2 + 5A5∆λ4 + 7A7∆λ
6
𝑑𝑦
𝑑𝜆= 2B2∆λ + 4B4∆λ
3 + 6B6∆λ5 + 8B8∆λ
7
Dónde:
A1 = Ncosφ, A3 =Ncos3 φ
6[1 − t2 + η2]
A5 =Ncos5 φ
120[5 − 18t2 + t4 + 14η2 − 58η2t2
+13η4 − 64η4t2 + 4η6 − 24η6t2]
A7 =Ncos7 φ
5040
[
61 − 479t2 + 179t4 − t6 + 331η2 − 3298η2t2
+1771η2t4 + 715η4 − 8655η4t2 + 6080η4t4
+769η6 − 10964η6t2 + 9480η6t4 + 412η8 − 6760η8t2
+6912η8t4 + 88η10 − 1632η10t2 + 1920η10t4 ]
B2 =Ncosφ sinφ
2, B4 =
Ncos3 φsin φ
24[5 − t2 + 9η2 + 4η4]
B6 =Ncos5 φsin φ
720[
61 − 58t2 + t4
+270η2 − 330η2t2 + 445η4 − 680η4t2
+324η6 − 600η6t2 + 88η8 − 192η8t2]
B8 =Ncos7 φsin φ
40320
[
1385 − 3111t2 + 543t4 − t6
+10899η2 − 32802η2t2 + 9219η2t4 + 34419η4
−129087η4t2 + 49644η4t4 + 56385η6 − 252084η6t2
+121800η6t4 + 50856η8 − 263088η8t2 + 151872η8t4
+24048η10 − 140928η10t2 + 94080η10t4 + 4672η12
−30528η12t2 + 23040η12t4 ]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
150
Sustituyendo.
tan γ =
22𝑁∆𝜆sin𝜑 cos𝜑 +
424𝑁∆𝜆3 sin𝜑 cos3 𝜑 [5 − 𝑡2 + 9𝜂2 + 4𝜂4] +
6720
𝑁∆𝜆5 sin𝜑 cos5 𝜑…
𝑁 cos𝜑 +36𝑁∆𝜆2 cos3 𝜑 [1 − 𝑡2 + 𝜂2] +
5120
𝑁∆𝜆4 cos5 𝜑 [5 − 18𝑡2 +⋯] +7
5040𝑁∆𝜆6 cos7 𝜑…
Reduciendo términos.
tan γ =
∆𝜆sin 𝜑 +16∆𝜆3 sin 𝜑 cos2 𝜑 [5 − 𝑡2 + 9𝜂2 + 4𝜂4] +
1120
∆𝜆5 sin 𝜑 cos4 𝜑…
1 +12∆𝜆2 cos2 𝜑 [1 − 𝑡2 + 𝜂2] +
124∆𝜆4 cos4 𝜑 [5 − 18𝑡2 +⋯] +
1720
∆𝜆6 cos6 𝜑…
Se puede apreciar que la relación entre las derivadas de las coordenadas
ortogonales, forman una expresión que complace la siguiente condición para
números infinitesimales.
1
1 + 𝑥≈ 1 − 𝑥 − 𝑥2 − 𝑥3 −⋯− 𝑥𝑛
Tomando en cuenta esta serie de expansión se puede interpretarlo
siguiente.
tan γ =
[ ∆𝜆sin𝜑 +
1
6∆𝜆3 sin 𝜑 cos2 𝜑 (5 − 𝑡2 + 9𝜂2 + 4𝜂4)
+1
120∆𝜆5 sin𝜑 cos4 𝜑 (61 − 58𝑡2 + 𝑡4 + 270𝜂2…)
+1
5040∆𝜆7 sin𝜑 cos6 𝜑 (1385 − 3111𝑡2 + 543𝑡4 − 𝑡6 + 10899𝜂2…)]
∙
[ 1 −
1
2∆𝜆2 cos2 𝜑 (1 − 𝑡2 + 𝜂2)
−1
24∆𝜆4 cos4 𝜑 (5 − 18𝑡2 + 𝑡4 + 14𝜂2…)
−1
720∆𝜆6 cos6 𝜑 (61 − 479𝑡2 + 179𝑡4 − 𝑡6 + 331𝜂2…)]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
151
γ
= Arctan
{
[ ∆𝜆sin 𝜑 +
1
6∆𝜆3 sin 𝜑 cos2 𝜑 (5 − 𝑡2 + 9𝜂2 + 4𝜂4)
+1
120∆𝜆5 sin 𝜑 cos4 𝜑 (61 − 58𝑡2 + 𝑡4 + 270𝜂2…)
+1
5040∆𝜆7 sin 𝜑 cos6 𝜑 (1385 − 3111𝑡2 + 543𝑡4 − 𝑡6 + 10899𝜂2… )]
∙
[ 1 −
1
2∆𝜆2 cos2 𝜑 (1 − 𝑡2 + 𝜂2)
−1
24∆𝜆4 cos4 𝜑 (5 − 18𝑡2 + 𝑡4 + 14𝜂2…)
−1
720∆𝜆6 cos6 𝜑 (61 − 479𝑡2 + 179𝑡4 − 𝑡6 + 331𝜂2…)]
}
Además se hará uso del desarrollo en serie del Arco tangente.
Arctan(𝑥) = 𝑥 −𝑥3
3+𝑥5
5−𝑥7
7+⋯
𝑥𝑛
𝑛
De acuerdo a lo anterior, desarrollando y simplificando términos se tiene
que:
γ = ∆𝜆sin 𝜑 +∆𝜆3
3sin 𝜑 cos2 𝜑 (1 + 3𝜂2 + 2𝜂4)
+∆𝜆5
15sin 𝜑 cos4 𝜑 (
2 − 2𝑡2 + 15𝜂2 + 35𝜂4 − 15𝜂2𝑡2 + 33𝜂6
−50𝜂4𝑡2 + 11𝜂8 − 60𝜂6𝑡2 − 24𝜂8𝑡2)
+∆𝜆7
315sin 𝜑 cos6 𝜑 (17 − 26𝑡2 + 2𝑡4)
Por lo que finalmente.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
152
𝛄 = 𝐬𝐢𝐧𝛗
{
∆𝛌 +
(∆𝛌)𝟑 𝐜𝐨𝐬𝟐𝛗
𝟑(𝟏 + 𝟑𝛈𝟐 + 𝟐𝛈𝟒)
+(∆𝛌)𝟓 𝐜𝐨𝐬𝟒𝛗
𝟏𝟓[𝟐(𝟏 − 𝐭𝟐) + 𝟏𝟓𝛈𝟐(𝟏 − 𝐭𝟐) + 𝟓𝛈𝟒(𝟕 − 𝟏𝟎𝐭𝟐)
+𝟑𝛈𝟔(𝟏𝟏 − 𝟐𝟎𝐭𝟐) + 𝛈𝟖(𝟏𝟏 − 𝟐𝟒𝐭𝟐)]
+(∆𝛌)𝟕 𝐜𝐨𝐬𝟔𝛗
𝟏𝟓(𝟏𝟕 − 𝟐𝟔𝐭𝟐 + 𝟐𝐭𝟒) }
En esta expresión final los coeficientes con valores exponenciales mayores
a la sexta potencia son omitidos debido a que representan cantidades
extremadamente pequeñas, las cuales no causan ningún incremento o
decremento en el valor final.
Hernández López (2009), asegura que el valor γ de también puede ser
obtenido en función de las coordenadas ortogonales de la representación GK.
𝛄 = 𝐭 [𝐱
𝐍−𝟏
𝟑(𝐱
𝐍)𝟑
(𝟏 + 𝐭𝟐 − 𝛈𝟐 − 𝟐𝛈𝟒) +𝟏
𝟏𝟓(𝐱
𝐍)𝟑
(𝟐 − 𝟓𝐭𝟐 + 𝟑𝐭𝟒)]
Finalmente solo queda mencionar que la CM solo será positiva para todo
punto que se ubique al este del MC, mientras que para los puntos que se
encuentren del lado oeste esta será negativa.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
153
Fig. III.32 Sistema UTM, cilindro secante al elipsoide.
3.6 La Proyección Universal Transversa de Mercator (UTM).
La proyección Universal Transversa de Mercator (UTM) es una de las más
conocidas y utilizadas en el mundo, así mismo es la de principal apoyo para la
elaboración de documentos cartográficos en México por el INEGI. Se caracteriza
por ser una variante de la proyección cilíndrica transversa modificada de Lambert,
pero teniendo como principales cimientos en el sistema GK, debido a que esta
toma como figura geométrica al elipsoide para la representación terrestre, siendo
casi iguales. Sin embargo aunque compartan algunas características y elementos,
en la proyección UTM existen algunas variantes que la hacen completamente
distinta.
Una de esas pequeñas modificaciones y la más significativa es; que en la
proyección UTM el cilindro es transverso pero esta vez secante al elipsoide y no
tangente como en la representación GK, esta situación genera que dos círculos
atraviesen al elipsoide, siendo estos tangentes al mismo, muy próximos al MC,
logrando que en esa zona el grado de deformación sea mínima (Errázuriz Körner
& González L., 1992).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
154
Fig. III.33 Vista en planta del sistema UTM. Fuente: Cartografía Básica, Caire Lomelí, 2002
Esta variante provoca que en la proyección UTM la transformada del MC
sobre el plano no sea a través de una línea automecoica, si no que para este
sistema, el MC solo se convierte en una línea recta perpendicular a la
transformada del Ecuador, la cual no dependerá de su valor real en el elipsoide
(longitud de arco de meridiano). De manera sencilla se puede decir que la
transformada del MC en el sistema proyectivo UTM cuenta con un factor de escala
muy cercano a la unidad.
A pesar de ello, esta proyección conserva las demás características ya
conocidas de la representación GK como: ser una proyección que conserve
cantidades angulares (conforme), la transformación de los paralelos mediante
curvas complejas mientras que los meridianos se convierten en curvas con
concavidad hacia el MC, etc. De igual manera el fenómeno de deformación se
presenta de este a oeste, el cual va incrementando gradualmente conforme el
objeto a representar se va alejando del MC, por lo que querer representar toda la
superficie terrestre no es viable debido a la distorsión geométrica que se puede
generar.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
155
Fig. III.34 Zonas UTM para Sur América. Fuente: Guía de Proyecciones Cartográficas, Gómez Moreno, 2003
Si se trata de proyectar la superficie terrestre de grandes extensiones, se
obtendrá un patrón sumamente deformado, pero para áreas vecinas a la zona
secante, la proyección resulta extremadamente uniforme en escala, conforme y
equivalente (Hansen A., 2000).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
156
De acuerdo a lo que menciona Barrera Trejo (2015), para dar solución al
inconveniente de deformación, se partió del hecho de que en el elipsoide todos los
meridianos son iguales a comparación de los paralelos, este artificio delineó un
procedimiento de representación sistemático y universal de porciones iguales de la
superficie terrestre. La solución propuesta fue la de subdividir a la superficie
terrestre en 60 franjas o bandas meridianas con una amplitud 6°, definiendo un
meridiano de referencia para cada banda al centro de la misma, aunque
Fernández Coppel (2001) afirma que en algunos casos estas bandas meridianas
se pueden extender a una amplitud de 8º. En la bibliografía existente estas bandas
meridianas reciben el nombre de Zonas UTM o husos.
Las zonas UTM tendrán una representación cartográfica distinta, donde
cada una de ellas contaran con un desarrollo cilíndrico conforme transverso y
secante al elipsoide de revolución, mismos que serán regidos por un MC que se
posicionara en la zona de corte secante, siendo este último equidistante a 3º de
longitud de los meridianos que limitan dicha zona.
La división de bandas meridianas fue establecida y sistematizada por la
Armada de los Estados Unidos en cooperación de la Asociación Internacional de
Geodesia y la Unión, Cartográfica Internacional. Estas instituciones constituyeron
la numeración de bandas iniciando con el número 1 y finalizando con el 60,
posicionando a la primera zona entre los meridianos 180º W y 174º de longitud,
siendo el meridiano 180º W o antimeridiano como el meridiano de partida. En
cuanto al sentido de numeración de zonas, estas incrementan hacia el este por lo
que el MC de la primera zona es el 177º W y no el 180º W.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
157
No Banda
Amplitud de Banda Meridiana
MC No.
Banda Amplitud de Banda
Meridiana MC
1 180º W - 174º W 177º W 31 0º - 6º E 3 E
2 174º W - 168º W 171º W 32 6º E - 12º E 9 E
3 168º W - 162º W 165º W 33 12º E - 18º E 15 E
4 162º W - 156º W 159º W 34 18º E - 24º E 21 E
5 156º W - 150º W 153º W 35 24º E - 30º E 27 E
6 150º W - 144º W 147º W 36 30º E - 36º E 33 E
7 144º W - 138º W 141º W 37 36º E - 42º E 39 E
8 138º W - 132º W 135º W 38 42º E - 48º E 45 E
9 132º W - 126º W 129º W 39 48º E - 54º E 51 E
10 126º W - 120º W 123º W 40 54º E - 60º E 57 E
11 120º W - 114º W 117º W 41 60º E - 66º E 63 E
12 114º W - 108º W 111º W 42 66º E - 72º E 69 E
13 108º W - 102º W 105º W 43 72º E - 78º E 75 E
14 102º W - 96º W 99º W 44 78º E - 84º E 81 E
15 96º W - 90º W 93º W 45 84º E - 90º E 87 E
16 90º W - 84º W 87º W 46 90º E - 96º E 93 E
17 84º W - 78º W 81º W 47 96º E - 102º E 99 E
18 78º W - 72º W 75º W 48 102º E - 108º E 105 E
19 72º W - 66º W 69º W 49 108º E - 114º E 111 E
20 66º W - 60º W 63º W 50 114º E - 120º E 117 E
21 60º W - 54º W 57º W 51 120º E - 126º E 123 E
22 54º W - 48º W 51º W 52 126º E - 132º E 129 E
23 48º W - 42º W 45º W 53 132º E - 138º E 135 E
24 42º W - 36º W 39º W 54 138º E - 144º E 141 E
25 36º W - 30º W 33º W 55 144º E - 150º E 147 E
26 30º W - 24º W 27º W 56 150º E - 156º E 153 E
27 24º W - 18º W 21º W 57 156º E - 162º E 159 E
28 18º W - 12º W 15º W 58 162º E - 168º E 165 E
29 12º W- 6º W 9º W 59 168º E - 174º E 171 E
30 6º W - 0º 3º W 60 174º E - 180º E 177 E
Tabla III.1 Zonas UTM de cobertura mundial.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
158
Fig
. II
I.3
5 Z
on
as U
TM
pa
ra t
od
o e
l p
lan
eta
tie
rra
. F
ue
nte
. W
ikip
ed
ia,
200
7

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
159
El fenómeno de deformación también se hace presente en dirección norte
sur y viceversa, esta nueva deformación se comporta de manera similar a la ya
conocida pero esta vez de manera vertical, donde la distorsión geométrica del
objeto que se desea cartografiar aumenta si este se encuentra en latitudes muy
alejadas del Ecuador, lo que origina, que esta proyección no sea recomendable
para la representación de las regiones polares, siendo lo más viable reemplazarse
por proyecciones azimutales polares en las que el plano es tangente al elipsoide
en el polo correspondiente, como la Proyección Universal Estereográfica Polar
(UPS).
Debido a esto en la práctica cartográfica las bandas meridianas se acotan
en los paralelos 84º N y 80º S, lo que genera que en este nuevo artificio no se
consideren las regiones polares evitando así representar territorios con
deformaciones exageradas.
Recordando que en la representación GK, el sistema de coordenadas tiene
como origen la intersección de las transformadas del MC y el Ecuador, donde las
coordenadas planas de este punto sean 0,0. Entonces para un punto cualquiera
sobre el elipsoide, las coordenadas de transformación de este en el plano serán
regidas por los siguientes valores;
La ordenada de dicho punto será igual al valor del segmento de arco
del meridiano que se subtiende entre el paralelo que pasa por el
punto y el Ecuador.
Mientras que para la ordenada, esta será igual al valor en metros de
la distancia que existe entre el meridiano que pasa sobre el punto en
cuestión y el MC (∆𝜆).
Estas condiciones de transformación concebirán coordenadas con valores
positivos y negativos en cualquiera de sus dos ejes (𝑥, 𝑦), dependiendo de la
ubicación del objeto o punto a representar, generando que el sistema GK no sea
completamente viable para un sistema universal de coordenadas, siendo

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
160
susceptible a errores y confusiones al momento de elaboración de documentos
cartográficos.
Atendiendo a este problema las modificaciones que se realizaron al sistema
GK para su adaptación con la proyección UTM fueron las siguientes:
Las zonas UTM se clasificaron en dos grupos, donde dicha
clasificación estuviera sujeta a los hemisferios que conforman a la
tierra (norte y sur), para que de esta manera se pudieran localizar los
lugares susceptibles a una transformación de coordenadas con
valores numéricos negativos, debido a que el origen del sistema GK
en el plano comparte la división positiva y negativa. Esta clasificación
daría como resultado zonas UTM norte y zonas UTM Sur, las cuales
conservarían los valores de MC y amplitud de banda ya
mencionados.
Para erradicar los valores negativos en las coordenadas X se realizó
el artificio matemático de posicionar el origen del eje de las abscisas
a 500 km a la izquierda del MC, por lo que coordenada X en el MC
asignada fue de 500,000.000 a este nuevo origen de las abscisas
recibe el nombre de “Falso Este”.
En cuanto al origen del eje de las ordenadas seguirá siendo el
Ecuador, con la variante de que para las zonas UTM Norte la
coordenada de origen será 0 mientras que para las Zonas UTM Sur
el origen se trasladara a la ordenada 10’000,000.000.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
161
Estas modificaciones darán lugar a un doble origen para las ordenadas,
generando a su vez, que las zonas Norte y Sur que pertenecen a una sola banda
meridiana tendrán coordenadas en el eje Y con el mismo valor numérico. Para dar
solución a esta situación, se realizó una nueva división del planeta, el cual sería de
manera vertical, esta división contemplaría a los 60 husos. En esta nueva división
las bandas meridianas fueron segmentadas en 20 zonas verticales, donde cada
una de ellas tendría una amplitud de 8º de latitud, estas zonas fueron nombradas
fajas.
Fig. III.36 Sistema de coordenadas UTM para los dos hemisferios de la tierra.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
162
El fraccionamiento internacional adoptado en Estados Unidos de América
del Norte y Europa así como en México por la Secretaría de la Defensa Nacional
(SEDENA) realiza la segmentación de fajas respetando la amplitud meridiana de
las zonas UTM, formando cuadriláteros que dividen a las latitudes a cada 8º,
designando a cada espaciamiento por letras en orden alfabético iniciando con la
letra C y culminando con la letra X evitando las letras I y O ya que son parecidas al
número 1 y 0, de esta manera no producir posibles errores en la nomenclatura
(Caire Lomelí, Bases para Integrar la Cartografía Urbana - Rural, 2004). El
incremento numérico de las fajas es de sur a norte por lo que la faja inicial C se
sitúa entre los paralelos de latitud 80º S y 72º S, por lo que para la faja final X se
posiciona entre los paralelos 72º N y 84º N, teniendo esta ultima una amplitud de
12º de longitud.
No. Faja Amplitud Paralelos Limites
Sur Norte
1 C 8º 80º S 72º S
2 D 8º 72º S 64º S
3 E 8º 64º S 56º S
4 F 8º 56º S 48º S
5 G 8º 48º S 40º S
6 H 8º 40º S 32º S
7 J 8º 32º S 24º S
8 K 8º 24º S 16º S
9 L 8º 16º S 8º S
10 M 8º 8º S 0º
11 N 8º 0º 8º N
12 P 8º 8º N 16º N
13 Q 8º 16º N 24º N
14 R 8º 24º N 32º N
15 S 8º 32º N 40º N
16 T 8º 40º N 48º N
17 U 8º 48º N 56º N
18 V 8º 56º N 64º N
19 W 8º 64º N 72º N
20 X 12º 72º N 84º N
Tabla III.2 Fajas UTM de cobertura mundial

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
163
Fig
. II
I.3
7 F
aja
s U
TM
pa
ra t
od
o e
l p
lan
eta
tie
rra
. F
ue
nte
: W
ikip
ed
ia, 2
007

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
164
Fig. III.38 Zonas y Fajas UTM asignadas a la República Mexicana. Fuente: INEGI.
De acuerdo a la división de bandas meridianas y la subdivisión de estas en
fajas de latitud, al territorio que conforma la República Mexicana queda cubierta
por las zonas UTM 11 hasta la 16, mientras que para las fajas, el territorio nacional
se sitúa entre las fajas P hasta parte de la faja S.
En síntesis las condiciones generales de la proyección UTM son las
siguientes.
Su base geométrica de proyección es un cilíndrico conforme
transverso y perpendicular al eje del elipsoide, donde el eje del
cilindro coincide con el Ecuador. Además de que dicho cilindro es
secante al elipsoide regido por un MC.
Divide al mundo en 60 zonas o husos con una amplitud meridiana de
6º y un MC a cada 3º para cada uno de ellos. Cada huso es
simétrico con respecto al MC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
165
Las Zonas o husos son clasificados de acuerdo al hemisferio en el
cual se encuentren ubicados.
En el plano el MC de cada huso se transforma en un segmento de
recta con un factor de escala aproximado a la unidad (𝑘0 ≈ 1), lo
que genera que en un inicio las distancias se conserven. Además
que este coincide con el norte geográfico.
Las transformadas del MC y el Ecuador son por medio de dos líneas
rectas, las cuales son perpendiculares entre sí. En donde el MC se
convierte en el eje de las ordenadas y el Ecuador en el eje de las
abscisas.
En el MC, la convergencia será constante.
El resto de meridianos se convierten en curvas con concavidad hacia
el MC, mientras que los paralelos se transforman en curvas
complejas.
En el elipsoide, el MC correspondiente a cada huso será el origen de
las longitudes, mientras tanto el Ecuador se considerara como el
origen de las latitudes.
Para evitar valores negativos en las ordenadas, el MC para cada
zona se le asignara un origen X de 500,000.000 (Falso Este).
El origen de las ordenadas para los husos ubicados en el hemisferio
norte será el Ecuador con un valor de 0, mientras que para los husos
sur su origen de ordenadas será en el 10’000,000.000. Este valor
recibe el nombre de “Falso Norte”.
Para evitar deformaciones en puntos ubicados en latitudes
crecientes, los husos se acotan en los paralelos 84º N y 80º S
despreciando de esta manera a los polos.
La acotación al norte y al sur de los husos generara que la tierra se
subdividida de manera vertical en 20 fajas, mismas que tendrán una
amplitud de 8º de latitud exceptuando a la última faja norte, la cual
contara con una amplitud de 12º.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
166
Según Errázuriz Körner & Gonzáles L. las características geométricas
que presenta esta proyección, así mismo la fidelidad que esta genera en
cuanto a la transformación del dato geográfico, hace que sea una de las
proyecciones más utilizadas en la confección de documentos cartográficos
esencialmente cartas topográficas. Todos los países pueden insertarse en
este sistema de proyección, lográndose una cartografía con características
comunes y capaces de conformar una carta universal.
En México la proyección UTM es adoptada por el INEGI para la
elaboración de documentos cartográficos de escalas medias y grandes (no
menores que 1:500,000), así como en la mayoría de otras instituciones,
nacionales y del exterior. De hecho, la mayor parte de la cartografía topográfica
mexicana y americana se representa en esta proyección, apoyándose en la
cuadrícula asociada al mismo nombre. En la proyección UTM se utiliza el nivel
medio del mar para referir sus posiciones.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
167
Fig. III.39 Carta topográfica escala 1:50 000 en la proyección UTM. Fuente: INEGI, 2015.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
168
3.6.1 Sistema de Proyección.
Como se mencionaba, la proyección UTM basa su sistema proyectivo en
los principios geométricos y analíticos de la representación GK, lo que genera que
ambos sistemas sean semejantes en algunas características, pero totalmente
diferentes por modificaciones significativas, esto con el fin de lograr su uso y
aplicación para la representación universal del elipsoide terrestre. Una de estas
modificaciones, la más importante y significativa, es la introducción de un factor de
escala al MC.
La introducción de un factor de escala se hace con el fin de minimizar la
distorsión de magnitudes lineales, las cuales van aumentando gradualmente
conforme el objeto a representar se aleje del MC, pero ahora, la cuestión es,
¿Cómo se calcula u obtiene el valor?, para resolver esta incógnita será necesario
recurrir a las condiciones generales de la representación GK.
Recordando, en la representación GK el cilindro es transverso y tangente al
elipsoide a través de un MC, el cual conserva su magnitud lineal real que presenta
en el elipsoide, por lo que se puede decir que su factor de escala es igual a la
unidad. Esta situación genera que el elipsoide se dividida en bandas meridianas
de 3º de amplitud, en donde dichas bandas las deformidades no exceden al 10%,
originando que el factor de escala oscile entre 1 y 1.001
Según Barrera Trejo (2015), el factor de escala para cualquier punto sobre
una banda meridiana de la representación GK, se podrá calcular tomando en
cuenta a los meridianos extremos que conforman dicha banda.
𝑘𝑜𝑀𝐶 = 1 𝑘𝑜𝐸𝑋𝑇 = 1 + ∆𝑘

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
169
Fig. III.40 Factores de escala en la proyección GK.
Dónde:
𝑘𝑜𝑀𝐶 = Factor de Escala en el MC
𝑘𝑜𝐸𝑋𝑇 = Factor de Escala en los meridianos extremos
∆𝑘 = Incremento de Factor de Escala.
En la representación GK el factor de escala siempre será mayor a 1 en
todas las zonas que se encuentren fuera del MC.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
170
Para darle una mayor cobertura al planeta y hacer que las distorsiones
lineales del elemento geográfico en la representación sobre el plano no sobre
pasen más allá del 1.1, se recurre al artifició geométrico de obligar que el cilindro
se posicione de forma secante al elipsoide y no tangente, mismo que seguirá
regido por el MC, originando la subdivisión del elipsoide en 60 bandas meridianas.
Esta modificación hace que dos círculos intersecten al elipsoide, donde su
transformación en el plano sea través de dos líneas rectas automecoicas (mismas
que comparten la dirección del MC y el norte geográfico), dicho de forma simple, la
transformación de estos círculos en el plano será mediante dos líneas rectas, las
cuales conservan sus distancias en el elipsoide, por lo que se puede decir que el
factor de escala para cada una de ellas es 1. Lo que dará como resultado, que
todo objeto o punto que se encuentre dentro de una zona UTM, tendrá una
distorsión no mayor al 10%, donde el MC contara con un factor de escala muy
cercano a 1.
El factor de escala del MC y para cualquier punto ubicado en alguna de las
zonas UTM se calculara aplicando los factores de escala de la representación GK.
Por lo que se puede decir que:
𝑘𝑜𝑀𝐶 = 1 ∙ 𝑘𝑜 𝑘𝑜𝐸𝑋𝑇 = (1 + ∆𝑘) ∙ 𝑘𝑜
Fig. III.41 Factor de escala en el sistema TM.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
171
Para cumplir el hecho de que las distorsiones no sobre pasen el valor de 1,
en la proyección UTM se tendrá que reducir la deformación de la representación
GK a la mitad.
𝑘𝑜𝐸𝑋𝑇 = (1 + ∆𝑘) ∙ 𝑘𝑜 = (1 +∆𝑘
2) ∙ 𝑘𝑜
Despejando el valor de 𝑘𝑜
𝑘𝑜 =1 +
∆𝑘2
1 + ∆𝑘≈ (1 +
∆𝑘
2) (1 − ∆𝑘)
𝑘𝑜 = (1 +∆𝑘
2) (1 − ∆𝑘) = 1 +
∆𝑘
2− ∆𝑘 −
∆𝑘2
2
𝑘𝑜 = 1 −∆𝑘
2(∆𝑘 + 1)
Despreciando la sumatoria del incremento y la unidad, se obtiene
finalmente el factor de escala para objetos que se encuentren dentro del perímetro
de la zona UTM.
𝒌𝒐 = 𝟏 −∆𝒌
𝟐
Entonces para obtener el valor constante de 𝑘𝑜 para el MC se utilizara la
fórmula de deformaciones lineales, evaluada con los valores de ∆𝜆 y ∆𝜑 de una
zona UTM (la mitad del ancho y largo de una zona UTM en grados, los cuales
dependen del MC y el Ecuador).
∆𝜆 = 3° ∆𝜑 = 40°
𝐿 = 1 + (∆𝜆2
2cos2 ∆𝜑) (1 + 𝜂2) = 𝑘𝑜𝐸𝑋𝑇

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
172
Sustituyendo valores.
𝑘𝑜𝐸𝑋𝑇 = 1 + [(3°𝑅𝐴𝐷)
2
2(cos 40°𝑅𝐴𝐷)
2] [1 + 𝑒′(cos 40°𝑅𝐴𝐷)2]
𝑘𝑜𝐸𝑋𝑇 = 1.00081
Donde 𝑘𝑜𝐸𝑋𝑇 también puede ser interpretado como:
𝑘𝑜𝐸𝑋𝑇 = 1 + ∆𝑘 = 1.00081 ∴ ∆𝑘 = 1.00081 − 1
∆𝑘 = 0.00081
Por lo tanto.
𝑘𝑜 = 1 −∆𝑘
2= 1 −
0.00081
2
𝒌𝒐 = 𝟎. 𝟗𝟗𝟗𝟔
Finalmente se obtiene el factor de escala para el MC en cualquiera de las
zonas que conforman la proyección UTM, así mismo se verifica que todo elemento
que se situé dentro de un huso tendrá una deformación muy pequeña. El factor de
escala variará, aumentando hasta un valor igual a 1 en los puntos que el cilindro
intersecta con el elipsoide y siendo mayor que la unidad más allá de estos puntos
(Sánchez Menéndez, 2004).
Con este valor se puede deducir el cálculo del factor de escala para la
transformada de un punto cualquiera en la proyección UTM, el cual se expresa de
la siguiente manera.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
173
Fig. III.42 Factor de escala en el sistema UTM.
𝒌 = 𝒌𝒐 [𝟏 + (∆𝝀𝟐
𝟐𝐜𝐨𝐬𝟐 ∆𝝋) (𝟏 + 𝜼𝟐)]
Sin embargo Krakiwsky (1973), menciona que esta fórmula se puede
truncar, omitiendo la suma de 1 + 𝜂2, debido a que esta arroja un valor muy
pequeño el cual no afecta el resultado final.
𝒌 = 𝒌𝒐 [𝟏 +∆𝝀𝟐
𝟐𝐜𝐨𝐬𝟐 ∆𝝋]
Si se requiere de mayor precisión en el cálculo, Gómez Moreno (2003)
sugiere complementar la ecuación de la siguiente manera:
𝒌 = 𝒌𝒐
{
𝟏 +
(∆𝝀 ∙ 𝐜𝐨𝐬 ∆𝝋)𝟐
𝟐[𝟏 + 𝜼𝟐]
+(∆𝝀 ∙ 𝐜𝐨𝐬 ∆𝝋)𝟒
𝟐𝟒[𝟓 − 𝟒𝒕𝟐 + 𝟏𝟒𝜼𝟐 + 𝟏𝟑𝜼𝟒 + 𝟒𝜼𝟔
−𝟐𝟖𝒕𝟐𝜼𝟐 − 𝟒𝟖𝒕𝟐𝜼𝟒 − 𝟐𝟒𝒕𝟐𝜼𝟔]
+(∆𝝀 ∙ 𝐜𝐨𝐬 ∆𝝋)𝟔
𝟕𝟐𝟎[𝟔𝟏 − 𝟏𝟒𝟖𝒕𝟐 + 𝟏𝟔𝒕𝟒] }
Dónde:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
174
Fig. III.43 Factor de escala en un huso UTM.
𝑡 = tan𝜑 , 𝑒′2=
𝑒2
1 − 𝑒2, 𝜂2 = 𝑒′
2cos2 𝜑
Si se conservara tangente el cilindro, el factor de escala en el meridiano
central sería la unidad, pero en el límite de la zona de 6° tendría un valor de
1.0009, mientras que con el cilindro secante se balancean los errores, de modo
que a lo largo del meridiano central el factor de escala vale 0.9996, en los dos
meridianos simétricos a l.6º del meridiano central vale 1.0000 y en los extremos de
la zona tiene un valor de 1.0004 (Hansen A., 2000).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
175
Traducido en metros, todo aquel elemento que se encuentre a 180 km a lo
largo del Ecuador, en dirección este u oeste del MC, contara con un factor de
escala equivalente a la unidad, debido a que en esa distancia se localizan las
elipses del cilindro que intersectan al elipsoide. Esta distancia da como resultado
otra de las simbólicas variantes de la proyección UTM, trasladar 500 km a la
derecha del MC al origen de las abscisas.
3.6.2 Transformación Directa de Coordenadas.
Como ya se mencionó, las fórmulas de transformación directa tienen
fundamento en las formulas de la representación GK o TM caso elipsoidal, con la
única diferencia, que para la proyección UTM se contemplan las modificaciones
que se enumeran a continuación.
Se trata de una proyección conforme, en donde en el plano se
conservan las direcciones y demás cantidad angular que se presenta
en el elipsoide.
El elipsoide de revolución será dividido en 60 bandas meridianas,
con una cobertura de 6º cada una y regida por un MC a cada 3º. Los
cuáles serán subdivididos y clasificados dependiendo del hemisferio
donde se encuentren, Norte o Sur.
El Factor de escala del MC y todo aquel elemento que se encuentre
dentro de una zona UTM, será afectado por el factor de escala con
valor de 0.9996, por lo que dicho valor será volverá constante,
multiplicado a las fórmulas de trasformación directa GK, con el fin de
reducir el grado de distorsión dentro de las zonas UTM.
En todas las zonas UTM el MC se trasladara a 500 km al este del
mismo, generando un falso origen para las abscisas. Por lo que el
valor de 500,000.000 se le sumara a la formula X de la
representación GK.
El origen de las ordenadas siempre será el Ecuador, por lo que para
las zonas UTM que se encuentren en el Norte su valor será 0. Las

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
176
zonas UTM ubicadas en el hemisferio sur poseerán un falso origen
en la ordenada con un valor de 10’000,000.000, por lo que dicho
cantidad se le sumara al valor resultante de la formula Y de la
representación GK.
Entonces, aplicando estas modificaciones a las fórmulas de transformación
de la representación GK se podrán obtener las fórmulas de correspondencia
directa para la proyección UTM.
En primera instancia se determinara la zona UTM de un punto cualquiera en
el elipsoide 𝑃(λ,φ). Para ello, solo será necesario utilizar la cantidad en grados de
la longitud, por lo que el valor de λ se truncara para solo manipular el entero de
esta cantidad.
𝐙𝐎𝐍𝐀𝐔𝐓𝐌 = 𝟑𝟎 − 𝐄𝐧𝐭𝐞𝐫𝐨 (𝛌𝒑
𝟔)
El resultado de la división entre la latitud y el número seis también será
truncado para su fácil manipulación. Teniendo la zona, se podrá determinar su MC
correspondiente, mediante la siguiente ecuación.
𝐌𝐂 = 𝟏𝟖𝟑° − 𝟔° ∙ 𝐙𝐎𝐍𝐀𝐔𝐓𝐌
La fórmula anterior solo se aplicara para puntos que se encuentren de lado
Este del Meridiano de Greenwich, por lo que para la República Mexicana y puntos
ubicados en lado Oeste la ecuación se interpretara como.
𝐌𝐂 = 𝟔° ∙ 𝐙𝐎𝐍𝐀𝐔𝐓𝐌 − 𝟏𝟖𝟑°

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
177
También se tendrá que obtener el valor del incremento de la latitud del
punto con respecto al MC.
∆𝝀 = 𝐌𝐂 − 𝝀𝐩
Ahora se realizara la introducción del factor de en las formulas de la
representación GK.
X = 𝑘0 ∙ XGK Y = 𝑘0 ∙ YGK
Donde.
𝑘0 = 0.9996
Sustituyendo.
X = 0.9996 ∙ XGK Y = 0.9996 ∙ YGK
Agregando el Falso Este a la coordenada X, se tiene que.
𝐗 = 𝟓𝟎𝟎, 𝟎𝟎𝟎. 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔 ∙ 𝐗𝐆𝐊 𝐘 = 𝟎. 𝟗𝟗𝟗𝟔 ∙ 𝐘𝐆𝐊
La última modificación se realizara solo para zonas UTM con latitudes Sur,
agregando el Falso Norte a la coordenada Y.
𝐗 = 𝟓𝟎𝟎, 𝟎𝟎𝟎. 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔 ∙ 𝐗𝐆𝐊 𝐘 = 𝟏𝟎′𝟎𝟎𝟎, 𝟎𝟎𝟎. 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔 ∙ 𝐘𝐆𝐊
Finalmente las fórmulas de transformación directa para la proyección UTM
se interpretan como:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
178
Para Zonas UTM en el hemisferio Norte.
𝐗 = 𝟓𝟎𝟎, 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔[𝐀𝟏∆𝛌 + 𝐀𝟑∆𝛌𝟑 + 𝐀𝟓∆𝛌
𝟓 + 𝐀𝟕∆𝛌𝟕]
𝐘 = 𝟎. 𝟗𝟗𝟗𝟔[𝐒 + 𝐁𝟐∆𝛌𝟐 + 𝐁𝟒∆𝛌
𝟒 + 𝐁𝟔∆𝛌𝟔 + 𝐁𝟖∆𝛌
𝟖]
Para Zonas UTM en el hemisferio Sur.
𝐗 = 𝟓𝟎𝟎, 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔[𝐀𝟏∆𝛌 + 𝐀𝟑∆𝛌𝟑 + 𝐀𝟓∆𝛌
𝟓 + 𝐀𝟕∆𝛌𝟕]
𝐘 = 𝟏𝟎′𝟎𝟎𝟎, 𝟎𝟎𝟎 + 𝟎. 𝟗𝟗𝟗𝟔[𝐒 + 𝐁𝟐∆𝛌𝟐 + 𝐁𝟒∆𝛌
𝟒 + 𝐁𝟔∆𝛌𝟔 + 𝐁𝟖∆𝛌
𝟖]
Donde.
𝐭 = 𝐭𝐚𝐧𝛗 , 𝒆′𝟐=
𝒆𝟐
𝟏 − 𝒆𝟐, 𝛈𝟐 = 𝒆′
𝟐𝐜𝐨𝐬𝟐𝛗
Además.
𝐀𝟏 = 𝐍𝐜𝐨𝐬𝛗, 𝐀𝟑 =𝐍𝐜𝐨𝐬𝟑𝛗
𝟔[𝟏 − 𝐭𝟐 + 𝛈𝟐]
𝐀𝟓 =𝐍𝐜𝐨𝐬𝟓𝛗
𝟏𝟐𝟎[𝟓 − 𝟏𝟖𝐭𝟐 + 𝐭𝟒 + 𝟏𝟒𝛈𝟐 − 𝟓𝟖𝛈𝟐𝐭𝟐
+𝟏𝟑𝛈𝟒 − 𝟔𝟒𝛈𝟒𝐭𝟐 + 𝟒𝛈𝟔 − 𝟐𝟒𝛈𝟔𝐭𝟐]
𝐀𝟕 =𝐍𝐜𝐨𝐬𝟕𝛗
𝟓𝟎𝟒𝟎
[
𝟔𝟏 − 𝟒𝟕𝟗𝐭𝟐 + 𝟏𝟕𝟗𝐭𝟒 − 𝐭𝟔 + 𝟑𝟑𝟏𝛈𝟐 − 𝟑𝟐𝟗𝟖𝛈𝟐𝐭𝟐
+𝟏𝟕𝟕𝟏𝛈𝟐𝐭𝟒 + 𝟕𝟏𝟓𝛈𝟒 − 𝟖𝟔𝟓𝟓𝛈𝟒𝐭𝟐 + 𝟔𝟎𝟖𝟎𝛈𝟒𝐭𝟒
+𝟕𝟔𝟗𝛈𝟔 − 𝟏𝟎𝟗𝟔𝟒𝛈𝟔𝐭𝟐 + 𝟗𝟒𝟖𝟎𝛈𝟔𝐭𝟒 + 𝟒𝟏𝟐𝛈𝟖 − 𝟔𝟕𝟔𝟎𝛈𝟖𝐭𝟐
+𝟔𝟗𝟏𝟐𝛈𝟖𝐭𝟒 + 𝟖𝟖𝛈𝟏𝟎 − 𝟏𝟔𝟑𝟐𝛈𝟏𝟎𝐭𝟐 + 𝟏𝟗𝟐𝟎𝛈𝟏𝟎𝐭𝟒 ]
𝐁𝟐 =𝐍𝐜𝐨𝐬𝛗 𝐬𝐢𝐧𝛗
𝟐, 𝐁𝟒 =
𝐍𝐜𝐨𝐬𝟑𝛗𝐬𝐢𝐧𝛗
𝟐𝟒[𝟓 − 𝐭𝟐 + 𝟗𝛈𝟐 + 𝟒𝛈𝟒]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
179
𝐁𝟔 =𝐍𝐜𝐨𝐬𝟓𝛗𝐬𝐢𝐧𝛗
𝟕𝟐𝟎[
𝟔𝟏 − 𝟓𝟖𝐭𝟐 + 𝐭𝟒
+𝟐𝟕𝟎𝛈𝟐 − 𝟑𝟑𝟎𝛈𝟐𝐭𝟐 + 𝟒𝟒𝟓𝛈𝟒 − 𝟔𝟖𝟎𝛈𝟒𝐭𝟐
+𝟑𝟐𝟒𝛈𝟔 − 𝟔𝟎𝟎𝛈𝟔𝐭𝟐 + 𝟖𝟖𝛈𝟖 − 𝟏𝟗𝟐𝛈𝟖𝐭𝟐]
𝐁𝟖
=𝐍𝐜𝐨𝐬𝟕𝛗𝐬𝐢𝐧𝛗
𝟒𝟎𝟑𝟐𝟎
[
𝟏𝟑𝟖𝟓 − 𝟑𝟏𝟏𝟏𝐭𝟐 + 𝟓𝟒𝟑𝐭𝟒 − 𝐭𝟔
+𝟏𝟎𝟖𝟗𝟗𝛈𝟐 − 𝟑𝟐𝟖𝟎𝟐𝛈𝟐𝐭𝟐 + 𝟗𝟐𝟏𝟗𝛈𝟐𝐭𝟒 + 𝟑𝟒𝟒𝟏𝟗𝛈𝟒
−𝟏𝟐𝟗𝟎𝟖𝟕𝛈𝟒𝐭𝟐 + 𝟒𝟗𝟔𝟒𝟒𝛈𝟒𝐭𝟒 + 𝟓𝟔𝟑𝟖𝟓𝛈𝟔 − 𝟐𝟓𝟐𝟎𝟖𝟒𝛈𝟔𝐭𝟐
+𝟏𝟐𝟏𝟖𝟎𝟎𝛈𝟔𝐭𝟒 + 𝟓𝟎𝟖𝟓𝟔𝛈𝟖 − 𝟐𝟔𝟑𝟎𝟖𝟖𝛈𝟖𝐭𝟐 + 𝟏𝟓𝟏𝟖𝟕𝟐𝛈𝟖𝐭𝟒
+𝟐𝟒𝟎𝟒𝟖𝛈𝟏𝟎 − 𝟏𝟒𝟎𝟗𝟐𝟖𝛈𝟏𝟎𝐭𝟐 + 𝟗𝟒𝟎𝟖𝟎𝛈𝟏𝟎𝐭𝟒 + 𝟒𝟔𝟕𝟐𝛈𝟏𝟐
−𝟑𝟎𝟓𝟐𝟖𝛈𝟏𝟐𝐭𝟐 + 𝟐𝟑𝟎𝟒𝟎𝛈𝟏𝟐𝐭𝟒 ]
𝐒 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗]
𝐀 = 𝟏 +𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
𝐁 = − [𝟑
𝟒𝒆𝟐 +
𝟏𝟓
𝟏𝟔𝒆𝟒 +
𝟓𝟐𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐂 =𝟏𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟎𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖
𝐃 = − [𝟑𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐄 =𝟑𝟏𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
En la bibliografía existente así mismo como en los softwares de
interpretación y elaboración cartográfica, así mismo en los equipos destinados
para levantamientos geodésicos (GPS), las coordenadas UTM son renombradas
como; Este para las coordenadas en el eje X y Norte para las del eje Y. Por lo que
comúnmente las fórmulas directas se expresan como:

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
180
Hemisferio Norte.
E = 500,000 + 0.9996 ∙ XGK N = 0.9996 ∙ YGK
Hemisferio Sur.
E = 500,000 + 0.9996 ∙ XGK N = 10′000,000 + 0.9996 ∙ YGK
3.6.3 Transformación Inversa de Coordenadas.
Para resolver la transformación inversa de coordenadas en el sistema UTM
al sistema geodésico se recurrirá de igual forma a las formulas GK para este
mismo caso, adoptando las modificaciones realizadas en las formulas del proceso
directo.
Entonces para obtener las formulas inversas de esta proyección será
necesario en primera instancia transformar las coordenadas UTM en coordenadas
GK, logrando así un método más fácil y conocido de cálculo. Para obtener las
coordenadas GK con respecto a las coordenadas UTM, se deberá despejar la
constante del factor de escala que afecta a ambos términos, así mismo los valores
de Falso Este (FE) y Falso Norte (FN) según sea el caso.
X = FE + 0.9996 ∙ XGK Y = FN + 0.9996 ∙ YGK
𝐗𝐆𝐊 =𝐗 − 𝐅𝐄
𝟎. 𝟗𝟗𝟗𝟔 𝐘𝐆𝐊 =
𝐘 − 𝐅𝐍
𝟎. 𝟗𝟗𝟗𝟔
Obteniendo los valores correspondientes de las coordenadas UTM en el
sistema GK de un punto cualquiera, se procederá a realizar el cálculo del proceso
inverso mediante las formulas ya conocidas para la representación GK.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
181
Finalmente las fórmulas de transformación inversa del sistema UTM son las
siguientes:
Transformación de coordenadas UTM a GK para Zonas UTM Norte.
𝐗𝐆𝐊 =𝐗 − 𝟓𝟎𝟎, 𝟎𝟎𝟎
𝟎. 𝟗𝟗𝟗𝟔 𝐘𝐆𝐊 =
𝐘
𝟎. 𝟗𝟗𝟗𝟔
Transformación de coordenadas UTM a GK para Zonas UTM Sur.
𝐗𝐆𝐊 =𝐗 − 𝟓𝟎𝟎, 𝟎𝟎𝟎
𝟎. 𝟗𝟗𝟗𝟔 𝐘𝐆𝐊 =
𝐘 − 𝟏𝟎′𝟎𝟎𝟎, 𝟎𝟎𝟎
𝟎. 𝟗𝟗𝟗𝟔
Fórmulas de Correspondencia Inversa GK
∆𝛌 = 𝐂𝟏𝐗𝐆𝐊 − 𝐂𝟑𝐗𝐆𝐊𝟑 + 𝐂𝟓𝐗𝐆𝐊
𝟓 − 𝐂𝟕𝐗𝐆𝐊𝟕
𝚽 = 𝚽𝟎 − 𝐃𝟐𝐗𝐆𝐊𝟐 + 𝐃𝟒𝐗𝐆𝐊
𝟒 − 𝐃𝟔𝐗𝐆𝐊𝟔 + 𝐃𝟖𝐗𝐆𝐊
𝟖
Recordando que para el cálculo de la latitud isométrica Φ, se realizara
mediante iteraciones con respecto a la latitud del punto de expansión φ0.
Dónde:
𝐭 = 𝐭𝐚𝐧𝛗𝟎 , 𝒆′𝟐=
𝒆𝟐
𝟏 − 𝒆𝟐, 𝛈𝟐 = 𝐞′
𝟐𝐜𝐨𝐬𝟐𝛗𝟎
𝐂𝟏 =𝟏
𝐍𝐜𝐨𝐬𝛗𝟎
, 𝐂𝟑 =𝟏 + 𝟐𝐭𝟐 + 𝛈𝟐
𝟔𝐍𝟑 𝐜𝐨𝐬𝛗𝟎
𝐂𝟓 =𝟏
𝟏𝟐𝟎𝐍𝟓 𝐜𝐨𝐬𝛗𝟎
[𝟓 + 𝟐𝟖𝐭𝟐 + 𝟐𝟒𝐭𝟒 + 𝟔𝛈𝟐 + 𝟖𝛈𝟐𝐭𝟐
−𝟑𝛈𝟒 + 𝟒𝛈𝟒𝐭𝟐 − 𝟒𝛈𝟔 + 𝟐𝟒𝛈𝟔𝐭𝟐]

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
182
𝐂𝟕 =𝟏
𝟓𝟎𝟒𝟎𝐍𝟕 𝐜𝐨𝐬𝛗𝟎
[ 𝟔𝟏 + 𝟔𝟔𝟐𝐭𝟐 + 𝟏𝟑𝟐𝟎𝐭𝟒 + 𝟕𝟐𝟎𝐭𝟔 + 𝟏𝟎𝟕𝛈𝟐 + 𝟒𝟒𝟎𝛈𝟐𝐭𝟐
+𝟑𝟑𝟔𝛈𝟐𝐭𝟒 + 𝟒𝟑𝛈𝟒 − 𝟐𝟑𝟒𝛈𝟒𝐭𝟐 − 𝟏𝟗𝟐𝛈𝟒𝐭𝟒 + 𝟗𝟕𝛈𝟔
−𝟕𝟕𝟐𝛈𝟔𝐭𝟐 + 𝟒𝟎𝟖𝛈𝟔𝐭𝟒 + 𝟏𝟖𝟖𝛈𝟖 − 𝟐𝟑𝟗𝟐𝛈𝟖𝐭𝟐
+𝟏𝟓𝟑𝟔𝛈𝟖𝐭𝟒 + 𝟖𝟖𝛈𝟏𝟎 − 𝟏𝟔𝟑𝟐𝛈𝟏𝟎𝐭𝟐 + 𝟏𝟗𝟐𝟎𝛈𝟏𝟎𝐭𝟒 ]
𝐃𝟐 =𝐭
𝟐𝐍𝟐 𝐜𝐨𝐬𝛗𝟎
, 𝐃𝟒 =𝐭[𝟓 + 𝟔𝐭𝟐 + 𝛈𝟐 − 𝟒𝛈𝟒]
𝟐𝟒𝐍𝟒 𝐜𝐨𝐬𝛗𝟎
𝐃𝟔 =𝐭
𝟕𝟐𝟎𝐍𝟔 𝐜𝐨𝐬𝛗𝟎
[𝟔𝟏 + 𝟏𝟖𝟎𝐭𝟐 + 𝟏𝟐𝟎𝐭𝟒 + 𝟒𝟔𝛈𝟐 + 𝟒𝟖𝛈𝟐𝐭𝟐 − 𝟑𝛈𝟒
−𝟑𝟔𝛈𝟒𝐭𝟐 + 𝟏𝟎𝟎𝛈𝟔 − 𝟗𝟔𝛈𝟔𝐭𝟐 + 𝟖𝟖𝛈𝟖 − 𝟏𝟗𝟐𝛈𝟖𝐭𝟐]
𝐃𝟖 =𝐭
𝟒𝟎𝟑𝟐𝟎𝐍𝟖 𝐜𝐨𝐬𝛗𝟎
[ 𝟏𝟑𝟖𝟓 + 𝟕𝟐𝟔𝟔𝐭𝟐 + 𝟏𝟎𝟗𝟐𝟎𝐭𝟒 + 𝟓𝟎𝟒𝟎𝐭𝟔 + 𝟏𝟕𝟑𝟏𝛈𝟐
+𝟒𝟒𝟏𝟔𝛈𝟐𝐭𝟐 + 𝟐𝟔𝟖𝟖𝛈𝟐𝐭𝟒 − 𝟓𝟕𝟑𝛈𝟒 − 𝟏𝟖𝟑𝟎𝛈𝟒𝐭𝟐
−𝟏𝟓𝟑𝟔𝛈𝟒𝐭𝟒 − 𝟐𝟗𝟐𝟕𝛈𝟔 + 𝟓𝟎𝟓𝟐𝛈𝟔𝐭𝟐 + 𝟕𝟒𝟒𝛈𝟔𝐭𝟒
−𝟖𝟖𝟎𝟖𝛈𝟖 + 𝟐𝟕𝟒𝟓𝟔𝛈𝟖𝐭𝟐 − 𝟕𝟖𝟕𝟐𝛈𝟖𝐭𝟒 − 𝟏𝟏𝟒𝟕𝟐𝛈𝟏𝟎
+𝟓𝟑𝟗𝟓𝟐𝛈𝟏𝟎𝐭𝟐 − 𝟐𝟒𝟗𝟔𝟎𝛈𝟏𝟎𝐭𝟒 − 𝟒𝟔𝟕𝟐𝛈𝟏𝟐
+𝟑𝟎𝟓𝟐𝟖𝛈𝟏𝟐𝐭𝟐 − 𝟐𝟑𝟎𝟒𝟎𝛈𝟏𝟐𝐭𝟒 ]
Obtención de coordenadas geodésicas.
𝛌 = 𝐌𝐂 + ∆𝛌
𝛗 = 𝛗𝟎 + 𝐆𝟏∆𝚽 − 𝐆𝟐(∆𝚽)𝟐 − 𝐆𝟑(∆𝚽)
𝟑
∆𝚽 = 𝚽−𝚽𝟎
𝐆𝟏 = 𝐜𝐨𝐬𝛗𝟎 (𝟏 + 𝛈𝟐) 𝐆𝟐 =
𝟏 + 𝟒𝛈𝟐 + 𝟑𝛈𝟒
𝟐∙ 𝐬𝐢𝐧𝛗𝟎 𝐜𝐨𝐬𝛗𝟎
𝐆𝟑 =𝐜𝐨𝐬𝟑𝛗𝟎
𝟔[𝟏 − 𝐭𝟐 + 𝟓𝛈𝟐 − 𝟏𝟑𝛈𝟐𝐭𝟐 + 𝟕𝛈𝟒
−𝟐𝟕𝛈𝟒𝐭𝟐 + 𝟑𝛈𝟔 − 𝟏𝟓𝛈𝟔𝐭𝟐]
Es importante aclarar que para determinar el MC, es necesario conocer
previamente la zona UTM en la que el punto de estudio se encuentre posicionado.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
183
3.7 La Proyección Transversa Modificada Ejidal (TME).
La proyección TME es una variante más de la proyección TM, que al igual
que la proyección UTM toman como figura geométrica al elipsoide de revolución
para la representación terrestre, lo que origina que sus algoritmos de
transformación tengan base fundamental en los algoritmos de la representación
GK, pero con la característica esencial de que la proyección TME es para un uso
local o regional, por lo que su uso es exclusivo es para las zonas, estados y
municipios que conforman la República Mexicana.
La proyección TME fue ideada por el INEGI con el fin de garantizar la
conformidad de la proyección UTM, en la cual la representación de ejidos o
terrenos con superficies mayores a las 10 Ha, contaran con una reducción mínima
en la distorsión en áreas, distancias y direcciones muy cercanas al MC.
La solución encontrada recibió el nombre de Transversa Modificada Ejidal y
consistió en retomar las formulas de la representación GK en combinación con el
sistema de coordenadas UTM, y mediante un artificio matemático conseguir
condiciones de quasiequivalencia, quasiequidistancia y quasiazimutalidad en la
representación de entidades geográficas.
Por lo que se puede decir que en la representación TME, el cilindro será
conforme, transverso y tangente al elipsoide a lo largo de un MC, donde el sistema
de coordenadas en el plano será muy similar al del sistema UTM. A diferencia de
sus dos proyecciones base, en el sistema TME se despreciaran la subdivisión del
elipsoides en bandas meridianas, debido a que esta representación es para uso
local, además de que las zonas de estudio no sobre pasan más allá de un grado
de longitud.
Una de las principales modificaciones que en la proyección TME se
realizan, es el establecimiento de un MC arbitrario, el cual es aquel meridiano que
se sitúa en la zona intermedia del polígono ejidal de estudio, despreciando de esta

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
184
Fig. III.44 Zona ejidal en la proyección TME.
manera a los MC oficiales para la proyección UTM y el MC de 102º que rige a la
proyección GK para la República Mexicana.
El MC recibe el nombre de Meridiano Central Ejidal (MCE), mismo que se
definirá como el promedio de las longitudes de cada uno de los vértices
perimetrales del polígono ejidal (Gómez Moreno, 2003), pero recordando que la
base es el sistema GK, generara que el factor de escala a lo largo de este nuevo
MC sea igual a la unidad. Por lo que la transformada del MCE en el plano será
mediante un segmento de línea recta automecoica, mismo que será el origen de
las abscisas. Esta modificación dará como resultado que para cada ejido, se
estudiara y representara cartográficamente bajo el establecimiento de una
proyección transversa de Mercator con parámetros individualizados en función de
la ubicación geográfica del mismo.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
185
Al igual que en el sistema UTM, para evitar coordenadas negativas en el eje
X, el MCE se trasladara a 500 km al este del mismo, generando que el origen de
las abscisas en el sistema TME sea de 500,000, generando así un Falso Este.
Sumado a esto, las condiciones generales de la proyección TME se
enumeran a continuación.
Se trata de una proyección conforme, en donde en el plano se
conservan las direcciones y demás cantidades angulares que se
presenta en el elipsoide.
Es un sistema de proyección local, destinado para la representación
de propiedades y terrenos ejidales de la República Mexicana.
El MC se establece por medio del promedio de las longitudes de
cada uno de los vértices que conforma el polígono ejidal a
representar, el cual recibe el nombre de Meridiano Central Ejidal
(MCE).
En el plano, el MCE se transforma en un segmento de recta en el
cual el valor de las distancias se conservan (línea isométrica
automecoica), por lo que el factor de escala o de deformación lineal
(L) es 1.
Para evitar abscisas con valores negativos, el MC se traslada a 500
km al este del mismo, generando un falso origen para las abscisas.
Por lo que el valor del origen de la coordenada X será de
500,000.000 “Falso Este”.
El Ecuador será el origen de las ordenadas con un valor igual a 0.
La transformación del MCE y el Ecuador en el plano se dan por
medio de dos líneas rectas, las cuales son perpendiculares entre sí.
En donde el meridiano central se convierte en el eje de las
ordenadas y el Ecuador en el eje de las abscisas.
El resto de meridianos y paralelos en el plano, se convierten en
curvas complejas.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
186
Además de solucionar el inconveniente de distorsión, esta proyección
resuelve uno de los problemas clásicos que se generan en el sistema UTM, el cual
es representar zonas o territorios que se encuentran ubicados geográficamente
entre dos bandas meridianas, esto debido al establecimiento del MCE en la zona
de interés.
En la actualidad el sistema TME es utilizado oficialmente por dependencias
gubernamentales como lo son el Instituto Nacional de Estadística y Geografía
(INEGI), el Registro Agrario Nacional (RAN), Gobiernos Municipales, Estatales y
Federales, así mismo en las diferentes secretarias e instituciones catastrales que
se encargan en el control y monitorio de ejidos.
Para facilitar la conversión de coordenadas del sistema UTM al TME y
viceversa, el INEGI desarrollo el software TMCalc, el cual es una aplicación que
permite realizar la transformación entre las coordenadas geodésicas y veinticinco
diferentes proyecciones cartográficas entre las que se encuentran UTM y TME
(Gómez Moreno, 2003). La aplicación TMCalc base sus algoritmos de
transformación en las fórmulas de transformación que se presentaran en los
siguientes capítulos.
Es importante mencionar que aun cuando este programa tiene disponible la
opción para realizar el cambio entre diferentes datums, no se recomienda su uso
para datos de México, ya que los modelos matemáticos que utiliza no son los
adecuados para nuestro país (ITRF2008, Época 2010.0).

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
187
Fig
. II
I.4
5 P
lan
o e
jid
al e
n la
pro
ye
cc
ión
TM
E.
Fu
en
te:
INE
GI,
20
15
.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
188
3.7.1 Transformación Directa de Coordenadas.
Las fórmulas de transformación directa de la proyección TME se obtendrán
de manera similar que las del sistema UTM, aplicando las modificaciones del
Falso Este y el MCE a las fórmulas de trasformación de la representación GK.
A diferencia de la proyección UTM, el factor de escala en MC de la
proyección TME será la unidad por lo que la única variante que se le añadirá a las
formulas GK será la suma de 500,000 en la coordenada X, además del
establecimiento del nuevo MC.
En primera instancia será viable determinar el valor del MCE, recordando
que este será el meridiano que dividida a la mitad del ejido o la zona de estudio en
cuestión. El MCE se definirá como el promedio de las longitudes geodésicas que
conforman el ejido, por lo que la ecuación para determinar dicho parámetro se
expresara como:
𝐌𝐂𝐄 =∑ 𝝀𝒊𝒊=𝒏𝒊=𝟏
𝒏
Dónde:
𝜆𝑖 = Longitudes geodésicas de cada uno de los vértices perimetrales del ejido.
𝑛 = Número de vértices que conforma el polígono ejidal.
El valor resultante obtenido en esta ecuación será redondeado al minuto
más cercano, esto con el fin de evitar un MCE con cifras decimales en minutos o
segundos.
En base lo anterior se podrá calcular la amplitud meridiana ∆𝜆 de cada
vértice con respecto a este nuevo MC, modificando la formula ya conocida.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
189
∆𝝀 = 𝐌𝐂𝐄 − 𝝀𝐩
Dónde:
𝜆P = Longitud geodésica del vértice o vértices ejidales.
En cuanto a las fórmulas de transformación estas se expresaran de la
siguiente manera.
𝐗 = 𝟓𝟎𝟎, 𝟎𝟎𝟎 + 𝐗𝐆𝐊 𝐘 = 𝐘𝐆𝐊
Las formulas correspondientes a las ordenadas y abscisas de la
representación GK podrán consultarse en los capítulos 3.5.1 y 3.5.2 de este
documento.
3.7.2 Transformación Inversa de Coordenadas.
La obtención de fórmulas de transformación de coordenadas planas del
sistema TME a un sistema geodésico universal, se hará siguiendo el desarrollo
inverso de la proyección UTM, en el cuál para facilitar el proceso de cálculo, se
deberán transformar las coordenadas del sistema UTM al sistema de origen GK.
De acuerdo a lo anterior y recordando que la proyección TME y GK son,
iguales, exceptuando por el origen de las abscisas, para la deducción de las
fórmulas de transformación inversas, solo se despejara el valor del Falso Este,
permaneciendo intacta el valor de la ordenada TME, siendo esta es igual a la
coordenada en Y en el sistema GK.

III. DE LA CONCEPCIÓN GEOMÉTRICA, DEDUCCIONES.
190
Por lo que se tiene lo siguiente.
𝐗𝐆𝐊 = 𝐗 − 𝟓𝟎𝟎, 𝟎𝟎𝟎 𝐘𝐆𝐊 = 𝐘
Con lo anterior se puede determinar que las coordenadas geodésicas de un
punto cualquiera en el elipsoide, mediante las siguientes expresiones.
∆𝛌 = 𝐂𝟏𝐗𝐆𝐊 − 𝐂𝟑𝐗𝐆𝐊𝟑 + 𝐂𝟓𝐗𝐆𝐊
𝟓 − 𝐂𝟕𝐗𝐆𝐊𝟕
𝚽 = 𝚽𝟎 − 𝐃𝟐𝐗𝐆𝐊𝟐 + 𝐃𝟒𝐗𝐆𝐊
𝟒 − 𝐃𝟔𝐗𝐆𝐊𝟔 + 𝐃𝟖𝐗𝐆𝐊
𝟖
𝛌 = 𝐌𝐂𝐄 + ∆𝛌 ∆𝚽 = 𝚽−𝚽𝟎
𝛗 = 𝛗𝟎 + 𝐆𝟏∆𝚽 − 𝐆𝟐(∆𝚽)𝟐 − 𝐆𝟑(∆𝚽)
𝟑
Para obtener el dato preciso de la longitud geodésica es necesario conocer
en primera instancia el valor del MCE.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
191
IV. DE LA INVESTIGACIÓN Y
DESARROLLO DEL
PROYECTO.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
192
4.1 Introducción.
La proyección TM o GK es el pilar fundamental de las proyecciones
cilíndricas conformes que en la actualidad se utilizan para la representación fiel del
esferoide terrestre. No obstante sus fórmulas complejas o algoritmos de
transformación, limitan el uso de este sistema a una franja o zona limitada de la
tierra, debido a que más allá de los límites geográficos de dichas zonas la
deformación geométrica y precisión del dato geográfico pierden toda veracidad.
Es por esta circunstancia y mediante tratados internacionales varias
naciones se sujeten a limitaciones y ajustes para la representación completa de
sus territorios, generando así una subdivisión del territorio para conservar la
precisión y la información geométrica de dichas zonas, siendo una opción alterna
la utilización de otros sistemas proyectivos.
En México esta situación no es la excepción, es por eso que la utilización
de la proyección TM sea despreciada para la representación completa de su
territorio y solo sea empleada para la base de los algoritmos de la proyección UTM
y TME aplicada a zonas pequeñas de dichos territorios. La aplicación de este
sistema de proyección a todo el territorio nacional genera un error de
transformación de coordenadas exageradamente alto siendo la precisión
totalmente nula e inútil para cualquier trabajo cartográfico, geodésico o
topográfico.
Atendiendo a esta problemática y pretendiendo inhibir el error de
transformación entre sistemas de coordenadas asegurando así una precisión
milimétrica para la representación completa de la República Mexicana en la
proyección TM, a continuación se presentan las pruebas, deducciones y
resultados realizados a este sistema proyectivo con el fin de solucionar y
satisfacer dicha situación y los objetivos planteados en este trabajo de
investigación, siendo estas pruebas sustentadas en la teoría y estudios realizados
por el doctor Carlos Enriquez Turiño (2009).

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
193
4.2 Relación entre Amplitud Meridiana y Precisión.
Como se ha visto a lo largo de esta investigación, el sistema de proyección
GK es pilar fundamental de gran parte de las proyecciones transversas cilíndricas
aplicadas al elipsoide, sin embargo desde su concepción hasta hoy en día, las
ecuaciones que estructuran sus fórmulas de transformación han sido motivo de
sinnúmero de estudios, esto con la finalidad de garantizar fidelidad y precisión a la
representación del dato geográfico en la elaboración de cartografía topográfica y
geodésica, provocando así, que sus ecuaciones hayan evolucionado conforme a
cada estudio de investigación realizado.
Realmente las siglas GK se asignan a esta proyección por las primeras
modificaciones realizadas al modelo TM de Lambert, una efectuada por Gauss
(1772) utilizando al elipsoide como modelo matemático de representación terrestre
y la otra hecha por Krüger (1912), siendo esta ultima la más significativa. Posterior
a ellos las formulas se complementarían por las aportaciones de Paul D. Thomas
(1952).
La aportación de Thomas a la proyección GK hace que las fórmulas de
transformación originales aseguren una precisión por debajo del milímetro en una
cobertura de aplicación de 3º de longitud (∆𝜆) con respecto al MC o lo que es lo
mismo, una banda meridiana o huso de 6º de amplitud. Sin embargo dichas
modificaciones no son lo suficiente para satisfacer la necesidad de precisión más
allá de dicho límite geográfico; cabe resaltar que es la aportación más reciente que
haya dejado vestigio sobre la representación, desarrollo y deducción de sus
fórmulas de transformación.
Debido a esto, es que las formulas extendidas de Thomas son las que
conforman la base de los algoritmos de transformación con las cuales trabajan la
mayoría de los softwares comerciales para la elaboración de cartografía digital y
manipulación de datos e información geográfico, así mismo algunas calculadoras
de trasformación geodésica. Siendo la representación de regiones, territorios y en

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
194
la mayoría de casos países enteros, los que sean sometidos al cumplimiento de
las normas geométricas y geográficas que esta proyección demanda, sacrificando
la precisión y representación de los elementos que queden fuera de dicha
cobertura meridiana, es por eso que las instituciones y organizaciones oficiales
para la elaboración de cartografía de cada nación obedezcan y dispongan de
pautas y estándares de representación cartográfica para la resolución de esta
problemática.
La República Mexicana no es la excepción, el INEGI la máxima autoridad
para la elaboración cartográfica señala que dicho sistema sólo puede ser utilizado
para la representación completa del territorio nacional a escala 1:4 000 000. Pero
en la bibliografía consultada, así mismo en los mapas y cartas donde se muestra
toda la extensión territorial de los Estados Unidos Mexicanos, el sistema
proyectivo GK no aparece como referencia, siendo la proyección Cónica Conforme
de Lambert (CCL) con dos paralelos tipo o de contacto la más utilizada.
Retomando, la problemática de precisión en el sistema GK reside en el
número de términos y coeficientes exponenciales (η, t) que conforman sus
fórmulas de transformación, mismos que de igual manera que el efecto de
distorsión geométrica, son directamente proporcional a la distancia que se
encuentre alejado el punto de estudio del MC.
Esta teoría es afirmada por Hernández López (2009) y Mena Barrios (2008),
el cual menciona que; “Cuanto mayor sea la separación de un punto P(φ, λ) con
respecto al meridiano central, mayor ha de ser el número de términos en las
fórmulas de transformación, ya que las distorsiones de la proyección se
incrementan con el diferencial de longitud (∆λ).”
Dichos términos son resultado de las derivadas de orden superior que
surgen del desarrollo de la serie de Taylor aplicada a las funciones complejas de
origen que plantea el procedimiento de deducción. Las fórmulas de trasformación
para ambos casos tienen fundamento en el método numérico de la serie de Taylor,

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
195
donde la precisión deseada dependerá directamente de las aproximaciones de la
función 𝑓(Φ) (proceso directo) y F(𝑦) (proceso inverso) por medio de polinomios,
a través de una serie infinita de potencias, los cuales representan el
comportamiento de aproximación de la función un punto dado, dicho de manera
sencilla, entre mayor sean las aproximaciones más veracidad y precisión tendrá el
resultado final.
Para el sistema GK la precisión de sus coordenadas será directamente
proporcional al número de derivadas que conformen la serie de Taylor en conjunto
del valor de ∆λ del punto de estudio, pero debido a que la función de origen es
una función transcendente, el resultado algebraico de cada derivada aumentara de
acuerdo al orden de dicha derivada (polinomios cada vez más exagerados).
En sí el factor problema en la obtención de las ecuaciones adecuadas que
aseguren una precisión milimétrica en cualquiera de sus dos casos depende
directamente de la resolución algebraica de las derivadas consecutivas que
conforman la Serie de Taylor de las funciones complejas 𝑓(Φ) y F(𝑦), el cual
permite representar dichas derivadas en ecuaciones polinómicas simples. Esta
situación aunada al escaso avance tecnológico, es lo que limitó a Gauss en su
desarrollo de fórmulas completas para una cobertura meridiana adecuada, sin
embargo Louis Krüger realiza el complemento a las formulas mediante el cálculo
de la sexta derivada para ambos casos de trasformación.
Las fórmulas que conforman los algoritmos de Krüger tienen fundamento en
el teorema de Taylor aproximando el valor de sus coordenadas con la derivada de
orden séptimo de las funciones previamente señaladas, sus ecuaciones aseguran
una precisión de 0.00001” en un amplitud de ∆λ 1º 30” a 6º que traducida en
metros es igual a 0.003 m. Sin embargo y como se explicaba en la reseña
histórica, Lee y Redfearn re calculan las fórmulas de Krüger siendo Thomas el
que da veracidad a estos términos, agregando una derivada más a la serie Taylor
mediante un nuevo método de derivación.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
196
Redfearn (1948) y Thomas (1952) derivan fórmulas idénticas, que extienden
(un poco) las ecuaciones de Krüger, y la actualización de la notación y
formulación. Estas son consideradas como el estándar para las transformaciones
entre el elipsoide y la proyección TM (Intergovernmental Committe on Surveying
and Mappin, 2009).
Para obtener el índice de error generado por los algoritmos existentes
Deakin, Hunter y Karney (2011) realizan una comparativa de precisión obtenida
por las fórmulas de Krüger en su forma directa y los algoritmos de Thomas y
Redfearn en su forma inversa, aplicado a una latitud de 75º y una amplitud de 6º,
10º, 15º, 20º, 30º y 35º de longitud, tomando como MC al meridiano 45º.
Punto Gauss – Krüger
(Directo) Thomas – Redfearn
(Inverso)
Error de Transformación
en M.
φ = 75° X = 173137.521 φ = 75°00′00.0000" 0.001
∆λ = 6° Y = 8335703.234 ∆λ = 5°59′59.9999"
φ = 75° X = 287748.837 φ = 75°00′00.0000" 0.027
∆λ = 10° Y = 8351262.809 ∆λ = 9°59′59.9966"
φ = 75° X = 429237.683 φ = 75°00′00.0023" 1.120
∆λ = 15° Y = 8381563.943 ∆λ = 14°59′59.8608"
φ = 75° X = 567859.299 φ = 75°00′00.0472" 16.888
∆λ = 20° Y = 8423785.611 ∆λ = 19°59′57.9044"
φ = 75° X = 832650.961 φ = 75°00′03.8591" 942.737
∆λ = 30° Y = 8543094.338 ∆λ = 29°58′03.5194"
φ = 75° X = 956892.903 φ = 75°00′23.0237" 4900.000
∆λ = 35° Y = 8619555.491 ∆λ = 34°49′57.6840"
Tabla IV.1 Comparación de algoritmos de transformación, GK – Thomas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
197
En la elaboración de la cartografía nacional a escala 1:4 000 000, el INEGI
basa sus cálculos en los algoritmos amplificados de Thomas, donde la
representación del territorio completo lleva consigo un error de desplazamiento en
transformaciones de casi 3 m, esto debido a que la amplitud meridiana en la que
el país se localiza es aproximadamente de 33º de longitud, promoviendo una
insuficiencia en estudios geodésicos ligados a esta proyección.
Realizando una prueba de conversión con los algoritmos completos de
Thomas aplicados a un valor ∆λ de 16º 30’ de longitud y sobre el paralelo 33º y
tomando el meridiano 102º W como MC, siendo estos los valores máximos para el
territorio mexicanos, se tiene lo siguiente:
Punto φ = 33° ∆λ = 16°30′ MC = 102°
∆𝛌 ∙ 𝒇′(𝚽) ∆𝛌𝟐 ∙ 𝒇′′(𝚽) ∆𝛌𝟑 ∙ 𝒇′′′(𝚽) ∆𝛌𝟒 ∙ 𝒇𝟒(𝚽)
1541978.0433 120925.6054 8739.9402 2716.3177
∆𝛌𝟓 ∙ 𝒇𝟓(𝚽) ∆𝛌𝟔 ∙ 𝒇𝟔(𝚽) ∆𝛌𝟕 ∙ 𝒇𝟕(𝚽) ∆𝛌𝟖 ∙ 𝒇𝟖(𝚽)
-107.6974 42.6791 -6.8509 0.1941
𝐒 3652748.0430 X= 1550603.43519 Y= 3776432.8395
Tabla IV.2 Transformación directa GK.
Aplicando la transformación con estos valores.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
198
Punto X= 1550603.43519 Y= 3776432.8395 MC = 102°
∆𝛌 ∙ 𝐅′(𝒚) ∆𝛌𝟐 ∙ 𝐅′′(𝒚) ∆𝛌𝟑 ∙ 𝐅′′′(𝒚) ∆𝛌𝟒 ∙ 𝐅𝟒(𝒚)
16°48′24.82444" −01°22′57.11414" −00°19′03.38952" 00°03′09.77868"
∆𝛌𝟓 ∙ 𝐅𝟓(𝒚) ∆𝛌𝟔 ∙ 𝐅𝟔(𝒚) ∆𝛌𝟕 ∙ 𝐅𝟕(𝒚) ∆𝛌𝟖 ∙ 𝐅𝟖(𝒚)
00°00′40.25028" −00°00′08.13678" −00°00′01.75891" 00°00′00.38121"
𝐒 ∆𝚽 ∙ 𝐅′(𝒚) ∆𝚽𝟐 ∙ 𝐅′′(𝒚) ∆𝚽𝟑 ∙ 𝐅′′′(𝒚)
3652748.0430 −01°06′28.25337" −00°00′26.36055" 00°00′00.13150"
∆𝛌 𝟏𝟔°𝟐𝟗′𝟓𝟗. 𝟗𝟐𝟔𝟑𝟎" 𝛗 𝟑𝟑°𝟎𝟎′𝟎𝟎. 𝟎𝟏𝟏𝟎𝟎"
Tabla IV.3 Transformación Inversa GK.
Siendo los errores.
Errores angulares Errores en proyección.
∆𝛌 −𝟎𝟎. 𝟎𝟕𝟑𝟕𝟎" 𝐗 𝟐. 𝟐𝟕𝟗𝟎 𝐦
𝛗 𝟎𝟎. 𝟎𝟏𝟏𝟎𝟎" 𝐘 𝟎. 𝟑𝟒𝟎𝟏 𝐦
Tabla IV.4 Errores de cálculos entre transformaciones.
Se aprecia que para la transformación directa el valor de cada producto
comienza a disminuir de forma gradual siendo el producto de ∆λ 8 por la octava
derivada el que arroja un resultado de aproximación muy cercano a 0.20 m, lo que
quiere decir que si la serie infinita se extendiera un poco más, los términos
siguientes asegurarían resultados por debajo o aproximados al milímetro. Lo
mismo ocurre con el proceso inverso, pero este representado en grados, minutos
y segundos, donde la sumatoria de dichos valores se aleja demasiado de las
coordenadas geodésicas de origen, donde el valor inverso de ∆λ sea el más
castigado.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
199
Con esta prueba es como se da por cierta la teoría de precisión estipulada
por David Hernández y Mena Barrios, de manera que se puede concretar que el
número derivadas ligado a la amplitud de meridiana que existe entre el punto de
estudio y el MC aseguran la precisión de las coordenadas en cualquiera de sus
dos sistemas.
Los algoritmos de Thomas aseguran una precisión de ± 1 mm en una
banda meridiana de 6º de longitud, esta razón es la que propicia que sus fórmulas
sean truncadas sin que se pierda la precisión alcanzada, esto debido a que en la
evaluación, varios de sus términos arrojan cantidades lo suficientemente
pequeñas para ser despreciadas. Para motivos geodésicos y topográficos las
fórmulas de transformación son suficientes hasta los términos con índice 5 y 6
para cálculos donde ∆λ sea menor a 3° de longitud. Cuando se extiende la
proyección poco más de los 3° es conveniente utilizar hasta los términos con
índice 7 y 8.
Las fórmulas pueden contener expresiones que numéricamente
acondicionadas hacen que la precisión se pierda. Esta pérdida de precisión es de
poca importancia si los errores de truncamiento son del mismo orden. Sin
embargo, en el intento de minimizar los errores numéricos, se necesita un medio
preciso para la cuantificación de los errores de truncamiento y redondeo (F.
Karney, 2011).
Esta estandarización es la que promueve que la labor de las instituciones
geográficas (incluyendo al INEGI) en el desarrollo de cartografía se límite a la
expansión de los algoritmos de transformación para la cobertura completa de los
territorios correspondientes a sus naciones, cayendo en un zona de confort en la
cual se adoptan sistemas proyectivos alternativos internacionales, o en muchos
casos poniendo como interferencia el creciente valor de deformación geométrica o
factor de escala en las zonas que se encuentren más allá de los 6º de ∆λ. Los
algoritmos aplicados en México utilizan las fórmulas completas de Thomas para la

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
200
proyección TM o GK sin embargo para las proyecciones UTM y TME estos se
truncan hasta la sexta potencia de los coeficientes η y t.
Además de esto, otro factor detonante para al desarrollo de nuevos
algoritmos, es que los softwares y calculadoras de trasformación carto-geodésica
existentes, no soportan un cálculo el cual permita una expansión conveniente a las
series de Taylor, mismas que aseguren un error de cálculo y aproximación no
mayor al milímetro o en el peor de los casos él. Aunque hoy en día la existencia de
súper servidores ya son una realidad, estos no pueden ser aprovechados para la
solución a este inconveniente, debido a que el acceso a ellos, está limitado a
operaciones y tareas especiales y no para la elaboración de cartografía, por lo que
los usuarios e instituciones utilizan softwares comerciales o desarrollan sus
propias calculadoras con los algoritmos existentes.
Algunos autores han tratado de dar solución a esta problemática
desarrollando fórmulas de trasformación alternas fundamentadas en las
ecuaciones de Thomas pero estas descartan la idea de amplificación de las series
de Taylor como es el caso de Lee (1945) y Karney (2011), siendo este último el
que ofrece un algoritmo que permite obtener precisiones del orden del nanómetro
para la transformación de coordenadas, por lo que las investigaciones existentes
solo se limitan a solo mencionar dicho problema.
Sin embargo una de las investigaciones más recientes que se aproxima a la
solución de este problema fue realizada por el Doctor español Carlos Enríquez
Turiño en el año 2009, en su trabajo de tesis Doctoral el desarrolla y explica un
método matemático con el cual permite conocer el número de términos,
coeficientes exponenciales y derivadas consecutivas necesarias para asegurar
una precisión deseada en función del ancho de zona, ∆λ y de la latitud.
Turiño basa su investigación en la teoría de proyecciones conformes
analíticas, las cuales como ya se ha mencionado admiten un desarrollo en serie
para aproximar sus valores a un valor óptimo. En su trabajo Turiño omite el

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
201
desarrollo de los extensos polinomios que conforman las derivadas de la serie de
Taylor sólo presentando los términos adecuados para una amplitud meridiana de
3º a 70º con respecto a un máximo de latitud de 80º. Para realizar esto, él recurrió
al álgebra simbólica acompañada de softwares de manipulación algebraica para
sustentar su hipótesis.
Las pruebas realizadas por el doctor español fueron tomando como valor
mínimo ∆λ el de 3º (siendo que en este las fórmulas de Thomas son
exageradamente precisas) el cual fue incrementando de la siguiente manera: 5º,
10, 15, 20º, 25º, 30º, 40º, 50º, 60º y 70º, en cuanto a la latitud sus pruebas
comprendieron el ecuador 0º como inicio de las latitudes mismas que fueron
aumentando cada de 10 grados hasta llegar al paralelo 80º. Dichos cálculos
fueron realizados utilizando los parámetros geométricos del elipsoide WGS 84.
Con estas experimentaciones Turiño especifica los términos suficientes
para alcanzar una precisión que va del decámetro hasta el milímetro en relación
de las latitudes y ya señaladas.
𝛗 ∆𝛌
3 5 10 15 20 25 30 40 50 60 70
0 5 7 9 11 13 15 17 25 33 51 89
10 6 7 9 11 12 16 18 23 33 49 85
20 6 6 9 11 13 15 18 24 32 46 77
30 6 7 9 11 12 14 17 22 30 43 66
40 5 7 8 10 12 13 16 21 27 38 56
50 5 6 8 10 12 14 15 20 25 34 46
60 5 6 8 9 10 13 14 17 23 28 38
70 5 6 7 9 10 12 12 16 20 24 29
80 5 5 7 8 9 10 10 14 16 19 21
Tabla 1.0 Número de términos necesarios para la proyección Gauss-Krüger en función de ∆𝛌 Fuente: Enriquez Turiño, 2009.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
202
Comparando los resultados de la tabla anterior con el valor máximo de ∆λ y
el paralelo más alejado en que el territorio Mexicano se extiende, se deduce que
los términos necesarios para asegurar una precisión milimétrica para la
representación completa de este territorio se encuentran sobre el desarrollo de las
derivadas hasta el orden doce de la serie de Taylor para ambos métodos de
transformación.
Debido a que en su investigación Turiño no presenta ninguna de estas
derivadas, en esta tesis se realizara el desarrollo completo de cada una ellas
mediante diferentes metodologías siendo la utilización del software matemático
Wolfram Mathematica® Versión 10.0 el principal sustento que de veracidad de los
cálculos y la teoría ya señalada.
En síntesis las fórmulas de GK serán expandidas hasta el orden doce de las
derivadas que conforman las series de Taylor en sus procesos directos e inversos
con el fin de asegurar precisiones milimétricas en la representación completa de la
República Mexicana.
4.3 De la Zona de Estudio.
Conocida la problemática que se sitúa entre la precisión y las fórmulas de
transformación para la representación GK o proyección TM, será de carácter
obligatorio mencionar los aspectos geográficos elementales y demás
características que envuelvan, conforman y sean consideradas importantes de la
zona de estudio, siendo esta en la cual se realizaran las pruebas correspondientes
que den veracidad al cumplimiento a la hipótesis ya planteada y su posible
solución.
De esta manera y para poder profundizar en el tema que este proyecto de
investigación tiene como prepósito, en este bloque se compilara toda la
información geográfica relevante y existente acerca de la República Mexicana, así
mismo de las normativas, elementos y características técnicas oficiales para el

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
203
desarrollo de cartografía y todos sus derivados en este país, mismas que serán el
principal de sustento para el pleno desarrollo de este proyecto.
4.3.1 Ubicación Geográfica.
La República Mexicana, República de México o comúnmente llamada
México, es uno de los países más importantes de América del Norte en cuanto su
biodiversidad, economía y cultura que ofrece, así mismo es uno de los países más
poblados del habla hispana.
La República Mexicana de manera oficial recibe el nombre de Estados
Unidos Mexicanos la cual se sitúa en el hemisferio occidental, sobre el continente
americano. Desde el punto de vista geográfico-político la República Mexicana se
localiza en América del Norte y por su situación geográfica pertenece tanto a la
porción norte del continente como a Centroamérica, considerando que la
Cordillera Neo volcánica es el límite entre estas dos porciones continentales
(Pereña García, 2011).
Así mismo y desde el punto de vista cultural México forma parte de América
Latina; su frontera norte, que se extiende a lo largo de más de 3 100 km, se
convierte en el punto de contacto entre esta región y la América anglosajona. Por
lo que se puede decir que la República Mexicana es el país más septentrional de
América Latina.
El territorio que comprende la República Mexicana cuenta con una
superficie de 1.9 millones de kilómetros cuadrados aproximadamente, el cual
según datos del INEGI, se extiende entre los paralelos 14° 32’ 27” latitud norte en
la desembocadura del río Suchiate y el paralelo 32° 43’ 06” que pasa por la
confluencia del río Gila con el Colorado en el Monumento 206, que es el punto
más al norte; así mismo está comprendido entre las longitudes oeste de
Greenwich de 118° 27’ 24” en la Punta Roca Elefante de la Isla de Guadalupe y

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
204
86° 42’ 36” correspondiente al extremo sureste de la Isla Mujeres (Coordenadas
extremas).
Las coordenadas anteriores enmarcan el territorio continental y marítimo
mexicano sin embargo, dada las subdivisiones que existen en estas porciones de
terreno es preciso mencionar los puntos extremos para cada uno de ellos.
El territorio continental Mexicano comparte los mismos puntos extremos
norte y sur que los puntos extremos oficiales designados para el país, por lo que
los puntos extremos continentales este y oeste son diferentes a los ya
mencionados. Entonces el punto este más extremo es aquel que se localiza muy
cerca de la laguna Nichupté en la ciudad de Cancún, Quintana Roo, cuyas
coordenadas son 21º 8’ 17” latitud norte y 86º 44’ 27” longitud oeste, mientras que
para el punto oeste, se ubica muy próximo a la ciudad de Tijuana, Baja California
teniendo como coordenadas geográficas las siguientes: 32º 39’ 8” latitud norte y
117º 07’ 33” longitud oeste.
Para la parte del territorio nacional que contempla la zona marítima, la Zona
Económica Exclusiva de México (ZEEM) es aquella que envuelve al territorio
continental siendo a su vez la más alejada geográficamente, donde sus puntos
extremos son demarcados en el decreto presidencial que fija al límite exterior de
dicha zona (DOF:07/06/1976), el cual estipula que la ZEEM se extiende entre los
paralelos 11º 58’ 07.07” y 32º 35’ 22.11” latitud norte ambos ubicados en el
Océano Pacifico; y sobre los meridianos 122º 10’ 13.50” longitud oeste ubicado en
el Océano Pacifico y 84º 02’ 46.50” longitud oeste ubicado en el Mar Caribe.
En la siguiente tabla se describen las coordenadas extremas de cada zona.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
205
Coordenadas Extremas Oficiales
Latitud Longitud
G M S Zona G M S Zona
14º 32' 27” N 86º 42' 36” W
32º 43' 06” N 118º 27' 24” W
Coordenadas Extremas Continentales
Latitud Longitud
G M S Zona G M S Zona
14º 32' 27” N 86º 44' 27” W
32º 43' 06” N 117º 07' 33” W
Coordenadas Extremas ZEEM
Latitud Longitud
G M S Zona G M S Zona
11º 58' 07”.70 N 84º 02' 46”.50 W
32º 35' 22”.11 N 122º 10' 13”.50 W
Tabla IV.5 Coordenadas extremas de la república mexicana.
Fig. IV.1 Coordenadas extremas de la República Mexicana. Rojo – Oficiales, Naranja – Continentales, Verde – ZEEM. Fuente: INEGI, 2015.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
206
Además de esto, el territorio mexicano está localizado en la zona
intertropical, el cual es delimitado por el cruce del Trópico de Cáncer, este hecho,
junto con la accidentada orografía, determina una gran variedad de climas y
paisajes que, asociados a la historia geológica del subsuelo, han dado lugar a una
amplia diversidad de recursos naturales, que a su vez han condicionado el
desarrollo de las actividades económicas en determinadas zonas, la estrategia y
tendencia comercial que el país ha ido adoptando y sobre todo, determinado la
historia económica, social y política de México.
4.3.2 Límites y Fronteras.
Dada su ubicación geográfica la Republica de México cuenta con límites
terrestres y marítimos que se podrían clasificar como naturales y artificiales. En los
límites naturales se encuentran los mares, ríos, océanos y montañas, mientras
que para los artificiales se tienen los linderos trazados que obedecen a Tratados
Internacionales (Díaz Alonso, 2002).
Según datos oficiales obtenidos de la Secretaría de Gobernación (SEGOB)
y el INEGI las cuatro fronteras internacionales con las que cuenta México son las
siguientes:
► El territorio nacional limita al norte con los Estados Unidos de
América, sobre los cuales se extiende una línea fronteriza a lo largo
de 3152 km, desde el Monumento 258 al noroeste de Tijuana hasta
la desembocadura del Río Bravo en el Golfo de México. El Río
Bravo, también conocido como Río Grande, cubre el 70.4% de esta
línea divisoria internacional. Asimismo, forman parte de esta frontera
el Río Colorado y 258 monumentos principales, 18 auxiliares y 442
mojoneras.
► Al sur colinda con las Repúblicas de Guatemala y Belice, donde una
línea fronteriza de 956 km se levanta con Guatemala, definida por los
ríos Suchiate, Usumacinta y Chixoy, el volcán Tacaná, los cerros

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
207
Buenavista e Ixbul, así como las líneas imaginarias señaladas por
monumentos o cercas. Con Belice existe una línea divisoria de 193
km, definida por la Bahía de Chetumal, el Río Hondo, el Arroyo Azul
y el meridiano Garbutt. Sin incluir los 85.26 km de límite marítimo
generados por la Bahía Chetumal.
► En la zona Este, está delimitada por el océano Atlántico, el Golfo de
México y la porción que se conoce con el nombre del mar de las
Antillas. Estos mares se unen por medio del estrecho canal de
Yucatán que se encuentra entre la isla de Cuba y la península de
Yucatán.
► Y finalmente en el oeste limita con el Océano Pacífico y el golfo de
California o Mar de Cortés con la presencia de la península de la
Baja California, paralela en lo general a la línea costera.
Los límites internacionales fueron definidos por una serie de líneas trazadas
astronómicamente y materializadas en el terreno mediante monumentos que están
fijados por levantamientos realizado por la Comisión Internacional (INEGI,
Referencias Geográficas y Extensión Territorial de México, 2015), mientras que los
linderos naturales fueron estipulados mediante acuerdos y tratados
internacionales desde la fundación de la República Mexicana.
De acuerdo a lo que menciona Coll-Hurtado (2000), los límites marinos
proporcionan al país 10 mil kilómetros de litoral. El hecho de estar localizado entre
los dos mayores océanos permite al país contar con abundantes recursos
pesqueros y minerales, así como tener la posibilidad de ampliar sus rutas
comerciales, sobre todo cuando se toma en consideración que la distancia entre el
Atlántico y el Pacífico en el Istmo de Tehuantepec es de tan solo poco más de 200
kilómetros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
208
Fig. IV.2 Límites fronterizos de la República Mexicana. Fuente: INEGI, 2015.
4.3.3 Extensión Territorial.
Los Estados Unidos Mexicanos cuenta con una extensión territorial de
5’114,295 km2 mismo que se integra por una superficie continental, marítima e
insular y está distribuido casi por partes iguales, a ambos lados del trópico de
Cáncer. El perímetro del país es de 15,518 km, de los cuales 11,208 km son
litorales y 4,310 km fronteras.
Según el artículo 42 de la Constitución Política de México especifica que el
país está integrado por entidades federativas; islas, arrecifes y cayos en los mares
adyacentes; las islas Guadalupe y Benito Juárez; la plataforma continental y los
zócalos submarinos; las aguas de los mares territoriales y los mares interiores, y el
espacio aéreo situado sobre el territorio nacional.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
209
De acuerdo a lo anterior, el territorio nacional correspondiente a la zona
continental cuenta con una superficie de 1’958,248 km2 y 5’127 km2 de superficie
insular, siendo esta última distribuida en más de tres mil islas que se encuentran
en la ZEEM, además de las que se localizan en los ríos, lagos, lagunas y presas.
En el recuento de territorio insular se incluyen islas pequeñas, islotes, cayos o
rocas que no tienen nombre y se identifican por sus coordenadas geográficas.
Entre ellas destacan los archipiélagos de Revillagigedo (Socorro, Clarión, San
Benedicto, Roca Partida), y las islas Marías, en el Pacífico; las islas de
Guadalupe, Cedros, Ángel de la Guarda, Coronado, Rocas Alijos, Isla del Tiburón,
Isla del Carmen, frente a la península de Baja California y la costa de Sonora; y las
de Ciudad del Carmen, Cozumel, Mujeres, y el arrecife Alacranes, en la cuenca
atlántica.
La zona marítima nacional o también conocida como Mar patrimonial, tiene
su fundamento según la Ley Federal del Mar proclamada en 1986, y está
constituido por el mar territorial, la zona contigua y la zona económica exclusiva,
las cuales se describen a continuación:
Mar Territorial. Constituye la franja del mar adyacente a las costas
nacionales, sean continentales o insulares, en la cual la Nación ejerce
soberanía, incluyendo el lecho y subsuelo de ese mar, así como el espacio
aéreo supra yacente. La anchura es de 12 millas náuticas (22,224 m),
medidas a partir de la línea de base, sean normal o rectas o una
combinación de las mismas. La superficie del Mar Territorial Mexicano,
adyacente al continente, es de 231,813 km2.
Zona Contigua. Es una zona adyacente al mar territorial con una
superficie de 200,855 km2, que se extienden hasta las 24 millas náuticas
(44,448 m), contadas a partir de las líneas de base, de las cuales se mide la
anchura del Mar Territorial.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
210
La Zona Económica Exclusiva de México (ZEEM). Es un área situada
más allá del mar territorial y adyacente a éste. Comprende la franja de mar
que se mide desde el límite exterior del mar territorial hasta una distancia
máxima de 300 millas náuticas (684.5 km) mar adentro, contadas a partir de
la línea base desde la que se mide la anchura de éste, en la cual se
extienden 2’717,252 km2. El límite interior de la ZEE coincide idénticamente
con el límite exterior del Mar Territorial. En esta zona la Nación ejerce
derechos de soberanía para fines de exploración y explotación económica,
es decir, es una zona donde los barcos mexicanos pueden circular
libremente con fines de transporte o para aprovechar sus recursos
naturales.
La ZEEM se adoptó por decreto presidencial el 26 de enero de 1976,
según el párrafo 8º del artículo 27 constitucional, en donde se habla de
dicha zona fuera del mar territorial, pero adyacente a este, y sobre el cual el
Estado ejercerá los derechos de soberanía y las jurisdicciones que
determinen las leyes del Congreso para fines de exploración y explotación
económicas.
Resumiendo, las porciones territoriales de la República Mexicana se
muestran en el siguiente mapa y cuadro.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
211
Porción Superficie (Km2)
Continental. 1’959,248
Insular 5,127
Zona Terrestre 1’964,375
Mar Territorial 231,813
Zona Contigua 200,855
ZEEM 2’717,252
Zona Marítima 3’149,920
Superficie Total. 5’114,295
Tabla IV.6 Extensión territorial de la república mexicana. Fuente CONABIO 2015.
En América, México ocupa el 5° lugar en extensión territorial y el 3° por el
número de sus habitantes. Es casi 5 veces menor que Canadá, cuatro veces
inferior a Brasil, cuatro y media veces menor que Estados Unidos y con área un
tercio menor a la de Argentina; mientras que podría encerrar diecisiete veces a
Guatemala dentro de sus fronteras, dos veces a Venezuela, casi tres veces a
Chile, cuatro veces a Paraguay y cuatro veces a Ecuador.
Puede afirmarse que México queda comprendido en el grupo de países de
extensión superficial mediana y por su población, en el grupo de naciones también
de mediana población absoluta (INEGI, Referencias Geográficas y Extensión
Territorial de México, 2015).

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
212
Fig. IV.3 Extensión territorial de la República Mexicana. Fuente: INEGI, 2015.
4.3.4 División Política.
Por decreto constitucional, la forma de gobierno de los Estados Unidos
Mexicanos es una república representativa y federal y democrática conformada
por estados libres y soberanos, según reza en su constitución. Es un régimen
presidencialista en el que el presidente, es jefe de Estado y de gobierno al mismo
tiempo.
El gobierno de la República Mexicana está integrado por 32 entidades
federativas, de las cuales 31 son estados y la restante es un Distrito Federal
donde se encuentra la sede de los Poderes de la Unión. Cada uno de esos
estados se divide territorial y políticamente en municipios, además de que, con
base en el principio del federalismo, en los artículos 115 y 116 de la Constitución
se establece que “adoptaran para su régimen interior la forma de gobierno
republicana, representativa y popular”, y de su poder público “se dividirá, para su

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
213
Fig. IV.4 División política de los Estados Unidos Mexicanos. Fuente: INEGI, 2015.
ejercicio, en Ejecutivo, Legislativo y Judicial”. Pero aun cuando los estados de la
República son autónomos, puesto que pueden dictar su propia constitución y
elegir su propio gobierno, el pacto federal los obliga a subordinarse a la
Constitución general y al gobierno de la Unión. En cuanto al Distrito Federal,
dividido en Delegaciones, su gobierno es ejercido directamente por un Jefe de
Gobierno del Distrito Federal (Delgado de Cantú, 2003).
En el INEGI se utilizan con fines censales los límites geoestadísticos y no
los político administrativos.
A continuación se presenta el cuadro y mapa de la división política de
México incluyendo las extensiones territoriales de las diferentes entidades
federativas y sus respectivas coordenadas geográficas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
214
No. Entidad
Federativa Ciudad Capital.
Coordenadas Superficie (Km2) Latitud Longitud
1. Aguascalientes Aguascalientes 22º01’18” N 102º21’23” W 5,589
2. Baja California Mexicali 29º57’00” N 115º07’00” W 70,113
3. Baja California
Sur La Paz 25º50’46” N 111º58’22” W 73,677
4. Campeche Campeche 18º50’11” N 90º24’12” W 51,833
5. Coahuila de
Zaragoza Saltillo 27º18’08” N 102º02’41” W 151,571
6. Colima Colima 19º05’48” N 103º57’39” W 5’455
7. Chiapas Tuxtla Gutiérrez 16º24’36” N 92º24’31” W 73,887
8. Chihuahua Chihuahua 28º48’51” N 106º26’22” W 247,087
9. Distrito Federal Ciudad de México 19º25’10” N 99º08’44” W 1,499
10. Durango Victoria de Durango
24º56’05” N 104º54’43” W 73,677
11. Guanajuato Guanajuato 21º01’08” N 101º15’46” W 30,589
12. Guerrero Chilpancingo de
Bravo 17º36’47” N 99º57’00” W 63,794
13. Hidalgo Pachuca de Soto 20º28’42” N 98º51’49” W 20,987
14. Jalisco Guadalajara 20º34’00” N 103º40’35” W 80,137
15. México Toluca de Lerdo 19º21’15” N 99º37’51” W 21,461
16. Michoacán de
Ocampo Morelia 19º10’07” N 101º53’59” W 59,864
17. Morelos Cuernavaca 18º44’51” N 99º04’31” W 4,941
18. Nayarit Tepic 21º44’38” N 105º13’32” W 27,621
19. Nuevo León Monterrey 25º34’00” N 99º58’14” W 64,555

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
215
20. Oaxaca Oaxaca de
Juárez 16º53’53” N 96º24’51” W 95,364
21. Puebla Heroica Puebla
de Zaragoza 19º00’13” N 97º53’18” W 33,919
22. Querétaro de
Arteaga Santiago de Querétaro
20º35’28” N 100º23’28” W 11,769
23. Quintana Roo Chetumal 19º36’00” N 87º55’00” W 50,350
24. San Luis Potosí San Luis Potosí 22º36’12” N 100º25’47” W 62,848
25. Sinaloa Culiacán Rosales 25º00’10” N 107º30’10” W 58,092
26. Sonora Hermosillo 29º38’46” N 110º52’08” W 184,934
27. Tabasco Villahermosa 17º58’20” N 92º35’20” W 24,661
28. Tamaulipas Ciudad Victoria 24º17’14” N 98º33’48” W 79,829
29. Tlaxcala Tlaxcala de Xicohténcatl
19º25’44” N 98º09’39” W 3,914
30. Veracruz Llave Xalapa de Enríquez
19º11’25” N 96º09’12” W 72,815
31. Yucatán Mérida 20º50’00” N 89º00’00” W 39,340
32. Zacatecas Zacatecas 23º17’34” N 102º42’02” W 75,040
Tabla IV.7 Entidades federativas de los estados unidos mexicanos. Fuente INEGI 2015.
4.3.5 Husos Horarios.
Con la finalidad de establecer un sistema de tiempo general y puesto que la
tierra gira alrededor de su eje en un lapso aproximado de 24 horas, por acuerdos
internacionales se establecieron 24 zonas o husos horarios, mismos que tiene una
amplitud meridiana de 15º de longitud, donde cada huso cuenta con un Meridiano
Central (MC). El MC de cada huso horario determina la hora para toda esa franja
meridiana, siendo estos referidos al meridiano de Greenwich o meridiano 0º y
puesto que la tierra gira en sentido oeste-este provoca que en los husos horarios

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
216
orientales sea más tarde, mientras que para los occidentales sea más temprano
(INEGI, Datos Básicos de la Geografía de México, 1991).
La Ley de husos horarios, publicada en el DOF el día 29 de diciembre del
2001, establece la Hora Oficial en un punto determinado del territorio nacional en
función de la posición geográfica. Así mismo, define las zonas horarias y la forma
en que se relaciona la hora en cada zona con la hora del meridiano cero. Cabe
indicar que la hora del meridiano cero está determinada por la escala de tiempo
denominada Tiempo Universal Coordinado, UTC. Es oportuno indicar que la
escala de tiempo UTC es generada por la Oficina Internacional de Pesas y
Medidas (BIPM), que es una escala de tiempo para propósitos científicos y que es
virtual (no existe una señal física asociada a dicha escala). En México la
realización física del UTC está a cargo del Centro Nacional de Metrología la cual
es denominada UTC (CNM).
El territorio de México queda cortado por tres husos horarios, 90º, 105º y
120º. Por mucho tiempo se cumplió esta convención, pero observando los
inconvenientes que su aplicación producía, se resolvió que la mayor parte del país
adoptara el tiempo del meridiano de 90° W y únicamente los estados de Sonora,
Chihuahua, Sinaloa, Nayarit y Baja California Sur se rigieran por el tiempo del
meridiano 105°, una hora menos que el de 90º (tiempo que sigue vigente)
Asimismo Baja California adoptó el tiempo del meridiano 120°, dos horas menos
que el de la mayor parte del país (funcionando así hasta la fecha).
La Hora Oficial en los Estados Unidos Mexicanos es la materialización de
las escalas de tiempo que rigen en el territorio nacional y corresponden a la
realización del UTC en nuestro país. El CENAM, como lo indican sus atribuciones
en la LFMyN, establece el patrón nacional de escalas de tiempo, u hora oficial, y la
Secretaría de Economía lo reconoce como tal (publicación del DOF del lunes 4 de
junio del 2007), en virtud de la atribución que la LFMyN le otorga. La Hora Oficial
en los Estados Unidos Mexicanos está definida en términos del UTC (CNM) de
acuerdo a las siguientes relaciones:

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
217
Fig. IV.5 Husos horarios y tiempo oficial para la República Mexicana. Fuente: INEGI, 2015.
Tiempo Fórmula Huso
Del Sureste (TS) TS = UTC(CNM) − 5 90º W
Del Centro (TC) TC = UTC(CNM) − N 90º W
Del Pacífico (PC) PC = UTC(CNM) − (N + 1) 105º W
Del Noroeste (PN) PN = UTC(CNM) − (N + 2) 120º W
Tabla IV.8 Husos horarios de la república mexicana. Fuente CENAM 2016.
Donde N es 6 horas para el horario de invierno y 5 horas para el horario de
verano. El Horario de verano se aplica del primer domingo de abril a las 2h00 de la
mañana al último domingo de octubre a las 2h00 de la mañana.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
218
La Hora Oficial de los Estados Unidos Mexicanos se genera en base a la
operación de una serie de relojes atómicos ubicados en el Centro Nacional de
Metrología. La variabilidad de la Hora Oficial es cercana a 0.03 millonésimas de
segundo por año y es independiente de las variaciones en la rotación terrestre
(Secretaría de Economía, 2012).
4.3.6 Autoridad Encargada de la Elaboración de Cartografía
Nacional.
En México el Instituto Nacional de Estadística y Geografía (INEGI) es el
encargado de coordinar el Sistema de Información Geográfica en el país y el
levantamiento de la Cartografía Nacional, aunque existen otras Instituciones como
la UNAM, que a partir de algunos Institutos como el Instituto de Geografía,
Geología y Geofísica, hacen estudios y realizan mapas de muy diversos temas,
además de otras Instituciones y Secretarías como la Defensa Nacional,
SAGARPA, Comunicaciones y Transportes, Servicio Geológico Mexicano, etc.,
que tienen como base la cartografía topográfica del INEGI.
Con la promulgación de la Ley del Sistema Nacional de Información
Estadística y Geográfica (LSNIEG) el 16 de abril de 2008, estipula que el INEGI
cuenta con una personalidad jurídica, adquiriendo autonomía técnica y de gestión,
por lo que dicha institución es un órgano descentralizado con autoridad propia.
Además en el En el Título Segundo de la Ley del Sistema Nacional de
Información Estadística y Geográfica Capítulo I del sistema, artículo 3 se establece
que:
“El Sistema Nacional de Información Estadística y Geográfica, conocido por
sus siglas SNIEG, tiene la finalidad de suministrar a la sociedad y al Estado
Información de calidad, pertinente, veraz y oportuna, a efecto de coadyuvar al
desarrollo nacional.”

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
219
El SNIEG tiene como propósito generar e integrar la información estadística
y geográfica de interés nacional de forma homogénea para todos los participantes
a fin de proporcionar el servicio público de información a todos los sectores de la
sociedad.
Algunos de los principales productos que contienen información geográfica
y que de acuerdo a la Ley rectora del INEGI mencionada anteriormente y que en
el Título primero, Disposiciones Generales se comprende como “el conjunto
organizado de datos espaciales georreferenciados, que mediante símbolos y
códigos genera el conocimiento acerca de las condiciones físico ambientales, de
los recursos naturales y de las obras de naturaleza antrópica del territorio
nacional”
De manera general la información Geográfica se agrupa como se describe
a continuación:
1. Información Topográfica
2. Imágenes de percepción remota
3. Información Geodésica
4. Información de Recursos Naturales
5. Información del Marco Geoestadístico
6. Información Urbana
7. Información Catastral
8. Promoción y Difusión de la Actividad Geográfica
9. Compendios
10. Productos Cartográficos
11. Publicaciones
12. Informes de campo (muestras)
13. Sistemas de Consulta
Entre sus principales productos cartográficos se encuentran, Atlas Nacional,
Cartografía Aeronáutica, Cartografía Geológica, Cartografía Geoidal o

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
220
Gravimétrica, Cartografía Topográfica, Cartografía Hidrológica, Fotografías
Aéreas, Imágenes Satelitales, Mapa Digital de México, Metadatos, Datos LIDAR,
Modelos Digitales de Elevación, entre otros.
4.3.7 Proyecciones y Escalas Cartográficas para la República
Mexicana.
Para establecer las disposiciones mínimas que regulen la correcta edición de la
cartografía topográfica nacional, de modo que se normalicen los formatos y las
escalas de representación de la misma, así como de los elementos y símbolos
cartográficos, el INEGI en el año 2006 expide la Norma Técnica para la Edición de
Cartografía Topográfica (NTG-013-2006), en la cual se redactan las características
y requerimientos necesarios para las proyecciones, escalas, simbología,
nomenclatura, medidas oficiales y demás elementos necesarios para la
elaboración de documentos cartográficos para la República Mexicana.
Esta norma estipula las escalas cartográficas oficiales para la
representación del territorio Mexicano y zonas específicas, mismas que son las
siguientes.
Escalas Cartográficas Oficiales
{
Chicas {
1: 4′000,0001: 1′000,0001: 500,000
Medianas {
1: 250,0001: 100,0001: 50,0001: 20,000
Grandes
{
1: 10,0001: 5,0001: 2,0001: 1,0001: 500

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
221
Esta misma norma designa como proyecciones oficiales para la elaboración
de documentos cartográficos del territorio nacional, las proyecciones UTM, TM o
GK y Cónica Conforme de Lambert (CCL) con dos paralelos tipo, mismas que
deberán cumplir las siguientes especificaciones:
Proyección Universal Transversa de Mercator (UTM).
► Elipsoide de referencia Geodetic Reference System de 1980
(GRS 80), especificado en la Norma Técnica NTG-001-2004
Sistema Geodésico Nacional, emitida por el INEGI.
► Factor de escala (ko) en el MC: 0.999600
► Longitud de Origen: MC en cada zona, para la República
Mexicana le corresponden: 87º, 93º, 99º, 105º, 111º y 117º al
Oeste del Meridiano de Greenwich.
► Latitud de Origen: 0º, en el Ecuador.
► Zonas UTM: 11, 12, 13, 14, 15, 16 y 17
► Fajas UTM: P, Q, R y S
► Unidad de medida: Metro.
► Falsa Ordenada (Norte): 0.000000 metros en el ecuador para
el Hemisferio Norte.
► Falsa Abscisa (Este): 500,000.000000 metros para el MC de
cada Zona.
► Se utiliza para representar zonas pequeñas y hasta entidades
federativas completas para cartas con escalas que van de la
1:500 hasta 1:500,000
Proyección Cónica Conforme de Lambert (CCL).
► Elipsoide de referencia: Geodetic Reference System de
1980 (GRS 80).
► Latitud del primer paralelo base: 17º 30’ 00” N.
► Latitud del segundo paralelo base: 29º 30’ 00” N

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
222
► Longitud del MC: 102º 00’ 00” W
► Latitud de Origen de la Proyección Cartográfica: 12º 00’ 00”
N
► Factor de escala (ko) sobre el MC: 1.0
► Falso Este: 2’500,000.000
► Falso Norte: 0.000
► Esta proyección presenta la configuración y los accidentes
geográficos con errores muy pequeños. Es utilizada para
representar todo el territorio nacional, o regiones que
comprendan varios estados, por lo que es ocupada para
cartas en las escalas 1: 1’000,000 y 1:4’000,000.
Proyección Transversa de Mercator (TM) o Gauss-Krüger (GK).
► Elipsoide de referencia: Geodetic Reference System de
1980 (GRS 80).
► Longitud del MC: 102º 00’ 00” W.
► Latitud de Origen de la Proyección Cartográfica: 14º 00’ 00”
N.
► Factor de escala (ko) sobre el MC: 1.0
► Falso Este: 2’500,000.000
► Falso Norte: 0.000
► Es utilizada para representar todo el territorio nacional, por
lo que es ocupada para cartas únicamente en la escala
1:4’000,000.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
223
Proyección Transversa de Modificada Ejidal (TME).
► Elipsoide de referencia: Geodetic Reference System de
1980 (GRS 80).
► Longitud del MCE: Dependerá de la zona de estudio,
donde dicha longitud será redondeada al minuto más
cercano.
► Factor de escala (ko) sobre el MCE: 1.0
► Falso Este: 500,000.000000
► Falso Norte: 0.000
► Es utilizada única y exclusivamente para representar
principalmente terrenos ejidales, aplicada comúnmente en
escalas grandes. Dada esta situación se vuelve una
proyección opcional de apoyo y no oficial (local).
En cuanto a la proyección Mercator Simple esta es utilizada por la
Secretaría de Marina (SEMAR) para la elaboración de cartografía náutica la cual
sirve como sustento para estudios oceanográficos y el trazo de rutas de
navegación en la zona marítima del estado mexicano. La elaboración de
documentos cartográficos en esta proyección cumple los términos, parámetros y
escalas oficiales estipuladas por SEMAR, siendo estos distintos a los estipulados
por el INEGI. La proyección TME sólo es utilizada por organismos como el
Registro Agrario Nacional para referir sus trabajos topográficos, convirtiéndola en
un sistema de proyección arbitrario o local.
En resumen las proyecciones y escalas cartográficas oficiales para la
República se presentan en la siguiente tabla.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
224
Escala Proyección
1:4 000 000 Cónica Conforme de Lambert o
Transversa de Mercator
1:1 000 000 Cónica Conforme de Lambert
1:500 000 Universal Transversa de Mercator
1:250 000 Universal Transversa de Mercator
1:50 000 Universal Transversa de Mercator
1:20 000 Universal Transversa de Mercator
1:10 000 Universal Transversa de Mercator
1:5 000 Universal Transversa de Mercator
1:2 000 Universal Transversa de Mercator
1:1 000 Universal Transversa de Mercator
1:500 Universal Transversa de Mercator
Tabla IV.9 Escalas y proyecciones cartográficas para la república mexicana. Fuente INEGI 2006
4.3.8 Sistemas de Referencia Geodésicos Oficiales para la
Elaboración de Cartografía Mexicana.
Los sistemas de referencia geodésicos definen la forma y dimensión de la
Tierra, así como el origen y orientación de los sistemas de coordenadas. Los
sistemas de referencia geodésicos pueden ser descritos en base a dos modelos
matemáticos: el esférico y el elipsoídico, los cuales son obtenidos en base
parámetros físicos medidos sobre la superficie terrestre, tales como la aceleración
de gravedad (Guevara Ortíz, 2004).
Según la Norma Técnica NTG-001-2004 estipulada por el INEGI, se definen
las disposiciones, parámetros y características mínimas que debe de cumplir el

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
225
Sistema Geodésico Nacional (SGN), mismo que es de carácter obligatorio para la
plena y adecuada ejecución de todos los levantamientos geodésicos realizados en
suelo mexicano, mismos que van ligados a los algoritmos de transformación de las
proyecciones cartográficas oficiales.
Para el desarrollo del trabajo cartográfico se es necesario conocer
previamente los sistemas de coordenadas geodésicas horizontales, verticales al
cual está referido la zona de estudia destinada a la representación cartográfica.
Estos dos sistemas son los pilares fundamentales del sistema nacional, los cuales
serán descritos a continuación.
Constante Alías Valor
Semieje Mayor 𝑎 6 378 137 m
Velocidad Angular ω 7 292 115 x 10−11 Rad/Seg
Constante Gravitacional Geocéntrica
GM 3 986 005 x 10−8 m/Seg2
Factor Dinámico de Forma no Normalizado
J2 108 263 x 10−8
Semieje Menor 𝑏 6 356 752.3141 m
Excentricidad Lineal E 521 854.0097
Radio Polar 𝑐 6 399 593.6259 m
Primera Excentricidad al Cuadrado
𝑒2 0.006 694 380 022 90
Segunda Excentricidad al Cuadrado
𝑒′2 0.006 739 496 775 48
Achatamiento 𝑓 0.003 352 810 681 18
Recíproco del Achatamiento.
1/𝑓 298.257 222 101
Cuadrante Meridiano Q 10 001 965.7293 m
Radio Medio R1 6 371 008.7714 m

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
226
Radio de la Esfera de la Misma Superficie
R2 6 371 007.1810 m
Radio de la Esfera del Mismo Volumen
R3 6 371 000.7900 m
Gravedad Normal en el Ecuador
γe 978 032.677 15 mGals
Relación de la Aceleración Centrífuga
con Respecto a γe
m′ 0.003 449 786 003 08
Tabla IV.10 Principales constantes geométricas y físicas del elipsoide GRS 80. Fuente INEGI 2006
Sistema de Referencia Geodésico Horizontal (Datum Horizontal).
El SGN, se adopta el conceptualizado por la Asociación Internacional
de Geodesia a través del Sistema Geodésico de Referencia (GRS80), y
éste deberá estar referido al Marco de Referencia Terrestre Internacional
(ITRF) definido por el Servicio Internacional de Rotación de la Tierra (IERS)
para el año 2008, con datos de la época 2010.0 denominado ITRF08 época
2010.0 asociado al elipsoide de referencia GRS80, el cual es el Marco de
Referencia oficial para México.
El sistema es geocéntrico, global, tridimensional, dinámicamente
definido y de muy alta precisión, tiene su origen en los estudios y trabajos
del IERS (International Earth Rotation Service), con base en la combinación
de varias soluciones globales tridimensionales y se propuso como patrón al
cual referir todos los trabajos geodésicos. El sistema anterior (ITRF92) dio
lugar a la creación de la red geodésica nacional vigente, denominada Red
Geodésica Nacional Activa (RGNA), constituida por 16 estaciones fijas
distribuidas en todo el territorio nacional, equipadas con instrumental GPS y
las cuales están constantemente monitoreando el paso de los satélites de la
constelación GPS-Navstar y además constituyen la base de apoyo para los
levantamientos geodésicos GPS que se efectúan en el ámbito del territorio
nacional. En adición a lo anterior, se ha creado y está en proceso de

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
227
densificación la Red Geodésica Nacional Pasiva (RGNP), constituida al
momento por cerca de 80,000 vértices a lo largo de todo el país.
Desde el punto de vista cartográfico, el Sistema Geodésico
Horizontal definido en esta Norma es compatible con el WGS84, así como
SIRGAS, por lo que sólo en aquellos casos en que un proyecto tenga como
requerimiento mejor exactitud posicional se deberá realizar la
transformación de coordenadas de WGS-84 o SIRGAS al ITRF08 época
2010.0 (INEGI, 2010).
Dado que el sistema ITRF08 está asociado al elipsoide GRS80 a
continuación se describen los elementos geométricos de dicho parámetro.
Sistema de Referencia Geodésico Vertical (Datum Vertical).
En lo que respecta a las alturas, todo punto perteneciente a un
levantamiento geodésico vertical, deberá estar referido al nivel de referencia
vertical definido por el Datum Vertical Norteamericano de 1988 (NAV88),
debiéndose expresar sus valores en metros, identificado por la estación
geodésica ubicada en el mareógrafo de Rimouski, en Québec, Canadá.
Dicho Marco en su vertiente vertical se deberá materializar mediante
levantamientos geodésicos verticales que comprendan todas aquellas
operaciones de campo dirigidas a determinar la distancia vertical que existe
entre Estaciones Geodésicas situadas sobre o cerca de la superficie
terrestre y el nivel de referencia adoptado. Por lo que la representación
cartográfica de dichos valores tienen que estar referidos ha dicho sistema,
así mismo toda Estación Geodésica perteneciente a un Levantamiento
Geodésico Vertical, deberá estar relacionado al nivel de referencia vertical,
definido por el NAVD88, debiéndose expresar los valores de altura en
metros en el sistema de Alturas Ortométricas (H) derivado de los números
geopotenciales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
228
4.4 Fórmulas de Derivación Modificadas.
De manera previa a la amplificación de fórmulas de transformación para el
sistema GK será necesario encontrar una metodología eficiente la cual permita el
adecuado desarrollo de dichas ecuaciones.
Como se mostraba en el subcapítulo 3.5, el desarrollo de las fórmulas de
transformación de coordenadas directa e inversa para la proyección Transversa de
Mercator o representación Gauss-Krüger, es afectada por funciones complejas, las
cuales solo se pueden resolver por el método numérico de la serie de Taylor,
teniendo estas ecuaciones un grado de dificultad alto para la resolución por
métodos algebraicos clásicos.
La aplicación de la serie de Taylor a la función de la latitud isométrica (Φ)
(proceso de transformación de coordenadas inverso) y en el desarrollo de la
integral elíptica de la longitud de arco de meridiano (∫ 𝜌 𝑑𝜑), así mismo la función
del radio de un paralelo distinto al Ecuador y su forma inversa (𝑁 cos𝜑) (proceso
de transformación directo e inverso), hacen que el desarrollo y aplicación de la
serie de Taylor a dichas ecuaciones se torne difícil dado a la estructura algebraica
que componen dichas ecuaciones, generando así que el número de términos
resultantes en las derivadas de orden superior o derivadas consecutivas vayan
aumentado gradualmente conforme al grado o número de veces que se requiera
derivar la función original, propiciando a obtener resultados exageradamente
grandes que estén sujetos a funciones trigonométricas repetitivas.
Esta circunstancia incita a que se realicen diferentes cambios de variable,
reduciendo los resultados obtenidos en el proceso de derivación, para que de esta
manera, se pueda facilitar la comprensión de los datos obtenidos, pero la
problemática vuelve aparecer cuando este resultado se tiene que volver a derivar
de acuerdo a la fórmula de la seria de Taylor, haciendo que los cambios de
variable se sustituyan con el valor original, generando una cadena repetitiva de
cambio variable – sustitución y viceversa.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
229
Los cambios de variable facilitan la interpretación y sustitución de
resultados en la estructura de la serie de Taylor, pero en los términos consecutivos
o derivadas de orden superior, los resultados se tiene que mostrar en su forma
original, debido a que a la variable que se pretende derivar (𝜑 ó 𝜑0) se muestra
implícita en dichos cambios, lo que hace imposible realizar el proceso de
derivación.
Esta serie de cambios y sustituciones, de igual manera la intervención de
funciones trigonométricas exponenciales repetitivas, propician que durante el
inicio, final o intermedio del proceso matemático de derivación y reducción de
términos exista y sea más latente la posibilidad de cometer un error de
equivocación, el cual, si no es detectado a tiempo puede convertirse en un error
sistemático. Siendo el problema más latente y principal, perder la precisión del
dato geográfico de latitud, longitud, abscisa u ordenada requerida al momento de
evaluar la ecuación previamente desarrollada. Dicho de manera simple, la
probabilidad de equivocarse o cometer un error es directamente proporcional al
rango de las derivadas de orden superior y los términos y coeficientes que la
conforman.
Dada esta situación y antes de iniciar con el desarrollo de las fórmulas
completas para la representación completa de la República Mexicana en la
representación GK, será necesario idear un método en el cual se pueda minimizar
el índice de error que se presenta al momento de derivar y realizar los cambios de
variable necesarios para su sustitución en la serie de Taylor y en las formulas
finales, así mismo facilitar el proceso de derivación y reducción de términos. Para
lograr este objetivo de primera mano es ineludible conocer los cambios de
variable, coeficientes, términos y demás parámetros que se utilizan en el
desarrollo de las derivadas, mismos con los que se presentan los resultados
finales de las fórmulas de transformación.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
230
Latitud Geodésica Longitud Geodésica Meridiano Central
φ λ MC ó 𝜆0
Amplitud Meridiana Latitud Geodésica del punto de Expansión
Latitud Isométrica del punto de Expansión
∆λ = MC − λ φ0 Φ0
Amplitud de Paralelo Isométrico
Coordenada Este GK Coordenada Norte GK
∆Φ = Φ0 −Φ XGK YGK
Semieje Mayor Semieje Menor Achatamiento
𝑎 𝑏 = 𝑎(1 − 𝑓) 𝑓
Primera Excentricidad Segunda Excentricidad Radio del Primer
Vertical
𝑒 = √1 − (𝑏
𝑎)2
𝑒′ = √𝑒2
1 − 𝑒2
N =𝑎
(1 − 𝑒2 sin2 φ)12
Radio de Curvatura de una Sección Inclinada
Función Seno de la Latitud
Función Coseno de la Latitud
ρ =𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 φ)32
sin φ cosφ
Tangente de la Latitud Relación de Radios
Geodésicos Producto
t = tanφ N
ρ= 1 + η2 η2 = 𝑒′2 ∙ cos2 φ0
Tabla IV.11 Parámetros base de transformación.
Los términos con los que son expresados los resultados de las derivadas de
orden superior y formulas finales de transformación son mediante las variables 𝜂 y
𝑡, mismos que facilitan de cierta manera la expresión y reducción de las variables
geodésicas, las cuales traen consigo una serie de sustituciones que se vuelven
más difíciles de aplicar de acuerdo al incremento exponencial del polinomio final
de la derivada en cuestión. Siendo esta circunstancia lo que limita a los métodos

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
231
tradicionales de derivación para la propagación de las derivadas mayores al orden
ocho.
En la actualidad existen métodos algebraicos que satisfacen esta
necesidad, los cuales aplican estas sustituciones en procesos previos al
procedimiento de derivación, dos de estos métodos aplicados al sistema GK y de
los cuales se tiene registro fueron desarrollados por Paul D. Thomas (1952) y
David Hernández López (2009), este último estipulado en su libro Cartografía
Matemática. Estos atienden a la necesidad previamente planteada pero con la
peculiaridad de que solo son viables hasta cierto punto (solo aplican en el
desarrollo de las primeras cinco derivadas, más allá de ellas, el desarrollo se
vuelve complicado y confuso), dada esta situación, ambos métodos se fusionarán
para dar paso a la creación de un nuevo, un método algebraico de derivación que
permita el pleno desarrollo de las fórmulas de transformación directo e inverso
para dicha proyección.
Antes de iniciar con el desarrollo y explicación de este nuevo método, será
necesariamente forzoso recordar el origen de los cambios de variable.
Partiendo de la relación de radios geodésicos.
𝑁
𝜌=
[𝑎
(1 − 𝑒2 sin2 φ)12
]
[𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 φ)32
]
𝑁
𝜌=
𝑎(1 − 𝑒2 sin2 φ)32
𝑎(1 − 𝑒2)(1 − 𝑒2 sin2 φ)12
=1 − 𝑒2 sin2 φ
1 − 𝑒2
𝑁
𝜌=1 − 𝑒2(1 − cos2 φ)
1 − 𝑒2=1 − 𝑒2 + 𝑒2 cos2 φ
1 − 𝑒2= 1 +
𝑒2
1 − 𝑒2∙ cos2 φ

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
232
Siendo 𝑒2
1−𝑒2 el valor de la segunda excentricidad del elipsoide, por lo que
dicha relación se interpreta como:
𝑵
𝝆= 𝟏 + 𝒆′𝟐 ∙ 𝐜𝐨𝐬𝟐𝛗
Pero según Richard H. Rapp (2001), esta ecuación la interpreta con el
siguiente cambio de variable.
V2 =𝑁
𝜌= 1 + 𝑒′2 ∙ cos2 φ
De la ecuación anterior se desprende la variable 𝜂2.
𝜂2 = 𝑒′2 ∙ cos2 φ = (𝑒′ ∙ 𝑐𝑜𝑠 φ)2
De lo anterior se deduce.
𝜼𝒏 = (𝒆′ ∙ 𝒄𝒐𝒔𝛗)𝒏
𝜂 = 𝑒′ ∙ 𝑐𝑜𝑠 φ , 𝜂2 = (𝑒′ ∙ 𝑐𝑜𝑠 φ)2, 𝜂3 = (𝑒′ ∙ 𝑐𝑜𝑠 φ)3
Entonces la variable de Rapp se interpreta como.
𝐕𝟐 = 𝟏 + 𝜼𝟐, 𝐕 = (𝟏 + 𝜼𝟐)𝟏𝟐, 𝐕𝟑 = (𝟏 + 𝜼𝟐)
𝟑𝟐
Mientras que para la variable 𝑡, se interpreta lo siguiente:
𝒕𝒏 = (𝒕𝒂𝒏𝛗)𝒏 = 𝒕𝒂𝒏𝒏𝛗
𝑡 = 𝑡𝑎𝑛φ, 𝑡2 = 𝑡𝑎𝑛2φ, 𝑡3 = 𝑡𝑎𝑛3φ

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
233
A partir de estas variables se realizaran las modificaciones adecuadas para
obtener fórmulas de derivación confiables, debido a que ambas dependen
directamente de la latitud geodésica, recordando que en los procesos de
derivación, estos se realizan en torno a la latitud, por lo que la longitud se descarta
en esta modificación.
Conociendo esta situación y los términos susceptibles a un proceso
algebraico de derivación se iniciara las modificaciones deseadas, para ello se
realizarán las derivadas de las potencias de dichos términos. Dada su estructura
el primer término a evaluar será 𝜂.
Se tomara como ejemplo dicho término y su valor cuadrático, por lo que las
derivadas serán los siguientes.
𝑓(φ) = 𝜂
𝑓(φ) = 𝑒′ ∙ cosφ
𝑓′(φ) = −𝑒′ ∙ sin φ
𝑓(φ) = 𝜂2
𝑓(φ) = (𝑒′ cos φ)2 = 𝑒′2 ∙ cos2φ
𝑓′(φ) = −2𝑒′2 ∙ cos φ ∙ sinφ
Se puede apreciar que en dicha variable interfiere la función coseno
generando resultado de su respectiva ecuación sea afectada por su función
trigonométrica hermana, el seno en su forma negativa, esta situación será pieza
clave para llevar dichos resultados a la variables deseadas.
Para cumplir con lo anterior al resultado de dichas derivadas serán
racionalizadas por la multiplicación y división de la función coseno (cosφ
cosφ), de esta
manera equilibrar la función y expresar el resultado final en función de 𝜂 y 𝑡.
Racionalizando se tiene:

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
234
𝑓′(φ) = −𝑒′ ∙ sin φ
𝑓′(φ) = −(𝑒′ ∙ sin φ) ∙ 1
𝑓′(φ) = −(𝑒′ ∙ sin φ) ∙ (cosφ
cosφ)
𝑓′(φ) = −(𝑒′ ∙ cosφ) ∙ (sinφ
cosφ)
𝑓′(φ) = −𝑒′ ∙ cosφ ∙ tanφ
𝑓′(φ) = −2𝑒′2 cosφ ∙ sinφ
𝑓′(φ) = −(2𝑒′2 cosφ ∙ sinφ) ∙ 1
𝑓′(φ) = −(2𝑒′2 cosφ ∙ sinφ) ∙ (cosφ
cosφ)
𝑓′(φ) = −(2𝑒′2 ∙ cos2 φ) ∙ (sinφ
cosφ)
𝑓′(φ) = −2 ∙ 𝑒′2 ∙ cos2 φ ∙ tanφ
Efectuando el cambio de variable, se tiene que:
𝒇′(𝛗) = −𝜼 ∙ 𝒕 𝒇′(𝛗) = −𝟐 ∙ 𝜼𝟐 ∙ 𝒕
Es de esta manera como logra expresar la derivada de 𝜂 en función de si
misma, pero dada la intervención de la función coseno de la latitud geodésica en
esta ecuación y su repetitiva aparición en las derivadas de orden superior, se
tendrá que realizar una misma modificación, en la cual se excluya la función seno
de φ.
Para ello se realizara la derivación de la función del coseno y su forma
cuadrática.
𝑓(φ) = cosφ , 𝑓(φ) = cos2 φ
Derivando se tiene que:
𝑓′(φ) = − sinφ , 𝑓′(φ) = −2 sinφ ∙ cosφ
Multiplicando por cosφ
cosφ ambos resultados.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
235
𝑓′(φ) = − sinφ ∙ (cosφ
cosφ) 𝑓′(φ) = −2 sinφ ∙ cosφ ∙ (
cosφ
cosφ)
𝑓′(φ) = − cosφ ∙ (sin φ
cosφ) 𝑓′(φ) = −2 ∙ cos2 φ ∙ (
sin φ
cosφ)
𝑓′(φ) = − cosφ ∙ tanφ 𝑓′(φ) = −2 ∙ cos2 φ ∙ tanφ
Efectuando el cambio de variable, se tiene que:
𝒇′(𝛗) = −𝒕 ∙ 𝐜𝐨𝐬𝛗 𝒇′(𝛗) = −𝟐 ∙ 𝒕 ∙ 𝐜𝐨𝐬𝟐𝛗
Poniendo claro estos resultados y su relación con las variables η y t, se
aprecia que, cuando la latitud es el argumento de la función coseno, siendo este
último objeto de derivación, se es forzoso realizar la racionalización, multiplicando
por cosφ
cosφ el resultado de la derivada, volviéndose este en un factor constante. Con
este artificio algebraico se consigue que de forma racional el término −sinφ
forme parte del cambio de variable 𝑡 y los términos restantes conformen la
sustitución para la variable 𝜂.
Es mediante la racionalización que se puede realizar una modificación a las
fórmulas de derivación habituales, logrando así obtener nuevas fórmulas las
cuales no dependan directamente de la variable φ, pero que faciliten el cálculo
entorno a ella.
De acuerdo a esta hipótesis, se podrán modificar las fórmulas de derivación
clásicas, obligándolas a que sus expresiones finales se presenten en las variables
ya estipuladas.
Para el Coseno de la latitud se tiene.
𝑓(φ) = cosφ
𝑓(φ) = cos𝑛 φ = (cosφ)𝑛

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
236
𝑓′(φ) = 𝑎 ∙ (cosφ)𝑎−1 ∙ (cosφ)′
𝑓′(φ) = −𝑎 ∙ (cosφ)𝑎−1 ∙ sin φ
Multiplicando por cosφ
cosφ
𝑓′(φ) = [−𝑛 ∙ (cosφ)𝑛−1 ∙ sin φ] ∙ 1
𝑓′(φ) = [−𝑛 ∙ (cosφ)𝑛−1 ∙ sin φ] ∙ (cosφ
cosφ) = −𝑛 ∙ (cosφ)𝑛−1 ∙ cos φ ∙ (
sinφ
cosφ)
𝑓′(φ) = −𝑛 ∙ (cosφ)𝑛−1+1 ∙ tanφ = −𝑛 ∙ (cos φ)𝑛 ∙ tanφ
𝑓′(φ) = −𝑛 ∙ cos𝑛 φ ∙ tanφ
Efectuando el cambio de variable.
𝑓′(φ) = −𝑛 ∙ cos𝑛 φ ∙ 𝑡
Por lo que finalmente la formula modificada del coseno se expresa como:
𝒇′(𝐜𝐨𝐬𝛗) = −𝒏 ∙ 𝒕 ∙ 𝐜𝐨𝐬𝒏𝛗
Este mismo procedimiento se aplicara a las derivadas de las ecuaciones
que contemplen la variable 𝜂.
𝑓(φ) = 𝜂𝑛
𝑓(φ) = (𝑒′ cosφ)𝑛 = 𝑒′𝑛 ∙ cos𝑛 φ
Derivando.
𝑓′(φ) = [𝑒′𝑛∙ cos𝑛 φ]′
𝑓′(φ) = 0 ∙ cos𝑛 φ + 𝑒′𝑛∙ (cos𝑛 φ)′

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
237
𝑓′(φ) = 𝑒′𝑛∙ (cos𝑛 φ)′
Para evitar el paso de la racionalización, la derivada del coseno será
remplazada por la formula previamente modificada.
𝑓′(φ) = 𝑒′𝑛(−𝑛 ∙ 𝑡 ∙ cos𝑛 φ) = −𝑛 ∙ 𝑡 ∙ 𝑒′
𝑛∙ cos𝑛 φ
Recordando que si 𝑒′ y cosφ comparten la misma potencia se convierten
en 𝜂, por lo que finalmente la derivada modificada de dicha variable será la
siguiente:
𝑓′(φ) = −𝑛 ∙ 𝑡 ∙ 𝑒′𝑛∙ cos𝑛 φ = −𝑛 ∙ 𝑡 ∙ 𝜂𝑛
𝒇′(𝜼) = −𝒏 ∙ 𝜼𝒏 ∙ 𝒕
Es así como se determinan las modificaciones para las derivadas que
dependen de la función trigonométrica del coseno de la latitud, por lo que la última
modificación se realizaría a los términos que contemplan a la tangente de la
latitud.
La modificación de la derivada de la tangente, es más sencilla a
comparación que la del coseno, dado que el resultado de la derivada de dicha
función es igual a la sec2φ, por lo que se recurrirá a una sustitución trigonométrica
en donde el valor de tangente y su derivada se relacionen entre sí.
Entonces para 𝑡.
𝑓(φ) = 𝑡 = tanφ
𝑓′(φ) = sec2φ
Dónde:
tan2φ + 1 = sec2φ

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
238
Sustituyendo se tiene:
𝑓′(φ) = tan2φ + 1
Realizando el cambio de variable se puede decir.
𝑓′(φ) = 𝑡2 + 1 ∴ 𝒇′(𝐭) = 𝒕𝟐 + 𝟏
La fórmula anterior se emplea solo sí la variable toma como potencia la
unidad, en caso de ser una potencia distinta a esta se recurrirá a una fórmula
similar a la anterior. La cual se describe a continuación.
Suponiendo una función 𝑡𝑛, donde 𝑎 ≠ 1 y siendo esta misma una
constante.
𝑓(𝑡) = 𝑡𝑛
Derivando.
𝑓′(𝑡) = (𝑡𝑛)′
𝑓′(𝑡) = 𝑛 ∙ 𝑡𝑛−1 ∙ (𝑡)′
Sustituyendo el valor de la derivada de 𝑡 previamente modificada.
𝑓′(𝑡) = 𝑛 ∙ (𝑡𝑛−1) ∙ (𝑡2 + 1)
𝑓′(𝑡) = 𝑛 ∙ 𝑡2 ∙ (𝑡𝑛−1) + 𝑛 ∙ (𝑡𝑛−1) = 𝑛 ∙ 𝑡2+𝑛−1 + 𝑛 ∙ 𝑡𝑛−1
𝑓′(𝑡) = 𝑛 ∙ 𝑡𝑛+1 + 𝑛 ∙ 𝑡𝑛−1
Entonces finalmente la derivada modificada para la variable 𝑡 con una
potencia distinta de la unidad se expresa como:

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
239
𝒇′(𝐭𝒏) = 𝒏(𝐭𝒏+𝟏) + 𝒏(𝐭𝒏−𝟏)
De esta manera las derivadas de las variables 𝜂, 𝑡 y él cosφ se pueden
expresar en función de las mismas, sin perder la esencia y el equilibrio de la
función original, logrando de esta manera una fácil notación para su unificación
con la serie de Taylor, evitando expresiones trigonométricas exageradas y
diferentes a las originales.
Además de las modificaciones realizadas a las variables base también será
necesario realizar una modificación a las derivadas de las fórmulas de radios
geodésicos que interfieren en el desarrollo de las series de Taylor, esto con el fin
de expresar todos los resultados que en este teorema aparecen en términos de 𝜂,
𝑡 y cosφ. Para lograr esto, se partirá de las modificaciones realizadas por Paul D.
Thomas (1952), mismos que son explicados en el inciso 6.4.1 de este documento.
Para el radio de curvatura del primer vertical (𝑁), será necesario
racionalizar por 𝜌
𝜌
𝑓′(𝑁) = (𝑁 − 𝜌) tanφ
𝑓′(𝑁) = [(𝑁 − 𝜌) tanφ] ∙ 1 = [(𝑁 − 𝜌) tanφ] ∙ (𝜌
𝜌)
𝑓′(𝑁) =(𝑁 − 𝜌)
𝜌∙ 𝜌 ∙ tanφ = (
𝑁
𝜌− 1) ∙ 𝜌 ∙ tanφ
Realizando los cambios de variable y sustitución se tiene.
𝑓′(𝑁) = [(1 + 𝜂2) − 1] ∙ 𝜌 ∙ 𝑡 = [1 + 𝜂2 − 1] ∙ 𝜌 ∙ 𝑡
𝒇′(𝑵) = 𝜼𝟐 ∙ 𝒕 ∙ 𝝆

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
240
También será necesario obtener la derivada 𝑁 con potencia distinta de la
unidad.
𝑓(𝑁) = 𝑁𝑛
𝑓′(𝑁) = 𝑛 ∙ 𝑁𝑛−1 ∙ 𝑁′ = 𝑛 ∙ 𝑁𝑛−1 ∙ (𝜂2 ∙ 𝑡 ∙ 𝜌)
𝒇′(𝑵𝒏) = 𝒏 ∙ 𝑵𝒏−𝟏 ∙ 𝜼𝟐 ∙ 𝒕 ∙ 𝝆
Para el radio de una sección inclinada (𝜌).
𝑓′(𝜌) = 3 (𝜌
𝑁) (𝑁 − 𝜌) tanφ
𝑓′(𝜌) = 3 [𝑁 (𝜌
𝑁) − 𝜌 (
𝜌
𝑁)] tanφ = 3 [𝜌 −
𝜌2
𝑁] tanφ
𝑓′(𝜌) = 3 ∙ 𝜌 [1 −𝜌
𝑁] tanφ = 3 ∙ 𝜌 [
𝑁 − 𝜌
𝑁] tanφ
Racionalizando.
𝑓′(𝜌) = [3 ∙ 𝜌 (𝑁 − 𝜌
𝑁) tanφ] ∙ 1 = [3 ∙ 𝜌 (
𝑁 − 𝜌
𝑁) tanφ] ∙
[1𝜌]
[1𝜌]
𝑓′(𝜌) = 3 ∙ 𝜌 [
𝑁𝜌− 1
𝑁𝜌
] tanφ = 3 ∙ 𝜌 [(1 + 𝜂2) − 1
1 + 𝜂2] tanφ = 3 ∙ 𝜌 [
𝜂2
1 + 𝜂2] tanφ
𝒇′(𝝆) =𝟑 ∙ 𝜼𝟐 ∙ 𝒕 ∙ 𝝆
𝐕𝟐
Para la relación de radios (𝑁
𝜌).
𝑓′ (𝑁
𝜌) = −2 ∙
𝑁 − 𝜌
𝜌∙ tanφ

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
241
𝑓′ (𝑁
𝜌) = −2 ∙ (
𝑁
𝜌− 1) ∙ tanφ = −2 ∙ [(1 + 𝜂2) − 1] ∙ tanφ
𝒇′ (𝑵
𝝆)′
= 𝐕𝟐 = −𝟐 ∙ 𝜼𝟐 ∙ 𝒕
También será necesario encontrar la derivada del radio geodésico de un
paralelo distinto al ecuador.
𝑟 = 𝑁 ∙ cosφ
𝑓′(φ) = (𝑁 ∙ cosφ)′ = 𝜂2 ∙ 𝑡 ∙ 𝜌 ∙ cos 𝜑 + 𝑁(−𝑡 ∙ cosφ)
𝑓′(φ) = 𝜂2 ∙ 𝑡 ∙ 𝜌 ∙ cosφ − 𝑁 ∙ 𝑡 ∙ cos 𝜑 = 𝑡 ∙ cosφ (𝜂2 ∙ 𝜌 − 𝑁)
𝒇′(𝒓) = 𝒕 ∙ 𝐜𝐨𝐬𝛗 (𝜼𝟐 ∙ 𝝆 − 𝑵)
Para 𝑁𝑛 ∙ cos φ
𝑓(φ) = 𝑁𝑛 ∙ cosφ
𝑓′(φ) = (𝑁𝑛 ∙ cos φ)′ = 𝑛 ∙ 𝑁𝑛−1 ∙ (𝜂2 ∙ 𝑡 ∙ 𝜌) ∙ cosφ + 𝑁𝑛(−𝑡 ∙ cosφ)
𝑓′(φ) = 𝑛 ∙ 𝑁𝑛−1 ∙ 𝜂2 ∙ 𝑡 ∙ 𝜌 ∙ cosφ − 𝑁𝑛 ∙ 𝑡 ∙ cos φ
𝒇′(𝑵𝒏 ∙ 𝐜𝐨𝐬𝛗) = 𝑵𝒏−𝟏 ∙ 𝒕 ∙ 𝐜𝐨𝐬𝛗 (𝒏 ∙ 𝜼𝟐 ∙ 𝝆 − 𝑵)
Además de estas modificaciones David Hernández (2009) sugiere
representar los radios 𝑁 y 𝜌 en una forma alterna en la que intervenga la variable
de Rapp, a partir de los parámetros básicos del elipsoide, semieje mayor (𝑎),
semieje menor (𝑏), radio polar (c), achatamiento (𝑓) y la primera excentricidad
(𝑒).
Despejando el valor cuadrático del semieje mayor de la fórmula de la
primera excentricidad.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
242
𝑒 = √1 − (𝑏
𝑎)2
∴ 𝑎 =𝑏
√1 − 𝑒2
Además será necesario dejar en términos de 𝑎 y 𝑏 el valor del radio polar.
c =𝑎
1 − 𝑓
c =𝑎
1 − (𝑎 − 𝑏𝑎
)=
𝑎
1 − (1 −𝑏𝑎)=
𝑎
1 − 1 +𝑏𝑎
=𝑎
𝑏𝑎
c =𝑎2
𝑏
Con estos nuevos valores se realizara la modificaciones de 𝑁 y 𝜌.
Para 𝑁.
𝑁 =𝑎
(1 − 𝑒2 sin2 φ)12
= [𝑎
(1 − 𝑒2 sin2 φ)12
] ∙ 1
𝑁 = [𝑎
(1 − 𝑒2 sin2 φ)12
] ∙𝑎
𝑎=
𝑎2
𝑎(1 − 𝑒2 sin2 φ)12
Sustituyendo el valor de 𝑎.
𝑁 =𝑎2
(𝑏
√1 − 𝑒2) (1 − 𝑒2 sin2 φ)
12
=𝑎2
𝑏∙
1
(1 − 𝑒2 sin2 φ)12
(1 − 𝑒2)12
𝑁 =𝑎2
𝑏∙
1
(1 − 𝑒2 sin2 φ
1 − 𝑒2)
12
=𝑎2
𝑏∙
1
[1 − 𝑒2(1 − cos2 φ)
1 − 𝑒2]
12
=
𝑎2
𝑏
[1 − 𝑒2 + 𝑒2 cos2 φ
1 − 𝑒2]
12

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
243
𝑁 =
𝑎2
𝑏
(1 +𝑒2
1 − 𝑒2∙ cos2 φ)
12
=c
(1 + 𝜂2)12
𝑵 =𝐜
𝐕
Para 𝜌.
𝜌 =𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 φ)32
= [𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 φ)32
] ∙ 1
𝜌 = [𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 φ)32
] ∙𝑎
𝑎=
𝑎2(1 − 𝑒2)
𝑎(1 − 𝑒2 sin2 φ)32
Sustituyendo el valor de 𝑎.
𝜌 =𝑎2(1 − 𝑒2)
(𝑏
√1 − 𝑒2) (1 − 𝑒2 sin2 φ)
32
=𝑎2
𝑏∙
1 − 𝑒2
(1 − 𝑒2)12(1 − 𝑒2 sin2 φ)
32
𝜌 =𝑎2
𝑏∙
1
1
(1 − 𝑒2)32
∙ (1 − 𝑒2 sin2 φ)32
=𝑎2
𝑏∙
1
(1 − 𝑒2 sin2 φ
1 − 𝑒2)
32
𝜌 =
𝑎2
𝑏
[1 − 𝑒2(1 − cos2 φ)
1 − 𝑒2]
32
=
𝑎2
𝑏
[1 − 𝑒2 + 𝑒2 cos2 φ
1 − 𝑒2]
32
=
𝑎2
𝑏
[1 +𝑒2
1 − 𝑒2∙ cos2 φ]
32
𝜌 =c
[1 + 𝜂2]32
∴ 𝝆 =𝐜
𝐕𝟑

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
244
Es así como las derivadas y parámetros base del elipsoide que conforman
las series de Taylor correspondientes a las fórmulas de transformación directa e
inversa para la representación GK son modificadas y simplificadas para su fácil
manipulación en el proceso algebraico de derivación, de esta manera asegurando
la fidelidad y precisión del dato geográfico, excluyendo expresiones
trigonométricas exageradas y diferentes a las originales.
Todas las modificaciones e igualdades se presentan en las siguientes
tablas, pero para evitar confusión con las constantes 𝑛 y la variable 𝜂 la
representación de las constantes será mediante la letra k.
Semieje Mayor Semieje Menor Achatamiento
𝑎 𝑏 = 𝑎(1 − 𝑓) 𝑓 = 1 −𝑏
𝑎
Semieje Mayor Primera Excentricidad Segunda Excentricidad
𝑎 =𝑏
√1 − 𝑒2 𝑒 = √1 − (
𝑏
𝑎)2
𝑒′ =𝑒
√1 − 𝑒2
Radio Polar Variable de Rapp (N/ρ) Variable Cuadrática de
Rapp
c=a2
b V = √1 + η2 V2 = 1 + η2
Variable Cubica de Rapp Radio del Primer Vertical Radio de Curvatura de una Sección Inclinada
V3 = (1 + η2)32 N =
c
V ρ =
c
V3
Radio de un Paralelo Producto Tangente de la Latitud
r =c
V∙ cosφ η = 𝑒′ ∙ cosφ t = tanφ
Tabla IV.12 Parámetros Base e Igualdades.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
245
𝑓(φ) 𝑓′(φ)
cosφ −t ∙ cosφ
cosk φ −k ∙ t ∙ coskφ
N η2 ∙ t ∙ ρ
Nk k ∙ Nk−1(η2 ∙ t ∙ ρ)
ρ 3 ∙η2 ∙ t ∙ ρ
V2
r t ∙ cos φ(η2 ∙ ρ − N)
Nk ∙ cos φ Nk−1 ∙ t ∙ cosφ(k ∙ η2 ∙ ρ − N)
N
ρ= V2 −2 ∙ η2 ∙ t
η −η ∙ t
ηk −k ∙ ηk ∙ t
t t2 + 1
tk k(tk+1) + k(tk−1)
Tabla IV.13 Fórmulas de derivación modificadas.
Con la aplicación de estas nuevas fórmulas a las series de Taylor que
conforman los algoritmos de transformación para la representación GK, se podrán
desarrollar las derivadas faltantes y necesarias para la representación total de la
República Mexicana con un rango de precisión milimétrica, mismo que se
desarrollara en el siguiente bloque.
4.5 Fórmulas de Transformación Gauss-Krüger Amplificadas a la
Derivada de Orden Doce.
Atendiendo la necesidad de precisión geodésica en la representación del
dato geográfico para amplitudes meridianas mayores a 6º de longitud con respecto
a una cierta latitud y en base de la teoría de precisión que Enriquez Turiño
plantea, en el siguiente bloque se desarrollaran las formulas completas con los

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
246
términos necesarios para la fidedigna representación del territorio nacional en la
representación GK.
4.5.1 Amplificación Directa.
De acuerdo a la hipótesis formulada sobre precisión en la representación
GK ligada al número exacto de términos que componen sus ecuaciones de
conversión, misma que se fundamenta en los estudios realizados por el Doctor
Turiño. Se logra deducir que, para obtener una precisión por debajo del milímetro
para la amplitud meridiana en la cual toda la extensión terrestre de la República
Mexicana se posiciona, se es necesario conseguir la décima segunda derivada del
teorema de Taylor, el cual es aplicado a la integral elíptica del radio de una
sección inclinada (𝜌), esto para su proceso directo.
El desarrollo de las formulas directas se iniciara declarando el teorema de
Taylor a la variable compleja de la latitud isométrica.
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!(∆λ𝑖) +
𝑓′′(Φ)
2!(∆λ𝑖)2 +
𝑓′′′(Φ)
3!(∆λ𝑖)3 +⋯+
𝑓𝑛(Φ)
𝑛!(∆λ𝑖)𝑛
Pero aplicando la doceava derivada de Φ, la ecuación se interpreta como:
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!(∆λ𝑖) +
𝑓′′(Φ)
2!(∆λ𝑖)2 +
𝑓′′′(Φ)
3!(∆λ𝑖)3 +⋯
+𝑓XII(Φ)
12!(∆λ𝑖)12
Aplicando el teorema de números imaginarios.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
247
𝑓(𝑤) = 𝑓(Φ) +𝑓′(Φ)
1!∆λ𝑖 −
𝑓′′(Φ)
2!∆λ2 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓IV(Φ)
4!∆λ4
+𝑓V(Φ)
5!∆λ5𝑖 −
𝑓VI(Φ)
6!∆λ6 −
𝑓VII(Φ)
7!∆λ7𝑖 +
𝑓VIII(Φ)
8!∆λ8
+𝑓IX(Φ)
9!∆λ9𝑖 −
𝑓X(Φ)
10!∆λ10 −
𝑓XI(Φ)
11!∆λ11𝑖 +
𝑓XII(Φ)
12!∆λ12
Recordando que:
𝑓(𝑤) = 𝑦(Φ, ∆λ) + 𝑥(Φ, ∆λ)𝑖
Sustituyendo.
𝑦(Φ, ∆λ) + 𝑥(Φ, ∆λ)𝑖 =
𝑓(Φ) +𝑓′(Φ)
1!∆λ𝑖 −
𝑓′′(Φ)
2!∆λ2 −
𝑓′′′(Φ)
3!∆λ3𝑖 +
𝑓IV(Φ)
4!∆λ4 +
𝑓V(Φ)
5!∆λ5𝑖
−𝑓VI(Φ)
6!∆λ6 −
𝑓VII(Φ)
7!∆λ7𝑖 +
𝑓VIII(Φ)
8!∆λ8 +
𝑓IX(Φ)
9!∆λ9𝑖
−𝑓X(Φ)
10!∆λ10 −
𝑓XI(Φ)
11!∆λ11𝑖 +
𝑓XII(Φ)
12!∆λ12
Agrupando términos semejantes y eliminando los factores imaginarios
finalmente se expresan las fórmulas para la representación GK.
𝑥 =𝑓′(Φ)
1!∆λ −
𝑓′′′(Φ)
3!∆λ3 +
𝑓V(Φ)
5!∆λ5 −
𝑓VII(Φ)
7!∆λ7 +
𝑓IX(Φ)
9!∆λ9 −
𝑓XI(Φ)
11!∆λ11
𝑦 = 𝑓(Φ) −𝑓′′(Φ)
2!∆λ2 +
𝑓IV(Φ)
4!∆λ4 −
𝑓VI(Φ)
6!∆λ6 +
𝑓VIII(Φ)
8!∆λ8 −
𝑓X(Φ)
10!∆λ10
+𝑓XII(Φ)
12!∆λ12
Pero además se sabe que:

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
248
𝑓(Φ) = S
Entonces las fórmulas se expresan como:
𝐱 =𝒇′(𝚽)
𝟏!∆𝛌 −
𝒇′′′(𝚽)
𝟑!∆𝛌𝟑 +
𝒇𝐕(𝚽)
𝟓!∆𝛌𝟓 −
𝒇𝐕𝐈𝐈(𝚽)
𝟕!∆𝛌𝟕 +
𝒇𝐈𝐗(𝚽)
𝟗!∆𝛌𝟗 −
𝒇𝐗𝐈(𝚽)
𝟏𝟏!∆𝛌𝟏𝟏
𝐲 = 𝐒 −𝒇′′(𝚽)
𝟐!∆𝛌𝟐 +
𝒇𝐈𝐕(𝚽)
𝟒!∆𝛌𝟒 −
𝒇𝐕𝐈(𝚽)
𝟔!∆𝛌𝟔 +
𝒇𝐕𝐈𝐈𝐈(𝚽)
𝟖!∆𝛌𝟖 −
𝒇𝐗(𝚽)
𝟏𝟎!∆𝛌𝟏𝟎
+𝒇𝐗𝐈𝐈(𝚽)
𝟏𝟐!∆𝛌𝟏𝟐
Declarados los términos completos para cada una de las fórmulas de
transformación se proseguirá a realizar las derivadas consecutivas
correspondientes, utilizando las formulas e igualdades modificadas descritas en el
bloque anterior.
Para la primera derivada de Φ
𝑓(Φ) = 𝑆 = ∫𝜌 𝑑𝜑
Derivando.
𝑓′(Φ) = 𝜌 = {𝑑[𝑓(Φ)]
𝑑𝜑}
′
=𝑑[𝑓(Φ)]
𝑑𝜑∙𝑑𝜑
𝑑Φ
Dónde.
𝑑𝜑
𝑑Φ=𝑟
𝜌
Sustituyendo.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
249
𝑓′(Φ) = 𝜌 ∙𝑟
𝜌= 𝑟 = 𝑁 cos𝜑
Segunda derivada de Φ.
𝑓′′(Φ) = [𝑓′(Φ)]′ ∙𝑑𝜑
𝑑Φ
Derivando.
[𝑓′(Φ)]′ = (𝑁 cos𝜑)′
[𝑓′(Φ)]′ = 𝜂2𝜌𝑡 ∙ cos 𝜑 + 𝑁(−𝑡 cos 𝜑)
[𝑓′(Φ)]′ = cos 𝜑 (𝜂2𝑡𝜌 − 𝑁𝑡)
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓′′(Φ) = [𝑓′(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓′′(Φ) = cos𝜑 (𝜂2𝑡𝜌 − 𝑁𝑡) ∙ (𝑁 cos𝜑
𝜌) = 𝑁 cos2 𝜑 (𝜂2𝑡 −
𝑁
𝜌𝑡)
𝑓′′(Φ) = 𝑁 cos2 𝜑 [𝜂2𝑡 − (1 + 𝜂2)𝑡] = −𝑁𝑡 cos2 𝜑
Tercera derivada de Φ.
𝑓′′′(Φ) = [𝑓′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
Derivando.
[𝑓′′(Φ)]′ = (−𝑁𝑡 cos2 𝜑)′
[𝑓′′(Φ)]′ = −[(𝜂2𝑡𝜌)𝑡 cos2 𝜑 + 𝑁(𝑡2 + 1) cos2 𝜑 + 𝑁𝑡(−2𝑡 cos2 𝜑)]
[𝑓′′(Φ)]′ = − cos2 𝜑 [𝜂2𝑡2𝜌 + 𝑁(𝑡2 + 1) − 2𝑁𝑡2]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
250
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓′′′(Φ) = {− cos2 𝜑 [𝜂2𝑡2𝜌 + 𝑁(𝑡2 + 1) − 2𝑁𝑡2]} ∙ [𝑁 cos 𝜑
𝜌]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2 +𝑁
𝜌(𝑡2 + 1) − 2
𝑁
𝜌𝑡2]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2 + (1 + 𝜂2)(𝑡2 + 1) − 2(1 + 𝜂2)𝑡2]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [1 + 𝜂2 − 𝑡2]
Dada la extensión del proceso algebraico solo se presentaran los resultados
parciales deseados, el desarrollo completo de todas las derivadas se encuentran
en el anexo 6.5.1 de este documento.
Cuarta Derivada.
𝑓IV(Φ) = 𝑁𝑡 cos4 𝜑 [5 − 𝑡2 + 9𝜂2 + 4𝜂4]
Quinta Derivada.
𝑓V(Φ) = 𝑁 cos5 𝜑 [5 − 18𝑡2 + 𝑡4 + 2𝜂2(7 − 29𝑡2)
+𝜂4(13 − 64𝑡2) + 4𝜂6(1 − 6𝑡2)]
Sexta Derivada.
𝑓VI(Φ) = −𝑁𝑡 cos6 𝜑 [
61 − 58𝑡2 + 𝑡4 + 30𝜂2(9 − 11𝑡2)
+5𝜂4(89 − 136𝑡2) + 12𝜂6(27 − 50𝑡2)
+8𝜂8(11 − 24𝑡2)
]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
251
Séptima Derivada.
𝑓VII(Φ) = −𝑁 cos7 𝜑
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4)
+5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4)
+4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
Octava Derivada.
𝑓VIII(Φ) = 𝑁𝑡 cos8 𝜑
[
1385 − 3111𝑡2 + 543𝑡4 − 𝑡6
+21𝜂2(519 − 1562𝑡2 + 439𝑡4)
+21𝜂4(1639 − 6147𝑡2 + 2364𝑡4)
+21𝜂6(2685 − 12004𝑡2 + 5800𝑡4)
+24𝜂8(2119 − 10962𝑡2 + 6328𝑡4)
+48𝜂10(501 − 2936𝑡2 + 1960𝑡4)
+64𝜂12(73 − 477𝑡2 + 360𝑡4) ]
Novena Derivada.
𝑓IX(Φ) = 𝑁 cos9 𝜑
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
252
Decima Derivada.
𝑓X(Φ) =
−𝑁𝑡cos10 𝜑
[
50521 − 206276𝑡2 + 101166𝑡4 − 4916𝑡6 + 𝑡8
+180𝜂2(3403 − 18211𝑡2 + 13345𝑡4 − 1329𝑡6)
+10𝜂4(304319 − 1995438𝑡2 + 1921083𝑡4 − 287944𝑡6)
+1764𝜂6(4677 − 36081𝑡2 + 42622𝑡4 − 8420𝑡6)
+3𝜂8(4501907 − 39770624𝑡2 + 55294736𝑡4 − 13415808𝑡6)
+360𝜂10(38263 − 379690𝑡2 + 604288𝑡4 − 172480𝑡6)
+64𝜂12(134264 − 1475140𝑡2 + 2634795𝑡4 − 859680𝑡6)
+576𝜂14(5224 − 62841𝑡2 + 124120𝑡4 − 45360𝑡6)
+256𝜂16(1774 − 23157𝑡2 + 50004𝑡4 − 20160𝑡6) ]
Decima Primera Derivada.
𝑓XI(Φ) = −𝑁 cos11 𝜑 ∙
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
Decima Segunda Derivada.
𝑓XII(Φ) = 𝑁𝑡 cos12 𝜑 ∙
[
2702765 − 17460701𝑡2 + 16889786𝑡4 − 2819266𝑡6 + 44281𝑡8 − 𝑡10
+33𝜂2(1407933 − 11604668𝑡2 + 15691278𝑡4 − 4376508𝑡6 + 183613𝑡8)
+22𝜂4(14943197 − 148368637𝑡2 + 254823357𝑡4 − 98835787𝑡6 + 6937022𝑡8)
+66𝜂6(19637685 − 226691218𝑡2 + 468302229𝑡4 − 230348508𝑡6 + 22503800𝑡8)
+11𝜂8(291287467 − 3816686007𝑡2 + 9160219344𝑡4 − 5415555968𝑡6 + 671328384𝑡8)
+99𝜂10(52970419 − 774283096𝑡2 + 2108068176𝑡4 − 1446975744𝑡6 + 215568640𝑡8)
+4𝜂12(1448764771 − 23317854076𝑡2 + 70778414608𝑡4 − 55066922064𝑡6 + 9518065920𝑡8)
+48𝜂14(89401503 − 1568269028𝑡2 + 5237711952𝑡4 − 4538661600𝑡6 + 888148800𝑡8)
+64𝜂16(31961980 − 606076217𝑡2 + 2204324568𝑡4 − 2099265696𝑡6 + 456825600𝑡8)
+384𝜂18(1480293 − 30139018𝑡2 + 118386084𝑡4 − 122618880𝑡6 + 29272320𝑡8)
+512𝜂20(136883 − 2975559𝑡2 + 12537288𝑡4 − 14004720𝑡6 + 3628800𝑡8) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
253
4.5.2 Amplificación Inversa.
El desarrollo matemático para las fórmulas de correspondencia inversa se
hará tomando el criterio previamente establecido, por lo que en dicho proceso
también requerirá desarrollar hasta la décimo segunda derivada de la serie de
Taylor, esta vez aplicada al inverso de 𝜌. Por lo que el primer paso será declarar
dicha serie con los doce términos.
F(𝑧) = F(𝑦) +F′(𝑦)
1!(𝑖𝑥) +
F′′(𝑦)
2!(𝑖𝑥)2 +
F′′′(𝑦)
3!(𝑖𝑥)3 +
FIV(𝑦)
4!(𝑖𝑥)4
+FV(𝑦)
5!(𝑖𝑥)5 +
FVI(𝑦)
6!(𝑖𝑥)6 +
FVII(𝑦)
7!(𝑖𝑥)7 +
FVIII(𝑦)
8!(𝑖𝑥)8
+FIX(𝑦)
9!(𝑖𝑥)9 +
FX(𝑦)
10!(𝑖𝑥)10 +
FXI(𝑦)
11!(𝑖𝑥)11 +
FXII(𝑦)
12!(𝑖𝑥)12
Aplicando el teorema de números imaginarios.
F(𝑧) = F(𝑦) +F′(𝑦)
1!𝑖𝑥 −
F′′(𝑦)
2!𝑥2 −
F′′′(𝑦)
3!(𝑖𝑥)3 +
FIV(𝑦)
4!𝑥4 +
FV(𝑦)
5!(𝑖𝑥)5
−FVI(𝑦)
6!𝑥6 −
FVII(𝑦)
7!(𝑖𝑥)7 +
FVIII(𝑦)
8!𝑥8 +
FIX(𝑦)
9!(𝑖𝑥)9
−FX(𝑦)
10!𝑥10 −
FXI(𝑦)
11!(𝑖𝑥)11 +
FXII(𝑦)
12!𝑥12
Siendo.
F(𝑧) = 𝑖(𝑥, 𝑦)∆λ + Φ(𝑥, 𝑦)

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
254
Sustituyendo.
𝑖(𝑥, 𝑦)∆λ + Φ(𝑥, 𝑦) =
F(𝑦) +F′(𝑦)
1!𝑖𝑥 −
F′′(𝑦)
2!𝑥2 −
F′′′(𝑦)
3!(𝑖𝑥)3 +
FIV(𝑦)
4!𝑥4 +
FV(𝑦)
5!(𝑖𝑥)5 −
FVI(𝑦)
6!𝑥6
−FVII(𝑦)
7!(𝑖𝑥)7 +
FVIII(𝑦)
8!𝑥8 +
FIX(𝑦)
9!(𝑖𝑥)9 −
FX(𝑦)
10!𝑥10
−FXI(𝑦)
11!(𝑖𝑥)11 +
FXII(𝑦)
12!𝑥12
Agrupando términos semejantes y eliminando los factores imaginarios
finalmente se expresan las fórmulas para la representación GK.
∆𝛌 =𝐅′(𝒚)
𝟏!𝒙 −
𝐅′′′(𝒚)
𝟑!𝒙𝟑 +
𝐅𝐕(𝒚)
𝟓!𝒙𝟓 −
𝐅𝐕𝐈𝐈(𝒚)
𝟕!𝒙𝟕 +
𝐅𝐈𝐗(𝒚)
𝟗!𝒙𝟗 −
𝐅𝐗𝐈(𝒚)
𝟏𝟏!𝒙𝟏𝟏
𝚽 = 𝐅(𝒚) −𝐅′′(𝒚)
𝟐!𝒙𝟐 +
𝐅𝐈𝐕(𝒚)
𝟒!𝒙𝟒 −
𝐅𝐕𝐈(𝒚)
𝟔!𝒙𝟔 +
𝐅𝐕𝐈𝐈𝐈(𝒚)
𝟖!𝒙𝟖 −
𝐅𝐗(𝒚)
𝟏𝟎!𝒙𝟏𝟎
+𝐅𝐗𝐈𝐈(𝒚)
𝟏𝟐!𝒙𝟏𝟐
Recordando que la función de 𝑦 es igual a la latitud isométrica del punto de
expansión.
F(𝑦) = Φ0
Conociendo esto, solo resta encontrar las derivadas correspondientes.
Primera Derivada de F(𝑦)
𝑦 = ∫𝜌𝑑𝜑
𝑑𝑦 = 𝜌𝑑𝜑 ∴ 𝑑𝜑
𝑑𝑦=1
𝜌

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
255
F′(𝑦) =𝑑Φ
𝑑𝜑∙𝑑𝜑
𝑑𝑦 ∴ F′(𝑦) =
𝜌
𝑟∙1
𝜌=1
𝑟
F′(𝑦) =1
𝑁 cos𝜑0
Segunda Derivada de F(𝑦)
Derivando.
F′′(𝑦) = [F′(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
[F′(𝑦)]′ = (1
𝑁 cos𝜑0)′
[F′(𝑦)]′=−[𝑡 cos 𝜑0 (𝜂
2𝜌 − 𝑁)]
𝑁2 cos2 𝜑0=𝑁𝑡 − 𝜂2𝑡𝜌
𝑁2 cos𝜑0
Multiplicando por 𝑑𝜑
𝑑𝑦.
F′′(𝑦) = [𝑁𝑡 − 𝜂2𝑡𝜌
𝑁2 cos𝜑0] ∙ (
1
𝜌) = [
1
𝑁2 cos 𝜑0] ∙ [
𝑁𝑡 − 𝜂2𝑡𝜌
𝜌]
F′′(𝑦) = [1
𝑁2 cos 𝜑0] ∙ [
𝑁𝑡
𝜌−𝜂2𝑡𝜌
𝜌] = [
1
𝑁2 cos 𝜑0] ∙ [
𝑁
𝜌𝑡 − 𝜂2𝑡]
F′′(𝑦) = [1
𝑁2 cos 𝜑0] ∙ [(1 + 𝜂2)𝑡 − 𝜂2𝑡] =
𝑡
𝑁2 cos𝜑0
Tercera Derivada de F(𝑦).
F′′′(𝑦) = [F′′(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
Derivando.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
256
[F′′(𝑦)]′ = (𝑡
𝑁2 cos 𝜑0)′
[F′′(𝑦)]′ =[(𝑡2 + 1)𝑁2 cos 𝜑0] − 𝑡[𝑁𝑡 cos 𝜑0 (2𝜂
2𝜌 − 𝑁)]
(𝑁2 cos 𝜑0)2
[F′′(𝑦)]′ =𝑁 cos𝜑0 [𝑁(𝑡
2 + 1) − 2𝜂2𝑡2𝜌 + 𝑁𝑡2]
𝑁4 cos2 𝜑0
[F′′(𝑦)]′ =𝑁(𝑡2 + 1) + 𝑁𝑡2 − 2𝜂2𝑡2𝜌
𝑁3 cos 𝜑0
Multiplicando por 𝑑𝜑
𝑑𝑦.
F′′′(𝑦) = [𝑁(𝑡2 + 1) + 𝑁𝑡2 − 2𝜂2𝑡2𝜌
𝑁3 cos 𝜑0] ∙ (
1
𝜌)
F′′′(𝑦) =1
𝑁3 cos 𝜑0∙ [𝑁
𝜌(𝑡2 + 1) +
𝑁
𝜌𝑡2 − 2
𝜌
𝜌𝜂2𝑡2]
F′′′(𝑦) =1
𝑁3 cos 𝜑0∙ [(1 + 𝜂2)(𝑡2 + 1) + (1 + 𝜂2)𝑡2 − 2𝜂2𝑡2]
F′′′(𝑦) =1 + 2𝑡2 + 𝜂2
𝑁3 cos𝜑0
Cuarta Derivada.
FIV(𝑦) =𝑡(5 + 6𝑡2 + 𝜂2 − 4𝜂4)
𝑁4 cos𝜑0
Quinta Derivada.
FV(𝑦) =1
𝑁5 cos 𝜑0[5 + 28𝑡2 + 24𝑡4 + 2𝜂2(3 + 4𝑡2)
−𝜂4(3 − 4𝑡2) − 4𝜂6(1 − 6𝑡2)]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
257
Sexta Derivada.
FVI(𝑦) =𝑡
𝑁6 cos 𝜑0[
61 + 180𝑡2 + 120𝑡4 + 2𝜂2(23 + 24𝑡2)
−3𝜂4(1 + 12𝑡2) + 4𝜂6(25 − 24𝑡2) + 8𝜂8(11 − 24𝑡2)]
Séptima Derivada.
FVII(𝑦) =
1
𝑁7 cos 𝜑0[
61 + 662𝑡2 + 1320𝑡4 + 720𝑡6
+𝜂2(107 + 440𝑡2 + 336𝑡4) + 𝜂4(43 − 234𝑡2 − 192𝑡4)
+𝜂6(97 − 772𝑡2 + 408𝑡4) + 4𝜂8(47 − 598𝑡2 + 384𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
Octava Derivada.
FVIII(𝑦) =
𝑡
𝑁8 cos 𝜑0[
1385 + 7266𝑡2 + 10920𝑡4 + 5040𝑡6
+3𝜂2(577 + 1472𝑡2 + 896𝑡4) − 3𝜂4(191 + 610𝑡2 + 512𝑡4)
−𝜂6(2927 − 5052𝑡2 − 744𝑡4) − 24𝜂8(367 − 1144𝑡2 + 328𝑡4)
−48𝜂10(239 − 1124𝑡2 + 520𝑡4) − 64𝜂12(73 − 477𝑡2 + 360𝑡4)]
Novena Derivada.
FIX(𝑦) =
1
𝑁9 cos 𝜑0
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
258
Decima Derivada.
FX(𝑦) =
𝑡
𝑁10 cos𝜑0
[ 50521 + 408360𝑡2 + 1023120𝑡4 + 1028160𝑡6 + 362880𝑡8
+4𝜂2(22103 + 101304𝑡2 + 139680𝑡4 + 60480𝑡6)
+2𝜂4(4475 − 50328𝑡2 − 122688𝑡4 − 69120𝑡6)
+4𝜂6(11981 − 28128𝑡2 + 34416𝑡4 + 23040𝑡6)
+5𝜂8(111269 − 406872𝑡2 + 139248𝑡4 − 16704𝑡6)
+8𝜂10(207487 − 1233180𝑡2 + 946080𝑡4 − 79200𝑡6)
+128𝜂12(18974 − 155703𝑡2 + 186075𝑡4 − 33840𝑡6)
+64𝜂14(26600 − 281439𝑡2 + 466056𝑡4 − 131040𝑡6)
+256𝜂16(1774 − 23157𝑡2 + 50004𝑡4 − 20160𝑡6) ]
Décimo Primera Derivada.
FXI(𝑦) =1
𝑁11 cos 𝜑0
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
259
Décimo Segunda Derivada.
FXII(𝑦) =𝑡
𝑁12 cos 𝜑0∙
[ 2702765𝑡 + 30974526𝑡3 + 113760240𝑡5 + 185280480𝑡7 + 139708800𝑡9 + 39916800𝑡11
+𝜂2(6081221 + 43501632𝑡2 + 100526976𝑡4 + 95040000𝑡6 + 31933440𝑡8)
+18𝜂4(118731 − 111078𝑡2 − 1574272𝑡4 − 2356992𝑡6 − 1013760𝑡8)
−6𝜂6(583553 + 208676𝑡2 − 1199312𝑡4 − 3753984𝑡6 − 2027520𝑡8)
−3𝜂8(9305437 − 40929674𝑡2 + 18565584𝑡4 + 3828000𝑡6 + 2949120𝑡8)
−9𝜂10(18609159 − 126997256𝑡2 + 123815264𝑡4 − 19374720𝑡6 − 585600𝑡8)
−12𝜂12(41013457 − 395555536𝑡2 + 612260512𝑡4 − 187121280𝑡6 + 8334720𝑡8)
−48𝜂14(16591909 − 208486552𝑡2 + 453204432𝑡4 − 220545408𝑡6 + 18829440𝑡8)
−576𝜂16(1264608 − 19673399𝑡2 + 55628988𝑡4 − 37996944𝑡6 + 5214720𝑡8)
−128𝜂18(2753297 − 51259494𝑡2 + 179830944𝑡4 − 160588800𝑡6 + 31207680𝑡8)
−512𝜂20(136883 − 2975559𝑡2 + 12537288𝑡4 − 14004720𝑡6 + 3628800𝑡8) ]
El desarrollo completo de estas derivadas se encuentra en el anexo 6.5.2.
El valor de la latitud del punto de expansión (𝜑0) se calculara mediante
aproximaciones partiendo del despeje de dicho valor mediante la fórmula truncada
de longitud de arco de meridiano. Además de ello con dicho punto se calculara el
valor de su latitud isométrica con la fórmula ya conocida.
Φ0 = ln [tan (𝜋
4+𝜑0
2) (1 − 𝑒 sin𝜑
0
1 + 𝑒 sin𝜑0
)
𝑒2
]
Además de estos términos también será necesario encontrar la sexta
derivada de Φ y de esta manera encontrar el valor exacto de la longitud geodésica
del punto de estudio.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
260
Primera Derivada de Φ.
𝜑 = F(Φ) = ∫𝑟
𝜌
Φ
0
𝑑Φ
Derivando.
𝑑𝜑
𝑑Φ=𝑟
𝜌=𝑁 cos𝜑
𝜌,
𝑑𝜑
𝑑𝜑= 1
F′(Φ) =𝑑𝜑
𝑑𝜑∙𝑑𝜑
𝑑Φ= 1 ∙ [
𝑁 cos 𝜑
𝜌] = (
𝑁
𝜌) cos 𝜑0
F′(Φ) = (1 + 𝜂2) cos 𝜑0
Segunda Derivada de Φ.
F′′(Φ) = [F′(Φ)]′ ∙𝑑𝜑
𝑑Φ
[F′(Φ)]′ = [(1 + 𝜂2) cos 𝜑0]′
[F′(Φ)]′ = −2𝜂2𝑡 cos𝜑0 + [(1 + 𝜂2)(−𝑡 cos 𝜑0)]
[F′(Φ)]′ = −3𝜂2𝑡 cos 𝜑0 − 𝑡 cos 𝜑0 = −𝑡 cos 𝜑 (3𝜂2 + 1)
Multiplicando por 𝑑𝜑
𝑑Φ.
F′′(Φ) = −𝑡 cos 𝜑0 (3𝜂2 + 1) ∙ [(
𝑁
𝜌) cos 𝜑0]
F′′(Φ) = −𝑡 cos 𝜑0 (3𝜂2 + 1) ∙ [(1 + 𝜂2) cos 𝜑0]
F′′(Φ) = −(3𝜂2 + 1)(1 + 𝜂2)𝑡 cos2 𝜑0

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
261
Tercera Derivada de Φ.
F′′′(Φ) = [F′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
[F′′(Φ)]′ = [−(1 + 4𝜂2 + 3𝜂4)𝑡 cos2 𝜑0]′
[F′′(Φ)]′ = −[(𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡) cos2 𝜑0]′
[F′′(Φ)]′ = −(𝑢 ∙ 𝑣)′ = −(𝑢′ ∙ 𝑣 + 𝑢 ∙ 𝑣′)
Siendo.
𝑢 = 𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡, 𝑣 = cos2 𝜑0
Derivando por partes.
𝑢′ = {𝑡2 + 1 + 4[−2𝜂2𝑡 ∙ 𝑡 + 𝜂2(𝑡2 + 1)]
+3[−4𝜂4𝑡 ∙ 𝑡 + 𝜂4(𝑡2 + 1)]}
𝑢′ = {1 + 𝑡2 + 4[−2𝜂2𝑡2 + 𝜂2𝑡2 + 𝜂2]
+3[−4𝜂4𝑡2 + 𝜂4𝑡2 + 𝜂4]} = {
1 + 𝑡2 + 4[−𝜂2𝑡2 + 𝜂2]
+3[−3𝜂4𝑡2 + 𝜂4]}
𝑢′ = 1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2
𝑣′ = −2𝑡 cos2 𝜑0
Sustituyendo.
[F′′(Φ)]′ = −{(1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2) cos2 𝜑0
+[(−2𝑡 cos2 𝜑0)(𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡)]
}
[F′′(Φ)]′ = −cos2 𝜑0 {(1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2)
−(2𝑡2 + 8𝜂2𝑡2 + 6𝜂4𝑡2)}
[F′′(Φ)]′ = −cos2 𝜑0 [1 + 𝑡2 − 2𝑡2 + 4𝜂2 − 4𝜂2𝑡2 − 8𝜂2𝑡2
+3𝜂4 − 9𝜂4𝑡2 − 6𝜂4𝑡2]
[F′′(Φ)]′ = −cos2 𝜑0 [1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
262
Multiplicando por 𝑑𝜑
𝑑Φ.
F′′′(Φ) =
−{cos2 𝜑0 [1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2]} ∙ [(
𝑁
𝜌) cos 𝜑0]
F′′′(Φ) = − cos3 𝜑0 {[1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2](1 + 𝜂2)}
F′′′(Φ) = −(1 + 𝜂2) [1 − 𝑡2 + 4𝜂2(1 − 3𝑡2)
+3𝜂4(1 − 5𝑡2)] cos3 𝜑0
Cuarta Derivada.
FIV(Φ) = (1 + 𝜂2)𝑡 [5 − 𝑡2 + 3𝜂2(17 − 13𝑡2)
+𝜂4(103 − 135𝑡2) + 3𝜂6(19 − 35𝑡2)] cos4 𝜑0
Quinta Derivada.
FV(Φ) = (1 + 𝜂2)
[ 5 − 18𝑡2 + 𝑡4 + 8𝜂2(7 − 50𝑡2 + 15𝑡4)
+2𝜂4(77 − 800𝑡2 + 435𝑡4)
+80𝜂6(2 − 27𝑡2 + 21𝑡4)
+3𝜂8(19 − 314𝑡2 + 315𝑡4) ]
cos5 𝜑0
Sexta Derivada.
FVI(Φ) = −𝑡(1 + 𝜂2)
[
61 − 58𝑡2 + 𝑡4
+3𝜂2(421 − 858𝑡2 + 121𝑡4)
+10𝜂4(589 − 1796𝑡2 + 495𝑡4)
+6𝜂6(1829 − 7340𝑡2 + 2975𝑡4)
+𝜂8(9025 − 44622𝑡2 + 23625𝑡4)
+3𝜂10(913 − 5342𝑡2 + 3465𝑡4) ]
cos6 𝜑0
El desarrollo completo de todas las derivadas se encuentra en el anexo
6.5.3.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
263
4.6 Pruebas de Error y Exactitud.
Se han desarrollado las derivadas faltantes de las fórmulas de
transformación para ambos casos, siendo estas amplificadas hasta el doceavo
término, por consiguiente con estas nuevas ecuaciones se proseguirá a realizar
las pruebas de trasformación, exactitud y aproximación necesarias para dar
veracidad y confirmar la teoría de Enriquez Turiño (2009). Por lo que en este
apartado se realizaran dichas pruebas y demostraciones.
Estas pruebas se realizaron tomando como base las coordenadas
geodésicas extremas oficiales de la República Mexicana y los parámetros del
sistema de referencia ITRF08. Los cálculos y demás estimaciones que a
continuación se presentan fueron realizados con las hojas de cálculo que el
software Microsoft Excel® 2013 ofrece, apoyados del programa de procesos
algebraicos Wolfram Mathematica® V. 10.0 y la calculadora geodésica
desarrollada por Karney (2011).
4.6.1 Aplicación de las formulas amplificadas a un Δλ máximo
para el territorio mexicano.
La primera prueba a realizar será la aplicación de las nuevas fórmulas
amplificadas primeramente convirtiendo de coordenadas geodésicas a ortogonales
GK y posteriormente la aplicación inversa, obteniendo el desplazamiento o error
angular o métrico (según sea el caso) generado en ambas transformaciones, esto
con el fin de cerciorar si dicha amplificación cumple con la precisión requerida y si
los términos de ambos casos se vinculan para el logro de este objetivo.
Como ya se dijo, los cálculos se realizaran utilizando los parámetros
geométricos del sistema ITRF08, Época 2010.0 los cuales están asociados al
elipsoide GRS80, aplicando las formulas amplificadas a las coordenadas extremas
del territorio mexicano.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
264
Debido a que la zona meridiana en la que se encuentra el país no es
totalmente simétrica con respecto al MC 102º W de longitud, siendo el valor de ∆λ
W mayor al del lado E del mismo, los cálculos se desarrollaran extendiendo los
valores de ∆λ hasta un valor de 18º para ambos lados, produciendo que los
nuevos límites sean los meridianos 120º W y 84º W, esta ampliación trabajara en
conjunto con la transformación simétrica de la proyección con respecto al MC,
facilitando así la comprensión de resultados.
Para las latitudes sucederá lo mismo truncando la latitud mínima al paralelo
14º N y aproximando a la latitud máxima al paralelo 33º N obteniendo así una faja
de latitud que cubra de manera vertical todo el territorio de estudio.
Para evitar la saturación de coordenadas y un posible entorpecimiento en
los cálculos, la banda meridiana y la faja de latitud se seccionara en porciones
iguales atendiendo las siguientes condiciones:
- Se tomaran los meridianos que se encuentren a cada 6º de longitud
partiendo del MC, siendo los limites los meridianos 120º W y 84º W.
- Para las latitudes, estas incrementaran a cada 6º tomando como
inicio el paralelo 14º N, siendo el párelo el 33º N el paralelo limite.
Tal y como se muestra en la imagen IV.6.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
265
Fig. IV.6 Red de coordenadas para el proceso de conversión.
Los resultados de los cálculos que se presentan a continuación fueron
realizados tomando como referencia la latitud de cada paralelo siendo las
longitudes las variables, esto debido a que los radios de curvatura del elipsoide
dependen directamente de φ.
El proceso de conversión y demás fórmulas geodésicas fueron entorno a
los parámetros geométricos del elipsoide GRS 80 mismos que se muestran en la
tabla IV.9.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
266
Proceso directo para φ 14º N
t η v N ρ S
0.24932800 0.07965588 1.00316751 6379386.8336 6339164.4572 1548345.6449
Tabla IV.14 Radios de curvatura y demás parámetros geométricos para φ de 14º N
𝑓(Φ) ∙ ∆𝜆 λ
84º W 90º W 96º W 102º W 108º W 114º W 120º W
I 1944611.8545 1296407.9030 648203.9515 0.000000 -648203.9515 -1296407.903 -1944611.854
II 73897.199942 32843.199974 8210.799994 0.000000 8210.799994 32843.199974 73897.199942
III 28434.443749 8425.0203704 1053.1275463 0.000000 -1053.127546 -8425.020370 -28434.44374
IV 2858.2426193 564.59113468 35.28694592 0.000000 35.28694592 564.59113468 2858.2426193
V 552.8394594 72.80190412 2.275059504 0.000000 -2.275059504 -72.80190412 -552.8394594
VI 104.5624867 9.179697046 0.143432766 0.000000 0.143432766 9.179697046 104.5624867
VII 10.1424890 0.593616181 0.004637626 0.000000 -0.004637626 -0.593616181 -10.1424890
VIII 3.67957663 0.143571348 0.000560826 0.000000 0.000560826 0.143571348 3.67957663
IX 0.10888870 0.002832445 0.000005532 0.000000 -0.000005532 -0.002832445 -0.10888870
X 0.12392646 0.002149074 0.000002099 0.000000 0.000002099 0.002149074 0.12392646
XI -0.00357713 -0.000041355 -0.000000020 0.000000 0.000000020 0.000041355 0.00357713
XII 0.00394155 0.000030379 0.000000007 0.000000 0.000000007 0.000030379 0.00394155
Tabla IV.15 Valores de los doce términos con respecto a φ y λ expresados en metros.
λ = 84° W X1 = 1973609.3855565 λ = 90° W X2 =1304906.32171282 λ = 96° W X3 = 649259.35876447
φ = 14° N Y1 = 1625209.4574210 φ = 14° N Y2 = 1581762.7614850 φ = 14° N Y3 = 1556591.8758634
λ = 108° W X4 = -649259.3587644 λ = 114° W X5 = -1304906.321712 λ = 120° W X6 = -1973609.385556
φ = 14° N Y4 = 1556591.8758634 φ = 14° N Y5 = 1581762.7614850 φ = 14° N Y6 = 1625209.4574210
λ = 102° W XMC = 000.00000000
φ = 14° N YMC = 1548345.644928
Tabla IV.16 Coordenadas finales expresadas en el sistema GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
267
Proceso inverso.
PARA X1 & Y1
φ0 Φ0 t η v N ρ S
14º41’40.93515” 14º45’40.28575” 0.2622463 0.07940923 1.00314796 6379511.1931 6339535.1906 1625209.4574
PARA X2 & Y2
φ0 Φ0 t η v N ρ S
14º18’07.31819” 14º21’29.33362” 0.2549346 0.07955008 1.00315912 6379440.2227 6339323.6159 1581762.7615
PARA X3 & Y3
φ0 Φ0 t η v N ρ S
14º04’28.31643” 14º07’29.87951” 0.2507102 0.07962998 1.00316546 6379399.9111 6339203.4423 1556591.8759
PARA X4 & Y4
φ0 Φ0 t η v N ρ S
14º04’28.31643” 14º07’29.87951” 0.2507102 0.07962998 1.00316546 6379399.9111 6339203.4423 1556591.8759
PARA X5 & Y5
φ0 Φ0 t η v N ρ S
14º18’07.31819” 14º21’29.33362” 0.2549346 0.07955008 1.00315912 6379440.2227 6339323.6159 1581762.7615
PARA X6 & Y6
φ0 Φ0 t η v N ρ S
14º41’40.93515” 14º45’40.28575” 0.2622463 0.07940923 1.00314796 6379511.1931 6339535.1906 1625209.4574
PARA XMC & YMC
φ0 Φ0 t η v N ρ S
14º00’00.00000” 14º02’55.04727” 0.2493280 0.07965588 1.00316751 6379386.8336 6339164.4572 1548345.6449
Tabla IV.17 Radios de curvatura y demás parámetros geométricos para las latitudes de los puntos de expansión de cada coordenada GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
268
F(𝑦) ∙ X COORD GK
X1,Y1 X2,Y2 X3,Y3 XMC,YMC X4,Y4 X5,Y5 X6,Y6
I 18º19’29.27223” 12º05’40.65883” 06º00’42.16243” 00º00’00.00000” -06º00’42.16243” -12º05’40.65883” -18º19’29.27223”
II -00º44’36.05396” -00º18’55.24743” -00º04’36.10926” 00º00’00.00000” -00º04’36.10926” -00º18’55.24743” 00º44’36.05396”
III -00º20’03.67129” -00º05’45.01238” -00º00’42.29535” 00º00’00.00000” 00º00’42.29535” 00º05’45.01238” 00º20’03.67129”
IV 00º01’55.65467” 00º00’21.35916” 00º00’01.28300” 00º00’00.00000” 00º00’01.28300” 00º00’21.35916” 00º01’55.65467”
V 00º00’35.65421” 00º00’04.42235” 00º00’00.13343” 00º00’00.00000” -00º00’00.13343” -00º00’04.42235” -00º00’35.65421”
VI -00º00’05.05624” -00º00’00.40584” -00º00’00.00602” 00º00’00.00000” -00º00’00.00602” -00º00’00.40584” -00º00’05.05624”
VII -00º00’01.30680” -00º00’00.07003” -00º00’00.00052” 00º00’00.00000” 00º00’00.00052” -00º00’00.07003” 00º00’01.30680”
VIII 00º00’00.22703” 00º00’00.00791” 00º00’00.00003” 00º00’00.00000” 00º00’00.00003” 00º00’00.00791” 00º00’00.22703”
IX 00º00’00.05395” 00º00’00.00125” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00125” -00º00’00.05395”
X -00º00’00.01046” -00º00’00.00016” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00016” -00º00’00.01046”
XI -00º00’00.00239” -00º00’00.00002” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00002” 00º00’00.00239”
XII 00º00’00.00049” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00049”
F(Φ) ∙ ∆Φ Para φ
I -00º41’36.97945” -00º18’06.58414” -00º04’28.27222” 00º00’00.00000” -00º04’28.27222” -00º18’06.58414” -00º41’36.97945”
II -00º00’04.01322” -00º00’00.73880” -00º00’00.04429” 00º00’00.00000” -00º00’00.04429” -00º00’00.73880” -00º00’04.01322”
III 00º00’00.05729” 00º00’00.00474” 00º00’00.00007” 00º00’00.00000” 00º00’00.00007” 00º00’00.00474” 00º00’00.05729”
IV 00º00’00.00025” 00º00’00.00001” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00001” 00º00’00.00025”
V 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
VI 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
Tabla IV.18 Valores de los términos inversos con respecto a X y Y.
X1,Y1
λ = -84º 00’ 00.00009”
X2,Y2
λ = -90º 00’ 00.00000”
X3,Y3
λ = -96º 00’ 00.00000”
φ = 14º 00’ 00.00002” φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00000”
Φ = 14º 02’ 55.04729” Φ = 14º 02’ 55.04727” Φ = 14º 02’ 55.04727”
X4,Y4
λ = -108º 00’ 00.00000”
X5,Y5
λ = -114º 00’ 00.00000”
X6,Y6
λ = -119º 59’ 59.99991”
φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00002”
Φ = 14º 02’ 55.04727” Φ = 14º 02’ 55.04727” Φ = 14º 02’ 55.04729”
XMC,YMC
λ = -102º 00’ 00.00000”
φ = 14º 00’ 00.00000”
Φ = 14º 02’ 55.04727”
Tabla IV.19 Coordenadas geodésicas transformadas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
269
Errores.
Coordenadas
de Origen
Transformación
Directa
Transformación
Inversa
Error
Angular Metros
λ = 84º W X1 = 1973609.3855565 λ1 = -84º 00’ 00.00009” 00.00009” 0.003
φ = 14º N Y1 = 1625209.4574210 φ1 = 14º 00’ 00.00002” 00.00002” 0.0006
λ = 90º W X2 =1304906.3217128 λ2 = -90º 00’ 00.00000” 00.00000” 0.000
φ = 14º N Y2 = 1581762.7614850 φ2 = 14º 00’ 00.00000” 00.00000” 0.000
λ = 96º W X3 = 649259.35876447 λ3 = -96º 00’ 00.00000” 00.00000” 0.000
φ = 14º N Y3 = 1556591.8758634 φ3 = 14º 00’ 00.00000” 00.00000” 0.000
λ = 102º W XMC = 000.00000000 λ = -102º 00’ 00.00000” 00.00000” 0.000
φ = 14º N YMC = 1548345.64492 φ = 14º 00’ 00.00000” 00.00000” 0.000
λ = 108º W X4 = -649259.3587644 λ4 = -108º 00’ 00.00000” 00.00000” 0.000
φ = 14º N Y4 = 1556591.8758634 φ4 = 14º 00’ 00.00000” 00.00000” 0.000
λ = 114º W X5 = -1304906.321712 λ5 = -114º 00’ 00.00000” 00.00000” 0.000
φ = 14º N Y5 = 1581762.7614850 φ5 = 14º 00’ 00.00000” 00.00000” 0.000
λ = 120º W X6 = -1973609.385556 λ6 = -119º 59’ 59.99991” -00.00009” -0.003
φ = 14º N Y6 = 1625209.4574210 φ6 = 14º 00’ 00.00002” 00.00002” 0.0006
Tabla IV.20 Errores de transformación entre conversiones.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
270
Proceso directo para φ 20º N
t η v N ρ S
0.36397023 0.07714353 1.00297114 6380635.8072 6342888.4823 2212366.2541
Tabla IV.21 Radios de curvatura y demás parámetros geométricos para φ de 20º N.
𝑓(Φ) ∙ ∆𝜆 λ
84º W 90º W 96º W 102º W 108º W 114º W 120º W
I 1883647.5535 1255765.0357 627882.5178 0.000000 -627882.5178 -1255765.035 -1883647.553
II 101197.83176 44976.814119 11244.20352 0.000000 11244.20352 44976.814119 101197.83176
III 23898.527626 7081.0452227 885.1306528 0.000000 -885.1306528 -7081.045222 -23898.52762
IV 3616.8856502 714.44654819 44.652909261 0.000000 44.652909261 714.44654819 3616.8856502
V 318.41707348 41.931466466 1.3103583270 0.000000 -1.310358327 -41.93146646 -318.4170734
VI 116.77384978 10.251750872 0.1601836073 0.000000 0.1601836073 10.251750872 116.77384978
VII 0.0561433341 0.0032859382 0.0000256714 0.000000 -0.000025671 -0.003285938 -0.056143334
VIII 3.3991937216 0.1326312441 0.0005180908 0.000000 0.0005180908 0.1326312441 3.3991937216
IX -0.265544717 -0.006907427 -0.000013491 0.000000 0.000013491 0.006907427 0.265544717
X 0.0846000044 0.0014670935 0.000001432 0.000000 0.000001432 0.0014670935 0.0846000044
XI -0.015327858 -0.000177205 -0.000000086 0.000000 0.000000086 0.000177205 0.015327858
XII 0.0014993828 0.0000115562 0.000000002 0.000000 0.000000002 0.0000115562 0.0014993828
Tabla IV.22 Valores de los doce términos con respecto a φ y λ expresados en metros.
λ = 84° W X1 =1907864.2735521 λ = 90° W X2 = 1262888.0086113 λ = 96° W X3 = 628768.9588836
φ = 20° N Y1 = 2317301.2306654 φ = 20° N Y2 = 2258067.9006316 φ = 20° N Y3 = 2223655.2712453
λ = 108° W X4 = -628768.9588836 λ = 114° W X5 = -1262888.008611 λ = 120° W X6 = -1907864.273552
φ = 20° N Y4 = 2223655.2712453 φ = 20° N Y5 = 2258067.9006316 φ = 20° N Y6 = 2317301.2306654
λ = 102° W XMC = 000.00000000
φ = 20° N YMC = 2212366.254102
Tabla IV.23 Coordenadas finales expresadas en el sistema GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
271
Proceso inverso.
PARA X1 & Y1
φ0 Φ0 t η v N ρ S
20º56’52.20267” 21º17’36.86948” 0.3828198 0.07666851 1.00293472 6380867.5390 6343579.5902 2317301.2307
PARA X2 & Y2
φ0 Φ0 t η v N ρ S
20º24’46.14006” 20º43’30.21769” 0.3721513 0.07693924 1.00295546 6380735.6450 6343186.2285 2258067.9006
PARA X3 & Y3
φ0 Φ0 t η v N ρ S
20º06’07.10618” 20º43’44.43597” 0.3659871 0.07709344 1.00296730 6380660.3113 6342961.5603 2223655.2712
PARA X4 & Y4
φ0 Φ0 t η v N ρ S
20º06’07.10618” 20º43’44.43597” 0.3659871 0.07709344 1.00296730 6380660.3113 6342961.5603 2223655.2712
PARA X5 & Y5
φ0 Φ0 t η v N ρ S
20º24’46.14006” 20º43’30.21769” 0.3721513 0.07693924 1.00295546 6380735.6450 6343186.2285 2258067.9006
PARA X6 & Y6
φ0 Φ0 t η v N ρ S
20º56’52.20267” 21º17’36.86948” 0.3828198 0.07666851 1.00293472 6380867.5390 6343579.5902 2317301.2307
PARA XMC & YMC
φ0 Φ0 t η v N ρ S
20º00’00.00000” 20º17’15.95335” 0.3639702 0.07714354 1.00297115 6380635.8072 6342888.4823 2212366.2541
Tabla IV.24 Radios de curvatura y demás parámetros geométricos para las latitudes de los puntos de expansión de cada coordenada GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
272
F(𝑦) ∙ X COORD GK
X1,Y1 X2,Y2 X3,Y3 XMC,YMC X4,Y4 X5,Y5 X6,Y6
I 18º20’37.33892” 12º05’59.72110” 06º00’44.46697” 00º00’00.00000” -06º00’44.46697” -12º05’59.72110” -18º20’37.33892”
II -01º02’59.38972” -00º26’44.23780” -00º06’30.30862” 00º00’00.00000” -00º06’30.30862” -00º26’44.23780” -01º02’59.38972”
III -00º21’18.13368” -00º06’04.85405” -00º00’44.62316” 00º00’00.00000” 00º00’44.62316” 00º06’04.85405” 00º21’18.13368”
IV 00º02’45.70124” 00º00’30.56662” 00º00’01.83491” 00º00’00.00000” 00º00’01.83491” 00º00’30.56662” 00º02’45.70124”
V 00º00’42.70124” 00º00’05.22510” 00º00’00.15687” 00º00’00.00000” -00º00’00.15687” -00º00’05.22510” -00º00’42.70124”
VI -00º00’07.57397” -00º00’00.60547” -00º00’00.00895” 00º00’00.00000” -00º00’00.00895” -00º00’00.60547” -00º00’07.57397”
VII -00º00’01.77580” -00º00’00.09401” -00º00’00.00069” 00º00’00.00000” 00º00’00.00069” 00º00’00.09401” 00º00’01.77580”
VIII 00º00’00.36361” 00º00’00.01257” 00º00’00.00005” 00º00’00.00000” 00º00’00.00005” 00º00’00.01257” 00º00’00.36361”
IX 00º00’00.08330” 00º00’00.00190” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00190” -00º00’00.08330”
X -00º00’00.01819” -00º00’00.00027” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00027” -00º00’00.01819”
XI -00º00’00.00416” -00º00’00.00004” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00004” 00º00’00.00416”
XII 00º00’00.00094” 00º00’00.00001” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00001” 00º00’00.00094”
F(Φ) ∙ ∆Φ Para φ
I -00º56’41.47366” -00º24’44.14071” -00º06’06.98545” 00º00’00.00000” -00º06’06.98545” -00º24’44.14071” -00º56’41.47366”
II -00º00’10.86225” -00º00’02.01046” -00º00’00.12090” 00º00’00.00000” -00º00’00.12090” -00º00’02.01046” -00º00’10.86225”
III 00º00’00.13205” 00º00’00.01108” 00º00’00.00017” 00º00’00.00000” 00º00’00.00017” 00º00’00.01108” 00º00’00.13205”
IV 00º00’00.00122” 00º00’00.00004” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00004” 00º00’00.00122”
V 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
VI 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
Tabla IV.25 Valores de los términos inversos con respecto a X y Y.
X1,Y1
λ = -84º 00’ 00.00018”
X2,Y2
λ = -90º 00’ 00.00000”
X3,Y3
λ = -96º 00’ 00.00000”
φ = 20º 00’ 00.00004” φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00000”
Φ = 20º 17’ 15.95339” Φ = 20º 17’ 15.95335” Φ = 20º 17’ 15.95335”
X4,Y4
λ = -108º 00’ 00.00000”
X5,Y5
λ = -114º 00’ 00.00000”
X6,Y6
λ = -119º 59’ 59.99982”
φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00004”
Φ = 20º 17’ 15.95335” Φ = 20º 17’ 15.95335” Φ = 20º 17’ 15.95339”
XMC,YMC
λ = -102º 00’ 00.00000”
φ = 20º 00’ 00.00000”
Φ = 20º 17’ 15.95335”
Tabla IV.26 Coordenadas geodésicas transformadas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
273
Errores.
Coordenadas
de Origen
Transformación
Directa
Transformación
Inversa
Error
Angular Metros
λ = 84º W X1 =1907864.2735521 λ1 = -84º 00’ 00.00018” 00.00018” 0.005
φ = 20º N Y1 = 2317301.2306654 φ1 = 20º 00’ 00.00004” 00.00004” 0.001
λ = 90º W X2 = 1262888.0086113 λ2 = -90º 00’ 00.00000” 00.00000” 0.000
φ = 20º N Y2 = 2258067.9006316 φ2 = 20º 00’ 00.00000” 00.00000” 0.000
λ = 96º W X3 = 628768.9588836 λ3 = -96º 00’ 00.00000” 00.00000” 0.000
φ = 20º N Y3 = 2223655.2712453 φ3 = 20º 00’ 00.00000” 00.00000” 0.000
λ = 102º W XMC = 000.00000000 λ = -102º 00’ 00.00000” 00.00000” 0.000
φ = 20º N YMC = 2212366.25410 φ = 20º 00’ 00.00000” 00.00000” 0.000
λ = 108º W X4 = -628768.9588836 λ4 = -108º 00’ 00.00000” 00.00000” 0.000
φ = 20º N Y4 = 2223655.2712453 φ4 = 20º 00’ 00.00000” 00.00000” 0.000
λ = 114º W X5 = -1262888.008611 λ5 = -114º 00’ 00.00000” 00.00000” 0.000
φ = 20º N Y5 = 2258067.9006316 φ5 = 20º 00’ 00.00000” 00.00000” 0.000
λ = 120º W X6 = -1907864.273552 λ6 = -119º 59’ 59.99982” -00.00018” -0.005
φ = 20º N Y6 = 2317301.2306654 φ6 = 20º 00’ 00.00004” 00.00004” 0.001
Tabla IV.27 Errores de transformación entre conversiones.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
274
Proceso directo para φ 26º N
t η v N ρ S
0.48773259 0.07378599 1.00271849 6382243.5527 6347684.3934 2876834.5725
Tabla IV.28 Radios de curvatura y demás parámetros geométricos para φ de 26º N.
𝑓(Φ) ∙ ∆𝜆 λ
84º W 90º W 96º W 102º W 108º W 114º W 120º W
I 1802118.8647 1201412.5765 600706.2882 0.000000 -600706.2882 -1201412.576 -1802118.865
II 124092.42497 55152.188876 13788.047219 0.000000 13788.047219 55152.188876 124092.42497
III 18380.840588 5446.1749892 680.77187364 0.000000 -680.7718736 -5446.174989 -18380.84059
IV 3966.8036159 783.56614635 48.972884147 0.000000 48.972884147 783.56614635 3966.8036159
V 74.054838393 9.7520774839 0.3047524214 0.000000 -0.304752421 -9.752077484 -74.05483839
VI 105.85795548 9.2934281906 0.1452098155 0.000000 0.1452098155 9.2934281906 105.85795548
VII -8.115816168 -0.474999757 -0.003710935 0.000000 0.003710935 0.474999757 8.115816168
VIII 2.1699167791 0.0846667727 0.0003307295 0.000000 0.0003307295 0.0846667727 2.1699167791
IX -0.452865568 -0.011780073 -0.000023007 0.000000 0.000023007 0.011780073 0.452865568
X 0.0190757461 0.0003308026 0.000000323 0.000000 0.000000323 0.0003308026 0.0190757461
XI -0.015877118 -0.000183556 -0.000000090 0.000000 0.000000090 0.000183556 0.015877118
XII -0.001054486 -0.000008127 -0.000000002 0.000000 0.000000002 0.000008127 0.001054486
Tabla IV.29 Valores de los doce términos con respecto a φ y λ expresados en metros.
λ = 84° W X1 =1820565.1756049 λ = 90° W X2 = 1206868.0165945 λ = 96° W X3 = 601387.3611377
φ = 26° N Y1 = 3005001.8470002 φ = 26° N Y2 = 2932779.7059590 φ = 26° N Y3 = 2890671.7381625
λ = 108° W X4 = -601387.3611377 λ = 114° W X5 = -1206868.016594 λ = 120° W X6 = -1820565.175605
φ = 26° N Y4 = 2890671.7381625 φ = 26° N Y5 = 2932779.7059590 φ = 26° N Y6 = 3005001.8470002
λ = 102° W XMC = 000.00000000
φ = 26° N YMC = 2876834.572518
Tabla IV.30 Coordenadas finales expresadas en el sistema GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
275
Proceso inverso.
PARA X1 & Y1
φ0 Φ0 t η v N ρ S
27º09’24.39445” 28º03’34.39006” 0.5129769 0.07304443 1.00266420 6382589.1632 6348715.6663 3005001.8470
PARA X2 & Y2
φ0 Φ0 t η v N ρ S
26º30’17.84516” 27º19’58.75516” 0.4986896 0.07346596 1.00269499 6382393.1245 6348130.6895 2932779.7060
PARA X3 & Y3
φ0 Φ0 t η v N ρ S
26º07’29.62784” 26º54’40.57569” 0.4904339 0.07370737 1.00271271 6382280.3584 6347794.2131 2890671.7382
PARA X4 & Y4
φ0 Φ0 t η v N ρ S
26º07’29.62784” 26º54’40.57569” 0.4904339 0.07370737 1.00271271 6382280.3584 6347794.2131 2890671.7382
PARA X5 & Y5
φ0 Φ0 t η v N ρ S
26º30’17.84516” 27º19’58.75516” 0.4986896 0.07346596 1.00269499 6382393.1245 6348130.6895 2932779.7060
PARA X6 & Y6
φ0 Φ0 t η v N ρ S
27º09’24.39445” 28º03’34.39006” 0.5129769 0.07304443 1.00266420 6382589.1632 6348715.6663 3005001.8470
PARA XMC & YMC
φ0 Φ0 t η v N ρ S
26º00’00.00000” 26º46’22.75977” 0.4877326 0.07378599 1.00271849 6382243.5527 6347684.3934 2876834.5725
Tabla IV.31 Radios de curvatura y demás parámetros geométricos para las latitudes de los puntos de expansión de cada coordenada GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
276
F(𝑦) ∙ X COORD GK
X1,Y1 X2,Y2 X3,Y3 XMC,YMC X4,Y4 X5,Y5 X6,Y6
I 18º22’04.30656” 12º06’24.18328” 06º00’47.43178” 00º00’00.00000” -06º00’47.43178” -12º06’24.18328” -18º22’04.30656”
II -01º20’37.69286” -00º34’14.97000” -00º08’20.19030” 00º00’00.00000” -00º08’20.19030” -00º34’14.97000” -01º20’37.69286”
III -00º22’53.35029” -00º06’30.32423” -00º00’47.61810” 00º00’00.00000” 00º00’47.61810” 00º06’30.32423” 00º22’53.35029”
IV 00º03’35.95920” 00º00’39.78490” 00º00’02.38653” 00º00’00.00000” 00º00’02.38653” 00º00’39.78490” 00º03’35.95920”
V 00º00’51.33441” 00º00’06.26454” 00º00’00.18724” 00º00’00.00000” -00º00’00.18724” -00º00’06.26454” -00º00’51.33441”
VI -00º00’10.40674” -00º00’00.82832” -00º00’00.01222” 00º00’00.00000” -00º00’00.01222” -00º00’00.82832” -00º00’10.40674”
VII -00º00’02.40984” -00º00’00.12636” -00º00’00.00093” 00º00’00.00000” 00º00’00.00093” 00º00’00.12636” 00º00’02.40984”
VIII 00º00’00.53783” 00º00’00.01846” 00º00’00.00007” 00º00’00.00000” 00º00’00.00007” 00º00’00.01846” 00º00’00.53783”
IX 00º00’00.12574” 00º00’00.00284” 00º00’00.00001” 00º00’00.00000” -00º00’00.00001” -00º00’00.00284” -00º00’00.12574”
X -00º00’00.02928” -00º00’00.00043” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00043” -00º00’00.02928”
XI -00º00’00.00695” -00º00’00.00007” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00007” 00º00’00.00695”
XII 00º00’00.00165” 00º00’00.00001” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00001” 00º00’00.00165”
F(Φ) ∙ ∆Φ Para φ
I -01º09’03.03148” -00º30’13.84292” -00º07’29.38543” 00º00’00.00000” -00º07’29.38543” -00º30’13.84292” -01º09’03.03148”
II -00º00’21.57072” -00º00’04.01987” -00º00’00.24268” 00º00’00.00000” -00º00’00.24268” -00º00’04.01987” -00º00’21.57072”
III 00º00’00.20433” 00º00’00.01750” 00º00’00.00027” 00º00’00.00000” 00º00’00.00027” 00º00’00.01750” 00º00’00.20433”
IV 00º00’00.00350” 00º00’00.00013” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00013” 00º00’00.00350”
V 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
VI 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
Tabla IV.32 Valores de los términos inversos con respecto a X y Y.
X1,Y1
λ = -84º 00’ 00.00036”
X2,Y2
λ = -90º 00’ 00.00000”
X3,Y3
λ = -96º 00’ 00.00000”
φ = 26º 00’ 00.00008” φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00000”
Φ = 26º 46’ 22.75986” Φ = 26º 46’ 22.75977” Φ = 26º 46’ 22.75977”
X4,Y4
λ = -108º 00’ 00.00000”
X5,Y5
λ = -114º 00’ 00.00000”
X6,Y6
λ = -119º 59’ 59.99964”
φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00008”
Φ = 26º 46’ 22.75977” Φ = 26º 46’ 22.75977” Φ = 26º 46’ 22.75986”
XMC,YMC
λ = -102º 00’ 00.00000”
φ = 26º 00’ 00.00000”
Φ = 26º 46’ 22.75977”
Tabla IV.33 Coordenadas geodésicas transformadas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
277
Errores.
Coordenadas
de Origen
Transformación
Directa
Transformación
Inversa
Error
Angular Metros
λ = 84º W X1 =1820565.1756049 λ1 = -84º 00’ 00.00036” 00.00036” 0.010
φ = 26º N Y1 = 3005001.8470002 φ1 = 26º 00’ 00.00008” 00.00008” 0.002
λ = 90º W X2 = 1206868.0165945 λ2 = -90º 00’ 00.00000” 00.00000” 0.000
φ = 26º N Y2 = 2932779.7059590 φ2 = 26º 00’ 00.00000” 00.00000” 0.000
λ = 96º W X3 = 601387.3611377 λ3 = -96º 00’ 00.00000” 00.00000” 0.000
φ = 26º N Y3 = 2890671.7381625 φ3 = 26º 00’ 00.00000” 00.00000” 0.000
λ = 102º W XMC = 000.00000000 λ = -102º 00’ 00.00000” 00.00000” 0.000
φ = 26º N YMC = 2876834.57252 φ = 26º 00’ 00.00000” 00.00000” 0.000
λ = 108º W X4 = -601387.3611377 λ4 = -108º 00’ 00.00000” 00.00000” 0.000
φ = 26º N Y4 = 2890671.7381625 φ4 = 26º 00’ 00.00000” 00.00000” 0.000
λ = 114º W X5 = -1206868.016594 λ5 = -114º 00’ 00.00000” 00.00000” 0.000
φ = 26º N Y5 = 2932779.7059590 φ5 = 26º 00’ 00.00000” 00.00000” 0.000
λ = 120º W X6 = -1820565.175605 λ6 = -119º 59’ 59.99964” -00.00036” -0.010
φ = 26º N Y6 = 3005001.8470002 φ6 = 26º 00’ 00.00008” 00.00008” 0.002
Tabla IV.34 Errores de transformación entre conversiones.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
278
Proceso directo para φ 33º N
t η v N ρ S
0.64940759 0.06885019 1.00236737 6384479.1883 6354357.3199 3652748.0430
Tabla IV.35 Radios de curvatura y demás parámetros geométricos para φ de 33º N.
𝑓(Φ) ∙ ∆𝜆 λ
84º W 90º W 96º W 102º W 108º W 114º W 120º W
I 1682157.86543 1121438.5769 560719.28847 0.000000 -560719.2884 -1121438.577 -1682157.8654
II 143911.464321 63960.650809 15990.162702 0.000000 15990.162702 63960.650809 143911.464321
III 11346.8195521 3362.0206080 420.25257600 0.000000 -420.2525760 -3362.020608 -11346.819552
IV 3847.11179890 759.92331830 47.495207394 0.000000 47.495207394 759.92331830 3847.11179890
V -166.39804913 -21.91250029 -0.684765634 0.000000 0.684765634 21.91250029 166.39804913
VI 71.936076384 6.3153757045 0.0986777454 0.000000 0.0986777454 6.3153757045 71.936076384
VII -12.59712464 -0.737280271 -0.005760002 0.000000 0.005760002 0.737280271 12.59712464
VIII 0.3895118352 0.0151981451 0.0000593677 0.000000 0.0000593677 0.0151981451 0.3895118352
IX -0.393628887 -0.010239191 -0.000019998 0.000000 0.000019998 0.010239191 0.393628887
X -0.037957136 -0.000658235 -0.000000643 0.000000 -0.000000643 -0.000658235 -0.037957136
XI -0.006626518 -0.000076609 -0.000000037 0.000000 0.0000000374 0.000076609 0.006626518
XII -0.001967506 -0.000015164 -0.000000004 0.000000 -0.000000004 -0.000015164 -0.001967506
Tabla IV.36 Valores de los doce términos con respecto a φ y λ expresados en metros.
λ = 84° W X1 =1693325.2895623 λ = 90° W X2 = 1124777.9374712 λ = 96° W X3 = 561138.85051011
φ = 33° N Y1 = 3800578.9048593 φ = 33° N Y2 = 3717474.9471035 φ = 33° N Y3 = 3668785.7997213
λ = 108° W X4 = -561138.8505101 λ = 114° W X5 = -1124777.937471 λ = 120° W X6 = -1693325.289562
φ = 33° N Y4 = 3668785.7997213 φ = 33° N Y5 = 3717474.9471035 φ = 33° N Y6 = 3800578.9048593
λ = 102° W XMC = 000.00000000
φ = 33° N YMC = 3652748.043075
Tabla IV.37 Coordenadas finales expresadas en el sistema GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
279
Proceso inverso.
PARA X1 & Y1
φ0 Φ0 t η v N ρ S
34º19’58.12838” 36º22’37.55857” 0.6829933 0.06779157 1.00229521 6384938.8220 6355729.8141 3800578.9049
PARA X2 & Y2
φ0 Φ0 t η v N ρ S
33º35’00.96077” 35º28’40.74902” 0.6639859 0.06839120 1.00233595 6384679.3346 6354954.9447 3717474.9471
PARA X3 & Y3
φ0 Φ0 t η v N ρ S
33º08’40.58551” 34º57’17.36575” 0.6530018 0.06873712 1.00235961 6384528.6145 6354504.9001 3668785.7997
PARA X4 & Y4
φ0 Φ0 t η v N ρ S
33º08’40.58551” 34º57’17.36575” 0.6530018 0.06873712 1.00235961 6384528.6145 6354504.9001 3668785.7997
PARA X5 & Y5
φ0 Φ0 t η v N ρ S
33º35’00.96077” 35º28’40.74902” 0.6639859 0.06839120 1.00233595 6384679.3346 6354954.9447 3717474.9471
PARA X6 & Y6
φ0 Φ0 t η v N ρ S
34º19’58.12838” 36º22’37.55857” 0.6829933 0.06779157 1.00229521 6384938.8220 6355729.8141 3800578.9049
PARA XMC & YMC
φ0 Φ0 t η v N ρ S
33º00’00.00000” 34º46’59.05498” 0.6494076 0.06885019 1.00236737 6384479.1883 6354357.3199 3652748.0431
Tabla IV.38 Radios de curvatura y demás parámetros geométricos para las latitudes de los puntos de expansión de cada coordenada GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
280
F(𝑦) ∙ X COORD GK
X1,Y1 X2,Y2 X3,Y3 XMC,YMC X4,Y4 X5,Y5 X6,Y6
I 18º24’04.04333” 12º06’58.05846” 06º00’51.55126” 00º00’00.00000” -06º00’51.55126” -12º06’58.05846” -18º24’04.04333”
II -01º39’59.52573” -00º42’31.07307” -00º10’21.31934” 00º00’00.00000” -00º10’21.31934” -00º42’31.07307” -01º39’59.52573”
III -00º25’04.58596” -00º07’05.60980” -00º00’51.77984” 00º00’00.00000” 00º00’51.77984” 00º07’05.60980” 00º25’04.58596”
IV 00º04’34.40139” 00º00’50.47196” 00º00’03.02494” 00º00’00.00000” 00º00’03.02494” 00º00’50.47196” 00º04’34.40139”
V 00º01’03.70730” 00º00’07.72119” 00º00’00.22984” 00º00’00.00000” -00º00’00.22984” -00º00’07.72119” -00º01’03.70730”
VI -00º00’14.12997” -00º00’01.11935” -00º00’00.01647” 00º00’00.00000” -00º00’00.01647” -00º00’01.11935” -00º00’14.12997”
VII -00º00’03.34711” -00º00’00.17407” -00º00’00.00127” 00º00’00.00000” 00º00’00.00127” 00º00’00.17407” 00º00’03.34711”
VIII 00º00’00.79547” 00º00’00.02709” 00º00’00.00010” 00º00’00.00000” 00º00’00.00010” 00º00’00.02709” 00º00’00.79547”
IX 00º00’00.19354” 00º00’00.00432” 00º00’00.00001” 00º00’00.00000” -00º00’00.00001” -00º00’00.00432” -00º00’00.19354”
X -00º00’00.04751” -00º00’00.00070” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” -00º00’00.00070” -00º00’00.04751”
XI -00º00’00.01180” -00º00’00.00011” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00011” 00º00’00.01180”
XII 00º00’00.00295” 00º00’00.00002” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00002” 00º00’00.00295”
F(Φ) ∙ ∆Φ Para φ
I -01º19’20.49280” -00º34’53.85841” -00º08’40.15352” 00º00’00.00000” -00º08’40.15352” -00º34’53.85841” -01º19’20.49280”
II -00º00’37.86348” -00º00’07.12235” -00º00’00.43230” 00º00’00.00000” -00º00’00.43230” -00º00’07.12235” -00º00’37.86348”
III 00º00’00.22031” 00º00’00.01970” 00º00’00.00031” 00º00’00.00000” 00º00’00.00031” 00º00’00.01970” 00º00’00.22031”
IV 00º00’00.00770” 00º00’00.00028” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00028” 00º00’00.00770”
V 00º00’00.00004” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00004”
VI 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000” 00º00’00.00000”
Tabla IV.39 Valores de los términos inversos con respecto a X y Y.
X1,Y1
λ = -84º 00’ 00.00070”
X2,Y2
λ = -90º 00’ 00.00000”
X3,Y3
λ = -96º 00’ 00.00000”
φ = 33º 00’ 00.000015” φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00000”
Φ = 33º 46’ 59.05516” Φ = 33º 46’ 59.05498” Φ = 33º 46’ 59.05498”
X4,Y4
λ = -108º 00’ 00.00000”
X5,Y5
λ = -114º 00’ 00.00000”
X6,Y6
λ = -119º 59’ 59.99930”
φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00015”
Φ = 33º 46’ 59.05498” Φ = 33º 46’ 59.05498” Φ = 33º 46’ 59.05516”
XMC,YMC
λ = -102º 00’ 00.00000”
φ = 33º 00’ 00.00000”
Φ = 33º 46’ 59.05498”
Tabla IV.40 Coordenadas geodésicas transformadas.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
281
Errores.
Coordenadas
de Origen
Transformación
Directa
Transformación
Inversa
Error
Angular Metros
λ = 84º W X1 =1693325.2895623 λ1 = -84º 00’ 00.00070” 00.00070” 0.018
φ = 33º N Y1 = 3800578.9048593 φ1 = 33º 00’ 00.00015” 00.00015” 0.005
λ = 90º W X2 = 1124777.9374712 λ2 = -90º 00’ 00.00000” 00.00000” 0.000
φ = 33º N Y2 = 3717474.9471035 φ2 = 33º 00’ 00.00000” 00.00000” 0.000
λ = 96º W X3 = 561138.85051011 λ3 = -96º 00’ 00.00000” 00.00000” 0.000
φ = 33º N Y3 = 3668785.7997213 φ3 = 33º 00’ 00.00000” 00.00000” 0.000
λ = 102º W XMC = 000.00000000 λ = -102º 00’ 00.00000” 00.00000” 0.000
φ = 33º N YMC = 3652748.04307 φ = 33º 00’ 00.00000” 00.00000” 0.000
λ = 108º W X4 = -561138.8505101 λ4 = -108º 00’ 00.00000” 00.00000” 0.000
φ = 33º N Y4 = 3668785.7997213 φ4 = 33º 00’ 00.00000” 00.00000” 0.000
λ = 114º W X5 = -1124777.937471 λ5 = -114º 00’ 00.00000” 00.00000” 0.000
φ = 33º N Y5 = 3717474.9471035 φ5 = 33º 00’ 00.00000” 00.00000” 0.000
λ = 120º W X6 = -1693325.289562 λ6 = -119º 59’ 59.99930” -00.00070” -0.018
φ = 33º N Y6 = 3800578.9048593 φ6 = 33º 00’ 00.00015” 00.00015” 0.005
Tabla IV.41 Errores de transformación entre conversiones.
Aplicando dichas amplificaciones se puede verificar que los doce términos
satisfacen un error o aproximación en conversión de coordenadas que van de los
± 0.003 m hasta los ± 0.018 m para un valor de 18º ∆λ con respecto al MC 102º
W, mientras que para la latitud 33º N estos oscilan entre ± 0.0006 m y ± 0.005 m.
Estos errores solo ocurren en los meridianos y paralelos límites que
conforman la zona de estudio, pero recordando que dicha zona fue ajustada de
manera simétrica con respecto al MC debido a la forma irregular del territorio
nacional, genera que si estas fórmulas se aplicaran a las coordenadas extremas
reales de dicho territorio los errores serían menores a los que se obtuvieron en
estas pruebas de manera que, el objetivo esencial de esta investigación se
cumple.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
282
Los ajustes a la zona geográfica de estudio trabajan en conjunto con las
fórmulas generando que la simetría de la proyección se acople y sea visible en los
resultados finales, cada resultado refleja que los doce términos que conforman las
formulas directas e inversas se vinculan generando mismos valores para un ∆λ
positivo o negativo, donde un error de aproximación de coordenadas sea el mismo
para ambos lados del MC pero con signo contrario. Siendo esta la prueba fiel de
que estos nuevos términos agregados son confiables y que solo trabajan en
conjunto (mismos términos para transformación directa e inversa).
Además de esto se puede notar que estas amplificaciones ya aseguran la
precisión ideal angular que traducida en distancia generan un error de
transformación de 0.000 m para amplitudes meridianas de 24º de longitud misma
que es cuatro veces mayor a la de un huso UTM.
Mediante estas pruebas se es notorio que la precisión en las conversiones
también dependen de la latitud en la cual el punto se encuentre situado, este
fenómeno se hace presente en el proceso de conversión inverso, donde para un
∆λ de 18º el error incrementa de forma gradual con respecto al paralelo de
intersección, siendo un valor de error máximo de 0.005 m para el paralelo 33º N.
Este error es mínimo para las latitudes donde el territorio nacional se
encuentra ubicado, sin embargo este incrementara de acuerdo si la zona de
estudio se aleja del Ecuador y se acerca a los polos, de la misa manera que la
deformación geométrica o factor de escala.
De forma general con estas pruebas y el desarrollo de amplificación de las
fórmulas de transformación aseguran la precisión milimétrica dando veracidad a la
teoría e hipótesis de Enriquez Turiño (2009).

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
283
4.6.2 Latitudes Crecientes.
Se ha dejado claro que la latitud es otro de los factores que influye en el
rango de precisión, siendo esta la que camina en conjunto con el valor de ∆λ, es
por eso que en este apartado se realizaran las pruebas de transformación inversa
y directa para verificar el índice de error máximo que se puede alcanzar para los
paralelos que se encuentren más allá de la zona de estudio.
Estas pruebas se realizaran con el fin de garantizar el rango de latitud ideal
en las cuales las fórmulas amplificadas son confiables asegurando una precisión
óptima, mostrando a su vez el error de transformación o aproximación que se
genera en cada una de ellas.
Dado que las pruebas anteriores arrojaron simetría para un valor cualquiera
∆λ sin importar su signo (positivo o negativo), para estas nuevas conversiones
solo se tomara el valor absoluto de dicha cantidad angular.
Estas conversiones se harán en dos bloques, ambos se realizaran en torno
a los valores geográficos de la República Mexicana, el primero se realizara
tomando como valor máximo de ∆λ de 24º iniciando con un mínimo de 12º
incrementando a cada 2º de longitud, mientras que para las latitudes se utilizaran
desde el Ecuador 0º incrementando cada 5º hacia al polo norte 90º N.
El segundo bloque será la continuación del primero pero esta vez partiendo
de un de ∆λ 30º incrementando a cada 5º de longitud hasta un máximo de ∆λ 60º,
mientras que para las latitudes estas partirán del paralelo 0º hasta el 90º N en
incrementos de 10º
Para y facilitar la comprensión de datos en ambos casos solo se presentara
el error de conversión expresados en metros o kilómetros (sea el caso), siendo los
parámetros del elipsoide GRS 80 la base de los cálculos.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
284
φ Δλ
12º 14º 16º 18º 20º 22º 24º
0º Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.002 Δλ = 0.008 Δλ = 0.027 Δλ = 0.085
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000
5º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.002 Δλ = 0.008 Δλ = 0.027 Δλ = 0.089
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.006
10º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.002 Δλ = 0.009 Δλ = 0.032 Δλ = 0.108
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.005 φ = 0.019
15º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.001 Δλ = 0.003 Δλ = 0.013 Δλ = 0.049 Δλ = 0.167
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.003 φ = 0.013 φ = 0.047
20º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.001 Δλ = 0.005 Δλ = 0.023 Δλ = 0.086 Δλ = 0.293
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.006 φ = 0.026 φ = 0.096
25º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.002 Δλ = 0.009 Δλ = 0.039 Δλ = 0.146 Δλ = 0.499
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.002 φ = 0.011 φ = 0.045 φ = 0.170
30º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.003 Δλ = 0.014 Δλ = 0.061 Δλ = 0.231 Δλ = 0.789
φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.004 φ = 0.017 φ = 0.073 φ = 0.272
35º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.004 Δλ = 0.021 Δλ = 0.089 Δλ = 0.338 Δλ = 1.157
φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.005 φ = 0.026 φ = 0.108 φ = 0.407
40º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.006 Δλ = 0.029 Δλ = 0.122 Δλ = 0.462 Δλ = 1.585
φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.008 φ = 0.036 φ = 0.151 φ = 0.572
45º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.007 Δλ = 0.037 Δλ = 0.157 Δλ = 0.595 Δλ = 2.047
φ = 0.000 φ = 0.000 φ = 0.002 φ = 0.010 φ = 0.048 φ = 0.200 φ = 0.758
50º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.009 Δλ = 0.045 Δλ = 0.191 Δλ = 0.726 Δλ = 2.500
φ = 0.000 φ = 0.000 φ = 0.002 φ = 0.012 φ = 0.059 φ = 0.250 φ = 0.948
55º N Δλ = 0.000 Δλ = 0.002 Δλ = 0.010 Δλ = 0.051 Δλ = 0.220 Δλ = 0.837 Δλ = 2.885
φ = 0.000 φ = 0.000 φ = 0.003 φ = 0.015 φ = 0.070 φ = 0.294 φ = 1.117
60º N Δλ = 0.000 Δλ = 0.002 Δλ = 0.011 Δλ = 0.056 Δλ = 0.239 Δλ = 0.909 Δλ = 3.134
φ = 0.000 φ = 0.000 φ = 0.003 φ = 0.016 φ = 0.077 φ = 0.325 φ = 1.235
65º N Δλ = 0.000 Δλ = 0.002 Δλ = 0.011 Δλ = 0.057 Δλ = 0.243 Δλ = 0.924 Δλ = 3.185
φ = 0.000 φ = 0.000 φ = 0.003 φ = 0.017 φ = 0.080 φ = 0.335 φ = 1.273
70º N Δλ = 0.000 Δλ = 0.002 Δλ = 0.011 Δλ = 0.053 Δλ = 0.229 Δλ = 0.868 Δλ = 2.991
φ = 0.000 φ = 0.000 φ = 0.003 φ = 0.016 φ = 0.076 φ = 0.319 φ = 1.210
75º N Δλ = 0.000 Δλ = 0.002 Δλ = 0.009 Δλ = 0.045 Δλ = 0.194 Δλ = 0.737 Δλ = 2.539
φ = 0.000 φ = 0.000 φ = 0.002 φ = 0.014 φ = 0.065 φ = 0.273 φ = 1.036
80º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.007 Δλ = 0.033 Δλ = 0.141 Δλ = 0.537 Δλ = 1.848
φ = 0.000 φ = 0.000 φ = 0.002 φ = 0.010 φ = 0.047 φ = 0.200 φ = 0.759
85º N Δλ = 0.000 Δλ = 0.001 Δλ = 0.003 Δλ = 0.017 Δλ = 0.075 Δλ = 0.283 Δλ = 0.974
φ = 0.000 φ = 0.000 φ = 0.001 φ = 0.005 φ = 0.025 φ = 0.106 φ = 0.401
90º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000
Tabla IV.42 Errores de conversión para latitudes crecientes siendo Δλ de 24º el valor máximo de amplitud meridiana.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
285
φ Δλ
30º 35º 40º 45º 50º 55º 60º
0º Δλ = 1.733 Δλ = 14.575 Δλ = 97.537 Δλ = 559.231 Δλ = 2.90 km Δλ = 14.2 km Δλ = 691 km
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000
10º N Δλ = 2.525 Δλ = 24.510 Δλ = 193.918 Δλ = 1.34 km Δλ = 8.78 km Δλ = 56.6 km Δλ = 384 km
φ = 0.653 φ = 8.331 φ = 83.962 φ = 726. 608 φ = 5.75 km φ = 44.4 km φ = 359 km
20º N Δλ = 7.502 Δλ = 79.491 Δλ = 634.357 Δλ = 5.41 km Δλ = 40.2 km Δλ = 304 km Δλ = 2540 km
φ = 3.125 φ = 39.447 φ = 405.539 φ = 3.70 km φ = 32.1 km φ = 284 km φ = 2555 km
30º N Δλ = 20.504 Δλ = 221.875 Δλ = 2.00 km Δλ = 16.3 km Δλ = 128 km Δλ = 1045 km Δλ = 9487 km
φ = 9.081 φ = 118.118 φ = 1.26 km φ = 12.2 km φ = 112 km φ = 1038 km φ = 5653 km
40º N Δλ = 41.865 Δλ = 461.313 Δλ = 4.25 km Δλ = 35.6 km Δλ = 289 km Δλ = 2429 km Δλ = 22 Mm
φ = 19.535 φ = 260.419 φ = 2.87 km φ = 28.4 km φ = 270 km φ = 2260 km φ = 676 Mm
50º N Δλ = 66.736 Δλ = 742.837 Δλ = 6.97 km Δλ = 58.6 km Δλ = 482 km Δλ = 4105 km Δλ = 38 Mm
φ = 32.781 φ = 441.897 φ = 4.92 km φ = 49.4 km φ = 463 km φ = 3070 km φ = Error
60º N Δλ = 83.885 Δλ = 935.825 Δλ = 87.5 km Δλ = 74.2 km Δλ = 611 km Δλ = 5.2 Mm Δλ = 49 Mm
φ = 42.822 φ = 578.747 φ = 6.47 km φ = 64.8 km φ = 587 km φ = 2.9 Mm φ = Error
70º N Δλ = 79.969 Δλ = 891.105 Δλ = 8.31 km Δλ = 70.4 km Δλ = 579 km Δλ = 4.9 Mm Δλ = 46 Mm
φ = 41.906 φ = 565.808 φ = 6.31 km φ = 62.9 km φ = 547 km φ = 2.4 Mm φ = Error
80º N Δλ = 49.315 Δλ = 548.625 Δλ = 5.11 km Δλ = 43.2 km Δλ = 354 km Δλ = 3.0 Mm Δλ = 28 Mm
φ = 26.244 φ = 353.763 φ = 353.763 φ = 39.1 km φ = 328 km φ = 1.1 Mm φ = Error
90º N Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000 Δλ = 0.000
φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000 φ = 0.000
Tabla IV.43 Errores de conversión para latitudes crecientes siendo Δλ de 60º el valor máximo de amplitud meridiana.
Mediante estas pruebas se puede apreciar la cantidad de error máxima que
pueden alcanzar los doce términos de las fórmulas generales de proyección con
respecto a los valores angulares de ∆λ y φ, de igual manera se deja claro que
efectivamente la precisión camina en conjunto con estos valores, siendo
inversamente proporcional a ellos, lo que quiere decir que entre mayor sean los
valores de ∆λ y φ menor será la precisión.
Con estas conversiones se reafirma que las fórmulas amplificadas
satisfacen un proceso de transformación perfecto para una ∆λ de 12º donde el
valor de la latitud no interfiere en dichos resultados, siendo el error de
aproximación para esta zona de 0.000 m. No obstante estas amplificaciones

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
286
ofrecen una aproximación milimétrica para amplitudes meridianas de hasta 20º
grados de longitud con paralelos muy cercanos al Ecuador, donde dicha
aproximación pierde precisión conforme va incrementando la latitud, siendo el
error máximo de 23 cm en ∆λ y de 1.7 cm en φ para el paralelo 65º N.
Este incremento en el error se comporta de manera similar en todas las
bandas meridianas pero con la peculiaridad de que llega a su punto máximo en el
paralelo 65º N a partir de ahí dicho valor comienza a disminuir hasta convertirse
en 0 en el paralelo 90º N. Este fenómeno se debe a que los paralelos comienzan a
disminuir su radio, decreciendo gradualmente hasta llegar a los polos.
Con el resultado de estos cálculos se deduce que los doce términos
agregados las formulas GK satisfacen una precisión milimétrica para un ∆λ de 16º
y 18º, precisión al centímetro para ∆λ de 20º, al decímetro para ∆λ de 22º, 5
decímetros para ∆λ de 24º y métrica en ∆λ de 30º. Más allá de 30º la precisión
decae pasando de metros, kilómetros hasta llegar a los megámetros (Mm) en ∆λ
de 55º y 60º.
Se verifica que estas amplificaciones pierden su aproximación más allá de
los 30º de longitud siendo totalmente inservibles para valores de 55º, 60º y
mayores de longitud, donde el error de la latitud en esta última amplitud es
desmesurado, por lo cual en la tabla se simboliza con la palabra error.
La precisión o error de cálculo de los doce términos agregados se describe
en la siguiente tabla.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
287
Δλ Precisión
Máxima Mínima
12º λ = 0.000 λ = 0.000
φ = 0.000 φ = 0.000
14º λ = ± 0.001 λ = ± 0.002
φ = 0.000 φ = 0.000
16º λ = ± 0.001 λ = ± 0.011
φ = ± 0.001 φ = ± 0.003
18º λ = ± 0.002 λ = ± 0.057
φ = ± 0.001 φ = ± 0.017
20º λ = ± 0.008 λ = ± 0.243
φ = ± 0.001 φ = ± 0.080
22º λ = ± 0.027 λ = ± 0.924
φ = ± 0.001 φ = ± 0.335
24º λ = ± 0.085 λ = ± 3.185
φ = ± 0.006 φ = ± 0.273
30º λ = ± 1.733 λ = ± 85.206
φ = ± 0.653 φ = ± 44.13
Tabla IV.44 Precisiones máximas y mínimas para latitudes crecientes en un rango de Δλ de 12º a 30º
Aunque la precisión y el índice de error se vinculan con ∆λ, el creciente de
error recae más en las longitudes siendo los valores de latitud los menos
afectados.
La aplicación de estos nuevos términos dan certeza de aproximación
milimétrica para la cobertura completa del territorio nacional u otro territorio que
tenga una extensión similar o ligeramente menor a este, por lo que dichos
términos se convierten en un método confiable para la representación cartográfica
del mismo.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
288
4.6.3 Número de términos necesarios en función de Δλ.
Hasta el momento se ha verificado el rango de precisión y comportamiento
de los nuevos términos agregados a las fórmulas de transformación con respecto
a las coordenadas geodésicas y el MC de un punto en particular, siendo las
pruebas destinadas a ello satisfactorias, cumpliendo así con el principal objetivo
de esta tesis. Sin embargo las fórmulas amplificadas se componen de términos
que se fundamentan en ecuaciones polinómicas que dependiendo el orden de
dicho término o derivada consecutiva van incrementando, esta situación genera
que en la evaluación, sustitución y cálculo de coordenadas algunos de los
términos arrojen resultados muy pequeños que son considerados despreciables
para la precisión requerida o demandada, propiciando así una situación de
redundancia entorno a cálculos innecesarios.
Como ya se dijo, esta situación se vincula directamente con la amplitud de
∆λ, donde el adecuado número de términos influye en la aproximación de las
coordenadas, pero para no saturar las fórmulas con términos innecesarios lo más
conveniente y lo que a lo largo del tiempo varios autores han hecho, es truncar o
designar los términos suficientes para dicho logro, tal como lo hizo Enriquez Turiño
(2009).
Es por eso que a continuación se presenta un análisis de aproximación que
ofrece cada término consecutivo con respecto a ∆λ. Dichas pruebas se realizaron
tomando un de ∆λ 18º de amplitud meridiana con un incremento a cada dos
grados de longitud, mientras que para las latitudes, el análisis partió del paralelo
14º N aumentando a cada 3º de latitud hasta llegar al paralelo 33º N, mismos que
como ya se ha mencionado, son los límites geográficos de la República Mexicana.
Los cálculos se realizaron en función de la latitud geodésica siendo la
variable el término creciente o derivada consecutiva, los cuales son presentados

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
289
en gráficas para su fácil interpretación, divididas para los casos existentes, directo
e inverso.
Para reducir expresiones se tomaran las siguientes consideraciones para
ambos procesos de conversión.
L𝑛 =𝑓𝑛(Φ)
𝑛!∙ ∆λ𝑛 Proceso Directo.
l𝑛 =F𝑛(𝑦)
𝑛!∙ X𝑛 Proceso Inverso ∆λ y Φ0.
m𝑛 =F𝑛(Φ)
𝑛!∙ ∆Φ𝑛 Proceso Inverso φ.
Siendo 𝑛 el número o incremento del término de la serie de Taylor en
cuestión.
Proceso Directo (L𝑛)
2 4 6 8 10 12 14 16 18
14 216067.98 432135.96 648203.95 864271.93 1080339.9 1296407.9 1512475.8 1728543.8 1944611.8
17 212971.66 425943.32 638914.98 851886.64 1064858.3 1277829.9 1490801.6 1703773.2 1916744.9
20 209294.17 418588.34 627882.51 837176.69 1046470.8 1255765.0 1465059.2 1674353.3 1883647.5
23 205045.07 410090.14 615135.21 820180.28 1025225.3 1230270.4 1435315.5 1640360.5 1845405.6
26 200235.42 400470.85 600706.28 800941.71 1001177.1 1201412.5 1401648.0 1601883.4 1802118.8
29 194877.81 389755.63 584633.44 779511.26 974389.08 1169266.8 1364144.7 1559022.5 1753900.3
33 186906.42 373812.85 560719.28 747625.71 934532.14 1121438.5 1308345.0 1495251.4 1682157.8
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Kiló
me
tro
s
L1
Fig. IV.7 Primera aproximación de L en kilómetros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
290
2 4 6 8 10 12 14 16 18
14 912.3111 3649.244 8210.800 14596.97 22807.77 32843.20 44703.24 58387.91 73897.19
17 1086.762 4347.048 9780.859 17388.19 27169.05 39123.43 53251.34 69552.78 88027.73
20 1249.355 4997.423 11244.20 19989.69 31233.89 44976.81 61218.44 79958.78 101197.8
23 1398.314 5593.256 12584.82 22373.02 34957.85 50339.30 68517.38 89492.09 113263.4
26 1532.005 6128.021 13788.04 24512.08 38300.13 55152.18 75068.25 98048.33 124092.4
29 1648.963 6595.853 14840.67 26383.41 41224.08 59362.68 80799.20 105533.6 133566.0
33 1776.684 7106.739 15990.16 28426.95 44417.11 63960.65 87057.55 113707.8 143911.4
0
20
40
60
80
100
120
140
160
Kiló
me
tro
sL2
2 4 6 8 10 12 14 16 18
14 39.00472 312.0377 1053.127 2496.302 4875.590 8425.020 13378.62 19970.41 28434.44
17 36.09959 288.7967 974.6888 2310.373 4512.448 7797.510 12382.15 18482.98 26316.59
20 32.78262 262.2609 885.1306 2098.087 4097.827 7081.045 11244.43 16784.69 23898.52
23 29.12720 233.0176 786.4343 1864.140 3640.899 6291.475 9990.629 14913.12 21233.72
26 25.21377 201.7101 680.7718 1613.681 3151.721 5446.174 8648.324 12909.45 18380.84
29 21.12787 169.0229 570.4524 1352.183 2640.983 4563.619 7246.858 10817.46 15402.21
33 15.56491 124.5192 420.2525 996.1542 1945.613 3362.020 5338.764 7969.234 11346.81
0
5
10
15
20
25
30
Kiló
me
tro
s
L3
Fig. IV.8 Segunda aproximación de L en kilómetros.
Fig. IV.9 Tercera aproximación de L en kilómetros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
291
2 4 6 8 10 12 14 16 18
14 0.009362 0.299596 2.275060 9.587082 29.25745 72.80190 157.3536 306.7866 552.8395
17 0.007447 0.238311 1.809675 7.625955 23.27256 57.90959 125.1654 244.0305 439.7510
20 0.005392 0.172557 1.310358 5.521839 16.85131 41.93147 90.63042 176.6989 318.4171
23 0.003296 0.105469 0.800907 3.375014 10.29972 25.62901 55.39439 108.0004 194.6203
26 0.001254 0.040132 0.304752 1.284224 3.919141 9.75208 21.07808 41.09517 74.05484
29 0.000644 0.020593 0.156378 0.658975 2.011031 5.00409 10.81581 21.08719 37.99980
33 0.002818 0.090175 0.684766 2.885597 8.806142 21.91250 47.36155 92.33910 166.3980
050
100150200250300350400450500550600
Me
tro
s
L5
2 4 6 8 10 12 14 16 18
14 0.435641 6.970261 35.28694 111.5242 272.2758 564.5911 1045.974 1784.386 2858.242
17 0.500761 8.012179 40.56165 128.1949 312.9757 648.9865 1202.327 2051.117 3285.494
20 0.551270 8.820328 44.65290 141.1252 344.5441 714.4465 1323.600 2258.003 3616.885
23 0.586056 9.376902 47.47056 150.0304 366.2852 759.5291 1407.121 2400.487 3845.115
26 0.604604 9.673656 48.97288 154.7785 377.8772 783.5661 1451.653 2476.456 3966.803
29 0.607005 9.712081 49.16741 155.3933 379.3782 786.6786 1457.419 2486.292 3982.560
33 0.586361 9.381769 47.49520 150.1083 366.4754 759.9233 1407.851 2401.733 3847.111
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Kiló
me
tro
sL4
Fig. IV.10 Cuarta aproximación de L en kilómetros.
Fig. IV.11 Quinta aproximación de L en metros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
292
2 4 6 8 10 12 14 16 18
14 0.000197 0.012592 0.143433 0.805899 3.074262 9.179697 23.14777 51.57756 104.5624
17 0.000214 0.013692 0.155965 0.876314 3.342874 9.981768 25.17029 56.08412 113.6985
20 0.000220 0.014063 0.160184 0.900017 3.433291 10.25175 25.85109 57.60106 116.7738
23 0.000214 0.013725 0.156333 0.878382 3.350761 10.00532 25.22968 56.21645 113.9668
26 0.000199 0.012748 0.145210 0.815884 3.112350 9.293428 23.43455 52.21657 105.8579
29 0.000176 0.011244 0.128075 0.719607 2.745082 8.196770 20.66919 46.05483 93.36634
33 0.000135 0.008663 0.098678 0.554436 2.115007 6.315376 15.92502 35.48392 71.93608
0102030405060708090
100110120
Me
tro
s
L6
2 4 6 8 10 12 14 16 18
14 0.00000 0.00027 0.00464 0.03474 0.16567 0.59362 1.74636 4.44710 10.1425
17 0.00000 0.00013 0.00230 0.01727 0.08233 0.29500 0.86787 2.21004 5.04043
20 0.00000 0.00000 0.00003 0.00019 0.00092 0.00329 0.00967 0.02462 0.05614
23 0.00000 0.00012 0.00203 0.01518 0.07239 0.25940 0.76314 1.94333 4.43215
26 0.00000 0.00022 0.00371 0.02780 0.13256 0.47500 1.39740 3.55848 8.11582
29 0.00000 0.00029 0.00493 0.03694 0.17612 0.63107 1.85655 4.72770 10.7824
33 0.00000 0.00034 0.00576 0.04315 0.20576 0.73728 2.16900 5.52337 12.5971
0123456789
10111213
Me
tro
s
L7
Fig. IV.12 Sexta aproximación de L en metros.
Fig. IV.13 Séptima aproximación de L en metros.
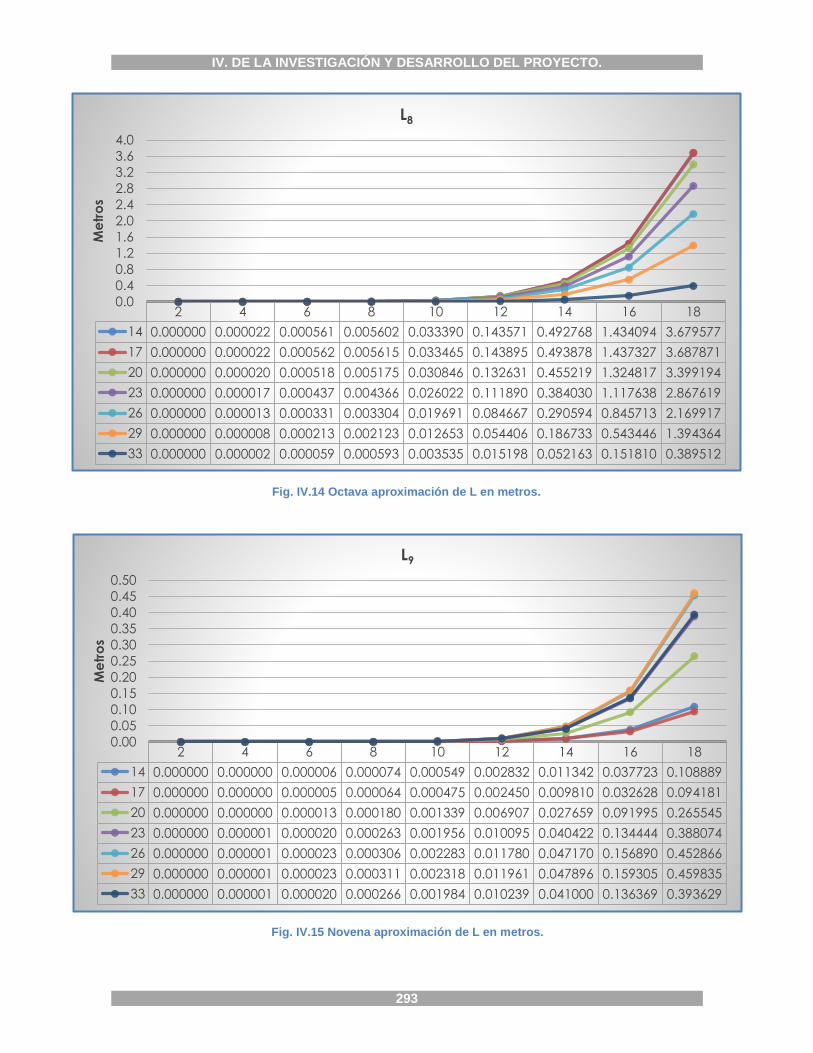
IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
293
2 4 6 8 10 12 14 16 18
14 0.000000 0.000022 0.000561 0.005602 0.033390 0.143571 0.492768 1.434094 3.679577
17 0.000000 0.000022 0.000562 0.005615 0.033465 0.143895 0.493878 1.437327 3.687871
20 0.000000 0.000020 0.000518 0.005175 0.030846 0.132631 0.455219 1.324817 3.399194
23 0.000000 0.000017 0.000437 0.004366 0.026022 0.111890 0.384030 1.117638 2.867619
26 0.000000 0.000013 0.000331 0.003304 0.019691 0.084667 0.290594 0.845713 2.169917
29 0.000000 0.000008 0.000213 0.002123 0.012653 0.054406 0.186733 0.543446 1.394364
33 0.000000 0.000002 0.000059 0.000593 0.003535 0.015198 0.052163 0.151810 0.389512
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
3.6
4.0
Me
tro
s
L8
Fig. IV.14 Octava aproximación de L en metros.
2 4 6 8 10 12 14 16 18
14 0.000000 0.000000 0.000006 0.000074 0.000549 0.002832 0.011342 0.037723 0.108889
17 0.000000 0.000000 0.000005 0.000064 0.000475 0.002450 0.009810 0.032628 0.094181
20 0.000000 0.000000 0.000013 0.000180 0.001339 0.006907 0.027659 0.091995 0.265545
23 0.000000 0.000001 0.000020 0.000263 0.001956 0.010095 0.040422 0.134444 0.388074
26 0.000000 0.000001 0.000023 0.000306 0.002283 0.011780 0.047170 0.156890 0.452866
29 0.000000 0.000001 0.000023 0.000311 0.002318 0.011961 0.047896 0.159305 0.459835
33 0.000000 0.000001 0.000020 0.000266 0.001984 0.010239 0.041000 0.136369 0.393629
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
Me
tro
s
L9
Fig. IV.15 Novena aproximación de L en metros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
294
2 4 6 8 10 12 14 16 18
14 0.000000 0.000000 0.000000 0.000000 0.000006 0.000041 0.000225 0.000979 0.003577
17 0.000000 0.000000 0.000000 0.000001 0.000017 0.000124 0.000674 0.002930 0.010702
20 0.000000 0.000000 0.000000 0.000002 0.000024 0.000177 0.000966 0.004196 0.015328
23 0.000000 0.000000 0.000000 0.000002 0.000026 0.000197 0.001071 0.004654 0.017000
26 0.000000 0.000000 0.000000 0.000002 0.000025 0.000184 0.001000 0.004346 0.015877
29 0.000000 0.000000 0.000000 0.000002 0.000020 0.000146 0.000795 0.003454 0.012619
33 0.000000 0.000000 0.000000 0.000001 0.000010 0.000077 0.000418 0.001814 0.006627
0.000
0.002
0.004
0.006
0.008
0.010
0.012
0.014
0.016
0.018
Me
tro
s
L11
Fig. IV.17 Decimo primera aproximación de L en metros.
2 4 6 8 10 12 14 16 18
14 0.000000 0.000000 0.000002 0.000037 0.000347 0.002149 0.010040 0.038163 0.123926
17 0.000000 0.000000 0.000002 0.000033 0.000308 0.001909 0.008918 0.033899 0.110081
20 0.000000 0.000000 0.000001 0.000025 0.000237 0.001467 0.006854 0.026052 0.084600
23 0.000000 0.000000 0.000001 0.000016 0.000147 0.000909 0.004248 0.016148 0.052437
26 0.000000 0.000000 0.000000 0.000006 0.000053 0.000331 0.001545 0.005874 0.019076
29 0.000000 0.000000 0.000000 0.000003 0.000029 0.000182 0.000850 0.003232 0.010497
33 0.000000 0.000000 0.000001 0.000011 0.000106 0.000658 0.003075 0.011689 0.037957
0.000.010.020.030.040.050.060.070.080.090.100.110.120.13
Me
tro
s
L10
Fig. IV.16 Decima aproximación de L en metros.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
295
Proceso Inverso (l𝑛)
2 4 6 8 10 12 14 16 18
14 2.000433 4.003464 6.011712 8.027832 10.05454 12.09462 14.15099 16.22665 18.32479
17 2.000443 4.003551 6.012007 8.028538 10.05593 12.09707 14.15493 16.23265 18.33353
20 2.000456 4.003652 6.012352 8.029363 10.05756 12.09992 14.15953 16.23965 18.34370
23 2.000470 4.003768 6.012743 8.030297 10.05940 12.10315 14.16474 16.24756 18.35519
26 2.000486 4.003895 6.013175 8.031331 10.06144 12.10671 14.17049 16.25628 18.36786
29 2.000503 4.004033 6.013645 8.032452 10.06365 12.11058 14.17671 16.26573 18.38155
33 2.000528 4.004232 6.014320 8.034062 10.06683 12.11612 14.18563 16.27924 18.40112
0
2
4
6
8
10
12
14
16
18
20
Gra
do
s D
ec
ima
les.
l1
2 4 6 8 10 12 14 16 18
14 0.000000 0.000000 0.000000 0.000000 0.000003 0.000030 0.000193 0.000959 0.003942
17 0.000000 0.000000 0.000000 0.000000 0.000002 0.000022 0.000142 0.000703 0.002888
20 0.000000 0.000000 0.000000 0.000000 0.000001 0.000012 0.000073 0.000365 0.001499
23 0.000000 0.000000 0.000000 0.000000 0.000000 0.000001 0.000005 0.000023 0.000093
26 0.000000 0.000000 0.000000 0.000000 0.000001 0.000008 0.000052 0.000257 0.001054
29 0.000000 0.000000 0.000000 0.000000 0.000002 0.000014 0.000087 0.000430 0.001766
33 0.000000 0.000000 0.000000 0.000000 0.000002 0.000015 0.000096 0.000479 0.001968
0.000
0.001
0.002
0.003
0.004
L12
Fig. IV.18 Decimo segunda aproximación de L en metros.
Fig. IV.19 Primera aproximación de l en grados decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
296
2 4 6 8 10 12 14 16 18
14 0.008453 0.033915 0.076697 0.137322 0.216541 0.315347 0.434994 0.577035 0.743348
17 0.010216 0.040987 0.092686 0.165944 0.261660 0.381028 0.525556 0.697106 0.897935
20 0.011951 0.047946 0.108419 0.194102 0.306041 0.445622 0.614596 0.815125 1.049830
23 0.013653 0.054773 0.123852 0.221719 0.349561 0.508946 0.701862 0.930755 1.198595
26 0.015317 0.061449 0.138942 0.248718 0.392098 0.570825 0.787108 1.043668 1.343804
29 0.016940 0.067956 0.153648 0.275026 0.433535 0.631086 0.870097 1.153547 1.485048
33 0.019030 0.076338 0.172589 0.308901 0.486876 0.708631 0.976844 1.294813 1.666535
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
Gra
do
s d
ec
ima
les
l2
2 4 6 8 10 12 14 16 18
14 0.025960 0.208122 0.704922 1.679329 3.301260 5.750206 9.218129 13.91273 20.06119
17 0.026610 0.213360 0.722813 1.722444 3.387283 5.902783 9.468008 14.29927 20.63431
20 0.027370 0.219483 0.743719 1.772814 3.487749 6.080901 9.759575 14.75004 21.30223
23 0.028232 0.226424 0.767413 1.829884 3.601532 6.282536 10.08946 15.25972 22.05687
26 0.029185 0.234107 0.793635 1.893022 3.727363 6.505404 10.45385 15.82231 22.88917
29 0.030221 0.242449 0.822099 1.961534 3.863838 6.746988 10.84857 16.43126 23.78925
33 0.031711 0.254439 0.862997 2.059930 4.059728 7.093497 11.41425 17.30308 25.07643
0.02.04.06.08.0
10.012.014.016.018.020.022.024.026.0
Min
uto
s D
ec
ima
les
l3
Fig. IV.21 Segunda aproximación de l en grados decimales, siendo 0.20 igual a 12’.
Fig. IV.20 Tercera aproximación de l en minutos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
297
2 4 6 8 10 12 14 16 18
14 0.000261 0.004193 0.021383 0.068278 0.168912 0.355986 0.672352 1.172986 1.927578
17 0.000317 0.005094 0.025981 0.082964 0.205265 0.432655 0.817280 1.426084 2.343994
20 0.000373 0.005996 0.030582 0.097665 0.241662 0.509444 0.962495 1.679811 2.761687
23 0.000429 0.006898 0.035182 0.112366 0.278073 0.586287 1.107876 1.933957 3.180320
26 0.000485 0.007798 0.039776 0.127049 0.314447 0.663082 1.253227 2.188177 3.599320
29 0.000541 0.008695 0.044354 0.141686 0.350718 0.739684 1.398273 2.441984 4.017869
33 0.000615 0.009882 0.050416 0.161071 0.398769 0.841199 1.590571 2.778641 4.573356
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Min
uto
s D
ec
ima
les
l4
2 4 6 8 10 12 14 16 18
14 0.00001 0.00029 0.00222 0.00946 0.02920 0.07371 0.16206 0.32232 0.59424
17 0.00001 0.00031 0.00240 0.01023 0.03161 0.07987 0.17582 0.35020 0.64672
20 0.00001 0.00034 0.00261 0.01113 0.03443 0.08708 0.19194 0.38286 0.70819
23 0.00001 0.00037 0.00285 0.01216 0.03764 0.09529 0.21027 0.41998 0.77804
26 0.00001 0.00041 0.00312 0.01330 0.04120 0.10441 0.23063 0.46119 0.85557
29 0.00001 0.00045 0.00341 0.01455 0.04509 0.11434 0.25281 0.50608 0.94000
33 0.00002 0.00050 0.00383 0.01635 0.05070 0.12869 0.28482 0.57086 1.06179
0.00.10.20.30.40.50.60.70.80.91.01.11.2
Min
uto
s D
ec
ima
les
l5
Fig. IV.22 Cuarta aproximación de l en minutos decimales, siendo 0.50 igual a 30”.
Fig. IV.23 Quitan aproximación de l en minutos decimales, siendo 0.10 igual a 6”.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
298
2 4 6 8 10 12 14 16 18
14 0.00000 0.00003 0.00052 0.00394 0.01913 0.07003 0.21127 0.55403 1.30680
17 0.00000 0.00003 0.00060 0.00455 0.02209 0.08096 0.24470 0.64305 1.52047
20 0.00000 0.00004 0.00069 0.00527 0.02561 0.09401 0.28461 0.74939 1.77580
23 0.00000 0.00005 0.00080 0.00610 0.02970 0.10916 0.33095 0.87288 2.07250
26 0.00000 0.00005 0.00093 0.00705 0.03435 0.12636 0.38359 1.01324 2.40984
29 0.00000 0.00006 0.00106 0.00811 0.03953 0.14555 0.44235 1.16993 2.78663
33 0.00000 0.00007 0.00127 0.00968 0.04722 0.17407 0.52968 1.40294 3.34711
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
Se
gu
nd
os
De
cim
ale
s
l7
Fig. IV.25 Séptima aproximación de l en segundos decimales.
2 4 6 8 10 12 14 16 18
14 0.00001 0.00052 0.00602 0.03426 0.13301 0.40584 1.05000 2.41048 5.05624
17 0.00001 0.00065 0.00745 0.04243 0.16477 0.50298 1.30202 2.99097 6.27860
20 0.00001 0.00078 0.00895 0.05103 0.19825 0.60547 1.56828 3.60512 7.57397
23 0.00001 0.00092 0.01054 0.06010 0.23361 0.71382 1.85006 4.25595 8.94880
26 0.00002 0.00106 0.01222 0.06968 0.27094 0.82832 2.14813 4.94520 10.40674
29 0.00002 0.00121 0.01398 0.07976 0.31027 0.94903 2.46265 5.67323 11.94850
33 0.00002 0.00143 0.01647 0.09397 0.36572 1.11935 2.90678 6.70225 14.12997
0.01.02.03.04.05.06.07.08.09.0
10.011.012.013.014.015.0
Se
gu
nd
os
De
cim
ale
s
l6
Fig. IV.24 Sexta aproximación de l en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
299
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00003 0.00024 0.00125 0.00517 0.01788 0.05395
17 0.00000 0.00000 0.00000 0.00004 0.00029 0.00154 0.00639 0.02216 0.06709
20 0.00000 0.00000 0.00000 0.00005 0.00036 0.00190 0.00790 0.02745 0.08330
23 0.00000 0.00000 0.00000 0.00006 0.00044 0.00233 0.00971 0.03379 0.10279
26 0.00000 0.00000 0.00001 0.00007 0.00053 0.00284 0.01183 0.04126 0.12574
29 0.00000 0.00000 0.00001 0.00008 0.00064 0.00342 0.01428 0.04989 0.15232
33 0.00000 0.00000 0.00001 0.00011 0.00081 0.00432 0.01808 0.06326 0.19354
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18
0.20
Se
gu
nd
os
De
cim
ale
s
l9
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00003 0.00029 0.00179 0.00791 0.02804 0.08475 0.22703
17 0.00000 0.00000 0.00004 0.00037 0.00228 0.01010 0.03586 0.10851 0.29110
20 0.00000 0.00000 0.00005 0.00047 0.00284 0.01257 0.04467 0.13534 0.36361
23 0.00000 0.00000 0.00006 0.00057 0.00346 0.01535 0.05459 0.16561 0.44558
26 0.00000 0.00000 0.00007 0.00068 0.00416 0.01846 0.06572 0.19961 0.53783
29 0.00000 0.00000 0.00008 0.00081 0.00494 0.02192 0.07812 0.23754 0.64088
33 0.00000 0.00000 0.00010 0.00100 0.00610 0.02709 0.09668 0.29438 0.79547
0.000.050.100.150.200.250.300.350.400.450.500.550.600.650.700.750.80
Se
gu
nd
os
De
cim
ale
s
l8
Fig. IV.26 Octava aproximación de l en segundos decimales.
Fig. IV.27 Novena aproximación de l en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
300
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00000 0.00002 0.00014 0.00062 0.00239
17 0.00000 0.00000 0.00000 0.00000 0.00000 0.00003 0.00018 0.00082 0.00317
20 0.00000 0.00000 0.00000 0.00000 0.00001 0.00004 0.00023 0.00107 0.00416
23 0.00000 0.00000 0.00000 0.00000 0.00001 0.00005 0.00030 0.00139 0.00541
26 0.00000 0.00000 0.00000 0.00000 0.00001 0.00007 0.00039 0.00178 0.00695
29 0.00000 0.00000 0.00000 0.00000 0.00001 0.00008 0.00049 0.00225 0.00880
33 0.00000 0.00000 0.00000 0.00000 0.00001 0.00011 0.00065 0.00301 0.01180
0.0000.0010.0020.0030.0040.0050.0060.0070.0080.0090.0100.0110.012
Se
gu
nd
os
De
cim
ale
s
l11
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00002 0.00016 0.00077 0.00306 0.01046
17 0.00000 0.00000 0.00000 0.00000 0.00003 0.00021 0.00102 0.00407 0.01396
20 0.00000 0.00000 0.00000 0.00000 0.00004 0.00027 0.00132 0.00529 0.01819
23 0.00000 0.00000 0.00000 0.00001 0.00005 0.00035 0.00169 0.00675 0.02326
26 0.00000 0.00000 0.00000 0.00001 0.00007 0.00043 0.00212 0.00848 0.02928
29 0.00000 0.00000 0.00000 0.00001 0.00008 0.00053 0.00262 0.01051 0.03634
33 0.00000 0.00000 0.00000 0.00001 0.00011 0.00070 0.00341 0.01371 0.04751
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0.050
Se
gu
nd
os
De
cim
ale
s
l10
Fig. IV.28 Decima aproximación de l en segundos decimales.
Fig. IV.29 Decimo primera aproximación de l en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
301
2 4 6 8 10 12 14 16 18
14 0.00825 0.03304 0.07452 0.13291 0.20854 0.30183 0.41332 0.54366 0.69361
17 0.00982 0.03935 0.08873 0.15822 0.24819 0.35911 0.49159 0.64635 0.82422
20 0.01129 0.04522 0.10194 0.18174 0.28501 0.41226 0.56412 0.74135 0.94485
23 0.01263 0.05058 0.11402 0.20323 0.31861 0.46068 0.63009 0.82760 1.05413
26 0.01383 0.05539 0.12483 0.22244 0.34861 0.50385 0.68878 0.90415 1.15084
29 0.01488 0.05958 0.13425 0.23916 0.37468 0.54128 0.73955 0.97019 1.23399
33 0.01602 0.06414 0.14449 0.25729 0.40287 0.58163 0.79406 1.04075 1.32236
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
Min
uto
s D
ec
ima
les
m1
Fig. IV.31 Primera aproximación de m en minutos decimales, siendo 0.20 igual a 12".
Proceso Inverso para m𝑛
Fig. IV.30 Decimo segunda aproximación de l en segundos decimales.
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00002 0.00011 0.00049
17 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00003 0.00016 0.00069
20 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00004 0.00021 0.00094
23 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00005 0.00029 0.00126
26 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00007 0.00037 0.00165
29 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00009 0.00048 0.00214
33 0.00000 0.00000 0.00000 0.00000 0.00000 0.00002 0.00013 0.00066 0.00295
0.0000
0.0003
0.0006
0.0009
0.0012
0.0015
0.0018
0.0021
0.0024
0.0027
0.0030
Se
gu
nd
os
De
cim
ale
s
l12

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
302
2 4 6 8 10 12 14 16 18
14 0.00000 0.00001 0.00007 0.00041 0.00157 0.00474 0.01216 0.02764 0.05729
17 0.00000 0.00001 0.00012 0.00066 0.00254 0.00769 0.01969 0.04465 0.09236
20 0.00000 0.00001 0.00017 0.00095 0.00367 0.01108 0.02831 0.06403 0.13205
23 0.00000 0.00002 0.00022 0.00125 0.00482 0.01451 0.03699 0.08342 0.17142
26 0.00000 0.00002 0.00027 0.00152 0.00582 0.01750 0.04446 0.09988 0.20433
29 0.00000 0.00003 0.00030 0.00170 0.00651 0.01950 0.04932 0.11026 0.22429
33 0.00000 0.00003 0.00031 0.00174 0.00662 0.01970 0.04945 0.10952 0.22031
0.000.020.040.060.080.100.120.140.160.180.200.220.24
Se
gu
nd
os
De
cim
ale
s
m3
2 4 6 8 10 12 14 16 18
14 0.00054 0.00868 0.04429 0.14149 0.35027 0.73880 1.39669 2.43927 4.01322
17 0.00094 0.01509 0.07696 0.24578 0.60814 1.28196 2.42180 4.22608 6.94632
20 0.00148 0.02371 0.12090 0.38592 0.95439 2.01046 3.79495 6.61588 10.86225
23 0.00215 0.03459 0.17630 0.56251 1.39024 2.92636 5.51871 9.61055 15.75925
26 0.00297 0.04763 0.24268 0.77390 1.91136 4.01987 7.57323 13.17269 21.57072
29 0.00390 0.06260 0.31884 1.01618 2.50789 5.26966 9.91690 17.22711 28.16828
33 0.00529 0.08493 0.43230 1.37669 3.39403 7.12235 13.38257 23.20514 37.86348
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
Se
gu
nd
os
De
cim
ale
s
m2
Fig. IV.32 Segunda aproximación de m en segundos decimales.
Fig. IV.33 Tercera aproximación de m en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
303
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
17 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
20 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
23 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
26 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
29 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001
33 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00004
0.00000
0.00001
0.00002
0.00003
0.00004
0.00005
Se
gu
nd
os
De
cim
ale
s
m5
Fig. IV.35 Quinta aproximación de m en segundos decimales.
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00000 0.00001 0.00003 0.00009 0.00025
17 0.00000 0.00000 0.00000 0.00000 0.00000 0.00002 0.00007 0.00023 0.00060
20 0.00000 0.00000 0.00000 0.00000 0.00001 0.00004 0.00015 0.00046 0.00122
23 0.00000 0.00000 0.00000 0.00000 0.00002 0.00008 0.00027 0.00082 0.00218
26 0.00000 0.00000 0.00000 0.00000 0.00003 0.00013 0.00044 0.00132 0.00350
29 0.00000 0.00000 0.00000 0.00001 0.00004 0.00019 0.00065 0.00195 0.00515
33 0.00000 0.00000 0.00000 0.00001 0.00006 0.00028 0.00099 0.00293 0.00770
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
Se
gu
nd
os
De
cim
ale
s
m4
Fig. IV.34 Cuarta aproximación de m en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
304
Para la elaboración de estos gráficos se tomaron los valores absolutos de
cada término esto con el fin de representar en un solo sentido la aproximación de
cada cantidad. Se logra apreciar el acercamiento que alcanza cada término de los
doce planteados para las fórmulas de transformación, puntualizando que dichos
términos actúan en conjunto para cualquiera de las dos conversiones (directa e
inversa) siendo estos directamente proporcionales, de forma sencilla y dando
veracidad a la hipótesis planteada y fundamentada en la idea de Enriquez Turiño
(2009), se confirma que; la misma cantidad de términos utilizados para la
conversión directa serán los mismos empleados para la transformación inversa.
Así mismo, las gráficas revelan que el comportamiento de todos los
términos se acoplan al desarrollo en serie de Taylor, donde cada termino que
estructura dicha teorema se aproxima a la función requerida, siendo los últimos
términos los que casi alcanzan el valor de 0, dando por hecho que el método de
expansión es el adecuado.
2 4 6 8 10 12 14 16 18
14 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
17 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
20 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
23 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
26 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
29 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
33 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
0.00000
0.00001
0.00002
0.00003
0.00004
0.00005
Se
gu
nd
os
De
cim
ale
s
m6
Fig. IV.36 Sexta aproximación de m en segundos decimales.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
305
De acuerdo a la información anterior y atendiendo una posible confusión por
la saturación términos en las fórmulas de conversión de coordenadas, en la
siguiente tabla se presentan los términos necesarios que se deben aplicar para
satisfacer una precisión milimétrica con respecto a un valor de ∆λ.
Conversión ∆𝛌
2º 4º 6º 8º 10º 12º 14º 16º 18º
Directa (X,Y) 6 6 8 8 10 10 12 12 12
Inversa (Δλ, Φ) 6 6 8 8 10 10 12 12 12
Inversa (φ) 3 3 3 3 3 3 4 4 6
Tabla IV.45 Número de términos de conversión necesarios en función de Δλ.
Los términos asignados a cada ∆λ cumplen con el objetivo de precisión
milimétrica esto sin importar el valor de la latitud, siendo estos útiles para ambos
hemisferios terrestres en una amplitud meridiana de 18º.
Por último, se aprecia que la cantidad de términos aumentan de la misma
manera que ∆λ, lo que quiere decir que a cada 2º de longitud a las formulas se le
tienen que añadir dos términos más para asegurar el milímetro en la precisión, por
lo que se deduce que para representar todo el mundo en esta proyección
asegurando una precisión milimétrica se necesitarían 120 términos para un ∆λ de
180º.
4.6.4 Comparación de resultados con los algoritmos de Karney.
Con esta serie de pruebas se ha logrado verificar que las expansiones a las
fórmulas de GK mediante el método de Thomas (1952) cumplen con el objetivo de
precisión milimétrica requerido para la representación completa del territorio
nacional, sin embargo como dichas expansiones son términos nuevos que hasta el
momento no existe algún desarrollo próximo a ellos, genera una situación de
desconfianza en el proceso de conversión.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
306
Para aclarar esta situación y sustentar las fórmulas amplificadas, se
realizara una última prueba la cual constara en la comparación de resultados que
arrojan dichas fórmulas con los que brindan los algoritmos perfectos de Karney.
Se tomaran dichos algoritmos como prueba ferviente, debido a que estos en
la actualidad cuentan con las fórmulas más precisas para la transformación de
coordenadas en los sistemas TM y UTM, ofreciendo una precisión o error de
cálculo equivalente a cantidades manométricas en un ∆λ de 30º.
Este método exacto proporciona una precisión de 9 Nm. sobre todo el
elipsoide, mientras que los errores en el método de serie están a menos de 5 Nm.
dentro de un ancho de banda de 30º de longitud con respecto al meridiano central
o lo que es lo mismo a 3,900 kilómetros. En cada caso, la convergencia meridiano
y la escala también se calculan con exactitud similar. La velocidad del método de
la serie es competitivo con otros algoritmos de menor precisión y el método exacto
es aproximadamente 5 veces más lento (F. Karney, 2011).
Los algoritmos de Karney tratan de una expansión a las fórmulas del
desarrollo en serie creado por Redfearn (1948), los cuales se fundamentan en una
resolución alterna al conocido y creado por Gauss y Thomas mediante la variable
compleja y la serie de Taylor. Las fórmulas de Redfearn se deducen a través de
las funciones elípticas exponenciales que componen las ecuaciones de
transformación de la proyección TM caso esférico, siendo las deducciones de
Redfearn y Karney ajustadas y amplificadas al elipsoide.
Karney amplifica dichos algoritmos dado a que estos se basan en un
método diferente de resolución, siendo más fácil a la variable compleja de Krüger
y así mismo puntualizando que el método utilizado por Krüger y Thomas no
garantizan precisión más allá de los 8º de ∆λ.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
307
Como ya se dijo, Karney utiliza los algoritmos de Redfearn los cuales
permiten el cálculo de coordenadas en el sistema TM para todo el elipsoide,
aunque estos algoritmos cuentan una solución numérica más fácil que la original
tienen el inconveniente de que contemplan el uso de largas series con diferentes
tipos de coeficientes, integración numérica e iteraciones (Enríquez Turiño, 2009),
en pocas palabras, sus fórmulas son más extensas y más permisibles a
equivocaciones de cálculo y captura de datos.
De acuerdo a lo anterior y para dar sustento a las pruebas de comparación,
se utilizara la calculadora conformada por los algoritmos completos de Karney
obtenida de http://www.mygeodesy.id.au/map-projection/
Las pruebas de comparación se realizaran tomando las coordenadas
geográficas designadas para la República Mexicana utilizadas en el inciso 4.6.1 de
este documento, pero solo aquellas que se encuentren en lado positivo de ∆λ,
para ambos cálculos se emplearan los parámetros del elipsoide GRS 80. Los
resultados de comparación se presentan en la tabla IV.46 y los errores entre
coordenadas en la tabla IV.47.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
308
Coordenada
de Origen
Algoritmos de Conversión.
Conversión Directa. Conversión Inversa
GK Ka - Kr GK Ka - Kr
λ = 102º W X = 0.000000000 X = 0.000000000 λ = -102º 00’ 00.00000” λ = -102º 00’ 00.00000”
φ = 14º N Y = 1548345.64492826 Y = 1548345.64492826 φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00000”
λ = 96º W X = 649259.358764473 X = 649259.358764473 λ = -96º 00’ 00.00000” λ = -96º 00’ 00.00000”
φ = 14º N Y = 1556591.87586344 Y = 1556591.87586344 φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00000”
λ = 90º W X = 1304906.32171282 X = 1304906.32171096 λ = -90º 00’ 00.00000” λ = -90º 00’ 00.00000”
φ = 14º N Y = 1581762.76148506 Y = 1581762.76148546 φ = 14º 00’ 00.00000” φ = 14º 00’ 00.00000”
λ = 84º W X =1973609.38555653 X = 1973609.38518178 λ = -84º 00’ 00.00012” λ = -84º 00’ 00.00000”
φ = 14º N Y = 1625209.45742102 Y = 1625209.45753932 φ = 14º 00’ 00.00002” φ = 14º 00’ 00.00000”
λ = 102º W X = 0.000000000 X = 0.000000000 λ = -102º 00’ 00.00000” λ = -102º 00’ 00.00000”
φ = 20º N Y = 2212366.25410298 Y = 2212366.25410298 φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00000”
λ = 96º W X = 628768.958883641 X = 628768.958883641 λ = -96º 00’ 00.00000” λ = -96º 00’ 00.00000”
φ = 20º N Y = 2223655.27124530 Y = 2223655.27124530 φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00000”
λ = 90º W X = 1262888.00861127 X = 1262888.00860798 λ = -90º 00’ 00.00000” λ = -90º 00’ 00.00000”
φ = 20º N Y = 2258067.90063164 Y = 2258067.90063163 φ = 20º 00’ 00.00000” φ = 20º 00’ 00.00000”
λ = 84º W X = 1907864.27355215 X = 1907864.27289785 λ = -84º 00’ 00.00018” λ = -84º 00’ 00.00000”
φ = 20º N Y = 2317301.23066543 Y = 2317301.23066102 φ = 20º 00’ 00.00004” φ = 20º 00’ 00.00000”
λ = 102º W X = 0.000000000 X = 0.000000000 λ = -102º 00’ 00.00000” λ = -102º 00’ 00.00000”
φ = 26º N Y = 2876834.57251837 Y = 2876834.57251837 φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00000”
λ = 96º W X = 601387.361137679 X = 601387.361137679 λ = -96º 00’ 00.00000” λ = -96º 00’ 00.00000”
φ = 26º N Y = 2890671.73816254 Y = 2890671.73816254 φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00000”
λ = 90º W X = 1206868.01659456 X = 1206868.01659251 λ = -90º 00’ 00.00000” λ = -90º 00’ 00.00000”
φ = 26º N Y = 2932779.70595900 Y = 2932779.70595874 φ = 26º 00’ 00.00000” φ = 26º 00’ 00.00000”
λ = 84º W X = 1820565.17560492 X = 1820565.17520456 λ = -84º 00’ 00.00036” λ = -84º 00’ 00.00000”
φ = 26º N Y = 3005001.84700025 Y = 3005001.84692098 φ = 26º 00’ 00.00008” φ = 26º 00’ 00.00000”
λ = 102º W X = 0.000000000 X = 0.000000000 λ = -102º 00’ 00.00000” λ = -102º 00’ 00.00000”
φ = 33º N Y = 3652748.04307509 Y = 3652748.04307509 φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00000”
λ = 96º W X = 561138.850510106 X = 561138.850510106 λ = -96º 00’ 00.00000” λ = -102º 00’ 00.00000”
φ = 33º N Y = 3668785.79972137 Y = 3668785.79972137 φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00000”
λ = 90º W X = 1124777.93747121 X = 1124777.93747151 λ = -90º 00’ 00.00000” λ = -90º 00’ 00.00000”
φ = 33º N Y = 3717474.94710347 Y = 3717474.94710332 φ = 33º 00’ 00.00000” φ = 33º 00’ 00.00000”
λ = 84º W X = 1693325.28956226 X = 1693325.28962511 λ = -84º 00’ 00.00070” λ = -84º 00’ 00.00000”
φ = 33º N Y = 3800578.90485927 Y = 3800578.90480573 φ = 33º 00’ 00.00015” φ = 33º 00’ 00.00000”
Tabla IV.46 Comparativa de coordenadas entre los algoritmos amplificados de GK y los de Karney – Krüger (Ka – Kr)

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
309
Coordenada de
Origen
Algoritmos de Conversión.
GK y Ka - Kr. Directo. GK y Ka - Kr. Inverso.
X Y λ φ
λ = 102º W φ = 14º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 96º W φ = 14º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 90º W φ = 14º N 0.000001860 0.000000400 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 84º W φ = 14º N 0.000374750 0.000118300 00º 00’ 00.00012” 00º 00’ 00.00002”
λ = 102º W φ = 20º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 96º W φ = 20º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 90º W φ = 20º N 0.000003290 0.000000010 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 84º W φ = 20º N 0.000654300 0.000004410 00º 00’ 00.00018” 00º 00’ 00.00004”
λ = 102º W φ = 26º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 96º W φ = 26º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 90º W φ = 26º N 0.000002050 0.000000260 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 84º W φ = 26º N 0.000400360 0.000079270 00º 00’ 00.00036” 00º 00’ 00.00008”
λ = 102º W φ = 33º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 96º W φ = 33º N 0.000000000 0.000000000 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 90º W φ = 33º N 0.000000300 0.000000150 00º 00’ 00.00000” 00º 00’ 00.00000”
λ = 84º W φ = 33º N 0.000062850 0.000053540 00º 00’ 00.00070” 00º 00’ 00.00015”
Tabla IV.47 Diferencia entre las coordenadas obtenidas con los algoritmos amplificados de GK y Ka – Kr.
Se aprecia que ambos algoritmos arrojan coordenadas similares para las
amplitudes de 0º y 6º de longitud, donde los errores son levemente notorios para
las amplitudes meridianas de 12º y 18º, siendo las diferencias entre ellos por
debajo del milímetro en la proyección y sobre el elipsoide.
Con esta prueba se puede verificar que las amplificaciones mediante el
método de Thomas – Krüger son confiables, por lo que solo resta confirmar el
error que existe entre aquellas coordenadas que son levemente diferentes en
ambos sistemas. Esto se lograra realizando el proceso inverso de conversión con
los algoritmos de Karney a las coordenadas GK que muestran diferencias.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
310
Coordenada
de Origen
Algoritmos de Conversión.
Conversión Error
GK (Directo) Ka – Kr (Inverso) Angular Metros
λ = 90º W X = 1304906.32171282 λ = -90º 00’ 00.00000” λ = 00º 00’ 00” 00.0000
φ = 14º N Y = 1581762.76148506 φ = 14º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 84º W X =1973609.38555653 λ = -84º 00’ 00.00001” λ = 00.00001” 00.0003
φ = 14º N Y = 1625209.45742102 φ = 14º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 90º W X = 1262888.00861127 λ = -90º 00’ 00.00000” λ = 00º 00’ 00” 00.0000
φ = 20º N Y = 2258067.90063164 φ = 20º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 84º W X = 1907864.27355215 λ = -84º 00’ 00.00002” λ = 00.00002” 00.0003
φ = 20º N Y = 2317301.23066543 φ = 20º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 90º W X = 1206868.01659456 λ = -90º 00’ 00.00000” λ = 00º 00’ 00” 00.0000
φ = 26º N Y = 2932779.70595900 φ = 26º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 84º W X = 1820565.17560492 λ = -84º 00’ 00.00001” λ = 00.00001” 00.0003
φ = 26º N Y = 3005001.84700025 φ = 26º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 90º W X = 1124777.93747121 λ = -90º 00’ 00.00000” λ = 00º 00’ 00” 00.0000
φ = 33º N Y = 3717474.94710347 φ = 33º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
λ = 84º W X = 1693325.28956226 λ = -84º 00’ 00.00000” λ = 00º 00’ 00” 00.0000
φ = 33º N Y = 3800578.90485927 φ = 33º 00’ 00.00000” φ = 00º 00’ 00” 00.0000
Tabla IV.48 Aplicación de los algoritmos de Karney a las coordenadas obtenidas en los algoritmos amplificados GK.
Mediante esta comparativa se deja en claro que la diferencia entre ambos
sistemas de conversión es mínima, ofreciendo un error de aproximación por
debajo del milímetro entre ellos. Aunque las fórmulas amplificadas de GK ofrecen
coordenadas con precisión milimétrica estas pueden ser utilizadas sin ningún
problema con los algoritmos de Karney obteniendo un error de transformación
mínimo, asegurando así la precisión deseada.
Aunque los algoritmos de Karney ofrecen una precisión perfecta para las
transformaciones, estos tienen un inconveniente muy notorio el cual es que sus
fórmulas de trasformación solo son viables para la zona Este del meridiano de
Greenwich, generando coordenadas totalmente distintas y desiguales para las
zonas que se encuentren de lado oeste de dicho meridiano. Esta situación se
debe a que el análisis de estos algoritmos y su aplicación se hicieron en torno a la

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
311
zona geográfica donde se encuentra ubicado el Reino Unido, donde el valor de las
coordenadas geodésicas es meramente positivas.
Este inconveniente género que el cálculo de coordenadas GK para el
análisis se haya hecho tomando como positivo las coordenadas de la República
Mexicana, siendo las latitudes de manera inversa al MC (102º, 108º, 114º y 120º)
pero respetando los incrementos de ∆λ. Esto debido a que la zona positiva de ∆λ
con respecto al MC se invierte.
Con esta última prueba se sustenta la veracidad de estas expansiones,
dejando en claro que los resultados de sus cálculos pueden ser utilizados en los
algoritmos de Karney en los de Thomas y viceversa asegurando la precisión
milimétrica en ambos sistemas, la cual es la más requerida en trabajos topo-
geodésicos.
De igual manera se asegura que las teorías de Thomas y Enriquez Turiño
son ciertas y que a pesar de que existen formas alternas de resolución al sistema
GK, sustentadas por autores como Lee y Karney que aseguran que el método
original no es el más viable por el exceso en las fórmulas, estas pierden su
veracidad, siendo las nuevas amplificaciones la prueba fiel de que los métodos
originales de deducción siempre serán los más confiables y los menos confusos.
4.6.5 Error máximo alcanzado.
Es así como los algoritmos amplificados por el método original de Krüger
cumplen de manera satisfactoria con todas las pruebas y análisis de precisión,
error y exactitud realizados a un máximo de ∆λ 18º y para latitudes que van de 14º
N hasta 33º N esencialmente, esto con el fin de satisfacer una condición de
simetría a la zona de estudio, dada esta situación se conoce la precisión máxima
alcanzada en dicha zona sin embargo se desconoce la precisión exacta donde el
territorio nacional se desenvuelve. Es por eso que en este apartado se presentara
la precisión y el índice de error máximos alcanzados para las coordenadas

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
312
oficiales de la República Mexicana así mismo las coordenadas perteneciente a la
ZEEM, esto con el fin de detallar el objetivo logrado.
Atendiendo lo anterior en las siguientes tablas se expondrán la conversión
de coordenadas, en primera estancia con los algoritmos anteriores o básicos GK,
posteriores a ello con los algoritmos amplificados, presentando de igual forma el
error o precisión que ofrece cada uno de ellos.
Coordenada de
Origen
Algoritmos de Conversión.
Conversión Error
Directo Inverso Angular Metros
Coordenadas Oficiales.
λ = 86º 42’ 36.00” W X = 1665351.33394794 λ = -86º 42’ 36.01234” λ = 00.01234” 00.3696
φ = 14º 32º 27.00“ N Y = 1664962.52922639 φ = 14º 32’ 27.00109” φ = 00.00109” 00.0334
λ = 118º 27’ 24.00” W X = -1795444.93543463 λ = -118º 27’ 23.97562” λ = 00.02438” 00.7297
φ = 14º 32º 27.00” N Y = 1674255.35245975 φ = 14º 32’ 27.00238” φ = 00.00238” 00.0732
λ = 86º 42’ 36.00” W X = 1440478.49742902 λ = -86º 42’ 36.03543” λ = 00.03543” 00.9226
φ = 32º 43º 06.00“ N Y = 3726928.26319330 φ = 32º 43’ 06.00461” φ = 00.00461” 00.1419
λ = 118º 27’ 24.00” W X = -1551578.3535154 λ = -118º 27’ 23.92944” λ = 00.07056” 01.8375
φ = 32º 43º 06.00“ N Y = 3744009.35061247 φ = 32º 43’ 06.01053” φ = 00.01053” 00.3243
Coordenadas ZEEM
λ = 84º 02’ 46.50” W X = 1985508.29283915 λ = -84º 02’ 46.55182” λ = 00.05182” 01.5679
φ = 11º 58º 07.70“ N Y = 1389759.56143801 φ = 11º 58’ 07.70424” φ = 00.00424” 00.1303
λ = 122º 10’ 13.50” W X = -2239746.95953755 λ = -122º 10’ 13.34693” λ = 00.15307” 04.6310
φ = 11º 58º 07.70“ N Y = 1407995.85054807 φ = 11º 58’ 07.71502” φ = 00.01502” 00.4615
λ = 84º 02’ 46.50” W X = 1697070.86404977 λ = -84º 02’ 46.65907” λ = 00.15907” 04.1483
φ = 32º 35º 22.11“ N Y = 3753364.93188279 φ = 32º 35’ 22.13758” φ = 00.02758” 00.8497
λ = 122º 10’ 13.50” W X = -1909923.00429847 λ = -122º 10’ 13.01718” λ = 00.48282” 12.5913
φ = 32º 35º 22.11“ N Y = 3793002.76742477 φ = 32º 35’ 22.21034” φ = 00.10034” 03.0909
Tabla IV.49 Conversión de coordenadas oficiales y de la ZEE pertenecientes a la República Mexicana utilizando los algoritmos básicos GK.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
313
Coordenada de
Origen
Algoritmos de Conversión.
Conversión Error
Directo Inverso Angular Metros
Coordenadas Oficiales.
λ = 86º 42’ 36.00” W X = 1665351.34944626 λ = -86º 42’ 36.00001” λ = 00.00001” 00.0003
φ = 14º 32º 27.00“ N Y = 1664962.55371541 φ = 14º 32’ 27.00000” φ = 00.00000” 00.0001
λ = 118º 27’ 24.00” W X = -1795444.96521879 λ = -118º 27’ 23.99997” λ = 00.00003” 00.0009
φ = 14º 32º 27.00” N Y = 1674255.40372410 φ = 14º 32’ 27. 00001” φ = 00.00001” 00.0002
λ = 86º 42’ 36.00” W X = 1440478.40402795 λ = -86º 42’ 36. 00007” λ = 00.00007” 00.0019
φ = 32º 43º 06.00“ N Y = 3726928.25576302 φ = 32º 43’ 06.00001” φ = 00.00001” 00.0004
λ = 118º 27’ 24.00” W X = -1551578.17212048 λ = -118º 27’ 23.99980” λ = 00.00020” 00.0053
φ = 32º 43º 06.00“ N Y = 3744009.33501956 φ = 32º 43’ 06.00004” φ = 00.00004” 00.0012
Coordenadas ZEEM
λ = 84º 02’ 46.50” W X = 1985508.54189950 λ = -84º 02’ 46.50008” λ = 00.00008” 00.0023
φ = 11º 58º 07.70“ N Y = 1389759.68733183 φ = 11º 58’ 07.70001” φ = 00.00001” 00.0004
λ = 122º 10’ 13.50” W X = -2239747.67124631 λ = -122º 10’ 13.49963” λ = 00.00037” 00.0113
φ = 11º 58º 07.70“ N Y = 1407996.25734129 φ = 11º 58’ 07.70007” φ = 00. 00007” 00.0020
λ = 84º 02’ 46.50” W X = 1697070.46261973 λ = -84º 02’ 46.50065” λ = 00.00065” 00.0170
φ = 32º 35º 22.11“ N Y = 3753364.89497803 φ = 32º 35’ 22.11014” φ = 00.00014” 00.0043
λ = 122º 10’ 13.50” W X = -1909921.85443538 λ = -122º 10’ 13.49676” λ = 00.00324” 00.0846
φ = 32º 35º 22.11“ N Y = 3793002.64759331 φ = 32º 35’ 22. 11079” φ = 00.00079” 00.0244
Tabla IV.50 Conversión de coordenadas oficiales y de la ZEE pertenecientes a la República Mexicana utilizando los algoritmos amplificados GK.
En virtud de los resultados de esta última prueba se estipula que el rango
error de transformación obtenido para las conversiones directas e inversas en la
representación GK aplicadas a las coordenadas extremas oficiales de la República
Mexicana son de; 1 mm para ambos pares de coordenadas, geodésicas y de
proyección únicamente para la zona este que se encuentra del MC 102º de
longitud, mientras que para la zona contraria a ella el rango es de 5 mm para la
longitud y/o coordenada X, siendo este menor o aproximado a 1 mm para la latitud
y/o coordenada Y.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
314
De forma general el error máximo alcanzado para la zona oficial del estado
mexicano fue de ± 0.00020” en una banda meridiana de 31º 44’ 48” de longitud y
de ± 0.00004” en una faja de latitud de 18º 10’ 39” o que es lo mismo a un ΔX de ±
0.005 m en 3,534.022 Km y de un ΔY ± 0.001 m en 2010.627 Km.
La precisión deseada fue obtenida con éxito para la zona oficial del territorio
nacional, no obstante esta decae para la ZEE siendo de ± 0.085 m en una banda
meridiana de 38º 07’ 27” y de ± 0.024 m en una faja de latitud de 20º 37’ 15.41”.
Aunque en esta zona el error de aproximación es de orden del centímetro, este
puede llegar a ser despreciable debido a que la ZEE contempla la zona marítima
del país.
Para no lidiar con estas diferencias y de acuerdo a la normatividad del
INEGI, para esta zona y demás zonas marítimas y costeras del país, la proyección
adecuada para su representación es la proyección Mercator.
Es así, que con esta última conversión y comparativa se logra demostrar
que los términos agregados a las fórmulas de conversión GK cumplen con el
objetivo esencial planteado en esta investigación, logrando así que los errores de
cálculo o aproximación entre transformaciones directa e inversa y viceversa hayan
sido reducidos a un 99.85 %, asegurando de esta manera la precisión milimétrica
para la representaci completa del territorio nacional.
4.7 Nuevos Algoritmos de Transformación para la Proyección GK.
Realizando las pruebas correspondientes y dando veracidad a que dichas
ecuaciones amplificadas cumplen con los objetivos planteados en esta tesis, a
continuación se presentan las fórmulas con los coeficientes, términos y
parámetros bases necesarios para la representación completa de la República
Mexicana en la proyección GK o TM, para ambos casos de transformación.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
315
4.7.1 Fórmulas de Transformación Directa.
𝐗 = 𝐀𝟏∆𝛌 + 𝐀𝟑∆𝛌𝟑 + 𝐀𝟓∆𝛌
𝟓 + 𝐀𝟕∆𝛌𝟕 + 𝐀𝟗∆𝛌
𝟗 + 𝐀𝟏𝟏∆𝛌𝟏𝟏
𝐘 = 𝐒 + 𝐁𝟐∆𝛌𝟐 + 𝐁𝟒∆𝛌
𝟒 + 𝐁𝟔∆𝛌𝟔 + 𝐁𝟖∆𝛌
𝟖 + 𝐁𝟏𝟎∆𝛌𝟏𝟎 + 𝐁𝟏𝟐∆𝛌
𝟏𝟐
Parámetros Base
Semieje Mayor Semieje Menor Achatamiento
𝑎 𝑏 = 𝑎(1 − 𝑓) 𝑓
Latitud en Radianes Longitud en Radianes Meridiano Central
φ λ MC ó 𝜆0
Amplitud Meridiana Primera Excentricidad Segunda Excentricidad
∆λ = MC − λ 𝑒 = √1 − (𝑏
𝑎)2
𝑒′ =𝑒
√1 − 𝑒2
Radio Polar Producto Tangente de la Latitud
c=a2
b η = 𝑒′ cosφ t = tanφ
Radio del Primer Vertical
Radio de Curvatura de una Sección Inclinada
Variable de Rapp (N/ρ)
N =c
V ρ =
c
V3 V = √1 + η2
Tabla IV.51 Parámetros y nomenclatura base para el proceso directo.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
316
Siendo.
𝐀𝟏 = 𝐍𝐜𝐨𝐬𝛗 𝐀𝟑 =𝐍𝐜𝐨𝐬𝟑𝛗
𝟔[𝟏 + 𝛈𝟐 − 𝐭𝟐]
𝐀𝟓 =𝐍𝐜𝐨𝐬𝟓𝛗
𝟏𝟐𝟎[𝟓 − 𝟏𝟖𝐭𝟐 + 𝐭𝟒 + 𝟐𝛈𝟐(𝟕 − 𝟐𝟗𝐭𝟐)
+𝛈𝟒(𝟏𝟑 − 𝟔𝟒𝐭𝟐) + 𝟒𝛈𝟔(𝟏 − 𝟔𝐭𝟐)]
𝐀𝟕 =𝐍𝐜𝐨𝐬𝟕𝛗
𝟓, 𝟎𝟒𝟎
[
𝟔𝟏 − 𝟒𝟕𝟗𝐭𝟐 + 𝟏𝟕𝟗𝐭𝟒 − 𝐭𝟔
+𝛈𝟐(𝟑𝟑𝟏 − 𝟑𝟐𝟗𝟖𝐭𝟐 + 𝟏𝟕𝟕𝟏𝐭𝟒)
+𝟓𝛈𝟒(𝟏𝟒𝟑 − 𝟏𝟕𝟑𝟏𝐭𝟐 + 𝟏𝟐𝟏𝟔𝐭𝟒)
+𝛈𝟔(𝟕𝟔𝟗 − 𝟏𝟎𝟗𝟔𝟒𝐭𝟐 + 𝟗𝟒𝟖𝟎𝐭𝟒)
+𝟒𝛈𝟖(𝟏𝟎𝟑 − 𝟏𝟔𝟗𝟎𝐭𝟐 + 𝟏𝟕𝟐𝟖𝐭𝟒)
+𝟖𝛈𝟏𝟎(𝟏𝟏 − 𝟐𝟎𝟒𝐭𝟐 + 𝟐𝟒𝟎𝐭𝟒) ]
𝐀𝟗 =𝐍𝐜𝐨𝐬𝟗𝛗
𝟑𝟔𝟐, 𝟖𝟖𝟎
[
𝟏𝟑𝟖𝟓 − 𝟏𝟗𝟎𝟐𝟖𝐭𝟐 + 𝟏𝟖𝟐𝟕𝟎𝐭𝟒 − 𝟏𝟔𝟑𝟔𝐭𝟔 + 𝐭𝟖
+𝟒𝛈𝟐(𝟑𝟎𝟕𝟏 − 𝟓𝟑𝟓𝟑𝟓𝐭𝟐 + 𝟕𝟐𝟕𝟏𝟕𝐭𝟒 − 𝟏𝟏𝟕𝟗𝟕𝐭𝟔)
+𝟒𝟐𝛈𝟒(𝟏𝟎𝟕𝟗 − 𝟐𝟐𝟔𝟓𝟒𝐭𝟐 + 𝟑𝟗𝟑𝟓𝟓𝐭𝟒 − 𝟗𝟏𝟓𝟐𝐭𝟔)
+𝟖𝟒𝛈𝟔(𝟏𝟎𝟖𝟏 − 𝟐𝟔𝟒𝟑𝟕𝐭𝟐 + 𝟓𝟓𝟓𝟏𝟎𝐭𝟒 − 𝟏𝟔𝟓𝟗𝟔𝐭𝟔)
+𝟑𝛈𝟖(𝟑𝟓𝟕𝟒𝟕 − 𝟗𝟗𝟒𝟗𝟗𝟐𝐭𝟐 + 𝟐𝟒𝟑𝟔𝟒𝟒𝟖𝐭𝟒 − 𝟖𝟖𝟏𝟔𝟔𝟒𝐭𝟔)
+𝟐𝟒𝛈𝟏𝟎(𝟑𝟏𝟐𝟏 − 𝟗𝟕𝟐𝟎𝟐𝐭𝟐 + 𝟐𝟕𝟎𝟖𝟔𝟒𝐭𝟒 − 𝟏𝟏𝟒𝟐𝟒𝟎𝐭𝟔)
+𝟏𝟔𝛈𝟏𝟐(𝟏𝟕𝟗𝟓 − 𝟔𝟏𝟕𝟒𝟒𝐭𝟐 + 𝟏𝟗𝟐𝟑𝟒𝟖𝐭𝟒 − 𝟗𝟐𝟏𝟔𝟎𝐭𝟔)
+𝟔𝟒𝛈𝟏𝟒(𝟕𝟑 − 𝟐𝟕𝟒𝟓𝐭𝟐 + 𝟗𝟒𝟑𝟐𝐭𝟒 − 𝟓𝟎𝟒𝟎𝐭𝟔) ]
𝐀𝟏𝟏 =𝐍𝐜𝐨𝐬𝟏𝟏𝛗
𝟑𝟗′𝟗𝟏𝟔, 𝟖𝟎𝟎∙
[
𝟓𝟎𝟓𝟐𝟏 − 𝟏𝟎𝟕𝟑𝟓𝟏𝟕𝐭𝟐 + 𝟏𝟗𝟒𝟗𝟕𝟔𝟐𝐭𝟒 − 𝟓𝟒𝟎𝟐𝟒𝟐𝐭𝟔 + 𝟏𝟒𝟕𝟓𝟕𝐭𝟖 − 𝐭𝟏𝟎
+𝛈𝟐(𝟔𝟔𝟑𝟎𝟔𝟏 − 𝟏𝟕𝟓𝟗𝟒𝟖𝟕𝟔𝐭𝟐 + 𝟒𝟑𝟐𝟓𝟓𝟖𝟎𝟔𝐭𝟒 − 𝟏𝟖𝟗𝟐𝟖𝟑𝟏𝟔𝐭𝟔 + 𝟏𝟐𝟎𝟓𝟗𝟒𝟏𝐭𝟖)
+𝟏𝟎𝛈𝟒(𝟑𝟔𝟓𝟓𝟕𝟑 − 𝟏𝟏𝟓𝟑𝟖𝟑𝟗𝟓𝐭𝟐 + 𝟑𝟓𝟑𝟕𝟖𝟔𝟔𝟕𝐭𝟒 − 𝟐𝟎𝟗𝟏𝟒𝟎𝟔𝟗𝐭𝟔 + 𝟐𝟏𝟏𝟏𝟐𝟗𝟔𝐭𝟖)
+𝟐𝛈𝟔(𝟓𝟔𝟒𝟔𝟕𝟎𝟗 − 𝟐𝟎𝟓𝟓𝟑𝟕𝟕𝟒𝟔𝐭𝟐 + 𝟕𝟒𝟗𝟒𝟔𝟔𝟕𝟒𝟏𝐭𝟒 − 𝟓𝟓𝟐𝟒𝟐𝟓𝟎𝟖𝟒𝐭𝟔 + 𝟕𝟓𝟒𝟕𝟔𝟐𝟖𝟎𝐭𝟖)
+𝟑𝛈𝟖(𝟕𝟐𝟓𝟏𝟗𝟖𝟑 − 𝟐𝟗𝟕𝟗𝟗𝟐𝟐𝟑𝟗𝐭𝟐 + 𝟏𝟐𝟓𝟐𝟗𝟐𝟗𝟐𝟓𝟔𝐭𝟒 − 𝟏𝟎𝟗𝟖𝟎𝟏𝟔𝟑𝟎𝟒𝐭𝟔 + 𝟏𝟖𝟕𝟏𝟖𝟏𝟓𝟔𝟖𝐭𝟖)
+𝟑𝛈𝟏𝟎(𝟗𝟎𝟗𝟑𝟒𝟔𝟕 − 𝟒𝟏𝟓𝟐𝟕𝟎𝟒𝟐𝟒𝐭𝟐 + 𝟏𝟗𝟕𝟎𝟒𝟎𝟐𝟖𝟏𝟔𝐭𝟒 − 𝟏𝟗𝟗𝟎𝟎𝟒𝟗𝟎𝟖𝟖𝐭𝟔 + 𝟒𝟎𝟑𝟐𝟐𝟔𝟖𝟖𝟎𝐭𝟖)
+𝟖𝛈𝟏𝟐(𝟐𝟕𝟗𝟓𝟗𝟒𝟕 − 𝟏𝟒𝟎𝟐𝟏𝟎𝟖𝟗𝟐𝐭𝟐 + 𝟕𝟑𝟖𝟗𝟓𝟒𝟔𝟖𝟎𝐭𝟒 − 𝟖𝟒𝟏𝟓𝟎𝟔𝟖𝟒𝟎𝐭𝟔 + 𝟏𝟗𝟔𝟑𝟎𝟎𝟖𝟎𝟎𝐭𝟖)
+𝟔𝟒𝛈𝟏𝟒(𝟏𝟖𝟏𝟐𝟖𝟎 − 𝟗𝟖𝟖𝟖𝟕𝟕𝟓𝐭𝟐 + 𝟓𝟕𝟏𝟖𝟖𝟖𝟒𝟒𝐭𝟒 − 𝟕𝟐𝟐𝟓𝟔𝟔𝟖𝟎𝐭𝟔 + 𝟏𝟖𝟗𝟕𝟓𝟔𝟎𝟎𝐭𝟖)
+𝟔𝟒𝛈𝟏𝟔(𝟓𝟒𝟏𝟏𝟐 − 𝟑𝟏𝟖𝟔𝟑𝟒𝟑𝐭𝟐 + 𝟐𝟎𝟎𝟐𝟕𝟑𝟎𝟒𝐭𝟒 − 𝟐𝟕𝟕𝟐𝟗𝟗𝟑𝟔𝐭𝟔 + 𝟖𝟎𝟔𝟒𝟎𝟎𝟎𝐭𝟖)
+𝟐𝟓𝟔𝛈𝟏𝟖(𝟏𝟕𝟕𝟒 − 𝟏𝟏𝟐𝟎𝟒𝟕𝐭𝟐 + 𝟕𝟓𝟗𝟒𝟕𝟒𝐭𝟒 − 𝟏𝟏𝟒𝟏𝟐𝟎𝟎𝐭𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝐭𝟖) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
317
𝐁𝟐 =𝐍𝐭 𝐜𝐨𝐬𝟐𝛗
𝟐 𝐁𝟒 =
𝐍𝐭 𝐜𝐨𝐬𝟒𝛗
𝟐𝟒[𝟓 − 𝐭𝟐 + 𝟗𝛈𝟐 + 𝟒𝛈𝟒]
𝐁𝟔 =𝐍𝐭 𝐜𝐨𝐬𝟔𝛗
𝟕𝟐𝟎[
𝟔𝟏 − 𝟓𝟖𝐭𝟐 + 𝐭𝟒 + 𝟑𝟎𝛈𝟐(𝟗 − 𝟏𝟏𝐭𝟐)
+𝟓𝛈𝟒(𝟖𝟗 − 𝟏𝟑𝟔𝐭𝟐) + 𝟏𝟐𝛈𝟔(𝟐𝟕 − 𝟓𝟎𝐭𝟐)
+𝟖𝛈𝟖(𝟏𝟏 − 𝟐𝟒𝐭𝟐)
]
𝐁𝟖 =𝐍𝐭 𝐜𝐨𝐬𝟖𝛗
𝟒𝟎, 𝟑𝟐𝟎
[
𝟏𝟑𝟖𝟓 − 𝟑𝟏𝟏𝟏𝐭𝟐 + 𝟓𝟒𝟑𝐭𝟒 − 𝐭𝟔
+𝟐𝟏𝛈𝟐(𝟓𝟏𝟗 − 𝟏𝟓𝟔𝟐𝐭𝟐 + 𝟒𝟑𝟗𝐭𝟒)
+𝟐𝟏𝛈𝟒(𝟏𝟔𝟑𝟗 − 𝟔𝟏𝟒𝟕𝐭𝟐 + 𝟐𝟑𝟔𝟒𝐭𝟒)
+𝟐𝟏𝛈𝟔(𝟐𝟔𝟖𝟓 − 𝟏𝟐𝟎𝟎𝟒𝐭𝟐 + 𝟓𝟖𝟎𝟎𝐭𝟒)
+𝟐𝟒𝛈𝟖(𝟐𝟏𝟏𝟗 − 𝟏𝟎𝟗𝟔𝟐𝐭𝟐 + 𝟔𝟑𝟐𝟖𝐭𝟒)
+𝟒𝟖𝛈𝟏𝟎(𝟓𝟎𝟏 − 𝟐𝟗𝟑𝟔𝐭𝟐 + 𝟏𝟗𝟔𝟎𝐭𝟒)
+𝟔𝟒𝛈𝟏𝟐(𝟕𝟑 − 𝟒𝟕𝟕𝐭𝟐 + 𝟑𝟔𝟎𝐭𝟒) ]
𝐁𝟏𝟎 =
𝐍𝐭𝐜𝐨𝐬𝟏𝟎𝛗
𝟑′𝟔𝟐𝟖, 𝟖𝟎𝟎
[
𝟓𝟎𝟓𝟐𝟏 − 𝟐𝟎𝟔𝟐𝟕𝟔𝐭𝟐 + 𝟏𝟎𝟏𝟏𝟔𝟔𝐭𝟒 − 𝟒𝟗𝟏𝟔𝐭𝟔 + 𝐭𝟖
+𝟏𝟖𝟎𝛈𝟐(𝟑𝟒𝟎𝟑 − 𝟏𝟖𝟐𝟏𝟏𝐭𝟐 + 𝟏𝟑𝟑𝟒𝟓𝐭𝟒 − 𝟏𝟑𝟐𝟗𝐭𝟔)
+𝟏𝟎𝛈𝟒(𝟑𝟎𝟒𝟑𝟏𝟗 − 𝟏𝟗𝟗𝟓𝟒𝟑𝟖𝐭𝟐 + 𝟏𝟗𝟐𝟏𝟎𝟖𝟑𝐭𝟒 − 𝟐𝟖𝟕𝟗𝟒𝟒𝐭𝟔)
+𝟏𝟕𝟔𝟒𝛈𝟔(𝟒𝟔𝟕𝟕 − 𝟑𝟔𝟎𝟖𝟏𝐭𝟐 + 𝟒𝟐𝟔𝟐𝟐𝐭𝟒 − 𝟖𝟒𝟐𝟎𝐭𝟔)
+𝟑𝛈𝟖(𝟒𝟓𝟎𝟏𝟗𝟎𝟕 − 𝟑𝟗𝟕𝟕𝟎𝟔𝟐𝟒𝐭𝟐 + 𝟓𝟓𝟐𝟗𝟒𝟕𝟑𝟔𝐭𝟒 − 𝟏𝟑𝟒𝟏𝟓𝟖𝟎𝟖𝐭𝟔)
+𝟑𝟔𝟎𝛈𝟏𝟎(𝟑𝟖𝟐𝟔𝟑 − 𝟑𝟕𝟗𝟔𝟗𝟎𝐭𝟐 + 𝟔𝟎𝟒𝟐𝟖𝟖𝐭𝟒 − 𝟏𝟕𝟐𝟒𝟖𝟎𝐭𝟔)
+𝟔𝟒𝛈𝟏𝟐(𝟏𝟑𝟒𝟐𝟔𝟒 − 𝟏𝟒𝟕𝟓𝟏𝟒𝟎𝐭𝟐 + 𝟐𝟔𝟑𝟒𝟕𝟗𝟓𝐭𝟒 − 𝟖𝟓𝟗𝟔𝟖𝟎𝐭𝟔)
+𝟓𝟕𝟔𝛈𝟏𝟒(𝟓𝟐𝟐𝟒 − 𝟔𝟐𝟖𝟒𝟏𝐭𝟐 + 𝟏𝟐𝟒𝟏𝟐𝟎𝐭𝟒 − 𝟒𝟓𝟑𝟔𝟎𝐭𝟔)
+𝟐𝟓𝟔𝛈𝟏𝟔(𝟏𝟕𝟕𝟒 − 𝟐𝟑𝟏𝟓𝟕𝐭𝟐 + 𝟓𝟎𝟎𝟎𝟒𝐭𝟒 − 𝟐𝟎𝟏𝟔𝟎𝐭𝟔) ]
𝐁𝟏𝟐 =𝐍𝐭 𝐜𝐨𝐬𝟏𝟐𝛗
𝟒𝟕𝟗′𝟎𝟎𝟏, 𝟔𝟎𝟎∙
[
𝟐𝟕𝟎𝟐𝟕𝟔𝟓 − 𝟏𝟕𝟒𝟔𝟎𝟕𝟎𝟏𝐭𝟐 + 𝟏𝟔𝟖𝟖𝟗𝟕𝟖𝟔𝐭𝟒 − 𝟐𝟖𝟏𝟗𝟐𝟔𝟔𝐭𝟔 + 𝟒𝟒𝟐𝟖𝟏𝐭𝟖 − 𝐭𝟏𝟎
+𝟑𝟑𝛈𝟐(𝟏𝟒𝟎𝟕𝟗𝟑𝟑 − 𝟏𝟏𝟔𝟎𝟒𝟔𝟔𝟖𝐭𝟐 + 𝟏𝟓𝟔𝟗𝟏𝟐𝟕𝟖𝐭𝟒 − 𝟒𝟑𝟕𝟔𝟓𝟎𝟖𝐭𝟔 + 𝟏𝟖𝟑𝟔𝟏𝟑𝐭𝟖)
+𝟐𝟐𝛈𝟒(𝟏𝟒𝟗𝟒𝟑𝟏𝟗𝟕 − 𝟏𝟒𝟖𝟑𝟔𝟖𝟔𝟑𝟕𝐭𝟐 + 𝟐𝟓𝟒𝟖𝟐𝟑𝟑𝟓𝟕𝐭𝟒 − 𝟗𝟖𝟖𝟑𝟓𝟕𝟖𝟕𝐭𝟔 + 𝟔𝟗𝟑𝟕𝟎𝟐𝟐𝐭𝟖)
+𝟔𝟔𝛈𝟔(𝟏𝟗𝟔𝟑𝟕𝟔𝟖𝟓 − 𝟐𝟐𝟔𝟔𝟗𝟏𝟐𝟏𝟖𝐭𝟐 + 𝟒𝟔𝟖𝟑𝟎𝟐𝟐𝟐𝟗𝐭𝟒 − 𝟐𝟑𝟎𝟑𝟒𝟖𝟓𝟎𝟖𝐭𝟔 + 𝟐𝟐𝟓𝟎𝟑𝟖𝟎𝟎𝐭𝟖)
+𝟏𝟏𝛈𝟖(𝟐𝟗𝟏𝟐𝟖𝟕𝟒𝟔𝟕 − 𝟑𝟖𝟏𝟔𝟔𝟖𝟔𝟎𝟎𝟕𝐭𝟐 + 𝟗𝟏𝟔𝟎𝟐𝟏𝟗𝟑𝟒𝟒𝐭𝟒 − 𝟓𝟒𝟏𝟓𝟓𝟓𝟓𝟗𝟔𝟖𝐭𝟔 + 𝟔𝟕𝟏𝟑𝟐𝟖𝟑𝟖𝟒𝐭𝟖)
+𝟗𝟗𝛈𝟏𝟎(𝟓𝟐𝟗𝟕𝟎𝟒𝟏𝟗 − 𝟕𝟕𝟒𝟐𝟖𝟑𝟎𝟗𝟔𝐭𝟐 + 𝟐𝟏𝟎𝟖𝟎𝟔𝟖𝟏𝟕𝟔𝐭𝟒 − 𝟏𝟒𝟒𝟔𝟗𝟕𝟓𝟕𝟒𝟒𝐭𝟔 + 𝟐𝟏𝟓𝟓𝟔𝟖𝟔𝟒𝟎𝐭𝟖)
+𝟒𝛈𝟏𝟐(𝟏𝟒𝟒𝟖𝟕𝟔𝟒𝟕𝟕𝟏 − 𝟐𝟑𝟑𝟏𝟕𝟖𝟓𝟒𝟎𝟕𝟔𝐭𝟐 + 𝟕𝟎𝟕𝟕𝟖𝟒𝟏𝟒𝟔𝟎𝟖𝐭𝟒 − 𝟓𝟓𝟎𝟔𝟔𝟗𝟐𝟐𝟎𝟔𝟒𝐭𝟔 + 𝟗𝟓𝟏𝟖𝟎𝟔𝟓𝟗𝟐𝟎𝐭𝟖)
+𝟒𝟖𝛈𝟏𝟒(𝟖𝟗𝟒𝟎𝟏𝟓𝟎𝟑 − 𝟏𝟓𝟔𝟖𝟐𝟔𝟗𝟎𝟐𝟖𝐭𝟐 + 𝟓𝟐𝟑𝟕𝟕𝟏𝟏𝟗𝟓𝟐𝐭𝟒 − 𝟒𝟓𝟑𝟖𝟔𝟔𝟏𝟔𝟎𝟎𝐭𝟔 + 𝟖𝟖𝟖𝟏𝟒𝟖𝟖𝟎𝟎𝐭𝟖)
+𝟔𝟒𝛈𝟏𝟔(𝟑𝟏𝟗𝟔𝟏𝟗𝟖𝟎 − 𝟔𝟎𝟔𝟎𝟕𝟔𝟐𝟏𝟕𝐭𝟐 + 𝟐𝟐𝟎𝟒𝟑𝟐𝟒𝟓𝟔𝟖𝐭𝟒 − 𝟐𝟎𝟗𝟗𝟐𝟔𝟓𝟔𝟗𝟔𝐭𝟔 + 𝟒𝟓𝟔𝟖𝟐𝟓𝟔𝟎𝟎𝐭𝟖)
+𝟑𝟖𝟒𝛈𝟏𝟖(𝟏𝟒𝟖𝟎𝟐𝟗𝟑 − 𝟑𝟎𝟏𝟑𝟗𝟎𝟏𝟖𝐭𝟐 + 𝟏𝟏𝟖𝟑𝟖𝟔𝟎𝟖𝟒𝐭𝟒 − 𝟏𝟐𝟐𝟔𝟏𝟖𝟖𝟖𝟎𝐭𝟔 + 𝟐𝟗𝟐𝟕𝟐𝟑𝟐𝟎𝐭𝟖)
+𝟓𝟏𝟐𝛈𝟐𝟎(𝟏𝟑𝟔𝟖𝟖𝟑− 𝟐𝟗𝟕𝟓𝟓𝟓𝟗𝐭𝟐 + 𝟏𝟐𝟓𝟑𝟕𝟐𝟖𝟖𝐭𝟒 − 𝟏𝟒𝟎𝟎𝟒𝟕𝟐𝟎𝐭𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝐭𝟖) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
318
Longitud de Arco de Meridiano.
𝐒 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗]
𝐀 = 𝟏 +𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
𝐁 = − [𝟑
𝟒𝒆𝟐 +
𝟏𝟓
𝟏𝟔𝒆𝟒 +
𝟓𝟐𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐂 =𝟏𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟎𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖
𝐃 = − [𝟑𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐄 =𝟑𝟏𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
319
4.7.2 Fórmulas de Transformación Inversa.
∆𝛌 = 𝐂𝟏𝐗𝐆𝐊 + 𝐂𝟑𝐗𝐆𝐊𝟑 + 𝐂𝟓𝐗𝐆𝐊
𝟓 + 𝐂𝟕𝐗𝐆𝐊𝟕 + 𝐂𝟗𝐗𝐆𝐊
𝟗 + 𝐂𝟏𝟏𝐗𝐆𝐊𝟏𝟏
𝚽 = 𝚽𝟎 +𝐃𝟐𝐗𝐆𝐊𝟐 +𝐃𝟒𝐗𝐆𝐊
𝟒 +𝐃𝟔𝐗𝐆𝐊𝟔 +𝐃𝟖𝐗𝐆𝐊
𝟖 +𝐃𝟏𝟎𝐗𝐆𝐊𝟏𝟎 + 𝐃𝟏𝟐𝐗𝐆𝐊
𝟏𝟐
𝛌 = 𝐌𝐂 + ∆𝛌
𝛗 = 𝛗𝟎 + 𝐆𝟏∆𝚽+ 𝐆𝟐∆𝚽𝟐 + 𝐆𝟑∆𝚽
𝟑 + 𝐆𝟒∆𝚽𝟒 + 𝐆𝟓∆𝚽
𝟓 + 𝐆𝟔∆𝚽𝟔
∆𝚽 = 𝚽−𝚽𝟎
Parámetros Base
Semieje Mayor Semieje Menor Achatamiento
𝑎 𝑏 = 𝑎(1 − 𝑓) 𝑓
Coordenada Este GK Coordenada Norte GK Meridiano Central
XGK YGK MC ó 𝜆0
Latitud Geodésica e Isométrica del punto de
Expansión Primera Excentricidad Segunda Excentricidad
φ0, Φ0 𝑒 = √1 − (𝑏
𝑎)2
𝑒′ =𝑒
√1 − 𝑒2
Radio Polar Radio del Primer Vertical Radio de Curvatura de una Sección Inclinada
c=a2
b N =
c
V ρ =
c
V3
Variable de Rapp (N/ρ) Producto Tangente de la Latitud
del Punto de Expansión
V = √1 + η2 η = 𝑒′ cosφ0 t = tanφ0
Tabla IV.52 Parámetros y nomenclatura base para el proceso inverso.

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
320
Para la Latitud Geodésica del Punto de Expansión.
𝛗′𝟏=
𝐘𝐆𝐊
𝒂(𝟏 − 𝒆𝟐) (𝟏 +𝟑𝟒𝒆𝟐 +
𝟒𝟓𝟔𝟒
𝒆𝟒 +𝟏𝟕𝟓𝟐𝟓𝟔
𝒆𝟔 +𝟏𝟏𝟎𝟐𝟓𝟏𝟔𝟑𝟖𝟒
𝒆𝟖)
𝐒′𝟏 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗′𝟏−𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗′
𝟏+𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗′
𝟏−𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗′
𝟏+𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗′
𝟏]
∆𝟏= 𝐘𝐆𝐊 − 𝐒′𝟏
∆𝛗′𝟏=
∆𝟏
𝒂(𝟏 − 𝒆𝟐) (𝟏 +𝟑𝟒𝒆𝟐 +
𝟒𝟓𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓𝟐𝟓𝟔
𝒆𝟔 +𝟏𝟏𝟎𝟐𝟓𝟏𝟔𝟑𝟖𝟒
𝒆𝟖)
𝛗′𝟐= 𝛗′
𝟏+ ∆𝛗′
𝟏
𝛗′𝟐; 𝐒′𝟐; ∆𝟐; ∆𝛗
′𝟐
𝛗′𝟑; 𝐒′𝟑; ∆𝟑; ∆𝛗
′𝟑
𝛗′𝟒; 𝐒′𝟒; ∆𝟒; ∆𝛗
′𝟒
𝛗′𝟓= 𝛗𝟎
Para la Latitud Isométrica del Punto de Expansión.
𝚽𝟎 = 𝐥𝐧 [𝐭𝐚𝐧 (𝝅
𝟒+𝛗𝟎
𝟐) ∙ (
𝟏 − 𝒆 𝐬𝐢𝐧𝛗𝟎
𝟏 + 𝒆 𝐬𝐢𝐧𝛗𝟎
)
𝒆𝟐]
Para la Amplitud Meridiana (∆λ).
𝐂𝟏 =𝟏
𝐍𝐜𝐨𝐬𝛗𝟎
𝐂𝟑 = −𝟏 + 𝟐𝐭𝟐 + 𝛈𝟐
𝟔 ∙ 𝐍𝟑 𝐜𝐨𝐬𝛗𝟎
𝐂𝟓 =𝟏
𝟏𝟐𝟎 ∙ 𝐍𝟓 𝐜𝐨𝐬𝛗𝟎
[𝟓 + 𝟐𝟖𝐭𝟐 + 𝟐𝟒𝐭𝟒 + 𝟐𝛈𝟐(𝟑 + 𝟒𝐭𝟐)
−𝛈𝟒(𝟑 − 𝟒𝐭𝟐) − 𝟒𝛈𝟔(𝟏 − 𝟔𝐭𝟐)]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
321
𝐂𝟕 = −𝟏
𝟓𝟎𝟒𝟎 ∙ 𝐍𝟕 𝐜𝐨𝐬𝛗𝟎
[ 𝟔𝟏 + 𝟔𝟔𝟐𝐭𝟐 + 𝟏𝟑𝟐𝟎𝐭𝟒 + 𝟕𝟐𝟎𝐭𝟔
+𝛈𝟐(𝟏𝟎𝟕 + 𝟒𝟒𝟎𝐭𝟐 + 𝟑𝟑𝟔𝐭𝟒)
+𝛈𝟒(𝟒𝟑 − 𝟐𝟑𝟒𝐭𝟐 − 𝟏𝟗𝟐𝐭𝟒)
+𝛈𝟔(𝟗𝟕 − 𝟕𝟕𝟐𝐭𝟐 + 𝟒𝟎𝟖𝐭𝟒)
+𝟒𝛈𝟖(𝟒𝟕 − 𝟓𝟗𝟖𝐭𝟐 + 𝟑𝟖𝟒𝐭𝟒)
+𝟖𝛈𝟏𝟎(𝟏𝟏 − 𝟐𝟎𝟒𝐭𝟐 + 𝟐𝟒𝟎𝐭𝟒) ]
𝐂𝟗 =
𝟏
𝟑𝟔𝟐𝟖𝟖𝟎 ∙ 𝐍𝟗 𝐜𝐨𝐬𝛗𝟎
[ 𝟏𝟑𝟖𝟓 + 𝟐𝟒𝟓𝟔𝟖𝐭𝟐 + 𝟖𝟑𝟔𝟔𝟒𝐭𝟒 + 𝟏𝟎𝟎𝟖𝟎𝟎𝐭𝟔 + 𝟒𝟎𝟑𝟐𝟎𝐭𝟖
+𝟒𝛈𝟐(𝟕𝟕𝟗 + 𝟔𝟔𝟖𝟒𝐭𝟐 + 𝟏𝟏𝟗𝟓𝟐𝐭𝟒 + 𝟔𝟎𝟒𝟖𝐭𝟔)
+𝟔𝛈𝟒(𝟏𝟗𝟑 − 𝟖𝟐𝟒𝐭𝟐 − 𝟑𝟒𝟓𝟔𝐭𝟒 − 𝟐𝟑𝟎𝟒𝐭𝟔)
−𝟒𝛈𝟔(𝟖𝟕𝟓 − 𝟔𝟕𝟕𝟔𝐭𝟐 − 𝟏𝟒𝟒𝐭𝟒 − 𝟐𝟑𝟎𝟒𝐭𝟔)
−𝛈𝟖(𝟏𝟏𝟕𝟑𝟓 − 𝟏𝟖𝟓𝟒𝟗𝟔𝐭𝟐 + 𝟏𝟗𝟓𝟗𝟖𝟒𝐭𝟒 − 𝟗𝟕𝟗𝟐𝐭𝟔)
−𝟐𝟒𝛈𝟏𝟎(𝟖𝟒𝟓 − 𝟏𝟗𝟏𝟑𝟖𝐭𝟐 + 𝟑𝟒𝟎𝟓𝟔𝐭𝟒 − 𝟕𝟒𝟒𝟎𝐭𝟔)
−𝟏𝟔𝛈𝟏𝟐(𝟏𝟎𝟎𝟗 − 𝟑𝟎𝟐𝟑𝟐𝐭𝟐 + 𝟕𝟕𝟒𝟕𝟐𝐭𝟒 − 𝟐𝟕𝟑𝟔𝟎𝐭𝟔)
−𝟔𝟒𝛈𝟏𝟒(𝟕𝟑 − 𝟐𝟕𝟒𝟓𝐭𝟐 + 𝟗𝟒𝟑𝟐𝐭𝟒 − 𝟓𝟎𝟒𝟎𝐭𝟔) ]
𝐂𝟏𝟏 = −𝟏
𝟑𝟗𝟗𝟏𝟔𝟖𝟎𝟎 ∙ 𝐍𝟏𝟏 𝐜𝐨𝐬𝛗𝟎
∙
[ 𝟓𝟎𝟓𝟐𝟏 + 𝟏𝟑𝟐𝟔𝟏𝟐𝟐𝐭𝟐 + 𝟔𝟕𝟒𝟗𝟎𝟒𝟎𝐭𝟒 + 𝟏𝟑𝟑𝟑𝟓𝟖𝟒𝟎𝐭𝟔 + 𝟏𝟏𝟒𝟗𝟏𝟐𝟎𝟎𝐭𝟖 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝐭𝟏𝟎
+𝛈𝟐(𝟏𝟑𝟖𝟗𝟑𝟑 + 𝟐𝟎𝟑𝟔𝟓𝟔𝟎𝐭𝟐 + 𝟔𝟐𝟔𝟗𝟒𝟕𝟐𝐭𝟒 + 𝟕𝟎𝟑𝟐𝟗𝟔𝟎𝐭𝟔 + 𝟐𝟔𝟔𝟏𝟏𝟐𝟎𝐭𝟖)
+𝟐𝛈𝟒(𝟒𝟖𝟔𝟖𝟏 + 𝟓𝟖𝟑𝟎𝐭𝟐 − 𝟖𝟑𝟕𝟓𝟎𝟒𝐭𝟒 − 𝟏𝟓𝟓𝟖𝟔𝟓𝟔𝐭𝟔 − 𝟕𝟔𝟎𝟑𝟐𝟎𝐭𝟖)
+𝟐𝛈𝟔(𝟐𝟖𝟒𝟑𝟕 − 𝟒𝟔𝟗𝟑𝟎𝟎𝐭𝟐 + 𝟑𝟒𝟔𝟓𝟏𝟐𝐭𝟒 + 𝟖𝟐𝟎𝟐𝟐𝟒𝐭𝟔 + 𝟓𝟎𝟔𝟖𝟖𝟎𝐭𝟖)
+𝛈𝟖(𝟔𝟎𝟒𝟐𝟔𝟗 − 𝟏𝟎𝟒𝟒𝟗𝟔𝟐𝟐𝐭𝟐 + 𝟏𝟑𝟔𝟓𝟕𝟏𝟎𝟒𝐭𝟒 − 𝟐𝟕𝟎𝟖𝟔𝟒𝟎𝐭𝟔 − 𝟕𝟑𝟕𝟐𝟖𝟎𝐭𝟖)
+𝛈𝟏𝟎(𝟐𝟐𝟏𝟔𝟐𝟒𝟏 − 𝟓𝟕𝟖𝟖𝟎𝟎𝟖𝟖𝐭𝟐 + 𝟏𝟐𝟖𝟗𝟗𝟖𝟎𝟖𝟎𝐭𝟒 − 𝟒𝟑𝟔𝟒𝟗𝟐𝟖𝟎𝐭𝟔 + 𝟐𝟏𝟎𝟐𝟒𝟎𝟎𝐭𝟖)
+𝟖𝛈𝟏𝟐(𝟓𝟏𝟏𝟎𝟕𝟏 − 𝟏𝟕𝟗𝟒𝟑𝟖𝟗𝟎𝐭𝟐 + 𝟓𝟗𝟐𝟕𝟕𝟐𝟔𝟒𝐭𝟒 − 𝟑𝟓𝟒𝟓𝟐𝟖𝟎𝟎𝐭𝟔 + 𝟑𝟏𝟏𝟔𝟏𝟔𝟎𝐭𝟖)
+𝟔𝟒𝛈𝟏𝟒(𝟔𝟒𝟓𝟒𝟖 − 𝟐𝟖𝟓𝟔𝟔𝟗𝟓𝐭𝟐 + 𝟏𝟐𝟔𝟏𝟎𝟕𝟐𝟖𝐭𝟒 − 𝟏𝟏𝟎𝟕𝟑𝟖𝟖𝟖𝐭𝟔 + 𝟏𝟕𝟑𝟑𝟕𝟔𝟎𝐭𝟖)
+𝟔𝟒𝛈𝟏𝟔(𝟑𝟑𝟔𝟗𝟔 − 𝟏𝟖𝟎𝟔𝟕𝟒𝟓𝐭𝟐 + 𝟏𝟎𝟎𝟕𝟎𝟔𝟕𝟔𝐭𝟒 − 𝟏𝟏𝟖𝟕𝟎𝟗𝟐𝟖𝐭𝟔 + 𝟐𝟕𝟒𝟏𝟕𝟔𝟎𝐭𝟖)
+𝟐𝟓𝟔𝛈𝟏𝟖(𝟏𝟕𝟕𝟒 − 𝟏𝟏𝟐𝟎𝟒𝟕𝐭𝟐 + 𝟕𝟓𝟗𝟒𝟕𝟒𝐭𝟒 − 𝟏𝟏𝟒𝟏𝟐𝟎𝟎𝐭𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝐭𝟖) ]
Para la Latitud Isométrica del Punto de Estudio (Φ).
𝐃𝟐 = −𝐭
𝟐 ∙ 𝐍𝟐 𝐜𝐨𝐬𝛗𝟎
𝐃𝟒 = 𝐭(𝟓 + 𝟔𝐭𝟐 + 𝛈𝟐 − 𝟒𝛈𝟒)
𝟐𝟒 ∙ 𝐍𝟒 𝐜𝐨𝐬𝛗𝟎
𝐃𝟔 = −𝐭
𝟕𝟐𝟎 ∙ 𝐍𝟔 𝐜𝐨𝐬𝛗𝟎
[
𝟔𝟏 + 𝟏𝟖𝟎𝐭𝟐 + 𝟏𝟐𝟎𝐭𝟒 + 𝟐𝛈𝟐(𝟐𝟑 + 𝟐𝟒𝐭𝟐)
−𝟑𝛈𝟒(𝟏 + 𝟏𝟐𝐭𝟐) + 𝟒𝛈𝟔(𝟐𝟓 − 𝟐𝟒𝐭𝟐)
+𝟖𝛈𝟖(𝟏𝟏 − 𝟐𝟒𝐭𝟐)
]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
322
𝐃𝟖 =𝐭
𝟒𝟎𝟑𝟐𝟎 ∙ 𝐍𝟖 𝐜𝐨𝐬𝛗𝟎
[ 𝟏𝟑𝟖𝟓 + 𝟕𝟐𝟔𝟔𝐭𝟐 + 𝟏𝟎𝟗𝟐𝟎𝐭𝟒 + 𝟓𝟎𝟒𝟎𝐭𝟔
+𝟑𝛈𝟐(𝟓𝟕𝟕 + 𝟏𝟒𝟕𝟐𝐭𝟐 + 𝟖𝟗𝟔𝐭𝟒)
−𝟑𝛈𝟒(𝟏𝟗𝟏 + 𝟔𝟏𝟎𝐭𝟐 + 𝟓𝟏𝟐𝐭𝟒)
−𝛈𝟔(𝟐𝟗𝟐𝟕 − 𝟓𝟎𝟓𝟐𝐭𝟐 − 𝟕𝟒𝟒𝐭𝟒)
−𝟐𝟒𝛈𝟖(𝟑𝟔𝟕 − 𝟏𝟏𝟒𝟒𝐭𝟐 + 𝟑𝟐𝟖𝐭𝟒)
−𝟒𝟖𝛈𝟏𝟎(𝟐𝟑𝟗 − 𝟏𝟏𝟐𝟒𝐭𝟐 + 𝟓𝟐𝟎𝐭𝟒)
−𝟔𝟒𝛈𝟏𝟐(𝟕𝟑 − 𝟒𝟕𝟕𝐭𝟐 + 𝟑𝟔𝟎𝐭𝟒) ]
𝐃𝟏𝟎 = −𝐭
𝟑𝟔𝟐𝟖𝟖𝟎𝟎 ∙ 𝐍𝟏𝟎 𝐜𝐨𝐬𝛗𝟎
∙
[ 𝟓𝟎𝟓𝟐𝟏 + 𝟒𝟎𝟖𝟑𝟔𝟎𝐭𝟐 + 𝟏𝟎𝟐𝟑𝟏𝟐𝟎𝐭𝟒 + 𝟏𝟎𝟐𝟖𝟏𝟔𝟎𝐭𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝐭𝟖
+𝟒𝛈𝟐(𝟐𝟐𝟏𝟎𝟑 + 𝟏𝟎𝟏𝟑𝟎𝟒𝐭𝟐 + 𝟏𝟑𝟗𝟔𝟖𝟎𝐭𝟒 + 𝟔𝟎𝟒𝟖𝟎𝐭𝟔)
+𝟐𝛈𝟒(𝟒𝟒𝟕𝟓 − 𝟓𝟎𝟑𝟐𝟖𝐭𝟐 − 𝟏𝟐𝟐𝟔𝟖𝟖𝐭𝟒 − 𝟔𝟗𝟏𝟐𝟎𝐭𝟔)
+𝟒𝛈𝟔(𝟏𝟏𝟗𝟖𝟏 − 𝟐𝟖𝟏𝟐𝟖𝐭𝟐 + 𝟑𝟒𝟒𝟏𝟔𝐭𝟒 + 𝟐𝟑𝟎𝟒𝟎𝐭𝟔)
+𝟓𝛈𝟖(𝟏𝟏𝟏𝟐𝟔𝟗 − 𝟒𝟎𝟔𝟖𝟕𝟐𝐭𝟐 + 𝟏𝟑𝟗𝟐𝟒𝟖𝐭𝟒 − 𝟏𝟔𝟕𝟎𝟒𝐭𝟔)
+𝟖𝛈𝟏𝟎(𝟐𝟎𝟕𝟒𝟖𝟕 − 𝟏𝟐𝟑𝟑𝟏𝟖𝟎𝐭𝟐 + 𝟗𝟒𝟔𝟎𝟖𝟎𝐭𝟒 − 𝟕𝟗𝟐𝟎𝟎𝐭𝟔)
+𝟏𝟐𝟖𝛈𝟏𝟐(𝟏𝟖𝟗𝟕𝟒 − 𝟏𝟓𝟓𝟕𝟎𝟑𝐭𝟐 + 𝟏𝟖𝟔𝟎𝟕𝟓𝐭𝟒 − 𝟑𝟑𝟖𝟒𝟎𝐭𝟔)
+𝟔𝟒𝛈𝟏𝟒(𝟐𝟔𝟔𝟎𝟎 − 𝟐𝟖𝟏𝟒𝟑𝟗𝐭𝟐 + 𝟒𝟔𝟔𝟎𝟓𝟔𝐭𝟒 − 𝟏𝟑𝟏𝟎𝟒𝟎𝐭𝟔)
+𝟐𝟓𝟔𝛈𝟏𝟔(𝟏𝟕𝟕𝟒 − 𝟐𝟑𝟏𝟓𝟕𝐭𝟐 + 𝟓𝟎𝟎𝟎𝟒𝐭𝟒 − 𝟐𝟎𝟏𝟔𝟎𝐭𝟔) ]
𝐃𝟏𝟐 =𝐭
𝟒𝟕𝟗𝟎𝟎𝟏𝟔𝟎𝟎 ∙ 𝐍𝟏𝟐 𝐜𝐨𝐬𝛗𝟎
∙
[ 𝟐𝟕𝟎𝟐𝟕𝟔𝟓 + 𝟑𝟎𝟗𝟕𝟒𝟓𝟐𝟔𝐭𝟐 + 𝟏𝟏𝟑𝟕𝟔𝟎𝟐𝟒𝟎𝐭𝟒 + 𝟏𝟖𝟓𝟐𝟖𝟎𝟒𝟖𝟎𝐭𝟔 + 𝟏𝟑𝟗𝟕𝟎𝟖𝟖𝟎𝟎𝐭𝟖 + 𝟑𝟗𝟗𝟏𝟔𝟖𝟎𝟎𝐭𝟏𝟎
+𝛈𝟐(𝟔𝟎𝟖𝟏𝟐𝟐𝟏 + 𝟒𝟑𝟓𝟎𝟏𝟔𝟑𝟐𝐭𝟐 + 𝟏𝟎𝟎𝟓𝟐𝟔𝟗𝟕𝟔𝐭𝟒 + 𝟗𝟓𝟎𝟒𝟎𝟎𝟎𝟎𝐭𝟔 + 𝟑𝟏𝟗𝟑𝟑𝟒𝟒𝟎𝐭𝟖)
+𝟏𝟖𝛈𝟒(𝟏𝟏𝟖𝟕𝟑𝟏 − 𝟏𝟏𝟏𝟎𝟕𝟖𝐭𝟐 − 𝟏𝟓𝟕𝟒𝟐𝟕𝟐𝐭𝟒 − 𝟐𝟑𝟓𝟔𝟗𝟗𝟐𝐭𝟔 − 𝟏𝟎𝟏𝟑𝟕𝟔𝟎𝐭𝟖)
−𝟔𝛈𝟔(𝟓𝟖𝟑𝟓𝟓𝟑 + 𝟐𝟎𝟖𝟔𝟕𝟔𝐭𝟐 − 𝟏𝟏𝟗𝟗𝟑𝟏𝟐𝐭𝟒 − 𝟑𝟕𝟓𝟑𝟗𝟖𝟒𝐭𝟔 − 𝟐𝟎𝟐𝟕𝟓𝟐𝟎𝐭𝟖)
−𝟑𝛈𝟖(𝟗𝟑𝟎𝟓𝟒𝟑𝟕 − 𝟒𝟎𝟗𝟐𝟗𝟔𝟕𝟒𝐭𝟐 + 𝟏𝟖𝟓𝟔𝟓𝟓𝟖𝟒𝐭𝟒 + 𝟑𝟖𝟐𝟖𝟎𝟎𝟎𝐭𝟔 + 𝟐𝟗𝟒𝟗𝟏𝟐𝟎𝐭𝟖)
−𝟗𝛈𝟏𝟎(𝟏𝟖𝟔𝟎𝟗𝟏𝟓𝟗 − 𝟏𝟐𝟔𝟗𝟗𝟕𝟐𝟓𝟔𝐭𝟐 + 𝟏𝟐𝟑𝟖𝟏𝟓𝟐𝟔𝟒𝐭𝟒 − 𝟏𝟗𝟑𝟕𝟒𝟕𝟐𝟎𝐭𝟔 − 𝟓𝟖𝟓𝟔𝟎𝟎𝐭𝟖)
−𝟏𝟐𝛈𝟏𝟐(𝟒𝟏𝟎𝟏𝟑𝟒𝟓𝟕 − 𝟑𝟗𝟓𝟓𝟓𝟓𝟓𝟑𝟔𝐭𝟐 + 𝟔𝟏𝟐𝟐𝟔𝟎𝟓𝟏𝟐𝐭𝟒 − 𝟏𝟖𝟕𝟏𝟐𝟏𝟐𝟖𝟎𝐭𝟔 + 𝟖𝟑𝟑𝟒𝟕𝟐𝟎𝐭𝟖)
−𝟒𝟖𝛈𝟏𝟒(𝟏𝟔𝟓𝟗𝟏𝟗𝟎𝟗 − 𝟐𝟎𝟖𝟒𝟖𝟔𝟓𝟓𝟐𝐭𝟐 + 𝟒𝟓𝟑𝟐𝟎𝟒𝟒𝟑𝟐𝐭𝟒 − 𝟐𝟐𝟎𝟓𝟒𝟓𝟒𝟎𝟖𝐭𝟔 + 𝟏𝟖𝟖𝟐𝟗𝟒𝟒𝟎𝐭𝟖)
−𝟓𝟕𝟔𝛈𝟏𝟔(𝟏𝟐𝟔𝟒𝟔𝟎𝟖 − 𝟏𝟗𝟔𝟕𝟑𝟑𝟗𝟗𝐭𝟐 + 𝟓𝟓𝟔𝟐𝟖𝟗𝟖𝟖𝐭𝟒 − 𝟑𝟕𝟗𝟗𝟔𝟗𝟒𝟒𝐭𝟔 + 𝟓𝟐𝟏𝟒𝟕𝟐𝟎𝐭𝟖)
−𝟏𝟐𝟖𝛈𝟏𝟖(𝟐𝟕𝟓𝟑𝟐𝟗𝟕 − 𝟓𝟏𝟐𝟓𝟗𝟒𝟗𝟒𝐭𝟐 + 𝟏𝟕𝟗𝟖𝟑𝟎𝟗𝟒𝟒𝐭𝟒 − 𝟏𝟔𝟎𝟓𝟖𝟖𝟖𝟎𝟎𝐭𝟔 + 𝟑𝟏𝟐𝟎𝟕𝟔𝟖𝟎𝐭𝟖)
−𝟓𝟏𝟐𝛈𝟐𝟎(𝟏𝟑𝟔𝟖𝟖𝟑 − 𝟐𝟗𝟕𝟓𝟓𝟓𝟗𝐭𝟐 + 𝟏𝟐𝟓𝟑𝟕𝟐𝟖𝟖𝐭𝟒 − 𝟏𝟒𝟎𝟎𝟒𝟕𝟐𝟎𝐭𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝐭𝟖) ]

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
323
Para la Latitud Geodésica del Punto de Estudio (φ).
𝐆𝟏 = 𝐕𝟐 𝐜𝐨𝐬𝛗𝟎
𝐆𝟐 = −𝐕𝟐𝐭
𝟐(𝟏 + 𝟑𝛈𝟐) 𝐜𝐨𝐬𝟐𝛗𝟎
𝐆𝟑 = −𝐕𝟐
𝟔[𝟏 − 𝐭𝟐 + 𝟒𝛈𝟐(𝟏 − 𝟑𝐭𝟐)
+𝟑𝛈𝟒(𝟏 − 𝟓𝐭𝟐)] 𝐜𝐨𝐬𝟑𝛗𝟎
𝐆𝟒 =𝐕𝟐𝐭
𝟐𝟒[
𝟓 − 𝐭𝟐 + 𝟑𝛈𝟐(𝟏𝟕 − 𝟏𝟑𝐭𝟐)
+𝛈𝟒(𝟏𝟎𝟑 − 𝟏𝟑𝟓𝐭𝟐) + 𝟑𝛈𝟔(𝟏𝟗 − 𝟑𝟓𝐭𝟐)] 𝐜𝐨𝐬𝟒𝛗𝟎
𝐆𝟓 =𝐕𝟐
𝟏𝟐𝟎
[ 𝟓 − 𝟏𝟖𝐭𝟐 + 𝐭𝟒 + 𝟖𝛈𝟐(𝟕 − 𝟓𝟎𝐭𝟐 + 𝟏𝟓𝐭𝟒)
+𝟐𝛈𝟒(𝟕𝟕 − 𝟖𝟎𝟎𝐭𝟐 + 𝟒𝟑𝟓𝐭𝟒)
+𝟖𝟎𝛈𝟔(𝟐 − 𝟐𝟕𝐭𝟐 + 𝟐𝟏𝐭𝟒)
+𝟑𝛈𝟖(𝟏𝟗 − 𝟑𝟏𝟒𝐭𝟐 + 𝟑𝟏𝟓𝐭𝟒) ]
𝐜𝐨𝐬𝟓𝛗𝟎
𝐆𝟔 = −𝐕𝟐𝐭
𝟕𝟐𝟎
[
𝟔𝟏 − 𝟓𝟖𝐭𝟐 + 𝐭𝟒
+𝟑𝛈𝟐(𝟒𝟐𝟏 − 𝟖𝟓𝟖𝐭𝟐 + 𝟏𝟐𝟏𝐭𝟒)
+𝟏𝟎𝛈𝟒(𝟓𝟖𝟗 − 𝟏𝟕𝟗𝟔𝐭𝟐 + 𝟒𝟗𝟓𝐭𝟒)
+𝟔𝛈𝟔(𝟏𝟖𝟐𝟗 − 𝟕𝟑𝟒𝟎𝐭𝟐 + 𝟐𝟗𝟕𝟓𝐭𝟒)
+𝛈𝟖(𝟗𝟎𝟐𝟓 − 𝟒𝟒𝟔𝟐𝟐𝐭𝟐 + 𝟐𝟑𝟔𝟐𝟓𝐭𝟒)
+𝟑𝛈𝟏𝟎(𝟗𝟏𝟑 − 𝟓𝟑𝟒𝟐𝐭𝟐 + 𝟑𝟒𝟔𝟓𝐭𝟒) ]
𝐜𝐨𝐬𝟔𝛗𝟎
Longitud de Arco de Meridiano.
𝐒 = 𝒂(𝟏 − 𝒆𝟐) [𝐀𝛗𝟎 +𝐁
𝟐𝐬𝐢𝐧 𝟐𝛗𝟎 +
𝐂
𝟒𝐬𝐢𝐧 𝟒𝛗𝟎 +
𝐃
𝟔𝐬𝐢𝐧 𝟔𝛗𝟎 +
𝐄
𝟖𝐬𝐢𝐧 𝟖𝛗𝟎]
𝐀 = 𝟏 +𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖
𝐁 = − [𝟑
𝟒𝒆𝟐 +
𝟏𝟓
𝟏𝟔𝒆𝟒 +
𝟓𝟐𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟐𝟎𝟒𝟖𝒆𝟖]
𝐂 =𝟏𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟎𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖
𝐃 = − [𝟑𝟓
𝟓𝟏𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟐𝟎𝟒𝟖𝒆𝟖] , 𝐄 =
𝟑𝟏𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
324
4.8 Representación Cartográfica de los Estados Unidos Mexicanos
en la Proyección Transversa de Mercator.
De manera satisfactoria hasta este punto se han cumplido con casi todos
los objetivos planteados en esta investigación, siendo las pruebas, análisis y
demás procedimientos vinculados a este trabajo el principal sustento. Sin embargo
solo queda pendiente un último objetivo, el cual se trata de la representación
cartográfica completa de la República Mexicana utilizando estas nuevas fórmulas
amplificadas.
Dada esta circunstancia y culminando con este trabajo de investigación, en
este apartado se presentara el mapa del territorio mexicano a escala 1: 4 000 000
en la proyección TM o GK, elaborado con estos nuevos algoritmos modificados,
para sí mostrar a la comunidad cartográfica, geodésica y topográfica Mexicana
uno de los primeros mapas en esta representación.
Para la elaboración de este mapa se utilizaron alrededor de 176 mil puntos
o coordenadas los cuales conforman de manera detallada todos los límites
geográficos, administrativos y oficiales de la República Mexicana y de todas sus
entidades federativas.
Los puntos utilizados para la elaboración de este mapa fueron tomados de
las bases de datos de la página web de CONABIO (Comisión nacional para el
conocimiento y uso de la biodiversidad), donde dicha información es
proporcionada por el INEGI, siendo así fidedigna y confiable. Esto en cuanto a la
República Mexicana y su ZEE, para la información internacional, los puntos de los
países vecinos al territorio nacional fueron obtenidos de la página web de DIVA-
GIS y el servidor de la United States Census.
Se ha de aclarar que todas las coordenadas geodésicas o puntos utilizados
para este mapa se encuentran referidos al sistema geodésico WGS 84 (esto por
normativa mundial), sin embargo a que este sistema y el sistema GRS 80 son

IV. DE LA INVESTIGACIÓN Y DESARROLLO DEL PROYECTO.
325
elipsoides geocéntricos genera que algunos de sus parámetros geométricos sean
idénticos y/o casi iguales, por lo cual en la elaboración cartográfica se tomen como
similares sin propiciar diferencia o error alguno.
Desde el punto de vista cartográfico, el Sistema Geodésico Horizontal
ITRF08 época 2010.0 es compatible con el WGS84, así como SIRGAS, por lo que
sólo en aquellos casos en que un proyecto tenga como requerimiento mejor
exactitud posicional se deberá realizar la transformación de coordenadas de WGS-
84 o SIRGAS al ITRF08 época 2010.0 (INEGI, 2010).
Para la visualización y manipulación de la información obtenida se utilizó el
software cartográfico Global Mapper® Versión 16, las conversiones y demás
cálculos geodésicos fueron realizados con Excel® 2010 para su fácil exportación a
una plataforma CAD, la importación de coordenadas transformadas y el dibujo a
detalle fue realizado con los softwares AutoCAD Civil 3D® y AutoCAD Map 3D®
versiones 2016.
La principal simbología que se muestra en el mapa son meridianos y
paralelos, la división política del país, ciudades capitales de todas las entidades
federativas, la demarcación de la ZEE y los puntos de la Red Geodésica Nacional
Activa (RGNA). Toda la información que recopila dicho documento fue dibujado
tomando los criterios y estándares de la norma para la elaboración de cartografía
topográfica NTG-013-2006 para la elaboración de un documento cartográfico
escala 1: 4 000 000 en la proyección TM, salvo una única modificación, la cual es
que el ecuador es el origen de las latitudes y no el paralelo 14º N.
El tamaño con el que cuenta el mapa es de 105 x 75 cm tomando los
formatos, medidas, calidades de línea, colores, tamaños de texto, etc. con los que
el INEGI expide sus cartas a dicha escala pero con unas leves modificaciones.
Dicho documento se presenta en la última hoja de este documento y el cual lleva
por nombre “Carta Geográfica de los Estados Unidos Mexicanos”.

V. CONCLUSIONES Y RECOMENDACIONES.
326
V. CONCLUSIONES Y
RECOMENDACIONES.

V. CONCLUSIONES Y RECOMENDACIONES.
327
5.1 Conclusiones.
En este trabajo de investigación, tesis, se realizó un análisis exhaustivo a
las fórmulas y algoritmos de transformación de coordenadas de la proyección
Transversa de Mercator o Gauss-Krüger para su aplicación a la extensión
completa del territorio mexicano, asegurando así una representación fiel y precisa
de dicha zona. Con dicho análisis y de las pruebas y resultados que este arrojaron
se derivan las siguientes conclusiones:
1. Se ratifica que la precisión o el índice de error de cálculo en la conversión de
coordenadas depende directamente del valor de ∆λ y el número de términos que
componen las fórmulas de transformación, siendo así, directamente
proporcionales. Lo que quiere decir que para mayor amplitud de ∆λ mayor serán
los incrementos a los términos de las fórmulas de transformación, esto para
asegurar una precisión milimétrica o menor a esta para una determinada zona.
2. Las fórmulas y/o teoremas clásicos de transformación algebraica o de cálculo
infinitesimal facilitan hasta cierto punto la resolución de ecuaciones complejas,
para la derivación o integración de las mismas, no obstante si estas se
sintetizaran desde una perspectiva diferente sin perder su esencia original y
ofreciendo los mismos resultados, los procesos de deducción y resolución se
optimizarían generando así métodos de cálculo y análisis más simples y menos
confusos. Pudiéndose decir que dos más dos también es igual a dos al
cuadrado.
3. La amplificación de las fórmulas de trasformación aseguran una precisión
micrométrica para un de ∆λ 12º, milimétrica para amplitudes de 14º a 16º, de
centímetros para 18º y de orden del decímetro para 20º. Esto sin importar el
valor de ∆λ. Más allá de estos límites los doce términos toda precisión se
reduce.
4. De acuerdo a la teoría de Enriquez Turiño (2009) se afirma que para mantener
la precisión deseada, los términos utilizados en un sistema de conversión deben
de ser los mismos para el sistema inverso o viceversa, siendo así que ambos

V. CONCLUSIONES Y RECOMENDACIONES.
328
métodos estén vinculados. Los mismos pasos de ida son los mismos que
aseguran tu regreso.
5. De acuerdo a lo anterior y para no generar cálculos excesivos y redundantes los
términos se truncaron de tal suerte que dependiendo el valor de estos aseguren
precisión milimétrica en dicha zona, quedando de la siguiente forma:
a) Para un ∆λ de 2º a 4º serán necesarios 6 términos.
b) Para un ∆λ de 6º a 8º serán necesarios 8 términos.
c) Para un ∆λ de 10º a 12º serán necesarios 10 términos.
d) Para un ∆λ de 14º a 18º serán necesarios 12 términos.
Siguiendo este comportamiento se deduce que para representar todo el
mundo asegurando una precisión milimétrica se necesitarían 120 términos para
un ∆λ de 180º o que es lo mismo a derivar 120 veces las funciones 𝑓(Φ) y
F(y).
6. Con los algoritmos amplificados se logró cumplir exitosamente con el objetivo
planteado en este trabajo, reduciendo un 99.9 % los errores generados en los
cálculos de transformación, de tal manera que la precisión máxima alcanzada
para la extensión completa del territorio mexicano con estas nuevas fórmulas
fue de 5 mm para una banda meridiana de 36º y una faja de latitud de 19º. Es
importante aclarar que si la banda meridiana fuera totalmente simétrica con
respecto al MC 102º, el error de transformación sería un poco menor.
7. Aunque los métodos alternos de Lee y Karney ofrecen una deducción y
desarrollo de las fórmulas de trasformación más simple, siendo los más
precisos, estos son más extensos y confusos, por lo tanto se reafirma que el
método ideal y más eficiente siempre será el clásico, estipulado por Louis
Krüger y Paul D. Thomas.
8. Dado que las amplificaciones son nuevo método de cálculo, por el momento
estas solo ofrecen una representación fiel y precisa del territorio nacional, no
obstante se espera que en un futuro no muy lejano estas se puedan adoptar de
forma oficial para la optimización, re proyección y enriquecimiento de la
cartografía nacional y que de igual manera faciliten los trabajos geodésicos y
topográficos en México.
V. CONCLUSIONES Y RECOMENDACIONES.
329
5.2 Aplicaciones y Trabajos a Futuro.
Es así como de manera satisfactoria fundamentada en un arduo de trabajo
de investigación, calculo, desarrollo y análisis matemático, es como se logran
obtener los algoritmos de transformación en la proyección GK para la
representación completa de la República Mexicana, sin embargo estos como
nuevo método de cálculo solo pueden ser utilizados para la representación fiel,
fidedigna y precisa del territorio nacional u algún otro país o zona que sea de la
misma proporción a este, siendo estos aún deficientes para algunos casos de
aplicación a labores de topografía y geodesia.
Esta situación se debe a que en el presente trabajo solo se desarrollaron
las fórmulas de conversión de coordenadas, por lo cual queda pendiente
estructurar las ecuaciones que permitan el cálculo y análisis de los factores de
deformación lineal y/o de escala, así como también la ecuación para la
determinación de la convergencia de meridianos, siendo estos fundamentados en
los nuevos algoritmos de transformación. Generando estas ecuaciones se podrá
complementar y optimizar esta proyección para la aplicación a los trabajos de
topografía y geodesia realizados en toda la extensión territorial del estado
mexicano o cualquier otra zona con las mismas condiciones geográficas a este.
Realizando esta optimización, la proyección GK o TM podrá ser un sistema
proyectivo general para el territorio mexicano, siendo totalmente familiar y
compatible con las otras proyecciones cartográficas, cilíndricas conformes oficiales
para la representación de la República Mexicana. Es decir que con la amplificación
y optimización del sistema GK los trabajos referidos a los sistemas UTM y TME
podrán ser ligados a este sistema sin ningún problema, esto debido a que todas
estas proyecciones comparten los mismos algoritmos de transformación, teniendo
como resultado una fácil conversión de un sistema a otro, mismo que únicamente
dependa de un simple despeje a los valores dados de “Falso Este” y “Factor de
Escala”.

V. CONCLUSIONES Y RECOMENDACIONES.
330
Es importante dejar en claro que para lograr que estos sistemas se vinculen
se tienen que hacer algunas modificaciones a los parámetros de designación base
para cada una de estas proyecciones, logrando que para cada sistema proyectivo
cilíndrico transverso cada uno de estos parámetros se conviertan en valores
únicos e iguales, un ejemplo de estos son el Falso Este y el origen de latitudes.
Haciendo énfasis en este último se recomienda que para facilitar la conversión del
sistema TM al UTM y viceversa, el origen de las latitudes sea el ecuador y no el
paralelo 14º N como lo estipula la Norma Técnica NTG-001-2004.
Si se implementará esta acción, el INEGI y demás instituciones oficiales
gubernamentales que se encargan del desarrollo de la cartografía nacional,
podrían referir todos sus trabajos a un solo sistema proyectivo únicamente cuando
sea necesario, desapareciendo así la problemática de representación general-
zona y viceversa, y de las conversiones que traen consigo al utilizar sistemas
proyectivos diferentes a los comúnmente utilizados, tal es el caso de la proyección
Cónica Conforme de Lambert.
Independientemente de esta posible optimización, los algoritmos
amplificados poseen la capacidad de precisión y aprovechamiento para su
aplicación en la proyección UTM, siendo así que exista la posibilidad de
representar aquellas zonas que se encuentren levemente fuera de un cierto huso
UTM, asegurando la representación máxima del territorio a mapear o estudiar sin
perder la precisión de los elementos geográficos que lo conforman.
Si los algoritmos amplificados fueran la base oficial de las fórmulas de
transformación de la proyección UTM se podrían amplificar sus husos hasta un
valor de 24º de longitud, el cual representa cuatro veces el valor de banda original,
reduciendo de 60 a solo 15 zonas UTM el esferoide terrestre, donde en cada uno
de ellos alcanzarían una precisión de cálculo y transformación del orden del
micrómetro. Pero si se deseara utilizar una precisión milimétrica, las zonas UTM
se podrían extender hasta un valor de 36º de longitud reduciendo a 10 el total de
las zonas.

V. CONCLUSIONES Y RECOMENDACIONES.
331
Estas posibles aplicaciones traerán consigo que dichos algoritmos
amplificados sean forzosamente implementados en los softwares y calculadoras
de desarrollo CAD y SIG, así mismo a equipos de trabajo como lo son estaciones
totales, GPS y navegadores, esto con el fin de facilitar la manipulación,
interpretación, entendimiento y análisis de la información geográfica y así mismo
asegurar su precisión y evitar desfases. Siendo de esta manera que la información
geográfica y todos sus métodos geodésicos y topográficos que involucren su
medición puedan estar ligados entre sí mediante el sistema GK.
Este trabajo es solo un pequeño paso que pretende impulsar y aportar el
enriquecimiento, conocimiento y entendimiento de la geografía, cartografía y
demás ciencias afines que se dedican a la medición y comprensión del elipsoide
terrestre, específicamente al territorio nacional. Aunque parece mucho lo que en
este documento se presenta es sólo la primera piedra de lo que posiblemente se
pueda lograr más adelante, quizá en un futuro próximo con esta aportación se
pueda idear una proyección cilíndrica conforma la cual ofrezca además de una
representación fiel y precisa del territorio mexicano, una representación que inhiba
los índices de deformación geométrica en toda su extensión, suena un desarrollo
un poco descabellado, pero con el paso del tiempo y con la evolución de la
tecnología estoy seguro de que se pueda lograr.
Espero que con esta aportación organizaciones, usuarios y toda aquella
persona que se dedique a ejercer estas bellas profesiones como lo son; la
cartografía, geodesia, topografía, geografía, geomática, etc. puedan aplicar y
entender que…
“Por mínimo que parezca, pero un simple milímetro nos aproxima a la realidad”.

VI. ANEXOS.
332
VI. ANEXOS.

VI. ANEXOS.
333
6.1 Introducción.
Como bien se sabe la mayoría de algoritmos y fórmulas de transformación
carto-geodésicas se conforman de ecuaciones trigonométricas complejas, donde
la estructura de cada una de ellas depende tajantemente de un desarrollo
algebraico extremadamente minucioso y especialmente extenso (además de
tedioso), siendo en muchos casos el cálculo infinitesimal la base para la resolución
de estos. Esta circunstancia es la que ha propiciado a que la mayoría de autores
excluya dichos desarrollos en sus trabajos de investigación, teniendo como
consecuencia que el conocimiento matemático se guarde con celo y en el peor de
los casos se pierda.
En este contexto y facilitando la comprensión de este documento (en cuanto
a saturación de contenido), en este bloque se desarrollaran los procesos
algebraicos más extensos de algunas de las formulas carto-geodésicas que se
deducen a lo largo de esta investigación, dejando claro el adecuado y pleno
desarrollo matemático que consigo llevan.
6.2 La Integral de la Latitud Isométrica (Proyección Mercator Caso
Elipsoidal).
Para la obtener la ecuación que permita la transformación la ordenada ene l
sistema Mercator para el elipsoide estará dado por la integral de la relación de los
radios geodésicos N y 𝜌.
𝑑𝑦
𝜌 ∙ 𝑑𝜑=
𝑎
N cos𝜑
Despejando 𝑑𝜑.
∫𝑑𝑦 = 𝑎∫𝜌
Nsec𝜑 ∙ 𝑑𝜑
𝜑
0

VI. ANEXOS.
334
Dónde.
N =𝑎
(1 − 𝑒2 sin2 𝜑)12
; 𝜌 =𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
Sustituyendo.
𝑑𝑦 = 𝑎
[
𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
𝑎
(1 − 𝑒2 sin2 𝜑)12 ]
sec 𝜑 ∙ 𝑑𝜑 = 𝑎 [𝑎(1 − 𝑒2)(1 − 𝑒2 sin2 𝜑)
12
𝑎(1 − 𝑒2 sin2 𝜑)32
] sec 𝜑 ∙ 𝑑𝜑
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2 sin2 𝜑) cos 𝜑∙ 𝑑𝜑
𝜑
0
Tomando las siguientes consideraciones.
𝑥 = sin 𝜑 ; sin2 𝜑 + cos2 𝜑 = 1; cos2 𝜑 = 1 − sin2 𝜑 ;
cos2 𝑥 = 1 − 𝑥2;
𝑑𝑥
𝑑𝜑= cos𝜑 ∴
𝑑𝑥
cos 𝜑= 𝑑𝜑
Realizando el cambio de variable se tiene que:
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2𝑥2) cos𝜑∙𝑑𝑥
cos 𝜑
𝜑
0
= 𝑎∫1 − 𝑒2
(1 − 𝑒2𝑥2) cos2 𝜑∙ 𝑑𝑥
𝜑
0
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2𝑥2)(1 − 𝑥2)∙ 𝑑𝑥

VI. ANEXOS.
335
Con esta nueva expresión la integral se puede realizar mediante el método
de fracciones parciales.
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2𝑥2)(1 − 𝑥2)∙ 𝑑𝑥 = 𝑎∫
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)∙ 𝑑𝑥
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)=
A
1 + 𝑒𝑥+
B
1 − 𝑒𝑥+
C
1 + 𝑥+
D
1 − 𝑥
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)
=
A(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥) + B(1 + 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)
+C(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 − 𝑥) + D(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)
1 − 𝑒2 =A(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥) + B(1 + 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)
+C(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 − 𝑥) + D(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)
Resolviendo los coeficientes A, B, C y D por separado se tiene que:
Para A.
1 + 𝑒𝑥 = 0 ∴ 𝑥 = −1
𝑒
Sustituyendo.
1 − 𝑒2 = A(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥) = A [1 − 𝑒 (−1
𝑒)] [1 + (−
1
𝑒)] [1 − (−
1
𝑒)]
1 − 𝑒2 = A(1 + 1) (1 −1
𝑒) (1 +
1
𝑒) = 2A (1 −
1
𝑒2)
1 − 𝑒2 = 2A (1 −1
𝑒2) ∴ A =
1 − 𝑒2
2 (1 −1𝑒2)

VI. ANEXOS.
336
A =1 − 𝑒2
2 (1 −1𝑒2)=1
2∙1 − 𝑒2
(𝑒2 − 1𝑒2
)=1
2∙𝑒2(1 − 𝑒2)
𝑒2 − 1
A =1
2∙𝑒2(1 − 𝑒2)
−(1 − 𝑒2)= −
1
2∙ 𝑒2
A = −𝑒2
2
Para B.
1 − 𝑒𝑥 = 0 ∴ 𝑥 =1
𝑒
Sustituyendo.
1 − 𝑒2 = B(1 + 𝑒𝑥)(1 + 𝑥)(1 − 𝑥) = B [1 + 𝑒 (1
𝑒)] [1 + (
1
𝑒)] [1 − (
1
𝑒)]
1 − 𝑒2 = B(1 + 1) (1 +1
𝑒) (1 −
1
𝑒) = 2B (1 −
1
𝑒2)
1 − 𝑒2 = 2B(1 −1
𝑒2) ∴ B =
1 − 𝑒2
2 (1 −1𝑒2)
B =1 − 𝑒2
2 (1 +1𝑒2)=1
2∙1 − 𝑒2
(𝑒2 + 1𝑒2
)=1
2∙𝑒2(1 − 𝑒2)
𝑒2 − 1
B =1
2∙𝑒2(1 − 𝑒2)
−(1 − 𝑒2)= −
1
2∙ 𝑒2
B = −𝑒2
2

VI. ANEXOS.
337
Para C.
1 + 𝑥 = 0 ∴ 𝑥 = −1
Sustituyendo.
1 − 𝑒2 = C(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 − 𝑥) = C[1 + 𝑒(−1)][1 − 𝑒(−1)][1 − (−1)]
1 − 𝑒2 = C(1 − 𝑒)(1 + 𝑒)(1 + 1) = 2C(1 − 𝑒2)
1 − 𝑒2 = 2C(1 − 𝑒2) ∴ C =1 − 𝑒2
2(1 − 𝑒2)
C =1
2
Para D.
1 − 𝑥 = 0 ∴ 𝑥 = 1
Sustituyendo.
1 − 𝑒2 = D(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥) = D[1 + 𝑒(1)][1 − 𝑒(1)][1 + (1)]
1 − 𝑒2 = D(1 + 𝑒)(1 − 𝑒)(1 + 1) = 2D(1 − 𝑒2)
1 − 𝑒2 = 2D(1 − 𝑒2) ∴ D =1 − 𝑒2
2(1 − 𝑒2)
D =1
2
Sustituyendo los valores parciales en la integral original.

VI. ANEXOS.
338
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)=
−𝑒2
21 + 𝑒𝑥
+−𝑒2
21 − 𝑒𝑥
+
12
1 + 𝑥+
12
1 − 𝑥
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)= −
𝑒2
2(1 + 𝑒𝑥)−
𝑒2
2(1 − 𝑒𝑥)+
1
2(1 + 𝑥)+
1
2(1 − 𝑥)
Por lo que la integral se re escribe como:
∫1 − 𝑒2
(1 − 𝑒2𝑥2)(1 − 𝑥2)∙ 𝑑𝑥 = ∫
1 − 𝑒2
(1 + 𝑒𝑥)(1 − 𝑒𝑥)(1 + 𝑥)(1 − 𝑥)∙ 𝑑𝑥
= −∫𝑒2
2(1 + 𝑒𝑥)∙ 𝑑𝑥 − ∫
𝑒2
2(1 − 𝑒𝑥)∙ 𝑑𝑥 + ∫
1
2(1 + 𝑥)∙ 𝑑𝑥
+ ∫1
2(1 − 𝑥)∙ 𝑑𝑥
=1
2∫
1
1 + 𝑥∙ 𝑑𝑥 +
1
2∫
1
1 − 𝑥∙ 𝑑𝑥 −
1
2∫
𝑒2
1 + 𝑒𝑥∙ 𝑑𝑥 −
1
2∫
𝑒2
1 − 𝑒𝑥∙ 𝑑𝑥
Integrando se tiene que:
=1
2ln(1 + 𝑥) +
1
2ln(1 − 𝑥) −
𝑒
2ln(1 + 𝑒𝑥) +
𝑒
2ln(1 − 𝑒𝑥)
= ln(1 + 𝑥)12 + ln(1 − 𝑥)
12 + ln(1 − 𝑒𝑥)
𝑒2 − ln(1 + 𝑒𝑥)
𝑒2
= ln(1 + 𝑥)
12
(1 − 𝑥)12
+ ln(1 − 𝑒𝑥)
𝑒2
(1 + 𝑒𝑥)𝑒2
= ln [(1 + 𝑥
1 − 𝑥)
12∙ (1 − 𝑒𝑥
1 + 𝑒𝑥)
𝑒2]
∫1 − 𝑒2
(1 − 𝑒2𝑥2)(1 − 𝑥2)∙ 𝑑𝑥 = ln [(
1 + 𝑥
1 − 𝑥)
12∙ (1 − 𝑒𝑥
1 + 𝑒𝑥)
𝑒2]
Como esta integral se efectuó con un cambio de variable, será necesario
regresar la ecuación a su forma original.
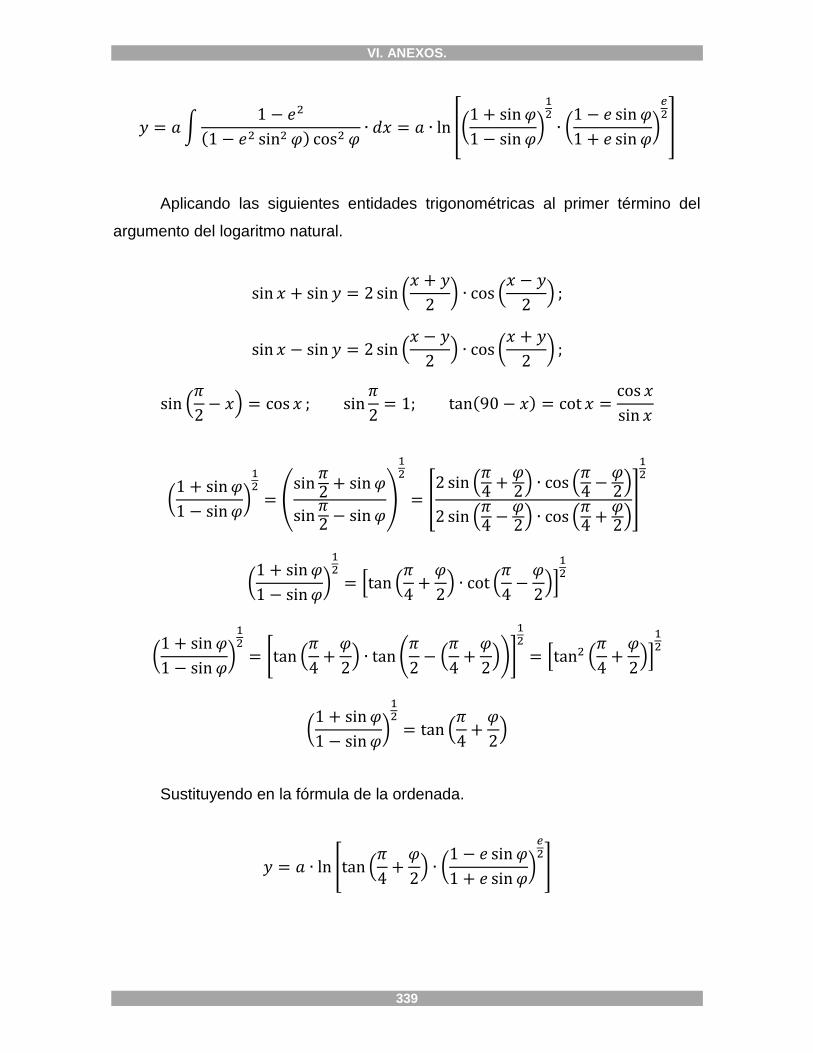
VI. ANEXOS.
339
𝑦 = 𝑎∫1 − 𝑒2
(1 − 𝑒2 sin2 𝜑) cos2 𝜑∙ 𝑑𝑥 = 𝑎 ∙ ln [(
1 + sin 𝜑
1 − sin 𝜑)
12∙ (1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
Aplicando las siguientes entidades trigonométricas al primer término del
argumento del logaritmo natural.
sin 𝑥 + sin 𝑦 = 2 sin (𝑥 + 𝑦
2) ∙ cos (
𝑥 − 𝑦
2) ;
sin 𝑥 − sin 𝑦 = 2 sin (𝑥 − 𝑦
2) ∙ cos (
𝑥 + 𝑦
2) ;
sin (𝜋
2− 𝑥) = cos 𝑥 ; sin
𝜋
2= 1; tan(90 − 𝑥) = cot 𝑥 =
cos 𝑥
sin 𝑥
(1 + sin 𝜑
1 − sin 𝜑)
12= (
sin𝜋2+ sin𝜑
sin𝜋2− sin𝜑
)
12
= [2 sin (
𝜋4+𝜑2) ∙ cos (
𝜋4−𝜑2)
2 sin (𝜋4−𝜑2) ∙ cos (
𝜋4+𝜑2)]
12
(1 + sin𝜑
1 − sin𝜑)
12= [tan (
𝜋
4+𝜑
2) ∙ cot (
𝜋
4−𝜑
2)]
12
(1 + sin 𝜑
1 − sin 𝜑)
12= [tan (
𝜋
4+𝜑
2) ∙ tan (
𝜋
2− (
𝜋
4+𝜑
2))]
12
= [tan2 (𝜋
4+𝜑
2)]
12
(1 + sin𝜑
1 − sin𝜑)
12= tan (
𝜋
4+𝜑
2)
Sustituyendo en la fórmula de la ordenada.
𝑦 = 𝑎 ∙ ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]

VI. ANEXOS.
340
Si se omite el valor del semi eje mayor de esta ecuación, esta se convierte
en la ecuación de la latitud, creciente o isométrica para el elipsoide.
Φ = ln [tan (𝜋
4+𝜑
2) ∙ (
1 − 𝑒 sin 𝜑
1 + 𝑒 sin 𝜑)
𝑒2]
6.3 La Integral Elíptica para la Longitud de Arco de Meridiano.
El desarrollo para la formula final del arco de la elipse meridiana parte
mediante la integral de 𝜌.
S = ∫ 𝑎(1 − 𝑒2)(1 − 𝑒2 sin2 𝜑)−32
𝜑
0
∙ 𝑑𝜑
Para simplificar los términos de esta integral y expresarlos en una función
permisible al proceso integración directo será necesario recurrir al teorema
binomial de Newton, el cual será aplicado a la forma inversa del numerado. Siendo
la fórmula del teorema binomial la siguiente:
(𝑥 + 𝑦)𝑧 = 𝑥𝑧 +𝑧
1!𝑥(𝑧−1)𝑦 +
𝑧(𝑧 − 1)
2!𝑥(𝑧−2)𝑦2 +
𝑧(𝑧 − 1)(𝑧 − 2)
3!𝑥(𝑧−3)𝑦3 +⋯
+𝑧(𝑧 − 1)(𝑧 − 2)… (𝑧 − 𝑛)
𝑛!𝑥(𝑧−𝑛)𝑦𝑛
Aplicando se tiene que:

VI. ANEXOS.
341
(1 − 𝑒2 sin2 𝜑)−32
= 1 +(−
32)
1!(−𝑒2 sin2 𝜑) +
(−32) (−
32− 1)
2!(−𝑒2 sin2 𝜑)2
+(−
32) (−
32− 1) (−
32− 2)
3!(−𝑒2 sin2 𝜑)3
+(−
32) (−
32− 1) (−
32− 2) (−
32− 3)
4!(−𝑒2 sin2 𝜑)4…
Desarrollando.
(1 − 𝑒2 sin2 𝜑)−32
= 1 + (−3
2) (−𝑒2 sin2 𝜑) +
(−32) (−
52)
2(−𝑒2 sin2 𝜑)2
+(−
32) (−
52) (−
72)
6(−𝑒2 sin2 𝜑)3
+(−
32) (−
52) (−
72) (−
92)
24(−𝑒2 sin2 𝜑)4…
(1 − 𝑒2 sin2 𝜑)−32
= 1 +3
2(𝑒2 sin2 𝜑) +
(154)
2(−𝑒2 sin2 𝜑)2 −
(1058)
6(−𝑒2 sin2 𝜑)3
+(94516
)
24(−𝑒2 sin2 𝜑)4…

VI. ANEXOS.
342
(1 − 𝑒2 sin2 𝜑)−32
= 1 +3
2(𝑒2 sin2 𝜑) +
15
8(𝑒4 sin4 𝜑) +
35
16(𝑒6 sin6 𝜑)
+315
128(𝑒8 sin8 𝜑)…
Sustituyendo en la integral.
S = ∫ 𝑎(1 − 𝑒2) [1 +3
2(𝑒2 sin2 𝜑) +
15
8(𝑒4 sin4 𝜑) +
35
16(𝑒6 sin6 𝜑)
𝜑
0
+315
128(𝑒8 sin8 𝜑)… ] ∙ 𝑑𝜑
S = 𝑎(1 − 𝑒2)∫ 𝑑𝜑𝜑
0
+3
2∙ 𝑒2∫ sin2 𝜑 ∙ 𝑑𝜑
𝜑
0
+15
8∙ 𝑒4∫ sin4 𝜑 ∙ 𝑑𝜑
𝜑
0
+35
16
∙ 𝑒6∫ sin6 𝜑 ∙ 𝑑𝜑𝜑
0
+315
128∙ 𝑒8∫ sin8 𝜑 ∙ 𝑑𝜑
𝜑
0
…
De acuerdo con Mena (2008) citando a Bass, para resolver estas integrales
se recurre a la expresión de la integral de Wallis.
∫sin𝑛 𝑥 ∙ 𝑑𝑥 = −1
𝑛∙ sin 𝑥 ∙ cos 𝑥 +
𝑛 − 1
𝑛∫sin(𝑛−2) 𝑥 ∙ 𝑑𝑥
Teniendo en cuenta esto, la integral se puede resolver miembro a miembro,
exceptuando las constantes.
∫𝑑𝜑 = 𝜑
∫sin2 𝜑 ∙ 𝑑𝜑 = −1
2∙ sin 𝜑 ∙ cos 𝜑 +
1
2∙ 𝜑

VI. ANEXOS.
343
∫sin4 𝜑 ∙ 𝑑𝜑 = −1
4∙ sin3 𝜑 ∙ cos 𝜑 +
3
4∫sin2 𝜑 ∙ 𝑑𝜑
= −1
4∙ sin3 𝜑 ∙ cos 𝜑 +
3
4(−
1
2∙ sin 𝜑 ∙ cos𝜑 +
1
2𝜑)
= −1
4∙ sin3 𝜑 ∙ cos 𝜑 −
3
8∙ sin 𝜑 ∙ cos 𝜑 +
3
8∙ 𝜑
∫sin6 𝜑 ∙ 𝑑𝜑 = −1
6∙ sin5 𝜑 ∙ cos 𝜑 +
5
6∫sin4 𝜑 ∙ 𝑑𝜑
= −1
6∙ sin5 𝜑 ∙ cos 𝜑
+5
6(−
1
4∙ sin3 𝜑 ∙ cos𝜑 −
3
8∙ sin𝜑 ∙ cos𝜑 +
3
8∙ 𝜑)
= −1
6∙ sin5 𝜑 ∙ cos 𝜑 −
5
24∙ sin3 𝜑 ∙ cos𝜑 −
5
16∙ sin𝜑 ∙ cos 𝜑 +
5
16∙ 𝜑
∫sin8 𝜑 ∙ 𝑑𝜑 = −1
8∙ sin7𝜑 ∙ cos 𝜑 +
7
8∫sin6 𝜑 ∙ 𝑑𝜑
= −1
8∙ sin7 𝜑 ∙ cos𝜑
+7
8(−
1
6∙ sin5 𝜑 ∙ cos𝜑 −
5
24∙ sin3 𝜑 ∙ cos 𝜑 −
5
16∙ sin𝜑 ∙ cos𝜑 +
5
16
∙ 𝜑)
= −1
8∙ sin7 𝜑 ∙ cos𝜑 −
7
48∙ sin5 𝜑 ∙ cos 𝜑 −
35
192∙ sin3 𝜑 ∙ cos𝜑 −
35
128
∙ sin𝜑 ∙ cos𝜑 +35
128∙ 𝜑
Sustituyendo en la integral original.
S = 𝑎(1 − 𝑒2)

VI. ANEXOS.
344
[ 𝜑 +
3
2∙ 𝑒2 (−
1
2∙ sin𝜑 ∙ cos𝜑 +
1
2∙ 𝜑)
+15
8∙ 𝑒4 (−
1
4∙ sin3𝜑 ∙ cos𝜑 −
3
8∙ sin𝜑 ∙ cos𝜑 +
3
8∙ 𝜑)
+35
16∙ 𝑒6 (−
1
6∙ sin5𝜑 ∙ cos𝜑 −
5
24∙ sin3𝜑 ∙ cos𝜑 −
5
16∙ sin𝜑 ∙ cos𝜑 +
5
16∙ 𝜑)
+315
128∙ 𝑒8 (−
1
8∙ sin7𝜑 ∙ cos𝜑 −
7
48∙ sin5𝜑 ∙ cos𝜑 −
35
192∙ sin3𝜑 ∙ cos𝜑 −
35
128∙ sin𝜑 ∙ cos𝜑 +
35
128∙ 𝜑)]
Simplificando valores se tiene que:
𝐒 = 𝒂(𝟏 − 𝒆𝟐)
[ (𝟏 +
𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖)𝝋
−(𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖) 𝐬𝐢𝐧𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟏𝟓
𝟑𝟐𝒆𝟒 +
𝟏𝟕𝟓
𝟑𝟖𝟒𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟐𝟗𝟓𝟕𝟔𝒆𝟖) 𝐬𝐢𝐧𝟑𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟑𝟓
𝟗𝟔𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟔𝟏𝟒𝟒𝒆𝟖) 𝐬𝐢𝐧𝟓𝝋 ∙ 𝐜𝐨𝐬𝝋
−(𝟑𝟏𝟓
𝟏𝟎𝟐𝟒𝒆𝟖) 𝐬𝐢𝐧𝟕𝝋 ∙ 𝐜𝐨𝐬𝝋 ]
Sin embargo, dado que esta fórmula está en función del seno y coseno de
la latitud y en virtud de que en la bibliografía existente, esta fórmula no es
reportada, es factible de simplificarse mediante la consideración de las siguientes
identidades trigonométricas:
sin 𝜑 ∙ cos 𝜑 =1
2∙ sin 2𝜑, sin2 𝜑 =
1
2−1
2∙ cos 2𝜑,
sin 𝜑 ∙ cos 𝛽 =1
2[sin(𝜑 − 𝛽) + sin(𝜑 + 𝛽)]
Aplicando a las funciones sin𝑛 𝜑 ∙ cos 𝜑
sin 𝜑 ∙ cos 𝜑 =1
2∙ sin 2𝜑

VI. ANEXOS.
345
sin3 𝜑 ∙ cos 𝜑 = sin2 𝜑 sin𝜑 ∙ cos 𝜑 = (1
2−1
2∙ cos 2𝜑) (
1
2∙ sin 2𝜑)
=1
4∙ sin 2𝜑 −
1
4∙ sin 2𝜑 ∙ cos 2𝜑 =
1
4∙ sin 2𝜑 −
1
4(1
2∙ sin 4𝜑)
=1
4∙ sin 2𝜑 −
1
8∙ sin 4𝜑
sin5 𝜑 ∙ cos 𝜑 = sin3 𝜑 ∙ cos 𝜑 ∙ sin2 𝜑 = (1
4∙ sin 2𝜑 −
1
8∙ sin 4𝜑) (
1
2−1
2∙ cos 2𝜑)
=1
8∙ sin 2𝜑 −
1
8∙ sin 2𝜑 ∙ cos 2𝜑 −
1
16∙ sin 4𝜑 +
1
16∙ sin 4𝜑 ∙ cos 2𝜑
=1
8∙ sin 2𝜑 −
1
8(1
2∙ sin 4𝜑) −
1
16∙ sin 4𝜑
+1
16[1
2(sin 2𝜑 + sin 6𝜑)]
=1
8∙ sin 2𝜑 −
1
16∙ sin 4𝜑 −
1
16∙ sin 4𝜑 +
1
32∙ sin 2𝜑 +
1
32∙ sin 6𝜑
=5
32∙ sin 2𝜑 −
1
8∙ sin 4𝜑 +
1
32∙ sin 6𝜑
sin7 𝜑 ∙ cos𝜑 = sin5 𝜑 ∙ cos 𝜑 ∙ sin2 𝜑
= (5
32∙ sin 2𝜑 −
1
8∙ sin 4𝜑 +
1
32∙ sin 6𝜑) (
1
2−1
2∙ cos 2𝜑)
=5
64∙ sin 2𝜑 −
1
16∙ sin 4𝜑 +
1
64∙ sin 6𝜑 −
5
64∙ sin 2𝜑 ∙ cos 2𝜑 +
1
16
∙ sin 4𝜑 ∙ cos 2𝜑 −1
64∙ sin 6𝜑 ∙ cos 2𝜑
=5
64∙ sin 2𝜑 −
1
16∙ sin 4𝜑 +
1
64∙ sin 6𝜑 −
5
64(1
2∙ sin 4𝜑)
+1
16[1
2(sin 2𝜑 + sin 6𝜑)] −
1
64[1
2(sin 4𝜑 + sin 8𝜑)]

VI. ANEXOS.
346
sin7 𝜑 ∙ cos 𝜑 =5
64∙ sin 2𝜑 −
1
16∙ sin 4𝜑 +
1
64∙ sin 6𝜑 −
5
128∙ sin 4𝜑 +
1
32
∙ sin 2𝜑 +1
32∙ sin 6𝜑 −
1
128∙ sin 4𝜑 −
1
128∙ sin 8𝜑
=7
64∙ sin 2𝜑 −
7
64∙ sin 4𝜑 +
3
64∙ sin 6𝜑 −
1
128∙ sin 8𝜑
Aplicando estos valores en los resultados parciales de las integrales, se
tiene que:
∫𝑑𝜑 = 𝜑
∫sin2 𝜑 ∙ 𝑑𝜑 = −1
2∙ sin 𝜑 ∙ cos 𝜑 +
1
2∙ 𝜑 = −
1
2(1
2∙ sin 2𝜑) +
1
2∙ 𝜑
= −1
4∙ sin 2𝜑 +
1
2∙ 𝜑
∫sin4 𝜑 ∙ 𝑑𝜑 = −1
4∙ sin3 𝜑 ∙ cos 𝜑 −
3
8∙ sin 𝜑 ∙ cos 𝜑 +
3
8∙ 𝜑
= −1
4(1
4∙ sin 2𝜑 −
1
8∙ sin 4𝜑) −
3
8(1
2∙ sin 2𝜑) +
3
8∙ 𝜑
= −1
16∙ sin 2𝜑 +
1
32∙ sin 4𝜑 −
3
16∙ sin 2𝜑 +
3
8∙ 𝜑
= −1
4∙ sin 2𝜑 +
1
32∙ sin 4𝜑 +
3
8∙ 𝜑
∫sin6 𝜑 ∙ 𝑑𝜑 = −1
6∙ sin5 𝜑 ∙ cos𝜑 −
5
24∙ sin3 𝜑 ∙ cos 𝜑 −
5
16∙ sin𝜑 ∙ cos𝜑 +
5
16∙ 𝜑
= −1
6(5
32∙ sin 2𝜑 −
1
8∙ sin 4𝜑 +
1
32∙ sin 6𝜑)
−5
24(1
4∙ sin 2𝜑 −
1
8∙ sin 4𝜑) −
5
16(1
2∙ sin 2𝜑) +
5
16∙ 𝜑
= −5
192∙ sin 2𝜑 +
1
48∙ sin 4𝜑 −
1
192∙ sin 6𝜑 −
5
96∙ sin 2𝜑 +
5
192
∙ sin 4𝜑 −5
32∙ sin 2𝜑+
5
16∙ 𝜑

VI. ANEXOS.
347
∫sin6 𝜑 ∙ 𝑑𝜑 = −15
64∙ sin 2𝜑 +
3
64∙ sin 4𝜑 −
5
96∙ sin 2𝜑+
5
16∙ 𝜑
∫sin8𝜑 ∙ 𝑑𝜑 = −1
8∙ sin7 𝜑 ∙ cos𝜑 −
7
48∙ sin5 𝜑 ∙ cos𝜑 −
35
192∙ sin3 𝜑 ∙ cos𝜑 −
35
128
∙ sin𝜑 ∙ cos𝜑 +35
128∙ 𝜑
= −1
8(7
64∙ sin 2𝜑 −
7
64∙ sin 4𝜑 +
3
64∙ sin 6𝜑 −
1
128∙ sin 8𝜑)
−7
48(5
32∙ sin 2𝜑 −
1
8∙ sin 4𝜑 +
1
32∙ sin 6𝜑)
−35
192(1
4∙ sin 2𝜑 −
1
8∙ sin 4𝜑) −
35
128(1
2∙ sin 2𝜑) +
35
128∙ 𝜑
= −7
512∙ sin 2𝜑 +
7
512∙ sin 4𝜑 −
3
512∙ sin 6𝜑 +
1
1024∙ sin 8𝜑
−35
1536∙ sin 2𝜑 +
7
384∙ sin 4𝜑 −
35
1536∙ sin 6𝜑 −
35
768∙ sin 2𝜑
+35
1536∙ sin 4𝜑 −
35
256∙ sin 2𝜑+
35
128∙ 𝜑
= −7
32∙ sin 2𝜑 +
7
128∙ sin 4𝜑 −
1
196∙ sin 6𝜑 +
1
1024∙ sin 8𝜑 +
35
128∙ 𝜑
Sustituyendo.
S = 𝑎(1 − 𝑒2)
[ 𝜑 +
3
2∙ 𝑒2 (−
1
4∙ sin 2𝜑 +
1
2∙ 𝜑)
+15
8∙ 𝑒4 (−
1
4∙ sin 2𝜑 +
1
32∙ sin 4𝜑 +
3
8∙ 𝜑)
+35
16∙ 𝑒6 (−
15
64∙ sin 2𝜑 +
3
64∙ sin 4𝜑 −
5
96∙ sin 2𝜑 +
5
16∙ 𝜑)
+35
16∙ 𝑒6 (−
7
32∙ sin 2𝜑 +
7
128∙ sin 4𝜑 −
1
196∙ sin 6𝜑 +
1
1024∙ sin 8𝜑 +
35
128∙ 𝜑)]

VI. ANEXOS.
348
Por lo que finalmente se tiene.
𝐒 = 𝒂(𝟏 − 𝒆𝟐)
[ (𝟏 +
𝟑
𝟒𝒆𝟐 +
𝟒𝟓
𝟔𝟒𝒆𝟒 +
𝟏𝟕𝟓
𝟐𝟓𝟔𝒆𝟔 +
𝟏𝟏𝟎𝟐𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖)𝝋
−(𝟑
𝟖𝒆𝟐 +
𝟏𝟓
𝟑𝟐𝒆𝟒 +
𝟓𝟐𝟓
𝟏𝟎𝟐𝟒𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟒𝟎𝟗𝟔𝒆𝟖) 𝐬𝐢𝐧 𝟐𝝋
+(𝟏𝟓
𝟐𝟓𝟔𝒆𝟒 +
𝟏𝟎𝟓
𝟏𝟎𝟐𝟒𝒆𝟔 +
𝟐𝟐𝟎𝟓
𝟏𝟔𝟑𝟖𝟒𝒆𝟖) 𝐬𝐢𝐧 𝟒𝝋
−(𝟑𝟓
𝟑𝟎𝟕𝟐𝒆𝟔 +
𝟑𝟏𝟓
𝟏𝟐𝟐𝟖𝟖𝒆𝟖) 𝐬𝐢𝐧 𝟔𝝋
+(𝟑𝟏𝟓
𝟏𝟑𝟏𝟎𝟕𝟐𝒆𝟖) 𝐬𝐢𝐧 𝟖𝝋 ]
6.4 Derivadas Consecutivas para la Representación GK.
En este apartado se desarrollaran las derivadas básicas (conocidas hasta el
momento) que conforman las fórmulas de transformación de la representación GK
en su proceso inverso y directo, así mismo del método empleado por D. Thomas
(1952) para facilitar dicho proceso.
6.4.1 El método de derivación de Paul D. Thomas.
Las derivadas requeridas en las formulas GK dependen directamente de los
radios de 𝑁 y 𝜌, siendo estos constantes en los resultados finales a partir de la
tercera derivada, de igual manera a partir de esta derivada los procesos
algebraicos y derivación para la reducción de términos se vuelven gradualmente
complicados.
La solución a este inconveniente la presenta Paul D. Thomas (1952), el cual
por medio de un razonamiento puramente algebraico convierte los resultados de
las derivadas de 𝑁 y 𝜌 en funciones sujetas a estas mismas variables, logrando
que el proceso sea más ágil. Para comprensión del desarrollo de derivación a
continuación se presenta la modificación hecha por Thomas.

VI. ANEXOS.
349
Para la derivada de 𝑁 se tiene que:
𝑓′(Φ) = 𝑓′(𝑁) =𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos𝜑
(1 − 𝑒2 sin2 𝜑)32
= 𝑁 ∙𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
1 − 𝑒2 sin2 𝜑
𝑓′(𝑁) = 𝑁 ∙𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
1 − 𝑒2 sin2 𝜑∙cos 𝜑
cos 𝜑= 𝑁 ∙
𝑒2 ∙ cos2 𝜑
1 − 𝑒2 sin2 𝜑∙ tan𝜑
𝑓′(𝑁) = 𝑁 ∙𝑒2(1 − sin2 𝜑)
1 − 𝑒2 sin2 𝜑∙ tan𝜑 = 𝑁 ∙
𝑒2 − 𝑒2sin2 𝜑
1 − 𝑒2 sin2 𝜑∙ tan𝜑
𝑓′(𝑁) = 𝑁 ∙(𝑒2 − 𝑒2sin2 𝜑) + 0
1 − 𝑒2 sin2 𝜑∙ tan𝜑 = 𝑁 ∙
(𝑒2 − 𝑒2sin2 𝜑) + 1 − 1
1 − 𝑒2 sin2 𝜑∙ tan𝜑
𝑓′(𝑁) = 𝑁 ∙𝑒2 − 1 + 1 − 𝑒2sin2 𝜑
1 − 𝑒2 sin2 𝜑∙ tan𝜑 = 𝑁
−(1 − 𝑒2) + (1 − 𝑒2sin2 𝜑)
1 − 𝑒2 sin2 𝜑tan𝜑
𝑓′(Φ) = 𝑁 [1 − 𝑒2sin2 𝜑
1 − 𝑒2sin2 𝜑−
(1 − 𝑒2)
1 − 𝑒2sin2 𝜑] tan𝜑 = 𝑁 [1 −
(1 − 𝑒2)
1 − 𝑒2sin2 𝜑] tan𝜑
𝑓′(Φ) = [𝑎
(1 − 𝑒2 sin2 𝜑)12
−𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
] tan𝜑
𝒇′(𝑵) = (𝑵 − 𝝆) 𝐭𝐚𝐧𝝋
Ahora calculando la derivada de 𝜌.
𝜌 =𝑎 ∙ (1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
𝑓′(Φ) = 𝑓′(𝜌) =−𝑎(1 − 𝑒2)
32(1 − 𝑒2 sin2 𝜑)
12(−2 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑)
[(1 − 𝑒2 sin2 𝜑)32]2

VI. ANEXOS.
350
𝑓′(𝜌) = 3𝑎 ∙ 𝑒2(1 − 𝑒2) ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)52
= 3(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)∙𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)32
𝑓′(𝜌) = 3(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)∙𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)32
∙𝑎
𝑎= 3
𝑎(1 − 𝑒2)
𝑎(1 − 𝑒2 sin2 𝜑)∙ 𝑁′
𝑓′(𝜌) = 3𝑎(1 − 𝑒2)
𝑎(1 − 𝑒2 sin2 𝜑)∙(1 − 𝑒2 sin2 𝜑)
12
(1 − 𝑒2 sin2 𝜑)12
∙ 𝑁′ = 3
𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
𝑎
(1 − 𝑒2 sin2 𝜑)12
∙ 𝑁′
𝒇′(𝝆) = 𝟑 (𝝆
𝑵) (𝑵 − 𝝆) 𝐭𝐚𝐧𝝋
Además de estas modificaciones Thomas sugiere realizar la derivada de la
relación del radio de curvatura meridiana y la normal mayor (𝑁
𝜌), debido a que a
esta relación también se vuelve constante.
Aplicando las formulas modificadas se tiene que:
𝑓′(Φ) = (𝑁
𝜌)′
𝑓′ (𝑁
𝜌) =
[(𝑁 − 𝑝) tan𝜑]𝜌 − 𝑁 [3 (𝜌𝑁) (𝑁 − 𝑝) tan𝜑]
𝜌2
𝑓′ (𝑁
𝜌) =
𝜌(𝑁 − 𝑝) tan𝜑 − 3𝜌(𝑁 − 𝑝) tan𝜑
𝜌2=𝜌 tan𝜑[(𝑁 − 𝑝) − 3(𝑁 − 𝑝)]
𝜌2
𝒇′ (𝑵
𝝆)′
= −𝟐 ∙𝑵 − 𝝆
𝝆∙ 𝐭𝐚𝐧𝝋

VI. ANEXOS.
351
6.4.2 Derivadas de orden superior para el proceso directo.
Siguiendo las condiciones de derivación ya impuestas para la serie de
Taylor que componen las fórmulas de trasformación para la representación GK y
apoyadas del método de Thomas, a continuación se desarrollaran las ocho
derivadas que componen dichas formulas.
Teniendo en cuenta estas modificaciones se proseguirá con el proceso de
derivación para la serie de Taylor.
Segunda derivada de 𝑓(Φ).
𝑓′′(Φ) = [𝑓′(Φ)]′ ∙𝑑𝜑
𝑑Φ
Derivando 𝑓′(Φ).
[𝑓′(Φ)]′ = (N cos𝜑)′ = {[𝑎
(1 − 𝑒2 sin2 𝜑)12
] cos 𝜑}
′
Debido a la complejidad de la función la derivada se realizara por
partes.
𝑢 =𝑎
(1 − 𝑒2 sin2 𝜑)12
𝑣 = cos𝜑
[𝑓′(Φ)]′ = 𝑢′𝑣 + 𝑢𝑣′
Sustituyendo.
𝑢′ =−𝑎
12(1 − 𝑒2 sin2 𝜑)−
12 ∙ (−𝑒22 sin 𝜑 cos 𝜑)
(1 − 𝑒2 sin2 𝜑)=
−12∙−2 ∙ 𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)12
(1 − 𝑒2 sin2 𝜑)

VI. ANEXOS.
352
𝑢′ =
𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)12
(1 − 𝑒2 sin2 𝜑)=
𝑎
(1 − 𝑒2 sin2 𝜑)12
∙𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)
𝑢′ =𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)32
, 𝑣′ = −sin𝜑
Sustituyendo en la ecuación de la derivada.
[𝑓′(Φ)]′ = [𝑎
(1 − 𝑒2 sin2 𝜑)12
∙𝑒2 ∙ sin 𝜑 ∙ cos𝜑
(1 − 𝑒2 sin2 𝜑)∙ cos 𝜑]
+ [𝑎
(1 − 𝑒2 sin2 𝜑)12
∙ (−sin 𝜑)]
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [𝑒2 cos2 𝜑
1 − 𝑒2 sin2 𝜑− 1]
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [𝑒2 cos2 𝜑 − 1 + 𝑒2 sin2 𝜑
1 − 𝑒2 sin2 𝜑]
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [𝑒2(cos2 𝜑 + sin2 𝜑) − 1
1 − 𝑒2 sin2 𝜑]
Teniendo en cuenta que:
sin2 𝜃 + cos2 𝜃 = 1
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [𝑒2 − 1
1 − 𝑒2 sin2 𝜑]
Realizando el producto y factorizando el signo negativo de 𝑒2 − 1 se
logra obtener el valor de 𝜌.

VI. ANEXOS.
353
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [𝑒2 − 1
1 − 𝑒2 sin2 𝜑]
[𝑓′(Φ)]′ = [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
] ∙ [−(1 − 𝑒2)
1 − 𝑒2 sin2 𝜑] = −
𝑎(1 − 𝑒2)
(1 − 𝑒2 sin2 𝜑)32
∙ sin 𝜑
[𝑓′(Φ)]′ = −𝜌 ∙ sin 𝜑
Multiplicando por 𝑑𝜑
𝑑Φ
𝑓′′(Φ) = [𝑓′(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓′′(Φ) = −𝜌 ∙ sin 𝜑 ∙𝑟
𝜌= −𝜌 ∙ sin 𝜑 ∙
𝑁 ∙ cos 𝜑
𝜌
Finalmente la segunda derivada de 𝑓(Φ) se interpreta como.
𝒇′′(𝚽) = −𝑵𝐬𝐢𝐧𝝋 𝐜𝐨𝐬𝝋
Tercera derivada de 𝑓(Φ).
𝑓′′′(Φ) = [𝑓′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
Derivando 𝑓′′(Φ).
[𝑓′′(Φ)]′ = −(𝑁 sin𝜑 cos 𝜑)′
Se observa que 𝑓′′(Φ) es una ecuación formada por tres términos
en los cuales aparece a la variable a derivar, esta situación llevara al uso de
la fórmula de diferenciación para funciones triples.

VI. ANEXOS.
354
𝑢 ∙ 𝑣 ∙ 𝑤
𝑓′(𝑢 ∙ 𝑣 ∙ 𝑤) = (𝑢′ ∙ 𝑣 ∙ 𝑤) + (𝑢 ∙ 𝑣′ ∙ 𝑤) + (𝑢 ∙ 𝑣 ∙ 𝑤′)
Efectuando el cambio de variable.
𝑢 = 𝑁 =𝑎 ∙ sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
𝑣 = sin 𝜑 𝑤 = cos𝜑
𝑢′ =𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)32
𝑣′ = cos𝜑 𝑤′ = − sin𝜑
Sustituyendo.
[𝑓′′(Φ)]′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤
[𝑓′′(Φ)]′ = −
{
[𝑎 ∙ 𝑒2 ∙ sin 𝜑 ∙ cos 𝜑
(1 − 𝑒2 sin2 𝜑)32
∙ sin 𝜑 ∙ cos 𝜑]
+ [𝑎 ∙ sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
∙ cos 𝜑 ∙ cos 𝜑]
+ [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
∙ sin𝜑 ∙ (− sin𝜑)]
}
[𝑓′′(Φ)]′ = − {[𝑎 ∙ 𝑒2
(1 − 𝑒2 sin2 𝜑)32
∙ sin2 𝜑 ∙ cos2 𝜑] + [𝑎 ∙ sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
∙ cos2 𝜑]
− [𝑎 sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
∙ sin2 𝜑]}
Para facilitar el proceso algebraico el valor de la normal mayor se
expresará en su forma explícita.

VI. ANEXOS.
355
[𝑓′′(Φ)]′ = − [𝑁 ∙𝑒2 ∙ sin2 𝜑 ∙ cos2 𝜑
1 − 𝑒2 sin2 𝜑+ 𝑁 ∙ cos2 𝜑 − 𝑁 ∙ sin2 𝜑]
[𝑓′′(Φ)]′ = −𝑁 ∙ [𝑒2 ∙ sin2 𝜑 ∙ cos2 𝜑
1 − 𝑒2 sin2 𝜑+ cos2 𝜑 − sin2 𝜑]
[𝑓′′(Φ)]′ = −𝑁 ∙ [sin2 𝜑 ∙ (𝑒2 ∙ cos2 𝜑
1 − 𝑒2 sin2 𝜑− 1) + cos2 𝜑]
[𝑓′′(Φ)]′ = −𝑁 ∙ {sin2 𝜑 ∙ [𝑒2 ∙ cos2 𝜑 +𝑒2 ∙ sin2 𝜑 − 1
1 − 𝑒2 sin2 𝜑] + cos2 𝜑}
[𝑓′′(Φ)]′ = −𝑁 ∙ {−sin2 𝜑 ∙ [1 − 𝑒2
1 − 𝑒2 sin2 𝜑] + cos2 𝜑}
[𝑓′′(Φ)]′ = [𝑎
(1 − 𝑒2 sin2 𝜑)12
] ∙ [1 − 𝑒2
1 − 𝑒2 sin2 𝜑] sin2 𝜑 − 𝑁 ∙ cos2 𝜑
𝑓′′′(Φ) = 𝜌 ∙ sin2 𝜑 − 𝑁 ∙ cos2 𝜑
Multiplicación por 𝑑𝜑
𝑑Φ.
𝑓′′′(Φ) = (𝜌 ∙ sin2 𝜑 − 𝑁 ∙ cos2 𝜑) ∙ (𝑁
𝜌∙ cos 𝜑)
𝑓′′′(Φ) = 𝑁 ∙ sin2 𝜑 ∙ cos 𝜑 −𝑁2
𝜌∙ cos3 𝜑
Se racionalizara por cos2𝜑
cos2𝜑, para obtener una expresión más simple.
𝑓′′′(Φ) = [𝑁 ∙ sin2 𝜑 ∙ cos 𝜑 −𝑁2
𝜌∙ cos3 𝜑] ∙ 1
𝑓′′′(Φ) = [𝑁 ∙ sin2 𝜑 ∙ cos 𝜑 −𝑁2
𝜌∙ cos3 𝜑] ∙
cos2 𝜑
cos2 𝜑
𝒇′′′(𝚽) = 𝑵 [𝐭𝐚𝐧𝟐𝝋 −𝑵
𝝆] 𝐜𝐨𝐬𝟑𝝋

VI. ANEXOS.
356
Cuarta derivada 𝑓(Φ)
𝑓4(Φ) = [𝑓′′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
Derivando 𝑓′′′(Φ).
[𝑓′′′(Φ)]′ = {𝑁 [tan2 𝜑 −𝑁
𝜌] cos3 𝜑}
′
[𝑓′′′(Φ)]′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤
Siendo.
𝑢 = 𝑁 =𝑎 ∙ sin 𝜑
(1 − 𝑒2 sin2 𝜑)12
𝑣 = tan2 𝜑 −𝑁
𝜌 𝑤 = cos3 𝜑
𝑢′ = (𝑁 − 𝑝) tan𝜑 𝑣′ = 2𝑁 tan𝜑 [sec2 𝜑 +𝑁 − 𝜌
𝜌] 𝑤′ = −3 cos2 𝜑 sin𝜑
Sustituyendo.
[𝑓′′′(Φ)]′ =
{
[(𝑁 − 𝑝) tan𝜑] (tan2 𝜑 −
𝑁
𝜌) cos3 𝜑
+𝑁 [2 ∙ tan𝜑 ∙ sec2 𝜑 + 2𝑁 tan𝜑 (sec2 𝜑 +𝑁 − 𝜌
𝜌)] cos3 𝜑
+𝑁 (tan2 𝜑 −𝑁
𝜌) (−3 ∙ cos2 𝜑 ∙ sin 𝜑)
}
[𝑓′′′(Φ)]′ =
{
(𝑁 − 𝑝) (tan2 𝜑 −
𝑁
𝜌) cos3 𝜑 tan𝜑
+2𝑁 tan𝜑 [sec2 𝜑 +𝑁 − 𝜌
𝜌] cos3 𝜑
−3𝑁 (tan2 𝜑 −𝑁
𝜌) cos2 𝜑 sin 𝜑
}

VI. ANEXOS.
357
[𝑓′′′(Φ)]′ = cos2 𝜑 sin 𝜑
[ (𝑁 − 𝑝) (tan2 𝜑 −
𝑁
𝜌)
+2𝑁 (sec2 𝜑 +𝑁 − 𝜌
𝜌)
−3𝑁 (tan2 𝜑 −𝑁
𝜌)
]
[𝑓′′′(Φ)]′ = cos2 𝜑 sin𝜑 [(tan2 𝜑 −𝑁
𝜌) [(𝑁 − 𝑝) − 3𝑁] + 2𝑁 (sec2 𝜑 +
𝑁 − 𝜌
𝜌)]
[𝑓′′′(Φ)]′ = cos2 𝜑 sin𝜑 [(tan2 𝜑 −𝑁
𝜌) (−2𝑁 − 𝑝) + 2𝑁 (tan2 𝜑 + 1+
𝑁
𝜌− 1)]
[𝑓′′′(Φ)]′ = cos2 𝜑 sin𝜑 [−2𝑁 tan2 𝜑 + 2𝑁2
𝜌− 𝜌 tan2 𝜑 + 𝑁
+ 2𝑁 tan2 𝜑+2𝑁2
𝜌]
[𝑓′′′(Φ)]′ = cos2 𝜑 sin 𝜑 (4𝑁2
𝜌− 𝑝 tan2 𝜑 + 𝑁)
Multiplicando por 𝑑𝜑
𝑑Φ
𝑓4(Φ) = [cos2 𝜑 sin𝜑 (4𝑁2
𝜌− 𝜌 tan2 𝜑 + 𝑁)] [
𝑁 cos 𝜑
𝜌]
𝑓4(Φ) = 𝑁 cos3 𝜑 sin 𝜑 [4𝑁2
𝜌2−𝜌
𝜌tan2 𝜑 +
𝑁
𝜌]
𝒇𝟒(𝚽) = 𝑵 [𝟒 (𝑵
𝝆)𝟐
+𝑵
𝝆− 𝐭𝐚𝐧𝟐𝝋] 𝐜𝐨𝐬𝟑𝝋𝐬𝐢𝐧𝝋
Entonces para obtener 𝑓5 se tiene que:
𝑓5(Φ) = [𝑓4(Φ)]′ ∙𝑑𝜑
𝑑Φ

VI. ANEXOS.
358
𝑓5(Φ) = {𝑁 [4 (𝑁
𝜌)2
+𝑁
𝜌− tan2 𝜑] cos3 𝜑 sin𝜑}
′
(𝑁 ∙ cos𝜑
𝜌)
𝑓5(Φ) = {𝑁 [4 (𝑁
𝜌)2
cos3 𝜑 +𝑁
𝜌cos3 𝜑 − cos3 𝜑 ∙ tan2 𝜑] sin 𝜑}
′
(𝑁 ∙ cos 𝜑
𝜌)
Derivando 𝑓4(Φ)
𝑓5(Φ) = {(𝑁 − 𝜌) [4 (𝑁
𝜌)2
cos3 𝜑 +𝑁
𝜌cos3 𝜑 − cos3 𝜑 ∙ tan2 𝜑] sin 𝜑 ∙ tan 𝜑
+ 𝑁 [4 (2𝑁
𝜌(−2 ∙
𝑁 − 𝑝
𝜌∙ tan𝜑) cos3 𝜑 − 3(
𝑁
𝜌)2
cos2 𝜑 ∙ sin 𝜑)
+ (−2 ∙𝑁 − 𝑝
𝜌∙ tan𝜑) cos3 𝜑 −
𝑁
𝜌cos2 𝜑 ∙ sin 𝜑
− (2 ∙ cos2 𝜑 ∙ sin 𝜑 − sin3 𝜑)] sin 𝜑
+ 𝑁 [4 (𝑁
𝜌)2
cos3 𝜑 +𝑁
𝜌cos3 𝜑 − cos3 𝜑 ∙ tan2 𝜑] cos 𝜑} (
𝑁 ∙ cos 𝜑
𝜌)
Reduciendo términos.
𝒇𝟓(𝚽) =𝑵
𝟏𝟔
{
𝟐 [𝟏 − 𝟐 (
𝑵
𝝆) + 𝟏𝟑(
𝑵
𝝆)𝟐
− 𝟒(𝑵
𝝆)𝟑
] 𝐜𝐨𝐬𝝋
− [𝟑 − 𝟐 (𝑵
𝝆) + 𝟑 (
𝑵
𝝆)𝟐
− 𝟒𝟒 (𝑵
𝝆)𝟑
] 𝐜𝐨𝐬(𝟑𝝋)
+ [𝟏 + 𝟐 (𝑵
𝝆) − 𝟕 (
𝑵
𝝆)𝟐
+ 𝟐𝟖 (𝑵
𝝆)𝟑
] 𝐜𝐨𝐬(𝟓𝝋)}

VI. ANEXOS.
359
Debido a la complejidad del proceso algebraico y de derivación para las
derivadas restantes solo se presentaran los resultados finales.
𝒇𝟔(𝚽) = −𝑵
𝟑𝟐
{
[𝟓 − 𝟔 (
𝑵
𝝆) − 𝟗𝟏 (
𝑵
𝝆)𝟐
+ 𝟑𝟔𝟒(𝑵
𝝆)𝟑
− 𝟏𝟑𝟔(𝑵
𝝆)𝟒
] 𝐬𝐢𝐧(𝟐𝝋)
−𝟒 [𝟏 − (𝑵
𝝆)𝟐
+ 𝟐𝟖(𝑵
𝝆)𝟑
− 𝟖𝟖 (𝑵
𝝆)𝟒
] 𝐬𝐢𝐧(𝟒𝝋)
+ [𝟏 + 𝟐 (𝑵
𝝆) + 𝟑𝟑(
𝑵
𝝆)𝟐
− 𝟏𝟗𝟔(𝑵
𝝆)𝟑
+ 𝟐𝟖𝟎 (𝑵
𝝆)𝟒
] 𝐬𝐢𝐧(𝟔𝝋)}
𝒇𝟕(𝚽)
= −𝑵
𝟔𝟒
{
− [𝟓 − 𝟗(
𝑵
𝝆) + 𝟐𝟕𝟗 (
𝑵
𝝆)𝟐
− 𝟏𝟗𝟏𝟏 (𝑵
𝝆)𝟑
+ 𝟐𝟎𝟒𝟒 (𝑵
𝝆)𝟒
− 𝟔𝟖𝟎 (𝑵
𝝆)𝟓
] 𝐜𝐨𝐬𝝋
+ [𝟗 − 𝟗(𝑵
𝝆) + 𝟐𝟔𝟕 (
𝑵
𝝆)𝟐
− 𝟐𝟖𝟑𝟏 (𝑵
𝝆)𝟑
+ 𝟔𝟎𝟕𝟔 (𝑵
𝝆)𝟒
− 𝟐𝟐𝟖𝟎 (𝑵
𝝆)𝟓
] 𝐜𝐨𝐬(𝟑𝝋)
− [𝟓 + 𝟑 (𝑵
𝝆) − 𝟗𝟕 (
𝑵
𝝆)𝟐
+ 𝟐𝟗𝟑 (𝑵
𝝆)𝟑
+ 𝟏𝟕𝟎𝟖 (𝑵
𝝆)𝟒
− 𝟑𝟓𝟗𝟐 (𝑵
𝝆)𝟓
] 𝐜𝐨𝐬(𝟓𝝋)
+ [𝟏 + 𝟑 (𝑵
𝝆) − 𝟖𝟓 (
𝑵
𝝆)𝟐
+ 𝟏𝟐𝟕𝟕 (𝑵
𝝆)𝟑
− 𝟒𝟏𝟏𝟔 (𝑵
𝝆)𝟒
+ 𝟑𝟔𝟒𝟎 (𝑵
𝝆)𝟓
] 𝐜𝐨𝐬(𝟕𝝋)}
𝒇𝟖(𝚽)
=𝑵
𝟏𝟐𝟖
{
−𝟐[𝟕 − 𝟗(
𝑵
𝝆) − 𝟖𝟏𝟗(
𝑵
𝝆)𝟐
+ 𝟏𝟐𝟒𝟏𝟑(𝑵
𝝆)𝟑
− 𝟑𝟔𝟗𝟖𝟒(𝑵
𝝆)𝟒
+ 𝟑𝟑𝟔𝟒𝟖(𝑵
𝝆)𝟓
− 𝟏𝟎𝟐𝟒𝟎(𝑵
𝝆)𝟔
] 𝐬𝐢𝐧(𝟐𝝋)
+𝟐 [𝟕 − 𝟑(𝑵
𝝆) − 𝟐𝟕𝟗(
𝑵
𝝆)𝟐
+ 𝟕𝟐𝟒𝟑(𝑵
𝝆)𝟑
− 𝟑𝟖𝟓𝟔𝟖(𝑵
𝝆)𝟒
+ 𝟓𝟖𝟓𝟏𝟐(𝑵
𝝆)𝟓
− 𝟐𝟎𝟖𝟔𝟒(𝑵
𝝆)𝟔
] 𝐬𝐢𝐧(𝟒𝝋)
−𝟔 [𝟏 + (𝑵
𝝆) + 𝟗𝟏(
𝑵
𝝆)𝟐
− 𝟏𝟑𝟖𝟏(𝑵
𝝆)𝟑
+ 𝟐𝟖𝟕𝟐(𝑵
𝝆)𝟒
+ 𝟑𝟑𝟒𝟒(𝑵
𝝆)𝟓
− 𝟕𝟏𝟔𝟖(𝑵
𝝆)𝟔
] 𝐬𝐢𝐧(𝟔𝝋)
+[𝟏 + 𝟑(𝑵
𝝆) + 𝟐𝟕𝟗(
𝑵
𝝆)𝟐
− 𝟕𝟐𝟑𝟓(𝑵
𝝆)𝟑
+ 𝟒𝟒𝟏𝟑𝟔(𝑵
𝝆)𝟒
− 𝟗𝟎𝟑𝟖𝟒(𝑵
𝝆)𝟓
+ 𝟓𝟖𝟐𝟒𝟎(𝑵
𝝆)𝟔
] 𝐬𝐢𝐧(𝟖𝝋)}

VI. ANEXOS.
360
6.4.3 Derivadas de orden superior para el proceso inverso.
Teniendo en cuenta las fórmulas de Thomas
𝑓′(𝑁) = (𝑁 − 𝜌) tan𝜑, 𝑓′(𝜌) = 3 (𝜌
𝑁) (𝑁 − 𝜌) tan𝜑
𝑓′ (𝑁
𝜌)′
= −2 ∙𝑁 − 𝑝
𝜌∙ tan𝜑
Y los siguientes cambios de variable.
𝑡 = tan𝜑0 , 𝑁
𝜌= 1 + 𝜂2, 𝜂2 = 𝑒′
2cos2 𝜑0 , 𝑒
′2 =𝑒2
1 − 𝑒2
El Desarrollo de las derivadas consecutivas para F(𝑦) son las siguientes:
Segunda derivada de F(𝑦)
𝐹′′(𝑦) = [𝑑𝐹′(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
Derivando 𝐹′(𝑦).
[𝑑𝐹′(𝑦)
𝑑𝜑0]
′
= [1
𝑁 cos𝜑0]′
[𝑑𝐹′(𝑦)
𝑑𝜑0]
′
=−[(𝑁 − 𝜌) tan𝜑0 ∙ cos 𝜑0 − 𝑁 sin 𝜑0]
(𝑁 cos𝜑0)2
=−sin𝜑0 (𝑁 − 𝜌 − 𝑁)
(𝑁 cos𝜑0)2
[𝑑𝐹′(𝑦)
𝑑𝜑0]
′
=𝜌 sin𝜑0
(𝑁 cos 𝜑0)2=
𝜌 sin𝜑0𝑁2 cos2 𝜑0
=𝜌 tan𝜑0𝑁2 cos 𝜑0

VI. ANEXOS.
361
Multiplicando por 𝑑𝜑0
𝑑𝑦
𝐹′′(𝑦) =𝜌 tan𝜑0𝑁2 cos 𝜑0
∙1
𝜌=
tan𝜑0𝑁2 cos 𝜑0
Efectuando cambio de variable.
𝑭′′(𝒚) =𝒕
𝑵′𝟐 𝐜𝐨𝐬𝝋𝟎
Tercera derivada de F(𝑦)
𝐹′′′(𝑦) = [𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
Derivando 𝐹′′(𝑦).
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
= [tan𝜑0
𝑁2 cos 𝜑0]′
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=𝑁2 cos 𝜑0 sec
2 𝜑0 − tan𝜑0 [2𝑁(𝑁 − 𝜌) cos𝜑0 tan𝜑0 − 𝑁2 sin 𝜑0]
(𝑁2 cos 𝜑0)2
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=𝑁2 cos 𝜑0 sec
2 𝜑0 − 𝑁 sin𝜑0 tan𝜑0 [2(𝑁 − 𝜌) − 𝑁]
(𝑁2 cos 𝜑0)2
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=𝑁[𝑁 cos𝜑0 sec
2 𝜑0 − sin 𝜑0 tan𝜑0 (𝑁 − 2𝜌)]
(𝑁2 cos 𝜑0)2
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=[𝑁 cos𝜑0 sec
2 𝜑0 − sin 𝜑0 tan𝜑0 (𝑁 − 2𝜌)]
𝑁3 cos 𝜑0 cos 𝜑0
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=[𝑁 sec2 𝜑0 − tan
2 𝜑0 (𝑁 − 2𝜌)]
𝑁3 cos 𝜑0

VI. ANEXOS.
362
[𝑑𝐹′′(𝑦)
𝑑𝜑0]
′
=[𝑁(1 + tan2 𝜑0) − tan
2 𝜑0 (𝑁 − 2𝜌)]
𝑁3 cos 𝜑0=𝑁 + 2𝜌tan2 𝜑0𝑁3 cos 𝜑0
Multiplicando por 𝑑𝜑0
𝑑𝑦
𝐹′′′(𝑦) =𝑁 + 2𝜌tan2 𝜑0𝑁3 cos 𝜑0
∙1
𝜌= (
1
𝑁3 cos 𝜑0) (𝑁
𝜌+ 2 ∙ tan2 𝜑′)
Aplicando cambio de variable.
𝑭′′′(𝒚) =𝟏 + 𝟐𝒕𝟐 + 𝜼𝟐
𝑵𝟑 𝐜𝐨𝐬𝝋𝟎
Cuarta derivada de F(𝑦)
𝐹𝐼𝑉(𝑦) = [𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
Derivando 𝐹′′′(𝑦)
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
= [(1
𝑁3 cos 𝜑0) (𝑁
𝜌+ 2 ∙ tan2 𝜑0)]
′
Debido a la complejidad que esta función representa el proceso de
derivación se hará por partes tomando en cuenta lo siguiente.
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
= 𝑢′ ∙ 𝑣 + 𝑢 ∙ 𝑣′
𝑢 =1
𝑁3 cos 𝜑0 𝑣 =
𝑁
𝜌+ 2 ∙ tan2 𝜑0

VI. ANEXOS.
363
𝑢′ =−[3𝑁3(𝑁 − 𝜌) cos𝜑0 tan𝜑0 − 𝑁
3 sin 𝜑′]
(𝑁3 cos 𝜑0)2
=−𝑁2 sin 𝜑0 [3(𝑁 − 𝜌) − 𝑁]
(𝑁3 cos 𝜑0)2
𝑢′ =−sin 𝜑0 [3𝑁 − 3𝜌 − 𝑁]
𝑁4 cos2 𝜑0= −(
tan𝜑0𝑁4 cos 𝜑0
) (2𝑁 − 3𝜌)
Para 𝑣′
𝑣′ = −2(𝑁 − 𝜌
𝜌) tan𝜑0 + 4 tan𝜑0 sec
2 𝜑0 = 2 tan𝜑0 [(𝑁
𝜌− 1) + 2 sec2 𝜑0]
𝑣′ = 2 tan𝜑0 [𝑁
𝜌− 1 + 2(1 + tan2 𝜑0)] = −2 tan𝜑0 (
𝑁
𝜌− 2 tan2 𝜑0 + 3)
Sustituyendo.
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
=
{
−(tan𝜑0
𝑁4 cos 𝜑0) (2𝑁 − 3𝜌) (
𝑁
𝜌+ 2tan2 𝜑0)
+ [−2 tan𝜑0 (𝑁
𝜌− 2 tan2 𝜑0 + 3)] (
1
𝑁3 cos 𝜑0)}
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
=
[ − (
tan𝜑0𝑁4 cos 𝜑0
) (2𝑁 − 3𝜌) (𝑁
𝜌+ 2tan2 𝜑0)
−2 (tan𝜑0
𝑁3 cos 𝜑0) (𝑁
𝜌− 2 tan2 𝜑0 + 3) ]
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
= −tan𝜑0
𝑁4 cos 𝜑0[ (2𝑁 − 3𝜌) (
𝑁
𝜌+ 2tan2 𝜑0)
−2𝑁 (𝑁
𝜌− 2 tan2 𝜑0 + 3) ]
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
= −tan𝜑0
𝑁4 cos𝜑0[ 2𝑁2
𝜌+ 4𝑁tan2 𝜑0 − 3𝑁 − 6𝜌 tan
2 𝜑0
+2𝑁2
𝜌− 4𝑁tan2 𝜑0 − 6𝑁 ]
[𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
= −tan𝜑0
𝑁4 cos 𝜑0[4𝑁2
𝜌− 9𝑁 − 6𝜌 tan2 𝜑0]

VI. ANEXOS.
364
Multiplicando por 𝑑𝜑0
𝑑𝑦.
𝐹4(𝑦) = [𝑑𝐹′′′(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
𝐹4(𝑦) = [− (tan𝜑0
𝑁4 cos 𝜑0) (4
𝑁2
𝜌− 9𝑁 − 6𝜌 tan2 𝜑0)] ∙ (
1
𝜌)
𝐹4(𝑦) = −tan𝜑0
𝑁4 cos 𝜑0[4 (
𝑁
𝜌)2
− 9(𝑁
𝜌) − 6 tan2 𝜑0]
Efectuando el cambio de variable.
𝐹4(𝑦) = −𝑡
𝑁4 cos𝜑0[4(1 + 𝜂2)2 − 9(1 + 𝜂2) − 6𝑡2]
𝐹4(𝑦) = −𝑡
𝑁4 cos 𝜑0[4(2 + 2𝜂2 + 𝜂4)2 − 9 − 9𝜂2 − 6𝑡2]
𝑭𝟒(𝒚) =𝒕[𝟓 + 𝟔𝒕𝟐 + 𝜼𝟐 − 𝟒𝜼𝟒]
𝑵𝟒 𝐜𝐨𝐬𝝋𝟎
Quinta derivada de F(𝑦)
𝐹𝑉(𝑦) = [𝑑𝐹4(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
Derivando 𝐹4(𝑦)
[𝑑𝐹4(𝑦)
𝑑𝜑0]
′
= −{(tan𝜑0
𝑁4 cos 𝜑0) [4 (
𝑁
𝜌)2
− 9(𝑁
𝜌) − 6 tan2 𝜑0]}
′
[𝑑𝐹4(𝑦)
𝑑𝜑0]
′
= −(𝑢′ ∙ 𝑣 + 𝑢 ∙ 𝑣′)

VI. ANEXOS.
365
Siendo.
𝑢 =tan𝜑0
𝑁4 cos 𝜑0 𝑣 = 4 (
𝑁
𝜌)2
− 9(𝑁
𝜌) − 6 tan2 𝜑0
Para 𝑢′
𝑢′ =𝑁4 sec2 𝜑0 cos 𝜑0 − tan𝜑0 [4𝑁
3(𝑁 − 𝜌) cos 𝜑0 tan𝜑0 − 𝑁4 sin 𝜑0]
(𝑁4 cos 𝜑0)2
𝑢′ =𝑁4 sec2 𝜑0 cos 𝜑0 − 𝑁
3 sin 𝜑0 tan𝜑0 [4(𝑁 − 𝜌) − 𝑁]
(𝑁4 cos 𝜑0)2
𝑢′ =𝑁3[𝑁 sec2 𝜑0 cos 𝜑0 − sin𝜑0 tan𝜑0 (3𝑁 − 4𝜌)]
(𝑁4 cos 𝜑0)2
𝑢′ =𝑁 sec2 𝜑0 cos 𝜑0 − sin𝜑0 tan𝜑0 (3𝑁 − 4𝜌)
𝑁5 cos2 𝜑0
𝑢′ = (1
𝑁5 cos2 𝜑0) [𝑁(1 + tan2 𝜑0) − tan
2 𝜑0 (3𝑁 − 4𝜌)]
𝑢′ =𝑁 − 2𝑁 tan2 𝜑0 + 4𝜌 tan
2 𝜑0𝑁5 cos2 𝜑0
Para 𝑣′
𝑣′ = 4 {2 (𝑁
𝜌) [−2 (
𝑁 − 𝜌
𝜌) tan𝜑0]} − 9 [−2 (
𝑁 − 𝜌
𝜌) tan𝜑0]
− 6(2 tan𝜑0 sec2 𝜑0)
𝑣′ = −16 (𝑁
𝜌) (𝑁
𝜌− 1) tan𝜑0 + 18 (
𝑁
𝜌− 1) tan𝜑0 − 12 tan𝜑0 sec
2 𝜑0
𝑣′ = 2 tan𝜑0 [−8 (𝑁
𝜌) (𝑁
𝜌− 1) + 9 (
𝑁
𝜌− 1) − 6(1 + tan2 𝜑0)]
𝑣′ = 2 tan𝜑0 [−8 (𝑁
𝜌)2
+ 8(𝑁
𝜌) + 9 (
𝑁
𝜌) − 9 − 6 − 6 tan2 𝜑0]

VI. ANEXOS.
366
𝑣′ = 2 tan𝜑0 [−8 (𝑁
𝜌)2
+ 17 (𝑁
𝜌) + 9 (
𝑁
𝜌) − 6 tan2 𝜑0 − 15]
Sustituyendo.
[𝑑𝐹4(𝑦)
𝑑𝜑0]
′
= −
{
(
𝑁 − 2𝑁 tan2 𝜑0 + 4𝜌 tan2 𝜑0
𝑁5 cos2 𝜑0) [4 (
𝑁
𝜌)2
− 9(𝑁
𝜌) − 6 tan2 𝜑0]
+2(tan2 𝜑0𝑁4 cos 𝜑0
) [−8 (𝑁
𝜌)2
+ 17(𝑁
𝜌) + 9 (
𝑁
𝜌) − 6 tan2 𝜑0 − 15]
}
[𝑑𝐹4(𝑦)
𝑑𝜑0]
′
= −1
𝑁5 cos 𝜑0
{
(𝑁 − 2𝑁 tan2 𝜑0 + 4𝜌 tan
2 𝜑0) [4 (𝑁
𝜌)2
− 9(𝑁
𝜌) − 6 tan2 𝜑0]
+2𝑁 tan2 𝜑0 [−8 (𝑁
𝜌)2
+ 17 (𝑁
𝜌) + 9 (
𝑁
𝜌) − 6 tan2 𝜑0 − 15]
}
Multiplicando por 𝑑𝜑0
𝑑𝑦.
𝐹5(𝑦) = [𝑑𝐹4(𝑦)
𝑑𝜑0]
′
∙𝑑𝜑0𝑑𝑦
𝐹5(𝑦) =
−1
𝑁5 cos𝜑0
{
(
𝑁
𝜌− 2
𝑁
𝜌tan2 𝜑0 + 4 tan
2 𝜑0) [4 (𝑁
𝜌)2
− 9𝑁
𝜌− 6 tan2 𝜑0]
+2 (𝑁
𝜌) tan2 𝜑0 [−8 (
𝑁
𝜌)2
+ 17 (𝑁
𝜌) + 9 (
𝑁
𝜌) − 6 tan2 𝜑0 − 15]
}
∙ (1
𝜌)

VI. ANEXOS.
367
𝐹5(𝑦)
= −1
𝑁5 cos 𝜑0
[ 4 (
𝑁
𝜌)3
− 9(𝑁
𝜌)2
− 8(𝑁
𝜌)3
tan2 𝜑0 + 34 (𝑁
𝜌)2
tan2 𝜑0
−42 (𝑁
𝜌) tan2 𝜑0 + 12 (
𝑁
𝜌) tan4 𝜑0 − 24 tan
4 𝜑0 − 16 (𝑁
𝜌)3
tan2𝜑0
+34(𝑁
𝜌)3
tan2 𝜑0 − 30 (𝑁
𝜌) tan2 𝜑0 − 12 (
𝑁
𝜌) tan4 𝜑0 ]
𝐹5(𝑦) = −1
𝑁5 cos 𝜑0
[ 4 (
𝑁
𝜌)3
− 9(𝑁
𝜌)2
− 24 tan4 𝜑0
−24 (𝑁
𝜌)3
tan2 𝜑0 + 68 (𝑁
𝜌)2
tan2 𝜑0 − 72 (𝑁
𝜌) tan2 𝜑0]
Efectuando el cambio de variable
𝐹5(𝑦) = −1
𝑁5 cos 𝜑0[
4(1 + 𝜂2)3 − 9(1 + 𝜂2)2 − 24𝑡4
−24(1 + 𝜂2)3𝑡2 + 68(1 + 𝜂2)2𝑡2 − 72(1 + 𝜂2)𝑡2]
𝐹5(𝑦) = −1
𝑁5 cos 𝜑0[
4(1 + 𝜂2)3 − 9(1 + 𝜂2)2 − 24𝑡4
−24(1 + 𝜂2)3𝑡2 + 68(1 + 𝜂2)2𝑡2 − 72(1 + 𝜂2)𝑡2]
𝐹5(𝑦) = −1
𝑁5 cos 𝜑0[
4(1 + 3𝜂2 + 3𝜂4 + 𝜂6) − 9(1 + 2𝜂2 + 𝜂4)
−24𝑡2(1 + 3𝜂2 + 3𝜂4 + 𝜂6) + 68𝑡2(1 + 2𝜂2 + 𝜂4)
−72𝑡2(1 + 𝜂2) − 24𝑡4]
𝑭𝟓(𝒚) =𝟏
𝑵𝟓 𝐜𝐨𝐬𝝋𝟎∙ [𝟓 + 𝟐𝟖𝒕𝟐 + 𝟐𝟒𝒕𝟒 + 𝟔𝜼𝟐 + 𝟖𝜼𝟐𝒕𝟐
−𝟑𝜼𝟒 + 𝟒𝜼𝟒𝒕𝟐 − 𝟒𝜼𝟔 + 𝟐𝟒𝜼𝟔𝒕𝟐]
Debido al extenso proceso algebraico, para las derivadas restantes solo se
mostrara el resultado final.
𝑭𝟔(𝒚) =𝒕
𝑵𝟔 𝐜𝐨𝐬𝝋𝟎∙ [
𝟔𝟏 + 𝟏𝟖𝟎𝒕𝟐 + 𝟏𝟐𝟎𝒕𝟒 + 𝟒𝟔𝜼𝟐 + 𝟒𝟖𝜼𝟐𝒕𝟐 − 𝟑𝜼𝟒
−𝟑𝟔𝜼𝟒𝒕𝟐 + 𝟏𝟎𝟎𝜼𝟔 − 𝟗𝟔𝜼𝟔𝒕𝟐 + 𝟖𝟖𝜼𝟖 − 𝟏𝟗𝟐𝜼𝟖𝒕𝟐]

VI. ANEXOS.
368
𝑭𝟕(𝒚) =𝟏
𝑵𝟕 𝐜𝐨𝐬𝝋𝟎∙
[ 𝟔𝟏 + 𝟔𝟔𝟐𝒕𝟐 + 𝟏𝟑𝟐𝟎𝒕𝟒 + 𝟕𝟐𝟎𝒕𝟔 + 𝟏𝟎𝟕𝜼𝟐 + 𝟒𝟒𝟎𝜼𝟐𝒕𝟐
+𝟑𝟑𝟔𝜼𝟐𝒕𝟒 + 𝟒𝟑𝜼𝟒 − 𝟐𝟑𝟒𝜼𝟒𝒕𝟐 − 𝟏𝟗𝟐𝜼𝟒𝒕𝟒 + 𝟗𝟕𝜼𝟔
−𝟕𝟕𝟐𝜼𝟔𝒕𝟐 + 𝟒𝟎𝟖𝜼𝟔𝒕𝟒 + 𝟏𝟖𝟖𝜼𝟖 − 𝟐𝟑𝟗𝟐𝜼𝟖𝒕𝟐
+𝟏𝟓𝟑𝟔𝜼𝟖𝒕𝟒 + 𝟖𝟖𝜼𝟏𝟎 − 𝟏𝟔𝟑𝟐𝜼𝟏𝟎𝒕𝟐 + 𝟏𝟗𝟐𝟎𝜼𝟏𝟎𝒕𝟒 ]
𝑭𝑽𝑰𝑰𝑰(𝒚) =𝒕
𝑵𝟖 𝐜𝐨𝐬𝝋𝟎∙
[ 𝟏𝟑𝟖𝟓 + 𝟕𝟐𝟔𝟔𝒕𝟐 + 𝟏𝟎𝟗𝟐𝟎𝒕𝟒 + 𝟓𝟎𝟒𝟎𝒕𝟔 + 𝟏𝟕𝟑𝟏𝜼𝟐
+𝟒𝟒𝟏𝟔𝜼𝟐𝒕𝟐 + 𝟐𝟔𝟖𝟖𝜼𝟐𝒕𝟒 − 𝟓𝟕𝟑𝜼𝟒 − 𝟏𝟖𝟑𝟎𝜼𝟒𝒕𝟐
−𝟏𝟓𝟑𝟔𝜼𝟒𝒕𝟒 − 𝟐𝟗𝟐𝟕𝜼𝟔 + 𝟓𝟎𝟓𝟐𝜼𝟔𝒕𝟐 + 𝟕𝟒𝟒𝜼𝟔𝒕𝟒
−𝟖𝟖𝟎𝟖𝜼𝟖 + 𝟐𝟕𝟒𝟓𝟔𝜼𝟖𝒕𝟐 − 𝟕𝟖𝟕𝟐𝜼𝟖𝒕𝟒 − 𝟏𝟏𝟒𝟕𝟐𝜼𝟏𝟎
+𝟓𝟑𝟗𝟓𝟐𝜼𝟏𝟎𝒕𝟐 − 𝟐𝟒𝟗𝟔𝟎𝜼𝟏𝟎𝒕𝟒 − 𝟒𝟔𝟕𝟐𝜼𝟏𝟐
+𝟑𝟎𝟓𝟐𝟖𝜼𝟏𝟐𝒕𝟐 − 𝟐𝟑𝟎𝟒𝟎𝜼𝟏𝟐𝒕𝟒 ]
6.4.4 Derivadas de orden superior de 𝐅(𝚽) para el proceso
inverso.
Aplicando las fórmulas de derivación de Thomas, se tiene lo siguiente.
Segunda derivada de F(Φ).
𝐹′′(Φ) =𝑑𝐹′(Φ)
𝑑𝜑∙𝑑𝜑
𝑑Φ
Derivando 𝐹′(Φ).
𝑑𝐹′(Φ)
𝑑𝜑= [(
𝑁
𝜌) cos 𝜑]
′
𝑑𝐹′(Φ)
𝑑𝜑= −2(
𝑁 − 𝜌
𝜌) tan𝜑 cos𝜑 − (
𝑁
𝜌) sin 𝜑 = −sin 𝜑 [2 (
𝑁
𝜌− 1) +
𝑁
𝜌]
𝑑𝐹′(Φ)
𝑑𝜑= −sin𝜑 [3 (
𝑁
𝜌) − 2]

VI. ANEXOS.
369
Multiplicando por 𝑑𝜑
𝑑Φ.
𝐹′′(Φ) = {− sin 𝜑 [3 (𝑁
𝜌) − 2]} [(
𝑁
𝜌) cos 𝜑] = − [3 (
𝑁
𝜌)2
− 2(𝑁
𝜌)] sin 𝜑 cos 𝜑
Efectuando el cambio de variable.
𝐹′′(Φ) = −[3(1 + 𝜂2)2 − 2(1 + 𝜂2)] sin 𝜑 cos 𝜑
𝑭′′(𝚽) = −[𝟏 + 𝟒𝜼𝟐 + 𝟑𝜼𝟒] 𝐬𝐢𝐧𝝋 𝐜𝐨𝐬𝝋
Tercera derivada de F(Φ).
𝐹′′′(Φ) =𝑑𝐹′′(Φ)
𝑑𝜑∙𝑑𝜑
𝑑Φ
Derivando.
𝑑𝐹′′(Φ)
𝑑𝜑= −{[3 (
𝑁
𝜌)2
− 2(𝑁
𝜌)] sin 𝜑 cos𝜑}
′
𝑑𝐹′′(Φ)
𝑑𝜑= 𝑢′𝑣𝑤 + 𝑢𝑣′𝑤 + 𝑢𝑣𝑤′
Siendo.
𝑢 = [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] 𝑣 = sin 𝜑 𝑤 = cos𝜑
𝑢′ = 3 ∙ 2 (𝑁
𝜌) [−2 (
𝑁 − 𝜌
𝜌) tan𝜑] − 2 [−2(
𝑁 − 𝜌
𝜌) tan𝜑]
𝑢′ = −12 (𝑁
𝜌) (𝑁
𝜌− 1) tan𝜑 + 4 (
𝑁
𝜌− 1) tan𝜑

VI. ANEXOS.
370
𝑢′ = [−12 (𝑁
𝜌)2
+ 12 (𝑁
𝜌) + 4 (
𝑁
𝜌) − 4] tan𝜑
𝑢′ = [−12 (𝑁
𝜌)2
+ 16 (𝑁
𝜌) − 4] tan𝜑 𝑣′ = cos𝜑 𝑤′ = −sin 𝜑
Sustituyendo.
𝑑𝐹′′(Φ)
𝑑𝜑= −
{
[−12(
𝑁
𝜌)2
+ 16 (𝑁
𝜌) − 4] tan𝜑 sin 𝜑 cos 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] cos 𝜑 cos 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] sin 𝜑 sin 𝜑
}
𝑑𝐹′′(Φ)
𝑑𝜑= −
{
[−12 (
𝑁
𝜌)2
+ 16 (𝑁
𝜌) − 4] sin2 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] cos2 𝜑
− [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] sin2 𝜑
}
𝑑𝐹′′(Φ)
𝑑𝜑= −
{
[−12 (
𝑁
𝜌)2
+ 16 (𝑁
𝜌) − 4 − 3 (
𝑁
𝜌)2
+ 2(𝑁
𝜌)] sin2 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] cos2 𝜑
}
𝑑𝐹′′(Φ)
𝑑𝜑= −{[−15 (
𝑁
𝜌)2
+ 18 (𝑁
𝜌) − 4] sin2 𝜑 + [3 (
𝑁
𝜌)2
− 2(𝑁
𝜌)] cos2 𝜑}
Racionalizando.
𝑑𝐹′′(Φ)
𝑑𝜑= −
{
[−15 (
𝑁
𝜌)2
+ 18 (𝑁
𝜌) − 4] sin2 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] cos2 𝜑
}
(cos2 𝜑
cos2 𝜑)

VI. ANEXOS.
371
𝑑𝐹′′(Φ)
𝑑𝜑= −
{
[−15 (
𝑁
𝜌)2
+ 18 (𝑁
𝜌) − 4] tan2 𝜑 cos2 𝜑
+ [3 (𝑁
𝜌)2
− 2(𝑁
𝜌)] cos2 𝜑
}
𝑑𝐹′′(Φ)
𝑑𝜑= −cos2 𝜑 {[−15 (
𝑁
𝜌)2
+ 18 (𝑁
𝜌) − 4] tan2 𝜑 + 3(
𝑁
𝜌)2
− 2(𝑁
𝜌)}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝐹′′′(Φ) = − cos2 𝜑
{
[−15 (
𝑁
𝜌)2
+ 18 (𝑁
𝜌) − 4] tan2 𝜑
+3(𝑁
𝜌)2
− 2(𝑁
𝜌)
}
[(𝑁
𝜌) cos 𝜑]
𝐹′′′(Φ) = − cos3 𝜑
[ −15 (
𝑁
𝜌)3
tan2 𝜑 + 18 (𝑁
𝜌)2
tan2 𝜑
−4(𝑁
𝜌) tan2 𝜑 + 3(
𝑁
𝜌)3
− 2(𝑁
𝜌)2
]
Efectuando el cambio de variable.
𝐹′′′(Φ) = − cos3 𝜑 [−15𝑡2(1 + 𝜂2)3 + 18𝑡2(1 + 𝜂2)2
−4𝑡2(1 + 𝜂2) + 3(1 + 𝜂2)3 − 2(1 + 𝜂2)2]
𝐹′′′(Φ) = − cos3 𝜑 [
−15𝑡2 − 45𝜂2𝑡2 − 45𝜂4𝑡2 − 15𝜂6𝑡2 + 18𝑡2
+36𝜂2𝑡2 + 18𝜂4𝑡2 − 4𝑡2 − 4𝜂2𝑡2 + 3
+9𝜂2 + 9𝜂4 + 3𝜂6 − 2 − 4𝜂2 − 2𝜂4]
𝑭′′′(𝚽) = − [𝟏 − 𝒕𝟐 + 𝟓𝜼𝟐 − 𝟏𝟑𝜼𝟐𝒕𝟐 + 𝟕𝜼𝟒
−𝟐𝟕𝜼𝟒𝒕𝟐 + 𝟑𝜼𝟔 − 𝟏𝟓𝜼𝟔𝒕𝟐] 𝐜𝐨𝐬𝟑𝝋

VI. ANEXOS.
372
6.5 Desarrollo de las Doce Derivadas Consecutivas para la
Representación GK.
6.5.1 Derivadas de orden superior para el proceso directo.
Para 𝒇′(𝚽).
𝑓(Φ) = 𝑆 = ∫ 𝜌 𝑑𝜑𝜑
0
Derivando 𝑓(Φ).
𝑑[𝑓(Φ)]
𝑑𝜑= 𝜌
𝑓′(Φ) = {𝑑[𝑓(Φ)]
𝑑𝜑}
′
=𝑑[𝑓(Φ)]
𝑑𝜑∙𝑑𝜑
𝑑Φ
Dónde.
𝑑𝜑
𝑑Φ=𝑟
𝜌
Sustituyendo.
𝑓′(Φ) = 𝜌 ∙𝑟
𝜌= 𝑟
𝒇′(𝚽) = 𝑵𝐜𝐨𝐬𝝋
Para 𝒇′′(𝚽).
𝑓′(Φ) = 𝑁 cos𝜑

VI. ANEXOS.
373
Derivando.
[𝑓′(Φ)]′ = (𝑁 cos𝜑)′
[𝑓′(Φ)]′ = 𝜂2𝜌𝑡 ∙ cos 𝜑 + 𝑁(−𝑡 cos 𝜑)
[𝑓′(Φ)]′ = cos 𝜑 (𝜂2𝑡𝜌 − 𝑁𝑡)
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓′′(Φ) = [𝑓′(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓′′(Φ) = cos𝜑 (𝜂2𝑡𝜌 − 𝑁𝑡) ∙ (𝑁 cos 𝜑
𝜌) = 𝑁 cos2 𝜑 [
(𝜂2𝜌𝑡 − 𝑁𝑡)
𝜌]
𝑓′′(Φ) = 𝑁 cos2 𝜑 (𝜂2𝑡 −𝑁
𝜌𝑡) = 𝑁 cos2 𝜑 [𝜂2𝑡 − (1 + 𝜂2)𝑡]
𝑓′′(Φ) = 𝑁 cos2 𝜑 [𝜂2𝑡 − 𝑡 − 𝜂2𝑡]
𝒇′′(𝚽) = −𝑵𝒕 𝐜𝐨𝐬𝟐𝝋
Para 𝒇′′′(𝚽).
Derivando.
[𝑓′′(Φ)]′ = (−𝑁𝑡 cos2 𝜑)′
[𝑓′′(Φ)]′ = −[(𝜂2𝑡𝜌)𝑡 cos2 𝜑 + 𝑁(𝑡2 + 1) cos2 𝜑 + 𝑁𝑡(−2𝑡 cos2 𝜑)]
[𝑓′′(Φ)]′ = − cos2 𝜑 [𝜂2𝑡2𝜌 + 𝑁(𝑡2 + 1) − 2𝑁𝑡2]
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓′′′(Φ) = [𝑓′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓′′′(Φ) = {− cos2 𝜑 [𝜂2𝑡2𝜌 + 𝑁(𝑡2 + 1) − 2𝑁𝑡2]} ∙ (𝑁 cos 𝜑
𝜌)

VI. ANEXOS.
374
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2𝜌 + 𝑁(𝑡2 + 1) − 2𝑁𝑡2
𝜌]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2 +𝑁
𝜌(𝑡2 + 1) − 2
𝑁
𝜌𝑡2]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2 + (1 + 𝜂2)(𝑡2 + 1) − 2(1 + 𝜂2)𝑡2]
𝑓′′′(Φ) = −𝑁 cos3 𝜑 [𝜂2𝑡2 + 𝑡2 + 1 + 𝜂2𝑡2 + 𝜂2 − 2𝑡2 − 2𝜂2𝑡2]
𝒇′′′(𝚽) = −𝑵𝐜𝐨𝐬𝟑𝝋 [𝟏 + 𝜼𝟐 − 𝒕𝟐]
Para 𝒇𝐈𝐕(𝚽).
Derivando.
[𝑓′′′(Φ)]′ = [−𝑁 cos3 𝜑 (1 + 𝜂2 − 𝑡2)]′
[𝑓′′′(Φ)]′ = − {𝜂2𝑡𝜌 ∙ cos3 𝜑 (1 + 𝜂2 − 𝑡2) + 𝑁(−3𝑡 cos3 𝜑)(1 + 𝜂2 − 𝑡2)
+𝑁 cos3 𝜑 [−2𝜂2𝑡 − (2𝑡3 + 2𝑡)]}
[𝑓′′′(Φ)]′ = − cos3 𝜑 {𝜂2𝑡𝜌(1 + 𝜂2 − 𝑡2) − 3𝑁𝑡(1 + 𝜂2 − 𝑡2)
+𝑁[−2𝜂2𝑡 − 2𝑡3 − 2𝑡]}
[𝑓′′′(Φ)]′ = − cos3 𝜑 {𝜂2𝑡𝜌(1 + 𝜂2 − 𝑡2) − 𝑁(3𝑡 + 3𝜂2𝑡 − 3𝑡3)
+𝑁[−2𝜂2𝑡 − 2𝑡3 − 2𝑡]}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓IV(Φ) = [𝑓′′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓𝐼𝑉(Φ) = − cos3 𝜑 [𝜂2𝑡𝜌(1 + 𝜂2 − 𝑡2) − 𝑁(3𝑡 + 3𝜂2𝑡 − 3𝑡3)
+𝑁(−2𝜂2𝑡 − 2𝑡3 − 2𝑡)] ∙ (
𝑁 cos 𝜑
𝜌)
𝑓IV(Φ) = −𝑁 cos4 𝜑
[ 𝜂2𝑡𝜌(1 + 𝜂2 − 𝑡2)
𝜌−𝑁(3𝑡 + 3𝜂2𝑡 − 3𝑡3)
𝜌
+𝑁(−2𝜂2𝑡 − 2𝑡3 − 2𝑡)
𝜌 ]

VI. ANEXOS.
375
𝑓IV(Φ) = −𝑁 cos4 𝜑
[ 𝜂2𝑡(1 + 𝜂2 − 𝑡2) −
𝑁
𝜌(3𝑡 + 3𝜂2𝑡 − 3𝑡3)
+𝑁
𝜌(−2𝜂2𝑡 − 2𝑡3 − 2𝑡)
]
𝑓IV(Φ) = −𝑁 cos4 𝜑 [𝜂2𝑡(1 + 𝜂2 − 𝑡2) − (1 + 𝜂2)(3𝑡 + 3𝜂2𝑡 − 3𝑡3)
+(1 + 𝜂2)(−2𝜂2𝑡 − 2𝑡3 − 2𝑡)]
𝑓𝐼𝑉(Φ) = −𝑁 cos4 𝜑 [
𝜂2𝑡 + 𝜂4𝑡 − 𝜂2𝑡3
−3𝑡 − 6𝜂2𝑡 + 3𝑡3 − 3𝜂4𝑡 + 3𝜂2𝑡3
−4𝜂2𝑡 − 2𝑡3 − 2𝑡 − 2𝜂4𝑡 − 2𝜂2𝑡3]
𝑓IV(Φ) = −𝑁 cos4 𝜑 [
(−2𝑡 − 3𝑡) + (3𝑡3 − 2𝑡3)
+(𝜂2𝑡 − 6𝜂2𝑡 − 4𝜂2𝑡) + (3𝜂2𝑡3 − 2𝜂2𝑡3 − 𝜂2𝑡3)
+(𝜂4𝑡 − 3𝜂4𝑡 − 2𝜂4𝑡)
]
𝑓𝐼𝑉(Φ) = −𝑁 cos4 𝜑 [−5𝑡 + 𝑡3 − 9𝜂2𝑡 − 4𝜂4𝑡]
𝒇𝐈𝐕(𝚽) = 𝑵𝒕 𝐜𝐨𝐬𝟒𝝋 [𝟓 − 𝒕𝟐 + 𝟗𝜼𝟐 + 𝟒𝜼𝟒]
Para facilitar el proceso de derivación a partir de la sexta derivada el
proceso se realizara por partes.
Para 𝒇𝐕(𝚽).
𝑓IV(Φ) = 𝑁𝑡 cos4 𝜑 [5 − 𝑡2 + 9𝜂2 + 4𝜂4] = 𝑁 cos4 𝜑 [5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡]
Siendo.
𝑢 = 𝑁, 𝑣 = cos4 𝜑 , 𝑤 = 5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡
Derivando por partes.
[𝑓IV(Φ)]′ = [𝑁 cos4 𝜑 (5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡)]′
[𝑓IV(Φ)]′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −4𝑡 cos4 𝜑

VI. ANEXOS.
376
𝑤′ = 5(𝑡2 + 1) − (3𝑡4 + 3𝑡2) + 9[−2𝜂2𝑡 ∙ 𝑡 + 𝜂2(𝑡2 + 1)]
+ 4[−4𝜂4𝑡 ∙ 𝑡 + 𝜂4(𝑡2 + 1)]
𝑤′ = 5𝑡2 + 5 − 3𝑡4 − 3𝑡2 + 9[−2𝜂2𝑡2 + 𝜂2𝑡2 + 𝜂2] + 4[−4𝜂4𝑡2 + 𝜂4𝑡2 + 𝜂4]
𝑤′ = 5 + 2𝑡2 − 3𝑡4 + 9[−𝜂2𝑡2 + 𝜂2] + 4[−3𝜂4𝑡2 + 𝜂4]
𝑤′ = 5 + 2𝑡2 − 3𝑡4 − 9𝜂2𝑡2 + 9𝜂2 − 12𝜂4𝑡2 + 4𝜂4
𝑤′ = (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
Sustituyendo.
[𝑓IV(Φ)]′ =
𝜂2𝑡𝜌 ∙ cos4 𝜑 (5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡)
+𝑁(−4𝑡 cos4 𝜑)(5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡)
+𝑁 cos4 𝜑 (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
[𝑓IV(Φ)]′ = cos4 𝜑
[ 𝜂2𝑡𝜌(5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡)
−4𝑁𝑡(5𝑡 − 𝑡3 + 9𝜂2𝑡 + 4𝜂4𝑡)
+𝑁 (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)]
[𝑓IV(Φ)]′ = cos4 𝜑
[ 𝜌(5𝜂2𝑡2 − 𝜂2𝑡4 + 9𝜂4𝑡2 + 4𝜂6𝑡2)
−𝑁(20𝑡2 − 4𝑡4 + 36𝜂2𝑡2 + 16𝜂4𝑡2)
+𝑁 (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
]
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓V(Φ) = [𝑓𝐼𝑉(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓V(Φ) = cos4 𝜑
[ 𝜌(5𝜂2𝑡2 − 𝜂2𝑡4 + 9𝜂4𝑡2 + 4𝜂6𝑡2)
−𝑁(20𝑡2 − 4𝑡4 + 36𝜂2𝑡2 + 16𝜂4𝑡2)
+𝑁 (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
]
∙ (𝑁 cos 𝜑
𝜌)

VI. ANEXOS.
377
𝑓V(Φ) = 𝑁 cos5 𝜑
[ 𝜌
𝜌(5𝜂2𝑡2 − 𝜂2𝑡4 + 9𝜂4𝑡2 + 4𝜂6𝑡2)
−𝑁
𝜌(20𝑡2 − 4𝑡4 + 36𝜂2𝑡2 + 16𝜂4𝑡2)
+𝑁
𝜌(5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
]
𝑓V(Φ) = 𝑁 cos5 𝜑
[
5𝜂2𝑡2 − 𝜂2𝑡4 + 9𝜂4𝑡2 + 4𝜂6𝑡2
−(1 + 𝜂2)(20𝑡2 − 4𝑡4 + 36𝜂2𝑡2 + 16𝜂4𝑡2)
+(1 + 𝜂2) (5 + 2𝑡2 − 3𝑡4 + 9𝜂2
+4𝜂4 − 9𝜂2𝑡2 − 12𝜂4𝑡2)
]
𝑓V(Φ) = 𝑁 cos5 𝜑
[
5𝜂2𝑡2 − 𝜂2𝑡4 + 9𝜂4𝑡2 + 4𝜂6𝑡2
−20𝑡2 − 56𝜂2𝑡2 + 4𝑡4 + 4𝜂2𝑡4 − 52𝜂4𝑡2 − 16𝜂6𝑡2
5 + 14𝜂2 + 2𝑡2 − 7𝜂2𝑡2 − 3𝑡4 − 3𝜂2𝑡4 + 4𝜂6
−21𝜂4𝑡2 + 13𝜂4 − 12𝜂6𝑡2 ]
𝑓V(Φ) = 𝑁 cos5 𝜑
[
5 + (−20𝑡2 + 2𝑡2) + (4𝑡4 − 3𝑡4)
+14𝜂2 + 13𝜂4 + 4𝜂6
+(5𝜂2𝑡2 − 56𝜂2𝑡2 − 7𝜂2𝑡2) + (4𝜂2𝑡4 − 3𝜂2𝑡4 − 𝜂2𝑡4)
+(9𝜂4𝑡2 − 52𝜂4𝑡2 − 21𝜂4𝑡2) + (4𝜂6𝑡2 − 16𝜂6𝑡2 − 12𝜂6𝑡2)]
𝑓V(Φ) = 𝑁 cos5 𝜑 [5 − 18𝑡2 + 𝑡4 + 14𝜂2 + 13𝜂4 + 4𝜂6
−58𝜂2𝑡2 − 64𝜂4𝑡2 − 24𝜂6𝑡2]
𝒇𝐕(𝚽) = 𝑵𝐜𝐨𝐬𝟓𝝋[𝟓 − 𝟏𝟖𝒕𝟐 + 𝒕𝟒 + 𝟐𝜼𝟐(𝟕 − 𝟐𝟗𝒕𝟐)
+𝜼𝟒(𝟏𝟑 − 𝟔𝟒𝒕𝟐) + 𝟒𝜼𝟔(𝟏 − 𝟔𝒕𝟐)]
Para 𝒇𝐕𝐈(𝚽).
[𝑓V(Φ)]′ = 𝑁 cos5 𝜑 [5 − 18𝑡2 + 𝑡4 + 2𝜂2(7 − 29𝑡2)
+𝜂4(13 − 64𝑡2) + 4𝜂6(1 − 6𝑡2)]′
[𝑓V(Φ)]′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′
Siendo.
𝑢 = 𝑁, 𝑣 = cos5 𝜑 , 𝑤 = [5 − 18𝑡2 + 𝑡4 + 2𝜂2(7 − 29𝑡2)
+𝜂4(13 − 64𝑡2) + 4𝜂6(1 − 6𝑡2)]

VI. ANEXOS.
378
Derivando por partes.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −5𝑡 cos5 𝜑,
𝑤′ =
{
−18(2𝑡3 + 2𝑡) + 4𝑡5 + 4𝑡3
+[2(−2𝜂2𝑡)(7 − 29𝑡2) + 2𝜂2(−29(2𝑡3 + 2𝑡))]
+[−4𝜂4𝑡(13 − 64𝑡2) + 𝜂4(−64(2𝑡3 + 2𝑡))]
+[4(−6𝜂6𝑡)(1 − 6𝑡2) + 4𝜂6(−6(2𝑡3 + 2𝑡))] }
𝑤′ =
{
−36𝑡3 − 36𝑡 + 4𝑡5 + 4𝑡3
+[−28𝜂2𝑡 + 116𝜂2𝑡3 − 116𝜂2𝑡3 − 116𝜂2𝑡]
+[−52𝜂4𝑡 + 256𝜂4𝑡3 − 128𝜂4𝑡3 − 128𝜂4𝑡]
+[−24𝜂6𝑡 + 144𝜂6𝑡3 + −48𝜂6𝑡3 − 48𝜂6𝑡] }
𝑤′ = [−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3]
Sustituyendo.
[𝑓V(Φ)]′ =
{
𝜂2𝑡𝜌 ∙ cos5 𝜑 [
5 − 18𝑡2 + 𝑡4 + 2𝜂2(7 − 29𝑡2)
+𝜂4(13 − 64𝑡2) + 4𝜂6(1 − 6𝑡2)]
+𝑁(−5𝑡 cos5 𝜑) [5 − 18𝑡2 + 𝑡4 + 2𝜂2(7 − 29𝑡2)
+𝜂4(13 − 64𝑡2) + 4𝜂6(1 − 6𝑡2)]
+𝑁 ∙ cos5 𝜑 [−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3]}
[𝑓V(Φ)]′ = cos5 𝜑
{
𝜌 [
5𝜂2𝑡 − 18𝜂2𝑡3 + 𝜂2𝑡5 + 14𝜂4𝑡 + 13𝜂6𝑡
+4𝜂8𝑡 − 58𝜂4𝑡3 − 64𝜂6𝑡3 − 24𝜂8𝑡3]
−𝑁 [25𝑡 − 90𝑡3 + 5𝑡5 + 70𝜂2𝑡 + 65𝜂4𝑡
+20𝜂6𝑡 − 290𝜂2𝑡3 − 320𝜂4𝑡3 − 120𝜂6𝑡3]
+𝑁 [−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3]}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓VI(Φ) = [𝑓𝑉(Φ)]′ ∙𝑑𝜑
𝑑Φ

VI. ANEXOS.
379
𝑓VI(Φ) = cos5 𝜑
{
𝜌 [
5𝜂2𝑡 − 18𝜂2𝑡3 + 𝜂2𝑡5 + 14𝜂4𝑡 + 13𝜂6𝑡
+4𝜂8𝑡 − 58𝜂4𝑡3 − 64𝜂6𝑡3 − 24𝜂8𝑡3]
−𝑁 [25𝑡 − 90𝑡3 + 5𝑡5 + 70𝜂2𝑡 + 65𝜂4𝑡
+20𝜂6𝑡 − 290𝜂2𝑡3 − 320𝜂4𝑡3 − 120𝜂6𝑡3]
+𝑁 [−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3]}
∙ (𝑁 cos𝜑
𝜌)
𝑓VI(Φ) = 𝑁 cos6 𝜑
{
𝜌
𝜌[5𝜂2𝑡 − 18𝜂2𝑡3 + 𝜂2𝑡5 + 14𝜂4𝑡 + 13𝜂6𝑡
+4𝜂8𝑡 − 58𝜂4𝑡3 − 64𝜂6𝑡3 − 24𝜂8𝑡3]
−𝑁
𝜌[
25𝑡 − 90𝑡3 + 5𝑡5 + 70𝜂2𝑡 + 65𝜂4𝑡
+20𝜂6𝑡 − 290𝜂2𝑡3 − 320𝜂4𝑡3 − 120𝜂6𝑡3]
+𝑁
𝜌[
−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3]}
𝑓VI(Φ) = 𝑁 cos6 𝜑
[ (
5𝜂2𝑡 − 18𝜂2𝑡3 + 𝜂2𝑡5 + 14𝜂4𝑡 + 13𝜂6𝑡
+4𝜂8𝑡 − 58𝜂4𝑡3 − 64𝜂6𝑡3 − 24𝜂8𝑡3)
−(1 + 𝜂2) (25𝑡 − 90𝑡3 + 5𝑡5 + 70𝜂2𝑡 + 65𝜂4𝑡
+20𝜂6𝑡 − 290𝜂2𝑡3 − 320𝜂4𝑡3 − 120𝜂6𝑡3)
+(1 + 𝜂2) (−36𝑡 − 32𝑡3 + 4𝑡5 − 144𝜂2𝑡
−180𝜂4𝑡 + 128𝜂4𝑡3 − 72𝜂6𝑡 + 96𝜂6𝑡3)]
𝑓VI(Φ) =
𝑁 cos6 𝜑
[ (
5𝜂2𝑡 − 18𝜂2𝑡3 + 𝜂2𝑡5 + 14𝜂4𝑡 + 13𝜂6𝑡
+4𝜂8𝑡 − 58𝜂4𝑡3 − 64𝜂6𝑡3 − 24𝜂8𝑡3)
+ (−25𝑡 − 5𝑡5 + 90𝑡3 − 95𝜂2𝑡 − 135𝜂4𝑡 − 85𝜂6𝑡 − 20𝜂8𝑡
+380𝜂2𝑡3 − 5𝜂2𝑡5 + 610𝜂4𝑡3 + 440𝜂6𝑡3 + 120𝜂8𝑡3)
+ (−36𝑡 − 32𝑡3 + 4𝑡5 − 180𝜂2𝑡 − 324𝜂4𝑡 − 252𝜂6𝑡 − 72𝜂8𝑡
−32𝜂2𝑡3 + 4𝜂2𝑡5 + 128𝜂4𝑡3 + 224𝜂6𝑡3 + 96𝜂8𝑡3)]
𝑓VI(Φ) =
𝑁 cos6 𝜑
[
(−25𝑡 − 36𝑡) + (90𝑡3 − 32𝑡3) + (4𝑡5 − 5𝑡5)
+(5𝜂2𝑡 − 95𝜂2𝑡 − 180𝜂2𝑡) + (−18𝜂2𝑡3 − 32𝜂2𝑡3 + 380𝜂2𝑡3)
+(𝜂2𝑡5 + 4𝜂2𝑡5 − 5𝜂2𝑡5) + (14𝜂4𝑡 − 135𝜂4𝑡 − 324𝜂4𝑡)
+(−58𝜂4𝑡3 + 128𝜂4𝑡3 + 610𝜂4𝑡3) + (13𝜂6𝑡 − 85𝜂6𝑡 − 252𝜂6𝑡)
+(−64𝜂6𝑡3 + 224𝜂6𝑡3 + 440𝜂6𝑡3) + (4𝜂8𝑡 − 20𝜂8𝑡 − 72𝜂8𝑡)
+(−24𝜂8𝑡3 + 96𝜂8𝑡3 + 120𝜂8𝑡3) ]
𝑓VI(Φ) = 𝑁 cos6 𝜑 [
−61𝑡 + 58𝑡3 − 𝑡5 − 270𝜂2𝑡 + 330𝜂2𝑡3
−445𝜂4𝑡 + 680𝜂4𝑡3 − 324𝜂6𝑡 + 600𝜂6𝑡3
−88𝜂8𝑡 + 192𝜂8𝑡3]

VI. ANEXOS.
380
𝑓VI(Φ) = −𝑁𝑡 cos6 𝜑 [
61 − 58𝑡2 + 𝑡4 + 270𝜂2 − 330𝜂2𝑡2
+445𝜂4 − 680𝜂4𝑡2 + 324𝜂6 − 600𝜂6𝑡2
+88𝜂8 − 192𝜂8𝑡2]
𝒇𝐕𝐈(𝚽) = −𝑵𝒕 𝐜𝐨𝐬𝟔𝝋[
𝟔𝟏 − 𝟓𝟖𝒕𝟐 + 𝒕𝟒 + 𝟑𝟎𝜼𝟐(𝟗 − 𝟏𝟏𝒕𝟐)
+𝟓𝜼𝟒(𝟖𝟗 − 𝟏𝟑𝟔𝒕𝟐) + 𝟏𝟐𝜼𝟔(𝟐𝟕 − 𝟓𝟎𝒕𝟐)
+𝟖𝜼𝟖(𝟏𝟏 − 𝟐𝟒𝒕𝟐)
]
Para 𝒇𝐕𝐈𝐈(𝚽).
[𝑓VI(Φ)]′ = {−𝑁𝑡 cos6 𝜑 [
61 − 58𝑡2 + 𝑡4 + 30𝜂2(9 − 11𝑡2)
+5𝜂4(89 − 136𝑡2) + 12𝜂6(27 − 50𝑡2)
+8𝜂8(11 − 24𝑡2)
]}
′
[𝑓VI(Φ)]′ = −{𝑁 cos6 𝜑 [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2(9 − 11𝑡2)
+5𝜂4(89𝑡 − 136𝑡3) + 12𝜂6(27𝑡 − 50𝑡3)
+8𝜂8(11𝑡 − 24𝑡3)
]}
′
[𝑓VI(Φ)]′ = −(𝑢 ∙ 𝑣 ∙ 𝑤) = −(𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′)
Siendo.
𝑢 = 𝑁, 𝑣 = cos6 𝜑 , 𝑤 = [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2(9𝑡 − 11𝑡3)
+5𝜂4(89𝑡 − 136𝑡3) + 12𝜂6(27𝑡 − 50𝑡3)
+8𝜂8(11𝑡 − 24𝑡3)
]
Derivando.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −6𝑡 cos6 𝜑,
𝑤′ =
{
61(𝑡2 + 1) − 58(3𝑡4 + 3𝑡2) + 5𝑡6 + 5𝑡4
+30[−2𝜂2𝑡(9𝑡 − 11𝑡3) + 𝜂2(9(𝑡2 + 1) − 11(3𝑡4 + 3𝑡2))]
+5[−4𝜂4𝑡 ∙ 𝑡(89𝑡 − 136𝑡3) + 𝜂4(89(𝑡2 + 1) − 136(3𝑡4 + 3𝑡2))]
+12[−6𝜂6𝑡(27𝑡 − 50𝑡3) + 𝜂6(27(𝑡2 + 1) − 50(3𝑡4 + 3𝑡2))]
+8[−8𝜂8𝑡(11𝑡 − 24𝑡3) + 𝜂8(11(𝑡2 + 1) − 24(3𝑡4 + 3𝑡2))] }

VI. ANEXOS.
381
𝑤′ = {61 − 113𝑡2−169𝑡4 + 5𝑡6
+30[9𝜂2 − 42𝜂2𝑡2 − 11𝜂2𝑡4] + 5[89𝜂4 − 675𝜂4𝑡2 + 136𝜂4𝑡4]
+12[27𝜂6 − 285𝜂6𝑡2 + 150𝜂6𝑡4] + 8[11𝜂8 − 149𝜂8𝑡2 + 15𝜂8𝑡4]}
𝑤′ =
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
Sustituyendo.
[𝑓VI(Φ)]′ = −
{
𝜂2𝑡𝜌 ∙ cos6 𝜑 [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2𝑡(9 − 11𝑡2)
+5𝜂4𝑡(89 − 136𝑡2) + 12𝜂6𝑡(27 − 50𝑡2)
+8𝜂8𝑡(11 − 24𝑡2)
]
+𝑁(−6𝑡 cos6 𝜑) [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2𝑡(9 − 11𝑡2)
+5𝜂4𝑡(89 − 136𝑡2) + 12𝜂6𝑡(27 − 50𝑡2)
+8𝜂8𝑡(11 − 24𝑡2)
]
+𝑁 ∙ cos6 𝜑
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}
[𝑓VI(Φ)]′ = −cos6 𝜑
{
𝜂2𝑡𝜌 [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2𝑡(9 − 11𝑡2)
+5𝜂4𝑡(89 − 136𝑡2) + 12𝜂6𝑡(27 − 50𝑡2)
+8𝜂8𝑡(11 − 24𝑡2)
]
−6𝑁𝑡 [
61𝑡 − 58𝑡3 + 𝑡5 + 30𝜂2𝑡(9 − 11𝑡2)
+5𝜂4𝑡(89 − 136𝑡2) + 12𝜂6𝑡(27 − 50𝑡2)
+8𝜂8𝑡(11 − 24𝑡2)
]
+𝑁
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}

VI. ANEXOS.
382
[𝑓VI(Φ)]′ = −cos6 𝜑
{
𝜌 [
61𝜂2𝑡2 − 58𝜂2𝑡4 + 𝜂2𝑡6 + 30𝜂4𝑡2(9 − 11𝑡2)
+5𝜂6𝑡2(89 − 136𝑡2) + 12𝜂8𝑡2(27 − 50𝑡2)
+8𝜂10𝑡2(11 − 24𝑡2)
]
−𝑁 [
366𝑡2 − 348𝑡4 + 6𝑡6 + 180𝜂2𝑡2(9 − 11𝑡2)
+30𝜂4𝑡2(89 − 136𝑡2) + 72𝜂6𝑡2(27 − 50𝑡2)
+48𝜂8𝑡2(11 − 24𝑡2)
]
+𝑁
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓VII(Φ) = [𝑓VI(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓VII(Φ) =
−cos6 𝜑
{
𝜌 [
61𝜂2𝑡2 − 58𝜂2𝑡4 + 𝜂2𝑡6 + 30𝜂4𝑡2(9 − 11𝑡2)
+5𝜂6𝑡2(89 − 136𝑡2) + 12𝜂8𝑡2(27 − 50𝑡2)
+8𝜂10𝑡2(11 − 24𝑡2)
]
−𝑁 [
366𝑡2 − 348𝑡4 + 6𝑡6 + 180𝜂2𝑡2(9 − 11𝑡2)
+30𝜂4𝑡2(89 − 136𝑡2) + 72𝜂6𝑡2(27 − 50𝑡2)
+48𝜂8𝑡2(11 − 24𝑡2)
]
+𝑁
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}
∙ (𝑁 cos𝜑
𝜌)

VI. ANEXOS.
383
𝑓VII(Φ) = −𝑁 cos7 𝜑
{
𝜌
𝜌[
61𝜂2𝑡2 − 58𝜂2𝑡4 + 𝜂2𝑡6 + 30𝜂4𝑡2(9 − 11𝑡2)
+5𝜂6𝑡2(89 − 136𝑡2) + 12𝜂8𝑡2(27 − 50𝑡2)
+8𝜂10𝑡2(11 − 24𝑡2)
]
−𝑁
𝜌[
366𝑡2 − 348𝑡4 + 6𝑡6 + 180𝜂2𝑡2(9 − 11𝑡2)
+30𝜂4𝑡2(89 − 136𝑡2) + 72𝜂6𝑡2(27 − 50𝑡2)
+48𝜂8𝑡2(11 − 24𝑡2)
]
+𝑁
𝜌
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}
𝑓VII(Φ) =
−𝑁 cos7 𝜑
{
[
61𝜂2𝑡2 − 58𝜂2𝑡4 + 𝜂2𝑡6 + 30𝜂4𝑡2(9 − 11𝑡2)
+5𝜂6𝑡2(89 − 136𝑡2) + 12𝜂8𝑡2(27 − 50𝑡2)
+8𝜂10𝑡2(11 − 24𝑡2)
]
−(1 + 𝜂2) [
366𝑡2 − 348𝑡4 + 6𝑡6 + 180𝜂2𝑡2(9 − 11𝑡2)
+30𝜂4𝑡2(89 − 136𝑡2) + 72𝜂6𝑡2(27 − 50𝑡2)
+48𝜂8𝑡2(11 − 24𝑡2)
]
+(1 + 𝜂2)
[
61 − 113𝑡2−169𝑡4 + 5𝑡6
+270𝜂2 − 1260𝜂2𝑡2 − 330𝜂2𝑡4 + 445𝜂4
−3375𝜂4𝑡2 + 680𝜂4𝑡4 + 324𝜂6 − 3420𝜂6𝑡2
+1800𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 120𝜂8𝑡4 ]
}
𝑓VII(Φ) = −𝑁 cos7 𝜑
{
[
61𝜂2𝑡2 − 58𝜂2𝑡4 + 𝜂2𝑡6 + 270𝜂4𝑡2 − 330𝜂4𝑡4
+445𝜂6𝑡2 − 680𝜂6𝑡4 + 324𝜂8𝑡2 − 600𝜂8𝑡4
+88𝜂10𝑡2 − 192𝜂10𝑡4]
+
[ −366𝑡2 + 348𝑡4 − 6𝑡6 − 1986𝜂2𝑡2 + 2328𝜂2𝑡4
−6𝜂2𝑡6 − 4290𝜂4𝑡2 + 6060𝜂4𝑡4 − 4614𝜂6𝑡2
+7680𝜂6𝑡4 − 2472𝜂8𝑡2 + 4752𝜂8𝑡4 − 528𝜂10𝑡2
− + 1152𝜂10𝑡4 ]
+
[ 61 − 113𝑡2 − 169𝑡4 + 5𝑡6 + 331𝜂2 − 1373𝜂2𝑡2
−499𝜂2𝑡4 + 5𝜂2𝑡6 + 715𝜂4 − 4635𝜂4𝑡2
+350𝜂4𝑡4 + 769𝜂6 − 6795𝜂6𝑡2 + 2480𝜂6𝑡4
+412𝜂8 − 4612𝜂8𝑡2 + 2760𝜂8𝑡4 + 88𝜂10
−1192𝜂10𝑡2 + 960𝜂10𝑡4 ]
}

VI. ANEXOS.
384
𝑓VII(Φ) =
−𝑁 cos7 𝜑
[
61 − (113𝑡2 + 366𝑡2) − (169𝑡4 − 348𝑡4) + (5𝑡6 − 6𝑡6)
+331𝜂2 + (61𝜂2𝑡2 − 1373𝜂2𝑡2 − 1986𝜂2𝑡2)
−(58𝜂2𝑡4 + 499𝜂2𝑡4 − 2328𝜂2𝑡4) + (𝜂2𝑡6 + 5𝜂2𝑡6 − 6𝜂2𝑡6)
+715𝜂4 + (270𝜂4𝑡2 − 4290𝜂4𝑡2 − 4635𝜂4𝑡2)
−(330𝜂4𝑡4 − 6060𝜂4𝑡4 − 350𝜂4𝑡4) + 769𝜂6
+(445𝜂6𝑡2 − 4614𝜂6𝑡2 − 6795𝜂6𝑡2) − (680𝜂6𝑡4 − 2480𝜂6𝑡4
−7680𝜂6𝑡4) + 412𝜂8 + (324𝜂8𝑡2 − 2472𝜂8𝑡2 − 4612𝜂8𝑡2)
−(600𝜂8𝑡4 − 4752𝜂8𝑡4 − 2760𝜂8𝑡4) + 88𝜂10 + (88𝜂10𝑡2
−528𝜂10𝑡2 − 1192𝜂10𝑡2) − (192𝜂10𝑡4 − 960𝜂10𝑡4 − 1152𝜂10𝑡4)]
𝑓VII(Φ) = −𝑁 cos7 𝜑
[ 61 − 479𝑡2 + 179𝑡4 − 𝑡6 + 331𝜂2 − 3298𝜂2𝑡2
+1771𝜂2𝑡4 + 715𝜂4 − 8655𝜂4𝑡2 + 6080𝜂4𝑡4
+769𝜂6 − 10964𝜂6𝑡2 + 9480𝜂6𝑡4 + 412𝜂8
−6760𝜂8𝑡2 + 6912𝜂8𝑡4 + 88𝜂10 − 1632𝜂10𝑡2
+1920𝜂10𝑡4 ]
𝒇𝐕𝐈𝐈(𝚽) = −𝑵𝐜𝐨𝐬𝟕𝝋
[
𝟔𝟏 − 𝟒𝟕𝟗𝒕𝟐 + 𝟏𝟕𝟗𝒕𝟒 − 𝒕𝟔
+𝜼𝟐(𝟑𝟑𝟏 − 𝟑𝟐𝟗𝟖𝒕𝟐 + 𝟏𝟕𝟕𝟏𝒕𝟒)
+𝟓𝜼𝟒(𝟏𝟒𝟑 − 𝟏𝟕𝟑𝟏𝒕𝟐 + 𝟏𝟐𝟏𝟔𝒕𝟒)
+𝜼𝟔(𝟕𝟔𝟗 − 𝟏𝟎𝟗𝟔𝟒𝒕𝟐 + 𝟗𝟒𝟖𝟎𝒕𝟒)
+𝟒𝜼𝟖(𝟏𝟎𝟑 − 𝟏𝟔𝟗𝟎𝒕𝟐 + 𝟏𝟕𝟐𝟖𝒕𝟒)
+𝟖𝜼𝟏𝟎(𝟏𝟏 − 𝟐𝟎𝟒𝒕𝟐 + 𝟐𝟒𝟎𝒕𝟒) ]
Para 𝒇𝐕𝐈𝐈𝐈(𝚽).
[𝑓VII(Φ)]′ =
{
−𝑁 cos7 𝜑
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4)
+5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4)
+4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
}
′

VI. ANEXOS.
385
[𝑓VII(Φ)]′ = −
{
𝑁 cos7 𝜑
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4)
+5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4)
+4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
}
′
[𝑓VII(Φ)]′ = −(𝑢 ∙ 𝑣 ∙ 𝑤) = −(𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′)
Siendo.
𝑢 = 𝑁, 𝑣 = cos7 𝜑 , 𝑤 =
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4)
+5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4)
+4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
Derivando.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −7𝑡 cos7 𝜑,
𝑤′ =
{
61 − 479(2𝑡3 + 2𝑡) + 179(4𝑡5 + 4𝑡3) − (6𝑡7 + 6𝑡5)
+[−2𝜂2𝑡(331 − 3298𝑡2 + 1771𝑡4) + 𝜂2(−3298(2𝑡3 + 2𝑡) + 1771(4𝑡5 + 4𝑡3))]
+5[−4𝜂4𝑡(143 − 1731𝑡2 + 1216𝑡4) + 𝜂4(−1731(2𝑡3 + 2𝑡) + 1216(4𝑡5 + 4𝑡3))]
+[−6𝜂6𝑡(769 − 10964𝑡2 + 9480𝑡4) + 𝜂6(−10964(2𝑡3 + 2𝑡) + 9480(4𝑡5 + 4𝑡3))]
+4[−8𝜂8𝑡(103 − 1690𝑡2 + 1728𝑡4) + 𝜂8(−1690(2𝑡3 + 2𝑡) + 1728(4𝑡5 + 4𝑡3))]
+8[−10𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) + 𝜂10(−204(2𝑡3 + 2𝑡) + 240(4𝑡5 + 4𝑡3))] }
𝑤′ =
{
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7
+[−662𝜂2𝑡 − 6596𝜂2𝑡 + 488𝜂2𝑡3 + 6596𝜂2𝑡3 + 7084𝜂2𝑡5 − 3542𝜂2𝑡5]
+5[−572𝜂4𝑡 − 3462𝜂4𝑡 + 1402𝜂4𝑡3 + 6924𝜂4𝑡3 + 4864𝜂4𝑡5 − 4864𝜂4𝑡5]
+[−4614𝜂6𝑡 − 21928𝜂6𝑡 + 15992𝜂6𝑡3 + 65784𝜂6𝑡3 + 37920𝜂6𝑡5 − 56880𝜂6𝑡5]
+4[−824𝜂8𝑡 − 3380𝜂8𝑡 + 3532𝜂8𝑡3 + 13520𝜂8𝑡3 + 6912𝜂8𝑡5 − 13824𝜂8𝑡5]
+8[−110𝜂10𝑡 − 408𝜂10𝑡 + 552𝜂10𝑡3 + 2040𝜂10𝑡3 + 960𝜂10𝑡5 − 2400𝜂10𝑡5] }

VI. ANEXOS.
386
𝑤′ =
{
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7
+[−7258𝜂2𝑡 + 7084𝜂2𝑡3 + 3542𝜂2𝑡5] + 5[−4034𝜂4𝑡 + 8326𝜂4𝑡3]
+[−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5]
+4[−4204𝜂8𝑡 + 17052𝜂8𝑡3 − 6912𝜂8𝑡5]
+8[−518𝜂10𝑡 + 2592𝜂10𝑡3 − 1440𝜂10𝑡5] }
𝑤′ =
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
Sustituyendo.
[𝑓VII(Φ)]′ =
−
{
𝜂2𝑡𝜌 cos7 𝜑
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4) + 5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4) + 4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
+𝑁(−7𝑡 cos7 𝜑)
[
61 − 479𝑡2 + 179𝑡4 − 𝑡6
+𝜂2(331 − 3298𝑡2 + 1771𝑡4) + 5𝜂4(143 − 1731𝑡2 + 1216𝑡4)
+𝜂6(769 − 10964𝑡2 + 9480𝑡4) + 4𝜂8(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
+𝑁 cos7 𝜑
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
}

VI. ANEXOS.
387
[𝑓VII(Φ)]′ =
−cos7 𝜑
{
𝜌
[
61𝜂2𝑡 − 479𝜂2𝑡3 + 179𝜂2𝑡5 − 𝜂2𝑡7
+𝜂4𝑡(331 − 3298𝑡2 + 1771𝑡4) + 5𝜂6𝑡(143 − 1731𝑡2 + 1216𝑡4)
+𝜂8𝑡(769 − 10964𝑡2 + 9480𝑡4) + 4𝜂10𝑡(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂12𝑡(11 − 204𝑡2 + 240𝑡4) ]
−𝑁
[
427𝑡 − 3353𝑡3 + 1253𝑡5 − 7𝑡7
+7𝜂2𝑡(331 − 3298𝑡2 + 1771𝑡4) + 35𝜂4𝑡(143 − 1731𝑡2 + 1216𝑡4)
+7𝜂6𝑡(769 − 10964𝑡2 + 9480𝑡4) + 28𝜂8𝑡(103 − 1690𝑡2 + 1728𝑡4)
+56𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
+𝑁
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓VIII(Φ) = [𝑓VII(Φ)]′ ∙𝑑𝜑
𝑑Φ
[𝑓VII(Φ)]′ =
−cos7 𝜑
{
𝜌
[
61𝜂2𝑡 − 479𝜂2𝑡3 + 179𝜂2𝑡5 − 𝜂2𝑡7
+𝜂4𝑡(331 − 3298𝑡2 + 1771𝑡4) + 5𝜂6𝑡(143 − 1731𝑡2 + 1216𝑡4)
+𝜂8𝑡(769 − 10964𝑡2 + 9480𝑡4) + 4𝜂10𝑡(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂12𝑡(11 − 204𝑡2 + 240𝑡4) ]
−𝑁
[
427𝑡 − 3353𝑡3 + 1253𝑡5 − 7𝑡7
+7𝜂2𝑡(331 − 3298𝑡2 + 1771𝑡4) + 35𝜂4𝑡(143 − 1731𝑡2 + 1216𝑡4)
+7𝜂6𝑡(769 − 10964𝑡2 + 9480𝑡4) + 28𝜂8𝑡(103 − 1690𝑡2 + 1728𝑡4)
+56𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
+𝑁
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
}
∙ (𝑁 cos𝜑
𝜌)

VI. ANEXOS.
388
𝑓VIII(Φ) =
−𝑁 cos8 𝜑
{
𝜌
𝜌
[
61𝜂2𝑡 − 479𝜂2𝑡3 + 179𝜂2𝑡5 − 𝜂2𝑡7
+𝜂4𝑡(331 − 3298𝑡2 + 1771𝑡4) + 5𝜂6𝑡(143 − 1731𝑡2 + 1216𝑡4)
+𝜂8𝑡(769 − 10964𝑡2 + 9480𝑡4) + 4𝜂10𝑡(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂12𝑡(11 − 204𝑡2 + 240𝑡4) ]
−𝑁
𝜌
[
427𝑡 − 3353𝑡3 + 1253𝑡5 − 7𝑡7
+7𝜂2𝑡(331 − 3298𝑡2 + 1771𝑡4) + 35𝜂4𝑡(143 − 1731𝑡2 + 1216𝑡4)
+7𝜂6𝑡(769 − 10964𝑡2 + 9480𝑡4) + 28𝜂8𝑡(103 − 1690𝑡2 + 1728𝑡4)
+56𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
+𝑁
𝜌
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
}
𝑓VIII(Φ) = −𝑁 cos8 𝜑 ∙
{
[
61𝜂2𝑡 − 479𝜂2𝑡3 + 179𝜂2𝑡5 − 𝜂2𝑡7
+𝜂4𝑡(331 − 3298𝑡2 + 1771𝑡4)+ 5𝜂6𝑡(143 − 1731𝑡2 + 1216𝑡4)
+𝜂8𝑡(769 − 10964𝑡2 + 9480𝑡4)+ 4𝜂10𝑡(103 − 1690𝑡2 + 1728𝑡4)
+8𝜂12𝑡(11 − 204𝑡2 + 240𝑡4) ]
−(1 + 𝜂2)
[
427𝑡 − 3353𝑡3 + 1253𝑡5 − 7𝑡7
+7𝜂2𝑡(331 − 3298𝑡2 + 1771𝑡4)+ 35𝜂4𝑡(143 − 1731𝑡2 + 1216𝑡4)
+7𝜂6𝑡(769 − 10964𝑡2 + 9480𝑡4) + 28𝜂8𝑡(103 − 1690𝑡2 + 1728𝑡4)
+56𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
+(1 + 𝜂2)
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7 − 7258𝜂2𝑡
+7084𝜂2𝑡3 + 3542𝜂2𝑡5 − 20170𝜂4𝑡 + 41630𝜂4𝑡3
−26542𝜂6𝑡 + 81776𝜂6𝑡3 − 18960𝜂6𝑡5 − 16816𝜂8𝑡
+68208𝜂8𝑡3 − 27648𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3
−11520𝜂10𝑡5 ]
}

VI. ANEXOS.
389
𝑓VIII(Φ) = −𝑁 cos8 𝜑 ∙
{
[ 61𝜂2𝑡 − 479𝜂2𝑡3 + 179𝜂2𝑡5 − 𝜂2𝑡7 + 331𝜂4𝑡 − 3298𝜂4𝑡3
+1771𝜂4𝑡5 + 715𝜂6𝑡 − 8655𝜂6𝑡3 + 6080𝜂6𝑡5 + 769𝜂8𝑡
−10964𝜂8𝑡3 + 9480𝜂8𝑡5 + 412𝜂10𝑡 − 6760𝜂10𝑡3
+6912𝜂10𝑡5 + 88𝜂12𝑡 − 1632𝜂12𝑡3 + 1920𝜂12𝑡5 ]
+
[
−427𝑡 + 3353𝑡3 − 1253𝑡5 + 7𝑡7
−2744𝜂2𝑡 − 7322𝜂4𝑡 − 10388𝜂6𝑡 − 8267𝜂8𝑡
−3500𝜂10𝑡 − 616𝜂12𝑡 + 26439𝜂2𝑡3 + 83671𝜂4𝑡3
+137333𝜂6𝑡3 + 124068𝜂8𝑡3 + 58744𝜂10𝑡3
+11424𝜂12𝑡3 − 13650𝜂2𝑡5 − 54957𝜂4𝑡5 − 108920𝜂6𝑡5
−114744𝜂8𝑡5 − 61824𝜂10𝑡5 − 13440𝜂12𝑡5 + 7𝜂2𝑡7 ]
+
[
−958𝑡 − 242𝑡3 + 710𝑡5 − 6𝑡7
−8216𝜂2𝑡 − 27428𝜂4𝑡 − 46712𝜂6𝑡 − 43358𝜂8𝑡
−20960𝜂10𝑡 − 4144𝜂12𝑡 + 6842𝜂2𝑡3 + 48714𝜂4𝑡3
+123406𝜂6𝑡3 + 149984𝜂8𝑡3 + 88944𝜂10𝑡3 + 20736𝜂12𝑡3
+4252𝜂2𝑡5 + 3542𝜂4𝑡5 − 18960𝜂6𝑡5 − 46608𝜂8𝑡5
−39168𝜂10𝑡5 − 11520𝜂12𝑡5 − 6𝜂2𝑡7 ]
}
𝑓VIII(Φ) = −𝑁 cos8 𝜑 ∙
[
−(427𝑡 + 958𝑡) − (242𝑡3 − 3353𝑡3) + (710𝑡5 − 1253𝑡5) + (7𝑡7 − 6𝑡7)
+(61𝜂2𝑡 − 2744𝜂2𝑡 − 8216𝜂2𝑡) + (331𝜂4𝑡 − 7322𝜂4𝑡 − 27428𝜂4𝑡)
+(715𝜂6𝑡 − 46712𝜂6𝑡 − 10388𝜂6𝑡) + (769𝜂8𝑡 − 8267𝜂8𝑡 − 43358𝜂8𝑡)
+(412𝜂10𝑡 − 3500𝜂10𝑡 − 20960𝜂10𝑡) + (88𝜂12𝑡 − 616𝜂12𝑡 − 4144𝜂12𝑡)
−(479𝜂2𝑡3 − 6842𝜂2𝑡3 − 26439𝜂2𝑡3) − (3298𝜂4𝑡3 − 48714𝜂4𝑡3 − 83671𝜂4𝑡3)
−(8655𝜂6𝑡3 − 123406𝜂6𝑡3 − 137333𝜂6𝑡3) − (10964𝜂8𝑡3 − 124068𝜂8𝑡3 − 149984𝜂8𝑡3)
−(6760𝜂10𝑡3 − 58744𝜂10𝑡3 − 88944𝜂10𝑡3) − (1632𝜂12𝑡3 − 11424𝜂12𝑡3 − 20736𝜂12𝑡3)
+(179𝜂2𝑡5 + 4252𝜂2𝑡5 − 13650𝜂2𝑡5) + (1771𝜂4𝑡5 + 3542𝜂4𝑡5 − 54957𝜂4𝑡5)
+(6080𝜂6𝑡5 − 18960𝜂6𝑡5 − 108920𝜂6𝑡5) + (9480𝜂8𝑡5 − 46608𝜂8𝑡5 − 114744𝜂8𝑡5)
+(6912𝜂10𝑡5 − 61824𝜂10𝑡5 − 39168𝜂10𝑡5) + (1920𝜂12𝑡5 − 11520𝜂12𝑡5 − 13440𝜂12𝑡5)
+(7𝜂2𝑡7 − 𝜂2𝑡7 − 6𝜂2𝑡7) ]
𝑓VIII(Φ) = −𝑁 cos8 𝜑
[
−1385𝑡 + 3111𝑡3 − 543𝑡5 + 𝑡7
−10899𝜂2𝑡 − 34419𝜂4𝑡 − 56385𝜂6𝑡 − 50856𝜂8𝑡
−24048𝜂10𝑡 − 4672𝜂12𝑡 + 32802𝜂2𝑡3 + 129087𝜂4𝑡3
+252084𝜂6𝑡3 + 263088𝜂8𝑡3 + 140928𝜂10𝑡3
+30528𝜂12𝑡3 − 9219𝜂2𝑡5 − 49644𝜂4𝑡5
−121800𝜂6𝑡5 − 151872𝜂8𝑡5 − 94080𝜂10𝑡5
−23040𝜂12𝑡5 ]

VI. ANEXOS.
390
𝑓VIII(Φ) = 𝑁 cos8 𝜑
[
1385𝑡 − 3111𝑡3 + 543𝑡5 − 𝑡7
+10899𝜂2𝑡 − 32802𝜂2𝑡3 + 9219𝜂2𝑡5
+34419𝜂4𝑡 − 129087𝜂4𝑡3 + 49644𝜂4𝑡5
+56385𝜂6𝑡 − 252084𝜂6𝑡3 + 121800𝜂6𝑡5
+50856𝜂8𝑡 − 263088𝜂8𝑡3 + 151872𝜂8𝑡5
+24048𝜂10𝑡 − 140928𝜂10𝑡3 + 94080𝜂10𝑡5
+4672𝜂12𝑡 − 30528𝜂12𝑡3 + 23040𝜂12𝑡5 ]
𝒇𝐕𝐈𝐈𝐈(𝚽) = 𝑵𝒕 𝐜𝐨𝐬𝟖𝝋
[
𝟏𝟑𝟖𝟓 − 𝟑𝟏𝟏𝟏𝒕𝟐 + 𝟓𝟒𝟑𝒕𝟒 − 𝒕𝟔
+𝟐𝟏𝜼𝟐(𝟓𝟏𝟗 − 𝟏𝟓𝟔𝟐𝒕𝟐 + 𝟒𝟑𝟗𝒕𝟒)
+𝟐𝟏𝜼𝟒(𝟏𝟔𝟑𝟗 − 𝟔𝟏𝟒𝟕𝒕𝟐 + 𝟐𝟑𝟔𝟒𝒕𝟒)
+𝟐𝟏𝜼𝟔(𝟐𝟔𝟖𝟓 − 𝟏𝟐𝟎𝟎𝟒𝒕𝟐 + 𝟓𝟖𝟎𝟎𝒕𝟒)
+𝟐𝟒𝜼𝟖(𝟐𝟏𝟏𝟗 − 𝟏𝟎𝟗𝟔𝟐𝒕𝟐 + 𝟔𝟑𝟐𝟖𝒕𝟒)
+𝟒𝟖𝜼𝟏𝟎(𝟓𝟎𝟏 − 𝟐𝟗𝟑𝟔𝒕𝟐 + 𝟏𝟗𝟔𝟎𝒕𝟒)
+𝟔𝟒𝜼𝟏𝟐(𝟕𝟑 − 𝟒𝟕𝟕𝒕𝟐 + 𝟑𝟔𝟎𝒕𝟒) ]
Para 𝒇𝐈𝐗(𝚽).
[𝑓VIII(Φ)]′ =
{
𝑁𝑡 cos8 𝜑
[
1385 − 3111𝑡2 + 543𝑡4 − 𝑡6
+21𝜂2(519 − 1562𝑡2 + 439𝑡4)
+21𝜂4(1639 − 6147𝑡2 + 2364𝑡4)
+21𝜂6(2685 − 12004𝑡2 + 5800𝑡4)
+24𝜂8(2119 − 10962𝑡2 + 6328𝑡4)
+48𝜂10(501 − 2936𝑡2 + 1960𝑡4)
+64𝜂12(73 − 477𝑡2 + 360𝑡4) ]
}
′
[𝑓VIII(Φ)]′ =
{
𝑁 cos8 𝜑
[
1385𝑡 − 3111𝑡3 + 543𝑡5 − 𝑡7
+21𝜂2(519𝑡 − 1562𝑡3 + 439𝑡5)
+21𝜂4(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂6(2685𝑡 − 12004𝑡3 + 5800𝑡5)
+24𝜂8(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂10(501𝑡 − 2936𝑡3 + 1960𝑡5)
+64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5) ]
}
′
[𝑓VIII(Φ)]′ = 𝑢 ∙ 𝑣 ∙ 𝑤 = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′

VI. ANEXOS.
391
Siendo.
𝑢 = 𝑁, 𝑣 = cos8 𝜑 , 𝑤 =
[
1385𝑡 − 3111𝑡3 + 543𝑡5 − 𝑡7
+21𝜂2(519𝑡 − 1562𝑡3 + 439𝑡5)
+21𝜂4(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂6(2685𝑡 − 12004𝑡3 + 5800𝑡5)
+24𝜂8(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂10(501𝑡 − 2936𝑡3 + 1960𝑡5)
+64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5) ]
Derivando.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −8𝑡 cos8 𝜑,
𝑤′ =
{
1385(𝑡2 + 1) − 3111(3𝑡4 + 3𝑡2) + 543(5𝑡6 + 5𝑡4) − (7𝑡8 + 7𝑡6)
+21 [−2𝜂2𝑡(519𝑡 − 1562𝑡3 + 439𝑡5)
+𝜂2(519(𝑡2 + 1) − 1562(3𝑡4 + 3𝑡2) + 439(5𝑡6 + 5𝑡4))]
+21 [−4𝜂4𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+𝜂4(1639(𝑡2 + 1) − 6147(3𝑡4 + 3𝑡2) + 2364(5𝑡6 + 5𝑡4))]
+21 [−6𝜂6𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5)
+𝜂6(2685(𝑡2 + 1) − 12004(3𝑡4 + 3𝑡2) + 5800(5𝑡6 + 5𝑡4))]
+24 [−8𝜂8𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+𝜂8(2119(𝑡2 + 1) − 10962(3𝑡4 + 3𝑡2) + 6328(5𝑡6 + 5𝑡4))]
+48 [−10𝜂10𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5)
+𝜂10(501(𝑡2 + 1) − 2936(3𝑡4 + 3𝑡2) + 1960(5𝑡6 + 5𝑡4))]
+64 [−12𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)
+𝜂12(73(𝑡2 + 1) − 477(3𝑡4 + 3𝑡2) + 360(5𝑡6 + 5𝑡4))]
}
𝑤′ =
{
1385𝑡2 + 1385 − 9333𝑡4 − 9333𝑡2
+2715𝑡6 + 2715𝑡4 − 7𝑡8 − 7𝑡6
+21[519𝜂2 − 5205𝜂2𝑡2 + 633𝜂2𝑡4 + 1317𝜂2𝑡6]
+21[1639𝜂4 − 23358𝜂4𝑡2 + 17967𝜂4𝑡4 + 2364𝜂4𝑡6]
+21[2685𝜂6 − 49437𝜂6𝑡2 + 65012𝜂6𝑡4 − 5800𝜂6𝑡6]
+24[2119𝜂8 − 47719𝜂8𝑡2 + 86450𝜂8𝑡4 − 18984𝜂8𝑡6]
+48[501𝜂10 − 13317𝜂10𝑡2 + 30352𝜂10𝑡4 − 9800𝜂10𝑡6]
+64[73𝜂12 − 2234𝜂12𝑡2 + 6093𝜂12𝑡4 − 2520𝜂12𝑡6] }

VI. ANEXOS.
392
𝑤′ =
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
Sustituyendo.
[𝑓VIII(Φ)]′ =
{
𝜂2𝑡𝜌 ∙ cos8 𝜑
[
1385𝑡 − 3111𝑡3 + 543𝑡5 − 𝑡7 + 21𝜂2(519𝑡 − 1562𝑡3 + 439𝑡5)
+21𝜂4(1639𝑡 − 6147𝑡3 + 2364𝑡5) + 21𝜂6(2685𝑡 − 12004𝑡3 + 5800𝑡5)
+24𝜂8(2119𝑡 − 10962𝑡3 + 6328𝑡5) + 48𝜂10(501𝑡 − 2936𝑡3 + 1960𝑡5)
+64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5) ]
+𝑁(−8𝑡 cos8 𝜑)
[
1385𝑡 − 3111𝑡3 + 543𝑡5 − 𝑡7 + 21𝜂2(519𝑡 − 1562𝑡3 + 439𝑡5)
+21𝜂4(1639𝑡 − 6147𝑡3 + 2364𝑡5) + 21𝜂6(2685𝑡 − 12004𝑡3 + 5800𝑡5)
+24𝜂8(2119𝑡 − 10962𝑡3 + 6328𝑡5) + 48𝜂10(501𝑡 − 2936𝑡3 + 1960𝑡5)
+64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5) ]
+𝑁 cos8 𝜑
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
}

VI. ANEXOS.
393
[𝑓VIII(Φ)]′ = cos8 𝜑 ∙
{
𝜌
[
1385𝜂2𝑡2 − 3111𝜂2𝑡4 + 543𝜂2𝑡6 − 𝜂2𝑡8
+21𝜂4𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 21𝜂6𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂8𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 24𝜂10𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂12𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 64𝜂14𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
−𝑁
[
11080𝑡2 − 24888𝑡4 + 4344𝑡6 − 8𝑡8
+168𝜂2𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 168𝜂4𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+168𝜂6𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 192𝜂8𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+384𝜂10𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 512𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
+𝑁
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
}
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓IX(Φ) = [𝑓VIII(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓IX = cos8 𝜑 ∙
{
𝜌
[
1385𝜂2𝑡2 − 3111𝜂2𝑡4 + 543𝜂2𝑡6 − 𝜂2𝑡8
+21𝜂4𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 21𝜂6𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂8𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 24𝜂10𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂12𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 64𝜂14𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
−𝑁
[
11080𝑡2 − 24888𝑡4 + 4344𝑡6 − 8𝑡8
+168𝜂2𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 168𝜂4𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+168𝜂6𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 192𝜂8𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+384𝜂10𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 512𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
+𝑁
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
}
∙ (𝑁 cos𝜑
𝜌)

VI. ANEXOS.
394
𝑓IX(Φ) = 𝑁 cos9 𝜑 ∙
{
𝜌
𝜌
[
1385𝜂2𝑡2 − 3111𝜂2𝑡4 + 543𝜂2𝑡6 − 𝜂2𝑡8
+21𝜂4𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 21𝜂6𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂8𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 24𝜂10𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂12𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 64𝜂14𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
−𝑁
𝜌
[
11080𝑡2 − 24888𝑡4 + 4344𝑡6 − 8𝑡8
+168𝜂2𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 168𝜂4𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+168𝜂6𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 192𝜂8𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+384𝜂10𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 512𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
+𝑁
𝜌
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
}
𝑓IX(Φ) = 𝑁 cos9 𝜑 ∙
{
[
1385𝜂2𝑡2 − 3111𝜂2𝑡4 + 543𝜂2𝑡6 − 𝜂2𝑡8
+21𝜂4𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 21𝜂6𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+21𝜂8𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 24𝜂10𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+48𝜂12𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 64𝜂14𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
−(1 + 𝜂2)
[
11080𝑡2 − 24888𝑡4 + 4344𝑡6 − 8𝑡8
+168𝜂2𝑡(519𝑡 − 1562𝑡3 + 439𝑡5) + 168𝜂4𝑡(1639𝑡 − 6147𝑡3 + 2364𝑡5)
+168𝜂6𝑡(2685𝑡 − 12004𝑡3 + 5800𝑡5) + 192𝜂8𝑡(2119𝑡 − 10962𝑡3 + 6328𝑡5)
+384𝜂10𝑡(501𝑡 − 2936𝑡3 + 1960𝑡5) + 512𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5) ]
+(1 + 𝜂2)
[
1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8
+10899𝜂2 − 109305𝜂2𝑡2 + 13293𝜂2𝑡4 + 27657𝜂2𝑡6
+34419𝜂4 − 490518𝜂4𝑡2 + 377307𝜂4𝑡4 + 49644𝜂4𝑡6
+56385𝜂6 − 1038177𝜂6𝑡2 + 1365252𝜂6𝑡4 − 121800𝜂6𝑡6
+50856𝜂8 − 1145256𝜂8𝑡2 + 2074800𝜂8𝑡4 − 455616𝜂8𝑡6
+24048𝜂10 − 639216𝜂10𝑡2 + 1456896𝜂10𝑡4 − 470400𝜂10𝑡6
+4672𝜂12 − 142976𝜂12𝑡2 + 389952𝜂12𝑡4 − 161280𝜂12𝑡6 ]
}

VI. ANEXOS.
395
𝑓IX(Φ) = 𝑁 cos9 𝜑 ∙
{
[
1385𝜂2𝑡2 − 3111𝜂2𝑡4 + 543𝜂2𝑡6 − 𝜂2𝑡8 + 10899𝜂4𝑡2
−32802𝜂4𝑡4 + 9219𝜂4𝑡6 + 34419𝜂6𝑡2 − 129087𝜂6𝑡4
+49644𝜂6𝑡6 + 56385𝜂8𝑡2 − 252084𝜂8𝑡4 + 121800𝜂8𝑡6
+50856𝜂10𝑡2 − 263088𝜂10𝑡4 + 151872𝜂10𝑡6 + 24048𝜂12𝑡2
−140928𝜂12𝑡4 + 94080𝜂12𝑡6 + 4672𝜂14𝑡2 − 30528𝜂14𝑡4
+23040𝜂14𝑡6 ]
+
[
−11080𝑡2 + 24888𝑡4 − 4344𝑡6 + 8𝑡8
−98272𝜂2𝑡2 − 362544𝜂4𝑡2 − 726432𝜂6𝑡2 − 857928𝜂8𝑡2
−599232𝜂10𝑡2 − 229760𝜂12𝑡2 − 37376𝜂14𝑡2 + 287304𝜂2𝑡4
+1295112𝜂4𝑡4 + 3049368𝜂6𝑡4 + 4121376𝜂8𝑡4 + 3232128𝜂10𝑡4
+1371648𝜂12𝑡4 + 244224𝜂14𝑡4 − 78096𝜂2𝑡6 − 470904𝜂4𝑡6
−1371552𝜂6𝑡6 − 2189376𝜂8𝑡6 − 1967616𝜂10𝑡6 − 936960𝜂12𝑡6
−184320𝜂14𝑡6 + 8𝜂2𝑡8 ]
+
[ 1385 − 7948𝑡2 − 6618𝑡4 + 2708𝑡6 − 7𝑡8 + 12284𝜂2 + 45318𝜂4
+90804𝜂6 + 107241𝜂8 + 74904𝜂10 + 28720𝜂12 + 4672𝜂14
−117253𝜂2𝑡2 − 599823𝜂4𝑡2 − 1528695𝜂6𝑡2 − 2183433𝜂8𝑡2
−1784472𝜂10𝑡2 − 782192𝜂12𝑡2 − 142976𝜂14𝑡2 + 6675𝜂2𝑡4
+390600𝜂4𝑡4 + 1742559𝜂6𝑡4 + 3440052𝜂8𝑡4 + 3531696𝜂10𝑡4
+1846848𝜂12𝑡4 + 389952𝜂14𝑡4 + 30365𝜂2𝑡6 + 77301𝜂4𝑡6
−72156𝜂6𝑡6 − 577416𝜂8𝑡6 − 926016𝜂10𝑡6 − 631680𝜂12𝑡6
−161280𝜂14𝑡6 − 7𝜂2𝑡8 ]
}

VI. ANEXOS.
396
𝑓IX(Φ) = 𝑁 cos9 𝜑 ∙
[
1385 − (7948𝑡2 + 11080𝑡2) + (24888𝑡4 − 6618𝑡4)
+(2708𝑡6 − 4344𝑡6) + (8𝑡8 − 7𝑡8) + 12284𝜂2 + 45318𝜂4
+90804𝜂6 + 107241𝜂8 + 74904𝜂10 + 28720𝜂12 + 4672𝜂14
+(1385𝜂2𝑡2 − 98272𝜂2𝑡2 − 117253𝜂2𝑡2) + (10899𝜂4𝑡2
−362544𝜂4𝑡2 − 599823𝜂4𝑡2) + (34419𝜂6𝑡2 − 726432𝜂6𝑡2
−1528695𝜂6𝑡2) + (56385𝜂8𝑡2 − 857928𝜂8𝑡2 − 2183433𝜂8𝑡2)
+(50856𝜂10𝑡2 − 599232𝜂10𝑡2 − 1784472𝜂10𝑡2) + (24048𝜂12𝑡2
−229760𝜂12𝑡2 − 782192𝜂12𝑡2) + (4672𝜂14𝑡2 − 37376𝜂14𝑡2
−142976𝜂14𝑡2) + (287304𝜂2𝑡4 + 6675𝜂2𝑡4 − 3111𝜂2𝑡4)
+(1295112𝜂4𝑡4 + 390600𝜂4𝑡4 − 32802𝜂4𝑡4) + (3049368𝜂6𝑡4
+1742559𝜂6𝑡4 − 129087𝜂6𝑡4) + (4121376𝜂8𝑡4 + 3440052𝜂8𝑡4
−252084𝜂8𝑡4) + (3531696𝜂10𝑡4 + 3232128𝜂10𝑡4 − 263088𝜂10𝑡4)
+(1846848𝜂12𝑡4 + 1371648𝜂12𝑡4 − 140928𝜂12𝑡4) + (389952𝜂14𝑡4
+244224𝜂14𝑡4 − 30528𝜂14𝑡4) + (543𝜂2𝑡6 + 30365𝜂2𝑡6 − 78096𝜂2𝑡6)
+(9219𝜂4𝑡6 + 77301𝜂4𝑡6 − 470904𝜂4𝑡6) + (49644𝜂6𝑡6 − 72156𝜂6𝑡6
−1371552𝜂6𝑡6) + (121800𝜂8𝑡6 − 577416𝜂8𝑡6 − 2189376𝜂8𝑡6)
+(151872𝜂10𝑡6 − 926016𝜂10𝑡6 − 1967616𝜂10𝑡6) + (94080𝜂12𝑡6
−631680𝜂12𝑡6 − 936960𝜂12𝑡6) + (23040𝜂14𝑡6 − 161280𝜂14𝑡6
−184320𝜂14𝑡6) + (8𝜂2𝑡8 − 7𝜂2𝑡8 − 𝜂2𝑡8) ]
𝑓IX(Φ) = 𝑁 cos9 𝜑
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+12284𝜂2 + 45318𝜂4 + 90804𝜂6 + 107241𝜂8
+74904𝜂10 + 28720𝜂12 + 4672𝜂14 − 214140𝜂2𝑡2
−951468𝜂4𝑡2 − 2220708𝜂6𝑡2 − 2984976𝜂8𝑡2
−2332848𝜂10𝑡2 − 987904𝜂12𝑡2 − 175680𝜂14𝑡2
+290868𝜂2𝑡4 + 1652910𝜂4𝑡4 + 4662840𝜂6𝑡4
+7309344𝜂8𝑡4 + 6500736𝜂10𝑡4 + 3077568𝜂12𝑡4
+603648𝜂14𝑡4 − 47188𝜂2𝑡6 − 384384𝜂4𝑡6
−1394064𝜂6𝑡6 − 2644992𝜂8𝑡6 − 2741760𝜂10𝑡6
−1474560𝜂12𝑡6 − 322560𝜂14𝑡6 ]

VI. ANEXOS.
397
𝑓IX(Φ) =
𝑁 cos9 𝜑
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+12284𝜂2 − 214140𝜂2𝑡2 + 290868𝜂2𝑡4 − 47188𝜂2𝑡6
+45318𝜂4 − 951468𝜂4𝑡2 + 1652910𝜂4𝑡4 − 384384𝜂4𝑡6
+90804𝜂6 − 2220708𝜂6𝑡2 + 4662840𝜂6𝑡4 − 1394064𝜂6𝑡6
+107241𝜂8 − 2984976𝜂8𝑡2 + 7309344𝜂8𝑡4 − 2644992𝜂8𝑡6
+74904𝜂10 − 2332848𝜂10𝑡2 + 6500736𝜂10𝑡4 − 2741760𝜂10𝑡6
+28720𝜂12 − 987904𝜂12𝑡2 + 3077568𝜂12𝑡4 − 1474560𝜂12𝑡6
+4672𝜂14 − 175680𝜂14𝑡2 + 603648𝜂14𝑡4 − 322560𝜂14𝑡6 ]
𝒇𝐈𝐗(𝚽) = 𝑵𝐜𝐨𝐬𝟗𝝋
[
𝟏𝟑𝟖𝟓 − 𝟏𝟗𝟎𝟐𝟖𝒕𝟐 + 𝟏𝟖𝟐𝟕𝟎𝒕𝟒 − 𝟏𝟔𝟑𝟔𝒕𝟔 + 𝒕𝟖
+𝟒𝜼𝟐(𝟑𝟎𝟕𝟏 − 𝟓𝟑𝟓𝟑𝟓𝒕𝟐 + 𝟕𝟐𝟕𝟏𝟕𝒕𝟒 − 𝟏𝟏𝟕𝟗𝟕𝒕𝟔)
+𝟒𝟐𝜼𝟒(𝟏𝟎𝟕𝟗 − 𝟐𝟐𝟔𝟓𝟒𝒕𝟐 + 𝟑𝟗𝟑𝟓𝟓𝒕𝟒 − 𝟗𝟏𝟓𝟐𝒕𝟔)
+𝟖𝟒𝜼𝟔(𝟏𝟎𝟖𝟏 − 𝟐𝟔𝟒𝟑𝟕𝒕𝟐 + 𝟓𝟓𝟓𝟏𝟎𝒕𝟒 − 𝟏𝟔𝟓𝟗𝟔𝒕𝟔)
+𝟑𝜼𝟖(𝟑𝟓𝟕𝟒𝟕 − 𝟗𝟗𝟒𝟗𝟗𝟐𝒕𝟐 + 𝟐𝟒𝟑𝟔𝟒𝟒𝟖𝒕𝟒 − 𝟖𝟖𝟏𝟔𝟔𝟒𝒕𝟔)
+𝟐𝟒𝜼𝟏𝟎(𝟑𝟏𝟐𝟏 − 𝟗𝟕𝟐𝟎𝟐𝒕𝟐 + 𝟐𝟕𝟎𝟖𝟔𝟒𝒕𝟒 − 𝟏𝟏𝟒𝟐𝟒𝟎𝒕𝟔)
+𝟏𝟔𝜼𝟏𝟐(𝟏𝟕𝟗𝟓 − 𝟔𝟏𝟕𝟒𝟒𝒕𝟐 + 𝟏𝟗𝟐𝟑𝟒𝟖𝒕𝟒 − 𝟗𝟐𝟏𝟔𝟎𝒕𝟔)
+𝟔𝟒𝜼𝟏𝟒(𝟕𝟑 − 𝟐𝟕𝟒𝟓𝒕𝟐 + 𝟗𝟒𝟑𝟐𝒕𝟒 − 𝟓𝟎𝟒𝟎𝒕𝟔) ]
Para 𝒇𝐗(𝚽).
[𝑓IX(Φ)]′ =
{
𝑁 cos9 𝜑
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}
′
[𝑓IX(Φ)]′ = (𝑢 ∙ 𝑣 ∙ 𝑤)′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′

VI. ANEXOS.
398
Siendo.
𝑢 = 𝑁, 𝑣 = cos9 𝜑,
𝑤 =
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
Derivando por partes.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −9𝑡 cos9 𝜑,
𝑤′ =
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ] ′

VI. ANEXOS.
399
𝑤′ =
{
−19028(2𝑡3 + 2𝑡) + 18270(4𝑡5 + 4𝑡3) − 1636(6𝑡7 + 6𝑡5) + (8𝑡9 + 8𝑡7)
+4 [−2𝜂2𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+𝜂2(−53535(2𝑡3 + 2𝑡) + 72717(4𝑡5 + 4𝑡3) − 11797(6𝑡7 + 6𝑡5))]
+42 [−4𝜂4𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+𝜂4(−22654(2𝑡3 + 2𝑡) + 39355(4𝑡5 + 4𝑡3) − 9152(6𝑡7 + 6𝑡5))]
+84 [−6𝜂6𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+𝜂6(−26437(2𝑡3 + 2𝑡) + 55510(4𝑡5 + 4𝑡3) − 16596(6𝑡7 + 6𝑡5))]
+3 [−8𝜂8𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+𝜂8(−994992(2𝑡3 + 2𝑡) + 2436448(4𝑡5 + 4𝑡3) − 881664(6𝑡7 + 6𝑡5))]
+24 [−10𝜂10𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+𝜂10(−97202(2𝑡3 + 2𝑡) + 270864(4𝑡5 + 4𝑡3) − 114240(6𝑡7 + 6𝑡5))]
+16 [−12𝜂12𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+𝜂12(−61744(2𝑡3 + 2𝑡) + 192348(4𝑡5 + 4𝑡3) − 92160(6𝑡7 + 6𝑡5))]
+64 [−14𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6)
+𝜂14(−2745(2𝑡3 + 2𝑡) + 9432(4𝑡5 + 4𝑡3) − 5040(6𝑡7 + 6𝑡5))]
}
𝑤′ =
[
−38056𝑡 − 38056𝑡3 + 73080𝑡3 + 73080𝑡5
−9816𝑡5 − 9816𝑡7 + 8𝑡7 + 8𝑡9
+4(−113212𝜂2𝑡 + 290868𝜂2𝑡3 + 74652𝜂2𝑡5 − 47188𝜂2𝑡7)
+42(−49624𝜂4𝑡 + 202728𝜂4𝑡3 − 54912𝜂4𝑡5 − 18304𝜂4𝑡7)
+84(−59360𝜂6𝑡 + 327788𝜂6𝑡3 − 210596𝜂6𝑡5)
+3(−2275960𝜂8𝑡 + 15715744𝜂8𝑡3 − 15035776𝜂8𝑡5 + 1763328𝜂8𝑡7)
+24(−225614𝜂10𝑡 + 1861072𝜂10𝑡3 − 2310624𝜂10𝑡5 + 456960𝜂10𝑡7)
+16(−145028𝜂12𝑡 + 1386832𝜂12𝑡3 − 2091744𝜂12𝑡5 + 552960𝜂12𝑡7)
+64(−6512𝜂14𝑡 + 70668𝜂14𝑡3 − 124560𝜂14𝑡5 + 40320𝜂14𝑡7) ]

VI. ANEXOS.
400
𝑤′ =
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9 − 452848𝜂2𝑡 + 1163472𝜂2𝑡3
+298608𝜂2𝑡5 − 188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3 − 2306304𝜂4𝑡5
−768768𝜂4𝑡7 − 4986240𝜂6𝑡 + 27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7 − 5414736𝜂10𝑡
+44665728𝜂10𝑡3 − 55454976𝜂10𝑡5 + 10967040𝜂10𝑡7 − 2320448𝜂12𝑡
+22189312𝜂12𝑡3 − 33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
Sustituyendo.
[𝑓IX(Φ)]′ =
{
𝜂2𝑡𝜌 ∙ cos9
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁(−9𝑡 cos9 𝜑)
[
1385 − 19028𝑡2 + 18270𝑡4 − 1636𝑡6 + 𝑡8
+4𝜂2(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂4(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂6(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂8(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂10(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂12(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁 cos9 𝜑
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9
−452848𝜂2𝑡 + 1163472𝜂2𝑡3 + 298608𝜂2𝑡5
−188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3
−2306304𝜂4𝑡5 − 768768𝜂4𝑡7 − 4986240𝜂6𝑡
+27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7
−5414736𝜂10𝑡 + 44665728𝜂10𝑡3 − 55454976𝜂10𝑡5
+10967040𝜂10𝑡7 − 2320448𝜂12𝑡 + 22189312𝜂12𝑡3
−33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
}

VI. ANEXOS.
401
[𝑓IX(Φ)]′ =
cos9 𝜑
{
𝜌
[ 1385𝜂2𝑡 − 19028𝜂2𝑡3 + 18270𝜂2𝑡5 − 1636𝜂2𝑡7 + 𝜂2𝑡9
+4𝜂4𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂6𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂8𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂10𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂12𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂14𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂16𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
[ −12465𝑡 + 171252𝑡3 − 164430𝑡5 + 14724𝑡7 − 9𝑡9
−36𝜂2𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
−378𝜂4𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
−756𝜂6𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
−27𝜂8𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
−216𝜂10𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
−144𝜂12𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
−576𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9
−452848𝜂2𝑡 + 1163472𝜂2𝑡3 + 298608𝜂2𝑡5
−188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3
−2306304𝜂4𝑡5 − 768768𝜂4𝑡7 − 4986240𝜂6𝑡
+27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7
−5414736𝜂10𝑡 + 44665728𝜂10𝑡3 − 55454976𝜂10𝑡5
+10967040𝜂10𝑡7 − 2320448𝜂12𝑡 + 22189312𝜂12𝑡3
−33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
}

VI. ANEXOS.
402
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓𝑋(Φ) = [𝑓IX(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓X(Φ) = cos9 𝜑 ∙
{
𝜌
[ 1385𝜂2𝑡 − 19028𝜂2𝑡3 + 18270𝜂2𝑡5 − 1636𝜂2𝑡7 + 𝜂2𝑡9
+4𝜂4𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂6𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂8𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂10𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂12𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂14𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂16𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
[ −12465𝑡 + 171252𝑡3 − 164430𝑡5 + 14724𝑡7 − 9𝑡9
−36𝜂2𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
−378𝜂4𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
−756𝜂6𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
−27𝜂8𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
−216𝜂10𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
−144𝜂12𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
−576𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9
−452848𝜂2𝑡 + 1163472𝜂2𝑡3 + 298608𝜂2𝑡5
−188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3
−2306304𝜂4𝑡5 − 768768𝜂4𝑡7 − 4986240𝜂6𝑡
+27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7
−5414736𝜂10𝑡 + 44665728𝜂10𝑡3 − 55454976𝜂10𝑡5
+10967040𝜂10𝑡7 − 2320448𝜂12𝑡 + 22189312𝜂12𝑡3
−33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
}
∙ (𝑁 cos𝜑
𝜌)

VI. ANEXOS.
403
𝑓X(Φ) =
𝑁cos10 𝜑
{
𝜌
𝜌
[ 1385𝜂2𝑡 − 19028𝜂2𝑡3 + 18270𝜂2𝑡5 − 1636𝜂2𝑡7 + 𝜂2𝑡9
+4𝜂4𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂6𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂8𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂10𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂12𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂14𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂16𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
𝜌
[ −12465𝑡 + 171252𝑡3 − 164430𝑡5 + 14724𝑡7 − 9𝑡9
−36𝜂2𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
−378𝜂4𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
−756𝜂6𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
−27𝜂8𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
−216𝜂10𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
−144𝜂12𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
−576𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+𝑁
𝜌
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9
−452848𝜂2𝑡 + 1163472𝜂2𝑡3 + 298608𝜂2𝑡5
−188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3
−2306304𝜂4𝑡5 − 768768𝜂4𝑡7 − 4986240𝜂6𝑡
+27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7
−5414736𝜂10𝑡 + 44665728𝜂10𝑡3 − 55454976𝜂10𝑡5
+10967040𝜂10𝑡7 − 2320448𝜂12𝑡 + 22189312𝜂12𝑡3
−33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
}

VI. ANEXOS.
404
𝑓X(Φ) = 𝑁cos10 𝜑 ∙
{
[ 1385𝜂2𝑡 − 19028𝜂2𝑡3 + 18270𝜂2𝑡5 − 1636𝜂2𝑡7 + 𝜂2𝑡9
+4𝜂4𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
+42𝜂6𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
+84𝜂8𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
+3𝜂10𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
+24𝜂12𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
+16𝜂14𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
+64𝜂16𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+(1 + 𝜂2)
[ −12465𝑡 + 171252𝑡3 − 164430𝑡5 + 14724𝑡7 − 9𝑡9
−36𝜂2𝑡(3071 − 53535𝑡2 + 72717𝑡4 − 11797𝑡6)
−378𝜂4𝑡(1079 − 22654𝑡2 + 39355𝑡4 − 9152𝑡6)
−756𝜂6𝑡(1081 − 26437𝑡2 + 55510𝑡4 − 16596𝑡6)
−27𝜂8𝑡(35747 − 994992𝑡2 + 2436448𝑡4 − 881664𝑡6)
−216𝜂10𝑡(3121 − 97202𝑡2 + 270864𝑡4 − 114240𝑡6)
−144𝜂12𝑡(1795 − 61744𝑡2 + 192348𝑡4 − 92160𝑡6)
−576𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
+(1 + 𝜂2)
[ −38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9
−452848𝜂2𝑡 + 1163472𝜂2𝑡3 + 298608𝜂2𝑡5
−188752𝜂2𝑡7 − 2084208𝜂4𝑡 + 8514576𝜂4𝑡3
−2306304𝜂4𝑡5 − 768768𝜂4𝑡7 − 4986240𝜂6𝑡
+27534192𝜂6𝑡3 − 17690064𝜂6𝑡5 − 6827880𝜂8𝑡
+47147232𝜂8𝑡3 − 45107328𝜂8𝑡5 + 5289984𝜂8𝑡7
−5414736𝜂10𝑡 + 44665728𝜂10𝑡3 − 55454976𝜂10𝑡5
+10967040𝜂10𝑡7 − 2320448𝜂12𝑡 + 22189312𝜂12𝑡3
−33467904𝜂12𝑡5 + 8847360𝜂12𝑡7 − 416768𝜂14𝑡
+4522752𝜂14𝑡3 − 7971840𝜂14𝑡5 + 2580480𝜂14𝑡7 ]
}

VI. ANEXOS.
405
𝑓X(Φ) = 𝑁cos10 𝜑 ∙
{
[
1385𝜂2𝑡 + 12284𝜂4𝑡 + 45318𝜂6𝑡 + 90804𝜂8𝑡 + 107241𝜂10𝑡
+74904𝜂12𝑡 + 28720𝜂14𝑡 + 4672𝜂16𝑡 − 19028𝜂2𝑡3 − 214140𝜂4𝑡3
−951468𝜂6𝑡3 − 2220708𝜂8𝑡3 − 2984976𝜂10𝑡3 − 2332848𝜂12𝑡3
−987904𝜂14𝑡3 − 175680𝜂16𝑡3 + 18270𝜂2𝑡5 + 290868𝜂4𝑡5
+1652910𝜂6𝑡5 + 4662840𝜂8𝑡5 + 7309344𝜂10𝑡5 + 6500736𝜂12𝑡5
+3077568𝜂14𝑡5 + 603648𝜂16𝑡5 − 1636𝜂2𝑡7 − 47188𝜂4𝑡7
−384384𝜂6𝑡7 − 1394064𝜂8𝑡7 − 2644992𝜂10𝑡7 − 2741760𝜂12𝑡7
−1474560𝜂14𝑡7 − 322560𝜂16𝑡7 + 𝜂2𝑡9 ]
+
[
−12465𝑡 + 171252𝑡3 − 164430𝑡5 + 14724𝑡7 − 9𝑡9 − 9𝜂2𝑡9
−123021𝜂2𝑡 − 518418𝜂4𝑡 − 1225098𝜂6𝑡 − 1782405𝜂8𝑡
−1639305𝜂10𝑡 − 932616𝜂12𝑡 − 300528𝜂14𝑡 − 42048𝜂16𝑡
+2098512𝜂2𝑡3 + 10490472𝜂4𝑡3 + 28549584𝜂6𝑡3 + 46851156𝜂8𝑡3
+47860416𝜂10𝑡3 + 29886768𝜂12𝑡3 + 10472256𝜂14𝑡3 + 1581120𝜂16𝑡3
−2782242𝜂2𝑡5 − 17494002𝜂4𝑡5 − 56841750𝜂6𝑡5 − 107749656𝜂8𝑡5
−124290720𝜂10𝑡5 − 86204736𝜂12𝑡5 − 33130944𝜂14𝑡5 − 5432832𝜂16𝑡5
+439416𝜂2𝑡7 + 3884148𝜂4𝑡7 + 16006032𝜂6𝑡7 + 36351504𝜂8𝑡7
+48480768𝜂10𝑡7 + 37946880𝜂12𝑡7 + 16174080𝜂14𝑡7 + 2903040𝜂16𝑡7 ]
+
[
−38056𝑡 + 35024𝑡3 + 63264𝑡5 − 9808𝑡7 + 8𝑡9 + 8𝜂2𝑡9
−490904𝜂2𝑡 − 2537056𝜂4𝑡 − 7070448𝜂6𝑡 − 11814120𝜂8𝑡
−12242616𝜂10𝑡 − 7735184𝜂12𝑡 − 2737216𝜂14𝑡 − 416768𝜂16𝑡
+1198496𝜂2𝑡3 + 9678048𝜂4𝑡3 + 36048768𝜂6𝑡3 + 74681424𝜂8𝑡3
+91812960𝜂10𝑡3 + 66855040𝜂12𝑡3 + 26712064𝜂14𝑡3 + 4522752𝜂16𝑡3
+361872𝜂2𝑡5 − 2007696𝜂4𝑡5 − 19996368𝜂6𝑡5 − 62797392𝜂8𝑡5
−100562304𝜂10𝑡5 − 88922880𝜂12𝑡5 − 41439744𝜂14𝑡5 − 7971840𝜂16𝑡5
−198560𝜂2𝑡7 − 957520𝜂4𝑡7 − 768768𝜂6𝑡7 + 5289984𝜂8𝑡7
+16257024𝜂10𝑡7 + 19814400𝜂12𝑡7 + 11427840𝜂14𝑡7 + 2580480𝜂16𝑡7 ]
}

VI. ANEXOS.
406
𝑓X(Φ) = 𝑁cos10 𝜑 ∙
[ −(12465𝑡 + 38056𝑡) + (171252𝑡3 + 35024𝑡3) + (63264𝑡5 − 164430𝑡5)
+(14724𝑡7 − 9808𝑡7) + (8𝑡9 − 9𝑡9) + (8𝜂2𝑡9 + 𝜂2𝑡9 − 9𝜂2𝑡9)
+(1385𝜂2𝑡 − 123021𝜂2𝑡 − 490904𝜂2𝑡) + (12284𝜂4𝑡 − 518418𝜂4𝑡
−2537056𝜂4𝑡) + (45318𝜂6𝑡 − 1225098𝜂6𝑡 − 7070448𝜂6𝑡)
+90804𝜂8𝑡 − 1782405𝜂8𝑡 − 11814120𝜂8𝑡) + (107241𝜂10𝑡
−1639305𝜂10𝑡 − 12242616𝜂10𝑡) + (74904𝜂12𝑡 − 932616𝜂12𝑡
−7735184𝜂12𝑡) + (28720𝜂14𝑡 − 300528𝜂14𝑡 − 2737216𝜂14𝑡)
+(4672𝜂16𝑡 − 416768𝜂16𝑡 − 42048𝜂16𝑡) + (1198496𝜂2𝑡3
+2098512𝜂2𝑡3 − 19028𝜂2𝑡3) + (10490472𝜂4𝑡3 + 9678048𝜂4𝑡3
−214140𝜂4𝑡3) + (28549584𝜂6𝑡3 + 36048768𝜂6𝑡3 − 951468𝜂6𝑡3)
+(46851156𝜂8𝑡3 + 74681424𝜂8𝑡3 − 2220708𝜂8𝑡3) + (91812960𝜂10𝑡3
+47860416𝜂10𝑡3 − 2984976𝜂10𝑡3) + (66855040𝜂12𝑡3 + 29886768𝜂12𝑡3
−2332848𝜂12𝑡3) + (10472256𝜂14𝑡3 + 26712064𝜂14𝑡3 − 987904𝜂14𝑡3)
+(1581120𝜂16𝑡3 + 4522752𝜂16𝑡3 − 175680𝜂16𝑡3) + (18270𝜂2𝑡5
+361872𝜂2𝑡5 − 2782242𝜂2𝑡5) + (290868𝜂4𝑡5 − 2007696𝜂4𝑡5
−17494002𝜂4𝑡5) + (1652910𝜂6𝑡5 − 56841750𝜂6𝑡5 − 19996368𝜂6𝑡5)
+(4662840𝜂8𝑡5 − 62797392𝜂8𝑡5 − 107749656𝜂8𝑡5) + (7309344𝜂10𝑡5
−100562304𝜂10𝑡5 − 124290720𝜂10𝑡5) + (6500736𝜂12𝑡5 − 86204736𝜂12𝑡5
−88922880𝜂12𝑡5) + (3077568𝜂14𝑡5 − 33130944𝜂14𝑡5 − 41439744𝜂14𝑡5)
+(603648𝜂16𝑡5 − 5432832𝜂16𝑡5 − 7971840𝜂16𝑡5) + (439416𝜂2𝑡7
−198560𝜂2𝑡7 − 1636𝜂2𝑡7) + (3884148𝜂4𝑡7 − 957520𝜂4𝑡7 − 47188𝜂4𝑡7)
+(16006032𝜂6𝑡7 − 768768𝜂6𝑡7 − 384384𝜂6𝑡7) + (36351504𝜂8𝑡7
+5289984𝜂8𝑡7 − 1394064𝜂8𝑡7) + (16257024𝜂10𝑡7 + 48480768𝜂10𝑡7
−2644992𝜂10𝑡7) + (37946880𝜂12𝑡7 + 19814400𝜂12𝑡7 − 2741760𝜂12𝑡7)
+(16174080𝜂14𝑡7 + 11427840𝜂14𝑡7 − 1474560𝜂14𝑡7) + (2903040𝜂16𝑡7
+2580480𝜂16𝑡7 − 322560𝜂16𝑡7) ]

VI. ANEXOS.
407
𝑓X(Φ) = 𝑁cos10 𝜑 ∙
[ −50521𝑡 + 206276𝑡3 − 101166𝑡5 + 4916𝑡7 − 𝑡9 − 612540𝜂2𝑡 − 3043190𝜂4𝑡
−8250228𝜂6𝑡 − 13505721𝜂8𝑡 − 13774680𝜂10𝑡 − 8592896𝜂12𝑡 − 3009024𝜂14𝑡
−454144𝜂16𝑡 + 3277980𝜂2𝑡3 + 19954380𝜂4𝑡3 + 63646884𝜂6𝑡3
+119311872𝜂8𝑡3 + 136688400𝜂10𝑡3 + 94408960𝜂12𝑡3 + 36196416𝜂14𝑡3
+5928192𝜂16𝑡3 − 2402100𝜂2𝑡5 − 19210830𝜂4𝑡5 − 75185208𝜂6𝑡5
−165884208𝜂8𝑡5 − 217543680𝜂10𝑡5 − 168626880𝜂12𝑡5 − 71493120𝜂14𝑡5
−12801024𝜂16𝑡5 + 239220𝜂2𝑡7 + 2879440𝜂4𝑡7 + 14852880𝜂6𝑡7
+40247424𝜂8𝑡7 + 62092800𝑛10𝑡7 + 55019520𝑛12𝑡7 + 26127360𝑛14𝑡7
+5160960𝑛16𝑡7 ]
𝑓X(Φ) = −𝑁cos10 𝜑 ∙
[
50521𝑡 − 206276𝑡3 + 101166𝑡5 − 4916𝑡7 + 𝑡9 + 612540𝜂2𝑡
−3277980𝜂2𝑡3 + 2402100𝜂2𝑡5 − 239220𝜂2𝑡7 + 3043190𝜂4𝑡
−19954380𝜂4𝑡3 + 19210830𝜂4𝑡5 − 2879440𝜂4𝑡7 + 8250228𝜂6𝑡
−63646884𝜂6𝑡3 + 75185208𝜂6𝑡5 − 14852880𝜂6𝑡7 + 13505721𝜂8𝑡
−119311872𝜂8𝑡3 + 165884208𝜂8𝑡5 − 40247424𝜂8𝑡7 + 13774680𝜂10𝑡
−136688400𝜂10𝑡3 + 217543680𝜂10𝑡5 − 62092800𝑛10𝑡7
+8592896𝜂12𝑡 − 94408960𝜂12𝑡3 + 168626880𝜂12𝑡5 − 55019520𝑛12𝑡7
+3009024𝜂14𝑡 − 36196416𝜂14𝑡3 + 71493120𝜂14𝑡5 − 26127360𝑛14𝑡7
+454144𝜂16𝑡 − 5928192𝜂16𝑡3 + 12801024𝜂16𝑡5 − 5160960𝑛16𝑡7 ]
𝒇𝐗(𝚽) =
−𝑵𝒕𝐜𝐨𝐬𝟏𝟎𝝋
[
𝟓𝟎𝟓𝟐𝟏 − 𝟐𝟎𝟔𝟐𝟕𝟔𝒕𝟐 + 𝟏𝟎𝟏𝟏𝟔𝟔𝒕𝟒 − 𝟒𝟗𝟏𝟔𝒕𝟔 + 𝒕𝟖
+𝟏𝟖𝟎𝜼𝟐(𝟑𝟒𝟎𝟑 − 𝟏𝟖𝟐𝟏𝟏𝒕𝟐 + 𝟏𝟑𝟑𝟒𝟓𝒕𝟒 − 𝟏𝟑𝟐𝟗𝒕𝟔)
+𝟏𝟎𝜼𝟒(𝟑𝟎𝟒𝟑𝟏𝟗 − 𝟏𝟗𝟗𝟓𝟒𝟑𝟖𝒕𝟐 + 𝟏𝟗𝟐𝟏𝟎𝟖𝟑𝒕𝟒 − 𝟐𝟖𝟕𝟗𝟒𝟒𝒕𝟔)
+𝟏𝟕𝟔𝟒𝜼𝟔(𝟒𝟔𝟕𝟕 − 𝟑𝟔𝟎𝟖𝟏𝒕𝟐 + 𝟒𝟐𝟔𝟐𝟐𝒕𝟒 − 𝟖𝟒𝟐𝟎𝒕𝟔)
+𝟑𝜼𝟖(𝟒𝟓𝟎𝟏𝟗𝟎𝟕 − 𝟑𝟗𝟕𝟕𝟎𝟔𝟐𝟒𝒕𝟐 + 𝟓𝟓𝟐𝟗𝟒𝟕𝟑𝟔𝒕𝟒 − 𝟏𝟑𝟒𝟏𝟓𝟖𝟎𝟖𝒕𝟔)
+𝟑𝟔𝟎𝜼𝟏𝟎(𝟑𝟖𝟐𝟔𝟑 − 𝟑𝟕𝟗𝟔𝟗𝟎𝒕𝟐 + 𝟔𝟎𝟒𝟐𝟖𝟖𝒕𝟒 − 𝟏𝟕𝟐𝟒𝟖𝟎𝒕𝟔)
+𝟔𝟒𝜼𝟏𝟐(𝟏𝟑𝟒𝟐𝟔𝟒 − 𝟏𝟒𝟕𝟓𝟏𝟒𝟎𝒕𝟐 + 𝟐𝟔𝟑𝟒𝟕𝟗𝟓𝒕𝟒 − 𝟖𝟓𝟗𝟔𝟖𝟎𝒕𝟔)
+𝟓𝟕𝟔𝜼𝟏𝟒(𝟓𝟐𝟐𝟒 − 𝟔𝟐𝟖𝟒𝟏𝒕𝟐 + 𝟏𝟐𝟒𝟏𝟐𝟎𝒕𝟒 − 𝟒𝟓𝟑𝟔𝟎𝒕𝟔)
+𝟐𝟓𝟔𝜼𝟏𝟔(𝟏𝟕𝟕𝟒 − 𝟐𝟑𝟏𝟓𝟕𝒕𝟐 + 𝟓𝟎𝟎𝟎𝟒𝒕𝟒 − 𝟐𝟎𝟏𝟔𝟎𝒕𝟔) ]

VI. ANEXOS.
408
Para 𝒇𝐗𝐈(𝚽).
[𝑓X(Φ)]′ =
{
−𝑁𝑡cos10 𝜑
[
50521 − 206276𝑡2 + 101166𝑡4 − 4916𝑡6 + 𝑡8
+180𝜂2(3403 − 18211𝑡2 + 13345𝑡4 − 1329𝑡6)
+10𝜂4(304319 − 1995438𝑡2 + 1921083𝑡4 − 287944𝑡6)
+1764𝜂6(4677 − 36081𝑡2 + 42622𝑡4 − 8420𝑡6)
+3𝜂8(4501907 − 39770624𝑡2 + 55294736𝑡4 − 13415808𝑡6)
+360𝜂10(38263 − 379690𝑡2 + 604288𝑡4 − 172480𝑡6)
+64𝜂12(134264 − 1475140𝑡2 + 2634795𝑡4 − 859680𝑡6)
+576𝜂14(5224 − 62841𝑡2 + 124120𝑡4 − 45360𝑡6)
+256𝜂16(1774 − 23157𝑡2 + 50004𝑡4 − 20160𝑡6) ]
}
′
[𝑓X(Φ)]′ =
−
{
𝑁cos10 𝜑
[
50521𝑡 − 206276𝑡3 + 101166𝑡5 − 4916𝑡7 + 𝑡9
+180𝜂2(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂4(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂6(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂8(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂10(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂12(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂14(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}
′
[𝑓X(Φ)]′ = −(𝑢 ∙ 𝑣 ∙ 𝑤)′ = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′
Siendo.
𝑢 = 𝑁, 𝑣 = cos10 𝜑,

VI. ANEXOS.
409
𝑤 =
[
50521𝑡 − 206276𝑡3 + 101166𝑡5 − 4916𝑡7 + 𝑡9
+180𝜂2(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂4(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂6(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂8(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂10(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂12(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂14(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
Derivando.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −10𝑡 cos10 𝜑
𝑤′ =
{
50521(𝑡2 + 1) − 206276(3𝑡4 + 3𝑡2) + 101166(5𝑡6 + 5𝑡4) − 4916(7𝑡8 + 7𝑡6) + 9𝑡10 + 9𝑡8
+180 [−2𝜂2𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+𝜂2(3403(𝑡2 + 1) − 18211(3𝑡4 + 3𝑡2) + 13345(5𝑡6 + 5𝑡4) − 1329(7𝑡8 + 7𝑡6))]
+10 [−4𝜂4𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+𝜂4(304319(𝑡2 + 1) − 1995438(3𝑡4 + 3𝑡2) + 1921083(5𝑡6 + 5𝑡4) − 287944(7𝑡8 + 7𝑡6))]
+1764 [−6𝜂6𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+𝜂6(4677(𝑡2 + 1) − 36081(3𝑡4 + 3𝑡2) + 42622(5𝑡6 + 5𝑡4) − 8420(7𝑡8 + 7𝑡6))]
+3 [−8𝜂8𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+𝜂8(4501907(𝑡2 + 1) − 39770624(3𝑡4 + 3𝑡2) + 55294736(5𝑡6 + 5𝑡4) − 13415808(7𝑡8 + 7𝑡6))]
+360 [−10𝜂10𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+𝜂10(38263(𝑡2 + 1) − 379690(3𝑡4 + 3𝑡2) + 604288(5𝑡6 + 5𝑡4) − 172480(7𝑡8 + 7𝑡6))]
+64 [−12𝜂12𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+𝜂12(134264(𝑡2 + 1) − 1475140(3𝑡4 + 3𝑡2) + 2634795(5𝑡6 + 5𝑡4) − 859680(7𝑡8 + 7𝑡6))]
+576 [−14𝜂14𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+𝜂14(5224(𝑡2 + 1) − 62841(3𝑡4 + 3𝑡2) + 124120(5𝑡6 + 5𝑡4) − 45360(7𝑡8 + 7𝑡6))]
+256 [−16𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7)
+𝜂16(1774(𝑡2 + 1) − 23157(3𝑡4 + 3𝑡2) + 50004(5𝑡6 + 5𝑡4) − 20160(7𝑡8 + 7𝑡6))]
}

VI. ANEXOS.
410
𝑤′ =
[
50521 + 50521𝑡2 − 618828𝑡2 − 618828𝑡4 + 505830𝑡4
+505830𝑡6 − 34412𝑡6 − 34412𝑡8 + 9𝑡8 + 9𝑡10
+180[3403𝜂2 − 58036𝜂2𝑡2 + 48514𝜂2𝑡4 + 30732𝜂2𝑡6 − 6645𝜂2𝑡8]
+10[304319𝜂4 − 6899271𝜂4𝑡2 + 11600853𝜂4𝑡4 − 94525𝜂4𝑡6 − 863832𝜂4𝑡8]
+1764[4677𝜂6 − 131628𝜂6𝑡2 + 321353𝜂6𝑡4 − 101562𝜂6𝑡6 − 8420𝜂6𝑡8]
+3[4501907𝜂8 − 150825221𝜂8𝑡2 + 475326800𝜂8𝑡4 − 259794864𝜂8𝑡6 + 13415808𝜂8𝑡8]
+360[38263𝜂10 − 1483437𝜂10𝑡2 + 5679270𝜂10𝑡4 − 4228800𝜂10𝑡6 + 517440𝜂10𝑡8]
+64[134264𝜂12 − 5902324𝜂12𝑡2 + 26450235𝜂12𝑡4 − 24461325𝜂12𝑡6 + 4298400𝜂12𝑡8]
+576[5224𝜂14 − 256435𝜂14𝑡2 + 1311851𝜂14𝑡4 − 1434600𝜂14𝑡6 + 317520𝜂14𝑡8]
+256[1774𝜂16 − 96081𝜂16𝑡2 + 551061𝜂16𝑡4 − 691164𝜂16𝑡6 + 181440𝜂16𝑡8] ]
𝑤′ =
[
50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+612540𝑛2 − 10446480𝑛2𝑡2 + 8732520𝑛2𝑡4 + 5531760𝑛2𝑡6
−1196100𝑛2𝑡8 + 3043190𝑛4 − 68992710𝑛4𝑡2 + 116008530𝑛4𝑡4
−945250𝑛4𝑡6 − 8638320𝑛4𝑡8 + 8250228𝑛6 − 232191792𝑛6𝑡2
+566866692𝑛6𝑡4 − 179155368𝑛6𝑡6 − 14852880𝑛6𝑡8 + 13505721𝑛8
−452475663𝑛8𝑡2 + 1425980400𝑛8𝑡4 − 779384592𝑛8𝑡6 + 40247424𝑛8𝑡8
+13774680𝑛10 − 534037320𝑛10𝑡2 + 2044537200𝑛10𝑡4 − 1522368000𝑛10𝑡6
+186278400𝑛10𝑡8 + 8592896𝑛12 − 377748736𝑛12𝑡2 + 1692815040𝑛12𝑡4
−1565524800𝑛12𝑡6 + 275097600𝑛12𝑡8 + 3009024𝑛14 − 147706560𝑛14𝑡2
+755626176𝑛14𝑡4 − 826329600𝑛14𝑡6 + 182891520𝑛14𝑡8 + 454144𝑛16
−24596736𝑛16𝑡2 + 141071616𝑛16𝑡4 − 176937984𝑛16𝑡6 + 46448640𝑛16𝑡8 ]

VI. ANEXOS.
411
Sustituyendo.
[𝑓X(Φ)]′ =
−
{
𝜂2𝑡𝜌 ∙ cos10 𝜑
[
50521𝑡 − 206276𝑡3 + 101166𝑡5 − 4916𝑡7 + 𝑡9
+180𝜂2(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂4(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂6(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂8(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂10(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂12(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂14(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁(−10𝑡 cos10 𝜑)
[
50521𝑡 − 206276𝑡3 + 101166𝑡5 − 4916𝑡7 + 𝑡9
+180𝜂2(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂4(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂6(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂8(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂10(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂12(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂14(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁 cos10 𝜑
[ 50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+612540𝑛2 − 10446480𝑛2𝑡2 + 8732520𝑛2𝑡4 + 5531760𝑛2𝑡6
−1196100𝑛2𝑡8 + 3043190𝑛4 − 68992710𝑛4𝑡2 + 116008530𝑛4𝑡4
−945250𝑛4𝑡6 − 8638320𝑛4𝑡8 + 8250228𝑛6 − 232191792𝑛6𝑡2
+566866692𝑛6𝑡4 − 179155368𝑛6𝑡6 − 14852880𝑛6𝑡8
+13505721𝑛8 − 452475663𝑛8𝑡2 + 1425980400𝑛8𝑡4
−779384592𝑛8𝑡6 + 40247424𝑛8𝑡8 + 13774680𝑛10
−534037320𝑛10𝑡2 + 2044537200𝑛10𝑡4 − 1522368000𝑛10𝑡6
+186278400𝑛10𝑡8 + 8592896𝑛12 − 377748736𝑛12𝑡2
+1692815040𝑛12𝑡4 − 1565524800𝑛12𝑡6 + 275097600𝑛12𝑡8
+3009024𝑛14 − 147706560𝑛14𝑡2 + 755626176𝑛14𝑡4
−826329600𝑛14𝑡6 + 182891520𝑛14𝑡8 + 454144𝑛16
−24596736𝑛16𝑡2 + 141071616𝑛16𝑡4 − 176937984𝑛16𝑡6
+46448640𝑛16𝑡8 ]
}

VI. ANEXOS.
412
[𝑓X(Φ)]′ =
−cos10 𝜑
{
𝜌
[ 50521𝜂2𝑡2 − 206276𝜂2𝑡4 + 101166𝜂2𝑡6 − 4916𝜂2𝑡8 + 𝜂2𝑡10
+180𝜂4𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂6𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂8𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂10𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂12𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂14𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂16𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂18𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
[
−505210𝑡2 + 2062760𝑡4 − 1011660𝑡6 + 49160𝑡8 − 10𝑡10
−1800𝜂2𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
−100𝜂4𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
−17640𝜂6𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
−30𝜂8𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
−3600𝜂10𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
−640𝜂12𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
−5760𝜂14𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
−2560𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
[ 50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+612540𝑛2 − 10446480𝑛2𝑡2 + 8732520𝑛2𝑡4 + 5531760𝑛2𝑡6
−1196100𝑛2𝑡8 + 3043190𝑛4 − 68992710𝑛4𝑡2 + 116008530𝑛4𝑡4
−945250𝑛4𝑡6 − 8638320𝑛4𝑡8 + 8250228𝑛6 − 232191792𝑛6𝑡2
+566866692𝑛6𝑡4 − 179155368𝑛6𝑡6 − 14852880𝑛6𝑡8
+13505721𝑛8 − 452475663𝑛8𝑡2 + 1425980400𝑛8𝑡4
−779384592𝑛8𝑡6 + 40247424𝑛8𝑡8 + 13774680𝑛10
−534037320𝑛10𝑡2 + 2044537200𝑛10𝑡4 − 1522368000𝑛10𝑡6
+186278400𝑛10𝑡8 + 8592896𝑛12 − 377748736𝑛12𝑡2
+1692815040𝑛12𝑡4 − 1565524800𝑛12𝑡6 + 275097600𝑛12𝑡8
+3009024𝑛14 − 147706560𝑛14𝑡2 + 755626176𝑛14𝑡4
−826329600𝑛14𝑡6 + 182891520𝑛14𝑡8 + 454144𝑛16
−24596736𝑛16𝑡2 + 141071616𝑛16𝑡4 − 176937984𝑛16𝑡6
+46448640𝑛16𝑡8 ]
}
Multiplicando por 𝑑𝜑
𝑑Φ.

VI. ANEXOS.
413
𝑓XI(Φ) = [𝑓X(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓XI(Φ) = − cos10 𝜑 ∙
{
𝜌
[ 50521𝜂2𝑡2 − 206276𝜂2𝑡4 + 101166𝜂2𝑡6 − 4916𝜂2𝑡8 + 𝜂2𝑡10
+180𝜂4𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂6𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂8𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂10𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂12𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂14𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂16𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂18𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
[
−505210𝑡2 + 2062760𝑡4 − 1011660𝑡6 + 49160𝑡8 − 10𝑡10
−1800𝜂2𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
−100𝜂4𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
−17640𝜂6𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
−30𝜂8𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
−3600𝜂10𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
−640𝜂12𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
−5760𝜂14𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
−2560𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
[ 50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+612540𝑛2 − 10446480𝑛2𝑡2 + 8732520𝑛2𝑡4 + 5531760𝑛2𝑡6
−1196100𝑛2𝑡8 + 3043190𝑛4 − 68992710𝑛4𝑡2 + 116008530𝑛4𝑡4
−945250𝑛4𝑡6 − 8638320𝑛4𝑡8 + 8250228𝑛6 − 232191792𝑛6𝑡2
+566866692𝑛6𝑡4 − 179155368𝑛6𝑡6 − 14852880𝑛6𝑡8
+13505721𝑛8 − 452475663𝑛8𝑡2 + 1425980400𝑛8𝑡4
−779384592𝑛8𝑡6 + 40247424𝑛8𝑡8 + 13774680𝑛10
−534037320𝑛10𝑡2 + 2044537200𝑛10𝑡4 − 1522368000𝑛10𝑡6
+186278400𝑛10𝑡8 + 8592896𝑛12 − 377748736𝑛12𝑡2
+1692815040𝑛12𝑡4 − 1565524800𝑛12𝑡6 + 275097600𝑛12𝑡8
+3009024𝑛14 − 147706560𝑛14𝑡2 + 755626176𝑛14𝑡4
−826329600𝑛14𝑡6 + 182891520𝑛14𝑡8 + 454144𝑛16
−24596736𝑛16𝑡2 + 141071616𝑛16𝑡4 − 176937984𝑛16𝑡6
+46448640𝑛16𝑡8 ]
}
∙ (𝑁 cos𝜑
𝜌)

VI. ANEXOS.
414
𝑓XI(Φ) = −𝑁 cos11 𝜑
{
𝜌
𝜌
[ 50521𝜂2𝑡2 − 206276𝜂2𝑡4 + 101166𝜂2𝑡6 − 4916𝜂2𝑡8 + 𝜂2𝑡10
+180𝜂4𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
+10𝜂6𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
+1764𝜂8𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
+3𝜂10𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
+360𝜂12𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
+64𝜂14𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
+576𝜂16𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
+256𝜂18𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
𝜌
[
−505210𝑡2 + 2062760𝑡4 − 1011660𝑡6 + 49160𝑡8 − 10𝑡10
−1800𝜂2𝑡(3403𝑡 − 18211𝑡3 + 13345𝑡5 − 1329𝑡7)
−100𝜂4𝑡(304319𝑡 − 1995438𝑡3 + 1921083𝑡5 − 287944𝑡7)
−17640𝜂6𝑡(4677𝑡 − 36081𝑡3 + 42622𝑡5 − 8420𝑡7)
−30𝜂8𝑡(4501907𝑡 − 39770624𝑡3 + 55294736𝑡5 − 13415808𝑡7)
−3600𝜂10𝑡(38263𝑡 − 379690𝑡3 + 604288𝑡5 − 172480𝑡7)
−640𝜂12𝑡(134264𝑡 − 1475140𝑡3 + 2634795𝑡5 − 859680𝑡7)
−5760𝜂14𝑡(5224𝑡 − 62841𝑡3 + 124120𝑡5 − 45360𝑡7)
−2560𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
+𝑁
𝜌
[ 50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+612540𝑛2 − 10446480𝑛2𝑡2 + 8732520𝑛2𝑡4 + 5531760𝑛2𝑡6
−1196100𝑛2𝑡8 + 3043190𝑛4 − 68992710𝑛4𝑡2 + 116008530𝑛4𝑡4
−945250𝑛4𝑡6 − 8638320𝑛4𝑡8 + 8250228𝑛6 − 232191792𝑛6𝑡2
+566866692𝑛6𝑡4 − 179155368𝑛6𝑡6 − 14852880𝑛6𝑡8
+13505721𝑛8 − 452475663𝑛8𝑡2 + 1425980400𝑛8𝑡4
−779384592𝑛8𝑡6 + 40247424𝑛8𝑡8 + 13774680𝑛10
−534037320𝑛10𝑡2 + 2044537200𝑛10𝑡4 − 1522368000𝑛10𝑡6
+186278400𝑛10𝑡8 + 8592896𝑛12 − 377748736𝑛12𝑡2
+1692815040𝑛12𝑡4 − 1565524800𝑛12𝑡6 + 275097600𝑛12𝑡8
+3009024𝑛14 − 147706560𝑛14𝑡2 + 755626176𝑛14𝑡4
−826329600𝑛14𝑡6 + 182891520𝑛14𝑡8 + 454144𝑛16
−24596736𝑛16𝑡2 + 141071616𝑛16𝑡4 − 176937984𝑛16𝑡6
+46448640𝑛16𝑡8 ]
}

VI. ANEXOS.
415
𝑓XI(Φ) = −𝑁 cos11 𝜑 ∙
{
[ 50521𝜂2𝑡2 + 612540𝜂4𝑡2 + 3043190𝜂6𝑡2 + 8250228𝜂8𝑡2 + 13505721𝜂10𝑡2
+13774680𝜂12𝑡2 + 8592896𝜂14𝑡2 + 3009024𝜂16𝑡2 + 454144𝜂18𝑡2
−206276𝜂2𝑡4 − 3277980𝜂4𝑡4 − 19954380𝜂6𝑡4 − 63646884𝜂8𝑡4
−119311872𝜂10𝑡4 − 136688400𝜂12𝑡4 − 94408960𝜂14𝑡4 − 36196416𝜂16𝑡4
−5928192𝜂18𝑡4 + 101166𝜂2𝑡6 + 2402100𝜂4𝑡6 + 19210830𝜂6𝑡6
+75185208𝜂8𝑡6 + 165884208𝜂10𝑡6 + 217543680𝜂12𝑡6 + 168626880𝜂14𝑡6
+71493120𝜂16𝑡6 + 12801024𝜂18𝑡6 − 4916𝜂2𝑡8 − 239220𝜂4𝑡8
−2879440𝜂6𝑡8 − 14852880𝜂8𝑡8 − 40247424𝜂10𝑡8 − 62092800𝜂12𝑡8
−55019520𝜂14𝑡8 − 26127360𝜂16𝑡8 − 5160960𝜂18𝑡8 + 𝜂2𝑡10 ]
+
[
−505210𝑡2 + 2062760𝑡4 − 1011660𝑡6 + 49160𝑡8 − 10𝑡10
−6630610𝜂2𝑡2 − 36557300𝜂4𝑡2 − 112934180𝜂6𝑡2 − 217559490𝜂8𝑡2
−272804010𝜂10𝑡2 − 223675760𝜂12𝑡2 − 116019200𝜂14𝑡2 − 34631680𝜂16𝑡2
−4541440𝜂18𝑡2 + 34842560𝜂2𝑡4 + 232323600𝜂4𝑡4 + 836012640𝜂6𝑡4
+1829587560𝜂8𝑡4 + 2560002720𝜂10𝑡4 + 2310973600𝜂12𝑡4
+1306053760𝜂14𝑡4 + 421246080𝜂16𝑡4 + 59281920𝜂18𝑡4 − 25032660𝜂2𝑡6
−216129300𝜂4𝑡6 − 943960380𝜂6𝑡6 − 2410694160𝜂8𝑡6 − 3834278880𝜂10𝑡6
−3861705600𝜂12𝑡6 − 2401200000𝜂14𝑡6 − 842941440𝜂16𝑡6
−128010240𝜂18𝑡6 + 2441360𝜂2𝑡8 + 31186600𝜂4𝑡8 + 177323200𝜂6𝑡8
+551003040𝜂8𝑡8 + 1023402240𝜂10𝑡8 + 1171123200𝜂12𝑡8
+811468800𝜂14𝑡8 + 312883200𝜂16𝑡8 + 51609600𝜂18𝑡8 − 10𝜂2𝑡10 ]
+
[
50521 − 568307𝑡2 − 112998𝑡4 + 471418𝑡6 − 34403𝑡8 + 9𝑡10
+663061𝜂2 + 3655730𝜂4 + 11293418𝜂6 + 21755949𝜂8 + 27280401𝜂10
+22367576𝜂12 + 11601920𝜂14 + 3463168𝜂16 + 454144𝜂18 − 11014787𝜂2𝑡2
−79439190𝜂4𝑡2 − 301184502𝜂6𝑡2 − 684667455𝜂8𝑡2 − 986512983𝜂10𝑡2
−911786056𝜂12𝑡2 − 525455296𝜂14𝑡2 − 172303296𝜂16𝑡2 − 24596736𝜂18𝑡2
+8619522𝜂2𝑡4 + 124741050𝜂4𝑡4 + 682875222𝜂6𝑡4 + 1992847092𝜂8𝑡4
+3470517600𝜂10𝑡4 + 3737352240𝜂12𝑡4 + 2448441216𝜂14𝑡4
+896697792𝜂16𝑡4 + 141071616𝜂18𝑡4 + 6003178𝜂2𝑡6 + 4586510𝜂4𝑡6
−180100618𝜂6𝑡6 − 958539960𝜂8𝑡6 − 2301752592𝜂10𝑡6 − 3087892800𝜂12𝑡6
−2391854400𝜂14𝑡6 − 1003267584𝜂16𝑡6 − 176937984𝜂18𝑡6 − 1230503𝜂2𝑡8
−9834420𝜂4𝑡8 − 23491200𝜂6𝑡8 + 25394544𝜂8𝑡8 + 226525824𝜂10𝑡8
+461376000𝜂12𝑡8 + 457989120𝜂14𝑡8 + 229340160𝜂16𝑡8 + 46448640𝜂18𝑡8
+9𝜂2𝑡10 ]
}

VI. ANEXOS.
416
𝑓XI(Φ) = −𝑁 cos11 𝜑 ∙
[
50521 − (505210𝑡2 + 568307𝑡2) + (2062760𝑡4 − 112998𝑡4)
+(471418𝑡6 − 1011660𝑡6) + (49160𝑡8 − 34403𝑡8) + (9𝑡10 − 10𝑡10)
+663061𝜂2 + 3655730𝜂4 + 11293418𝜂6 + 21755949𝜂8 + 27280401𝜂10
+22367576𝜂12 + 11601920𝜂14 + 3463168𝜂16 + 454144𝜂18 + (50521𝜂2𝑡2
−6630610𝜂2𝑡2 − 11014787𝜂2𝑡2) + (612540𝜂4𝑡2 − 36557300𝜂4𝑡2
−79439190𝜂4𝑡2) + (3043190𝜂6𝑡2 − 112934180𝜂6𝑡2 − 301184502𝜂6𝑡2)
+(8250228𝜂8𝑡2 − 217559490𝜂8𝑡2 − 684667455𝜂8𝑡2) + (13505721𝜂10𝑡2
−272804010𝜂10𝑡2 − 986512983𝜂10𝑡2) + (13774680𝜂12𝑡2
−223675760𝜂12𝑡2 − 911786056𝜂12𝑡2) + (8592896𝜂14𝑡2 − 116019200𝜂14𝑡2
−525455296𝜂14𝑡2) + (3009024𝜂16𝑡2 − 34631680𝜂16𝑡2 − 172303296𝜂16𝑡2)
+(454144𝜂18𝑡2 − 4541440𝜂18𝑡2 − 24596736𝜂18𝑡2) + (34842560𝜂2𝑡4
+8619522𝜂2𝑡4 − 206276𝜂2𝑡4) + (232323600𝜂4𝑡4 + 124741050𝜂4𝑡4
−3277980𝜂4𝑡4) + (836012640𝜂6𝑡4 + 682875222𝜂6𝑡4 − 19954380𝜂6𝑡4)
+(1829587560𝜂8𝑡4 + 1992847092𝜂8𝑡4 − 63646884𝜂8𝑡4) + (3470517600𝜂10𝑡4
+2560002720𝜂10𝑡4 − 119311872𝜂10𝑡4) + (3737352240𝜂12𝑡4 + 2310973600𝜂12𝑡4
−136688400𝜂12𝑡4) + (2448441216𝜂14𝑡4 + 1306053760𝜂14𝑡4 − 94408960𝜂14𝑡4)
+(896697792𝜂16𝑡4 + 421246080𝜂16𝑡4 − 36196416𝜂16𝑡4) + (141071616𝜂18𝑡4
+59281920𝜂18𝑡4 − 5928192𝜂18𝑡4) + (6003178𝜂2𝑡6 + 101166𝜂2𝑡6
−25032660𝜂2𝑡6) + (2402100𝜂4𝑡6 + 4586510𝜂4𝑡6 − 216129300𝜂4𝑡6)
+(19210830𝜂6𝑡6 − 180100618𝜂6𝑡6 − 943960380𝜂6𝑡6) + (75185208𝜂8𝑡6
−958539960𝜂8𝑡6 − 2410694160𝜂8𝑡6) + (165884208𝜂10𝑡6 − 2301752592𝜂10𝑡6
−3834278880𝜂10𝑡6) + (217543680𝜂12𝑡6 − 3087892800𝜂12𝑡6 − 3861705600𝜂12𝑡6)
+(168626880𝜂14𝑡6 − 2391854400𝜂14𝑡6 − 2401200000𝜂14𝑡6) + (71493120𝜂16𝑡6
−842941440𝜂16𝑡6 − 1003267584𝜂16𝑡6) + (12801024𝜂18𝑡6 − 176937984𝜂18𝑡6
−128010240𝜂18𝑡6) + (2441360𝜂2𝑡8 − 1230503𝜂2𝑡8 − 4916𝜂2𝑡8) + (31186600𝜂4𝑡8
−9834420𝜂4𝑡8 − 239220𝜂4𝑡8) + (177323200𝜂6𝑡8 − 2879440𝜂6𝑡8 − 23491200𝜂6𝑡8)
+(551003040𝜂8𝑡8 + 25394544𝜂8𝑡8 − 14852880𝜂8𝑡8) + (226525824𝜂10𝑡8
+1023402240𝜂10𝑡8 − 40247424𝜂10𝑡8) + (1171123200𝜂12𝑡8 + 461376000𝜂12𝑡8
−62092800𝜂12𝑡8) + (811468800𝜂14𝑡8 + 457989120𝜂14𝑡8 − 55019520𝜂14𝑡8)
+(312883200𝜂16𝑡8 + 229340160𝜂16𝑡8 − 26127360𝜂16𝑡8) + (51609600𝜂18𝑡8
+46448640𝜂18𝑡8 − 5160960𝜂18𝑡8) + (9𝜂2𝑡10 + 𝜂2𝑡10 − 10𝜂2𝑡10) ]

VI. ANEXOS.
417
𝑓XI(Φ) = −𝑁 cos11 𝜑 ∙
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+663061𝜂2 + 3655730𝜂4 + 11293418𝜂6 + 21755949𝜂8 + 27280401𝜂10
+22367576𝜂12 + 11601920𝜂14 + 3463168𝜂16 + 454144𝜂18
−17594876𝜂2𝑡2 − 115383950𝜂4𝑡2 − 411075492𝜂6𝑡2 − 893976717𝜂8𝑡2
−1245811272𝜂10𝑡2 − 1121687136𝜂12𝑡2 − 632881600𝜂14𝑡2 − 203925952𝜂16𝑡2
−28684032𝜂18𝑡2 + 43255806𝜂2𝑡4 + 353786670𝜂4𝑡4 + 1498933482𝜂6𝑡4
+3758787768𝜂8𝑡4 + 5911208448𝜂10𝑡4 + 5911637440𝜂12𝑡4 + 3660086016𝜂14𝑡4
+1281747456𝜂16𝑡4 + 194425344𝜂18𝑡4 − 18928316𝜂2𝑡6 − 209140690𝜂4𝑡6
−1104850168𝜂6𝑡6 − 3294048912𝜂8𝑡6 − 5970147264𝜂10𝑡6 − 6732054720𝜂12𝑡6
−4624427520𝜂14𝑡6 − 1774715904𝜂16𝑡6 − 292147200𝜂18𝑡6 + 1205941𝜂2𝑡8
+21112960𝜂4𝑡8 + 150952560𝜂6𝑡8 + 561544704𝜂8𝑡8 + 1209680640𝜂10𝑡8
+1570406400𝜂12𝑡8 + 1214438400𝜂14𝑡8 + 516096000𝜂16𝑡8 + 92897280𝜂18𝑡8 ]
𝑓XI(Φ) = −𝑁 cos11 𝜑 ∙
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+663061𝜂2 − 17594876𝜂2𝑡2 + 43255806𝜂2𝑡4 − 18928316𝜂2𝑡6 + 1205941𝜂2𝑡8
+3655730𝜂4 − 115383950𝜂4𝑡2 + 353786670𝜂4𝑡4 − 209140690𝜂4𝑡6
+21112960𝜂4𝑡8 + 11293418𝜂6 − 411075492𝜂6𝑡2 + 1498933482𝜂6𝑡4
−1104850168𝜂6𝑡6 + 150952560𝜂6𝑡8 + 21755949𝜂8 − 893976717𝜂8𝑡2
+3758787768𝜂8𝑡4 − 3294048912𝜂8𝑡6 + 561544704𝜂8𝑡8 + 27280401𝜂10
−1245811272𝜂10𝑡2 + 5911208448𝜂10𝑡4 − 5970147264𝜂10𝑡6 + 1209680640𝜂10𝑡8
+22367576𝜂12 − 1121687136𝜂12𝑡2 + 5911637440𝜂12𝑡4 − 6732054720𝜂12𝑡6
+1570406400𝜂12𝑡8 + 11601920𝜂14 − 632881600𝜂14𝑡2 + 3660086016𝜂14𝑡4
−4624427520𝜂14𝑡6 + 1214438400𝜂14𝑡8 + 3463168𝜂16 − 203925952𝜂16𝑡2
+1281747456𝜂16𝑡4 − 1774715904𝜂16𝑡6 + 516096000𝜂16𝑡8 + 454144𝜂18
−28684032𝜂18𝑡2 + 194425344𝜂18𝑡4 − 292147200𝜂18𝑡6 + 92897280𝜂18𝑡8 ]
𝒇𝐗𝐈(𝚽) = −𝑵𝐜𝐨𝐬𝟏𝟏𝝋 ∙
[
𝟓𝟎𝟓𝟐𝟏 − 𝟏𝟎𝟕𝟑𝟓𝟏𝟕𝒕𝟐 + 𝟏𝟗𝟒𝟗𝟕𝟔𝟐𝒕𝟒 − 𝟓𝟒𝟎𝟐𝟒𝟐𝒕𝟔 + 𝟏𝟒𝟕𝟓𝟕𝒕𝟖 − 𝒕𝟏𝟎
+𝜼𝟐(𝟔𝟔𝟑𝟎𝟔𝟏 − 𝟏𝟕𝟓𝟗𝟒𝟖𝟕𝟔𝒕𝟐 + 𝟒𝟑𝟐𝟓𝟓𝟖𝟎𝟔𝒕𝟒 − 𝟏𝟖𝟗𝟐𝟖𝟑𝟏𝟔𝒕𝟔 + 𝟏𝟐𝟎𝟓𝟗𝟒𝟏𝒕𝟖)
+𝟏𝟎𝜼𝟒(𝟑𝟔𝟓𝟓𝟕𝟑 − 𝟏𝟏𝟓𝟑𝟖𝟑𝟗𝟓𝒕𝟐 + 𝟑𝟓𝟑𝟕𝟖𝟔𝟔𝟕𝒕𝟒 − 𝟐𝟎𝟗𝟏𝟒𝟎𝟔𝟗𝒕𝟔 + 𝟐𝟏𝟏𝟏𝟐𝟗𝟔𝒕𝟖)
+𝟐𝜼𝟔(𝟓𝟔𝟒𝟔𝟕𝟎𝟗 − 𝟐𝟎𝟓𝟓𝟑𝟕𝟕𝟒𝟔𝒕𝟐 + 𝟕𝟒𝟗𝟒𝟔𝟔𝟕𝟒𝟏𝒕𝟒 − 𝟓𝟓𝟐𝟒𝟐𝟓𝟎𝟖𝟒𝒕𝟔 + 𝟕𝟓𝟒𝟕𝟔𝟐𝟖𝟎𝒕𝟖)
+𝟑𝜼𝟖(𝟕𝟐𝟓𝟏𝟗𝟖𝟑 − 𝟐𝟗𝟕𝟗𝟗𝟐𝟐𝟑𝟗𝒕𝟐 + 𝟏𝟐𝟓𝟐𝟗𝟐𝟗𝟐𝟓𝟔𝒕𝟒 − 𝟏𝟎𝟗𝟖𝟎𝟏𝟔𝟑𝟎𝟒𝒕𝟔 + 𝟏𝟖𝟕𝟏𝟖𝟏𝟓𝟔𝟖𝒕𝟖)
+𝟑𝜼𝟏𝟎(𝟗𝟎𝟗𝟑𝟒𝟔𝟕 − 𝟒𝟏𝟓𝟐𝟕𝟎𝟒𝟐𝟒𝒕𝟐 + 𝟏𝟗𝟕𝟎𝟒𝟎𝟐𝟖𝟏𝟔𝒕𝟒 − 𝟏𝟗𝟗𝟎𝟎𝟒𝟗𝟎𝟖𝟖𝒕𝟔 + 𝟒𝟎𝟑𝟐𝟐𝟔𝟖𝟖𝟎𝒕𝟖)
+𝟖𝜼𝟏𝟐(𝟐𝟕𝟗𝟓𝟗𝟒𝟕 − 𝟏𝟒𝟎𝟐𝟏𝟎𝟖𝟗𝟐𝒕𝟐 + 𝟕𝟑𝟖𝟗𝟓𝟒𝟔𝟖𝟎𝒕𝟒 − 𝟖𝟒𝟏𝟓𝟎𝟔𝟖𝟒𝟎𝒕𝟔 + 𝟏𝟗𝟔𝟑𝟎𝟎𝟖𝟎𝟎𝒕𝟖)
+𝟔𝟒𝜼𝟏𝟒(𝟏𝟖𝟏𝟐𝟖𝟎 − 𝟗𝟖𝟖𝟖𝟕𝟕𝟓𝒕𝟐 + 𝟓𝟕𝟏𝟖𝟖𝟖𝟒𝟒𝒕𝟒 − 𝟕𝟐𝟐𝟓𝟔𝟔𝟖𝟎𝒕𝟔 + 𝟏𝟖𝟗𝟕𝟓𝟔𝟎𝟎𝒕𝟖)
+𝟔𝟒𝜼𝟏𝟔(𝟓𝟒𝟏𝟏𝟐 − 𝟑𝟏𝟖𝟔𝟑𝟒𝟑𝒕𝟐 + 𝟐𝟎𝟎𝟐𝟕𝟑𝟎𝟒𝒕𝟒 − 𝟐𝟕𝟕𝟐𝟗𝟗𝟑𝟔𝒕𝟔 + 𝟖𝟎𝟔𝟒𝟎𝟎𝟎𝒕𝟖)
+𝟐𝟓𝟔𝜼𝟏𝟖(𝟏𝟕𝟕𝟒 − 𝟏𝟏𝟐𝟎𝟒𝟕𝒕𝟐 + 𝟕𝟓𝟗𝟒𝟕𝟒𝒕𝟒 − 𝟏𝟏𝟒𝟏𝟐𝟎𝟎𝒕𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝒕𝟖) ]

VI. ANEXOS.
418
Para 𝒇𝐗𝐈𝐈(𝚽).
[𝑓XI(Φ)]′ =
{
−𝑁 cos11 𝜑
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}
′
[𝑓XI(Φ)]′ =
−
{
𝑁 cos11 𝜑
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}
′
[𝑓XI(Φ)]′ = −(𝑢 ∙ 𝑣 ∙ 𝑤)′ = −(𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′)
Siendo.
𝑢 = 𝑁, 𝑣 = cos11 𝜑,
𝑤 =
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
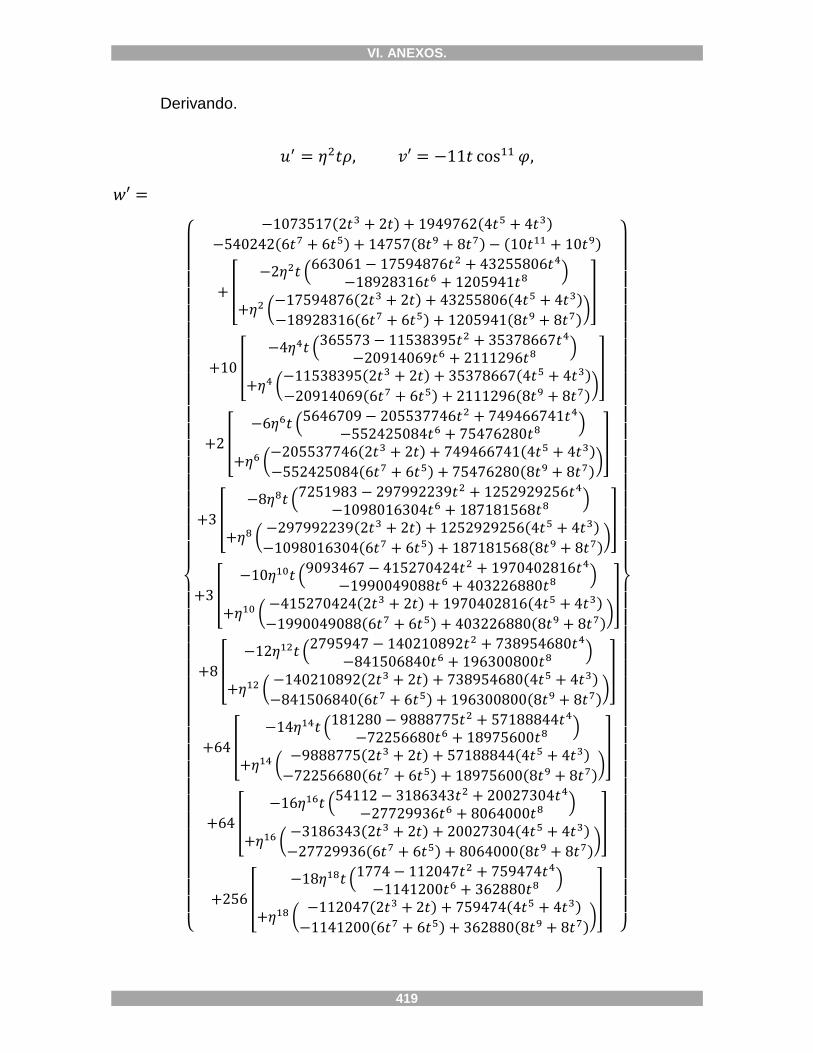
VI. ANEXOS.
419
Derivando.
𝑢′ = 𝜂2𝑡𝜌, 𝑣′ = −11𝑡 cos11 𝜑,
𝑤′ =
{
−1073517(2𝑡3 + 2𝑡) + 1949762(4𝑡5 + 4𝑡3)
−540242(6𝑡7 + 6𝑡5) + 14757(8𝑡9 + 8𝑡7) − (10𝑡11 + 10𝑡9)
+ [
−2𝜂2𝑡 (663061 − 17594876𝑡2 + 43255806𝑡4
−18928316𝑡6 + 1205941𝑡8)
+𝜂2 (−17594876(2𝑡3 + 2𝑡) + 43255806(4𝑡5 + 4𝑡3)
−18928316(6𝑡7 + 6𝑡5) + 1205941(8𝑡9 + 8𝑡7))]
+10 [
−4𝜂4𝑡 (365573 − 11538395𝑡2 + 35378667𝑡4
−20914069𝑡6 + 2111296𝑡8)
+𝜂4 (−11538395(2𝑡3 + 2𝑡) + 35378667(4𝑡5 + 4𝑡3)
−20914069(6𝑡7 + 6𝑡5) + 2111296(8𝑡9 + 8𝑡7))]
+2 [
−6𝜂6𝑡 (5646709 − 205537746𝑡2 + 749466741𝑡4
−552425084𝑡6 + 75476280𝑡8)
+𝜂6 (−205537746(2𝑡3 + 2𝑡) + 749466741(4𝑡5 + 4𝑡3)
−552425084(6𝑡7 + 6𝑡5) + 75476280(8𝑡9 + 8𝑡7))]
+3 [
−8𝜂8𝑡 (7251983 − 297992239𝑡2 + 1252929256𝑡4
−1098016304𝑡6 + 187181568𝑡8)
+𝜂8 (−297992239(2𝑡3 + 2𝑡) + 1252929256(4𝑡5 + 4𝑡3)
−1098016304(6𝑡7 + 6𝑡5) + 187181568(8𝑡9 + 8𝑡7))]
+3 [
−10𝜂10𝑡 (9093467 − 415270424𝑡2 + 1970402816𝑡4
−1990049088𝑡6 + 403226880𝑡8)
+𝜂10 (−415270424(2𝑡3 + 2𝑡) + 1970402816(4𝑡5 + 4𝑡3)
−1990049088(6𝑡7 + 6𝑡5) + 403226880(8𝑡9 + 8𝑡7))]
+8 [
−12𝜂12𝑡 (2795947 − 140210892𝑡2 + 738954680𝑡4
−841506840𝑡6 + 196300800𝑡8)
+𝜂12 (−140210892(2𝑡3 + 2𝑡) + 738954680(4𝑡5 + 4𝑡3)
−841506840(6𝑡7 + 6𝑡5) + 196300800(8𝑡9 + 8𝑡7))]
+64 [
−14𝜂14𝑡 (181280 − 9888775𝑡2 + 57188844𝑡4
−72256680𝑡6 + 18975600𝑡8)
+𝜂14 (−9888775(2𝑡3 + 2𝑡) + 57188844(4𝑡5 + 4𝑡3)
−72256680(6𝑡7 + 6𝑡5) + 18975600(8𝑡9 + 8𝑡7))]
+64 [
−16𝜂16𝑡 (54112 − 3186343𝑡2 + 20027304𝑡4
−27729936𝑡6 + 8064000𝑡8)
+𝜂16 (−3186343(2𝑡3 + 2𝑡) + 20027304(4𝑡5 + 4𝑡3)
−27729936(6𝑡7 + 6𝑡5) + 8064000(8𝑡9 + 8𝑡7))]
+256 [
−18𝜂18𝑡 (1774 − 112047𝑡2 + 759474𝑡4
−1141200𝑡6 + 362880𝑡8)
+𝜂18 (−112047(2𝑡3 + 2𝑡) + 759474(4𝑡5 + 4𝑡3)
−1141200(6𝑡7 + 6𝑡5) + 362880(8𝑡9 + 8𝑡7))]
}

VI. ANEXOS.
420
𝑤′ =
{
−2147034𝑡 − 2147034𝑡3 + 7799048𝑡3 + 7799048𝑡5 − 3241452𝑡5
−3241452𝑡7 + +118056𝑡7 + 118056𝑡9 − 10𝑡9 − 10𝑡11
+ [−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5
−66065736𝜂2𝑡7 + 7235646𝜂2𝑡9]
+10 [−24539082𝜂4𝑡 + 164591458𝜂4𝑡3 − 125484414𝜂4𝑡5
−24937770𝜂4𝑡7 + 8445184𝜂4𝑡9]
+2 [−444955746𝜂6𝑡 + 3820017948𝜂6𝑡3 − 4813483986𝜂6𝑡5
+603810240𝜂6𝑡7 + 150952560𝜂6𝑡9]
+3 [−654000342𝜂8𝑡 + 6799670458𝜂8𝑡3 − 11599814848𝜂8𝑡5
+3693485152𝜂8𝑡7]
+3 [−921475518𝜂10𝑡 + 11203774656𝜂10𝑡3 − 23762711424𝜂10𝑡5
+11186011392𝜂10𝑡7 − 806453760𝜂10𝑡9]
+8 [−313973148𝜂12𝑡 + 4357927640𝜂12𝑡3 − 10960678480𝜂12𝑡5
+6619447440𝜂12𝑡7 − 785203200𝜂12𝑡9]
+64 [−22315470𝜂14𝑡 + 347420676𝜂14𝑡3 − 1005428520𝜂14𝑡5
+729858240𝜂14𝑡7 − 113853600𝜂14𝑡9]
+64 [−7238478𝜂16𝑡 + 124718018𝜂16𝑡3 − 406707264𝜂16𝑡5
+341811360𝜂16𝑡7 − 64512000𝜂16𝑡9]
+256 [−256026𝜂18𝑡 + 4830648𝜂18𝑡3 − 17479836𝜂18𝑡5
+16597440𝜂18𝑡7 − 3628800𝜂18𝑡9]
}
𝑤′ =
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]

VI. ANEXOS.
421
Sustituyendo.
[𝑓XI(Φ)]′ = −
{
𝜂2𝑡𝜌 cos11 𝜑
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁(−11𝑡 cos11 𝜑)
[
50521 − 1073517𝑡2 + 1949762𝑡4 − 540242𝑡6 + 14757𝑡8 − 𝑡10
+𝜂2(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂4(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂6(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂8(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂10(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂12(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂14(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂16(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁 cos11 𝜑
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]
}

VI. ANEXOS.
422
[𝑓XI(Φ)]′ = −cos11 𝜑
{
𝜌
[
50521𝜂2𝑡 − 1073517𝜂2𝑡3 + 1949762𝜂2𝑡5 − 540242𝜂2𝑡7 + 14757𝜂2𝑡9 − 𝜂2𝑡11
+𝜂4𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂6𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂8𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂10𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂12𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂14𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂16𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂18𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂20𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
[
−555731𝑡 + 11808687𝑡3 − 21447382𝑡5 + 5942662𝑡7 − 162327𝑡9 + 11𝑡11
−11𝜂2𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
−110𝜂4𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
−22𝜂6𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
−33𝜂8𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
−33𝜂10𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
−88𝜂12𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
−704𝜂14𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
−704𝜂16𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
−2816𝜂18𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]
}

VI. ANEXOS.
423
Multiplicando por 𝑑𝜑
𝑑Φ.
𝑓XII(Φ) = [𝑓XI(Φ)]′ ∙𝑑𝜑
𝑑Φ
𝑓XII(Φ) = − cos11 𝜑
{
𝜌
[
50521𝜂2𝑡 − 1073517𝜂2𝑡3 + 1949762𝜂2𝑡5 − 540242𝜂2𝑡7 + 14757𝜂2𝑡9 − 𝜂2𝑡11
+𝜂4𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂6𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂8𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂10𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂12𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂14𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂16𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂18𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂20𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
[
−555731𝑡 + 11808687𝑡3 − 21447382𝑡5 + 5942662𝑡7 − 162327𝑡9 + 11𝑡11
−11𝜂2𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
−110𝜂4𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
−22𝜂6𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
−33𝜂8𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
−33𝜂10𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
−88𝜂12𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
−704𝜂14𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
−704𝜂16𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
−2816𝜂18𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]
}
∙ (𝑁cos𝜑
𝜌)

VI. ANEXOS.
424
𝑓XII(Φ) = −𝑁 cos12 𝜑
{
𝜌
𝜌
[
50521𝜂2𝑡 − 1073517𝜂2𝑡3 + 1949762𝜂2𝑡5 − 540242𝜂2𝑡7 + 14757𝜂2𝑡9 − 𝜂2𝑡11
+𝜂4𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂6𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂8𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂10𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂12𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂14𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂16𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂18𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂20𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
𝜌
[
−555731𝑡 + 11808687𝑡3 − 21447382𝑡5 + 5942662𝑡7 − 162327𝑡9 + 11𝑡11
−11𝜂2𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
−110𝜂4𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
−22𝜂6𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
−33𝜂8𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
−33𝜂10𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
−88𝜂12𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
−704𝜂14𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
−704𝜂16𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
−2816𝜂18𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+𝑁
𝜌
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]
}

VI. ANEXOS.
425
𝑓XII(Φ) = −𝑁 cos12 𝜑
{
[
50521𝜂2𝑡 − 1073517𝜂2𝑡3 + 1949762𝜂2𝑡5 − 540242𝜂2𝑡7 + 14757𝜂2𝑡9 − 𝜂2𝑡11
+𝜂4𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
+10𝜂6𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
+2𝜂8𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
+3𝜂10𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
+3𝜂12𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
+8𝜂14𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
+64𝜂16𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
+64𝜂18𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
+256𝜂20𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+(1 + 𝜂2)
[
−555731𝑡 + 11808687𝑡3 − 21447382𝑡5 + 5942662𝑡7 − 162327𝑡9 + 11𝑡11
−11𝜂2𝑡(663061 − 17594876𝑡2 + 43255806𝑡4 − 18928316𝑡6 + 1205941𝑡8)
−110𝜂4𝑡(365573 − 11538395𝑡2 + 35378667𝑡4 − 20914069𝑡6 + 2111296𝑡8)
−22𝜂6𝑡(5646709 − 205537746𝑡2 + 749466741𝑡4 − 552425084𝑡6 + 75476280𝑡8)
−33𝜂8𝑡(7251983 − 297992239𝑡2 + 1252929256𝑡4 − 1098016304𝑡6 + 187181568𝑡8)
−33𝜂10𝑡(9093467 − 415270424𝑡2 + 1970402816𝑡4 − 1990049088𝑡6 + 403226880𝑡8)
−88𝜂12𝑡(2795947 − 140210892𝑡2 + 738954680𝑡4 − 841506840𝑡6 + 196300800𝑡8)
−704𝜂14𝑡(181280 − 9888775𝑡2 + 57188844𝑡4 − 72256680𝑡6 + 18975600𝑡8)
−704𝜂16𝑡(54112 − 3186343𝑡2 + 20027304𝑡4 − 27729936𝑡6 + 8064000𝑡8)
−2816𝜂18𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
+(1 + 𝜂2)
[ −2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−36515874𝜂2𝑡 + 173023224𝜂2𝑡3 − 27058284𝜂2𝑡5 − 66065736𝜂2𝑡7
+7235646𝜂2𝑡9 − 245390820𝜂4𝑡 + 1645914580𝜂4𝑡3 − 1254844140𝜂4𝑡5
−249377700𝜂4𝑡7 + 84451840𝜂4𝑡9 − 889911492𝜂6𝑡 + 7640035896𝜂6𝑡3
−9626967972𝜂6𝑡5 + 1207620480𝜂6𝑡7 + 301905120𝜂6𝑡9 − 1962001026𝜂8𝑡
+20399011374𝜂8𝑡3 − 34799444544𝜂8𝑡5 + 11080455456𝜂8𝑡7
−2764426554𝜂10𝑡 + 33611323968𝜂10𝑡3 − 71288134272𝜂10𝑡5
+33558034176𝜂10𝑡7 − 2419361280𝜂10𝑡9 − 2511785184𝜂12𝑡
+34863421120𝜂12𝑡3 − 87685427840𝜂12𝑡5 + 52955579520𝜂12𝑡7
−6281625600𝜂12𝑡9 − 1428190080𝜂14𝑡 + 22234923264𝜂14𝑡3
−64347425280𝜂14𝑡5 + 46710927360𝜂14𝑡7 − 7286630400𝜂14𝑡9
−463262592𝜂16𝑡 + 7981953152𝜂16𝑡3 − 26029264896𝜂16𝑡5
+21875927040𝜂16𝑡7 − 4128768000𝜂16𝑡9 − 65542656𝜂18𝑡
+1236645888𝜂18𝑡3 − 4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7
−928972800𝜂18𝑡9 ]
}

VI. ANEXOS.
426
𝑓XII(Φ) = −𝑁 cos12 𝜑
{
[ 50521𝜂2𝑡 + 663061𝜂4𝑡 + 3655730𝜂6𝑡 + 11293418𝜂8𝑡 + 21755949𝜂10𝑡 + 27280401𝜂12𝑡
+22367576𝜂14𝑡 + 11601920𝜂16𝑡 + 3463168𝜂18𝑡 + 454144𝜂20𝑡 − 1073517𝜂2𝑡3
−17594876𝜂4𝑡3 − 115383950𝜂6𝑡3 − 411075492𝜂8𝑡3 − 893976717𝜂10𝑡3
−1245811272𝜂12𝑡3 − 1121687136𝜂14𝑡3 − 632881600𝜂16𝑡3 − 203925952𝜂18𝑡3
−28684032𝜂20𝑡3 + 1949762𝜂2𝑡5 + 43255806𝜂4𝑡5 + 353786670𝜂6𝑡5 + 1498933482𝜂8𝑡5
+3758787768𝜂10𝑡5 + 5911208448𝜂12𝑡5 + 5911637440𝜂14𝑡5 + 3660086016𝜂16𝑡5
+1281747456𝜂18𝑡5 + 194425344𝜂20𝑡5 − 540242𝜂2𝑡7 − 18928316𝜂4𝑡7 − 209140690𝜂6𝑡7
−1104850168𝜂8𝑡7 − 3294048912𝜂10𝑡7 − 5970147264𝜂12𝑡7 − 6732054720𝜂14𝑡7
−4624427520𝜂16𝑡7 − 1774715904𝜂18𝑡7 − 292147200𝜂20𝑡7 + 14757𝜂2𝑡9 + 1205941𝜂4𝑡9
+21112960𝜂6𝑡9 + 150952560𝜂8𝑡9 + 561544704𝜂10𝑡9 + 1209680640𝜂12𝑡9
+1570406400𝜂14𝑡9 + 1214438400𝜂16𝑡9 + 516096000𝜂18𝑡9 + 92897280𝜂20𝑡9 − 𝜂2𝑡11 ]
+
[
−555731𝑡 + 11808687𝑡3 − 21447382𝑡5 + 5942662𝑡7 − 162327𝑡9 + 11𝑡11
−7849402𝜂2𝑡 − 47506701𝜂4𝑡 − 164440628𝜂6𝑡 − 363543037𝜂8𝑡 − 539399850𝜂10𝑡
−546127747𝜂12𝑡 − 373664456𝜂14𝑡 − 165715968𝜂16𝑡 − 43090432𝜂18𝑡 − 4995584𝜂20𝑡
+205352323𝜂2𝑡3 + 1462767086𝜂4𝑡3 + 5791053862𝜂6𝑡3 + 14355574299𝜂8𝑡3
+23537667879𝜂10𝑡3 + 26042482488𝜂12𝑡3 + 19300256096𝜂14𝑡3 + 9204883072𝜂16𝑡3
+2558709824𝜂18𝑡3 + 315524352𝜂20𝑡3 − 497261248𝜂2𝑡5 − 4367467236𝜂4𝑡5
−20379921672𝜂6𝑡5 − 57834933750𝜂8𝑡5 − 106369958376𝜂10𝑡5 − 130051304768𝜂12𝑡5
−105288958016𝜂14𝑡5 − 54360168192𝜂16𝑡5 − 16237900800𝜂18𝑡5 − 2138678784𝜂20𝑡5
+214154138𝜂2𝑡7 + 2508759066𝜂4𝑡7 + 14453899438𝜂6𝑡7 + 48387889880𝜂8𝑡7
+101906157936𝜂10𝑡7 + 139724221824𝜂12𝑡7 + 124921304640𝜂14𝑡7
+70390577664𝜂16𝑡7 + 22735494144𝜂18𝑡7 + 3213619200𝜂20𝑡7 − 13427678𝜂2𝑡9
−245507911𝜂4𝑡9 − 1892720720𝜂6𝑡9 − 7837469904𝜂8𝑡9 − 19483478784𝜂10𝑡9
−30580957440𝜂12𝑡9 − 30633292800𝜂14𝑡9 − 19035878400𝜂16𝑡9 − 6698926080𝜂18𝑡9
−1021870080𝜂20𝑡9 + 11𝜂2𝑡11 ]
+
[
−2147034𝑡 + 5652014𝑡3 + 4557596𝑡5 − 3123396𝑡7 + 118046𝑡9 − 10𝑡11
−38662908𝜂2𝑡 − 281906694𝜂4𝑡 − 1135302312𝜂6𝑡 − 2851912518𝜂8𝑡
−4726427580𝜂10𝑡 − 5276211738𝜂12𝑡 − 3939975264𝜂14𝑡 − 1891452672𝜂16𝑡
−528805248𝜂18𝑡 − 65542656𝜂20𝑡 + 178675238𝜂2𝑡3 + 1818937804𝜂4𝑡3
+9285950476𝜂6𝑡3 + 28039047270𝜂8𝑡3 + 54010335342𝜂10𝑡3 + 68474745088𝜂12𝑡3
+57098344384𝜂14𝑡3 + 30216876416𝜂16𝑡3 + 9218599040𝜂18𝑡3 + 1236645888𝜂20𝑡3
−22500688𝜂2𝑡5 − 1281902424𝜂4𝑡5 − 10881812112𝜂6𝑡5 − 44426412516𝜂8𝑡5
−106087578816𝜂10𝑡5 − 158973562112𝜂12𝑡5 − 152032853120𝜂14𝑡5
−90376690176𝜂16𝑡5 − 30504102912𝜂18𝑡5 − 4474838016𝜂20𝑡5 − 69189132𝜂2𝑡7
−315443436𝜂4𝑡7 + 958242780𝜂6𝑡7 + 12288075936𝜂8𝑡7 + 44638489632𝜂10𝑡7
+86513613696𝜂12𝑡7 + 99666506880𝜂14𝑡7 + 68586854400𝜂16𝑡7 + 26124871680𝜂18𝑡7
+4248944640𝜂20𝑡7 + 7353692𝜂2𝑡9 + 91687486𝜂4𝑡9 + 386356960𝜂6𝑡9
+301905120𝜂8𝑡9 − 2419361280𝜂10𝑡9 − 8700986880𝜂12𝑡9 − 13568256000𝜂14𝑡9
−11415398400𝜂16𝑡9 − 5057740800𝜂18𝑡9 − 928972800𝜂20𝑡9 − 10𝜂2𝑡11 ]
}

VI. ANEXOS.
427
𝑓XII(Φ) = −𝑁 cos12 𝜑
[
−(555731𝑡 + 2147034𝑡) + (5652014𝑡3 + 11808687𝑡3) + (4557596𝑡5 − 21447382𝑡5)
+(5942662𝑡7 − 3123396𝑡7) + (118046𝑡9 − 162327𝑡9) + (11𝑡11 − 10𝑡11) + (50521𝜂2𝑡
−7849402𝜂2𝑡 − 38662908𝜂2𝑡) + (663061𝜂4𝑡 − 47506701𝜂4𝑡 − 281906694𝜂4𝑡) + (3655730𝜂6𝑡
−164440628𝜂6𝑡 − 1135302312𝜂6𝑡) + (11293418𝜂8𝑡 − 363543037𝜂8𝑡 − 2851912518𝜂8𝑡)
+(21755949𝜂10𝑡 − 4726427580𝜂10𝑡 − 539399850𝜂10𝑡) + (27280401𝜂12𝑡 − 546127747𝜂12𝑡
−5276211738𝜂12𝑡) + (22367576𝜂14𝑡 − 373664456𝜂14𝑡 − 3939975264𝜂14𝑡) + (11601920𝜂16𝑡
−165715968𝜂16𝑡 − 1891452672𝜂16𝑡) + (3463168𝜂18𝑡 − 43090432𝜂18𝑡 − 528805248𝜂18𝑡)
+(454144𝜂20𝑡 − 4995584𝜂20𝑡 − 65542656𝜂20𝑡) + (178675238𝜂2𝑡3 + 205352323𝜂2𝑡3
−1073517𝜂2𝑡3) + (1462767086𝜂4𝑡3 + 1818937804𝜂4𝑡3 − 17594876𝜂4𝑡3) + (5791053862𝜂6𝑡3
+9285950476𝜂6𝑡3 − 115383950𝜂6𝑡3) + (28039047270𝜂8𝑡3 + 14355574299𝜂8𝑡3
−411075492𝜂8𝑡3) + (54010335342𝜂10𝑡3 + 23537667879𝜂10𝑡3 − 893976717𝜂10𝑡3)
+(68474745088𝜂12𝑡3 + 26042482488𝜂12𝑡3 − 1245811272𝜂12𝑡3) + (57098344384𝜂14𝑡3
+19300256096𝜂14𝑡3 − 1121687136𝜂14𝑡3) + (30216876416𝜂16𝑡3 + 9204883072𝜂16𝑡3
−632881600𝜂16𝑡3) + (9218599040𝜂18𝑡3 + 2558709824𝜂18𝑡3 − 203925952𝜂18𝑡3)
+(1236645888𝜂20𝑡3 + 315524352𝜂20𝑡3 − 28684032𝜂20𝑡3) + (1949762𝜂2𝑡5 − 22500688𝜂2𝑡5
−497261248𝜂2𝑡5) + (43255806𝜂4𝑡5 − 1281902424𝜂4𝑡5 − 4367467236𝜂4𝑡5)
+(353786670𝜂6𝑡5 − 10881812112𝜂6𝑡5 − 20379921672𝜂6𝑡5) + (1498933482𝜂8𝑡5
−44426412516𝜂8𝑡5 − 57834933750𝜂8𝑡5) + (3758787768𝜂10𝑡5 − 106087578816𝜂10𝑡5
−106369958376𝜂10𝑡5) + (5911208448𝜂12𝑡5 − 130051304768𝜂12𝑡5 − 158973562112𝜂12𝑡5)
+(5911637440𝜂14𝑡5 − 105288958016𝜂14𝑡5 − 152032853120𝜂14𝑡5) + (3660086016𝜂16𝑡5
−54360168192𝜂16𝑡5 − 90376690176𝜂16𝑡5) + (1281747456𝜂18𝑡5 − 16237900800𝜂18𝑡5
−30504102912𝜂18𝑡5) + (194425344𝜂20𝑡5 − 2138678784𝜂20𝑡5 − 4474838016𝜂20𝑡5)
+(214154138𝜂2𝑡7 − 69189132𝜂2𝑡7 − 540242𝜂2𝑡7) + (2508759066𝜂4𝑡7 − 315443436𝜂4𝑡7
−18928316𝜂4𝑡7) + (14453899438𝜂6𝑡7 + 958242780𝜂6𝑡7 − 209140690𝜂6𝑡7)
+(48387889880𝜂8𝑡7 + 12288075936𝜂8𝑡7 − 1104850168𝜂8𝑡7) + (101906157936𝜂10𝑡7
+44638489632𝜂10𝑡7 − 3294048912𝜂10𝑡7) + (139724221824𝜂12𝑡7 + 86513613696𝜂12𝑡7
−5970147264𝜂12𝑡7) + (124921304640𝜂14𝑡7 + 99666506880𝜂14𝑡7 − 6732054720𝜂14𝑡7)
+(70390577664𝜂16𝑡7 + 68586854400𝜂16𝑡7 − 4624427520𝜂16𝑡7) + (26124871680𝜂18𝑡7
+22735494144𝜂18𝑡7 − 1774715904𝜂18𝑡7) + (4248944640𝜂20𝑡7 + 3213619200𝜂20𝑡7
−292147200𝜂20𝑡7) + (7353692𝜂2𝑡9 + 14757𝜂2𝑡9 − 13427678𝜂2𝑡9) + (91687486𝜂4𝑡9
+1205941𝜂4𝑡9 − 245507911𝜂4𝑡9) + (386356960𝜂6𝑡9 + 21112960𝜂6𝑡9 − 1892720720𝜂6𝑡9)
+(301905120𝜂8𝑡9 + 150952560𝜂8𝑡9 − 7837469904𝜂8𝑡9) + (561544704𝜂10𝑡9
−19483478784𝜂10𝑡9 − 2419361280𝜂10𝑡9) + (1209680640𝜂12𝑡9 − 8700986880𝜂12𝑡9
−30580957440𝜂12𝑡9) + (1570406400𝜂14𝑡9 − 30633292800𝜂14𝑡9 − 13568256000𝜂14𝑡9)
+(1214438400𝜂16𝑡9 − 11415398400𝜂16𝑡9 − 19035878400𝜂16𝑡9) + (516096000𝜂18𝑡9
−5057740800𝜂18𝑡9 − 6698926080𝜂18𝑡9) + (92897280𝜂20𝑡9 − 928972800𝜂20𝑡9
−1021870080𝜂20𝑡9) + (11𝜂2𝑡11 − 10𝜂2𝑡11 − 𝜂2𝑡11) ]

VI. ANEXOS.
428
𝑓XII(Φ) = −𝑁 cos12 𝜑
[ −2702765𝑡 + 17460701𝑡3 − 16889786𝑡5 + 2819266𝑡7 − 44281𝑡9 + 𝑡11
−46461789𝜂2𝑡 + 382954044𝜂2𝑡3 − 517812174𝜂2𝑡5 + 144424764𝜂2𝑡7
−6059229𝜂2𝑡9 − 328750334𝜂4𝑡 + 3264110014𝜂4𝑡3 − 5606113854𝜂4𝑡5
+2174387314𝜂4𝑡7 − 152614484𝜂4𝑡9 − 1296087210𝜂6𝑡
+14961620388𝜂6𝑡3 − 30907947114𝜂6𝑡5 + 15203001528𝜂6𝑡7
−1485250800𝜂6𝑡9 − 3204162137𝜂8𝑡 + 41983546077𝜂8𝑡3
−100762412784𝜂8𝑡5 + 59571115648𝜂8𝑡7 − 7384612224𝜂8𝑡9
−5244071481𝜂10𝑡 + 76654026504𝜂10𝑡3 − 208698749424𝜂10𝑡5
+143250598656𝜂10𝑡7 − 21341295360𝜂10𝑡9 − 5795059084𝜂12𝑡
+93271416304𝜂12𝑡3 − 283113658432𝜂12𝑡5 + 220267688256𝜂12𝑡7
−38072263680𝜂12𝑡9 − 4291272144𝜂14𝑡 + 75276913344𝜂14𝑡3
−251410173696𝜂14𝑡5 + 217855756800𝜂14𝑡7 − 42631142400𝜂14𝑡9
−2045566720𝜂16𝑡 + 38788877888𝜂16𝑡3 − 141076772352𝜂16𝑡5
+134353004544𝜂16𝑡7 − 29236838400𝜂16𝑡9 − 568432512𝜂18𝑡
+11573382912𝜂18𝑡3 − 45460256256𝜂18𝑡5 + 47085649920𝜂18𝑡7
−11240570880𝜂18𝑡9 − 70084096𝜂20𝑡 + 1523486208𝜂20𝑡3
−6419091456𝜂20𝑡5 + 7170416640𝜂20𝑡7 − 1857945600𝜂20𝑡9 ]
𝑓XII(Φ) = 𝑁 cos12 𝜑
[ 2702765𝑡 − 17460701𝑡3 + 16889786𝑡5 − 2819266𝑡7 + 44281𝑡9 − 𝑡11
+46461789𝜂2𝑡 − 382954044𝜂2𝑡3 + 517812174𝜂2𝑡5 − 144424764𝜂2𝑡7
+6059229𝜂2𝑡9 + 328750334𝜂4𝑡 − 3264110014𝜂4𝑡3 + 5606113854𝜂4𝑡5
−2174387314𝜂4𝑡7 + 152614484𝜂4𝑡9 + 1296087210𝜂6𝑡
−14961620388𝜂6𝑡3 + 30907947114𝜂6𝑡5 − 15203001528𝜂6𝑡7
+1485250800𝜂6𝑡9 + 3204162137𝜂8𝑡 − 41983546077𝜂8𝑡3
+100762412784𝜂8𝑡5 − 59571115648𝜂8𝑡7 + 7384612224𝜂8𝑡9
+5244071481𝜂10𝑡 − 76654026504𝜂10𝑡3 + 208698749424𝜂10𝑡5
−143250598656𝜂10𝑡7 + 21341295360𝜂10𝑡9 + 5795059084𝜂12𝑡
−93271416304𝜂12𝑡3 + 283113658432𝜂12𝑡5 − 220267688256𝜂12𝑡7
+38072263680𝜂12𝑡9 + 4291272144𝜂14𝑡 − 75276913344𝜂14𝑡3
+251410173696𝜂14𝑡5 − 217855756800𝜂14𝑡7 + 42631142400𝜂14𝑡9
+2045566720𝜂16𝑡 − 38788877888𝜂16𝑡3 + 141076772352𝜂16𝑡5
−134353004544𝜂16𝑡7 + 29236838400𝜂16𝑡9 + 568432512𝜂18𝑡
−11573382912𝜂18𝑡3 + 45460256256𝜂18𝑡5 − 47085649920𝜂18𝑡7
+11240570880𝜂18𝑡9 + 70084096𝜂20𝑡 − 1523486208𝜂20𝑡3
+6419091456𝜂20𝑡5 − 7170416640𝜂20𝑡7 + 1857945600𝜂20𝑡9 ]

VI. ANEXOS.
429
𝑓XII(Φ) = 𝑁𝑡 cos12 𝜑
[ 2702765 − 17460701𝑡2 + 16889786𝑡4 − 2819266𝑡6 + 44281𝑡8 − 𝑡10
+46461789𝜂2 − 382954044𝜂2𝑡2 + 517812174𝜂2𝑡4 − 144424764𝜂2𝑡6
+6059229𝜂2𝑡8 + 328750334𝜂4 − 3264110014𝜂4𝑡2 + 5606113854𝜂4𝑡4
−2174387314𝜂4𝑡6 + 152614484𝜂4𝑡8 + 1296087210𝜂6
−14961620388𝜂6𝑡2 + 30907947114𝜂6𝑡4 − 15203001528𝜂6𝑡6
+1485250800𝜂6𝑡8 + 3204162137𝜂8 − 41983546077𝜂8𝑡2
+100762412784𝜂8𝑡4 − 59571115648𝜂8𝑡6 + 7384612224𝜂8𝑡8
+5244071481𝜂10 − 76654026504𝜂10𝑡2 + 208698749424𝜂10𝑡4
−143250598656𝜂10𝑡6 + 21341295360𝜂10𝑡8 + 5795059084𝜂12
−93271416304𝜂12𝑡2 + 283113658432𝜂12𝑡4 − 220267688256𝜂12𝑡6
+38072263680𝜂12𝑡8 + 4291272144𝜂14 − 75276913344𝜂14𝑡2
+251410173696𝜂14𝑡4 − 217855756800𝜂14𝑡6 + 42631142400𝜂14𝑡8
+2045566720𝜂16 − 38788877888𝜂16𝑡2 + 141076772352𝜂16𝑡4
−134353004544𝜂16𝑡6 + 29236838400𝜂16𝑡8 + 568432512𝜂18
−11573382912𝜂18𝑡2 + 45460256256𝜂18𝑡4 − 47085649920𝜂18𝑡6
+11240570880𝜂18𝑡8 + 70084096𝜂20 − 1523486208𝜂20𝑡2
+6419091456𝜂20𝑡4 − 7170416640𝜂20𝑡6 + 1857945600𝜂20𝑡8 ]
𝒇𝐗𝐈𝐈(𝚽) = 𝑵𝒕 𝐜𝐨𝐬𝟏𝟐𝝋
[
𝟐𝟕𝟎𝟐𝟕𝟔𝟓 − 𝟏𝟕𝟒𝟔𝟎𝟕𝟎𝟏𝒕𝟐 + 𝟏𝟔𝟖𝟖𝟗𝟕𝟖𝟔𝒕𝟒 − 𝟐𝟖𝟏𝟗𝟐𝟔𝟔𝒕𝟔 + 𝟒𝟒𝟐𝟖𝟏𝒕𝟖 − 𝒕𝟏𝟎
+𝟑𝟑𝜼𝟐(𝟏𝟒𝟎𝟕𝟗𝟑𝟑 − 𝟏𝟏𝟔𝟎𝟒𝟔𝟔𝟖𝒕𝟐 + 𝟏𝟓𝟔𝟗𝟏𝟐𝟕𝟖𝒕𝟒 − 𝟒𝟑𝟕𝟔𝟓𝟎𝟖𝒕𝟔 + 𝟏𝟖𝟑𝟔𝟏𝟑𝒕𝟖)
+𝟐𝟐𝜼𝟒(𝟏𝟒𝟗𝟒𝟑𝟏𝟗𝟕 − 𝟏𝟒𝟖𝟑𝟔𝟖𝟔𝟑𝟕𝒕𝟐 + 𝟐𝟓𝟒𝟖𝟐𝟑𝟑𝟓𝟕𝒕𝟒 − 𝟗𝟖𝟖𝟑𝟓𝟕𝟖𝟕𝒕𝟔 + 𝟔𝟗𝟑𝟕𝟎𝟐𝟐𝒕𝟖)
+𝟔𝟔𝜼𝟔(𝟏𝟗𝟔𝟑𝟕𝟔𝟖𝟓 − 𝟐𝟐𝟔𝟔𝟗𝟏𝟐𝟏𝟖𝒕𝟐 + 𝟒𝟔𝟖𝟑𝟎𝟐𝟐𝟐𝟗𝒕𝟒 − 𝟐𝟑𝟎𝟑𝟒𝟖𝟓𝟎𝟖𝒕𝟔 + 𝟐𝟐𝟓𝟎𝟑𝟖𝟎𝟎𝒕𝟖)
+𝟏𝟏𝜼𝟖(𝟐𝟗𝟏𝟐𝟖𝟕𝟒𝟔𝟕 − 𝟑𝟖𝟏𝟔𝟔𝟖𝟔𝟎𝟎𝟕𝒕𝟐 + 𝟗𝟏𝟔𝟎𝟐𝟏𝟗𝟑𝟒𝟒𝒕𝟒 − 𝟓𝟒𝟏𝟓𝟓𝟓𝟓𝟗𝟔𝟖𝒕𝟔 + 𝟔𝟕𝟏𝟑𝟐𝟖𝟑𝟖𝟒𝒕𝟖)
+𝟗𝟗𝜼𝟏𝟎(𝟓𝟐𝟗𝟕𝟎𝟒𝟏𝟗 − 𝟕𝟕𝟒𝟐𝟖𝟑𝟎𝟗𝟔𝒕𝟐 + 𝟐𝟏𝟎𝟖𝟎𝟔𝟖𝟏𝟕𝟔𝒕𝟒 − 𝟏𝟒𝟒𝟔𝟗𝟕𝟓𝟕𝟒𝟒𝒕𝟔 + 𝟐𝟏𝟓𝟓𝟔𝟖𝟔𝟒𝟎𝒕𝟖)
+𝟒𝜼𝟏𝟐(𝟏𝟒𝟒𝟖𝟕𝟔𝟒𝟕𝟕𝟏 − 𝟐𝟑𝟑𝟏𝟕𝟖𝟓𝟒𝟎𝟕𝟔𝒕𝟐 + 𝟕𝟎𝟕𝟕𝟖𝟒𝟏𝟒𝟔𝟎𝟖𝒕𝟒 − 𝟓𝟓𝟎𝟔𝟔𝟗𝟐𝟐𝟎𝟔𝟒𝒕𝟔 + 𝟗𝟓𝟏𝟖𝟎𝟔𝟓𝟗𝟐𝟎𝒕𝟖)
+𝟒𝟖𝜼𝟏𝟒(𝟖𝟗𝟒𝟎𝟏𝟓𝟎𝟑 − 𝟏𝟓𝟔𝟖𝟐𝟔𝟗𝟎𝟐𝟖𝒕𝟐 + 𝟓𝟐𝟑𝟕𝟕𝟏𝟏𝟗𝟓𝟐𝒕𝟒 − 𝟒𝟓𝟑𝟖𝟔𝟔𝟏𝟔𝟎𝟎𝒕𝟔 + 𝟖𝟖𝟖𝟏𝟒𝟖𝟖𝟎𝟎𝒕𝟖)
+𝟔𝟒𝜼𝟏𝟔(𝟑𝟏𝟗𝟔𝟏𝟗𝟖𝟎 − 𝟔𝟎𝟔𝟎𝟕𝟔𝟐𝟏𝟕𝒕𝟐 + 𝟐𝟐𝟎𝟒𝟑𝟐𝟒𝟓𝟔𝟖𝒕𝟒 − 𝟐𝟎𝟗𝟗𝟐𝟔𝟓𝟔𝟗𝟔𝒕𝟔 + 𝟒𝟓𝟔𝟖𝟐𝟓𝟔𝟎𝟎𝒕𝟖)
+𝟑𝟖𝟒𝜼𝟏𝟖(𝟏𝟒𝟖𝟎𝟐𝟗𝟑 − 𝟑𝟎𝟏𝟑𝟗𝟎𝟏𝟖𝒕𝟐 + 𝟏𝟏𝟖𝟑𝟖𝟔𝟎𝟖𝟒𝒕𝟒 − 𝟏𝟐𝟐𝟔𝟏𝟖𝟖𝟖𝟎𝒕𝟔 + 𝟐𝟗𝟐𝟕𝟐𝟑𝟐𝟎𝒕𝟖)
+𝟓𝟏𝟐𝜼𝟐𝟎(𝟏𝟑𝟔𝟖𝟖𝟑− 𝟐𝟗𝟕𝟓𝟓𝟓𝟗𝒕𝟐 + 𝟏𝟐𝟓𝟑𝟕𝟐𝟖𝟖𝒕𝟒 − 𝟏𝟒𝟎𝟎𝟒𝟕𝟐𝟎𝒕𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝒕𝟖) ]

VI. ANEXOS.
430
6.5.2 Derivadas de orden superior para el proceso inverso.
Para 𝐅′(𝒚)
𝑦 = ∫𝜌𝑑𝜑
𝑑𝑦 = 𝜌𝑑𝜑 ∴ 𝑑𝜑
𝑑𝑦=1
𝜌
F′(𝑦) =𝑑Φ
𝑑𝜑∙𝑑𝜑
𝑑𝑦 ∴ F′(𝑦) =
𝜌
𝑟∙1
𝜌=1
𝑟
𝐅′(𝒚) =𝟏
𝑵 𝐜𝐨𝐬𝝋
Para 𝐅′′(𝒚)
Derivando.
[F′(𝑦)]′ = (1
𝑁 cos𝜑)′
[F′(𝑦)]′=−[𝑡 cos 𝜑 (𝜂2𝜌 − 𝑁)]
𝑁2 cos2 𝜑=−𝑡(𝜂2𝜌 − 𝑁)
𝑁2 cos𝜑
[F′(𝑦)]′ =𝑁𝑡 − 𝜂2𝑡𝜌
𝑁2 cos 𝜑
Multiplicando por 𝑑𝜑
𝑑𝑦.
F′′(𝑦) = [F′(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
F′′(𝑦) = (𝑁𝑡 − 𝜂2𝑡𝜌
𝑁2 cos 𝜑) ∙ (
1
𝜌) = (
1
𝑁2 cos 𝜑) ∙ (
𝑁𝑡 − 𝜂2𝑡𝜌
𝜌)
F′′(𝑦) = (1
𝑁2 cos 𝜑) ∙ (
𝑁𝑡
𝜌−𝜂2𝑡𝜌
𝜌) = (
1
𝑁2 cos𝜑) ∙ (
𝑁
𝜌𝑡 − 𝜂2𝑡)

VI. ANEXOS.
431
Sustituyendo el valor de 𝑁
𝜌.
F′′(𝑦) = (1
𝑁2 cos 𝜑) ∙ [(1 + 𝜂2)𝑡 − 𝜂2𝑡] = (
1
𝑁2 cos𝜑) ∙ [𝑡 + 𝜂2𝑡 − 𝜂2𝑡]
𝐅′′(𝒚) =𝒕
𝑵𝟐 𝐜𝐨𝐬𝝋
Para 𝐅′′′(𝒚)
Derivando.
[F′′(𝑦)]′ = (𝑡
𝑁2 cos 𝜑)′
[F′′(𝑦)]′ =[(𝑡2 + 1)𝑁2 cos𝜑] − 𝑡[𝑁𝑡 cos 𝜑 (2𝜂2𝜌 − 𝑁)]
(𝑁2 cos 𝜑)2
[F′′(𝑦)]′ =(𝑡2 + 1)𝑁2 cos 𝜑 − 𝑁𝑡2 cos 𝜑 (2𝜂2𝜌 − 𝑁)
𝑁4 cos2 𝜑
[F′′(𝑦)]′ =𝑁 cos𝜑 [𝑁(𝑡2 + 1) − 2𝜂2𝑡2𝜌 + 𝑁𝑡2]
𝑁4 cos2 𝜑
[F′′(𝑦)]′ =𝑁(𝑡2 + 1) + 𝑁𝑡2 − 2𝜂2𝑡2𝜌
𝑁3 cos 𝜑
Multiplicando por 𝑑𝜑
𝑑𝑦.
F′′′(𝑦) = [F′′(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
F′′′(𝑦) = [𝑁(𝑡2 + 1) + 𝑁𝑡2 − 2𝜂2𝑡2𝜌
𝑁3 cos 𝜑] ∙ (
1
𝜌)
F′′′(𝑦) =1
𝑁3 cos𝜑∙ [𝑁(𝑡2 + 1) + 𝑁𝑡2 − 2𝜂2𝑡2𝜌
𝜌]

VI. ANEXOS.
432
F′′′(𝑦) =1
𝑁3 cos 𝜑∙ [𝑁
𝜌(𝑡2 + 1) +
𝑁
𝜌𝑡2 − 2
𝜌
𝜌𝜂2𝑡2]
F′′′(𝑦) =1
𝑁3 cos𝜑∙ [(1 + 𝜂2)(𝑡2 + 1) + (1 + 𝜂2)𝑡2 − 2𝜂2𝑡2]
F′′′(𝑦) =1
𝑁3 cos 𝜑∙ [1 + 𝜂2 + 𝑡2 + 𝜂2𝑡2 + 𝑡2 + 𝜂2𝑡2 − 2𝜂2𝑡2]
𝐅′′′(𝒚) =𝟏 + 𝟐𝒕𝟐 + 𝜼𝟐
𝑵𝟑 𝐜𝐨𝐬𝝋
Para 𝐅𝐈𝐕(𝒚)
Derivando.
[F′′′(𝑦)]′ = [1 + 2𝑡2 + 𝜂2
𝑁3 cos 𝜑]
′
[F′′′(𝑦)]′
=[2(2𝑡3 + 2𝑡) − 2𝜂2𝑡]𝑁3 cos 𝜑 − {(1 + 2𝑡2 + 𝜂2)[𝑁2𝑡 cos 𝜑 (3𝜂2𝜌 − 𝑁)]}
(𝑁3 cos 𝜑)2
[F′′′(𝑦)]′ =𝑁2 cos 𝜑 {𝑁(4𝑡 + 4𝑡3 − 2𝜂2𝑡) − [(1 + 2𝑡2 + 𝜂2)(3𝜂2𝑡𝜌 − 𝑁𝑡)]}
𝑁6 cos2 𝜑
[F′′′(𝑦)]′ =𝑁(4𝑡 + 4𝑡3 − 2𝜂2𝑡) − (1 + 2𝑡2 + 𝜂2)(3𝜂2𝑡𝜌 − 𝑁𝑡)
𝑁4 cos 𝜑
Multiplicando por 𝑑𝜑
𝑑𝑦.
FIV(𝑦) = [F′′′(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FIV(𝑦) = [𝑁(4𝑡 + 4𝑡3 − 2𝜂2𝑡) − (1 + 2𝑡2 + 𝜂2)(3𝜂2𝑡𝜌 − 𝑁𝑡)
𝑁4 cos 𝜑] ∙ (
1
𝜌)
FIV(𝑦) = [1
𝑁4 cos 𝜑] ∙ [
𝑁(4𝑡 + 4𝑡3 − 2𝜂2𝑡) − (1 + 2𝑡2 + 𝜂2)(3𝜂2𝑡𝜌 − 𝑁𝑡)
𝜌]

VI. ANEXOS.
433
FIV(𝑦) = [1
𝑁4 cos𝜑] ∙ [
𝑁
𝜌(4𝑡 + 4𝑡3 − 2𝜂2𝑡) − (1 + 2𝑡2 + 𝜂2) (3𝜂2𝑡
𝜌
𝜌−𝑁
𝜌𝑡)]
FIV(𝑦) = [1
𝑁4 cos 𝜑] ∙ {
(1 + 𝜂2)(4𝑡 + 4𝑡3 − 2𝜂2𝑡)
−(1 + 2𝑡2 + 𝜂2)[3𝜂2𝑡 − (1 + 𝜂2)𝑡]}
FIV(𝑦) = [1
𝑁4 cos 𝜑] ∙ [
(1 + 𝜂2)(4𝑡 + 4𝑡3 − 2𝜂2𝑡)
−(1 + 2𝑡2 + 𝜂2)(3𝜂2𝑡 − 𝑡 − 𝜂2𝑡)]
FIV(𝑦) = [1
𝑁4 cos 𝜑] ∙ [
4𝑡 + 4𝑡3 + 2𝜂2𝑡 − 2𝜂4𝑡 + 4𝜂2𝑡3
−(−𝑡 − 2𝑡3 + 𝜂2𝑡 + 2𝜂4𝑡 + 4𝜂2𝑡3)]
FIV(𝑦) = [1
𝑁4 cos 𝜑] ∙ [
4𝑡 + 𝑡 + 4𝑡3 + 2𝑡3 + 2𝜂2𝑡 − 𝜂2𝑡
−2𝜂4𝑡 − 2𝜂4𝑡 + 4𝜂2𝑡3 − 4𝜂2𝑡3]
FIV(𝑦) =5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡
𝑁4 cos 𝜑
𝐅𝐈𝐕(𝒚) =𝒕(𝟓 + 𝟔𝒕𝟐 + 𝜼𝟐 − 𝟒𝜼𝟒)
𝑵𝟒 𝐜𝐨𝐬𝝋
Para 𝐅𝐕(𝒚)
[FIV(𝑦)]′ = [𝑡(5 + 6𝑡2 + 𝜂2 − 4𝜂4)
𝑁4 cos 𝜑]
′
= [5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡
𝑁4 cos𝜑]
′
[FIV(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2
Siendo.
𝑢 = 5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡, 𝑣 = 𝑁4 cos 𝜑
Derivando por partes.
𝑢′ = {5(𝑡2 + 1) + 6(3𝑡4 + 3𝑡2) + [−2𝜂2𝑡2 + 𝜂2(𝑡2 + 1)]
−4[−4𝜂4𝑡2 + 𝜂4(𝑡2 + 1)]}
𝑢′ = {5(𝑡2 + 1) + 6(3𝑡4 + 3𝑡2) + [−2𝜂2𝑡2 + 𝜂2(𝑡2 + 1)]
−4[−4𝜂4𝑡2 + 𝜂4(𝑡2 + 1)]}

VI. ANEXOS.
434
𝑢′ = {5 + 5𝑡2 + 18𝑡2 + 18𝑡4 + [−2𝜂2𝑡2 + 𝜂2𝑡2 + 𝜂2]
−4[−4𝜂4𝑡2 + 𝜂4𝑡2 + 𝜂4]}
𝑢′ = 5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2
𝑣′ = 𝑁3𝑡 cos 𝜑 (4𝜂2𝜌 − 𝑁)
Dado que los coeficientes que componen la variable 𝑢 y su respectiva
derivada comenzaran a incrementar como en el caso del proceso directo, la
sustitución de estas funciones en la fórmula de derivación completa (F′(𝑦)) se
realizara posterior la simplificación de dicha ecuación de las variables 𝑁𝑛 cos𝜑,
esto con el fin de facilitar el proceso algebraico de reducción de términos.
Sustituyendo 𝑣 y 𝑣′.
[FIV(𝑦)]′ =𝑢′ ∙ 𝑁4 cos 𝜑 − 𝑢 ∙ 𝑁3𝑡 cos 𝜑 (4𝜂2𝜌 − 𝑁)
(𝑁4 cos 𝜑)2
[FIV(𝑦)]′ =𝑁3 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(4𝜂2𝜌 − 𝑁)]
𝑁8 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ (4𝜂2𝑡𝜌 − 𝑁𝑡)]
𝑁5 cos 𝜑
[FIV(𝑦)]′ =1
𝑁5 cos𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ (4𝜂2𝑡𝜌 − 𝑁𝑡)]
Sustituyendo 𝑢 y 𝑢′.
[FIV(𝑦)]′ =1
𝑁5 cos𝜑[𝑁(5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2)
−(4𝜂2𝑡𝜌 − 𝑁𝑡)(5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡)]
Multiplicando por 𝑑𝜑
𝑑𝑦.
FV(𝑦) = [FIV(𝑦)]′ ∙𝑑𝜑
𝑑𝑦

VI. ANEXOS.
435
FV(𝑦) = {1
𝑁5 cos 𝜑[𝑁(5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2)
−(4𝜂2𝑡𝜌 − 𝑁𝑡)(5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡)]} ∙ (
1
𝜌)
FV(𝑦) =
{
1
𝑁5 cos 𝜑
[ 𝑁
𝜌(5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2)
− (1
𝜌) (4𝜂2𝑡𝜌 − 𝑁𝑡)(5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡)
]
}
FV(𝑦) =1
𝑁5 cos 𝜑
[ 𝑁
𝜌(5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2)
− (4𝜂2𝑡𝜌
𝜌−𝑁
𝜌𝑡) (5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡)
]
FV(𝑦) =1
𝑁5 cos 𝜑{(1 + 𝜂2)(5 + 23𝑡2 + 18𝑡4 + 𝜂2 − 𝜂2𝑡2 − 4𝜂4 + 12𝜂4𝑡2)
−[4𝜂2𝑡 − (1 + 𝜂2)𝑡](5𝑡 + 6𝑡3 + 𝜂2𝑡 − 4𝜂4𝑡)}
FV(𝑦) =1
𝑁5 cos 𝜑
{
[
5 + 23𝑡2 + 18𝑡4 + 6𝜂2 − 4𝑛6
+22𝜂2𝑡2 + 11𝜂4𝑡2 + 12𝜂6𝑡2 + 18𝜂2𝑡4]
− [−5𝑡2 − 6𝑡4 + 14𝜂2𝑡2 + 7𝜂4𝑡2
−12𝜂6𝑡2 + 18𝜂2𝑡4]
}
FV(𝑦) =1
𝑁5 cos 𝜑[
5 + (23𝑡2 + 5𝑡2) + (18𝑡4 + 6𝑡4) + 6𝜂2
+(22𝜂2𝑡2 − 14𝜂2𝑡2) + (18𝜂2𝑡4 − 18𝜂2𝑡4) − 3𝜂4
+(11𝜂4𝑡2 − 7𝜂4𝑡2) − 4𝑛6 + (12𝜂6𝑡2 + 12𝜂6𝑡2)
]
FV(𝑦) =1
𝑁5 cos𝜑[5 + 28𝑡2 + 24𝑡4 + 6𝜂2 + 8𝜂2𝑡2
−3𝜂4 + 4𝜂4𝑡2 − 4𝑛6 + 24𝜂6𝑡2]
𝐅𝐕(𝒚) =𝟏
𝑵𝟓 𝐜𝐨𝐬𝝋[𝟓 + 𝟐𝟖𝒕𝟐 + 𝟐𝟒𝒕𝟒 + 𝟐𝜼𝟐(𝟑 + 𝟒𝒕𝟐)
−𝜼𝟒(𝟑 − 𝟒𝒕𝟐) − 𝟒𝜼𝟔(𝟏 − 𝟔𝒕𝟐)]
Para 𝐅𝐕𝐈(𝒚)
[FV(𝑦)]′ = {1
𝑁5 cos𝜑[5 + 28𝑡2 + 24𝑡4 + 2𝜂2(3 + 4𝑡2)
−𝜂4(3 − 4𝑡2) − 4𝜂6(1 − 6𝑡2)]}′
[FIV(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2

VI. ANEXOS.
436
Siendo.
𝑢 = [5 + 28𝑡2 + 24𝑡4 + 2𝜂2(3 + 4𝑡2)
−𝜂4(3 − 4𝑡2) − 4𝜂6(1 − 6𝑡2)] , 𝑣 = 𝑁5 cos 𝜑
Derivando por partes.
𝑢′ =
{
28(2𝑡3 + 2𝑡) + 24(4𝑡5 + 4𝑡3)
+2[−2𝜂2𝑡(3 + 4𝑡2) + 4𝜂2(2𝑡3 + 2𝑡)] − [−4𝜂4𝑡(3 − 4𝑡2) + 𝜂4(−4(2𝑡3 + 2𝑡))]
−4[−6𝜂6𝑡(1 − 6𝑡2) + 𝜂6(−6(2𝑡3 + 2𝑡))]
}
𝑢′ = [56𝑡 + 56𝑡3 + 96𝑡3 + 96𝑡5 + 2(2𝜂2𝑡)
−(−20𝜂4𝑡 + 8𝜂4𝑡3) − 4(−18𝑛6𝑡 + 24𝑛6𝑡3)]
𝑢′ = [56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
𝑣′ = 𝑁4𝑡 cos 𝜑 (5𝜂2𝜌 − 𝑁)
Sustituyendo 𝑣 y 𝑣′.
[FV(𝑦)]′ =𝑢′ ∙ 𝑁5 cos𝜑 − 𝑢 ∙ 𝑁4𝑡 cos𝜑 (5𝜂2𝜌 − 𝑁)
(𝑁5 cos 𝜑)2
[FV(𝑦)]′ =𝑁4 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(5𝜂2𝜌 − 𝑁)]
𝑁10 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(5𝜂2𝜌 − 𝑁)]
𝑁6 cos 𝜑
[FV(𝑦)]′ =1
𝑁6 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ (5𝜂2𝑡𝜌 − 𝑁𝑡)]

VI. ANEXOS.
437
Sustituyendo 𝑢 y 𝑢′.
[FV(𝑦)]′ =1
𝑁6 cos 𝜑
{
𝑁 [
56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
−𝑡(5𝜂2𝜌 − 𝑁) [5 + 28𝑡2 + 24𝑡4 + 2𝜂2(3 + 4𝑡2)
−𝜂4(3 − 4𝑡2) − 4𝜂6(1 − 6𝑡2)]}
Multiplicando por 𝑑𝜑
𝑑𝑦.
FVI(𝑦) = [FV(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FVI(𝑦) =
[
1
𝑁6 cos 𝜑
{
𝑁 [
56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
−𝑡(5𝜂2𝜌 − 𝑁) [5 + 28𝑡2 + 24𝑡4 + 2𝜂2(3 + 4𝑡2)
−𝜂4(3 − 4𝑡2) − 4𝜂6(1 − 6𝑡2)]}
]
∙ (1
𝜌)
FVI(𝑦) =1
𝑁6 cos 𝜑
{
𝑁
𝜌[
56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
− (1
𝜌) (5𝜂2𝜌 − 𝑁) [
5𝑡 + 28𝑡3 + 24𝑡5 + 2𝜂2𝑡(3 + 4𝑡2)
−𝜂4𝑡(3 − 4𝑡2) − 4𝜂6𝑡(1 − 6𝑡2)]}
FVI(𝑦) =1
𝑁6 cos 𝜑
{
𝑁
𝜌[
56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
− (5𝜂2𝜌
𝜌−𝑁
𝜌) [5𝑡 + 28𝑡3 + 24𝑡5 + 2𝜂2𝑡(3 + 4𝑡2)
−𝜂4𝑡(3 − 4𝑡2) − 4𝜂6𝑡(1 − 6𝑡2)]}
FVI(𝑦) =1
𝑁6 cos 𝜑
{
(1 + 𝜂2) [
56𝑡 + 152𝑡3 + 96𝑡5 + 4𝜂2𝑡
+20𝜂4𝑡 − 8𝜂4𝑡3 + 72𝑛6𝑡 − 96𝑛6𝑡3]
−[5𝜂2 − (1 + 𝜂2)] [5𝑡 + 28𝑡3 + 24𝑡5 + 2𝜂2𝑡(3 + 4𝑡2)
−𝜂4𝑡(3 − 4𝑡2) − 4𝜂6𝑡(1 − 6𝑡2)]}
FVI(𝑦) =1
𝑁6 cos 𝜑
{
[56𝑡 + 152𝑡3 + 96𝑡5 + 60𝜂2𝑡 + 24𝜂4𝑡 + 92𝜂6𝑡 + 72𝜂8𝑡
+152𝜂2𝑡3 − 8𝜂4𝑡3 − 104𝜂6𝑡3 − 96𝜂8𝑡3 + 96𝜂2𝑡5]
− [−5𝑡 − 28𝑡3 − 24𝑡5 + 14𝜂2𝑡 + 27𝜂4𝑡 − 8𝜂6𝑡 − 16𝜂8𝑡
+104𝜂2𝑡3 + 28𝜂4𝑡3 − 8𝜂6𝑡3 + 96𝜂8𝑡3 + 96𝜂2𝑡5]}

VI. ANEXOS.
438
FVI(𝑦)
=1
𝑁6 cos 𝜑
[ (56𝑡 + 5𝑡) + (152𝑡3 + 28𝑡3) + (96𝑡5 + 24𝑡5) + (60𝜂2𝑡 − 14𝜂2𝑡)
+(152𝜂2𝑡3 − 104𝜂2𝑡3) + (24𝜂4𝑡 − 27𝜂4𝑡) − (28𝜂4𝑡3 + 8𝜂4𝑡3)
+(92𝜂6𝑡 + 8𝜂6𝑡) + (8𝜂6𝑡3 − 104𝜂6𝑡3) + (72𝜂8𝑡 + 16𝜂8𝑡)
−(96𝜂8𝑡3 + 96𝜂8𝑡3) + (96𝜂2𝑡5 − 96𝜂2𝑡5) ]
FVI(𝑦) =1
𝑁6 cos 𝜑[
61𝑡 + 180𝑡3 + 120𝑡5 + 46𝜂2𝑡 + 48𝜂2𝑡3
−3𝜂4𝑡 − 36𝜂4𝑡3 + 100𝜂6𝑡 − 96𝜂6𝑡3
+88𝜂8𝑡 − 192𝜂8𝑡3]
𝐅𝐕𝐈(𝒚) =𝒕
𝑵𝟔 𝐜𝐨𝐬𝝋[
𝟔𝟏 + 𝟏𝟖𝟎𝒕𝟐 + 𝟏𝟐𝟎𝒕𝟒 + 𝟐𝜼𝟐(𝟐𝟑 + 𝟐𝟒𝒕𝟐)
−𝟑𝜼𝟒(𝟏 + 𝟏𝟐𝒕𝟐) + 𝟒𝜼𝟔(𝟐𝟓 − 𝟐𝟒𝒕𝟐) + 𝟖𝜼𝟖(𝟏𝟏 − 𝟐𝟒𝒕𝟐)]
Para 𝐅𝐕𝐈𝐈(𝒚)
[FVI(𝑦)]′ =
{𝑡
𝑁6 cos 𝜑[
61 + 180𝑡2 + 120𝑡4 + 2𝜂2(23 + 24𝑡2)
−3𝜂4(1 + 12𝑡2) + 4𝜂6(25 − 24𝑡2) + 8𝜂8(11 − 24𝑡2)]}′
[FVI(𝑦)]′ =
{1
𝑁6 cos 𝜑[
61𝑡 + 180𝑡3 + 120𝑡5 + 2𝜂2(23𝑡 + 24𝑡3)
−3𝜂4(𝑡 + 12𝑡3) + 4𝜂6(25𝑡 − 24𝑡3) + 8𝜂8(11𝑡 − 24𝑡3)]}
′
[FVI(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2
Siendo.
𝑢 = [
61𝑡 + 180𝑡3 + 120𝑡5 + 2𝜂2(23𝑡 + 24𝑡3)
−3𝜂4(𝑡 + 12𝑡3) + 4𝜂6(25𝑡 − 24𝑡3)
+8𝜂8(11𝑡 − 24𝑡3)
] , 𝑣 = 𝑁6 cos 𝜑

VI. ANEXOS.
439
Derivando por partes.
𝑢′ =
{
61(𝑡2 + 1) + 180(3𝑡4 + 3𝑡2) + 120(5𝑡6 + 5𝑡4)
+2[−2𝜂2𝑡(23𝑡 + 24𝑡3) + 𝜂2(23(𝑡2 + 1) + 24(3𝑡4 + 3𝑡2))]
−3[−4𝜂4𝑡(𝑡 + 12𝑡3) + 𝜂4(𝑡2 + 1 + 12(3𝑡4 + 3𝑡2))]
+4[−6𝜂6𝑡(25𝑡 − 24𝑡3) + 𝜂6(25(𝑡2 + 1) − 24(3𝑡4 + 3𝑡2))]
+8[−8𝜂8𝑡(11𝑡 − 24𝑡3) + 𝜂8(11(𝑡2 + 1) − 24(3𝑡4 + 3𝑡2))]}
𝑢′ =
[61 + 61𝑡2 + 540𝑡2 + 540𝑡4 + 600𝑡4 + 600𝑡6
+2[23𝜂2 + 49𝜂2𝑡2 + 24𝜂2𝑡4] − 3[𝜂4 + 33𝜂4𝑡2 − 12𝜂4𝑡4]
+4[25𝜂6 − 197𝜂6𝑡2 + 72𝜂6𝑡4] + 8[11𝜂8 − 149𝜂8𝑡2 + 120𝜂8𝑡4]]
𝑢′ = [
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6 + 46𝜂2 + 98𝜂2𝑡2
+48𝜂2𝑡4 − 3𝜂4 − 99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6
−788𝜂6𝑡2 + 288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
𝑣′ = 𝑁5𝑡 cos𝜑 (6𝜂2𝜌 − 𝑁)
Sustituyendo 𝑣 y 𝑣′.
[FVI(𝑦)]′ =𝑢′ ∙ 𝑁6 cos 𝜑 − 𝑢 ∙ 𝑁5𝑡 cos 𝜑 (6𝜂2𝜌 − 𝑁)
(𝑁6 cos 𝜑)2
[FVI(𝑦)]′ =𝑁5 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(6𝜂2𝜌 − 𝑁)]
𝑁12 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(6𝜂2𝜌 − 𝑁)]
𝑁7 cos 𝜑
[FVI(𝑦)]′ =1
𝑁7 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(6𝜂2𝜌 − 𝑁)]

VI. ANEXOS.
440
Sustituyendo 𝑢 y 𝑢′
[FVI(𝑦)]′
=1
𝑁7 cos 𝜑
{
𝑁
[
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6
+46𝜂2 + 98𝜂2𝑡2 + 48𝜂2𝑡4 − 3𝜂4
−99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6 − 788𝜂6𝑡2
+288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
−𝑡(6𝜂2𝜌 − 𝑁) [
61𝑡 + 180𝑡3 + 120𝑡5 + 2𝜂2(23𝑡 + 24𝑡3)
−3𝜂4(𝑡 + 12𝑡3) + 4𝜂6(25𝑡 − 24𝑡3)
+8𝜂8(11𝑡 − 24𝑡3)
]
}
Multiplicando por 𝑑𝜑
𝑑𝑦.
FVII(𝑦) = [FVI(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FVII(𝑦) =
1
𝑁7 cos 𝜑
{
𝑁
[
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6
+46𝜂2 + 98𝜂2𝑡2 + 48𝜂2𝑡4 − 3𝜂4
−99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6 − 788𝜂6𝑡2
+288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
−𝑡(6𝜂2𝜌 − 𝑁) [
61𝑡 + 180𝑡3 + 120𝑡5 + 2𝜂2(23𝑡 + 24𝑡3)
−3𝜂4(𝑡 + 12𝑡3) + 4𝜂6(25𝑡 − 24𝑡3)
+8𝜂8(11𝑡 − 24𝑡3)
]
}
∙ (1
𝜌)
FVII(𝑦) =
1
𝑁7 cos 𝜑
{
𝑁
𝜌
[
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6
+46𝜂2 + 98𝜂2𝑡2 + 48𝜂2𝑡4 − 3𝜂4
−99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6 − 788𝜂6𝑡2
+288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
− (1
𝜌) (6𝜂2𝜌 − 𝑁) [
61𝑡2 + 180𝑡4 + 120𝑡6 + 2𝜂2𝑡(23𝑡 + 24𝑡3)
−3𝜂4𝑡(𝑡 + 12𝑡3) + 4𝜂6𝑡(25𝑡 − 24𝑡3)
+8𝜂8𝑡(11𝑡 − 24𝑡3)
]
}

VI. ANEXOS.
441
FVII(𝑦) =
1
𝑁7 cos 𝜑
{
𝑁
𝜌
[
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6
+46𝜂2 + 98𝜂2𝑡2 + 48𝜂2𝑡4 − 3𝜂4
−99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6 − 788𝜂6𝑡2
+288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
− (6𝜂2𝜌
𝜌−𝑁
𝜌) [
61𝑡2 + 180𝑡4 + 120𝑡6 + 2𝜂2𝑡(23𝑡 + 24𝑡3)
−3𝜂4𝑡(𝑡 + 12𝑡3) + 4𝜂6𝑡(25𝑡 − 24𝑡3)
+8𝜂8𝑡(11𝑡 − 24𝑡3)
]
}
FVII(𝑦) =
1
𝑁7 cos𝜑
{
(1 + 𝜂2)
[
61 + 601𝑡2 + 1140𝑡4 + 600𝑡6
+46𝜂2 + 98𝜂2𝑡2 + 48𝜂2𝑡4 − 3𝜂4
−99𝜂4𝑡2 + 36𝜂4𝑡4 + 100𝜂6 − 788𝜂6𝑡2
+288𝜂6𝑡4 + 88𝜂8 − 1192𝜂8𝑡2 + 960𝜂8𝑡4]
−[6𝜂2 − (1 + 𝜂2)] [
61𝑡2 + 180𝑡4 + 120𝑡6 + 2𝜂2𝑡(23𝑡 + 24𝑡3)
−3𝜂4𝑡(𝑡 + 12𝑡3) + 4𝜂6𝑡(25𝑡 − 24𝑡3)
+8𝜂8𝑡(11𝑡 − 24𝑡3)
]
}
FVII(𝑦) =
1
𝑁7 cos𝜑
{
[ 61 + 601𝑡2 + 1140𝑡4 + 600𝑡6 + 107𝜂2 + 43𝜂4 + 97𝜂6 + 188𝜂8
+88𝜂10 + 699𝜂2𝑡2 − 𝜂4𝑡2 − 887𝜂6𝑡2 − 1980𝜂8𝑡2 − 1192𝜂10𝑡2
+1188𝜂2𝑡4 + 84𝜂4𝑡4 + 324𝜂6𝑡4 + 1248𝜂8𝑡4 + 960𝜂10𝑡4
+600𝜂2𝑡6 ]
− [
−61𝑡2 − 180𝑡4 − 120𝑡6 + 259𝜂2𝑡2 + 233𝜂4𝑡2 − 115𝜂6𝑡2
+412𝜂8𝑡2 + 440𝜂10𝑡2 + 852𝜂2𝑡4 + 276𝜂4𝑡4 − 84𝜂6𝑡4
−288𝜂8𝑡4 − 960𝜂10𝑡4 + 600𝜂2𝑡6]
}
FVII(𝑦) =
1
𝑁7 cos 𝜑
[ 61 + (601𝑡2 + 61𝑡2) + (1140𝑡4 + 180𝑡4) + (600𝑡6 + 120𝑡6)
+107𝜂2 + (699𝜂2𝑡2 − 259𝜂2𝑡2) + (1188𝜂2𝑡4 − 852𝜂2𝑡4)
+(600𝜂2𝑡6 − 600𝜂2𝑡6) + 43𝜂4 − (233𝜂4𝑡2 + 𝜂4𝑡2)
+(84𝜂4𝑡4 − 276𝜂4𝑡4) + 97𝜂6 + (115𝜂6𝑡2 − 887𝜂6𝑡2)
+(324𝜂6𝑡4 + 84𝜂6𝑡4) + 188𝜂8 − (1980𝜂8𝑡2 + 412𝜂8𝑡2)
+(1248𝜂8𝑡4 + 288𝜂8𝑡4) + 88𝜂10 − (1192𝜂10𝑡2 + 440𝜂10𝑡2)
+(960𝜂10𝑡4 + 960𝜂10𝑡4) ]

VI. ANEXOS.
442
FVII(𝑦) =1
𝑁7 cos 𝜑
[ 61 + 662𝑡2 + 1320𝑡4 + 720𝑡6 + 107𝜂2 + 440𝜂2𝑡2
+336𝜂2𝑡4 + 43𝜂4 − 234𝜂4𝑡2 − 192𝜂4𝑡4 + 97𝜂6
−772𝜂6𝑡2 + 408𝜂6𝑡4 + 188𝜂8 − 2392𝜂8𝑡2
+1536𝜂8𝑡4 + 88𝜂10 − 1632𝜂10𝑡2 + 1920𝜂10𝑡4 ]
𝐅𝐕𝐈𝐈(𝒚) =
𝟏
𝑵𝟕 𝐜𝐨𝐬𝝋
[
𝟔𝟏 + 𝟔𝟔𝟐𝒕𝟐 + 𝟏𝟑𝟐𝟎𝒕𝟒 + 𝟕𝟐𝟎𝒕𝟔
+𝜼𝟐(𝟏𝟎𝟕 + 𝟒𝟒𝟎𝒕𝟐 + 𝟑𝟑𝟔𝒕𝟒) + 𝜼𝟒(𝟒𝟑 − 𝟐𝟑𝟒𝒕𝟐 − 𝟏𝟗𝟐𝒕𝟒)
+𝜼𝟔(𝟗𝟕 − 𝟕𝟕𝟐𝒕𝟐 + 𝟒𝟎𝟖𝒕𝟒) + 𝟒𝜼𝟖(𝟒𝟕 − 𝟓𝟗𝟖𝒕𝟐 + 𝟑𝟖𝟒𝒕𝟒)
+𝟖𝜼𝟏𝟎(𝟏𝟏 − 𝟐𝟎𝟒𝒕𝟐 + 𝟐𝟒𝟎𝒕𝟒) ]
Para 𝐅𝐕𝐈𝐈𝐈(𝒚)
[FVII(𝑦)]′ =
{
1
𝑁7 cos 𝜑
[
61 + 662𝑡2 + 1320𝑡4 + 720𝑡6
+𝜂2(107 + 440𝑡2 + 336𝑡4) + 𝜂4(43 − 234𝑡2 − 192𝑡4)
+𝜂6(97 − 772𝑡2 + 408𝑡4) + 4𝜂8(47 − 598𝑡2 + 384𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
}
′
[FVII(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2
Siendo.
𝑢 =
[
61 + 662𝑡2 + 1320𝑡4 + 720𝑡6
+𝜂2(107 + 440𝑡2 + 336𝑡4) + 𝜂4(43 − 234𝑡2 − 192𝑡4)
+𝜂6(97 − 772𝑡2 + 408𝑡4) + 4𝜂8(47 − 598𝑡2 + 384𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
,
𝑣 = 𝑁7 cos 𝜑

VI. ANEXOS.
443
Derivando por partes.
𝑢′ =
{
662(2𝑡3 + 2𝑡) + 1320(4𝑡5 + 4𝑡3) + 720(6𝑡7 + 6𝑡5)
+[−2𝜂2𝑡(107 + 440𝑡2 + 336𝑡4) + 𝜂2(440(2𝑡3 + 2𝑡) + 336(4𝑡5 + 4𝑡3))]
+[−4𝜂4𝑡(43 − 234𝑡2 − 192𝑡4) + 𝜂4(−234(2𝑡3 + 2𝑡) − 192(4𝑡5 + 4𝑡3))]
+[−6𝜂6𝑡(97 − 772𝑡2 + 408𝑡4) + 𝜂6(−772(2𝑡3 + 2𝑡) + 408(4𝑡5 + 4𝑡3))]
+4[−8𝜂8𝑡(47 − 598𝑡2 + 384𝑡4) + 𝜂8(−598(2𝑡3 + 2𝑡) + 384(4𝑡5 + 4𝑡3))]
+8[−10𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) + 𝜂10(−204(2𝑡3 + 2𝑡) + 240(4𝑡5 + 4𝑡3))]}
𝑢′ =
{
1324𝑡 + 1324𝑡3 + 5280𝑡3 + 5280𝑡5 + 4320𝑡5 + 4320𝑡7
+[666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5] + [−640𝜂4𝑡 − 300𝜂4𝑡3]
+[−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5]
+4[−1572𝜂8𝑡 + 5124𝜂8𝑡3 − 1536𝜂8𝑡5]
+8[−518𝜂10𝑡 + 2592𝜂10𝑡3 − 1440𝜂10𝑡5] }
𝑢′ =
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
𝑣′ = 𝑁6𝑡 cos 𝜑 (7𝜂2𝜌 − 𝑁)
Sustituyendo 𝑣 y 𝑣′.
[FVII(𝑦)]′ =𝑢′ ∙ 𝑁7 cos 𝜑 − 𝑢 ∙ 𝑁6𝑡 cos 𝜑 (7𝜂2𝜌 − 𝑁)
(𝑁7 cos𝜑)2
[FVII(𝑦)]′ =
𝑁6 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(7𝜂2𝜌 − 𝑁)]
𝑁14 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(7𝜂2𝜌 − 𝑁)]
𝑁8 cos 𝜑
[FVII(𝑦)]′ =1
𝑁8 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(7𝜂2𝜌 − 𝑁)]

VI. ANEXOS.
444
Sustituyendo 𝑢 y 𝑢′
[FVII(𝑦)]′ =
1
𝑁8 cos𝜑
{
𝑁
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
−𝑡(7𝜂2𝜌 − 𝑁)
[
61 + 662𝑡2 + 1320𝑡4 + 720𝑡6
+𝜂2(107 + 440𝑡2 + 336𝑡4) + 𝜂4(43 − 234𝑡2 − 192𝑡4)
+𝜂6(97 − 772𝑡2 + 408𝑡4) + 4𝜂8(47 − 598𝑡2 + 384𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
}
Multiplicando por 𝑑𝜑
𝑑𝑦.
FVIII(𝑦) = [FVII(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FVIII(𝑦) =1
𝑁8 cos 𝜑∙
{
𝑁
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
−𝑡(7𝜂2𝜌 − 𝑁)
[
61 + 662𝑡2 + 1320𝑡4 + 720𝑡6
+𝜂2(107 + 440𝑡2 + 336𝑡4) + 𝜂4(43 − 234𝑡2 − 192𝑡4)
+𝜂6(97 − 772𝑡2 + 408𝑡4) + 4𝜂8(47 − 598𝑡2 + 384𝑡4)
+8𝜂10(11 − 204𝑡2 + 240𝑡4) ]
}
∙ (1
𝜌)

VI. ANEXOS.
445
FVIII(𝑦) =
1
𝑁8 cos𝜑
{
𝑁
𝜌
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
− (1
𝜌) (7𝜂2𝜌 − 𝑁)
[
61𝑡 + 662𝑡3 + 1320𝑡5 + 720𝑡7
+𝜂2𝑡(107 + 440𝑡2 + 336𝑡4) + 𝜂4𝑡(43 − 234𝑡2 − 192𝑡4)
+𝜂6𝑡(97 − 772𝑡2 + 408𝑡4) + 4𝜂8𝑡(47 − 598𝑡2 + 384𝑡4)
+8𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
}
FVIII(𝑦) =
1
𝑁8 cos𝜑
{
𝑁
𝜌
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
− (7𝜂2𝜌
𝜌−𝑁
𝜌)
[
61𝑡 + 662𝑡3 + 1320𝑡5 + 720𝑡7
+𝜂2𝑡(107 + 440𝑡2 + 336𝑡4) + 𝜂4𝑡(43 − 234𝑡2 − 192𝑡4)
+𝜂6𝑡(97 − 772𝑡2 + 408𝑡4) + 4𝜂8𝑡(47 − 598𝑡2 + 384𝑡4)
+8𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
}
FVIII(𝑦) =1
𝑁8 cos 𝜑∙
{
(1 + 𝜂2)
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7
+666𝜂2𝑡 + 1344𝜂2𝑡3 + 672𝜂2𝑡5 − 640𝜂4𝑡 − 300𝜂4𝑡3
−2126𝜂6𝑡 + 4720𝜂6𝑡3 − 816𝜂6𝑡5 − 6288𝜂8𝑡 + 20496𝜂8𝑡3
−6144𝜂8𝑡5 − 4144𝜂10𝑡 + 20736𝜂10𝑡3 − 11520𝜂10𝑡5 ]
−[7𝜂2 − (1 + 𝜂2)]
[
61𝑡 + 662𝑡3 + 1320𝑡5 + 720𝑡7
+𝜂2𝑡(107 + 440𝑡2 + 336𝑡4) + 𝜂4𝑡(43 − 234𝑡2 − 192𝑡4)
+𝜂6𝑡(97 − 772𝑡2 + 408𝑡4) + 4𝜂8𝑡(47 − 598𝑡2 + 384𝑡4)
+8𝜂10𝑡(11 − 204𝑡2 + 240𝑡4) ]
}

VI. ANEXOS.
446
FVIII(𝑦) =1
𝑁8 cos 𝜑∙
{
[
1324𝑡 + 6604𝑡3 + 9600𝑡5 + 4320𝑡7 + 1990𝜂2𝑡 + 26𝜂4𝑡 − 2766𝜂6𝑡
−8414𝜂8𝑡 − 10432𝜂10𝑡 − 4144𝜂12𝑡 + 7948𝜂2𝑡3 + 1044𝜂4𝑡3 + 4420𝜂6𝑡3
+25216𝜂8𝑡3 + 41232𝜂10𝑡3 + 20736𝜂12𝑡3 + 10272𝜂2𝑡5 + 672𝜂4𝑡5
−816𝜂6𝑡5 − 6960𝜂8𝑡5 − 17664𝜂10𝑡5 − 11520𝜂12𝑡5 + 4320𝜂2𝑡7 ]
−
[ −61𝑡 − 662𝑡3 − 1320𝑡5 − 720𝑡7 + 259𝜂2𝑡 + 599𝜂4𝑡 + 161𝜂6𝑡
+394𝜂8𝑡 + 1040𝜂10𝑡 + 528𝜂12𝑡 + 3532𝜂2𝑡3 + 2874𝜂4𝑡3 − 632𝜂6𝑡3
−2240𝜂8𝑡3 − 12720𝜂10𝑡3 − 9792𝜂12𝑡3 + 7584𝜂2𝑡5 + 2208𝜂4𝑡5
−1560𝜂6𝑡5 + 912𝜂8𝑡5 + 7296𝜂10𝑡5 + 11520𝜂12𝑡5 + 4320𝜂2𝑡7 ]
}
FVIII(𝑦) =1
𝑁8 cos 𝜑∙
[
(1324𝑡 + 61𝑡) + (6604𝑡3 + 662𝑡3) + (9600𝑡5 + 1320𝑡5)
+(4320𝑡7 + 720𝑡7) + (1990𝜂2𝑡 − 259𝜂2𝑡) + (7948𝜂2𝑡3 − 3532𝜂2𝑡3)
+(10272𝜂2𝑡5 − 7584𝜂2𝑡5) + (26𝜂4𝑡 − 599𝜂4𝑡) + (1044𝜂4𝑡3 − 2874𝜂4𝑡3)
+(672𝜂4𝑡5 − 2208𝜂4𝑡5) − (2766𝜂6𝑡 + 161𝜂6𝑡) + (4420𝜂6𝑡3 + 632𝜂6𝑡3)
+(1560𝜂6𝑡5 − 816𝜂6𝑡5) − (8414𝜂8𝑡 + 394𝜂8𝑡) + (25216𝜂8𝑡3 + 2240𝜂8𝑡3)
−(6960𝜂8𝑡5 + 912𝜂8𝑡5) − (10432𝜂10𝑡 + 1040𝜂10𝑡) + (41232𝜂10𝑡3
+12720𝜂10𝑡3) − (17664𝜂10𝑡5 + 7296𝜂10𝑡5) − (4144𝜂12𝑡 + 528𝜂12𝑡)
+(20736𝜂12𝑡3 + 9792𝜂12𝑡3) − (11520𝜂12𝑡5 + 11520𝜂12𝑡5)
+(4320𝜂2𝑡7 − 4320𝜂2𝑡7) ]
FVIII(𝑦) =
1
𝑁8 cos 𝜑
[ 1385𝑡 + 7266𝑡3 + 10920𝑡5 + 5040𝑡7 + 1731𝜂2𝑡 + 4416𝜂2𝑡3
+2688𝜂2𝑡5 − 573𝜂4𝑡 − 1830𝜂4𝑡3 − 1536𝜂4𝑡5 − 2927𝜂6𝑡
+5052𝜂6𝑡3 + 744𝜂6𝑡5 − 8808𝜂8𝑡 + 27456𝜂8𝑡3 − 7872𝜂8𝑡5
−11472𝜂10𝑡 + 53952𝜂10𝑡3 − 23040𝜂12𝑡5 − 4672𝜂12𝑡
+30528𝜂12𝑡3 − 24960𝜂10𝑡5 ]
𝐅𝐕𝐈𝐈𝐈(𝒚) =
𝒕
𝑵𝟖 𝐜𝐨𝐬𝝋
[
𝟏𝟑𝟖𝟓 + 𝟕𝟐𝟔𝟔𝒕𝟐 + 𝟏𝟎𝟗𝟐𝟎𝒕𝟒 + 𝟓𝟎𝟒𝟎𝒕𝟔
+𝟑𝜼𝟐(𝟓𝟕𝟕 + 𝟏𝟒𝟕𝟐𝒕𝟐 + 𝟖𝟗𝟔𝒕𝟒) − 𝟑𝜼𝟒(𝟏𝟗𝟏 + 𝟔𝟏𝟎𝒕𝟐 + 𝟓𝟏𝟐𝒕𝟒)
−𝜼𝟔(𝟐𝟗𝟐𝟕 − 𝟓𝟎𝟓𝟐𝒕𝟐 − 𝟕𝟒𝟒𝒕𝟒) − 𝟐𝟒𝜼𝟖(𝟑𝟔𝟕 − 𝟏𝟏𝟒𝟒𝒕𝟐 + 𝟑𝟐𝟖𝒕𝟒)
−𝟒𝟖𝜼𝟏𝟎(𝟐𝟑𝟗 − 𝟏𝟏𝟐𝟒𝒕𝟐 + 𝟓𝟐𝟎𝒕𝟒) − 𝟔𝟒𝜼𝟏𝟐(𝟕𝟑 − 𝟒𝟕𝟕𝒕𝟐 + 𝟑𝟔𝟎𝒕𝟒)]

VI. ANEXOS.
447
Para 𝐅𝐈𝐗(𝒚)
[FVIII(𝑦)]′ =
{
1
𝑁8 cos 𝜑
[
1385 + 7266𝑡2 + 10920𝑡4 + 5040𝑡6
+3𝜂2(577 + 1472𝑡2 + 896𝑡4) − 3𝜂4(191 + 610𝑡2 + 512𝑡4)
−𝜂6(2927 − 5052𝑡2 − 744𝑡4) − 24𝜂8(367 − 1144𝑡2 + 328𝑡4)
−48𝜂10(239 − 1124𝑡2 + 520𝑡4) − 64𝜂12(73 − 477𝑡2 + 360𝑡4)]
}
′
[FVIII(𝑦)]′ =
{
1
𝑁8 cos 𝜑
[
1385𝑡 + 7266𝑡3 + 10920𝑡5 + 5040𝑡7
+3𝜂2(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5)]
}
′
[FVIII(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2
Siendo.
𝑢 =
[
1385𝑡 + 7266𝑡3 + 10920𝑡5 + 5040𝑡7
+3𝜂2(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5)]
𝑣 = 𝑁8 cos 𝜑

VI. ANEXOS.
448
Derivando por partes.
𝑢′ =
{
1385(𝑡2 + 1) + 7266(3𝑡4 + 3𝑡2) + 10920(5𝑡6 + 5𝑡4) + 5040(7𝑡8 + 7𝑡6)
+3 [−2𝜂2𝑡(577𝑡 + 1472𝑡3 + 896𝑡5)
+𝜂2(577(𝑡2 + 1) + 1472(3𝑡4 + 3𝑡2) + 896(5𝑡6 + 5𝑡4))]
−3 [−4𝜂4𝑡(191𝑡 + 610𝑡3 + 512𝑡5)
+𝜂4𝑡(191(𝑡2 + 1) + 610(3𝑡4 + 3𝑡2) + 512(5𝑡6 + 5𝑡4))]
− [−6𝜂6𝑡(2927𝑡 − 5052𝑡3 − 744𝑡5)
+𝜂6(2927(𝑡2 + 1) − 5052(3𝑡4 + 3𝑡2) − 744(5𝑡6 + 5𝑡4))]
−24 [−8𝜂8𝑡(367𝑡 − 1144𝑡3 + 328𝑡5)
+𝜂8(367(𝑡2 + 1) − 1144(3𝑡4 + 3𝑡2) + 328(5𝑡6 + 5𝑡4))]
−48 [−10𝜂10𝑡(239𝑡 − 1124𝑡3 + 520𝑡5)
+𝜂10(239(𝑡2 + 1) − 1124(3𝑡4 + 3𝑡2) + 520(5𝑡6 + 5𝑡4))]
−64 [−12𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)
+𝜂12(73(𝑡2 + 1) − 477(3𝑡4 + 3𝑡2) + 360(5𝑡6 + 5𝑡4))]
}
𝑢′ =
{
1385 + 1385𝑡2 + 21798𝑡2 + 21798𝑡4
+54600𝑡4 + 54600𝑡6 + +35280𝑡6 + 35280𝑡8
+3[577𝜂2 + 3839𝜂2𝑡2 + 5952𝜂2𝑡4 + 2688𝜂2𝑡6]
−3[191𝜂4 + 1257𝜂4𝑡2 + 1950𝜂4𝑡4 + 512𝜂4𝑡6]
−[2927𝜂6 − 29791𝜂6𝑡2 + 11436𝜂6𝑡4 + 744𝜂6𝑡6]
−24[367𝜂8 − 6001𝜂8𝑡2 + 7360𝜂8𝑡4 − 984𝜂8𝑡6]
−48[239𝜂10 − 5523𝜂10𝑡2 + 10468𝜂10𝑡4 − 2600𝜂10𝑡6]
−64[73𝑛12 − 2234𝑛12𝑡2 + 6093𝑛12𝑡4 − 2520𝑛12𝑡6] }
𝑢′ =
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
𝑣′ = 𝑁7𝑡 cos 𝜑 (8𝜂2𝜌 − 𝑁)

VI. ANEXOS.
449
Sustituyendo 𝑣 y 𝑣′.
[FVIII(𝑦)]′ =𝑢′ ∙ 𝑁8 cos𝜑 − 𝑢 ∙ 𝑁7𝑡 cos𝜑 (8𝜂2𝜌 − 𝑁)
(𝑁8 cos 𝜑)2
[FVIII(𝑦)]′ =
𝑁7 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(8𝜂2𝜌 − 𝑁)]
𝑁16 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(8𝜂2𝜌 − 𝑁)]
𝑁9 cos 𝜑
[FVIII(𝑦)]′ =1
𝑁9 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(8𝜂2𝜌 − 𝑁)]
Sustituyendo 𝑢 y 𝑢′
[FVIII(𝑦)]′ =1
𝑁9 cos 𝜑∙
{
𝑁
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
−𝑡(8𝜂2𝜌 − 𝑁)
[
1385𝑡 + 7266𝑡3 + 10920𝑡5 + 5040𝑡7
+3𝜂2(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12(73𝑡 − 477𝑡3 + 360𝑡5)]
}
Multiplicando por 𝑑𝜑
𝑑𝑦.
FIX(𝑦) = [FVIII(𝑦)]′ ∙𝑑𝜑
𝑑𝑦

VI. ANEXOS.
450
FIX(𝑦) =1
𝑁9 cos 𝜑∙
{
𝑁
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
−(8𝜂2𝜌 − 𝑁)
[
1385𝑡2 + 7266𝑡4 + 10920𝑡6 + 5040𝑡8
+3𝜂2𝑡(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4𝑡(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6𝑡(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8𝑡(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10𝑡(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)]
}
∙ (1
𝜌)
FIX(𝑦) =1
𝑁9 cos 𝜑∙
{
𝑁
𝜌
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
− (1
𝜌) (8𝜂2𝜌 − 𝑁)
[
1385𝑡2 + 7266𝑡4 + 10920𝑡6 + 5040𝑡8
+3𝜂2𝑡(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4𝑡(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6𝑡(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8𝑡(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10𝑡(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)]
}

VI. ANEXOS.
451
FIX(𝑦) =1
𝑁9 cos 𝜑∙
{
𝑁
𝜌
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
− (8𝜂2𝜌
𝜌−𝑁
𝜌)
[
1385𝑡2 + 7266𝑡4 + 10920𝑡6 + 5040𝑡8
+3𝜂2𝑡(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4𝑡(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6𝑡(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8𝑡(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10𝑡(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)]
}
FIX(𝑦) =1
𝑁9 cos 𝜑∙
{
(1 + 𝜂2)
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8
+1731𝜂2 + 11517𝜂2𝑡2 + 17856𝜂2𝑡4 + 8064𝜂2𝑡6 − 573𝜂4
−3771𝜂4𝑡2 − 5850𝜂4𝑡4 − 1536𝜂4𝑡6 − 2927𝜂6 + 29791𝜂6𝑡2
−11436𝜂6𝑡4 − 744𝜂6𝑡6 − 8808𝜂8 + 144024𝜂8𝑡2
−176640𝜂8𝑡4 + 23616𝜂8𝑡6 − 11472𝜂10 + 265104𝜂10𝑡2
−502464𝜂10𝑡4 + 124800𝜂10𝑡6 − 4672𝜂12 + 142976𝜂12𝑡2
−389952𝜂12𝑡4 + 161280𝜂12𝑡6 ]
−[8𝜂2 − (1 + 𝜂2)]
[
1385𝑡2 + 7266𝑡4 + 10920𝑡6 + 5040𝑡8
+3𝜂2𝑡(577𝑡 + 1472𝑡3 + 896𝑡5) − 3𝜂4𝑡(191𝑡 + 610𝑡3 + 512𝑡5)
−𝜂6𝑡(2927𝑡 − 5052𝑡3 − 744𝑡5) − 24𝜂8𝑡(367𝑡 − 1144𝑡3 + 328𝑡5)
−48𝜂10𝑡(239𝑡 − 1124𝑡3 + 520𝑡5) − 64𝜂12𝑡(73𝑡 − 477𝑡3 + 360𝑡5)]
}

VI. ANEXOS.
452
FIX(𝑦) =1
𝑁9 cos 𝜑∙
{
[
1385 + 23183𝑡2 + 76398𝑡4 + 89880𝑡6 + 35280𝑡8 + 3116𝜂2
+1158𝜂4 − 3500𝜂6 − 11735𝜂8 − 20280𝜂10 − 16144𝜂12 − 4672𝜂14
+34700𝜂2𝑡2 + 7746𝜂4𝑡2 + 26020𝜂6𝑡2 + 173815𝜂8𝑡2 + 409128𝜂10𝑡2
+408080𝜂12𝑡2 + 142976𝜂14𝑡2 + 94254𝜂2𝑡4 + 12006𝜂4𝑡4 − 17286𝜂6𝑡4
−188076𝜂8𝑡4 − 679104𝜂10𝑡4 − 892416𝜂12𝑡4 − 389952𝜂14𝑡4
+97944𝜂2𝑡6 + 6528𝜂4𝑡6 − 2280𝜂6𝑡6 + 22872𝜂8𝑡6 + 148416𝜂10𝑡6
+286080𝜂12𝑡6 + 161280𝜂14𝑡6 + 35280𝜂2𝑡8 ]
−
[
−1385𝑡2 − 7266𝑡4 − 10920𝑡6 − 5040𝑡8 + 7964𝜂2𝑡2 + 12690𝜂4𝑡2
−1084𝜂6𝑡2 − 11681𝜂8𝑡2 − 50184𝜂10𝑡2 − 75632𝜂12𝑡2 − 32704𝜂14𝑡2
+46446𝜂2𝑡4 + 32742𝜂4𝑡4 − 17862𝜂6𝑡4 + 7908𝜂8𝑡4 + 138240𝜂10𝑡4
+347136𝜂12𝑡4 + 213696𝜂14𝑡4 + 73752𝜂2𝑡6 + 20352𝜂4𝑡6 − 11496𝜂6𝑡6
+13080𝜂8𝑡6 − 30144𝜂10𝑡6 − 151680𝜂12𝑡6 − 161280𝜂14𝑡6 + 35280𝜂2𝑡8]
}
FIX(𝑦) =1
𝑁9 cos 𝜑∙
[ 1385 + (23183𝑡2 + 1385𝑡2) + (76398𝑡4 + 7266𝑡4) + (89880𝑡6 + 10920𝑡6)
+(35280𝑡8 + 5040𝑡8) + 3116𝜂2 + (34700𝜂2𝑡2 − 7964𝜂2𝑡2) + (94254𝜂2𝑡4
−46446𝜂2𝑡4) + (97944𝜂2𝑡6 − 73752𝜂2𝑡6) + (35280𝜂2𝑡8 − 35280𝜂2𝑡8)
+1158𝜂4 + (7746𝜂4𝑡2 − 12690𝜂4𝑡2) + (12006𝜂4𝑡4 − 32742𝜂4𝑡4)
+(6528𝜂4𝑡6 − 20352𝜂4𝑡6) − 3500𝜂6 + (26020𝜂6𝑡2 + 1084𝜂6𝑡2)
+(17862𝜂6𝑡4 − 17286𝜂6𝑡4) + (11496𝜂6𝑡6 − 2280𝜂6𝑡6) − 11735𝜂8
+(173815𝜂8𝑡2 + 11681𝜂8𝑡2) − (188076𝜂8𝑡4 − 7908𝜂8𝑡4) + (22872𝜂8𝑡6
−13080𝜂8𝑡6) − 20280𝜂10 + (409128𝜂10𝑡2 + 50184𝜂10𝑡2) − (679104𝜂10𝑡4
+138240𝜂10𝑡4) + (148416𝜂10𝑡6 + 30144𝜂10𝑡6) − 16144𝜂12 + (408080𝜂12𝑡2
+75632𝜂12𝑡2) + (142976𝜂14𝑡2 + 32704𝜂14𝑡2) − (892416𝜂12𝑡4 + 347136𝜂12𝑡4)
+(286080𝜂12𝑡6 + 151680𝜂12𝑡6) − 4672𝜂14 − (389952𝜂14𝑡4 + 213696𝜂14𝑡4)
+(161280𝜂14𝑡6 + 161280𝜂14𝑡6) ]

VI. ANEXOS.
453
FIX(𝑦) =1
𝑁9 cos 𝜑∙
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8 + 3116𝜂2 + 26736𝜂2𝑡2
+47808𝜂2𝑡4 + 24192𝜂2𝑡6 + 1158𝜂4 − 4944𝜂4𝑡2 − 13824𝜂4𝑡6 − 3500𝜂6
+27104𝜂6𝑡2 + 576𝜂6𝑡4 + 9216𝜂6𝑡6 − 11735𝜂8 + 185496𝜂8𝑡2 − 195984𝜂8𝑡4
+9792𝜂8𝑡6 − 20280𝜂10 + 459312𝜂10𝑡2 − 817344𝜂10𝑡4 + 178560𝜂10𝑡6
−16144𝜂12 + 483712𝜂12𝑡2 − 1239552𝜂12𝑡4 + 437760𝜂12𝑡6 − 4672𝜂14
+175680𝜂14𝑡2 − 20736𝜂4𝑡4 − 603648𝜂14𝑡4 + 322560𝜂14𝑡6 ]
𝐅𝐈𝐗(𝒚) =
𝟏
𝑵𝟗 𝐜𝐨𝐬𝝋
[ 𝟏𝟑𝟖𝟓 + 𝟐𝟒𝟓𝟔𝟖𝒕𝟐 + 𝟖𝟑𝟔𝟔𝟒𝒕𝟒 + 𝟏𝟎𝟎𝟖𝟎𝟎𝒕𝟔 + 𝟒𝟎𝟑𝟐𝟎𝒕𝟖
+𝟒𝜼𝟐(𝟕𝟕𝟗 + 𝟔𝟔𝟖𝟒𝒕𝟐 + 𝟏𝟏𝟗𝟓𝟐𝒕𝟒 + 𝟔𝟎𝟒𝟖𝒕𝟔)
+𝟔𝜼𝟒(𝟏𝟗𝟑 − 𝟖𝟐𝟒𝒕𝟐 − 𝟑𝟒𝟓𝟔𝒕𝟒 − 𝟐𝟑𝟎𝟒𝒕𝟔)
−𝟒𝜼𝟔(𝟖𝟕𝟓 − 𝟔𝟕𝟕𝟔𝒕𝟐 − 𝟏𝟒𝟒𝒕𝟒 − 𝟐𝟑𝟎𝟒𝒕𝟔)
−𝜼𝟖(𝟏𝟏𝟕𝟑𝟓 − 𝟏𝟖𝟓𝟒𝟗𝟔𝒕𝟐 + 𝟏𝟗𝟓𝟗𝟖𝟒𝒕𝟒 − 𝟗𝟕𝟗𝟐𝒕𝟔)
−𝟐𝟒𝜼𝟏𝟎(𝟖𝟒𝟓 − 𝟏𝟗𝟏𝟑𝟖𝒕𝟐 + 𝟑𝟒𝟎𝟓𝟔𝒕𝟒 − 𝟕𝟒𝟒𝟎𝒕𝟔)
−𝟏𝟔𝜼𝟏𝟐(𝟏𝟎𝟎𝟗 − 𝟑𝟎𝟐𝟑𝟐𝒕𝟐 + 𝟕𝟕𝟒𝟕𝟐𝒕𝟒 − 𝟐𝟕𝟑𝟔𝟎𝒕𝟔)
−𝟔𝟒𝜼𝟏𝟒(𝟕𝟑 − 𝟐𝟕𝟒𝟓𝒕𝟐 + 𝟗𝟒𝟑𝟐𝒕𝟒 − 𝟓𝟎𝟒𝟎𝒕𝟔) ]
Para 𝐅𝐗(𝒚)
[FIX(𝑦)]′ =
{
1
𝑁9 cos 𝜑
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}
′
[FIX(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2

VI. ANEXOS.
454
Siendo.
𝑢 =
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
𝑣 = 𝑁9 cos 𝜑
Derivando por partes.
𝑢′ =
{
24568(2𝑡3 + 2𝑡) + 83664(4𝑡5 + 4𝑡3)
+100800(6𝑡7 + 6𝑡5) + 40320(8𝑡9 + 8𝑡7)
+4 [−2𝜂2𝑡(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+𝜂2(6684(2𝑡3 + 2𝑡) + 11952(4𝑡5 + 4𝑡3) + 6048(6𝑡7 + 6𝑡5))]
+6 [−4𝜂4𝑡(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
+𝜂4(−824(2𝑡3 + 2𝑡) − 3456(4𝑡5 + 4𝑡3) − 2304(6𝑡7 + 6𝑡5))]
−4 [−6𝜂6𝑡(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
+𝜂6(−6776(2𝑡3 + 2𝑡) − 144(4𝑡5 + 4𝑡3) − 2304(6𝑡7 + 6𝑡5))]
− [−8𝜂8𝑡(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
+𝜂8(−185496(2𝑡3 + 2𝑡) + 195984(4𝑡5 + 4𝑡3) − 9792(6𝑡7 + 6𝑡5))]
−24 [−10𝜂10𝑡(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
+𝜂10(−19138(2𝑡3 + 2𝑡) + 34056(4𝑡5 + 4𝑡3) − 7440(6𝑡7 + 6𝑡5))]
−16 [−12𝜂12𝑡(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
+𝜂12(−30232(2𝑡3 + 2𝑡) + 77472(4𝑡5 + 4𝑡3) − 27360(6𝑡7 + 6𝑡5))]
−64 [−14𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6)
+𝜂14(−2745(2𝑡3 + 2𝑡) + 9432(4𝑡5 + 4𝑡3) − 5040(6𝑡7 + 6𝑡5))]}

VI. ANEXOS.
455
𝑢′ =
{
49136𝑡 + 49136𝑡3 + 334656𝑡3 + 334656𝑡5 + 604800𝑡5
+604800𝑡7 + 322560𝑡7 + 322560𝑡9
+4[11810𝜂2𝑡 + 47808𝜂2𝑡3 + 60192𝜂2𝑡5 + 24192𝜂2𝑡7]
+6[−2420𝜂4𝑡 − 12176𝜂4𝑡3 − 13824𝜂4𝑡5 − 4608𝜂4𝑡7]
−4[−18802𝜂6𝑡 + 26528𝜂6𝑡3 − 13536𝜂6𝑡5]
−[−464872𝜂8𝑡 + 1896912𝜂8𝑡3 − 842688𝜂8𝑡5 + 19584𝜂8𝑡7]
−24[−46726𝜂10𝑡 + 289328𝜂10𝑡3 − 248976𝜂10𝑡5 + 29760𝜂10𝑡7]
−16[−72572𝜂12𝑡 + 612208𝜂12𝑡3 − 783936𝜂12𝑡5 + 164160𝜂12𝑡7]
−64[−6512𝜂14𝑡 + 70668𝜂14𝑡3 − 124560𝜂14𝑡5 + 40320𝜂14𝑡7] }
𝑢′ =
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
𝑣′ = 𝑁8𝑡 cos 𝜑 (9𝜂2𝜌 − 𝑁)
Sustituyendo 𝑣 y 𝑣′.
[FIX(𝑦)]′ =𝑢′ ∙ 𝑁9 cos 𝜑 − 𝑢 ∙ 𝑁8𝑡 cos 𝜑 (9𝜂2𝜌 − 𝑁)
(𝑁9 cos𝜑)2
[FIX(𝑦)]′ =𝑁8 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(9𝜂2𝜌 − 𝑁)]
𝑁18 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(9𝜂2𝜌 − 𝑁)]
𝑁10 cos 𝜑
[FIX(𝑦)]′ =1
𝑁10 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(9𝜂2𝜌 − 𝑁)]

VI. ANEXOS.
456
Sustituyendo 𝑢 y 𝑢′
[FIX(𝑦)]′ =1
𝑁10 cos 𝜑∙
{
𝑁
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
−𝑡(9𝜂2𝜌 − 𝑁)
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}
Multiplicando por 𝑑𝜑
𝑑𝑦.
FX(𝑦) = [FIX(𝑦)]′ ∙𝑑𝜑
𝑑𝑦

VI. ANEXOS.
457
FX(𝑦) =1
𝑁10 cos 𝜑∙
{
𝑁
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
−𝑡(9𝜂2𝜌 − 𝑁)
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}
∙ (1
𝜌)
FX(𝑦) =1
𝑁10 cos 𝜑∙
{
𝑁
𝜌
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
− (1
𝜌) (9𝜂2𝜌 − 𝑁)
[ 1385𝑡 + 24568𝑡3 + 83664𝑡5 + 100800𝑡7 + 40320𝑡9
+4𝜂2𝑡(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4𝑡(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6𝑡(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8𝑡(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10𝑡(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12𝑡(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14𝑡(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}

VI. ANEXOS.
458
FX(𝑦) =1
𝑁10 cos 𝜑∙
{
𝑁
𝜌
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
− (9𝜂2𝜌
𝜌−𝑁
𝜌)
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}
FX(𝑦) =1
𝑁10 cos 𝜑∙
{
(1 + 𝜂2)
[ 49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9
+47240𝜂2𝑡 + 191232𝜂2𝑡3 + 240768𝜂2𝑡5 + 96768𝜂2𝑡7
−14520𝜂4𝑡 − 73056𝜂4𝑡3 − 82944𝜂4𝑡5 − 27648𝜂4𝑡7
+75208𝜂6𝑡 − 106112𝜂6𝑡3 + 54144𝜂6𝑡5 + 464872𝜂8𝑡
−1896912𝜂8𝑡3 + 842688𝜂8𝑡5 − 19584𝜂8𝑡7 + 1121424𝜂10𝑡
−6943872𝜂10𝑡3 + 5975424𝜂10𝑡5 − 714240𝜂10𝑡7
+1161152𝜂12𝑡 − 9795328𝜂12𝑡3 + 12542976𝜂12𝑡5
−2626560𝜂12𝑡7 + 416768𝜂14𝑡 − 4522752𝜂14𝑡3
+7971840𝜂14𝑡5 − 2580480𝜂14𝑡7 ]
−𝑡[9𝜂2 − (1 + 𝜂2)]
[ 1385 + 24568𝑡2 + 83664𝑡4 + 100800𝑡6 + 40320𝑡8
+4𝜂2(779 + 6684𝑡2 + 11952𝑡4 + 6048𝑡6)
+6𝜂4(193 − 824𝑡2 − 3456𝑡4 − 2304𝑡6)
−4𝜂6(875 − 6776𝑡2 − 144𝑡4 − 2304𝑡6)
−𝜂8(11735 − 185496𝑡2 + 195984𝑡4 − 9792𝑡6)
−24𝜂10(845 − 19138𝑡2 + 34056𝑡4 − 7440𝑡6)
−16𝜂12(1009 − 30232𝑡2 + 77472𝑡4 − 27360𝑡6)
−64𝜂14(73 − 2745𝑡2 + 9432𝑡4 − 5040𝑡6) ]
}

VI. ANEXOS.
459
FX(𝑦) =1
𝑁10 cos 𝜑∙
{
[
49136𝑡 + 383792𝑡3 + 939456𝑡5 + 927360𝑡7 + 322560𝑡9 + 96376𝜂2𝑡
+32720𝜂4𝑡 + 60688𝜂6𝑡 + 540080𝜂8𝑡 + 1586296𝜂10𝑡 + 2282576𝜂12𝑡
+1577920𝜂14𝑡 + 416768𝜂16𝑡 + 575024𝜂2𝑡3 + 118176𝜂4𝑡3 − 179168𝜂6𝑡3
−2003024𝜂8𝑡3 − 8840784𝜂10𝑡3 − 16739200𝜂12𝑡3 − 14318080𝜂14𝑡3
−4522752𝜂16𝑡3 + 1180224𝜂2𝑡5 + 157824𝜂4𝑡5 − 28800𝜂6𝑡5 + 896832𝜂8𝑡5
+6818112𝜂10𝑡5 + 18518400𝜂12𝑡5 + 20514816𝜂14𝑡5 + 7971840𝜂16𝑡5
+1024128𝜂2𝑡7 + 69120𝜂4𝑡7 − 27648𝜂6𝑡7 − 19584𝜂8𝑡7 − 733824𝜂10𝑡7
−3340800𝜂12𝑡7 − 5207040𝜂14𝑡7 − 2580480𝜂16𝑡7 + 322560𝜂2𝑡9 ]
−
[
−1385𝑡 − 24568𝑡3 − 83664𝑡5 − 100800𝑡7 − 40320𝑡9 + 7964𝜂2𝑡
+23770𝜂4𝑡 + 12764𝜂6𝑡 − 16265𝜂8𝑡 − 73600𝜂10𝑡 − 146096𝜂12𝑡 − 124480𝜂14𝑡
−37376𝜂16𝑡 + 169808𝜂2𝑡3 + 218832𝜂4𝑡3 − 66656𝜂6𝑡3 + 31336𝜂8𝑡3
+1024656𝜂10𝑡3 + 3190784𝜂12𝑡3 + 3694016𝜂14𝑡3 + 1405440𝜂16𝑡3
+621504𝜂2𝑡5 + 403200𝜂4𝑡5 − 166464𝜂6𝑡5 + 200592𝜂8𝑡5 − 750528𝜂10𝑡5
−5299200𝜂12𝑡5 − 9312768𝜂14𝑡5 − 4829184𝜂16𝑡5 + 782208𝜂2𝑡7
+207360𝜂4𝑡7 − 119808𝜂6𝑡7 + 63936𝜂8𝑡7 − 100224𝜂10𝑡7 + 990720𝜂12𝑡7
+3179520𝜂14𝑡7 + 2580480𝜂16𝑡7 + 322560𝜂2𝑡9 ]
}
FX(𝑦) =1
𝑁10 cos 𝜑∙
[
(49136𝑡 + 1385𝑡) + (383792𝑡3 + 24568𝑡3) + (939456𝑡5 + 83664𝑡5)
+(100800𝑡7 + 927360𝑡7) + (322560𝑡9 + 40320𝑡9) + (96376𝜂2𝑡 − 7964𝜂2𝑡)
+(575024𝜂2𝑡3 − 169808𝜂2𝑡3) + (1180224𝜂2𝑡5 − 621504𝜂2𝑡5) + (1024128𝜂2𝑡7
−782208𝜂2𝑡7) + (32720𝜂4𝑡 − 23770𝜂4𝑡) + (118176𝜂4𝑡3 − 218832𝜂4𝑡3)
+(157824𝜂4𝑡5 − 403200𝜂4𝑡5) + (69120𝜂4𝑡7 − 207360𝜂4𝑡7) + (60688𝜂6𝑡
−12764𝜂6𝑡) + (66656𝜂6𝑡3 − 179168𝜂6𝑡3) + (166464𝜂6𝑡5 − 28800𝜂6𝑡5)
+(119808𝜂6𝑡7 − 27648𝜂6𝑡7) + (540080𝜂8𝑡 + 16265𝜂8𝑡) − (2003024𝜂8𝑡3
+31336𝜂8𝑡3) + (896832𝜂8𝑡5 − 200592𝜂8𝑡5) − (63936𝜂8𝑡7 + 19584𝜂8𝑡7)
+(1586296𝜂10𝑡 + 73600𝜂10𝑡) − (8840784𝜂10𝑡3 + 1024656𝜂10𝑡3) + (6818112𝜂10𝑡5
+750528𝜂10𝑡5) + (100224𝜂10𝑡7 − 733824𝜂10𝑡7) + (2282576𝜂12𝑡 + 146096𝜂12𝑡)
−(16739200𝜂12𝑡3 + 3190784𝜂12𝑡3) + (5299200𝜂12𝑡5 + 18518400𝜂12𝑡5)
−(3340800𝜂12𝑡7 + 990720𝜂12𝑡7) + (1577920𝜂14𝑡 + 124480𝜂14𝑡) − (3694016𝜂14𝑡3
+14318080𝜂14𝑡3) + (20514816𝜂14𝑡5 + 9312768𝜂14𝑡5) − (5207040𝜂14𝑡7
+3179520𝜂14𝑡7) + (416768𝜂16𝑡 + 37376𝜂16𝑡) − (4522752𝜂16𝑡3 + 1405440𝜂16𝑡3)
+(7971840𝜂16𝑡5 + 4829184𝜂16𝑡5) − (2580480𝜂16𝑡7 + 2580480𝜂16𝑡7)
+(322560𝜂2𝑡9 − 322560𝜂2𝑡9) ]

VI. ANEXOS.
460
FX(𝑦) =1
𝑁10 cos 𝜑∙
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9 + 88412𝜂2𝑡
+405216𝜂2𝑡3 + 558720𝜂2𝑡5 + 241920𝜂2𝑡7 + 8950𝜂4𝑡 − 100656𝜂4𝑡3
−245376𝜂4𝑡5 − 138240𝜂4𝑡7 + 47924𝜂6𝑡 − 112512𝜂6𝑡3 + 137664𝜂6𝑡5
+92160𝜂6𝑡7 + 556345𝜂8𝑡 − 2034360𝜂8𝑡3 + 696240𝜂8𝑡5 − 83520𝜂8𝑡7
+1659896𝜂10𝑡 − 9865440𝜂10𝑡3 + 7568640𝜂10𝑡5 − 633600𝜂10𝑡7
+2428672𝜂12𝑡 − 19929984𝜂12𝑡3 + 23817600𝜂12𝑡5 − 4331520𝜂12𝑡7
+1702400𝜂14𝑡 − 18012096𝜂14𝑡3 + 29827584𝜂14𝑡5 − 8386560𝜂14𝑡7
+454144𝜂16𝑡 − 5928192𝜂16𝑡3 + 12801024𝜂16𝑡5 − 5160960𝜂16𝑡7 ]
𝐅𝐗(𝒚) =
𝒕
𝑵𝟏𝟎 𝐜𝐨𝐬𝝋
[ 𝟓𝟎𝟓𝟐𝟏 + 𝟒𝟎𝟖𝟑𝟔𝟎𝒕𝟐 + 𝟏𝟎𝟐𝟑𝟏𝟐𝟎𝒕𝟒 + 𝟏𝟎𝟐𝟖𝟏𝟔𝟎𝒕𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝒕𝟖
+𝟒𝜼𝟐(𝟐𝟐𝟏𝟎𝟑 + 𝟏𝟎𝟏𝟑𝟎𝟒𝒕𝟐 + 𝟏𝟑𝟗𝟔𝟖𝟎𝒕𝟒 + 𝟔𝟎𝟒𝟖𝟎𝒕𝟔)
+𝟐𝜼𝟒(𝟒𝟒𝟕𝟓 − 𝟓𝟎𝟑𝟐𝟖𝒕𝟐 − 𝟏𝟐𝟐𝟔𝟖𝟖𝒕𝟒 − 𝟔𝟗𝟏𝟐𝟎𝒕𝟔)
+𝟒𝜼𝟔(𝟏𝟏𝟗𝟖𝟏 − 𝟐𝟖𝟏𝟐𝟖𝒕𝟐 + 𝟑𝟒𝟒𝟏𝟔𝒕𝟒 + 𝟐𝟑𝟎𝟒𝟎𝒕𝟔)
+𝟓𝜼𝟖(𝟏𝟏𝟏𝟐𝟔𝟗 − 𝟒𝟎𝟔𝟖𝟕𝟐𝒕𝟐 + 𝟏𝟑𝟗𝟐𝟒𝟖𝒕𝟒 − 𝟏𝟔𝟕𝟎𝟒𝒕𝟔)
+𝟖𝜼𝟏𝟎(𝟐𝟎𝟕𝟒𝟖𝟕 − 𝟏𝟐𝟑𝟑𝟏𝟖𝟎𝒕𝟐 + 𝟗𝟒𝟔𝟎𝟖𝟎𝒕𝟒 − 𝟕𝟗𝟐𝟎𝟎𝒕𝟔)
+𝟏𝟐𝟖𝜼𝟏𝟐(𝟏𝟖𝟗𝟕𝟒 − 𝟏𝟓𝟓𝟕𝟎𝟑𝒕𝟐 + 𝟏𝟖𝟔𝟎𝟕𝟓𝒕𝟒 − 𝟑𝟑𝟖𝟒𝟎𝒕𝟔)
+𝟔𝟒𝜼𝟏𝟒(𝟐𝟔𝟔𝟎𝟎 − 𝟐𝟖𝟏𝟒𝟑𝟗𝒕𝟐 + 𝟒𝟔𝟔𝟎𝟓𝟔𝒕𝟒 − 𝟏𝟑𝟏𝟎𝟒𝟎𝒕𝟔)
+𝟐𝟓𝟔𝜼𝟏𝟔(𝟏𝟕𝟕𝟒 − 𝟐𝟑𝟏𝟓𝟕𝒕𝟐 + 𝟓𝟎𝟎𝟎𝟒𝒕𝟒 − 𝟐𝟎𝟏𝟔𝟎𝒕𝟔) ]
Para 𝐅𝐗𝐈(𝒚)
[FX(𝑦)]′ =
{
𝑡
𝑁10 cos 𝜑
[ 50521 + 408360𝑡2 + 1023120𝑡4 + 1028160𝑡6 + 362880𝑡8
+4𝜂2(22103 + 101304𝑡2 + 139680𝑡4 + 60480𝑡6)
+2𝜂4(4475 − 50328𝑡2 − 122688𝑡4 − 69120𝑡6)
+4𝜂6(11981 − 28128𝑡2 + 34416𝑡4 + 23040𝑡6)
+5𝜂8(111269 − 406872𝑡2 + 139248𝑡4 − 16704𝑡6)
+8𝜂10(207487 − 1233180𝑡2 + 946080𝑡4 − 79200𝑡6)
+128𝜂12(18974 − 155703𝑡2 + 186075𝑡4 − 33840𝑡6)
+64𝜂14(26600 − 281439𝑡2 + 466056𝑡4 − 131040𝑡6)
+256𝜂16(1774 − 23157𝑡2 + 50004𝑡4 − 20160𝑡6) ]
}
′

VI. ANEXOS.
461
[FX(𝑦)]′ =
{
1
𝑁10 cos 𝜑
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9
+4𝜂2(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}
′
[FX(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2
Siendo.
𝑢 =
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9
+4𝜂2(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
𝑣 = 𝑁10 cos 𝜑
Derivando por partes.
𝑣′ = 𝑁9𝑡 cos 𝜑 (10𝜂2𝜌 − 𝑁)

VI. ANEXOS.
462
𝑢′ =
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9
+4𝜂2(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ] ′
𝑢′ =
{
50521(𝑡2 + 1) + 408360(3𝑡4 + 3𝑡2) + 1023120(5𝑡6 + 5𝑡4)
+1028160(7𝑡8 + 7𝑡6) + 362880(9𝑡10 + 9𝑡8)
+4 [
−2𝜂2𝑡(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+𝜂2 (22103(𝑡2 + 1) + 101304(3𝑡4 + 3𝑡2)
+139680(5𝑡6 + 5𝑡4) + 60480(7𝑡8 + 7𝑡6))]
+2 [
−4𝜂4𝑡(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+𝜂4 (4475(𝑡2 + 1) − 50328(3𝑡4 + 3𝑡2)
−122688(5𝑡6 + 5𝑡4) − 69120(7𝑡8 + 7𝑡6))]
+4 [
−6𝜂6𝑡(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+𝜂6 (11981(𝑡2 + 1) − 28128(3𝑡4 + 3𝑡2)
+34416(5𝑡6 + 5𝑡4) + 23040(7𝑡8 + 7𝑡6))]
+5 [
−8𝜂8𝑡(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+𝜂8 (111269(𝑡2 + 1) − 406872(3𝑡4 + 3𝑡2)
+139248(5𝑡6 + 5𝑡4) − 16704(7𝑡8 + 7𝑡6))
]
+8 [
−10𝜂10𝑡(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+𝜂10 (207487(𝑡2 + 1) − 1233180(3𝑡4 + 3𝑡2)
+946080(5𝑡6 + 5𝑡4) − 79200(7𝑡8 + 7𝑡6))
]
+128 [
−12𝜂12𝑡(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+𝜂12 (18974(𝑡2 + 1) − 155703(3𝑡4 + 3𝑡2)
+186075(5𝑡6 + 5𝑡4) − 33840(7𝑡8 + 7𝑡6))
]
+64 [
−14𝜂14𝑡(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+𝜂14 (26600(𝑡2 + 1) − 281439(3𝑡4 + 3𝑡2)
+466056(5𝑡6 + 5𝑡4) − 131040(7𝑡8 + 7𝑡6))
]
+256 [
−16𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7)
+𝜂16 (1774(𝑡2 + 1) − 23157(3𝑡4 + 3𝑡2)
+50004(5𝑡6 + 5𝑡4) − 20160(7𝑡8 + 7𝑡6))]
}

VI. ANEXOS.
463
𝑢′ =
{
50521 + 50521𝑡2 + 1225080𝑡2 + 1225080𝑡4 + 5115600𝑡4
+5115600𝑡6 + 7197120𝑡6 + 7197120𝑡8 + 3265920𝑡8 + 3265920𝑡10
+4[22103𝜂2 + 281809𝜂2𝑡2 + 799704𝜂2𝑡4 + 842400𝜂2𝑡6 + 302400𝜂2𝑡8]
+2[4475𝜂4 − 164409𝜂4𝑡2 − 563112𝜂4𝑡4 − 606528𝜂4𝑡6 − 207360𝜂4𝑡8]
+4[11981𝜂6 − 144289𝜂6𝑡2 + 256464𝜂6𝑡4 + 126864𝜂6𝑡6 + 23040𝜂6𝑡8]
+5[111269𝜂8 − 1999499𝜂8𝑡2 + 2730600𝜂8𝑡4 − 534672𝜂8𝑡6 + 16704𝜂8𝑡8]
+8[207487𝜂10 − 5566923𝜂10𝑡2 + 13362660𝜂10𝑡4 − 5284800𝜂10𝑡6 + 237600𝜂10𝑡8]
+128[18974𝜂12 − 675823𝜂12𝑡2 + 2331702𝜂12𝑡4 − 1539405𝜂12𝑡6 + 169200𝜂12𝑡8]
+64[26600𝜂14 − 1190117𝜂14𝑡2 + 5426109𝜂14𝑡4 − 5111784𝜂14𝑡6 + 917280𝜂14𝑡8]
+256[1774𝜂16 − 96081𝜂16𝑡2 + 551061𝜂16𝑡4 − 691164𝜂16𝑡6 + 181440𝜂16𝑡8] }
𝑢′ =
{
50521 + 50521𝑡2 + 1225080𝑡2 + 1225080𝑡4 + 5115600𝑡4
+5115600𝑡6 + 7197120𝑡6 + 7197120𝑡8 + 3265920𝑡8 + 3265920𝑡10
+4[22103𝜂2 + 281809𝜂2𝑡2 + 799704𝜂2𝑡4 + 842400𝜂2𝑡6 + 302400𝜂2𝑡8]
+2[4475𝜂4 − 164409𝜂4𝑡2 − 563112𝜂4𝑡4 − 606528𝜂4𝑡6 − 207360𝜂4𝑡8]
+4[11981𝜂6 − 144289𝜂6𝑡2 + 256464𝜂6𝑡4 + 126864𝜂6𝑡6 + 23040𝜂6𝑡8]
+5[111269𝜂8 − 1999499𝜂8𝑡2 + 2730600𝜂8𝑡4 − 534672𝜂8𝑡6 + 16704𝜂8𝑡8]
+8[207487𝜂10 − 5566923𝜂10𝑡2 + 13362660𝜂10𝑡4 − 5284800𝜂10𝑡6 + 237600𝜂10𝑡8]
+128[18974𝜂12 − 675823𝜂12𝑡2 + 2331702𝜂12𝑡4 − 1539405𝜂12𝑡6 + 169200𝜂12𝑡8]
+64[26600𝜂14 − 1190117𝜂14𝑡2 + 5426109𝜂14𝑡4 − 5111784𝜂14𝑡6 + 917280𝜂14𝑡8]
+256[1774𝜂16 − 96081𝜂16𝑡2 + 551061𝜂16𝑡4 − 691164𝜂16𝑡6 + 181440𝜂16𝑡8] }
𝑢′ =
[
50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6 + 10463040𝑡8
+3265920𝑡10 + 88412𝜂2 + 1127236𝜂2𝑡2 + 3198816𝜂2𝑡4 + 3369600𝜂2𝑡6
+1209600𝜂2𝑡8 + 8950𝜂4 − 328818𝜂4𝑡2 − 1126224𝜂4𝑡4 − 1213056𝜂4𝑡6
−414720𝜂4𝑡8 + 47924𝜂6 − 577156𝜂6𝑡2 + 1025856𝜂6𝑡4 + 507456𝜂6𝑡6
+92160𝜂6𝑡8 + 556345𝜂8 − 9997495𝜂8𝑡2 + 13653000𝜂8𝑡4 − 2673360𝜂8𝑡6
+83520𝜂8𝑡8 + 1659896𝜂10 − 44535384𝜂10𝑡2 + 106901280𝜂10𝑡4
−42278400𝜂10𝑡6 + 1900800𝜂10𝑡8 + 2428672𝜂12 − 86505344𝜂12𝑡2
+298457856𝜂12𝑡4 − 197043840𝜂12𝑡6 + 21657600𝜂12𝑡8 + 1702400𝜂14
−76167488𝜂14𝑡2 + 347270976𝜂14𝑡4 − 327154176𝜂14𝑡6 + 58705920𝜂14𝑡8
+454144𝜂16 − 24596736𝜂16𝑡2 + 141071616𝜂16𝑡4 − 176937984𝜂16𝑡6
+46448640𝜂16𝑡8 ]

VI. ANEXOS.
464
Sustituyendo 𝑣 y 𝑣′.
[FX(𝑦)]′ =𝑢′ ∙ 𝑁10 cos 𝜑 − 𝑢 ∙ 𝑁9𝑡 cos 𝜑 (10𝜂2𝜌 − 𝑁)
(𝑁10 cos𝜑)2
[FX(𝑦)]′ =
𝑁9 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(10𝜂2𝜌 − 𝑁)]
𝑁20 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(10𝜂2𝜌 − 𝑁)]
𝑁11 cos 𝜑
[FX(𝑦)]′ =1
𝑁11 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(10𝜂2𝜌 − 𝑁)]
Sustituyendo 𝑢 y 𝑢′
[FX(𝑦)]′ =1
𝑁11 cos 𝜑
{
𝑁
[
50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6
+10463040𝑡8 + 3265920𝑡10 + 88412𝜂2 + 1127236𝜂2𝑡2
+3198816𝜂2𝑡4 + 3369600𝜂2𝑡6 + 1209600𝜂2𝑡8 + 8950𝜂4
−328818𝜂4𝑡2 − 1126224𝜂4𝑡4 − 1213056𝜂4𝑡6 − 414720𝜂4𝑡8
+47924𝜂6 − 577156𝜂6𝑡2 + 1025856𝜂6𝑡4 + 507456𝜂6𝑡6
+92160𝜂6𝑡8 + 556345𝜂8 − 9997495𝜂8𝑡2 + 13653000𝜂8𝑡4
−2673360𝜂8𝑡6 + 83520𝜂8𝑡8 + 1659896𝜂10 − 44535384𝜂10𝑡2
+106901280𝜂10𝑡4 − 42278400𝜂10𝑡6 + 1900800𝜂10𝑡8
+2428672𝜂12 − 86505344𝜂12𝑡2 + 298457856𝜂12𝑡4
−197043840𝜂12𝑡6 + 21657600𝜂12𝑡8 + 1702400𝜂14
−76167488𝜂14𝑡2 + 347270976𝜂14𝑡4 − 327154176𝜂14𝑡6
+58705920𝜂14𝑡8 + 454144𝜂16 − 24596736𝜂16𝑡2
+141071616𝜂16𝑡4 − 176937984𝜂16𝑡6 + 46448640𝜂16𝑡8 ]
−𝑡(10𝜂2𝜌 − 𝑁)
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9
+4𝜂2(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}

VI. ANEXOS.
465
Multiplicando por 𝑑𝜑
𝑑𝑦.
FXI(𝑦) = [FX(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FXI(𝑦) =1
𝑁11 cos 𝜑
{
𝑁
[
50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6
+10463040𝑡8 + 3265920𝑡10 + 88412𝜂2 + 1127236𝜂2𝑡2
+3198816𝜂2𝑡4 + 3369600𝜂2𝑡6 + 1209600𝜂2𝑡8 + 8950𝜂4
−328818𝜂4𝑡2 − 1126224𝜂4𝑡4 − 1213056𝜂4𝑡6 − 414720𝜂4𝑡8
+47924𝜂6 − 577156𝜂6𝑡2 + 1025856𝜂6𝑡4 + 507456𝜂6𝑡6
+92160𝜂6𝑡8 + 556345𝜂8 − 9997495𝜂8𝑡2 + 13653000𝜂8𝑡4
−2673360𝜂8𝑡6 + 83520𝜂8𝑡8 + 1659896𝜂10 − 44535384𝜂10𝑡2
+106901280𝜂10𝑡4 − 42278400𝜂10𝑡6 + 1900800𝜂10𝑡8
+2428672𝜂12 − 86505344𝜂12𝑡2 + 298457856𝜂12𝑡4
−197043840𝜂12𝑡6 + 21657600𝜂12𝑡8 + 1702400𝜂14
−76167488𝜂14𝑡2 + 347270976𝜂14𝑡4 − 327154176𝜂14𝑡6
+58705920𝜂14𝑡8 + 454144𝜂16 − 24596736𝜂16𝑡2
+141071616𝜂16𝑡4 − 176937984𝜂16𝑡6 + 46448640𝜂16𝑡8 ]
−𝑡(10𝜂2𝜌 − 𝑁)
[ 50521𝑡 + 408360𝑡3 + 1023120𝑡5 + 1028160𝑡7 + 362880𝑡9
+4𝜂2(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}
∙ (1
𝜌)

VI. ANEXOS.
466
FXI(𝑦) =1
𝑁11 cos 𝜑
{
𝑁
𝜌
[
50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6
+10463040𝑡8 + 3265920𝑡10 + 88412𝜂2 + 1127236𝜂2𝑡2
+3198816𝜂2𝑡4 + 3369600𝜂2𝑡6 + 1209600𝜂2𝑡8 + 8950𝜂4
−328818𝜂4𝑡2 − 1126224𝜂4𝑡4 − 1213056𝜂4𝑡6 − 414720𝜂4𝑡8
+47924𝜂6 − 577156𝜂6𝑡2 + 1025856𝜂6𝑡4 + 507456𝜂6𝑡6
+92160𝜂6𝑡8 + 556345𝜂8 − 9997495𝜂8𝑡2 + 13653000𝜂8𝑡4
−2673360𝜂8𝑡6 + 83520𝜂8𝑡8 + 1659896𝜂10 − 44535384𝜂10𝑡2
+106901280𝜂10𝑡4 − 42278400𝜂10𝑡6 + 1900800𝜂10𝑡8
+2428672𝜂12 − 86505344𝜂12𝑡2 + 298457856𝜂12𝑡4
−197043840𝜂12𝑡6 + 21657600𝜂12𝑡8 + 1702400𝜂14
−76167488𝜂14𝑡2 + 347270976𝜂14𝑡4 − 327154176𝜂14𝑡6
+58705920𝜂14𝑡8 + 454144𝜂16 − 24596736𝜂16𝑡2
+141071616𝜂16𝑡4 − 176937984𝜂16𝑡6 + 46448640𝜂16𝑡8 ]
− (10𝜂2𝜌
𝜌−𝑁
𝜌)
[ 50521𝑡2 + 408360𝑡4 + 1023120𝑡6 + 1028160𝑡8 + 362880𝑡10
+4𝜂2𝑡(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4𝑡(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6𝑡(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8𝑡(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10𝑡(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12𝑡(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14𝑡(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}

VI. ANEXOS.
467
FXI(𝑦) =1
𝑁11 cos 𝜑
{
(1 + 𝜂2)
[
50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6
+10463040𝑡8 + 3265920𝑡10 + 88412𝜂2 + 1127236𝜂2𝑡2
+3198816𝜂2𝑡4 + 3369600𝜂2𝑡6 + 1209600𝜂2𝑡8 + 8950𝜂4
−328818𝜂4𝑡2 − 1126224𝜂4𝑡4 − 1213056𝜂4𝑡6 − 414720𝜂4𝑡8
+47924𝜂6 − 577156𝜂6𝑡2 + 1025856𝜂6𝑡4 + 507456𝜂6𝑡6
+92160𝜂6𝑡8 + 556345𝜂8 − 9997495𝜂8𝑡2 + 13653000𝜂8𝑡4
−2673360𝜂8𝑡6 + 83520𝜂8𝑡8 + 1659896𝜂10 − 44535384𝜂10𝑡2
+106901280𝜂10𝑡4 − 42278400𝜂10𝑡6 + 1900800𝜂10𝑡8
+2428672𝜂12 − 86505344𝜂12𝑡2 + 298457856𝜂12𝑡4
−197043840𝜂12𝑡6 + 21657600𝜂12𝑡8 + 1702400𝜂14
−76167488𝜂14𝑡2 + 347270976𝜂14𝑡4 − 327154176𝜂14𝑡6
+58705920𝜂14𝑡8 + 454144𝜂16 − 24596736𝜂16𝑡2
+141071616𝜂16𝑡4 − 176937984𝜂16𝑡6 + 46448640𝜂16𝑡8 ]
−[10𝜂2 − (1 + 𝜂2)]
[ 50521𝑡2 + 408360𝑡4 + 1023120𝑡6 + 1028160𝑡8 + 362880𝑡10
+4𝜂2𝑡(22103𝑡 + 101304𝑡3 + 139680𝑡5 + 60480𝑡7)
+2𝜂4𝑡(4475𝑡 − 50328𝑡3 − 122688𝑡5 − 69120𝑡7)
+4𝜂6𝑡(11981𝑡 − 28128𝑡3 + 34416𝑡5 + 23040𝑡7)
+5𝜂8𝑡(111269𝑡 − 406872𝑡3 + 139248𝑡5 − 16704𝑡7)
+8𝜂10𝑡(207487𝑡 − 1233180𝑡3 + 946080𝑡5 − 79200𝑡7)
+128𝜂12𝑡(18974𝑡 − 155703𝑡3 + 186075𝑡5 − 33840𝑡7)
+64𝜂14𝑡(26600𝑡 − 281439𝑡3 + 466056𝑡5 − 131040𝑡7)
+256𝜂16𝑡(1774𝑡 − 23157𝑡3 + 50004𝑡5 − 20160𝑡7) ]
}

VI. ANEXOS.
468
FXI(𝑦) =1
𝑁11 cos 𝜑
{
[ 50521 + 1275601𝑡2 + 6340680𝑡4 + 12312720𝑡6 + 10463040𝑡8 + 3265920𝑡10
+138933𝜂2 + 97362𝜂4 + 56874𝜂6 + 604269𝜂8 + 2216241𝜂10 + 4088568𝜂12
+4131072𝜂14 + 2156544𝜂16 + 454144𝜂18 + 2402837𝜂2𝑡2 + 798418𝜂4𝑡2
−905974𝜂6𝑡2 − 10574651𝜂8𝑡2 − 54532879𝜂10𝑡2 − 131040728𝜂12𝑡2
−162672832𝜂14𝑡2 − 100764224𝜂16𝑡2 − 24596736𝜂18𝑡2 + 9539496𝜂2𝑡4
+2072592𝜂4𝑡4 − 100368𝜂6𝑡4 + 14678856𝜂8𝑡4 + 120554280𝜂10𝑡4
+405359136𝜂12𝑡4 + 645728832𝜂14𝑡4 + 488342592𝜂16𝑡4 + 141071616𝜂18𝑡4
+15682320𝜂2𝑡6 + 2156544𝜂4𝑡6 − 705600𝜂6𝑡6 − 2165904𝜂8𝑡6 − 44951760𝜂10𝑡6
−239322240𝜂12𝑡6 − 524198016𝜂14𝑡6 − 504092160𝜂16𝑡6 − 176937984𝜂18𝑡6
+11672640𝜂2𝑡8 + 794880𝜂4𝑡8 − 322560𝜂6𝑡8 + 175680𝜂8𝑡8 + 1984320𝜂10𝑡8
+23558400𝜂12𝑡8 + 80363520𝜂14𝑡8 + 105154560𝜂16𝑡8 + 46448640𝜂18𝑡8
+3265920𝜂2𝑡10 ]
−
[ −50521𝑡2 − 408360𝑡4 − 1023120𝑡6 − 1028160𝑡8 − 362880𝑡10 + 366277𝜂2𝑡2
+786758𝜂4𝑡2 + 32626𝜂6𝑡2 − 125029𝜂8𝑡2 + 3347209𝜂10𝑡2 + 12510392𝜂12𝑡2
+20155648𝜂14𝑡2 + 14867456𝜂16𝑡2 + 4087296𝜂18𝑡2 + 3270024𝜂2𝑡4
+3747600𝜂4𝑡4 − 793392𝜂6𝑡4 + 1021752𝜂8𝑡4 − 8443800𝜂10𝑡4
−68858976𝜂12𝑡4 − 161357760𝜂14𝑡4 − 156180672𝜂16𝑡4 − 53353728𝜂18𝑡4
+8649360𝜂2𝑡6 + 5273856𝜂4𝑡6 − 2346048𝜂6𝑡6 + 542736𝜂8𝑡6 − 1302480𝜂10𝑡6
+44300160𝜂12𝑡6 + 184530816𝜂14𝑡6 + 255647232𝜂16𝑡6 + 115209216𝜂18𝑡6
+9011520𝜂2𝑡8 + 2315520𝜂4𝑡8 − 1336320𝜂6𝑡8 + 912960𝜂8𝑡8 − 118080𝜂10𝑡8
−1370880𝜂12𝑡8 − 30597120𝜂14𝑡8 − 70318080𝜂16𝑡8 − 46448640𝜂18𝑡8
+3265920𝜂2𝑡10 ]
}

VI. ANEXOS.
469
FXI(𝑦) =1
𝑁11 cos 𝜑
[ 50521 + (1275601𝑡2 + 50521𝑡2) + (6340680𝑡4 + 408360𝑡4) + (12312720𝑡6
+1023120𝑡6) + (10463040𝑡8 + 1028160𝑡8) + (3265920𝑡10 + 362880𝑡10)
+138933𝜂2 + (2402837𝜂2𝑡2 − 366277𝜂2𝑡2) + (9539496𝜂2𝑡4 − 3270024𝜂2𝑡4)
+(15682320𝜂2𝑡6 − 8649360𝜂2𝑡6) + (11672640𝜂2𝑡8 − 9011520𝜂2𝑡8)
+97362𝜂4 + (798418𝜂4𝑡2 − 786758𝜂4𝑡2) + (2072592𝜂4𝑡4 − 3747600𝜂4𝑡4)
+(2156544𝜂4𝑡6 − 5273856𝜂4𝑡6) + (794880𝜂4𝑡8 − 2315520𝜂4𝑡8) + 56874𝜂6
−(905974𝜂6𝑡2 + 32626𝜂6𝑡2) + (793392𝜂6𝑡4 − 100368𝜂6𝑡4) + (2346048𝜂6𝑡6
−705600𝜂6𝑡6 + (1336320𝜂6𝑡8 − 322560𝜂6𝑡8) + 604269𝜂8 + (125029𝜂8𝑡2
−10574651𝜂8𝑡2) + (14678856𝜂8𝑡4 − 1021752𝜂8𝑡4) − (2165904𝜂8𝑡6
+542736𝜂8𝑡6) + (175680𝜂8𝑡8 − 912960𝜂8𝑡8) + 2216241𝜂10 − (54532879𝜂10𝑡2
+3347209𝜂10𝑡2) + (120554280𝜂10𝑡4 + 8443800𝜂10𝑡4) + (1302480𝜂10𝑡6
−44951760𝜂10𝑡6) + (1984320𝜂10𝑡8 + 118080𝜂10𝑡8) + 4088568𝜂12
−(131040728𝜂12𝑡2 + 12510392𝜂12𝑡2) + (405359136𝜂12𝑡4 + 68858976𝜂12𝑡4)
−(239322240𝜂12𝑡6 + 44300160𝜂12𝑡6) + (23558400𝜂12𝑡8 + 1370880𝜂12𝑡8)
+4131072𝜂14 − (162672832𝜂14𝑡2 + 20155648𝜂14𝑡2) + (161357760𝜂14𝑡4
+645728832𝜂14𝑡4) − (524198016𝜂14𝑡6 + 184530816𝜂14𝑡6) + (80363520𝜂14𝑡8
+30597120𝜂14𝑡8) + 2156544𝜂16 − (100764224𝜂16𝑡2 + 14867456𝜂16𝑡2)
+(488342592𝜂16𝑡4 + 156180672𝜂16𝑡4) − (504092160𝜂16𝑡6 + 255647232𝜂16𝑡6)
+(105154560𝜂16𝑡8 + 70318080𝜂16𝑡8) + 454144𝜂18 − (24596736𝜂18𝑡2
+4087296𝜂18𝑡2) + (141071616𝜂18𝑡4 + 53353728𝜂18𝑡4) − (176937984𝜂18𝑡6
+115209216𝜂18𝑡6) + (46448640𝜂18𝑡8 + 46448640𝜂18𝑡8)
+(3265920𝜂2𝑡10 − 3265920𝜂2𝑡10) ]
FXI(𝑦) =1
𝑁11 cos 𝜑
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+138933𝜂2 + 2036560𝜂2𝑡2 + 6269472𝜂2𝑡4 + 7032960𝜂2𝑡6 + 2661120𝜂2𝑡8
+97362𝜂4 + 11660𝜂4𝑡2 − 1675008𝜂4𝑡4 − 3117312𝜂4𝑡6 − 1520640𝜂4𝑡8
+56874𝜂6 − 938600𝜂6𝑡2 + 693024𝜂6𝑡4 + 1640448𝜂6𝑡6 + 1013760𝜂6𝑡8
+604269𝜂8 − 10449622𝜂8𝑡2 + 13657104𝜂8𝑡4 − 2708640𝜂8𝑡6 − 737280𝜂8𝑡8
+2216241𝜂10 − 57880088𝜂10𝑡2 + 128998080𝜂10𝑡4 − 43649280𝜂10𝑡6
+2102400𝜂10𝑡8 + 4088568𝜂12 − 143551120𝜂12𝑡2 + 474218112𝜂12𝑡4
−283622400𝜂12𝑡6 + 24929280𝜂12𝑡8 + 4131072𝜂14 − 182828480𝜂14𝑡2
+807086592𝜂14𝑡4 − 708728832𝜂14𝑡6 + 110960640𝜂14𝑡8 + 2156544𝜂16
−115631680𝜂16𝑡2 + 644523264𝜂16𝑡4 − 759739392𝜂16𝑡6 + 175472640𝜂16𝑡8
+454144𝜂18 − 28684032𝜂18𝑡2 + 194425344𝜂18𝑡4 − 292147200𝜂18𝑡6
+92897280𝜂18𝑡8 ]

VI. ANEXOS.
470
𝐅𝐗𝐈(𝒚) =𝟏
𝑵𝟏𝟏 𝐜𝐨𝐬𝝋
[ 𝟓𝟎𝟓𝟐𝟏 + 𝟏𝟑𝟐𝟔𝟏𝟐𝟐𝒕𝟐 + 𝟔𝟕𝟒𝟗𝟎𝟒𝟎𝒕𝟒 + 𝟏𝟑𝟑𝟑𝟓𝟖𝟒𝟎𝒕𝟔 + 𝟏𝟏𝟒𝟗𝟏𝟐𝟎𝟎𝒕𝟖 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝒕𝟏𝟎
+𝜼𝟐(𝟏𝟑𝟖𝟗𝟑𝟑 + 𝟐𝟎𝟑𝟔𝟓𝟔𝟎𝒕𝟐 + 𝟔𝟐𝟔𝟗𝟒𝟕𝟐𝒕𝟒 + 𝟕𝟎𝟑𝟐𝟗𝟔𝟎𝒕𝟔 + 𝟐𝟔𝟔𝟏𝟏𝟐𝟎𝒕𝟖)
+𝟐𝜼𝟒(𝟒𝟖𝟔𝟖𝟏 + 𝟓𝟖𝟑𝟎𝒕𝟐 − 𝟖𝟑𝟕𝟓𝟎𝟒𝒕𝟒 − 𝟏𝟓𝟓𝟖𝟔𝟓𝟔𝒕𝟔 − 𝟕𝟔𝟎𝟑𝟐𝟎𝒕𝟖)
+𝟐𝜼𝟔(𝟐𝟖𝟒𝟑𝟕 − 𝟒𝟔𝟗𝟑𝟎𝟎𝒕𝟐 + 𝟑𝟒𝟔𝟓𝟏𝟐𝒕𝟒 + 𝟖𝟐𝟎𝟐𝟐𝟒𝒕𝟔 + 𝟓𝟎𝟔𝟖𝟖𝟎𝒕𝟖)
+𝜼𝟖(𝟔𝟎𝟒𝟐𝟔𝟗 − 𝟏𝟎𝟒𝟒𝟗𝟔𝟐𝟐𝒕𝟐 + 𝟏𝟑𝟔𝟓𝟕𝟏𝟎𝟒𝒕𝟒 − 𝟐𝟕𝟎𝟖𝟔𝟒𝟎𝒕𝟔 − 𝟕𝟑𝟕𝟐𝟖𝟎𝒕𝟖)
+𝜼𝟏𝟎(𝟐𝟐𝟏𝟔𝟐𝟒𝟏 − 𝟓𝟕𝟖𝟖𝟎𝟎𝟖𝟖𝒕𝟐 + 𝟏𝟐𝟖𝟗𝟗𝟖𝟎𝟖𝟎𝒕𝟒 − 𝟒𝟑𝟔𝟒𝟗𝟐𝟖𝟎𝒕𝟔 + 𝟐𝟏𝟎𝟐𝟒𝟎𝟎𝒕𝟖)
+𝟖𝜼𝟏𝟐(𝟓𝟏𝟏𝟎𝟕𝟏 − 𝟏𝟕𝟗𝟒𝟑𝟖𝟗𝟎𝒕𝟐 + 𝟓𝟗𝟐𝟕𝟕𝟐𝟔𝟒𝒕𝟒 − 𝟑𝟓𝟒𝟓𝟐𝟖𝟎𝟎𝒕𝟔 + 𝟑𝟏𝟏𝟔𝟏𝟔𝟎𝒕𝟖)
+𝟔𝟒𝜼𝟏𝟒(𝟔𝟒𝟓𝟒𝟖 − 𝟐𝟖𝟓𝟔𝟔𝟗𝟓𝒕𝟐 + 𝟏𝟐𝟔𝟏𝟎𝟕𝟐𝟖𝒕𝟒 − 𝟏𝟏𝟎𝟕𝟑𝟖𝟖𝟖𝒕𝟔 + 𝟏𝟕𝟑𝟑𝟕𝟔𝟎𝒕𝟖)
+𝟔𝟒𝜼𝟏𝟔(𝟑𝟑𝟔𝟗𝟔 − 𝟏𝟖𝟎𝟔𝟕𝟒𝟓𝒕𝟐 + 𝟏𝟎𝟎𝟕𝟎𝟔𝟕𝟔𝒕𝟒 − 𝟏𝟏𝟖𝟕𝟎𝟗𝟐𝟖𝒕𝟔 + 𝟐𝟕𝟒𝟏𝟕𝟔𝟎𝒕𝟖)
+𝟐𝟓𝟔𝜼𝟏𝟖(𝟏𝟕𝟕𝟒 − 𝟏𝟏𝟐𝟎𝟒𝟕𝒕𝟐 + 𝟕𝟓𝟗𝟒𝟕𝟒𝒕𝟒 − 𝟏𝟏𝟒𝟏𝟐𝟎𝟎𝒕𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝒕𝟖) ]
Para 𝐅𝐗𝐈𝐈(𝒚)
[FXI(𝑦)]′ = [1
𝑁11 cos 𝜑]′
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ] ′
[FXI(𝑦)]′ = (𝑢
𝑣)′
=𝑢′ ∙ 𝑣 − 𝑢 ∙ 𝑣′
𝑣2

VI. ANEXOS.
471
Siendo.
𝑣 = 𝑁11 cos𝜑
𝑢′ =
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
Derivando por partes.
𝑣′ = 𝑁10𝑡 cos 𝜑 (11𝜂2𝜌 − 𝑁)

VI. ANEXOS.
472
𝑢′ =
{
1326122(2𝑡3 + 2𝑡) + 6749040(4𝑡5 + 4𝑡3) + 13335840(6𝑡7 + 6𝑡5)
+11491200(8𝑡9 + 8𝑡7) + 3628800(10𝑡11 + 10𝑡9)
+ [
−2𝜂2𝑡(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+𝜂2 (2036560(2𝑡3 + 2𝑡) + 6269472(4𝑡5 + 4𝑡3)
+7032960(6𝑡7 + 6𝑡5) + 2661120(8𝑡9 + 8𝑡7))
]
+2 [
−4𝜂4𝑡(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+𝜂4 (5830(2𝑡3 + 2𝑡) − 837504(4𝑡5 + 4𝑡3)
−1558656(6𝑡7 + 6𝑡5) − 760320(8𝑡9 + 8𝑡7))
]
+2 [
−6𝜂6𝑡(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂6 (−469300(2𝑡3 + 2𝑡) + 346512(4𝑡5 + 4𝑡3)
+820224(6𝑡7 + 6𝑡5) + 506880(8𝑡9 + 8𝑡7))
]
+ [
−8𝜂8𝑡(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂8 (−10449622(2𝑡3 + 2𝑡) + 13657104(4𝑡5 + 4𝑡3)
−2708640(6𝑡7 + 6𝑡5) − 737280(8𝑡9 + 8𝑡7))
]
+ [
−10𝜂10𝑡(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+𝜂10 (−57880088(2𝑡3 + 2𝑡) + 128998080(4𝑡5 + 4𝑡3)
−43649280(6𝑡7 + 6𝑡5) + 2102400(8𝑡9 + 8𝑡7))
]
+8 [
−12𝜂12𝑡(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+𝜂12 (−17943890(2𝑡3 + 2𝑡) + 59277264(4𝑡5 + 4𝑡3)
−35452800(6𝑡7 + 6𝑡5) + 3116160(8𝑡9 + 8𝑡7))
]
+64 [
−14𝜂14𝑡(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+𝜂14 (−2856695(2𝑡3 + 2𝑡) + 12610728(4𝑡5 + 4𝑡3)
−11073888(6𝑡7 + 6𝑡5) + 1733760(8𝑡9 + 8𝑡7))
]
+64 [
−16𝜂16𝑡(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+𝜂16 (−1806745(2𝑡3 + 2𝑡) + 10070676(4𝑡5 + 4𝑡3)
−11870928(6𝑡7 + 6𝑡5) + 2741760(8𝑡9 + 8𝑡7))
]
+256 [
−18𝜂18𝑡(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8)
+𝜂18 (−112047(2𝑡3 + 2𝑡) + 759474(4𝑡5 + 4𝑡3)
−1141200(6𝑡7 + 6𝑡5) + 362880(8𝑡9 + 8𝑡7))
]
}

VI. ANEXOS.
473
𝑢′ =
{
2652244𝑡 + 2652244𝑡3 + 26996160𝑡3 + 26996160𝑡5 + 80015040𝑡5
+80015040𝑡7 + 91929600𝑡7 + 91929600𝑡9 + 36288000𝑡9 + 36288000𝑡11
+[3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5 + 49420800𝜂2𝑡7
+15966720𝜂2𝑡9]
+2[−183064𝜂4𝑡 − 3361676𝜂4𝑡3 − 9351936𝜂4𝑡5 − 9199872𝜂4𝑡7 − 3041280𝜂4𝑡9]
+2[−1109222𝜂6𝑡 + 3263248𝜂6𝑡3 + 4228320𝜂6𝑡5 + 4055040𝜂6𝑡7 + 1013760𝜂6𝑡9]
+[−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7]
+ [−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5 + 191416320𝜂10𝑡7
−4204800𝜂10𝑡9]
+8 [−42020632𝜂12𝑡 + 416547956𝜂12𝑡3 − 686934912𝜂12𝑡5 + 237646080𝜂12𝑡7
−12464640𝜂12𝑡9]
+64 [−6617062𝜂14𝑡 + 84723252𝜂14𝑡3 − 192550608𝜂14𝑡5 + 102461184𝜂14𝑡7
−10402560𝜂14𝑡9]
+64 [−4152626𝜂16𝑡 + 65577134𝜂16𝑡3 − 192073680𝜂16𝑡5 + 140643360𝜂16𝑡7
−21934080𝜂16𝑡9]
+256 [−256026𝜂18𝑡 + 4830648𝜂18𝑡3 − 17479836𝜂18𝑡5 + 16597440𝜂18𝑡7
−3628800𝜂18𝑡9]
}
𝑢′ =
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5
+49420800𝜂2𝑡7 + 15966720𝜂2𝑡9 − 366128𝜂4𝑡 − 6723352𝜂4𝑡3
−18703872𝜂4𝑡5 − 18399744𝜂4𝑡7 − 6082560𝜂4𝑡9 − 2218444𝜂6𝑡
+6526496𝜂6𝑡3 + 8456640𝜂6𝑡5 + 8110080𝜂6𝑡7 + 2027520𝜂6𝑡9
−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7
−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5
+191416320𝜂10𝑡7 − 4204800𝜂10𝑡9 − 336165056𝜂12𝑡 + 3332383648𝜂12𝑡3
−5495479296𝜂12𝑡5 + 1901168640𝜂12𝑡7 − 99717120𝜂12𝑡9
−423491968𝜂14𝑡 + 5422288128𝜂14𝑡3 − 12323238912𝜂14𝑡5
+6557515776𝜂14𝑡7 − 665763840𝜂14𝑡9 − 265768064𝜂16𝑡
+4196936576𝜂16𝑡3 − 12292715520𝜂16𝑡5 + 9001175040𝜂16𝑡7
−1403781120𝜂16𝑡9 − 65542656𝜂18𝑡 + 1236645888𝜂18𝑡3
−4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7 − 928972800𝜂18𝑡9 ]

VI. ANEXOS.
474
Sustituyendo 𝑣 y 𝑣′.
[FXI(𝑦)]′ =𝑢′ ∙ 𝑁11 cos 𝜑 − 𝑢 ∙ 𝑁10𝑡 cos 𝜑 (11𝜂2𝜌 − 𝑁)
(𝑁11 cos 𝜑)2
[FXI(𝑦)]′ =𝑁10 cos 𝜑 [𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(11𝜂2𝜌 − 𝑁)]
𝑁22 cos2 𝜑=[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(11𝜂2𝜌 − 𝑁)]
𝑁12 cos 𝜑
[FXI(𝑦)]′ =1
𝑁12 cos 𝜑[𝑢′ ∙ 𝑁 − 𝑢 ∙ 𝑡(11𝜂2𝜌 − 𝑁)]
Sustituyendo 𝑢 y 𝑢′
[FXI(𝑦)]′ =1
𝑁12 cos 𝜑∙
{
𝑁
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5
+49420800𝜂2𝑡7 + 15966720𝜂2𝑡9 − 366128𝜂4𝑡 − 6723352𝜂4𝑡3
−18703872𝜂4𝑡5 − 18399744𝜂4𝑡7 − 6082560𝜂4𝑡9 − 2218444𝜂6𝑡
+6526496𝜂6𝑡3 + 8456640𝜂6𝑡5 + 8110080𝜂6𝑡7 + 2027520𝜂6𝑡9
−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7
−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5
+191416320𝜂10𝑡7 − 4204800𝜂10𝑡9 − 336165056𝜂12𝑡 + 3332383648𝜂12𝑡3
−5495479296𝜂12𝑡5 + 1901168640𝜂12𝑡7 − 99717120𝜂12𝑡9
−423491968𝜂14𝑡 + 5422288128𝜂14𝑡3 − 12323238912𝜂14𝑡5
+6557515776𝜂14𝑡7 − 665763840𝜂14𝑡9 − 265768064𝜂16𝑡
+4196936576𝜂16𝑡3 − 12292715520𝜂16𝑡5 + 9001175040𝜂16𝑡7
−1403781120𝜂16𝑡9 − 65542656𝜂18𝑡 + 1236645888𝜂18𝑡3
−4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7 − 928972800𝜂18𝑡9 ]
−𝑡(11𝜂2𝜌 − 𝑁)
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}

VI. ANEXOS.
475
Multiplicando por 𝑑𝜑
𝑑𝑦.
FXII(𝑦) = [FXI(𝑦)]′ ∙𝑑𝜑
𝑑𝑦
FXII(𝑦) =1
𝑁12 cos 𝜑∙
{
𝑁
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5
+49420800𝜂2𝑡7 + 15966720𝜂2𝑡9 − 366128𝜂4𝑡 − 6723352𝜂4𝑡3
−18703872𝜂4𝑡5 − 18399744𝜂4𝑡7 − 6082560𝜂4𝑡9 − 2218444𝜂6𝑡
+6526496𝜂6𝑡3 + 8456640𝜂6𝑡5 + 8110080𝜂6𝑡7 + 2027520𝜂6𝑡9
−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7
−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5
+191416320𝜂10𝑡7 − 4204800𝜂10𝑡9 − 336165056𝜂12𝑡 + 3332383648𝜂12𝑡3
−5495479296𝜂12𝑡5 + 1901168640𝜂12𝑡7 − 99717120𝜂12𝑡9
−423491968𝜂14𝑡 + 5422288128𝜂14𝑡3 − 12323238912𝜂14𝑡5
+6557515776𝜂14𝑡7 − 665763840𝜂14𝑡9 − 265768064𝜂16𝑡
+4196936576𝜂16𝑡3 − 12292715520𝜂16𝑡5 + 9001175040𝜂16𝑡7
−1403781120𝜂16𝑡9 − 65542656𝜂18𝑡 + 1236645888𝜂18𝑡3
−4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7 − 928972800𝜂18𝑡9 ]
−𝑡(11𝜂2𝜌 − 𝑁)
[ 50521 + 1326122𝑡2 + 6749040𝑡4 + 13335840𝑡6 + 11491200𝑡8 + 3628800𝑡10
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}
∙ (𝑁
𝜌)

VI. ANEXOS.
476
FXII(𝑦) =1
𝑁12 cos 𝜑∙
{
𝑁
𝜌
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5
+49420800𝜂2𝑡7 + 15966720𝜂2𝑡9 − 366128𝜂4𝑡 − 6723352𝜂4𝑡3
−18703872𝜂4𝑡5 − 18399744𝜂4𝑡7 − 6082560𝜂4𝑡9 − 2218444𝜂6𝑡
+6526496𝜂6𝑡3 + 8456640𝜂6𝑡5 + 8110080𝜂6𝑡7 + 2027520𝜂6𝑡9
−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7
−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5
+191416320𝜂10𝑡7 − 4204800𝜂10𝑡9 − 336165056𝜂12𝑡 + 3332383648𝜂12𝑡3
−5495479296𝜂12𝑡5 + 1901168640𝜂12𝑡7 − 99717120𝜂12𝑡9
−423491968𝜂14𝑡 + 5422288128𝜂14𝑡3 − 12323238912𝜂14𝑡5
+6557515776𝜂14𝑡7 − 665763840𝜂14𝑡9 − 265768064𝜂16𝑡
+4196936576𝜂16𝑡3 − 12292715520𝜂16𝑡5 + 9001175040𝜂16𝑡7
−1403781120𝜂16𝑡9 − 65542656𝜂18𝑡 + 1236645888𝜂18𝑡3
−4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7 − 928972800𝜂18𝑡9 ]
− (11𝜂2𝜌
𝜌−𝑁
𝜌)
[ 50521𝑡 + 1326122𝑡3 + 6749040𝑡5 + 13335840𝑡7 + 11491200𝑡9 + 3628800𝑡11
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}

VI. ANEXOS.
477
FXII(𝑦) =1
𝑁12 cos 𝜑∙
{
(1 + 𝜂2)
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 3795254𝜂2𝑡 + 25077888𝜂2𝑡3 + 54736704𝜂2𝑡5
+49420800𝜂2𝑡7 + 15966720𝜂2𝑡9 − 366128𝜂4𝑡 − 6723352𝜂4𝑡3
−18703872𝜂4𝑡5 − 18399744𝜂4𝑡7 − 6082560𝜂4𝑡9 − 2218444𝜂6𝑡
+6526496𝜂6𝑡3 + 8456640𝜂6𝑡5 + 8110080𝜂6𝑡7 + 2027520𝜂6𝑡9
−25733396𝜂8𝑡 + 117326148𝜂8𝑡3 − 70880256𝜂8𝑡5 − 480960𝜂8𝑡7
−137922586𝜂10𝑡 + 979033024𝜂10𝑡3 − 1035884160𝜂10𝑡5
+191416320𝜂10𝑡7 − 4204800𝜂10𝑡9 − 336165056𝜂12𝑡 + 3332383648𝜂12𝑡3
−5495479296𝜂12𝑡5 + 1901168640𝜂12𝑡7 − 99717120𝜂12𝑡9
−423491968𝜂14𝑡 + 5422288128𝜂14𝑡3 − 12323238912𝜂14𝑡5
+6557515776𝜂14𝑡7 − 665763840𝜂14𝑡9 − 265768064𝜂16𝑡
+4196936576𝜂16𝑡3 − 12292715520𝜂16𝑡5 + 9001175040𝜂16𝑡7
−1403781120𝜂16𝑡9 − 65542656𝜂18𝑡 + 1236645888𝜂18𝑡3
−4474838016𝜂18𝑡5 + 4248944640𝜂18𝑡7 − 928972800𝜂18𝑡9 ]
−[11𝜂2 − (1 + 𝜂2)]
[ 50521𝑡 + 1326122𝑡3 + 6749040𝑡5 + 13335840𝑡7 + 11491200𝑡9 + 3628800𝑡11
+𝜂2(138933 + 2036560𝑡2 + 6269472𝑡4 + 7032960𝑡6 + 2661120𝑡8)
+2𝜂4(48681 + 5830𝑡2 − 837504𝑡4 − 1558656𝑡6 − 760320𝑡8)
+2𝜂6(28437 − 469300𝑡2 + 346512𝑡4 + 820224𝑡6 + 506880𝑡8)
+𝜂8(604269 − 10449622𝑡2 + 13657104𝑡4 − 2708640𝑡6 − 737280𝑡8)
+𝜂10(2216241 − 57880088𝑡2 + 128998080𝑡4 − 43649280𝑡6 + 2102400𝑡8)
+8𝜂12(511071 − 17943890𝑡2 + 59277264𝑡4 − 35452800𝑡6 + 3116160𝑡8)
+64𝜂14(64548 − 2856695𝑡2 + 12610728𝑡4 − 11073888𝑡6 + 1733760𝑡8)
+64𝜂16(33696 − 1806745𝑡2 + 10070676𝑡4 − 11870928𝑡6 + 2741760𝑡8)
+256𝜂18(1774 − 112047𝑡2 + 759474𝑡4 − 1141200𝑡6 + 362880𝑡8) ]
}

VI. ANEXOS.
478
FXII(𝑦) =1
𝑁12 cos 𝜑∙
{
[ 2652244𝑡 + 29648404𝑡3 + 107011200𝑡5 + 171944640𝑡7 + 128217600𝑡9
+36288000𝑡11 + 6447498𝜂2𝑡 + 3429126𝜂4𝑡 − 2584572𝜂6𝑡 − 27951840𝜂8𝑡
−163655982𝜂10𝑡 − 474087642𝜂12𝑡 − 759657024𝜂14𝑡 − 689260032𝜂16𝑡
−331310720𝜂18𝑡 − 65542656𝜂20𝑡 + 54726292𝜂2𝑡3 + 18354536𝜂4𝑡3
−196856𝜂6𝑡3 + 123852644𝜂8𝑡3 + 1096359172𝜂10𝑡3 + 4311416672𝜂12𝑡3
+8754671776𝜂14𝑡3 + 9619224704𝜂16𝑡3 + 5433582464𝜂18𝑡3
+1236645888𝜂20𝑡3 + 161747904𝜂2𝑡5 + 36032832𝜂4𝑡5 − 10247232𝜂6𝑡5
−62423616𝜂8𝑡5 − 1106764416𝜂10𝑡5 − 6531363456𝜂12𝑡5
−17818718208𝜂14𝑡5 − 24615954432𝜂16𝑡5 − 16767553536𝜂18𝑡5
−4474838016𝜂20𝑡5 + 221365440𝜂2𝑡7 + 31021056𝜂4𝑡7 − 10289664𝜂6𝑡7
+7629120𝜂8𝑡7 + 190935360𝜂10𝑡7 + 2092584960𝜂12𝑡7 + 8458684416𝜂14𝑡7
+15558690816𝜂16𝑡7 + 13250119680𝜂18𝑡7 + 4248944640𝜂20𝑡7
+144184320𝜂2𝑡9 + 9884160𝜂4𝑡9 − 4055040𝜂6𝑡9 + 2027520𝜂8𝑡9
−4204800𝜂10𝑡9 − 103921920𝜂12𝑡9 − 765480960𝜂14𝑡9 − 2069544960𝜂16𝑡9
−2332753920𝜂18𝑡9 − 928972800𝜂20𝑡9 + 36288000𝜂2𝑡11 ]
−
[
−50521𝑡 − 1326122𝑡3 − 6749040𝑡5 − 13335840𝑡7 − 11491200𝑡9
−3628800𝑡11 + 366277𝜂2𝑡 + 1291968𝜂4𝑡 + 916746𝜂6𝑡 − 35529𝜂8𝑡
+3826449𝜂10𝑡 + 18073842𝜂12𝑡 + 36754608𝜂14𝑡 + 39154176𝜂16𝑡
+21111296𝜂18𝑡 + 4541440𝜂20𝑡 + 11224660𝜂2𝑡3 + 20353940𝜂4𝑡3
+1055200𝜂6𝑡3 + 1063622𝜂8𝑡3 − 46616132𝜂10𝑡3 − 435249760𝜂12𝑡3
−1252682720𝜂14𝑡3 − 1712653120𝜂16𝑡3 − 1127632768𝜂18𝑡3
−286840320𝜂20𝑡3 + 61220928𝜂2𝑡5 + 64369728𝜂4𝑡5 − 17443104𝜂6𝑡5
−6726864𝜂8𝑡5 + 7572960𝜂10𝑡5 + 815762688𝜂12𝑡5 + 3935094528𝜂14𝑡5
+7426342656𝜂16𝑡5 + 6250807296𝜂18𝑡5 + 1944253440𝜂20𝑡5
+126325440𝜂2𝑡7 + 73446912𝜂4𝑡7 − 32813568𝜂6𝑡7 + 19113120𝜂8𝑡7
+16562880𝜂10𝑡7 − 152870400𝜂12𝑡7 − 2127495168𝜂14𝑡7
−6327548928𝜂16𝑡7 − 7305246720𝜂18𝑡7 − 2921472000𝜂20𝑡7
+112250880𝜂2𝑡9 + 28131840𝜂4𝑡9 − 16220160𝜂6𝑡9 + 10874880𝜂8𝑡9
−9475200𝜂10𝑡9 − 3905280𝜂12𝑡9 + 138332160𝜂14𝑡9 + 934133760𝜂16𝑡9
+1661829120𝜂18𝑡9 + 928972800𝜂20𝑡9 + 36288000𝜂2𝑡11 ]
}

VI. ANEXOS.
479
FXII(𝑦) =1
𝑁12 cos 𝜑∙
[ (2652244𝑡 + 50521𝑡) + (29648404𝑡3 + 1326122𝑡3) + (107011200𝑡5 + 6749040𝑡5)
+(171944640𝑡7 + 13335840𝑡7) + (128217600𝑡9 + 11491200𝑡9) + (36288000𝑡11
+3628800𝑡11) + (6447498𝜂2𝑡 − 366277𝜂2𝑡) + (54726292𝜂2𝑡3 − 11224660𝜂2𝑡3)
+(161747904𝜂2𝑡5 − 61220928𝜂2𝑡5) + (221365440𝜂2𝑡7 − 126325440𝜂2𝑡7)
+(144184320𝜂2𝑡9 − 112250880𝜂2𝑡9) + (3429126𝜂4𝑡 − 1291968𝜂4𝑡)
+(18354536𝜂4𝑡3 − 20353940𝜂4𝑡3) + (36032832𝜂4𝑡5 − 64369728𝜂4𝑡5)
+(31021056𝜂4𝑡7 − 73446912𝜂4𝑡7) + (9884160𝜂4𝑡9 − 28131840𝜂4𝑡9)
−(2584572𝜂6𝑡 + 916746𝜂6𝑡) − (1055200𝜂6𝑡3 + 196856𝜂6𝑡3) + (17443104𝜂6𝑡5
−10247232𝜂6𝑡5) + (32813568𝜂6𝑡7 − 10289664𝜂6𝑡7) + (16220160𝜂6𝑡9
−4055040𝜂6𝑡9) + (35529𝜂8𝑡 − 27951840𝜂8𝑡) + (123852644𝜂8𝑡3 − 1063622𝜂8𝑡3)
+(6726864𝜂8𝑡5 − 62423616𝜂8𝑡5) + (7629120𝜂8𝑡7 − 19113120𝜂8𝑡7)
+(2027520𝜂8𝑡9 − 10874880𝜂8𝑡9) − (163655982𝜂10𝑡 + 3826449𝜂10𝑡)
+(1096359172𝜂10𝑡3 + 46616132𝜂10𝑡3) − (1106764416𝜂10𝑡5 + 7572960𝜂10𝑡5)
+(190935360𝜂10𝑡7 − 16562880𝜂10𝑡7) + (9475200𝜂10𝑡9 − 4204800𝜂10𝑡9)
−(474087642𝜂12𝑡 + 18073842𝜂12𝑡) + (4311416672𝜂12𝑡3 + 435249760𝜂12𝑡3)
−(815762688𝜂12𝑡5 + 6531363456𝜂12𝑡5) + (2092584960𝜂12𝑡7 + 152870400𝜂12𝑡7)
+(3905280𝜂12𝑡9 − 103921920𝜂12𝑡9) − (759657024𝜂14𝑡 + 36754608𝜂14𝑡)
+(8754671776𝜂14𝑡3 + 1252682720𝜂14𝑡3) − (17818718208𝜂14𝑡5
+3935094528𝜂14𝑡5) + (8458684416𝜂14𝑡7 + 2127495168𝜂14𝑡7) − (765480960𝜂14𝑡9
+138332160𝜂14𝑡9) − (689260032𝜂16𝑡 + 39154176𝜂16𝑡) + (9619224704𝜂16𝑡3
+1712653120𝜂16𝑡3) − (7426342656𝜂16𝑡5 + 24615954432𝜂16𝑡5)
+(15558690816𝜂16𝑡7 + 6327548928𝜂16𝑡7) − (2069544960𝜂16𝑡9 + 934133760𝜂16𝑡9)
−(331310720𝜂18𝑡 + 21111296𝜂18𝑡) + (5433582464𝜂18𝑡3 + 1127632768𝜂18𝑡3)
−(16767553536𝜂18𝑡5 + 6250807296𝜂18𝑡5) + (13250119680𝜂18𝑡7
+7305246720𝜂18𝑡7) − (2332753920𝜂18𝑡9 + 1661829120𝜂18𝑡9) − (65542656𝜂20𝑡
−4541440𝜂20𝑡) + (1236645888𝜂20𝑡3 + 286840320𝜂20𝑡3) − (4474838016𝜂20𝑡5
+1944253440𝜂20𝑡5) + (4248944640𝜂20𝑡7 + 2921472000𝜂20𝑡7) − (928972800𝜂20𝑡9
+928972800𝜂20𝑡9) + (36288000𝜂2𝑡11 − 36288000𝜂2𝑡11) ]

VI. ANEXOS.
480
FXII(𝑦) =1
𝑁12 cos 𝜑∙
[ 2702765𝑡 + 30974526𝑡3 + 113760240𝑡5 + 185280480𝑡7 + 139708800𝑡9
+39916800𝑡11 + 6081221𝜂2𝑡 + 43501632𝜂2𝑡3 + 100526976𝜂2𝑡5
+95040000𝜂2𝑡7 + 31933440𝜂2𝑡9 + 2137158𝜂4𝑡 − 1999404𝜂4𝑡3
−28336896𝜂4𝑡5 − 42425856𝜂4𝑡7 − 18247680𝜂4𝑡9 − 3501318𝜂6𝑡
−1252056𝜂6𝑡3 + 7195872𝜂6𝑡5 + 22523904𝜂6𝑡7 + 12165120𝜂6𝑡9
−27916311𝜂8𝑡 + 122789022𝜂8𝑡3 − 55696752𝜂8𝑡5 − 11484000𝜂8𝑡7
−8847360𝜂8𝑡9 − 167482431𝜂10𝑡 + 1142975304𝜂10𝑡3 − 1114337376𝜂10𝑡5
+174372480𝜂10𝑡7 + 5270400𝜂10𝑡9 − 492161484𝜂12𝑡 + 4746666432𝜂12𝑡3
−7347126144𝜂12𝑡5 + 2245455360𝜂12𝑡7 − 100016640𝜂12𝑡9
−796411632𝜂14𝑡 + 10007354496𝜂14𝑡3 − 21753812736𝜂14𝑡5
+10586179584𝜂14𝑡7 − 903813120𝜂14𝑡9 − 728414208𝜂16𝑡
+11331877824𝜂16𝑡3 − 32042297088𝜂16𝑡5 + 21886239744𝜂16𝑡7
−3003678720𝜂16𝑡9 − 352422016𝜂18𝑡 + 6561215232𝜂18𝑡3
−23018360832𝜂18𝑡5 + 20555366400𝜂18𝑡7 − 3994583040𝜂18𝑡9
−70084096𝜂20𝑡 + 1523486208𝜂20𝑡3 − 6419091456𝜂20𝑡5
+7170416640𝜂20𝑡7 − 1857945600𝜂20𝑡9 ]
𝐅𝐗𝐈𝐈(𝒚) =𝒕
𝑵𝟏𝟐 𝐜𝐨𝐬𝝋∙
[ 𝟐𝟕𝟎𝟐𝟕𝟔𝟓 + 𝟑𝟎𝟗𝟕𝟒𝟓𝟐𝟔𝒕𝟐 + 𝟏𝟏𝟑𝟕𝟔𝟎𝟐𝟒𝟎𝒕𝟒 + 𝟏𝟖𝟓𝟐𝟖𝟎𝟒𝟖𝟎𝒕𝟔 + 𝟏𝟑𝟗𝟕𝟎𝟖𝟖𝟎𝟎𝒕𝟖 + 𝟑𝟗𝟗𝟏𝟔𝟖𝟎𝟎𝒕𝟏𝟎
+𝜼𝟐(𝟔𝟎𝟖𝟏𝟐𝟐𝟏 + 𝟒𝟑𝟓𝟎𝟏𝟔𝟑𝟐𝒕𝟐 + 𝟏𝟎𝟎𝟓𝟐𝟔𝟗𝟕𝟔𝒕𝟒 + 𝟗𝟓𝟎𝟒𝟎𝟎𝟎𝟎𝒕𝟔 + 𝟑𝟏𝟗𝟑𝟑𝟒𝟒𝟎𝒕𝟖)
+𝟏𝟖𝜼𝟒(𝟏𝟏𝟖𝟕𝟑𝟏 − 𝟏𝟏𝟏𝟎𝟕𝟖𝒕𝟐 − 𝟏𝟓𝟕𝟒𝟐𝟕𝟐𝒕𝟒 − 𝟐𝟑𝟓𝟔𝟗𝟗𝟐𝒕𝟔 − 𝟏𝟎𝟏𝟑𝟕𝟔𝟎𝒕𝟖)
−𝟔𝜼𝟔(𝟓𝟖𝟑𝟓𝟓𝟑 + 𝟐𝟎𝟖𝟔𝟕𝟔𝒕𝟐 − 𝟏𝟏𝟗𝟗𝟑𝟏𝟐𝒕𝟒 − 𝟑𝟕𝟓𝟑𝟗𝟖𝟒𝒕𝟔 − 𝟐𝟎𝟐𝟕𝟓𝟐𝟎𝒕𝟖)
−𝟑𝜼𝟖(𝟗𝟑𝟎𝟓𝟒𝟑𝟕 − 𝟒𝟎𝟗𝟐𝟗𝟔𝟕𝟒𝒕𝟐 + 𝟏𝟖𝟓𝟔𝟓𝟓𝟖𝟒𝒕𝟒 + 𝟑𝟖𝟐𝟖𝟎𝟎𝟎𝒕𝟔 + 𝟐𝟗𝟒𝟗𝟏𝟐𝟎𝒕𝟖)
−𝟗𝜼𝟏𝟎(𝟏𝟖𝟔𝟎𝟗𝟏𝟓𝟗 − 𝟏𝟐𝟔𝟗𝟗𝟕𝟐𝟓𝟔𝒕𝟐 + 𝟏𝟐𝟑𝟖𝟏𝟓𝟐𝟔𝟒𝒕𝟒 − 𝟏𝟗𝟑𝟕𝟒𝟕𝟐𝟎𝒕𝟔 − 𝟓𝟖𝟓𝟔𝟎𝟎𝒕𝟖)
−𝟏𝟐𝜼𝟏𝟐(𝟒𝟏𝟎𝟏𝟑𝟒𝟓𝟕 − 𝟑𝟗𝟓𝟓𝟓𝟓𝟓𝟑𝟔𝒕𝟐 + 𝟔𝟏𝟐𝟐𝟔𝟎𝟓𝟏𝟐𝒕𝟒 − 𝟏𝟖𝟕𝟏𝟐𝟏𝟐𝟖𝟎𝒕𝟔 + 𝟖𝟑𝟑𝟒𝟕𝟐𝟎𝒕𝟖)
−𝟒𝟖𝜼𝟏𝟒(𝟏𝟔𝟓𝟗𝟏𝟗𝟎𝟗 − 𝟐𝟎𝟖𝟒𝟖𝟔𝟓𝟓𝟐𝒕𝟐 + 𝟒𝟓𝟑𝟐𝟎𝟒𝟒𝟑𝟐𝒕𝟒 − 𝟐𝟐𝟎𝟓𝟒𝟓𝟒𝟎𝟖𝒕𝟔 + 𝟏𝟖𝟖𝟐𝟗𝟒𝟒𝟎𝒕𝟖)
−𝟓𝟕𝟔𝜼𝟏𝟔(𝟏𝟐𝟔𝟒𝟔𝟎𝟖 − 𝟏𝟗𝟔𝟕𝟑𝟑𝟗𝟗𝒕𝟐 + 𝟓𝟓𝟔𝟐𝟖𝟗𝟖𝟖𝒕𝟒 − 𝟑𝟕𝟗𝟗𝟔𝟗𝟒𝟒𝒕𝟔 + 𝟓𝟐𝟏𝟒𝟕𝟐𝟎𝒕𝟖)
−𝟏𝟐𝟖𝜼𝟏𝟖(𝟐𝟕𝟓𝟑𝟐𝟗𝟕 − 𝟓𝟏𝟐𝟓𝟗𝟒𝟗𝟒𝒕𝟐 + 𝟏𝟕𝟗𝟖𝟑𝟎𝟗𝟒𝟒𝒕𝟒 − 𝟏𝟔𝟎𝟓𝟖𝟖𝟖𝟎𝟎𝒕𝟔 + 𝟑𝟏𝟐𝟎𝟕𝟔𝟖𝟎𝒕𝟖)
−𝟓𝟏𝟐𝜼𝟐𝟎(𝟏𝟑𝟔𝟖𝟖𝟑 − 𝟐𝟗𝟕𝟓𝟓𝟓𝟗𝒕𝟐 + 𝟏𝟐𝟓𝟑𝟕𝟐𝟖𝟖𝒕𝟒 − 𝟏𝟒𝟎𝟎𝟒𝟕𝟐𝟎𝒕𝟔 + 𝟑𝟔𝟐𝟖𝟖𝟎𝟎𝒕𝟖) ]

VI. ANEXOS.
481
6.5.3 Derivadas de orden superior de 𝐅′(𝚽) para el proceso
inverso.
Para 𝐅′(𝚽)
𝜑 = F(Φ) = ∫𝑟
𝜌
Φ
0
𝑑Φ
Derivando.
𝑑𝜑
𝑑Φ=𝑟
𝜌=𝑁 cos𝜑
𝜌,
𝑑𝜑
𝑑𝜑= 1
F′(Φ) =𝑑𝜑
𝑑𝜑∙𝑑𝜑
𝑑Φ= 1 ∙ [
𝑁 cos 𝜑
𝜌] = (
𝑁
𝜌) cos 𝜑
𝐅′(𝚽) = (𝟏 + 𝜼𝟐) 𝐜𝐨𝐬𝝋
Para 𝐅′′(𝚽)
[F′(Φ)]′ = [(1 + 𝜂2) cos 𝜑]′
[F′(Φ)]′ = −2𝜂2𝑡 cos 𝜑 + [(1 + 𝜂2)(−𝑡 cos 𝜑)]
[F′(Φ)]′ = −2𝜂2𝑡 cos𝜑 + (−𝑡 cos𝜑 − 𝜂2𝑡 cos 𝜑)
[F′(Φ)]′ = −3𝜂2𝑡 cos 𝜑 − 𝑡 cos 𝜑 = −𝑡 cos 𝜑 (3𝜂2 + 1)
Multiplicando por 𝑑𝜑
𝑑Φ.
F′′(Φ) = [F′(Φ)]′ ∙𝑑𝜑
𝑑Φ
F′′(Φ) = −𝑡 cos𝜑 (3𝜂2 + 1) ∙ [(𝑁
𝜌) cos 𝜑]

VI. ANEXOS.
482
F′′(Φ) = −𝑡 cos 𝜑 (3𝜂2 + 1) ∙ [(1 + 𝜂2) cos 𝜑]
F′′(Φ) = −(3𝜂2 + 1)(1 + 𝜂2)𝑡 cos2 𝜑 = −(3𝜂2 + 3𝜂4 + 1 + 𝜂2)𝑡 cos2 𝜑
𝐅′′(𝚽) = −(𝟏 + 𝟒𝜼𝟐 + 𝟑𝜼𝟒)𝒕 𝐜𝐨𝐬𝟐𝝋
Para 𝐅′′′(𝚽)
[F′′(Φ)]′ = [−(1 + 4𝜂2 + 3𝜂4)𝑡 cos2 𝜑]′
[F′′(Φ)]′ = −[(𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡) cos2 𝜑]′
[F′′(Φ)]′ = −(𝑢 ∙ 𝑣)′ = −(𝑢′ ∙ 𝑣 + 𝑢 ∙ 𝑣′)
Siendo.
𝑢 = 𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡, 𝑣 = cos2 𝜑
Derivando por partes.
𝑢′ = {𝑡2 + 1 + 4[−2𝜂2𝑡 ∙ 𝑡 + 𝜂2(𝑡2 + 1)]
+3[−4𝜂4𝑡 ∙ 𝑡 + 𝜂4(𝑡2 + 1)]}
𝑢′ = {1 + 𝑡2 + 4[−2𝜂2𝑡2 + 𝜂2𝑡2 + 𝜂2]
+3[−4𝜂4𝑡2 + 𝜂4𝑡2 + 𝜂4]} = {
1 + 𝑡2 + 4[−𝜂2𝑡2 + 𝜂2]
+3[−3𝜂4𝑡2 + 𝜂4]}
𝑢′ = 1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2
𝑣′ = −2𝑡 cos2 𝜑
Sustituyendo.
[F′′(Φ)]′ = −{(1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2) cos2 𝜑
+[(−2𝑡 cos2 𝜑)(𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡)]}
[F′′(Φ)]′ = −cos2 𝜑 {(1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2)
−[2𝑡(𝑡 + 4𝜂2𝑡 + 3𝜂4𝑡)]}

VI. ANEXOS.
483
[F′′(Φ)]′ = −cos2 𝜑 {(1 + 𝑡2 + 4𝜂2 − 4𝜂2𝑡2 + 3𝜂4 − 9𝜂4𝑡2)
−(2𝑡2 + 8𝜂2𝑡2 + 6𝜂4𝑡2)}
[F′′(Φ)]′ = −cos2 𝜑 [1 + 𝑡2 − 2𝑡2 + 4𝜂2 − 4𝜂2𝑡2 − 8𝜂2𝑡2
+3𝜂4 − 9𝜂4𝑡2 − 6𝜂4𝑡2]
[F′′(Φ)]′ = −cos2 𝜑 [1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2]
Multiplicando por 𝑑𝜑
𝑑Φ.
F′′′(Φ) = [F′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
F′′′(Φ) =
−{cos2 𝜑 [1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2]} ∙ [(𝑁
𝜌) cos 𝜑]
F′′′(Φ) =
−{cos2 𝜑 [1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2]} ∙ [(1 + 𝜂2) cos 𝜑]
F′′′(Φ) = − cos3 𝜑 {[1 − 𝑡2 + 4𝜂2 − 12𝜂2𝑡2 + 3𝜂4 − 15𝜂4𝑡2](1 + 𝜂2)}
𝐅′′′(𝚽) = −(𝟏 + 𝜼𝟐) [𝟏 − 𝒕𝟐 + 𝟒𝜼𝟐(𝟏 − 𝟑𝒕𝟐)
+𝟑𝜼𝟒(𝟏 − 𝟓𝒕𝟐)] 𝐜𝐨𝐬𝟑𝝋
Para 𝐅𝐈𝐕(𝚽)
[F′′′(Φ)]′ = − {(1 + 𝜂2) [1 − 𝑡2 + 4𝜂2(1 − 3𝑡2)
+3𝜂4(1 − 5𝑡2)] cos3 𝜑}
′
[F′′′(Φ)]′ = −(𝑢 ∙ 𝑣 ∙ 𝑤) = −(𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′)
Siendo.
𝑢 = 1 + 𝜂2, 𝑣 = [1 − 𝑡2 + 4𝜂2(1 − 3𝑡2)
+3𝜂4(1 − 5𝑡2)] 𝑤 = cos3 𝜑

VI. ANEXOS.
484
Derivando por partes.
𝑢′ = −2𝜂2𝑡, 𝑤′ = −3𝑡 cos3 𝜑
𝑣′ = {−(2𝑡3 + 2𝑡) + 4[−2𝜂2𝑡(1 − 3𝑡2) − 3𝜂2(2𝑡3 + 2𝑡)]
+3[−4𝜂4𝑡(1 − 5𝑡2) − 5𝜂4(2𝑡3 + 2𝑡)]}
𝑣′ = {−2𝑡 − 2𝑡3 + 4[−8𝜂2𝑡] + 3[−14𝜂4𝑡 + 10𝜂4𝑡3]}
𝑣′ = −2𝑡 − 2𝑡3 − 32𝜂2𝑡 − 42𝜂4𝑡 + 30𝜂4𝑡3
Sustituyendo.
[F′′′(Φ)]′ =
−
{
−2𝜂2𝑡 [
1 − 𝑡2 + 4𝜂2(1 − 3𝑡2)
+3𝜂4(1 − 5𝑡2)] cos3 𝜑 + (1 + 𝜂2) [
−2𝑡 − 2𝑡3 − 32𝜂2𝑡
−42𝜂4𝑡 + 30𝜂4𝑡3] cos3 𝜑
+(1 + 𝜂2) [1 − 𝑡2 + 4𝜂2(1 − 3𝑡2)
+3𝜂4(1 − 5𝑡2)] (−3𝑡 cos3 𝜑)
}
[F′′′(Φ)]′ =
−cos3 𝜑
{
[2𝜂2𝑡 − 2𝜂2𝑡3 + 8𝜂4𝑡(1 − 3𝑡2)
+6𝜂6𝑡(1 − 5𝑡2)] + (1 + 𝜂2) [
−2𝑡 − 2𝑡3 − 32𝜂2𝑡
−42𝜂4𝑡 + 30𝜂4𝑡3]
−(1 + 𝜂2) [3𝑡 − 3𝑡3 + 12𝜂2𝑡(1 − 3𝑡2)
+18𝜂4𝑡(1 − 5𝑡2)]
}
[F′′′(Φ)]′ = −cos3 𝜑
{
[
−2𝜂2𝑡 + 2𝜂2𝑡3 − 8𝜂4𝑡 + 24𝜂4𝑡3
−6𝜂6𝑡 + 30𝜂6𝑡3]
+ [−2𝑡 − 2𝑡3 − 34𝜂2𝑡 − 2𝜂2𝑡3
−74𝜂4𝑡 + 30𝜂4𝑡3 − 42𝜂6𝑡 + 30𝜂6𝑡3]
− [3𝑡 − 3𝑡3 + 15𝜂2𝑡 − 39𝜂2𝑡3
+21𝜂4𝑡 − 81𝜂4𝑡3 + 9𝜂6𝑡 − 45𝜂6𝑡3]}
[F′′′(Φ)]′ =
−cos3 𝜑
[ −(3𝑡 + 2𝑡) + (3𝑡3 − 2𝑡3) − (2𝜂2𝑡 + 15𝜂2𝑡 + 34𝜂2𝑡)
+(2𝜂2𝑡3 − 2𝜂2𝑡3 + 39𝜂2𝑡3) − (8𝜂4𝑡 + 21𝜂4𝑡 + 74𝜂4𝑡)
+(24𝜂4𝑡3 + 30𝜂4𝑡3 + 81𝜂4𝑡3) − (6𝜂6𝑡 + 9𝜂6𝑡 + 42𝜂6𝑡)
+(30𝜂6𝑡3 + 30𝜂6𝑡3 + 45𝜂6𝑡3) ]

VI. ANEXOS.
485
[F′′′(Φ)]′ = −cos3 𝜑 [−5𝑡 + 𝑡3 − 51𝜂2𝑡 + 39𝜂2𝑡3 − 103𝜂4𝑡
+135𝜂4𝑡3 − 57𝜂6𝑡 + 105𝜂6𝑡3]
Multiplicando por 𝑑𝜑
𝑑Φ.
FIV(Φ) = [F′′′(Φ)]′ ∙𝑑𝜑
𝑑Φ
FIV(Φ) =
{− cos3 𝜑 [−5𝑡 + 𝑡3 − 51𝜂2𝑡 + 39𝜂2𝑡3 − 103𝜂4𝑡
+135𝜂4𝑡3 − 57𝜂6𝑡 + 105𝜂6𝑡3]} ∙ [(
𝑁
𝜌) cos 𝜑]
FIV(Φ) =
{− cos3 𝜑 [−5𝑡 + 𝑡3 − 51𝜂2𝑡 + 39𝜂2𝑡3 − 103𝜂4𝑡
+135𝜂4𝑡3 − 57𝜂6𝑡 + 105𝜂6𝑡3]} ∙ [(1 + 𝜂2) cos 𝜑]
FIV(Φ) = −(1 + 𝜂2) [−5𝑡 + 𝑡3 − 51𝜂2𝑡 + 39𝜂2𝑡3 − 103𝜂4𝑡
+135𝜂4𝑡3 − 57𝜂6𝑡 + 105𝜂6𝑡3] cos4 𝜑
FIV(Φ) = (1 + 𝜂2)𝑡 [5 − 𝑡2 + 51𝜂2 − 39𝜂2𝑡2 + 103𝜂4
−135𝜂4𝑡2 + 57𝜂6 − 105𝜂6𝑡2] cos4 𝜑
𝐅𝐈𝐕(𝚽) = (𝟏 + 𝜼𝟐)𝒕 [𝟓 − 𝒕𝟐 + 𝟑𝜼𝟐(𝟏𝟕 − 𝟏𝟑𝒕𝟐)
+𝜼𝟒(𝟏𝟎𝟑 − 𝟏𝟑𝟓𝒕𝟐) + 𝟑𝜼𝟔(𝟏𝟗 − 𝟑𝟓𝒕𝟐)] 𝐜𝐨𝐬𝟒𝝋
Para 𝐅𝐕(𝚽)
[FIV(Φ)]′ = {(1 + 𝜂2)𝑡 [5 − 𝑡2 + 3𝜂2(17 − 13𝑡2)
+𝜂4(103 − 135𝑡2) + 3𝜂6(19 − 35𝑡2)] cos4 𝜑}
′
[FIV(Φ)]′ = {(1 + 𝜂2) [5𝑡 − 𝑡3 + 3𝜂2(17𝑡 − 13𝑡3)
+𝜂4(103𝑡 − 135𝑡3) + 3𝜂6(19𝑡 − 35𝑡3)] cos4 𝜑}
′
[FIV(Φ)]′ = 𝑢 ∙ 𝑣 ∙ 𝑤 = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′

VI. ANEXOS.
486
Siendo.
𝑢 = 1 + 𝜂2, 𝑣 = [5𝑡 − 𝑡3 + 3𝜂2(17𝑡 − 13𝑡3)
+𝜂4(103𝑡 − 135𝑡3) + 3𝜂6(19𝑡 − 35𝑡3)] 𝑤 = cos4 𝜑
Derivando por partes.
𝑢′ = −2𝜂2𝑡, 𝑤′ = −4𝑡 cos4 𝜑
𝑣′ =
{
5(𝑡2 + 1) − (3𝑡4 + 3𝑡2)
+3[−2𝜂2𝑡(17𝑡 − 13𝑡3) + 𝜂2(17(𝑡2 + 1) − 13(3𝑡4 + 3𝑡2))]
+[−4𝜂4𝑡(103𝑡 − 135𝑡3) + 𝜂4(103(𝑡2 + 1) − 135(3𝑡4 + 3𝑡2))]
+3[−6𝜂6𝑡(19𝑡 − 35𝑡3) + 𝜂6(19(𝑡2 + 1) − 35(3𝑡4 + 3𝑡2))] }
𝑣′ = {5 + 5𝑡2 − 3𝑡2 − 3𝑡4 + 3[17𝜂2 − 56𝜂2𝑡2 − 13𝜂2𝑡4]
+[103𝜂4 − 714𝜂4𝑡2 + 135𝜂4𝑡4] + 3[19𝜂6 − 200𝜂6𝑡2 + 105𝜂6𝑡4]}
𝑣′ = [5 + 2𝑡2 − 3𝑡4 + 51𝜂2 − 168𝜂2𝑡2 − 39𝜂2𝑡4 + 103𝜂4
−714𝜂4𝑡2 + 135𝜂4𝑡4 + 57𝜂6 − 600𝜂6𝑡2 + 315𝜂6𝑡4]
Sustituyendo.
[FIV(Φ)]′ =
{
−2𝜂2𝑡 [
5𝑡 − 𝑡3 + 3𝜂2(17𝑡 − 13𝑡3)
+𝜂4(103𝑡 − 135𝑡3) + 3𝜂6(19𝑡 − 35𝑡3)] cos4 𝜑
+(1 + 𝜂2) [
5 + 2𝑡2 − 3𝑡4 + 51𝜂2 − 168𝜂2𝑡2
−39𝜂2𝑡4 + 103𝜂4 − 714𝜂4𝑡2 + 135𝜂4𝑡4
+57𝜂6 − 600𝜂6𝑡2 + 315𝜂6𝑡4] cos4 𝜑
+(1 + 𝜂2) [5𝑡 − 𝑡3 + 3𝜂2(17𝑡 − 13𝑡3)
+𝜂4(103𝑡 − 135𝑡3) + 3𝜂6(19𝑡 − 35𝑡3)] (−4𝑡 cos4 𝜑)
}

VI. ANEXOS.
487
[FIV(Φ)]′ =
cos4 𝜑
{
[
−10𝜂2𝑡2 + 2𝜂2𝑡4 − 6𝜂4𝑡(17𝑡 − 13𝑡3)
−2𝜂6𝑡(103𝑡 − 135𝑡3) − 6𝜂8𝑡(19𝑡 − 35𝑡3)]
+(1 + 𝜂2) [
5 + 2𝑡2 − 3𝑡4 + 51𝜂2 − 168𝜂2𝑡2
−39𝜂2𝑡4 + 103𝜂4 − 714𝜂4𝑡2 + 135𝜂4𝑡4
+57𝜂6 − 600𝜂6𝑡2 + 315𝜂6𝑡4]
−(1 + 𝜂2) [20𝑡2 − 4𝑡4 + 12𝜂2𝑡(17𝑡 − 13𝑡3)
+4𝜂4𝑡(103𝑡 − 135𝑡3) + 12𝜂6𝑡(19𝑡 − 35𝑡3)]}
[FIV(Φ)]′ =
cos4 𝜑
{
[
−10𝜂2𝑡2 + 2𝜂2𝑡4 − 102𝜂4𝑡2 + 78𝜂4𝑡4
−206𝜂6𝑡2 + 270𝜂6𝑡4 − 114𝜂8𝑡2 + 210𝜂8𝑡4]
+ [
5 + 2𝑡2 − 3𝑡4 + 56𝜂2 − 166𝜂2𝑡2 + 154𝜂4
−882𝜂4𝑡2 + 160𝜂6 − 1314𝜂6𝑡2 + 57𝜂8 − 600𝜂8𝑡2
−42𝜂2𝑡4 + 96𝜂4𝑡4 + 450𝜂6𝑡4 + 315𝜂8𝑡4]
− [
20𝑡2 − 4𝑡4 + 224𝜂2𝑡2 − 160𝜂2𝑡4 + 616𝜂4𝑡2
−696𝜂4𝑡4 + 640𝜂6𝑡2 − 960𝜂6𝑡4 + 228𝜂8𝑡2
−420𝜂8𝑡4]
}
[FIV(Φ)]′ =
cos4 𝜑
[
5 + (2𝑡2 − 20𝑡2) + (4𝑡4 − 3𝑡4) + 56𝜂2 − (10𝜂2𝑡2 + 224𝜂2𝑡2
+166𝜂2𝑡2) + (2𝜂2𝑡4 + 160𝜂2𝑡4 − 42𝜂2𝑡4) + 154𝜂4
−(102𝜂4𝑡2 + 616𝜂4𝑡2 + 882𝜂4𝑡2) + (78𝜂4𝑡4 + 96𝜂4𝑡4 + 696𝜂4𝑡4)
+160𝜂6 − (206𝜂6𝑡2 + 640𝜂6𝑡2 + 1314𝜂6𝑡2) + (270𝜂6𝑡4
+450𝜂6𝑡4 + 960𝜂6𝑡4) + 57𝜂8 − (114𝜂8𝑡2 + 228𝜂8𝑡2 + 600𝜂8𝑡2)
+(210𝜂8𝑡4 + 315𝜂8𝑡4 + 420𝜂8𝑡4) ]
[FIV(Φ)]′ = cos4 𝜑
[ 5 − 18𝑡2 + 𝑡4 + 56𝜂2 − 400𝜂2𝑡2 + 120𝜂2𝑡4
+154𝜂4 − 1600𝜂4𝑡2 + 870𝜂4𝑡4 + 160𝜂6
−2160𝜂6𝑡2 + 1680𝜂6𝑡4 + 57𝜂8 − 942𝜂8𝑡2
+945𝜂8𝑡4 ]

VI. ANEXOS.
488
Multiplicando por 𝑑𝜑
𝑑Φ.
FV(Φ) = [FIV(Φ)]′ ∙𝑑𝜑
𝑑Φ
FV(Φ) =
{
cos4 𝜑
[ 5 − 18𝑡2 + 𝑡4 + 56𝜂2 − 400𝜂2𝑡2 + 120𝜂2𝑡4
+154𝜂4 − 1600𝜂4𝑡2 + 870𝜂4𝑡4 + 160𝜂6
−2160𝜂6𝑡2 + 1680𝜂6𝑡4 + 57𝜂8 − 942𝜂8𝑡2
+945𝜂8𝑡4 ]
}
∙ [(𝑁
𝜌) cos 𝜑]
FV(Φ) =
{
cos4 𝜑
[ 5 − 18𝑡2 + 𝑡4 + 56𝜂2 − 400𝜂2𝑡2 + 120𝜂2𝑡4
+154𝜂4 − 1600𝜂4𝑡2 + 870𝜂4𝑡4 + 160𝜂6
−2160𝜂6𝑡2 + 1680𝜂6𝑡4 + 57𝜂8 − 942𝜂8𝑡2
+945𝜂8𝑡4 ]
}
∙ [(1 + 𝜂2) cos 𝜑]
FV(Φ) = (1 + 𝜂2)
[ 5 − 18𝑡2 + 𝑡4 + 56𝜂2 − 400𝜂2𝑡2 + 120𝜂2𝑡4
+154𝜂4 − 1600𝜂4𝑡2 + 870𝜂4𝑡4 + 160𝜂6
−2160𝜂6𝑡2 + 1680𝜂6𝑡4 + 57𝜂8 − 942𝜂8𝑡2
+945𝜂8𝑡4 ]
cos5 𝜑
𝐅𝐕(𝚽) = (𝟏 + 𝜼𝟐)
[ 𝟓 − 𝟏𝟖𝒕𝟐 + 𝒕𝟒 + 𝟖𝜼𝟐(𝟕 − 𝟓𝟎𝒕𝟐 + 𝟏𝟓𝒕𝟒)
+𝟐𝜼𝟒(𝟕𝟕 − 𝟖𝟎𝟎𝒕𝟐 + 𝟒𝟑𝟓𝒕𝟒)
+𝟖𝟎𝜼𝟔(𝟐 − 𝟐𝟕𝒕𝟐 + 𝟐𝟏𝒕𝟒)
+𝟑𝜼𝟖(𝟏𝟗 − 𝟑𝟏𝟒𝒕𝟐 + 𝟑𝟏𝟓𝒕𝟒) ]
𝐜𝐨𝐬𝟓𝝋
Para 𝐅𝐕𝐈(𝚽)
[FV(Φ)]′ =
{
(1 + 𝜂2)
[ 5 − 18𝑡2 + 𝑡4 + 8𝜂2(7 − 50𝑡2 + 15𝑡4)
+2𝜂4(77 − 800𝑡2 + 435𝑡4)
+80𝜂6(2 − 27𝑡2 + 21𝑡4)
+3𝜂8(19 − 314𝑡2 + 315𝑡4) ]
cos5 𝜑
}
′
[FV(Φ)]′ = 𝑢 ∙ 𝑣 ∙ 𝑤 = 𝑢′ ∙ 𝑣 ∙ 𝑤 + 𝑢 ∙ 𝑣′ ∙ 𝑤 + 𝑢 ∙ 𝑣 ∙ 𝑤′

VI. ANEXOS.
489
Siendo.
𝑢 = 1 + 𝜂2, 𝑣 =
[ 5 − 18𝑡2 + 𝑡4 + 8𝜂2(7 − 50𝑡2 + 15𝑡4)
+2𝜂4(77 − 800𝑡2 + 435𝑡4)
+80𝜂6(2 − 27𝑡2 + 21𝑡4)
+3𝜂8(19 − 314𝑡2 + 315𝑡4) ]
𝑤 = cos5 𝜑
Derivando por partes.
𝑢′ = −2𝜂2𝑡, 𝑤′ = −5𝑡 cos5 𝜑
𝑣′ =
{
−18(2𝑡3 + 2𝑡) + (4𝑡5 + 4𝑡3)
+8[−2𝜂2𝑡(7 − 50𝑡2 + 15𝑡4) + 𝜂2(−50(2𝑡3 + 2𝑡) + 15(4𝑡5 + 4𝑡3))]
+2[−4𝜂4𝑡(77 − 800𝑡2 + 435𝑡4) + 𝜂4(−800(2𝑡3 + 2𝑡) + 435(4𝑡5 + 4𝑡3))]
+80[−6𝜂6𝑡(2 − 27𝑡2 + 21𝑡4) + 𝜂6(−27(2𝑡3 + 2𝑡) + 21(4𝑡5 + 4𝑡3))]
+3[−8𝜂8𝑡(19 − 314𝑡2 + 315𝑡4) + 𝜂8(−314(2𝑡3 + 2𝑡) + 315(4𝑡5 + 4𝑡3))]}
𝑣′ = {
−36𝑡 − 36𝑡3 + 4𝑡3 + 4𝑡5 + 8[−114𝜂2𝑡 + 60𝜂2𝑡3 + 30𝜂2𝑡5]
+2[−1908𝜂4𝑡 + 3340𝜂4𝑡3] + 80[−66𝜂6𝑡 + 192𝜂6𝑡3 − 42𝜂6𝑡5]
+3[−780𝜂8𝑡 + 3144𝜂8𝑡3 − 1260𝜂8𝑡5]
}
𝑣′ = [
−36𝑡 − 32𝑡3 + 4𝑡5 − 912𝜂2𝑡 + 480𝜂2𝑡3 + 240𝜂2𝑡5
−3816𝜂4𝑡 + 6680𝜂4𝑡3 − 5280𝜂6𝑡 + 15360𝜂6𝑡3
−3360𝜂6𝑡5 − 2340𝜂8𝑡 + 9432𝜂8𝑡3 − 3780𝜂8𝑡5]

VI. ANEXOS.
490
Sustituyendo.
[FV(Φ)]′ =
{
−2𝜂2𝑡
[ 5 − 18𝑡2 + 𝑡4 + 8𝜂2(7 − 50𝑡2 + 15𝑡4)
+2𝜂4(77 − 800𝑡2 + 435𝑡4)
+80𝜂6(2 − 27𝑡2 + 21𝑡4)
+3𝜂8(19 − 314𝑡2 + 315𝑡4) ]
cos5 𝜑
+(1 + 𝜂2)
[ −36𝑡 − 32𝑡3 + 4𝑡5 − 912𝜂2𝑡 + 480𝜂2𝑡3
+240𝜂2𝑡5 − 3816𝜂4𝑡 + 6680𝜂4𝑡3
+15360𝜂6𝑡3 − 3360𝜂6𝑡5 − 5280𝜂6𝑡
−3780𝜂8𝑡5 − 2340𝜂8𝑡 + 9432𝜂8𝑡3 ]
cos5 𝜑
+(1 + 𝜂2)
[ 5 − 18𝑡2 + 𝑡4 + 8𝜂2(7 − 50𝑡2 + 15𝑡4)
+2𝜂4(77 − 800𝑡2 + 435𝑡4)
+80𝜂6(2 − 27𝑡2 + 21𝑡4)
+3𝜂8(19 − 314𝑡2 + 315𝑡4) ]
(−5𝑡 cos5 𝜑)
}
[FV(Φ)]′ =
cos5 𝜑
{
[ −10𝜂2𝑡 + 36𝜂2𝑡3 − 2𝜂2𝑡5
−16𝜂4𝑡(7 − 50𝑡2 + 15𝑡4)
−16𝜂6𝑡(77 − 800𝑡2 + 435𝑡4)
−160𝜂8𝑡(2 − 27𝑡2 + 21𝑡4)
−6𝜂10𝑡(19 − 314𝑡2 + 315𝑡4)]
+(1 + 𝜂2)
[ −36𝑡 − 32𝑡3 + 4𝑡5 − 912𝜂2𝑡 + 480𝜂2𝑡3
+240𝜂2𝑡5 − 3816𝜂4𝑡 + 6680𝜂4𝑡3
+15360𝜂6𝑡3 − 3360𝜂6𝑡5 − 5280𝜂6𝑡
−3780𝜂8𝑡5 − 2340𝜂8𝑡 + 9432𝜂8𝑡3 ]
−(1 + 𝜂2)
[
25𝑡 − 90𝑡3 + 5𝑡5
+40𝜂2𝑡(7 − 50𝑡2 + 15𝑡4)
+10𝜂4𝑡(77 − 800𝑡2 + 435𝑡4)
+400𝜂6𝑡(2 − 27𝑡2 + 21𝑡4)
+15𝜂8𝑡(19 − 314𝑡2 + 315𝑡4)]
}

VI. ANEXOS.
491
[FV(Φ)]′ =
cos5 𝜑
{
[
−10𝜂2𝑡 + 36𝜂2𝑡3 − 2𝜂2𝑡5 − 112𝜂4𝑡
+800𝜂4𝑡3 − 240𝜂4𝑡5 − 308𝜂6𝑡 + 3200𝜂6𝑡3
−1740𝜂6𝑡5 − 320𝜂8𝑡 + 4320𝜂8𝑡3 − 3360𝜂8𝑡5
−114𝜂10𝑡 + 1884𝜂10𝑡3 − 1890𝜂10𝑡5 ]
+
[
−36𝑡 − 32𝑡3 + 4𝑡5 − 948𝜂2𝑡 + 448𝜂2𝑡3
+244𝜂2𝑡5 − 4728𝜂4𝑡 + 7160𝜂4𝑡3 + 240𝜂4𝑡5
−9096𝜂6𝑡 + 22040𝜂6𝑡3 − 3360𝜂6𝑡5 − 7620𝜂8𝑡
+24792𝜂8𝑡3 − 7140𝜂8𝑡5 − 2340𝜂10𝑡 + 9432𝜂10𝑡3
−3780𝜂10𝑡5 ]
−
[
25𝑡 − 90𝑡3 + 5𝑡5 + 305𝜂2𝑡 − 2090𝜂2𝑡3
+605𝜂2𝑡5 + 1050𝜂4𝑡 − 10000𝜂4𝑡3 + 4950𝜂4𝑡5
+1570𝜂6𝑡 − 18800𝜂6𝑡3 + 12750𝜂6𝑡5 + 1085𝜂8𝑡
−15510𝜂8𝑡3 + 13125𝜂8𝑡5 + 285𝜂10𝑡 − 4710𝜂10𝑡3
+4725𝜂10𝑡5 ]
}
[FV(Φ)]′ = cos5 𝜑
[
−(25𝑡 + 36𝑡) + (90𝑡3 − 32𝑡3) + (4𝑡5 − 5𝑡5)
−(10𝜂2𝑡 + 948𝜂2𝑡 + 305𝜂2𝑡) + (36𝜂2𝑡3 + 448𝜂2𝑡3
+2090𝜂2𝑡3) + (244𝜂2𝑡5 − 605𝜂2𝑡5 − 2𝜂2𝑡5)
−(112𝜂4𝑡 + 1050𝜂4𝑡 + 4728𝜂4𝑡) + (800𝜂4𝑡3
+7160𝜂4𝑡3 + 10000𝜂4𝑡3) + (240𝜂4𝑡5 − 240𝜂4𝑡5
−4950𝜂4𝑡5) − (308𝜂6𝑡 + 9096𝜂6𝑡 + 1570𝜂6𝑡)
+(3200𝜂6𝑡3 + 18800𝜂6𝑡3 + 22040𝜂6𝑡3) − (1740𝜂6𝑡5
+3360𝜂6𝑡5 + 12750𝜂6𝑡5) − (320𝜂8𝑡 + 1085𝜂8𝑡
+7620𝜂8𝑡) + (4320𝜂8𝑡3 + 15510𝜂8𝑡3 + 24792𝜂8𝑡3)
−(3360𝜂8𝑡5 + 7140𝜂8𝑡5 + 13125𝜂8𝑡5) − (114𝜂10𝑡
+285𝜂10𝑡 + 2340𝜂10𝑡) + (1884𝜂10𝑡3 + 4710𝜂10𝑡3
+9432𝜂10𝑡3) − (1890𝜂10𝑡5 + 3780𝜂10𝑡5 + 4725𝜂10𝑡5)]
[FV(Φ)]′ = cos5 𝜑
[ −61𝑡 − 𝑡5 + 58𝑡3 − 1263𝜂2𝑡 + 2574𝜂2𝑡3 − 363𝜂2𝑡5
−5890𝜂4𝑡 + 17960𝜂4𝑡3 − 4950𝜂4𝑡5 − 10974𝜂6𝑡
+44040𝜂6𝑡3 − 17850𝜂6𝑡5 − 9025𝜂8𝑡 + 44622𝜂8𝑡3
−23625𝜂8𝑡5 − 2739𝜂10𝑡 + 16026𝜂10𝑡3 − 10395𝜂10𝑡5]

VI. ANEXOS.
492
Multiplicando por 𝑑𝜑
𝑑Φ.
FVI(Φ) = [FV(Φ)]′ ∙𝑑𝜑
𝑑Φ
FVI(Φ) =
{
cos5 𝜑
[ −61𝑡 + 58𝑡3 − 𝑡5 − 1263𝜂2𝑡 + 2574𝜂2𝑡3 − 363𝜂2𝑡5
−5890𝜂4𝑡 + 17960𝜂4𝑡3 − 4950𝜂4𝑡5 − 10974𝜂6𝑡
+44040𝜂6𝑡3 − 17850𝜂6𝑡5 − 9025𝜂8𝑡 + 44622𝜂8𝑡3
−23625𝜂8𝑡5 − 2739𝜂10𝑡 + 16026𝜂10𝑡3 − 10395𝜂10𝑡5]
}
[(𝑁
𝜌) cos 𝜑]
FVI(Φ) =
{
cos5 𝜑
[ −61𝑡 + 58𝑡3 − 𝑡5 − 1263𝜂2𝑡 + 2574𝜂2𝑡3 − 363𝜂2𝑡5
−5890𝜂4𝑡 + 17960𝜂4𝑡3 − 4950𝜂4𝑡5 − 10974𝜂6𝑡
+44040𝜂6𝑡3 − 17850𝜂6𝑡5 − 9025𝜂8𝑡 + 44622𝜂8𝑡3
−23625𝜂8𝑡5 − 2739𝜂10𝑡 + 16026𝜂10𝑡3 − 10395𝜂10𝑡5]
}
∙ [(1 + 𝜂2) cos 𝜑]
FVI(Φ) =
(1 + 𝜂2)
[ −61𝑡 + 58𝑡3 − 𝑡5 − 1263𝜂2𝑡 + 2574𝜂2𝑡3 − 363𝜂2𝑡5
−5890𝜂4𝑡 + 17960𝜂4𝑡3 − 4950𝜂4𝑡5 − 10974𝜂6𝑡
+44040𝜂6𝑡3 − 17850𝜂6𝑡5 − 9025𝜂8𝑡 + 44622𝜂8𝑡3
−23625𝜂8𝑡5 − 2739𝜂10𝑡 + 16026𝜂10𝑡3 − 10395𝜂10𝑡5]
cos6 𝜑
𝐅𝐕𝐈(𝚽) = −𝒕(𝟏 + 𝜼𝟐)
[
𝟔𝟏 − 𝟓𝟖𝒕𝟐 + 𝒕𝟒
+𝟑𝜼𝟐(𝟒𝟐𝟏 − 𝟖𝟓𝟖𝒕𝟐 + 𝟏𝟐𝟏𝒕𝟒)
+𝟏𝟎𝜼𝟒(𝟓𝟖𝟗 − 𝟏𝟕𝟗𝟔𝒕𝟐 + 𝟒𝟗𝟓𝒕𝟒)
+𝟔𝜼𝟔(𝟏𝟖𝟐𝟗 − 𝟕𝟑𝟒𝟎𝒕𝟐 + 𝟐𝟗𝟕𝟓𝒕𝟒)
+𝜼𝟖(𝟗𝟎𝟐𝟓 − 𝟒𝟒𝟔𝟐𝟐𝒕𝟐 + 𝟐𝟑𝟔𝟐𝟓𝒕𝟒)
+𝟑𝜼𝟏𝟎(𝟗𝟏𝟑 − 𝟓𝟑𝟒𝟐𝒕𝟐 + 𝟑𝟒𝟔𝟓𝒕𝟒) ]
𝐜𝐨𝐬𝟔𝝋

VII. BIBLIOGRAFÍA
493
VII. BIBLIOGRAFÍA
Aguer, B. (2014). Geopolíticas del Conocimiento Tras la Proyección Mercator.
Avatares Filosóficos, 130.
Barrera Trejo, F. (2015). Cartografía Matemática. Ciudad de México, México:
Colegio de Ingenieros Topografos A.C.
Brotton, J. (2014). Historia del Mundo en 12 Mapas. Barcelona, España: Debate.
Caire Lomelí, J. (1983). Cartografía Matemática II. Proyección Cartográfica para la
República Mexicana. Ciudad de México: Instituto Politécnico Nacional.
Caire Lomelí, J. (2002). Cartografía Básica. Ciudad de México, México:
Universidad Nacional Autónoma de México.
Caire Lomelí, J. (2004). Bases para Integrar la Cartografía Urbana - Rural. Ciudad
de México: Universidad Nacional Autónoma de México.
Castro Caballero, M. (2013). Navegación Plana. La Punta - Callao, Perú: Escuela
Superior de Guerra Naval. .
Cid Álvarez, C. (2011). Cartografía Nautica. Dirección de Enseñanza Naval.
Escuela de Hidrografía "Alejandro Malaspina".
Coll-Hurtado, A. (2000). México Una Visión Geográfica. Ciudad de México:
Universidad Autónoma de México.
Cuesta Domingo, M. (2013). La Imagen del Nuevo Mundo en Mercator. El Trazado
de Mapas Hasta 1569. Revista Complutense de Historia de América, 270.
De Régules, S. (2010). El Mundo No es Como lo Pintan: Mentiras y Verdades de
un Mapa. ¿Cómo ves? Revista de Divulgación de la Ciencía de la UNAM.
Delgado de Cantú, G. M. (2003). México Estructura Política, Económica y Social.
Ciudad de México: Pearson Prentice Hall.
Díaz Alonso, A. (2002). Tutorial Para la Asignatura Geografía Económica de
México. Ciudad de México: Fondo Editorial FCA, UNAM.
Dozier, J. (1980). Improved Algortihm for Calculation of UTM and Geodetic
Coordinates. Washington, D.C: National Oceanic and Atmospheric
Administration (NOAA).

VII. BIBLIOGRAFÍA
494
Enríquez Turiño, C. (2009). Desarrollo de Nuevos Algoritmos para el Cálculo de la
Proyección Gauss-Krüger (Tesis Doctoral). Madrid, España: Universidad
Politécnica de Madrid.
Errázuriz Körner, A. M., & González L., J. I. (1992). Proyecciones Cartográficas,
Manejo y Uso. Santiago de Chile: Pontificia Universidad Católica de Chile.
F. Karney, C. F. (2011). Transverse Mercator with an accuracy of a few
nanometers. Washinton D.C.: SRI International.
Fernández Coppel, I. A. (2001). Las Coordenadas Geográficas y la Proyección
UTM. El Datum. Valladolid, España: Universidad de Valladolid.
Gauss, C. F. (1844). Untersuchungen über Gegenstände der Höheren Geodäsie.
Gende, M., & Constanza Manassero, M. (2011). Proyecciones Cartográficas. La
Plata, Argentina: Facultad de Ciencias Astronómicas y Geofísicas.
Gómez Moreno, R. Á. (2003). Guía de Proyecciones Cartográficas.
Aguascalientes, México: INEGI.
Guevara Ortíz, E. (2004). Guía Básica para la Elaboración de Atlas Estatales y
Municipales de Peligros y Riesgos. Ciudad de México: CENAPRED.
Gutiérrez Llorente, A. (2005). Historia de la Cartogafía. Ciudad de México:
Universidad Autónoma Metropolitana.
Gutiérrez Palacios, J. (2005). Topografía para las Tropas. Santiago de Chile.
Rapp, H. R. (2001). Geodesia Geométrica. Concepción, Chile: Instituto Geográfico
Militar.
Hager, J. W., Behensky, J. F., & Drew, B. W. (1989). The Universal Grids:
Universal Transverse Mercator (UTM) and Universal Polar Stereographic
(UPUS). Washington, D.C.: Defense Mapping Agency Technical Report TM
8358.2.
Hansen A., F. (2000). Cartografía Básica. Ciudad de México, México: Instituto
Nacional de Estadística y Geografía.
Hernández López, D. (2009). Geodesia y Cartografía Matemática. Valencia:
Universidad Politécnica de Valencia.
INEGI. (1991). Datos Básicos de la Geografía de México. Aguascalientes: Instituto
Nacional de Estadística, Geografía e Informatica.

VII. BIBLIOGRAFÍA
495
INEGI. (2004). Norma Técnica NTG - 001- 2004. Norma Técnica para el Sistema
Geodésico Nacional. Aguascalientes, México: Instituto Nacional de
Estad´sitica y Geografía.
INEGI. (2006). Norma Técnica NTG - 013 - 2006. Edición de Cartografía.
Aguascalientes, México.: Instituto Nacional de Estadística y Geografía.
INEGI. (2015). Catalogo de Símbolos y Especificaciones Topográficas.
Aguascalientes.: Instituto Nacional de Estadística y Geografía.
INEGI. (2015). Referencias Geográficas y Extensión Territorial de México. Ciudad
de México: Instituto Nacional de Estadística y Geografía .
INEGI. (2016). TMCalc. Programa para la Conversión de Coordenadas entre
Proyecciones TM y Geodésicas. Aguascalientes.: Instituto Nacional de
Estadística y Geografía.
Intergovernmental Committe on Surveying and Mappin. (2009). Geocentric Datum
of Australia - Technical Manual, Versión 2.3, Amendment 1.
Intergovernmental Committe on Surveying and Mapping.
Kawase, K. (2011). A General Formula Calulating Meridian Arc Length and its
Application to coordinate Conversion in the Gauss-Krüger Projection.
Bulletin of the Geospatial Information Authority of Japan.
Krakiwsky, E. J. (1973). Conformal Map Projections in Geodesy. Fredericton, New
Brunswick, Canada: University of New Brunswick.
Krüger, L. (1912). Konforme Abbildung des Erdellipsoids in der Ebene. Postdam:
Veröffentlichung Königlich Preuszischen Geodätischen Institutes.
Lorenzo Martinez, R. M. (2004). Cartografía, Urbanismo y Desarrollo Inmobilario.
Madrid, España: DOSSAT.
Mena Barrios, J. (2008). Geodesia Superior. Vol. II. Madrid: Centro Nacional de
Información Geográfica.
Meza Rojas, P. A. (2011). El Datum en Navegación. Valdivia, Chile: Universidad
Austral de Chile.
Millán Gamboa, J. M. (2006). Fundamentos para Cartografía Nautica. Cádiz,
España: JM Ediciones.

VII. BIBLIOGRAFÍA
496
Millar Ordenes, F. (2003). Evaluación de la Apliación de un Huso TM para Chile
Continental, Aplicable a Cartografía del Ministerio de Bienes Nacionales.
Santiago de Chile: Universidad de Santiago de Chile.
Negrón, P., Seguin, A.-M., & Apparicio, P. (2007). Manual de Lectura y
Elaboración de Mapas. Montreal: Canadian International Development
Agency.
Orihuela, S. (2012). Aplicación de la Proyección Gauss-Krüger en Fajas Ampliadas
. Santa Fe, Argentina.
Orihuela, S. (2014). Apliación de la Proyección Gauss-Krüger en Fajas Ampliadas.
Santa Fe.
Osborne, P. (2013). The Mercator Projections. Edinburgh.
Pereña García, M. (2011). Las Relaciones Diplomáticas de México, Plaza y
Valdés. México: Universidad Nacional Autónoma de México.
Puerto Sarmiento, F. J. (1991). Historia de la Ciencia y de la Técnica. Madrid,
España: Ediciones Akal.
Ruiz Morales, M., & Ruiz Bustos, M. (2000). Forma y Dimensiones de la Tierra.
Síntesis y Evolución Histórica. . Barcelona: Ediciones del Serbal, Colección
La Estrella Polar.
Ruiz Vera, C. (2014). Trabajo Fin de Grado. Cartografía. Murcia, España:
Universidad de Murcia.
Sánchez Menéndez, F. J. (2004). Geodesia Y Cartografía: Los conceptos y su
Aplicación Práctica. Madrid, España: Earth Observation Sciences &
Geographic Information Systems (EOSGIS S.L.).
Sánchez, P. C., & Bustamente, O. (1964). Apuntes de Cartografía. Ciudad de
México: Secretaría de Agricultura y Fomento. Dirección de Estudios
Geográficos y Climatológicos.
SEDENA. (2010). Cartografía Militar Mexicana. Ciudad de México: SEDENA.
Sevilla de Lerma, M. J. (1986). Cartografía Matemática. Madrid, España: Instituto
de Astronomía y Geodesia (UCM-CSIC) Madrid.
Snyder, J. P. (1987). Map Projections - A Working Manual. Washington: U.S.
geological Survey Professional Paper.

VII. BIBLIOGRAFÍA
497
Surroca Carrascosa, A. (2012). Revista de Historia Naval. Quinto Centenario de
Mercator. Traducción Comentada de su Carta Náutica de 1569. Madrid:
Instituto de Historia y Cultura Naval Armada Española.
Thomas, P. D. (1952). Conformal Projections in Geodesy and Cartography.
Washinton, D.C.: U.S. Departament of Comerce.
Van Erkel, R. (2012). Gerardus Mercator. The Man Who Named North-America.
DUTCH, The Magazine.

CHET
COL2
CULC
HER2
ICAM
ICEP
ICHI
ICHS
IDGO
IMIE
IMIP
INEG
IPAZ
IZAC
MERI
MEXI
MTY2
OAX2
TAMP
TOL2
UGTO
UQRO
USLP
UVER
VIL2
Aguascalientes
Mexicali
La Paz
Campeche
Saltillo
Tuxtla
Chihuahua
Durango
Guanajuato
Chilpancingo
Pachuca
Guadalajara
Toluca
Morelia
Cuernavaca
Tepic
Monterrey
Oaxaca
Puebla
Quéretaro
Chetumal
San Luis Potosí
Culiacá
Hermosillo
Villahermosa
Ciudad Victoria
Tlaxcala
Xalapa
Mérida
Zacatecas
Tuxtla
Gutierrez
Oaxaca
Chilpancingo
Cuernavaca
Puebla
Xalapa
Villahermosa
Campeche
Mérida
Chetumal
Tlaxcala
Pachuca
Toluca
Morelia
Guadalajara
Guanajuato
Queretaro
San Luis Potosí
Aguascalientes
Tepic
Zacatecas
Durango
Culiacán
Ciudad
Victoria
Saltillo
Monterrey
Chihuahua
Hermosillo
Mexicali
La Paz
Colima
D.F.
CHET
MERI
ICAM
VIL2
ICHS
OAX2
ICEP
TOL2
UQRO
UGTO
USLP
TAMP
UVER
COL2
INEG
IZAC
IDGO
MTY2
HER2
MEXI
IMIP
IPAZ
CULC
IMIE
ICHI
O A X A C A
M I C H O A C Á N
TLAXCALA
G U E R R E R O
P U E B L A
C H I A P A S
T A B A S C O
C A M P E C H E
Y U C A T Á N
Q U I N T A N A
ROO
V E R A C R U Z
M É X I C O
CIUDAD DE
MÉXICO
H I D A L G O
MORELOS
GUANAJUATO
J A L I S C O
COLIMA
N A Y A R I T
SAN LUIS POTOSÍ
T A M A U L I P A S
Z A C A T E C A S
D U R A N G O
C H I H U A H U A
C O A H U I L A
S O N O R A
B
A
J
A
C
A
L
I
F
O
R
N
I
A
B
A
J
A
C
A
L
I
F
O
R
N
I
A
S
U
R
S
I
N
A
L
O
A
NUEVO LEÓN
ISTMO DE TEHUANTEPEC
PENINSULA DE YUCATÁN
P
E
N
I
N
S
U
L
A
D
E
B
A
J
A
C
A
L
I
F
O
R
N
I
A
CAYO LOBOS
CAYO CENTRO
ISLA CAYO NORTE
CAYO CHELEN
PUNTA HERRERO
PUNTA ALLEN
ISLA COZUMEL
PUNTA MOLAS DEL NORTE
PUNTA NIZUC
ISLA MUJERES
ISLA CONTOY
CABO CATOCHE
PUNTA FRANCISCA
PUNTA HOLOHIT
ARRECIFE
ALACRAN
PROGRESO
PUNTA NIMUN
PUNTA SEYBAPLAYA
BARRA PUERTO REAL
ISLA DEL CARMEN
BARRA TUPILCO
PUNTA ROCA PARTIDA
ISLA EL IDOLO
ISLA LOBO
CABO ROJO
ISLA
JUANA RAMIREZ
BARRA
SOTO LA MARINA
BARRA
JESUS MARIA
ISLAS CORONADO
ISLA DE TODOS
LOS SANTOS
CABO BANDA
PUNTA SANTO TOMAS
CABO COLONET
CABO SAN QUINTIN
PUNTA SAN ANTONIO
ISLA GUADALUPE
ISLAS SAN BENITO
ISLA CEDROS
PUNTA EUGENIA
ISLA NATIVIDAD
PUNTA ABREOJOS
ISLA MAGDALENA
ISLA SANTA MARGARITA
CABO SAN LUCAS
PUNTA ARENA
ISLA CERRALVO
PUNTA COYOTES
ISLA ESPIRITU SANTO
ISLA SAN JOSE
ISLA SANTA CRUZ
ISLA SANTA CATALINA
ISLA MONSERRAT
ISLA DEL CARMEN
ISLA PARTIDA
ISLA CORONADOS
PUNTA CONCEPCIÓN
ISLA SAN MARCOS
ISLA TORTUGA
ISLA SAN LORENZO
ISLA SAN ESTEBAN
ISLA TIBURÓN
ISLA ÁNGEL
DE LA GUARDA
ISLA SAN LUIS
ISLA
MONTAGUE
ISLA LOBOS
ISLA SANTA IGNACIO
ISLA
ALTAMURA
PENINSULA
LUCENILLA
ISLA SAN JUANITO
ISLA MARIA MADRE
ISLA MARIA CLEOFAS
ISLA MARIA MAGDALENA
ISLAS MARIAS
ISLA ISABELA
PUNTA MITA
CABO CORRIENTES
BARRA DE NAVIDAD
PUNTA SAN TELMO
BARRA TONALA
BARRA ZACAPULCO
GUATEMALA
GUATEMALA
BELIC
E
ESTADOS UNIDOS DE AMÉRICA
ESTADOS UNIDOS DE AMÉRICA
ESTADOS UNIDOS DE AMÉRICA
Bahía de Chetumal
Bahía del Espíritu Santo
Bahía de la Ascensión
Laguna de Términos
Laguna del Carmen
Laguna de Alvarado
Laguna
de Tamiahua
Laguna
Madre
Laguna Barril
Bahía el Descanso
Bahía San Ramón
Bahía Santa Maria
Bahía Rosario
Bahía
Sebastian Vizacaino
Laguna el Fuerte
Bahía San Cristobal
Bahía Ballenas
Bahía la Soledad
Bahía Magdalena
Bahía las Palmas
Bahía la Ventana
Bahía la Paz
Bahía San Carlos
Bahía Santa Ana
Canal Salsipuedes
Canal las Ballenas
Bahía Luis Gonzaga
Bahía Adair
Bahía San Jorge
Bahía Tepoca
C
a
n
a
l
e
l
I
n
f
i
e
r
n
i
l
o
Bahía Guásimas
Bahía Tepolobampo
Bahía
Santa Martha
Bahía Altata
Laguna
Agua Grande
Bahía de Banderas
Ensenada Teopa
Bahía Manzanillo
Bahía Petacalco
Bahía Potosí
Laguna Coyuca
Laguna
Superior
Laguna
Inferior
Mar
Muerto
M A R C A R I B E(MAR DE LAS ANTILLAS)
CANAL DE YUCATÁN
ISLA SOCORRO
ISLA SAN BENEDICTO
ISLA CLARION
I S L A S R E V I L L A G I G E D O
G O L F O
D E
M É X I C O
OCÉ
AN
O
PÁ
CI
FI
CO
AGUASCALIENTES
GOLFODE
TEHUANTEPEC
SONDA D
E CAMPECHE
CARTA GEOGRÁFICA DE LOS ESTADOS UNIDOS MEXICANOS
89º 88º 87º 84º 85º 90º 91º 92º 93º 94º 95º 96º 97º 98º 99º 100º 101º 102º 103º 104º 105º 106º 107º 108º 109º 110º 111º 112º 113º 114º 115º 116º 117º 118º 119º 120º
102º 103º 104º 105º 106º 107º
108º
109º 110º 111º 112º 113º 114º 115º 116º 117º 118º 119º 120º 121º 122º 123º 124º 101º 100º 99º 98º 97º 96º 95º 94º 93º 92º 91º 90º 89º 88º 87º 86º 85º 84º 83º 82º
18º
19º
20º
21º
22º
23º
24º
25º
26º
27º
28º
29º
30º
31º
32º
33º
17º
16º
15º
14º
13º
12º
12º
13º
14º
15º
16º
17º
18º
19º
20º
21º
22º
23º
24º
25º
26º
27º
28º
29º
30º
31º
32º
33º
TRÓPICO DE CÁNCER
TRÓPICO DE CÁNCER
E S P E C I F I C A C I O N E S
S I M B O L O G Í A
CAPITAL DEL PAÍS.
CAPITAL DEL ESTADO.
ESTACIÓN GEODÉSICA DE LA RGNA.
LÍMITE ESTATAL.
LÍMITE INTERNACIONAL.
ZONA ECÓNOMICA EXLCUSIVA (ZEE).
P A R Á M E T R O S
ELIPSOIDE. GRS80.
PROYECCIÓN. TRANSVERSA DE MERCATOR (TM).
MERIDIANO CENTRAL (MC). 102º W.
ORIGEN DE LATITUDES. ECUADOR.
FALSO ESTE (m). 2 500 000.000
FALSO NORTE (m). 000.000
FACTOR DE ESCALA EN EL MC. 1.000
DATUM HORIZONTAL. ITRF08
N O T A S G E N E R A L E S
- PARA LA ELABORACIÓN DE ESTE DOCUMENTO SE UTILIZARON ALREDEDOR DE
176 MIL COORDENADAS, APLICANDO EN ELLAS LOS ALGORITMOS DE
TRANSFORMACIÓN AMPLIFICADOS PARA LA PROYECCIÓN TRANSVERSA DE
MERCATOR O GAUSS-KRÜGER QUE EN ESTA TESIS SE PRESENTA.
- LA INFORMACIÓN POR ENTIDAD FEDERATIVA CORRESPONDIENTE A LA
REPÚBLICA MEXICANA FUE OBTENIDA DE LOS SERVIDORES EN LÍNEA DEL
INSTITUTO NACIONAL DE ESTADÍSTICA Y GEOGRAFÍA (INEGI) Y LA COMISIÓN
NACIONAL PARA EL CONOCIMIENTO Y USO DE LA BIODIVERSIDAD (CONABIO).
- LA INFORMACIÓN GEOGRÁFICA CORRESPONDIENTE A LOS ESTADOS UNIDOS
FUE OBTENIDA DEL SERVIDOR EN LÍNEA DE LA UNITED STATES CENSUS,
MIENTRAS QUE PARA LAS REPÚBLICAS DE BELICE Y GUATEMALA SE UTILIZARÓN
OTRAS FUENTES.
- LA REPRESENTACIÓN CARTOGRÁFICA DE TODOS LOS ELEMENTOS
GEOGRÁFICOS, CARACTERÍSTICAS Y PARÁMETROS QUE EN ESTA CARTA SE
PRESENTAN, ESTÁN APEGADOS A LA NORMATIVIDAD PARA LA ELABORACIÓN DE
CARTOGRAFÍA ESTIPULADA POR EL INEGI.
DICIEMBRE 2016
ESCALA 1:4 000 000
0100 75 50 25 100 200Kilómetros
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA Y ARQUITECTURA
UNIDAD "TICOMÁN"
CIENCIAS DE LA TIERRA
“DESARROLLO DE NUEVOS ALGORITMOS DE TRANSFORMACIÓN PARA
LA REPRESENTACIÓN COMPLETA DE LA REPÚBLICA MEXICANA
EN LA PROYECCIÓN TRANSVERSA DE MERCATOR
O GAUSS-KRÜGER.”
ELABORÓ: GABRIEL ADRIÁN HERNÁNDEZ DE LA ROSA
REVISÓ: ING. FERNANDO BARRERA TREJO
RECIBE: DEPTO. DE TITULACIÓN ESIA TICOMÁN
300