Definición de proyecto para la clase de Robótica
10
Definición de proyecto para la clase de Robótica Joel Edmundo Morales Sánchez, Eduardo Valentín Talavera Moctezuma, Alejandro Suarez Calleja, Alan Hernández López Facultad de Ingeniería, Universidad Nacional Autónoma de México D.F, México [email protected] [email protected] [email protected] [email protected] Abstract— The content of this work shows the state of art about robots. It shows how they are classified and what their main configurations are. Afterwards, the paper shows seven robots of interest that could be develop during a semester of any robotic course. Secondly, the paper shows a comparison between four of the seven robots, for the purpose of choosing one configuration. Finally, prototype of a robot will be proposed in order to be built in the course of Robotics in the semester 2014-2 at the UNAM. I. INTRODUCCIÓN En este documento se encuentra una revisión bibliográfica sobre algunos proyectos de manipuladores seriales que están en investigación, así como nuestra propuesta para la entrega del proyecto del curso de robótica. II. ESTADO DEL ARTE Entre los robots considerados de más utilidad en la actualidad se encuentran los robots industriales o manipuladores. Existen ciertas dificultades a la hora de establecer una definición formal de lo que es un robot industrial. La primera de ellas surge de la diferencia conceptual entre el mercado japonés y el euro-americano de lo que es un robot y lo que es un manipulador. Así, mientras que para los japoneses un robot industrial es cualquier dispositivo mecánico dotado de articulaciones móviles destinado a la manipulación, el mercado occidental es más restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control. En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo a la hora de determinar una definición formal. Además, la evolución de la robótica ha ido obligando a diferentes actualizaciones de su definición. La definición más comúnmente aceptada posiblemente sea la de la Asociación de Industrias de Robótica (RIA, Robotic Industry Association), según la cual: "Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas" Esta definición, ligeramente modificada, ha sido adoptada por la Organización Internacional de Estándares (ISO) que define al robot industrial como: "Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas" Se incluye en esta definición la necesidad de que el robot tenga varios grados de libertad. Una definición más completa es la establecida por la Asociación Francesa de Normalización (AFNOR), que define primero el manipulador y, basándose en dicha definición, el robot: Manipulador: mecanismo formado generalmente por elementos en serie, articulados entre sí, destinado al agarre y desplazamiento de objetos. Es multifuncional y puede ser gobernado directamente por un operador humano o mediante dispositivo lógico. Robot: manipulador automático servo-controlado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos especiales, siguiendo trayectoria variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material. Por último, la Federación Internacional de Robótica (IFR, International Federation of Robotics) distingue entre robot industrial de manipulación y otros robots:
Transcript of Definición de proyecto para la clase de Robótica

Definición de proyecto para la clase de Robótica
Joel Edmundo Morales Sánchez, Eduardo Valentín Talavera Moctezuma, Alejandro Suarez Calleja, Alan
Hernández López
Facultad de Ingeniería, Universidad Nacional Autónoma de México
D.F, México [email protected]
Abstract— The content of this work shows the state of art about
robots. It shows how they are classified and what their main
configurations are. Afterwards, the paper shows seven robots of
interest that could be develop during a semester of any robotic
course. Secondly, the paper shows a comparison between four of
the seven robots, for the purpose of choosing one configuration.
Finally, prototype of a robot will be proposed in order to be built
in the course of Robotics in the semester 2014-2 at the UNAM.
I. INTRODUCCIÓN
En este documento se encuentra una revisión bibliográfica
sobre algunos proyectos de manipuladores seriales que están
en investigación, así como nuestra propuesta para la entrega
del proyecto del curso de robótica.
II. ESTADO DEL ARTE
Entre los robots considerados de más utilidad en la
actualidad se encuentran los robots industriales o
manipuladores. Existen ciertas dificultades a la hora de
establecer una definición formal de lo que es un robot
industrial.
La primera de ellas surge de la diferencia conceptual entre
el mercado japonés y el euro-americano de lo que es un robot
y lo que es un manipulador. Así, mientras que para los
japoneses un robot industrial es cualquier dispositivo
mecánico dotado de articulaciones móviles destinado a la
manipulación, el mercado occidental es más restrictivo,
exigiendo una mayor complejidad, sobre todo en lo relativo al
control. En segundo lugar, y centrándose ya en el concepto
occidental, aunque existe una idea común acerca de lo que es
un robot industrial, no es fácil ponerse de acuerdo a la hora de
determinar una definición formal. Además, la evolución de la
robótica ha ido obligando a diferentes actualizaciones de su
definición.
La definición más comúnmente aceptada posiblemente sea
la de la Asociación de Industrias de Robótica (RIA, Robotic
Industry Association), según la cual:
"Un robot industrial es un manipulador multifuncional
reprogramable, capaz de mover materias, piezas,
herramientas, o dispositivos especiales, según trayectorias
variables, programadas para realizar tareas diversas"
Esta definición, ligeramente modificada, ha sido adoptada
por la Organización Internacional de Estándares (ISO) que
define al robot industrial como:
"Manipulador multifuncional reprogramable con varios
grados de libertad, capaz de manipular materias, piezas,
herramientas o dispositivos especiales según trayectorias
variables programadas para realizar tareas diversas"
Se incluye en esta definición la necesidad de que el robot
tenga varios grados de libertad. Una definición más completa
es la establecida por la Asociación Francesa de Normalización
(AFNOR), que define primero el manipulador y, basándose en
dicha definición, el robot:
Manipulador: mecanismo formado generalmente por
elementos en serie, articulados entre sí, destinado al agarre y
desplazamiento de objetos. Es multifuncional y puede ser
gobernado directamente por un operador humano o mediante
dispositivo lógico.
Robot: manipulador automático servo-controlado,
reprogramable, polivalente, capaz de posicionar y orientar
piezas, útiles o dispositivos especiales, siguiendo trayectoria
variables reprogramables, para la ejecución de tareas
variadas. Normalmente tiene la forma de uno o varios brazos
terminados en una muñeca. Su unidad de control incluye un
dispositivo de memoria y ocasionalmente de percepción del
entorno. Normalmente su uso es el de realizar una tarea de
manera cíclica, pudiéndose adaptar a otra sin cambios
permanentes en su material.
Por último, la Federación Internacional de Robótica
(IFR, International Federation of Robotics) distingue entre
robot industrial de manipulación y otros robots:

"Por robot industrial de manipulación se entiende una
máquina de manipulación automática, reprogramable y
multifuncional con tres o más ejes que pueden posicionar y
orientar materias, piezas, herramientas o dispositivos
especiales para la ejecución de trabajos diversos en las
diferentes etapas de la producción industrial, ya sea en una
posición fija o en movimiento"
A. Estructura de los robots industriales
Un manipulador robótico consta de una secuencia de
elementos estructurales rígidos, denominados enlaces
o eslabones, conectados entre sí mediante juntas o
articulaciones, que permiten el movimiento relativo de cada
dos eslabones consecutivos.
Fig.1 ASIMO. Fotografía cortesía de American Honda Motor Co.
Una articulación puede ser de 3 tipos:
Lineal (deslizante, traslacional o
prismática), si un eslabón desliza sobre un eje
solidario al eslabón anterior.
Rotacional, en caso de que un eslabón gire
en torno a un eje solidario al eslabón anterior.
Combinacion de las anteriores
Fig. 2. Los 6 tipos de articulaciones en un robot [1]
El conjunto de eslabones y articulaciones se
denomina cadena cinemática. Se dice que una cadena
cinemática es abierta si cada eslabón se conecta mediante
articulaciones exclusivamente al anterior y al siguiente,
exceptuando el primero, que se suele fijar a un soporte, y el
último, cuyo extremo final queda libre. A éste se puede
conectar un elemento terminal o actuador final: una
herramienta especial que permite al robot de uso general
realizar una aplicación particular, que debe diseñarse
específicamente para dicha aplicación: una herramienta de
sujeción, de soldadura, de pintura, etc. El punto más
significativo del elemento terminal se denomina punto
terminal (PT). En el caso de una pinza, el punto terminal
vendría a ser el centro de sujeción de la misma. Los elementos
terminales pueden dividirse en dos categorías:
pinzas (gripper) y herramientas
Las pinzas se utilizan para tomar un objeto, normalmente
la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del
robot. Hay una diversidad de métodos de sujeción que pueden
utilizarse, además de los métodos mecánicos obvios de agarre
de la pieza entre dos o más dedos. Estos métodos
suplementarios incluyen el empleo de casquillos de sujeción,
imanes, ganchos, y cucharas.
Una herramienta se utiliza como actuador final en
aplicaciones en donde se exija al robot realizar alguna
operación sobre la pieza de trabajo. Estas aplicaciones
incluyen la soldadura por puntos, la soldadura por arco, la
pintura por pulverización y las operaciones de taladro. En
cada caso, la herramienta particular está unida a la muñeca del
robot para realizar la operación.
Fig. 3. Los 6 tipos de articulaciones en un robot [1]

A los manipuladores robóticos se les suele denominar
también brazos de robot por la analogía que se puede
establecer, en muchos casos, con las extremidades superiores
del cuerpo humano.
Fig.4. Robot Antropomórfico, mostrando sus GDL [1]
Se denomina grado de libertad (g.d.l.) a cada una de las
coordenadas independientes que son necesarias para describir
el estado del sistema mecánico del robot (posición y
orientación en el espacio de sus elementos). Normalmente, en
cadenas cinemáticas abiertas, cada par eslabón-articulación
tiene un solo grado de libertad, ya sea de rotación o de
traslación. Pero una articulación podría tener dos o más g.d.l.
que operan sobre ejes que se cortan entre sí.
Para describir y controlar el estado de un brazo de robot es
preciso determinar:
La posición del punto terminal (o de cualquier otro
punto) respecto de un sistema de coordenadas externo
y fijo, denominado el sistema mundo.
El movimiento del brazo cuando los elementos
actuadores aplican sus fuerzas y momentos.
El análisis desde el punto de vista mecánico de un robot se
puede efectuar atendiendo exclusivamente a sus movimientos
(estudio cinemático) o atendiendo además a las fuerzas y
momentos que actúan sobre sus partes (estudio dinámico)
debidas a los elementos actuadores y a la carga transportada
por el elemento terminal.
B. Configuraciones morfológicas y parámetros
característicos de los robots industriales
Según la geometría de su estructura mecánica, un
manipulador puede ser:
Cartesiano, cuyo posicionamiento en el espacio se lleva
a cabo mediante articulaciones lineales.
Cilíndrico, con una articulación rotacional sobre una
base y articulaciones lineales para el movimiento en
altura y en radio.
Polar, que cuenta con dos articulaciones rotacionales y
una lineal.
Esférico (o de brazo articulado), con tres articulaciones
rotacionales.
Mixto, que posee varios tipos de articulaciones,
combinaciones de las anteriores. Es destacable la
configuración SCARA (Selective Compliance Assembly
Robot Arm)
Paralelo, posee brazos con articulaciones prismáticas o
rotacionales concurrentes.
Los principales parámetros que caracterizan a los robots
industriales son:
Número de grados de libertad. Es el número total de
grados de libertad de un robot, dado por la suma de g.d.l.
de las articulaciones que lo componen. Aunque la
mayoría de las aplicaciones industriales requieren 6
g.d.l., como las de soldadura, mecanizado y
almacenamiento, otras más complejas requieren un
número mayor, tal es el caso de las labores de montaje.
Espacio de accesibilidad o espacio (volumen) de
trabajo. Es el conjunto de puntos del espacio accesibles
al punto terminal, que depende de la configuración
geométrica del manipulador. Un punto del espacio se
dice totalmente accesible si el PT puede situarse en él en
todas las orientaciones que permita la constitución del
manipulador y se dice parcialmente accesible si es
accesible por el PT pero no en todas las orientaciones
posibles. En la figura inferior se aprecia el volumen de
trabajo de robots de distintas configuraciones.
Capacidad de posicionamiento del punto terminal. Se
concreta en tres magnitudes fundamentales: resolución
espacial, precisión y repetibilidad, que miden el grado de
exactitud en la realización de los movimientos de un
manipulador al realizar una tarea programada.
Capacidad de carga. Es el peso que puede transportar el
elemento terminal del manipulador. Es una de las
características que más se tienen en cuenta en la
selección de un robot dependiendo de la tarea a la que se
destine.
Velocidad. Es la máxima velocidad que alcanzan el PT y
las articulaciones.
C. Clasificación de los robots
1) De servicio o industriales
Los robots manipuladores pueden ser clasificados como de
servicio o industriales.

Robots de servicio
Los robots de servicio son dispositivos electromecánicos
móviles o estacionarios, dotados de uno o varios brazos
mecánicos, controlados por un ordenador y que realizan tareas
de servicio, no industriales [3]. Dentro de esta categoría están
los robots especiales utilizados como ayuda a minusválidos,
los robots de laboratorio, los robots didácticos, los robots que
se utilizan en operaciones de alto riesgo, los robots de
exploración submarina, entre otros.
2) Robots industriales
Se los puede clasificar de diversas maneras, entre ellas
está la clasificación de la AFRI (Asociación Francesa de
Robótica Industrial) y de la IFR (Federación Internacional de
Robótica):
3) Según la AFRI
TIPO A Manipulador con control manual o telemando.
TIPO B Manipulador automático con ciclos preajustados;
regulación mediante fines de carrera o topes; control por PLC;
accionamiento neumático, eléctrico o hidráulico.
TIPO C Robot programable con trayectoria continua o
punto a punto. Carece de conocimientos sobre su entorno.
TIPO D Robot capaz de adquirir datos de su entorno,
readaptando su tarea en función de éstos.
Según la IFR.
Robot secuencial.
Robot de trayectoria controlable.
Robot adaptativo
Robot telemanipulado
Otras clasificaciones diferencian a los robots de acuerdo a
otras características como son:
4) Clasificación en generaciones
1ª Generación: Repite la tarea programada
secuencialmente. No toma en cuenta las posibles alteraciones
del entorno.
2ª Generación: Adquiere información limitada de su
entorno y actúa en consecuencia. Puede localizar, clasificar
(visión) y detectar esfuerzos y adaptar sus movimientos en
consecuencia.
3ª Generación Su programación se realiza mediante el
empleo de un lenguaje natural. Posee capacidad para la
planificación automática de tareas.
5) De acuerdo a sus funciones (clases)
Clase 1: Coger y dejar
Clase 2: Seguir trayectoria
Clase 3: Montaje de detalles
6) De acuerdo a su aprendizaje [1]
Robots Manuales: Exigen que el movimiento de sus
elementos sea controlado por el hombre.
Robots autónomos de secuencia fija: Permiten
gobernar el movimiento de sus elementos en forma
autónoma pero no es posible alterar sus operaciones o
secuencia de operaciones.
Robots autónomos de secuencia variable: Permite
gobernar el movimiento de sus elementos en forma
autónoma y además, es posible alterar algunas de las
características de los ciclos de trabajo.
Robots programables: Pueden ser programados
mediante lenguajes específicos o mediante un proceso de
aprendizaje en el cual un operador enseña inicialmente
una secuencia de movimientos, el sistema las memoriza
y se limita a repetirla indefinidamente.
Robots inteligentes: Son manipuladores o sistemas
mecánicos multifuncionales controlados por
computador, capaces de relacionarse con su entorno a
través de sensores y de tomar decisiones en tiempo real.
Pueden analizar su entorno y reaccionar ante sus
modificaciones o alteraciones, para ello requiere del
concurso de sus sistemas de análisis y control, de
sensores adecuados, de control de esfuerzos, de
seguimiento de trayectorias, de reconocimiento de
imágenes, etc.
7) De acuerdo al control de su trayectoria
Existen dos formas básicas:
Control de trayectoria punto a punto: Con el control
punto a punto, el robot es programado para realizar una
pausa en cada punto para planear el próximo paso en una
trayectoria predeterminada. Un robot controlado punto a
punto ofrece mayor precisión en términos de
repetibilidad.
Control de trayectoria continua: este robot tiene un
movimiento más suave a lo largo de la trayectoria
definida pero disminuye la velocidad en los recorridos,
lo cual es una función del tamaño de los pasos
calculados por el computador maestro en tiempo real,
usando métodos de interpolación.
8) De acuerdo a sus sistemas de coordenadas
Elementos (Eslabones): Cuerpos rígidos que conforman
un manipulador
Articulaciones: Parte del manipulador que permite el
movimiento de los elementos que lo conforman. En principio,
pueden ser de diferentes tipos en la robótica:
Prismáticas (Deslizantes): P
De revolución (de revoluta, rotativas): R
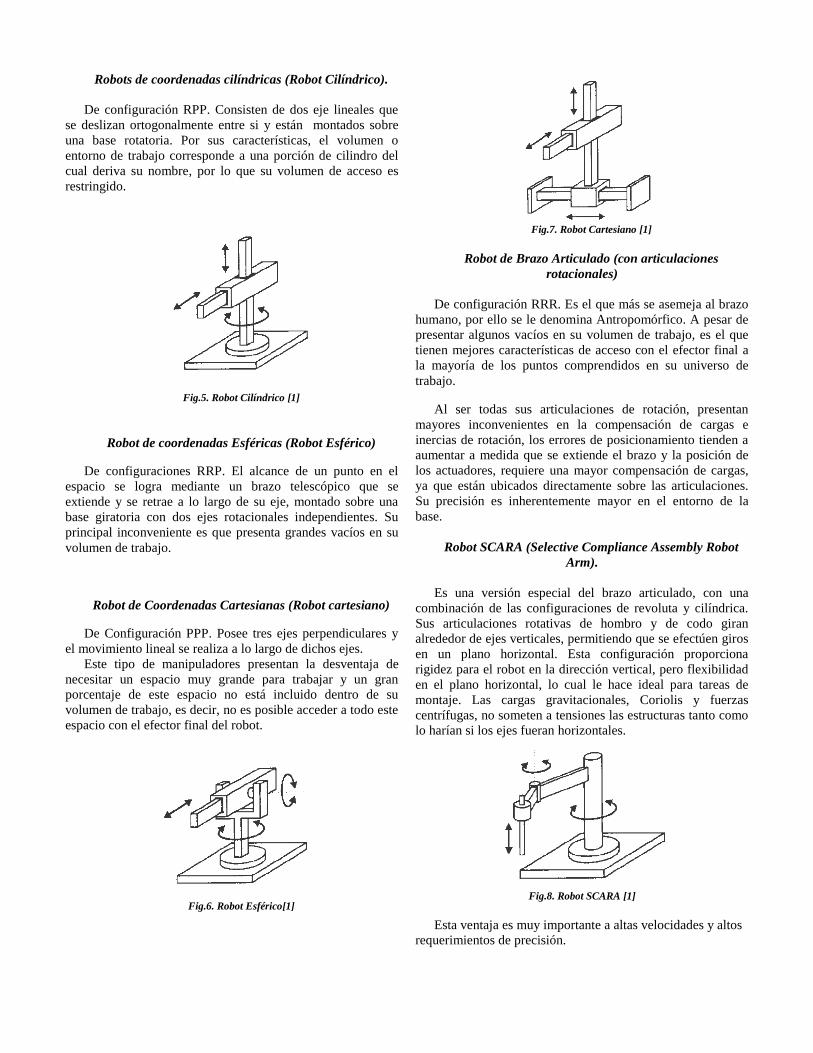
Robots de coordenadas cilíndricas (Robot Cilíndrico).
De configuración RPP. Consisten de dos eje lineales que
se deslizan ortogonalmente entre si y están montados sobre
una base rotatoria. Por sus características, el volumen o
entorno de trabajo corresponde a una porción de cilindro del
cual deriva su nombre, por lo que su volumen de acceso es
restringido.
Fig.5. Robot Cilíndrico [1]
Robot de coordenadas Esféricas (Robot Esférico)
De configuraciones RRP. El alcance de un punto en el
espacio se logra mediante un brazo telescópico que se
extiende y se retrae a lo largo de su eje, montado sobre una
base giratoria con dos ejes rotacionales independientes. Su
principal inconveniente es que presenta grandes vacíos en su
volumen de trabajo.
Robot de Coordenadas Cartesianas (Robot cartesiano)
De Configuración PPP. Posee tres ejes perpendiculares y
el movimiento lineal se realiza a lo largo de dichos ejes.
Este tipo de manipuladores presentan la desventaja de
necesitar un espacio muy grande para trabajar y un gran
porcentaje de este espacio no está incluido dentro de su
volumen de trabajo, es decir, no es posible acceder a todo este
espacio con el efector final del robot.
Fig.6. Robot Esférico[1]
Fig.7. Robot Cartesiano [1]
Robot de Brazo Articulado (con articulaciones
rotacionales)
De configuración RRR. Es el que más se asemeja al brazo
humano, por ello se le denomina Antropomórfico. A pesar de
presentar algunos vacíos en su volumen de trabajo, es el que
tienen mejores características de acceso con el efector final a
la mayoría de los puntos comprendidos en su universo de
trabajo.
Al ser todas sus articulaciones de rotación, presentan
mayores inconvenientes en la compensación de cargas e
inercias de rotación, los errores de posicionamiento tienden a
aumentar a medida que se extiende el brazo y la posición de
los actuadores, requiere una mayor compensación de cargas,
ya que están ubicados directamente sobre las articulaciones.
Su precisión es inherentemente mayor en el entorno de la
base.
Robot SCARA (Selective Compliance Assembly Robot
Arm).
Es una versión especial del brazo articulado, con una
combinación de las configuraciones de revoluta y cilíndrica.
Sus articulaciones rotativas de hombro y de codo giran
alrededor de ejes verticales, permitiendo que se efectúen giros
en un plano horizontal. Esta configuración proporciona
rigidez para el robot en la dirección vertical, pero flexibilidad
en el plano horizontal, lo cual le hace ideal para tareas de
montaje. Las cargas gravitacionales, Coriolis y fuerzas
centrífugas, no someten a tensiones las estructuras tanto como
lo harían si los ejes fueran horizontales.
Fig.8. Robot SCARA [1]
Esta ventaja es muy importante a altas velocidades y altos
requerimientos de precisión.
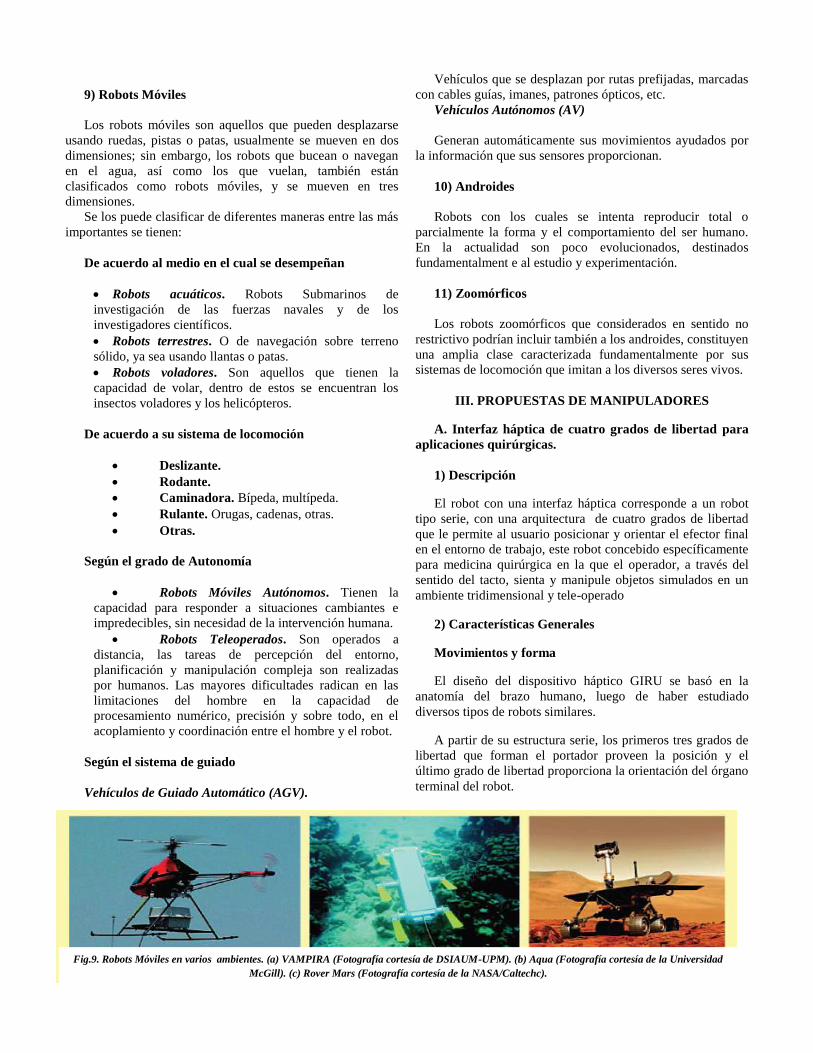
9) Robots Móviles
Los robots móviles son aquellos que pueden desplazarse
usando ruedas, pistas o patas, usualmente se mueven en dos
dimensiones; sin embargo, los robots que bucean o navegan
en el agua, así como los que vuelan, también están
clasificados como robots móviles, y se mueven en tres
dimensiones.
Se los puede clasificar de diferentes maneras entre las más
importantes se tienen:
De acuerdo al medio en el cual se desempeñan
Robots acuáticos. Robots Submarinos de
investigación de las fuerzas navales y de los
investigadores científicos.
Robots terrestres. O de navegación sobre terreno
sólido, ya sea usando llantas o patas.
Robots voladores. Son aquellos que tienen la
capacidad de volar, dentro de estos se encuentran los
insectos voladores y los helicópteros.
De acuerdo a su sistema de locomoción
Deslizante.
Rodante.
Caminadora. Bípeda, multípeda.
Rulante. Orugas, cadenas, otras.
Otras.
Según el grado de Autonomía
Robots Móviles Autónomos. Tienen la
capacidad para responder a situaciones cambiantes e
impredecibles, sin necesidad de la intervención humana.
Robots Teleoperados. Son operados a
distancia, las tareas de percepción del entorno,
planificación y manipulación compleja son realizadas
por humanos. Las mayores dificultades radican en las
limitaciones del hombre en la capacidad de
procesamiento numérico, precisión y sobre todo, en el
acoplamiento y coordinación entre el hombre y el robot.
Según el sistema de guiado
Vehículos de Guiado Automático (AGV).
Vehículos que se desplazan por rutas prefijadas, marcadas
con cables guías, imanes, patrones ópticos, etc.
Vehículos Autónomos (AV)
Generan automáticamente sus movimientos ayudados por
la información que sus sensores proporcionan.
10) Androides
Robots con los cuales se intenta reproducir total o
parcialmente la forma y el comportamiento del ser humano.
En la actualidad son poco evolucionados, destinados
fundamentalment e al estudio y experimentación.
11) Zoomórficos
Los robots zoomórficos que considerados en sentido no
restrictivo podrían incluir también a los androides, constituyen
una amplia clase caracterizada fundamentalmente por sus
sistemas de locomoción que imitan a los diversos seres vivos.
III. PROPUESTAS DE MANIPULADORES
A. Interfaz háptica de cuatro grados de libertad para
aplicaciones quirúrgicas.
1) Descripción
El robot con una interfaz háptica corresponde a un robot
tipo serie, con una arquitectura de cuatro grados de libertad
que le permite al usuario posicionar y orientar el efector final
en el entorno de trabajo, este robot concebido específicamente
para medicina quirúrgica en la que el operador, a través del
sentido del tacto, sienta y manipule objetos simulados en un
ambiente tridimensional y tele-operado
2) Características Generales
Movimientos y forma
El diseño del dispositivo háptico GIRU se basó en la
anatomía del brazo humano, luego de haber estudiado
diversos tipos de robots similares.
A partir de su estructura serie, los primeros tres grados de
libertad que forman el portador proveen la posición y el
último grado de libertad proporciona la orientación del órgano
terminal del robot.
Fig.9. Robots Móviles en varios ambientes. (a) VAMPIRA (Fotografía cortesía de DSIAUM-UPM). (b) Aqua (Fotografía cortesía de la Universidad
McGill). (c) Rover Mars (Fotografía cortesía de la NASA/Caltechc).
Características Particulares
Dispositivo Háptico
Los dispositivos hápticos son aquellos que producen la
sensación de estar tocando realmente un mundo virtual o
remoto, el objetivo ideal es que el operador no distinga entre
lo real y lo virtual y según esto permite que el cirujano tenga
una experiencia más real, en la que se reproducen las fuerzas
de contacto, se aumenta la sensación de presencia, se mejora
la interacción y el manejo de los instrumentos médicos.
Entre las aplicaciones biomédicas para las cuales sería útil
el uso de esta interfaz se encuentran: un simulador virtual de
entrenamiento para procedimientos quirúrgicos,
Interfaz para interactuar con sistemas tele-operados en
entornos remotos, un sistema robótico de rehabilitación para
personas con discapacidad en terapias de movimiento
Apoyado en un ambiente virtual, es decir, la terapia podría
ser conducida por la interfaz siguiendo trayectorias de los
movimientos requeridos, programadas previamente por un
Fisioterapeuta.
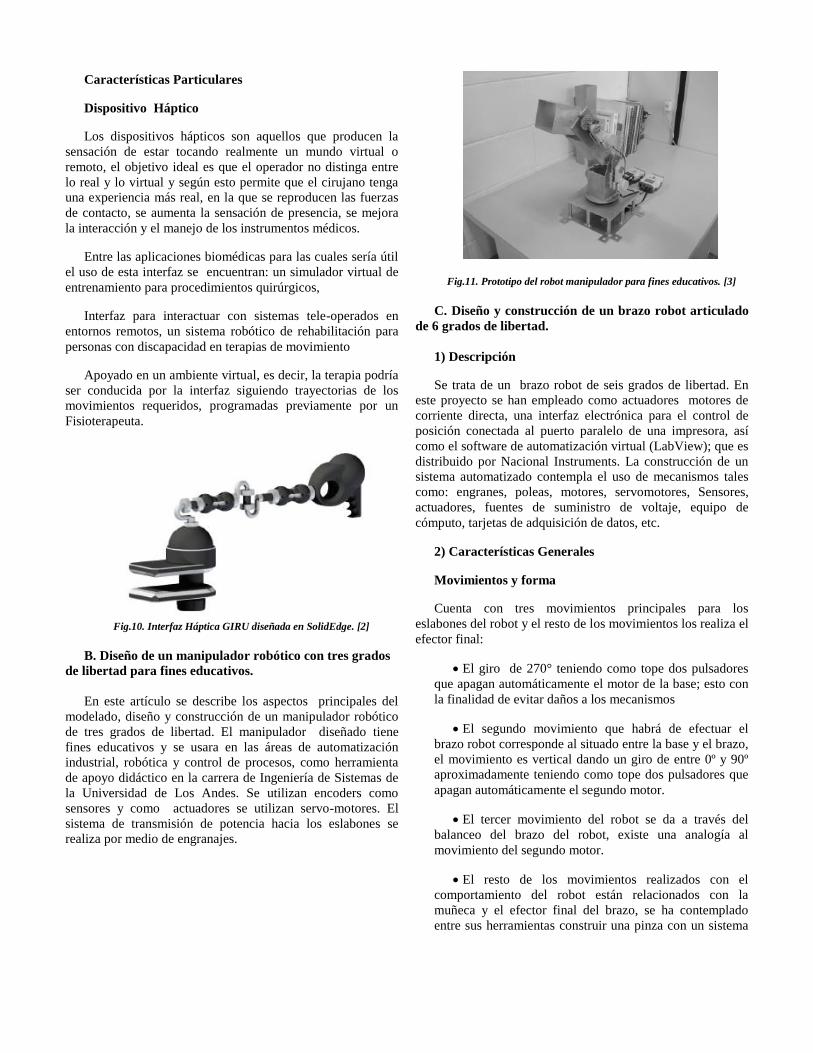
Fig.10. Interfaz Háptica GIRU diseñada en SolidEdge. [2]
B. Diseño de un manipulador robótico con tres grados
de libertad para fines educativos.
En este artículo se describe los aspectos principales del
modelado, diseño y construcción de un manipulador robótico
de tres grados de libertad. El manipulador diseñado tiene
fines educativos y se usara en las áreas de automatización
industrial, robótica y control de procesos, como herramienta
de apoyo didáctico en la carrera de Ingeniería de Sistemas de
la Universidad de Los Andes. Se utilizan encoders como
sensores y como actuadores se utilizan servo-motores. El
sistema de transmisión de potencia hacia los eslabones se
realiza por medio de engranajes.
Fig.11. Prototipo del robot manipulador para fines educativos. [3]
C. Diseño y construcción de un brazo robot articulado
de 6 grados de libertad.
1) Descripción
Se trata de un brazo robot de seis grados de libertad. En
este proyecto se han empleado como actuadores motores de
corriente directa, una interfaz electrónica para el control de
posición conectada al puerto paralelo de una impresora, así
como el software de automatización virtual (LabView); que es
distribuido por Nacional Instruments. La construcción de un
sistema automatizado contempla el uso de mecanismos tales
como: engranes, poleas, motores, servomotores, Sensores,
actuadores, fuentes de suministro de voltaje, equipo de
cómputo, tarjetas de adquisición de datos, etc.
2) Características Generales
Movimientos y forma
Cuenta con tres movimientos principales para los
eslabones del robot y el resto de los movimientos los realiza el
efector final:
El giro de 270° teniendo como tope dos pulsadores
que apagan automáticamente el motor de la base; esto con
la finalidad de evitar daños a los mecanismos
El segundo movimiento que habrá de efectuar el
brazo robot corresponde al situado entre la base y el brazo,
el movimiento es vertical dando un giro de entre 0º y 90º
aproximadamente teniendo como tope dos pulsadores que
apagan automáticamente el segundo motor.
El tercer movimiento del robot se da a través del
balanceo del brazo del robot, existe una analogía al
movimiento del segundo motor.
El resto de los movimientos realizados con el
comportamiento del robot están relacionados con la
muñeca y el efector final del brazo, se ha contemplado
entre sus herramientas construir una pinza con un sistema
de detección de presión, una pinza para soldadura o corte y
una ventosa neumática.
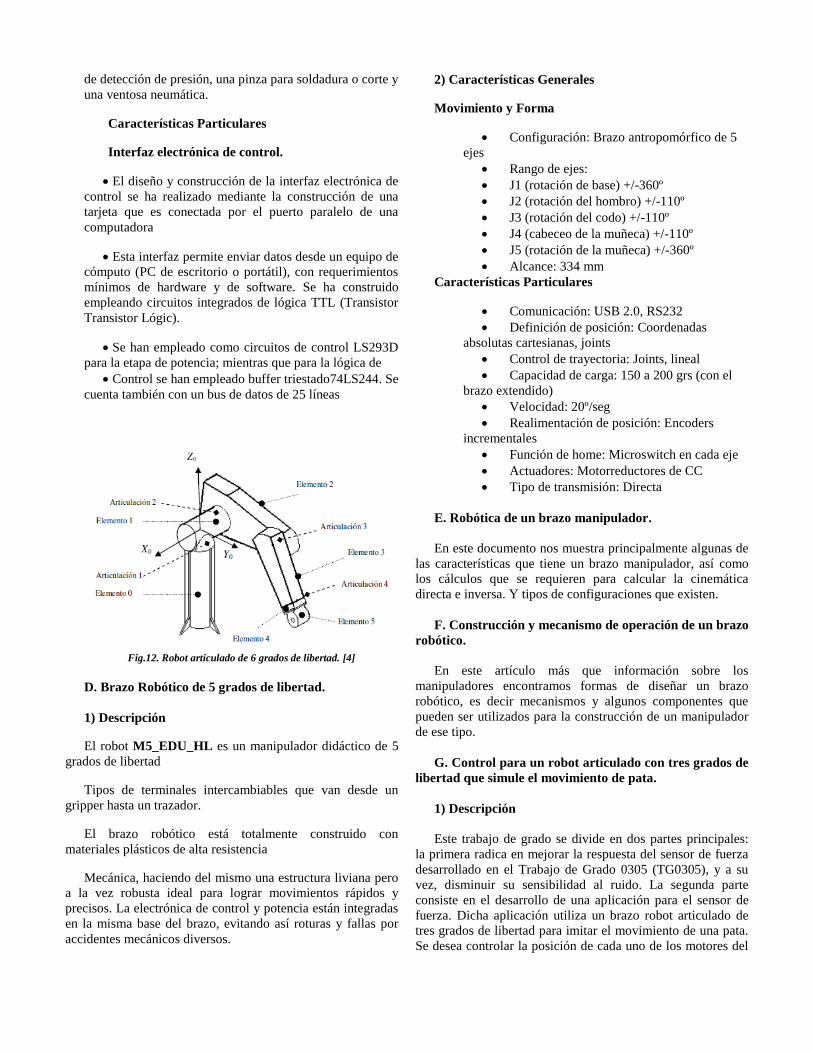
Características Particulares
Interfaz electrónica de control.
El diseño y construcción de la interfaz electrónica de
control se ha realizado mediante la construcción de una
tarjeta que es conectada por el puerto paralelo de una
computadora
Esta interfaz permite enviar datos desde un equipo de
cómputo (PC de escritorio o portátil), con requerimientos
mínimos de hardware y de software. Se ha construido
empleando circuitos integrados de lógica TTL (Transistor
Transistor Lógic).
Se han empleado como circuitos de control LS293D
para la etapa de potencia; mientras que para la lógica de
Control se han empleado buffer triestado74LS244. Se
cuenta también con un bus de datos de 25 líneas
Fig.12. Robot articulado de 6 grados de libertad. [4]
D. Brazo Robótico de 5 grados de libertad.
1) Descripción
El robot M5_EDU_HL es un manipulador didáctico de 5
grados de libertad
Tipos de terminales intercambiables que van desde un
gripper hasta un trazador.
El brazo robótico está totalmente construido con
materiales plásticos de alta resistencia
Mecánica, haciendo del mismo una estructura liviana pero
a la vez robusta ideal para lograr movimientos rápidos y
precisos. La electrónica de control y potencia están integradas
en la misma base del brazo, evitando así roturas y fallas por
accidentes mecánicos diversos.
2) Características Generales
Movimiento y Forma
Configuración: Brazo antropomórfico de 5
ejes
Rango de ejes:
J1 (rotación de base) +/-360º
J2 (rotación del hombro) +/-110º
J3 (rotación del codo) +/-110º
J4 (cabeceo de la muñeca) +/-110º
J5 (rotación de la muñeca) +/-360º
Alcance: 334 mm
Características Particulares
Comunicación: USB 2.0, RS232
Definición de posición: Coordenadas
absolutas cartesianas, joints
Control de trayectoria: Joints, lineal
Capacidad de carga: 150 a 200 grs (con el
brazo extendido)
Velocidad: 20º/seg
Realimentación de posición: Encoders
incrementales
Función de home: Microswitch en cada eje
Actuadores: Motorreductores de CC
Tipo de transmisión: Directa
E. Robótica de un brazo manipulador.
En este documento nos muestra principalmente algunas de
las características que tiene un brazo manipulador, así como
los cálculos que se requieren para calcular la cinemática
directa e inversa. Y tipos de configuraciones que existen.
F. Construcción y mecanismo de operación de un brazo
robótico.
En este artículo más que información sobre los
manipuladores encontramos formas de diseñar un brazo
robótico, es decir mecanismos y algunos componentes que
pueden ser utilizados para la construcción de un manipulador
de ese tipo.
G. Control para un robot articulado con tres grados de
libertad que simule el movimiento de pata.
1) Descripción
Este trabajo de grado se divide en dos partes principales:
la primera radica en mejorar la respuesta del sensor de fuerza
desarrollado en el Trabajo de Grado 0305 (TG0305), y a su
vez, disminuir su sensibilidad al ruido. La segunda parte
consiste en el desarrollo de una aplicación para el sensor de
fuerza. Dicha aplicación utiliza un brazo robot articulado de
tres grados de libertad para imitar el movimiento de una pata.
Se desea controlar la posición de cada uno de los motores del

brazo y la fuerza que se hace en el extremo del robot. Y la
tercer parte nos habla sobre el montaje mecánico y sobre las
tarjetas de control utilizadas.
El Manipulador robótico de tres grados de libertad. Este
tipo de robots con movimientos articulares se encuentran en
mayor medida en las industrias, cercanos a los 40 mil robots
instalados para el 2003 (Barrientos et Al., 2008) El robot es
del tipo manipulador robótico industrial. Inicialmente será
diseñado para que cumpla funciones de posicionamiento, a
medida que avance la investigación, capacidad de carga,
descarga, manipulación y traslado de objetos; y finalmente
puede ser adaptado para que realice otras aplicaciones como
pintura y soldadura, entre otras.
2) Características Generales
Movimiento y forma
El robot es del tipo manipulador, y cuenta con cuatro
eslabones y tres grados de libertad (movimiento que puede
realizar cada articulación con respecto a la anterior). Cada uno
de los grados de libertad será una articulación del tipo
rotacional (o rotativa).
Tanto los tres primeros eslabones como las tres
articulaciones (o grados de libertad para este caso) servirán
para posicionar el extremo del robot en la posición deseada y
permitirá realizar ejercicios de posicionamiento espacial.
Características Particulares
Para cumplir con el requisito de poco peso, se trabaja con
aluminio como material principal del cuerpo del robot
manipulador. Para simplificar el proceso de fabricación y
diseño, se utiliza un perfil comercial cuadrado de aluminio de
76,2 mm (3 pulgadas) de lado y 2 mm de espesor. Luego a los
eslabones 1 y 2 se les colocan extensiones hechas de chapa
diámetro y 74 mm de altura, soldados a las tapas; dejando la
base con una altura total de 80 mm.
Fig.13. Circuito Sensor Fuerza. [5]
IV. PROPUESTA A PARTIR DE LAS
CONFIGURACIONES
Nuestra propuesta consta de un robot manipulador de
cinco grados de libertad, con el cual pretendemos hacer un
robot tele-operado con la ayuda del Kinect de Microsoft, esto
con el fin de que el manipulador logre imitar los movimientos
de un brazo real.
V. CLASIFICACIÓN DE LAS DIFERENTES
PROPUESTAS
Las propuestas definidas anteriormente se clasifican de
manera general en robots antropomórficos seriales de media
potencia. A continuación se mostrará una tabla comparativa
entre los robots más significativos de las propuestas
mostradas.
VI. EVALUACIÓN DE LAS DIFERENTES
PROPUESTAS.
Propuesta Propuesta 2 Propuesta 3 Propuesta 4
Configuración Serial Serial Serial Serial
Forma Antropomórf
ico
Antropomórfi
co
Antropomórfi
co
Antropomórfi
co
GDL 4 6 5 3
Tipo de
Actuadores
Eléctricos
(Motores CD
y
servomotore
s)
Eléctricos
(Motores CD)
, Neumáticos
(efector final)
Eléctricos
(Motores y
servomotores
CD)
Eléctricos
(Motores CD)
Efector Final Intercambiab
le
Intercambiabl
es
Intercambiabl
e
Intercambiabl
e
Comunicación USB Puerto
Paralelo USB-RS232 SD
Comunicación
con el Usuario
Tele operado
(joystick)
Tele operado
(Computadora
Labview
Tele operado
(Computadora
)
SD
Materiales SD
Acero,
aluminio y
Plástico
Plástico Aluminio
Potencia de
los Actuadores Alta Alta Media Media
Precisión de
los actuadores Alta Media Media Baja

Dificultad de
control Alta Alta Media Baja
Dificultad de
Manufactura Alta Alta Media Baja
Costo Alto Alto Medio Medio
Tabla 1. Comparativa de las propuestas
VII. CONCLUSIONES
La robótica se ha desarrollado de una manera exponencial
y ha creado una diversa gama de robots para múltiples fines
como: entretenimiento, investigación, servicio, cuidado
médico, manufactura, transporte, entre muchas otras.
Sin embargo, una de las configuraciones más ampliamente
utilizadas son los robots seriales antropomórficos. Esto se
debe a que son muy versátiles y pueden ser utilizados en
prácticamente cualquier aplicación. No obstante, el problema
actual no es realizar robots antropomórficos sino, ver su
aplicación.
Debido a esto recientemente han salidos robots
antropomórficos para entretenimiento, educación, operaciones
quirúrgicas y manipulación de objetos.
Finalmente, aunque los robots antropomórficos tienen
cierto costo elevado, su flexibilidad y potencial de aplicación
lo compensan. Ya que al fin de cuentas imita a un brazo
humano real.
VIII. DEFINIR CONFIGURACIÓN Y APLICACIÓN
DEL ROBOT
En resumen, se decidió por un robot antropomórfico de 5
grados de libertad con un efector final intercambiables. Su
configuración es serial, articulado.
Además, utilizará servomotores de 180° capaces de mover
cargas de 14 kg. Su manejo será tele-operado, ya sea a través
de un controlador operado por el usuario.
El principio de funcionamiento del motor servirá para la
recolección de objetos y la manipulación de ellos en dos tipos
de ambiente.
Primeramente en aquellos donde las condiciones del
ambiente sean perjudiciales para los seres humanos.
Segundo en situaciones donde el humano requiere de
manipular objetos en lugares lejanos a donde se encuentra.
REFERENCIAS
[1]Barrientos, A., & Balaguer, C. (2007). Fundamentos de
robótica, 2a Ed: McGraw-Hill Interamericana de España S.L.
[2] Muñoz, J. W. G., Ortiz, L. F. R., & Salinas, S. A.
(2011). INTERFAZ HÁPTICA DE CUATRO GRADOS DE
LIBERTAD PARA APLICACIONES QUIRÚRGICA Haptic
interface with four degrees of freedom for surgical
applications. Ingenieria Biomedica, 5(9), 35-42.
[3] Andueza, L., & Gil, I. A. (2009). Diseño de un
manipulador robótico con tres grados de libertad para fines
educativos. Ciencia e Ingeniería, 30(1), 3-14.
[4]Fu, K. S., González, R. C., & Lee, C. S. G. (1987).
Robotics: control, sensing, vision, and intelligence:
McGraw-Hill.
[5]Gomez, R. L., Gomez, J. C. P., Sabogal, C. A. V., &
Electrónica, C. D. I. Control para un Robot Articulado con
Tres Grados de Libertad que Simule ql Movimiento de Pata.
Ysiquio, A. N. F. (2004). Modelado de Sistemas de
control de un robot manipulador basado en procesamiento
digital de Imágenes.
Tsai, L. W. (1999). Robot Analysis: The Mechanics of
Serial and Parallel Manipulators: Wiley.
Velasco, J. A. A. (2005). Tecnologias de la informacion y
de la comunicacion: Alfaomega.
ARQHYS: Efector del robot (2014). Recuperado de
http://www.arqhys.com/articulos/efector-robot.html
ROBOTEC Tecnología robótica: Clasificación de los
Robots (2014). Recuperado de:
http://robotec11.tripod.com/id4.html
Pires, J. N. (2007). Industrial Robots Programming:
Building Applications for the Factories of the Future:
Springer.
Garcia, E., Jimenez, M. A., De Santos, P. G., & Armada,
M. (2007). The evolution of robotics research. Robotics &
Automation Magazine, IEEE, 14(1), 90-103. doi:
10.1109/mra.2007.339608