DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ...
246
University of Windsor Scholarship at UWindsor Electronic eses and Dissertations 2012 DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ANALYSIS Li Li University of Windsor Follow this and additional works at: hp://scholar.uwindsor.ca/etd is online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. ese documents are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the Creative Commons license—CC BY-NC-ND (Aribution, Non-Commercial, No Derivative Works). Under this license, works must always be aributed to the copyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission of the copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, please contact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208. Recommended Citation Li, Li, "DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ANALYSIS" (2012). Electronic eses and Dissertations. Paper 5382.
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ...

University of WindsorScholarship at UWindsor
Electronic Theses and Dissertations
2012
DAMAGE AND MATERIALIDENTIFICATION USING INVERSEANALYSISLi LiUniversity of Windsor
Follow this and additional works at: http://scholar.uwindsor.ca/etd
This online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. Thesedocuments are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the CreativeCommons license—CC BY-NC-ND (Attribution, Non-Commercial, No Derivative Works). Under this license, works must always be attributed to thecopyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission ofthe copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, pleasecontact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208.
Recommended CitationLi, Li, "DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ANALYSIS" (2012). Electronic Theses and Dissertations.Paper 5382.

DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ANALYSIS
by
Li Li
A Dissertation
Submitted to the Faculty of Graduate Studies
through Department of Civil and Environmental Engineering
in Partial Fulfillment of the Requirements for
the Degree of Doctor of Philosophy
at the University of Windsor
Windsor, Ontario, Canada
2012
© 2012 Li Li

DAMAGE AND MATERIAL IDENTIFICATION USING INVERSE ANALYSIS
BY
Li Li
APPROVED BY:
______________________________________________
R. Ben Mrad, External Examiner
University of Toronto
______________________________________________
N. Zamani
Department of Mechanical, Automotive & Materials Engineering
______________________________________________
B. Budkowska
Department of Civil & Environmental Engineering
______________________________________________
S. Cheng
Department of Civil and Environmental Engineering
______________________________________________
F. Ghrib, Advisor
Department of Civil and Environmental Engineering
______________________________________________
J. Albanese, Chair of Defense
Department of Sociology, Anthropology & Criminology
September 11, 2012
iii
DECLARATION OF ORIGINALITY
I hereby certify that I am the sole author of this thesis and that no part of this thesis has
been published or submitted for publication.
I certify that, to the best of my knowledge, my thesis does not infringe upon
anyone‘s copyright nor violate any proprietary rights and that any ideas, techniques,
quotations, or any other material from the work of other people included in my thesis,
published or otherwise, are fully acknowledged in accordance with the standard
referencing practices. Furthermore, to the extent that I have included copyrighted
material that surpasses the bounds of fair dealing within the meaning of the Canada
Copyright Act, I certify that I have obtained a written permission from the copyright
owner(s) to include such material(s) in my thesis and have included copies of such
copyright clearances to my appendix.
I declare that this is a true copy of my thesis, including any final revisions, as
approved by my thesis committee and the Graduate Studies office, and that this thesis has
not been submitted for a higher degree to any other University or Institution.
iv
ABSTRACT
In this thesis, we formulate novel solutions to two inverse problems using optical
measurements as input data: i) local level damage identification of beams, and ii) material
constitutive parameter identification using digital image correlation measurement of
surface strain/displacements.
A novel photogrammetric procedure based on edge-detection was devised to
measure the quasi-continuous deflection of beams under given loading. This method is
based on the close-range photogrammetry technique made possible through recent
developments of image processing algorithms and modern digital cameras.
Two computational procedures to reconstruct the stiffness distribution and to
detect damage in Euler-Bernoulli beams are developed in this thesis. The first
formulation is based on the principle of the equilibrium gap along with a finite element
discretization. The solution is obtained by minimizing a regularized functional using a
Tikhonov Total Variation (TTV) scheme. The second proposed formulation is a
minimization of a data discrepancy functional between measured and model-based
deflections. The optimal solution is obtained using a gradient-based minimization
algorithm and the adjoint method to calculate the Jacobian. The proposed identification
methodology is validated using experimental data. The proposed methodology has the
potential to be used for long term health monitoring and damage assessment of civil
engineering structures.
The identification of material plasticity parameters is carried out by minimizing a
least-square functional measuring the gap between inhomogeneous displacement fields
obtained from measurements and finite element simulations. The material parameters are

v
identified simultaneously by means of direct, derivative-free optimization methods where
the finite element simulation is treated as a black-box procedure. Methods verifying and
validating the identified results are given. Particular interest is given to the identifiability
issue in deterministic and statistical sense. The validation procedure intends to detect
false positive results (type-II errors). The performance of the computational procedures
is illustrated by numerical and experimental examples. The proposed approach avoids
using the gradient of the cost function in the identification process; it has the benefit of
allowing the use of any finite element code as a black box to solve the direct problem.

vi
ACKNOWLEDGEMENTS
First, I would like to express my sincere gratitude to my advisor Dr. F. Ghrib for his
patient instructions, insightful comments and financial assistance during the research
program. I also would like to thank my committee members, Dr. Zamani, Dr.
Budkowska, and Dr. Cheng, for their valuable suggestions to improve this thesis. I owe
much thanks to Dr. W. Altenhof, Dr. H.K. Kwan, for their teaching during my training at
the University of Windsor. My deep appreciation and gratitude goes to Dr. Green of the
department of Mechanical Engineering for providing me the ARAMIS optical testing
system. I would like to thank the technical staff in the Civil and Mechanical Engineering
Laboratories, to their assistance during the test programs. I would also like to recognize
individually, friends and staff in the University of Windsor: Catherine Wilson, Lucian
Pop, Pat Seguin, Andrew Jenner, Matt St. Louis, Wafa Polies; their help and support
during the test programs are greatly appreciated.

vii
TABLE OF CONTENTS
DECLARATION OF ORIGINALITY .............................................................................. iii
ABSTRACT ....................................................................................................................... iv
ACKNOWLEDGEMENTS ............................................................................................... vi
LIST OF TABLES ...............................................................................................................x
LIST OF FIGURES AND ILLUSTRATIONS................................................................. xii
LIST OF SYMBOLS, ABBREVIATIONS AND NOMENCLATURE ...........................xv
CHAPTER ONE: INTRODUCTION ..................................................................................1
1.1 General .......................................................................................................................1
1.2 Optical full-field measurements using digital cameras ..............................................4
1.3 Damage identification based on static tests ...............................................................5
1.4 Material parameter identification using full-field measurements ..............................6
1.5 Hyperelasticity model parameter identification for rubber and rubber-like solids ....8
CHAPTER TWO: OPTICAL MEASUREMENT USING DIGITAL CAMERAS:
DIGITAL IMAGE CORRELATION AND CLOSE-RANGE
PHOTOGRAMMETRY .............................................................................................9
2.1 Introduction ................................................................................................................9
2.2 Close-range photogrammetry and applications in civil engineering .......................10
2.2.1 Overview .........................................................................................................10
2.2.2 Applications of close-range photogrammetry in civil engineering .................24
2.3 Close-range photogrammetry for beam deflection measurement ............................26
2.3.1 Overview .........................................................................................................26
2.4 Photogrammetric measurement of beam deflection using an edge-based
approach .................................................................................................................30
2.5 Photogrammetric measurement of beam deflection using a surface-based
approach .................................................................................................................40
2.6 Digital image correlation .........................................................................................40
2.7 Summary ..................................................................................................................45
CHAPTER THREE: DAMAGE IDENTIFICATION OF EULER-BERNOULLI
BEAMS USING FULL-FIELD MEASUREMENTS ..............................................46
3.1 Introduction and background ...................................................................................46
3.1.1 An introduction to damage identification problem .........................................46
3.1.2 Material-level methods ....................................................................................47
3.1.3 System identification .......................................................................................48
3.1.4 Model updating ................................................................................................49
3.1.5 Finite element model updating ........................................................................50
3.1.6 The four levels of damage assessment ............................................................50
3.1.7 Classification of damage identification methods ............................................51
3.1.8 Overview of this chapter .................................................................................53
3.2 Literature review ......................................................................................................54
viii
3.2.1 Dynamic damage identifications .....................................................................54
3.2.2 Static response data-based damage identification ...........................................60
3.2.3 Advantages and disadvantaged of static and dynamic identifications ............68
3.3 Equilibrium gap method ..........................................................................................72
3.4 Data discrepancy-based FE model updating ............................................................80
3.5 Examples ..................................................................................................................85
3.5.1 Numerical examples ........................................................................................85
3.5.1.1 Validation of the Equilibrium Gap Method ...........................................85
3.5.1.2 Validation of the Data Discrepancy Functional Method .......................87
3.5.2 Experimental examples ...................................................................................90
3.5.2.1 Test # 1: Step-wise damage detection ....................................................91
3.5.2.2 Test # 2: Single saw-cut damaged beam ................................................94
3.5.2.3 Test # 3: Discrete three saw-cuts damaged beam ..................................96
3.5.2.4 Test #4: Combination of discrete and step cuts damaged beam ............98
3.6 Conclusions ............................................................................................................104
3.7 Extension and envision: .........................................................................................105
CHAPTER FOUR: MATERIAL PARAMETER IDENTIFICATION USING FULL-
FIELD MEASUREMENTS ...................................................................................107
4.1 Introduction and literature review of related research ...........................................107
4.1.1 General review ...............................................................................................107
4.1.2 Outline of the proposed methodology ...........................................................111
4.1.3 The advantages of using DIC ........................................................................113
4.1.4 Organization of this chapter ..........................................................................115
4.2 Overview of elasto-plasticity .................................................................................116
4.3 General methodology .............................................................................................118
4.4 Nonlinear regression theory: parameter estimation using statistical inference .....120
4.5 Least-squares formulation and solution of the identification problem ..................122
4.6 Overview and selection of optimization techniques ..............................................127
4.7 Statistical inference with DIC data ........................................................................136
4.7.1 Nonlinear regression inference using linear approximation ..........................137
4.7.2 Calculation of Sensitivity ..............................................................................140
4.7.3 Checking response fit ....................................................................................141
4.8 Identifiability issues ...............................................................................................142
4.8.1 General ..........................................................................................................142
4.8.2 Ill-posed or well-posed ..................................................................................143
4.8.3 Model and parameter identifiability ..............................................................144
4.8.4 Verification and validation (V&V) ...............................................................144
4.8.5 Quality and nature of information from data .................................................146
4.8.6 Curvature measure of nonlinearity: checking the adequacy of linearized
covariance analysis (LCA) .............................................................................148
4.8.7 Summary of procedures addressing the identifiability issue .........................152
4.9 Examples and results .............................................................................................154
4.9.1 Numerical example ........................................................................................154
4.9.2 Example 2: identification of model parameters of a cast iron component ....160
ix
4.10 Summary of this study .........................................................................................175
CHAPTER FIVE: HYPERELASTICITY MODEL IDENTIFICATION FOR
RUBBER AND RUBBER-LIKE SOLIDS ............................................................177
5.1 Introduction and literature review of related research ...........................................177
5.2 Hyperelastic models for rubber-like materials .......................................................185
5.3 Methodological and analytical approaches used for this project ...........................192
5.4 Results and illustrative examples ...........................................................................193
5.4.1 Rubber block .................................................................................................193
5.4.2 Engine mount .................................................................................................195
5.5 Summary ................................................................................................................205
CHAPTER SIX: CONCLUSION AND FUTURE WORK .............................................207
REFERENCES ................................................................................................................209
VITA AUCTORIS ............................................................................................................229

x
LIST OF TABLES
Table 3.1: A synopsis for the classification of damage identification methods ............... 53
Table 3.2: Damage identification algorithm using the adjoint-optimization method. ...... 84
Table 3.3: Identified stiffness of test #1 .......................................................................... 101
Table 3.4: Identified stiffness of test #2 .......................................................................... 102
Table 3.5: Identified stiffness of test #3 .......................................................................... 103
Table 3.6: Identified stiffness of test #4 .......................................................................... 103
Table 4.1: identified solution with and without synthetic noise (load factor = 1.1) ....... 157
Table 4.2: Comparison of identification solution with and without synthetic noise to
Nelder-Mead and Genetic Algorithm (GA) methods (load factor = 1.1) ............... 158
Table 4.3: Identification solution without synthetic noise (load factor = 1.05)
IM=0.0001 ............................................................................................................... 159
Table 4.4: identification solution without synthetic noise (load factor = 1.1)(Tresca
yield criterion) IM= 0.0002 ..................................................................................... 160
Table 4.5: Re-identified parameters with and without synthetic noise ........................... 168
Table-4.6: Parameter identification with Stage 10 measurement data (elastic response)171
Table-4.7: Identification with Stage 50 data ................................................................... 172
Table 5.1: Popular constitutive models for compressible rubberlike materials in FE
analysis .................................................................................................................... 191
Table 5.2: numerical test of the inverse problem (IM = 0.0001) .................................. 194
Table 5.3: numerical test of the inverse problem with 5% synthetic noise (IM =0.0004) ................................................................................................................... 195
Table 5.4: numerical test of the inverse problem using simulated surface
displacements (IM = 0.0006) ................................................................................. 199
Table 5.5: numerical test of the inverse problem using simulated surface
displacements with synthetic noise (IM = 0.0013) ................................................ 200
Table 5.6: The identified model parameters using experimental data ............................ 203

xi
Table 5.7: Sensitivity of the identified model parameters with introduced noise in the
test data ................................................................................................................... 205

xii
LIST OF FIGURES AND ILLUSTRATIONS
Figure 2.1: Examples of patterns targeted in close-range photogrammetry. a) Targets
attached to the surface and used for measuring displacements of concrete beams
(Niederöst and Maas, 1997); and b) a dense grid of circles printed on the surface
of testing structures (Cardenas-Garcia, Wu et al., 1997) (Hegger, Sherif et al.,
2004) (Franke, Franke et al., 2007). .......................................................................... 12
Figure 2.2: Procedural steps for beam deflection measurement using photogrammetry
based on edge-detection. ........................................................................................... 31
Figure 2.3. The laboratory set-up for tests of a step-cut beam. ........................................ 32
Figure 2.4. The detected upper-edge of a cantilever beam: a) a cut-out RGB image; b)
the detected edge in a grey-scale image; and c) a binary image of the edge
generated using a pixel threshold. ............................................................................. 33
Figure 2.5: The experimental set-up for close-range photogrammetric measurement of
the displacement of a loaded cantilever beam with a high-contrast stable
background using consumer-grade optical equipment. ............................................ 38
Figure 2.6: Beam deflection: Experimentally-obtained measurements using edge-
detection methods and close-range photogrammetry technique. .............................. 39
Figure 2.7: Beam Deflection: Theoretical deflections with E = 66 GPa and E = 72
GPa, and correspondence of the predicted values to the experimentally-measured
deflection profile shown in the previous figure. Predictions were based on
elastic beam theory. The elasticity modulus of the aluminum alloy material was
calibrated at 70.14 GPa. Measurements were obtained using edge-detection
methods and close-range photogrammetry techniques. ............................................ 39
Figure 2.8: Rotation computation from the mollified displacement measurements. ....... 40
Figure 2.9: the ARAMIS system of the GOM Company ................................................. 44
Figure 3.1: Internal force equillibrium in Euler-Bernoulli beams subjected to flexure. ... 74
Figure 3.2: Identified damage indices of a simply-supported beam using the
equilibrium gap method. (a): no noise, (b): 2.5% noise, (c): 5% noise, (d): 10%
noise. ......................................................................................................................... 87
Figure 3.3: Comparison of the identified damage indices of a simply-supported beam
using equilibrium gap and data discrepancy formulation. ........................................ 88

xiii
Figure 3.4: Identified stiffness factor distribution for a simply-supported beam with
constant stiffness using the data discrepancy functional method ............................. 89
Figure 3.5: Identified stiffness factor distribution for a simply-supported beam with
parabolic stiffness variation. ..................................................................................... 90
Figure 3.6. The cantilever beam with a distributed damage. ............................................ 91
Figure 3.7. Damage detection of the cantilever beam with distributed damage using
the equilibrium gap method. ..................................................................................... 92
Figure 3.8. Identified stiffness factor distribution of the cantilever beam with
distributed damage using the data discrepancy formulation. .................................... 92
Figure 3.9. Performance of the adjoint based method for solving the data discrepancy
problem, (a) convergence rate, (b) influence of the initial guess, (c) iteration
process for initial guess EI0 and (d) iteration process for intial guess 1.2 EI0. ......... 94
Figure 3.10: Uniform cantilever beam with a saw-cut damage ........................................ 95
Figure 3.11: Damage detection of saw-cut beam using the equilibrium gap method ....... 96
Figure 3.12: Identified stiffness factor distribution of the saw-cut beam using the data
discrepancy formulation. ........................................................................................... 96
Figure 3.13. The cantilever beam with three saw-cuts damage. ....................................... 97
Figure 3.14. Damage detection of the beam with three saw-cuts using the equilibrium
gap method. ............................................................................................................... 98
Figure 3.15. Identified stiffness factor distribution of the beam with three saw-cuts
using the data discrepancy formulation. ................................................................... 98
Figure 3.16. Cantilever beam with double saw-cuts and a distributed damage. ............... 99
Figure 3.17. Damage detection of the beam with saw-cuts and step damage using the
equilibrium gap method. ......................................................................................... 100
Figure 3.18. Identified stiffness factor distribution of the beam with saw-cuts and step
damage using the data discrepancy formulation. .................................................... 100
Figure 4.1: Flowchart of material parameter identification using optimization-based
FE-model updating .................................................................................................. 119
Figure 4.2: Plate with a hole under tension ..................................................................... 155
Figure 4.3: Plasticity range in the final loading stage ..................................................... 156

xiv
Figure 4.4: the bearing cap .............................................................................................. 162
Figure 4.5: photo of the bearing cap on the testing machine and two cameras taking
images ..................................................................................................................... 163
Figure 4.6: FE model of the bearing cap......................................................................... 163
Figure 4.7: Horizontal strain μx simulated by the FE model .......................................... 164
Figure 4.8: typical stress-strain curves for cast iron materials under tension and
compression ............................................................................................................ 165
Figure 4.9: a bilinear approximation model for cast iron material ................................. 165
Figure 4.10: typical images from a DIC test result in ARAMIS; data measured inside
the red rectangle are used in the identification pocess ............................................ 166
Figure 4.11: the sensitivity of the identification of one parameter E. (Left: the
sensitivity surface of identified E with respect to the errors in the x- and y-
translation; Right: sensitivity of the surface of the objective function with respect
to the errors in the x- and y- translation) ................................................................. 173
Figure 4.12: the sensitivity of the identification of four parameters Et, Ec, ϵt, ϵcand the
objective function. ................................................................................................... 174
Figure 5.1: The simulated strain contours of a rubber block using COMSOL ............... 193
Figure 5.2: The engine mount and the DIC test using the ARAMIS DIC system .......... 197
Figure 5.3: The geometry model and finite element model of the engine mount ........... 198
Figure 5.4: The DIC measurements of displacement in the 7.8 kN load case ................ 202
Figure 5.5: The FE simulation of displacement at the 7.8 kN load case using
identified Mooney-Rivlin model ............................................................................. 202
Figure 5.6: The experimental and simulated load-displacement curves ......................... 203
xv
LIST OF SYMBOLS, ABBREVIATIONS AND NOMENCLATURE
Abbreviations Definition
CONDOR COnstrained, Non-linear, Direct, parallel Optimization using trust
Region method for high-computing load function
DFO Derivative-Free Optimization
DIC Digital Image Correlation
DOF Degree Of Freedom
FEM Finite Element Method
FRF Frequency Response Function
LCA Linearized Covariance Analysis
LS Least-Squares
RSM Response Surface Methodology
TV Tikhonov-Total Variation
VFM Virtual Fields Method
V&V Verification and Validation
Symbols Definitions
B The left Cauchy-Green tensor
C The right Cauchy-Green tensor
𝒅 Test data set
𝐸 Modulus of elasticity
𝒇 Force vector in FEA
𝑓(𝑥) A function
F Deformation gradient
𝑮 System matrix in the equilibrium gap method
𝐼𝑀 The relative offset measure
𝐽 Objective function to be minimized
𝐽𝛿𝑓(𝑥) Mollifier of function 𝑓(𝑥)
𝑱 𝜽 Jacobian evaluated at 𝜽
𝑲, 𝒌𝑖 Stiffness matrix and element stiffness matrix in FEA
𝑷 Covariance matrix
T The first Piola-Kirchhoff stress tensor
𝒖 Displacement vector
𝑣 Deflection of a beam
𝑊 The strain energy function
𝒙 Coordinates
𝛼 Tikhonov regularization parameter
𝛿 The mollifier‘s radius
Φ 𝛉 The regularization function
𝝀 Lagrangian multipliers

xvi
𝜃 Rotation angle of a beam
𝜽, 𝜃𝑖 Parameter vector and its components
Ω A region or a subset
𝝈 Cauchy stress
Finite element assembly operator
1
CHAPTER ONE: INTRODUCTION
“The mere formulation of a problem is far more essential than its solution, which may be
merely a matter of mathematical or experimental skills. To raise new questions, new
possibilities, to regard old problems from a new angle require creative imagination and
marks real advances in science.” Albert Einstein
1.1 General
Traditional techniques in experimental mechanics rely on displacement or strain
transducers carefully placed in a small number of positions on the surface of the tested
specimen. The data usually consist of series of test data correlated with the applied load
and the measured field (usually a displacement or strain component). The recent
development of new technologies combining low-cost CCD cameras and computer vision
led to novel experimental methods to assess solids and structures. Non-contact
measurement techniques are now becoming affordable for research and development
purposes in laboratories as well as for on-site monitoring of structures.
Digital image correlation (DIC), moiré and speckle interferometry, and grid
methods are among the many new technologies that can be utilized in the field of
experimental mechanics. The fundamental shift in the possibilities offered by these new
technologies is related to the spatial properties of the collected data. For example, a
typical DIC test system commonly has the capability of collecting up to 10,000
independent displacement measurements from the surface of the specimen. The large
amount of information available to the experimentalist opens new horizons that would

2
not be possible using traditional transducers. For example, in the context of constitutive
laws identification, the geometry and the boundary conditions must be very simple when
traditional transducers are used, so that an analytical solution of the stress/strain field is
possible; the stress and strain fields must be homogeneous in order to determine the
material properties. Consequently, the identification of constitutive laws requires more
than one test, since only the mechanical properties associated with the mechanisms
activated during the test can be identified. When non-contact measurement techniques
are used along with the finite element method (FEM), however, the need for simplified
loading and boundary conditions is relaxed. Non-contact measurement techniques with a
single test set-up can replace the large number of test set-ups involving various
combinations of experimental parameters that are necessary when local transducers are
used.
Full-field displacement measurements allow much greater flexibility as they
provide very rich experimental data and allow the use of tests under non-homogeneous
conditions. However, the large amount of data produced by full-field measurement
techniques requires suitable computational methods to extract the information
encapsulated within the non-homogeneous displacement and strain fields. The effort to
integrate new measurement technologies in experimental mechanics has introduced a
completely new research area, referred to as inverse problems in solid mechanics.
Full-field displacement measurements can also be integrated with numerical
simulation techniques such as FEM to build health monitoring systems for structures in
service. The methodology consists of incorporating the measured displacement or strain
field parameters with the mathematical model of the structure in order to estimate the

3
location and severity of damage. The formulation of a health monitoring problem as an
inverse problem has become a very important subject that has attracted a great deal of
interest and research activity over the last decade.
This thesis concerns two aspects of research based on the use of full-field
measurement techniques and finite element simulations for the health monitoring of
structures and for constitutive law identification. In the first part of this work, we
formulate the problem of reconstruction of the stiffness of beams through the
measurement of displacements along the beam. In the second part of this thesis, we study
the implementation of this material identification problem using DIC to measure the
displacement and strain on the surface of a specimen.
Each of these issues is of the utmost importance in practice. Currently, there is an
increasing demand for effective methods to identify complex nonlinear material models.
The competitive industrial environment leads engineers to develop better, but also more
complex models of complicated systems. These models are generally difficult to define,
and the work presented here is a step towards the development of a systematic approach
for material characterisation. Furthermore, the problem of reconstruction of a beam‘s
stiffness can be considered as one of the fundamental problems in the health monitoring
of these important structural elements.
From a mathematical point of view, the problems mentioned above can be
considered as two examples of inverse problems. However, the stiffness reconstruction
of beams is typically classified as an ill-posed functional identification problem, whereas
the identification of material properties is considered a well-posed parameter
identification problem. Traditional problems in structural mechanics consist of

4
evaluating the response of the studied structure to a known force or displacement where
the basic parameters, such as the geometry of the structure and the mechanical properties
of the materials, are known. Inverse problems, on the other hand, seek to determine
unknown geometrical and/or mechanical parameters from the known measured responses
of the system.
A direct procedure can rarely compute material and geometric properties from
measurable responses, such as displacements or strains. Inverse methods usually
formulate the problem as a minimization of error function between measured and
computed responses; this is also called an estimation function. These inverse procedures
usually involve finite-element (FE) model-updating techniques.
1.2 Optical full-field measurements using digital cameras
The damage identification methods developed in this thesis require a technique to
measure the displacements during static loading tests. In optical measurements, objects
are measured without being touched. A novel procedure based on edge-detection was
devised to measure the quasi-continuous deflection of beams under given loading, and is
presented in Chapter 2. This method is based on the close-range photogrammetry
technique made possible through recent developments of image processing algorithms
and modern digital cameras. These studies demonstrate that modern consumer cameras
can be used in optical measurement procedures, offering an additional advantage in terms
of cost.
The studies of material parameter identification presented in this thesis employ
DIC to provide full-field displacement/strain measurements for the surface of complex
5
3D components as input for the inverse analysis. DIC is an image analysis technique
based on grey-value digital images that can determine the contour and the displacements
of an object under load in three dimensions with sub-pixel precision. This technique is
already mature and commercialized; Chapter 2 provides a brief description of the DIC
technique, and the commercial DIC system employed in the current work.
1.3 Damage identification based on static tests
The problem of stiffness reconstruction is presented in Chapter 3. In this chapter,
we are particularly interested in formulating the identification of damage from static
measurement. Static tests are the most direct way of evaluating the load-bearing capacity
of structures. All structures throughout their service undergo a continual and ongoing
accumulation of damage and decreased loading capacity. Consequently, damage
identification is an important aspect of safety and functionality, and has attracted
intensive research efforts over the past twenty years.
Two computational procedures using static deflection measurements to
reconstruct the stiffness distribution, and to detect regions containing damages in Euler-
Bernoulli beams, are presented and compared in Chapter 3. The first proposed
formulation is based on the principle of the equilibrium gap along with a FE
discretization, and the mathematical problem leads to an over-determinate linear system.
The solution is obtained by minimizing a regularized function with a Tikhonov Total
Variation (TTV) regularization scheme. The second proposed formulation is defined as a
minimization of a data discrepancy functional between measured and model-based
deflections. The optimal solution is obtained using a gradient-based minimization

6
algorithm and the adjoint method to calculate the Jacobian. The two proposed
methodologies are validated using experimental data.
1.4 Material parameter identification using full-field measurements
Modern design and performance evaluation requires realistic simulations of
structural and material behaviour, and nonlinear FE simulation has become a fundamental
engineering tool. FE approaches are increasingly popular among engineers from
different industries. Constitutive parameters associated with nonlinear models are not
always available in standard material databases; therefore, engineers need to identify
them experimentally.
Although the identification of plasticity material parameters is the focus of the
current work (presented in Chapter 4), this study aims to provide a unified identification
methodology. In light of recent developments in direct optimization and regression
analysis, particularly the verification and validation of the material parameter
identification using statistical tools, this thesis proposes novel procedures for the
identification of material parameters in any given model.
The problem of material parameter identification is formulated as a nonlinear
regression problem using DIC measurement data as the input. The study presented in
Chapter 4 includes the following topics: definition of the inverse problem; a brief
description of the derivative-free optimization scheme; discussion of the identifiability
issues related to the inverse approach; and the application of statistical inference with a
non-dimensional measure of response fit.

7
Solution of the material parameter identification problem was performed by
minimizing a least-squares (LS) function measuring the gap between inhomogeneous
displacement fields obtained from DIC measurements and FE simulations. Specifically,
a LS formulation of a cost function consisting of a norm for the discrepancies between
the experimental data and the simulated data was minimized; the simulated data was
obtained by the FE method using commercial software. Direct, derivative-free
optimization methods, which treat the FE simulation as a black-box procedure, identified
the material parameters simultaneously. Particular attention was paid to the
identifiability and numerical stability issues of this approach, and methods for verifying
and validating the identified results are discussed. In particular, consideration is given to
the identifiability issue in the deterministic and the statistical sense. Sampling-based
statistical inference derived from nonlinear regression theory was adopted to quantify the
quality of the identification procedure, the rationale being that DIC provides a large
amount of data, and thus allows the use of statistical inference. Sampling-based
inference and sensitivity analysis were used to check the adequacy of the identification
solution, thus avoiding Type-2 errors (i.e., the acceptance of incorrect results). Several
recommended numerical approaches for validating the identification results are presented.
Linearized covariance analysis (LCA) was adopted to check the fit of the parameters. An
index derived from the response surface geometry was used to check the response fit, and
relative curvature measures proposed to check the adequacy of LCA. The proposed
validation procedure is primarily intended to detect false positives (i.e., Type-II errors).
The proposed approach avoids using the gradient of the cost function in the
identification process, and has the benefit of allowing the use of any FE code as a black
8
box to solve the direct problem. The quantification of the quality of the result is of
paramount importance to the practical application of any identification methodology.
1.5 Hyperelasticity model parameter identification for rubber and rubber-like solids
The mechanical behaviour of rubber-like materials is usually characterized by a
strain energy density function 𝑊; the parameters of the 𝑊 function may be considered as
material parameters. Traditional laboratory techniques require several tests — using
different homogeneous deformation modes and standard cut-out samples — to determine
the appropriate strain energy form and parameters.
The general approach for material parameter identification (described in Chapter
4) was used to determine the parameters of strain energy functions (𝑊) with DIC test
data collected for the original structural components. In this approach, whole field
displacement/strain on the surface of components is measured by a DIC-based technique,
which provides massive amounts of experimental data in a single test. The DIC-based
methodology for parameter identification in hyperelasticity models (presented in Chapter
5) replaces the performance of multiple tests on simple-shape specimens with supposed
uniform state variable distributions that are required by traditional techniques.
9
CHAPTER TWO: OPTICAL MEASUREMENT USING DIGITAL CAMERAS:
DIGITAL IMAGE CORRELATION AND CLOSE-RANGE PHOTOGRAMMETRY
“It is necessary to measure everything that can be measured and to try making
measurable what isn’t as yet.” Galileo
2.1 Introduction
The technique of obtaining information from photographs is called photogrammetry. The
most important feature of photogrammetry is that objects are measured without being
touched. The development of photogrammetry has a long history, particularly the branch
related to aerial photogrammetry. Currently, with the development of computer and
digital photography, photogrammetric technology has changed dramatically from purely
optical equipment to fully digital workflow (i.e. without any type of film or plotter), and a
new branch — close-range photogrammetry, also termed vision metrology or
videogrammetry, is developing rapidly. Furthermore, inexpensive digital consumer
cameras have reached a high technical standard with good geometric resolution, and can
replace expensive metric cameras for close-range photogrammetry as long as the
accuracy/precision required for the measurement is not too high (Linder, 2009).
While close-range photogrammetry is used primarily for field measurements, the
application of optical measurements in an experimental setting has aroused interest. For
example, holographic interferometry, moiré and moiré interferometry, and speckle
methods are among the optical techniques available for strain measurements. An

10
innovation, digital image correlation (DIC), developed in the 1980s is now
commercialized for use in industrial processes.
Close-range photogrammetry and DIC developed independently from each other.
Nevertheless, DIC can be regarded as a branch of close-range photogrammetry. The
research presented in this thesis uses digital cameras to optically measure beam deflection
profiles and full-field displacements/strains on the surface of specimens and components
for inverse identification processes. This chapter briefly reviews some of the concepts
and procedures involved in close-range photogrammetry and its application to civil
engineering. Two novel techniques proposed for the measurement of beam deflection
profiles in a laboratory setting are presented: 1) an edge-based technique using edge-
detection suitable for beams with a clean surface and smooth edges; and 2) a surface-
based technique using image correlation. Finally, DIC methods are briefly described.
The novel methods are presented in the following sections: Section 2 describes
the new approach: edge-based deflection measurement of beams is introduced with
example. The data of this example is served as the input to the new damage
identification method to be introduced in Chapter 3. In Section 3, the fundamental theory
and characteristics of DIC measurement is described. Beam deflection measurement
using image correlation is presented in Section 5, with example of a concrete beam.
2.2 Close-range photogrammetry and applications in civil engineering
2.2.1 Overview
The primary purpose of a photogrammetric measurement, both aerial and
terrestrial, is the reconstruction of a three-dimensional object in digital form (coordinates

11
and derived geometric elements). For every image point, values in the form of
radiometric data (intensity, grey value, and color value) and geometric data (position in
image) can be obtained.
Close-range photogrammetry differs from traditional far-field photogrammetry
and image-based measurement systems as the primary task in close-range
photogrammetry is to measure the three-dimensional coordinates of targets placed on all
areas of interest on a structure or system, whereas the primary tasks in traditional
photogrammetry and image-based measurements are feature extraction, object
identification, and metrological measurement at relatively lower accuracy (Heijden,
1994). Thus, the key to the technique of close-range photogrammetry is the precise
calculation of the positions of each of the targets in the field of view; see (Luhmann,
Robson et al., 2006) for an overview of traditional methods and models in close-range
photogrammetry.
Laser-scanning measurement is an alternative to photogrammetry. The advantage
of laser-scanning methods is that the object can be low-textured while photogrammetric
techniques often require highly textured objects. On the other hand, laser-scanning
techniques are time-consuming and usually very expensive.
Visible patterns are a very important feature of photogrammetry, particularly
patterns that can be identified using pixel or color information. Patterns targeted in close-
range photogrammetry are usually simply attached metallic stickers. Popular types of
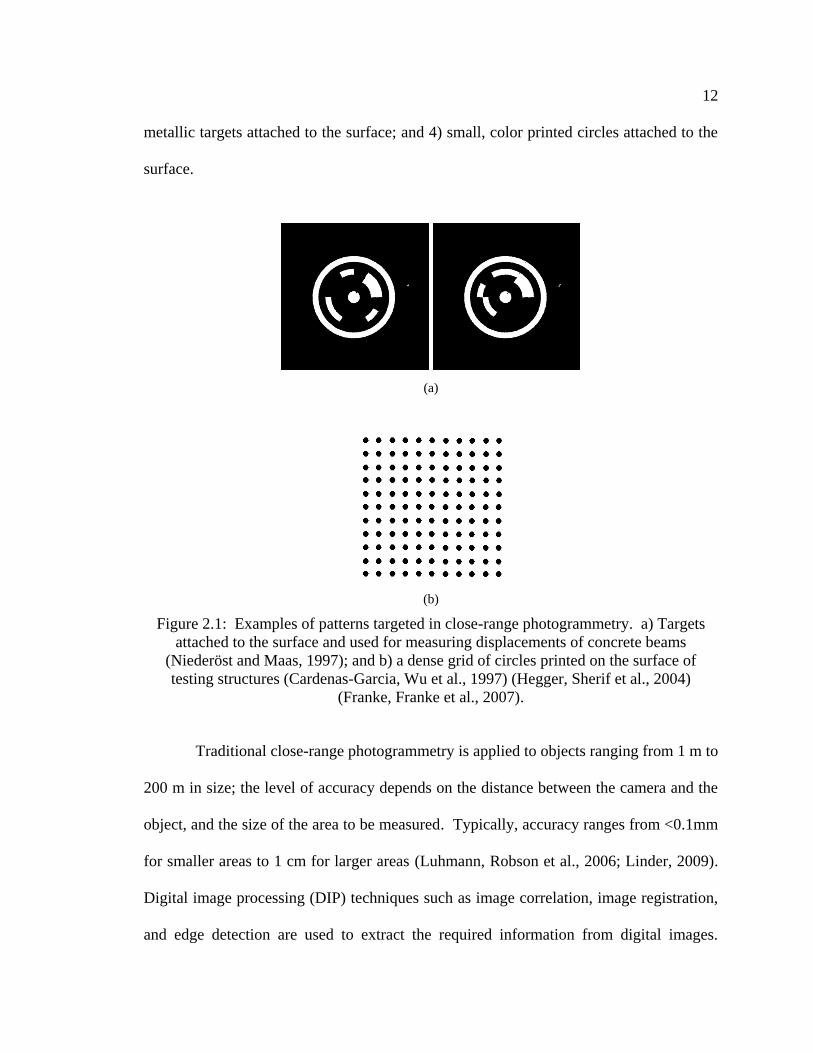
surface patterns targeted in photogrammetry are illustrated in Figure 1 and may include:
1) black and white sprays on the surface; 2) patterns etched onto the raw material; 3)
12
metallic targets attached to the surface; and 4) small, color printed circles attached to the
surface.
(a)
(b)
Figure 2.1: Examples of patterns targeted in close-range photogrammetry. a) Targets
attached to the surface and used for measuring displacements of concrete beams
(Niederöst and Maas, 1997); and b) a dense grid of circles printed on the surface of
testing structures (Cardenas-Garcia, Wu et al., 1997) (Hegger, Sherif et al., 2004)
(Franke, Franke et al., 2007).
Traditional close-range photogrammetry is applied to objects ranging from 1 m to
200 m in size; the level of accuracy depends on the distance between the camera and the
object, and the size of the area to be measured. Typically, accuracy ranges from <0.1mm
for smaller areas to 1 cm for larger areas (Luhmann, Robson et al., 2006; Linder, 2009).
Digital image processing (DIP) techniques such as image correlation, image registration,
and edge detection are used to extract the required information from digital images.

13
General information related to: a) basic procedures; b) digital images; c) image
coordinate systems and orientation; and d) reference or control points are briefly
summarized in the following pages.
Close-range photogrammetric measurement procedures
The fundamental procedures of a close-range photogrammetric measurement
include the preparation and recording of images, pre-processing, orientation calculations,
measurement, and image analysis. The steps in the general protocol for close-range
photogrammetry can be summarized as follows:
1. Preparation and recording of images
a) Application of surface targets.
b) Determination of control points or scaling lengths.
c) Image recording.
2. Pre-processing
a) Computation: calculate reference point coordinates and/or distances
from survey observations.
3. Orientation and measurement calculation
a) Measurement of image points: identification and measurement of
reference and scale points, including tie points (points observed in
multiple images).
b) Bundle adjustment: simultaneously calculate both interior and exterior
orientation parameters as well as the object point coordinates required
for subsequent analysis.
c) Removal of outliers.
14
4. Measurement and analysis
a) Single point measurement: identify the pixel coordinates of each point
to be measured in the image, and transform to physical coordinates.
b) Calculate displacements.
c) Field measurement: with interpolation and smoothing, measured points
can be connected and interpolated to make a field measurement.
Specific experimental procedures for the research presented in this thesis are
described in later sections. Some general concepts related to the composition of digital
images, image coordinate systems and the use of reference points to establish their
relationship to object coordinates (orientation), and digital imaging systems are
introduced in the following pages.
Digital images:
The essential advantage in using digital images over traditional photos is the ease
in image-processing, such as image enhancement, deblurring, edge-sharpening and de-
noising, thus attains the maximal utilization of information contained in images. The
digital image is actually a rectangular array composed of picture elements called pixels.
Each pixel is assigned an intensity value meant to characterize the color of a small
rectangular segment of the scene. A high-resolution picture can contain 5 to 10 million
pixels, while a low-resolution picture small picture may contain comparatively few pixels
(e.g. 256 × 256 = 65536 pixels). Digital image processing is thus notorious for its
intensive computation.
Grey-scale images are typically recorded by means of a charge-coupled device
(CCD), an array of tiny detectors arranged in a rectangular grid, which is able to record
15
the amount, or intensity, of the light that hits each detector. Thus, we can think of a grey-
scale image as a rectangular 𝑚 × 𝑛 array with entries that represent light intensities.
A digital image may be considered as a matrix made up of elements that are
positive integers representing surface brightness. Each of these elements is called a pixel,
which has a specific value in a range that depends on the digital camera and the image
acquisition electronics (e.g. for an 8-bit system, there are 256 grey values ranging from 0-
255). Measurements, such as the 2D in-plane incremental displacement field, can be
assessed by comparing successive digital images. Generally, grey-scale images of this
type are used in image processing for edge detection, image registration, and image
correlation.
Metric cameras are monochrome; using a monochrome camera has several
advantages over a digital camera with Red–Green–Blue (RGB) color sensor. A
monochrome sensor has no color filter in front of the sensor. This increases the
International Organization for Standardization (ISO) rating of the sensor to 200 as
compared to ISO 80 for the color version of the same sensor. All pixels are sensitive to
the same spectrum of light. The information at each pixel location is not interpolated on
a monochrome sensor. Pixels of a typical RGB color sensor are arranged in a one layer
matrix of which 50%, 25%, and 25% are masked green, red, and blue, respectively.
During post-processing this single layer of pixels is interpolated to a triplet of layers,
meaning that 50%, 75%, and 75% of the pixels representing the green, red, and blue
channels of the image, respectively, must be interpolated from pixels with a different
color. This interpolation can lead to artefacts in the images, reducing the geometric
quality of the image. Saving the three layers in separate color channels triples the size of

16
one image to 18 MB for a sensor with 6 million pixels and 8 Bit color depth, as compared
to a monochrome image, while no information is added. Image correlation software
typically employs only one color channel of an image for analysis (ERDAS, 2002). This
implies that 100% of the original information of a monochrome sensor can be utilized by
the software while a single layer of a colour image will carry at most only 50% of the
original resolution of an RGB sensor. At the same time, image file size is reduced and
light sensitivity of the sensor is increased when using a monochrome camera. An image
size of 6MB allowed analysis to be performed on uncompressed Tagged Image File
Format (TIFF) images. The image compression in JPEG format may bring more blurring
and loss of information (Li, Yuan et al., 2002).
However, consumer cameras typically use color sensors. Color images in the
RGB format can be separated into three grey-scale images or matrices; one of these can
then be used for image processing. Alternatively, one can calculate a mixed
monochrome image matrix using the following well-known formula (Linder, 2009):
grey value = 0.3 × red(R) + 0.11 × green(G) + 0.59 × blue(B)
Generally, this calculation can be easily performed with image-processing
software by activating the option ―mixed image‖ when importing images (Linder, 2009;
Umbaugh, 2011).
World and camera coordinates
In measuring the position and orientation of objects with computer vision
methods, we have to couple the coordinates of the camera system (coordinates of the
image plane) to some reference coordinates (world coordinates) in the physical space.
17
The coordinates of the camera system are denoted 𝒙 = 𝑥, 𝑦, 𝑧 𝑇 . Usually the 𝑧
axis is aligned with the optical axis orthogonal to the image plane. The world coordinates
are denoted as 𝑿 = [𝑋,𝑌,𝑍] . The two coordinates are coupled by two linear
transformations: a translation and a rotation. The translation is a shift of origin and can
be described with a vector 𝒕. If the two origins coincide, the remaining differences can
be neutralized by rotations. Here, we have also three degrees of freedom: 𝜙,𝜓, and 𝜃.
Mathematically, rotation corresponds to multiplication of the coordinate vector with a
3 × 3 orthogonal matrix 𝑹. Clearly, the matrix depends nonlinearly on the three rotation
parameters. As a whole, the coupling between world coordinates and camera coordinates
is given by the following expression: 𝒙 = 𝑹(𝑿 − 𝒕), i.e. the ideal imaging process is a
linear transformation between world coordinates/object points and sensor/image
locations. However, there are potential for distortions when using this ideal pinhole
model to predict image locations.
Pin-hole camera model
Perspective projection is a simple model describing the image formation with a
lens system; it is equivalent to a pinhole camera model (Heijden, 1994). Such a model
consists of a non-transparent plane with a small hole. Parallel to this plane, at a distance
𝑑, the image plane is located. Light emitted from the surfaces of objects in the scene
passes through the hole and illuminates the image plane. If the pinhole is small enough,
an infinitesimal small surface patch of an object is mapped onto a small spot of light at
the image plane. The collection of all surface patches will give rise to an irradiance
called image. In the pinhole model, each point in the image plane corresponds exactly to
one surface patch in the scene.

18
The pinhole camera model is based on the principle of collinearity, where each
point in the object space is projected by a straight line through the projection center into
the image plane. Usually, the pinhole model is a basis that is extended with some
corrections for the systematically distorted image coordinates. The most commonly used
correction is for the radial lens distortion that causes the actual image point to be
displaced radially in the image plane.
Image coordinate system (pixel coordinate system) and orientation
In principle, the one-to-one correspondence between the physical and image
coordinates of the object has to be established via a camera/lens calibration procedure.
The image coordinate system described above is defined by a two-dimensional image-
based reference system of rectangular Cartesian coordinates. Its physical relationship to
the camera is defined by reference points.
Camera calibration in the context of three-dimensional machine vision is the
process of determining the internal camera geometric and optical characteristics (intrinsic
parameters) and/or the 3-D position and orientation of the camera frame relative to a
certain world coordinate system. In geometrical camera calibration the objective is to
determine a set of camera parameters that describe the mapping between 3-D reference
coordinates and 2-D image coordinates. The whole calibration procedure may include
control point extraction from images, model fitting, image correction, and an additional
step to compensate for radial and tangential distortions of the lens. Correction of other
error sources in feature extraction, like changes in the illumination, may also be required,
especially in field measurements. Various methods for camera calibration can be found
from the literature.

19
Physical camera parameters are commonly divided into extrinsic and intrinsic
parameters. Extrinsic parameters are needed to transform object coordinates to a camera
centered coordinate frame. In multi-camera systems, the extrinsic parameters also
describe the relationship between the cameras. The intrinsic camera parameters usually
include the effective focal length, scale factor, and the image center also called the
principal point. These coefficients can be typically obtained from the data sheets of the
camera and frame-grabber.
Methods where the camera model is based on physical parameters, like focal
length and principal point, are called explicit methods. In most cases, the values for these
parameters are in themselves useless, because only the relationship between 3-D
reference coordinates and 2-D image coordinates is required. In implicit camera
calibration, the physical parameters are replaced by a set of non-physical implicit
parameters that are used to interpolate between some known reference points.
In traditional aerial and terrestrial analogue photogrammetry, orientation is
performed with the use of fiducial marks superimposed on the images and their nominal
coordinates in the camera calibration certificate. Measuring (digitizing) the fiducial
marks can set up the transformation between camera and pixel coordinates. Exterior
orientation must be carried out for each image independently. It can be manually
performed by measuring control points (reference points) or automatically using a
method called bundle triangulation. The following section describes the use of reference
points in establishing exterior orientation.
In these experiments, interior orientation was ignored, thus no lens calibration for
lens distortion or check of camera quality was conducted. Measurements presented in

20
this thesis were taken in a laboratory setting, the camera used was new, and the distance
between the object and the camera was short. Our findings show that the accuracy of the
measurements was sufficient without accounting for interior orientation. Exterior
orientation was determined using marks (reference points) with known (pre-measured)
coordinates.
Determining the exterior orientation of an image in an automated fashion is
considerably more difficult to implement than line following or driveback. The
orientation of an image is typically determined by identifying four or more points of
known approximate XYZ coordinates. Once these have been identified, the camera
exterior orientation can be computed using a closed-form space resection. To automate
the space resection procedure it is necessary to use exterior orientation devices and/or
coded targets. Examples of these are shown in Figures 2.1a and 2.1b. If either an
exterior orientation device or coded targets are seen in any image they are identified and
decoded, and if enough object points with approximately known 3D coordinates are
available the exterior orientation can be completed (and even automated with the so-
called intelligent camera devices).
Reference points (control points)
Ultimately, the objective of determining the orientation of known coordinates is to
calculate the relationship between all image and object coordinates. In order to determine
the orientation, several control points printed on the surface of the object must be
measured (coordinated). A control point is a point on an object that is represented in the
image and for which the three-dimensional object coordinates (x, y, z) are known. After
obtaining suitable grey-scale or mixed monochrome digital images of the object, we

21
identify these control points in the image, and determine the coordinates of the control
point in the array of image coordinates.
Plane affine transformation can be used to obtain a two-dimensional
transformation of the image based on the relationship between the object and image
coordinates of the control points (Heijden, 1994). Over-determination of object reference
points is required for plane affine transformation; at least three control points are
necessary. In general, in order to obtain a stable over-determination, the more control
points used, the better the outcome. The research presented in this thesis required at least
five well-distributed control points (where three well-distributed control points would
form a triangle, not a line).
Optimal accuracy is achieved in areas contained within the control points.
Consequently, if multiple cameras are needed to photograph a single object, it is
beneficial to include as many identical reference points as possible in neighbouring
images. Two types of reference or control points can be used: 1) signalized (or targeted)
points that have been applied to the surface of the object; and 2) the object‘s natural
features. Control points need to be highly visible in the images captured for
photogrammetry by digital imaging systems. The following section provides a brief
overview of the camera features needed for photogrammetric measurement.
Digital imaging systems
Traditional photogrammetry uses metric cameras to acquire images for analysis.
A metric camera is characterized by stability rather than flexibility, and has the following
features: a known and stable interior orientation, a fixed focal length (i.e., no zoom
capability), good lens correction, and a central shutter. Recently, with the rapid

22
development of digital photography, consumer-grade digital cameras have become
commonplace; there is significant potential for their use in photogrammetric applications
when calibrated (Cronk, Fraser et al., 2006). In general, the differences between metric
and consumer cameras are due to the quality and stability of the camera body and the
lens. Consumer cameras often have a zoom lens with large distortions that are
inconsistent (e.g. can vary with focal length); thus, it is difficult to correct these
distortions using calibration procedures (Linder, 2009).
Linder notes that a consumer-grade camera suitable for use in photogrammetric
measurement should have the following properties (Linder, 2009):
It should be possible to set the parameters for focal length, focus, exposure
time and f-number manually.
The resolution needs to be sufficient for photogrammetry. Generally, the
higher the number of pixels, the better the resolution; however, small chips
with a large number of pixels have a very small pixel size, and are not very
light sensitive. The signal-to-noise ratio is poor, particularly for high ISO
values (>200) and in dark parts of the image. In general, lighting
requirements are more demanding when using consumer-grade cameras.
It should be possible to deactivate the auto focus, and manually set the
distance parameters.
The digital images should be saved in a standard format (e.g. JPEG or TIFF).
The image compression rate must be selectable; the best option is to turn off
compression to minimize possible loss of quality.
23
Accessories to reduce unwanted movement and optimize lighting should
include a tripod, a remote release control, and an adapter for an external flash.
Note that the focal length or pixel size is required for digital image processing and
analysis; pixel size can be obtained from the calibration process. In order to obtain
accurate measurements using consumer-grade cameras, usually both interior orientation
and exterior orientation determinations are required.
Captured image may be corrupted by noise due to low lighting conditions, which
affect the sensors, or due to the noise generated by the electronic circuitry of the imaging
hardware. Impulse noise is also commonly referred to as salt and pepper noise. Blurring
is caused by a relative motion between camera and object or out of focusing or due to
corruption by noise. Blurring is typically modeled by linear operation on the image.
Hence restoration is also known as inverse filtering or deconvolution. Pre-processing
including deblurring or restoration may be required in photogrammetry.
Illumination
The particular type of image formation we discuss is the formation based on
radiant energy, reflection at the surface of the objects, and perspective projection. The
information of the scene is found in the contrasts (local differences in irradiance).
Carefully choosing the illumination of the objects is important in enhancing the contrasts
for accurate measurements. The purpose of front illumination is to illuminate the objects
such that the reflectance distribution of the surface becomes the defining features in the
image. Many applications require this type of illumination: detection of flaws, scratches
and other damages on the surface of material, DIC, etc. In outdoor applications, specular
illumination or diffuse illumination may be considered.

24
2.2.2 Applications of close-range photogrammetry in civil engineering
Measurements in civil and mechanical engineering, particularly structural
engineering applications have been made without physical contact by using
interferometry, moiré technology, holographic and laser speckle interferometry, and
theodolite measurement systems (Durelli and Parks, 1970) (Vest, 1979) (Ransom, Sutton
et al., 1987) (Post, Han et al., 1994). Recent technological improvements in image
acquisition and image analysis opened new possibilities in many fields of engineering
and science; the use of close-range photogrammetry in civil engineering is the focus of
recent research. Early applications of this technique at large civil engineering sites
included measurements of excavation sites and damage assessment after an earthquake
(Teimouri, Delavar et al., 2008). Optical methods and image analysis were applied to the
observation of cracks in mortar and concrete; the analyses included RGB combination,
image filtering, binarization, and shape and fractal analysis of crack patterns (Ringot and
Bascoul, 2001).
Numerous laboratory and field studies have been conducted. These include a
pilot study of beam deformation measurement using digital close-range terrestrial
photogrammetry. Jauregui et al reported the photogrammetric measurement of global
deflected shape of structures, which is not practical using traditional instruments
(Jauregui, White et al., 2002) (Jauregui, White et al., 2003); in this exercise, the initial
camber and dead-load deflection of pre-stressed concrete bridge girders were measured
photogrammetrically and compared with level rod and total station readings, and also
with dead-load deflection diagrams. Niederost et al. reported using a digital still video
camera to measure deformations occurring during the dehydration process of concrete
25
parts over several months where displacement vectors were obtained through tracking
targets (Niederöst and Maas, 1997). Similarly, Maas made photogrammetric
measurements of the 3-D coordinates of signalized targets on a large water reservoir wall
in Switzerland (Maas, 1998). Measurement of concrete cracks using digitized close-
range photographs was reported by several researchers (Barazzetti and Scaioni, 2010)
(Chen, Jan et al., 2001); in these works, edge-detection was used to identify the cracks;
researchers inspected localized changes in the width of cracks. Franke et al. conducted
strain analysis of solid wood and glued laminated timber constructions using close-range
photogrammetry; measurements were made of the progression of deformations, cracks
and deterioration when loading and relieving the specimens (Franke, Franke et al., 2007).
Hegger et al. studied the crack-opening process in pre-stressed concrete beams using a
photogrammetric technique called grid-method (Hegger, Sherif et al., 2004). Whiteman
et al. described the use of digital photogrammetry for measurement of deflections in
concrete beams (Whiteman, Lichti et al., 2002); a precision of 0.25 mm was achieved for
deflections and comparisons were made with linear variable differential transformer
(LVDT) deflection measurements. Other works of metrological digital photogrammetry
include testing of concrete and column (Woodhouse, 1999), thermal deflection of steel
beams (Fraser, 2000), pavement deformation under rolling load (Mills, 2001), and
deformation of a coal dredger (Fraser, 1995). In these tests, retro-reflective targets were
usually attached to and around the beams. Both stable targets on walls and deforming
targets on beams were used.
Consumer-grade digital camera was used for measuring soil erosion, generating
digital elevation models from soil surfaces for a planimetric area of 16𝑚2 with high

26
spatial and temporal resolution (Rieke-Zapp and Nearing, 2005). A consumer-grade
digital camera was used for image acquisition. The camera was calibrated using BLUH
software (Jacobsen, 2000). The program system BLUH is a commercial bundle block
adjustment program that allows camera calibration of the interior orientation including
parameters to account for radial symmetric lens distortion as well as other systematic
deviations of the camera geometry from the frame camera model. Homologous points in
overlapping images were identified with least squares matching.
Photogrammetric analysis of photographs taken from a fixed viewpoint at
different times during the loading process has been applied to soil mechanics experiments
to capture non-homogeneous deformation throughout a test (Desrues and Viggiani,
2004). The photographed surface was textured, the scale of the photograph was
determined from six or more reference marks placed on the specimen side. ,
2.3 Close-range photogrammetry for beam deflection measurement
2.3.1 Overview
Although various close-range photogrammetric techniques have been proposed
and applied to structural engineering problems, human knowledge, experience and skill
still play a significant role in current photogrammetric measurement applications. In
particular, these experiential factors determine the extent to which the reconstructed
model corresponds to the physical object or fulfils the task‘s objectives. On the other
hand, digital image processing (DIP) has achieved a level of maturity, and MATLAB and
public domain DIP programs are widely available (Thyagarajan, 2006) (Semmlow, 2004)
(Umbaugh, 2011).

27
In this thesis, we examined two simple methods for measuring a quasi-continuous
deflection profile of beams in the laboratory by processing camera photographs, and
compared the results with dial-gauge readings and the predictions of elastic beam theory.
The data obtained with these methods can be used as input for inverse damage
identification. In this research, we used consumer-grade cameras obtained in the
marketplace, and the widely available MATLAB image-processing toolbox to process the
images for photogrammetric analysis.
The first method is an edge-based approach; the procedures can be summarized
as:
a) An ordinary consumer-grade camera (Nikon D300S single lens reflex (SLR)
digital camera, with an array of 2848 × 4288 pixels in each RGB image) was
used to take colored photos of the beam with and without loading. The
images were saved as a RGB matrix with the following characteristics:
Size Bytes Data Class
2848×4288×3 36636672 Unit8 array
b) The contrast between structure and background was enhanced using contrast
enhancement in Adobe Photoshop. This step is not necessary, but was shown
to be useful.
c) Since the cameras were not fixed to the ground, there were always small
movements of the camera during photo-capture. The detrimental effects of
camera motion were reduced using image-registration; the image-registration
technique detected camera movement, which was deleted from the calculated
displacements.
d) Image-segmentation and edge-detection were used to identify the continuous
boundary between structure and background. This was the key step in this
procedure. Edge-detection can be done manually, at a very high cost of time
and patience; however, advanced automatic edge-detection techniques have
28
been developed that can do this job quickly (Semmlow, 2004) (Louban, 2009).
Our research found that the performance of automated edge-detection
algorithms depends on the level of contrast between the structure and the
background and automated edge-detection tools varied in their sensitivity to
contrast. For example, in preliminary tests we did not attend to the contrast
between the background and the beam; the MATLAB toolbox methods failed
to reliably detect edges in these images. Another application, the GROWCUT
freeware program (a cellular automata algorithm for edge-detection
[www.shawnlankton.com]), worked well with these images, however.
Consequently, attention should be paid to lighting and background screening
to improve the appearance of the targets in the photographs and enhance the
effectiveness of automatic edge-detection techniques.
e) The detected edges were saved as a black-and-white binary image, which is a
binary matrix in MATLAB. An averaging process called mollification was
used to calculate displacement in pixel coordinates.
f) The displacement solutions in the form of pixel coordinates were transformed
to physical coordinates via homogeneous transformation.
Image-registration
Image registration is the alignment of two or more images so that they are
optimally superimposed. In order to achieve the best alignment, it may be necessary to
transform the images using affine transformations (displacement and rotation). Image
registration can be assisted or unassisted; we need to perform an unassisted image
registration, which relies on an optimization technique that maximizes the correlation
between the images.
Unaided image registration usually involves the application of an optimization
algorithm to maximize the correlation, or some measure of similarity, between the

29
images. The structure in the image and in the loading device moved during the tests
presented in this thesis, but the supporting frame and the wall in the background
remained immobile; therefore, these parts of the fixed background were cut from the
whole picture. The appropriate transformation was applied to one of the images, the
deformed image, and a comparison was made between this transformed image and the
reference image (also termed the base image). The optimization routine seeks to vary the
transformation until the correlation is optimal. In the research presented here, image
registration was used to detect movement of the camera mounted on a tripod.
Segmentation and edge-detection
Image segmentation is the identification and isolation of components of an image
into regions that correspond to structural units. Segmentation is used to isolate the
structure of interest in both the deformed and the reference images, and thus enable the
identification of displacements of the structure. The problems associated with
segmentation have been well-studied and a large number of approaches have been
developed, many specific to a particular type of image (Heijden, 1994). General
approaches to segmentation can be grouped into three classes: pixel-based methods,
regional methods, and edge-based methods. Pixel-based methods are the easiest to
understand and to implement, but are also the least powerful and, since they operate on
one element at a time, are particularly susceptible to noise. Continuity-based and edge-
based methods approach the segmentation problem from different angles: edge-based
methods search for differences while continuity-based methods search for similarities in
the image. The second method is a surface-based approach, in which image correlation is
used to find the displacement of a subset of pixels.
30
2.4 Photogrammetric measurement of beam deflection using an edge-based
approach
The DIP methods described in Section 2.3 are useful tools in making a digital
phtogrammetric measurement. These methods have been extensively developed, but
their wise use and commercialization to make industrial photogrammetric measurement is
still a problem for the future. In this section, we present a procedure for measuring
pseudo-continuous deflection profile of a beam which is based on edge-detection and
other DIP techniques described in Section 2.3.
The experiments presented in this thesis used consumer-grade digital cameras
(rather than expensive metric cameras) for edge-based measurement of beam deflections
via close-range photogrammetry. A photogrammetric technique based on edge-detection
was used in this research. The upper and lower edges of the beam were detected in
digital images taken at different loading stages. The displacements of the two edges were
calculated by comparison to reference images (i.e. digital images recorded when the
beam was unloaded). The average displacement of the beam‘s top and lower edges is
considered representative of the loaded beam‘s deflection.
The consumer-grade camera (Nikon D300S single lens reflex (SLR) digital
camera) used in the present work has the following features; the sensor size of the camera
can be up to 12 megapixels, with an array of 4288 × 2848 pixels in each RGB image.
More than one camera can be used to measure longer beams, with the field of view for
each camera overlapping slightly to ensure image alignment. This technique is becoming
standard procedure in state-of-the-art digital image processing; multiple cameras must be
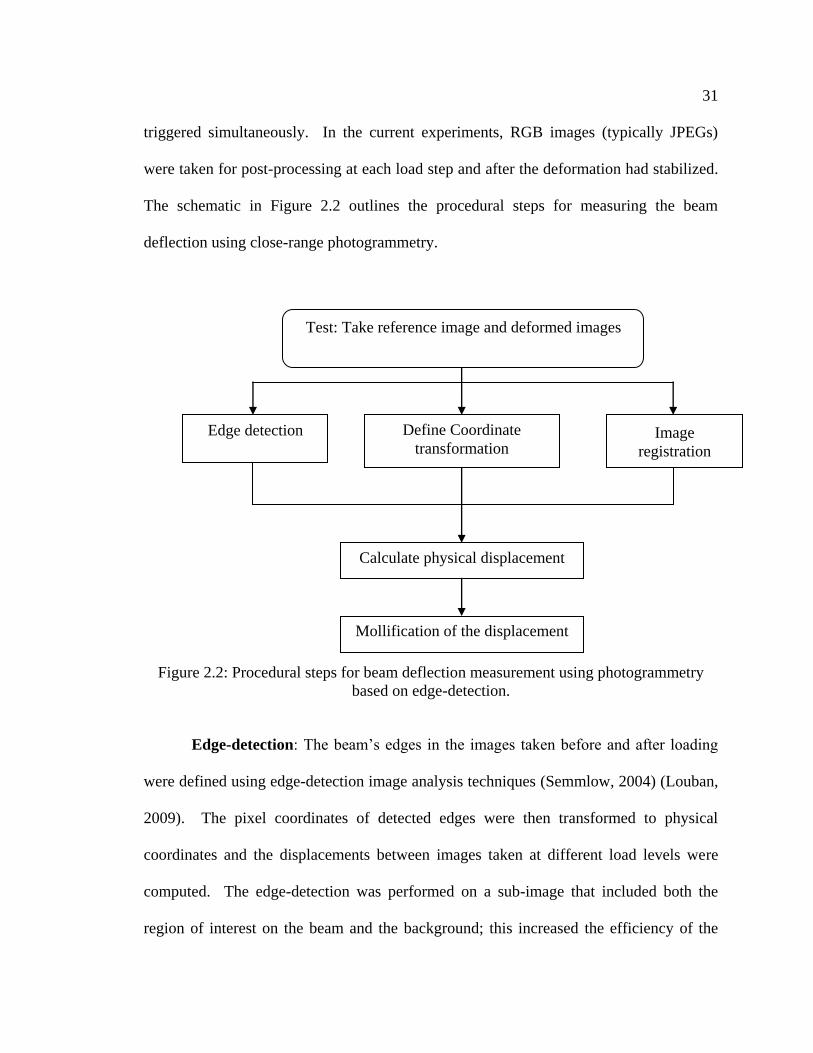
31
triggered simultaneously. In the current experiments, RGB images (typically JPEGs)
were taken for post-processing at each load step and after the deformation had stabilized.
The schematic in Figure 2.2 outlines the procedural steps for measuring the beam
deflection using close-range photogrammetry.
Figure 2.2: Procedural steps for beam deflection measurement using photogrammetry
based on edge-detection.
Edge-detection: The beam‘s edges in the images taken before and after loading
were defined using edge-detection image analysis techniques (Semmlow, 2004) (Louban,
2009). The pixel coordinates of detected edges were then transformed to physical
coordinates and the displacements between images taken at different load levels were
computed. The edge-detection was performed on a sub-image that included both the
region of interest on the beam and the background; this increased the efficiency of the
Test: Take reference image and deformed images
Edge detection Define Coordinate
transformation Image
registration
Calculate physical displacement
Mollification of the displacement

32
algorithm. The edge detection algorithm operated on the original RGB image; the
portion of the image containing the detected edge was transferred to a grey-scale image,
and a threshold in pixel values was set to separate the edge from the background. The
criteria would either be set manually by observing the grey-scale values of the image or
through the histogram of pixel values. To enhance the edge-detection operation, a black
screen was placed behind the beam to enhance the contrast. The image was then
transformed to a binary grey-scale format. The experimental set-up is shown in Figure
2.3; and one set of detected edges is shown in Figure 2.4. The edge-based
photogrammetric measurement technique was shown to be feasible in laboratory settings.
Figure 2.3. The laboratory set-up for tests of a step-cut beam.

33
a)
b)
c)
Figure 2.4. The detected upper-edge of a cantilever beam: a) a cut-out RGB image; b) the
detected edge in a grey-scale image; and c) a binary image of the edge generated using a
pixel threshold.
Perspective projection is a simple model describing the image formation with a
lens system. It is equivalent to a pinhole camera model. Homogeneous coordinates are a
powerful concept to describe the transformations. Translation, rotation, scaling and
perspective projection can be handled mathematically with a single matrix multiplication.
The transformations can be expressed as 𝒙 = 𝑴𝑿 . In principle, the one-to-one
correspondence between the physical and image coordinates of the object has to be
established via a camera/lens calibration procedure.
Coordinate transformation
Mechanical devices, such as dial gauges, require a stable base for mounting;
photogrammetric measurements require the selection of stable reference points on a
stable background to calibrate coordinate transformation from pixel coordinates to global
physical coordinates. In this study, several stable points in the background and geometric
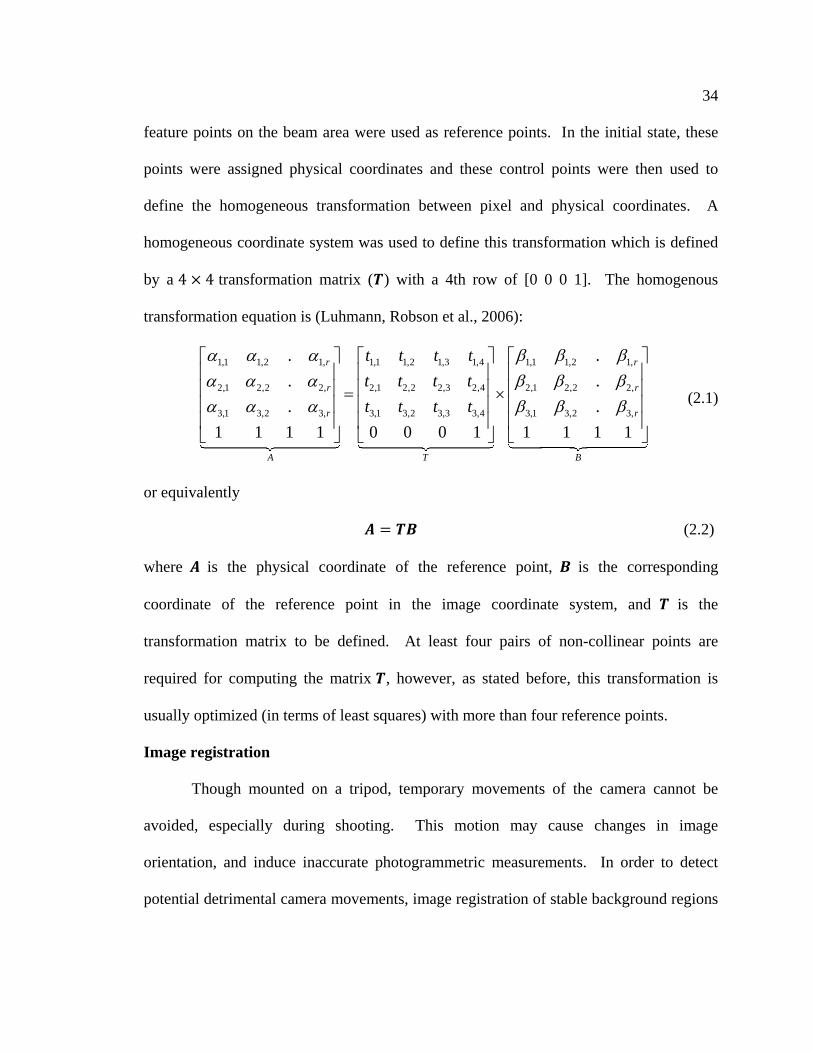
34
feature points on the beam area were used as reference points. In the initial state, these
points were assigned physical coordinates and these control points were then used to
define the homogeneous transformation between pixel and physical coordinates. A
homogeneous coordinate system was used to define this transformation which is defined
by a 4 × 4 transformation matrix (𝑻) with a 4th row of [0 0 0 1]. The homogenous
transformation equation is (Luhmann, Robson et al., 2006):
1,1 1,2 1, 1,1 1,2 1,3 1,4 1,1 1,2 1,
2,1 2,2 2, 2,1 2,2 2,3 2,4 2,1 2,2 2,
3,1 3,2 3, 3,1 3,2 3,3 3,4 3,1 3,2 3,
. .
. .
. .
1 1 1 1 0 0 0 1 1 1 1 1
r r
r r
r r
A T B
t t t t
t t t t
t t t t
(2.1)
or equivalently
𝑨 = 𝑻𝑩 (2.2)
where 𝑨 is the physical coordinate of the reference point, 𝑩 is the corresponding
coordinate of the reference point in the image coordinate system, and 𝑻 is the
transformation matrix to be defined. At least four pairs of non-collinear points are
required for computing the matrix 𝑻, however, as stated before, this transformation is
usually optimized (in terms of least squares) with more than four reference points.
Image registration
Though mounted on a tripod, temporary movements of the camera cannot be
avoided, especially during shooting. This motion may cause changes in image
orientation, and induce inaccurate photogrammetric measurements. In order to detect
potential detrimental camera movements, image registration of stable background regions

35
in the image sequence was used to detect any changes in camera orientation; when
detected, the change in image orientation was corrected (Semmlow, 2004).
Mollification
Model updating and damage identification are often performed with FE models;
however, the number of points measured along the beam (>4000 in this research) is much
higher than the number of nodes in a FE model. A mollification-based procedure was
used for noise-filtering and data reduction. The mollification method is an inverse-
problem technique, and has multiple applications when implemented as a filtering
algorithm, including the reduction of data through filtering and numerical differentiation
(Murio, 1993) (Murio, Mejia et al., 1998). Furthermore, although displacements can be
obtained directly through close-range photogrammetry, the rotation angles are indirectly
accessible, and the mollification technique allows their approximation (Murio, Mejia et
al., 1998).
To illustrate the mollification technique, let us consider the locally integrable two-
dimensional function 𝑓(𝑥) in a domain 𝛺 in 𝑅2. The mollifier of 𝑓, denoted as 𝐽𝛿𝑓(𝑥), is
defined as:
𝐽𝛿𝑓 𝑥 = 𝑤𝛿 𝑥 − 𝑦 𝑓 𝑦 𝑑𝑦𝑅2 (2.3)
The mollifier‘s radius is 𝛿 . For any number 𝛿 > 0, we define the family of
functions 𝑤𝛿 𝑥 as:
𝑤𝛿 𝑥 =1
𝛿2 𝑤(𝑥
𝛿) (2.4)
The weight function 𝑤(𝑥) is characterized as 𝐶∞ , is non-negative, has a total
integral of 1, and vanishes outside the unit ball centered at 0: 𝐵 0,1 = 𝑥 ∈ 𝑅 : 𝑥 <

36
1 . Under such conditions, it is clear that 𝑤𝛿 ∈ 𝐶0∞(𝐵(0, 𝛿)) , and moreover, that
𝑤𝛿(𝑥)𝑅2 𝑑𝑥 = 1.
In the present study, we selected the following weight function:
𝑤 𝑥 = 𝐶𝑒𝑥𝑝 −
1
1− 𝑥 2 𝑓𝑜𝑟 𝑥 < 1
0 𝑓𝑜𝑟 𝑥 ≥ 1 (2.5)
where 𝐶 represents a constant normalizing the kernel function. It is evident that the
corresponding discretized version of the mollification can be computed using a numerical
convolution. The numerical convolution and the optimal selection of the mollifier‘s
radius using cross-validation (Woodbury, 2003) was used to filter the data and
numerically compute the derivatives in the current research.
Within the Euler-Bernoulli beam theory, the rotation angle is the derivative of the
deflection, 𝜃 = 𝑑𝑣/𝑑𝑥. It is well known that direct numerical differentiation of the raw
data is an ill-posed problem. The mollification approach to numerical differentiation can
be used to substitute the original ill-posed problem of finding the derivative of the
deflection , 𝑣′, by a new problem of finding the derivative of its mollifier (𝐽𝛿𝑣)′. It is
demonstrated that this numerical technique is consistent and stable (Murio, Mejia et al.,
1998). This means that the reconstruction of the derivative of the mollified data function
is stable with respect to the noise existing in the measurements. The central difference
scheme is applied to evaluate the first derivative. The rotation at a given node 𝑥𝑖 is
obtained as follows:
𝜃 𝑥 = 𝜃𝑥𝑖 = 𝐷0 𝐽𝛿𝑣 =𝑣 𝑥𝑖+∆𝑥 −𝑣 𝑥𝑖−∆𝑥
2∆𝑥 (2.6)
where ∆𝑥 is the distance between two successive nodes.

37
The following example illustrates the implementation of the measurement
technique described above; a cantilever beam subjected to a concentrated load was tested.
The experimental set-up is shown in Figure 2.5. The camera-to-object distance was
approximately 0.5 m, which is sufficient for one-camera measurement of a 1 m-long
beam depending on the range of view. The deflection profile and rotation angle that was
obtained using the described edge-detection based method are reported in Figure 2.6 and
2.7. These results were compared with the predicted theoretical deflections, and the
photogrammetric measurements were found to be accurate.

38
Figure 2.5: The experimental set-up for close-range photogrammetric measurement of the
displacement of a loaded cantilever beam with a high-contrast stable background using
consumer-grade optical equipment.

39
0 20 40 60 80 100
Distance (cm)
-8
-6
-4
-2
0
Defl
ection
(mm
)
Figure 2.6: Beam deflection: Experimentally-obtained measurements using edge-
detection methods and close-range photogrammetry technique.
Figure 2.7: Beam Deflection: Theoretical deflections with 𝑬 = 𝟔𝟔 GPa and 𝑬 = 𝟕𝟐
GPa, and correspondence of the predicted values to the experimentally-measured
deflection profile shown in the previous figure. Predictions were based on elastic beam
theory. The elasticity modulus of the aluminum alloy material was calibrated at
𝟕𝟎.𝟏𝟒 𝑮𝑷𝒂. Measurements were obtained using edge-detection methods and close-
range photogrammetry techniques.
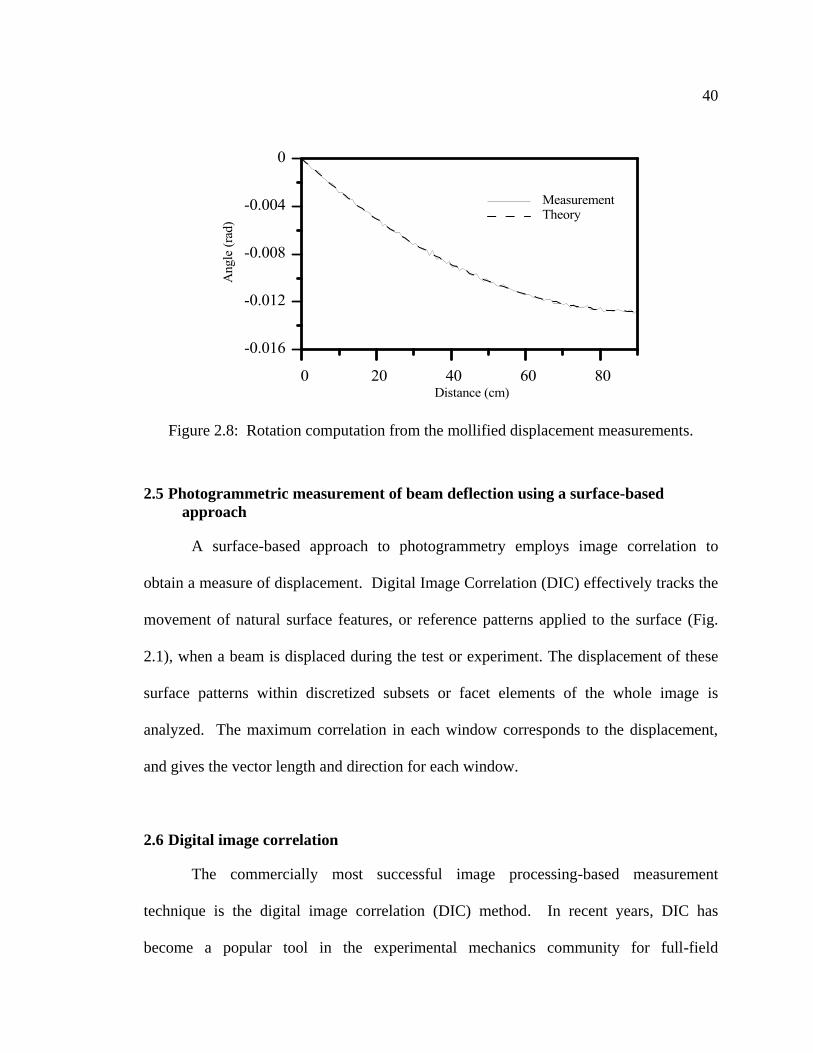
40
Figure 2.8: Rotation computation from the mollified displacement measurements.
2.5 Photogrammetric measurement of beam deflection using a surface-based
approach
A surface-based approach to photogrammetry employs image correlation to
obtain a measure of displacement. Digital Image Correlation (DIC) effectively tracks the
movement of natural surface features, or reference patterns applied to the surface (Fig.
2.1), when a beam is displaced during the test or experiment. The displacement of these
surface patterns within discretized subsets or facet elements of the whole image is
analyzed. The maximum correlation in each window corresponds to the displacement,
and gives the vector length and direction for each window.
2.6 Digital image correlation
The commercially most successful image processing-based measurement
technique is the digital image correlation (DIC) method. In recent years, DIC has
become a popular tool in the experimental mechanics community for full-field
41
displacement measurement and experimental strain analysis. A wide range of
applications demonstrate the versatility of this technique.
Digital Image Correlation is a full-field image analysis method, based on grey
value digital images that can determine the contour and the displacements of an object
under load in three dimensions. A recent review on 2-dimensional DIC for in-plane
displacement measurement is given in (Pan, Qian et al., 2009); a more comprehensive
review of DIC, including both 2D and 3D measurements, and also a comprehensive
presentation is given in the book (Sutton, Orteu et al., 2009).
Peters and Ranson (1982) proposed and implemented a DIC technique that is
applicable to the computation of surface strains and displacements (Peters and Ranson,
1982) (Chu, Ranson et al., 1985) (Sutton, Turner et al., 1991). This technique relies on
the analysis of intensity patterns in digital images of the object under consideration
(reference/undeformed and deformed), with a random pattern of white speckles on its
surface. (Digitizers were used before the invention of digital CCD cameras). The digital
image is actually a rectangular array made up of picture elements called pixels. The
determination of local disparities existing between pairs of images, or the problem of
image registration, is a basic requirement of computer vision. In image registration,
cross-correlation is frequently used to detect local similarities between two images. A
common correlation function is the least-squares correlation function (sum of squared
differences):
𝐶 = 𝑓−𝑔 2𝑆
𝑓2𝑆
(2.7)
42
It is non-negative and approaches 0 when the values for 𝑓 and 𝑔 are similar.
Different alternative versions of the sum of squares exist: normalized sum of squared
differences and zero-normalized sum of squared differences; the latter was shown to be
the most reliable and robust criterion in case of image blurring and variations in lighting
and exposure conditions while taking reference and deformed photos (Tong, 2005). The
image correlation algorithm is actually the pattern matching techniques used to compute
image motion from a sequence of two or more images (Giachetti, 2000),
Another option is the normalized cross-correlation coefficient (Giachetti, 2000):
𝐶 = 𝑓∗𝑔 𝑆
𝑓2∗𝑔2 𝑆 12
(2.8)
Unlike the least-squares correlation function (which should be minimized in the
search for matched pairs of pixel subsets), the cross-correlation function should be
maximized.
The DIC technique for the research presented in this thesis consisted of the
following: a) Consider two images of the same object before and after deformation. b)
Define a subset Ω in the undeformed image, centered at point 𝐴(𝑖, 𝑗), as an (𝑛 × 𝑛) pixels
reference area. c) Define a bigger subset Ω∗ in the deformed image, centered at the same
position, as an (m × m) pixel area (m > 𝑛).
The normalized cross-correlation coefficient as a function of position coordinate
(x, y) is written as:
𝐶 𝑥,𝑦 = 𝐼(𝑖 ,𝑗 )𝑛
𝑗=1𝑛𝑖=1 ∙𝐼∗(𝑖+𝑥 ,𝑗+𝑦)
𝐼2(𝑖 ,𝑗 )𝑛𝑗=1
𝑛𝑖=1 ∙ 𝐼∗2(𝑖+𝑥 ,𝑗+𝑦)𝑛
𝑗=1𝑛𝑖=1
(2.9)
43
where 𝐼(𝑖, 𝑗) is the grey value of the subset Ω at the point (𝑖, 𝑗), and 𝐼∗(𝑖 + 𝑥, 𝑗 + 𝑦) is the
grey value of the subset Ω∗ at the point (𝑖 + 𝑥, 𝑗 + 𝑦). For the DIC analysis using the
ARAMIS system presented in this thesis, the 𝑛 value was chosen to be 15.
In order to achieve sub-pixel accuracy (so that the maximum correlation
coefficient value can be located between two pixels, rather than at a discrete pixel
position), a continuous correlation distribution is constructed by fitting the discrete
correlation coefficients to a 2D curved surface. From this theoretical continuous
distribution, the maximum correlation coefficient value can be determined using an
optimum search technique, thus achieving sub-pixel accuracy.
Before evaluating the similarity between reference and deformed subsets using
the correlation criterion, the intensity of these points with subpixel locations must be
provided. Thus, a certain subpixel interpolation scheme should be utilized. In the
literature, various sub-pixel interpolation schemes including bilinear interpolation,
bicubic interpolation, bicubic B-spline interpolation, biquintic B-spline interpolation and
bicubic spline interpolation have been used. A high-order interpolation scheme (e.g.
bicubic spline interpolation or biquintic spline interpolation) is recommended by Schreier
et al (Schreier, Braasch et al., 2000) since they provide higher registration accuracy and
better convergence character of the algorithm than the simple interpolation schemes do.
Basic principles of DIC measurement
DIC is an optical full-field measurement technique that measures the deformation
of an object‘s surface. The image correlation system tracks random grey-value patterns in
small areas (image subsets) of images taken during deformation. Two cameras (placed
according to triangulation principle) can be used along with stereo vision models to

44
obtain 3D deformation measurements. The corresponding surface strains are calculated
from surface deformations or calculated simultaneously with displacement, depending on
the method and representation used.
Several commercial DIC systems have already been developed and
commercialized, including: ARAMIS, Correlated Solutions, and LaVision‘s StrainMaster
DIC system (LaVision). The work presented in this thesis was conducted using the
ARAMIS DIC system (GOM and Trillion Quality Systems).
Figure 2.9: the ARAMIS system of the GOM Company
Figure 2.8 shows a typical experimental setup using the ARAMIS DIC system. A
random speckle pattern using black and white spray paints is applied to the surface of the
specimen. Note that two cameras are positioned on a special tripod with a stable
mounting base and with support bars that allow flexibility in positioning the cameras.

45
External light was used to provide optimal exposure. The lighting is especially important
and the contrast between the object and the background affects the quality of the
measurements. The stability of the camera set-up is particularly important when
capturing images; camera movement and vibration causes errors in calibration and
deformation calculations. Trials were conducted to determine optimal conditions for a)
camera placement and b) random speckle pattern.
High zoom lengths can be used in the ARAMIS system along with a 1-inch2 (25.4
mm) calibration block to measure a small region. A calibration block is a target with a
dedicated pattern with known pattern dimensions, and is used to calibrate the cameras.
The calibration block must be produced with special care to ensure the accuracy of the
pattern‘s dimensions. The ARAMIS system comes with pre-manufactured calibration
blocks. Random speckle patterns were created and optimized using trial and error.
2.7 Summary
In this chapter we developed one photogrammetric measurement for beam
deflection and presented the optical method – DIC, for obtaining strain/displacements on
the surface of a specimen. The edge-detection-based photogrammetric measurement of
beam deflection profiles provide input data to drive a damage identification procedure
which is to be developed in the next chapter. The results were comparable to the
predictions of calculated dead-load deflection diagrams. The DIC measurement provides
input data to drive the material parameter identification procedures which will be
presented in chapters 4 and 5.
46
CHAPTER THREE: DAMAGE IDENTIFICATION OF EULER-BERNOULLI
BEAMS USING FULL-FIELD MEASUREMENTS
“To perform an effective analysis is an art (K.J. Bathe)”, to perform an effective
damage identification is even a finer art.
3.1 Introduction and background
3.1.1 An introduction to damage identification problem
Structural systems undergo degradation processes and become aged through the
course of time, or may deteriorate suddenly for a variety of reasons, such as unexpected
loading or natural causes. As a result, damage occurs, generally in the form of localized
stiffness decrease in structural members. In general, early detection of damage is vital in
order to monitor the continuous degradation of the structure. Without monitoring,
continuous damage can ultimately lead to catastrophic failure of the system.
Recent events show that structures are not immune from disastrous collapse.
From some of these events we list: The Silver Bridge failure in West Virginia in 1967
caused 46 deaths; the collapse of the Mianus Bridge in 1983; the de la Concorde overpass
collapse in Quebec crushed five people to death; and, on August 1, 2007, the I-35W St.
Anthony Falls Bridge over the Mississippi River in Minneapolis, Minnesota collapsed in
the middle of rush hour. The collapse of the Minneapolis Bridge in particular has raised
a public safety issue concerning the 73,784 bridges in U.S.A that are rated ―structurally
deficient‖ by the U.S.A Department of Transportation (Arnoldy, 2007). In response to
disasters, there is an ever-increasing demand for assessment of the integrity and

47
reliability of structures in service. As such, the identification of structural damage has
attracted intensive research efforts in the past thirty years.
Structural damage identification technique involves the localization and detection
of damages that occur in a structure from measurements of its dynamic and static
responses. The process of implementing a damage identification strategy for aerospace,
civil and mechanical engineering infrastructure is referred to as Structural Health
Monitoring (SHM) (Farrar and Worden, 2007) (Worden, Farrar et al., 2007). This area
involved a full research specialization in the last two decades. For example, when
replacing the I-35W St. Anthony Falls Bridge, vibrating-wire strain gauges were
positioned inside piers and shafts to monitor the new bridge. SHM has become a
fundamental tool in maintaining safety and integrity of structures and avoiding loss of life
and property, as can be testified by the dedicated academic journal. Since 2002, the
journal ―Structural Health Monitoring‖ is fully dedicated to this entire area of research
(http://shm.sagepub.com/). In the following, we give a brief presentation of the most
used approaches for damage identification.
3.1.2 Material-level methods
Some visual and localized experimental techniques are widely used for
monitoring structural behaviours, these techniques include acoustic emission tests,
ultrasonic methods, magnetic field methods, radiographs, and eddy-current methods
(Phares, Rolander et al., 2001) (Kundu, 2004). These techniques have been called local
methods (Doebling, Farrar et al., 1996), but they should more appropriately be referred to
as material-based methods, as they detect defects on the material level. The results of
these techniques do not directly translate to stiffness changes on the structural level.

48
3.1.3 System identification
Many investigators have used system identification techniques for the non-
destructive assessment of structural integrity. System identification refers to the
determination of a mathematical model through observation of the relationships between
a system‘s inputs and the corresponding outputs (Juang, 1994) (Ljung, 1999). System
identification approaches are commonly used for the dynamic systems employed in
electrical and mechanical engineering. In civil engineering, the application of system
identification focuses on the estimation of modal properties: modal frequencies, damping,
modal shapes, etc. Standard techniques exist for selecting the mathematical model
structure from a set of model candidates (Ljung, 1999), including physical and non-
physical classes of models, such as ARMA models or state-space models. Popular
methods for model determination include least squares and recursive least square
methods, maximum likelihood methods, and Bayesian methods. System identification
relates strongly to theory of optimal controls.
Unfortunately, mathematical models such as state space models and ARMA
models are generally not directly applicable to structural damage identification because
damage needs to be associated to physical changes; in particular, through the use of
parameters that define the structural properties, such as the reduction in stiffness or
material modulus, or the size and location of cracks. In contrast, system identification
techniques usually provide a phenomenological mathematical model, which requires
additional effort to translate changes in the model to damage states in the structure. For
example, ARMA models were used for SHM (Peeters, 2000), where modal frequencies

49
and modal damping could be obtained, the change in these two parameters was used to
indicate possible damage.
In structural damage assessment, damage is usually related to changes in the
internal material structure for ductile behaviour such as steel materials and/or the
appearance of cracks for geomaterials. Damage accumulation is associated with a
reduction of the structural members stiffness, and is generally expressed as a ―damage
variable‖ comparing the remaining stiffness with a reference value (Bicanic and Chen,
1997) (Kokot and Zambaty, 2009a).
3.1.4 Model updating
Damage identification can be formulated as a parameter-based model updating
problem. Model updating focuses on the improvement of a mathematical model using
experimental data. Usually a mathematical model is defined to translate parameters
describing structural damage to measurable responses or data characteristic of the
structure, such as modal characteristics, static deflections, strains, derived characteristics,
and dynamic time response history. An optimization problem is usually formulated to
minimize a measure of the difference between the experimental and computed outputs.
Model updating is solved as an estimation of predefined uncertain structural parameters
involving least-square output matching.
As defined, model updating is often solved as a parameter identification problem.
Formally, parameter identification is the process used to inversely determine or update a
set of unknown parameters from a mathematical model through the examination of
measured responses and derived data to a given input. This process is usually called
parameter estimation, and statistical analyses are often associated with the estimation

50
process to determine a confidence region for the estimated parameters. Within structural
health monitoring literature, terms such as model identification, structural identification,
or damage identification are often used inter-changeably. Thus, these terms are used
somewhat arbitrarily.
The model-updating problem is also considered as an inverse problem; depending
on the definition of the cost function, the type of data, and the amount of data available,
the mathematical problems need to be solved can be well-conditioned or ill-conditioned.
3.1.5 Finite element model updating
Since the FE model has been proven to be the most appropriate tool for modeling
structures, model updating for structures usually refers to FE model updating. The
purpose of damage identification is to update the parameters of the FE model to match
the results with measured data.
Research in the area of FE model-updating methods were initiated in the 1990‘s
to identify the state of structures from given measurements. Generally, in damage
identification problems, a finite-element model of the studied structure, with a known
geometry and topology, is constructed with parameterized constitutive models at the
element level. Identifying these parameters provides the location and severity of
structural damage; understanding of the damage state and prediction of future
performance can also be achieved with an updated FE model (Brownjohn, Xia et al.,
2001).
3.1.6 The four levels of damage assessment
A system of classification for damage-identification methods, as presented by
(Doebling, Farrar et al., 1996), who defined four levels of damage identification:

51
Level 1 (Existence): Determination that damage is present in the structure.
Level 2 (Location): Determination of the geometric location of the
damage.
Level 3 (Severity): Quantification of the severity of the damage.
Level 4 (Diagnosis & prognosis): Prediction of the remaining service life
of the structure.
Levels 1 to 3 pertain to the problem of damage identification. Different methods
are used to solve the various levels of a damage identification problem with various
degrees of precision. Level 4 refers specially to structural health monitoring after
damage is located and quantified or when an updated model is developed to precisely
describe the structure‘s behaviour. The identified structural parameters or member
properties (e.g. 𝐸𝐴 for trusses or 𝐸𝐼 for beams) can be used for damage assessment, and
for load rating in the management of structural systems (e.g. bridge management
systems). Model-based updating and detection techniques are necessary for the
assessment of damage severity and the prognosis of the future behaviour of the structure.
3.1.7 Classification of damage identification methods
Nowadays, an extensive literature for damage identification in structures is
available. The majority of existing approaches can often be classified into two major
categories: i) dynamic damage identification methods using dynamic testing and dynamic
test data (modal properties, time histories, etc.); and ii) static damage identification
methods using static test data (displacements, strains, etc.).
We can also adopt another classification for damage identification methods to
distinguish between model-based and non-model-based methods. As stated before, the

52
model-based methods are usually FE model updating techniques for damage
identification; these methods can be further divided into two classes: i) matrix updating
that are non-parametric methods based on property matrix updating; and ii) parametric
updating that use a parameterized representation of the model. Most FE model updating
methods for damage identification are parametric-based techniques. Non-model-based
methods include matching response contours, checking irregularity (often called damage
index in the response data and/or derived data from responses), and detection of
nonlinearity and pattern recognition paradigms using neural networks and time series
analysis models such as AR models, ARMA models (Sohn, Worden et al., 2002)
(Omenzetter and Brownjohn, 2006).
The classification of damage identification methods can be based on the targeted
application to define two classes: 1) local level damage identification; and 2) global level
damage identification. The local level methods focus on the details related to the damage
in a given structural member. Usually for a beam member or a plate/shell member, the
problem is to locate and quantify localized damage in the form of discrete cracks, or to
reconstruct a spatially distributed damage field. A great deal of work has been done to
address the problem of crack localization in a beam, using dynamic or static test data.
Recently, the problem of identification of stiffness variation in a beam has also attracted
interests among researchers. Local level methods reveal details about damage to a
structural member. By exhaustive application to an entire structure, these local level
methods could provide a complete picture of the current damage state, or health state, of
the structure. For large and complex structures, these methods are best used to
periodically monitor specific parts of the structure.

53
A structural model consisting of an assembly of many members is considered
when applying global level methods. Parameters are defined as the stiffness of a cross
section area/inertia of each member, i.e. damages are defined as the ―average‖ reduction
of stiffness for a member, which is usually modeled as one element or a substructure in
the FE model. After the localization of a possible damage in a structural member, usually
a truss or beam, a direct examination of that member is thereafter performed to determine
its condition in detail.
Table 3.1: A synopsis for the classification of damage identification methods
Model-based methods
Matrix updating
Parametric updating
Non-model-based methods, i.e. response-based methods
3.1.8 Overview of this chapter
In Section 3.2, the state-of-the-art of damage identification methodologies is
reviewed with an emphasis on the static response-based methods. We will also discuss
some related issues including measurement of responses, quantification of damage,
identifiability, and regularization of ill-posed inverse problems in Sections 3.2 to 3.5.
Next, we propose a new methodology for damage identification in Euler-Bernoulli beams
using measurements of static deflections. Two formulation techniques are discussed: (i)
The first method uses the equilibrium gap concept; and (ii) the second technique employs
the adjoint optimization technique to minimize a data discrepancy functionally expressed
as a misfit between the measured and model-based deflections. To overcome the ill-
posedness inherent in these types of formulations, a regularization technique based on the
54
Tikhonov-Total Variation (TTV) is used. The proposed methodology is validated using
synthetic data for beams with known damage locations and levels (i.e., the distribution of
stiffness is known). In the second phase of validation, a series of experiments are
presented; four beams with different types of predefined damage were tested and used for
validation.
3.2 Literature review
3.2.1 Dynamic damage identifications
The dynamic identification techniques are by large account more extensively
studied than the static-based methods, and the corresponding literature is quite extensive.
The main assumption is that damages alter the dynamic response of the structure;
difference between the predicted and measured dynamic characteristics can be used to
retrieve damage information.
Engineers and researchers in the aerospace and offshore oil industries began to
study vibration-based damage detection during the late 1970s and early 1980s. Early
works used correlation changes in the modal properties to the changes in structural
properties (Silva and Maia, 1999). Afterwards different types of dynamic characteristics
have been employed, including natural frequencies (Bicanic and Chen, 1997) (Salawu,
1997), modal shapes (Doebling, Farrar et al., 1996) (Kim, Ryu et al., 2003), modal shape
derivatives (Maeck and Roeck, 1999) (Ndambi, Vantomme et al., 2002), frequency
response function shapes (Liu, Lieven et al., 2009), response time histories, wavelet
analysis of dynamic signals (Kim and Melhelm, 2004), and harmonic responses (Kokot
and Zambaty, 2009a) (Liu and Chen, 2002) (Kokot and Zambaty, 2009b), impulse
responses (Sophia and Karolos, 1997) (Mangal, Idichandy et al., 2001).

55
The literature on vibration-based damage identification methods is extensive, as
testified by the number of reviews published. We cite few review papers in this area:
Natke reviewed the FE model updating techniques in frequency domain (Natke, 1988).
Friswell and Mottershead gave an extensive review of FE model updating using dynamic
data (Friswell and Mottershead, 1995), a special issue of Mechanical Systems and Signal
Processing is devoted to this topic (Mottershead and Friswell, 1998), and a recent
overview of dynamic based methods is available in (Friswell, 2007).
Literature review with a focus on the statistical pattern recognition viewpoint, and
emphasized data fusion, cleansing, outlier analysis was given in (Doebling, Farrar et al.,
1996), later extended in (Sohn, Farrar et al., 2003), the authors referred to these
techniques as statistical models. Other important reviews include (Lynch and Loh, 2006)
(Carden and Fanning, 2004) (Doebling, Farrar et al., 1998) (Doebling and Farrar, 1997).
A recent literature review that includes the basic approaches of dynamic
monitoring, and guidelines for sensor selection, data collection is available in (Hsieh,
Halling et al., 2006). In this review, the experimental approaches were separated into
ambient vibration, forced vibration (usually harmonic), and free vibration monitoring.
Ambient vibration tests are easiest to conduct; however, in ambient vibration methods,
stationarity, whiteness, and unidirectional excitation are often assumed.
Because of the extensive literature for vibration-based damage identification and
health monitoring research, an adequate classification is necessary to simplify the review.
In the classical review by Doebling et al, dynamic identification methods were
categorized as (Doebling, Farrar et al., 1996):
Modal frequency Based Methods
56
Modal Shape Based Methods
Modal Shape Derivatives such as Curvature/Strain Modal Shape Based
Methods
Dynamically Measured Flexibility Based Methods
Matrix Update Based Methods (direct, non-parametric updating method)
Non-linear Methods (detection of nonlinearity)
Neural Network Based Methods
Other Methods
This categorization is mainly based on the types of dynamic characteristics
employed; this classification paradigm was later followed in many other reviews, with
sometimes minor modification (Carden and Fanning, 2004).
We had given a different synopsis in section 3.1.7: model-based methods, and
non-model-based methods. Most damage identification methods are model-based
approach, in which a model (usually a FE model) is updated to minimize the difference
between measured and calculated properties; therefore model-based methods are
normally FE model updating methods, and can be further divided into two classes: matrix
updating and parametric updating.
Model-based methods - I: Matrix updating for dynamic FE model updating
The non-parametric, matrix updating methods adjusts the stiffness, mostly along
with the mass, and in some cases, the damping matrices, from measured data (mostly
modal testing data or dynamic FRFs). These methods tend to fit the available
experimental data exactly, update the mathematical model, but generally do not provide
57
any direct physical meanings, and thus they are usually not suitable for damage
assessment purposes, but they are useful for control design and predictive modeling.
This type of methods have been called ―direct updating‖ methods in the literature since
no iterative solution process is required (Caesar and Pete, 1987), but we prefer to call
them ―non-parametric updating‖ methods, or ―matrix-updating‖ over ―direct methods‖ or
―direct updating methods‖, since the name ―direct methods‖ is widely associated to
optimization algorithms without utilizing gradient information.
Non-parametric updating methods are global level methods; although they can be
performed to deal with any level of complexity, for damage identification purposes, the
mathematical models need to be very simple, such as discrete spring-mass systems.
Model-based methods - II: parametric updating methods for dynamic FE model
updating
In parametric-updating methods, the problem of damage identification is
formulated as a parameter estimation problem where an error function is defined as the
discrepancy between a mathematical model response and measured data. The formulated
problem is in the form of an optimization problem where the unknowns are the
parameters defining the mathematical model that fit the best the measured data.
Parametric model updating methods can be subdivided according to the nature of the
measured data they use which can be: mode frequency, mode shapes, mode shape
curvatures, etc, as in the classification we have mentioned by Doebling et al. (Doebling,
Farrar et al., 1996).

58
Based on the optimization scheme employed to solve the problem, a model-
updating problem can be divided as iterative or non-iterative methods, in the latter direct
analytical solutions are possible and the former require iterative updating. Furthermore,
iterative methods include sensitivity-based and non-sensitivity-based; the former employ
gradient-based optimization schemes, and the latter, direct search methods such as
response surface methods, genetic algorithms, Nelder-Mead simplex method, particle
swarm, cluster-based stochastic search, etc.
In the early 1990‘s most of parametric model updating formulation employ
gradient-based search methods. For this reason, the parameter estimation methods for
damage identification have been referred to as sensitivity-based methods (Doebling,
Farrar et al., 1996) (Farhat and Hemez, 1993), because they usually make use of
sensitivity of the stiffness matrix to the unknown structural parameters in the gradient-
based iterative updating process. However, sensitivity evaluations are not always
necessary in solving optimization problems, direct derivative-free methods and
evolutionary methods can be considered as an alternative to solve the parameter
identification problems for damage identification as they have specific advantages such
as stability and exhaustiveness of search space. Recent reviews of the alternative shows
that methods based on derivative-free algorithms are becoming a competitive choice.
Response-based Dynamic Identification Methods without reference to models
Dynamic identification methods that do not use a specific mathematical model are
called response-based. Techniques used in these methods include direct matching
contours, irregularity checking in responses and derived properties, damage index from
59
response data or derived data. In response-based approaches, no baseline model is
required, and the irregularities are detected from the measured or derived responses, such
as curvature mode shapes.
Possibly the first work in this category is made in (Lifshitz and Rotem, 1969),
who proposed a method for damage detection from measure frequencies. The authors
related the changes in the dynamic moduli to the frequency changes in particle-filled
elastomers. Most of early work of vibration-based damage identification focused on
rotating blades and machinery. An early literature survey of damage detection using
modal properties was due to (Richardson, 1980), which cites large amount of research
work dealing with rotating machinery.
Masoud and Al-Said (2009) developed a crack localization algorithm exploring
the variation in a single frequency of a beam as a function of rotor speeds (which is
equivalent to varying axial loading of the beam) to detect and localize a crack. The
frequencies are obtained analytically using Lagrange equations and an assumed mode
method (Masoud and Al-Said, 2009); the contour lines of the cracked beam frequencies
are plotted with crack location and crack depth as its axis; the identification procedure is
developed utilizing the contour plots. Similar crack identification procedures in
cantilever beams based on contour plots of modal frequencies in terms of crack depth and
crack location were developed by (Nahvi and Jabbari, 2005) (Batabyal, Sankar et al.,
2008), in which FEA are used to evaluate modal parameters. It is worth mentioning that
these methods are non-model-based methods, because the analytical or FEA solutions are
used to obtain the contour plots only, and the identification is performed with the contour
plots without reference to any model.

60
Pandey, Biswas et al (1991) suggested another damage identification method
based on curvature mode shape of beam, instead of natural frequencies changes, to
identify the location of a crack (Pandey, Biswas et al., 1991). It is assumed that large
change in curvature indicates the location of damage. This method is further improved
by Ratcliffe (Ratcliffe, 1997) (Ratcliffe and Bagaria, 1998); he suggested using the third
order polynomial interpolation of the second-order finite difference of modal shapes; this
indicator is more sensitive than the curvature. One limitation of these methods is that
only a single crack can be considered in the beam to be detected. Beams with more than
one single crack cannot be analysed with this methodology.
3.2.2 Static response data-based damage identification
In comparison to dynamic-based identification methods, the literature of damage
identification methods based on quasi-static responses is rather limited. The synopsis
table in section 3.1.7 can also be used to group static identification methods, in which
most static identification methods belong to the group of parametric updating, and the
non-model based methods include only a few works using signal processing to detect
irregularities in static deflection.
Early work on static-based methods started in the 1980s. Sheena et al presented a
method for improving the analytical stiffness matrix from noise-free static measurements,
in which they optimize the difference between the theoretical and correct stiffness
subjected to measured displacements constraints (Sheena, Zalmanovitch et al., 1982b)
(Sheena, Zalmanovitch et al., 1982a). The method requires the measurement of the
displacements at all the active DOFs associated to a FE model. If only a limited number

61
of DOFs are measured, spline interpolation can be used to create the complete set of
displacement data. Within this formulation, the stiffness is computed as a whole matrix,
not directly related to the internal parameters controlling the properties of each element.
To the author‘s best knowledge, this is the only published work on matrix updating using
static responses.
Most static response-based identification methods can be considered as part of
parametric FE model updating group. Early research in this area was due to a group of
researchers including Sanayei, Hajela, Banan, Hjelmstad. For example, Sanayei and
Scampoli presented an identification procedure of plate-bending stiffness parameters for
a one-third scale, reinforced-concrete pier-deck model; the formulation is based on FE
model updating using static test results through minimization of the equilibrium gap
functional (Sanayei and Scampoli, 1991). Sanayei and Onipede presented an analytical
method for the identification of properties of structural elements using static test data
(Sanayei and Onipede, 1991). In this approach, the forces are applied to a set of DOFs
and the associated displacements are measured at another set of DOFs. An iterative
procedure is used to minimize the difference between the measured and the model
response. The sensitivity analysis proposed by Adelman and Haftka (1986) is used at the
heart of this iterative method to identify directly the structural element parameters
(Adelman and Haftka, 1986). The stiffness matrix properties such as element
connectivity, positive definiteness, symmetry and bandedness are automatically
preserved.
Hajela and Soeiro (1990) presented a review on damage detection techniques; the
authors classified both static and dynamic identification techniques into three categories:

62
the equation error approach, the output error approach, and the minimum deviation
approach (Hajela and Soeiro, 1990a). Given an equilibrium equation in the form
𝑲(𝜽)𝒙 = 𝒇, where 𝒙 is the state variable, and 𝒇 is the excitation, 𝜽 is a set of internal
variables, then the equation error, also called force error estimator is defined as:
min𝜽𝑲 𝜽 𝒖 − 𝒇 , and the output error (displacement error) estimator is defined as
min𝜽𝑸𝑲−𝟏 𝜽 𝒇 − 𝒖𝒎𝒆𝒂𝒔𝒖𝒓𝒆𝒅 , where 𝑸 is a Boolean matrix extracting the measured
responses from the whole set of DOFs. The advantage of the equation error approach is
that the error is a linear function of the entries in 𝑲(𝜽). Its disadvantage lies in the
necessity to measure all the DOFs in the model. The advantage of the output error
approach is that the minimization can be operated on the measured DOFs and therefore
no need to measure all the DOFs. The disadvantage of the output error estimator is that
the error is now a highly nonlinear function of the entries in 𝑲(𝜽).
The equation error and output error approaches applied for static identification are
studied in details by Banan et al (Banan, Banan et al., 1994a) (Banan, Banan et al.,
1994b). In 1994, the authors studied the two formulations for estimating the constitutive
parameters needed to calibrate finite-element model results with measured displacements
from known static loading. The authors solved the problem by minimizing the error
between the simulated displacements and the on-site measurements using sensitivity-
based optimization which is similar to the method developed by Sanayei and Onipede in
1991 (Sanayei and Onipede, 1991). The problem was formulated as a constrained
nonlinear optimization using either a force-error (output error) estimator or a
displacement (equation error) estimator. The methodology was tested on a simulated 25
member bowstring truss; Monte Carlo simulations are used to study the performance.

63
Later, Sanayei and Saletnik conducted a similar work as that of Banan et al, but
used static strain measurements instead of the displacements (Sanayei and Saletnik,
1996a) (Sanayei and Saletnik, 1996b). The internal parameters were estimated by
minimizing the error between the theoretical and measured strains in the structure
resulting from a series of loading cases of concentrated forces. A similar approach was
used by Hjelmstad and Shin, where they proposed to group the parameter reduce the
number of unknowns, especially in case of inadequate measurements (Hjelmstad and
Shin, 1997).
In 1997, Liu and Chian developed a procedure for identifying the cross-sectional
areas of a truss using static strain measurements resulting from a series of concentrated
force loading cases (Liu and Chian, 1997). A closed-form solution was obtained for the
truss. A numerical example is presented along with model test results.
Chou and Ghaboussi (Chou and Ghaboussi, 2001) used a genetic algorithm to
identify damage in a truss based on measured deflections and verified with numerical
examples. An optimization problem is formulated for the detection and identification of
structural damage. Both the ―‗output error‘‘ defined as a measure of the difference
between the measured and computed responses under static loading condition and the
‗‗equation error‘‘ indicating the residual force in the system of equilibrium equations are
used to formulate the objective function to be optimized. Recently, Shenton and Hu used
a misfit cost function using strain measurements and a genetic based minimization
algorithm to identify damage in beams subjected to static loading (Shenton and Hu, 2006)
(Hu and Shenton, 2007). Shenton and Hu proposed a damage distribution formulation
based on the re-distribution of the dead load strain taking place in a structure when

64
damage occurs; since the structure‘s own weight is always present, this method
eliminates the need for an external loading apparatus and is also suited for designing a
permanent SHM system. In this technique, the damage is identified by minimizing the
error between the measured strain changes and the model strains prediction in the
damaged structure. The problem is formulated as a constrained optimization problem
and solved by a real-coded genetic algorithm; the basic procedure is introduced for an
example of a single-span fixed-fixed beam using a closed-form solution (Shenton and
Hu, 2006) (Hu and Shenton, 2006). In a later paper, this procedure was extended to use
finite elements (Hu and Shenton, 2007).
In 2005, Nejad et al. presented a method to describe the change in the static
displacement of certain degrees of freedom by minimizing the difference between the
load vectors of damaged and undamaged structures (Nejad, Rahai et al., 2005).
From the review of the literature, it appears that all of the static-based methods
developed to date require one or more external loading cases to be applied to the structure
and that the corresponding static responses being measured. The loading configuration to
excite the structure needs to be designed to make sensitive results. One may note that in
practice, this requirement might be feasible in bridges, but may pose a difficulty in many
other types of structures.
Choi et al. presented a solution based on the conjugate beam method; it was
shown that for determinate beams, the shape of the displacement variation due to damage
is related to the influence line of the moment in the conjugate beam (Choi, Lee et al.,
2004). Other research work proposed a formulation of locating cracks through wavelet
65
analysis of the static deflection profile using signal processing techniques (Rucka and
Wilde, 2006).
Some authors proposed that static response data to be combined with dynamic
data in the damage identification. It is believed that more information can be available by
combining different type of measurements. Hajela and Soeiro proposed that static
displacement information be incorporated to supplement the modal data for damage
detection (Hajela and Soeiro, 1990b). Simulated static deflections and vibration mode
data are used successfully for parameter estimations (Hajela and Soeiro, 1990b). Another
method making use of composite data was proposed by Wang et al.; the proposed method
can be considered a two-stage identification algorithm for identifying the structural
damages by employing the changes in natural frequencies and measured static
displacements (Wang, Hu et al., 2001).
Oh and Jung proposed a method combining both static displacements
measurement and identified dynamic modes (Oh and Jung, 1998); the proposed approach
allows the use of composite data consisting of a combination of static displacements and
eigen-modes. In dynamic tests the curvature and slope of mode shapes are included in
the formulation of the error responses. To examine the capability of the proposed
damage assessment algorithm a series of tests for a predetermined damaged two-span
continuous beam and a planar bowstring truss structure were performed. This work
showed that the combination of the curvature or slope of mode shape and the static
displacement data results a superior capabilities for the damage detection and assessment.

66
However, conducting dynamic and static tests complicates the application in real world
structures.
The methods reviewed before are global level methods, which the damage is
identified as average stiffness reduction of a structural member. Local level methods can
be divided into two groups based on the way of parameterization.
Most existing damage detection methods aim at identifying localized damage
zones and quantifying their intensity (Yang, 2002) (Buda, 2006) (Nikolakopoulos, 1997)
(Chen, 2005). Within this approach, cracks are usually parameterized beforehand
assuming accurate knowledge of the structure stiffness distribution.
For methods developed to localize and quantify concentrated cracks, it is usually
assumed that an accurate knowledge of the stiffness distribution of the undamaged
structure is available, and the unknown parameters define the crack location and depth.
Buda and Caddemi presented a crack identification scheme for Euler-Bernoulli beams
based on static displacements (Buda and Caddemi, 2007).
For methods developed to localize and quantify concentrated cracks, it is usually
assumed that an accurate knowledge of the stiffness distribution of the undamaged
structure is available. Earlier research showed that numerical algorithms that perform
well for the discrete damage identification may be inefficient for the stiffness
reconstruction problem.
Lesnic et al. presented a mathematical analysis of the identification of a
heterogeneous flexural stiffness distribution of an Euler-Bernoulli beam. The authors
established the conditions for the well-posedness of the associated inverse problem
(Lesnic, Elliott et al., 1999).
67
All of the static-based methods developed to date require one or more cases of
external loadings to be applied to the structure and corresponding static responses to be
measured. The loading configuration to excite the structure need to be designed to make
sensitive results; one may note that in practice, this requirement is simple for bridges, but
may pose a difficulty in many types of structures.
For methods dealing with the identification of distributed stiffness, the problem
consists of recovering a continuous distribution of the beam‘s stiffness using
experimental data. Mathematically, the problem involves a minimization of a functional,
and it is generally more difficult inverse problem to solve than the identification of
discrete cracks. Usually, the identification of distributed stiffness requires extensive
amount of information than for the case of discrete cracks. Focusing on the theoretical
aspect of the problem, it is worth to mention the work Lesnic et al. who presented a
mathematical analysis of the identification of a heterogeneous flexural stiffness
distribution of an Euler-Bernoulli beam. The authors established the conditions for the
well-posedness of the associated inverse problem (Lesnic, 1999). Earlier research
showed that numerical algorithms that perform well for the discrete damage identification
may be inefficient for the stiffness reconstruction problem.
Chou and Ghaboussi (Chou and Ghaboussi, 2001) used a genetic algorithm to
solve an optimization problem formulated for detection and identification of structural
damage. The ‗‗output error‘‘ indicating the difference between the measured and
computed responses under static loading and the ‗‗equation error‘‘ indicating the residual
force in the system of equilibrium equations are used to formulate the objective function
to be optimized.

68
The response surface methodology, which is a combination of statistical and
mathematical techniques, was employed by Ren et al to update a FE model based on
static responses of structures (Ren, Fang et al., 2011); uniform DOE was used in building
the response surface models. This method was verified in a numerical beam and an
experimental box-girder bridge.
3.2.3 Advantages and disadvantaged of static and dynamic identifications
Advantages and disadvantaged of dynamic identification
Vibration testing is easier to conduct; it is generally easier to excite a large
structure dynamically, particularly with harmonic loading or environmental loading,
although one often cited challenging problem when applied to real structures is that it is
often impractical to excite full scale structures in controlled way. It is also easier to
measure and continuously monitor acceleration response.
One significant disadvantage of dynamic identification is the requirement of mass
matrix and damping in dynamic model, while the required results are usually of stiffness
only. Estimating damping is difficult, and although model masses can be estimated from
structural drawings, it adds uncertainty in modeling errors.
Soil-structure interaction poses another difficulty in dynamic identification, but
not for static identification; non-structural elements is another source of uncertainty need
to be considered in dynamic identification. Dynamic-based identifications are mostly
based on modal identification results. In modal identification, only lowest frequencies
and modal properties can be estimated with certainty. For ordinary structures, no more
than 3~5 frequencies can be accurately identified; for very large bridges, this number can
69
be 10. However, Damage is typically a local phenomenon. Localized damages often
require higher modes to be accurately measured which are impossible.
Some modal shape-based algorithms require complete mode shapes to be
measured. When only a small number of sensors are installed, one can use either system
condensation techniques or modal expansion techniques. Some methods require a very
dense measurement of displacement or strain mode shape (Goldfeld, 2007);
System condensation techniques reduce the DOFs defined in the analytical model
to the measured DOFs. Reduction techniques often produce a condensed matrix that does
not resemble the member connectivity of the original model. On the other hand, modal
expansion methods generally do not produce the results that are accurate enough to
provide reliable information about damaged DOFs or damaged structural members.
Up to date the most successful dynamic-based damage identification practice is
the local-level frequency-based detections of rotating blades which is already a tool in
routine practice for rotating machinery. Rotating blades can be regarded as cantilever
beams under various axial loads induced by centrifugal forces; however this type of
cantilever beams is scarce in real civil infrastructures. Furthermore in civil structures, it
can be difficult to isolate local modes, generally a global mean, some local identification
using modal properties, this is the major difficulty; another problem is that cracks in truss
behaviour members are not revealed by frequency-change, but are dangerous. One needs
to use local bending models to identify cracks, i.e. local level test need local bending
modes.
In beam damage identification using dynamic responses, most of the
investigations reported in the literature focused on testing single free–free beams, for

70
example, references: (Maeck, Wahab et al., 2000) (Ren and De Roeck, 2002) (Cerri and
Vestroni, 2003) (Wahab, De Roeck et al., 1999), i.e. the global and local modes are
identical and are for the beam only; this type of condition rarely occur in real practice.
Another difficulty using dynamic properties is the variability of dynamic
parameters identified using system identification techniques as a result of environmental
and operational conditions, such as temperature, moisture, wind and others (Cornwell,
Farrar et al., 1999). It has been demonstrated that changes in modal parameters due to
environmental and operational factors may well exceed those caused by even severe
damage, and thus if this variability is neglected, it is very difficult to draw reliable
conclusions about structural condition (Sohn, Dzwonczyk et al., 1999) (Farrar, Cornwell
et al., 2000).
If measured over a fair frequency range, frequency response functions (FRF) is
high density data and generally contain much more data and information than frequencies
and modal shapes, however the difficulty is that FRFs are heavily influenced by damping,
and it is generally difficult to model damping exactly in a FE model. One may try to
assume Rayleigh damping and identify the damping ratios or Rayleigh coefficients
multiplying the mass and stiffness matrices. Some modal identification methods give
complex modal shapes in most types of damping; in this case a complex transformation is
often required to transform a complex modal shape to a real one (Niedbal, 1984). This
may introduce further uncertainties in following damage identification.
Frequency response functions (FRFs) contain a large amount of redundant
information since there are many more points in a FRF than parameters in the model. It is

71
therefore necessary to choose which points of the FRF should be used in updating the
model. On the other hand, if the sensitivity is too high, it will suffer from noise since it
will be highly sensitive to noise. Another advantage of FRF is that they are not restricted
to linear systems, and modal parameters in structures with high modal density are
difficult to identify.
Advantage and disadvantages of static identification:
There is no need to assume mass, damping in static identification, and in some
cases, the test is easier, especially when optical measurements are used. The
measurement devices are being developed, including inclinometers, strain gauges, and
especially the close-range photogrammetry, which considered by the author as one very
promising development for civil engineering in future.
In global level identification, the effect of the damage may be concealed due to
the limitation of load paths. For a real structure, the damaged components which have
fairly little contribution to structural deformations under a certain load case will be
difficult to identify. These kinds of limitations can be practically overcome by optimizing
the loading scheme according to the proper pre-analysis or loading several groups of load
synthetically. A static test is easy to excite the whole structure in local level. Multiple
loading cases are usually required in global level identification.
Some of the most successful results of damage identification have been achieved
on laboratory scale truss structures, both dynamic and static identifications, in dynamic
tests, the lack of rotational degrees of freedom and ease of accessibility allow entire mode
shapes to be measured (Kosmatka and Ricles, 1999); while in static tests, displacements

72
can be measured at joints only or strains to be measured in each single bar member
(Hjelmstad and Shin, 1997) (Liu and Chian, 1997).
Successful damage identification and stiffness recovery require efficient
measurement techniques of the structural response. Traditional measurement techniques
using LVDTs and strain gauges allow only localized measurements along the beam and
therefore provide reduced amount of information. Recent progresses in image processing
techniques and digital cameras permit a quasi-continuous deflection profile
measurements of beams (Jiang, 2008). This progress offers new possibilities in structural
parameter identification, damage localization. Unlike localized testing sensors, digital
images (Digital Image Correlation and close range digital photogrammetry) are able to
provide a large number of spatially distributed measurements. The large quantity of
experimental data in the form of quasi-continuous measurements of the deflection profile
becomes a valuable input for the damage identification problem.
3.3 Equilibrium gap method
Claire et al. (Claire, 2004) developed the general concept of the equilibrium gap
to identify damages in 2D structures. When restricted to the elasticity domain and in the
absence of volumetric loading, the continuous format of the equilibrium equation is given
by: 𝑑𝑖𝑣 𝝈 𝒖 = 𝟎, or equivalently 0)))(,(( xuσ Ediv , where the Cauchy stress σ is a
function of the displacement field, )(xu , and the material parameters 𝐸 and 𝜈. Using
finite element discretization, the continuous equilibrium equations can be written as a set
of discrete equations in the form of 𝝈 ∙ 𝒏 = 𝟎, where ∗ denotes the jump of the

73
quantity * in the continuum. The stress jump equations can also be given as 𝝈𝑖𝒏 = 𝝈𝑗𝒏,
where 𝒏 denotes the normal of an interface between the two sides of a section. Given a
measured displacement field, a piecewise-constant material parameter distribution is
assumed and the distribution is evaluated through a finite element formulation.
The principle of equilibrium gap formulation can be applied specifically for
beams where the equilibrium equations can be written as functions of the generalized
forces at any given section:
l r lrF F P (3.1-a)
l r lrM M M (3.1-b)
where the indices 𝑙 and 𝑟 denote the internal force to the left and right of the section,
respectively. The variables 𝑃𝑙𝑟 and 𝑀𝑙𝑟 denote the external force and moment at the
cross section. Equations (3.1-a) and (3.1-b) are the equilibrium conditions associating the
external and internal forces; in each material point, the sum of all internal forces arising
from various adjacent elements equals the applied load (Figure 3.1).
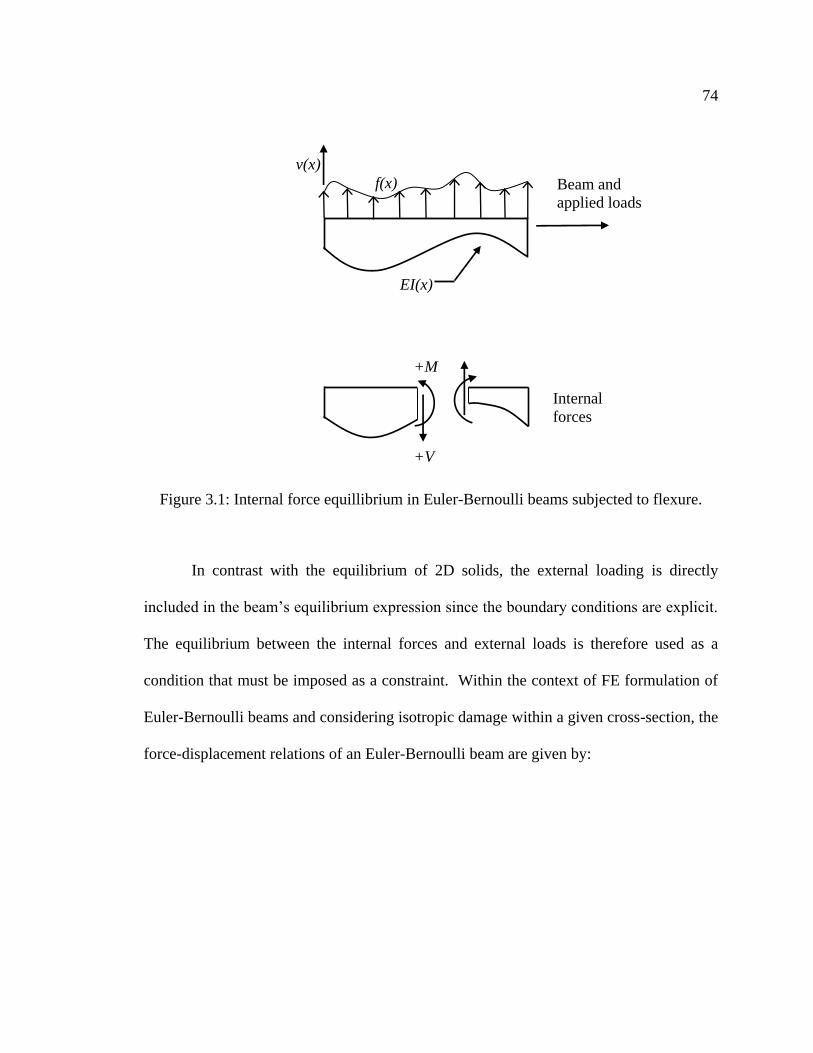
74
Figure 3.1: Internal force equillibrium in Euler-Bernoulli beams subjected to flexure.
In contrast with the equilibrium of 2D solids, the external loading is directly
included in the beam‘s equilibrium expression since the boundary conditions are explicit.
The equilibrium between the internal forces and external loads is therefore used as a
condition that must be imposed as a constraint. Within the context of FE formulation of
Euler-Bernoulli beams and considering isotropic damage within a given cross-section, the
force-displacement relations of an Euler-Bernoulli beam are given by:
Beam and
applied loads
v(x)
f(x)
x
Internal
forces
+M
+V
EI(x)

75
1 1
2 2
1 10
3
2 2
2 2
2 2
(1 )
12 6 12 6
6 4 6 2(1 )
12 6 12 6
6 2 6 4
d
D
v VL L
ML L L LEID
v VL LL
ML L L L
0
k d f
k d f
(3.2)
where 1 2 1 2, , ,T
v v are the nodal degrees of freedom (vertical deflection, rotation
angle), and 1 1 2 2, , ,V M V M are the dual variables (shear, moment). The stiffness matrix
of the element at the damaged state is denoted 𝐤𝐝 and is proportional to a reference value
for stiffness 𝐤𝟎. The variable 𝐷 (0 ≤ D ≤ 1) is a scalar indicating the damage level
(stiffness decrease). When 𝐷 = 0, the beam element is considered undamaged and its
stiffness is equal to the reference value. At the other limit, the ultimate condition 𝐷 = 1
represents a complete loss of the beam‘s stiffness. This definition for damage is in
accordance to the continuum damage mechanics (Lemaitre, 1996). When the axial
deformation is neglected, the stiffness matrix depends only on the flexural stiffness 𝐸𝐼,
and the beam‘s element length. For each element, we define a reference value for
stiffness 0EI , and note that its value can vary along the beam. We will assume that a
reference distribution is 𝐸𝐼0 𝑥 , and take this as the initial estimate for the identification
process. For example, this reference stiffness can, but not necessarily, correspond to the
stiffness of the undamaged beam. From Eq. (3.2), a possible definition for the damage
variable would be 𝐷(𝑥) = 1 −𝐸𝐼(𝑥)
𝐸𝐼0(𝑥), where 𝐸𝐼(𝑥) is the actual stiffness of the cross-
section at a position 𝑥. It is clear that when EI decreases, damage increases linearly, so
76
that the theoretical limit of 1 is reached when the cross-section loses its flexural
resistance. Using this definition, the beam‘s stiffness matrix is expressed as a function of
the damage variable 𝐷 (with 0)1( kk D ). The parameter )1( D corresponds to the
stiffness reduction factor. When FE discretization is used, a constant damage parameter
𝐷 is assumed for each element, which corresponds to a piecewise-constant definition of
the damage field along the beam. ( this is origital application of the equilibrium gap)
At present, we will assume that the deflection profile is available from non-
contact measurements made using close-range photogrammetry. For each pair of
adjacent elements, e and 𝑒 + 1, the following equilibrium equations can be written:
(1 − 𝐷𝑒)(𝑘03)𝑒𝑑𝑒 ,𝑟 + (1 − 𝐷𝑒+1)(𝑘0
1)𝑒+1𝑑𝑒+1,𝑙 = (𝑉2)𝑙 + (𝑉1)𝑟 = 𝑃𝑙𝑟 (3.3-a)
(1 − 𝐷𝑒)(𝑘04)𝑒𝑑𝑒 ,𝑟 + (1 − 𝐷𝑒+1)(𝑘0
2)𝑒+1𝑑𝑒+1,𝑙 = (𝑀2)𝑙 + (𝑀1)𝑟 = 𝑀𝑙𝑟 (3.3-b)
where 3
0( )ek is the third row in the reference stiffness matrix of element 𝑒; and eD is the
associated damage variable. Similarly, 1
0 1( )ek is the first row of the reference stiffness
matrix of element 𝑒 + 1; 𝑑𝑒 ,𝑟 and 𝑑𝑒+1,𝑙 are the displacement vectors of the node on the
right and left sides of elements 𝑒 and 𝑒 + 1, respectively. The generalized forces 𝑃𝑙𝑟 and
𝑀𝑙𝑟 are the concentrated load and moment applied at the node connecting elements 𝑒 and
𝑒 + 1. In writing these equilibrium equations for each pair of adjacent elements, one can
arrange the linear system in terms of the damage variables to obtain the following
algebraic equations:

77
(k03)1d1 (k0
1)2d2
(k04)1d1 (k0
2)2d2
(k03)2d2 (k0
1)3d3
(k04)2d2 (k0
2)3d3
(k03)3d3
(k04)3d3
⋮
………
1 − D1
1 − D2
⋮ ⋮
1 − Dnel
=
P1
M1
P2
⋮⋮
Pnel
Mnel
(3.4)
Finally, the problem for identification of the damage variable is written as:
𝐹𝑖𝑛𝑑 𝜽 = 1 − 𝐷1 1 − 𝐷2 … 1 − 𝐷𝑛𝑒𝑙 𝑇
𝑠𝑢𝑐 𝑡𝑎𝑡 𝑮𝜽 = 𝑹 (3.5)
where 𝜽 is the set associated with the damage variables corresponding to each element
𝜽 = (1 − 𝐷1 , 1 − 𝐷2 ,… .1 − 𝐷𝑛𝑒𝑙 ), and 𝐑 = 𝑃1,𝑀1 ,… ,𝑃𝑖 ,𝑀𝑖 ,… T is the external force
at the nodes associated with the generalised degrees of freedom (i.e. displacements)
(𝑑1 ,𝑑2,… ,𝑑𝑛).
This formulation leads to a typical inverse problem, where the coefficient matrix
𝑮 defines the mathematical model. Generally, the forward problem associated with Eq.
(3.5) would be to solve the system 𝑲𝒅𝒅 = 𝑹 given a set 𝜽. In the inverse problem
associated with Eq. (3.5), the matrix 𝑮 encapsulates both the model and the data. The
discretization process leads inevitably to modeling errors in forming the system, whereas
measurement errors in the data affect the solution of the inverse problem. These two
phenomena lead to the ill-posedness of the inverse problem for Eq. (3.5), therefore
indicating the need for a regularization procedure. Eq. (3.5) is typical to problems in
many engineering areas, including biomedical and seismic imaging, digital tomography
and digital image reconstruction. A detailed analysis of regularization techniques and

78
solution methods for such inverse problems can be found in (Aster, Borchers et al.,
2005).
In this study, a Tikhonov-Total Variation (TTV) regularization scheme is used to
solve Eq. (3.5) (Aster, Borchers et al., 2005). The problem is treated in the least-square
sense augmented with the TTV regularization, leading to:
𝑚𝑖𝑛 1
2 𝐺𝜽 − 𝑹 2 + 𝛼𝛷(𝜽) (3.6)
where α is the Tikhonov parameter controlling the relative weight between the least
squares and the regularization term Φ 𝛉 . In this thesis, the value of this parameter
chosen is 10−4, which is found to be a sub-optimal choice in most practical applications.
A better value can be chosen for this parameter is possible using selecting methods such
as the L-curve method (Hansen, 1992) (Hansen, 1998). The function Φ(𝜽) represents the
total variation (TV) functional of the vector 𝜽. Minimization of the regularized TTV
functional yields an efficient scheme to solve the discrete inverse problem. This type of
regularization penalizes highly oscillatory solutions while allowing jumps-like
discontinuities. Vogel (Vogel, 2002) showed that in the case of two-dimensional image
deblurring, TTV regularization tends to produce qualitatively correct reconstructions of
blocky images (Dobson, 1996).
The accuracy of the regularized solution depends very much on the smoothness of
the true model. If 𝐦true is not smooth, then Tikhonov regularization solution simply will
not give an accurate solution.
𝜽

79
To obtain the numerical scheme for calculating Φ(𝜽), consider the following
general definition of the total variation (TV) of a function 𝑓(𝑥) on the interval [0, 1]:
𝑇𝑉 𝑓 ≝ sup |𝑓(𝑥𝑖) − 𝑓 𝑥𝑖−1 |𝑖 (3.7)
where the index, 𝑖 , is taken over all partitions (0 = 𝑥0 < 𝑥1 < ⋯ < 𝑥𝑛 = 1 ) of the
interval. In the one-dimensional case, the smooth form of TV functional defines the total
variance function Φ as:
Φ 𝑓 = 𝑑𝑓
𝑑𝑥
2d𝑥
L0 (3.8)
This equation is a continuous form of the discrete total variation that includes the
sum of the magnitude of the jumps for 𝒇. However, due to the non-differentiability of
the Euclidean norm at the origin, special attention is required for numerical
implementation. One can select a smooth approximation to the Euclidean norm, |x|, such
as x 2 + β2, where β is a small positive parameter giving rise to the following smooth
total variance functional:
Φ θ(x) = dθ
dx
2+ β2dx
L
0 (3.9)
To derive the discrete form of the TTV term, let ∆𝑥 be the interval distance used
to discretize 𝜽(𝑥) (i.e. the length of a beam element in our case), and assume that the
number of elements is 𝑛𝑒𝑙 (i.e. the index of 𝜽 ranging from 1 to nel); then, the discretized
version of Eq. (3.9) can be written as:
Φ 𝛉 = ψ Δi𝛉 2 Δxn
i=2 , and ψ Δi𝛉 2 =
θi−θi−1
Δx
2+ β2 (3.10)
80
With this discretization of Φ 𝛉 , the regularized least-square problem shown in
Eq. (3.5) can be solved using a primal-dual Newton method (Chan, Golub et al., 1996)
(Vogel, 2002).
Within the present framework, both statically determinate and indeterminate
beams can be analyzed with this formulation as long as the applied load and displacement
measurements are available. It is also worth mentioning that the damage identification
can be restricted to a given segment of the beam, and that the search area does not need to
enclose the entire beam.
3.4 Data discrepancy-based FE model updating
Using a measured deflection of a beam, um, the problem of reconstructing the
stiffness of a beam can be formulated as an optimization problem using a misfit function
between the measurements and the model-based 𝒖(𝜽) displacements:
2
1
1min ( , ) ( ) ( )
2
. ( )
Nm
i i
i
J u u
suchthat K
θ
u θ θ θ
θ u f
(3.11)
where J is the data-discrepancy functional augmented with a TTV functional similar to
that in Equation (3.10). N is the total number of measured points along the beam, θ is
the vector collection of the unknown damage parameters, the vector m
u is the measured
displacement data and )(θu is the set of simulated results corresponding to a set of
distributed parameters θ . The constraint equations appearing in the minimization
problem expressed in Eq. (3.11) is the static finite element direct problem corresponding
81
to a set of parameters θ and a given load vector f . Solution of Eq.(16) leads to the
expression of a FE model updating problem.
To solve a minimization problem efficiently, one needs to evaluate the gradient of
the cost functional, J , which is constrained by the static equilibrium FE problem (Eq.
3.11). An adjoint formulation is used to compute the gradient vector of the cost
functional to the unknown stiffness distribution parameters, θ . The adjoint method
allows computation of the gradient of a cost functional with a large number of input
parameters. The constraint equations are the equilibrium-governing equations of the
discretized beam using FE, and are written in the following residual form:
( , ( )) ( ) R θ u θ K θ u f 0 (3.12)
where u is the state variable (representing displacements in the present case), and the
residual is an implicit function of the unknown internal variables θ . Introduction of the
Lagrangian multipliers, 𝝀 , converts the constrained problem into an unconstrained
optimization. The augmented functional that enforces the governing equations is
expressed as:
( , ) ( , ) ( , )TL J θ u θ u λ R θ u (3.13)
Differentiating the Lagrangian with respect to i , gives:
( , ) T T
i i i i
dL J J d
d d
θ u R u Rλ λ
u u (3.14)
Usually, the derivative of the displacement with respect to the internal parameters,
id du , is difficult to evaluate, and is not directly accessible. However, with a suitable

82
choice of λ , it is possible to make the term in the bracket,
u
Rλ
u
TJ, equal zero,
thus avoiding the need to evaluate the gradient id du . Therefore, an additional equation
can be written as:
0
u
Rλ
u
TJ (3.15)
Equation (3.15) is the adjoint equation, which is solved for Tλ ; this equation
reduces to the following linear system:
( ) ( )m T u u λ K θ (3.16)
where u is the displacement vector computed from the FE model in Eq.(16), and m
u is
the corresponding measured displacement vector. Therefore, Eq. (3.14) is simplified to:
( , ) T
i i i
dL J
d
θ u Rλ (3.17)
in which the two derivative terms can be easily computed as:
J
θ θ
and ( )
i i i
R K θ fu (3.18)
The regularized TV-functional ( ) θ is defined in the previous section (see Eq.
3.9 and Eq. 3.10). In order to calculate the gradient of the TV term J , J
θ θ
, it is
easy to deduce from Eq.(3.10) that
'( )Tx diag
Δ θ Δ θθ
(3.19)

83
x is the size of the beam element, and the term in the brackets,
'( )T diag Δ θ Δ , is a positive, semi-definite, symmetric matrix. The Δ matrix has
( 1)n rows and ( )n columns, with the ith
row being i (see Eq.11). The '( )diag θ
matrix is a ( 1) ( 1)n n diagonal matrix with the ith
diagonal entry equal to ' 2( )i θ .
The global stiffness matrix K is the classical assembly of the elements‘ stiffness
matrices ik :
1 (1 )Nel
i i iD K k (3.20)
where is the FE assembly operator, and Nel is the number of elements in the FE
model. As stated earlier, we assume that for each element, the damage is represented by a
scalar parameter, iD , in the interval [0,1]. Therefore, the derivative of the stiffness matrix
with respect to θ can be computed analytically given a specific beam element
formulation. For the Euler-Bernoulli bending element the following expression holds:
1 1
( )( )j jNel Nel
j j i
ii
kk
K θ (3.21)
In conclusion, the adjoint method leads to an efficient computational method to
calculate the gradient of the cost functional and consists of two consecutive steps: 1)
solve the adjoint equation (3.17) for Tλ , then insert T
λ into Eq. (3.18) to calculate the
gradient of the Lagrangian. With the gradient calculated, any efficient gradient-based
optimization technique can be used to find the optimal solution. A procedure based on the
BFGS pseudo-Newton optimization technique is summarized in Table-2. The algorithm
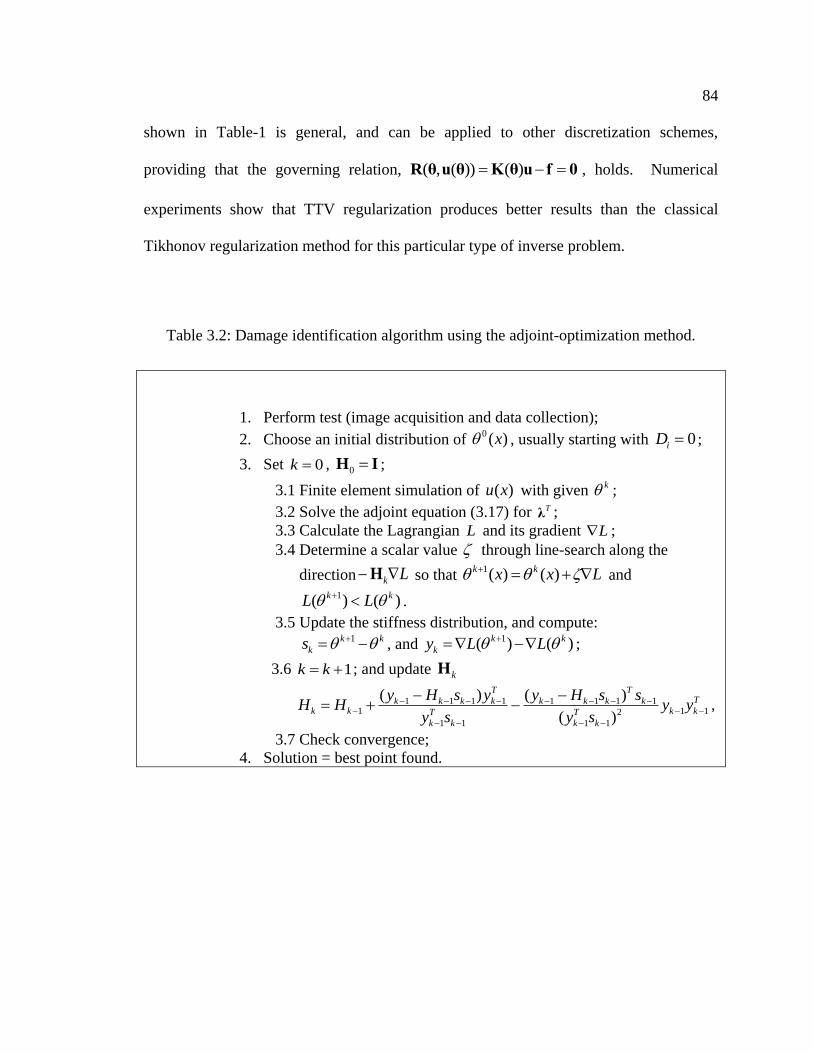
84
shown in Table-1 is general, and can be applied to other discretization schemes,
providing that the governing relation, ( , ( )) ( ) R θ u θ K θ u f 0 , holds. Numerical
experiments show that TTV regularization produces better results than the classical
Tikhonov regularization method for this particular type of inverse problem.
Table 3.2: Damage identification algorithm using the adjoint-optimization method.
1. Perform test (image acquisition and data collection);
2. Choose an initial distribution of 0 ( )x , usually starting with 0iD ;
3. Set 0k , 0 H I ;
3.1 Finite element simulation of ( )u x with given k ;
3.2 Solve the adjoint equation (3.17) for Tλ ;
3.3 Calculate the Lagrangian L and its gradient L ;
3.4 Determine a scalar value through line-search along the
direction LkH so that 1( ) ( )k kx x L and
1( ) ( )k kL L .
3.5 Update the stiffness distribution, and compute: 1k k
ks , and 1( ) ( )k k
ky L L ;
3.6 1k k ; and update kH
T
kk
k
T
k
k
T
kkk
k
T
k
T
kkkkkk yy
sy
ssHy
sy
ysHyHH 112
11
1111
11
11111
)(
)()(
,
3.7 Check convergence;
4. Solution = best point found.
85
3.5 Examples
3.5.1 Numerical examples
3.5.1.1 Validation of the Equilibrium Gap Method
To validate the proposed algorithms, we start with an ideal case where the
―experimental‖ data are synthetic and obtained from a direct problem using a FE solution.
The objective is to validate the proposed algorithms for locating discrete cracks and
reconstructing the stiffness distribution along a beam. In this first validation attempt, we
seek to validate the equilibrium gap-based method for a beam with two localized,
damaged sections. A simply supported 10 𝑚 long beam with a constant stiffness is
subjected to a concentrated load of 5 kN at the mid-span. The stiffness of the two
elements at locations 1 2.5x m and 2 5x m are reduced by 50% and 30% (𝐷 = 0.5 and
𝐷 = 0.3 ), respectively. The deflection of the FE model is used as input for the
equilibrium gap method to identify the damage. The beam is discretized with 100
elements, and therefore the stiffness distribution function is represented by 100 discrete
unknown parameters. A Gaussian noise is added to the simulated response to emulate
real measured signals as expressed by:
( ) ( )noise x NRND a RMS u (3.22)
where NRND is a Gaussian random distribution with zero-mean and a unit standard
deviation; a is the applied noise level; and )(uRMS is the root-mean-square of the
measured displacement )(xu . The problem is solved using a Primal-Dual method
(Vogel, 2002).

86
Figure 3.2-(a) shows the damage pattern when no noise is added to the deflection
measurements; in this case the two damaged zones (cracks) and damage levels are
identified with very good accuracy. In Figures 3.2-(b) and 3.2-(c), noise levels of 2.5%
and 5% are added to the measured deflection data, respectively. The numerical simulation
is capable of identifying the positions and levels of the damage under these noise
conditions. However, it is observed that the noise added to the synthetic measurements
can mask the damage at the fine-scale level. If the noise level is known, the minimum
scale of detectable damage corresponding to this level of noise can be approximately
estimated by inspecting the variations of the identified damage indices. For example, at a
5% noise level, the finest detectable level of damage seems to be 10%, as it can be seen
from inspection of Figure 3.2-(c).
To demonstrate the effect of noise in masking fine-scale damage, the beam is re-
simulated using a different damage scenario, the beam‘s stiffness is reduced by 30% and
10% at two locations, 2.5 𝑚 and 6 𝑚 from the left support, (i.e. 𝐷(2.5𝑚) = 0.3 and
𝐷(6𝑚) = 0.1). A 5 % level of noise is added, and the identified damage indices are
shown in Figure 3.2-(d), in which only the damage at location 2.5 m (𝐷(2.5𝑚) = 0.3 ) is
identifiable; damage at the 6 m location is indistinguishable from the noise.

87
Figure 3.2: Identified damage indices of a simply-supported beam using the equilibrium
gap method. (a): no noise, (b): 2.5% noise, (c): 5% noise, (d): 5% noise.
3.5.1.2 Validation of the Data Discrepancy Functional Method
The previously described problem is solved again using the data discrepancy
functional method and the results are shown in Figure-3.3. Both the equilibrium gap and
data discrepancy functional methods are in good agreement with the baseline solution.
0 2 4 6 8 10
Distance (m)
-0.2
0
0.2
0.4
0.6
Dam
ag
ein
dex
(D)
b
0 2 4 6 8 10
Distance (m)
-0.2
0
0.2
0.4
0.6
Dam
ag
ein
dex
(D)
a
0 2 4 6 8 10
Distance (m)
-0.2
0
0.2
0.4
0.6
Dam
ag
ein
dex
(D)
c
0 2 4 6 8 10
Distance (m)
-0.2
0
0.2
0.4
0.6
Dam
ag
ein
dex
(D)
d

88
Figure 3.3: Comparison of the identified damage indices of a simply-supported beam
using equilibrium gap and data discrepancy formulation.
In a second example, a 10 m long, simply-supported beam is simulated to validate
the data discrepancy functional method. The beam is assumed to have a constant
stiffness; a concentrated load of 5kN is applied at the mid-span. The beam is discretized
using 100 beam elements; hence, the continuous stiffness distribution function is
represented by 100 discrete unknown stiffness parameters. A FE simulation is used to
calculate the deflection profile. A Gaussian noise level of 5% is added to the synthetic
displacement field that is to be used as input for the identification.
For the first validation test, we try to recover the stiffness of a beam with constant
stiffness. The initial estimate is based on a uniform stiffness factor of 0.5 (i.e. half of the
true stiffness value). The results from the application of the adjoint optimization method
are illustrated in Figure 3.4. In the second test case, the beam is assumed to have a
continuous parabolic stiffness distribution. Again, a constant stiffness factor of 0.5 is

89
used to initiate the iteration process. The results of the data discrepancy-based method in
comparison to the reference stiffness distribution are shown in Figure 3.5.
The results shown in Figures 3.4 and 3.5 illustrate the performance of the data
discrepancy formulation, and show that, at a distance from the supports, the identification
is in good agreement with the expected stiffness values. The displacements of a simply
supported beam close to the support are very small (zero at the support), and the lack of
information in this region is not capable to improve the initial guess locally. This explains
the drift between the expected results and the results from the simulation near the ends of
the beam.
Figure 3.4: Identified stiffness factor distribution for a simply-supported beam with
constant stiffness using the data discrepancy functional method
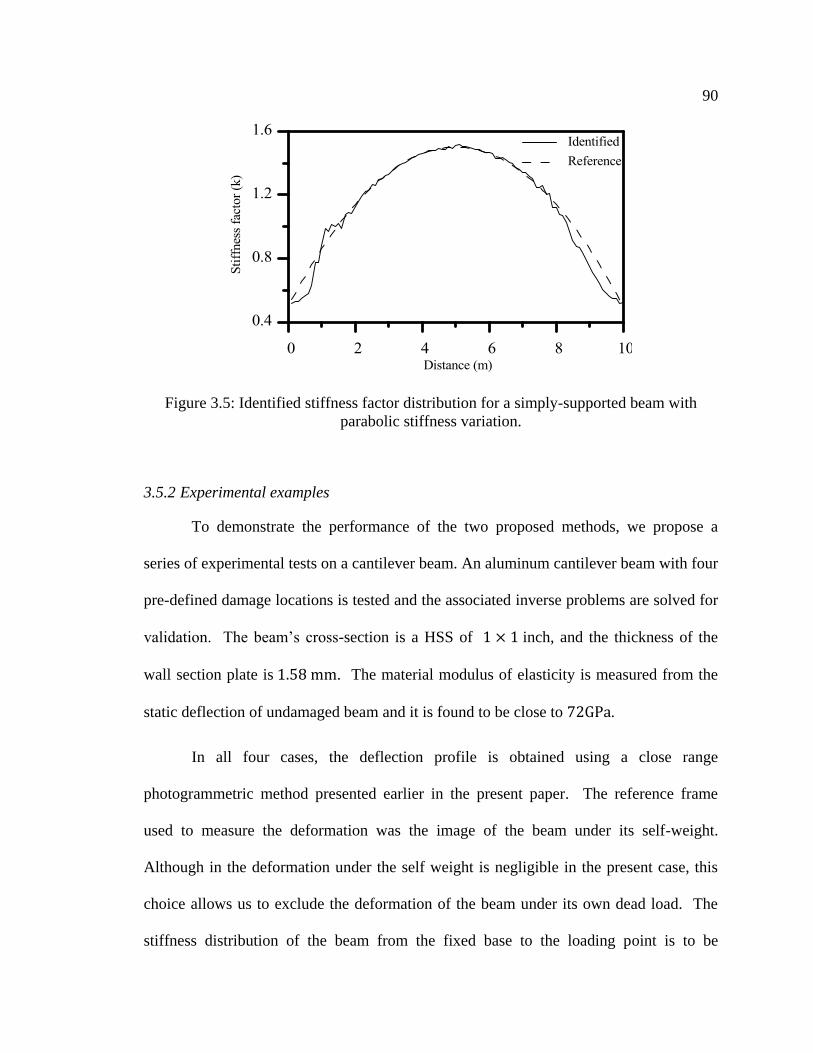
90
Figure 3.5: Identified stiffness factor distribution for a simply-supported beam with
parabolic stiffness variation.
3.5.2 Experimental examples
To demonstrate the performance of the two proposed methods, we propose a
series of experimental tests on a cantilever beam. An aluminum cantilever beam with four
pre-defined damage locations is tested and the associated inverse problems are solved for
validation. The beam‘s cross-section is a HSS of 1 × 1 inch, and the thickness of the
wall section plate is 1.58 mm. The material modulus of elasticity is measured from the
static deflection of undamaged beam and it is found to be close to 72GPa.
In all four cases, the deflection profile is obtained using a close range
photogrammetric method presented earlier in the present paper. The reference frame
used to measure the deformation was the image of the beam under its self-weight.
Although in the deformation under the self weight is negligible in the present case, this
choice allows us to exclude the deformation of the beam under its own dead load. The
stiffness distribution of the beam from the fixed base to the loading point is to be

91
identified, while the stiffness distribution in the region of the free tip beyond the loading
is not taken into consideration, since no information is available in that region.
3.5.2.1 Test # 1: Step-wise damage detection
The first test setup is shown in Figure 3.6. The total length of the beam is
L = 130 cm. A concentrated load of 21 𝑁 is applied at a location 90 cm away from the
fixed end. To induce a predefined damage, the bottom face of the HSS section is cut out
between 50 cm and 70 cm from the fixed end as illustrated. The stiffness in the damaged
region is reduced to 0.83% of the original cross-section (𝐷 = 0.17).
Figure 3.6. The cantilever beam with a distributed damage.
The identified damage variable profile using the equilibrium gap method is shown
in Figure 3.7, it is clear that the results reproduce the expected damage location and level
with very good accuracy. The recovered stiffness factor of each element using the data
discrepancy method and reference values are plotted in Figure 3.8. The step damage is
clearly visible despite the oscillatory nature of the identified stiffness distribution; the
amplitudes of oscillations are generally less than 5%, with exception of regions near the
beam‘s ends. The larger errors in the two ends can be attributed to the measurement
𝑙𝑜𝑎𝑑
50 𝑐𝑚
20 𝑐𝑚
20 𝑐𝑚

92
errors of the displacement close to the loading point and the lack of information close to
the fixed end (theoretical displacements close to zero).
Figure 3.7. Damage detection of the cantilever beam with distributed damage using the
equilibrium gap method.
Figure 3.8. Identified stiffness factor distribution of the cantilever beam with distributed
damage using the data discrepancy formulation.

93
Figure 3.9 illustrates the performance of the adjoint based optimization algorithm
for solving the inverse problem formulated using the data discrepancy functional. Figure
3.9(a) shows the convergence of the cost function minimization, whereas Figure 3.9(b)
illustrates that at convergence, the solution is independent of the initial guess of the
beam‘s stiffness. The intermediate results during the iteration processes are shown in
Figure 3.9(c) and 3.9(d) as they illustrate the convergence process.
(a)
(b)

94
Figure 3.9. Performance of the adjoint based method for solving the data discrepancy
problem, (a) convergence rate, (b) influence of the initial guess, (c) iteration process for
initial guess EI0 and (d) iteration process for intial guess 1.2 EI0.
3.5.2.2 Test # 2: Single saw-cut damaged beam
In this example, a single saw-cut was created on the tested beam to simulate
damage in the form of a crack, as shown in Figure 3.10. The length of the beam is
𝐿 = 95.5𝑐𝑚, and a concentrated load of 17 𝑁 is applied at a distance of 89 𝑐𝑚 away
from the support. The location of the saw-cut is 50 𝑐𝑚 from the base; the cut is 1.5 𝑚𝑚
wide and 15 𝑚𝑚 in depth, corresponding to a 86% reduction in stiffness (D= 0.86).
(c)
(d)

95
Figure 3.10: Uniform cantilever beam with a saw-cut damage
Using the equilibrium gap method, the damage distribution along the beam is
shown in Figure 3.11. The sharp peak is captured by the solution, indicating a clearly
concentrated damage. The recovered stiffness factor profile using the data discrepancy
method is plotted in Figure 3.12. The identification of the single concentrated damage is
also clear, however small amplitudes oscillations similar to test 1 are observed. The
larger errors close to the free-end can be attributed to the errors in the displacement
measurement close to the loading point.
𝑙𝑜𝑎𝑑
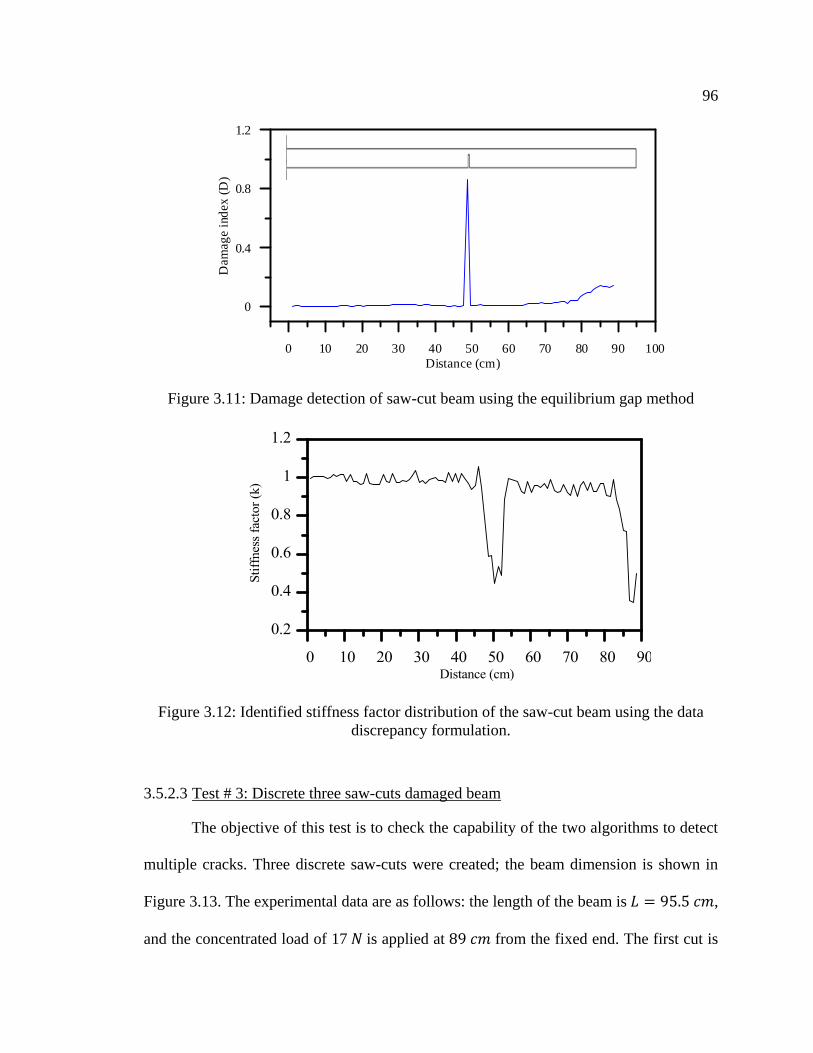
96
Figure 3.11: Damage detection of saw-cut beam using the equilibrium gap method
Figure 3.12: Identified stiffness factor distribution of the saw-cut beam using the data
discrepancy formulation.
3.5.2.3 Test # 3: Discrete three saw-cuts damaged beam
The objective of this test is to check the capability of the two algorithms to detect
multiple cracks. Three discrete saw-cuts were created; the beam dimension is shown in
Figure 3.13. The experimental data are as follows: the length of the beam is 𝐿 = 95.5 𝑐𝑚,
and the concentrated load of 17 𝑁 is applied at 89 𝑐𝑚 from the fixed end. The first cut is
0 10 20 30 40 50 60 70 80 90 100
Distance (cm)
0
0.4
0.8
1.2
Dam
ag
ein
dex
(D)

97
30.6 𝑐𝑚 away from the base, with a depth of 1.5 𝑚𝑚, corresponding to 17% stiffness
reduction; the second cut is located at 50 𝑐𝑚 away from the base, having a depth of 15
𝑚𝑚, corresponding to a 86% reduction in stiffness; the third cut is at 70 𝑐𝑚 from the
base, and is of 2 𝑚𝑚 in depth, corresponding to 20% stiffness reduction. All introduced
cuts have a width of 1.5 𝑚𝑚.
Figure 3.13. The cantilever beam with three saw-cuts damage.
The results of the equilibrium gap and the data discrepancy methods are
illustrated in Figures 3.14 and 3.15, respectively. The sharp peaks are clear in the
identified damage variables obtained by the equilibrium gap method (Figure 3.14), the
identification of the location and magnitude of the damage is in good agreement with the
expected results. From the stiffness factors obtained using the data discrepancy method,
shown in Figure 3.15, it can be seen that although the location and magnitude of the
damage have been captured, oscillations of the solution are still visible.
𝑙𝑜𝑎𝑑
30.6 𝑐𝑚
19.4 𝑐𝑚
20 𝑐𝑚
19 𝑐𝑚

98
Figure 3.14. Damage detection of the beam with three saw-cuts using the equilibrium gap
method.
Figure 3.15. Identified stiffness factor distribution of the beam with three saw-cuts using
the data discrepancy formulation.
3.5.2.4 Test #4: Combination of discrete and step cuts damaged beam
In this example, a step-cut damage was added to the previously discussed beam; a
step-cut is added between the second and the third saw-cuts (Figure 3.16). The depth of

99
the step cut is 2 𝑚𝑚, equal to the depth of the original third saw-cut at the location of 70
𝑐𝑚 from the base; thus, the third saw-cut becomes part of the step-cut, but the second cut
still displays as a discrete cut attached to the continuous step material removal.
Figure 3.16. Cantilever beam with double saw-cuts and a distributed damage.
The identified damage indices and stiffness factors, using the two proposed
methods, are shown in Figure 3.17 and Figure 3.18. The results of the equilibrium gap
method show two sharp peaks and the flat stiffness region of the step damage are clearly
identified. The overall predictions are consistent with expected damage location and
levels. We observe an error close to the location of the loading larger than in the rest of
the beam, this error can be attributed to the measurement variability in this region and the
influence of the concentrated load. On the other hand, the results of the data discrepancy
method display a similar trend of oscillations as was observed in the previous example;
however, the damage locations and magnitude are easily identifiable.
𝑙𝑜𝑎𝑑
19.4 𝑐𝑚
20 𝑐𝑚
30.6 𝑐𝑚

100
Figure 3.17. Damage detection of the beam with saw-cuts and step damage using the
equilibrium gap method.
Figure 3.18. Identified stiffness factor distribution of the beam with saw-cuts and step
damage using the data discrepancy formulation.
The identified damage indices and stiffness factors of several critical sections in
the four test cases are transformed to stiffness (𝐸𝐼) and are displayed in Tables 3.3 to 3.6.
Note that the identified values of saw-cuts are taken as the peak value around the

101
location, but the identified step-cut or original beam section stiffness values are taken as
average of five values around the approximate location since there can be some
oscillations in the identified stiffness of a constant section, especially for the data-
discrepancy formulation.
Table 3.3: Identified stiffness of test #1
Stiffness (unit: 108 𝑀𝑃𝑎 ∙ 𝑚𝑚4) 𝐸𝐼1 𝐸𝐼2 𝐸𝐼3
Expected values 5.5259 4.5865 5.5259
Equilibrium gap
Identified values 5.5143 4.4533 5.4651
Errors -0.2% -2.9% -1.1%
Data discrepancy
Identified values 5.4485 4.3655 5.4430
Errors -1.4% -4.8% -1.5%
1 2 3

102
Table 3.4: Identified stiffness of test #2
Stiffness (unit: 108 𝑀𝑃𝑎 ∙ 𝑚𝑚4) 𝐸𝐼1 𝐸𝐼2 𝐸𝐼3
Expected values 5.5259 0.7737 5.5259
Equilibrium
gap
Identified
values
5.5093 0.7644 5.4430
Errors -0.003 -1.2% -1.5%
Data
discrepancy
Identified
values
5.6088 2.4739 5.3049
Errors 1.5% 219% -4.0%
1 2 3
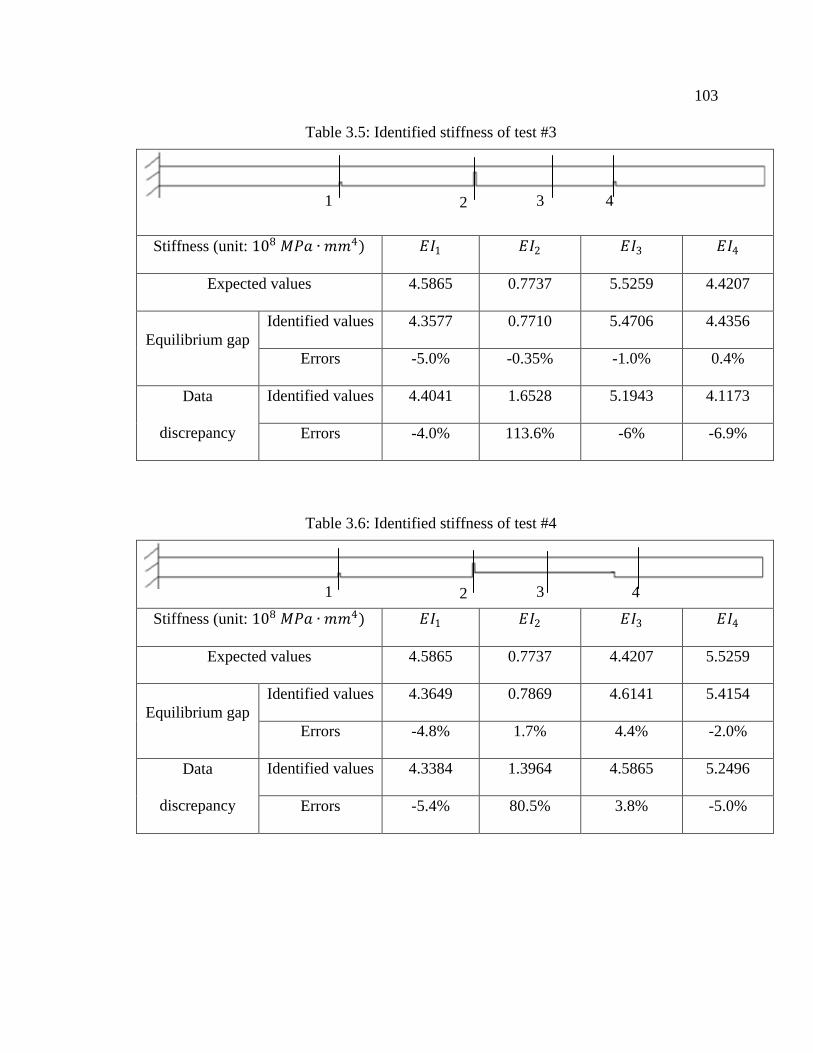
103
Table 3.5: Identified stiffness of test #3
Stiffness (unit: 108 𝑀𝑃𝑎 ∙ 𝑚𝑚4) 𝐸𝐼1 𝐸𝐼2 𝐸𝐼3 𝐸𝐼4
Expected values 4.5865 0.7737 5.5259 4.4207
Equilibrium gap
Identified values 4.3577 0.7710 5.4706 4.4356
Errors -5.0% -0.35% -1.0% 0.4%
Data
discrepancy
Identified values 4.4041 1.6528 5.1943 4.1173
Errors -4.0% 113.6% -6% -6.9%
Table 3.6: Identified stiffness of test #4
Stiffness (unit: 108 𝑀𝑃𝑎 ∙ 𝑚𝑚4) 𝐸𝐼1 𝐸𝐼2 𝐸𝐼3 𝐸𝐼4
Expected values 4.5865 0.7737 4.4207 5.5259
Equilibrium gap
Identified values 4.3649 0.7869 4.6141 5.4154
Errors -4.8% 1.7% 4.4% -2.0%
Data
discrepancy
Identified values 4.3384 1.3964 4.5865 5.2496
Errors -5.4% 80.5% 3.8% -5.0%
4 2 3 1
4 2 3 1
104
3.6 Conclusions
Two inverse problem based formulations are proposed to identify damage in
Euler-Bernouilli beams using the equilibrium gap concept and a data discrepancy
functional. The static deflection profile of the beam is obtained from close range
photogrammetric technique. A quasi-continuous measurement of the deflection became
possible with the use of digital image processing based technology. We describe a
technique to measure the displacement of beams based on an edge detection algorithm.
The first inverse problem formulation uses the equilibrium gap principle along with a
finite element forward problem solver. An over-determinate algebraic system is obtained
and solved in the least squares sense with a TTV regularization scheme. The second
formulation is based on a data discrepancy expression of the measured and model based
deflection. The minimization of the functional is obtained through an adjoint method and
a TTV regularization.
The proposed methodology is validated by a series of synthetic data generated
from simulations of a damaged beam. The identification of the location and level of
damage is verified and the effect of noise is reported. The reconstruction of a
continuously varying stiffness beam is also validated. Four tests were conducted on
beams with different damage scenarios. The two methodologies were validated and
showed overall good performance within a laboratory conditions. In each test, the
location and level of damage were identified with a good level of accuracy. However, the
formulation based on the equilibrium gap functional performed better and showed closer
solutions to the real damage state. The data discrepancy based formulation depicts a
slight oscillatory phenomenon in the solution, but the results are acceptable from a

105
practical point of view. A validation on more complex systems, such as rehabilitated
reinforced concrete beams is underway.
As for any inverse problem formulation, the quality of the data measurements is
essential to the performance of the algorithm. Two aspects need to be addressed in future
work: (i) develop a reliable methodology for deflection measurements using digital image
correlation, and (ii) include error uncertainty in the formulation of the inverse problems.
These two enhancements will allow practical use of the proposed methodologies for the
health monitoring of structures.
The proposed methodology deals with two broad activities: (i) periodic non-
destructive damage localization and severity estimation; and (ii) the assessment of
structural safety based on the results of the non-destructive damage detection.
Once the identification of the structure has been accomplished, subsequent
analyses, e.g. the determination of load capacity, rating, reliability and useful life
determination of the structure can then be conducted
3.7 Extension and envision:
Field testing and identification is different from lab setting. In the published
results, some are validated using pure simulated data to small-scale structures (Banan,
Banan et al., 1994b) (Sanayei, Imbaro et al., 1997) , some using test data in lab
experiments on small scale structures; nonetheless, in-situ testing is challenging.
Experimental design, testing, acquisition of data, data processing and data quality
assessment, all involve some difficulties. Acquiring a topologically correct a priori FE

106
model can also be a problem, boundary conditions are needed to be identified first before
damage identification.
There is a long history of research in full-scale testing for assessment of highway
bridge (Phares, Rolander et al., 2001) (Bakht and Jaeger, 1990). While for large and
exotic bridges the SHM systems are more an academic performance, for smaller bridges
the global response is more sensitive to defects, visual inspection is less frequent and
SHM systems can make a real contribution (Heywood, Roberts et al., 2000).

107
CHAPTER FOUR: MATERIAL PARAMETER IDENTIFICATION USING FULL-
FIELD MEASUREMENTS
Give me matter, and I will construct a world out of it. (Immanuel Kant)
4.1 Introduction and literature review of related research
4.1.1 General review
Modern design and performance evaluation requires realistic simulation of structural and
material behaviours; the corresponding theories are classified as models of elasticity,
plasticity, hyperelasticity, rate-dependent viscoelasticity/viscoplasticity, as well as
additional models of continuum damage and fracture mechanics at material and structural
levels. For background material about the different classes of inelastic constitutive
models for isotropic materials and numerical solution schemes, we cite, for example:
(Kojic and Bathe, 2005; Neto, Peric et al., 2008).
In today‘s practice of inelastic FE analysis using commercial programs, extensive
libraries of material models are available. Constitutive parameters associated with
inelastic models are not necessarily available in standard material databases, but are
essential input data for any finite element simulation. Therefore, unknown material
parameters must be identified experimentally. Traditionally, the identification of material
parameters is performed using standard testing procedures on regularly shaped cut-outs
or machined specimens. In these tests, it is generally assumed that the mechanical fields
are homogeneous, and that the experimental specimen gauge response can be associated

108
to the simulated material response through simple fitting of the analytical relationships
(Bell, 1984).
However, even in the case of simple tests, obtaining a perfectly homogeneous
deformation field is not certain. For example, the accurate estimation of plastic material
properties from a simple tensile test can be difficult due to the non-uniform stress/strain
distribution in the necking zone. Generally, it is not possible to determine the hardening
parameters from direct measurement of specimen elongations. In order to calculate the
stress accurately, the Bridgman correction needs to be applied, and this requires
additional measurements of the contractions and curvature of the necking zone
(Bridgman, 1952). To overcome these limitations, Rodic et al. used an inverse approach,
referred to as the ―error minimization concept‖, to estimate the hardening parameters in a
Nadai-type constitutive law (Rodic, Gresovnik et al., 1995). In this approach, the
parameters are estimated by minimizing an error function between the experimental and
predicted load-displacement responses. Consequently, the necking distortion present in
the specimens is implicitly included in the analysis; this approach does not require
additional measurements to be obtained from the necking zone as is required for
application of the Bridgman correction. Rodic and Gresovnik developed an identification
system based on the finite element code, ―Elfen‖, and an inverse program, ―Inverse‖, to
solve a minimization problem (Rodic and Gresovnik, 1998). A similar method was
adopted by Mahken and Stein, but they included the observed contours of the necking
zone during the loading process as additional experimental information to calculate the
elasto-plastic material parameters of a mild steel (Mahnken and Stein, 1997).
109
A technique called the ―mixed numerical experimental‖ method parallels the error
minimization concept, but the deformation mode does not need to be pre-determined, so
general specimen geometries and loading conditions can be chosen (Hendricks, 1991;
Meuwissen, 1998; Meuwissen, Oomens et al., 1998). For example, Meuwissen (1998)
applied the mixed technique to identify the mechanical parameters of aluminum and steel
alloy materials, where the specimens were plate with holes so the geometries were not
standard and deformation was inhomogeneous. Measurements included displacement
fields on the surface of specimens determined by the grid or grating method; the
combination of Von Mises yield criterion with nonlinear hardening laws was validated.
This family of identification procedures derives from formulation as an optimization
problem to minimize the difference between the computed and the measured responses.
Typically, these procedures employ a pseudo-Newton method to search for the minimum,
and dedicated gradient computation schemes, such as direct differentiation or finite
difference, are required (Meuwissen, 1998; Meuwissen, Oomens et al., 1998; Mahnken,
2004) (Springmann and Kuna, 2003; Springmann and Kuna, 2005) (Zentar, Hicher et al.,
2001) (Mahnken, 2000) (Mahnken, 2002).
Subsequently, due to the rapid development of finite element analysis of nonlinear
materials and optimization techniques that accompanied the extraordinary development
of computer hardware and software in the last twenty years, this method has been studied
and applied extensively to determine different material parameters in a variety of tests.
The mixed numerical experimental technique has been examined under names such as the
―inverse identification approach‖, or the ―simultaneous determination of material
110
parameters‖ (Springmann and Kuna, 2003; Springmann and Kuna, 2005) (Zentar, Hicher
et al., 2001) (Mahnken, 2000) (Mahnken, 2002).
In addition to gradient-based local deterministic methods, the application of
evolutionary algorithms to solve optimization problems, and identify inelastic material
parameters with finite element model updating based on uni-axial load-displacement data
has been investigated (Hwang, Wu et al., 2010) (Müller and Hartmann, 1989; Furukawa
and Yagawa, 1997) (Munoz-Rojas, Cardoso et al., 2010). For example, Dusunceli et al.
proposed a formulation based on error minimization of the stress-strain curve from
homogeneous uni-axial tension tests along with a genetic algorithm-based solver
(Dusunceli, Colak et al., 2010).
Alternatively, artificial neural networks (ANN) have been used to determine
material properties from load-displacement data (Aguir, BelHadjSalah et al., 2011)
(Mahnken, 2004) (Lefik and Schrefler, 2002). The ANNs can be trained using FEA
simulations to build a mapping from measurement data to material parameters. ANNs
are tolerant of measurement errors. The ANN model is used as an alternative to the finite
element calculations to evaluate the objective functions.
One may classify the different methods of correlating test data and model
parameters as:
1) methods based on theoretical/analytical relationships (analytical fitting);
2) methods based on numerical simulations of the test (mixed-numerical
experimental methods); and
3) methods based on empirical relationships, including empirical
relationships using artificial neural networks.

111
The mixed-numerical experimental method provides not only more flexibility in
test design, but also more accurate and complete assessment of constitutive models. For
example, this method allows the design of experiments in which conditions are much
closer to those of practical situations; this is especially important in mechanical
component analysis since it minimizes the extrapolation of results obtained under testing
conditions to practical conditions. Thus, the mixed numerical-experimental method is a
perfect candidate for designing experiments that approximate real-world conditions. This
is especially important if in-situ testing is required, in which the specimen is tested within
the assembly.
Generally, forward simulation is performed with finite element analysis, so this
inverse identification is actually a problem of finite element model updating (see Chapter
3 for discussion of FE model updating in damage identification). Since the 1980s, finite
element model updating has emerged as an important aspect of the design of mechanical
systems and civil structures, especially in the development of automotive and aerospace
systems; it quickly became the most popular branch of model-updating (Keane and Nair,
2005; Arora, 2007).
4.1.2 Outline of the proposed methodology
The research presented in this chapter considers the problem of identification of
material plasticity parameters. We developed an identification method based on the
minimization of a least-squares error function between the inhomogeneous displacement
fields measured by digital image correlation (DIC) and a finite element simulation under
a given load. The material parameters are identified simultaneously by means of a direct

112
derivative-free optimization method that uses the finite element code as a black-box
procedure.
The three components of this inverse identification procedure are: (i) nonlinear
finite element analysis, (ii) direct optimization algorithm, and (iii) digital image
correlation (DIC) test results. One of the fundamental aims of this work is to reformulate
the algorithm to minimize the cost function, and thus remove the need to evaluate the
gradient of the cost function. Derivative-free optimization methods allow us to avoid the
tedious coding of numerical gradient computation associated with a material constitutive
model. The second objective of this work is to exploit the use of a full-field
measurement technique based on DIC as input. DIC is capable of capturing
heterogeneous deformation fields and provides an excellent source of data for both
deterministic and statistical analysis. Furthermore, both finite element analysis and DIC
are now standard tools widely available in industry. Therefore, the proposed
methodology can be easily adopted for practical use. Finally, this work employs
statistical studies of nonlinear regression analysis in this inverse identification procedure
to verify and validate the identified material parameters. DIC provides a large amount of
data and thus allows the use of statistical inference; whereas homogeneous tests seldom
provide enough data for statistical inference unless they are associated with random
simulations (Seibert, Lehn et al., 2000a) (Harth, 2003) (Harth, Schwan et al., 2004)
(Harth and Lehn, 2007).
Taken together, finite element analysis, optical full-field measurement techniques
(such as DIC or advanced grid methods), and direct optimization techniques comprise a
standard tool for the determination of material properties. Moreover, since these
113
components of the proposed inverse identification procedure (not only finite element
analysis, but also the DIC technique and finite element model updating through direct
optimization), have become commercialized, they are currently available for general
industrial use.
4.1.3 The advantages of using DIC
Different optical measurement techniques have been used in material
characterization studies. For example, an optical method called ―silhouette analysis‖ was
used to obtain the section profile of a cylindrical specimen during necking; these data,
along with load-displacement curves, were used to identify parameters in a damage
model (Broggiato, Campana et al., 2007). Likewise, the moiré method was used to
obtain planar displacements (Kreißig, Benedix et al., 2007), while a grid method was
used by Meuwissen and Mahken (Meuwissen, 1998) (Mahken, 1998). However, the
commercially most successful image processing-based measurement technique is the
digital image correlation (DIC) method (Louban, 2009) (see Chapter 2 for a list of current
commercial DIC systems and software). Sutton et al. presented details of the DIC
technique and a review of its applications in a recent book (Sutton, Orteu et al., 2009).
Many researchers have noted the advantages of using inhomogeneous
displacement fields in material parameter identification (Kleuter, Menzel et al., 2007)
(Cooreman, Lecompte et al., 2008). Recently, investigators in France developed a
methodology based on the principle of virtual work, the ―virtual fields method (VFM)‖,
that allows the development of simple or more complex analytical models for the
constitutive equations of the material under investigation. The VFM assumes that the
input will consist of full-field measurement data obtained using DIC or the grid method

114
(Grediac, Toussaint et al., 2002) (Grediac, 2004) (Grédiac and Pierron, 2006) (Toussaint,
Grediac et al., 2006) (Promma, Raka et al., 2009) (Grédiac, 2011). In addition,
inhomogeneous displacement fields must be provided for the VFM; otherwise, the
resulting linear system of equations becomes ill-conditioned as the data may not contain
sufficient information for more than two parameters. Intuitively, although homogeneous
displacement fields are adequate for identification of the elastic modulus, the deformation
must be heterogeneous for the determination of elasto-plastic parameters. Section 4.8
presents further discussion of the issue of identifiability.
There is an additional advantage arises from the large amount of data generated
by DIC: the valid use of statistical inference. For example, the estimate of the covariance
is valid when the amount of data is large. On the other hand, unless used in conjunction
with random simulation, homogeneous tests seldom provide enough data to support
statistical inference (Seibert, Lehn et al., 2000a) (Harth, 2003) (Harth, Schwan et al.,
2004) (Harth and Lehn, 2007).
Another significant advantage to using DIC is that the identification of parameters
in material models can be performed with non-standard specimens and even with original
components, so in-situ testing becomes possible. The use of non-standard specimens
under non-standard loading conditions is not only an intellectual curiosity, but is
particularly useful in some practical applications. For example, Partheepan et al used
miniature specimens, thus avoiding the removal of large material samples, for the
evaluation of current material properties of an in-service component (Partheepan, Sehgal
et al., 2008).
115
4.1.4 Organization of this chapter
Chapter 4 is organized as follows: Section 4.2 outlines the formulation of
continuous functions in solid mechanics and gives an overview of popular material
constitutive models that are widely used in engineering finite element analysis. Section
4.3 outlines the approaches used in the current work, and describes the identification
method in detail; including the least squares solution and the validation procedures based
on theories in nonlinear regression analysis. Section 4.4 summarizes the relevant theories
in nonlinear regression related to this work. Section 4.5 presents the inverse
identification problem using nonlinear least squares estimation. Section 4.6 is an
overview of state-of-the-art numerical optimization methods, with emphasis on direct
derivative-free techniques developed in recent years. Section 4.7 describes the statistical
inference procedures for the DIC test data; these procedures employ linearized
covariance analysis (LCA) of uncertainty for the identified parameters and sampling-
based statistical inferences of the response fit.
Identifiability issues are discussed in Section 4.8. Numerical and experimental
examples are presented in Section 4.9; the first validation is based on synthetic data, and
the experimental example deals with a cast iron bearing cap component, where the
displacement field was obtained using the ARAMIS DIC system (ARAMIS). Four direct
optimization methods are compared using these examples, including (i) the derivative-
free CONDOR algorithm which is based upon the trust-region algorithm and response
surface exploration techniques, (ii) the Nelder-Mead simplex method, (iii) a response
surface method in FE software, and (iv) a pseudo-Newton method using finite difference
approximation to gradients. The fourth method is usually considered as first-order,

116
gradient-based method with an approximate gradient evaluation; this type of methods
have been used in material parameter identification. However, since in this type of
methods, the FE simulation process can actually be treated as black-box, we consider it
also as a derivative-free method; i.e. in this thesis the term ―derivative-free‖ is associated
with methods in which the objective-function evaluation process can be treated as an
external black box. Section 4.10 summarizes the findings of this work.
4.2 Overview of elasto-plasticity
In this section, we summarize the general theory of elasto-plasticity. By
definition, the theory of elasto-plasticity is concerned with solids that, after being
subjected to a loading program, may sustain permanent (or plastic) deformations after
complete unloading. Elasto-plasticity theory has been successfully applied to metals, and
it is nowadays theoretically consolidated and well-studied phenomenological constitutive
model.
The basic components of the general elasto-plastic constitutive model include:
The strain decomposition principle where the total strain 𝜖 is assumed to
be the sum of an elastic, 𝜖𝑒 , and a plastic components, 𝜖𝑝 : 𝜖 = 𝜖𝑒 + 𝜖𝑝 ,
A yield criterion usually expressed in the stress space, 𝛷(𝜎), that defines
the onset of plasticity. Classical yield criteria widely used in engineering
practice include Tresca, von Mises, Mohr-Coulomb and Drucker-Prager
criteria.
A plastic flow rule defining the evolution of the plastic strain, the flow
rule is usually defined as a flow potential. In the case of associative flow
rule, the flow rule is described from the gradient of the yield function
117
which leads to the fact that the plastic strain rate is a tensor normal to the
yield surface in the stress space.
A hardening law, characterizing the evolution of the yield surface (i.e.
deformation after yielding occurred). The hardening rule describes the
evolution of the yield function over time, usually identified from a
uniaxial specimen.
To express the irreversibility of the plastic deformation, the Kuhn-Tucker
conditions must be applied.
The identification of an associative elasto-plastic constitutive model consists of
finding the parameters that define the yield function and the hardening surface. In FE
analysis, the hardening law is generally expressed as a one-dimensional function
describing the full stress-strain curve during uniaxial loading (Ramberg and Osgood,
1943) (ASTM, 2011).
For example, in the case of the linear hardening law: 𝜎 = 𝜎0 + 𝐻𝜖𝑝 , where 𝜎 is
the current yield stress, 𝜎0 is the initial yield stress, 𝜖𝑝 = 𝜖 − 𝜖𝑒 is the equivalent plastic
strain, 𝜖 is the total strain and 𝜖𝑒 is the elastic strain, 𝐻 is the hardening modulus. In this
simple model, the parameters that need determined are 𝜎0 and 𝐻. In most FEA programs,
the data required for an elasto-plastic behaviour is a multi-linear function that is the best
fitting of the stress-strain curve. There exist a variety of nonlinear hardening laws for
metals including the Nadai hardening law: 𝜎 = 𝜎0 + 𝑐𝜖𝑝𝑛 , defined by the three parameters
𝜎0, 𝑐 and 𝑛.; the rigid-plastic power hardening law: 𝜎 = 𝑐𝜖𝑝𝑛 ; and the Ramberg-Osgood

118
hardening law: 𝜖 =𝜎
𝐸+ 𝐾
𝜎
𝐸 𝑛
, where 𝐸 is the Young‘s modulus, and 𝐾 and 𝑛 are the
two material parameters.
4.3 General methodology
Material parameter identification is a particular type of parameter identification
problem. Parameter identification problems arise in all fields of engineering science.
Consequently, parameter identification has attracted considerable research interest since
the mid-seventies; a number of books describe standard treatment of parameter
identification using deterministic and statistical methods (Bard, 1974) (Beck and Arnold,
1977) (Bates and Watts, 1988) (Tarantola, 2004) (Seber and Wild, 2005). In the current
research, we focus on a formulation for the identification of constitutive parameters based
on the least-squares cost function measuring the gap between a FE model prediction and
the results of experimental measurements. The least-squares estimation is a fundamental
approach to system identification problems, and has already become a classic method
frequently practiced by scientists and engineers in a wide variety of applications.
The principle components of the inverse identification technique are presented
schematically in Figure 4.1:

119
Figure 4.1: Flowchart of material parameter identification using optimization-based FE-
model updating
In this procedure, the post-processing phase performs a coordinate transformation
and interpolation to correlate the coordinates used in the DIC experiment with those of
the FE simulation results. When commercial FEA software is involved in the
optimization process, the data flow between the optimization algorithm and the FEA code
is maintained through file exchanges. This process requires the optimization algorithm to
modify the input file iteratively and submit the modified data to the FEA software.
Modern commercial design software packages developed for coupling with FE analysis
(e.g. iSIGHT or HYPERSTUDY) have interfaces that simplify the data flow process.

120
The research presented in this chapter uses ANSYS software for the FE analyses.
MATLAB programs implementing CONDOR and Nelder-Mead simplex algorithms are
used as well, and the interaction with the ANSYS FE software is performed through
modification of the ANSYS APDL modeling file. For purposes of comparison, a
response surface methodology included in the ANSYS DesignSpace software package is
also used; in this case, the interaction between the optimization algorithm and the FE
code is internal to the software.
4.4 Nonlinear regression theory: parameter estimation using statistical inference
Due to unavoidable systematic inaccuracies inherent in loading, boundary conditions, and
measurement devices, the recorded experimental data includes errors. Therefore, the
sensitivity and inferences on the calculated parameters represents important information
to the user regarding the precision of the combined testing/modeling procedures.
The parametric nonlinear regression model is written as: 𝒀 = 𝑓 𝒙,𝜽 + 𝝐; where
the response vector 𝒀 is observed for each value of the independent variable 𝒙, it is
assumed that the true regression relationship between 𝑌 and 𝑥 is a sum of a systematic
(physical) part and a random part; generally, the true system function is approximated by
a parametric function 𝑓 , called the regression function, that depends on unknown
parameters 𝜃. The function 𝑓 does not need to be knowm explicitly, in many cases it is a
function of the solution of differential equations. 𝜖 is a random error equal, by
construction, to the discrepancy between observation 𝑌 and 𝑓.

121
The problem is to estimate the unknown parameter vector 𝜃 . A natural and
popular choice is the least squares estimator, and the LS estimator is also the maximum
likelihood estimator (MLE) in the case of Gaussian observations.
The inverse identification process described in Section 4.3 can be interpreted as a
statistical parameter estimator using nonlinear regression. Statistical inference can be
employed to study the reliability of the parameter identification, and to provide an
assessment of the quality of the results (Huet, Bouvier et al., 2004). In using statistical
inference, a set of parameters (𝜽) are considered as random variables; thus, their accuracy
is related to the shape of the probability distribution function. Accuracy is often
expressed in terms of a confidence region for the parameter vector, or as the confidence
interval of its components. A 100(1-α)% confidence region is a region of parameter
space that contains the true parameters with a probability of 1 − α; therefore, 1 − α is the
confidence level for this region (Huet, Bouvier et al., 2004).
There are three methods for statistical inference:
I. Likelihood approach,
II. Sampling theory approach,
III. Bayesian approach.
All three methods produce the same point estimates for 𝜽. They also produce
similar confidence regions of reasonable parameter values.
In nonlinear regression inference, the success of parameter identification can be
checked by: 1) expectation function fit and 2) parameter fit. If a model gives a smaller
residual response and/or smaller confidence regions in the expectation function and

122
response function, the model is said to be phenomenologically better, or the model
parameter set yields a better description of the model‘s behaviour.
The most accurate way to perform a sensitivity analysis is through Monte Carlo
methods in which properties of the distributions of random variables are investigated by
use of simulated random numbers (Gentle, 2003). In the random simulation, scattered
data from simulated identification experiments is collected, and analyzed statistically
(Mosegaard and Sambridge, 2002). For example, researchers used stochastic search and
Monte Carlo analyses to study viscoplasticity models; their test data were homogeneous
responses and their models were ordinary differential equations (ODE) solved
numerically using the Runge-Kutta method. This type of forward analysis is easy to
solve, and computationally inexpensive, therefore stochastic techniques can be applied
without difficulty (Seibert, Lehn et al., 2000a) (Harth, Schwan et al., 2004) (Harth and
Lehn, 2007).
Nevertheless, due to the complex geometry and nonlinear FEA, we cannot
recommend this approach for industrial applications. With current computing power, if
optimization and validation require between 20 to 50 FE analyses, then this approach is
affordable; however, if these processes require 5000 FE analyses, the computational cost
is too high. For the same reason, global stochastic optimization methods are not
applicable to this problem.
4.5 Least-squares formulation and solution of the identification problem
In the mixed numerical-experimental method using a least squares estimator, the
set of parameters 𝜽 of the material model are determined by minimizing the difference
123
between a test data set 𝒅 and numerically simulated results denoted 𝑴(𝒙;𝜽) in the sense
of an error norm. Usually, a classical least squares objective function is used:
min 𝑓 𝜽 =1
2 𝑴 𝒙;𝜽 − 𝒅 2
2 𝑴 𝒙;𝜽 ∈ 𝑅𝑁 𝜽 ∈ 𝝑 ∈ 𝑅𝐾 𝒅 ∈ 𝑅𝑁 (4.1)
Obviously, the objective function 𝑓(𝜽) is a scalar function of the unknown
material parameters 𝜽; the numerically simulated response, referred to as model, 𝑴(𝒙;𝜽)
is a function of the material parameters 𝜽. Here, N is the number of measured response
data and 𝐾 is the number of parameters. For most practical purposes; and to keep
generality, the response 𝑴(𝒙;𝜽) is assumed to be generated by finite element
simulations. The variables defined in Equation (4.1) include: 𝒙 , the discrete space
locations where the measurements are carried out and, 𝝑 which denotes the space of
material parameters 𝜽 associated with a specific constitutive model; this space defines the
practical constraints for each parameter in the set 𝜽. In formulation (4.1) the 𝐿2 norm is
used; however, different norms can also be considered as it was shown previously that
the identification results are barely affected by the choice of the norm (Seibert, Lehn et
al., 2000b).
The cost function 𝑓 𝜽 in (4.1) can be rewritten as:
𝑓 𝜽 =1
2𝑹𝑇 𝜽 𝑹 𝜽 =
1
2 𝑅𝑖
2 𝜽 𝑁𝑖=1 (4.2)
where 𝑹 𝜽 = 𝑅𝑖 𝜽 𝑇 , 𝑖 = 1,… ,𝑁, denotes a column vector of residual components
between the calculated and measured values; and 𝑅𝑖 𝜽 = 𝑀𝑖 𝜽 − 𝑑𝑖 , where index 𝑖
refers to a particular space location 𝒙𝑖 .
The necessary optimality condition,𝛻𝑓 𝜽∗ = 0, leads to the normal equation:
𝑱𝑇𝑱𝜽∗ = 𝑱𝑇𝑹 (4.3)

124
where 𝑱 denotes the Jacobian matrix of the residuals with respect to the parameters; that
is:
𝐽𝑖𝑗 =𝜕𝑅𝑖
𝜕𝜃𝑗 (4.4)
If the model mapping 𝑴(𝒙;𝜽) is linear, this normal equation leads to a direct
solution of the unknown parameters 𝜽. In general, the mapping is implicit and nonlinear;
therefore, an iterative procedure needs to be used.
Without loss of generality, the problem expressed by Equation (4.1) can be
considered as finite element model updating through minimization of the cost function
defined in (4.2). This general formulation is flexible as different types of experimental
data can be combined. For example, DIC data and load-displacement data can be
combined and input together, or DIC data at different loading stages and/or under
different loading configurations can be defined as an input ensemble. In the present
work, we used DIC measurements as input, but the solution methodology can be
generalized to data acquired with different measurement techniques.
In practice, the data 𝒅 is unavoidably affected by measurement errors, and a
weight can be applied to be cost function. Theoretically, the ideal weight used should be
the inverse of the covariance matrix of the observed data. In the current study, we
assumed that the noise from different sources of error is independent and identically
distributed; the cost function with these ideal weights can be expressed as:
𝑓 𝜽 =1
2
𝑅𝑖2 𝜽
𝜎𝑖2
𝑁𝑖=1 (4.5)
where 𝜎𝑖2 is the expected error variance of measurement data 𝑑𝑖 . Thus, the least squares
estimate is identical to the maximum likelihood one.
125
From examination of currently available optimization algorithms, one may
distinguish between schemes that make use of the gradient of the objective function, and
those that do not rely on gradient estimations. Most of the existing mixed numerical-
experimental approaches use gradient-based optimization methods, and the gradient is
generally derived analytically using either direct differentiation or adjoint formulation
techniques, or calculated numerically using finite difference. An iterative method is
adopted along with the gradient information to solve the nonlinear least-squares problem
(Kreißig, Benedix et al., 2007) (Mahnken, 2004) (Springmann and Kühhorn, 2009).
In this study, direct optimization methods were preferred to solve the least squares
identification problem expressed by Equation (4.2). Note that the terms direct search,
derivative-free search, and zero-th order search are sometimes used interchangeably in
the literature. According to Conn et al, for state-of-the-art research and development,
derivative-free optimization methods are best for dealing with noisy data; the
performance of these methods is notably better than gradient-based methods using finite
difference approximations, especially in cases of noisy data (Conn, Scheinberg et al.,
2009).
Powell (1964) originally proposed a derivative-free version of the nonlinear
conjugate gradient method consisting of the construction of a sequence of at most 𝐾 +
1 one-dimensional searches (𝐾 being the number of unknown parameters); each one-
dimensional search is conducted by finding the exact minimum of a quadratic interpolant
(Powell, 1964). The interpolant used in Powell‘s method is similar to the response
surface methodology (RSM) in stochastic optimization.

126
In Monte Carlo analyses, model parameters simulate real world conditions by
varying randomly, whereas response surface methodology combines global and local
analyses to create a simple mathematical equation of the complex and implicit
relationship between different factors.
In the last twenty years, with the exception of a few heuristic-based searches and
cluster-based random searches, direct optimization algorithms developed extensively
primarily due to the efficient use of response surface exploration in combination with
different efficient optimization, line-search and trust-region algorithms. Recently,
considerable research progress in code development of derivative-free Newton-based
methods has taken place, including DFO (Conn, Scheinberg et al., 1997), Powell‘s
UOBYQA (Powell, 2002), CONDOR (Berghen, 2004) (Berghen and Bersini, 2005), and
NEWUOA (Powell, 2006).
Berghen developed CONDOR (COnstrained, Non-linear, Direct, parallel
Optimization using trust Region method for high-computing load function) for expensive
optimizations, such as objective functions evaluated from the output of nonlinear FEA or
Computational Fluid Dynamics (CFD) simulations. CONDOR was designed mainly for
unconstrained optimization problems and for easy (box) constraints. The algorithms in
CONDOR are based on a derivative-free trust region method using a surrogate model that
approximates the objective function by a quadratic polynomial, which is then minimized
by sequential quadratic programming (SQP). Descent conditions from trust region
methods enforce convergence properties. CONDOR has been compared to DFO (Ugur,
Karasozen et al., 2008) and genetic algorithms (Harth, Sun et al., 2007) in designs
involving flow problems, and its performance was found to be better.

127
In the present study, the CONDOR method was used to minimize the least
squares cost function and to obtain the list of unknown parameters. For comparison, we
also used the original Nelder-Mead simplex method, a pseudo-Newton method based on
finite difference derivatives, and a response surface method to illustrate the superiority of
a derivative-free algorithm in the context of parameter identification.
The use of derivative-free optimization methods provides the level of generality
and modularity necessary for the optimization tool if the objective is to use the finite
element code as a black box. Some of the modern derivative-free methods are considered
globally convergent, since they include techniques such as line-search, reinforcing good
geometry and trust region, thus ensuring a global optimum. Note, however, that because
of the lack of rigorous convergence properties of derivative-free methods, the solutions
must be considered local. One simple way to address this issue is to vary the starting
point and the trust region radius to validate the final optimal solution.
In summary, for the solution of the optimization problem, the following
recommendations are made:
Use justification to give box-constraints to define the acceptable search
region.
If possible, have more than one method to solve the problem.
Start from several different starting points.
4.6 Overview and selection of optimization techniques
The material parameter identification requires the solution of a nonlinear
optimization problem:

128
minimize 𝑓 𝜽 ; 𝜽 ∈ 𝑅𝐾
𝑠. 𝑡. 𝜃𝑖 ∈ 𝜃𝑖𝑙 ,𝜃𝑖
𝑢 , 𝑖 = 1,…𝐾
where 𝜽 ∈ 𝑅𝐾 is the vector of unknown parameters, and 𝜽𝑙 and 𝜽𝑢 are vectors of lower
and upper bounds, respectively. Comparing to the general nonlinear optimization
problem, there is no present of equality and inequality constraints.
The major concern is that the evaluation of 𝑓 𝜽 is computationally expensive.
This fact rules out the application of stochastic optimization methods, such as
evolutionary algorithms and other heuristic-based global optimization methods.
Intuitively, the most straightforward way to tackle the computational cost issue is to use a
strategy that employs computationally cheap surrogate models for the objective to solve
an approximation to 𝑓 𝜽 . Surrogate-assisted search algorithms are the choice.
They can be classified into zero-order methods, first order-methods, and second-
order methods. The zero-order methods use only the objective function values to
determine the optimum values. The first-order methods use the objective function and the
gradient of the objective function to construct search directions during iterations. The
second-order methods use second-derivatives (Hessian) to construct the search directions.
Nonlinear least squares problems can be solved in two ways: 1) as nonlinear least
squares optimization problems or 2) as PDE-constrained optimization problems. In this
study, only the first category of these solutions is considered. Various numerical solution
methods for optimization problems are available. For example, one may distinguish
schemes by whether or not the solution uses gradients of the objective function. In
general, published accounts describing mixed-numerical-experimental approaches used

129
gradient-based optimization methods. Usually formulas to evaluate a gradient were
derived analytically, and an iterative method was adopted along with the gradient
information to solve the nonlinear least-squares problem (Kreißig, Benedix et al., 2007)
(Mahnken, 2004) (Springmann and Kühhorn, 2009). The most frequently used iterative
approaches for solving nonlinear least-square problems include the pseudo-Newton
methods, such as the Gauss-Newton method or the BFGS method, and trust region
methods, such as the Levenberg-Marquardt method. In these approaches, the Hessian
𝛻2𝑓(𝜽) is not required, which is a great advantage over complete Newton methods since
derivation of analytical Hessian is more complicated than analytical gradients. A
summary of the fundamental aspects of gradient-based methods for solving the
optimization problem follows.
The iterative schemes can be expressed as:
𝜽𝑘+1 = 𝜽𝑘 − 𝛼𝑗𝑯𝑗∇𝑓 𝜽𝑗 (4.6)
where 𝛼𝑗 is the step size at the 𝑘𝑡 iteration and 𝑯𝑘 is the pseudo-Newton iteration
matrix at the 𝑘𝑡 iteration.
The pseudo-Newtonian iteration matrices defined for each method are:
Method 𝑯
Gauss-Newton 𝑱𝑇𝑱 −1
Levenberg-Marquardt 𝑱𝑻𝑱 + 𝛾𝑰 −1
BFGS 𝑯(𝑯𝑗−1 ,∇𝑓,𝜽)

130
Gradient methods are efficient and often require fewer forward simulations. In
the case of practical applications where the data are associated with noise, the
convergence rate of gradient-based methods depends closely on the initial estimate of the
parameters. Apart from the problem of local minimum, the major difficulty in using
gradient-based methods lies in the implementation of gradient-evaluation procedures.
These are tedious and require a great deal of additional effort in addition to the FE
analysis. Furthermore, users generally do not have access to commercial codes; this
prevents users of complex commercial numerical analysis programs from obtaining
reliable derivative information for the requested numerical analysis. Another hindrance
is that the evaluation of gradients can vary for different material models, element types,
deformation levels, integration schemes, or even the type of response data.
In the FE model updating and material identification literature, gradient
evaluations are often referred to as sensitivity analyses. A sensitivity analysis using DIC-
measured surface strains was reported by (Cooreman, Lecompte et al., 2007). This
particular analysis applies only to simple tensile tests, however, and since the return-
mapping scheme was considered in the derivation, it cannot be directly applied to FE
programs using other schemes, such as the effective stress integration scheme in ADINA
(ADINA). Some researchers have used finite difference approximation of the gradients
as an alternative (Meuwissen, 1998) (Meuwissen, Oomens et al., 1998) (Haber, Tortorelli
et al., 1993) (Springmann and Kuna, 2003) (Ghouati and Gelin, 2001), but this approach
is considered unreliable, especially when the noise in the experimental data is not
negligible (Springmann and Kuna, 2003) (Ghouati and Gelin, 2001) (Fraś, Nowak et al.,
131
2011). Of course, the poor reputation of this method may stem from the fact that its
simplicity is not persuasive for application to scholarly research.
Gradient methods are more efficient, and require fewer forward simulations. On
the other hand, they are local methods; if the objective function is multi-modal (the multi-
modality can be essential or caused by noise in the data), convergence is highly
dependent on the initial estimates of the parameters. A local minimum solution is easily
found; a global minimum may be found using multiple initial guesses.
There are also a variety of direct search methods based on heuristics, which are
often without theoretical justification; these include random search, evolutionary
algorithms, and taboo search. The most significant advantage of these methods is that
they are generally global; however, they are also often slow. In other words, these
methods are ‗slow, but sure‘. Simulated annealing and genetic algorithms are among the
leading candidates for global optimization applications. Nevertheless, these methods are
also problem-specific, and require user-intervention and learning. Consequently, standard
implementation of these methods has yet to coalesce. The cluster-oriented controlled
random search method proposed by Price (Price, 1983) was used by (Harth and Lehn,
2007) to identify material parameters in Chaboche‘s viscoplastic model for solution of an
error minimization problem with data from homogeneous tension/compression tests and
creep tests. Since the strain was homogeneous, the model was an ODE model solved
using Runge-Kutta methods. The random search direct method requires extensive
forward simulations, but is affordable for ODE models. However, if an FE model is used,
and the model is geometrically complicated and nonlinear, the random search will
become unaffordable with current computational resources.

132
In this paper, direct optimization methods are used to solve the least square
identification problem. The phrase ―direct search‖ was coined by Hooke and Jeeves in
(Hooke and Jeeves, 1961); they proposed a pattern search method based on heuristics.
The terms direct search, derivative-free search, and zero-th order search are sometimes
used interchangeably, especially in finite element design software. There is no unanimity
among researchers in their use of these terms. This is of no great consequence in practice,
and to some extent simply reflects historical developments.
Conn et al. defined derivative-free methods as ―methods without explicit
approximation to derivatives of objective or constraints‖ (Conn, Scheinberg et al., 2009).
However, optimization with finite difference derivatives is excluded from Conn et al.‘s
definition, and in our study, ―derivative-free‖ means any method that treats the FEA
forward solution as a black box. In this way, finite difference gradient-based pseudo-
Newtonian methods can also be considered as derivative-free. Under this condition, the
requirements from a user are minimal, since the simulation code is used in the manner of
a black-box. According to (Conn, Scheinberg et al., 2009), with current state-of-the-art
derivative-free optimization methods one can expect to successfully address problems:
1) which do not possess more than 100 variables, 2) problems which are reasonably
smooth, and 3) problems in which the evaluation of the function is expensive and
computed with noise.
There are four main classes of methods for designing a derivative-free method:
I. Coordinate search: these methods are slow, robust and capable of handling
noise. The HYPERSTUDY/HYPERWORK program implemented a

133
simple version of this type of method, which is called ―alternative-
direction method‖ in the menu.
II. Nelder-Mean simplex method: the most popular method, but is not robust
or reliable in some cases. The MATLAB program implemented an
original version of this method in the Optimization toolbox (Nelder and
Mead, 1965).
III. Implicit filtering algorithm: a line-search algorithm that imposes sufficient
decrease along a quasi-Newton direction. The main difference from
derivative-based methods is that the true gradient is replaced by the
simplex gradient; so, this method resembles to some extent a pseudo-
Newton method using finite difference approximation to gradients. This
implementation of pseudo-Newton methods is deemed by Kelley to be
particularly well-equipped to handle noisy functions since there is implicit
filtering of noise due to the use of the simplex gradient corresponding to
the gradient of a regression model and to an inaccurate line-search (Kelley,
1999). To our knowledge, this class of methods has not been implemented
in any FE/design software.
IV. Interpolation-based trust region approach: trust region-based algorithms in
which interpolation models are built from polynomial interpolation or
regression. The interpolation is often called response surface and the term
―response surface method‖ is frequently used in FEA and engineering
design software (e.g. ANSYS includes several response surface methods).
However, in the derivative-free optimization literature, the term ―response
134
surface‖ is rarely used, and is generally reserved for experimental design
and stochastic optimization.
Most recent progress in derivative-free optimization has focused on the fourth of
these method categories. Powell‘s celebrated method (1964) is a derivative-free version
of the nonlinear conjugate gradient method. It consists in each stage of a sequence of
𝐾 + 1 one-dimensional searches, and each one-dimensional search is conducted by
finding the exact minimization of a quadratic interpolant. This method is thus a first-
order method with a Q-property. The interpolant used in Powell‘s method is actually the
response surface methodology from stochastic optimization. Response surface is the idea
that if the function evaluation is exact, one can use finite difference to approximate the
derivative. If the function evaluation is uncertain, however, one can design an
appropriate experiment and perform a regression analysis to obtain a surrogate of the
original function, and thus estimate the derivative and update the search directions.
Powell‘s work has spawned considerable research and code development of
derivative-free Newtonian-based methods, including DFO (Conn, Scheinberg et al.,
1997), Powell‘s UOBYQA (Powell, 2002), and CONDOR (Berghen, 2004) (Berghen and
Bersini, 2005), and recently, NEWUOA (Powell, 2006). Conn et al. (1997) constructed
a multivariate DFO algorithm that uses a surrogate model for the objective function
within a trust region method. In that work, points were sampled to obtain a well-defined
quadratic interpolation model, and descent conditions from trust region methods enforced
convergence properties. The trust region method can be used to globalize Newton-based
methods and to avoid most of the local instability within Newton-based methods. The
CONDOR method for high-computing load function developed by Berghen, is based on

135
the UOBYQA of Powell, and was developed mainly for unconstrained optimization
problems and for easy (box) constraints. The algorithms are based on a derivative-free
trust region method approximating the objective function by a quadratic polynomial,
which is then minimized by a sequential quadratic programming (SQP) method. This
method was developed for expensive optimizations, such as objective functions evaluated
from the output of nonlinear FE or CFD simulations, and is based on the assumption that
the function evaluation is time-consuming. Details of this method can be found in
(Berghen, 2004) (Berghen and Bersini, 2005). DFO was applied as a black-box
optimization routine in optimizing energy systems (Lee, Terlaky et al., 2001) and for
helicopter rotor blade design (Scheinberg, 2000). Numerical tests in both of these reports
show that DFO is faster and more accurate than derivative-based methods such as the
quasi-Newton methods. However, CONDOR was also compared to DFO (Ugur,
Karasozen et al., 2008) and genetic algorithms (Harth, Sun et al., 2007) in designs
involving flow problems, and its performance was found to be better. Several derivative-
free methods are available in software or freeware; (Conn, Scheinberg et al., 2009) list a
collection of freely-available derivative-free programs.
The present study used the CONDOR method to minimize the least squares cost
function and to obtain the requested list of parameters. As mentioned above, this method
is a trust region method combined with response surface technique that finds the
minimum 𝒙∗ ∈ 𝑅𝑛 of an objective function 𝐹(𝒙) ∈ 𝑅. For the purpose of comparison,
the original Nelder-Mead simplex method, a pseudo-Newtonian method based on the
finite difference derivative, and a response surface method in ANSYS were also used in
this study. The use of derivative-free optimization methods provides generality and

136
modularity to the approach considered here. One advantageous by-product of this
approach is that direct methods are usually more robust and more global than their
derivative-counterparts.
4.7 Statistical inference with DIC data
Estimating the level of uncertainty associated with the identification of the
parameters is a new trend in material testing. It is good practice in any measurement to
evaluate and report the uncertainty associated with the test results. A customer who
wishes to know the limits within which the reported result may be assumed to lie may
require a statement of uncertainty, or the test laboratory itself may wish to develop a
better understanding of which particular aspects of the test procedure have the greatest
effect on results so that this may be monitored more closely. A Code of Practice (CoP)
was developed by UNCERT (a project funded by the European Commission‘s Standards,
Measurement and Testing programme under reference SMT4-CT97-2165) to simplify the
way in which uncertainties are evaluated. This CoP is one of seventeen produced by the
UNCERT consortium for the estimation of uncertainties associated with mechanical tests
on metallic materials.
The inverse identification process outlined in Section 4.4 can be interpreted as a
statistical parameter estimator using nonlinear regression. Statistical inference can then
be employed to study the reliability of the identification and to provide a measure of
quality. In using statistical inference, the material parameters set 𝜽 are considered
random variables, so their accuracy is related to the shape of the probability distribution
function. Generally, accuracy is defined in terms of a confidence region for the

137
parameter vector, or as the confidence interval of its components. A 100(1-α )%
confidence region is a region of parameter space that contains the real parameters with a
probability of 1-α, where 1-α is the confidence level of this particular region.
In deterministic inverse problem formulation, 𝑴(𝜽) is called the model; in
statistical inverse problem formulation of nonlinear regression, it is called the expectation
function. In nonlinear regression inference, the success of the identification can be
checked by two measures: (i) expectation function fit and (ii) parameter fit. If a model
gives a smaller residual in the response function, and/or a smaller confidence region in
the expectation function and response function, the model is said to be
phenomenologically better (i.e., the model parameter set yields a better description of the
model‘s behaviour).
The most accurate way to perform the statistical analysis is through Monte Carlo
(MC) methods. The Monte Carlo method has been used to validate the linearized
covariance analysis (LCA) for nonlinear parameter estimation problems (Grimstad,
Kolltveit et al., 2001). However, this method requires the solution of a large number of
related parameter identification problems. Considering the complex geometry and
nonlinearity involved in the identification of plasticity models, the Monte Carlo approach
is not feasible for the present study.
4.7.1 Nonlinear regression inference using linear approximation
From a statistical perspective, the identification of constitutive laws using full-
field measurements can be considered as a problem where the sample is essentially the
complete population. The LCA method is the most computationally efficient method and

138
the most used one. It was shown previously that, for normally distributed errors, LCA is
equivalent to the likelihood method (Uusipaikka, 2009) (Seber and Wild, 2005).
The covariance matrix 𝑷 of the model parameters can be approximated from the
linearization of the cost function 𝑓(𝜽) around the solution 𝜽 :
𝑓 𝜽 ≅ 𝑓 𝜽 + 𝑱 𝜽 (𝜽 − 𝜽 ) (4.6)
where 𝑱 𝜽 is the Jacobian of the cost function 𝑓(𝜽) evaluated at the solution 𝜽 . The
matrix 𝑷 is then given by:
𝑷 = cov 𝜽 ≅ s2 𝑱T 𝜽 𝑱 𝜽 −1
(4.7)
Recalling expansion (2), the residual mean square estimate, 𝑠2 , is given as
follows:
𝜎2 ≅ 𝑠2 =𝑹𝑇 𝜽 𝑹 𝜽
𝑁−𝐾 (4.8)
where 𝑁 is the sample size and 𝐾 is the number of parameters.
The associated correlation matrix is defined as:
𝐶𝑖𝑗 =𝑃𝑖𝑗
𝑃𝑖𝑖𝑃𝑗𝑗 (4.9)
The off-diagonal elements of the 𝐶𝑖𝑗 matrix represent the correlation between two
parameters 𝜃𝑖 and 𝜃𝑗 . A strong correlation often indicates over-parameterization due to
either a fault or true redundancy within the model. The diagonal elements of the
covariance matrix 𝑷 represent the estimated values of the variances of the parameters 𝜃𝑗 .
𝜎𝜃𝑗2 ≅ 𝑃𝑗𝑗 (4.10)
which is a measure of confidence for the identified parameters 𝜃𝑗 .
The 100 1 − 𝛼 % joint confidence region is an ellipsoid and can be defined as:

139
𝜽 − 𝜽 𝑇𝑷 𝜽 − 𝜽 ≤ 𝐾𝐹(𝐾,𝑁 − 𝐾;𝛼) (4.11)
where 𝐹(𝐾,𝑁 − 𝐾;𝛼) is the upper 𝛼 quantile for Fisher‘s F-distribution with 𝐾 and
𝑁 − 𝐾 degrees of freedom.
An approximate 100 1 − 𝛼 % marginal confidence interval for a given
parameter 𝜃𝑖 is expressed by:
𝜃 𝑖 ± 𝑠 𝜃 𝑖 𝑡 𝑁 − 𝐾;𝛼
2 (4.12)
where 𝑡 𝑁 − 𝐾;𝛼
2 is the upper 𝛼/2 quantile for Student‘s t-distribution with 𝑁 − 𝐾
degrees of freedom and 𝑠 𝜃 𝑖 is the approximate standard deviation associated with 𝜃 𝑖 :
𝑠 𝜃 𝑖 = 𝑃𝑖𝑖 (4.13)
Expression (4.12) indicates that the marginal posterior density for a single
parameter 𝜃𝑖 is a univariate Student‘s t-distribution with location parameter 𝜃 𝑖 , scale
parameter 𝑃𝑖𝑖 , and degrees of freedom 𝑁 − 𝐾. Similarly, the marginal posterior density of
the model response is also a Student‘s t-distribution.
The 100 1 − 𝛼 % confidence interval is approximated as:
𝜃 − 𝜃 𝑇𝑃−1 𝜃 − 𝜃 ≤ 𝜒𝐾,𝛼
2 (4.14)
where 𝜒𝐾,𝛼2 is the upper 𝛼 quantile for the 𝜒2-distribution with 𝐾 degrees of freedom.
A popular formulation of the confidence interval is given as:
𝜃𝑖 − 𝜃 𝑖 ≤ 𝑧𝛼/2 𝑃𝑖𝑖 (4.15)
where 𝑧𝛼/2 is the upper 𝛼/2 quantile for the Gaussian distribution.

140
If the model-data combination is not highly nonlinear, the minimum of the
paraboloid approximation is close to the minimum of the true cost function, and the
inference can be considered reliable.
The LCA-based inference can also be used in other ways, including model
selection and design of experiments (DOE); this is best achieved through Bayesian
inference. The Bayesian marginal posterior density for material parameters 𝜽 (Seber and
Wild, 2005) is formulated as:
𝑝 𝜽 𝒅 ∝ 1 + 𝜽−𝜽
𝑇𝑷−1 𝜽−𝜽
𝑁−𝐾 −𝑁/2
(4.16)
This probability distribution is in the form of a 𝐾-variate Student‘s t-density with
location parameter 𝜽 , scaling matrix 𝑷 , and 𝑁 − 𝐾 degrees of freedom. If a non-
informative prior density for 𝜽 is assumed, the Bayesian identification and Bayesian
inference will be identical to the results based on sampling theory given above.
Bayesian inference possesses a great advantage because prior information can be
naturally incorporated into the identification process, and model selection is also
convenient (Koch, 2007). However, this aspect is for the focus of future work, and will
not be addressed in this thesis.
4.7.2 Calculation of Sensitivity
The sensitivity of the response function is required in the LCA inference, the
expectation fit check, and the calculation of curvature measures; the gradient is obtained
by finite differentiation. While the cost function involves non-negligible errors
associated with the measurement data, the response function is evaluated using the
141
numerical model representing the true physics, the modeling error induced by the finite
element approximation can be ignored and the numerical results can thus be assumed to
be noise-free.
The gradient is approximated by means of finite differences and requires an extra
FE simulation for each of the unknown parameters of the constitutive law with a
perturbed value for the parameter under consideration. The sensitivity can be determined
as follows:
𝑑𝐽
𝑑𝜃𝑖≅
∆𝐽
∆𝜃𝑖=
𝐽 𝜃𝑖+∆𝜃𝑖
∆𝜃𝑖 (4.17)
A perturbation size of ∆𝜃𝑖 = 0.001𝜃𝑖 is used for each parameter with the
exception of the Poisson‘s ratio, where a step size of ∆𝜈𝑖 = 0.1𝜈𝑖 is used.
4.7.3 Checking response fit
The residual 𝑅 𝜽 has been used directly as the criterion for checking the
convergence, and for comparing the model‘s fit. However, the residual values depend on
the units of the model and response functions, loading level and magnitude of response,
and also the number of data points, 𝑁; thus, it is not a convenient measure of model fit
and convergence.
A relative offset measure for checking convergence and model adequacy in
nonlinear regression is given by (Bates and Watts, 1988):
𝐼𝑀 = 𝑸1
𝑇 𝒅−𝑴 𝜽 / 𝐾
𝑸2𝑇 𝒅−𝑴 𝜽 / 𝑁−𝐾
(4.18)
where 𝑸1 and 𝑸2 are respectively, the first 𝐾 and the last 𝑁 − 𝐾 columns of the 𝑸 matrix
in the QR-decomposition of Jacobian 𝑱, denoted 𝑸. This index is related to the cotangent

142
of the angle that the residual vector makes with the tangent plane, so that a small relative
offset corresponds to an angle near 90𝑜 , and validates the model‘s accuracy. Bates and
Watts suggested the use of the criterion 𝐼𝑀<=0.001, reasoning that any inference will not
be affected because the current parameter vector is less that 0.1% of the radius of the
confidence region disk from the least squares point (Bates and Watts, 1988). Considering
that the Jacobian is evaluated using finite difference in the present work, the criterion
𝐼𝑀 < 0.01 is used to check response fit.
4.8 Identifiability issues
4.8.1 General
One of the fundamental problems in any inverse analysis is the justification and
assessment of the credibility of inversely identified results. The difficulty inherent in the
substantiation of a specific material identification problem is that without reference
values for comparison, how can we trust the identified material model parameters,
especially for in-situ determination of material properties where no ―reference‖ for
parameter values exists?
The principle that the parameters in a model can be consistently estimated is often
referred to as the identifiability of a model (Hsia, 1977). Identifiability is necessary to
draw consistent statistical inferences. The problem of identifiability and the stability of
numerical results are examined in this section; scepticism is the attitude we take in
addressing this issue.

143
4.8.2 Ill-posed or well-posed
The definition of well-posed problems given by Hadamard refers to the existence,
uniqueness and stability of solutions to differential equations (Tikhonov and Arsenin,
1977). Thus, in the case of inverse problems, the concept of well-posedness is related to
the existence and uniqueness of the solution to an inverse problem; the data must be
sufficient (i.e. contain enough information for simultaneous determination of all the
unknown parameters), and the global optimal must be unique and stable when there is
noise in the data.
The problem of material parameter identification has been described as ill-posed
(Mahnken, 2004); in practice, however, the material parameter identification problem
must be well-posed, with a few specific exceptions, such as the non-uniqueness of
parameters in the creep test for viscoplasticity (Seibert, Lehn et al., 2000a) (This
particular model is phenomenological, and is a summation of an arbitrary number of
Dirichrit-Prony exponentials chosen by the user). One indicator of ill-posedness is the
need for regularization. There should not be any regularization terms in the least square
objective function (4.1) for an unbiased solution of material parameters. In general, the
number 𝑁 of samples of experimental data has to be much larger than the number 𝐾 of
parameters; when these conditions are met, the resulting material parameter identification
problem is usually a well-posed problem.
Essentially, whether the problem is ill-posed or well-posed lies in whether the
problem is a function parameter identification problem or a functional identification
problem (i.e. problem of identification of a parameterized continuous field). The problem
outlined in Chapter 3 is indeed ill-posed, since it is a parameterized functional

144
identification problem. Functional identification problems are affluent in geophysical
and medical tomography (Snieder and Trampert, 1999). In functional identification
problems, whether the forward problem is represented as a linear system 𝑨𝒎 = 𝒅 or a
nonlinear system 𝑨 𝒎 = 𝒅 , where 𝑨 defines a nonlinear operator, it is ill-posed if the
information contained in data 𝒅 alone cannot guarantee a unique and stable solution of
model parameters 𝒎.
4.8.3 Model and parameter identifiability
Katafygiotis and Beck (1998) made a distinction between ―model identifiability‖
and ―parameter identifiability‖ (Katafygiotis and Beck, 1998). The former has also been
called ―structural identifiability‖ (Cobelli and DiStefano, 1980; Hof, 1998). The model
identification problem is to find all of the structural models within a specified model class
that are able to produce the same output within a set of observed degrees of freedom
when the models are all subjected to the same input. However, in our material parameter
identification problem, the model is selected via the judgement of the engineer, not
through the identification process; thus, we need only focus on the parameter
identifiability issue.
4.8.4 Verification and validation (V&V)
The assessment of the credibility of a numerical procedure is typically called
verification and validation (V&V), and is closely connected to the problem of
identifiability. The verification process can be defined as verification of the model
response obtained from data, and the validation process as the comparison of the model

145
response with data that was not used in the identification. In the professional literature,
verification is usually defined as the process of assessing software correctness and the
numerical accuracy of the solution to a given model; validation is the process of assessing
the physical accuracy of a model (ASME, 2006).
A more straightforward definition of V&V is that verification is ―solving the
equations right‖, and validation is ―solving the right equations‖ (Oberkampf and Roy,
2010). In material identification, verification can be defined as the correct solution of the
inverse problem (i.e. the global optimal of the multi-modal LS objective function is
determined), and validation is that the problem is defined correctly (i.e. the data contain
enough information, the global optimum is unique, and the FE model (mesh, element
type, boundary conditions, etc.) represents the reality well, so that the nonlinear
regression model (data-model set) is correctly defined).
Thus, V&V can be described as the process of providing evidence of the
correctness and accuracy of the parameter identification results; V&V procedures are
founded on the concept of quantitative accuracy assessment. While V&V do not entirely
answer the question of identification credibility, they are the keys to establishing
credibility. Traditionally, one needs to have accurate benchmarks or reference values for
comparison. Reference values are not generally available for complex material model
parameters, however, especially for individual components. For this reason, numerical
studies and statistical tools are used to assess uncertainty during V&V of the inverse
identification process.
In material parameter identification, V&V is concerned with two issues: (i) to
verify that the solution is a global optimum; and (ii) to validate the global optimum by
146
ensuring that it corresponds to a set of parameters that are similar enough to the correct
values. When using local optimization methods, techniques based on the re-identification
of the parameters using different initial solutions is widely used to verify that the
optimum is a global solution. Although derivative-free methods, such as CONDOR, are
considered to be robust and globally convergent, the use of multiple-initial estimates is
still recommended for V&V. Alternatively, re-identification of the parameters using
synthetic data can also serve as a verification tool for assessing the identifiability of a
given experimental/estimation solution.
4.8.5 Quality and nature of information from data
Besides the problem of local minimum, the quality and nature of the available
data also needs to be considered carefully. There are two causes for unsuccessful
identifications: (i) the minimization process leads to a local minimum; and/or (ii) the data
are insufficient. For example, the parameters of the Rousselier damage mechanics model
were identified by updating a FE model to match a simulated 2D displacement field on a
tensile specimen using synthetic data at every FE node (Springmann and Kuna, 2003). If
only one material parameter was under consideration, the identification was successful;
however, simultaneous updating of two or more parameters was less successful because,
in some cases, only a local optimum could be found. One possible reason for
unsuccessful identification may be due to the fact that the information contained in the
collected data is insufficient for simultaneous updating of all of the parameters.
The nature of the data can lead to over-parameterization; i.e. when one or more of
the mechanical properties associated with the parameters are not activated during the

147
experiment. For example, if, when attempting the identification of a hardening law in an
elasto-plastic constitutive model, the material remains largely in the elastic range under a
given load. In the case of DIC, the large amount of data with an elastic nature may
overwhelm the small fraction of data in the plastic range. This situation is called fault
redundancy induced within the experiment.
A quantitative approach to determining identifiability is based on Fisher
information; a parameter vector is identifiable from a particular set of observed responses
if the associated Fisher information matrix is nonsingular (Bos, 2007). The Fisher
information is related to the sensitivity of the Jacobian with respect to parameters.
𝐹𝜃 = 𝐸 𝑺𝜽𝑺𝜽𝑻 = 𝐸
𝜕𝑞(𝒘;𝜽)
𝜕𝜽
𝜕𝑞(𝒘;𝜽)
𝜕𝜽𝑇
is the Fisher information matrix of the observed data d , where q(𝐰;𝛉) is the log-
probability density function of the response, and 𝐒θ is the Fisher score vector. The Fisher
score and Fisher information are connected to the sensitivities of the response to the
unknown parameters.
However, local sensitivity at a single point may not be sufficient; the singularity
of Fisher information not only depends on the local sensitivity at a point in parameter
space, but also depends on the global sensitivity in a finite region. Global sensitivity
analysis techniques deal with the entire range of variation of the input parameters.
Sensitivity analysis allows one to study the relationships of response variances and
parameter variances, and to identify adequacies in the numerical-experimental setting. In
particular, global sensitivity analysis allows analysts to perform model calibration, model
validation, and decision making; i.e. global sensitivity analysis enables any process where

148
it is useful to know which of the variables contribute most to the variability of the output.
One should note that while sensitivity analysis quantifies the influence of the input
parameters on the model‘s response, uncertainty analysis is used to evaluate statistical
parameters, confidence intervals and probability laws for the model‘s responses.
Thus, inadequacy and faulty parameter redundancy due to the quality and nature
of the data can be detected through global sensitivity analysis and/or statistical inference
(Patelli, Pradlwarter et al., to appear) (Saltelli, Ratto et al., 2008).
4.8.6 Curvature measure of nonlinearity: checking the adequacy of linearized covariance
analysis (LCA)
Uncertainty quantification is an important aspect of V&V. Linearized covariance
analysis (LCA) is used to check the fit of parameters, and provides a quantitative measure
of uncertainty. LCA is an approximation of a nonlinear problem. Whether this
approximation is valid, and produces results that are adequate is addressed in this section
by adopting an attitude of scepticism.
The most reliable check of the adequacy of LCA is through the use of Monte
Carlo analyses. However, as noted previously, the research presented here is based on
the assumption that Monte Carlo analyses are not affordable, so curvature measures of
nonlinearity are substituted as an alternative to Monte Carlo techniques in this study.
Curvature measures are able to detect only incorrect results that are false positives (type-
II errors). In other words, it is possible for nonlinearity measures to give a false alarm
indicating a problem with the LCA when the LCA is actually adequate; however,
nonlinearity measures will correctly detect all instances when the LCA is inadequate. In

149
fact, type-I error rarely happens in material testing and parameter identification if sound
judgement is employed; so, focusing on avoidance of type-II error is sufficient for our
purposes.
When deciding whether to reject the null hypothesis that H0: 𝛉 = 𝛉 , there are two
fundamental errors to be identified by inference:
Type-I error: the hypothesis is actually true, but we think it is wrong, i.e.
the LCA is adequate, but we think that there is a problem with the solution.
Type-II error: the hypothesis is actually wrong, but we think it is true, i.e.
the LCA is inadequate, but we think that the solution is correct.
In the context of statistical regression analysis, the cost function 𝑓(𝜽) , is
considered as an expectation function. The noise associated with measurement and
modeling errors is assumed to have spherical normal distribution. The expectation
function can be considered as an N-dimensional response surface. The vector 𝑴(𝒙;𝜽)
defines a 𝐾-dimensional surface, and is called the expectation surface in the response
space. The Least Square estimates thus correspond to a point on the expectation surface
𝑴 = 𝑴 (𝜽 ) , which is the closest point to data vector 𝒅 . For nonlinear models, the
expectation surface is curved and bounded (Green, 1988) (Seber and Wild, 2005).
The LCA involves two distinct approximations (Bates and Watts, 1988):
I. The planar assumption, where the expectation surface 𝑴(𝜽) near 𝑴 (𝜽 ) is
approximated by its tangent plane at 𝑴 (𝜽 ).
II. The uniform coordinate assumption, in which a linear coordinate system
𝐽(𝜽 − 𝜽 ), is imposed to the approximation of tangent plane defined in 1).
150
To validate these two assumptions, one can use the curvature of the expectation
surface at the solution 𝜽 . The curvature of the expectation surface depends on the testing
and simulation procedures, and will also depend on the type and amount of data used in
the identification procedure. For example, an identification based on a load-displacement
curve is expected to produce a higher curvature than a technique using full-field data
from DIC measurements.
In summary, the LCA uses local information to generate a tangent plane with a
linear coordinate system defined by the derivative vectors, projects the residual vector
onto that tangent plane, and then maps the tangent plane coordinates onto the parameter
plane using linear mapping. If we assume that the tangent plane forms a good
approximation to the expectation surface near 𝜽 , then the likelihood region for 𝜽
corresponds to a disk on the tangent plane with a radius proportional to 𝑆(𝜽 ) with
𝑆 𝜽 = 𝑴 𝜽 − 𝒅 2.
While LCA is used to characterize the quality of the estimates using inference
intervals, the adequacy of the LCA can also be checked. The relative curvature measure
enables us to assess the intrinsic and parameter-effects (PE) nonlinearity, and the validity
of LCA inference. The LCA method is based on the linearization of the model function
at a given point; it is of fundamental importance therefore, to verify the validity of the
LCA. An accurate method of assessing the validity of LCA, and the global sensitivity
analysis is with Monte Carlo analysis, but as noted previously, this method is
computationally expensive due to the complex geometry and nonlinearity of the model.
The curvature measures of nonlinearity approach are a potential alternative to the Monte
151
Carlo approach. Curvature measures of nonlinearity are approximations, but are
considerably less expensive to compute. In this study, the curvature measures are used to
check the validity of LCA inference; as noted previously, this approach can prevent type-
II errors, but not type-I errors. If the LCA is deemed to be adequate, then the validity is
assured; on the other hand, if the curvature measures of nonlinearity indicate that the
LCA is inadequate, it does not necessarily follow that the LCA inference is wrong.
Bates and Watts (1980) employed differential geometry to construct a relative
intrinsic and a parameter-effects curvature measure, which provide global measures of
nonlinearity of the model (Bates and Watts, 1980). Threshold values for curvature
measures of nonlinearity have been published for which application of the LCA may be
justified as inadequate, but not necessarily wrong, based on the shape of linearized
confidence regions (Bates and Watts, 1988) (Seber and Wild, 2005) (Grimstad, Kolltveit
et al., 2001) (Haines, O'Brien et al., 2004). Donaldson and Schnabel (Donaldson and
Schnabel, 1987) performed extensive evaluation of LCA predictions for a series of
different nonlinear models using Monte Carlo analyses; the recommended thresholds for
the curvature measures of nonlinearity constructed by Bates and Watts were found to
give good indications as to when the LCA may be insufficient (Donaldson and Schnabel,
1987).
The use of nonlinearity measures to validate LCA, and thus avoid type-II errors,
is proposed in this chapter, but is not implemented in the examples. It is left for future
investigation in which a Monte Carlo analysis can be performed to determine an accurate
threshold for this specific problem, for comparison of the results of LCA, curvature
measures of nonlinearity and Monte Carlo approaches.

152
4.8.7 Summary of procedures addressing the identifiability issue
In summary, the fundamental elements that build credibility into computational
results are: (a) the quality of the physics modeling; (b) V&V activities; (c) uncertainty
quantification; and (d) sensitivity analyses. All four of these elements are necessary to
establish credibility, and none is sufficient in itself. The first element is a pre-
requirement for the estimator. Approaches addressing the latter three can be summarized
as follows:
1) One may try different optimization algorithms (if required) with different
initial values to ensure that the minimization achieves a global minimum.
2) Re-identify the model: perform a numerical study before testing to re-
identify parameters of a given material model. This is the verification
procedure in V&V. This numerical test needs to be based on both
synthetic noise-free data and noise-polluted data to ensure the well-
posedness of the inverse problem defined by the data-optimizer
combination. In other words, not only the existence and uniqueness of
the solution, but also the stability of the solution need to be assured. From
the results of numerical tests, one can determine whether or not all of the
unknown model parameters could be identified from the response of the
selected system. Unlike functional identification problems, the material
parameter identification problem must be a well-posed problem.
3) Validation using different data sets: depending on the type of test, the test
data can be divided as 𝑫 = 𝑫𝟏 + 𝑫𝟐 . The material parameters are
153
determined based on data set 𝑫1 (parameter identification), and
investigation of the model quality can be performed using another set of
data 𝑫𝟐 (validation) for extrapolation. Extrapolation (validation) is an
assessment performed by using the identified parameters to predict the
response of the material in experiments that were not used to supply data
for the identification. If the difference is significant in all or part of the
responses, then this is an indication of potential problems in the choice of
model, the experimental setup, or the design of the identification process.
Furthermore, if the errors between predicted and measured responses show
a deterministic pattern that cannot be explained by stochastic distribution
of errors, this also indicates potential problems.
4) Inference using LCA: to consider the parameters as random variables. The
transfer process of uncertainty from data to the identified parameters is
studied, and a quantitative evaluation of uncertainty is determined.
5) In the optimization process, checking expectation (response) fit using the
offset index 𝐼𝑀 in addition to the convergence check inherent in the
adopted optimization algorithm. This gives a non-dimensional indication
of the level of response fit. If the final residual 𝑹(𝜽 ) is too high as
demonstrated by a high value of non-dimensional index 𝐼𝑀 , it is an
indication to increase the complexity of the model (i.e., increase the
number of parameters 𝐾 ), to reconsider the underlying physics for
selection of a different model, or to re-examine the modeling process and
test setup. For example, the Bauschinger effect can be included, or
154
exponential hardening changed to piecewise linear hardening laws,
bilinear hardening changed to multi-linear hardening, or a power type
Norton law could be used. More complicated models may be involved,
such as anisotropic models (Hill models).
6) Curvature measure of nonlinearity: for checking whether the LCA
inference is adequate or not. This procedure completely removes type-II
errors from material parameter identification, which is of greater concern
than type-I errors.
7) If necessary, perform a global sensitivity analysis.
The above procedures can be implemented with software for general purpose
material parameter identification in industrial applications.
4.9 Examples and results
4.9.1 Numerical example
The first example uses artificial data generated from numerical simulation; the intent is to
test the optimization algorithm and demonstrate the proposed methodology. We consider
a plate with a hole subjected to a tension load above the elasticity limit where the
deformation is heterogeneous (Figure 4.2). The boundary value problem is solved using
a standard finite element method with reference parameters. The goal is to re-identify the
parameters using synthetic displacement data collected at 25 scattered points on the
surface of the specimen from evenly distributed grids that simulate DIC measurements,
since DIC measurement is based on a regular grid pattern defined by a fixed number of
pixels.
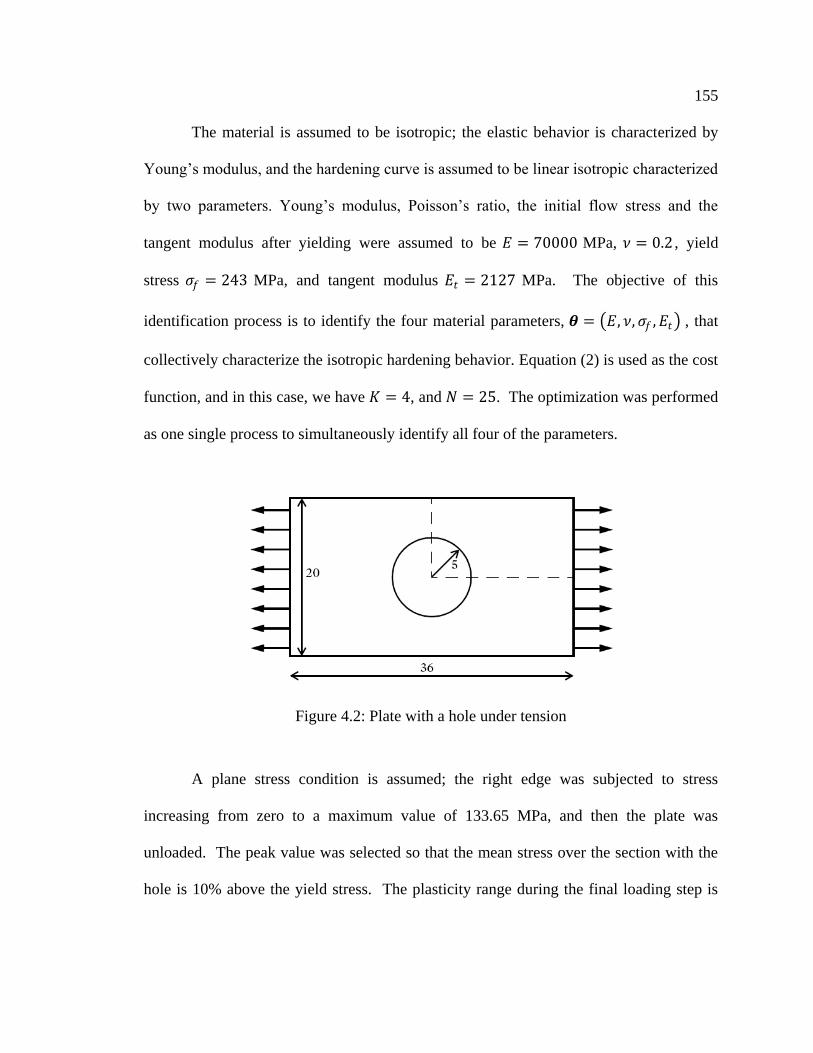
155
The material is assumed to be isotropic; the elastic behavior is characterized by
Young‘s modulus, and the hardening curve is assumed to be linear isotropic characterized
by two parameters. Young‘s modulus, Poisson‘s ratio, the initial flow stress and the
tangent modulus after yielding were assumed to be 𝐸 = 70000 MPa, 𝜈 = 0.2 , yield
stress 𝜎𝑓 = 243 MPa, and tangent modulus 𝐸𝑡 = 2127 MPa. The objective of this
identification process is to identify the four material parameters, 𝜽 = 𝐸, 𝜈,𝜎𝑓 ,𝐸𝑡 , that
collectively characterize the isotropic hardening behavior. Equation (2) is used as the cost
function, and in this case, we have 𝐾 = 4, and 𝑁 = 25. The optimization was performed
as one single process to simultaneously identify all four of the parameters.
Figure 4.2: Plate with a hole under tension
A plane stress condition is assumed; the right edge was subjected to stress
increasing from zero to a maximum value of 133.65 MPa, and then the plate was
unloaded. The peak value was selected so that the mean stress over the section with the
hole is 10% above the yield stress. The plasticity range during the final loading step is

156
shown in Figure 4.3. Second-order triangular elements with four Gauss points were used
in the simulation.
Figure 4.3: Plasticity range in the final loading stage
Several inverse analyses were performed with different initial estimates, and the
results show that the solution produces a global minimum; this is the first indication that
the problem is not ill-posed and that the solution is stable. To evaluate the sensitivity of
these methods to uncertainty in the measurement, a 5% white noise measure was added to
the synthetic data. The noise was defined as:
𝑛𝑜𝑖𝑠𝑒 𝒙 = 𝑁𝑅𝐴𝑁𝐷 ∙ 𝛼 ∙ 𝑢 𝒙 (4.18)
where 𝑁𝑅𝐴𝑁𝐷 is a Gaussian random distribution with zero-mean and a unit standard
deviation; α = 5% is the applied noise level; and 𝑢(𝑥) is the displacement response at
location 𝑥 . The corresponding identification solution is given in the fifth column of
Plasticity range

157
Table 4.1; while the initial estimates used to start the optimization process is given in the
fourth column.
Table 4.1: identified solution with and without synthetic noise (load factor = 1.1)
noise parameter Target
values
Initial
guesses
Obtained
values
(CONDOR)
Variance
(LCA) 𝜎𝜃𝑗2
relative
offset
measure 𝐼𝑀
0%
𝐸1
𝜈
𝜎𝑦
𝐸2
70000
0.2
243
2127
50000
0.3
500
10000
70001
0.215
243
2126.8
2.86
0.114
2.5
11.9
singular
5%
𝐸1
𝜈
𝜎𝑦
𝐸2
70000
0.2
243
2127
50000
0.3
500
10000
70006.1
0.216
240.4
2141.2
2.86
0.116
12.7
31.4
0.0004
For comparison, two additional direct search methods were also used; namely, (i)
the Nelder-Mead simplex method and (ii) the genetic algorithm in the MATLAB
toolboxes. Table 4.1 summarizes the results. Both methods produced similar solutions to
the method proposed here, but with different levels of efficiency. The proposed solution
required nine iterative steps of optimization when using CONDOR, 29 iterative steps of
optimization using the Nelder-Mead simplex method, and 3500 function evaluations
using the MATLAB genetic algorithm.

158
Table 4.2: Comparison of identification solution with and without synthetic noise to
Nelder-Mead and Genetic Algorithm (GA) methods (load factor = 1.1)
Noise Parameter Target
values
Initial
estimates
Obtained
values
(Nelder-
Mead)
Obtained
values
(GA)
0%
E1
ν
σy
E2
70000
0.2
243
2127
50000
0.3
500
10000
70001.5
0.217
243
2126.5
70002
0.216
242
2129
5%
E1
ν
σy
E2
70000
0.2
243
2127
50000
0.3
500
10000
70008
0.217
238
2143
70005
0.214
240
2141
It is clear that the identification results depend highly on the quality of the input
data. The plasticity mechanism must be fully activated in order to identify the model
parameters. To study this aspect of the proposed method, the identification was repeated
with simulated inhomogeneous displacement field data at the loading stage where the
mean stress is 5% above the yield stress. The identified model parameters calculated
without synthetic noise are shown in Table 4.3. The deterioration of the identified
plasticity parameters is evident. It is interesting that the evaluations for the initial tangent
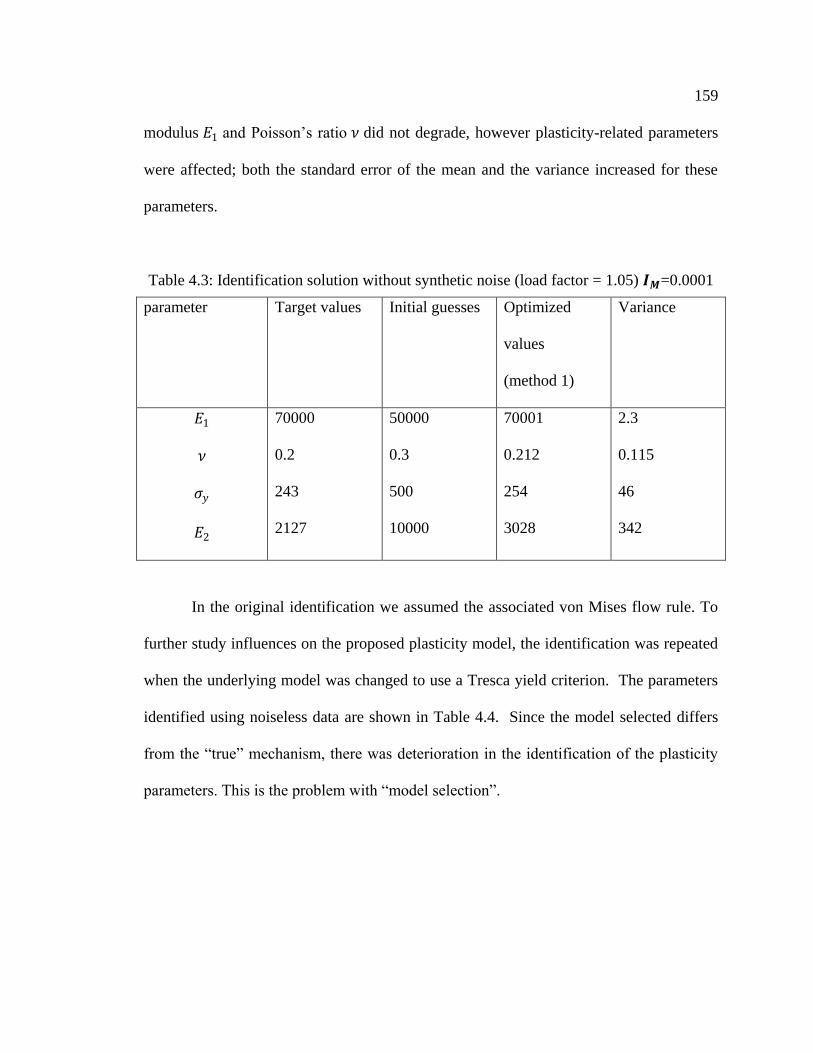
159
modulus 𝐸1 and Poisson‘s ratio 𝜈 did not degrade, however plasticity-related parameters
were affected; both the standard error of the mean and the variance increased for these
parameters.
Table 4.3: Identification solution without synthetic noise (load factor = 1.05) 𝑰𝑴=0.0001
parameter Target values Initial guesses Optimized
values
(method 1)
Variance
𝐸1
𝜈
𝜎𝑦
𝐸2
70000
0.2
243
2127
50000
0.3
500
10000
70001
0.212
254
3028
2.3
0.115
46
342
In the original identification we assumed the associated von Mises flow rule. To
further study influences on the proposed plasticity model, the identification was repeated
when the underlying model was changed to use a Tresca yield criterion. The parameters
identified using noiseless data are shown in Table 4.4. Since the model selected differs
from the ―true‖ mechanism, there was deterioration in the identification of the plasticity
parameters. This is the problem with ―model selection‖.

160
Table 4.4: identification solution without synthetic noise (load factor = 1.1)(Tresca yield
criterion) 𝑰𝑴= 0.0002
Parameters Target values Initial
estimates
Optimized
values
Variance
𝐸1
𝜈
𝜎𝑦
𝐸2
70000
0.2
243
2127
50000
0.3
500
10000
70001
0.25
244
2124
2.78
0.13
11.5
14.7
4.9.2 Example 2: identification of model parameters of a cast iron component
In this example, a grey cast iron engine bearing cap subjected to vertical
compressive loading is analyzed (Figure 4.4). The load was applied on a Tinius–Olsen
hydraulic universal testing machine with a load capacity of 300 kN. A maximum load of
150 KN was applied to the top of the bearing cap. The ARAMIS-DIC system was used to
measure the deformation and the strain on the surface of the specimen. An automatic
data acquisition system coupled with the testing machine was also used to collect the data
for the load—displacement curve.
A random pattern was applied to the specimen‘s surface; a flat white paint was
applied to the surface in order to reduce the glare in the camera image. A black speckle
pattern was then applied using spray paint in order to provide contrast with the white
surface coating, and to provide surface target points from which strain and displacement
measurements were evaluated using digital image correlation photogrammetry. Speckle

161
points were approximately 3 to 5 pixels in diameter, and the correlated subset size chosen
was 15 pixels. According to (Tong, 2005) and (Robert, Nazaret et al., 2007), 5% of RMS
error is a conservative estimate of the error in measurement for a speckle pattern with
speckle sizes smaller than the subset size.
The test data was comprised of the force-load curves and the three-dimensional
displacement/strain fields on the surface of the component, measured by using the
ARAMIS commercial DIC system. Two CCD cameras with a 510 mm object-camera
distance were used to acquire synchronized stereo images of the component under
compression at different load levels during the test (Figure 4.5).
By means of photogrammetrical procedures and image processing, the data
acquisition system evaluated the three dimensional displacement field associated with
each respective loading step. Although the ARAMIS system provides three-dimensional
displacements and two-dimensional strains on the surface, only the horizontal strains (𝜇𝑥)
and vertical strains (𝜇𝑦 ) were used in the identification of model parameters. In DIC
measurement, the primary results consist of displacements, and the deformation data are
obtained by post-acquisition processing techniques. Equation 4.2 was used as the cost
function, where the data vector 𝒅 consists of 120 measurement points inside the rectangle
(shown in Figure 4.10), and the corresponding numerical responses 𝑀𝑖 𝜽 are the
simulated results from the same points. It was found that strains in this region are
sensitive to the material parameters, and that the DIC-measured data are reliable in this
region (located in the center of the images). In total, 53 images were taken during the
loading process at one second time intervals. The load was measured with a Tinius-Olsen
162
load cell and recorded by the ARAMIS data acquisition system using a BNC connector
cable. Each strain stage represents a complete data set for load and deformation.
The bearing surface under the test specimen was greased to reduce friction;
therefore, in the FE model, the bottom faces of the two feet of the bearing cap were
constrained to prevent vertical movement, while horizontal movement was kept free;
symmetry along the direction of thickness was adopted to reduce the computational cost.
ANSYS (Version-9) software was used to generate the FE model for a nonlinear cast iron
material (Figure 4.6). A solution of horizontal strain of this model is presented in Figure
4.7, which is comparable to the measured quantities in Figure 4.10.
Figure 4.4: the bearing cap

163
Figure 4.5: photo of the bearing cap on the testing machine and two cameras taking
images
Figure 4.6: FE model of the bearing cap

164
Figure 4.7: Horizontal strain 𝝁𝒙 simulated by the FE model
Cast iron materials are known to exhibit different behaviours under tension than
they do under compression; the yielding point under tension is significantly lower than
the yielding point under compression. The tension and compression behaviour past
yielding also differ. Usually, the past yielding tangent modulus for tension is larger than
it is for compression. The curve shown in Figure 4.8 is a typical stress-strain curve for
cast iron materials. In practice, piecewise-linear models are used to approximate the
continuous stress-strain curves after yielding. The most commonly used is two different
bilinear curves for tension and compression, respectively, as shown in Figure 4.9. In this
case, the material parameters to be identified can be assembled in the set 𝜽 =
𝐸,𝐸𝑡 ,𝐸𝑐 , 𝜖𝑡 , 𝜖𝑐 𝑇 , where 𝐸 is the initial Young‘s modulus before yielding, 𝐸𝑡 is the
tangent modulus after tensile yielding, 𝐸𝑐 is the tension modulus after yielding under
compression, 𝜖𝑡 is the yielding strain under tension, and 𝜖𝑐 is the yielding strain under
compression.

165
Figure 4.8: typical stress-strain curves for cast iron materials under tension and
compression
Figure 4.9: a bilinear approximation model for cast iron material
E: Young‘s modulus
Compression
c
cE
Compression
Tension
t
tE
Tension
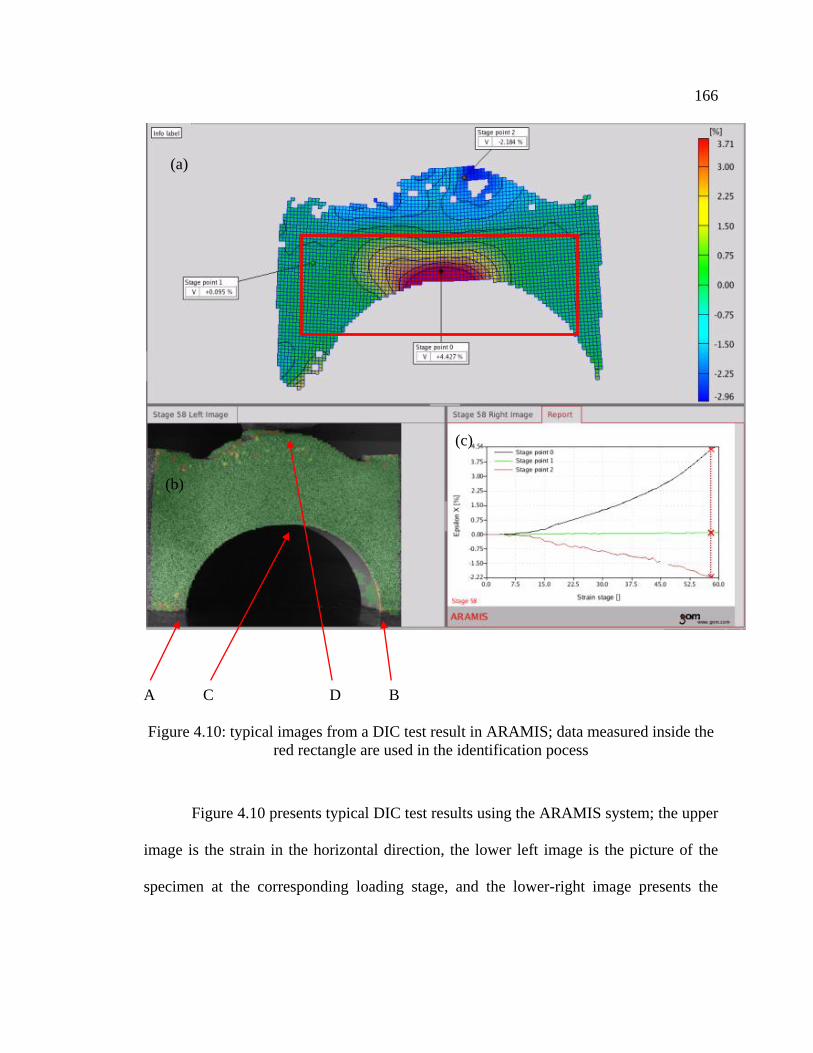
166
A C D B
Figure 4.10: typical images from a DIC test result in ARAMIS; data measured inside the
red rectangle are used in the identification pocess
Figure 4.10 presents typical DIC test results using the ARAMIS system; the upper
image is the strain in the horizontal direction, the lower left image is the picture of the
specimen at the corresponding loading stage, and the lower-right image presents the
(c)
(b)
(a)
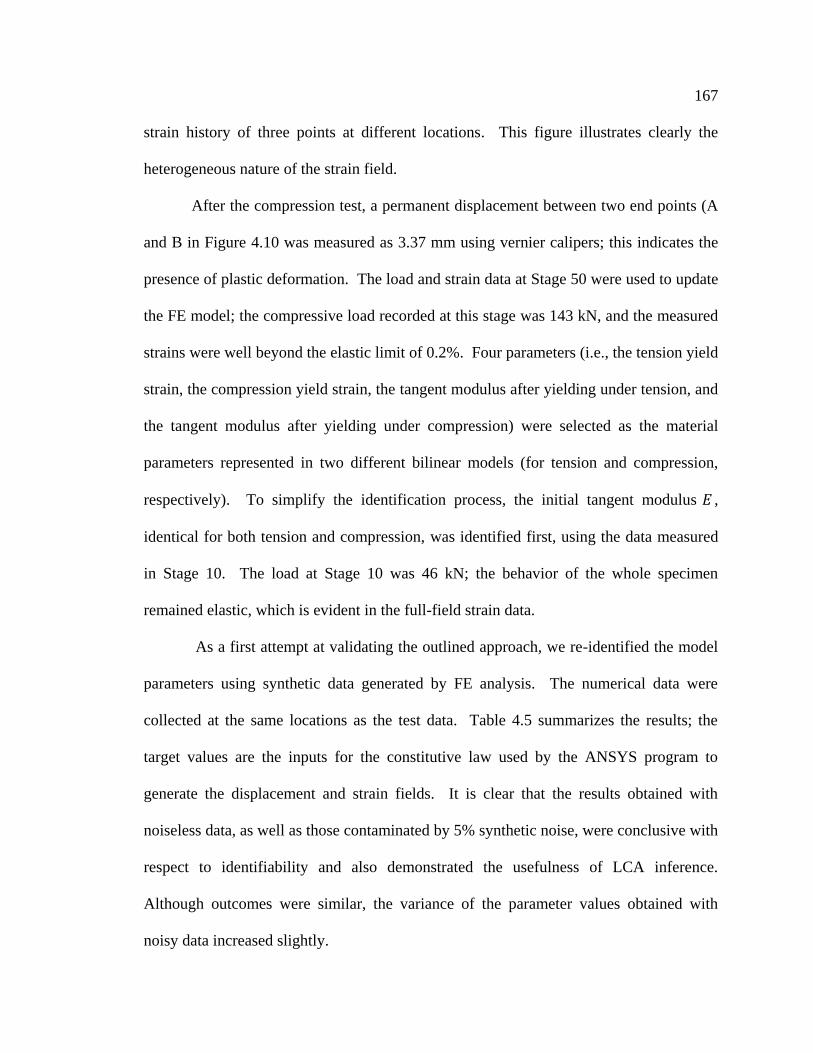
167
strain history of three points at different locations. This figure illustrates clearly the
heterogeneous nature of the strain field.
After the compression test, a permanent displacement between two end points (A
and B in Figure 4.10 was measured as 3.37 mm using vernier calipers; this indicates the
presence of plastic deformation. The load and strain data at Stage 50 were used to update
the FE model; the compressive load recorded at this stage was 143 kN, and the measured
strains were well beyond the elastic limit of 0.2%. Four parameters (i.e., the tension yield
strain, the compression yield strain, the tangent modulus after yielding under tension, and
the tangent modulus after yielding under compression) were selected as the material
parameters represented in two different bilinear models (for tension and compression,
respectively). To simplify the identification process, the initial tangent modulus 𝐸 ,
identical for both tension and compression, was identified first, using the data measured
in Stage 10. The load at Stage 10 was 46 kN; the behavior of the whole specimen
remained elastic, which is evident in the full-field strain data.
As a first attempt at validating the outlined approach, we re-identified the model
parameters using synthetic data generated by FE analysis. The numerical data were
collected at the same locations as the test data. Table 4.5 summarizes the results; the
target values are the inputs for the constitutive law used by the ANSYS program to
generate the displacement and strain fields. It is clear that the results obtained with
noiseless data, as well as those contaminated by 5% synthetic noise, were conclusive with
respect to identifiability and also demonstrated the usefulness of LCA inference.
Although outcomes were similar, the variance of the parameter values obtained with
noisy data increased slightly.
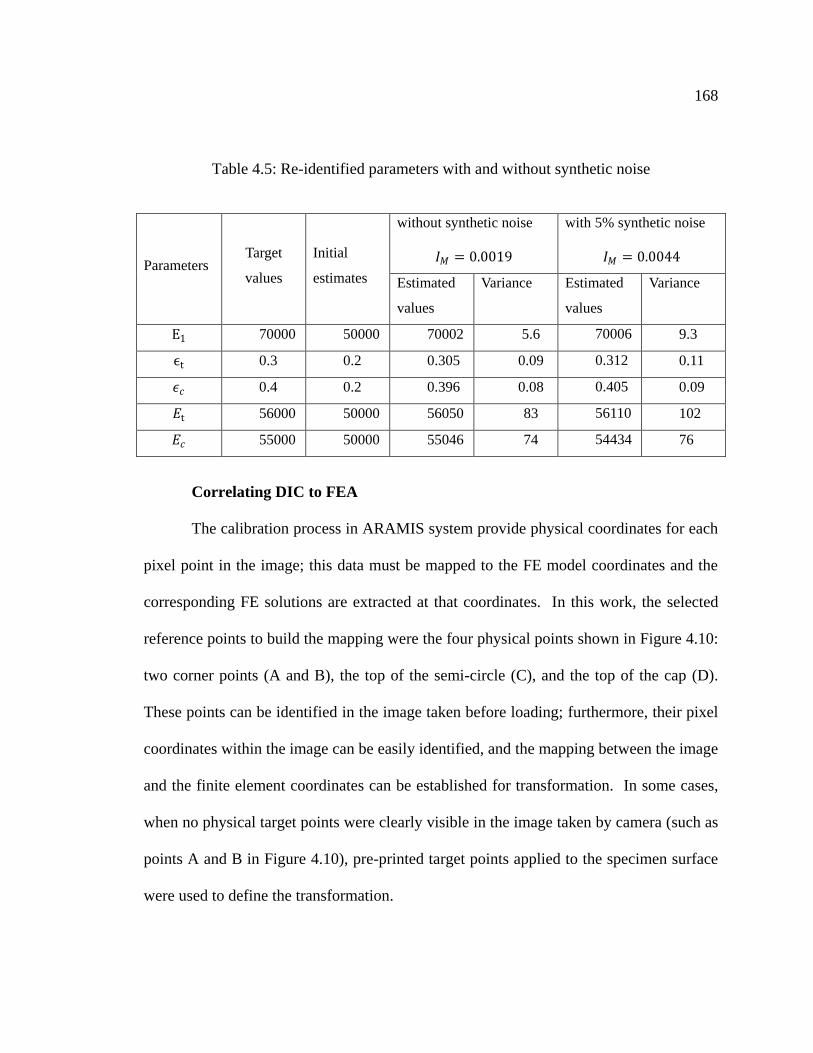
168
Table 4.5: Re-identified parameters with and without synthetic noise
Parameters Target
values
Initial
estimates
without synthetic noise
𝐼𝑀 = 0.0019
with 5% synthetic noise
𝐼𝑀 = 0.0044
Estimated
values
Variance Estimated
values
Variance
E1 70000 50000 70002 5.6 70006 9.3
ϵt 0.3 0.2 0.305 0.09 0.312 0.11
𝜖𝑐 0.4 0.2 0.396 0.08 0.405 0.09
𝐸t 56000 50000 56050 83 56110 102
𝐸𝑐 55000 50000 55046 74 54434 76
Correlating DIC to FEA
The calibration process in ARAMIS system provide physical coordinates for each
pixel point in the image; this data must be mapped to the FE model coordinates and the
corresponding FE solutions are extracted at that coordinates. In this work, the selected
reference points to build the mapping were the four physical points shown in Figure 4.10:
two corner points (A and B), the top of the semi-circle (C), and the top of the cap (D).
These points can be identified in the image taken before loading; furthermore, their pixel
coordinates within the image can be easily identified, and the mapping between the image
and the finite element coordinates can be established for transformation. In some cases,
when no physical target points were clearly visible in the image taken by camera (such as
points A and B in Figure 4.10), pre-printed target points applied to the specimen surface
were used to define the transformation.
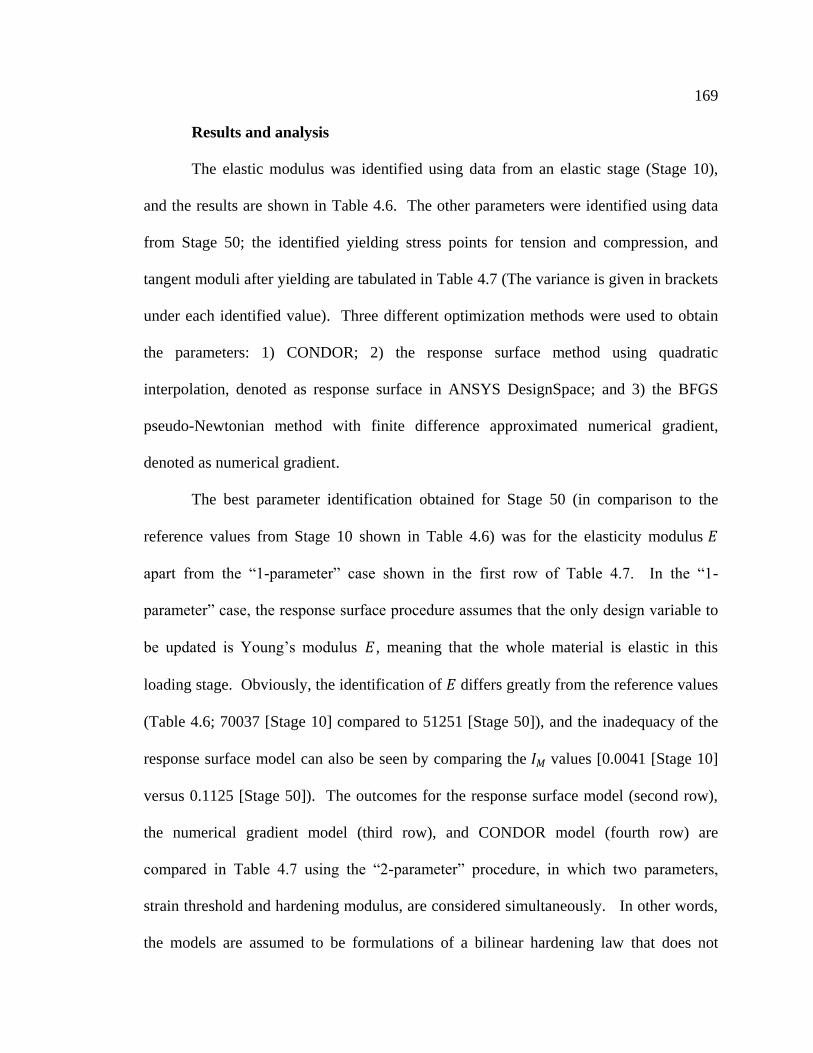
169
Results and analysis
The elastic modulus was identified using data from an elastic stage (Stage 10),
and the results are shown in Table 4.6. The other parameters were identified using data
from Stage 50; the identified yielding stress points for tension and compression, and
tangent moduli after yielding are tabulated in Table 4.7 (The variance is given in brackets
under each identified value). Three different optimization methods were used to obtain
the parameters: 1) CONDOR; 2) the response surface method using quadratic
interpolation, denoted as response surface in ANSYS DesignSpace; and 3) the BFGS
pseudo-Newtonian method with finite difference approximated numerical gradient,
denoted as numerical gradient.
The best parameter identification obtained for Stage 50 (in comparison to the
reference values from Stage 10 shown in Table 4.6) was for the elasticity modulus 𝐸
apart from the ―1-parameter‖ case shown in the first row of Table 4.7. In the ―1-
parameter‖ case, the response surface procedure assumes that the only design variable to
be updated is Young‘s modulus 𝐸, meaning that the whole material is elastic in this
loading stage. Obviously, the identification of 𝐸 differs greatly from the reference values
(Table 4.6; 70037 [Stage 10] compared to 51251 [Stage 50]), and the inadequacy of the
response surface model can also be seen by comparing the 𝐼𝑀 values [0.0041 [Stage 10]
versus 0.1125 [Stage 50]). The outcomes for the response surface model (second row),
the numerical gradient model (third row), and CONDOR model (fourth row) are
compared in Table 4.7 using the ―2-parameter‖ procedure, in which two parameters,
strain threshold and hardening modulus, are considered simultaneously. In other words,
the models are assumed to be formulations of a bilinear hardening law that does not

170
distinguish the difference between compression and tension. Although the two-parameter
procedure is still an inadequate approach to modelling the cast iron material considered
here, the differences between the ―2-parameter‖ and the ―4-parameter‖ cases are less
evident than those observed with the elasticity model in the ―1-parameter‖ case,
suggesting that ―2-parameter‖ models are closer to the ―true‖ one. In the ―4-parameter‖
cases (compared in the bottom three rows of Table 4.7), all four parameters
𝐸𝑡 ,𝐸𝑐 , 𝜖𝑡 , 𝜖𝑐 𝑇 were included in the identification of material parameters using the three
derivative-free methods; the table shows the minimum variances and the minimum
objective function values, along with minimum 𝐼𝑀 measures.
The differences between the outcomes of the three derivative-free methods were
found to be small, but consistent (Table 4.7). The ―numerical gradient‖ method, had the
worst performance indicators, as can be seen from comparison of the objective function
values and 𝐼𝑀 measures for the three methods (numerical gradient>response
surface>CONDOR). Although the algorithmic details of the ―response surface‖ method
are not clear, its performance was found to be better than that of the ―numerical gradient‖
method. Nevertheless, the CONDOR method was shown to be the best method for
identifying model parameters in a cast iron component. The identification of model
parameters was consistent with reference values for an elastic stage, and CONDOR
produced better performance indicators (objective function values and 𝐼𝑀 measures) than
the other methods.

171
Table-4.6: Parameter identification with Stage 10 measurement data (elastic response)
Method E (MPa) Objective Variance 𝐼𝑀
1-parameter
(response surface)
70037 1.6428 25.6 0.0041
1-parameter**
(CONDOR)
70037 1.6427 25.5 0.0040
1-parameter
(numerical gradient)
70101 1.6744 54.2 0.0058
**: the best model
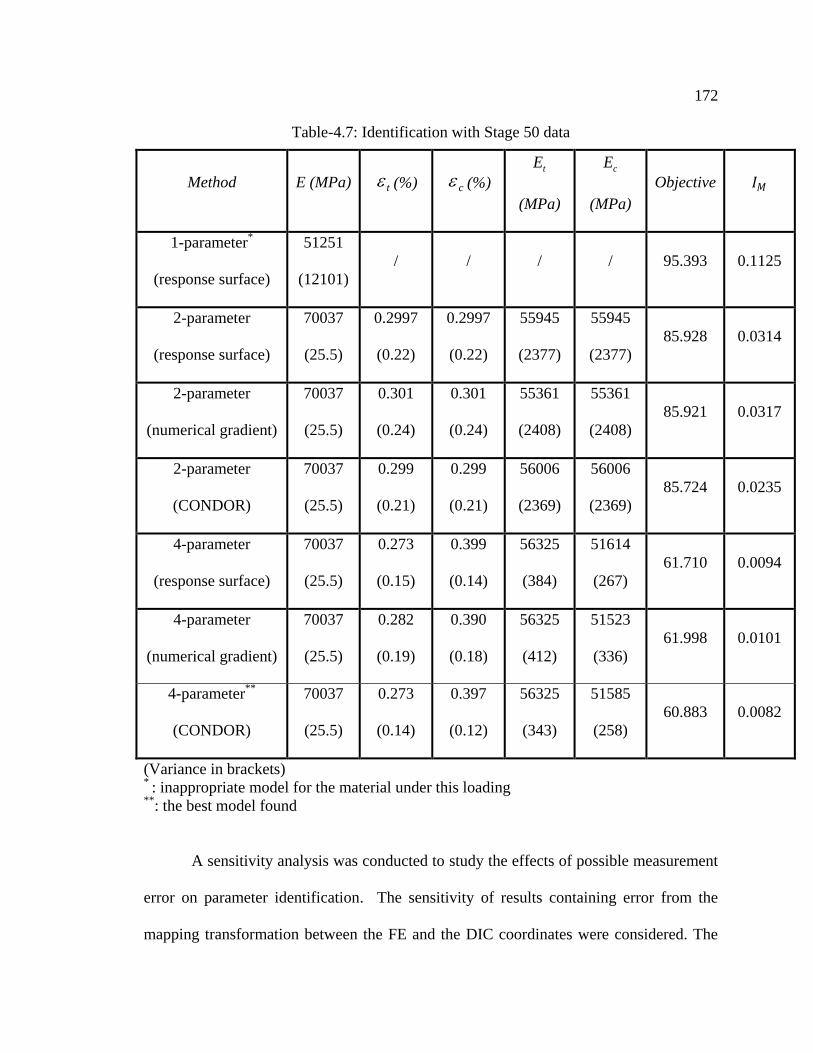
172
Table-4.7: Identification with Stage 50 data
Method E (MPa) t (%) c (%) tE
(MPa)
cE
(MPa)
Objective 𝐼𝑀
1-parameter*
(response surface)
51251
(12101)
/ / / / 95.393 0.1125
2-parameter
(response surface)
70037
(25.5)
0.2997
(0.22)
0.2997
(0.22)
55945
(2377)
55945
(2377)
85.928 0.0314
2-parameter
(numerical gradient)
70037
(25.5)
0.301
(0.24)
0.301
(0.24)
55361
(2408)
55361
(2408)
85.921 0.0317
2-parameter
(CONDOR)
70037
(25.5)
0.299
(0.21)
0.299
(0.21)
56006
(2369)
56006
(2369)
85.724 0.0235
4-parameter
(response surface)
70037
(25.5)
0.273
(0.15)
0.399
(0.14)
56325
(384)
51614
(267)
61.710 0.0094
4-parameter
(numerical gradient)
70037
(25.5)
0.282
(0.19)
0.390
(0.18)
56325
(412)
51523
(336)
61.998 0.0101
4-parameter**
(CONDOR)
70037
(25.5)
0.273
(0.14)
0.397
(0.12)
56325
(343)
51585
(258)
60.883 0.0082
(Variance in brackets) * : inappropriate model for the material under this loading
**: the best model found
A sensitivity analysis was conducted to study the effects of possible measurement
error on parameter identification. The sensitivity of results containing error from the
mapping transformation between the FE and the DIC coordinates were considered. The

173
errors in the x- and y- coordinate transformation (expressed as a percentage) are denoted
as 𝑑𝑥 and 𝑑𝑦, respectively. The variation of the identified initial tangent modulus 𝐸 and
the objective function value are plotted in Figure 4.11. Figure 4.12 shows the variation of
the initial tangent modulus, the tangent modulus for tension and compression as well as
the initial yield strain for tension and compression.
Figure 4.11: the sensitivity of the identification of one parameter 𝑬. (Left: the sensitivity
surface of identified 𝑬 with respect to the errors in the x- and y-translation; Right:
sensitivity of the surface of the objective function with respect to the errors in the x- and
y- translation)

174
Figure 4.12: the sensitivity of the identification of four parameters 𝑬𝒕,𝑬𝒄, 𝝐𝒕, 𝝐𝒄 and
the objective function.
It can be seen in these figures that transformation errors introduce uncertainty into
the identification results. Nonetheless, the sensitivity surfaces are relatively flat,
175
especially for transformation errors near the center (zero coordinate). This indicates that
the identification function is well-posed with respect to coordinate transformation errors.
4.10 Summary of this study
The problem of parameter identification in plasticity constitutive models is
formulated as an inverse problem (i.e., mixed-numerical experimental inverse
identification of material model parameters) in this study. The data were obtained from
full-field measurement of the displacement/strain on the surface of structures using the
digital image correlation (DIC) technique. Our objective was to develop a procedure that
uses derivative-free optimization algorithms available in commercial FE software (e.g.
ABAQUS, ANSYS, COMSOL, MARK, etc.); the derivative-free optimization
algorithms were used to determine the parameters by minimizing the gap between
measured data and simulated responses.
The proposed methodology is general and appropriate for any material model
implemented in commercial software or codes. The method consists of three building
blocks: (i) commercial finite element analysis, (ii) direct optimization algorithms, and
(iii) digital image correlation test results. The latter two are currently highly
commercialized and available for general industrial use.
The focus of this study was on checking the quality and reliability of the
solutions. Methodology for validating experiments was presented and demonstrated. A
systematic verification and validation process, using statistical and sensitivity analyses,
was proposed for use in cases where no reference values of the true parameters are
available a priori. If we state that the null hypothesis 𝐻0 is that the identified parameters

176
are similar to the ―true‖ parameters, then the proposed validation process can prevent
Type-2 error (i.e., acceptance of incorrectly identified parameters), which is the most
important requirement for industrial applications.
In conclusion, the direct optimization technique, finite element simulation, and
digital image correlation can be combined into a useful, efficient and industrially-
applicable technique for the accurate selection and validation of material models and
model parameters. Furthermore, all of the techniques involved in the proposed
methodology are readily available on the commercial market.

177
CHAPTER FIVE: HYPERELASTICITY MODEL IDENTIFICATION FOR
RUBBER AND RUBBER-LIKE SOLIDS
“The life of rubber is like the life of human.” (Anonymous)
5.1 Introduction and literature review of related research
Components comprised of rubbery materials play very important roles in
engineering processes and products. The use of sophisticated mathematical constitutive
models capable of accurate representation of stress/deformation responses (e.g. finite
element analysis) is a key ingredient in the design of engineering components and
structures under general loading conditions. Usually, the mechanical behavior of rubber-
like materials is characterized by hyperelastic constitutive models in which the existence
of a strain energy function is postulated; elastic materials that possess a strain energy
function are called ‗Green-elastic‘ or ‗hyperelastic‘ (Ciarlet, 1988; Doghri, 2000).
Strain energy functions are usually defined in terms of the strain invariants (e.g.
the polynomial forms), or in terms of the principal stretches (e.g. the Ogden forms).
Various types of strain energy functions have been proposed; the most popular of these
include the Mooney-Rivlin model and the Yeoh model, based on the phenomenological
framework of finite elasticity, and the Arruda-Boyce model, which is founded on the
statistical mechanics-based kinetic theory of polymer chain deformations (Boyce and
Arruda, 2000; Saccomandi and Ogden, 2004).
There is not a single constitutive model currently available, which can reproduce
all aspects of the behavior of real rubber. The selection of the type of strain energy

178
function and the essential parameters of the model must be determined through
appropriate laboratory and/or field tests. In contrast to most material constitutive models,
the parameters in rubber constitutive models often have no physical
counterparts/meanings, and therefore cannot be measured directly; in general, they must
be estimated through an inverse approach (i.e., by fitting the model to experimental data,
or by empirical correlations, such as the correlation between rubber stiffness and
hardness) (Gent, 2001).
Traditional laboratory techniques for determining the appropriate form of strain
energy function and corresponding parameters require homogeneous deformation tests
performed on cutout standard samples; these include tests of uniaxial tension and
compression, planar shear, and equibiaxial tension and compression. The task is to find
the strain energy model that fits the observational data exactly, and will behave
reasonably and predictably in other deformation modes.
Initially, elementary methods were utilized to determine the material constants of
an isotropic material from simple observational data (Ogden, 1972), such as Treloar‘s
(Treloar, 1944) data for samples cut from a single sheet of vulcanized natural rubber.
Several researchers have used Treloar‘s experimental data in simple tension, pure shear,
and equibiaxial tension to develop their models for rubber-like materials. For example,
Ogden (Ogden, 1972) used a simplified stress-deformation function to model Treloar‘s
(1944) data; 𝑃 = 𝜇𝑖(𝜆−1+𝛼𝑖 − 𝜆−1+𝑐𝛼 𝑖𝑁
𝑖=1 ) , where 𝑃 represents the force per unit
undeformed area, 𝜆 is the principal stretch, 𝜇𝑖 and 𝛼𝑖 are the material parameters, and 𝑐 is
related to deformation type which is equal to -0.5, -2, -1 for simple tension, equibiaxial
tension, and pure shear, respectively. Thus, Ogden (1972) developed an ad hoc method

179
to obtain parameters based on elementary test data, employing the fact that at small strain
values, only one term is dominant. The obvious limitation to this approach is that the
model provides good fit for only a limited range of strain with such sets of material
parameters.
Recently, researchers improved the estimation by using optimization algorithms,
such as the Levenberg-Marquardt least-square optimization algorithm, to determine the
material constants for each set of the homogeneous deformation data. Many studies that
focus on the identification of Rivlin- or Ogden-type polynomial functions use the load-
displacement curves or stress-strain relations of a specially shaped sample to formulate a
least-square problem. Analytical sensitivity relations can be derived for Rivlin- and
Ogden-type strain energy functions; Rivlin models are polynomial functions based on the
invariants of the Right Cauchy-Green tensor, and Ogden models are power functions of
the eigenvalues of the right stretch tensor with real exponents (Benjeddou, Jankovich et
al., 1993) (Gendy and Saleeb, 2000). The major drawback is that the optimization
procedure is based on the analytical solution for the deformation observed in simple
experiments with a specific form of hyperelastic strain energy; it does not generalize to
deformations that differ from those used by the researcher to develop the model or to a
different stress-deformation function (Gendy and Saleeb, 2000).
Physical parameters for an in vivo hyperelastic model in living soft tissue were
identified in a similar fashion by using the analogy between experimental and predicted
numerical results (Tsuta, Yamazaki et al., 1996). The tests were performed on a regular
circular area of soft tissue on the human forehead; force-displacement data were collected,
and the analytical gradient of displacement for a specific model-type was determined and
180
parameters were computed for the two-dimensional axi-symmetric model using a steepest
descent method. Currently, the most typical approach used is the general FE-based
procedure for determination of the constitutive law of rubber-like hyperelasticity (Wang
and Lu, 2003). First, uniaxial tension and compression tests of rubber specimens are
conducted; then, tension and compression test simulations with a one-element model and
with FE models of the experimental specimen are performed, and suitable rubber-like
hyperelastic constitutive laws are obtained. Finally, candidate constitutive laws for
hyperelastic and rubber-like materials are selected through comprehensive comparison of
the simulation results (from the FE analysis for real working conditions) with the
experimental observations.
Although parameters can be estimated from the results of a single test, tests
conducted at different deformation modes are usually required to obtain a strain energy
function that is adequate for predicting material behaviour under a variety of deformation
modes. As an alternative to homogeneous experiments, Hartmann, Mars and Fatemi
proposed specially-designed experiments that would be conducted using a novel
specimen, a short, thin-walled cylindrical specimen subjected to combined axial and twist
displacements, in order to study the mechanical response of rubber-like materials under
multiaxial loading (Hartmann, 2001) (Mars and Fatemi, 2003) (Mars and Fatemi, 2004).
Hartmann identified parameters in Rivlin‘s hyperelasticity model using tension, torsion,
and combined tension-torsion tests with cylindrical rubber specimens where the
analytical solutions to the extension and torsion of a cylindrical body subjected to
incompressibility are known (Hartmann, 2001). The solution to the resulting boundary
value problem is known, and is used to formulate the least-square optimization algorithm.
181
Sometimes it is difficult to machine an appropriate homogeneous specimen,
however, due to the availability of backup components or the size of the component.
Furthermore, it is always more desirable to test the behaviour of rubber materials in their
installed size and shape within the component, rather than using cut-out standard samples.
Nevertheless, determination of the elastic properties of rubber-like materials can be
considered as an inverse problem of identification in each of these cases. Moreover,
since the essential requirement for laboratory testing is to simulate field conditions as
closely as possible, the principal advantage of in-situ tests is that they assess rubber
behaviour under natural conditions, thus avoiding sample disturbance. In-situ tests also
tend to be more economical than laboratory tests, and in some cases, can provide results
that are more representative due to the higher density of collected data.
The research presented in this chapter explores a method that combines Finite
Element (FE) model updating with full-field measurement using digital image correlation
(DIC) to determine the in-service material properties of mechanical and structural
components. From a mathematical point of view, FE model updating involves the
minimization of the response gap between the analytical and experimental response data.
From a statistical point of view, FE model updating is essentially a nonlinear regression
problem fitting the data using a nonlinear function. For example, FE model updating
using least-square optimization algorithms was used to estimate Mooney-Rivlin
parameters for soft tissue from force-displacement data at the indenter obtained during an
in vivo animal experiment; a 3D FE model simulated the force at the indenter and an
optimization program updated the parameters and ran the simulation iteratively
(Seshaiyer and Humphrey, 2003).

182
Full-field optical techniques for displacement or strain measurements are now
widely used in experimental mechanics. The main techniques reported are
photoelasticity, geometric moiré, moiré interferometry, holographic interferometry,
speckle interferometry (ESPI), grid method and DIC (Rastogi, 2000). Due to its
simplicity and versatility, the DIC method is one of the most commonly used techniques.
Many applications for DIC can be found in the professional literature, including research
related to the heterogeneous deformation of foams (Wang and Cuitino, 2002), large
deformation of polymers (Chevalier, Calloch et al., 2001) (Parsons, Boyce et al., 2004),
and measurement of small strains in fiber-reinforced refractory castables (Robert, Nazaret
et al., 2007). The DIC method can be used with a single camera (standard DIC) to
measure in-plane displacement/strain fields on planar objects, or with two cameras (3D
DIC) to measure 3D displacement/strain fields on any 3-D object (Rastogi, 2000).
The DIC technique provides a number of benefits; DIC measures whole field
displacement/strain on the surface of a component, generates massive amounts of
experimental data in a single test (replacing traditional techniques involving multiple
tests with multidimensional loading paths), and thus provides enough information to
formulate an inverse problem. The full-field measurement in DIC allows better
characterization of the behavior of materials and the response of structural components to
external loadings. The problem of ill-conditioning, which is often encountered in FE-
model updating, can be avoided to a large extent. Furthermore, although the deformation
includes multiple modes, the FE-model formulated using DIC includes coefficients that
reproduce the complex deformation modes exactly; thus, the estimate function will be
better at predicting the behavior of the material. The large amount of full-field data from
183
DIC is conducive to statistical inference; for example, the estimate of covariance is valid
when the amount of data is large. On the other hand, unless used in conjunction with
random simulation, homogeneous tests seldom provide enough data for statistical
inference (Seibert, Lehn et al., 2000a) (Harth, 2003) (Harth, Schwan et al., 2004) (Harth
and Lehn, 2007). The scientific literature dealing with different aspects of the
identification of material parameters for constitutive equations and structural parameters
for analysis models is quite extensive, and was recently reviewed (Mahnken, 2004).
Mahnken and Stein suggested that full-field optical tests such as grid methods or DIC can
overcome the problem of ill-posedness, which is often a major difficulty in inverse
identification problems, and to account for non-uniform stress and strain distribution
during experiments (Mahnken and Stein, 1996); they presented a unified strategy for
material parameter identification in the context of the FE-method that accounts for non-
uniform stress and strain distribution in the test specimen. Their work was limited to
plane stress samples, however, and required complete measurements in a continuous
region.
In this chapter, a commercial FE program (ARAMIS) and a derivative-free
optimization tool (CONDOR) are integrated to solve the inverse identification problem.
The use of the derivative-free optimization program is not due solely to intellectual
curiosity, but is particularly useful in industrial applications. One of the major
difficulties in using optimization-based inverse identification besides the problem of local
minimum lies in the implementation of gradient-evaluation procedures. It is usually
difficult or impossible to get reliable derivative information for the requested numerical
analysis when using complex commercial numerical analysis programs because users
184
generally do not have access to the codes. Thus, the gradient-evaluation procedures are
tedious and require a great deal of additional effort beyond the numerical analysis
provided by commercial software. Furthermore, the evaluation of the gradients involved
in the analysis can differ for various material models, element types, integration schemes,
and degree of deformation or type of response data. For example, a sensitivity analysis
was performed using DIC-measured surface strains (Cooreman, Lecompte et al., 2007);
this analysis is limited to simple tensile tests, and as the return-mapping scheme is
considered in the derivation, cannot be applied directly to FE programs using other
integration schemes (e.g. ADINA, which uses an effective stress integration scheme).
The CONDOR method, a trust-region based derivative-free optimization method
using multivariate polynomial interpolation, is examined in the analysis presented in this
chapter. This algorithm is designed to minimize simple constrained (box constraints)
functions whose evaluations are considered to be expensive and whose derivatives are not
available for computation. The strain/displacement data measured on part of the surface
of a three-dimensional component was used to update the FE model in order to obtain the
strain energy function parameters. This approach does not require a complete set of
response measurements, but there is no strict mathematical theory that guarantees the
validity of the solution. The problem of identifiability is discussed, and nonlinear
regression inferences are used to support the validity of the identifications. To
demonstrate this inverse approach, several hyperelastic models were identified for the
rubber blocks in an engine mount. Specifically, the research presented in this chapter
studies the identification of constitutive models for rubberlike materials using an inverse
185
approach with data from DIC measurements. The analysis is illustrated with a simulated
rubber block and experimental observations of an engine block.
This chapter is structured in the following way: Section 5.1: The introduction and
review. Section 5.2: Basic description of hyperelastic constitutive models for rubberlike
materials. Section 5.3: The approaches used in this work. Section 5.4: Examples and
results: including a simulated rubber block and experimental results of an engine block.
Section 5.5: Summary and conclusions.
5.2 Hyperelastic models for rubber-like materials
This section presents a short review of current hyperelasticity models for the
representation of elasticity behaviour in rubber and rubber-like materials. The underlying
hypothesis of hyperelasticity is that there is a scalar-valued potential function, the strain
energy density function 𝑊, which is a function of the strain state, and whose derivative
with respect to a particular strain component gives the corresponding stress component
by setting:
)()()( xudxx
xxF
I
= deformation gradient (5.1)
))(det()())(()( xFxFxxTxT T = first Piola-Kirchhoff stress tensor (5.2)
where x ∈ Ω (Ω is the computation domain of the problem) is generic point of the
reference configuration, with coordinates xi; and xφ = φ(x) is the generic point of the
deformed configuration, with coordinates xiφ
. The strain energy is a function of the

186
deformation gradient F (relative to some fixed reference configuration), and is written
W(F) per unit volume (Ciarlet, 1988).
The tensor FFC T (in EEM 3 ) is called the right Cauchy-Green tensor; it
measures the length of an elementary vector after deformation in terms of its definition in
the reference configuration. The tensor is symmetric and positive-definite by construction.
Corresponding to the right Cauchy-Green strain tensor C, there is also the left
Cauchy-Green tensor
TFFB (5.3)
By construction, 𝐶 is a symmetric positive definite tensor in EE , which
implies that 𝐶 has three strictly positive eigenvalues 3
1
2 ))(( ii C . Three invariants can be
defined for 𝐶
2
3
2
2
2
11 )()( CtrCI (5.4)
2
1
2
3
2
3
2
2
2
2
2
1
22
2 ))(()}(){(2
1)( CcoftrCtrCtrCI (5.5)
2
3
2
2
2
13 )det()( CCI (5.6)
A deformation is isochoric if and only if, it preserves volumes ( dxdx ). This
deformation is characterized by the deformation gradient 𝐹 which satisfies the
incompressibility constraint
xxF 1)(det (5.7)

187
Thus, the hyperelastic theory states that the first Piola-Kirchhoff stress tensor T is
given as:
2W W
T FF C
(5.8)
The Cauchy stress tensor T is automatically symmetric, and is now given by:
1 1(det ) 2(det )T TW
T F TF F F FC
(5.9)
As for compressible materials, the axiom of indifference implies that 𝑊 is a
function of the right Cauchy-Green strain tensor only (Tallec, 1994). The constitutive law
therefore becomes
TpF
C
WFT
~
2 (5.10)
dpFC
WFT T
I
~
2 (5.11)
Similarly, for isotropic materials, 𝑊 is again a function of the invariants of C
only. Thus, in this case we have simply
1
1 2 2
W W W WI d C
C I I I
I (5.12)
TpFFC
I
WF
I
WI
I
WT
22
1
1
22 (5.13)
In all of these constitutive laws, the hydrostatic pressure 𝑝 is an additional
unknown element, determined by the Lagrange multiplier associated with the additional
nonlinear kinematic constraint
1det FJ (5.14)

188
Various forms of the strain energy function 𝑊 have been proposed for rubber-like
materials. The choice of 𝑊 usually reflects the experience and preferences of the
individual researchers rather than objective criteria. In general, the proposed models can
be categorized into two classes: (1) phenomenological descriptions; and (2) descriptions
based on statistical mechanics (Horgan and Saccomandi, 2006).
Phenomenological descriptions (based on continuum mechanics analysis) assume
that rubber-like materials in the undeformed state are isotropic; i.e., the long molecular
chains are distributed randomly, which allows formulation of a strain energy density
description in volume element units. The strain energy function is either: 1) a function of
the principal invariants of the right Cauchy-Green strain tensor; or 2) a symmetric
function of the principal stretches. The former includes the popular Mooney-Rivlin
model and the Yeoh model, which are appropriate for strains of medium magnitude;
while the latter includes the Ogden model, which is considered to be an effective model
for very large strains (Horgan and Saccomandi, 2006).
The strain energy functions for rubber-like materials based on statistical
mechanics assume that the elastic restoring force is related to the decrease of entropy, and
that elongation of the material‘s fibers reduces disorder within the material. Essentially,
these models make assumptions about the length and direction of molecular chains; the
constitutive models are obtained via statistical analysis (Treloar, 1975). The Arruda-
Boyce and Van der Waals are important forms of the models in this class (Boyce and
Arruda, 2000) (Horgan and Saccomandi, 2004).

189
The Arruda-Boyce model of strain energy is the most popular of the 𝑊 functions
based on statistical molecular theory. The strain energy function is expressed in terms of
𝐼1 and needs only two parameters, namely 𝜇 and 𝜆𝑚 , for incompressible rubber material,
and one additional parameter, 𝐷 , for a compressible case (Arruda and Boyce, 1993). The
strain energy function is:
25
12 21
1 1( 3 ) ln
2
i ii
ii m
C JW I J
D
(5.15)
where: 1 2 3 4 5
1 1 11 19 519, , , ,
2 20 1050 7050 673750C C C C C . The Arruda-Boyce strain
energy model is also called the eight-chain model. The values for 𝐶𝑖 (𝑖 = 1,… ,5) are
obtained from statistical thermodynamics, and therefore they are physically meaningful.
The parameter 𝜇 represents the initial shear modulus of the material. The parameter 𝜆𝑚 is
the locking stretch, which location is around the sharpest point on the stress-strain curve.
This type of strain energy function has been shown to be accurate for engineering most
elastic materials.
The polynomial form of the strain energy function is written as:
2
1 2
1 1
1( 3) ( 3) ( 1)
N Ni j i
ij
i j i i
W C I I JD
(5.16)
This function denote 𝐼1 and 𝐼2 as the first and second invariants of the deviatoric
part of right-Cauchy-Green deformation tensor, respectively; 𝐽 = 𝑑𝑒𝑡(𝑭) is the ratio of
deformed volume over the undeformed volume of the material, and 𝑭 is the deformation
gradient. The parameter 𝑁 is the order of the polynomial chosen for a specific material.
The parameters 𝐷𝑖 determines the compressibility of the material; the material is

190
incompressible if all values of 𝐷𝑖 are equal to zero. For polynomial models, the initial
shear modulus 𝜇0 and volume modulus 𝑘0 are determined by the first-order polynomial
(𝑁 = 1) no matter how many orders are selected for the polynomial model.
)(2 01100 CC , and 1
0
2
Dk (5.17)
The famous Mooney-Rivlin strain energy form can be obtained by retaining only
the linear part of strain energy, that is, 𝑁 = 1.
2
10 1 01 2
1( 3) ( 3) ( 1)
i
W C I C I JD
(5.18)
The Mooney-Rivlin form is a very popular one; although it cannot model the
sharp upturn of the stress-strain curve under large strains, it is effective for small and
medium strain ranges. The first term of this form dictates a linear shear modulus model -
the neo-Hookean model:
10 1( 3)U C I (5. 19)
Treloar constructed the so-called neo-Hookean form of the strain energy on the
basis of Gaussian statistics and molecular network theory (Treloar, 1975) as:
𝑊 =1
2𝜇 𝐼1 − 3 (5. 20)
where 𝜇 is the shear modulus in the ground state. It is easy to see that the Neo-Hookean
model can be obtained by retaining only the first term in Equation (5.18). Actually the
neo-Hookean form is the first W function proposed by Treloar in 1943.
The reduced polynomial forms are obtained from the polynomial models by
setting all of the 0ijC for 0j :

191
N
i
N
i
i
i
i
i JD
ICU1 0
2
10 )1(1
)3( (5.21)
A special form of the reduced polynomial is the Yeoh model which is the reduced
polynomial function at N=3:
3
1
3
0
2
10 )1(1
)3(i i
i
i
i
i JD
ICU
(5.22)
The Yeoh model, is another popular model, and is effective for modeling the large
deformation of rubber-like materials.
To obtain accurate estimates of material parameters, the data space of 𝜆1 − 𝜆2
must be sampled thoroughly. While this is not easily done using traditional tests on
homogeneous stress-strain fields, it is easy to do with tests of the original components, so
that the test configuration generates a complicated strain/displacement pattern. The
mechanical response of a rubber-like material is then defined by choosing a constitutive
model with a strain energy function that fits the experimental behavior of the tested
components. Several of the most widely applied hyperelastic constitutive models are
summarized in Table-5.1.
Table 5.1: Popular constitutive models for compressible rubberlike materials in FE
analysis
Constitutive models based on statistical mechanics Number of material parameters
1. Arruda-Boyce model
2. Van der Waals model
3
4
Phenomenological models Number of material parameters
1. Polynomial models (N-th order)
2. Reduced polynomial models (Yeoh)
2N
N

192
The number of items included in the polynomial and reduced-polynomial models
can be infinitely high, making it possible to represent stress-strain behaviors of any
shape. High order strain energy functions are of little practical value, however, because
rubber materials are not sufficiently reproducible to allow one to evaluate a large number
of coefficients with any accuracy. Generally, the extra terms usually only do a good job
in fitting experimental errors. Therefore, the Mooney-Rivlin model remains the most
widely used strain energy function in FEA, and should be the first choice due to its
simplicity and robustness (Saccomandi and Ogden, 2004). The Mooney-Rivlin model is
used in the example presented in Section 5.4.1.
5.3 Methodological and analytical approaches used for this project
The research presented in this chapter is based on the same methodology as the research
presented in Chapter 4. Briefly, the ARAMIS commercial DIC system was used to
measure displacements and strains on the surface of the test component. A finite element
model of the component was developed and correlated with the experimental
measurements. Direct optimization algorithms and regression analysis techniques were
employed to evaluate and validate this nonlinear optimization problem. Procedural
details are provided in Chapter 4, sections 4.2 to 4.7. The results of applying this
approach to hyperelasticity in rubberlike materials (a rubber block and an engine mount
with a rubber component) are described in Section 5.4.
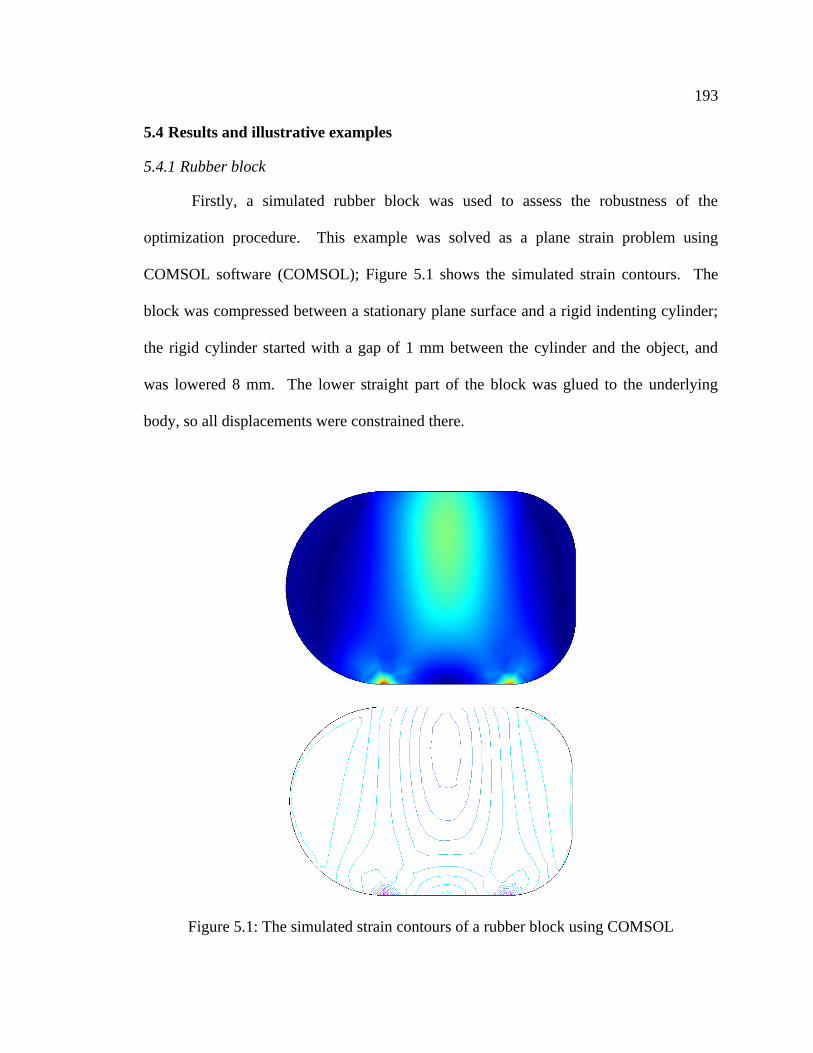
193
5.4 Results and illustrative examples
5.4.1 Rubber block
Firstly, a simulated rubber block was used to assess the robustness of the
optimization procedure. This example was solved as a plane strain problem using
COMSOL software (COMSOL); Figure 5.1 shows the simulated strain contours. The
block was compressed between a stationary plane surface and a rigid indenting cylinder;
the rigid cylinder started with a gap of 1 mm between the cylinder and the object, and
was lowered 8 mm. The lower straight part of the block was glued to the underlying
body, so all displacements were constrained there.
Figure 5.1: The simulated strain contours of a rubber block using COMSOL

194
The rubber material used in this experiment is hyperelastic and was approximated
as a Mooney-Rivlin material with 𝐶10 = 0.37𝑀𝑃𝑎 and 𝐶01 = 0.11𝑀𝑃𝑎. The material is
almost incompressible, so the bulk modulus was set to 104 MPa , and the mixed
formulation option was used. The simulated surface normal strains along a vertical
direction were used for updating the model to define the parameters (Table 5.2).
Table 5.2: numerical test of the inverse problem (𝑰𝑴 = 𝟎.𝟎𝟎𝟎𝟏)
Parameter Reference value Re-identified
value
Relative error Variances
𝐂𝟏𝟎 0.37 0.3704 0.11% 0.02
𝐶01 0.11 0.1106 0.55% 0.02
1/𝐷1 104 103.6 -0.38% 4.8
Studies examining the performance of DIC suggest that a 5% RMS error in strain
measurement is a safe estimation (Tong, 2005) (Robert, Nazaret et al., 2007). Therefore,
5% synthetic noise was added to the simulated strains. The results show that this
procedure produces good solutions even with potential noise in the DIC measurements
(Table 5.3).

195
Table 5.3: numerical test of the inverse problem with 5% synthetic noise (𝑰𝑴 = 𝟎.𝟎𝟎𝟎𝟒)
Parameter Reference value Re-identified
value
Relative error Variances
𝐂𝟏𝟎 0.37 0.3647 -1.43% 0.09
𝐶01 0.11 0.1189 8.09% 0.05
1/𝐷1 104 106.3 2.21% 17.4
5.4.2 Engine mount
An engine mount with a rubber component was tested in the second numerical
example. The FE simulation is performed using commercial FE software ANSYS
(ANSYS). In the FE model, totally 9454 solid185 hyperelastic elements are used to mesh
one rubber block in the engine mount; symmetry condition is used to reduce the
computation cost in the FE simulation.
Figure-5.2 shows a typical experimental setup using ARAMIS DIC system. A
random speckle pattern using black and white spray paints was coated on the surface of
the specimen. The two cameras are shown mounted on a stable base with a special
support tripod and support bars that allowed flexibility in positioning the cameras.
External light was used to provide optimal exposure. The lighting is especially important
as the contrast between white and black speckles can determine the success of a
measurement. Likewise, stabilizing the camera, in order to minimize movement and
vibration while capturing images, is particularly important. camera movement causes
errors in the camera calibration and deformation calculations. Preliminary trials were
conducted to optimize the camera placement and the random speckle pattern.
196
A small region on the randomly speckled surface of the object was measured
using high zoom ratios along with the 1-inch2 (25.4 mm) pre-manufactured calibration
block that comes with the ARAMIS DIC system. Random speckle patterns were created
using 15-pixel subsets that were three times larger than the mean speckle size (5-6 pixels).
(DIC measurement depends on the surface speckle pattern of the component to be
measured. Um and Kim (2007) studied the effects of subset size, subset shape, and step
size on correlation error. Robert et al. (2007) examined the effects of factors such as
speckle size and geometry and image noise in speckle patterns. In general, the findings
indicate that if the size of a large speckle is larger than the subset, poor correlation scores
will result. Thus, a practical rule of thumb is that the subset should be three times larger
than the mean speckle size).
The DIC measurement depends on the surface speckle pattern of the component
to be measured. Um and Kim conducted experimental research of a paper tensile
specimen to study the effect of subset size, subset shape, and step size, on the correlation
error (Um and Kim, 2007). Robert et al studied the effect of speckle patterns, i.e., factors
such as speckle size and geometry, image noise, etc. (Robert, Nazaret et al., 2007). It was
found that if the size of a large speckle is larger than the subset, bad correlation scores
will results. A practical rule of thumb is that the subset 3 times larger than the mean
speckle size. A subset size of 15 pixels was used in our DIC test; an optimal speckle size
should be 5 to 6 pixels.
The frontal surface of the mount was first painted white, and then a black speckle
pattern was randomly sprayed onto the white painted surface. Efforts were made to
obtain an evenly distributed homogeneous pattern of black paint drops on the undeformed
197
surface. Inhomogeneous strain/displacement fields on the rubber surface under loading
were obtained using the ARAMIS DIC system (ARAMIS). The inhomogeneous strain
histories under incremental loading at multiple points were used as input to select the best
model and to identify the corresponding material parameters. In this test, the loads were
applied to the top of the engine mount, incrementally from 0.0 kN to 13.8 kN; the DIC
measurements were conducted at six discrete load-cases, (i.e. 3.6, 6.0, 7.8, 10.8, 12.2, and
13.8 kN load steps). As a good model must be able to predict the behaviour of rubber
under a large range of strains, DIC measurements from all six of these load cases were
used in the least-squares objective function to update the FE model.
Figure 5.2: The engine mount and the DIC test using the ARAMIS DIC system

198
Therefore, the least-squares objective problem is written as:
Find 𝜽 ∈ 𝚯 : 𝑚𝑖𝑛 𝑓 𝜃 = 1
2 𝑀 𝜃 − 𝑑𝑒𝑥𝑝
2𝑁𝑖=1𝑝∈𝑃 (29)
where P is the set of load cases used in the identification; and 𝑁 is the number of
effective measurement points of the DIC tests. In these DIC measurements, each image
contains 1024-by-1280 pixels; grids with subsets of 15-by-15 pixels were used in the
analysis. As noted previously, the optimal speckle size is 5 to 6 pixels for the subset size
of 15 pixels used in our DIC tests. For speckles larger than this size, the RMS error of
strain/displacement measurements increases with the increase in speckle size.
Since the test is performed on a real component rather than a symmetrical cutout,
patterns are not well-controlled. The paint was applied to the engine mount manually,
and there were also unique scratches, and marks or labels on the surface of the mount.
Therefore, regions on the surface with speckles larger than the subset size were deleted
from the measured results. Thus, a typical DIC measurement (Figure 5.3) may contain
blank areas (regions where the speckle pattern is not adequate for accurate DIC
measurement). Therefore, the effective measurement points used in Equation (29), must
be chosen from DIC test results that exclude these blank regions.
Figure 5.3: The geometry model and finite element model of the engine mount
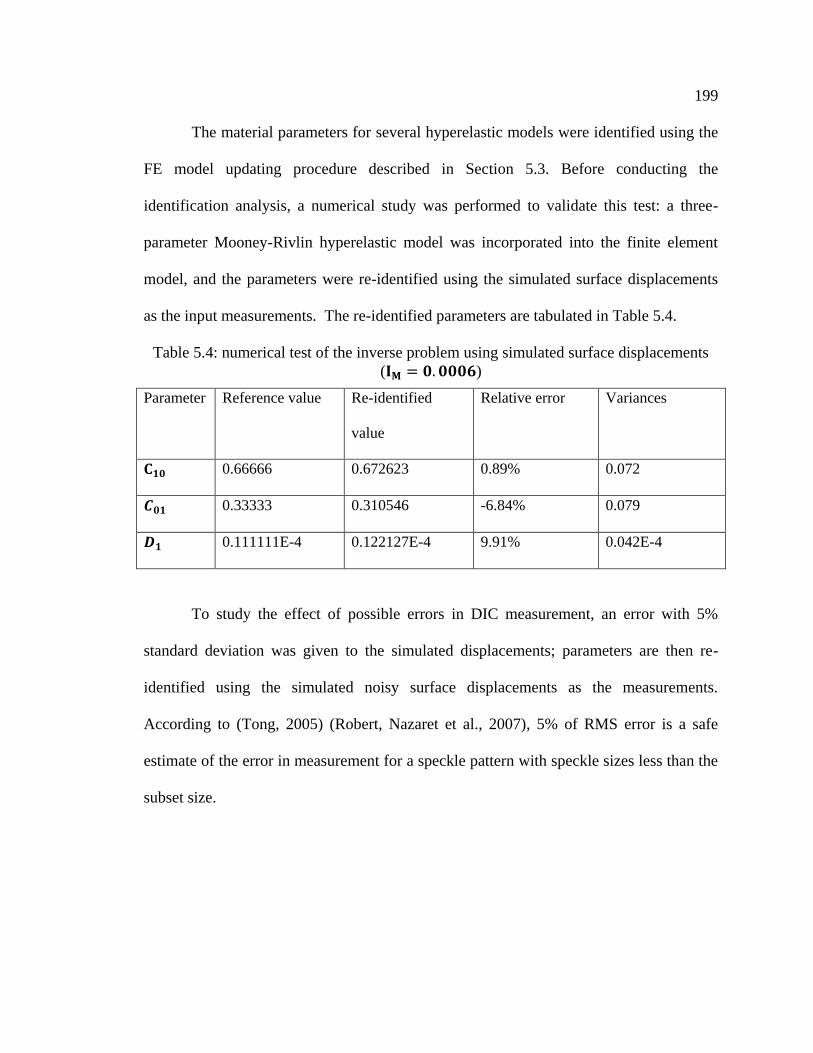
199
The material parameters for several hyperelastic models were identified using the
FE model updating procedure described in Section 5.3. Before conducting the
identification analysis, a numerical study was performed to validate this test: a three-
parameter Mooney-Rivlin hyperelastic model was incorporated into the finite element
model, and the parameters were re-identified using the simulated surface displacements
as the input measurements. The re-identified parameters are tabulated in Table 5.4.
Table 5.4: numerical test of the inverse problem using simulated surface displacements
(𝐈𝐌 = 𝟎.𝟎𝟎𝟎𝟔)
Parameter Reference value Re-identified
value
Relative error Variances
𝐂𝟏𝟎 0.66666 0.672623 0.89% 0.072
𝑪𝟎𝟏 0.33333 0.310546 -6.84% 0.079
𝑫𝟏 0.111111E-4 0.122127E-4 9.91% 0.042E-4
To study the effect of possible errors in DIC measurement, an error with 5%
standard deviation was given to the simulated displacements; parameters are then re-
identified using the simulated noisy surface displacements as the measurements.
According to (Tong, 2005) (Robert, Nazaret et al., 2007), 5% of RMS error is a safe
estimate of the error in measurement for a speckle pattern with speckle sizes less than the
subset size.

200
Table 5.5: numerical test of the inverse problem using simulated surface displacements
with synthetic noise (𝑰𝑴 = 𝟎.𝟎𝟎𝟏𝟑)
Parameter Reference value Re-identified
value
Relative error Variances
𝐂𝟏𝟎 0.66666 0.67812 1.72% 0.091
𝑪𝟎𝟏 0.33333 0.31735 -4.79% 0.099
𝑫𝟏 0.111111E-4 0.12472E-4 12.25% 0.048E-4
Tables 5.4 and 5.5 show that, for the identification of parameters in a Mooney-
Rivlin hyperelastic model, the accuracy of the identified 𝐶10 parameter is very good,
while the potential errors in identification of the 𝐶01 parameter and the 𝐷1 parameter are
relatively high. The identified strain energy function is sufficient to describe the behavior
of this rubber, however, because the contribution of the 𝐶10 parameter is dominant in the
Mooney-Rivlin strain energy function. Furthermore, the effects of parameter 𝐶01 and the
compressibility parameter 𝐷1 are relatively insignificant for a strain range up to 150%,
so this level of error can be regarded as acceptable in FE analysis.
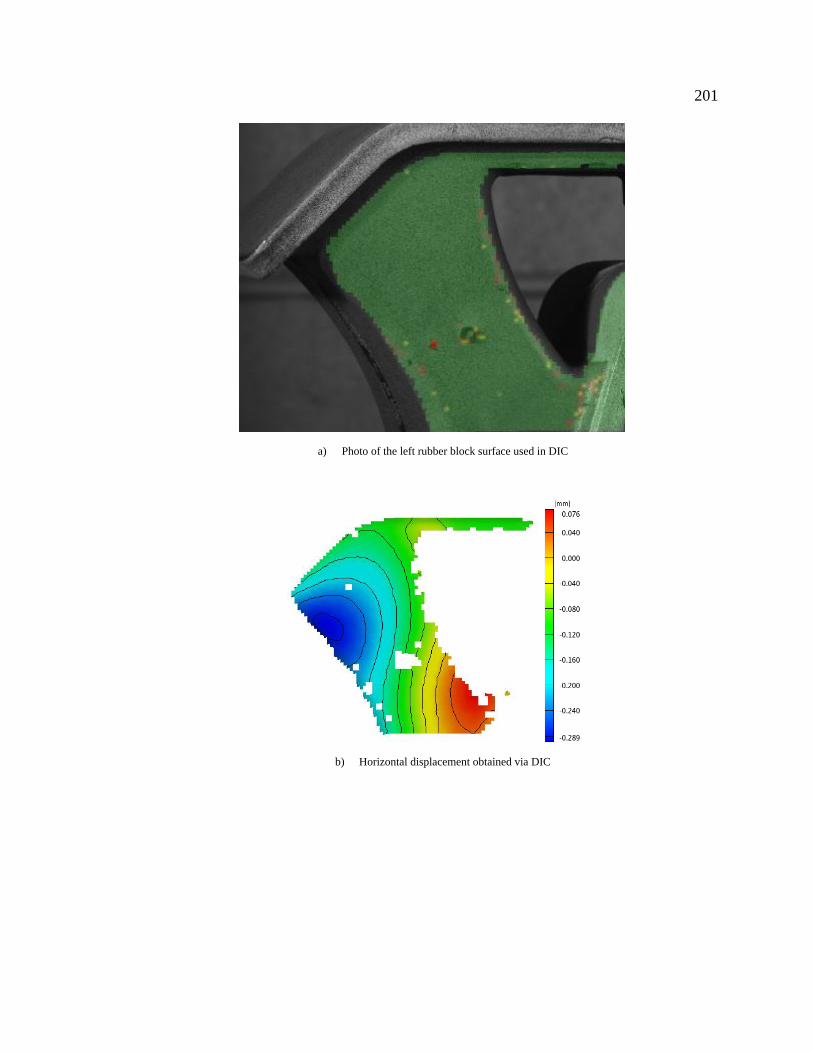
201
a) Photo of the left rubber block surface used in DIC
b) Horizontal displacement obtained via DIC

202
c) Vertical displacement obtained via DIC
Figure 5.4: The DIC measurements of displacement in the 7.8 kN load case
a) Horizontal displacement b) Vertical displacement
Figure 5.5: The FE simulation of displacement at the 7.8 kN load case using identified
Mooney-Rivlin model
The parameters identified for four different strain energy functions using the
experimental data are tabulated in Table 5.6. The estimated variance for each parameter
is given in brackets. Note that, as the measure derives from different models in this case,
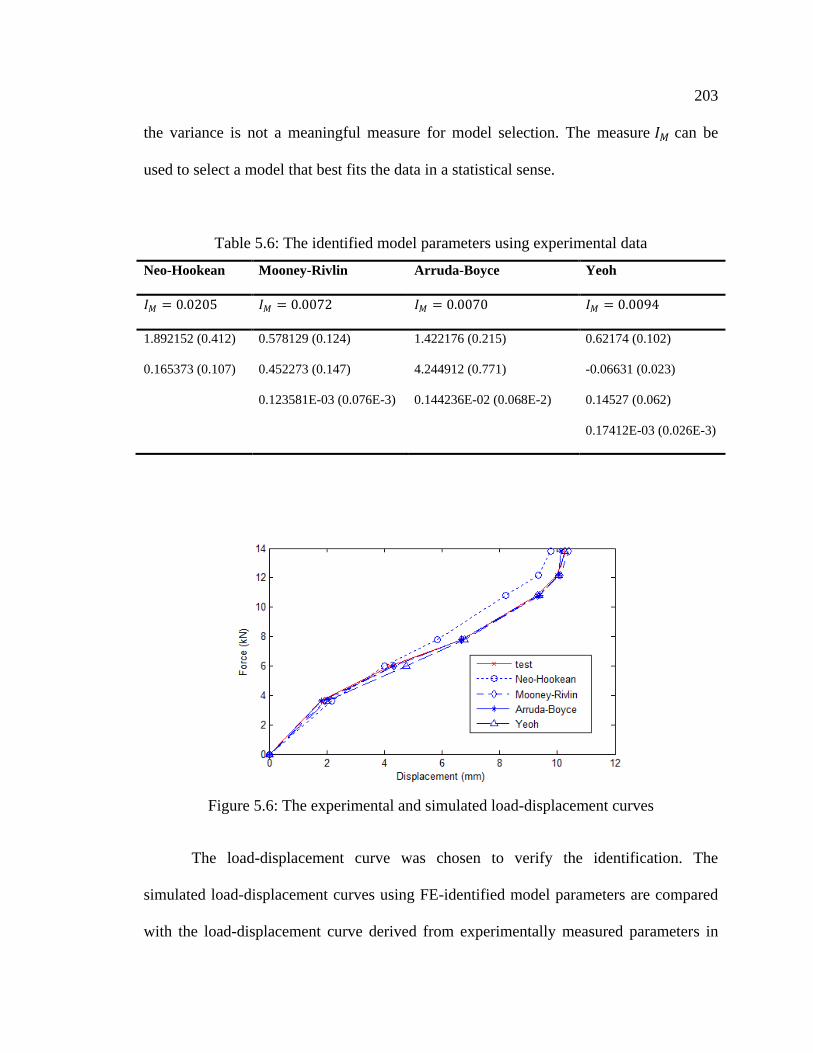
203
the variance is not a meaningful measure for model selection. The measure 𝐼𝑀 can be
used to select a model that best fits the data in a statistical sense.
Table 5.6: The identified model parameters using experimental data
Neo-Hookean Mooney-Rivlin Arruda-Boyce Yeoh
𝐼𝑀 = 0.0205 𝐼𝑀 = 0.0072 𝐼𝑀 = 0.0070 𝐼𝑀 = 0.0094
1.892152 (0.412)
0.165373 (0.107)
0.578129 (0.124)
0.452273 (0.147)
0.123581E-03 (0.076E-3)
1.422176 (0.215)
4.244912 (0.771)
0.144236E-02 (0.068E-2)
0.62174 (0.102)
-0.06631 (0.023)
0.14527 (0.062)
0.17412E-03 (0.026E-3)
Figure 5.6: The experimental and simulated load-displacement curves
The load-displacement curve was chosen to verify the identification. The
simulated load-displacement curves using FE-identified model parameters are compared
with the load-displacement curve derived from experimentally measured parameters in

204
Figure 5.6. The Neo-Hookean model does not perform well for high load ranges because
it is a linear shear modulus model. The simulated load-displacement curves generated by
the three other FE-identified models compare well with the experimental load-
displacement curve. In particular, the Mooney-Rivlin and Arruda-Boyce models
produced the best outcomes in terms of accurately simulating the experimental load-
displacement curve. Thus, designers can use FE-identified models, such as the Mooney-
Rivlin and Arruda-Boyce models in this case, to assess a static stiffness measure for the
design of a component under different load configurations and strain ranges. Moreover,
the examination of relative error when artificial noise was added to the test data indicates
that the level of error in FE-models is comparable to that seen in experimental tests.
The Mooney-Rivlin strain energy function parameters, which were identified after
introducing noise (5% error to the DIC experimental data), are given in Table 5.7. The
relative error shown in this table was calculated with respect to the model parameters
identified without artificial noise in the test data. Therefore, according to this numerical
analysis, the identification of model parameters is not overly sensitive to measurement
error; since error of ±5% is well within the range of potential error in a well-controlled
DIC test, this level of error is acceptable for numerical analysis. Likewise, the speckle
points applied to the surface were approximately 3 to 5 pixels (less than 0.05mm) in
diameter; the corresponding subset size chosen was 15 pixels. According to Tong and
Robert, RMS error of 5% is a safe estimate of the measurement error for a speckle pattern
with speckle sizes smaller than the subset size (Tong, 2005) (Robert, 2007)).

205
Table 5.7: Sensitivity of the identified model parameters with introduced noise in the test
data
Identified Mooney-Rivlin
model without artificial noise in
test data
Identified Mooney-Rivlin
model with artificial noise in
test data
Relative error
0.578129
0.452273
0.123581E-03
0.581362
0.474483
0.136529E-03
0.56%
4.91%
10.48%
5.5 Summary
This chapter provides a methodology for rapid model selection and identification
of model parameters for rubber-like materials in structural components. This method is
based on an inverse problem approach which uses displacement/strain data measured by
digital image correlation (DIC) as input. A least-squares objective function is minimized
by use of a trust region-based derivative-free optimization method. An engine mount
with rubber components was tested to demonstrate and validate this approach.
The concept proposed in this chapter is a flexible methodology for the
identification of effective material models of rubber-like materials. The identifiability of
model parameters and numerical stability issues arising from this approach are discussed;
several numerical analyses are recommended to validate model identification.
In particular, this chapter considers the identification of constitutive parameters of
rubberlike materials under monotonic loading. Future research would include the
identification of constitutive parameters of rubber-like materials under cyclic loading,
enabling study of parameters defining hysteresis and the Mullins effect. The Mullins
effect is closely related to the fatigue of elastomeric parts used in engineering

206
applications. Quantitative study of the Mullins effect is thus a necessary step towards the
scientific evaluation of the fatigue life of rubber and rubber-like materials.
207
CHAPTER SIX: CONCLUSION AND FUTURE WORK
Contribution is sometimes a reward in itself. Recognition of the value of an idea is a
further reward. Edward de Bono
This thesis solves two inverse problems: (i) reconstruction of stiffness distribution of
beams which can serve as damage identification and structural monitoring technique, and
(ii) the identification of nonlinear material model parameters of components/specimens
which is a topic in more and more demanding as engineers today have the ambition to
describe comprehensively the nonlinear deformation processes of materials and structures.
The two inverse problems are different, one is ill-posed functional identification and one
is well-posed parameter identification, although the former must also be solved in
parametric ways.
In this work, optically measured beam deflection profiles and full-field
displacements/strains on the specimen surface using digital cameras are used as inputs to
inverse identification processes. The author believes that optical measuring techniques
are very promising, and whence combined with modern parameter identification
techniques, offers great potentials to engineering problems including damage and
material identification.
A novel methodology of damage identification is developed using static
deflection measurements. Two FE model updating methods for beams were proposed in
this work; they can be used as damage identification methods. The methods presented in
this work depart from traditional damage identification techniques by trying to
208
reconstruct the complete stiffness distribution of a beam. Although a baseline model is
required, only boundary conditions need to be accurately modeled.
Throughout this work, a number of ―future work‖ have appeared in text. This is
not an indication of a lack of effort; rather, it reflects the fact of the research,
1) Measurements: photogrammetry, camera calibration, metric cameras, other
measurement techs, fibre optic, inclinometers, etc.
2) Additional field testing: the primary focus of future efforts should be on continued
testing with field testing on real structures, to see how well the methods will
perform in practice. Loading is a problem, especially bridges, issues like lighting,
requirement of stable mounting base, calibration of cameras may arise and need to
be studied in practice. Another interesting issue can be the permanent mounting of
inspecting cameras and data transition through cables, in a time that cameras are
installed everywhere for security of humans, it would a more though to use
cameras for safety of structures.
3) Combination of different damage identification techniques: local+global, dynamic
+ static, irregularity detection from static deflection measurements.

209
REFERENCES
Adelman, H. M. and Haftka, R. T. (1986). "Sensitivity analysis of discrete structural
systems." AIAA Journal 24(5).
ADINA. "ADINA software, www.adina.com." Retrieved September 1, 2011.
Aguir, H., BelHadjSalah, H. and Hambli, R. (2011). "Parameter identification of an
elasto-plastic behaviour using artificial neural networks-genetic algorithm method."
Materials and Design 32: 48-53.
ANSYS. "the ANSYS software, http://www.ansys.com, Swanson Analysis Systems,
Inc.". Retrieved May 1, 2011.
ARAMIS. "ARAMIS system, http://www.trilion.com ". Retrieved September 1, 2008.
Arnoldy, B. (2007). How to pay for US road and bridge repair? . The Christian Science
Monitor. August 10.
Arora, J. S. (2007). Optimization of structural and mechanical systems, World Scientific.
Arruda, E. M. and Boyce, M. C. (1993). "A three-dimensional constitutive model for the
large stretch behavior of rubber elastic materials." Journal of the Mechanics and Physics
of Solids 41(2): 389-412.
ASME (2006). Guide for Verification and Validation in Computational Solid Mechanics,
American Society of Mechanical Engineers.
Aster, R. C., Borchers, B. and Thurber, C. H. (2005). Parameter estimation and inverse
problems. Amsterdam, Elsevier Academis Press.
ASTM (2011). Standard test methods for tension testing of metallic materials. E8M-11.
Bakht, B. and Jaeger, L. G. (1990). "Bridge testing: a surprise every time." Journal of
Structural Engineering 116: 1370-1383.
Banan, M. R., Banan, M. R. and Hjelmstad, K. D. (1994a). "Parameter estimation of
structures from static response. I. computational aspects." Journal of Structural
Engineering 120(11): 3243-3258.
Banan, M. R., Banan, M. R. and Hjelmstad, K. D. (1994b). "Parameter estimation of
structures from static response. II. numerical simulation studies." Journal of Structural
Engineering 120(11): 3259-3283.
210
Barazzetti, L. and Scaioni, M. (2010). "Development and Implementation of Image-based
Algorithms for Measurement of Deformations in Material Testing." Sensors 10: 7469-
7495.
Bard, Y. (1974). Nonlinear parameter estimation. New Tork, Academic Press.
Batabyal, A. K., Sankar, P. and Paul, T. K. (2008). Crack detection in cantilever beam
using vibration response. Vibration Problems ICOVP-2007. Inan, E., Springer Science.
Bates, D. M. and Watts, D. G. (1980). "Relative curvature measures of nonlinearity (with
discussion)." Journal of Royal Statistical Society B 42(1): 1-25.
Bates, D. M. and Watts, D. G. (1988). Nonlinear regression analysis and its applications,
John Wiley & Sons, Inc.
Beck, J. V. and Arnold, K. J. (1977). Parameter estimation in engineering and science.
NY, John Wiley & Sons.
Bell, J. F. (1984). The experimental foundations of solid mechanics. Berlin and New
York, Springer-Verlag.
Benjeddou, A., Jankovich, E. and Hadri, T. (1993). "Determination of the parameters of
Ogdens law using biaxial data and Levenberg-Marquardt-Fletcher algorithm." Journal of
Elastomers and Plastics 25: 224-248.
Berghen, F. V. (2004). CONDOR: a constrained, non-linear, derivative-free parallel
optimizer for continuous, high computing load, noisy objective functions. Belgium,
Universite Libre de Bruxelles. PhD.
Berghen, F. V. and Bersini, H. (2005). "CONDOR, a new parallel, constrained extension
of Powell's UOBYQA algorithm: Experimental results and comparison with the DFO
algorithm." Journal of Computational and Applied Mathematics 181: 157-175.
Bicanic, N. and Chen, H. P. (1997). "Damage identification in framed structures using
natural frequencies." International Journal for Numerical Methods in Engineering 40:
4451-4468.
Bos, A. V. D. (2007). Parameter estimation for scientists and engineers, John Wiley &
Sons.
Boyce, M. C. and Arruda, E. M. (2000). "Constitutive models of rubber elasticity: a
review." Rubber Chemistry Technology 73: 504-523.
Bridgman, P. W. (1952). Studies in Large Plastic Flow and Fracture. New York, McGraw
Hill.
211
Broggiato, G. B., Campana, F. and Cortese, L. (2007). "Identification of material
damage model parameters: an inverse approach using digital image processing."
Meccanica 42: 9-17.
Brownjohn, J. M. W., Xia, P., Hao, H. and Xia, Y. (2001). "Civil structure condition
assessment by FE model updating: methodology and case studies." Journal of Finite
Elements in analysis and Design 37: 761-775.
Buda, G. and Caddemi, S. (2007). "Identification of concentrated damages in Euler-
Bernoulli beams under static loads." Journal of Engineering Mechanics 133(8): 942-956.
Caesar, B. and Pete, J. (1987). "Direct update of dynamic mathematical models from
model test data." AIAA Journal 25: 1494-1499.
Carden, E. P. and Fanning, P. (2004). "Vibration based condition monitoring: a review."
Structural Health Monitoring 3(4): 355-377.
Cardenas-Garcia, J. F., Wu, M. M. and Hashemi, J. (1997). A review of strain
measurement techniques using the grid method. Nontraditional methods of sensing stress,
strain, and damage in materials and structures. Lucas, G. F. and Stubbs, D. A., ASTM,
Philadelphia.
Cerri, M. N. and Vestroni, F. (2003). "Use of frequency change for damage identification
in reinforced concrete beams." Journal of Vibration and Control 9(3-4): 475-491.
Chan, T. F., Golub, G. H. and Mulet, P. (1996). A nonlinear primal-dual method for total
variation-based image restoration. Lecture Notes in Control and Information Sciences.
219: 241-252.
Chen, L. C., Jan, H. H. and Huang, C. W. (2001). Measurement of concrete cracks using
digitized close-range photographs. 22nd Asian Conference on Remote Sensing.
Singapore.
Chevalier, L., Calloch, S., Hild, F. and Marco, Y. (2001). "Digital image correlation used
to analyze the mul-tiaxial behaviour of rubberlike materials." Europian Journal of
Mechanics A 20: 169-187.
Choi, I. Y., Lee, J. S., Choi, E. and Cho, H. N. (2004). "Development of elastic damage
load theorem for damage detection in a statically determinate beam." Computers and
Structures 82: 2483-2492.
Chou, J.-H. and Ghaboussi, J. (2001). "Genetic algorithm in structural damage detection."
Computers and Structures 79: 1335-1353.
212
Chu, T. C., Ranson, W. F., Sutton, M. A. and Peters, W. H. (1985). "Applications of
digital image correlation techniques to mechanics." Experimental Mechanics 25(3): 232-
244.
Ciarlet, P. G. (1988). Mathematical elasticity, Volume 1: Three dimensional elasticity,
Elsevier.
Cobelli, C. and DiStefano, J. J. (1980). "Parameter and structural identifiability concepts
and ambiguities: a critical review and analysis." American Journal of Physiology 239(1):
R7-R24.
COMSOL. "COMSOL software, www.comsol.com." Retrieved May 1, 2009.
Conn, A. R., Scheinberg, K. and Toint, P. L. (1997). "Recent progress in unconstrained
nonlinear optimization without derivatives." Mathematical Programming 79: 397-414.
Conn, A. R., Scheinberg, K. and Vicente, L. N. (2009). Introduction to derivative-free
optimization. Philadelphia, SIAM.
Cooreman, S., Lecompte, D., Sol, H., Vantomme, J. and Debruyne, D. (2007). "Elasto-
plastic material parameter identification by inverse methods: Calculation of
the sensitivity matrix." International Journal of Solids and Structures 44: 4329 - 4341.
Cooreman, S., Lecompte, D., Sol, H., Vantomme, J. and Debruyne, D. (2008).
"Identification of Mechanical Material Behavior Through Inverse Modeling and DIC."
Experimental Mechanics 48: 421-433.
Cornwell, P. J., Farrar, C. R., Doebling, S. W. and Sohn, H. (1999). "Environmental
variability of modal properties." Experimental Techniques 23: 45-48.
Cronk, S., Fraser, C. and Hanley, H. (2006). "Automated metric calibration of colour
digital cameras." The Photogrammetric Record 21(116): 355-372.
Desrues, J. and Viggiani, G. (2004). "Strain localization in dans: an overview of the
experimental results obtained in Grenoble using stereophotogrammetry." International
Journal for Numerical and Analytical Methods in Geomechanics 28: 279-321.
Doebling, S. W. and Farrar, C. R. (1997). Using Statistical Analysis to Enhance Modal-
Based Damage Identification. Structural Damage Assessment Using Advanced Signal
Processing Procedures, Proceedings of DAMAS'97. University of Sheffield, UK: 199-
210.
Doebling, S. W., Farrar, C. R. and Prime, M. B. (1998). "A summary review of vibration-
based damage identification methods." The Shock and Vibration Digest 30(2): 91-105.

213
Doebling, S. W., Farrar, C. R., Prime, M. B. and Shevitz, D. W. (1996). Damage
identification and health monitoring of structural and mechanical systems from changes
in their vibration characteristics: a literature review Research Report, LA-13070-MS,
ESA-EA. Los Alamos, N.M., USA. , Los Alamos National Laboratory.
Doghri, I. (2000). Mechanics of deformable solids. Berlin, Heidelberg, Springer Verlag.
Donaldson, J. R. and Schnabel, R. B. (1987). "Computational Experience With
Confidence Regions and Confidence Intervals for Nonlinear Least Squares."
Technometrics 29(1): 67-82.
Durelli, A. J. and Parks, V. J. (1970). Moiré analysis of strain. Eaglewood Cliffs, NJ,
Prentice-Hall.
Dusunceli, N., Colak, O. U. and Filiz, C. (2010). "Determination of material parameters
of a viscoplastic model by genetic algorithm." Materials and Design 31: 1250-1255.
ERDAS (2002). IMAGINE OrthoBASE user‘s guide Version 8.6. Atlanta, USA, Leica
Geosystems.
Farhat, C. and Hemez, P. M. (1993). "Updating finite element dynamics models using an
element-by-element sensitivity methodology." AIAA Journal 31(9): 1702-1711.
Farrar, C. R., Cornwell, P. J., Doebling, S. W. and Prime, M. B. (2000). Structural Health
Monitoring Studies of the Alamosa Canyon and I-40 Bridges. Los Alamos, NM, USA,
Los Alamos National Laboratory.
Farrar, C. R. and Worden, K. (2007). "An introduction to structural health monitoring."
Philosophical Transactions of the Royal Society A 365: 303-315.
Franke, S., Franke, B. and Rautenstrauch, K. (2007). "Strain analysis of wood
components by close range photogrammetry." Materials and Structures 40: 37-46.
Fraś, T., Nowak, Z., Perzyna, P. and Pecherski, R. B. (2011). "Identification of the model
describing viscoplastic behaviour of high strength metals." Inverse Problems in Science
and Engineering 19(1): 17-30.
Friswell, M. I. (2007). "Damage identification using inverse methods." Philosophical
Transactions of the Royal Society A 365: 393-410.
Friswell, M. I. and Mottershead, J. E. (1995). Finite element model updating in structural
dynamics. Dordecht, The Netherlands, Kluwer Academic Publishers.

214
Furukawa, T. and Yagawa, G. (1997). "Inelastic constitutive parameter identification
using an evolutionary algorithm with continuous individuals." International Journal for
Numerical Methods in Engineering 40: 1071-1090.
Gendy, A. S. and Saleeb, A. F. (2000). "Nonlinear material parameter estimation for
characterizing hyperelastic large strain models." Computational Mechanics 25: 66-77.
Gent, A. (2001). Engineering with rubber, how to design rubber components. 2nd Ed.
Munich, Germany, Hanser Publishers.
Gentle, J. E. (2003). Random Number Generation and Monte Carlo Methods. New York,
NY, Springer-Verlag.
Ghouati, O. and Gelin, J.-C. (2001). "A finite element-based identification method for
complex metallic material behaviour." Computational Materials Science 21: 57-68.
Giachetti, A. (2000). "the pattern matching techniques used to compute image motion
from a sequence of two or more images." Image and Vision Computing 18(3): 247-260.
Goldfeld, Y. (2007). "Identification of the stiffness distribution in statically indeterminate
beams." Journal of Sound and Vibration 304: 918-931.
Grediac, M. (2004). "The use of full-field measurement methods in composite material
characterization: interest and limitations." Composites Part A 35: 751-761.
Grédiac, M. (2011). "the Virtual Fields Method website: http://www.camfit.fr/."
Retrieved September 20, 2011.
Grédiac, M. and Pierron, F. (2006). "Applying the Virtual Fields Method to the
identification of elasto-plastic constitutive parameters." International Journal of Plasticity
22: 602-627.
Grediac, M., Toussaint, E. and Pierron, F. (2002). "Special virtual fields for the direct
determination of material parameters with the virtual fields method. 1–Principle and
definition." International Journal of Solids and Structures(39): 2691-2705.
Green, P. J. (1988). "Regression, curvature and weighted least squares." Mathematical
Programming 42: 41-51.
Grimstad, A.-A., Kolltveit, K., Mannseth, T. and Nordtvedt, J.-E. (2001). "Assessing the
validity of a linearized accuracy measure for a nonlinear parameter estimation problem."
Inverse Problems 17: 1373-1390.
Haber, R. B., Tortorelli, D. A. and Vidal, C. A. (1993). Design sensitivity analysis of
nonlinear structures I: large-deformation hyperelasticity and history-dependent material

215
response. Structural optimization: status and promise. Kamat, M. P. Washington DC,
American Institute of Aeronautics and Astronautics 369-405.
Haines, L. M., O'Brien, T. E. and Clarke, G. P. Y. (2004). "Kurtosis and curvature
measures for nonlinear regression models." Statistica Sinica 14: 547-570.
Hajela, P. and Soeiro, F. J. (1990a). "Recent developments in damage detection based on
system identification methods." Structural Optimization 2: 1-10.
Hajela, P. and Soeiro, F. J. (1990b). "Structural damage detection based on static and
modal analysis." AIAA Journal 28(6): 1110-1115.
Hansen, P. C. (1992). "Analysis of discrete ill-posed problems by means of the L-curve."
SIAM Rev. 34: 561-580.
Hansen, P. C. (1998). Rank-deficient and discrete ill-posed problems: numerical aspects
of linear inversion. Philadelphia, SIAM.
Harth, T. (2003). Identification of material parameters for inelastic constitutive models:
stochastic simulation and design of experiments. Fechbereich Mathematik (Department
of Mathematics), Darmstadt University of Technology. PhD.
Harth, T. and Lehn, J. (2007). "Identification of material parameters for inelastic
constitutive models using stochastic methods." GAMM-Mitt. 30(2): 409-429.
Harth, T., Schwan, S., Lehn, J. and Kollmann, F. G. (2004). "Identification of material
parameters for inelastic constitutive models: statistical analysis and design of
experiments." International Journal of Plasticity 20: 1403-1440.
Harth, Z., Sun, H. and Schafer, M. (2007). "Comparison of derivative free Newton-based
and evolutionary methods for shape optimization of flow problems." International Journal
for Numerical Methods in Fluids 53: 753-775.
Hartmann, S. (2001). "Numerical studies on the identification of the material parameters
of Rivlin's hyperelasticity using tension-torsion tests." Acta Mechanica 148: 129-155.
Hegger, J., Sherif, A. and Gortz, S. (2004). "Investigation of Pre- and Postcracking Shear
Behavior of Prestressed Concrete Beams Using Innovative Measuring Techniques." ACI
Structural Journal 101(2): 183-192.
Heijden, F. v. d. (1994). Image based measurement systems: object recognition and
parameter estimation. New York, NY, John Wiley & Sons.
Hendricks, M. A. N. (1991). Identification of the mechanical behavior of solid materials.
Eindhoven, The Netherlands, Eindhoven University of Technology. PhD.

216
Heywood, R. J., Roberts, W., Taylor, R. and Anderson, R. (2000). "Fitness-for-purpose
evaluation of bridges using health monitoring technology." Transportation Research
Record 1696: 193-201.
Hjelmstad, K. D. and Shin, S. (1997). "Damage detection and assessment of structures
from static response." Journal of Engineering Mechanics 123(6): 568-576.
Hof, J. M. v. d. (1998). "Structural Identifiability of Linear Compartmental Systems."
IEEE Transactions on Automatic Control 43(6): 880-818.
Hooke and Jeeves (1961). "Direct search solution of numerical and statistical problems.
." Journal of the Association for computing Machinery 8: 212-229.
Horgan, C. O. and Saccomandi, G. (2004). "Constitutive models for compressible
nonlinearly elastic materials with limiting chain extensibility." Journal of Elasticity 77:
123-138.
Horgan, C. O. and Saccomandi, G. (2006). "Phenomenological hyperelastic strain-
stiffening constitutive models for rubber." Rubber Chemistry Technology 79: 152-169.
Hsia, T. C. (1977). System identification: least-squares methods. Lexington,
Massachusetts, Lexington Books.
Hsieh, K. H., Halling, M. W. and Barr, P. J. (2006). "Overview of Vibrational Structural
Health Monitoring with Representative Case Studies." Journal of Bridge Engineering
11(6): 707-715.
Hu, X. and Shenton, H. W. (2006). "Damage identification based on dead load
redistribution: effect of measurement error." Journal of Structural Engineering 132(8):
1264-1273.
Hu, X. and Shenton, H. W. (2007). "Dead load based damage identification method for
long term structural health monitoring." Journal of Intelligent Material systems and
Structures 18: 923-938.
Huet, S., Bouvier, A., Poursat, M.-A. and Jolivet, E. (2004). Statistical Tools for
Nonlinear Regression. New York, NY, Springer-Verlag.
Hwang, S.-F., Wu, J.-C., Barkanovs, E. and Belevicius, R. (2010). "Elastic constants of
composite materials by an inverse determination method based on a hybrid genetic
algorithm." Journal of Mechanics 26(3).
Jacobsen, K. (2000). Program system BLUH user‘s manual. Hanover, Institute of
Photogrammetry and Engineering Surveys, University of Hanover: 444 pages.

217
Jauregui, D. V., White, K. R., Woodward, C. B. and Leitch, K. R. (2002). Static
measurement of beam deformations via close-range photogrammetry. Transportation
Research Record. Las Cruces, New Mexico, USA, New Mexico State University,
Department of Civil and Geological Engineering. 1814: 3-8.
Jauregui, D. V., White, K. R., Woodward, C. B. and Leitch, K. R. (2003). "Noncontact
Photogrammetric Measurement of Vertical Bridge Deflection." Journal of Bridge
Engineering 8(4): 212-222.
Juang, J. N. (1994). Applied system identification. Englewood Cliffs, NJ, Prentice Hall.
Katafygiotis, L. S. and Beck, J. L. (1998). "Updating models and their uncertainties. II:
model identifiability." Journal of Engineering Mechanics 124(4): 463-467.
Keane, A. J. and Nair, P. B. (2005). Computational approaches for aerospace design,
John Wiley & Sons
Kelley, C. T. (1999). Iterative methods for optimization. Philadelphia, USA, SIAM.
Kim, H. and Melhelm, H. (2004). "Damage detection of structures by wavelet analysis."
Engineering Structures 26: 347-362.
Kim, J. T., Ryu, Y. S., Cho, H. M. and Stubbs, N. (2003). "Damage identification in
beam-type structures: frequency-based method vs. mode-shape-based method."
Engineering Structures 25: 57-67.
Kleuter, B., Menzel, A. and Steinmann, P. (2007). "Generalized parameter identification
for finite viscoelasticity." Computer Methods in Applied Mechanics and Engineering
196: 3315-3334.
Koch, K.-R. (2007). Introduction to Bayesian Statistics. Berlin Heidelberg, Springer-
Verlag.
Kojic, M. and Bathe, K.-J. (2005). Inelastic Analysis of Solids and Structures. Berlin
Heidelberg, Springer-Verlag.
Kokot, S. and Zambaty, Z. (2009a). "Damage reconstruction of 3D frames using genetic
algorithms with Levenberg-Marquardt local search." Soil Dynamics and Earthquake
Engineering 29(2): 311-323.
Kokot, S. and Zambaty, Z. (2009b). "Vibration based stiffness reconstruction of beams
and frames by observing their rotations under harmonic excitations - numerical analysis."
Engineering Structures 31: 1581-1588.
218
Kosmatka, J. B. and Ricles, J. M. (1999). "Damage detection in structures by modal
vibration characterization." Journal of Structural Engineering 125(12): 1384-1392.
Kreißig, R., Benedix, U., U.-J.Gorke and Lindner, M. (2007). "Identification and
estimation of constitutive parameters for material laws in elastoplasticity." GAMM-Mitt.
30(2): 458-480.
Kundu, T. (2004). Ultrasonic nondestructive evaluation: engineering and biological
material characterization. Boca Raton, FL, CRC Press.
LaVision. "StrainMaster system of LaVision,
http://www.lavision.de/en/products/strainmaster.php."
Lee, P. v. d., Terlaky, T. and Woudstra, T. (2001). "A new approach to optimizing energy
systems." Computer Methods in Applied Mechanics and Engineering 190: 5297-5310.
Lefik, M. and Schrefler, B. A. (2002). "Artificial neural network for parameter
identifications for an elasto-plastic model of superconducting cable under cyclic loading."
Computers and Structures 80: 1699-1713.
Lemaitre, J. (1996). A Course on Damage Mechanics. 2nd ed. , Springer.
Lesnic, D., Elliott, L. and Ingham, D. B. (1999). "Analysis of coefficient identification
problems associated to the inverse Euler-Bernoulli beam theory." IMA Journal of
Applied Mathematics 62: 101-116.
Li, Z., Yuan, X. and Lam, K. W. K. (2002). "Effects of JPEG compression on the
accuracy of photogrammetric point determination." Photogrammetric Engineering &
Remote Sensing 68(8): 847-853.
Lifshitz, J. M. and Rotem, A. (1969). "Determination of Reinforcement Unbonding of
Composites by a Vibration Technique." Journal of Composite Materials 3: 412-423.
Linder, W. (2009). Digital Photogrammetry: A Practical Course, Springer-Verlag Berlin
Heidelberg.
Liu, G. R. and Chen, S. C. (2002). "A novel technique for inverse identification of
distributed stiffness factor in structures." Journal of Sound and Vibration 254(5): 823-
835.
Liu, P. L. and Chian, C. C. (1997). "Parametric identification of truss structures using
static strains." Journal of Structural Engineering 123(7): 927-933.
219
Liu, X., Lieven, N. A. J. and Escamilla-Ambrosio, P. J. (2009). "Frequency response
function shape-based methods for structural damage localization." Mechanical Systems
and Signal Processing 23: 1243-1259.
Ljung, L. (1999). System identification: theory for the user. Englewood Cliffs, NJ,
Prentice Hall.
Louban, R. (2009). Image processing of edge and surface defects: theoretical basis of
adaptive algorithms with numerous practical applications. Berlin, Germany, Springer-
Verlag.
Luhmann, T., Robson, S., Kyle, S. and Harley, I. (2006). Close-range Photogrammetry,
principles, techniques and applications, Whittles Publishing.
Lynch, J. P. and Loh, K. J. (2006). "A Summary Review of Wireless Sensors and Sensor
Networks for Structural Health Monitoring." The Shock and Vibration Digest 38(2): 91-
128.
Maas, H. G. (1998). Photogrammetric Techniques For Deformation Measurements On
Reservoir Walls. Proceedings Of The IAG Symposium On Geodesy For Geotechnical
And Structural Engineering. Eisenstadt, Austria: 319-324.
Maeck, J. and Roeck, G. D. (1999). "Dynamic bending and torsion stiffness derivation
from modal curvatures and torsion rates." Journal of Sound and Vibration 251(1): 153-
170.
Maeck, J., Wahab, M. A., Peeters, B., De Roeck, G., De Visscher, J., De Wilde, W. P.,
Ndambi, J.-M. and Vantomme, J. (2000). "Damage identification in reinforced concrete
structures by dynamic stiffness determination." Engineering Structures 22(1339-1349).
Mahnken, R. (2000). "An inverse finite-element algorithm for parameter identication of
thermoelastic damage models." International Journal for Numerical Methods in
Engineering 48: 1015-1036.
Mahnken, R. (2002). "Theoretical, numerical and identification aspects of a new model
class for ductile damage." International Journal of Plasticity 18: 801-831.
Mahnken, R. (2004). Identification of Material Parameter for Constitutive Equations.
Encyclopedia of Computational Mechanics-Volume 2: Solids and Structures. Stein, E.,
Borst, R. d. and Hughes, T., John Wiley & Sons.
Mahnken, R. and Stein, E. (1996). "A unified approach for parameter identification of
inelastic material models in the frame of the finite element method." Computational
Methods in Applied Mechanics and Engineering 136: 225-258.

220
Mahnken, R. and Stein, E. (1997). "Parameter identification for finite deformation elasto-
plasticity in principal directions." Computational Methods in Applied Mechanics and
Engineering 147: 17-39.
Mangal, L., Idichandy, V. G. and Ganapathy, C. (2001). "Structural monitoring of
offshore platforms using impulse and relaxation response." Ocean Engineering 28: 689-
705.
Mars, W. V. and Fatemi, A. (2003). "A Novel Specimen for Investigating Mechanical
Behavior of Elastomers under Multiaxial Loading Conditions." Journal of Experimental
Mechanics 44(2): 136-146.
Mars, W. V. and Fatemi, A. (2004). "Observations of the Constitutive Response and
Characterization of Filled Natural Rubber under Monotonic and Cyclic Multiaxial Stress
States." Journal of Engineering Materials and Technology 126: 19-28.
Masoud, A. A. and Al-Said, S. (2009). "A new algorithm for crack localization in a
rotating Timoshenko beam." Journal of Vibration and Control 15(10): 1541-1561.
Meuwissen, M. H. H. (1998). An inverse method for the mechanical characterization of
metals. Eindhoven, The Netherlands, Eindhoven Technical University. PhD.
Meuwissen, M. H. H., Oomens, C. W. J., Baaijens, F. P. T., Petterson, R. and Janssen, J.
D. (1998). "Determination of the elasto-plastic properties of aluminium using a mixed
numerical–experimental method." Journal of Materials Processing Technology 75: 204-
211.
Mosegaard, K. and Sambridge, M. (2002). "Monte Carlo analysis of inverse problems."
Inverse Problems 18: 29-54.
Mottershead, J. E. and Friswell, M. I. (1998). "Model updating, special issue of
Mechanical systems and Signal Processing." 12(1).
Müller, D. and Hartmann, G. (1989). "Identification of Materials Parameters for Inelastic
Constitutive Models Using Principles of Biologic Evolution." Journal of Engineering
Materials and Technology 111(3): 299-305.
Munoz-Rojas, P. A., Cardoso, E. L. and Jr., M. V. (2010). "Parameter identification of
damage models using genetic algorithms." Experimental Mechanics 50: 627-634.
Murio, D. A. (1993). The mollification method and the numerical solution of ill-posed
problems, John Wiley & Sons.
Murio, D. A., Mejia, C. E. and Zhan, S. (1998). "Discrete mollification and automatic
numerical differentiation." Computers & Mathematics with Applications 35(5): 1-16.

221
Nahvi, H. and Jabbari, M. (2005). "Crack detection in beams using experimental modal
data and finite element model." International Journal of Mechanical Sciences 47: 1477.
Natke, H. G. (1988). "Updating computational models in the frequency domain based on
measured data: a survey." Probabilistic Engineering Mechanics 3(1): 28-35.
Ndambi, J. M., Vantomme, J. and Harri, K. (2002). "Damage assessment in reinforced
concrete beams using eigenfrequencies and mode shape derivatives." Engineering
Structures 24(4): 501-515.
Nejad, F. B., Rahai, A. and Esfandiarib, A. (2005). "A structural damage detection
method using static noisy data." Engineering Structures 27: 1784-1793.
Nelder, J. A. and Mead, R. (1965). "A simplex method for function minimization." The
Computer Journal 7: 308-313.
Neto, E. A. d. S., Peric, D. and Owen, D. R. J. (2008). Computational methods for
plasticity: theory and applications, John Wiley & Sons.
Niedbal, N. (1984). Analytical determination of real normal modes from measured
complex responses. 25th Structures, Structural Dynamics and Materials Conference.
Palm Springs: 292-295.
Niederöst, M. and Maas, H.-G. (1997). Automatic Deformation Measurement with a Still
Video Camera. Gruen/Kahmen (Eds.) Optical 3-D Measurement Techniques IV.
Heidelberg, Germany, Wichmann Verlag: 266-271.
Oberkampf, W. L. and Roy, C. J. (2010). Verification and validation in scientific
computing. Cambridge, UK, Cambridge University Press.
Ogden, R. W. (1972). "Large deformation isotropic elasticity: on the correlation of theory
and experi-ment for incompressible rubberlike solids." Proceedings of the Royal Society
A 326: 565-584.
Oh, B. H. and Jung, B. S. (1998). "Structural damage assessment with combined data of
static and modal tests." Journal of Structural Engineering 124(8): 956-965.
Omenzetter, P. and Brownjohn, J. M. W. (2006). "Application of time series analysis for
bridge monitoring." Smart Materials and Structures 15: 129-138.
Pan, B., Qian, K., Xie, H. and Asundi, A. (2009). "Two-dimensional digital image
correlation for in-plane displacement and strain measurement: a review." Measurement
Science and Technology 20(4): 1-17.

222
Pandey, A. K., Biswas, M. and Samman, M. M. (1991). "Damage detection from changes
in curvature mode shapes." Journal of Sound and Vibration 145(2): 321-332.
Parsons, E., Boyce, M. and Parks, D. (2004). "An experimental investigation of the large-
strain tensile beha-vior of neat and rubber toughened polycarbonate." Polymer 45: 2665-
2684.
Partheepan, G., Sehgal, D. K. and Pandey, R. K. (2008). "Finite Element Application to
Estimate Inservice Material Properties using Miniature Specimen." International Journal
of Aerospace and Mechanical Engineering 2(2): 130-136.
Patelli, E., Pradlwarter, H. J. and Schueller, G. I. (to appear). "Global Sensitivity of
Structural Variability by Random Sampling."??? ??: ??
Peeters, B. (2000). System identification and damage detection in civil engineering.
Belgium, Katholieke Universiteit Leuven. PhD: 256.
Peters, W. H. and Ranson, W. F. (1982). "Digital imaging techniques in experimental
stress analysis." Optical Engineering 21(3): 427-431.
Phares, B. M., Rolander, D. D., Graybeal, B. A. and Washer, G. A. (2001). "Reliability of
visual bridge inspection." Public Roads 64(5): 22-29.
Post, D., Han, B. and Ifju, O. (1994). High sensitivity moiré. New York, NY, Springer-
Verlag.
Powell, M. J. D. (1964). "An efficient method for finding the minimum of a function of
several variables without calculating derivatives." Comput. J. 7: 155-162.
Powell, M. J. D. (2002). "UOBYQA: unconstrained optimization by quadratic
approximation." Mathematical Programming Series B 92: 555-582.
Powell, M. J. D. (2006). "The NEWUOA software for unconstrained optimization
without derivatives." Large Scale Nonlinear Optimization: 255-297.
Price, W. L. (1983). "Global optimization by controlled random search." Journal of
Optimization Theory and Applications 40(3): 333-348.
Promma, N., Raka, B., Grediac, M., Toussaint, E., Cam, J. B. L., Balandraud, X. and
Hild, F. (2009). "Application of the virtual fields method to mechanical characterization
of elastomeric materials." International Journal of Solids and Structures 46: 698-715.
Ramberg, W. and Osgood, W. R. (1943). Description of stress-strain curves by three
parameters, National Advisory Committee for Aeronautics.

223
Ransom, W. F., Sutton, M. A. and Peters, W. H. (1987). Holographic and laser speckle
interferometry. Handbook on experimental mechanics. Kobayashi, A. S. Englewood
Cliffs, NJ, Prentice-Hall. Chap.8.
Rastogi, P. K. (2000). Photomechanics, topics in applied physics, (Ed.) Springer-Verlag
Berlin Heidelberg.
Ratcliffe, C. P. (1997). "Damage detection using a modified Laplacian operator on mode
shape data." Journal of Sound and Vibration 204(3): 505-517.
Ratcliffe, C. P. and Bagaria, W. J. (1998). "A vibration technique for locating
delamination in a composite beam." AIAA Journal 36(6): 1074-1077.
Ren, W.-X., Fang, S.-E. and Deng, M.-Y. (2011). "Response surface-based finite-
element-model updating using structural static responses." Journal of Engineering
Mechanics 137(4): 248-257.
Ren, W. X. and De Roeck, G. (2002). "Structural damage identification using modal data
I: simulation verification." Journal of Structural Engineering 128(1): 87-95.
Richardson, M. H. (1980). Detection of Damage in Structures from Changes in their
Dynamic (Modal) Properties- A survey, . Washington, D.C., U.S. Nuclear Regulatory
Commission. NUREG/CR-1431.
Rieke-Zapp, D. H. and Nearing, M. A. (2005). "Digital close range photogrammetry for
measurement of soil erosion." The Photogrammetric Record 20(109): 69-87.
Ringot, E. and Bascoul, A. (2001). "About the analysis of microcracking in concrete."
Cement & Concrete Composites 23: 261-266.
Robert, L. (2007). Estimation of digital image correlation (DIC) performances.
Experimental Analysis of Nano and Engineering Materials and Structures, Proceedings of
the 13th International Conference on Experimental Mechanics July 1–6, 2007,
Alexandroupolis, Greece. B, 2T18: 347-348.
Robert, L., Nazaret, F., Cutard and Orteu, J. J. (2007). "Use of 3-D Digital Image
Correlation to Characterize the Mechanical Behavior of a Fiber Reinforced Refractory
Castable." Experimental Mechanics 47: 761-773.
Rodic, T. and Gresovnik, I. (1998). "A computer system for solving inverse and
optimization problems." Engineering Computations 15(7): 893-907.
Rodic, T., Gresovnik, I. and Owen, D. R. J. (1995). Application of error minimization
concept to estimation of hardening parameters in the tension test. Proceedings of the

224
Fourth International Conference on Computational Plasticity, Barcelona, Spain, Swansea,
Pineridge Press.
Rucka, M. and Wilde, K. (2006). "Crack identification using wavelets on experimental
static deflection profiles." Engineering Structures 28: 279-288.
Saccomandi, G. and Ogden, R. W. (2004). Mechanics and thermomechanics of
rubberlike solids. NY, USA, Springer.
Salawu, O. S. (1997). "Detection of structural damage through changes in frequency: a
review." Engineering Structures 19(9): 718-723.
Saltelli, A., Ratto, M., Andres, T., Campolongo, F., Cariboni, J., Gatelli, D., Saisana, M.
and Tarantola, S. (2008). Global sensitivity analysis, the primer, John Wiley & Sons.
Sanayei, M., Imbaro, G., McClain, J. A. S. and Brown, L. C. (1997). "Parameter
estimation of structures using NDT data: Strains or displacements." Journal of Structural
Engineering 123(6): 792-798.
Sanayei, M. and Onipede, O. (1991). "Damage assessment of sructures using static test
data." AIAA Journal 29(7): 1174-1179.
Sanayei, M. and Saletnik, M. J. (1996a). "Parameter estimation of structures from static
strain measurements. I: formulation." Journal of Structural Engineering 122(5): 555-562.
Sanayei, M. and Saletnik, M. J. (1996b). "Parameter estimation of structures from static
strain measurements. II: error sensitivity analysis." Journal of Structural Engineering
122(5): 563-572.
Sanayei, M. and Scampoli, S. F. (1991). "Structural element stiffness identification from
static test data." Journal of Engineering Mechanics 117: 1021-1036.
Scheinberg, K. (2000). Derivative free optimization method. New York,, Technical
report, IBM T.J. Watson Research Center,.
Schreier, H. W., Braasch, J. R. and Sutton, M. A. (2000). "Systematic Errors in Digital
image Correlation caused by Gray-value Interpolation." Optical Engineering 39(11):
2915-2921.
Seber, G. A. F. and Wild, C. J. (2005). Nonlinear regression, Wiley-Interscience.
Seibert, T., Lehn, J., Schwan, S. and Kollmann, F. G. (2000a). "Identification of material
parameters for inelastic constitutive models: stochastic simulations for the analysis of
deviation." Continuum Mechanics and Thermodynamics 12: 95-120.
225
Seibert, T., Lehn, J., Schwan, S. and Kollmann, F. G. (2000b). "Identification of material
parameters for inelastic constitutive models: stochastic simulations for the analysis of
deviations." Continuum Mechanics and Thermodynamics 12: 95-120.
Semmlow, J. L. (2004). Biosignal and Biomedical Image Processing: MATLA B-Based
Applications. New York, NY, USA, Marcel Dekker, Inc.
Seshaiyer, P. and Humphrey, J. D. (2003). "A sub-domain inverse finite element
characterization of hyper-elastic membranes including soft tissues." Journal of
Biomedical Engineering, ASME 125: 363-371.
Sheena, Z., Zalmanovitch, A. and Unger, A. (1982a). "Theoretical stiffness matrix
correction by static test results." Israel Journal of Technology 20: 245-253.
Sheena, Z., Zalmanovitch, A. and Unger, A. (1982b). Theoretical stiffness matrix
correction by using static test results. 24th Israel Annual Conference of Aviation and
Astronautics.
Shenton, H. W. and Hu, X. (2006). "Damage identification based on dead load
redistribution: methodology." Journal of Structural Engineering 132(8): 1254-1263.
Silva, J. M. M. and Maia, N. M. M. (1999). Modal Analysis and Testing. Dordrecht,
Netherlands, Kluwer Academic Publishers.
Snieder, R. and Trampert, J. (1999). Inverse problems in geophysics. Wavefield
inversion. Virgin, A. New York, USA, Springer Verlag: 119-190.
Sohn, H., Dzwonczyk, M., Straser, E. G., Kiremidjian, A. S., Law, K. H. and Meng, T.
(1999). "An experimental study of temperature effect on modal parameters of the
Alamosa Canyon Bridge." Earthquake Engineering and Structural Dynamics 28: 879-
897.
Sohn, H., Farrar, C. R., Hemez, F. M., Shunk, D. D., Stinemates, D. W. and Nadler, B. R.
(2003). A review of structural health monitoring literature: 1996-2001, Los Alamos
National Laboratory. LA-13976-MS.
Sohn, H., Worden, K. and Farrar, C. R. (2002). "Statistical Damage Classification Under
Changing Environmental and Operational Conditions." Journal of Intelligent Material
Systems and Structures 13: 561-574.
Sophia, H. and Karolos, G. (1997). "Damage detection using impulse response."
Nonlinear Analysis, Theory, Methods & Applications 30(8): 4757-4764.
226
Springmann, M. and Kühhorn, A. (2009). "Influence of Strain Localization on Parameter
Identification." Journal of Engineering Materials and Technology 131: 011003-011001-
011009.
Springmann, M. and Kuna, M. (2003). "Identification of material parameters of the
Rousselier model by non-linear optimization. 26 (2003) 202–209." Computational
Materials Science 26: 202-209.
Springmann, M. and Kuna, M. (2005). "Identification of material parameters of the
Gurson-Tvergaard-Needleman model by combined experimental and numerical
techniques." Computational Materials Science 33: 501-509.
Sutton, M. A., Orteu, J.-J. and Schreier, H. W. (2009). Image Correlation for Shape,
Motion and Deformation Measurements: Basic Concepts, Theory and Applications,
Springer.
Sutton, M. A., Turner, J. L., Bruck, H. A. and Chae, T. A. (1991). "Full-field
representation of discretly sampled surface deformation for displacement and strain
analysis." Experimental Mechanics 31(2): 168-177.
Tallec, P. L. (1994). Numerical methods for nonlinear three-dimensional elasticity.
Handbook of numerical analysis, Vol. 3, Elsevier Science.
Tarantola, A. (2004). Inverse problem theory and methods for model parameter
estimation. Philadelphia, SIAM.
Teimouri, M., Delavar, M. R., Kolyaie, S., Chavoshi, S. H. and Moghaddam, H. K.
(2008). A SDSS-BASED EARTHQUAKE DAMAGE ASSESSMENT FOR
EMERGENCY RESPONSE: CASE STUDY IN BAM. The International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXVII, Part
B8. Beijing, PR. China.
Thyagarajan, K. S. (2006). Digital image processing with application to digital cinema.
Burlington, MA, USA, Elsevier Inc.
Tikhonov, A. N. and Arsenin, V. Y. (1977). Solutions of ill-posed problems. Washington,
DC, Winston.
Tong, W. (2005). "An evaluation of digital image correlation criteria for strain mapping
applications." Strain 41: 167-175.
Toussaint, E., Grediac, M. and Pierron, F. (2006). "The virtual fields method with
piecewise virtual fields." International Journal of Mechanical Sciences 48: 256-264.

227
Treloar, L. R. (1975). The Physics of Rubber Elasticity, 3rd ed. Oxford, Oxford
University Press.
Treloar, L. R. G. (1944). "Stress-strain data for vulcanized rubber under various types of
deformations." Transaction of Faraday Society 40: 59-70.
Tsuta, T., Yamazaki, T. and Li, M. (1996). Finite element analysis of permanent facial
wrinkling. Computer methods in biomechanics & biomedical engineering. Middleton, J.,
Jones, M. L. and Pande, G. N., Gordon and Breach Publishers.
Ugur, O., Karasozen, B., Schafer, M. and Yapıcı, K. (2008). "Derivative free
optimization methods for optimizing stirrer configurations." European Journal of
Operational Research 191: 855-863.
Um, G. J. and Kim, H.-J. (2007). "Experimental Error Assessment for Image Correlation
Analysis on a Paper Tensile Specimen." Journal of Industrial and Engieering Chemistry
13(2): 214-218.
Umbaugh, S. E. (2011). Digital image processing and analysis: human and computer
vision applications with CVIPtools. Boca Raton, FL, CRC Press.
Uusipaikka, E. (2009). Confidence intervals in generalized regression models, CRC
Press.
Vest, V. M. (1979). Holographic interferometry. New York, NY, John Wiley & Sons.
Vogel, C. R. (2002). Computational methods for inverse problems. Philadelphia, SIAM.
Wahab, M. M. A., De Roeck, G. and Peeters, B. (1999). "Parameterization of damage in
reinforced concrete structures using model updating." Journal of Sound and Vibration
228(4): 717-730.
Wang, L. R. and Lu, Z. H. (2003). "Finite element simulation based modeling method for
constitutive law of rubber hyperelasticity." Rubber Chemistry Technology 76: 270-284.
Wang, X., Hu, N., Fukunaga, H. and Yao, Z. H. (2001). "Structural damage identification
using static test data and changes in frequencies." Engineering Structures 23(6): 610-621.
Wang, Y. and Cuitino, A. (2002). "Full-field measurements of heterogeneous
deformation patterns on polymeric foams using digital image correlation." International
Journal of Solids and Structures 39: 3777-3796.
Whiteman, T., Lichti, D. D. and Chandler, I. (2002). Measurement of deflections in
concrete beams by close-range digital photogrammetry. Symposium on Geospatial

228
Theory, Processing and Applications, International Archives of Photogrammetry and
Remote Sensing, Volume XXXIV, Part 4. Ottawa, Canada.
Woodbury, K. A. (2003). Inverse engineering handbook, CRC Press.
Worden, K., Farrar, C. R., Manson, G. and Park, G. (2007). "The fundamental axioms of
structural health monitoring." Proceedings of the Royal Society A 463: 1639-1664.
Zentar, R., Hicher, P. Y. and Moulin, G. (2001). "Identification of soil parameters by
inverse analysis." Computers and Geotechnics 28: 129-144.
229
VITA AUCTORIS
Li Li was born in 1973 in Hefei, China. He completed a engineer degree in
construction management at the Anhui University, Hefei, China, in 1992 before he
worked as a highway and bridge construction superintendent and project manager in
Anhui Provincial Road and Bridge Construction Company, Anhui Provincial Ministry of
Highway Transportation from 1992 to 1995. He went on to the Xi‘an Highway
University, Xi‘an, China, where he obtained a Master of Engineering degree in Bridge
and Tunnel Engineering in 1998. Afterwards he had worked as bridge engineer at a
consulting company in Beijing, China.
Li Li came to Canada in 2003 and obtained a Master of Applied Science degree in
Civil Engineering in 2005 at the University of Windsor, Windsor, Ontario. Presently Li
Li is a candidate for Doctor of Philosophy degree with specialization in Structural
Engineering at the University of Windsor, Windsor, Ontario; he finished his final defense
on September 11 and expects to graduate in October 2012.