Cyclostationarity-based signal detection and source location in non-Gaussian noise
9
368 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 44, NO. 3, MARCH 1996 Cyclostationarity-Based Signal Detec Source Location in Non-Gaussian Giacinto Gelli, Lucian0 Izzo, and Luigi Paura Abstract- The paper deals with two-sensor interception of cyclostationarysignals in the presence of additive non-Gaussian noise. The locally optimum approach is considered as a starting point to derive cyclostationarity-exploiting receiverstructures€or detecting a weak signal and locating its emission source through time-difference-of-arrival (TDOA) measurements. To obtain an- alytical information about the detection performance of the proposed receivers, the deflection in both constant and variable noise-level environments is evaluated. Monte Carlo simulations, aimed at evaluating the detection performance in terms of de- tection probability and false-alarm probability, and the TDOA estimation accuracy, have been carried out. The results show that the cyclostationarity-exploiting receivers can signiiicantly outperform the radiometric receivers in both signal detection and source location, when the noise level is unknown or variable andlor strong interfering signals are present. I. INTRODUCTION Recently, detection schemes that are highly tolerant to the presence of nonstationary noise and/or interfering signals have been proposed, with reference to both Gaussian [3], [4], and non-Gaussian noise [2]. Such detectors exploit the cyclostationary nature of the signal to be intercepted, namely, the spectral lines in correspondence to a set of discrete values of frequency (that depend on the signal modulation format), referred to as cycle frequencies, revealed when the signal is subject to some appropriate quadratic transformation. In interception problems, the primary purpose is usually not only to detect the presence of a signal, but also to locate its source of emission. Source location can be accomplished by resorting to estimates of the differences between the times of arrival of the signal at different pairs of sensors [5]. In the time-difference-of-arrival (TDOA) estimation con- text, the cyclostationaxity-based approach has revealed its superiority with respect to the conventional one when the collected data are severely corrupted by interfering signals that impinge on both sensors, giving rise to interference (or greater than) the signal of interest in both power spectral density level and bandwidth [5], [6]. In a very recent paper 171, the problem of detecting a weak cyclostationary signal and locating its source of emission by a pair of sensors has been considered, assuming a white Gauss- ian noise background. Although the Gaussian model offers a significant mathematical simplification in both synthesis and analysis of the receivers, it is often not appropriate for the interfering signals and for modeling the background noise in a the performances of the receivers optimized against Gaussian noise can de@ade when non-Gaussian noise Or interference is present I2I9 [’I2 [lo]. This paper deals with two-sensor interception of cyclosta- tionary signals embedded in non-Gaussian noise. In Section receiver structures for detecting a weak cyclostationary signal and locating its emission source through TDOA estimation. a given false-alarm probability is an intractable problem, to HE ‘ “On approach to the detection task for signal interception is based on the assumptions that the signal to be intercepted is weak and modeled as a wide- of locally optimum (LO) detection structures, known as the radiometer [l] and the modified radiometer [2], depending on the assumption of Gaussianity or non-Gaussianity for the noise. Radiometric techniques are based on energy measurements in selected time and frequency intervals. They are, however, susceptible to unknown or changing background noise level and interference activity. Moreover, the stationary model for the signal to be intercepted is no longer appropriate when- ever signal generation mechanisms involve periodically time- and coding. In all these situations, the cyclostationary or almost cyclostationary model [l], that accounts for multiple periodicities in the second-order statistics of the signal, is more appropriate. stationary (wss) process. This leads to the synthesis components, between the sensors, comparable to varying operations, such as sampling, wide range Of the communication spectrum 181. Furlhermore, Paper approved by J s Lehned, the Editor for Modulation and SlKnd Design of the IEEE Communications Society. Manuscnpt received October 7, 1993, revised December 29, 1994 and May 24, 1995. his work was supported in part by the Minister0 dell’Universit8 e dells Rcerca Scientifica e Tecnologica (MURST). Napoli, 1-8 1031 Aversa, Italy (e-mail. [email protected] unina it). Napoli Fedenco 11, 1-80125 Napoli, Italy (e-mal. izzo@nadis dis unina.it). per Monteroni, 1-73 100 Lecce, Italy (e-Mal paura@nadis dis.unina.it). a, the LO approach is considered as a starting point to derive 6, Gelli 1s with the Dlpartlmento dl Ingegnena, &con& Unlverslt& di Since the Of the detection probability for L. Izzo is with the Dipartimento di Ingegnena Elettronica, Universith di L Paura is with the Dipartimento di Matematica, Universit8 di Lecce, via Publisher Item Identifier S 0090-6778(96)01782-5. ‘To avoid confusion, note that in [3], the “moddied radiometer” is a radiometric structure that Jointly performs signal detection and noise-level still obtain Some information about the detection performances Of the receivers proposed in Section 11, the de- flection, that is a useful measure of performance in weak-signal detection, is evaluated in Section HI, in both constant and carried out by assuming the generalized Gaussian distribution noise-1eve1 environments. The deflection is estimation. 0090-6778/96$05.00 0 1996 IEEE
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Cyclostationarity-based signal detection and source location in non-Gaussian noise
368 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 44, NO. 3, MARCH 1996
Cyclostationarity-Based Signal Detec Source Location in Non-Gaussian
Giacinto Gelli, Lucian0 Izzo, and Luigi Paura
Abstract- The paper deals with two-sensor interception of cyclostationary signals in the presence of additive non-Gaussian noise. The locally optimum approach is considered as a starting point to derive cyclostationarity-exploiting receiver structures €or detecting a weak signal and locating its emission source through time-difference-of-arrival (TDOA) measurements. To obtain an- alytical information about the detection performance of the proposed receivers, the deflection in both constant and variable noise-level environments is evaluated. Monte Carlo simulations, aimed at evaluating the detection performance in terms of de- tection probability and false-alarm probability, and the TDOA estimation accuracy, have been carried out. The results show that the cyclostationarity-exploiting receivers can signiiicantly outperform the radiometric receivers in both signal detection and source location, when the noise level is unknown or variable andlor strong interfering signals are present.
I. INTRODUCTION
Recently, detection schemes that are highly tolerant to the presence of nonstationary noise and/or interfering signals have been proposed, with reference to both Gaussian [3], [4], and non-Gaussian noise [2]. Such detectors exploit the cyclostationary nature of the signal to be intercepted, namely, the spectral lines in correspondence to a set of discrete values of frequency (that depend on the signal modulation format), referred to as cycle frequencies, revealed when the signal is subject to some appropriate quadratic transformation.
In interception problems, the primary purpose is usually not only to detect the presence of a signal, but also to locate its source of emission. Source location can be accomplished by resorting to estimates of the differences between the times of arrival of the signal at different pairs of sensors [5].
In the time-difference-of-arrival (TDOA) estimation con- text, the cyclostationaxity-based approach has revealed its superiority with respect to the conventional one when the collected data are severely corrupted by interfering signals that impinge on both sensors, giving rise to interference
(or greater than) the signal of interest in both power spectral density level and bandwidth [5 ] , [6].
In a very recent paper 171, the problem of detecting a weak cyclostationary signal and locating its source of emission by a pair of sensors has been considered, assuming a white Gauss- ian noise background. Although the Gaussian model offers a significant mathematical simplification in both synthesis and analysis of the receivers, it is often not appropriate for the interfering signals and for modeling the background noise in a
the performances of the receivers optimized against Gaussian noise can de@ade when non-Gaussian noise Or
interference is present I2I9 [’I2 [lo]. This paper deals with two-sensor interception of cyclosta-
tionary signals embedded in non-Gaussian noise. In Section
receiver structures for detecting a weak cyclostationary signal and locating its emission source through TDOA estimation.
a given false-alarm probability is an intractable problem, to
HE ‘‘“On approach to the detection task for signal interception is based on the assumptions that the
signal to be intercepted is weak and modeled as a wide-
of locally optimum (LO) detection structures, known as the radiometer [l] and the modified radiometer [2], depending on the assumption of Gaussianity or non-Gaussianity for the noise.
Radiometric techniques are based on energy measurements in selected time and frequency intervals. They are, however, susceptible to unknown or changing background noise level and interference activity. Moreover, the stationary model for the signal to be intercepted is no longer appropriate when- ever signal generation mechanisms involve periodically time-
and coding. In all these situations, the cyclostationary or almost cyclostationary model [l], that accounts for multiple periodicities in the second-order statistics of the signal, is more appropriate.
stationary (wss) process. This leads to the synthesis components, between the sensors, comparable to
varying operations, such as sampling, wide range Of the communication spectrum 181. Furlhermore,
Paper approved by J s Lehned, the Editor for Modulation and SlKnd Design of the IEEE Communications Society. Manuscnpt received October 7, 1993, revised December 29, 1994 and May 24, 1995. his work was supported in part by the Minister0 dell’Universit8 e dells Rcerca Scientifica e Tecnologica (MURST).
Napoli, 1-8 103 1 Aversa, Italy (e-mail. [email protected] unina it).
Napoli Fedenco 11, 1-80125 Napoli, Italy (e-mal. izzo@nadis dis unina.it).
per Monteroni, 1-73 100 Lecce, Italy (e-Mal paura@nadis dis.unina.it).
a, the LO approach is considered as a starting point to derive
6, Gelli 1s with the Dlpartlmento dl Ingegnena, &con& Unlverslt& di Since the Of the detection probability for
L. Izzo is with the Dipartimento di Ingegnena Elettronica, Universith di
L Paura is with the Dipartimento di Matematica, Universit8 di Lecce, via
Publisher Item Identifier S 0090-6778(96)01782-5. ‘To avoid confusion, note that in [3], the “moddied radiometer” is a
radiometric structure that Jointly performs signal detection and noise-level
still obtain Some information about the detection performances Of the receivers proposed in Section 11, the de- flection, that is a useful measure of performance in weak-signal detection, is evaluated in Section HI, in both constant and
carried out by assuming the generalized Gaussian distribution noise-1eve1 environments. The deflection is
estimation.
0090-6778/96$05.00 0 1996 IEEE

369 GELLI et al.: CYCLOSTATIONARITY-BASED SIGNAL DETECTION AND SOURCE LOCATION IN NON-GAUSSIAN NOISE
for the noise, since it is both flexible, encompassing a wide class of noise distributions, and appropriate to model first-order characteristics of a variety of man-made and natural noise sources [2] , [9], [lo]. Moreover, the noise-level variability is modeled as the square of a Gaussian variate. Finally, to present numerical results, the binary phase shift keying (BIPSK) modulation format for the signal to be intercepted is assumed. Section IV presents results of Monte Carlo computer siinulations aimed at evaluating the detection performances, in terms of detection probability and false-alarm probability, mid the TDOA estimation accuracy of the proposed two- sensor receivers, in both constant and variable noise-level environments, and in the presence of a strong broadband interfering signal that impinges on both sensors, giving rise to correlated interference components. In particular, the detection gain in using two-sensor rather than one-sensor receivers is also shown. Whenever possible, the simulation results are compared with the analytical results obtained by the deflection analysis in Section 111. Finally, conclusions are drawn in the last section.
11. RECEPTION STRUCTURES Consider the following model for reception at two separate
sensors:
HO’ xp ( i ) = np(i)
H I ” xp( i ) = s ( i - IC,) + np(i)
p=1,2; i = 1 , 2 , * * . , M
(1)
where the subscript p denotes the sensor, and xp( i ) , s ( i - k p ) , and np(i) are the ith sample of the received signal, the zero-mean random signal to be detected (SD), and the noise, respectively. The integer number I C p accounts for the time of arrival of the real signal s ( . ) on the pth sensor, relative to some arbitrary reference time instant. The noises at the sensors are assumed to be mutually independent and, moreover, each of them is modeled as a sequence of independent and identically distributed (i.i.d.) random variables (RV’s).
Under the ideal assumptions that the autocorrelation func- tion of the SD and the times of arrival kp are perfectly known, the locally optimum detection statistic can be derived by a second-order Taylor series expansion of the likelihood ratio about zero signal level [lo]. Therefore, it results that the decision statistic TLo is given by
dot denotes the derivative, the zero-memory nonlinearities (ZMNL’s) g p ( . ) are defined by
(5 )
fp (.) denotes the univariate probability density function (PDF) of n,(.), Si, is the Kronecker delta, and, finally, R,(., .) is the autocorrelation function of the signal s(.).
If the SD is (almost) cyclostationary, then its autocorrelation function can be expressed in the generalized Fourier-series form
R,(i,m) = R,“(i - m)eJx“(i+m) (6) cy
where L
is the cyclic autocorrelation function [l] and the index a of the summation ranges over all harmonics (integer multiples) of the fundamental frequencies of cyclostationarity (e&, doubled carrier frequency, keying rate, code repetition rate), and their sums and differences.
By substituting (6) in (3) and (4), one has
r M-I 1
cy
M-1
(9)
and M - maxlr.01
(1 1) jZna(i+r/2) . g2[x2( i ) le -
are the cyclic auto-
ZMNL‘s, and finally and cross-correlograms of the signals at the output of the
is an estimate of the complex amplitude of the sinewave component with frequency a of the signal gp[[zp(.)].

370 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 44, NO. 3, MARCH 1996
Equation (8) shows that for cyclostationary signals, ypp consists of a summation of two terms. The former evaluates, for all cycle frequencies a, the cyclic autocorrelogram Rrpp (.) of the output of the ZMNL excited by zp (.) and then performs the summation over a of the correlation between each cyclic autocorrelogram and the corresponding cyclic autocorrelation function RT(.) (phase-shifted by e-JaTcukP). The latter eval- uates a weighted summation over a: of the estimates AFp, the weights of which are RT(0)*eJ2""kp. Note that both y11 and y22 represent the LO detection statistic for the one-sensor detector [2].
As regards yl2, it consists of a summation [see (9)] over a of the correlation between each cyclic cross-correlogram and the corresponding cyclic autocorrelation function, suitably shifted in time by an amount equal to the TDOA and multiplied by e-JTa(kl+kz), so that the different terms of the sum add constructively.
Let us note that in the special case of WSS model for the SD, it results that I?;(.) f 0 for any a # 0, and Rz(.) is the conventional autocorrelation function. Therefore, in such a case, only the a = 0 terms in (8) and (9) are nonzero, and the resulting statistic is the sum of the following three terms:
r=l-M
(13) M - 1
y;2 = 2M I?:(?- + k2 - k 1 ) R ; J T ) . (14) r=l-M
Observe that both yyl and yZo2 represent the conventional radiometer modified, however, to account for the non-Gaussian behavior of the noise [2] . Moreover, the terms yo do not
only on the TDOA k2 - k l . To take into account that in general R, (., .) contains un-
known parameters and, moreover, the times of arrival kp are unknown, one can consider the statistic
depend on the times of arrival kl and k2, whereas ylz 8" depends
T = max TLo (15) k
that jointly detects the signal presence and provides maximum likelihood estimates of kl and k 2 . In (15), TLo is given by (2) where, however, kl and k2 have to be interpreted as parameters and k embodies all signal parameters involved in the maximization, that is, not only the times of arrival, but also the other parameters (e.g., carrier phase, keying clock phase, etc.) upon which R,(., .) depends.
Let us note that in the particular case of Gaussian noises, it results that
where 0: is the variance of the noise samples np(z). In this case, the statistic (15) reduces to the quadratic statistic considered in [7].
The implementation of the statistic (15) is, in general, an impractical task since it requires a multidimensional search
over the set of the signal parameters contained in TLo, which in tum, is a summation over all (possibly infinite) cycle frequencies of the SD. Most of the signals of interest, however, exhibit a significant degree of cyclostationarity for only a few cycle frequencies. Moreover, the values of a: can be suitably selected to reduce the number of the parameters involved in the multidimensional search, even though this can lead to a potentially severe performance penalty. In other words, one can resort to the statistic
where only a subset A of all cycle frequencies of the SD is involved. In (17), y?', y;yZ, and yF2 are those defined in (8) and (9), and kA is the vector of the unknown signal parameters resulting from the selection of the subset A. Note that to obtain a real statistic, the subset A must contain both cycle frequencies *a [see (7)-(12) and (17)]. The statistic (17) will be referred to as the multicycle (MC) detectodestimator statistic. In particular, if the subset A reduces to just a pair of cycle frequencies *a # 0, the resulting statistic will be named the single-cycle (SC) detectodestimator statistic. When only the term for a = 0 is considered, the resulting statistic is that of the two-sensor weak-signal detectodestimator for a WSS signal [see (13), (14), and (17)], which in the following, will be called simply the radiometer (R).
Finally, it is worthwhile to underline that the subset A can also be chosen to reduce the performance degradation due to a possible mismatch between the actual noise environment and the noise model considered in the synthesis of the receiver structures. For example, it has been shown that in a Gaussian noise environment the a = 0 terms in the statistics are highly susceptible to unknown or changing noise level and interference activity [3], [7], and hence, the exclusion of the value a = 0 from the subset A could be advantageous. Fw- thermore, when the interference exhibits a significant degree of cyclostationarity with a cycle frequency common to the SD, it seems reasonable to exclude such a cycle frequency from A.
m. DETECTION PERFORMANCE ANALYSIS VIA DEFLECTION
The detection probability Po, for a given false-alarm prob- ability PFA. is, as is well known, the most desirable detection performance measure. Unfortunately, the analytical evaluation of PD and PFA for the problem at hand is an intractable problem. To still obtain useful analytical information about the detection performance of the receivers we therefore resort here to the deflection, which is commonly adopted in weak-signal conditions [2], [3], [ 111, especially in interception problems.
The deflection of a detection statistic X is defined as
where E ( X 1 Ho) , E ( X I H I ) , and VAR(X I No) denote the expectations conditioned to HO and H I , and the variance conditioned to HO of the decision variable X .
The evaluation of the deflection for the statistic (17) is carried out (see Appendix A) under a simplifying assumption
GELLI ef al.: CYCL.OSTATIONAR1TY-BASED SIGNAL DETECTION AND SOURCE LOCATION IN NON-GAUSSIAN NOISE 37 1
that renders the problem mathematically tractable. Specifically, it is assumed that all signal parameters involved in (17) are perfectly known, so that no maximization has to be performed. Obviously, the evaluated deflection represents an upper bound (perfect measurement bound) on the deflection of the statistic (17).
The deflection evaluation presented in Appendix A assumes that the noise processes (on both sensors) have a common variance a2 modeled as the square of a Gaussian RV with mean ug and coefficient of variation p = VAR(c2)/a,4. Moreover, for a given noise variance is2, the noise processes are distributedl according to a generalized Gaussian univariate PDF PI, 193, [lo1
A
where I?( .) is the gamma function, c is a positive parameter governing the rate of decay (c = 1 for Laplacian noise, c = 2 for Gaussian noise, c > 8 for nearly uniform noise), and
Note that the considered model encompasses both the constant noise-level case ( p = 0) and the variable one ( p # 0). This last case is adequate to represent inaccuracy in noise-level knowledge or nonstationary activity of broadband interference signals [3], [7].
The derivation of the deflection (presented in Appendix A for both one-sensor and two-sensor receivers) is based on (Bl)-(B3), derived in Appendix B on the assumptions that the sample size M satisfies the relations
M > > 1/ min ( a ) (21)
M >> max(.r,) + XJka - k l J (22) CI Ed- ( 0 )
(YEA
where T~ is the width of the cyclic autocorrelation function RF(.) and X = 1 for the two-sensor receiver and X = 0 for the one-sensor receiver.
To quantitatively assess the performance gain obtainable by resorting to a two-sensor rather than a one-sensor receiver in a constant noise-level environment, we consider now the deflection ratio x in the case where the SD is a full-duty-cycle rectangular envelope BPSK signal sampled at rate fs = 1 /Ts , whose samples can be expressed as
M ~.
s ( i ) =Ac rect(iTs - mTo - IC') m=--M
. c o s ( 2 1 ~ f c i T s - k" - 4m) (23)
where rect (.) denotes the rectangular keying envelope, TO is the keying interval, k' is the keying clock phase, fc is the carrier frequency, Ac is the carrier amplitude, k" is the carrier phase, and { $ m } is the binary message sequence, modeled as an i.i.d. sequence with equiprobable values zero and IT.
This signal exhibits cyclostationarity with cycle frequencies a = h/To and a = + 2 f c + h/To for all integers h
I ="-4 1.
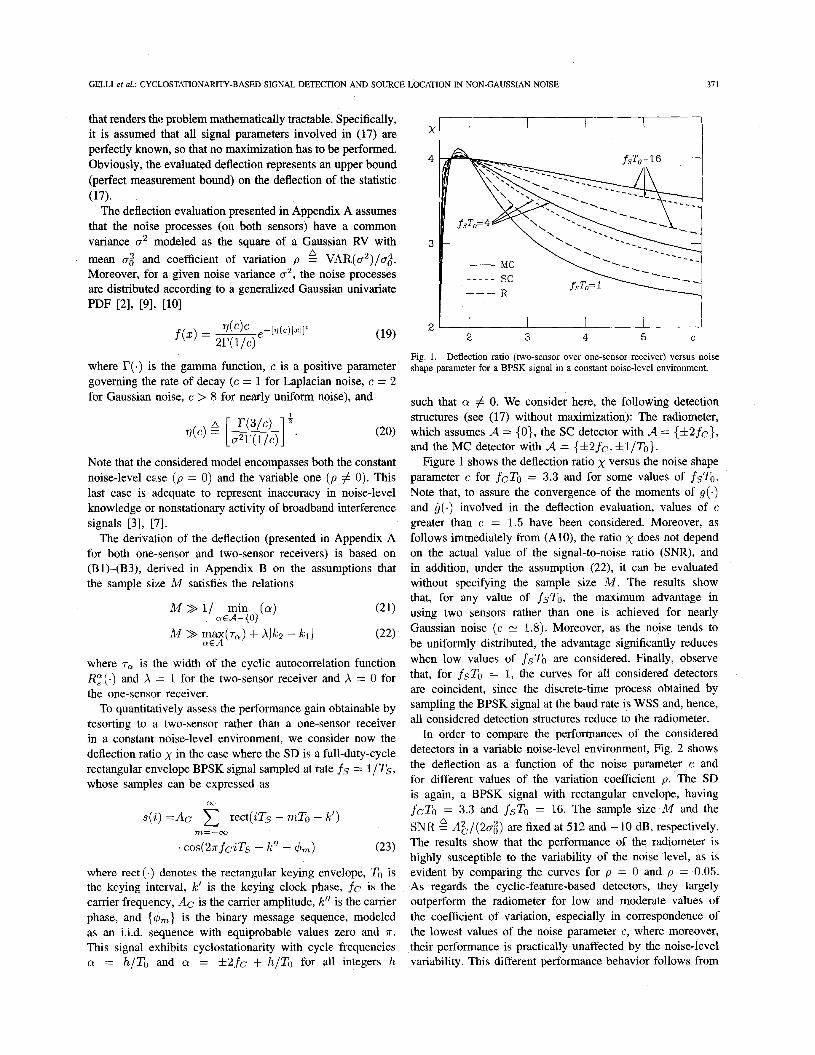
such that a # 0. We consider here, the following detection structures (see (17) without maximization): The radiometer, which assumes A = {0}, the SC detector with A = {&2fc}, and the MC detector with A = {*tafc, &l/To}.
Figure 1 shows the deflection ratio x versus the noise shape parameter c for fcT0 = 3.3 and for some values of fsT0. Note that, to assure the convergence of the moments of g(.) and g ( e ) involved in the deflection evaluation, values of c greater than c = 1.5 have been considered. Moreover, as follows immediately from (AlO), the ratio x does not depend on the actual value of the signal-to-noise ratio (SNR), and in addition, under the assumption (22), it can be evaluated without specifying the sample size M . The results show that, for any value of fsT0, the maximum advantage in using two sensors rather than one is achieved for nearly Gaussian noise (c N 1.8). Moreover, as the noise tends to be uniformly distributed, the advantage significantly reduces when low values of fsT0 are considered. Finally, observe that, for fsT0 = 1, the curves for all considered detectors are coincident, since the discrete-time process obtained by sampling the BPSK signal at the baud rate is WSS and, hence, all considered detection structures reduce to the radiometer.
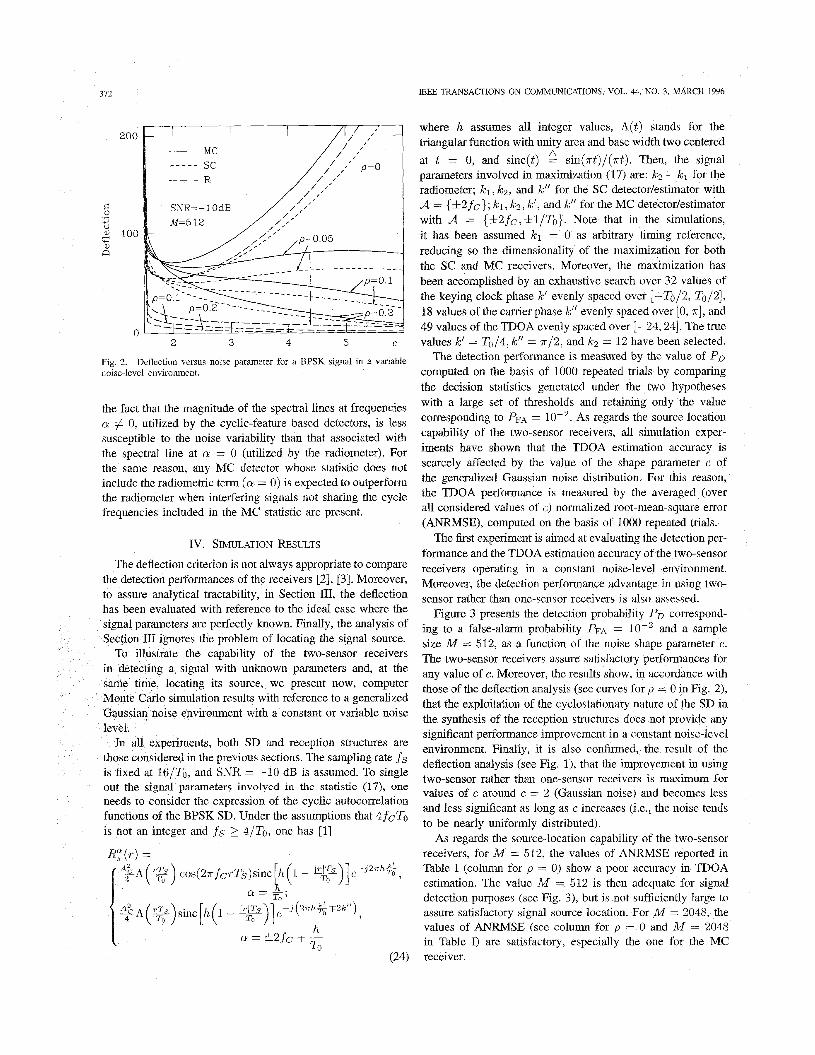
In order to compare the performances of the considered detectors in a variable noise-level environment, Fig. 2 shows the deflection as a function of the noise parameter c and for different values of the variation coefficient p. The SD is again, a BPSK signal with rectangular envelope, having fcTo = 3.3 and fsT0 = 16. The sample size M and the SNR 2 A&/(2ai) are fixed at 512 and -10 dl3, respectively. The results show that the performance of the radiometer is highly susceptible to the variability of the noise level, as is evident by comparing the curves for p = 0 and p = 0.05. As regards the cyclic-feature-based detectors, they largely outperform the radiometer for low and moderate values of the coefficient of variation, especially in correspondence of the lowest values of the noise parameter c, where moreover, their performance is practically unaffected by the noise-level variability. This different performance behavior follows from
312 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 44, NO. 3, MARCH 1996
where h assumes all integer values, A(t) stands for the triangular function with unity area and base width two centered at t = 0, and sinc(t) = sin(nt)/(.irt). Then, the signal parameters involved in maximization (17) are: k2 - kl for the radiometer; k1, k2, and k" for the SC detectodestimator with A = { f 2 fc}; k1, k2, k', and k" for the MC detectodestimator with A = {&2fc, f l /To}. Note that in the simulations, it has been assumed kl = 0 as arbitrary timing reference, reducing so the dimensionality of the maximization for both the SC and MC receivers. Moreover, the maximization has been accomplished by an exhaustive search over 32 values of the keying clock phase k' evenly spaced over [-To/2, To/2], 18 values of the carrier phase k" evenly spaced over [O, T ] , and 49 values of the TDOA evenly spaced over [-24,241. The true
2 3 4 5 c values k' = To/4, k" = 7r/2, and k2 = 12 have been selected.
computed on the basis of 1000 repeated trials by comparing the decision statistics generated under the two hypotheses with a lage set Of
capability of the two-sensor receivers, all simulation exper- iments have shown that the TDOA estimation accuracy is
affected by the Of the shape pameter Of
the generalized Gaussian noise distribution. For this reason, the TDoA performance is measured by the averaged (Over all considered values of e) normalized root-mean-square error (ANRMSE), computed on the basis of 1000 repeated trials.
The first experiment is aimed at evaluating the detection per- formance and the TDOA estimation accuracy of the two-sensor
200 n
FI SNRZ-lOdB t' 4 $ 100 Q1
0
Fig. 2. Deflection versus noise parameter for a BPSK signal In a vanable The detection performance is measured the Of ' 0
noise-level environment.
the fact that the magnitude of the spectral lines at frequencies
susceptible to the noise variability than that associated with the spectral line at = (utilized by the radiometer). For the same reason, any MC detector whose statistic does not include the radiomeUric term (a = o) is expected to outpe~om the radiometer when interfering signals not sharing the cycle frequencies included in the MC statistic are present.
and retaining Only the # 0, utilized by the cyclic-feature based detectors, is less corresponding to pFA = As regards the location
Iv. SJMULATION bSULTS
The deflection criterion is not always appropriate to compare the detection performances of the receivers 121, [3i. Moreover,
receivers operating in a constant noise-level environment, Moreover, the detection performance advantage in using two-
to assure analytical tractability, in Section HI, the deflection has been evaluated with reference to the ideal case where the
the problem Of locating the source. t~ of the two-sensor receivers nknown and' at the
Its with reference to a generalized with a constant Or noise
experiments' both SD and reception structures are those considered in the previous sections. The sampling rate f s is fixed at l6/T0, and SNR = -10 dE? is assumed. To single out the signal parameters involved in the statistic (17), one needs to consider the expression of the cyclic autocorrelation functions of the BPSK SD. Under the assumptions that 4fcTo is not an integer and f s 2 4/2'0, one has 111
Rr(r) =
sensor rather than one-sensor receivers is also assessed. presents the detection probability correspond-
size M = 512, as a function of the noise shape parameter c. The two-sensor receivers assure satisfactory performances for any value of c. Moreover, the results show, in accordance with
that the exploitation of the cyclostationary nature of the SD in the synthesis of the reception structures does not provide any significant performance improvement in a constant noise-level environment. Finally, it is also confirmed, the result of the deflection analysis (see Fig. l), that the improvement in using two-sensor rather than one-sensor receivers is maximum for values of c around c = 2 (Gaussian noise) and becomes less and less significant as long as c increases (i.e., the noise tends to be nearly uniformly distributed).
As regards the source-location capability of the two-sensor receivers, for M = 512, the values of ANRMSE reported in Table I (column for p = 0) show a poor accuracy in TDOA estimation. The value M = 512 is then adequate for signal detection purposes (see Fig. 3), but is not sufficiently large to assure satisfactory signal source location. For M = 2048, the values of ANRMSE (see column for p = 0 and M = 2048 in Table I) are satisfactory, especially the one for the MC
ly hXk'n. Finally, the analysis of ing to a fdse-dann probability pFA = 10-2 and a
time, locating its source, we present now, computer those ofthe deflection analysis (see curves for p = 0 in Fig, 2),
In
+A(%) c o s ( 2 . i r ~ c r ~ s ) s i n c ~ ( l bp)le-@nh& ' Q 1 -.
h Q = Zttafc + -
TO (24) receiver.
GELLI et al.: CYCLOSTATIONARITY-BASED SIGNAL DETECTION AND SOURCE LOCATION IN NON-GAUSSIAN NOISE
MC SC R
~
373
3.5. lo-' 3.7. lo-' 4.1 . IO-' 2.1 . lo-* 3.1 . 5.0 . lo-' 4 .6 . lo-' 4 . 6 . lo-' 4 . 7 . lo-' 8.9. lo-' 9.1 . lo-' 1.0. IO-' 4.9. lo-' 5.0. lo-' 5.1 . IO-' 8.7. lo-' 8 . 6 . lo-' 9.4. lo-'
0.8
0.6
Fig. 3.
SNR=-lOdB PFA= 1 o-2 M=512
2 3 4 5 c
Detection probability versus noise shape parameter for a BPSK signal in a constant noise-level environment.
TABLE I AVERAGED NORMALIZED ROOT-MEAN-SQUARE ERROR OF THE
TDOA ESTIMATE FOR A BPSK SIGNAL IN A CONSTANT (p = 0) OR VARIABLE (p # 0) NOISE-LEVEL ENVIRONMENT
M = 512 M = 2048 I I1 I I
I
In the second experiment, the two-sensor receivers have been tested in a variable noise-level environment, where the noise Variability has been modeled as in Section 111.
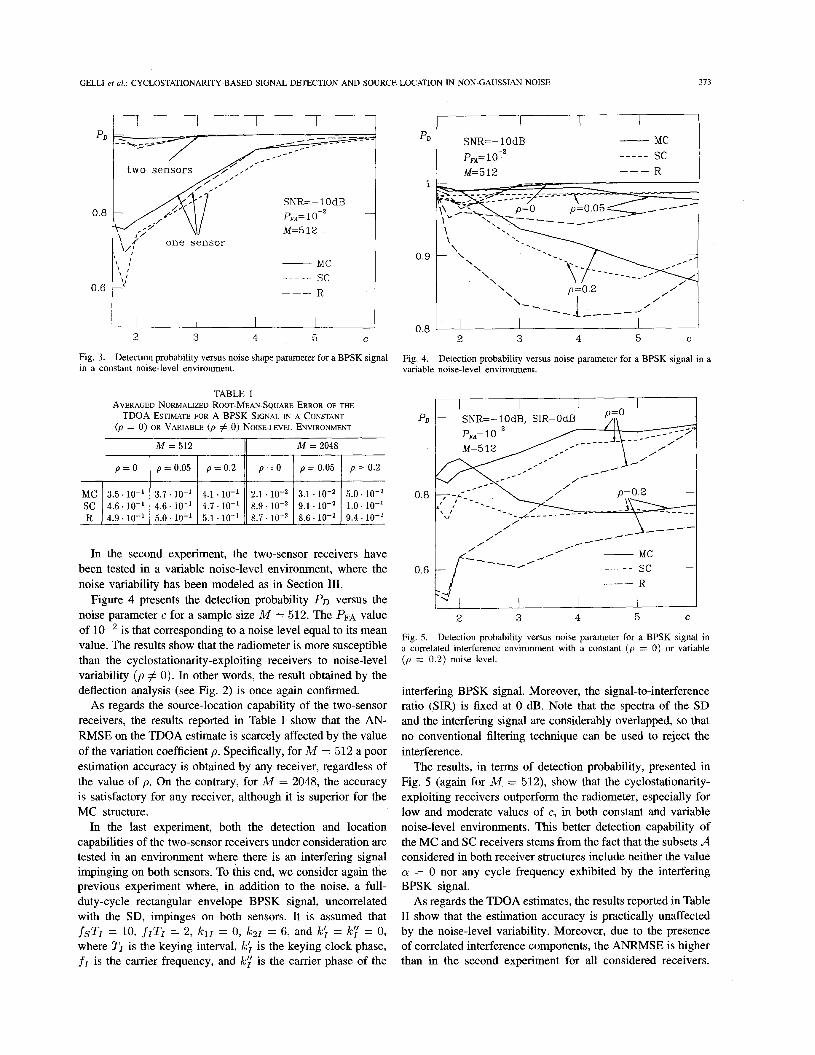
Figure 4 presents the detection probability PO versus the noise parameter c for a sample size M = 512. The PFA value of lo-' is that corresponding to a noise level equal to its mean value. The results show that the radiometer is more susceptible than the cyclostationarity-exploiting receivers to noise-level variability ( p sf 0). In other words, the result obtained by the deflection analysis (see Fig. 2) is once again confirmed.
As regards the source-location capability of the two-sensor receivers, the results reported in Table I show that the AN- RMSE on the 'TDOA estimate is scarcely affected by the value of the variation coefficient p. Specifically, for M = 512 a poor estimation accuracy is obtained by any receiver, regardless of the value of p. On the contrary, for M = 2048, the accuracy is satisfactory for any receiver, although it is superior for the MC structure.
In the last experiment, both the detection and location capabilities of the two-sensor receivers under consideration are tested in an environment where there is an interfering signal impinging on both sensors. To this end, we consider again the previous experiment where, in addition to the noise, a full- duty-cycle rectangular envelope BPSK signal, uncorrelated with the SD, impinges on both sensors. It is assumed that fsTI = 10, f l T I = 2, = 0, IC21 = 6, and IC; = IC: = 0, where TI is the keying interval, IC: is the keying clock phase, fI is the carrier frequency, and IC: is the carrier phase of the
'D SNR=-lOdB PF*= 1 o-2 M=512
1
0.9
0.8 2 3 4 5 c
Detection probability versus noise parameter for a BPSK signal in a Fig. 4. variable noise-level environment.
0.8
0.6
I I I I I - SNR=-lOdB, SIR=OdB
__--- - MC
sc _-- - - -
2 3 4 5 c
Fig. 5. Detection probability versus noise parameter for a BPSK signal in a correlated interference environment with a constant ( p = 0) or variable ( p = 0.2) noise level.
interfering BPSK signal. Moreover, the signal-to-interference ratio (SIR) is fixed at 0 dB. Note that the spectra of the SD and the interfering signal are considerably overlapped, so that no conventional filtering technique can be used to reject the interference.
The results, in terms of detection probability, presented in Fig. 5 (again for M = 512), show that the cyclostationarity- exploiting receivers outperform the radiometer, especially for low and moderate values of e, in both constant and variable noise-level environments. This better detection capability of the MC and SC receivers stems from the fact that the subsets A considered in both receiver structures include neither the value a = 0 nor any cycle frequency exhibited by the interfering BPSK signal.
As regards the TDOA estimates, the results reported in Table I1 show that the estimation accuracy is practically unaffected by the noise-level variability. Moreover, due to the presence of correlated interference components, the ANRMSE is higher than in the second experiment for all considered receivers.

374 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 44, NO. 3, MARCH 1996
TABLE I1 AVERAGED NORMALIZED ROOT-MEAN-SQUARE ERROR OF THE TDOA ESrIMATE
FOR A BPSK SIGNAL IN A CORRELATED INTERFERENCE ENVIRONMENT WITH A CONSTANT (p = 0) OR VARIABLE (p = 0.2) NOISE LEVEL
Finally, although for M = 2048, the MC structure is the only one that can assure a satisfactory estimation accuracy, for larger values of the sample size any cyclostationarity- exploiting receiver is expected to attain a satisfactory accuracy. On the contrary, regardless of the value of M , the radiometer is expected to perform poorly, since it is inherently susceptible to the presence of interference components correlated between the sensors.
V. CONCLUSION This paper deals with two-sensor interception of weak
cyclostationary signals embedded in additive non-Gaussian noise.
The locally optimum approach is considered as a starting point to derive a receiver structure that jointly detects the sig- nal presence and locates its emission source through maximum likelihood TDOA estimation. This receiver presents severe computational requirements since it involves the consideration of all cycle frequencies (possibly infinite in number) of the signal to be intercepted and, moreover, requires a multidimen- sional maximization over all unknown signal parameters. An appropriate selection of a subset of cycle frequencies leads to single-cycle or multicycle structures, generally easier to implement, even though they can still exhibit a significant degree of complexity, since the number of parameters involved in the maximization is not necessarily reduced (see, e.g., the considered multicycle detector). Moreover, a careful choice of cycle frequencies can also be effective in reducing perfor- mance degradation due to unknown or changing noise level and interference activity.
The detection performance has been evaluated analyti- cally, in terms of deflection, and via Monte Carlo com- puter simulations, in terms of detection probability and false- alarm probability. The results obtained for a BPSK signal embedded in generalized Gaussian noise have shown that the cyclostationarity-exploiting receivers, competitive with the radiometer in the ideal case of constant noise level, outper- form the radiometric structure in the presence of noise-level variability, whose degrading effects, moreover, are negligibly small in nearly Gaussian noise conditions. The results have also shown that the cyclostationarity-based receivers are highly tolerant to the presence of interfering signals not sharing the same cycle frequencies of the signal to be detected.
As regards the source-location capability, the simulation results have shown that the TDOA estimation accuracy is
scarcely affected by both the amount of noise-level vari- ability and the value of the shape parameter of the gen- eralized Gaussian distribution. The sample size required to obtain a satisfactory TDOA estimation accuracy is larger than that assuring a good detection performance. When interfer- ing signals correlated between the sensors are present, the cyclostationarity-exploiting receivers can significantly outper- form the radiometer provided that the sample size is suf- ficiently large. Simulation results have also shown that for moderate values of the sample size, the major computational cost of the multicycle receiver can pay off in terms of improved TDOA estimation accuracy.
APPENDIX A
In this Appendix, we illustrate the derivation of the de- flection for both one-sensor and two-sensor MC receivers synthesized on the assumption of perfect knowledge of the signal parameters and operating in a variable noise-level environment.
To this end, it is convenient to express the deflection as
D(TMC)
Y
where E,2(.) denotes the expectation with respect to 0’ and L L
T~~ = T” = Xxgq (A21 “ E A c u E A p = l q = p
with L = I or 2 depending on the number of sensors and y& defined in accordance with (8) and (9). Then, assuming the generalized Gaussian model for the noise PDF conditioned to 0’ and accounting for (B1)-(B3), it results that
N =L2M2
1 1 1 2 2 . -&3 - 4) + -&1 - W l ) - -(.2 0 , 3 C - WIW’) Lo 0 0

GELLI et al.: CYCLOSTATIONARITY-BASED SIGNAL DETECTION AND SOURCE LOCATION IN NON-GAUSSIAN NOISE 315
and
g (x) = - c[q (c )] 1% 1 sgn( Z) . (A91
In the particular case of a constant noise level ( p = 0), the expectation with respect to a’ in (Al) and (A5)-(A8) does not operate, and as can be easily shown, it results that
1 4
= - V A R ( T I ~ ~ I H ~ )
Finally, note that (Al)-(AlO) show that for any value of p, the deflection is independent of the values of the times of arrival on the sensors. Moreover, it depends on the SD only through the magnitude of the cyclic autocorrelation functions R:(*).
APPENDIX B
In this Appendix, we present the following equations, based on the assumptions (21) and (22) and exploited in the evalu- ation of the deflection formulas
M
M
R,(i-k, ,m-k,) R:( i -m+k,-kp) a,m=l aEA
. e ~ n a ( a + m - k p - k q )
M
M - 1
a E d r = l - M M - 1
M
i = l aEd aEA
ACKNOWLEDGMENT The authors are grateful to the reviewers for their helpful
comments and suggestions.
REFERENCES
[l] W. A. Gardner, Zntroduction to Random Processes With Applications to Signals and Systems. New York McGraw-Hill, 1989.
[2] L. Izzo, L. Paura, and M. Tanda, “Signal interception in non-Gaussian noise,” ZEEE Trans. Commun., vol. 40, pp. 1030-1037, June 1992.
[3] W. A. Gardner and C. M. Spooner, “Signal interception: Performance advantages of cyclic-feature detectors,” IEEE Trans. Commun., vol. 40, pp. 149-159, Jan. 1992.
[4] W. A. Gardner, “Signal interception: A unifying theoretical frame- work for feature detection,” ZEEE Trans. Commun., vol. COM-36, pp. 897-906, Aug. 1988.
[5] W. A. Gardner and C.-K. Chen, “Signal-selective time-difference-of- arrival estimation for passive location of man-made signal sources in highly corruptive environments, Part I: Theory and method,” IEEE Trans. Signal Processing, vol. 40, pp. 1168-1184, May 1992.
[6] __ , “Signal-selective time-difference-of-arrival estimation for pas- sive location of man-made signal sources in highly corruptive envi- ronments, Part 11: Algorithms and performance,” ZEEE Trans. Signal Processing, vol. 40, pp. 1185-1197, May 1992.
[7] W. A. Gardner and C. M. Spooner, “Detection and source loca- tion of weak cyclostationary signals: Simplifications of the maximum- likelihood receiver,” ZEEE Trans. Commun., vol. 41, pp. 905-916, June 1993.
[8] R. M. Showers, R. B. Schulz, and S.-Y. Lin, “Fundamental limits on EMC,” Proc. IEEE, vol. 69, pp. 183-195, Feb. 1981.
[9] J. H. Miller and J . B. Thomas, “Detectors for discrete-time signals in non-Gaussian noise,” ZEEE Trans. Inform. Theory, vol. IT-18, pp. 241-250, Mar. 1972.
[lo] S. A. Kassam, Signal Detection in Non-Gaussian Noise. New York Springer-Verlag, 1988.
[ I l l B. Picinbono and P. Duvaut, “Optimal linear-quadratic systems for detection and estimation,” IEEE Trans. Inform. Theory, vol. IT-34, pp. 304-3 11, Mar. 1988.
Giacinto Gelli was born in Naples, Italy, on July 29, 1964 He received the Dr. Eng degree in elec- tronic engineenng, in 1990, and the PhD degree in computer science and electronic engineenng, in 1994, both from the University of Naples Fedenco II
He has been an Assistant Professor in the De- partment of Engineering of the Second University of Naples since December 1994. His research interests are in the fields of statistical signal processing, array processing, detection, and eshmauon

376
Lucian0 Izzo was born in Naples, Italy, on Septem- ber 17, 1946 He received the Dr Eng degree in electronic engineenng from the Umversity of Naples, Italy, in 1971
He has been with the University of Naples since 1973 Specifically, from 1973 to 1983, he was with the Electncal Engineenng Insbtute and from January 1984 he has been with the Department of Electronic Engineenng He was an Associate Professor of Electncal Communications from 1977 to 1985 and Radio Engineenng from 1985 to 1993
He is currently an Associate Professor of Elec&cal C&"mnications at the University of Naples Federico 11. He was an Appointed Professor of Radio Engineering from 1984 to 1992 and has been a Professor of Telecommu- nication Systems since 1992 at the University of Salemo, Italy. He is the author of numerous research joumal and conference papers in the fields of digital communication systems, detection, estimation and signal processing applications.
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL 44, NO 3, MARCH 1996
Luigi Paura was born in Naples, Italy, on February 20, 1950. He received the Dr Eng. degree in elec- tronic engineenng from the University of Naples, Italy, in 1974.
He was with the Department of Electronic Engi- neering of the Umversity of Naples as an Associate Professor of Information Theory from August 1979 to October 1994 He has been a Full Professor of Electncal Commumcatlons at the Department of Mathematics of the University of Lecce, Italy since November 1995 His research interests include
statisbcal signal processing, higher-order cyclostatlonarity, detection and parameter estimation