
Out of sight, out of mind? -The protection of failed asylum seekers Acknowledgements

Control strategy for hybrid power filter to compensate unbalanced and non-linear, three-phase loads
S. P. Litrán, P. Salmerón, J. R. Vázquez, R. S. Herrera, A. Pérez ESCUELA POLITÉCNICA SUPERIOR. UNIVERSITY OF HUELVA
Electrical Engineering Department, Ctra. de Palos de la Frontera s/n Palos de la Frontera, Huelva, Spain
Tel.: +034– 959 21 75 85 Fax: +034 – 959 21 73 04
E-Mail: [email protected]; [email protected]; [email protected]; reyes.sanchez@[email protected]; [email protected]
URL: http://www.uhu.es
Acknowledgements This work is part of the projects "A new technique to reduce the harmonic distortion in electrical systems by means of equipment of active compensation", ref. DPI2004-03501, sponsored by the “Comisión Interministerial de Ciencia y Tecnología, CICYT, del Ministerio de Ciencia y Tecnología” of Spain, and “Design and implementation of a new equipment of active compensation with series connection for the improvement of the electrical waveform quality”, ref. P06-TEP-02354, sponsored by the “Consejería de Innovación, Ciencia y Empresa de la Junta de Andalucía”, Spain.
Keywords Active power filters, harmonics, instantaneous reactive power, power quality, hybrid filters
Abstract A control algorithm is proposed for a three-phase hybrid power filter constituted by a series active filter and a shunt passive filter. The control strategy is based on the dual formulation of the vectorial theory of electrical power, so that the voltage waveform injected by the active filter is able to compensate the reactive power, to eliminate harmonics of the load current and to balance asymmetrical loads. An experimental prototype was developed and experimental results presented.
Introduction Many social and economic activities depend on electrical energy quality and its efficiency. Both industrial and commercial users are interested in guaranteeing the signal quality which feed their electric systems, therefore, the mitigation of the current harmonics or voltage harmonics generate by the load is necessary. Traditionally, a passive LC power filter is used to eliminate current harmonics when it is connected in parallel with the load [1]. This compensation equipment has some drawbacks [2-4], because of which, the passive filter cannot provide a complete solution. Shunt active power filter, series active power filter and combined systems with passive filter and active filter have been proposed to improve the behavior of passive filters [5-16]. A configuration with an active filter connected in series to the source and passive filter in parallel to the load (Fig. 1) is analyzed in this work [11-14]. In this topology, the shunt passive filter suppresses the prevalent harmonics currents produced by the load, while the active filter connected in series with the source acts as a “harmonic isolator” between the source and the load, besides it compensates the reactive power and balances asymmetrical loads. The used control strategy is based on the instantaneous power theory [17-20]. The active power filter designed consists of a three-phase PWM (pulse With Modulation) voltage source inverter (VSI), which is connected in series with the ac source impedance and load, through three single phase

Fig. 1. Scheme of series active filter combined with shunt passive filter
iS iL
iC
+ vC - LS
LR L5 L7 C5 C7
Vdc -Vdc
CR
Ideal behavior vPC
transformers (Fig. 1). A small rate passive filter to suppress switching ripples is connected between the transformers and the inverter. The control is verified through an experimental prototype, and measured are carry out to corroborate the theoretical analysis.
Control strategy Electrical companies try to generate electrical power with sinusoidal and balanced voltages. It has been obtained as a reference condition in the supply. Due to this fact the compensation target is based on an ideal reference load which must be resistive, balanced and linear. It means that the source currents are collinear to the supply voltages and the system will have unity power factor. Therefore at the point of common coupling the following expression is satisfied
iv eR= (1) Re is the equivalent resistance, v the voltage vector at the connection point and i the load current vector. According to Fig. 2 both vectors can be defined as
[ ] [ ]TcbaT
cba iiivvv == iv (2) When the currents are unbalanced and non-sinusoidal, a balanced resistive load can be considered the ideal reference load. So, the active power supplied by the source will be
eS RIP 21+= (3)
Here, I1
+2 is the norm of the positive sequence fundamental component of the current vector. This norm is defined by
Load
a
b
c
0
ia ib
i0
ic va
vb vc
Fig. 2. Three-phase four-wire system

( )∫ +++ ⋅=T T dtI'0
21 T
111 ii (4)
Where i+
1 is the positive sequence fundamental component of the instantaneous current vector. Compensator instantaneous power is the difference between the total real instantaneous power required by the load and the instantaneous power supplied by the source. It is,
SLC ppp −= (5) When the average values are calculated in this equation and taking into account that the active power exchanged by the compensator has to be null, the following expression is satisfied
eL RIdtpT
21
10 +−= ∫ (6)
Therefore, the equivalent resistance can be calculated by
21
21
1
++==
∫IP
I
dtpTR L
L
e (7)
Here, PL is the load average power. It can be obtained by means of
∫∫ == dtT
dtpT
P TLLL iv11 (8)
Being vT
L the transpose voltage vector at the load side. The aim is that the compensation equipment and load have ideal behavior from the point of common coupling (PCC). The voltage at the connection point of the active filter can be calculated as follows
iv 21+=
IPL
PCC (9)
The reference signal for the output voltage of the active filter is
LLCC*C vivvv −=−= +2
1IPL
P (10)
When the active filter supplies this compensation voltage, the set load and compensation equipment will behave as a resistor with a Re value.
Control scheme The control scheme to determine the reference signal is shown in Fig. 3. The input signals are the voltage vector, measured at the load side and the current vector measured at the source side, before the coupling transformer. Both vectors are multiplied to obtain the instantaneous power. A low pass filter let the load active power to be obtained. This power will be divided by the norm of the positive sequence fundamental component of the current vector. Thus, the direct sequence component of the current vector has to be calculated. For it, the following expression is implemented in a calculation block
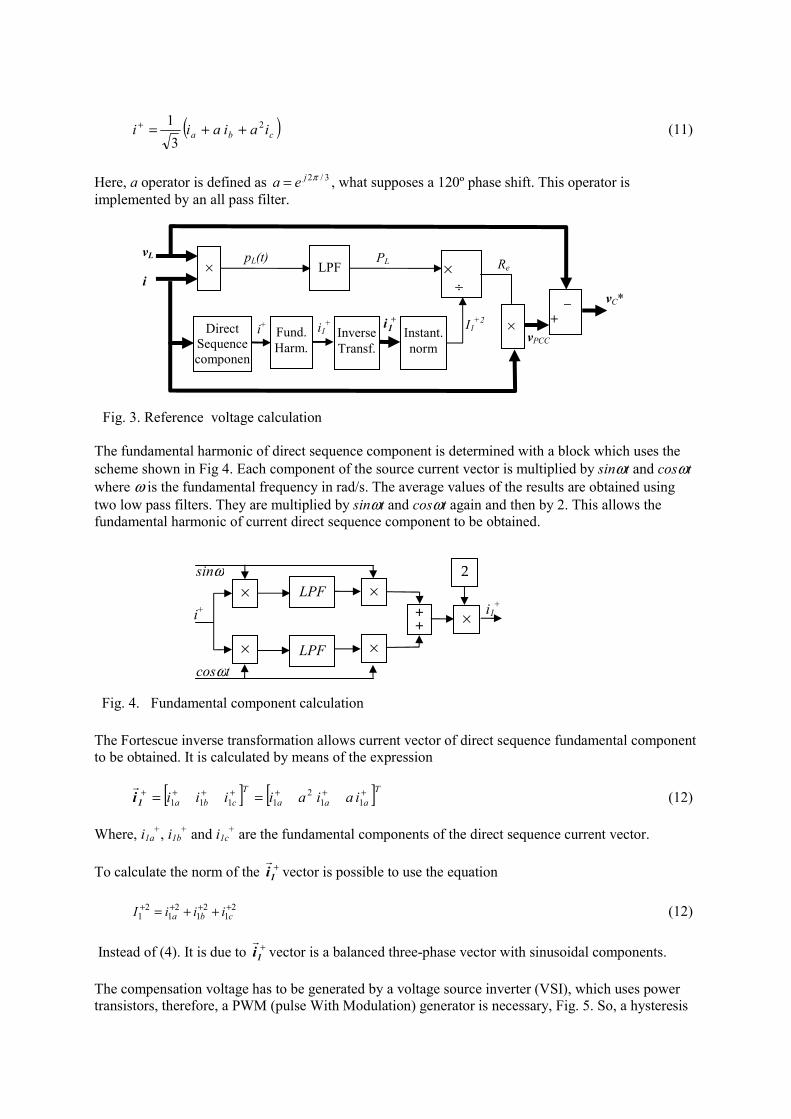
Fig. 3. Reference voltage calculation
× LPF
Direct Sequence componen
Fund. Harm.
Inverse Transf.
Instant. norm
× ÷
×
− +
vL
i
pL(t) PL Re
i+ i1+ I1
+2 vPCC
vC* +
1i
Fig. 4. Fundamental component calculation
LPF ×
×
×
×LPF
++ ×i+ i1
+
sinω
cosωt
2
( )cba iaiaii 2
31 ++=+ (11)
Here, a operator is defined as 3/2πjea = , what supposes a 120º phase shift. This operator is implemented by an all pass filter.
The fundamental harmonic of direct sequence component is determined with a block which uses the scheme shown in Fig 4. Each component of the source current vector is multiplied by sinωt and cosωt where ω is the fundamental frequency in rad/s. The average values of the results are obtained using two low pass filters. They are multiplied by sinωt and cosωt again and then by 2. This allows the fundamental harmonic of current direct sequence component to be obtained. The Fortescue inverse transformation allows current vector of direct sequence fundamental component to be obtained. It is calculated by means of the expression
[ ] [ ]TaaaT
cba iaiaiiii +++++++ == 112
11111i (12) Where, i1a
+, i1b+ and i1c
+ are the fundamental components of the direct sequence current vector. To calculate the norm of the +
1i vector is possible to use the equation
21
21
21
21
++++ ++= cba iiiI (12) Instead of (4). It is due to +
1i vector is a balanced three-phase vector with sinusoidal components. The compensation voltage has to be generated by a voltage source inverter (VSI), which uses power transistors, therefore, a PWM (pulse With Modulation) generator is necessary, Fig. 5. So, a hysteresis

Fig. 5. Control DC-link and PWM generator scheme
+ − + PI ×
++ +
−D Q
Vdc+
Vdc−
2VRef
vC*
vinv
PWM
Sampling clock+
1i
Hysteresis comparator
Table I. Passive element values
Source Ls= 2.8 mH; Rs=1.8 Ω
Passive filter L5= 13.5 mH C5= 30 μF L7=6.75 mH C7= 30 μF
Ripple filter Lrf= 13.5 mH Crf= 50 μF
band control was developed. The gating signals are generated comparing the reference signal with the inverter output voltage (vinv) considering a hysteresis band. In this method the transistors switch when the error exceeds a fixed magnitude: the hysteresis band. This technique has a variable switching frequency, so, the IGBTs maximum switching frequency could be reached. The sampling clock signal limits the switching frequency. Fig. 5 includes a control loop with PI controller to ensure the capacitor voltages to remain constant at the inverter DC side. Here, VRef is the reference voltage to remain in the capacitors; Vdc+ and Vdc- are the measured voltage. The difference between the reference value of the DC-link voltage and the monitored DC-link voltages serves as an input signal to the PI controller. The output controller is multiplied by direct sequence fundamental component vector which is calculated with the voltage vC
*. It corrects the reference voltage calculated by means of (10).
Experimental prototype The experimental prototype scheme is shown in Fig. 6. The power circuit is a three-phase system supplied by a sinusoidal balanced three-phase 100 V source and 50 Hz frequency with a source inductance of 2.8 mH and a source resistance of 1.8 Ω. The inverter consists of an IGBT (Insulated Gate Bipolar Transistor) bridge. It is a Semikron SKM50GB123-type IGBT bridge. Two 2200 μF capacitors are connected at the DC side. The reference voltage at the capacitors is 100 V. An LC filter has been included to eliminate the high frequency components at the output of the inverter. The selection criteria for ripple filter have been the following: for low frequency components the inverter output voltage must be almost equal to voltage across Crf. However, for high frequency components the dropped voltage in Lrf must be higher than in Crf capacitor. Furthermore, Lrf and Crf values must be selected to not exceed the transformer burden. Table I includes their values. This set is matched to the power system by means of three single-phase transformers with a turn ratio of 1:1 to ensure galvanic isolation. The passive filter is constituted by two LC branches tuned to the 5th and 7th harmonics. Element values are included in Table I. The control strategy was implemented in a control and general application data acquisition cards compatible with Matlab-Simulink and developed by dSPACE. Real-Time Interface (RTI) from dSPACE together with Real Time Workshop (RTW) from Mathworks automatically generate real time code. It allows the processor board to be programmed and I/O boards to be selected. It is based
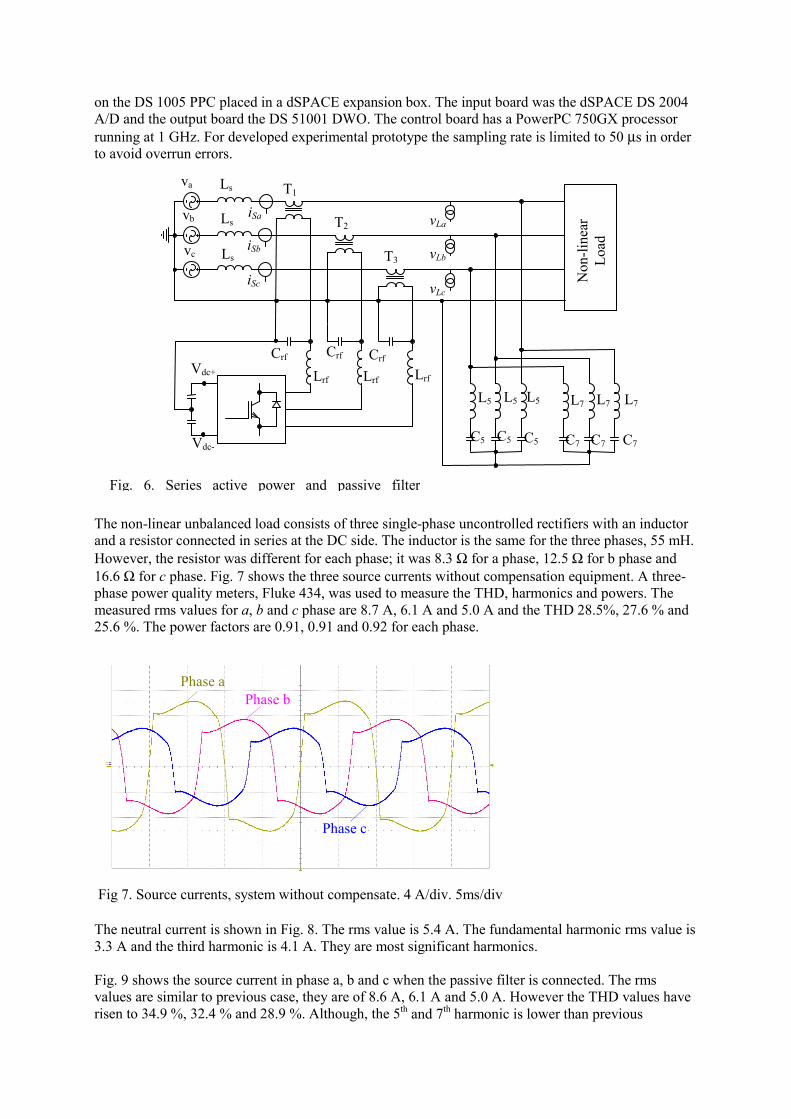
Fig. 6. Series active power and passive filter
va
vb
vc
Ls
Ls
C7 C7
Crf Crf Crf Lrf Lrf Lrf
Non
-line
ar
Load
C5 C5 C5 C7
L5 L5 L5 L7 L7 L7
Ls
T1
T2
T3
iSa
iSb
iSc
vLa
vLb
vLc
Vdc+
Vdc-
on the DS 1005 PPC placed in a dSPACE expansion box. The input board was the dSPACE DS 2004 A/D and the output board the DS 51001 DWO. The control board has a PowerPC 750GX processor running at 1 GHz. For developed experimental prototype the sampling rate is limited to 50 μs in order to avoid overrun errors. The non-linear unbalanced load consists of three single-phase uncontrolled rectifiers with an inductor and a resistor connected in series at the DC side. The inductor is the same for the three phases, 55 mH. However, the resistor was different for each phase; it was 8.3 Ω for a phase, 12.5 Ω for b phase and 16.6 Ω for c phase. Fig. 7 shows the three source currents without compensation equipment. A three-phase power quality meters, Fluke 434, was used to measure the THD, harmonics and powers. The measured rms values for a, b and c phase are 8.7 A, 6.1 A and 5.0 A and the THD 28.5%, 27.6 % and 25.6 %. The power factors are 0.91, 0.91 and 0.92 for each phase. The neutral current is shown in Fig. 8. The rms value is 5.4 A. The fundamental harmonic rms value is 3.3 A and the third harmonic is 4.1 A. They are most significant harmonics. Fig. 9 shows the source current in phase a, b and c when the passive filter is connected. The rms values are similar to previous case, they are of 8.6 A, 6.1 A and 5.0 A. However the THD values have risen to 34.9 %, 32.4 % and 28.9 %. Although, the 5th and 7th harmonic is lower than previous
Fig 7. Source currents, system without compensate. 4 A/div. 5ms/div
Phase a Phase b
Phase c
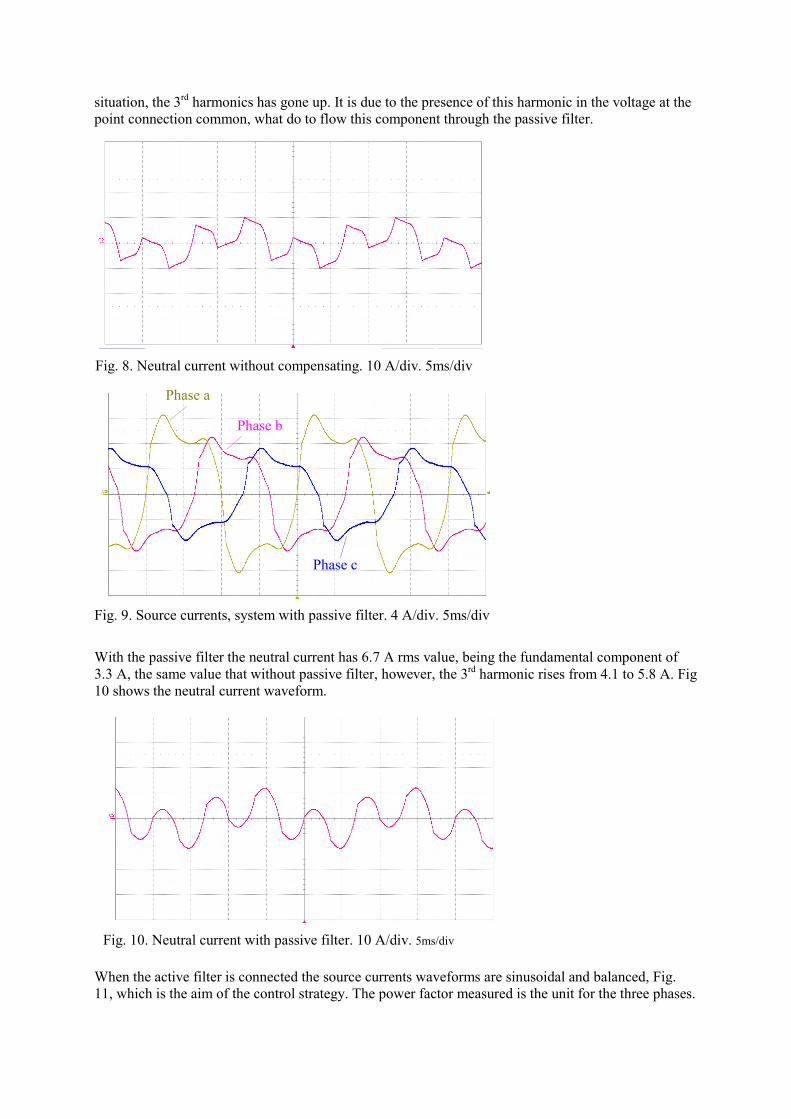
Fig. 8. Neutral current without compensating. 10 A/div. 5ms/div
Fig. 10. Neutral current with passive filter. 10 A/div. 5ms/div
situation, the 3rd harmonics has gone up. It is due to the presence of this harmonic in the voltage at the point connection common, what do to flow this component through the passive filter. With the passive filter the neutral current has 6.7 A rms value, being the fundamental component of 3.3 A, the same value that without passive filter, however, the 3rd harmonic rises from 4.1 to 5.8 A. Fig 10 shows the neutral current waveform. When the active filter is connected the source currents waveforms are sinusoidal and balanced, Fig. 11, which is the aim of the control strategy. The power factor measured is the unit for the three phases.
Fig. 9. Source currents, system with passive filter. 4 A/div. 5ms/div
Phase a
Phase b
Phase c

Fig. 11. Source currents, with passive and active filter. 4 A/div. 5ms/div
Phase a Phase b Phase c
Fig. 12. Neutral current with passive and active filter. 4 A/div. 5ms/div
The rms values are 5.7 A, 5.6 A and 5.7 A. The unbalance is due to outliers in the measured sensors and modulation technique. The current THD are reduced to 2.6 %, 2.6 % and 2.9%. The neutral current is shown in Fig 12. When active and passive filter are connected, the rms value is reduced to 0.5 A. The fundamental component is reduced to 0.3 A and the 3rd harmonic to 0.4 A. Fig. 13 shows the voltage and current of the a phase. They are practically sinusoidal and in phase. It demonstrates the resistive behaviour of the set compensation equipment-load. Similar results are obtained to the b and c phase. Fig. 13. Voltage and current at the PCC, a phase. Voltage 48V/div and current 10 A/div. 5ms/div

Table II summarizes the most important results. Harmonics, THD, powers and power factors are included. The THD voltage at the point of common coupling is improved with the active filter. This voltage is distorted by the nonlinear load. The power factor is raised from 0.91 to 1. With the passive filter, the power factor is improved; however, the THD current and THD voltage are worse than without passive filter. It is due to the reactive power compensation with LC branches.
Conclusion
A control algorithm for a hybrid power filter constituted by a series active filter and a passive filter connected in parallel with the load is proposed. The control strategy is based on the dual vectorial theory of electric power. The new control approach achieves the following targets:
- The compensation characteristics of the hybrid compensator do not depend on the system impedance.
- The hybrid filter and load set are resistive behavior. This fact eliminates the risk of overload due to the current harmonics of non-linear loads close to the compensated system.
- This compensator can be applied to loads with random power variation as it is not affected by changes in the tuning frequency of the passive filter. Furthermore, the reactive power variation is compensated by the active filter.
- Series and/or parallel resonances with the rest of the system are avoided because compensation equipment and load are resistive behavior.
- The active filter improves the harmonic compensation features of the passive filter and compensates the reactive power, achieving unit power factor.
- -The proposed control algorithm allows balancing asymmetrical loads.
Experimental results are presented. This allows the verification of the developed theoretical analysis.
Table II. Measured value in different situations THD(%) RMS Fund. H3 H5 H7 H9 P(kW) Q(kvar) S(kVA) PF
With
out
com
pens
atio
n
Phase a V 12.4 96 95.8 6.7 5.8 4.8 3.8
0.76 0.23 (ind) 0.79 0.91 I 28.5 8.7 8.3 2 1.1 0.6 0.4
Phase b V 9.1 97.1 96.7 4.4 3.9 3.6 3.1 0.54 0.17 (ind) 0.57 0.91 I 27.6 6.1 5.9 1.3 0.7 0.5 0.3
Phase c V 7.2 98.2 97.9 3.1 3.0 2.7 2.5
0.45 0.13 (ind) 0.47 0.92 I 25.9 5.0 4.8 1.0 0.6 0.4 0.3
Neutral I 5.4 3.3 4.1 0.5 0.4 0.9 - - - -
With
pas
sive
filte
r Phase a V 11.3 97.8 97.1 9.4 3.3 1.2 2.3
0.79 0.05 (ind) 0.79 0.93 I 34.9 8.6 8.2 2.8 0.6 0.2 0.2
Phase b V 7.6 98.9 98.6 6.1 2 0.6 1.6 0.57 0.02 (cap) 0.57 0.94
I 32.4 6.1 5.8 1.8 0.4 0.1 0.2
Phase c V 5.6 100 99.8 4.2 1.3 0.5 1.3
0.47 0.07 (cap) 0.78 0.94 I 28.9 5.0 4.8 1.3 0.2 0.1 0.1
Neutral I 6.7 3.3 5.8 0.3 0.1 0.5 - - - -
With
act
ive
and
pass
ive
filte
r
Phase a V 1.0 98.5 98.4 0.5 0.2 0.1 0.1 0.56 0.01 0.56 1 I 2.6 5.7 5.7 0.1 0.0 0.0 0.0
Phase b V 1.0 98.5 98.4 0.5 0.1 0.2 0.1 0.54 0.01 0.54 1 I 2.6 5.5 5.5 0.1 0.0 0.0 0.0
Phase c V 1.2 98.8 98.8 0.5 0.1 0.1 0.2 0.56 0.01 0.56 1 I 2.9 5.7 5.7 0.1 0.0 0.0 0.0 Neutral I 0.5 0.3 0.4 0.0 0.0 0.0 - - - -

References [1] F. Z. Peng and D. J. Adams, “Harmonics sources and filtering approaches,” in Proc. Industry Aplications
Conference, October 1999, Vol, 1, pp. 448-455 [2] Ginn, H.L., III; Czarnecki, L.S. “An optimization based method for selection of resonant harmonic filter
branch parameters,” IEEE Trans. on Power Delivery, Vol. 21, Issue 3, July 2006, pp. 1445-1451 [3] Pomilio, J.A.; Deckmann, S.M. “Characterization and compensation of harmonics and reactive power of
residential and commercial loads,” IEEE Trans. on Power Delivery, Vol. 22, Issue 2, April 2007, pp. 1049-1055
[4] J.C. Das, “Passive Filters-Potentialities and Limitations,” IEEE Trans. on Industry Applications, Vol. 40, No. 1, January 2004, pp. 232-241.
[5] H. Akagi, “Active harmonic filters,” Proceedings of the IEEE, Vol. 93, Issue 12, Dec. 2005, pp. 2128-2141 [6] Singh, B.; Al-Haddad, K.; Chandra, A. “A review of active filters for power quality improvement” IEEE
Trans. on Industrial Electronics, Vol. 46, Issue 5, Oct. 1999, pp. 960 – 971 [7] George, S.; Agarwal, V. “Optimum control of selective and total harmonic distortion in current and voltage
under nonsinusoidal conditions,” IEEE Trans. on Power Delivery, Vol. 23, Issue 2, April 2008, pp. 937-944
[8] Orts, S.; Gimeno-Sales, F.J.; Abellan, A.; Segui-Chilet, S.; Alcaniz, M.; Masot, R, “Achieving Maximum Efficiency in Three-Phase Systems With a Shunt Active Power Compensator Based on IEEE Std. 1459”, IEEE Trans. on Power Delivery, Vol. 23, Issue 2, April 2008, pp. 812 – 822
[9] Lascu, C.; Asiminoaei, L.; Boldea, I.; Blaabjerg, F. “Frequency Response Analysis of Current Controllers for Selective Harmonic Compensation in Active Power Filters”, IEEE Trans. on Industrial Electronics, Vol. 56, Issue 2, Feb. 2009, pp. 337-347
[10] Chaer, T. A.; Gaubert, J.-P.; Rambault, L.; Najjar, M., “Linear Feedback Control of a Parallel Active Harmonic Conditioner in Power Systems”, IEEE Trans. Power Electronics, Vol. 24, Issue 3, March 2009, pp. 641-653
[11] Z. Wang, Q. Wang, W. Yao and J. Liu, “A series active power filter adopting hybrid control approach,” IEEE Trans. Power Electronics, Vol. 16, No. 3, May 2001, pp. 301-310
[12] F. Z. Peng, H. Akagi, A. Nabae, “A new approach to harmonic compensation in power systems-a combined system of shunt passive and series active filters,” IEEE Trans. Industry Applications. Vol, 26, No. 6, Nov/Dec 1990, pp. 983-990
[13] Y. S. Kim, J. S. Kim and S. H. Ko, “Three-phase three-wire series active power filter, which compensates for harmonics and reactive power”, IEE proc. Electric. Power Applications, Vol, 151, No. 3, May 2004, pp. 276-282.
[14] Huayun Yang; Shiyan Ren. “A practical series-shunt hybrid active power filter based on fundamental magnetic potential self-balance,” IEEE Trans. on Power Delivery, Vol. 23, Issue 4, Oct. 2008, pp. 2089-2096
[15] An Luo; Zhikang Shuai; Wenji Zhu; Ruixiang Fan; Chunming Tu. “Development of hybrid active power filter based on the adaptive fuzzy dividing frequency-control method,” IEEE Trans on Power Delivery, Vol. 24, Issue 1, Jan. 2009, pp. 424-432
[16] Corasaniti, V. F.; Barbieri, M. B.; Arnera, P. L.; Valla, M. I., “Hybrid Active Filter for Reactive and Harmonics Compensation in a Distribution Network “, IEEE Trans. on Industrial Electronics, Vol. 56, Issue 3, March 2009, pp. 670-677
[17] F. Z. Peng, J. S. Lai, “Generalized instantaneous reactive power theory for three phase power system”, IEEE Trans. Instrumentation. Measurement. 1996, 45, (1), pp. 293-297.
[18] Aredes, M.; Akagi , H.; Hirokazu Watanabe, E.; Vergara Salgado, E.; Frizera Encarnação , L., “Comparisons Between the p-q and p-q-r Theories in Three-Phase Four-Wire Systems”, IEEE Trans. on Power Electronics, Vol. 24, Issue 4, April 2009, pp. 924-933
[19] Herrera, R.S.; Salmerón, P. “Instantaneous reactive power theory: a comparative evaluation of different formulations”, IEEE Trans. on Power Delivery, Vol. 22, Issue 1, Jan. 2007, pp. 595-604
[20] P. Salmerón, R. S. Herrera, J. R. Vázquez, “Mapping matrices against vectorial frame in the instantaneous reactive power compensation”, IET Electric Power Applications, Vol. 1, No 5, September 2007, pp. 727-736.
Copyright © 2022 FDOKUMEN




















