Simulation and validation of compressible flow in nozzle ...

Conservative Split-Explicit Time Integration Methods for the CompressibleNonhydrostatic Equations
J. B. KLEMP, W. C. SKAMAROCK, AND J. DUDHIA
National Center for Atmospheric Research,* Boulder, Colorado
(Manuscript received 29 August 2006, in final form 22 November 2006)
ABSTRACT
Historically, time-split schemes for numerically integrating the nonhydrostatic compressible equations ofmotion have not formally conserved mass and other first-order flux quantities. In this paper, split-explicitintegration techniques are developed that numerically conserve these properties by integrating prognosticequations for conserved quantities represented in flux form. These procedures are presented for bothterrain-following height and hydrostatic pressure (mass) vertical coordinates, two potentially attractiveframeworks for which the equation sets and integration techniques differ significantly. For each set ofequations, the linear dispersion equation for acoustic/gravity waves is derived and analyzed to determinewhich terms must be solved in the small (acoustic) time steps and how these terms are represented in thetime integration to achieve stability. Efficient techniques for including numerical filters for acoustic andexternal modes are also presented. Simulations for several idealized test cases in both the height and masscoordinates are presented to demonstrate that these integration techniques appear robust over a wide rangeof scales, from subcloud to synoptic.
1. Introduction
In numerically integrating the compressible nonhy-drostatic equations of motion for atmospheric applica-tions, the presence of high-frequency acoustic modescan place significant constraints on the allowable timesteps that will maintain computational stability. As aresult, a variety of techniques have been developed toachieve computational efficiency in nonhydrostatic nu-merical models, including semi-implicit time integra-tion, split-explicit time stepping, and the integration offiltered equations. In this paper we focus on split-explicit integration techniques for the compressiblenonhydrostatic equations, and propose new proceduresthat are suitable for integrating these equations whencast in conservative (flux) form.
In semi-implicit schemes, the terms responsible forsound-wave propagation are averaged in time, produc-ing an implicit set of equations for variables at the new
time level that requires the solution of a three-dimensional Helmholz equation for pressure to com-plete each time step. Semi-implicit techniques havebeen developed for integrating the equations in Eule-rian form (e.g., Tapp and White 1976) and have alsofrequently been employed in conjunction with a semi-Lagrangian integration (e.g., Tanguay et al. 1990; Stani-forth and Côté 1991; Yeh et al. 2002). The semi-implicitsemi-Lagrangian techniques add significant computa-tional expense for each time step, and computationalefficiency is often achieved by using larger time stepsfor which the Courant number may be significantlygreater than unity. However, for nonhydrostatic andmesoscale applications, there is evidence that Courantnumbers must remain less than unity in order to main-tain desired accuracy in the simulations (e.g., Pinty etal. 1995; Bartello and Thomas 1996).
Another approach in solving the nonhydrostaticequations is to modify the equations to an anelasticform that does not admit acoustic modes. The anelasticequations were originally derived through scale analysisby Ogura and Phillips (1962), with modifications to im-prove their accuracy subsequently proposed by Wil-helmson and Ogura (1972), Lipps and Hemler (1982),and Durran (1989). With these techniques, the timederivative of density is ignored in the continuity equa-tion and consequently pressure must be obtained each
* The National Center for Atmospheric Research is sponsoredby the National Science Foundation.
Corresponding author address: Dr. Joseph B. Klemp, NationalCenter for Atmospheric Research, P.O. Box 3000, Boulder, CO80307-3000.E-mail: [email protected]
AUGUST 2007 K L E M P E T A L . 2897
DOI: 10.1175/MWR3440.1
© 2007 American Meteorological Society
MWR3440

time step from the solution of a three-dimensional el-liptic equation. Anelastic models have been success-fully used in a wide variety of cloud and mesoscaleapplications (e.g., Clark 1977, 1979), and have beenproposed as a framework for global applications (Smo-larkiewicz et al. 2001), although the validity of theseapproximations for numerical weather prediction(NWP) or climate applications has been questioned(Davies et al. 2003).
With split-explicit techniques, the fully compressiblenonhydrostatic equations can be integrated without theneed to solve a three-dimensional elliptic equation.Computational efficiency is achieved by integrating themodes of physical interest with a time step appropriatefor these modes, but then subdividing these time stepsinto a number of smaller (acoustic) time steps duringwhich the terms responsible for sound-wave propaga-tion are advanced in time (Klemp and Wilhelmson1978). This approach was originally developed forcloud-scale modeling (Klemp and Wilhelmson 1978;Tripoli and Cotton 1982; Wicker and Wilhelmson1995), and has subsequently been successfully adoptedin a number of NWP models, such as the fifth-generation Pennsylvania State University–NationalCenter for Atmospheric Research (NCAR) MesoscaleModel (MM5; Dudhia 1993), the Coupled Ocean/Atmosphere Mesoscale Prediction Systems (COAMPS;Hodur 1997), the Lokal Model (LM; Doms and Schät-tler 1999), the Advanced Regional Prediction System(ARPS; Xue et al. 2000), and the Japan MeteorologicalAgency nonhydrostatic model (JMA-NHM; Saito et al.2006). Similar time-splitting techniques have been de-veloped and analyzed for integrating the hydrostaticprimitive equations (e.g., Madala 1981). The smalltime-step integration of acoustic terms can be viewed asan alternative solution procedure for the semi-implicitformulation; however it has the advantages that thenumerical integration maintains the simplicity of theexplicit time-stepping, high-frequency acoustic modesare not artificially retarded to lower frequencies com-parable to modes of physical interest, and the split-explicit integration tends to be computationally moreefficient than semi-implicit solvers for NWP applica-tions (Thomas et al. 2000).
Historically, split-explicit integration schemes havenot been designed to numerically conserve first-orderquantities such as mass, momentum, and potential tem-perature coupled with density (!"). The equations havebeen cast in advective form and pressure is calculatedfrom a prognostic equation of the general form
!tp # $c2
"%! · #"V & #Hm', %1'
derived by combining the continuity equation with theideal gas law. Here, c is the speed of sound, and Hm
represents diabatic contributions, principally from la-tent heating. With this approach density is computeddiagnostically from the gas law, and thus mass will notbe numerically conserved. Because the coefficient c2 onthe right-hand side of (1) is large, the primary effect insolving a prognostic pressure equation is to maintainthe three-dimensional divergence near zero (which isrigorously enforced in the anelastic equations). Sincethe divergence term dominates in this equation, there islittle restoring influence to keep the mean pressurefrom drifting (implying a corresponding mass drift)when incorporating open upper or lateral boundaries.
The pressure equation [(1)] has frequently been sim-plified for numerical convenience. One popular simpli-fication has been to ignore the diabatic term in (1)(Klemp and Wilhelmson 1978; Dudhia 1993; Wickerand Wilhelmson 1995). Although testing this approxi-mation appears to justify its use for many applications,the consequence of ignoring the diabatic term in thepressure equation is to effectively add an artificialsource term to the continuity equation. In other words,diabatic heating does not directly increase the pressurebecause a compensating amount of mass is removedfrom the atmosphere. Dudhia (1993) has pointed outthat this can have the beneficial effect of preventingartificial changes in pressure due to diabatic processesin models having a rigid-lid upper boundary.
Because of the dominant role of (1) in maintainingnear nondivergence in the flow, this equation has alsobeen viewed in the context of artificial compressibility(Chorin 1967), in which nondivergent flows are numeri-cally integrated by solving a time dependent equationin the form of (1) with a large coefficient multiplyingthe divergence term to drive the solution to the desiredstate of nondivergence. This approach has been pro-posed for time-split integration schemes for the elasticequations, artificially decreasing the sound speed in (1)to increase the size of the small (acoustic) time steps(e.g., Droegemeier and Wilhelmson 1987; Tripoli 1992).However, combining this modified pressure equationwith the gas law again reveals that the effective conti-nuity equation has been altered with the addition of anartificial source/sink term for mass.
In this paper, we propose new split-explicit tech-niques for integrating the compressible nonhydrostaticequations that numerically conserve mass and otherfirst-order conserved quantities. Using the flux form ofthe equations, we follow Ooyama’s (1990) philosophyin formulating prognostic equations in terms of vari-ables that have conservation properties and recoverother variables (such as pressure and temperature)
2898 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

from diagnostic relationships. In particular, we solvethe full continuity equation as a prognostic equation,and ensure that the other flux-form equations are con-sistent with this equation (i.e., for a constant value ofthe scalar variable, the equation is numerically equiva-lent to the continuity equation). By ensuring mass con-servation, this approach allows the conservation ofother first-order flux quantities and eliminates theproblem of pressure drift that can occur in time-splitmodels in advective form that solve a prognostic pres-sure equation. Strict conservation of mass, moisture,and potential temperature is likely to be important forlonger term integrations such as for regional climateand is also important for dynamical models used in at-mospheric-chemistry and air-quality applications (Byun1999).
In designing and testing conservative time-split tech-niques, we consider equation sets cast in terms of twodifferent vertical coordinates that have potential appli-cation in cloud-scale and mesoscale models. Histori-cally, cloud-scale models have utilized geometric heightor terrain-following transformations based on height asthe vertical coordinate. On the other hand, larger scalehydrostatic models typically employ a terrain-followingpressure (sigma) coordinate. Laprise (1992) proposed aformulation for the nonhydrostatic equations in termsof a terrain-following hydrostatic pressure, which isequivalent to the sigma coordinate. Since the mass inthe layers between adjacent coordinate surfaces is pro-portional to the increment in the vertical coordinateacross the layer, this coordinate is often referred to asthe mass coordinate. The nonhydrostatic equation setin the mass coordinate is somewhat more complex thanin the height coordinate since the coordinate surfacesmove with time and transformation metrics are there-fore time dependent. All nonhydrostatic time-splitmodels to date have been formulated using height forthe vertical coordinate, so there is little experience indetermining how or if time-splitting techniques willwork with the mass coordinate.
In developing the techniques for time-split integra-tion of the flux-form nonhydrostatic equations, we be-gin in section 2 with the equations cast in terms of theterrain-following height coordinate and then consider,in section 3, the corresponding time-split proceduresfor the equation set using the mass coordinate. For eachvertical coordinate, we consider the modifications re-quired to accommodate moist processes and appropri-ate filters to control acoustic and/or external modesthat are not of physical interest. Linear analyses of thedispersion equation for both vertical coordinates arederived in the appendix to identify the terms that mustbe integrated on the acoustic time steps and how they
should be represented in time. Selected test simulationsare presented in section 4 to demonstrate that the time-split procedures in both the height and mass coordi-nates are robust over a wide range of scales and pro-duce nearly equivalent results. Summary comments areincluded in section 5 with a brief assessment of addi-tional factors that distinguish the two coordinate frame-works.
2. Time splitting with a terrain-following heightcoordinate
In writing the flux-form equations for the moist sys-tem, we choose to represent the flux variables in termsof the dry density !d and to solve a continuity equationfor dry density. We then predict the mixing ratios of allmoist species, where the mixing ratio is defined as themass of moist species per unit mass of dry air. We fol-low this approach because !d is a conserved quantitythat can be used to formulate flux-form equations forother conserved variables that do not contain addi-tional terms accounting for sources and sinks of liquidwater.
For the moist system it is also convenient to define amodified potential temperature variable "m # "(1 &a(q)), where q) is the mixing ratio of water vapor anda( * R) /Rd ! 1.61, with Rd and R) being the gas con-stants for dry air and water vapor, respectively. Notethat "m is different from virtual potential temperature"), where the constant is a ! 0.61 instead of a(. Thefollowing equations clarify the relationship between "m
and "):
p # #dRdT & #dq$R$T # #dRd%""1 &R$
Rdq$#
* #dRd%"m * #d%1 & q$'Rd%"$ . %2'
In formulating the prognostic equations in terms ofquantities that have conservation properties, we defineflux variables that are adjusted to include terrain effectsthrough transformation of the vertical coordinate. Toincorporate a terrain transformation into the equationsexpressed using geometric height z as the vertical co-ordinate, we specify the terrain-following vertical coor-dinate as + # +(x, y, z). Defining a transformation-adjusted dry density !̃d # !d /+z , the flux variables be-come
V # #̃dv # %U, V, W', &m # #̃d"m, and Qj # #̃dqj ,
%3'
where qj # (q), qc, qr, . . .) includes the mixing ratios ofcloud water qc, rainwater qr, and any other moist spe-
AUGUST 2007 K L E M P E T A L . 2899

cies. The flux-form nonhydrostatic equations can thenbe expressed as
!tVH #$%! · vVH'' $#d
#m,!' p̃( & !'%"Hp̃('-
& FVH* RVH
, %4'
!tW # $%! · vW'' $#d
#m,!'%'z p̃(' & g#̃(m-
& FW * RW, %5'
!t&m # $%! · v&m'' & F&m* R&m
, %6'
!t #̃(d # $%! · V'' * R#d, and %7'
!tQj # $%! · vQj'' & FQj, %8'
where !m # !d(1 & q) & qc & qr & · · ·) is the total massdensity and !̃m # !m /+z. The factor !d /!m in the pres-sure-gradient terms arises because dry density is used todefine the flux-form velocities while the inverse densitymultiplying the pressure-gradient terms represents thetotal mass density.
In writing these equations, we follow the notation ofDutton (1976) in defining
%! · Vb'' # %V · !b'' & b%! · V'' # !' · %Vb' & !'%)b'
%9'
for any scalar variable b. Here, . # V · !+ is the com-ponent of the mass flux in the direction normal to thecoordinate surface, where !+ # (+x, +y, +z) representsthe metrics of the transformation, and !+ refers to thedivergence operator along a constant + surface. In ad-dition, VH # (U, V), (! · vVH)+ # [(! · vU)+, (! · vV)+],and "H # (+x, +y). The R() notation is introduced in(4)–(7) to represent right-hand side terms in the time-split equations that follow.
In (4)–(8), the terms denoted by F( ) contain the Co-riolis and diffusion terms as well as diabatic effects andany parameterized physics that arise in a full atmo-spheric prediction model. Pressure is obtained from thediagnostic equation of state:
p # p0"Rd&m
p0#*
, %10'
and p̃ # (p/+z). Here, / # cp /c) # 1.4 is the ratio of theheat capacities for dry air, and p0 is a reference surfacepressure.
We have employed the traditional approach of usinga time-invariant reference state to recast the thermo-dynamic variables in the above equations. Perturbationvariables are defined as deviations from a time-invari-ant hydrostatically balanced dry reference state suchthat p # p(z) & p(, !d # !d(z) & !(d , !m # !d(z) & !(m ,
and 0m # !d(z)"(z) & 0(m . This choice reduces thehorizontal pressure-gradient-force errors associatedwith sloping coordinate surfaces and also greatly re-duces the machine round-off error in computing smalldifferences between the vertical pressure-gradient andbuoyancy terms. The introduction of perturbationquantities is not essential in this formulation; their useis motivated by the desire for higher accuracy andgreater flexibility in the choice of discretizations.
In contrast to most existing compressible nonhydro-static models, by integrating (4)–(8), we do not inte-grate a prognostic pressure equation (typically an equa-tion cast in terms of p or the Exner function 1). Instead,(6) takes the place of a pressure equation. Since from(10) it is clear that pressure is just 0m raised to thepower /, (6) can be interpreted as a modified form ofthe pressure equation that has conservative properties.With this interpretation in mind, we can also use (10) toexpress the pressure-gradient terms in (4) and (5) interms of 0m using the relation
!p # *Rd%!&m,
where 1 # (p/p0)2 and 2 # Rd /cp. The resulting unap-proximated momentum equations are
!tVH # $%! · vVH'' $#d
#m*Rd% ,!'&(m & !'%"H&(m'-
& FVH%11'
!tW # $%! · vW'' $#d
#m$*Rd%!'%'z&(m'
$ g" #̃d
%(
%$ #̃(m#%& FW . %12'
Since the presence of acoustic modes places a severerestriction on the time step, we utilize time splitting inthe explicit numerical integration scheme to gain com-putational efficiency. The partitioning of terms be-tween the large and small time steps, and the smalltime-step temporal discretization, are guided by an ex-amination of the linear dispersion relation governingacoustic and gravity waves given in the appendix. Be-cause gravity wave modes have significantly lower fre-quencies than the acoustic modes, they can, in prin-ciple, be evaluated on the large time steps in a splitexplicit scheme. Solving the prognostic equations in ad-vective form, Klemp and Wilhelmsom (1978) evaluatedthe potential temperature equation and the buoyancyterm in the vertical momentum equation on the largetime steps for simulations of convective storms withhorizontal grids of several kilometers or less. However,Skamarock and Klemp (1992) documented that forhorizontal grids of several tens of kilometers or greater,
2900 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

the buoyancy frequency may impose significant con-straints on the size of the large time step, particularly inregions of high atmospheric stability. Consequently,here we also include terms fundamental to gravity wavepropagation on the small time steps. Since the advec-tion of 0m in (6) and the mass divergence term in thedensity equation [(7)] must both be integrated on thesmall time steps to maintain stability for the acousticmodes, the gravity wave modes are accommodated onthe small time steps by simply including the buoyancyterm in the vertical momentum equation [(5)] in thesmall time-step integration (at little computational ex-pense), thereby removing the buoyancy–frequencylimitation on the size of the large time steps (see ap-pendix).
In evaluating terms on the small time steps, thosecontaining horizontal derivatives are time integratedusing forward–backward differencing, with forward dif-ferencing in the horizontal momentum equations andbackward differencing in the potential temperature anddensity equations, which is analogous to the forward–backward scheme used by Klemp and Wilhelmson(1978). Since the vertical grid size is often much smallerthan the horizontal grid length, the explicit treatment ofterms responsible for the vertical propagation of acous-tic modes could cause severe restrictions on the smalltime step. Therefore, these terms are solved implicitlyon the small time steps to remove this limitation (seeappendix).
To facilitate this small time-step integration, we re-cast the equations using prognostic variables expressedas perturbations from their values at time t by definingV3 # V $ Vt # (U $ Ut, V $ Vt, W $ Wt) # (U3, V3,W3), 03m # 0m $ 0t
m, and !̃3d # !̃d $ !̃td , and noting that
!̃3m # (!m /!d)!̃3d . Given these considerations, the tem-porally discrete form of the terms advanced during theacoustic time steps can be expressed as
+,V-H &#d
t
#mt *Rd%t ,!'&-,
m & !'%"H&-,m '- # RVH
t , %13'
+,W- &#d
t
#mt $*Rd% t!'%'z&-m
,' $ g#̃d
Rd
c$
%t
%
&-m,
&mt %& g#̃-d
,
# RWt , %14'
+,&-m & !' · %V H-,&.,"m
t ' & !'%)-,"m
t ' # R&m
t , and
%15'
+, #̃-d & !' · V H-,&., & !')-
,# R#d
t , %16'
where .3 # . $ .t, and the time-differencing andtime-averaging operators are
+,/ #%/,&., $ /,'
.,and
/,#
1 & 0s
2/,&., &
1 $ 0s
2/,. %17'
The superscript t denotes the variables at time level tthat are evaluated at the most recent large time stepand held fixed during the acoustic time steps, and theright-hand sides Rt
( ) are defined in (4)–(7). To accom-modate implicit treatment of the buoyancy term in (12)on the small time steps (see appendix), we have linear-ized the ideal gas law about the variables at time t toreplace the 13 variable in the vertical momentum equa-tion using 13 # Rd1
t03m/(c)0tm). This is the only ap-
proximation to the small-step equations, and it is highlyaccurate since the perturbations are limited to thevariations that occur over a single large time step.
Representing the velocity variables as perturbationsabout the time level t is a new approach in solving thesmall-step equations, and it has the benefit of evaluat-ing virtually all the slow-mode contributions to the fluxdivergence terms in (15) on the large time step. Thus,computationally expensive high-order or monotonicflux schemes only need to be used on the large timesteps in the potential temperature equation [(15)]. If weevaluated the full flux divergence of 0m on the smalltime step, the cost of the flux schemes would be muchhigher because they would be computed on each acous-tic time step, and they would be difficult to implementin the vertically implicit solution procedure.
Integrating over a small time step 45, the horizontalmomentum equations [(13)] are integrated first, withterms involving 03m evaluated at time 5. Next, (14)–(16)are integrated, using V 35&45
H for the horizontal gradientterms in (15)–(16). Equations (14)–(16), however, areimplicitly coupled in the vertical. To form a verticallyimplicit equation for .3, the relationship .3 # +xU 3 &+yV 3 & +zW 3 is used to write 65W 3 in (14) in terms of65.3, given that +x65U3 & +y65V3 can be evaluated usingthe updated horizontal velocities. [With second-ordervertical differencing on a C grid, eliminating !̃3d and 03mfrom (14) using (15) and (16) results in a tridiagonalequation for .3 that is easily inverted.] Having solved(14), (15) and (16) are then evaluated.
Within the acoustic time steps, the prognostic vari-ables for the discrete equations are U 3, V 3, .3, 03m, and!̃3d, and the coefficients multiplying terms involvingthese variables are evaluated at time t and held fixedduring the small time steps. Neither the Exner function1, nor the vertical velocity W, nor the uncoupled vari-ables "m and v need evaluation during the small timesteps. The upper and lower boundary conditions are
AUGUST 2007 K L E M P E T A L . 2901

also cast in terms of these variables (i.e., .3 # 0 at thesurface and at the upper lid). Thus, the time-splittingprocedures involve only the dynamical equations [(13)–(16)] on the small time steps. The moisture equations[(8)] and any other scalar transport variables in themodel system can be represented in flux form and in-tegrated on the large time steps using velocities in theflux divergence terms that have been averaged in timeover the small time steps to insure conservation.
a. Treatment of diabatic forcing
Diabatic influences Hm in the 0m equation [(15)] arecontained in Rt
0m, and have the form
Hm # %1 & a(q$ 'M" & a(Mq$, %18'
where M" and Mq)represent the diabatic contributions
to d"/dt and dq) /dt, respectively. In addition, the mois-ture equations [(8)] contain microphysical and sedi-mentation terms Mqj
that are a part of FQj. Although
the microphysical effects Hm and Mqjare computed on
the large time steps, these influences are typically omit-ted from Rt
0min (15) and then included as adjustments
to the potential temperature and moisture variables af-ter both the variables have been advanced to the newtime level. This approach is adopted in most time-splitmodels to enable saturated conditions to be exactly sat-isfied by variables at the new time level. We havefound, however, that this procedure can introduce somenoise in the time-split integration, analogous to thatencountered with additive splitting techniques [see Ska-marock and Klemp (1992) and references therein]. Toeffectively remove this source of noise, we have refinedthe conventional time-split procedure by including anestimate of Hm as part of Rt
0min (15) for the acoustic
substeps using a value that is retained from the previoustime step, and then correcting the microphysical adjust-ment at the end of the time step. Other physics tenden-cies as well as diffusive and advective terms are knownprior to computing the small time steps and can beaccurately represented on the right-hand sides of theequations advanced on the acoustic steps.
b. Acoustic-mode filtering
Stability analyses of time-split integration schemeshave documented the need for acoustic filtering to in-sure numerical stability over a wide range of applica-tions (Skamarock and Klemp 1992; Wicker and Skama-rock 1998). This filtering can be accomplished by for-ward centering the vertically implicit portion of thesmall time steps (Durran and Klemp 1983) and/or byadding a 3D divergence damping term to the horizontalmomentum equations (Skamarock and Klemp 1992).
Forward centering of the vertically implicit terms in(13)–(16) is accomplished by defining the time-averaging operator as indicated in (17), with a coeffi-cient typically 7s # 0.1.
To more selectively damp acoustic modes, Skama-rock and Klemp (1992) proposed adding a term to eachof momentum equations that is proportional to the gra-dient of the 3D divergence. These terms have the effectof introducing a second-order diffusion of the 3D di-vergence, which is highly specific to filtering acousticmodes. For the current time-split integration scheme,we propose a modified version of divergence dampingthat is implemented by simply replacing 035m in the pres-sure-gradient terms in the horizontal momentum equa-tion with a modified value:
&-*m # &-,m & 0d%&-,
m $ &m-,$.,', %19'
where 7d is the divergence damping coefficient (typi-cally set to 7d # 0.1). With this representation, thehorizontal pressure-gradient terms are slightly forwardcentered from the time level 5 that is used in the for-ward backward differencing of the horizontal gradientterms in (13)–(16). This off-centering will damp high-frequency horizontally propagating modes in a mannersimilar to the off-centering of the vertically implicitterm that damps high frequency vertically propagatingmodes. This horizontal filter, however, is more selectiveto acoustic modes since it is essentially equivalent todamping the 3D divergence as proposed by Skamarockand Klemp (1992). Instead of adding a term propor-tional the horizontal gradient of the 3D divergence,(19) corresponds to adding a term proportional to thehorizontal gradient of 650m ! $! · (0mv) & !dHm.Damping this expression is consistent with an equationof anelastic balance given by ! · (!d"mv) # !dHm, whichwas proposed by Durran (1989) as an improved repre-sentation of the anelastic approximation. (This expres-sion is actually a modification of Durran’s expressionthat results from including moisture in the gas law.)Implementing the divergence damping using (19) in-stead of constructing the full 3D divergence also signifi-cantly streamlines the required computations.
3. Time splitting with a terrain-followinghydrostatic pressure coordinate
Laprise (1992) introduced an equation set for thecompressible nonhydrostatic equations in terms of aterrain-following hydrostatic pressure vertical coordi-nate
1 # %ph $ pht'23d , %20'
2902 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

where 8 # phs $ pht, ph is the hydrostatic component ofthe pressure for dry air, and phs and pht refer to valuesalong the surface and top boundaries, respectively.Here, we recast Laprise’s equations in flux form toachieve conservation for the prognostic variables.While this approach is analogous to those used in somehydrostatic models (e.g., Anthes and Warner 1978), it isunique for nonhydrostatic models in this coordinate.Since 8d(x, y) represents the mass of dry air per unitarea within the column in the model domain at (x, y),the appropriate flux-form variables become
V # 3dv # %U, V, W', ) # 3d 1̇, & # 3d", and
Qj # 3dqj . %21'
As with the height-coordinate formulation, we defineflux variables in terms of dry air to avoid the appear-ance of source and sink terms for condensed water inthe flux-form equations. Using these variables, weagain follow Ooyama’s (1990) approach in writing theprognostic equations in terms of variables that haveconservation properties and recast Laprise’s (1992)equations in flux form for a moist atmosphere:
!tVH # $%! · vVH'1
$ 3d
4m
4d"4d!1p &
13d
!1p!1/#& FVH
* RVH, %22'
!tW # $%! · vW'1 & g"4m
4d!1p $ 3d#
& FW * RW , %23'
!t& # $%! · v&'1 & F& * R& , %24'
!t/ # $%v · !/'1 & gw * R/, %25'
!t3d # $%! · V'1, and %26'
!tQj # $%! · vQj'1 & FQj, %27'
together with diagnostic relations for the hydrostaticpressure
!1/ # $3d4d %28'
and the gas law
p # "Rd"m
p04d#*
. %29'
The specific volume 9m # 9d(1 & q) & qc & qr & · · ·)$1
for a moist environment, whereas 9m # 9d and "m # "for dry air. Here, the prognostic equation [(25)] forgeopotential : * gz is an exception to the approach ofwriting the prognostic equations in terms of conserved
variables, since geopotential is not a conserved quantityand its equation represents the definition of verticalvelocity (dz/dt * w). As pointed out by Laprise (1992),the nonhydrostatic equation set in the mass coordinatecan be solved using either a prognostic equation forpressure or a prognostic equation for the geopotential.We have chosen the latter approach as it is computa-tionally simpler (it avoids computing the full 3D diver-gence), and removes the potential for pressure driftdiscussed in the previous section.
For this system of equations, it is also desirable toreduce truncation errors in the finite differencing bydefining variables as perturbations from a hydrostati-cally balanced reference state. For this purpose, we de-fine reference variables (denoted by overbars) that area function of height only and that satisfy (22)–(29) foran atmosphere at rest. In this manner, p # p(z) & p(,: # :(z) & :(, 9 # 9(z) & 9(, and 8d # 8d(x) & 8(d.Because the ; coordinate surfaces are generally nothorizontal, the reference profiles p, :, and 9 are func-tions of (x, y, ;). Notice also that the reference vari-ables are defined in terms of the height z in the refer-ence sounding, and therefore do not change in time atmodel grid points even though the coordinate surfacesmove vertically over time. Using these perturbationvariables, the hydrostatically balanced portion of thepressure gradients in the reference sounding can be re-moved without approximation in the equations, suchthat the momentum equations [(22) and (23)] become
RVH# $%! · vVH'1 $ 3d
4m
4d$4d!1p( & %!1p'4(d
& !1/( &1
3d%!1/'%!1p( $ 3(d'%& FVH
and
%30'
RW # $%! · vW'1 & g"4m
4d!1p( $ 3(d & 3d
4 $ 4d
4d#
& FW , %31'
and similarly (28) becomes
!1/( # $3d4(d $ 4d3(d. %32'
In constructing a split-explicit time integrationscheme for the mass-coordinate equations, we againidentify the terms that are fundamentally responsiblefor acoustic and gravity wave propagation and evaluatethese terms on smaller acoustic time steps (see appen-dix), while the remaining terms (advection, diffusion,Coriolis, parameterized physics, etc.) are updated onlarger time steps appropriate for the modes of physicalinterest. With this approach, constraints on the size of
AUGUST 2007 K L E M P E T A L . 2903

the large time step due to the speed of sound and thebuoyancy frequency are again removed.
To facilitate the integration of these equations overthe small acoustic time steps in the time-split scheme,we again define small time-step variables that representdeviations from the most recent large time-step values(denoted by superscript t):
V! # V $ Vt, )- # ) $ )t, &- # & $ &t,
/- # /( $ /(t, p- # p( $ p(t, 4- # 4( $ 4(t, and
3-d # 3(d $ 3(td. %33'
Using these variables, the equations integrated over thesmall time steps 45 take the form
+,V!H & 3dt 4m
t
4dt $4d
t !1p-, & %!1p'4 d-, & !1/-,
&1
3dt %!1/t'%!1p- $ 3-d'
,%# RVH
t , %34'
+,3-d & ,! · %V!,&., & Vt'-1 # 0, %35'
+,&- & %! · V!,&.,"t'1 # R&t , %36'
+,W- $ g"4mt
4dt !1p- $ 3-d# ,
# RWt , and
%37'
!,/- &1
3dt ,%V!,&., · !/t'1 $ gW-
,- # R/
t , %38'
where all of the terms represented by Rt( ) on the right-
hand sides of (34)–(38) are evaluated at time level t. Inthe thermodynamic equation [(36)] the diabatic termsHm contained in Rt
0 are initially estimated at time t andthen corrected after completing the small time steps asdiscussed in section (2.1). As in the height-coordinatesystem, the moisture equations [(27)] and any otherscalar equations are integrated on the large time steps.
For the small time-step integration, the expressionsfor perturbation pressure and specific density are de-rived from (29) and (32):
p- #c2
4dt "&-
&t $4-d
4dt $
3-d
3dt # and %39'
4-d # $1
3dt %!1/- & 4d
t 3-d', %40'
where c2 # /pt9td is the square of the sound speed.
The expression (39) for p3 is obtained by linearizingthe gas law (29) about the most recent large time-stepvalues. This increases the efficiency on the small stepsby eliminating the exponentiation, but more impor-
tantly, allows the vertical pressure gradient in (37) to beexpressed in terms of :3 in order to solve implicitly forthe vertically propagating acoustic modes. Combining(39) and (40), the vertical pressure gradient <;p3 can beexpressed as
!1p- # !1" c2
3dt 4d
t2 !1/-# & !1" c2
4dt
&-
&t#. %41'
This linearization about the most recent large time stepshould be highly accurate over the time interval of theseveral small time steps.
The integration over the small time steps proceeds inthe following manner: Starting with all of the smalltime-step variables at time 5, (34) is stepped forward toobtain U 35&45 and V 35&45. Both 835&45
d and .35&45 arethen calculated from (35). This is accomplished by firstintegrating (35) vertically from the surface to the ma-terial surface at the top of the domain, which removesthe <;. term such that
+,3-d # &1
0
!1 · %V!,&., & Vt' d1. %42'
After computing 835&45d from (42), .35&45 is recovered
by integrating the <;.3 term in (35) vertically, using theboundary condition .3 # 0 at the surface. Equation(36) is then stepped forward to calculate 035&45. Equa-tions (37) and (38) are combined using (41) to form avertically implicit equation that is solved for W 35&45
subject to the boundary conditions W 3 # V3 · !h at thesurface z # h(x, y), and a specification for p( or W alongthe upper boundary of the domain. Then :35&45 is ob-tained from (38), and p35&45 and 935&45
d are recoveredfrom (39) and (40), respectively.
a. Hydrostatic option
Writing the nonhydrostatic equations using hydro-static pressure as the vertical coordinate allows solu-tions to the corresponding hydrostatic equations to begenerated with only small modifications to the full non-hydrostatic code. To compute the hydrostatic solution,the integration procedure steps forward (34)–(36) asdescribed above for the nonhydrostatic system. Next,instead of solving prognostic equations (37) and (38),the hydrostatic equation <;p3 # (9d /9)t83d is integratedvertically to obtain p35&45, 935&45
d is diagnosed from thegas law (39), and :35&45 is recovered through verticalintegration of (40), in that order. On the large timesteps, the full perturbation pressure is computed fromthe hydrostatic equation
!1p( #4d
43d $ 3d . %43'
2904 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

Thus, by employing a few simple switches in the code,either nonhydrostatic or hydrostatic solutions can beproduced for the governing equations.
For large-scale hydrostatic-flow applications, utiliz-ing the hydrostatic option improves the numerical effi-ciency by avoiding the computationally more expensivevertically implicit solution of (37), (38), and (41), al-though the nonhydrostatic integration will produce es-sentially the same result. In the hydrostatic system, thevertical velocity does not appear in the equations, andvertical motion is represented by .. Further computa-tional efficiency can be gained in the hydrostatic optionby writing the perturbation form of the hydrostaticpressure-gradient terms in the horizontal momentumequations in terms of 9 instead of 9d:
4!zp # 4!1p & !1/ # 4!1p( & 4(!1p & !1/(,
%44'
which allows the cancellation of several terms in the fullpressure gradient through the hydrostatic equation[(43)].
b. Acoustic-mode filtering
Filtering for the acoustic modes in the mass-coordinate equations is accomplished in a similar man-ner to techniques used for the height-coordinate sys-tem. The time averaging in the vertically implicit por-tion of the small time steps in (34)–(38) can be slightlyforward centered using the averaging operator definedin (17). In addition, terms can be added to the horizon-tal momentum equations that specifically damp the 3Ddivergence. Here, we again represent the 3D diver-gence in terms of the time derivative of the pressureand employ a modified pressure in the horizontal pres-sure-gradient terms in (34) that adjusts the pressureslightly forward in time. Since these gradient terms areexpressed in terms of p3 instead of 03m as in (19), wereplace p35 by
p-* # p-, & 0d%p-, $ p-,$.,' %45'
on the left-hand side of (34). Although we do not solvea prognostic equation for pressure, this equation isreadily derived by logarithmically differentiating (29)with respect to time as in (1), yielding
+,p-! $c2
"m,! · %#d"mv' $ #dHm-.
Thus, adding a small portion of 65p3 into the horizontalpressure-gradient terms is again consistent with dampingtoward Durran’s (1989) anelastic balance, ! · (!d"mv) #!dHm.
c. Upper boundary condition and external-modefiltering
To maintain control over the conservation of massand other first-order quantities, it is highly beneficial tospecify the upper boundary of the integration domainto be a material surface, such that . # 0. Subject to thisconstraint, several different physical boundary condi-tions can be readily implemented. Solving the tridiago-nal matrix resulting from the implicit equations [(37),(38), and (41)] requires an upper boundary conditionfor pressure or vertical velocity (or a relation betweenthe two) in addition to the lower boundary conditionprovided by the surface terrain. Specifying w # 0 at thetop will produce a rigid lid, while p( # 0 corresponds toa free (constant pressure) surface. A radiation condi-tion for gravity waves can be imposed in a manner pro-posed by Klemp and Durran (1983) by Fourier trans-forming the vertical velocity along the upper boundary,applying a radiation condition to the Fourier modes,and then taking the inverse transform to recover thepressure along the upper boundary. (This can be ac-complished as part of the implicit solver by applying theradiation condition at the top after removing the lowerdiagonal from the tridiagonal matrix.)
By relaxing the rigid lid constraint for the upperboundary, external modes can form that may be artifi-cially excited. To control these modes, we have de-signed a new filter that is highly specific to externalwaves. This filter is similar in concept to the 3D diver-gence except that it damps the vertical integral of thehorizontal divergence Dh, which contributes fundamen-tally to the existence of the external modes (analogousto the horizontal divergence in the shallow-water equa-tions). To provide a filter for Dh, we add a term to theright-hand sides of the horizontal momentum equationsof the form
!tVH # · · · $ *e!1%!t3d'. %46'
Here, <t8d # Dh, which is evident by vertically integrat-ing the hydrostatic continuity equation as indicated in(42). By taking the horizontal divergence of (46) andthen integrating all terms in the equation vertically withrespect to ;, we obtain
!tDh # · · · & *e!12Dh , %47'
which confirms that the term added to (46) results inthe second-order diffusion of Dh. This filter is imple-mented in the small time-step integration by adding aterm to the left-hand side of (34) of the form
+,V-H & · · · & "0e.h2
.,#!1%+,$.,3-d' # RVH
, %48'
AUGUST 2007 K L E M P E T A L . 2905

where 4h # 4x # 4y, and 7e # /e45/4h2 is the dimen-sionless filter coefficient that is typically set to 7e #0.01. Notice that this filter term does not depend onheight and therefore only needs to be computed oncefor each vertical column.
4. Model numerics and sample applications
The techniques described above for time splitting ofthe nonhydrostatic equations expressed in flux form donot require the specification of any particular spatialdifferencing, time differencing on the large time steps,or grid staggering. These choices can be made based onuser preferences and requirements for the intendedrange of model applications.
In considering the large time-step integration tech-niques, stable schemes for time-split models have beendemonstrated using leapfrog (Klemp and Wilhelmson1978; Skamarock and Klemp 1992), second-orderRunge–Kutta (Wicker and Skamarock 1998), and third-order Runge–Kutta (Wicker and Skamarock 2002) timeintegration. The leapfrog scheme is the simplest toimplement; its detracting factors are that it is a threetime level scheme and small time steps must be inte-grated over a time interval of 24t for each large timestep, it is only stable for centered (even order) advec-tion, and it is technically only first-order accurate intime because of the required time smoothing. The sec-ond-order Runge–Kutta is a forward-in-time scheme inwhich the advection terms must be computed twice foreach large time step. It is stable only for upwind (odd-order) differencing of the advection terms and the al-lowable time step is significantly restricted when usingthe higher order advection schemes (Wicker and Ska-marock 1998). The third-order Runge–Kutta time inte-gration is stable for both centered and upwind differ-encing for advection and allows a stable time step thatis about twice the value that can be used in leapfrog(Wicker and Skamarock 2002). It is third order in time(formally for linear disturbances) and requires threecomputations of the advection terms for each time step.
For the staggering of variables on the computationalgrid, we have chosen the Arakawa C grid as it providesthe best resolution of gravity waves (Arakawa andLamb 1977); these are the most important modes nearthe grid scale in nonhydrostatic applications, which iswhere selectively higher numerical resolution is mostneeded. On the C grid, the pressure-gradient and di-vergence terms are computed over a single grid inter-val. Using second-order spatial differences for theseterms thus provides accuracy comparable to fourth-order differencing on an unstaggered grid for waves ofintermediate resolution, and provides significantly
greater accuracy at high wavenumbers (e.g., Durran1999, p. 115), although the convergence of low wave-number modes with increasing resolution remains sec-ond order.
To test and evaluate the time-splitting techniquespresented here, we originally developed 2D prototypecodes for both the terrain-following height and massvertical coordinates using, for simplicity, leapfrog dif-ferencing for the large time steps and second-order cen-tered representations for all required spatial averagingand differencing. With these codes we have conductedsimulations for a variety of idealized test cases such asdensity currents, mountain waves, and 2D squall linesacross a range of horizontal scales (4x ranging from 100m to 20 km). These simulations confirm that the pro-posed time-splitting procedures for the flux-form equa-tions are robust across a broad range of scales, that theheight- and mass-based coordinates produce virtuallyidentical results, and that mass is conserved in the simu-lations to machine accuracy.
To illustrate these results, we present here the simu-lation for the 2D density current. This simulation fol-lows the benchmark case analyzed by Straka et al.(1993). A density current is generated within a neu-trally stable atmosphere by a cold bubble that descendsto the surface and then spreads out laterally due to thenegative buoyancy of the cold air. The parameters aredefined as specified by Straka et al. Using a constantdiffusion coefficient (75 m2 s$1) the numerical solutionswill converge in the limit of small grid increments. Forthis test, we have specified 4x # 4z ! 100 m, andintegrate the time-split equations with a large time step4t # 1 s and small time step 45 # 0.25 s. The evolvingdensity current is displayed in Fig. 1 for both the height-and mass-coordinate simulations. The two simulationsare nearly identical and both agree well with the refer-ence results presented by Straka et al.
Based on the successful testing of the 2D implemen-tations, we developed 3D versions of the conservativeequations in both height and mass coordinates. For thenumerics, we adopted the time-split third-orderRunge–Kutta time integration scheme (Wicker andSkamarock 2002) along with flux-form advection op-erators selectable from second to sixth order (fifth-order upwind advection is used for the test cases de-scribed below). By including a full suite of physics pack-ages and procedures to initialize the model with realdata, these constituted the early prototypes for theWeather Researching and Forecasting (WRF) model(Skamarock et al. 2001, 2005). Testing these 3D imple-mentations in a variety of idealized applications pro-vides further confirmation of the robust nature of these
2906 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

time-split techniques for integrating the nonhydrostaticflux-form equations.
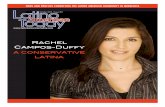
The simulation of an idealized supercell thunder-storm, depicted in Fig. 2, illustrates the ability of thesecodes to model strong convective systems, which pro-vides a stringent test for model numerics since moistinstability provides significant forcing (latent heating)near the grid scale. The sounding used for this simula-tion corresponds to case C presented by Weisman andKlemp (1984) for a splitting supercell with a strongerright-flank storm due to a quarter-circle turning of thewind shear between the surface and 2.5 km. The stormwas simulated in an 80 = 80 = 20 km domain with4x # 4y # 1 km, 4z ! 500 m, and using a large timestep 4t # 6 s and a small time step 45 # 1.5 s. Figure 2displays the splitting supercell at 2 h for the simulationwith the mass coordinate, which is virtually the same asthe height-coordinate simulation (not shown). At thistime, the storm has split into mature right- and left-moving storms with merging anvil outflow aloft. Al-though there is no absolute reference solution for thiscase, these results are quite similar to those producedwith other cloud models.
To test these numerical techniques at very largescales, we have simulated the growth of an idealizedmoist baroclinic wave in a channel. The initialization
for this case follows that described in Rotunno et al.(1994) except that, instead of a Boussinesq atmosphere,we invert the PV equation for the compressible atmo-sphere to obtain the initial 2D (y, z) jet structure. Themaximum wind speeds in the initial jet are slightly lessthan 70 m s$1. The domain is a periodic (west–east)channel of length 4000 km and width 8000 km. Thenorth and south lateral boundaries are free-slip walls,and the lower boundary is also free slip. The domainheight is approximately 16 km with an upper boundarythat is a rigid lid for the height coordinate and a con-stant pressure surface for the mass coordinate. The gridintervals are set at 4x # 4y # 100 km, 4z ! 250 m, andthe equations are integrated using 4t # 10 min, and45 # 2.5 min. A small-amplitude, large-scale perturba-tion in the temperature field is imposed on the initialjet, from which the most unstable mode (the normalmode) grows and begins to dominate after about a day.The finite-amplitude disturbances are displayed in Fig.3 at a time 3.5 days after the growing disturbance hasreached an amplitude (defined as the maximum meridi-onal velocity at z # 150 m) of 1 m s$1 in each simula-tion. At this time the two simulations exhibit nearly thesame amplitude (slightly greater than 50 m s$1), andFig. 3 confirms that the structures of the breaking baro-clinic waves are also very similar.
FIG. 1. Potential temperature field for Straka et al. (1993) 2D density-current benchmarkcase for (a) height-coordinate and (b) mass-coordinate simulations for 4x # 4z ! 100 m.Contour interval (CI) is 1 K.
AUGUST 2007 K L E M P E T A L . 2907

5. Summary
In this paper, we have presented new time-splittingtechniques for numerically integrating the nonhydro-static equations in flux form. With this approach, theprognostic equations are cast in terms of variables thathave conservation properties, while thermodynamicvariables that have no direct conservation laws, such astemperature and pressure, are recovered from diagnos-tic relationships. These techniques permit the numeri-cal conservation of mass and other first-order scalarquantities, which is an important attribute in atmo-spheric transport models.
We have developed the time-split integration proce-dures for two different vertical coordinates; the terrain-following height coordinate and the terrain-followinghydrostatic pressure (mass) coordinate. For each sys-tem, we have analyzed the linear dispersion equation toidentify the terms that need to be integrated on thesmall (acoustic) time steps and how those terms mustbe represented in time to achieve computational stabil-ity (see appendix). Numerical testing of these time-splitprocedures on a variety of idealized test cases confirmthat the height- and mass-coordinate prototypes are ro-bust over a wide range of scales, and that they producenearly identical results. In addition, extensive real-timeforecasting over the continental United States has con-
firmed that these two systems produce very comparableresults, both on a case-by-case basis and statistically.
These tests suggest that both the height and massvertical coordinates provide viable frameworks for thetime-split integration of the nonhydrostatic equations.The mass coordinate, however, exhibits some beneficialcharacteristics that bear consideration in selecting thevertical coordinate. With the mass coordinate, a con-stant pressure upper surface allows the atmosphere toexpand or contract vertically in response to heating andcooling, which allows a more realistic response to dia-batic processes. In contrast, for the height coordinatewith a rigid upper surface, heating can produce artificialpressure increases or mass removal (depending on thenumerical implementation). While this differential be-havior may not be significant for localized diabatic ef-fects in deep atmospheric domains, it may be importantfor persistent large-scale forcing such as radiative heat-ing. Since the upper surface in the mass coordinate canbe defined as a material surface, this coordinate main-tains its conservation properties with a broader range ofupper boundary conditions (constant pressure, rigid lid,gravity wave radiation). The mass coordinate requiressome additional computations to keep track of themoving coordinate surfaces (adding several percent tothe computation time over the height-coordinate sys-tem for the dynamic portion of the code); however, the
FIG. 2. Simulated splitting supercell thunderstorms evolving in strong environmental wind shear, displayed at 2 h. The cloud field isshaded in gray, surface temperature is colored in shades ranging from red (warm) to blue (cold), and surface wind vectors are includedat every fourth interval. The model integration employed 4x #4y # 1 km, 4z ! 500 m, within an 80 = 80 = 20 km domain (from Klempand Skamarock 2004).
2908 M O N T H L Y W E A T H E R R E V I E W VOLUME 135
Fig 2 live 4/C

mass coordinate allows simplification of the numericsfor hydrostatic applications with a simple switchthrough which the code reverts to the traditional hy-drostatic sigma system.
APPENDIX
Time Splitting for Acoustic and Gravity Waves
When choosing equations and a discretization for asplit-explicit model, one must determine which terms inthe governing equations are associated with the acous-tic and (optionally) gravity wave modes that need to beincluded in the small time steps. Within the flux-formequations that do not use pressure as a prognostic vari-able, it is not clear, at first glance, which terms need tobe included on the small time steps, and which small-step terms need to be handled implicitly to achieve animplicit discretization for vertically propagating acous-tic modes.
To answer these questions, we examine the disper-sion relation for the continuous and discrete systems,for the simplified case of two-dimensional flow with nomean wind (no advection), and for an isothermal atmo-sphere (c2 # /RT # constant) so that the linear system
will have constant coefficients. In order of importance,we seek to:
1) determine, for the acoustic time-step scheme, whichterms are responsible for the acoustic mode propa-gation, and to determine which terms to treat im-plicitly to accommodate vertical propagation;
2) assure that frequencies for the discrete system arereal (imaginary frequencies result in exponentialgrowth and lead to numerical instability), which re-quires that imaginary terms in the discrete disper-sion equation cancel numerically; and
3) determine the differencing that provides consistenttreatment of real terms in the discrete dispersionrelation, such that terms that cancel in the continu-ous equation also cancel in the discretized equation.
a. Height-coordinate equations
In linearizing the equations expressed in the terrain-following height coordinate +, we define + in terms ofmean dependent variables such that the vertical coor-dinate effectively reverts to height z. We then beginwith the dry linear equations derived from (4)–(7):
!tU & c2!x&̃(U&x
# 0, %A1'
FIG. 3. Baroclinic wave in a channel for the (a) mass-coordinate and (b) height-coordinate simulations at 3.5 days,depicting the temperature (solid lines, CI # 4 K), cloud field (shaded), and horizontal wind vectors at z # 150,together with surface pressure (dashed lines, CI # 4 mb). The model grid is 4x # 4y # 100 km and 4z ! 250 mwithin a 4000 = 6000 = 16 km domain.
AUGUST 2007 K L E M P E T A L . 2909

!tW & c2!z0̃(
W&z
& c2 N2
gW&z
&̃( $ gRc$
W&B
&̃( & g#(
W#B
# 0,
%A2'
!t#( & !xURUx
& !zWRWz
# 0, and
%A3'
!t&̃( & !xU
&Ux
& !zW
&Wz
&N2
g&Wz
W # 0,
%A4'
where the variables are as described in section 2 withthe prime notation designating perturbation quantities,and defining 0̃( # 0(/" to achieve a form in which allcoefficients are independent of height. The notationsbelow the terms in (A1)–(A4) are tags that will trackwhere each term contributes to the discrete dispersionrelation, and will be used to identify the discretizationin time for the respective terms. Substituting the Fou-rier representation > # >̂ exp[i(kx & lz $ ?t)] for eachof the variables in (A1)–(A4) then yields
det'5 0 0 $kc2
0 5 ig $lc2 & i"c2N2
g$ g
Rc$#
$k $l 5 0
$k $l & iN2
g0 5
'# 0.
Recognizing that the vertical wavenumber will have animaginary part (l # lR & ilI), the frequency equationbecomes
54 $$ k2
U&x&Ux
& lR2
W&z&Wz
$N2
g&Wz
"N2
gW&z
$Rc$
W&B
g
c2#$ lI% lI
W&z&Wz
$ 0' & ilR% 2lIW&z&Wz
$ 0'%c252
& kc2
U&x
, kN2
RUx&WzW#B
& igklRUx&WzW#B
$ igklRWz&UxW#B
- # 0,
%A5'
where
0 #N2
gW&z&Wz
$Rc$
W&B
g
c2
&Wz
&N2
gW&z&Wz
&g
c2
RWzW#B
.
%A6'
In the dispersion relation (A5), the first three terms arethe primary terms responsible for sound-wave propa-gation:
54 $ %k2 & lR2 'c252 # 0. %A7'
We want to handle the acoustic modes on the smalltime step, treating horizontally propagating terms ex-plicitly using forward–backward differencing and thevertically propagating terms implicitly (as in Klemp andWilhelmson 1978). Denoting terms handled explicitlyon the small time steps using values at time 5 as E$,terms evaluated explicitly using values at 5 & 45 as E&,and terms represented implicitly as I, this treatmentrequires
U&x #6 E$, &Ux #6 E&, and
W&z 7#6 &Wz #6 I, %A8'
where the notation #@ associates a particular term inthe equations with a specific numerical representationin time, and A#@ associates terms that must have thesame time discretization.
Because ? must be real to maintain stability, the igklterms in the dispersion relation (A5) must cancel ex-actly, which requires
RUx&Wz 7#6 RWz&Ux
and hence, given (A8)
RUx #6E&, RWz #6 I. %A9'
In addition, we recognize that for real frequencies, lI #7/2, which removes the imaginary part of the coefficientof c2?2 in (A5).
With the time discretization specified as indicated in(A8) and (A9), the first two of the three objectiveslisted above are satisfied. The only terms remaining in(A1)–(A4) whose time discretizations have not yetbeen specified are the buoyancy terms [the last threeterms in (A2) tagged by W0B and W!B]. While theseterms are not important to the propagation of acousticmodes, they are fundamental contributors to the grav-ity wave modes. They could be evaluated on the largetime steps and still maintain stability in the time-splitintegration. However with this approach, the large timestep would be constrained by the gravity wave fre-quency (essentially the Brunt–Väisälä frequency N),and several terms that should cancel in the dispersionequation [the fourth and fifth terms in (A5) and the firsttwo terms on the rhs of (A6)] will not exactly cancel in thediscrete system [recognizing that N2/g # (R/c))(g/c2)in the isothermal atmosphere]. These inconsisten-cies are avoided by evaluating the buoyancy termson the small time step, which can be accommodated
2910 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

with little additional computational cost. Thus, to sat-isfy the third objective and achieve numerical cancella-tion of the terms mentioned above, the buoyancy termsshould be solved implicitly:
W&B 7#6 W#B #6 I. %A10'
With this treatment of the buoyancy terms, the dis-cretized form of lI from (A6) becomes
lI #0
2#
12 "N2
g&
g
c2# # $12
#z
#, %A11'
which confirms that disturbances will amplify withheight in proportion to the inverse square root of themean density (as expected).
The time differencing indicated by (A8)–(A10) com-pletes the specification for (A1)–(A4). The dispersionequation [(A5)] becomes
54 $ " k2
E&E$
& lR2
II
&02
4II#c252 & k2c2N2
E&E$II
# 0,
%A12'
which agrees with the analytic relationship. The time-discretized dispersion equation is then given by
sin4 5.,
2$ $k2 & "lR
2 &02
4 # cos2 5.,
2 %c2 sin2 5.,
2
& k2c2N2 cos2 5.,
2# 0, %A13'
confirming that the equation remains second-order cen-tered on the small time steps. This time-discretizedform follows immediately from (A12) recognizing that? is replaced by (2/45)sin(?45/2), terms designated byE& and E$ are multiplied by exp($i?45/2) andexp(&i?45/2), respectively, and terms designated by Iare multiplied by cos(?45/2).
The temporal discretization for the linear system isthus given by
+,U &c2
"!x&(, # 0, %A14'
+,W &c2
"!z&(
,& g#(
,$
gR
c$"&(
,# 0, %A15'
+,#( & !xU,&., & !zW,# 0, and %A16'
+,&( & !x%"U,&.,' & !z%"W',# 0. %A17'
The solution procedure for the small time steps is toadvance the horizontal momentum equation first[(A14)], and then to advance the vertically implicitequations [(A15)–(A17)], given that the horizontal de-
rivatives of U5&45 in (A16) and (A17) can be evaluatedafter advancing (A14). The implicit solution requiressolving a tridiagonal matrix for each grid column.
b. Mass-coordinate equations
For the mass-coordinate system, we also express theterrain-following vertical coordinate in terms of mean-state quantities [; # (ph $ pht)/8], such that ; essen-tially reverts to the hydrostatic pressure vertical coor-dinate. In this coordinate, the flux-form variables(coupled with 8 # constant) are the same as the un-coupled variables, and thus the dry linear system (2D,no advection) based on (22)–(29) becomes
!tu & !x p̃(upx
& !x/(u/x
# 0, %A18'
!tw $g
3 4wp1
!1 p̃( $ 0p̃wp1
( # 0, %A19'
!t/( $ 1̃̇(/1̇
$ gw/w
# 0, %A20'
!t"̃( $N2
g2
"1̇
1̃̇( # 0, %A21'
together with the diagnostic constraints
!xu &1
3 4!11̃̇( &
0
g1̃̇( # 0,
13 4
!1/( # $4̃(, and
p̃( # c2%"̃( $ 4̃('. %A22'
Here, the perturbation variables have been scaled bydefining p̃( # 9p(, ;̇̃( # 8 9;̇(, "̃( # "(/", and 9̃( # 9(/9.Recognizing that (1/8 9)<; # $(1/g)<z, with this scaling(A18)–(A22) will have constant coefficients for normalmodes of the form > # >̂ exp[i(kx & lz $ ?t)]. Also, wedefine 7 * 9z /9 as in (A11).
Representing the variables in terms of these normalmodes yields a determinant that can be evaluated toobtain the dispersion relation. Here, the three diagnos-tic relationships in (A22) are used to eliminate the vari-ables p̃(, 9̃(, and ;̇̃(, resulting in a 4 = 4 determinant forthe prognostic equations [(A18)–(A21)]:
det'5 0 $k"1 $
ilc2
g # $kc2
0 5ilc2
g%l & i0' $%l & i0'c2
$igk
%l & i0'$ig 5 0
$ikN2
g%l & i0'0 0 5
'# 0.
AUGUST 2007 K L E M P E T A L . 2911

Evaluating this determinant produces the frequencyequation
54 $ k2$ 1l & i0
/1̇
" lupx
& ig
c2
u/x
# &i
l & i0"1̇
N2
gupx
%c252
$ l%l & i0/wwp1
'c252 &k2N2c2
l & i0"1̇/w
$" 1u/x
$ilc2
gupx
#%l & i0wp1
'
&ilc2
gupx
%l & i0
wp1
'%# 0. %A23'
Recalling (A7), we recognize that the second majorterm in (A23) is responsible for the horizontal sound-wave propagation and thus the upx, u:x, :;̇, and ";̇terms in (A18)–(A21) must be included on the smalltime steps. For the frequency to be real (numericallystable), this term must be real; this is satisfied if
upx 7#6 u/x and /1̇ 7#6 "1̇, %A24'
in which case the expression in brackets reduces nu-merically to unity.
The third major term in (A23) represents the verticalsound-wave propagation; to treat these terms implicitlyon the small time steps requires
wp1 7#6 /w #6 I. %A25'
This term also defines the imaginary part of the verticalwavenumber (l # lR & ilI) to be lI # $7/2 for this termto be real. Notice that this value of lI is the same as in(A11) for the height coordinate except opposite in sign.This sign difference occurs because in the height-coordinate analysis, the normal-mode variables havebeen coupled with density.
The last major term in (A23) is a fundamental con-tributor to the gravity wave modes. Although this termis not essential to the acoustic modes, it is formed fromterms designated in (A24) and (A25) that are requiredfor sound-wave propagation. Consequently, in this ver-tical coordinate, the terms governing the acoustic andgravity wave modes are intermingled to the extent thatit does not appear feasible to evaluate any of the gravitywave terms on the large time steps, even if one desiredto do so. With proper specification of the numerics, thisfinal term in the discretized dispersion equation re-mains real and reduces to k2N 2c2. Using forward–backward time differencing for the horizontally propa-gating acoustic modes, this will be achieved provided
upx #6 E$ and /1̇ #6 E&. %A26'
Representing the time discretization of the small timestep terms according to (A24)–(A26), the dispersion
equation is now identical to (A12) and (A13), confirm-ing again that the frequency remains real and the timedifferencing will be second-order centered.
For the linear system, the temporal discretization forterms integrated on the small time steps is thus repre-sented by
+,u & 4!xp(, & /(,x # 0, %A27'
!xu,&., & !11̇(,&., # 0, %A28'
+,"( & "11̇(,&., # 0, %A29'
+,w $g3
!1p(,# 0, and %A30'
+,/( & /11̇(,&., $ gw , # 0. %A31'
These equations are integrated by first stepping for-ward the horizontal momentum equation [(A27)] andthen obtaining ;̇( at the new time level from the con-tinuity equation in (A28). Equation (A29) can next bestepped forward to obtain " at the new time level. Fi-nally, (A30) and (A31) are advanced by solving a tridi-agonal matrix for the vertically implicit portion of theequations, having replaced the p( term in (A30) byterms involving :( and "( by combining the last twoequations in (A22) as discussed in section 3.
REFERENCES
Anthes, R. A., and T. T. Warner, 1978: Development of hydrody-namic models suitable for air pollution and other meso-meteorological studies. Mon. Wea. Rev., 106, 1045–1078.
Arakawa, A., and V. R. Lamb, 1977: Computational design of thebasic dynamical processes of the UCLA general circulationmodel. Methods in Computational Physics, Vol. 17, J. Chang,Ed., Academic Press, 173–265.
Bartello, P., and S. J. Thomas, 1996: The cost-effectiveness ofsemi-Lagrangian advection. Mon. Wea. Rev., 124, 2883–2897.
Byun, D. W., 1999: Dynamically consistent formulations in me-teorological and air quality models for multiscale atmo-spheric studies. Part I: Governing equations in a generalizedcoordinate system. J. Atmos. Sci., 56, 3789–3807.
Chorin, A. J., 1967: A numerical method for solving incompress-ible viscous flow problems. J. Comput. Phys., 2, 12–26.
Clark, T. L., 1977: A small-scale dynamic model using a terrain-following coordinate transformation. J. Comput. Phys., 24,186–215.
——, 1979: Numerical simulations with a three-dimensional cloudmodel: Lateral boundary condition experiments and multi-cellular severe storm simulations. J. Atmos. Sci., 36, 2191–2215.
Davies, T., A. Staniforth, N. Wood, and J. Thuburn, 2003: Validityof anelastic and other equation sets as inferred from normal-mode analysis. Quart. J. Roy. Meteor. Soc., 129, 2761–2775.
Doms, G., and U. Schättler, Eds., 1999: The nonhydrostatic lim-ited-area model LM (Lokal Model) of DWD. Part I: Scien-
2912 M O N T H L Y W E A T H E R R E V I E W VOLUME 135

tific documentation. Deutscher Wetterdienst Rep. LM F901.35, 172 pp. [Available from Deutscher Wetterdienst, P.O.Box 100465, 63004 Offenbach, Germany.]
Droegemeier, K. K., and R. B. Wilhelmson, 1987: Numericalsimulation of thunderstorm outflow dynamics. Part I: Out-flow sensitivity experiments and turbulence dynamics. J. At-mos. Sci., 44, 1180–1210.
Dudhia, J., 1993: A nonhydrostatic version of the Penn State–NCAR Mesoscale Model: Validation tests and simulation ofan Atlantic cyclone and cold front. Mon. Wea. Rev., 121,1493–1513.
Durran, D. R., 1989: Improving the anelastic approximation. J.Atmos. Sci., 46, 1453–1461.
——, 1999: Numerical Methods for Wave Equations in Geophysi-cal Fluid Dynamics. Springer-Verlag, 465 pp.
——, and J. B. Klemp, 1983: A compressible model for the simu-lation of moist mountain waves. Mon. Wea. Rev., 111, 2341–2361.
Dutton, J. A., 1976: Dynamics of Atmospheric Motion. Dover,617 pp.
Hodur, R. M., 1997: The Naval Research Laboratory’s CoupledOcean/Atmosphere Mesoscale Prediction System (COAMPS).Mon. Wea. Rev., 125, 1414–1430.
Klemp, J. B., and R. B. Wilhelmson, 1978: The simulation ofthree-dimensional convective storm dynamics. J. Atmos. Sci.,35, 1070–1096.
——, and D. R. Durran, 1983: An upper boundary condition per-mitting internal gravity wave radiation in numerical meso-scale models. Mon. Wea. Rev., 111, 430–444.
——, and W. Skamarock, 2004: Model numerics for convective-storm simulation. Atmospheric Turbulence and MesoscaleMeteorology: Scientific Research Inspired by Doug Lilly, E.Federovich et al., Eds., Cambridge University Press, 117–137.
Laprise, R., 1992: The Euler equations of motion with hydrostaticpressure as an independent variable. Mon. Wea. Rev., 120,197–207.
Lipps, F. B., and R. S. Hemler, 1982: A scale analysis of deepmoist convection and some related numerical calculations. J.Atmos. Sci., 39, 2192–2210.
Madala, R. V., 1981: Efficient time integration schemes for atmo-sphere and ocean models. Finite-Difference Techniques forVectorized Fluid Dynamics Calculations, D. L. Book, Ed.,Springer-Verlag, 56–70.
Ogura, Y., and N. A. Phillips, 1962: Scale analysis of deep andshallow convection in the atmosphere. J. Atmos. Sci., 19, 173–179.
Ooyama, K. V., 1990: A thermodynamic foundation for modelingthe moist atmosphere. J. Atmos. Sci., 47, 2580–2596.
Pinty, J.-P., R. Benoit, E. Richard, and R. Laprise, 1995: Simpletests of a semi-implicit semi-Lagrangian model on 2D moun-tain wave problems. Mon. Wea. Rev., 123, 3042–3058.
Rotunno, R., W. C. Skamarock, and C. Snyder, 1994: An analysisof frontogenesis in numerical simulations of baroclinic waves.J. Atmos. Sci., 51, 3373–3398.
Saito, K., and Coauthors, 2006: The operational JMA nonhydro-static mesoscale model. Mon. Wea. Rev., 134, 1266–1298.
Skamarock, W. C., and J. B. Klemp, 1992: The stability of time-
split numerical methods for the hydrostatic and the nonhy-drostatic elastic equations. Mon. Wea. Rev., 120, 2109–2127.
——, ——, and J. Dudhia, 2001: Prototypes for the WRF(Weather Research and Forecast) model. Preprints, NinthConf. on Mesoscale Processes, Fort Lauderdale, FL, Amer.Meteor. Soc., CD-ROM, J1.5.
——, ——, ——, D. O. Gill, D. M. Barker, W. Wang, and J. G.Powers, 2005: A description of the Advanced Research WRFVersion 2. NCAR Tech. Note NCAR/TN-468&STR, 88 pp.
Smolarkiewicz, P. K., L. G. Margolin, and A. A. Wyszogrodzki,2001: A class of nonhydrostatic global models. J. Atmos. Sci.,58, 349–364.
Staniforth, A., and J. Côté, 1991: Semi-Lagrangian integrationschemes for atmospheric models—A review. Mon. Wea. Rev.,119, 2206–2223.
Straka, J., R. B. Wilhelmson, L. J. Wicker, J. R. Anderson, andK. K. Droegemeier, 1993: Numerical solutions of a nonlineardensity current: A benchmark solution and comparisons. Int.J. Numer. Methods Fluids, 17, 1–22.
Tanguay, M., A. Robert, and R. Laprise, 1990: A semi-implicitsemi-Lagrangian fully compressible regional forecast model.Mon. Wea. Rev., 118, 1970–1980.
Tapp, M. C., and P. W. White, 1976: A non-hydrostatic mesoscalemodel. Quart. J. Roy. Meteor. Soc., 102, 277–296.
Thomas, S., C. Girard, G. Doms, and U. Schättler, 2000: Semi-implicit scheme for the DWD Lokal-Modell. Meteor. Atmos.Phys., 73, 105–125.
Tripoli, G. J., 1992: A nonhydrostatic mesoscale model designedto simulate scale interaction. Mon. Wea. Rev., 120, 1342–1359.
——, and W. R. Cotton, 1982: The Colorado State Universitythree-dimensional cloud/mesoscale model. Part I: Generaltheoretical framework and sensitivity experiments. J. Rech.Atmos., 16, 185–220.
Weisman, M. L., and J. B. Klemp, 1984: Characteristics of isolatedconvective storms. Mesoscale Meteorology and Forecasting,P. S. Ray, Ed., Amer. Meteor. Soc., 331–358.
Wicker, L. J., and R. B. Wilhelmson, 1995: Simulation and analy-sis of tornado development and decay within a three-dimensional supercell thunderstorm. J. Atmos. Sci., 52, 2675–2703.
——, and W. C. Skamarock, 1998: A time-splitting scheme for theelastic equations incorporating second-order Runge–Kuttatime differencing. Mon. Wea. Rev., 126, 1992–1999.
——, and ——, 2002: Time-splitting methods for elastic modelsusing forward time schemes. Mon. Wea. Rev., 130, 2088–2097.
Wilhelmson, R. B., and Y. Ogura, 1972: The pressure perturba-tion and the numerical modeling of a cloud. J. Atmos. Sci., 29,1295–1307.
Xue, M., K. K. Droegemeier, and V. Wong, 2000: The AdvancedRegional Prediction System (ARPS)—A multi-scale nonhy-drostatic atmospheric simulation and prediction model. PartI: Model dynamics and verification. Meteor. Atmos. Phys., 75,161–193.
Yeh, K.-S., J. Côté, S. Gravel, A. Méthot, A. Patoine, M. Roch,and A. Staniforth, 2002: The CMC–MRB Global Environ-mental Multiscale (GEM) model. Part III: Nonhydrostaticformulation. Mon. Wea. Rev., 130, 339–356.
AUGUST 2007 K L E M P E T A L . 2913
Copyright © 2022 FDOKUMEN