
Assessment of regional seasonal rainfall predictability using the CPTEC/COLA atmospheric GCM
Upload
independentCategory
view
2download
0
Characteristics of tropical Pacific SST predictability in coupledGCM forecasts using the NCEP CFS
Emilia K. Jin Æ James L. Kinter III
Received: 26 October 2007 / Accepted: 21 April 2008 / Published online: 15 May 2008
� Springer-Verlag Berlin Heidelberg 2008
Abstract The limits of predictability of El Nino and the
Southern Oscillation (ENSO) in coupled models are
investigated based on retrospective forecasts of sea surface
temperature (SST) made with the National Centers for
Environmental Prediction (NCEP) coupled forecast system
(CFS). The influence of initial uncertainties and model
errors associated with coupled ENSO dynamics on forecast
error growth are discussed. The total forecast error has
maximum values in the equatorial Pacific and its growth is
a strong function of season irrespective of lead time. The
largest growth of systematic error of SST occurs mainly
over the equatorial central and eastern Pacific and near the
southeastern coast of the Americas associated with ENSO
events. After subtracting the systematic error, the root-
mean-square error of the retrospective forecast SST
anomaly also shows a clear seasonal dependency associ-
ated with what is called spring barrier. The predictability
with respect to ENSO phase shows that the phase locking
of ENSO to the mean annual cycle has an influence on the
seasonal dependence of skill, since the growth phase of
ENSO events is more predictable than the decay phase.
The overall characteristics of predictability in the coupled
system are assessed by comparing the forecast error growth
and the error growth between two model forecasts whose
initial conditions are 1 month apart. For the ensemble
mean, there is fast growth of error associated with initial
uncertainties, becoming saturated within 2 months. The
subsequent error growth follows the slow coupled mode
related the model’s incorrect ENSO dynamics. As a result,
the Lorenz curve of the ensemble mean NINO3 index does
not grow, because the systematic error is identical to the
same target month. In contrast, the errors of individual
members grow as fast as forecast error due to the large
instability of the coupled system. Because the model errors
are so systematic, their influence on the forecast skill is
investigated by analyzing the erroneous features in a long
simulation. For the ENSO forecasts in CFS, a constant
phase shift with respect to lead month is clear, using
monthly forecast composite data. This feature is related to
the typical ENSO behavior produced by the model that,
unlike the observations, has a long life cycle with a JJA
peak. Therefore, the systematic errors in the long run
are reflected in the forecast skill as a major factor limit-
ing predictability after the impact of initial uncertainties
fades out.
Keywords Predictability of ENSO in CGCM �NCEP CFS model � Influence of initial uncertainties
and model errors
1 Introduction
In the late 1960s, the theoretical groundwork for predict-
ability was laid by E. Lorenz through a series of papers
(Lorenz 1965, 1969a, b). These studies have shown that the
predictability of weather is represented entirely by the
growth rate and saturation value of small errors along with
several others (e.g., Smagorinsky 1963; Charney et al.
1966; Leith 1971; Williamson and Kasahara 1971; Leith
and Kraichnan 1972; Lorenz 1982; Shukla 1985; Gutzler
and Shukla 1984; Simmons et al. 1995). Focusing on
E. K. Jin � J. L. Kinter III
Department of Climate Dynamics, George Mason University,
Fairfax, VA, USA
E. K. Jin (&) � J. L. Kinter III
Center for Ocean-Land-Atmosphere Studies, 4041 Powder Mill
Road, Suite 302, Calverton, MD 20705, USA
e-mail: [email protected]; [email protected]
123
Clim Dyn (2009) 32:675–691
DOI 10.1007/s00382-008-0418-2
weather, Lorenz (1969b) conceived a method to estimate
the predictability of the atmosphere by finding for ana-
logues that are sufficiently close in some phase space to
permit using the evolution of the distance between the
analogous states as a proxy for error growth in the classical
predictability sense. Goswami and Shukla (1991) investi-
gated the error growth of climate forecasts using a coupled
model. Since then, predictability studies focusing on the
seasonal time scale have continued with substantial
development of climate prediction models.
However, most state-of-the art coupled general circula-
tion models (CGCM) of the global climate still have
significant errors in simulating the mean climatology of the
tropical ocean and atmosphere (Mechoso et al. 1995;
Delecluse et al. 1998; Latif et al. 2001; AchutaRao and
Sperber 2002; Davey et al. 2002; Schneider et al. 2003),
even though they are generally regarded as the most
promising tools for producing seasonal forecasts with the
capability to reproduce important characteristics of the
dominant modes of variability (e.g., Latif et al. 1993; Ji
et al. 1994; Rosati et al. 1997; Kirtman et al. 2002; Vint-
zileos et al. 1999; Guilyardi et al. 2004). These systematic
errors have a profound influence on the capability of theses
climate models to simulate the fluctuations of the tropical
climate. Therefore, the characteristics of systematic errors
are a fundamental issue in studies of the limit of predict-
ability of the coupled ocean–atmosphere system.
What is limiting the predictability in coupled models?
Several plausible sources of error both in simulating the
mean climatology and interannual anomalies have been
discussed (e.g., Goswami and Shukla 1991). One major
source of error is uncertainty in the initial conditions. This
issue has been studied in the context of the chaotic non-
linear dynamics of the coupled system (e.g., Lorenz 1965;
Kirtman 2003). Errors also depend on a given model’s
characteristics, in particular, after the influence of the ini-
tial conditions fades out with respect to lead time in a
forecast. Focusing on the tropical SST predictability,
model errors associated with the El Nino and the Southern
Oscillation (ENSO) mechanism may have a strong impact.
In the tropical Pacific, ENSO phase may have an influence
on the seasonal limitation of predictability. Stochastic
noise and atmospheric, oceanic, and coupled instabilities
not only limit predictability, but their influence is also hard
to estimate. For example, if we assume a perfect model,
perfect boundary conditions, and almost perfect initial
conditions, the prediction may not be perfect due to the
nonlinear stochastic processes in nature (Shukla and Kinter
2006). Among these factors, which mechanism is dominant
has implications for prediction and predictability.
Since the pioneering work by Lorenz (1965) demon-
strated that the growth of small-scale errors contaminates
the larger scale and places an upper bound on
predictability, forecast error growth as the inherent limiting
factor of numerical weather prediction skill has been
investigated in various studies (Lorenz 1969b; Shukla
1985; Chen 1989; Schubert and Suarez 1989; Reynolds
et al. 1994 as well as many others). Lorenz (1982) esti-
mated the current lower and upper bounds of predictability
by using forecast error growth rates. The growth of error is
induced by both internal sources representing the growth of
errors in the initial conditions and external sources deno-
ting the error growth due to model deficiencies (Leith
1978; Arpe et al. 1985; Dalcher and Kalnay 1987;
Reynolds et al. 1994). In terms of ENSO predictions in the
Zebiak and Cane (1987) dynamical-coupled model, two
error growth processes have been suggested, including a
fast time scale related with initial conditions in the level of
natural variability and an intrinsic slow growth process
associated with the low frequency ENSO mode in the
model (Battisti 1988, 1989; Battisti and Hirst 1989;
Goswami and Shukla 1991). In addition, a number of
studies have pointed out the seasonal dependency of error
growth based on initial time (Cane et al. 1986; Cane and
Zebiak 1987; Goswami et al. 1997).
After the influence of initial conditions is forgotten
statistically with respect to lead time, the most important
source of forecast error is a model’s systematic biases.
Focusing on ENSO predictability, understanding of the
ENSO mechanism in the particular system could lead to an
understanding of errors in SST predictions. Several studies
have diagnosed the ENSO characteristics in long simula-
tions made with the coupled GCMs that are used for
operational SST forecasting (e.g., Wang et al. 2005). This
kind of approach is useful to distinguish a given model’s
problematic features away from the influence of initial
conditions. However, there have not been sufficient quan-
titative assessments of the linkage between a model’s
systematic error and its forecast error.
It is a well-known feature of the predictions of sea
surface temperature (SST) anomalies associated with
ENSO that the skill of forecasts has a strong seasonality
(e.g., Troup 1965; Wright 1979; Webster and Yang 1992;
Xue et al. 1994; Latif et al. 1994). Many prediction
schemes generally show a significant decline in skill in
boreal spring (target months) with apparent skill recovery
in subsequent seasons, which is often called the ‘‘spring
predictability barrier’’. The cause of this barrier is not yet
fully understood, and various hypotheses have been dis-
cussed. Some authors suggested that it may be a result of
relatively weak coupling between the ocean and atmo-
sphere during boreal spring (Zebiak and Cane 1987;
Battisti 1988; Goswami and Shukla 1991; Blumenthal
1991). Recent studies have emphasized the phase locking
of the ENSO to the mean annual cycle (Balmaseda et al.
1995; Torrence and Webster 1998), and, alternatively, the
676 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
biennial component of ENSO (Clarke and van Gorder
1999; Yu 2005).
Despite many studies of the errors in coupled forecast
systems (CFSs), there has been limited quantitative
assessment of the overall real predictability of fully cou-
pled GCMs, particularly the seasonal characteristics with
respect to initial conditions, since there are limited retro-
spective experiments in which real forecast conditions have
been used. Recently, results from the DEMETER (Deve-
lopment of a European Multi-model Ensemble System for
Seasonal to Interannual Prediction) project, including
6-month ensemble forecasts made every 4 months during
1980–2001 using seven different CGCMs, were analyzed
for the mean drift, with a focus on the relative importance
of atmospheric and oceanic components for error growth
(Lazar et al. 2005). More recently, the National Centers for
Environmental Prediction (NCEP) CFS has been used to
provide a more extensive data set, with 9-month integra-
tions starting from 15 different initial conditions based on
the observed state for every calendar month in 1981–2003.
The CFS is the fully coupled ocean–land–atmosphere
dynamical seasonal prediction system currently used as the
operational climate prediction system in NCEP (Saha et al.
2006). The retrospective forecasts can be analyzed to
determine how the initial errors grow over relatively long
leads, including the dependence on the phase of the annual
cycle.
Saha et al. (2006) showed that mean bias of tropical SST
forecasts is acceptably small and the forecast skill of
NINO3.4 SST anomalies (area average over 5�S–5�N,
170�–240�W) is also comparable to statistical methods
used operationally at NCEP, even though there is relatively
large drift in August–October even at a short lead. In
addition, the inherent characteristics of SST associated
with ENSO have been studied using long simulations in
which the model is run freely for several years and there-
fore has no ‘‘memory’’ of its initial state (Wang et al. 2005;
Zhang et al. 2007). Corresponding to the forecast results,
CFS long runs reproduce the observed seasonal climatol-
ogy, generally regarded as a favorable condition for
reasonable ENSO simulation (e.g., Zebiak and Cane 1987;
Battisti 1988). The simulated amplitude of ENSO vari-
ability is also comparable to that of the observed. However,
simulated ENSO events tend to occur very regularly, and
moreover, the onset of warm events occurs 3–6 months
earlier and cold events persist longer than in observations
(Wang et al. 2005).
In this paper, we investigate the predictability of the
NCEP CFS by analyzing the structure of its systematic
error and estimating the growth of its forecast error from
small initial perturbations. First, the seasonal characteris-
tics of ENSO forecast error associated with phase-locking
to the annual cycle will be investigated. Second, to assess
the relative importance of uncertainty of initial conditions
and model error in determining forecast error, the theo-
retical limit of predictability will be evaluated and
compared with realizable prediction skill. Based on the
averaged error growth over all calendar months, a general
perspective of the coupled model’s predictability will be
drawn. In particular, we will adopt Lorenz’ classical defi-
nition of the predictability of weather to evaluate climate
forecasts. Focusing on the influence of model error, we will
investigate the behavior of the CFS in a long simulation,
comparing the evolution of ENSO events in a free run of
the model and ENSO forecasts at different lead times.
The paper is organized as follows. Section 2 describes
the model and experimental design, and Sect. 3 provides
the characteristic space–time structure of systematic error.
Section 4 discusses the seasonal dependency of RMS error
and the implication of ENSO phase-locking to the annual
cycle. In Sect. 5, we discuss the relative influence of
uncertainty of initial conditions and model error using a
more theoretical approach. The influence of model defi-
ciency on forecast error with respect to lead time is
discussed in Sect. 6. A summary and concluding remarks
are given in Sect. 7.
2 The model and experimental design
The NCEP CFS is composed of the NCEP Global Forecast
System (GFS) atmospheric general circulation model
(Moorthi et al. 2001), and the Geophysical Fluid Dynamics
Laboratory (GFDL) Modular Ocean Model version 3
(MOM3) (Pacanowski and Griffies 1998). The atmospheric
and oceanic components are coupled with no flux adjust-
ment or correction. The two components exchange daily
averaged quantities, such as heat and momentum fluxes,
once per simulated day.
A retrospective forecast data set was created by running
a 9-month integration for each of the 12 calendar months in
the 24 years from 1981 to 2004. Runs were initiated from
15 different initial conditions in each month, selected to
span the evolution of both the atmosphere and ocean in a
continuous fashion. The atmospheric initial conditions
were taken from the NCEP/DOE Atmospheric Model
Intercomparison Project (AMIP) II Reanalysis (R2) data
(Kanamitsu et al. 2002), and the ocean initial conditions
were taken from the NCEP Global Ocean Data Assimila-
tion (GODAS) (see Behringer et al. 2005, unpublished
manuscript). The initial conditions for each month were
partitioned into three segments. For each segment, a single
ocean analysis was used as initial conditions for MOM3,
and a series of atmospheric states taken from R2 at daily
intervals near the time of the ocean analysis were used as
initial conditions for GFS. The first segment was centered
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 677
123
on the pentad ocean initial condition of the 11th of a given
month, and the five atmospheric initial states were taken
from the 9th, 10th, 11th, 12th and 13th of the month used
the same pentad ocean initial condition for that month. The
second set of five atmospheric initial states for the 19th,
20th, 21st, 22nd and 23rd of the month used the same
pentad ocean initial condition from the 21st of the month.
The last set of five atmospheric initial states included the
second-to-last day of the month, the last day of the month,
and the first, second and third days of the next month with
the same pentad ocean initial conditions of the first of the
next month. Saha et al. (2006) provide a detailed descrip-
tion of the model and experimental design for the
retrospective forecasts, including nomenclature for the
forecast lead time. For example, in the case of December as
the month of forecast lead zero, the 15 members in the
ensemble include the 9th–13th December, 19th–23rd
December, and 30th December–3rd of January. For con-
venience, this example is referred to as the ‘‘December
forecast’’ in this study, with similar naming convention
used for the forecasts made starting from the other
11 months. Since the three segments differ in initial con-
ditions by 20 days for the atmosphere, we will break them
down into three components in Fig. 7. And note that some
of the forecasts actually have a less than 0-day lead for the
atmospheric initial condition when referred to as 1-month
forecasts.
These retrospective forecasts and a 52-year long run
were analyzed to investigate the characteristics of model
error (Hu et al. 2007). The long coupled run starts from 1
January 1985 and the atmospheric and oceanic initial
conditions were taken from the same data as forecasts.
In this study, SST is used as the variable which represents
the coupled system. For comparison with observations, the
HadISST1.1 SST (Rayner et al. 2003) is used.
3 Space–time structure of total systematic error
The seasonal dependency of systematic error is investi-
gated by defining the systematic error at each lead time,
L (L = 1, 2,…, 9 months) as the root mean square differ-
ence between the mean of all ensemble member forecasts
and the observations for a given initial calendar month,
M (M = 1, 2,…, 12; M = 1 corresponds to initial condi-
tions in December, as described in the example above) over
the 23 years of retrospective forecasts. Therefore, the
systematic error here means the total error including terms
related to both the mean bias and the individual forecast
error. We will refer to forecasts by their initial month, e.g.,
‘‘December forecasts’’ will denote those forecasts with
December initial conditions. Note that the root mean
square differences are calculated for the same calendar
month mean of the forecasts and the observations.
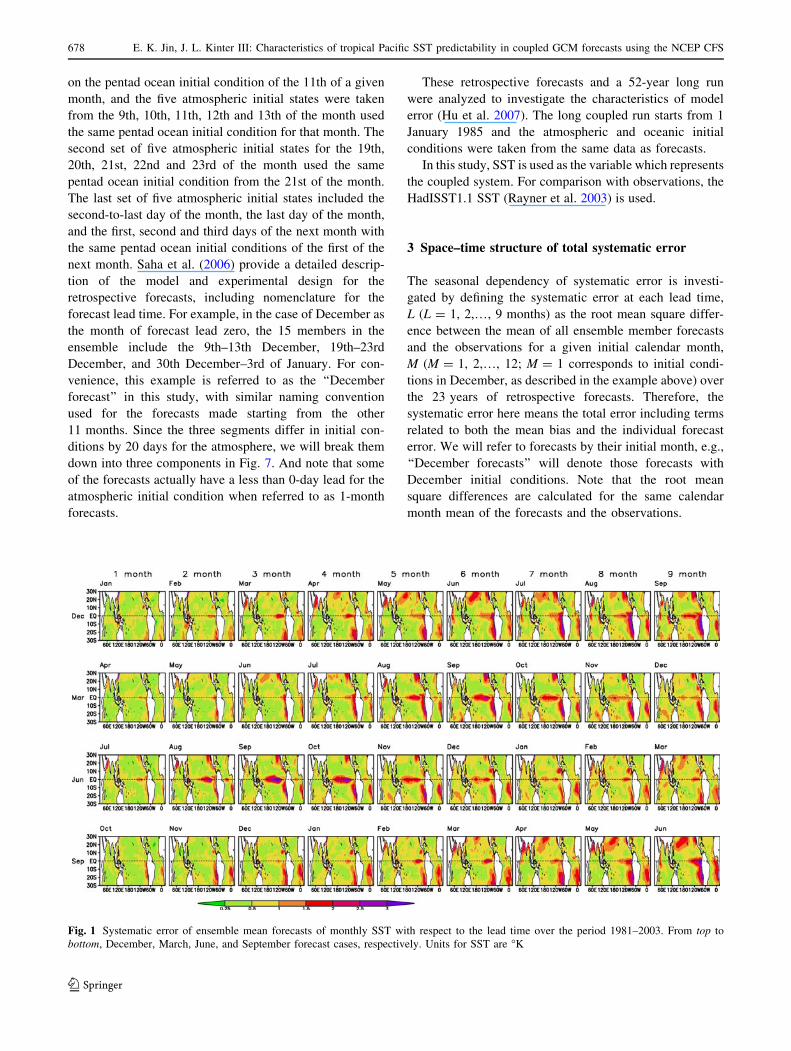
Fig. 1 Systematic error of ensemble mean forecasts of monthly SST with respect to the lead time over the period 1981–2003. From top to
bottom, December, March, June, and September forecast cases, respectively. Units for SST are �K
678 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
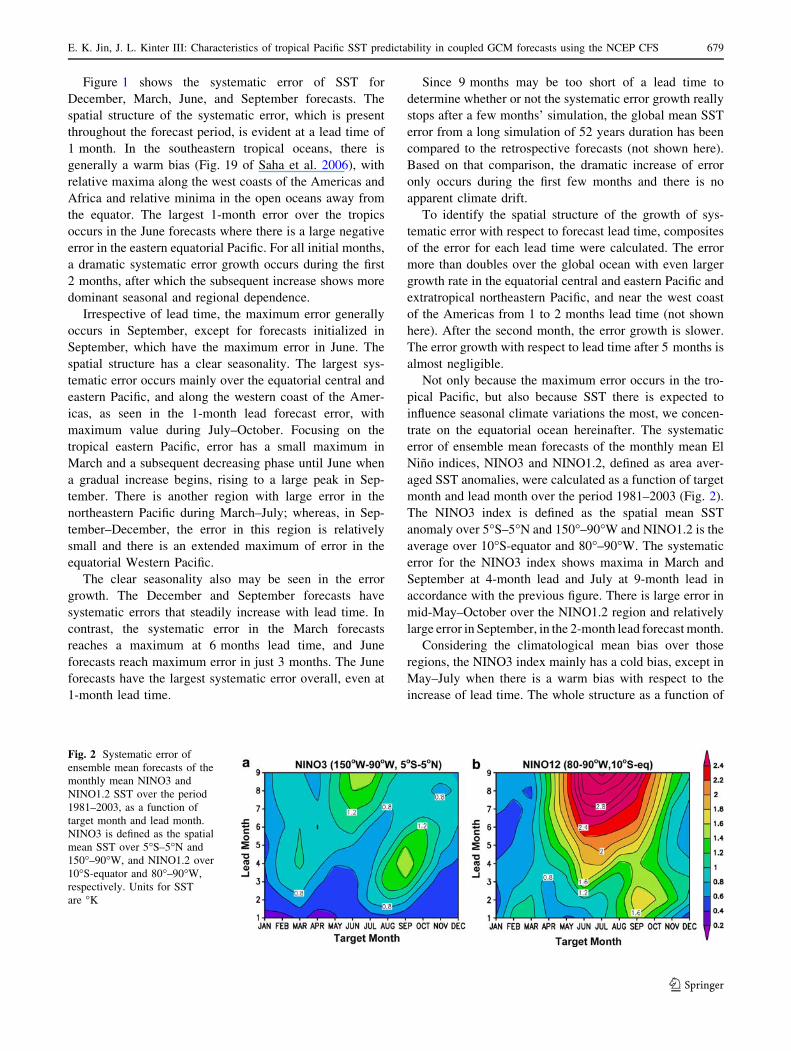
Figure 1 shows the systematic error of SST for
December, March, June, and September forecasts. The
spatial structure of the systematic error, which is present
throughout the forecast period, is evident at a lead time of
1 month. In the southeastern tropical oceans, there is
generally a warm bias (Fig. 19 of Saha et al. 2006), with
relative maxima along the west coasts of the Americas and
Africa and relative minima in the open oceans away from
the equator. The largest 1-month error over the tropics
occurs in the June forecasts where there is a large negative
error in the eastern equatorial Pacific. For all initial months,
a dramatic systematic error growth occurs during the first
2 months, after which the subsequent increase shows more
dominant seasonal and regional dependence.
Irrespective of lead time, the maximum error generally
occurs in September, except for forecasts initialized in
September, which have the maximum error in June. The
spatial structure has a clear seasonality. The largest sys-
tematic error occurs mainly over the equatorial central and
eastern Pacific, and along the western coast of the Amer-
icas, as seen in the 1-month lead forecast error, with
maximum value during July–October. Focusing on the
tropical eastern Pacific, error has a small maximum in
March and a subsequent decreasing phase until June when
a gradual increase begins, rising to a large peak in Sep-
tember. There is another region with large error in the
northeastern Pacific during March–July; whereas, in Sep-
tember–December, the error in this region is relatively
small and there is an extended maximum of error in the
equatorial Western Pacific.
The clear seasonality also may be seen in the error
growth. The December and September forecasts have
systematic errors that steadily increase with lead time. In
contrast, the systematic error in the March forecasts
reaches a maximum at 6 months lead time, and June
forecasts reach maximum error in just 3 months. The June
forecasts have the largest systematic error overall, even at
1-month lead time.
Since 9 months may be too short of a lead time to
determine whether or not the systematic error growth really
stops after a few months’ simulation, the global mean SST
error from a long simulation of 52 years duration has been
compared to the retrospective forecasts (not shown here).
Based on that comparison, the dramatic increase of error
only occurs during the first few months and there is no
apparent climate drift.
To identify the spatial structure of the growth of sys-
tematic error with respect to forecast lead time, composites
of the error for each lead time were calculated. The error
more than doubles over the global ocean with even larger
growth rate in the equatorial central and eastern Pacific and
extratropical northeastern Pacific, and near the west coast
of the Americas from 1 to 2 months lead time (not shown
here). After the second month, the error growth is slower.
The error growth with respect to lead time after 5 months is
almost negligible.
Not only because the maximum error occurs in the tro-
pical Pacific, but also because SST there is expected to
influence seasonal climate variations the most, we concen-
trate on the equatorial ocean hereinafter. The systematic
error of ensemble mean forecasts of the monthly mean El
Nino indices, NINO3 and NINO1.2, defined as area aver-
aged SST anomalies, were calculated as a function of target
month and lead month over the period 1981–2003 (Fig. 2).
The NINO3 index is defined as the spatial mean SST
anomaly over 5�S–5�N and 150�–90�W and NINO1.2 is the
average over 10�S-equator and 80�–90�W. The systematic
error for the NINO3 index shows maxima in March and
September at 4-month lead and July at 9-month lead in
accordance with the previous figure. There is large error in
mid-May–October over the NINO1.2 region and relatively
large error in September, in the 2-month lead forecast month.
Considering the climatological mean bias over those
regions, the NINO3 index mainly has a cold bias, except in
May–July when there is a warm bias with respect to the
increase of lead time. The whole structure as a function of
Fig. 2 Systematic error of
ensemble mean forecasts of the
monthly mean NINO3 and
NINO1.2 SST over the period
1981–2003, as a function of
target month and lead month.
NINO3 is defined as the spatial
mean SST over 5�S–5�N and
150�–90�W, and NINO1.2 over
10�S-equator and 80�–90�W,
respectively. Units for SST
are �K
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 679
123
target month and lead month is well matched with that of
systematic error (not shown here). The large warm bias
over the NINO1.2 region also shows a clear resemblance to
the structure of systematic error. This means that many
aspects of the systematic error reflect the seasonality and
growth of the climatological mean bias.
The facts that the CFS mean bias exhibits its typical
spatial structure early in the forecast and that the systematic
error is tightly linked to the annual cycle both in terms of
magnitude and growth rate strongly suggest that a simple
flux correction applied to the SST in the course of a fore-
cast could substantially reduce the forecast error. This
possibility is left for a future study.
4 ENSO phase-locking and the seasonal dependence
of RMS error
As shown in Sect. 3, the mean CFS error is very systematic
in terms of its spatial structure and seasonality, so it can be
removed a posteriori. The average of all ensemble mean
forecasts for a given calendar month was subtracted from
all the forecasts for that particular initial month. In this
way, the mean bias is a function of lead time. And the
mean annual cycle of monthly means was subtracted from
the observations, and the root-mean-squared (RMS) error
was computed from the remainder. Hereafter, RMS will
refer to the root mean square error after the monthly mean
systematic error has been removed.
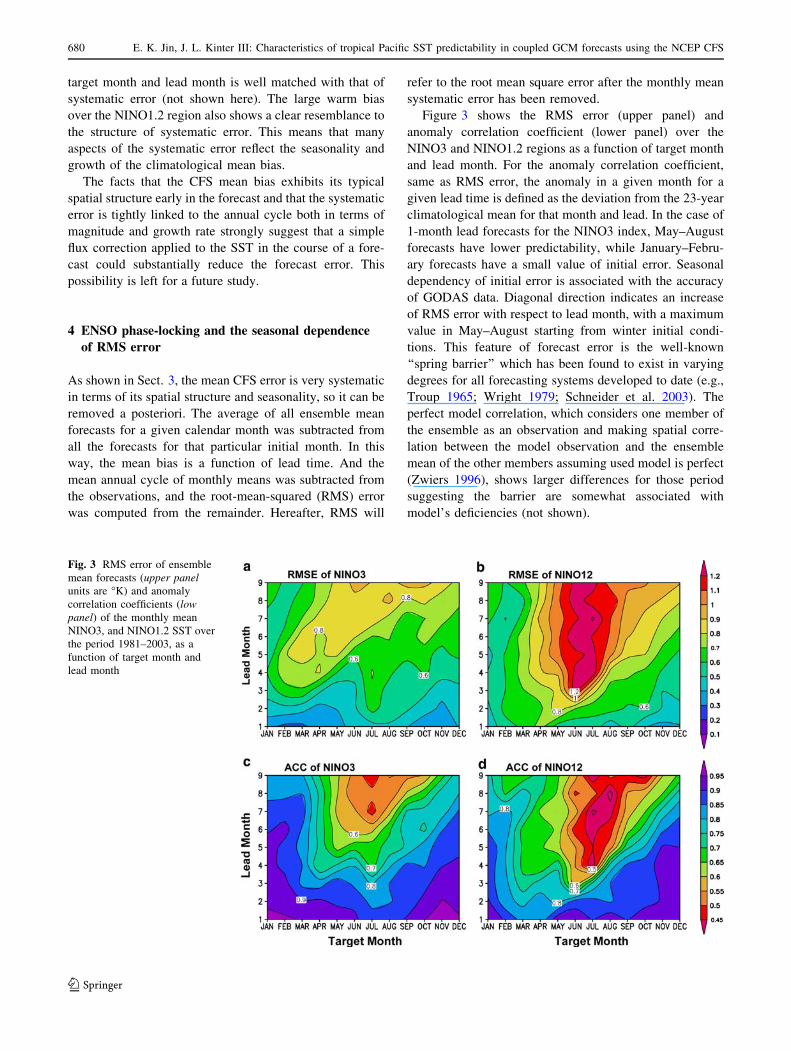
Figure 3 shows the RMS error (upper panel) and
anomaly correlation coefficient (lower panel) over the
NINO3 and NINO1.2 regions as a function of target month
and lead month. For the anomaly correlation coefficient,
same as RMS error, the anomaly in a given month for a
given lead time is defined as the deviation from the 23-year
climatological mean for that month and lead. In the case of
1-month lead forecasts for the NINO3 index, May–August
forecasts have lower predictability, while January–Febru-
ary forecasts have a small value of initial error. Seasonal
dependency of initial error is associated with the accuracy
of GODAS data. Diagonal direction indicates an increase
of RMS error with respect to lead month, with a maximum
value in May–August starting from winter initial condi-
tions. This feature of forecast error is the well-known
‘‘spring barrier’’ which has been found to exist in varying
degrees for all forecasting systems developed to date (e.g.,
Troup 1965; Wright 1979; Schneider et al. 2003). The
perfect model correlation, which considers one member of
the ensemble as an observation and making spatial corre-
lation between the model observation and the ensemble
mean of the other members assuming used model is perfect
(Zwiers 1996), shows larger differences for those period
suggesting the barrier are somewhat associated with
model’s deficiencies (not shown).
Fig. 3 RMS error of ensemble
mean forecasts (upper panelunits are �K) and anomaly
correlation coefficients (lowpanel) of the monthly mean
NINO3, and NINO1.2 SST over
the period 1981–2003, as a
function of target month and
lead month
680 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
In contrast to the NINO3 index, the NINO1.2 index has
large initial error for February–April forecasts. In addition,
the RMS error is dominated by the seasonality with a large
maximum value in May–August and a relatively weak
dependence on lead time. Since the systematic error has a
strong seasonal dependence during June–September in the
eastern and southeastern Pacific (Fig. 1), it is apparent that
the systematic and RMS errors are phase-locked in the
NINO1.2 region.
To prevent being misled by the variation of monthly vari-
ance, the root-mean-square error normalized by the respective
calendar month standard deviation (rmsn) is calculated as a
function of target month and lead month and compared with
the RMS error in Fig. 4 (not shown). As a result, the main
features of the structure and seasonal dependency are identical
except for a small change of amplitude.
Anomaly correlation coefficients also support this sea-
sonal dependency of error growth. The forecast error
growth over the tropical Pacific shows clear seasonal
characteristics. This marked decay in skill during spring
(the ‘‘spring barrier’’), followed sometimes by a recovery
of skill in autumn and winter, is common to most models
(e.g., Webster and Yang 1992; Latif et al. 1994; Clarke and
Van Gorder 1999). Several processes are the plausible
candidate causes of the seasonal dependence, based on
previous studies. These include the intrinsic nature of SST,
the seasonal change of SST persistence associated with the
interannual variability of SST and ENSO phase locked to
the seasonal cycle (Zebiak and Cane 1987; Battisti 1988;
Goswami and Shukla 1991; Xue et al. 1994); the signal-
to-noise ratio of SST (DeWitt 2005); and the change of
relationship between upper-ocean heat content and SST
with respect to season (Kleeman 1993; Galanti et al. 2002;
McPhaden 2003). Based on the model, the seasonal accu-
racy of initialization and model error to simulate the ENSO
can influence on the seasonal dependency of skill.
In this study, ENSO phase-locking to the seasonal cycle
is considered to explain the spring barrier shown in this
JanuaryAprilJulyOctober
El Nino GrowthLa Nina GrowthEl Nino DecayLa Nina DecayNormal
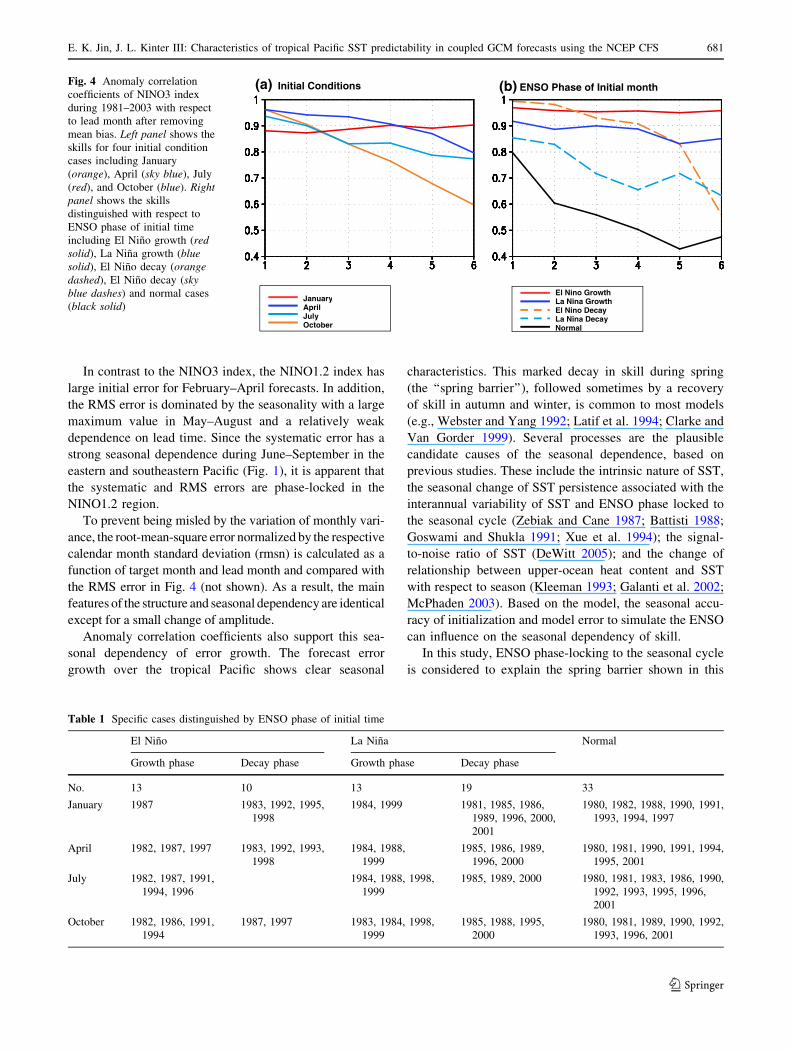
Initial Conditions(a) (b) ENSO Phase of Initial monthFig. 4 Anomaly correlation
coefficients of NINO3 index
during 1981–2003 with respect
to lead month after removing
mean bias. Left panel shows the
skills for four initial condition
cases including January
(orange), April (sky blue), July
(red), and October (blue). Rightpanel shows the skills
distinguished with respect to
ENSO phase of initial time
including El Nino growth (redsolid), La Nina growth (bluesolid), El Nino decay (orangedashed), El Nino decay (skyblue dashes) and normal cases
(black solid)
Table 1 Specific cases distinguished by ENSO phase of initial time
El Nino La Nina Normal
Growth phase Decay phase Growth phase Decay phase
No. 13 10 13 19 33
January 1987 1983, 1992, 1995,
1998
1984, 1999 1981, 1985, 1986,
1989, 1996, 2000,
2001
1980, 1982, 1988, 1990, 1991,
1993, 1994, 1997
April 1982, 1987, 1997 1983, 1992, 1993,
1998
1984, 1988,
1999
1985, 1986, 1989,
1996, 2000
1980, 1981, 1990, 1991, 1994,
1995, 2001
July 1982, 1987, 1991,
1994, 1996
1984, 1988, 1998,
1999
1985, 1989, 2000 1980, 1981, 1983, 1986, 1990,
1992, 1993, 1995, 1996,
2001
October 1982, 1986, 1991,
1994
1987, 1997 1983, 1984, 1998,
1999
1985, 1988, 1995,
2000
1980, 1981, 1989, 1990, 1992,
1993, 1996, 2001
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 681
123

model. Figure 4a shows the anomaly correlation coeffi-
cients of the NINO3 index as a function of forecast lead
month for four initial condition cases. The forecast skill
also shows clear seasonality associated with spring barrier,
with a fast drop of skill for January and April initial con-
ditions and moderate change of skill for July and October
initial conditions in the first 6 months.
Furthermore, the ENSO phase at the initial time, based
on the observed monthly NINO3 index, distinguishes the
cases. Using the half of one standard deviation of observed
SST anomalies, which is calculated separately for warm
and cold anomalies to consider the asymmetry, El Nino
growth and decay, La Nina growth and decay, and normal
cases are identified, respectively. Table 1 shows the years
and number of cases in each category selected in this
manner. Due to the ENSO phase locking to the annual
cycle, the growth phase occur frequently in July and
October initial condition cases, and the decaying phase is
more typical in January and April cases. The growth phase
of both warm and cold events is more predictable than the
decay phase (Fig. 4b). Forecasts in the El Nino growth
phase show more sustained skill than in La Nina growth
cases, while cases with a decaying El Nino lose skill faster
than cases of La Nina decay. Normal events are far less
predictable than warm or cold events. Therefore, the fast
drop of skill in January and April cases can be explained
since it includes more decaying phase situations, which
have lower skill than growth phase cases. August and
November forecasts have relatively better skill because
they are less frequently in the decaying phase, due to the
phase locking of ENSO to the annual cycle. The fact that
there is less seasonal dependency of skill for normal cases
(not shown) also supports this result. Jin et al. (2008) have
shown similar conclusion from ten coupled GCM forecast
results. The reason why ENSO growth is more predictable
than decay is less obvious and requires further analysis
(Table 2).
5 Error growth, Lorenz curve, and its implication
on forecast error
Forecast error occurs not only because the initial condition
obtained from the analysis is not perfect, but also because
the model itself has formulation errors. The actual forecast
error defined as the difference between forecast for a given
day started some days earlier and the observation is always
an upper limit for the forecast error. The so-called ‘‘per-
fect-model error’’ is the difference between forecasts
started a short time apart, due to the chaotic dynamics and
the difference in initial conditions. It eliminates consider-
ation of the model’s formulation error. The actual forecast
error results from a combination of model formulation
errors and errors due to chaos. We expect the differences in
forecast error started a few days apart to be less than the
actual forecast error. In this sense, the perfect-model error
might form a lower limit of sorts.
Similarly, the actual forecast error, which gives the
correct skill of forecast, can be considered as the lower
Table 2 Correlation coefficients between observed and simulated NINO3 index for four months including January, April, July, and October
Target month First month Third month Sixth month Ninth month
January 0.96 (December) 0.93 (October) 0.89 (July) 0.81 (April)
April 0.90 (March) 0.83 (January) 0.73 (October) 0.70 (July)
July 0.88 (June) 0.79 (April) 0.58 (January) 0.46 (October)
October 0.95 (September) 0.88 (July) 0.74 (April) 0.55 (January)
Months inside brackets denotes forecast initial month
Forecast Error of Ensemble meanLorenz Curve of Ensemble meanMean Forecast Error of Each MemberMean Lorenz Curve of Each MemberForecast Error of Each MemberLorenz Curve of Each Member
Forecast Lead Month
Fig. 5 Forecast error and Lorenz curve of NINO3 index. Twelve
initial condition cases are averaged with respect to forecast lead
month. Black solid line denotes the forecast error of ensemble mean,
black dashed line is for mean of individual member, and gray dashedlines for individual member. Likewise, red solid line is for the Lorenz
curve of ensemble mean, red dashed line denotes mean of individual
member, and orange dashed lines are for each member, respectively.
Units are �K
682 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123

limit of predictability of this coupled system. To assess the
complementary upper limit of predictability, the ‘‘Lorenz
curve’’ suggested in earlier predictability studies is used.
As shown by Goswami and Shukla (1991), the approach
conceived by Lorenz (1969b) for estimating the lower
bound of weather forecast error can also be applied to
climate forecasts. We will refer to that limit as the ‘‘Lorenz
curve’’, which is estimated from monthly mean data by
assembling the locus of the RMS difference between the
1- and 2-months lead forecasts for the first target month,
the RMS difference between the 2- and 3-months lead
forecasts for the second target month, and so on. The
Lorenz curve is one measure of perfect model error growth.
The analysis thus far has been applied solely to ensemble
mean forecasts; however, there is information in the indi-
vidual ensemble members. The sources of error in seasonal
forecasts are mainly the uncertainty in the initial conditions,
model errors, and instabilities of the coupled system. By
comparing the ensemble mean and individual member
cases, the relative importance of model error and initial error
in determining the error growth can be distinguished. The
difference between the upper and lower limits of predict-
ability can be also interpreted as the instability of the system.
Because we have seen that the maximum error variance
is in the eastern tropical Pacific, and for convenience, we
focus on the average of SST anomalies over the NINO3
region in the remainder of this paper. NINO3 is also a good
index of ENSO variability (Barnston et al. 1997). Figure 5
shows the RMS error and Lorenz curve of the NINO3
index as a function of lead time, for all calendar months’
forecasts. The black solid lines indicate ensemble mean
error, dashed lines show the average of individual ensem-
ble members’ RMS errors, and dashed lines denote
individual members. Likewise, the Lorenz curve has been
computed for each ensemble member (matching ensemble
members by the initial date within the initial month) and
for the ensemble mean forecasts of NINO3, as shown in
Fig. 5 with red lines.
In almost all cases, at almost all leads, the ensemble
mean forecast has smaller RMS error than any of the
individual ensemble members. This behavior is found in
many weather and climate prediction systems—multi-
forecast averages have generally lower error variance. This
is a quantitative expression of the conventional wisdom of
forecasters that the consensus forecast is best, on average.
The most striking feature of this figure is that, surprisingly,
the Lorenz curve of the ensemble mean does not grow with
respect to lead month. Focusing on the individual mem-
bers, at month one, 15 different values of error correspond
to the fifteen members of the ensemble, because each one
has been integrated for a slightly different length of time.
After that, the growth rate of forecast error of individual
members is almost the same as the Lorenz curve,
suggesting that this model has very fast error growth due to
instability of system. The behavior of the ensemble mean
and the individual members look contradictory to each
other. However, note that the forecast error growth in
cases, including both ensemble mean and individual
members appears not to be saturated as the lead time
increases to 9 months, although it is not shown here.
To understand this apparent contradiction, individual
forecast cases from four strong ENSO growth cases were
selected (Fig. 6). The black solid line denotes the observed
NINO3 SST anomalies. The red thick line and the orange
lines are the ensemble mean and individual members of
December initial conditions forecasts and the blue thick
line and the sky-blue lines are January initial conditions
forecasts, respectively. In all cases, the ensemble means of
December and January forecasts are similar to each other,
suggesting that the error is a function of target month
regardless of the initial conditions. This implies that fast
error growth induced by initial conditions has already
saturated, which is consistent with previous results show-
ing fast error growth within 2 months over the tropics.
Even though the ensemble spread is increasing with respect
to lead month in both initial conditions forecast cases, the
ensemble mean error grows similarly, suggesting the strong
regulation of the model’s systematic error by the annual
cycle. For the NINO3 index, this may be a result of the
systematic error of the model ENSO dynamics. That is why
the Lorenz curve is flat, while the differences among
ensemble members show quite a large range, even more
than 4�K sometimes after a few months of model integra-
tion. This also suggests the possibility that ENSO dynamics
in this model appears to be quite wrong.
The flat growth rate of ensemble mean error deceptively
indicates that there is no error growth. However, based on
our analysis of individual cases, it is clear that the initial
error growth is saturated within 2 months in this model.
After this fast error growth saturation induced by initial
errors, the error growth levels off and follows the identical
model error as a function of target month. The fast growth
of the Lorenz curve of individual members results from the
large ensemble spread in CFS due to its instability. Finally
we reach a conclusion analogous to that obtained by
Lorenz’ for weather forecasts, namely that the best way to
improve the 10-day weather forecast is by improving the
first day forecast (Lorenz 1982). We find that the sub-
stantial improvement in ENSO prediction can be obtained
by reducing the first month forecast error.
To clarify the effect of initial conditions associated with
lead time, we analyzed the forecast error and its growth for
the three segments of the initial conditions as determined in
the experimental design. The three segments are the fore-
casts initialized near the 11th of the month, those initialized
near the 21st of the month, and those initialized near the
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 683
123
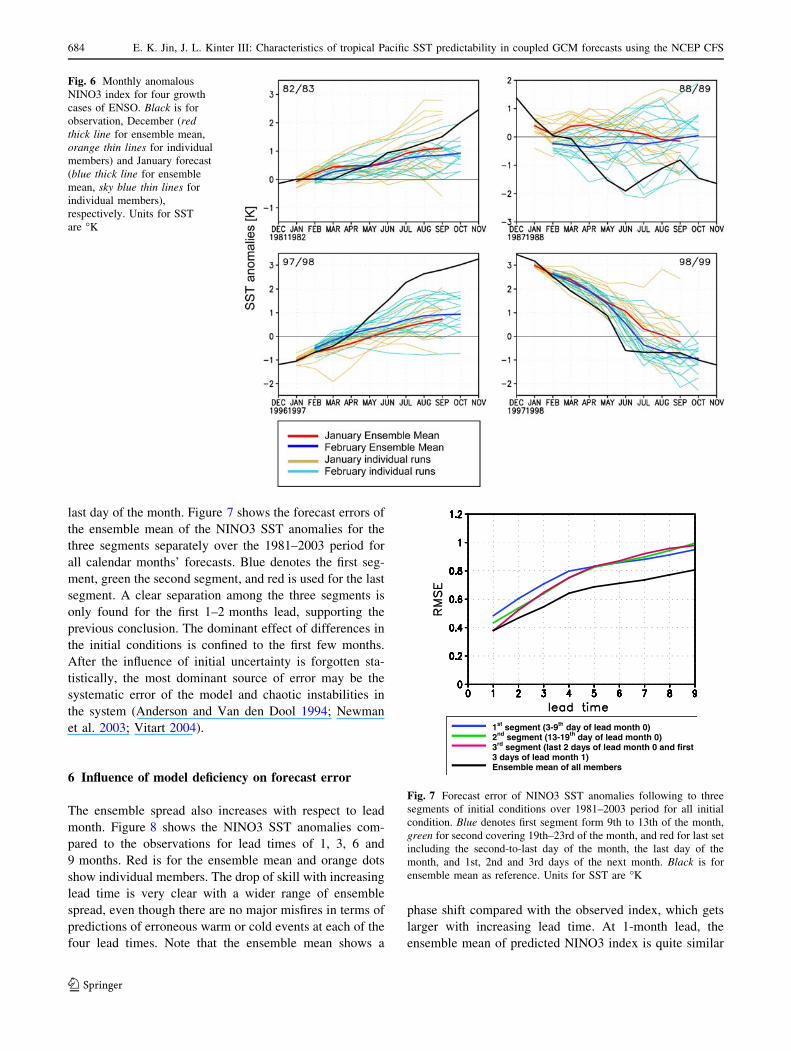
last day of the month. Figure 7 shows the forecast errors of
the ensemble mean of the NINO3 SST anomalies for the
three segments separately over the 1981–2003 period for
all calendar months’ forecasts. Blue denotes the first seg-
ment, green the second segment, and red is used for the last
segment. A clear separation among the three segments is
only found for the first 1–2 months lead, supporting the
previous conclusion. The dominant effect of differences in
the initial conditions is confined to the first few months.
After the influence of initial uncertainty is forgotten sta-
tistically, the most dominant source of error may be the
systematic error of the model and chaotic instabilities in
the system (Anderson and Van den Dool 1994; Newman
et al. 2003; Vitart 2004).
6 Influence of model deficiency on forecast error
The ensemble spread also increases with respect to lead
month. Figure 8 shows the NINO3 SST anomalies com-
pared to the observations for lead times of 1, 3, 6 and
9 months. Red is for the ensemble mean and orange dots
show individual members. The drop of skill with increasing
lead time is very clear with a wider range of ensemble
spread, even though there are no major misfires in terms of
predictions of erroneous warm or cold events at each of the
four lead times. Note that the ensemble mean shows a
phase shift compared with the observed index, which gets
larger with increasing lead time. At 1-month lead, the
ensemble mean of predicted NINO3 index is quite similar
Fig. 6 Monthly anomalous
NINO3 index for four growth
cases of ENSO. Black is for
observation, December (redthick line for ensemble mean,
orange thin lines for individual
members) and January forecast
(blue thick line for ensemble
mean, sky blue thin lines for
individual members),
respectively. Units for SST
are �K
1st segment (3-9th day of lead month 0)2nd segment (13-19th day of lead month 0)3rd segment (last 2 days of lead month 0 and first 3 days of lead month 1) Ensemble mean of all members
Fig. 7 Forecast error of NINO3 SST anomalies following to three
segments of initial conditions over 1981–2003 period for all initial
condition. Blue denotes first segment form 9th to 13th of the month,
green for second covering 19th–23rd of the month, and red for last set
including the second-to-last day of the month, the last day of the
month, and 1st, 2nd and 3rd days of the next month. Black is for
ensemble mean as reference. Units for SST are �K
684 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
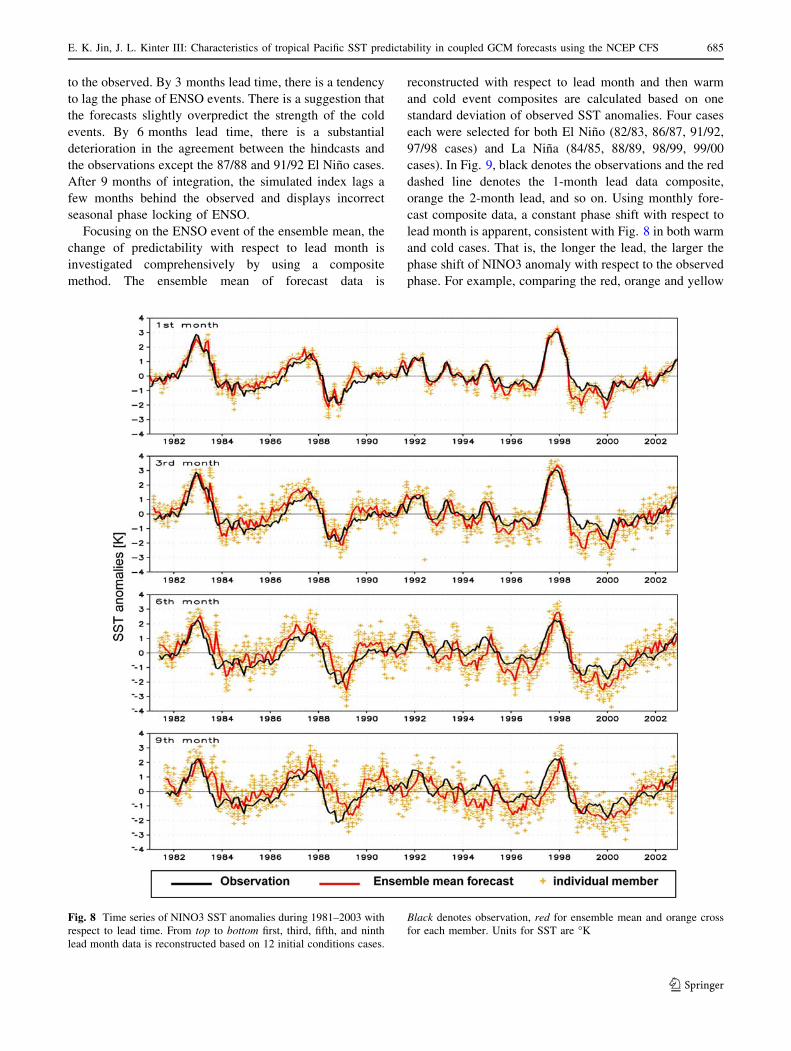
to the observed. By 3 months lead time, there is a tendency
to lag the phase of ENSO events. There is a suggestion that
the forecasts slightly overpredict the strength of the cold
events. By 6 months lead time, there is a substantial
deterioration in the agreement between the hindcasts and
the observations except the 87/88 and 91/92 El Nino cases.
After 9 months of integration, the simulated index lags a
few months behind the observed and displays incorrect
seasonal phase locking of ENSO.
Focusing on the ENSO event of the ensemble mean, the
change of predictability with respect to lead month is
investigated comprehensively by using a composite
method. The ensemble mean of forecast data is
reconstructed with respect to lead month and then warm
and cold event composites are calculated based on one
standard deviation of observed SST anomalies. Four cases
each were selected for both El Nino (82/83, 86/87, 91/92,
97/98 cases) and La Nina (84/85, 88/89, 98/99, 99/00
cases). In Fig. 9, black denotes the observations and the red
dashed line denotes the 1-month lead data composite,
orange the 2-month lead, and so on. Using monthly fore-
cast composite data, a constant phase shift with respect to
lead month is apparent, consistent with Fig. 8 in both warm
and cold cases. That is, the longer the lead, the larger the
phase shift of NINO3 anomaly with respect to the observed
phase. For example, comparing the red, orange and yellow
Fig. 8 Time series of NINO3 SST anomalies during 1981–2003 with
respect to lead time. From top to bottom first, third, fifth, and ninth
lead month data is reconstructed based on 12 initial conditions cases.
Black denotes observation, red for ensemble mean and orange cross
for each member. Units for SST are �K
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 685
123

curves with the blue, indigo and violet curves, it is apparent
that the former tend to reproduce the observed phase of
NINO3 anomaly quite closely, while the latter are lagged
with respect to the observed. The implication is that the
model tends to persist both warm and cold events too long.
By analyzing four CFS simulations of 32 years each,
Wang et al. (2005) pointed out that the simulated ENSO
events have longer period. Warm events start 3 months
earlier and cold events maintain their strength more in the
model than in observations in the case of NINO3.4 SST
anomalies. Zhang et al. (2007) also showed that CFS
produces an early onset of warm events with longer period:
about 5 years instead of about 4 years in the observations.
Recently, Jin et al. (2008) shows that CFS inherently
generates monotonous type of El Nino different from
observation showing two types of El Nino based on dis-
tinctive spatial pattern of SST anomalies and discharge
mechanism. Simulated El Nino is the midway of two types
and it becomes one of sources of error to reproduce SST
anomalies and associated atmospheric and oceanic
variables.
The problematic features of the simulated ENSO found
in retrospective forecasts may be associated with those of
long runs. In addition, on the premise that the influence of
coupled model errors on actual forecasts is an dominant
factor degrading the predictability after the influence of the
initial conditions fades out as the lead increase, investi-
gating the model capability in long simulations without the
influence of initial conditions is one key to understanding
the behavior of forecast error and identifying possible
means to correct it. In this study, a 52-year long run sim-
ulation is analyzed and compared with forecast data
(K. Pegion, personal communication).
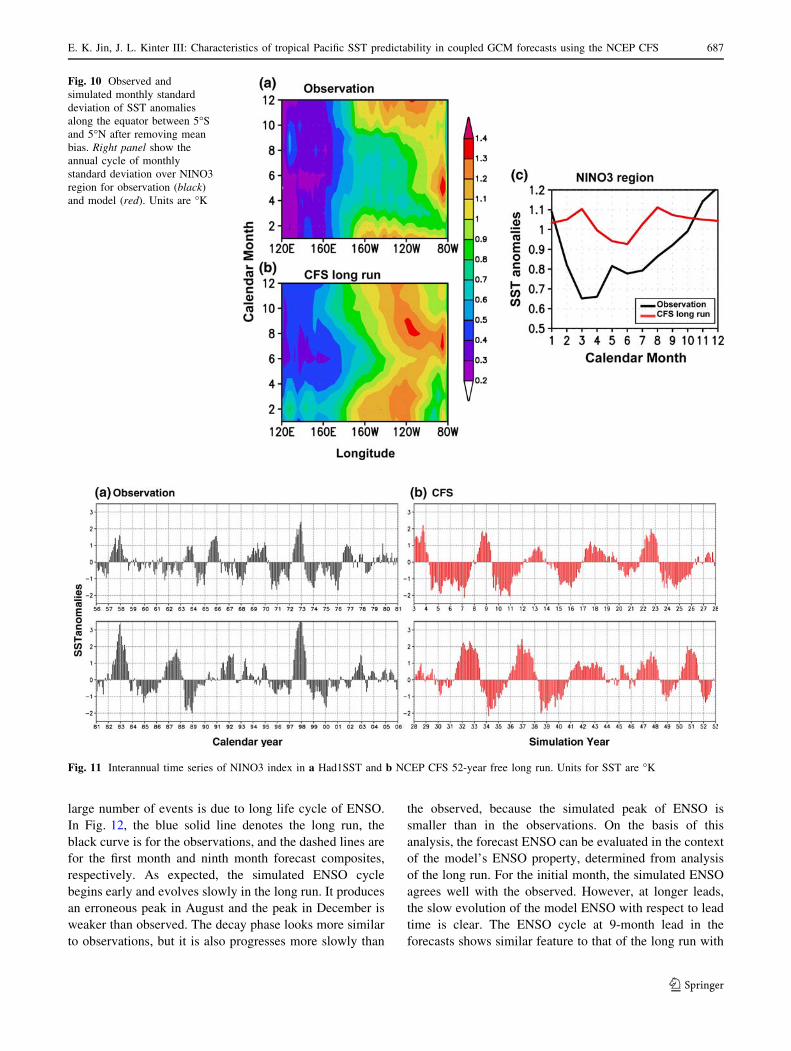
After removing the mean bias by calculating anomalies
as the departures from the climatology of the last 50 years
in the long run, the monthly standard deviation of SST
anomalies over the tropics during the last 50 years is
compared with observations (Fig. 10). Over the eastern and
central Pacific, the observed SST has clear seasonality
showing strong variance in DJF and a weak phase from
February through July. In contrast, the model shows near-
constant high variance over the central and eastern Pacific
even in JJA, unlike the observations. This shows there are
many inconsistencies after even removing the mean bias in
this model. The standard deviation of the NINO3 index
shows this difference very clearly (Fig. 10c). The black
curve is for observations and the red curve is for the long
CFS run. The observed maximum variance is in December
with weak variance in March–July, while the model has
larger variance in March and August unlike the
observations.
The simulated interannual variability of the NINO3
index is also quite different from observed in Fig. 11. The
model has a very regular and long ENSO cycle with a 5- to
6-year period. Associated with this long life cycle, the peak
of ENSO frequently occurs in boreal summer. Therefore,
this model has large error during JJA especially. Based on
the NINO3.4 index, previous studies also show that the
simulated ENSO in the CFS long run has a longer life cycle
with earlier onset and lasts longer, even though the model
reproduces some features of the observed ENSO variability
very well (Wang et al. 2005; Zhang et al. 2007). This
difference may result from the fact that the maximum error
of SST variability occurs over the eastern Pacific, rather
than the central Pacific.
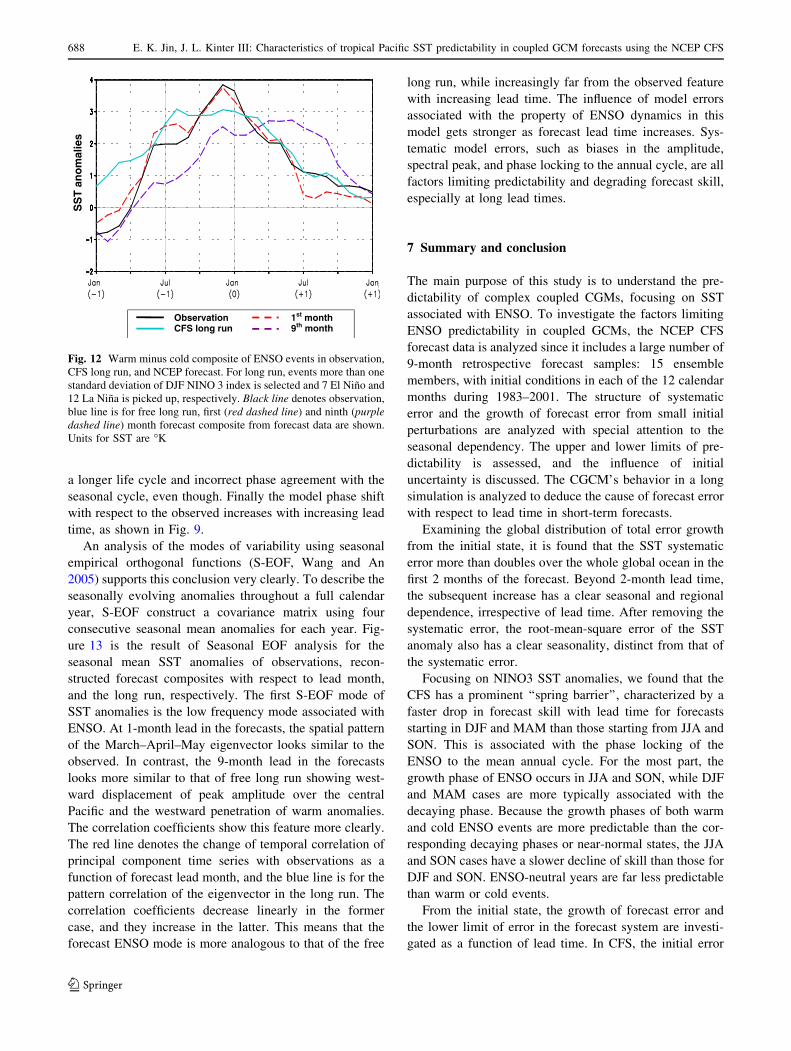
Finally, by computing the warm minus cold composite,
the model ENSO cycle can be compared with observed.
We selected events with more than one standard deviation
of the DJF NINO3 index in the long run. In the 52-year run,
7 El Nino and 12 La Nina events were found. Note that the
Fig. 9 Warm and cold
composite of ENSO events
during 1981–2003. Four
strongest El Nino and La Nina
cases are selected, respectively.
Black solid line denotes
observation, and dashed linesdenotes first to ninth forecast
composite from reconstructed
forecast data with respect to
forecast lead month. Units for
SST are �K
686 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
large number of events is due to long life cycle of ENSO.
In Fig. 12, the blue solid line denotes the long run, the
black curve is for the observations, and the dashed lines are
for the first month and ninth month forecast composites,
respectively. As expected, the simulated ENSO cycle
begins early and evolves slowly in the long run. It produces
an erroneous peak in August and the peak in December is
weaker than observed. The decay phase looks more similar
to observations, but it is also progresses more slowly than
the observed, because the simulated peak of ENSO is
smaller than in the observations. On the basis of this
analysis, the forecast ENSO can be evaluated in the context
of the model’s ENSO property, determined from analysis
of the long run. For the initial month, the simulated ENSO
agrees well with the observed. However, at longer leads,
the slow evolution of the model ENSO with respect to lead
time is clear. The ENSO cycle at 9-month lead in the
forecasts shows similar feature to that of the long run with
Fig. 10 Observed and
simulated monthly standard
deviation of SST anomalies
along the equator between 5�S
and 5�N after removing mean
bias. Right panel show the
annual cycle of monthly
standard deviation over NINO3
region for observation (black)
and model (red). Units are �K
Fig. 11 Interannual time series of NINO3 index in a Had1SST and b NCEP CFS 52-year free long run. Units for SST are �K
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 687
123
a longer life cycle and incorrect phase agreement with the
seasonal cycle, even though. Finally the model phase shift
with respect to the observed increases with increasing lead
time, as shown in Fig. 9.
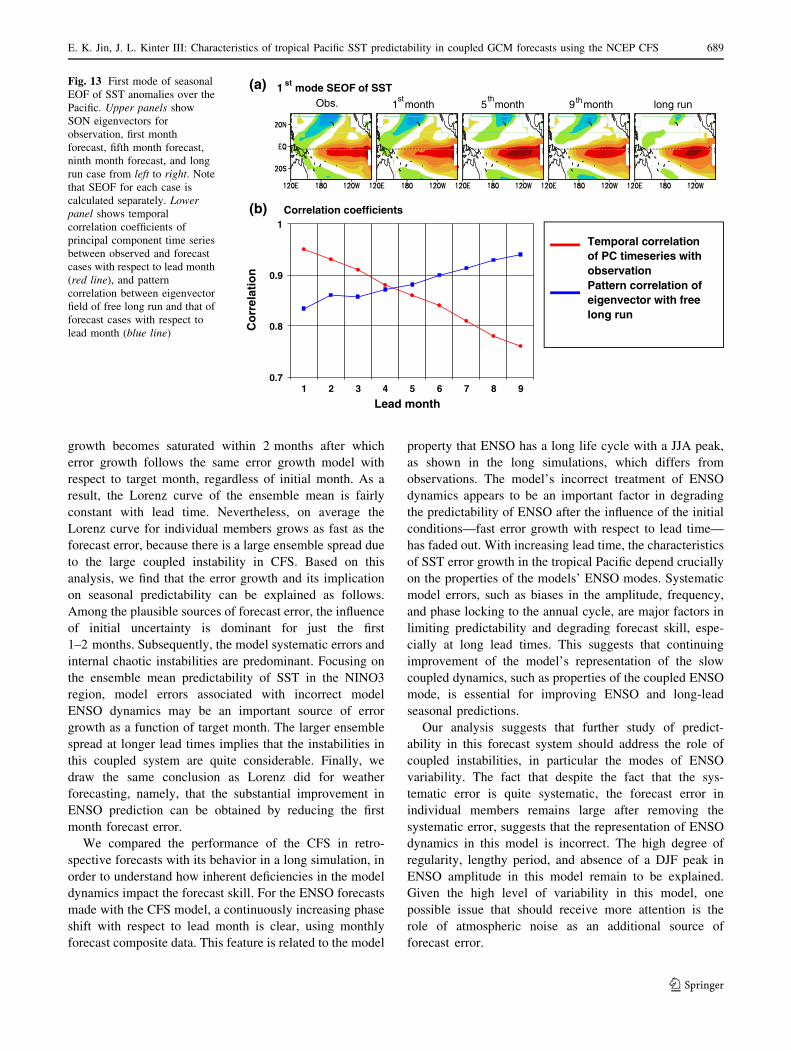
An analysis of the modes of variability using seasonal
empirical orthogonal functions (S-EOF, Wang and An
2005) supports this conclusion very clearly. To describe the
seasonally evolving anomalies throughout a full calendar
year, S-EOF construct a covariance matrix using four
consecutive seasonal mean anomalies for each year. Fig-
ure 13 is the result of Seasonal EOF analysis for the
seasonal mean SST anomalies of observations, recon-
structed forecast composites with respect to lead month,
and the long run, respectively. The first S-EOF mode of
SST anomalies is the low frequency mode associated with
ENSO. At 1-month lead in the forecasts, the spatial pattern
of the March–April–May eigenvector looks similar to the
observed. In contrast, the 9-month lead in the forecasts
looks more similar to that of free long run showing west-
ward displacement of peak amplitude over the central
Pacific and the westward penetration of warm anomalies.
The correlation coefficients show this feature more clearly.
The red line denotes the change of temporal correlation of
principal component time series with observations as a
function of forecast lead month, and the blue line is for the
pattern correlation of the eigenvector in the long run. The
correlation coefficients decrease linearly in the former
case, and they increase in the latter. This means that the
forecast ENSO mode is more analogous to that of the free
long run, while increasingly far from the observed feature
with increasing lead time. The influence of model errors
associated with the property of ENSO dynamics in this
model gets stronger as forecast lead time increases. Sys-
tematic model errors, such as biases in the amplitude,
spectral peak, and phase locking to the annual cycle, are all
factors limiting predictability and degrading forecast skill,
especially at long lead times.
7 Summary and conclusion
The main purpose of this study is to understand the pre-
dictability of complex coupled CGMs, focusing on SST
associated with ENSO. To investigate the factors limiting
ENSO predictability in coupled GCMs, the NCEP CFS
forecast data is analyzed since it includes a large number of
9-month retrospective forecast samples: 15 ensemble
members, with initial conditions in each of the 12 calendar
months during 1983–2001. The structure of systematic
error and the growth of forecast error from small initial
perturbations are analyzed with special attention to the
seasonal dependency. The upper and lower limits of pre-
dictability is assessed, and the influence of initial
uncertainty is discussed. The CGCM’s behavior in a long
simulation is analyzed to deduce the cause of forecast error
with respect to lead time in short-term forecasts.
Examining the global distribution of total error growth
from the initial state, it is found that the SST systematic
error more than doubles over the whole global ocean in the
first 2 months of the forecast. Beyond 2-month lead time,
the subsequent increase has a clear seasonal and regional
dependence, irrespective of lead time. After removing the
systematic error, the root-mean-square error of the SST
anomaly also has a clear seasonality, distinct from that of
the systematic error.
Focusing on NINO3 SST anomalies, we found that the
CFS has a prominent ‘‘spring barrier’’, characterized by a
faster drop in forecast skill with lead time for forecasts
starting in DJF and MAM than those starting from JJA and
SON. This is associated with the phase locking of the
ENSO to the mean annual cycle. For the most part, the
growth phase of ENSO occurs in JJA and SON, while DJF
and MAM cases are more typically associated with the
decaying phase. Because the growth phases of both warm
and cold ENSO events are more predictable than the cor-
responding decaying phases or near-normal states, the JJA
and SON cases have a slower decline of skill than those for
DJF and SON. ENSO-neutral years are far less predictable
than warm or cold events.
From the initial state, the growth of forecast error and
the lower limit of error in the forecast system are investi-
gated as a function of lead time. In CFS, the initial error
ObservationCFS long run
SS
Tan
om
alie
s
1st month9th month
Fig. 12 Warm minus cold composite of ENSO events in observation,
CFS long run, and NCEP forecast. For long run, events more than one
standard deviation of DJF NINO 3 index is selected and 7 El Nino and
12 La Nina is picked up, respectively. Black line denotes observation,
blue line is for free long run, first (red dashed line) and ninth (purpledashed line) month forecast composite from forecast data are shown.
Units for SST are �K
688 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
growth becomes saturated within 2 months after which
error growth follows the same error growth model with
respect to target month, regardless of initial month. As a
result, the Lorenz curve of the ensemble mean is fairly
constant with lead time. Nevertheless, on average the
Lorenz curve for individual members grows as fast as the
forecast error, because there is a large ensemble spread due
to the large coupled instability in CFS. Based on this
analysis, we find that the error growth and its implication
on seasonal predictability can be explained as follows.
Among the plausible sources of forecast error, the influence
of initial uncertainty is dominant for just the first
1–2 months. Subsequently, the model systematic errors and
internal chaotic instabilities are predominant. Focusing on
the ensemble mean predictability of SST in the NINO3
region, model errors associated with incorrect model
ENSO dynamics may be an important source of error
growth as a function of target month. The larger ensemble
spread at longer lead times implies that the instabilities in
this coupled system are quite considerable. Finally, we
draw the same conclusion as Lorenz did for weather
forecasting, namely, that the substantial improvement in
ENSO prediction can be obtained by reducing the first
month forecast error.
We compared the performance of the CFS in retro-
spective forecasts with its behavior in a long simulation, in
order to understand how inherent deficiencies in the model
dynamics impact the forecast skill. For the ENSO forecasts
made with the CFS model, a continuously increasing phase
shift with respect to lead month is clear, using monthly
forecast composite data. This feature is related to the model
property that ENSO has a long life cycle with a JJA peak,
as shown in the long simulations, which differs from
observations. The model’s incorrect treatment of ENSO
dynamics appears to be an important factor in degrading
the predictability of ENSO after the influence of the initial
conditions—fast error growth with respect to lead time—
has faded out. With increasing lead time, the characteristics
of SST error growth in the tropical Pacific depend crucially
on the properties of the models’ ENSO modes. Systematic
model errors, such as biases in the amplitude, frequency,
and phase locking to the annual cycle, are major factors in
limiting predictability and degrading forecast skill, espe-
cially at long lead times. This suggests that continuing
improvement of the model’s representation of the slow
coupled dynamics, such as properties of the coupled ENSO
mode, is essential for improving ENSO and long-lead
seasonal predictions.
Our analysis suggests that further study of predict-
ability in this forecast system should address the role of
coupled instabilities, in particular the modes of ENSO
variability. The fact that despite the fact that the sys-
tematic error is quite systematic, the forecast error in
individual members remains large after removing the
systematic error, suggests that the representation of ENSO
dynamics in this model is incorrect. The high degree of
regularity, lengthy period, and absence of a DJF peak in
ENSO amplitude in this model remain to be explained.
Given the high level of variability in this model, one
possible issue that should receive more attention is the
role of atmospheric noise as an additional source of
forecast error.
1 st mode SEOF of SST
Temporal correlation of PC timeseries with observationPattern correlation of eigenvector with free long run
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8 9
Lead month
Co
rrel
atio
n
Correlation coefficients
Obs.
(a)
(b)
long run1st
month 9thmonth5th
month
Fig. 13 First mode of seasonal
EOF of SST anomalies over the
Pacific. Upper panels show
SON eigenvectors for
observation, first month
forecast, fifth month forecast,
ninth month forecast, and long
run case from left to right. Note
that SEOF for each case is
calculated separately. Lowerpanel shows temporal
correlation coefficients of
principal component time series
between observed and forecast
cases with respect to lead month
(red line), and pattern
correlation between eigenvector
field of free long run and that of
forecast cases with respect to
lead month (blue line)
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 689
123

Acknowledgments The advice of Jagadish Shukla has been
much appreciated, and also discussions with B. Kirtman, B. Wang,
and J.-Y. Lee. The forecast data was generously provided by the
NCEP Environmental Modeling Center (EMC), long run data was
generously provided by K. Pegion (COLA), and the author is grateful
for these contributions. The first author was supported by the Asian-
Pacific Economic Cooperation Climate Center (APCC) International
Research Project. The second author was supported by grants from
the National Science Foundation (ATM-0332910), the National
Oceanic and Atmospheric Administration (NA04OAR4310034) and
the National Aeronautics and Space Administration (NNG04GG46G).
References
AchutaRao K, Sperber KR (2002) Simulation of the El Nino-Southern
oscillation: results from the coupled model intercomparison
project. Clim Dyn 19:191–209
Anderson JL, van den Dool HM (1994) Skill and return of skill
in dynamic extended-range forecasts. Mon Weather Rev 122:
507–516
Arpe K, Hollingsworth A, Tracton MS, Lorenc AC, Uppala S,
Kallberg P (1985) The response of numerical weather prediction
systems to FGGE level IIbdata—Part II: Forecast verification and
implications for predictability. Q J R Meteorol Soc 111:67–101
Balmaseda MA, Davey MK, Anderson DLT (1995) Decadal
and seasonal dependence of ENSO prediction skill. J Clim
8:2705–2715
Barnston AG, Chelliah M, Goldenberg SB (1997) Documentation of a
highly ENSO-related SST region in the equatorial Pacific. Atmos
Ocean 35:367–383
Battisti DS (1989) On the role of off-equatorial oceanic Rossby waves
during ENSO. J Phys Oceanogr 19:551–560
Battisti DS (1988) Dynamics and thermodynamics of a warming
event in a coupled tropical atmosphere–ocean model. J Atmos
Sci 45:2889–2919
Battisti DS, Hirst AC (1989) Interannual variability in a tropical
atmosphere–ocean model: influence of the basic state, ocean
geometry and nonlinearity. J Atmos Sci 46:1687–1712
Behringer DW et al. (2005) The Global Ocean Data Assimilation
System (GODAS) at NCEP (to be submitted)
Blumenthal MB (1991) Predictability of a coupled ocean–atmosphere
model. J Clim 4:766–784
Cane MA, Zebiak SE, Dolan SC (1986) Experimental forecasts of El
Nino. Nature 321:827–832
Cane M, Zebiak SE (1987) Prediction of El Nino events using a
physical model. In: Cattle H (ed) Atmospheric and oceanic
variability. Royal Meteorological Society Press, Reading, pp
153–182
Charney J, Fleagle RG, Riehl H, Lally VE, Wark DQ (1966) The
feasibility of a global observation and analysis experiment. Bull
Am Meteorol Soc 47:200–220
Chen WY (1989) Estimates of dynamical predictability from NMC
DERF experiments. Mon Weather Rev 117:1227–1236
Clarke AJ, Van Gorder S (1999) The connection between the boreal
spring Southern oscillation persistence barrier and biennial
variability. J Clim 12:610–620
Dalcher A, Kalnay E (1987) Error growth and predictability in
operational ECMWF forecasts. Tellus 39A:474–491
Davey M, Huddleston M, Sperber KR, Braconnot P, Bryan F, Chen
D, Colman RA, Cooper C, Cubasch U, Delecluse P, DeWitt D,
Fairhead L, Flato G, Gordon C, Hogan T, Ji M, Kimoto M, Kitoh
A, Knutson TR, Latif M, Le Treut H, Li T, Manabe S, Mechoso
CR, Meehl GA, Oberhuber J, Power SB, Roeckner E, Terray L,
Vintzileos A, Voss R, Wang B, Washington WM, Yoshikawa I,
Yu J-Y, Yukimoto S, Zebiak SE (2002) A study of coupled
model climatology and variability in tropical ocean regions.
Clim Dyn 18:403–420
Delecluse P, Davey M, Kitamura Y, Philander S, Suarez M,
Bengtsson L (1998) TOGA review paper: coupled general
circulation modeling of the tropical Pacific. J Geophys Res
103:14357–14373
DeWitt DG (2005) Retrospective forecasts of interannual sea surface
temperature anomalies from 1982 to present using a directly
coupled atmosphere–ocean general circulation model. Mon
Weather Rev 133:2972–2995
Galanti E, Tziperman E, Harrison M, Rosati A, Giering R, Sirkes Z
(2002) The equatorial thermocline outcropping—a seasonal
control on the tropical Pacific ocean–atmosphere instability
strength. J Clim 15:2721–2739
Goswami BN, Shukla J (1991) Predictability of the coupled ocean–
atmosphere model. J Clim 4:3–22
Goswami BN, Rajendran K, Sengupta D (1997) Source of seasonality
and scale dependence of predictability in a coupled ocean–
atmosphere model. Mon Weather Rev 125:846–858
Guilyardi E, Gualdi S, Slingo J, Navarra A, Delecluse P, Cole J,
Madec G, Roberts M, Latif M, Terray L (2004) Representing El
Nino in coupled ocean–atmosphere GCMs: the dominant role of
the atmospheric component. J Clim 17:4623–4629
Gutzler DS, Shukla J (1984) Analogs in the wintertime 500 mb height
field. J Atmos Sci 41:177–189
Hu H, Huang B, Pegion K (2007) Leading patterns of the tropical
Atlantic variability in a coupled general circulation model. Clim
Dyn. doi:10.1007/s00382-007-0318-x
Ji M, Kumar A, Leetmaa A (1994) An experimental coupled forecast
system at the National Meteorological Centre. Some early
results. Tellus 46A:398–418
Jin EK, Kinter JL III, Wang B, Park C-K, Kang I-S, Kirtman B, Kug
J-S, Kumar A, Luo J-J, Schemm J, Shukla J, Yamagata T (2008)
Current status of ENSO prediction skill in coupled ocean–
atmosphere models. Clim Dyn (in press)
Kanamitsu M, Ebisuzaki W, Woollen J, Yang S-K, Slingo JJ, Fiorino
M, Potter GL (2002) NCEP-DOE AMIP-II reanalysis (R–2).
Bull Am Meteorol Soc 83:1631–1643
Kirtman BP, Shukla J, Balmaseda M, Graham N, Penland C, Xue Y,
Zebiak S (2002) Current status of ENSO forecast skill: a report to
the climate variability and predictability (CLIVAR) Numerical
Experimentation Group (NEG). CLIVAR Working Group on
seasonal to interannual prediction, 31 pp. Available online at http://
www.cliver.org/publications/wgpreports/wgsip/nino3/report.htm
Kirtman BP (2003) The COLA anomaly coupled model: ensemble
ENSO prediction. Mon Weather Rev 131:2324–2341
Kleeman R (1993) On the dependence of hindcast skill on ocean
thermodynamics in a coupled ocean–atmosphere model. J Clim
6:2012–2033
Latif M, Sterl A, Maier-Reimer E, Junge MM (1993) Climate variability
in a coupled GCM. Part I: The tropical Pacific. J Clim 6:5–21
Latif M et al (2001) ENSIP: the El Nino simulation intercomparison
project. Clim Dyn 18:255–276
Latif M, Barnett TP, Cane MA, Flugel M, Graham NE, von Storch H,
Xu J-S, Zebiak SE (1994) A review of ENSO prediction studies.
Clim Dyn 9:167–179
Lazar A, Vintzileos A, Doblas-reyes FJ, Rogel P, Delecluse P (2005)
Seasonal forecast of tropical climate with coupled ocean–
atmosphere general circulation models: on the respective role
of the atmosphere and the ocean components in the drift of the
surface temperature error. Tellus 57:387–397
Leith CE (1971) Atmospheric predictability and two-dimensional
turbulence. J Atmos Sci 28:148–161
Leith CE, Kraichnan RH (1972) Predictability of turbulent flows.
J Atmos Sci 29:1041–1058
690 E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS
123
Leith CE (1978) Objective methods for weather prediction. Annu Rev
Fluid Mech 10:107–128
Lorenz EN (1965) A study of the predictability of a 28-variable
model. Tellus 17:321–333
Lorenz EN (1969a) The predictability of a flow which possesses many
scales of motion. Tellus 21:289–307
Lorenz EN (1969b) Atmospheric predictability as revealed by
naturally occurring analogues. J Atmos Sci 26:636–646
Lorenz EN (1982) Atmospheric predictability experiments with a
large numerical model. Tellus 34:505–513
McPhaden MJ (2003) Tropical Pacific Ocean heat content variations
and ENSO persistence barriers. Geophys Res Lett 30:1480. doi:
10.1029/2003GLO16872
Mechoso CR, Robertson AW, Barth N, Davey MK, Delecluse P, Gent
PR, Ineson S, Kirtman B, Latif M, Le Treut H, Nagai T, Neelin
JD, Philander SGH, Polcher J, Schopf PS, Stockdale T, Suarez
MJ, Terray L, Thual O, Tribbia JJ (1995) The seasonal cycle
over the tropical Pacific in coupled atmosphere–ocean general-
circulation models. Mon Weather Rev 123:2825–2838
Moorthi S, Pan H-L, Caplan P (2001) Changes to the 2001 NCEP
operational MRF/AVN global analysis/forecast system. NWS
Tech. Procedures Bulletin 484, 14 pp. Available online at
http://www.nws.noaa.gov/om/tpb/484.htm
Newman M, Sardeshmukh PD, Winkler CR, Whitaker JS (2003) A
study of subseasonal predictability. Mon Weather Rev
131:1715–1732
Pacanowski RC, Griffies SM (1998) MOM 3.0 manual. NOAA/
GFDL. Available online at http://www.gfdl.noaa.gov/_smg/
MOM/web/guide_parent/guide_parent.html
Rayner NA, Parker DE, Horton EB, Folland CK, Alenxander LV,
Rowell DP, Kent EC, Kaplan A (2003) Global analyses of sea
surface temperature, sea ice, and night marine air temperature
since the late nineteenth century. J Geophys Res 108:4407–4443
Reynolds CA, Webster PJ, Kalnay E (1994) Random error growth in
NMC’s global forecasts. Mon Weather Rev 122:1281–1305
Rosati A, Miyakoda K, Gudgel R (1997) The impact of ocean initial
conditions on ENSO forecasting with a coupled model. Mon
Weather Rev 125:754–772
Saha S, Nadiga S, Thiaw C, Wang J, Wang W, Zhang Q, van den
Dool HM, Pan H-L, Moorthi S, Behringer D, Stokes D, White G,
Lord S, Ebisuzaki W, Peng P, Xie P (2006) The NCEP cliamte
forecast system. J Clim 15:3483–3517
Schneider EK, DeWitt DG, Rosati A, Kirtman BP, Ji L, Tribbia JJ
(2003) Retrospective ENSO forecasts: sensitivity to atmospheric
model and ocean resolution. Mon Weather Rev 131:3038–3060
Schubert SD, Suarez M (1989) Dynamical predictability in a simple
general circulation model: average error growth. J Atmos Sci
46:353–370
Shukla J (1985) Predictability. In: Hoskins BJ, Pearch RP (eds)
Large-scale dynamical processes in the atmosphere. Academic
Press, London, pp 87–122
Shukla J, Kinter JL III (2006) Predictability of seasonal climate
variations: a pedagogical review. In: Palmer T, Hagedorn R (eds)
Predictability of weather and climate. Cambridge University
Press, London, pp 306–341
Simmons AJ, Mureau R, Petroliagis T (1995) Error growth and
estimates of predictability from the ECMWF forecasting system.
Q J R Meteorol Soc 121:1739–1771
Smagorinsky J (1963) General circulation experiments with the
primitive equations. I: The basic experiment. Mon Weather Rev
91:99–164
Torrence C, Webster PJ (1998) The annual cycle of persistence in the
El Nino/Southern oscillation. Q J R Meteorol Soc 124:1985–
2004
Troup AJ (1965) The ‘‘southern oscillation’’. Q J R Meteorol Soc
91:490–506
Vintzileos A, Delecluse P, Sadourny R (1999) On the mechanisms in
a tropical ocean–global atmosphere coupled general circulation
model. Part I: Mean state and the seasonal cycle. Clim Dyn
15:43–62
Vitart F (2004) Monthly forecasting at ECMWF. Mon Weather Rev
132:2761–2779
Wang B, An S-I (2005) A method for detecting season-dependent
modes of climate variability: S-EOF analysis. Geophys Res Lett
32:L15710
Wang W, Saha S, Pan H-L, Nadiga S, White G (2005) Simulation of
ENSO in the new NCEP Coupled Forecast System Model (CFS03).
Mon Weather Rev 133:1574–1593. doi:10.1175/MWR2936.1
Webster PJ, Yang S (1992) Monsoon and ENSO: selectively
interactive systems. Q J R Meteorol Soc 118:877–925
Williamson DL, Kasahara A (1971) Adaptation of meteorological
variables forced by updating. J Atmos Sci 28:1313–1324
Wright PB (1979) Persistence of rainfall anomalies in the central
Pacific. Nature 277:371–374
Xue Y, Cane MA, Zebiak SE, Blumenthal MB (1994) On the
prediction of ENSO: a study with a low-order Markov model.
Tellus 46A:512–528
Yu J-Y (2005) Enhancement of ENSO’s persistence barrier by biennial
variability in a coupled atmosphere–ocean general circulation
model. J Geophys Res 32:L13707. doi:10.1029/2005GL023406
Zebiak SE, Cane MA (1987) A model El Nino-Southern oscillation.
Mon Weather Rev 115:2262–2278
Zwiers FW (1996) Interannual variability and predictability in an
ensemble of AMIP climate simulations conducted with the CCC
GCM2. Clim Dyn 12:825–848
Zhang Q, Kumar A, Xue Y, Wang W, Jin F-F (2007) Analysis of the
ENSO Cycle in NCEP Coupled Forecast Model. J Clim
20:1265–1284
E. K. Jin, J. L. Kinter III: Characteristics of tropical Pacific SST predictability in coupled GCM forecasts using the NCEP CFS 691
123
Copyright © 2022 FDOKUMEN




















