
Chaos reduced-order anti-synchronization of chaotic systems with fully unknown parameters
14
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution and sharing with colleagues. Other uses, including reproduction and distribution, or selling or licensing copies, or posting to personal, institutional or third party websites are prohibited. In most cases authors are permitted to post their version of the article (e.g. in Word or Tex form) to their personal website or institutional repository. Authors requiring further information regarding Elsevier’s archiving and manuscript policies are encouraged to visit: http://www.elsevier.com/copyright
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Chaos reduced-order anti-synchronization of chaotic systems with fully unknown parameters

This article appeared in a journal published by Elsevier. The attachedcopy is furnished to the author for internal non-commercial researchand education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling orlicensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of thearticle (e.g. in Word or Tex form) to their personal website orinstitutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies areencouraged to visit:
http://www.elsevier.com/copyright

Author's personal copy
Chaos reduced-order anti-synchronization of chaotic systemswith fully unknown parameters
M. Mossa Al-sawalha a,⇑, M.S.M. Noorani b
a Faculty of Science, Mathematics Department, University of Hail, Saudi Arabiab Center for Modelling & Data Analysis, School of Mathematical Sciences, Universiti Kebangsaan Malaysia, 43600 UKM Bangi, Selangor, Malaysia
a r t i c l e i n f o
Article history:Received 29 September 2010Received in revised form 9 May 2011Accepted 12 July 2011Available online 29 July 2011
Keywords:Reduced-orderAnti-synchronizationAdaptive controlUnknown parameters
a b s t r a c t
In this present paper, we elaborated the concept of the reduced-order anti-synchronizationof uncertain chaotic systems. Based upon the parameters modulation and the adaptive con-trol techniques, we show that dynamical evolution of third order chaotic system can beanti-synchronized with the projection of a fourth-order chaotic system even though theirparameters are unknown. The techniques are successfully applied to several examples:hyperchaotic Chen system (fourth-order) and Lü system (third-order), theoretical analysisand numerical simulations are shown to verify the results.
Crown Copyright � 2011 Published by Elsevier B.V. All rights reserved.
1. Introduction
Our natural world consists of physical systems that are undoubtedly nonlinear. As one understand this fact, one will real-ize that chaos is inevitable and inherently present in our lives, even though it may not be seen with the naked eye. It has beenrepeatedly demonstrated by scientists in the last recent decades that nonlinear systems, which models our real world, candisplay a variety of behaviors including chaos and hyperchaos. The most important characteristic of chaotic dynamics is itscritical sensitivity to initial conditions, which is responsible for initially neighboring trajectories separating from each otherexponentially in the course of time. This behavior made chaos undesirable and unwanted in many cases of research as itreduces their predictability over long time scales. But this special attribute may be a valuable advantage in certain areasof research. The ability of chaotic dynamics to amplify small perturbations improves their utility for reaching specific desiredstates with very high flexibility and low energy cost is indeed advantageous. In other words, we could try controlling chaosfor the benefit of our needs. Synchronization or anti-synchronization of different chaotic or hyperchaotic systems is one ofthe few main control methods which are popularly discussed recently. This is generally due to its prospective applicationsespecially in chemical reactions, power converters, biological systems, information processing, secure communications, etc.[1]. As the problems of synchronization and anti-synchronization of chaos are interesting, nontraditional, and indeed verychallenging [2–4], a widely variety of approaches have been proposed for chaos synchronization and anti-synchronizationsuch as adaptive control [5–9], linear and nonlinear feedback control [10–12], active control [13–16,36], complete synchro-nization [17] and reduced-order synchronization [18,19].
The Synchronization of chaotic systems with different order or reduced-order synchronization has received less attention.To the author’s best knowledge, there are only a few results in the literature about the synchronization between chaoticsystems whose order is different [18,19]. Moreover, in many real systems, the synchronization is carried out even though
1007-5704/$ - see front matter Crown Copyright � 2011 Published by Elsevier B.V. All rights reserved.doi:10.1016/j.cnsns.2011.07.015
⇑ Corresponding author.E-mail address: [email protected] (M. Mossa Al-sawalha).
Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920
Contents lists available at ScienceDirect
Commun Nonlinear Sci Numer Simulat
journal homepage: www.elsevier .com/locate /cnsns

Author's personal copy
the oscillators have different order. In the case of thalamic neurons, for instance, such a problem is reasonable if their order isdifferent from the one of the hippocampal neurons. Another example happens in the synchronization between heart andlung. One can observe that both, circulatory and respiratory systems, behave in synchronous way. However, one can expectthat the model of the circulatory system is strictly different from the respiratory one, which can involve different order. Inaddition, the synchronization of strictly-different chaotic systems is interesting by itself.
Reduced-order synchronization is the problem of synchronizing a slave system with projections of a master system. Itshould be noted that the reduced order synchronization is not the partial synchronization problem. On the one hand, thepartial synchronization is for coupling two chaotic systems which have an equal order. A main feature of the partial synchro-nization is that, at least, one state of the slave system is not synchronous in some sense. On the other hand, in reduced-ordersynchronization, all states of the slave system are synchronous, in some sense. The main feature of the reduced-order syn-chronization is that the order of the slave system is less than the master one.
Chaos synchronization or anti-synchronization methods have attracted interest of many researchers since they have wideand fascinating application in real life specially in secure communications. For example in [20] the authors presented a gen-eral approach to construct a large class of synchronized dynamical systems and they show that this approach has applicationin a communication scheme where the information can be recovered without errors. Furthermore, they introduced a proce-dure for synthesizing high-dimensional synchronized systems. In [21] the authors demonstrated the feasibility of a simplemethod to synchronize two Lorenz systems with different parameters and then extend it to the recovery of the informationsignal, which is originally inserted into a chaotic signal, with satisfactory precision. The problem of synchronization of a classof continuous-time chaotic systems using the drive-response concept was undertaken by [22], where the author designed anadaptive observer-based response system to synchronize with a given chaotic drive system whose dynamical model is sub-jected to unknown parameters. In [23] the authors proposed an adaptive secure communication scheme with channel noisesbased on the idea of chaotic masking-modulation, and they show that by using adaptive feedback control techniques themessage is encrypted by a chaotic signal and the transmitter and the receiver are synchronized, so the masked signal canbe perfectly recovered by the receiver in the presence of channel noises. In [24] the authors addressed the synchronizationof the unified chaotic system via scalar control and the application in secure communication. They use the linear optimalfeedback control for nonlinear systems methodology to synchronize the unified chaotic system in two distinct situations.Finally it is worth mentioning that since the estimation of Lyapunov exponents is one of the fundamental tasks in the studiesof dynamical systems, chaos synchronization has been exploited to estimate the largest Lyapunov exponent of nonsmoothsystems, (cf. [25]).
The epitome of this paper centers on chaos anti-synchronization between two chaotic systems whose order is different,since some of the aforementioned methods and many other existing methods are mainly concern to synchronized or anti-synchronized between two chaotic system with same order. This feature limits the complexity of the chaotic dynamics. It isbelieved that the anti-synchronization between two chaotic systems whose order is different have much wider applicationand may play an important role in many fields, including chaotic secure communication. The rest of the paper is organized asfollows. Section 2 briefly describes the problem formulation and systems description. In Sections 3–5, we present the adap-tive anti-synchronization strategies with a parameter update law for hyperchaotic Chen (fourth order) and Lü (third order)systems to perform the anti-synchronization respectively. A conclusion is given at the end.
2. Problem formulation and systems description
2.1. Problem formulation
Consider the chaotic system described by
_x ¼ f ðxÞ þ FðxÞa ð1Þ
where x 2 Rm is the state vector of the system (1), f : Rm ! Rm is a continuous vector function including nonlinear terms,F : Rm ! Rm�k, and a 2 Rk is the parameter vector of system. Eq. (1) is considered as the master system. Similarly, the slavesystem is given by
_y ¼ gðyÞ þ GðyÞbþ U ð2Þ
where y 2 Rn is the state vector, g : Rn ! Rn is a continuous vector function, G : Rn ! Rn�‘ , and b 2 R‘ is the parameter vec-tor. The purpose of chaos anti-synchronization is to design a controller UðU 2 RnÞ, which is able to anti-synchronize the stateof the master and the slave systems. When order n = m, ‘ = k and the functions f = g, F = G, the slave system is identical to themaster system, and the CAS problem has been well studied. When two systems satisfy the condition n < m (of course f – g,and F – G), that is, the order of the slave oscillator is lower than that of the master system, the anti-synchronization is onlyattained in reduce-order. Actually, reduced-order anti-synchronization is the problem of controlling a slave system to be theprojection of the master system. Therefore, we can divide the master system into two parts. The projection:
_xı ¼ fıðxÞ þ FıðxÞa ð3Þ
where xı 2 Rn; fı : Rm ! Rn; and Fı : Rm ! Rn�k. The rest:
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1909
Author's personal copy
_x| ¼ f|ðxÞ þ F|ðxÞa ð4Þ
where x| 2 Ru; f| : Rm ! Ru; F| : Rm ! Ru�k and orders n, u satisfy n + u = m. With a suitable controller, the reduced-orderanti–synchronization between two different systems can be achieved, i.e.,
limt!1kyðtÞ þ xıðtÞk ¼ 0 ð5Þ
where the error vector is defined by e(t) = y(t) + xı(t), where eðtÞ 2 Rn, we add Eq. (3) to Eq. (1) and
_e ¼ gðyÞ þ GðyÞbþ U þ fıðxÞ þ FıðxÞa ¼ qðe; xÞ þ Gðe; xÞbþ FıðxÞaþ U ð6Þ
where q : Rn �Rm ! Rn is a continuous vector function. In practical situations, the parameters belonging to the master andthe slave systems are always unknown. Therefore, by using the adaptive control and the parameter identification techniques,the adaptive nonlinear controller [19] can be decided as
U ¼ Qðe; xÞ � Gðe; xÞb� FıðxÞa ð7Þ
where Q : Rn �Rm ! Rn; a and b are the estimated vector of unknown parameters, and the updating laws of the estimatedparameters [19] are given by
_b ¼ GTðyÞeT
_a ¼ FTı ðxÞeT
ð8Þ
Assume a positive Lyapunov function V ¼ 12 ðeT eþ ~aT ~aþ ~bT ~bÞ, where ~a ¼ a� a and ~b ¼ b� b. With the choice of the updating
laws above and reasonable control function Q(e,x), the time derivative of V along the solution in Eq. (6) will be smaller thanzero. In other words, the error vector will approach to zero as time goes infinite and from Lyapunov stability theory [26], thestates of the slave system and projected master system are asymptotically anti-synchronized.
2.2. Systems description
The hyperchaotic Chen system [27,28] is given by
_x ¼ aðy� xÞ þw;_y ¼ dx� xzþ cy;_z ¼ xy� bz;_w ¼ yzþ rw:
ð9Þ
where x, y, z, and w are state variables, and a, b, c, d, and r are real constants. When a = 35, b = 3, c = 12, d = 7, 0 6 r 6 0.085,system (9) is chaotic, when a = 35, b = 3, c = 12, d = 7, 0.085 < r 6 0.798, system (9) is hyperchaotic, when a = 35, b = 3, c = 12,d = 7, 0.798 < r 6 0.9, system (9) is periodic.
In 1963, Lorenz found the first chaotic attractor [29], which has just been mathematically confirmed to exist [30]. In 1999,Chen found another similar but topologically not equivalent chaotic attractor [31] as the dual of the Lorenz system, which isdefined by [32]. The Lorenz system satisfies the condition a12a21 > 0 while the Chen system satisfies a12a21 < 0, where a12 anda21 are the corresponding elements in the constant matrix A = (aij)3�3 for the linear part of the system. Recently, Lü and Chenfound a new chaotic system [33,34], bearing the name of the Lü system [35–37], which satisfies the condition a12a21 = 0. Thisbridges the gap between the Lorenz and Chen attractors [33,34]. The Lü system is described by
_x ¼ aðy� xÞ;_y ¼ �xzþ cy;_z ¼ xy� bz:
ð10Þ
where x, y and z are state variables and a, b and c are positive parameters. System (10) exhibits chaotic behavior when a = 36,b = 3 and c = 20.
3. Anti-synchronization between the projection x–y–z of the hyperchaotic Chen system and Lü system
In order to investigate the reduced-order anti-synchronization behavior between hyperchaotic Chen system and Lü sys-tem, we assume that the x–y–z projection of the hyperchaotic Chen systems is the master system which will be denoted bythe subscript 1, therefore, the master system is the projection part of Eq. (9), and it can be presented in the form of
_x1 ¼ a1ðy1 � x1Þ þw1;
_y1 ¼ d1x1 � x1z1 þ c1y1;
_z1 ¼ x1y1 � b1z1;
ð11Þ
1910 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920

Author's personal copy
and we assume that the Lü system is the response system which will be denoted by the subscript 2, and it can be presentedin the form of
_x2 ¼ a2ðy2 � x2Þ þ u1;
_y2 ¼ �x2z2 þ c2y2 þ u2;
_z2 ¼ x2y2 � b2z2 þ u3:
ð12Þ
where u1, u2, u3 are three control functions to be designed and all parameters a1, d1, b1, c1, a2, c2, b2 are unknown constantparameters. We add Eq. (12) to Eq. (11) and get
_e1 ¼ a1ðy1 � x1Þ þw1 þ a2ðy2 � x2Þ þ u1;
_e2 ¼ d1x1 � x1z1 þ c1y1 � x2z2 þ c2y2 þ u2;
_e3 ¼ x1y1 � b1z1 þ x2y2 � b2z2 þ u3;
ð13Þ
where e1 = x2 + x1, e2 = y2 + y1, e3 = z2 + z1, our goal is to find proper control functions ui(i = 1,2,3) and parameter update rule,such that system Eq. (12) asymptotically anti-synchronizes system Eq. (11) . i.e. limt?1 kek = 0, where e = [e1,e2,e3]T. For thisend, we propose the following adaptive control laws for system Eq. (13)
u1 ¼ �a2ðy2 � x2Þ � a1ðy1 � x1Þ �w1 � e1;
u2 ¼ �d1x1 þ x1z1 � c1y1 þ x2z2 � c2y2 � e2;
u3 ¼ �x1y1 þ b1z1 � x2y2 þ b2z2 � e3;
ð14Þ
and parameter update rules
_a1 ¼ ðy1 � x1Þe1;
_b1 ¼ �z1e3;
_d1 ¼ x1e2;
_c1 ¼ y1e2;
_a2 ¼ ðy2 � x2Þe1;
_b2 ¼ �z2e3;
_c2 ¼ y2e2;
ð15Þ
where a1; b1; d1; c1; a2; b2; c2 are estimates of a1, b1, d1, c1, a2, b2, c2 respectively.
Theorem 1. For any initial conditions the Lü system is anti-synchronize with the x � y � z projection of hyperchaotic Chen systemasymptotically anti-synchronize by using adaptive control laws Eq. (14) and parameter update rules Eq. (15).
Proof. Applying control laws Eq. (14) to Eq. (13) yields the resulting the closed–loop error dynamical system as follows:
_e1 ¼ ~a1ðy1 � x1Þ þ ~a2ðy2 � x2Þ � e1;
_e2 ¼ ~d1x1 þ ~c1y1 þ ~c2y2 � e2;
_e3 ¼ �~b1z1 � ~b2z2 � e3;
ð16Þ
where ~a1 ¼ a1 � a1;~b1 ¼ b1 � b1;
~d1 ¼ d1 � d1; ~c1 ¼ c1 � c1; ~a2 ¼ a2 � a2;~b2 ¼ b2 � b2; ~c2 ¼ c2 � c2.
Consider the following Lyapunov function candidate
V ¼ 12
eT eþ ~a21 þ ~b2
1 þ ~d21 þ ~c2
1 þ ~a22 þ ~b2
2 þ ~c22
� �> 0; ð17Þ
then the time derivative of V along the solution of error dynamical system Eq. (16) gives
_V ¼ eT _eþ ~a1_~a1 þ ~b1
_~b1 þ ~d1_~d1 þ ~c1
_~c1 þ ~a2_~a2 þ ~b2
_~b2 þ ~c2_~c2
¼ e1ð~a1ðy1 � x1Þ þ ~a2ðy2 � x2Þ � e1Þ þ e2ð~d1x1 þ ~c1y1 þ ~c2y2 � e2Þ þ e3ð�~b1z1 � ~b2z2 � e3Þ þ ~a1ð�ðy1 � x1Þe1Þ
þ ~b1ðz1e3Þ þ ~c1ð�y1e2Þ þ ~d1ð�x1e2Þ þ ~a2ð�ðy2 � x2Þe1Þ þ ~b2ðz2e3Þ þ ~c2ð�y2e2Þ¼ �eT e 6 0: ð18Þ
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1911
Author's personal copy
Since V is positive definite and _V is negative definite in the neighborhood of zero solution of system Eq. (13), it follows thate1; e2; e3 2 L1; a1; b1; d1; c1; a2; b2; c2 2 L1, from Eq. (16), we have e1,e2, e3 2 L1, since _V ¼ �eT e then we obtain
Z t
0kek2dt 6
Z t
0eT edt ¼
Z t
0� _Vdt ¼ Vð0Þ � VðtÞ 6 Vð0Þ
a b
c
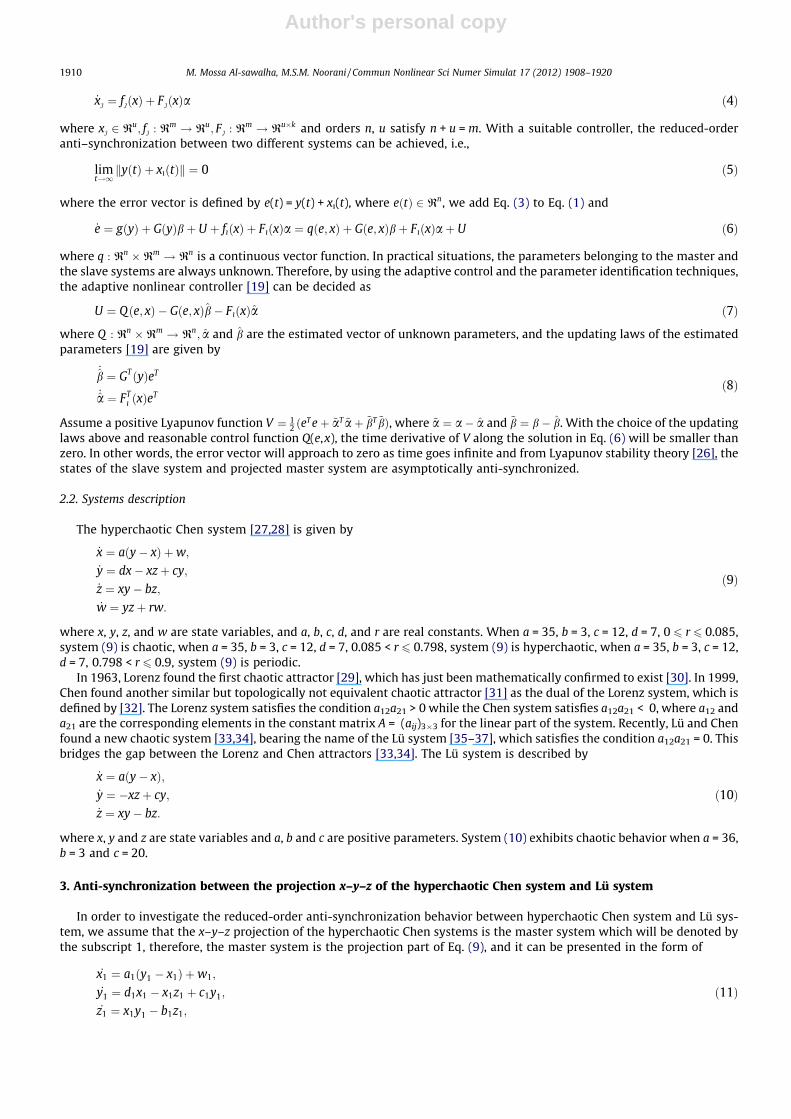
Fig. 1. State trajectories of drive system (11) and response system (12): (a) Signals x1 and x2; (b) signals y1 and y2; (c) signals z1 and z2.
a b
c
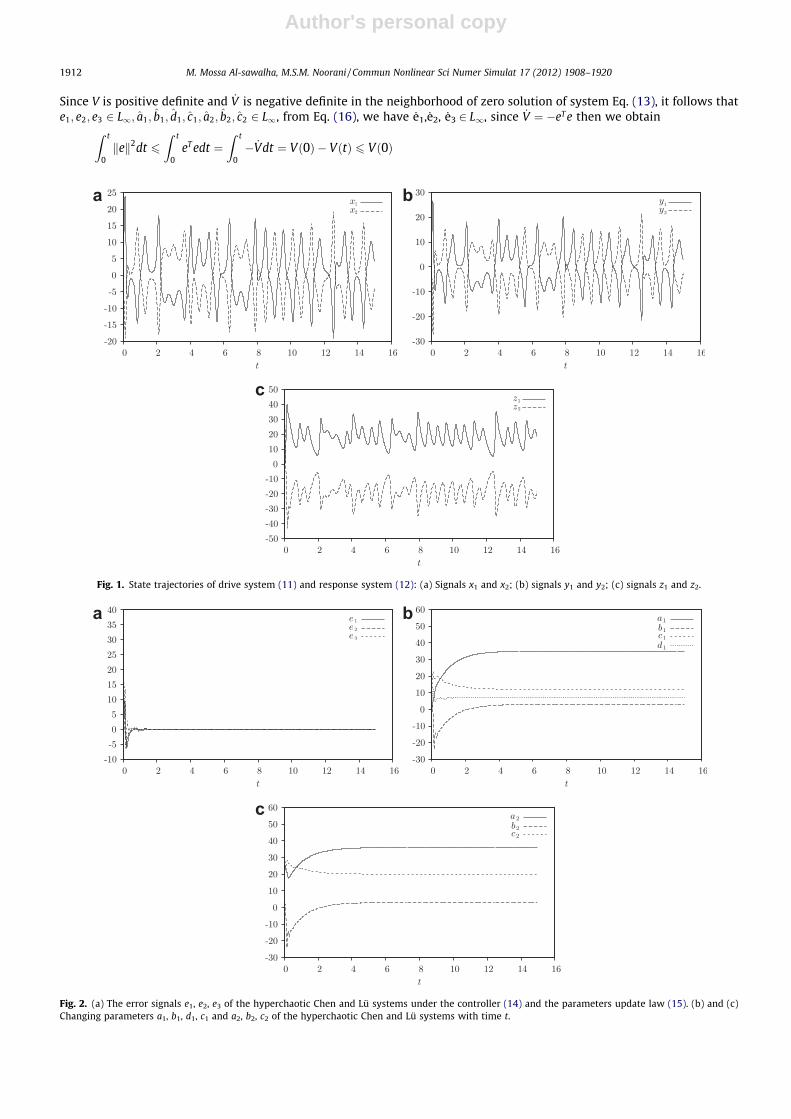
Fig. 2. (a) The error signals e1, e2, e3 of the hyperchaotic Chen and Lü systems under the controller (14) and the parameters update law (15). (b) and (c)Changing parameters a1, b1, d1, c1 and a2, b2, c2 of the hyperchaotic Chen and Lü systems with time t.
1912 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920

Author's personal copy
Thus, e1, e2, e3 2 L2, by Barbalat’s lemma, we have limt?1ke(t)k = 0. Therefore, the response system Eq. (12) can anti-synchro-nize the drive system Eq. (11) asymptotically. This completes the proof. h
3.1. Numerical simulations
To verify and demonstrate the effectiveness of the proposed method, we discuss the simulation results for the reduced-order anti-synchronization problem between the x � y � z projective of the hyperchaotic Chen and the Lü systems. In thenumerical simulations, the fourth-order Runge–Kutta method is used to solve both systems with time step size 0.001. As-sume that the initial conditions, (x1(0), y1(0),z1(0),w1(0)) = (5,8, �1, �3), and (x2(0),y2(0),z2(0)) = (�10,0,37) are employed.Hence the error system has the initial values e1(0) = �5, e2(0) = 8 and e3(0) = 36. The unknown parameters are chosen asa1 = 35, b1 = 3, r1 = 0.5, c1 = 12, d1 = 7 and a2 = 36, b2 = 3, c2 = 20 in simulations so that the both systems exhibits a chaoticbehavior. anti-synchronization of the systems (11) and (12) via adaptive control law (14) and (15) with the initial estimatedparameters a1ð0Þ ¼ 0:2; b1ð0Þ ¼ 2; d1ð0Þ ¼ 3; c1ð0Þ ¼ 10; a2ð0Þ ¼ 25; b2ð0Þ ¼ 5 and c2ð0Þ ¼ 30 are shown in Figs. 1–3. Fig. 1display the state response of systems (11) and (12). Fig. 2 shows that the anti-synchronization errors and the estimatesa1ðtÞ; b1ðtÞ; r1ðtÞ; a2ðtÞ; b2ðtÞ and c2ðtÞ of the unknown parameters converges to a1 = 35, b1 = 3, r1 = 0.5, c1 = 12, d1 = 7 anda2 = 36, b2 = 3, c2 = 20 as t ?1. Fig. 3 show that the Lü system is control to the x � y � z projective of the hyperchaotic Chensystem.
4. Anti-synchronization between the projection x–y–w of the hyperchaotic Chen system and Lü system
In order to investigate the reduced-order anti-synchronization behavior between hyperchaotic Chen system and Lü sys-tem, we assume that the x � y � w projection of the hyperchaotic Chen systems is the master system which will be denotedby the subscript 1, therefore, the master system is the projection part of Eq. (9), and it can be presented in the form of
_x1 ¼ a1ðy1 � x1Þ þw1;
_y1 ¼ d1x1 � x1z1 þ c1y1;
_w1 ¼ y1z1 þ r1w1;
ð19Þ
and we assume that the Lü system is the response system which will be denoted by the subscript 2, and it can be presentedin the form of
_x2 ¼ a2ðy2 � x2Þ þ u1;
_y2 ¼ �x2z2 þ c2y2 þ u2;
_z2 ¼ x2y2 � b2z2 þ u3:
ð20Þ
where u1, u2, u3 are three control functions to be designed and all parameters a1, r1, c1, d1, a2, c2, b2 are unknown. In order todetermine the control functions to realize the anti-synchronization between systems Eqs. (19) and (20). We add Eqs. (20)and (19) and get
Fig. 3. Hyperchaotic Chen system (solid line) and the controlled Lü system (dotted line).
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1913

Author's personal copy
_e1 ¼ a1ðy1 � x1Þ þw1 þ a2ðy2 � x2Þ þ u1;
_e2 ¼ d1x1 � x1z1 þ c1y1 � x2z2 þ c2y2 þ u2;
_e3 ¼ y1z1 þ r1w1 þ x2y2 � b2z2 þ u3:
ð21Þ
where e1 = x1 + x2, e2 = y1 + y2, e3 = w1 + z2, our goal is to find proper control functions ui(i = 1,2,3) and parameter update rule,such that system Eq. (20) anti-synchronizes asymptotically with system Eq. (19). i.e. limt ?1kek = 0, where e = [e1,e2,e3]T. Forthis end we propose the following adaptive control law for system Eq. (21)
u1 ¼ �a2ðy2 � x2Þ � a1ðy1 � x1Þ �w1 � e1;
u2 ¼ �d1x1 þ x1z1 � c1y1 þ x2z2 � c2y2 � e2;
u3 ¼ �y1z1 � r1w1 � x2y2 þ b2z2 � e3:
ð22Þ
and parameter update rules
_a1 ¼ ðy1 � x1Þe1;
_d1 ¼ x1e2;
_c1 ¼ y1e2;
_r1 ¼ w1e3;
_a2 ¼ ðy2 � x2Þe1
_b2 ¼ �z2e3;
_c2 ¼ y2e2:
ð23Þ
where a1; d1; c1; r1 and a2; b2; c2 are the estimates of a1, d1, r1, c1, a2, b2, c2 respectively.
Theorem 2. For any initial conditions the Lü system asymptotically anti-synchronize with the x � y � w projection ofhyperchaotic Chen system asymptotically by using adaptive control laws Eq. (22) and parameter update rules Eq. (23).
Proof. Applying control law Eq. (22) to Eq. (21) yields the resulting error dynamics as follows:_e1 ¼ ~a1ðy1 � x1Þ þ ~a2ðy2 � x2Þ � e1;
_e2 ¼ ~d1x1 þ ~c1y1 þ ~c2y2 � e2;
_e3 ¼ ~r1w1 � ~b2z2 � e3:
ð24Þ
where ~a1 ¼ a1 � a1;~d1 ¼ d� d1;~c1 ¼ c1 � c1;~r1 ¼ r1 � r1; ~a2 ¼ a2 � a2;
~b2 ¼ b2 � b2; ~c2 ¼ c2 � c2.Consider the following Lyapunov function candidate
V ¼ 12
eT eþ ~a21 þ ~d2
1 þ ~c21 þ ~r2
1 þ ~a22 þ ~b2
2 þ ~c22
� �> 0 ð25Þ
The time derivative of V is as follows
_V ¼ eT _eþ ~a1_~a1 þ ~d1
_~d1 þ ~c1_~c1 þ ~r1
_~r1 þ ~a2_~a2 þ ~b2
_~b2 þ ~c2_~c2
¼ e1 _e1 þ e2 _e2 þ e3 _e3 þ ~a1ð� _a1Þ þ ~d1ð�_d1Þ þ ~c1ð� _c1Þ þ ~r1ð� _r1Þ þ ~a2ð� _a2Þ þ ~b2ð�
_b2Þ þ ~c2ð� _c2Þ ð26Þ
Inserting (23) and (24) into (26) yields the follows
_V ¼ �e21 � e2
2 � e23 6 0 ð27Þ
Since V is positive definite and _V is negative definite in the neighborhood of zero solution of system Eq. (21), it follows thate1; e2; e3 2 L1; a1; d1; c1; r1; a2; b2; c2 2 L1, from Eq. (21), we have e1, e2, e3 2 L1, since _V ¼ �eT e then we obtain
Z t
0kek2dt 6
Z t
0eT edt ¼
Z t
0� _Vdt ¼ Vð0Þ � VðtÞ 6 Vð0Þ
Thus, e1, e2, e3 2 L2, by Barbalats lemma, we have limt?1ke(t)k = 0. Therefore, response system Eq. (20) can anti-synchronizedrive system Eq. (19) asymptotically. This completes the proof. h
4.1. Numerical simulations
To verify and demonstrate the effectiveness of the proposed method, we discuss the simulation results for the reduced-order anti-synchronization problem between the x � y � w projective of the hyperchaotic Chen and the Lü systems. In the
1914 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920

Author's personal copy
numerical simulations, the fourth-order Runge–Kutta method is used to solve the systems with time step size 0.001. We as-sume that the initial condition, (x1(0), y1(0),z1(0),w1(0)) = (5,8, �1, �7), and (x2(0),y2(0),z2(0)) = (�10,0,37). Hence the er-ror system has the initial values e1(0) = �5, e2(0) = 8, e3(0) = 30. The unknown parameters are chosen as a1 = 35, b1 = 3,r1 = 0.5, c1 = 12, d1 = 7 and a2 = 36, b2 = 3, c2 = 20 in all simulations so that the both systems exhibits a chaotic behavior.
a b
c
Fig. 4. State trajectories of drive system (19) and (20): (a) Signals x1 and x2; (b) signals y1 and y2; (c) signals w1 and z2.
a b
c
Fig. 5. (a) The error signals e1, e2, e3 of the hyperchaotic Chen and Lü systems under the controller (22) and the parameters update law (23). (b) and (c):Changing parameters a1, d1, c1, r1 and a2, b2, c2of the drive system (19) and the response system (20) with time t.
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1915

Author's personal copy
anti–synchronization of the systems (19) and (20) via adaptive control law (22) and (22) with the initial estimated param-eters a1(0) = 0.2, d1(0) = 2, c1(0) = 10, r1(0) = 2 and a2(0) = 25, b2(0) = 5, c2(0) = 30 are shown in Figs. 4–6. Fig. 4 display thestate response of systems (19) and (20). Fig. 5 shows the anti-synchronization errors and the estimatesa1ðtÞ; d1ðtÞ; c1ðtÞ; ;r1ðtÞ and a2ðtÞ; b2ðtÞ; c2ðtÞ of the unknown parameters converges to a1 = 36, d1 = 7, c1 = 20, r1 = 0.5 anda2 = 35, b2 = 3, c2 = 28 as t ?1. Fig. 6 show that the Lü system is control to the x � y � w projective of the hyperchaotic Chensystem.
5. Anti-synchronization between the projection x-z-w of the hyperchaotic Chen system and Lü system
In order to investigate the reduced-order anti-synchronization behavior between hyperchaotic Chen system and Lü sys-tem, we assume that the x � z � w projection of the hyperchaotic Chen systems is the master system which will be denotedby the subscript 1, therefore, the master system is the projection part of Eq. (9), and it can be presented in the form of
_x1 ¼ a1ðy1 � x1Þ þw1;
_z1 ¼ x1y1 � b1z1;
_w1 ¼ y1z1 þ r1w1;
ð28Þ
and we assume that the Lü system is the response system which will be denoted by the subscript 2, and it can be presentedin the form of
_x2 ¼ a2ðy2 � x2Þ þ u1;
_y2 ¼ �x2z2 þ c2y2 þ u2;
_z2 ¼ x2y2 � b2z2 þ u3:
ð29Þ
where u1, u2, u3 are three control functions to be designed and all parameters a1, b1, r1,a2, c2, b2 are unknown. In order todetermine the control functions to realize the anti–synchronization between systems Eqs. (28) and (29). We add Eqs. (29)to Eq. (28) and get
_e1 ¼ a1ðy1 � x1Þ þw1 þ a2ðy2 � x2Þ þ u1;
_e2 ¼ x1y1 � b1z1 � x2z2 þ c2y2 þ u2;
_e3 ¼ y1z1 þ r1w1 þ x2y2 � b2z2 þ u3:
ð30Þ
where e1 = x1 + x2, e2 = z1 + y2, e3 = w1 + z2, our goal is to find proper control functions ui(i = 1,2,3) and parameter update rule,such that system Eq. (29) anti-synchronizes asymptotically with system Eq. (28). i.e. limt?1kek = 0, where e = [e1,e2,e3]T. Forthis end we propose the following adaptive control law for system Eq. (30)
u1 ¼ �a2ðy2 � x2Þ � a1ðy1 � x1Þ �w1 � e1;
u2 ¼ �x1y1 þ b1z1 þ x2z2 þ c2y2 � e2;
u3 ¼ �y1z1 � r1w1 � x2y2 þ b2z2 � e3:
ð31Þ
Fig. 6. Hyperchaotic Chen system (solid line) and the controlled Lü system (dotted line).
1916 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920
Author's personal copy
and parameter update rules
_a1 ¼ ðy1 � x1Þe1;
_b1 ¼ �z1e2;
_r1 ¼ w1e3;
_a2 ¼ ðy2 � x2Þe1
_b2 ¼ �z2e3;
_c2 ¼ y2e2:
ð32Þ
where a1; b1; r1 and a2; b2; c2 are the estimates of a1, b1, r1, a2, b2, c2 respectively.
Theorem 3. For any initial conditions the Lü system asymptotically anti-synchronize with the x � z � w projection ofhyperchaotic Chen system asymptotically by using adaptive control laws Eq. (31) and parameter update rules Eq. (32).
Proof. Applying control law Eq. (31) to Eq. (30) yields the resulting error dynamics as follows:
_e1 ¼ ~a1ðy1 � x1Þ þ ~a2ðy2 � x2Þ þ u1;
_e2 ¼ �~b1z1 þ ~c2y2 þ u2;
_e3 ¼ ~r1w1 � ~b2z2 þ u3:
ð33Þ
where ~a1 ¼ a1 � a1;~b1 ¼ b� b1;~r1 ¼ r1 � r1; ~a2 ¼ a2 � a2;
~b2 ¼ b2 � b2;~c2 ¼ c2 � c2.Consider the following Lyapunov function candidate
V ¼ 12
eT eþ ~a21 þ ~b2
1 þ ~r21 þ ~a2
2 þ ~b22 þ ~c2
2
� �> 0 ð34Þ
The time derivative of V is as follows
_V ¼ eT _eþ ~a1_~a1 þ ~b1
_~b1 þ ~r1_~r1 þ ~a2
_~a2 þ ~b2_~b2 þ ~c2
_~c2
¼ e1 _e1 þ e2 _e2 þ e3 _e3 þ ~a1ð� _a1Þ þ ~b1ð�_b1Þ þ ~r1ð� _r1Þ þ ~a2ð� _a2Þ þ ~b2ð�
_b2Þ þ ~c2ð� _c2Þ ð35Þ
a b
c
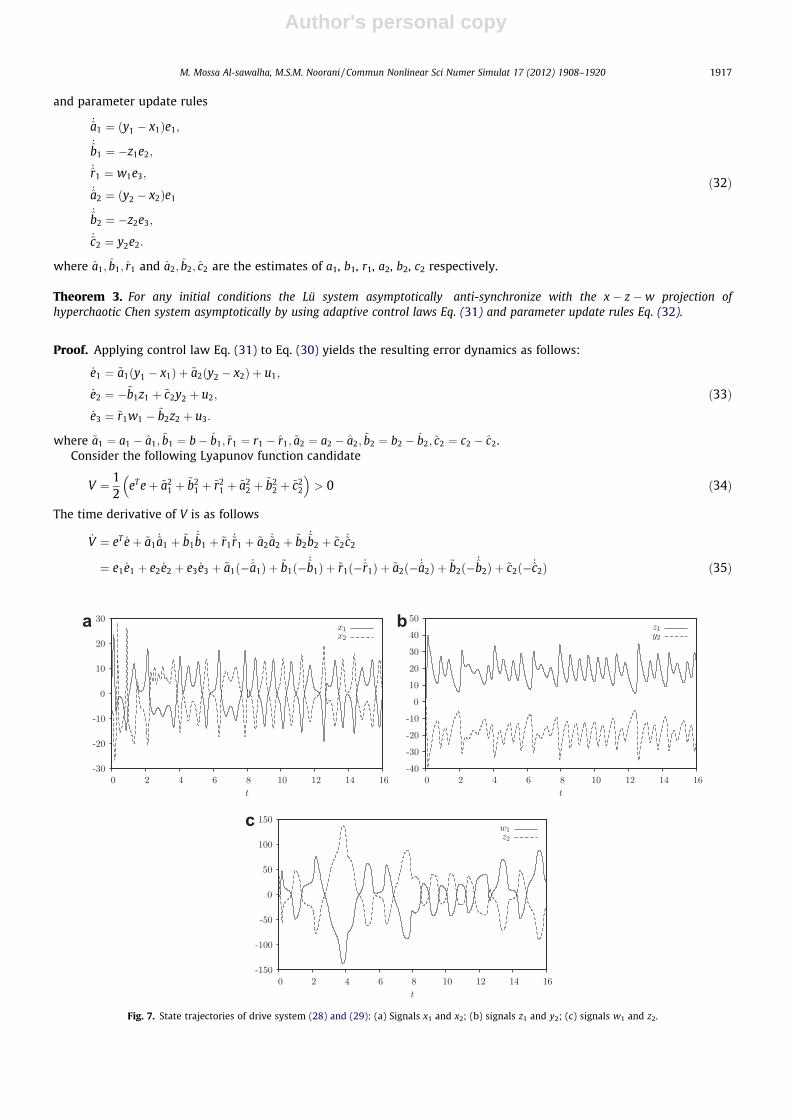
Fig. 7. State trajectories of drive system (28) and (29): (a) Signals x1 and x2; (b) signals z1 and y2; (c) signals w1 and z2.
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1917

Author's personal copy
Inserting (32) and (33) into (35) yields the follows
_V ¼ �e21 � e2
2 � e23 6 0 ð36Þ
Since V is positive definite and _V is negative definite in the neighborhood of zero solution of system Eq. (30), it follows thate1; e2; e3 2 L1; a1; b1; r1; a2; b2; c2 2 L1, from Eq. (30), we have e1, e2, e3 2 L1, since _V ¼ �eT e then we obtain
Z t
0kek2dt 6
Z t
0eT edt ¼
Z t
0� _Vdt ¼ Vð0Þ � VðtÞ 6 Vð0Þ
Thus, e1, e2, e3 2 L2, by Barbalats lemma, we have limt?1ke(t)k = 0. Therefore, response system Eq. (29) can anti-synchronizedrive system Eq. (28) asymptotically. This completes the proof. h
a b
c
Fig. 8. (a) The error signals e1, e2, e3 of the hyperchaotic Chen and Lü systems under the controller (31) and the parameters update law (32). (b) and (c):Changing parameters a1, d1, c1, r1 and a2, b2, c2of the drive system (28) and the response system (29) with time t.
Fig. 9. Hyperchaotic Chen system (solid line) and the controlled Lü system (dotted line).
1918 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920

Author's personal copy
5.1. Numerical simulations
To verify and demonstrate the effectiveness of the proposed method, we discuss the simulation results for the reduced-order anti-synchronization problem between the x � z � w projective of the hyperchaotic Chen and the Lü systems. In thenumerical simulations, the fourth-order Runge–Kutta method is used to solve the systems with time step size 0.001. We as-sume that the initial condition, (x1(0), y1(0),z1(0),w1(0)) = (5,8, �1, �7), and (x2(0),y2(0),z2(0)) = (�10,0,37). Hence the er-ror system has the initial values e1(0) = �5, e2(0) = �1, e3(0) = 34. The unknown parameters are chosen as a1 = 35, b1 = 3,r1 = 0.5, c1 = 12, d1 = 7 and a2 = 36, b2 = 3, c2 = 20 in all simulations so that the both systems exhibits a chaotic behavior.anti-synchronization of the systems (28) and (29) via adaptive control law (31) and (31) with the initial estimated param-eters a1(0) = 0.2, b1(0) = 10, r1(0) = 2 and a2(0) = 25, b2(0) = 5, c2(0) = 30 are shown in Figs. 7–9. Fig. 7 display the state re-sponse of systems (28) and (29). Fig. 8 shows the anti–synchronization errors and the estimates a1ðtÞ; b1ðtÞ; r1ðtÞ anda2ðtÞ; b2ðtÞ; c2ðtÞ of the unknown parameters converges to a1 = 36,b1 = 3, r1 = 0.5 and a2 = 35, b2 = 3, c2 = 28 as t ?1. Fig. 9show that the Lü system is control to the x � z � w projective of the hyperchaotic Chen system.
6. Concluding remark
In conclusion, the adaptive reduced-order anti-synchronization of uncertain chaotic systems with different order is dis-cussed. A novel adaptive anti-synchronization controllers with corresponding parameter update laws is proposed to anti-synchronize the projection of the fourth-order hyperchaotic Chen system with the third order chaotic Lu system even thoughtheir parameters are unknown. This technique has been successfully applied to several examples. Theoretical analysis via theLyapunov stability theory and numerical simulations have been shown to verify our results for the anti-synchronization ofthe proposed method. We would like to highlight that in contrast to our method, the nonlinear control (cf. [11,12]) and theactive control (cf. [15,16]) approach to anti-synchronization in these papers are based on exactly known system parameters.Since there always exits parameter mismatches and distortions in the physical world, so, chaos control and anti-synchroni-zation with uncertain parameters are universal and thus has received much significant attention for their potential applica-tions. Thus, it is much more attractive and challenging to realize the anti-synchronization for systems with unknownparameters.
Acknowledgments
This work is financially supported by the Malaysian Ministry of Higher Education Grant: UKM-ST-06-FRGS0008-2008.Also the authors are grateful to the anonymous referees for their helpful comments on the earlier draft of the paper.
References
[1] Chen G, Dong X. From chaos to order. Singapore: World Scientific; 1998.[2] Boccaletti S, Kurths J, Osipov G, Valladares DL, Zhou CS. The synchronization of chaotic systems. Phys Rep 2002;366:1–101.[3] Nijmeijer H. A dynamical control view on synchronization. Physica D 2001;154:219–28.[4] Rafikov M, Balthazar J. On control and synchronization in chaotic and hyperchaotic systems via linear feedback control. Commun Nonlinear Sci Numer
Simulat 2008;13:1246–55.[5] Bowong S. Adaptive synchronization between two different chaotic dynamical systems. Commun Nonlinear Sci Numer Simulat 2007;12:976–85.[6] Chen X, Lü J. Adaptive synchronization of different chaotic systems with full unknown parameters. Phys Lett A 2007;364:123–8.[7] Wang Z. Anti-synchronization in two non-identical hyperchaotic systems with known or unknown parameters. Commun Nonlinear Sci Numer Simulat
2009;14:2366–72.[8] Al–Sawalha MM, Noorani MSM. Adaptive anti-synchronization of two identical and different hyperchaotic systems with uncertain parameters.
Commun Nonlinear Sci Numer Simulat 2010;15:1036–47.[9] Al–Sawalha MM, Noorani MSM. Anti-synchronization of chaotic systems with uncertain parameters via adaptive control. Phys Lett A
2009;373:2852–7.[10] Lòpez-Mancilla D, Cruz-Hernández C. Output synchronization of chaotic systems under nonvanishing perturbations. Chaos Solitons Fract.
2008;37:1172–86.[11] Al-Sawalha MM, Noorani MSM. On anti-synchronization of chaotic systems via nonlinear control. Chaos Solitons Fract 2009;42:170–9.[12] Al-Sawalha MM, Noorani MSM. Anti-synchronization of two hyperchaotic systems via nonlinear control. Commun Nonlinear Sci Numer Simul
2009;14:3402–11.[13] Zhou Hung, Ho MC, Hung YC, Chou CH. Phase and anti-phase synchronization of two chaotic systems by using active control. Phys Lett A
2002;296:43–8.[14] Li GH, Zhou SP. Anti-synchronization in different chaotic systems. Chaos Solitons Fract 2007;32:516–20.[15] Al-Sawalha MM, Noorani MSM. Chaos anti-synchronization between two novel different hyperchaotic systems. Chin Phys Lett 2008;25(8):2743–6.[16] Al-Sawalha MM, Noorani MSM. Active anti-synchronization between identical and distinctive hyperchaotic systems. Open Syst Inform Dyn
2008;15(4):371–82.[17] Cao J, Wang Z, Sun Y. Synchronization in an array of linearly stochastically coupled networks with time delays. Physica A 2007;385:718–28.[18] Bowong S. Stability analysis for the synchronization of chaotic systems with different order: application to secure communications. Phys Lett A
2004;326:102–13.[19] Ho M, Hung Y, Liua Z, Jiang I. Reduced-order synchronization of chaotic systems with parameters unknown. Phys Lett A 2006;348:251–9.[20] Kocarev L, Parlitz U. General approach for chaotic synchronization with applications to communication. Phys Rev Lett 1995;74:5028–31.[21] Yeh JP, Wu KL. A simple method to synchronize chaotic systems and its application to secure communications. Math Comput Model 2008;47:894–902.[22] Feki M. An adaptive chaos synchronization scheme applied to secure communication. Chaos Solitons Fract 2003;18:141–8.[23] Sun Y, Caoa J, Feng G. An adaptive chaotic secure communication scheme with channel noises. Phys Lett A 2008;372:5442–7.
M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920 1919

Author's personal copy
[24] Grzybowski JMV, Rafikov M, Balthazar JM. Synchronization of the unified chaotic system and application in secure communication. CommunNonlinear Sci Numer Simulat 2009;14:2793–806.
[25] Stefanski A, Kapitaniak T. Using chaos synchronization to estimate the largest Lyapunov exponent of nonsmooth systems. Disc Dyn Nature Soc2000;4:207–15.
[26] Khalil HK. Nonlinear systems. 3rd ed. Englewood Cliffs (NJ): Prentice–Hall; 2002.[27] Yuxia L, Wallace K, Chen G. Generating hyperchaos via state feedback control. Int J Bifurcat Chaos 2005;15:3367–75.[28] Park J. Adaptive synchronization of hyperchaotic Chen system with uncertain parameters. Chaos Solitons Fract 2005;26:959–64.[29] Lorenz EN. Deterministic nonperiodic flow. J Atmos Sci 1963;20(2):130–41.[30] Stewart I. The Lorenz attractor exists. Nature 2000;406:948–54.[31] Chen G, Ueta T. Yet another chaotic attractor. Int J Bifurcat Chaos 1999;9(7):1465–76.[32] Sprott JC. Chaos and time-series analysis. Oxford: Oxford University Press; 2003.[33] Lü J, Chen G, Zhang S. Dynamical analysis of a new chaotic attractor. Int J Bifurcat Chaos 2002;12:1001–15.[34] Lü J, Chen G, Zhang S. The compound structure of a new chaotic attractor. Chaos Solitons Fract 2002;14:669–72.[35] Yu Y, Zhang S. Controlling uncertain Lü system using backstepping design. Chaos Solitons Fract 2003;15:897902.[36] Zhou Z. A new chaotic anti-control model-Lü system. J Xian Teachers College 2002;3:19–21.[37] Lü J, Lu J. Controlling uncertain Lü system using linear feedback. Chaos Solitons Fract 2003;17:127–33.
1920 M. Mossa Al-sawalha, M.S.M. Noorani / Commun Nonlinear Sci Numer Simulat 17 (2012) 1908–1920




















