Biomimetic Models for Sensor Networks: Towards a Social Sensor Network
32
Biomimetic Models for Sensor Networks: Towards a Social Sensor Network Kennie H Jones NASA Langley Research Center Hampton, VA, USA And Old Dominion University Norfolk, VA, USA Presented at: Wireless Communication and Information Conference Berlin, Germany October 12, 2007
Transcript of Biomimetic Models for Sensor Networks: Towards a Social Sensor Network

WCI 2007
Biomimetic Models for Sensor Networks:Towards a Social Sensor Network
Kennie H JonesNASA Langley Research Center
Hampton, VA, USA
And
Old Dominion UniversityNorfolk, VA, USA
Presented at:Wireless Communication and Information Conference
Berlin, GermanyOctober 12, 2007

Kennie H. Jones
Page 2October 12, 2007
WCI 2007
Outline
• New Requirements for Aerospace Vehicles• Overview of Sensor Networks• A New Direction for Sensor Networks• An Ecological Approach to Sensor Network Architecture• Current Work• Conclusions

Kennie H. Jones
Page 3October 12, 2007
WCI 2007
New Requirements for Aerospace Vehicles
• NASA, for aeronautics and future space missions, has aneed for autonomous and intelligent systems to manageoperations and health.
– Reduce costs, and improve safety, performance, reliability.
– Improve diagnostic capabilities that form the basis forprognostics.
– Can benefit from situation management science using sensornetworks.
Kennie H. Jones
Page 4October 12, 2007
WCI 2007
Why New Requirements for AerospaceVehicles?
Aircraft accident causes:• System/component failure or malfunction.
• Environmental effects: fire, ice, fuel, wind shear, lightning, etc..
• Failure of flight crews to:
– Correctly interpret, process, and cross-check data, assess failuremodes, and analyze effects.
– Maintain aircraft system status awareness.
– Understand the impact of inoperative or degraded systems.
• Sensors inadequate to:
– Accumulate and present adequate trend information.
– Indicate impact and other environmental damage.
– Provide warning of unsafe flight critical systems.
Kennie H. Jones
Page 5October 12, 2007
WCI 2007
Why New Requirements for AerospaceVehicles?
• Evidence reveals that a high percentage of aircraft accidentsand incidents caused:
– Directly by equipment failure.
– Indirectly by the inability of crew to properly and timely managesituations.
• Can be improved with high fidelity sensing/actuatingcombined with advanced techniques in situation management.
Kennie H. Jones
Page 6October 12, 2007
WCI 2007
Integrated Vehicle Health Management
• NASA’s Aeronautics Research Mission Directorate– Aviation Safety Program
• Integrated Vehicle Health Management (IVHM)
• Goal to improve safety, reduce costs, and improveperformance in every aircraft class.
• Will require future aircraft to have:– Increasing levels of autonomy to sense, control,
communicate, and navigate.
– Automatic health monitoring.
– Self-healing systems.

Kennie H. Jones
Page 7October 12, 2007
WCI 2007
IVHM Tasks
• Develop technologies required for such future aircraft.
• Improve diagnostic capabilities
• Improve prognostic capabilities
• Investigate fundamental failure physics and associatedeffects of damage and degradation caused by environmentalhazards.
• Addresses challenges in communication and effectivearchitectures to facilitate the integration of IVHMcomponents with each other and with other vehicle systems.

Kennie H. Jones
Page 8October 12, 2007
WCI 2007
Overview of Sensor Networks
• Networks of sensors, actuators, and computers are not new:– Industrial process control.– Building monitoring.– Transportation: automobiles, aircraft, trains, etc.
• Limits:– Restricted to small numbers of components due to cost, size and
other constraints.– Computer at the apex of a hierarchical network; role is to:
• Collect and aggregate sensor inputs.• Process data.• Issue commands to control the process.

Kennie H. Jones
Page 9October 12, 2007
WCI 2007
Overview of Sensor Networks
New technology positioned to create a revolution:
• MEMS and nanotechnology enabling small, inexpensive, self-powereddevices, containing a sensor (and/or actuator), an onboard computer,and wireless communications.
• Enabling massive numbers of smart devices capable of sensing andactuating in situ at an unprecedented fidelity.
• Common terms:
– Sensor network.
– Wireless Sensor Network (WSN).
– Wireless Sensor-Actor Network (WSAN).
– Each node in the network a mote (hereafter I will refer to these as sensornodes or nodes).

Kennie H. Jones
Page 10October 12, 2007
WCI 2007
What Are Sensors Nodes?
• Miniature devices with modestcapabilities linked by some wirelessmedium (e.g. radio, ultrasound, laser)
• Non-renewable energy budget• Disposable: tiny, mass-produced, dust
cheap!• Mass production implies:
– testing is not practical– anonymity: no fabrication-time IDs

Kennie H. Jones
Page 11October 12, 2007
WCI 2007
Sensor Networks for Future NASAMissions
• How do we design applications andarchitectures to fully utilize this newtechnology in support of futureNASA missions?
The Question:

Kennie H. Jones
Page 12October 12, 2007
WCI 2007
Common Attributes of Current SensorNetwork Implementations
• All have remote sensors relay data to central processor foraction.
• All could have been implemented for years (with largersensors and wired networks).
• Relatively small number of nodes (< 50 inimplementations; < 300 in simulations).
• Advantages of current sensor networks:– Micro Electro Mechanical Systems (MEMS) technology reduces
size, cost, intrusion, and obtrusion of nodes.
– Wireless technology reduces cost and intrusion of networking.
Kennie H. Jones
Page 13October 12, 2007
WCI 2007
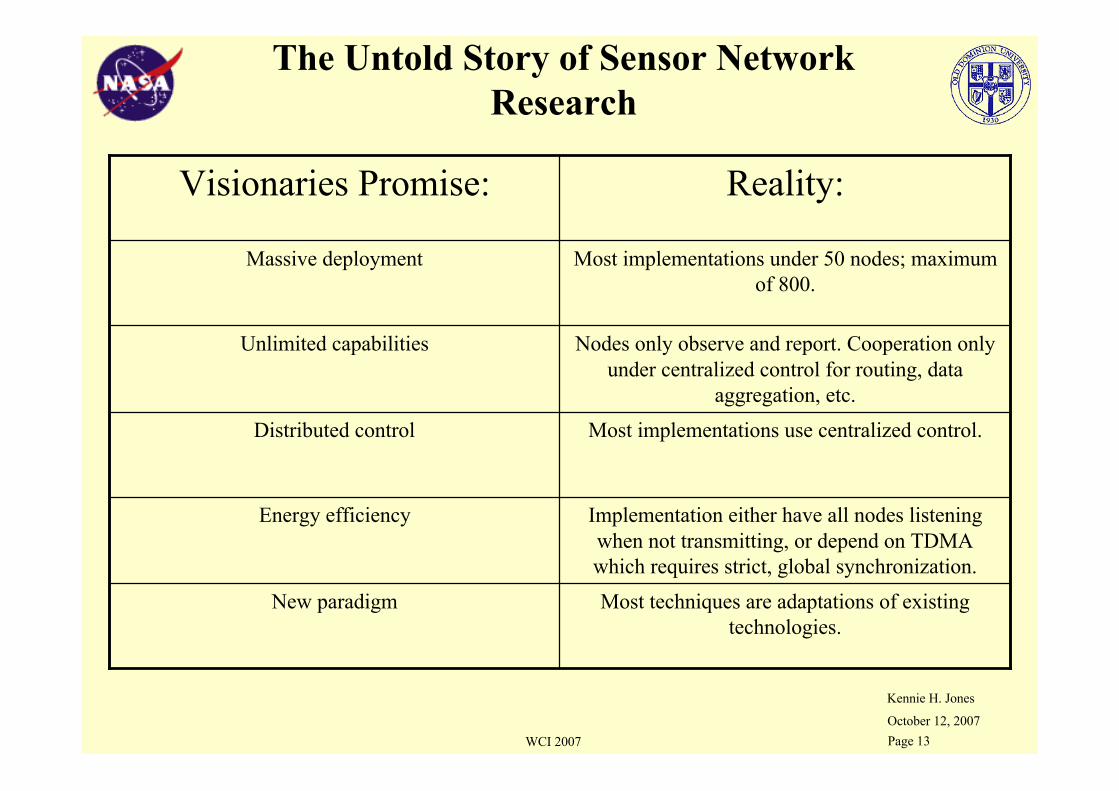
The Untold Story of Sensor NetworkResearch
Reality:Visionaries Promise:
Most techniques are adaptations of existingtechnologies.
New paradigm
Implementation either have all nodes listeningwhen not transmitting, or depend on TDMAwhich requires strict, global synchronization.
Energy efficiency
Most implementations use centralized control.Distributed control
Nodes only observe and report. Cooperation onlyunder centralized control for routing, data
aggregation, etc.
Unlimited capabilities
Most implementations under 50 nodes; maximumof 800.
Massive deployment
Kennie H. Jones
Page 14October 12, 2007
WCI 2007
Research Landscape
• Growing pains are obvious– unmistakable rush to the market: paper writing race
– tendency to recycle old ideas:
• too many people are tweaking known classical communicationprotocols trying to make them work in sensor networks
• too many people are tweaking known topology and powermanagement schemes borrowed from cellular or ad hoc networks
– Only about 10% of papers address real issues
• Old techniques are not sufficient to realize the fullpotential of sensor networks
• Punch-line: a new way of thinking must be developed
Kennie H. Jones
Page 15October 12, 2007
WCI 2007
New Direction: What’s Missing?
Full potential of sensor networks realized by:
• Massive numbers of heterogeneous nodes cooperating.
• Autonomous and intelligent nodes:
– Must act as well as sense.
– Local decisions from local information must produceglobal effects (i.e., no centralized control).
• Sensor Networks working as a Cooperative Community.
Kennie H. Jones
Page 16October 12, 2007
WCI 2007
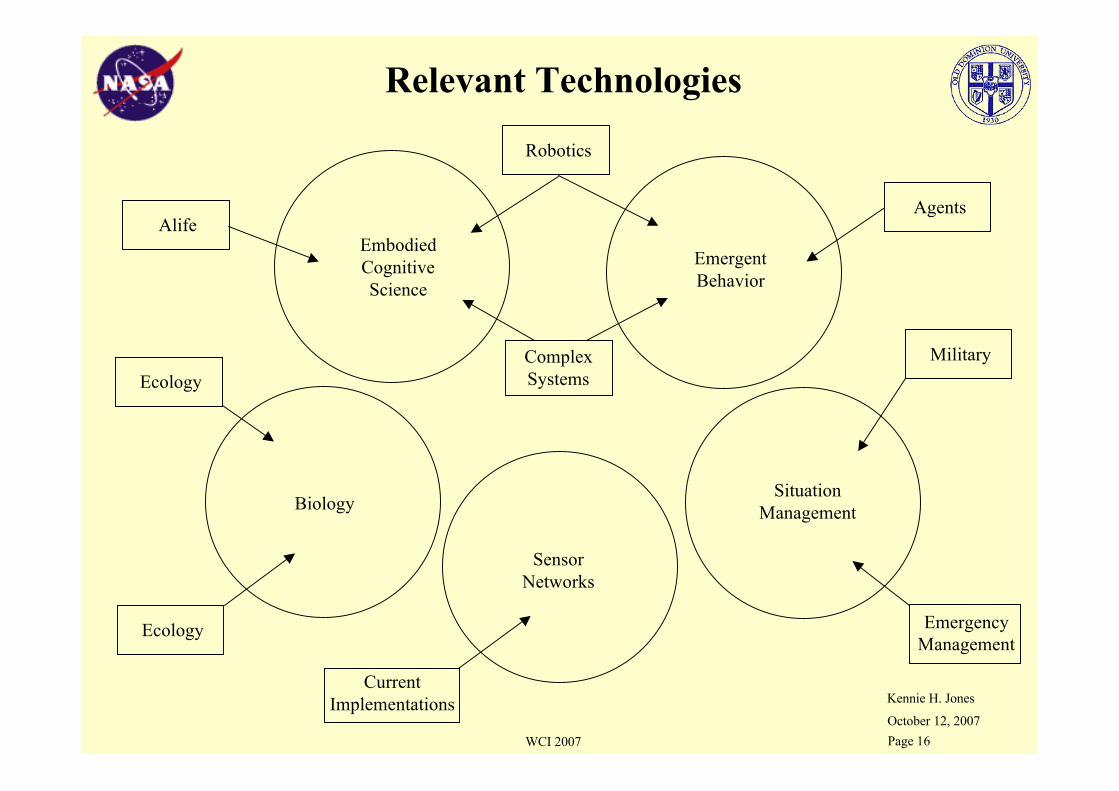
Relevant Technologies
EmbodiedCognitiveScience
EmergentBehavior
BiologySituation
Management
SensorNetworks
Alife
Ecology EmergencyManagement
ComplexSystems
Military
Agents
Robotics
CurrentImplementations
Ecology

Kennie H. Jones
Page 17October 12, 2007
WCI 2007
Merging Relevant Technologies
EmbodiedCognitiveScience
EmergentBehavior
Biology SituationMgmt.
SensorNetworks
New Vision forSensor Networks

Kennie H. Jones
Page 18October 12, 2007
WCI 2007
New Direction: Short Term Goals
Sensor networks that
• Do not increase the time required for action or energy consumed pernode as the network size grows.
• Minimize bottlenecks even if the number of nodes is dramaticallyincreased.
• Function without centralized control:
– Perform fully distributed data aggregation in a scalable fashion, whereindividual nodes operate based on local information, making localdecisions that are aggregated across the network to achieve globally-meaningful effects.

Kennie H. Jones
Page 19October 12, 2007
WCI 2007
New Direction: Long Term Goals
Sensor Networks that:
• Demonstrate nodes that do more than sense a value and report thatvalue, but also interact with their environment.
• Demonstrate nodes operating asynchronously, autonomously;learning from their environment to make better decisions.
• Striving towards self-sustaining communities of machines withemergent behavior that adapt to changes in the environment.

Kennie H. Jones
Page 20October 12, 2007
WCI 2007
Ecological Approach to Sensor Networks
• Key distinction between sensor networks and conventionalcomputer networks: extent functionality of nodes and thenetwork is tied to the physical environment.
• Conventional computer network:– Network serves as a conduit for transfer of bits between computers.
– Physical location of the computer is seldom of consequence.
• Sensor network:– Exists to interact with the environment.
– Locations of the nodes are paramount to function.
– Broadcast communication and limited transmission range defineslocal neighborhoods.
Kennie H. Jones
Page 21October 12, 2007
WCI 2007
Ecological Approach to Sensor Networks
• Biological ecosystem serves as an excellent model for amassively deployed sensor network.– An ecosystem is defined as a community of organisms interacting
with one another and with their environment and interconnectedby an ongoing flow of material and information exchange.
– Organisms react to and operate on the environment autonomouslyand asynchronously, yet they can cooperate with localneighboring organisms.
• Using the biological model, sensor nodes can be designedand implemented as a community of autonomousorganisms capable of interacting with both theirenvironment and their neighbors: a sensor ecosystem.

Kennie H. Jones
Page 22October 12, 2007
WCI 2007
Ecological Approach to Sensor Networks
A sensor network ecosystem:• Nodes are viewed as organisms with genetic endowments: states
and rules.
• Nodes may remember and record their interaction with theenvironment (memory).
• The use of memory to change state or rules is learning.
• Changing state conditions or rules based on learning demonstratessome level of cognition.
• Nodes interact with their environment, changing states and rules asthey adapt.
• Nodes operate autonomously and asynchronously yet cooperatewith local neighbors.
• Provides a more scalable, efficient, robust, and sustainable system.
Kennie H. Jones
Page 23October 12, 2007
WCI 2007
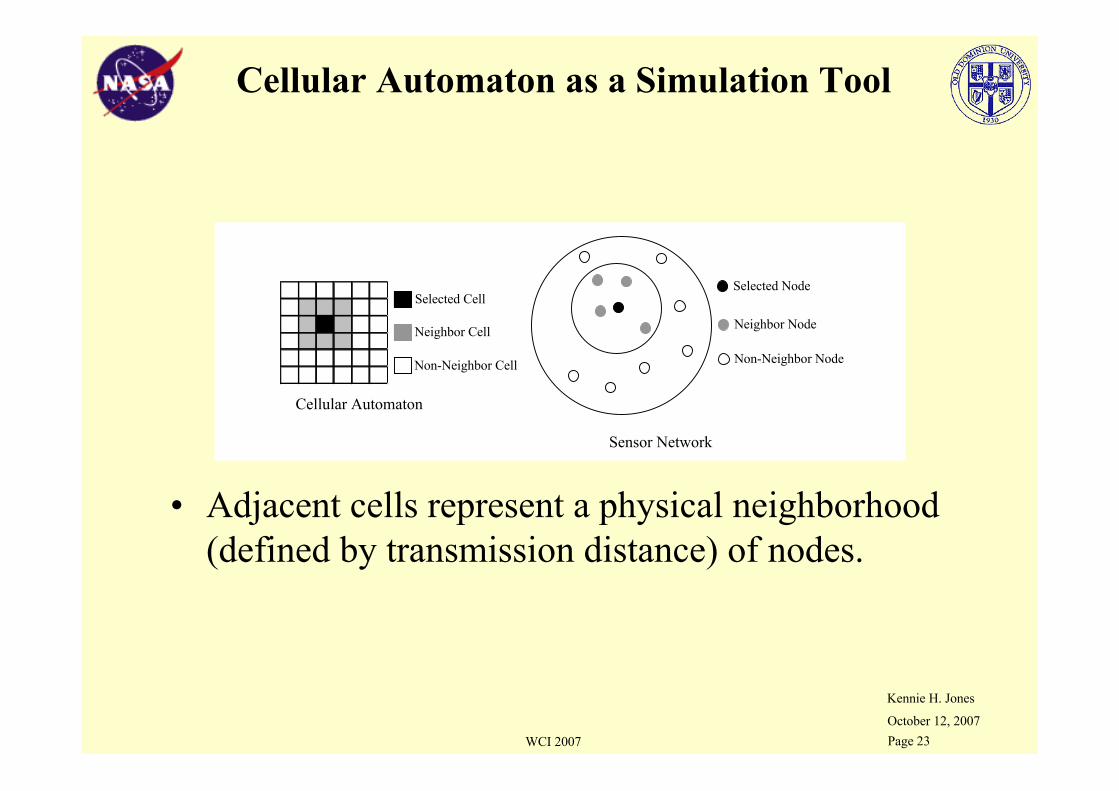
Cellular Automaton as a Simulation Tool
Neighbor Node
Selected Node
Non-Neighbor Node
Cellular Automaton
Sensor Network
Selected Cell
Neighbor Cell
Non-Neighbor Cell
• Adjacent cells represent a physical neighborhood(defined by transmission distance) of nodes.

Kennie H. Jones
Page 24October 12, 2007
WCI 2007
Simulation of Calculating Average
Initialdistribution of
colors
Distributionafter 1 time
step
Distributionafter 10 time
steps
Total Cells Vs. Time
0.E+00
2.E+02
4.E+02
6.E+02
8.E+02
1.E+03
1.E+03
1.E+03
2.E+03
-4.0E+04 1.0E+04 6.0E+04 1.1E+05 1.6E+05 2.1E+05 2.6E+05 3.1E+05 3.6E+05
Total Cells
Tim
e S
tep
s
Scalability Metric: Time
Total Cells Vs. Selections per Cell
0
200
400
600
800
1000
1200
1400
1600
0.0E+00 1.0E+05 2.0E+05 3.0E+05 4.0E+05
Total Cells
Se
lec
tio
ns
pe
r C
ell
Maximum
Average
Minimum
Scalability Metric: Transactions Per Cell
Total Cells .Vs Time Steps within Tolerance
0
200
400
600
800
1000
1200
1400
0 50000 100000 150000 200000 250000 300000 350000 400000
Total Cells
Tim
e S
tep
s
99% within tolerance
95% within tolerance
68% within tolerance
99% within tolerance*2
95% within tolerance*2
68% within tolerance*2
Scalability Metric: Time for % within Tolerance

Kennie H. Jones
Page 25October 12, 2007
WCI 2007
Simulation of Time-sync Protocol for SensorNetworks
Initial distributionof clock values for
TPSN
25% of cells aresynchronized at 2
50% of cells aresynchronized
75% of cells aresynchronized
Total Cell Vs. Time Steps
0
1000
2000
3000
4000
5000
6000
7000
0.E+00 2.E+05 4.E+05 6.E+05 8.E+05 1.E+06
Cells
Tim
e S
tep
s
Total Cell Vs. Transmissions Per Cell
0
5
10
15
20
25
30
35
0.E+00 2.E+05 4.E+05 6.E+05 8.E+05 1.E+06
CellsT
ran
sm
issio
ns P
er
Cell
Average
Maximum
Scalability Metric: Time Scalability Metric: Transactions Per Cell

Kennie H. Jones
Page 26October 12, 2007
WCI 2007
Simulation of Firefly Synchronization
Initialdistribution of
clock values forFirefly
Synchronization
Distributionof clock
values afterthe first
time period
Distributionof clock
values after10 timeperiods
Totals Cells Vs. Time Steps
0
50
100
150
200
250
300
350
400
450
0.0E+00 2.0E+05 4.0E+05 6.0E+05 8.0E+05 1.0E+06 1.2E+06
Totals Cells
Tim
e S
tep
s
Totals Cells Vs. Cell Selections
0
50
100
150
200
250
300
350
0.0E+00 2.0E+05 4.0E+05 6.0E+05 8.0E+05 1.0E+06 1.2E+06
Cells
Ce
ll S
ele
cti
on
s
Maximum
Average
Minimum
Totals Cells Vs. % Within Time Tolerance
0
50
100
150
200
250
300
350
400
450
0.0E+00 2.0E+05 4.0E+05 6.0E+05 8.0E+05 1.0E+06 1.2E+06
Cells
Tim
e S
tep
s All equal
99% within tolerance
95% within tolerance
68% within tolerance
Scalability Metric: Time
Scalability Metric: Transactions Per Cell Scalability Metric: Time for % within Tolerance

Kennie H. Jones
Page 27October 12, 2007
WCI 2007
TPSN vs. Firefly Synchronization– Good Enough: Reducing the Global Domain
• In TPSN, values of nodes do not change until it istheir “turn.”
• In Firefly Synchronization, the range of thedomain reduces very quickly such that theminimum and maximum are much closer to theaverage than in the initial distribution
• If the goal is to move all sensor nodes in thenetwork towards a common value:
– TPSN is never “good enough” until the process iscomplete but …
– using my method, the range of values may be“good enough” much quicker.
• Will analyze this process and to determine theclass of problems that may benefit from “goodenough” computing in the sense of rapid rangereduction.
TPSN at 50% oftime to synchronize:range has not been
reduced.
Color Vs. Number of Cells for 300X300 Grid
0
500
1000
1500
2000
2500
3000
79
97
101
104
106
108
110
112
114
116
118
120
122
124
126
128
130
132
134
136
138
140
142
144
146
148
150
152
Color
Nu
mb
er o
f C
ell
s
Firefly Synchronization at 2% of time tosynchronize: range reduced from [0..255] to
[105..148]
Kennie H. Jones
Page 28October 12, 2007
WCI 2007
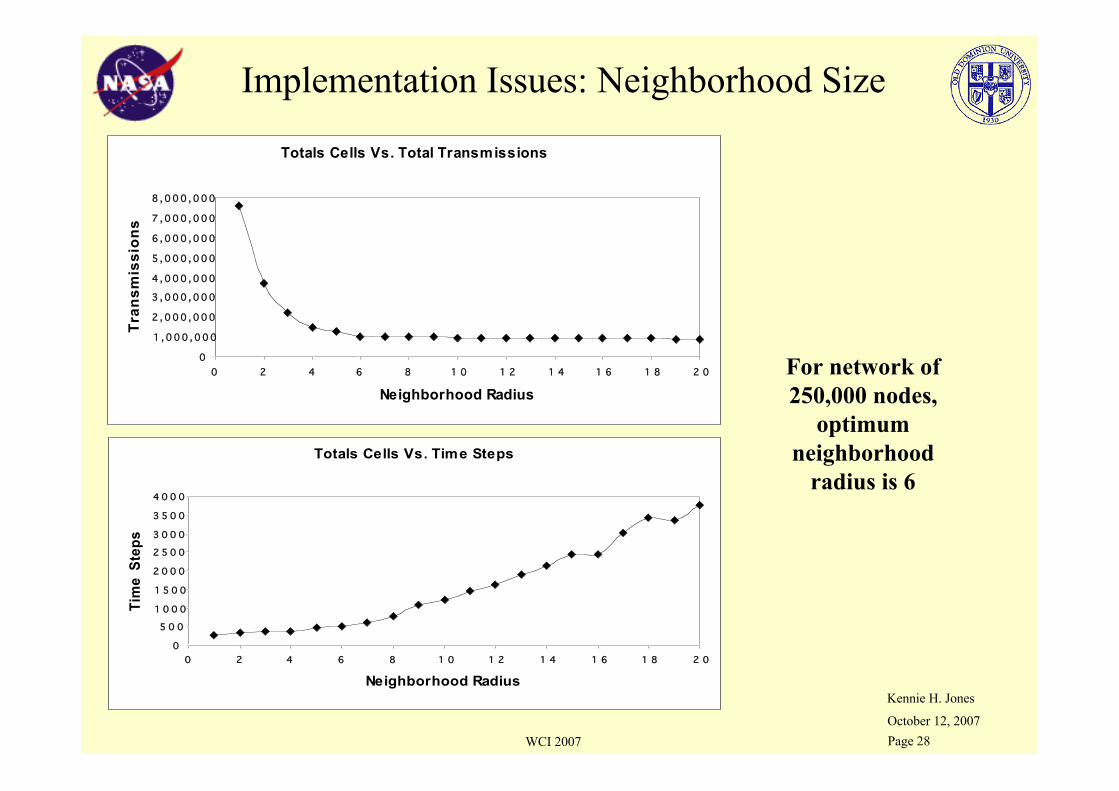
Implementation Issues: Neighborhood Size
Totals Cells Vs. Total Transmissions
0
1 , 0 0 0 , 0 0 0
2 , 0 0 0 , 0 0 0
3 , 0 0 0 , 0 0 0
4 , 0 0 0 , 0 0 0
5 , 0 0 0 , 0 0 0
6 , 0 0 0 , 0 0 0
7 , 0 0 0 , 0 0 0
8 , 0 0 0 , 0 0 0
0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0
Neighborhood Radius
Tra
ns
mis
sio
ns
Totals Cells Vs. Time Steps
0
5 0 0
1 0 0 0
1 5 0 0
2 0 0 0
2 5 0 0
3 0 0 0
3 5 0 0
4 0 0 0
0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0
Neighborhood Radius
Tim
e S
tep
s
For network of250,000 nodes,
optimumneighborhood
radius is 6
Kennie H. Jones
Page 29October 12, 2007
WCI 2007
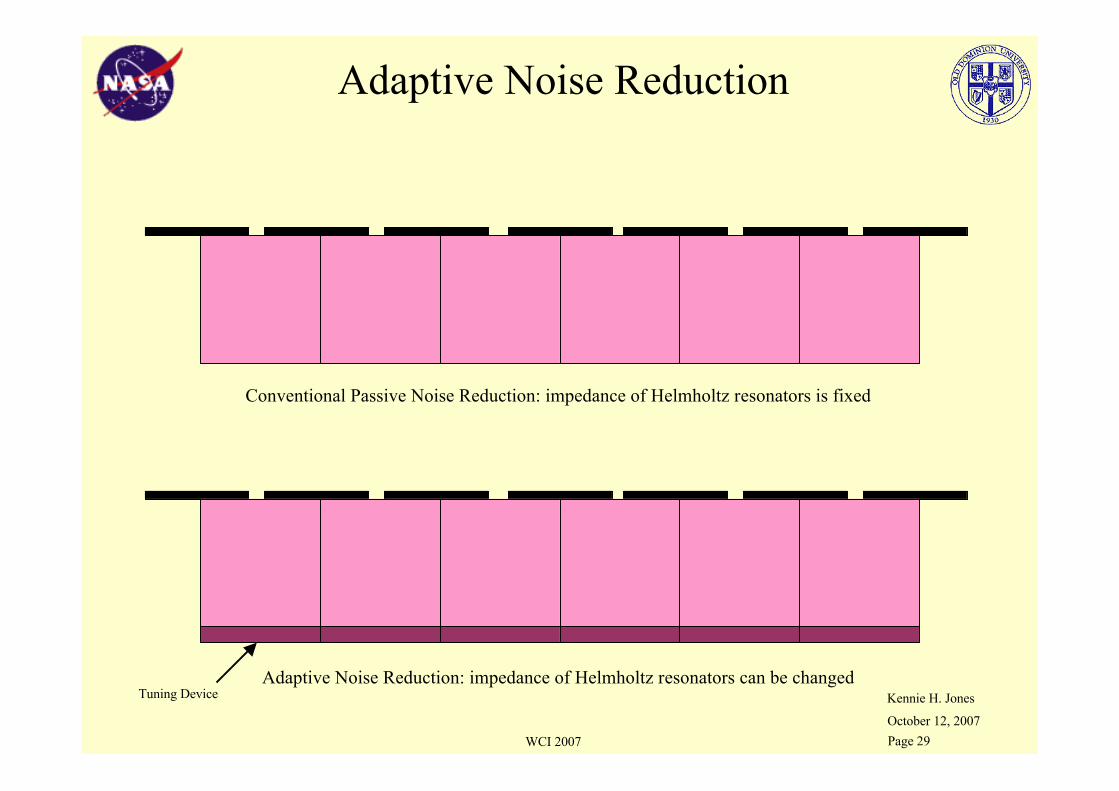
Adaptive Noise Reduction
Conventional Passive Noise Reduction: impedance of Helmholtz resonators is fixed
Adaptive Noise Reduction: impedance of Helmholtz resonators can be changedTuning Device

Kennie H. Jones
Page 30October 12, 2007
WCI 2007
Centralized Approach to Adaptive Tuning
One Side Liner of Rectangular Duct
Air Flow
Entrance Sensor Exit Sensor
Central ComputerDisadvantage: liner must be homogeneous

Kennie H. Jones
Page 31October 12, 2007
WCI 2007
Communal Approach to Adaptive Tuning
Advantage: As each linerpatch is autonomous, linercan be heterogeneous
Kennie H. Jones
Page 32October 12, 2007
WCI 2007
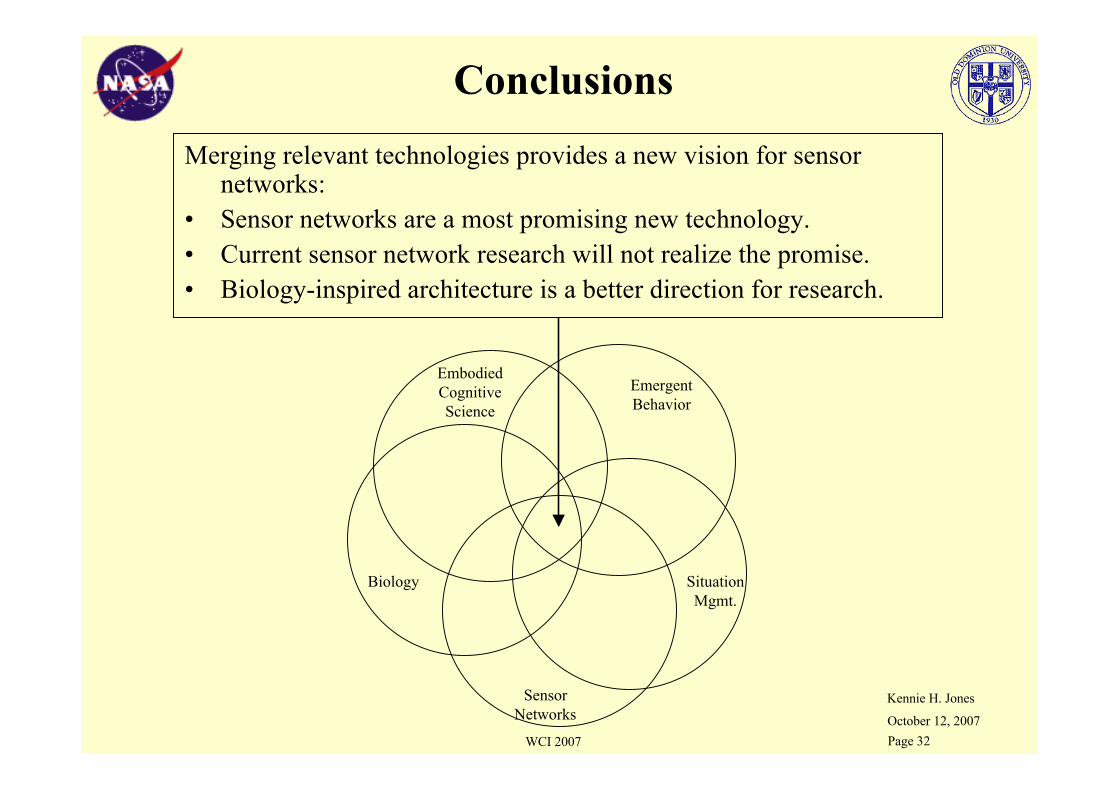
Conclusions
EmbodiedCognitiveScience
EmergentBehavior
Biology SituationMgmt.
SensorNetworks
Merging relevant technologies provides a new vision for sensornetworks:
• Sensor networks are a most promising new technology.• Current sensor network research will not realize the promise.• Biology-inspired architecture is a better direction for research.