
BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram ...
13
19 BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram Dibawah ini adalah blok diagram secara keseluruhan dari pesawat sinar-x. Pada bagian ini menjelaskan masing – masing blok rangkaian yang terdapat pada pesawat sinar-x. Gambar 3.1 Blok Diagram Pesawat Sinar-X
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of BAB III METODOLOGI PENELITIAN 3.1 Blok Diagram ...
19
BAB III
METODOLOGI PENELITIAN
3.1 Blok Diagram
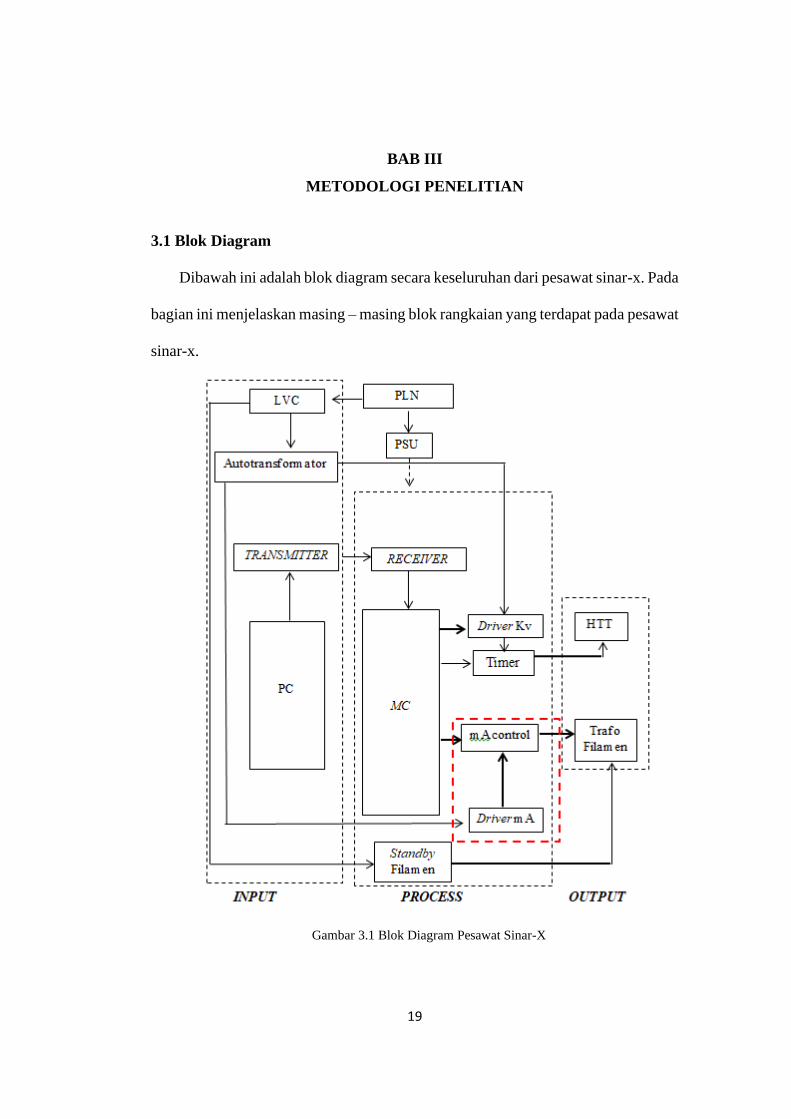
Dibawah ini adalah blok diagram secara keseluruhan dari pesawat sinar-x. Pada
bagian ini menjelaskan masing – masing blok rangkaian yang terdapat pada pesawat
sinar-x.
Gambar 3.1 Blok Diagram Pesawat Sinar-X
20
Penjelasan Blok Diagram :
Tegangan dari PLN masuk ke LVC (Line Voltage Compensator) dan akan
memberi supply tegangan ke semua rangkaian. Apabila tegangan kurang dari
220 VAC maka LVC otomatis menyesuaikan tegangan agar input tercapai
sebesar 220 VAC. Kemudian tegangan masuk ke Autotrafo. Autotrafo akan
memberikan supply tegangan ke driver kV dan mA, driver kV untuk
memberikan supply tegangan ke trafo HTT dan driver mA akan memberikan
supply tegangan ke trafo filamen. Personal Computer (PC) berfungsi sebagai
sistem kendali pada modul ini. Pemilihan parameter kV, mA dan s dilakukan
di PC. Ketika akan digunakan maka perlu dilakukan setting parameter kV, mA
dan s, setelah parameter berhasil di setting maka dilanjutkan dengan menekan
tombol ready ketika tombol ready ditekan driver mA akan aktif sesuai dengan
mA yang dipilih dan timer akan berjalan selama 3 detik, setelah timer tercapai
maka tombol ekspose akan muncul. Ketika tombol ekspose ditekan maka
driver kV akan aktif sesuai dengan kV yang telah dipilih dan proses ekspose
akan berjalan, proses ekspose akan berjalan sesuai dengan waktu (s) yang
dipilih, ketika waktu habis maka proses ekspose akan selesai. Dalam keadaan
standby filament akan menyala redup karena mendapatkan supply tegangan
dari rangkaian standby filamen.
3.2 Diagram Alir Alat
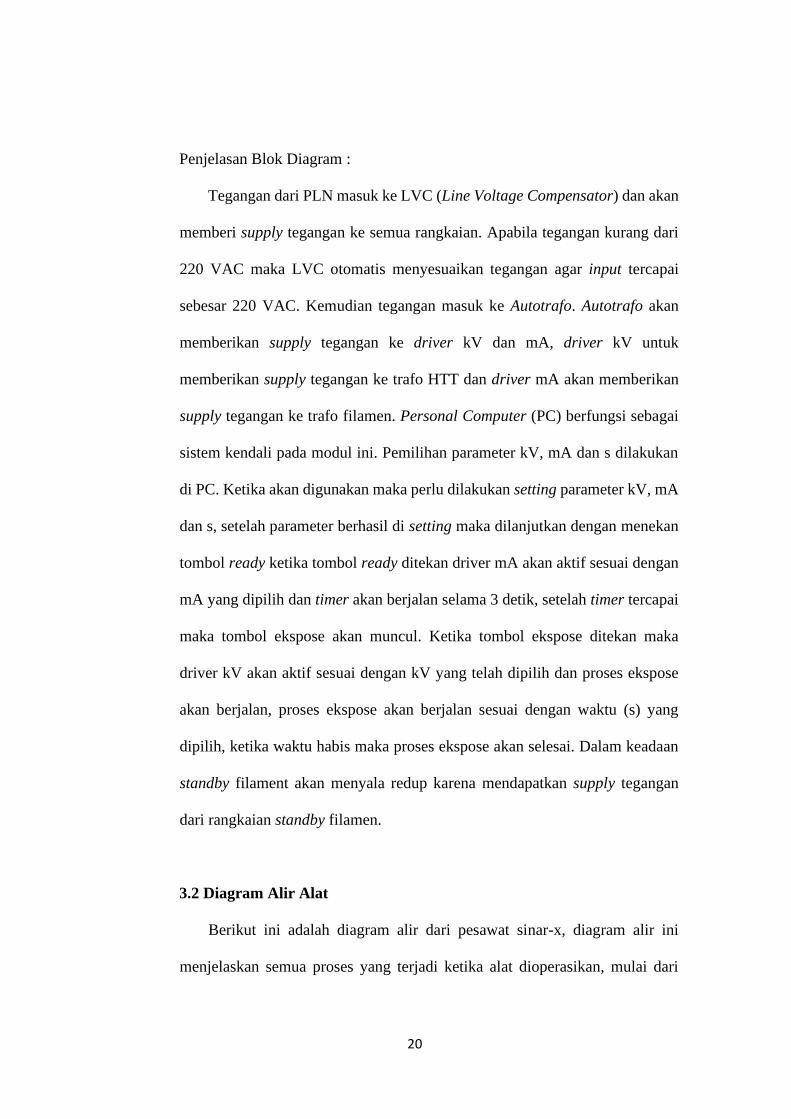
Berikut ini adalah diagram alir dari pesawat sinar-x, diagram alir ini
menjelaskan semua proses yang terjadi ketika alat dioperasikan, mulai dari
21
proses awal ketika alat dinyalakan sampai dengan proses akhir ketika alat
dimatikan.
Gambar 3.2 Diagram Alir Alat
Penjelasan diagram alir alat :
Ketika alat dinyalakan maka rangkaian mikrokontroler akan melakukan
inisialisasi, langkah pertama yang dilakukan adalah melihat tegangan input
yang masuk ke alat, dapat dilihat pada Display LVC (Line Voltage
Compensator) apabila tegangan masuk belum mencapai 220V maka LVC akan
22
menyesuaikan tegangan masuk tersebut sampai menjadi 220V, ketika akan
menggunakan alat untuk foto rontgen yang pertama dilakukan adalah mengatur
kV, mA dan S setelah diatur maka dilanjutkan dengan menekan tombol ready
ketika ready tercapai maka lampu indikator hijau akan menyala, setelah
indikator ready menyala bisa dilanjutkkan dengan menekan tombol ekspose,
apabila indikator ready belum menyala maka proses proses ekspose tidak akan
bisa berjalan, ketika ekspose maka alat akan menghasilkan sinar-x, indikator
warna merah akan menyala ketika proses ekspose telah selesai.
3.3 Diagram Mekanik Alat
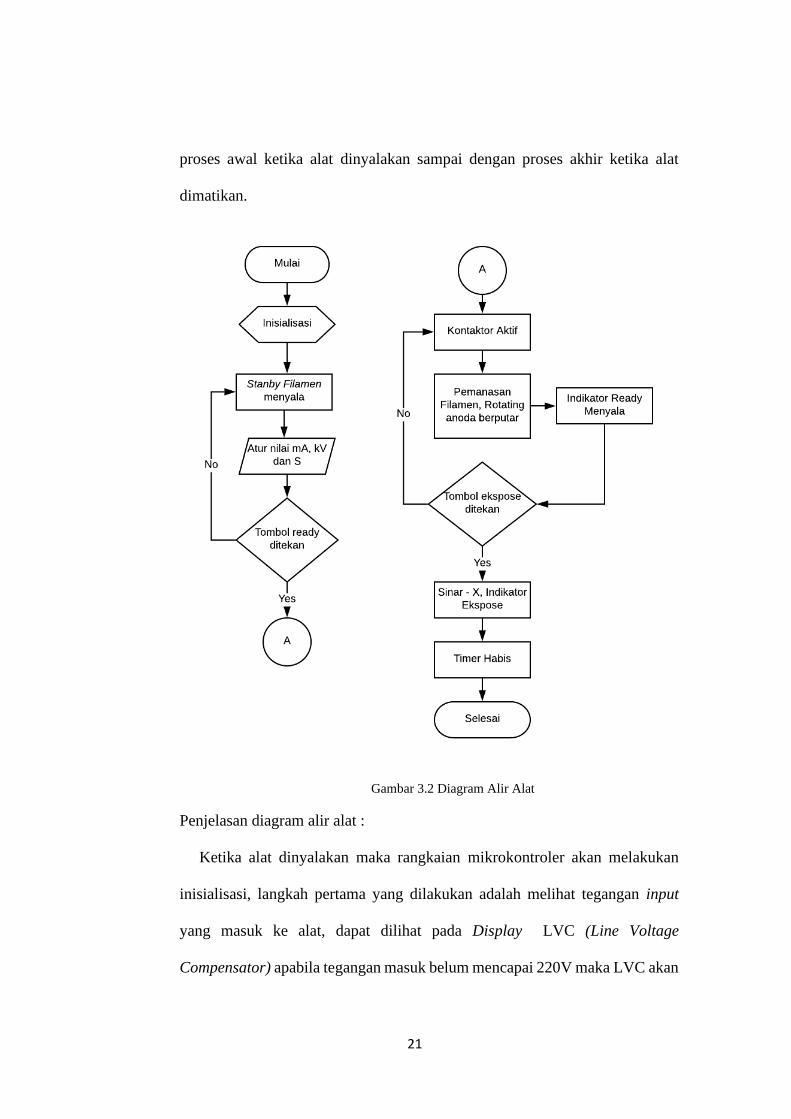
Berikut ini adalah diagram mekanik alat. Pada diagram ini terdapat
rancangan atau gambaran bentuk fisik dari sistem pengendali pesawat sinar-x,
mulai dari tampak depan, tampak belakang, tombol – tombol, socket, dan
display tampilannya.
Gambar 3.3 Bentuk Fisik Alat
23
Keterangan :
1. Socket input
2. Socket output
3. Tombol power
4. Indikator standby
5. Indikator ready
6. Indikator ekspose
7. Personal Computer PC
3.4 Alat dan Bahan
3.4.1 Alat
1. Personal Computer (PC).
2. Toolset
3. Solder
4. Bor
5. Mata bor
6. Spidol OPM
7. Gergaji Mesin
3.4.2 Bahan
1. Relay
2. Kontaktor
3. PCB
4. Resistor
24
5. Autotrafo
6. Trafo
7. Kapasitor
8. Dioda
9. Modul Bluetooth HC-05
10. Minimum system arduino
3.5 Rangkaian Skematik
Rangkaian skematik berfungsi untuk memudahkan kita mencoba rangkaian
didalam PC sehingga meminimalisir kesalahan rangkaian yang terjadi dipapan
PCB. Pembuatan skematik rangkaian ini menggunakan program aplikasi bernama
proteus, aplikasi tersebut digunakan karena tampilannya yang praktis sehingga
mudah untuk dipahami.
3.5.1 Skematik Minymum System Arduino
Minimum system adalah sebuah yang paling sederhana yang dibutuhkan untuk
membuat IC mikrokontroller dapat digunakan untuk menjalankan program. Untuk
membuat rangkaian minimum system diperlukan beberapa komponen utama seperti:
osilator atau kristal dan juga kapasitor. Dibawah ini adalah gambar rangkaian
minimum system dari mikrokontroller yang menggunakan arduino:
25
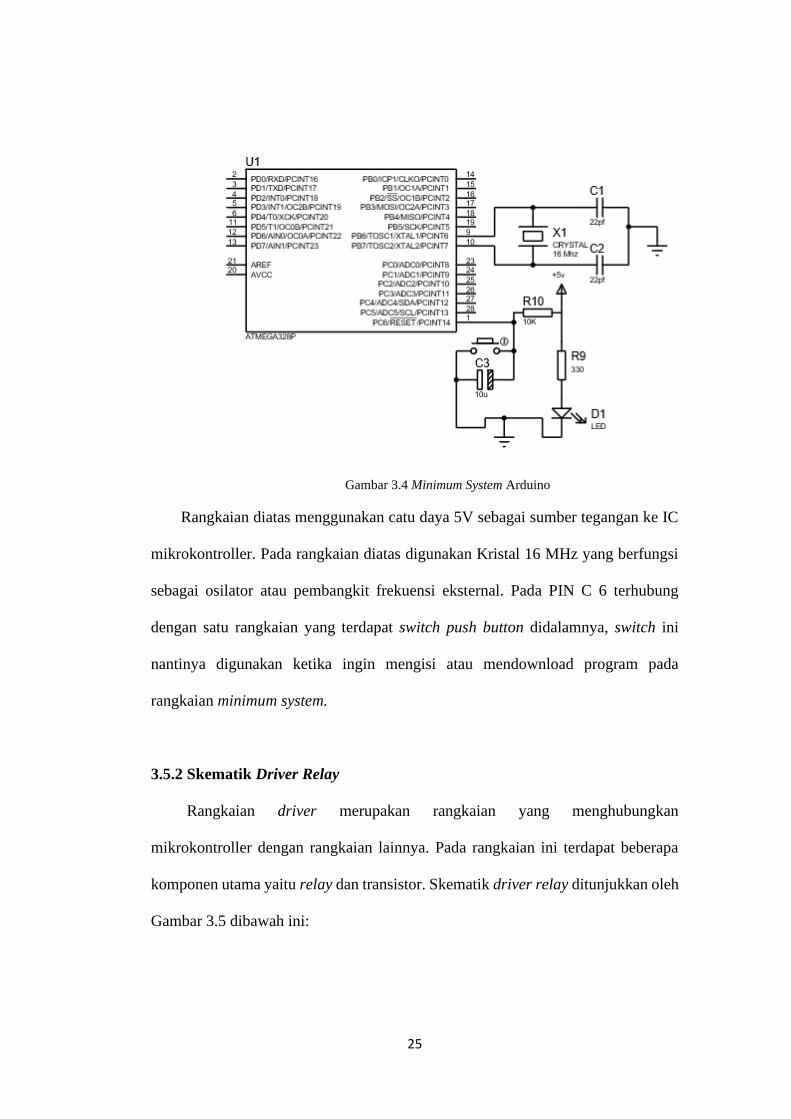
Gambar 3.4 Minimum System Arduino
Rangkaian diatas menggunakan catu daya 5V sebagai sumber tegangan ke IC
mikrokontroller. Pada rangkaian diatas digunakan Kristal 16 MHz yang berfungsi
sebagai osilator atau pembangkit frekuensi eksternal. Pada PIN C 6 terhubung
dengan satu rangkaian yang terdapat switch push button didalamnya, switch ini
nantinya digunakan ketika ingin mengisi atau mendownload program pada
rangkaian minimum system.
3.5.2 Skematik Driver Relay
Rangkaian driver merupakan rangkaian yang menghubungkan
mikrokontroller dengan rangkaian lainnya. Pada rangkaian ini terdapat beberapa
komponen utama yaitu relay dan transistor. Skematik driver relay ditunjukkan oleh
Gambar 3.5 dibawah ini:

26
Gambar 3.5 Skematik Rangkaian Driver Relay
Cara kerja rangkaian:
Ketika kaki basis dialiri tegangan maka kaki colector dan emitor akan
terhubung sehingga coil pada relay akan terhubung ke ground dan relay akan aktif,
ketika relay aktif maka tegangan 220 VAC pada common akan dialirkan ke beban
melalui kontak Normally Open (NO). Rangkaian driver relay ini akan aktif ketika
terdapat perintah pada mikrokontroller, ketika mendapat perintah maka rangkaian
mikrokontroller akan mengalirkan tegangan ke transistor.
3.5.3 Skematik Pengendali Arus (mA)
Rangkaian pengendali arus (mA) ini berfungsi untuk memberikan pilihan
arus yang akan digunakan pada proses ekspose dan juga arus yang digunakan
ketika alat dalam keadaan standby. Arus yang diatur pada rangkaian ini adalah arus
yang terdapat pada tabung sinar-X. Pada rangkaian ini terdapat beberapa
komponen utama diantaranya adalah kontaktor dan autotransformator. Dibawah
ini adalah gambar rangkaian pengendali arus:
27
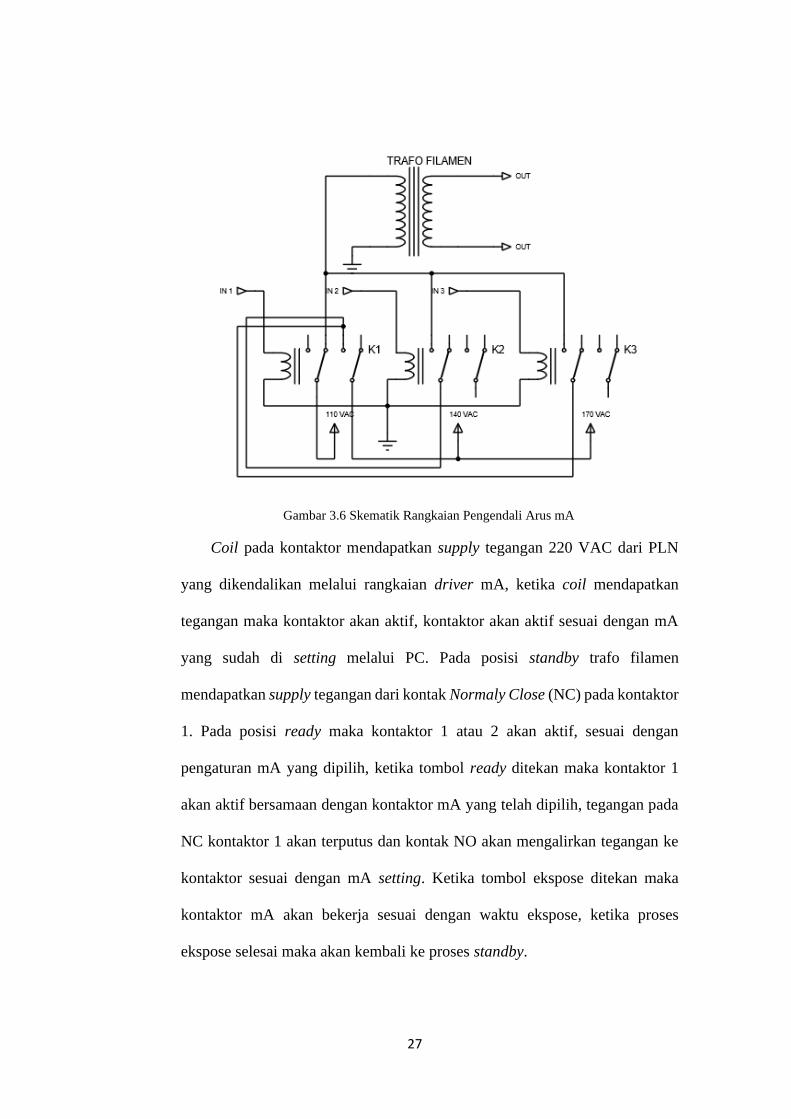
Gambar 3.6 Skematik Rangkaian Pengendali Arus mA
Coil pada kontaktor mendapatkan supply tegangan 220 VAC dari PLN
yang dikendalikan melalui rangkaian driver mA, ketika coil mendapatkan
tegangan maka kontaktor akan aktif, kontaktor akan aktif sesuai dengan mA
yang sudah di setting melalui PC. Pada posisi standby trafo filamen
mendapatkan supply tegangan dari kontak Normaly Close (NC) pada kontaktor
1. Pada posisi ready maka kontaktor 1 atau 2 akan aktif, sesuai dengan
pengaturan mA yang dipilih, ketika tombol ready ditekan maka kontaktor 1
akan aktif bersamaan dengan kontaktor mA yang telah dipilih, tegangan pada
NC kontaktor 1 akan terputus dan kontak NO akan mengalirkan tegangan ke
kontaktor sesuai dengan mA setting. Ketika tombol ekspose ditekan maka
kontaktor mA akan bekerja sesuai dengan waktu ekspose, ketika proses
ekspose selesai maka akan kembali ke proses standby.

28
3.6 Pembuatan Program
Program merupakan suatu coding perintah atau instruksi yang ditanamkan
didalam alat dengan tujuan agar alat dapat bekerja sesuai dengan yang kita
inginkan. Didalam alat, program dimasukkan kedalam sebuah Integrated Circuit
(IC) yang juga berperan sebagai eksekutor untuk memproses program tersebut.
Untuk pembuatan program pada modul ini menggunakan dua software yang
berbeda yaitu software Delphi dan software arduino.
3.6.1 Program Delphi
Software delphi digunakan untuk membuat program kendali modul ini yang
berada di Personal Computer (PC). Dibawah ini adalah listing program Delphi:
Program diatas adalah ketika arus yang dipilih adalah 50 mA maka akan
tertampil nilai mAS sebesar 1, 2, 4, dan 250 pada layar tampilan di PC.
if (combobox2.Text= '50') then
begin
comport1.WriteStr('a');
edit1.Clear;
combobox3.Clear;
combobox3.Items.Add('1');
combobox3.Items.Add('2');
combobox3.Items.Add('4');
combobox3.Items.Add('250');
29
Program diatas adalah ketika arus yang dipilih adalah 60 mA maka akan
tertampil nilai mAS sebesar 1, 2 dan 4 pada layar tampilan di PC.
Program diatas adalah rumus untuk menghitung waktu atau timer, lamanya
waktu didapatkan dari hasil pembagian antara mAs dengan mA. Kemudian hasil
tersebut akan ditampilkan pada PC dengan format penulisan dua angka dibelakang
koma.
3.6.2 Program Arduino
Arduino berperan sebagai eksekutor ke rangkaian hardware pada modul ini.
Arduino akan bekerja setelah menerima perintah dari system kendali yang berada
di PC. Berikut ini adalah listing program yang terdapat pada arduino:
if (combobox2.Text= '60') then
begin
comport1.WriteStr('b');
edit1.Clear;
combobox3.Clear;
combobox3.Items.Add('1');
combobox3.Items.Add('2');
combobox3.Items.Add('4');
mA := StrToFloat(ComboBox2.Text);
mAs := StrToFloat
(ComboBox3.Text);
hasil := mAs/mA;
edit1.Text := FloatToStr(hasil);
edit1.Text :=
formatfloat('0.##',hasil);
end;

30
Ketika data a mendapat perintah maka pin 7 akan aktif, data a merupakan
pilihan arus 50 mA. Ketika data b mendapat perintah maka pin 8 akan aktif, data b
merupakan pilihan arus 60 mA.
Ketika data E mendapat perintah maka pin 9 akan aktif, kemudian ada jeda
waktu selama 1500 ms, setelah itu pin 10 akan aktif. Data E adalah proses ready.
//pengaturan mA
if (ch=='a')
{
digitalWrite(PIN_7,HIGH);
digitalWrite(PIN_8,LOW);
}
else if (ch=='b')
{
digitalWrite(PIN_7,LOW);
digitalWrite(PIN_8,HIGH);
}
//ready
if (ch=='E')
{
digitalWrite(PIN_9,HIGH);
delay(1500);
digitalWrite(PIN_10,HIGH);
}
31
3.7 Teknik Analisis Data
a. Rata – rata
Rata – rata adalah bilangan yang didapatkan dari hasil pembagian
jumlah data yang diambil atau diukur dengan banyaknya pengambilan data
atau banyaknya pengukuran. Rumus dari rata –rata adalah sebagai berikut
:
𝑅𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 (𝑋) = ∑ 𝑋𝑛
𝑛 .................................................................... (3-1)
X = Rata – rata
∑ 𝑋𝑛 = Jumlah nilai data
n = Banyaknya data ke-n
b. Koreksi
Koreksi adalah selisih dari rata – rata nilai yang dikehendaki
dengan nilai yang diukur. Rumus koreksi adalah sebagai berikut:
𝐾𝑜𝑟𝑒𝑘𝑠𝑖 = 𝑋𝑛 − 𝑋 ............................................................................ (3-2)
Xn = Nilai yang diukur
X = Nilai yang dikehendaki




















