AUTOPILOT DESIGN FOR FIXED WING UAV
76
AUTOPILOT DESIGN FOR FIXED WING UAV By HUDA ELNIEMA ABD-ELRAHMAN ABD-ALLAH INDEX NO.124107 Supervisor Prof. Mustafa Nawari A REPORT SUBMITTED TO University of Khartoum In partial fulfillment for the degree of B.Sc. (HONS) Electrical and Electronics Engineering (CONTROL AND INSTRUMANTATION ENGINEERING) Faculty of Engineering Department of Electrical and Electronic Engineering October 2017
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of AUTOPILOT DESIGN FOR FIXED WING UAV

AUTOPILOT DESIGN FOR FIXED WING UAV
By
HUDA ELNIEMA ABD-ELRAHMAN ABD-ALLAH
INDEX NO.124107
Supervisor
Prof. Mustafa Nawari
A REPORT SUBMITTED TO
University of Khartoum
In partial fulfillment for the degree of
B.Sc. (HONS) Electrical and Electronics Engineering
(CONTROL AND INSTRUMANTATION ENGINEERING)
Faculty of Engineering
Department of Electrical and Electronic Engineering
October 2017
II
DECLARATION OF ORGINALITY
I declare this report entitled “Autopilot design for fixed wing UAV” is
my own work except as cited in references. The report has been not
accepted for any degree and it is not being submitted currently in
candidature for any degree or other reward.
Signature: ____________________
Name: _______________________
Date: ________________________

III
ACKNOWLEDGEMENT
First and foremost, I would like to thank my supervisor prof. Mustafa Nawari,
who has introduced me to the wonders of control theory, and who has guided me
through this project.
I would like to thank Ustaza Azza Algaily for her useful hints and comments.
She is very dedicated to her work with helping students to advance in their studies.
My gratitude goes to Eng. Mohamed Mahdi from Aviation Researches Centre
(ARC) and Ustaza Dania ALSadig from department of Mechanical Engineering, for
their great help during the journey of this project.
I would also like to thank my advisors Dr. Ahmed ELSayed and Dr. Ahmed
Nasr Eldin Ibrahim for their invaluable guidance and support.
Lastly, I would like to thank my best friend and project partner Mohammed
Abd-Elmoneim, I couldn’t do this without him. I am grateful for all the enjoyable
moments and interesting discussions.

IV
DEDICATION
This thesis is dedicated with love and affection to my Mother for raising me to
believe that anything is possible. Words cannot describe how lucky I’m to have her in
my life. To my family for their continuous support.
Dedicated to Fedaa Awad, Amira Elhadi, Serien Hashim, Hind Hassan,
Hammam Najeeb, Zahraa Najeeb and Eyas Elhashmi who kept me going, when I
wanted to give up. To my best friends and seniors, whose words of encouragement
and push for tenacity ring in my ears.
To coffee, my companion through many a long night of writing.

V
ABSTRACT
Unmanned aerial systems have been widely used for variety of military and
civilian applications over the past few years. Some of these applications require
accurate guidance and control. Consequently, Unmanned Aerial Vehicle (UAV)
guidance and control attracted many researchers in both control theory and aerospace
engineering. Fixed wings, as a particular type of UAV, are considered to have one of
the most efficient aerodynamic structures. The focus of this thesis is on control design
for both lateral and longitudinal for a UAV system. The platform understudy is a fixed
wing developed and modeled by University of Minnesota.
The novel approach suggested in this thesis is to use a successive loop closure
to obtain the gains for the PID controller which is implemented in MATLAB Simulink.
The Software in the Loop Simulation (SIL_Sim) is built by adding actuator and sensor
dynamics that can help prove or test the software.
The performance of the designed controller is compared to the controller of
University of Minnesota. It was found that the performance of the designed controller
is satisfactory in term of time analysis characteristics.

VI
المستخلص
على مدى السنوات القليلة الماضية أصبحت أنظمة الطائرات بدون طيار تستخدم بصورة
بعض هذه التطبيقات تتطلب التوجيه الدقيق و التحكم و المدنية. واسعة فى التطبيقات العسكرية
هتمام أنظار و انتيجة لذلك فإن المركبات الجوية بدون طيار أصبحت محط لهذه الطائرات ؛
من واحدة الطائرات ذات األجنحة الثابتة تعتبر . باحثين فى نظريات التحكم و هندسه الفضاءال
.أكفأ النماذج األيروديناميكية
تركز هذه االطروحة على تصميم أنظمة التحكم لكل من الحركة الجانبية و الطولية
حت الدراسة طائرة ذات جناح ثابت صممت و للمركبات بدون طيار. المنصة أو المنظومة ت
طورت بواسطة جامعة مينيسوتا.
النهج أو الطريقة المقترحة لهذه األطروحة هى استخدام حلقات اإلغالق المتتالية
. ( Simulink)ونفذت باستخدام برنامج الماتالب PIDللحصول على مكاسب من متحكم ال
مع إضافة Software In Loop (SIL)رنامج المحاكاة تم خلق البيئة المطلوبة باستخدام ب
الحساسات و المشغالت الميكانيكية والتي تساعد في إثبات واختبار البرنامج.
قورن أداء المتحكم الذي تم تصميمه بمتحكم جامعة مينيسوتا . ووجد أن أداء المتحكم
لى خصائص تحليل الزمن.المصمم والمقترح في هذه األطروحة قد أعطى نتائج مرضية بناء ع

VII
TABLE OF CONTENTS
DECLARATION OF ORGINALITY .............................................................. II
ACKNOWLEDGEMENT ............................................................................... III
DEDICATION ................................................................................................. IV
ABSTRACT ...................................................................................................... V
VI ............................................................................................................ المستخلص
TABLE OF CONTENTS ............................................................................... VII
LIST OF FIGURES. ......................................................................................... X
LIST OF TABLES. ........................................................................................ XII
LIST OF ABBREVIATIONS ....................................................................... XIII
LIST OF SYMBOLS .................................................................................... XIV
CHAPTER1 INTRODUCTION ..................................................................... 1
1.1 Background .............................................................................................. 1
1.2 Project aim and objectives ....................................................................... 2
CHAPTER2 LITERATURE REVIEW .......................................................... 3
2.1. Coordinate Frames. ........................................................................... 3
2.1.1 The inertial frame Fi. ............................................................................. 4
2.1.2 The vehicle frame Fv. ...................................................................... 4
2.1.3 The vehicle-1 frame Fv1. ................................................................. 4
2.1.4 The vehicle-2 frame Fv2. ................................................................. 5
2.1.5 The body frame Fb. ........................................................................ 6
2.1.6 The stability frame Fs. .................................................................... 7
2.1.7 The wind frame Fw. ........................................................................ 8
2.2 Fixed wing UAV parameters................................................................ 9
2.2.1 Geometric parameters. ................................................................... 9
2.2.2 Basic aerodynamic parameters. ..................................................... 9
2.2.3 Kinematics and dynamics. ............................................................. 10
2.3 Mathematical modeling. ...................................................................... 10
2.3.1. State variables. ............................................................................ 10
2.3.2. Basic aerodynamics. .................................................................... 11

VIII
2.3.3 Forces and moments acting on aircraft. ....................................... 13
2.3.4 Gravitational and thrust forces. .................................................... 13
2.3.5 Kinematic equations. .................................................................... 13
2.3.6 Rigid-body Dynamics. ................................................................. 14
2.3.7 Summary of equations of motion. ................................................ 15
2.3.8 UltraStick25-e. ............................................................................. 17
CHAPTER3 AUTOPILOT DESIGN & SIMULATION.............................. 23
3.1 Introduction. ........................................................................................... 23
3.2 Validation of aircraft model linearization. ......................................... 23
3.2.3 Doublet response of the linear and nonlinear longitudinal model.
24
3.2.4 Doublet response of the linear and nonlinear lateral model. ........ 25
3.3 Automatic Flight Control System (AFCS) ......................................... 26
3.3.1 Successive loops approach. .......................................................... 26
3.3.2 Saturation constraints. .................................................................. 27
3.4 Lateral-directional autopilot. .............................................................. 27
3.4.1 Roll Attitude Loop Design. .......................................................... 28
3.4.2 Course hold loop design. .............................................................. 30
3.4.3 Sideslip hold loop design. ............................................................ 32
3.5 Longitudinal directional controller..................................................... 33
3.5.1 Pitch attitude hold......................................................................... 34
3.5.2 Altitude hold using commanded pitch. ........................................... 36
3.5.3 Airspeed hold using commanded pitch. .......................................... 37
3.5.4 Airspeed hold using throttle. ........................................................ 38
3.6 Controller testing. ............................................................................... 38
3.6.1 Software in loop SIL. ................................................................... 38
3.6.2 Comparison. ................................................................................. 38
CHAPTER4 RESULTS & DISCUSSION .................................................... 40
4.1 Introduction ............................................................................................ 40
4.2 Lateral controller results..................................................................... 40
4.2.1 Direction heading controller......................................................... 42
4.2.2 Sideslip doublet response ............................................................. 43
4.3 Longitudinal controller responses. ..................................................... 45
4.3.1 Pitch Attitude Tracker Simulation Tests. ..................................... 45

IX
4.3.2 Altitude Hold Controller Simulation Tests. ................................. 46
CHAPTER5 CONCLUSION & FUTURE WORK ...................................... 49
5.1 Conclusion ............................................................................................. 49
5.2 Limitations ............................................................................................. 49
5.3 Future Work ........................................................................................... 49
REFERENCES ................................................................................................ 50
APPENDICES ................................................................................................... 1
Appendix A: UAV Nonlinear Simulation Setup ............................................... 1
Appendix B: UAV_NL Model Verification ...................................................... 1
Appendix C: Computing Gains Code ................................................................ 1
Appendix D: Baseline Controller ....................................................................... 1
Appendix E: Heading Controller ....................................................................... 1
Appendix F: UAV Software-in-the-Loop Simulation setup .............................. 1

X
LIST OF FIGURES.
Figure2-1 Inertial frame ..................................................................................... 4
Figure 2-2 Vehicle-1 frame. ............................................................................... 4
Figure 2-3 Vehicle-2 frame. ............................................................................... 5
Figure 2-4 Body frame. ...................................................................................... 6
Figure 2-5 Stability frame. ................................................................................. 7
Figure 2-6 Wind frame....................................................................................... 8
Figure 2-7 Airfoil shape. .................................................................................... 9
Figure 2-8 Wind triangle. ................................................................................. 12
Figure 2-9 UltraStic25-e. ................................................................................. 17
Figure 2-10 Flight scenarios ............................................................................ 19
Figure 3-1 Linear velocity linear response validation. .................................... 23
Figure 3-2 Angular velocity linear response validation. .................................. 24
Figure 3-3 Longitudinal (α, q) doublet response. ............................................ 24
Figure 3-4 Lateral dynamics (β, p, r)response of linear and nonlinear model. 25
Figure 3-5 Open loop system. .......................................................................... 26
Figure 3-6 Successive loops approach. ............................................................ 26
Figure 3-7 Lateral autopilot using successive loops. ....................................... 27
Figure 3-8 Lateral inner loops.......................................................................... 28
Figure 3-9 Roll PD controller. ......................................................................... 29
Figure 3-10 Kiφ using root locus. .................................................................... 29
Figure 3-11 Roll PID controller. ...................................................................... 30
Figure 3-12 Course angle controller design ..................................................... 31
Figure 3-13 Course hold controller. ................................................................. 31
Figure 3-14 Sideslip hold loop. ........................................................................ 32
Figure 3-15 Lateral PID controller. ................................................................. 33
Figure 3-16 Longitudinal controller flight regimes. ........................................ 34
Figure 3-17 Root locus of Pitch tracker. .......................................................... 35
Figure 3-18 Pitch attitude hold controller. ....................................................... 35
Figure 3-19 Altitude hold controller using commanded pitch. ........................ 36
Figure 3-20 Airspeed hold controller using commanded pitch. ...................... 37
Figure 3-21 Airspeed hold controller using throttle. ....................................... 38

XI
Figure 4-1 Doublet response comparison of roll tracker. ................................ 40
Figure 4-2 Doublet response of roll tracker in existance of noise ................... 41
Figure 4-3 Multi step response of the roll tracker. ........................................... 41
Figure 4-4 Doublet signal response of heading angle. ..................................... 42
Figure 4-5 Doublet signal response of heading angle in existence of noise. ... 42
Figure 4-6 Rectangular motion heading command response. .......................... 43
Figure 4-7 Doublet response to β angle ........................................................... 43
Figure 4-8 Doublet signal response of the Φ angle in SIL. ............................. 44
Figure 4-9 Doublet signal response for pitch tracker....................................... 45
Figure 4-10 Doublet signal response of pitch tracker in existence of noise. ... 45
Figure 4-11 Multi steps response for pitch tracker .......................................... 46
Figure 4-12 Step response of altitude hold controller. ..................................... 46
Figure 4-13 Altitude doublet signal response .................................................. 47
Figure 4-14 Altitude doublet signal response with existence of noise. ........... 47
Figure 4-15 Climbing Scenario response. ........................................................ 48
XII
LIST OF TABLES.
Table 2.1 State variables. ................................................................................ 10
Table 2.2 UltraStick25-e specifications. .......................................................... 18
Table 2.3 Trimmed values for UltraStick25-e. ................................................ 20
Table 2.4 Longitudinal poles. .......................................................................... 21
Table 2.5 Lateral poles. .................................................................................... 22
Table 3.1 Errors between linear and nonlinear longitudinal model ................. 25
Table 3.2 Errors between linear and nonlinear lateral model. ......................... 25
Table 3.3 Roll PID controller........................................................................... 30
Table 3.4 Course hold controller. .................................................................... 32
Table 3.5 Sideslip hold controller. ................................................................... 33
Table 3.6 Pitch attitude hold controller............................................................ 36
Table 3.7 Altitude hold controller. ................................................................... 37
Table 3.8 Airspeed hold controller using commanded pitch. .......................... 37
Table 3.9 Airspeed hold controller using throttle. ........................................... 38
Table 3.10 Designed gains and classic gains. .................................................. 39

XIII
LIST OF ABBREVIATIONS
AFCS Automatic Flight Control System.
DOF Degree Of Freedom.
GCS Ground Control Station.
GPS Global Positioning System.
MAV Micro Air Vehicles.
MUAV Mini Unmanned Aerial Vehicle.
NED North East Down.
PID Proportional Integral Differential.
SIL Software In Loop.
SISO Single Input Single Output.
SUAV Small Unmanned Aerial Vehicle.
UAS Unmanned Aircraft Systems.
UAV Unmanned Aerial Vehicle.

XIV
LIST OF SYMBOLS
(ii, ji , ki) Inertial frame axes
(iv, jv, kv) Vehicle frame axes
(ib, jb, kb) Body frame axes
(𝜓, 𝜃, 𝜙) Attitude angles - Euler angles, rad.
α
β
Angle of attack.
Sideslip angle.
𝜒 Course angle.
Γ∗
ρ
Products of the inertia matrix.
Air density.
𝛿𝑎
𝛿𝑒
𝛿𝑟
Aileron deflection.
Elevator deflection.
Rudder deflection.
ζ Damping Coefficient.
𝑎𝜙∗ Constants for transfer function associated with roll dynamics
𝑎𝑥 Acceleration component along x-axis of body frame.
𝑎𝑧 Acceleration component along z-axis of body frame.
B Wing span.
C Mean aerodynamic chord of the wing.
fg Gravity force.
fa Aerodynamic force.
fp Propeller force.
Gp Output vector of accelerometer.
Gpx, Gpy, Gpz Acceleration components of accelerometer.
g Gravitational acceleration (9.81 m/s2) .
J The inertia matrix.
Jx, Jy, Jz, Jxz Elements of the inertia matrix.
kmotor Constant that specifies the efficiency of the motor.
kd_q Feedback damping gain of pitch rate.
kp_θ Proportional gain of pitch angle.
ki_θ Integral gain of pitch angle.
kp_h Proportional gain of altitude.
𝑀∗
State-space coefficients associated with longitudinal dynamics.
XV
m Mass
mb External moment applied to the airframe.
l, m, n The components of mb in Fb.
ma Aerodynamic moment.
mp Propeller moment.
𝑁∗
State-space coefficients associated with lateral dynamics.
𝑝𝑛
The inertial (North) position of the aircraft along ii in Fi.
𝑝𝑒
The inertial (East) position of the aircraft along ji in Fi.
𝑝𝑑
The inertial down position (negative of h (altitude)) of the aircraft
measured along ki in Fi.
𝑝
The roll rate measured along ib in Fb.
𝑞
The pitch rate measured along jb in Fb.
𝑟
The yaw rate measured along kb in Fb.
𝑆𝑝𝑟𝑜𝑝
Area of the propeller.
𝑆𝑌𝑆𝑙𝑎𝑡
State space model associated with lateral dynamics (Alat, Blat, Clat,
Dlat).
𝑆𝑌𝑆𝑙𝑜𝑛𝑔
State space model associated with longitudinal dynamics (Alon,
Blon, Clon, Dlon).
𝑡𝑟
Rise time of step response.
𝑡𝑠
Settling time of step response.
𝑢∗
Trim input.
(𝑢, 𝑣, 𝑤) Velocity components of the airframe projected onto xb-axis.

XVI
𝑉𝑎
Airspeed vector.
𝑉𝑔
Ground speed vector.
𝑉𝑤
Wind speed vector.
𝑥∗ Trim state.
𝑋∗
𝑌∗
𝑍∗
State-space coefficients associated with longitudinal dynamics.
State-space coefficients associated with lateral dynamics.
State-space coefficients associated with longitudinal dynamics.

Chapter 1 Introduction
1
CHAPTER1 INTRODUCTION
High cost and operational limitation of manned aircraft prohibits their use by a
lot of scientific institutions as platforms for research. The use of Unmanned Aerial
Vehicles (UAV) offers a viable alternative. Unmanned Aerial Vehicles (UAVs) become
one of the fastest growing sectors of the world’s aerospace industry.
1.1 Background
There are many different opinions of what an Unmanned Aerial Vehicle (UAV)
is. Many believe that they are only used for military purposes, but this is far from the
truth. The most important definition of an UAV is that it is an aerial vehicle without a
pilot. Without pilot means that the aerial vehicle is flying autonomously. The UAV is
preprogrammed and is supposed to do the operation and come back without human
interference.
Unmanned Aerial Vehicles (UAVs) have many advantages over manned
aircraft: starting from low manufacturing and operational costs of the systems; they
are smaller due to the elimination of the aircrew and related life support systems.
UAVs are capable of flying longer, higher and faster. Furthermore, the development
of small UAVs has been expanded rapidly and used for various purposes such as:
Military applications: reconnaissance surveillance and target acquisition
(RSTA)UAVs surveillance, Meteorology missions, route and landing
reconnaissance support.
Civil Applications:
Scientific Research – In many cases, scientific research necessitates
obtaining data from hazardous or remote locations.
Logistics and Transportation – UAVs can be used to carry and deliver a
variety of payloads.
Disaster and emergency management, industrial applications, etc.
Automatic flight controller is the main building block of UAV , which is known
as autopilot. There are different kinds of autopilots, from the simple ones used in small
private boats to more complex systems used on for instance submarines, oil tankers and
aircrafts [2].
To avoid disasters Autopilot is simulated and tested using MATLAB Simulink
which is a very powerful tool used to estimate the behaviors of systems designed before
implementing them.
UAV can be divided into two categories: Fixed-Wing aircraft & Rotorcraft.
Based on the aircraft role and flight envelope, basic to complex and
sophisticated controllers are used to stabilize the aircraft flight parameters. These
controllers constitute the autopilot system for

Chapter 1 Introduction
2
UAVs. The autopilot systems, most commonly, provide lateral and longitudinal
control through Proportional-Integral-Derivative (PID) controllers. Various techniques
are commonly used to ‘tune’ gains of these controllers.
1.2 Project aim and objectives
This thesis is about small unmanned aircraft which is the class of fixed-wing aircraft
with a wing span between 5 and 10 feet. They are typically designed to operate on the
order of 8 to 20 minutes, with payloads of approximately 10 to 50 pounds.
Autonomy of UAVs requires accurate control systems. Mathematical simulation can be
used to check UAV characteristics, reduce cost, risk and time that is wasted in
experimenting real models.
The main objectives of this thesis are to design a full autonomous controller for a fixed-
wing UAV. The fixed-wing UAV in consideration is UltraStick-25e.
This thesis is organized as follows:
Chapter 2:
includes the modelling of the UAV, its mass-inertia properties. Dynamic model is
based on the 6-DOF equations of motion. Aerodynamic data is used from the
reference [27]. Mass-inertia properties are taken from [27]. UAV model is extracted
in this chapter, is taken from reference [5].
Chapter 3:
The design of autopilot for ULTRA-Stick e25 is introduced using different techniques
such as successive loop closure and root locus.
Chapter 4:
The performance of the designed controller for both lateral and longitudinal parts is
introduced. A variety of setpoints are used to ascertain the attainability of reliable
results. The designed controller is tested against the classical one of university of
Minnesota research team and SIL technique is used to mimic the real aircraft
Chapter 5:
Conclusion and recommendations for future work are presented.

Chapter 2 Literature Review
3
CHAPTER2 LITERATURE REVIEW
In studying unmanned aircraft systems, understanding how different bodies are
oriented relative to each other is very important. In other words, understanding how the
air craft is oriented with respect to earth is the key to determine its behavior. This
chapter describes the various coordinates systems used to express the position and
orientation of the air craft and how to transform between these coordinates. In this
chapter development of a 6-DOF nonlinear model of the ULTRASTICK-25E is
presented. The 6-DOF nonlinear model includes the aerodynamics, atmospheric and
gravity models[1]. The chapter covers linearization of the nonlinear model, decoupling
of airplane dynamics into longitudinal and lateral dynamics, their state space
representations.
2.1. Coordinate Frames.
There are seven major coordinates that describes different aspects of the
aircraft[2]. The transformation from one coordinate frame to another is obtained
through rotation and translation. It is necessary to use several different coordinate
systems for the following reasons:
• Newton’s equations of motion are derived relative to a fixed, inertial reference
frame. However, motion is most easily described in a body-fixed frame.
• Aerodynamic forces and torques act on the aircraft body and are most easily
described in a body-fixed reference frame.
• Sensors like accelerometers and rate gyros measure information with respect
to the body frame. Alternatively, GPS measures position, ground speed, and course
angle with respect to the inertial frame[3].
The inertial frame, vehicle frame, vehicle-1 frame, vehicle-1 frame, body frame,
stability frame, and the wind frame are introduced next. Inertial frame and vehicle frame
are related by translation while other frames are related with rotation. Pitch angle, roll
angle, and yaw angle are the angles which describe the relative orientations of the
vehicle, vehicle-1, vehicle-2, and the body frames. Altitude of the aircraft is determined
by knowing the values of these angles. These angles are commonly known as Euler’s
angles. The rotation angles that define relative orientations between body, stability, and
wind frames are angle of attack and sideslip angle[2][4].
Chapter 2 Literature Review
4
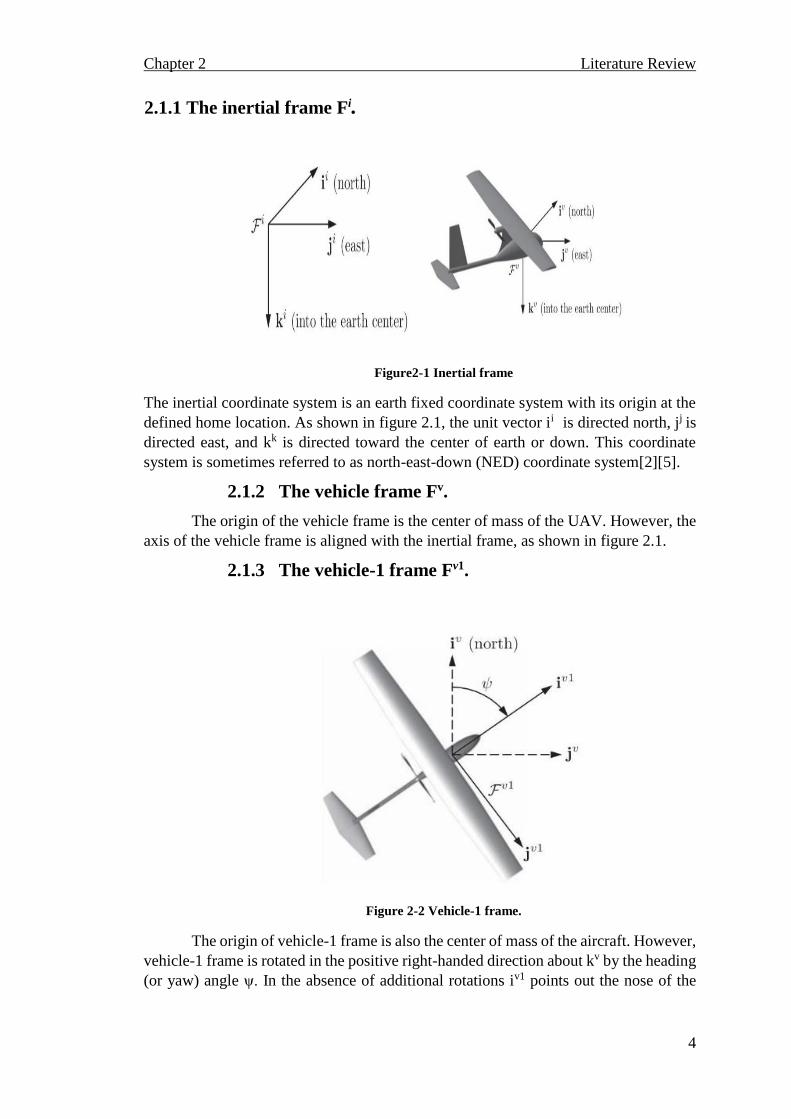
2.1.1 The inertial frame Fi.
Figure2-1 Inertial frame
The inertial coordinate system is an earth fixed coordinate system with its origin at the
defined home location. As shown in figure 2.1, the unit vector ii is directed north, jj is
directed east, and kk is directed toward the center of earth or down. This coordinate
system is sometimes referred to as north-east-down (NED) coordinate system[2][5].
2.1.2 The vehicle frame Fv.
The origin of the vehicle frame is the center of mass of the UAV. However, the
axis of the vehicle frame is aligned with the inertial frame, as shown in figure 2.1.
2.1.3 The vehicle-1 frame Fv1.
Figure 2-2 Vehicle-1 frame.
The origin of vehicle-1 frame is also the center of mass of the aircraft. However,
vehicle-1 frame is rotated in the positive right-handed direction about kv by the heading
(or yaw) angle ψ. In the absence of additional rotations iv1 points out the nose of the

Chapter 2 Literature Review
5
airframe, jv1 points out right wing and kv1 is aligned with kv and points into the earth as
in figure 2.2[2].
The transformation from vehicle frame to vehicle-1 frame is given by:
𝑝𝑣1 = 𝑅𝑣1_𝑣𝑝𝑣
Where
𝑅𝑣1_𝑣 = (𝐶𝜓 𝑆𝜓 0
−𝑆𝜓 𝐶𝜓 00 0 1
)
2.1.4 The vehicle-2 frame Fv2.
Figure 2-3 Vehicle-2 frame.
Center of mass of the aircraft is again the origin of vehicle-2 frame. vehicle-2
frame is obtained by rotating vehicle-1 frame in the right-handed side around jv1 axis
by the pitch angle θ. The unit vector iv2 points out the nose of the aircraft, jv2 points out
the right wing, and kv2 points out the belly, as shown in figure 2.3[2].
The transformation from Fv1 to Fv2 is given by:
𝑝𝑣2 = 𝑅𝑣1_𝑣2 𝑝𝑣1
Where
𝑅𝑣1_𝑣2 = (𝐶𝜃 0 −𝑆𝜃0 1 0
𝑆𝜃 0 𝐶𝜃)

Chapter 2 Literature Review
6
2.1.5 The body frame Fb.
Figure 2-4 Body frame.
The body frame is obtained by rotating the vehicle-2 frame around the iv2 in the
positive right-handed side by the roll angle φ. There for the unity vector ib points out
the nose of the aircraft, jb points out the right wing and kb out the belly.
The transformation from FV2 to Fb is given by:
𝑝𝑣2 = 𝑅𝑣2_𝑏𝑝𝑣1
Where
𝑅𝑣2_𝑏 = (1 0 00 𝐶φ 𝑆φ0 −𝑆φ 𝐶φ
)
Thus the rotation from vehicle frame to body frame can be obtained directly
using the rotational matrix property[6].
𝑅𝑣2_𝑏𝑅𝑣1_v2𝑅𝑣_𝑣1 = (1 0 00 𝐶φ 𝑆φ0 −𝑆φ 𝐶φ
) (𝐶𝜃 0 −𝑆𝜃0 1 0
𝑆𝜃 0 𝐶𝜃) (
𝐶𝜓 𝑆𝜓 0−𝑆𝜓 𝐶𝜓 0
0 0 1
)
= (
𝐶𝜃𝐶𝜓 𝐶𝜃𝑆𝜓 −𝑆𝜃𝑆𝜑𝑆𝜃𝐶𝜓 − 𝐶𝜑𝑆𝜓 𝑆𝜑𝑆𝜃𝑆𝜓 + 𝐶𝜑𝐶𝜓 𝑆𝜑𝐶𝜃𝐶𝜑𝑆𝜃𝐶𝜓 + 𝑆𝜑𝑆𝜓 𝐶𝜑𝑆𝜃𝑆𝜓 − 𝑆𝜑𝐶𝜓 𝐶𝜑𝐶𝜃
)
Chapter 2 Literature Review
7
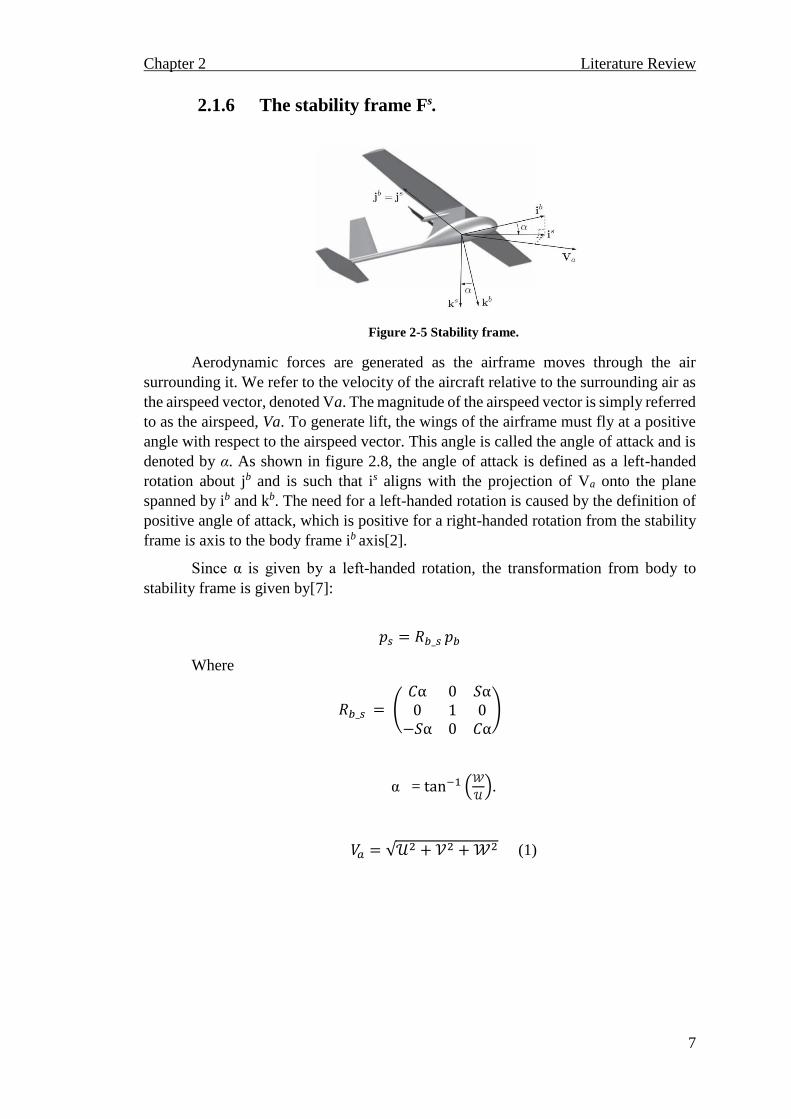
2.1.6 The stability frame Fs.
Figure 2-5 Stability frame.
Aerodynamic forces are generated as the airframe moves through the air
surrounding it. We refer to the velocity of the aircraft relative to the surrounding air as
the airspeed vector, denoted Va. The magnitude of the airspeed vector is simply referred
to as the airspeed, Va. To generate lift, the wings of the airframe must fly at a positive
angle with respect to the airspeed vector. This angle is called the angle of attack and is
denoted by α. As shown in figure 2.8, the angle of attack is defined as a left-handed
rotation about jb and is such that is aligns with the projection of Va onto the plane
spanned by ib and kb. The need for a left-handed rotation is caused by the definition of
positive angle of attack, which is positive for a right-handed rotation from the stability
frame is axis to the body frame ib axis[2].
Since α is given by a left-handed rotation, the transformation from body to
stability frame is given by[7]:
𝑝𝑠 = 𝑅𝑏_𝑠 𝑝𝑏
Where
𝑅𝑏_𝑠 = (𝐶α 0 𝑆α0 1 0
−𝑆α 0 𝐶α)
α = tan−1 (𝒲
𝒰).
𝑉𝑎 = √𝒰2 + 𝒱2 + 𝒲2 (1)

Chapter 2 Literature Review
8
2.1.7 The wind frame Fw.
Figure 2-6 Wind frame.
The angle between the velocity vector and the xb-zb plane is called the side-slip
angle and is denoted by β. As shown in figure 2.9, the wind frame is obtained by rotating
the stability frame by a right-handed rotation of β about ks. The unit vector iw is aligned
with the airspeed vector Va[2].
The transformation from stability to wind frame is given by
𝑝𝑤 = 𝑅𝑠_𝑤 𝑝𝑠
Where
𝑅𝑠_𝑤 = (𝐶β 𝑆β 0
−𝑆β 𝐶β 00 0 1
)
The total transformation from the body frame to the wind frame is given by:
𝑅𝑏_𝑤 = 𝑅𝑠_𝑤 𝑅𝑏_𝑠
Where
𝑅𝑏_𝑤 = (CαC β Sβ SαC β
−CαS β Cβ −SαSβ−Sα 0 Cα
)
And
𝛽 = tan−1(𝒱
√𝒰2+𝒲2).

Chapter 2 Literature Review
9
2.2 Fixed wing UAV parameters.
This section presents the basic used parameters of the UltraStick-25e (Thor). It
has a conventional fixed-wing airframe with flap, aileron, rudder, and elevator control
surfaces. The maximum deflection of servo actuators equals 25 degrees in each
direction[8].
2.2.1 Geometric parameters.
Figure 2-7 Airfoil shape.
The shape of the airfoil determines its aerodynamic properties, and some of its
geometrical parameters. As shown in figure 2.7.
2.2.2 Basic aerodynamic parameters.
The dynamics of the UAV is decomposed into longitudinal and lateral
dynamics; each of them has some aerodynamic non-dimensional coefficients affect the
stability of the aircraft. These coefficients are parameters in the aerodynamic forces and
moments equations, and influenced by the airfoil design[2].
2.2.2.I Longitudinal Aerodynamic Coefficients
The longitudinal motion acts in the xb-zb plane which is called pitch plane and
affected by the lift force (fL), Drag force (fD), and pitch moment (m). The effectiveness
of these forces and moments are measured by lift coefficient (CL), drag coefficient (CD),
and pitch moment coefficient (Cm). These coefficients influenced by the angle of attack
(α), pitch angular rate (q), and elevator deflection (δe)[9].
2.2.2.II Lateral Aerodynamic Coefficients
The lateral motion which is responsible of the yaw and roll motions. It’s affected
by the side force (fY), yaw moment (𝓃), and roll moment (ℓ). The effectiveness of these
forces and moments are measured by side force coefficient (CY), yaw moment
coefficient (Cn), and roll moment coefficient (Cl). These coefficients influenced by
sideslip angle (𝛽 ), yaw angular rate (r), roll angular rate (p), aileron deflection (𝛿a ) and
rudder deflection (𝛿r )[9].
Chapter 2 Literature Review
10
Assuming a flat nonrotating earth surface makes linear approximations for these
coefficients and their derivatives acceptable for modeling purposes and accurate, the
linearization is produced by the first-Taylor approximation, and non-dimensionalize of
the aerodynamic coefficients of the angular rates.
2.2.3 Kinematics and dynamics.
There are three position states and three velocity states associated with the
translational motion of the MAV. Similarly, there are three angular position and three
angular velocity states associated with the rotational motion. The north-east-down
positions of the MAV (Pn, Pe and Pd) are defined relative to the inertial frame. We will
sometimes use h =−Pd to denote the altitude. The linear velocities (u, v and w) and the
angular velocities (p, q and r) of the UAV are defined with respect to the body
frame[8][10].
2.3 Mathematical modeling.
A mathematical model is a representation in mathematical terms of the behavior
of real devices and objects. Since the modeling of devices and phenomena is essential
to both engineering and science, engineers and scientists have very practical reasons
for doing mathematical modeling. Modeling the aircraft allows us to predict the
behavior of the aircraft under certain conditions using simulation; this gives a chance
for avoiding huge losses when system fails, as building an aircraft prototype then testing
its behavior is very expensive especially when talking about fails and errors that could
cause destruction of the prototype[2][11].
2.3.1. State variables.
In developing the equations of motion for a MAV, twelve state variables will
be introduced. There are three position states and three velocity states associated with
the translational motion of the MAV. Similarly, there are three angular position and
three angular velocity states associated with the rotational motion[12].
Table 2.1 State variables.
Name Description
pn
pe
pd
Inertial north position of the MAV along
ii in Fi
Inertial east position of the MAV along ji
in Fi
Inertial down position (negative of
altitude) of the MAV
u
v
Body frame velocity measured along ib
in Fb

Chapter 2 Literature Review
11
w
φ
θ
ψ
Body frame velocity measured along jb
in Fb
Body frame velocity measured along kb
in Fb
Roll angle defined with respect to Fv2v
Pitch angle defined with respect to F 1
Heading (yaw) angle defined with
respect to Fv
p
q
r
Roll rate measured along ib in Fb
Pitch rate measured along jb in Fb
Yaw rate measured along kb in Fb
2.3.2. Basic aerodynamics.
The aerodynamic forces and moments on an aircraft are produced by the relative
motion with respect to the air and depend on the orientation of the aircraft with respect
to the airflow. there are two orientation angles needed to specify the aerodynamic forces
and moments, these angles are the Angle Of Attack (α) and the Sideslip Angle (𝛽), and
are known as the aerodynamic angles. The forces and moments acting on the aircraft
are defined in terms of the aerodynamic angles.
2.3.2.I Airspeed, wind speed, and ground speed.
MAV inertial forces are directly affected with velocities and accelerations
relative to a fixed (inertial) reference frame. Velocity of the airframe relative to the
surrounding air helps determining the aerodynamic forces. In the absence of wind, these
velocities are the same. However, wind is almost always present with MAVs regarding
its light weight and small size. We must carefully distinguish between airspeed,
represented by the velocity with respect to the surrounding air Va, and the ground speed,
represented by the velocity with respect to the inertial frame Vg. These velocities are
related by the expression[2]:
𝑉𝑎 = 𝑉𝑔 − 𝑉𝑤 (2)
Where 𝑉𝑤 is the wind velocity relative to the inertial frame.

Chapter 2 Literature Review
12
2.3.2.II The wind triangle.
Figure 2-8 Wind triangle.
Understanding the significant effect of the wind on a MAV is very important
more so than for larger conventional aircraft, where the airspeed is typically much
greater than the wind speed. Introducing the concepts of reference frames, airframe
velocity, wind velocity, and the airspeed vector, gives the ability to discuss some
important definitions relating to the navigation of MAVs. Airspeed is the
vector difference between the groundspeed and the wind speed. On a perfectly still day,
the airspeed is equal to the ground speed. But if the wind is blowing in the same
direction that the aircraft is moving, the airspeed will be less than the groundspeed[2].
The forces and moments acting on the aircraft are defined in terms of the
aerodynamic angles. Dimensionless aerodynamic coefficients and the flight dynamic
pressure as follows[9][13]:
Axial force X = 𝑞SCx = 0.5⍴V2 SCx
Side force Y = 𝑞SCy = 0.5⍴V2SCy
Normal force Z = 𝑞SCz = 0.5⍴V2SC
Rolling force L = 𝑞SCL = 0.5⍴V2SBCL
Pitching force M = 𝑞SCM = 0.5⍴V2𝑐 SCM.
Yawing force N = 𝑞SCN = 0.5⍴V2SBCN.
The aerodynamic coefficients Cx, Cy, Cz, CL, CM, and CN are referred to as
stability derivatives because their values determine the static and dynamic stability of
the MAV.

Chapter 2 Literature Review
13
2.3.3 Forces and moments acting on aircraft.
The external forces and moments acting on the aircraft can be re-expressed as
X = FX + GX + XT.
Y = FY + GY + YT.
Z = FZ + GZ + ZT.
L = MX + LT.
M = MY + MT.
N = MZ + NT.
For convenience, X, Y, Z will contain implicitly the propulsive force
components, also L, M, N will contain implicitly the propulsive moment components,
so the nonlinear equations of motions are obtained as follows
X - mg sin θ= m (U + q W - V r).
Y + mg cos θ sin ∅ = m (V + U r - P W).
Z + mg cos θ cos ∅ = m (W + V P - U q).
L = Ixx P - Ixz (r + P q) + (Izz - Iyy) P r.
M= Iyy q + Ixz (p2-r2) + (Ixx - Izz) P r.
N= Izz r - Ixz p + P q (Iyy - Ixx) + Ixz q r.
2.3.4 Gravitational and thrust forces.
The gravitational force acts at the center of gravity of the aircraft. In the aircraft,
the centers of mass and gravity coincide so there is no external moment produced by
gravity about the CG. direct resolution of the vector mg along the coordinate system
axes (x, y, z) yields the following components[14]:
Gx = - mg sinθ.
Gy = mg cosθ sin ∅.
Gz = mg cos ∅ cos θ.
2.3.5 Kinematic equations.
The translational velocity of the MAV is commonly expressed in terms of the
velocity components along each of the axes in a body-fixed coordinate frame. The
components u, v, and w correspond to the inertial velocity of the vehicle projected onto
the ib, jb, and kb axes, respectively. On the other hand, the translational position of the
MAV is usually measured and expressed in an inertial reference frame. Relating the
translational velocity and position requires differentiation and a rotational
transformation.

Chapter 2 Literature Review
14
(
𝑝𝑛̇ 𝑝𝑒̇ 𝑝�̇�
) = 𝑅𝑏_𝑣 (𝑢𝑣𝑤
)
(
𝑝𝑛̇ 𝑝𝑒̇ 𝑝�̇�
) = (
𝑐𝜃𝑐𝜓𝑠𝜙𝑠𝜃𝑐𝜓 −𝑐𝜙𝑠𝜓𝑐𝜙𝑠𝜃𝑐𝜓 𝑠𝜙𝑠𝜓
𝑐𝜃𝑠𝜓𝑠𝜙𝑠𝜃𝑠𝜓 𝑐𝜙𝑐𝜓𝑐𝜙𝑠𝜃𝑠𝜓 −𝑠𝜙𝑐𝜓
−𝑠𝜃 𝑠𝜙𝑐𝜃 𝑐𝜙𝑐𝜃
) (𝑢𝑣𝑤
)
This is a kinematic relation in that it relates the derivative of position to velocity:
forces or accelerations are not considered. Angular position elements φ, θ, and ψ and
angular rates p, q, and r relation is a little bit complicated as they exist in different
coordinate frames. The angular rates are defined in the body frame Fb. The angular
positions (Euler angles) are defined in three different coordinate frames: the roll angle
φ is a rotation from Fv2 to Fb about the iv2 = ib axis; the pitch angle θ is a rotation from
Fv1 to Fv2 about the jv1 = jv2 axis; and the yaw angle ψ is a rotation from Fv to Fv1
about the kv = kv1 axis. By performing the proper translation Euler angles derivatives
can express the angular rates in the body frame. The translation can be done as follows
(
�̇�
�̇��̇�
) = (
1 𝑠𝑖𝑛𝜙𝑡𝑎𝑛𝜃 𝑐𝑜𝑠𝜙𝑡𝑎𝑛𝜃0 𝑐𝑜𝑠𝜙 −𝑠𝑖𝑛𝜙0 𝑠𝑖𝑛𝜙𝑠𝑒𝑐𝜃 𝑐𝑜𝑠𝜙𝑠𝑒𝑐𝜃
) (𝑝𝑞𝑟
)
2.3.6 Rigid-body Dynamics.
To derive the dynamic equations of motion for the MAV, we will apply
Newton’s second law—first to the translational degrees of freedom and then to the
rotational degrees of freedom. Newton’s laws hold in inertial reference frames, meaning
the motion of the body of interest must be referenced to a fixed (i.e., inertial) frame of
reference, which in our case is the ground. We will assume a flat earth model, which is
appropriate for small and miniature air vehicles. Even though motion is referenced to a
fixed frame, it can be expressed using vector components associated with other frames,
such as the body frame. We do this with the MAV velocity vector Vg, which for
convenience is most commonly expressed in the body frame as Vb g = (u, v, w). Vb g
is the velocity of the MAV with respect to the ground as expressed in the body
frame[14].
Resulting Rigid-body equation will be
(�̇��̇��̇�
) = (
Γ1 𝑝𝑞 − Γ2𝑞𝑟
Γ5 𝑝𝑟 − Γ6(𝑝2 − 𝑟2)Γ7 𝑝𝑞 − Γ1𝑞𝑟
) + (
𝛤3𝑙 + 𝛤4𝑛1
𝑗𝑦+ 𝑚
𝛤4𝑙 + 𝛤8𝑛
)

Chapter 2 Literature Review
15
Where
𝛤1 = 𝐽𝑥𝑧(𝐽𝑥 − 𝐽𝑦 + 𝐽𝑧)
𝛤
𝛤2 = 𝐽𝑧(𝐽𝑧 − 𝐽) + 𝐽𝑥𝑧
2
𝛤
𝛤3 = 𝐽𝑧
𝛤
𝛤4 = 𝐽𝑥𝑧
𝛤
𝛤5 = 𝐽𝑧 − 𝐽𝑥
𝐽𝑦
𝛤6 = 𝐽𝑥𝑧
𝐽𝑦
𝛤7 = 𝐽𝑥(𝐽𝑥 − 𝐽𝑦) + 𝐽𝑥𝑧
2
𝛤
𝛤8 = 𝐽𝑥
𝛤
And Γ = (𝐽𝑥 𝐽𝑦) + 𝐽𝑥𝑧2
𝐽 𝑥 𝑖𝑠 𝑡ℎ𝑒 𝑖𝑛𝑒𝑟𝑡𝑖𝑎𝑙 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑎𝑙𝑜𝑛𝑔 𝑡ℎ𝑒 𝑋 𝑑𝑖𝑟𝑒𝑐𝑡𝑖𝑜𝑛 𝐽 𝑦 𝑖𝑠 𝑡ℎ𝑒 𝑖𝑛𝑒𝑟𝑡𝑖𝑎𝑙 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑎𝑙𝑜𝑛𝑔 𝑡ℎ𝑒 𝑌 𝑑𝑖𝑟𝑒𝑐𝑡𝑖𝑜𝑛 𝐽 𝑧 𝑖𝑠 𝑡ℎ𝑒 𝑖𝑛𝑒𝑟𝑡𝑖𝑎𝑙 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑎𝑙𝑜𝑛𝑔 𝑡ℎ𝑒 𝑍 𝑑𝑖𝑟𝑒𝑐𝑡𝑖𝑜𝑛
2.3.7 Summary of equations of motion.
Finally the 12 state variables equation of motion for a six-degrees of freedom
UAV will be[15]
2.3.7.I Kinematics (Position) equations.
(
𝑝𝑛̇ 𝑝𝑒̇ 𝑝�̇�
) = (
𝑐𝜃𝑐𝜓𝑠𝜙𝑠𝜃𝑐𝜓 −𝑐𝜙𝑠𝜓𝑐𝜙𝑠𝜃𝑐𝜓 𝑠𝜙𝑠𝜓
𝑐𝜃𝑠𝜓𝑠𝜙𝑠𝜃𝑠𝜓 𝑐𝜙𝑐𝜓𝑐𝜙𝑠𝜃𝑠𝜓 −𝑠𝜙𝑐𝜓
−𝑠𝜃 𝑠𝜙𝑐𝜃 𝑐𝜙𝑐𝜃
) (𝑢𝑣𝑤
) (3)
2.3.7.II Aerodynamic angles.
(
�̇�
�̇��̇�
) = (
1 𝑠𝑖𝑛𝜙𝑡𝑎𝑛𝜃 𝑐𝑜𝑠𝜙𝑡𝑎𝑛𝜃0 𝑐𝑜𝑠𝜙 −𝑠𝑖𝑛𝜙0 𝑠𝑖𝑛𝜙𝑠𝑒𝑐𝜃 𝑐𝑜𝑠𝜙𝑠𝑒𝑐𝜃
) (𝑝𝑞𝑟
) (4)

Chapter 2 Literature Review
16
2.3.7.III Angular rates (Rigid-body) equations.
(�̇��̇��̇�
) = (
Γ1 𝑝𝑞 − Γ2𝑞𝑟
Γ5 𝑝𝑟 − Γ6(𝑝2 − 𝑟2)Γ7 𝑝𝑞 − Γ1𝑞𝑟
) + (
𝛤3𝑙 + 𝛤4𝑛1
𝑗𝑦+ 𝑚
𝛤4𝑙 + 𝛤8𝑛
) (5)
2.3.7.IV Accelerations, velocities and forces.
(�̇��̇��̇�
) = (
𝑟𝑣 − 𝑞𝑤𝑝𝑤 − 𝑟𝑢𝑞𝑢 − 𝑝𝑣
) + 1
𝑚 (
𝑓𝑥
𝑓𝑦
𝑓𝑧
) (6)
2.3.7.V Final equations of motions.
𝑝𝑛̇ = (𝑐𝑜𝑠𝜃𝑐𝑜𝑠𝜓)𝑢 + (𝑠𝑖𝑛𝜙𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜓 − 𝑐𝑜𝑠𝜙𝑠𝑖𝑛𝜓)𝑣 + (𝑐𝑜𝑠𝜙𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜓 +
𝑠𝑖𝑛𝜙𝑠𝑖𝑛𝜓)𝑤 (7)
𝑝𝑒̇ = (𝑐𝑜𝑠𝜃𝑠𝑖𝑛𝜓)𝑢 + (𝑠𝑖𝑛𝜙𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜓 + 𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜓)𝑣 + (𝑐𝑜𝑠𝜙𝑠𝑖𝑛𝜃𝑠𝑖𝑛𝜓 +𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜓)𝑤 (8)
ℎ̇ = 𝑢𝑠𝑖𝑛𝜃 − 𝑣𝑠𝑖𝑛𝜙𝑐𝑜𝑠𝜃 − 𝑤𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜃 (9)
�̇� = 𝑟𝑣 − 𝑞𝑤 − 𝑔𝑠𝑖𝑛𝜃 +𝜌𝑉𝑎
2𝑆
2𝑚(𝐶𝑥 + 𝐶𝜒𝑞
𝑐𝑞
2𝑉𝑎+ 𝐶𝑋𝛿𝑒
𝛿𝑒)
+ 𝜌𝑆𝑝𝑟𝑜𝑝𝐶𝑝𝑟𝑜𝑝
2𝑚 ((𝐾𝑚𝑜𝑡𝑜𝑟𝛿𝑡)2 − 𝑉𝑎
2) (10)
�̇� = 𝑝𝑤 − 𝑟𝑢 − 𝑔𝑐𝑜𝑠𝜃𝑠𝑖𝑛𝜓
+𝜌𝑉𝑎
2𝑆
2𝑚(𝐶𝑦0 + 𝐶𝑦𝑝
𝑏𝑝
2𝑉𝑎+ 𝐶𝑦𝑟
𝑏𝑟
2𝑉𝑎+ 𝐶𝑦𝛿𝑟
𝛿𝑟 + 𝐶𝑦𝛿𝑎𝛿𝑎) (11)
�̇� = 𝑝𝑤 − 𝑟𝑢 − 𝑔𝑐𝑜𝑠𝜃𝑠𝑖𝑛𝜓
+𝜌𝑉𝑎
2𝑆
2𝑚(𝐶𝑦0 + 𝐶𝑦𝑝
𝑏𝑝
2𝑉𝑎+ 𝐶𝑦𝑟
𝑏𝑟
2𝑉𝑎+ 𝐶𝑦𝛿𝑟
𝛿𝑟 + 𝐶𝑦𝛿𝑎𝛿𝑎) (12)
�̇� = 𝑞𝑢 − 𝑝𝑣 − 𝑔𝑐𝑜𝑠𝜃𝑐𝑜𝑠𝜓 +𝜌𝑉𝑎
2𝑆
2𝑚(𝐶𝑧 + 𝐶𝑧𝑞
𝑐𝑝
2𝑉𝑎+ 𝐶𝑦𝑟
𝑏𝑟
2𝑉𝑎+ 𝐶𝑧𝛿𝑒
𝛿𝑒) (13)
�̇� = 𝑝 + 𝑞𝑠𝑖𝑛𝜙𝑡𝑎𝑛𝜃 + 𝑟𝑐𝑜𝑠𝜙𝑡𝑎𝑛𝜃 (14)̇
�̇� = 𝑞𝑐𝑜𝑠𝜃 − 𝑟𝑠𝑖𝑛𝜙 (15)
�̇� = 𝑞𝑠𝑖𝑛𝜙𝑠𝑒𝑐𝜃 + 𝑟𝑐𝑜𝑠𝜙𝑠𝑒𝑐𝜃 (16)
�̇� = 𝛤1𝑝𝑞 − 𝛤2𝑞𝑟
+0.5𝜌𝑉𝑎2𝑆𝑏 (𝐶𝑝0 + 𝐶𝑝𝛽
𝛽 + 𝐶𝑝𝑝
𝑏𝑝
2𝑉𝑎+ 𝐶𝑝𝑟
𝑏𝑟
2𝑉𝑎+ 𝐶𝑝𝛿𝑎 + 𝐶𝑝𝛿𝑟𝛿𝑟) (17)

Chapter 2 Literature Review
17
�̇� = 𝛤5𝑝𝑟 − 𝛤6(𝑝2 − 𝑟2) +𝜌𝑉𝑎
2𝑆𝐶
2𝐽𝑦(𝐶𝑚0 + 𝐶𝑚𝛼
𝛼 + 𝐶𝑚𝑞
𝑐𝑞
2𝑉𝑎+ 𝐶𝑚𝛿𝑒
𝛿𝑒) (18)
�̇� = 𝛤7𝑝𝑞 − 𝛤1𝑞𝑟 + 0.5𝜌𝑉𝑎2𝑆𝑏 (𝐶𝑟0 + 𝐶𝑟𝛽𝛽 + 𝐶𝑟𝑝
𝑏𝑝
2𝑉𝑎+ 𝐶𝑟𝛿𝑎
𝛿𝑎 + 𝐶𝑟𝛿𝑟𝛿𝑟) (19)
2.3.8 UltraStick25-e.
2.3.8.I UltraStic25-e brief overview.
Figure 2-9 UltraStic25-e.
This plane is based on the hugely popular Hangar 9® Ultra Sticks and offers the
same excellent flying characteristics, but with electric power rather than glow. No other
.25-size Stick on the market comes out of the box with so much ready to go. The
airframe is fully built and covered, the steerable tailwheel is factory-installed and the
control surfaces are prehinged. That means less assembly time and more flying time for
the modeler. It’s also set up to accept two different brushless applications, giving
consumers more options to fit into their personal preferences. Plus, the wing is designed
for optional quad-flap configuration, and separately purchased fiberglass floats can be
added for fun touch-and-go at the lake.
2.3.8.II UltraStick25-e key features.
UltraStick25-e is a Mini UAV (MUAV) that is mostly good for civil
applications it has several advantages, features of ULtraStick25-e which makes it a
good choice are listed next:

Chapter 2 Literature Review
18
Fully built and covered airframe is highly prefabricated.
All flight control surfaces are prehinged.
Aft float mount is included with kit for flying off water.
Firewall set up for two different brushless out runner motors.
Fully prebuilt and covered airframe.
Strong landing gear mounts for smooth grass takeoffs and landings.
Preinstalled steerable tailwheel.
Prehinged flight control surfaces.
Large wing area.
Wing designed for optional quad flaps.
2.3.8.III UltraStick25-e specifications.
In this section we will list the main design criteria of the UltraStick25-e which
are used in mathematical modeling. These specifications include body design
specifications, control surface specifications and flight conditions see table 2.2[16][17].
Table 2.2 UltraStick25-e specifications.
Property Symbol The value
Wing
span
B 1.27m
Wing
surface area.
S 0.3097m2
Main cord C 0.25m
Mass M 1.959kg
Inertia Jx
Jy
Jz
Jxz
0.07151kg.m2
0.08636 kg.m2
0.15364kg.m2
0.14kg.m2
2.3.8.IV Equilibrium point and steady state flight.
Bringing the model under control is done by finding a combination of values of
the state and control variables that correspond to a steady-state flight condition then
decoupling of the dynamics. The next step is using trimming technique which is
analyzing the dynamics of the aircraft about steady state scenarios or equilibrium
points. Steady state aircraft flight can be defined as a condition in which all of the
motion variables like linear and angular velocities, mass of the aircraft and all
acceleration components are constant or zero[18].

Chapter 2 Literature Review
19
Figure 2-10 Flight scenarios
When studying flight of aircrafts is usually arranged in scenarios methodology
to give a better tracking and understanding of the situation of the flight figure 2.10.
Common scenarios are steady wings level flight, steady turning flight, steady wings
level climb climbing turn. Each scenario has assumptions of its own according to
aircraft parameters at its current scenario. Assumptions of each scenario are
Steady wings level flight:
Φ, div (Φ, θ, ψ) = 0
Steady turning flight:
div (Φ, θ) = 0 and div ψ turn rate .
Steady pull-up flight:
Φ, div (Φ, ψ) = 0 and div θ pull-up rate.
Steady climbing turn:
div (Φ) and div θ pull-up rate, div ψ turn rate.
After obtaining nonlinear 12-state equations of motion and obtaining the
trimmed values of different flight conditions, a linearization technique to linearize the
equations will be derived to obtain the state space models for longitudinal and lateral

Chapter 2 Literature Review
20
dynamics at last[16][19]. Table 2.3 shows the trimmed values for the UltraStick25-e
aircraft.
2.3.8.V Longitudinal reduced order modes.
The longitudinal dynamics has two modes, short period mode (fast and damped)
and Phugoid (slow or lightly damped) mode.
2.3.8.VI Lateral reduced order modes.
Lateral motion of the aircraft disturbed from its equilibrium state is a
complicated combination of rolling, yawing, and side slipping motions. There are three
lateral dynamic instabilities of interest to the airframe designer; roll subsidence, spiral
divergence, and Dutch roll oscillations[20].
Table 2.3 Trimmed values for UltraStick25-e.
I II III IV
Thrust control δt 0.569 0.721 0.582 0.731
Elevator control
δe
-0.0963 -0.102 -0.125 -0.131
Rudder control
δr
0.00317 0.00436 -0.00748 -0.00607
Ailerons control
δa
0.01 0.0138 0.0186 0.0253
Va 17 17 17 17
𝛃 3.72*10-22 3.56*10
-25 -1.51*10-20 5.8*10
-20
α 0.054 0.0529 0.0646 0.0633
h 100 Don’t care
Φ -0.00172 -0.00239 0.544 0.547
θ 0.054 0.14 0.0553 0.141
ψ 2.71 2.71 2.71 2.71
p 5.09*10-2 5.21*10
-28 -0.0193 -0.0492
q -7.56*10-23 1.12*10
-26 0.181 0.18
r -1.03*10-24 -8.32*10
-28 0.298
0.295
γ -9.8*10-17
0.0873 -1.23*10-09 0.0873

Chapter 2 Literature Review
21
2.3.8.VII State space model for UltraStick25-e.
At this section both longitudinal and lateral state space models of UltraStick25e
are illustrated[21][22].
Longitudinal state space model.
Valued Longitudinal Model for Straight and Level Flight State space
longitudinal model has five States (u, w, θ, q, and h) two Inputs (thrust control and elevator
control), and five Outputs (Va, α, θ, q and h). The longitudinal linear state space model is
SYSlon which has (Alon, Blon, Clon, and Dlon) is as follows:
00179985.05399.
10*284.781.150406.7041.1
01000
000939.72.155294.56.7.744-
10*5.077.8747-9.791-.8008.5944-
Alon18
-5
00
07.133
00
0703.2
04669.
Blon
10000
00000
00100
00005874.003176.
00005399.9985.
Clon
Dlon = 0.
The eigenvalues can be determined by finding the eigenvalues of the matrix Alon.
Table 2.4 shows the damping, frequency and Eigen values of matrix Alon.
Table 2.4 Longitudinal poles.
Eigen value Damping Frequency
-0.159 ± 0.641i 0.241 0.66
-11.7 ± 10.0i 0.759 15.4

Chapter 2 Literature Review
22
Lateral state space model.
The lateral-directional model has five states p, r, ψ, Φ,
v, two inputs (ailerons control and rudder control) and five outputs p, r, β, ψ, Φ. The
lateral state space model is SYSlat with (Alat, Blat, Clat, and Dlat) is as follows:
0573.7001.100
0088.405406.10
00775.2514.702.0
00367.309.16823.2
0791.982.168789.8726.
Alat
00
00
04.825.11
008.55.156
302.50
Blat
10000
01000
00100
00010
000005882.
Clat
Dlat = 0.
Also table 2.5 shows the Eigen value of matrix Alat.
Table 2.5 Lateral poles.
Eigen value Damping Frequency
0 -1 0
-0.0138 1 0.0138
-1.84+5.28i 0.329 5.59
-16.1 1 16.1

Chapter 3 Autopilot Design & Simulation
23
CHAPTER3 AUTOPILOT DESIGN & SIMULATION
3.1 Introduction.
Generally, autopilot is a system that is used to guide the aircraft during a flight
without the assistance of a human pilot. The more autonomous abilities of the UAV the
more complex its guidance and control. Autopilots can be as simple as a single-axis
autopilot manages just one set of controls, -usually the ailerons- or as complex as a full
complete autopilot that controls position (altitude, lateral, and longitude) and attitude
(pitch, yaw, and roll) during the flight. A full autopilot design is presented in this
chapter then applied to Ultrastick25-e (Thor) linear model introduced in the previous
chapter. Validation of the linear model is presented in section 3.2 by comparing the
response of the nonlinear model of Ultrastick25-e to the response of the linearized
model. Controller design is presented in section 3.4 and 3.5.
First the lateral motion controllers are presented, starting with the inner loop
controller (roll rate, and roll damper) then a Proportional Integral (PI) controller for roll
tracking. The guidance and control system is related to the design of heading direction
controller with Proportional (P) controller. The second part of the autopilot design is
longitudinal motion controller which also starts with the design of the most inner loop
(pitch rate, and pitch damper). The guidance and control system is related to the design
of altitude hold controller with P controller as an example of outer loop controller
design.
3.2 Validation of aircraft model linearization.
In this section the performance of Ultrastick25-e linear model is compared to
the nonlinear model performance by applying a doublet signal to the control inputs
(elevator, rudder and ailerons) of the linear and nonlinear model.
3.2.1 Linear velocity response.
Figure 3-1 Linear velocity linear response validation.

Chapter 3 Autopilot Design & Simulation
24
Figure 3.1 shows the response of the linear and nonlinear model linear velocity
Va to the control input elevator, rudder and aileron (δe, δr and δa) respectively.
3.2.2 Angular velocity response.
Figure 3-2 Angular velocity linear response validation.
Figure 3.2 shows the response of the linear and nonlinear model angular velocity
to the control input elevator, rudder and aileron (δe, δr and δa) respectively.
3.2.3 Doublet response of the linear and nonlinear longitudinal
model.
Figure 3-3 Longitudinal (α, q) doublet response.
Response angle of attack and pitch rate of longitudinal dynamics is illustrated
in figure 3.3. Validation of the longitudinal linear model is given in terms of errors in
table 3.1.

Chapter 3 Autopilot Design & Simulation
25
Table 3.1 Errors between linear and nonlinear longitudinal model
State Errors
Airspeed 0.20 m/s
Angle of attack 0.05 deg.
Pitch angle 0.40 deg.
Pitch rate 1.0 deg./s
3.2.4 Doublet response of the linear and nonlinear lateral
model.
Lateral dynamics response to a doublet signal is also presented in this section.
Figure 3-4 Lateral dynamics (β, p, r)response of linear and nonlinear model.
Figure 3.4 shows the lateral dynamics response to a doublet signal. The response
of both linear and nonlinear model is smooth and quite identical with zero errors shown
in table 3.2.
Table 3.2 Errors between linear and nonlinear lateral model.
State Errors
Sideslip angle 0 deg.
Roll rate 0 deg./s
Yaw rate 0 deg./s

Chapter 3 Autopilot Design & Simulation
26
3.3 Automatic Flight Control System (AFCS)
Several factors make controlling and stabilization of a small aircraft more
difficult than a large one like low mass of the vehicle and low wing loading. Thus,
control system is more difficult to design for SUAV.
The complete SUAV state is a measure of its position, airspeed, attitudes (Euler
angles), and attitude rates. Controlling these states means complete control of the
SUAV with six degrees of freedom. If designed properly the control system ensures the
dynamics are relatively fast and oscillations die out quickly also a good tracking to the
input command with a minimum steady state error is achieved. The control system of a
SUAV uses linear and nonlinear feedback control to modify poles and loop gains. A
typical successive loops approach is used to design the feedback loop for both
longitudinal and lateral control systems.
3.3.1 Successive loops approach.
Figure 3-5 Open loop system.
The basic idea behind successive loop closure is to close several simple
feedback loops in succession around the open-loop plant dynamics rather than
designing a single (presumably more complicated) control system[23].
Figure 3-6 Successive loops approach.
Assuming a system that has three plants P1, P2 and P3 as shown in figure 3.5,
the successive loop approach can be implemented for such a system by closing the most
inner loop at P1 after adding controller C1 then do the same for the outer loop and the
most outer loop this makes it easier to design states controllers as shown in figure 3.6.
A necessary condition in the design is that the inner loop has the highest bandwidth
with each successive loop bandwidth a factor of 5 to 10 times smaller in frequency so
that the inner loop can be represented with a gain of 1 allowing to design the next outer
loop controller independently[2].

Chapter 3 Autopilot Design & Simulation
27
For SMAV most plants are second order systems so PID controller is introduced
and methods like root-locus are convenient and will be used.
3.3.2 Saturation constraints.
Designing a controller using successive loop methodology ensures that the
performance of the system is govern by the most inner loop. The need for saturation
rise from the fact that each actuator has a physical limit taking the lateral controller as
an example the roll rate of the SUAV is limited due to physical limitation in the ailerons.
The target of the design is to ensure that the most inner loop has the largest bandwidth
possible without violating the saturation constraints[24][2].
3.4 Lateral-directional autopilot.
Keeping the aircraft flying in a coordinated turn and following a commanded
turn rate is the major tasks of rudder and ailerons. To manage the lateral scenarios of
the aircraft, the lateral autopilot uses multiple inner loops and outer loops.
Designing the lateral autopilot begins with the body axis roll rate which is fed
back to the ailerons to modify the damping of the roll mode, and yaw rate to modify the
damping of the dutch roll mode, but yaw rate feedback only is not sufficient due to
coupling between yaw and roll which results a steady state yaw rate component during
turns, a simple solution of this problem is to use a washout filter on the output of the
yaw rate sensor. The washout filter acts like a high pass filter removing the steady state
component. The output of the washout approximates affects the yaw rate which is
suitable feedback for the dutch roll mode[25].
The outer-loop is designed to achieve the tracking command requirements. The
inner loops are designed to track roll attitude reference signals required for the outer
loop. Several design goals are introduced against the inner loop performance that the
closed loop rise time should be less than 1 second, and the overshoot has to be smaller
than 5%.
Figure 3-7 Lateral autopilot using successive loops.
Figure 3.7 illustrates the block diagram for a lateral autopilot using successive
loop closure. There are five gains associated with the lateral autopilot. The derivative
gain kdφ provides roll rate damping for the most inner loop. The roll attitude is regulated
with the proportional and integral gains kpφ and kiφ. The course angle is regulated with

Chapter 3 Autopilot Design & Simulation
28
the proportional and integral gains kpχ and kiχ. The idea with successive loop closure is
that the gains are successively chosen beginning with the inner loop and working
outward. In particular, kdφ and kpφ are usually selected first kiφ second, and finally kpχ
and kiχ.
3.4.1 Roll Attitude Loop Design.
Both roll rate and roll angle are controlled using the inner loops of the roll
attitude controller. Equation 20 represents the linearized roll rate transfer function that
is used to design the roll rate damper then the bank angle tracker then the heading
controller.
𝑝(𝑠) =−156.5
𝑠 + 16.09𝛿𝑎 (20)
Now, Kdφ and Kpφ can be systematically selected such that the desired response
of the closed loop controller is met.
Figure 3-8 Lateral inner loops.
From figure 3.8 the overall transfer function of the system is given by
𝜑(𝑠) =𝐾𝑝𝜑𝑎𝜑2
𝑠2+(𝑎𝜑2𝐾𝑑𝜑+𝑎𝜑1)s+𝑎𝜑2𝐾𝑝𝜑𝜑𝑐 (21)
Comparing this form to the second order system general form will give the
systematic calculations of Kdφ and Kpφ.
The general form of a second order system is
𝑌
𝑌𝐶=
𝜔𝑛2
𝑠2+2𝜁𝜔𝑛𝑠+𝜔𝑛2
Thus
𝜔𝑛2 = 𝐾𝑃𝜑𝑎𝜑2
𝐾𝑑𝜑 = 2𝜁𝜑𝜔𝑛𝜑 − 𝑎𝜑1
𝑎𝜑2 (22)
Note that the actuator effort δa can be expressed as
𝛿𝑎 = 𝐾𝑝𝜑𝑒 − 𝐾𝑑𝜑 𝛿�̇�

Chapter 3 Autopilot Design & Simulation
29
Since 𝛿�̇� is very small or zero the actuator effort is mainly governed by the error
signal and the value of the gain 𝐾𝑝𝜑. The equation above can be rearranged to calculate
the maximum value of 𝐾𝑝𝜑using the maximum actuator effort 𝛿𝑎 𝑚𝑎𝑥 and the maximum
error 𝑒𝑚𝑎𝑥 such that:
𝐾𝑝𝜑 = 𝛿𝑎 𝑚𝑎𝑥
𝑒𝑚𝑎𝑥 (23)
Figure 3-9 Roll PD controller.
With the Kdφ value selected to -0.0618, the desired pole will move from -16.09
to -25.76, which implies more stability.
Figure 3-10 Kiφ using root locus.

Chapter 3 Autopilot Design & Simulation
30
Usually the roll loop has a disturbance input of dφ. This disturbance represents
the terms in the dynamics that were neglected in the process of creating the linear,
reduced-order model of the roll dynamics. It can also represent physical perturbations
to the system, such as those from gusts or turbulence.
To ensure a zero-steady state error resulting from any disturbance dφ an
integrator with a gain of 𝐾𝑖𝜑 is added to the roll controller loop using root locus
technique shown in figure 3.10.
Figure 3-11 Roll PID controller.
The final roll rate and roll angle controller loop is shown in figure 3.11.
𝐾𝑝𝜑, 𝐾𝑑𝜑 and 𝐾𝑖𝜑 values are shown in table 3.3.
Table 3.3 Roll PID controller.
0 Value
𝑲𝒑𝝋 -1.1216
𝑲𝒅_𝒑 -0.0618
𝑲𝒊𝝋 -0.1
3.4.2 Course hold loop design.
The next step in designing the lateral directional autopilot is the outer loop of
the course angle.
From equation (16 & 1)
�̇� = 𝑞𝑠𝑖𝑛𝜙𝑠𝑒𝑐𝜃 + 𝑟𝑐𝑜𝑠𝜙𝑠𝑒𝑐𝜃
A simplified linear relation between the heading angle and roll angle can
obtained assuming the absence of the wind or sideslip.
Va = Vg & 𝜓 = 𝜒

Chapter 3 Autopilot Design & Simulation
31
𝜒 ̇ = �̇� =𝑔
𝑉𝑔𝑡𝑎𝑛𝜙 (24)
Equation 24 can be rewritten as:
�̇� =𝑔
𝑉𝑔𝜙 +
𝑔
𝑉𝑔(𝑡𝑎𝑛𝜙 − 𝜙)
�̇� =𝑔
𝑉𝑔𝜙 +
𝑔
𝑉𝑔𝑑𝜒
Converting to Laplace domain
𝜒 =𝑔
𝑉𝑔𝑠(𝜙(𝑠) + 𝑑𝜒(𝑠) ) (25)
Equation 25 can be used to control the heading form roll attitude.
Figure 3-12 Course angle controller design
The inner loop can be replaced with a gain of 1 as its bandwidth is much larger
than the outer loop. Figure 3.12 clarifies the course loop controller.
Figure 3-13 Course hold controller.
Using the same procedure and comparing the closed loop of the course hold
controller to the second order system 𝐾𝑝𝜒 and 𝐾𝑖𝜒 values for Ultrastick25-e can be
obtained. Table 3.4 shows the gains for Ultrastick25-e course hold controller. Figure
3.13 shows the course hold controller loop.

Chapter 3 Autopilot Design & Simulation
32
Table 3.4 Course hold controller.
Gains Values
𝑲𝒑𝝌 4.0511
𝑲𝒊𝝌 0.01
3.4.3 Sideslip hold loop design.
Figure 3-14 Sideslip hold loop.
Ultrastick25-e rudder is used to maintain zero sideslip angle β = 0. The sideslip
hold loop is illustrated in figure 3.14. Values for 𝐾𝑝𝛽 and 𝐾𝑖𝛽 are obtained using the
same calculations as before. Equation 26 represents the linearized transfer function of
yaw rate to rudder. The lateral model has complex pair poles (-1.84 ± 5.28i) with lightly
damping ratio (0.329) and natural frequency (5.59 rad/sec). The purpose of the damper
is to increase this damping ratio.
𝑟(𝑠)
𝛿𝑟(𝑠)=
−82.04𝑠3 − 1385𝑠2 − 1228𝑠 − 2351
𝑠4 + 19.74𝑠3 + 90.49𝑠2 + 502.2𝑠 + 6.89 (26)
The controlled system is designed by assigning the gain kd_r = 0.065, and the
washout filter with transfer function:
𝐻(𝑠) =𝜏𝑠
𝜏𝑠 + 1

Chapter 3 Autopilot Design & Simulation
33
Table 3.5 Sideslip hold controller.
Gains Values
𝑲𝒑𝜷 -3
𝑲𝒊𝜷 -0.8
𝑲𝒅𝜷 0.065
Figure 3-15 Lateral PID controller.
Maintaining the roll rate, roll angle, course hold, and sideslip hold loops at
desired values means full state control of the lateral motion. Lateral full controller is
shown in figure 3.15.
3.5 Longitudinal directional controller.
The longitudinal dynamics control is much more difficult than the lateral
dynamics due to airspeed noticeable effect on the longitudinal dynamics. Throttle and
elevators are used as actuators to control the SUAV altitude and to regulate the airspeed.
Altitude and airspeed regulation depends on the altitude error[26].
Concerning design requirements rise time should be less than 1 Second, in the
inner loop and the overshoot has to be smaller than 5% in outer loop, but in pitch attitude
is in between 7% to increase the response and decrease the settling time. The
achievement of above requirements assured the successfulness in Ultrastick-25e flights.

Chapter 3 Autopilot Design & Simulation
34
Figure 3-16 Longitudinal controller flight regimes.
The longitudinal motion regimes are shown in figure 3.16. In the take-off zone
the need for full throttle is obvious and the pitch attitude is regulated to a fixed value of
θc. Climbing rate is maximized at climb zone by commanding full throttle. Desired
altitude is ensured at altitude hold zone by regulating the throttle and the pitch angle.
The decent zone is much similar to the climb zone except that the throttle is commanded
to zero. Designing a longitudinal controller is composed of four control loops designed
using the same systematic procedures used in designing the lateral controller.
Elevator and throttle represents the inputs for the longitudinal motion controller.
The elevator is used to control inner loops (pitch θ, and pitch rate q) and outer loop
height (h), while the throttle (δt) is used to control vehicle speed in the outer loop.
3.5.1 Pitch attitude hold.
The inner loop of longitudinal motion controller is the pitch damper. Designing
the pitch damper provides satisfactory natural frequency and damping ratio for short
period mode. Pitch rate feedback controls the aircraft position of the short period mode.
The linearized transfer function of the pitch rate taking the elevator command
δe as an input is given in Equation 27.
𝑞
𝛿𝑒=
−133.7𝑠 − 990.7
𝑠2 + 23.37𝑠 + 235.9 (27)
The Eigenvalues are (-11.7 ± 9.97i) with damping ratio ξ = 0.761 and natural
frequency ωn = 15.4 rad/sec. The value of damping ratio is too good but the effect of
actuator will get the response slower, so the choice of the gain is to increase the
damping.

Chapter 3 Autopilot Design & Simulation
35
Figure 3-17 Root locus of Pitch tracker.
Again, root locus technique is used to find the gain 𝐾𝑑_𝑞 = -0.072. Figure 3.17
shows the gain selection.
The second inner loop is pitch attitude controller (PI), used for regulating the
pitch angle (θ). Using P controller only is not sufficient due to coupling between pitch
attitude (θ) and pitch rate (q). Thus, an integrator is used to get rid off the steady state
error.
Figure 3-18 Pitch attitude hold controller.
Figure 3.18 illustrates the controller for pitch attitude hold. Values for 𝐾𝑝𝜃 ,
𝐾𝑑𝜃 and 𝐾𝑑𝜃 are shown in table 3.6.

Chapter 3 Autopilot Design & Simulation
36
Table 3.6 Pitch attitude hold controller.
Gains Values
𝑲𝒑𝜽 -0.97
𝑲𝒅_𝒒 -0.072
𝑲𝒊𝜽 -0.1
3.5.2 Altitude hold using commanded pitch.
The altitude-hold autopilot utilizes a successive-loop-closure strategy with the
pitch-attitude-hold autopilot as an inner loop. Equation 28 represents the linear relation
between the altitude and pitch attitude at constant airspeed which is controlled by the
elevator.
ℎ̇ = 𝑣𝑎𝜃 + 𝑑ℎ (28)
Converting to Laplace domain
ℎ(𝑠) =𝑣𝑎
𝑠(𝜃 +
1
𝑣𝑎𝑑ℎ) (29)
Equation 3.10 can be used to derive the altitude controller using commanded
pitch.
Figure 3-19 Altitude hold controller using commanded pitch.
Figure 3.19 shows the altitude hold after designing the inner pitch loop. Suitable
values for 𝐾𝑑ℎ , 𝐾𝑝ℎ and 𝐾𝑖ℎ are calculated after close looping and obtaining the overall
transfer function of the controller inner and outer loops. Altitude hold gains are shown
in table 3.7.
Chapter 3 Autopilot Design & Simulation
37
Table 3.7 Altitude hold controller.
Gains Values
𝑲𝒑𝒉 0.06
𝑲𝒊𝒉 0.0
𝑲𝒅𝒉 0.0
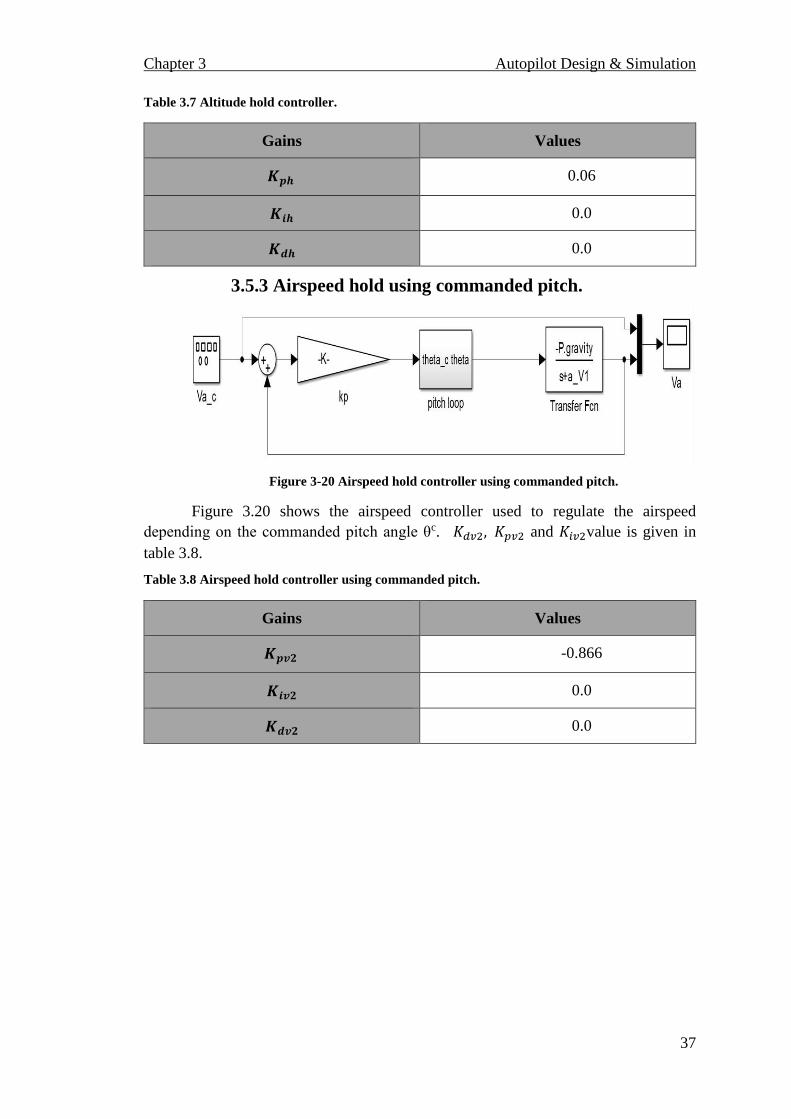
3.5.3 Airspeed hold using commanded pitch.
Figure 3-20 Airspeed hold controller using commanded pitch.
Figure 3.20 shows the airspeed controller used to regulate the airspeed
depending on the commanded pitch angle θc. 𝐾𝑑𝑣2, 𝐾𝑝𝑣2 and 𝐾𝑖𝑣2value is given in
table 3.8.
Table 3.8 Airspeed hold controller using commanded pitch.
Gains Values
𝑲𝒑𝒗𝟐 -0.866
𝑲𝒊𝒗𝟐 0.0
𝑲𝒅𝒗𝟐 0.0

Chapter 3 Autopilot Design & Simulation
38
3.5.4 Airspeed hold using throttle.
Figure 3-21 Airspeed hold controller using throttle.
Regulating the airspeed using the throttle can be done using the controller in
figure 3.21. 𝐾𝑑𝑣, 𝐾𝑝𝑣 and 𝐾𝑖𝑣 are given in table 3.9.
Table 3.9 Airspeed hold controller using throttle.
Gains Values
𝑲𝒑𝒗 1
𝑲𝒊𝒗 24
𝑲𝒅𝒗 0.0
3.6 Controller testing.
Testing is considered a very important stage in design to evaluate the
performance of the designed autopilot. There are many techniques to measure the
designed controller’s responses, here two mechanisms were used to see if the autopilot
is good enough.
3.6.1 Software in loop SIL.
The SIL simulation is a way of validation of control law performance. The
Software in the Loop Simulation builds upon the nonlinear model simulation by adding
actuator and sensor dynamics as well as integrating Simulink based flight control laws.
3.6.2 Comparison.
SIL shows if the desired control inputs were met. Here the response of the
autopilot is compared to another one in terms of gains and outputs (responses). Gains
values are obtained by a research group from University of MINNESOTA [27]. Table
3.10 shows the designed gains and classic gains used for comparison.

Chapter 3 Autopilot Design & Simulation
39
Table 3.10 Designed gains and classic gains.
Dampers P PI
Gain p
P
I
Minnesota designed Minnesota designed Minnesota designed Minnesota designed
q -0.08 -0.072
-0.84 -0.97 -0.23 -0.1
h 0.021 0.06 0.0017
P -0.07 -0.072
-0.52
-1.1216
-0.2 -0.01
1.2 4.0511 0.008

Chapter 4 Results & Discussion
40
CHAPTER4 RESULTS & DISCUSSION
4.1 Introduction
This chapter will elaborate more on the findings gathered of this project. It
presents results of the controllers introduced in sections 3.4 to 3.6. also, the performance
of the two controllers is discussed in this chapter.
4.2 Lateral controller results.
Doublet signal response
Figure 4-1 Doublet response comparison of roll tracker.
Doublet signal is concerned with the change in direction of aircraft to measure
its response due to these changes.
As shown in figure 4.1 the designed controller responds to change in input
signal quicker than Minnesota controller. This response is very useful to the
requirements of aircraft design.

Chapter 4 Results & Discussion
41
The effects of sensors noise in the response
By assigning standard deviation σ = 1.0*10-03 rad to investigate the effect of
noise in the response.
Figure 4-2 Doublet response of roll tracker in existance of noise
The noise influences are not effectiveness in the designed controller as seen
from Figure 4.2
Multi-step of roll attitudes response
Figure 4-3 Multi step response of the roll tracker.
As can be seen from figure 4.3 a different reference input such as the multi-step
is applied to assure that the performance meets the required specifications.

Chapter 4 Results & Discussion
42
4.2.1 Direction heading controller.
Doublet signal from standalone Simulink model.
Figure 4-4 Doublet signal response of heading angle.
From figure 4.4 we can deduce that the designed controller tracks the set point
faster than the classical controller and it has less undershoot than the classical one.
The effect of sensor noises.
The noise test is executed under the noise at sigma σ = 1*10-3 rad.
Figure 4-5 Doublet signal response of heading angle in existence of noise.
According to figure 4-5 ,the two models give almost the same response as in
figure 4-4 even in the existence of noise.

Chapter 4 Results & Discussion
43
Rectangular motion heading command
Figure 4-6 Rectangular motion heading command response.
The designed controller has higher overshoot than the classic one, but it
responds to change faster the classic controller, but both has zero steady state error at
the end.
4.2.2 Sideslip doublet response
Figure 4-7 Doublet response to β angle

Chapter 4 Results & Discussion
44
From figure 4.7 the designed controller proposed a good tracking of set point,
but there’s an error in the transition points.
Phi response in SIL:
Figure 4-8 Doublet signal response of the Φ angle in SIL.
According to figure 4-8, the response of the designed controller in SIL has some
ripples, but the response of the classical controller is more smoothers.
We refer this to the limitation that our controller was not tested on the
It can be seen in figures 4-1 to figure 4-8 that the overall performance of the
designed controller is the best.

Chapter 4 Results & Discussion
45
4.3 Longitudinal controller responses.
4.3.1 Pitch Attitude Tracker Simulation Tests.
θref doublet signal response in linear Simulink.
Figure 4-9 Doublet signal response for pitch tracker.
From figure 4-9 The response of the designed controller has a smoother responseand
less overshoot comparing to the classical controller.
The effect of noise (0.001 rad) in the designed control system
Figure 4-10 Doublet signal response of pitch tracker in existence of noise.
The noise influences are not effectiveness in the designed controller as shown
in figure 4.10.

Chapter 4 Results & Discussion
46
Multi steps response
Figure 4-11 Multi steps response for pitch tracker
As seen in figure 4-11 the two controllers have an identical response to multi
step set pint.
4.3.2 Altitude Hold Controller Simulation Tests.
The first category of tests is step response input, doublet signal and climbing
scenario response .
Step response of altitude hold controller
Figure 4-12 Step response of altitude hold controller.
From Figure 4.12 the unit step response showed that the designed controller is
obviously better in rise time and maximum overshoot and settling time.

Chapter 4 Results & Discussion
47
10 [m] Altitude doublet signal response.
Figure 4-13 Altitude doublet signal response
The output changes against noise (0.001m).
Figure 4-14 Altitude doublet signal response with existence of noise.
According to figure 4-13 & 4-14 the designed controller still has a time analysis
characteristics better than the classical one.

Chapter 4 Results & Discussion
48
Climbing Scenario response.
Applying climbing scenario 100 [m] then straight and leveling in the two
controllers
Figure 4-15 Climbing Scenario response.
According to figure 4-15, Simulations results illustrate that Both of the
controllers perform equally well tracking of the input signal in the straight scenario and
both of reaches the climbing level(100m) after almost 20 seconds. Yet the designed
controller has less overshoot.

Chapter 5 Conclusion & Future Work
49
CHAPTER5 CONCLUSION & FUTURE WORK
In this chapter, the state of the project, in the light of its aim and objective, is
investigated and possible future work directions are discussed.
5.1 Conclusion
The main objective of the project, which is the design and implementation of
autopilot has been done successfully, the project status can be elaborated as follows:
The longitudinal and lateral autopilot were successfully implemented
using successive loop closure and PID controller.
Using different set points such as step input, doublet signal the
performance is compared to University of Minnesota research team
controller and better performance was obtained.
SIL simulation demonstrate that PID controller is able to control with
acceptable performance the aircraft adopted for the flight tests.
5.2 Limitations
However, the system still suffers some limitations such as:
Only simulation is used in the project, the response of the designed
controller not satisfactory enough, when implemented using SIL
simulation.
By designing a PID controller, it is impossible to take into account the
uncertainties, which are present in the model parameters.
5.3 Future Work
However, the project still leaves a place for development and enhancement it
includes:
Testing the PID controller on HIL (Hardware in loop) and flight
simulator.
Using different control strategies such as LQR (Linear quadratic
Regulator) and Robust Controller.
50
REFERENCES
[1] N. Kumar and S. Jain, “Identification, Modeling and Control of Unmanned
Aerial Vehicles,” Int. J. Adv. Sci. Technol., vol. 67, pp. 1–10, 2014.
[2] R. W. B. T. W. McLAIN, SMALL UNMANNED AIRCRAFT Theory and
Practice. .
[3] J. D. Barton, “Fundamentals of Small Unmanned Aircraft Flight,” Johns
Hopkins Apl Tech. Dig., vol. 31, no. 2, pp. 132–149, 2012.
[4] T. M. Adami and J. J. Zhu, “6DOF Flight Control of Fixed-Wing Aircraft by
Trajectory Linearization,” 2011 Am. Control Conf., pp. 1610–1617, 2011.
[5] T. S. Andersen, “Master of Science in Technology Aerodynamic Modeling and
Estimation of a Fixed- wing UAV Department of technology,” 2013.
[6] a Noth, S. Bouabdallah, and R. Siegwart, “Dynamic Modeling of Fixed-Wing
UAVs,” Master Course Mech. Eng., pp. 0–11, 2006.
[7] T. I. Fossen, “MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT
AND SATELLITES,” no. February 1998, 2011.
[8] R. B. Equations, “Equations of Motion for an Unmanned Aerial,” pp. 9–23.
[9] “Rewriting the equations of motion,” pp. 1–5.
[10] S. Bagheri, “Modeling, Simulation and Control System Design for Civil
Unmanned Aerial Vehicle (UAV),” pp. 1–115, 2014.
[11] I. H. Johansen, “Autopilot Design for Unmanned Aerial Vehicles,” no. June,
2012.
[12] N. Kumar and S. Jain, “Identification , Modeling and Control of Unmanned
Aerial Vehicles,” vol. 67, pp. 1–10, 2014.
[13] C. Chen and W. Chen, “Research on Longitudinal Control Algorithm,” vol. 6,
no. 5, pp. 2155–2181, 2013.
[14] S. M. Calhoun, “SIX DEGREE OF FREEDOM,” no. June, 2006.
[15] A. Sarhan and S. Qin, “Adaptive PID Control of UAV Altitude Dynamics Based
on Parameter Optimization with Fuzzy Inference,” Int. J. Model. Optim., vol. 6,
no. 4, p. 246, 2016.
[16] B. Aliyu, A. Petinrin, and A. Adewumi, “PID Control Design of Sideslip Angle
for a FixedWing Mini-UAV,” Adv. Res., vol. 6, no. 3, pp. 1–14, 2015.
[17] D. Sartori, F. Quagliotti, M. J. Rutherford, and K. P. Valavanis, “Implementation
and Testing of a Backstepping Controller Autopilot for Fixed-wing UAVs,” J.
Intell. Robot. Syst. Theory Appl., vol. 76, no. 3–4, pp. 505–525, 2014.
[18] A. E. Ahmed, A. Hafez, A. N. Ouda, H. E. H. Ahmed, and H. M. Abd-elkader,
“Modeling of a Small Unmanned Aerial Vehicle,” Int. J. Mech. Aerospace, Ind.
Mechatron. Manuf. Eng., vol. 9, no. 3, pp. 449–457, 2015.

51
[19] “Feedback Control Systems State-Space.”
[20] “Pilot ’ s Handbook of Aeronautical Knowledge.”
[21] E. N. Mobarez, “Mathematical Representation , Modeling and Linearization for
Fixed Wing UAV,” vol. 147, no. 2, pp. 24–31, 2016.
[22] A. Dorobantu, P. J. Seiler, and G. J. Balas, “Validating Uncertain Aircraft
Simulation Models Using Flight Test Data,” pp. 1–8.
[23] M. Ahsan, K. Rafique, and F. Mazhar, “Optimization Based Tuning of Autopilot
Gains for a Fixed Wing UAV,” World Acad. Sci. Eng. Technol. Int. J. Mech.
Aerospace, Ind. Mechatron. Manuf. Eng., vol. 7, no. 5, pp. 1–6, 2013.
[24] A. Kaviyarasu and K. S. Kumar, “DESIGN OF AUTOMATIC PID GAIN
SCHEDULING FOR FIXED WING UNMANNED AERIAL VEHICLE,” no.
1, pp. 451–460.
[25] T. R. Yechout, INTRODUCTION TO AIRCRAFT FLIGHT MECHANICS,
2003rd ed. .
[26] A. Elsayed, H. Eldin, and H. Ahmed, “Design of Longitudinal Motion Controller
of a Small Unmanned Aerial Vehicle,” no. September, pp. 37–47, 2015.
[27]“UNIVERSITY OF MINNESOTA.” [Online].
Available:http://www.uav.aem.umn.edu/.

A-1
APPENDICES
Appendix A: UAV Nonlinear Simulation Setup
This script will setup the nonlinear simulation (UAV_NL.mdl) and call trim and
linearization routines. ‘Ultra-Stick 25e’ via the "UAV_config( )" function call.
% % Calls: UAV_config.m % trim_UAV.m % linearize_UAV.m % % University of Minnesota % Aerospace Engineering and Mechanics % Copyright 2011 Regents of the University of Minnesota. % All rights reserved.
%clean up clear all close all bdclose all clc
%% Add Libraries folder to MATLAB path addpath ../Libraries warning('off','Simulink:SL_LoadMdlParameterizedLink')
%% Configure Airframe, 'Ultrastick': [AC,Env] = UAV_config('Ultrastick');
%% Simulation sample time SampleTime = 0.02; % sec
%% Set aircraft initial conditions % Set the initial model inputs TrimCondition.Inputs.elevator = 0.091; % rad TrimCondition.Inputs.l_aileron = 0; % rad TrimCondition.Inputs.r_aileron = 0; % rad TrimCondition.Inputs.aileron = 0; % rad, combined aileron input TrimCondition.Inputs.rudder = 0; % rad TrimCondition.Inputs.l_flap = 0; % rad TrimCondition.Inputs.r_flap = 0; % rad TrimCondition.Inputs.throttle = 0.559; % nd, 0 to 1
% Set initial state values TrimCondition.InertialIni = [0 0 -100]'; % Initial Position in
Inertial Frame [Xe Ye Ze], [m] TrimCondition.LLIni = [44.7258357 -93.07501316]'; %
Initial Latitude/Longitude of Aircraft [Lat Long], [deg] TrimCondition.VelocitiesIni = [17 0 0.369]'; % Initial Body Frame
velocities [u v w], [m/s] TrimCondition.AttitudeIni = [0 0.0217 155*pi/180]'; % Initial
Euler orientation [roll,pitch,yaw] [rad], can't use 0 heading,
causes large entry in C matrix for psi

A-2
TrimCondition.RatesIni = [0 0 0]'; % Initial Body Frame
rotation rates [p q r], [rad/s] TrimCondition.EngineSpeedIni = 827; % Initial Engine
Speed [rad/s]
%% Trim aircraft to a specific flight condition % specify as a target.
TrimCondition.target = struct('V_s',17,'gamma',0,'h',100); %
straight and level, (m/s, rad) %TrimCondition.target = struct('V_s',17,'gamma',5/180*pi); % level
climb, (m/s, rad) %TrimCondition.target =
struct('V_s',17,'gamma',0,'psidot',20/180*pi); % level turn, (m/s,
rad, rad/sec) %TrimCondition.target =
struct('V_s',17,'gamma',5/180*pi,'psidot',20/180*pi); % climbing
turn, (m/s, rad, rad/sec) %TrimCondition.target = struct('V_s',17,'gamma',0,'beta',5/180*pi);
% level steady heading sideslip, (m/s, rad, rad)
% Find the trim solution [TrimCondition,OperatingPoint] = trim_UAV(TrimCondition,AC);
%% Linearize about the operating point
[longmod,spmod,latmod,linmodel]=linearize_UAV(OperatingPoint);

B-1
Appendix B: UAV_NL Model Verification
This script compares the linear/nonlinear doublet response of the current simulation
This script Compares the linear/nonlinear doublet response of the current
simulation %model (blue/green lines) with the check case data (red/black).
%% Full Linear Model % Full 13 state linear model. Doublets on elevator, aileron, and
rudder. load('./Verification/doublet_fullmodel.mat')
% Plot results figure(1) subplot(321), hold on plot(tsim,xsim(:,1),'r', tlin,xlin(:,7)+xsim(1,1),'k'); grid on title('Linear Velocity to Doublet Sequence
[elevator,rudder,aileron]'); xlabel('Time (sec)');ylabel('u (m/sec)') legend('NonLinear', 'Linear','Checkcase: NonLinear','Checkcase:
Linear'); subplot(323),hold on plot(tsim,xsim(:,2),'r', tlin,xlin(:,8)+xsim(1,2),'k'); grid on xlabel('Time (sec)');ylabel('v (m/sec)') subplot(325),hold on plot(tsim,xsim(:,3),'r', tlin,xlin(:,9)+xsim(1,3),'k'); grid on xlabel('Time (sec)');ylabel('w (m/sec)')
subplot(322),hold on plot(tsim,180/pi*xsim(:,10),'r',
tlin,180/pi*(xlin(:,4)+xsim(1,10)),'k'); grid on title('Angular Velocity to Doublet Sequence
[elevator,rudder,aileron]'); xlabel('Time (sec)');ylabel('p (deg/sec)') subplot(324),hold on plot(tsim,180/pi*xsim(:,11),'r',
tlin,180/pi*(xlin(:,5)+xsim(1,11)),'k'); grid on xlabel('Time (sec)');ylabel('q (deg/sec)') subplot(326),hold on plot(tsim,180/pi*xsim(:,12),'r',
tlin,180/pi*(xlin(:,6)+xsim(1,12)),'k'); grid on xlabel('Time (sec)');ylabel('r (deg/sec)')
%% Longitudinal Linear Model % Reduced order longitudinal linear model. Doublets on elevator
only. load('./Verification/doublet_longmodel.mat')
% Plot results figure(2) subplot(211),hold on plot(tsim,180/pi*ysim(:,3),'r',
tlin,180/pi*(ylin(:,2)+ysim(1,3)),'k'); grid on title('Longitudinal Model Doublet Sequence [elevator]');

B-2
xlabel('Time (sec)');ylabel('\alpha (deg)') legend('NonLinear', 'Linear','Checkcase: NonLinear','Checkcase:
Linear');
subplot(212),hold on plot(tsim,180/pi*xsim(:,11),'r',
tlin,180/pi*(ylin(:,3)+xsim(1,11)),'k'); grid on xlabel('Time (sec)');ylabel('q (deg/sec)')
%% Lateral-Directional Linear Model % Reduced order lateral directional linear model. Doublets on
aileron and % rudder. load('./Verification/doublet_latmodel.mat')
% Plot results figure(3) subplot(311),hold on plot(tsim,180/pi*ysim(:,2),'r',
tlin,180/pi*(ylin(:,1)+ysim(1,2)),'k'); grid on title('Lateral-Directional Model Doublet Sequence [rudder,
aileron]'); xlabel('Time (sec)');ylabel('\beta (deg)') legend('NonLinear', 'Linear','Checkcase: NonLinear','Checkcase:
Linear');
subplot(312),hold on plot(tsim,180/pi*xsim(:,10),'r',
tlin,180/pi*(ylin(:,2)+xsim(1,10)),'k'); grid on xlabel('Time (sec)');ylabel('p (deg/sec)')
subplot(313),hold on plot(tsim,180/pi*xsim(:,12),'r',
tlin,180/pi*(ylin(:,3)+xsim(1,12)),'k'); grid on
xlabel('Time (sec)');ylabel('r (deg/sec)')

C-1
Appendix C: Computing Gains Code
This code is used to compute the PID controller gains using the successive loop
technique.
%%compute coefficients lambda = P.Jx*P.Jz - (P.Jxz^2); lambda_3 = P.Jz/lambda; lambda_4 = P.Jxz/lambda; C_p_p = lambda_3*P.C_ell_p + lambda_4*P.C_n_p; C_p_delta_a = lambda_3*P.C_ell_delta_a + lambda_4*P.C_n_delta_a; %%TF poles and zeros a_phi1 = -0.25*P.rho*P.Va*P.S_wing*(P.b^2)*C_p_p; a_phi2 = 0.5*P.rho*P.Va*P.Va*P.S_wing*P.b*C_p_delta_a; disp(sprintf('a_phi1 is %d:',a_phi1)); disp(sprintf('a_phi2 is %d:',a_phi2)); e_phi_max = 0.1; delta_a_max = 45; % Maximum aileron deflection zeta_phi = 0.707; phi_max = 15; omega_n_phi = sqrt(-a_phi2*delta_a_max*sqrt(1-zeta_phi^2)/phi_max); P.roll_kp = (omega_n_phi^2)/a_phi2; P.roll_kd = (2*zeta_phi*omega_n_phi - a_phi1)/a_phi2; disp(sprintf('P.roll_kp is %d:',P.roll_kp)); disp(sprintf('P.roll_kd is %d:',P.roll_kd)); disp(sprintf('omega_n_phi is %d:',omega_n_phi)); %%compute P.roll_ki using sisotool & rootlocus s = tf('s'); roll_TF=a_phi2/(s*(s^2+(a_phi1+a_phi2*P.roll_kd)*s+a_phi2*P.roll_kp
)) rlocus(roll_TF) ,sisotool(roll_TF) %------------------------------------------ omega_n_xi = 0.1*omega_n_phi; % W_xi is taken as 10, design
parameter zeta_xi = 0.707; % Design parameter damping P.heading_kp =(2*zeta_xi*omega_n_xi*P.Va)/P.gravity; P.heading_ki = (omega_n_xi^2)*P.Va/P.gravity; disp(sprintf('P.heading_kp is %d:',P.heading_kp)); disp(sprintf('P.heading_ki is %d:',P.heading_ki)); %----------------------------------- omega_n_beta = 0.05*omega_n_phi; zeta_beta = 0.707; lambda4 = P.Jxz/lambda; lambda8 = P.Jx/lambda; a_beta1 = -1*P.rho*P.Va*P.S_wing*P.C_Y_beta/(2*P.mass); a_beta2 = P.rho*P.Va*P.S_wing*P.C_Y_delta_r /(2*P.mass); e_beta_max = 0.1; delta_r_max = 25; P.beta_kp = (2*zeta_beta*omega_n_beta-a_beta1)/a_beta2; P.beta_ki = (omega_n_beta^2)/a_beta2; disp(sprintf('P.beta_kp is %d:',P.beta_kp)); disp(sprintf('P.beta_ki is %d:',P.beta_ki));

E-1
Appendix D: Baseline Controller
This code is used for comparing the roll & theta tracker of both the designed
and classic controller.
%% ======================== Lateral Control ==================%%
%% YAW DAMPER k_YD=0.065;
a_YD=-2.0; K_YD=zpk(0,a_YD,k_YD); % Washout filter K_YDz = c2d(K_YD,SampleTime); [YDz_num,YDz_den]=tfdata(K_YDz,'v'); % obtain discrete T.F.
coefficients %% ROLL TRACKER if(strcmpi(AC.aircraft,'Ultra Stick 25e')) %kp_RT= -1.1216; %ki_RT= -.01; %kp_RD= -0.072; % Roll damper %%Classical parameters kp_RT=-0.52; ki_RT=-0.2; kp_RD=-0.07;
end %% ====================== Longitudinal
Control======================% %% THETA TRACKER if(strcmpi(AC.aircraft,'Ultra Stick 25e'))
%%My parameters %kp_PT= -0.97; %ki_PT=-0.1; %kp_PD=-0.072; %Pitch damper %%Classical parameters kp_PT=-0.84; ki_PT=-0.23; kp_PD=-.08;
end

F-1
Appendix E: Heading Controller
if(strcmpi(AC.aircraft,'Ultra Stick 25e')) %%designed % Velocity Tracker kp_VT = 0.091; ki_VT = 0.02; % Altitude Tracker kp_AT = 0.021; ki_AT = 0.0 % Heading Tracker kp_HT = 1.2; %%classic % Velocity Tracker %kp_VT = .15; %ki_VT = .04; % Altitude Tracker %kp_AT= .023; %ki_AT = 0.0010; % Heading Tracker %kp_HT = 1.5;
end
% Low pass filter for altitude and velocity with pole at 2 rad/sec LP_filter=[0 0.0392;1 -.9608];

F-1
Appendix F: UAV Software-in-the-Loop Simulation
setup
This script will setup the SIL simulation. Stored aircraft configuration and trim
conditions are used.
%% Clean up %clear all %close all %bdclose all %clc
%% Add Libraries and controllers folder to MATLAB path addpath ../Libraries addpath ../Controllers
%% Load airframe configuration and trim condition % To change these, use the functions "UAV_config.m" and
"trim_UAV.m" load UAV_modelconfig load UAV_trimcondition
%% Simulation sample time SampleTime = 0.02; % sec %% Noise off, Turbulence off or on AC.Sensors.NoiseOn = 0; Env.Winds.TurbulenceOn = 0;
%% Set controller variants % Each variant corresponds to a different Simulink model that will
be % referenced in the "UAV_SIL/Control Software/Control Software"
block. flightcode_var = Simulink.Variant('controller_mode == 1 ||
controller_mode == 2); baseline_control_var = Simulink.Variant('controller_mode == 1'); heading_control_var = Simulink.Variant('controller_mode == 2');
%% Set controller mode % Use this variable to quickly change what controller is used in
the % simulation. % % 1 = baseline controller (Simulink) % 2 = Heading controller (Simulink)
controller_mode = 1;
% Load controller parameters or compile flight code switch controller_mode
case 1 % Baseline controller in Simulink. baseline_gains; % Declare baseline controller gains
F-2
pitch_gains = [kp_PT, ki_PT, kp_PD]; roll_gains = [kp_RT, ki_RT, kp_RD]; yaw_damper_num = [YDz_num]; % discrete transfer function
yaw damper coefficients yaw_damper_den = [YDz_den];
case 2 % Heading controller in Simulink baseline_gains; % heading controller lays on top of the
baseline controller pitch_gains = [kp_PT, ki_PT, kp_PD]; roll_gains = [kp_RT, ki_RT, kp_RD]; yaw_damper_num = [YDz_num]; % discrete transfer function
yaw damper coefficients yaw_damper_den = [YDz_den];
heading_gains; % Specify heading gains phi_sat = 45; % phi controller output saturation theta_sat = 20; % altitude controller output saturation
%% Integer Time delay in flight software loop IntegerTimeDelay = 2; %
%% Open sim diagram UAV_SIL