
Aníbal Ollero - IEEE Aerial Robotics and UAVs
20
Aerial Robotics: Challenges and Opportunities Aníbal Ollero Professor and Head of GRVC Universidad de Sevilla (Spain) aoller [email protected] Scientific Advisor of the Center for Advanced Aerospace Technologies (Sevilla, Spain) [email protected]
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of Aníbal Ollero - IEEE Aerial Robotics and UAVs

Aerial Robotics:
Challenges and Opportunities
Aníbal Ollero
Professor and Head of GRVC Universidad de Sevilla
(Spain)
Scientific Advisor of the Center for Advanced Aerospace
Technologies (Sevilla, Spain)

Outline
General challenges
Manipulation challenges
Energy and safety: GRIFFIN
Conclusions
A. Ollero. IROS 2018. Key Note, Challenges inAerial Robotic Manipulation October3, 2018
6/1/2019 2Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Low High ChallengesRange Short Long Energy
Line of Sight VLOS BVLOS
AutonomyGNSS Available Denied
Comms Available Denied
Interactions Information Physical Soft
Challenges

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Cross effects
Energy Autonomy Soft
Energy • Autonomousrefuelling, perching, ……
• Wind efficiency
• Morphing
Autonomy • Increasing on-boardcapabilities
• Embeddedsensing and actuation
Soft • Increaseactuatorresponse
Adaptivecompliance
Challenges

The application needs: work at height
Aerial robot with physical interaction and manipulation capabilities
Unmanned aerial
systems
Mobile robotic
manipulation
General manipulation
with control, perception
and planning capabilities
Aerial manipulation
Increasing number of DoF:
• Flexibility for multiple applications
• Dexterity
• Cancel perturbations

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
• Indoor• Conventional platform• Few DoFs arms• Motion tracking systems• No perception• No planning
• Outdoor/ Indoor• Adapted platforms• 6/7 DoF Arms• Compliance• GPS navigation/ Beacons
indoor• On-board perception
with markers• Planning at Ground
station
• Outdoor/ Indoor• Full actuated platforms• Multiple arms• GPS free navigation• On-Board SLAM• On-board perception
without markers• Ground station with
control awareness• Planning on-board
?
Increase TRL: Industrial applications
Generations of aerial manipulators
AEROARMS H2020 ProjectARCAS FP7 Project

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
MISSION• Mapping• Localize objects (Comm
or perception)• Planning trajectories• Fly eventually avoiding
obstacles• Object recognition• Accurate positioning• Plan manipulation• Manipulation eventually
using visual servoing and contact information
• Reactions and local re-planning if needed
Aerial manipulation
Aerial Manipulator control in grasping phase using visual servoingCrawler detection with DNN (use of colour and depth image). Point cloud model of the crawler is provided to perform an ICP-based algorithm (Iterative closest Point algorithm)

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Increasing TRLIndustrial Applications
Oil and gas applications:Refinery inspectionWall Thickness Measurements
Bridge inspection:Crack detection and evaluationDeformation measurement
Aerial manipulation

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
New book
Springer STAR
Aerial Robotic ManipulationA.Ollero and B. Sicilano editors27 Chapters• Introduction• Design, modelling and mechatronics. • Control• Perception• Planning• Applications
Structure constructionInspection and Maintenance
• Conclusions and Future Directions
• Emphasize Research and Application
• From ARCAS FP7 and AEROARMS H2020 European projects
To appear in
June 2019

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
• Indoor• Conventional platform• Few DoFs arms• Motion tracking systems• No perception• No planning
• Outdoor/ Indoor• Adapted platforms• 6/7 DoF Arms• Compliance• GPS navigation/ Beacons
indoor• On-board perception
with markers• Planning at Ground
station
• Outdoor/ Indoor• Full actuated platforms• Multiple arms• GPS free navigation• On-Board SLAM• On-board perception
without markers• Ground station with
control awareness• Planning on-board
AccuracyForcesEnergySafety
Increase TRL: Industrial applications
Generations of aerial manipulators
AEROARMS H2020 Project

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
• Power sources• Engines, turbines, ..• Battery technologies• Solar, Fuel Cells, others
• Recharging• Flying: Refueling, wire or wireless transmission• Perching
• Wind• Static soaring• Dynamic soaring
Energy challenge

Energy and safety: GRIFFIN
ERC Advanced GrantGeneral compliant aerial Robotic manipulation system Integrating
Fixed and Flapping wings to INcrease range and safety GRIFFIN
Aerial robots with gliding and flapping wing phases which are able to
perch on curved surfaces to fold the wings and maintain contact by using
grips or hands and to perform dexterous manipulation

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
GRIFFIN research 1) Transitions fixed wings < --- > flapping wings < --- > perching or grabbing
• Aerodynamic model of transitions
• Extension to flexible wings
• Control based on models (aerodynamic transitions, aeroelastic)
2) Perching based on on-board perception, planning and learning trajectories
• Landing on constrained and curved surfaces: bars, pipes, ………
• Fusion of cameras and lasers sensors
• Saliency maps and deep learning techniques for fast landing place detection
• Dynamic vision systems and event cameras for faster perception
• Artificial muscles
3) Manipulation with fixed contact points subject to destabilizing forces
• Active control of the compliance of the body to adapt to perturbations and, at the
same time, to provide enough accuracy for the dexterous manipulation
• Joint analysis of equilibrium and manipulability conditions
• High frequency integration of visual perception and force sensing
• Cooperative manipulation
Energy and safety: GRIFFIN
Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
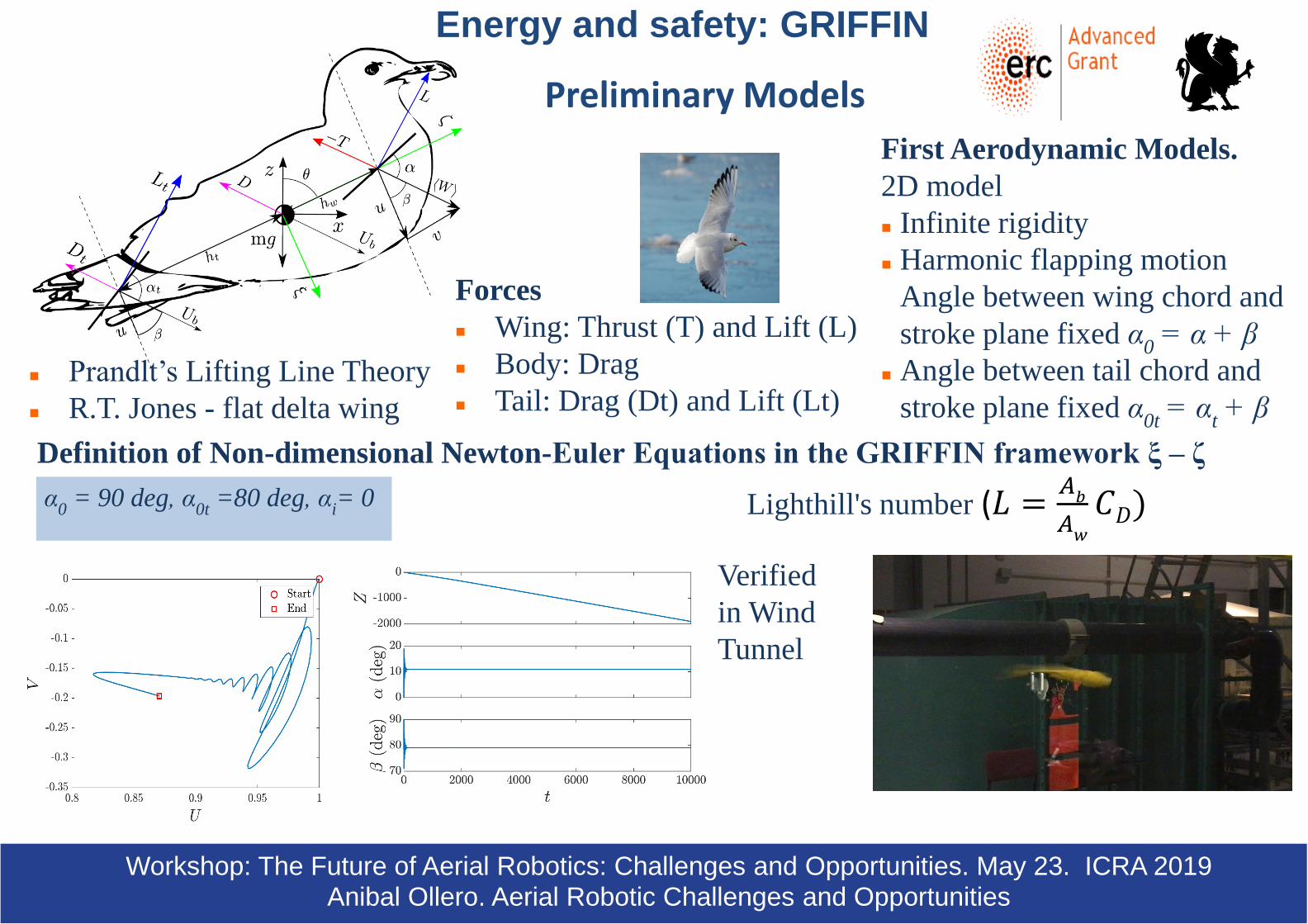
First Aerodynamic Models.
2D model
Infinite rigidity
Harmonic flapping motion
Angle between wing chord and
stroke plane fixed α0
= α + β
Angle between tail chord and
stroke plane fixed α0t
= αt+ β
Forces
Wing: Thrust (T) and Lift (L)
Body: Drag
Tail: Drag (Dt) and Lift (Lt)
Definition of Non-dimensional Newton-Euler Equations in the GRIFFIN framework ξ – ζ
Energy and safety: GRIFFIN
Preliminary Models
Lighthill's number (𝐿 =𝐴𝑏
𝐴𝑤
𝐶𝐷)
Verified
in Wind
Tunnel
Prandlt’s Lifting Line Theory
R.T. Jones - flat delta wing
α0
= 90 deg, α0t
=80 deg, αi= 0

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Comparison of unstable modes in fixed wing and flapping wings.
Faster in flapping wings, related to bioinspired tail designs
Flight control and maneuvering (take off, landing, perching, …) in flapping wings
Nonlinear systems, and generally time periodic. Nonlinear control
Main problem in GRIFFIN:
Increase payload
Power consumption
Flexible wing designs
Wing control
Wing power consumption
𝑃𝑊 = 𝑃𝐹 + 𝑃𝑇 + 2𝐼𝜃 𝜃 𝜃 + 2𝐼𝜂 𝜂 𝜂
Energy and safety: GRIFFIN
Flight Control
Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
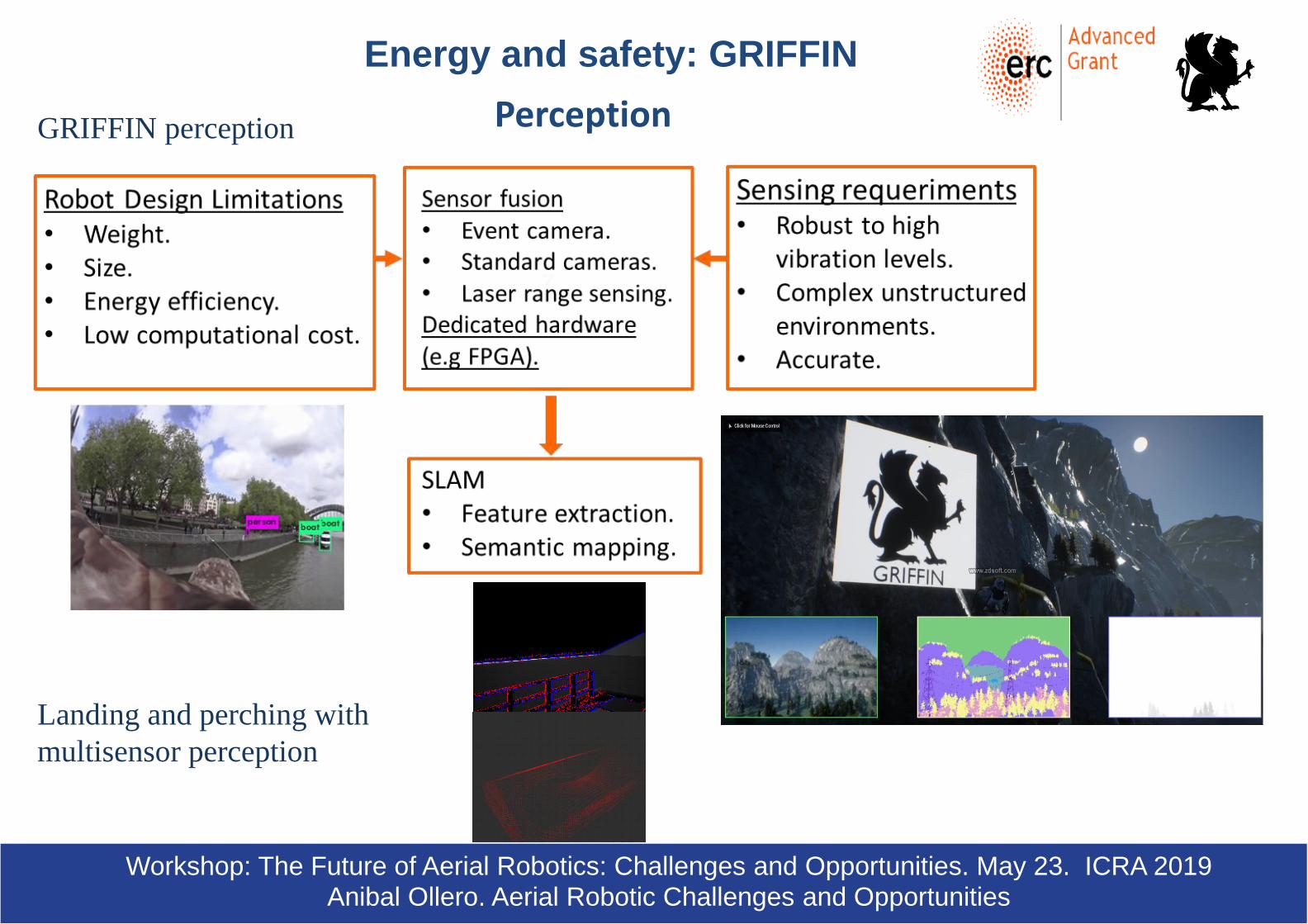
GRIFFIN perception
Landing and perching with
multisensor perception
Energy and safety: GRIFFIN
Perception

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Low weight claws: Compliant grasping
Twisted and coiled polymer muscles
• Contractive actuators• Ultra lightweight• High ratio force-weight• Actuated with electrical heating
Energy and safety: GRIFFIN
Bioinspired designs

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
Perform manipulation when ornithopter is perched:
Keep the equilibrium
React safely against unavoidable perturbationsSymmetric systemProblem in 2D
Objective: reach a particular point
𝑥𝑡 , 𝑦𝑡 θ1, θ2,θ3,θ4,θ5
Underactuated system:
1 passive joint (the first one)
4 actuated joints (DC motors)
Equilibrium points:
θ1=0, πΓ 𝑖= 𝑈𝑖 (i=2,3,4,5)
Robust control
techniques to
stabilize the
system !!!!
Energy and safety: GRIFFINManipulation control

Workshop: The Future of Aerial Robotics: Challenges and Opportunities. May 23. ICRA 2019Anibal Ollero. Aerial Robotic Challenges and Opportunities
ICRA 2019. Workshop “The Future of Aerial Robotics: Challenges and Opportunities”. May 23, 2019A. Ollero.Aerial Robotics: Challengesand Opportunities
Towards Robotic Arms for Winged Aerial Robots
Human-size compliant dual arm – 50 cm reach, 1.3 kg
Half-scale compliant dual arm – 25 cm reach, 0.2 kg
Harder payload constraints in flapping-wing platforms
One order of magnitude lighter manipulators:
o Dual arm for multirotor platform 1.5 – 2.5 kg weight
o Dual arm for ornithopter platform 0.2 – 0.3 kg weight
Smaller actuators (micro servos), simpler mechanics
Compliance for force/torque estimation and control
Energy and safety: GRIFFIN

Conclusions
• General Aerial Robotic Challenges in energy, autonomy and interactions
• Aerial robotics manipulation challenges in accuracy, autonomyand application of forces
• Limits in the aerial manipulation while flying• Landing/Perching for manipulation• New approaches to overcome energy and safety constraintso Flapping/fixed wingo Compliance in the aerial platform and the limbso Integrated control, perception and planning




















