
An intelligent hybrid approach for industrial quality control combining neural networks, fuzzy logic...
15
An intelligent hybrid approach for industrial quality control combining neural networks, fuzzy logic and fractal theory Patricia Melin * , Oscar Castillo Department of Computer Science, Tijuana Institute of Technology, Mexico Abstract The application of type-2 fuzzy logic to the problem of automated quality control in sound speaker manufacturing is presented in this paper. Traditional quality control has been done by manually checking the quality of sound after pro- duction. This manual checking of the speakers is time consuming and occasionally was the cause of error in quality eval- uation. For this reason, by applying type-2 fuzzy logic, an intelligent system for automated quality control in sound speaker manufacturing is developed. The intelligent system has a type-2 fuzzy rule base containing the knowledge of human experts in quality control. The parameters of the fuzzy system are tuned by applying neural networks using, as training data, a real time series of measured sounds produced by good sound speakers. The fractal dimension is used as a measure of the complexity of the sound signal. Ó 2006 Elsevier Inc. All rights reserved. Keywords: Neural networks; Fuzzy logic; Fractal theory; Quality control 1. Introduction In this paper, we present the use of an intelligent hybrid approach, combining type-2 fuzzy logic and neural networks, to the problem of quality control in the manufacturing of sound speakers. The quality control of the speakers was done manually by checking the quality of sound achieved after production [4]. A human expert evaluated the quality of sound of the speakers to decide if production quality was achieved. Of course, this manual inspection of the speakers was time consuming and occasionally resulted in errors in quality evalua- tion [8]. For this reason, it was necessary to consider automating the quality control of the sound speakers using intelligent techniques and fractal theory. The problem of measuring the quality of the sound speakers can be outlined as follows: 0020-0255/$ - see front matter Ó 2006 Elsevier Inc. All rights reserved. doi:10.1016/j.ins.2006.07.022 * Corresponding author. E-mail address: [email protected] (P. Melin). Information Sciences 177 (2007) 1543–1557 www.elsevier.com/locate/ins
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of An intelligent hybrid approach for industrial quality control combining neural networks, fuzzy logic...
Information Sciences 177 (2007) 1543–1557
www.elsevier.com/locate/ins
An intelligent hybrid approach for industrial qualitycontrol combining neural networks, fuzzy
logic and fractal theory
Patricia Melin *, Oscar Castillo
Department of Computer Science, Tijuana Institute of Technology, Mexico
Abstract
The application of type-2 fuzzy logic to the problem of automated quality control in sound speaker manufacturing ispresented in this paper. Traditional quality control has been done by manually checking the quality of sound after pro-duction. This manual checking of the speakers is time consuming and occasionally was the cause of error in quality eval-uation. For this reason, by applying type-2 fuzzy logic, an intelligent system for automated quality control in soundspeaker manufacturing is developed. The intelligent system has a type-2 fuzzy rule base containing the knowledge ofhuman experts in quality control. The parameters of the fuzzy system are tuned by applying neural networks using, astraining data, a real time series of measured sounds produced by good sound speakers. The fractal dimension is usedas a measure of the complexity of the sound signal.� 2006 Elsevier Inc. All rights reserved.
Keywords: Neural networks; Fuzzy logic; Fractal theory; Quality control
1. Introduction
In this paper, we present the use of an intelligent hybrid approach, combining type-2 fuzzy logic and neuralnetworks, to the problem of quality control in the manufacturing of sound speakers. The quality control of thespeakers was done manually by checking the quality of sound achieved after production [4]. A human expertevaluated the quality of sound of the speakers to decide if production quality was achieved. Of course, thismanual inspection of the speakers was time consuming and occasionally resulted in errors in quality evalua-tion [8]. For this reason, it was necessary to consider automating the quality control of the sound speakersusing intelligent techniques and fractal theory. The problem of measuring the quality of the sound speakerscan be outlined as follows:
0020-0255/$ - see front matter � 2006 Elsevier Inc. All rights reserved.
doi:10.1016/j.ins.2006.07.022
* Corresponding author.E-mail address: [email protected] (P. Melin).
1544 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
(1) First, we need to extract the real sound signal of the speaker during the testing period after production.(2) Second, we need to compare the real sound signal to the desired sound signal of the speaker, and mea-
sure the difference with some appropriate metric.(3) Third, we need to decide on the quality of the speaker based on the difference found in step 2. If the
difference is small enough then the speaker can be considered of good quality, otherwise it is of badquality.
The first part of the problem was solved by using a multimedia kit that enables us to extract the sound sig-nal as a file, which basically contains 108,000 points over a period of time of 3 s (this is the time required fortesting). We can consider that the sound signal is expressed as a time series [3], which captures the basic char-acteristics of the speaker. The second part of the problem was addressed by using a neuro-fuzzy approach totrain a fuzzy model with the data coming from the good quality speakers [9]. We used a neural network [6] toobtain a Sugeno fuzzy system [22] with the time series of the ideal speakers. In this case, a neural network[5,17,21] is used to adapt the parameters of the fuzzy system with real data of the problem. With this fuzzymodel, the time series of other speakers can be used as checking data to evaluate the total error betweenthe real speaker and the desired one. The third part of the problem was solved by using another set oftype-2 fuzzy rules [13], which basically are fuzzy expert rules to decide on the quality of the speakers basedon the total checking error obtained in the previous step. Of course, in this case we needed to define type-2membership functions for the error and quality of the product, and the Mamdani reasoning approach wasused. We also use as input variable of the fuzzy system the fractal dimension of the sound signal. The fractaldimension [9] is a measure of the geometrical complexity of an object (in this case, the time series). We testedour fuzzy-fractal approach for automated quality control during production with real sound speakers withexcellent results.
2. Basic concepts of sound speakers
In any sound system, ultimate quality depends on the speakers [4]. The best recording, encoded on the mostadvanced storage device and played by a top-of-the-line deck and amplifier, will sound awful if the system ishooked up to poor speakers. A system’s speaker is the component that takes the electronic signal stored onthings like CDs, tapes and DVD’s and turns it back into actual sound that we can hear.
To understand how speakers work, the first thing you need to do is understand how sound is processed bythe human brain. Inside your ear there is a very thin piece of skin called the eardrum. When your eardrumvibrates, your brain interprets the vibrations as sound. Rapid changes in air pressure are the most commonthing to vibrate your eardrum.
An object produces sound when it vibrates in air (sound can also travel through liquids and solids, but air isthe transmission medium when we listen to speakers). When something vibrates, it moves the air particlesaround it. Those air particles in turn move the air particles around them, carrying the pulse of the vibrationthrough the air as more and more particles are pushed farther from the source of the vibration. In this way, avibrating object sends a wave of pressure fluctuation through the atmosphere. When the fluctuation wavereaches your ear, it vibrates the eardrum back and forth. Our brain interprets this motion as sound. We heardifferent sounds from different vibrating objects because of variations in:
• sound wave frequency – a higher wave frequency simply means that the air pressure fluctuates faster. Wehear this as a higher pitch. When there are fewer fluctuations in a period of time, the pitch is lower.
• air pressure level – the wave’s amplitude – determines how loud the sound is. Sound waves with greateramplitudes move our ear-drums more, and we register this sensation as a higher volume.
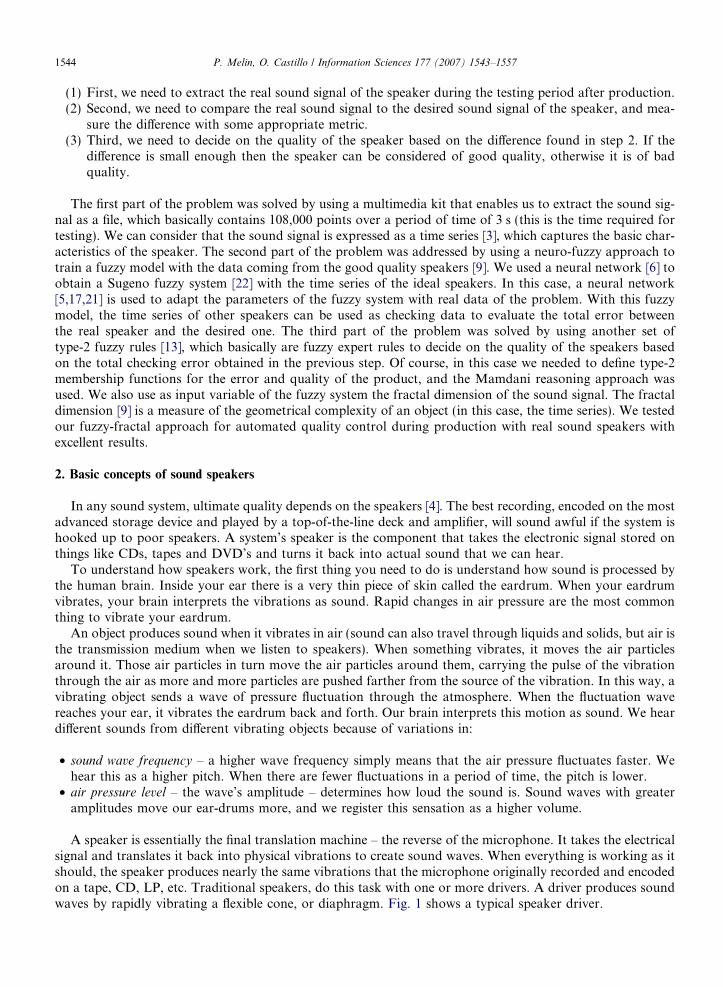
A speaker is essentially the final translation machine – the reverse of the microphone. It takes the electricalsignal and translates it back into physical vibrations to create sound waves. When everything is working as itshould, the speaker produces nearly the same vibrations that the microphone originally recorded and encodedon a tape, CD, LP, etc. Traditional speakers, do this task with one or more drivers. A driver produces soundwaves by rapidly vibrating a flexible cone, or diaphragm. Fig. 1 shows a typical speaker driver.
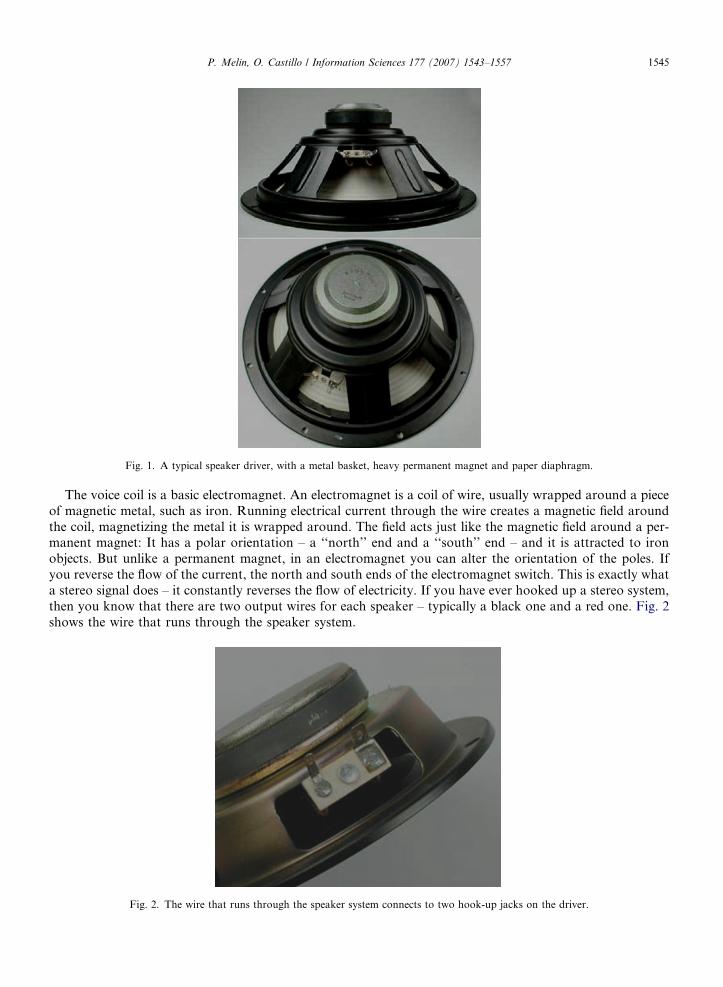
Fig. 1. A typical speaker driver, with a metal basket, heavy permanent magnet and paper diaphragm.
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1545
The voice coil is a basic electromagnet. An electromagnet is a coil of wire, usually wrapped around a pieceof magnetic metal, such as iron. Running electrical current through the wire creates a magnetic field aroundthe coil, magnetizing the metal it is wrapped around. The field acts just like the magnetic field around a per-manent magnet: It has a polar orientation – a ‘‘north’’ end and a ‘‘south’’ end – and it is attracted to ironobjects. But unlike a permanent magnet, in an electromagnet you can alter the orientation of the poles. Ifyou reverse the flow of the current, the north and south ends of the electromagnet switch. This is exactly whata stereo signal does – it constantly reverses the flow of electricity. If you have ever hooked up a stereo system,then you know that there are two output wires for each speaker – typically a black one and a red one. Fig. 2shows the wire that runs through the speaker system.
Fig. 2. The wire that runs through the speaker system connects to two hook-up jacks on the driver.
1546 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
Essentially, the amplifier is constantly switching the electrical signal, fluctuating between a positive chargeand a negative charge on the wire. Since electrons always flow in the same direction between positively chargedparticles and negatively charged particles, the current going through the speaker moves one way and thenreverses and flows the other way. This alternating current causes the polar orientation of the electromagnetto reverse itself many times a second.
So how does this fluctuation make the speaker coil move back and forth? The electromagnet is positioned ina constant magnetic field created by a permanent magnet. These two magnets – the electromagnet and the per-manent magnet – interact with each other as any two magnets do. The positive end of the electromagnet isattracted to the negative pole of the permanent magnetic field, and the negative pole of the electromagnetis repelled by the permanent magnet’s negative pole.
3. Type-2 fuzzy logic systems
Fuzzy logic systems are comprised of rules. Quite often, the knowledge that is used to build these rules isuncertain. Such uncertainty leads to rules whose antecedents or consequents are uncertain, which translatesinto uncertain antecedent or consequent membership functions [7,29]. Type-1 fuzzy systems [6], whose mem-bership functions are type-1 fuzzy sets, are unable to directly handle such uncertainties [15]. We describebriefly in this section, type-2 fuzzy systems, in which the antecedent or consequent membership functionsare type-2 fuzzy sets. Such sets are fuzzy sets whose membership grades themselves are type-1 fuzzy sets; theyare very useful in circumstances where it is difficult to determine an exact membership function for a fuzzy set.
3.1. Type-2 fuzzy sets
The concept of a type-2 fuzzy set, was introduced by Zadeh [26–28] as an extension of the concept of anordinary fuzzy set (henceforth called a ‘‘type-1 fuzzy set’’). A type-2 fuzzy set is characterized by a fuzzy mem-bership function, i.e., the membership grade for each element of this set is a fuzzy set in [0, 1], unlike a type-1set where the membership grade is a crisp number in [0, 1]. Such sets can be used in situations where there isuncertainty about the membership grades themselves, e.g., an uncertainty in the shape of the membershipfunction or in some of its parameters [16]. Consider the transition from ordinary sets to fuzzy sets. Whenwe cannot determine the membership of an element in a set as 0 or 1, we use fuzzy sets of type-1. Similarly,when the situation is so fuzzy that we have trouble determining the membership grade even as a crisp numberin [0,1], we use fuzzy sets of type-2.
This does not mean that we need to have extremely fuzzy situations to use type-2 fuzzy sets. There are manyreal-world problems where we cannot determine the exact form of the membership functions, e.g., in time ser-ies prediction because of noise in the data. Another way of viewing this is to consider type-1 fuzzy sets as a firstorder approximation to the uncertainty in the real-world. Then type-2 fuzzy sets can be considered as a secondorder approximation. Of course, it is possible to consider fuzzy sets of higher types but the complexity of thefuzzy system increases very rapidly. Let us consider some simple examples of type-2 fuzzy sets [14].
Example 1. Consider the case of a fuzzy set characterized by a Gaussian membership function with mean m
and a standard deviation that can take values in [r1,r2], i.e.,
lðxÞ ¼ exp � 1
2½ðx� mÞ=r�2
� �; r 2 ½r1; r2� ð1Þ
Corresponding to each value of r, we will get a different membership curve (see Fig. 3). So, the membershipgrade of any particular x (except x = m) can take any of a number of possible values depending upon the valueof r, i.e., the membership grade is not a crisp number, it is a fuzzy set. This is an example of an ‘‘interval-val-ued’’ type-2 fuzzy set because it uses an interval for the standard deviation. Of course, a general type-2 fuzzyset would use a type-1 fuzzy set instead of an interval, but general type-2 fuzzy sets are more difficult to use inpractice. For this reason, in most of the real-world applications of type-2 fuzzy sets, to the moment, intervalfuzzy sets have been used.
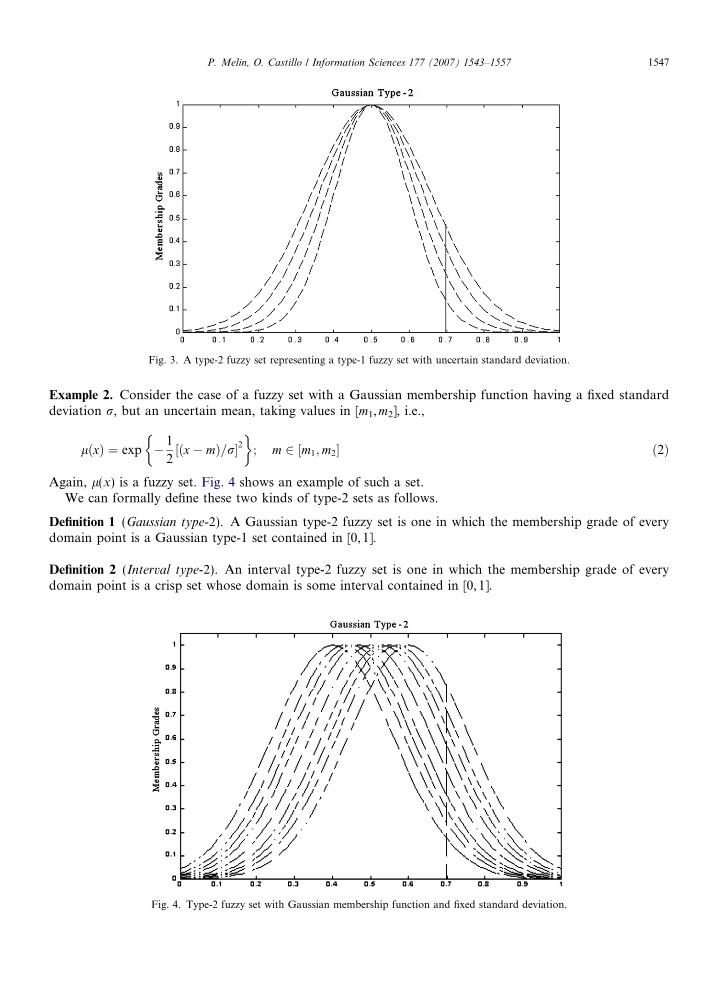
Fig. 3. A type-2 fuzzy set representing a type-1 fuzzy set with uncertain standard deviation.
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1547
Example 2. Consider the case of a fuzzy set with a Gaussian membership function having a fixed standarddeviation r, but an uncertain mean, taking values in [m1,m2], i.e.,
lðxÞ ¼ exp � 1
2½ðx� mÞ=r�2
� �; m 2 ½m1;m2� ð2Þ
Again, l(x) is a fuzzy set. Fig. 4 shows an example of such a set.We can formally define these two kinds of type-2 sets as follows.
Definition 1 (Gaussian type-2). A Gaussian type-2 fuzzy set is one in which the membership grade of everydomain point is a Gaussian type-1 set contained in [0, 1].
Definition 2 (Interval type-2). An interval type-2 fuzzy set is one in which the membership grade of everydomain point is a crisp set whose domain is some interval contained in [0, 1].
Fig. 4. Type-2 fuzzy set with Gaussian membership function and fixed standard deviation.
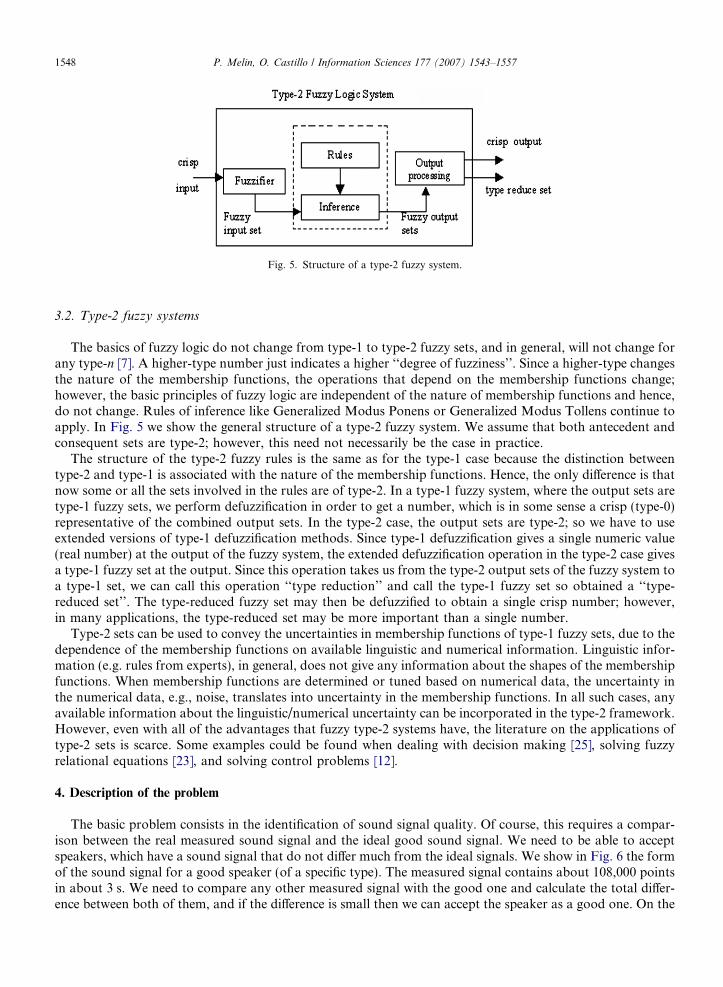
Fig. 5. Structure of a type-2 fuzzy system.
1548 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
3.2. Type-2 fuzzy systems
The basics of fuzzy logic do not change from type-1 to type-2 fuzzy sets, and in general, will not change forany type-n [7]. A higher-type number just indicates a higher ‘‘degree of fuzziness’’. Since a higher-type changesthe nature of the membership functions, the operations that depend on the membership functions change;however, the basic principles of fuzzy logic are independent of the nature of membership functions and hence,do not change. Rules of inference like Generalized Modus Ponens or Generalized Modus Tollens continue toapply. In Fig. 5 we show the general structure of a type-2 fuzzy system. We assume that both antecedent andconsequent sets are type-2; however, this need not necessarily be the case in practice.
The structure of the type-2 fuzzy rules is the same as for the type-1 case because the distinction betweentype-2 and type-1 is associated with the nature of the membership functions. Hence, the only difference is thatnow some or all the sets involved in the rules are of type-2. In a type-1 fuzzy system, where the output sets aretype-1 fuzzy sets, we perform defuzzification in order to get a number, which is in some sense a crisp (type-0)representative of the combined output sets. In the type-2 case, the output sets are type-2; so we have to useextended versions of type-1 defuzzification methods. Since type-1 defuzzification gives a single numeric value(real number) at the output of the fuzzy system, the extended defuzzification operation in the type-2 case givesa type-1 fuzzy set at the output. Since this operation takes us from the type-2 output sets of the fuzzy system toa type-1 set, we can call this operation ‘‘type reduction’’ and call the type-1 fuzzy set so obtained a ‘‘type-reduced set’’. The type-reduced fuzzy set may then be defuzzified to obtain a single crisp number; however,in many applications, the type-reduced set may be more important than a single number.
Type-2 sets can be used to convey the uncertainties in membership functions of type-1 fuzzy sets, due to thedependence of the membership functions on available linguistic and numerical information. Linguistic infor-mation (e.g. rules from experts), in general, does not give any information about the shapes of the membershipfunctions. When membership functions are determined or tuned based on numerical data, the uncertainty inthe numerical data, e.g., noise, translates into uncertainty in the membership functions. In all such cases, anyavailable information about the linguistic/numerical uncertainty can be incorporated in the type-2 framework.However, even with all of the advantages that fuzzy type-2 systems have, the literature on the applications oftype-2 sets is scarce. Some examples could be found when dealing with decision making [25], solving fuzzyrelational equations [23], and solving control problems [12].
4. Description of the problem
The basic problem consists in the identification of sound signal quality. Of course, this requires a compar-ison between the real measured sound signal and the ideal good sound signal. We need to be able to acceptspeakers, which have a sound signal that do not differ much from the ideal signals. We show in Fig. 6 the formof the sound signal for a good speaker (of a specific type). The measured signal contains about 108,000 pointsin about 3 s. We need to compare any other measured signal with the good one and calculate the total differ-ence between both of them, and if the difference is small then we can accept the speaker as a good one. On the
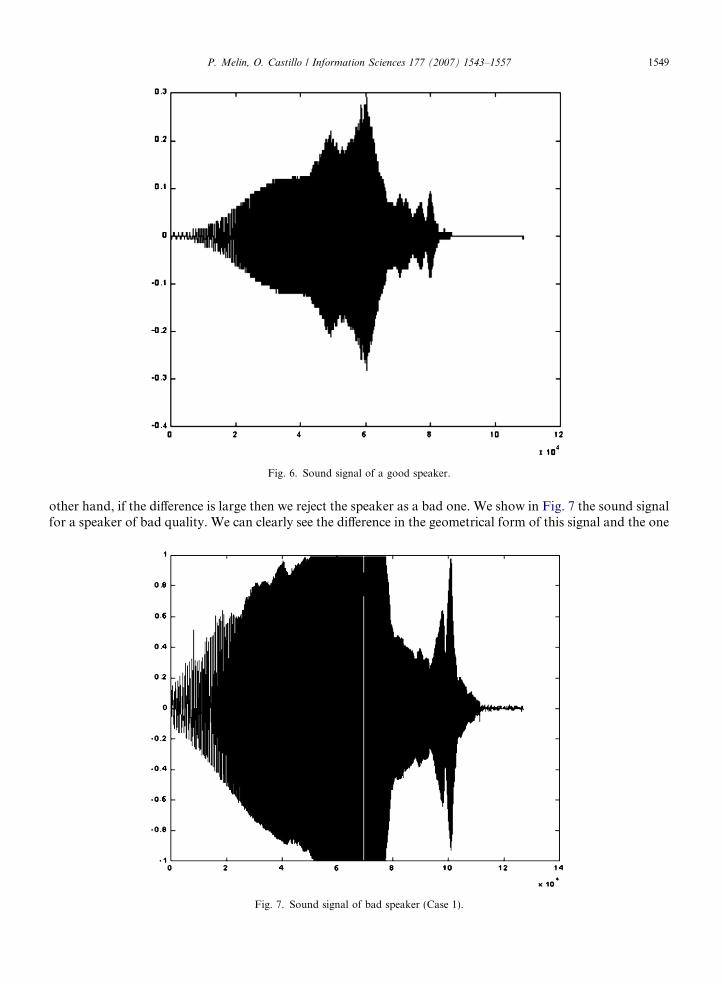
Fig. 6. Sound signal of a good speaker.
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1549
other hand, if the difference is large then we reject the speaker as a bad one. We show in Fig. 7 the sound signalfor a speaker of bad quality. We can clearly see the difference in the geometrical form of this signal and the one
Fig. 7. Sound signal of bad speaker (Case 1).
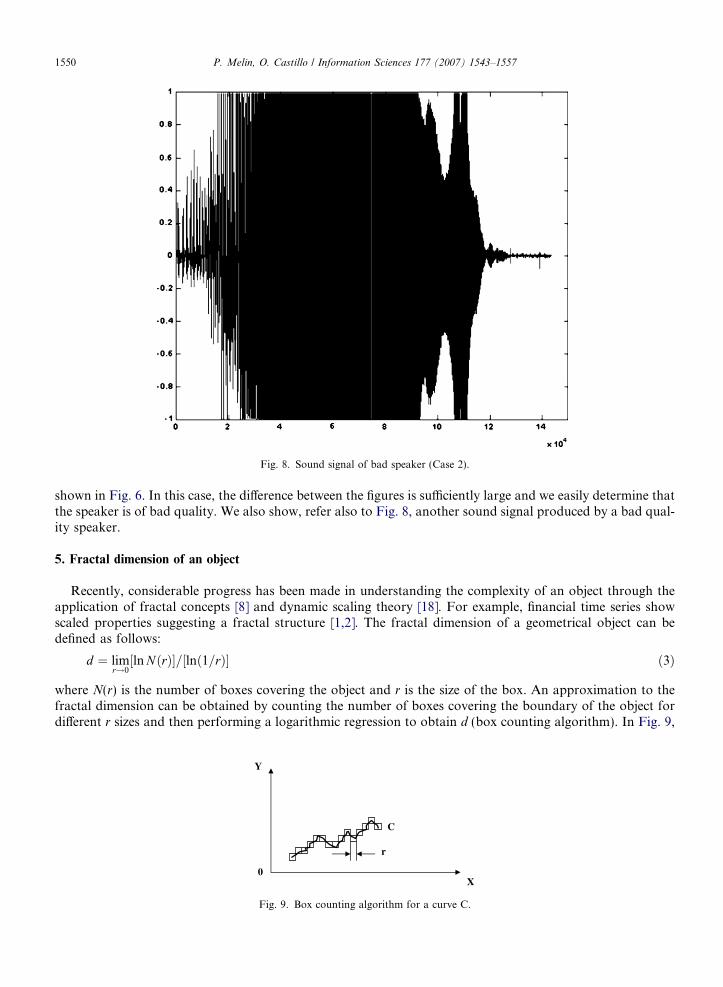
Fig. 8. Sound signal of bad speaker (Case 2).
1550 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
shown in Fig. 6. In this case, the difference between the figures is sufficiently large and we easily determine thatthe speaker is of bad quality. We also show, refer also to Fig. 8, another sound signal produced by a bad qual-ity speaker.
5. Fractal dimension of an object
Recently, considerable progress has been made in understanding the complexity of an object through theapplication of fractal concepts [8] and dynamic scaling theory [18]. For example, financial time series showscaled properties suggesting a fractal structure [1,2]. The fractal dimension of a geometrical object can bedefined as follows:
d ¼ limr!0½ln NðrÞ�=½lnð1=rÞ� ð3Þ
where N(r) is the number of boxes covering the object and r is the size of the box. An approximation to thefractal dimension can be obtained by counting the number of boxes covering the boundary of the object fordifferent r sizes and then performing a logarithmic regression to obtain d (box counting algorithm). In Fig. 9,
C
r
X
Y
0
Fig. 9. Box counting algorithm for a curve C.
0 ln r
ln N(r)ln N(r) = ln β - dlnr
(Ni, ri)
Fig. 10. Logarithmic regression to find dimension.
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1551
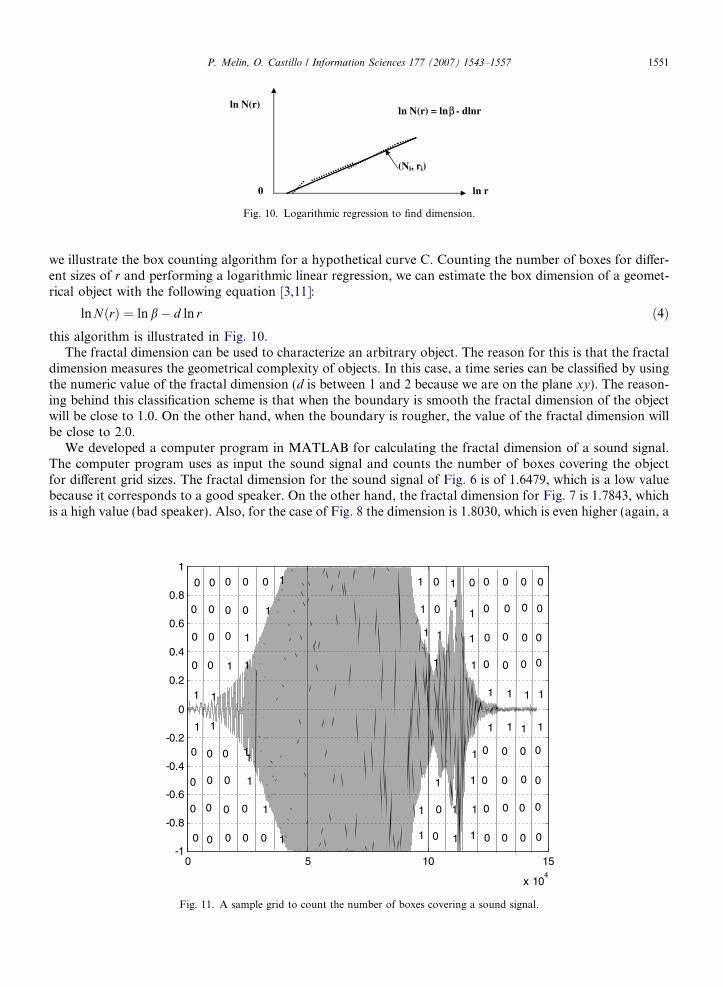
we illustrate the box counting algorithm for a hypothetical curve C. Counting the number of boxes for differ-ent sizes of r and performing a logarithmic linear regression, we can estimate the box dimension of a geomet-rical object with the following equation [3,11]:
ln NðrÞ ¼ ln b� d ln r ð4Þ
this algorithm is illustrated in Fig. 10.The fractal dimension can be used to characterize an arbitrary object. The reason for this is that the fractaldimension measures the geometrical complexity of objects. In this case, a time series can be classified by usingthe numeric value of the fractal dimension (d is between 1 and 2 because we are on the plane xy). The reason-ing behind this classification scheme is that when the boundary is smooth the fractal dimension of the objectwill be close to 1.0. On the other hand, when the boundary is rougher, the value of the fractal dimension willbe close to 2.0.
We developed a computer program in MATLAB for calculating the fractal dimension of a sound signal.The computer program uses as input the sound signal and counts the number of boxes covering the objectfor different grid sizes. The fractal dimension for the sound signal of Fig. 6 is of 1.6479, which is a low valuebecause it corresponds to a good speaker. On the other hand, the fractal dimension for Fig. 7 is 1.7843, whichis a high value (bad speaker). Also, for the case of Fig. 8 the dimension is 1.8030, which is even higher (again, a
0 5 10 15
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0 0 0 0
0 0 0 0
0 0 0
0 0
0
0
0
0 0 0 0 0 0 0 0 0 0
0000
0 0 00
0 0 0 0
0000
0000
0 0 0
0 0
0 0
0 0 0 0
0 0 0 0 0
0
1
1
1
1 1
1 1
1 1 1
1
1
1 1
1
1
0
1
1
11
1
1
1
1 1
11
0
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Fig. 11. A sample grid to count the number of boxes covering a sound signal.
1552 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
bad speaker). We show in Fig. 11 an illustration of the box counting algorithm for the sound signal of a goodspeaker. In this figure we can appreciate how we can count the number of boxes covering the signal by usingthe sum of the 1’s in the grid. This process is repeated for several sizes of boxes, and then used in Eq. (4) toestimate the box dimension.
6. Experimental results
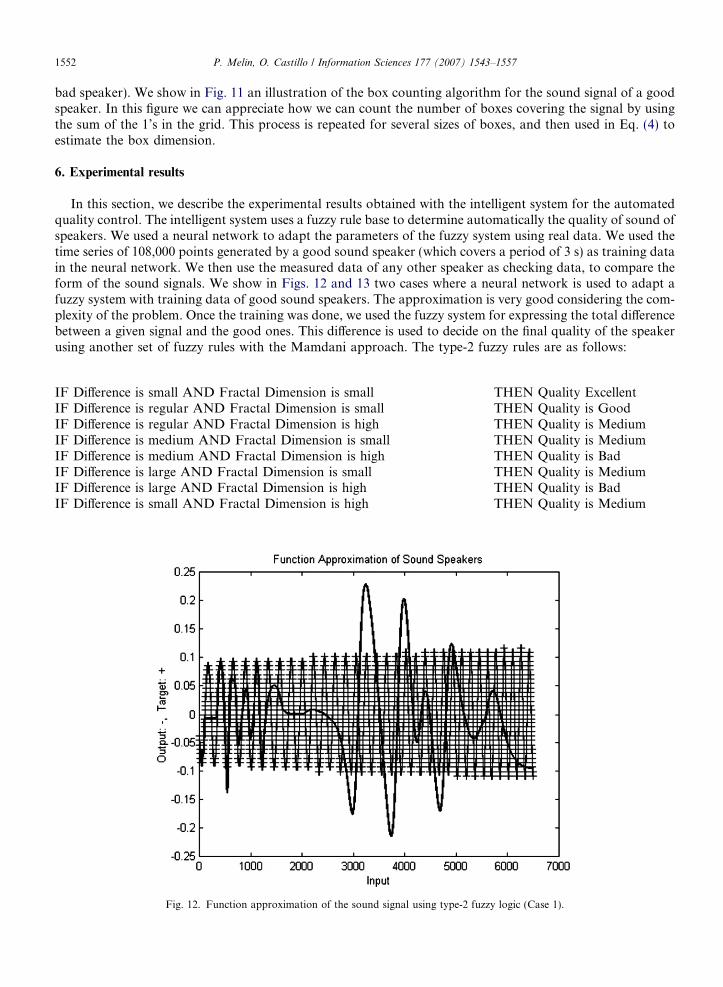
In this section, we describe the experimental results obtained with the intelligent system for the automatedquality control. The intelligent system uses a fuzzy rule base to determine automatically the quality of sound ofspeakers. We used a neural network to adapt the parameters of the fuzzy system using real data. We used thetime series of 108,000 points generated by a good sound speaker (which covers a period of 3 s) as training datain the neural network. We then use the measured data of any other speaker as checking data, to compare theform of the sound signals. We show in Figs. 12 and 13 two cases where a neural network is used to adapt afuzzy system with training data of good sound speakers. The approximation is very good considering the com-plexity of the problem. Once the training was done, we used the fuzzy system for expressing the total differencebetween a given signal and the good ones. This difference is used to decide on the final quality of the speakerusing another set of fuzzy rules with the Mamdani approach. The type-2 fuzzy rules are as follows:
Fig. 12. Function approximation of the sound signal using type-2 fuzzy logic (Case 1).
IF Difference is small AND Fractal Dimension is small THEN Quality ExcellentIF Difference is regular AND Fractal Dimension is small THEN Quality is GoodIF Difference is regular AND Fractal Dimension is high THEN Quality is MediumIF Difference is medium AND Fractal Dimension is small THEN Quality is MediumIF Difference is medium AND Fractal Dimension is high THEN Quality is BadIF Difference is large AND Fractal Dimension is small THEN Quality is MediumIF Difference is large AND Fractal Dimension is high THEN Quality is BadIF Difference is small AND Fractal Dimension is high THEN Quality is Medium
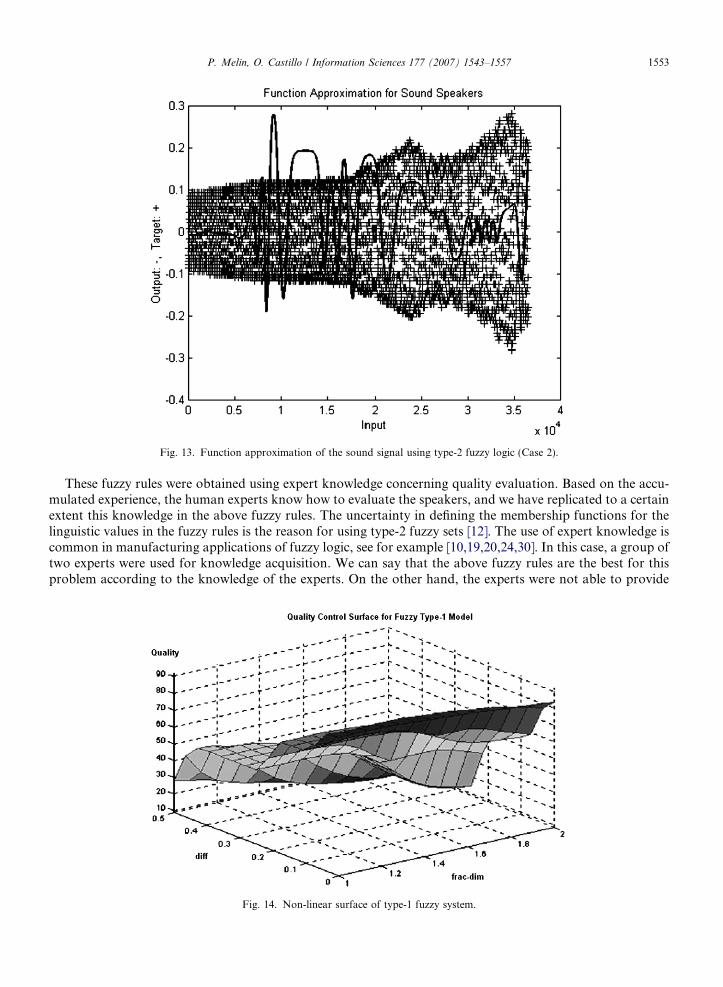
Fig. 13. Function approximation of the sound signal using type-2 fuzzy logic (Case 2).
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1553
These fuzzy rules were obtained using expert knowledge concerning quality evaluation. Based on the accu-mulated experience, the human experts know how to evaluate the speakers, and we have replicated to a certainextent this knowledge in the above fuzzy rules. The uncertainty in defining the membership functions for thelinguistic values in the fuzzy rules is the reason for using type-2 fuzzy sets [12]. The use of expert knowledge iscommon in manufacturing applications of fuzzy logic, see for example [10,19,20,24,30]. In this case, a group oftwo experts were used for knowledge acquisition. We can say that the above fuzzy rules are the best for thisproblem according to the knowledge of the experts. On the other hand, the experts were not able to provide
Fig. 14. Non-linear surface of type-1 fuzzy system.
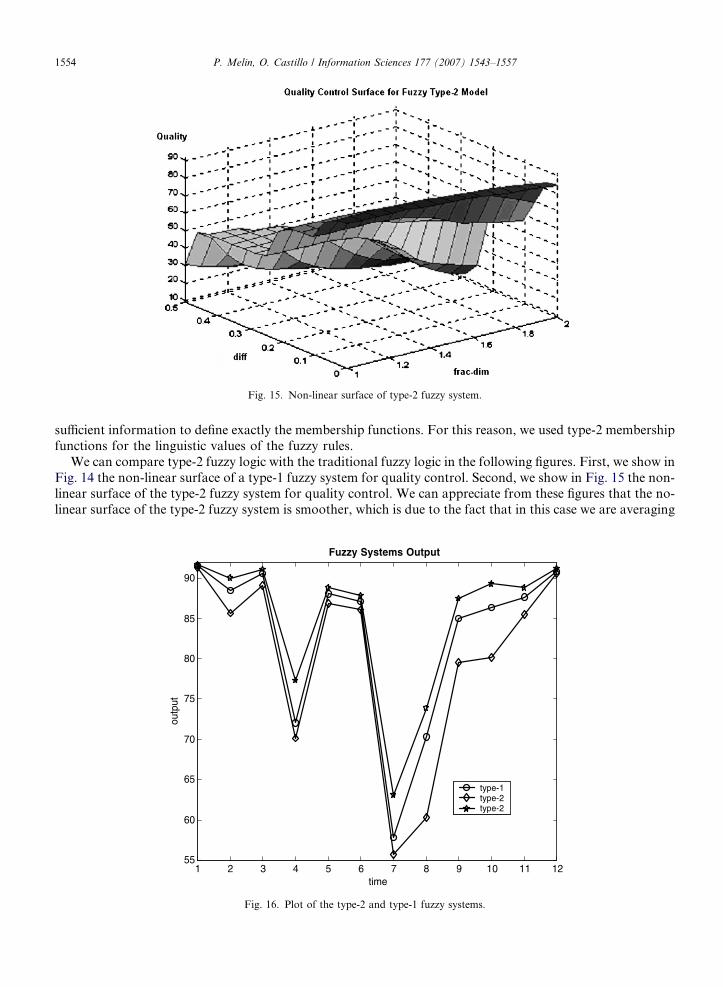
Fig. 15. Non-linear surface of type-2 fuzzy system.
1554 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
sufficient information to define exactly the membership functions. For this reason, we used type-2 membershipfunctions for the linguistic values of the fuzzy rules.
We can compare type-2 fuzzy logic with the traditional fuzzy logic in the following figures. First, we show inFig. 14 the non-linear surface of a type-1 fuzzy system for quality control. Second, we show in Fig. 15 the non-linear surface of the type-2 fuzzy system for quality control. We can appreciate from these figures that the no-linear surface of the type-2 fuzzy system is smoother, which is due to the fact that in this case we are averaging
1 2 3 4 5 6 7 8 9 10 11 1255
60
65
70
75
80
85
90
Fuzzy Systems Output
time
outp
ut
type-1type-2type-2
Fig. 16. Plot of the type-2 and type-1 fuzzy systems.
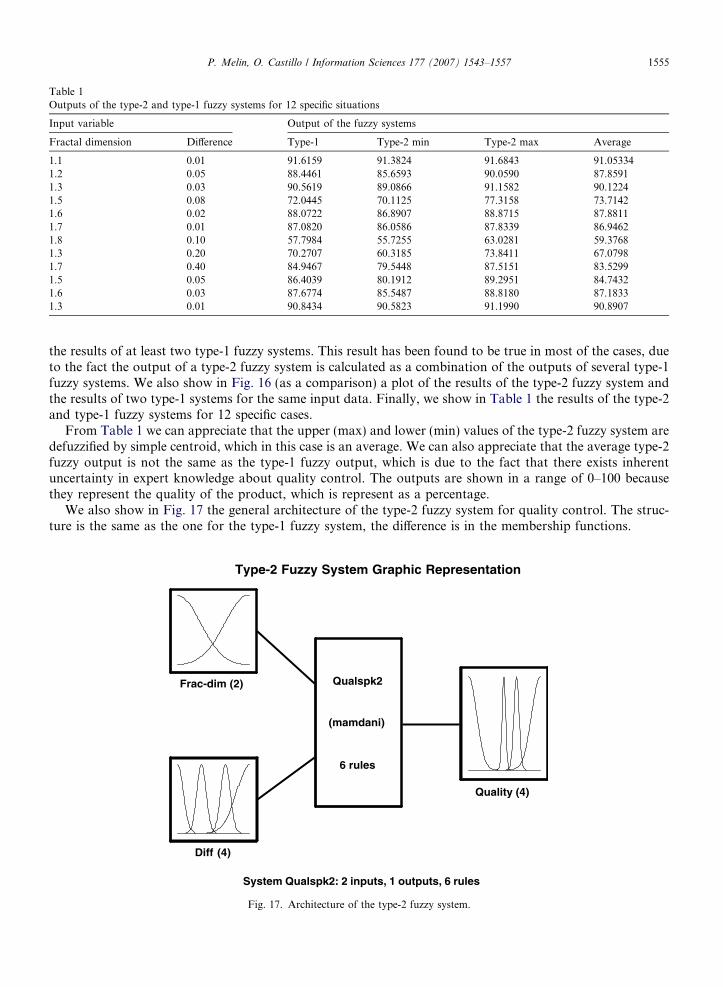
Table 1Outputs of the type-2 and type-1 fuzzy systems for 12 specific situations
Input variable Output of the fuzzy systems
Fractal dimension Difference Type-1 Type-2 min Type-2 max Average
1.1 0.01 91.6159 91.3824 91.6843 91.053341.2 0.05 88.4461 85.6593 90.0590 87.85911.3 0.03 90.5619 89.0866 91.1582 90.12241.5 0.08 72.0445 70.1125 77.3158 73.71421.6 0.02 88.0722 86.8907 88.8715 87.88111.7 0.01 87.0820 86.0586 87.8339 86.94621.8 0.10 57.7984 55.7255 63.0281 59.37681.3 0.20 70.2707 60.3185 73.8411 67.07981.7 0.40 84.9467 79.5448 87.5151 83.52991.5 0.05 86.4039 80.1912 89.2951 84.74321.6 0.03 87.6774 85.5487 88.8180 87.18331.3 0.01 90.8434 90.5823 91.1990 90.8907
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1555
the results of at least two type-1 fuzzy systems. This result has been found to be true in most of the cases, dueto the fact the output of a type-2 fuzzy system is calculated as a combination of the outputs of several type-1fuzzy systems. We also show in Fig. 16 (as a comparison) a plot of the results of the type-2 fuzzy system andthe results of two type-1 systems for the same input data. Finally, we show in Table 1 the results of the type-2and type-1 fuzzy systems for 12 specific cases.
From Table 1 we can appreciate that the upper (max) and lower (min) values of the type-2 fuzzy system aredefuzzified by simple centroid, which in this case is an average. We can also appreciate that the average type-2fuzzy output is not the same as the type-1 fuzzy output, which is due to the fact that there exists inherentuncertainty in expert knowledge about quality control. The outputs are shown in a range of 0–100 becausethey represent the quality of the product, which is represent as a percentage.
We also show in Fig. 17 the general architecture of the type-2 fuzzy system for quality control. The struc-ture is the same as the one for the type-1 fuzzy system, the difference is in the membership functions.
Frac-dim (2)
Diff (4)
System Qualspk2: 2 inputs, 1 outputs, 6 rules
Quality (4)
Qualspk2
(mamdani)
6 rules
Type-2 Fuzzy System Graphic Representation
Fig. 17. Architecture of the type-2 fuzzy system.
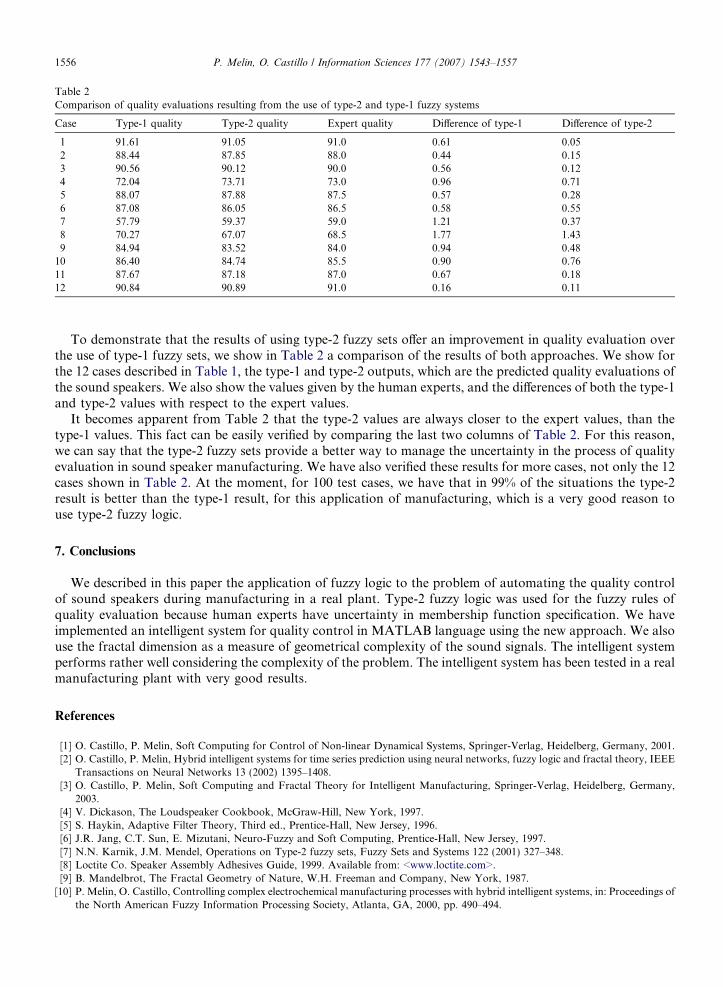
Table 2Comparison of quality evaluations resulting from the use of type-2 and type-1 fuzzy systems
Case Type-1 quality Type-2 quality Expert quality Difference of type-1 Difference of type-2
1 91.61 91.05 91.0 0.61 0.052 88.44 87.85 88.0 0.44 0.153 90.56 90.12 90.0 0.56 0.124 72.04 73.71 73.0 0.96 0.715 88.07 87.88 87.5 0.57 0.286 87.08 86.05 86.5 0.58 0.557 57.79 59.37 59.0 1.21 0.378 70.27 67.07 68.5 1.77 1.439 84.94 83.52 84.0 0.94 0.48
10 86.40 84.74 85.5 0.90 0.7611 87.67 87.18 87.0 0.67 0.1812 90.84 90.89 91.0 0.16 0.11
1556 P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557
To demonstrate that the results of using type-2 fuzzy sets offer an improvement in quality evaluation overthe use of type-1 fuzzy sets, we show in Table 2 a comparison of the results of both approaches. We show forthe 12 cases described in Table 1, the type-1 and type-2 outputs, which are the predicted quality evaluations ofthe sound speakers. We also show the values given by the human experts, and the differences of both the type-1and type-2 values with respect to the expert values.
It becomes apparent from Table 2 that the type-2 values are always closer to the expert values, than thetype-1 values. This fact can be easily verified by comparing the last two columns of Table 2. For this reason,we can say that the type-2 fuzzy sets provide a better way to manage the uncertainty in the process of qualityevaluation in sound speaker manufacturing. We have also verified these results for more cases, not only the 12cases shown in Table 2. At the moment, for 100 test cases, we have that in 99% of the situations the type-2result is better than the type-1 result, for this application of manufacturing, which is a very good reason touse type-2 fuzzy logic.
7. Conclusions
We described in this paper the application of fuzzy logic to the problem of automating the quality controlof sound speakers during manufacturing in a real plant. Type-2 fuzzy logic was used for the fuzzy rules ofquality evaluation because human experts have uncertainty in membership function specification. We haveimplemented an intelligent system for quality control in MATLAB language using the new approach. We alsouse the fractal dimension as a measure of geometrical complexity of the sound signals. The intelligent systemperforms rather well considering the complexity of the problem. The intelligent system has been tested in a realmanufacturing plant with very good results.
References
[1] O. Castillo, P. Melin, Soft Computing for Control of Non-linear Dynamical Systems, Springer-Verlag, Heidelberg, Germany, 2001.[2] O. Castillo, P. Melin, Hybrid intelligent systems for time series prediction using neural networks, fuzzy logic and fractal theory, IEEE
Transactions on Neural Networks 13 (2002) 1395–1408.[3] O. Castillo, P. Melin, Soft Computing and Fractal Theory for Intelligent Manufacturing, Springer-Verlag, Heidelberg, Germany,
2003.[4] V. Dickason, The Loudspeaker Cookbook, McGraw-Hill, New York, 1997.[5] S. Haykin, Adaptive Filter Theory, Third ed., Prentice-Hall, New Jersey, 1996.[6] J.R. Jang, C.T. Sun, E. Mizutani, Neuro-Fuzzy and Soft Computing, Prentice-Hall, New Jersey, 1997.[7] N.N. Karnik, J.M. Mendel, Operations on Type-2 fuzzy sets, Fuzzy Sets and Systems 122 (2001) 327–348.[8] Loctite Co. Speaker Assembly Adhesives Guide, 1999. Available from: <www.loctite.com>.[9] B. Mandelbrot, The Fractal Geometry of Nature, W.H. Freeman and Company, New York, 1987.
[10] P. Melin, O. Castillo, Controlling complex electrochemical manufacturing processes with hybrid intelligent systems, in: Proceedings ofthe North American Fuzzy Information Processing Society, Atlanta, GA, 2000, pp. 490–494.
P. Melin, O. Castillo / Information Sciences 177 (2007) 1543–1557 1557
[11] P. Melin, O. Castillo, Modelling, Simulation and Control of Non-Linear Dynamical Systems, Taylor and Francis, London, GreatBritain, 2002.
[12] P. Melin, O. Castillo, A new method for adaptive control of non-linear plants using Type-2 fuzzy logic and neural networks,International Journal of General Systems 33 (2004) 289–304.
[13] J.M. Mendel, Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions, Prentice Hall, New Jersey, USA, 2000.[14] J.M. Mendel, Uncertainty, Fuzzy Logic, and Signal Processing, Elsevier Science, 2000.[15] J.M. Mendel, Computing derivatives in interval Type-2 fuzzy logic systems, IEEE Transactions on Fuzzy Systems 12 (2004) 84–98.[16] J.M. Mendel, R. John, Type-2 fuzzy sets made simple, IEEE Transactions on Fuzzy Systems 10 (2002) 117–127.[17] D.B. Parker, Learning Logic, Invention Report 581-64, Stanford University, 1982.[18] S.N. Rasband, Chaotic Dynamics of Non-Linear Systems, Wiley Interscience, New York, 1990.[19] D. Ruan, J. Liu, R. Carchon, Linguistic assessment approach for managing nuclear safeguards indicator information, International
Journal of Logistics Information Management 16 (2003) 401–419.[20] D. Ruan, X. Zeng, Intelligent Sensory Evaluation, Springer-Verlag, Heidelberg, Germany, 2004.[21] D.E. Rumelhart, G.E. Hinton, R.J. Williams, Learning internal representations by error propagation, in: D.E. Rumelhart, J.L.
McClelland (Eds.), Parallel Distributed Processing: Explorations in the Microstructures of Cognition, vol. 1, MIT Press, Cambridge,USA, 1986, pp. 318–362.
[22] M. Sugeno, G.T. Kang, Structure identification of fuzzy model, Fuzzy Sets and Systems 28 (1988) 15–33.[23] M. Wagenknecht, K. Hartmann, Application of fuzzy sets of Type 2 to the solution of fuzzy equations systems, Fuzzy Sets and
Systems 25 (1988) 183–190.[24] Y. Xu, J. Jun, D. Ruan, Rule acquisition and adjustment based on set-valued mapping, Information Sciences 157 (2003) 167–198.[25] R.R. Yager, Fuzzy subsets of Type II in decisions, Journal of Cybernetics 10 (1980) 137–159.[26] L.A. Zadeh, Similarity Relations and Fuzzy Ordering, Information Sciences 3 (1971) 177–206.[27] L.A. Zadeh, Outline of a new approach to the analysis of complex systems and decision processes, IEEE Transactions on Systems,
Man, and Cybernetics 3 (1973) 28–44.[28] L.A. Zadeh, The concept of a linguistic variable and its application to approximate reasoning, Information Sciences 8 (1975) 43–80.[29] L.A. Zadeh, Toward a generalized theory of uncertainty (GTU) – an outline, Information Sciences 172 (2005) 1–40.[30] C. Zhou, D. Ruan, Fuzzy control rules extraction from perception-based information using computing with words, Information
Sciences 142 (2002) 275–290.




















