An execution, monitoring and replanning approach for optimal energy management in microgrids
8
An execution, monitoring and replanning approach for optimal energy management in microgrids Eleonora Riva Sanseverino a, * , Maria Luisa Di Silvestre a , Mariano Giuseppe Ippolito a , Alessandra De Paola b , Giuseppe Lo Re b a DIEET, Università di Palermo, Edificio 9 Viale delle Scienze, 90128 Palermo, Italy b DINFO, Università di Palermo, Edificio 6 Viale delle Scienze, 90128 Palermo, Italy article info Article history: Received 24 September 2010 Received in revised form 18 February 2011 Accepted 19 March 2011 Available online 22 April 2011 Keywords: Distributed energy resources management Multi-objective evolutionary optimization Microgrids abstract This work develops a new approach for optimal energy management of electrical distribution ‘smart- grids’. Optimality aims at improving sustainability through the minimization of carbon emissions and at reducing production costs and maximizing quality. Input data are the forecasted loads and productions from renewable generation units, output data are a set of control actions for the actuators. The considered electrical distribution system includes storage units that must be considered over a 24 h time interval, to consider an entire charge and discharge cycle. The objectives for the optimal management of distributed (renewables and not) generation are technical, economical and environmental. It is thus required to solve a multi-objective optimization problem over a 24 h time interval considering the uncertainty associated to weather conditions and loads profiles. The novelty of the proposed approach resides in considering the optimal scheduling of generation units an automatic planning process in a dynamic, non-deterministic and not fully observable environment, as it is, getting closer to actual conditions. The system proposed here is a planning and execution scheduler which allows the central controller to monitor the execution of a scheduling plan, interrupt the monitoring to input new infor- mation and repair the plan under execution every time interval. Ó 2011 Elsevier Ltd. All rights reserved. 1. Background As an effect of all the activity around clean energy, communi- cation technologies, smart meters, and electric vehicles, it is imperative to understand that the goal is to optimize the integra- tion of such resources having the electrical distribution network as backbone. Optimizing the electrical grid management will thus be accomplished with intelligent software applications that can “predict, shape, and optimize” the network. The combination of interdisciplinary knowledge to develop intelligent, comprehensive, secure and integrated analytic-based applications is the key to achieving long-term success of the new developing idea of elec- trical distribution systems. The electrical power distribution area, in the last years, has indeed experienced an important reorganization towards active networks characterized by a high penetration of Distributed Energy Resources, DER, including Distributed Generation Units, DGU, storage systems and controllable loads. DGUs are based both on renewable and not renewable technologies (internal combus- tion engines, small and micro gas turbines, fuel cells, photovoltaic and wind plants). The possibility to produce energy in a physically distributed fashion gives the idea of many interests requiring high quality and economical operation. This is why modern power distribution management problems can be formulated as multi- objective optimization issues. Complex optimal management problems can be, in particular, formulated for Microgrids. Micro- grids [1] are low or medium voltage intelligent distribution networks comprising various DER which can be operated as interconnected to the main distribution grid or as islanded if disconnected from the main grid. From the grid’s point of view, a Microgrid can be regarded as a controlled entity within the power system that can be operated as a single aggregated load and as a small source of power or ancillary services supporting the network. Indeed, in order to optimize the power flows in the lines, a Microgrid is equipped with load controllers and micro source controllers, that are interfaces to control interruptible loads and micro sources (active and reactive generation levels), and a Microgrid central controller that promotes technical and eco- nomical operation and provides set points to load controllers and * Corresponding author. Tel.: þ39 (0)916615262; fax: þ39 (0)91488452. E-mail addresses: [email protected] (E.R. Sanseverino), marialuisa. [email protected] (M.L. Di Silvestre), [email protected] (M.G. Ippolito), depaola@ dinfo.unipa.it (A. De Paola), [email protected] (G. Lo Re). Contents lists available at ScienceDirect Energy journal homepage: www.elsevier.com/locate/energy 0360-5442/$ e see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.energy.2011.03.047 Energy 36 (2011) 3429e3436
Transcript of An execution, monitoring and replanning approach for optimal energy management in microgrids

lable at ScienceDirect
Energy 36 (2011) 3429e3436
Contents lists avai
Energy
journal homepage: www.elsevier .com/locate/energy
An execution, monitoring and replanning approach for optimal energymanagement in microgrids
Eleonora Riva Sanseverino a,*, Maria Luisa Di Silvestre a, Mariano Giuseppe Ippolito a,Alessandra De Paola b, Giuseppe Lo Re b
aDIEET, Università di Palermo, Edificio 9 Viale delle Scienze, 90128 Palermo, ItalybDINFO, Università di Palermo, Edificio 6 Viale delle Scienze, 90128 Palermo, Italy
a r t i c l e i n f o
Article history:Received 24 September 2010Received in revised form18 February 2011Accepted 19 March 2011Available online 22 April 2011
Keywords:Distributed energy resources managementMulti-objective evolutionary optimizationMicrogrids
* Corresponding author. Tel.: þ39 (0)916615262; faE-mail addresses: [email protected]
[email protected] (M.L. Di Silvestre), [email protected] (A. De Paola), [email protected] (G. Lo Re
0360-5442/$ e see front matter � 2011 Elsevier Ltd.doi:10.1016/j.energy.2011.03.047
a b s t r a c t
This work develops a new approach for optimal energy management of electrical distribution ‘smart-grids’. Optimality aims at improving sustainability through the minimization of carbon emissions and atreducing production costs and maximizing quality. Input data are the forecasted loads and productionsfrom renewable generation units, output data are a set of control actions for the actuators. Theconsidered electrical distribution system includes storage units that must be considered over a 24 h timeinterval, to consider an entire charge and discharge cycle. The objectives for the optimal management ofdistributed (renewables and not) generation are technical, economical and environmental. It is thusrequired to solve a multi-objective optimization problem over a 24 h time interval considering theuncertainty associated to weather conditions and loads profiles. The novelty of the proposed approachresides in considering the optimal scheduling of generation units an automatic planning process ina dynamic, non-deterministic and not fully observable environment, as it is, getting closer to actualconditions. The system proposed here is a planning and execution scheduler which allows the centralcontroller to monitor the execution of a scheduling plan, interrupt the monitoring to input new infor-mation and repair the plan under execution every time interval.
� 2011 Elsevier Ltd. All rights reserved.
1. Background
As an effect of all the activity around clean energy, communi-cation technologies, smart meters, and electric vehicles, it isimperative to understand that the goal is to optimize the integra-tion of such resources having the electrical distribution network asbackbone. Optimizing the electrical grid management will thus beaccomplished with intelligent software applications that can“predict, shape, and optimize” the network. The combination ofinterdisciplinary knowledge to develop intelligent, comprehensive,secure and integrated analytic-based applications is the key toachieving long-term success of the new developing idea of elec-trical distribution systems.
The electrical power distribution area, in the last years, hasindeed experienced an important reorganization towards activenetworks characterized by a high penetration of DistributedEnergy Resources, DER, including Distributed Generation Units,
x: þ39 (0)91488452.t (E.R. Sanseverino),marialuisa.ipa.it (M.G. Ippolito), depaola@).
All rights reserved.
DGU, storage systems and controllable loads. DGUs are based bothon renewable and not renewable technologies (internal combus-tion engines, small and micro gas turbines, fuel cells, photovoltaicand wind plants). The possibility to produce energy in a physicallydistributed fashion gives the idea of many interests requiring highquality and economical operation. This is why modern powerdistribution management problems can be formulated as multi-objective optimization issues. Complex optimal managementproblems can be, in particular, formulated for Microgrids. Micro-grids [1] are low or medium voltage intelligent distributionnetworks comprising various DER which can be operated asinterconnected to the main distribution grid or as islanded ifdisconnected from the main grid. From the grid’s point of view,a Microgrid can be regarded as a controlled entity within thepower system that can be operated as a single aggregated load andas a small source of power or ancillary services supporting thenetwork. Indeed, in order to optimize the power flows in the lines,a Microgrid is equipped with load controllers and micro sourcecontrollers, that are interfaces to control interruptible loads andmicro sources (active and reactive generation levels), anda Microgrid central controller that promotes technical and eco-nomical operation and provides set points to load controllers and

E.R. Sanseverino et al. / Energy 36 (2011) 3429e34363430
microsource controllers. Moreover, DGUs in Microgrids are electricgenerating units, typically in the range of 3 kWe200 kW, parallelto the electric utility or stand-alone, located within the electricdistribution system at or near the end user. DGUs also involvepower electronic interfaces, as well as communications andcontrol devices for efficient dispatch and operation of singlegenerating units, multiple system packages, and aggregated blocksof power. Intra-system cross-supply and communal managementstandards differentiate a Microgrid from a group of independentbut physically proximate small generators. In addition, Microgridsenhance local reliability, reduce emissions, due to the presence ofrenewable generators, improve power quality by supportingvoltage and potentially lower the cost of energy supply. Thesegoals can be achieved provided generation scheduling of powerproduction from generation units is carried out over a daily toweekly time horizon while respecting various generatorconstraints and system constraints and considering renewable andloads variability. The objective function may include costs associ-ated with energy production as well as other environmental andquality indices, such as limiting green house gas emissions,reducing the transmission power losses and delaying or evenpreventing the construction of new energy infrastructures.Differently from modern distribution systems including distrib-uted generation and storage systems [2], in microgrids theproblem of voltage and frequency regulation is of primaryimportance, since these systems may work in islanded configu-ration. The co-ordination of all these generating and loading unitsto meet demand, maximize quality and minimize emissions isa quite challenging issue also requiring distributed intelligenceapplications. For this reason these modern distribution systemsare also referred to as ‘smart-grids’.
In this frame, what is most interesting is to create connectionand to bridge ideas between proximate but quite different fields.The idea behind this work is that solution techniques that aresuitable for robotics in dynamic environments can be used forMicrogrids in uncertain conditions. The environment in whichactuators should operate is indeed dynamic due to the presence ofRenewable Energy Sources (RES) generation and variable loads.The depth of the decision tree through which the control actionsmust be planned and then taken is strongly dependent on thepricing horizons for energy (1 day-ahead market) and on thepresence of certain storage systems which must be managedalong an entire charge and discharge cycle (24 h). In the technicalliterature, the issue of optimal energy management in microgridsunder uncertainty is dealt with considering the different aspectsof the problem. Despite the microgrid mode of operation, i.e., 1)grid connected, 2) islanded (autonomous), or 3) transitionbetween the two modes, the literature on the subject of powermanagement in microgrids can be divided based on the level ofregulation examined, i.e. 1) primary regulation, 2) secondaryregulation, 3) tertiary regulation. An interesting general view ofthe problem can be found in Ref. [3] where a hierarchical archi-tecture for control is presented with a special focus on autono-mous operation. The primary control is typically based on thedroop method; the secondary control allows the restoration of thedeviations produced by the primary control finally the tertiarycontrol manages overall objectives such as the power flowbetween the microgrid and the external electrical distributionsystem or the minimization of losses. Typically this latter opti-mization is carried out considering a 24 h time frame and isrepeated every day.
Most papers consider the primary/secondary regulation issues[4,5] while fewer papers focus on the problem of the optimalgeneration scheduling of DER in tertiary regulation: the problemis similar to that of traditional unit commitment for power
systems. In Ref. [6], the optimization is aimed at reducing the fuelconsumption rate of the system while constraining it to fulfil thelocal energy demand (both electrical and thermal) and providea certain minimum reserve power. No storage systems areconsidered. In this work the problem is treated as a singleobjective issue by neither considering the emission nor thesystem’s operation and maintenance costs as well as no sold orpurchased power to or from the main grid. The work in Ref. [7]considers the presence of storage systems, but as [6,8], it doesnot formulate the problem on a 24 h time frame and thus does notconsiders the issue of charge and discharge cycles and otherpricing issues. The work in Ref. [9] develops the classical 24 h unitcommitment problem using a three steps method. The algorithmis a hybrid method merging Lagrangian relaxation and Geneticalgorithms. Cost minimization is the only considered objective.Same problem is faced in Ref. [10], but again the problemformulation nor the approach followed considers the issue ofuncertainty.
Research by Bertani et al. [11] proposes an efficient controlsystem for Microgrids management considering a 24 h time frameand storage systems. In the latter, the control systemmanages boththe transient and the steady state features of the electrical system.The application is devoted to the implementation on a small LowVoltage test facility at the CESI (Centro Elettrotecnico SperimentaleItaliano, Milan, Italy). None of the cited papers however deals withthe problem of the uncertain environment in which the strategiesare implemented (i.e. weather predictions over the considered 24 htime frame).
As shown, 24 h dispatch is typically carried out every 24 h andthe resulting set of commands is delivered to the MicrosourceControllers and Load Controllers through a telecommunicationsystem. In this way, forecasts about loads and weather conditionsare affected by large errors and the economical and technicalindices calculated as a result of such elaboration are affected bylarge errors. During operation, such errors are then correctedwithin fast regulation dynamics.
The effects of the variability of environmental conditions can beindeed reduced through different approaches. In this paper, start-ing from the output of some data mining tools as loads andgeneration productions forecasting models, the optimal generatorsscheduling is deduced by identifying optimal real and reactivepower dispatch among DER in Microgrids.
The problem of uncertainty associated to a dynamic environ-ment is considered adopting an Execution Monitoring andReplanning (EMR) approach [12]. The 24 h time frame is thusdivided into T elementary time intervals, within which we canconsider that the variability of weather conditions and loads islimited. Every elementary time interval, the problem can beformulated as follows: knowing the upper and lower productionlimits of each DER, the loading level of each bus of the electricaldistribution network in the subsequent 24 h and the startingcharging level of batteries, the objectives to be achieved are:
� the minimization of the 24 h energy losses;� the minimization of the overall 24 h production costs;� the minimization of 24 h carbon emissions.
The unknowns of the problem are, at each time interval:
� the power injections at the nodes where the DER are installed;� the storage levels of the batteries.
The problem is dealt using a multi-objective stochastic approach:the non-dominated sorting genetic algorithm II [13] within anEMR cycle.
State
estimation
field 24 hours load forecast
24 hours RES forecast
Day-ahead
scheduler
E.R. Sanseverino et al. / Energy 36 (2011) 3429e3436 3431
In what follows, the optimization algorithm is briefly outlined.Then a real world power distribution engineering application isdescribed. After a brief review on the Microgrid concept and on thepower dispatch problem, the multi-objective formulation is pre-sented. Finally, application examples on the CESI test system [11]are provided.
DER control
Fig. 2. Scheme of MicroGrid Central controller and dispatcher.
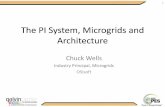
2. Microgrids for electrical distributionIn this section, the authors will detail the practical problem ofpower generation optimal dispatch problem in Microgrids. In Fig. 1,the typical layout of a Microgrid is represented.
As Fig. 1 shows, the Microgrid is supplied from the mainMedium Voltage (MV) grid through an MV/LV transformer. Thethe MicroGrid Central controller (MGCC) is located downstreamthe transformer; the Microsource Controller (MC), and the LoadController (LC), are respectively installed close to the DGUs andthe loads. In the same figure, the Photovoltaic units are identifiedwith PV, the Combined Heat and Power generating units areindicated with CHP, while the inverter is indicated with AC/DC(Alternating Current, Direct Current). The inverter interfaces thegenerating units with the electric grid and is able to changevoltage module and displacement in order to adapt to the currentoperating requirements. The Load Controllers and Microsourcecontrollers are usually implemented into inverters control logic.Every generating units produces LV electric power and can beconnected to the grid through a transformer or a conditioningsystem.
The following Fig. 2 shows the general architecture of theMicroGrid Central controller proposed by Bertani et al. [11]. As it canbe observed, in the same unit the following functions areperformed:
- identification of the bus voltages all over the network, based ona set of redundant measures of electrical quantities (stateestimation block);
- load and renewable energy sources generation potential long-term forecasts (load and RES forecast blocks);
- power generation dispatch (Day-ahead scheduler block).
In Fig. 2, ‘field’ indicates the power distribution system. WhileRES indicates Renewable Energy Sources, comprising controllableloads, storage systems and generation units. The ‘state estimation’block takes the available measures from the power distribution
MGCCHV
Network
MVHV
Micro Turbine
StorageLoad
Load
PV
Load
Load CHP
Micro Turbine
Load
PV
DC AC
DC AC
DC AC
DC AC
MC
MC
MC
MC MC
LC
LC
LC
LC
DCAC
Fig. 1. Typical Microgrid with its control devices.
system and turns them into reliable quantities to be processed forloads and renewables units output forecasts. Typically, forecasts arecarried out using a Neural Networks-based approach for time-series predictions. The block termed ‘24 h forecasts’ are referred tothe prediction of loads and power production from renewableenergy sources in the following 24 h.
The ‘day-ahead scheduler’ calculates the active power set points(DER control actions) during the following day in order to optimizedifferent technical, economical and environmental objectives. Finallythe block named ‘DER control’ has as inputs the results of the ‘Day-ahead scheduler’ and as outputs a set of control actions to beimplemented by the Load Controllers and Microsource Controllers.
Currently, the interest in the issue of managing Microgrids isquite high. The European community indeed is supporting theresearch in this fieldwith a specific platform [14], and different callswithin the Framework Program 7 (FP7). The latter being one of themost important EC initiatives for promoting research and playinga crucial role in reaching the goals of growth, competitiveness andemployment within the European Union. In the following section,the mathematical formulation of the optimal dispatch problem isoutlined.
2.1. 24-h power dispatch problem definition
The technical and economical power dispatch within the day-ahead scheduler consists in the identification of the optimal setpoints of the generating units, interruptible loads and storagesystems in an electrical system along the subsequent 24 h. Typicallythe objectives are connected to the minimization of the productioncost of these units, although also power quality and sustainabilityobjectives can be considered within the optimization. Identifyingthe generated power scheduling of each unit giving the minimumproduction cost and the best operating indices requires the solutionof the load flow problem, based on the knowledge of:the forecastedload at the network nodes;
the forecasted generating upper limits for renewable energysources;
the size and type of DER in the system;the units production costs and environmental data.This work proposes a new approach for the day-ahead scheduler
of a Microgrid. Each elementary time interval, based on the inputdata above listed, the scheduler elaborates a set of control signalsthat are sent to the DERs. In this paper, DERs include storage systemand generation units and the elementary time interval is 1 h. Thesesignals are turned by suitable transducers into actions over theregulating systems that modulate the power injections at theDERs.Consider an n-bus Microgrid system with: Nfix load orgeneration nodes with fixed forecasted real and reactive powerdemands or injections; NDG controllable DGU; and NSTO storagesystems.
The problem is that to identify the 24 � 2*NDG þ 24*NSTO realvalued vector identifying the 24 h schedule of the operating pointsof the DERs in the network:

E.R. Sanseverino et al. / Energy 36 (2011) 3429e34363432
X ¼hPg;11 ;.;pg;1NDG
;.;Qg;11 ;.;Qg;1
NDG;.; Pg;241 ;.;
Pg;24NDG; Qg;24
1 ;.;Qg;24NDG
; E11;.; E1STO;.; E241 ;.; E24STOi (1)
minimizing one or more among the following objectives:
- joule energy losses Eloss in the system
Eloss ¼X24 X
RiI2i;h (2)
h¼1 i¼1;nbr
where nbr is the number of branches in the system, Ri is the ithbranch resistance and Ii,h is the ith branch current at hour h;
- fuel consumption costs CP
CP ¼X24 X
C gh (3)
h¼1 i¼1;NDGPriðPi Þ
where CPri(Pigh) is the fuel consumption cost of the ith source athour h, Pigh the power output of the ith source at hour h;
- minimization of the CO2 emissions, Em
Em ¼X24
h¼1
Xi¼1;NDG
Emhi (4)
where Emih are the CO2 emissions at hour h from the i-th DER.
The typical constraints are:
- upper and lower limits of the values of the controlled variables,namely the DG units power outputs, taking into account therequired power reserves;
PgJmin � Pghj � Pgjmax h ¼ 1;.;24 j ¼ 1;.;NDG (5)
Qgjmin
�Pgj
��Qgh
j �Qgjmax
�pgj
�h¼ 1;.;24 j¼ 1;.;NDG (6)
- voltage drops at network buses below 1% of the rated values.
In (5) and (6):
- respectively represent the active production at hour h at thej-th DG unit and the minimum and maximum limits of realpower at the jth DG unit;
- respectively represent the reactive production at hour h at thej-th DG unit and the minimum and maximum limits of thereactive power at the jth DG unit.
The solution must also satisfy the constraint about powertransfer limits in the network lines, this constraint is usually alwayssatisfied in well designed networks, therefore it will not beconsidered.
Energy losses Eloss and bus voltages can be calculated if thefollowing highly non-linear load flow equations for each hour(loading level and production from DER) are solved:
Pghi ¼ PLhi þV2i $Yii$coswiiþ
Xn
jsi
Vi$Vj$Yij$cos�dj�diþdij
�
Qghi ¼ QLh
i þV2i $Yii$sinwiiþ
Xn
jsi
Vi$Vj$Yij$sin�dj�diþdij
�(7)
where n is the number of buses of the network; Pigh and Qigh are,
respectively, the active and reactive power generated at the ithbus at hour h; PiLh and Pi
Lh are, respectively, the active and reactivepower demand at the ith bus at hour h; Vi is the absolute value ofthe voltage at the ith bus; di is the phase angle of the voltagephasor of the ith bus; Yii is the absolute value of the sum of theadmittances of all the branches connected to the ith bus; Yij is theabsolute value of the sum of the admittances of all the branchesconnecting the ith and the jth buses; wij is the phase angle of theadmittance Yij.
The system of equations (7) expresses the equality of thegenerated power (both real and reactive) with the sum of thepower required by the loads and the power losses in the branchesof the network (the terms given as a function of Vi and Yij).Therefore, the formulated problem is that to determine the oper-ating points of the DGUs giving rise to a technicaleeconomicaloptimum as a compromise betweenminimum cost operation, highquality service and minimum emissions level. Minimum costoperation is ensured if the overall fuel consumption is minimum.The latter condition depends directly on the power generated byfuel-supplied DGUs. High quality service is attained if energy los-ses connected to conductors heating are kept as limited aspossible.
3. The optimization algorithm
The algorithm used for solving the optimization problem is theNon dominated Sorting Genetic Algorithm II (NSGA-II) [13].
The concept of non-dominance is one of the basic concepts inmulti-objective optimization. For a problem having more than oneobjective function tominimize (say, fj, j¼ 1,.,m andm> 1) any twomultidimensional solutions x1 and x2 can have one or two possi-bilities: one dominates the other or none dominates the other. Asolution x1 is said to dominate the other solution x2, if both thefollowing conditions are true:
a) The solution x1 is no worse than x2 in all objectives,fj(x1) � fj(x2), for all j ¼ 1,.,m.
b) The solution x1 is strictly better than x2 in at least one objective,or fj*(x1) < fj*(x2) for at least one j* ˛ {1,.,m}.
If any of the above conditions is violated, the solution x1 does notdominate solution x2. If x1 dominates the solution x2, it is alsocustomary to write x2 is dominated by x1, or x1 is not dominated byx2, or, simply, among two solutions, x1 is the non-dominatedsolution.
It is also important to observe that the concept of optimality inmulti-objective optimization is related to a set of solutions, insteadthan to a single one. It is therefore possible to define Pareto localand global optimality for sets of solutions.
P is a locally optimal Pareto set, if for every member x in P, thereexist no solution y in a small neighbourhood, which dominatesevery member in the set P.
P is a global Pareto-optimal set, if there exist no solution in thesearch space, which dominates every member in the set P.
From the above discussion, it is possible to point out that thereare primarily two goals that a multi-criterion optimization algo-rithm must achieve:
1. guide the search towards the global Pareto-optimal region;2. maintain population diversity in the Pareto-optimal front.
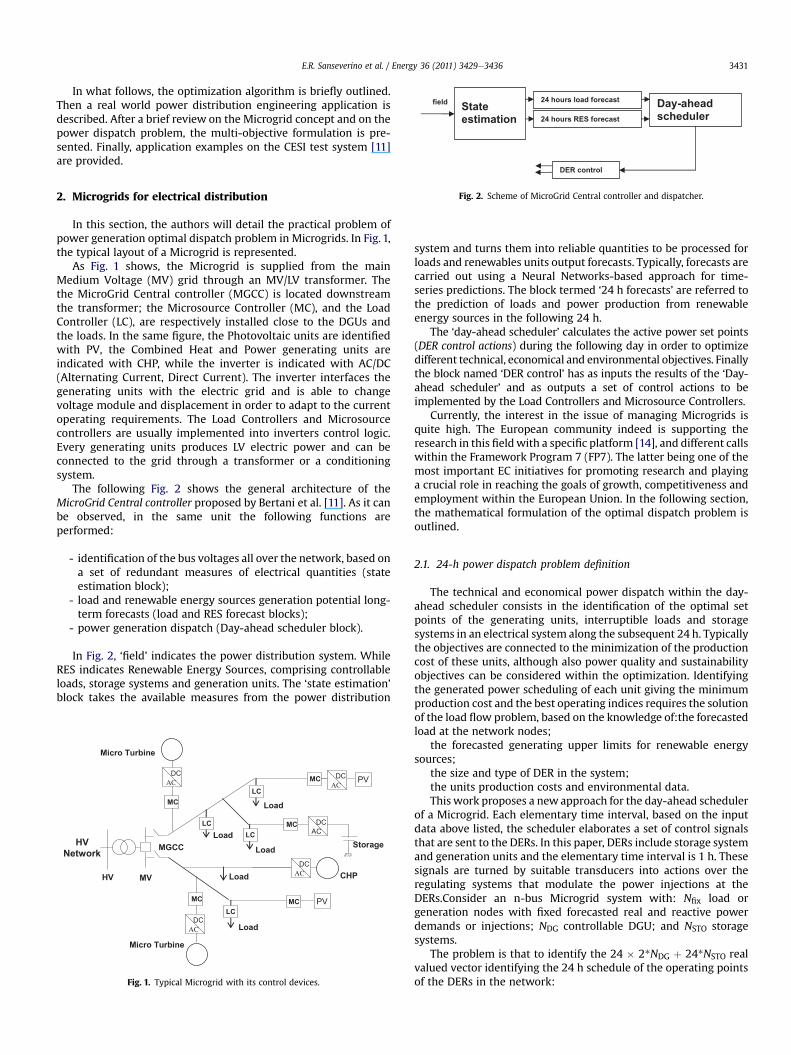
As NSGA [15], it divides the population in fronts of non-domi-nated solutions so that the search can be addressed towards
h = 1 h = 2 h = 24…….…
……mother
father
child
……
……
Fig. 3. Crossover operator.
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
measured loading factor
loading factor with error
starting hour for predictions
Fig. 5. Loading factor of the grid, measured versus predicted values.
E.R. Sanseverino et al. / Energy 36 (2011) 3429e3436 3433
interesting areas of the search space, where the global Pareto-optimal region is presumably located.
NSGA-II varies from the NSGA in three main things. It is moreefficient computationally, since the ranking of solutions is per-formed with an O(kN2) algorithm, instead of O(kN3), where k is thenumber of objectives and N is the population size; it significantlyprevents the loss of good solutions once they have been found(elitism); it does not need any parameter specification. A BinaryTournament Selection operator is used to select the offspringpopulation, whereas crossover and mutation operators remain asusual. Before selection is performed, the population is rankedon the basis of an individual’s non-domination level and, to allowthe diversification, a crowding factor is calculated for each solution.
Basically the NSGA-II works on a real coded string. Since wewant the charge and discharge cycles of batteries to be positively‘biased’ in order to meet different criteria, in the nodes wherebatteries are installed a non-uniform mutation operator can beapplied. As it was said before, the bias can be imposed, if needed, tomeet different criteria:
- meeting load demand (charging during day and dischargingduring night in islanded systems);
- limiting the number of manoeuvres;- limiting the charge and discharge power.
24 hours optimization
24 h - DER control actions
time
Implement first action
24 hours optimization
24 h - DER control actions
Implement first action
Field measures, 24 hours forecasts and new initial state
24 hours optimization
24 h - DER control actions
Implement first action
T=k
T=k+1
T=k+2
Field measures, 24 hours forecasts and initial state at time k
Field measures, 24 hours forecasts and new initial state
Fig. 4. Logical sequence of actions in the EMR approach for tertiary regulation inmicrogrids.
In the other nodes, a uniform mutation has been appliedthrough a small variation of the DER units injectionwithin imposedlimits. The crossover operator is described in Fig. 3. It is applied soas not to destroy the charge and discharge history of a storagesystem.
Constraints have been handled using the constraint dominationconcept as proposed by Deb [16].
4. Managing uncertainty in Microgrids using an ExecutionMonitoring and Replanning approach
Planning techniques based on Artificial Intelligence usuallymake simplifying assumptions about accessibility, dynamicity, andnon-determinism of the surrounding world. However, real dynamicdomains not always behave as planned. The interleaving of plan-ning and execution can produce several advantages, such forinstance, the capability of starting the execution plan before itscompletion or the acquisition of further information from theexternal world into the planner [12].
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
measured loading factor
loading factor with error
starting hour for predictions
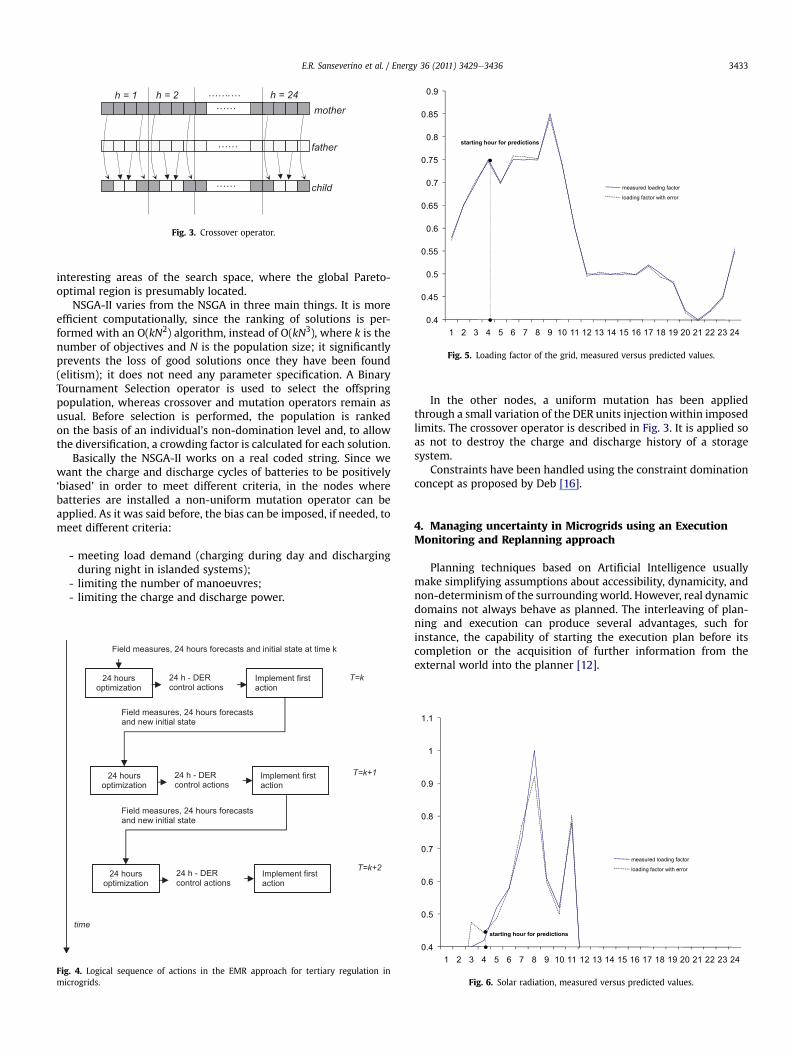
Fig. 6. Solar radiation, measured versus predicted values.

MGCC
PV
MV
Network
MV
LV
Storage
Storage
Storage
Micro TurbineMC
ACAC
MC
ACDC
MC
AC DC
MC
AC DC
ACDC
Fig. 7. Test system.
E.R. Sanseverino et al. / Energy 36 (2011) 3429e34363434
Indeed, the effectiveness of classic planning methods dependson some hypotheses that could be not valid in highly dynamicdomains. In particular, there is no guarantee that the execution ofsome selected actions produce the expected effects on the domain,or that some unforeseen physical processes do not perturb thesystem. In the Microgrid domain this uncertainty is mainly due tothe forecast of loads and productions from renewable generationunits; it has been demonstrated that the error of this kind offorecast grows linearly with the time [17]; this involves that,without any continuous acquisition of new information from thefield, any action plan determined by any classical planningapproach is doomed to miss the optimal solution. In the microgridscontrol area, the issue of interleaving among monitoring, planning,and acting has been treated only partially. The idea of the on-linechanging of the action plan, on the basis of information coming
Eh-11
Initial conditions for storage
systems deduced by the 24
hours optimal dispatch between
hours h-1 and h-1+24
24-hours Optimal dispatch
storage systems Eh-1STO
Fig. 8. EMR si
from the field, has been already presented in some works of theliterature. In Ref. [18] amulti-agent architecture is presented for theoptimization of Microgrid functioning in presence of differentoperators. Authors propose a Reinforcement Learning mechanism,modified in order to manage stochastic environment, such is thecase of Microgrids. The idea behind this work seems very inter-esting, although the paper provided neither a detailed problemformulation nor any experimental evidence for the implementa-tion. Moreover in the proposed approach the control actions wereselected exclusively on the basis of a short-term rewarding, and nolong-term planning was presented.
‘Monitoring and Acting’ may represent a valid approach for theon-line control of electrical systems. When more long-term plan-ning is required, as effect of technical (presence of storage systems)and economical issues (free market environment), more accurate
E11 Eh+24
1E241Eh
1
E1STO Eh+24
STOE24STOEh
STO
mulation.

Table 1Comparison of the two approaches.
Static approach for dispatching EMR approach for dispatching
Energy losses Production cost CO2 emissions Energy losses Production cost CO2 emissions
0,27643 MWh/day 373,954 kV/day 1652 tons 0,246625 MWh/day 300,7908 kV/day 143,385 tons
E.R. Sanseverino et al. / Energy 36 (2011) 3429e3436 3435
planning tools are needed in order to account for weather vari-ability in high penetration of renewable energy sources generationsystems.
Fig. 4 represents the logical sequence of actions in the proposedExecution Monitoring and Replanning architecture. Data collectedfrom the field at time T ¼ k, after a suitable processing algorithm(state estimation), are used to run an optimal dispatch algorithm inthe subsequent 24 h. The control actions relevant to the first hourare implemented and the procedure is started again. Of course theinitial state of storage systems and other generation units ischanged. The basic hypotheses underwhich the proposed approachis considered valid are that loads and weather forecasts are affectedby an error that increases as the time horizon gets wider. This isproved by the relevant literature on the subject, which has beenused to deduce the input data (weather and loads forecasts overa 24 h time horizon) for simulations. The considered variables to bepredicted can indeed be modelled as nonstationary time-series. Inparticular, a multilayer feedforward neural network can beemployed to forecast one-day ahead hourly load consumption ofweekday, as suggested in [18]. The load consumption forecastingerrors that are attained for domestic load profiles increase alongtime and range from 1.2% to 2.32%. We can assume to applya similar model for solar radiation prediction [19] with errorsranging from 10% to 20%. In what follows, the error profilesdepicted in Figs. 5 and 6 have thus been assumed for simulations.
5. Applications and results
The application is devoted to prove the validity of the proposedEMR approach for optimal management of microgrids compared towhat is currently done. A comparison of the current 24 h dispatchpolicy of the generation units and the EMR approach proposed by
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
1 2 3 4 5 6 7 8 9 10 11 12
static approach
EMR approach
Fig. 9. Batteries charge level along 2
the authors has been carried out. The test system is the LV testfacility installed at the CESI. The network is depicted in Fig. 7.
Details have been deduced from many reports available on thewebsite [19].
The system has 15 nodes. The Distributed Energy Resourcesinstalled are: a CHP microturbine, 100 kWe, 167 kWth, 0.10003V/kWh; a 42 kW/2 h Vanadium Redox Battery (rated output 42 kW,energy 84 kWh); a 64 kW/30 min high-temperature Zebra battery(rated output 64 kW, energy 32 kWh); a 100 kW/1 h Lead-acidbattery (rated output 100 kW, energy 100 kWh); and two 31.3 kWhybrid photovoltaic system.
No heating system has been considered in the applications.Batteries can charge and discharge with the same efficiency. Thesystem is connected to themain grid and the cost for buying energyfrom the grid is the same as the selling price, 136 V/MWh; theemissions of the MV grid (MV/LV transformer: 630 kW) areconsidered to be 526.7 kg/MWh (source: ENEA, 2005).
In order to test the efficiency of the EMR approach the followingprocedure has been followed:
The 24-h optimization approach has been executed with start-ing time 1 am, the batteries totally discharged and the errorsapplied to production units and loads deduced following theapproach described in Section 4. For the minimum cost solution,the obtained 24 h scheduling of the set points of the generationnodes have been saved. With the set points of the generation unitsdeduced at the preceding step, the system has been simulated overa 24 h time interval with actual production and actual consumptionat generation and at loading nodes; the values of the objectives(production cost, energy losses and CO2 emissions) have beensaved.
The EMR approach has been simulated in the following way:The 24-h optimization approach has been executed with
changing starting time from 1 am to 12 pm, and the starting level of
13 14 15 16 17 18 19 20 21 22 23 24
4 h using the two approaches.

E.R. Sanseverino et al. / Energy 36 (2011) 3429e34363436
the batteries at each time interval has been taken from the batterieslevel at the first hour in the minimum cost solution string of thepreceding run; the errors applied to production units and loadshave been deduced following the approach described in Section 4.
For the minimum cost solution, the set points for the generationunits obtained at the first hour have been saved;
With the set points of the generation units deduced at thepreceding step, the system has been simulated over a 24 h timeinterval with actual production and actual consumption at gener-ation and at loading nodes; the values of the objectives (productioncost, energy losses and CO2 emissions) have been saved.
Fig. 8 explains the entire process for the EMR simulation.The average of minimum production cost solutions over 20 runs
is summarized in Table 1. All the runs have been executed with 100individuals and 100 iterations.
As it can be observed, the management of the system evenconsidering a limited variability of environmental conditions(10%e20%of randomerror canbequite limited for solar irradiation) isimproved in terms of the considered technical, economical andenvironmental objectives. Energy losses are reduced of 12%,production cost is improved of 24% and emissions are reduced of 15%.
The considered approach gives the manager of the network thepossibility to dispatch the energy sources that are available in thesystem considering the weather variability and to adapt the actionsaccordingly with a more limited error. The suitability of theproposed approach is confirmed looking at the behavior ofbatteries along the 24 h using the two approaches. The attainedcharge and discharge cycles are comparable although smootherchanges can be observed for the EMR approach, see Fig. 9.
6. Conclusions
In this paper, an ExecutionMonitoring and Replanning approachhas been used to solve the optimal 24 h energy generation dispatchproblem in a smart grid. The approach followed shows that in thepresence of high variability of the input data due to the presence ofrenewable energy sources the environment in which managementis carried out cannot be considered stationary. For this reason,approaches commonly employed are no more efficient, causinga large adjustment of the operation set point during primary andsecondary regulation. The system proposed here is a planning andexecution system which allows the central controller to monitorthe execution of a scheduling plan, interrupt the monitoring toinput new information and repair the plan under execution everyelementary time interval.
The proposed control system performs an ‘execution-moni-toring’ rather than simply testing the next action to execute. Thisway, the proposed system anticipates forthcoming situations andadjusts the plan in accordance. The replanning module is based ona heuristic multi-objective optimizer able to efficiently incorporate
constraints. The obtained results are encouraging and suggest toincorporate into the Microgrids software technology approachesfor managing uncertainties and for accounting for dynamic and notfully observable environments.
References
[1] Lasseter R, Akhil A, Marnay C, Stevens J, Dagle J, Guttromson R, et al. Whitepaper on integration of consortium energy resources e The CERTS MicroGridconcept. CA: CERTS; 2002. Rep. LBNL-50829.
[2] Niknam T, Zeinoddini Meymand H, Doagou Mojarrad H. An efficient algorithmfor multi-objective optimal operation management of distribution networkconsidering fuel cell power plants. Energy 2011;36:119e32.
[3] Guerrero JM, Vasquez JC, Matas J, García de Vicuña L, Castilla M. Hierarchicalcontrol of droop-controlled AC and DC microgridsdA general approachtoward standardization. IEEE Transactions on Industrial Electronica 2011;58(1):158e72.
[4] De Brabandere K, Vanthournout K, Driesen J, Deconinck G, Belmans R. Controlof microgrids, power engineering society general meeting IEEE 24e28 June2007; 2007. pp. 1e7.
[5] Katiraei F, Iravani MR. Power management strategies for a microgrid withmultiple distributed generation units. IEEE Transactions on Power Systems2006;21(4):1821e32.
[6] Carlos A, Hernandez-Aramburo T, Green C, Mugniot N. Fuel consumptionminimization of a microgrid. IEEE Transactions on Industry Applications 2005;41(3):673e82.
[7] Mohamed F, Koivo H. System modelling and online optimal management ofmicrogrid with battery storage. In: Proceedings of 6th international confer-ence on renewable energies and power quality, Sevilla, Spain. 2007.
[8] Mohamed FA, Koivo HN. System modelling and online optimal managementof MicroGrid using mesh adaptive direct search. Electrical Power and EnergySystems 2010;32:398e407.
[9] Logenthiran T, Srinivasan D. Short term generation scheduling of a Microgrid.In: TENCON 2009e2009 IEEE region 10 conference, 2009. pp. 1e6.
[10] Morais H, Kàdàr P, Faria P, Vale ZA, Khodr HM. Optimal scheduling ofa renewable micro-grid in an isolated load area using mixed-integer linearprogramming. Renewable Energy 2010;35:151e6.
[11] Bertani A, Borghetti A, Bossi C, De Biase L, Lamquet O, Massucco S, et al.Management of low voltage grids with high penetration of distributedgeneration: concepts, implementations and experiments. In: CIGRE, editor.Proceedings of CIGRE 2007 session, (paper C6e304); 2006. Paris, France.
[12] Stone P, Veloso M. User-guided interleaving of planning and execution. Fron-tiers in artificial intelligence and applications. IOS Press; 1995. pp. 103e112.
[13] Deb K, Agrawal S, Pratap A, Meyarivan TA. Fast elitist non-dominated sortinggenetic algorithm for multi-objective optimization: NSGA-II. In: Springer,editor. Parallel problem solving from Nature VI e Lecture Notes in ComputerScience; 2000. p. 849e58. Paris, France.
[14] European Commission. European SmartGrids technology platform: vision andstrategy for Europe’s electricity networks of the future, http://ec.europa.eu/research/energy/pdf/smartgrids_en.pdf; April 2006, http://www.smartgrids.eu; April 2006 [Accessed 27.05.10.].
[15] Deb K. Multiobjective optimization using evolutionary algorithms. John Wileyand Sons Ltd.; 2001.
[16] Deb K. An efficient constraint-handling method for genetic algorithms.Computer Methods in Applied Mechanics and Engineering 2000;186 (2e4):311e38.
[17] Chow TWS, Leung CT. Neural network based short-term load forecasting usingweather compensation. IEEE Transactions on Power Systems November 1996;11(4):1736e42.
[18] Dimeas AL, Hatziargyriou ND. Agent based control for microgrids. In: IEEEpower engineering society general meeting, 2007. pp. 1e5.
[19] Reikard G. Predicting solar radiation at high resolutions: a comparison of timeseries forecasts. Solar Energy 2009;83 (2009):342e9.