An Energy Efficient Approach to Dynamic Coverage in Wireless Sensor Networks
11
An Energy Efficient Approach to Dynamic Coverage in Wireless Sensor Networks Mohamed K. Watfa Department of Computer Science, American University of Beirut, Beirut, Lebanon [email protected] Sesh Commuri School of Electrical and Computer Engineering, University of Oklahoma, Norman, OK, USA [email protected] Abstract- Tracking of mobile targets is an important application of sensor networks. This is a non-trivial problem as the increased accuracy of tracking results in an overall reduction in the lifetime of the sensor network. In this paper, the tracking issue is first addressed through the determination of a reduced cover for the region of interest. Tracking algorithms are then developed using a reduced set of sensor nodes. The tradeoffs involved in the energy efficient tracking of the target are studied and the performance of the distributed tracking algorithms is compared with well known strategies from the literature. It is shown that the gain in energy savings comes at the expense of reduced quality of tracking. The algorithms guarantee the robustness and accuracy of tracking as well as the extension of the overall system lifetime. Numerical simulations are presented to validate the performance of the proposed algorithms. Index Terms: ad-hoc and sensor networks, tracking, 3D coverage, energy efficiency, reduced cover. I. INTRODUCTION A Wireless Sensor Network (WSN) is a computational network of many, spatially distributed sensing devices that can be used to monitor conditions such as temperature, sound, vibration, pressure, motion or pollutants at various locations. Usually these devices are small, inexpensive, and their resources in terms of energy, memory, computational speed and bandwidth are severely constrained [1, 2]. The application of sensor networks in the tracking of dynamic phenomenon or targets is an important and widely researched area in sensor networks. An important issue to be addressed in the ability of a WSN to track a dynamic target is the coverage of the WSN. Coverage in a WSN was considered by Gupta and Das in [3]. Here, the notion of a ‘connected sensor cover’ was introduced and the energy efficiency addressed through the construction of a near-optimal connected sensor cover. Shakkottai [8] derived the necessary and sufficient conditions for the connectivity and coverage in terms of the sensing radius, transmission radius and the failure rates of sensors. Zhang and Hou [9] show that if the communication range is at least twice the sensing range, then complete coverage of a convex area implies connectivity among the nodes. A Coverage Configuration Protocol (CCP) that can provide different degrees of connected coverage is presented in [10]. While coverage of a region of interest is essential for tracking using WSNs, the limited power available at each sensor node requires the determination of a minimum set of nodes that can guarantee coverage. The problem of selecting a subset of randomly deployed nodes for energy efficiency and coverage of an area was addressed in [4, 5]. The problem of selecting a minimum number of nodes such that each node in the network is either selected or is a neighbor of a selected node was also formulated as the minimum dominating connected set (MDCS) problem [6]. In [7], Chen and Liestman proposed an algorithm for finding small weakly connected dominating sets in a WSN. Here, energy-efficient distributed algorithms were developed to construct a near optimal dominating connected set. The coverage issues in three-dimensional deployment of sensor networks was addressed in [21] where computational geometric methods were used to develop computationally simple, distributed algorithms for the optimal sensor selection as well as for network healing in the event of failures. Tracking, which involves identifying an object by its particular sensor signature and determining its path over a period of time, is one of the applications that can benefit from exploiting the characteristics of wireless sensor networks. The inherent parallelism of distributed sensors makes it possible to track multiple objects simultaneously, while the relatively low cost and ease of deployment enable the use of sensor network based tracking systems in remote or inaccessible locations, and when they need to be deployed on short notice. Even Based on “An energy efficient 3-dimensional wireless sensor cover”, by M. Watfa and S. Commuri which appeared in the Proceedings of the IEEE CCNC 2006, Las Vegas, NV, USA, 2006. © 2006 IEEE. 10 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 © 2006 ACADEMY PUBLISHER
Transcript of An Energy Efficient Approach to Dynamic Coverage in Wireless Sensor Networks
An Energy Efficient Approach to Dynamic
Coverage in Wireless Sensor Networks
Mohamed K. Watfa Department of Computer Science, American University of Beirut, Beirut, Lebanon
Sesh Commuri School of Electrical and Computer Engineering, University of Oklahoma, Norman, OK, USA
Abstract- Tracking of mobile targets is an important
application of sensor networks. This is a non-trivial problem
as the increased accuracy of tracking results in an overall
reduction in the lifetime of the sensor network. In this
paper, the tracking issue is first addressed through the
determination of a reduced cover for the region of interest.
Tracking algorithms are then developed using a reduced set
of sensor nodes. The tradeoffs involved in the energy
efficient tracking of the target are studied and the
performance of the distributed tracking algorithms is
compared with well known strategies from the literature. It
is shown that the gain in energy savings comes at the
expense of reduced quality of tracking. The algorithms
guarantee the robustness and accuracy of tracking as well
as the extension of the overall system lifetime. Numerical
simulations are presented to validate the performance of the
proposed algorithms.
Index Terms: ad-hoc and sensor networks, tracking, 3D
coverage, energy efficiency, reduced cover.
I. INTRODUCTION
A Wireless Sensor Network (WSN) is a
computational network of many, spatially distributed
sensing devices that can be used to monitor conditions
such as temperature, sound, vibration, pressure, motion
or pollutants at various locations. Usually these devices
are small, inexpensive, and their resources in terms of
energy, memory, computational speed and bandwidth are
severely constrained [1, 2]. The application of sensor
networks in the tracking of dynamic phenomenon or
targets is an important and widely researched area in
sensor networks.
An important issue to be addressed in the ability of a
WSN to track a dynamic target is the coverage of the
WSN. Coverage in a WSN was considered by Gupta and
Das in [3]. Here, the notion of a ‘connected sensor cover’
was introduced and the energy efficiency addressed
through the construction of a near-optimal connected
sensor cover. Shakkottai [8] derived the necessary and
sufficient conditions for the connectivity and coverage in
terms of the sensing radius, transmission radius and the
failure rates of sensors. Zhang and Hou [9] show that if
the communication range is at least twice the sensing
range, then complete coverage of a convex area implies
connectivity among the nodes. A Coverage Configuration
Protocol (CCP) that can provide different degrees of
connected coverage is presented in [10].
While coverage of a region of interest is essential for
tracking using WSNs, the limited power available at each
sensor node requires the determination of a minimum set
of nodes that can guarantee coverage. The problem of
selecting a subset of randomly deployed nodes for energy
efficiency and coverage of an area was addressed in [4,
5]. The problem of selecting a minimum number of nodes
such that each node in the network is either selected or is
a neighbor of a selected node was also formulated as the
minimum dominating connected set (MDCS) problem
[6]. In [7], Chen and Liestman proposed an algorithm for
finding small weakly connected dominating sets in a
WSN. Here, energy-efficient distributed algorithms were
developed to construct a near optimal dominating
connected set. The coverage issues in three-dimensional
deployment of sensor networks was addressed in [21]
where computational geometric methods were used to
develop computationally simple, distributed algorithms
for the optimal sensor selection as well as for network
healing in the event of failures.
Tracking, which involves identifying an object by its
particular sensor signature and determining its path over
a period of time, is one of the applications that can
benefit from exploiting the characteristics of wireless
sensor networks. The inherent parallelism of distributed
sensors makes it possible to track multiple objects
simultaneously, while the relatively low cost and ease of
deployment enable the use of sensor network based
tracking systems in remote or inaccessible locations, and
when they need to be deployed on short notice. Even
Based on “An energy efficient 3-dimensional wireless sensor cover”,
by M. Watfa and S. Commuri which appeared in the Proceedings of the
IEEE CCNC 2006, Las Vegas, NV, USA, 2006. © 2006 IEEE.
10 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER

though target tracking has been widely studied for sensor
networks with large nodes and distributed tracking
algorithms are available [11-15], tracking in ad hoc
networks with micro sensors poses different challenges
due to communication, processing and energy
constraints. In particular, the sensors should collaborate
and share data to exploit the benefits of sensor data
fusion, but this should be done without sending data
requests to and collecting data from all sensors, thus
overloading the network and using up the energy supply.
Target tracking is considered a canonical application
for wireless sensor networks, and work in this area has
been motivated in large part by DARPA programs. Zhao
et al. present the information driven sensor querying
(IDSQ) mechanism in [14, 15]. IDSQ is a sensor-to-
sensor leader handoff based scheme in which at any
given time there is a leader sensor node which makes the
decisions about which sensors should be selectively
turned on in order to obtain the best information about
the target. Liu et al. [16] develop a dual-space approach
to tracking targets which also enables selective activation
of sensors based on which nodes the target is likely to
approach next. Along these lines, Ramanathan et al. [17],
advocate a location-centric approach to performing
collaborative sensing and target tracking. The idea is to
develop programming abstractions that provide
addressing and communication between localized
geographic regions within the network rather than
individual nodes. This makes localized selective-
activation strategies simpler to implement. Brooks et al.
present self-organized distributed target tracking
techniques with prediction based on Pheromones,
Bayesian, and Extended Kalman Filter techniques [18,
19]. The implementation and testing of a real distributed
sensor network collaborative tracking algorithm in a
military context is described in [20].
In the research mentioned above, the algorithms
utilized the information from all the sensors for tracking.
This results in higher expenditure of energy and reduced
lifetime for the network. In this paper, it is demonstrated
that substantial savings can be obtained by using a
reduced number of nodes at each instant for tracking the
target. Further, it is also demonstrated that this savings
comes at the expense of the quality of tracking. The
techniques presented are computationally simple and can
be implemented in a distributed fashion.
The rest of the paper is organized as follows. The
design challenges for tracking using wireless sensor
networks are presented in Section 2. Preliminary
definitions are stated in Section 3 and an algorithm for
obtaining 3D coverage is presented in Section 4. In
Section 5, an energy efficient distributed algorithm for
tracking a dynamic phenomenon is addressed. Numerical
simulation results that validate the proposed algorithms
are presented in Section 6 and the conclusions are
summarized in Section 7.
II. PERFORMANCE ISSUES
Though certain types of energy harvesting are
conceivable, energy efficiency will be a deciding factor
in the success of WSNs in the foreseeable future. This
requirement pervades all aspects of the system's design,
and drives most of the other requirements. In this section,
some key design challenges for any proposed tracking
algorithm in the domain of wireless sensor networks is
outlined.
1. Large number of sensors: Given the large number of
sensor nodes deployed, scalability is a major issue.
Nodes may fail and new nodes may join the network.
In the light of target tracking, the coordination
function should scale with the size of the network,
the number of targets to be tracked.
2. Low energy use: Since in many applications the
sensor nodes will be deployed in a remote area,
service of a node may not be possible. In this case,
the lifetime of a node may be determined by the
battery life, thereby requiring the minimization of
energy expenditure.
3. Network self-organization: Since the network can
be randomly deployed in inaccessible regions, the
sensor nodes should be capable of organizing
themselves into a network and achieving the desired
objective in the absence of any human intervention.
4. Collaborative signal processing: The end goal is
detection/estimation of some events of interest, and
not just communications. To improve the
detection/estimation performance, it is often quite
useful to fuse data from multiple sensors.
5. Distributed processing: While a centralized
architecture is theoretically optimal and conceptually
simple [5], it is not suitable in a large scale area
because of the limited communication bandwidth of
the wireless sensors. Moreover, failure of the fixed
superior node may imply failure of the whole
system.
6. Tracking accuracy: To be effective, the tracking
system should be accurate and the likelihood of
missing a target should be low.
7. Computation and communication costs: Any
protocol being developed for sensor networks should
keep in mind the costs associated with computations
and communication. With current technology, the
cost of computation locally is lower than that of
communication in a power constrained scenario. As
a consequence, emphasis should be put on
minimizing the communication requirements.
8. Uncertainty: The exact positions of the nodes can
not be known, so any position estimate of the target
being tracked will be affected.
9. Multi-modality sensor network: A multi-modal
network can obtain more complete descriptions of
the monitored environment by combining the data
from various sensors with different capabilities and
strengths.
JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 11
© 2006 ACADEMY PUBLISHER

10. Time synchronization: Time synchronization is a
critical piece of infrastructure for any distributed
system.
In this paper, these issues are addressed through the
development of a reduced cover strategy that minimizes
the number of sensor nodes that are active at any given
time. A self healing concept based on the reduced cover
was developed in [21] to address the energy efficiency,
self-organization, and reliability of the network. In this
paper, the approach in [21] is extended to the case of
distributed energy efficient tracking. The algorithm
specifically aims at minimizing the number of active
nodes necessary to track a dynamic phenomenon while
achieving a high level of tracking accuracy.
III. PRELIMINARIES
An emerging application area for sensor networks is
intelligent surveillance and tracking. In these
applications, information obtained from nodes far away
from the region of activity is of little or no use. On the
other hand, in dense WSNs, the information obtained
from some sensors close to the region of activity might
be redundant. Since the lifetime of the WSN is affected
by the availability of energy, an obvious way to conserve
energy is to switch on only a subset of the sensor nodes.
In most sensor activation strategies, energy savings come
at the expense of a reduction in the quality of tracking.
Depending on the information provided by a small subset
of the sensor nodes would result in an increased
uncertainty and thus the tracking accuracy would decline.
In this paper, a reduced cover of a region is first obtained
and energy efficient algorithms that address the issues in
section II are then developed.
One of the fundamental problems in sensor networks
is determining how many sensors nodes are required to
cover a specific area at any given time. Most existing
results focus on planar networks [3]-[7]; however, three-
dimensional modeling of the sensor network would
reflect more accurately the real-life situations [21]. We
will start by defining the notion of a sensing region of a
sensor node. Then, we provide definitions for both a
reduced cover and a border cover. These definitions will
aid in the development of a distributed tacking algorithm.
Definition 1: Let 3iY y R | O ( y ) .
The sensing region of sensor Si located at 3iX R is
defined as i i sA y Y | y X R , where ||.|| is the
Euclidean distance between y and iX .
In the case of 2D, the sensing region is assumed to be a
disk of radius sR . The sensing boundary (circle) of
sensor iS , in this case, is denoted by iCir .
Definition 2: A collection, 1 ,..., }F nC S S , of sensor
nodes is said to fully cover the region R if and only
if 1 2 ...R nA A A .
Definition 3: A cover RFC of R with sensor nodes
1 2, ,..., nS S S each with sensing radius sR and sensing
regions 1 2, ,..., nA A A is reduced if no proper subset of
RFC is a cover of R.
Definition 4: A set of sensor nodes RBC is said to be a
reduced boundary cover of a region R if p RB( )
, p Si for some Si Border ,ReducedC and no proper
subset of RBC is a boundary cover of R.
i.e. RB l l RBC S , for any S C is not a boundary cover of
R .
Using definition 4, a region is said to be boundary
covered if and only if an intruder is always detected as it
crosses the border of the region.
Definition 5: A boundary sensor node bS is a sensor
node that is on the boundary cover. A sensor nbS is said
to be a non-boundary sensor node if
,p C p Anb i
for some nbA Ai
i.e. its border
circle is completely covered by other sensors.
The coverage problem can be stated as: Given a dense
deployment of sensor nodes, find a minimum subset of
active nodes that guarantee full coverage of R.
IV. SENSOR SELECTION FOR 3D COVERAGE
In this section, an algorithm is developed where the
nodes make local decisions on whether to sleep, or join
the set of active nodes. If the sensing region of a node is
completely covered by its neighbors, then the node can
be disabled without affecting the overall coverage.
Let 0 1 2, , ,...,n nC S S S S be the set of all the sensor
nodes that cover the region R. Let the intersection of
sphere 0S and sphere iS be given by the circle iC , i.e.
0 .i iC A A The interior of the circle iC is said to be
the disc bounded by the circle iC , i.e. .i iD interior C
Definition 6: A circle iC is completely covered if the
disc bounded by the circle is completely covered, i.e.
, .1
j
np D p Ai
j
Theorem 1: Let the sensor node 0S be adjacent to sensor
nodes 1 2, , ... , nS S S and 0 , 1..k kC A A k n be the
circles of intersection. 0S is completely covered if and
only if all ' , 1..kC s k n are covered.
Proof: If 0S is completely covered, then every disc kD
in 0S is covered. Definition 3.1 then ensures that the “if”
12 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER

part of the theorem holds. To show the “only if” part,
suppose that all the circles are covered but there exist
points in 0S that are not covered. If a circle kC in 0S is
completely covered, then each point ‘p’ on the disc
kD belongs to some sphere lS . Further, 0S can be seen
to be partitioned by the spherical patches obtained by the
intersection of the surfaces of the spheres 1 2, , ... , nS S S
in 0S . If a circle is completely covered then each
spherical segment adjacent to it is also covered. Each
spherical segment must be bounded by some circle
segment, and since each circle Ci is completely covered
then all spherical segments are also completely covered.
The utility of Theorem 3.2 is in reducing the
coverage of sensor node 0S to a simpler problem of
checking if all the circles of intersection between 0S and
the adjacent nodes are covered. This still is a complex
task that is difficult to achieve in real time. The following
theorem demonstrates a technique where such coverage
can be determined by a few straightforward
computations.
Theorem 2: A circle 0C is completely covered by
spheres if all the intersection points
, , 1...0
C C D i j ni jare covered by one or more
adjacent spheres.
Proof: Consider an uncovered point ‘p’ in 0D . Since
some parts of 0D are covered by adjacent sensor nodes,
these spheres are going to partition 0D into regions
bounded by arcs from the boundary of 0C and/or arcs
from circles 1kC ' s, k ,..,n. Suppose ‘p’ belongs to a
region xR in 0D . Since ‘p’ is not covered, is easy to see
that xR has to be bounded only by the exterior arcs of the
circles. Also, the entire boundary of xR , including the
intersection points of the arcs, must have the same
coverage status as ‘p’, i.e. all the intersection points on
the boundary of xR in 0D must not be covered. This
contradicts the assumption that all the intersection points
, , 1...0
C C D i j ni j are covered. Therefore, if all
the intersection points 0
C C Di jare covered by one
or more adjacent spheres, then 0D is covered.
Consequently, 0C is covered.
A. Algorithm for Obtaining Complete Coverage in 3-
Dimensional Space
Theorems 1 and 2 indicate that a sensor node is
completely covered if all the intersection points
i j kC C D are covered by some sensor node
1lS ,l i, j ,k ..n . Therefore, to check if 0S is
completely covered; one has to first find all the circles
obtained by the intersection of 0 , 1..kS S k n . For
each kC , find all the intersection points that lie
within kD . If all these intersection points are covered,
then the circles kC are covered. Then, by the theorems 1-
2, 0S is covered and can be deactivated.
Definition 7: A node iS is said to be a neighbor of node
jS if and only if ( , ) 2 ,i j cd X X R where cR is the
communication radius of sensor nodes iS , jS .
Definition 8: The neighbor set ( )N i of sensor node iS is
the set of all the neighbors of node iS and is defined
as ( ) { | ( , ) 2 }j i j cN i S C d X X R .
Distributed 3D Coverage Algorithm
Step 1: For each node iS , form the set of neighbors
( )N i . For each element ‘ kS ’ in ( )N i compute the
volume of overlap, ikV , between sensor node iS and kS .
If the total overlap between iS and its neighbors is less
than the volume of iS , then iS is not completely covered
by its neighbors and must remain active. That is
3
1
4
3
n
overlap ik s ik
V V R S remains active.
Step 2: 34
3overlap sV R does not necessarily mean that
iS is covered. To check if iS is covered, for every pair of
nodes inj kS ,S N i do the following:
a) Find ijC the circle got by the intersection of the
coverage surface of iS , jS .
b) Find ikC the intersection circle of i kS , S .
c) Find the intersection points ij ikC C .
d) If the intersection points are all covered, i.e.
ij ik l lC C A , S N i , l i, j ,k , then
deactivate iS .
It is well known that the coverage problem in WSNs
is NP-hard [17]. The computational complexity of the
algorithm developed in this section is 3( )N where
1
n
iN max N( i ) is the maximum number of nodes in
the neighbor set of any sensor in the network.
V. DISTRIBUTED TRACKING ALGORITHM
In the previous section, and algorithm for selecting a
reduced set of sensor nodes in order to cover a 3D region
was presented. In this section, our results from the
JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 13
© 2006 ACADEMY PUBLISHER

previous section will be used to develop an energy
efficient distributed tracking algorithm using the
minimum subset of sensor nodes.
A. Algorithms
The objective of the intrusion detection algorithm is
to achieve a static arrangement of the sensor nodes that
minimizes the probability of undetected penetration of
the intruder. It will first be shown that if there exists a
reduced cover of a region of interest, then the border
cover (minimum set of sensor nodes that cover the
boundary of a region) is a subset of the reduced cover.
A sensor iS is not on the boundary of coverage (or
coverage hole H) if and only if its sensing boundary
circle iCir is completely covered by its neighbors i.e.
i i j jS B( H ) p Cir , p A , for some S S . Now,
the boundary of coverage (or coverage hole H) can be
defined in terms of the set of sensor nodes.
Lemma 3: Every reduced cover reducedC of a region R
admits a border cover borderC such that .border reducedC C
Proof:
Let | .b k k reduced kC S S C and A B R
Then, , .k k bk
x B R x A where S C This implies
that bC is a cover for the border of the region and by
construction, .b reducedC C
Lemma 3 is a powerful result as it enables the
selection of sensor nodes to cover the boundary of a
region as a subset of the reduced cover of the region.
Tracking algorithms based on the reduced cover employ
fewer nodes and are therefore efficient from an energy
standpoint. Activating only those nodes in the vicinity of
the target being tracked also reduces the energy
consumption of the network. This can be accomplished
by activating the sensor nodes in the vicinity of the
sensor node that has detected the target. The radius of the
active zone depends on the maximum speed of the
intruder and the maximum time needed to calculate a
reduced cover. The key to the algorithm is that there is no
central controller i.e. each node will decide
autonomously to be active or not in order to track the
target.
The sensor nodes in the network can be in three
different modes:
1- Active Mode: A node is capable of both sensing and
communicating with neighboring nodes.
2- Relay Mode: A node can only communicate with
neighbors.
3- Sleep Mode: A node is inactive.
The tracking algorithms in this paper depend on the
idea of “Divide and Conquer” where at each instant a
reduced sensor cover is established for the moving zone.
When a sensor node on the boundary detects that the
target is about to leave the zone, a new zone is created
with the border sensor node as its center. A set of new
sensor nodes are then activated. In a refinement of this
algorithm, prediction techniques are utilized to activate a
subset of the nodes in the reduced cover depending on
the predicted location of the target. Both approaches are
discussed in details in the following sections.
Next, we will provide a number of algorithms that
will aid us in developing a distributed tracking algorithm.
Algorithm 1 (Reduced Cover Algorithm)
PROBLEM
Given a dense deployment of sensor nodes, find a
minimum subset of active nodes that guarantee full
coverage of R.
SOLUTION
The distributed coverage algorithm developed in Section
4 is used.
Algorithm 2 (Sub Reduced Cover Algorithm)
PROBLEM
Given a reduced cover set of a region R, deduce the
reduced cover of a sub region Rsub of R.
SOLUTION
Each node ( , , )j j j jS x y z that is part of the reduced
cover set will receive an ALERT message that contains
the coordinates of the center of the sub region
( , , )i i i iS x y z and the maximum speed of the intruder. A
node jS will be added to the sub-cover if
max max( , ) .i jd S S V t .
Algorithm 3 (Boundary Cover Algorithm)
PROBLEM
Given a reduced cover set of a region R, deduce the
border cover.
SOLUTION
Each node ( , , )j j j jS x y z that is a part of the reduced
cover set will receive an ALERT message that contains
the coordinates of the center of the sub region
( , , )i i i iS x y z and the maximum speed of the intruder and
therefore can deduce the radius subr of the sub region. jS
will be added to the reduced sub-cover if
( , )sub s i j sub sr R d S S r R .
Algorithm 4 (Prediction Algorithm)
In the linear prediction (LP) model, also known as the
autoregressive (AR) model, the next location X(n) is
approximated by a linear combination of k past
locations. We are then looking for a vector ‘a’ of k
coefficients, k being the order of the LP model. Provided
14 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER
that the ‘a’ is estimated, the predicted value is computed
simply by FIR filtering of the k past samples with the
coefficients using1
( ) ( )k
ii
X n a X n i . To keep the
calculation simple and the communication overhead low,
the prediction model we use is only based on the target’s
moving speed and its direction of movement using the
previous and current position of the target to predict the
next location. The previous position of the target
( ) ( ( ), ( ))X t a x t a y t a and the current position of
the target ( ) ( ( ), ( ))X t x t y t are used to estimate the
velocity and the direction of the movement. The velocity
is given by ( ( ), ( ))d X t X t a
va
while the direction
is 1 ( ) ( )cos
( ( ), ( ))
x t x t a
d X t X t a. The next position of the
target can be predicted by ( ) ( ) cosx t a x t vt
and ( ) ( ) siny t a y t vt .
B. Tracking Algorithm
Energy efficient tracking of a target involves
different steps:
Phase 1:
Find a reduced cover of the region of interest.
Deduce the border cover of the region of interest.
Phase 2:
Detect the presence of the target.
Broadcast the coordinates of the border sensor node
and activate the necessary Sub reduced cover
(Deduce the Sub border Cover).
Move the sub region accordingly.
The distributed tracking algorithm works by
assigning a role for each sensor node. The initialization
phase basically activates a border cover of the region of
interest i.e. all the sensor nodes on the border of the
region of interest are active. When a target is detected by
a particular border sensor node Si, then Si is selected as
the center node and broadcasts its coordinates to the
reduced cover nodes in order to activate a subset of the
reduced cover that will cover the sub circular zone of
center Si. The new sub border cover is deduced and as
soon as a border sensor node detects the intruder, the
same steps are repeated. This procedure guarantees the
tracking of the target at all times since the radius of the
circular zone depends on the maximum speed of the
target and on the maximum time it takes to form the
reduced cover of the sub region. A snapshot of the
tracking algorithm is depicted in Figure 1.
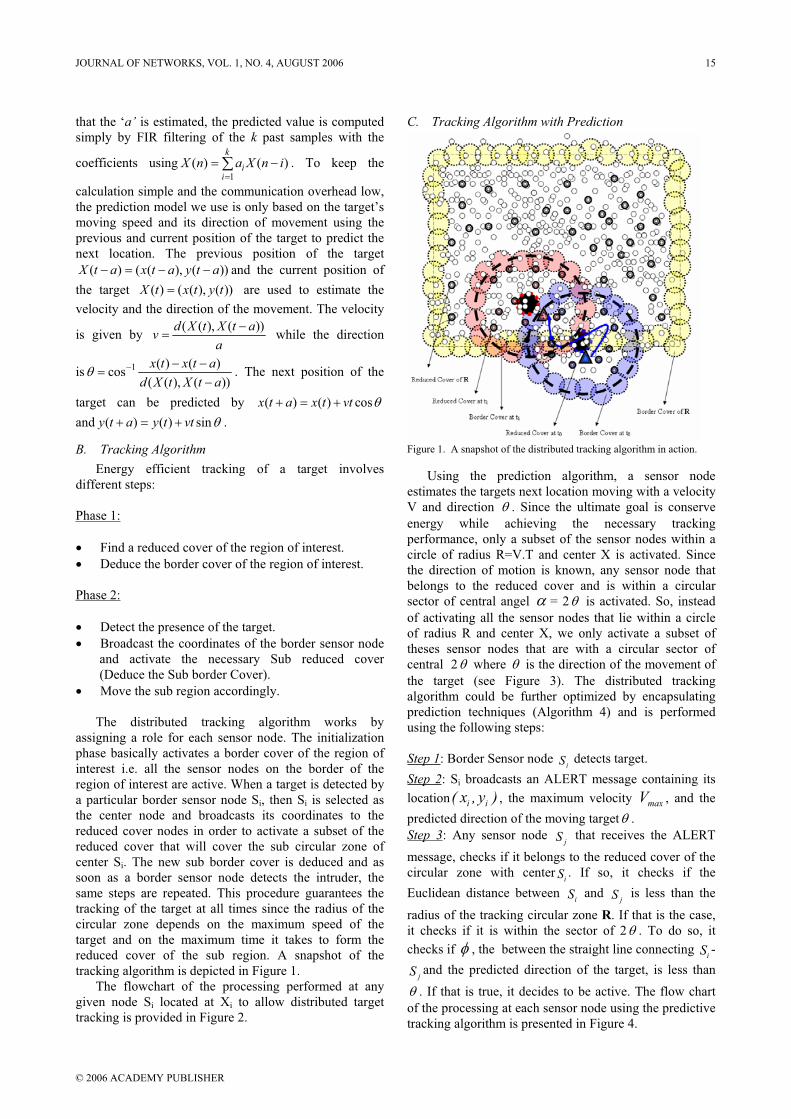
The flowchart of the processing performed at any
given node Si located at Xi to allow distributed target
tracking is provided in Figure 2.
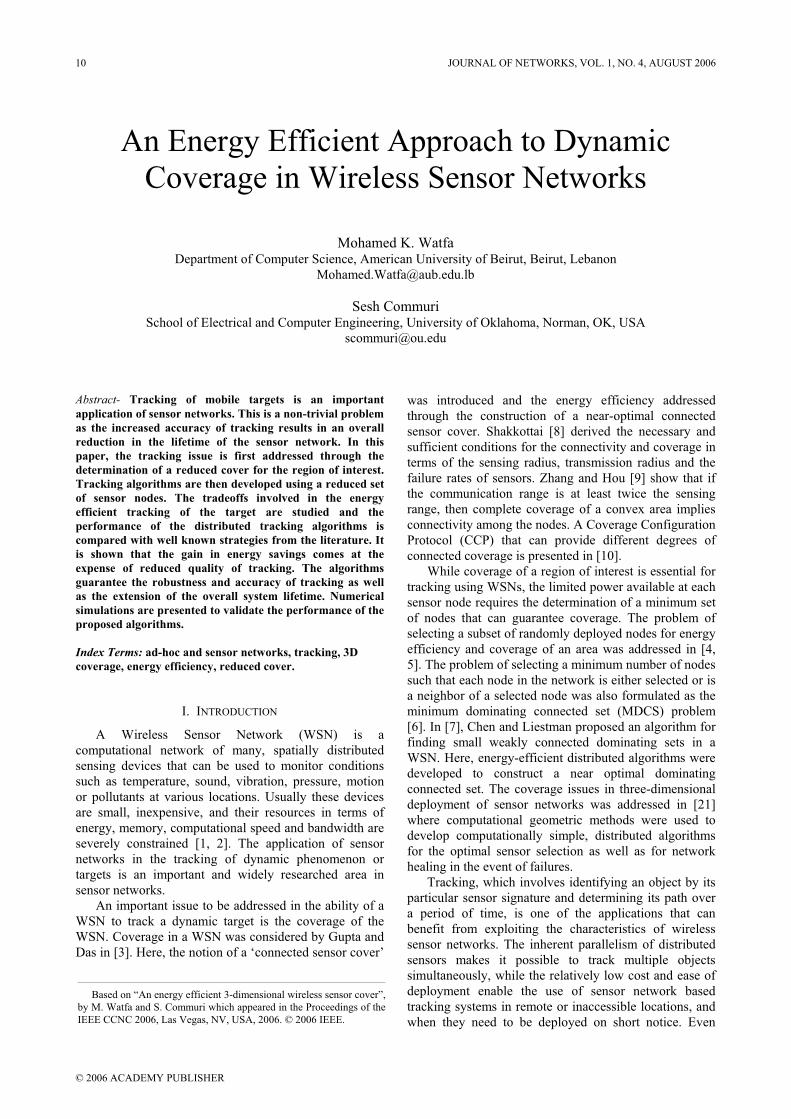
C. Tracking Algorithm with Prediction
Figure 1. A snapshot of the distributed tracking algorithm in action.
Using the prediction algorithm, a sensor node
estimates the targets next location moving with a velocity
V and direction . Since the ultimate goal is conserve
energy while achieving the necessary tracking
performance, only a subset of the sensor nodes within a
circle of radius R=V.T and center X is activated. Since
the direction of motion is known, any sensor node that
belongs to the reduced cover and is within a circular
sector of central angel = 2 is activated. So, instead
of activating all the sensor nodes that lie within a circle
of radius R and center X, we only activate a subset of
theses sensor nodes that are with a circular sector of
central 2 where is the direction of the movement of
the target (see Figure 3). The distributed tracking
algorithm could be further optimized by encapsulating
prediction techniques (Algorithm 4) and is performed
using the following steps:
Step 1: Border Sensor node iS detects target.
Step 2: Si broadcasts an ALERT message containing its
location i i( x , y ) , the maximum velocity maxV , and the
predicted direction of the moving target .
Step 3: Any sensor node jS that receives the ALERT
message, checks if it belongs to the reduced cover of the
circular zone with centeriS . If so, it checks if the
Euclidean distance between iS and
jS is less than the
radius of the tracking circular zone R. If that is the case,
it checks if it is within the sector of 2 . To do so, it
checks if , the between the straight line connecting iS -
jS and the predicted direction of the target, is less than
. If that is true, it decides to be active. The flow chart
of the processing at each sensor node using the predictive
tracking algorithm is presented in Figure 4.
JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 15
© 2006 ACADEMY PUBLISHER
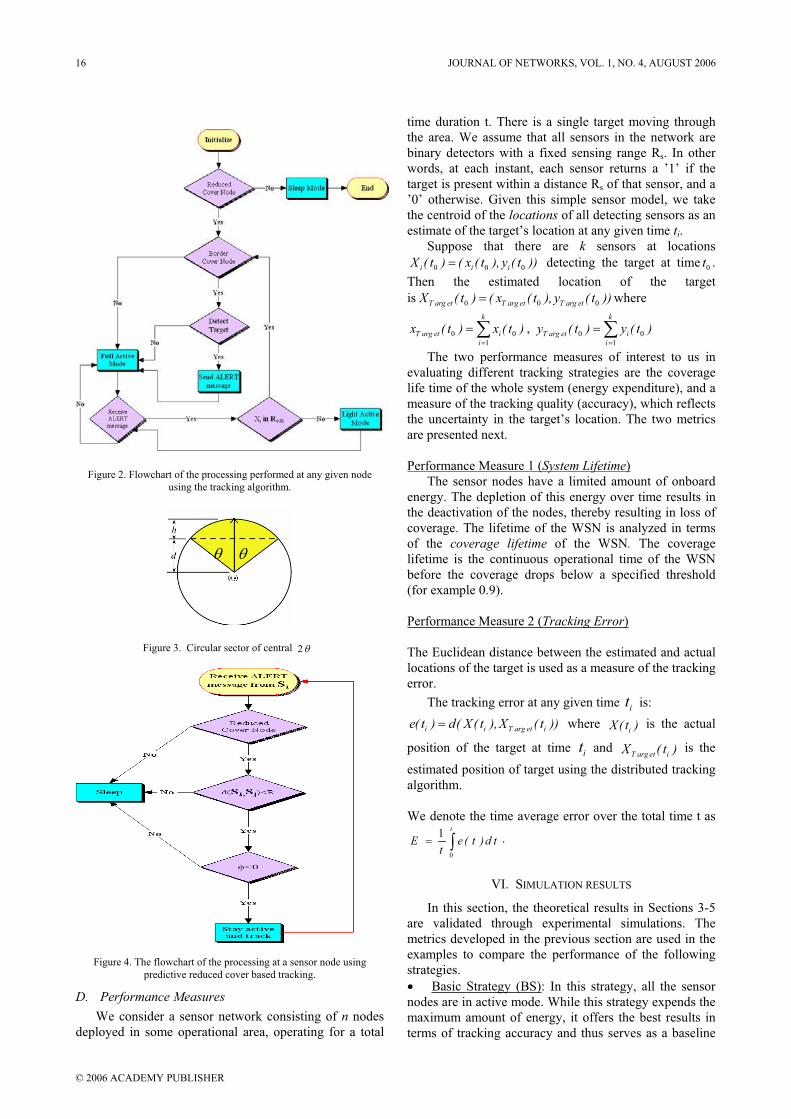
Figure 2. Flowchart of the processing performed at any given node
using the tracking algorithm.
Figure 3. Circular sector of central 2
Figure 4. The flowchart of the processing at a sensor node using
predictive reduced cover based tracking.
D. Performance Measures
We consider a sensor network consisting of n nodes
deployed in some operational area, operating for a total
time duration t. There is a single target moving through
the area. We assume that all sensors in the network are
binary detectors with a fixed sensing range Rs. In other
words, at each instant, each sensor returns a ’1’ if the
target is present within a distance Rs of that sensor, and a
’0’ otherwise. Given this simple sensor model, we take
the centroid of the locations of all detecting sensors as an
estimate of the target’s location at any given time ti.
Suppose that there are k sensors at locations
0 0 0i i iX ( t ) ( x ( t ), y ( t )) detecting the target at time 0t .
Then the estimated location of the target
is0 0 0T arg et T arg et T arg etX ( t ) ( x ( t ), y ( t )) where
0 0
1
k
T arg et i
i
x ( t ) x ( t ) , 0 0
1
k
T arg et i
i
y ( t ) y ( t )
The two performance measures of interest to us in
evaluating different tracking strategies are the coverage
life time of the whole system (energy expenditure), and a
measure of the tracking quality (accuracy), which reflects
the uncertainty in the target’s location. The two metrics
are presented next.
Performance Measure 1 (System Lifetime)
The sensor nodes have a limited amount of onboard
energy. The depletion of this energy over time results in
the deactivation of the nodes, thereby resulting in loss of
coverage. The lifetime of the WSN is analyzed in terms
of the coverage lifetime of the WSN. The coverage
lifetime is the continuous operational time of the WSN
before the coverage drops below a specified threshold
(for example 0.9).
Performance Measure 2 (Tracking Error)
The Euclidean distance between the estimated and actual
locations of the target is used as a measure of the tracking
error.
The tracking error at any given time it is:
i i T arg et ie( t ) d( X( t ),X ( t )) where iX( t ) is the actual
position of the target at time it andT arg et iX ( t ) is the
estimated position of target using the distributed tracking
algorithm.
We denote the time average error over the total time t as
0
1t
E e ( t )d tt
.
VI. SIMULATION RESULTS
In this section, the theoretical results in Sections 3-5
are validated through experimental simulations. The
metrics developed in the previous section are used in the
examples to compare the performance of the following
strategies.
Basic Strategy (BS): In this strategy, all the sensor
nodes are in active mode. While this strategy expends the
maximum amount of energy, it offers the best results in
terms of tracking accuracy and thus serves as a baseline
16 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER
for comparison with the strategies developed in Section
5.
Basic Selective Predictive Strategy (BSPS): In this
strategy, only the nodes in the vicinity of the target are
activated for tracking. These nodes also predict the
“next” position of the target and hand over tracking to
nodes best placed to track the target. The remaining
nodes are in “relay” mode and can switch to tracking
mode on being alerted by the tracking nodes.
Reduced Cover Strategy (RCS): In this strategy,
only the sensor nodes in the reduced cover obtained
using Algorithm 1 are used to track the object. In contrast
to the Basic Strategy, complete coverage of the region is
still maintained, but by using the reduced cover.
Reduced Cover Selective Tracking Strategy
(RCSTS): In this strategy, a subset of all the sensor nodes
in the reduced cover is activated to track the target while
the rest of the nodes are in the relay mode.
Reduced Cover Selective Predictive Strategy
(RCSPS): In this approach, the subset of nodes in the
vicinity of the target is determined using Algorithm 4.
Here, instead of waking up all the nodes in the vicinity of
the target, those nodes belonging to a sector determined
by the current position and velocity of the target are
activated.
In the following examples, 2000 nodes, each with a
sensing radius of 1 unit, are assumed to be uniformly
randomly deployed in a region of size 10x10x10 units
(Figure 5). Each sensor node is also assumed to have a
limited energy supply (300 Joules) and is deactivated
when the energy is depleted. The power consumption of
Tx (transmit), Rx (receive), Idle and Sleeping modes are
1400mW, 1000mW, 830mW, 130mW respectively.
Example 1: Determination of a Reduced Cover.
A reduced cover is first determined using the
algorithm in Section 4. From Figure 6, it can be seen that
436 nodes are active in the reduced cover resulting in an
overall savings of 78.2%. If a bcc lattice deployment was
used, then the minimum number of sensor nodes required
would be 396 [21]. Therefore, the reduced cover has a
measure of optimality equal to 1.101, which indicates
that the algorithm has resulted in a solution very close to
the optimum cover that is obtained by bcc lattice
deployment.
0
24
68
10
0
2
4
6
8
100
2
4
6
8
10
Figure 5. Random distribution of 2000 sensor nodes over a region
10x10x10 units.
0
24
68
10
0
2
4
6
8
100
2
4
6
8
10
Figure 6. Reduced cover of the region 10x10x10 units. Initial
Deployment = 2000; Number of active nodes = 436.
The number of deployed sensor nodes versus the number
of active nodes and the effective coverage are shown in
Figures 7 and 8 respectively.
1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 30000
100
200
300
400
500
600
700
800
900
1000
Total number of Deployed sensors
Num
ber O
f w
orki
ng N
odes
Figure 7. Deployed node number vs. working node number
1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 30000
0.2
0.4
0.6
0.8
1
Total number of Deployed sensors
Cov
erag
e
Fi
Figure 8. Deployed node number vs. coverage
Example 2: Coverage Lifetime for Target Tracking.
In this example, 800 sensor nodes are deployed
randomly in a region of size 10x10 units and the
effectiveness of the strategies outlined earlier for tracking
a target moving linearly with a velocity of 1 m/s is
studied. The coverage lifetime of the network is shown in
Figure 10. It can be seen from Figure 10(a) that the
activating a subset of the sensor nodes for tracking
results in a significant improvement in coverage lifetime
compared to having all the nodes active. From this
figure, it is also clear that a reduced WSN has a better
JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 17
© 2006 ACADEMY PUBLISHER

(a)
(b)
(c)
(d)Figure 9. (a),(c) The coverage life time of the network as time passes
using algorithms BS, RCS, BSPS when the number of deployed nodes
is 800 and 1600 respectively. (b), (d). The coverage life time of the
network as time passes using algorithms BSPS, RCSTS, RCSPS when
the number of deployed nodes is 800 and 1600 respectively.
Figure 10. The resulting tracking error as we increase the sensing
radius of each sensor node using 4 different algorithms: BS, BSPS,
RCSTS, and RCSPS.
coverage lifetime over the full network. This
improvement, however, comes at a price. The algorithm
for obtaining the reduced network requires the
communication between a node and its neighbors and as
a result a portion of energy is used up during the
initialization stage of the network. This causes early
onset of degradation and loss of cover. This, however,
can be addressed by incorporating self healing in the
WSN [21].
The two tracking algorithms (RCSTS and RCSPS)
proposed earlier can further improve the energy savings
and thus increasing the overall cover life time of the
system (Figure 9(a),(b)). Similar results are observed as
the number of deployed sensor nodes is increased.
However, using BSPS decreases the performance since
all the sensor nodes within a specified radius are active in
the reduced cover approach, the number of sensor nodes
to be activated would almost be the same since we first
calculate the reduced cover of the region and then
activate the necessary subset in order to track the target.
The results are shown in Figure 9(c) and Figure 9(d).
Example 3: Comparison of Tracking Error.
In this example, the accuracy of the different tracking
algorithms is studied. We notice that in terms of tracking
error, with no surprise, BS outperforms all the others.
However, as the sensing radius of each sensor node is
increased, all the other algorithms converge to a
negligible tracking error. The results are shown in Figure
10.
Example 4: Comparison of Performance.
In this example, the performance of the WSN in
tracking a target moving along a trajectory of the
form by( t ) ax ( t ) c sin dx( t ) e is studied. Using the
basic strategy, 312 (Reduced Cover) nodes are always
active. Using RCSTS, the size of the sub region depends
on the maximum velocity of the target and thus the
number of nodes that will be activated would not vary as
we change the velocity. As can be seen in Figures 11(a)
18 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER
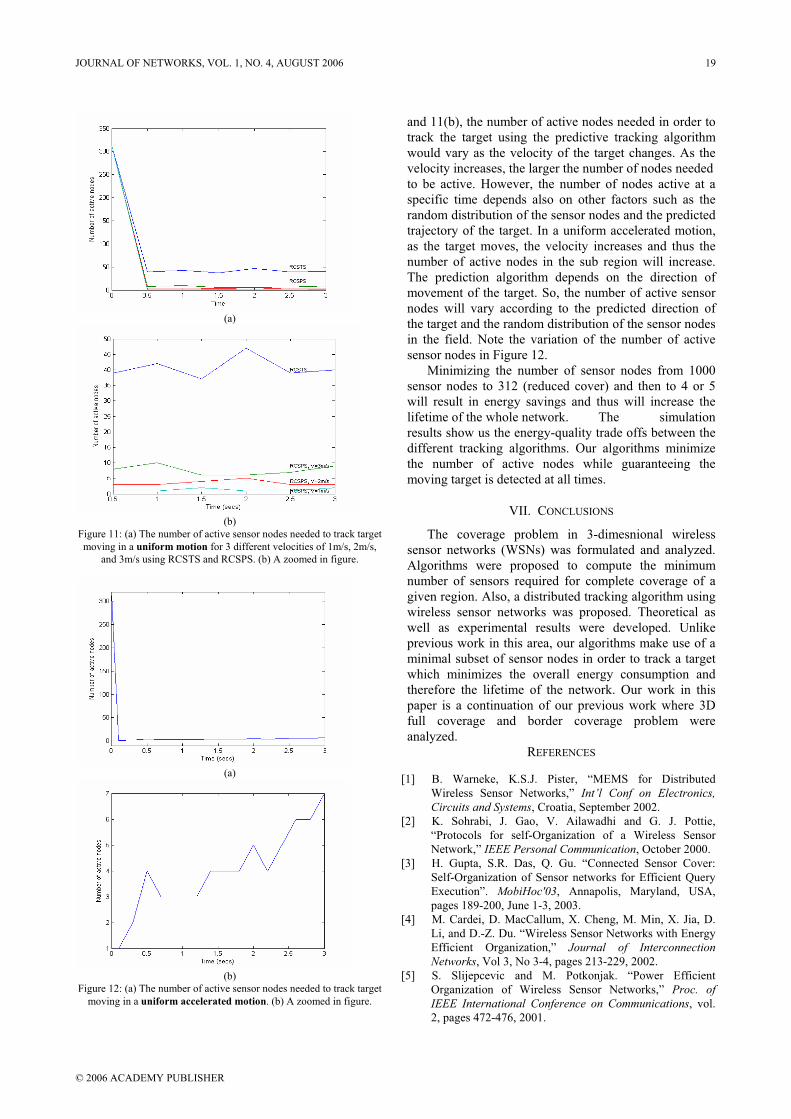
(a)
(b)
Figure 11: (a) The number of active sensor nodes needed to track target
moving in a uniform motion for 3 different velocities of 1m/s, 2m/s,
and 3m/s using RCSTS and RCSPS. (b) A zoomed in figure.
(a)
(b)
Figure 12: (a) The number of active sensor nodes needed to track target
moving in a uniform accelerated motion. (b) A zoomed in figure.
and 11(b), the number of active nodes needed in order to
track the target using the predictive tracking algorithm
would vary as the velocity of the target changes. As the
velocity increases, the larger the number of nodes needed
to be active. However, the number of nodes active at a
specific time depends also on other factors such as the
random distribution of the sensor nodes and the predicted
trajectory of the target. In a uniform accelerated motion,
as the target moves, the velocity increases and thus the
number of active nodes in the sub region will increase.
The prediction algorithm depends on the direction of
movement of the target. So, the number of active sensor
nodes will vary according to the predicted direction of
the target and the random distribution of the sensor nodes
in the field. Note the variation of the number of active
sensor nodes in Figure 12.
Minimizing the number of sensor nodes from 1000
sensor nodes to 312 (reduced cover) and then to 4 or 5
will result in energy savings and thus will increase the
lifetime of the whole network. The simulation
results show us the energy-quality trade offs between the
different tracking algorithms. Our algorithms minimize
the number of active nodes while guaranteeing the
moving target is detected at all times.
VII. CONCLUSIONS
The coverage problem in 3-dimesnional wireless
sensor networks (WSNs) was formulated and analyzed.
Algorithms were proposed to compute the minimum
number of sensors required for complete coverage of a
given region. Also, a distributed tracking algorithm using
wireless sensor networks was proposed. Theoretical as
well as experimental results were developed. Unlike
previous work in this area, our algorithms make use of a
minimal subset of sensor nodes in order to track a target
which minimizes the overall energy consumption and
therefore the lifetime of the network. Our work in this
paper is a continuation of our previous work where 3D
full coverage and border coverage problem were
analyzed.
REFERENCES
[1] B. Warneke, K.S.J. Pister, “MEMS for Distributed
Wireless Sensor Networks,” Int’l Conf on Electronics,
Circuits and Systems, Croatia, September 2002.
[2] K. Sohrabi, J. Gao, V. Ailawadhi and G. J. Pottie,
“Protocols for self-Organization of a Wireless Sensor
Network,” IEEE Personal Communication, October 2000.
[3] H. Gupta, S.R. Das, Q. Gu. “Connected Sensor Cover:
Self-Organization of Sensor networks for Efficient Query
Execution”. MobiHoc'03, Annapolis, Maryland, USA,
pages 189-200, June 1-3, 2003.
[4] M. Cardei, D. MacCallum, X. Cheng, M. Min, X. Jia, D.
Li, and D.-Z. Du. “Wireless Sensor Networks with Energy
Efficient Organization,” Journal of Interconnection
Networks, Vol 3, No 3-4, pages 213-229, 2002.
[5] S. Slijepcevic and M. Potkonjak. “Power Efficient
Organization of Wireless Sensor Networks,” Proc. of
IEEE International Conference on Communications, vol.
2, pages 472-476, 2001.
JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006 19
© 2006 ACADEMY PUBLISHER

[6] S. Guha and S. Khuller. “Approximation algorithms for
connected dominating sets.” Proc. of 4th Annual European
Symposium on Algorithms, pages 179-193, 1996.
[7] Y. Chen and A. Liestman. “Approximating minimum size
weakly-connected dominating sets for clustering mobile ad
hoc networks.” In Proc. of the Symp. On Mobile ad hoc
networking and computing, pages 165-172, June 2002.
[8] S. Shakkottai, R. Srikant, and N. Shro. “Unreliable sensor
grids: Coverage, connectivity and diameter.” In
Proceedings of INFOCOM, pages 1073-1083, 2003.
[9] H. Zhang and J. C. Hou, “Maintaining Sensing Coverage
and Connectivity in Large Sensor Networks,” Technical
Report UIUC, UIUCDCS-R-2003-2351, 2003.
[10] W. R. Heinzelman, A. Chandrakasan, and H.
Balakrishnan. “Energy-efficient communication protocol
for wireless micro sensor networks.” In Proc. Of Intl.
Conf. on System Sciences (HICSS), pages 1-10, 2000.
[11] C. Meesookho, S. Narayanan, and C.S. Raghavendra,
Collaborative Classification Applications in Sensor
Networks, Sensor Array and Multichannel Signal
Processing Workshop, August 2002.
[12] D. Li, K.D. Wong, Y.H. Hu, and A.M. Sayeed, Detection,
classification, and tracking of targets, IEEE Signal
Processing Magazine, March 2002.
[13] Q. Fang, F. Zhao, and L. Guibas, Counting Targets:
Building and Managing Aggregates in Wireless Sensor
Networks, Xerox Palo Alto Research Center (PARC)
Technical Report, June 2002.
[14] M. Chu, H. Haussecker, and F. Zhao, Scalable
Information-Driven Sensor Querying and Routing for ad
hoc Heterogeneous Sensor Networks, Xerox Palo Alto
Research Center (PARC), July 2001.
[15] F. Zhao, J. Shin, J. Reich, “Information-Driven Dynamic
Sensor Collaboration for Tracking Applications.” IEEE
Signal Processing Magazine, March 2002.
[16] J. Liu, P. Cheung, L. Guibas, and F. Zhao, A Dual-Space
Approach to Tracking and Sensor Management in Wireless
Sensor Networks, Palo Alto Research Center, Technical
Report P2002-10077, March 2002.
[17] P. Ramanathan, Location-centric Approach for
Collaborative Target Detection, Classification, and
Tracking, IEEE CAS Workshop on Wireless
Communication and Networking, September 2002.
[18] R. Brooks, and C. Griffin, “Traffic model evaluation of ad
hoc target tracking algorithms,” Journal of High
Performance Computer Applications, Accepted, 2002.
[19] R. Brooks, C. Griffin, and D. S. Friedlander, “Self-
Organized distributed sensor network entity tracking,”
International Journal of High Performance Computer
Applications, special issue on Sensor Networks, vol. 16,
no. 3, Fall 2002.
[20] J. Moore, T. Keiser, R. R. Brooks, S. Phoha, D.
Friedlander, J. Koch, A. Reggio, and N. Jacobson,
“Tracking Targets with Self-Organizing Distributed
Ground Sensors,” 2003 IEEE Aerospace Conference,
Invited Paper, Accepted for publication, November 2002.
[21] Watfa M., Commuri S., “An Energy Efficient and Self-
Healing 3-Dimensional Sensor Cover”, International
Journal of Ad Hoc and Ubiquitous Computing (IJAHUC),
2006 (to appear).
Mohamed K. Watfa is an Assistant Professor in the
department of Computer Science at the American University of
Beirut. He received his Ph.D. from the School of Electrical and
Computer Engineering at the University of Oklahoma in
Norman, OK in 2006. He obtained his BS in Computer Science
from American University of Beirut in 2002 and his Masters
degree in Engineering Science from the University of Toledo,
OH in 2003. His research interests include sensor networks,
wireless networking, software engineering, resource
management, energy issues, tracking, routing, and performance
measures. He is also a member of the ACM and IEEE.
Sesh Commuri is an Associate Professor in the School of
Electrical and Computer Engineering at the University of
Oklahoma in Norman. He received his Masters degree in
Electrical Engineering from the Indian Institute of Technology,
Kanpur, India in 1989 and Ph. D in Electrical Engineering from
the University of Texas at Arlington in 1996. Dr. Commuri has
over 9 years experience in the industry and his research
interests include wireless sensor networks, intelligent systems,
real-time systems, mechatronics, embedded controls and
robotics.
20 JOURNAL OF NETWORKS, VOL. 1, NO. 4, AUGUST 2006
© 2006 ACADEMY PUBLISHER