
An approach to parameters estimation of a chromatography model using a clustering genetic algorithm...
11
ORIGINAL PAPER An approach to parameters estimation of a chromatography model using a clustering genetic algorithm based inverse model Mirtha Irizar Mesa • Orestes Llanes-Santiago • Francisco Herrera Ferna ´ndez • David Curbelo Rodrı ´guez • Anto ˆnio Jose ´ Da Silva Neto • Leo ˆncio Dio ´genes T. Ca ˆmara Published online: 4 August 2010 Ó Springer-Verlag 2010 Abstract Genetic algorithms are tools for searching in complex spaces and they have been used successfully in the system identification solution that is an inverse prob- lem. Chromatography models are represented by systems of partial differential equations with non-linear parameters which are, in general, difficult to estimate many times. In this work a genetic algorithm is used to solve the inverse problem of parameters estimation in a model of protein adsorption by batch chromatography process. Each popu- lation individual represents a supposed condition to the direct solution of the partial differential equation system, so the computation of the fitness can be time consuming if the population is large. To avoid this difficulty, the implemented genetic algorithm divides the population into clusters, whose representatives are evaluated, while the fitness of the remaining individuals is calculated in func- tion of their distances from the representatives. Simulation and practical studies illustrate the computational time saving of the proposed genetic algorithm and show that it is an effective solution method for this type of application. Keywords Genetic algorithms Inverse problem Parameter estimation Adsorption chromatography 1 Introduction System identification is a fundamental tool in the analysis of systems. It consists in the construction of mathematical models of dynamic systems starting from experimental data of measurement. Such models have important appli- cations in many areas as diagnosis, simulation, prediction and control. In general, the identification process has three successive phases: preparation, estimation and validation. It is typically an iterative procedure, where the user criteria are mixed with formal calculations, an extensive manipu- lation of the data and computer algorithms. There are many contributions on this topic in the last five decades and some representative examples are: Eykhoff (1974), Ljung (1999), Ljung and Glad (1994). There are a large number of identification methods and they can be classified according to different approaches (Ljung 1999; So ¨derstrom and Stoica 1994). In one group there are the parametric methods. In general, they require the election of a possible structure model and a parameter adjustment approach and estimation of parameters that better adjust the model to experimental data. Model iden- tification is defined as the experimental determination of parameters that governs the dynamics and/or the non-linear behavior, if the structure of process model is known (Ljung M. Irizar Mesa (&) O. Llanes-Santiago Department of Automation and Computers, Technical University of Havana (ISPJAE), Ciudad de La Habana, Cuba e-mail: [email protected] O. Llanes-Santiago e-mail: [email protected] F. Herrera Ferna ´ndez Department of Automation and Computational Systems, Central University of Las Villas (UCLV), Villa Clara, Cuba e-mail: herrera@fie.uclv.edu.cu D. Curbelo Rodrı ´guez Center of Molecular Immunology, Ciudad de la Habana, Cuba e-mail: [email protected] A. J. Da Silva Neto L. D. T. Ca ˆmara Departamento de Engenharia Meca ˆnica e Energia, DEMEC, IPRJ-UERJ, Nova Friburgo, Brazil e-mail: [email protected] L. D. T. Ca ˆmara e-mail: [email protected] 123 Soft Comput (2011) 15:963–973 DOI 10.1007/s00500-010-0638-3
Transcript of An approach to parameters estimation of a chromatography model using a clustering genetic algorithm...
ORIGINAL PAPER
An approach to parameters estimation of a chromatographymodel using a clustering genetic algorithm based inverse model
Mirtha Irizar Mesa • Orestes Llanes-Santiago • Francisco Herrera Fernandez •
David Curbelo Rodrıguez • Antonio Jose Da Silva Neto •
Leoncio Diogenes T. Camara
Published online: 4 August 2010
� Springer-Verlag 2010
Abstract Genetic algorithms are tools for searching in
complex spaces and they have been used successfully in
the system identification solution that is an inverse prob-
lem. Chromatography models are represented by systems
of partial differential equations with non-linear parameters
which are, in general, difficult to estimate many times. In
this work a genetic algorithm is used to solve the inverse
problem of parameters estimation in a model of protein
adsorption by batch chromatography process. Each popu-
lation individual represents a supposed condition to the
direct solution of the partial differential equation system,
so the computation of the fitness can be time consuming if
the population is large. To avoid this difficulty, the
implemented genetic algorithm divides the population into
clusters, whose representatives are evaluated, while the
fitness of the remaining individuals is calculated in func-
tion of their distances from the representatives. Simulation
and practical studies illustrate the computational time
saving of the proposed genetic algorithm and show that it is
an effective solution method for this type of application.
Keywords Genetic algorithms � Inverse problem �Parameter estimation � Adsorption chromatography
1 Introduction
System identification is a fundamental tool in the analysis
of systems. It consists in the construction of mathematical
models of dynamic systems starting from experimental
data of measurement. Such models have important appli-
cations in many areas as diagnosis, simulation, prediction
and control. In general, the identification process has three
successive phases: preparation, estimation and validation.
It is typically an iterative procedure, where the user criteria
are mixed with formal calculations, an extensive manipu-
lation of the data and computer algorithms. There are many
contributions on this topic in the last five decades and some
representative examples are: Eykhoff (1974), Ljung (1999),
Ljung and Glad (1994).
There are a large number of identification methods and
they can be classified according to different approaches
(Ljung 1999; Soderstrom and Stoica 1994). In one group
there are the parametric methods. In general, they require
the election of a possible structure model and a parameter
adjustment approach and estimation of parameters that
better adjust the model to experimental data. Model iden-
tification is defined as the experimental determination of
parameters that governs the dynamics and/or the non-linear
behavior, if the structure of process model is known (Ljung
M. Irizar Mesa (&) � O. Llanes-Santiago
Department of Automation and Computers, Technical University
of Havana (ISPJAE), Ciudad de La Habana, Cuba
e-mail: [email protected]
O. Llanes-Santiago
e-mail: [email protected]
F. Herrera Fernandez
Department of Automation and Computational Systems,
Central University of Las Villas (UCLV), Villa Clara, Cuba
e-mail: [email protected]
D. Curbelo Rodrıguez
Center of Molecular Immunology, Ciudad de la Habana, Cuba
e-mail: [email protected]
A. J. Da Silva Neto � L. D. T. Camara
Departamento de Engenharia Mecanica e Energia, DEMEC,
IPRJ-UERJ, Nova Friburgo, Brazil
e-mail: [email protected]
L. D. T. Camara
e-mail: [email protected]
123
Soft Comput (2011) 15:963–973
DOI 10.1007/s00500-010-0638-3

1999). Estimation of unknown parameters in a mathemat-
ical model starting from known data of the solution con-
stitutes an inverse problem (see Fig. 1). Taking into
account the results of an objective function which lets the
comparison between the experimental values and those
obtained from the model evaluation, the parameters are
upgraded successively by means of an inverse method until
a stopping condition. Such problems (Tarantola 2005) are
frequent and of great importance in chemical, physical and
pharmaceutical applications among many others.
Solution of inverse problems can vary drastically from
one problem to another. However, their general charac-
teristic is the same: a system output answer is measured
and the conditions to obtain it should be calculated.
Although there are adequate methods to solve general
inverse problems, in several cases those are not completely
effective or require an excessive computational time to
solve the wide spectrum of inverse problems that are
important to scientists and engineers. The most effective
methods for inverse problems solution include non-linear
optimization procedures, which can be applied virtually in
any case.
Classical algorithms for parameter estimation as an
optimization problem perform local searches around an
initial guess or require gradient information that may not
always be easily available. The gradient-based optimiza-
tion methods such as steepest descent, conjugate gradient,
Davidon–Fletcher–Powell, Broydon–Fletcher–Goldfarb–
Shanno (Fletcher 1987) and Levenberg–Marquardt (Dennis
and Schnabel 1983) can identify a local optimum around
the initial guess. The gradient-less techniques, such as
the downhill simplex method due to Nelder and Mead
(1965), require additional function evaluations and a search
direction is obtained at each major iteration. All of these
methods provide a local optimum, but frequently there are
multiple local solutions for this type of problem and the
convergence to the global solution cannot be guaranteed.
Evolutionary algorithms, a subfield of computational
intelligence, are search methods based on the mechanisms
of the genetics (Davis 1991; Goldberg 1989). Genetic
algorithm (GA) is a type of evolutionary algorithm that
constitutes a special and efficient method of stochastic
optimization and it has been used for the solution of dif-
ficult problems, where the objective functions do not have
good mathematical properties (Back 1997; Michalewicz
1992). These algorithms carry out their searches using a
population of possible solutions for the problem. They
implement the survival strategy of the best adapted, as a
form to find better solutions, that distinguishes them from
the traditional search methods. GAs have been useful in the
solution of many different problems which require the
search in a complex and non-linear space to achieve a good
solution. Some examples can be found in Au et al. (2003),
Benini and Toffolo (2002), Giro et al. (2002), Kewley and
Embrechts (2002), Manterea and Alanderb (2005), Montiel
et al. (2003) and Oduguwa et al. (2005).
Biotechnological processes are generally non-linear and
it is common that the kinetics associated to them, as for
example the mechanisms of transport, are not well under-
stood. Therefore, the modeling of these processes is rela-
tively complex, and parameter estimation is a continuous
need. These types of processes have been identified using
different techniques, from the most classic to those of
computational intelligence. Some examples are:
– In Angelov and Guthke (1997) it is stated an approach
to the industrial optimization of the fermentation of
antibiotics described by fuzzy rules, which is based on
a GA that allows to determine good values of the
control variables and to optimize the parameters of
fuzzy memberships functions.
– In Nagata and Chu (2003) neural networks and GAs are
used to model and to optimize a medium of enzymes
fermentation, combining both techniques to create a
powerful tool.
– In Roeva and Pencheva (2004) GAs are used for
parameter estimation in a process of fermentation
model with non-linear characteristics. These GAs
predict the cultivation process with good accuracy.
– In Georgieva et al. (2003) it is proposed a method for
parameter estimation of a process model on the base of
non-linear optimization methods. A variable structure
control is designed to fed-batch fermentation of Esch-
erichia coli.
– In Andres-Toro et al. (2002) there are presented
evolutionary methods for multi objective optimization
and control of a complex fermentation process, with
satisfactory results.
– In Fu et al. (2005) an artificial neural network is used to
model the adsorption of BSA (albumin of serum of
+
-
Input
Experiment
Model
Inverse Method
Modeling Vector
ObservationVector
Objectivefunction inparametersvector
F(p)
Fig. 1 Schematic representation of parameters estimation methods
964 M. I. Mesa et al.
123

bovine) in a porous membrane. A correspondence
among results predicted for the network and experi-
mental data was found, although this solution does not
provide detailed information of diffusion mechanisms.
Chromatography is a science that studies the separation
of molecules based on the differences of its structure and
adsorption phenomenon. A mobile phase transports the
compounds to be separated and a stationary phase retains
those compounds through inter-molecular forces.
Previous works have developed parameters estimation
in protein chromatography models but all of them used
local search methods or a simple GA (Altenhoner et al.
1997; Gu 1995; Horstmann and Chase 1989; Persson and
Nilsson 2001; de Vasconcellos et al. 2002). Applying a
simple GA the fitness function is evaluated for each indi-
vidual in the population, so the computational cost is high.
To reduce this one, different techniques like clustering
have been used (Hee-Su and Sung-Bae 2001).
In this article a new efficient GA is used to estimate the
parameters of a protein chromatography model constituted
by a system of partial differential equations. The new GA
is based on the combination of clustering and GA, creating
a GA with less fitness evaluations in each generation.
In Sect. 2, the problem of the inverse solution of partial
differential equations and the procedure to obtain the protein
adsorption chromatography model is analyzed. In this par-
ticular application the computation of the fitness requires a
considerable time if a simple genetic algorithm is applied, so
Sect. 3 presents the Clustering GA application to the esti-
mation process of model parameters. Section 4 shows the
results of the experimental studies with synthetic data that
include a comparison between clustering GA versus simple
GA and classic methods. In Sect. 5 the validation of the
results of parameters estimation using real data of concen-
tration obtained in a process of proteins chromatography in
stirred tank is presented. Finally come the conclusions.
2 Protein adsorption chromatography problem
This section presents firstly, the general characteristics of
the inverse solution of partial differential equation system.
After that, the model of a protein adsorption chromatog-
raphy process which is constituted by two partial differ-
ential equations is described. The parameters of the model
should be estimated using the solution method of an
inverse problem.
2.1 A solution of an inverse problem
In most of the scientific disciplines and particularly in
engineering there are problems characterized by differential
equations with initials and boundary conditions associated.
When these problems are solved in a direct way, the result is
generally a functional relationship or an equation system,
which can be used to calculate values of the dependent
variable for given values of the independent variable.
Direct solution methods of differential equations are
consolidated in the mathematical theory. However, the
interest in the solution of problems such as the inverse
solution of partial differential equations has grown in the
last years. This constitutes a complex problem for which
there are no universally accepted methods. Given an
applicable direct solution to a system of partial differential
equations, it is possible to propose an inverse problem as a
problem of optimization (Karr et al. 2000). An algorithm to
achieve this is present next:
– Suppose a solution to the inverse problem. This can
include the supposition of an initial or boundary
condition, or a typical parameter to a given problem.
– Feed the supposed condition to the direct solution of
the partial differential equation, calculating in this way
values of the dependent variable y. Here, the output of
the direct solution is a vector of values corresponding
to the times in which the values of y are measured. This
vector of solutions will be denoted as calculated and it
will be represented as y:
– Compare the calculated values y with the values of the
dependent variable y measured in consistent times with
those for which y was calculated.
The success of this approach is the mechanism for which
the supposed condition is improved in the subsequent
invocations of the first step. Optimization is the procedure
to upgrade the suppositions of the conditions, and in this
case a GA will be used.
The sum of the squared error (SSE) is the function
mostly used in measuring prediction errors, although the
mean squared error (MSE) and root mean squared error
(RMSE) can be applied.
SSEðy; hÞ ¼XT
t¼1
ðyðtÞ � yðt; hÞÞ2
MSEðy; hÞ ¼ 1
T
XT
t¼1
ðyðtÞ � yðt; hÞÞ2
RMSEðy; hÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
T
XT
t¼1
ðyðtÞ � yðt; hÞÞ2vuut
where h is the vector of estimated parameters.
2.2 Protein adsorption chromatography model
Mathematical models of chromatography present a group
of parameters whose appropriate estimation can contribute
to understand the rate limiting step of the whole process.
An approach to parameters estimation 965
123

The model that describes the adsorption of proteins in
macro porous solid for chromatography in a stirred tank is
represented by Eqs. 1 and 2 (de Vasconcellos et al. 2003).
It includes the mass transfer effects of external film and
pore diffusion, as well as an expression for the rate of
adsorption.
oCi
ot¼ w
r2
o
orr2 oCi
or
� �
w ¼ Deff
1þ qqmKd
epðKdþCiÞ2
ð1Þ
where Ci is the protein concentration in the liquid phase
inside the pores of the particles, Deff is the coefficient of
effective diffusivity; q is the density of the adsorbent
particles, ep is the particle porosity, qm is the maximal
adsorption capacity of Langmuir isotherm model, Kd is
the dissociation constant of Langmuir isotherm model
and t and r are time and space variables (radial), respec-
tively.
The initial condition is:
Ciðr; t ¼ 0Þ ¼ 0 for 0� r�R
and boundary conditions are:
epDeff
oCi
or¼ KsðCb � CiÞ for t [ 0 and r ¼ R
where Cb is the protein concentration in the bulk liquid
phase, R is the particle radius and Ks it is the film mass
transfer coefficient.
Mass balance in the bulk liquid phase with regard to the
protein concentration (de Vasconcellos et al. 2003) can be
written as
oCb
ot¼ � 3
R
1� eb
eb
Ks Cb � Ci jr¼Rð Þ ð2Þ
where eb is the bed porosity.
Equation 2 has the following initial condition
Cb ¼ C0 for t ¼ 0
In general, these equation systems cannot be solved ana-
lytically. Some numerical methods have been developed,
such as finite differences (Gu 1995; Horstmann and Chase
1989; ONeil 1983) that simulate the physical process
advancing in the time and recalculating the function Cb in
each successive instant of time in this case. However, most
of the proposed solutions for the system estimate the mass
transfer coefficient Ks with correlations previously
obtained in the bibliography, which are based on dimen-
sionless numbers as Sherwood, Reynolds and Schmidt
numbers (Guiochon et al. 2006).
In this work the system to be modeled was the adsorp-
tion of bovine serum albumin (BSA) to 2.5, 2 and 1.5 mg/ml
as initial concentrations on chromatographic beads of
anion exchanger Streamline DEAE. Protein was prepared
in sodium phosphate 20 mM, pH 7.0 and kinetic adsorp-
tion was evaluated to 25�C. 50 ml protein solution was
recirculated and samples were collected after leaving the
vessel to off-line analysis of protein concentration by
absorbance at 280 nm. Chromatographic beads 1.5 g were
kept in suspension by agitation at 200 rpm This system is
described by Eqs. 1 and 2.
3 Clustering genetic algorithm and estimation of model
parameters
The parameters estimation of the model presented in the
last section is developed using a clustering genetic algo-
rithm. In this section, the general characteristics of this type
of efficient GA are analyzed and after, the process of
parameters estimation is explained.
3.1 Clustering genetic algorithm
There are methods that use approximation models to
replace evaluations with high computational cost. An
overview of those techniques can be found in Jin (2002
2005), Zhou et al. (2004, 2007). Among others, clustering
is a method of exploratory data analysis which is applied
to data samples to find structures or groups in a data set
(Jain and Dubes 1988). Samples are grouped into sets
according to some similarity measure, which is a funda-
mental aspect in clustering. Based on this technique, a
GA, which is shown in Fig. 2, is developed. Clustering
GA (Hee-Su and Sung-Bae 2001) is a simple GA with
three operators: selection, crossover and mutation, but it
uses clustering to divide the population into groups.
Whenever evaluating the population, one representative of
each group is chosen and evaluated, while non-represen-
tative individuals are evaluated indirectly, through fitness
values of the representatives.
Fig. 2 Clustering GA
description
966 M. I. Mesa et al.
123
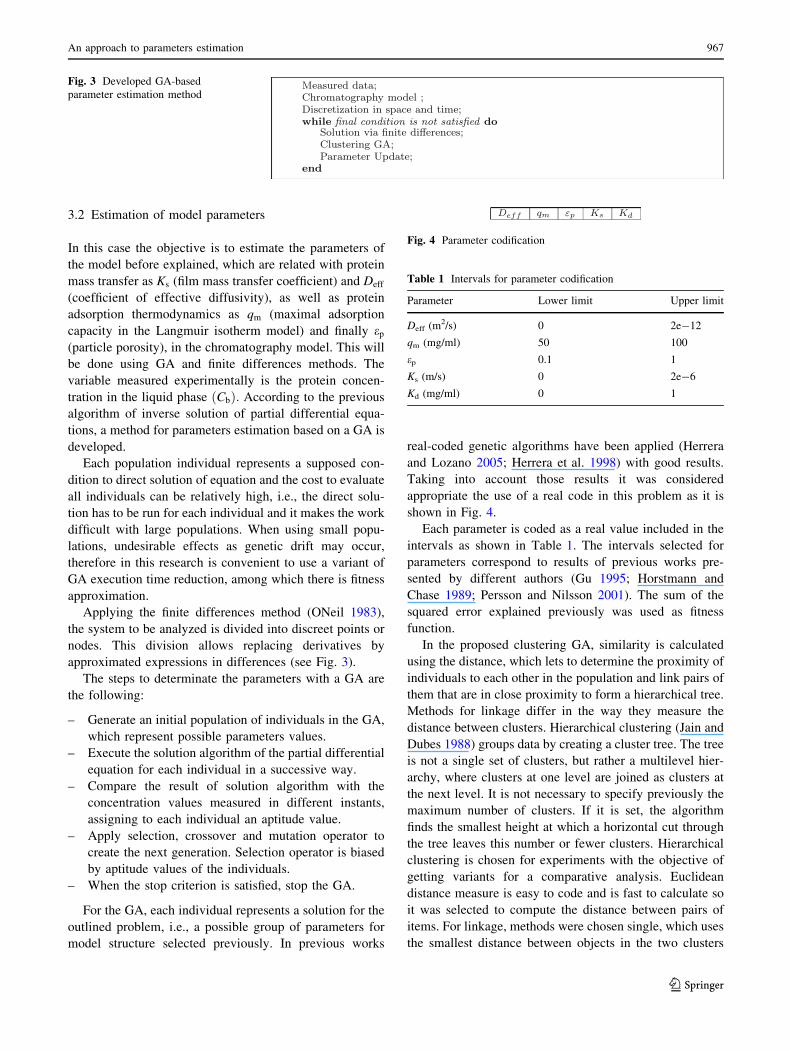
3.2 Estimation of model parameters
In this case the objective is to estimate the parameters of
the model before explained, which are related with protein
mass transfer as Ks (film mass transfer coefficient) and Deff
(coefficient of effective diffusivity), as well as protein
adsorption thermodynamics as qm (maximal adsorption
capacity in the Langmuir isotherm model) and finally ep
(particle porosity), in the chromatography model. This will
be done using GA and finite differences methods. The
variable measured experimentally is the protein concen-
tration in the liquid phase ðCbÞ: According to the previous
algorithm of inverse solution of partial differential equa-
tions, a method for parameters estimation based on a GA is
developed.
Each population individual represents a supposed con-
dition to direct solution of equation and the cost to evaluate
all individuals can be relatively high, i.e., the direct solu-
tion has to be run for each individual and it makes the work
difficult with large populations. When using small popu-
lations, undesirable effects as genetic drift may occur,
therefore in this research is convenient to use a variant of
GA execution time reduction, among which there is fitness
approximation.
Applying the finite differences method (ONeil 1983),
the system to be analyzed is divided into discreet points or
nodes. This division allows replacing derivatives by
approximated expressions in differences (see Fig. 3).
The steps to determinate the parameters with a GA are
the following:
– Generate an initial population of individuals in the GA,
which represent possible parameters values.
– Execute the solution algorithm of the partial differential
equation for each individual in a successive way.
– Compare the result of solution algorithm with the
concentration values measured in different instants,
assigning to each individual an aptitude value.
– Apply selection, crossover and mutation operator to
create the next generation. Selection operator is biased
by aptitude values of the individuals.
– When the stop criterion is satisfied, stop the GA.
For the GA, each individual represents a solution for the
outlined problem, i.e., a possible group of parameters for
model structure selected previously. In previous works
real-coded genetic algorithms have been applied (Herrera
and Lozano 2005; Herrera et al. 1998) with good results.
Taking into account those results it was considered
appropriate the use of a real code in this problem as it is
shown in Fig. 4.
Each parameter is coded as a real value included in the
intervals as shown in Table 1. The intervals selected for
parameters correspond to results of previous works pre-
sented by different authors (Gu 1995; Horstmann and
Chase 1989; Persson and Nilsson 2001). The sum of the
squared error explained previously was used as fitness
function.
In the proposed clustering GA, similarity is calculated
using the distance, which lets to determine the proximity of
individuals to each other in the population and link pairs of
them that are in close proximity to form a hierarchical tree.
Methods for linkage differ in the way they measure the
distance between clusters. Hierarchical clustering (Jain and
Dubes 1988) groups data by creating a cluster tree. The tree
is not a single set of clusters, but rather a multilevel hier-
archy, where clusters at one level are joined as clusters at
the next level. It is not necessary to specify previously the
maximum number of clusters. If it is set, the algorithm
finds the smallest height at which a horizontal cut through
the tree leaves this number or fewer clusters. Hierarchical
clustering is chosen for experiments with the objective of
getting variants for a comparative analysis. Euclidean
distance measure is easy to code and is fast to calculate so
it was selected to compute the distance between pairs of
items. For linkage, methods were chosen single, which uses
the smallest distance between objects in the two clusters
Fig. 3 Developed GA-based
parameter estimation method
Fig. 4 Parameter codification
Table 1 Intervals for parameter codification
Parameter Lower limit Upper limit
Deff (m2/s) 0 2e-12
qm (mg/ml) 50 100
ep 0.1 1
Ks (m/s) 0 2e-6
Kd (mg/ml) 0 1
An approach to parameters estimation 967
123
and Ward’s, that uses the sum of the squares of the dis-
tances between all objects in the cluster and the centroid of
the cluster. The first linkage tends to create big clusters and
therefore the number of individual evaluations would be
smaller, while the second is efficient although it can create
clusters of small size.
In the proposed clustering GA, a selection scheme by
means of two individual’s tournament was used. As
crossover operator the scattered uniform crossover was
applied. It creates a random binary vector and selects the
genes from the first parent if the bits in the vector are 1 or
from the second parent if the bits in the vector are 0. The
child is formed combining the genes. Because some
authors (Deb et al. 2002; Herrera et al. 2003) have pro-
posed advanced real-parameter crossover operators, many
experiments with different crossover operators were real-
ized later, but improvements were not obtained.
4 Experiments on synthetic data
The developed experiments and the obtained results using
synthetic data are presented in the first part of this section.
After that, a comparison between a simple GA and the
clustering GA is done.
4.1 Parameter study on clustering GA
For determination of GA, operation characteristics such as
crossover and mutation probabilities, population size and
stopping criterion have some practical criteria. It is nec-
essary to repeat the runs to test the GA performance in
different cases.
In Table 2, the principal variants of developed experi-
ments are summarized. With a population size of 50
individuals, crossover and mutation probabilities were
changed as it is showed. The results obtained with a pop-
ulation size greater than 50 individuals were similar but the
computation time grew.
Initially, different experiments with clustering GA were
realized using synthetic data. The synthetic dataset was
generated executing the direct solution of the equation’s
system with the set of parameters shown in Table 3.
One objective in this paper is to obtain a good efficiency
in the execution time of the GA. Then, the number of
generations for each GA was used as stopping criteria. In
this case the used number was 100.
A common practice in system identification is to simu-
late the model using validation data, and then to compare
visual and graphically the correspondence between the real
measured output and the predicted output. Very big devi-
ations indicate a low quality of the model. After this, the
quality of adjustment should be determined through a
group of indicators (Ljung 1999, 1999; Soderstrom and
Stoica 1994):
– Residual analysis. Residuals of a model are the
differences among the calculated and measured values
of the output. Supposing that the model is correct,
residuals approximate to the random errors. Therefore,
the random behavior of the residuals suggests that the
model adjusts the data well. However, if the residuals
show a systematic pattern it indicates the opposite.
– Statistical properties of the estimates. After using
graphic methods to evaluate the quality of adjustment,
statistical properties of the estimates should be
examined.
SSE measures the total deviation of the fitness values to
the answer values. A nearer value to zero indicates a better
adjustment.
The statistic R2 measures how much successful is the
adjustment in the explanation of the variation of data. R2
can take only values in the interval [0, 1]. A closer value to
one indicates a better adjustment.
RMSE is known as the standard error of adjustment and
the standard error of regression. A closer value to zero
indicates a better adjustment.
Table 2 Variants of developed experiments
Clustering (distance,
linkage)
Mutation
probability
Crossover
fraction
No
Euclid., Ward’s 0.02 0.6 1.1
0.8 1.2
0.9 1.3
Euclid., Ward’s 0.2 0.6 2.1
0.8 2.2
0.9 2.3
Euclid., simple 0.02 0.6 3.1
0.8 3.2
0.9 3.3
Euclid., simple 0.2 0.6 4.1
0.8 4.2
0.9 4.3
Table 3 Values of the parameters to obtain the synthetic data
Parameter Value
Deff (m2/s) 5.37e-13
qm (mg/ml) 70.5
ep 0.62
Ks (m/s) 8.92e-3
Kd (mg/ml) 0.05
968 M. I. Mesa et al.
123

Efficiency was calculated using the formula:
Efic ¼PT
t¼1 yðtÞ � yðtÞ� �2
�PT
t¼1 yðtÞ � yðtÞð Þ2
PTt¼1 yðtÞ � yðtÞ� �2
Another criterion to characterize the model is the calculus
of mean and variance of the real output, the estimated
output and the modeling error. It should be proven if a
correspondence exists among predictions given by the
model and experimental observations of the system. In that
case the estimated parameters are considered valid (Ljung
1999).
Table 4 shows statistical properties to allow a quanti-
tative comparison for 100 runs of the GA. Synthetic data
with a 3% of added random noise were used in these
experiments to simulate real data and assess the algorithm.
The results are the averages obtained in the 100 runs of
each experiment. In general, better results were reached
using Euclidean distance with Ward’s linkage for cluster-
ing and this demonstrate the validity of this method.
4.2 Clustering GA versus a simple GA and classic
methods
To compare simple and clustering GA respects to the mean
values of objective function and the execution time, some
experiments were developed. In those experiments the
same mutation and crossover operators and probabilities
values were used.
Table 5 shows the mean values of objective function
and execution time for ten runs of the GA in a CPU
Pentium 4, 2.4 GHz and 512 MB of RAM memory. In all
the cases the running times for the clustering GA are less
than for the simple GA. The clustering GA using Ward’s
linkage is slower than using single linkage, but the fitness
values are better in the first case. Best results are high-
lighted in boldface. The minimum running time for the
simple GA and the minimum fitness value are obtained
with 0.2 mutation probability and 0.9 crossover fraction.
In general, the combination of 0.2 mutation and 0.9
crossover fraction for the genetic operators yields satis-
factory results.
Table 4 Comparison of developed experiments results
Exp. num. Mean Standard deviation RMSE R2 Efic.
Meas. output Estim. output Error Meas. output Estim. output Error
1.1 0.2028 0.2023 0.0005 0.1575 0.1819 0.0244 0.0492 0.7517 0.9309
1.2 0.1955 0.2005 0.0050 0.1688 0.1761 0.0073 0.0303 0.9196 0.9721
1.3 0.2556 0.1979 0.0577 0.1466 0.1741 0.0275 0.0732 0.8199 0.8332
2.1 0.2085 0.2011 0.0074 0.1746 0.1764 0.0018 0.0311 0.9832 0.9706
2.2 0.1900 0.1994 0.0094 0.1715 0.1761 0.0046 0.0370 0.9738 0.9574
2.3 0.2133 0.2034 0.0099 0.1758 0.1778 0.0020 0.0300 0.9808 0.9730
3.1 0.2072 0.1998 0.0074 0.1758 0.1761 0.0003 0.0325 0.9991 0.9678
3.2 0.1933 0.2004 0.0071 0.1778 0.1838 0.0060 0.0347 0.9356 0.9663
3.3 0.2310 0.2034 0.0276 0.1338 0.1778 0.0440 0.0747 0.5909 0.8332
4.1 0.2212 0.2004 0.0208 0.1769 0.1838 0.0069 0.0400 0.9373 0.9552
4.2 0.2230 0.1998 0.0232 0.1670 0.1761 0.0091 0.0421 0.9153 0.9461
4.3 0.2055 0.2005 0.0050 0.1746 0.1761 0.0015 0.0275 0.9852 0.9770
Table 5 Comparative results of experiments with simple and clustering GA
Mut.
prob.
Cross.
fract.
Fitness GA
simple
Time GA(s)
simple
Fitness GA clust.
euclid., single
Time GA(s) clust.
euclid. single
Fitness clust.
euclid. ward
Time GA(s) clust.
euclid., ward
0.02 0.6 8.33e-4 92.26 4.59e-4 25.22 8.64e-4 39.85
0.8 1.00e-3 92.98 1.33e-2 24.78 2.42e-2 36.78
0.9 1.10e-3 100.97 0.27e-2 26.87 7.82e-2 35.84
0.2 0.6 1.11e24 134.30 1.54e-2 24.75 2.41e-4 37.01
0.8 3.30e-4 92.39 0.16e-2 24.40 6.72e-4 36.15
0.9 3.74e-4 91.06 1.06e24 24.43 9.41e25 36.09
An approach to parameters estimation 969
123

Results of experiments with some classic methods
aforementioned are shown in Table 6. In these experi-
ments, initial values in the algorithms runs were set as the
minimum typical values for the parameters to be estimated.
It is evident that the results for clustering GA experiments
shown in Table 5 are better than the results with classic
algorithms in all the cases.
Non-parametric tests could be applied to small sample
of data and their effectiveness have been proved in com-
plex experiments. Wilcoxon signed-rank test is a non-
parametric statistical procedure for performing pairwise
comparisons between two algorithms (Garcia et al. 2009).
In the null hypothesis H0 the average rank of the results are
equal. In the alternative hypothesis H1 there is a difference.
The ranks are computed as follows:
Rþ ¼X
di [ 0
rankðdiÞ þ1
2
X
di¼0
rankðdiÞ
R� ¼X
di\0
rankðdiÞ þ1
2
X
di¼0
rankðdiÞ;
where di is the difference between the performance of the
two algorithms on the i-th run. These differences are sorted
in an upward way and the ranks are computed accordingly.
If the smallest of the sums, T ¼ minðRþ;R�Þ is less than or
equal to the value of the distribution of Wilcoxon for
N degrees of freedom (Zar 1999) the null hypothesis of
equality is rejected.
In this case it is used to compare the results between the
behavior of simple and clustering genetic algorithms and to
stipulate which one is the best with a probability of error,
that is the complement of the probability of reporting that
two systems are the same, called the p value (Zar 1999).
The computation of the p value in the Wilcoxon distribu-
tion could be carried out by computing a normal approxi-
mation (Sheskin 1736).
Table 7 shows the results obtained in the comparisons,
being R? the sum of the ranks for which the clustering GA
outperformed the simple GA. These ranks were computed
Table 6 Results of experiments with classic methods
Algorithm Objective function
evaluation
Time
(s)
Broydon–Fletcher–Goldfarb–Shanno
(BFGS)
0.0499 218.78
Nelder–Mead 0.0134 180.65
Levenberg–Marquardt 0.0062 173.25
Gauss–Newton 0.0528 173.32
Table 7 Wilcoxon test results
Mut. prob. Cross. fract. Euclid. single Euclid. ward
R? R- p value R? R- p value
0.02 0.6 4,066 29 4.5926e-16 4,095 0 1.7438e-16
0.8 4,095 0 1.7438e-16 2,251 1,844 0.4129
0.9 4,095 0 1.7438e-16 4,093 2 1.865e-16
0.2 0.6 4,095 0 1.7438e-16 3,553 542 1.3811e-9
0.8 2,826 1,269 0.0017 4,095 0 1.7438e-16
0.9 4,095 0 1.7438e-16 4,095 0 1.7438e-16
Error
-0.04
-0.02
0
0.02
0.04
0.06
time (min)
time (min)
Cb (t)
C0
C0= 2.5 mg/mL
0 20 40 60 80 100 120 140 160 180
0 20 40 60 80 100 120 140 160 180
0.4
0.5
0.6
0.7
0.8
0.9
1
- realx estimate
0.08
Fig. 5 Estimated output and error values corresponding to the
solution determined by GA for an initial concentration value of
2.5 mg/ml
970 M. I. Mesa et al.
123
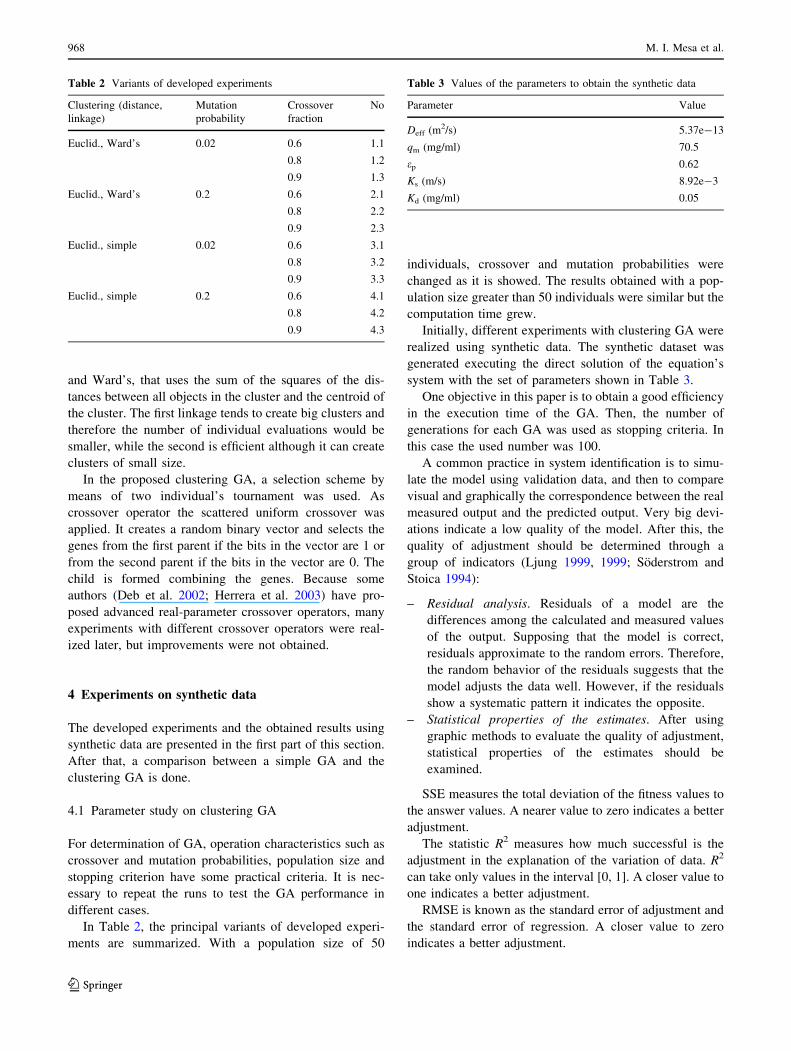
from the difference of errors obtained evaluating the direct
solution of the model for mean values of the estimated
parameters in ten runs of the clustering and simple GA,
respectively, and considering 90 samples. With the
exception of the value highlighted in boldface, the rest are
valid and better for clustering GA performance. As can be
seen, in all of the experiments where Euclidean distance
and Ward’s linkage was applied, the clustering GA was the
winner algorithm.
5 Validation of the results using real data: a case study
on the adsorption of proteins in macro porous solid
for chromatography in stirred tank
Parameters values were identified for ten runs of the GA
with equal operation characteristics and for each datasets
corresponding to three different initial concentrations val-
ues aforementioned.
Samples of concentration were acquired every 2 min,
for a total of 90, which were used out of line to test the
algorithm runs.
Figures 5, 6 and 7 show the GA capacity to obtain a
good agreement between experimental and calculated
values of concentration at one given time for different
initial concentration values. Besides graphic analysis, val-
idation of results was carried out based on the values of
statistical properties. Experiments showed that the best
average among the ten runs in the estimate of chromatog-
raphy process parameters were obtained with a GA
based on cluster (Euclidean distance, Ward’s linkage),
Cb (t)
C0
0 20 40 60 80 100 120 140 160 180
0.4
0.5
0.6
0.7
0.8
0.9
1
time (min)
- real* estiimate
C0 = 2 mg/ml
Error
0 20 40 60 80 100 120 140 160 180-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time (min)
Fig. 6 Estimated output and error values corresponding to the best
solution determined by GA for an initial concentration value of
2 mg/ml
0 20 40 60 80 100 120 140 160 180
0.4
0.5
0.6
0.7
0.8
0.9
1
Error
0 20 40 60 80 100 120 140 160 180-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
time (min)
time (min)
- real* estiimate
C0 = 1,5 mg/mlCb (t)
C0
Fig. 7 Estimated output and error values corresponding to the best
solution determined by GA for an initial concentration value of
1.5 mg/ml
Table 8 Estimated parameters from experimental data
Data set Deff (m2/s) qm (mg/ml) ep Ks (m/s) Kd (mg/ml)
1 1.37e-12 86.6 0.62 1.65e-6 0.32
2 1.25e-12 85.3 0.57 1.46e-6 0.29
3 1.15e-12 89.7 0.63 1.73e-6 0.34
An approach to parameters estimation 971
123
non-uniform mutation operator with mutation probability
equal to 0.2 and scattered crossover with a probability
equal to 0.9. The values of estimated parameters for this
case are shown in Table 8. These GA parameters together
with generation number of 100 and population size of 50
can be used as starting point for further experiments of
parameters estimation in similar chromatographic
processes.
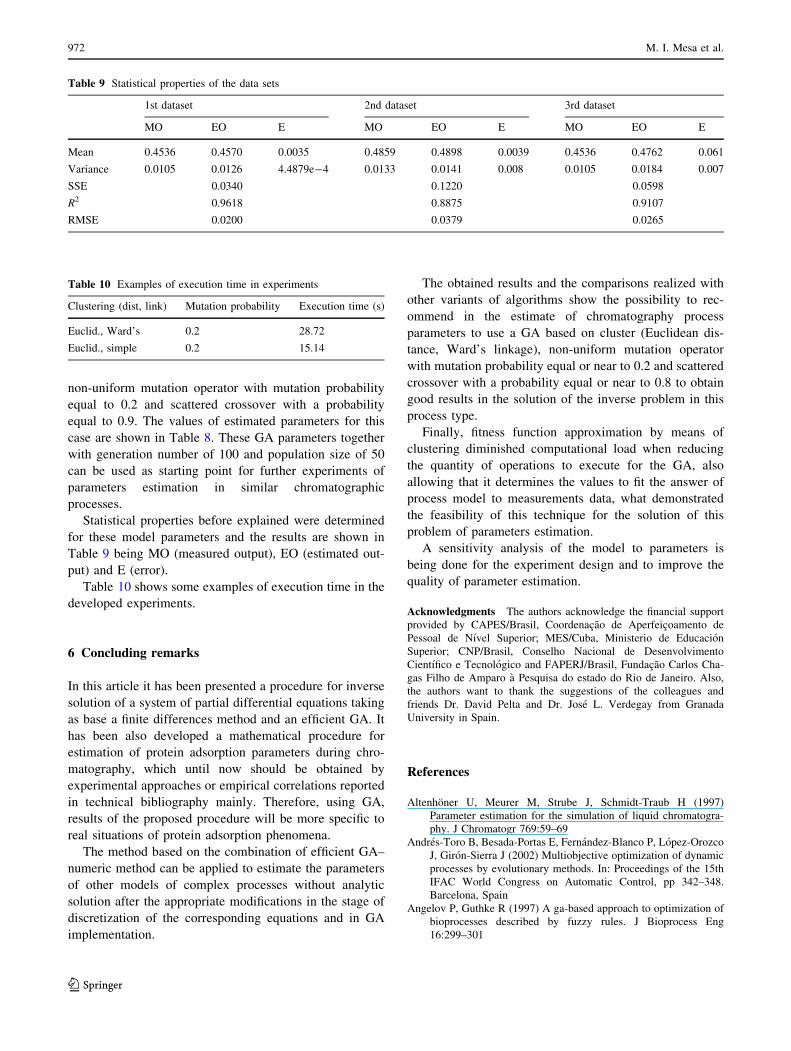
Statistical properties before explained were determined
for these model parameters and the results are shown in
Table 9 being MO (measured output), EO (estimated out-
put) and E (error).
Table 10 shows some examples of execution time in the
developed experiments.
6 Concluding remarks
In this article it has been presented a procedure for inverse
solution of a system of partial differential equations taking
as base a finite differences method and an efficient GA. It
has been also developed a mathematical procedure for
estimation of protein adsorption parameters during chro-
matography, which until now should be obtained by
experimental approaches or empirical correlations reported
in technical bibliography mainly. Therefore, using GA,
results of the proposed procedure will be more specific to
real situations of protein adsorption phenomena.
The method based on the combination of efficient GA–
numeric method can be applied to estimate the parameters
of other models of complex processes without analytic
solution after the appropriate modifications in the stage of
discretization of the corresponding equations and in GA
implementation.
The obtained results and the comparisons realized with
other variants of algorithms show the possibility to rec-
ommend in the estimate of chromatography process
parameters to use a GA based on cluster (Euclidean dis-
tance, Ward’s linkage), non-uniform mutation operator
with mutation probability equal or near to 0.2 and scattered
crossover with a probability equal or near to 0.8 to obtain
good results in the solution of the inverse problem in this
process type.
Finally, fitness function approximation by means of
clustering diminished computational load when reducing
the quantity of operations to execute for the GA, also
allowing that it determines the values to fit the answer of
process model to measurements data, what demonstrated
the feasibility of this technique for the solution of this
problem of parameters estimation.
A sensitivity analysis of the model to parameters is
being done for the experiment design and to improve the
quality of parameter estimation.
Acknowledgments The authors acknowledge the financial support
provided by CAPES/Brasil, Coordenacao de Aperfeicoamento de
Pessoal de Nıvel Superior; MES/Cuba, Ministerio de Educacion
Superior; CNP/Brasil, Conselho Nacional de Desenvolvimento
Cientıfico e Tecnologico and FAPERJ/Brasil, Fundacao Carlos Cha-
gas Filho de Amparo a Pesquisa do estado do Rio de Janeiro. Also,
the authors want to thank the suggestions of the colleagues and
friends Dr. David Pelta and Dr. Jose L. Verdegay from Granada
University in Spain.
References
Altenhoner U, Meurer M, Strube J, Schmidt-Traub H (1997)
Parameter estimation for the simulation of liquid chromatogra-
phy. J Chromatogr 769:59–69
Andres-Toro B, Besada-Portas E, Fernandez-Blanco P, Lopez-Orozco
J, Giron-Sierra J (2002) Multiobjective optimization of dynamic
processes by evolutionary methods. In: Proceedings of the 15th
IFAC World Congress on Automatic Control, pp 342–348.
Barcelona, Spain
Angelov P, Guthke R (1997) A ga-based approach to optimization of
bioprocesses described by fuzzy rules. J Bioprocess Eng
16:299–301
Table 9 Statistical properties of the data sets
1st dataset 2nd dataset 3rd dataset
MO EO E MO EO E MO EO E
Mean 0.4536 0.4570 0.0035 0.4859 0.4898 0.0039 0.4536 0.4762 0.061
Variance 0.0105 0.0126 4.4879e-4 0.0133 0.0141 0.008 0.0105 0.0184 0.007
SSE 0.0340 0.1220 0.0598
R2 0.9618 0.8875 0.9107
RMSE 0.0200 0.0379 0.0265
Table 10 Examples of execution time in experiments
Clustering (dist, link) Mutation probability Execution time (s)
Euclid., Ward’s 0.2 28.72
Euclid., simple 0.2 15.14
972 M. I. Mesa et al.
123
Au W, Chan K, Yao X (2003) A novel evolutionary data mining
algorithm with applications to churn prediction. IEEE Trans
Evol Comput 7(6):532–545
Back T (1997) Handbook of evolutionary computation. Oxford
University Press, Oxford
Benini E, Toffolo A (2002) Optimal design of horizontal-axis wind
turbines using blade-element theory and evolutionary computa-
tion. J Solar Energy Eng 124(4):357–363
Davis L (1991) The handbook of genetic algorithms. Van Nostrand
Reinholdm, New York
de Vasconcellos J, Silva Neto A, Santana C (2003) An inverse mass
transfer problem in solid-liquid adsorption systems. Inverse
Probl Eng 11(5):391–408
de Vasconcellos J, Silva Neto A, Santana C, Soeiro F (2002)
Parameter estimation in adsorption columns with stochastic
global optimization methods. In: 4th international conference on
inverse problems in engineering, Rio de Janeiro, Brazil,
pp 45–51
Deb K, Anand A, Joshi D (2002) A computationally efficient
evolutionary algorithm for real-parameter optimization. Evol
Comput 10:371–395
Dennis J, Schnabel R (1983) Numerical methods for unconstrained
optimization and nonlinear equations. Prentice Hall, Englewood
Cliffs
Eykhoff P (1974) System identification. Parameter and state estima-
tion. Wiley, New York
Fletcher R (1987) Practical methods of optimization. Wiley, New
York
Fu R, Xu T, Pan Z (2005) Modelling of the adsorption of bovine
serum albumin on porous polyethylene membrane by back-
propagation artificial neural network. J Membr Sci 251:137–144
Garcia S, Fernandez A, Luengo J, Herrera F (2009) A study of
statistical techniques and performance measures for genetics-
based machine learning: accuracy and interpretability. Soft
Computing 13:959–977. Published online 20th December 2008.
Springer
Georgieva O, Hristozov I, Pencheva T, Tzonkov S, Hitzmann B
(2003) Mathematical modelling and variable structure control
systems for fed-batch fermentation of Escherichia coli. Biochem
Eng Quart 17(4):293–299
Giro R, Cyrillo M, Galvao D (2002) Designing conducting polymers
using genetic algorithms. Chem Phys Lett 366(1–2):170–175
Goldberg D (1989) Genetic algorithms in search, optimization, and
machine learning. Addison-Wesley, Reading
Gu T (1995) Mathematical modelling and scale-up of liquid
chromatography. Springer, New York
Guiochon G, Shirazi D, Felinger A, Katti A (2006) Fundamentals of
preparative and nonlinear chromatography, 2nd edn. Academic
Press, London
Hee-Su K, Sung-Bae C (2001) An efficient genetic algorithm with
less fitness evaluation by clustering. In: Proceedings of the 2001
IEEE congress on evolutionary computation. IEEE
Herrera F, Lozano M (2005) Editorial note: real coded genetic
algorithms. special issue on real coded genetic algorithms:
foundations, models and operators. Softcomputing 9(4):223–224
Herrera F, Lozano M, Sanchez AM (2003) A taxonomy for the
crossover operator for real-coded genetic algorithms. an exper-
imental study. Int J Intell Syst 18(3):309–338
Herrera F, Lozano M, Verdegay J (1998) Tackling real-coded genetic
algorithms: operators and tools for the behavioral analysis. Artif
Intell Rev 12(4):265–319
Horstmann BJ, Chase HA (1989) Modelling the affinity adsorption of
immunoglobulin g to protein a immobilized to agarose matrices.
Chem Eng Res Des 67
Jain AK, Dubes RC (1988) Algorithms for clustering data. Prentice
Hall, Upper Saddle River
Jin Y (2002) Fitness approximation in evolutionary computation: A
survey. In: Proceedings of the 2002 genetic and evolutionary
computation conference, pp 1105–1112
Jin Y (2005) A comprehensive survey of fitness approximation in
evolutionary computation. Soft Comput 9(1):3–9. Special Issue
on ‘‘approximation and learning in evolutionary computation’’
Karr C, Yakushin I, Nicolosi K (2000) Solving inverse initial-value,
boundary-value problems via genetic algorithm. Eng Appl Artif
Intell 13:625–633
Kewley R, Embrechts M (2002) Computational military tactical
planning system. IEEE Trans Syst Man Cybernet Part C Appl
Rev 32(2):161–171
Ljung L (1999) Model validation and model error modeling. Tech.
Rep. LiTH-ISY-R-215, Lund University, Sweden
Ljung L (1999) System identification Theory for the user, 2nd edn.
Prentice Hall, Upper Saddle River
Ljung L, Glad T (1994) Modeling of dynamic systems. Prentice Hall,
Upper Saddle River
Manterea T, Alanderb J (2005) Evolutionary software engineering, a
review. Appl Soft Comput 5(3):315–331
Michalewicz Z (1992) Genetic algorithms ? data structures =
evolution programs. Springer, Berlin
Montiel O, Castillo O, Melin P, Sepulveda R (2003) The evolutionary
learning rule for system identification. Appl Soft Comput
3(4):343–352
Nagata Y, Chu K (2003) Optimization of a fermentation medium
using neural networks and genetic algorithms. Biotechnol Lett
25(21):1837–1842
Nelder J, Mead R (1965) A simplex method for function minimiza-
tion. Comput J 7(4):308–313
Oduguwa V, Tiwari A, Roy R (2005) Evolutionary computing in
manufacturing industry: an overview of recent applications.
Appl Soft Comput 5(3):281–299
ONeil P (1983) Advanced engineering mathematics. Wadsworth
Publishing Company, Belmont
Persson P, Nilsson B (2001) Parameter estimation of protein
chromatographic processes based on breakthrough curves. In:
Dochain D, Perrier M (eds) Proceedings of the 8th international
conference on computer applications in biotechnology. Quebec
City, Canada
Roeva O, Pencheva T, et al (2004) A genetic algorithms based
approach for identification of escherichia coli fed-batch fermen-
tation. Bioautomation 1:30–41
Sheskin D (2006) Handbook of parametric and nonparametric
statistical procedures, vol. 1736. Chapman & Hall//CRC, Londos/
West Palm Beach
Soderstrom T, Stoica P (1994) System identification. Prentice Hall
International, Hemel Hempstead, Paperback Edition
Tarantola A (2005) Inverse problem theory and model parameter
estimation. SIAM
Zar J (1999) Biostatiscal analysis. Prentice Hall, Englewood Cliffs
Zhou Z, Ong Y, Nair P (2004) Hierarchical surrogate-assisted
evolutionary optimization framework. In: Proceedings of IEEE
congress evolutionary computation CEC’04, special session on
learning and approximation in design optimization, Portland,
USA, pp 1586–1593
Zhou Z, Ong Y, Nair P, Keane AJ, Lum K (2007) Combining global
and local surrogate models to accelerate evolutionary optimiza-
tion. IEEE Trans Syst Man Cybernet Part C Appl Rev 37(1):
66–76
An approach to parameters estimation 973
123














![[Cool] Gas Chromatography and Lipids](https://static.fdokumen.com/doc/165x107/6325a4b1852a7313b70e98e9/cool-gas-chromatography-and-lipids.jpg)





